Embed Size (px)
Citation preview
Sistemas de sensores en
robótica ROBÓTICA INTEGRADA A LA MANUFACTURA.
ANDREAS OBED LLANES CORNEJO
Introducción
Los sensores son instrumentos de uso en sistemas de control, sistemas de percepción y aprendizaje, medios informáticos, control de estructuras articuladas. Así como robots hay de muchas clases y aplicaciones diferentes, también los sensores hay de muchos tipos y no necesariamente se utilicen todos en un robot particular, se pueden encontrar desde sensores para detectar un objeto, hasta sensores de visión artificial, en la cual se hacen investigaciones en redes neuronales, controles inteligentes, resolución de problemas de elevada complejidad. Usando recursos tecnológicos e informativos, se pueden formular nuevas metodologías para mejorar los sistemas de realimentación sensorial, procesos de decisión y aprendizaje en robots.
Esta investigación corresponde a mencionar y explicar algunos sensores de uso común en robótica
Sensor
Un sensor utiliza un transductor que capta una señal del entorno para ser utilizada por el robot.
¿Qué tipo de señales se podrían captar?
Mecánicas: posición, velocidad, tamaño, fuerza, caudal, etc.
Termotecmia: temperatura, calor, entropía, etc.
Magnéticas: Intensidad de campo, densidad de flujo, permeabilidad, etc.
Eléctricas: Voltaje, amperaje, resistencia, capacidad, etc.
Opticas: reflexión, bloqueo, refracción u otras fases físicas en un haz de luz.
Moleculares (químicas): PH, reacciones, etc
Cualquier dispositivo que convierta una señal de un tipo en una señal de otro tipo debería considerarse un transductor.
Estructura de un sensor
• Controlador del transductor. Es el elemento interfaz entre el usuario del
sensor y el transductor. Por ejemplo, hay circuitos controladores que
indican cuándo y cómo se debe hacer una medida.
• Transductor. Convierte las variaciones de una magnitud física en
variaciones de una magnitud eléctrica (señal).
• Acondicionamiento de la señal. Si existe, realiza la función de modificar
la señal entregada por el transductor para obtener una señal adecuada
(amplificación, linealización, etc.). Con el avance de la electrónica
digital, cada vez los circuitos acondicionadores son más sencillos.
Clasificación sensorial
Clasificación sensorial
Sensores propioceptivos: recepción de señales internas del robot,
medidas de carga de baterías, posición del robot.
Sensores Exteroseptivos: son sensores que detectaran señales externas del
robot, aunque se coordinen en el sistema de trabajo, por ejemplo:
temperatura, presión, localización de objetos.
Propiedades de los sensores a
considerar
Velocidad de operación.
Coste.
Tasa de error
Robustez, resolución y sensibilidad.
Requerimientos computacionales
Potencia, peso y tamaño.
Linealidad.
Histéresis
Repetividad
Ruido
Función a la que se destina

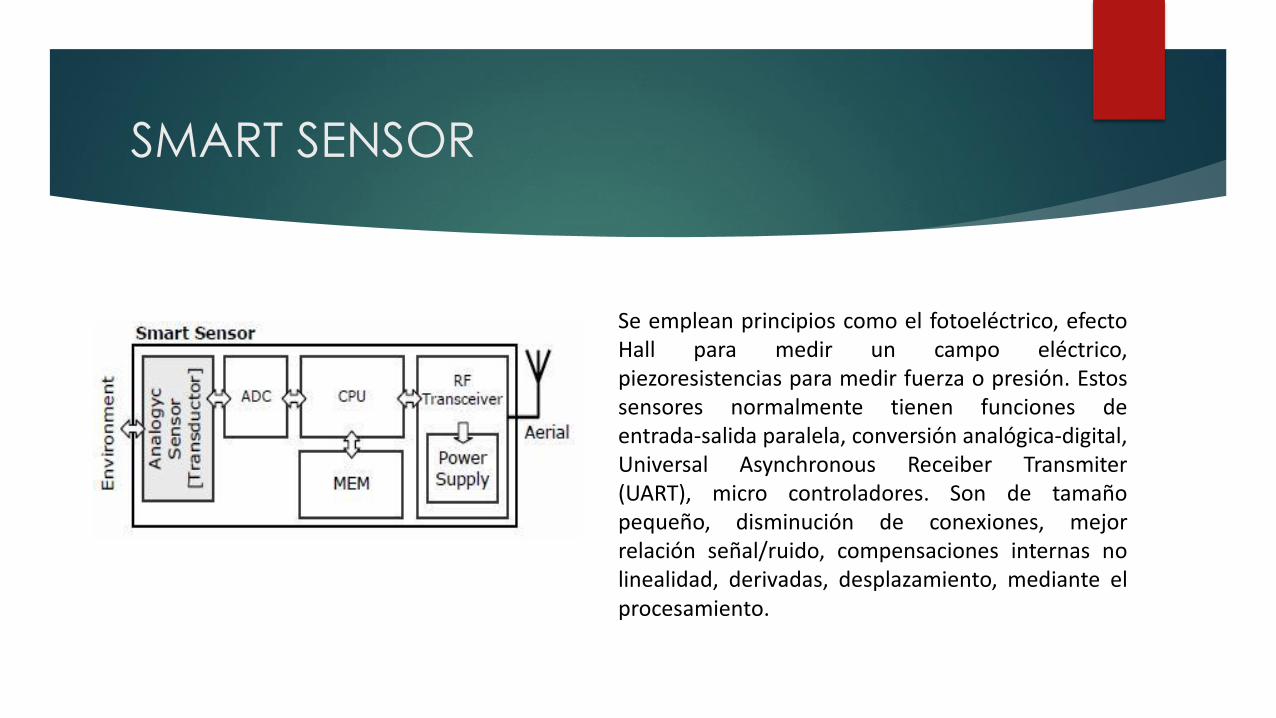
SMART SENSOR
Existen otros sensores que no solo producen la magnitud de lo que se está midiendo, sino que también procesan la información y son llamados Smart sensors
Poseen comunicación bidireccional.
Pre-procesar los valores medidos.
Notificar las medidas con señales digitales y protocolos de comunicación.
Toma de decisiones en base a las condiciones registradas de forma separada al microcontrolador.
Recordar la calibración o la configuración de sus parámetros .Autocalibracion en algunos.
Filtros, reducción de informacion en generalCompensación de no linealidades.
Funciones de multisensorial, tomando diferentes señales, para hacer un balance de la magnitud medida
SMART SENSOR
Se emplean principios como el fotoeléctrico, efecto Hall para medir un campo eléctrico, piezoresistencias para medir fuerza o presión. Estos sensores normalmente tienen funciones de entrada-salida paralela, conversión analógica-digital, Universal Asynchronous Receiber Transmiter (UART), micro controladores. Son de tamaño pequeño, disminución de conexiones, mejor relación señal/ruido, compensaciones internas no linealidad, derivadas, desplazamiento, mediante el procesamiento.
Sensores de desplazamiento lineal y
rotativo.
Potenciómetros.
Mediante un contacto móvil, al ir variando el valor de la resistencia del potenciómetro se puede determinar cuánto se ha desplazado junto con el elemento móvil.
Esta ecuación, es válida si no hay derivación de corriente en los contactos, de haber, se emplean amplificadores de alta impedancia de entrada a la salida de los potenciómetros.
Bajo costo, precisión limitada, errores lineales del 0.1%
Sensores de desplazamiento lineal y
rotativo
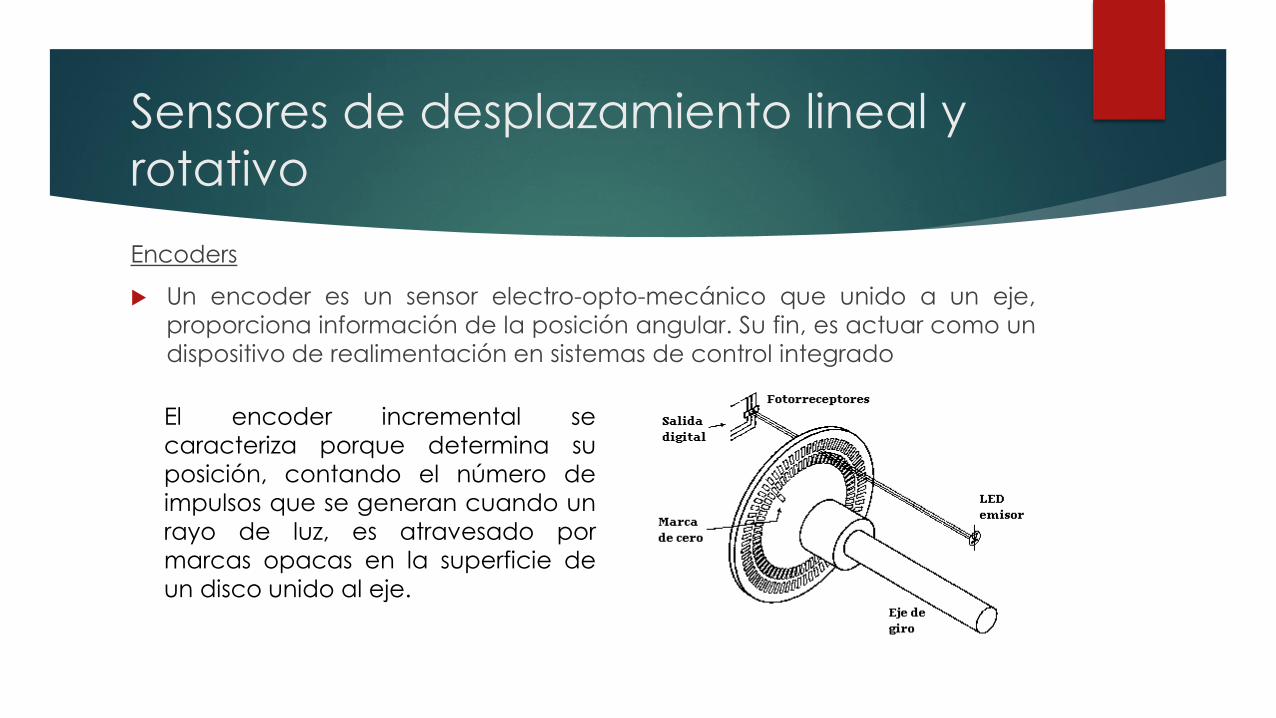
Encoders
Un encoder es un sensor electro-opto-mecánico que unido a un eje,
proporciona información de la posición angular. Su fin, es actuar como un
dispositivo de realimentación en sistemas de control integrado
El encoder incremental se
caracteriza porque determina su
posición, contando el número de
impulsos que se generan cuando un
rayo de luz, es atravesado por
marcas opacas en la superficie de
un disco unido al eje.
Sensores de desplazamiento lineal y
rotativo
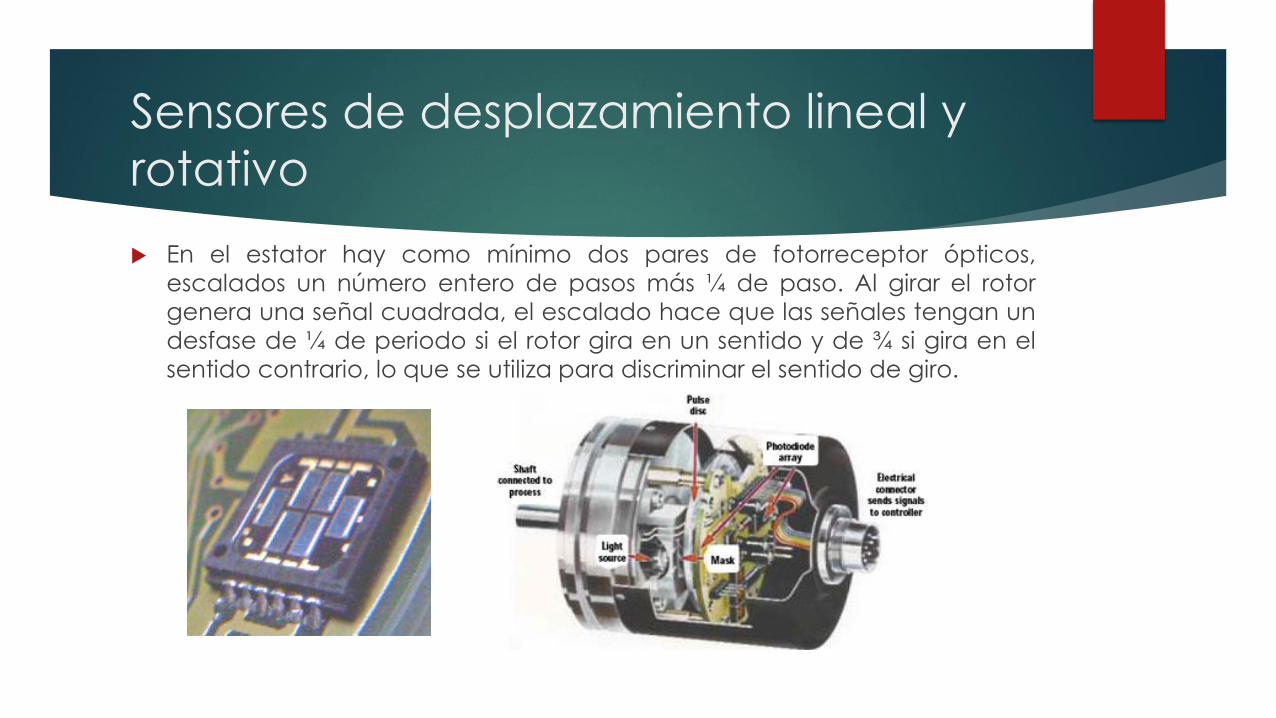
En el estator hay como mínimo dos pares de fotorreceptor ópticos,
escalados un número entero de pasos más ¼ de paso. Al girar el rotor
genera una señal cuadrada, el escalado hace que las señales tengan un
desfase de ¼ de periodo si el rotor gira en un sentido y de ¾ si gira en el
sentido contrario, lo que se utiliza para discriminar el sentido de giro.
Sensores de desplazamiento lineal y
rotativo
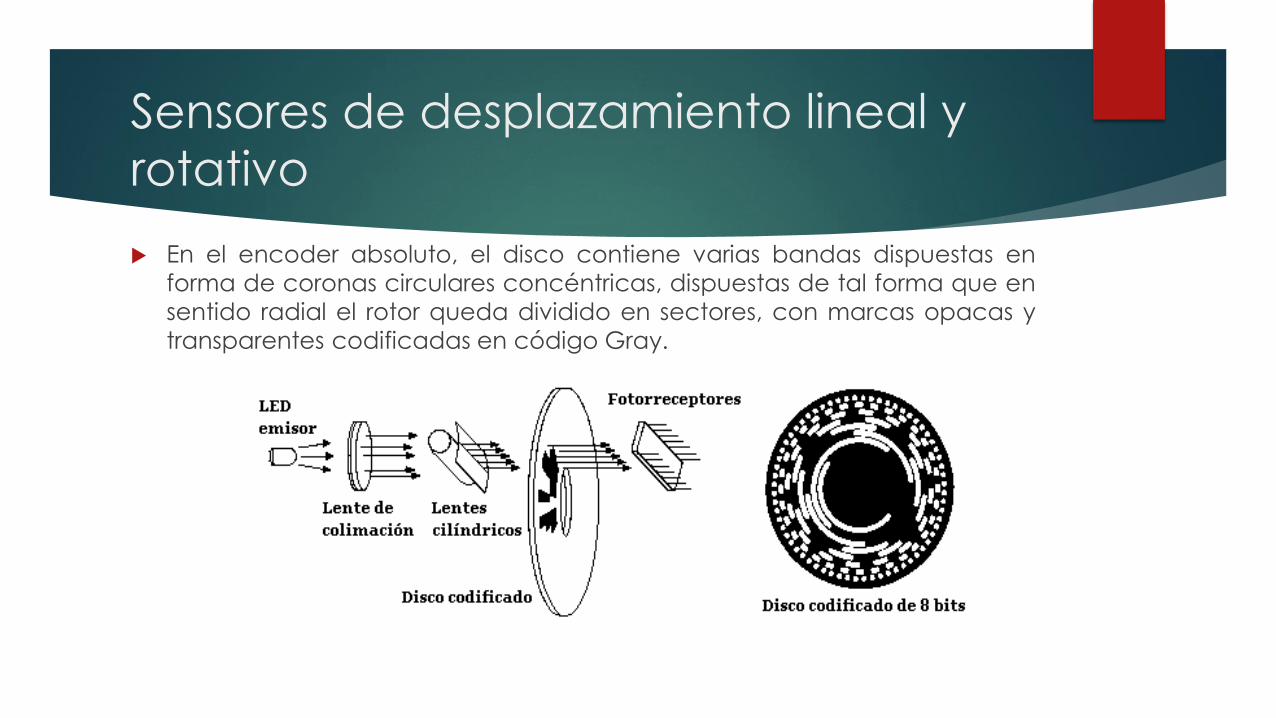
En el encoder absoluto, el disco contiene varias bandas dispuestas en
forma de coronas circulares concéntricas, dispuestas de tal forma que en
sentido radial el rotor queda dividido en sectores, con marcas opacas y
transparentes codificadas en código Gray.

Sensores de desplazamiento lineal y
rotativo
El estator tiene un fotorreceptor por cada bit representado en el disco. El
valor binario obtenido de los fotorreceptores es único para cada posición
del rotor y representa su posición absoluta. Se utiliza el código Gray en
lugar de un binario clásico porque en cada cambio de sector sólo
cambia el estado de una de las bandas, evitando errores por falta de
alineación de los captadores.

Sensores de desplazamiento lineal y
rotativo
Para un encoder con n bandas en el disco, el rotor permite 2^n
combinaciones, por lo cual la resolución será 360° dividido entre los 2^n
sectores; Por ejemplo para encoders de 12 y 16 bits se obtiene una
resolución angular de 0.0879° y 0.00549° respectivamente

Sensores de presencia y proximidad
Finales de carrera: elemento que por accionamiento mecanico activa o
desactiva, y esto cumple con la función de señalar presencia o
proximidad
Sensores de presencia y proximidad
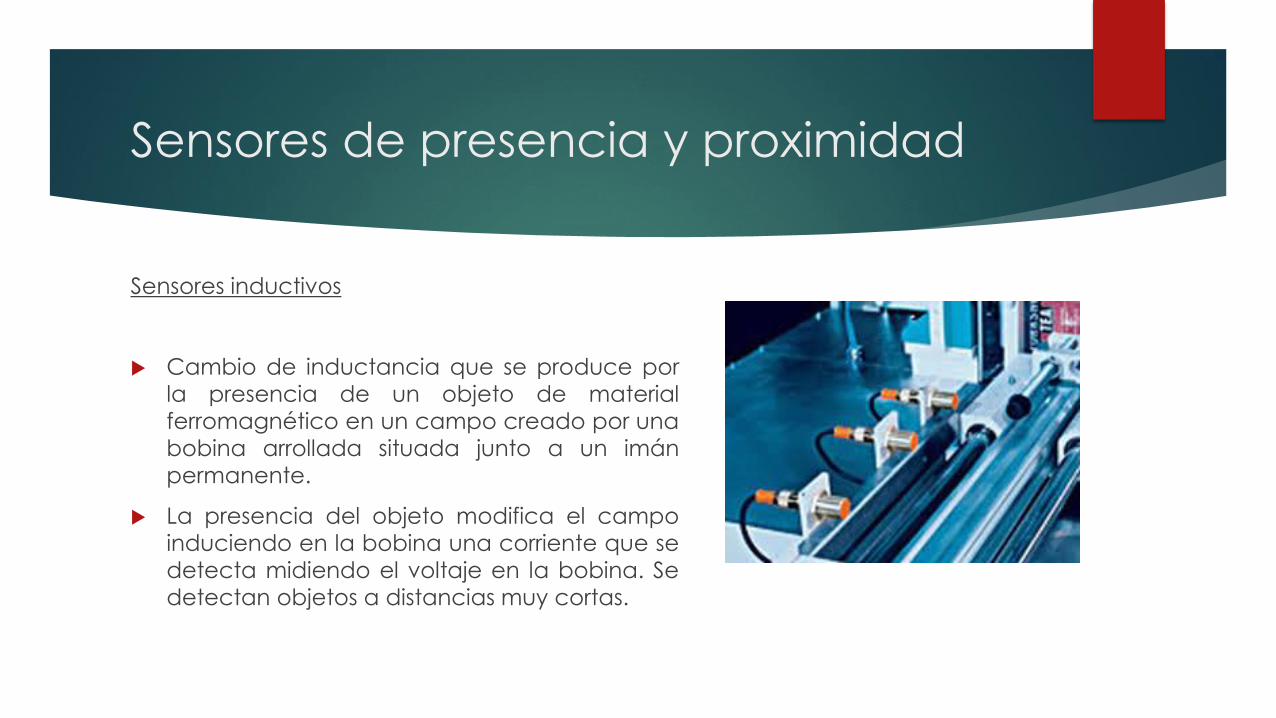
Sensores inductivos
Cambio de inductancia que se produce por la presencia de un objeto de material ferromagnético en un campo creado por una bobina arrollada situada junto a un imán permanente.
La presencia del objeto modifica el campo induciendo en la bobina una corriente que se detecta midiendo el voltaje en la bobina. Se detectan objetos a distancias muy cortas.
Sensores de presencia y proximidad
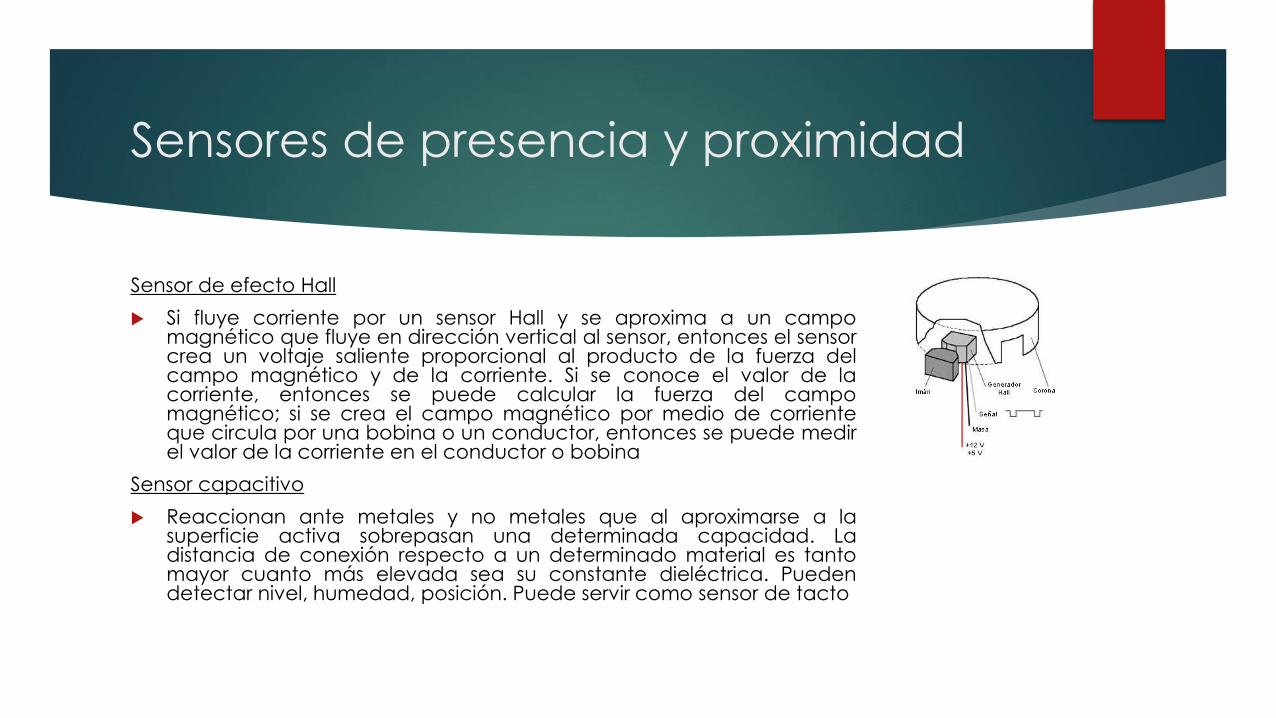
Sensor de efecto Hall
Si fluye corriente por un sensor Hall y se aproxima a un campo magnético que fluye en dirección vertical al sensor, entonces el sensor crea un voltaje saliente proporcional al producto de la fuerza del campo magnético y de la corriente. Si se conoce el valor de la corriente, entonces se puede calcular la fuerza del campo magnético; si se crea el campo magnético por medio de corriente que circula por una bobina o un conductor, entonces se puede medir el valor de la corriente en el conductor o bobina
Sensor capacitivo
Reaccionan ante metales y no metales que al aproximarse a la superficie activa sobrepasan una determinada capacidad. La distancia de conexión respecto a un determinado material es tanto mayor cuanto más elevada sea su constante dieléctrica. Pueden detectar nivel, humedad, posición. Puede servir como sensor de tacto
Sensores de presencia y proximidad
Sensores de ultrasonido
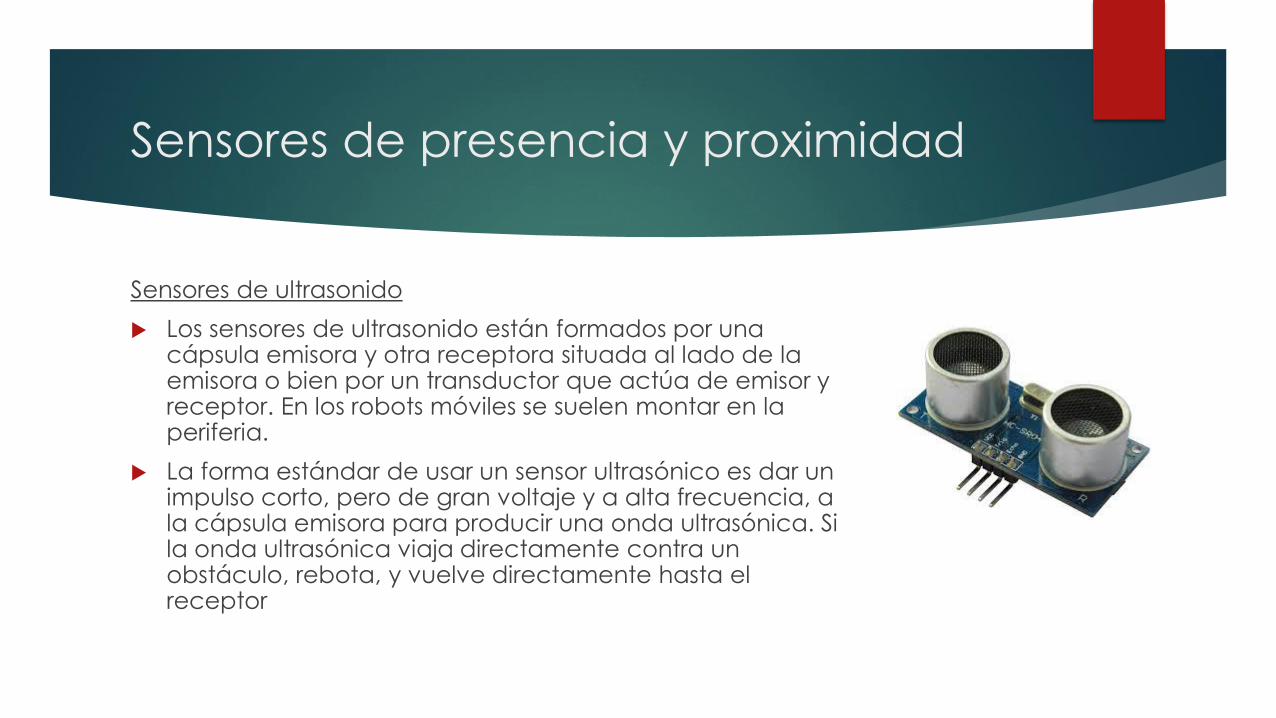
Los sensores de ultrasonido están formados por una cápsula emisora y otra receptora situada al lado de la emisora o bien por un transductor que actúa de emisor y receptor. En los robots móviles se suelen montar en la periferia.
La forma estándar de usar un sensor ultrasónico es dar un impulso corto, pero de gran voltaje y a alta frecuencia, a la cápsula emisora para producir una onda ultrasónica. Si la onda ultrasónica viaja directamente contra un obstáculo, rebota, y vuelve directamente hasta el receptor
Sensores de presencia y proximidad
A continuación la formula de este sensor: donde d es la distancia al objeto, c es la velocidad del sonido en el aire, y t es el tiempo que tarda la señal desde que se emite hasta que se recibe. La velocidad del sonido depende dela temperatura y se calcula aproximadamente:
T viene dado en grados Celsius y c0 es 331 m/s.
Dificultades:
La velocidad del sonido es variable.
El tiempo en blanco
Atenuación
Angulo de medida
Sensores de presencia y proximidad
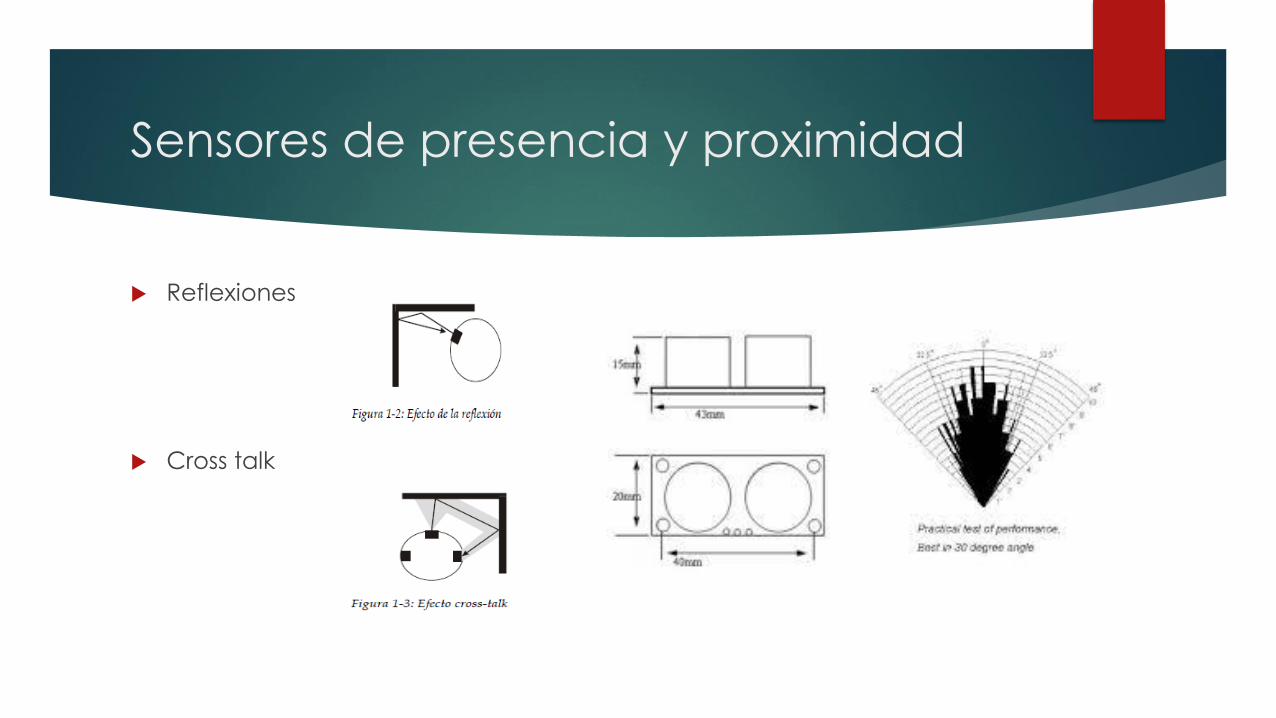
Reflexiones
Cross talk
Sensores de presencia y proximidad
Sensores de efecto infrarrojo:
Triangulación: Por relación geométrica de un triángulo que se forma entre el emisor, el objeto que rebota la señal y el receptor, el ángulo que se forma.
La empresa Sharp produce una línea de medidores de distancia basados en un haz infrarrojo, que forman la familia GP2DXXX. Estos sensores de infrarrojos detectan objetos a distintos rangos de distancia, y en algunos casos ofrecen información de la distancia en algunos modelos, como los GP2D02 y GP2D12. El método de detección de estos sensores es por triangulación. El haz es reflejado por el objeto e incide en un pequeño array CCD, con lo cual se puede determinar la distancia y/o presencia de objetos en el campo de visión. En los sensores que entregan un nivel de salida analógico para indicar la distancia, el valor no es lineal con respecto a la distancia medida, y se debe utilizar una tabla de conversión.
Sensores de presencia y proximidad
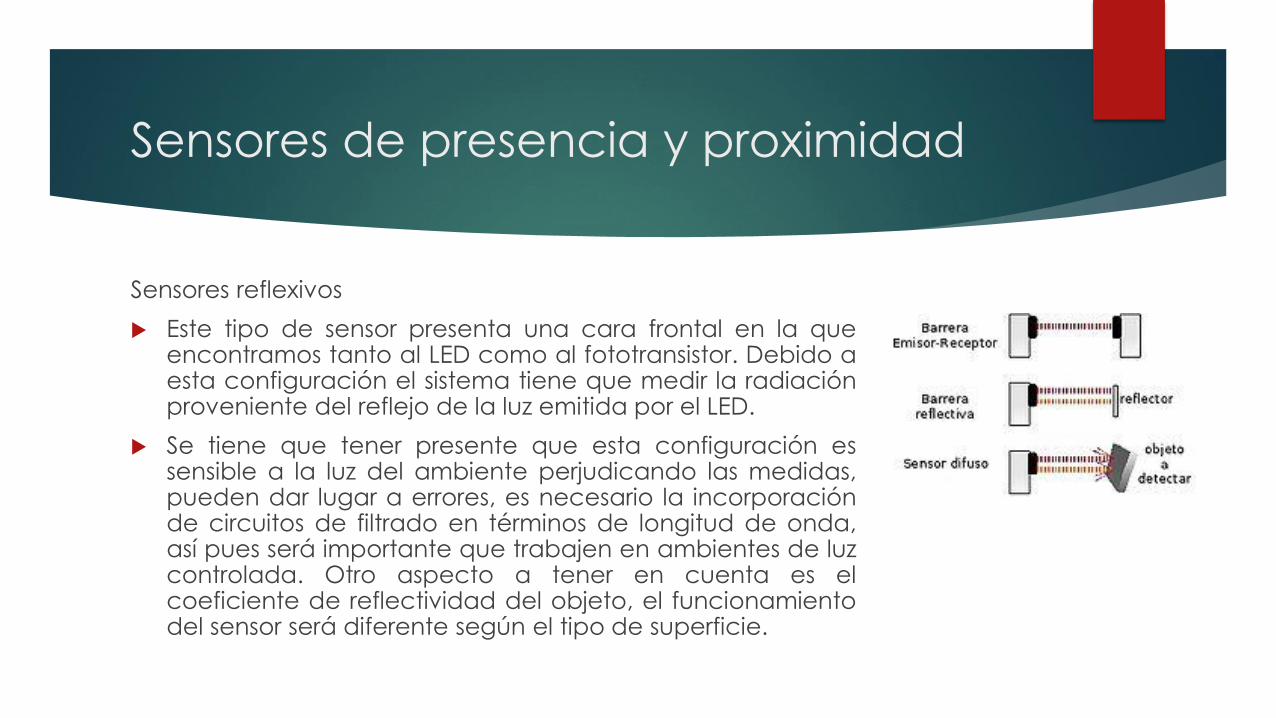
Sensores reflexivos
Este tipo de sensor presenta una cara frontal en la que encontramos tanto al LED como al fototransistor. Debido a esta configuración el sistema tiene que medir la radiación proveniente del reflejo de la luz emitida por el LED.
Se tiene que tener presente que esta configuración es sensible a la luz del ambiente perjudicando las medidas, pueden dar lugar a errores, es necesario la incorporación de circuitos de filtrado en términos de longitud de onda, así pues será importante que trabajen en ambientes de luz controlada. Otro aspecto a tener en cuenta es el coeficiente de reflectividad del objeto, el funcionamiento del sensor será diferente según el tipo de superficie.
Sensores de presencia y proximidad
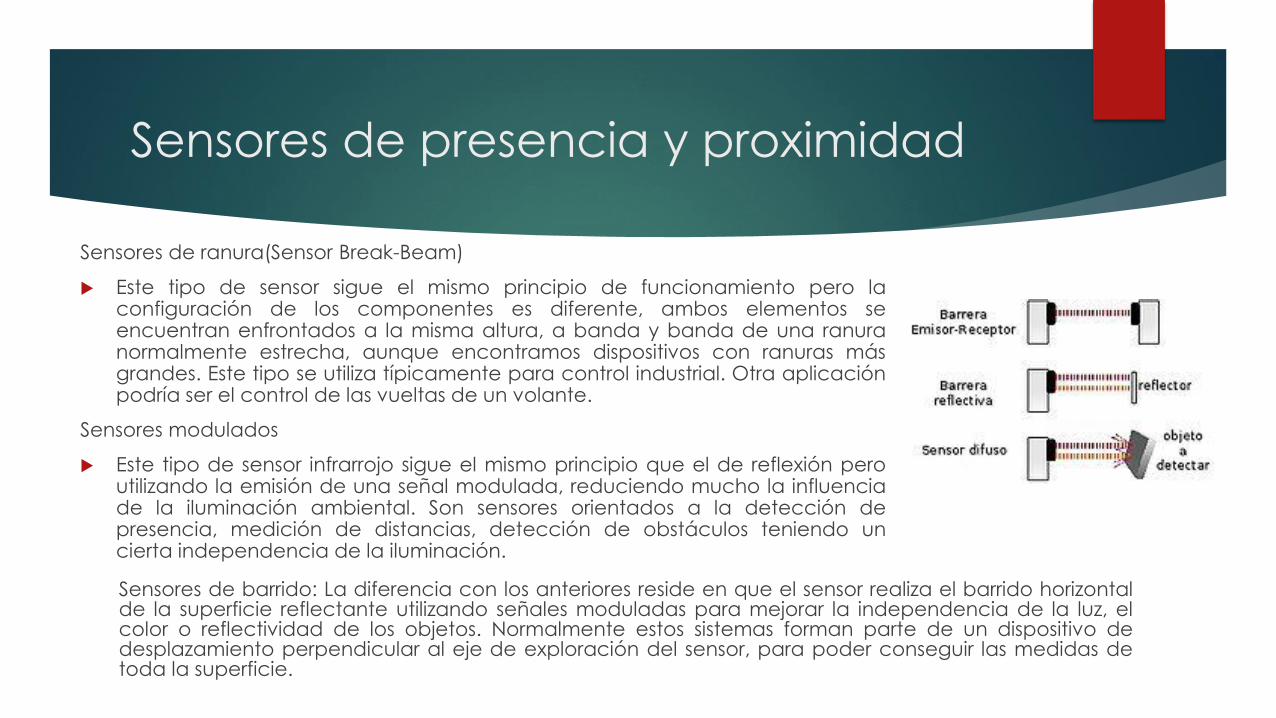
Sensores de ranura(Sensor Break-Beam)
Este tipo de sensor sigue el mismo principio de funcionamiento pero la configuración de los componentes es diferente, ambos elementos se encuentran enfrontados a la misma altura, a banda y banda de una ranura normalmente estrecha, aunque encontramos dispositivos con ranuras más grandes. Este tipo se utiliza típicamente para control industrial. Otra aplicación podría ser el control de las vueltas de un volante.
Sensores modulados
Este tipo de sensor infrarrojo sigue el mismo principio que el de reflexión pero utilizando la emisión de una señal modulada, reduciendo mucho la influencia de la iluminación ambiental. Son sensores orientados a la detección de presencia, medición de distancias, detección de obstáculos teniendo un cierta independencia de la iluminación.
Sensores de barrido: La diferencia con los anteriores reside en que el sensor realiza el barrido horizontal de la superficie reflectante utilizando señales moduladas para mejorar la independencia de la luz, el color o reflectividad de los objetos. Normalmente estos sistemas forman parte de un dispositivo de desplazamiento perpendicular al eje de exploración del sensor, para poder conseguir las medidas de toda la superficie.

Sensores de navegación
Sensores de navegación: Giroscopios mecánicos, electrónicos y ópticos, compas magnéticos, GPS, sensores para vehículos auto guiados industriales
Sistema de posicionamiento global
Si bien nos puede parecer demasiado lujo para nuestros experimentos, lo cierto es que un sistema de posicionamiento global (GPS, Global Positioning System) aporta una serie de datos que pueden ser muy útiles para un robot avanzado. Un ejemplo de este servicio es el módulo DS-GPM, fabricado por Total Robots, que entrega datos de latitud, longitud, altitud, velocidad, hora y fecha y posición satelital. Estos datos se comunican desde los registros del módulo a través de interfaces I2C y RS232

Sensores de navegación
Receptores de radiobalizas
Por medio de un grupo de emisores de radiofrecuencia codificados, ubicados en lugares conocidos por el sistema, es posible establecer con precisión la posición de un robot, con sólo hacer una triangulación. Al efecto el robot debe poseer una antena de recepción direccional (con reflector parabólico, o similar) que pueda girar 360°, y así determine la posición de las radiobalizas. En el robot es posible usar receptores integrados muy pequeños y de bajo costo, como el RWS-433, o el RXLC-434, y otros similares, que trabajan en frecuencias de entre 303 y 433 Mhz. La elección de los transmisores dependerá de la distancia a que se ubiquen las radiobalizas, pero si se trata de áreas acotadas es posible utilizar los módulos transmisores hermanados con los anteriores, como elTWS-433 y el TXLC-434.
Visión artificial
Cámaras
Procesamiento de datos de cualquier tipo que use el
espectro electromagnético que produce la imagen. Una
imagen implica múltiples lecturas dispuestas en una rejilla
o matriz de dos dimensiones, trabajan en el espectro
visible y en el espectro infrarrojo.
En este campo se han desarrollado algoritmos para filtrar
ruido, compensar problemas de iluminación, encontrar
líneas, emparejar líneas con modelos, extraer formas y
construir representaciones tridimensionales.

Otras aplicaciones
Micrófonos y sensores de sonido
El uso de micrófonos en un robot se puede hallar en dos aplicaciones: primero, dentro de un sistema de medición de distancia, en el que el micrófono recibe sonidos emitidos desde el mismo robot luego de que éstos rebotan en los obstáculos que tiene enfrente, es decir, un sistema de sonar; y segundo, un micrófono para captar el sonido ambiente y utilizarlo en algún sentido, como recibir órdenes a través de palabras o tonos, y, un poco más avanzado, determinar la dirección de estos sonidos. Como es obvio, ahora que se habla tanto de robots para espionaje, también se incluyen micrófonos para tomar el sonido ambiente y transmitirlo a un sitio remoto
Otras aplicaciones
Sensores de presión
En la industria hay un amplísimo rango de sensores de
presión, la mayoría orientados a medir la presión de un
fluido sobre una membrana. En robótica puede ser
necesario realizar mediciones sobre fluidos hidráulicos
(por dar un ejemplo), aunque es más probable que los
medidores de presión disponibles resulten útiles como
sensores de fuerza (el esfuerzo que realiza una parte
mecánica, como por ejemplo un brazo robótico), con la
debida adaptación
Otras aplicaciones
Sensores de fuerza
Un sensor de fuerza ideal para el uso en robótica es el sensor FlexiForce. Se trata de un elemento totalmente plano integrado dentro de una membrana de circuito impreso flexible de escaso espesor. Esta forma plana permite colocar al sensor con facilidad entre dos piezas de la mecánica de nuestro sistema y medir la fuerza que se aplica sin perturbar la dinámica de las pruebas. Los sensores FlexiForce utilizan una tecnología basada en la variación de resistencia eléctrica del área sensora. La aplicación de una fuerza al área activa de detección del sensor se traduce en un cambio en la resistencia eléctrica del elemento sensor en función inversamente proporcional a la fuerza aplicada.
Otras aplicaciones
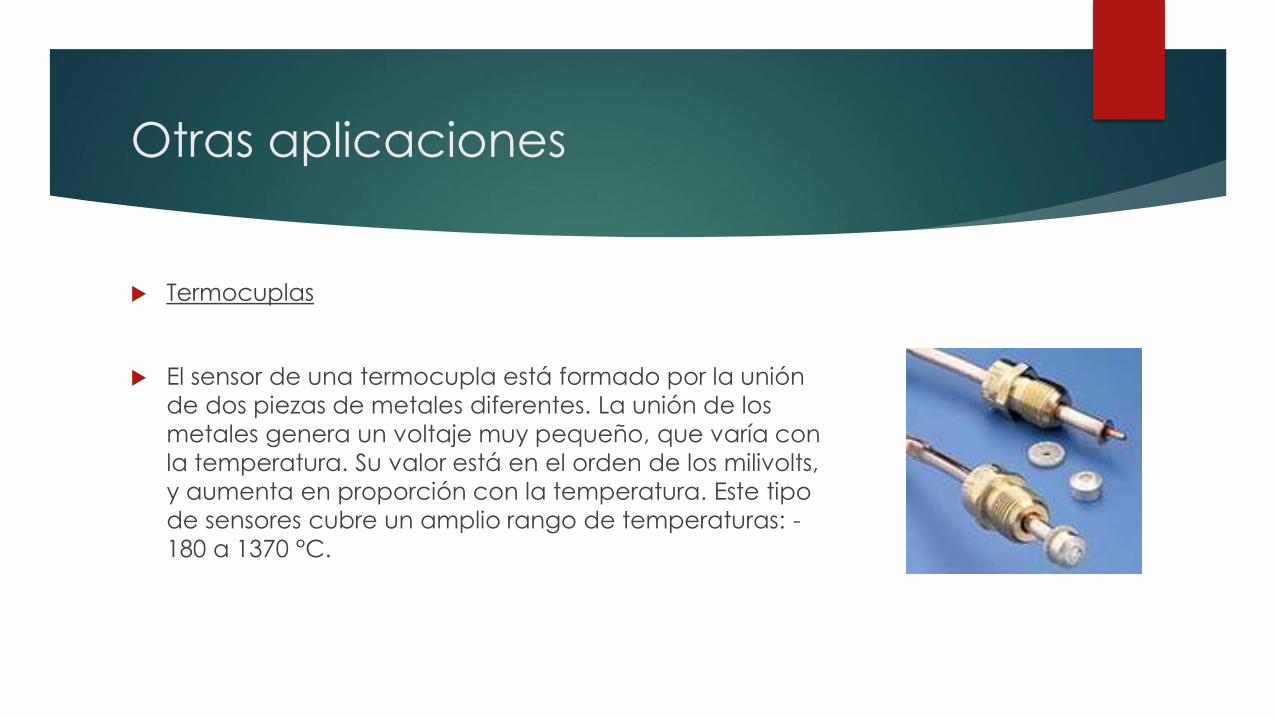
Termocuplas
El sensor de una termocupla está formado por la unión
de dos piezas de metales diferentes. La unión de los
metales genera un voltaje muy pequeño, que varía con
la temperatura. Su valor está en el orden de los milivolts,
y aumenta en proporción con la temperatura. Este tipo
de sensores cubre un amplio rango de temperaturas: -
180 a 1370 °C.
Bibliografia
Capitulo 1: sensores para robots móviles:
http://www.iit.upcomillas.es/~alvaro/teaching/Clases/Robots/teoria/Sensores%20y%
20actuadores.pdf
Capitulo 7 de sensores. Robotica manipuladores y robots móviles. Aníbal Ollero
Batarune Catedratico de ingeniería de sistemas y automática de ESI Universidad de
Sevilla
Sensores - Conceptos generales Eduardo J. Carletti
http://robots-argentina.com.ar/Sensores_general.htm

Fin