Departman za mehanizaciju i konstrukciono mainstvo Katedra za
motore i vozila
DRUMSKA VOZILADEO: TEORIJA KRETANJA VOZILA
SkriptaZA STUDENTE DEPARTMANA ZA SAOBRAAJ
Mr Boris Stoji, dipl. in. ma.
Novi Sad, jun 2010. radna verzija
SADRAJ1.
UVOD..........................................................................................................................
11.1 1.2 PODELA DINAMIKE VOZILA I OBLASTI PROUAVANJA
........................................... 1 POLOAJ TEITA I
OSOVINSKE REAKCIJE
..................................................................
2
Osovinske reakcije vozila u mirovanju na horizontalnoj
podlozi..................................................... 3
Osovinske reakcije vozila u mirovanju na podlozi pod uzdunim
nagibom .................................... 3 Promena poloaja
teita pri optereivanju
vozila............................................................................
4 Kriterijumi za odreivanje nosivosti teretnih
vozila.........................................................................
5 Uticaj prikljunog vozila na osovinske reakcije
...............................................................................
5 Dinamike osovinske reakcije
..........................................................................................................
5
2. OSNOVNI POJMOVI UZDUNE DINAMIKE VOZILA
....................................... 62.1 2.2 OBLASTI PROUAVANJA
...................................................................................................
6 MODEL VOZILA I
PRETPOSTAVKE...................................................................................
6
2.3 SILE KOJE DELUJU NA VOZILO U OPTEM SLUAJU KRETANJA I OSNOVNI
GEOMETRIJSKI
PARAMETRI..........................................................................................................
7 2.4 2.5 VEZA SILE / MOMENTA I SNAGE
......................................................................................
8 MEHANIKA KOTRLJANJA ELASTINOG TOKA PO KRUTOJ PODLOZI
................. 9
Dinamiki radijus toka
....................................................................................................................
9 Otpor kotrljanja: histerezis pneumatika
............................................................................................
9 Tangencijalna reakcija
toka...........................................................................................................
13
3. OTPORI KRETANJA
...............................................................................................153.1
OTPOR KOTRLJANJA
TOKA...........................................................................................
15 Faktori koji utiu na vrednost koeficijenta otpora
kotrljanja..........................................................
16 Ukupan otpor kotrljanja za
vozilo...................................................................................................
17 3.2 OTPOR
VAZDUHA...............................................................................................................
18 Aerodinamika drumskih
vozila.......................................................................................................
18 Sila otpora
vazduha.........................................................................................................................
19 Sile izdizanja
...................................................................................................................................
20 3.3 3.4 3.5 OTPOR USPONA
..................................................................................................................
21 OTPOR INERCIJE
.................................................................................................................
21 OTPOR PRIKLJUNOG VOZILA
.......................................................................................
22
4. VUNO DINAMIKE PERFORMANSE DRUMSKIH VOZILA
.....................234.1 UVODNE
NAPOMENE.........................................................................................................
23 Pojam raspoloive snage i momenta na toku
................................................................................
23 Veza izmeu snage i momenta pri datom broju
obrtaja..................................................................
23 4.2 PRENOENJE SNAGE NA POGONSKE TOKOVE
........................................................ 23 Osnovni
elementi
transmisije..........................................................................................................
24 Gubici u
transmisiji.........................................................................................................................
25 Prenosni odnosi transmisije
............................................................................................................
26 Vuna sila na toku i brzina kretanja vozila
...................................................................................
27 4.3 BRZINSKE KARAKTERISTIKE POGONSKIH MOTORA
............................................... 28 Pojam brzinske
karakteristike
.........................................................................................................
29 Radni reim (radna taka)
motora...................................................................................................
29 Regulacija brzine
vonje.................................................................................................................
32 Stabilnost radnog
reima.................................................................................................................
32 Idealna pogonska karakteristika
hiperbola...................................................................................
34 4.4 4.5 VUNO-BRZINSKA KARAKTERISTIKA
.........................................................................
34 ANALIZA VUNO-DINAMIKIH PERFORMANSI
VOZILA......................................... 36 Idealna
hiperbola vue
....................................................................................................................
35 Maksimalna brzina kretanja vozila
.................................................................................................
36 Maksimalni uspon
...........................................................................................................................
38 Ubrzanje, vreme i put zaleta
...........................................................................................................
38 4.6 POTRONJA GORIVA
.........................................................................................................
43 Energija potrebna za kretanje
vozila...............................................................................................
44 Specifina efektivna potronja
goriva.............................................................................................
46 Optimalan izbor radnog reima motora sa aspekta potronje goriva
(uticaj prenosnog odnosa) ... 47
5. REALIZACIJA UZDUNE SILE IZMEU TOKA I PODLOGE
......................495.1 UVOD
.....................................................................................................................................
49 Uslov kotrljanja toka
.....................................................................................................................
49 Analogija klizanja krutog tela i pojave klizanja toka pri
kotrljanju.............................................. 49 5.2
PRIJANJANJE GUME NA VRSTOJ
PODLOZI................................................................
50 Pojam prijanjanja (adhezije) i
terminologija...................................................................................
50 Mehanizam
prijanjanja....................................................................................................................
51 Faktori koji utiu na prijanjanje
......................................................................................................
52
5.3 5.4 5.5
KOEFICIJENT PRIJANJANJA PNEUMATIKA
.............................................................. 53
KLIZANJE TOKA
...............................................................................................................
53 ZAVISNOST KOEFICIJENTA PRIJANJANJA OD KLIZANJA
........................................ 55
Vrednosti koeficijenta prijanjanja i osnovni uticajni faktori
.......................................................... 56
Akvaplaniranje
................................................................................................................................
58
Drumska vozila, deo: Teorija kretanja
Uvod
1. UVODOsnovni zadatak teorije kretanja vozila je prouavanje
dejstva sila na vozilo, odnosno njihovih uzroka i posledica. Prva
podela ove oblasti moe se izvriti prema karakteru podloge po kojima
se vozilo kree, pa se posebno razmatraju: teorija kretanja po
tvrdim podlogama (drumska vozila), i teorija kretanja po mekim
podlogama (vanputna vozila)
U prouavanju kretanja vozila po mekim podlogama, uzimanje u
obzir mehanikih osobina zemljita, pre svega njegovih napona i
deformacija po kretanju, od sutinskog je znaaja. S obzirom na
raznovrsnost tipova zemljita, velik broj uticajnih parametara ije
je su varijacije u realnim uslovima esto intenzivne i stohastike
(vlanost, prostorna raspodela mehanikih svojstava...), a na kraju i
zbog kompleksnog naponsko deformacijskog ponaanja mekog zemljita,
kretanje vanputnih vozila prouava se u okviru posebne discipline,
koja ovde nee biti dalje razmatrana. U prouavanju kretanja drumskih
vozila, vozilo se kree po nedeformabilnoj podlozi odnosno mehanika
svojstva podloge su takva da se njene deformacije pod uticajem
vozila mogu zanemariti. Disciplina koja prouava kretanje vozila po
tvrdm podlogama se uobiajeno naziva DINAMIKA VOZILA.
1.1 Podela dinamike vozila i oblasti prouavanjaVozilo
predstavlja kompleksan dinamiki sistem sa velikim brojem stepeni
slobode. Posmatrajui samo telo vozila (karoserija sa pripadajuim
elementima), ono u optem sluaju predstavlja telo sa svih 6 stepeni
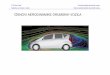
slobode u prostoru, slika 1 [chula.ac.th].
Slika 1. Mogua kretanja vozila Pored toga, svaki od tokova takoe
ima po 6 stepeni slobode, ime ukupan broj stepeni slobode dostie
30, bez uzimanja u obzir bilo kakvih unutranjih pomeranja tj.
deformacija (koje se u stvarnosti javljaju u odreenoj meri). S
obzirom na veze izmeu tokova i vozila, parametri koji opisuju sva
ova kretanja su u meusobnim interakcijama. Takoe, mnogi elementi
iskazuju sloene forme ponaanja sa izrazitim nelinearnostima.
Analitiko modeliranje kretanja vozila u optem sluaju zato bi dovelo
do izuzetno sloenog sistema jednaina, pri emu bi bila potpuno
izgubljena preglednost i razumevanje pojedinih uticaja i
meuzavisnosti. Zbog toga je detaljna analiza kretanja vozila
predmet specifinih razmatranja, pri emu se za ovakve analize
obavezno koriste raunarski podrane simulacije. Za potrebe
prouavanja kretanja vozila i razumevanje osnovnih zakonitosti,
meutim, svrsishodna je analiza specijalnih, pojednostavljenih
sluajeva kretanja, koji smanjuju broj stepeni slobode i uticajnih
faktora, omoguavajui na taj nain bolju preglednost i razumevanje
sistema. U praksi se ovi specijalni sluajevi klasifikuju prema
osama du kojih deluju sile koje su od interesa pa se tako dinamika
vozila klasifikuje na sledee celine: 1
Drumska vozila, deo: Teorija kretanja
Uvod
uzduna dinamika sile deluju u pravcu kretanja; glavni aspekti
izuavanja su otpori kretanja i mogunost njihovog savladavanja,
koenje itd.; kretanje vozila je translatorno, parametri kretanja se
obino tretiraju kao unapred zadati; matematiki pristup je ovde
najjednostavnji i bazira se uglavnom na algebarskim relacijama;
poprena dinamika sile deluju u pravcu poprene ose, od interesa je
pre svega kretanje vozila u krivini; matematiki modeli su po
pravilu znatno sloeniji nego kod uzdune dinamike, pre svega zbog
kompleksnog ponaanja pneumatika, ali i zbog prisustva veeg broja
uticajnih faktora vertikalna dinamika sile deluju u pravcu
vertikalne ose, podruje od interesa su oscilacije vozila i njihov
uticaj na komfor putnika kao i na kontakt toka sa podlogom;
uglavnom se zasniva na primeni teorije oscilacija.
1.2 Poloaj teita i osovinske reakcije
hT GP lP
G A lZ l GZ
Slika 2. Poloaj teita i osovinske reakcije G teina vozila, GP,
GZ osovinske reakcije prednje i zadnje osovine, l osovinski razmak,
lP, lZ normalna rastojanja teita od napadnih linija GP i GZ, hT
visina teita Teina vozila G izaziva vertikalne reakcije na prednjoj
i zadnjoj osovini, GP i GZ, slika 2. Osovinske reakcije su po
svojoj prirodi uvek normalne na podlogu, slika 3.
Slika 3. Pravac dejstva osovinskih reakcija
2
Drumska vozila, deo: Teorija kretanja OSOVINSKE REAKCIJE VOZILA
U MIROVANJU NA HORIZONTALNOJ PODLOZI Na osnovu statikih uslova
ravnotee, uzimajui u obzir lP + lZ = l, vai: Zi = 0 GP + GZ = G MA
= 0 GPl = GlZGZ = lP G llZ G l
Uvod
lP =
GP =
odnosnolZ =
GZ l G GP l G
, tj.
lZ G P = lP G Z
Jednostavnost navedenih relacija, kao i injenica da osovinska
optereenja u zbiru moraju dati teinu vozila, dovodi do u praksi
esto korienog naina zadavanja osovinskih reakcija kroz procentualni
odnos u kom se teina vozila rasporeuje na prednju i zadnju osovinu.
Ovo je najbolje ilustrovati konkretnim numerikim primerom: ako,
npr. GP iznosi 0,63G, GZ tada mora iznositi G0,63G = 0,37G, pa se
moe navesti da procentualni odnos raspodele teine po osovinama
napred / nazad iznosi 63% / 37%. OSOVINSKE REAKCIJE VOZILA U
MIROVANJU NA PODLOZI POD UZDUNIM NAGIBOM hT GP lP l Gcos lZ Gsin G
A GZ
Slika 4. Vozilo na podlozi sa uzdunim nagibom Kada se vozilo
nalazi na podlozi pod uzdunim nagibom pod uglom , slika 4, od
interesa je izvriti r razlaganje sile teine vozila G na komponente
u pravcu upravnom na podlogu (Gcos) i paralelno sa podlogom (Gsin).
Statiki uslovi ravnotee tada glase: Zi = 0 GP + GZ = Gcos MA = 0
GPl = GcoslZ GsinhT Sledi:GZ = GP = lP h G cos + T G sin l l h lZ G
cos T G sin l l
3
Drumska vozila, deo: Teorija kretanja U navedenim izrazima moe
se primetiti da na osovinska optereenja uticaj imaju dva faktora: G
cos potie od dejstva sile koja vozilo pritiska uz podlogu, delujui
na nju l upravno, a to je sila Gcos (na horizontalnoj podlozi je to
sila G u celokupnom iznosu)
Uvod
lan
l P, Z
hT G sin potie od dejstva sile Gsin, koja je paralelna sa
podlogom. Moment ove sile l tei da izazove preraspodelu osovinskih
optereenje, odnosno, u sluaju uzbrdice, da rastereti prednju, a da
za isti iznos (jer suma vertikalnih sila ne moe biti promenjena
usled dejstva horizontalne!) dodatno optereti zadnju. Zbog toga se
ovaj lan u oba sluaja javlja u istom obliku, s tim da kod prednje
osovinske reakcije ima pozitivan, a kod zadnje negativan predznak.
U sluaju nizbrdice, situacija je obrnuta, odnosno usled dejstva
sile Gsin (odnosno uticaja njenog momenta sa krakom hT) dolazi do
dodatnog optereivanja prednje, na raun rastereivanja zadnje osovine
u istom iznosu.
lan
Za = 0 dobijaju se prethodno izvedene relacije: G Z =
l lP G , GP = Z G l l
PROMENA POLOAJA TEITA PRI OPTEREIVANJU VOZILA Vozilo predstavlja
sloen mehaniki sistem koji se sastoji od vie celina. Takoe,
prisutni su putnici, kao i koristan teret koji vozilo prevozi.
Svaki od pomenutih subjekata ima sopstveno teite, tako da
jedinstveno teite vozila zapravo predstavlja mesto delovanja
rezultante svih pojedinih sila teine, koje se odreuje prema
pravilima statike. Shodno tome, kada se optereenje vozila menja,
dolazi i do promene poloaja njegovog teita (menja se odnos lP i
lZ), a shodno tome i do promene procentualnog odnosa osovinskih
rekacija. Kod putnikih vozila, masa putnika odnosno tereta u odnosu
na masu vozila je obino takva da se promena poloaja teita pri
promeni optereenja moe zanemariti, to nije sluaj kod teretnih
vozila, gde su razlike u masi praznog i optereenog vozila
znatne.
GT GUK lP0 GP lP G0 lZ0 lZ GZ
Slika 5. Promena poloaja teita teretnog vozila pri promeni teine
tereta: GUK rezultanta sila G0 i GT, zamenjuje njihova pojedinana
dejstva!
4
Drumska vozila, deo: Teorija kretanja KRITERIJUMI ZA ODREIVANJE
NOSIVOSTI TERETNIH VOZILA
Uvod
Za svako vozilo proizvoa deklarie najveu dozvoljenu masu (misli
se na ukupnu masu vozila i celokupnog tereta, putnika i opreme)
odnosno teinu (GMAX), kao i dozvoljena osovinska optereenja (GPMAX
i GZMAX) koja u toku eksploatacije vozila ne smeju biti prekoraena.
Nosivost vozila se, prema tome, odreuje kao razlika izmeu najvee
dozvoljene mase i mase praznog vozila. Pri tome, osovinska
optereenja pri potpuno optereenom vozilu moraju ostati u granicama
maksimalnih vrednosti koje propisuje proizvoa. Merenjem osovinskih
optereenja vozila optereenog do maksimalne nosivosti, odnosno
raunskim putem primenom optih statikih uslova ravnotee, kao to je
prikazano u gornjim razmatranjima moe se proveriti da li je ovaj
uslov ispunjen, uzimajui u obzir da su osovinska optereenja GP i GZ
posledica sumarnog dejstva G0 i GT, slika 5 (ukupna teina vozila:
GUK = G0 + GT). UTICAJ PRIKLJUNOG VOZILA NA OSOVINSKE REAKCIJE
Prisustvo prikljunog vozila izaziva zbog horizontalne i vertikalne
komponente sile na poteznici preraspodelu osovinskih optereenja
vunog vozila ali i promenu njihove sume (uticaj vertikalne
komponente!). U zavisnosti od uslova kretanja i pogonskog koncepta,
ova preraspodela moe se pozitivno ili negativno odraziti na
mogunost realizacije vunih sila pri ogranienom prijanjanju izmeu
pogonskih tokova i podloge. DINAMIKE OSOVINSKE REAKCIJE Dinamiki
uticaji koji izazivaju promenu vrednosti osovinskih reakcija pri
kretanju vozila su: inercijalna sila, iji uticaj ima isti karakter
kao i uticaj nagiba podloge, odnosno izaziva preraspodelu ne
menjajui sumu, i aerodinamike sile izdizanja, koje menjaju
vrednosti osovinskih reakcija, po pravilu menjajui (tj. najee
smanjujui) i njihovu sumu. Otpor kotrljanja tokova takoe doprinosi
preraspodeli osovinskih reakcija pri kretanju vozila, ali je njegov
uticaj mali i u praksi se obino ne uzima u razmatranje.
5
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
2. OSNOVNI POJMOVI UZDUNE DINAMIKE VOZILA2.1 Oblasti
prouavanjaProuavaju se sile koje deluju u pravcu uzdune ose vozila
i pratee pojave: Otpori kretanja Bilans sila koje deluju na vozilo:
potrebna i raspoloiva vuna sila Vrste i karakteristike pogonskih
agregata i koncepata Prenos obrtnog momenta na pogonski toak
Realizacija vune / kone sile, klizanje i prijanjanje Proklizavanje
pogonskog, blokiranje koenog toka Vuno-brzinske karakteristike
vozila Parametri ubrzanja, maksimalna brzina, maksimalni usponi,
vua prikljunog vozila Parametri koenja: usporenje, vreme i put
koenja, osovinske reakcije, optimalna raspodela sile koenja, uticaj
odstupanja stvarne od optimalne raspodele Potronja goriva Uzduna
stabilnost
2.2 Model vozila i pretpostavkeZanemaruju se sva pomeranja u
pravcima normalnim na pravac kretanja (Zi = 0, Yi = 0) Zanemaruju
se svi vidovi pobuda na oscilovanje i vibracije, i sve vrste
deformacija Vozilo se kree translatorno pravolinijski po idealno
ravnoj podlozi Vozilo se posmatra u jednoj ravni uzdunoj Sile na
pojedinim tokovima svode se na osovine
6
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
2.3 Sile koje deluju na vozilo u optem sluaju kretanja i osnovni
geometrijski parametrihT FW
FO FfP GP lP FN l
T
FIN F
G
G = F N + F
lZ FfZ GZ FPV
Slika 6. Opti sluaj kretanja vozila: l razmak osovina, lP
horizontalno rastojanje teita od mesta kontakta prednje osovine i
tla, lZ horizontalno rastojanje teita od mesta kontakta zadnje
osovine i tla, hT visina teita Da bi vozilo moglo da savlada otpore
kretanja, raspoloiva vuna sila na toku, FO, mora biti vea ili
jednaka od sume svih sila koje predstavljaju otpore kretanju.
Koristei Dalamberov princip (FIN = - ma), zakon kretanja prema
Drugom Njutnovom zakonu glasi: FO = Ff + FW + F + FIN + FPV Ova
relacija se naziva bilans sila koje deluju nas vozilo. Raspoloiva
obimna (vuna, pogonska) sila na toku:FO = MT rD
pogonski obrtni moment na toku, doveden do toka od motora putem
transmisije dinamiki poluprenik toka
G = mg teina vozila Kada se vozilo kree na podlozi pod uzdunim
nagibom , od interesa je vektorsko razlaganje teine G na komponentu
normalnu na podlogu, FN, i paralelnu sa podlogom, F: G = F N + F FN
= Gcos sila koja pritiska vozilo normalno na podlogu Sile koje
deluju du pravca kretanja vozila su: FfP, FfZ sile otpora
kotrljanja na prednjoj odnosno zadnjoj osovini FW sila otpora
vazduha 7
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
F = Gsin sila otpora uspona (na nizbrdici, ova sila ne
predstavlja otpor ve pomae kretanju!) FIN sila otpora inercije pri
ubrzavanju vozila FPV sila otpora prikljunog vozila, ukoliko je
prisutnoSile otpora kotrljanja i otpora vazduha javljaju se u svim
uslovima, mada je pri malim brzinama otpor vazduha zanemarljiv.
Ostale sile javljaju se u posebnim sluajevima, i mogu, u odreenim
uslovima, menjati predznak (uzbrdica / nizbrdica, ubrzanje /
koenje), tj. mogu delovati i u smeru kretanja. U ovom smislu od
interesa moe biti analiza kretanja vozila na nizbrdici odnosno
uticaj sile F u takvom sluaju. Promena smera inercijalne sile,
odnosno koenja vozila, prouava se zasebno od prouavanja dejstva
otpora kretanja. Kada je u pitanju pogonski toak, sila otpora
kotrljanja se ne pojavljuje u formi vektora sile koja deluje na
vozilo, ve se manifestuje kroz smanjenje tangencijalne reakcije
nastale usled dejstva pogonskog momenta MT na toku MT, dakle
stvarna sila koja pokree vozilo bie neto manja od . U analizi
kretanja vozila rD uobiajena postavka je, meutim, da se usvoji da
je na pogonskom toku na raspolaganju obimna sila u M punom iznosu (
FO = T ), a otpor kotrljanja pogonskih tokova se razmatra
objedinjeno sa otporom rD kotrljanja nepogonskih. Na ovaj nain se
pristup pojednostavljuje, bez gubljenja na tanosti rezultata.
2.4 Veza sile / momenta i snagePrema definiciji iz mehanike,
snaga predstavlja izvreni mehaniki rad, odnosno utroak energije, po
jedinici vremena: P = dE / dt = dA / dt = F(ds / dt) = Fv Iz
gornjeg sledi:
P = Fv snaga je jednaka proizvodu sile, i brzine pri kojoj se
vri savladavanje te sile.Za rotaciono kretanje je, po analogiji: P
= dE / dt = dA / dt = M(d / dt) = M
P = M snaga je jednaka proizvodu obrtnog momenta, i ugaone
brzine pri kojoj se vrisavladavanje tog obrtnog momenta. Sila,
odnosno moment, daju informaciju o tome kolika je veliina
optereenja koje se savlauje. Snaga upotpunjuje informaciju podatkom
o tome kolikom brzinom moemo da savladamo to optereenje. U gornjim
relacijama, sve veliine su u osnovnim jedinicama (P[W], F[N],
M[Nm], v[m/s], [rad/s]). U prouavanju kretanja vozila, uobiajeno je
da se snaga zadaje u [kW] a brzina u [km/h], dok se umesto ugaone
brzine koristi broj obrtaja u minutu, n[o/min], n = 30/ (1 obrtaj
tj. pun krug = 2 rad). Koristei navedene dimenzije gornje relacije
dobijaju oblik: P=
F v 3600
i
P=
M n 9554
8
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
2.5 Mehanika kotrljanja elastinog toka po krutoj podloziDINAMIKI
RADIJUS TOKA
S obzirom na dejstvo vertikalnog optereenja kojim vozilo deluje
na toak, usled njegove elastinosti dolazi do radijalne deformacije
u zoni kontakta sa podlogom. Ova deformacija se manifestuje
lokalnim smanjenjem njegovog radijusa. Rastojanje od ose toka do
podloge prilikom kotrljanja naziva se dinamiki radijus, rD [Simi].
Vrednost dinamikog radijusa se ne izraunava, ve se uzima iz
kataloga proizvoaa pneumatika, za odgovarajui tip i dimenzije.
Radijalna elastinost moe se ematski predstaviti sistemom radijalno
rasporeenih opruga, slika 7.
r0
rDSlika 7. Dinamiki radijus toka r0 radijus neoptereenog toka;
rD dinamiki radijus pri kotrljanju OTPOR KOTRLJANJA: HISTEREZIS
PNEUMATIKA Vertikalna reakcija elastinog toka u mirovanju
Kod elastinog toka, usled njegove deformacije kontakt sa tlom se
ne ostvaruje koncentrisano, u jednoj taki, ve du linije (uslovno
posmatrano, zanemarujui irinu toka!). Reakcije podloge stoga deluje
u formi kontinualnog optereenja. Uoava se da radijalna deformacija
(skraenje poluprenika toka u odnosu na rastereeno stanje) ima
najveu vrednost u sreditu kontaktne zone. Idui prema krajevima
kontaktne zone deformacija poluprenika se kontinualno smanjuje, da
bi na samim krajevima zone nestala. Opisana zakonitost je ematski
prikazana skraivanjem opruga, koje predstavljaju radijalnu
elastinost pneumatika, pod dejstvom sila sabijanja (slika 8). Kod
opruga na krajevima kontaktne zone deformacije su najmanje, a prema
sredini deformacija opruga, odnosno skraenje poluprenika, raste.
Ova zakonitost rasporeda deformacije uslovljava i zakonitost po
kome se menja kontinualno optereenje, s obzirom na proporcionalnost
izmeu sile i deformacije. Zakonitost raspodele kontinualnog
optereenja, s obzirom na simetrinost raspodele deformacija,
simetrina je u odnosu na vertikalnu osu simetrije toka. Rezultanta
ovog kontinualnog optereenja, ZT, stoga deluje u njegovoj sredini,
odnosno saosna je sa spoljnim optereenjem RZT.
9
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
RZT
ZT
Raspodela kontinualnog optereenja
Slika 8. Elastini toak u mirovanju: RZT spoljno vertikalno
optereenje toka, ZT rezultanta kontinualne reakcije podloge
Elastini toak pri kotrljanju
Posmatra se elastini toak koji se kotrlja jednoliko (konstantnom
brzinom) bez klizanja, slika 9. Prilikom kotrljanja toka, dolazi do
stalne promene radijalne deformacije njegovih pojedinih segmenata,
a time i do unutranjih pomeranja u materijalu pneumatika. Kao i u
prethodno posmatranom sluaju, usled radijalne deformacije
pneumatika u njegovim radijalnim segmentima javlja se elastina sila
FEL proporcionalna deformaciji. Razlika u odnosu na sluaj
pneumatika koji miruje je pojava unutranje sile trenja FTR, koja se
javlja usled unutranjih pomeranja u materijalu. Usled dejstva ove
sile nastaju energetski gubici (disipacija energije). Energija koja
se troi na savladavanje gubitaka manifestuje se kroz pojavu sile
otpora, to sledi iz analize date u nastavku. U zoni segmenata koji
se nalaze u ulasku u kontaktnu zonu, deformaciji se, uz elastinu
silu FEL suprotstavlja i sila unutranjeg trenja FTR, tako da
rezultujua radijalna sila koja deluje na neki segment pneumatika u
ovoj zoni iznosi FR'=FEL+FTR. Savladavanje obe ove komponente vri
se na raun energije dovedene spolja. U ovoj zoni radijalna
deformacija posmatrano du pravca kretanja raste, sve do sredine
kontaktne povrine (sve vee sabijanje radijalnih opruga!). Iza
sredine kontaktne povrine segmenti pneumatika naputaju zonu
kontakta, odnosno radijalna deformacija poinje da opada (sabijanje
radijalnih opruga se smanjuje). Tom prilikom elastine sile vraaju
uloeni rad1, odnosno vraa se deo energije uloene prilikom uvoenja
istog segmenta u zonu kontakta. Meutim ta energija se ne vraa u
potpunosti. Naime, u ovom sluaju na raun unutranjih elastinih sila
vri se i savladavanje sila unutranjeg trenja, na ta se troi deo
energije, koji dakle predstavlja gubitke. U ovoj zoni, sila trenja
FTR je, dakle, usmerena suprotno od FEL, pa je rezultujua radijalna
sila FR''=FEL-FTR. Usled razlike izmeu FR' i FR'', zakon raspodele
kontinualnog vertikalnog optereenja toka vie nee biti simetrian u
odnosu na vertikalnu osu toka, kao to je sluaj za toak koji miruje.
Rezultujua vertikalna optereenja u prednjem delu kontaktne povrine
(FR'=FEL+FTR) neto su vea nego u
1
Za elastine sile vai zakon konzervacije energije!
10
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
zadnjem (FR''=FEL FTR), to dovodi preraspodele kontinualnog
optereenja, tj. do naruavanja simetrinosti. F F
RZT RXT XT rD
FEL
FTR
FEL
F Optereivanje: F=FEL Rastereivanje: F=FEL
F Optereivanje: F=FEL + FTR Rastereivanje: F=FEL FTR
ZT e
Kontinualno optereenje
Slika 9. Kotrljanje elastinog toka: RZT spoljno vertikalno
optereenje toka, ZT rezultanta kontinualne reakcije podloge, RXT
sila kojom vozilo deluje na toak, XT tangencijalna reakcija izmeu
toka i podloge; FEL sila otpora elastinoj deformaciji; FTR sila
otpora unutranjem pomeranju pri deformaciji (unutranje trenje)
Posledica toga je da vertikalna reakcija tla ZT (koja zapravo
predstavlja rezultantu kontinualnog optereenja!) vie ne deluje u
osi vertikalne simetrije toka, ve ispred nje, pomerena za
ekscentricitet e. Veliina ovog ekscentriciteta zavisi, izmeu
ostalog, i od ukupne duine kontaktne povrine. Usled toga na toak
deluje moment vertikalne reakcije, veliine e ZT koji se smerom svog
dejstva suprotstavlja kotrljanju toka. Ovo dejstvo je veoma vano i
predstavlja najvaniji od svih uzroka koji dovode do pojave otpora
kotrljanja toka (to e biti detaljnije razmatrano u nastavku). S
obzirom na svoju prirodu i mehanizam nastanka, naziva se otpor
deformacije pneumatika odnosno otpor histerezisa. Mf = eZT moment
otpora kotrljanja S obzirom na to da se moment Mf smerom svog
dejstva protivi kotrljanju, sledi vaan zakljuak da je na toak
potrebno delovati nekim drugim spoljnim dejstvom, da bi se dejstvo
momenta Mf savladalo tj. uravnoteilo i toak doveo u stanje
kotrljanja. Ovo dejstvo predstavlja horizontalna sila RXT (slika
9), kojom vozilo deluje na (nepogonski!) toak. Kao reakcija na ovo
dejstvo, na osnovu statikog uslova ravnotee (posmatramo kretanje
konstantnom brzinom!) u kontaktu izmeu toka i podloge javlja se
suprotno usmerena tangencijalna sila XT, jednakog intenziteta.
Spreg horizontalnih sila rDXT uravnoteava spreg eZT i omoguava
jednoliko kotrljanje toka. Sila XT predstavlja silu otpora
kotrljanja. Ukoliko se, umesto silom, na toak deluje spoljnim
momentom MT = eZT u smeru kotrljanja, tada se ovo dejstvo
suprotstavlja otporu kotrljanja i dovodi toak, kao i u prethodnom
sluaju, u stanje jednolikog kotrljanja bez klizanja. Razlika u
odnosu na prethodni sluaj je u tome da ovde na toak ne deluju
nikakve sile u horizontalnom pravcu, pa samim tim nee biti ni
tangencijalne reakcije izmeu 11
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
toka i podloge. Drugim reima, u posmatranom sluaju celokupan
iznos obrtnog momenta saoptenog toku je potroen na savladavanje
sopstvenog otpora kretanja toka. Oigledno, ukoliko se na toak
deluje silom ili momentom ije dejstvo po intenzitetu prevazilazi
spreg eGT, nakon prevladavanja sopstvenog otpora kotrljanja toka na
raspolaganju ostaje viak sile ili momenta, na raun kog se tada mogu
savladavati dodatni otpori (sluaj pogonskog toka, analiziran u
nastavku) ili toku saoptiti ubrzanje. Kako je veliina
ekscentriciteta e zavisna od velikog broja parametara i kompleksnih
fizikih mehanizama, kolinik e/rD zamenjuje se empirijskim
koeficijentom otpora kotrljanja f, koji e biti detaljnije razmatran
prilikom analize otpora kretanja vozila. f= e rD
Na osnovu toga, sila otpora kotrljanja (u prethodnim
razmatranjima obeleena sa XT) uobiajeno se obeleava sa Ff:
Ff = fZT sila otpora kotrljanjaVana napomena: uslov da se toak
moe dovesti u stanje kotrljanja bez klizanja jeste postojanje sile
trenja odnosno prijanjanja izmeu toka i podloge. U sluaju odsustva
prijanjanja, dejstvo horizontalne sile izazvalo bi isto
translatorno kretanje toka odnosno njegovo klizanje du podloge, dok
bi se u sluaju dejstva momenta toak obrtao u mestu, proklizavajui u
odnosu na podlogu
12
Drumska vozila, deo: Teorija kretanja TANGENCIJALNA REAKCIJA
TOKAG F rd X e Z
Osnovni pojmovi uzdune dinamike vozila
MT MO G A rd X e Zrd
G Fa
MK MK
X e Z
NEPOGONSKI TOAK
POGONSKI TOAK
KOENI TOAK
Na toak deluju: G vertikalno optereenje toka Z vertikalna
reakcija tla (eekscentricitet vertikalne reakcije posledica
unutranjeg trenja u pneumatiku) F aktivna sila koja vue ili gura
toak X horizontalna reakcija tla usled dejstva F Uslov ravnotee
sila: Z = G; X = F Uslov ravnotee momenata: Z e = X rd X=e Z rD
Na toak deluju: MT pogonski moment X tangencijalna reakcija tla
usled dejstva MT A sila kojom vozilo zadrava toak G vertikalno
optereenje toka Z vertikalna reakcija tla Uslov ravnotee momenata:
MT = XrD + Ze Uvodimo oznaku: X = XT X = XT =
Na toak deluju: MK koni moment X tangencijalna reakcija tla
usled dejstva MK Fa sila inercije kojom vozilo gura koeni toak G
vertikalno optereenje toka Z vertikalna reakcija tla Uslov ravnotee
momenata: MK + Ze = XrD Uvodimo oznaku: X = XK X = XK =
MT e Z rD rD
MK e + Z rD rD
e = f - koeficijent otpora rD kotrljanja X = FfT = f G (otpor
kotrljanja toka)
MT = FO obimna (vuna) rDsila toka
MK = FK kona sila toka rDZ e = FfT rD
Z
e = FfT rD
XT = FO - FfT - rezultujua tangencijalna sila na toku FO
fiktivna veliina2 XT stvarna veliina
XK = FK + FfT - rezultujua tangencijalna sila na toku
2
Fiktivna u smislu da sila kao vektor tog intenziteta ne deluje
na toak, ve se FO koristi kao oznaka za veliinu MT/rD
13
Drumska vozila, deo: Teorija kretanja
Osnovni pojmovi uzdune dinamike vozila
Bilans sila koje deluju na vozilo, kao to je navedeno u uvodu,
glasi: FO = Ff + FW + F + FIN + FPVMO . Kao to je gore pokazano, rD
M stvarna rezultujua tangencijalna sila na pogonskim tokovima
predstavlja veliinu O umanjenu za rD sopstveni otpor kotrljanja
pogonskih tokova. Navedena postavka bilansa sila ipak je korektna,
jer se za silu otpora kotrljanja Ff na desnoj strani jednaine uzima
suma otpora kotrljanja svih tokova, pa tako i pogonskih. Iz toga
sledi da navedena forma predstavlja korektnu matematiku
interpretaciju stvarnog bilansa sila.
Pri tome se za vrednost pogonske sile uzima fiktivna veliina
FO=
14
Drumska vozila, deo: Teorija kretanja
Otpori kretanja
3. OTPORI KRETANJA3.1 Otpor kotrljanja tokaIako otpor kotrljanja
toka predstavlja sumarno dejstvo nekoliko razliitih faktora, kao
najvaniji i najdominantniji mora se posebno izdvojiti otpor
histerezisa, iji je mehanizam detaljnije obraen u poglavlju o
kotrljanju elastinog toka po tvrdoj podlozi. U uobiajenim uslovima
kretanja drumskih vozila, ovaj udeo ini 90% ukupnog otpora. Otpor
histerezisa odlikuje se, ukratko, sledeim osobinama: nastaje usled
unutranjeg trenja zbog stalne promene deformacijskog stanja usled
kotrljanja; raste sa poveanjem radijalne deformacije pneumatika
(porast pritiska u pneumatiku dovodi do smanjenja radijalne
deformacije, pa samim tim i otpora kotrljanja); postoji i kada je
brzina kretanja jednaka nuli, odnosno na toak treba delovati nekom
konanom silom da bi se uopte doveo u stanje kretanja; vrednost mu
je za jedan iri dijapazon brzina gotovo konstantna ili raste veoma
blago sa porastom brzine, dok za vee brzine ima nagliji porast, to
utie i na maksimalnu brzinu kojom neki pneumatik moe trajno da se
kree bez oteenja; sa porastom temperature pneumatika otpor
histerezisa opada (prisustvo otpora histerezisa dovodi do
zagrevanja pneumatika, jer se unutranji otpori (trenje) pretvaraju
u toplotne gubitke; zbog toga u poetku temperatura pneumatika
raste, usled ega otpor histerezisa opada; nakon odreenog vremena
(3060 min.) toplotni bilans dostie ravnoteu, tj. otpor kotrljanja i
temperatura pneumatika se vie ne menjaju); proporcionalan je
vertikalnom optereenju toka i koeficijentu otpora kotrljanja (koji
u uobiajenim uslovima iznosi 0,010.02, odnosno sila otpora
kotrljanja iznosi oko 1-2% u odnosu na vertikalno optereenje toka)
Ostali uzroci koji prouzrokuju otpor kotrljanja su: Otpor trenja u
leaju toka Otpor na neravnoj podlozi (poveava se dejstvo
deformacije pneumatika tj. otpor histerezisa!) Otpor usmerenosti
tj. bonog klizanja (povoenja) toka Otpor istiskivanja sloja vlage
ili neistoa na podlozi Prilepljivanje pneumatika za vlanu podlogu
[Jankovi, zadaci] Otpor klizanja u kontaktnoj povrini Na mekoj
podlozi otpor tonjenja toka i deformacije podloge Zbog sloenosti
analitikog razmatranja svih uticaja na otpor kotrljanja, uvodi se
empirijski koeficijent proporcionalnosti izmeu sile otpora
kotrljanja i vertikalnog optereenja toka, f: Ff = fZT Koeficijent
f, pri tome, u najveoj meri obuhvata veliinu e , ali i druge
navedene uticaje. rD
15
Drumska vozila, deo: Teorija kretanja FAKTORI KOJI UTIU NA
VREDNOST KOEFICIJENTA OTPORA KOTRLJANJA Uticaj eksploatacionih
parametara
Otpori kretanja
Brzina Kao to je pomenuto, koeficijent otpora kotrljanja u
poetku raste veoma blago sa porastom brzine, dok za vee brzine ima
nagliji porast. Razliite vrste pneumatika imaju razliite karaktere
porasta koeficijenta f u funkciji brzine. Nekoliko primera
prikazano je na dijagramu, slika 10 [Walentowitz].
Slika 10.
Promena koeficijenta otpora kotrljanja sa brzinom za razliite
pneumatike
U literaturi postoji vei broj empirijskih izraza kojima se
modelira zavisnost koeficijenta f od brzine. Najbrojniji su
polinomi, opteg oblika: f = C0+C1v+C2v2+C3v3+C4v4+... Primer (prema
[Mitschke]): f = f0+C1v+ C2v4 , f0 = 0,01 C1 = 5,4210-6 C2 =
1,0510-11 Orijentaciona vrednost koeficijenta f na tvrdoj podlozi
(za vozilo u mirovanju ili pri maloj brzini 1000 kg kretanja): f0 =
0,01 za putnika vozila f0 < 0,01 za teretna vozila 10 kg v
(km/h) Prosene vrednosti koeficijenata iznose priblino:
16
Drumska vozila, deo: Teorija kretanja
Otpori kretanja
Pritisak Pritisak pneumatika je veoma vaan faktor otpora
kotrljanja, kako zbog velikog uticaja, tako i zbog toga to je to
jedini parametar pneumatika ijim podeavanjem korisnik moe uticati
na otpor kotrljanja (kao i na druge parametre pneumatika) u toku
eksploatacije. Povienje pritiska dovodi do poveanja radijalne
krutosti odnosno smanjenja deformacije, a time i do manjeg rada
uloenog u savladavanje otpora histerezisa odnosno do smanjenja sile
otpora kotrljanja. Povienje pritiska je sa ove take gledita
povoljno, ali je maksimalna vrednost pritiska, sa druge strane,
ograniena uslovima prijanjanja odnosno kontakta izmeu pneumatika i
podloge, to je od fundamentalne vanosti za bezbednost vozila zbog
uticaja na realizaciju sila koenja i voenja vozila u krivini.
Temperatura Sa porastom temperature pneumatika, dolazi do smanjenja
otpora kotrljanja, jer porast temperature dovodi do smanjenja
unutranjih otpora gume koji prouzrokuju otpor histerezisa. Otpor
histerezisa proizvodi energetske gubitke, odnosno dovodi do
transformacije mehanike energije u toplotnu, to se manifestuje kroz
povienje temperature pneumatika. Zbog toga u poetnoj fazi dolazi do
intenzivnijeg porasta temperature pneumatika, to dalje za posledicu
ima intenzivniju razmenu toplote sa okolinom odnosno sporiji porast
temperature. Zbog porasta temperature, otpor histerezisa opada, a
time se smanjuju i energetski gubici. Nakon odreenog vremena
uspostavlja se termodinamiki ravnoteno stanje na kome otpor
histerezisa i temperatura pneumatika dostiu ustaljenu vrednost. Red
veliine trajanja ovog perioda iznosi priblino 1h [Wagner].Uticaj
konstruktivnih parametara
Koeficijent f opada sa: poveanjem dimenzija pneumatika (smanjuje
se odnos e/rD) smanjenjem odnosa visine prema irini (poveava se
radijalna krutost) poboljanjem sastava smee gume smanjenje
histerezisa
UKUPAN OTPOR KOTRLJANJA ZA VOZILO
Ukupna suma otpora kotrljanja motornog vozila jednaka je sumi
otpora kotrljanja svh tokova, odnosno: Ff = FfTi = fZTi = fG Za
nastanak otpora kotrljanja merodavna je uvek veliina sile koja
vozilo pritiska uz podlogu, jer je to uticaj koji izaziva
deformaciju pneumatika a time i otpor histerezisa. Kada se vozilo
nalazi na uzdunom nagibu, sila koja pritiska vozilo uz podlogu
iznosi: FN = Gcos
Gcos
G
Zbog toga je prilikom vonje na uzdunom nagibu, za otpor
kotrljanja merodavna komponenta sile teine normalna na podlogu.
Poto je za >0, cos 1 - empirijski koeficijent uea obrtnih masa u
ubrzavanjuOvakav pristup, iako sa mehanike take gledita ne
predstavlja sasvim tanu interpretaciju, opravdan je jer smanjuje
broj potrebnih koraka pri izraunavanju. U optem sluaju koeficijent
se izraunava prema obrascu:
= A + BiTR2Iako je koeficijent empirijskog karaktera, treba
pomenuti da je ovakav njegov oblik direktno vezan za mehaniki model
meusobnih relacija elemenata transmisije. U literaturi se za
koeficijente A i B sreu razliite vrednosti, npr.:
= 1,03 + 0,0018iTR2
3.5 Otpor prikljunog vozilaUkoliko je na poteznici vozila
prikljueno prikljuno vozilo, vuno vozilo mora savladati i sve
njegove otpore kretanja koji nastaju usled navedenih dejstava.
22
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
4. VUNO DINAMIKE PERFORMANSE DRUMSKIH VOZILA4.1 Uvodne
napomenePOJAM RASPOLOIVE SNAGE I MOMENTA NA TOKU
Analiza otpora kretanja dovodi do podatka o veliini obimne tj.
vune sile koju je potrebno realizovati na pogonskom toku da bi bio
ostvaren odreeni reim kretanja. Sa druge strane, da bi se znalo
kolika je raspoloiva vuna sila, odnosno ona koju je realno mogue
realizovati, potrebno je poznavati performanse pogonskog motora i
karakteristike transmisije putem koje se snaga motora prenosi na
pogonske tokove.VEZA IZMEU SNAGE I MOMENTA PRI DATOM BROJU
OBRTAJA
Zadatak motora je odavanje obrtnog momenta, odnosno snage, pri
nekom broju obrtaja. Na osnovu definicije pojma snage, kao to je ve
obrazloeno u uvodu, snaga motora je jednaka proizvodu obrtnog
momenta koji motor savlauje i ugaone brzine pri kojoj se
savladavanje tog obrtnog momenta vri, odnosno: P = M - P(W), M(Nm),
(rad/s) Ako se, kao to je uobiajeno, umesto ugaone brzine koristi
broj obrtaja u minutu n, i ako se snaga umesto u (W) izrazi u (kW),
gornji izraz postaje: P= M n 9554 odnosno: M = 9554 P n
Pri korienju gornjih izraza vano je voditi rauna o tome da se
vrednosti za P i M odnose na datu vrednost broja obrtaja, tj. za
svako n postoji jedan par vrednosti za P i M (to odgovara krivoj
brzinske karakteristike motora). Na osnovu gornjih relacija, mogu
se formulisati sledei zakljui:
obrtni moment M i broj obrtaja n predstavljaju PARAMETRE SNAGE
za konstantnu raspoloivu snagu je Mn = const, odnosno: pri jednom
konstantnom nivou snage, potreba za veim obrtnim momentom se moe
realizovati samo pri smanjenju broja obrtaja, i obrnuto, smanjenjem
optereenja u vidu manjeg obrtnog momenta mogue je poveati broj
obrtaja pri kome se savladava optereenje. Promena vrednosti M i n u
skladu sa uslovima kretanja, pri datoj snazi, naziva se
TRANSFORMACIJA PARAMETARA SNAGE.
4.2 Prenoenje snage na pogonske tokoveZa prenos snage od motora
do pogonskih tokova koristi se sistem mehanikih prenosnika, odnosno
transmisija. Osnovni zadatak transmisije je, osim prenosa snage, u
optem sluaju i transformacija njenih parametara. Transformacija
parametara snage je neophodna kad god izlazni parametri snage
pogonskog motora, ili bar jedan od njih, nisu pogodni za direktno
prenoenje na pogonski toak. Na primer, broj obrtaja pogonskog
motora, koji se u eksploataciji najee kree u dijapazonu od priblino
2000 - 4000 o/min3, previe je velik za pogonski toak, pa se zbog
toga mora smanjiti. Ovo smanjenje3
Ovo predstavlja samo okvirni tj. orijentacioni podatak!
23
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
se vri u okviru transmisije, pri emu, na osnovu zakonitosti Mn =
const istom prilikom mora doi i do poveanja obrtnog momenta u istoj
razmeri. Prenoenje snage kroz transmisiju podrazumeva i neeljene
ali neminovne energetske gubitke.OSNOVNI ELEMENTI TRANSMISIJE
Prikazana je ema tri najee primenjivana koncepta transmisije
putnikih vozila, slika 14. M m+GP KP M m m M R GP
KP GPc)
GPa) b)
Slika 14. Osnovne koncepcije transmisije putnikih vozila M
motor, m menja, GP glavni prenosnik, KP kardanski prenosnik, R
razvodnik snage a) motor napred, pogon na prednjim tokovima, b)
motor napred, pogon na zadnjim tokovima, c) motor napred, pogon na
sva etiri toka
Transmisiju vozila, u najoptijem sluaju, ine sledei
elementi:
Spojnica prenosi snagu pogonskog motora na transmisiju; nema
transformacije parametara snage niti energetskih gubitaka (osim u
reimu klizanja!); Menjaki prenosnik vri transformaciju broja
obrtaja i momenta motora radi prilagoavanja vunih karakteristika
vozila trenutnim uslovima eksploatacije; raspolae veim brojem
stepeni prenosa radi mogunosti realizacije to ireg dijapazona
uslova kretanja vozila; kod pojedinih vrsta vozila (teretna vozila,
traktori...) moe postojati vie od jednog menjakog prenosnika;
Kardanski prenosnik (kardansko vratilo sa kardanskim zglobovima)
vri prenos snage izmeu udaljenih ili meusobno relativno pokretnih
komponenata transmisije bez transformacije parametara; energetski
gubici su u optem sluaju mali, ponekad zanemarljivi; Razvodnik
snage (samo kod vozila sa pogonom na vie od jedne osovine) razvodi
snagu pogonskog motora na dve ili vie pogonskih osovina; po pravilu
se vri transformacja parametara snage, esto uz mogunost promene
prenosnog odnosa; Boni reduktor (kamioni, autobusi, traktori);
element za transformaciju parametara snage ije uvoenje je
uslovljeno konstruktvnim i eksploatacionim parametrima vozila
Glavni prenosnik vri zavrnu transformaciju broja obrtaja i momenta;
razvodi snagu na pogonske tokove jedne osovine;24
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
GUBICI U TRANSMISIJI Prilikom prenosa snage neminovno dolazi do
njenih gubitaka. Ovi energetski gubici u transmisiji nastaju jer se
moraju savladati unutranji otpori kretanju elemenata, koji potiu od
kulonovog i viskoznog trenja pri relativnom kretanju pojedinih
elemenata (leajevi, zupanici, zglobovi, zaptivai, mazivo...).
Prema fundamentalnom fizikom zakonu odranja energije, prema kome
se energija ne moe izgubiti, ve samo transformisati iz jednog oblka
u drugi, moe se, uzimajui u obzir da snaga predstavlja utroak
energije po jedinici vremena, formulisati opti oblik energetskog
bilansa za prenos snage, koji emo ovde posmatrati za sluaj
mehanikog prenosnika: PUL = PIZL,UK ukupna snaga koja je "ula" u
prenosnik mora biti jednaka ukupnoj snazi koja je "izala" iz
prenosnika, slika 15. PUL PRENOSNIK PIZL,UK PIZL,GUB PIZL,KOR (
PIZL)
Slika 15.
Opta ema bilansa snage pri njenom prenoenju
Sa druge strane, ukupna snaga koja je "izala", deli se na
korisnu snagu koja se moe dalje iskoristiti i snagu izgubljenu na
savladavanje unutranjih otpora: PIZL,UK = PIZL,KOR + PIZL,GUB Pod
pojmom "izlazne snage" u terminologiji vezanoj za mehanike
prenosnike, a i uopte, po pravilu se misli samo na deo koji se moe
iskoristiti. Snaga potroena na savladavanje unutranjih gubitaka,
dakle, ne spada u ovako definisanu izlaznu snagu: PIZL PIZL,KOR
Odnos izmeu ulazne i izlazne snage naziva se stepen korisnosti
prenosnika, :PIZL 1, odnosno dolazi do smanjenja tj. redukcije
broja obrtaja, dakle broj obrtaja na toku je manji od broja obrtaja
motora. Obrtni moment na toku, tom prilikom, mora biti u odnosu na
moment motora uvean istim faktorom kojim je broj obrtaja umanjen
iTR, ali uz uzimanje u obzir unutranjih gubitaka .VUNA SILA NA TOKU
I BRZINA KRETANJA VOZILA
Kada se toku saopti obrtni moment, kao horizontalna reakcija
izmeu toka i podloge, javlja se usled trenja tj. prijanjanja toka
za podlogu tangencijalna sila na toku. Kao to je poznato, deo
obrtnog momenta dovedenog na pogonski toak "potroi" se na
savladavanje sopstvenog otpora kotrljanja, a ostatak je na
raspolaganju za realizaciju tangencijalne reakcije izmeu toka i
podloge, odnosno stvarnu silu vue. U razmatranju vunih performansi
vozila, meutim, uobiajeno je da se u bilansu sila otpori kotrljanja
svih tokova uzimaju objedinjeno, za sve tokove, a za pogonsku
(vunu, obimnu) silu na toku (FO) se tada usvaja fiktivna veliina:
FO =MT rD
MT obrtni moment na toku rD dinamiki radijus
FO Poto je iTR = imiGP, sledi:FO =
TR i m i GP M - vuna sila na toku u zavisnosti od obrtnog
momenta motora M rD
27
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
Ukoliko se pogonski toak obre ugaonom brzinom T, uz pretpostavku
da nema klizanja, brzina kretanja vozila e biti: v = rDT (v[m/s],
rD[m], T[rad/s]) n T , zatim 30
Uzimajui u obzir vezu izmeu ugaone brzine u rad/s i broja
obrtaja u minutu n, T = poto je nT = n i TR , i pretvarajui brzinu
v u [km/h], dobija se:
v = 0,377rD
n - brzina kretanja vozila u [km/h], u zavisnosti od broja
obrtaja motora n i m i GP
U gornjim relacijama n je broj obrtaja pogonskog motora, a nT
broj obrtaja pogonskog toka u minutu.
4.3 Brzinske karakteristike pogonskih motoraPogonske motore koji
se koriste u motornim vozilima karakterie niz razliitih osobina, od
kojih su najvanije: snaga i obrtni moment: maksimalne vrednosti i
brzinska karakteristika potreba za transmisijom dimenzije, masa
energetska efikasnost ( potronja goriva) i emisija (lokalna i
globalna) nain skladitenja pogonske energije i vreme dopunjavanja
izvora energije karakteristike i raspoloivost pogonskog goriva,
nain dobijanja i skladitenja gustina energije i snage autonomija
vonje pouzdanost, vek trajanja, pogodnost za odravanje udobnost,
buka, vibracije itd. Za prouavanje uzdune dinamike vozila, odnosno
analize mogunosti savladavanja otpora kretanja i energije koja je
za to potrebna, karakteristike od prevashodnog znaaja su: brzinska
karakteristika obrtnog momenta M (Nm), brzinska karakteristika
snage P (kW), brzinska karakteristika specifine efektivne potronje
goriva gE (g/kWh) Obrtni moment motora se putem transmisije, uz
transformacije (promene vrednosti momenta i broja obrtaja) prenosi
do toka. Usled obrtnog momenta na pogonskom toku, u kontaktu sa
podlogom dolazi do realizacije vune sile koja se koristi za
savladavanje otpora kretanja. Stoga je obrtni moment motora
direktna mera za veliinu otpora tj. radnog optereenja koje vozilo
moe da savlada. Snaga koju motor tom prilikom odaje, s obzirom na
znaenje ovog pojma u mehanici, predstavlja direktnu meru za brzinu
kojom je trenutne otpore mogue savladati. Zato snaga predstavlja
merodavan 28
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
parametar pri odreivanju maksimalne brzine kojom se vozilo u
nekim posmatranim uslovima moe kretati. Specifina efektivna
potronja goriva, gE, predstavlja koliinu goriva u g (ili kg)
potrebnu za odavanje 1kWh energije4 pri datom reimu rada i moe se
koristiti za izraunavanje ukupne potronje goriva na nekoj deonci
puta, pod pretpostavkom da su poznati svi uslovi (brzina, nagib
podloge itd.).POJAM BRZINSKE KARAKTERISTIKE
Parametri motora nemaju konstantnu vrednost, ve se menjaju sa
promenom broja obrtaja. Pojam brzinske karakteristike motora
oznaava zavisnost nekog njegovog izlaznog parametra od broja
obrtaja. Drugim reima, brzinska karakteristika npr. obrtnog
momenta, podrazumeva poznavanje vrednosti obrtnog momenta za bilo
koji broj obrtaja izmeu minimalnog i maksimalnog pri kom motor moe
da radi. Odavde sledi da brzinska karakteristika predstavlja krivu
funkcionalne zavisnosti M=f(n). Karakteristike motora SUS se, u
najosnovnjoj formi, po pravilu prikazuju brzinskim karakteristikama
snage P i obrtnog momenta M, slika 16. S obzirom da su moment i
snaga razliite fizike veliine (iako meusobno povezane!), tj.
iskazuju se u razliitim dimenzjama (Nm odnosno kW), za svaku od
njih se na dijagramu koristi zasebna vertikalna osa sa odgovarajuom
razmerom.
M (Nm)
100 P (kW) 300 M 270 P 240 80 210 180 60 150 120 40 90 60 20 30
0 0 1000 1500 2000 2500 3000 3500 4000 4500 5000n (o/min)Slika 16.
Brzinska karakteristia motora primer
RADNI REIM (RADNA TAKA) MOTORA
Parametri radnog reima motora su: broj obrtaja, i moment (snaga)
Dakle, pod radnim reimom motora podrazumeva se broj obrtaja sa
kojim motor radi i obrtni moment odnosno snaga koju tom prilikom
odaje. S obzirom na to da obrtni moment (odnosno snaga) nema jednu
konstantnu vrednost, ve razliite vrednosti za razliite brojeve
obrtaja, postavlja se pitanje ta je
4
energija = snaga vreme
29
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
to to odreuje na kom reimu odnosno pri kom broju obrtaja e motor
raditi. Pri tome treba imati u vidu da motor svojim obrtnim
momentom savlauje neki spoljni otpor5. Da bi se mogao odrediti
radni reim odnosno radna taka motora, potrebno je poznavati i
brzinsku karakteristiku otpora koji motor savlauje (tj. zavisnost
otpora od broja obrtaja). Kod drumskih vozila, kao to je poznato,
vuna sila na pogonskim tokovima jednaka je sumi otpora kretanja, a
ovoj sili proporcionalna je veliina obrtnog momenta na toku. Ovaj
moment se, dalje, moe redukovati na zamajac pogonskog motora,
odnosno odrediti koliki treba da bude moment na zamajcu tj. izlazni
moment motora da bi moment na toku imao potrebnu vrednost.FO = TR i
m i GP M rD
M=
rD FO - moment motora potreban za savladavanje TR i m i GP
otpora kretanja
S obzirom na to da izmeu broja obrtaja i brzine kretanja, u
okviru jednog konstantnog stepena prenosa, postoji linearna
zavisnost (odnosno v = constn), sledi da e i kriva potrebnog
momenta motora imati isti tok kao i kriva potrebne vune sile u
zavisnosti od brzine kretanja, a to je zbog karakter otpora
kretanja priblino kvadratna hiperbola. Ova karakteristika prikazana
je na zajednikom dijagramu sa brzinskom karakteristikom motora,
slika 17. Vaan zakljuak koji sledi iz gornje relacije je da se, za
istu vrednost otpora kretanja, optereenje motora smanjuje ukoliko
se povea prenosni odnos menjaa im, odnosno stepen prenosa promeni
na nii, slika 18, dakle:
pri poveanju im tj. izborom nieg stepena prenosa kriva potrebnog
momenta se pomera nanie, pri smanjenju im tj. izborom vieg stepena
prenosa kriva potrebnog momenta se pomera navie. M(Nm) Brzinska
karakteristika motora: KOLIKO MOTOR MOE DA ISPORUI Brzinska
karakteristika otpora redukovana na motor: KOLIKO TREBA Vai u
okviru jednog konstantnog stepena prenosa!
n(o/min)Slika 17.
Brzinska karakteristika motora i prikljuenog potroaa
(otpora)
Ako na motor nije povezan nikakav spoljni otpor, njegov izlazni
moment je jednak nuli (trei Njutnov zakon princip akcije i
reakcije)! Ovo je uvek sluaj kod vozila sa menjaem u poloaju
praznog hoda ili sa iskljuenom spojnicom, bez obzira na poloaj
pedale za gas!
5
30
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
M(Nm)
Karakteristika otpora za VII stepen prenosa MANJE im
Karakteristika otpora za NII stepen prenosa VEE im
n(o/min)Slika 18. Promena optereenja motora sa promenom stepena
prenosa
Radna taka motora mora se uvek nalaziti na krivoj karakteristike
motora, a radna taka otpora na krivoj karakteristike otpora (radna
taka ne moe skliznuti sa svoje krive!). Na prikazanom primeru
(slika 19a), kada je n=n1, radna taka motora nalazi se u taki A, a
radna taka otpora u taki B. Oigledno je na tom reimu moment motora
MMOT vei od momenta otpora MOTP pa prema zakonu obrtanja krutog
tela oko nepokretne ose sledi:&& && JMOT MOT = MMOT
MOTP > 0 MOT > 0 motor ubrzava radni reim se menja!
&& (JMOT moment inercije, MOT - ugaono ubrzanje zamajca
motora)
Opisani sluaj, s obzirom na to da je radni reim promenljiv u
vremenu, naziva se nestacionarni reim. Poto motor ubrzava, odnosno
broj obrtaja raste, radne take i motora i otpora e se (svaka na
svojoj && krivoj!) pomerati u pravcu veih vrednosti n sve
dok je MOT > 0, odnosno MMOT > MOTP. U nekom trenutku motor e
dostii broj obrtaja n=n2 pri kom se krive seku (slika 19b), tj. na
tom reimu je MMOT = MOTP. Radna taka motora se poklapa sa radnom
takom otpora, i obe se nalaze u && taki C. Oigledno je
tada, zbog ravnotee pogonskog i otpornog momenta i MOT = 0 odnosno
n = n2 = const. Ovaj reim se u toku vremena nee menjati (ukoliko ne
doe do spoljnih uticaja), pa se zbog toga naziva stacionarnim.
M(Nm) MMOT M(Nm)
NESTACIONARNI REIM A Motor ubrzava (n )
STACIONARNI REIM n, M = const C
MMOT > MOTP MOTP B n1a) Slika 19.
MMOT = MOTP n(o/min)b) Nestacionarni (a) i stacionarni (b) radni
reim
n(o/min) n2
31
Drumska vozila, deo: Teorija kretanja REGULACIJA BRZINE
VONJE
Vuno-dinamike performanse drumskih vozila
Iz navedenog sledi da je stacionarni reim rada motora definisan
presekom krivih pogonskog momenta i momenta otpora. Ovako definisan
radni reim mogue je promeniti promenom krive ili pogonskog momenta,
ili momenta otpora. Do promene otpora moe doi usled promene
spoljnih uslova (nailazak vozila na uzduni nagib, promena jaine
vetra i sl.). Meutim, da bi voza mogao da vri regulaciju broja
obrtaja motora a time i brzine vonje, potrebno je da ima mogunost
uticaja na brzinsku karakteristiku motora. Ovaj uticaj se vri preko
promene poloaja organa za regulaciju optereenja, odnosno pedale
gasa. Brzinska karakteristika koja se uobiajeno prikazuje vai za
konstantni, maksimalni poloaj pedale (pun gas). Ova karakteristika
se naziva spoljna karakteristika motora. Osim spoljne moe se
definisati i niz tzv. parcijalnih karakteristika za neke druge
poloaje pedale za gas koji odgovaraju manjim optereenjima. Vano je
napomenuti da je za svaku pojedinanu parcijalnu karakteristiku, kao
i za spoljnu, poloaj pedale konstantan. Poputanjem pedale za gas do
nekog novog poloaja, motor uvek prelazi na novu parcijalnu
karakteristiku koja se nalazi ispod dotadanje. Usled toga
novodobijena parcijalna karakteristika se see sa karakteristikom
otpora na nekom manjem broju obrtaja, kojem odgovara i manja brzina
kretanja. Princip regulacije ematski je prikazan primerom, slika
20. Jo jednom se skree panja da je ovde re o regulaciji brzine u
okviru jednog konstantnog stepena prenosa menjaa. M(Nm) Spoljna 3
Spoljna 2 Spoljna 1 Parcijalna karakteristika Otpor
2300 2800 3400 4000 46Slika 20. STABILNOST RADNOG REIMA
n(o/min) v(km/h)
56
68
80
Regulacija brzine vonje
Jedna osobina motora koja ima veliki znaaj za vune performanse
vozila je stabilnost njegovog radnog reima, odnosno kako e se motor
ponaati ako se promeni spoljni otpor. Posmatrajmo dati primer
(slika 21), i pretpostavimo da je karakteristika otpora prvobitno
odgovarala nioj, punoj krivoj (otpor 1). U tom sluaju, motor radi
na stacionarnom reimu u taki A. M(Nm) B1 2
Otpor 2 Otpor 1 A3
C n(o/min) 32
Drumska vozila, deo: Teorija kretanja Slika 21.
Vuno-dinamike performanse drumskih vozila Stabilnost radnog
reima
Pretpostavimo sada da se u nekom momentu iz nekog razloga otpor
promenio6, pa je sada njegova karakteristika predstvljena gornjom,
isprekidanom krivom (otpor 2). U tom momentu, s obzirom da motor u
trenutku promene jo uvek radi na reimu koji odgovara taki A, bie
moment otpora vei od momenta motora, odnosno:&& &&
JMOT MOT = MMOT MOTP < 0 MOT < 0 motor usporava
Motor je oigledno preao na nestacionarni reim rada, ovog puta
usporavanje. Meutim, dijagram pokazuje da pri padu broja obrtaja u
posmatranoj situaciji moment motora raste (strelica 1), usled ega
ponovo dolazi do preseka brzinske karakteristike motora sa krivom
otpora 2, odnosno do uspostavljanja novog stacionarnog reima u taki
B. Ukoliko bi sada dolo do ponovnog povratka otpora na donju krivu
otpor 1, tada bi bilo:&& && JMOT MOT = MMOT MOTP
> 0 MOT > 0 motor ubrzava (strelica 2) do ponovnog
uspostavljanja stacionarnog reima u taki A.
Do istog zakljuka bi se dolo i da je, umesto poveanja,
analizirano smanjenje otpora. Oigledno vai:
pri promeni spoljnih uslova, motor uspostavlja novi stacionarni
reim u skladu sa novonastalim uslovima pri povratku spoljnih uslova
na prethodni nivo, uspostavlja se prethodni stacionarni reim (bez
potrebe za intervencijom od strane vozaa!).
Stoga je radni reim motora u posmatranim uslovima stabilan.
Posmatrajmo sada sluaj stacionarnog reima u taki C. Ukoliko u
takvoj situaciji doe do poveanja otpora, motor ponovo usporava zbog
MMOT MOTP < 0 (strelica 3). Meutim poto na ovom delu sa
smanjenjem broja obrtaja dolazi do daljeg pada momenta motora,
motor vie ne moe da uspostavi stacionarni reim i pad broja obrtaja
se nastavlja sve do njegovog zaustavljanja ("guenja" usled
preoptereenja). Ovakav reim se naziva nestabilan jer pri promeni
spoljnih uslova ne dolazi do uspostavljanja novog stacionarnog
reima, niti se, pri povratku spoljnih uslova na prethodni nivo, bez
spoljnog uticaja moe uspostaviti prethodni stacionarni reim. Pri
porastu optereenja pri radu motora u nestabilnom reimu, jedini nain
da vozilo nastavi kretanje moe biti izbor nieg stepena prenosa jer
se, kao to je pokazano, na taj nain za date uslove kretanja vozila
smanjuje optereenje motora odnosno moment koji on mora da savlada.
Generalno se moe izvesti zakljuak:
na delu karakteristike na kom moment motora opada pri poveanju
broja obrtaja, radni reim motora je stabilan na delu karakteristike
na kom moment motora raste pri poveanju broja obrtaja (kod motora
SUS poetni deo krive), radni reim motora je nestabilan
6
Npr. nailazak vozila na uzbrdicu ili na podlogu sa poveanim
otporom kotrljanja, jai "kontra-vetar"...
33
Drumska vozila, deo: Teorija kretanja IDEALNA POGONSKA
KARAKTERISTIKA HIPERBOLA
Vuno-dinamike performanse drumskih vozila
Ukoliko bi brzinska karakteristika nekog motora bila stabilna na
proizvoljnom broju obrtaja, takav motor bi mogao da se prilagodi
bilo kom radnom optereenju bez potrebe za menjakim prenosnikom.
Uslov stabilnosti reima rada je opadajui tok krive momenta sa
porastom broja obrtaja. Takoe, povoljno je da pri veoma velikim
optereenjima kriva momenta ima to strmiji tok7. Kriva koja u punoj
meri ispunjava navedene zahteva je hiperbola, slika 22. Hiperbola
je, u optem sluaju, definisana relacijom: M= const n
Sa druge strane, poto je M =
9554 P , sledi da je kod ovakve brzinske karakteristike na
raspolaganju n P (kW) Snaga P = const Hiperbola obrtnogn
uvek konstantni nivo snage. M (Nm) Razni otpori kretanja
momenta M = 9554 P n(o/min)Slika 22. Idealna pogonska
karakteristika hiperbola obrtnog momenta
Zbog navedenih karakteristika hiperbola predstavlja idealan
oblik vune krive. Tenja je da se ovakav oblik pogonske
karakteristike realizuje kod pogonskih motora. U praksi, meutim,
samo pojedine vrste motora mogu, u odreenoj meri, da se priblie
idealnoj karakteristici (neki elektro i hidromotori, gasne turbine
itd.). Meutim kod motora SUS, koji imaju druge povoljne osobine
koje su dovele do njihove dominantne primene u motornim vozilima,
oblik pogonske krakteristike se drastino razlikuje od idealnog. Ovo
se kompenzuje primenom menjakih prenosnika sa veim brojem prenosnih
odnosa, tako da se izlazna karakteristika zajednikog rada motora
SUS i menjaa tzv. vuno-brzinska karakteristika koja e biti obraena
u narednom poglavlju u odreenoj meri pribliava idealnoj
hiperboli.
4.4 Vuno-brzinska karakteristikaObrtni moment M i broj obrtaja n
motora se, kao to je pokazano, transformiu u obimnu (vunu,
pogonsku) silu na toku FO i brzinu kretanja vozila v. Brzinska
karakteristika motora preslikava se, u funkciji parametara
transmisije, u karakteristiku raspoloive obimne sile u funkciji
brzine kretanja. Prema analogiji sa brzinskom karakteristikom
motora, ova karakteristika naziva se vuno-brzinska karakteristika
vozila, koja dakle predstavlja izlazni pokazatelj zajednikog rada
pogonskog motora i
7
Da bi, pri intenzivnijim fluktuacijama veih optereenja, broj
obrtaja varirao u to niim granicama
34
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
transmisije vozila, uzimajui u obzir i dinamiki radijus toka.
Dijagram na kom je prikazana vunobrzinska karakteristika naziva se
vuni dijagram, slika 23. S obzirom na to da transmisija obuhvata
menjaki prenosnik sa veim brojem stepeni prenosa, vuni dijagram
obuhvata vei broj krivih FO(v), koje predstavljaju brzinsku
karakteristiku motora preslikanu na toak, svaka za odgovarajui
prenosni odnos menjaa. Za nie stepene prenosa (prvi, drugi...)
prenosni odnosi imaju vee numerike vrednosti, i obrnuto vrednosti
prenosnih odnosa viih stepena su manje, na primer: iI = 4,31; iII =
2,54; iIII = 1,41; iIV = 0,97; iV = 0,86 S obzirom na zavisnosti:FO
= M i m i GP TR rD
i
v=
0,377 rD n , i m i GP
sledi da e vune sile u niim stepenima prenosa (vee im) biti vee
a brzine manje, dok je za vie stepene prenosa (manje im) obrnuto,
to se uoava na vunom dijagramu. FO (N)FOI FOII FOIII FOIV FOV im =
iI im = iII im = iIII im = iIV im = iV
Idealna hiperbola - FOid FOI Neiskoriena podruja FOII FOIII FOIV
FOV Otpor kretanja FOTP v (km/h)
Slika 23.
Vuno-brzinska karakteristika (vuni dijagram)
IDEALNA HIPERBOLA VUE Idealna hiperbola8 predstavlja teorijsku
(hipotetiku!) zavisnost vune sile na toku od brzine kretanja, uz
pretpostavku (koja se u praksi nikada ne moe u potpunosti
realizovati, a naroito kod motora SUS!) da je maksimalna snaga
motora PMAX dostupna u celom dijapazonu brzina kretanja vozila, uz
uzimanje u obzir gubitaka u transmisiji: 3600 PMAX TR FOid = v
Idealna hiperbola se obino prikazuje u okviru vunog dijagrama.
Preko nje se moe proceniti u kojoj meri prenosni odnosi menjaa
omoguavaju iskorienje kapaciteta motora. Osenena podruja izmeu
Pojam idealna se u ovom sluaju ne odnosi, kako je to inae
uobiajeno, na stepen korisnosti u energetskom smislu, ve na idealni
(sa aspekta vunih performansi) oblik krive koja opisuje zakonitost
promene vune sile u funkciji brzine kretanja vozila, a uzimajui u
obzir maksimalnu raspoloivu snagu motora.
8
35
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
idealne hiperbole FOid i realnih krivih FOi (i=1,2,...)
predstavljaju neiskoriena podruja (slika 23). Pri projektovanju
transmisije odnosno izboru vrednosti prenosnih odnosa tei se da ova
podruja budu to manja. Kod transmisije sa kontinualnom promenom
prenosnog odnosa mogu je rad na podruju cele idealne hiperbole.
4.5 Analiza vuno-dinamikih performansi vozilaGlavne
vuno-dinamike performanse vozila, koje ono moe da ostvari sa
aspekta svoje vunobrzinske karakteristike u odreenim uslovima
kretanja, su: maksimalna brzina kretanja, mogunost savladavanja
uspona, i parametri ubrzanja (vreme i put zaleta) Vuni proraun se
obino koristi za analizu maksimalnih performansi vozila, zbog ega
se on vezuje za spoljnu karakteristiku motora (reim punog
optereenja). Prema potrebi, vuni dijagram moe, prema istim
pravilima, biti formiran i na osnovu parcijalnih brzinskih
karakteristika (analiza kretanja vozila pri reimima deliminog
optereenja motora).MAKSIMALNA BRZINA KRETANJA VOZILA
Maksimalnu brzinu vozila u datim uslovima najpodesnije je
odrediti grafikim putem, na osnovu vunog dijagrama (slika 24a).
Stoga se u okvru vunog dijagrama prikazuje i kriva otpora kretanju.
Maksimalna brzina se odreuje prema istom principu kao i stacionarna
radna taka motora u spezi sa otporom: sve dok je vuna sila vea od
sile otpora kretanja (FO > FOTP), rezultujua sila je vea od nule
pa, prema Drugom Njutnovom zakonu, vozilo ubrzava. Poto sila FO
opada a FOTP raste sa porastom brzine, pri nekoj brzini djagrami
otpora i vune sile e se presei, dakle ove sile e se izjednaiti tj.
nai e se u ravnotei. Tada ubrzavanje vie nije mogue odnosno sledi
da vozilo u tom reimu postie maksimalnu brzinu kretanja9.
Maksimalna brzina kojom bi vozilo moglo da se kree sa stanovita
maksimalne snage motora nalazi se na preseku idealne hiperbole i
krive otpora kretanju. Da bi se vozilo zaista i moglo kretati ovom
brzinom, potrebno je da se presek stvarne krive vune sile i otpora
nae u istoj taki. Ovo je mogue postii adekvatnm izborom prenosnih
odnosa i dinamikog radijusa, tako to se vrednosti parametara
izaberu na nain da se maksimalna brzina dostie pri broju obrtaja
koji odgovara broju obrtaja maksimalne snage. U praksi se, meutim,
esto susree i koncepcija kod koje ovaj uslov nije zadovoljen, pa je
stvarna maksimalna brzina neto manja od teorijske. Ovaj sluaj
prikazan je kroz dati primer, slika 24b (to predstavlja uveliani
detalj prikazanog dijagrama). Drugim reima, teorijska maksimalna
brzina u ovom sluaju lei u neiskorienom podruju (prema gornjem
prikazu, slika 23).
9
Ovde se radi o kretanju vozila pri radu motora SUS na spoljnoj
karakteristici, za koju je i definisana posmatrana vunobrzinska
karakteristika vozila. Prelaskom na neku od parcijalnih
karakteristika motora, tj. smanjivanjem gasa, vozilo se moe kretati
bilo kojom manjom brzinom.
36
Drumska vozila, deo: Teorija kretanjaFO(N)
Vuno-dinamike performanse drumskih vozila
2 > 1 FO(N) 1 > 0 FOid FOV
=0 vMAX3 vMAX2 vMAX1 v (km/h)
FOTP v MAX - stvarno v (km/h)
a) Slika 24.
b) Grafiko odreivanje maksimalne brzine vozila
v MAX teorijsko (mogue za drugu vrednost iTR)
Slika 24a prikazuje i uticaj nagiba podloge na maksimalnu
brzinu. Brzina vMAX1 predstavlja maksimalnu brzinu kretanja na
horizontalnoj podlozi (ugao uzdunog nagiba = 0). Kada se vozilo
kree na uzbrdici, npr. pod uglom 1, tada se ukupan otpor kretanja
uveava za otpor uspona, odnosno kriva otpora se pomera navie, pa e
se u ovom sluaju maksimalna brzina kretanja smanjiti na vMAX2.
Daljim poveavanjem ugla nagiba podloge od 1 do nove, vee vrednosti
2, usled daljeg poveanja otpora maksimalna brzina se smanjuje na
vMAX3.FO(N) FOII FOIII FOIV FOV vMAX(V), V stepen vMAX = vMAX(IV),
IV stepen v (km/h)
Slika 25.
Primer dostizanja maksimalne brzine u pretposlednjem stepenu
prenosa (na horizontalnoj podlozi)
Sa dijagrama se takoe moe odrediti u kom stepenu prenosa vozilo
dostie maksimalnu brzinu. Kod putnikih vozila uobiajeno je da se
prenosni odnosi menjaa izaberu tako da vozilo maksimalnu brzinu
postie u pretposlednjem stepenu, dok je prenosni odnos poslednjeg
stepena takav da je maksimalna brzina kretanja u okviru ovog
stepena neto manja, slika 2510. U tom sluaju postie se smanjenje
potronje goriva, buke i habanja motora u reimu vonje na otvorenom
putu gde uslovi saobraaja omoguavaju vonju veim brzinama. Kod
vozila visokih performansi, maksimalna brzina vozila se po pravilu
dostie u poslednjem stepenu prenosa.
10
Na slici nije prikazana vuna kriva prvog stepena prenosa,
FOI
37
Drumska vozila, deo: Teorija kretanja MAKSIMALNI USPON
Vuno-dinamike performanse drumskih vozila
Maksimalni uspon koji vozilo moe da savlada u nekom stepenu
prenosa moe se odrediti preko maksimalne obimne sile na toku,
odnosno obimne sile pri maksimalnom momentu. Kod razmatranja
savladavanja uspona u niim stepenima prenosa, zbog malih brzina moe
se zanemariti otpor vazduha. Iz istog razloga nema potrebe ni
uzimati u obzir zavisnost koeficijenta otpora kotrljanja od brzine
ve se moe smatrati f = f0 0,01. Takoe nema ni otpora inercije, jer
se razmatra sluaj kada je vuna sila u celini na raspolaganju za
savladavanje otpora uspona. S obzirom na to da je otpor kotrljanja
uvek prisutan, bilans sila e bti: FOMAX = Ff + FMAX = fGcosMAX +
GsinMAX S obzirom na uobiajene vrednosti maksimalnih uspona,
dozvoljeno je pojednostavljenje cosMAX 1 pa je onda : FOMAX =M MAX
i m i GP TR = fG + GsinMAX rD
Iz ovog izraza lako se izraunava MAX, jer su sve ostale veliine
poznate. Ako se gornja relacija koristi za odreivanje maksimalnih
uspona pri viim stepenima prenosa, treba imati uvidu da e, zbog
uticaja otpora vazduha koji u navedenom izrazu nije uzet u obzir,
stvarni maksimalni uspon u tom sluaju biti neto manji od
izraunatog. U praksi je, meutim, obino od interesa mogunost
savladavanja maksimalnog mogueg uspona, dakle onog koji vozilo moe
da savlada u prvom stepenu prenosa (tj. za najveu vrednost obimne
sile na toku).UBRZANJE, VREME I PUT ZALETA
Mogunost ubrzavanja predstavlja vaan pokazatelj dinamikih
performansi vozila.Vanost ovog parametra dolazi do izraaja: u
gradskoj vonji, zbog stalno promenljivih uslova kretanja pri
preticanju, mogunost ubrzavanja direktno utie na bezbednost
dinamike karakteristike pogonskog motora i vozila prenosni odnosi,
zbog uticaja na raspoloivu obimnu silu reim promene stepena prenosa
(sa ili bez prekida toka snage) strategija promene stepena prenosa
pri ubrzavanju
Na ubrzanje vozila utiu:
Pod strategijom promene stepena misli se pre svega na brzinu
kretanja tj. broj obrtaja motora pri kom se pri ubrzavanju vri
promena stepena navie, kao i na izbor stepena prenosa pri kom se
zapoinje ubrzavanje. Kada je, npr. pri preticanju, neophodno
iskoristiti pun kapacitet vozila za ubrzavanje, sa aspekta punog
iskorienja raspoloive obimne sile, vano je da se promena stepena
prenosa pri ubrzavanju vri tako da se u okviru svakog stepena
prenosa iskoristi maksimalna raspoloiva sila; na osnovu vunog
dijagrama sledi da e maksimalno ubrzanje biti postignuto kada se
uvek ubrzava u najniem moguem stepenu prenosa; kod manuelnih menjaa
pravilan izbor strategije je preputen znanju i iskustvu vozaa, dok
kod automatskih ovo ini deo sveukupne strategije optimalnog
upravljanja menjaem u skladu da datim uslovima.
38
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
Polazei od bilansa sila, FO = FIN + Ff + FW + F, razlika izmeu
krivih obimne sile FO i krive ukupnih otpora za ustaljeno kretanje
Ff + FW + F predstavlja viak vune sile koji je na raspolaganju za
ubrzavanje vozila, to je na prikazu (slika 26a) predstavljeno
osenenom povrinom. Treba napomenuti da je ovde re o ubrzavanju pri
radu motora na spoljnoj karakteristici, dakle maksimalnom moguem
ubrzanju. U eksploataciji se ovaj reim retko koristi, odnosno kada
motor ubrzava pri radu na nekoj parcijalnoj karakteristici,
ubrzanje e biti manje, a radna taka e se nai negde unutar osenene
povrine, a ne na njenoj ivici, kao to je sluaj za spoljnu
karakteristiku. Na drugom delu slike (slika 26b) prikazana je taka
pravilnog izbora stepena prenosa, taka A, prema opisanoj strategiji
koja omoguava postizanje maksimalnog ubrzanja sa aspekta punog
iskorienja raspoloive obimne sile. Promena stepena prenosa na niem
(taka B) ili viem broju obrtaja (taka C) dovodi do gubitka u
iskorienju raspoloive obimne sile, FO, a time i do smanjenja
ubrzanja odnosno produavanja vremena i puta zaleta, to npr. pri
preticanju dovodi do smanjivanja bezbednosti izvoenja ovog manevra.
FO (N) Viak vune sile za ubrzavanje FO (N) B A C
FO(B) FO(C)
a)
Ff + FW + F v (km/h)
b)
v (km/h)
Slika 26. a) Grafiki prikaz sile koja stoji na raspolaganju za
savladavanje otpora inercije tj. za ubrzavanje vozila osenena
povrina; b) Uticaj izbora strategije promene prenosnog odnosa na
iskorienje raspoloive obimne sile pri ubrzavanju, FO(B), FO(C)
gubitak obimne sile usled neadekvatnog izbora stepena prenosa
Izraunavanje ubrzanja
Kao to je objanjeno u poglavlju o otporu inercije, inercijalna
sila pri ubrzanju vozila je: FIN = ma = 1,03 + 0,0018iTR2 -
empirijski koeficijent uea obrtnih masa u ubrzavanju
Polazi se od bilansa sila prema prethodnim razmatranjima, za
sluaj horizontalne podloge (F = 0). FO =FIN + Ff + FW = ma + Ff +
FW Uzimajui u obzir da je Ff = fG, m = FO FW = a+ f G g VeliinaFO
FW naziva se, prema definiciji, dinamika karakteristika D: G
G , delei sa G i prebacujui FW na levu stranu dobija se: g
39
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
D=
FO FW - dinamika karakteristika G
Dinamika karakteristika je izvedena veliina ija je osnovna
funkcija pojednostavljena analiza vunodinamikih parametara vozila
grafikim postupkom tj. na osnovu dijagrama. Ovi postupci nee biti
razmatrani, a pojam dinamike karakteristike se na ovom mestu uvodi
iskljuivo zbog pojednostavljenja izraza za izraunavanje ubrzanja
koji sada glasi:a= D f g - ubrzanje vozila
S obzirom na to da ubrzanje zavisi od obimne sile, i dijagram
ubrzanja ima karakter slian vunom dijagramu, slika 27. Meusobni
odnosi i tok krivih u pojedinim stepenima prenosa su, dodue, neto
drugaijeg karaktera, kako zbog uticaja obrtnih masa (to vie dolazi
do izraaja u niim stepenima prenosa) tako i zbog porasta otpora
vazduha i kotrljanja pri veim brzinama (to je stoga izraenije u
viim stepenima). Sa dijagrama ubrzanja se takoe moe doneti zakljuak
o maksimalnoj brzini kretanja vozila, imajui u vidu da se
maksimalna brzina dostie u momentu kada ubrzanje padne na vrednost
a = 0.4 3,5 3 2,5 2 1,5 1 0,5 0 0 20 40Slika 27.
a(
m ) s2
60
80
100
120 140 160
180
200
v (km/h)Dijagram ubrzanja vozila - primer
S obzirom na zavisnost koeficijenta od prenosnog odnosa,
oigledno je da e u niim stepenima prenosa, gde su vrednosti
prenosnog odnosa vee, vrednosti koeficijenta vee (i to znatno, zbog
kvadratne zavisnosti), i obrnuto, e biti manje u viim stepenima tj.
za manje vednosti prenosnih odnosa. Do ovog zakljuka opteg
karaktera moe se doi na osnovu injenice da je prilikom ubrzavanja,
za jednu istu irinu intervala promene brzine v, interval promene
broja obrtaja n najiri u prvom stepenu prenosa, a zatim opada kako
se stepen prenosa menja navie tj. prenosni odnos opada. Znai da u
niim stepenima rotacione mase imaju vei uticaj nego u viim, slika
28.
40
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
a(
m ) s2
5 4,5 4 3,5 3 2,5 2 1,5 1 0,5 0 0 20 40 60 80
I = 1,91 II = 1,27 III = 1,16 IV = 1,1 v = 1,08
v (km/h) 100 120
140
160
180
Slika 28.
Uticaj rotacionih masa na ubrzanje primer (pune linije stvarno
ubrzanje; isprekidane linije teorijsko ubrzanje pri = 1)
Vreme i put zaleta
Rezultat razmatranog pristupa je dijagram ubrzanja u zavisnosti
od brzine kretanja, odnosno niz numerikih vrednosti koje se stalno
menjaju. Ovakav prikaz, sam po sebi, ne omoguava dobar uvid u
dinamike performanse vozila pri ubrzavanju. Zbog toga je potrebno
odrediti parametre ubrzanja na osnovu kojih se mogu donositi
zakljuci vezani za performanse vozila u eksploataciji, a to su:
vreme zaleta, i put zaleta
Ove veliine direktno pokazuju koliko sekundi tj. metara je
potrebno da bi se dostigla odreena brzina. Od interesa moe biti i
njihova meusobna veza, odnosno duina puta potrebna za dostizanje
odreene brzine.Odreivanje vremena zaleta
Vreme zaleta predstavlja osnovni parametar za ocenu ubrzanja
vozila. Pri izraunavanju vremena zaleta polazi se od osnovne
kinematike definicije ubrzanja: v2 dv 1 1 a= dt = dv t Z = dv dt a
a v1 Vreme zaleta vozila od brzine v1 do brzine v2, dakle, jednako
je povrini ispod krive recipronog ubrzanja u funkciji brzine na
intervalu od v1 do v2. S obzirom na to da zavisnost recipronog
ubrzanja od brzine nije raspoloiva u analitikoj formi, vrednost
odreenog integrala u praksi se izraunava priblino, neposrednim
priblinim izraunavanjem veliine povrine ispod krive na osnovu
geometrije. Uobiajen postupak je podela povrine na niz podintervala
(slika 29), ije se povrine radi lakeg izraunavanja aproksimiraju
trapezima.
41
Drumska vozila, deo: Teorija kretanja1 s2 a m
Vuno-dinamike performanse drumskih vozila
v (km/h)
Slika 29.
Dijagram recipronih ubrzanja
Pri praktinim izraunavanjima treba imati u vidu da je
podintegralna funkcija u navedenom izrazu za odreivanje vremena
zaleta definisana za osnovne jedinice, tj. brzina je u [m/s]. Kada
se izraunavanje povrine ispod krive recipronog ubrzanja vri za
sluaj da je brzina data u [km/h], to je uobiajen pristup, vrednost
odreenog integrala je potrebno jo podeliti sa 3,6, slika 30.1 s2 a
m
tZ =
A - vreme zaleta od v1 do v2 3,6
A veliina povrinev1
v (km/h) v2
Slika 30.
Primer grafike integracije: vreme zaleta od brzine v1 do brzine
v2 proporcionalno je povrini A
Odreivanje puta zaleta
Put zaleta se takoe odreuje grafikom integracijom, priblinim
raunanjem povrine ispod krive v=v(t): v=t ds ds = v dt s = v dt 0
dt
Za v u [km/h] je: s =
A 3,6
42
Drumska vozila, deo: Teorija kretanja Veza izmeu vremena i puta
zaleta
Vuno-dinamike performanse drumskih vozila
Na osnovu prethodno izraunatih podataka za tZ i sZ, mogue je
nacrtati dijagram u kom su ova dva parametra meusobno povezana. Na
ovaj nain se podatak o vremenu potrebnom za prelazak odreene duine
puta pri ubrzavanju vozila iz mirovanja dobija u formi dijagrama.
Na primer, kao kriterijum za ocenu dinamikih performansi vozila
esto se daje podatak o vremenu potrebnom da vozilo, ubrzavajui od
v=0, pree deonicu duine 1 km.
4.6 Potronja gorivaZa savladavanje otpora kretanja pri nekoj
brzini, pogonskom toku je potrebno dovesti odgovarajuu snagu (P =
Fv). Dovoenje snage u toku odreenog vremenskog perioda znai
potronju odreene energije na realizaciju te snage (P = dE/dt E =
Pdt). Kao primarni izvor energije slui pogonsko gorivo, ija se
unutranja energija u motoru transformie u mehaniku, koju motor
dalje stavlja na raspolaganje vozilu za savladavanje otpora
kretanja. Potronja goriva na nekoj deonici puta zavisi stoga pre
svega od ukupne energije potrebne za savladavanje otpora kretanja
na toj deonici. S obzirom na prirodu otpora, ova ukupna energija
dalje zavisi od parametara vozila i podloge, njihovih meusobnih
interakcija i uslova u kojima se vozilo kree, to sve skupa
obuhvata: aerodinamike parametre vozila (cW, A) i dejstvo vetra
brzinu kretanja i njene promene u toku vremena masu (merodavna za
otpor inercije, u ta treba ukljuiti i momente inercije rotacionih
elemenata) odnosno teinu vozila (merodavnu za otpore uspona i
kotrljanja) koeficijent otpora kotrljanja uzduni nagib podloge Za
neku odreenu koliinu energije potrebne za savladavanje otpora na
posmatranoj deonici, na potronju goriva iskazanu u jedinici mase
ili zapremine po jedinici puta utiu parametri motora (stepen
korisnosti tj. njemu obrnuto srazmerna specifina efektivna potronja
goriva), kao i parametri samog goriva (toplotna mo, gustina).
Stepen korisnosti motora predstavlja odnos izmeu izlazne i ulazne
energije motora. Izlazna energija je ona koja se troi na vrenje
mehanikog rada potrebnog za savladavanje otpora kretanja vozila i
unutranjih otpora transmisije. Ulazna energija je energija dovedena
motoru putem potroenog goriva. Toplotna mo i gustina goriva daju
podatke o koliini goriva (iskazanoj u jedinici mase ili zapremine)
koja je potrebna da se motoru dopremi potrebna ulazna energija.
Pored nabrojanih pokazatelja, na potronju goriva znaajan uticaj
imaju i parametri transmisije: stepen korisnosti, zbog potronje
energije na savladavanje unutranjih gubitaka prenosni odnos, od
koga zavisi da li e motor raditi na reimu manjeg ili veeg stepena
korisnosti (odn. vee ili manje specifine efektivne potronje goriva)
Na osnovu navedenog moe se zakljuiti da je potronja goriva odreena
kroz: 1. ukupnu energiju potrebnu za kretanje vozila na nekoj
deonici (uzimajui u obzir i unutranje otpore i gubitke transmisije)
i stepen korisnosti motora, to odreuje ukupnu energiju koju motoru
treba dovesti kroz gorivo 2. toplotnu mo i specifinu teinu goriva,
koje na osnovu ukupne energije koju motor dobija od goriva odreuju
masu ili zapreminu goriva potroenog za dovoenje te energije motoru.
43
Drumska vozila, deo: Teorija kretanja ENERGIJA POTREBNA ZA
KRETANJE VOZILA
Vuno-dinamike performanse drumskih vozila
Na osnovu veze izmeu energije i snage, moe se doi do izraza za
ukupnu energiju potrebnu za kretanje vozila na datoj deonici puta
pri zadatim uslovima:PT = dE E = PT (t) dt dt 0T
E energija potrebna za kretanje vozila u vremenskom intervalu
duine T PT potrebna snaga na pogonskom toku (u optem sluaju menja
se u toku vremena sa promenom reima kretanja i spoljnih uslova) S
obzirom na to da potrebna snaga na toku mora biti jednaka ukupnom
zbiru parcijalnih snaga potrebnih za savladavanje pojedinih
komponenata otpora kretanja, ista relacija se moe primeniti i na
energiju: E = Ef + EW + EIN + E = Pf (t) dt + PW (t) dt + PIN (t)
dt + P (t) dt0 0 0 0 T T T T
Imajui u vidu da je P = Fv, uzimajui u obzir izraze za
izraunavanje pojedinih otpora kretanja (Ff, FW, FIN, F), mogu se
dobiti izrazi za parcijalne energije utroene na njihovo
savladavanje.Energija potrebna za savladavanje otpora
kotrljanja:T
E f = f G v dt = f G S0
S ukupan preeni put Energija koja se troi na savladavanje otpora
kotrljanja linearno je proporcionalna sili otpora kotrljanja (Ff =
fG) i duini preenog puta S.Energija potrebna za savladavanje otpora
uspona:T
E = G sin v dt = G sin S = G H0
H = Ssin visina penjanja Energija koja se troi na savladavanje
otpora uspona linearno je proporcionalna teini vozila G i visini
penjanja H, slika 31.
44
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
G H S G
Slika 31.
Visina penjanja pri kretanju na uzbrdici
Vano je uoiti da energija potrebna za savladavanje otpora uspona
predstavlja jedinu konzervativnu energiju, odnosno ovaj udeo
energije se u potpunosti vraa nazad vozilu pri kasnijem sputanju
niz nagib. Energija otpora vazduha i otpora kotrljanja su u
potpunosti disipativne (u potpunosti se transformiu u energiju
toplotnih gubitaka). Energija potrebna za savladavanje otpora
inercije moe se, u sluaju postojanja sistema za rekuperaciju
kinetike energije, delimino ponovo iskoristiti, odnosno delom
prevoditi u potencijalnu a nakon toga ponovo delom u
kinetiku.Energija potrebna za savladavanje otpora inercije:
& v > 0 E IN
G G & = v v dt = v dv = EK g 0 g 0
T
T
Energija potrebna za savladavanje otpora inercije pri ubrzavanju
vozila, dakle, jednaka je kinetikoj energiji koju treba saoptiti
vozilu. Ciklusi pri kojima se poveava brzina stoga utiu na poveanje
potronje goriva, i to proporcionalno teini vozila. Upotrebom
sistema za rekuperaciju kinetike energije moe se poboljati
energetski bilans vozila, odnosno smanjiti potronja goriva u vonji
promenljivom brzinom. Kod ovakvih sistema kinetika energija se u
fazi koenja prevodi u potencijalnu (npr. korienjem
elektrogeneratora, zamajca, hidrostatikog sistema itd.), da bi
potom ponovo bila stavljena na raspolaganje pri sledeem ubrzavanju
vozila. Uzimajui u obzir da se svi procesi konverzije energije iz
jednog oblika u drugi odvijaju uz odreene gubitke, kinetiku
energiju nije mogue u potpunosti skladititi i u punom iznosu ponovo
iskoristiti. Realne vrednosti stepena korisnosti rekuperacije imaju
red veliine REK ~ 0,511 (prema: [Guzella / Sciaretta]).Energija
potrebna za savladavanje otpora vazduha:
EW =
1 c W A v 3 dt 2 0
T
Kada se brzina menja u toku vremena, moe se napisati
[Mitschke]:v(t) = v + v(t) , gde je:
v srednja vrednost brzine
11
ak i kada ne bi postojali gubici pri konverziji energije iz
jednog oblika u drugi, ne bi bilo mogue kinetiku energiju u
celokupnom iznosu prevesti u potencijalnu, jer se na reimu koenja
otpori kotrljanja i vazduha savlauju na raun kinetike energije, to
dovodi do disipacije tj. gubitka jednog njenog dela
45
Drumska vozila, deo: Teorija kretanja
Vuno-dinamike performanse drumskih vozila
v(t) trenutna vrednost odstupanja brzine od srednje
vrednosti
Uz pretpostavku simetrine raspodele odstupanja brzina oko
srednje vrednosti, vai:v = v 3 = 0
Pri tome je: v 2 = 2 standardno odstupanje Sreivanjem se
dobija:EW = 1 3 2 c W A v 2 1 + 2 2 v
Odavde sledi vaan zakljuak da fluktuacija brzine oko srednje
vrednosti v poveava potrebnu energiju za savladavanje otpora
vazduha, dakle potronja goriva usled otpora vazduha za istu prosenu
brzinu raste kada brzina intenzivnije varira tokom
vremena.SPECIFINA EFEKTIVNA POTRONJA GORIVA
Specifina efektivna potronja goriva gE predstavlja koliinu
goriva potroenog po jedinici energije koju motor proizvede,
iskazanu kroz masu potroenog goriva. Jedinica u kojoj se ova
veliina iskazuje je g/kWh (ili kg/kWh). Ovde je za jedinicu
energije uzet kWh, to nije standardna jedinica za energiju ali se u
tehnici esto koristi12. Ako se pri reimu na kom motor odaje
efektivnu snagu PE [kW], merenjem utvrdi asovna potronja goriva Gh
[g/h], tada na tom reimu specifina efektivna potronja goriva
iznosi: gE =Gh g , PE kW h
Spoljna karakt. Tekua parc. karakteristika MA
M (Nm)
gE = gE1 = const gE = gE2 = const gE = gE3 = const gE = gE4 =
const gE = gE5 = const gE = gE6 = const AgE1 > gE2 > gE3 >
...
Tekua karakt. otpora nA Slika 32.
n(o/min)koljkasti dijagram
Specifina efektivna potronja moe biti prikazana preko