Embed Size (px)
Citation preview
TEORIJA KRETANJA DRUMSKIH VOZILA
Univerzitet u Novom Sadu
FAKULTET TEHNIČKIH NAUKA
- PREDAVANJA -
Doc. dr Boris Stojić, 2018.
FTN Novi Sad – Departman za mehanizaciju i konstrukciono mašinstvo
Katedra za motore i vozila
- PREDAVANJA -
Vertikalna dinamika i oscilacije Vertikalna dinamika i oscilacije vozilavozila
Teorija kretanja drumskih vozilaTeorija kretanja drumskih vozila
vozilavozila
Vertikalna dinamika i oscilacije vozila
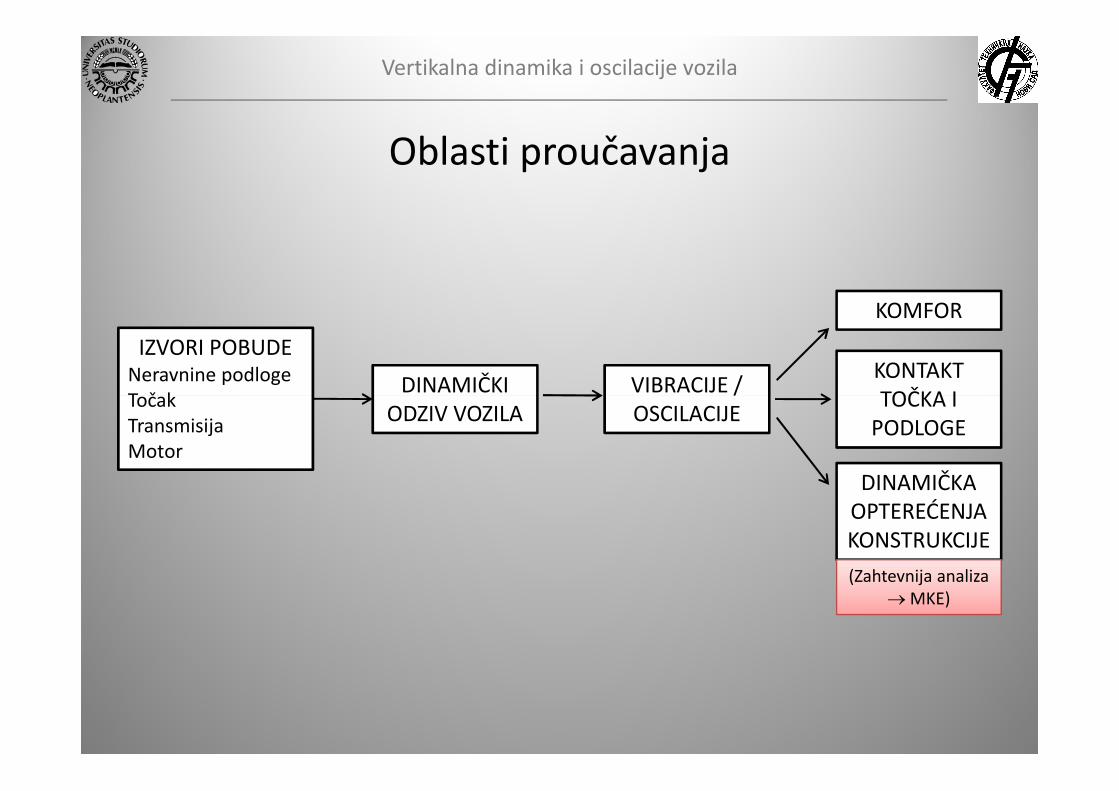
Oblasti proučavanja
IZVORI POBUDENeravnine podlogeTočak
DINAMIČKI VIBRACIJE /
KOMFOR
KONTAKT TOČKA I Točak
TransmisijaMotor
DINAMIČKI ODZIV VOZILA
VIBRACIJE / OSCILACIJE
TOČKA I PODLOGE
DINAMIČKA OPTEREĆENJA KONSTRUKCIJE
(Zahtevnija analiza MKE)
Vertikalna dinamika i oscilacije vozila
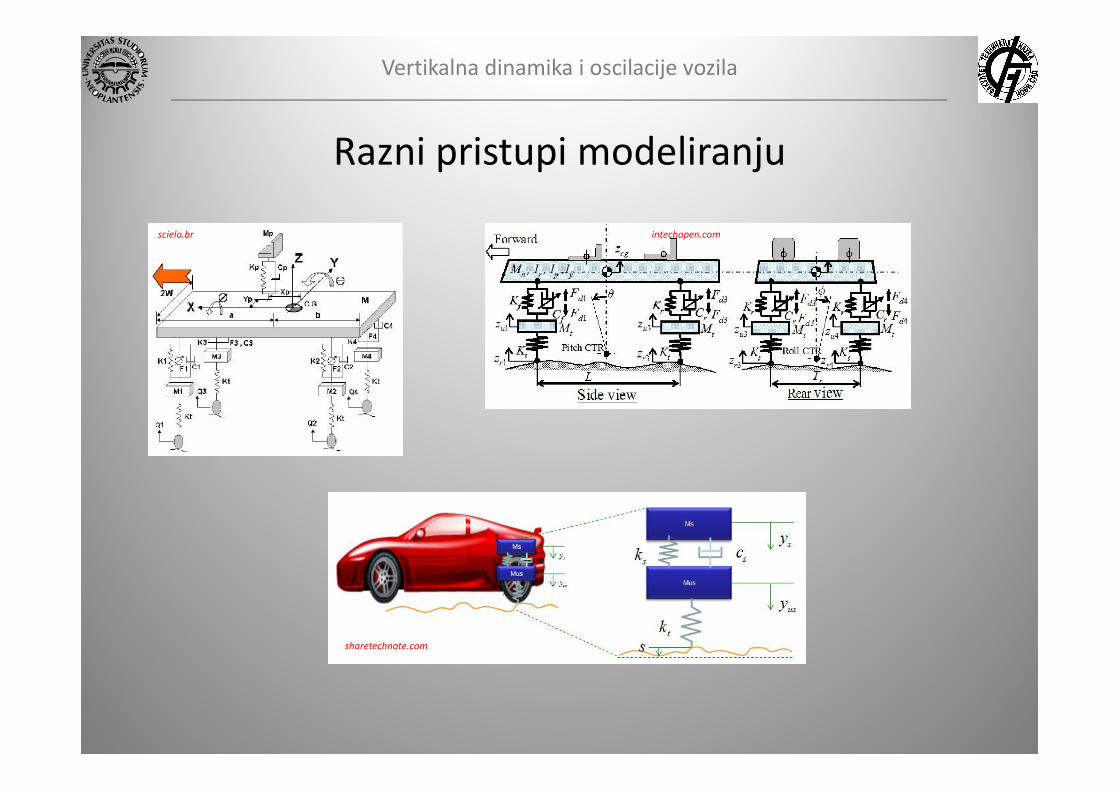
Razni pristupi modeliranju
scielo.br intechopen.com
sharetechnote.com
Vertikalna dinamika i oscilacije vozila
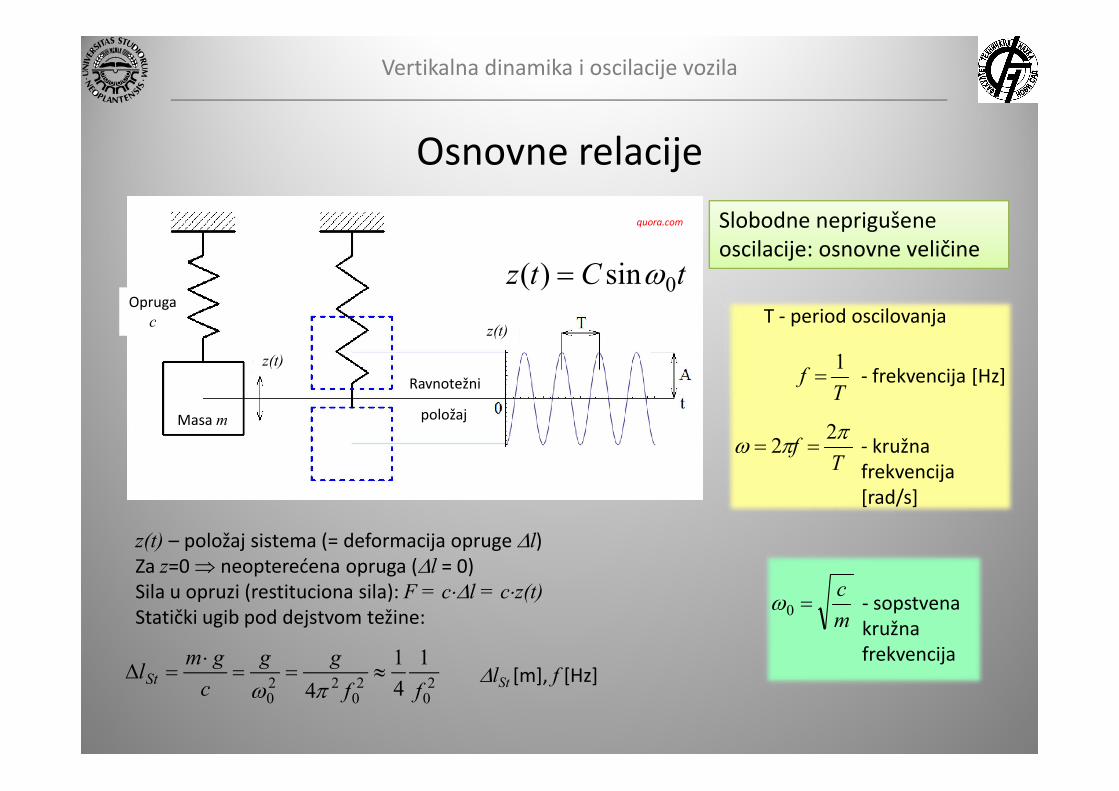
Osnovne relacije
quora.com
Oprugac
Ravnotežni
z(t)
z(t)
Slobodne neprigušene oscilacije: osnovne veličine
T - period oscilovanja
Tf
1 - frekvencija [Hz]
tCtz 0sin)(
Masa m položaj
z(t) – položaj sistema (= deformacija opruge l)Za z=0 neopterećena opruga (l = 0)Sila u opruzi (restituciona sila): F = cl = cz(t)Statički ugib pod dejstvom težine:
20
20
220
1
4
1
4 ff
gg
c
gmlSt
T
Tf
22 - kružna
frekvencija [rad/s]
m
c0 - sopstvena
kružna frekvencija
lSt [m], f [Hz]
Vertikalna dinamika i oscilacije vozila
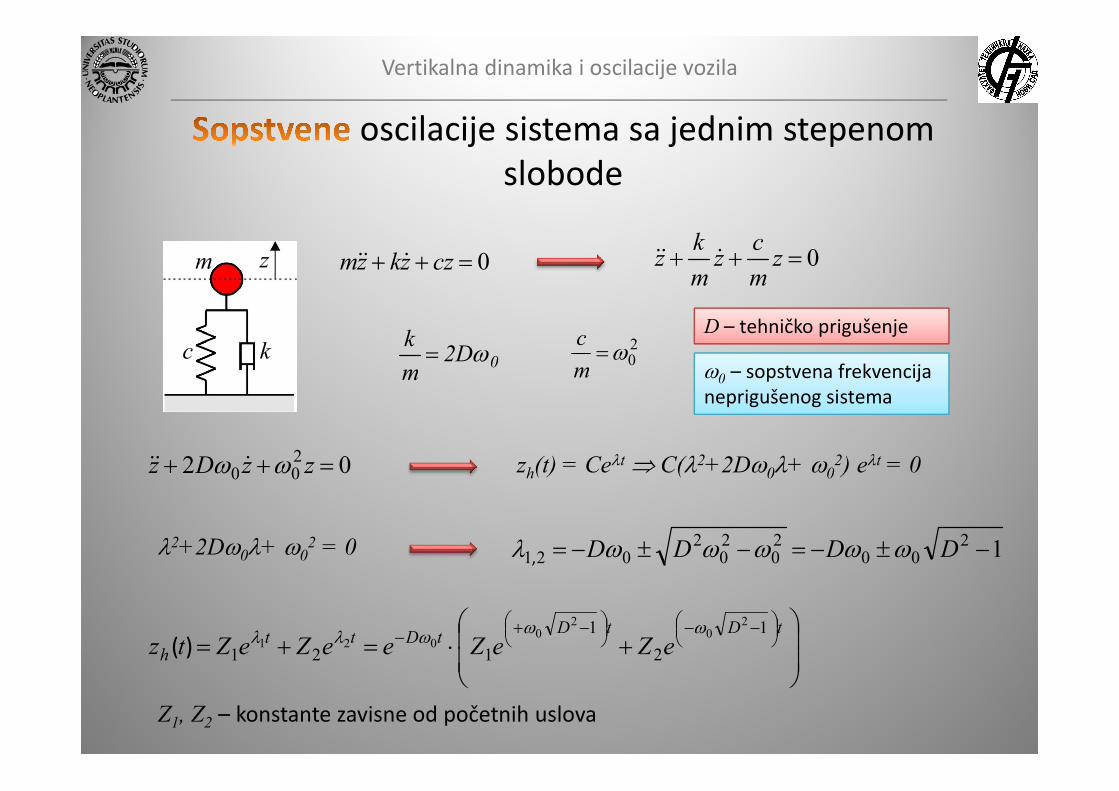
oscilacije sistema sa jednim stepenom slobode
0 czzkzm m
c k
z 0 zm
cz
m
kz
02Dm
k
20
m
cD – tehničko prigušenje
0 – sopstvena frekvencija neprigušenog sistema
02 200 zzDz zh(t) = Cet C(2+2D0+ 0
2) et = 0
2+2D0+ 02 = 0 12
0020
20
2021 DDDD ,
tDtD
tDtth eZeZeeZeZtz
1
2
1
121
20
20
021
)(
Z1, Z2 – konstante zavisne od početnih uslova
neprigušenog sistema
Vertikalna dinamika i oscilacije vozila
m
c k
z
tDtD
tDtth eZeZeeZeZtz
1
2
1
121
20
20
021
)(
k
kmkk 111
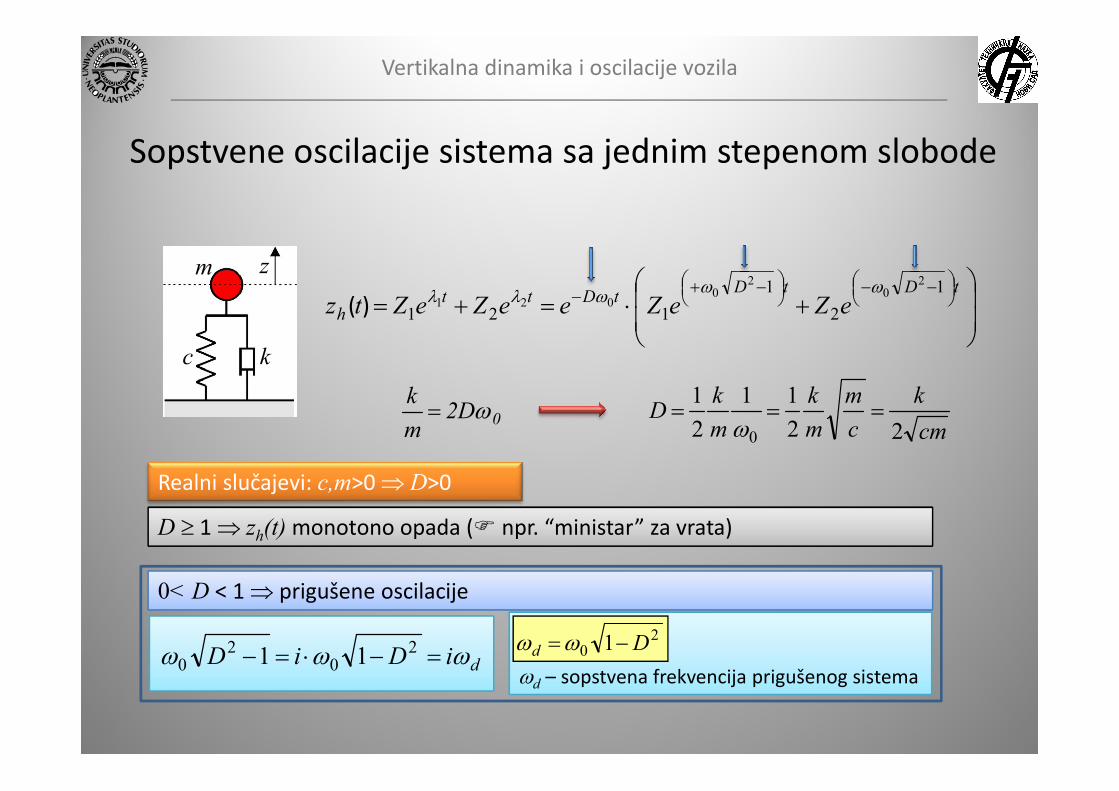
Sopstvene oscilacije sistema sa jednim stepenom slobode
02Dm
k
cm
k
c
m
m
k
m
kD
22
11
2
1
0
Realni slučajevi: c,m>0 D>0
D 1 zh(t) monotono opada ( npr. “ministar” za vrata)
diDiD 20
20 11
0< D < 1 prigušene oscilacije
d – sopstvena frekvencija prigušenog sistema
20 1 Dd
Vertikalna dinamika i oscilacije vozila
m
c k
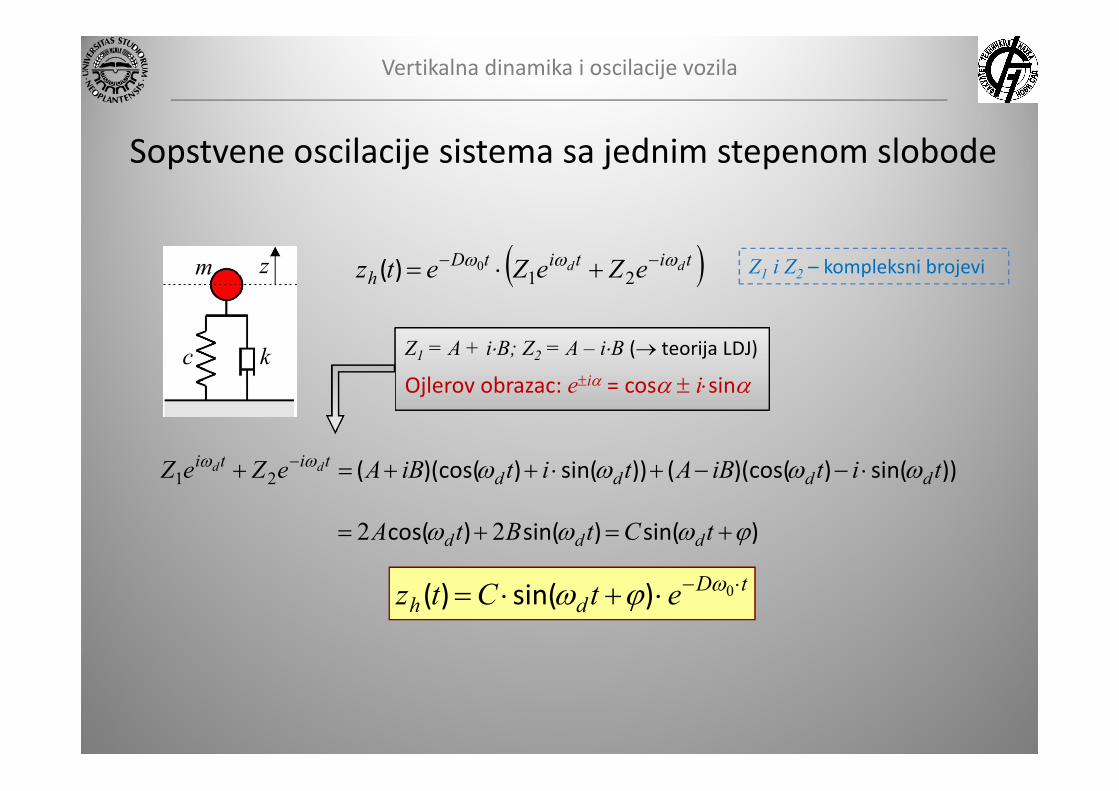
z tititDh
dd eZeZetz 210)(
Ojlerov obrazac: ei = cos isin
Z1 = A + iB; Z2 = A – iB ( teorija LDJ)
Sopstvene oscilacije sistema sa jednim stepenom slobode
Z1 i Z2 – kompleksni brojevi
Ojlerov obrazac: e = cos isin
))sin())(cos(())sin())(cos(( titiBAtitiBAeZeZ ddddtiti dd
21
)sin()sin()cos( tCtBtA ddd 22
tDdh etCtz 0 )sin()(
Vertikalna dinamika i oscilacije vozila
m
c k
z
30
80
z(m
m)
t(s)
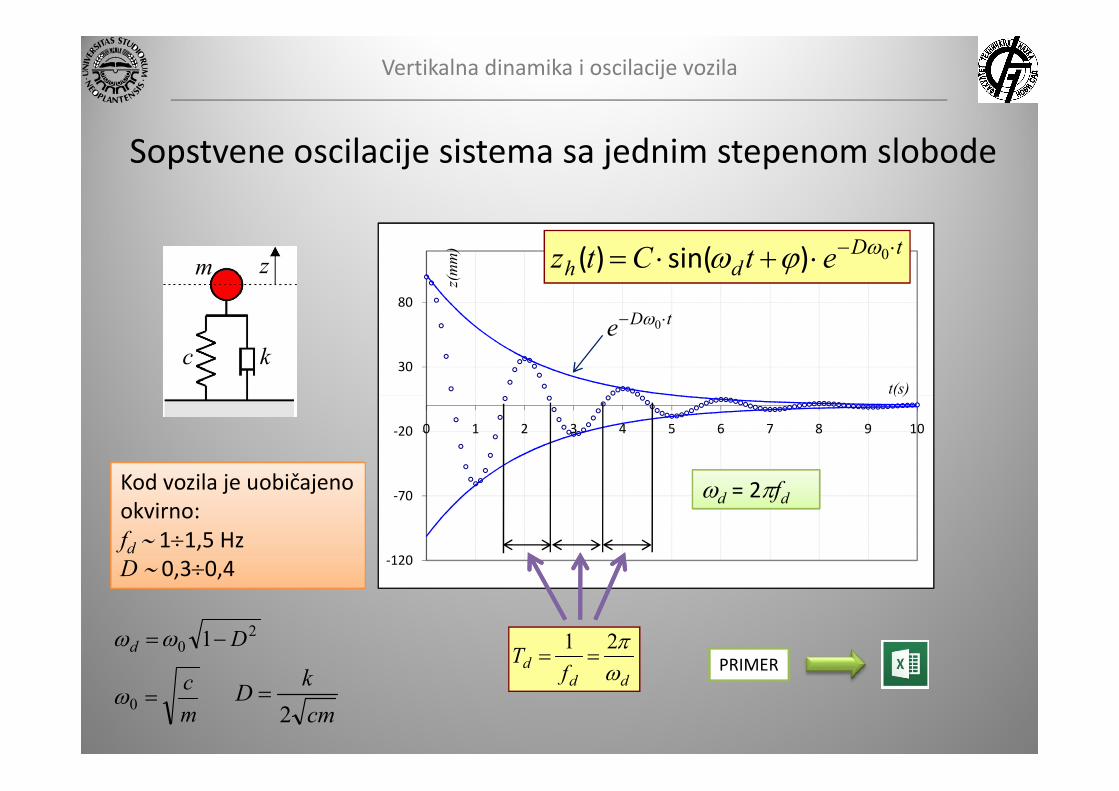
tDdh etCtz 0 )sin()(
tDe 0
Sopstvene oscilacije sistema sa jednim stepenom slobode
-120
-70
-20 0 1 2 3 4 5 6 7 8 9 10
t(s)
d = 2fd
ddd
fT
21
Kod vozila je uobičajeno okvirno:fd 11,5 HzD 0,30,4
PRIMER
20 1 Dd
m
c0
cm
kD
2
Vertikalna dinamika i oscilacije vozila
oscilacije sistema sa jednim stepenom slobode
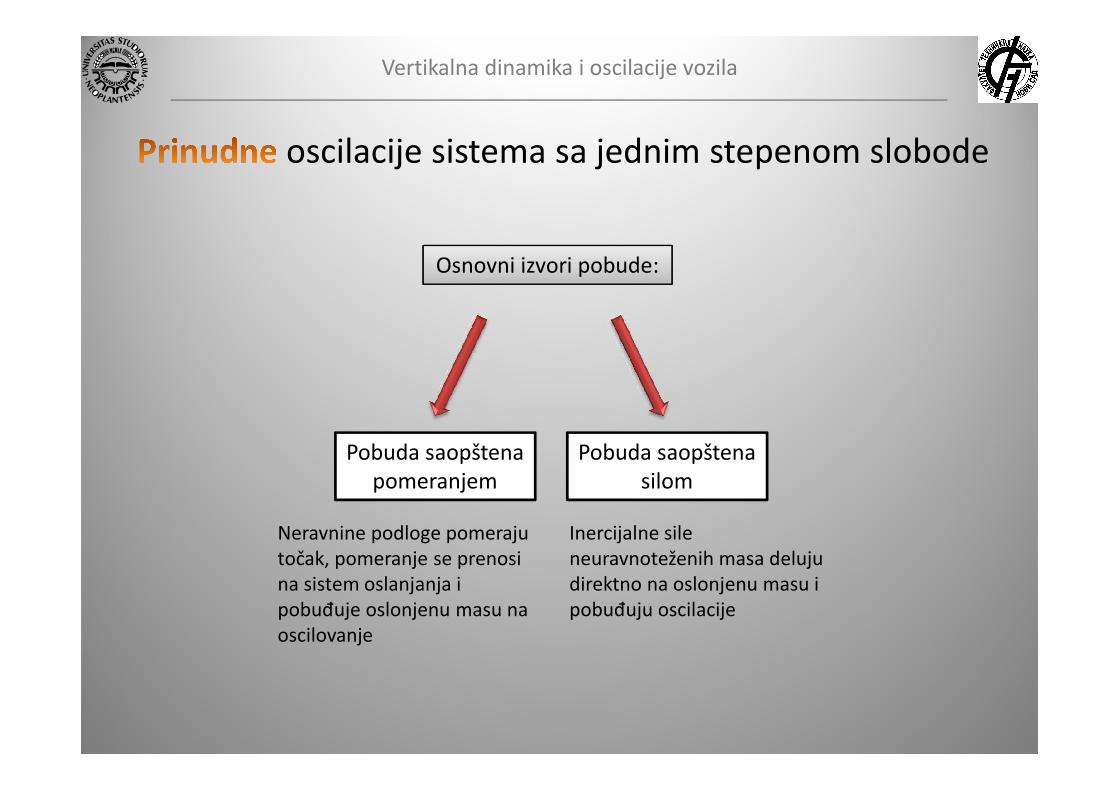
Osnovni izvori pobude:
Pobuda saopštena pomeranjem
Pobuda saopštena silom
Neravnine podloge pomeraju točak, pomeranje se prenosi na sistem oslanjanja i pobuđuje oslonjenu masu na oscilovanje
Inercijalne sile neuravnoteženih masa deluju direktno na oslonjenu masu i pobuđuju oscilacije
Vertikalna dinamika i oscilacije vozila
Prinudne oscilacije sistema sa jednim stepenom slobode
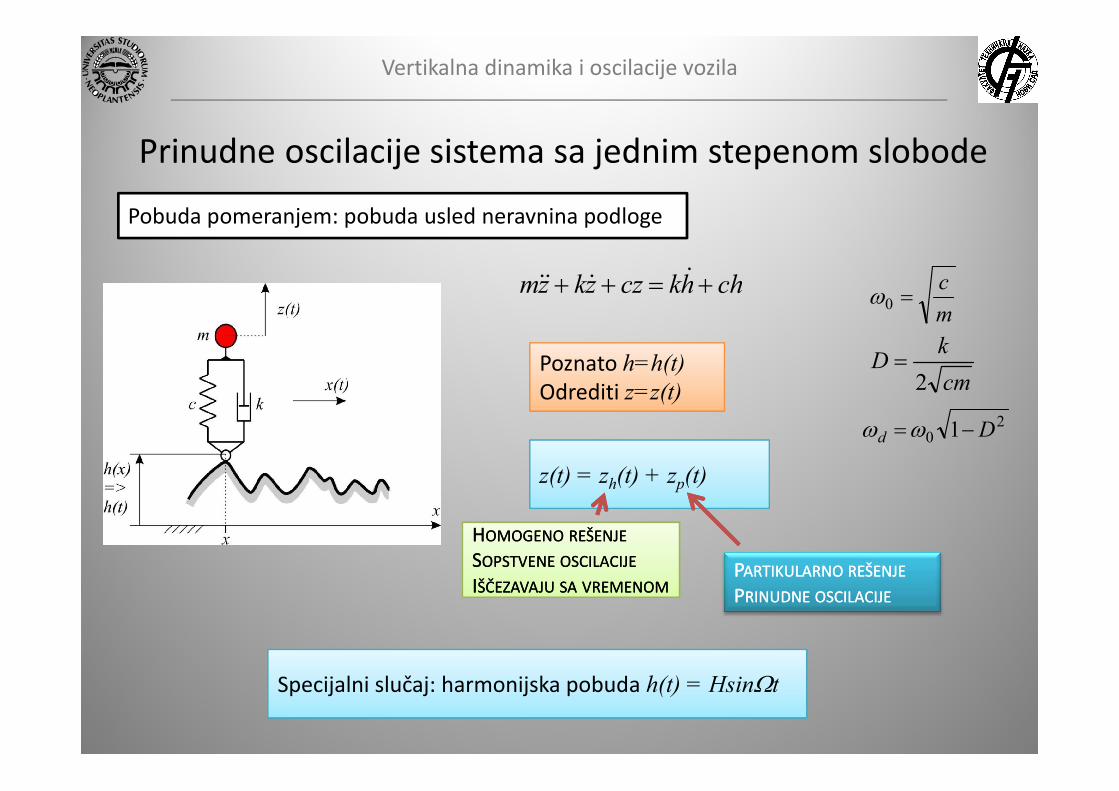
chhkczzkzm
Pobuda pomeranjem: pobuda usled neravnina podloge
Poznato h=h(t)Odrediti z=z(t)
m
c0
cm
kD
2
Odrediti z=z(t)
z(t) = zh(t) + zp(t)
HH
II
HHOMOGENOOMOGENO REŠENJEREŠENJE
SSOPSTVENEOPSTVENE OSCILACIJEOSCILACIJE
IIŠČEZAVAJUŠČEZAVAJU SASA VREMENOMVREMENOMPPARTIKULARNOARTIKULARNO REŠENJEREŠENJE
PPRINUDNERINUDNE OSCILACIJEOSCILACIJE
Specijalni slučaj: harmonijska pobuda h(t) = Hsint
20 1 Dd
cm2
Vertikalna dinamika i oscilacije vozila
Prinudne oscilacije sistema sa jednim stepenom slobode
Pobuda pomeranjem: pobuda usled neravnina podloge
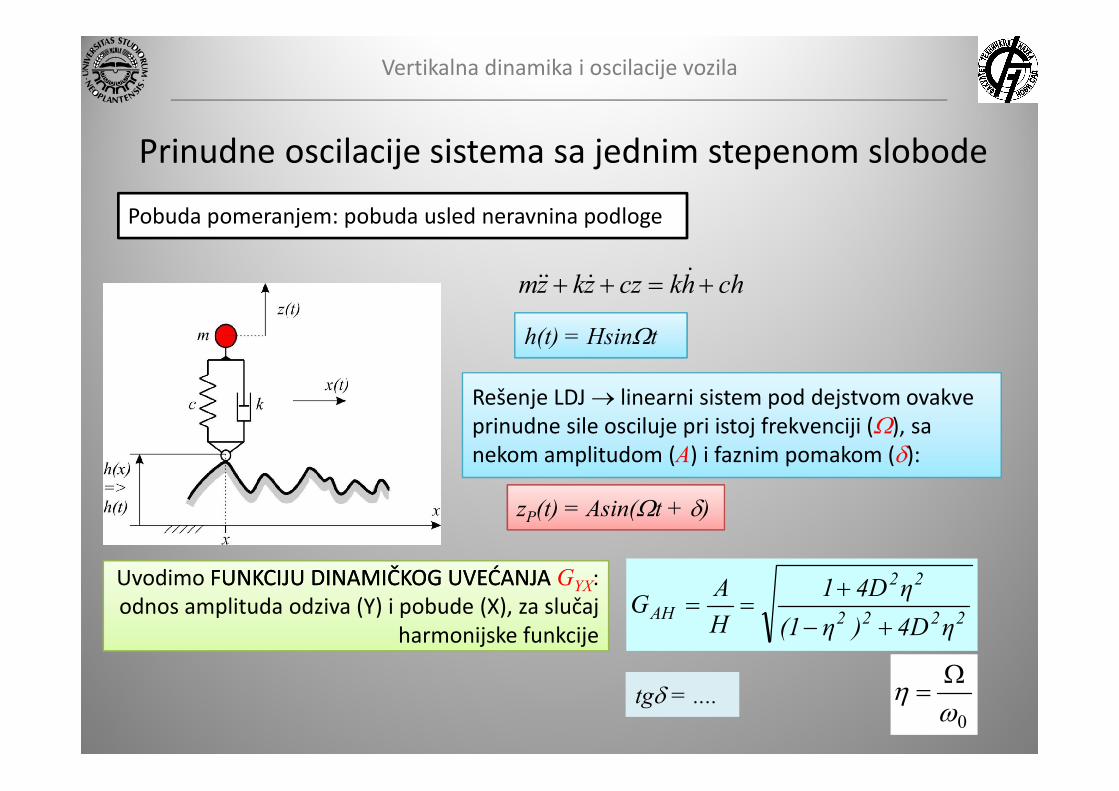
chhkczzkzm
h(t) = Hsint
Rešenje LDJ linearni sistem pod dejstvom ovakve Rešenje LDJ linearni sistem pod dejstvom ovakve prinudne sile osciluje pri istoj frekvenciji (), sa nekom amplitudom (A) i faznim pomakom ():
zP(t) = Asin(t + )
Uvodimo FUNKCIJU DINAMIČKOG UVEĆANJA FUNKCIJU DINAMIČKOG UVEĆANJA GYX: odnos amplituda odziva (Y) i pobude (X), za slučaj
harmonijske funkcije2222
22
AHη4D)η(1
η4D1
H
AG
0
tg = ....
Vertikalna dinamika i oscilacije vozila
Prinudne oscilacije sistema sa jednim stepenom slobode
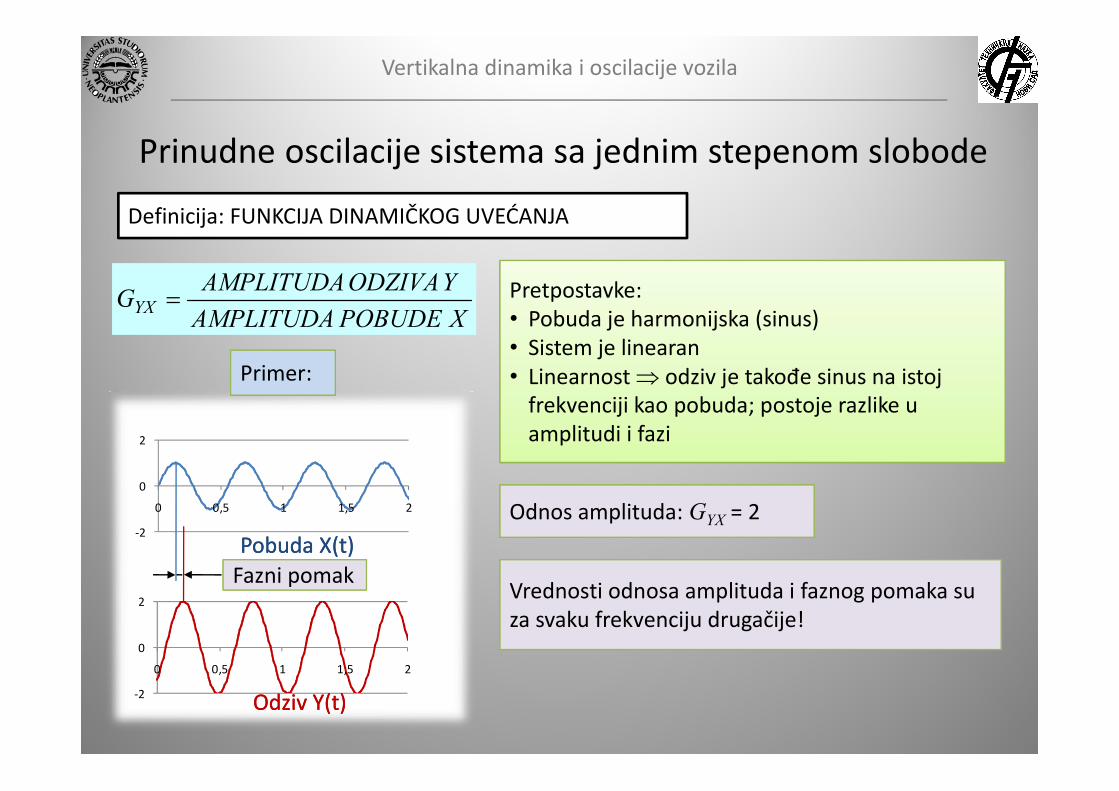
Definicija: FUNKCIJA DINAMIČKOG UVEĆANJA
X POBUDE AMPLITUDA
Y ODZIVA AMPLITUDAGYX Pretpostavke:
• Pobuda je harmonijska (sinus)• Sistem je linearan• Linearnost odziv je takođe sinus na istoj
frekvenciji kao pobuda; postoje razlike u
Primer:
frekvenciji kao pobuda; postoje razlike u amplitudi i fazi
-2
0
2
0 0,5 1 1,5 2
-2
0
2
0 0,5 1 1,5 2
Pobuda X(t)Pobuda X(t)
Odziv Y(t)Odziv Y(t)
Odnos amplituda: GYX = 2
Fazni pomakVrednosti odnosa amplituda i faznog pomaka su za svaku frekvenciju drugačije!
2,5
3
D=0,2
D=0,4
Vertikalna dinamika i oscilacije vozila
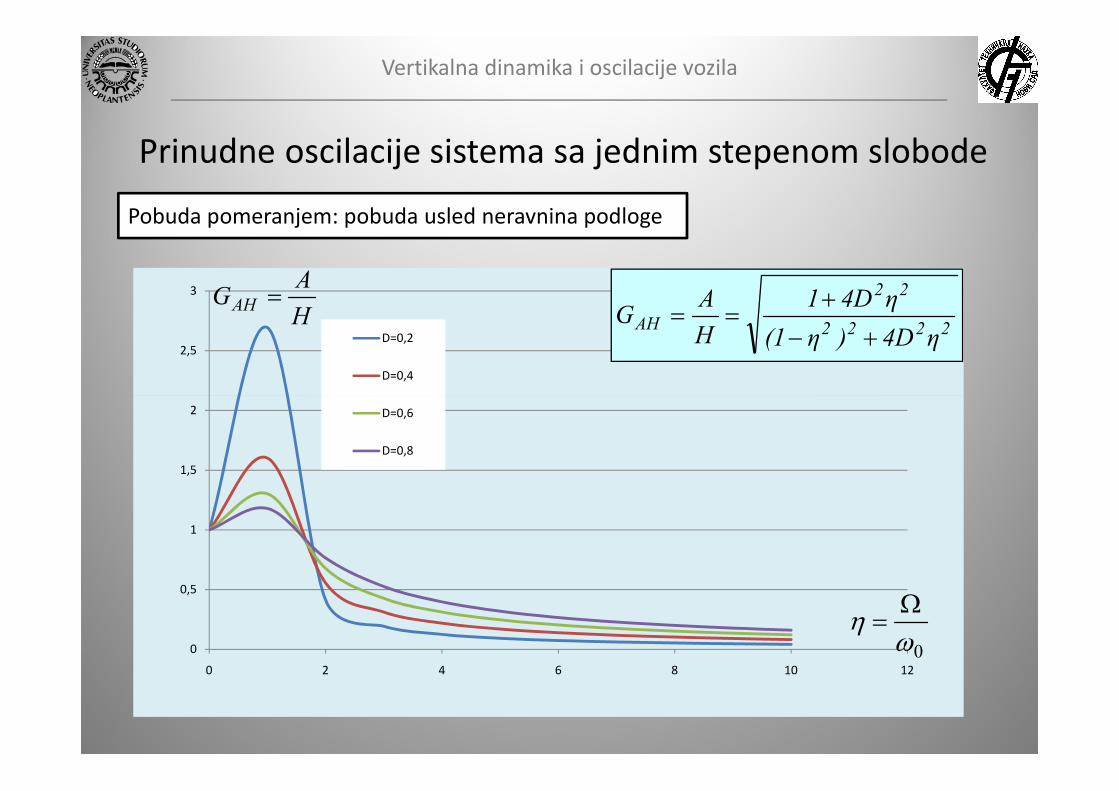
Prinudne oscilacije sistema sa jednim stepenom slobode
Pobuda pomeranjem: pobuda usled neravnina podloge
H
AGAH
2222
22
AHη4D)η(1
η4D1
H
AG
0
0,5
1
1,5
2
0 2 4 6 8 10 12
D=0,6
D=0,8
0
Vertikalna dinamika i oscilacije vozila
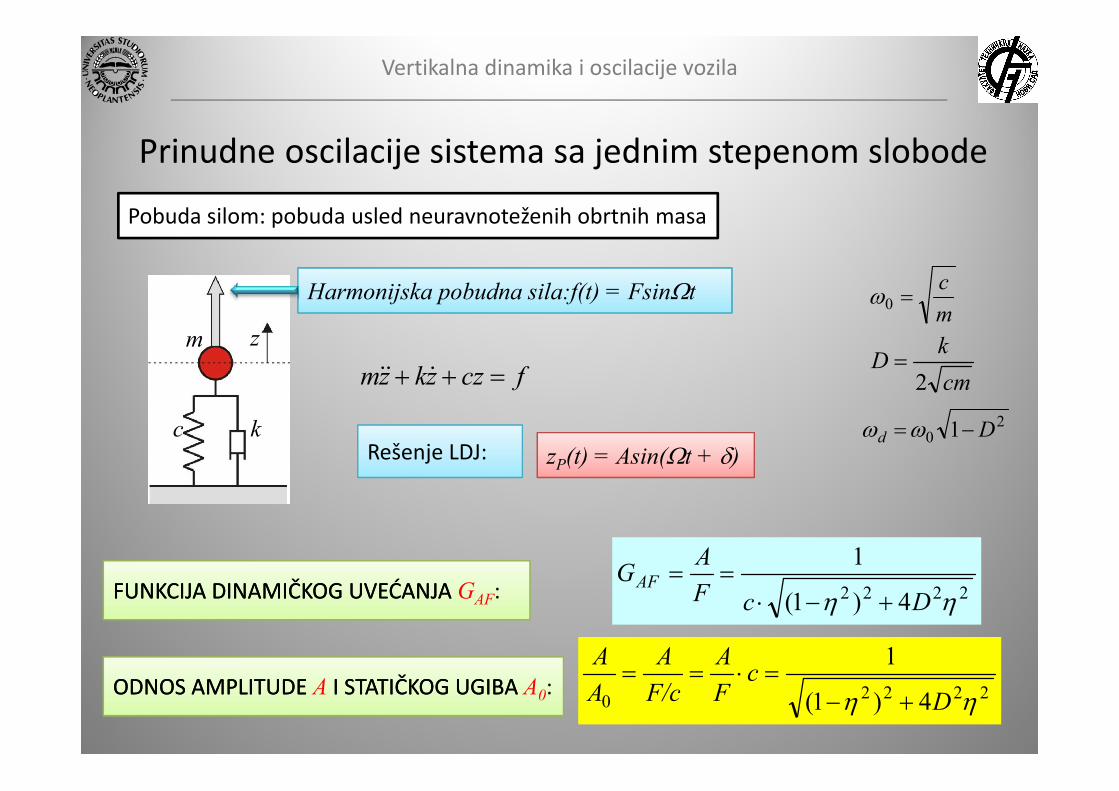
Prinudne oscilacije sistema sa jednim stepenom slobode
Pobuda silom: pobuda usled neuravnoteženih obrtnih masa
m zm
c0
cm
kD
2
Harmonijska pobudna sila:f(t) = Fsint
fczzkzm
c k 20 1 Dd
cm2
Rešenje LDJ: zP(t) = Asin(t + )
FUNKCIJA DINAMIČKOG UVEĆANJA FUNKCIJA DINAMIČKOG UVEĆANJA GAF: 2222 4)1(
1
DcF
AGAF
ODNOS AMPLITUDE ODNOS AMPLITUDE A I STATIČKOG UGIBA I STATIČKOG UGIBA A0: 22220 4)1(
1
Dc
F
A
F/c
A
A
A
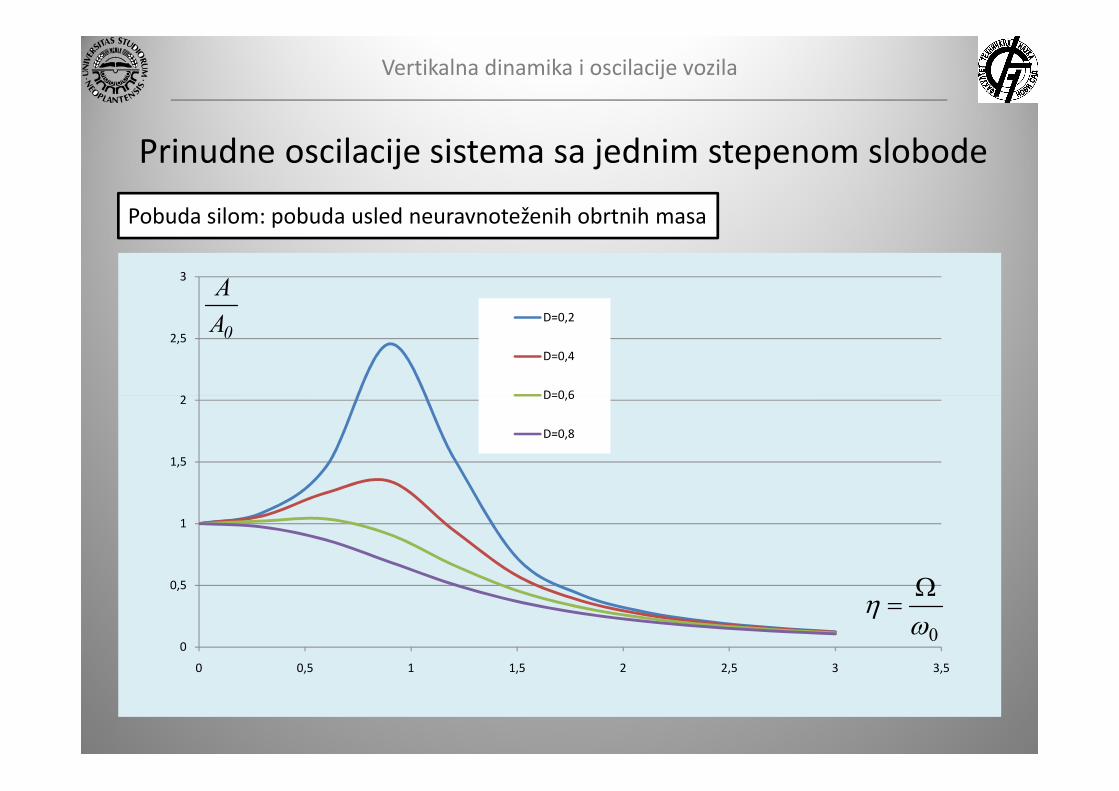
Vertikalna dinamika i oscilacije vozila
Prinudne oscilacije sistema sa jednim stepenom slobode
Pobuda silom: pobuda usled neuravnoteženih obrtnih masa
2
2,5
3
D=0,2
D=0,4
D=0,6
0A
A
0
0,5
1
1,5
2
0 0,5 1 1,5 2 2,5 3 3,5
D=0,6
D=0,8
0
Vertikalna dinamika i oscilacije vozila
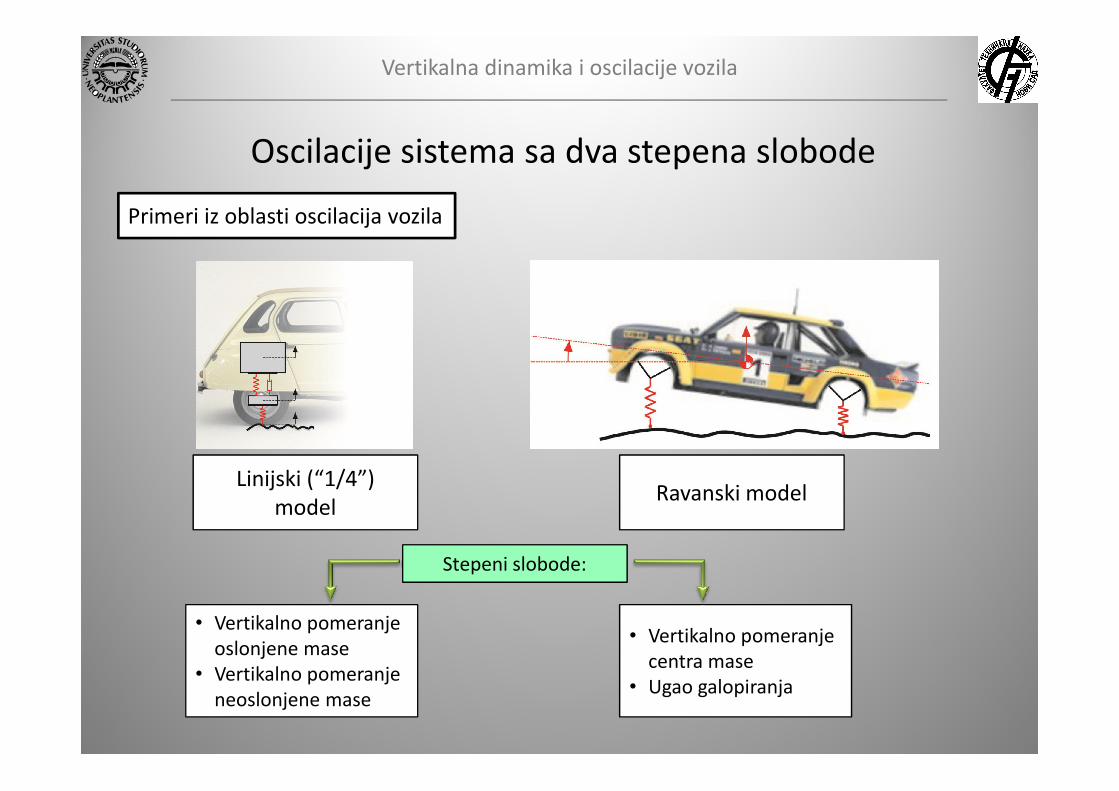
Oscilacije sistema sa dva stepena slobode
Primeri iz oblasti oscilacija vozila
Linijski (“1/4”) model
Ravanski model
Stepeni slobode:
• Vertikalno pomeranje oslonjene mase
• Vertikalno pomeranje neoslonjene mase
• Vertikalno pomeranje centra mase
• Ugao galopiranja
Vertikalna dinamika i oscilacije vozila
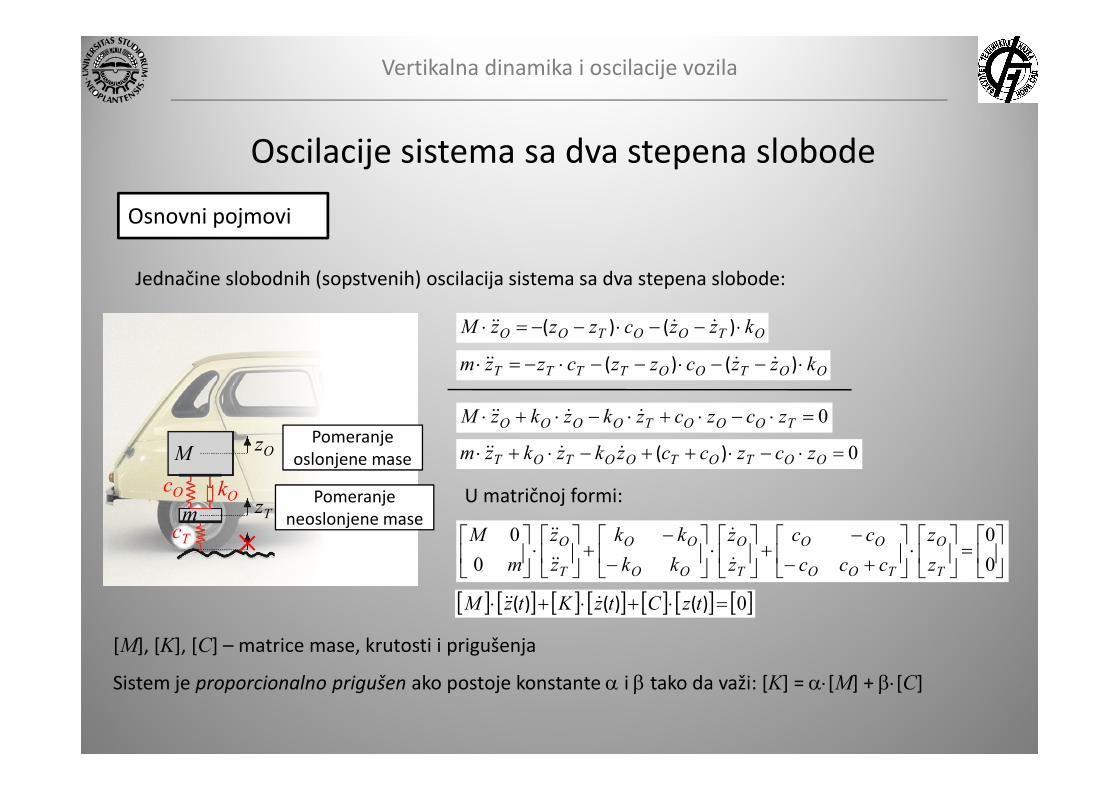
Oscilacije sistema sa dva stepena slobode
Osnovni pojmovi
Jednačine slobodnih (sopstvenih) oscilacija sistema sa dva stepena slobode:
OTOOTOO kzzczzzM )()(
OOTOOTTTT kzzczzczzm )()(
M
m
zO
zT
cO kO
cT
Pomeranje oslonjene mase
Pomeranje neoslonjene mase
0 TOOOTOOOO zczczkzkzM
0
0
0
0
T
O
TOO
OO
T
O
OO
OO
T
O
z
z
ccc
cc
z
z
kk
kk
z
z
m
M
0 OOTOTOOTOT zczcczkzkzm )(
U matričnoj formi:
0 )()()( tzCtzKtzM
[M], [K], [C] – matrice mase, krutosti i prigušenja
Sistem je proporcionalno prigušen ako postoje konstante i tako da važi: [K] = [M] + [C]
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Osnovni pojmovi
Neprigušen i prigušen sistem, proporcionalno prigušenje, čvorovi, proporcionalneamplitude, glavne forme sopstvenih oscilacija, rezonancije, sopstvene i prinudneoscilacijeRešenje jednačina kretanja dovodi do dve vrednosti sopstvene frekvencije: 1, 2
Vertikalna dinamika i oscilacije vozila
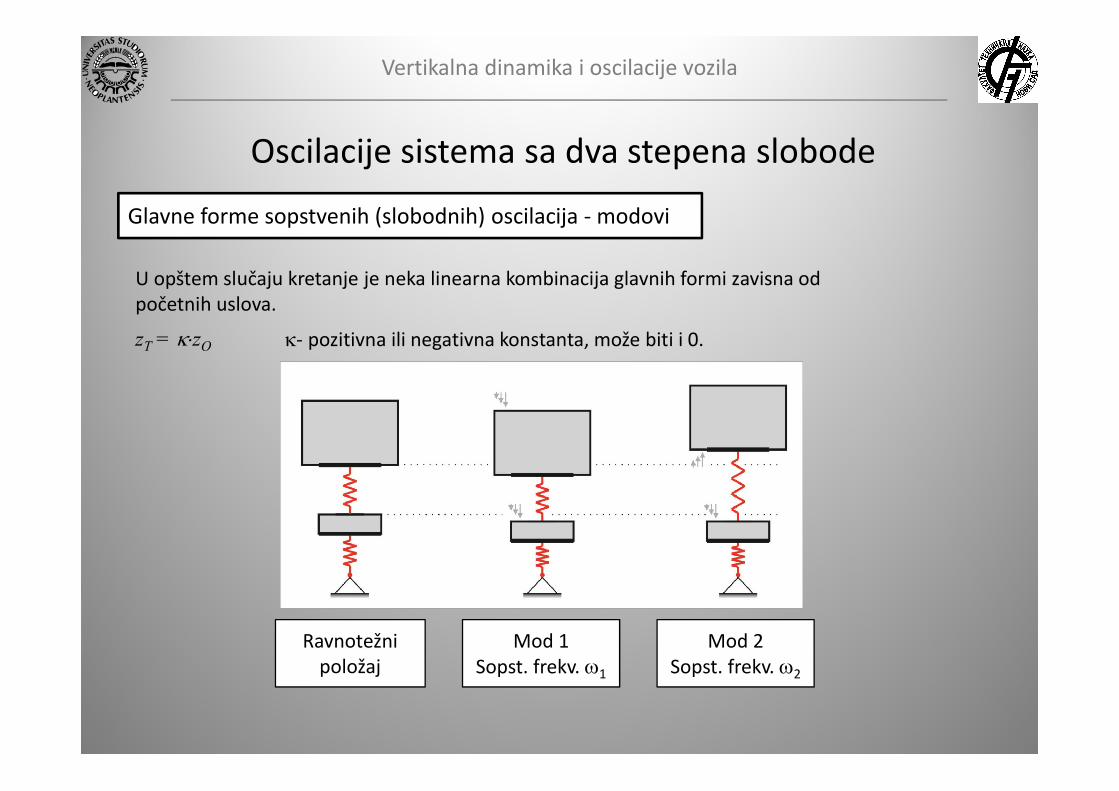
Oscilacije sistema sa dva stepena slobode
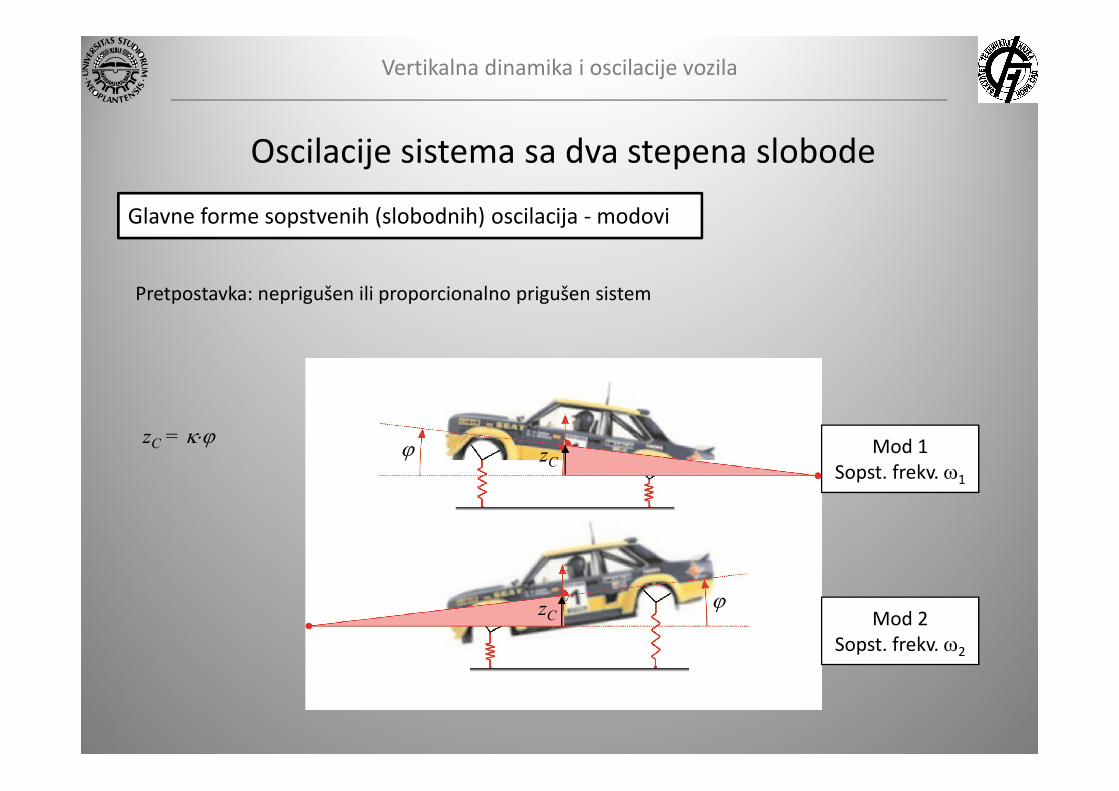
Glavne forme sopstvenih (slobodnih) oscilacija - modovi
U opštem slučaju kretanje je neka linearna kombinacija glavnih formi zavisna od početnih uslova.
zT = zO - pozitivna ili negativna konstanta, može biti i 0.
Ravnotežni položaj
Mod 1Sopst. frekv. 1
Mod 2Sopst. frekv. 2
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Pretpostavka: neprigušen ili proporcionalno prigušen sistem
Glavne forme sopstvenih (slobodnih) oscilacija - modovi
zC =
zC
zC
Mod 1Sopst. frekv. 1
Mod 2Sopst. frekv. 2
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
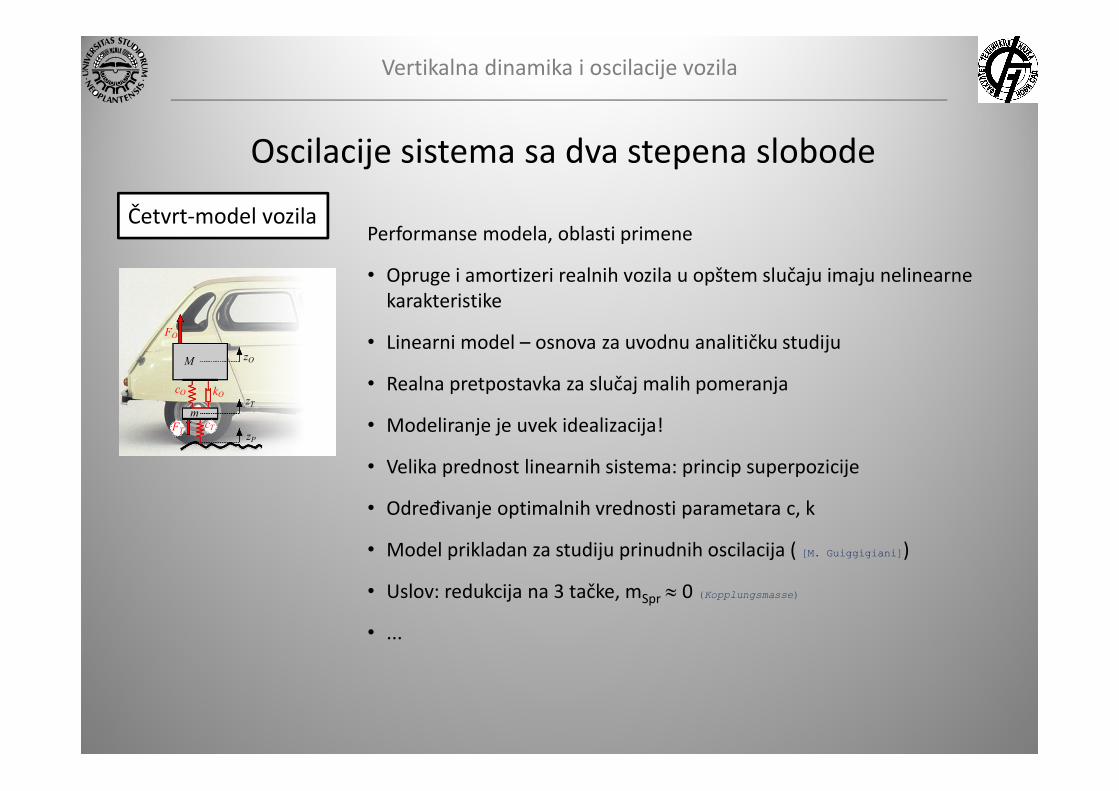
Četvrt-model vozilaPerformanse modela, oblasti primene
• Opruge i amortizeri realnih vozila u opštem slučaju imaju nelinearne karakteristike
• Linearni model – osnova za uvodnu analitičku studiju
• Realna pretpostavka za slučaj malih pomeranjaM zO
z
FO
cO kORealna pretpostavka za slučaj malih pomeranja
• Modeliranje je uvek idealizacija!
• Velika prednost linearnih sistema: princip superpozicije
• Određivanje optimalnih vrednosti parametara c, k
• Model prikladan za studiju prinudnih oscilacija ( [M. Guiggigiani])
• Uslov: redukcija na 3 tačke, mSpr 0 (Kopplungsmasse)
• ...
mzT
zP
cO kO
FTcT
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
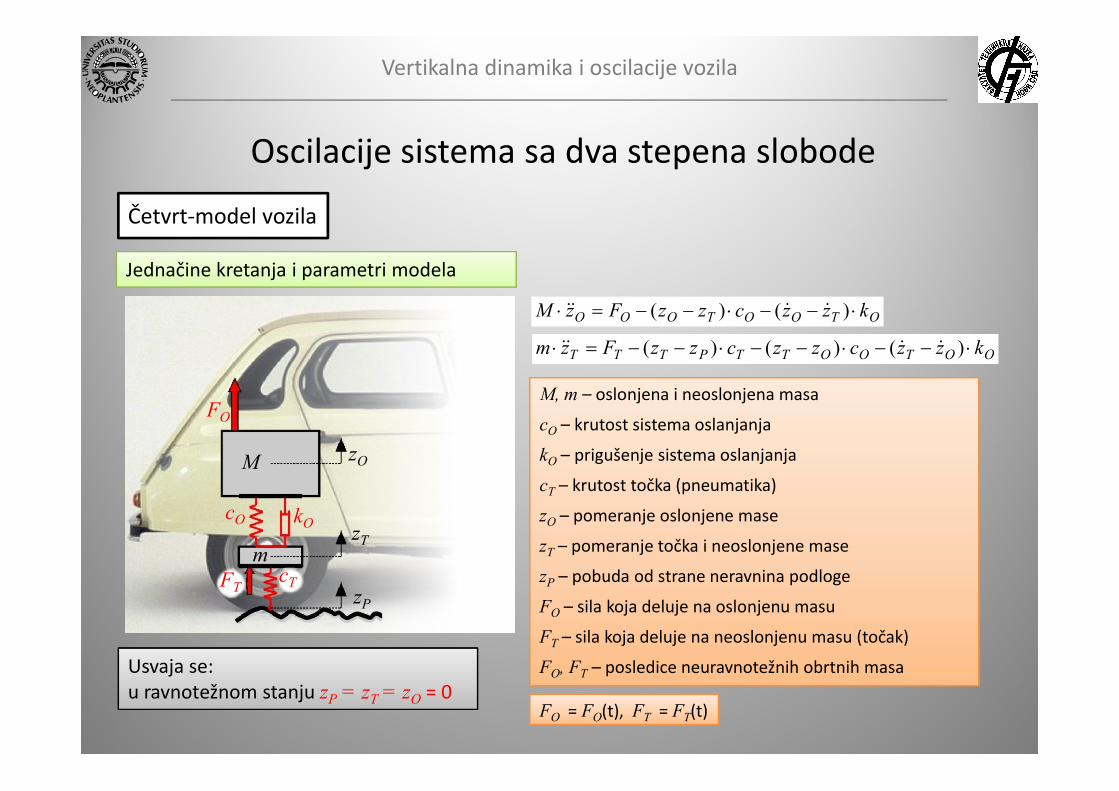
Jednačine kretanja i parametri modela
OTOOTOOO kzzczzFzM )()(
OOTOOTTPTTT kzzczzczzFzm )()()(
M, m – oslonjena i neoslonjena masa
M
m
zO
zT
zP
M, m – oslonjena i neoslonjena masa
cO – krutost sistema oslanjanja
kO – prigušenje sistema oslanjanja
cT – krutost točka (pneumatika)
zO – pomeranje oslonjene mase
zT – pomeranje točka i neoslonjene mase
zP – pobuda od strane neravnina podloge
FO – sila koja deluje na oslonjenu masu
FT – sila koja deluje na neoslonjenu masu (točak)
FO, FT – posledice neuravnotežnih obrtnih masa
FO
cO kO
FTcT
Usvaja se:u ravnotežnom stanju zP = zT = zO = 0
FO = FO(t), FT = FT(t)
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
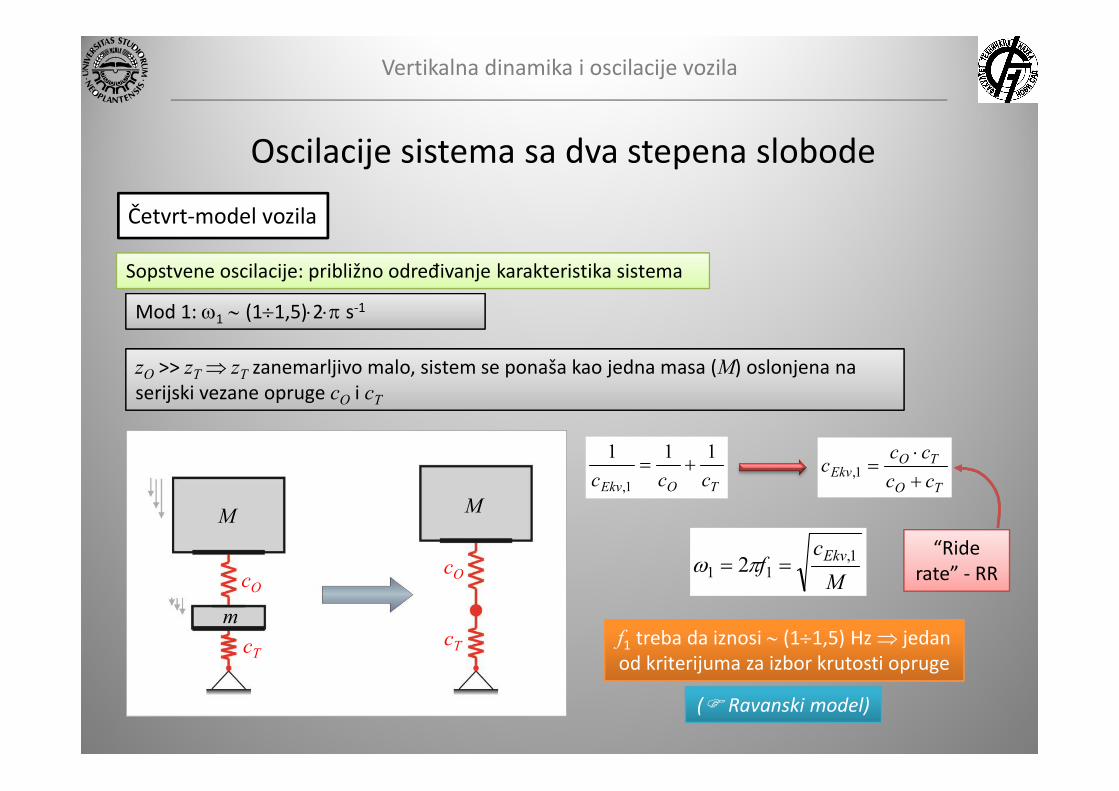
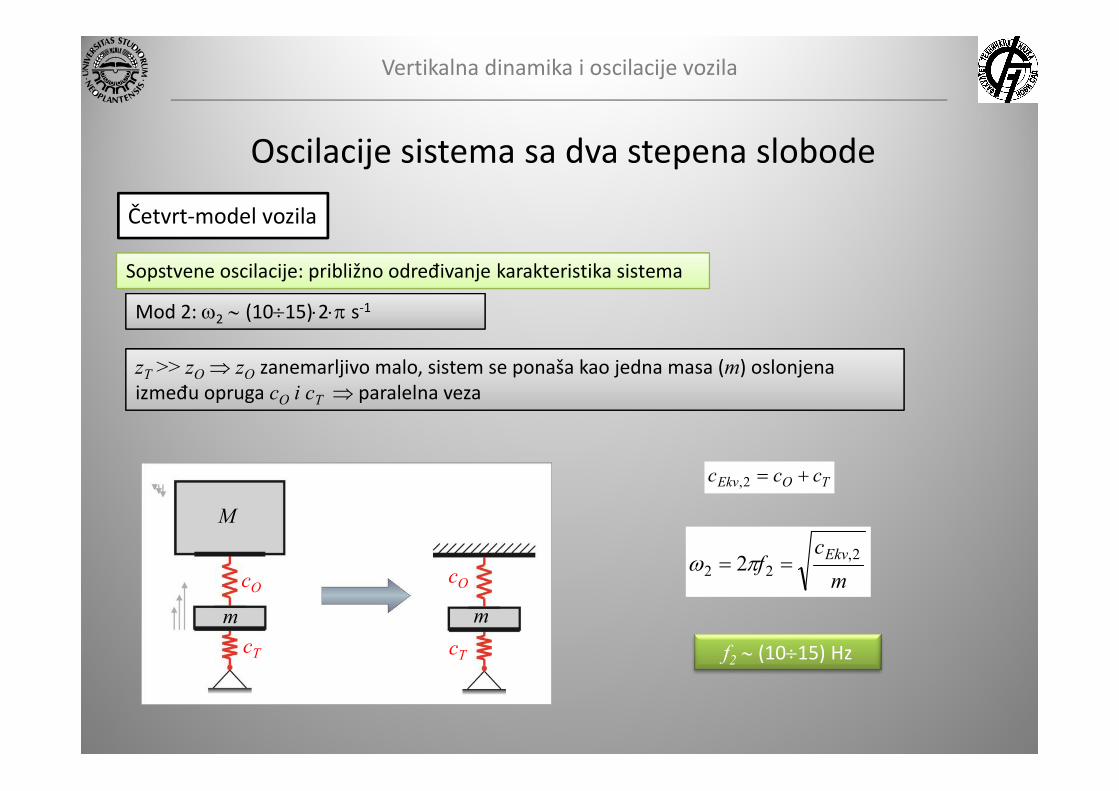
Sopstvene oscilacije: približno određivanje karakteristika sistema
Mod 1: 1 (11,5)2 s-1
zO >> zT zT zanemarljivo malo, sistem se ponaša kao jedna masa (M) oslonjena na serijski vezane opruge cO i cTserijski vezane opruge cO i cT
cO
cTcT
cO
TOEkv ccc
111
1,
TO
TOEkv
cc
ccc
1,
M
cf
Ekv 1,11 2
f1treba da iznosi (11,5) Hz jedan od kriterijuma za izbor krutosti opruge
M
m
M
“Ride rate” - RR
( Ravanski model)
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
Mod 2: 2 (1015)2 s-1
zT >> zO zO zanemarljivo malo, sistem se ponaša kao jedna masa (m) oslonjena između opruga cO i cT paralelna veza
Sopstvene oscilacije: približno određivanje karakteristika sistema
između opruga cO i cT paralelna veza
cO
cT cT
cO
TOEkv ccc 2,
m
cf
Ekv 2,22 2
f2 (1015) Hz
M
m m
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
mM
c
M
c
m
cc
M
c
m
cc OOOTOOT22
22,1
4
2
1
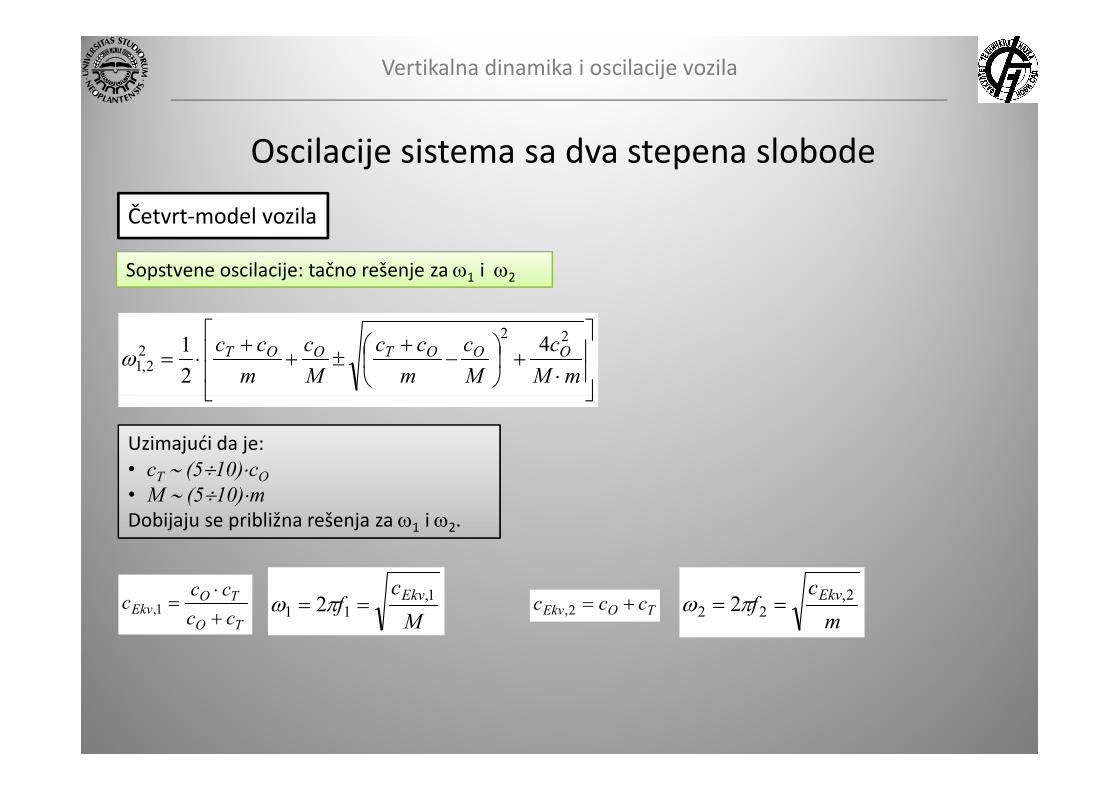
Sopstvene oscilacije: tačno rešenje za 1 i 2
Uzimajući da je:• cT (510)cO
• M (510)mDobijaju se približna rešenja za 1 i 2.
TO
TOEkv
cc
ccc
1,
M
cf
Ekv 1,11 2 TOEkv ccc 2,
m
cf
Ekv 2,22 2
Vertikalna dinamika i oscilacije vozila
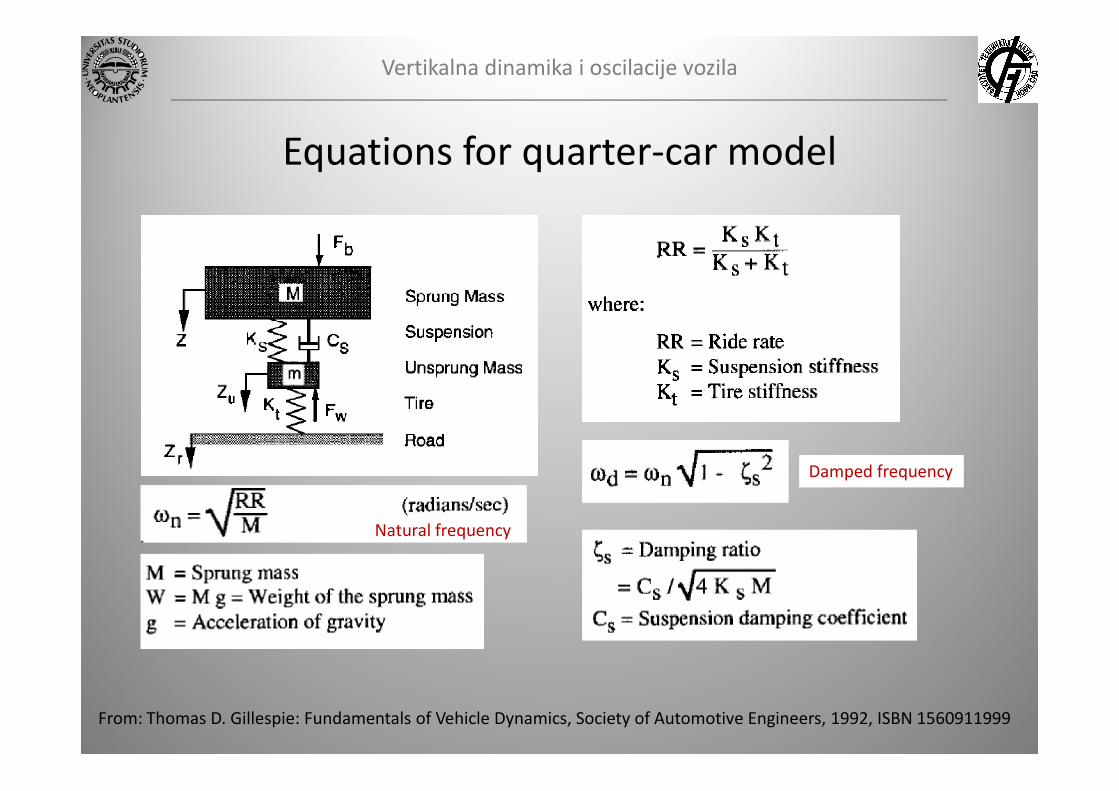
Equations for quarter-car model
From: Thomas D. Gillespie: Fundamentals of Vehicle Dynamics, Society of Automotive Engineers, 1992, ISBN 1560911999
Natural frequency
Damped frequency
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
POBUDE
zP
FO
FT
ODZIVI OD INTERESA
zO
d2zO/dt2
zT
Z
Pažnja – oznake!
Pomeranje
Sila
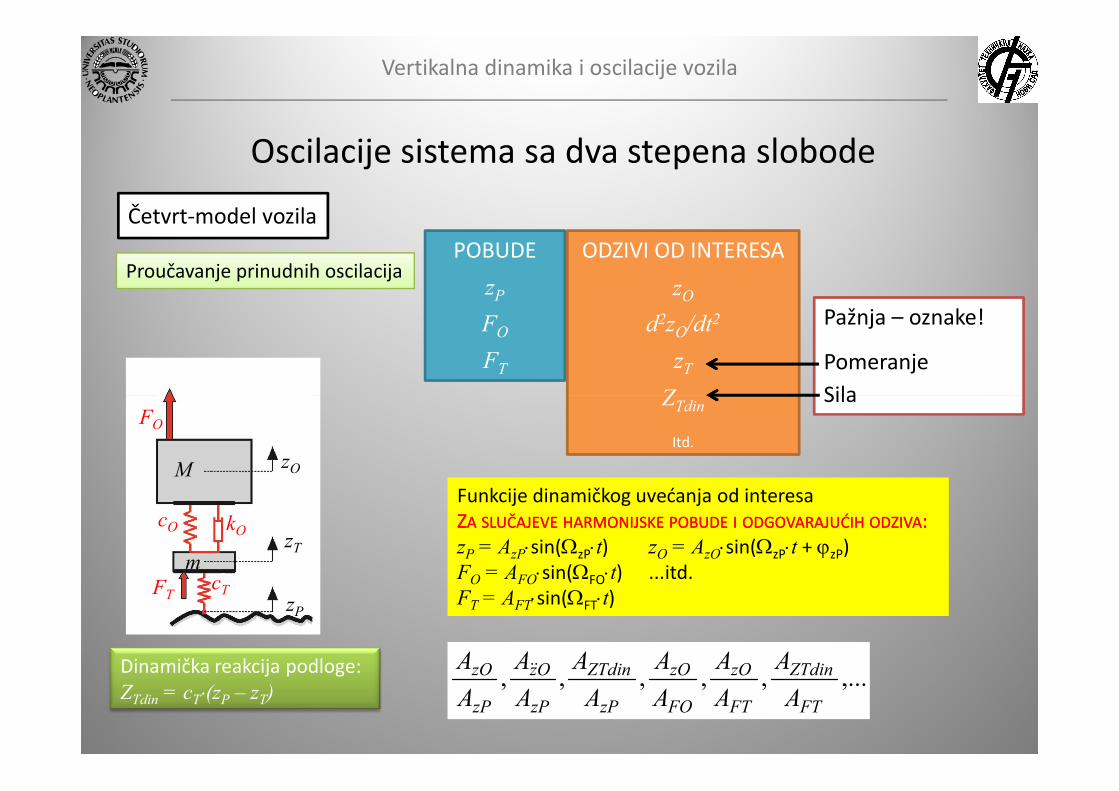
Proučavanje prinudnih oscilacija
Funkcije dinamičkog uvećanja od interesaZZAA SLUČAJEVESLUČAJEVE HARMONIJSKEHARMONIJSKE POBUDEPOBUDE II ODGOVARAJUĆIHODGOVARAJUĆIH ODZIVAODZIVA::zP = AzPsin(zPt) zO = AzOsin(zPt + zP)FO = AFOsin(FOt) ...itd.FT = AFTsin(FTt)
M
m
zO
zT
zP
FO
cO kO
FTcT
Dinamička reakcija podloge:ZTdin = cT(zP – zT)
ZTdin
Itd.
Sila
,...,,,,,FT
ZTdin
FT
zO
FO
zO
zP
ZTdin
zP
Oz
zP
zO
A
A
A
A
A
A
A
A
A
A
A
A
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
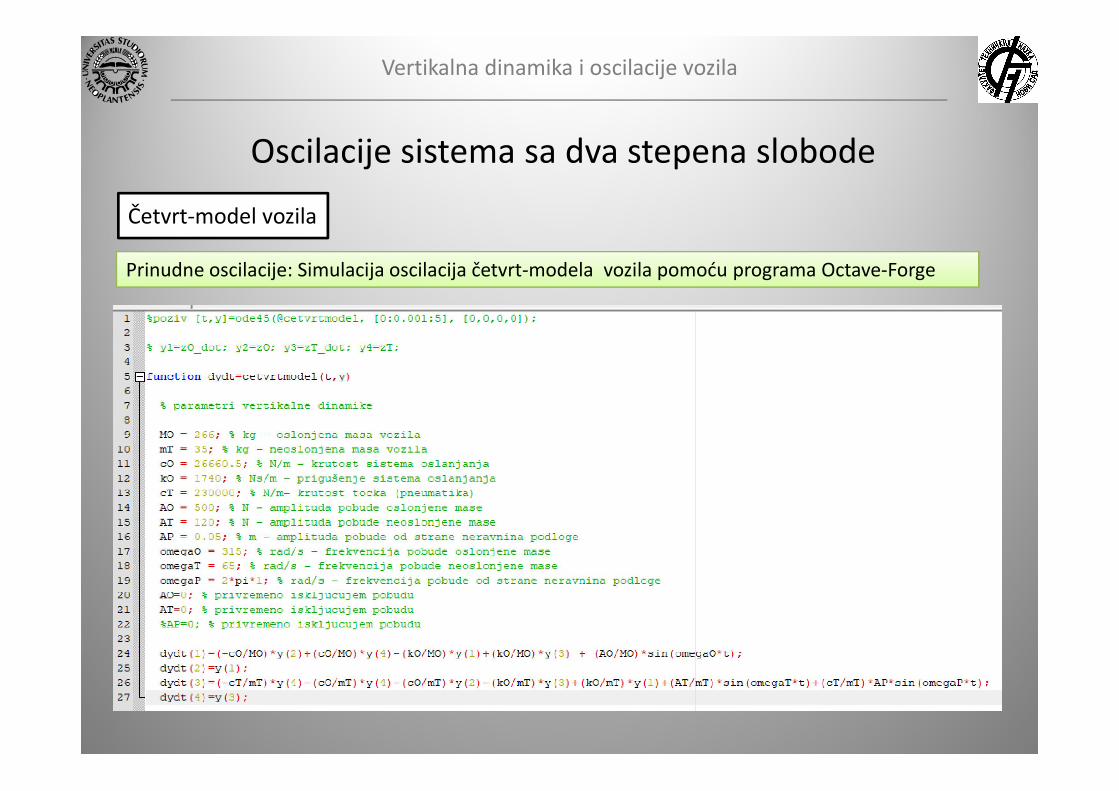
Prinudne oscilacije: Simulacija oscilacija četvrt-modela vozila pomoću programa Octave-Forge
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
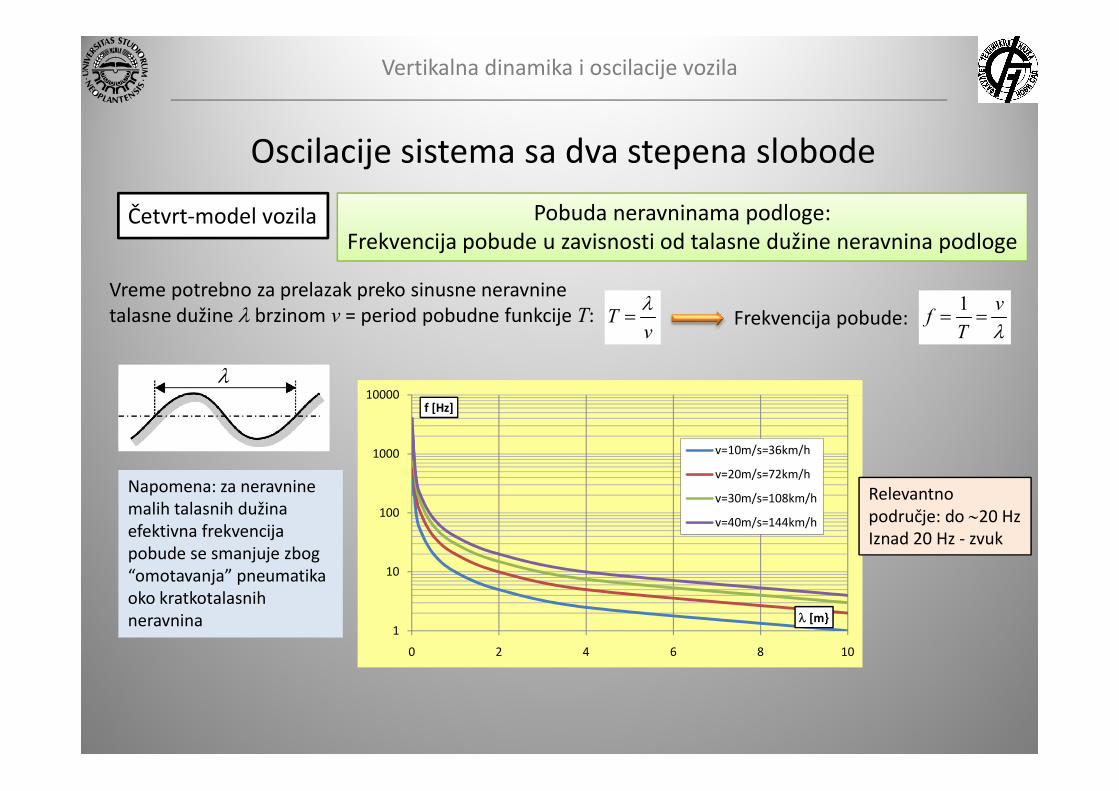
Četvrt-model vozila Pobuda neravninama podloge:Frekvencija pobude u zavisnosti od talasne dužine neravnina podloge
Vreme potrebno za prelazak preko sinusne neravninetalasne dužine brzinom v = period pobudne funkcije T:
vT
Frekvencija pobude:
v
Tf
1
10000
1
10
100
1000
10000
0 2 4 6 8 10
f [Hz]
[m}
v=10m/s=36km/h
v=20m/s=72km/h
v=30m/s=108km/h
v=40m/s=144km/h
Napomena: za neravninemalih talasnih dužinaefektivna frekvencijapobude se smanjuje zbog“omotavanja” pneumatikaoko kratkotalasnihneravnina
Relevantnopodručje: do 20 HzIznad 20 Hz - zvuk
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
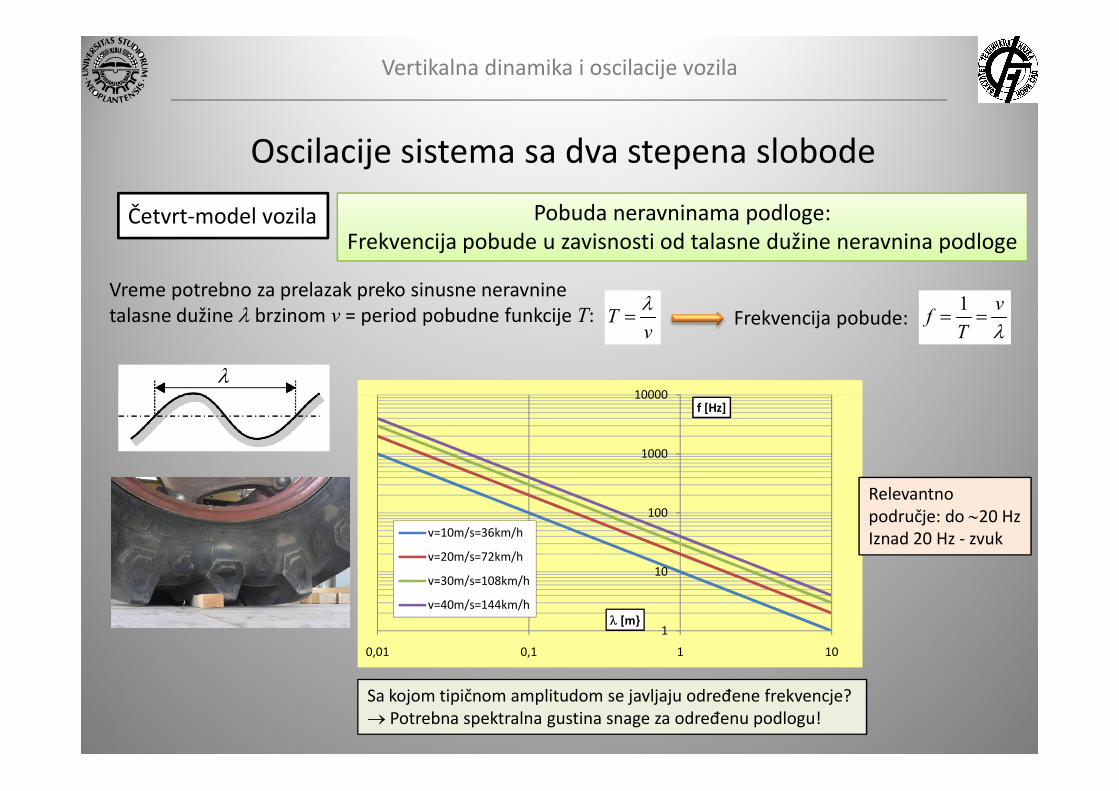
Četvrt-model vozila Pobuda neravninama podloge:Frekvencija pobude u zavisnosti od talasne dužine neravnina podloge
Vreme potrebno za prelazak preko sinusne neravninetalasne dužine brzinom v = period pobudne funkcije T:
vT
Frekvencija pobude:
v
Tf
1
10000
1
10
100
1000
10000
0,01 0,1 1 10
f [Hz]
[m}
v=10m/s=36km/h
v=20m/s=72km/h
v=30m/s=108km/h
v=40m/s=144km/h
Relevantnopodručje: do 20 HzIznad 20 Hz - zvuk
Sa kojom tipičnom amplitudom se javljaju određene frekvencje? Potrebna spektralna gustina snage za određenu podlogu!
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
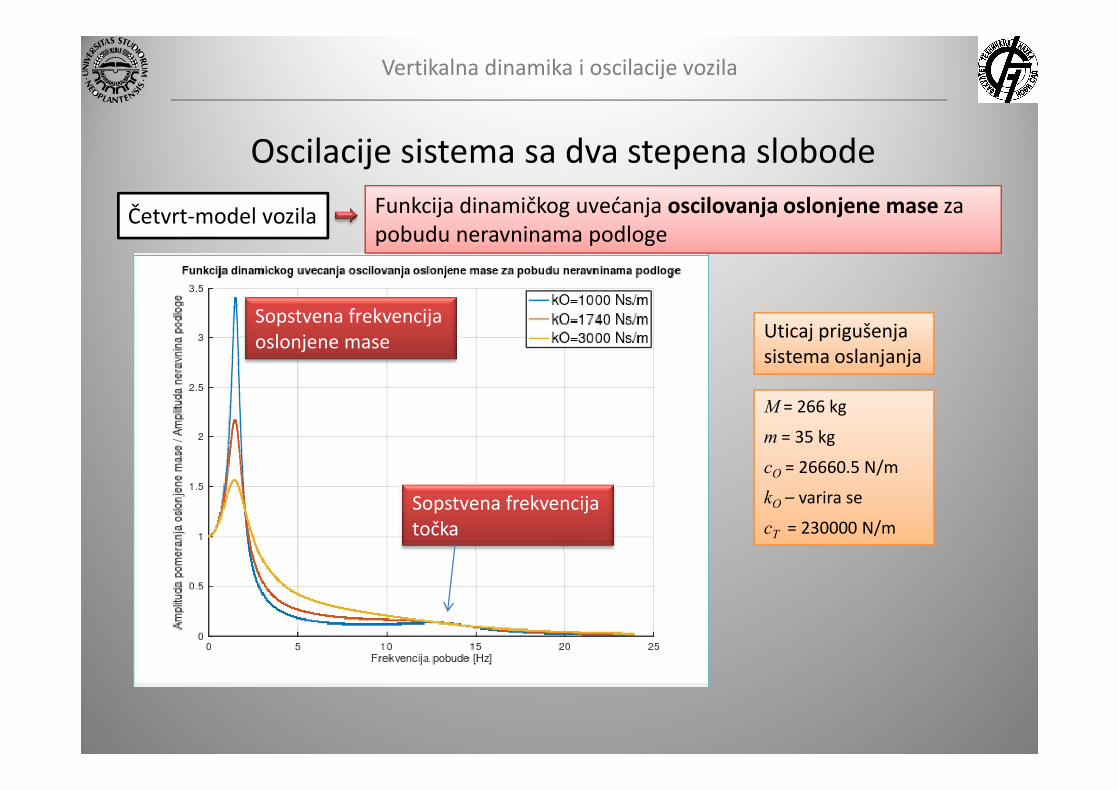
Četvrt-model vozila
Sopstvena frekvencija oslonjene mase
= 266 kg
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
Uticaj prigušenjasistema oslanjanja
Sopstvena frekvencija točka
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO – varira se
cT = 230000 N/m
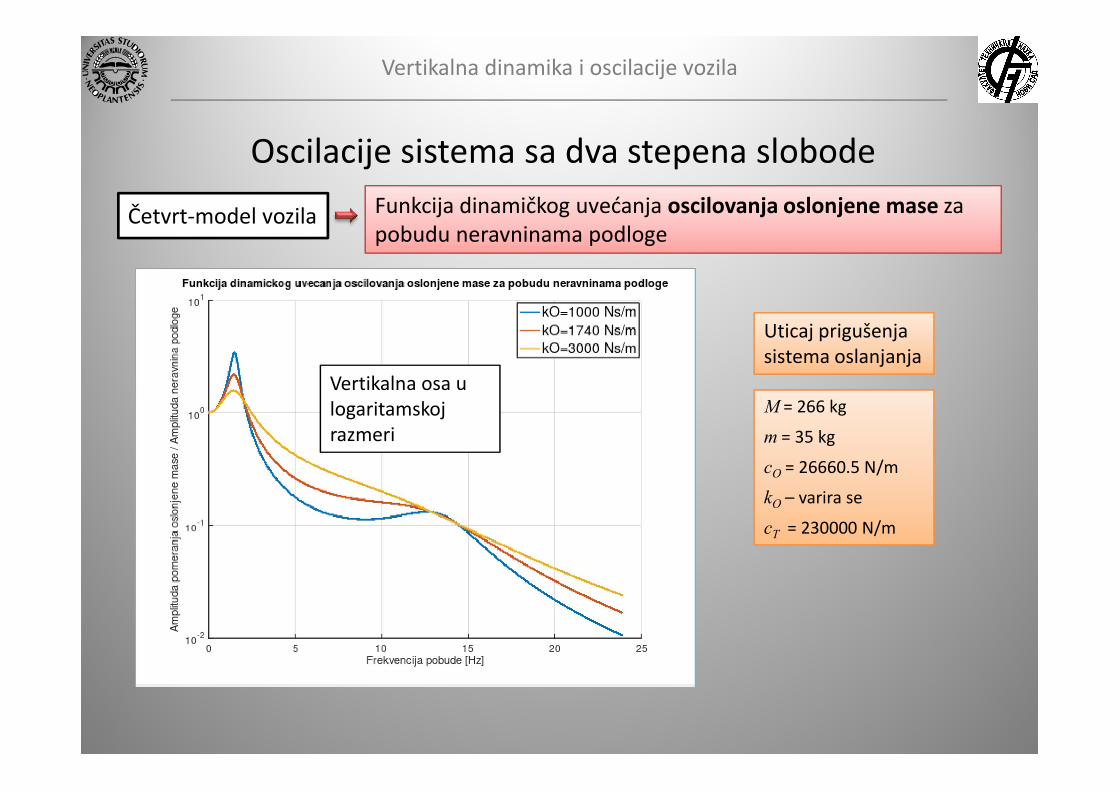
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
Vertikalna osa u = 266 kg
Uticaj prigušenjasistema oslanjanja
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
Vertikalna osa u logaritamskoj razmeri
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO – varira se
cT = 230000 N/m
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
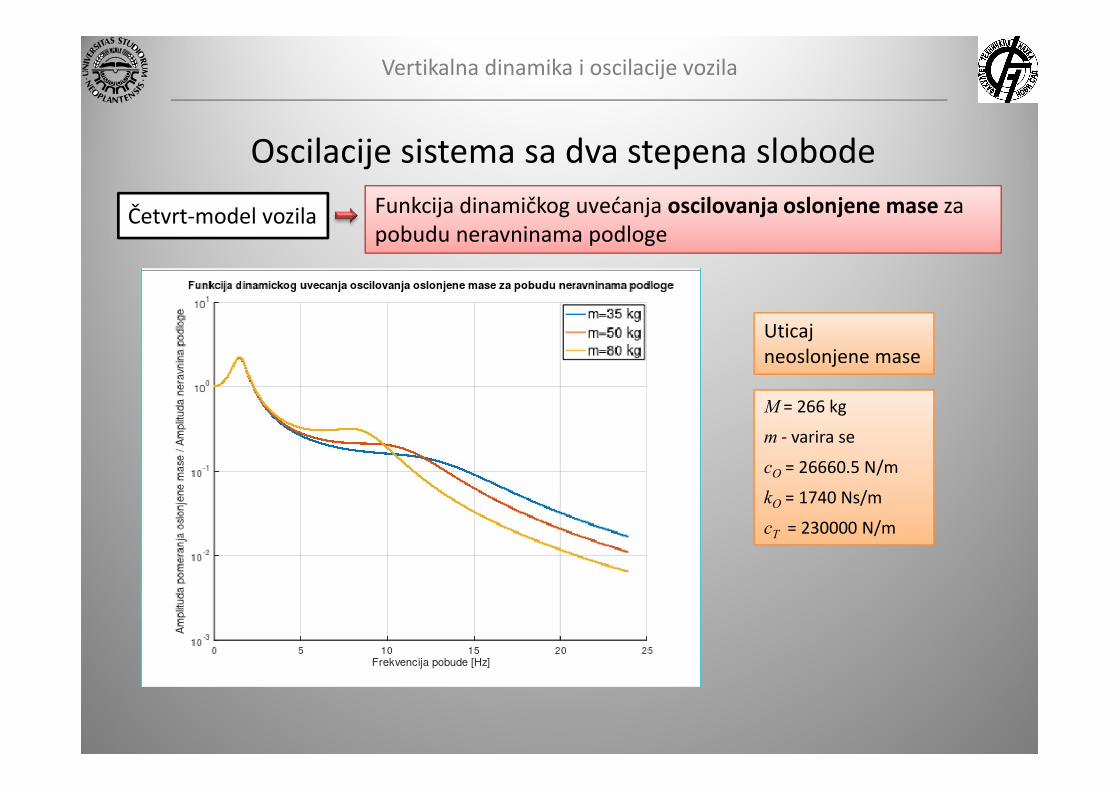
Uticaj neoslonjene mase
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
M = 266 kg
m - varira se
cO = 26660.5 N/m
kO = 1740 Ns/m
cT = 230000 N/m
Vertikalna dinamika i oscilacije vozila
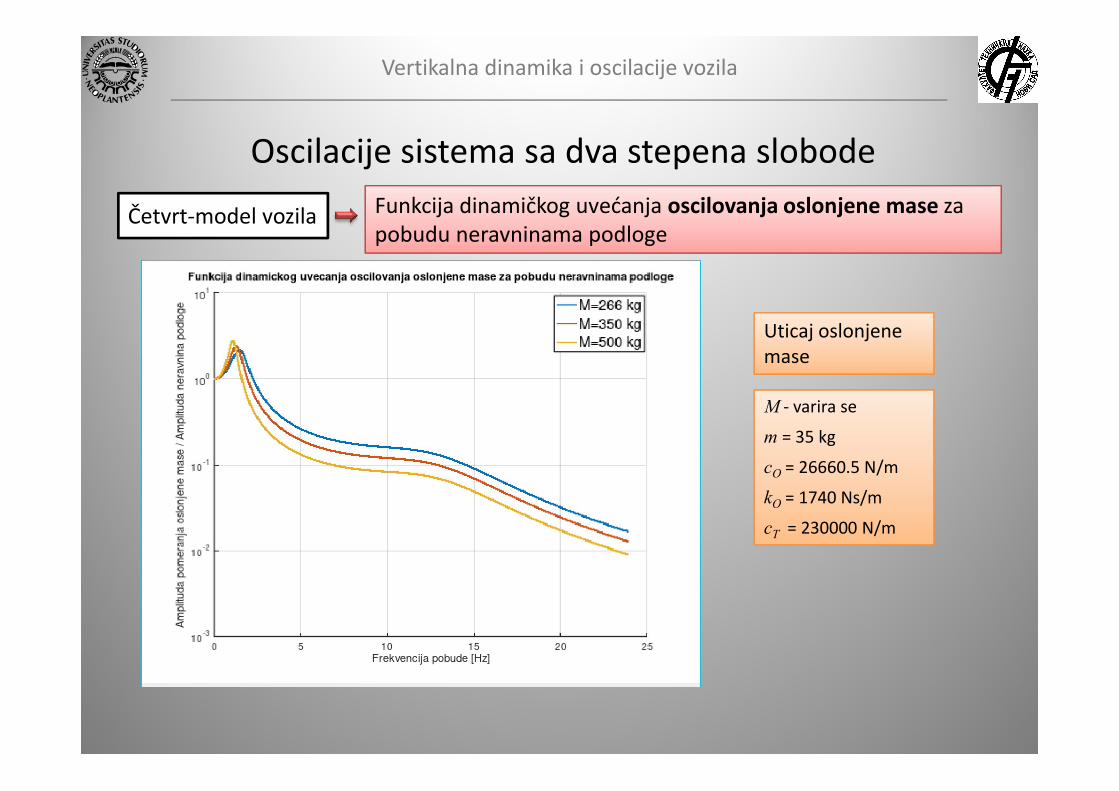
Oscilacije sistema sa dva stepena slobode
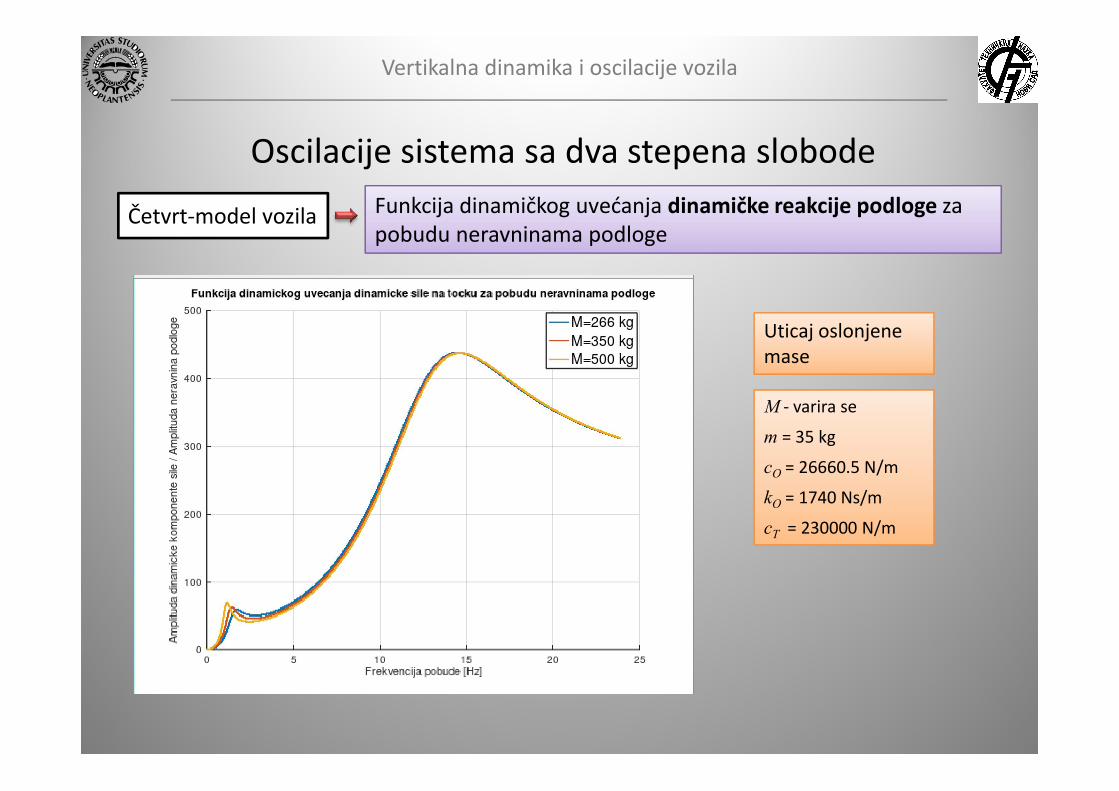
Četvrt-model vozila
- varira se
Uticaj oslonjenemase
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
M - varira se
m = 35 kg
cO = 26660.5 N/m
kO = 1740 Ns/m
cT = 230000 N/m
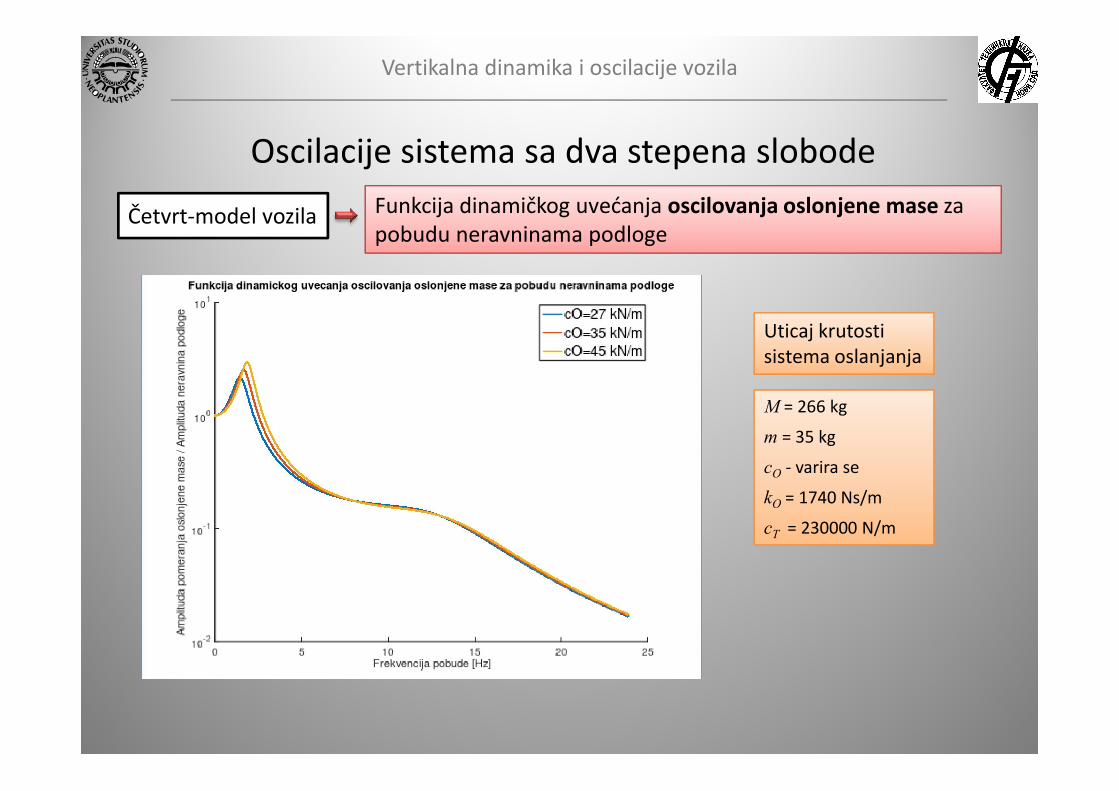
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
Uticaj krutostisistema oslanjanja
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
M = 266 kg
m = 35 kg
cO - varira se
kO = 1740 Ns/m
cT = 230000 N/m
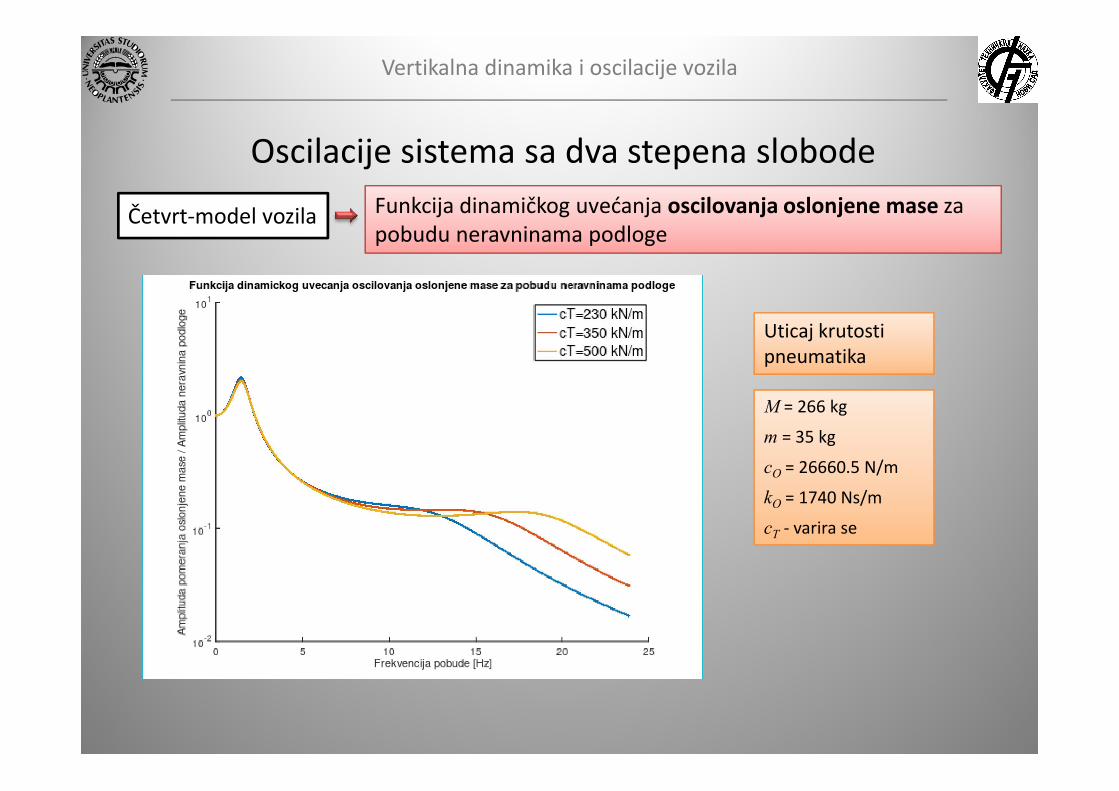
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
Uticaj krutostipneumatika
Funkcija dinamičkog uvećanja oscilovanja oslonjene mase zapobudu neravninama podloge
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO = 1740 Ns/m
cT - varira se
Vertikalna dinamika i oscilacije vozila
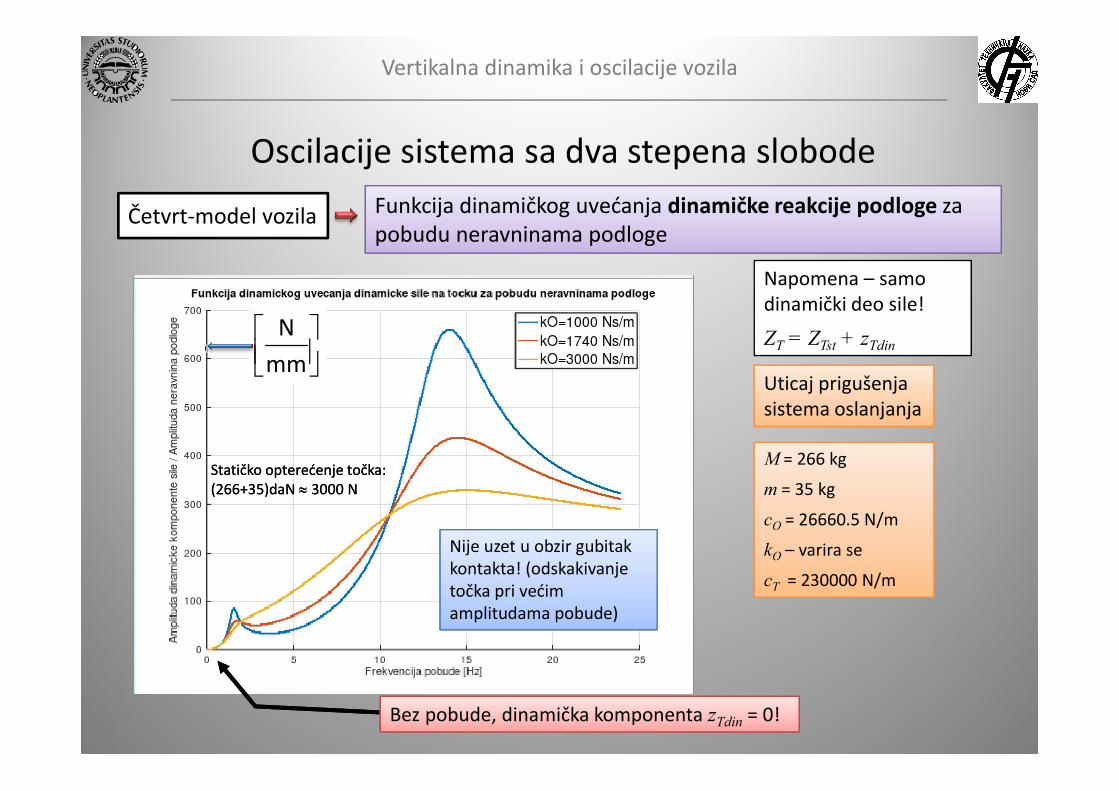
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
Napomena – samo dinamički deo sile!
ZT = ZTst + zTdin
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
Uticaj prigušenja
mm
N
Nije uzet u obzir gubitak kontakta! (odskakivanje točka pri većimamplitudama pobude)
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO – varira se
cT = 230000 N/m
Uticaj prigušenjasistema oslanjanja
Statičko opterećenje točka: (266+35)daN 3000 NStatičko opterećenje točka: (266+35)daN 3000 N
Bez pobude, dinamička komponenta zTdin = 0!
Vertikalna dinamika i oscilacije vozila
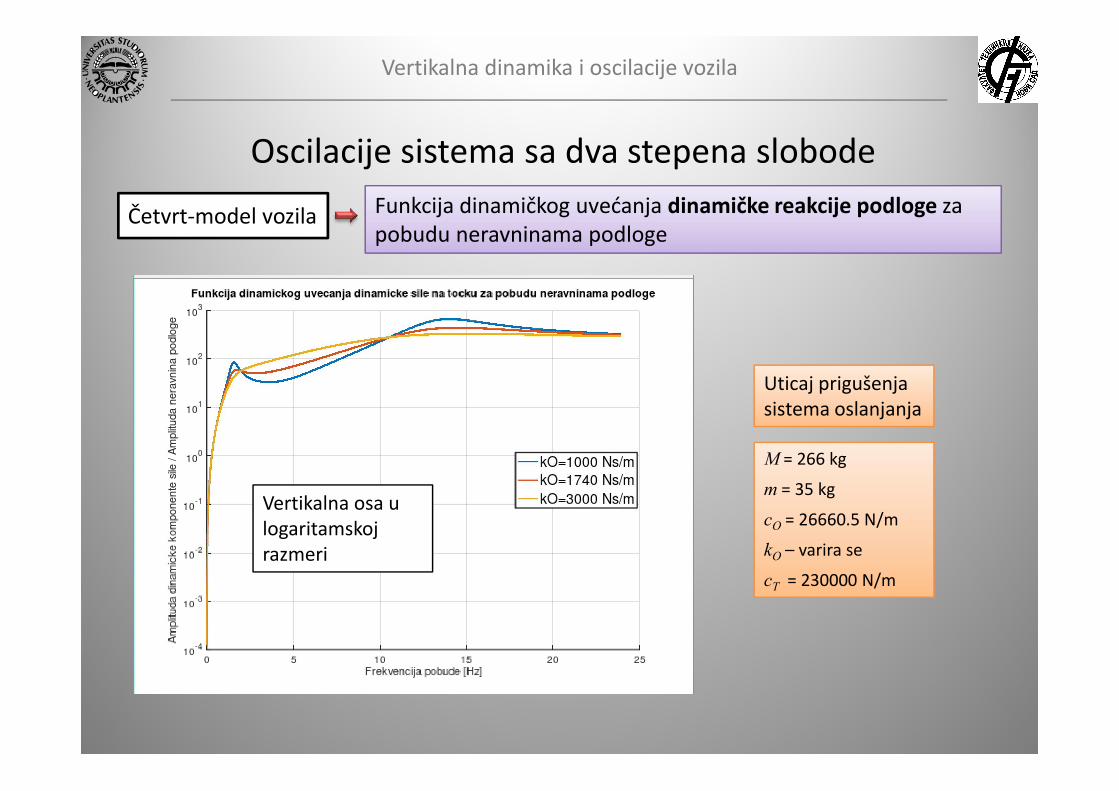
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
Uticaj prigušenja
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO – varira se
cT = 230000 N/m
Uticaj prigušenjasistema oslanjanja
Vertikalna osa u logaritamskoj razmeri
Vertikalna dinamika i oscilacije vozila
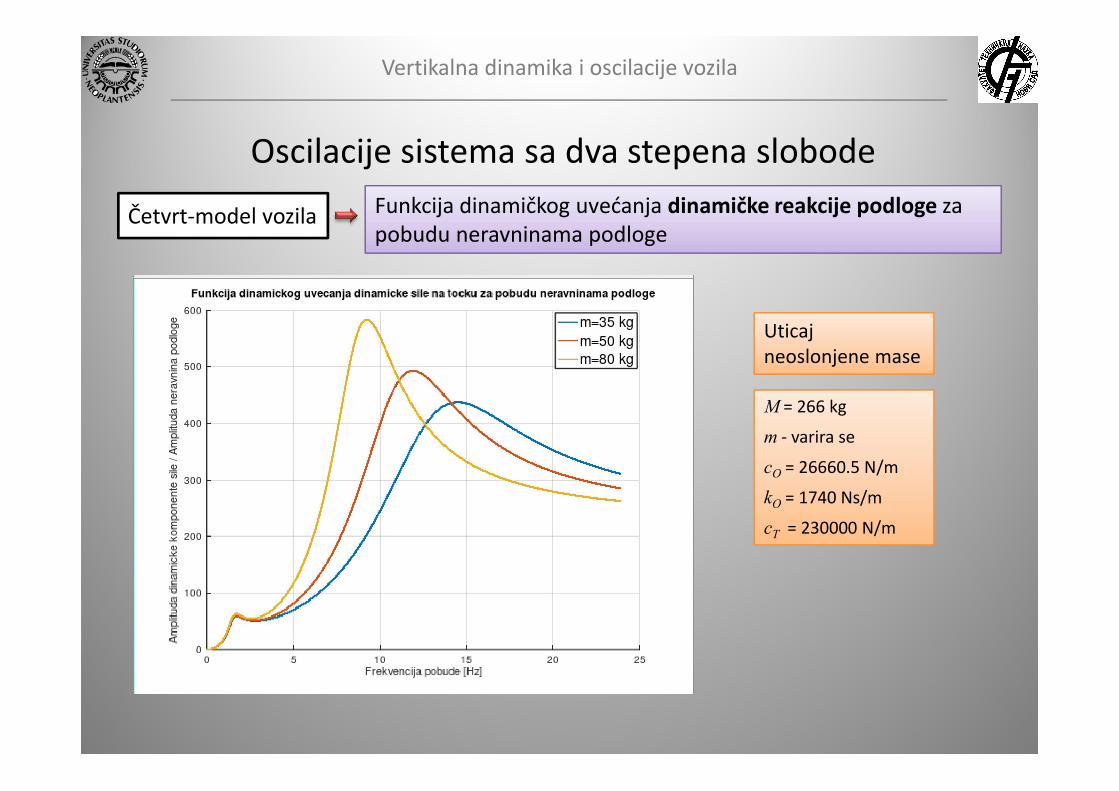
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
Uticaj neoslonjene mase
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
M = 266 kg
m - varira se
cO = 26660.5 N/m
kO = 1740 Ns/m
cT = 230000 N/m
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
- varira se
Uticaj oslonjenemase
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
M - varira se
m = 35 kg
cO = 26660.5 N/m
kO = 1740 Ns/m
cT = 230000 N/m
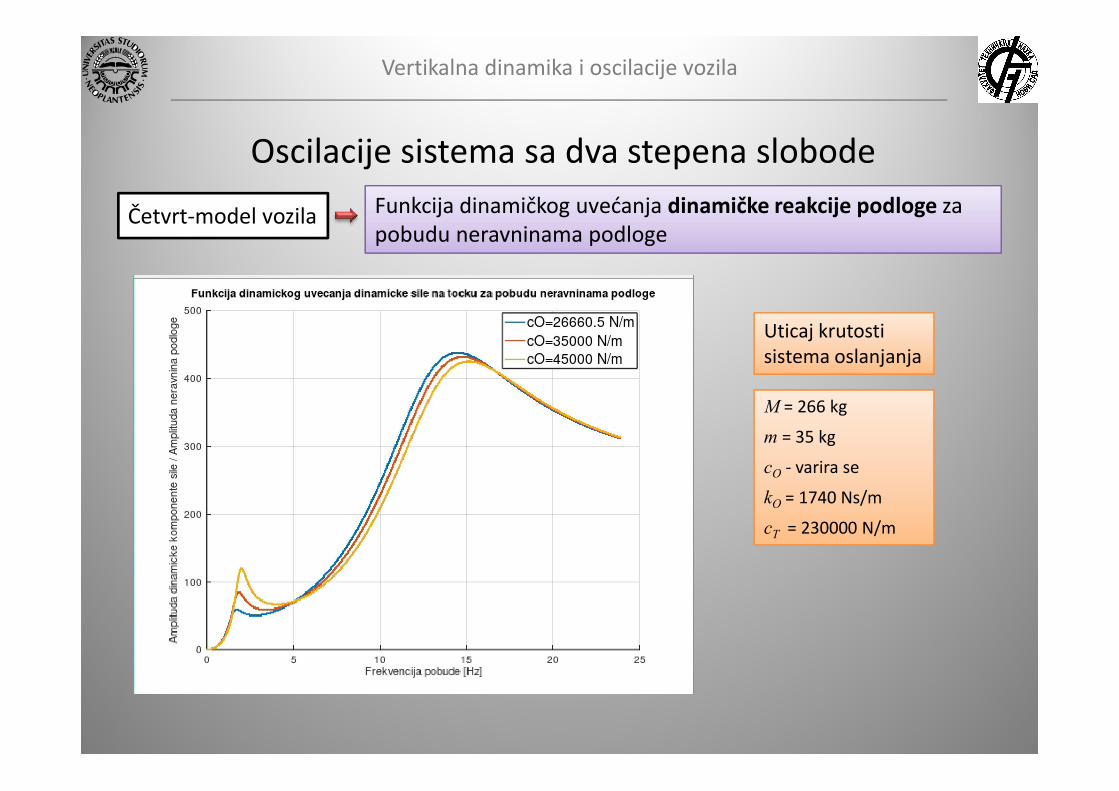
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
Uticaj krutostisistema oslanjanja
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
M = 266 kg
m = 35 kg
cO - varira se
kO = 1740 Ns/m
cT = 230000 N/m
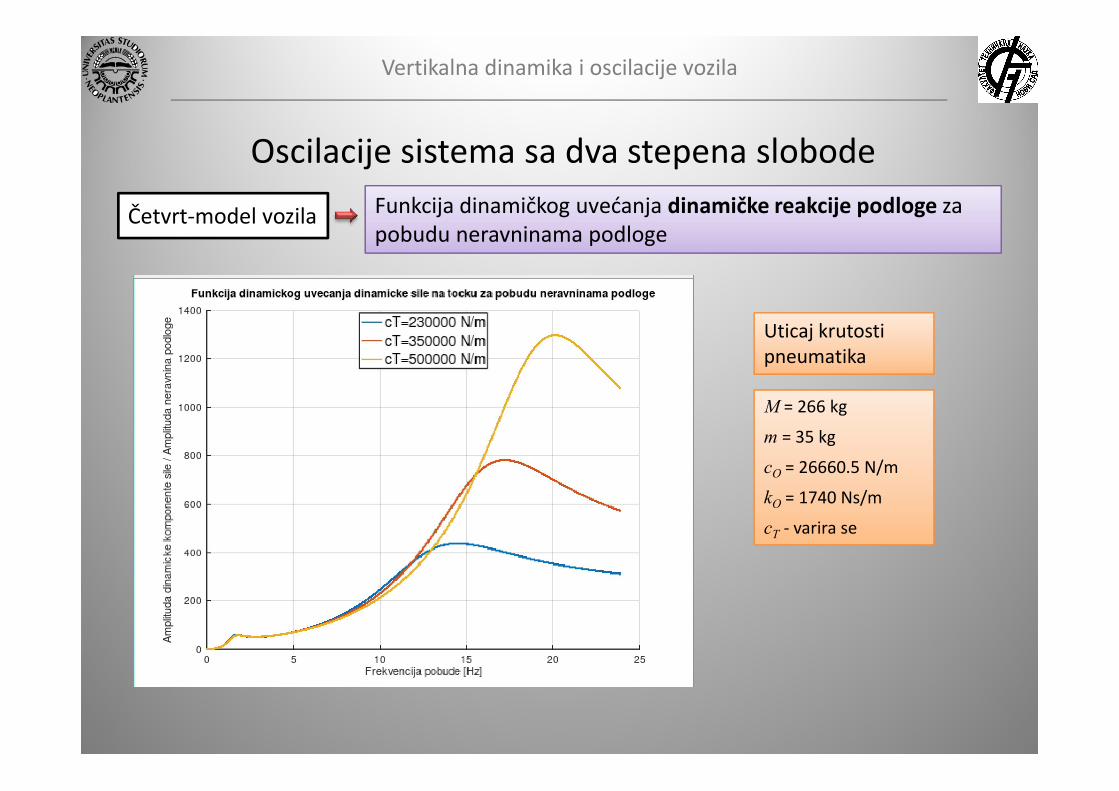
Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila
= 266 kg
Uticaj krutostipneumatika
Funkcija dinamičkog uvećanja dinamičke reakcije podloge zapobudu neravninama podloge
M = 266 kg
m = 35 kg
cO = 26660.5 N/m
kO = 1740 Ns/m
cT - varira se
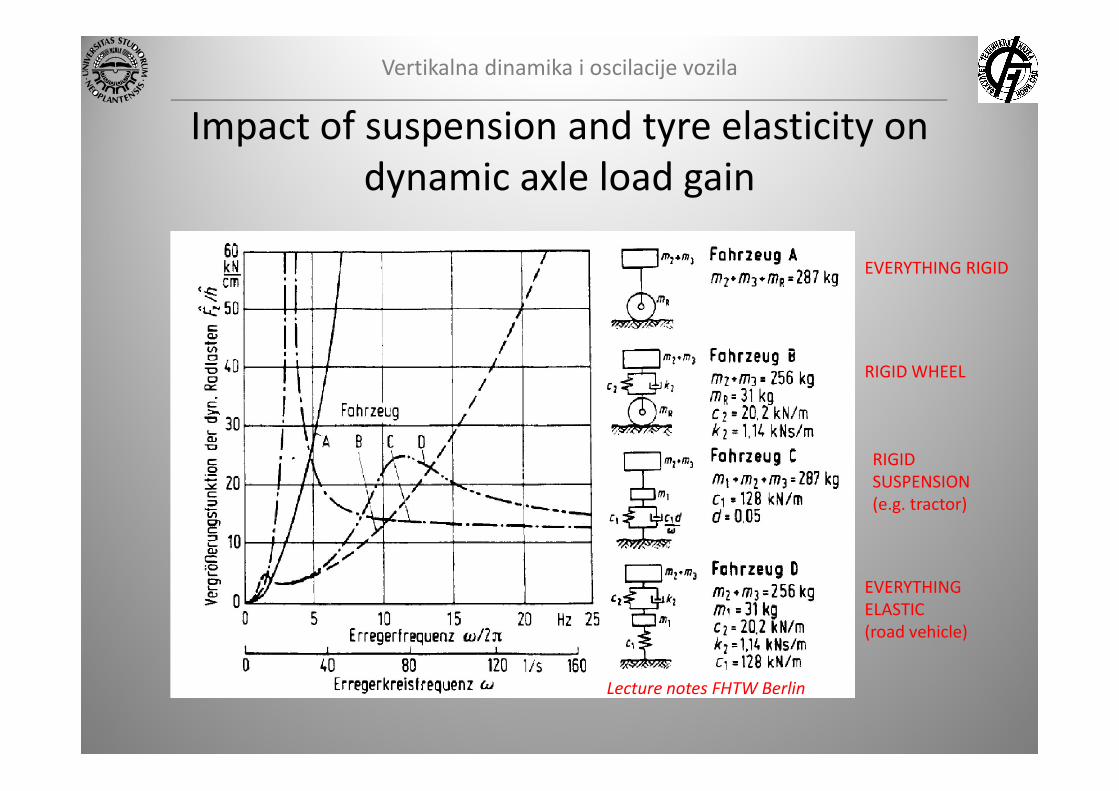
Vertikalna dinamika i oscilacije vozila
Impact of suspension and tyre elasticity on dynamic axle load gain
EVERYTHING RIGID
RIGID WHEEL
Lecture notes FHTW Berlin
RIGID SUSPENSION (e.g. tractor)
EVERYTHING ELASTIC(road vehicle)

Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila Oscilatorni pokazatelji vozila pri kretanju na neravnim podlogama
• Mikroprofil podloge: stohastički karakter
• Opisivanje profila: statistički pokazatelji, spektralna gustina snage
• Od interesa: srednja kvadratna vrednost • Od interesa: srednja kvadratna vrednost relevantnih parametara
• Najvažniji pokazatelji: pomeranja i ubrzanja oslonjene mase, fluktuacije dinamičke reakcije podloge
( Genta, Veh. Dyn. And Sim. Str. 390)

Vertikalna dinamika i oscilacije vozila
Oscilacije sistema sa dva stepena slobode
Četvrt-model vozila Oscilatorni pokazatelji vozila pri kretanju na neravnim podlogama
Pobuda: brzina vertikalnog pomeranja mikroprofila
( Genta, Veh. Dyn. And Sim. Str. 390)
Odziv 1: ubrzanje oslonjene mase
Odziv 2: dinamička reakcija podloge kO

![Prisilne oscilacije sustava s jednim stupnjem slobode1].pdf · Dinamika konstrukcija i potresno inženjerstvo – 2016./2017. Prisilne oscilacije sustava s jednim stupnjem slobode](https://img.pdfslide.tips/doc/110x75/60a2981904256f57895f5a4f/prisilne-oscilacije-sustava-s-jednim-stupnjem-slobode-1pdf-dinamika-konstrukcija.jpg)



























