Embed Size (px)
Citation preview

Skript zur Analysis III
Richard Hermann, Jan Köllner, Lukas König,
Jann van der Meer, Robert Sauter, Mirjam Schöckle,
Paul Schwahn, Christian Streib, Philipp Beck
Stand 29. März 2016


Inhaltsverzeichnis
I. Funktionentheorie 5
1. Stetigkeit 7
2. Differenzierbarkeit 11
3. Integration 15
4. Isomorphie und Analytizität 25
5. Nullstellen 43
6. Integrale längs geschlossener Kurven 55
7. Analytische Fortsetzung 73
II. Differentialgleichungen 83
1. Einführung 85
2. Einige Lösungsmethoden 89
3. Existenz und Eindeutigkeit 99
4. Lineare Differentialgleichungen erster Ordnung 105
5. Differentialgleichungen höherer Ordnung 115
III. Vektoranalysis 123
1. Kurvenintegrale 125
3

Inhaltsverzeichnis
2. Flächenintegrale im R3 133
3. Integralsätze 137
4

Teil I.
Funktionentheorie
5


1. Stetigkeit
Zur Diskussion stetiger Abbildungen sei hier noch einmal die Definition solcher angegeben:
1.1 Definition:Sei D ⊆ C, f ∶D → C. Dann heißt f stetig in z0 ∈D, falls
∀ε > 0 ∃δε > 0 ∀z ∈D ∶ ∣z − z0∣ < δε ⇒ ∣f(z) − f(z0)∣ < ε
oder äquivalent:
∀(zn)n∈N in D ∶ zn → z0 Ô⇒ f(zn)→ f(z0). (Folgenstetigkeit)
f heißt stetig in D, falls f in allen z0 aus D stetig ist.
1.2 Satz:Bestimmte Verknüpfungen stetiger Abbildungen erhalten die Stetigkeit:Für z0 ∈D,f ∶D → C stetig in z0 ∈D gilt:
1. Ist auch g ∶D → C stetig in z0,so sind auch f ± g, f ⋅ g sowie f/g (für g(z0) ≠ 0) stetig in z0.
2. Ist eine Funktion g ∶ D′ → C definiert auf dem Bild von f ∶ f(D) ⊆ D′ und stetig inf(z0),So ist auch die Verkettung g ○ f stetig in z0.
Beweis. Siehe Skript zur Analysis 1/2
1.3 Definition:Die Konvergenz einer Folge von Funktionen ist definiert nach:Sei D ⊆ C und f, fn ∶D → C Funktionen. Die Folge (fn)n∈N nennt man
1. punktweise konvergent gegen f , falls
∀z ∈D ∀ε > 0 ∃Nε,z ∈ N ∀n > Nε,z ∶ ∣fn(z) − f(z)∣ < ε
7

1. Stetigkeit
oder kurz:∀z ∈D ∶ fn(z)→ f(z)
2. gleichmäßig konvergent auf D, falls
∀ε > 0 ∃Nε ∈ N ∀n > Nε ∀z ∈D ∶ ∣fn(z) − f(z)∣ < ε
Die gleichmäßige Konvergenz ist ein stärkeres Kriterium, da in jeder ε-Umgebung von fdie ganze Funktion fn liegen muss. Bei der punktweisen Konvergenz müssen stattdessen nurdie einzelen Punkte fn(z) gegen f(z) konvergieren.
1.4 Satz:Die gleichmäßige Konvergenz überträgt Stetigkeit auf die Grenzfunktion:Sei D ⊆ C, und fn ∶ D → C stetige Funktionen-Folgenglieder, so dass die Folge (fn)n∈Ngleichmäßig auf D gegen f konvergiert. Dann ist der Grenzwert f stetig.
Beweis. Seien ε > 0 und z ∈ D fest gewählt. Dann ist für n > Nε wegen der gleichmäßigenKonvergenz fn → f auch
∣f(z) − fn(z)∣ < ε/3 und ∣fn(z0) − f(z0)∣ < ε/3,
bzw. wegen Stetigkeit von fn auch
∣fn(z) − fn(z0)∣ < ε
für ∣z − z0∣ < δε. Damit folgt aber
∣f(z) − f(z0)∣ < ∣f(z) − fn(z)∣ + ∣fn(z) − fn(z0)∣ + ∣fn(z0) − f(z0)∣ < ε,
1.5 Definition:Eine Reihe ∑∞
k=0 fk von Funktionen fk ∶D → C mit der Teilsummenfolge sn ∶= ∑nk=0 fk heißt
1. punktweise konvergent, wenn (sn) punktweise konvergiert
2. gleichmäßig konvergent, wenn (sn) glm. konvergiert
3. absolut konvergent, falls ∑∞k=0 ∣fn(z)∣ konvergiert
1.6 Weierstraß-Kriterium:Die Abschätzung einer Reihe von Funktionen mit Konstanten erlaubt Aussagen über die
8

Konvergenz:Ist ∑∞
k=0 ak mit ak ≥ 0 konvergent und es existieren fk ∶D → C mit
∃K ∈ N ∶ ∀k >K ∶ ∣fk(z)∣ ≤ ak.
Dann konvergiert ∑∞k=0 fk absolut und gleichmäßig auf D.
1.7 Definition und Satz:Sei (an)n∈N Folge in C, z0 ∈ C und f(z) ∶= ∑∞
k=0 ak(z − z0)k
Der Konvergenzradius R ist gegeben zu
R−1 ∶= lim supn→∞
n√
∣an∣ (wobei10∶=∞)
dann ergeben sich die folgenden Aussagen:
1. Die Potenzreihe konvergiert gleichmäßig auf BR(z0) ∶= z ∈ C ∶ ∣z − z0∣ < R und diver-giert auf z ∈ C ∶ ∣z − z0∣ > R
2. f ist stetig auf BR(z0)
3. Falls limn→∞ ∣an+1an∣ existiert, gilt: R−1 = limn→∞ ∣an+1an
∣
1.8 Definition:Die folgenden Reihen von Funktionen sind auf ganz C gleichmäßig konvergent. Nach 1.4 sindauch die sich ergebenden Funktionen stetig.
Die Exponentialfunktion: ez ∶=∞∑k=0
zk
k!
Die Cosinusfunktion: cos z ∶=∞∑k=0
(−1)k z2k
(2k)!
Die Sinusfunktion: sin z ∶=∞∑k=0
(−1)k z2k+1
(2k + 1)!
1.9 Bemerkung:Aus der Reihendarstellung folgen einige geschickte Identitäten:
Eulersche Formel: eiz = cos z + i sin z
Weiterhin lässt sich so jedes z ∈ C/{0} eindeutig durch ein r > 0 und ein ϕ ∈ [0; 2π[ darstellen:
Polardarstellung: z = reiϕ = r(cosϕ + i sinϕ)
9

1. Stetigkeit
arg(z) ∶= ϕ nennt man das Argument von z; r entspricht dem Betrag
Damit errechnet sich leicht:
zn = rn ⋅ einφ;z1 ⋅ z2 = r1r2ei(φ1+φ2);z1
z2= r1
r2ei(φ1−φ2)
10

2. Differenzierbarkeit
2.1 Definition und Bemerkung:Die folgenden mengentheoretischen Grundlagen sind vonnöten, um das Thema „Differenzier-barkeit“ betrachten zu können:
1. O ⊆ C heißt offen, falls
∀z0 ∈ O ∃rz0 > 0 ∶ Brz0 (z0) ⊆ O,
2. A ⊆ C heißt abgeschlossen, falls C/A offen ist.
3. Für M ⊆ C ist
• M ∶= ⋂{A ⊆ C ∶ A abgeschlossen ∧M ⊆ A} der Abschluss von M ,
• M ∶= ⋃{O ∈ C ∶ O offen ∧O ⊆M} das Innere von M .
Der Abschluss ist also als Schnitt abgeschlossener Mengen abgeschlossen und die „kleinste“abgeschlossene Menge, die M als Teilmenge besitzt.
Das Inntere ist die „größte“ offene Menge, die Teilmenge von M ist.
2.2 Beispiele für offene und abgeschlossene Mengen:
1. C,∅ sind offen und abgeschlossen.
2. Für r > 0 ist Br(z0) offen und der Abschluss Br(z0) gegeben zu {z ∈ C ∶ ∣z − z0∣ ≤ r}.
2.3 Definition:Sei O ∈ C offen, eine Funktion f ∶ O → C und z0 ∈ O.
1. f heißt differenzierbar in z0, falls
f ′(z0) = limz→z0
f(z) − f(z0)z − z0
existiert, oder äquivalent:
∃f ′(z0) ∈ C ∶ f(z) = f(z0) + f ′(z0)(z − z0) + o(∣z − z0∣) für z → z0,
11

2. Differenzierbarkeit
f ′(z0) heißt Ableitung von f in z0.
2. f heißt differenzierbar, falls f in jedem z0 ∈ O differenzierbar ist. Die Ableitung f ′ ∶O → C heißt Ableitung(-sfunktion) von f .
2.4 Beispiele für Ableitungen:
1. Die konstante Funktion ist gegeben zu f ∶ C → C ∶ z ↦ c für ein c ∈ C. Ihre Ableitungerrechnet sich nach f ′ ∶ C→ C ∶ z ↦ 0.
2. Die Identität ist gegeben zu f ∶ C → C ∶ z ↦ z. Die Ableitung errechnet sich fürbeliebige z0 ∈ C nach Definition zu: f ′(z0) = limz→z0
z−z0z−z0 = 1
3. Für beliebige n ∈ N/{1} sei die Funktion f ∶ C→ C ∶ z ↦ zn gegeben.
Für z0 ≠ 0 errechnet sich die Ableitung zu
f ′(z0) = limz→z0
zn − zn0z − z0
= limz→z0
zn0z0
⋅( zz0 )
n − 1zz0− 1
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶(geom. Summe)
= zn0
z0⋅ limz→z0
n−1
∑k=0
( zz0
)k
= zn−10 ⋅ n
Für z0 = 0 ergibt sich die Ableitung nach
f ′(z0) = limz→z0
zn − zn0z − z0
= limz→0
zn
z= 0 (= 0n−1 ⋅ n)
4. Die Funktion f ∶ C → C ∶ z ↦ ∣z∣2 ist in jedem Punkt z0 = x0 + iy0 ≠ 0 nicht dif-ferenzierbar. Dies wird erkennbar, indem der Grenzwert aus verschiedenen Richtungenbetrachtet wird:
Zuerst sollen Punkte betrachtet werden, die im Realteil variieren: zh ∶= x0 + h + iy0
12

Der Differenzenquotient ergibt hier:
limh→0
f(zh) − f(z0)zh − z0
6 = limh→0
(x0 + h)2 + y20 − x2
0 − y20
h
= limh→0
2hx0 + h2
h= 2x0 ← reell
Variiert hingegen der Imaginärteil mit z′h ∶= x0 + i(y0 + h), so folgt:
limh→0
f(zh) − f(z0)zh − z0
= limh→0
x20 + (y0 + h)2 − x2
0 − y20
h
= limh→0
2hy0 + h2
ih= 2y0
i← imaginär
Also existiert der Grenzwert limz→z0
f(z)−f(z0)z−z0 nicht und f ist nicht differenzierbar in z0.
2.5 Satz:Für Funktionen f, g ∶ C ⊇D → C, differenzierbar in z0, ergeben sich die folgenden Ableitungs-regeln:
1. Ist f differenzierbar in z0, dann ist f stetig in z0
2. (f + g)′(z0) = f ′(z0) + g′(z0)
3. (f ⋅ g)′(z0) = f ′(z0)g(z0) + f(z0)g′(z0)
4. Falls g(z0) ≠ 0: (f/g)′(z0) = f ′(z0)g(z0)−f(z0)g′(z0)g(z0)2 (Quotientenregel)
5. Für ein h ∶ C ⊇ M → C differenzierbar in f(z0) (h ○ f)′(z0) = h′(f(z0)) ⋅ f ′(z0)(Kettenregel)
6. Eine Funktion g ∶ R ⊇ [a, b]→ C differenzierbar in t0 undeine Funktion f ∶ C ⊇ O → C mit g([a, b]) ⊆ O sei differenzierbar in g(t0).Dann ist auch f ○g ∶ [a, b]→ C differenzierbar in t0 mit (f ○g)′(t0) = f ′(g(t0)) ⋅g′(t0)
Beweise wie in R.
2.6 Beispiel: 1. Polynomfunktionen sind differenzierbar auf C.
2. Gebrochenrationale Funktionen
f ∶ C/{z ∶ q(z) = 0}→ C ∶ z ↦ p(z)q(z)
mit Polynomen p, q ∈ C[Z]sind differenzierbar.
13


3. Integration
3.1 Definition:
1. Sei γ ∈ C1([a, b]→ C), das heißt Reγ, Imγ ∶ [a, b]→ R sind stetig differenzierbar.Dann heißt γ Weg von z1 = γ(a) nach z2 = γ(b) .Für γ(a) = γ(b) heißt γ geschlossen.
2. Sei γ ein Weg und f ∶ γ([a, b])→ C stetig.Dann heißt
∫γf(x)dx ∶=∫
b
af(γ(t)) ⋅ γ′(t)dt
∶=∫b
aRe (f(γ(t))) ⋅Re (γ′(t)) − Im (f(γ(t))) ⋅ Im (γ′(t))´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
=Re(f(γ(t))⋅γ′(t))∈R
dt
+i∫b
aRe (f(γ(t))) ⋅ Im (γ′(t)) + Im (f(γ(t))) ⋅Re (γ′(t))´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
=Im(f(γ(t))⋅γ′(t))∈R
dt
Integral von f längs γ.
3.2 Beispiel:
1. Es soll nun das Integral von f(z) = z3 längs γ(t) = t ⋅ (1 + i) für t ∈ [0,1] berechnetwerden.
∫γz3dz = ∫
1
0(t ⋅ (1 + i))3
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶f(γ(t))
⋅ (1 + i)´¹¹¹¹¸¹¹¹¹¹¶γ′(t)
dt = (1 + i)4 ⋅ ∫1
0t3dt = (1 + i)4
4= 16
γ
Abbildung 3.1.: Der geschlossene Integrationsweg
15

3. Integration
2. Das Integral von f(z) = 1z über den Weg γ(t) = ei⋅t für t ∈ [0,2π] wird berechnet:
∫γ
1
zdz = ∫
2π
0
1
ei⋅t ⋅ i ⋅ ei⋅t = i ⋅ ∫
2π
01dt = 2πi ≠ 0
3.3 Bemerkung:
1. Das komplexe Integral ist wohldefiniert, denn ist γ eine andere Parametrisierung desWeges γ, so dass
γ(s) = (γ ○ ϕ)(s) für s ∈ [a, b],
ϕ ∈ C1([a, b]→ [a, b]), mit
ϕ(a) = a und ϕ(b) = b,
so folgt aus der Substitutionsregel für reelle Integrale
∫γf(z)dz = ∫
b
af(γ(t)) ⋅ γ′(t)dt
Substitution=t=ϕ(s)
∫b
af(γ ○ ϕ(s)
´¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¶γ(s)
) ⋅ γ′(ϕ(s)) ⋅ ϕ′(s)ds
= ∫b
af(γ(s)) ⋅ γ′(s)ds = ∫
γf(z)dz
Die Integrale stimmen also überein.
2. Ein Weg, welcher dieselben Funktionswerte wie γ durchläuft, jedoch von End- zu Start-punkt, also umgekehrt, wird als −γ bezeichnet
γ(t) = γ(a + b − t) für a ≤ t ≤ b
ACHTUNG: −γ bedeutet keine Multiplikation der Funktionswerte von γ mit (−1).Es folgt für das Integral:
∫−γf(z)dz = ∫
b
af(γ(a + b − t)
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=−γ(t)
) ⋅ γ′(a + b − t) ⋅ (−1)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
=−γ′(t)
dt
Substitution=s∶=a+b−t ∫
a
bf(γ(s)) ⋅ γ′(s) ⋅ (−1) ⋅ (−1)ds
= −∫b
af(γ(s)) ⋅ γ′(s)ds
= −∫γf(z)dz
16
3. Ähnlich zur Bogenlängenparametrisierung aus Analysis 2 kann jeder Weg so umpara-metrisiert werden, dass a = 0 und b = 1, daher wird in Zukunft mit diesen Wertengearbeitet.
4. Die gerade Verbindungsstrecke zwischen zwei Punkten z1, z2 ist definiert als: γ =[z1, z2] ∶⇔ γ(t) = z1 + t(z2 − z1), t ∈ [0,1]Damit ist das Integral über jeden Konstanten Weg ∫[z1,z1] f(z)dz = 0
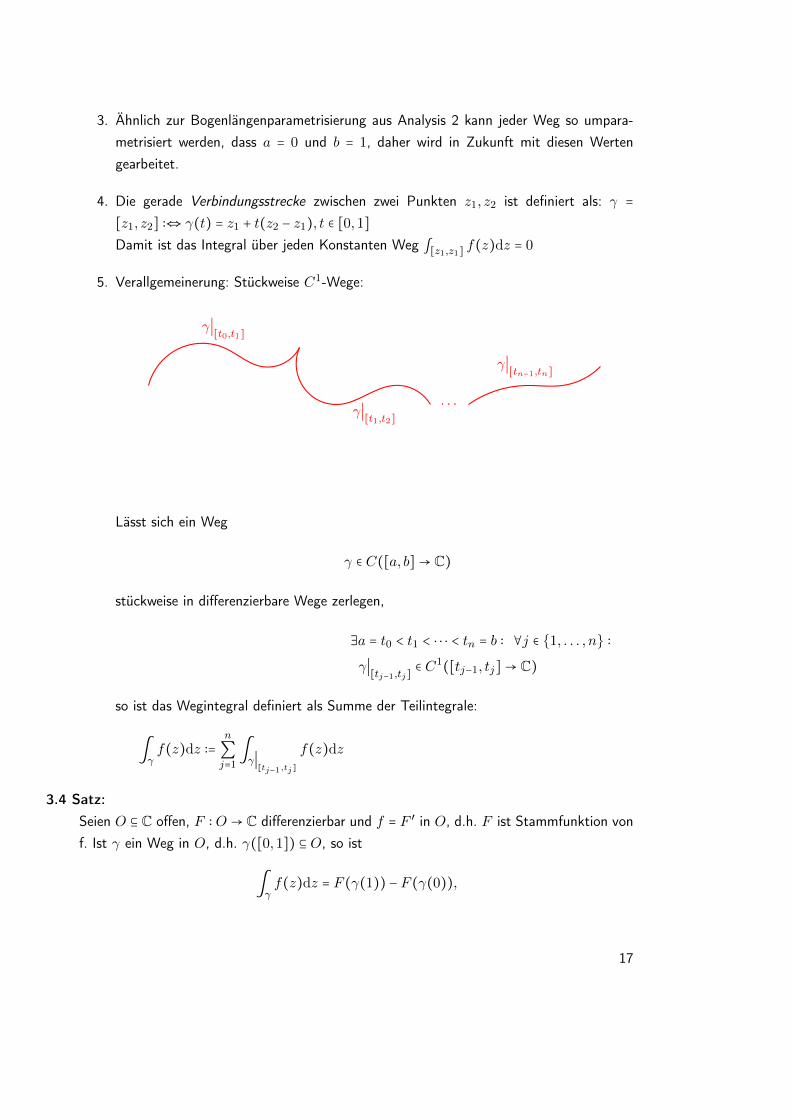
5. Verallgemeinerung: Stückweise C1-Wege:
. . .
γ∣[t0,t1]
γ∣[t1,t2]
γ∣[tn−1,tn]
Lässt sich ein Weg
γ ∈ C([a, b]→ C)
stückweise in differenzierbare Wege zerlegen,
∃a = t0 < t1 < ⋅ ⋅ ⋅ < tn = b ∶ ∀j ∈ {1, . . . , n} ∶
γ∣[tj−1,tj] ∈ C1([tj−1, tj]→ C)
so ist das Wegintegral definiert als Summe der Teilintegrale:
∫γf(z)dz ∶=
n
∑j=1∫γ∣
[tj−1,tj ]
f(z)dz
3.4 Satz:Seien O ⊆ C offen, F ∶ O → C differenzierbar und f = F ′ in O, d.h. F ist Stammfunktion vonf. Ist γ ein Weg in O, d.h. γ([0,1]) ⊆ O, so ist
∫γf(z)dz = F (γ(1)) − F (γ(0)),
17
3. Integration
Beweis.
Das Integral über f wird mit der Stammfunktion substituiert:
∫γf(z)dz = ∫
1
0f(γ(t)) ⋅ γ′(t)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
= ddt (F○γ)
dt
dann wird es nach Definition in Re- und Im-Teil zerlegt:
= ∫1
0
ddt
Re(F ○ γ)(t)dt + i ⋅ ∫1
0
ddt
Im(F ○ γ)(t)dt
Nach dem Hauptsatz der Differential- und Integralrechnung heben sich Integral und Differen-tial auf:
= ReF (γ(1)) −ReF (γ(0)) + i ⋅ (ImF (γ(1)) − ImF (γ(0)))
= F (γ(1)) − F (γ(0))
3.5 Folgerung:
1. Mit den Voraussetzungen zu Satz 3.4 folgt auch:Ist γ geschlossen, so ist ∫γ f(z)dz = 0.
2. f ∶ C/{0} → C ∶ z ↦ 1z hat keine Stammfunktion, da für den geschlossenen Weg
γ(t) = e2πi⋅t, t ∈ [0,1] gilt:
∫γ
1
zdz = 2πi ≠ 0
(Später: f besitzt eine Stammfunktion u.a. auf der positiven reellen Achse).
3.6 Satz:Ähnlich zur Integralabschätzung in R lässt sich auch in C der Betrag eines Integrals nachoben abschätzen: Sei γ ein Weg in C und die Funktion f stetig auf γ([0,1]), dann gilt:
∣∫γf(z)dz∣ ≤ ∫
1
0∣f(γ(t))∣ ⋅ ∣γ′(t)∣dt
≤ maxz∈γ([0,1])
∣f(z)∣ ⋅ ∫1
0∣γ′(t)∣dt
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶Weglänge L(γ)
18

Beweis. Für beliebige ϕ ist
∣∫γf(z)dz∣ = ∣eiϕ ⋅ ∫
γf(z)dz∣
Wird ϕ nun geschickt gewählt, so wird das gesamte Integral auf die reelle Achse gedreht,wodurch der Betrag entfällt
=ϕ=−arg(∫γ f)
eiϕ ⋅ ∫γf(z)dz
= ∫1
0eiϕ ⋅ f(γ(t)) ⋅ γ′(t)dt
Dieses Integral wird nach Definition aufgelöst in Real- und Imaginärteil:
= ∫1
0Re(eiϕ ⋅ f(γ(t)) ⋅ γ′(t))´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
≤∣eiϕ∣⋅∣f(γ(t))∣⋅∣γ′(t)∣
dz + i ⋅ ∫1
0Im(. . . )dz
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=0, da ∣ ∫γ f(z)dz∣∈R
Da Gleichheit zu dem Betrag vom Anfang gilt, entfällt der Imaginärteil hier.
≤ ∫1
0∣f(γ(t))∣ ⋅ ∣γ′(t)∣dt
Da nun ein Integral in R vorliegt, kann die reelle Abschätzung vorgenommen werden:
≤ maxz∈γ([0,1])
∣f(z)∣ ⋅ ∫1
0∣γ′(t)∣dt
3.7 Definition:Die Länge eines Weges ist gegeben durch L(γ) ∶= ∫
10 ∣γ′(t)∣dt. Diese Weglänge lässt sich im
vorigen Satz wiederfinden, in diesem Zusammenhang bedeutet die Aussage aus Satz 3.6, dass
∣Wegintegral∣ ≤ max ∣f ∣ ⋅Weglänge,
3.8 Bemerkung:Die aktuelle Definition der Weglänge entspricht derjenigen aus Analysis 2:
γ ∈ C1([0,1]→ R2) Ô⇒ L(γ) = ∫1
0
√γ′21 (t) + γ′22 (t)dt
3.9 Beispiel:
19

3. Integration
1. Für eine direkte Verbindung γ = [z1, z2] ∶ γ(t) = z1+t(z2−z1) ergibt sich die Weglängeals der Abstand der beiden Zahlen:
L(γ) = ∫1
0∣z2 − z1∣dt = ∣z2 − z1∣
2. Die Abschätzung aus Satz 3.6 ist scharf, das heißt es gibt einen Fall, für den Gleicheitgilt:Für f(z) = 1
z , γ○ = e2πi⋅t, t ∈ [0,1] sind die Voraussetzungen für 3.6 erfüllt, und es gilt:
2π = ∣2πi∣ = ∣∫γ○f(z)dz∣ = ∣∫
γ○
1
zdz∣
Gleichheit!≤
3,6maxz=e2πi⋅t
∣1z∣ ⋅ ∫
1
0∣2πi∣±=2π
⋅∣e2πi⋅t∣
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=γ′○(t)
dt
= 2π
3. Die Abschätzung ist aber sinnvoll, das heißt es gilt nicht immer Gleichhheit:Da eine Stammfunktion existiert ist nämlicht
0 = ∫γ○zdz
3,6
≤ maxz=e2πi⋅t
∣z∣ ⋅ ∫1
0∣2πi ⋅ e2πi⋅t∣dt = 2π
3.10 Satz:
Sei (an) eine Folge in C mit dem Konvergenzradius der zugehörigen Potenzreihe:
Rf ∶ =1
lim supn→∞n√
∣an∣> 0
und für ∣z∣ < Rf definiere diese Potenzreihe eine Funktion:
f(z) ∶ =∞∑k=0
ak ⋅ zk (f ist definiert und stetig)
20

Dann ist f auf BRf (0) beliebig oft differenzierbar mit den Ableitungen
f ′(z) =∞∑k=1
ak ⋅ k ⋅ zk−1,
⋮
f (j)(z) =∞∑k=j
ak ⋅ k ⋅ (k − 1) ⋅ . . . ⋅ (k − j + 1)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
k!(k−j)!
⋅zk−j
Für z ∈ BRf (0) Insbesondere sind also Reihengrenzwert und Ableitung verauschbar.
Beweis. Sei g(z) ∶= ∑∞k=1 k ⋅ ak ⋅ zk−1
1. Zeige: g ist definiert auf BRf (0). Zu der Potenzreihe
z ⋅ g(z) =∞∑k=1
ak ⋅ k ⋅ zk
ergibt sich der Konvergenzradius
Rz⋅g(z) ∶=1
lim supk→∞k√
∣k ⋅ ak∣
Da k√k → 1 für k →∞ ist Rz⋅g(z) = Rf , dem Konvergenzradius von f .
Außerdem konvergiert z ⋅g(z) nur genau dort, wo auch g(z) konvergiert, es muss Rz⋅g(z)gleich dem Konvergenzradius Rg von g selbst sein.Damit ist g(z) definiert auf BRf (0).
2. Sei w ∈ BR(0) beliebig, aber fest. Zeige f ′(w) = g(w). Wähle r ∈]0,R[, sodassw ∈ Br(0). Für z ∈ Br(0), z ≠ w gilt:
f(z) − f(w)z −w
− g(w) = 1
z −w
∞∑k=1
ak(zk −wk) −∞∑k=1
kakwk−1 =
∞∑k=1
ak (zk −wk
z −w− kwk−1)
Definiere nun γ als die Verbindungsstrecke zwischen w und z, d.h. γ(t) = w+t(z−w,0 ≤
21

3. Integration
t ≤ 1. Damit folgt für den hinteren Teil der Summe
∣zk −wk
z −w− kwk−1∣ = 1
∣z −w∣∣[ξk − ξkwk−1]zw∣
= 1
∣z −w∣∣∫
γ(kξk−1 − kwk−1)dξ∣
3.6≤ k
∣z −w∣maxξ∈[w,z]
∣ξk−1 −wk−1∣1
∫0
∣γ′(t)∣dt
= k
∣z −w∣maxξ∈[w,z]
∣ξk−1 −wk−1∣∣z −w∣
= k maxξ∈[w,z]
∣ξk−1 −wk−1∣
Für jedes feste k folgt also ∣ak ( zk−wkz−w − kwk−1)∣ → 0 für z → w. Außerdem gilt wegen
z ∈ Br(0) ∣z∣ ≤ ∣r∣ und somit auch
∣ak (zk −wk
z −w− kwk−1)∣ ≤ k∣ak∣∣zk−1∣ + k∣ak∣∣wk−1∣ ≤ k∣ak∣∣rk−1∣ + k∣ak∣∣rk−1∣
Wegen r < R ist die Reihe∞∑k=1
k∣ak∣rk−1 konvergent. Nach dem Majorantenkriterium von
Weierstraß folgt somit gleichmäßige Konvergenz für die Reihe∞∑k=1
ak ( zk−wkz−w − kwk−1).
limz→w
(f(z) − f(w)z −w
− g(w)) = limz→w
∞∑k=1
ak (zk −wk
z −w− kwk−1)
glm. konv.=∞∑k=1
limz→w
ak (zk −wk
z −w− kwk−1) = 0
Ô⇒ f ′(w) = g(w)
3. Rest durch Induktion.
3.11 Beispiel:
1. ez =∞∑k=0
1k!z
k für z ∈ C
3.10Ô⇒ (ez)′ =∞∑k=1
1
k!kzk−1 =
∞∑k=1
1
(k − 1)!zk−1 l=k−1=
∞∑l=0
1
l!kzl = ez
22

2. cosz =∞∑k=0
(−1)k(2k)! z
2k für z ∈ C
3.10Ô⇒ (cosz)′ =∞∑k=1
(−1)k
(2k)!2kz2k−1 =
∞∑k=1
(−1)k
(2k − 1)!z2k−1 l=k−1= −
∞∑l=0
(−1)l
(2l + 1)!z2l+1 = −sinz
3. Analog folgt (sinz)′ = cosz
3.12 Definition:Seien O ∈ C offen und γ1, γ2 ∈ C1([0,1]→ O) Wege in O.Dann heißen γ1, γ2 zueinander C1-homotop oder einfach homotop in O, wenn eine AbbildungΦ ∈ C1([0,1] × [0,1]→ O) existiert, so dass für alle s ∈ [0,1] die Bedingungen
Φ(s,0) = γ1(s),
Φ(s,1) = γ2(s)
und für alle t ∈ [0,1] die Bedingungen
Φ(0, t) = const = Φ(0,0) = γ1(0) = Φ(0,1) = γ2(0) (2.1 A)
Φ(1, t) = const = Φ(1,0) = γ1(1) = Φ(1,1) = γ2(1) (2.1 B)
erfüllt sind. Die erste Bedingung bedeutet dabei anschaulich, dass der Weg γ1 stetig in denWeg γ2 überführt, bzw. deformiert wird. Man stelle sich dazu vor, dass das Bild von γ1 mitHilfe eines Drahtes veranschaulicht ist, dieser wird nun so verbogen, dass das Bild von γ2
entsteht. Die zweite Bedingung besagt in diesem Zusammenhang, dass beim Verbiegen dieEndpunkte des Drahtes festgehalten werden. Geschlossene Wege bleiben dabei also geschlos-sen.Da dies eine Äquivalenzrelation ist (der Beweis bleibt dem geneigten Leser zur Übung über-lassen), schreiben wir im, falls γ1 und γ2 homotop sind, symbolisch γ1 ∼ γ2.Φ heißt Homotopie(abbildung) zwischen γ1 und γ2.Ein geschlossener Weg heißt nullhomotop, falls er homotop zu einem konstanten Weg ist.
3.13 Beispiel:
1. Homotopie ist kein spezifisches Hilfsmittel, um Wege zu unterscheiden: Für O = C:Sind γ1, γ2 Wege in C mit γ1(0) = γ2(0), γ1(1) = γ2(1), so sind sie homotop mit z.B.:
Φ(t, s) = s ⋅ γ2(t) + (1 − s) ⋅ γ1(t)
23

3. Integration
Mit derselben Homotopie Φ sind beliebige geschlossene Wege γ1, γ2 in C homotop. Inbeiden Fällen erfolgt der Beweis durch simples Einsetzen in die Bedingungen.
2. Betrachtet man nun jedoch O = C ∖ {0} und die Wege γ1(t) = eπit und γ2(t) = e−πit,so gilt γ1(0) = γ2(0) = 1 und γ1(1) = γ2(1) = −1. Die Wege sind jedoch offensichtlichnicht homotop in O = C ∖ {0}, während sie in C homotop sind.
24

4. Isomorphie und Analytizität
4.1 Vereinbarung:
für f ∶ O → C setzten wir O =⎧⎪⎪⎨⎪⎪⎩
⎛⎝x
y
⎞⎠∈ R2 ∶ x + iy ∈ O
⎫⎪⎪⎬⎪⎪⎭⎛⎝u
v
⎞⎠∶ O → R2 ∶
⎛⎝x
y
⎞⎠↣
⎛⎝Re (f (x + iy))Im (f (x + iy))
⎞⎠
kurz: wir interpretieren f als Abbildung von R2 nach R2
4.2 Satz:Sei O ⊆ C offen f ∶ O → C. Dann sind äquivalent:
(i) f ist differenzierbar in O
(ii) f ist stetig und für γ1, γ2 ∈ C1 ([0,1]→ O) gilt: γ1 ∼ γ2 ⇒ ∫γ1 f (z)dz = ∫γ2 f (z)dz
(iii) f ist stetig und für γ1, γ2 ∈ C1 ([0,1]→ O) gilt: γ1 nullhomotop in O⇒ ∫γ1 f (z)dz =0
(iv) für jedes z0 ∈ O existiert einR > 0 und eine Potenzreihe, sodass gilt: f(z) = ∑∞k=0 ak (z − z0)k für ∣z − z0∣ <
R
(v) f ist beliebig oft differenzierbar in O.
(vi)⎛⎝u
v
⎞⎠∈ C1 (O → R2) und u,v erfüllen die cauchy-riemann’schen Differentialglei-
chungen: ∂xu = ∂yv ∧ ∂yu = −∂xv
Der Beweis dieses Satzes erstreckt sich über das gesamte Kapitel 4.
4.3 Definition:Sei O ⊆ C offen, f ∶ O → C
25

4. Isomorphie und Analytizität
Erfüllt f eine und damit alle Bedingungen von 4.2, so heißt f holomorph (dies betont Eigen-schaft (v)), oder analytisch (dies betont Eigenschaft (iv)).
4.4 Cauchy’scher Integralsatz für Bilder von Rechtecken:Sei O ⊆ C offen, f ∶ O → C differenzierbar, R ∶= [0,1] × [0,1] ⊆ R2, ϕ ∈ C1(R → O), γ diegeschlossene Randkurve von R (also stückweise C1.)Dann gilt:
∫ϕ○γ
f(z)dz = 0
Beweis. 1. Definition des Integrals: ∫ϕ○γ
f(z)dz =4
∑j=1∫βj
f(z)dz, wobei βj ∈ C1([0,1] →
C), j ∈ {1,2,3,4} jeweils einer Rechteckseite entspricht.
2. Reϕ, Imϕ ∈ C1(R → R), R kompakt
∃C > 0 ∶ ∥∇Reϕ∥ =XXXXXXXXXXX
⎛⎝∂xReϕ
∂y Reϕ
⎞⎠
XXXXXXXXXXX≤ C
∥∇ Imϕ∥ = ∥ Im∇ϕ∥ =XXXXXXXXXXX
⎛⎝∂x Imϕ
∂y Imϕ
⎞⎠
XXXXXXXXXXX≤ C
3. Konstruiere rekursiv eine Folge (Rn)n∈N0 von Rechtecken:R0 ∶= RTeile Rn nun durch Halbierung der Seiten in vier Rechtecke. Wähle als Rn+1 dasjenige,
für das ∣ ∫ϕ○γn+1
f(z)dz∣ am größten ist. γn+1 ist hierbei die Randkurve von Rn+1.
4. Abschätzung von ∣ ∫ϕ○γ
f(z)dz∣:
αj,n seien in Folgenden die Randkurven der vier Teile des Rechtecks Rn. Folglich giltalso für genau ein j ∈ {1,2,3,4} αj,n = γn+1. Außerdem folgt nach Konstruktion, dassfür alle j ∈ {1,2,3,4} αj,n ≤ γn+1 gilt. Da sich die Integrale über die inneren Ränder
26

der vier Teilrechtecke nach Bemerkung 3.3 jeweils paarweise aufheben, gilt außerdem:
4
∑j=1
∫ϕ○αj,n
f(z)dz = ∫ϕ○γn
f(z)dz
Ô⇒RRRRRRRRRRRRR∫
ϕ○γn
f(z)dzRRRRRRRRRRRRR
∆-Ungl.≤
4
∑j=1
RRRRRRRRRRRRRR∫
ϕ○βj
f(z)dzRRRRRRRRRRRRRR≤ 4
RRRRRRRRRRRRR∫
ϕ○γn+1
f(z)dzRRRRRRRRRRRRR
Durch Induktion folgt dann auch
RRRRRRRRRRRRR∫ϕ○γ
f(z)dzRRRRRRRRRRRRR≤ 4
RRRRRRRRRRRRR∫ϕ○γ1
f(z)dzRRRRRRRRRRRRR≤ . . . ≤ 4n
RRRRRRRRRRRRR∫
ϕ○γn
f(z)dzRRRRRRRRRRRRR
(4.1)
5. Definiere nun eine Folge xn, wobei xn jeweils der Mittelpunkt des Rechtecks Rn ist.Ô⇒ ∀x ∈ Rn ∶ ∥x − xn∥ ≤ L(γn) = . . . = 1
2nL(γ)∀m ≥ n ∶ Rm ⊆ Rn Ô⇒ ∀m ≥ n ∶ ∥xm − xn∥ ≤ 1
2nL(γ)→ 0
Ô⇒ (xn) ist Cauchy-Folge, also konvergent. Setze y ∶= limn→∞
xn.
Ô⇒ ∀x ∈ Rn ∶ ∥x − y∥ = limm→∞
∥x − xm∥ ≤ 12nL(γ)
6. Da xn gegen y konvergiert und ϕ stetig ist, folgt ϕ(xn) → ϕ(y) =∶ z0. Für z ∈ ϕ(Rn)gilt nach Definition von ϕ(Rn): ∃x ∈ Rn ∶ z = ϕ(x).
MWS, Ana2/11.32Ô⇒ ∃ξ ∈]x, y[∶ ∣Re z −Re z0∣ = ∣Reϕ(x) −Reϕ(y)∣ = ∣∇Re (ξ) ⋅ (x − y)∣
∆-Ungl.≤ ∥∇Reϕ(ξ)∥ ⋅ ∥x − y∥ ≤ C∥x − y∥
Ô⇒ ∣Re z −Re z0∣ ≤ C ⋅ 1
2nL(γ)
Analog folgt auch ∀z ∈ ϕ(Rn) ∶ ∣ Im z − Im z0∣ ≤ C ⋅ 12nL(γ)
Ô⇒ ∀z ∈ ϕ(Rn) ∶ ∣z − z0∣ ≤√
2C ⋅ 1
2nL(γ) (4.2)
27

4. Isomorphie und Analytizität
7. Abschätzung von L(ϕ ○ γn):
L(ϕ ○ γn) =4
∑j=1
L(ϕ ○ αj,n) =4
∑j=1
1
∫0
∣(ϕ ○ αj,n)′(t)∣dt
=4
∑j=1
1
∫0
∣ϕ′(αj,n(t))∣ ⋅ ∣α′j,n(t)∣dt ≤4
∑j=1
1
∫0
√2C ∣α′j,n(t)∣dt
=√
2CL(γn) =√
2C1
2nL(γ)
8. Sei ε ≥ 0 beliebig aber fest, f differenzierbar in z0.
Ô⇒ f(z) = f(z0) + f ′(z0)(z − z0) + r(z, z0) mit ∣r(z, z0)∣ < ε ⋅ ∣z − z0∣,
falls ∣z − z0∣ < δε
Diese Bedingung ist äquivalent zu r(z, z0) = o(∣z − z0∣).Wähle nun n ∈ N mit ∣z − z0∣ < δε für z ∈ ϕ(Rn) (möglich nach Schritt 6)
Ô⇒RRRRRRRRRRRRR∫
ϕ○γn
f(z)dzRRRRRRRRRRRRR=RRRRRRRRRRRRR∫
ϕ○γn
(f(z0) + f ′(z0)(z − z0))dz + ∫ϕ○γn
r(z, z0)dzRRRRRRRRRRRRR
Das linke Integral ergibt nach Folgerung 3.5 0, da ϕ ○ γn nach Konstruktion ein ge-schlossener Weg ist und der Integrand ein Polynom ist und daher eine Stammfunktionbesitzt. Es muss also nur noch das rechte Integral abgeschätzt werden:
3.6, 3.7≤ max
z∈Bild(ϕ○γn)∣r(z, z0)∣ ⋅L(ϕ ○ γn)
Bild(ϕ○γn)⊆ϕ(Rn)≤ max
z∈ϕ(Rn)ε∣z − z0∣ ⋅L(ϕ ○ γn)
z∈ϕ(Rn), Schritt 6≤ ε
√2 ⋅CL(γ)
2n⋅L(ϕ ○ γn) ≤ ε
√2 ⋅CL(γ)
2n
√2C
1
2nL(γ)
= ε ⋅ 2C2L(γ)2
4n
9. Schluss: Aus den Gleichungen 4.1 und 4.2 folgt
RRRRRRRRRRRRR∫ϕ○γ
f(z)dzRRRRRRRRRRRRR≤ 4n2εC2 1
4nL(γ)2 = ε ⋅ 2C2L(γ)2 (4.3)
Da ε > 0 beliebig ist, folgt ∫ϕ○γ
f(z)dz = 0.
28

4.5 Folgerung:Sei O ⊆ C offen, f ∶ O → C differenzierbar, γ1 ∼ γ2 in O. Dann gilt:
∫γ1
f(z)dz = ∫γ2
f(z)dz
Beweis. Seien β1(t) = (t,0), β2(t) = (1, t), β3(t) = (1− t,1), β4(t) = (0,1− t) für t ∈ [0,1].Sei φ die Homotopie mit φ(⋅,0) = γ1 = ϕ ○ β1, φ(⋅,1) = −γ2 = ϕ ○ β3, γ1(0) = γ2(0) = z1,γ1(1) = γ2(1) = z2. Setze R ∶= [0,1] × [0,1], ϕ ∶= φ.4.4Ô⇒ 0 = ∫
ϕ○γf(z)dz
Falls Aussage (i) aus Satz 4.2 erfüllt ist, gilt:
ϕ(0, s) = ϕ(0,0) ∧ ϕ(1, s) = ϕ(1,0) Ô⇒⎧⎪⎪⎪⎨⎪⎪⎪⎩
ϕ ○ β2(t) = z2
ϕ ○ β4(t) = z1
Mit Satz 4.4 folgt nun
0 = ∫ϕ○γ
f(z)dz =4
∑j=1
∫ϕ○βj
f(z)dz
= ∫γ1
f(z)dz + ∫[z2,z2]
f(z)dz + ∫−γ2
f(z)dz + ∫[z1,z1]
f(z)dz
Ô⇒ ∫γ1
f(z)dz = ∫γ2
f(z)dz
Das zweite und das vierte Integral fallen hierbei weg, da hier jeweils über einen konstantenWeg integriert wird.Falls Aussage (ii) aus Satz 4.2 erfüllt ist, so gilt:
0 =4
∑j=1
∫ϕ○βj
f(z)dz
= ∫γ1
f(z)dz + ∫ϕ○β2
f(z)dz − ∫γ2
f(z)dz + ∫ϕ○β4=−ϕ○β2
f(z)dz
Ô⇒ ∫γ1
f(z)dz = ∫γ2
f(z)dz
Damit ist nun ein Teilbeweis des Satzes 4.2 möglich: (i) Ô⇒ (ii) folgt nun direkt, da ausDifferenzierbarkeit auch immer Stetigkeit folgt.
29

4. Isomorphie und Analytizität
(ii) Ô⇒ (iii): γ nullhomotop. Ô⇒ γ ∼ γ mit γ(t) = const.
(ii) Ô⇒ ∫γf(z)dz = ∫
γ
f(z)dz =1
∫0f(γ(t)) ⋅ γ′(t)dt = 0, da γ′(t) = 0.
4.6 Cauchysche Integralformel für Kreisscheiben:Sei O ⊆ C offen, f ∶ O → C differenzierbar, z0 ∈=, Br(z0) ⊆ O. Dann gilt für alle w ∈ Br(z0):
f(w) = 1
2πi∫
∣z−z0∣=r
f(z)z −w
dz
Insbesondere ist f in Br(z0) eindeutig bestimmt durch die Werte von f(z) auf dem Kreisrand.Hierbei ist das Integral zu verstehen als Integral längs der Kurve γ(t) ∶= re2πit+z0, t ∈ [0,1].
Beweis. Sei w ∈ Br(z0) beliebig aber fest. Da Br(z0) offen ist, existiert ein ε > 0, sodassBε(w) ⊆ Br(z0). Sei γε die Randkurve von Bε(w)In Br(z0) ∖ {w} ist die Abbildung z ↦ f(z)
z−w differenzierbar. Außerdem ist γ offensichtlichhomotop zum Weg γε in Br(z0) ∖ {w}. Also gilt
∫∣z−z0∣=r
f(z)z −w
dz 4.5= ∫γε
f(z)z −w
dz = ∫γε
f(z) − f(w)z −w
dz + ∫γε
f(w)z −w
dz
=∶ a + b ε→0→ 0 + 2πif(w)
Abschätzung von a:
f(z) − f(w)z −w
→ f ′(w) für z → w Ô⇒ ∣f(z) − f(w)z −w
∣ ≤ C für ∣z −w∣ < ε
Ô⇒ ∣a∣3.6≤ max
z∈Bild(γε)∣f(z) − f(w)
z −w∣ ⋅L(γε) ≤ C ⋅ 2πε→ 0 für ε→ 0
Berechnung von b:
b = f(w)∫γε
1
z −wdz Bsp. 3.3= f(w) ⋅ 2πi (unabhängig von ε)
4.7 Potenzreihenentwicklungssatz:Sei O ⊆ C offen, f ∶ O → C differenzierbar, z0 ∈ O, r > 0 mit Br(z0) ⊆ O. Dann existiert eine
30

Folge (an) in C, sodass
f(z) =∞∑k=0
ak(z − z0)k für ∣z − z0∣ < r
Beweis. Zunächst leitet man durch geschicktes Umformen und anwenden der geometrischenReihe folgende Gleichheit her:
f(z)z −w
= f(z)z − z0
⋅ 1
1 − w−z0z−z0
= f(z)z − z0
⋅∞∑k=0
(w − z0
z − z0)k
, da ∣w − z0
z − z0∣ = ∣w − z0∣
r< rr= 1
Sei w ∈ Br(z0) beliebig, aber fest. Dann folgt durch Anwendung von 4.6 und Ausnutzendieser Gleichheit:
f(w) = 1
2πi ∫∣z−z0∣=r
f(z)z −w
dz = 1
2πi ∫∣z−z0∣=r
f(z)z − z0
⋅∞∑k=0
(w − z0
z − z0)k
dz
Die Reihe, die nun im Integrand steht, konvergiert gleichmäßig bzgl. z mit ∣z − z0∣ = r, da∞∑k=0
( ∣w−z0∣r )
kunabhängig von z eine konvergente Majorante der betrachteten Reihe ist. Nach
dem Weierstraß-Kriterium folgt also gleichmäßige Konvergenz für die Reihe. Nach Analysis IIsind im Falle gleichmäßiger Konvergenz Integral und Summe vertauschbar. Nützt man diesnun aus, so erhält man
f(w) =∞∑k=0
1
2πi ∫∣z−z0∣=r
f(z)(z − z0)k+1
dz (w − z0)k
Nun definiert man ak ∶= 12πi ∫
∣z−z0∣=r
f(z)(z−z0)k+1
dz. Man hat also durch explizite Konstruktion
einer solchen Folge deren Existenz gezeigt.
4.8 Folgerung: 1. Da die Koeffizienten ak für k ∈ N0 gemäß obiger Formel explizit bestimmtwerden können, folgt auch Eindeutigkeit für die Potenzreihendarstellung einer Funktion.
2. Erweiterte Cauchy’sche Integralformel:
f(z) =∞∑k=0
ak(z − z0)k für ∣z − z0 < r3.10Ô⇒ f (j)(z) =
∞∑k=j
akk!
(k−j)!(z − z0)k−j , ∣z − z0∣ < r
Ô⇒ f (j)(z0) = aj j!(j−j)! = j! ⋅ aj =
j!2πi ∫
∣z−z0∣=r
f(z)(z−z0)j+1 dz
31

4. Isomorphie und Analytizität
4.9 Folgerung:Sei f ∶ O → C differenzierbar, z0 ∈ O und f(z) =
∞∑k=0
ak(z − z0)k für ∣z − z0∣ < r. Dann gilt für
den Konvergenzradius R:
R ≥ sup{r > 0 ∶ Br(z0) ⊆ O} =∶ S
Beweis. Sei z ∈ C mit ∣z − z0∣<S beliebig aber fest. Wähle ρ ∶= 12(∣z − z0∣ + S) Ô⇒ ρ >
∣z − z0∣ ∧ ρ < SDef. ρÔ⇒ Bρ(z0) ⊆ O
4.7Ô⇒ ∀w ∈ Bρ(z0) ∶ f(w) =∞∑k=0
ak(w − z0)k
Für ∣z − z0∣ < ρ gilt also f(z) =∞∑k=0
ak(z − z0)k, insbesondere konvergiert die Reihe in z. Da
z ∈ BS(z0) beliebig war, folgt die Konvergenz der Reihe auf ganz BS(z0).
4.10 Beispiel:
∞∑k=0
(−x2)k = 1
1 + x2
Die Funktion auf der rechten Seite ist offensichtlich auf ganz R definiert, der Konvergenzradiusder Reihe links beträgt jedoch R = 1. Betrachte nun die Funktion f(z) ∶= 1
1+z2 für z ∈C ∖ {i,−i} =∶ O. Offensichtlich ist f in O differenzierbar.
sup{r > 0 ∶ Br(z0) ⊆ O} = min{∣z0 − i∣, ∣z0 + i∣}
Folgerung 4.9 besagt nun, dass für ∣z − z0∣ < min{∣z0 − i∣, ∣z0 + i∣} die Funktion f(z) = 11+z2
gemäß f(z) =∞∑k=0
ak(z − z0)k als in z0 entwickelter Potenzreihe darstellbar ist. Für den
Konvergenzradius R der Potenzreihe muss also gelten: R ≥ min{∣z0 − i∣, ∣z0 + i∣}. Es bleibtalso noch zu prüfen, ob der Konvergenzradius eventuell größer als der durch Folgerung 4.9garantierte Wert ist. Im Folgenden soll dies untersucht werden.Für z → i geht ∣f(z)∣→∞.
Ô⇒ ∣∞∑k=0
ak(z − z0)k∣→∞ für z → i
Die Potenzreihe konvergiert also für z =i nicht. Es gilt somit auch R ≤ min{∣z0 − i∣, ∣z0 + i∣}und damit R = min{∣z0 − i∣, ∣z0 + i∣} bei Entwicklung von f(z) = 1
1+z2 im Punkt z0.
32

Für z0 = 0 hat also beispielsweise die zugehörige Potenzreihe f(z) =∞∑k=0
(−z2)k den Konver-
genzradius R(f,0) = min{∣0 − i∣, ∣0 + i∣}=1.
4.11 Definition:Ist f ∶ C→ C differenzierbar, so heißt f ganze Funktion. Ist f ganz, so gilt
f(z) =∞∑k=0
ak(z − z0)k ∀z ∈ C
bei beliebigem z0 ∈ C. Dies bedeutet R = ∞. Zur Bestimmung der Koeffizienten ak wendeman die unter Folgerung 4.8 hergeleitete Formel an.
4.12 Beispiel:Beispiele für ganze Funktionen sind:
z ↦ ez, z ↦ cos(z), z ↦ sin(z)
Teilbeweis von 4.2
(i) Ô⇒ (iv): 4.7(iv) Ô⇒ (v): 3.10(v) Ô⇒ (i): offensichtlich
4.13 Cauchy-Abschätzung für Taylorkoeffizienten:Sei O ⊆ C offen, f ∶ O → C differenzierbar, Br(z0) ⊆ O, ∣f(z0)∣ ≤M für ∣z − z0∣ = r und
f(z) =∞∑k=0
ak(z − z0)k für ∣z − z0∣ < r.
Dann gilt:
∣f(n)(z0)n!
∣ = ∣an∣ ≤M
rn
33
4. Isomorphie und Analytizität
Beweis.
∣an∣4.8 ,1)= 1
2π
RRRRRRRRRRRRRR∫
∣z−z0∣=r
f(z)(z − z0)n+1
dz
RRRRRRRRRRRRRR3.6≤ 1
2πmax
∣z−z0∣=r∣ f(z)(z − z0)n+1
∣ ⋅L(γ)
≤ 1
2π
M
rn+1⋅L(γ) = 1
2π
M
rn+1⋅ 2πr = M
rn
4.14 Satz von Liouville:Ist f ∶ C→ C eine ganze, beschränkte Funktion, dann ist f konstant.
Beweis. Sei f auf ganz C differenzierbar.
∀z ∈ C ∶ f(z) =∞∑k=0
akzk
Da f beschränkt ist, gilt M ∶= supz∈C
∣f(z)∣ < ∞. Damit lassen sich die Koeffizienten an der
Potenzreihe durch Anwendung von 4.13 in Br(0) folgendermaßen abschätzen:
∣an∣ ≤M
rn
Da diese Abschätzung unabhängig von r > 0 gilt, kann man r ausreichend groß wählen,sodass an < ε für n ∈ N und ein beliebiges ε > 0 gilt. Damit folgt für n ∈ N an = 0 und somitf(z) = a0 für z ∈ C.
4.15 Riemann’scher Hebbarkeitssatz:Sei O ⊆ C offen, z0 ∈ O, f ∶ O ∖ {z0}→ C holomorph und∃r > 0 ∶ ∃M > 0 ∀z ∈ Br(z0) ∖ {z0} ∶ ∣f(z)∣ ≤M .Dann ist f in z0 holomorph ergänzbar, d.h. es existiert ein a ∈ C, sodass f mit
f(z) ∶=⎧⎪⎪⎪⎨⎪⎪⎪⎩
f(z) , z ∈ O ∖ {z0}
a , z = z0
in O holomorph ist.
Beweis. Definiere g(z) ∶=⎧⎪⎪⎪⎨⎪⎪⎪⎩
(z − z0)2f(z) , z ∈ O ∖ {z0}
0 , z = z0
34

Dann ist g in O ∖ {z0} differenzierbar und
g(z) − g(z0)z − z0
= (z − z0)2f(z) − 0
z − z0= (z − z0)f(z)→ 0 für z → z0, z ≠ z0
Also ist g auch in z0 mit g′(z0) = 0 differenzierbar. Damit folgt Differenzierbarkeit von g inO. Nach dem Potenzreihenentwicklungssatz lässt sich nun g in z0 entwickeln. Dabei kannman die beiden ersten Summanden weglassen, da a0 = g(z0) = 0 = a1 = g′(z0) gilt:
∃r > 0 ∶ g(z) =∞∑k=0
ak(z − z0)k =∞∑k=2
ak(z − z0)k = (z − z0)2 ⋅∞∑k=2
ak(z − z0)k−2 für ∣z − z0∣ < r
Ô⇒ f(z) =∞∑k=2
ak(z − z0)k−2 für z ≠ z0, ∣z − z0∣ < r
Setze f(z) = f(z) für z ≠ z0, f(z0) = a2.
Ô⇒ f(z) =∞∑k=2
ak(z − z0)k−2 für ∣z − z0∣ < r
Ô⇒ f ist sowohl in z = z0 als auch in O ∖ {z0} und damit in ganz O differenzierbar.
4.16 Beispiel:Sei f ∶ O → C holomorph, z0 ∈ O. Dann ist
g(z) ∶=⎧⎪⎪⎪⎨⎪⎪⎪⎩
f(z)−f(z0)z−z0 , z ∈ O ∖ {z0}
f ′(z0) , z = z0
holomorph in O.
4.17 Hilfssatz:Sei O ⊆ C offen, f ∶ O → C erfülle Aussage (iii) aus Satz 4.2 (d.h. f ist stetig und dasIntegral von f über beliebige nullhomotope Wege ergibt 0). Ist D ⊆ O eine abgeschlosseneDreiecksfläche mit Randweg ∂D (geschlossen, stückweise C1), so gilt:
∫∂D
f(z)dz = 0
Beweis. 1. Sei p(t) = 3t2 − 2t3 = t2(3 − 2t). Dann folgt:
• p(0) = 0, p(1) = 1
• p′(t) > 0 für 0 < t < 1
35

4. Isomorphie und Analytizität
• p′(0) = p′(1) = 0
2. Konstruiere nun eine C1-Parametrisierung von ∂D:
γ(t) =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
β1(t) ,0 ≤ t ≤ 1
β2(t) ,1 < t ≤ 2
β3(t) ,2 < t ≤ 3
Die Kurven βj , j ∈ {1,2,3} sollen hierbei jeweils die Strecken entlang einer Dreiecksseitesein und sind offensichtlich alle C1.Setze α1(t) ∶= β1(p(3t)) für 0 ≤ t ≤ 1
3 . Mit Bemerkung 3.3, 1) folgt nun:
• ∫α1
f(z)dz = ∫β1
f(z)dz
(α1 und β1 sind verschiedene Parametrisierungen desselben Weges)
• α1 ∈ C1([0, 13]→ O)
• α′1(0) = 3β′1(p(0))p′(0) = 3β′1(p(0)) ⋅ 0 = 0
α′1(13) = 3β′1(p(1))p′(1) = 3β′1(p(1)) ⋅ 0 = 0
Verfahre nun analog mitα2(t) ∶= β2(1 + p(3(t − 1
3))),13 ≤ t ≤ 2
3
α3(t) ∶= β3(2 + p(3(t − 23))),
23 ≤ t ≤ 1
Damit erhält man nun eine neue Parametrisierung γ ∈ C1([0,1]→ O) von ∂D:
γ(t) =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
α1(t) ,0 ≤ t ≤ 13
α2(t) , 13 < t ≤ 2
3
α3(t) , 23 < t ≤ 1
3. γ ist homotop zum konstanten Weg γ(0) in O mit der Homotopie
φ(t, s) = (1 − s)γ(t) + s(γ(0)), 0 ≤ s, t ≤ 1
Es gilt nun:
• φ ∈ C1([0,1] × [0,1]→ C)
• Bild(φ) ⊆D ⊆ O (D ist konvex)
• φ(⋅,0) = γ, φ(⋅,1) = γ(0) = const.
36

γ ist also nullhomotop. Unter den Voraussetzungen von 4.2, (iii) folgt nun:
∫∂D
f(z)dz = ∫γ
f(z)dz = 0
4.18 Satz von Morera:Sei O ⊆ C offen, f ∶ O → C stetig und für jede abgeschlossene Dreiecksfläche D ⊆ O mitRandweg ∂D gelte
∫∂D
f(z)dz = 0
Dann ist f holomorph in O.
Beweis. Sei z0 ∈ O beliebig aber fest. Da O offen ist, existiert ein r > 0 mit Br(z0) ⊆ O. ImFolgenden wird nun gezeigt, dass f in Br(z0) eine Stammfunktion F besitzt.Für z ∈ Br(z0) definiere F (z) ∶= ∫
[z0,z]f(z)dz. Beweise nun die Existenz von F ′(z) und zeige
F ′(z) = f(z) für z ∈ Br(z0). Dies ist äquivalent zu
∣F (w) − F (z)w − z
− f(z)∣ w→z→ 0,
Man betrachtet nun das Dreieck mit den Eckpunkten z0, z und w. Nach Voraussetzung folgtnun:
0 = ∫[z0,z]
f(z)dz + ∫[z,w]
f(z)dz + ∫[w,z0]
f(z)dz
= ∫[z0,z]
f(z)dz + ∫[z,w]
f(z)dz − ∫[z0,w]
f(z)dz
= F (z) + ∫[z,w]
f(z)dz − F (w)
⇔ F (w) − F (z) = ∫[z,w]
f(z)dz
Verwende nun f(z) = w−zw−zf(z) =
1w−z ∫
[z,w]f(z)dz.
37

4. Isomorphie und Analytizität
(Diese Gleichheit gilt, da f(z) konstant bzgl. z ist.)
Ô⇒ ∣F (w) − F (z)w − z
− f(z)∣ = ∣ 1
w − z∣ ⋅
RRRRRRRRRRRRRR∫
[z,w]
(f(z) − f(z))dzRRRRRRRRRRRRRR
≤ 1
∣w − z∣⋅ maxz∈Bild([z,w])
∣f(z) − f(z)∣ ⋅L([z,w])
L([z,w])=∣w−z∣= maxz∈Bild([z,w])
∣f(z) − f(z)∣
< ε für ∣z − z∣ < δε, da f stetig ist.
Wählt man ∣w − z∣ < δε, so ist für alle z ∈ Bild([z,w]) offensichtlich auch ∣z − z∣ < δε
gewährleistet. Daraus folgt also
limw→z
∣F (w) − F (z)w − z
− f(z)∣ = 0
Ô⇒ F ′(z) = f(z) ∀z ∈ Br(z0)Ô⇒ F ist holomorph in Br(z0)Ô⇒ f = F ′ ist holomorph in Br(z0). Insbesondere ist f differenzierbar in z0.
4.19 Bemerkung:Der Beweis zum Satz von Morera zeigt, dass die Differenzierbarkeit der Funktion f in O
äquivalent zur Existenz einer lokalen Stammfunktion F von f ist. Dies bedeutet:∀z0 ∈ O ∶ ∃r > 0 ∶ f besitzt in Br(z0) eine Stammfunktion.Achtung: Die Die Funktion f ∶ C ∖ {0} → C, z ↦ 1
z besitzt zwar eine lokale Stammfunktionum jeden Punkt z0 ∈ C ∖ {0}, aber keine Stammfunktion auf O = C ∖ {0}.
4.20 Satz:Sei O ⊆ C offen, z0 = x0 + iy0 ∈ O, O ∶= {(x, y) ∈ R2 ∶ x + iy ∈ O}, f ∶ O → C,u(x, y) ∶= Re f(x + iy), v(x, y) ∶= Im f(x + iy). Dann sind äquivalent:
(i) f ist differenzierbar in O
(ii) u, v ∈ C1(O → R) und erfüllen die Cauchy-Riemann’schen Differentialgleichungen
∂xu = ∂yv, ∂yu = −∂xv in O
38

Falls diese beiden Bedingungen erfüllt sind, gilt für (x, y) ∈ O:
ux(x, y) = ∂xu(x, y) = Re f ′(x + iy)
uy(x, y) = ∂yu(x, y) = − Im f ′(x + iy)
Beweis. Einschub: Multiplikation zweier komplexer Zahlen:
(a + ib)(c + id) = ac + aid + ibc + i2bd = ac − bd + i(ad + bc)
1. Sei z0 ∈ O, z0 = x0 + iy0. Dann ist f differenzierbar in z0.
⇔ f(z) = f(z0) + f ′(z0)(z − z0) + o(∣z − z0∣) für z → z0
z=x+iy⇔
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Re f(z) = Re f(z0) +Re f ′(z0)(x − x0) − Im f ′(z0)(y − y0) + o(∣z − z0∣)
Im f(z) = Im f(z0) + Im f ′(z0)(x − x0) +Re f ′(z0)(y − y0) + o(∣z − z0∣)
für z → z0
⇔
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
u(x, y) = u(x0, y0) + (Re f ′(z0), − Im f ′(z0))⎛⎜⎝
x − x0
y − y0
⎞⎟⎠+ o
⎛⎜⎝
XXXXXXXXXXXXXX
⎛⎜⎝
x
y
⎞⎟⎠−⎛⎜⎝
x0
y0
⎞⎟⎠
XXXXXXXXXXXXXX
⎞⎟⎠
v(x, y) = v(x0, y0) + (Im f ′(z0), Re f ′(z0))⎛⎜⎝
x − x0
y − y0
⎞⎟⎠+ o
⎛⎜⎝
XXXXXXXXXXXXXX
⎛⎜⎝
x
y
⎞⎟⎠−⎛⎜⎝
x0
y0
⎞⎟⎠
XXXXXXXXXXXXXX
⎞⎟⎠
= v(x0, y0) + (∂xv, ∂yv)⎛⎜⎝
x − x0
y − y0
⎞⎟⎠+ o
⎛⎜⎝
XXXXXXXXXXXXXX
⎛⎜⎝
x
y
⎞⎟⎠−⎛⎜⎝
x0
y0
⎞⎟⎠
XXXXXXXXXXXXXX
⎞⎟⎠
⇔
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
u differenzierbar in (x0, y0) mit ∂xu(x0, y0) = Re f ′(z0)
∂yu(x0, y0) = − Im f ′(z0)
v differenzierbar in (x0, y0) mit ∂xv(x0, y0) = Im f ′(z0)
∂yu(x0, y0) = Re f ′(z0)
2. (i)Schritt 1Ô⇒
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
u, v differenzierbar in O
∂xu = Re f ′ = ∂yv
∂yu = − Im f ′ = −∂xv
Außerdem folgt aus dem bereits bewiesenen Teil von Satz 4.2 (i) Ô⇒ (v) und dervorausgesetzten Differenzierbarkeit von f , dass f in O holomorph, also beliebig oft
39

4. Isomorphie und Analytizität
differenzierbar ist.Ô⇒ f, f ′ stetig in OÔ⇒ u, v, ∂xu, ∂yu, ∂xv, ∂yv ∈ C(O → R)Ô⇒ u, v ∈ C1(O → R)
3. (ii)Schritt 1Ô⇒
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
Re f(z) = Re f(z0) + ∂xu(x0, y0)(x − x0) + ∂yu(x0, y0)(y − y0) + o(∣z − z0∣)
Im f(z) = Im f(z0) + ∂xv(x0, y0)(x − x0) + ∂yv(x0, y0)(y − y0) + o(∣z − z0∣)
= Im f(z0) − ∂yu(x0, y0)(x − x0) + ∂xu(x0, y0)(y − y0) + o(∣z − z0∣)für z → z0
Ô⇒ f(z) = f(z0) + (∂xu(x0, y0) − i∂yv(x0, y0))(z − z0) + o(∣z − z0∣)Ô⇒ f ist differenzierbar in z0, f ′(z0) = ∂xu(x0, y0)− i∂yv(x0, y0)). Da z0 ∈ O beliebiggewählt werden kann, folgt Differenzierbarkeit von f auf ganz O.
4.21 Beispiel:f(z) = ez, z ∈ C
f(x + iy) = ex+iy = exeiy = ex(cos y + i sin y) = ex cos y + iex sin y
Ô⇒ u(x, y) = ex cos y, v(x, y) = ex sin y
∂xu = ex cos y = ∂yv
∂yu = −ex sin y = −∂xv
4.22 Definition: 1. M ⊆ C heißt wegzusammenhängend, falls zu je zwei Punkten aus M einWeg in M existiert, der diese beiden miteinander verbindet:∀z1, z2 ∈M ∃γ ∈ C1([0,1]→M) ∶ γ(0) = z1 ∧ γ(1) = z2
2. G ⊆ C heißt Gebiet, falls G offen und wegzusammenhängend ist.
4.23 Beispiel: 1. B1(0) ∪B1(2) ist nicht wegzusammenhängend.
2. C ∖ {−1,1 + i,2 + i} ist wegzusammenhängend.
4.24 Satz:Sei G ⊆ C ein Gebiet, f ∶ G→ C holomorph mit f ′ ≡ 0 in G. Dann ist f in ganz G konstant.
Beweis. Wähle z0 ∈ G fest. Zu beliebigem z ∈ G sei γ ∈ C1([0,1] → G) mit γ(0) = z0,
40

γ(1) = z. f ist Stammfunktion von f ′.
Ô⇒ f(z) − f(z0) = ∫γ
f ′(z)dz = ∫γ
0dz =1
∫0
0 ⋅ γ′(t)dt = 0
Ô⇒ ∀z ∈ G ∶ f(z) = f(z0)
4.25 Satz:Sei G ⊆ C ein Gebiet, f holomorph in G und ∃z0 ∈ G ∀n ∈ N ∶ f (n)(z0) = 0. Dann ist f inganz G konstant.
Beweis. Sei z ∈ G beliebig aber fest, γ ∈ C1([0,1] → G), γ(0) = z0, γ(1) = z. SetzeT ∶= sup{t ≥ 0 ∶ f ○ γ∣[0,t] = const.}
1. Zeige: f, γ stetig Ô⇒ f ○ γ∣[0,T ] = const.a) T = sup{t ≥ 0 ∶ f ○ γ∣[0,t] = const.} Ô⇒ ∃ Folge (tn) in [0,1] mitf ○ γ∣[0,tn] = const., tn → T
Ô⇒⎧⎪⎪⎪⎨⎪⎪⎪⎩
f ○ γ(tn) = f ○ γ(0), da f ○ γ = const.
f ○ γ(tn)n→∞→ f ○ γ(T ) (wegen Stetigkeit)
Ô⇒ f ○ γ(T ) = f ○ γ(0)b) Sei t ∈ [0, t[. Ô⇒ ∃n ∈ N ∶ t ≤ tn Ô⇒ t ∈ [0, tn] Ô⇒ f ○ γ(t) = f ○ γ(0)
2. Zeige T > 0: Nach dem Potenzreihenentwicklungssatz existiert ein R > 0, sodass:
f(z) =∞∑k=0
ak(z − z0)k4.8= a0 +
∞∑k=1
f (k)(z0)k!
(z − z0)k = a0 = f(z0) = const. , ∣z − z0∣ < R
Die Summe fällt hierbei weg, da vorausgesetzt wurde, dass in z0 alle Ableitungen ver-schwinden. Da γ stetig ist, folgt:
∃δ > 0 ∶ ∣t − 0∣ < δ Ô⇒ ∣γ(t) − γ(0)∣ < R
Ô⇒ f ○ γ∣[0, δ2] = const.
Ô⇒ T ≥ δ2> 0
3. Zeige: T = 1. Dann folgt f ○ γ∣[0,1] = const.Ô⇒ f(z) = (f ○ γ)(1) = (f ○ γ)(0) = f(z0)
41

4. Isomorphie und Analytizität
Beweis per Widerspruch: Annahme: T < 1:Berechne rekursiv f (n)(γ(T )) ∶Induktiuonsanfang n=1:
f ′(γ(T )) = limz→γ(T )
f(z) − f(γ(T ))z − γ(T )
= limt↗T
f(γ(t)) − f(γ(T ))γ(t) − γ(T )
= 0,
da f ○ γ∣[0,T ] = const.
Die Existenz dieses Grenzwerts folgt hierbei aus der Differenzierbarkeit von f . Da derGrenzwert als solcher existiert, muss er also insbesondere mit dem linksseitigen Grenz-wert identisch sein. Diese Gleichheit wird in der obigen Rechnung verwendet. Die Äqui-valenz der Bedingungen z → γ(T ) und t → T folgt aus der Stetigkeit von γ. Ana-log berechnet man auch f ′(γ(t)) = 0 für 0 < t < T . Induktiv erhält man dann ausf (n)(γ(t)) = 0 für 0 < t ≤ T auch f (n+1)(γ(t)) = 0 für 0 < t ≤ T .Ô⇒ ∀n ∈ N ∶ f (n)(γ(T )) = 0
Wendet man nun Schritt 2 in γ(T ) an, so ergibt sich die Folgerung∃δ > 0 ∶ f ○ γ∣[T,T+ δ
2] = const.
Ô⇒ f ○ γ∣[0,T+ δ2] = const. ☇ T = sup{t ≥ 0 ∶ f ○ γ∣[0,t] = const.}
42
5. Nullstellen
5.1 Definition:Sei O ⊆ C offen, f holomorph in O, z0 ∈ O mit f(z0) = 0. Falls
∃n ∈ N ∶ f (n)(z0) ≠ 0,
heißt K ∶= min{n ∈ N∣f (n)(z0) ≠ 0} die Ordnung der Nullstelle z0 von f oder die Vielfachheitder Nullstelle. Falls
∀n ∈ N ∶ f (n)(z0) = 0,
so heißt die Ordnung der Nullstelle unendlich.
5.2 Bemerkung:Sei G ⊆ C ein Gebiet, f holomorph in G mit Nullstelle z0 der Ordnung unendlich. Dann folgtaus 4.25:
f(z) = f(z0) = 0 für z ∈ G, also f ≡ 0 in G
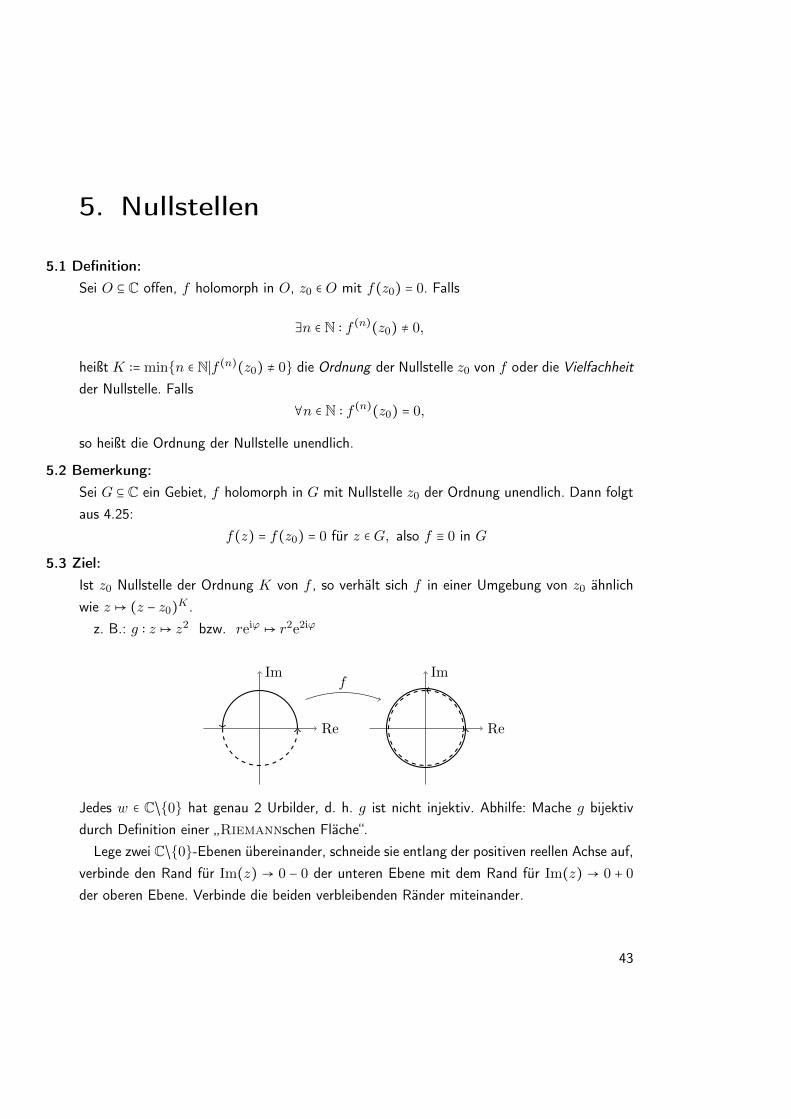
5.3 Ziel:Ist z0 Nullstelle der Ordnung K von f , so verhält sich f in einer Umgebung von z0 ähnlichwie z ↦ (z − z0)K .
z. B.: g ∶ z ↦ z2 bzw. reiϕ ↦ r2e2iϕ
Re
Imf
Re
Im
Jedes w ∈ C/{0} hat genau 2 Urbilder, d. h. g ist nicht injektiv. Abhilfe: Mache g bijektivdurch Definition einer „Riemannschen Fläche“.
Lege zwei C/{0}-Ebenen übereinander, schneide sie entlang der positiven reellen Achse auf,verbinde den Rand für Im(z) → 0 − 0 der unteren Ebene mit dem Rand für Im(z) → 0 + 0
der oberen Ebene. Verbinde die beiden verbleibenden Ränder miteinander.
43

5. Nullstellen
III
III
0 0
C C
Re
Im
Re
Im
untere Ebene
obere Ebene
Dadurch wird eine doppelte komplexe Ebene erzeugt und
g ∶ C/{0}→ R ∶= {reiϕ∣r > 0,0 ≤ ϕ < 4π, ei(ϕ+2π) ≠ eiϕ, ei(ϕ+4π) = eiϕ}
ist bijektiv. Die Riemannsche Fläche hat 2 Blätter. Die Riemannsche Fläche zu z ↦ zK
hat dementsprechend K Blätter.
5.4 Definition:
1. Das Argument einer komplexen Zahl z ≠ 0 ist der eindeutig bestimmte Winkel ϕ zwi-schen der Strecke 0z und der positiven reellen Halbachse.
Re
Imz
ϕ = arg z
Problem:arg ∶ C/{0}→ [0,2π[
ist auf der positiven reellen Halbachse unstetig.
2. Sei ϕ0 ∈ [0,2π[ und Cϕ0 ∶= C/{rei(ϕ0+π)∣r ≥ 0}.
44

Re
Im
ϕ0
z1
z2
argϕ0(z1) = arg(z1) ∈]ϕ0 − π,ϕ0 + π[
argϕ0(z2) = arg(z2) − 2π ∈]ϕ0 − π,ϕ0 + π[,
da arg(z2) > ϕ0 + π
Für z ∈ Cϕ0 ist argϕ0(z) ∶= ϕ, wobei ϕ ∈]ϕ0−π,ϕ0+π[ der eindeutig bestimmte Winkel
zwischen 0z und der positiven reellen Halbachse.
5.5 Hilfssatz:argϕ0
∶ Cϕ0 →]ϕ0 − π,ϕ0 + π[ ist stetig, denn z. B.
argϕ0(z) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
arccosRe(z)∣z∣
(evtl. ± 2π) Im(z) > 0
π − arcsinIm(z)∣z∣
(evtl. ± 2π) Re(z) > 0
. . .
und z ↦ 1z , z ↦ Re(z), arccos = (cos ∣[0,π])
−1, arcsin = (sin ∣[−π
2,π2])−1
sind stetig.
5.6 Definition und Satz:Sei 0 ≤ ϕ0 < 2π, k ∈ N und:
k√
∶ Cϕ0 → C ∶ k√z ∶= z
1k ∶= ∣z∣
1k ei
argϕ0(z)
k
Dann ist k√
holomorph und es gelten ( k√z)k = z, k
√z′ = 1
k( k√z)k−1 .
Beweis.
1. ( k√z)k = (∣z∣
1k ei
argϕ0(z)
k )k = ∣z∣eiargϕ0(z) = z
2. Setze g(z) ∶= k√z für z ∈ Cϕ0 . Dann:
• g ist stetig als Hintereinanderausführung stetiger Funktionen
• g ist injektiv: g(z1) = g(z2)⇒ z1 = g(z1)k = g(z2)k = z2
45

5. Nullstellen
Setze f(z) ∶= zk ⇒ f ′(z) = kzk−1. Sei z0 ∈ Cϕ0 . g ist differenzierbar in z0:
g′(z0) = limz→z0
g(z) − g(z0)z − z0
z≠z0⇒g(z)≠g(z0)= limz→z0
1f(g(z))−f(g(z0))
g(z)−g(z0)
g stetig, ζ∶=g(z)= limζ→g(z0)
1f(ζ)−f(g(z0))
ζ−g(z0)
f ′(z)=kzk−1= 1
f ′(g(z0))= 1
k( k√z0)k−1
z0 beliebig ⇒ g holomorph.
Achtung: k√zk = z ist i. A. falsch. Gegenbeispiel: k > 2, ϕ0 = π (argπ = arg)
z = −i, z2 = −1, arg(z2) = π
⇒ 2√z2 = ∣z2∣
12 ei arg(z
2)
2 = 1 ⋅ eiπ2 = i
5.7 Satz:O ⊆ C offen, f holomorph in O, z0 ∈ O Nullstelle der Ordnung K ∈ N. Dann existiert einr > 0 und eine holomorphe Funktion h ∶ Br(z0)→ C mit h(z0) = 0, h′(z0) ≠ 0 und
f(z) = h(z)K
für ∣z − z0∣ < r.
Beweis. Für den Fall K = 1 wähle h = f , damit ist die Aussage trivial. Sei nun K ≥ 2.Sei o. B. d. A. z0 = 0 (andernfalls betrachte f(z) ∶= f(z − z0)).f holomorph
4.7⇒ f(z) = ∑∞k=0 akz
k, ∣z∣ < R, ak = f(k)(0)k!
⇒ f(z) =∞∑k=K
akzk (aK = f
(K)(0)K!
≠ 0)
= zK (aK +∞∑
k=K+1
akzk−K)
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=∶g(z), g(0)=aK≠0, g holomorph in BR(0)
Da g stetig ist, gibt es ein r > 0 mit ∣g(z) − g(0)∣ < ∣g(0)∣2 für ∣z∣ < r. Setze ϕ0 ∶= arg(g(0))
⇒ ∀z ∈ Br(0) ∶ g(z) ∈ Cϕ0 .
46

Re
Im
g(0)
ϕ0
g(z) für ∣z∣ < r
Definiere h(z) ∶= z ⋅ K√g(z).
⇒ h(z)K = zKg(z) = f(z) für z ∈ Br(0)
h ist holomorph in Br(0) als Hintereinanderausführung und Verknüpfung holomorpher Funk-tionen.
h(0) = 0
h′(0) = 1 ⋅ K√g(0) + 0 ⋅ 1
K( K√g(0))K−1
⋅ g(0) = K√g(0) = K
√aK ≠ 0
Bedeutung des Satzes: f hat in z0 eine Nullstelle der Ordnung K
⇒ ∃ holomorphe Funktion g ∶ f(z) = (zg(z)²=h(z)
)K , g(z0) ≠ 0
h(z) ist so etwas wie die K-te Wurzel aus f . Weitere K-te Wurzeln von f :
hl(z) = ei 2πKlh(z), l = 0,1, . . . ,K − 1
5.8 Beispiel:f ∶ C→ C ∶ z ↦ ez
∣f ′(z)∣ = ∣ez ∣ = ∣eRe(z)+i Im(z)∣ = ∣eRe(z)∣ ⋅ ∣ei Im(z)∣´¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¶
=1
≠ 0
47

5. Nullstellen
Aber: f ist nicht injektiv, da f(z + 2πi) = f(z).
5.9 Lokale Umkehrfunktion:Sei f holomorph in O, z0 ∈ O, f ′(z0) ≠ 0. Dann existiert ein r > 0, sodass f ∣
Br(z0)injektiv
ist. Weiter gelten:
• f(Br(z0)) ist offen,
• f−1 ∶ f(Br(z0))→ Br(z0) ist holomorph und
• (f−1)′(w) = 1f ′(f−1(w)) für w ∈ f(Br(z0)).
Beweis.
u(x, y) ∶= Re(f(x + iy)), v(x, y) ∶= Im(f(x + iy))
für (x, y) ∈ O ∶= {(x, y)∣x + iy ∈ O}. Dann folgt:
f(x + iy) = w1 + iw2 ⇔⎧⎪⎪⎨⎪⎪⎩
g1(x, y,w1,w2) ∶= u(x, y) −w1 = 0
g2(x, y,w1,w2) ∶= v(x, y) −w2 = 0
g∶=( g1g2 )⇐⇒ g(x, y,w1,w2) = 0 ∈ R2 (∗)
Prüfe die Bedingungen des Satzes über implizite Funktionen:
g ∈ C1(O ×R2 → R2)
0(∗)= g(x0, y0,Re(f(x0 + iy0)), Im(f(x0 + iy0)))
det⎛⎝∂xg1 ∂yg1
∂xg2 ∂yg2
⎞⎠= det
⎛⎝∂xu ∂yu
∂xv ∂yv
⎞⎠
4.20= det⎛⎝
Re(f ′(x0 + iy0)) − Im(f ′(x0 + iy0))Im(f ′(x0 + iy0)) Re(f ′(x0 + iy0))
⎞⎠
= Re(f ′(x0 + iy0))2 + Im(f ′(x0 + iy0))2 = ∣f ′(x0 + iy0)∣2 ≠ 0
in (x0, y0) bzw. z0 ∶= x0 + iy0
48

Satz über implizite Funktionen⇒ Es existieren offene Umgebungen U ⊆ R2 von (Re(f(z0)), Im(f(z0))) und V ⊆ R2 von(x0, y0) und eine eindeutige Auflösung
⎛⎝x
y
⎞⎠=⎛⎝ϕ1(w1,w2)ϕ2(w1,w2)
⎞⎠
in U × V,⎛⎝ϕ1
ϕ2
⎞⎠∈ C1(U → V )
⇒
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
f−1(w1 + iw2) = ϕ1(w1,w2) + iϕ2(w1,w2) für w1,w2 ∈ U
(insbesondere ist f ∣V
injektiv)
f−1 ist stetig in U
f stetig ⇒ ∃r > 0 ∶ f(Br(z0)) ⊆ U ∧Br(z0) ⊆ V
f−1 stetig ⇒ f(Br(z0)) ist offen als Urbild bez. f−1 der offenen Menge
Br(z0) = f−1(f(Br(z0)))
(w1,w2)
(x, y)
][
] [
V
(x0, y0)
U(Re(f(z0)),Im(f(z0)))
U × V
g = 0 aus Satz überimplizite Funktionen
g = 0
f−1 ist differenzierbar in w ∈ f(Br(z0)):
(f−1)′(w) = limu→w
f−1(u) − f−1(w)u −w
u≠w⇒f−1(u)≠f−1(u)= lim
u→w
1f(f−1(u))−f(f−1(w))
f−1(u)−f−1(w)
f−1
stetig= limf−1(u)→f−1(w)
1f(f−1(u))−f(f−1(w))
f−1(u)−f−1(w)
= 1
f ′(f−1(w))
5.10 Blätterzahl einer Nullstelle:
49
5. Nullstellen
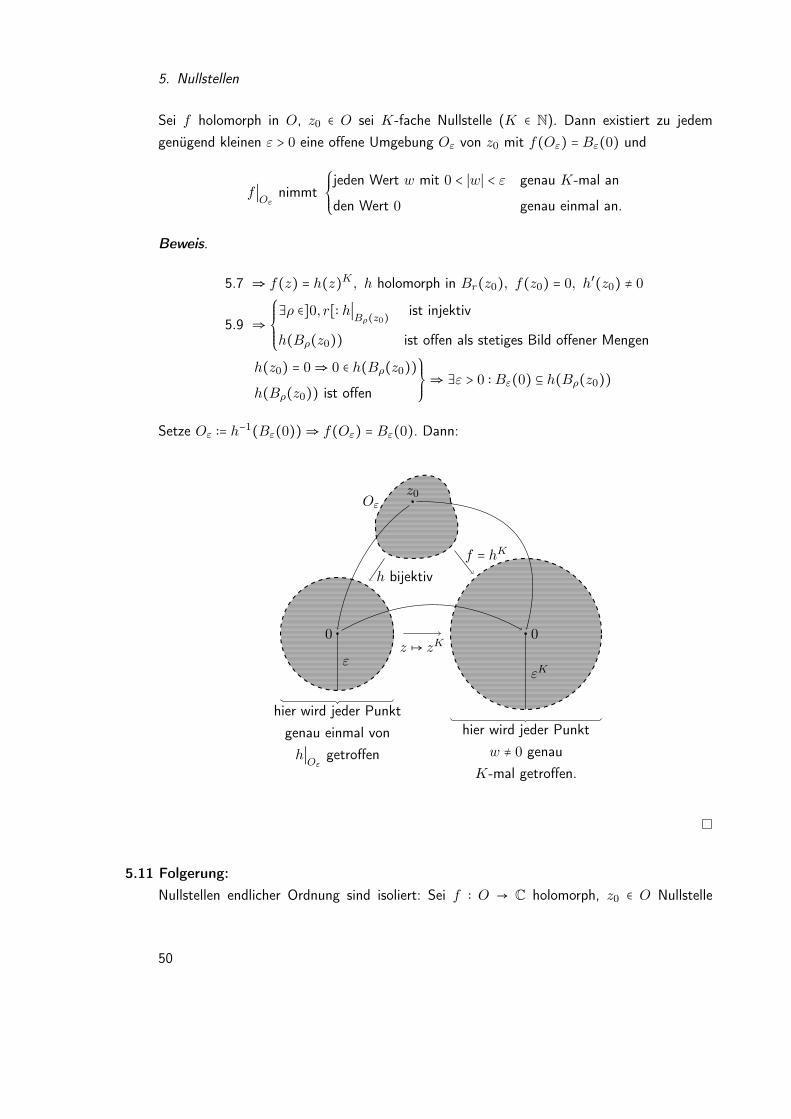
Sei f holomorph in O, z0 ∈ O sei K-fache Nullstelle (K ∈ N). Dann existiert zu jedemgenügend kleinen ε > 0 eine offene Umgebung Oε von z0 mit f(Oε) = Bε(0) und
f ∣Oε
nimmt⎧⎪⎪⎨⎪⎪⎩
jeden Wert w mit 0 < ∣w∣ < ε genau K-mal an
den Wert 0 genau einmal an.
Beweis.
5.7 ⇒ f(z) = h(z)K , h holomorph in Br(z0), f(z0) = 0, h′(z0) ≠ 0
5.9 ⇒⎧⎪⎪⎪⎨⎪⎪⎪⎩
∃ρ ∈]0, r[∶ h∣Bρ(z0)
ist injektiv
h(Bρ(z0)) ist offen als stetiges Bild offener Mengen
h(z0) = 0⇒ 0 ∈ h(Bρ(z0))
h(Bρ(z0)) ist offen
⎫⎪⎪⎬⎪⎪⎭⇒ ∃ε > 0 ∶ Bε(0) ⊆ h(Bρ(z0))
Setze Oε ∶= h−1(Bε(0))⇒ f(Oε) = Bε(0). Dann:
z0
0 0
εεK
z ↦ zK
h bijektivf = hK
hier wird jeder Punktgenau einmal vonh∣Oε
getroffen
hier wird jeder Punktw ≠ 0 genau
K-mal getroffen.
Oε
5.11 Folgerung:Nullstellen endlicher Ordnung sind isoliert: Sei f ∶ O → C holomorph, z0 ∈ O Nullstelle
50

endlicher Ordnung. Dann
∃ε > 0 ∀z ∈ Bε(z0)/{z0} ∶ f(z0) ≠ 0,
5.12 Satz von der inversen Abbildung:Seien O1,O2 ⊆ C offen, f ∶ O1 → O2 holomorph und bijektiv. Dann gelten:
• f ′(z) ≠ 0 in O1,
• f−1 ist holomorph in O2 und
• (f−1)′(w) = 1f ′(f−1(w)) für w ∈ O2.
Beweis. Annahme: ∃z0 ∈ O1 ∶ f(z0) = 0. Setze g(z) ∶= f(z) − f(z0). Dann sind g(z0) =g′(z0) = 0 und g ist holomorph in O1. Somit ist z0 eine Nullstelle mindestens der Ordnung 2.
Fall a) z0 ist Nullstelle der Ordnung ∞
4.25⇒ ∃r > 0 ∶ g(z) = konst. = 0 in Br(z0)
⇒f(z) = f(z0) für z ∈ Br(z0), Widerspruch zur Injektivität von f,
Fall b) z0 ist Nullstelle der Ordnung K ≥ 2
5.10⇒ ∃Oε ⊆ O1 ∶ g∣Oε nimmt jeden Wert w mit 0 < ∣w∣ < ε genau K-mal anK≥2⇒ f ∣
Oε= g∣
Oε+ f(z0) ist nicht injektiv ☇
⇒ ∀z0 ∈ O1 ∶ f ′(z0) ≠ 0. Rest: siehe 5.10.
5.13 Identitätssatz:Sei G ⊆ C ein Gebiet, f, g holomorph in G, (zn) eine Folge in G mit zn → z0 ∈ G und∀n ∈ N ∶ f(zn) = g(zn). Dann folgt f = g.
Beweis. Übungsblatt 4, Aufgabe 4.2.
5.14 Gebietstreue:Sei G ⊆ C ein Gebiet, f ∶ G→ C holomorph, f ≠ konst. Dann ist f(G) ein Gebiet.
Beweis. 1. f(G) ist wegzusammenhängend: Seien w1 = f(z1),w2 = f(z2) ∈ f(G). Gwegzusammenhängend
⇒∃γ ∈ C1([0,1]→ G) ∶ γ(0) = z1, γ(1) = z2
51

5. Nullstellen
(d. h. γ ist Weg von z1 nach z2)
⇒f ○ γ ∈ C1([0,1]→ f(G)), (f ○ γ)(0) = w1, (f ○ γ)(1) = w2
(d. h. f ○ γ ist Weg in f(G) von w1 nach w2)
2. f(G) ist offen als stetiges Bild der offenen Menge G.
5.15 Maximumsprizip I:Sei G ⊆ C ein Gebiet, f ∶ G→ C holomorph. Falls
∃z1 ∈ G ∀z ∈ G ∶ ∣f(z)∣ ≤ ∣f(z1)∣ (5.1)
oder∃z2 ∈ G ∶ f(z2) ≠ 0 ∧ ∀z ∈ G ∶ ∣f(z)∣ ≥ ∣f(z2)∣ (5.2)
(d. h. f nimmt das Maximum oder Minimum ≠ 0 in G an), so folgt f ≡ konst. in G.
Beweis. (im Fall (‘5.1‘)) Annahme: f ≠ konstant in G. Mit (‘5.1‘) folgt f(z1) ≠ 0.
G Gebiet
f holomorph in G
f ≠ konst.
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭
Gebiets-treueÔ⇒ f(G) ist ein Gebiet
Insbes. f(G) offen
f(z1) ∈ f(G)
⎫⎪⎪⎬⎪⎪⎭⇒ ∃r > 0 ∶ Br(f(z1)) ⊆ f(G)
vgl.SkizzeÔ⇒ ∃z ∈ G ∶ ∣f(z)∣ > ∣f(z1)∣, Widerspruch zu (5.1)
52

Re
Im
∣f(z1)∣
f(z1)r
f(z)Br(f(z1)) ⊆ f(G)
Im Fall (5.2) funktioniert der Beweis analog und man folgert, dass ∃z ∈ G ∶ ∣f(z)∣ < ∣f(z1)∣⇒ Widerspruch.
Einschub:Achtung: ∣∫
γf(z)dz∣
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶≤L(γ)max
γ∣f(z)∣
≰ ∫γ∣f(z)∣dz
Betrachte zum Beispiel f(z) = 1z , γ ∶ [0,1]→ C ∶ t↦ e2πit. Es gilt
∣∫γf(z)dz∣ = ∣2πi∣ = 2π,
aber
∫γ∣f(z)∣dz = ∫
1
0∣ 1
e2πit ∣2πie2πitdt = 2πi(∫1
0cos(2πt)dt + i∫
1
0sin(2πt)dt) = 0.
5.16 Maximumsprinzip II:Sei G ⊆ C ein beschränktes Gebiet, f ∶ G → C, f holomorph in G und stetig auf G. Danngelten:
1. ∃z1 ∈ ∂G = G/G ∀z ∈ G ∶ ∣f(z)∣ ≤ ∣f(z1)∣
2. Falls min{∣f(z)∣ ∶ z ∈ G} > 0, dann
∃z2 ∈ ∂G ∀z ∈ G ∶ ∣f(z)∣ ≥ ∣f(z2)∣
(Maximum und Minimum werden am Rand angenommen).
Beweis. 1. Da G beschränkt und abgeschlossen ist, folgt mit dem Satz von Heine-Borel, dassG kompakt ist. ∣f ∣ ist stetig und reellwertig, also nimmt ∣f ∣ aufGMinimum
53

5. Nullstellen
und Maximum an:
∃z1, z2 ∈ G ∀z ∈ G ∶ ∣f(z2)∣ ≤ ∣f(z)∣ ≤ ∣f(z1)∣
2. Annahme: Sei z1 ∈ G. Nach dem Maximumsprinzip I ist f in G konstant. Da f stetigist, ist es folglich auf ganz G konstant. Also kann z1 aus ∂G = G/G beliebig gewähltwerden.
3. Annahme: Sei z2 ∈ G und f(z2) ≠ 0. Mit dem Maximumsprinzip I folgt wieder, dass fin G und aufgrund der Stetigkeit auch auf G konstant ist, somit kann man z2 beliebigaus ∂G wählen.
5.17 Beispiel: 1. f(z) = ez, G = B2(1 + 2i).
Re
Im
z2 = −1 + 2i z1 = 3 + 2i1 + 2i
G
2
1
∣f(z)∣ = eRe(z)
e−1 = ∣f(−1 + 2i)∣ ≤ ∣f(z)∣ ≤ ∣f(3 + 2i)∣ = e3
Die Funktion f nimmt Maximum und Minimum am Rand von G an.
2. f(z) = z, G = B1(0).
minz∈G
∣f(z)∣ = 0 = ∣f(0)∣
∀z ∈ G/{0} ∶ ∣f(z)∣ > ∣f(0)∣
Aber z2 = 0 ∉ ∂G. Die Bedingung minz∈G
∣f(z)∣ > 0 ist verletzt.
54

6. Integrale längs geschlossener Kurven
6.1 Beispiel:
f(z) =∞∑k=0
akzk für ∣z∣ < R
g(z) =∞∑k=1
bkzk für ∣z∣ < r
Dann g(1
z) =
∞∑k=1
bkz−k für ∣z∣ > 1
r.
Sei 1r < R und h(z) ∶= f(z) + g(1
z ) für 1r < ∣z∣ < R.
⇒ h(z) =∞∑k=−∞
ckzk mit ck =
⎧⎪⎪⎨⎪⎪⎩
ak k ∈ N0
b−k −k ∈ N
Re
Im
R1r
6.2 Laurent-Entwicklung:Sei 0 < r < R, Br,R(z0) ∶= {z ∈ C∣r < ∣z − z0∣ < R} und f ∶ Br,R(z0) → C holomorph. Dann
55

6. Integrale längs geschlossener Kurven
ist f als Laurent-Reihe darstellbar:
f(z) =∞∑k=−∞
ak(z − z0)k für r < ∣z − z0∣ < R
(Konvergenz ist automatisch garantiert), mit
ak =1
2πi ∫∣z−z0∣=ρ
f(z)(z − z0)k+1
dz
für jedes ρ ∈]r,R[ (Cauchy-Formel für Laurent-Koeffizienten). Die Reihen
−∞∑k=−1
ak(z − z0)k
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶∶=H(z)
und∞∑k=0
ak(z − z0)k
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶∶=N(z)
heißen Hauptteil bzw. Nebenteil der Laurent-Reihe.
Beweis. Sei o. B. d. A. z0 = 0 (andernfalls betrachte f(z) ∶= f(z − z0)). Sei z ∈ Br,R(0)beliebig, aber fest gewählt.
ε ∶= 1
2min{∣z∣ − r,R − ∣z∣}
00 0z
γ1
R
r z
γ2
z
γ3
γ1 ∼ γ2 in Br,R(0)/{z} γ2 ∼ γ3 in Br,R(0)/{z}
Wegintegrale hebensich weg
Kreis um z
mit Radius ε
56

Mit dem Integralsatz von Cauchy folgt:
f(z) ∶= 1
2πi ∫γ1f(w)w − z
dw (w ↦ f(w)w − z
ist holomorph in Br,R(0)/{z})
γ1∼γ3= 1
2πi ∫γ3f(w)w − z
dw
Teil-Wegintegrale= 1
2πi ∫∣w∣=R−ε
f(w)w − z
dz − 1
2πi ∫∣w∣=r+ε
f(w)w − z
dw
= 1
2πi ∫∣w∣=R−ε
f(w)w
1
1 − zw
²=∑∞k=0(
zw)k
mit ∣ zw∣= ∣z∣R−ε
<1
gleichmäßig bzgl. w
dw − 1
2πi ∫∣w∣=r+ε
f(w)−z
1
1 − wz
²=∑∞k=0(
zw)k
mit ∣wz∣= r+ε
∣z∣<1
gleichmäßig bzgl. w
dw
= 1
2πi
∞∑k=0∫∣w∣=R−ε
f(w)wk+1
dw ⋅ zk + 1
2πi
∞∑k=0∫∣w∣=r+ε
f(w)wkdw ⋅ 1
zk+1
∣w∣=ρ∼∣w∣=R−ε∼∣w∣=r+ε=k′∶=−k−1
∞∑k=0
1
2πi ∫∣w∣=ρ
f(w)wk+1
dw
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=ak für k∈N0
⋅zk +−∞∑k′=−1
1
2πi ∫∣w∣=ρ
f(w)wk′+1
dw
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=ak′ für −k′∈N
⋅zk′
6.3 Bemerkung:
1. H(z) konvergiert in {z ∈ C∣ ∣z − z0∣ > r}, N(z) konvergiert in BR(z0).
2. r = 0 ist erlaubt: B0,R(z0) = BR(z0)/{z0}. In diesem Fall besagt der RiemannscheHebbarkeitssatz: Entweder ist ∣f(z)∣ in B0,ρ(z0) für ein ρ ∈]0,R[ beschränkt. Dannkann f holomorph in z0 fortgesetzt werden. Oder ∣f(z)∣ ist unbeschränkt für z → z0.Im ersten Fall gilt für −k ∈ N:
ak =1
2πi ∫∣z−z0∣=ρf(z)(z − z0)−k−1
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶holomorph in Bρ(z0)
dz = 0
⇒H(z) = 0.
6.4 Definition:
1. Sei O ⊆ C offen, f holomorph in O, z0 ∈ C/O, so dass
∃R > 0 ∶ BR(z0)/{z0} ⊆ O
57

6. Integrale längs geschlossener Kurven
(d. h. O hat in z0 ein „Loch“), dann hat f in z0 eine isolierte Singularität.
z0
O
BR(z0)/{z0}
2. f habe in z0 eine isolierte Singularität. Aus 6.2 folgt:
∃R > 0 ∶ f(z) ∶∞∑k=−∞
ak(z − z0)k für 0 < ∣z − z0∣ < R.
a) Gilt ∀k < 0 ∶ ak = 0, so hat f in z0 eine hebbare Singularität, d. h. f ist in z0
holomorph fortsetzbar.
b) Existiert ein k < 0, sodass ak ≠ 0 und ∃K ∈ N ∀k < −K ∶ ak = 0 (d. h. gibt esgenau endlich viele k < 0 mit ak ≠ 0), dann heißt z0 Polstelle von f und
K ∶= max{k ∈ N ∶ a−k ≠ 0}
heißt Ordnung des Pols.
c) Gilt ∀K ∈ N ∃k < −K ∶ ak ≠ 0 (d. h. gibt es unendlich viele k < 0 mit ak ≠ 0),dann hat f in z0 eine wesentliche Singularität.
6.5 Beispiel:
1.
O ∶= C/{0},
f(z) ∶= e1z =
∞∑k=0
(1z)k
k!=−∞∑k=0
1
(−k)!zk
⇒ f hat eine wesentliche Singularität in z0 = 0.
2. Sei f(z) = p(z)q(z) und p, q Polynome. Seien z1, . . . , zn alle Nullstellen von q.
O ∶= C/{z1, . . . , zn}⇒ Alle zj sind isolierte Singularitäten von f .
58
Vereinfachung: Sei deg p < deg q, p, q haben keine gemeinsamen Nullstellen, d. h.∀j = 1, . . . , n ∶ p(zj) ≠ 0. Sei z1 Nullstelle der Ordnung K von q. Aus der Partial-bruchzerlegung erhält man:
f(z) =K
∑k=1
ak(z − z1)k
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶Hauptteil der
Laurent-Entwicklungvon f in z1
+ p(z)q(z)²
holomorph in einerUmgebung von z1,
Potenzreihenentwicklung= Nebenteil der
Laurent-Entwicklungvon f in z1
wobei p, q Polynome sind, q(z1) ≠ 0 und aK ≠ 0. Somit hat f in z1 einen Pol derOrdnung K.
6.6 Bemerkung:Hat f einen Pol der Ordnung K ∈ N in z0, so folgt:
∃R > 0 ∶ f(z) =∞∑k=−K
ak(z − z0)k =1
(z − z0)K∞∑k=−K
ak(z − z0)k+K
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=∶g holomorph,g(z0)=a−K≠0
für 0 < ∣z − z0∣ < R
⇒ limz→z0
∣f(z)∣ =∞
6.7 Casorati-Weierstraß:Hat f in z0 eine wesentliche Singularität, ist f(B0,R(z0)) dicht in C für jedes R > 0 mitB0,R(z0) ⊆D(f).
Beweis. Gegenannahme: ∃R > 0 ∶ f(B0,R(z0)) nicht dicht in C.
⇒ ∃w ∈ C ∃r > 0 ∶ Br(w) ⊆ C/f(B0,R(z0))
(C/f(B0,R(z0)) ist offen und nichtleer). Setze
g(z) ∶= 1
f(z) −wfür z ∈ B0,R(z0)
⇒
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
g ist holomorph
g ist beschränkt: ∣g(z)∣ = 1
∣f(z) −w∣≤ 1
rRiemannscherHebbarkeitssatzÔ⇒ g ist holomorph fortsetzbar in z0 zu g ∶ BR(z0)→ C holomorph
59

6. Integrale längs geschlossener Kurven
Fall a)
g(z0) ≠ 0⇒ ∃t > 0 ∀z ∈ Bt(z0) ∶ g(z) ≠ 0
⇒ 1
g∶ Bt(z0)→ C ist holomorph
⇒ f(z) = 1
g(z)+w für z ∈ B0,R(z0)
ist holomorph fortsetzbar in z = z0. Dies ist ein Widerspruch dazu, dass f in z0 einewesentliche Singularität besitzt.
Fall b) g(z0) = 0.
Fall b1) z0 ist Nullstelle der Ordnung ∞ von g.
BR(z0)wegzusammenhängend
Ô⇒ g(z) = g(z0) = 0 in B0,R(z0),
aber g(z) = 1
f(z) −w≠ 0 (Widerspruch)
Fall b2) z0 ist Nullstelle der Ordnung K ∈ N von g.
⇒ g(z) =∞∑k=0
ak(z − z0)k für ∣z − z0∣ < R, aK ≠ 0
= (z − z0)K∞∑k=K
ak(z − z0)k−K
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=∶h holomorph in BR(z0)
h(z0)=aK≠0
⇒ 1
g(z)= 1
(z − z0)K⋅ 1
h(z)²
holomorph inUmgebung Bε(z0)
=∑∞l=0 bl(z−z0)l, b0≠0
k=l−K=∞∑k=−K
bk+K(z − z0)k
⇒ 1
g(z)hat in z0 einen Pol der Ordnung K ∈ N
⇒ f(z) = 1
g(z)+w = 1
g(z)+w hat in z0 einen Pol der Ordnung K
Dies ist ein Widerspruch dazu, dass f in z0 eine wesentliche Singularität besitzt.
6.8 Folgerung:
60

1. f hat in z0 einen Pol der Ordnung K ∈ N
⇔ limz→z0
∣f(z)∣ =∞
2. f hat in z0 eine hebbare Singularität
⇔ limz→z0
∣f(z)∣ existiert
⇔∣f(z)∣ ist beschränkt für z → z0
3. f hat in z0 eine wesentliche Singularität⇔ ∣f(z)∣ ist unbeschränkt, aber nicht bestimmtdivergent für z → z0.
6.9 Definition:Sei γ ein geschlossener, stückweise stetig differenzierbarer Weg in C und z0 ∈ C/Bild(γ).Dann heißt
ν(γ, z0) ∶=1
2πi ∫γ1
z − z0dz
die Umlaufzahl von γ um z0.
6.10 Satz:ν(γ, z0) ∈ Z.
Beweis. ν(γ, z0) ∈ Z⇔ e2πiν(γ,z0) = 1. Zeige also e2πiν(γ,z0) = 1. Man definiert eine Hilfs-funktion ϕ:
ϕ(s) ∶= e∫s0
γ′(t)γ(t)−z0
dt
⇒ ϕ′(s) = ϕ(s) γ′(s)γ(s) − z0
61

6. Integrale längs geschlossener Kurven
in allen Teilintervallen von [0,1], in denen ϕ stetig differenzierbar ist.
⇒ dds
ϕ(s)γ(s) − z0
= ϕ′(s)(γ(s) − z0) − ϕ(s)γ′(s)
(γ(s) − z0)2= 0 in jedem Teilintervall.
⇒ ϕ(s)γ(s) − z0
= konstant in jedem Teilintervall
γ∈C([0,1]→C)Ô⇒ ϕ(s)
γ(s) − z0= konst. = ϕ0
γ(0) − z0= 1
γ(0) − z0auf [0,1]
⇒ ϕ(1) = γ(1) − z0
γ(0) − z0
γ ge-schlossen= γ(0) − z0
γ(0) − z0= 1
⇒ e∫γ1
z−z0dz = e∫
10
γ′(t)γ(t)−z0
dt = ϕ(1) = 1
6.11 Beispiel:
1. Sei N ∈ N, γN ∶ [0,1]→ C ∶ t↦ e2πiNt.
Re
Im
γN
γN
z1
z2
ν(γN ,0) = N
ν(γN , z1) = N, da γN ∼ γN in C/{z1} für ∣z1∣ < 1
ν(γN , z2) = 0, da γN für ∣z2∣ > 1 nullhomotop in C/{z2} ist
(z. B. Φ(t, s) = (1 − s)γN(t))
62

2.
z1 z2
z3
γ1 γ2
γ
ν(γ, z1) = 1 = ν(γ1, z1)
ν(γ, z2) = −1 = ν(γ2, z2)
ν(γ, z3) = 0, da γ nullhomotop in C/{z3} ist
6.12 Satz:Sei
f(z) =∞∑k=−∞
ak(z − z0)k für 0 < ∣z − z0∣ < R (6.1)
und γ ein geschlossener Weg in B0,R(z0). Dann gilt:
∫γf(z)dz = 2πia−1ν(γ, z0)
Beweis. Definiere:
g(z) = f(z) − a−1(z − z0)−1 =∞∑k=−∞k≠−1
ak(z − z0)k für 0 < ∣z − z0∣ < R
g hat eine Stammfunktion:
G(z) =∞∑k=−∞k≠−1
akk + 1
(z − z0)k+1
γgeschlossenÔ⇒ 0 = ∫
γg(z)dz = ∫
γf(z)dz − ∫
γ
a−1
z − z0dz
⇒ ∫γf(z)dz = a−1∫
γ
1
z − z0dz = 2πia−1ν(γ, z0)
63

6. Integrale längs geschlossener Kurven
6.13 Definition:Sei f holomorph in O ⊆ C mit einer isolierten Singularität in z0 und Laurent-Entwicklung(6.1). Dann heißt
Res(f, z0) ∶= a−16.12= 1
2πi ∫∣z−z0∣=r
f(z)dz für 0 < r < R
Residuum von f in z0.
6.14 Beispiel:
1. f(z) = sin zz2
sin z
z2=
∞∑k=0
(−1)k
(2k + 1)!z2k−1
⇒ Res(f,0) = (−1)0
(2 ⋅ 0 + 1)!= 1
2. f(z) = e1z
e1z =
∞∑k=0
1
k!(1
z)k
⇒ Res(f,0) = 1
1!= 1
3. f(z) = e1z2
e1z =
∞∑k=0
1
k!( 1
z2)k
⇒ Res(f,0) = 0
4. Hat f in z0 eine hebbare Singularität, so folgt:
f(z) =∞∑k=0
ak(z − z0)k
⇒ Res(f, z0) = 0
6.15 Residuensatz:Sei O ⊆ C offen, f holomorph in O/S, wobei f in allen z ∈ S eine isolierte Singularität besitzt,
64

γ ein nullhomotoper Weg in O mit Bild(γ) ∩ S = ∅. Dann
∫γf(z)dz = ∑
z∈S2πiRes(f, z)ν(γ, z)
und in der Summe sind nur endlich viele Summanden ungleich 0, d. h. die Summe ist endlich.
Beweis. Schritt 1: Zeige, dass die Summe endlich ist.
a) Alle hebbaren Singularitäten von f liefern den Beitrag 0, da das Residuum von f indiesen Punkten 0 ist.
S′ ∶= {z ∈ S∣f hat in‘z‘keine hebbare Singularität}
⇒∑z∈S
2πiRes(f, z)ν(γ, z) = ∑z∈S′
2πiRes(f, z)ν(γ, z) (falls definiert)
b) Sei Φ die Homotopie zwischen γ und einem konstanten Weg. Für z0 ∈ O/Bild(Φ) gilt
2πiν(γ, z0) = ∫γ
1
z − z0dz = 0 (γ nullhomotop in C/{z0})
S′′ ∶= {z ∈ S′∣z ∈ Bild(Φ)}
⇒ ∑z∈S
2πiRes(f, z)ν(γ, z) = ∑z∈S′
2πiRes(f, z)ν(γ, z)
= ∑z∈S′′
2πiRes(f, z)ν(γ, z) (falls definiert)
c) Zeige: S′′ ist endlich. Dann ist die Summe ∑z∈S′′ . . . definiert.
Φ ∶ [0,1] × [0,1]´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
kompakt
→ C ist stetig ⇒ Bild(Φ) ist kompakt
Annahme: S′′ ist unendlich. Wir wissen: S′′ ⊆ Bild(Φ)
⇒S′′ hat Häufungspunkt in Bild(Φ)
⇔∃(zn)n∈N in S′′ ∶ zn → z0 ∈ Bild(Φ) ∧ ∀n ∈ N ∶ zn ≠ z0
65

6. Integrale längs geschlossener Kurven
In zn hat f eine nicht hebbare Singularität, damit folgt nach 6.8
∣f(z)∣ unbeschränkt für z → zn
⇒∃z′n ∈ O/S ∶ ∣zn − z′n∣ <1
n∧ ∣f(z′n)∣ > n
⇒⎧⎪⎪⎨⎪⎪⎩
z′n → z0
∣f(z′n)∣→∞6.8⇒ f hat in z0 eine isolierte Singularität
⇒ Widerspruch zu zn → z0, f hat in zn Singularität
Also ist die Annahme falsch, d. h. S′′ ist endlich.
Schritt 2: Sei S′′ = {z1, . . . , zn} und Hj der Hauptteil der Laurent-Entwicklung von f inzj (j = 1, . . . , n). Setze
g(z) ∶= f(z) −n
∑j=1
Hj(z)´¹¹¹¹¸¹¹¹¹¹¶definiert
für z∈C/{zj}
⇒g hat in z1, . . . , zn hebbare Singularitäten.
Setze g zu einer auch in z1, . . . , zn holomorphen Funktion g fort.
⇒∫γg(z)dz = 0, da g in jedem Punkt z ∈ Bild(Φ) holomorph ist
0 = ∫γg(z)dz = ∫
γf(z)dz −
n
∑j=1∫γHj(z)dz
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶6.12= 2πia(j)
−1 ν(γ,zj)6.13= 2πiRes(f,zj)ν(γ,zj)
⇒∫γf(z)dz =
n
∑j=1
2πiRes(f, zj)ν(γ, zj)
6.16 Residuenberechnung:
1. Falls f in z0 einen Pol der Ordnung K hat:
66

Fall K = 1:
f(z) =∞∑k=−1
ak(z − z0)k
⇒ (z − z0)f(z) =∞∑k=−1
ak(z − z0)k+1
⇒ limz→z0
(z − z0)f(z) = a−1 = Res(f, z0)
Fall K ∈ N/{1}:
Res(f, z0) = limz−z0
1
(K − 1)!dK−1
dzK−1((z − z0)Kf(z))
Beweis über Laurent-Reihe entsprechend dem Fall K = 1.
2. Falls f = gh , h hat in z0 eine Nullstelle 1. Ordnung und g(z0) ≠ 0. Dann ist
ϕ(z) ∶=
⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
h(z) −
=0h(z0)
z − z0z ≠ z0
h′(z0) z = z0
holomorph bei z0.
⇒ f(z) = g(z)(z − z0)ϕ(z)
= 1
z − z0
g(z)ϕ(z)²
holomorph, da ϕ(z0)≠0
f hat in z0 eine Polstelle 1. Ordnung
⇒ Res(f, z0) = limz→z0
(z − z0)f(z) =g(z0)h′(z0)
6.17 Beispiel:
67

6. Integrale längs geschlossener Kurven
1.
f(z) = eiz
1 + z2= eiz
(z + i)(z − i)
6.16, 2.⇒ Res(f, i) = eiz
2z∣z=i
= e−1
2i= − i
2e
Res(f,−i) = eiz
2z∣z=−i
= e1
−2i= ie
2
2.
f(z) = eiz
(1 + z2)2= eiz
(z + i)2(z − i)2
f hat Polstellen 2. Ordnung in z = ±i.
6.16, 2.⇒ Res(f, i) K=2= 1
1!limz→i
ddz
eiz
(z + i)2= limz→i
ieiz(z + i)2 − eiz2(z + i)(z + i)4
= ie−1(2i)2 − e−12(2i)(2i)4
= −4e−1
−8i= − i
2e
Anwendung:
Re
Im
z = −i
z = i
−R R
γ1
γ2
γ
Es gilt:
∫γf(z)dz = ∫
γ1f(z)dz + ∫
γ2f(z)dz
Die Voraussetzungen für die Anwendung des Residuensatzes sind erfüllt: O ∶= C, S ={−i, i}, γ ist nullhomotop in C, für R > 1 gilt Bild(γ) ∩ S = ∅. Somit folgt aus dem
68

Residuensatz:
∫γf(z)dz = 2πiRes(f, i)
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=− i
2e
ν(γ, i)´¹¹¹¹¹¸¹¹¹¹¹¹¶
=1
+2πiRes(f,−i)ν(γ,−i)´¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¶
=0
= πeunabhängig von R > 1
γ1 ∶ [−R,R]→ C ∶ t↦ t
⇒ ∫γ1f(z)dz = ∫
R
−Rf(t)±
=f(γ1(t))
⋅ 1®
=γ′1(t)
dt = ∫R
−R
eit
(1 + t2)2dt = ∫
R
−R
cos t
(1 + t2)2dt + i∫
R
−R
sin t
(1 + t2)2dt
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=0
Dies ist ein reelles Integral. Zeige: ∫γ2 f(z)dz → 0 für R →∞.
∣ei(x+iy)∣∣1 + z2∣2
=
=1«∣eix∣ ⋅
≤1¬∣e−y ∣
∣1 + z2∣2²
∆-Ungl.n. u.≥ (∣z2∣−1)2
≤ 1
(R2 − 1)2für x + iy ∈ Bild(γ2)
⇒ ∣∫γ2f(z)dz∣ ≤ max
z∈Bild(γ2)∣ eiz
(1 + z2)2∣L(γ2) ≤
πR
(R2 − 1)2→ 0 für R →∞
R→∞⇒ π
e= limR→∞∫
R
−R
cos t
(1 + t2)2dt = ∫
∞
−∞
cos t
(1 + t2)2dt, denn ∫
∞
−∞
cos t
(1 + t2)2dt konvergiert:
∣ cos t
(1 + t2)2∣ ≤ 1
1 + t2, ∫
∞
−∞
1
1 + t2dt konvergiert (Vergleichskriterium für uneigentliche Integrale).
6.18 Definition:Sei G ⊆ C ein Gebiet. Ein geschlossener Weg γ in C berandet G, falls
∀z ∈ G ∶ ν(γ, z) = 1 ∧ ∀z ∈ C/G ∶ ν(γ, z) = 0.
6.19 Beispiel:BR(0) wird berandet von γR ∶ t↦ Re2πit. BR(0) wird nicht berandet von γR,N ∶ t↦ Re2πiNt,falls N ∈ N, N ≥ 2.
6.20 Definition:Sei O ⊆ C offen. Ist f holomorph in O/S, wobei
∀z ∈ S ∶ f hat einen Pol in z,
so heißt f meromorph in O.
69

6. Integrale längs geschlossener Kurven
6.21 Null- und Polstellen zählendes Integral I:Sei f meromorph in O, G ⊆ O ein Gebiet mit G ⊆ O, γ ein nullhomotoper Weg in O, der Gberandet und auf keine Null- oder Polstelle von f trifft. Dann gilt
1
2πi ∫γf ′(z)f(z)
dz = NG − PG,
wobei NG die Anzahl der Nullstellen und PG die Anzahl der Polstellen von f in G, jeweilsmit Ordnung gezählt, bezeichnet.
Beweis. Definiere S ∶= {z ∈ O∣z ist Null- oder Polstelle von f}. Dann besteht S nur ausisolierten Punkten (siehe 5.11 bzw. Definition einer Polstelle 6.4).
g ∶= f′
f⇒ g ist holomorph in O/S
Für z0 ∈ S gilt:
f(z) = (z − z0)Kh(z), h ist holomorph für 0 < ∣z − z0∣ < ε, h(z0) ≠ 0
K > 0 ∶ f hat in z0 eine Nullstelle der Ordnung K
K < 0 ∶ f hat in z0 eine Polstelle der Ordnung −K
⇒ g(z) = K(z − z0)K−1h(z) + (z − z0)Kh′(z)(z − z0)Kh(z)
= K
z − z0+ h′(z)
h(z)²
holomorph, evtlε verkleinern
für 0 < ∣z − z0∣ < ε
⇒ g hat in z0 eine Polstelle 1. Ordnung
⇒ Res(g, z0) = limz→z0
(z − z0)g(z) =K
Residuen-satzÔ⇒ ∫
γg(z)dz = ∑
z∈S2πiRes(g, z)ν(γ, z)
´¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¶
=⎧⎪⎪⎪⎨⎪⎪⎪⎩
0 z ∉ G
1 z ∈ G
= ∑z∈S∩G
2πiRes(g, z)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
=⎧⎪⎪⎪⎨⎪⎪⎪⎩
K z ist Nullstelle der Ordnung K
−K z ist Polstelle der Ordnung K
6.22 Beispiel:f(z) = (z−2)(z−3)
(z−1)2
70

Re
Im
1 2 3
γ1 γ2 γ3
γ4
⇒ 1
2πi ∫γjf(z)dz =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
−2 j = 1
1 j = 2,3
0 j = 4
6.23 Null- und Polstellen zählendes Integral II:Es seien die Voraussetzungen von 6.21 erfüllt. Dann gilt:
NG − PG = ν(f ○ γ,0)
Beweis.
2πi(NG − PG)6.21= ∫
γ
f ′(z)f(z)
dzDef. ∫= ∫
1
0
f ′(γ(t))f(γ(t))
γ′(t)dt = ∫1
0
1
(f ○ γ)(t) − 0(f ○ γ)′(t)
Def. ∫= ∫f○γ
1
z − 0dz = 2πiν(f ○ γ,0)
6.24 Satz von Rouché:Seien f, g holomorph in O, G ⊆ O ein Gebiet mit G ⊆ O, γ ein nullhomotoper Weg in O, derG berandet. Gilt
∀z ∈ Bild(γ) ∶ ∣g(z)∣ < ∣f(z)∣,
dann haben f und f + g in G gleich viele Nullstellen (mit Vielfachheit gezählt).
Beweis. Aus 6.23 folgt:
NG(f) = ν(f ○ γ,0), da PG = 0
NG(f + g) = ν((f + g) ○ γ,0)
71

6. Integrale längs geschlossener Kurven
Zeige: f ○ γ ∼ (f + g) ○ γ in C. Dann folgt:
NG(f) =1
2πi ∫f○γ1
zdz = 1
2πi ∫(f+g)○γ
1
zdz = NG(f + g)
Setze Φ(t, s) ∶= (f ○ γ)(t) + s(g ○ γ)(t).
⇒
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
Φ ist Homotopie zwischen f ○ γ und (f + g) ○ γ
Bild(Φ) ⊆ C/{0}, denn
∣Φ(t, s)∣∆-Ungl.n. u.≥ ∣(f ○ γ)(t)∣ − s∣(g ○ γ)(t)∣
s≤1≥ ∣f(γ(t))∣ − ∣g(γ(t))∣ > 0
6.25 Fundamentalsatz der Algebra:Sei
p(z) = zn¯
=∶f(z)
+n−1
∑k=0
akzk
´¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¶=∶g(z)
.
Wähle (R ∶= ∑n−1k=0 ∣ak∣)+ 1, G ∶= BR(0), O ∶= C, γ(t) = Re2πit für 0 ≤ t ≤ 1. Daraus folgt für
z ∈ Bild(γ) bzw. ∣z∣ = R:
∣g(z)∣∆Ungl.≤
n−1
∑k=0
∣ak∣ ∣zk∣°
=Rk≤Rn−1
≤ Rn−1n−1
∑k=0
∣ak∣
´¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¶<R
< Rn = ∣f(z)∣
Mit dem Satz von Rouché folgt: p = f + g hat in G gleich viele Nullstellen wie f . Daf in z0 = 0 eine Nullstelle der Vielfachheit n besitzt, hat p in G genau n Nullstellen (mitVielfachheit gezählt). Die Rechnung für ∣g(z)∣ < ∣f(z)∣ zeigt:
∣z∣ ≤ R⇒ ∣g(z)∣ < ∣f(z)∣
⇒ ∣p(z)∣∆-Ungl.n. u.≥ ∣∣f(z)∣ − ∣g(z)∣∣ > 0
⇒ Außerhalb von G hat p keine Nullstellen.
72

7. Analytische Fortsetzung
7.1 Beispiel:f(z) =
∞∑k=0
(−z2)k für ∣z∣ < 1 ist holomorph, f(z) = 11+z2 .
Entwickle f um z1 = −12 in eine Potenzreihe
⇒ f1(z) =∞∑k=0
ak(z +1
2)k für ∣z + 1
2∣ <
√5
4
Entwickle f1 um z2 = −32
⇒ f2(z) =∞∑k=0
fk(z +3
2)k für ∣z + 3
2∣ <
√13
4
f1, f2 sind analytische Fortsetzungen von f .
Re
Im
z0 = 0z1 = −12
z2 = −32
z = i
z = −i
√54
√134
7.2 Definition:Ein Tupel B = (B0, ...,Bn) offener Kreisscheiben Bj = Brj(zj) heißt Kreiskette, falls
zj ∈ Bj−1 ∧ fj ∣Bj∩Bj−1 = fj−1∣Bj∩Bj−1 für j = 1, . . . , n.
73

7. Analytische Fortsetzung
Sind fj ∶ Bj → C holomorph mit
fj ∣Bj∩Bj−1 = fj−1∣Bj∩Bj−1 für j = 1, . . . , n
so heißt f0 analytisch fortsetzbar längs B, fn heißt analytische Fortsetzung von f0 längs B.
7.3 Bemerkung: 1. Identitätssatz ⇒ f1 eindeutig ⇒ ... ⇒ fn eindeutig.
2. Frage: B = (B0, ...,Bn), B = (B0, ..., Bn) zwei verschiedene Kreisketten mit B0 = B0,Bn = Bn und fn, fn analytische Fortsetzungen längs B bzw. B. Gilt dann fn = fn?Antwort: i. A. nein
7.4 Beispiel:Erinnerung: argϕ0
(z) ∈ ]ϕ0 − π,ϕ0 + π[
zj ∶= eiπj4 ; Bj = B1(z0); j = 0, ...,4
zj ∶= e−iπj4 ; Bj = B1(z0); j = 0, ...,4
Im
Rez0 = z0
z1
z2
z3
z4 = z4
z3
z2
z1
B0 = B0
B1B3
B4 = B4
(B0,...,B4)
(B0,...,B4)
sind Kreisketten
74

f(z) = ∣z∣12 ei 1
2arg0(z)(=
√z holomorph in C/] −∞,0])
f0(z) = f(z) für z ∈ B0
⇒ f1(z) = f(z) in B1, f2(z) = g(z) in B2
g(z) ∶ = ∣z∣12 ei 1
2argπ(z) holomorph in C/[0,∞[
⇒ g(z)∣{z∈C∶Im(z)>0} = f ∣{z∈C∶Im(z)>0}
⇒ f3(z) = g(z) für z ∈ B3
⇒ f4(z) = g(z) für z ∈ B4
f4 ist die analytische Fortsetzung längs (B0,...,B4)
f0 = f0 = f in B1, f2 = f in B2
h(z) = ∣z∣12 ei 1
2(argπ(z)−2π) für z ∈ C/[0,∞[
⇒ h∣U = f ∣U für U = {z ∈ C ∶ Im(z) < 0}
f3 = h in B3, f4 = h in B4
f4 ist die analytische Fortsetzung längs (B0,...,B4)Es gilt
f4(z) = ∣z∣12 ei 1
2argπ(z) e−iπ
°=−1
= −f4(z)
⇒ f4 ≠ f4.
7.5 Definition:Sei γ ∈ C([t0, t1] → C). Eine Kreiskette B = (B0,...,Bn), n ∈ N verläuft längs γ, falls eineUnterteilung τ = t0 < τ1 <...< τn = t1 existiert, so dass
γ(τj) = Mittelpunkt von Bj , j = 0,...,nγ([τj−1, τj]) ⊆ Bj−1 ∩Bj , j = 1...,n
(Die zweite Bedingung verändert das folgende Szenario)
75

7. Analytische Fortsetzung
B0
γ
B1
7.6 Beispiel:(B0,...,B4) aus 7.4 verläuft längs γ mit γ(t) = eiπt, 0 ≤ t ≤ 1
(B0,...,B4) aus 7.4 verläuft längs γ mit γ(t) = e−iπt, 0 ≤ t ≤ 1.
7.7 Satz:Seien γ ∈ C([t0, t1]→ C), B, B′ offene Kreisscheiben um γ(t0) bzw. γ(t1),f ∶ B → C holomorph, g, g ∶ B′ → C holomorph, wobei g, g analytische Fortsetzungen von flängs Kreisketten, die längs γ verlaufen, sind. Dann g = g.
B B’γ(t0) γ(t1)
γ
Beweis. 1. Sei τ = t0 < τ1 < ... < τn = t1 die Unterteilung zur Kreiskette B = {B0, . . . ,Bn},B0 = B, Bn = B′ zur Fortsetzung g von f . Seien weiter f0 = f, f1, . . . , fn = g die Fort-setzungsfunktionen. Für t ∈ [τj−1, τj] sei
Pt(z) ∶=∞∑k=0
ak(t)(z − γ(t))k für z ∈ Br(t)(γ(t))
die Entwicklung von fj−1 um γ(t).
fj = fj−1 in Bj ∩Bj−1 ⊇ τ([τj−1, τj])
⇒ Pt ist auch die Entwicklung von fj um γ(t)
⇒⎧⎪⎪⎪⎨⎪⎪⎪⎩
keine doppelte Definition von Pt bei t = τjPt ist Entwicklung von fj um γ(t) für t ∈ [τj−1, τj+1]
2. γ stetig ⇒ Für festes t ∈ [t0, t1] ∶
76

∃δ > 0 ∶ ∣γ(t′) − γ(t)∣ < r(t)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
γ(t′)∈Br(t)(γ(t))
für ∣t′ − t∣ < δ, t, t′ ∈ [t0, t1]
Wähle δ so klein, dass t, t′ im selben Intervall [τj−1, τj+1]⇒ Für ∣t′ − t∣ < δ erhält man Pt′ auch durch Entwicklung von Pt (da fj ∣Br(t)(γ(t)) = Pt)um γ(t′) (d.h. lokale Verträglichkeit der Familie (Pt)t∈[t0,t1])Genauso: Familie (Pt)t∈[t0,t1] für die andere Kreiskette zur Unterteilungσ0 = t0 < σ1 < ... < σn = t1
3. M ∶= {t ∈ [t0, t1] ∶ Pt′ = Pt′ für 0 ≤ t′ ≤ t}Zeige:
a) M ≠ ∅
b) M ist relativ offen (M ist Schnitt einer offenen Menge mit [t0, t1]).
c) M ist relativ abgeschlossen (d.h. Schnitt einer abgeschlossenen Menge mit [t0, t1]).
Dann folgt mit [t0, t1] zusammenhängend, dass M = [t0, t1] (Einfache Topologie)
a) γ(min{σ1, τ1}) ⊆ B ⇒ [t0,min{σ1, τ1}]´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
(*)
⊆M
(*) in diesem Intervall sind Pt, Pt die Entwicklungen von f
b) s ∈M ⇒ Ps = Ps mit r(s) = r(s) (Konvergenzradius)lokale⇒
VerträglichkeitPt = Pt solange γ(t) ∈Kr(s)(γ(s))
Wähle δ > 0 so, dass ∣γ(t) − γ(s)∣ < r(s) für ∣t − s∣ < δ
⇒]s − δ, s + δ[∩[t0, t1] ⊆M
⇒M relativ offen.
c) Sei (sn) Folge in M , sn → s, sn ≠ s für n ∈ N
77

7. Analytische Fortsetzung
⇒ s ∈ [t0, t1] ∧ ∃j, k ∶ s ∈]τj−1, τj+1[∩]σk−1, σk+1[
⇒ ∃N0 ∈ N∀n > N0 ∶ sn ∈]τj−1, τj+1[∩]σk−1, σk+1[
lokale⇒Verträglichkeit
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Ps ist Entwicklung von PsN0+1
Ps ist Entwicklung von PsN0+1
sN0+1∈M
⇒ Ps = Ps
⇒ s ∈M , also M abgeschlossen.
7.8 Definition:γ ∈ C([t0, t1] → C, B,B′ offene Kreisscheiben von γ(t0) beziehungsweise γ(t1), f ∶ B → Cholomorph, g ∶ B′ → C holomorph.Dann heißt g analytische Fortsetzung von f längs γ, falls eine Kreiskette B existiert, die längsγ verläuft, so dass g analytische Fortsetzung längs B ist. (7.7 ⇒ Wohldefiniertheit von g)
7.9 Beispiel:N ∈ N, N ≥ 2, f(z) = ∣z∣
1N e
iarg0(z)N ,
B = B1(1) = B′, γ(t) = ei2πt, 0 ≤ t ≤ N ,
τj = j8 , Bj = B1(γ(τj)), j = 0,...,8N .
Im
Reγ
γ(τ1)γ(τ3)
B1 = B9 =...= B8N−7
B = B’= B0 = B8 = B16 =...= B8N
B3
f ist holomorph in C/] −∞,0]⇒ f1 = f ∣B1 ∧ f2 = f ∣B2
78

g ∶= ∣z∣1N e
iargπ(z)
N
⇒ g holomorph in C/[0,∞[, g∣σ = f ∣σ für σ = {z ∈ C ∶ Im(z) > 0}
⇒ fj = g∣Bj , j = 3,4,5,6
h ∶= fei2πN ⇒
⎧⎪⎪⎪⎨⎪⎪⎪⎩
h holomorph in C/] −∞,0]
h∣U = g∣U , U = {z ∈ C ∶ Im(z) < 0}⇒ fj = h∣Bj , j = 7,8,9,10
Beachte: B8 = B0, aber analytische Fortsetzung
f8 ≠ f0
f16 = ei2⋅2πN
⋮
f8N = f0
7.10 Umparametrisierung:γ ∈ C([t0, t1] → C), f1 analytische Fortsetzung von f0 längs γ, ϕ ∈ C([s0, s1] → [t0, t1])streng monoton wachsend mit ϕ(s0) = t0 ∧ϕ(s1) = t1. Dann ist f1 auch analytische Fortset-zung von f0 längs γ ∶= γ ○ ϕ. Insbesondere kann s0 = 0, s1 = 1 gewählt werden.
Beweis. Verwende dieselbe Kreiskette (längs γ) als Unterteilungen σj ∶= ϕ−1(τj).
7.11 Monodromiesatz:Seien γ, γ ∈ C([0,1] → C) mit γ(0) = γ(0) ∧ γ(1) = γ(1), φ stetige Homotopie zwischen γund γ, d.h.
φ ∈ C([0,1] × [0,1]→ C)
φ(⋅,0) = γ ∧ φ(⋅,1) = γ
φ(0, s) = γ(0) ∧ φ(1, s) = γ(1) für 0 ≤ s ≤ 1
γ(1) = γ(1)
γ(0) = γ(0)
φ(., 23)
φ(., 13)
γ γ
Ist f0 holomorph in einer offenen Kreisscheibe Kr(γ(0)) und lässt sich f0 längs jedes Weges
79

7. Analytische Fortsetzung
γs ∶= φ(⋅, s) ∶ t ↦ φ(t, s) analytisch fortsetzen (0 ≤ s ≤ 1), so stimmen die Fortsetzungenlängs γ und γ überein.
Beweis. ähnlich wie 7.7M ∶= {s ∈ [0,1] ∶ Fortsetzung längs γ1 = Fortsetzung längs γs = γ}Zeige:
M ≠ ∅
M relativ offen in [0,1]
M relativ abgeschlossen in [0,1]
⇒M = [0,1]
7.12 Definition:Ein Gebiet heißt einfach zusammenhängend, falls jeder geschlossene Weg γ ∈ C([0,1]→ G) inG stetig nullhomotop ist, d.h. eine stetige Homotopie zwischen γ und einem konstanten Wegexistiert. Oder äquivalent, falls zu je zwei γ, γ ∈ C([0,1]→ G) mit γ(0) = γ(0), γ(1) = γ(1)eine Homotopie φ ∈ C([0,1] × [0,1]→ G) existiert.
7.13 Folgerung:G ⊆ C einfach zusammenhängend, f0 holomorph in Kr(z0) ⊆ G. Lässt sich f0 längs jedesWeges γ ∈ C([0,1]→ G) mit γ(0) = z0 analytisch fortsetzen (z0 ∈ G fest), dann gibt es eineeindeutige holomorphe Fortsetzung von f0 auf G, d.h.:
∃!f ∶ G→ C holomorph ∶ f ∣Kr(z0) = f0
Beweis. (Skizze)
1. Zu z1 ∈ G wähle Weg γ von z0 nach z1.Setze f(z1) ∶= Fortsetzung längs γ in z1
Monodromiesatz ⇒⎧⎪⎪⎪⎨⎪⎪⎪⎩
Wohldefiniertheit
Eindeutigkeit
2. Zeige: Die so definierte Funktion ist holomorph.
80
7.14 Beispiel:f0 = ∣z∣
1N ei 1
Narg0(z) in K1(2 + 2i), G = C/[0,∞[
⇒ f(z) = ∣z∣1N e
iargπ(z)
N
G ∶= {z ∈ C ∶ z ≠ it für t ≥ 0}
⇒ f(z) = ∣z∣1N e
iarg3π/2(z)
N
Re
Im
Kr(z0)
z0
81


Teil II.
Differentialgleichungen
83


1. Einführung
1.1 Beispiel: Teetasse:Problem:
In diesem Beispiel soll die Teetemperatur x einer Tasse im Laufe der Zeit t betrachtet werden.Die Außentemperatur xU sei bekannt, dann ergibt sich folgendes Problem: Die Änderung derTemperatur hängt davon ab, wie viel heißer der Tee als die Umgebung ist:
x(t) ∶= dxdt
(t)∝ (x(t) − xU)
Es wird zur Beschreibung der Situation also nun die folgende Differentialgleichung (Def. folgt)aufgestellt:
x(t) = −b (x(t) − xU) für ein b ∈ R
Allgemeine Lösung:Allgemein kann diese Gleichung durch einen exponentiellen Abfall der Temperatur gelöstwerden:
x(t) = c ⋅ e−α⋅t + xU
Setzt man diese Funktion in die Differentialgleichung ein, so ergibt sich auf der linken Seite:
x(t) = c ⋅ e−αt ⋅ (−α)
85

1. Einführung
Auf der rechten Seite steht dann
−b (x(t) − xU) = −b ⋅ (c ⋅ e−αt + xU − xU)
= (c ⋅ e−αt) ⋅ (−b)
Wir erkennen, dass jede Funktion mit α = b unsere Differentialgleichung löst. Anfangswert-problem:Leider ist
x(t) = c ⋅ e−b⋅t
immer noch keine eindeutige Lösung unseres Teeproblems, die Konstanten b und c bleibenunbekannt. Um diese zu bestimmen ist nun weiteres Geheimwissen über den Tee notwendig,so kann zum Beispiel c aus der Anfangstemperatur x0 ∶= x(t = 0) bestimmt werden.
x0 ∶ = x(t = 0) (1.1)
= c ⋅ e−b⋅0 (1.2)
= c ⋅ 1 (1.3)
In der Lösung bleibt jetzt lediglich die Unbekannte b zurück, sie bestimmt wie schnell dieTemperatur sinkt und kann zum Beispiel aus x1 = x(0) bestimmt werden.
t
x
x = x(t)
x0
xU
1.2 Definition:
1. Sei n ∈ N, F ∶ Rn+2 ⊇D → R. Die Gleichung
F (y(n)(x), y(n−1)(x), . . . , y′(x), y(x), x) = 0 (1.4)
für die unbekannte Funktion y heißt gewöhnliche Differentialgleichung n-ter Ordnung.
86

Ist (1.4) nach y(n)(x) auflösbar, so heißt
y(n)(x) = f(y(n−1)(x), . . . , y(x), x) (1.5)
explizite Differentialgleichung n-ter Ordnung.
2. Existiert ein Intervall ]a, b[ und y ∈ Cn(]a, b[→ R), so dass (1.4) oder (1.5) für x ∈]a, b[erfüllt ist, so heißt y Lösung.
1.3 Bemerkung:
1. „Gewöhnlich“ bedeutet: In der Gleichung kommen keine partiellen Ableitungen vor, yhängt nur von einer skalaren Variable ab.
2. Differentialgleichungen haben i. A. unendlich viele Lösungen. Eindeutig wird die Lösungdurch eine Anfangsbedingung.
87


2. Einige Lösungsmethoden
Kamke: „Mit gesundem Menschenverstand kommt man ziemlich weit.“
2.1 Integrieren:Ist y′(x) = f(x), x ∈]a, b[, x0 ∈]a, b[, so gilt:
y(x) = ∫x
x0f(t)dt + c mit einem c ∈ R
Falls f stetig ist, folgt aus dem Hauptsatz der Differential- und Integralrechnung, dass diesalle Lösungen sind.
2.2 Trennung der Variablen:Gegeben sei die Differentialgleichung
y′(x) = f(y(x)) ⋅ g(x)
oder kurz y′ = f(y) ⋅ g(x). Die Variablen x und y sind hierbei in getrennten Funktionen,welche multipliziert werden (z. B. y′ = 2x cos y, aber nicht y′ = 2x + cos y).
1. Spezielle Lösungen: Betrachte die Nullstellen von f . Für η ∈ {y∣f(y) = 0} ist diekonstante Funktion y(x) = η eine Lösung.
2. Allgemeine Lösungen: Betrachte y mit y(x) ∈ {y∣f(y) = 0}. Dann folgt:
y′(x) = f(y(x)) ⋅ g(x)
⇔ y′(x)f(y(x))
= g(x)
falls allesstetig⇐⇒ ∫
y′(x)f(y(x))
dx
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶u=y(x)
dudx =y
′(x)= ∫ 1
f(u)du∣
u=y(x)
H Stammfktvon f= H(y(x))+d
= ∫ g(x)dxG Stammfkt
von g= G(x) + c
89

2. Einige Lösungsmethoden
(Kurz: ∫dydx
f(y(x))dx = ∫dyf(y))
⇔ H(y(x)) = G(x) + c − d±=∶C
Da H ′(y) = 1f(y) ≠ 0 ist H zumindest lokal streng monoton, also invertierbar
⇔ y(x) =H−1(G(x) +C) für ein C ∈ R
Die Lösungsmethode für y′ = f(y) ⋅ g(x) ist also:
1. ∀η ∶ f(η) = 0⇔ y(x) = η ist Lösung
2. Sei f(y) ≠ 0. Aus dydx = f(y) ⋅ g(x) folgt in symbolischer Schreibweise
1
f(y)dy = g(x)dx,
dann rechne man die Integrale
∫1
f(y)dy = ∫ g(x)dx
aus und löse nach y auf.
2.3 Beispiel: 1. y′ = −x¯g(x)
⋅ y2
®f(y)
a) Spezielle Lösungen: f(y) = 0⇔ y = 0, somit ist y(x) = 0 eine Lösung.
b) Sei y ≠ 0.
dydx
= −xy2
⇔∫dyy2
= ∫ −xdx
⇔ −1
y= −x
2
2+ c (eine Konstante reicht aus)
⇔ y(x) = 1x2
2 + c= 2
x2 − 2c= 2
x2 + d, d ∈ R
90

x
y
d = 1d = 0,
x < 0
d = 0,
x > 0
d = −4,
x < −2
d = −4,
−2 < x < 2
d = −4,
x > 2
y = 0
• Dies sind die Graphen von sieben verschiedenen Lösungen, denn eine Lösungmuss auf einem Intervall definiert sein.
• Durch jeden Punkt (x, y) ∈ R2 geht genau eine Lösung.
• Manche Lösungen sind global, d. h. mit Definitionsbereich R, manche sindlokal, d. h. mit Definitionsbereich ]a, b[⊊ R.
2. y′ = cos2 y = cos2 y²f(y)
⋅ 1®g(x)
a) Spezielle Lösungen: f(y) = 0 ⇔ y = π2 + kπ, k ∈ Z, also gibt es abzählbar viele
Lösungen:y(x) = π
2+ kπ für jedes k ∈ Z
b) Sei y ≠ π2 + kπ für alle k ∈ Z.
dydx
= cos2 y
⇔∫dy
cos2 y= ∫ dx
⇔ tan y = x + c
⇔ y(x) = arctan(x + c) + kπ mit c ∈ R, k ∈ Z
91

2. Einige Lösungsmethoden
x
y
k = 1c = 0, k = 1
k = 0c = 1, k = 0 c = 0, k = 0
k = −1c = 0, k = −1
k = −2
Gesamte Lösungsvielfalt:
⎧⎪⎪⎪⎨⎪⎪⎪⎩
y(x) = π2+ kπ, k ∈ Z
y(x) = arctan(x + c)kπ, c ∈ R, k ∈ Z
• Durch jeden Punkt (x, y) ∈ R2 geht genau eine Lösung.
• Alle Lösungen sind global.
2.4 Beobachtung:Ist y ∈ C1(]a, b[→ R) eine lokale Auflösung von
h(x, y(x)) = konst. (2.1)
und ist h differenzierbar, so folgt:
ddxh(x, y(x))
Ketten-regel= ∂xh(x, y(x)) + ∂yh(x, y(x))y′(x) = 0
Somit ist y Lösung der impliziten Differentialgleichung
∂xh(x, y) + ∂yh(x, y)y′ = 0. (2.2)
Ist umgekehrt y ∈ C1(]a, b[→ R) Lösung von (2.2), so folgt (2.1) für x ∈]a, b[, d. h. Auflösungvon (2.1) liefert alle Lösungen der Differentialgleichung (2.2).
2.5 Definition:
92

Sei D(h) ⊆ R2 offen, h ∈ C1(D(h)→ R). Dann heißt
∂xh(x, y(x)) + ∂yh(x, y(x))y′(x) = 0
exakte Differentialgleichung in D(h).
2.6 Satz:Sei G ⊆ R2 ein einfach zusammenhängendes Gebiet und f, g ∈ C1(G → R). Dann ist dieDifferentialgleichung
f(x, y) + g(x, y)y′ = 0
genau dann exakt, wenn∂yf(x, y) = ∂xg(x, y) in G. (2.3)
Beweis. (2.3) ist notwendig, „⇒“:
Differentialgleichung exakt
⇒∃h ∈ C1(G→ R) ∶ ∂xh = f ∧ ∂yh = gf,g∈C1
⇒ h ∈ C2(G→ R)
⇒∂yf = ∂y∂xhSatz vonSchwarz= ∂x∂yh = ∂xg
⇒ (2.3)
(2.3) ist hinreichend, „⇐“: Setze F ∶=⎛⎝f
g
⎞⎠=⎛⎝F1
F2
⎞⎠.
∂yF1 = ∂xF2
G einfach zus. Gebiet
F ∈ C1(G→ R2)
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭
(später)⇒ F besitzt in G ein Potential h, d. h.
h ∈ C2(G→ R) ∧ F = ∇h =⎛⎝∂xh
∂yh
⎞⎠
in G
⇒f = ∂xh, g = ∂yh⇒ Differentialgleichung ist exakt
2.7 Beispiel: 1. 2x + yexy´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶f(x,y)
+ xexy±g(x,y)
y′ = 0
93

2. Einige Lösungsmethoden
a) Ist die Differentialgleichung exakt?
∂yf = 1 ⋅ exy + yexy ⋅ x
∂xg = 1 ⋅ exy + xexy ⋅ y = ∂yf
⇒ Differentialgleichung exakt
b) Finde h:
f(x, y) = ∂xh(x, y)
⇒ h(x, y) = ∫ f(x, y)dx = ∫ (2x + yexy)dx = x2 + exy + c(y)
g(x, y) = ∂yh(x, y) =∂
∂y(x2 + exy + c(y)) = xexy + c′(y) != xexy
⇒ c′(y) = 0, also c(y) = konst.
Wähle h(x, y) = x2 + exy (h ist bis auf eine additive Konstante eindeutig).
c) Finde alle Lösungen der Differentialgleichung:
h(x, y) = c⇔ x2 + exy = c > 0
⇔ exy = c − x2
⇔ xy = ln(c − x2) für x2 < c
⇔ x = 0 ∨ y = 1
xln(c − x2)
d) Die Differentialgleichung hat nur Sinn, falls y = y(x). Alle Lösungen der Diffe-rentialgleichung sind somit von der Form y(x) = 1
x ln(c − x2) für x2 < c undc > 0.
e) Überprüfe: (x0, y0) ∈ R2. Gibt es eine Lösung mit y(x0) = y0?
1
x0ln(c − x2
0) = y0 ⇔ c = x20 + ex0y0
Also wurden alle Lösungen gefunden (siehe später). Ergänzung: Für x = 0 ergibtdie Differentialgleichung y(0) = 0, somit gibt es keine Lösung für x0 = 0, y0 ≠ 0.Für (x0, y0) = (0,0) ergibt sich c = 1, die Lösung
y(x) = 1
xln(1 − x2)´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶=∑∞k=1
x2k
k
94

ist in x = 0 stetig ergänzbar. Also geht durch jeden Punkt (x0, y0) ∈ R2/{(0, y)∣y ≠0} genau eine Lösung.
2. xy2 + y´¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¶f(x,y)
−x¯g(x,y)
y′ = 0
a)
∂yf = 2yx + 1
∂xg = −1 ≠ ∂yf
Die Differentialgleichung ist nicht exakt. Multipliziere mit 1y2
für y ≠ 0:
x + 1
y²f(x,y)
− xy2
±g(x,y)
y′ = 0
∂yf = − 1
y2
∂xg = −1
y2= ∂yf
Die neue Differentialgleichung ist exakt in G = {(x, y)∣y > 0} oder in G′ ={(x, y)∣y < 0}.
b) Suche h:
∂xhf = x + 1
y
⇒h(x, y) = x2
2+ xy+ c(y)
⇒ ∂yh = −x
y2+ c′(y) != − x
y2
⇒ c′(y) = 0, also c(y) = konst.
Wähle h(x, y) = x2
2 + xy .
95

2. Einige Lösungsmethoden
c)
h(x, y) = c⇔x2
2+ xy= c
⇔x
y= c − x
2
2falls x≠0,
∣x∣≠√
2c⇐⇒ y = x 1
c − x2
2
= 2x
2c − x2
d) Einsetzen in Differentialgleichung: y(x) = 2x2c−x2 ist auch bei x = 0 eine Lösung.
Zusätzlich ist die konstante Funktion y(x) = 0 eine Lösung.
2.8 Definition:Sei O ⊆ R2 offen, f, g ∈ C(O → R). Ist λ ∈ C(O → R), sodass die Differentialgleichung
λ(x, y)f(x, y) + λ(x, y)g(x, y)y′ = 0
exakt ist, so heißt λ integrierender Faktor zur Differentialgleichung f(x, y) + g(x, y)y′ = 0.
2.9 Bemerkung:Das Problem besteht darin, λ(x, y) zu finden. Tipp: Probiere zunächst λ(x) oder λ(y).
2.10 Ähnlichkeitsdifferentialgleichung:Gegeben sei die Differentialgleichung y = f( yx). Annahme: y ∈ C1(]a, b[→ R) ist Lösung derobigen Gleichung. Setze u(x) ∶= y(x)
x für x ≠ 0. Bestimme die Differentialgleichung für u:
u′(x) ∶= y′(x) ⋅ x − y(x) ⋅ 1
x2= 1
x
⎛⎜⎜⎜⎝
y′(x)²
=f(xy)=f(u)
− y(x)x
²=u
⎞⎟⎟⎟⎠
⇒ u ist eine Lösung der separierbaren Differentialgleichung
u′ = 1
x(f(u) − u)
Man verfährt also, indem man zunächst die Differentialgleichung für u löst und dann y(x) =x ⋅ u(x) einsetzt.
2.11 Beispiel:y′′ = f(x, y′, y) =
√1 + (y′)2
96

1. Setze u = y′ ⇒ u′ = y′′ =√
1 + (y′)2 =√
1 + u2.
u′ =√
1 + u2
´¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¶f(u)
⋅ 1®g(x)
(separierbar)
√1+u2≠0⇐⇒ ∫
1√1 + u2
du = ∫ 1dx
⇔ arsinhu = x + c
⇔ u = sinh(x + c), c ∈ R
2. Rücksubstitution: y′ = sinh(x + c)⇒ y(x) = cosh(x + c) + d.
x
y
c = 0,
d = 0
c = −2,
d = −0,5
Durch jeden Punkt (x0, y0) gehen unendlich viele Lösungen. Durch Vorgabe von y(x0) =y0 ∧ y′(x0) = y1 wird die Lösung eindeutig (Nachrechnen möglich).
97


3. Existenz und Eindeutigkeit
3.1 Satz (Picard 1890, Lindelöf 1894):Seien n ∈ N, x0 ∈ R, y0 ∈ Rn, a, b > 0 und f ∈ C(Q→ Rn), wobei
Q ∶= {(x, y) ∈ R ×Rn∣x0 − a ≤ x ≤ x0 + a ∧ ∥y − y0∥∞ ≤ b}
und f genüge einer Lipschitz-Bedingung:
∃L > 0 ∀(x, y), (x, y) ∈ Q ∶ ∥f(x, y) − f(x, y)∥∞ ≤ L∥y − y∥∞
Ferner seienK ∶= max
(x,y)∈Q∥f(x, y)∥∞ > 0, α ∶= min{a, b
K} .
Dann besitzt das Anfangswertproblem
y′ = f(x, y) ∧ y(x0) = y0 (3.1)
eine eindeutige Lösung y ∈ C1([x0 − α,x0 + α]→ Rn).
3.2 Bemerkung: 1. Im Fall n ≥ 2 heißt y′ = f(x, y) auch System von Differentialgleichungen.
2. Zur Veranschaulichung der Definition von α im Fall n = 1:
x
y
x
y
x0 − bK
x0 x0 + bK
x0 − a x0 x0 + a
y0 y0
y = y0 +K(x − x0)
y = y0 +K(x − x0)
Im schraffierten Bereich verläuft die Lösung, denn ∣y′(x)∣ = ∣f(x, y(x))∣ ≤K.
99

3. Existenz und Eindeutigkeit
3. Ist f ∈ C1(Q → Rn), so erfüllt f eine Lipschitz-Bedingung: Seien 1 ≤ k ≤ n, x ∈[x0 − a, x0 + a] fest.
∣fk(x, y) − fk(x, y)∣
MWS derDifferential-rechnung=
RRRRRRRRRRR
n
∑j=1
∂fk∂yj
(x, ηj)(yj − yj)RRRRRRRRRRR≤
n
∑j=1
RRRRRRRRRRR
∂fk∂yj
(x, ηj)RRRRRRRRRRR⋅ ∥y − y∥∞
≤ L∥y − y∥∞ mit L ∶= max(x,y)∈Q1≤k≤n
n
∑j=1
RRRRRRRRRRR
∂fk∂yj
(x, y)RRRRRRRRRRR
4. Eine Verallgemeinerung im Fall n = 1 ist der Satz von Peano (1986/90). Die Vor-aussetzungen sind wie in 3.1, aber ohne die Lipschitz-Bedingung. Dann besitzt (3.1)mindestens eine Lösung y ∈ C1([x0 − α,x0 + α] → R). Eindeutigkeit kann allerdingsnicht garantiert werden.
Beweis des Satzes von Picard-Lindelöf
Sei I ∶= [x0 − α,x0 + α].
1. Äquivalente Integralgleichung:
y ∈ C(I → Rn) ∧ y(x) = y0 + ∫x
x0f(t, y(t))dt für x ∈ I (3.2)
a) Sei y eine Lösung von (3.1). Dann folgen:
y ∈ C(I → Rn),
y(x) − y0(3.1)= y(x) − y(x0)
HauptsatzDiff.- und
Int.-Rechnung= ∫x
x0y′(t)dt
(3.1)= ∫x
x0f(t, y(t))dt
Somit löst y auch (3.2).
b) Sei y eine Lösung von (3.2), dann ist t↦ f(t, y(t)) stetig. Somit folgen
y′(x)
HauptsatzDiff.- und
Int.-Rechnung= 0 + f(x, y(x)), insbesondere y′ ∈ C(I → Rn),
y(x0) = y0 + 0
Also y ∈ C1(I → Rn) und y löst (3.1).
100

2. Anwendung des Banachschen Fixpunktsatzes: Setze
F (g)(x) ∶= y0 + ∫x
x0f(t, g(t))dt
g Fixpunkt ⇔ g = F (g)⇔ g(x) = y0 + ∫x
x0f(t, g(t))dt
a) Man definiert:
M ∶= {g ∈ C(I → Rn)∣maxx∈I
∥g(x) − y0∥∞ ≤ b}
∥g∥ ∶= maxx∈I
e−2L∣x−x0∣´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
≤1,≥e−2Lα
∥g(x)∥∞
⇒maxx∈I
∥g(x)∥∞e−2Lα ≤ ∥g∥ ≤ maxx∈I
∣∣g(x)∣∣∞
(M, ∥ ⋅ ∥) ist vollständig: Sei (gn) eine Cauchy-Folge in M .
⇒ gn → g ∈ C(I → Rn) gleichmäßig auf I
Für x ∈ I:
∥g(x) − y0∥∞ = limn→∞
∥gn(x) − y0∥∞´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
≤b
≤ b
gn → g gleichmäßig
⇒ ∥gn − g∥ ≤ maxx∈I
∥gn(x) − g(x)∥∞ → 0
⇒ gn∥⋅∥→ g ∈M
b) F ist wohldefiniert: Sei g ∈M . Zeige: F (g) ∈M .
g ∈M ⇒ g stetig ⇒ F (g) ∈ C(I → Rn)
Für x ∈ I:
∥F (g)(x) − y0∥∞Def. F= ∥∫
x
x0f(t, g(t))dt∥
∞≤ ∣∫
x
x0∥f(t, g(t))∥∞dt∣
≤ ∣x − x0∣ ⋅Kx∈I≤ αK ≤ b
Also liegt F (g) in M .
101

3. Existenz und Eindeutigkeit
c) F ∶M →M ist eine Kontraktion:
∥F (g)(x) − F (h)(x)∥∞Def. F= ∥∫
x
x0(f(t, g(t)) − f(t, h(t)))dt∥
∞
≤ ∣∫x
x0∥(f(t, g(t)) − f(t, h(t))∥∞´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
≤L∥g(t)−h(t)∥∞
dt∣
≤ ∣∫x
x0L ∥g(t) − h(t)∥∞e−2L∣t−x0∣
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶≤∥g−h∥
e2L∣t−x0∣dt∣
≤ L∥g − h∥ ∣∫x
x0e2L∣t−x0∣dt∣
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶= 12L
(e2L∣x−x0 ∣−1)< 12L
e2L∣x−x0 ∣
≤ 1
2e2L∣x−x0∣∥g − h∥
⇒ ∥F (g) − F (h)∥ = maxx∈I
e−2L∣x−x0∣∥F (g)(x) − F (h)(x)∥∞ ≤ 1
2∥g − h∥
Aus dem Banachschen Fixpunktsatz folgt:
∃!g ∈M ∶ F (g) = g
⇔ ∃!g ∈ C(I → Rn) ∶ ∥g(x) − y0∥∞ ≤ b ∧ g(x) = y0 + ∫x
x0f(t, g(t))dt
3.3 Satz:Seien −∞ < a < b <∞, x0 ∈]a, b[, y0 ∈ Rn, f ∈ C([a, b]×Rn → Rn) und f genüge in [a, b]×Rn
einer Lipschitz-Bedingung. Dann bewirkt (3.1) genau eine Lösung y ∈ C1([a, b]→ Rn).
Beweis. Genauso wie von 3.1 mit M ∶= C(I → Rn).
3.4 Satz:Seien die Voraussetzungen von 3.1 oder 3.3 erfüllt und
y ∈ C1(I → Rn) ∧ y′ = f(x, y) ∧ y(x0) = y0,
y ∈ C1(I → Rn) ∧ y′ = f(x, y) ∧ y(x0) = y0.
Dann gilt
∥y(x) − y(x)∥∞ ≤ eL∣x−x0∣∥y0 − y0∥
für x ∈ I ∩ I.
102

Beweis. Zeige: Für n ∈ N gilt
max∣t−x0∣≤∣x−x0∣
∥y(t) − y(t)∥ ≤ (L∣x − x0∣)n
n!max
∣t−x0∣≤∣x−x0∣∥y(t) − y(t)∥ +
n−1
∑k=0
(L∣x − x0∣)k
k!∥y0 − y0∥.
Für n→∞ folgt dann max∣t−x0∣≤∣x−x0∣
∥y(t) − y(t)∥ ≤ eL∣x−x0∣∥y0 − y0∥.
Im Folgenden sei nur der Induktionsschritt gezeigt.
∥y(x) − y(x)∥∞(3.2)= ∥y0 − y0 + ∫
x
x0(f(t, y(t)) − f(t, y(t)))dt∥
∞
≤ ∥y0 − y0∥ + ∣∫x
x0∥f(t, y(t)) − f(t, y(t))∥∞´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
≤L∥y−y∥∞
dt∣
≤ ∥y0 − y0∥ +L ∣∫x
x0((L∣t − x0∣)n
n!max
∣τ−x0∣≤∣t−x0∣∥y(τ) − y(τ)∥
+n−1
∑k=0
(L∣x − x0∣)k
k!∥y0 − y0∥)dt∣
Damit folgt die Induktionsbehauptung.
103


4. Lineare Differentialgleichungen ersterOrdnung
4.1 Definition:Seien −∞ ≤ a ≤ b ≤ ∞, n ∈ N, A ∶]a, b[→ Rn2
(im Fall n ≥ 2 eine matrixwertige Funktion),g ∶]a, b[→ Rn. Dann heißt die explizite Differentialgleichung
y′ = A(x)y + g(x), x ∈]a, b[
für die Unbekannte y ∶]a, b[→ Rn lineare Differentialgleichung erster Ordnung oder linearesSystem. Ist g nicht identisch Null, so heißt die Differentialgleichung inhomogen, und dieDifferentialgleichung
y′ = A(x)y
heißt zugehörige homogene Differentialgleichung.
4.2 Bemerkung:Bei linearen Differentialgleichungen gibt es keine Einschränkung für den Wertebereich von y.Die einzige Beschränkung liegt im Laufbereich von x für die Definiertheit von A(x) und g(x).
4.3 Satz:Seien −∞ ≤ a ≤ b ≤∞, n ∈ N, A ∈ C(]a, b[→ Rn2), g ∈ C(]a, b[→ Rn), (x0, y0) ∈]a, b[×Rn.Dann besitzt das Anfangswertproblem
y′ = A(x)y ∧ y(x0) = y0 (4.1)
eine eindeutige Lösung y ∈ C1(]a, b[→ Rn). Insbesondere gilt für a = −∞ und b = ∞, dassdie Lösung global ist.
Beweis. 1. Wähle eine monoton fallende Folge (am), am → a sowie eine monoton stei-gende Folge (bm), bm → b, sodass a < am < bm < b gilt. Setze
f(x, y) ∶= A(x)y + g(x).
105

4. Lineare Differentialgleichungen erster Ordnung
Dann folgen:
f ∈ C([am, bm] ×Rn → Rn),
∀(x, y), (x, y) ∈ [am, bm] ×Rn ∶ ∥f(x, y) − f(x, y)∥∞ = ∥A(x)(y − y)∥∞
= max1≤k≤n
RRRRRRRRRRR
n
∑j=1
akj(x)(yj − yjRRRRRRRRRRR≤⎛⎝
max1≤k≤n
n
∑j=1
∣akj(x)∣⎞⎠
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶∶=L<∞
∥y − y∥∞
2. Aus Satz 3.3 folgt, dass (4.1) eine eindeutige Lösung
y = ym ∈ C1([am, bm]→ Rn)
besitzt. Durch die Eindeutigkeit der ym folgt
ym∣[am−1,bm−1]= ym−1. (∗)
Definiere y(x) ∶= ym(x), wobei m jeweils so gewählt wird, dass x ∈ [am, bm]. y istwohldefiniert aufgrund von (∗) und definiert auf ]a,b[. Damit folgen:
y ∈ C1(]a, b[→ Rn) ∶ Zu x0 ∈]a, b[ wähle m mit x0 ∈]am, bm[
y∣]am,bm[ = ym ⇒
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
y′(x0) = y′m(x0) existiert
y′(x) = y′m(x) ist stetig in ]am, bm[
y′ stetig in x0
y(x0) = y∣[am,bm](x0) = y0
y′(x) = y′m(x) = A(x)ym(x) + g(x) = A(x)y(x) + g(x) für geeignetes m
Also y ∈ C1(]a, b[→ Rn) und y löst (4.1).
3. Sei y ∈ C1(]a, b[→ Rn) eine weitere Lösung von (4.1). Mit der Eindeutigkeit der Lösungauf [am, bm] folgt
∀m ∈ N ∶ y∣[am,bm] = ym = y∣[am,bm]
⇒ y = y in ]a, b[.
106

4.4 Struktur des Lösungsraums, homogen:Sei A ∈ C(]a, b[→ Rn2) und
V ∶= {y ∈ C1(]a, b[→ Rn)∣y′ = A(x)y für a < x < b}.
V ist ein n-dimensionaler Untervektorraum von C1(]a, b[→ Rn).
Beweis. 1. V ist Untervektorraum: Seien y, y ∈ V und α,β ∈ R. Es gelten
αy + βy ∈ C1(]a, b[→ Rn)
(αy + βy)′ = αy′ + βy′ = αA(x)y + βA(x)y = A(x)(αy + βy),
also αy + βy ∈ V . Die Lösung y ≡ 0 liegt in V , also V ≠ ∅. Somit ist V ein Unterraumvon C1(]a, b[→ Rn).
2. dimV = n: Wähle x0 ∈]a, b[ fest, setze
Ix0 ∶ V → Rn ∶ y ↦ y(x0).
V (nach 1.) und Rn sind Vektorräume.Ix0 ist linear:
Ix0(αy + βy) = (αy + βy)(x0) = αy(x0) + βy(x0) = αIx0(y) + βIx0(y)
Ix0 ist injektiv: Sind y, y ∈ V und gilt y(x0) = y(x0), so folgt aus der Eindeutigkeit derLösung von (4.1), dass y = y.Ix0 ist surjektiv: Sei y0 ∈ Rn. Aus der Existenz der Lösung von (4.1) folgt
∃y ∈ C1(]a, b[→ Rn) ∶ y′ = A(x)y ∧ y(x0) = y0
⇔ ∃y ∈ V ∶ Ix0(y) = y0
Ix0 ist ein Isomorphismus von V nach Rn ⇒ dimV = dimRn = n.
4.5 Definition:Eine Basis des Lösungsraumes V heißt Fundamentalsystem der Differentialgleichung y′ =A(x)y.
4.6 Satz:Eine Menge von n Lösungen {y[1], . . . , y[n]} von y′ = A(x)y bildet genau dann ein Funda-
107

4. Lineare Differentialgleichungen erster Ordnung
mentalsystem, wenn
∃x0 ∈]a, b[∶W (x0) ∶= det (y[1](x0) . . . y[n](x0)) ≠ 0.
Dann gilt sogar∀x ∈]a, b[∶W (x) ≠ 0.
W (x) heißt Wronski-Determinante.
Beweis.
∃x0 ∈]a, b[∶W (x0) ≠ 0
LAAG I⇔ {y[1](x0), . . . , y[n](x0)} ist Basis des Rn
Ix0 Isom.⇔ {y[1], . . . , y[n]} ist Basis von V, d. h. Fundamentalsystem von y′ = A(x)y
Ix Isom.⇔ {y[1](x), . . . , y[n](x)} ist Basis des Rn für jedes x ∈]a, b[
⇔∀x ∈]a, b[∶W (x) ≠ 0
4.7 Beispiel:y′(x) = (
1x
1
0 1x
) y in ]a, b[=]0,∞[. Betrachte {y[1], y[2]} mit
y[1](x) =⎛⎝x2
x
⎞⎠, y[2](x) =
⎛⎝x
0
⎞⎠.
y[1], y[2] sind Lösungen.
W (x) = det⎛⎝x2 x
x 0
⎞⎠= −x2 ≠ 0 in ]0,∞[
⇒ {y[1], y[2]} ist Fundamentalsystem
⇒ Alle Lösungen sind gegeben durch
y(x) = c1⎛⎝x2
x
⎞⎠+ c2
⎛⎝x
0
⎞⎠, c1, c2 ∈ R.
Mit der Anfangsbedingung y(x0) = c1 ( x20x0
)+c2 ( x00 ) = ( (y0)1(y0)2 ) ist das lineare System eindeutig
lösbar, da W (x0) ≠ 0.
108

4.8 Struktur des Lösungsraumes, inhomogen:Seien A ∈ C(]a, b[→ Rn2), g ∈ C(]a, b[→ Rn) und
y′ = A(x)y + g(x). (4.2)
Sei ypart ∈ C1(]a, b[→ Rn) eine Lösung von 4.2, die sogenannte partikuläre Lösung.
1. Für y ∈ C1(]a, b[→ Rn) sind äquivalent:
a) y löst 4.2
b) y ∶= y − ypart ist Lösung der zugehörigen homogenen Differentialgleichung
y′ = A(x)y, x ∈]a, b[.
2. Die allgemeine Lösung y von 4.2 erhält man durch
y = ypart + yhom,
wobei yhom die allgemeine Lösung von y′ = A(x)y bezeichnet.
Beweis. 1.
a): y′ = A(x)y + g(x)
⇒ y′ = y′ − y′part4.2= A(x)y + g(x) −A(x)ypart − g(x)
= A(x)(y − ypart) = A(x)y⇒ b)
b): y′ = A(x)y, y ∶= y + ypart
⇒ y′ = y′ + y′part4.2= A(x)y +A(x)ypart + g(x)
= A(x)(y + ypart) + g(x) = A(x)y + g(x)⇒ a)
2. Folgt aus 1) mit yhom = y.
4.9 Variation der Konstanten:Wie findet man eine partikuläre Lösung?Sei {y[1], . . . , y[n]} ein Fundamentalsystem von y′ = A(x)y und
y(x) ∶= c1(x)y[1](x) + . . . + cn(x)y[n](x).
Dann sind äquivalent:
109

4. Lineare Differentialgleichungen erster Ordnung
1. y′ = A(x)y + g(x)
2. c′ = (c′1⋮c′n
) ist eindeutige Lösung des linearen Gleichungssystems
(y[1](x) . . . y[n](x))´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
n×n-Matrix,Höchstrang, da W (x)≠0
⎛⎜⎜⎜⎝
c′1(x)⋮
c′n(x)
⎞⎟⎟⎟⎠= g(x), x ∈]a, b[.
Beweis. Übung.
4.10 Beispiel:
y′ =⎛⎝
1x 1
0 1x
⎞⎠+⎛⎝
2x2
3x
⎞⎠
Fundamentalsystem:⎧⎪⎪⎨⎪⎪⎩x↦
⎛⎝x2
x
⎞⎠, x↦
⎛⎝x
0
⎞⎠
⎫⎪⎪⎬⎪⎪⎭Ansatz für partikuläre Lösung:
ypart(x) = c1(x)⎛⎝x2
x
⎞⎠+ c2(x)
⎛⎝x
0
⎞⎠
Mit Satz 4.9 folgt:
⎛⎝x2 x
x 0
⎞⎠⎛⎝c′1c′2
⎞⎠=⎛⎝
2x2
3x
⎞⎠
⇔⎧⎪⎪⎨⎪⎪⎩
c′1x2 + c′2x = 2x2
c′1x + c′20 = 3x
⇒c′1 = 3, also c′2x = −x2 ⇒ c′2 = −x
Wähle c1 = 3x, c2 = −x2
2 . Einsetzen in Ansatz:
ypart(x) =⎛⎝
3x3
3x2
⎞⎠−⎛⎝
x3
2
0
⎞⎠=⎛⎝
52x
3
3x2
⎞⎠
110

Somit ist die allgemeine Lösung der Differentialgleichung gegeben durch:
y(x) = ypart(x) + yhom(x) =⎛⎝
52x
3
3x2
⎞⎠+ d1
⎛⎝x2
x
⎞⎠+ d2
⎛⎝x
0
⎞⎠, d1, d2 ∈ R
4.11 Bemerkung:Die Variation der Konstanten funktioniert auch im Fall n = 1.
4.12 Definition:Sei A ∈ Rn2
eine (konstante) n × n-Matrix.
eA ∶=∞∑k=0
Ak
k!mit A0 ∶= E.
eA ist wieder eine n × n-Matrix. Die Konvergenz der Reihe wird in den Übungen gezeigt.
4.13 Satz:Sei A ∈ Rn2
.
ddx
(exA) = A ⋅ exA für x ∈ R
ddx
(exA ⋅ v) = A ⋅ exA ⋅ v für v ∈ Rn, x ∈ R
Beweis. Übung.
4.14 Satz:Sei {v1, . . . , vn} eine Basis des Rn und
y[j](x) ∶= exAvj , j = 1, . . . , n.
Dann ist {y[1], . . . , y[n]} ein Fundamentalsystem der Differentialgleichung y′ = Ay.
Beweis. 1. y′[j](x)4.13= AexAvj = Ay[j](x). y′[j] ist stetig, da exAvj differenzierbar ist.
Daraus folgt, dass alle y[j] die Differentialgleichung lösen.
2.
W (0) = det(e0⋅Av1²=v1
. . . e0⋅Avn´¹¹¹¹¸¹¹¹¹¹¶=vn
) ≠ 0,
da {v1, . . . , vn} eine Basis ist. D. h. {y[1], . . . , y[n]} ist ein Fundamentalsystem.
111

4. Lineare Differentialgleichungen erster Ordnung
4.15 Bemerkung:Wenn die Basis {v1, . . . , vn} geschickt gewählt wird, kann man y[j] sogar explizit berechnen:
Fall 1: λ ist ein reeller Eigenwert von AA reell⇔ ∃v ∈ Rn/{0} ∶ Av = λv. Also folgt:
exAv = limn→∞
n
∑k=0
(xkAk
k!v) = lim
n→∞(n
∑k=0
xkλk
k!) v = eλxv
Fall 2: λ ∈ C/R ist ein Eigenwert von A mit Eigenvektor v ∈ Cn/Rn. Wie oben gilt exAv =eλxv (komplexwertig). Da A reell ist, gilt Av = Av = λv, exAv = eλxv. Daraus folgt:
exA(v + v) =eλxv + eλxv = exReλ(cos(x Imλ) + i sin(x Imλ))v
+ exReλ(cos(x Imλ) − i sin(x Imλ))v
=exReλ(cos(x Imλ) (v + v)´¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¶∈Rn
− sin(x Imλ) 1
i(v − v)
´¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶∈Rn
)
ist eine reelle Funktion, passt also ins Fundamentalsystem.
Fall 3: Falls A nicht diagonalisierbar ist: Wähle als Basis diejenige, die die JordanscheNormalform liefert. Diese Basis enthält Eigenvektoren und Hauptvektorketten. Sei zumBeispiel {v1, v2, v3} Hauptvektorkette zum Eigenwert λ (für einen 3×3-Jordanblock),d. h.
Av1 = λv1
Av2 = λv2 + v1
Av3 = λv3 + v2
112

Zur Vereinfachung seien v1, v2, v3 ∈ Rn. Also folgt:
exAv1 = eλxv2
A2v2 = λAv2 +Av1 = λ2v2 + 2λv1
A3v2 = λ2Av2 + 2λAv1 = λ3v2 + 3λ2v1
⋮
Akv2 = λkv2 + kλk−1v1
⇒ exAv2 =∞∑k=0
xkAk
k!v2 =
∞∑k=0
xkλk
k!v2 + x
∞∑k=1
xk−1λk−1k
k!v1 = eλxv2 + xeλxv1
Analog exAv3 = eλxv3 + xeλxv2 +x2
2eλxv1.
4.16 Beispiel:A = ( 0 1
−4 −4 ), y′ = Ay. A hat nur den Eigenwert λ = −2 mit der algebraischen Vielfachheit 2und der geometrischen Vielfachheit 1. Der zugehörige Eigenvektor ist v1 = ( 1
−2 ). Bestimmungdes Hauptvektors: (A − λE)v2 = v1
⎛⎝
2 1
−4 −2
RRRRRRRRRRR
1
−2
⎞⎠Ð→
⎛⎝
2 1
0 0
RRRRRRRRRRR
1
0
⎞⎠
Wähle v2 = ( 1−1 ). Damit ergibt sich das Fundamentalsystem
⎧⎪⎪⎨⎪⎪⎩x↦ e−2x ⎛
⎝1
−2
⎞⎠, x↦ e−2x ⎛
⎝⎛⎝
1
−1
⎞⎠+ x
⎛⎝
1
−2
⎞⎠⎞⎠
⎫⎪⎪⎬⎪⎪⎭.
113


5. Differentialgleichungen höhererOrdnung
5.1 Beispiel:
y(3)(x) = 2y′′(x) + y′(x) − 2y(x)
Offensichtlich muss eine mögliche Lösung y(x) der Differentialgleichung dreimal stetig diffe-renzierbar sein. Definiere nun die vektorielle Funktion u(x) mit
u(x) =⎛⎜⎜⎜⎝
u1(x)u2(x)u3(x)
⎞⎟⎟⎟⎠∶=
⎛⎜⎜⎜⎝
y(x)y′(x)y′′(x)
⎞⎟⎟⎟⎠
Durch Differenzieren von u(x) und Einsetzen der Differentialgleichung in die unterste Zeileerhält man nun aus der ursprünglichen Differentialgleichung dritter Ordnung ein System ausdrei Differentialgleichungen erster Ordnung:
u′(x) =⎛⎜⎜⎜⎝
y′(x)y′′(x)y(3)(x)
⎞⎟⎟⎟⎠=⎛⎜⎜⎜⎝
y′(x)y′′(x)
2y′′(x) + y′(x) − 2y(x)
⎞⎟⎟⎟⎠=⎛⎜⎜⎜⎝
u2(x)u3(x)
2u′3(x) + u2(x) − 2u1(x)
⎞⎟⎟⎟⎠
Falls y(x) eine Lösung der Differentialgleichung ist, so folgt also
u′(x) =⎛⎜⎜⎜⎝
0 1 0
0 0 1
−2 1 2
⎞⎟⎟⎟⎠u(x)
Die Lösung dieses Gleichungssystems erhält man durch Diagonalisieren der Matrix. DerenEigenvektoren multipliziert mit eλix ergeben dann genau die linear unabhängigen Lösungen
115

5. Differentialgleichungen höherer Ordnung
des Gleichungssystems, wobei λi der jeweilige Eigenwert ist. In diesem Fall ist die Lösung also
u(x) = c1ex
⎛⎜⎜⎜⎝
1
1
1
⎞⎟⎟⎟⎠+ c2e
x
⎛⎜⎜⎜⎝
1
−1
1
⎞⎟⎟⎟⎠+ c3e
2x
⎛⎜⎜⎜⎝
1
2
4
⎞⎟⎟⎟⎠
Durch Auswerten der ersten Zeile erhält man die Lösung des ursprünglichen Problems:
y(x) = u1(x) = c1ex + c2e
−x + c3e2x
5.2 Satz:1) Sei y ∈ Cn(]a, b[→ R) eine Lösung des Anfangswertproblems
y(n)(x) = f(x, y(x), y′(x), y(n−1)(x)), y(x0) = y0 ∧ y′(x0) = y1 ∧ . . . ∧ y(n−1)(x0) = yn−1,
(5.1)
so ist u(x) =
⎛⎜⎜⎜⎜⎜⎝
u1(x)u2(x). . .
un(x)
⎞⎟⎟⎟⎟⎟⎠
∶=
⎛⎜⎜⎜⎜⎜⎝
y(x)y′(x). . .
y(n−1)(x)
⎞⎟⎟⎟⎟⎟⎠
∈ C1(]a, b[→ Rn) Lösung des Anfangswertproblems
u′(x) =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
u2(x)u3(x). . .
un(x)f(x,u1(x), . . . , un(x))
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
=∶ F (x,u(x)) ∧ u(x0) =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
y0
y1
. . .
yn−2
yn−1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
(5.2)
2) Ist u ∈ C1(]a, b[→ Rn) Lösung von Gleichung (5.2), so folgt, dass y(x) = u1(x) auf ]a,b[n-fach differenzierbar ist und Gleichung (5.1) löst.
Beweis. 1. klar, siehe Beispiel
2. Wegen u ∈ C1(]a, b[→ Rn) folgt insbesondere für jede Komponente von u stetigeDifferenzierbarkeit. Daraus lässt sich für j < n iterativ aus der Differenzierbarkeit der(j−1)-ten Ableitung von die Existenz der j-ten Ableitung herleiten. Diese ist wiederumeine Komponente von u und daher ebenfalls stetig differenzierbar. Es folgt also n-fachestetige Differenzierbarkeit von y. Die Aussage, dass y die Gleichung (5.1) löst, ergibtsich aus Teil 1.7.
116

5.3 Satz:Sei (x0, y0) ∈ R ×Rn, Q ∶= {(x, y) ∈ R ×Rn ∶ ∣x − x0∣ ≤ a ∧ ∥y − y0∥∞ ≤ b},f ∈ C(Q→ R) erfülle eine Lipschitz-Bedingung:
∃L > 0 ∀(x, y), (x, y) ∈ Q ∶ ∣f(x, y) − f(x, y)∣ ≤ L∥y − y∥∞
Dann existiert ein α > 0, sodass Gleichung (5.1) eine eindeutige Lösung y ∈ Cn([x0 −α, x0 +α]→ R) besitzt.
Beweis. Wende den Satz von Picard-Lindelöf auf Gleichung (5.2) an.
5.4 Satz:Seien −∞ < a < b <∞, x0 ∈]a, b[, (y0, . . . , yn−1 ∈ Rn, f ∈ C([a, b] ×Rn → R) mit∃L > 0 ∀(x, y), (x, y) ∈ [a, b] ×Rn ∶
∣f(x, y) − f(x, y)∣ ≤ L∥y − y∥∞,
Dann besitzt Gleichung (5.1) eine eindeutige Lösung y ∈ Cn([a, b]→ R).
Beweis. Wende Satz 5.2 an und wende auf das hier erstellte Gleichungssystem Satz 3.3an.
5.5 Definition und Satz:Seien −∞ < a < b <∞, a0, . . . , an−1, g ∈ C(]a, b[→ R).1) Die Differentialgleichung
y(n)(x) + an−1(x)y(n−1)(x) + . . . + a1(x)y′(x) + a0(x)y(x) = g(x) (5.3)
heißt lineare Differentialgleichung n-ter Ordnung. Ist g ≡ 0, so heißt (5.3) homogen, sonstinhomogen.2) Zu gegebenen x0 ∈]a, b[, y0, . . . , yn−1 ∈ R besitzt (5.3) genau eine Lösung y ∈ Cn(]a, b[→R), die die Anfangsbedingung y(x0) = y0, y
′(x0) = y1, . . . , y(n−1)(x0) = yn−1 erfüllt.
Beweis. Wähle zwei Folgen (an) und (bn) mit an → a ∧ bn → b ∧ ∀n ∈ N ∶ a < an+1 < an <x0 < bn < bn+1 < b. (an) soll also monoton fallend, (bn) monoton steigend sein. Wende 5.4in jedem Intervall [an, bn] auf die Funktion
f(x, y0, . . . , yn−1) ∶= g(x) − a0(x)y0 − a1(x)y1 − . . . − an−1(x)yn−1
an. Dann entspricht (5.3) der Gleichung (5.1) unter 5.2. Außerdem ist nach Voraussetzungf ∈ (]a, b[×Rn → R). Da [an, bn] kompakt ist, ist f auf jedem dieser Intervalle beschränkt.
117

5. Differentialgleichungen höherer Ordnung
Daher gilt die Abschätzung
∣f(x, y) − f(x, y∣ =
RRRRRRRRRRRRRRRRR
(a0(x) . . . an−1(x))⎛⎜⎜⎜⎝
y0 − y0
. . .
yn−1 − yn−1
⎞⎟⎟⎟⎠
RRRRRRRRRRRRRRRRR
≤ L∥y − y∥∞
mit L = maxa≤j≤n−1
∣aj(x)∣. Der Rest des Beweises läuft analog zu 4.3.
5.6 Lösungsraum homogener Differentialgleichungen:Sei a0, . . . , an−1 ∈ C(]a, b[→ R).
1. Die Menge V ∶= {y ∈ Cn(]a, b[→ R)∣y erfüllt Gleichung (5.3) mit g ≡ 0} bildet einenn-dimensionalen Vektorraum. Jede Basis von V heißt Fundamentalsystem.
2. {y[1], . . . , y[n]} ⊆ V bildet genau dann ein Fundamentalsystem, wenn
∃x ∈]a, b[∶W (x) ∶= det
⎛⎜⎜⎜⎜⎜⎜⎝
y[1](x) y[2](x) . . . y[n](x)y′[1](x) . . . . . . y′[n](x). . . . . . . . . . . .
y(n−1)[1] (x) . . . . . . y
(n−1)[n] (x)
⎞⎟⎟⎟⎟⎟⎟⎠
≠ 0
In diesem Fall gilt auch W (x) ≠ 0 ∀x ∈]a, b[. W (x) heißt Wronski-Determinante.
Beweis. 1. a) Seien y1(x), y2(x) Lösungen von Gleichung (5.3). Für g ≡ 0 folgt dannoffensichtlich, dass ay1(x) + by2(x) ebenfalls (5.3) löst. V ist also ein linearerRaum.
118

b) Setze V ∶=
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
u ∈ C1(]a, b[→ R) ∶ u′(x) =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
u2
u3
. . .
un−1
−a0(x)u1(x) − a1(x)u2(x) − . . . − an−1(x)un(x)
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
Ô⇒ u′(x) = A(x)u(x) mit A(x) =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
0 1 0 0 . . . 0
0 0 1 0 . . . 0
. . . . . . . . . . . . . . . . . .
0 0 0 0 . . . 1
−a0(x) −a1(x) . . . . . . . . . −an−1(x)
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
Definiere nun die Abbildung
L ∶ V → V ∶ y ↦ u ∶=
⎛⎜⎜⎜⎜⎜⎝
y
y′
. . .
y(n−1)
⎞⎟⎟⎟⎟⎟⎠
.
L ist nach Konstruktion linear, injektiv und surjektiv (nach 5.2 gilt y ∶= u1 Ô⇒u = L(u1)). L ist also ein Vektorraumisomorphismus. Wegen dim V = n folgt alsoauch dim V
4.4= n.
2. Da L ein Vektorraum-Isomorphismus ist, überführt L auch Basen von V in Basen vonV . {L(y[1]), . . . , L(y[n]} ist also genau dann eine Basis von V , wenn {y[1], . . . , y[n]}eine Basis von V ist. Nach 4.6 ist dies äquivalent dazu, dass es ein x ∈]a, b[ gibt, sodassW (x) ≠ 0, was wiederum nach 4.6 gleichbedeutend mit der Aussage W (x) ≠ 0 ∀x ∈]a, b[ ist.
5.7 Beispiel:y(3)(x) − 3y′′(x) + 3y′(x) − y(x) = 0
119
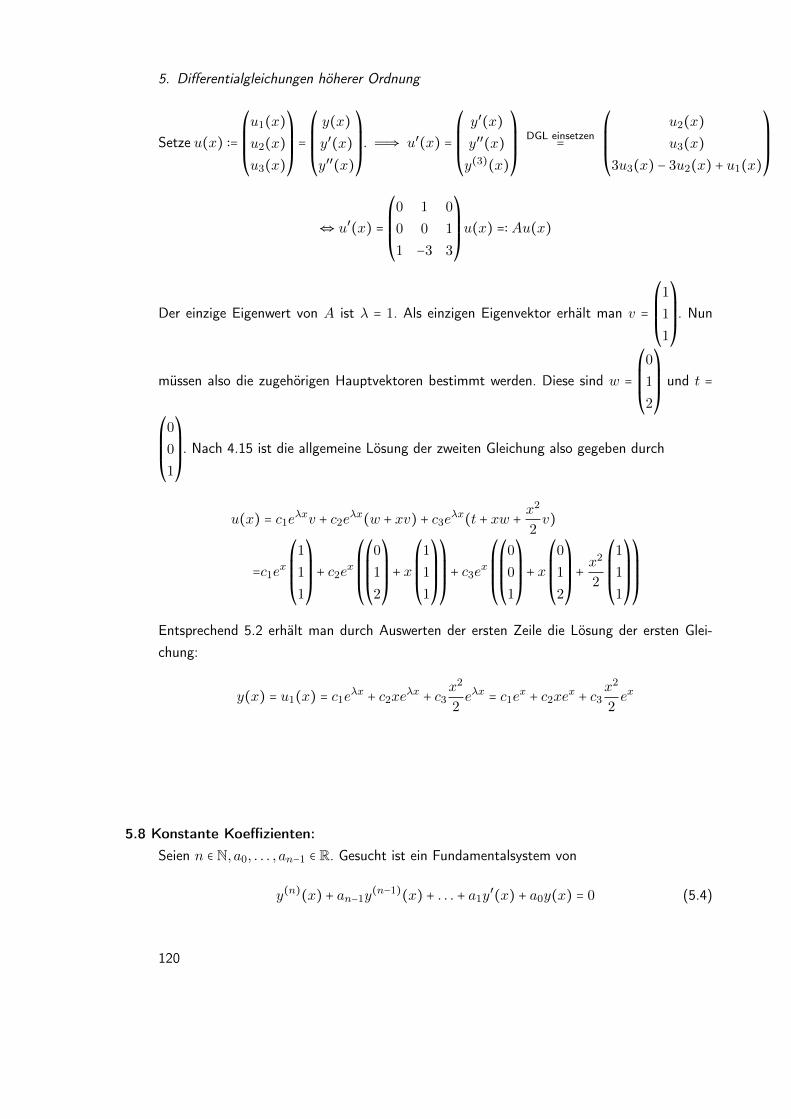
5. Differentialgleichungen höherer Ordnung
Setze u(x) ∶=⎛⎜⎜⎜⎝
u1(x)u2(x)u3(x)
⎞⎟⎟⎟⎠=⎛⎜⎜⎜⎝
y(x)y′(x)y′′(x)
⎞⎟⎟⎟⎠. Ô⇒ u′(x) =
⎛⎜⎜⎜⎝
y′(x)y′′(x)y(3)(x)
⎞⎟⎟⎟⎠
DGL einsetzen=⎛⎜⎜⎜⎝
u2(x)u3(x)
3u3(x) − 3u2(x) + u1(x)
⎞⎟⎟⎟⎠
⇔ u′(x) =⎛⎜⎜⎜⎝
0 1 0
0 0 1
1 −3 3
⎞⎟⎟⎟⎠u(x) =∶ Au(x)
Der einzige Eigenwert von A ist λ = 1. Als einzigen Eigenvektor erhält man v =⎛⎜⎜⎜⎝
1
1
1
⎞⎟⎟⎟⎠. Nun
müssen also die zugehörigen Hauptvektoren bestimmt werden. Diese sind w =⎛⎜⎜⎜⎝
0
1
2
⎞⎟⎟⎟⎠und t =
⎛⎜⎜⎜⎝
0
0
1
⎞⎟⎟⎟⎠. Nach 4.15 ist die allgemeine Lösung der zweiten Gleichung also gegeben durch
u(x) = c1eλxv + c2e
λx(w + xv) + c3eλx(t + xw + x
2
2v)
=c1ex
⎛⎜⎜⎜⎝
1
1
1
⎞⎟⎟⎟⎠+ c2e
x
⎛⎜⎜⎜⎝
⎛⎜⎜⎜⎝
0
1
2
⎞⎟⎟⎟⎠+ x
⎛⎜⎜⎜⎝
1
1
1
⎞⎟⎟⎟⎠
⎞⎟⎟⎟⎠+ c3e
x
⎛⎜⎜⎜⎝
⎛⎜⎜⎜⎝
0
0
1
⎞⎟⎟⎟⎠+ x
⎛⎜⎜⎜⎝
0
1
2
⎞⎟⎟⎟⎠+ x
2
2
⎛⎜⎜⎜⎝
1
1
1
⎞⎟⎟⎟⎠
⎞⎟⎟⎟⎠
Entsprechend 5.2 erhält man durch Auswerten der ersten Zeile die Lösung der ersten Glei-chung:
y(x) = u1(x) = c1eλx + c2xe
λx + c3x2
2eλx = c1e
x + c2xex + c3
x2
2ex
5.8 Konstante Koeffizienten:Seien n ∈ N, a0, . . . , an−1 ∈ R. Gesucht ist ein Fundamentalsystem von
y(n)(x) + an−1y(n−1)(x) + . . . + a1y
′(x) + a0y(x) = 0 (5.4)
120

u=(yy′
⋮)
⇔ u′(x) =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
0 1 0 . . . 0
0 0 1 . . . 0
. . . . . . . . . . . . . . .
0 0 0 . . . 1
−a0 −a1 −a2 . . . −an−1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠
u(x) =∶ Au(x) (5.5)
Gleichung (5.5) hat also Lösungen der Form eλxv, xeλxw, . . .. Man wählt nun als Ansatz zurLösung von Gleichung (5.4) y(x) = eλx. Setzt man diesen Ansatz in die Differentialgleichungein, so ergibt dies folgende Gleichung:
eλx(λn + an−1λn−1 + . . . + a1λ + a0) =∶ eλxp(λ) = 0⇔ p(λ) = 0
p(λ) heißt dabei charakteristisches Polynom der Differentialgleichung (5.4). Nach Konstruk-tion gilt p(λ) = ±det(A−λE), d.h. die Eigenwerte von A entsprechen den Nullstellen von p.Fall 1: λ ∈ R ist einfache Nullstelle von p Ô⇒ y(x) ∶= eλx
Fall 2: λ ∈ R ist k-fache Nullstelle von p Ô⇒ yj(x) ∶= xjeλx, j = 0, . . . , k − 1
Fall 3: λ ∈ R ∖ C ist einfache Nullstelle von p Ô⇒ y0(x) = exReλcos(xImλ), y1(x) =exReλsin(xImλ)Fall 4: λ ∈ R/C ist einfache Nullstelle von p Ô⇒ yj(x) = xjexReλcos(xImλ), yj(x) =xjexReλsin(xImλ), j = 0, . . . , k − 1,
Dadurch erhält man ein Fundamentalsystem der Differentialgleichung (5.4).
5.9 Lösungsraum der inhomogenen Differentialgleichung:Seien die Voraussetzungen von 5.6 erfüllt und V ebenso wie in 5.6 definiert. 1) Ist yp eineLösung der inhomogenen Differentialgleichung (5.3), so ist
Vi = yp + V ∶= {y + yp ∶ y ∈ V }
der affine Raum aller Lösungen von Gleichung (5.3).2) Variation der Konstanten: Sei {y[1], . . . , y[n]} ein Fundamentalsystem der homogenen Dif-
ferentialgleichung, y(x) =n
∑k=1
ck(x)y[k](x), Wenn
⎛⎜⎜⎜⎜⎜⎜⎝
y[1](x) y[2](x) . . . y[n](x)y′[1](x) y′[2](x) . . . y′[n](x). . . . . . . . . . . .
y(n−1)[1] (x) y
(n−1)[2] (x) . . . y
(n−1)[n] (x)
⎞⎟⎟⎟⎟⎟⎟⎠
⎛⎜⎜⎜⎜⎜⎝
c′1c′2. . .
c′n
⎞⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎝
0
. . .
0
g(x)
⎞⎟⎟⎟⎟⎟⎠
für a < x < b, dann ist y(x) Lösung der inhomogenen Differentialgleichung (5.3).
121

Teil III.
Vektoranalysis
123


1. Kurvenintegrale
1.1 Erinnerung:Man vergleiche mit Kapitel 10.11 aus Analysis II.Sei d ∈ N, wobei d ≥ 2 und γ ∈ C ([a, b]→ Rd).
1. K = Bild(γ) heißt Kurve im Rd und (γ, [a, b]) heißt Parameterdarstellung der Kurve.
2. Ist γ∣[a,b[
injektiv, so heißt K Jordan-Kurve.
3. Man bezeichnet K als glatt, falls γ einmal stetig differenzierbar ist und die Ableitungauf [a, b] nicht verschwindet. D.h. γ ∈ C1([a, b]→ Rd) und γ′(t) ≠ 0 auf [a, b].In diesem Fall heißt
Tγ(t) ∶=1
∥γ′(t)∥γ′(t)
Tangenteneinheitsvektor von γ(t).
4. Sei nun K eine glatte Jordan-Kurve. Dann folgt mit dem Satz 10.84 aus dem Skriptder Analysis II, dass K rektifizierbar ist und
L(K) = ∫b
a∥γ′(t)∥dt
für die Bogenlänge L(K) gilt.
5. Sei K eine rektifizierbare Jordan-Kurve. Wir definieren Kt ∶= γ([a, t]) für a ≤ t ≤ b undl(t) ∶= L(Kt). Dann gilt folgendes:
a) l ist streng monoton wachsend
b) l ist stetig
c) Bild(l) = [0, L(K)]
d) Falls K zusätzlich glatt ist, dann gilt l′(t) = ∥γ′(t)∥ für a ≤ t ≤ b.
125

1. Kurvenintegrale
6. Ist K eine rektifizierbare Jordan-Kurve, so heißt
(g, [0, L(K)]) mit g ∶= γ ○ l−1
Bogenlängenparametrisierung von K.D.h. für 0 ≤ s ≤ L(K) gilt L(g([0, s]) = s.
7. Wenn K eine glatte Jordan-Kurve ist, dann ist g differenzierbar mit ∥g′(s)∥ = 1 für0 ≤ s ≤ L(K).Praktischerweise gilt dann für den Tangenteneinheitsvektor in g(s) : Tg(s) = g′(s).Außerdem ist l−1 ∈ C1 ([0, L(K)]→ [a, b]) und somit ist (g, [0, L(K)]) eine äquiva-lente Parameterdarstellung zu (γ, [a, b]).
1.2 Definition:Sei D ⊆ Rd, f ∈ C(D → R) und K ⊆ D eine rektifizierbare Jordan-Kurve mit Bogenlängen-parametrisierung (g, [0, L(K)]).Dann heißt
∫Kfds ∶= ∫
L(K)
0f(g(s))ds
Kurvenintegral über f längs K.
1.3 Folgerungen:Seien f, h ∈ C (D → R). Dann gilt:
1. Linearität:Für µ,λ ∈ R gilt:
∫K
(λf + µh)ds = λ∫Kfds + µ∫
Khds
2. Beschränktheit:Da das Bild von g kompakt ist, folgt:
∣∫Kfds∣ ≤ max
x∈K∣f(x)∣L(K)
3. Additivität:Sei a < c < b, K1 ∶= γ([a, c]) und K2 ∶= γ([c, b]). Dann folgt:
∫Kfds = ∫
K1
fds + ∫K2
fds
126

1.4 Berechnung:Sei D ⊆ Rd, f ∈ C (D → R) und K ⊆ D eine Jordan-Kurve mit Parameterdarstellung(γ, [a, b]).
1. Ist K glatt, so gilt:
∫Kfds = ∫
b
af(γ(t)) ∥γ′(t)∥dt
2. K heißt stückweise glatt, falls a = t0 < t1 < ,,, < tn = b existieren, so dassKj = γ ([tj−1, tj]) für 1 ≤ j ≤ n glatt ist.Dies bedeutet, dass γ eingeschränkt auf [tj−1, tj] für 1 ≤ j ≤ n die für Glattheiterforderlichen Eigenschaften erfüllt.Ist K nun stückweise glatt, so gilt:
∫Kfds =
n
∑j=1∫
tj
tj−1f(γ(t)) ∥(γ∣
[tj−1,tj])′(t)∥dt
γ(a) = γ(t0)
γ(t1)
γ(t2)
γ(t3)
γ(b) = γ(t4)
K1
K2
K3
K4
Beweis. 1. Zunächst legen wir uns ein paar Werkzeuge zurecht. Nach 1.1, Abschnitt 5d) gilt
l(t) = ∫t
a∥γ′(t)∥dt
Weiter gilt nach 1.1, Abschnitt 6: g = γ ○ l−1.Nun substituieren wir s = l(t) und erhalten:
• g(s) = g(l(t)) = γ(l−1(l(t)) = γ(t)
• l(a) = 0 und l(b) = L(K)
• dsdt = l
′(t) = ∥γ′(t)∥
127

1. Kurvenintegrale
Insgesamt gilt dann:
∫Kfds = ∫
L(K)
0f(g(s))ds = ∫
b
af(γ(t)) ∥γ′(t)∥dt
2. Mit 1.3 Teil 3 folgt sofort:
∫Kfds =
n
∑j=1∫Kjfds
1)=n
∑j=1∫
tj
tj−1f(γ(t)) ∥(γ∣
[tj−1,tj])′(t)∥dt
1.5 Beispiel:
Sei a ∈ R und eine Kurve Ka mit der Parametrisierung γa(t) =⎛⎝t
at
⎞⎠für 0 ≤ t ≤ 1 gegeben.
Ka ist eine glatte Jordan-Kurve.Nun betrachten wir die stetige Funktion f(x, y) = x2 + y2. Dann gilt mit 1.4:
∫Kfds = ∫
1
0f(γ(t)) ∥γ′(t)∥dt = ∫
1
0t2 + (at)2
√1 + a2dt
= (1 + a2)32 ∫
1
0t2dt = (1 + a2)
32
3
1.6 Definition:Sei D ⊆ Rd, f ∈ C (D → Rd), K ⊆ D eine stückweise glatte Jordan-Kurve mit der Parame-terdarstellung (γ, [a, b]) und zugehöriger Bogenlängenparametrisierung (g, [0, L(K)]).Dann heißt
∫Kf ⋅ Tgds ∶=
n
∑j=1∫Kjf ⋅ Tgds
1,2=n
∑j=1∫
l(tj)
l(tj−1)f(g(s)) ⋅ g′(s)ds
1,4=n
∑j=1∫
tj
tj−1f(γ(t)) ⋅ γ′(t)
∥γ′(t)∥∥γ′(t)∥ds = ∫
tj
tj−1f(γ(t)) ⋅ (γ∣
[tj−1,tj])′(t)dt
Wegintegral über f längs K.
1.7 Bemerkungen:
1. In der Physik bezeichnet man Wegintegrale auch als Arbeitsintegrale.
128

2. Wenn K eine glatte Kurve ist, lässt sich eine andere Schreibweise anwenden:
∫Kf ⋅ Tgds =∶
d
∑j=1∫Kfjdxj
∫Kfjdxj = ∫
b
afj(γ(t))γ′j(t)dt
1.8 Definition:Sei D offen in Rd.
1. Ist f ∶D → R differenzierbar, so heißt
grad(f) ∶= ∇f ∶=⎛⎜⎜⎜⎝
∂x1f
⋮∂xdf
⎞⎟⎟⎟⎠
Gradient von f . ∇ ist der aus Analysis II bekannte Nabla-Operator.
2. Eine Abbildung f ∶D → Rd bezeichnet man als Vektorfeld.Ist f differenzierbar, so heißt
div(f) ∶=d
∑j=1
∂xjfj = ∇ ⋅ f
Divergenz von f („Quellenstärke“).
3. Folgendes gilt nur für d = 3. Ist f ∶ R3 ⊇D → R3 differenzierbar, so heißt
rot(f) ∶=⎛⎜⎜⎜⎝
∂x2f3 − ∂x3f2
∂x3f1 − ∂x1f3
∂x1f2 − ∂x2f1
⎞⎟⎟⎟⎠= ∇× f
Rotation von f („Wirbelstärke“).
129

1. Kurvenintegrale
1.9 Rechenregeln:Nun zu den Linearitäts-, Produkt- und Kombinationseigenschaften der in 1.8 eingeführtenBegriffe.
1. Linearität:Für α,β ∈ R und f, g mit entsprechenden Voraussetzungen aus 1.8 gilt:
grad(αf + βg) = ∇(αf + βg) = α(∇f) + β(∇g) = α grad(f) + β grad(g)
div(αf + βg) = ∇ ⋅ (αf + βg) = α(∇ ⋅ f) + β(∇ ⋅ g) = αdiv(f) + β div(g)
rot(αf + βg) = ∇× (αf + βg) = α(∇× f) + β(∇× g) = α rot(f) + β rot(g)
2. Produktregeln:Sei D eine offene Menge im Rd und alle hier auftretenden Funktionen differenzierbar.Für f, g ∶D → R gilt
grad(fg) = ∇(fg) = f∇g + g∇f = f grad(g) + g grad(f)
Nun sei f ∶D → R und g ∶D → Rd, dann gilt
div(fg) = ∇ ⋅ (fg) = (∇f) ⋅ g + f∇ ⋅ g = grad(f) ⋅ g + f div(g)
und für d = 3 gilt
rot(fg) = ∇× (fg) = f∇× g + (∇f) × g = f rot(g) + grad(f) × g
3. Kombinationen:Sei D eine offene Menge im Rd.Für f ∶D → R gilt :
div(grad(f)) = ∇ ⋅ (∇f) ∶= δf = ∂2x1f + ⋅ ⋅ ⋅ + ∂
2xdf
Nun sei f ∈ C2 (D → Rd). Für d = 3 gilt dann:
div(rot(f)) = ∇ ⋅ (∇× f) = 0
rot(grad(f)) = ∇× (∇f) = 0
130

1.10 Definition:Sei D eine offene Menge im Rd und f ∶D → Rd.Dann bezeichnet man f als Gradientenfeld, falls ein F ∈ C1 (D → R) mit f = ∇F existiert.F heißt dann Potential zu f .
1.11 Satz:Seien die selben Voraussetzungen wie in 1.6 gegeben.Ist f zusätzlich ein Gradientenfeld mit Potential F , so gilt für jede/n stückweise glatte/nKurve/Weg in D:
∫Kf ⋅ Tgds = F (γ(b)) − F (γ(a)) (= F (Endpunkt) − F (Anfangspunkt))
Beweis. Sei (γ, [a, b]) die in 1.6 gegebene Parametrisierung der Kurve.Zunächst betrachten wir f(γ(t)) ⋅ γ′(t). Da f ein Gradientenfeld ist, gilt:
f(γ(t)) ⋅ γ′(t) = ∇F (γ(t)) ⋅ γ′(t) =d
∑k=1
∂xkF (γ(t))γ′k(t)Kettenregel= d
dt(F ○ γ)(t)
Da F ○ γ eine Stammfunktion zu ddt (F ○ γ)(t) ist, folgt nun:
∫Kf ⋅ Tg ds 1,6=
n
∑j=1∫
tj
tj−1f(γ(t)) ⋅ γ′(t) dt =
n
∑j=1∫
tj
tj−1
ddt
(F ○ γ)(t) dt
=n
∑j=1
((F ○ y)(tj) − (F ○ γ)(tj−1)) = (F ○ γ)(tn) − (F ○ γ)(t0)
= (F ○ γ)(b) − (F ○ γ)(a)
1.12 Satz:Sei D ⊆ Rd ein Gebiet und f ∶D → Rd eine stetige Abbildung.Wenn das Wegintegral längs stückweise glatter Wege/Kurven in D wegunabhängig ist, dannist f ein Gradientenfeld.Wegunabhängigkeit bedeutet, dass das Wegintegral nur von den dem Anfangs-und Endpunktabhängt. Also der stückweise glatte Weg zwischen diesen Punkten kann beliebig in D gewähltwerden.
131

1. Kurvenintegrale
Beweis. Wir wählen x0 ∈D fest.Zu einem beliebigen x ∈ D existiert eine stückweise glatte Kurve Kx mit Anfangspunkt x0
und Endpunkt x.Nun definieren wir uns F (x) ∶= ∫Kx f ⋅ Tgds.Da das Integral wegunabhängig ist, ist F wohldefiniert.
Zu zeigen ist : ∇F = f in D.Dafür betrachten wir ∇F = f ⇔ ∂xjF = fj für j = 1, . . . , d
Sei h ≠ 0 , j ∈ {1, . . . , d} und x ∈ D. K ′ sei die Strecke, welche die Punkte x und x + hejverbindet. Wir hängen K ′ an K an und definieren damit die Kurve Kx+hej . Damit folgt:
F (x + hej) = ∫Kx+hej
f ⋅ Tg ds = ∫Kxf ⋅ Tg ds + ∫
K′
f ⋅ Tg ds
= F (x) + ∫h
0f(γ(t)) ⋅ γ′(t) dt = F (x) + ∫
h
0f(x + tej) ⋅ ej dt
x0
x x + hejKx
K ′
Kx+hej
Mit diesem Ergebnis betrachten wir:
1
h(F (x + hej) − F (x)) − fj(x) =
1
h(F (x) + ∫
h
0f(x + tej) ⋅ ej dt − F (x)) − fj(x)
= 1
h∫
h
0f(x + tej) ⋅ ej dt − fj(x)
= 1
h∫
h
0f(x + tej) ⋅ ej dt − 1
h∫
h
0f(x) ⋅ ej dt
= 1
h∫
h
0f(x + tej) ⋅ ej − f(x) ⋅ ej dt
Da f stetig ist, gilt ∣f(x + tej) ⋅ ej − f(x) ⋅ ej ∣ < ε für ∣t∣ < δ. Damit erhalten wir:
∣1h∫
h
0f(x + tej) ⋅ ej − f(x) ⋅ ej dt∣ ≤ 1
h∫
h
0ε dt = ε, 0 < ∣h∣ < δ
ÐÐ→ε→0
0
Es folgt ∂xjF (x) = fj(x) und damit auch ∇F = f .
132

2. Flächenintegrale im R3
2.1 Definition:Sei D ⊆ R2 ein beschränktes Gebiet, f ∈ C1(D → R3), f ∣
Dinjektiv und
Rang (∂x1f ∂x2f) = Rang
⎛⎜⎜⎜⎝
∂x1f1 ∂x2f1
∂x1f2 ∂x2f2
∂x1f3 ∂x2f3
⎞⎟⎟⎟⎠= 2
in D. Dann heißt F ∶= f(D) Fläche im R3 und (f,D) heißt Parameterdarstellung von F .
2.2 Beispiel:D ∶=]0,2π[×] − π
2 ,π2 [, R > 0. Durch
f⎛⎝ϕ1
ϕ2
⎞⎠=⎛⎜⎜⎜⎝
R cos(ϕ2) cos(ϕ1)R cos(ϕ2) sin(ϕ1)
R sin(ϕ2)
⎞⎟⎟⎟⎠
sind Kugelkoordinaten im R3 gegeben, wobei ϕ1 den Längengrad und ϕ2 den Breitengradbezeichnet. Es gilt ∥f(ϕ1, ϕ2)∥ = R.
x1
x2
x3
R cos(ϕ2) cos(ϕ1)
R cos(ϕ2) sin(ϕ1)
R sin(ϕ2)
xR
ϕ1ϕ2
133

2. Flächenintegrale im R3
F = f(D) ist eine Kugel um 0 mit dem Radius R. Klar: f ∣D
ist injektiv.
∂ϕ1f =⎛⎜⎜⎜⎝
−R cos(ϕ2) sin(ϕ1)R cos(ϕ2) cos(ϕ1)
0
⎞⎟⎟⎟⎠
∂ϕ2f =⎛⎜⎜⎜⎝
−R sin(ϕ2) cos(ϕ1)−R sin(ϕ2) sin(ϕ1)
R cos(ϕ2)
⎞⎟⎟⎟⎠
∂ϕ1f × ∂ϕ2f =⎛⎜⎜⎜⎝
−R2 cos2(ϕ2) cos(ϕ1)R2 cos2(ϕ2) sin(ϕ1)R2 cos(ϕ2) sin(ϕ2)
⎞⎟⎟⎟⎠≠ 0
Also ist Rang (∂ϕ1f ∂ϕ2f) = 2 auf D.
2.3 Satz:Sei (f,D) die Parameterdarstellung einer Fläche F . Ist (γ, [a, b]) die Parameterdarstellungeiner glatten Kurve in D, so ist (f ○γ, [a, b]) Parameterdarstellung einer glatten Kurve in R3,die auf F liegt.
Beweis. Seien f ∈ C1(D → R3), γ ∈ C1([a, b]→D), so folgt f ○ γ ∈ C1([a, b]→ R3).
(f ○ γ)′(t) =⎛⎜⎜⎜⎝
∂x1f1(γ(t))γ′1(t) + ∂x2f1(γ(t))γ′2(t)∂x1f2(γ(t))γ′1(t) + ∂x2f2(γ(t))γ′2(t)∂x1f3(γ(t))γ′1(t) + ∂x2f3(γ(t))γ′2(t)
⎞⎟⎟⎟⎠
= γ′1(t)∂x1f(γ(t)) + γ′2(t)∂x2f(γ(t)) ≠ 0,
denn {∂x1f, ∂x2f} sind linear unabhängig und γ′(t) ≠ 0, da die Kurve glatt ist.
2.4 Bemerkung:Der Tangentialvektor von f○γ in f○γ(t) liegt in der Ebene, die von {∂x1f(γ(t)), ∂x2f(γ(t))}aufgespannt wird.
2.5 Definition:Sei (f,D) die Parameterdarstellung einer Fläche F .
1. Für x ∈D heißt die Ebene
Ef(x) ∶= {f(x) + t∂x1f(x) + s∂x2f(x)∣s, t ∈ R}
Tangentialebene an F in f(x).
134

2. Für x ∈D heißt
n(x) ∶= 1
∥∂x1f(x) × ∂x2f(x)∥(∂x1f(x) × ∂x2f(x))
Normaleneinheitsvektor an F in f(x).
2.6 Bemerkung:∥∂x1f × ∂x2f∥ ist der Flächeninhalt des von {∂x1f, ∂x2f} aufgespannten Parallelogramms.
2.7 Definition:Sei (f,D) die Parameterdarstellung einer Fläche F und g ∈ C(F → R).
1.∣F ∣ ∶= ∫
D∥∂x1f(x) × ∂x2f(x)∥dx
heißt Flächeninhalt von F .
2.
∫Fgdσ ∶= ∫
Dg(f(x))∥∂x1f(x) × ∂x2f(x)∥dx
heißt Integral von g über F . Offensichtlich ist ∫F 1dσ = ∣F ∣.
2.8 Beispiel:Sei (f,D) wie in Beispiel 2.2.
∥∂ϕ1f × ∂ϕ2f∥2 = R4 cos4(ϕ2) cos2(ϕ1) +R4 cos4(ϕ2) sin2(ϕ1) +R4 cos2(ϕ2) sin2(ϕ2)
= R4 cos4(ϕ2) +R4 cos2(ϕ2) sin2(ϕ2) = R4 cos2(ϕ2)
⇒ ∣F ∣ = ∫[0,2π]×[−π
2,π2]R2∣ cos(ϕ2)∣d(ϕ1, ϕ2) = ∫
2π
0∫
π2
−π2
R2 cos(ϕ2)´¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¶
≥0
dϕ2dϕ1
= R2∫2π
0[sin(ϕ2)]
π2
−π2
dϕ1 = 4πR2
2.9 Definition:Sei O ⊆ R3 offen, v ∈ C(O → R3) ein Vektorfeld, F ⊆ O eine Fläche mit Parameterdarstellung(f,D). Dann heißt
Φ ∶= ∫Fv ⋅ ndσ 2.7= ∫
Dv(f(x)) ⋅ n(f(x))∥∂x1f(x) × ∂x2f(x)∥dx
= ∫Dv(f(x)) ⋅ (∂x1f(x) × ∂x2f(x))dx
Fluss von v durch F .
135

2. Flächenintegrale im R3
2.10 Beispiel:D ∶=]0,1[×]0,1[, f(x1, x2) ∶= (αx1, αx2,1) mit konstantem α > 0.
x1
x2
1
1
D
x1
x2
x3
1
F = f(D)
Sei v ∶ R3 → R3, v =⎛⎜⎜⎜⎝
v1
v2
v3
⎞⎟⎟⎟⎠ein konstantes Vektorfeld.
∂x1f × ∂x2f =⎛⎜⎜⎜⎝
α
0
0
⎞⎟⎟⎟⎠×⎛⎜⎜⎜⎝
0
α
0
⎞⎟⎟⎟⎠=⎛⎜⎜⎜⎝
0
0
α2
⎞⎟⎟⎟⎠
⇒ ∫Fv ⋅ ndσ = ∫
[0,1]×[0,1]
⎛⎜⎜⎜⎝
v1
v2
v3
⎞⎟⎟⎟⎠⋅⎛⎜⎜⎜⎝
0
0
α2
⎞⎟⎟⎟⎠
dx = ∫1
0∫
1
0α2v3dx2dx1 = α2v3
Also: Φ ist proportional zum Flächeninhalt von F .
v =⎛⎜⎜⎜⎝
v1
v2
0
⎞⎟⎟⎟⎠⇒ Φ = 0 ist sinnvoll, denn v∥F , d. h. es fließt nichts durch F .
v =⎛⎜⎜⎜⎝
0
0
v3
⎞⎟⎟⎟⎠⇒ Φ = α2v3 ist sinnvoll, denn v�F , d. h. v fließt orthogonal durch F .
136

3. Integralsätze
3.1 Definition:S ⊆ R2 heißt Standardbereich, falls es Intervalle I1 = [a1, b1], I2 = [a2, b2] und stückweiseglatte, reellwertige Funktionen uj , oj auf Ij gibt, so dass
S = {(x1, x2) ∈ R2 ∣ x1 ∈ I1 ∧ u1(x1) ≤ x2 ≤ o1(x1)}
= {(x1, x2) ∈ R2 ∣ x2 ∈ I2 ∧ u2(x2) ≤ x1 ≤ o1(x2)}
gilt.
x1
x2
x1
x2
a1 b1 a1 b1
a2
b2
a2
b2
x2 = u1(x1)
x2 = o1(x1) x1 = u2(x2)
x1 = o2(x2)S S
3.2 Bemerkungen:
1. S ist Riemann-messbar (Analysis II, Kapitel 14).Für f ∈ C(S → R) gilt:
∫Sf dx = ∫
b1
a1(∫
o1(x1)
u1(x1)f(x1, x2) dx2)dx1 = ∫
b2
a2(∫
o2(x2)
u2(x2)f(x1, x2) dx1)dx2
137

3. Integralsätze
2. Der Rand ∂S besitzt folgende stückweise glatte Parameterdarstellung:
γ(t) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
⎛⎜⎝
a1 + t(b1 − a1)
u1(a1 + t(b1 − a1))
⎞⎟⎠
0 ≤ t ≤ 1
⎛⎜⎝
b1
u1(b1) + (t − 1)(o1(b1) − u1(b1))
⎞⎟⎠
1 < t ≤ 2
⎛⎜⎝
b1 + (t − 2)(a1 − b1)
o1(b1 + (t − 2)(a1 − b1))
⎞⎟⎠
2 < t ≤ 3
⎛⎜⎝
a1
o1(a1) + (t − 3)(u1(a1) − o1(a1))
⎞⎟⎠
3 < t ≤ 4
γ′(t) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
⎛⎜⎝
b1 − a1
. . .
⎞⎟⎠≠ 0 0 < t < 1
⎛⎜⎝
0
o1(b1) − u1(b1)
⎞⎟⎠≠ 0 1 < t < 2
⎛⎜⎝
a1 − b1. . .
⎞⎟⎠≠ 0 2 < t ≤ 3
⎛⎜⎝
0
u1(a1) − o1(a1)
⎞⎟⎠≠ 0 3 < t < 4
Falls u1(a1) = o1(a1) gilt, wird der letzte Kurventeil weggelassen.Bezogen auf die Durchlaufrichtung liegt S immer links von der Randkurve.Man sagt, ∂S wird im positiven Sinne durchlaufen.
3.3 Integralsatz im R2:Sei D eine offene Menge im R2, S ⊆D ein Standardbereich und f, g ∈ C1(D → R).Dann gilt mit dem Tangenteneinheitsvektor T = (T1, T2)⊺:
∫∂Sf dx2 ∶= ∫
∂SfT2 ds = ∫
S∂x1f(x) dx
∫∂Sg dx1 ∶= ∫
∂SgT1 ds = −∫
S∂x2g(x) dx
∂S wird im positiven Sinne durchlaufen.
138

Beweis. Zunächst betrachten wir:
∫S∂x2g(x) dx 3.2= ∫
b1
a1(∫
o1(x1)
u1(x1)∂x2g(x1, x2) dx2)dx1
= ∫b1
a1(g(x1, o1(x1)) − g(x1, u1(x1))) dx1
Nun verwenden wir die Parametrisierung von ∂S aus 3.2:
∫∂SgT1 ds = ∫
4
0g(γ(t))γ′1(t) dt
= ∫1
0g⎛⎝⎛⎝
a1 + t(b1 − a1)u1(a1 + t(b1 − a1))
⎞⎠⎞⎠(b1 − a1) dt + ∫
2
1g(. . . ) ⋅ 0 dt
+ ∫3
2g⎛⎝⎛⎝
b1 + (t − 2)(a1 − b1)o1(b1 + (t − 2)(a1 − b1))
⎞⎠⎞⎠(a1 − b1) dt + ∫
4
3g(. . . ) ⋅ 0 dt
= ∫b1
a1g⎛⎝⎛⎝
x1
u1(x1)⎞⎠⎞⎠
dx1 + ∫a1
b1g⎛⎝⎛⎝
x1
o1(x1)⎞⎠⎞⎠
dx1 = −∫S∂x2g(x) tdx
Damit ist die zweite Gleichung des Satzes gezeigt. Die zweite wird noch geliefert.
3.4 Folgerungen:Seien die Voraussetzungen wie in 3.3 und v ∈ C1(D → R2).
1. Satz von Green:
∫S
∂v1
∂x2±∂x2g
− ∂v2
∂x1±∂x1f
dx = −∫∂S
v ⋅ T±gT1+gT2
ds
2. Satz von Gauß:T = (T1, T2)⊺ ist Tangenteneinheitsvektor und ∂S wird im positiven Sinne durchlaufen.Also ist n ∶= (T2,−T1)⊺ der Normalenvektor, der nach außen zeigt. Nun gilt:
∫S∇ ⋅ v dx = ∫
∂Sv ⋅ n ds
139

3. Integralsätze
S
∂S
⎛⎝T1
T2
⎞⎠
⎛⎝T2
−T1
⎞⎠
3.5 Bemerkung:Ein Greenscher Bereich ist eine Vereinigung von Standardbereichen, deren Inneres paarweisedisjunkt ist.D.h.: Sei X ein Greenscher Bereich, dann gilt:
X =n
⋃k=1
Sk, Si ∩ Sj für i ≠ j
Si ist für i ∈ {1, . . . , n} ein Standardbereich.Die Sätze von Green und Gauß im R2 bleiben gültig, wenn ein Greenscher Bereich an-statt eines Standardbereichs vorausgesetzt wird.
x1
x2
x1
x2
∂X
im positivenSinne
Randintegraleheben sich weg
XS1S2
S3 S4
3.6 Integralsatz von Stokes im R3:Sei O ⊆ R3 offen, g ∈ C1(O → R3), F ⊆ O eine Fläche mit Parameterdarstellung (f,D,D ⊆ R2 ein Greenscher Bereich und f ∈ C2(D → R3). Dann gilt:
∫F(∇× g) ⋅ ndσ = ∫
∂Fg ⋅ Tds
140

x1
x2
y1
y3
∂D = γ([a, b])D
∂F = (f ○ γ)([a, b])
F
y2
f g
R3
3.7 Satz:Sei O eine offene, konvexe Menge im R3 und g ∈ C2(O → R3). Dann sind äquivalent:(i) ∇× g = 0 in O(ii) g ist ein Gradientenfeld: ∃G ∈ C1(O → R) ∶ g = ∇G
141


























![Lesky Albin. - Esquilo - La Tragedia Griega[1]](https://img.pdfslide.tips/doc/110x75/557212e4497959fc0b91287c/lesky-albin-esquilo-la-tragedia-griega1.jpg)

