Embed Size (px)
Citation preview

N° D’ORDRE :
Spécialité : Génie Electrique (Electrotechnique)
Présentée par :
Lotfi ALLOUI
Pour obtenir le grade de DOCTREUR de l’UNIVERSITE PARIS SUD
Sujet de la thèse :
MODELISATION TRIDIMENSIONNELLE DES MATERIAUX SUPRACONDUCTEURS
Soutenue le
Devant le jury composé de : Rapporteurs : Gérard Meunier
Mouloud Féliachi Examinateurs : Jean Lévêque (Président)
Frédéric Bouillault Pierre Verdine
Thèse de DOCTORAT de L’UNIVERSITE PARIS SUD

A mes parents,
ma femme
Mes frères et sœurs

REMERCIEMENTS
Je voudrais exprimer ma profonde gratitude à Monsieur Frédéric BOUILLAULT, Professeur à l’Université Paris XI et directeur du LGEP, pour la confiance qu’il m’a accordée en m’accueillant au sein du laboratoire et en acceptant de diriger mes recherches. Ses précieux conseils, ses encouragements ainsi que sa qualité humaine, m’ont permis d’aboutir dans ce travail.
Je tiens à remercier Monsieur Adel RAZEK, directeur de recherche au CNRS, qui m’a accueilli dans son département de modélisation et contrôle de systèmes électromagnétiques - MOCOSEM et qui m’a accordé son soutien permanent durant ce travail. J’ai apprécié, notamment, son sens du dialogue et sa sympathie.
Je tiens aussi à remercier Monsieur Mebarek BAHRI, directeur du laboratoire de modélisation des systèmes énergétiques (LMSE) de l’université de Biskra de m’avoir accueilli au sein du laboratoire, de m’intégré aussi au sein du laboratoire et en me permettant en outre, de finalisé ce travail dans des bonnes conditions.
Je voudrais aussi remercier Monsieur Mouloud FELIACHI, Professeur à l’université de Nantes pour ses précieux conseils, ses encouragements ainsi que son soutient moral et surtout de m’avoir orienté vers le (LGEP).
Je remercie chaleureusement Monsieur Souri Mohamed MIMOUNE, qui a guidé mes premiers pas dans le monde de la recherche, en particulier, dans le monde des supraconducteurs et pour avoir accepté de participer à mon jury de thèse.
Je remercie chaleureusement Monsieur Jean LEVEQUE et son équipe du laboratoire le GREEN (en particulier, Bruno DOUINE et Smail MEZANI) pour les discussions enrichissantes et pour toutes les données expérimentales qui ont permis la validation de ce travail. J’ai apprécié particulièrement l’intérêt qu’il témoigné a ce travail.
Je remercier Monsieur Lionel PICHON, qui a fait de sorte que je puisse préparer mon Doctorat au sein de l’équipe Interaction Champs Matériaux Structures (ICHAMS) dans les meilleures conditions.

Je remercier Monsieur Olivier HUBERT pour le soutien informatique et l’aide qu’il ma apportée, surtout sa grande disponibilité malgré les grandes taches dont il est chargées au sein du laboratoire.
Je remercié vivement Mme Françoise RICHARD, Mme Christine SAFAKHAH et Mme Brigitte VINCENT pour m’avoir facilité tous les problèmes de logistique et de gestion liés à la thèse.
Je terminerai en adressant mes remerciements à tous les membres et thésards des laboratoires, de génie électrique de paris (LGEP) et de modélisation des systèmes énergétiques (LMSE) de l’université de biskra, ainsi qu’à mes amis.

TABLE DES MATIERES Listes des figures et tableaux 1
Introduction générale 6
Chapitre I. INTRODUCTION SUR LA SUPRACONDUCTIVITE
I.1. Historique des supraconducteurs 9
I.2. Effet Meissner 11
I.3. Types de supraconducteurs 13
I.3.1. Supraconducteurs type I 14
I.3.2. Supraconducteurs type II 14
I.4. Applications des supraconducteurs en électrotechnique 17
I.4.1. Limiteurs de courant 17
I.4.2. Lignes de transport 18
I.4.3. les systèmes de stockage de l’énergie SMES 19
I.4.4. les transformateurs 19
I.4.5. les machines supraconductrices 20
I.4.6. les aimants permanents supraconducteurs 21
I.4.7. lévitation et paliers magnétiques 22
Chapitre II. MODELISATION DES MATERIAUX SUPRACONDUCTEURS
DE TYPE II
II.1. Introduction 25
II.2. Les modèles considérés 26
II.2.1. Equations de Maxwell 26
II.2.2. Modèles de supraconducteurs 28
II.2.2.1. Dépendance en température de Jc et n 31
II.2.2.2. Dépendance en champ magnétique Jc 31
II.2.3. Problème électromagnétique et formulation en potentiels A-V 32
II.2.4. Problème thermique 35
II.3. Méthodes numériques de discrétisation 36
II.3.1. Principales méthodes existantes 36
II.3.2. La méthode des volumes finis MVF 37

Chapitre III. MISE EN ŒUVRE DE LA METHODE DES VOLUMES FINIS
III.1. Introduction 39
III.2. Méthode des volumes finis tridimensionnelle avec un maillage
cartésien MVFC 40
III.2.1. Discrétisation géométrique 40
III.2.2. Discrétisation des équations électromagnétiques par la MVFC 41
III.2.2.1. Intégration de A 41
III.2.2.2. Intégration de A 45
III.2.2.3. Intégration du terme source 45
III.2.2.4. Intégration du terme
Vσ
t
A 45
III.2.2.4. Intégration De l’équation en divergence 47
III.2.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFC 48
III.2.4. Méthodes numériques de résolution 50
III.2.4.1. Méthode d’Euler 50
III.2.4.2. Méthode de Gauss-Seidel 51
III.3. Méthode des volumes finis tridimensionnelle avec un maillage
non structuré (MVFM) 52
III.3.1. Définition du maillage 53
III.3.2. Discrétisation des équations électromagnétiques par la MVFM 56
III.3.2.1. Intégration de A 57
III.3.2.2. Intégration de x
Vt
A
)( 62
III.3.2.3. Intégration du terme source 62
III.3.2.4. Intégration de l’équation en divergence 63
III.3.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFM 65
III.4. Algorithmes de résolution 67
III.4.1. Algorithmes de résolution des problèmes, électromagnétique et thermique 67
III.4.2. Couplage électromagnétique-thermique 70
Chapitre IV. APPLICATIONS ET VALIDATIONS
IV.1. Aimantation des pastilles supraconductrices 73
IV.1.1. Introduction 73
IV.1.2. Etudes numériques des phénomènes couplés magnétothermiques
durant le processus d’aimantation des pastilles supraconductrices 76
IV.1.2.1. Procédés d’aimantation 77

IV.1.2.2. Résultats de simulation 78
IV.1.2.3. Implantation des canaux dans la pastille
supraconductrice à aimanter 82
IV.1.2.4. Force de lévitation magnétique entre aimant et
Supraconducteur aimanté, avec et sans canaux de refroidissement 87
IV.2. Association aimant permanent-supraconducteur 93
IV.2.1. Modélisation de l’aimant 93
IV.2.2. Validations des modèles 94
IV.2.2.1. Validation des modèles par confrontation
avec des résultats expérimentaux trouvés dans la littérature 95
IV.2.2.1.1. Validation de la MVFM par force d’interaction verticale 95
IV.2.2.1.2. Validation de la MVFC par comparaison avec la MVFM 96
IV.2.2.1.3. Validation de la MVFM par force d’interaction latérale 97
IV.2.2.2. Mesure des forces latérales 99
IV.2.2.3. Comparaison entre la formulation magnétique
jaugée et la formulation magnétique sans jauge 104
IV.2.3. Etudes de l’influence des paramètres géométriques et physiques
sur les forces d’interactions 105
IV.2.3.1. Etude de l’influence des paramètres géométriques de l’aimant
et de la pastille supraconductrice sur la force de lévitation 105
IV.2.3.1.1. Influence de l’épaisseur de l’aimant 105
IV.2.3.1.2. Influence du diamètre de l’aimant 108
IV.2.3.2. Influence de la distance de refroidissement sous champ 110
IV.2.3.3. Influence de la température du milieu extérieur 119
IV.2.3.4. Influence de la forme et de dimensions de la pastille
supraconductrice dans un système de guidage magnétique 124
IV.2.4. Couplage mécanique 128
IV.2.4.1. Formulation du problème 129
IV.2.4.2. Etude dynamique 130
IV.2.4.2. Formulation du deuxième problème 134
IV.2.4.2.1. Résultats des simulations 136
IV.2.5. Etude de la relaxation de la force de lévitation 144
Conclusion générale 147
Bibliographie 149

LISTE DES FIGURES
Fig.I.1. Différence entre un conducteur parfait et un supraconducteur 12
Fig.I.2. Surface critique délimitant la région où existe la supraconductivité 13
Fig.I.3. Caractéristique B(H) d’un supraconducteur de type I. 14
Fig.I.4. Caractéristique B(H) d’un supraconducteur de type II. 15
Fig.I.5. Distribution des vortex dans un supraconducteur. 15
Fig.I.6. Vortex dans un supraconducteur. 16
Fig. I.7. Volant d’inertie 23
Fig.II.1. Problème type à modéliser 26
Fig.II.2. Modèle de Bean et son approximation 28
Fig.II.3. Schématisation d’un plan de symétrie 34
Fig.III.1. Maillage structuré et non structuré, vue 2D 40
Fig.III.2. Volume fini élémentaire Dp 40
Fig.III.3. Approximation linéaire du potentiel à travers la facette e 42
Fig.III.4. Illustration des nœuds supplémentaires 44
Fig.III.5. Sous domaine d’intégration : méthodes ‘nœuds centrés’ 52
Fig.III.6. Sous domaine d’intégration : méthodes ‘éléments centrés’ 53
Fig.III.7. Schéma général du principe d’un code MVF pour un maillage non-structuré 53
Fig. III.8. Exemple de construction d’un maillage dual de type barycentrique 54
Fig. III.9. Exemple de construction d’un maillage dual de type Delauney-Voronoi 55
Fig.III.10. Maillage dual de type Delauny-Voronoi en 3D. 55
Fig.III.11. Volume fini élémentaire Dp 58
Fig.III.12. Projection d’un volume élémentaire suivant le plan XY. 59
Fig.III.13. Calcul des surfaces 61
Fig.III.14. Organigramme de l’algorithme du code de calcul du problème électromagnétique 68
Fig.III.15. Organigramme de l’algorithme du code de calcul du problème thermique 69
Fig.III.16. Organigramme utilisé pour calculer la solution du système couplé
magnétothermique au sein d’un supraconducteur. 71
Fig.IV.1. Plaque supraconductrice d’épaisseur 2a et infiniment longue 74
Fig.IV.2. Distribution de la densité de courant et du champ dans une pastille
supraconductrice selon le modèle de Bean. 76
Fig.IV.3. Evolution temporelle du champ magnétisant. 79
Fig.IV.4. Distribution de la température au sein de la pastille supraconductrice
aimantée en régime permanent pour différentes valeurs de . 80
Fig.IV.5. Répartition de la densité de courant au sein de la pastille
supraconductrice aimantée en régime permanent 81
Fig.IV.6. Distribution de l’induction magnétique B à z = 5 mm
au dessus de la pastille supraconductrice aimantée dans le cas
où l’effet thermique est pris en compte. 82

Fig.IV.7. Les valeurs maximales, Tmax, Jmax, Bmax et Edissmax,
en unité relative, pour chaque type d’aimantation. 83
Fig.IV.8. Implantation de n canaux de refroidissements
dans la pastille supraconductrice. 83
Fig.IV.9.a. Distribution du champ d’induction magnétique à 3.2 mm
au dessus de la pastille supraconductrice sans canaux lors
de la prise en compte de l’effet thermique. 84
Fig.IV.9.b. Distribution du champ d’induction magnétique à 3.2 mm au
dessus de la pastille sans canaux refroidis dans le cas où on ne tient pas compte de l’effet thermique. 84
Fig.IV.10. Distribution de la température au sein du matériau supraconducteur
sans canaux en régime permanent. 85
Fig.IV.11. Distribution de la température au sein de la pastille supraconductrice
à canaux en régime permanent. 85
Fig.IV.12. Distribution du champ d’induction magnétique à 3.2 mm
au dessus du supraconducteur à canaux en régime permanent. 87
Fig.IV.13. Distribution du champ d’induction magnétique à 3.2 mm au dessus
de la pastille supraconductrice sans canaux en régime permanent
pour Bm = 5.5T ≥ Bopt. 87
Fig.IV.14. Distribution du champ d’induction magnétique à 3.2 mm au dessus
de la pastille à canaux en régime permanent pour Bm = 5.5 T ≥ Bopt. 87
Fig.IV.15. La dépendance de la valeur maximale du Champ piégé Bme calculé
à 3.2 mm au dessus de la pastille en fonction de la valeur maximale
du champ appliqué Bm dans les deux pastilles supraconductrices. 88
Fig.IV.16. Force d’interaction verticale exercée entre l’aimant
et le supraconducteur en fonction de l’écart aimant-supra. 90
Fig.IV.17. Répartition des courants supraconducteurs dans la pastille supraconductrice
Aimantée. 90
Fig.IV.18. Répartition des lignes de champ d’induction magnétique B et courants
supraconducteurs dans la pastille supraconductrice non aimantée. 90
Fig.IV.19.a. Répartition de la température à l’intérieur de la pastille
supraconductrice aimantée en régime permanant. 91
Fig.IV.19.b. Répartition de la température à l’intérieur de la pastille supraconductrice,
64 canaux ont étais introduit dans la pastille. 91
Fig.IV.20.b. Force d’interaction verticale exercée entre l’aimant et le
supraconducteur en fonction de l’écart aimant-supra, dans les cas,
la pastille supraconductrice est avec ou sans canaux de refroidissement
et dans le cas où l’effet thermique est négligé. 92
Fig.IV.20.a. Force maximale d’interaction verticale exercée entre aimant
et pastille supraconductrices à canaux de refroidissement en fonction
du volume des canaux. 92
Fig.IV.21. Modélisation de l’aimant par une succession de ns spires. 93
Fig.IV.22.a. Répartition spatiale de la composante axiale de l’induction magnétique
calculée à 0.5 mm au dessus de la surface inférieur de l’aimant. 94
Fig.IV.22.b. Répartition spatiale de la composante axiale de l’induction magnétique

mesurée à 0.5 mm au dessus de la surface inférieur de l’aimant. 95
Fig.IV.23. Force verticale exercée entre l’aimant et le supraconducteur.
Fig.IV.24. Cycle de force. 96
Fig.IV.25. Force d’interaction verticale exercée entre l’aimant et le supraconducteur
calculée par la MVFC et la MVFM. 97
Fig.IV.26. Forces d’interactions latérales pour les deux types de refroidissements
sous champ magnétique et hors champ magnétique. 98
Fig.IV.27. Mesure des forces d’interactions latérales 99
Fig.IV.28. Mesure des forces d’interactions latérales lors du refroidissement
hors champ magnétique (RHC). 100
Fig.IV.29. Forces d’interactions latérales calculé et mesuré lors du refroidissement
hors champ magnétique. 101
Fig.IV.30. Mesure des forces d’interactions latérales lors du refroidissement sous
champ magnétique. 103
Fig.IV.31. Forces d’interactions latérales calculées et mesurée
lors du refroidissement sous champ magnétique. 103
Fig.IV.32. Force d’interaction verticale exercée entre l’aimant et le supraconducteur
calculée par les formulations AG et SG. 104
Fig.IV.33. Force d’interaction verticale exercée entre un supraconducteur et
un aimant d’épaisseur h = 5 mm, 10 mm et 40 mm, respectivement. 105
Fig.IV.34. Influence de hauteur de l’aimant h sur le force de lévitation verticale 106
Fig.IV.35. Répartition de la densité de courant (Jy) dans la pastille supraconductrice
pour un aimant d’épaisseur h = 5 mm, 10 mm et 40 mm, respectivement
à un écart aimant-supra de 3 mm. 107
Fig.IV.36. Force d’interaction verticale exercée entre la pastille et un aimant
de diamètre D égale à 14 mm, 20 mm et 25 mm respectivement. 108
Fig.IV.37. Répartition de la densité de courant dans la pastille supraconductrice
mise en dessous d’un aimant sur une distance z = 3 mm
ayant les diamètres D = 14 mm et 25 mm, respectivement. 109
Fig.IV.38. Répartition de la densité du courant dans la pastille supraconductrice
et du B entre un aimant permanent et une pastille supraconductrice
dans le cas du refroidissement hors champ. 112
Fig.IV.39. Répartition de la densité du courant dans la pastille supraconductrice 113
Fig.IV.40. Répartition de la densité du courant dans la pastille supraconductrice
et du champ d’induction magnétique B. 114
Fig.IV.41. La variation de la force latérale en fonction de la position latérale
du supraconducteur à la position de translation
ztr = 5 mm pour des différentes positions de refroidissements z0. 116
Fig.IV.42. Différents cycle à différents hauteurs de refroidissement,
respectivement à 5, 10, 15, 20, 40 et 50 mm. 117
Fig.IV.43.a. Force de répulsion maximale en fonction de la distance de refroidissement z0 118
Fig.IV.43.b. Force d’attraction maximale en fonction de la distance de refroidissement z0 118

Fig.IV.44. Force de lévitation magnétique en fonction de l’écart
aimant-supraconducteur à des différentes températures. 120
Fig.IV.45. La force de lévitation maximale en fonction de la température. 121
Fig.IV.46.a. Force latérale en fonction de la position latérale de l’aimant
dans le cas du refroidissement sous champ à des différentes
températures. 123
Fig.IV.46.b. Force latérale en fonction de la position latérale de l’aimant
dans le cas du refroidissement hors champ magnétiques à des
différentes températures. 123
Fig.IV.47. Système de guidage magnétique 124
Fig.IV.48.a. La valeur du champ d’induction magnétique B produit dans le centre
d’un aimant permanent en fonction de la distance verticale. 125
Fig.IV.48.b. La valeur du champ d’induction magnétique B produit dans le
centre d’un aimant permanent en fonction de la distance verticale 125
Fig.IV.49. Force de lévitation maximale entre les pastilles supraconductrices
A, B, C et D et entre un système de guidage magnétique. 128
Fig.IV.50. Structure du dispositif de lévitation. 130
Fig.IV.51. Organigramme de couplage magnétique-thermique-mécanique. 130
Fig.IV.52. Comportement dynamique du dispositif avec le modèle qui tient
compte de l’effet thermique et celui qui ne tient pas compte
l’effet thermique. 132
Fig.IV.53. Force de lévitation en fonction du temps. 132
Fig.IV.54. Evolution temporelle de la température au centre de la pastille 133
Fig.IV.55. Répartition spatiale de la température au sein de la pastille
supraconductrice aux instants t = 0.5 s, 1 s et 1.575 s respectivement. 133
Fig.IV.56.a. Position finale de l’aimant en fonction de sa position initiale 133
Fig.IV.56.b. Erreur absolue en fonction de la position initiale de l’aimant 133
Fig.IV.57. Structure du dispositif de lévitation avec une excitation extérieure. 135
Fig.IV.58. la disposition du système dans la première étape. 135
Fig.IV.59. Organigramme de couplage magnétique-thermique-mécanique. 136
Fig.IV.60. La simulation de la réponse dynamique d’un aimant permanent
en lévitation au dessus d’une pastille supraconductrice excitée
par une source d’oscillation. 140
Fig.IV.61. Répartition spatiale de la température au sein
de la pastille supraconductrice à l’instant t = 0.5 s et pour les
fréquences fa = 20 Hz et fa = 100 Hz respectivement. 141
Fig.IV.62. Erreur absolue entre les sommets supérieurs et inférieurs
pour les fréquences fa = 30 Hz, fa = 50 Hz en enfin fa = 70 Hz. 142
Fig.IV.63.a. erreur absolue en fonction de la fréquence fa. 144
Fig.IV.63.b. erreur absolue en fonction de l’amplitude Za. 144
Fig.IV.64. Force d’interaction verticale, calculée et mesurée. 145
Fig.IV.65. Force d’interaction verticale calculée 145
Fig. IV.66. Variation temporelle de la force de lévitation normalisée 146

LISTE DES TABLEAUX
Tableau VI.1. Propriétés thermiques du SHTC utilisé dans la simulation. 78
Tableau.IV.2. Données du calcul des deux méthodes MVFC et MVFM 97
Tableau.IV.3. Grandeurs caractéristiques de la pastille supraconductrice. 102
Tableau.IV.4. Données du calcul pour les deux formulations AG et SG 104
Tableau.IV.5. Propriétés géométriques des pastilles supraconductrices
utilisées dans les simulations. 126
Tableau.IV.6. Propriétés géométriques et force de lévitation produite par les quatre
pastilles supraconductrices utilisées dans les simulations. 127
Le tableau IV.7 résume les paramètres géométriques et physiques
utilisés dans les simulations 137

INTRODUCTION GENERALE

Introduction générale
6
Introduction générale
La découverte des supraconducteurs dits à haute température critique en 1986 a suscité un
grand intérêt nouveau pour ces matériaux. Leur utilisation en électrotechnique peut être
sérieusement envisagée dans des domaines tels que la production, le transport, le stockage
d’énergie, etc. Dans le domaine de la puissance, on envisage l’utilisation des
supraconducteurs pour, entre autre, la fabrication de câble, de machines ou de limiteurs de
courant. Par ailleurs, les deux propriétés remarquables des supraconducteurs est de faire
léviter et de manière stable un aimant permanent d’une part, d’autre part, de pouvoir piéger le
champ magnétique. Cette première propriété des supraconducteurs permet d’envisagé leur
utilisation pour des dispositifs en suspension auto-stable, la seconde, permet de concevoir des
aimants supraconducteurs. Ces aimants présentent l’avantage de pouvoir fournir des valeurs
de champ magnétique beaucoup plus importantes par rapport à celles fournies par les aimants
permanents conventionnels surtout à basse température.
L’étude de ces différentes applications indique qu’il est important de déterminer avec une
bonne précision les grandeurs électromagnétiques et thermiques liées aux supraconducteurs.
Pour cela, il est donc impératif de développer des outils de calcul numérique permettant un
apport important dans la conception et l’optimisation des dispositifs à base de matériaux
supraconducteurs. Pour cela, on s’intéresse à développer des outils de calcul capables de
modéliser des dispositifs supraconducteurs avec des géométries bidimensionnelles et dans le
cas le plus général avec des géométries tridimensionnelles permettant d’accéder aux
différentes grandeurs électromagnétiques et thermiques.
Plusieurs outils de simulation ont été proposés dédiés principalement à la modélisation
bidimensionnelle des matériaux supraconducteurs, cependant, peu de travaux ont été proposés
pour la modélisation tridimensionnelle de ces matériaux et encore moins la modélisation
tridimensionnelle des phénomènes magnétothermiques présents dans les supraconducteurs à
haute température critique (HTC). C’est à cette dernière que l’on s’intéresse tout
particulièrement. Pour cela, nous avons choisi une approche numérique, il s’agit d’appliquer
la méthode des volumes finis (MVF) pour la discrétisation des équations aux dérivées partielles caractéristiques des phénomènes physiques à traiter.
Dans ce travail de thèse, nous proposons deux approches différentes de la MVF, la première
basée sur un maillage structuré. Elle consiste à subdiviser le domaine de calcul en cellules
élémentaires de forme quadrilatère pour les applications en deux dimensions et de forme
hexaédrique pour les applications en trois dimensions. C’est une discrétisation de type
Différences Finies (“marches d’escaliers”) qui facilite la construction du maillage. On va
appeler cette première méthode, la méthode des volumes finis classique est notée ‘MVFC’. La
deuxième approche, basée sur un maillage non-structuré qui requiert un mailleur indépendant,
spécifique, parfaitement adapté à l’algorithme numérique. Son rôle est de partitionner
l’application étudiée en cellules élémentaires de forme aussi variée que des triangles (deux
dimensions), tétraèdres ou prismes (trois dimensions). Le choix entre ces deux méthodes est

Introduction générale
7
basé essentiellement sur la géométrie du dispositif à modéliser. Si la géométrie possède une
structure hexaédrique, l’application de la première approche est avantageuse en termes de
temps de calcul et de simplicité. Par contre, cette première approche présente l’inconvénient
de ne pas pourvoir modéliser des dispositifs ayant des géométries complexe. C’est
véritablement tout l’intérêt de la deuxième approche de la MVF, le maillage va suivre
naturellement la forme de la structure, les géométries complexes seront modélisées de façon
plus rigoureuse et plus conforme sans que cela ne génère un nombre de mailles trop
important. On va appeler cette deuxième méthode, la méthode des volumes finis modifiée. Elle sera notée ‘MVFM’.
Cette thèse est structurée en quatre chapitres :
Le premier commence par un bref rappel sur les supraconducteurs avec leurs propriétés. Il résume ensuite quelques applications des supraconducteurs en électrotechnique.
Le deuxième chapitre est consacré à l’étude du comportement électromagnétique et thermique
des supraconducteurs afin de le retranscrire dans un langage mathématique point de départ de
la modélisation. L’étude ne prendra en compte que les supraconducteurs de type II. Ce
chapitre décrit aussi la loi de comportement choisie pour décrire le phénomène de
supraconduction, qui ne peut être représenté par la loi d’Ohm. A la fin de ce chapitre, les
diverses méthodes numériques utilisées pour la discrétisation des équations aux dérivées
partielles, caractéristiques des phénomènes physiques à traiter sont présentées. En particulier,
la méthode des volumes finis adoptée comme méthode de résolution dans le cadre de travail de cette thèse.
Dans le troisième chapitre, nous passerons à la mise en œuvre de la MVF, les deux approches
de cette méthode seront présentées. La première basée sur un maillage structuré, la deuxième
basée sur un maillage non structuré. Les formes discrétisées correspondantes sont
implémentées dans un algorithme selon les deux types de maillage Nous présentons aussi les
méthodes de résolutions des systèmes d’équations algébriques obtenus après avoir appliqué la
MVF. Nous exposerons à la fin de ce chapitre, les différents modes, utilisés pour le couplage
magnétique thermique, ainsi, que le code de calcul développé et implémenté sous
l’environnement Matlab en décrivant ses fonctions pour les deux types d’environnement : magnétique et thermique.
Dans le quatrième chapitre, nous présentons les résultats de simulation obtenus à partir du
code numérique développé. Dans un premier temps, on s’intéressera à l’étude de l’interaction
entre aimant permanent et supraconducteur haute température critique, dans un second temps,
nous abordons de manière détaillée, la réponse dynamique de la pastille YBCO à des
variations de champ magnétique, en considérant les effets thermiques. Plusieurs critères
permettant d’optimiser le processus d’aimantation des pastilles supraconductrices seront
présentés. Finalement, Les résultats de simulation d’une nouvelle technique qui peut être

Introduction générale
8
appliquée dans le but d’améliorer les contraintes thermiques durant le processus
d’aimantation seront présentés. Cette nouvelle technique est basée sur l’implantation de canaux de refroidissement dans la pastille supraconductrice.
On terminera par donner des conclusions et des perspectives.

Chapitre I.
INTRODUCTION SUR LA SUPRACONDUCTIVITE
I.1. Historique des supraconducteurs 9
I.2. Effet Meissner 11
I.3. Types de supraconducteurs 13
I.3.1. Supraconducteurs type I 14
I.3.2. Supraconducteurs type II 14
I.4. Applications des supraconducteurs en électrotechnique 17
I.4.1. Limiteurs de courant 17
I.4.2. Lignes de transport 18
I.4.3. les systèmes de stockage de l’énergie SMES 19
I.4.4. les transformateurs 19
I.4.5. les machines supraconductrices 20
I.4.6. les aimants permanents supraconducteurs 21
I.4.7. lévitation et paliers magnétiques 22

Chapitre I. Introduction sur la supraconductivité
9
Ce chapitre est consacré à la présentation des matériaux supraconducteurs et de
leurs applications. Après un rappel de l’histoire de la supraconductivité, nous citons les
propriétés fondamentales des matériaux supraconducteurs. Nous présentons aussi la
définition des supraconducteurs de type I et de type II. A la fin de ce chapitre, nous
établissons un récapitulatif des principales applications des supraconducteurs, haute
température critique en électrotechnique, en particulier, leurs applications dans le
domaine de la lévitation magnétique et leurs utilisations comme aimants permanents à la place des aimants permanents conventionnels.
I.1. Historique des supraconducteurs
L’histoire de la supraconductivité est certainement l’une des aventures les plus
passionnantes et des plus extraordinaires de la physique. Que ce soit sa découverte
jusqu'aux rebondissements avec l’obtention des céramiques ‘hautes températures’. Les
avancées s’étalent sur l’ensemble du vingtième siècle en le parsemant de prix Nobel. De
façon directe, on ne lui doit pas moins de cinq prestigieuses récompenses : Heike
Kamerlingh Onnes pour la découverte du phénomène en 1913, John Bardeen, Leon Cooper
et Robert Schrieffer pour la théorie microscopique en 1972, Brian Josephson et Ivar
Giaever pour les effets de cohérence quantique en 1973, Alex Müller et J. Georg Bednorz
pour la découverte des supraconducteurs à haute température critique en 1987 et enfin
Alxel Abriskosov, Vitali Ginzburg et Anthony Legett pour leurs travaux dans le domaine théorique des supraconducteurs en 2003.
L’histoire de la supraconductivité débute à Leiden en Hollande. Depuis 1908 le groupe de
H. K. Onnes sait liquéfier l’hélium et atteindre des températures aussi basses que 4.2 K ou
même 1K. Pendant plusieurs années, Onnes est le seul à disposer du rare et précieux
élément qu’est l’hélium en quantité suffisante pour le liquéfier. Il le tient de Caroline du
Nord aux Etats-Unis où se trouve l’essentiel des ressources mondiales. Il peut sans
concurrence immédiate effectuer les mesures de résistivité électrique des matériaux à basse
température. La préoccupation du moment est de déterminer son comportement lorsqu’on
s’approche du zéro absolu. La résistivité tend-elle vers zéro avec l’affaiblissement de
l’agitation thermique ? Augmente-t-elle avec une localisation possible des électrons ? Ou atteint-elle une valeur limite due aux impuretés comme le prévoit déjà Matthiessen.
La tâche de Gilles Holst, étudiant de Kamerlingh Onnes, est alors de mesurer la résistivité
électrique du mercure. La difficulté expérimentale est alors de réaliser des fils en coulant le
mercure dans des tubes capillaires à température ambiante et en le refroidissant à une
température inférieure à sa température de solidification. Le travail de Host débouche alors
par une courte note à l’académie royale des Pays Bas en 1911 qui annonce ‘sous toute
réserve’ que la résistivité du mercure apparemment disparait juste au dessus de 4 K.
L’année suivante, il découvrit que l’étain et le plomb perdaient leur résistance
respectivement à 3.7 K et 6 K. la disparition de la résistivité électrique, en courant continu, est donc la première et la plus spectaculaire manifestation de la supraconductivité.

Chapitre I. Introduction sur la supraconductivité
10
Vers 1933, W. Meissner et R. Ochsenfeld ont montré pour leur part qu’un métal
supraconducteur massif présente par ailleurs un diamagnétisme presque parfait pour des
faibles valeurs du champ magnétique [Meissner 33], caractéristiques des matériaux dits de type I. Cet effet de non-pénétration du champ magnétique est nommé effet Meissner.
Avec la mise en évidence de la supraconductivité, les physiciens se sont trouvés confrontés
alors à deux propriétés : la chute à zéro de la résistance électrique et l’expulsion du champ
magnétique qui reste nul dans le matériau supraconducteur. Jusqu’en 1934, 20 ans après la
découverte de K. Onnes, il n’existe pas de description de la supraconductivité et encore
moins de théorie microscopique. C’est avec la théorie des frères London [London 35],
basée sur un ensemble d’équations, qu’apparaissent les premières lois de comportement
des électrons dans les supraconducteurs. Des équations qui rendent comptent de l’effet
Meissner mais n’expliquent en rien la chute à zéro de la résistivité dans les matériaux
supraconducteurs. Leur application montre qu’il excite une zone de transition au voisinage
de la surface de l’échantillon dans laquelle le champ magnétique passe de sa valeur initiale
à l’extérieur de l’échantillon à une valeur nulle au sein de l’échantillon. Cette épaisseur
dite de London constitue une des longueurs caractéristiques des problèmes de supraconductivité.
L’approche intuitive exemplaire de Landau allait mener la supraconductivité vers une
seconde description phénoménologique en 1950, il s’agit de la théorie de Ginzburg Landau
[Ginzburg 50]. Cette théorie phénoménologique consiste à utiliser les techniques de
description des transitions de phase du second ordre à la transition supraconductrice en
affectant comme paramètre d’ordre la fonction d’onde des électrons supraconducteurs. En
incorporant des termes assurant l’invariance par changement de jauge, Ginzburg et Landau
proposèrent deux équations très riches permettant de décrire l’état supraconducteur. Ces
équations rendent compte de l’effet Meisner avec la longueur caractéristique de London
d’établissement du champ mais elles introduisent une nouvelle longueur caractéristique
appelée longueur de cohérence qui représente la distance sur laquelle s’établit l’état
supraconducteur. C’est du rapport entre ces longueurs caractéristiques que dépend le
comportement en supraconducteurs de type I ou de type II. La découverte de la
supraconductivité de type II a été plus tardive puisqu’elle n’a eu lieu que vers 1954 dans un alliage de niobium et d’étain supraconducteur en dessous de 18 K.
Si la supraconductivité était en 1955 riche de résultats expérimentaux et forte de deux
théories phénoménologiques successives, aucune explication microscopique du phénomène
n’était apparue, jusqu’en 1957, où une nouvelle théorie fut publiée par Bardeen, Cooper et
Schrieffer [Bardeen 57]. Celle-ci est plus connue sous le non de théorie BCS. Cette théorie
explique qu’à très basse température, les électrons s’apparient, en quelque sorte en se
mettant en couple. On dit qu’ils forment des paires de Cooper. L’idée de base est que les
électrons (ou une partie d’entre eux) s’attirent plus qu’ils ne se repoussent naturellement et
se couplent en paire. Dans les paires ainsi formées, les électrons possèdent une énergie plus
faible, ainsi que des spins opposés. Cet ensemble, n’ayant plus de raisons d’interagir avec
son environnement, n’est plus à l’origine d’une résistance électrique. Avec cette théorie, le

Chapitre I. Introduction sur la supraconductivité
11
mécanisme de la supraconductivité ne permettrait pas d’obtenir des températures critiques
supérieures à une trentaine de Kelvins (au delà, l’agitation thermique casse les paires).
Par la découverte de Johannes Georg Bednorz et Karl Alexander Müller [Bednorz 86] en
1986 de la supraconductivité dans un oxyde synthétique de cuivre, lanthane et baryum à
une température critique Tc de 35 K, puis l’année suivante le composé YBaCuO
(Tc = 93 K). Cette découverte a donné vraiment naissance à la supraconductivité haute
température critique HTC. Ceci a fortement renforcé l’intérêt pour les supraconducteurs
qui pouvaient désormais être refroidis à l’azote liquide, fluide beaucoup moins couteux et
beaucoup plus facile d’utilisation que les fluides à température d’ébullition plus basse
(hélium liquide par exemple). Cette découverte relance alors la recherche dans ce domaine, et permet la mise en évidence de ce phénomène jusqu’à 164 K en 1998.
I.2. Effet Meissner
Les propriétés fondamentales des matériaux supraconducteurs sont donc essentiellement au nombre de deux :
une résistivité nulle,
expulsion des lignes d’induction (Effet Meisner).
Cette dernière propriété différencie le supraconducteur d’un conducteur parfait. En effet,
lorsqu’un conducteur parfait, sous champ nul à température ambiante, est refroidi en
dessous de Tc puis soumis à un champ magnétique, des courants d’écrantage vont être
induits pour s’opposer à toute pénétration de champ (Fig.I.1.b). Le réchauffement du
conducteur parfait dans ce cas, au dessus de Tc le rend résistif. Les courants s’amortissent
et le champ magnétique pénètre dans le conducteur (Fig.I.1.c). Si au contraire, le
conducteur parfait est refroidi sous champ, en l’absence de variation de champ extérieur,
aucun courant ne se trouve induit et le champ magnétique est maintenu dans le conducteur
parfait (Fig.I.1.d). Lorsque le champ magnétique extérieur est ramené à zéro, cette
variation négative du champ extérieur à une température inférieure à Tc induit des courants
d’écrantage qui s’opposent à toute variation de champ magnétique à l’intérieur du
conducteur parfait, ainsi, le champ magnétique se trouve piégé à l’intérieur du conducteur (Fig.I.1.e). Il en va tout à fait différemment dans le cas d’un supraconducteur :
dans le premier cas (refroidissement hors champ), le conducteur parfait et le
supraconducteur se comportent de manière identique car le champ magnétique est
toujours nul dans le matériau (Fig.I.1.a et Fig.I.1.b)
dans le deuxième cas (refroidissement sous champ), le champ magnétique est
expulsé de l’intérieur du supraconducteur dès qu’il est refroidi en dessous de sa
température critique (Fig.I.1.g). Lorsque le champ magnétique est coupé, les
courants supraconducteurs disparaissent afin de laisser le champ magnétique nul à l’intérieur de l’échantillon (Fig.I.1.h).

Chapitre I. Introduction sur la supraconductivité
12
Fig.I.1. Différences entre un conducteur parfait et un supraconducteur : l’effet Meissner.
Les figures Fig.I.1a et FigI.1.b représentent le comportement d’un conducteur parfait et le
comportement d’un supraconducteur, les figures Fig.I.1.c, Fig.I.1.d et Fig.I.1.f. représentent le
comportement d’un conducteur parfait et les figures Fig.I.1.f, Fig.I.1.g et Fig.I.1.h. représentent le
comportement d’un supraconducteur.
(a). l’échantillon est amené en champ nul à une température T<Tc
(b). le champ est appliqué sous Tc. Des courants sont induits par la variation de champ. Ils ne s’amortissent pas et font écran à la pénétration du champ.
(c). sous champ magnétique, l’échantillon est remonté à une température T > Tc. La résistivité réapparaît, les courants s’amortissent et le champ pénètre.
(d). l’échantillon est refroidi sous champ constant. En l’absence de variation de champ, aucun courant n’est induit.
(e). A T<Tc, le champ extérieur est coupé. Cette variation de champ engendre des courants qui ne s’amortissent pas et piègent le champ magnétique.
(f). sous champ magnétique, l’échantillon est remonté à une température T > Tc. La supraconductivité disparaît et le champ pénètre dans l’échantillon
(g). l’échantillon est refroidi sous champ constant. Des courants apparaissent faisant écran à la pénétration du champ magnétique (Etat supraconducteur).
(h). A T < Tc, le champ extérieur est coupé. Les supercourants disparaissent afin de laisser nul le champ à l’intérieur de l’échantillon.

Chapitre I. Introduction sur la supraconductivité
13
Ce comportement est connu sous le non d’effet Meisner Ochsenfeld : il s’agit de
l’expulsion de toute induction magnétique de l’intérieur du supraconducteur sauf sur une
très fine épaisseur, λL (10-7-10-8 m), appelée longueur de London, à la surface du métal.
Le diamagnétisme parfait est une propriété intrinsèque d’un supraconducteur, qui n’est
cependant valable que si la température et le champ magnétique sont en tous points
inférieurs à leur valeur critique T<Tc et H<Hc. L’épaisseur λL augmente avec la
température de manière que pour T proche de Tc, λL tend vers l’infini. Ainsi pour T
supérieur à Tc le comportement est non magnétique (aimantation nulle), par contre pour T
inférieur à Tc il est parfaitement diamagnétique (aimantation négative) si le champ
magnétique extérieur n’est pas très élevé. Pour des fréquences élevées, en infrarouge (1012
… 1014 Hz), le métal devient non supraconducteur même pour des températures très basses,
(T<Tc). Les théories classiques qui expliquent ces propriétés sont basées sur les équations de Maxwell London [Tixador 95].
I.3. Types de supraconducteurs
L’état supraconducteur non dissipatif est conditionné par trois grandeurs, appelées
grandeurs critiques, au-delà desquelles le matériau passe dans un état fortement dissipatif.
Il s’agit de la densité de courant critique Jc, de la température critique Tc et du champ
magnétique citrique Hc. Ces trois grandeurs sont fonction les unes des autres et forment
ainsi une surface critique (Fig.I.2.) au delà de laquelle le matériau cesse d’être non dissipatif.
Fig.I.2. Surface critique délimitant la région où existe la supraconductivité [Baixeras 98]
T (K)
Tc (0,0)
Jc (0,0)
Jc (A.m-2)
Hc(0,0)
H (A.m-1)
Supraconducteur
Normal

Chapitre I. Introduction sur la supraconductivité
14
A partir de deux des trois paramètres essentiels à la supraconductivité : la densité de
courant critique Jc et le champ critique Hc, on peut fixer une limite au-delà de laquelle le
matériau perd des performances supraconductrices. Cependant tous les supraconducteurs
n’ont pas le même comportement en présence d’un champ magnétique, la
supraconductivité disparaît selon deux scénarios déférents. Ces scénarios conduisent à un
classement des matériaux en supraconducteurs de type I et de type II.
I.3.1. Supraconducteurs type I
Les supraconducteurs type I ne possèdent qu’un seul champ critique Hc. Le champ
magnétique pénètre sur une épaisseur appelée Longueur de pénétration de London dans
laquelle se développent des supercourants. Le comportement de ce type de
supraconducteurs est simple car il n’existe que deux états. L’état normal correspond à une
valeur élevée de la résistance du matériau et l’état supraconducteur correspond à un
diamagnétisme presque parfait. Les supraconducteurs de type I sont essentiellement des
corps purs, comme le plomb (Pb), le mercure (Hg), l’indium (In) et l’étain (Sn). Les
champs magnétiques critiques des corps purs, supraconducteurs de type I, sont
relativement faible puisqu’ils ne dépassent pas 0.2 Tesla. Dans la Fig.I.3, la caractéristique
B(H) d’un supraconducteur du type I est présentée. Les supraconducteurs de type I n’ont aucune application industrielle à l’heure actuelle.
Fig.I.3. Caractéristique B(H) d’un supraconducteur de type I.
I.3.2. Supraconducteurs type II
En présence d’un champ magnétique, les supraconducteurs de type II offrent un
diamagnétisme parfait jusqu’au champ Hc1 de manière comparable aux supraconducteurs
Hc H
B
Etat supraconducteur (Etat Meissner)
Etat normal

Chapitre I. Introduction sur la supraconductivité
15
de type I. À partir de Hc1, le supraconducteur de type II est dans l’état mixte qui autorise
une pénétration partielle du champ jusqu’au champ Hc2 (Hc2 peut atteindre des dizaines de Teslas [Tixador 2003]) (Fig.I.4) et donc une supraconductivité à haut champ.
Fig.I.4. Caractéristique B(H) d’un supraconducteur de type II.
L’état mixte se présente comme un ensemble de cœurs à l’état normal qui emplissent le
matériau supraconducteur à partir de Hc1 (Fig.I.5), chacun contenant un quantum de flux
(2,07×10-15 weber [Rose 78]) et entouré d’un vortex de courants supraconducteurs
(Fig.I.6). Lorsque le champ magnétique augmente, le réseau se densifie jusqu’à combler
complètement le matériau supraconducteur à Hc2. A partir de cette valeur (H>Hc2), le flux
magnétique pénètre complètement et toute la supraconductivité disparaît. La résistivité à l’état normal est élevée devant celle des conducteurs classiques.
Fig.I.5. Distribution des vortex dans un supraconducteur.
Zone normale
Zone supraconductrice
H Supercourants
H Hc1 Hc2
B
Pente : μ0
Etat Meissner
Etat mixte
Etat normal

Chapitre I. Introduction sur la supraconductivité
16
Fig.I.6. Vortex dans un supraconducteur.
La distinction entre les deux types de supraconductivité est très liée à la notion de longueur
de cohérence ξ et de profondeur de pénétration λL (Fig.I.6), qui caractérisent l’interface
entre une région normale et une région supraconductrice. ξ représente la variation spatiale
de l’état supraconducteur (densité d’électrons supraconducteurs) et λL la longueur de
pénétration de London du champ magnétique. Le rapport de ces deux longueurs
caractéristiques, appelé paramètre de Ginzburg-Landau et noté ( = λL/ξ) détermine le
type de supraconductivité. Si < 2/2 , le supraconducteur est de type I et si > 2/2 ,
le supraconducteur est de type II.
À l’interface entre une région normale et une région supraconductrice, la pénétration du
champ magnétique, définie par λL, correspond à une augmentation de l’énergie libre dans le
matériau supraconducteur, tandis que la constitution de l’état supraconducteur, caractérisée
par la longueur de cohérence, se rapporte à une diminution de l’énergie libre. Le bilan
énergétique de l’interface dépend du rapport . Dans le cas des supraconducteurs de type
II, l’état mixte résulte donc de la création d’un grand nombre d’interfaces. Chaque
interface correspond en effet à un bilan négatif d’énergie qui favorise énergétiquement la supraconductivité au-delà de Hc1.
Les deux propriétés remarquables des matériaux supraconducteurs type II, effet Meissner
et état mixte, offre un grand avantage pour les applications de ce type de matériau
supraconducteur, tels que la lévitation magnétique. L’effet Meissner donne naissance à la
force de lévitation magnétique [Hull 99]. Un aimant qui est posé au-dessus d’un
supraconducteur subit une force de répulsion. Cette force est capable de vaincre la force de
gravité et elle peut être caractérisée par la lévitation de l’aimant (ou du supraconducteur).
Une simple force de répulsion toutefois donnerait lieu à une position instable de l’objet en
lévitation. En réalité, pour observer le phénomène de la lévitation, on utilise ce type de
matériau (supraconducteur type II) dans lesquels l’état Meissner n’est présent que pour des
2ξ
λL
x
J(x)
Happliqué
Zone Supraconductrice
Zone Supraconductrice
Zon
e no
rmal
e

Chapitre I. Introduction sur la supraconductivité
17
champs magnétiques très faibles. Un supraconducteur de type II, n’expulse pas totalement
les lignes de flux. Il est formé de zones supraconductrices, où circulent les courants, et de
zones dans l’état normal dans lesquelles le champ magnétique peut pénétrer (Fig.I.6). Les
zones, où pénètre un flux magnétique, sont appelées des vortex car ce sont les courants
supraconducteurs circulant autour d’elles qui stabilisent le champ magnétique. On dit que
le supraconducteur est dans un état “mixte” pour le distinguer de l’état Meissner. L’état
mixte du matériau supraconducteur va permettre d’obtenir la stabilité du système en lévitation [Zheng 07].
I.4. Applications des supraconducteurs en électrotechnique
La découverte en 1986 des supraconducteurs à haute température critique a encouragé
l’application des supraconducteurs en électrotechnique. Le choix des supraconducteurs
haute température critique, est dû à la capacité de ces matériaux à conduire du courant
électrique de très forte densité pour des températures assez élevées par rapport aux
supraconducteurs à basse température critique. Suivant la valeur utile de l’induction
magnétique générée par les matériaux supraconducteurs, on envisage, alors, leurs utilisations dans les applications de l’électrotechnique sous forme de trois catégories :
Très forts champs magnétiques. Cette catégorie concerne les bobines de champs,
les systèmes de stockage d’énergie...etc.
Forts champs magnétiques. Cette catégorie concerne les moteurs, les alternateurs,
les transformateurs, les systèmes de stockage de l’énergie… etc.
Faible champ magnétique. Cette catégorie concerne les lignes de transport
d’électricité, les transformateurs, les limiteurs de courant, lévitation magnétique...
etc.
Nous présentons ci-dessous quelques applications majeures des matériaux
supraconducteurs SHTC en électrotechnique. Cependant, nous rappelons que nous sommes
intéressés dans le cadre du travail de cette thèse par deux applications, les aimants supraconducteurs et la lévitation magnétique.
I.4.1. Limiteur de courant
La coupure des courants de défaut reste un problème mal résolu dans les réseaux
électriques. La caractéristique intrinsèque fortement non linéaire du champ électrique en
fonction du courant dans un supraconducteur ouvre une nouvelle voie particulièrement
intéressante et innovante pour la limitation des courants de défaut dans les réseaux
électrique [Buzon 02]. En régime normal, les pertes dans l’élément supraconducteur sont
très faibles (pertes AC), voire pratiquement nulles en DC. Par contre dès que le courant
dépasse un seuil prédéfini, l’élément supraconducteur développe instantanément un fort
champ électrique qui peut équilibrer la tension du réseau et limiter le courant à une valeur prédéterminée et facile à couper par un disjoncteur.

Chapitre I. Introduction sur la supraconductivité
18
Le limiteur supraconducteur réduit les contraintes sur tous les dispositifs classiques sur la
ligne et en réduit avantageusement la taille. Caractérisé par un temps de réponse et par la
possibilité d’être utilisés pour des niveaux de tensions très élevées [Tixador 95], il autorise
aussi et surtout une plus grande interconnexion pour de meilleure sécurisation et qualité d’énergie électrique.
Plusieurs travaux ont étudié les limiteurs supraconducteurs [Baldan 04], [Ueda 03] et
[Zong 03]. Au laboratoire CNRSCRTBT/LEG, un limiteur a été réalisé pour une tension
de 1 kV [Tixador 02]. Le limiteur testé a montré l’intérêt de l’YbaCuO monodomaine dans
ce type d’application, et les performances peuvent encore être améliorées [Tournier 03].
Une étude sur les limiteurs de courant continu et une comparaison avec les limiteurs en courant alternatif a été établie [Tixador 06].
I.4.2. lignes de transport
Les câbles supraconducteurs peuvent transporter trois à cinq fois plus d’énergie que des
câbles traditionnels en cuivre de même diamètre. Indépendants sur le plan thermique, des
câbles supraconducteurs compacts peuvent être installés dans les emprises existantes,
contribuant ainsi à réduire le coût et l’impact sur l’environnement des futures
augmentations de capacité des réseaux. Offrant une impédance plus faible que les
technologies habituelles, les câbles supraconducteurs peuvent être placés en des points
stratégiques d’un réseau électrique afin de délester les câbles classiques ou les lignes
aériennes, ce qui permet de désengorger les réseaux avec une solution respectueuse de
l’environnement. Le Ministère américain de l’Energie (DOE) considère les câbles
supraconducteurs comme un composant essentiel d’un super-réseau électrique moderne,
exempt de goulets d’étranglement et capable de transporter l’énergie jusqu’aux clients à partir de sites de production éloignés, à l’exemple des parcs éoliens.
Les câbles supraconducteurs de transport intéressent de plus en plus les chercheurs et les
industriels. Au Japon, la compagnie Furukawa Electric a installé en mars 2004 un câble,
refroidi à l’azote, de 500 m de longueur, de 77 kV et 1 kA dans le réseau électrique pour le
tester pendant une année [Mukoyama 05] et plus récemment, le câble supraconducteur de
transport électrique le plus long et le plus puissant au monde [Lipower 08], développé et
fabriqué par Nexans, leader mondial de l’industrie du câble, a été mis sous tension avec
succès dans le cadre d’une installation de test pour le compte de LIPA (Long Island Power
Authority), l’un des principaux opérateurs de réseaux électriques aux Etats-Unis. Cette
liaison de 600 mètres à 138 kV, capable de transporter une puissance électrique de 574
MVA à pleine capacité (soit suffisamment pour alimenter 300 000 foyers en électricité) et
composée de trois phases supraconductrices en parallèle, constitue le premier câble
supraconducteur au monde incorporé dans un réseau électrique à ce niveau de tension.
Après une phase d’exploitation initiale et un bilan technico-économique [Lipower 08],
LIPA prévoit d’intégrer définitivement le nouveau câble supraconducteur à son réseau.

Chapitre I. Introduction sur la supraconductivité
19
I.4.3. Les systèmes de stockage de l’énergie SMES
Les supraconducteurs permettent de concevoir un stockage direct de l'énergie électrique
sous forme magnétique, dans des bobines appelées SMES (Superconducting Magnetic
Energy Storage). L’intérêt d’un bobinage supraconducteur pour le stockage d’énergie est
de présenter des pertes Joule quasi nulles lorsqu’on le met en court-circuit. Avec les
condensateurs, ce sont les seuls moyens de stockage direct de l’électricité. Ainsi, ils ont
des rendements très importants et des temps de déstockage très courts. En effet, le
rendement d’un système supraconducteur de stockage d’énergie peut atteindre 97% alors
que ce rendement ne dépasse pas 70% pour un système de barrage à pompe. Avec tous ces
avantages, il faut noter que la densité volumique l’énergie stockée n’est pas très importante, 4kWh/m3 pour une valeur d’induction de 6 T [Tixador 95].
L’un des problèmes rencontrés dans ce type d’installations est dû aux forces très élevées que subit le bobinage d’une part, et d’autre part en raison de l’énergie requise pour la réfrigération et le coût des matériaux supraconducteurs, le SMES est plutôt utilisé pour un stockage court. Des applications avec des niveaux d’énergie stockés plus faibles ont été réalisées. La
majorité des SMES utilisent des supraconducteurs basses température critique (LTS) et
essentiellement le NbTi. De nombreux projets de SMES LTS ont été menés à travers le
monde [Floch 99]. Ainsi, l’US Air Force utilise depuis 10 ans des SMES de 1 MJ à 10 MJ
destinés à protéger des charges critiques contre les microcoupures [Parker 95]. Le
Wisconsin Public Service Corp. (WPS) a installé en 2000 un SMES commercialisé par les
sociétés American Superconductor et GE Indusrial et installé dans une remorque de
camion [geindustrial]. Ce système, réalisé à partir d’une bobine en NbTi, permet de stocker
3 MJ pour des décharges de 3 MW, pour stabiliser le réseau. En France, les plus gros
prototypes (plusieurs centaines de kJ) ont été réalisés à Grenoble [Bellin 06], au
département MCBT de l'Institut Néel avec l'aide de partenaires comme la DGA et Nexans.
L'application visée est l'alimentation d'un canon électromagnétique à des fins militaires ou civiles.
I.4.4. Les transformateurs
Les supraconducteurs peuvent aussi être utilisés dans des transformateurs en lieu et place
des enroulements classiques en cuivre ou en aluminium permettant des gains intéressants,
en poids et en volume. En effet, les études effectuées ont montré des performances
remarquables de ce type de transformateurs, par rapport à un transformateur conventionnel,
les pertes peuvent diminuer de 30 %, le volume de 50 % et le poids de 70 % [Chen 04]. La société SIEMENS a réalisé et testé avec succès un transformateur de 1 MVA [Leghissa 02].

Chapitre I. Introduction sur la supraconductivité
20
I.4.5. Les machines supraconductrices
Après la découverte des supraconducteurs à haute température critique et le développement
de ces matériaux, une autre période a commencé. Actuellement la quasi-totalité des
machines supraconductrices, réalisées ou étudiées, contiennent des matériaux
supraconducteurs à haute température critique. Les supraconducteurs à basse température
critique sont néanmoins encore très présents, notamment dans le domaine médical pour
réaliser les systèmes d’imagerie à résonance magnétique IRM ou dans le domaine des grands instruments de la physique (accélérateurs de particules, générateurs de fusion…).
A partir de l’année 2000, les machines à base de matériaux supraconducteurs haute
température commence à paraître dans le marché. Une machine de 400 kW a été réalisée
par Siemens, la température de fonctionnement de l’inducteur est de 30 K [Kummeth 05].
Les performances ont montré la validité du concept, et ont conduit à la réalisation d’une
machine à 4 MVA et 3600 tr.min-1 [Neumuller 06]. Même si le rendement de la machine
réalisée n’est pas beaucoup plus important par rapport à celui d’une machine synchrone
classique, 96,8 % contre 96 %, cette machine a pu fonctionner jusqu’à 700 % de sa
capacité nominale contre 130 % seulement pour une machine classique. Une étude de la
pollution en harmonique a permis de déterminer un THD de 0,15 % contre 3 % pour une
machine classique. La machine, en fonctionnement alternateur, a pu produire 600 kW
pendant 15 minutes, ce qui représente un pic de production de 150 % de sa puissance
nominale. Pour le rapport puissance/poids, la machine réalisée est deux fois plus intéressante qu’une machine synchrone non supraconductrice.
Un moteur réalisé par AMSC (American superconductor) est destiné à la propulsion
maritime. L’induit du moteur est en cuivre et sans fer. L’inducteur est en supraconducteur
à haute température critique BSCCO refroidi à 31 K. Le moteur a une puissance de 5 MW,
une vitesse de 230 tr.min-1, une tension aux bornes d’une phase statorique de 2,4 kV et un
courant statorique de 715 A [Snitchler 05]. Les tests ont été effectués pour 4 vitesses entre
60 et 230 tr.min-1. Le courant inducteur relevé en fonctionnement en plein couple et en
pleine vitesse est 3 % plus important que celui relevé pendant l’essai à vide. Les pertes
mesurées à vide sont proportionnelles au carré du courant inducteur. Le test à pleine charge
et à vitesse nominale a été effectué pendant presque 3 heures. La température du bobinage
induit relevée pendant le test est de 90 K. Le moteur a un rendement de 96 %. Cette réalisation est le prototype d’un autre moteur de 36,5 MW.
Les travaux réalisés jusqu’à maintenant ont montré que l’utilisation des supraconducteurs à
haute température critique dans l’inducteur des machines synchrones réduit les dimensions
et le poids de la machine. Cela réduit également les pertes et augmente le rendement de la
machine. Ces machines ont une réactance synchrone faible par rapport à ce qu’on a dans
les machines non supraconductrices ce qui renforce la stabilité du réseau [Malozemoff 02], [Ailam 06].

Chapitre I. Introduction sur la supraconductivité
21
I.4.6. Les aimants permanents supraconducteurs
La propriété remarquable des matériaux supraconducteurs de pouvoir piéger un champ
magnétique, permet de concevoir des aimants permanents supraconducteurs. Un
supraconducteur massif peut être utilisé comme aimant permanent. En refroidissant à
champ nul, un supraconducteur à haute température critique, puis en l’exposant à une
variation rapide du champ magnétique, il va piéger le champ magnétique. Le champ piégé
dans le supraconducteur est lié à des courants induits par la loi de Lenz. Ces courants se
développent comme dans un métal normal, à partir de la surface extérieure, mais
contrairement aux matériaux résistifs, ils ne s’amortissent pas puisque la résistivité est
nulle. Lorsque le champ extérieur diminue, la répartition des courants change pour
s’opposer à cette nouvelle variation et tendre à piéger l’induction. Pour que le
supraconducteur piège efficacement le champ magnétique il faut que le champ extérieur atteigne une valeur appelée champ de pénétration Hp [Braeck 02].
Les aimants permanents supraconducteurs présentent l’avantage de pouvoir fournir des
valeurs de champ magnétique beaucoup plus importantes par rapport à celle fournie par les
aimants permanents conventionnels, surtout à basses température. Des valeurs de champ
piégé de 9 T à 40 K et de 12.5 T à 22 K ont été obtenues pour un aimant YBa2Cu3O7-δ
(Y123) [Gruss 01) et plus récemment la valeur de 17 T à 29 K pour un disque de 2.65 cm
de diamètre [Tomita 03]. Cette propriété des supraconducteurs haute température critique
SHTC peut être exploitée comme source de champ à la place des aimants permanents
conventionnels qui sont limités en valeurs de champ. La réalisation des moteurs
supraconducteurs avec des SHTC massifs comme pôles magnétiques dans une machine
tournante à entrefer axial à l’université des sciences et de technologies marines de Tokyo
[Miki 06] en fait un exemple.
Il existe de nombreux procédés d’aimantation des SHTC, parmi lesquels on peut citer la
‘Magnétisation par champ pulsé’ (MCP) ou le ‘Pulsed field magnetization’ (PFM) en
terminologie anglaise. Ce procédé est souvent utilisé pour l’aimantation puisqu’il permet
d’atteindre des valeurs de champ magnétique piégé très élevées et ainsi des forces de
lévitation aimant-supra très importantes. Ce procédé est considéré comme la méthode la
plus commode et prometteuse [Braeck 02]. Une valeur maximale du champ magnétique
piégé peut être atteinte par une valeur de champ appliqué Bm= Bopt dite valeur optimale. Au
delà de cette valeur, le champ magnétique piégé dans les SHTC diminue [Mizutani 00]. Ce
comportement des SHTC est dû aux mouvements des vortex durant le processus
d’activation par MCP impliquant une dissipation de chaleur qui est accompagnée par une
élévation importante de température. Cette augmentation de température conduit à une
diminution de la densité de courant critique et par la suite à celle également de l’induction
piégée. D'autres techniques ont été proposées dans le but d’augmenter la valeur du champ
magnétique piégé, en particulier, celles basées sur l’application des impulsions multiples de champ [Sander 02].
Récemment une nouvelle technique à été proposé dans le but d'augmenter la valeur du
champ magnétique piégé dans les SHTC durant le processus d’activation par MCP

Chapitre I. Introduction sur la supraconductivité
22
[Alloui 09]. Cette technique consiste à créer des canaux de refroidissements dans le
matériau SHTC refroidis par le liquide cryogénique, ainsi, on renforce le transfert de
chaleur par convection entre la pastille supraconductrice et le milieu extérieur. Cette
technique est alors accompagnée par une diminution de la température à l’intérieur du
SHTC, conduisant à une amélioration des performances électromagnétiques du
supraconducteur. Les résultats de simulations de cette technique seront largement présentés au chapitre IV.
I.4.7. Lévitation et paliers magnétiques
Les supraconducteurs de type II peuvent être utilisés pour réaliser la sustentation
magnétique d’objets de masse éventuellement très élevée. L’une des applications la plus
importante et la plus prometteuse dans ce domaine est la réalisation des trains à lévitation
magnétique ou train Maglev (Magnetic Levitation) [Teranishi 02]. Le Maglev est équipé
des boucles de matériaux supraconducteurs qui lui permettent de léviter sous l’action des
aimants placés sur la voie. Le train ne touche donc pas les rails : il reste suspendu à
quelques centimètres du sol. Ce dispositif présente de nombreux avantages [Song 06], la
plupart étant liée à l’absence de contact avec le sol : grande vitesse où bien très grande
vitesse (le train expérimental Japonais Yamanashi a pu atteindre la vitesse de 580 Km/h),
sécurité (car le train ne peut, dans aucun cas, quitter sont rail), véhicule peu bruyant (en
raison de l’absence de bruits de frottement et de roulement), consommation d’énergie réduite grâce aux supraconducteurs et enfin une maintenance réduite.
La lévitation magnétique peut être aussi mise en œuvre dans des dispositifs afin de réaliser
des paliers et des suspensions magnétiques [FOU 00]. Le principe des paliers magnétiques
est basé sur des interactions magnétiques. Ces interactions peuvent être générées par des
électroaimants dans le cas des paliers actifs, ou par des aimants permanents dans le cas des
paliers passifs. Ces derniers (paliers passifs) ne demandent pas de source d’énergie
contrairement à leurs homologues actifs, Cette absence de source d'énergie extérieure pour faire fonctionner le dispositif est très intéressante en terme de pertes et de fiabilité.
Le théorème d'Earnshaw nous démontre qu'une suspension magnétique classique ne peut
être entièrement passive sans la présence d’un matériau diamagnétique : un degré de liberté
au minimum doit être contrôlé par un électroaimant dont le courant est asservi à la
position. Cette obligation introduit des pertes (électroaimant et électronique) et des problèmes de sécurité et de fiabilité.
Les matériaux supraconducteurs par leur propriété diamagnétique sont les seuls matériaux
qui permettent des suspensions magnétiques performantes entièrement passives et
naturellement stables (paliers passifs). L’effet Meissner (Effet diamagnétique) des
matériaux supraconducteurs entraine le phénomène de la lévitation magnétique, cependant,
les supraconducteurs de type II permettent une lévitation nettement meilleure par rapport
aux supraconducteurs de type I. La lévitation d’un supraconducteur de type I, n’est pas très
performante. Elle est instable latéralement et seul une géométrie bien adaptée permet son

Chapitre I. Introduction sur la supraconductivité
23
stabilisation, alors que dans le cas des supraconducteurs de type II, l’état intermédiaire,
essentiellement responsable pour la stabilité transversale du système, caractérisé par
l’apparition des vortex ancrés qui agissent comme des ressorts de rappel. En effet, toute
variation du champ magnétique appliqué entraîne un mouvement dissipatif des vortex et
les pertes hystérétiques associées donnent naissances à des forces de rappel verticales ou
latérales assurant ainsi, la stabilité du système en lévitation.
Les suspensions magnétiques avec supraconducteurs peuvent être de deux types : simple
ou hybride [Fou 00]. Dans le cas des structures simples, toutes les forces (verticales et
transversales) sont générées par interaction aimant permanent-supraconducteurs mais les
performances en lévitation sont limitées. La configuration hybride est constituée par une
judicieuse association de paliers à aimants permanents et de paliers supraconducteurs dont
le rôle est en outre de stabiliser les premiers. Les performances en lévitation, dans le cas de la structure hybride, sont meilleures.
Même si les performances de la structure hybrides sont meilleures grâce à l’interaction
aimant-aimant, nous nous concentrons dans notre étude sur l’interaction aimant-
supraconducteurs, c'est-à-dire on s’intéresse plus à la structure simple. Les résultats de
notre étude seront largement présentés au chapitre IV.
Il faut rappeler qu’il existe aujourd'hui diverses possibilités de stocker l'énergie : chimique
(batterie), magnétique (SMES), ..., il en est une qui s'applique particulièrement bien aux
suspensions magnétiques supraconductrices : le stockage inertiel. Il s'agit là, de convertir
l'énergie électrique sous forme cinétique pour ensuite, lorsque le besoin s'en fait ressentir,
effectuer la transformation inverse.
Fig. I.7. Volant d’inertie
Moteur débrayable
Volant d’inertie
Supraconducteur
Ω

Chapitre I. Introduction sur la supraconductivité
24
On imagine alors un volant d'inertie (Fig.I.7) entraîné par une machine électrique
réversible fonctionnant dans un premier temps, en moteur pour fournir l'énergie à la masse
inertielle. Le système d'entraînement désaccouplé, le volant d'inertie conserve cette énergie
dans sa rotation avant de la redistribuer à la machine électrique fonctionnant désormais en
génératrice. Notons au passage, que ces volants d'inertie, outre leur capacité de stockage
importante, sont aussi utilisés pour la stabilisation des satellites (effet gyroscopique). La
suspension magnétique supraconductrice doit alors posséder de bonnes performances
verticales (masse à léviter) mais aussi radiales lors du fonctionnement en régime
dynamique à très haute vitesse. Cependant, l’intérêt d’un tel système est à nuancer à cause
des basses températures nécessaires. Des environnements particuliers peuvent réduire
sensiblement les quelques contraintes imposées par le supraconducteurs (température
critique) : présence d’un système cryogénique déjà implanté ou température environnante naturellement basse (exemple : l’espace pour les satellites).

Chapitre II.
MODELISATION DES MATERIAUX SUPRACONDUCTEURS DE TYPE II
II.1. Introduction 25
II.2. Les modèles considérés 26
II.2.1. Equations de Maxwell 26
II.2.2. Modèles de supraconducteurs 28
II.2.2.1. Dépendance en température de Jc et n 31
II.2.2.2. Dépendance en champ magnétique Jc 31
II.2.3. Problème électromagnétique et formulation en potentiels A-V 32
II.2.4. Problème thermique 35
II.3. Méthodes numériques de discrétisation 36
II.3.1. Principales méthodes existantes 36
II.3.2. La méthode des volumes finis MVF 37

Chapitre II. Modélisation des matériaux supraconducteurs de type II
25
Ce chapitre est consacré à l’étude du comportement électromagnétique et thermique des
supraconducteurs afin de le retranscrire dans un langage mathématique point de départ de la
modélisation. L’étude ne prendra en compte que les supraconducteurs de type II. Ce chapitre
décrit aussi la loi de comportement choisie pour décrire le phénomène de la
supraconductivité, qui ne peut être représenté par la loi d’Ohm. A la fin de ce chapitre, les
diverses méthodes numériques utilisées pour la discrétisation des équations aux dérivées
partielles, caractéristiques des phénomènes physiques à traiter sont présentées. En
particulier, la méthode des volumes finis adoptée comme méthode de discrétisation des équations aux dérivées partielles.
II.1. Introduction
Comme présenté précédemment, les supraconducteurs haute température critique (SHTC), qui
sont souvent des supraconducteurs type II, ont des propriétés fondamentales très intéressantes.
Leur utilisation dans le domaine du génie électrique ne cesse d’augmenter. L’optimisation des
ces dispositifs nécessite de connaître leurs comportement électromagnétique et thermique. On
s’intéresse alors au développement, d’un modèle macroscopique qui permet d’obtenir les
grandeurs locales comme la répartition des champs magnétiques ou la répartition des champs thermiques, ainsi que les grandeurs globales tels que les pertes ou les forces magnétiques.
Le calcul numérique nous permettrait d’étudier dans un premier temps la faisabilité du
dispositif. Le calcul des pertes, est un élément important. Même c’est si pertes sont
relativement faibles, il convient de les évaluer avec précision. En effet, les pertes doivent être
extraites du supraconducteur. Ce dernier ne fonctionnant qu’à très basses températures,
l’extraction est très couteuse sur le plan énergétique. De plus, si les pertes sont mal évacuées,
elles conduisent à des augmentations de température au sein de la matière. Ces échauffements
locaux peuvent conduire à la disparition des phénomènes de la supraconductivité. Il convient
donc d’évaluer ces pertes, et par conséquent la température, si l’on veut s’assurer du maintien
de la température en dessous de la température critique Tc. D’autre part, si on veut calculer les
grandeurs magnétiques avec précision, il est important d’évaluer la température au sein du
matériau vu la dépendance en température des divers paramètres, magnétiques et thermiques,
caractéristiques au matériau supraconducteur de type II, tels que, la densité de courant critique
Jc, la conductivité électrique apparente du matériau supraconducteur σ et la chaleur spécifique Cp du matériau.
A titre d’exemple, dans le domaine de paliers magnétiques supraconducteurs, une
modélisation des dispositifs supraconducteurs nous permet de déterminer des géométries
adaptées pour, par exemple, optimiser une force qui est un paramètre très important pour
connaître la portance du dispositif. Dans ce cas, il est nécessaire aussi de prendre en compte
l’effet thermique sur le comportement magnétique des matériaux supraconducteurs car l’effet
thermique ne peut être négligé dans l’étude de la dynamique d’un système en lévitation
magnétique [Alloui 09a].
Il est nécessaire alors de présenter un modèle qui permet de décrire les phénomènes,
magnétiques et thermiques couplés, dans les matériaux supraconducteurs de type II. Un

Chapitre II. Modélisation des matériaux supraconducteurs de type II
26
problème type de modélisation peut être schématisé par un système (Fig.II.1) composé de
l’air, de matériau magnétique, d’un matériau supraconducteur de type II non linéaire et de
source de champ. La non-linéarité du matériau supraconducteur sera représentée par la conductivité électrique apparente σ du matériau supraconducteur.
Fig.II.1. Problème type à SHTC
II.2. Les modèles considérés
II.2.1. Equations de Maxwell
C’est J. C. Maxwell (1831-1879), qui apporta à l’étude de l’électromagnétisme la puissance
d’un formalisme mathématique, précisant les notions qualitatives introduites par Faraday. Il
parvint à établir le groupe d’équations qui portent son nom, et qui constituent toujours la base de nos connaissances théoriques de l’électromagnétisme.
Ces équations sont décrites par un ensemble de quatre équations qu’à basse fréquence peuvent s’écrire :
t
BE (II.1)
t
DJH c
(II.2)
0 B (II.3)
D (II.4)
avec :
H : Champ magnétique (A/m)
B : Induction magnétique (T)
E : Champ électrique (V/m)
Jc : Densité de courant de conduction (A/m2)
D : Induction électrique (C/m2)
Air
Source
Supraconducteur, J, T)
a
as

Chapitre II. Modélisation des matériaux supraconducteurs de type II
27
Le terme t
D dans l’équation (II.2) exprime la densité des courants de déplacement. Pour le
cas des basses fréquences, ce terme peut être négligé. Avec cette hypothèse, l’équation de
conservation est déduite par :
0 cJ (II.5)
Dans les équations (II.2) et (II.5), le terme source Jc qui représente la densité de courant de
conduction (A/m2), inclut deux parties essentielles, la partie source (ou inducteur) Js qui est
due, par exemple, à la présence d’un aimant permanent dans le cas de la lévitation
magnétique, ou d’un enroulement inducteur dans le cas de l’aimantation des pastilles
supraconductrices, et la partie induite J qui est due dans notre étude à la présence du matériau SHTC, ainsi on peut décomposer la densité de courant Jc en deux termes sous la forme :
JJsJc (II.6)
Afin de calculer l’évolution des champs électriques et magnétiques, les lois constitutives et
qui sont caractéristiques des milieux considérés doivent être ajoutées, ces relations sont données par :
HB μ (II.7)
EJ σ (II.8)
Les coefficients μ et σ sont respectivement, la perméabilité magnétique et la conductivité
électrique. Dans un problème de modélisation, ces coefficients doivent être définis dans les
différentes zones du domaine considéré (Fig.II.1). Dans l’air, par exemple, ces coefficients
valent respectivement (μ0, 0). Souvent, dans les matériaux linéaires, ces coefficients sont des
scalaires constants. Ils dépendent dans des cas particuliers de l’intensité des champs
appliqués. Dans le cas de notre travail, vu la présence du matériau supraconducteur, le
problème devient fortement non-linéaire, cette non-linéarité est due au caractère des
propriétés électrique et thermique du matériau SHTC, essentiellement à la conductivité
électrique apparente σ définie par le rapport entre la densité de courant J et le champ
électriques E [Yoshida 94], [Zheng 05] et [Enomoto 05]. Plusieurs modèles ont été proposés
pour décrire la relation E-J des matériaux SHTC, nous reviendrons sur ce point dans le paragraphe suivant.
Concernant la valeur de la perméabilité magnétique du SHTC, elle dépend de l’état du
matériau. Dans le cas où le matériau se retrouve dans un état dit supraconducteur, caractérisé
par la faible valeur du champ critique Hc1 (les valeurs des inductions magnétique critique Bc1
et Bc2, pour le YBCO, sont respectivement 25 mT et 150 T à 77 K [Buzon 02]), Dans ce cas,
la valeur de la perméabilité magnétique μ doit traduire l’effet diamagnétique parfait du
matériau SHTC, elle est prise inférieur à celle de l’air (généralement de l’ordre de 410-10
[Hiebel 92]). Mais dans les applications du génie électrique, telle que la lévitation
magnétique, le matériau SHTC est dans un état intermédiaire (le champ magnétique appliqué
à la surface du matériau est supérieur au champ critique Hc1). Dans cet état, le matériau
SHTC est caractérisé par une pénétration partielle du champ magnétique à travers les vortex

Chapitre II. Modélisation des matériaux supraconducteurs de type II
28
(état intermédiaire), généralement pour modéliser ce comportement du matériau, la valeur de
la perméabilité μ est prise égale à celle du vide μ0, c'est-à-dire une perméabilité magnétique relative égale à l’unité [Alonso 04].
II.2.2. Modèles de supraconducteurs
Plusieurs modèles excitent pour décrire la relation qui lie la densité de courant J et le champ
électrique E dans un matériau supraconducteur. Le modèle macroscopique le plus utilisé est le
modèle de l’état critique, appelé aussi modèle de Bean [Bean 62]. C’est le modèle le plus
classique qui stipule qu’à une température donnée la densité de courant dans un
supraconducteur est soit nulle ou soit égale à la densité de courant critique Jc (Fig II.2.a). Le supraconducteur est considéré comme non magnétique.
si E = 0 alors |J| ≤ Jc
si E ≠0 alors E
JcE
BJ )( (II.9)
En remplaçant l’expression de J dans (II.2) nous obtenons dans le matériau supraconducteur:
cμ0 JB ou 0 B (II.10)
Le modèle de Bean suppose, en plus, que la densité de courant critique est indépendante de la
valeur de l’induction magnétique B. Ce modèle a l’avantage d’être assez simple
mathématiquement. Il a permis d’avoir des expressions analytiques et d’étudier les grandeurs
importantes dans les matériaux supraconducteurs, comme par exemple, les pertes dans des géométries simples [Douine 00], [Douine 08].
Fig.II.2. Modèle de Bean et son approximation
a- Modèle de Bean b- Modèle de Bean Modifié
0 Ec
Jc Jc
0 En Ec
σf
J J
E E

Chapitre II. Modélisation des matériaux supraconducteurs de type II
29
Cependant la discontinuité de ce modèle le rend peu utilisable pour des développements
numériques, cela est dû à la relation non fonctionnelle qui lie E et J (graphe non fonctionnel
présenté dans la figure II.2.a. Grâce à la modification du modèle (FigII.2.b), proposée par
Bossavit [Bossavit 93]. Ce modèle a pu être exploité par la suite pour la modélisation des
problèmes bidimensionnels [Maslouh 98] et [Fou 00]. Cependant, le modèle de Bean modifié
présente l’inconvénient de ne pas pouvoir être utilisé simplement pour la modélisation
tridimensionnelle des matériaux SHTC d’une part, d’autre part, ce modèle ne reflète pas
toujours de façon satisfaisante le comportement des SHTC, de plus, il ne prend pas en compte
l’effet thermique sur le comportement des SHTC. Pour cela nous avons fait appel à d’autres
modèles plus généraux qui prennent en compte les effets thermiques et qui sont déduits
principalement aux effets du déplacement et d’ancrage des vortex. Lorsqu’un courant de
transport circule dans un supraconducteur dans l’état mixte, un réseau de vortex se déplace
par rapport à sa position d’équilibre. Ce réseau de vortex est dû au champ propre créé par le
courant de circulation. Le champ magnétique canalisé par ces vortex est perpendiculaire à la
direction du courant. Le courant électrique est à l’origine d’une force qui s’applique à tout vortex. Cette force s’exprime sous une forme de type ‘force de Lorentz’ :
0Φ J F (II.11)
0 : vecteur de flux magnétique canalisé par un vortex,
J : densité de courant de transport.
En l’absence de défauts dans le matériau, cette force mettrait immédiatement les vortex en
mouvement, par conséquent un travail est fourni et des pertes sont générées donnant naissance
à un champ électrique. Cependant en pratique, il existe toujours un certain nombre de défauts
dans le matériau. La présence de défauts au sein du matériau permet l’ancrage des vortex et la
disparition de ces pertes. Les défauts sont constitués de zones normales ou de zones pour
lesquelles la supraconductivité est affaiblie.
La force moyenne de réaction exercée par les défauts sur un vortex est appelée force
d’ancrage ou force de Pinning Fp. Un réseau de vortex restera stable (sans dissipation
d’énergie) si F<Fp, dans ce cas les vortex ne peuvent pas se mettre en mouvement et on parle
d’ancrage des vortex ou flux pinning. Par contre, si F>Fp, les défauts ne peuvent plus à eux
seuls maintenir les vortex en place et ceux-ci se mettent en mouvement. La densité de courant requise pour atteindre l’équilibre F = Fp est appelée densité de courant critique et notée Jc.
Les mécanismes intervenant lors du dépiégeage des vortex d’un supraconducteur HTC sont de
nature avalancheuse et donc très complexes à caractériser. Cependant, le formalisme décrit
bien avant l’apparition des SHTC par Anderson et Kim [Anderson 62], [Anderson 64] nommé
‘théorie de flux Creep’ permet d’avoir une vision assez claire des différents régimes
susceptibles d’exister durant la transition de nos matériaux. A partir de cette théorie, et en
comparant l’énergie volumique d’un ensemble de vortex avec la force de Lorentz et en
supposant que le décrochage des vortex est thermiquement activé, on arrive à estimer la
probabilité de dépiégeage des vortex et enfin le champ électrique généré par le déplacement
des vortex, ce denier est donné par la relation :

Chapitre II. Modélisation des matériaux supraconducteurs de type II
30
Tk
U
JTk
Usinh
bb .expE 0
0
0
J (II.12)
(J est la densité de courant, J0 est la densité de courant critique à 0 K et U0 est l’énergie de piégeage).
A partir de cette formulation et en réalisant un développement limité, on peut distinguer deux
régimes différents :
Le premier, appelé régime TAFF ‘thermally activated flux flow’, caractérisé par des
faibles densités de courant (J << J0). En réalisant un développement limité de la
relation (II.12) pour des faibles valeurs de J, on obtient une évolution linéaire du
champ électrique en fonction de la densité de courant. Ce régime est caractérisé alors,
par une résistivité constante. Ce régime peut être rencontré dans des supraconducteurs
HTC et à température élevée [Kes 89]
Le deuxième régime nommé FC ‘Flux Creep’, dans ce régime on considère que J est
grand devant kbT. Tenant compte de cette considération et en réalisant un
développement limité de la relation (II.12), on peut déduire la résistivité du supraconducteur qui varie, dans ce cas, de façon exponentielle [Brandt 90]:
kT
U 1
J
Jexpαρ 0
0
(II.13)
Cette dernière relation constitue la loi générale du régime de flux creep. Elle a été obtenue en
supposons que l’énergie d’activation est liée à la densité de courant par une relation du type :
U(J) = U0 (1-J/J0). Cependant, l’expérience à montrer que l’énergie d’activation suit en
général dans les SHTC une loi logarithmique (U(J) = U0 lm (J0/J)) [Zeldov 89],
[Sengupta 93]. En remplaçant l’énergie d’activation donnée par ce dernier terme dans (II.13)
nous obtenons finalement la caractéristique électrique E(J) des SHTC dans le régime flux
creep, proposée par Rhyner [Rhyner 93] :
JJc(T)
EcT),(
n(T)JJ
JE (II.14)
La relation qui lie le champ électrique E à la densité de courant J dans les SHTC est
gouvernée alors par une loi de type de puissance avec n(T) = U0(T) / (kbT). Le modèle en
puissance E-J est très rependu dans la littérature (en le trouve presque dans tout les travaux de
modélisation des SHTC). Il faut rappeler que dans le cas des applications du génie électrique,
les matériaux supraconducteurs utilisés sont caractérisés par des densités de courant critique
Jc élevées, alors il s’agit du régime flux creep. Dans ce cas, on a tendance à utiliser ce modèle
qui décrit bien ce régime, d’ailleurs c’est la confrontation de ce modèle avec des relevés
expérimentaux de la caractéristique E-J des SHTC qui a confirmé l’exactitude de ce modèle.
De plus, ce modèle peut prendre en compte l’effet thermique sur le comportement magnétique
des SHTC par la dépendance en température de diverses grandeurs caractéristiques du SHTC, tels que, la densité de courant critique Jc et l’exposant en puissance n.

Chapitre II. Modélisation des matériaux supraconducteurs de type II
31
II.2.2.1. Dépendance en température de Jc et n
Le modèle en loi de puissance cité précédemment caractérise l’évolution du champ électrique
en fonction de la densité de courant tant que le matériau est dans un état peu dissipatif (état
intermédiaire). Dans cet état, le supraconducteur peut engendrer des échauffements
thermiques non négligeables et une dégradation de ces performances. Par conséquent, il est
important d’introduire un modèle décrivant la dépendance expérimentale de Jc et n avec la
température.
Pour décrire cette dépendance, plusieurs modèles ont été proposés. Le modèle le plus
classique est le modèle issu de la théorie de Ginsburg-landau, dans ce modèle, la densité de
courant critique est décrite comme étant proportionnelle à (1-T/Tc)3/2. Ce modèle a été utilisé dans certains travaux de modélisation (par exemple [Kasal 08]).
D’autres auteurs parviennent à décrire cette dépendance de façon à adapter au mieux la
fonction Jc(T) aux données expérimentales. Par exemple, Yamashita et Gunther [Gunther 92],
trouvent que la courbe expérimentale qui décrit l’évolution du courant critique en fonction de
la température d’un supraconducteur YBaCuo au voisinage de Tc se superpose avec une courbe représentative de la fonction (1-T/Tc)2.
Concernant le modèle utilisé dans notre travail, nous avons choisi l’expression générale
suivante (II.15) pour modéliser la dépendance en température de la densité de courant critique
Jc, cette expression est très répandue dans la littérature, en particulier, dans les travaux de modélisation des matériaux SHTC [Braeck 02], [He 04], [Berger 05] :
Tc
T1
Tc
T1
JcJc(T)0
T
0 pour T0≤T≤Tc (II.15)
où α est un paramètre permettant d’adapter la fonction aux données expérimentales, Tc est la
température critique du SHTC, T0 est la température de l’enceinte cryogénique et JcT0 est la
valeur de la densité de courant critique obtenue pour T = T0.
La dépendance en température de n a été donnée précédemment (§ II.2.2), elle s’écrit :
Tk
UTn
b
0)( (II.16)
II.2.2.2. Dépendance en champ magnétique de Jc
Dans les matériaux SHTC, la diminution de Jc avec B est significative même pour des valeurs
modérées de champ magnétique. Pour prendre en compte cette effet dans notre étude, c'est-à-
dire, décrire la dépendance de Jc en champ magnétique B, nous avons fait appel au modèle proposé par Kim [Kim 62] :

Chapitre II. Modélisation des matériaux supraconducteurs de type II
32
0
0
1
)(
B
B
JcBJc B (II.17)
où B est le module de l’induction magnétique, B0 est une constante et JcB0 est la densité de
courant critique sous champ nul. Ce modèle basé sur des données expérimentales, fut
interprété par P. Anderson en terme de régime TAFC [Anderson 62], de sorte qu’on le connaît
sous l’appellation du modèle de Kim-Anderson. Ce modèle est très utilisé pour décrire la
dépendance en champ magnétique B du courant critique Jc [Fou 00], [Maslouh 98], [Alonso 04], [He 04].
II.2.3. Problème électromagnétique et formulation en potentiels A-V
Pour résoudre les équations de Maxwell dans le domaine simulé, présenté dans la figure II.1,
et calculer les variables électromagnétiques souhaitées, plusieurs formulations ont été
développées. Les principales formulations rencontrées sont : la formulation électrique en E,
A, A-V et la formulation magnétique en T-. Dans le cas des problèmes bidimensionnels, on
trouve principalement les formulations électriques. La formulation en A est la formulation la
plus classique et la plus utilisée en électromagnétisme en présence des supraconducteurs. Elle
présente l’avantage, par rapport aux autres formulations, de pouvoir être couplé facilement
avec les équations de circuit dans le calcul des pertes des conducteurs supraconducteurs
massifs [Vinot 02], les deux formulations A et E présentent, l’avantage d’avoir en 2D une
seule composante dans chaque nœud du maillage ce qui amène à réduire considérablement le
temps de calcul et les tailles des matrices à résoudre, ces deux formulations sont les plus
utilisées dans la modélisation bidimensionnelle des matériaux SHTC [Elbuken 07], [Ruiz 04], [Sykulski 97], [Zheng 06], [Maslouh 98].
La formulation en T- qui s’écrit de façon quasi identique en 2D et en 3D, présente
l’avantages [Klutsch 03], d’assurer la convergence du processus itératif y compris pour des
grandes valeurs de n (par exemple n = 500, n est le terme en puissance de la loi E-J). Elle
conduit à un nombre d’itérations plus faible par rapport à la formulation en A ou en E, cela a
été justifié par le fait que cette formulation utilise la loi J(E) au lieu de la loi E(J). Cependant,
cette formulation présente l’inconvénient d’occuper une grande place de mémoire vu les
tailles des matrices à résoudre et par conséquent un temps de calcul plus important (trois
variables à déterminer dans chaque nœud du maillage). Cette formulation n’est pas très utilisée dans la modélisation bidimensionnelle.
Pour la modélisation tridimensionnelle dans le domaine simulé, présenté dans la figure II.1,
les principales formulations rencontrées sont T- et A-V [Hashizume 96], [Meunier 02],
[Joo 07]. Dans ce travail de thèse, nous avons fait appel à la formulation la plus générale,
c'est-à-dire à la formulation A-V, utilisée aussi par plusieurs auteurs, comme par exemple,
[Fujioka 96], [Alonso 04] et plus récemment par Bird [Bird 08]. Certains reportent
l’inconvénient de cette formulation dans le cas 3D, par le nombre élevé des inconnues (quatre
variables d’état dans A- V au lieu de trois variables dans T-). A nos jours, avec les progrès

Chapitre II. Modélisation des matériaux supraconducteurs de type II
33
des calculateurs (vitesse, mémoires …) ce problème n’est plus crucial. Un autre problème qui
a été posé pour cette formulation, est sa difficulté de convergence dans certains cas,
notamment pour les grandes valeurs de n (pour n = 500 par exemple [Klutsch 03]). Ce
problème à notre avis, ne devrait pas être posé, puisque dans les applications du SHTC, ces
matériaux sont exploités dans le régime flux creep. Dans ce régime, le terme en puissance n
varie dans un intervalle de 15 à 40 [Kasal 07]. Il faut noter aussi que dans l’ensemble des
travaux cités ci-dessus, c’est la méthode des éléments finis MEF qui a été employée comme
méthode de discrétisation des équations aux dérivées partielles. A notre connaissance, c’est la
première fois que la méthode des volumes finis est utilisée pour la modélisation des SHTC.
Nous tenons à signaler que nous n’avons pas rencontrer de problème de convergence, même
pour des valeurs importantes de n, nous pensons alors, que la méthode des éléments finis est à
l’origine des problèmes de convergence dans le cas où le terme en puissance n prend des valeurs grandes [Kameni 09].
La formulation A-V est obtenue par la combinaison du système d’équation de Maxwell cité
précédemment. La variable d’état A est exprimée en fonction de l’induction magnétique B par la relation suivante :
AB (II.18)
A partir de cette relation, le terme B dans (II.2) sera remplacé par A et nous obtenons :
0
t
AE (II.19)
Cette relation nous permet l’introduction du potentiel scalaire électrique V, tel que :
Vt
AE (II.20)
Combinant les équations (II.2), (II.6), (II.7), (II.18) et (II.20) nous obtenons :
sVt
σ JA
A
(II.21)
En considérant la loi de conservation (II.5), on trouve comme deuxième équation :
0
V
tσ
A (II.22)
Le système d’équations (II.21) et (II.22) constitue la formulation en potentiels A-V :
0
Vt
σ
Vt
σ s
A
JA
A
(II.23)

Chapitre II. Modélisation des matériaux supraconducteurs de type II
34
La résolution du système (II.23) nécessite la connaissance des conditions aux limites relatives
au domaine d’étude. Une condition aux limites usuelle est d’imposer un champ magnétique normal nul à la surface extérieure , dans le calcul, on impose alors :
0 An sur (II.24)
Cette condition est dite condition de type Dirichlet. En présence d’un plan de symétrie, une
autre condition dite de Newman peut être utilisée :
0A)(n sur s (II.25)
où s est le plan de symétrie de vecteur unitaire normal n (Fig.I.2).
s
n
Fig.II.3. Schématisation d’un plan de symétrie
Afin de compléter la formulation II.23, une jauge doit être introduite, en effet, le problème
d’unicité de la solution se pose ; on remarque que si le couple (A, V) est une solution de
(II.23), il existe alors une infinité de solutions donnée par ( A ). En remplaçant ces
derniers dans (II.23), le système reste inchangé. Afin de rendre la solution unique et
d’améliorer le processus de convergence, nous avons fait appel a la jauge de Coulomb, cette
jauge est la plus utilisée [Tsuchimoto 94], [Alonso 04] et [Bird 08]. Cette jauge est introduite dans la formulation à travers un terme dit de pénalité donné par :
A p (II.26)
Cela est démontré aussi par Biro dans [Biro 89]. Afin d’avoir une meilleure approximation du
potentiel, le paramètre ajouté p est remplacé par la reluctivité du domaine [Fetzer 96].
Finalement, nous obtenons la formulation A-V jaugée qui permet de résoudre le problème magnétique dans un dispositif comportant des supraconducteurs à haute température critique :
0V)t
T)(,σ(.
V)t
T)(,σ()(ν)(ν
A
JA
AA s
E
E
(II.27)

Chapitre II. Modélisation des matériaux supraconducteurs de type II
35
Dans le système d’équations (II.27), la conductivité électrique apparente σ du SHTC est
définie par le rapport de J sur E [Yoshida 94] et [Fujioka 96], ce rapport est déduit à partir de la caractéristique E-J du SHTC donnée par la relation (II.14) :
1n(T)
1
Ec
E
Ec
Jc(T)
E
Jσ(E,T)
(II.28)
Il faut noter que la non linéarité de la loi J(E) demande l’utilisation des méthodes de
résolution non-linéaire ou pas à pas dans le temps. Un inconvénient de la loi en puissance est
le fait que ∂J/∂E tend vers l’infini quand le champ électrique est nul, ce qui rend la
programmation de cette loi difficile en particulier pour la valeur E = 0. Pour remédier à cet
inconvénient, cette loi a été légèrement modifiée. On a introduit une relation linéaire pour les
faibles valeurs de E en rajoutant une conductivité électrique, σ0 suffisamment élevée
(généralement supérieur à 100.(Jc/Ec) [Nibbio 99]). Dans notre travail nous avons utilisée la
valeur de σ0 = 1014 pour ne pas modifier les résultats de simulation [Nibbio 99], [Klutsch 03]. La loi complète du comportement est alors sous la forme :
E
J(E)0
0
),(
),(
TE
TE avec
1)(
1
)(),(
Tn
Ec
E
Ec
TJc
E
JTE (II.29)
La résolution du système d’équations (II.27), en tenant compte de l’expression de la
conductivité électrique apparente σ du SHTC donnée par (II.29), nous permet de déterminer
les diverses grandeurs magnétiques, locales (comme par exemple, la répartition des champs
magnétiques) ou globales (tel que les pertes engendrées). Cependant, vu la dépendance des
paramètres caractéristiques du SHTC en température, en particulier, Jc et n. Il peut être
nécessaire de résoudre le problème thermique. Dans les SHTC et pour la résolution du
problème thermique, on a fait appel à l’équation de diffusion de la chaleur [Berger 05], [Braeck 02], [He 04].
II.2.4. Problème thermique
Les phénomènes thermiques, qui existent lorsqu’un courant et/ou un champ magnétique sont appliqués au SHTC, sont régis par l’équation de diffusion de la chaleur :
WTTκ.t
T(T)ρC p
)( (II.30)
où λ(T), ρ, Cp(T) sont respectivement la conductivité thermique en (W/K/m), la masse
volumique en (Kg/m3) et la chaleur spécifique du matériau en (J/K/Kg), W est une puissance volumique en (W/m3).
L’expression de l’ensemble des pertes dissipées dans le supraconducteur est donnée par :
W = E.J (II.31)

Chapitre II. Modélisation des matériaux supraconducteurs de type II
36
La résolution de l’équation (II.30) permet de connaître la répartition de la température en tout
point du supraconducteur. Cependant il est nécessaire d’introduire les équations qui traduisent
les échanges thermiques entre le supraconducteur et le fluide cryogénique qui sont considérés
comme étant dus essentiellement à la convection. Ainsi sur la frontière du supraconducteur
Γs (Fig.II.1), l’équation à résoudre est donnée par :
)Th(TT.nκ(T) oas (II.32)
où h est le coefficient de convection du fluide cryogénique exprimé en W/K/m2 et T0 est la
température de ce même fluide. Partout en dehors du supraconducteur, on considère que la
température est constante et égale à la température du fluide cryogénique T0 (généralement celle de l’azote liquide) :
T = T0 dans Ωa (II.33)
Ainsi, le système d’équations, qui traduit les comportements magnétiques et thermiques, à
résoudre comporte autant d’équations que d’inconnues, il faut toutefois lui adjoindre les
conditions initiales qui, lorsque le matériau est initialement vierge et complètement refroidi,
s’écrivent :
A = 0, V = 0, T =T0 (II.34)
Notons que la valeur des potentiels A et V sont considérées nulles dans le cas d’un
refroidissement hors champ magnétique. C'est-à-dire aucune source de champ n’est présente
durant le processus de refroidissement. Dans ce travail de thèse, nous avons présenté quelques
résultats de simulation où on a considéré que le matériau supraconducteur est refroidi sous
champ, c'est-à-dire, on suppose que la source de champ est présente durant le processus de
refroidissement. Dans ces conditions, la valeur initiale des potentiels magnétiques est celle résultant de la présence de la source.
II.3. Méthodes numériques de discrétisation
II.3.1. Principales méthodes existantes
L’utilisation des méthodes numériques permet de remplacer un problème continu défini par
un modèle mathématique souvent différentiel par un problème discret sous une forme
algébrique. Dans les formulations issues de la physique de l’électrotechnique on peut citer les
méthodes : différences finies (MDF), éléments finis (MEF) et intégrales de frontières (MIF).
L’application de ces méthodes requiert la discrétisation du problème, c'est-à-dire que le
domaine d’étude s’appuie sur un maillage. Substituer les opérateurs différentiels dans les EDP
en chaque point du maillage donne un système d’équations qui peut être résolu algébriquement. Ainsi les quantités physiques peuvent être calculées localement.
La MDF est bien adaptée à la modélisation des matériaux ayant des propriétés non linéaires,
ce qui est la cas dans les SHTC, elle est simple à formuler et peut aisément être étendue à des
problèmes à deux ou trois dimensions. En outre, la MDF est relativement facile à comprendre
Chapitre II. Modélisation des matériaux supraconducteurs de type II
37
et à implanter pour résoudre les EDP rencontrées dans des problèmes à géométries simples.
L’inconvénient principal de cette méthode semble être son incapacité à manipuler
efficacement la solution de problèmes à géométries complexes, arbitrairement formés. En
effet, les difficultés d’interpolation entre les frontières et les points intérieurs nuisent au
développement d’expressions en différences finies des nœuds proches des frontières. Pour
cette raison, cette méthode a été utilisée, que pour la modélisation des problèmes
monodimensionnels ou bidimensionnels axisymétriques des SHTC, en particulier, dans le calcul des pertes et l’étude de la lévitation magnétique [Fou 00], [Sykulski 97], [Berger 05].
La MEF est considérée comme la méthode la plus performante et la plus puissante, très
utilisée dans la modélisation, bidimensionnelle et tridimensionnelle, des matériaux SHTC
[Tsuchimoto 94], [Gou 07], [Shiriaichi 03]. Cette méthode offre l’avantage de pouvoir être
utilisée, en particulier, pour la modélisation des problèmes ayant des géométries complexes et
ne sont donc limités à l’usage de maillages réguliers de types différences finis. La MEF est en
principe conçu pour pallier ce genre d’inconvénient mais elle ne constitue pas nécessairement
la panacée pour toutes les applications, notamment à cause de sa relative complexité en ce qui
concerne son contexte mathématique d’utilisation, son implémentation et la gestion
informatique. C’est pourquoi nous sommes lancés dans le développement d’une autre
méthode numérique, plus simple à concevoir que la MEF et qui offre les avantages de cette
méthode, surtout sa capacité à modéliser les géométries complexes. Il s’agit de la méthode des
volumes finis MVF qui fait l’objet de ce travail de thèse. A notre connaissance, la MVF n’a jamais été utilisée dans la modélisation des SHTC.
II.3.2. La méthode des volumes finis
La MVF a connu un essor considérable non seulement pour la modélisation en mécanique des
fluides, mais aussi pour la modélisation d’autres branches de l’ingénierie scientifique :
transfert thermique, électromagnétisme…etc. L’analyse mathématique de la MVF a
récemment permis de développer les principes fondamentaux qui font d’elle une méthode de
discrétisation performante. Cette méthode commence à prendre une place significative dans la
simulation numérique des problèmes de l’électromagnétisme. Très utilisée par l’équipe de
l’institut INRIA dans la simulation des phénomènes de propagation d’ondes
(électromagnétisme, acoustique) par exemple [Remaki 98], et dans d’autres applications telles
que : les problèmes d’électrostatique [Davies 96], la magnétostatique [Zou 04],
l’électrothermique [Ioan 06] où la MVF a été utilisée pour l’optimisation des contacts
démontables de forts courants et enfin le remplacement de la MEF par la MVF dans le
développement des codes de calculs , à L’ONERA par exemple (code EMicroM [Labbé 98]), dédiés à l’étude des minimiseurs d’énergies micromagnétiques [Labbé 98].
Dans ce travail de thèse, nous nous investiguons à donner une extension de l’utilisation de la
MVF notamment dans la modélisation tridimensionnelle des SHTC. Deux codes de calcul ont
été développés et implémentés sous l’environnement Matlab. Chacun utilise une approche
différente de la MVF. La première approche basée sur un maillage structuré, appelé aussi
cartésien où les volumes élémentaires prennent une forme hexaédrique régulière ou cubique et

Chapitre II. Modélisation des matériaux supraconducteurs de type II
38
la deuxième basée sur un maillage non-structuré où les volumes élémentaires prennent une
forme tétraédrique (voire prismatique).
La mise en œuvre du code numérique utilisant la MVF avec un maillage cartésien (premier
code) reste relativement accessible et demande une capacité de stockage d’informations
raisonnable. Certaines informations sur le maillage, telles que le barycentre, la normale des
faces ou encore le volume des mailles sont connues par l’utilisateur, cela ne demande donc
pas de pré-traitements particuliers. Néanmoins, ce type de discrétisation reste insuffisant pour
l’étude d’objets complexes de forme courbe, nous restons relativement limités pour modéliser
des objets de type sphère avec des hexaèdres réguliers, seule une discrétisation très fine
permet de suivre la géométrie entraînant automatiquement un nombre de mailles élevé et
défavorisant ainsi le temps de calcul. Par contre, un schéma Volumes Finis utilisé dans le
cadre d’un maillage non-structuré (deuxième code) assure une description conforme de la
géométrie de l’objet. La prise en compte des zones de géométries très complexes se fera de
façon plus naturelle et surtout plus précise sans que le maillage ne soit trop lourd en nombre
de volumes. Il a été montré [Bonnet 97] que le temps de calcul d’une application était moins
important en maillage ”non-structuré” qu’en maillage ”cartésien” grâce essentiellement à un
nombre de mailles moins important. Par conséquent, la modélisation électromagnétique se fait
sans restriction géométrique grâce à l’apport d’un mailleur fournissant au code numérique les
données nécessaires. La mise en ouvre des deux méthodes sera présentée dans le chapitre suivant.
Pour différencier les deux méthodes, la première méthode basée sur le maillage cartésien
méthode des volumes finis classiques est notée ‘MVFC’, et la deuxième méthode basée sur le maillage non-structuré méthode des volumes finis modifiée est notée ‘MVFM’.

Chapitre III.
MISE EN ŒUVRE DE LA METHODE DES VOLUMES FINIS
III.1. Introduction 39
III.2. Méthode des volumes finis tridimensionnelle avec un maillage
cartésien MVFC 40
III.2.1. Discrétisation géométrique 40
III.2.2. Discrétisation des équations électromagnétiques par la MVFC 41
III.2.2.1. Intégration de A 41
III.2.2.2. Intégration de A 45
III.2.2.3. Intégration du terme source 45
III.2.2.4. Intégration du terme
Vσ
t
A 45
III.2.2.4. Intégration De l’équation en divergence 47
III.2.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFC 48
III.2.4. Méthodes numériques de résolution 50
III.2.4.1. Méthode d’Euler 50
III.2.4.2. Méthode de Gauss-Seidel 51
III.3. Méthode des volumes finis tridimensionnelle avec un maillage
non structuré (MVFM) 52
III.3.1. Définition du maillage 53
III.3.2. Discrétisation des équations électromagnétiques par la MVFM 56
III.3.2.1. Intégration de A 57
III.3.2.2. Intégration de x
Vt
A
)( 62
III.3.2.3. Intégration du terme source 62
III.3.2.4. Intégration de l’équation en divergence 63
III.3.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFM 65
III.4. Algorithmes de résolution 67
III.4.1. Algorithmes de résolution des problèmes, électromagnétique et thermique 67
III.4.2. Couplage électromagnétique-thermique 70

Chapitre III. Mise en œuvre de la méthode des volumes finis
39
Nous présentons dans ce chapitre un aperçu sur la méthode des volumes finis (MVF),
utilisée pour la résolution des équations aux dérivées partielles, caractéristiques des
phénomènes physiques traités dans les systèmes ayant des matériaux supraconducteurs à
haute température critique. Deux approches de la MVF seront présentées, la première basée
sur un maillage structuré et la deuxième basée sur un maillage non structuré. Nous
présentons aussi les méthodes de résolutions des systèmes d’équations algébriques obtenus
après avoir appliqué la MVF. Nous exposerons à la fin de ce chapitre, les différents modes,
utilisés pour le couplage magnétique thermique, ainsi, que le code de calcul développé et
implémenté sous l’environnement MATLAB en décrivant ses fonctions pour les deux types d’environnement : magnétique et thermique.
III.1. Introduction
La méthode des volumes finis est utilisée depuis longtemps pour les simulations numériques
en mécanique des fluides mais elle a trouvé un second essor avec des applications en
électromagnétisme. Elle fait partie, au même titre que les Différences Finies, de ces méthodes
numériques capables de résoudre les équations de Maxwell dans le domaine temporel. L’idée
de base de la méthode volumes finis est de partitionner le domaine de calcul en sous domaines
(ou en volumes élémentaires) grâce à un maillage initial de type éléments finis. L’ensemble
de ces volumes élémentaires constitue donc le domaine de calcul complet. Comme nous
l’avons évoqué dans le chapitre précédent, l’utilisateur a le libre choix pour partitionner son
domaine de calcul. Le maillage n’est pas unique, on distingue deux types de maillage : un noté “structuré” ou “cartésien” et un autre noté “non-structuré”.
Dans ce travail de thèse, nous proposons deux approches différentes de la méthode des
volumes finis MVF, la première basée sur un maillage structuré (Fig.III.1.a), elle consiste à
subdiviser le domaine de calcul en volumes élémentaires de forme quadrilatère pour les
applications en deux dimensions et de forme hexaédrique pour les applications en trois
dimensions. C’est une discrétisation de type Différences Finies (“marches d’escaliers”) qui
facilite la construction du maillage. On va appeler cette première méthode, la méthode des
volumes finis classique, elle est notée ‘MVFC’.
La deuxième approche, basée sur un maillage non-structuré (Fig.III.2.b) qui requiert un
mailleur indépendant, spécifique, parfaitement adapté à l’algorithme numérique. Son rôle est
de partitionner l’application étudiée en volumes élémentaires de forme aussi variée que des
triangles (deux dimensions), tétraèdres ou prismes (trois dimensions). Le choix entre ces deux
méthodes est basé essentiellement sur la géométrie du dispositif à modéliser. Si la géométrie
possède une structure hexaédrique, l’application de la première approche est avantageuse en
termes de temps de calcul et de simplicité. Par contre, cette première approche présente
l’inconvénient de ne pas pourvoir modélisé des dispositifs ayant des géométries complexes.
C’est véritablement tout l’intérêt de la deuxième approche de la MVF, le maillage va suivre
naturellement la forme de la structure, les géométries complexes seront modélisées de façon
plus rigoureuse et plus conforme sans que cela ne génère un nombre de mailles trop
important. On va appeler cette deuxième méthode, la méthode des volumes finis modifiée elle sera notée ‘MVFM’.

Chapitre III. Mise en œuvre de la méthode des volumes finis
40
(a). Structuré (b). Non structuré
Fig.III.1. Maillage structuré et non structuré, vue 2D
III.2. Méthode des volumes finis tridimensionnels avec un maillage cartésien (MVFC)
III.2.1. Discrétisation géométrique
Dans cette partie nous passons à la mise en œuvre da la méthode des volumes finis classiques
(MVFC), utilisée pour la discrétisation des équations aux dérivées partielles des phénomènes
électromagnétiques et thermiques couplés dans les matériaux supraconducteurs haute
température critique (SHTC). Le maillage cartésien ou structuré, est constitué de volumes
élémentaires de forme hexaédrique ou cubique. A chaque volume pD de forme hexaédrique,
on associe un nœud dit principal P et six facettes : e et w selon la direction x, n et s selon la
direction y, t et b selon la direction z (Fig.III.2). Les volumes voisins de pD , sont représentés
par leurs nœuds voisins proches : E et W suivant l’axe x, N et S suivant l’axe y, T et B suivant l’axe z.
x
z
y
P E W
N
S B
T
e w n
s
t
b
Fig.III.2. Volume fini élémentaire pD
x
y z

Chapitre III. Mise en œuvre de la méthode des volumes finis
41
III.2.2. Discrétisation des équations électromagnétiques par la MVFC
La MVFC intègre sur chaque volume élémentaire pD , de volume d = dxdydz, les équations
des problèmes à résoudre. Elle fournit ainsi d’une manière naturelle des formulations discrètes.
Rappelons la formulation tridimensionnelle des équations électromagnétiques en
potentiels A-V donnée précédemment par (II.26) :
0)t
(.
)t
()(ν)(ν
Vσ(E,T)
Vσ(E,T)
A
JA
AA s
(III.1)
L’application de la MVFC consiste à intégrée les équations différentielles du système (III.1)
dans chaque volume élémentaires PD correspondant au nœud principal P :
P
PPPP
D
DDDD
0dτV)t
σ(.
dτdτV)t
σ()dτ.(υdτ)(υ
A
J A
A A s
(III.2)
Pour calculer les intégrales du système d’équations (III.2), chaque opérateur différentiel doit
être développé puis projeté sur les trois axes x, y et z du référentiel. Dans le but d’alléger les
développements, par la suite, on va seulement présenter la méthode pour une seule
composante.
III.2.2.1. Intégration de A
A
d
yd
e
w
n
s
t
b
yzyx z dydxd z
A
zy
A
zx
A
xy
A
x (III.3)
Les quatre termes différentiels dans (III.3), peuvent être représentés par une forme générale donnée par :
k
jA
i avec x, y, zi, j,k (III.4)

Chapitre III. Mise en œuvre de la méthode des volumes finis
42
Tenant compte de cette écriture, on distingue deux cas ; ki et ki . Soit par exemple le
calcul du deuxième terme dans (III.4) et qui correspond à xki et j = y :
e
w
n
s
t
b
yz dydxd
x
A
x
zdyd x
An
s
t
b
e
w
y
zyx
Ay
x
A
we
y
(III.5)
Pour calculer les termes en dérivées dans (III.5), on considère dans notre étude une variation linéaire du potentiel magnétique à travers les facettes e et w (Fig.III.3), on peut alors écrire :
e
Py
Ey
e
e
y
x
AA
x
A
(III.6)
Fig.III.3. Approximation linéaire du potentiel à travers la facette e
De même, on exprime la dérivée sur la facette w. Remplaçant ces dérivées dans (III.5), on aura la combinaison linéaire suivante :
Pywe
Wyw
Eye AccAcAc (III.7)
tel que :
m
mmΔx
ΔyΔzc pour w, em (III.8)
P
E
e
yA
ex

Chapitre III. Mise en œuvre de la méthode des volumes finis
43
où e et w sont respectivement, les réluctivités magnétiques des facettes e et w. le
quatrième terme dans (III.3) qui correspond à zki se développe de la même manière
présentée précédemment, cependant, le problème de la MVFC se pose pour le développement
du premier et du troisième terme dans (III.3), c’est à dire les termes qui correspondent à i = x, k = y et à i = z, k = y respectivement.
Dans le cas de la formulation (III.2), le terme en rotationnel )(ν A et le terme en
gradient A).( ne présentent pas une forme en divergence exigée par la formulation
classique de la MVF, en effet, la méthode des volumes finis dans son origine, été dédiée à la
résolution des problèmes thermiques définis essentiellement par des équations aux dérivées
partielles où les opérateurs prennent essentiellement une forme en divergence [Patankar 82].
Pour tenir compte de ces deux termes qui apparaissent dans la formulation électromagnétique,
une modification de la MVFC a été proposée [Alloui 08], [Alloui 09 b]. Cette modification est
basée sur l’implantation de huit nœuds supplémentaires dans le volume élémentaire PD
représentée dans la figure III.2. Dans ce cas, le nœud principal P de chaque volume
élémentaire est entouré par quatorze nœuds voisins au lieu de six nœuds voisins comme il est
présenté dans la figure III.4. Cette modification permet alors de discrétiser le terme en rotationnel de la formulation électromagnétique (III.2) dans le cas tridimensionnel.
Si on considère maintenant le troisième terme dans (III.3) soit pour xji et yk :
e
w
n
s
t
b
x z dydxd y
A
x
zyy
Ae
w
x
(III.9)
Grace à la modification proposée, la dérivée du potentiel Ax dans les facettes e et w peut être exprimée par :
y
AA
y
A sex
nex
e
e
x
(III.10)
Les potentiels nexA et se
xA dans les nœuds supplémentaires ne et se sont exprimés en fonction
des potentiels des nœuds de base voisins :
NEx
Nx
Ex
Px
nex AAAAA
4
1 (III.11)
De même :
SEx
Sx
Ex
Px
sex AAAAA
4
1 (III.12)

Chapitre III. Mise en œuvre de la méthode des volumes finis
44
x
z
y
P E W
N
S B
T
e w n
s
t
b
Fig.III.4. Illustration des nœuds supplémentaires, en haut de la figure, la structure du volume
élémentaire modifié en 3D, en bas de la figure, la projection d’un volume élémentaire suivant
le plan XY.
D’où :
SEx
Sx
NEx
Nxe
e
x AAAAΔyy
A
4
1 (III.13)
De la même façon, on calcule la dérivée du potentiel dans la facette w. Après arrangement, le terme (III.10) aboutit à une combinaison linéaire donnée par la forme suivante :
Sx
SWx
NWx
Nxs
SEx
Sx
NEx
Nxn AAAAqAAAA q
avec ΔzΔy
q mm 4
1 pour m = e,w (III.14)
P E W
N
S pD
e
NE
ne
w
n
s
nw
NW
x
xe xw
xE xW
x
y z
Nœuds supplémentaires
Nœuds de base
x
y
yn
ys
y

Chapitre III. Mise en œuvre de la méthode des volumes finis
45
De la même manière, on intègre les autres termes dans (III.3).
III.2.2.2. Intégration de A
d y
A
e
w
n
s
t
b
zyx zdydx dz
A
yy
A
yx
A
y (III.15)
L’équation différentielle (III.15) peut être intégrée par la MVFC comme décrit
précédemment. Le résultat de l’intégrale de (III.15) mène donc à une combinaison linéaire, qu’on peut les mettre sous la forme :
...,...,
,,
WEMwem
zyxi
Mim
Pysn AqAcc
(III.16)
où
mmm
Δy
ΔxΔzc pour snm (III.17)
III.2.2.3. Intégration du terme source
On suppose une distribution uniforme et constante du courant source dans le volume
élémentaire PD , on peut alors écrire :
ΔxΔyΔzJzdydxd ys
Dys
p
J (III.18)
III.2.2.4. Intégration du terme
Vσ
t
A
zdydxdVt
σ
e
w
n
s
t
b y
A
zyxy
V
t
Aσ
P
Py
p
(III.19)

Chapitre III. Mise en œuvre de la méthode des volumes finis
46
Ce terme exprime les courants induits dans les matériaux conducteurs. Dans notre cas, il
s’agit du SHTC, σp représente alors la valeur de la conductivité électrique apparente du
SHTC, donnée précédemment par (II.28), dans chaque nœud principal P. Dans (III.19) la
dérivée du potentiel V au nœud P doit être exprimée par une différence de potentiels aux
facettes, e et w. Et comme les facettes, e et w, sont situées sur les médianes des segments P-E et P-W, respectivement, cette dérivée devient :
we
WE
p xx
VV
x
V
(II.29)
En regroupant tout les termes développés précédemment, on aboutit à l’équation algébrique
(III.20). Cette équation exprime la composante suivant y du potentiel vecteur magnétique A
dans chaque nœud principal P ( PyA ) du maillage en fonction des potentiels Ax, Ay, Az et V des
nœuds voisins :
pysSN
sn
pp
...w,emz,xi
Mim
...w,em
Mym
Pypp
Py
DJVVΔyΔy
DAqAc
ADcpA
(III.20)
avec
1
)(
1
),,(
)(),(
),,,(
Tn
...w,em
mp
PiP
zyxii
Ec
E
Ec
TJc
E
JTE
cczyxit
AA
(III.21)
De la même manière les deux composantes x et z du potentiel vecteur magnétique A seront calculées :
pxsWE
we
pp
...w,emz,yi
Mim
...w,em
Mxm
Pxpp
Px
DJVVΔxΔx
DAqAc
ADcpA
(III.22)

Chapitre III. Mise en œuvre de la méthode des volumes finis
47
pzsBT
bt
pp
...w,emy,xi
Mim
...w,em
Mzm
Pzpp
Pz
DJVVΔzΔz
DAqAc
ADcpA
(III.23)
III.2.2.5. Intégration de l’équation en divergence
De même, la MVFC est utilisée pour la discrétisation de la deuxième équation aux dérivées
partielles du système (III.2). L’intégration dans chaque volume élémentaire PD qui
correspond au nœud principal P mène à :
zdydxdVσ
e
w
n
s
t
b
t
A
e
w
n
s
t
b
zyx zdydxdz
VAσ
zy
VAσ
yx
VAσ
x (III.24)
L’intégration, par exemple, du premier terme de (III.24) donne :
ΔyΔzx
VAσ
x
VAσ
w
wxw
e
exe
(III.25)
En approximant le potentiel vecteur magnétique Ax aux facettes e et w par des combinaisons
linéaires des potentiels aux nœuds voisins (par exemple exA par la moyenne des potentiels
aux nœuds E et W), et en considérant une variation linéaire du potentiel V entre les facettes e et w, l’expression (III.25) conduit à :
ΔyΔzΔx
VVAAσ
Δx
VVAAσ
w
WPW
xP
xwe
PEP
xE
xe
2
1
2
1 (III.26)
De la même façon seront calculés les autres termes dans (III.24). Finalement nous obtenons l’équation algébrique (III.27) qui exprime le potentiel scalaire électrique V au nœud P :
...,
,,...,
1
nemzyxi
Mim
wem
Mm
p
P AcvVuu
V
(III.27)

Chapitre III. Mise en œuvre de la méthode des volumes finis
48
Avec (par exemple pour m = e) :
eee
Δx
ΔyΔzcv
2
1,
eee
x
zyu
(III.28)
et
...w,em
mp uu
(III.29)
Les équations (III.20), (III.22), (III.23) et (III.27) sont réécrites pour l’ensemble des éléments
de maillage, ensuite elles sont assemblées et nous obtenons un système d’équations qu’on
peut mettre sous la forme matricielle suivante :
0VN 0
N N
V0M
0M
22
1211
2
1 sJAA
(III.30)
ou sous une forme condensée :
0VN
VM sJAA
(III.31)
avec
V
A
A
A
V z
y
x
A et
zs
ys
xs
s
J
J
J
J
III.2.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFC
Rappelons l’équation de diffusion de la chaleur en régime transitoire :
WTT.κt
T(T)ρC p
)( (III.32)
Après transformation des opérateurs différentiels de l’équation scalaire (III.32) nous obtenons :
Wz
Tκ
zy
Tκ
yx
Tκ
xt
TρC p
(III.33)

Chapitre III. Mise en œuvre de la méthode des volumes finis
49
L’intégration de l’équation différentielle (III.33), décrite essentiellement par un opérateur
différentiel en divergence est plus simple à intégrer par rapport a l’intégration des équations
électromagnétiques présentée précédemment. La discrétisation de ce type d’équation fait appelle au schéma des volumes finis présenté dans la figure III.2 :
e
w
n
s
t
b
e
w
n
s
t
b
e
w
n
s
t
b
e
w
n
s
t
b
e
w
n
s
t
b
p
Wdτdτz
Tκ
zdτ
y
Tκ
ydτ
x
Tκ
x
dτt
TρC
(III.34)
Chaque terme dans (III.34) est intégré dans l’espace, sur le volume fini, correspondant au
nœud principal P, et délimité par les facette (e, w, n, s, t, b). Nous présentons, par exemple, l’intégrale du deuxième terme de (III.34) :
n
s w
t
b
w
e
n
s
t
b
e
e
w
n
s
t
b
e
w
n
s
t
b
dydzx
Tκdydz
x
Tκ
dydzx
Tκdxdydz
x
Tκ
x
(III.35)
Avec un profil linéaire, choisi, exprimant ainsi la variation spatiale de la température (T), entre les facettes e et w, entre les nœuds voisins. Prenons par exemple la facette e :
ΔyΔzΔxe
TTκdydz
x
Tκ
PE
e
e
n
s
t
b
(III.36)
En réalisant le même développement sur la facette w et en remplaçant ces développements dans (III.35), nous obtenons :
ΔyΔzΔxw
TTκΔyΔz
Δxe
TTκ
dxdydzx
Tκ
x
WP
w
PE
e
e
w
n
s
t
b
(III.37)
De la même manière, tous les termes en dérivées partielles dans (III .34) seront développés.
Après arrangement, nous aboutissons à l’équation algébrique finale qui s’écrit sous la forme suivante :
P
WEMwem
MmPPpPp DWTaTaDTρC
,......,,....,
(III.38)

Chapitre III. Mise en œuvre de la méthode des volumes finis
50
avec (pour, par exemple, m = e) :
zyx
ae
ee
et
,.......,wem
mP aa (III.39)
L’équation algébrique (III.38) peut être mise sous la forme matricielle suivante :
QTKTC (III.40)
L’utilisation alors de la MVFC, a permis de transformer, la résolution des systèmes
d’équations aux dérivées partielles (III.1) et (III.32) en une résolution de système d’équations
algébriques non-linéaire donné par (III.31) et (III.40). Pour la résolution de ces systèmes
algébriques, généralement on fait appel aux méthodes itératives (par exemple méthode de
Gauss Seidel).
III.2.3. Méthodes numériques de résolution
III.2.3.1. la méthode d’Euler
On cherche à résoudre les systèmes algébriques non-linéaires (III.31) et (III.40) à chaque pas
de temps. On introduit pour cela une suite de vecteurs Am, Vm et Tm. Ces vecteurs sont une
approximation de A(mt), V(mt) et T(mt). La méthode la plus simple, à laquelle nous nous
limiterons, est la méthode d’Euler. Cette méthode fait intervenir un paramètre compris entre 0 et 1 [Nougier].
Elle consiste à remplacer les équations (III.31) et (III.40) par le schéma suivant :
0
tmθ)(1tmθ
θ)V(1θV
θ)(1θN
Δt
VV
ΔtM
mmm1m
)())1((
1
ssm1m
m1m
JJAAA-A
(III.41)
)())1((11
tmθ)Q(1tmθQθ)T(1θTKt
TTC mm
mm
(III.42)
Pour = 0, la méthode est explicite. Elle nécessite de choisir un pas de temps t
suffisamment petit sinon la solution devient instable. Pour = 1, la méthode est implicite, elle
est inconditionnellement stable [Pelletier]. Pour cette raison et après plusieurs tests
numériques, elle semble être un bon compromis entre rapidité de convergence du processus
itératif et stabilité numérique. Avec cette méthode ( = 1), la solution est obtenue
implicitement comme solution d’un système non linéaire que l’on va résoudre par la méthode de Gauss-Seidel non linéaire.

Chapitre III. Mise en œuvre de la méthode des volumes finis
51
Ce système est tel que :
0
tm
VN
Δt
VV
ΔtM
mm1m
))1((
1
s1m
m1m
JA
A-A
(III.43)
)))1((11
tmQTKt
TTC m
mm
(III.44)
III.2.3.1. la méthode de Gauss-Seidel
Après discrétisation des équations aux dérivées partielles des phénomènes électromagnétiques
et thermiques par la méthode des volumes finis, le problème se ramène à l’inversion de
systèmes d’équations matricielles (III.43) et (III.44). Du fait que ces systèmes sont souvent de
grandes tailles, il devient alors impossible de les inverser par une méthode directe. D’où la
nécessité d’utiliser des méthodes de résolution itératives. Ces méthodes sont particulièrement
utilisées pour la résolution des systèmes ayant des matrices de rang élevé, comportant de
nombreux éléments nuls (matrice creuses), ils font passer d’un estimé X(k) de la solution à un
autre estimé X(k+1) de cette solution.
Parmi ces méthodes nous avons utilisée la méthode de Gauss-Seidel. Cette méthode consiste à
transformer le système algébrique, comme par exemple, DXB en :
ni
bijbijXbijXdXn
ij
kj
i
j
kji
ki
............,.........1
)1(
1
1
)1()1(
(III.45)
En donnant aux inconnues kiX des valeurs arbitraires initiales 0
iX
Le processus sera arrêté si,
ki
ki XX 1
(III.46.a)
dans le cas d’une précision absolue et
ki
ki
ki
X
XX 1
(III.46.b)
dans le cas d’une précision relative. ( est la précision imposée par l’utilisateur).

Chapitre III. Mise en œuvre de la méthode des volumes finis
52
III.3. Méthode des volumes finis tridimensionnelle avec un maillage non-structuré (MVFM)
Le maillage bidimensionnel ou tridimensionnel étant réalisé, les équations de Maxwell
doivent être résolues et intégrées sous forme volumique à l’intérieur de chaque volume.
Historiquement, nous pouvons distinguer au moins deux choix d’intégrations dont la
différence se situe en fait sur la localisation des inconnues : la formulation dite “nœuds-
centrés” ou “cell-vertex” et la formulation dite “éléments-centrés” ou “ cell-centered”. La
première associe les composantes des champs électromagnétiques ou thermiques sur les
nœuds de chaque volume, ainsi comme le montre la figure III.5, les sous-domaines
d’intégration ne correspondent pas aux mailles constituant le volume de calcul mais
définissent une figure reliant les barycentres de chaque volume adjacent aux nœuds. Les
volumes d’intégrations ainsi obtenues ont souvent des géométries hexagonales. La validité, la
précision ainsi que la stabilité ont été prouvées à travers divers codes utilisant cette approche
[Bonnet 97] et [Cioni 95]. En revanche, dans le cas de la formulation dite “éléments-centrés”,
ainsi comme le montre la figure III.6, les sous-domaines d’intégration correspondent aux
mailles initiales ainsi les champs, électromagnétiques ou thermiques, seront calculés au
barycentre de chaque volume élémentaire. La prise en compte de la discontinuité entre deux
milieux ou le traitement proche des conditions frontières se font de façon plus naturelle dans
le cas des deux formulations. Dans le cadre de cette thèse, le choix s’est porté sur l’approche des ‘‘nœuds centrés’’.
B : Barycentres N : Nœuds
Fig.III.5. Sous domaine d’intégration : méthodes ‘nœuds centrés’
Maille
Sous-domaine d’intégration
Maille
Sous-domaine d’intégration

Chapitre III. Mise en œuvre de la méthode des volumes finis
53
B : Barycentres N : Nœuds
Fig.III.6. Sous domaine d’intégration : méthodes ‘éléments centrés’
III.3.1. Définition du maillage
L’organigramme présenté dans la figure III.7 détaille le déroulement de toutes les
modélisations électromagnétiques ou thermiques. La première étape consiste à définir le
problème physique, c’est à dire à décrire les structures de la modélisation dans un volume de
calcul. Cependant, ce volume tridimensionnel n’est pas nécessairement parallélépipédique,
par conséquent la construction du maillage de l’ensemble du problème ne se fait pas
automatiquement mais par le biais d’un mailleur indépendant. Contrairement à un maillage
uniforme (MVFC) où l’utilisateur peut créer sa structure et son propre maillage (en
définissant les pas spatiaux), c’est le mailleur qui discrétise l’ensemble du problème. Il suffit
donc de récupérer les informations fournies, de les traiter pour faire le lien avec le code
numérique. Cette étape est appelée la phase de pré-traitement. La deuxième étape est l’étape
classique, commune pour n’importe quel type de maillage : c’est le calcul des potentiels
magnétiques par exemple dans chacune des mailles suivie de la visualisation des données de la simulation.
Fig.III.7. Schéma général du principe d’un code MVF pour un maillage non-structuré
Dans le cas de la MVFM développée, il fallait construire deux maillages différents, duaux
l’un de l’autre. Les variables à déterminer seront discrétisées sur le maillage primal. Ce
dernier, de forme prismatique a été obtenu à partir du mailleur fourni par Matlab
(PDETOOL). Nous tenons à signaler que ce dernier, à l’origine, est dédié à la modélisation
des problèmes bidimensionnels, les mailles ont une forme triangulaire. Cependant, pour
Construction de la géométrie du problème
Maillage du volume de calcul
Récupération des données du mailleur
Calcul MVFM
Traitements des données du code MVFM
Phase 1
Phase 2

Chapitre III. Mise en œuvre de la méthode des volumes finis
54
transformer ce dernier en un maillage primal prismatique, nous avons développé un
programme qui permet de translater le maillage bidimensionnel, défini dans le plan X-Y,
suivant plusieurs niveaux selon l’axe Z.
Pour le maillage dual, généralement il existe deux façons pour le construire :
Méthode barycentrique
Méthode de Delauney – Voronoi.
Les règles de construction du maillage dual de type barycentrique sont les suivantes :
Les nœuds duaux sont les centres de gravité des volumes primaux
Les arrêtes duales se décomposent en deux parties : on considère deux volumes
primaux ayant une facette commune. On relie le nœud dual contenu dans le premier
volume primal au centre de cette facette. On relie alors celui-ci au nœud dual contenu
dans le deuxième volume primal. L’arête ainsi obtenue ne sera plus droite, mais aura
une allure ‘brisée’. La figure III.8 représente un exemple de maillage dual de ce type
dans le cas d’un maillage primal prismatique.
Fig. III.8. Exemple de construction d’un maillage dual de type barycentrique
Ce type de maillage dual présente l’inconvénient d’avoir une discrétisation relativement
complexe. Pour cette raison, nous avons opté pour l’utilisation du maillage dual de type Delauney Voronoi. Les règles de construction d’un tel maillage sont les suivantes :
Les nœuds duaux sont les centres des sphères circonscrites aux volumes primaux
Les arêtes duales traversent les facettes primales orthogonalement et en leur milieu.
La figure III.9 représente un exemple du maillage dual de ce type dans le cas d’un
maillage primal prismatique.

Chapitre III. Mise en œuvre de la méthode des volumes finis
55
Fig. III.9. Exemple de construction d’un maillage dual de type Delauney-Voronoi
A titre d’exemple, la figure III.10 montre un maillage dual de type Delauny-Voronoi
construit à partir du mailleur développé sous l’environnement Matlab. Ce maillage est
construit par élévation en tranches suivant l’axe Z. Le nombre d'élévation est égal à 25
avec un nombre total de nœuds, égal à 10800 nœuds.
-0.4
-0.20
0.2
0.4
-0.4
-0.2
0
0.2
0.40
0.2
0.4
0.6
0.8
Fig.III.10. maillage dual de type Delauny-Voronoi en 3D.

Chapitre III. Mise en œuvre de la méthode des volumes finis
56
III.3.2. Discrétisation des équations électromagnétiques par la MVFM
Rappelons d’abord quelques formules données précédemment (chapitre II. §.II.2.1), déduites
principalement du système d’équations de Maxwell :
JH (III.47)
rotAB (III.48)
HB μ (III.49)
La combinaison de ces trois équations mène à l’équation vectorielle suivante :
JA (III.50)
En tenant compte des relations de l’analyse vectorielle, le terme gauche de l’équation (III.50) s’écrit :
)AAA)
AA)A
).(Δν(ν
)ν(νν
()(
()( (III.51)
En introduisant la jauge de coulomb ( 0 A. ) dans (III.51), on obtient :
AAA ννν )( (III.52)
Dans le cas de la modélisation des problèmes ayant des matériaux supraconducteurs haute
température critique SHTC, généralement, La perméabilité magnétique a une valeur constante
dans tout le domaine à modéliser, sa valeur est prise égale à celle de l’air. Cela veut dire
que 0)()( A , en remplaçant ce terme dans (III.52) on obtient :
A
AAA
ν
ννν )( (III.53)
Il faut mentionner que cette simplification reste valable même dans le cas de la modélisation
d’un problème ayant des matériaux magnétique linéaire. En effet, dans chaque région du
dispositif étudié, la valeur de la perméabilité magnétique peut être considérée comme
constante, donc 0)( A , sauf aux interfaces, séparant deux régions de perméabilité
magnétique différente. Dans ce cas, la valeur de la perméabilité magnétique dans l’interface peut prendre une valeur équivalente choisie d’une manière adéquate.
En remplaçant l’équation (III.53) dans (III.51), nous obtenons :
J A (III.54)
Comme cité précédemment, le terme Jc, qui représente la densité de courant de conduction,
inclut deux parties essentielles, la partie source (ou inducteur) Js et la partie induite σE qui est due à la présence du SHTC, ainsi on peut décomposer la densité de courant J en deux termes :
EJsJ σ (III.55)

Chapitre III. Mise en œuvre de la méthode des volumes finis
57
En remplaçant le champ électrique E par son expression donnée par (II.19), dans (III.55) et en combinant les deux équations (III.55) et (III.54) nous obtenons la formulation suivante :
sVt
σ JA
A
(III.56)
La deuxième équation est déduite de la loi de conservation du courant, donnée précédemment
par (II.21). Finalement, nous aboutissons à la formulation A-V décrite par le système d’équations suivant :
0
Vt
σ
Vt
σ s
A
JA
A
(III.57)
Pour transformer le système d’équations aux dérivées partielles (III.57) en un système
d’équations algébriques, la MVFM est utilisée. Ayant le même principe que la MVFC, la
MVFM intègre sur chaque volume élémentaire PD (Fig.III.11), de volume d = ds.dz, les
équations des problèmes à résoudre. L’intégration du système (III.57) dans chaque volume
élémentaire PD correspondant au nœud principal P mène à :
P
PPP
D
D
s
DD
dVt
σ
ddVt
σdν
A
J A
A
0
(III.58)
Dans un souci d’alléger le développement, on ne considère par la suite que la composante x de la première équation vectorielle du système (III.58).
III.3.2.1. Intégration de A
P
P
D
x
D
x
dA
d
).(
A
(III.59)
L’application du théorème d’Ostrogradsky nous permet de transformer l’intégrale volumique (III.59) à une intégrale surfacique :
tx
D
x dsAdA
P
).( (III.60)

Chapitre III. Mise en œuvre de la méthode des volumes finis
58
tds représente la surface fermée qui limite le volume fini PD . Comme le montre la
figure III.11, cette surface est constituée de plusieurs surfaces latérales ( lads ), et de deux
surfaces égales (ds), une située dans le niveau supérieur et l’autre située dans le niveau inférieur du volume DP. De cela, l’équation (III.60) devient :
dsAdsAdsAdA xx
ds
laix
D
x
laiP
).( (III.61)
En considérons une variation linéaire du potentiel entre les facettes t et b (Fig.III.11), on peut
calculer les flux à travers les surfaces, inférieure (SB) et supérieure (ST), dans l’équation (III.61) le flux dans chacune des surfaces SB et ST est donné par :
sz
AAdsA
t
Px
Tx
txT
(III.62)
sz
AAdsA
b
Bx
Px
bxB
(III.63)
Pour le calcul des flux à travers les surfaces latérales ( laids ), dans (III.61), vu la
complexité du calcul des dérivées des potentiels suivant le référentiel (R) définis par les
coordonnées (x, y), il fallait ramener le calcul dans le référentiel (R`), ayant comme
coordonnées et , rapporté aux éléments primaux comme il est montré sur la figure III.12.
Fig.III.11. Volume fini élémentaire Dp
B
T
Nœuds latéraux
P
t
b
x
y
z
zt
zb
z
Surfaces Latérales
Surface supérieure dsT (ST)

Chapitre III. Mise en œuvre de la méthode des volumes finis
59
Fig.III.12 Projection d’un volume élémentaire suivant le plan XY.
Le potentiel magnétique Ax au nœud principal P dans chaque élément primal Ei peut être
exprimé en fonction des potentiels magnétiques des nœuds latéraux voisins et en coordonnées
locales (,) par la relation suivante :
PEiEiPEi AxAxAxAx )1( (III.64)
EiAx et EiAx sont les potentiels magnétiques aux nœuds latéraux voisins du nœud
principal P portés respectivement sur les deux axes Ei et Ei .
A partir de cette formulation, les dérivées du potentiel magnétique Ax dans chaque élément primal Ei peuvent être déduites par :
PEiPEi
PEiPEi
AxAxAx
AxAxAx
(III.65)
La relation qui lie les dérivées d’une fonction dans le référentiel (R’) en fonction de ces
dérivées dans le référentiel (R) est donnée par [Dhatt 84] :
)()( ,, yxJ (III.66)
où [J] est la matrice Jacobienne de la transformation géométrique. Les termes de [J] sont
définis par [Dhatt 84]:
PζEiPζEi
PηEiPηEi
-y yxx
-y yxxJ (III.67)
P
(S)
Nœuds latéraux
Surfaces latérales
Ei
Ei
Ei
Ei-1
Ei+1
y
x

Chapitre III. Mise en œuvre de la méthode des volumes finis
60
Les couples ( EiEi yx , ) et ( EiEi yx , ) représentent les coordonnées des nœuds latéraux de
chaque élément primal Ei entourant le nœud principal P, ayant les coordonnés (xP, yP), suivant
les deux axes Ei et Ei du référentiel (R’) porté par chaque élément primal Ei.
Ayant déterminé les dérivées du potentiel magnétique Ax dans le référentiel (R’) en et dans
(III.65), le calcul des dérivées de Ax peut être ramené dans le référentiel (R) en fonction des
coordonnés x et y en utilisant les relations (III.66) et (III.67) :
1
2221
1211
1
avec
EiEi
PEi
PEi
EiEi
EiEi
PEi
PEiEi
PEi
PEiEi
PEi
PEi
Jj
AxAx
AxAx
jj
jj
AxAx
AxAxj
AxAx
AxAxJ
y
Ax
x
Ax
(III.68)
Le développement de (III.68) mène aux équations suivantes :
PEiEiEiEiEiEiEi
PEiEiEiEiEiEiEi
AxayayAxayAxayy
Ax
AxaxaxAxaxAxaxx
Ax
)(
)(
(III.69)
Le flux à travers les surfaces latérales peut être réécrit de la façon suivante :
Einilayi
Einilaxilai ds
laxiEi
ds
layiEi
ds
laix dsy
Axds
x
AxdsA
....1....1
(III.70)
Les surfaces laxids et layids sont calculées comme montré dans le Fig.III.13.
nEi représente le nombre d’éléments primaux Ei entourant chaque nœud principal P
(généralement nEi = 8). En remplaçant les dérivées du potentiel magnétique Ax données par
(III.69) dans (III.70), on obtient :
Einilayi
Einilaxilai
ds
layiPEiEiEiEiEiEi
ds
laxiPEiEiEiEiEiEi
ds
laix
dsAxayayAxayAxay
dsAxaxaxAxaxAxaxdsA
....1
....1
))((
))((
(III.71)

Chapitre III. Mise en œuvre de la méthode des volumes finis
61
Fig.III.13 Calcul des surfaces laxids et layids
Après intégration et arrangement de tous les termes dans (III.71), nous aboutissons à
l’expression (III.72) qui exprime le flux à traves les surfaces latérales :
PEi
ni
EiEi
ni
Ei
ds
laix apAxAxaAxadsA
EiEilai
...1...1
(III.72)
avec
)( kEikEikEi ayaxa pour ,k et
,k
kEiaap
En remplaçant les termes des flux (III.62), (III.63) et (III.72), dans (III.61), on trouve :
szb
AAs
zt
AA
apAxAxaAxadA
Px
Bx
b
Px
Tx
t
PEi
ni
EiEi
ni
Ei
D
x
EiEiP
...1...1
).(
(III.73)
Ei
Ei-1
Ei+1
dly1Ei
dly2Ei
dlx1Ei
dlx1Ei
dzEdlyEdlydslayi
dzEdlxEdlxdslaxi
ii
ii
)(
)(
21
21

Chapitre III. Mise en œuvre de la méthode des volumes finis
62
III.3.2.2. Intégration de x
Vt
A
)(
PP D
Eix
D x
dsdzx
VAdV
t
A)()( (III.74)
De même que la transformation développée précédemment par (III.68), la dérivée du potentiel V est obtenue par :
PEiEiEiEiEiEiEi VaxaxVaxVaxx
V)(
(III.75)
Il vient alors que :
P
ni
EiEi
ni
EiEi
D
PEiEiEiEiEiEi
D
x
avVVavVav
dsdzVaxaxVaxVaxdV
EiEi
PP
......1......1
)(
(III.76)
avec
dsdzaxav kEikEi pour ,k et
,k
kEiaxav
En remplaçant l’expression (III.76) dans (III.74), nous obtenons :
P
ni
EiEi
ni
EiEix
D x
avVVavVavzsA
dVt
A
EiEi
P
......1......1
)(
(III.77)
III.3.2.3. Intégration du terme source
On suppose une distribution uniforme et constante du courant source dans le volume
élémentaire pD , on peut alors écrire :
ΔsΔzJd sx
Dxs
p
J (III.78)
En regroupant tout les termes développés précédemment. On aboutit à l’équation algébrique
(III.79). Cette équation exprime la composante x du potentiel vecteur magnétique A dans
chaque nœud principal P ( PxA ) du maillage en fonction des potentiels A et V dans les nœuds

Chapitre III. Mise en œuvre de la méthode des volumes finis
63
voisins (les nœuds, supérieur et inférieur et les nœuds latéraux qui entourent le nœud principal P) :
pxsPmEi
mni
mEi
BTj
jx
mni
EimxmEi
Pxpp
Px
DJavVVavajAAa
ADcpA
,...1,
,...1
(III.79)
avec
zj
sjaj
pour j= t, b et
btj
ajapcp
,
De même, les composantes y et z du potentiel sont :
psyPmEi
mni
mEi
BTj
jy
mni
EimymEi
Pypp
Py
DJavVVavajAAa
ADcpA
,...1,
,...1
(III.80)
pszPmEi
mni
mEi
BTj
jz
mni
EimzmEi
Pzpp
Pz
DJavVVavajAAa
ADcpA
,...1,
,...1
(III.81)
III.3.2.4. Intégration de l’équation en divergence
PD
dVt
σ A
(III.82)
par application du théorème d’Ostrogradsky, l’intégrale volumique (III.82) peut être transformée en intégrale surfacique suivant :
dsV
tσdV
tσ
PD
A
A (III.83)
ds représente la surface fermée qui limite le volume fini DP. L’intégrale (III.83) mène à
l’équation :

Chapitre III. Mise en œuvre de la méthode des volumes finis
64
dsVσsσAdVt
σ
zyxk
kP
k
DP,,
A
(III.84)
Comme présenté précédemment, l’intégrale du dernier terme dans (III.81) fait appel à la
transformation présentée par (III.68), en effectuant la transformation des dérivées du potentiel V, ce terme s’écrit :
ΔsΔz
-VVσΔs
Δz
-VV σ
dsy
Vσds
x
VσdsVσ
b
pB
t
pT
ds
layi
ds
laxi
1....nilayi
1....nilaxi
(III.85)
A partir de la transformation donnée par (III.75), on a :
PEiEiEiEiEiEi
PEiEiEiEiEiEi
VayayVayVayy
V
VaxaxVaxVaxx
V
)(
)(
(III.86)
par remplacement de (III.86) dans (III.85), on trouve :
ΔsΔz
-VVσΔs
Δz
-VVσ
VavVav dsVσ
b
pB
t
pT
P
ζ,ηm1......ni
mEimEi
(III.87)
avec
mEimEimEi ayaxav pour ,m et
,m
mEiavav
En remplaçant (III.87) dans (III.84) et après arrangement de tous les termes, nous aboutissons à la formulation finale suivante qui exprime le potentiel magnétique scalaire V :
zyxk
kP
kBTj
jjwem
mEimEiP sAV
z
sVavavV
,,,...,
(III.88)
Les équations (III.79), (III.80), (III.81) et (III.88) sont réécrites dans l’ensemble des éléments
de maillage, ensuite nous les assemblons et nous obtenons un système d’équations que l’on
peut mettre sous la forme matricielle suivante :

Chapitre III. Mise en œuvre de la méthode des volumes finis
65
0VD 0
D D
V0C
0C
22
1211
2
1 sJAA
(III.89)
sous une forme condensée, on écrit :
0VD
VC sJAA
(III.90)
avec
V
A
A
A
V z
y
x
A et
0
zs
ys
xs
sJ
J
J
J
III.3.3. Discrétisation de l’équation de diffusion de la chaleur par la MVFM
Rappelons l’équation de diffusion de la chaleur en régime transitoire :
WTT.κt
T(T)ρC p
)( (III.91)
L’intégration de l’équation différentielle (III.91) sur le volume élémentaire DP mène a :
dWTdT.κd
t
T(T)ρC
PPP DDD
p )( (III.92)
d représente le volume de l’élément élémentaire DP définis par, d=ds.dz. Par intégration du premier et du troisième terme, dans (III.92) sur le volume fini DP, nous obtenons :
zsT(TρCdt
T(T)ρC Pp
D
p
P
) (III.93)
zsWWd
PD
(III.94)
Pour l’intégral du deuxième terme dans (III.92), on fait appel au théorème d’Ostrogradsky :
TdsTTdT.κ
PD
)()( (III.95)

Chapitre III. Mise en œuvre de la méthode des volumes finis
66
ds représente la surface fermée qui limite le volume fini DP. L’intégrale de (III.95) sur ds mène à :
sz
TTTs
z
TTTTdsT
TdsTTdT.κ
b
PB
t
PT
dslai
lai
DP
)()()(
)()(
(III.96)
De même que précédemment, le calcul du flux de chaleur à travers les surfaces latérales fait
appel à la transformation (III.66). Ce calcul est fait sur le référentiel (R’) puis il sera ramené
au référentiel (R). La température T est exprimée dans (R’) par :
PEiEiPEi TTTT )1( (III.97)
Ce qui mène à :
PEiPEi
PEiPEi
TTT
TTT
(III.98)
Le calcul de ces dérivées est ramené au référentiel (R) à partir de la transformation (III.66) :
PEiEiEiEiEiEiPEi
PEiEiEiEiEiEiPEi
TayayTayTayy
T
TaxaxTaxTaxx
T
)(
)(
(III.99)
Le flux de chaleur à travers les surfaces latérales est donné par :
Einilayi
Einilaxilai ds
layiPEi
ds
laxiPEi
ds
lai dsy
Tds
x
TTds
....1....1
(III.100)
En remplaçant les termes des dérivés donnés par (III.99) dans (III.100) et après arrangement, le flux de chaleur à travers les surfaces latérales s’écrit :
PEi
ni
EiEi
ni
Ei
ds
lai bbpTTbTbTds
EiEilai
...1...1
(III.101)
avec
)( kEikEikEi ayaxb pour ,k et
,k
kEibbbp

Chapitre III. Mise en œuvre de la méthode des volumes finis
67
en remplaçant le flux de chaleur à travers les surfaces latérales donné par (III.101) dans (III.96), on trouve :
szb
TTs
zt
TT
bbpTTbTbdT
PB
b
PT
t
PEi
ni
EiEi
ni
Ei
D EiEiP
...1...1
).(
(III.102)
Après calcul de l’ensemble des termes provenant de l’intégration de l’équation aux dérivées
partielles (III.92) sur chaque volume élémentaire DP, on obtient la combinaison algébrique
donnée par (II.103). Cette expression exprime la température au nœud principal P en fonction des températures dans les autres nœuds voisins qui entourent le nœud principal P :
M
btm
mEi
ni
EiEi
ni
EiPPp TbTbTbzsWbpTzTs(TρC
EiEi
,...1...1
) (III.103)
avec : zm
sb mm
pour m = t, b et
btm
mbbbpbp
,
L’écriture de (III.103) pour l’ensemble des éléments du maillage, conduit à un système matriciel qu’on peut mettre sous la forme suivante :
QTFTE (III.104)
Les systèmes matriciels (III.90) et (III.104), obtenus après avoir appliqué la MVFM pour la
discrétisation des équations aux dérivées partielles qui décrivent les problèmes,
électromagnétique et thermique ressemblent à ceux obtenu par la MVFC, c'est-à-dire les
systèmes (III.31) et (III.40). Pour la résolution numérique de ces systèmes, on utilise les
mêmes méthodes numériques présentées précédemment (&.III.2.3). Le schéma d’Euler
implicite est utilisé pour la discrétisation temporelle et la méthode de Gauss-Seidel est utilisée pour la résolution du système d’équations algébrique.
III.4. Algorithmes de résolution
III.4.1 Algorithmes de résolution des problèmes, électromagnétique et thermique
L’organigramme de la Fig.III.14 résume les principales étapes du code de calcul que nous
avons développé et implémenté sous l’environnement Matlab pour la résolution du problème
électromagnétique. La fonction de chaque bloc peut être résumée comme suit :
Le premier bloc représente la phase de prétraitement du code de calcul. L’affectation
des données géométriques et physiques des régions constituant le domaine d’étude,
telles que les dimensions des objets, propriétés magnétiques et électriques…etc.
Egalement, les conditions aux limites sont introduites dans cette phase.

Chapitre III. Mise en œuvre de la méthode des volumes finis
68
Dans le deuxième bloc, le système matriciel, correspondant au problème
électromagnétique obtenu après avoir appliqué la méthode des volumes finis, est
résolu pour chaque maille et à chaque instant par le solveur GS (Gauss Seidel).
Le dernier bloc représente le bloc d’exploitations des résultats. La distribution
tridimensionnelle des variables calculées sont récupérées. Les résultats obtenus,
permettent aisément ainsi de déterminer la distribution des différentes grandeurs électromagnétiques.
Fig.III.14. Organigramme de l’algorithme du code de calcul du problème électromagnétique
Il faut noter que l’organigramme présenté dans la figure III.14 est applicable pour les
approches de la méthode des volumes finis, MVFC et MVFM. La différence réside dans le
premier bloc (phase de prétraitement). Dans le cas de la MVFM, le volume de calcul
tridimensionnel n’est pas nécessairement parallélépipédique, par conséquent la construction
du maillage de l’ensemble du problème ne se fait pas automatiquement mais par le biais d’un
mailleur indépendant. Contrairement à un maillage uniforme où nous avons pu créer notre
propre maillage (en définissant les pas spatiaux), c’est le mailleur qui discrétise l’ensemble du
problème. Il a fallu alors, récupérer les informations fournies, les traiter pour faire le lien avec le code numérique.
Données géométriques et physiques
Nouvelle Itération temporelle
Résolution du système d’équations algébrique, (III.) ou (III.), selon la méthode utilisée, MVFC ou la MVFM, par le solveur
GS
σ = f(E,J)
Test de convergence
Exploitation des Résultats
Fin itérations
Non
Oui
Non
Oui

Chapitre III. Mise en œuvre de la méthode des volumes finis
69
Le dernier bloc de l’organigramme (III.14), nous a permis d’estimer les pertes engendrées
dans le matériau supraconducteur à chaque instant, ces pertes, qui sont considérées comme
terme de source dans l’équation de diffusion de la chaleur, seront utilisées pour la résolution
du problème thermique. L’organigramme de la figure III.15 résume les principales étapes du
code de calcul que nous avons développé, sous l’environnement Matlab pour la résolution du
problème thermique. Il faut rappeler que l’équation de diffusion de la chaleur est résolue qu’à
l’intérieur du matériau supraconducteur.
La fonction de chaque bloc peut être résumée comme suit :
Le premier bloc représente la phase de prétraitement du code de calcul. Dans ce bloc
on doit affecter les données physiques des régions constituant le domaine d’étude,
c'est-à-dire, les propriétés thermiques du matériau supraconducteur. Dans ce bloc, on a
récupéré les données géométriques affectées précédemment, dans la résolution du
problème électromagnétique, c'est-à-dire qu’on a utilisé le même maillage pour la
résolution des problèmes, magnétique et thermique.
Dans le deuxième bloc, le système matriciel, correspondant au problème thermique
obtenu après avoir appliqué la méthode des volumes finis, est résolu dans chaque
maille qui se trouve à l’intérieur du matériau supraconducteur et à chaque instant par
le solveur GS (Gauss Seidel).
Enfin, le bloc des résultats où on récupère la distribution des variables calculées en
3D. principalement, la distribution tridimensionnelle de la température à l’intérieur du matériau supraconducteur.
Fig.III.15. Organigramme de l’algorithme du code de calcul du problème thermique
Données physiques
Résolution du système d’équations algébrique, (III.) ou (III.), selon la méthode utilisée, MVFC ou la MVFM, par le solveur
GS
ρCp(T), (T) Test de
convergence
Exploitation des Résultats thermiques
Non
Oui

Chapitre III. Mise en œuvre de la méthode des volumes finis
70
III.4.2 Couplage électromagnétique-thermique
Après avoir rappelé les formulations électromagnétiques et thermiques pour un système ayant
un matériau supraconducteur haute température critique, ainsi, que les méthodes numériques
de résolutions des équations aux dérivées partielles caractéristiques des phénomènes
physiques traités, nous nous proposons d’en étudier son comportement électromagnétique-
thermique. Aussi il est tout naturel de s’intéresser à l’intervention du couplage des deux
phénomènes physique en questions.
Il importe, en électromagnétisme, de tenir compte des variations des propriétés physiques en fonction de la température, parmi les quelles nous citerons :
La densité de courant critique Jc (T)
Le terme en puissance n(T) de la caractéristique E-J du SHTC
En thermique, on doit tenir compte des variations de la capacité calorifique ρCp(T) et de la
conductivité thermique (T) en fonction de la température.
A première vue, la température est obtenue après résolution de l’équation de la thermique. Or,
dans cette équation, la densité de puissance, due aux pertes engendrées dans le SHTC, est à
son tour une fonction de cette même température et bien entendue des caractéristiques
électromagnétiques du système, ce qui constitue le lien entre ces deux phénomènes physiques.
Ainsi, dans l’étude des systèmes ayant des matériaux SHTC, les équations caractérisant
l’évolution spatiale-temporelle des phénomènes électromagnétiques et thermiques, ne peut
être résolues séparément, et nécessitent absolument un traitement par un modèle mathématique numérique couplé.
Parmi les modèles mathématico-numériques utilisés pour la modélisation des phénomènes électromagnétiques et thermiques couplés, nous citons :
Le modèle de couplage direct,
Le modèle de couplage alterné dit aussi faible, que nous proposons dans le cadre de ce
travail.
Dans le modèle de couplage direct, le problème est considéré dans sa globalité : l’ensemble
des équations le régissant est résolu dans un même système d’équations, où le couplage
apparaît sous forme de termes croisés dans la matrice issue de la formulation numérique.
Cette technique de couplage présente l’avantage de ne pas nécessiter de transfert de données
ni d’interpolation, donc moins d’erreurs et une grande précision sur les résultats. Toutefois,
plusieurs facteurs sont à l’origine du temps de calcul très longs et une occupation mémoire
importante.
Le modèle de couplage des équations électromagnétiques et thermiques que nous proposons
dans le cadre de ce travail est le mode de couplage alterné. La modélisation qui utilise ce
modèle de couplage alterné (MCA) permet de résoudre séparément les problèmes
électromagnétique et thermique. Le couplage se fait alors par le transfert des données de l’un
des deux problèmes vers l’autre. Ce mode de couplage est plus simple à mettre en œuvre
puisque l’échange des informations est unilatéral au cours d’un pas de temps. Il s’applique

Chapitre III. Mise en œuvre de la méthode des volumes finis
71
bien au couplage thermique car les constantes de temps sont généralement grandes comparées
aux constantes de temps électriques. Il permet également un gain de mémoire par rapport au
mode de couplage fort car la matrice, issue de la formulation numérique, à résoudre est de taille plus petite.
Le mode de couplage alterné a donc été retenu, nous tenons à signaler que dans les travaux de
modélisation des phénomènes électromagnétique et thermiques couplé, trouvés dans la
littérature, utilisent ce mode de couplage. L’algorithme de ce mode de couplage est représenté
sur la Fig.III.16.
Fig.III.16. Organigramme utilisé pour calculer la solution du système couplé
magnétothermique au sein d’un supraconducteur.
Initialisation
Résolution du problème électromagnétique
Calcul de la densité de puissance due aux pertes engendrées dans le matériau SHTC
Résolution du problème thermique
Test de convergence ?
Fin
Réactualisation des propriétés
thermiques
Réactualisation des propriétés magnétiques
Non Oui

Chapitre IV. Applications et validations
72
Chapitre IV.
APPLICATIONS ET VALIDATIONS
IV.1. Aimantation des pastilles supraconductrices 73
IV.1.1. Introduction 73
IV.1.2. Etudes numériques des phénomènes couplés magnétothermiques
durant le processus d’aimantation des pastilles supraconductrices 76
IV.1.2.1. Procédés d’aimantation 77
IV.1.2.2. Résultats de simulation 78
IV.1.2.3. Implantation des canaux dans la pastille
supraconductrice à aimanter 82
IV.1.2.4. Force de lévitation magnétique entre aimant et
Supraconducteur aimanté, avec et sans canaux de refroidissement 87
IV.2. Association aimant permanent-supraconducteur 93
IV.2.1. Modélisation de l’aimant 93
IV.2.2. Validations des modèles 94
IV.2.2.1. Validation des modèles par confrontation
avec des résultats expérimentaux trouvés dans la littérature 95
IV.2.2.1.1. Validation de la MVFM par force d’interaction verticale 95
IV.2.2.1.2. Validation de la MVFC par comparaison avec la MVFM 96
IV.2.2.1.3. Validation de la MVFM par force d’interaction latérale 97
IV.2.2.2. Mesure des forces latérales 99
IV.2.2.3. Comparaison entre la formulation magnétique
jaugée et la formulation magnétique sans jauge 104
IV.2.3. Etudes de l’influence des paramètres géométriques et physiques
sur les forces d’interactions 105
IV.2.3.1. Etude de l’influence des paramètres géométriques de l’aimant
et de la pastille supraconductrice sur la force de lévitation 105
IV.2.3.1.1. Influence de l’épaisseur de l’aimant 105
IV.2.3.1.2. Influence du diamètre de l’aimant 108
IV.2.3.2. Influence de la distance de refroidissement sous champ 110
IV.2.3.3. Influence de la température du milieu extérieur 119
IV.2.3.4. Influence de la forme et de dimensions de la pastille
supraconductrice dans un système de guidage magnétique 124
IV.2.4. Couplage mécanique 128
IV.2.4.1. Formulation du problème 129
IV.2.4.2. Etude dynamique 130
IV.2.4.2. Formulation du deuxième problème133
IV.2.4.2.1. Résultats des simulations 136
IV.2.5. Etude de la relaxation de la force de lévitation 144

Chapitre IV. Applications et validations
73
Dans les chapitres II et III, nous avons présenté les formulations mathématiques et
numériques qui décrivent les phénomènes magnétothermiques dans les matériaux
supraconducteurs à haute température critique ainsi que les méthodes numériques de
discrétisation et de résolution. Dans ce chapitre, nous présentons les résultats des
simulations obtenus à partir des codes numériques développés et implémentés sous
l’environnement MATLAB. Dans un premier temps, nous abordons de manière détaillée, la
réponse dynamique d’une pastille supraconductrice en YBCO à une variation de champ
magnétique avec considération des effets thermiques. La répartition spatio-temporelle de
la température au sein de la pastille ainsi que les profils de la densité de courant et de
l’induction magnétique y sont présentés où nous déterminons les critères qui permettent
l’optimisation des processus d’aimantation des pastilles supraconductrices. Nous
présentons ainsi, les résultats de simulation d’une nouvelle technique qui peut être
appliquée dans le but d’améliorer les contraintes thermiques durant le processus
d’aimantation. Cette nouvelle technique est basée sur l’implantation de canaux de
refroidissement dans une pastille supraconductrice. Dans un second temps, nous nous
intéressons à l’étude de l’interaction entre un aimant permanent et un supraconducteur haute température critique (Etude de la lévitation magnétique).

Chapitre IV. Applications et validations
74
IV.1. Aimantation des pastilles supraconductrices
IV.1.1. Introduction
Comme il a été présenté précédemment (chapitre I, § I.4.6), un supraconducteur massif
peut aussi être utilisé comme aimant permanent. En refroidissant à champ nul, un
supraconducteur à haute température critique, en l’exposant à une variation rapide du
champ magnétique, il va piéger le champ magnétique. Le champ piégé dans le
supraconducteur est lié à des courants induits par la loi de Lenz. Ces courants se
développent comme dans un métal normal, à partir de la surface extérieure, mais
contrairement aux matériaux résistifs, ils ne s’amortissent pas puisque la résistivité est
nulle. Le modèle de Bean (chapitre II, § II.2.2) permet facilement d’expliquer le principe
de piégeage de flux dans un supraconducteur. Nous considérons une pastille
supraconductrice d’épaisseur 2a et infiniment longue suivant les directions y et z du
référentiel. Cette plaque est soumise à un champ magnétique extérieur Ha appliqué suivant l’axe y comme montré sur la figure ci-dessus (Figure.IV.1).
Fig.IV.1. Plaque supraconductrice d’épaisseur 2a et infiniment longue suivant
les directions y et z.
Nous supposons que le champ magnétique extérieur augmente à partir de zéro jusqu’à une
valeur maximale Hm puis diminue jusqu’à –Hm.
Les répartitions de J et H dans la plaque supraconductrice sont présentées ci-après
(Fig.IV.2). En se basant sur le modèle de Bean et les équations de Maxwell, on peut
déterminer et expliquer cette répartition durant les différentes phases du processus d’aimantation.
x
z
y
Ha Ha
a - a

Chapitre IV. Applications et validations
75
- Phase I : durant la première phase (Fig.IV.2.a), on suppose que le champ magnétique
appliqué à l’extérieur augmente. Suivant la loi de Lenz, des courants qui s’opposent aux
variations du champ magnétique se développent sur les bords de la pastille
supraconductrice. D’après le modèle de Bean, ces courants ont une densité égale à Jc, par
conséquent, le champ magnétique décroit de façon linéaire à l’intérieur de la pastille avec
la pente :
Jcx
Hy
(IV.1)
- Phase II : dans cette phase, la valeur du champ magnétique externe continue à augmenter
jusqu’à une valeur Hp, le champ magnétique continue à pénétrer dans la pastille
supraconductrice en atteignant le centre et la totalité de l’épaisseur est traversée par une
densité de courant qui vaut Jc (Fig.IV.2.b). La valeur du champ magnétique externe appliquée est appelée champ de pénétration complet est noté Hp.
- Phase III : dans cette phase, on suppose que le champ magnétique continue à augmenter,
de façon que la valeur de Hm dépasse la valeur Hp (Fig.IV.2.c). Comme les courants
d’écrantage, selon le modèle, ne peuvent plus augmenter, ils ne s’opposent plus au nouvel
accroissement du champ magnétique et celui-ci augmente d’une façon égale partout dans le conducteur.
- Phase IV : durant cette phase, le champ magnétique extérieur décroit. Les courants
d’écrantage s’oppose à cette diminution et sur les bords de la plaque des courants de sens
opposés apparaissent, la densité de courant et le champ restant inchangés ailleurs, comme il est indiqué sur la figure IV.2.d
- Phase V : le champ magnétique diminue d’une valeur de 2Hp par rapport à sa valeur
maximale, le supraconducteur est donc de nouveau en pénétration complète, cette fois avec une densité de courant égale à –Jc (Fig.IV.2.e).
- Phase VI : quand le champ magnétique extérieur recommence à augmenter, des régions avec des courants opposés apparaissent de nouveau sur les bords, voir figure IV.2.f.
Ainsi, dès que le champ magnétique pénètre la pastille supraconductrice (dans les deux
cas, pénétration complète ou partielle), il existe toujours des courants d’écrantage dans la
pastille, même quand le champ extérieur passe par zéro, le champ magnétique se trouve
piégé à l’intérieur de la pastille supraconductrice, c’est ce qui traduit son comportement
hystérétique. Ce comportement ressemble à celui d’un aimant permanent, c’est pourquoi,
on parle également de cryoaimant pour un supraconducteur capable de générer un champ magnétique.
Des valeurs de champ piégé de 9 T à 40 K et de 12.5 T à 22 K ont été obtenue pour un
aimant YBa2Cu3O7-δ (Y123) [Gruss 01] et plus récemment la valeur de 17 T à 29 K pour
un disque de 2.65 cm de diamètre [Tomita 03]. Cette propriété des SHTC peut être
exploitée comme source de champ à la place des aimants permanents conventionnels qui

Chapitre IV. Applications et validations
76
sont limités en valeurs de champ. La réalisation des moteurs supraconducteurs avec des
SHTC massifs comme pôles magnétiques dans une machine tournante à entrefer axial à l’université des sciences et technologies marines de Tokyo [Miki 06] en fait un exemple.
Fig.IV.2. Distribution de la densité de courant et du champ dans une pastille supraconductrice selon le modèle de Bean.
Ha
y
x
J = - Jc
J = + Jc J = + Jc J = + Jc
J = + Jc J = + Jc
J = + Jc
J = - Jc J = - Jc
J = - Jc J = - Jc
Phase I : Ha , Ha HP
Ha
Ha
Ha
Ha
Ha
Phase II : Ha , Ha= HP Phase III : Ha , Ha= Hm>HP
Phase IV : Ha , Ha> Hm -2HP Phase V : Ha , Ha= Hm -2HP Phase VI : Ha , Ha= Hm -2HP
a) b) c)
d) e) f)

Chapitre IV. Applications et validations
77
IV.1.2. Etudes numériques des phénomènes couplés magnétothermiques
durant le processus d’aimantation des pastilles supraconductrices :
Dans cette partie, nous présentons les résultats de simulations du comportement
magnétothermique d’une pastille supraconductrice YBCO durant le processus
d’aimantation.
Nous rappelons qu’il existe Plusieurs modèles macroscopiques pour définir la loi de
comportement des SHTC, les plus utilisés sont, le modèle de Bean [Bean 62] et le modèle
de la loi en puissance [Kasal 07]. Le modèle de Bean est plus particulièrement adapté pour
les matériaux utilisés à basse température critique, le modèle de la loi de puissance de
nature empirique peut représenter seulement le phénomène de flux Creep. De notre part,
nous avons utilisé un modèle plus général, qui tient compte du déplacement et de l’encrage
des vortex ; c’est ce que l’on appel le modèle ‘Flux Flow-Flux Creep’ (FFC). Ainsi, le régime de flux Creep est décrit par [Yoshida 94] :
kT
Uexp
Jc
J
kT
U sinhJ2ρJfE 00
cc )( , 0 ≤ J ≤ Jc (IV.2)
et le régime de flux flow est décrit par [Yoshida 94] :
1
Jc
J Jc ρJcρf(J)E fc , J > Jc (IV.3)
où ρc est la résistivité de flux Creep, U0 est énergie de piégeage, k est la constante de
Boltzmann, Jc est la densité de courant critique et ρf est la résistivité de flux Creep. Comme
il a été présenté précédemment, la dépendance en température de la densité du courant critique Jc est supposée linéaire, elle est décrite par la relation suivante [Braeck 02] :
00 TTc
TTc) Jc(TJc (T)
(IV.4)
Tc est la température critique du SHTC, T0 est la température du liquide cryogénique et
Jc(T0) est la valeur de la densité de courant critique à la température T = T0. Pour
l'évaluation de la distribution de la température au sein du matériau supraconducteur, l’équation de diffusion de la chaleur est utilisée :
WTκ(T)t
T(T)ρC p
. (IV.5)
ρCp est la capacité calorifique, est la conductivité thermique du matériau
supraconducteur et W est le terme source de la chaleur provenant de l'effet
électromagnétique dans le SHTC. Dans ce modèle, on considère la dépendance des différents paramètres vis-à-vis de la température.

Chapitre IV. Applications et validations
78
Les échanges thermiques entre le SHTC et le milieu extérieur (fluide cryogénique) sont
considérés comme étant dus essentiellement à l’effet convectif. Ainsi, sur les frontières du SHTC et le milieu extérieur, une condition de Neumann non homogène est utilisée :
)Th(TT.nκ(T) bain (IV.6)
h est un coefficient convectif exprimant l'échange thermique entre le supraconducteur et le fluide cryogénique, T est la température à la surface interne du SHTC et Tbain=T0.
Les propriétés thermiques de la pastille supraconductrice en YBCO utilisée dans la
simulation sont résumées dans le tableau VI.1, ces valeurs (ou bien ces expressions) sont extraites de la littérature [Buzon 02, Berger 06, Braeck 02].
Tableau VI.1. Propriétés thermiques du SHTC en YBCO utilisé dans la simulation.
Quantité Valeur ou expression
ρCp(T) : Capacité Calorifique moyenne [J.cm-3.K-1]
-0.5050 + 0.0245T – 6.2 10-5 T2 + 5.2 10-8 T3
κ : conductivité thermique
7 [W/(m.K)]
h : coefficient de convection du fluide cryogénique (Azote liquide)
400 [W/(m2.K)]
Tc : température critique 92 [K]
Jc(T0) : densité de courant critique à 77 K
500 A/mm2
T0 : température de l’azote liquide 77 K
IV.1.2.1 Procédés d’aimantation
Il existe de nombreux procédés d’aimantation des pastilles supraconductrices HTC, parmi
lesquels on peut en citer la ‘Magnétisation par Champ Pulsé’ (MCP) ou ‘Pulsed Field
Magnetization’ (PFM) en terminologie anglaise. Ce procédé est souvent utilisé pour
l’aimantation puisqu’il permet d’atteindre des valeurs de champ magnétique piégé très
élevées. Ce procédé est considéré comme la méthode la plus commode et prometteuse [Braeck 02].
La MCP est obtenue grâce à l’utilisation d’une bobine magnétisante traversée par une
impulsion de courant importante. Pour cela une décharge de type R, L, C peut être utilisée.
L’expression du champ magnétique appliqué est alors donnée par la solution de l’équation
de décharge du circuit. Dans certains travaux [Berger 06], le champ magnétique produit
par la bobine magnétisante est représenté par une fonction exponentielle (Fig.IV.3.a), son expression est donnée par :

Chapitre IV. Applications et validations
79
)1exp()(
tt
HtH ma (IV.7)
où est la constante de temps de la décharge et )/(0 τexp(1)qH m est la champ maximal
obtenu à t = , q0 étant la charge initiale du condensateur C du circuit de décharge. Dans
d’autres travaux de modélisation [Braeck 02], le champ de magnétisation Ha(t) est
représenté par une fonction de forme triangulaire représenté dans la Fig.IV.3.b. Son expression est donnée par :
)ttR(ttH mma )( (IV.8)
où R est une constante, le champ magnétique appliqué prend une valeur croissante jusqu’à
la valeur maximale Hm, dans l’intervalle de temps 0 ≤ t ≤ tm = Hm/R, puis, il décroit dans l’intervalle de temps tm≤ t ≤2tm.
Fig.IV.3. Evolution temporelle du champ magnétisant, Fig.IV.3.a. Le champ magnétisant
est représenté par une fonction exponentielle, Fig.IV.3.b. Le champ magnétisant est représenté par une fonction de forme triangulaire.
IV.1.2.2 Résultats de simulation
Le processus d’aimantation des pastilles supraconductrices est accompagné par une
élévation importante de la température au sein de la pastille. Ce comportement des SHTC
est dû aux mouvements des vortex durant le processus d’activation par MCP impliquant
une dissipation de chaleur qui est accompagnée par une élévation importante de la
température. Cette augmentation de température conduit à une diminution de la densité de courant et par la suite à celle également de l’induction magnétique piégée.
Dans le but d’étudier ce comportement, nous avons modélisé les phénomènes
magnétothermiques présents durant l’aimantation d’une pastille supraconductrice. Les
résultats de simulation sont obtenus pour une pastille supraconductrice (YBCO) de
Hm
tm 2tm
Hm b)
a)
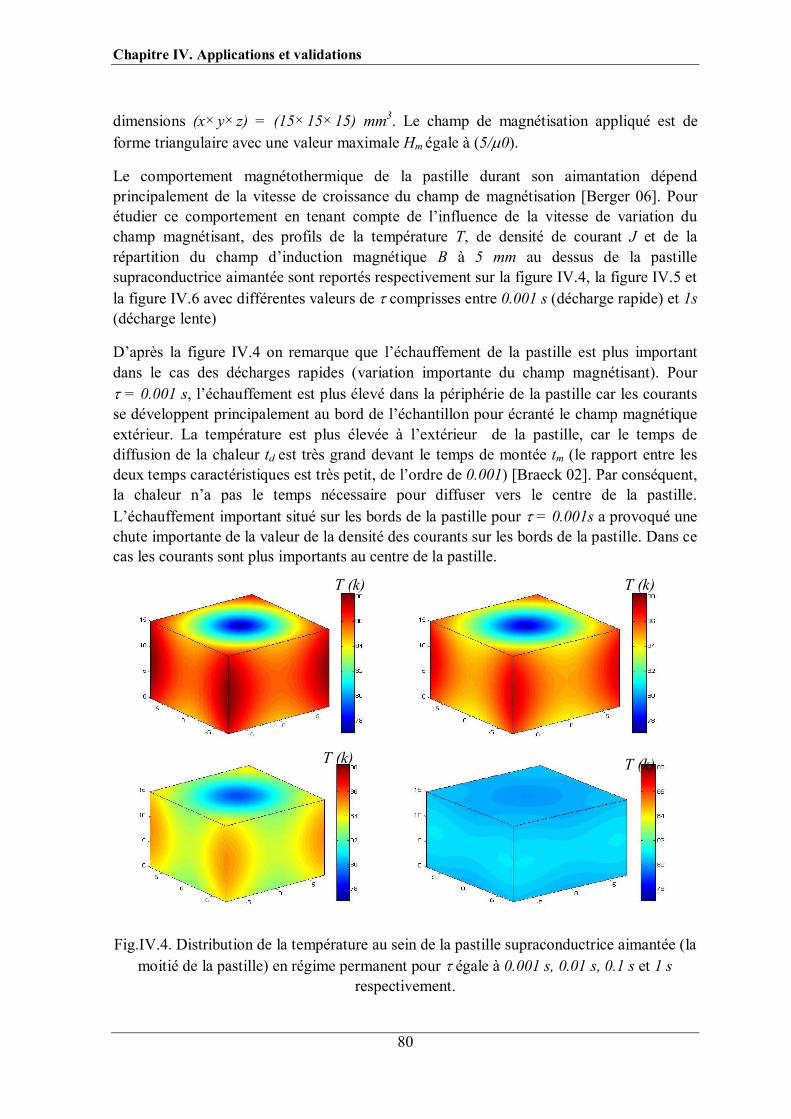
Chapitre IV. Applications et validations
80
dimensions (x y z) = (15 15 15) mm3. Le champ de magnétisation appliqué est de
forme triangulaire avec une valeur maximale Hm égale à (5/0).
Le comportement magnétothermique de la pastille durant son aimantation dépend
principalement de la vitesse de croissance du champ de magnétisation [Berger 06]. Pour
étudier ce comportement en tenant compte de l’influence de la vitesse de variation du
champ magnétisant, des profils de la température T, de densité de courant J et de la
répartition du champ d’induction magnétique B à 5 mm au dessus de la pastille
supraconductrice aimantée sont reportés respectivement sur la figure IV.4, la figure IV.5 et
la figure IV.6 avec différentes valeurs de comprisses entre 0.001 s (décharge rapide) et 1s
(décharge lente)
D’après la figure IV.4 on remarque que l’échauffement de la pastille est plus important
dans le cas des décharges rapides (variation importante du champ magnétisant). Pour
= 0.001 s, l’échauffement est plus élevé dans la périphérie de la pastille car les courants
se développent principalement au bord de l’échantillon pour écranté le champ magnétique
extérieur. La température est plus élevée à l’extérieur de la pastille, car le temps de
diffusion de la chaleur td est très grand devant le temps de montée tm (le rapport entre les
deux temps caractéristiques est très petit, de l’ordre de 0.001) [Braeck 02]. Par conséquent,
la chaleur n’a pas le temps nécessaire pour diffuser vers le centre de la pastille.
L’échauffement important situé sur les bords de la pastille pour = 0.001s a provoqué une
chute importante de la valeur de la densité des courants sur les bords de la pastille. Dans ce cas les courants sont plus importants au centre de la pastille.
Fig.IV.4. Distribution de la température au sein de la pastille supraconductrice aimantée (la
moitié de la pastille) en régime permanent pour égale à 0.001 s, 0.01 s, 0.1 s et 1 s
respectivement.
T (k) T (k)
T (k) T (k)

Chapitre IV. Applications et validations
81
Pour = 0.01, les effets thermiques sont moins importants et la pastille commence à se
refroidir. Pour = [0.1 s ; 1s], l’élévation de la température est très faible, voir
négligeable. Pour = 1 s, la densité de courant se répartit d’une manière uniforme à
l’intérieur de la pastille comme il est montré dans la figure IV.5. Les valeurs maximales, de
la température, de l’induction magnétique produite par la pastille aimantée à z = 0.5 mm au
dessus de la pastille, de la densité de courant critique, en régime permanent, sont
importants dans le cas de la magnétisation avec un champ de grande vitesse de variation
( = 0.001 s), qui sont respectivement Tmax ( = 0.001) = 88.1221 K, Jmax ( = 0.001) =1.4367108
A/m2 et Bmax ( = 0.001) =0.5138 T.
Fig.IV.5. Répartition de la densité de courant (la composante Jy) au sein de la pastille
supraconductrice (la moitié de la pastille) aimantée en régime permanent pour = 0.001 s, 0.01 s, 0.1 s et 1 s respectivement.
Jy (A/m2)×108
Jy (A/m2) )×108 Jy (A/m2) )×108
Jy (A/m2) )×108

Chapitre IV. Applications et validations
82
Fig.IV.6. Distribution de l’induction magnétique B à z = 5 mm au dessus de la pastille
supraconductrice aimantée dans le cas où l’effet thermique est pris en compte, pour égale à 0.001 s, 0.01 s, 0.1 s et 1 s respectivement.
Pour comparer les performances des processus d’aimantation présentés précédemment,
nous avons tracé sur la Figure.IV.7 les valeurs maximales, au régime permanent, pour
chaque type d’aimantation (aimantation avec les différentes valeurs de ), de la
température Tmax au sein de la pastille supraconductrice, de l’induction magnétique Bmax
calculée à 0.5 mm au dessus de la pastille supraconductrice, de la densité de courant dans la
pastille aimantée Jmax et de l’énergie dissipée maximale Edissmax, calculée pour les
différentes valeurs de . Ces valeurs sont ramenées à Tmax ( = 0.001), Bmax ( = 0.001), Jmax ( =
0.001) et à Ediss ( = 0.001)
D’après les résultats présentés précédemment, nous pouvons dire que les meilleures
performances en terme de valeur du champ magnétique produit par la pastille aimantée et
en terme de courant au sein de la pastille, sont obtenues avec un champ d’aimantation de
grande vitesse de variation (=0.001 s). L’inconvénient majeur de ce type d’aimantation
est l’augmentation de l’énergie dissipée et par conséquent, l’augmentation de la
température au sein de la pastille supraconductrice à aimanter, l’énergie dissipée diminue avec l’augmentation de .
B (T)
B (T) B (T)
B (T)

Chapitre IV. Applications et validations
83
Figure. IV.7. Valeurs maximales, Tmax, Jmax, Bmax et Edissmax, en unité relative, pour chaque
type d’aimantation ( comprises entre 0.001 s et 1 s ).
IV.1.2.3 Implantation des canaux dans la pastille supraconductrice à aimanter
Dans ce paragraphe, nous présentons les résultats de simulation d’une technique qui peut
être utilisée en pratique, dans le but d'augmenter, la valeur du champ magnétique piégé
dans les SHTC durant le processus d’activation par MCP. Cette technique consiste à créer
des canaux dans le matériau SHTC [Alloui 09 b] refroidis par le liquide cryogénique
(Fig.IV.8). Ainsi, on renforce le transfert de chaleur par convection entre la pastille
supraconductrice et le milieu extérieur. Cette technique est alors accompagnée par une
diminution de la température à l’intérieur du SHTC, conduisant à une amélioration des
performances électromagnétiques du supraconducteur durant son processus d’aimantation.
Fig.IV.8. Implantation de canaux de refroidissement dans la pastille supraconductrice.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.65
0.7
0.75
0.8
0.85
0.9
0.95
1
(s)
(Tmax/ Tmax ( = 0.001)) (Bmax/ Bmax ( = 0.001)) (Ediss max/ Ediss max ( = 0.001)) (Jmax/ Jmax ( = 0.001))
Implémentation de canaux

Chapitre IV. Applications et validations
84
Les résultats de simulation sont obtenus pour deux pastilles supraconductrices (YBCO) de
même dimensions (x y z) = (20 20 16) mm3. La première sans canaux et la deuxième
avec canaux (cent canaux uniformément répartis ont été introduits dans la pastille avec les
dimensions ((x y z) = (0.8 0.8 16) mm3). De même que précédemment, le champ
magnétique pulsé est obtenu à partir d’un champ appliqué à l’extérieur de forme
triangulaire [Braeck 02] :
)ttR(t(t)H mma (IV.9)
D’après les résultats présentés précédemment, on peut dire que l’effet thermique apparait
pour l’aimantation avec des champs de magnétisation de grande vitesse (=0.001 s). Cette
technique doit être appliquée dans le but d’atténuer les effets thermiques durant le
processus d’aimantation, pour cette raison, cette technique doit être appliquée pour les
aimantations des pastilles avec des champs de magnétisations de grande vitesse de
variation. Les figures, IV.9.a et figure IV.9.b montrent respectivement la distribution du
champ d’induction magnétique, calculé à une distance de 3.2 mm au dessus de la première
pastille supraconductrice (sans canaux de refroidissement) en régime permanent, pour
Hm = (5/0) A/m dans le cas où l’effet thermique est pris en compte dans la pastille et dans
le cas, où on ne tient pas compte de l’effet thermique, c'est-à-dire où on suppose que la
température dans la pastille est celle du bain d’azote (T = 77 K). On comparant les deux
figures on peut dire que l’élévation de la température à l’intérieur de la pastille
provoquerait une diminution considérable du champ piégé. En effet, la valeur maximale du
champ d’induction magnétique piégé dans la pastille, en régime permanent, dans le cas
avec effet thermique est de 0.59 T, en revanche la valeur maximale du champ d’induction
magnétique piégé dans le cas idéal sans effet thermique est de 1.26 T. Cela est dû à la
dépendance de la valeur du champ magnétique piégé par les courants induits. En régime
permanent, la valeur de ces courants diminue avec l’augmentation de la température.
Fig.IV.9.a. Distribution de l’induction magnétique à 3.2 mm au dessus de la pastille
supraconductrice sans canaux lors de la prise en compte de l’effet thermique.
Fig.IV.9.b Distribution de l’induction magnétique à 3.2 mm au dessus de la pastille
supraconductrice sans canaux refroidis dans le cas où on ne tient pas compte de l’effet thermique.
B(T) B(T)

Chapitre IV. Applications et validations
85
Figure.IV.10. Distribution de la température au sein du matériau supraconducteur sans canaux en régime permanent.
Nous remarquons que l’augmentation de la température au sein du SHTC ne peut être
négligée lors de son aimantation par MCP. Le moyen pour améliorer le processus
d’aimantation est de diminuer la température à l'intérieur et d’augmenter ainsi le champ
piégé d’où l’idée d’insérer des canaux de refroidissement (deuxième pastille). L'échange
thermique par convection avec le milieu extérieur à travers ces canaux de refroidissement est renforcé et par suite la température s’en trouvera diminuée.
La figure IV.11 montre la distribution de la température en régime permanent au sein de la
deuxième pastille supraconductrice avec canaux de refroidissement (cent canaux
uniformément répartis ont été implantés dans le supraconducteurs avec les dimensions (x y z) = (0.8 0.8 16) mm3).
Figure.IV.11. Distribution de la température au sein de la pastille supraconductrice avec
canaux en régime permanent.
T(K)
T(K)

Chapitre IV. Applications et validations
86
Afin de voir l’influence des canaux de refroidissement sur la valeur du champ piégé, nous
avons calculé le champ d’induction magnétique pour la même distance de 3.2 mm au
dessus de la pastille, représentée sur la figure IV.12. On peut dire que les canaux ont un
effet positif sur la valeur du champ piégé, en effet, la valeur maximale du champ piégé dans ce cas est de 0.90 T.
Fig.IV.12. Distribution du champ d’induction magnétique à 3.2 mm au dessus du supraconducteur à canaux en régime permanent.
Il a été démontré expérimentalement que l’augmentation du champ à partir d’une certaine
valeur dite optimale B = Bopt provoquerait une diminution du champ piégé en régime
permanant [Mizutani 00]. Cela est dû à l’augmentation de la température au sein du matériau supraconducteur (Fig.IV.13).
La figure IV.13 représente la distribution du champ d’induction magnétique B calculé sur
une distance 3.2 mm au dessus de la pastille supraconductrice en régime permanent pour
un temps t = 2 tm, pour Bm = 5.5 T. Dans ce cas, on remarque une diminution de la valeur du champ magnétique piégé par rapport à celle calculée pour B = 5 T (Fig.IV.9).
Pour vérifier l’effet des canaux, nous avons calculé le champ magnétique au dessus de la
pastille supraconductrice en régime permanent dans les mêmes conditions précédentes
(Fig.IV.14). Dans ce cas la valeur maximale du champ piégé est de 1.05 T. Par
comparaison avec le résultat précédent, nous pouvons dire qu'en plus de l'effet du champ
optimal appliqué qui permet d'augmenter le champ magnétique piégé, l’introduction des canaux de refroidissement dans le SHTC permet aussi d'augmenter le champ piégé.
Pour montrer la dépendance de la valeur du champ magnétique piégé Bme en fonction de la
valeur maximale du champ Bm appliqué, nous avons calculé la valeur de Bme à 3.2 mm
(Fig.IV.15) au dessus de la pastille supraconductrice en fonction de Bm,
B(T)

Chapitre IV. Applications et validations
87
Fig.IV.13. Distribution du champ d’induction magnétique à 3.2 mm au dessus de la pastille supraconductrice sans canaux en régime permanent pour Bm = 5.5T ≥ Bopt.
Fig.IV.14. Distribution du champ d’induction magnétique à 3.2 mm au dessus de la pastille
supraconductrice avec canaux en régime permanent pour Bm = 5.5 T ≥ Bopt.
B(T)
B(T)

Chapitre IV. Applications et validations
88
Fig.IV.15. La dépendance de la valeur maximale du champ piégé Bme calculé à 3.2 mm au
dessus de la pastille supraconductrice en fonction de la valeur maximale du champ appliqué Bm dans les deux pastilles supraconductrices.
IV.1.2.4 Force de lévitation magnétique entre aimant et supraconducteur aimanté, avec et sans canaux de refroidissement
Comme il a été présenté précédemment, le processus d’aimantation des pastilles
supraconductrices est accompagné par une élévation importante de la température au sein
de la pastille supraconductrice. La température peut atteindre la valeur de 88 K à l’intérieur
de la pastille [Braeck 02]. Or, d’après les travaux expérimentaux réalisés par Jiang et all
[Jiang 02] et plus récemment par Suzuki et all [Suzuki 07], la force de lévitation est
inversement proportionnelle à la température. L’augmentation de la température
provoquerait la diminution de la densité du courant dans la pastille supraconductrice et par
conséquent, la diminution de la force de lévitation, jusqu’à ce qu’elle s’annule à la
température critique [Jiang 02].
Dans le but de faire une comparaison entre la force de lévitation obtenue à partir d’un
aimant d’aimantation M = 1.1T, d’épaisseur h = 12 mm et de diamètre D = 22 mm, au
dessus d’une pastille supraconductrice non-aimantée (PSNA) et une pastille
supraconductrice aimantée (PSA) de dimensions 13×13×12 mm3, nous avons calculé la
force de lévitation dans les deux cas. La figure IV.16 présente la force de lévitation
calculée en fonction de l’écart aimant-supra. Il est clair que la force de lévitation entre
aimant et la pastille supraconductrice augmente avec le rapprochement de l’aimant. La
3 3.5 4 4.5 5 5.5 6 6.50
0.5
1
1.5
Bm(T)
Bm
e(T
)
cas idéal
avec canaux
sans canaux
Bm(T)

Chapitre IV. Applications et validations
89
force de lévitation obtenue à partir d’une PSA est plus élevée que celle obtenue à partir
d’une PSNA durant toute la phase de rapprochement de l’aimant, sa valeur maximale
à z = 3mm dans le cas de la PSNA est de 20.2 N, alors qu’elle est de 43 N dans le cas de la PSA.
Dans le cas de la PSA, nous remarquons que le cycle de force obtenu est très étroit par
rapport à celui obtenu pour la PSNA, l’allure de la force obtenue pour la PSA est
comparable à celle obtenue par He et all [He 04]. Cela est dû au fait que la force de
lévitation est proportionnelle à la densité des courants dans la pastille supraconductrice.
Dans le cas de la PSA la densité du courant est peu influencée par le mouvement de
l’aimant car les courants dans la pastille supraconductrice ont déjà pris naissance durant le
processus d’aimantation, comme il est montré dans la figure IV.17, les courants
supraconducteurs ont presque la même allure durant le déplacement de l’aimant de
z = 20 mm à z = 3 mm, nous pouvons dire alors, que la force de lévitation dans ce cas là,
est dominée par les courants créés durant le processus d’aimantation, alors que dans le cas
de la PSNA, les courants sont générés par le mouvement de l’aimant. Seule la variation
dans le temps du champ magnétique de l’aimant peut créer les courants dans la pastille supraconductrice non aimantée comme le montre la figure IV.18.
Pour la répartition des courants supraconducteurs dans la PSA, nous remarquons selon la
figure IV.17 que la densité des courants dans le cas de PSA, sont répartis dans tout le
volume de la pastille (pénétration complète), et ils sont plus faibles sur les bords qu’au
centre de la pastille, cela est dû à l’élévation importante de la température sur les bords de
la pastille par rapport aux autres endroits de la pastille, et vu la dépendance des courants
supraconducteurs en température, l’augmentation de la température provoquerait la
diminution de la densité du courant. Dans le cas de la PSNA les courants sont répartis sur
le bord supérieur de la pastille (côté le plus proche de la source), puisque la température reste presque constante, dans ce cas, l’effet thermique peut être négligé.
La figure IV.19.a représente le profil de la température au sein de la pastille
supraconductrice aimantée. La température dans la pastille peut atteindre les 87 K. Nous
pouvons dire alors que dans ce cas l’effet thermique ne peut être négligé. Pour améliorer
les contraintes thermiques durant le processus d’aimantation, par diminution de la
température, nous avons introduit dans la pastille supraconductrice 64 canaux de
refroidissement de dimension 0.433×0.433×12 mm3 (valeur optimale). Le but est de
pouvoir renforcer l’échange thermique par effet convectif avec le bain d’azote à travers ces
canaux. La figure IV.19.b présente le profil de la température au sein de la pastille
supraconductrice à canaux, en régime permanent. En comparant les deux figures : IV.19.a
et IV.19.b, nous pouvons remarquer une différence entre les deux profils de température.
L’implantation des canaux dans la pastille supraconductrice a permis de diminuer la température.

Chapitre IV. Applications et validations
90
Fig.IV.16. Force d’interaction verticale exercée entre l’aimant et pastille supraconductrice.
Fig.IV.17. Répartition des courants supraconducteurs dans une pastille supraconductrice aimantée où l’aimant est sur une distance de z = 20mm et de z = 3 mm respectivement.
Fig.IV.18. Répartition des lignes de champ d’induction magnétique B et courants
supraconducteurs dans la pastille supraconductrice non aimantée où l’aimant et dans sa position initiale à z = 20 mm, et dans sa position finale de z = 3 mm respectivement.
2 4 6 8 10 12 14 16 18 200
5
10
15
20
25
30
35
40
45F
orce
de
lévi
tati
on v
erti
cale
(N
)
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Ecart aimant-supra (mm) Ecart aimant-supra (mm)
Jy (A/mm2)
J(A/mm2)
Jy (A/mm2)
Pastille non-aimantée Pastille aimantée

Chapitre IV. Applications et validations
91
Fig.IV.19.a. Répartition de la température à l’intérieur de la pastille supraconductrice aimantée en régime permanant.
Fig.IV.19.b. Répartition de la température à l’intérieur de la pastille supraconductrice, 64 canaux ont été introduit dans la pastille.
Pour voir l’effet des canaux implantés dans la pastille supraconductrice sur la force de
lévitation, nous avons calculé la force de lévitation entre aimant et pastille
supraconductrice avec et sans canaux. La figure IV.20.a représente le force de lévitation
exercée entre aimant et pastille supraconductrice dans les deux cas ; pastille
supraconductrice avec et sans canaux de refroidissement et aussi dans le cas où on néglige
l’effet thermique, c'est-à-dire le cas où on suppose que la température de la pastille supraconductrice est maintenue à la température de l’azote liquide (77 K).
Il est évident que dans le cas où on néglige l’effet thermique, la force de lévitation est
beaucoup plus importante, la force de lévitation atteint la valeur de 75.87 N à
z = 3mm. Bien que ce cas présente le cas idéal, il est très loin de la réalité physique vu
l’échauffement produit dans la pastille durant le processus d’aimantation. Concernant
l’implantation des canaux, nous pouvons dire que cette technique a permis de réduire les
contraintes thermiques par conséquent d’augmenter la force de lévitation entre aimant et
pastille supraconductrice. Dans le cas de notre application elle a permis d’avoir une force
de lévitation de 50.69 N à z = 3mm au lieu d’une force de lévitation de 43 N à la même
distance.
Pour voir l’effet du volume des canaux sur la force de lévitation, nous avons calculé la
force de lévitation entre aimant et pastille supraconductrice avec canaux en fonction du
volume des canaux, le but, est de déterminer le volume qui peut être dédié aux canaux de
refroidissement pour que cette technique soit rentable d’une part, d’autre part, déterminer
la valeur du volume optimal des canaux qui permet d’avoir une grande force de lévitation.
La figure IV.20.b présente la dépendance entre la force de lévitation maximal calculée sur
une distance de z = 3mm en fonction du volume Vc des canaux de refroidissement. Dans
cette figure nous remarquons dans un premier temps, que la force de lévitation croit avec le
croissement du volume Vc jusqu'à la valeur optimale Vc = Vcoptimale = 144 mm3, soit
T (K) T (K)

Chapitre IV. Applications et validations
92
presque 7 % du volume total de la pastille supraconductrice, cette valeur correspond à
l’implantation de 64 canaux de dimensions 0.43×0.43×12mm3. L’augmentation de la force
de lévitation durant cet intervalle peut être expliquée par le fait que d’augmenter le volume
Vc , on augmente le flux de chaleur échangé entre la pastille et le fluide cryogénique, ainsi
nous pouvons diminuer la température et nous provoquons ainsi l’augmentation de la
densité des courants et par conséquent la force de lévitation.
A partir de cette valeur l’augmentation du volume des canaux provoquerait une diminution
de la force de lévitation jusqu'à la valeur Vc = Vclimite = 439 mm3. Soit presque 22 % du
volume total. A partir de cette valeur, cette technique n’est plus rentable car la force de
lévitation dépend de la densité du courant dans la pastille supraconductrice, mais aussi du volume de la pastille supraconductrice.
Fig.IV.20.a Force d’interaction verticale exercée entre l’aimant et le supraconducteur en
fonction de l’écart aimant-supra. Dans les cas où la pastille supraconductrice est avec ou sans canaux de refroidissement et dans le cas où l’effet thermique est négligé.
Fig.IV.20.b Force maximale d’interaction verticale exercée entre aimant et pastille supraconductrices à canaux de refroidissement en fonction du volume des canaux.
2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
80
0 100 200 300 400 500 60038
40
42
44
46
48
50
52
Cas idéal, Effet thermique négligé Pastille supraconductrice avec canaux Pastille supraconductrice sans canaux
For
ce d
e lé
vita
tion
ver
tica
le
(N)
Ecart aimant-supra (mm)
F = 43N
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Volume des canaux Vc [mm3]

Chapitre IV. Applications et validations
93
IV.2. Association aimant permanent-supraconducteur
IV.2.1 Modélisation de l’aimant
Dans ce travail, l’aimant permanent d’aimantation M, de hauteur h est modélisé par une
succession de ns spires parcourues par un courant d’intensité I = Mh/ns comme l’indique la figure IV.21.
Fig.IV.21. Modélisation de l’aimant par une succession de ns spires.
Dans cette étude, nous avons utilisé la formulation en potentiel vecteur magnétique et en
potentiel scalaire électrique (A-V). Dans un premier temps, nous avons évalué la partie du
potentiel vecteur magnétique As qui est due à l’aimant en tout point du domaine par la loi
de Biot Savart. L’induction magnétique Bs est évaluée par la relation : Bs = As.
Le potentiel vecteur magnétique As dans un point P produit par les spires est donné par :
ns4π
μ0IP
3r
dl)(As (IV.10)
où :
P : est un point quelconque de l’espace,
dl : est un élément du conducteur,
r : le vecteur allant d’un point de la spire au point M
La figure IV.22 représente la répartition spatiale de l’induction magnétique calculée
(Fig.IV.22.a) et mesurée (Fig.IV.22.b) à une distance de 0.5 mm au dessus d’un aimant
permanent (SmCo) de 20 mm de rayon, 30 mm d’épaisseur et ayant une aimantation de 1 T.
Des résultats satisfaisants sont obtenus si l’aimant a été remplacé par un nombre de spires ns espacées de 5 mm égal à 7.
M
I

Chapitre IV. Applications et validations
94
Fig.IV.22. Répartition spatiale de la composante axiale de l’induction magnétique, calculée (figure a) et mesurée (figure b) à 0.5 mm au dessus de la surface supérieure de l’aimant.
IV.2.2 Validations des modèles
Avant de présenter les résultats obtenus par les modèles mathématico-numériques
développés, nous avons d’abord validé ces modèles par la confrontation entre les résultats
de simulation et les résultats expérimentaux. Ces derniers, ont été obtenus, soit par des
essais expérimentaux trouvés dans la littérature, soit par des essais expérimentaux réalisés au sein du laboratoire le GREEN.
Dans cette confrontation, nous avons utilisé les deux types de forces d’interactions ; verticale et latérale. Ces forces sont calculées par :
V
dV BJF (IV.11)
avec :
V
xyyxz
V
yzzyx
) dVBJB(JF
) dVBJB(JF
e) vertical(force
latérale) (force
(IV.12)
Bs
(mT
)
a) b)

Chapitre IV. Applications et validations
95
IV.2.2.1. Validation des modèles par confrontation avec des résultats expérimentaux
trouvés dans la littérature
IV.2.2.1.1. Validation de la MVFM par le calcul de la force d’interaction verticale
Le premier test de validation concerne une géométrie cylindrique de la pastille
supraconductrice [Fou 00]. Dans ce cas, le code utilisant la MVFC ne peut être utilisé. La validation se fait donc par le code utilisant la MVFM.
La figure VI.23 représente la force d’interaction verticale en fonction de l’écart aimant-
supraconducteur obtenue par la MVFM et par l’expérience [Fou 00]. L’expérience consiste
à approcher l’aimant à partir d’une distance lointaine (refroidissement hors champ
magnétique) du supraconducteur puis l’éloigner. La vitesse de l’aimant reste la même
durant tout son déplacement (1 mm/s). La distance minimale entre l’aimant et le
supraconducteur est de 3 mm. Le supraconducteur caractérisé par une densité de courant
critique Jc = 108 A/m2 et l’aimant d’aimantation de 1,1 T, ont respectivement un rayon de 10.5 mm et de 11 mm et une épaisseur de 10 mm et de 20 mm.
En comparant les deux allures de la figure IV.23, on peut dire que la corrélation entre les
résultats numériques et les résultats expérimentaux pour le calcul de la force est très
satisfaisante. La valeur de l’erreur absolue maximale durant le processus du rapprochement
de l’aimant est de 0.90 N, cette valeur égale à 0.77 N durant le processus de l’éloignement
de l’aimant. La succession des phases d’approche et de retrait fait apparaître des cycles,
appelés cycles majeurs d’hystérésis (cycles (2°) et (3°) sur la figure IV.24). Ce phénomène
est une caractéristique des matériaux supraconducteurs à haute température critique
[Hiebel 92].
Fig.IV.23. Force verticale exercée entre l’aimant et le supraconducteur.
0 5 10 15 20 25 30 35 40-5
0
5
10
15
20
For
ce
de l
évit
atio
n ve
rtic
ale
(N)
Ecart aimant-supra (mm)
Résultats numériques
Résultats expérimentaux

Chapitre IV. Applications et validations
96
Fig.IV.24. Cycle de force.
IV.2.2.1.2. Validation de la MVFC par comparaison avec la MVFM
La figure IV.25 représente la force d’interaction en fonction de l’écart aimant-
supraconducteur. Cette force d’interaction est calculée à partir des deux codes numériques
développés, basés sur les deux méthodes : la MVFC et la MVFM. Pour pouvoir appliquer
la MVFC, nous avons modélisé le comportement d’une pastille supraconductrice de forme
hexaédrique, de dimensions LxLyLz = 212110 mm3, avec une densité de courant
critique Jc égale à 108 A/m2. L’aimant de rayon 11 mm et d’une épaisseur de
20 mm est caractérisé par une aimantation M = 1 T.
D’après la figure IV.25, on peut dire que les forces de lévitation calculées par la MVFM et
par la MVFC sont comparables.
Le tableau IV.2 résume les données du calcul des deux méthodes. Dans le cas de la MVFC,
le temps de calcul CPU (temps de montée et de descente) est réduit d’une manière
considérable presque de moitié. Sans oublier le gain en espace mémoire, en effet le
nombre de nœuds à l’intérieur de la pastille supraconductrice Nt dans le cas de la MVFC
est égale à Nt = 2773 alors qu’il est de 3140 nœuds dans le cas de la MVFM.
0 5 10 15 20 25 30 35 40-2
0
2
4
6
8
10
12
14
16
18
For
ce
de l
évit
atio
n ve
rtic
ale
(N)
Ecart aimant-supra (mm)
Le premier cycle
Le deuxième et le troisième cycle
(1°)
(2°) et (3°)

Chapitre IV. Applications et validations
97
Fig.IV.25. Force d’interaction verticale exercée entre l’aimant et le supraconducteur calculée par la MVFC et la MVFM.
Tableau.IV.2. Données du calcul des deux méthodes MVFC et MVFM
Points de comparaison MVFC MVFM
Erreur (N) Max 0.45
Moy 0.14 Temps CPU (s) 2773 4710
Taille du système nœuds 2700 3140
inconnues 10800 12560
IV.2.2.1.3. Validation de la MVFM par le calcul de la force d’interaction latérale
Dans cette expérience, l’aimant placé au dessus de la pastille supraconductrice est translaté
latéralement [Hull 99]. Deux types de refroidissements selon la position initiale de l’aimant z0, peuvent être envisagés :
Le refroidissement hors champ magnétique : dans ce cas, l’aimant est placé sur
une distance supposée lointaine z0, après le refroidissement de la pastille
supraconductrice (le passage de l’état normal vers l’état supraconducteur), l’aimant
est rapproché du supraconducteur jusqu’à la position finale zf. A partir de cette
0 5 10 15 20 25 30 35 40-2
0
2
4
6
8
10
12
14
16
18
MVFC MVFM
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Ecart aimant-supra (mm)

Chapitre IV. Applications et validations
98
position, l’aimant est translaté latéralement et une force latérale apparaît. Plusieurs
éléments peuvent influer sur la nature de cette force, principalement la distance
initiale z0, elle peut être répulsive (dans le cas où F(x) et x ont le même signe) ou
attractive (dans le cas où F(x) et x ont des signes différents).
Le refroidissement sous champ magnétique : dans ce cas, l’aimant est placé à
une distance z0 très proche du supraconducteur lors du refroidissement de la pastille
supraconductrice. A partir de cette position, il sera translaté latéralement.
La figure VI.26 représente les forces d’interactions latérales, calculées et mesurées [Hull
99], produites entre un aimant permanent et une pastille supraconductrice. La pastille
supraconductrice et l’aimant ont, respectivement, un diamètre de 30 mm et de 12.7 mm et
une épaisseur de 12 mm et 12.7 mm. La densité de courant critique de la pastille
supraconductrice est égale à 108 A/m2 [Hull 99]. Sur cette figure, sont reproduits les deux
types de refroidissement ; le refroidissement hors champ (RHC), où l’aimant d’aimantation
M = 0.33 T est placé à la position z0 = 30 mm supposée lointaine de la pastille. Il sera
rapproché avec une vitesse constante égale à 1 mm/s jusqu’à la position verticale finale
zf = 5 mm, à partir de cette position, l’aimant sera translaté latéralement suivant l’axe X, de
la position initiale x = 0 mm jusqu’à la position x = 12mm, et il sera ramené à la position
x = -12 mm, puis il sera reconduit vers sa position initiale. Pour le refroidissement sous
champ magnétique(RSC), l’aimant est placé à la distance z0 = zf = 5 mm. Après
refroidissement de la pastille, l’aimant sera translaté latéralement de la même manière que précédemment (refroidissement hors champ RHC).
Fig.IV.26. Forces d’interactions latérales pour les deux types de refroidissements, sous champ magnétique (RSC) et hors champ magnétique (RHC).
-15 -10 -5 0 5 10 15-1.5
-1
-0.5
0
0.5
1
1.5
Positions latérales x (mm)
For
ce l
atér
ale
(N)
+ Force calculée (RHC) Force Mesurée (RHC) Force calculée (RSC) Force mesurée (RSC)

Chapitre IV. Applications et validations
99
IV.2.2.2. Mesure des forces latérales
Fig.IV.27. Mesure des forces d’interactions latérales
Dans ces expériences, la pastille supraconductrice est plongée dans un bain d’azote
(température de 77°K) et l’aimant placé au-dessus de la pastille supraconductrice est
translaté latéralement à l’aide d’un charriot métallique qui assure le mouvement
transversal. Selon la position initiale de la pastille supraconductrice lors du processus de
refroidissement, on peut assurer les deux types de refroidissement. Pour le premier, il s’agit
d’un refroidissent hors champ magnétique, dans lequel, la pastille supraconductrice est
placée à une distance suffisamment éloignée lors du processus de refroidissement. Pour le
second, il s’agit d’un refroidissement sous champ magnétique, dans lequel, la pastille
supraconductrice est placée en dessous de l’aimant permanent à une faible distance lors du
processus du refroidissement.
- Le refroidissement hors champ magnétique (RHC) : Dans cette expérience
(Figure IV.28.), l’aimant, de diamètre D = 22 mm et de hauteur h = 9.8 mm, est placé en
dessus d’un supraconducteur, de diamètre D = 20.82 mm et de hauteur h = 8.01mm, sur
une distance verticale initiale z0 = 0.5 et sur une distance latérale initiale x0, supposée
lointaine (pour assurer le refroidissement hors champ magnétique). Ce dernier sera
translaté latéralement sur un intervalle de 29 mm.
Bain d’azote liquide
Chariot dans le quel en colle l’aimant
permanent
Oscilloscope

Chapitre IV. Applications et validations
100
Fig.IV.28. Mesure des forces d’interactions latérales lors du refroidissement hors champ
magnétique (RHC).
La figure IV.29, présente les forces d’interactions latérales, mesurées et calculées selon
deux modèles différents, le premier qui ne prend pas en compte l’influence du champ
d’induction magnétique B sur les grandeurs caractéristiques de la pastille supraconductrice,
tels que, la densité de courant critique Jc et le coefficient n dans la loi de puissance. Le
second, qui prend en considération ces dépendances. La dépendance des grandeurs
caractéristiques en champ d’induction magnétique B est exprimée par les relations
suivantes :
Supraconducteur
Aimant permanent Sens de déplacement
Position initiale
Pastille supraconductrice
Injection de l’azote liquide (refroidissement
hors champ)
La pastille est placée à une distance
lointaine

Chapitre IV. Applications et validations
101
0
0
1
)(
B
B
JcBJc B (IV.13)
0
101
B
B1
n-nnn(B) (IV.14)
Tels que |B| est l’amplitude de l’induction magnétique. B0, n0, n1 sont des constantes et JcB0
est la densité de courant critique sous champ nul.
Fig.IV.29. Forces d’interactions latérales calculé et mesuré lors du refroidissement hors
champ magnétique.
A partir de la comparaison entre les résultats de simulation et les résultats expérimentaux,
on peut dire qu’il y a une bonne concordance entre la simulation et l’expérimentation.
Selon les résultats présentés dans la figure IV.29, on peut dire que dans le cas du
refroidissement hors champ magnétique, la pastille supraconductrice tente de s’opposer au
déplacement latéral de l’aimant (la force latérale s’oppose au déplacement de l’aimant
permanent). Dans ce cas, la pastille veut éjecter l’aimant dans la direction opposée du
mouvement de l’aimant, on peut dire alors, que dans ce cas, un système de lévitation
utilisant un supraconducteur ne serait pas stable latéralement.
0 5 10 15 20 25 30-6
-5
-4
-3
-2
-1
0
1
Déplacement latéral (mm)
For
ce l
atér
ale
(N)
Expérimentale Numérique sans la loi J(B) et n(B) Numérique avec la loi J(B) et n(B)

Chapitre IV. Applications et validations
102
L’essai présenté ci-dessus a permis d’une part, de valider les modèles mathématico-
numériques développés précédemment, mais aussi, de déterminer les grandeurs
caractéristiques de la pastille supraconductrice utilisée dans cette expérience. Ces derniers
sont résumés dans le tableau ci-dessous :
Tableau.IV.3. Grandeurs caractéristiques de la pastille supraconductrice.
Grandeurs caractéristiques de la pastille supraconductrice valeurs
Densité de courant critique JcB0 (A/m2) 108
Le coefficient en puissance n0 20
Le coefficient n1 5
La valeur du champ B0 (T) 0.5
- Le refroidissement sous champ magnétique (RSC) : dans ce cas (Figure IV.30),
l’aimant est placé en dessous de la pastille supraconductrice lors du processus de
refroidissement et sur la même distance verticale initiale de z0 = 0.5 mm. Il sera translaté
latéralement sur un intervalle de 6mm.
La figure IV.31 présente les forces d’interactions latérales, mesurées et calculées selon les
deux modèles proposés, le premier qui prend en compte l’influence du champ d’induction
magnétique B sur les grandeurs caractéristiques de la pastille supraconductrice. Le second, qui ne prend pas en compte cette dépendance.
A partir de la comparaison entre les résultats de simulation et les résultats expérimentaux, on peut dire qu’il y a une bonne concordance entre la simulation et l’expérimentation.
Dans les cas du refroidissement sous champ magnétique, la force de rappelle est de signe
négatif. La pastille supraconductrice tente de maintenir l’aimant dans sa position initiale.
On peut dire que dans ce cas, la force de rappel conduirait à stabiliser un système en
lévitation. Dans ce cas, la force d’interaction latérale calculée à partir du modèle qui prend
en compte la dépendance en champ magnétique des grandeurs caractéristiques de la
pastille supraconductrice est très voisine de celle calculée à partir du modèle qui néglige
cette dépendance, l’écart maximal entre les deux forces calculées à partir des deux modèles
est de 0.11 N. Par contre, dans le cas du refroidissement hors champ magnétique présenté
précédemment, cet écart est plus important surtout pour les forts éloignements, il est de
0.65 N. En effet, la force latérale calculée à partir du modèle qui néglige la dépendance en
champ magnétique des grandeurs caractéristiques est supérieure à celle calculée à partir du modèle qui ne prend pas en compte cette dépendance.

Chapitre IV. Applications et validations
103
Fig.IV.30.Mesure des forces d’interactions latérales lors du refroidissement sous champ
magnétique.
0 1 2 3 4 5 6 7-6
-5
-4
-3
-2
-1
0
Fig.IV.31. Forces d’interactions latérales calculées et mesurée lors du refroidissement sous
champ magnétique.
Supraconducteur
Aimant permanent Sens de déplacement
Position initiale
Capteur de position
Injection de l’azote liquide (refroidissement
sous champ) Capteur de
Force
La pastille placée en dessous de
l’aimant
Expérimentale Numérique sans la loi J(B) et n(B) Numérique avec la loi J(B) et n(B)
Déplacement latérale (mm)
For
ce l
atér
ale
(N)

Chapitre IV. Applications et validations
104
IV.2.2.3. Comparaison entre la formulation magnétique jaugée et la formulation
magnétique sans jauge
Une autre comparaison nous a semblé utile, il s’agit de faire la comparaison entre les deux
formulations magnétiques ; la formulation magnétique avec jauge de coulomb (AG) et la
formulation magnétique sans jauge de Coulomb (SG). La figure IV.32 représente la force
d’interaction en fonction de l’écart aimant-supraconducteur calculée à partir des deux
formulations. Les résultats sont obtenus pour un nombre de nœuds Nt = 2250.
Le fait d’introduire la jauge de Coulomb dans la formulation électromagnétique n’influe
pas sur les résultats de simulation et entraîne une stabilité de calcul. On note un nombre
élevé d’itérations dans le cas de la formulation SG (tableau IV.4). Ce résultat de
convergence est confirmé également dans plusieurs travaux de modélisation par éléments
finis [Biro 96]. Bien entendu, la convergence n’est pas toujours assurée dans le cas de la
formulation sans jauge (SG). Le tableau.IV.4, résume les données du calcul dans les deux cas, formulation magnétique AG et formulation magnétique SG pour la même précision.
0 5 10 15 20 25 30 35 40-5
0
5
10
15
20
25
Fig.IV.32. Force d’interaction verticale exercée entre l’aimant et le supraconducteur calculée par les formulations AG et SG.
Tableau.IV.4. Données du calcul pour les deux formulations AG et SG
Nt Formulation CPU (s)
2250 AG 2549
SG 10600
Formulation AG Formulation SG
For
ce d
e lé
vita
tion
ver
tica
le (
N)

Chapitre IV. Applications et validations
105
IV.2.3 Etude de l’influence des paramètres géométriques et physiques sur les forces
d’interactions
Les forces d’interaction magnétique, verticales ou latérales, produites entre l’aimant
permanent et la pastille supraconductrice, dépendent principalement des paramètres
concernant soit la pastille supraconductrice, tels que : la densité de courant critique Jc, les
dimensions de la pastille supraconductrice, la distance de refroidissement et la température
du fluide cryogénique, soit, des paramètres concernant l’aimant tels que : l’aimantation et les dimensions de l’aimant.
Dans le but de faire une analyse de l’influence de ces paramètres sur les forces
d’interactions, nous présentons dans la partie ci-dessous, les résultats des simulations obtenus en prenant en compte l’influence de certains paramètres :
IV.2.3.1 Etude de l’influence des paramètres géométriques de l’aimant et de la pastille supraconductrice sur la force de lévitation
IV.2.3.1.1 Influence de l’épaisseur de l’aimant
Pour voir l’influence de l’épaisseur de l’aimant sur la force de lévitation, nous avons
calculé la force de lévitation verticale de trois aimants différents, dont l’épaisseur est de :
h = 5 mm, h = 10 mm et enfin h = 40 mm. Pour ces tests, nous avons utilisé le code qui
adopte la MVFC. Les dimensions de la pastille ainsi que le diamètre de l’aimant sont fixes
et sont respectivement (LxLyLz) = (191910) mm3 et 14 mm. L’aimant d’aimantation
M = 1,1 T est placé à une distance initiale z0 = 30 mm, il sera ramené à la distance finale
z f= 3 mm puis il sera retiré. La pastille supraconductrice a une densité de courant critique
Jc = 108. Les cycles de force de lévitation pour les trois aimants sont représentés sur la figure IV.33.
0 10 20 30-0.5
0
0.5
1
1.5
2
0 10 20 30-1
0
1
2
3
4
5
6
7
0 10 20 30-5
0
5
10
15
20
25
Fig.IV.33. Force d’interaction verticale exercée entre un supraconducteur et un aimant d’épaisseur h = 5 mm, 10 mm et 40 mm, respectivement.
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Ecart aimant-supra (mm)
h = 5mm h = 10mm h = 40mm

Chapitre IV. Applications et validations
106
La figure IV.34 résume la variation de la force de lévitation verticale en fonction de
l’épaisseur de l’aimant permanent lorsqu’il sera placé sur la position verticale z = 3mm.
D’après les deux figures (Fig.IV.33 et Fig.IV.3) on constate que la force de lévitation
maximale augmente avec l’augmentation de l’épaisseur de l’aimant. Cette augmentation
est importante pour des faibles épaisseurs « aimant plat » mais pour les grandes épaisseurs
elle devient moins importante. Cela s’explique par le fait qu’en augmentant l’épaisseur de
l’aimant, il se trouve que la partie supérieure de l’aimant se trouve très loin de la zone de
l’influence de la pastille supraconductrice.
On peut dire alors que l’augmentation de l’épaisseur de l’aimant n’est pas très rentable, en
effet, l’augmentation de l’épaisseur de l’aimant et par suite son volume, ne permet pas une
augmentation considérable de la zone active du supraconducteur comme il est montré dans
la figure IV.35.
5 10 15 20 25 30 35 40 450
5
10
15
20
25
Fig.IV.34. Influence de l’épaisseur de l’aimant h sur le force de lévitation verticale
For
ce d
e lé
vita
tion
ver
tica
le à
z =
3m
m (
N)
Hauteur de l’aimant (mm)

Chapitre IV. Applications et validations
107
Fig.IV.35. Répartition de la densité de courant (Jy) dans la pastille supraconductrice pour
un aimant d’épaisseur h = 5 mm, 10 mm et 40 mm, pour un écart aimant-supra de 3 mm (sur les figures seule la moitié de la pastille est représentée).
Jy (A/mm2)
Jy (A/mm2)
Jy (A/mm2)
y(m)
z(m) x(m)

Chapitre IV. Applications et validations
108
IV.2.3.1.2 Influence du diamètre de l’aimant
En utilisant les mêmes propriétés de la pastille supraconductrice précédente, nous avons
calculé la force d’interaction verticale entre la pastille et l’aimant d’épaisseur h = 20 mm
pour un diamètre D égale à 14 mm, 20 mm et 25 mm respectivement. La figure IV.36 représente les forces d’interactions calculées dans ces trois cas.
0 10 20 30-5
0
5
10
15
20
25
0 10 20 30-2
0
2
4
6
8
10
12
14
16
0 10 20 30-5
0
5
10
15
20
25
Fig.IV.36. Force d’interaction verticale exercée entre la pastille et un aimant de diamètre D
égale à 14 mm, 20 mm et 25 mm respectivement.
Les diamètres de l’aimant sont choisis d’une manière à avoir des cas où ; le diamètre est,
inférieur (D = 14 mm), équivalent (D = 20 mm) et supérieur (D = 25 mm) aux dimensions
de la pastille supraconductrice (LxLyLz) = (191910) mm3.
Comme le montre la figure IV.37, avec l’aimant de diamètre 25 mm, la répartition des
courants dans le volume périphérique est plus importante que dans le cas de l’aimant de
diamètre de 14 mm. Les lignes de champ sont contournées par la surface supérieure de la
pastille qui se comporte comme une surface écran, et ainsi, dans le cas du diamètre de
l’aimant faible, le volume périphérique de la pastille se trouve moins influencé par ces
lignes de champ, ainsi, l’amplitude de la densité est plus faible entrainant une force plus
faible. Ce volume contribue de manière effective mais certainement d’une manière moins importante que le volume placé sous l’aimant.
Les forces maximales calculées sont en effet :
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Ecart aimant-supra (mm)

Chapitre IV. Applications et validations
109
Fzmax ( 14 mm) = 14.26 N
Fzmax ( 25 mm) = 23.89 N
La pression magnétique ramenée, à la surface de supraconducteur, avec l’aimant 25 mm est alors :
Pz( 25 mm) = 6,62 N/cm2
Fig.IV.37. Répartition de la densité de courant dans la pastille supraconductrice mise en
dessous d’un aimant sur une distance z = 3 mm ayant les diamètres D = 14 mm et 25 mm, respectivement (les figures représentent la moitié de la pastille).
Jy (A/mm2)
Jy (A/mm2)
y(m)
z(m) x(m)

Chapitre IV. Applications et validations
110
Si seul le volume supraconducteur directement sous l’aimant intervenait, on aurait dû
obtenir avec l’aimant de diamètre 14 mm une force maximale de :
Fzmax ( 14) = 10.6 N
Cette valeur est plus faible que la force calculée (14.26 N), on peut dire que dans ces
conditions, la zone périphérique intervient donc pour environ 26 % dans la force résultante.
Le passage d’un aimant de diamètre de 14 mm à un aimant de diamètre de 25 mm, conduit
à une augmentation importante du volume d’aimant (presque le double) pour un accroissement plus limité de la force (+30%).
La force maximale pour l’aimant de diamètre de 20 mm est Fzmax = 23.48 N, alors qu’elle
est de 23.89 N pour un aimant de diamètre de 25 mm. L’écart entre les deux forces ne
semble pas significatif ; on peut dire alors que pour avoir une force de lévitation maximale,
il suffit d’avoir un aimant de diamètre égal à la longueur de la pastille supraconductrice (où bien le diamètre de la pastille supraconductrice dans le cas des géométries cylindriques).
IV.2.3.2. Influence de la distance de refroidissement sous champ
Deux types de refroidissement peuvent être envisagés :
- le refroidissement hors champ,
- le refroidissement sous champ.
Dans un dispositif expérimental, les supraconducteurs peuvent être refroidis en présence
des sources de champ magnétique comme ils peuvent être refroidis en l’absence de toute
source de champ magnétique (refroidissement hors champ magnétique). Dans les
simulations, le supraconducteur est dit refroidi hors champ dans le cas où l’aimant
permanent est mis à une distance initiale z0 considérée lointaine. Pour les faibles valeurs de
z0, on considère que l’aimant est très proche du supraconducteur, on parle alors du refroidissement sous champ.
Dans cette partie, nous allons présenter quelques résultats des simulations qui permettent
d’étudier l’influence de la distance de refroidissement sur les forces d’interaction,
horizontale et verticale. Dans le but de montrer la nature de la force de lévitation verticale
(répulsive ou attractive) en dépendance de la distance z0, nous avons calculé la force d’interaction verticale entre un aimant permanent et un supraconducteur.

Chapitre IV. Applications et validations
111
Le diamètre et la hauteur de l’aimant sont respectivement de 20 mm et de 10 mm. La
pastille supraconductrice a une densité de courant critique Jc égale à 108 A/m2 et a les
dimensions (LxLyLz) = (363610) mm3.
Les figures Fig.IV.38.a, Fig.IV.38.b et Fig.IV.38.c, représentent la distribution du champ
d’induction magnétique B et la distribution des courants dans la pastille supraconductrice
(la composante Jy), dans le cas où l’aimant est rapproché du supraconducteur à partir d’une
distance initiale z0 égale à 20 mm supposée lointaine (refroidissement hors champ).
Selon les figures, Fig.IV.38.b et Fig.IV.38.c, nous remarquons qu’avec la variation du
champ magnétique, produite par le rapprochement de l’aimant, des courants
supraconducteurs apparaissent dans la pastille, ces derniers vont créer une force de
répulsion entre l’aimant et le supraconducteur (Fig.IV.38.d). Avec l’éloignement de
l’aimant (phase de retrait présentée dans la Fig.IV.38 .c), la partie supérieure de la pastille
supraconductrice se trouve exposée à une variation négative du champ magnétique créé par
l’aimant, cette variation de champ induit des courants, dans cette partie, de sens inverse.
Dans cette phase, la force répulsive diminue avec l’éloignement de l’aimant, jusqu’à
l’apparition d’une faible force attractive.
Les figures, Fig.IV.39.a, Fig.IV.39.b et Fig.IV.39.c, représentent la distribution du champ
d’induction magnétique B et la distribution des courants dans la pastille supraconductrice
(la composante Jy), dans le cas où l’aimant est approché du supraconducteur à partir d’une
faible distance initiale z0 (refroidissement sous champ, z0 = 2mm). Dans ce cas, un nouveau
phénomène physique se produit. Dans la première étape, l’aimant est à une distance initiale
proche du supraconducteur z0 = 2mm, dans cette étape, le supraconducteur est dans un état
passif, aucun courant ne circule dans la pastille supraconductrice. Avec le retrait de
l’aimant, la variation spatiale du champ magnétique créé par l’aimant engendre des
courants dans la pastille supraconductrice, l’interaction des courants avec le champ
magnétique va créer cette fois ci une force attractive entre l’aimant et la pastille
supraconductrice, qui diminue avec l’éloignement de l’aimant. Dans la seconde phase
(phase du rapprochement – Fig.IV.39.c). La variation négative du champ magnétique de
l’aimant va engendrer des courants, de sens inverse, dans la partie supérieure de la pastille
supraconductrice. Ce changement donne naissance à une force attractive. La valeur de cette
force augmente avec le rapprochement de l’aimant. L’allure de la force verticale entre
l’aimant et le supraconducteur dans ce cas ne présente pas un cycle d’hystérésis, elle diffère de celle obtenue par refroidissement hors champ magnétique.

Chapitre IV. Applications et validations
112
Fig.IV.38. Répartition de la densité du courant dans la pastille supraconductrice (la
composante Jy) et du champ d’induction magnétique B entre un aimant permanent et une
pastille supraconductrice HTC, dans le cas du refroidissement hors champ, dans les figures
a), b), c) l’aimant est dans les positions initiales z0 = 20 mm, z = 2 mm et z = 20 mm
respectivement. La figure d) représente la force d’interaction produite entre aimant et le supraconducteur.
a) b)
c)
d) x
y z
Jy (A/m2)
Jy (A/m2) F
orce
de
lévi
tati
on v
erti
cale
(N
)
Ecart aimant-supra (mm)

Chapitre IV. Applications et validations
113
Fig.IV.39. Répartition de la densité du courant dans la pastille supraconductrice (la
composante Jy) et du champ d’induction magnétique B entre un aimant permanent et une
pastille supraconductrice HTC, dans le cas du refroidissement sous champ, dans les figures
a), b), c) l’aimant est dans les positions, initiale z0 = 2 mm, z = 20 mm et z = 2 mm
respectivement, la figure d) représente la force d’interaction produite entre aimant et le supraconducteur.
For
ce d
e lé
vita
tion
ver
tica
le (
N)
x
y z
Ecart aimant-supra (mm)
Jy (A/m2)
Jy (A/m2)

Chapitre IV. Applications et validations
114
Fig.IV.40. Répartition de la densité du courant dans la pastille supraconductrice (la
composante Jy) et du champ d’induction magnétique B entre un aimant permanent et une
pastille supraconductrice HTC, pour des différents déplacements latéraux. Dans les figures
a), b), c) l’aimant est dans les positions latérales, x = 2.1 mm, x = 5.1 mm et x = 7 mm
respectivement, la figure d) représente la force d’interaction latérale Fx produite entre aimant et le supraconducteur.
x
y z
For
ce d
’int
erac
tion
lat
éral
e (
N)
Déplacement latéral x (mm)
Jy (A/m2) Jy (A/m2)
Jy (A/m2)

Chapitre IV. Applications et validations
115
Les figures, Fig.IV.40.a, Fig.IV.40.b et Fig.IV.40.c, représentent la distribution du champ
d’induction magnétique B et la distribution des courants dans la pastille supraconductrice
(la composante Jy), dans le cas où l’aimant est translaté latéralement, selon l’axe des abscisse (x), respectivement à, x = 2.1 mm, x = 5.1 mm et x = 7 mm.
La force d’interaction latérale produite dans ce cas, est de nature attractive, la pastille
supraconductrice assure la stabilité du système, en effet tout mouvement latéral est
accompagné par une force d’attraction qui tente à attirer l’aimant vers sa position initiale.
Dans le but d’étudier l’effet des paramètres influents sur la stabilité latérale d’un système
en lévitation, et de montrer la dépendance entre la stabilité latérale d’un système en
lévitation et la distance de refroidissement, nous avons calculé la force latérale produite
entre un aimant permanent et un supraconducteur. La figure VI.41 représente ces forces
d’interactions. Le supraconducteur et l’aimant ont, respectivement, un diamètre de 30 mm
et de 12.7 mm et une épaisseur de 12 mm et 12.7 mm. La densité de courant critique de la
pastille supraconductrice Jc est égale à 108 A/m2. Sur cette figure, on a reproduit les deux
types de refroidissement, le refroidissement hors champ (RHC), où l’aimant d’aimantation
M = 0.33 T est placé sur des distances initiales z0, supposé lointain du supraconducteur. Il
sera rapproché jusqu’à la distance zf = 5mm, à partir de cette distance l’aimant sera
translaté latéralement suivant l’axe X, de la position initiale x = 0 mm jusqu’à la position x
= 12 mm, puis il sera ramené à la position x = -12 mm et enfin, il sera reconduit à sa
position initiale donnée par x = 0 mm. Pour le refroidissement sous champ (RSC), l’aimant
est placé à des distances z0 proches de la position de translation ztran = 5mm lors du
refroidissement de la pastille supraconductrice. Il sera translaté latéralement dans le même
intervalle précédent, de x = 0 mm à x = 12 mm. A partir de cette position il sera ramené à x = -12 mm puis il sera ramené à sa position initiale donnée par x = 0 mm.
Comme il est montré sur la figure IV.41, du fait, que la force magnétique latérale a le
même signe que le déplacement latéral pour des distances de refroidissement importante (à
partir de la distance z0 = 14 mm), le système n’est pas stable latéralement, cette instabilité
du système augmente avec l’augmentation de la position z0. Pour des distances de
refroidissement z0 inférieures ou égales à 10 mm, la force latérale et le déplacement latéral
prennent des signes différents, cela veut dire que le système est latéralement stable. La
stabilité latérale du système augmente avec la diminution de la position initiale z0. Cela
signifie qu’il existe une distance verticale de transition ztran0 à partir de laquelle, le système
peut être stable ou instable latéralement. Pour des distances de refroidissement inférieures
à ztran0, le système est considéré latéralement stable. Pour des distances de refroidissement
supérieures à ztran0, le système est considéré latéralement instable. Nous concluons alors,
qu’il est important de déterminer la valeur de ztran0 dans la conception des systèmes à lévitation.
Nous tenons à signaler que la valeur de ztran0 peut être influencée par plusieurs termes, tels
que : les propriétés géométriques de l’aimant ou de la pastille supraconductrice, les
propriétés physiques de la pastille supraconductrice telles que la densité de courant critique Jc, la température du fluide cryogénique.

Chapitre IV. Applications et validations
116
-15 -10 -5 0 5 10 15-1.5
-1
-0.5
0
0.5
1
1.5
Symbole Position initiale du supraconducteur
z0 (mm)
Position de translation
ztran (mm)
+
*
5
8
10
14
15
20
30
5
5
5
5
5
5
5
Fig.IV.41. Variation de la force latérale en fonction de la position latérale du
supraconducteur à la position de translation ztr = 5 mm pour différentes positions de
refroidissements z0.
Position latérale (mm)
For
ce l
atér
ale
(N)

Chapitre IV. Applications et validations
117
Nous avons aussi étudié l’influence de la position initiale de l’aimant z0 lors du
refroidissement du supraconducteur sur la force de lévitation verticale. La figure VI.42
représente la force d’interaction verticale en fonction de l’écart vertical aimant-
supraconducteur pour plusieurs valeurs de z0 (z0 égale à 5 mm, 10 mm, 20 mm, 40 mm et
50 mm respectivement). L’expérience consiste à approcher l’aimant, à partir d’une distance
initiale z0, du supraconducteur puis à l’éloigner. La vitesse de déplacement de l’aimant
reste la même durant tout son déplacement. La distance minimale entre l’aimant et le
supraconducteur est de 3 mm. Le supraconducteur de densité de courant critique
Jc = 108 A/m2 et l’aimant ont, respectivement, un rayon de 10.5 mm et de 11 mm et une
épaisseur de 10 mm et de 20 mm. L’aimant est caractérisé par une aimantation 1.1 T.
3 3.5 4 4.5 5-2
0
2
4
6
8
2 4 6 8 10-5
0
5
10
15
0 5 10 15-5
0
5
10
15
20
0 5 10 15 20-5
0
5
10
15
20
0 10 20 30 40-5
0
5
10
15
20
0 20 40 60-5
0
5
10
15
20
Fig.IV.42. Différents cycles à différentes hauteurs de refroidissement, respectivement à 5 mm, 10 mm, 15 mm, 20 mm, 40 mm et 50 mm.
z0 = 5mm z0 = 10 mm
z0 = 15 mm z0 = 20 mm
z0 = 40 mm z0 = 50 mm
Ecart aimant-supra (mm) Ecart aimant-supra (mm)
Ecart aimant-supra (mm) Ecart aimant-supra (mm)
Ecart aimant-supra (mm) Ecart aimant-supra (mm)
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)

Chapitre IV. Applications et validations
118
Selon la figure IV.42, on peut dire que les cycles de forces sont très semblables pour des
distances de refroidissement importantes. La différence entre ces cycles de forces apparaît à partir de la distance z0 = 10 mm.
En effet, à partir de cette valeur de z0, il apparaît très clairement que la raideur est fonction
de l’état initial du matériau supraconducteur. Plus il sera refroidi sous champ, plus la
raideur sera importante. On tient à rappeler que les performances d’un palier magnétique
sont caractérisées par la portance du dispositif mais aussi par sa stabilité. Plus la raideur est
grande plus la stabilité est meilleure. De cela, on peut dire alors que plus la distance de
refroidissement est grande, plus le système est stable. (ici on parle de la raideur verticale
donc il s’agit de la stabilité verticale, la raideur verticale est définie par z
Fzkz
).
Les forces répulsives maximales (pour une distance verticale z égale à 3 mm), les forces
attractives maximales sont déterminées en fonction de la distance de refroidissement sont résumées dans les figures IV.43.a et IV.43.b respectivement.
5 10 15 20 25 30 35 40 45 506
8
10
12
14
16
18
20
10 15 20 25 30 35 40 45 500.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fig.IV.43.a. Force de répulsion maximale en fonction de la distance de refroidissement z0
Fig.IV.43.b. Force d’attraction maximale en fonction de la distance de refroidissement z0
For
ce d
e ré
puls
ion
max
imal
e (N
)
Distance de refroidissement z0 (mm) a)
For
ce d
’att
ract
ion
max
imal
e (N
)
Distance de refroidissement z0 (mm) b)

Chapitre IV. Applications et validations
119
Selon les figures IV.43.a et IV.43.b, on constate qu’au delà d’une distance de
refroidissement z0 d’environ 40 mm, les forces attractives et répulsives ne varient
quasiment plus. Par contre la force répulsive décroit très fortement lorsque la distance de
refroidissement diminue. A 10 mm, on a déjà perdu environ 27 % des performances. Inversement, la force attractive augmente très sensiblement lorsque z0 diminue.
Le refroidissement sous champ est donc très préjudiciable aux performances de lévitation,
mais comme il a été présenté, il est très avantageux pour assurer la stabilité latérale. Il y a
donc ici une certaine incompatibilité. Une structure sera donc destinée soit à la lévitation,
soit à la stabilisation. Pour une buttée magnétique par exemple, il sera nécessaire pour
conserver une force de lévitation importante, de refroidir les pastilles supraconductrices avant de mettre le système en position de marche.
Le refroidissement sous champ améliore sensiblement les performances des forces
transversales. Plus la distance de refroidissement est faible, plus le gain en terme de force
maximale est important. D’une façon générale, le refroidissement sous champ est très bien adapté aux dispositifs nécessitant la stabilité.
IV.2.3.3. Influence de la température du milieu extérieur
Dans les applications des supraconducteurs HTC, en particulier dans le domaine de
transport à lévitation magnétique, il est important d’augmenter la force de lévitation
magnétique [Suzuki 07], plusieurs travaux ont étudié la force de lévitation à la température
de l’azote liquide (77 K), cependant, peu de travaux ont été présentés pour étudier la
relation entre la force de lévitation et la température du milieu extérieur (la température du
fluide cryogénique).
Récemment, quelques essais expérimentaux ont montré que la force de lévitation [Suzuki
07, Jiang 02], ainsi que le temps de relaxation dépendent principalement de la température
du fluide cryogénique [Suzuki 07]. Ces essais ont montré que les performances de ces matériaux, en termes de force sont meilleures à basse température.
Afin d’étudier ce comportement, nous avons calculé la force de lévitation entre une pastille
supraconductrice (YBACO) et un aimant permanent dans une gamme de température
extérieure, qui varié entre 20 °K et 100 °K. Le supraconducteur et l’aimant ont,
respectivement, un rayon de 10.5 mm et de 11 mm et une épaisseur de 10 mm et de 20 mm.
L’aimant est caractérisé par une aimantation magnétique de 1,1 T. La densité de courant critique Jc à 77 K est prise égale à 108 A/mm2.
La figure IV.44 représente la variation de la force de lévitation verticale en fonction de
l’écart aimant-supraconducteur calculée à différentes valeurs de température du milieu
extérieur, respectivement à T = 85 K, T = 77 K, T = 40 K et à T = 20 K. On comparant les
quatre allures des forces présentées dans la figure IV.44, on peut dire que le cycle de force
est important pour les températures les plus élevées (température de l’ordre de 85 K). Ce

Chapitre IV. Applications et validations
120
cycle se réduit progressivement avec la diminution de la température jusqu’à son
annulation pour des températures inférieures ou égales à T = 40 K. Cela peut s’expliquer par la pénétration du champ magnétique à l’intérieur de la pastille supraconductrice.
Pour le cas des températures les plus élevées (pour des valeurs de température proches de
la valeur de la température critique donnée par 77 K), la densité de courant dans la pastille
supraconductrice est de l’ordre de 108, cette valeur permet une pénétration partielle du
champ magnétique à l’intérieur de la pastille.
La valeur de la force de lévitation maximale est obtenue pour un écart aimant-
supraconducteur égale à z = 3mm. A cette distance, la valeur de la force maximale est de
18.41 N pour une température extérieur égale à 77 K, alors qu’elle est de 28.05 N pour une température extérieure égale à 20 K.
0 10 20 30 40-5
0
5
10
15
0 10 20 30 40-5
0
5
10
15
20
0 10 20 30 40-10
0
10
20
30
0 10 20 30 40-10
0
10
20
30
Fig.IV.44. Force de lévitation magnétique en fonction de l’écart aimant-supraconducteur à
des différentes températures, respectivement à T = 85 °K, T = 77 °K, T = 40 °K et T = 20 °K.
For
ce d
e lé
vita
tion
ver
tica
le (
N)
For
ce d
e lé
vita
tion
ver
tica
le (
N)
Ecart aimant-supra (mm)
Ecart aimant-supra (mm)
à T = 85 °K à T = 77 °K
à T = 40 °K à T = 20 °K
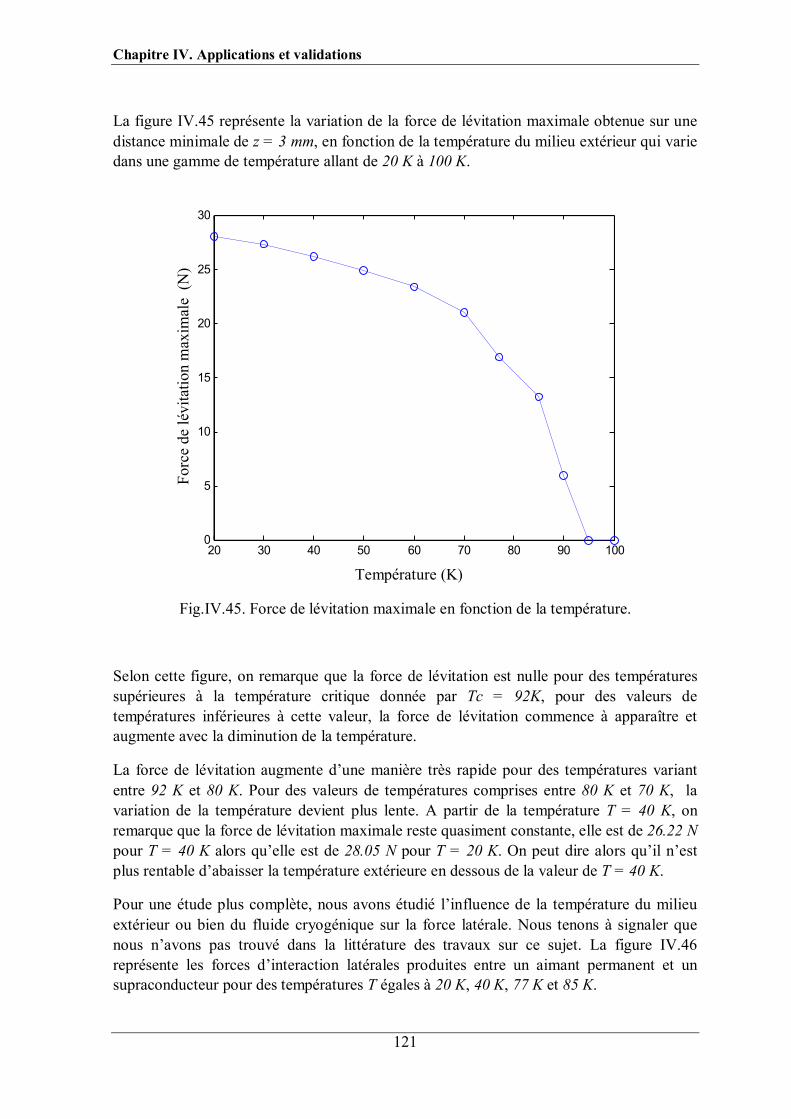
Chapitre IV. Applications et validations
121
La figure IV.45 représente la variation de la force de lévitation maximale obtenue sur une
distance minimale de z = 3 mm, en fonction de la température du milieu extérieur qui varie dans une gamme de température allant de 20 K à 100 K.
20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
Fig.IV.45. Force de lévitation maximale en fonction de la température.
Selon cette figure, on remarque que la force de lévitation est nulle pour des températures
supérieures à la température critique donnée par Tc = 92K, pour des valeurs de
températures inférieures à cette valeur, la force de lévitation commence à apparaître et augmente avec la diminution de la température.
La force de lévitation augmente d’une manière très rapide pour des températures variant
entre 92 K et 80 K. Pour des valeurs de températures comprises entre 80 K et 70 K, la
variation de la température devient plus lente. A partir de la température T = 40 K, on
remarque que la force de lévitation maximale reste quasiment constante, elle est de 26.22 N
pour T = 40 K alors qu’elle est de 28.05 N pour T = 20 K. On peut dire alors qu’il n’est
plus rentable d’abaisser la température extérieure en dessous de la valeur de T = 40 K.
Pour une étude plus complète, nous avons étudié l’influence de la température du milieu
extérieur ou bien du fluide cryogénique sur la force latérale. Nous tenons à signaler que
nous n’avons pas trouvé dans la littérature des travaux sur ce sujet. La figure IV.46
représente les forces d’interaction latérales produites entre un aimant permanent et un supraconducteur pour des températures T égales à 20 K, 40 K, 77 K et 85 K.
For
ce d
e lé
vita
tion
max
imal
e (
N)
Température (K)

Chapitre IV. Applications et validations
122
Le supraconducteur et l’aimant ont respectivement, un diamètre de 30 mm et de 12.7 mm et
une épaisseur de 12 mm et 12.7 mm. La densité de courant critique de la pastille
supraconductrice Jc est égale à 108 A/m2. De même, lors de cette étude, nous avons pris en
considération les deux types de refroidissement, le refroidissement hors champ magnétique
(RHC), où l’aimant d’aimantation M = 0.33 T est placé sur des distances initiales z0,
supposées lointaines du supraconducteur. Il sera rapproché jusqu’à la distance zf = 5mm, à
partir de cette distance l’aimant sera translaté latéralement suivant l’axe X, de la position
initiale x = 0 mm jusqu’à la position x = 12 mm. Puis il sera ramené à la position
x = -12 mm et enfin il sera reconduit à sa position originale initiale donnée par x = 0 mm.
Pour le refroidissement sous champ (RSC), l’aimant est placé à des distances z0 proches de
la position de translation ztran = 5mm lors du refroidissement de la pastille
supraconductrice. Il sera translaté latéralement dans le même intervalle précédent, de x = 0
mm à x = 12 mm, à partir de cette position, il sera ramené à x = -12 mm puis il sera ramené
à sa position initiale donnée par x = 0 mm.
Selon les résultats présentés dans les figures IV.46.a et IV.46.b, on peut dire que la
température du fluide cryogénique n’influe pas trop sur la force latérale dans le cas du
refroidissement hors champ magnétique, les allures sont très semblables pour des
températures T inférieures à 77 K, pour ces températures, on peut remarquer qu’avec
l’augmentation de la température, un cycle d’hystérésis très fin apparaît. La force latérale
semble être affectée pour les températures proches de la température critique. Un cycle de
force très épais apparaît pour ces températures, avec une diminution de la valeur de la force
latérale, nous concluons alors que dans le cas du refroidissement hors champ magnétique,
la température extérieure n’influe pas sur la force latérale. Il est donc d’autant plus rentable
de travailler avec la température de l’azote liquide.
Dans le cas de refroidissement sous champ magnétique, on remarque qu’avec
l’augmentation de la température, un cycle d’hystérésis apparaît, il sera très large dans le
cas des températures proches de la température critique. Pour des températures très basses,
la valeur maximale de la force latérale peut augmenter. En effet, pour la température T
égale à 20 K, la valeur maximale de la force latérale est de 1.65 N alors quelle est de 0.95 N pour T = 77 K et elle atteint la valeur de 0.59 N pour T = 85 K.
Selon les figures présentées, on peut dire que la température du milieu extérieur n’influe
pas sur la stabilité latérale du système en lévitation. En effet, dans le cas du refroidissement
hors champ magnétique, avec la diminution de la température, le système reste toujours instable latéralement.

Chapitre IV. Applications et validations
123
-20 -10 0 10 20-2
-1
0
1
2
-20 -10 0 10 20-2
-1
0
1
2
-20 -10 0 10 20-2
-1
0
1
2
-20 -10 0 10 20-2
-1
0
1
2
Fig.IV.46.a. Force latérale dans le cas du RSC à des différentes températures.
-20 -10 0 10 20-2
-1
0
1
2
-20 -10 0 10 20-2
-1
0
1
2
-20 -10 0 10 20-1
-0.5
0
0.5
1
-20 -10 0 10 20-1
-0.5
0
0.5
1
Fig.IV.46.b. Force latérale dans le cas du RHC à des différentes températures.
Fo
rce
de
laté
rale
(N
)
à T = 85 °K à T = 77 °K
à T = 40 °K à T = 20 °K
Fo
rce
de
laté
rale
(N
)
Fo
rce
de
laté
rale
(N
) F
orc
e d
e la
téra
le (
N)
Position latérale (mm)
Position latérale (mm)
Position latérale (mm)
For
ce d
e la
téra
le (
N)
à T = 85 °K à T = 77 °K
à T = 40 °K à T = 20 °K
For
ce d
e la
téra
le (
N)
For
ce d
e la
téra
le (
N)
For
ce d
e la
téra
le (
N)
Position latérale (mm)

Chapitre IV. Applications et validations
124
IV.2.3.4 Influence de la forme et de dimensions de la pastille supraconductrice dans le
cas d’un système de guidage magnétique
Dans plusieurs travaux de modélisation (par exemple : [Fou 00]) ou d’expérimentations
(comme par exemple [Hiebel 92]), il a été démontré, que les propriétés géométriques de la
pastille supraconductrice influent considérablement sur la force de lévitation verticale. Les
résultats de ces travaux ont montré qu’il n’est pas nécessaire d’avoir une pastille
supraconductrice trop épaisse [Fou 00], il a été constaté qu’il n’ya pas une influence de la
hauteur de la pastille supraconductrice sur la force d’interaction. Au delà d’une certaine
hauteur et pour une géométrie d’aimant donnée, la force d’interaction reste à peu prés la
même. En effet, le supraconducteur écrante en surface et développe un courant sur son
bord. Ainsi, progressivement, la contribution du fond du supraconducteur tend à être
négligeable, d’ailleurs ce qu’on peut voir sur les figures présentées dans les parties précédentes (Fig IV.35 et Fig.IV.37).
Les résultats présentés aussi dans ces travaux ont montré que l’épaisseur du
supraconducteur n’est pas directement liée à l’épaisseur de l’aimant. Même si on augmente
l’épaisseur de l’aimant, l’épaisseur de la pastille supraconductrice pour laquelle la force est
maximale est identique. Dans ces travaux, il a été montré aussi, que la force de lévitation
verticale est maximale lorsque l’épaisseur du supraconducteur est égale au rayon de
l’aimant. Ceci est vrai lorsque l’aimant et le supraconducteur ont à peu prés le même
diamètre et sont mis en vis versa. Concernant l’influence du diamètre de l’aimant, il a été
démontré que la force de lévitation dépend de la largeur du supraconducteur par rapport à
celle de l’aimant avec une pente asymptotique dès que la largeur du supraconducteur dépasse 50 % celle de l’aimant.
Beaucoup de travaux ont été présentés pour étudier la force de lévitation entre une pastille
supraconductrice et un simple aimant permanent. Alors qu’il est bien connu, que la force
de lévitation ne dépend pas seulement des propriétés de la pastille supraconductrice, mais
aussi du champ magnétique appliqué [Ren 03]. Dans notre recherche bibliographique, nous
avons trouvé peu de travaux qui ont étudié la force d’interaction entre une pastille
supraconductrice et un système de guidage magnétique (par exemple [Zhang 08]).
Généralement, un système de guidage magnétique est constitué de deux aimants
permanents adjacents ; d’aimantations inversées, entourés de trois noyaux magnétiques [Ren 03] comme la figure IV.47 le montre.
Fig.IV.47. Système de guidage magnétique
Aimants adjacents
Noyaux magnétique

Chapitre IV. Applications et validations
125
La différence entre un système de guidage magnétique et un simple aimant permanent
réside dans la valeur du champ magnétique produite par les deux systèmes [Ren 03], un
aimant permanent peut produire un champ magnétique de valeur maximale de 0.5 T sur
une distance de 5 mm au dessus de sa surface supérieure, alors qu’un système de guidage magnétique peut produire la valeur de 0.85 T sur la même distance.
Les figures, Fig.IV.48.a et Fig.IV.48.b., représentent la valeur du champ d’induction
magnétique B, au centre, d’un aimant permanent et d’un système de guidage magnétique, respectivement, en fonction de la distance verticale.
Pour étudier l’influence de la forme et des dimensions de la pastille supraconductrice sur la
force d’interaction verticale, en tenant compte de l’influence de la valeur du champ
d’induction magnétique B, nous avons calculé, dans un premier temps, la force de
lévitation produite entre un aimant permanent et des pastilles supraconductrices, de formes
et de dimensions différentes et dans un second temps, entre ces pastilles supraconductrices
et un système de guidage magnétique. Dans ces simulations et dans le but de voir l’effet du
champ magnétique sur la force de lévitation magnétique produite, nous avons considéré
que la pastille supraconductrice a une densité de courant critique égale à
4.106 A/m2. Le but est d’abaisser l’effet diamagnétique de la pastille supraconductrice.
Fig.IV.48.a. Champ d’induction magnétique B produit au centre d’un aimant permanent en fonction de la distance verticale
Fig.IV.48.b. Champ d’induction magnétique B produit au centre d’un aimant permanent en fonction de la distance verticale.
0 10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
1.4
Distance (mm)
B(T
)
Distance (mm)
B(T
)

Chapitre IV. Applications et validations
126
Tableau.IV.5. Propriétés géométriques des quatre pastilles supraconductrices utilisées dans
les simulations.
Pastille : A B C D
Formes de la pastille Hexagonale Cylindrique Cylindrique Cylindrique
Dimensions de la
pastille (mm)
(LxLyLz)
égale à
(252511)
Diamètre D
égale à 26
Hauteur h
égale à 11
Diamètre D
égale à 30
Hauteur h
égale à11
Diamètre D
égale à 30
Hauteur h
égale à14
Le tableau IV.5 résume les propriétés géométriques des quatre pastilles supraconductrices utilisées dans ces simulations.
La figure IV.49 représente les forces d’interactions verticales produites par les quatre pastilles supraconductrices (A, B, C et D).
Selon les résultats obtenus, nous pouvons dire que la force d’interaction verticale dépend de la forme et des propriétés géométriques de la pastille supraconductrice.
Dans le but de faire une comparaison plus générale entre les deux systèmes, le système à
faible valeur du champ magnétique (où l’aimant permanent est utilisé comme source de
champ magnétique) et le système à forte valeur du champ magnétique (système de guidage
magnétique), nous avons calculé la force de lévitation verticale produite par les deux systèmes.
Le Tableau IV.6 résume les résultats obtenus. Dans ce dernier, la valeur F0 représente la
valeur de la force de lévitation verticale produite dans le cas d’un système ayant un aimant
permanent comme source de champ à une distance verticale z égale à 3 mm. f0 est la valeur
de F0 ramenée à la surface du supraconducteur, Fmax et Fmin sont les forces de lévitation,
maximale et minimale obtenues dans le cas du système de guidage magnétique ; fmax est la
valeur de Fmax ramenée à la surface du supraconducteur, F15 et F20 sont les forces de
lévitation verticale à une distance z égale à 15 mm et à 20 mm respectivement, dans le cas
d’un système de guidage magnétique.
Selon les résultats présentés, nous pouvons dire que pour les faibles valeurs du champ
magnétiques appliqué, la pastille supraconductrice de forme hexagonale présente les
meilleures performances et la force de lévitation maximale est de 24 N (Pression
magnétique est de 3.24 N/cm2) alors qu’elle est entre 14 N et 20 N pour les pastilles
supraconductrices de forme cylindrique. Ceci peut être expliqué par le fait que les courants dans les bords de la pastille participent à l’augmentation de la force de lévitation.
Les forces de lévitation maximales pour les pastilles C et D sont presque les mêmes. On
observe un écart de 1.40 N à faible valeur du champ magnétique, cet écart se réduit à 0.2 N
dans le cas du système de guidage magnétique. On conclue alors qu’il n’est pas important

Chapitre IV. Applications et validations
127
d’avoir un supraconducteur trop épais, et surtout dans les applications à fort champ
magnétique.
On peut remarquer d’après les résultats présentés dans le tableau IV.6 que le comportement
des pastilles supraconductrices dépend de la valeur du champ magnétique appliqué. Dans
le cas des faibles valeurs du champ magnétique appliqué, la pastille A présente les
meilleurs performances en terme de force de lévitation alors que dans le cas de fortes
valeurs du champ magnétique appliqué, la pastille D présente les meilleurs performances.
La force de lévitation maximale pour la pastille B est de 14.2 N alors quelle est de 19.41 N
pour la pastille C, soit un écart de 5.2 N dans le cas d’un système ayant un aimant
permanent, cet écart devient plus grand dans les systèmes de guidage magnétique, en effet
la valeur de le force de lévitation maximale pour la pastille C est de 49.66 N, alors qu’elle
est de 69 N pour la pastille D, soit un écart de 19 N. On peut conclure alors qu’avec
l’augmentation du diamètre de la pastille, la force de lévitation magnétique augmentera et
l’augmentation du diamètre de la pastille devient plus bénéfique dans les systèmes à forte valeur de champ magnétique.
Par comparaison entre les deux systèmes, on peut dire que la force de lévitation est
maximale pour les systèmes à fort champ magnétique. Pour les systèmes de guidage
magnétique, la pression magnétique dans ces systèmes est de l’ordre de
9 à 10 N/cm2 alors quelle est de 2 à 3 N/cm2 dans les systèmes de faible valeur de champ
magnétique (aimant permanent simple). On peut conclure alors qu’il est plus intéressant
d’utiliser les systèmes de guidage magnétique. Comme se sera le cas dans le domaine du
transport à lévitation magnétique (MAGLEV).
Tableau.IV.6. Propriétés géométriques et force de lévitation produite par les quatre
pastilles supraconductrices utilisées dans les simulations.
Pastille supraconductrice : A B C
D
Air (cm2)
Epaisseur (h)
Diamètre (D)
F0 (N)
f0 (N/cm2)
Fmax (N)
fmax (N/cm2)
Fmin (N)
6.25
11
--
24.53
3.92
56.70
9.07
-10.66
5.30
11
26
14.2
2.67
49.66
9.36
-6.17
7.07
11
30
19.41
2.74
69
9.75
-7.28
7.07
14
30
20.81
2.94
70.33
9.94
-7.32

Chapitre IV. Applications et validations
128
Fig.IV.49. Force de lévitation maximale entre les pastilles supraconductrices A, B, C et D et entre un système de guidage magnétique.
IV.2.4 Couplage Mécanique
Dans les séries des simulations présentées précédemment, l’aimant permanent suivait un
déplacement qui lui est imposé au dessus du supraconducteur. Cela nous a permis de
mieux comprendre le comportement du matériau. Dans ce paragraphe, on s’intéresse au cas
où l’aimant est placé au dessus d’une pastille supraconductrice puis lâché librement. Dans
un premier temps, on considère que la pastille supraconductrice est fixe, c'est-à-dire seul
l’aimant peut se déplacer. Dans un second temps, on considère que l’aimant est libre de se
déplacer et la pastille supraconductrice suit un mouvement oscillatoire sinusoïdal imposé.
On cherche à mettre en évidence le phénomène de lévitation et comprendre son
comportement. Aussi on va montrer que l’effet thermique ne peut être négligé dans l’étude
0 10 20 30-20
-10
0
10
20
30
40
50
60
0 10 20 30-10
0
10
20
30
40
50
0 5 10 15 20 25 30-10
0
10
20
30
40
50
60
70
80
0 5 10 15 20 25 30-10
0
10
20
30
40
50
60
70
80
Pastille A Pastille B
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
Ecart aimant-supra (mm) Ecart aimant-supra (mm)
Pastille C Pastille D
For
ce v
erti
cale
(N
)
For
ce v
erti
cale
(N
)
Ecart aimant-supra (mm) Ecart aimant-supra (mm)

Chapitre IV. Applications et validations
129
de la dynamique d’un système en lévitation. Cette approche nécessite l’introduction des
équations de la mécanique couplées à celles des problèmes électromagnétique-thermique.
IV.2.4.1 Formulation du premier problème
Tous les résultats présentés précédemment prenaient en compte un aimant permanent dont
le déplacement (et donc la vitesse) était imposé, et ceci dans le but de simplifier l’étude du comportement du supraconducteur interagissant avec l’aimant.
Dans cette partie, on considère un aimant qui lévite librement au dessus d’une pastille
supraconductrice fixe (collée). Pour cela, on couple les équations électromagnétiques-
thermiques qui régissent le comportement supraconducteur et les équations de la
mécanique. Dans cette étude, on se concentre sur les performances verticales du système.
A partir du principe fondamental de la dynamique et des forces exercées sur l’aimant, le déplacement de l’aimant est donné par l’équation suivante :
zmmgFzF (IV.15)
où m est la masse de l’aimant,
Fz est la force due à l’interaction aimant-supraconducteur,
g est l’accélération gravitationnelle et z est la position du centre de l’aimant par rapport à
celui du supraconducteur (Fig.IV.50)
Pour le couplage mécanique, nous avons fait appel au mode de couplage faible. La
figure VI.51 présente l’organigramme du couplage magnétique-thermique-mécanique.
La résolution du problème électromagnétique –thermique nous permet de résoudre le
problème électromagnétique en prenant en compte l’effet thermique, ainsi de calculer la
force exercée sur l’aimant à chaque instant t. A partir de ce résultat, on résout le problème
mécanique. La résolution du problème mécanique utilise la méthode d’Euler implicite et
explicite décrite ci-après :
extFm
ttvtv )()1( (méthode explicite) (IV.16)
)1(.)()1( tVttztz (méthode implicite) (IV.17)
où v est la vitesse de l’aimant et Fext est la somme des forces extérieures exercées sur l’aimant.

Chapitre IV. Applications et validations
130
Fig.IV.50. Structure du dispositif de lévitation.
Fig.IV.51. Organigramme de couplage magnétique-thermique-mécanique.
IV.2.4.1.1. Etude dynamique
Dans le but d’étudier l’effet thermique sur la dynamique d’un système en lévitation
magnétique à base de matériau supraconducteur, nous avons utilisé les deux modèles
présentés précédemment (Chapitre III), le premier qui tient en compte l’effet thermique par
le biais de la dépendance des propriétés physiques des matériaux supraconducteurs en
température, telles que, la densité de courant critique où le coefficient n dans la loi en puissance, le second, qui ne prend pas compte cette dépendance.
Les résultats décrits dans ce paragraphe, sont obtenus à partir du modèle en puissance (la
caractéristique E-J décrite dans le &.II.2.2 définit par l’équation (II.14)), correspondant à
x
y z
Fz
mg z
Problème magnétique-thermique Problème mécanique
Force de lévitation Fz
Position de l’aimant z

Chapitre IV. Applications et validations
131
un supraconducteur de dimensions (lx, ly, lz) = (101010) mm3, le diamètre et l’épaisseur
de l’aimant sont respectivement de 20 mm et de 10 mm. L’aimant a une aimantation de
1,1 T, il s’agit d’un aimant SmCo. Certains paramètres géométriques et physiques du
dispositif ont été adaptés dans le but de faire léviter le dispositif dans un intervalle de
temps inférieur à 1.2 s. pour cela, on considère que l’aimant a une masse de 250 g. Pour un
aimant plus léger, la stabilité du système nécessite un temps de calcul important.
Cependant il n’existe pas à priori d’aimant SmCo de cette taille avec une telle masse. On
considère alors qu’il existe un dispositif amagnétique autour de l’aimant venant ajouter une
certaine masse. D’autre part, on suppose que le supraconducteur est caractérisé par une
densité de courant critique de l’ordre de 50 A/mm2.
Dans un premier temps, à l’instant t = 0, l’aimant est maintenu à une distance initiale
z0 = 8mm. Après refroidissement du supraconducteur sous champ, l’aimant est lâché et suit
librement sa trajectoire. Le comportement dynamique du système est représenté par la figure IV.52.
Selon les résultats présentés, on constate qu’après une période d’oscillations l’aimant
atteint une position d’équilibre ou bien une position finale zf. Durant les premiers instants,
l’aimant se rapproche progressivement du supraconducteur, cela du fait que les courants
supraconducteurs n’apparaissent qu’après le déplacement de l’aimant. En effet, les
courants supraconducteurs sont liés à l’apparition du champ électrique, donc à la variation
du champ magnétique, puisque il s’agit d’un refroidissement sous champ, les courants
apparaissent après quelques instants de relâchement de l’aimant.
Un écart apparaît entre les deux trajectoires calculées par les deux modèles, à partir de
l’instant t = 0.22 s. Cela veut dire que l’effet thermique intervient à partir de cet instant. On
comparant les deux allures de la trajectoire, on peut dire aussi, que l’effet thermique accélère la stabilité du système en lévitation.
La figure IV.53 représente la force d’interaction verticale entre l’aimant et le
supraconducteur. A l’instant t = 0s, l’aimant tombe librement car la force de répulsion
aimant-supraconducteur est inférieure au poids (Fz<mg=2.5 N). Selon cette figure, lorsque
la force de répulsion est égale au poids (le point (1) de la figure IV.53), l’aimant ne se
stabilise pas à cause d’un excès d’énergie cinétique. Il va alors ralentir pour repartir vers le
sens inverse. Par la suite il passe par la position (2) où à nouveau la force de répulsion et la
force de pesanteur sont égales. Le phénomène d’oscillations amorties ne peut s’expliquer
que par l’existence d’un phénomène dissipatif. Ce phénomène est en relation directe avec les cycles décrits par la force.
L’évolution temporelle de la température selon les points situés au centre de la pastille
supraconductrice suivant l’axe XY (x, y) = (0, 0) et selon plusieurs niveaux suivant z, est
représentée dans la figure IV.54. De même, nous avons représenté dans la figure IV.55 la
répartition spatiale (vue tridimensionnelle) de la température au sein de la pastille
supraconductrice à différents instants donnés par t = 0.5 s, t = 1 s et t = 1.57 s
respectivement. Selon le profil de la température, représenté sur ces figures, on peut dire

Chapitre IV. Applications et validations
132
que la température est élevée dans les surfaces supérieures de la pastille supraconductrice,
elle décroit progressivement vers les surfaces inférieures (les surfaces les plus chaudes sont
les surfaces les plus proches de la source du champ magnétique, c'est-à-dire les surfaces
proches de l’aimant). Le cœur de la pastille est le plus chaud car il est le plus éloigné de la source de refroidissement (l’azote liquide).
Fig.IV.52. Comportement dynamique du dispositif avec le modèle qui tient compte de
l’effet thermique et celui qui ne tient pas compte de l’effet thermique.
Fig.IV.53. Force de lévitation en fonction du temps.
Eca
rt a
iman
t-su
prac
ondu
cteu
r (m
m)
temps (s)
Avec effet thermique
Sans effet thermique
temps (s)
For
ce v
erti
cale
de
lévi
tati
on (
N)
Avec effet thermique
Sans effet thermique
2.5 N 1 2

Chapitre IV. Applications et validations
133
Fig.IV.54. Evolution temporelle de la température au centre de la pastille supraconductrice.
Fig.IV.55. Répartition spatiale de la température au sein de la pastille supraconductrice aux instants t = 0.5 s, 1 s et 1.57 s respectivement.
Fig.IV.56.a. Position finale de l’aimant en fonction de sa position initiale
Fig.IV.56.b. Erreur absolue en fonction de la position initiale de l’aimant
z = 2.2 mm z = 0.8 mm z = -0.80 mm
z = 3.6 mm
Temps (s)
Tem
pera
ture
(K
)
z = -2.2 mm z = -3.6 mm z = -5 mm
z =5 mm
T (K) T (K)
Position initiale z0 (mm) Position initiale z0 (mm)
Pos
itio
n fi
nale
zf
(mm
)
Err
eur
abso
lue
=
zf th
-zf s
(m
m)
T (K)

Chapitre IV. Applications et validations
134
Dans certains travaux [Fou 00 ; Todaka 98] et suivant mes travaux [Alloui 09 a], il a été
démontré que, plus la position initiale z0 est petite plus l’aimant atteindra sa position d’équilibre prés du supraconducteur, c'est-à-dire plus la valeur zf est réduite.
De notre part nous avons vérifié la validité de ces résultats en calculant la trajectoire de
l’aimant pour différentes valeurs de positions initiales z0 allant de 2 mm à 8 mm. Les
dimensions de l’aimant et de la pastille supraconductrice ainsi que les propriétés physiques
utilisées dans la modélisation sont celles données précédemment. La figure IV.56.a
représente la dépendance de la position finale zf en fonction de la position initiale de
l’aimant donnée par z0. Ce calcul est basé sur l’utilisation des deux modèles. Selon les
résultats obtenus, il est clair que plus la position initiale est grande, plus l’aimant s’éloigne
du supraconducteur. Cette constatation peut devenir gênante. En effet, cela signifie qu’à la
moindre perturbation l’aimant pourrait se stabiliser à une autre position que celle attendue.
Il s’agit du phénomène de reptation. Un agencement convenable de supraconducteur et
d’aimants peut éviter cet état de fait [Hiebel 92]. D’après l’allure présentée dans cette
figure, on remarque qu’il existe un écart entre les deux allures calculées par les modèles
utilisés, cet écart apparaît à partir de la distance initiale z0 égale à 5 mm. L’effet thermique
commence à apparaître à partir de cette distance. Sur la figure IV.56.b, nous avons présenté
l’erreur absolue () entre la position finale zfs calculée à partir du modèle qui ne tient pas
compte de l’effet thermique et la position finale zfth calculée à partir du modèle qui tient
compte de l’effet thermique, en fonction de la position initiale z0. Il est évident que la
valeur de l’erreur traduit l’effet thermique sur la dynamique du système en lévitation. La
valeur de dépend de la valeur de la position initiale z0, plus la position initiale est grande,
plus l’effet thermique est considérable. Dans notre cas, on peut dire que l’effet thermique
commence à avoir de l’influence sur la dynamique du système en lévitation à partir de la distance initiale z0 = 4 mm.
IV.2.4.2. Formulation du deuxième problème
Pour la conception des systèmes en lévitation, il est important de prévoir leurs dynamiques
en soumettant par exemple le dispositif à un mouvement oscillatoire imposé [Gou 08],
[Gou 07], [Sugiura 96]. Dans le cas d’un système en lévitation conçu à partir d’un matériau
supraconducteur, le mouvement oscillatoire peut être imposé sur la pastille supraconductrice [Gou 08], [Sugiura 96].
Le système en lévitation présenté dans la figure IV.57 est composé d’un aimant permanent,
dont le déplacement est libre, et une pastille supraconductrice excitée verticalement par
une source extérieure qui assure un mouvement vertical sinusoïdal.
L’aimant permanent est placé à une distance initiale z0 lors du processus du
refroidissement. Il sera translaté verticalement jusqu’à la position zeq puis il sera relâché
pour poursuivre sans déplacement libre. Concernant la pastille supraconductrice, elle suit
un déplacement vertical imposé et assuré par une source d’excitation extérieure, ce déplacement est donné par :
Zsc = Za sin (2 fa t) (IV.18)

Chapitre IV. Applications et validations
135
où Za et fa sont respectivement, l’amplitude et la fréquence de la source d’excitation.
Le mouvement vertical de l’aimant permanent sera décrit par l’équation :
scZcscZmmgFzzczm mm
(IV.19)
m est la masse de l’aimant permanent, c est le coefficient de frottement et Fz est la force
d’interaction verticale produite entre l’aimant et la pastille supraconductrice, g est
l’accélération gravitationnelle et enfin zm est la position relative de l’aimant par rapport à
la pastille supraconductrice.
Pour la résolution du problème, nous procédons de la manière suivante :
Fig.IV.57. Structure du dispositif de lévitation avec une excitation extérieure.
Fig.IV.58. la disposition du système dans la première étape.
Fz
mg
zm
x
y z
×
Zeq
SHTC
PM
Z
0
×
Z0 La position de refroidissement
La position d’équilibre : Fz-mg = 0
La pastille est collée (fixe)
Fz
mg zm
x
y z
×
Zsc = Za sin (2fat)
Zm
SHTC
PM
z
0
Z
0

Chapitre IV. Applications et validations
136
- Etape de refroidissement jusqu’à la position d’équilibre : dans un premier temps, la
pastille supraconductrice sera refroidie et l’aimant sera placé à une distance initiale donnée
par zm=Z0 comme le montre la figure IV.58. Sur cette position, la répartition du champ
magnétique créé par l’aimant permanent sera considérée comme condition initiale pour
cette étape. La répartition des champs, magnétique et thermique, dans la position
d’équilibre sera déduite on supposant que l’aimant permanent se déplace de la position zm=Z0 jusqu'à la position zm=Zeq supposée connue.
- Etape d’excitation : Les solutions (thermique et magnétique) obtenues dans la première
étape seront prises comme conditions initiales de cette seconde étape. Cette étape résout les
trois problèmes, magnétiques, thermiques et enfin mécaniques tenant en compte le déplacement imposé sur la pastille supraconductrice.
Fig.IV.59. Organigramme de couplage magnétique-thermique-mécanique.
IV.2.4.2.1. Résultats des simulations
Les résultats des simulations présentés ci-dessous, représente le mouvement libre d’un
aimant permanent qui lévite au dessus d’une pastille supraconductrice dont le déplacement est imposé par une source d’excitation extérieure.
Vue la géométrie circulaire de la pastille supraconductrice, le code numérique utilisé dans
les simulations est celui qui adopte la MVFM pour la discrétisation de l’ensemble des équations caractéristiques aux phénomènes physiques à traiter.
Dans ces simulations, nous avons présenté la dynamique du système en lévitation en
utilisant deux modèles différents, le premier qui prend en compte la dépendance en
température des différents paramètres caractéristiques, liés à la pastille supraconductrice
tels que : la densité de courant critique Jc et le coefficient n dans la loi de puissance. Le
second qui ne prend pas en compte cette dépendance. Nous tenons à signaler que nous
avons aussi pris en considération, la dépendance en champ magnétique des diverses
grandeurs, caractéristiques à la pastille supraconductrice, en utilisant la loi de Kim présentée précédemment.
Problème magnétique-thermique Problème mécanique
Force de lévitation Fz
Position de l’aimant z

Chapitre IV. Applications et validations
137
Le tableau IV.7 résume les paramètres géométriques et physiques utilisés dans les
simulations :
Paramètres géométriques et physiques
Diamètre
(mm)
Hauteur
(mm)
Jc
(A/mm2)
Ec
(V/m)
B0
(T)
C
(Ns/m)
m
(g)
Z0
(mm)
Zeq
(mm)
supraconducteur 18 10 5×107 1×10-
4 0.5 0.5 5 4.5
Aimant
permanent 25 15 80
Paramètres thermiques de la pastille supraconductrice
symbole quantité valeur
ρ Masse volumique 5.4 g/cm3
Cp Chaleur spécifique 150 J/(Kg.K)
λ Conductivité thermique 5W/(m .k)
h Coefficient e convection du fluide cryogénique (Azote
liquide) 400 W/(m2 .k)
Tc Température critique 92 K
n0 Exposant n à 77°K en champ propre 1 μV/cm
La figure IV.60, représente la dynamique du système en lévitation dont la source
d’excitation a une amplitude de 0.1mm, pour différentes fréquences qui sont respectivement, 20Hz, 30Hz, 40Hz, 50 Hz, 70 Hz et enfin 100Hz.
Selon ces résultats, on peut dire que l’effet thermique ainsi que les paramètres liés à la
source d’excitation tels que : la fréquence et l’amplitude de la source d’excitation influent
considérablement sur la dynamique du système en lévitation.

Chapitre IV. Applications et validations
138
0 0.1 0.2 0.3 0.4 0.5-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
Figure. IV.60.a. Fréquence d’excitation fa = 20 Hz.
0 0.1 0.2 0.3 0.4 0.5-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Figure. IV.60.b. Fréquence d’excitation fa = 30 Hz.
Dép
lace
men
t ve
rtic
al z
m (
mm
)
Temps (s)
Mouvement oscillatoire de la pastille imposé (Zsc)
Mouvement oscillatoire de la pastille imposé (Zsc)
Zm : avec couplage thermique Zm : sans couplage thermique
Dép
lace
men
t ve
rtic
al z
m (
mm
)
Temps (s)
Zm : avec couplage thermique Zm : sans couplage thermique

Chapitre IV. Applications et validations
139
0 0.1 0.2 0.3 0.4 0.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Figure. IV.60.c. Fréquence d’excitation fa = 40 Hz.
0 0.1 0.2 0.3 0.4 0.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Figure. IV.60.d. Fréquence d’excitation fa = 50 Hz.
Temps (s)
Dép
lace
men
t ve
rtic
al z
m (
mm
)
Temps (s)
Mouvement oscillatoire de la pastille imposé (Zsc)
Mouvement oscillatoire de la pastille imposé (Zsc)
Dép
lace
men
t ve
rtic
al z
m (
mm
)
Zm : avec couplage thermique Zm : sans couplage thermique
Zm : avec couplage thermique Zm : sans couplage thermique

Chapitre IV. Applications et validations
140
0 0.1 0.2 0.3 0.4 0.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Figure. IV.60.e. Fréquence d’excitation fa = 70 Hz.
0 0.1 0.2 0.3 0.4 0.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Figure. IV.60.f. Fréquence d’excitation fa = 100 Hz.
Figure. IV.60. La simulation de la réponse dynamique d’un aimant permanent en lévitation
au dessus d’une pastille supraconductrice excitée par une source d’oscillation dont
l’amplitude est de 0.1mm et dont les fréquences sont respectivement : a) fa = 20Hz,
b) fa = 30 Hz, c) fa = 40 Hz, d) fa = 50 e) fa = 70 f) fa = 100. Les modèles utilisés sont
ceux qui prennent ou ne prennent en compte la dépendance de la température dans la dynamique du système.
Mouvement oscillatoire de la pastille imposé (Zsc)
Mouvement oscillatoire de la pastille imposé (Zsc)
Zm : avec couplage thermique Zm : sans couplage thermique
Zm : avec couplage thermique Zm : sans couplage thermique
Dép
lace
men
t ver
tica
l z m
(m
m)
Dép
lace
men
t ve
rtic
al z
m (
mm
)
Temps (s)
Temps (s)

Chapitre IV. Applications et validations
141
Dans l’ensemble des cas, la réponse dynamique du système en lévitation à la même
fréquence que celle de la source d’excitation imposée sur la pastille supraconductrice.
Concernant l’amplitude de la réponse dynamique, elle a un décalage de par rapport à
l’amplitude de la source d’excitation imposée sur la pastille supraconductrice, sauf dans le cas où la fréquence d’excitation est de 20 Hz où les amplitudes sont en phases.
Selon les résultats des simulations de la dynamique du système en lévitation, on peut dire
que la distance entre l’aimant et la pastille supraconductrice zm diminue avec le temps.
Cette diminution est plus importante dans le cas où l’effet thermique est pris en
considération, ceci est dû principalement à la diminution de la densité du courant critique provoquée par l’augmentation de la température au sein de la pastille supraconductrice.
Dans tous les cas des simulations présentées, à l’instant initial (à t = 0s), la pastille
supraconductrice repousse l’aimant sauf dans le cas où la fréquence de la source
d’excitation extérieure est de 20 Hz, où l’aimant ne peut être repoussé.
En comparant la dynamique du système en lévitation pour les différentes fréquences de la
source d’excitation imposée, on peut dire que dans les cas où la fréquence de la source est
prise égale à fa = 20Hz où à fa = 30 Hz. Le système présente des ondulations plus
importantes par rapport à celles des autres cas. Ces ondulations ont tendance à augmenter
avec le temps, ceci peut provoquer une instabilité du système en lévitation.
La figure IV.61 représente la répartition spatiale de la température au sein de la pastille
supraconductrice à l’instant t = 0.5s dans les cas où la fréquence d’excitation de la source
extérieure est de 20 Hz et de 100 Hz respectivement. Il est clair que l’effet de la température au sein de la pastille supraconductrice ne peut être négligé.
FigureIV.61. Répartition spatiale de la température au sein de la pastille supraconductrice à l’instant t = 0.5 s et pour les fréquences fa = 20 Hz et fa = 100 Hz respectivement.
Pastille supraconductrice T(k)
Pastille supraconductrice T(k)

Chapitre IV. Applications et validations
142
0 0.1 0.2 0.3 0.4 0.5-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0 0.1 0.2 0.3 0.4 0.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 0.1 0.2 0.3 0.4 0.5
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Figure IV.62. Erreur absolue entre les sommets supérieurs et inférieurs pour les fréquences fa = 30 Hz, fa = 50 Hz en enfin fa = 70 Hz.
A
B C D
a
b c d
A
B C D
a b c d
Erreur entre les sommets inférieurs Erreur entre les sommets supérieurs
Erreur entre les sommets inférieurs Erreur entre les sommets supérieurs
Erreur entre les sommets inférieurs Erreur entre les sommets supérieurs
Temps (s)
Temps (s)
Temps (s)
Err
eur
abso
lu e
ntre
les
som
met
s su
péri
eurs
et
les
som
met
s in
féri
eurs
(m
m)
Err
eur
abso
lu e
ntre
les
som
met
s su
péri
eurs
et
les
som
met
s in
féri
eurs
(m
m)
Err
eur
abso
lu e
ntre
les
som
met
s su
péri
eurs
et
les
som
met
s in
féri
eurs
(m
m)

Chapitre IV. Applications et validations
143
Dans le but de montrer l’influence de la température sur la dynamique du système en
lévitation où la pastille supraconductrice suit un déplacement imposé, nous avons tracé sur
la figure IV.62 l’erreur absolue () entre le déplacement de l’aimant par rapport à sa
position d’équilibre (Zeq) calculée à partir du modèle qui ne prend pas en compte l’effet
thermique et le déplacement de l’aimant par rapport à sa position d’équilibre calculé à
partir du modèle qui prend en compte l’effet thermique pour les trois fréquences fa = 30Hz, fa = 50 Hz en enfin fa = 70 Hz.
Dans ce calcul, l’erreur est déduite à partir des sommets supérieurs désignés
respectivement par les points A, B, C, D, …etc. et à partir des sommets inférieurs désignés respectivement par les points a, b, c, d….etc.
Selon les résultats obtenus, il est clair que la trajectoire de l’aimant calculée à partir des
deux modèles est différente. L’erreur absolue entre les deux trajectoires augmente avec le
temps, ceci est dû à l’augmentation de la température avec le temps au sein de la pastille
supraconductrice, on peut dire lors que l’effet thermique ne peut être négligé dans la
dynamique d’un système en lévitation où la pastille supraconductrice suit une trajectoire
oscillatoire imposée par une source extérieure.
Dans le but de montrer l’influence de l’amplitude et de la fréquence de la source
d’excitation sur la dynamique du système en lévitation, nous avons calculé l’erreur
moyenne entre la position de l’aimant, déduite à partir du modèle qui prend en compte
l’effet thermique et le modèle qui ne prend pas en compte l’effet thermique en fonction de
la fréquence et de l’amplitude de la source d’excitation, représentée respectivement sur les
deux figure IV.63.a et IV.63.b.
Il est clair que l’erreur moyenne traduit l’effet thermique sur la dynamique du système en
lévitation. D’après les résultats obtenus et présentés dans les figures, IV.63.a et IV.63.b, on
peut dire, que l’erreur moyenne est maximale pour les deux fréquences fa = 20 Hz et
fa = 30 Hz, c'est-à-dire dans les cas des fréquences où le système est peu stable, on peut
dire alors que l’effet thermique augmente dans le cas des systèmes en lévitation peu stable.
Selon la figure IV.63.b, on peut dire que l’erreur moyenne augmente avec l’augmentation
de l’amplitude de la source d’excitation, en effet, avec l’augmentation de l’amplitude de la
source, le module des oscillations présente dans la trajectoire de l’aimant augmente, et par conséquent, l’effet thermique augmente.
Ces résultats mènent à dire que l’effet thermique augmente dans les systèmes peu stables.
Cette instabilité peut être provoquée par l’augmentation des amplitudes des oscillations de
la pastille supraconductrice, où par certaines fréquences liées aux oscillations de la pastille supraconductrices.
On peut dire alors, qu’il existe des fréquences de résonance dans le cas d’un système en lévitation où la pastille supraconductrice suit un déplacement oscillatoire.

Chapitre IV. Applications et validations
144
0 20 40 60 80 1003
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8x 10
-5
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 13.5
4
4.5
5
5.5
6x 10
-5
a) b)
Figure. IV.63.a. erreur absolue en fonction de la fréquence fa. Figure. IV.63.b. erreur absolue en fonction de l’amplitude Za.
IV.2.5. Etude de la relaxation de la force de lévitation
Pour assurer la stabilité d’un système en lévitation, il est préférable que la force de lévitation, ou bien la force qui doit soulever la masse en lévitation soit constante pour un point de fonctionnement donné [Smolyak 02]. (Le point de fonctionnement est le point où la masse à porter doit être immobile). Des travaux expérimentaux ont montré que la force de lévitation dans un point de fonctionnement décroit avec le temps [Suzuki 07], [Tseng 04], on appelle ce phénomène, la relaxation de la force de lévitation [Smolyak 02], [Tseng 04]. Dans ce contexte et dans le but d’étudier l’influence de la température du fluide cryogénique où bien la température de milieu extérieur sur la relaxation de la force de lévitation, nous avons étudié ce phénomène par l’outil de simulation développé. Dans un premier temps, nous avons reproduit en simulation un essai expérimental réalisé par Yoshida [Yoshida 94]. Il s’agit de calculer la force d’interaction produite entre un aimant et une pastille supraconductrice à la température de l’azote liquide (T = 77K). Dans cette expérience, l’aimant placé sur une distance verticale initiale z0 = 25 mm sera rapproché de la pastille supraconductrice progressivement selon une vitesse constante v = 12.25 mm/s. jusqu’à sa position finale z = 0.5mm à l’instant t= 2s où il sera arrêté. La figure IV.64 représente la variation temporelle de la force d’interaction entre l’aimant et la pastille supraconductrice calculée et mesurée [Yoshida 94].
Err
eur
abso
lue
=
z1-
zf2 (
mm
)
Err
eur
abso
lue
=
z1-
zf2 (
mm
)
Fréquences (Hz) Amplitudes (mm)

Chapitre IV. Applications et validations
145
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Figure. IV.64. Force d’interaction verticale, calculée et mesurée.
En comparant les deux figures, on peut dire qu’il y a une bonne concordance entre les calculs et les mesures de force, même après l’arrêt de l’aimant (à partir de t = 2s).
Après l’instant t = 2s, c'est-à-dire après l’arrêt de l’aimant, la force de lévitation diminue
régulièrement avec le temps, cela est dû nécessairement aux effets : flux Creep et flux
Flow ainsi que l’effet thermique sur les propriétés physiques de la pastille supraconductrice, principalement la densité de courant critique Jc.
0 20 40 60 80 100 1200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 20 40 60 80 100 1200
1
2
3
4
5
6
7
8
9
Figure. IV.65. Force d’interaction verticale calculée jusqu’à t = 120 secondes pour T = 10K, T = 20K, T = 30 K, T = 50K, T = 60 K, T = 77K et enfin T = 85K.
Temps(s) F
orce
de
lévi
tati
on (
N)
Temps(s)
For
ce d
e lé
vita
tion
(N
)
For
ce d
e lé
vita
tion
(N
)
T = 77K
Force calculée Force mesurée
Temps(s)
T = 20K
T = 30K
T = 50 K
T = 77 K T = 60 K
T = 85 K
T = 10K

Chapitre IV. Applications et validations
146
Dans le but de prévoir l’évolution temporelle de la force de lévitation après l’arrêt de
l’aimant, pour différentes températures du milieu extérieur (de T = 10 K à T = 85K), nous
avons calculé la force d’interaction produite sur une durée de 120 secondes. Les forces calculées sont présentées dans la figure IV.65.
Afin de montrer l’effet de la température du milieu extérieur sur la relaxation de la force de
lévitation, nous avons calculé la force d’interaction entre l’aimant et la pastille supraconductrice pour des températures qui varient entre T = 10 K et T = 85K.
La figure IV.66 représente la variation temporelle de la force de lévitation normalisée par
rapport à la valeur maximale de la force de lévitation pour des températures qui varient entre 10K et 85K selon une échelle de temps logarithmique.
Selon les résultats présentés on peut dire que le temps de relaxation diminue considérablement avec la diminution de la température du milieu extérieur.
Selon la figure IV.66, on peut dire que la diminution de la force de lévitation est presque
linéaire pour les très basses températures. Aux voisinages de la température critique (T = 92 K), on perd cette linéarité.
La variation temporelle de la force de lévitation normalisée par rapport à sa valeur
maximale, peut être exprimée par la relation suivante :
F/F0 = a log(t/t0) + b
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.50.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure. IV.66. variation temporelle de la force de lévitation normalisée par rapport à sa valeur maximale pour T = 10K, T = 20K, T = 30 K, T = 50K, T = 60 K, T = 77K et enfin
T = 85K.
F/F
0
Temps(s)
T = 20K
T = 30K
T = 50 K
T = 77 K
T = 60 K
T = 85 K
T = 10K

CONCLUSION GENERALE

Conclusion générale
147
Conclusion générale
Ce travail était relatif à la modélisation tridimensionnelle des matériaux supraconducteurs.
Les applications ont été principalement dédiées à l’étude des paliers magnétiques (étude de
l’interaction entre aimant permanent et supraconducteurs) et à l’étude des phénomènes
magnétothermiques couplés dans les supraconducteurs à haute température critique durant le
processus d’aimantation des pastilles supraconductrices. Afin d’obtenir la résolution
numérique du problème étudié, nous avons poursuivi le développement des deux codes de
calcul numérique des grandeurs électromagnétiques et thermiques dans les matériaux
supraconducteurs où la méthode des volumes finis MVF a été adoptée. Le premier code utilise
une approche de la MVF où le maillage structuré est utilisé (MVFC), le deuxième code utilise
une autre approche de la MVF où le maillage non structuré est utilisé (MVFM). Le choix
entre ces deux méthodes est basé essentiellement sur la géométrie du dispositif à modéliser. Si
la géométrie possède une structure hexaédrique, l’application de la première approche est
avantageuse en termes de temps de calcul et de simplicité. Par contre, cette première approche
présente l’inconvénient de ne pas pourvoir modélisé des dispositifs ayant des géométries
complexes. C’est véritablement tout l’intérêt de la deuxième approche de la MVF, le maillage
va suivre naturellement la forme de la structure, les géométries complexes seront modélisées
de façon plus rigoureuses et plus conformes sans que cela ne génère un nombre de mailles trop important.
L’étude du comportement des supraconducteurs dans le cadre des paliers magnétiques
nécessite la connaissance de la force de lévitation. Cette dernière a été appréciée
verticalement et latéralement en vu de la géométrie du problème. Elle a pu être obtenue grâce
au modèle introduit et a fait l’objet de comparaison avec l’expérience. On s’est intéressé, dans
un premier temps à l’étude des différents paramètres caractéristiques des deux dispositifs, le
premier, constitué d’un simple aimant permanent et d’un supraconducteur (les systèmes à
faible champ magnétique), le second constitué d’un système de guidage magnétique et d’un
supraconducteur (les systèmes à fort champ magnétique). Une étude comparative entre les
deux systèmes nous a amené à dire que la force de lévitation dans le cas des systèmes à fort
champ magnétique est plus importante que dans le cas des systèmes à faible champ
magnétique. En effet, la pression magnétique dans les systèmes de fort champ magnétique est
de l’ordre de 9 à 10 N/cm2 alors quelle n’est que de 2 à 3 N/cm2 dans les systèmes de faible champ magnétique.
L’étude des paliers magnétiques nous a conduits à étudier l’interaction entre un aimant et un
supraconducteur lorsqu’ils interagissent librement. On a donc couplé au modèle magnétique –
thermique le modèle mécanique. Cela nous a permis, entre autres, de mettre en évidence
l’effet thermique dans la dynamique d’un système en lévitation, cet effet peut accélérer la stabilité du système en lévitation.
L’étude du comportement des supraconducteurs durant le processus d’aimantation a montré
qu’il y’a une élévation importante de la température au sein de la pastille supraconductrice.
Ce comportement est dû aux mouvements des vortex durant le processus d’activation par
MCP impliquant une dissipation de chaleur qui est accompagnée par une élévation importante
de la température. Cette augmentation de température conduit à une diminution de la densité

Conclusion générale
148
de courant et par la suite à celle également de l’induction magnétique piégée. Le
comportement magnétothermique de la pastille durant son aimantation dépend principalement
de la vitesse de croissance du champ de magnétisation. L’échauffement de la pastille est plus
important dans le cas des décharges rapides (variation importante du champ magnétisant). Les
meilleurs performances en terme de valeur du champ magnétique produit par la pastille
aimantée et en terme de courant au sein de la pastille, sont obtenus avec un champ
d’aimantation de grande vitesse de variation. L’inconvénient majeur de ce type d’aimantation
est l’augmentation de l’énergie dissipée et par conséquent, l’augmentation de la température au sein de la pastille supraconductrice à aimanter.
Une technique a été proposée, elle consiste à créer des canaux dans le matériau
supraconducteur refroidis par le liquide cryogénique, dans le but d'augmenter la valeur du
champ magnétique piégé dans les supraconducteurs durant le processus d’activation par MCP.
Grace à cette technique, le transfert de chaleur par convection entre la pastille
supraconductrice et le milieu extérieur est renforcé. Cette technique est alors accompagnée
par une diminution de la température à l’intérieur du supraconducteur, conduisant à une
amélioration des performances électromagnétiques du supraconducteur durant son processus d’aimantation. Un nombre optimal (volume optimal) de canaux a été trouvé
Comme perspectives, nous proposons l’utilisation des codes de calcul développés pour étude du comportement magnétothermiques des applications suivantes :
- Limiteur de courant à base de matériaux supraconducteurs à haute température critique,
- Les machines supraconductrices, (optimisation et modélisation).

BIBLIOGRAPHIE

149
Bibliographie
[Ailam 06] E. H. Ailam., “Machine synchrone à plots supracondcuteurs : Etude et réalisation”, Thèse de l’Université de Henri Poincaré, Nancy-I, 2006.
[Alloui 09 b] L. Alloui, F. Bouillault and S.M. Mimoune., “Modélisation 3D par la méthode des volumes finis des phénomènes électromagnétiques et thermiques couplés dans les matériaux supraconducteurs à haute température critique”, to be published in Revue internationale de Génie électrique, RIGE, 2009.
[Alloui 09 a] L. Alloui, F. Bouillault and S. M. Mimoune, “Numerical Study of the Influence of flux creep and of Thermal Effect on Dynamic Behaviour of Magnetic Levitation Systems with a high-Tc superconductor using control volume method”, EPJ. App. Phys., Vol. 37, No. 2, pp. 191-195, Feb. 2009.
[Alloui 08] L. Alloui, F. Bouillault, S. M. Mimoune, “Modélisation tridimensionnelle des matériaux supraconducteur par la méthode des volumes finis”, Conférence sur les matériaux du génie électrique (MGE), Toulouse France, Proc., Art. P3, Mai. 2008.
[Alonso 04] D. R. Alonso et al, ‘‘Numerical analysis of high temperature superconductors with the critical-state model,’’ IEEE Trans on Applied superconductivity, vol. 14, no. 4, pp. 2053-2062, December. 2004.
[Anderson 62] P. W. Anderson, ‘‘Theory of flux creep in hard superconductors,’’ Phys. Rev. Let, 1962, Vol 9, no 7,p309.
[Anderson 64] P. W. Anderson, and Y.B. Kim, ‘‘Hard superconductivity: Theory of the motion of abriskov flux lines,’’ Rev. Mod. Phys, 36 (1964), p39.
[Bardeen 57] J. Bardeen, I. N. Cooper and J. R. Schrieffer., “Theory of superconductivity, Phys. Rev. 108 (1957) 329.
[Baldan 04] Carlos A. Baldan et al., “Resistive fault current limiter using HTS singlelayer coils”, Physica C 408–410 (2004) 937–939.
[Baixeras 98] J. Baixeras., “les supraconducteurs. Applications à l’électronique et à l’électrotechnique”, Erolles, CNRS Editions, 1998.
[Bednorz 86] J. G. Bednorz and K. A. Müller., “Possible high Tc superconductivity in the BaLaCuo system”, Z. Phys. B. Cond. Matter 64 (1986) 189.
[Bellin 06] B. Bellin., “Contributions à l’étude des bobinages supraconductrices : le projet DGA du SMES HTS impulsionnel”, Thèse de l’INP de grenoble, 2006.
[Bean 62] C. P. Bean ‘‘Magnetization of hard superconductors,’’ Physical Review Letters, vol. 8 (6), pp. 250-253, 1962.
[Berger 05] K. Berger and al, ‘‘Ac transport losses using calculation in a BI-2223 current lead using thermal coupling with an analytical formula,’’ IEEE Trans on Applied superconductivity, vol. 15, no. 2, pp. 1508-1511, June. 2005.

150
[Biro 89] O. Biro and K. Preis, “On the use of the magnetic vector potential in the finite element analysis of three dimentional eddy currents”, IEEE Trans. Magn., Vol. 25, No. 4, pp. 3145-3159, Jul. 1989.
[Bird 08] J. Bird and al., ‘‘Calcultating the forces created by an electrodynamic wheel using a 2-D steady-state finite element method,’’ IEEE Trans on Magntics, vol. 44, no. 3, pp. 365-372, March. 2008.
[Bossavit 93] A. Bossavit ‘‘Sur la modélisation des supraconducteurs : le modèle de l’état critique de bean en trios dimensions,’’ J. Phys III France,3, pp. 373-396, 1993.
[Bonnet 97] F. Bonnet and F. Poupaud, ‘‘Berenger absorbing boundary condition with finite-volume scheme for triangular meshes, Applied Numerical Mathematics,’’ No 25, pages 333-354, 1997.
[Braeck 02] S. Braeck et al., “Superconducting trapped-field magnets : temperature and field distributions during pulsed-field activation”, Journal of Applied Physics, vol. 92, n° 10, November 2002, pp. 6235-6240.
[Buzon 02] D.Buzon, “Limitation de courant à partir de matériaux supraconducteurs HTc”, Thèse de doctorat, Spécialité génie électrique, Institut national polytechnique de Grenoble, 2002.
[Chen 04] M. CHEN et al., “High Temperature superconductors for power applications”, Journal of the European Ceramic Society 24(2004) 1815-1822.
[Cioni 95] J-P. Cioni, ‘‘Résolution numérique des équations de Maxwell instationnaires par une méthode de Volumes Finis,’’ Thèse de doctorat à l’université de Nice Sophia-Antipolis, Décembre 1995.
[Clem 87] J. R. Clem, and al, ‘‘Ambegaokarbaratoff-Ginzburg-Landau crossover effects on the critical current density of granular superconductors,’’ Physical Review B, vol. 35 (13), pp. 6637-6642, 1987.
[Davies 96] J. B. Davies and A. J. Dean., “Finite volume with non-uniform mesh for the solution of Maxwell’s equations”, IEEE Trans. Magn., Vol. 32, No. 3, pp. 1417-1420, May 1996.
[Dhatt 84] G. Dhatt et G. Touzot, ‘‘Une présentation de la méthode des éléments finis,’’ deuxième édition, 1984.
[Douine 00] B.Douine and al., ‘‘AC loss measurement of a high critical temperature superconductor transporting sinusoidal or non-sinusoidal current,’’ IEEE Trans on Applied superconductivity, vol. 10, no. 1, pp. 1489-1492, March. 2000.
[Douine 08] B.Douine and al., ‘‘Analytical calculation of the instantaneous power in a current carrying superconducting tube with Jc(B),’’ IEEE Trans on Applied superconductivity, vol. 18, no. 3, pp. 1717-1723, September. 2008.
[Elbuken 07] C. Elbuken and al., ‘‘Modeling and analysis of eddy-current damping for high-precision magnetic levitation of a small magnet,’’ IEEE Trans on magnetics, vol. 43, no. 43, pp. 26-32, January. 2007.

151
[Enomoto 05] N. Enomoto, T. Izumi and N. Amemiya, ‘‘Electomagnetic field analysis of rectangular superconductor with large aspect ratio in arbitrary orientated magnetic fields,’’ IEEE Trans on Applied superconductivity, vol. 15, no. 2, pp. 1574-1577, June. 2005.
[Fetzer 96] J. Fetzer, S. Kurz and G. Lehner, “Comparison between different formulations for the solution of 3D nonlinear Magnetostatic problems using BEM-FEM coupling”, IEEE Trans. Magn., Vol. 32, No. 3, pp. 663-666, May 1996.
[Floch 99] E. Floch., “Conception d’un transformateur impulsionnel supraconducteur Modélisation de la transition / Validations”, Thèse de l’Université de Franche-Comté, 1999.
[Fou 00] H. T. S. Fou., “Modélisation de dispositifs supraconducteurs : Application à la lévitation magnétique”, Thèse de doctorat de l’Université de Paris XI, 2000.
[Fou 00] S. H. Fou, A. Erraud and F. Bouillault, ‘‘Numerical Modeling of the association of magnet and HTS superconductors,’’ IEEE Trans on Magntics, vol. 36, no. 4, pp. 1197-1200, July. 2000.
[Fujioka 96] T. Fujioka. ‘‘3-D analysis of current distribution and AC loss induced by external AC magnetic field in multifilamentary superconducting wires,’’ IEEE Trans on Magntics, vol. 32, no. 3, pp. 1140-1143, May. 1996.
[Geindustrial] www.geindustrial.com
[Ginzburg 50] V. L. Ginzburg and L. D. Landau., “On the theory of superconductivity”, Zhurnal Eksperimental’noi i Teoreticheskoi Fiziki, vol. 20, pp. 1064-1082, 1950.
[Gou 07] X.F. Gou and al., ‘‘Drift of levitated/suspended body in hign-Tc superconducting levitation system uunder vibration – Part II: Drift velocity for gap varying with time’’ IEEE Trans on Applied superconductivity, vol. 17, no. 3, pp. 3803-3808, September. 2007.
[Gruss 01] S. Gruss, G. Fuchs, G. Krabbes, P. Verges, G. Stover, K. H. Muller, J. Fink, L. Schultz, “Superconducting bulk magnets: very high trapped fields and cracking”, Appl. Phys. Lett 79, pp. 3131-3133, 2001.
[Gunther 92] C. Gunther and al, ‘‘Jonction Josephson en couche épaisse d’oxydes supraconducteurs,’’ J. Phys. III. France 2 (1992) , pp. 255-262.
[Hashizume 96] H. Hashizume and al., ‘‘three dimensional evaluation of the current distribution in twisted superconductors,’’ IEEE Trans on Magntics, vol. 32, no. 3, pp. 1152-1155, May. 1996.
[He 04] Chunyoung He and al, ‘‘Trapped field and related properties in a superconducting-disk magnetized by pulse field,’’ IEEE Trans on Applied superconductivity, vol. 14, no. 4, pp. 2025-2030, December. 2004.
[Hiebel 92] P. Hiebel, “Paliers magnétique supraconducteurs”, Thèse de doctorat, Spécialité génie électrique, Institut national polytechnique de Grenoble, 1992.

152
[Hull 99] J. R. Hull and A. Cansiz., “Vertical and lateral forces between a permanent magnet and a high-temperature superconductor”, Journal of applied physics., Vol. 8617, No. 11, pp. 6393-6404, Dec. 1999.
[Ioan 06] C. Ioan and al., “Modèle numérique électrothermique pour l’optimisation des contacts démontables de forts courants ”, Annals of the university of craiova, electrical engineering series, No. 30, 2006.
[Joo 07] J. H. Joo and al., ‘‘Design of electromagnet for high levitation force in 3D superconducting actuator,’’ Proceeding of international conference on electrical machines and systems 07, pp. 1549-1552, Seoul, Korea, Oct 2007.
[Jiang 02] Jiang He and all, « The magnetic levitation performance of YBaCuO bulk
at different temperature », Physica C 378–381 (2002) 868–872.
[Kameni 09] Abelin Kameni, Denis Netter, Frédéric Sirois, Bruno Douine, and Jean Lévêque, ‘‘ New Hybrid FE-FV Method for Computing Current Distribution in 2-D Superconductors: Application to an HTS Cylinder in Transverse Magnetic Field,’’ IEEE Trans. Appl. Supercond., vol. 19, no.3, pp. 2423-2427, June. 2009.
[Kasal 08] R. B. Kasal and E. V. de Mello, ‘‘Modeling and simulation of precursor diamagnetism in high critical temperature cuprates,’’ 8th European conference on applied superconductivity (EUCAS 2007).
[Kasal 07] R. B. Kasal and al., ‘‘Simulation of dynamic levitation force tacking flux creep,’’ IEEE Trans on Applied superconductivity, vol. 17, no. 2, pp. 2158-2160, June. 2007.
[Kes 89] P. H. Kes and al, ‘‘Thermally assisted flux flow at small driving forces,’’ Superconductor Science Technology, Vol. 1, pp. 242-248, 1989.
[Kim 62] Y. B. Kim and al, ‘‘Critical persistent currents in hard superconductors,’’ Phy. Rev. Lett. 9(7), pp. 306-309, 1962.
[Klutsch 03] I. Klutsch ‘‘Modélisation des supraconducteurs et mesures,’’ Thèse de l’INP de grenoble, 2003.
[Kummeth 05] P. Kummeth , M. Frank, W. Nick, G. Nerowski, H.-W. Neumueller., “Development of synchronous machines with HTS rotor”, Physica C 426–431 (2005) 1358–1364.
[Labbé 98 a] S. Labbé. EMicroM, logiciel. ONERA. numéro APP : IDDN. FR. 001.320023.R.P. 1998.000.31235.
[Labbé 98 b] S. Labbé and P. Leca., “Résolution rapide des équations de Maxwell quasistationnaires : matrices Toeplitz multidimensionnelles. Application au micromagnétisme”, C. R. Acad. Sci. Paris, Série I (t. 327) :415–420, 1998.
[Leghissa 02] M. Leghissa., “Development and application of superconducting transformers”, Physica C 372–376 (2002) 1688–1693.
[lipower 08] www.lipower.org

153
[London 35] F. London and H. London., “The electromagnetic equations of the superconductor”, Proceeding of the Royal Society of London, series A, vol. 149, pp. 71-88, 1935.
[Malozemoff 02] A. P. Malozemoff, J. Maguire, B. Gamble and S. Kalsi., “Power Applications of High Temperature Superconductors: Status and Perspectives”, IEEE Transaction on Applied Superconductivity, Vol. 12, No. 1, March 2002.
[Maslouh 98] M. Maslouh, F. Bouillault and al, ‘‘Numerical Modeling of superconductor materials using anisotropic kim law,’’ IEEE Trans on Magntics, vol. 34, no. 5, pp. 3064-3067, September. 1998.
[Meissner 33] W. Meissner and R. Ochsenfeld., “Ein neuer effekt bei eintritt der supraleitfahigkeit”, Naturwissenschaften, vol. 21, 1933.
[Meunier 02] G. Meunier, Electromagnétisme et problèmes couples. EGEM électronique, génie électrique, microsystèmes, paris Hermès 2002 Chapitre I pp. 21-63.
[Miki 06] M. Miki et al, “Development of a synchronous motor with a Gd-Ba-Cu-O bulk superconductors as pole-field magnets for propulsion system”, Supercond. Sci. Technol. vol. 19, n°7, 2006, S494-S499.
[Mizutani 00] U. Mizutani., “Applications of superconducting permanent magnets driven by static and pulsed fields”, Supercond. Sci. Technol. vol. 13, n°6, 2000, pp. 836-840.
[Mukoyama05] Shinichi Mukoyama., “Development of 500m HTS power cable in super-ACE project”, Cryogenics 45 (2005) 11–15.
[Neumuller 06] H.W. Neumuller, W. Nick, B. Wacker, M. Franck, G. Nerowski, J. Frauenhofer,W. Rzadki and R. Hartig., “Advances in and prospects for development of high-temperature superconductor rotating machines at Siemens”, Supercond. Sci. Technol. 19 (2006) S114-S117.
[Nibbio 99] N. Nibbio “Nonlinear electromagnetic modeling of high temperature superconducting tempes”, thèse de l’école polytechnique fédérale de lausane 1999.
[Nougier] J. P. Nougier, “Méthodes de calcul numérique”, 3éme édition, Edition Masson.
[Parker 95] G.J. Parker, T.R. Abel « United States Air Force Micro-Superconducting Magnetic Energy Storgae Technology Insertion Program » Proceedings of the 1995 Power Quality Conference, pp 541-539, Bremen, November 1995.
[Patankar 80] Patankar Suhas V., « Numerical heat transfer and fluid flow », Series in Computational methods in mechanics and thermal sciences. 1980, Hemisphere publishing corporation.
[Pelletier] J. P. Pelletier, ‘‘Techniques numériques appliqués au calcul scientifique,’’ Edition Masson et Cie ; pp. 132, 135.

154
[Ren 03] Z. Ren all, « Influence of shape and thikness on the levitation force of YBaCuO bulk HTS over a NdFeB guideway », Physica C 384 (2003) 159–162.
[Remaki 98] M. Remaki and al “Un nouveaux schéma de types volumes finis appliqué aux équations de Maxwell en milieu hétérogène ”, Rapport de recherche No. 3351, INRIA, ISSN 0249-6399, Janvier 1998.
[Rhyner 93] J. Rhyner, ‘‘Magnetic properties and ac losses of superconductors with power law current-voltage characteristics,’’ Physica C, Vol. 212, pp. 292-300, 1993.
[Rose 78] A.C. Rose-Innes and E.H. Rhoderick., “Introduction to Superconductivity”, Oxford, England: Pergamon Press plc, 1978.
[Ruiz 04] C. Elbuken and al., ‘‘Modeling and analysis of eddy-current damping for high-precision magnetic levitation of a small magnet,’’ IEEE Trans on magnetics, vol. 43, no. 43, pp. 26-32, January. 2007.
[Sander 02] M. Sander et al., “Comparison of pulsed field magnetization processes for HTS bulk parts”, Supercond. Sci. Technol. vol. 15, n°5, 2002, pp. 748.
[Shiraichi 03] R. Shiraichi and al., ‘‘Numerical and experimental anlysis of the rotation spped degradation of superconducting magnetic bearings’’ IEEE Trans on Applied superconductivity, vol. 13, no. 2, pp. 2279-2282, June. 2003.
[Snitchler 05] G. Snitchler, B. Gamble and S. Kalsi., “The performance of a 5 MW High Temperature Superconducor Ship Propultion Motor”, IEEE Transaction on Applied Superconductivity, Vol. 15, No. 2, June 2005.
[Song 06] H. Song et al., “Optimization end design of the permanent magnet guideway with the high temperature superconductor”, IEEE Trans on applied superconductivity., Vol. 16, No. 2, pp. 1023-1026, June. 2006.
[Sugiura 96] T. Sugiura and H. Fujimori, ‘‘Machanical resonance characteristics of a high-Tc supraconducting levitation system’’ IEEE Trans on Magnetics, vol. 32, no.3, pp. 1066-1069, May. 1996.
[Suzuki 07] T. Suzuki and all, ‘‘Temperature dependency of levitation force and its relaxation in HTS’’ IEEE Trans. Appl. Supercond., vol. 17, no.2, pp. 3020-3023, Jun. 2007.
[Sykulski 00] Sykulski and al., ‘‘2D Modeling of field diffusion abd AC losses in high temperature superconducting tapes,’’ IEEE Trans on Magnetics, vol. 36, no. 4, pp. 1178-1181, July. 2000.
[Sykulski 97] J. K. Sykulski and al., ‘‘Modelling HTc superconductors for AC power loss estimation,’’ IEEE on Magnetics, vol. 33, no. 2, pp. 1568-1571, March. 1997.
[Teranishi 02] Y. Teranishi et al., “Static and dynamic characteristics in levitating X-Y transporter using HTS bulks”, IEEE Trans on applied superconductivity., Vol. 12, No. 1, pp. 911-914, March. 2002.
[Tixador 95] P. Tixador., “les supraconducteurs, traité des nouvelles technologies”, série matériaux, Hermès.

155
[Tixador 03] P. Tixador., “Matériaux supraconducteurs”, Lavoisier, 2003.
[Tixador 06] P. Tixador, C. Villard et Y. Cointe., “DC superconducting fault current limiter”.
[Tixador 02] P. Tixador., “Superconducting fault current limiter with bulk materials”, Physica C 378–381 (2002) 815–822.
[Tournier 03] R. F. Tournier., “c-Axis YBCO domains for current limiting applications”,
[Tomita 03] M. Tomita, M. Murakami, “High-temperature superconductor bulk magnets that cant rap magnetic fields of over 17 tesla at 29 K”, Nature, vol. 421, pp. 517-520, 2003.
[Tsuchimoto 94] M. Tsuchimoto and al., ‘‘Nulerical evaluation of levitation force of HTSC flywheel,’’ IEEE Trans on Applied superconductivity, vol. 4, no. 4, pp. 211-215, December. 1994.
[Ueda 03] K. Ueda, K. Yasuda, K. Inoue, A. Kikuchi and K. Iwadate., “R&D of HTS power cable and fault current limiter in Super-ACE project”, Physica C 392–396 (2003) 1171–1179.
[Vinot 02] E. Vinot and al., ‘‘Circuit coupling method applied to bulk superconductors’’ IEEE Trans on Applied superconductivity, vol. 38, no. 6, pp. 3661-3664, November. 2002.
[Yamashita 88] T. Yamashita and al, ‘‘Jonction Josephson en couche épaisse d’oxydes supraconducteurs,’’ J. Phys. III. France 2 (1992) , pp. 255-262.
[Yoshida 94] Y. Yoshida, M. Uesaka, and K. Miya, ‘‘Magnetic field and force analysis of high Tc superconductor with flux flow and creep,’’ IEEE Trans. Magn, vol. 30, no. 5, pp. 3503-3506, Sep. 1994.
[Zhang 08] X. Y. Zhang and all, « Effects of magnetic history on the levitation characteristics in a superconducting levitation system », Physica C 468 (2008) 1013–1016.
[Zheng 07] X. Zheng and Y. Yang., “Transition cooling height-temperature superconductor levitation system”, IEEE Trans on applied superconductivity., Vol. 17, No. 4, pp. 3862-3866, Dec. 2007.
[Zheng 05] X. J. Zheng et al, ‘‘Influence of flux creep dynamic behaviour of magnetic levitation systems with a high-Tc superconductor,’’ IEEE Trans on Applied superconductivity, vol. 15, no. 3, pp. 1574-1577, September. 2005.
[Zheng 06] J. Zheng and al., ‘‘Numerical Method to the excited high-Tc superconducting levitation system above the NdFeb guideway,’’ IEEE Trans on Magnetics, vol. 42, no. 4, pp. 947-950, April. 2006.
[Zong 03] X.H. Zong, J.X. Wang, J. Sun, Y.N. Wang., “Study on inductive high-Tc superconducting fault current limiters”, Physica C 386 (2003) 522–526.
[Zou 04] J. Zou, J. S. Yuan et al., “Magnetic field analysis of iron-core reactor coils by the finite-volume method”, IEEE Trans. Magn., Vol. 40, No. 2, pp. 814-817, Mar. 2004.

Résumé--- nous présentons une contribution à la modélisation tridimensionnelle des phénomènes électromagnétiques et thermiques couplés dans les matériaux supraconducteurs à haute température critique. La méthode des volumes finis est adoptée comme méthode de résolution des équations aux dérivées partielles caractéristiques aux phénomènes physiques traités. Le couplage électromagnétique thermique est assuré par un algorithme alterné. L’ensemble des modèles mathématico-numériques ainsi développés et implémentés sous Matlab, sont appliqués pour étudié le comportement des supraconducteurs dans le cadre des paliers magnétiques et pour étudier le comportement des supraconducteurs durant le processus d’aimantation. Les résultats à caractère magnétique et ceux à caractère thermique sont largement présentés. La validité du travail proposé est atteinte par comparaison des résultats ainsi obtenus à ceux donnés par l’expérimentation. Mots clés--- Modélisation Numérique, Electromagnétisme, Thermique, Couplage Magnéto-Thermique, Volumes Finis, Algorithme Alterné, supraconducteurs à haute température critique.
Abstract--- We present a contribution for three-dimensional modeling of coupled electromagnetic and thermal phenomena in high temperature superconductor. The control volume method is used for the resolution of the partial derivative equations characterising of the treated physical phenomena. The electromagnetic and thermal coupling is ensured by an alternate algorithm. All mathematical and numerical models thus developed and implemented in Matlab software, are used for the simulation. The results in magnetic term and those in thermal term are largely presented. The validity of the suggested work is reached by the comparison of the results so obtained to those given by the experiment.
Key words -- Numerical Modelling, Electromagnetism, Thermal, Magneto-Thermal Coupling, Control Volumes, Alternate Algorithm, high temperature superconductors.





























