Embed Size (px)
Citation preview

ĐSTANBUL TEKNĐK ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ
YÜKSEK LĐSANS TEZĐ Osman CEYLAN
Anabilim Dalı : Elektronik ve Haberleşme Mühendisliği
Programı : Elektronik Mühendisliği
HAZĐRAN 2009
FREKANS MODÜLASYONLU SÜREKLĐ DALGA RADARI TASARIMI VE GERÇEKLEMESĐ
Tez Danışmanı: Öğr. Gör. Dr. H. Bülent YAĞCI


HAZĐRAN 2009
ĐSTANBUL TEKNĐK ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ
YÜKSEK LĐSANS TEZĐ Osman CEYLAN
(504061221)
Tezin Enstitüye Verildiği Tarih : 04 Mayıs 2009
Tezin Savunulduğu Tarih : 04 Haziran 2009
Tez Danışmanı : Öğr. Gör. Dr. H. Bülent YAĞCI (ĐTÜ) Diğer Jüri Üyeleri : Prof. Dr. Sema OKTUĞ (ĐTÜ)
Doç. Dr. Selçuk PAKER (ĐTÜ)
FREKANS MODÜLASYOLU SÜREKLĐ DALGA RADARI TASARIMI VE GERÇEKLEMESĐ


iii
Anneme ve babama,

iv

v
ÖNSÖZ
Öncelikle lisans ve yüksek lisans eğitimim boyunca her konuda bana destek olan danışmanım Sayın Dr. H. Bülent Yağcı’ya teşekkür etmek istiyorum. Teori ile gerçekler arasındaki köprüyü kurma konusunda bilginin ve bilgiyi kullanabilmenin önemini bana en iyi şekilde göstererek mühendislik mesleğinin güzelliğini bir kez daha anlamamı sağlamıştır. Farklı ve tecrübe dolu görüşleriyle sentezlenmiş hayata dair tavsiyelerini de ömrüm boyunca hiç aklımdan çıkarmayacağım.
Çalışmalarım sırasında tasarım sorunlarımla sabırla ilgilenen Sayın Doç. Dr. Selçuk Paker’e teşekkür ederim.
Yüksek lisans eğitimim sırasında en önemli kararları verdiğim anlarda yanımda olan Sayın Müh. Sevcan Erşan’a en içten duygularım ile teşekkür ederim.
Benden uzakta olsalar da her an yanımdaymış gibi desteklerini sürdüren aileme de sonsuz teşekkür ederim.
Yüksek lisans eğitimim süresince beni maddi olarak destekleyen TÜBĐTAK’a ve tezimin gerçeklenmesi için gerekli maddi desteği sağlayan ĐTÜ’ye de teşekkürlerimi sunarım.
Mayıs 2009
Osman Ceylan
(Elektronik Mühendisi)

vi

vii
ĐÇĐNDEKĐLER
Sayfa
ÖNSÖZ........................................................................................................................v ĐÇĐNDEKĐLER........................................................................................................vii KISALTMALAR......................................................................................................ix ÇĐZELGE LĐSTESĐ..................................................................................................xi ŞEKĐL LĐSTESĐ......................................................................................................xiii ÖZET.........................................................................................................................xv SUMMARY..............................................................................................................xii 1. GĐRĐŞ.......................................................................................................................1
1.1 Tezin Amacı ve Kapsamı...................................................................................2 1.2 Çalışmanın Katkıları..........................................................................................2
2. RADAR...................................................................................................................3 2.1 Giriş...................................................................................................................3 2.2 Radar Tipleri......................................................................................................4
3. FREKANS MODÜLASYONLU SÜREKLĐ DALGA RADARI......................9 3.1 Kısa Tarih..........................................................................................................9 3.2 Özellikleri.........................................................................................................10 3.3 Kullanım Alanları.............................................................................................11 3.4 Matematiksel Model........................................................................................13 3.5 FMSD Radarının Đç Yapısı..............................................................................16
3.5.1 Gerilim kontrollü osilatör.........................................................................17 3.5.2 Çeyrek faz farklı melez bağlayıcı.............................................................18 3.5.3 Anten........................................................................................................23
3.5.3.1 Antenlerin temel özellikleri 23 3.5.3.2 Çok kullanılan anten tipleri 24
Tel tip antenler 24 Açıklıklı antenler 25 Yansıtıcı antenler 26 Mikroşerit antenler 26
3.5.4 Üçgen dalga üretici...................................................................................35 3.5.5 Karıştırıcı (Mixer)....................................................................................37 3.5.6 Kuvvetlendirici.........................................................................................38
4. GERÇEKLENEN RADARIN ANALĐZĐ...........................................................41 4.1 Sistemi Oluşturan Yapılar ...............................................................................41 4.2 Mesafe Ölçümü................................................................................................43
5. SONUÇLAR ve GELECEKTEKĐ ÇALIŞMALAR.........................................46 KAYNAKLAR..........................................................................................................49 EKLER......................................................................................................................51

viii

ix
KISALTMALAR
ÇFFMB : Çeyrek Faz Farklı Melez Bağlayıcı FMCW : Frequency Modulated Continious Wave FMSD : Frekans Modülasyonlu Sürekli Dalga GKO : Gerilim Kontrollü Osilatör PCB : Printed Circuit Board

x

xi
ÇĐZELGE LĐSTESĐ
Sayfa
Çizelge 3.1 : Tasarım şartları ..................................................................................14
Çizelge 3.2 : HMC530LP5 özellikleri .....................................................................15
Çizelge 3.3 : Tasarım şartları ..................................................................................17
Çizelge 3.4 : Bağlayıcı benzetimi sonuçları. ...........................................................19
Çizelge 3.5 : Üretilen antenlerin ölçüm sonuçları. ...................................................32
Çizelge 3.6 : HMC412MS8G özellikleri. ................................................................36
Çizelge 4.1 : Ölçüm sonuçları. ................................................................................45

xii
xiii
ŞEKĐL LĐSTESĐ
Sayfa
Şekil 2.1 : Radarın algılama yöntemi...........................................................................3 Şekil 2.2 : Radarın iç yapısı..........................................................................................5 Şekil 2.3 : Darbe radarının iç yapısı.............................................................................6 Şekil 2.4 : Darbe radarı işaret şekilleri.........................................................................6 Şekil 3.1 : Bentley radarı..............................................................................................7 Şekil 3.2 : FMSD radarı alıcı ve vericideki işaretlerin frekansının zamana değişimi..8 Şekil 3.3 : Đrtifa ölçümü................................................................................................9 Şekil 3.4 : Seviye ölçümü.............................................................................................9 Şekil 3.5 : Taşıt uyarı sistemi.....................................................................................10 Şekil 3.6 : Frekans modülasyonlu sürekli dalga radarının temel yapısı.....................12 Şekil 3.7 : Üçgen dalga ile modüle edilmiş işaret......................................................13 Şekil 3.8 : Agilent EXA Signal Analyzer N9010A’dan ölçülen GKO çıkış gücü….16 Şekil 3.9 : Çeyrek faz farklı melez bağlayıcı.............................................................17 Şekil 3.10 : Bağlayıcı yapısının radarda kullanımı....................................................17 Şekil 3.11 : Çeyrek faz farklı melez bağlayıcı tasarımı.............................................18 Şekil 3.12 : Benzetim sonucunda bağlayıcının yalıtım ve yansıma değerleri............19 Şekil 3.13 : Benzetim sonucunda bağlayıcının iletim değerleri.................................19 Şekil 3.14 : Tasarımın gerçeklenmiş hali...................................................................20 Şekil 3.15 : Tasarımın ölçüm sonuçları......................................................................21 Şekil 3.16 : Dipol anten..............................................................................................22 Şekil 3.17 : Çevrim anten...........................................................................................23 Şekil 3.18 : Korna anten.............................................................................................23 Şekil 3.19 : Yama anten.............................................................................................24 Şekil 3.20 : Tasarlanan yama anten............................................................................25 Şekil 3.21 : Anten empedansı.....................................................................................25 Şekil 3.22 : Dört elemanlı anten dizisi.......................................................................26 Şekil 3.23 : Dört elemanlı anten dizisi tasarımı.........................................................27 Şekil 3.24 : Anten dizisinin empedansı.....................................................................27 Şekil 3.25 : Anten dizisinin S11 (yansıma) değerleri................................................28 Şekil 3.26 : HFSS’de tasarlanan yapı........................................................................28 Şekil 3.27 : S11 verisi................................................................................................29 Şekil 3.28 : Empedans değerleri................................................................................29 Şekil 3.29 : Anten kazancı.........................................................................................30 Şekil 3.30 : Anten üzerindeki elektrik alan dağılımı..................................................30 Şekil 3.31 : Üretilen antenin önden görünüşü............................................................31 Şekil 3.32 : Üretilen antenin arkadan görünüşü.........................................................31 Şekil 3.33 : Üretilen antenlerin ölçüm sonuçları........................................................32 Şekil 3.34 : Üçgen dalga üretici ve tampon devresi...................................................34 Şekil 3.35 : Üçgen dalga üretici baskı devresi (üstten görünü)..................................34 Şekil 3.36 : Üçgen dalga üretici devresinin önden ve arkadan görünüşü...................35 Şekil 3.37 : Karıştırıcı yapısı......................................................................................35 Şekil 3.38 : Karıştırıcı girişlerinin bağlayıcıdan yapılışı............................................36

xiv
Şekil 3.39 : Kuvvetlendirici........................................................................................37 Şekil 3.40 : Kuvvetlendiricinin kazanç bant genişliği grafiği....................................37 Şekil 4.1 : Montajlanmış ÇFFMB’nin önden ve arkadan görünüşü...........................39 Şekil 4.2 : FMSD radarı parçaları...............................................................................39 Şekil 4.3 : Kuvvetlendirici çıkışından ses kartına bağlantı........................................40 Şekil 4.4 : Gürültü analizi...........................................................................................41 Şekil 4.5 : Ölçüm sonuçları........................................................................................43

xv
FREKANS MODÜLASYONLU SÜREKLĐ DALGA RADARI TASARIMI VE GERÇEKLEMESĐ
ÖZET
Radarlar mikrodalga elektroniğinin en kapsamlı ve karmaşık konularındandır. Birden çok yapıyı (karıştırıcı, gerilim kontrollü osilatör, anten vb.) içermesinin yanı sıra bu yapıları uyumlu bir şekilde çalıştırmak da gerektiğinden önemli bir mühendislik uygulamasıdır. Savunma sanayi başta olmak üzere endüstriyel uygulamalarda da önemli bir kullanım alanı vardır. Radarlar ile bir cisme olan uzaklık, cismin hızı ve açısal konumu belirlenebilir.
Tez kapsamında bir Sürekli Dalga Kısa Mesafe Radarı’nın (FMCW, Frequency Modulated Continuous Wave) tasarımı öncelikle bilgisayar ortamında yapılmış, daha sonra gerçeklenerek testleri yapılmıştır. Tasarım esnasında AWR WMO, Ansoft HFSS, MATLAB, Orcad PSpice yazılımları kullanılmıştır. AWR yazılımı ile anten, anten dizisi ve melez bağlayıcı (hybrid coupler) tasarlanmıştır. Tasarlanan anten dizisinin HFSS ile de benzetimi yapılarak 2 farklı elektromanyetik benzetim programı ile tasarım doğrulanmıştır. PSpice ile karıştırıcı çıkışına bağlanacak kuvvetlendirici tasarımı yapılmıştır. MATLAB ile de radar işaretinin analizi yapılmıştır. Bütün elektronik devre kartlarının tasarımları yazılımlar ile yapılmış ve üretimleri Türkiye’deki yerli elektronik kart üreticilerine yaptırılmıştır.
Radarın parçaları öncelikle ayrık olarak tasarlanmış, üretilmiş ve test edilmiştir. Đlk olarak anten tasarımı yapılmış ardından antenlerin bant genişliğine uygun bağlayıcı tasarlanmıştır. Bu bant genişliğinde işaret üretebilmek için gerekli kontrol devresinin tasarımının ardından karıştırıcı çıkışındaki işareti kuvvetlendirmek üzere düşük gürültülü bir kuvvetlendirici tasarımı yapılmıştır. Bütün ayrık parçalar çalışır hale getirildikten sonra sistem birleştirilerek radar oluşturulmuş ve testler yapılmıştır.
Radarın tamamlanmasının ardından mesafe testleri yapılmıştır. Öncelikle boşta çalışma gürültüsünü belirlemek için radar anteni gökyüzüne tutulmuş ve veri kaydı yapılmıştır. Daha sonra farklı mesafelerdeki hedefler ile ölçüm yapılmıştır. Hedeften alınan işaretin boşta çalışma gürültüsünden çıkartılması ile hedeften dönen işaret elde edilmiş ve analizi yapılmıştır.
Tasarlanan radar başarılı bir şekilde çalıştırılmış ve beklenilen hata ölçüleri içerisinde yeterli doğrulukta ölçüm yapılmıştır.
Çalışma sonunda mikrodalga elektroniği konusunda önemli bir tasarım ve üretim bilgisi kazanılmıştır. Gelecek çalışmalar için önemli bir temel oluşturulmuştur. Anten dizisinin geliştirilmesi, daha yüksek güçte tasarımların yapılması ve mikrodenetleyici kullanımı ile daha yetenekli ve daha düşük maliyetli tasarımların hazırlanabileceği öngörülmüştür.

xvi

xvii
FREQUENCY MODULATED CONTINUOUS WAVE RADAR DESIGN AND APPLICATION
SUMMARY
Radar is one of the most important and compherensive part of microwave electronics. Radars contain lots of structure (antenna, mixer, VCO, etc.) and it is necessary to work them synchronic. So a radar design is a significant engineering application. Defence and commercial industries use radar for measurements and target tracking. A radar can detect target’s velocity, distance and angular position.
By the thesis project, a frequency modulated continuous wave radar was designed and realized for short range measurements. AWR WMO, Ansoft HFSS, MOTLAB and Orcad PSpice softwares were used at design period. Antenna and antenna array, hybrid coupler were designed by ARW WMO. Antenna array was simulated by Anfost HFSS again. So array design was checked twice by different electrmagnetic analysis softwares. Low noise amplifier was designed by Orcad PSpice. Radar signals were processed by MATLAB. All PCB designs were done by softwares and manufactured in Turkey.
Radar parts were designed, manufactured and tested one by one. Firstly antenna design was copmleted. Antennas bandwidth determined couplers center frequency and to produce this signal from VCO, a control circuit was designed. Finally mixer’s IF output a low noise amplifier was designed.
After the production of parts, they were connected each other. To determine radar noise its’ antenna was guieded to sky. After saving noise data, distance measurements were done and analysed by MATLAB.
End of the project distance measurement was succesfully done by the designed FMCW radar in determined tolerance interval.

xviii

1
1. GĐRĐŞ
Radarlar mikrodalga elektroniğinin en kapsamlı ve karmaşık konularından birisidir.
Birçok farklı devre türünü (osilatör, karıştırıcı (mixer), anten, süzgeç, bağlayıcı
(coupler), kuvvetlendirici…) içermesinden dolayı, bünyesinde barındırdığı yapıları
tek tek çalışır duruma getirmenin yanı sıra bir arada çalışmalarını da sağlamak
gerektiği için gerçek anlamda bir mühendislik uygulaması olarak kabul edilebilir.
Savunma sanayi başta olmak üzere endüstriyel uygulamalarda sıklıkla kullanılan
radarlar mikrodalga alanındaki gelişmelerin de etkisiyle geniş bir kullanım alanı
bulmuştur. Endüstrinin temel unsuru olan yetenekli ve düşük maliyetli sistemlerin
üretilebilmesiyle de endüstrideki mekanik ölçüm düzenlerinin yerini yavaş yavaş
almaktadır.
Radarlar ile hız, mesafe ve açısal konum tespiti yapılabilmektedir. Bir radarın
yeteneğini belirten unsurlar radarın ölçüm mesafesi ve ölçüm hatasının
düşüklüğüdür. Ölçüm mesafesi daha çok radarın gücü ile doğru orantılı olmaktadır.
Yüksek güçlü radarlar yüksek maliyetli olup genelde savunma sistemlerinde
kullanılan radarlar bu sınıftadır. Bilimsel amaçlı radarlar da genelde yüksek
güçlüdür. Radarların ölçüm hatası radarın kullanım amacına göre değişebilir.
Örneğin deniz seyrüsefer sistemlerinde 40-50 km menzilli bir radarın birkaç metre
ölçüm hatası yapması normaldir, ancak titreşim ölçümünde kullanılan bir radarın
ölçüm hatasının milimetrenin binde birine kadar inmesi beklenebilir. Mikrodalga
devrelerinin haberleşme dışında kullanımına güzel bir örnek olan radarların sivil
uygulamalarda da kullanımının yaygınlaşmasıyla sanayide otomasyon sistemlerine
entegre olarak üretim kalitesini ve maliyetini etkileyecek unsurlardan olacaktır.

2
1.1 Tezin Amacı ve Kapsamı
Tez kapsamında bir kısa mesafe radarının tasarımı ve gerçeklemesi yapılmıştır.
Düşük güçlü radar uygulamalarından olan frekans modülasyonlu sürekli dalga radarı
(FMCW, frequency modulated continuous wave) tasarlanmıştır. Amaç, düşük
maliyetli bir kısa mesafe radarının düşük güç tüketecek şekilde küçük hacimli olarak
tasarlanmasıdır. Bu sayede endüstride kullanılan mekanik veya sensör tabanlı
sistemlerin yerini tutabilecek bir sistemin geliştirilmesi hedeflenmiştir. Klasik
sensörlü veya mekanik ölçüm sistemleri sıcaklık, ortamdaki kimyasallar ve nem gibi
etkenlerden ciddi derecede etkilenmektedirler. Radarın ölçüm yaptığı nesneden
bağımsız olması nesneden kaynaklanacak ölçüm hatalarının da önüne geçecektir.
Radar bünyesinde bulunan anten, melez bağlayıcı (hybrid coupler), modülatör,
süzgeç ve kuvvetlendirici tasarımı yapılmış ve karıştırırı, gerilim kontrollü osilatör
dahil olmak üzere bütün yapılar uygun teknikler ile birbirine bağlanmıştır. Her devre
öncelikle ayrık olarak, sonra bütün halinde bilgisayar ortamında tasarlanmış ve
benzetim sonuçlarının incelenmesinin ardından tek tek üretilmiştir. Son aşamada
ayrık olarak tasarlanan bütün parçalar birleştirilerek sistem bir bütün haline
getirilerek çalıştırılmıştır.
1.2 Çalışmanın Katkıları
Mikrodalga devrelerin endüstride kullanımının yaygınlaşması için ara eleman
gerekmeksizin endüstride kullanılabilecek şekilde bir tasarım yapılmıştır. Bu çalışma
ile mikrodalga elektroniği konusunda önemli bir tasarım ve üretim tecrübesi
kazanılmıştır. Mikroşerit devre, yama anten gibi yüksek frekans elektroniği
yapılarının baskı devre üretiminin Türk firmaları tarafından yapılması onlar için de
ayrı bir tecrübe olmuştur. Gelecek çalışmalar için tasarım adımları ayrıntılı olarak
anlatılmış ve teorik hesaplamalar ile ölçülen sonuçlar karşılaştırmalı olarak
verilmiştir. Benzer yapılar ile kıyaslandığında ise üretiminin kolay olması, az devre
elemanı içermesi ve küçük hacmi ile daha avantajı konumdadır (Uhlig ve diğerleri,
2004) (Kulke ve diğerleri,2005). Đleri çalışmalarda gerilim kontrollü osilatör ve
karıştırıcının da tasarımlarının basit olarak yapılması ile ciddi derecede maliyet
avantajı da sağlanacaktır.

3
2. RADAR
2.1 Giriş
RADAR Đngilizce Radio Detection and Ranging kelimelerinden oluşur. “Radyo
Algılama ve Mesafe Belirleme” anlamına gelir. Radar; en genel haliyle bir alıcı,
verici ve işaret işleme yapılarından oluşur. Vericiden gönderilen radyo işareti hedefe
çarpıp yansır (Şekil 2.1). Yansıyan işaret alıcı tarafından algılanır ve işlenerek
hedefin hızı ve konumu hakkında bilgi edinilir.
Şekil 2.1 : Radarın algılama yöntemi.
Alman mühendis Christian Hülsmeyer tarafından 1904 yılında uzaktaki metal
nesnelerin varlığını tespit edebileceğini söylemiş ve yoğun sisli bir günde uzaktaki
bir geminin varlığını tasarladığı sistem ile tespit etmiştir. Bu sistemin Đngiltere’de
1904 yılında 165546 kayıt numarası ile patentini almıştır. Nikola Tesla 1917’de ilkel
radarın tanımını yaptı. Đlerleyen zamanda Đkinci Dünya Savaşı’ndan önce Amerika,
Sovyetler Birliği, Almanya, Fransa ve Đngiltere önemli çalışmalar yapmıştır.
Radarların ciddi anlamda ilk kullanımı 2. Dünya Savaşı sırasında olmuştur. Savaş
süresince ve sonrasındaki teknolojik ilerlemeler ile ( bilgisayarların keşfi, mikrodalga
alanındaki ilerlemeler) hızla gelişmiş ve hem askeri hem de sivil uygulamalarda
sıklıkla kullanılmaya başlanmıştır. Radarın sivil kullanım alanlarından bazıları:
• Havalimanı gözetleme sistemleri
• Deniz seyrüsefer sistemleri

4
• Hava durumu tahminleri
• Altimetre olarak (yükseklik ölçümü)
• Alarm sistemleri
• Uçak iniş-kalkış sistemleri
• Hız ölçümü (polis radarları)
• Haritacılık
Bilimsel kullanım alanlarına verilebilecek örnekler:
• Uzay araştırmaları (uydu konumlandırma, radyo ve radar astronomisi, )
• Haritacılık
• Hassas mesafe ölçümü
• Uzaktan izleme
Askeri kullanım alanlarına ilişkin örnekler:
• Hava-deniz taşıtları sefer sistemleri
• Hava-deniz taşıtlarını algılama
• Akıllı füzelerde
• Düşman gözetleme sistemlerin
• Atış kontrol sistemleri
2.2 Radar Tipleri
Radarlar en genel haliyle sürekli dalga ve darbe radarları olarak ikiye ayrılır. Sürekli
dalga radarlarında verici sürekli bir işaret üreterek hedefe gönderir. Hareketli
hedeften yansıyıp gelen işaretin Doppler Etkisi’nden dolayı frekansında ve fazında
bir değişim meydana gelir. Bu değişimin algılanması esasına dayalı olarak çalışır.
Doppler etkisinden dolayı gönderilen işaretin fazındaki değişim aşağıdaki gibi
olacaktır:
= 2 = = 4 = 4 (2.1)

5
Doppler açısal frekansı, doppler frekans kaymasını, hedefin göreli hızını Belirtmektedir. Doppler frekans kaymasının ifadesi:
= 2 = 2 )*
), hedefe gönderilen işaretin frekansı, c ışık hızı (2.2)
Sürekli dalga radarlarında sürekli işaret gönderimi olduğu için sürekli ölçüm
yapılabilmektedir. Gönderilen işaret, radarın kullanım amacına göre modülasyonlu
veya modülasyonsuz olabilir. Temel olarak modülasyonsuz bir sürekli dalga
radarının çalışma şekli Şekil 2.2’de verilmiştir.
Antenfo
fo ± fd
Sürekli Dalga Üreticifo
fo
fo ± fd fo
Algılayıcı(Karıştırıcı)
(mixer)
Kuvvetlendiricifd Gösterge
İşaret İşlemefd
Şekil 2.2 : Radarın iç yapısı.
Sürekli dalga radarlarında hedefin hareketsiz olması durumunda doppler etkisi
oluşmayacağı için ya da çok yavaş hareket ettiğinde ölçülemeyecek kadar küçük bir
etki oluşacağı için algılama yapılamamaktadır.
Darbe radarları genel olarak ikinci tür radar gurubunu oluşturur. Darbe radarlarında
hedefe bir darbe işareti gönderilir. Hedeften yansıyan işaret alıcı tarafından algılanır.
Algılama süresi kullanılarak hedefin uzaklığı tespit edilir. Fazdaki değişimden yola
çıkılarak da hedefin açısal konumu belirlenebilir. Bu tür radarlarda sürekli ölçüm
yapılarak hedefin yaptığı değişikliklerin tespiti ile hedefin hızı bulunabilir, ancak
hedefin etrafındaki sabit cisimlerden oluşabilecek yansımalar ölçümü oldukça
zorlaştırabilir (Skolnik, 1962). Bu nedenle darbe radarlarında sürekli bir dalga darbe
işareti ile modüle edilerek hedefe gönderilir (Şekil 2.3, 2.4). Doppler-darbe radarı
denilen bu yapı ile sadece yansıyan işaretteki doppler etkisini de kullanarak sabit
cisimlerden gelen gürültüler hedeften yansıyan işaretten 70-90 dB fazla bile olsa
algılama yapabilmektedir (Skolnik, 1962).

6
Şekil 2.3 : Darbe radarının iç yapısı.
Şekil 1.4 : Darbe radarı işaret şekilleri.
Sürekli dalga radarlarının mesafe bulamamamı, darbe radarlarının da karmaşık
fiziksel yapılar farklı yöntemlerin aranmasına yol açmıştır. Sürekli dalga radarına
ayrık bir zamanlama yapısı eklenerek mesafe ölçümü yapılabilir (Skolnik, 1962).
Ayrık bir zamanlama yapısı gönderilen işaretin frekans bandında genişlemeye sebep
olur, yani frekans bandında bir genişleme yapılabilirse yansıyıp gelen işaretin süresi
daha net ölçülebilir, bu genişleme de sürekli dalga modüle edilerek yapılabilir
(Skolnik, 1962). Bu yöntem frekans modülasyonlu sürekli dalga radarlarının keşfinin
temeli olmuştur.

7
3. FREKANS MODÜLASYONLU SÜREKLĐ DALGA RADARI
3.1 Kısa Tarih
Frekans modülasyonunun mesafe tespitinde kullanımı fikri 1900’lerin başında ortaya
atılmıştır. Đlk pratik kullanımı 1928’de J.O. Bentley tarafından “Uçak Đrtifa Gösterge
Sistemi” adı ile patent alınarak kullanılmaya başlamıştır (Komarov ve Smolskiy,
2003). Bentley’in radarının oldukça basit bir yapısı vardı (Şekil 3.1)
VERİCİ ALICI
Elektrik Motoru
Şekil 3.1 : Bentley Radarı.
Verici işareti bir motor yardımıyla ayarlı bir kondansatör kullanarak üçgen dalga ile
modüle edilerek hedefe gönderiliyordu. Alıcının giriş katı verici frekansına göre
akort edilmekteydi. Alıcıya gelen işaret belli bir τ gecikmesinden sonra geleceği için
farklı frekansta olacağı için alıcıda işaret karışımı olmamaktadır (Şekil 3.2 : FMSD
radarı alıcı ve vericideki işaretin frekansının zamanla değişimi.).

8
Şekil 3.2 : FMSD radarı alıcı ve vericideki işaretin frekansının zamanla değişimi.
Aradaki bu fark bir karıştırıcı (mixer) ile belirlenmektedir. Bu farkın gecikme ile
doğru orantılı olduğu Şekil 3.2’de görülmektedir. Bu uygulamanın endüstriyel olarak
kullanıma başlaması 1930’ların sonlarında yüksek frekans tekniklerinin gelişmesiyle
olmuştur (30 MHz). Özellikle 2. Dünya Savaşı sırasında uçaklarda irtifa metre olarak
kullanılmıştır. 1930’ların sonlarına doğru darbe radarlarının ortaya çıkmasıyla
unutulmuş, zamanla çok hassas ölçümlerin yapılması ihtiyacı gündeme geldiği için
tekrar hatırlanmıştır (Komarov ve Smolskiy, 2003).
3.2 Özellikleri
Frekans modülasyonlu sürekli dalga radarlarının başlıca özellikleri (Komarov ve
Smolskiy, 2003):
• Çok küçük mesafeleri ölçebilir.
• Aynı anda hem hız hem de mesafe tespiti yapabilir.
• Çok düşüm ölçüm hatası ile ölçüm yapar.
• Kullanılan işaretin dalga boyundan çok daha küçük değişimleri fark edebilir.
• Karıştırma işleminden sonra elde edilen işaret modülasyon frekansı ile
orantılıdır ve çok rahat işlenebilir.
• Anlık darbe gürültülerine karşı güvenlidir.
• Radar boyutları en basit haliyle kullanılan mikrodalga blokların büyüklüğüne
bağlıdır.
• Hafiftir, düşük gerilimler ile çalışabildiği için az enerji tüketir.

9
3.3 Kullanım Alanları
FMSD radarları işaret işlemedeki ve mikrodalga alanındaki gelişmelerin etkisiyle
maliyet ve boyut avantajlarının yanı sıra kullanıcı dostu olmasından dolayı askeri
uygulamalar kadar endüstriyel uygulamalarda da yoğun olarak kullanılmaya
başlamıştır. FMSD radarlarının keşfinden sonra ilk kullanım amacı olan irtifa
ölçümünü (altimetre) için hala kullanılmaktadır (Şekil 3.1).
Şekil 3.1: Đrtifa ölçümü.
Sanayideki en büyük kullanım alanı ise seviye ölçümlerindir. Sıvı tanklarında ve
tahıl silolarında sıkılıkla kullanılmaktadır. Sıvıya prob, şamandıra gibi nesneler
temas etmediği için tercih edilmektedir. Çok yüksek hassasiyetle ölçüm yapılabildiği
için her boyutta silo veya tank içerisinde kullanılabilmektedir (Şekil 3.4).
Şekil 3.4 : Seviye ölçümü.

10
FMSD radarlarının en çok kullanıldığı alan seyrüsefer sistemleridir (Komarov ve
Smolskiy, 2003). Birkaç yüz metreden birkaç on kilometre mesafelerde güvenle
kullanılmaktadır. Özellikle görüş mesafesinin düşük olduğu zamanlarda körfez,
kanal gibi yerlerde ciddi bir önem kazanmaktadır. Ayrıca çok büyük gemilerin
limana yanaşmaları esnasında gemi gövdesinin liman duvarına ne kadar yaklaştığı
hassas olarak belirlenebilmektedir. Ucuz ve kullanıcı dostu olması sebebiyle sıklıkla
kullanılmaktadır.
Son zamanlarda otomotiv sanayi FMSD radarlarını üzerine ciddi çalışmalar yapmaya
başlamıştır. Özellikle kaza erken uyarı sistemleri ve park sensörü olarak otomotiv
dünyasında kullanım alanı bulan FMSD radarlar yüksek hassasiyet ve bir otomasyon
sistemi sayesinde şoföre anlık bilgi vermektedir. Öndeki araca olan mesafe, arkadan
yaklaşmakta olan aracın uzaklığı seyir esnasında ve aracın dört tarafından gelen
veriler ile de park etme esnasında şoföre yardımcı olmaktadır (Şekil 3.5). Otomasyon
sistemi ile gerektiğinde alarm durumuna geçerek olası kazaları da önleme konusunda
önemli rol oynar.
Şekil 3.5 : Taşıt uyarı sistemi.

11
Sabit nesnelere olan mesafenin hassas ölçümü gerektiğinde de FMSD radarlar
kullanılmaktadır. Örneğin, kar ve buz kalınlığı ölçümü, jeodezik ölçümler. Bu tür
ölçümlerde ölçüm istasyonu bir defalık olarak kurulur ve uzun süre bilgi toplanır.
Örneğin kar seviyesi tehlikeli hale geldiğinde çığ uyarısı gibi koruyucu önlemler
alınarak olası kazaların önüne geçilir. Bilimsel çalışmalarda da sıklıkla
kullanılmaktadır. Makinelerdeki titreşim gibi çok küçük değişimler de FMSD
radarlar ile makineye hiç müdahale etmeden rahatlıkla ölçülebilmektedir. Örneğin
λ=7.2mm olan bir işaret kullanarak 10µm’lik bir değişiklik 1ºfaz kaymasına sebep
olur, bu değişimi mikrodalga yapılar ile ölçmek çok zordur ve uygulamalarda tercih
edilmez. Ancak bir FMSD radar ile bu değişiklik alıcı çıkışında düşük frekanslı bir
işaret olarak alınacaktır. Böylece hassas ölçüm çok daha az maliyetle
yapılabilecektir. Makineye temas etmediği için diğer sensörler gibi makinenin
yaydığı sıcaklık, nem gibi bozucu etkilerden etkilenmez.
3.4 Matematiksel Model
Darbe radarlarında hedefe gönderilen işaret bir gecikme ile alıcı tarafından
algılandığı için gönderilen ve yansıyan işaretin birbirine karışmaz. Ancak sürekli
dalga radarlarında sürekli bir işaret gönderimi ve alımı olduğu için iki işareti
birbirinden ayırmak olanaksızdır (Komarov ve Smolskiy, 2003). Bu ayrımı yapmak
için hedefe gönderilen işareti modülasyonlu olmalıdır. En uygun modülasyon şekli
de frekans modülasyonudur. Bu sayede gönderilen işaret yansıyıp geldikten alıcı
kısmında farklı bir frekansta algılanacağı için iki işareti birbirinden ayırmak çok daha
kolay olacaktır.

12
Şekil 3.6 : Frekans modülasyonlu sürekli dalga radarının temel yapısı.
Frekans modülasyonlu sürekli dalga radarında verici antenden yayılan işaretin
ifadesi:
-.(0) ifadesi işaretin genliği, 2.(0) de işaretin fazıdır. Antene gönderilen işaretten
bir örnek de karıştırıcıya gönderilir.
Hedeften yansıyıp gelen işareti ise:
Şeklinde olacaktır.
3.(0) = -.(0)4562.(0) (3.1)
37(0) = -7(0)45627(0) (3.2)
38 = -8(0, 9)45628(0, 9) = :;-8(0 − 9)=>? [2.(0 − 9) + 2B] (3.3)

13
τ zaman gecikmesidir. k1 ise genlikteki zayıflamadır. Bu işaret (3.2) denkleminde
verilen işaret ile karıştırıldığında elde edilen işaret:
30(0) = :D-8(0, 9) =>?[27(0) − 28(0, 9) − 2B] + :E-7(0) (3.4)
olur. (3.4) ifadesindeki ilk terim alıcı tarafından algılanan işaretin karıştırıcı
çıkışındaki halidir. Đkinci terim ise karıştırıcıya gönderilen işaretin genliğidir. k2 ve
k3 katsayıları ise karıştırıcının gerilim kazancını tanımlar. (3.4) ifadesinde sadece ilk
terim anlamlıdır ve hedef hakkında mesafe ve hız bilgisi içerir. Đkinci terim gürültü
işaretidir.
Şekil 3.7: Üçgen dalga ile modüle edilmiş işaret
R hedefe olan uzaklık c de elektromanyetik işaretlerin boşluktaki yayılma hızı olarak
alınırsa gecikme süresi aşağıdaki gibidir:
9 = DF4 (3.5)
Radar işaretinin bant genişliği ve periyodu karıştırıcı çıkışından elde edilecek işaretin
frekansını belirler. (BW bant genişliği, T periyot, τ gecikme süresi)
G = HIJ 9 (3.6)

14
Bant genişliği radarın çözünürlüğünü belirler:
KF = 4HI (3.7)
Bant genişliği radarın en küçük ölçüm mesafesini de belirler:
9LM :üçü: = ;HI (3.8)
Bant genişliği bir radarın en önemli parametrelerindendir. Bandın geniş tutulması
devre üretimin tekniğini ve anten tipini de belirleyen önemli etkenlerdendir.
3.5 FMSD Radarı Yapıları
FMSD radarlarındaki temel yapılar gerilim kontrollü osilatör (VCO), devir ettirici
(circulator) veya melez bağlayıcı (hybrid coupler), anten, karıştırıcı, modülatör, alt
geçiren süzgeç ve düşük gürültülü kuvvetlendiricidir.
Tasarlanacak radarın 1 metre çözünürlük ile 50 metre mesafede çalışması
planlanmaktadır. Merkez frekans 10 GHz alındığı takdirde (3.5)(3.6)(3.7) ifadeleri
kullanılarak aşağıdaki veriler elde edilmiştir. Tasarımlarda bu veriler kullanılarak
devrelerin özellikleri belirlenmiştir.
Çizelge 3.1 : Tasarım şartları
Çözünürlük 1m Bant genişliği 150 MHz
Tarama frekansı 100 Hz Frekans sapması 0-5 kHz

15
3.5.1 Gerilim kontrollü osilatör
Çıkış işaretinin frekansının DC gerilim ile ayarlandığı osilatördür. Ko osilatör
kazancı (Hertz / Volt) ise çıkış frekansının ifadesi aşağıdaki gibi olacaktır:
GçO:Oş = P5 QRS8Sş(0) (3.9)
Gerilim kontrollü osilatörler faz kilitlemeli çevrim yapılarında, fonksiyon
jeneratörlerinde ve modülasyon için kullanılır. Tez kapsamında gerilim kontrollü
osilatör tasarımı yapılmamıştır. Hittite firmasının HMC530LP5 kodlu ürünü
kullanılmıştır. Bazı önemli parametreleri şu şekildedir:
Çizelge 3.2 : Tasarım şartları
Frekans Aralığı 9.5-10.8 GHz Çıkış Gücü 8-14 dBm
SSB faz gürültüsü -110dBc/Hz Ayar Gerilimi 2-12 V Çektiği akım 290-390 mA
GKO merkez frekans 10.2 GHz olacak şekilde 3.5.4 başlığında bahsedilen üçgen
dalga işaret üretici ile kontrol edilmektedir. GKO çıkışı Agilent EXA Signal
Analyzer N9010A cihazına bağlanarak çıkış izlenmiştir (Şekil 3.8). Çıkış gücü
yaklaşık olarak 12 dBm seviyesindedir.

16
Şekil 3.8 : Agilent EXA Signal Analyzer N9010A’dan ölçülen GKO çıkış gücü.
3.5.2 Çeyrek faz farklı melez bağlayıcı (Quadrature hybrid coupler)
Çeyrek faz farklı melez bağlayıcı girişindeki işareti güçleri eşit olacak şekilde ikiye
böler. Çıkıştaki işaretlerin faz farkı 90º olur.
λ/4
λ/4
Zo
ZoZo
Zo
Zo/√2
Zo/√2
Çıkış 1
Çıkış 2Yalıtılmış
çıkış
Giriş
Şekil 3.9 : Çeyrek faz farklı melez bağlayıcı.

17
4 kapılı bu yapıda giriş ile yalıtılmış çıkış arasında herhangi bir güç iletimi olmaz.
Yapı simetrik olduğu için (3.9) giriş ve çıkışlar kullanım yönüne bağlıdır. Ancak
çıkışlar her zaman girişin karşısında olur. Genelde mikroşerit (microstrip) veya şerit
hat (stripline) şeklinde yapılır (Pozar, 2005). Yapının [S] matrisi aşağıdaki gibidir:
[S]= T;√D VB W ; BW B B ;; B B WB ; W BX (3.10)
Radar tasarımında gerilim kontrollü osilatör, karıştırıcı ve anteni birlikte
kullanabilmek için çeyrek faz farklı melez bağlayıcı kullanılmıştır.
Şekil 3.10 : Bağlayıcı yapısının radarda kullanımı.
Yapı AWR MWO yazılımı ile Taconic TLX-8 taban (0.76mm kalınlığında)
kullanılarak tasarlanmıştır.
Çizelge 3.3 : Tasarım şartları
ε 2.55 Tand 0.0019
Bakır kalınlığı 0.035 mm
Zo 50Ω, merkez frekans 10.2 GHz seçilerek tasarım yapılmıştır (Antenler 10.2 GHz
de çalıştığı için tasarım 10.2GHz’ye göre yapılmıştır). Hat kalınlıkları ve uzunlukları
WMO yazılımının TXLINE aracı kullanılarak hesaplanmıştır. Yazılım ile tasarlanan
bağlayıcı Şekil 3.9’da verilmiştir. Benzetim ortamı 0.1mm’lik ızgaralara
bölünmüştür. Đletken kısım mükemmel iletken seçilerek benzetim yapılmıştır.

18
Şekil 3.11 : Çeyrek faz farklı melez bağlayıcı tasarımı.
Elektromanyetik benzetim sonuçlarına göre 10.2 GHz’de elde edilen sonuçlar şu
şekildedir (Şekil 3.12, Şekil 3.13):

19
Çizelge 3.4 : Bağlayıcı benzetimi sonuçları.
S21 -3.316 dB S41 -3.256 dB S11 -21.78 dB S22 -21.78 dB S33 -22.28 dB S44 -22.28 dB S31 -21.25 dB S42 -21.25 dB
Şekil 3.12 : Benzetim sonucunda bağlayıcının yalıtım ve yansıma değerleri.
Şekil 3.13 : Benzetim sonucunda bağlayıcının iletim değerleri.

20
Şekil 3.14 : Tasarımın gerçeklenmiş hali
Gerçeklenen yapı (Şekil 3.14, sol taraftaki yapı ÇFFMB’dir) Agilent EXA Signal
Analyzer N9010A cihazına bağlanarak ölçülmüştür. 150 MHz’lik bant genişliği elde
edecek şekilde tasarlanan üçgen dalga üretici ile kontrol edilen GKO çıkışı
bağlayıcının girişine bağlanmış, anten bağlantı noktası da analiz cihazına bağlanarak
ölçüm yapılmıştır (Şekil 3.15). Ölçüm sonucunda hedeflendiği şekilde 10.2 GHz
civarında GKO’dan gelen 12dBm gücündeki işaretin yaklaşık olarak ikiye bölündüğü
gözlemlenmiştir. Merkez frekanstan uzaklaştıkça bölme oranı bozulmuştur. Ancak
tam olarak ikiye bölme olmasa da gücün büyük bir kısmının antene doğru olması
radarın çalışmasını etkilemeyecektir.
28 mm
47 mm

21
Şekil 3.15 : Tasarımın ölçüm sonuçları.
3.5.3 Anten
Elektromanyetik enerjiyi belli bir biçimde etkin olarak yaymak için tasarlanmış
yapılardır (Cheng, 2006). Elektrik akımını elektromanyetik dalgaya veya
elektromanyetik dalgayı elektrik akımına çeviren yapılardır. Đyi tasarlanmamış bir
anten kullanımının sonucunda ilgili işaret uygun şekilde yayılamaz ve istenilen verim
alınamaz. Bu da alıcı ve verici sistemleri etkileyerek kablosuz veri iletimini olumsuz
etkiler.
3.5.3.1 Antenlerin temel özellikleri
Antenin başlıca ışıma özellikleri ışıma deseni, yönlülük, kazanç ve bant genişliği
sayılabilir. Işıma deseni uzak alan (far field) sayılacak belirli bir noktadaki ışıma
gücünün açısal olarak tanımlanmış ifadesidir (Huang, Boyle, 2008). Işıma
desenlerini ifade etmek için 2 veya 3 boyutlu kutupsal (polar) eksenler kullanılır.
Yönlülük bir antenin en önemli parametrelerindendir. Belli bir yöndeki ışıma
gücünün yoğunluğu olarak tanımlanır (Huang, Boyle, 2008). Belli bir yöne doğru

22
olan ışıma gücünün bütün yönlere olan ortalama ışıma gücünün oranı olarak ifade
edilir. Anten tasarımlarında antenin kullanılacağı ortama uygun yönlülükte olmasına
dikkat edilir. Geniş açılı bir yayın yapılmak istenirse yönlülük düşük, belli bir
doğrultuda yayın yapılmak istenirse yönlülük büyük olur. Kazanç da belli bir
yöndeki ışıma gücünün antenin aldığı güce oranıdır. genelde izotropik bir antenin
ışıma gücüyle kıyaslanarak verilir. Birimi de dBi’dir. Bant genişliği de antenin
istenilen şekilde çalışabileceği bant aralığıdır. Frekansa bağlı olarak ifade edilir.
Belirtilen parametrelerin tamamı antenin şekline, anten yapımında kullanılan
malzemeye bağlıdır. Anten şekli antenin kullanılacağı sistemde bağlıdır. Örneğin cep
telefonunda küçük bir anten kullanmak gerekirken uydu haberleşmesinde çapı
metreler boyutunda olan çanak antenler kullanılır. Tasarım esnasında sistemin
boyutunu belirleyen önemli etkenlerden olan anten şekli maliyeti de doğrudan
etkiler.
3.5.3.2 Çok kullanılan anten tipleri
Günümüz uygulamalarında sıklıkla kullanılan anten tipleri: Tel tip anten, açıklıklı
anten, mikroşerit anten, yansıtıcı anten.
Tel tip antenler
Tel tip antenler yapımı en kolay antenlerdir. Dipol, monopol ve çevrim antenler bu
tür antenlerdir.
Şekil 3.16 : Dipol Anten

23
Hertz anten olarak da bilinen dipol anten ile tel tip anten yapısı kolayca açıklanabilir.
Kaynaktan çıkan ve faz farklı işaret belli uzunluktaki tellere bağlanır (Şekil 3.16).
Tel uzunluğu antenin parametrelerini belirler. Monopol antende tek tel kullanılır.
Çevrim tipi anten de Şekil 3.17’de görülmektedir.
Şekil 3.17 : Çevrim anten.
Açıklıklı antenler
Bu tarz antenlerde en çok kullanılan anten korna antendir (horn). Tel antenlerin
verimsiz olduğu daha yüksek frekanslarda kullanılır. Noktadan noktaya haberleşme
sistemlerin sıklıkla kullanılırlar. Yüksek kazançlıdırlar.
Şekil 3.18 : Korna anten (www.hamradio.si).
24
Yansıtıcı antenler
Uydu haberleşmesinde kullanılan antenler yansıtıcı antenlere örnektir. Yüksek
kazançlı, yüksek performanslı ve düşük maliyetlidirler.
Mikroşerit antenler
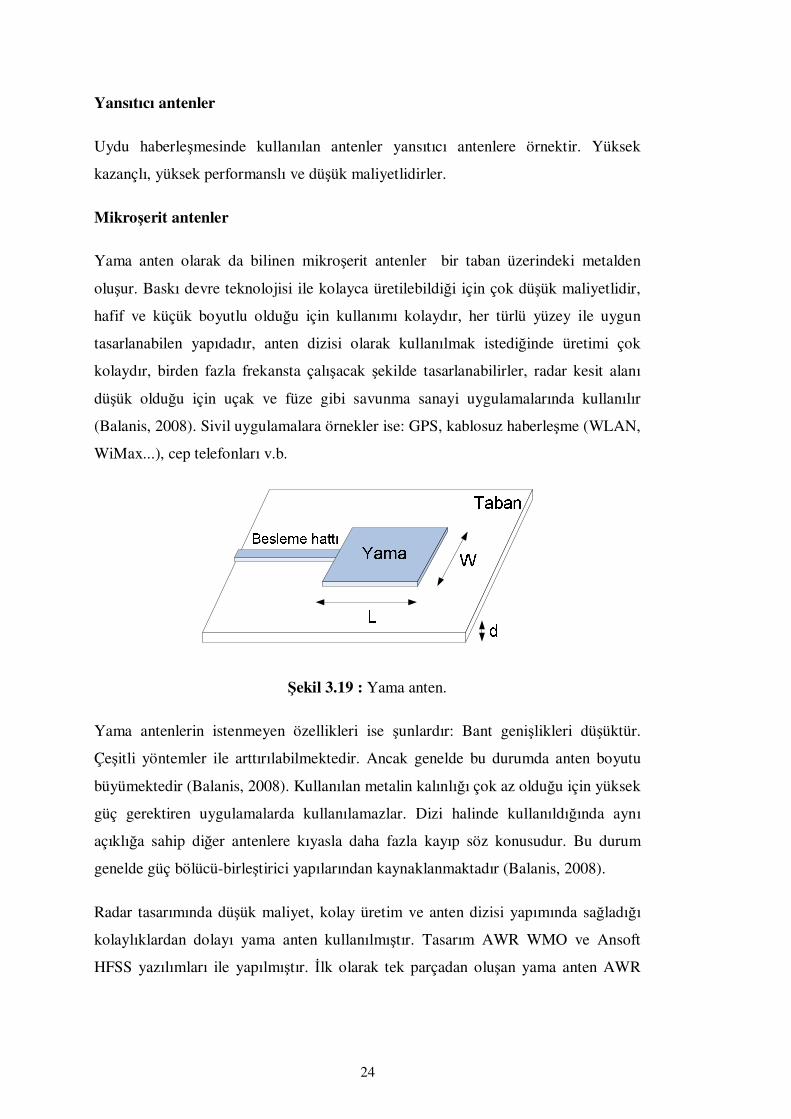
Yama anten olarak da bilinen mikroşerit antenler bir taban üzerindeki metalden
oluşur. Baskı devre teknolojisi ile kolayca üretilebildiği için çok düşük maliyetlidir,
hafif ve küçük boyutlu olduğu için kullanımı kolaydır, her türlü yüzey ile uygun
tasarlanabilen yapıdadır, anten dizisi olarak kullanılmak istediğinde üretimi çok
kolaydır, birden fazla frekansta çalışacak şekilde tasarlanabilirler, radar kesit alanı
düşük olduğu için uçak ve füze gibi savunma sanayi uygulamalarında kullanılır
(Balanis, 2008). Sivil uygulamalara örnekler ise: GPS, kablosuz haberleşme (WLAN,
WiMax...), cep telefonları v.b.
Şekil 3.19 : Yama anten.
Yama antenlerin istenmeyen özellikleri ise şunlardır: Bant genişlikleri düşüktür.
Çeşitli yöntemler ile arttırılabilmektedir. Ancak genelde bu durumda anten boyutu
büyümektedir (Balanis, 2008). Kullanılan metalin kalınlığı çok az olduğu için yüksek
güç gerektiren uygulamalarda kullanılamazlar. Dizi halinde kullanıldığında aynı
açıklığa sahip diğer antenlere kıyasla daha fazla kayıp söz konusudur. Bu durum
genelde güç bölücü-birleştirici yapılarından kaynaklanmaktadır (Balanis, 2008).
Radar tasarımında düşük maliyet, kolay üretim ve anten dizisi yapımında sağladığı
kolaylıklardan dolayı yama anten kullanılmıştır. Tasarım AWR WMO ve Ansoft
HFSS yazılımları ile yapılmıştır. Đlk olarak tek parçadan oluşan yama anten AWR

25
WMO 2008 ile tasarlanmıştır (Şekil 3.20). Tasarım 1.6mm kalınlığında Taconic
TLX-8 kodlu tabana göre yapılmıştır.
Şekil 3.20 : Tasarlanan yama anten.
L=8.8mm, W=11.2mm alındığında ve çeyrek dalga empedans uydurucu da 10 GHz
için seçildiğinde anten parametreleri istenilen şekilde elde edilmiştir. Antenin
ucundan görünen empedansın gerçek kısmı 93.7Ω, sanal kısmı da -3.4Ω olmaktadır
(Şekil 3.21). Tasarlanan tek anten dörtlü dizi haline getirilerek daha büyük kazanç ve
yönlülük elde edilecektir.
Şekil 3.21 : Anten empedansı.

26
Dizinin beslemesi tek noktadan yapılacak olup empedansı 50Ω olacaktır. Bu
şekildeki bir tasarım için iki anten arası bağlantı 100Ω, ikili yapıları bağlayan
bağlantı 70.71Ω, besleme hattı da 100Ω olmalıdır (Johnson, 1993).
Şekil 3.22 : Dört elemanlı anten dizisi (Johnson, 1993).
Elektromanyetik benzetim ortamında tasarlanan anten WMO yazılımının devre
şeması çizilen kısmına aktarılarak Şekil 3.22’de belirtilen yapı tasarlanmıştır (Şekil
3.23).

27
Şekil 3.23 : Dört elemanlı anten dizisi tasarımı.
Tasarlanan yapının 10 GHz’deki empedansı 51-j2.4’tür. yansıma katsayısı ise -
31dB’dir. Bant genişliği de yaklaşık 455 MHz’dir. Bu değer standart mikroşerit
antenlerdeki merkez frekansının %5’i kadar olan bant genişliğini (Balanis, 2008)
sağlamaktadır.
Şekil 3.24 : Anten dizisinin empedansı.
MTRACE2ID=X5W=2.8 mmL=5.14 mmBType=2M=1
MTRACE2ID=X4W=1.51 mmL=10.9 mmBType=2M=1
MTRACE2ID=X3W=1.51 mmL=10.9 mmBType=2M=1
MTRACE2ID=X2W=1.51 mmL=10.9 mmBType=2M=1
MTRACE2ID=X1W=1.51 mmL=10.9 mmBType=2M=1
PORTP=1Z=50 Ohm
1
SUBCKTID=S4NET="anten"
1
SUBCKTID=S3NET="anten"
1
SUBCKTID=S2NET="anten"
1
SUBCKTID=S1NET="anten"
MTRACE2ID=X8W=1.3 mmL=4.205 mmBType=2M=1
MTRACE2ID=X7W=1.3 mmL=4.205 mmBType=2M=1
MTRACE2ID=X6W=2.8 mmL=5.14 mmBType=2M=1

28
Şekil 3.25 : Anten dizisinin S11 (yansıma) değeri.
AWR WMO ile tasarlanan bu yapı farklı bir elektromanyetik benzetim yazılımı ile
incelenmiştir.Ansoft HFSS yazılımı ile tasarlanan yapı Şekil 3.26’da verilmiştir.
Şekil 3.26 : HFSS’de tasarlanan yapı.

29
Benzetim sonuçları da şu şekildedir:
Şekil 3.27 : S11 verisi.
Şekil 3.28 : Empedans değerleri.

30
Şekil 3.29 : Anten kazancı.
Şekil 3.30 : Anten üzerindeki elektrik alan dağılımı.
AWR WMO ile yapılan tasarımda antenler arası ve beslemeye doğru olan bağlantı
noktaları yazılım içerisindeki hazır modellenmiş mikroşerit yapılar kullanılmıştır.
HFSS’de ise antenler ve ara hatlar aynı yapı içerisinde tasarlanarak benzetim
yapılmıştır. AWR WMO yazılımı ile yapılan analizde tasarım hedefi olan 10 GHz’de
en düşük yansıma katsayısına (S11) sahip çalışan yapı elde edilmiştir. HFSS yazılımı
ile yapılan analizde antenin 10 GHz’de istenilen şekilde kullanılabileceği

31
görülmüştür. Ancak en düşük yansıma katsayısına 9.9 GHz’de eriştiği görülmüştür.
Đki yazılımdan da istenilen sonuç alınınca gerçekleme yapılmıştır. Tasarım baskı
devre üreticilerine gönderilerek üretimi yapılmıştır.
Tasarlanan antenin üretim sonra besleme noktasına SMA tip konnektör takılmıştır.
Şekil 3.31 : Üretilen antenin önden görünüşü.
Şekil 3.32 : Üretilen antenin arkadan görünüşü.
Anten Agilent PNA L 5230 model Network Analiz cihazı ile test edilmiştir. 3 adet
antenin yansıma parametreleri Şekil 3.33’de görülmektedir.
59 mm
61 mm
32
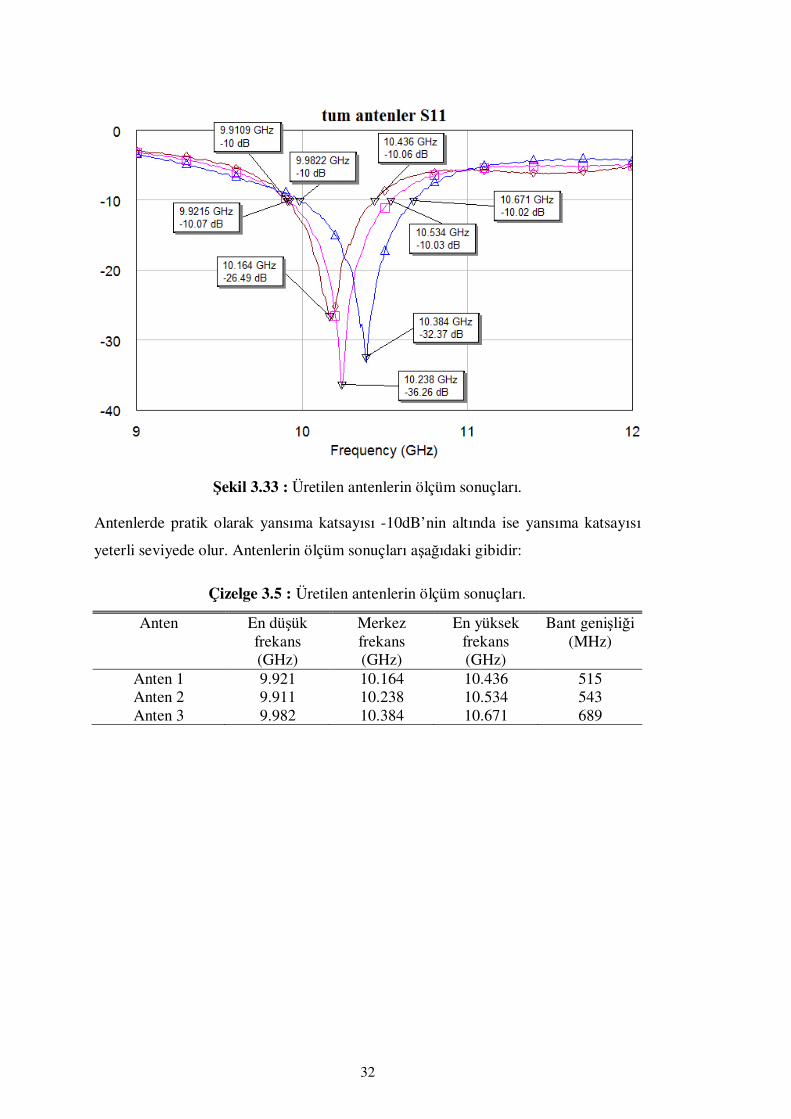
Şekil 3.33 : Üretilen antenlerin ölçüm sonuçları.
Antenlerde pratik olarak yansıma katsayısı -10dB’nin altında ise yansıma katsayısı
yeterli seviyede olur. Antenlerin ölçüm sonuçları aşağıdaki gibidir:
Çizelge 3.5 : Üretilen antenlerin ölçüm sonuçları.
Anten En düşük frekans (GHz)
Merkez frekans (GHz)
En yüksek frekans (GHz)
Bant genişliği (MHz)
Anten 1 9.921 10.164 10.436 515 Anten 2 9.911 10.238 10.534 543 Anten 3 9.982 10.384 10.671 689

33
Antenler merkez frekansları 10GHz olacak şekilde 0.1mm’lik karelere bölünmüş
şekilde benzetim yapılarak tasarlanmıştır. Tasarım boyutu bir anten için 8.2x11.2
mm olmuştur. Benzetimler esnasında 0.1 mm'lik bir boyut değişiminin antenin
merkez frekansında %5’lere varan değişikliklere yol açtığı gözlemlenmiştir. Bu
durum bize üretim hassasiyetinin önemini göstermektedir. Üretimler yüksek
adetlerde olmadığından otomatik makinelerde yüksek hassasiyetle tasarlanmadığı
için boyutlar istenilen hassasiyetle yapılamamıştır. Bu nedenle 3 adet anten aynı
şekilde üretilmiş olmalarına rağmen genel olarak 10GHz civarında çalışmalarına
rağmen merkez frekansları farklılık göstermiştir. Antenler incelendiğinde merkez
frekans 10.2 GHz alındığı takdirde radarın tasarım hedefi olan 150MHz bant
genişliğinde sorunsuz olarak kullanılabileceklerdir.
3.5.4 Üçgen dalga üretici
Gerilim kontrollü osilatör üçgen dalga şeklinde işaret ile sürülmektedir.
Kullandığımız GKO’ya göre uygun DC seviyesinin (offset voltage), işaret
frekansının ayarlanması için üçgen dalga osilatörü tasarlanmıştır. DC seviye ayarı
yapabilmek ve osilatörü GKO’dan ayırabilmek için bir adet tampon devresi de
osilatörün çıkışına eklenmiştir. 3 adet ayarlı direnç ile işaret frekansı, DC seviyesi ve
işaret genliği ayarlanmaktadır. Tasarımda 4 adet bağımsız işlemsel kuvvetlendirici
içeren LM324 tümdevresi kullanılmıştır.

34
Şekil 3.34 : Üçgen dalga üretici ve tampon devresi.
Şekil 3.35 : Üçgen dalga üretici baskı devresi (üstten görünüş).
Baskı devre tek yüzlü olarak tasarlanmıştır. Kartın sağ alt kısımdaki devre elemanları
GKO’ya 5 volt gerilim sağlamak için devreye eklenmiştir (U2, LM7805). Böylece
tek kart ile GKO’nun hem beslemesi hem de kontrolü yapılabilmektedir.

35
Şekil 3.36 : Üçgen dalga üretici devresinin önden ve arkadan görünüşü.
3.5.5 Karıştırıcı (Mixer)
En basit anlamda karıştırıcının iki adet girişi ve bir adet çıkışı vardır. Girişleri
birbiriyle karıştırarak (çarparak) çıkış işaretini üretir. Çıkış işaretinin frekansı giriş
işaretlerinin frekanslarının toplamı ve farkı kadar olur (3.11).
QFY(0) = Z; 6SMD[G;(0),
Q\](0) = ZD 6SMD[GD(0),
QFY(0). Q\](0) = Z;ZDD [456D[(G; − GD)0 − 456D[(G; + GD)0] (3.11)
Şekil 3.37 : Karıştırıcı yapısı.

36
Melez bağlayıcı GKO’dan aldığı işareti ikiyi bölerek yarısını antene yarısını da
karıştırıcıya gönderir. Aynı zamanda antenden aldığı işareti de karıştırıcıya gönderir.
Đki işareti birbiriyle karıştırarak fark işareti elde edilir.
GKO çıkışı Anten
KarıştırıcıLO girişi
KarıştırıcıRF girişi
Bağlayıcı
Şekil 3.38 : Karıştırıcı girişlerinin bağlayıcıdan yapılışı.
Çalışma kapsamında karıştırıcı tasarımı yapılmamıştır. Hittite firmasının
HMC412MS8G kodlu tümdevresi kullanılmıştır. Temel özellikleri şöyledir (IF=1.45
GHz, LO=13dBm, T=25º):
Çizelge 3.6 : HMC412MS8G özellikleri.
Frekans aralığı 9-15 GHz IF frekansı 0-2.5 GHz
Çevirme kaybı 8-11 dB Gürültü faktörü 8-11 dB LO-RF yalıtımı 40-50 dB LO-IF yalıtımı 40-50 dB
RF-IF 17 dB IP3 17 dBm
1dB bastırma noktası 9.5 dBm
3.5.6 Kuvvetlendirici
Karıştırıcı çıkışından alınan işaretin genliği çok küçük olacağı için işlenebilmesi için
kuvvetlendirilmesi gerekmektedir. Bu kuvvetlendirme esnasında kazanç yüksek
olduğu için işlemsel kuvvetlendiricinin iç yapısından kaynaklanan kondansatörlerden
etkisinden dolayı kesim frekansı düşük olmaktadır. Bir alt geçiren süzgeç görevi
görecek şekilde tasarlanarak kuvvetlendirici ile gerekli olan süzme işlemi de
yapılmaktadır. Kuvvetlendirici tasarımında Analog Devices firmasının AD8676
kodlu çok düşük gürültülü, tepeden tepeye çıkış verebilen, simetrik beslemeli
işlemsel kuvvetlendiricisi kullanılmıştır 2 katlı olarak tasarlanan devre ile daha
yüksek kazanç elde etmenin yanı sıra daha etkili bir süzme işlemi yapılmıştır.

37
Karıştırıcı çıkışında radar tasarımının yapısından dolayı 0-5kHz frekanslarında bir
işaret görülecektir. Bu nedenle teorik olarak kesim frekansı 5 kHz olan bir alt geçiren
süzgeç yeterli olacaktır. Tasarlanan kuvvetlendiricide kazanç 79.9 dB, kesim frekansı
da 12.5 kHz olarak belirlenmiştir. Kesim frekansının 2.5 kat yüksek tutulmasının
sebebi istenilen 0-5 kHz aralığında olabildiğince doğrusal bir kuvvetlendirme
istenmesidir.
Şekil 3.39 : Kuvvetlendirici.
Şekil 3.40 : Kuvvetlendiricinin kazanç bant genişliği grafiği.
Frequency
1.0Hz 10Hz 100Hz 1.0KHz 10KHz 100KHz 1.0MHz 10MHzVDB(R6:2)
-40
-20
0
20
40
60
80
(12.502K,76.948)
(156.293,79.901)


39
4. GERÇEKLENEN RADARIN ANALĐZĐ
AWR WMO, Ansonft HFSS ve Orcad PSpice ile yapılan tasarımların hedeflenen
şekilde yapılmasının ardından üretim yapılmıştır. Hazırlanan baskı devrelere
elektronik devre elemanları montajlanmasının ardından önce devreler tek tek test
edilmiş ve sonra birleştirilerek mesafe testleri yapılmıştır.
4.1 Sistemin Oluşturan Yapılar
Tasarlanan ÇFFMB’nın montajlanmış hali şekil 4.1’de verilmiştir.
Şekil 4.1 : Montajlanmış ÇFFMB’nin önden (soldaki) ve arkadan görünüşü.
Şekil 4.1’de verilen devrenin önden görünüşünde sağdaki yapı kuvvetlendiricidir.
Sağdaki yapı ise ÇFFMB olup iki yapı arasında karıştırıcı vardır. Arkadan
görünüşteki siyah konnektör kuvvetlendirici için besleme gerilimi bağlantısıdır.
Şekil 4.2 : FMSD radarı parçaları.

40
Sistem dört adet yapıdan oluşmaktadır. Şekil 4.2’de soldan sağa üçgen dalga işaret
üretici, gerilim kontrollü osilatör, melez bağlayıcı-karıştırıcı-kuvvetlendirici ve
antendir.
Kuvvetlendirici çıkışı 0-5 kHz olduğundan frekans analizinin yapmak için çıkış
işareti bir bilgisayarın ses kartı girişine bağlanmıştır. Kuvvetlendirici çıkışı tepeden
tepeye 12V olduğundan ve ses kartı girişi en yüksek 1V olduğu için basit bir direnç
yapısı ile 1/11 oranında gerilim bölücü yapılarak ses kartı girişine kuvvetlendiriciden
gelen işaret girişi yapıldı.
Şekil 4.3 : Kuvvetlendirici çıkışından ses kartına bağlantı.
SigView yazılımı ile ses kartı girişine uygulanan işaretin Hızlı Fourier Dönüşümü
(Fast Fourier Transform) yapılarak analizi yapılmıştır. Alınan sonuçlar MATLAB
yazılımı ile işlenerek sonuçlar değerlendirilmiştir.

41
4.2 Mesafe Ölçümü
Boşlukta yayılan işaretin yol kaybı frekans MHz, mesafe de km olarak alındığında:
_5` :abcı (7H) = DB`5R;B(7) + DB`5R;B(d) + ED. ee (4.1)
d=20 m (10 metredeki hedef giden işaret), f=10200 MHz alındığında 78.63 dB
zayıflama olacaktır. Buna işaretin hedeften yansıması esnasında ve devre içindeki
kayıplar da göz önüne alındığında ciddi bir zayıflama söz konusu olmaktadır. Belli
bir uzaklıktan sonra çıkıştan bir önceki katta 80 dB’lik kuvvetlendirmeyle mevcut
ölçüm cihazı olan bilgisayar ses kartından bile algılanamaz hale gelmektedir. Ancak
birkaç yüz kat daha kuvvetlendirmeden sonra ya da çok daha hassas ADC’ler ile
algılama yapılabilir.
Sistemin besleme gerilimi 12 V’dir. GKO ise 5V ile çalışmaktadır. Öncelikle radar
anteni gökyüzüne tutularak gürültü analizi yapıldı (Şekil 4.4). Bu analiz radara
herhangi bir işaret girişi olmadığında karıştırıcı çıkışından görünen işaretleri
belirlemek için yapılmıştır.
Şekil 4.4 : Gürültü analizi.

42
Gökyüzünden alınan ölçümden 20 metre uzaklıktaki bir otomobil, 4 metre
uzaklıktaki ve 7 metre uzaklıktaki iki duvardan alınan ölçüm verisi alınmıştır. Bu
verilerden boşta çalışmada oluşan gürültüleri süzmek için gökyüzünden alınan
ölçümden çıkarıldığında (Şekil 4.5) analizi yapılacak veri elde edilir. 4 metre
uzaklıktaki duvardan alınan asıl işaretin frekansı 387Hz’dir (Şekil 4.5 mavi işaret).
Teorik değer ise (3.6) ifadesine göre 400 Hz olmalıdır. 7 metredeki duvardan alınan
işaretin frekansı 646 Hz’dir (Şekil 4.5 kırmızı işaret). Teorik hesap ise 700 Hz’dir.
Şekil 4.5’teki yeşil işaret ise 20 metre uzaklıktaki otomobilden alınan işarettir.
3 uzaklık ölçümünde de özellikle 1kHz’den sonraki işaretlerin frekansları neredeyse
aynıdır. Sadece ölçüm yaptığımız uzaklık olan 4 ve 7 metrede beklediğimiz
frekanslarda değişimler olmuştur. Hedeften yansıyıp gelen işaretin genliği karıştırıcı
çıkışındaki işaretin genliğini belirler (3.3). Bu nedenle belli bir uzaklıktan sonra
değişim sezilemeyecek kadar küçük olduğu için mevcut ölçüm cihazları ile
sezilememiştir. Ancak diğer ölçümlerdeki değişimleri kıyaslayabilmek için uzak
mesafe ölçümü de yapılmıştır. (559 Hz’lik işaret yaklaşık 12 metreden sonraki her
ölçümde mevcuttur, bu nedenle gürültü işaretidir.)

43
Şekil 3.45 : Ölçüm sonuçları.

44

45
5. SONUÇLAR ve GELECEKTEKĐ ÇALIŞMALAR
Hedeflenen şekilde başarıyla çalıştırılan frekans modülasyonlu kısa mesafe radarı
belirlenen çözünürlük dikkate alındığında istenilen sonucu vermiştir.
Tasarım esnek bir yapıda tasarlandığı için üçgen dalga işaret üretici uygun şekilde
ayarlanarak ya da 50Ω’luk çıkış direncine uygun empedansta farklı antenler ile
sadece kısa mesafe, hassas ölçüm gibi özellikler kolayca kazandırılabilir.
Proje sonunda mikrodalga devrelerin tasarımında karşılaşılan zorluklar görülmüştür.
Özellikle üretimden kaynaklanan hataların en aza indirilmesine yönelik tasarımların
önemi anlaşılmıştır.
Gelecek çalışmalar da şu şekilde özetlenebilir:
•Daha büyük anten dizileri oluşturularak radarın etkisi arttırılabilir
•Antenler elektronik olarak yönlendirilebilir.
•Karıştırıcı ve GKO tasarımları yapılarak sistem bir bütün halinde üretilebilir.
•Mikrodenetleyici kontrolü ile kullanım esnekliği arttırılabilir.
Gelecek çalışmalarında belirtilen özelliklerin bu sisteme eklenmesiyle daha hassas,
belli bir amaca özel daha yetenekli, daha güçlü radarların tasarımı mümkündür.
Çizelge 4.1 : Ölçüm sonuçları.
Mesafe (m) Ölçülen (m)- Hata (%)
4 3.87 3.25
7 6.46 7.71

46

47
KAYNAKLAR
Balanis, C. A., 2008: Modern Antenna Handbook. Wiley and Sons, Danvers, MA.
Cheng, D. K., Çev: Armağan, N., Can, N., Çıngı, E., Đşçi, C., Önengül, G., Sözüer, S., :2006: Dalga ve Alan Elektromanyetizması. Akademi, Ankara.
Huang, Y. ve Boyle, K., 2008:Antennas from Theory to Practice. Wiley and Sons, Singapore.
Johnson, R. C., 1993: Antenna Engineering Handbook. McGraw-Hill, USA.
Komarov, I. V., Smolskiy, S. M., 2003: Fundamentals Of Short-Range FM Radar. Artech House, London.
Kulke, R., Günner, C., Holzwarth, S., Kassner, J., Lauer, A., Rittweger, M., Uhlig, P., Weigand, P., 2005: 24 GHz Radar integrates Patch Antenna and Frontend Module in single Multilayer LTCC Substrate, European Microelectronics and Packaging Conference, Brugge, Belgium, June 12-15.
Pozar, D. M., 2005: Microwave Engineering. Wiley and Sons, USA.
Skolnik, M. I., 1962: Introduction to Radar Systems. McGraw-Hill, USA.
Uhlig, P., R., Günner, C., Holzwarth, S., Kassner, Kulke, J., Lauer, A., Rittweger, M., 2004: LTCC Short Range Radar Sensor for Automotive Applications at 24 GHz, 37th IMAPS International Symposium on Microelectronic, Long Beach, November.

48

49
ÖZGEÇMĐŞ
Ad Soyad: Osman Ceylan
Doğum Yeri ve Tarihi: Çivril / Denizli 04.10.1984
Adres: ĐTÜ Ayazağa Kampüsü Elektrik Elektronik Fakültesi oda 1206 Maslak/Đstanbul
Lisans Üniversite: Đstanbul Teknik Üniversitesi Elektronik Mühendisliği 2006
Yayın Listesi:
Koyuncu, E, Yeniçeri, R., Ceylan, O., 2005: Bilgisayarla Görü Tabanlı Cisim Yörünge Doğrultusu Đzleyen Robot Kol Tasarımı, Otomatik Kontrol Türk Milli Komitesi Otomatik Kontrol Ulusal Toplantısı, Đstanbul.
Koyuncu, E, Yeniçeri, R., Ceylan, O., 2006: Kamera Denetimli Yapay Sinir Ağları ile Hareketli Cisim Yörüngesi Đzleyen Zeki Taret Savunma Sistemi Tasarımı, Kara Harp Okulu Savunma Bilimleri Enstitüsü Savunma Bilimleri Araştırmaları Teşvik Ödülleri, Ankara.




























