Embed Size (px)
Citation preview
Study of noise readings in infrared sensors and their effect
in the Khepera Miniature Robot’s performance
Saúl J. Vega Daisy A. Ortiz
Advisor: Raúl E. Torres, Ph.D., P.E.
Background
• Robots– Management of hazardous waste– Moving of heavy equipment– Ocean and space exploration– Fire extinguishing
• Artificial Intelligence– Knowledge-based– Behavior-based
Background (cont.)
• Behavior-based Artificial Intelligence– Subsumption Architecture (SA)
• Build behaviors from smaller sub-behaviors
• SA rely heavily on sensory input– Noise cause disturbance in robot
operation
Problem Statement
• Avoid negative effect of fluorescent lamps on infrared sensory readings
Oh! No!
Objectives
• Determine the effect of noisy readings on robot performance
• Determine the effect of filtered sensory on robot performance
Methodology
• Review of literature
• Simulation study
• Hardware implementation– Real Khepera used in testing
• Filters design
• Testing-platform development– Braitenberg vehicle algorithm
• Comparison of results
Our Star:Mr. Khepera
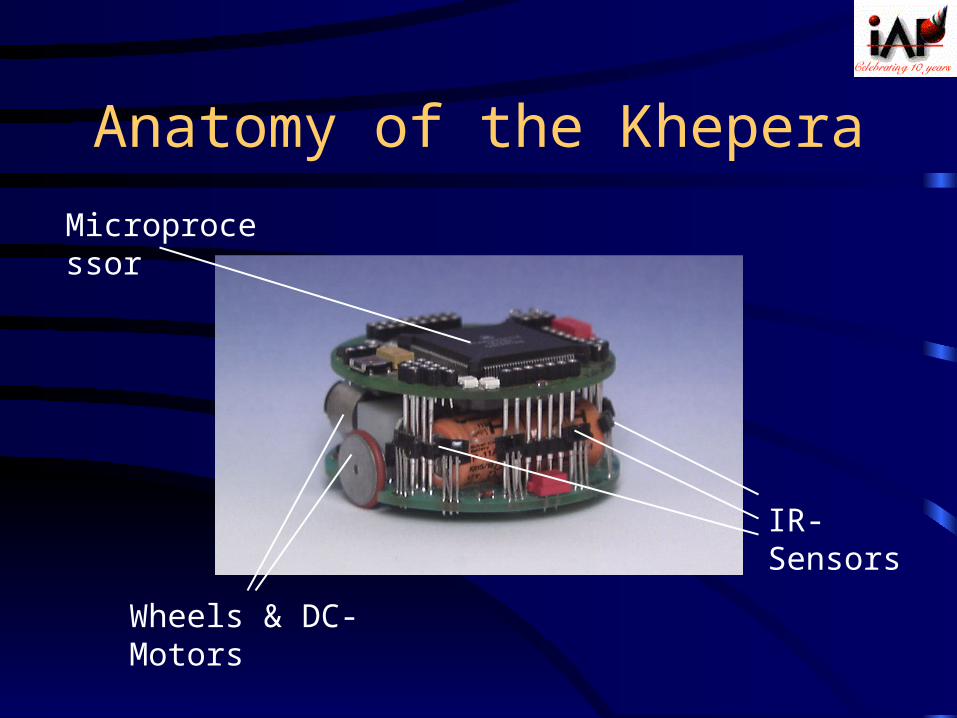
Anatomy of the Khepera
Microprocessor
IR-Sensors
Wheels & DC-Motors
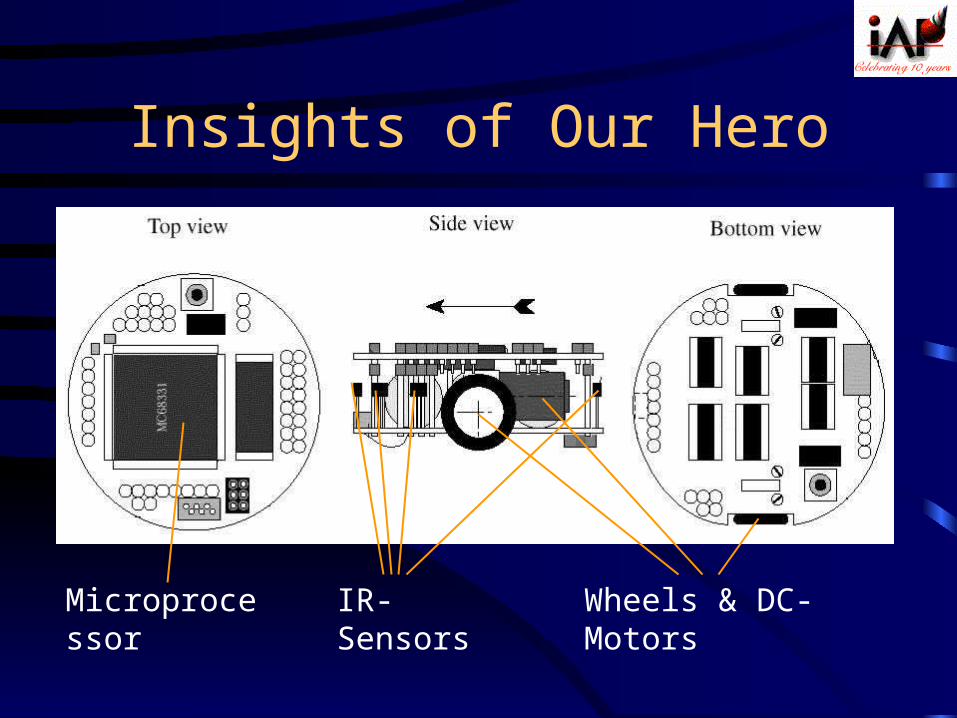
Insights of Our Hero
Microprocessor IR-Sensors Wheels & DC-Motors
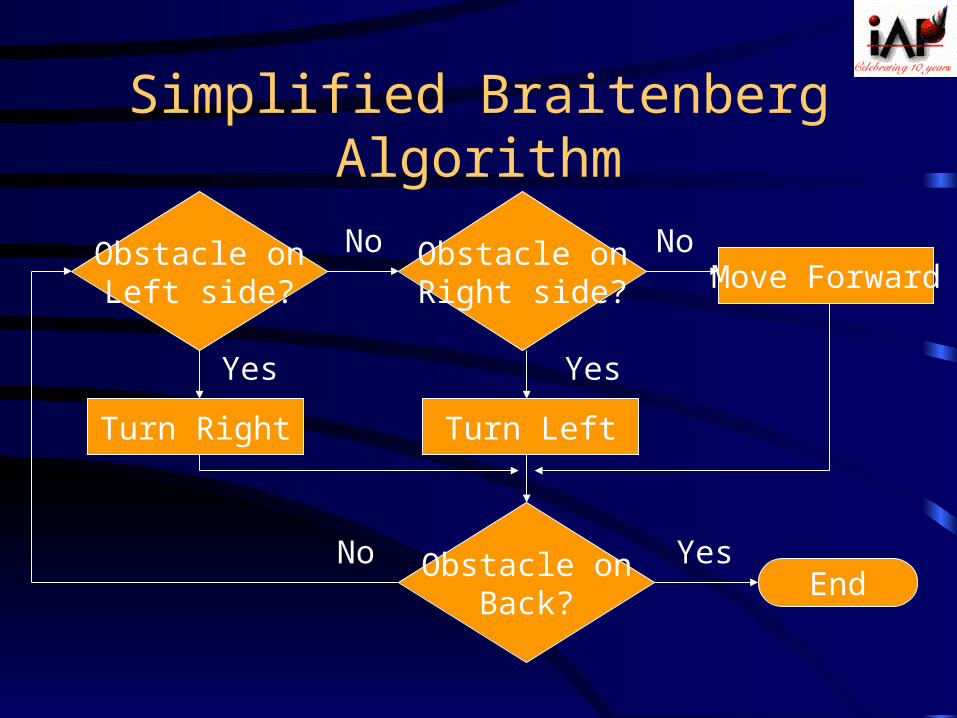
Simplified Braitenberg Algorithm
Turn Right
Obstacle onLeft side?
No
Yes
Obstacle onRight side?
Turn Left
Yes
NoMove Forward
No Obstacle onBack?
EndYes
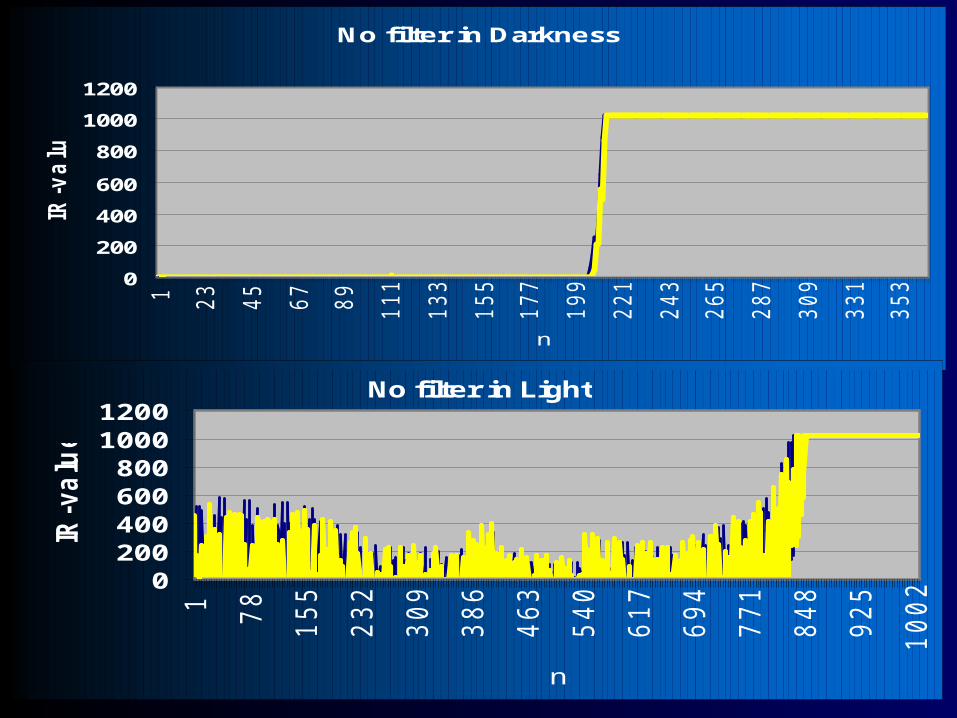
No filter in Darkness
0
200
400
600
800
1000
1200
1 23
45
67
89
111
133
155
177
199
221
243
265
287
309
331
353
n
IR-v
alu
es
No filter in Light
0200400600800
10001200
1
78
155
232
309
386
463
540
617
694
771
848
925
1002
n
IR-v
alu
es
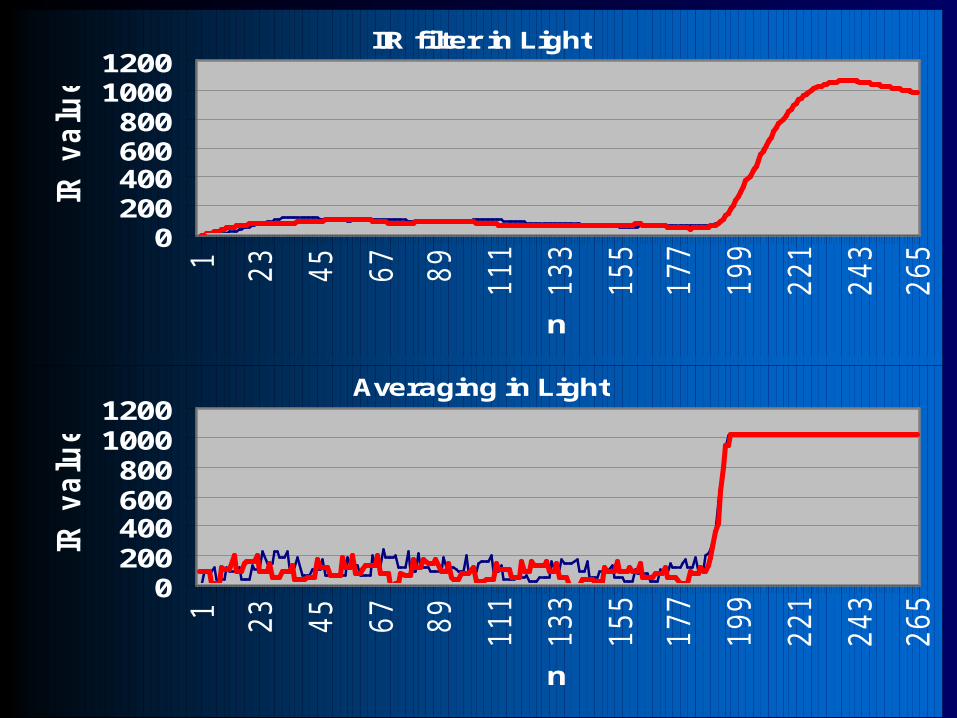
Averaging in Light
0200400600800
10001200
1 23
45
67
89
111
133
155
177
199
221
243
265
n
IR v
alu
es
IIR filter in Light
0200400600800
10001200
1 23
45
67
89
111
133
155
177
199
221
243
265
n
IR v
alu
es
Results
• On darkness– Slow filter response when approaching obstacle– Even slower when moving away from obstacle
• On light– Acceptable filter response time when approaching
obstacle– Acceptable filter response time when moving away
from obstacle– Noisy readings greatly reduced
Results (cont.)
• Satisfactory performance of Braitenberg algorithm without filtered readings on darkness
• Problems using filters with Braitenberg algorithm– Robot slow to react to filtered sensory readings
Conclusions
• Fluorescent light noise cause serious effects on Khepera’s performance
• Digital filters proved to be useful in reducing noise in sensory readings
• Filters performance are greatly affected by levels of ambient light
Future Works
• Braitenberg algorithm modified to allows detection of ambient light– Activate filters on high levels of ambient light– Disable filters on low-light conditions
• Develop user-friendly program for testing algorithms and filters

Questions?