Embed Size (px)
Citation preview
Système de positionnement
Smart Positioning ControllerSPC200
Auteur : S. BreuerRédacteurs : H.-J. Drung, M. HolderMaquette : Festo, Dépt. KI-TDTraducion : transline Deutschland,
Dr.-Ing. Sturz GmbHMise en page : KI-TD
Edition : 9904a
(Festo AG & Co., D-73726 Esslingen, 1999)
Toute communication ou reproduction de ce document,toute exploitation ou communication de son contenusont interdites, sauf autorisation expresse. Tout man-quement à cette règle est illicite et expose son auteurau versement de dommages et intérêts. Tous droits ré-servés, particulièrement le droit de déposer des mo-dèles d’utilité ou des modèles de présentation.
Im
prim
é su
r pa
pier
100
% r
ecyc
labl
e
SPC200... 9904a I
Marque déposée de International Business Machines Corporation
IBM®
Marque déposée de Microsoft Corporation
Microsoft®
Windows®
Marque déposée de MTS Sensortechnologie GmbH & Co.
Temposonics®
Référence : 194 500Titre : ManuelDésignation : P.BE-SPC200-F
II SPC200... 9904a
Sommaire
Utilisation conforme à l’usage prévu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIUtilisateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIIInstructions importantes d’utilisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIIRemarques concernant ce manuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IXConcepts spécifiques au produit et abréviations . . . . . . . . . . . . . . . . . . . . XI
1. Présentation du système
1.1 Système de positionnement avec SPC200 . . . . . . . . . . . . . . . . . 1-41.1.1 La gamme d’appareils pour le SPC200. . . . . . . . . . . . . . . . . . . . 1-71.1.2 Structure du SPC200 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-91.2 Raccordement des axes pneumatiques. . . . . . . . . . . . . . . . . . . 1-131.3 Structure d’une branche d’interface d’axe . . . . . . . . . . . . . . . . . 1-171.4 Modes de fonctionnement du SPC200 . . . . . . . . . . . . . . . . . . . 1-211.5 Applications multiaxiales avec le SPC200. . . . . . . . . . . . . . . . . 1-231.6 Possibilités de mise en service et de programmation . . . . . . . . 1-241.7 Espace d’adresses d’E/S du SPC200 . . . . . . . . . . . . . . . . . . . . 1-28
2. Montage
2.1 Montage et démontage des cartes . . . . . . . . . . . . . . . . . . . . . . . 2-52.2 Montage de l’unité de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-92.3 Montage du clavier/afficheur . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-122.4 Montage de l’interface d’axe et des modules d’E/S
fonctionnels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-142.5 Remarques concernant le montage des axes
pneumatiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
3. Installation
3.1 Consignes générales d’installation. . . . . . . . . . . . . . . . . . . . . . . . 3-43.2 Consignes concernant l’installation pneumatique . . . . . . . . . . . . 3-53.2.1 Circuit d’arrêt d’urgence pneumatique . . . . . . . . . . . . . . . . . . . . 3-153.2.2 Raccordement en cas de fonctionnement à chariot fixe et à
chariot mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-193.3 Installation du SPC200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-213.3.1 Choix du bloc d’alimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-223.3.2 Raccordement de la carte d’alimentation. . . . . . . . . . . . . . . . . . 3-243.3.3 Raccordement de la carte de diagnostic . . . . . . . . . . . . . . . . . . 3-30
SPC200... 9904a III
3.3.4 Raccordement de la carte d’E/S SPC200-DIO-... . . . . . . . . . . . 3-333.3.5 Raccordement des cartes d’entrées analogiques
SPC200-2AI-U . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-423.3.6 Raccordement d’une carte de sous-contrôleur
SPC200-SCU-AIF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-453.4 Installation des modules sur une branche d’interface d’axe . . . 3-473.4.1 Installation de l’interface d’axe SPC-AIF-... . . . . . . . . . . . . . . . . 3-513.4.2 Installation d’un module d’E/S fonctionnel
SPC-FIO-2E/2A-M8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-56
4. Mise en service
4.1 Procédure de mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-54.2 Raccordement d’un système à un seul axe pour sa
première mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-94.3 Mise en service à l’aide du clavier/afficheur . . . . . . . . . . . . . . . 4-164.3.1 Enregistrement de la configuration matérielle . . . . . . . . . . . . . . 4-164.3.2 Mise en service d’axes pneumatiques . . . . . . . . . . . . . . . . . . . . 4-204.3.3 Remarques concernant la mise en service de systèmes
multiaxiaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-38
5. Commande du SPC200
5.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-45.2 Mode Marche/Arrêt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-95.2.1 Description de tous les signaux d’E/S en
mode Marche/Arrêt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-115.3 Mode de sélection de bloc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-175.3.1 Description des signaux d’E/S en mode de sélection de bloc. . 5-22
6. Commande du SPC200 par le clavier/afficheur
6.1 Structure et fonctions du clavier/afficheur . . . . . . . . . . . . . . . . . . 6-46.1.1 Présentation des menus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86.2. Définir des paramètres spécifiques au projet. . . . . . . . . . . . . . . 6-146.3 Edition de programmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-286.3.1 Création d’un nouveau programme . . . . . . . . . . . . . . . . . . . . . . 6-296.3.2 Consignes d’édition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-356.3.3 Instructions disponibles sur le clavier/afficheur . . . . . . . . . . . . . 6-376.3.4 Edition d’un programme existant . . . . . . . . . . . . . . . . . . . . . . . . 6-406.3.5 Suppression d’un programme . . . . . . . . . . . . . . . . . . . . . . . . . . 6-426.4 Traitement d’un registre de position. . . . . . . . . . . . . . . . . . . . . . 6-43
IV SPC200... 9904a
6.5 Commande du déroulement du programme . . . . . . . . . . . . . . . 6-476.6 Affichage des opérandes et des états du système . . . . . . . . . . 6-496.7 Réglage des coefficients de régulation . . . . . . . . . . . . . . . . . . . 6-516.8 Fonctions de test et de diagnostic du clavier/afficheur . . . . . . . 6-53
7. Description des instructions
7.1 Remarques générales sur la programmation. . . . . . . . . . . . . . . . 7-47.1.1 Mode synchronisé et autonome. . . . . . . . . . . . . . . . . . . . . . . . . . 7-57.2 Remarques pour la programmation à l’aide du
clavier/afficheur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-87.2.1 Explication des instructions CN sur le clavier/afficheur . . . . . . . 7-13
8. Diagnostic et traitement des erreurs
8.1 Diagnostic local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-48.2 Messages d’erreur sur le clavier/afficheur . . . . . . . . . . . . . . . . . . 8-98.3 Elimination des incidents sur le système. . . . . . . . . . . . . . . . . . 8-248.3.1 Incidents à la mise sous tension . . . . . . . . . . . . . . . . . . . . . . . . 8-248.3.2 Incidents de positionnement. . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-25
A. Optimisation du comportement au positionnement
A.1 Principe de base de la régulation . . . . . . . . . . . . . . . . . . . . . . . . A-3A.2 Description des coefficients de régulation . . . . . . . . . . . . . . . . . . A-6A.3 Optimisation du positionnement. . . . . . . . . . . . . . . . . . . . . . . . . . A-9A.3.1 Procédure en cas de pression d’alimentation instable . . . . . . . A-15
B. Annexe technique
B.1 Structure interne des entrées/sorties . . . . . . . . . . . . . . . . . . . . . . B-3B.2 Caractéristiques techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-7B.2.1 Caractéristiques techniques du SPC200 . . . . . . . . . . . . . . . . . . . B-7B.2.2 Caractéristiques techniques de l’interface d’axe
type SPC-AIF-... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-13B.2.3 Caractéristiques techniques des modules d’E/S
fonctionnels type SPC-FIO-... . . . . . . . . . . . . . . . . . . . . . . . . . . B-14B.2.4 Caractéristiques techniques du clavier/afficheur
type SPC200-MMI-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-15
C. Index
C.1 Index. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-3
SPC200... 9904a V
Utilisation conforme à l’usage prévu
Le contrôleur Smart Positioning Controller SPC200 estdestiné à être monté dans une armoire électrique. Ilpermet la commande de positionnement et la régulationde position pour les axes linéaires pneumatiques ainsique la commande de positionnement pour les axes desmoteurs pas-à-pas. La description des cartes de baseet des modules du SPC200 figurent dans ce manuel.Les autres cartes d’extension spécifiques sont présen-tées dans des manuels séparés.
Il est absolument indispensable de respecter lesconsignes techniques de sécurité mentionnées ainsique l’usage prévu pour chaque carte ou module. Res-pecter également les consignes de sécurité des noticesd’utilisation des divers composants pneumatiques ou é-lectriques utilisés.
Le SPC200 ainsi que les modules qui lui sont raccor-dés doivent toujours être utilisés de la manière sui-vante :
– conformément à l’usage prévu,
– dans l’état d’origine,
– sans modifications non autorisées,
– dans un état fonctionnel irréprochable.
En cas de raccordement d’autres composants courantsdu commerce comme des capteurs et des actionneurs,les valeurs limites de pressions, de températures, decaractéristiques électriques et de couples doivent êtrerespectées. Respecter également les directives des or-ganismes professionnels et les réglementations natio-nales en vigueur.
VI SPC200... 9904a
Utilisateurs
Ce manuel s’adresse exclusivement aux spécialistesdes techniques d’asservissement et d’automatisation,possédant une première expérience de l’installation, dela mise en service, de la programmation et du diag-nostic sur les systèmes de positionnement.
Instructions importantes d’utilisation
Ce manuel comporte des instructions sur les diversdangers pouvant résulter d’une utilisation non conformedu SPC200. Ces instructions, imprimées en italique,sont encadrées et de surcroît répérées par un picto-gramme.
Catégoriesde risques
On distingue les indications suivantes :
DANGER :... indique un risque de graves dommages corporelsou matériels si les instructions ne sont pas respec-tées.
ATTENTION :... indique un risque de dommages corporels ou matériels si les instructions ne sont pas respectées.
NOTE :... indique un risque de dommages matériels si les instructions ne sont pas respectées.
SPC200... 9904a VII
Les pictogrammes et les légendes complètent les in-structions en attirant l’attention sur les divers dangers etleurs conséquences.
Pictogramme
Les pictogrammes utilisés sont les suivants :
Mouvements incontrôlés des tuyaux débranchés.
Mouvements incontrôlés des vérins connectés.
Tension électrique dangereuse pour l’homme ou: Etats indéterminés des composants électroniques ayantdes conséquences imprévisibles sur les circuits électri-ques.
Composants sensibles aux charges électrostatiques.La manipulation des contacts peut les endommager.
Les recommandations ou les conseils sont signalés parce pictogramme.
• Les points d’énumération accompagnent une listed’opérations qui peuvent se dérouler dans un ordrequelconque.
Signesd’énumération
1. Les chiffres sont utilisés lorsque les opérations doi-vent se dérouler dans un ordre défini, de haut enbas.
– Les tirets précèdent des énumérations d’ordre géné-ral.
VIII SPC200... 9904a
Remarques concernant ce manuel
Ce manuel contient des informations générales sur lemode de fonctionnement, le montage, l’installation et lamise en service d’axes pneumatiques avec le SPC200.Il concerne le Smart Positioning Controller SPC200avec système d’exploitation V 3.X.
Des cartes d’extension permettent le couplage sur desbus de terrain ainsi que le couplage d’axes électriques.Vous trouverez des informations à ce sujet dans lesmanuels respectifs des cartes.
Le manuel WinPISA fournit des informations sur la miseen service, la programmation et le diagnostic duSPC200 à l’aide du progiciel WinPISA.
SPC200... 9904a IX

Manuels utiles pour le Smart Positioning Controller SPC200
Type Titre Contenu
Manuel système Smart Positioning ControllerSPC200, Manueltype P.BE-SPC200-...
Installation, mise en service et diagno-stic des axes pneumatiques avec leSPC200; Cartes standard et modules
Manuel logiciel ProgicielWinPISA type P.SW-WIN-PISA-...
Fonctions du progiciel WinPISA
Aide Aide pour WinPISA(intégrée dans WinPISA)
Aide à l’utilisation du progiciel WinPISA
Manuels Cartes de bus de terrain type P.BE-SPC200-...-...
Installation, mise en service et diagno-stic des cartes de bus correspondantes
Cartes de moteurs pas-à-pastype P.BE-SPC200-SMX-1-...
Installation, mise en service et diagno-stic en cas d’utilisation d’un moteur pas-à-pas
Système de positionnement électriquetype P.BE-ATP-...
Informations complémentaires sur lessystèmes de positionnement électriques
Les manuels joints aux produits fournissent des infor-mations sur les composants pneumatiques.
X SPC200... 9904a

Concepts spécifiques au produit et abréviations
Les concepts et abréviations suivants sont utilisés dansce manuel :
Concept/abréviation Signification
API/PC industriel Automate programmable / PC industriel
Branche Ensemble des modules reliés à une branche d’interface d’axe.
Branche d’interfaced’axe
Ensemble des modules et des câbles reliés ensemble sur leconnecteur d’interface d’axe du SPC200.
Câble CP Câble spécifique permettant le couplage des différents modules sur la branche d’interface d’axe.
Cartes Cartes à enficher sur le rack du SPC200.
E/S Entrées/sorties TOR
F Bit mémoire (Flag)
I Entrée TOR (Input)
Interface d’axe Le couplage du système de mesure du déplacement s’effectue parl’intermédiaire de l’interface d’axe, tout comme celui du distributeurproportionnel sur le SPC200.
Module d’E/S Concept désignant les modules comportant des entrées et dessorties TOR et raccordés à une branche d’interface d’axe.
Paramètres d’axe Paramètres de configuration décrivant la structure, les propriétés etles éléments constitutifs de l’axe utilisé.
Paramètres d’application
Paramètres de configuration décrivant les conditions d’utilisation.
Q Sortie TOR
R Registre
Signal 0 L’entrée ou la sortie délivre une tension 0 V
Signal 1 L’entrée ou la sortie délivre une tension 24 V
SPC200... 9904a XI

XII SPC200... 9904a
Chapitre 1
Présentation du système
1. Présentation du système
SPC200... 9904a 1-1
Sommaire
1. Présentation du système
1.1 Système de positionnement avec SPC200 . . . . . . . . . . . . . . . . . 1-41.1.1 La gamme d’appareils pour le SPC200 . . . . . . . . . . . . . . . . . . . . 1-71.1.2 Structure du SPC200 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-91.2 Raccordement des axes pneumatiques . . . . . . . . . . . . . . . . . . . 1-131.3 Structure d’une branche d’interface d’axe . . . . . . . . . . . . . . . . . 1-171.4 Modes de fonctionnement du SPC200 . . . . . . . . . . . . . . . . . . . 1-211.5 Applications multiaxiales avec le SPC200 . . . . . . . . . . . . . . . . . 1-231.6 Possibilités de mise en service et de programmation . . . . . . . . 1-241.7 Espace d’adresses d’E/S du SPC200 . . . . . . . . . . . . . . . . . . . . 1-28
1. Présentation du système
1-2 SPC200... 9904a
Ce chapitre donne un aperçu sur les possibilités d’équi-pement des systèmes de positionnement avec lecontrôleur SPC200 et montre la variété des appareils etla structure du SPC200. Par conséquent, il comportedes informations essentielles sur :
Contenu dece chapitre
– le raccordement d’axes pneumatiques sur unebranche d’interface d’axe
– les divers modes de fonctionnement, de mise en ser-vice et de programmation du SPC200
– l’espace d’adresses d’E/S du SPC200.
Le couplage sur le bus de terrain est assuré par descartes de bus de terrain spécifiques. Vous trouverezdes informations à ce sujet dans le manuel de la cartede bus de terrain.
Autresinformations
Le raccordement d’axes électriques est assuré par descartes spécifiques. Vous trouverez des informations àce sujet dans le manuel de la carte de bus de terrain.
1. Présentation du système
SPC200... 9904a 1-3
1.1 Système de positionnement avec SPC200
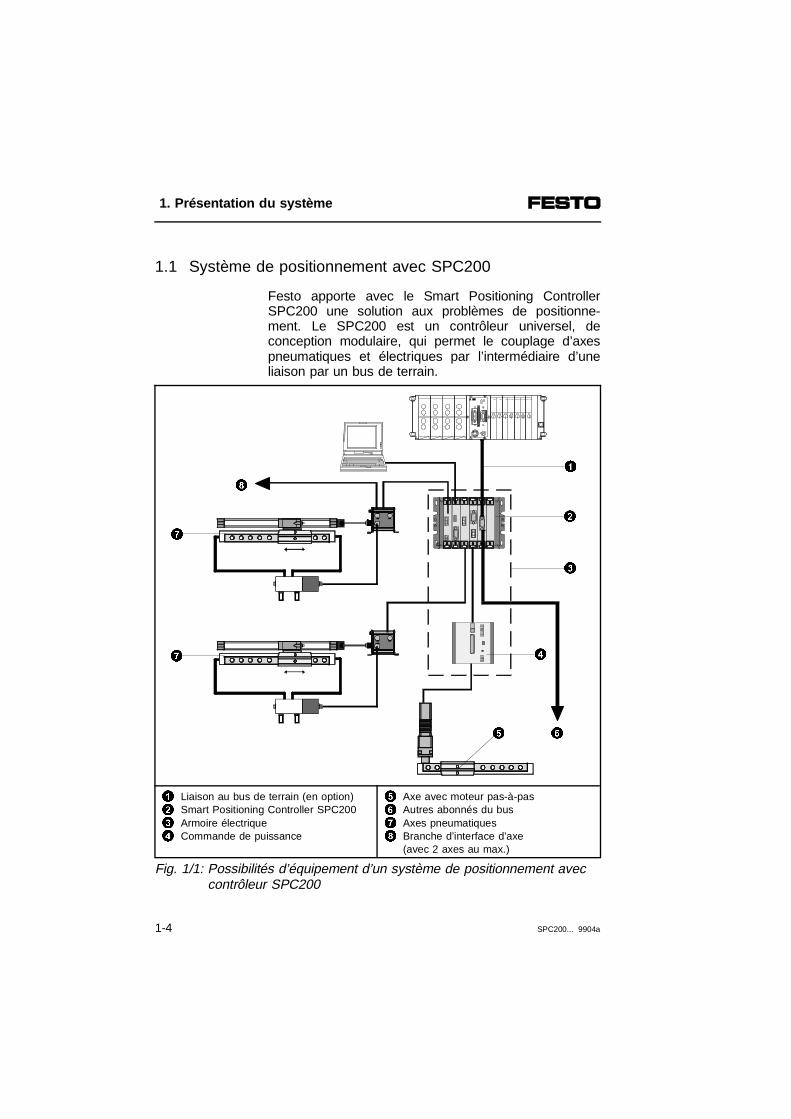
Festo apporte avec le Smart Positioning ControllerSPC200 une solution aux problèmes de positionne-ment. Le SPC200 est un contrôleur universel, deconception modulaire, qui permet le couplage d’axespneumatiques et électriques par l’intermédiaire d’uneliaison par un bus de terrain.
1234
Liaison au bus de terrain (en option)Smart Positioning Controller SPC200Armoire électriqueCommande de puissance
5678
Axe avec moteur pas-à-pasAutres abonnés du busAxes pneumatiquesBranche d’interface d’axe (avec 2 axes au max.)
Fig. 1/1: Possibilités d’équipement d’un système de positionnement avec contrôleur SPC200
7
2
1
8
7
3
5 6
4
1. Présentation du système
1-4 SPC200... 9904a
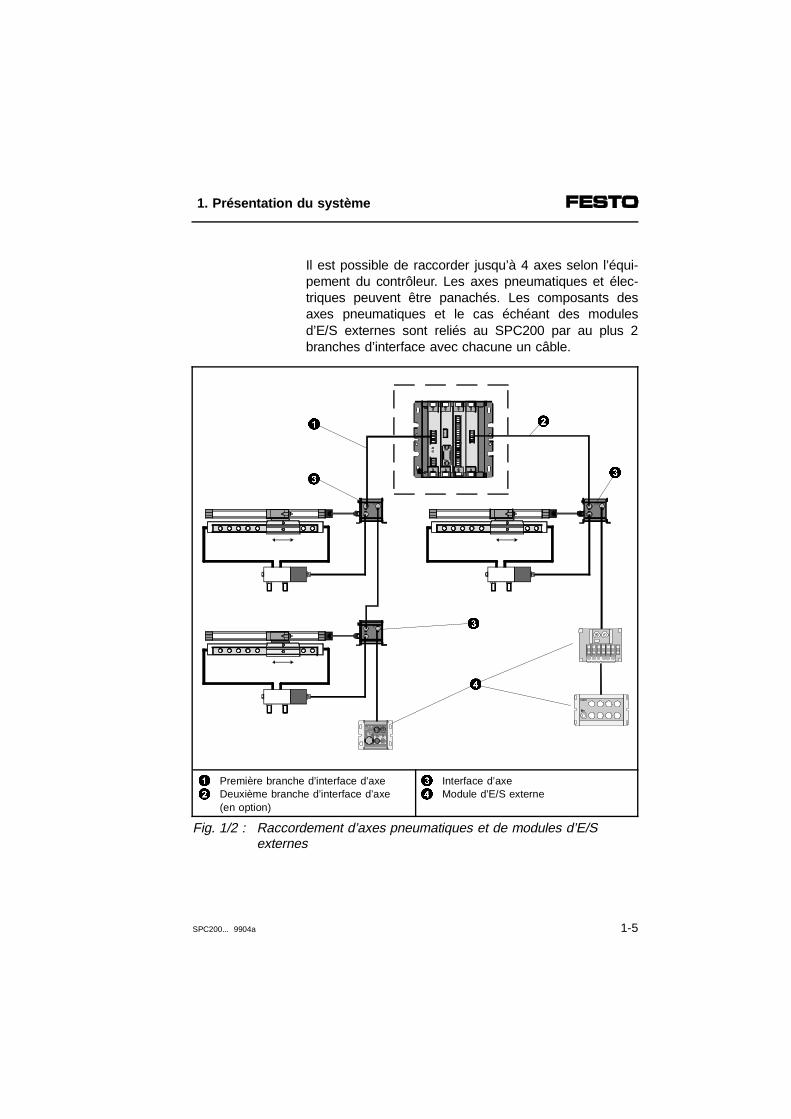
Il est possible de raccorder jusqu’à 4 axes selon l’équi-pement du contrôleur. Les axes pneumatiques et élec-triques peuvent être panachés. Les composants desaxes pneumatiques et le cas échéant des modulesd’E/S externes sont reliés au SPC200 par au plus 2branches d’interface avec chacune un câble.
12
Première branche d’interface d’axeDeuxième branche d’interface d’axe(en option)
34
Interface d’axeModule d’E/S externe
Fig. 1/2 : Raccordement d’axes pneumatiques et de modules d’E/Sexternes
1 2
3
4
33
1. Présentation du système
SPC200... 9904a 1-5
Le SPC200 peut aussi bien fonctionner en mode auto-nome que commandé par un API/PC INDUSTRIEL deniveau supérieur. Dans certaines limites, il peut égale-ment assurer des fonctions de commande. Pour cela,des cartes d’entrées/sorties peuvent être intégrées auSPC200 par l’intermédiaire d’E/S et des modules d’E/Sexternes peuvent être raccordés à une branche d’inter-face d’axe.
Le couplage sur un API/PC INDUSTRIEL peut être réa-lisé par des entrées/sorties TOR ou par des cartes debus de terrain spécifiques (p. ex. Interbus; PROFIBUS-DP etc.).
1. Présentation du système
1-6 SPC200... 9904a
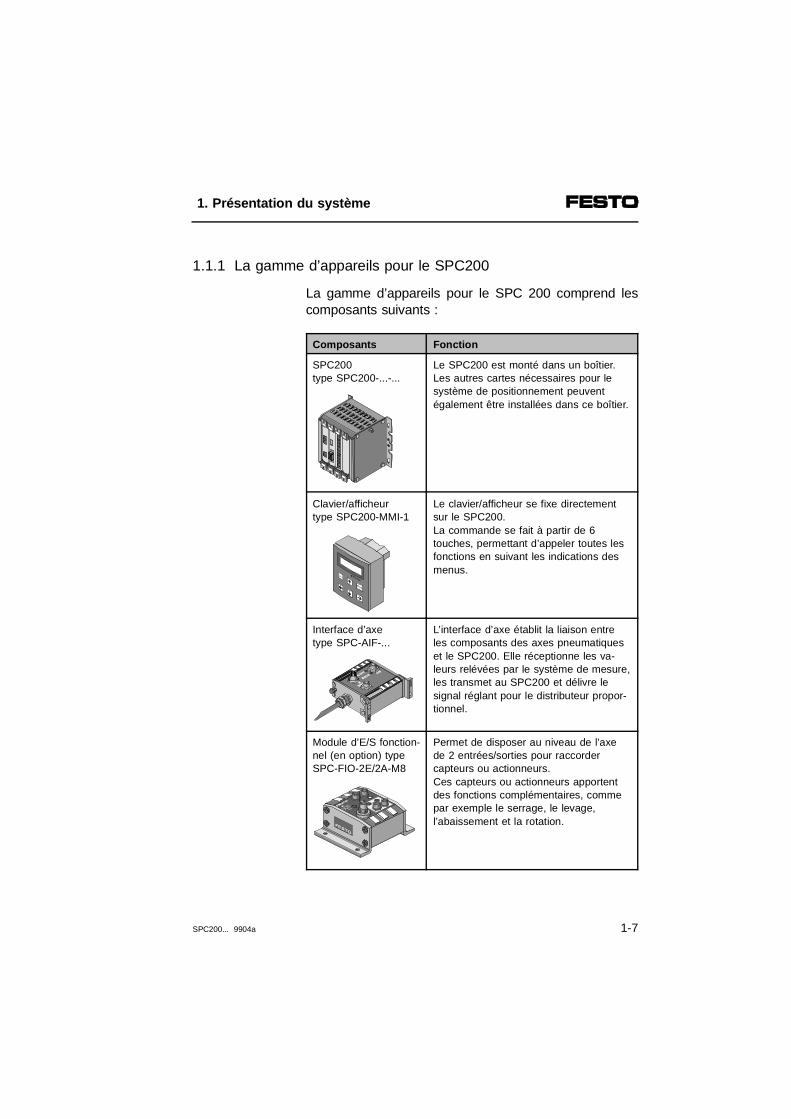
1.1.1 La gamme d’appareils pour le SPC200
La gamme d’appareils pour le SPC 200 comprend lescomposants suivants :
Composants Fonction
SPC200type SPC200-...-...
Le SPC200 est monté dans un boîtier.Les autres cartes nécessaires pour lesystème de positionnement peuventégalement être installées dans ce boîtier.
Clavier/afficheurtype SPC200-MMI-1
Le clavier/afficheur se fixe directementsur le SPC200.La commande se fait à partir de 6touches, permettant d’appeler toutes lesfonctions en suivant les indications desmenus.
Interface d’axetype SPC-AIF-...
L’interface d’axe établit la liaison entreles composants des axes pneumatiqueset le SPC200. Elle réceptionne les va-leurs relévées par le système de mesure,les transmet au SPC200 et délivre lesignal réglant pour le distributeur propor-tionnel.
Module d’E/S fonction-nel (en option) typeSPC-FIO-2E/2A-M8
Permet de disposer au niveau de l’axe de 2 entrées/sorties pour raccordercapteurs ou actionneurs.Ces capteurs ou actionneurs apportentdes fonctions complémentaires, commepar exemple le serrage, le levage,l’abaissement et la rotation.
1. Présentation du système
SPC200... 9904a 1-7
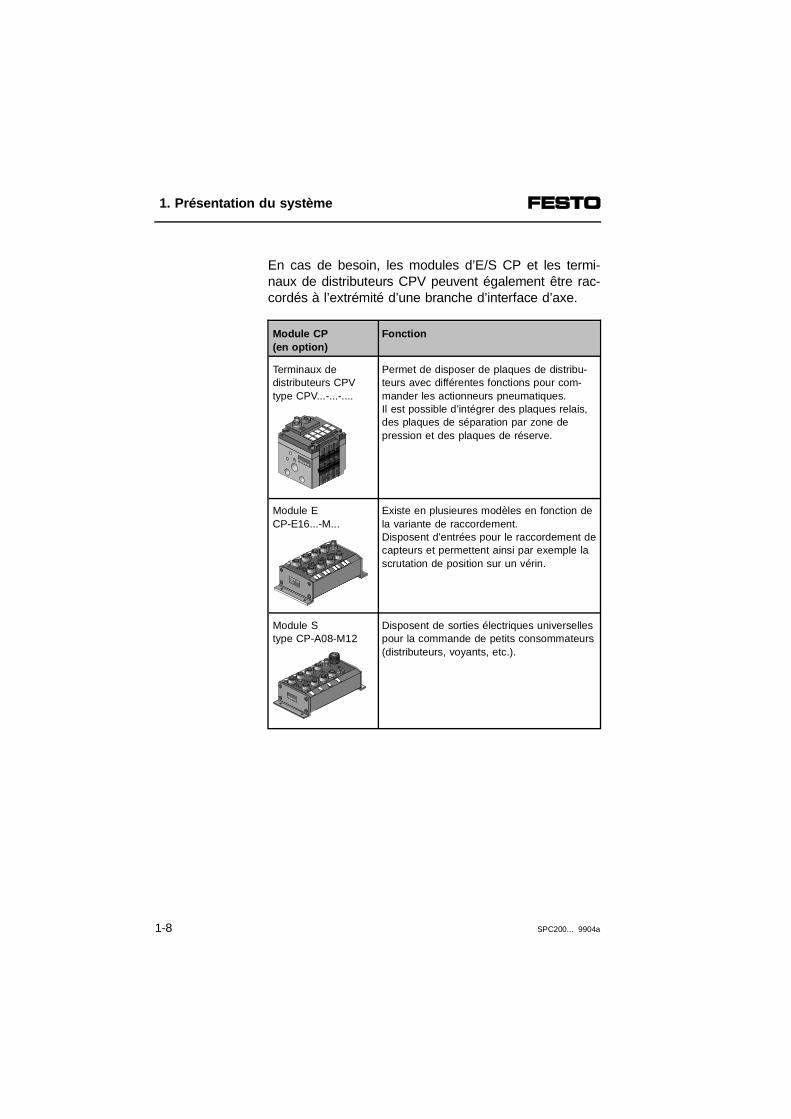
En cas de besoin, les modules d’E/S CP et les termi-naux de distributeurs CPV peuvent également être rac-cordés à l’extrémité d’une branche d’interface d’axe.
Module CP(en option)
Fonction
Terminaux de distributeurs CPVtype CPV...-...-....
Permet de disposer de plaques de distribu-teurs avec différentes fonctions pour com-mander les actionneurs pneumatiques.Il est possible d’intégrer des plaques relais,des plaques de séparation par zone depression et des plaques de réserve.
Module ECP-E16...-M...
Existe en plusieures modèles en fonction dela variante de raccordement.Disposent d’entrées pour le raccordement decapteurs et permettent ainsi par exemple lascrutation de position sur un vérin.
Module Stype CP-A08-M12
Disposent de sorties électriques universelles pour la commande de petits consommateurs (distributeurs, voyants, etc.).
1. Présentation du système
1-8 SPC200... 9904a
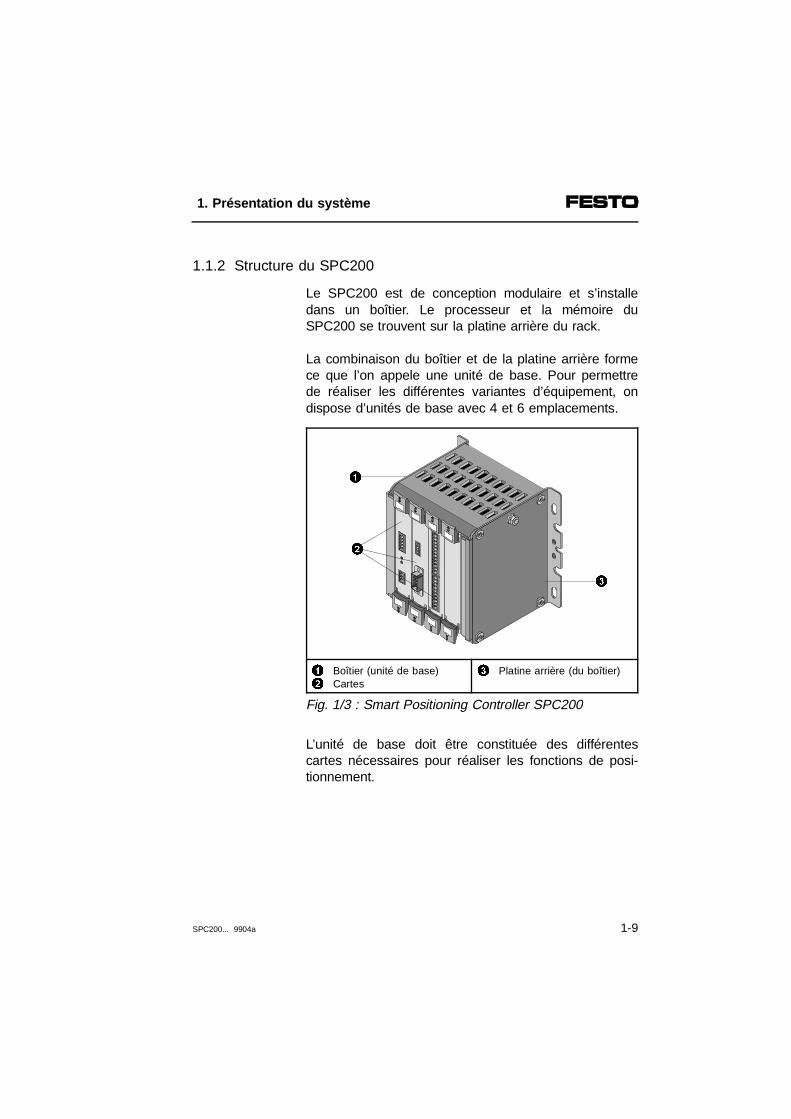
1.1.2 Structure du SPC200
Le SPC200 est de conception modulaire et s’installedans un boîtier. Le processeur et la mémoire duSPC200 se trouvent sur la platine arrière du rack.
La combinaison du boîtier et de la platine arrière formece que l’on appele une unité de base. Pour permettrede réaliser les différentes variantes d’équipement, ondispose d’unités de base avec 4 et 6 emplacements.
12
Boîtier (unité de base)Cartes
3 Platine arrière (du boîtier)
Fig. 1/3 : Smart Positioning Controller SPC200
L’unité de base doit être constituée des différentescartes nécessaires pour réaliser les fonctions de posi-tionnement.
2
3
1
1. Présentation du système
SPC200... 9904a 1-9
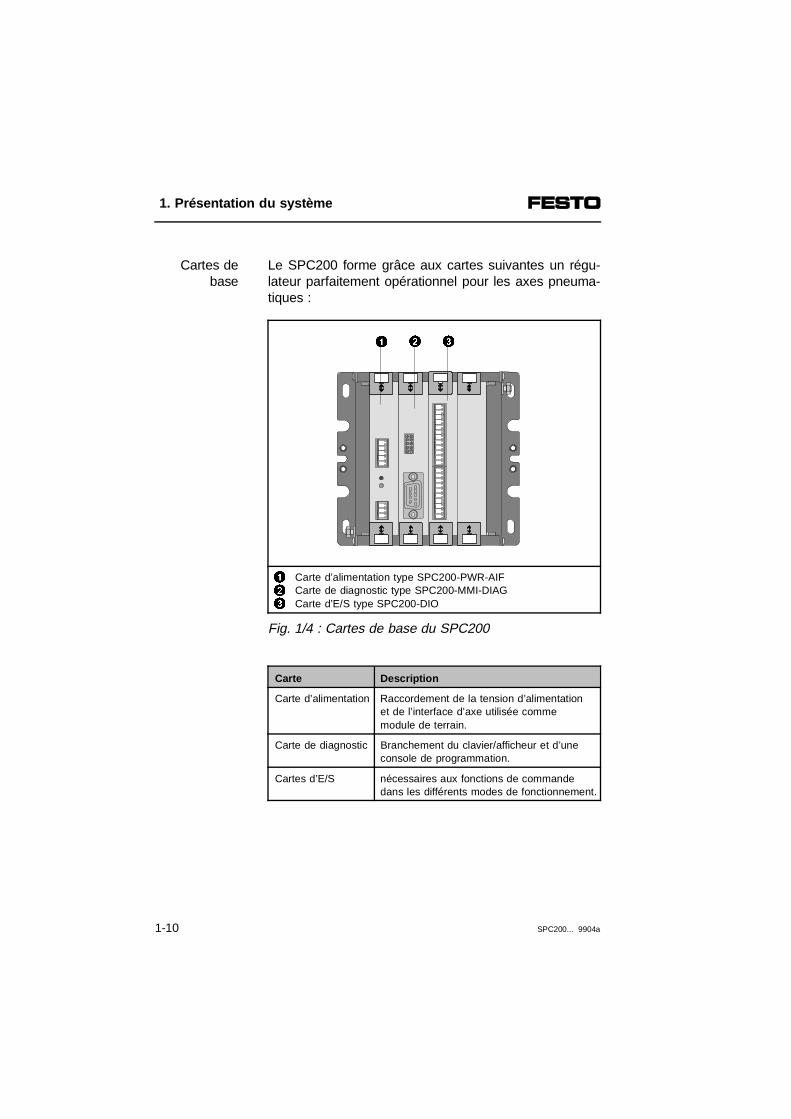
Le SPC200 forme grâce aux cartes suivantes un régu-lateur parfaitement opérationnel pour les axes pneuma-tiques :
Cartes debase
123
Carte d’alimentation type SPC200-PWR-AIFCarte de diagnostic type SPC200-MMI-DIAGCarte d’E/S type SPC200-DIO
Fig. 1/4 : Cartes de base du SPC200
Carte Description
Carte d’alimentation Raccordement de la tension d’alimentation et de l’interface d’axe utilisée commemodule de terrain.
Carte de diagnostic Branchement du clavier/afficheur et d’uneconsole de programmation.
Cartes d’E/S nécessaires aux fonctions de commandedans les différents modes de fonctionnement.
2 31
1. Présentation du système
1-10 SPC200... 9904a
Un système comportant tous les éléments mentionnésci-dessus offre les possibilités suivantes :
– commande de 2 axes pneumatiques
– possibilité de raccorder divers types de systèmes demesure grâce aux variantes d’interface d’axe
– mode autonome ou commande par les E/S d’unAPI/PCI externe
– programmation et commande par un PC ou un cla-vier/afficheur.
Les cartes figurant dans le tableau suivant permettentd’étendre encore les fonctions du système :
Cartesd’extension
1. Présentation du système
SPC200... 9904a 1-11
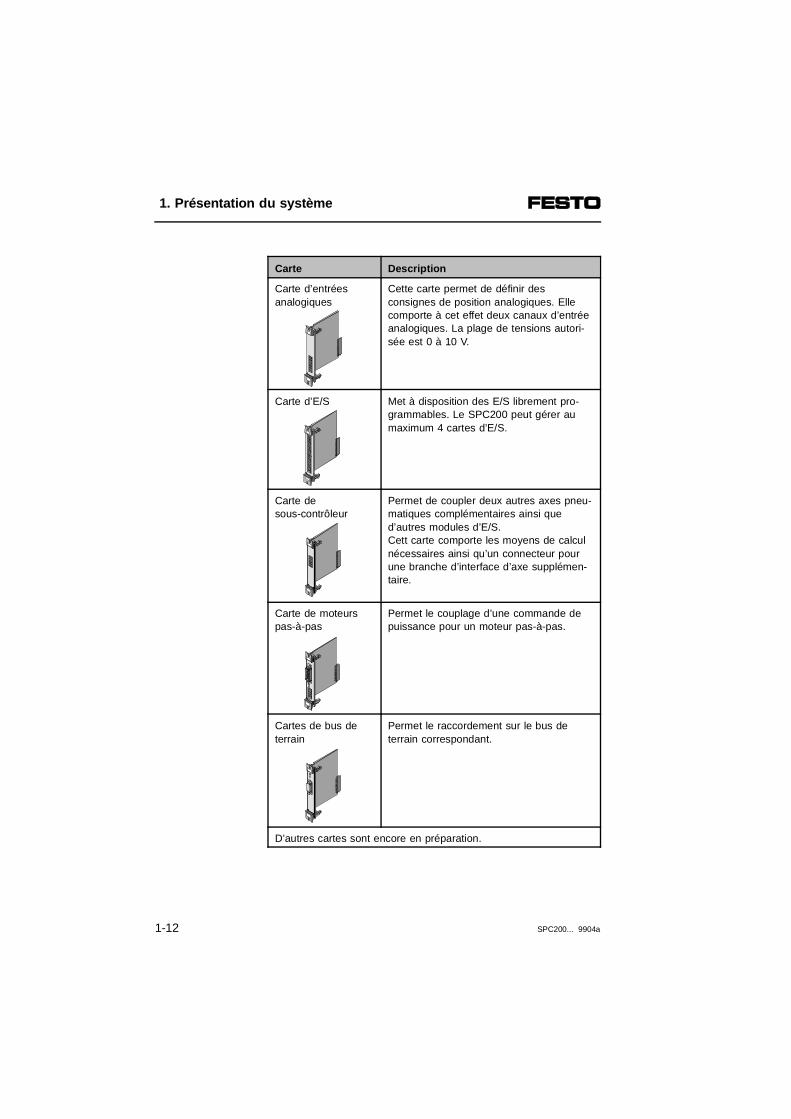
Carte Description
Carte d’entrées analogiques
Cette carte permet de définir desconsignes de position analogiques. Ellecomporte à cet effet deux canaux d’entréeanalogiques. La plage de tensions autori-sée est 0 à 10 V.
Carte d’E/S Met à disposition des E/S librement pro-grammables. Le SPC200 peut gérer aumaximum 4 cartes d’E/S.
Carte de sous-contrôleur
Permet de coupler deux autres axes pneu-matiques complémentaires ainsi qued’autres modules d’E/S.Cett carte comporte les moyens de calculnécessaires ainsi qu’un connecteur pourune branche d’interface d’axe supplémen-taire.
Carte de moteurspas-à-pas
Permet le couplage d’une commande depuissance pour un moteur pas-à-pas.
Cartes de bus de terrain
Permet le raccordement sur le bus deterrain correspondant.
D’autres cartes sont encore en préparation.
1. Présentation du système
1-12 SPC200... 9904a
1.2 Raccordement des axes pneumatiques
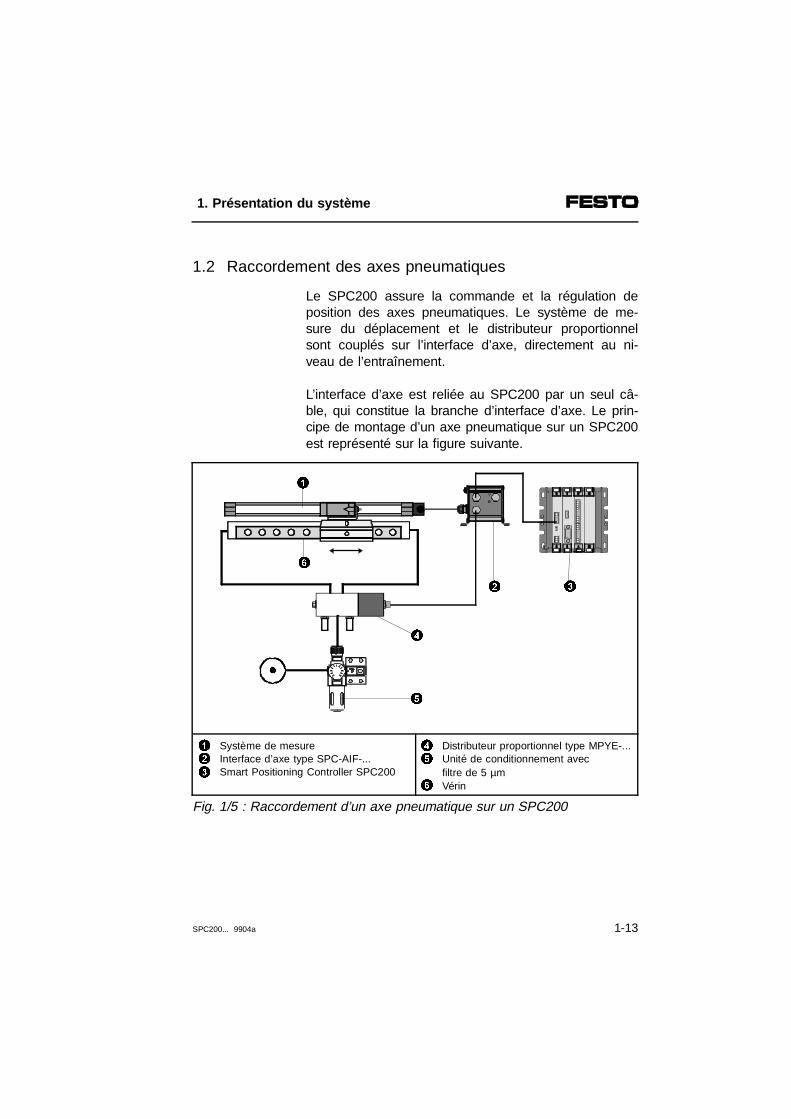
Le SPC200 assure la commande et la régulation deposition des axes pneumatiques. Le système de me-sure du déplacement et le distributeur proportionnelsont couplés sur l’interface d’axe, directement au ni-veau de l’entraînement.
L’interface d’axe est reliée au SPC200 par un seul câ-ble, qui constitue la branche d’interface d’axe. Le prin-cipe de montage d’un axe pneumatique sur un SPC200est représenté sur la figure suivante.
123
Système de mesureInterface d’axe type SPC-AIF-...Smart Positioning Controller SPC200
45
6
Distributeur proportionnel type MPYE-...Unité de conditionnement avec filtre de 5 µmVérin
Fig. 1/5 : Raccordement d’un axe pneumatique sur un SPC200
2 3
4
5
6
1
1. Présentation du système
SPC200... 9904a 1-13
Le montage d’un axe pneumatique doit impérativementcomporter les composants suivants :
Composantsde montage
– un contrôleur d’axe SPC200
– une interface d’axe type SPC-AIF-....
– un distributeur proportionnel type MPYE-5-...-010B
– un système de mesure du déplacement type MLO-POT-...-TLF ou type MME-MTS-...-TLF-AIF(ce système est intégré sur les vérins du typeDGPI(L)-...-...-...-AIF)
– un vérin avec guidage mécanique
– une unité de conditionnement avec filtre de 5 µm
– une alimentation 24 V
– éventuellement les composants nécessaires pour ins-taller un circuit d’arrêt d’urgence pneumatique.
Le Smart Positioning Controller SPC200 assume princi-palement les tâches suivantes :
– définition des consignes de position grâce à la com-mande de positionnement
– comparaison de la position réelle par rapport à laconsigne et régulation de position à l’aide du distribu-teur proportionnel
– optimisation de la régulation grâce à l’adaptation desparamètres
– commande de la périphérie grâce aux entrées/sortiesTOR et au séquenceur.
1. Présentation du système
1-14 SPC200... 9904a
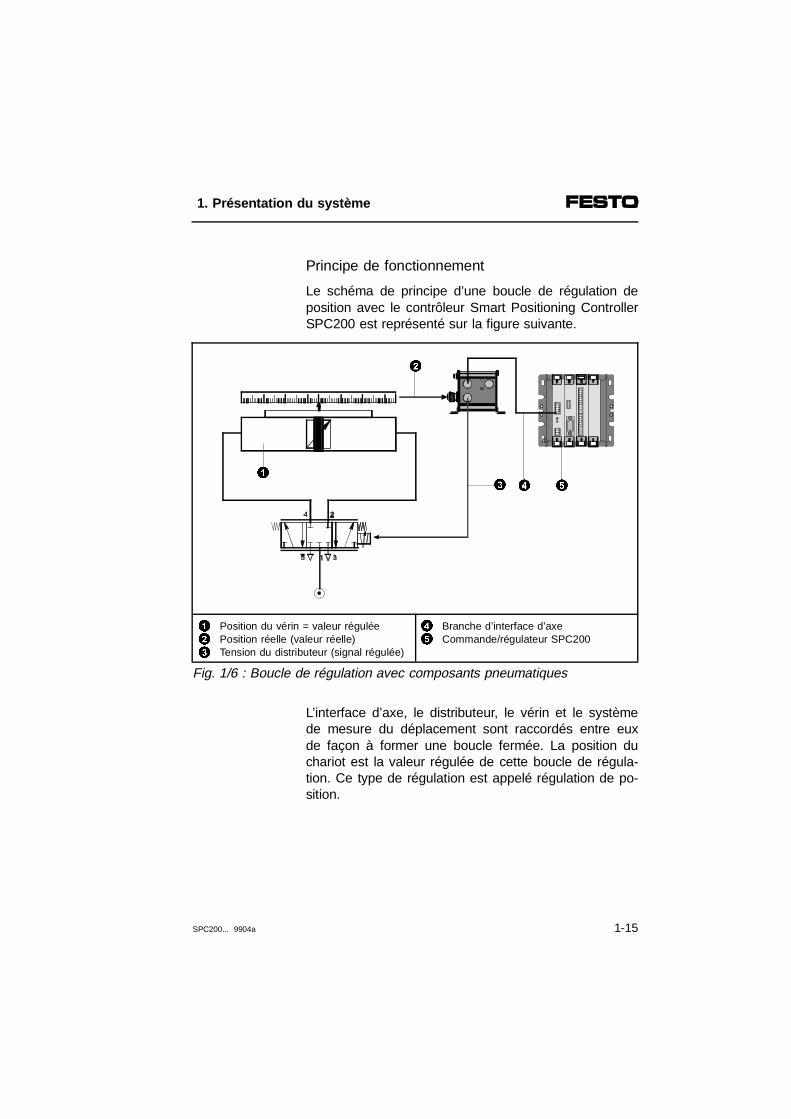
Principe de fonctionnement
Le schéma de principe d’une boucle de régulation deposition avec le contrôleur Smart Positioning ControllerSPC200 est représenté sur la figure suivante.
123
Position du vérin = valeur réguléePosition réelle (valeur réelle)Tension du distributeur (signal régulée)
45
Branche d’interface d’axeCommande/régulateur SPC200
Fig. 1/6 : Boucle de régulation avec composants pneumatiques
L’interface d’axe, le distributeur, le vérin et le systèmede mesure du déplacement sont raccordés entre euxde façon à former une boucle fermée. La position duchariot est la valeur régulée de cette boucle de régula-tion. Ce type de régulation est appelé régulation de po-sition.
3 541
2
1. Présentation du système
SPC200... 9904a 1-15
Dans la suite, les concepts piston et chariot ont lemême rôle.
Le système de mesure relève en permanence la posi-tion du chariot et transmet un signal électrique à l’inter-face d’axe.
Les valeurs de mesure sont ensuite transférées de l’in-terface d’axe au Smart Positioning Controller SPC200.Ce dernier compare la consigne de position avec la po-sition réelle et en déduit le signal régulée qui sera en-voyé au distributeur proportionnel.
Le distributeur proportionnel commande le chariot enmettant sous pression l’une des chambres, et l’autre àl’échappement. En position médiane du distributeur, leflux d’air est coupé et le chariot est donc maintenudans sa position actuelle.
1. Présentation du système
1-16 SPC200... 9904a
1.3 Structure d’une branche d’interface d’axe
Le SPC200 est prévu pour le montage dans une ar-moire électrique. Sa liaison avec le système de mesuredu déplacement et le distributeur proportionnel transitepar l’interface d’axe, raccordée au SPC200 par labranche d’interface d’axe.
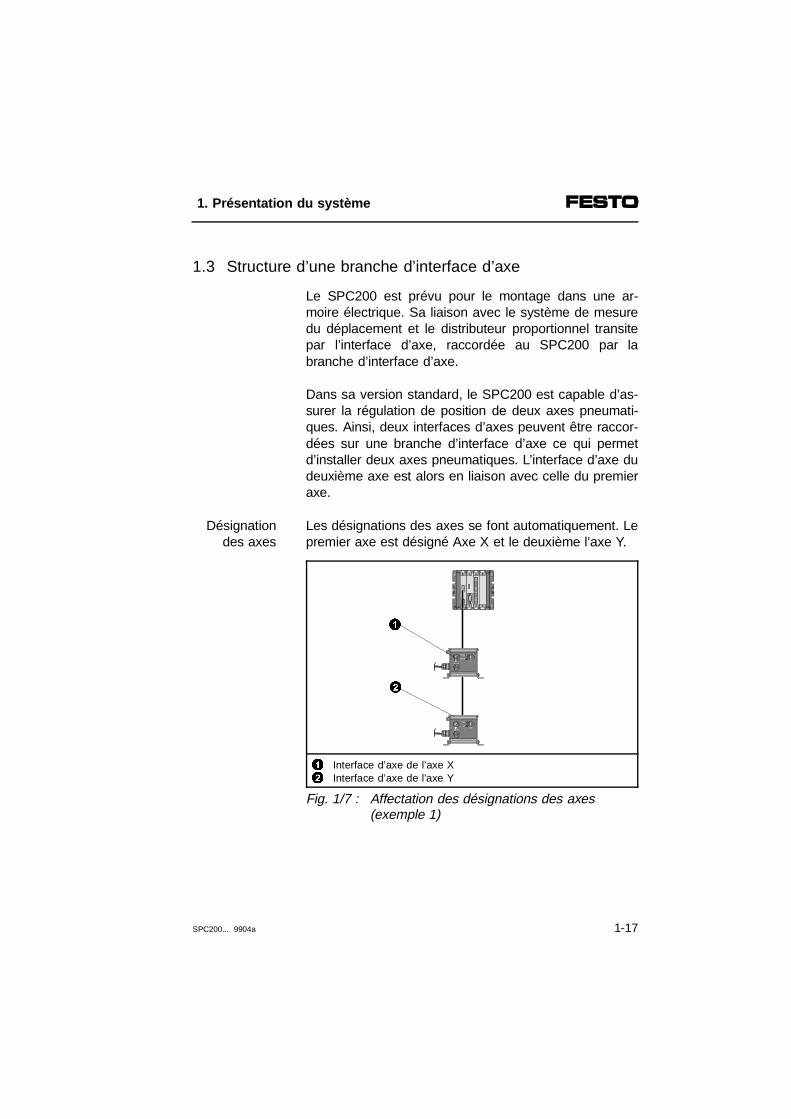
Dans sa version standard, le SPC200 est capable d’as-surer la régulation de position de deux axes pneumati-ques. Ainsi, deux interfaces d’axes peuvent être raccor-dées sur une branche d’interface d’axe ce qui permetd’installer deux axes pneumatiques. L’interface d’axe dudeuxième axe est alors en liaison avec celle du premieraxe.
Les désignations des axes se font automatiquement. Lepremier axe est désigné Axe X et le deuxième l’axe Y.
Désignationdes axes
12
Interface d’axe de l’axe XInterface d’axe de l’axe Y
Fig. 1/7 : Affectation des désignations des axes(exemple 1)
2
1
1. Présentation du système
SPC200... 9904a 1-17
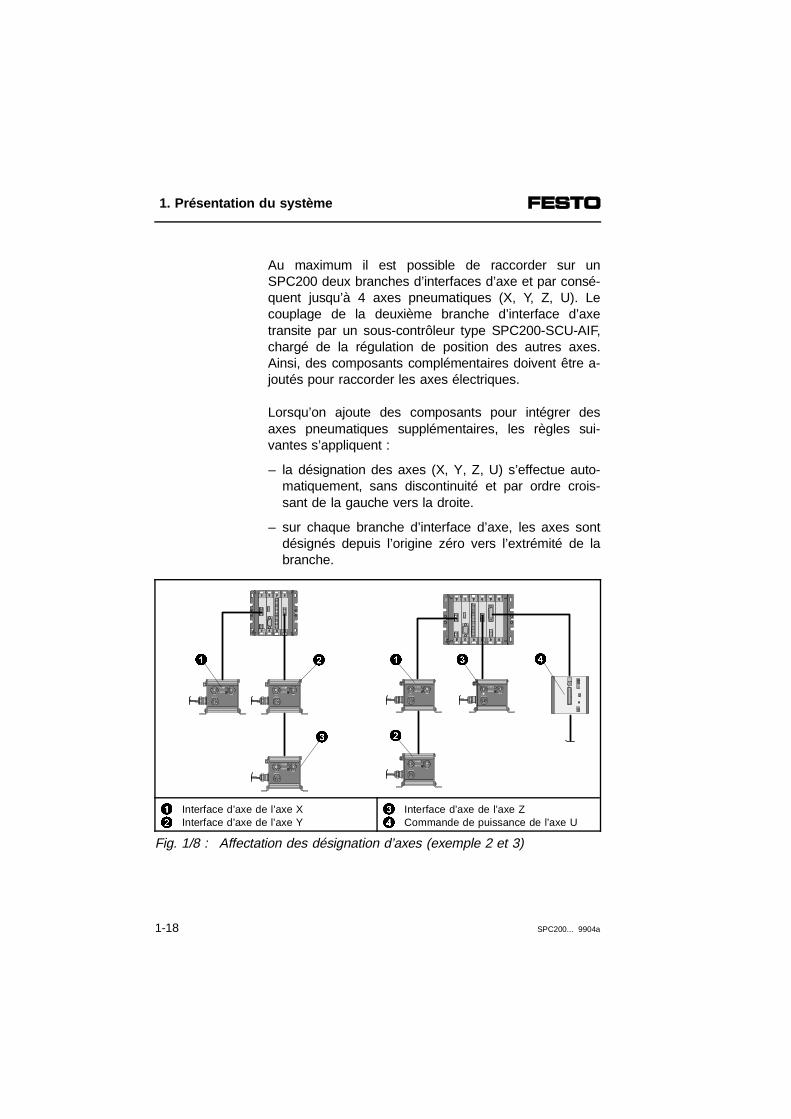
Au maximum il est possible de raccorder sur unSPC200 deux branches d’interfaces d’axe et par consé-quent jusqu’à 4 axes pneumatiques (X, Y, Z, U). Lecouplage de la deuxième branche d’interface d’axetransite par un sous-contrôleur type SPC200-SCU-AIF,chargé de la régulation de position des autres axes.Ainsi, des composants complémentaires doivent être a-joutés pour raccorder les axes électriques.
Lorsqu’on ajoute des composants pour intégrer desaxes pneumatiques supplémentaires, les règles sui-vantes s’appliquent :
– la désignation des axes (X, Y, Z, U) s’effectue auto-matiquement, sans discontinuité et par ordre crois-sant de la gauche vers la droite.
– sur chaque branche d’interface d’axe, les axes sontdésignés depuis l’origine zéro vers l’extrémité de labranche.
12
Interface d’axe de l’axe XInterface d’axe de l’axe Y
34
Interface d’axe de l’axe ZCommande de puissance de l’axe U
Fig. 1/8 : Affectation des désignation d’axes (exemple 2 et 3)
2
3 411
3
2
1. Présentation du système
1-18 SPC200... 9904a
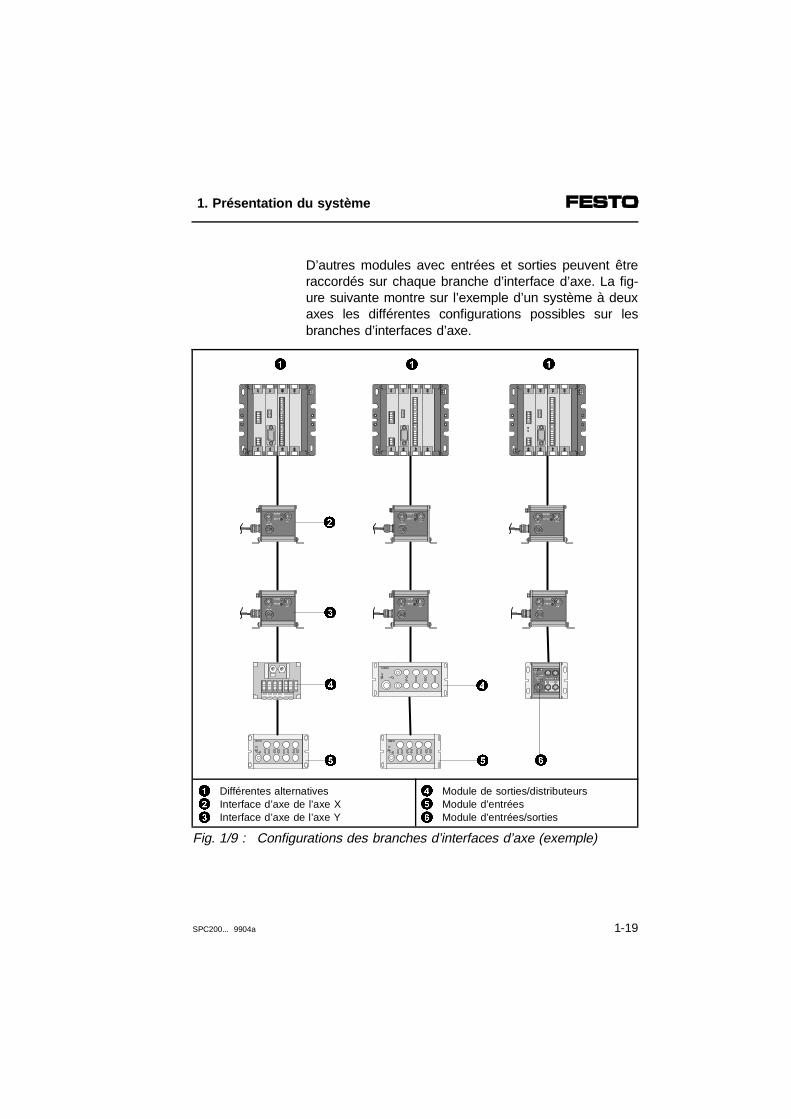
D’autres modules avec entrées et sorties peuvent êtreraccordés sur chaque branche d’interface d’axe. La fig-ure suivante montre sur l’exemple d’un système à deuxaxes les différentes configurations possibles sur lesbranches d’interfaces d’axe.
123
Différentes alternativesInterface d’axe de l’axe XInterface d’axe de l’axe Y
456
Module de sorties/distributeursModule d’entréesModule d’entrées/sorties
Fig. 1/9 : Configurations des branches d’interfaces d’axe (exemple)
1 11
2
4
5
4
5 6
3
1. Présentation du système
SPC200... 9904a 1-19
Les connecteurs de sortie des interfaces d’axe (2 ou3) permettent en cas de besoin de raccorder un mo-dule d’E/S fonctionnel (6) ou un module de sorties(4). Les modules de sorties (4) possèdent un connec-teur pour coupler un module d’entrées (5).
Les modules d’entrées peuvent également être raccor-dés directement sur l’interface d’axe.
Les divers modules sont reliés entre eux par des câblesCP. Ces câbles assurent le transfert d’informations en-tre les modules et le SPC200 ainsi que l’alimentationélectrique de l’électronique et des actionneurs. LeSPC200 identifie automatiquement tous les modulesraccordés.
1. Présentation du système
1-20 SPC200... 9904a
1.4 Modes de fonctionnement du SPC200
Le SPC200 offre des modes de fonctionnement adap-tés aux différentes applications. Les fonctions affectéesaux entrées et sorties TOR du SPC200 dépendent dumode de fonctionnement choisi. Les modes de fonc-tionnement suivants sont possibles :
– mode Marche/Arrêt
– mode de sélection de bloc.
En mode Marche/Arrêt, le SPC200 peut effectuer destâches de positionnement simples aussi bien de ma-nière autonome que sous la commande d’un API/PCIde niveau supérieur. Ainsi ce mode dispose d’entrées etde sorties librement programmables.
ModeMarche/Arrêt
Les programmes de déplacement sont démarrés etstoppés facilement à partir du clavier/afficheur, ou d’unAPI/PCI.
En cas de commande par un API/PCI de niveau supé-rieur, le couplage peut être interrompu avec l’instructionArrêt programmé (M00). Cette instruction permet desynchroniser le déroulement du programme du SPC200avec des processus externes.
1. Présentation du système
SPC200... 9904a 1-21

Ce mode fait fonctionner le SPC200 en étroite liaisonavec l’API/PCI de niveau supérieur. Dans ce cas, toutle déroulement du programme est commandé par l’A-PI/PCI. Ce dernier transmet au SPC200 les ordres depositionnement sous la forme de numéros de blocs parl’intermédiaire des E/S TOR.
Mode desélection
de bloc
En cas de commande via des cartes d’E/S, les blocsCN 0 à 31 du programme activé peuvent être appeléspar les 5 entrées TOR. Ces blocs CN sont systémati-quement associés à des ordres de déplacement. L’API/PCI peut ainsi librement accéder à 32 positionsdifférentes au maximum. En cas de commande par descartes de bus de terrain, le nombre maximal de blocsCN (1000 blocs CN) peut être appelé.
1. Présentation du système
1-22 SPC200... 9904a
1.5 Applications multiaxiales avec le SPC200
Le contrôleur d’axe SPC200 offre la possibilité d’exécu-ter plusieurs programmes en parallèle et convient pourles applications multiaxiales. Chaque SPC200 peut gé-rer jusqu’à 4 axes. Il supporte dans ce cas :
– le mode synchronisé
– le mode autonome.
En mode synchronisé, la possibilité d’exécuter des pro-grammes en parallèle n’est en général pas exploitée.Un seul programme est défini comme programme dedémarrage. Ce programme comporte des blocs CNavec des ordres de déplacement pour les différentsaxes.
Modesynchronisé
Si par exemple un ordre de déplacement concerne tousles axes, il se poursuit jusqu’à ce que tous les axesaient atteint leur position d’arrivée. Ceci permet de syn-chroniser les déplacements des axes.
Avec les systèmes multiaxiaux, les axes raccordés peu-vent être répartis en deux groupes indépendants etfonctionnant de manière asynchrone. Ceci permet defaire fonctionner économiquement deux systèmes monoou multiaxiaux à l’aide d’un SPC200.
Modeautonome
En mode autonome, les deux programmes exécutés enparallèle peuvent recevoir des ordres de déplacementconcernant un des groupes. Il est ainsi possible decommander par exemple à partir d’un même SPC200un poste de chargement et un poste de déchargement.
1. Présentation du système
SPC200... 9904a 1-23
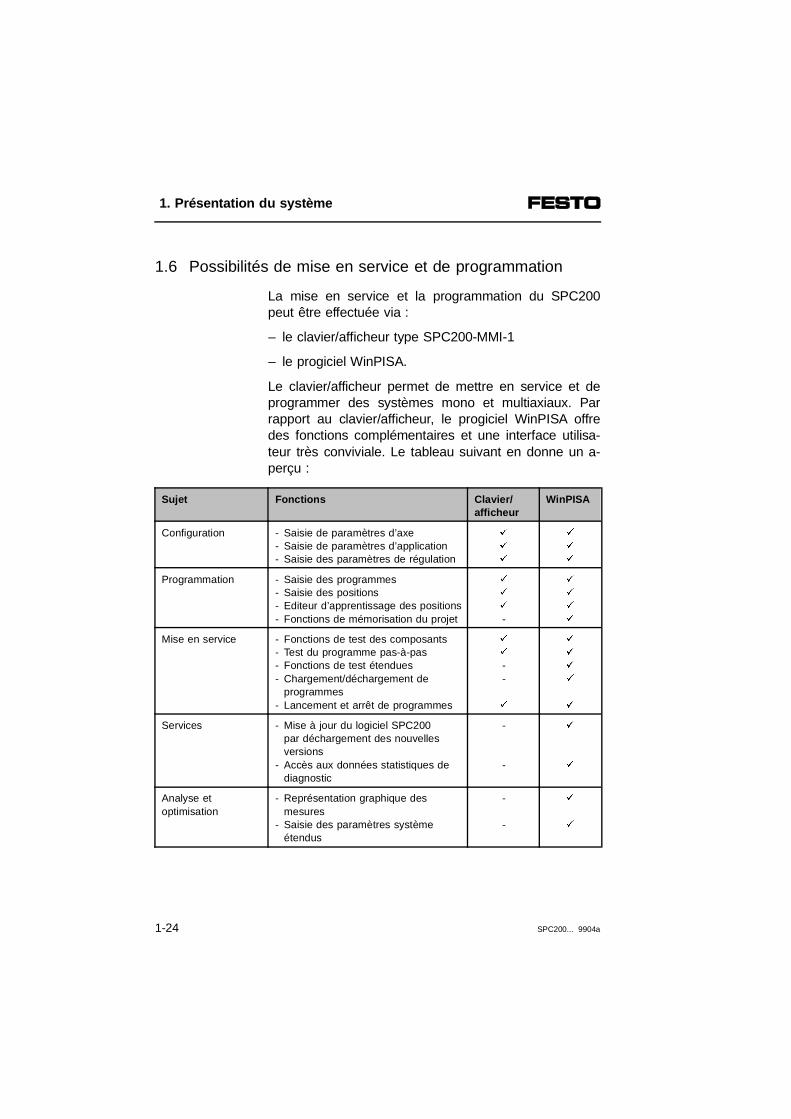
1.6 Possibilités de mise en service et de programmation
La mise en service et la programmation du SPC200peut être effectuée via :
– le clavier/afficheur type SPC200-MMI-1
– le progiciel WinPISA.
Le clavier/afficheur permet de mettre en service et deprogrammer des systèmes mono et multiaxiaux. Parrapport au clavier/afficheur, le progiciel WinPISA offredes fonctions complémentaires et une interface utilisa-teur très conviviale. Le tableau suivant en donne un a-perçu :
Sujet Fonctions Clavier/afficheur
WinPISA
Configuration - Saisie de paramètres d’axe- Saisie de paramètres d’application- Saisie des paramètres de régulation
á
á
á
á
á
á
Programmation - Saisie des programmes- Saisie des positions- Editeur d’apprentissage des positions- Fonctions de mémorisation du projet
á
á
á
-
á
á
á
á
Mise en service - Fonctions de test des composants- Test du programme pas-à-pas- Fonctions de test étendues- Chargement/déchargement de
programmes- Lancement et arrêt de programmes
á
á
--
á
á
á
á
á
á
Services - Mise à jour du logiciel SPC200 par déchargement des nouvellesversions
- Accès aux données statistiques dediagnostic
-
-
á
á
Analyse et optimisation
- Représentation graphique des mesures
- Saisie des paramètres système étendus
-
-
á
á
1. Présentation du système
1-24 SPC200... 9904a
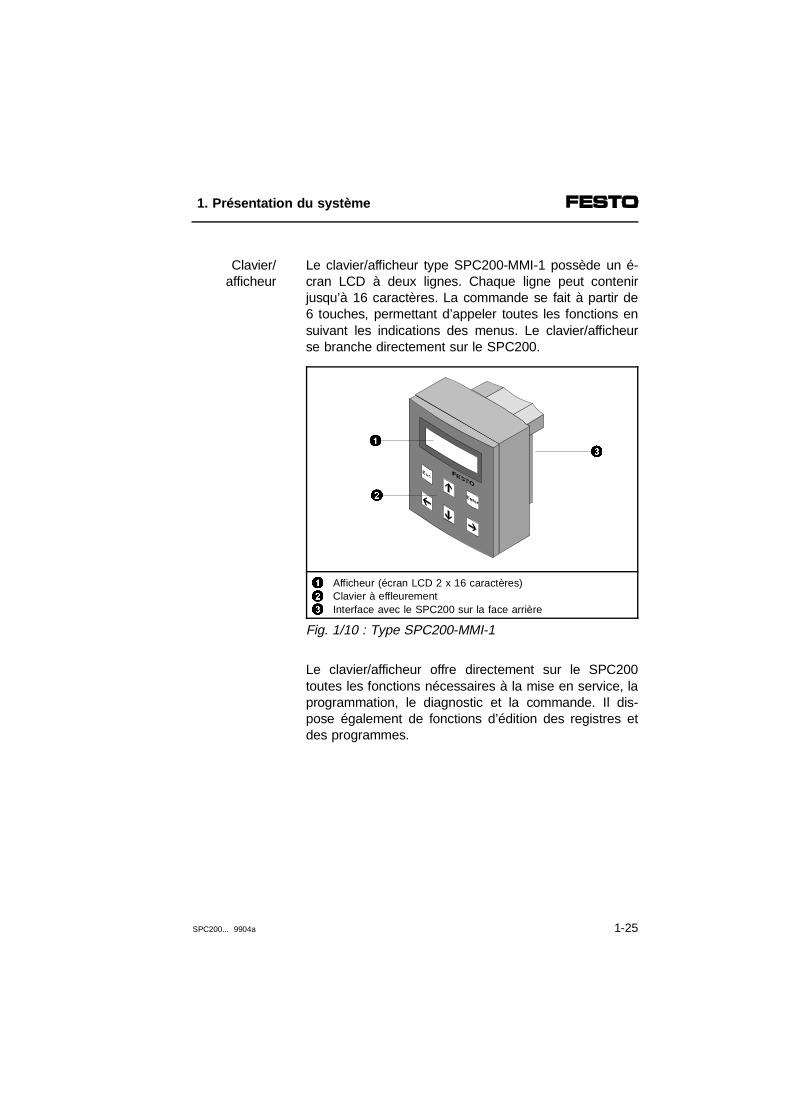
Le clavier/afficheur type SPC200-MMI-1 possède un é-cran LCD à deux lignes. Chaque ligne peut contenirjusqu’à 16 caractères. La commande se fait à partir de6 touches, permettant d’appeler toutes les fonctions ensuivant les indications des menus. Le clavier/afficheurse branche directement sur le SPC200.
Clavier/afficheur
123
Afficheur (écran LCD 2 x 16 caractères)Clavier à effleurementInterface avec le SPC200 sur la face arrière
Fig. 1/10 : Type SPC200-MMI-1
Le clavier/afficheur offre directement sur le SPC200toutes les fonctions nécessaires à la mise en service, laprogrammation, le diagnostic et la commande. Il dis-pose également de fonctions d’édition des registres etdes programmes.
13
2
1. Présentation du système
SPC200... 9904a 1-25
Les positions et les programmes peuvent être saisis àpartir du clavier en suivant les indications des menus.Lorsque l’installation du système de positionnement estterminée, les fonctions d’apprentissage permettent trèsfacilement d’accoster les positions et de les inscriredans un registre.
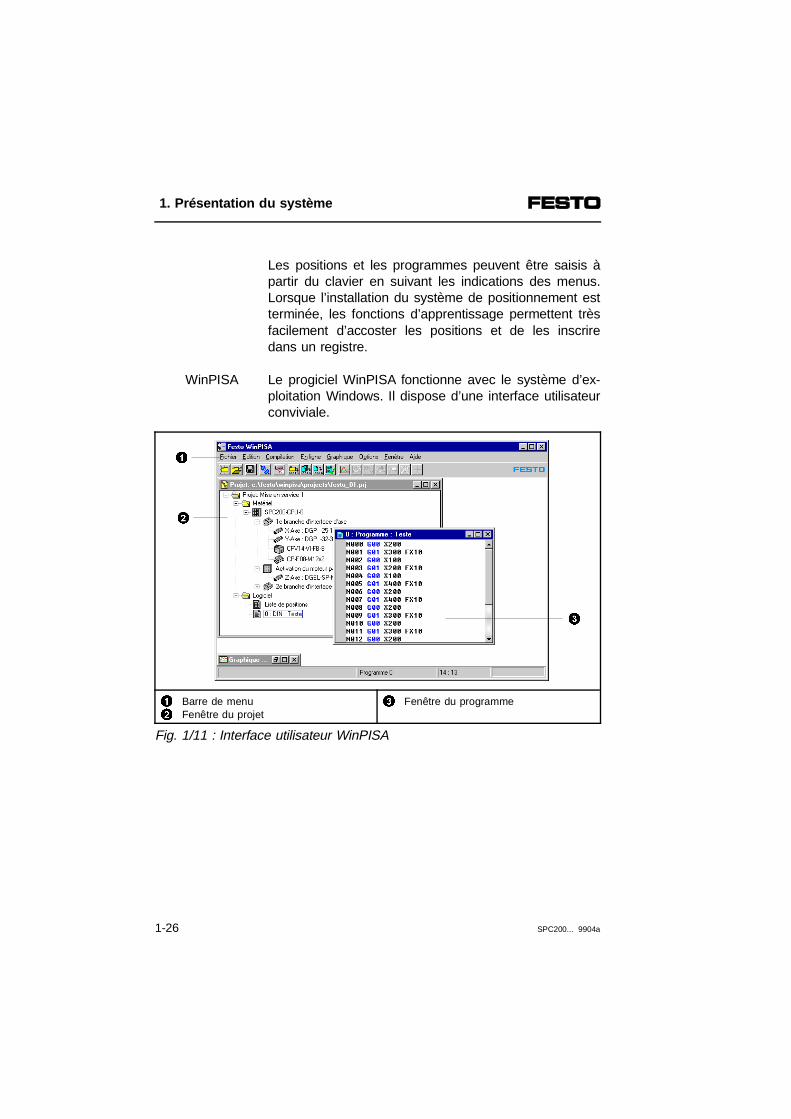
Le progiciel WinPISA fonctionne avec le système d’ex-ploitation Windows. Il dispose d’une interface utilisateurconviviale.
WinPISA
12
Barre de menuFenêtre du projet
3 Fenêtre du programme
Fig. 1/11 : Interface utilisateur WinPISA
3
1
2
1. Présentation du système
1-26 SPC200... 9904a
La fenêtre de projet de WinPISA donne un accès ra-pide aux données du projet. Elle affiche tous les élé-ments du projet comme la liste des positions, les pro-grammes et les paramètres de configuration. Un dou-ble-clic permet de contrôler ou de modifier les données.
WinPISA dispose des fonctions suivantes :
– conception d’un projet sur support graphique
– éditeur convivial pour la programmation CN analogueà la DIN 66025
– fonctions de chargement des programmes, des pro-jets, etc.
– fonctions graphiques d’analyse du comportement aupositionnement.
WinPISA convient aussi bien pour les applicationsmonoaxiales que pour les applications multiaxiales avecjusqu’à quatre axes.
1. Présentation du système
SPC200... 9904a 1-27
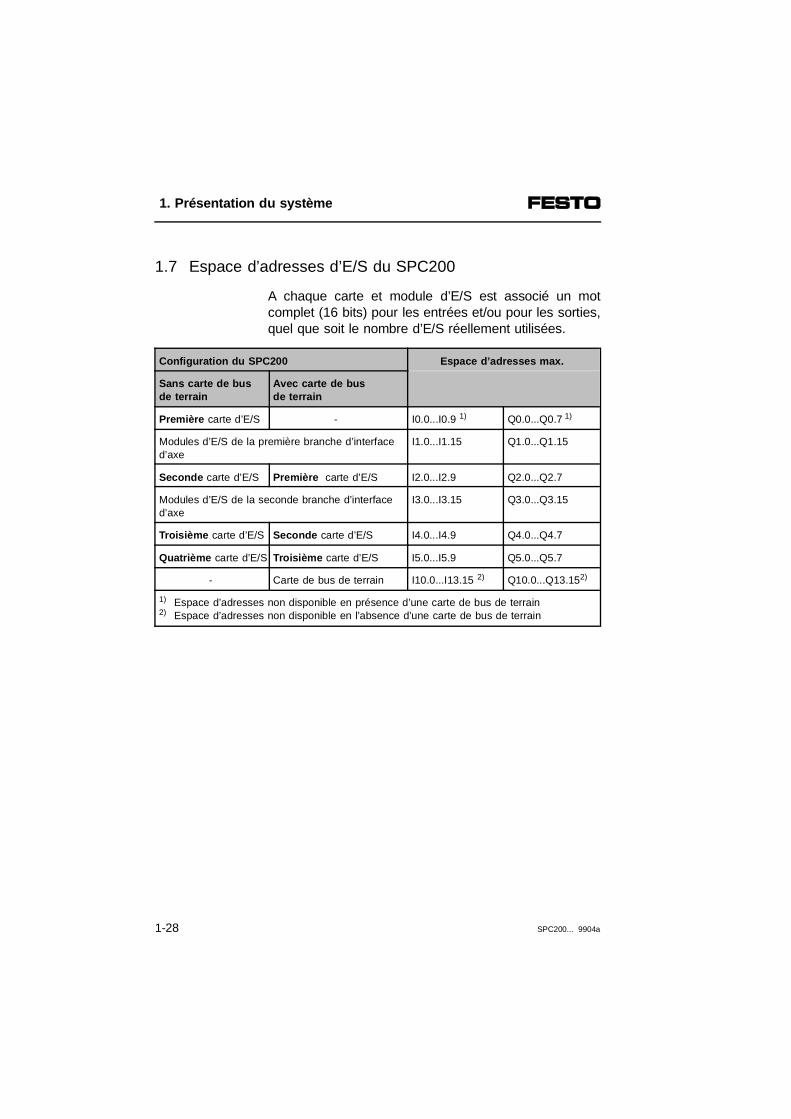
1.7 Espace d’adresses d’E/S du SPC200
A chaque carte et module d’E/S est associé un motcomplet (16 bits) pour les entrées et/ou pour les sorties,quel que soit le nombre d’E/S réellement utilisées.
Configuration du SPC200 Espace d’adresses max.
Sans carte de busde terrain
Avec carte de bus de terrain
Première carte d’E/S - I0.0...I0.9 1) Q0.0...Q0.7 1)
Modules d’E/S de la première branche d’interfaced’axe
I1.0...I1.15 Q1.0...Q1.15
Seconde carte d’E/S Première carte d’E/S I2.0...I2.9 Q2.0...Q2.7
Modules d’E/S de la seconde branche d’interfaced’axe
I3.0...I3.15 Q3.0...Q3.15
Troisième carte d’E/S Seconde carte d’E/S I4.0...I4.9 Q4.0...Q4.7
Quatrième carte d’E/S Troisième carte d’E/S I5.0...I5.9 Q5.0...Q5.7
- Carte de bus de terrain I10.0...I13.15 2) Q10.0...Q13.152)
1) Espace d’adresses non disponible en présence d’une carte de bus de terrain2) Espace d’adresses non disponible en l’absence d’une carte de bus de terrain
1. Présentation du système
1-28 SPC200... 9904a
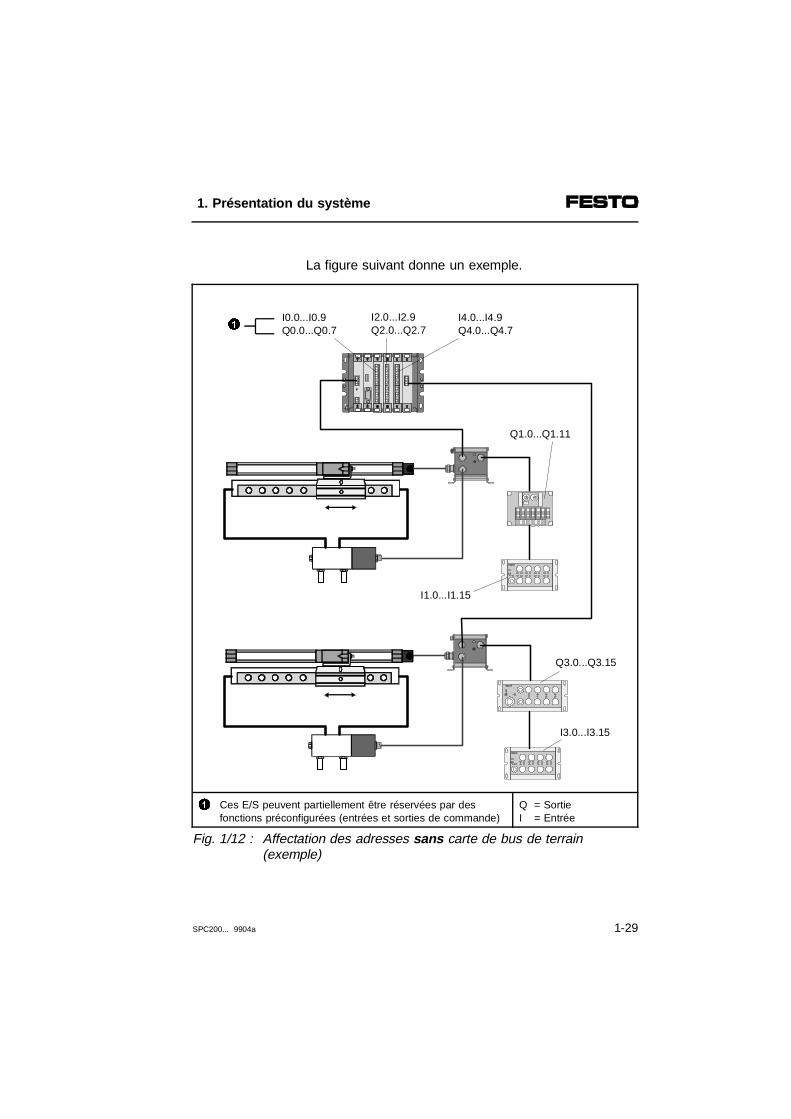
La figure suivant donne un exemple.
1 Ces E/S peuvent partiellement être réservées par desfonctions préconfigurées (entrées et sorties de commande)
Q = SortieI = Entrée
Fig. 1/12 : Affectation des adresses sans carte de bus de terrain(exemple)
I2.0...I2.9Q2.0...Q2.71
Q1.0...Q1.11
Q3.0...Q3.15
I3.0...I3.15
I4.0...I4.9Q4.0...Q4.7
I0.0...I0.9Q0.0...Q0.7
I1.0...I1.15
1. Présentation du système
SPC200... 9904a 1-29

1. Présentation du système
1-30 SPC200... 9904a
Chapitre 2
Montage
2. Montage
SPC200... 9904a 2-1
Sommaire
2. Montage
2.1 Montage et démontage des cartes. . . . . . . . . . . . . . . . . . . . . . . . 2-52.2 Montage de l’unité de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-92.3 Montage du clavier/afficheur . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-122.4 Montage de l’interface d’axe et des modules d’E/S
fonctionnels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-142.5 Remarques concernant le montage des axes
pneumatiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
2. Montage
2-2 SPC200... 9904a
Ce chapitre présente le montage et le démontage descartes SPC200 ainsi que le montage des cartes sui-vantes :
Contenu duchapitre
– unité de base SPC200
– clavier/afficheur
– interface d’axe
– module d’E/S fonctionnel.
Il comporte également des indications pour le montagedes axes pneumatiques.
Les indications concernant le montage des axes élec-tromécaniques, des commandes de puissance et descapteurs figurent dans le manuel du système de posi-tionnement électrique type P.BE-ATP-... .
Autresinformations
Les notices jointes aux produits fournissent des infor-mations détaillées. Pour plus d’informations sur l’axe é-lectrique, se reporter au manuel de la carte correspon-dante.
2. Montage
SPC200... 9904a 2-3

DANGER :Avant tous travaux de montage, couper les alimenta-tions dans l’ordre suivant :1. alimentation en air comprimé2. alimentation de l’électronique et des actionneurs
sur le SPC200 et le cas échéant l’alimentation desactionneurs sur la branche d’interface d’axe.
On évite ainsi :
– des mouvements incontrôlés des actionneurs,
– des mouvements incontrôlés des tuyaux débranchés.
– des états de commutation indéfinis.
2. Montage
2-4 SPC200... 9904a
2.1 Montage et démontage des cartes
ATTENTION :Des mauvaises manipulations peuvent endommagerles cartes.• Ne jamais toucher les cartes. • Respecter les consignes de manipulation des
cartes sensibles aux charges électrostatiques.• Décharger l’électricité statique du corps avant de
monter ou démonter des cartes pour les protégerdes décharges électrostatiques.
Le boîtier type SPC200-CPU-... accueille les cartes duSPC200. Le processeur et la mémoire du SPC200 sontfixés sur la platine arrière intégrée. Les différentescartes enfichées sont maintenues ensemble par cetteplatine arrière.
Les cartes sont fixées sur le boîtier par l’intermédiaired’un levier de blocage. Aucun outil n’est nécessairepour le montage ou le démontage.
Les emplacements sont numérotés de 1 à 4 ou 6 de lagauche vers la droite. L’emplacement 1 est réservé à lacarte d’alimentation (type SPC-200-PWR-AIF). Les au-tres cartes peuvent être positionnées sur n’importe le-quel des emplacements 2 à 4 ou 6. Chaque carte estidentifiée automatiquement.
Emplace-ments
2. Montage
SPC200... 9904a 2-5

Carte Désignation du type Nombre max.
Carte d’alimentation SPC200-PWR-AIF 1
Carte de diagnostic SPC200-MMI-DIAG 1
Carte de sous-contrôleur SPC200-SCU-AIF 1
Carte de bus de terrain SPC200-COM-... 1
Carte de valeur de consigne SPC200-2AI-U 2
Carte d’indexation du moteur pas-à-pas SPC200-SMX 3
Carte d’E/S SPC200-DIO 3 ou 4 1)
1) 4 cartes d’E/S au maximum en l’absence de carte de bus de terrain.
Recommandation :
– Pour l’installation d’une carte de sous-contrôleur oude moteur pas-à-pas :Vérifier si les cartes doivent être installées dans unordre précis. Les désignations d’axes sont affectéesà ces cartes automatiquement sans discontinuité parordre croissant et de la gauche vers le droite (X...U)(voir chapitre 1).
– Installer la carte de sous-contrôleur à l’emplacementle plus à l’extérieur vers la droite. Ceci permet deraccorder facilement le blindage du câble à la bornede terre située côté droit.
– Mettre en place la carte d’indexation de moteur pas-à-pas et la carte de bus de terrain en prévoyant é-ventuellement un espacement libre avant la carte dediagnostic, pour installer un clavier/afficheur.
2. Montage
2-6 SPC200... 9904a
DANGER :Si des cartes sont ajoutées ou supprimées sans quel’alimentation soit coupée, des actionneurs peuventêtre activés et le SPC200 endommagé. Avant tous travaux d’entretien et d’installation, cou-per les sources d’énergie dans l’ordre suivant :1. alimentation en air comprimé2. alimentation de l’électronique et des actionneurs
sur le SPC200.
Pour le montage des cartes sur les boîtiers, procéderde la manière suivante :
Montage descartes
1. Couper l’alimentation en air comprimé et l’alimenta-tion de l’électronique.
2. Enlever le cas échéant la plaque d’obturation.
3. Saisir la carte par la plaque avant et la glisser dansle rail de guidage. Veiller à ne pas bloquer la plaquede travers en la mettant en place et à ne pas en-dommager les éléments du circuit imprimé.
4. Veiller à ce que les connecteurs des barres decontacts à couteau soit bien superposés. Enfoncercomplètement la carte en appliquant une légèrepression. Les leviers de blocage se verrouillent alorsautomatiquement (voir fig. 2/1).
2. Montage
SPC200... 9904a 2-7
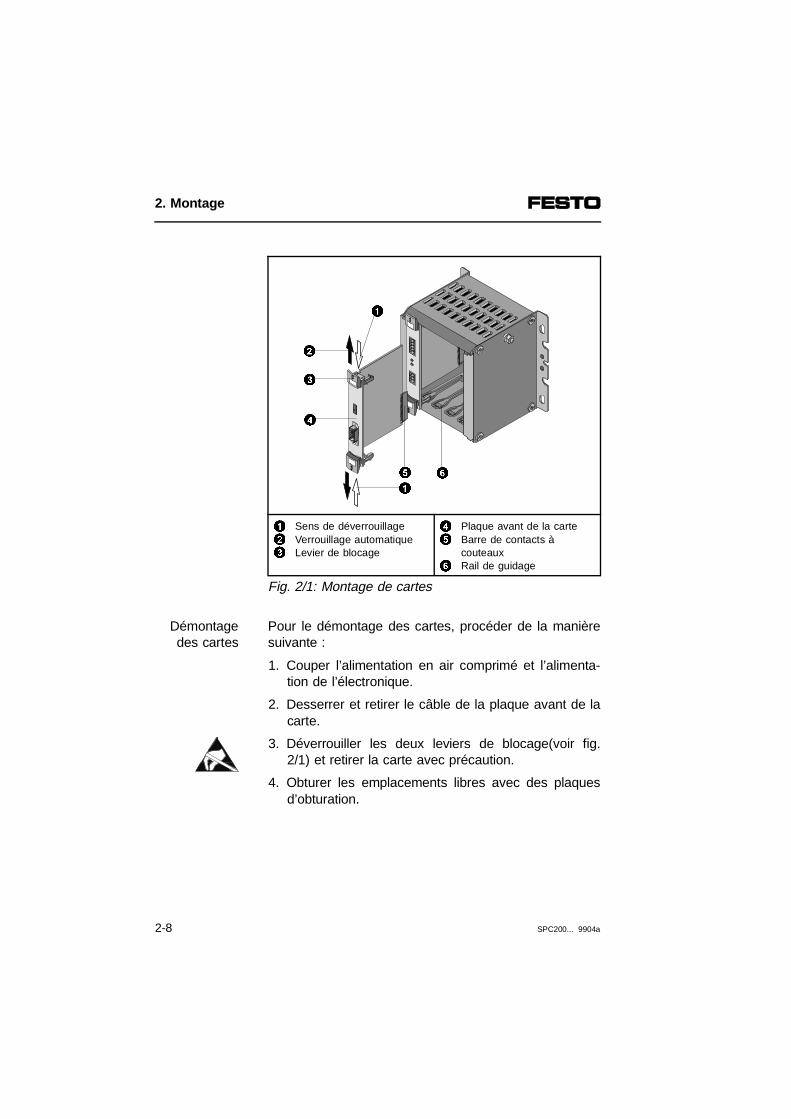
123
Sens de déverrouillageVerrouillage automatiqueLevier de blocage
45
6
Plaque avant de la carteBarre de contacts àcouteauxRail de guidage
Fig. 2/1: Montage de cartes
Pour le démontage des cartes, procéder de la manièresuivante :
Démontagedes cartes
1. Couper l’alimentation en air comprimé et l’alimenta-tion de l’électronique.
2. Desserrer et retirer le câble de la plaque avant de lacarte.
3. Déverrouiller les deux leviers de blocage(voir fig.2/1) et retirer la carte avec précaution.
4. Obturer les emplacements libres avec des plaquesd’obturation.
65
1
4
2
1
3
2. Montage
2-8 SPC200... 9904a
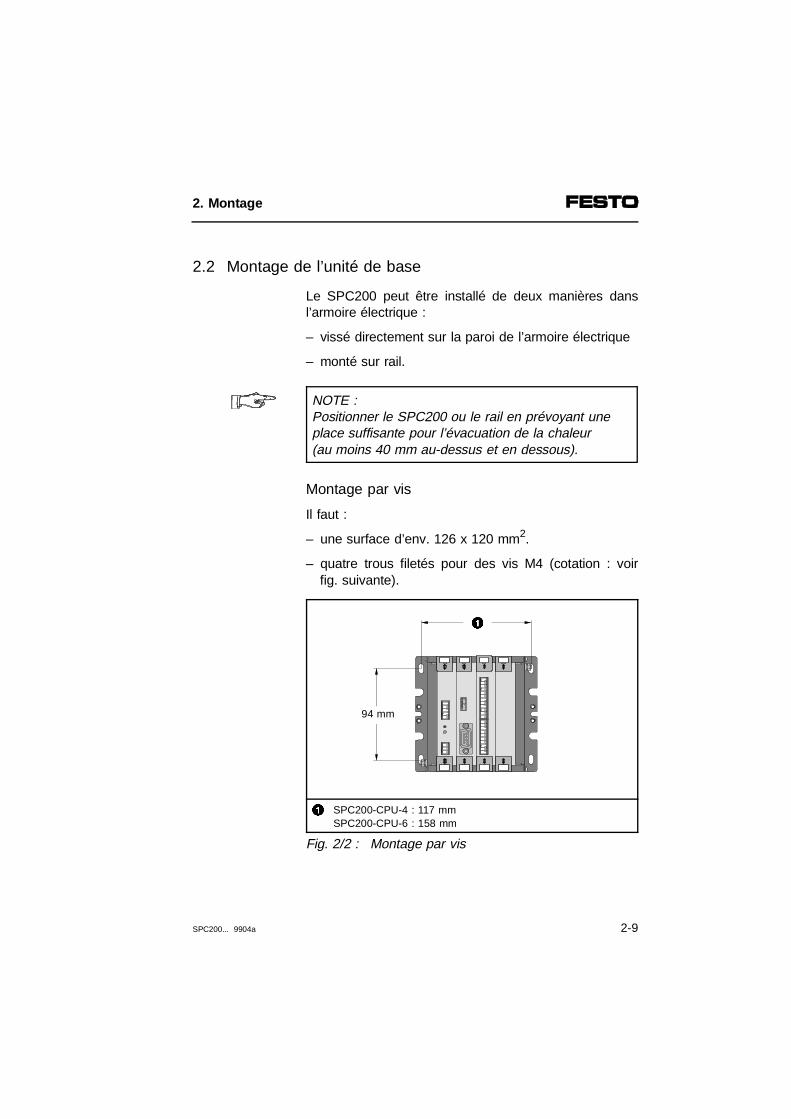
2.2 Montage de l’unité de base
Le SPC200 peut être installé de deux manières dansl’armoire électrique :
– vissé directement sur la paroi de l’armoire électrique
– monté sur rail.
NOTE :Positionner le SPC200 ou le rail en prévoyant uneplace suffisante pour l’évacuation de la chaleur (au moins 40 mm au-dessus et en dessous).
Montage par vis
Il faut :
– une surface d’env. 126 x 120 mm2.
– quatre trous filetés pour des vis M4 (cotation : voirfig. suivante).
1 SPC200-CPU-4 : 117 mmSPC200-CPU-6 : 158 mm
Fig. 2/2 : Montage par vis
94 mm
1
2. Montage
SPC200... 9904a 2-9
Montage sur rail
Le kit de montage CPV10/14-VI-BG-NRH permet d’ins-taller le boîtier sur un rail. Ce kit est composé de 2étriers, 4 vis M4x10 et 2 pattes à ressorts (voir fig. 2/3).
Pour le montage sur rail, procéder de la manière sui-vante :
1. S’assurer que la surface de montage peut supporterle poids du SPC200.
2. Installer le rail (Rail de montage EN 50022 - 35x7.5;largeur 35 mm, hauteur 7,5 mm).
3. Fixer le rail sur le support tous les 100 mm au mini-mum.
4. Visser les 2 étriers (2) à l’aide des vis jointesM4x10 (1) sur l’équerre de fixation du boîtier (voirfigure suivante). Attention, les douilles de positionne-ment (5) des étriers doivent entrer dans les trousde centrage réservés à cet effet sur le boîtier.
5. Suspendre le boîtier sur le rail. Bloquer le boîtier àl’aide des pattes (4) pour empêcher qu’il bascule ouqu’il glisse.
2. Montage
2-10 SPC200... 9904a
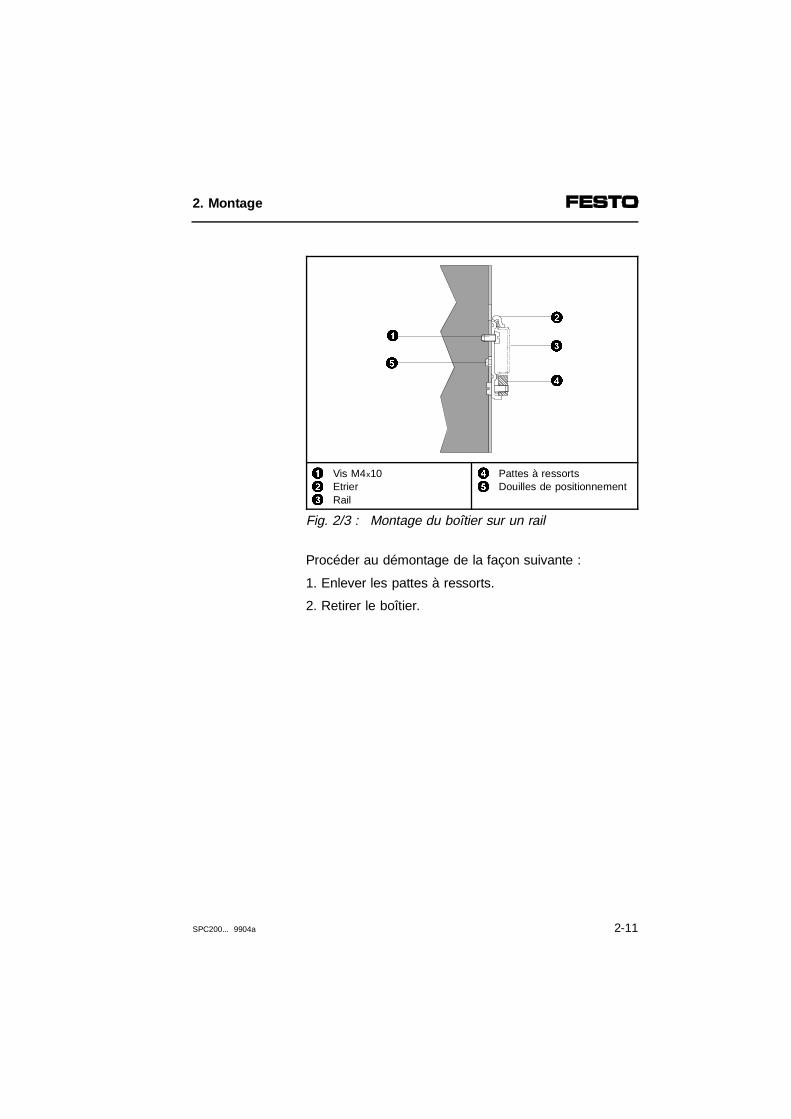
123
Vis M4x10EtrierRail
45
Pattes à ressortsDouilles de positionnement
Fig. 2/3 : Montage du boîtier sur un rail
Procéder au démontage de la façon suivante :
1. Enlever les pattes à ressorts.
2. Retirer le boîtier.
2
4
3
5
1
2. Montage
SPC200... 9904a 2-11
2.3 Montage du clavier/afficheur
DANGER :Si le clavier/afficheur est ajouté ou supprimé sansque l’alimentation soit coupée, des actionneurs peu-vent être activés involontairement et le SPC200 oule clavier/afficheur endommagés.Avant tous travaux d’entretien et d’installation, cou-per les sources d’énergie dans l’ordre suivant :1. alimentation en air comprimé2. alimentation des actionneurs et de l’électronique
sur le SPC200 et le cas échéant alimentation des actionneurs sur la branche d’interface d’axe.
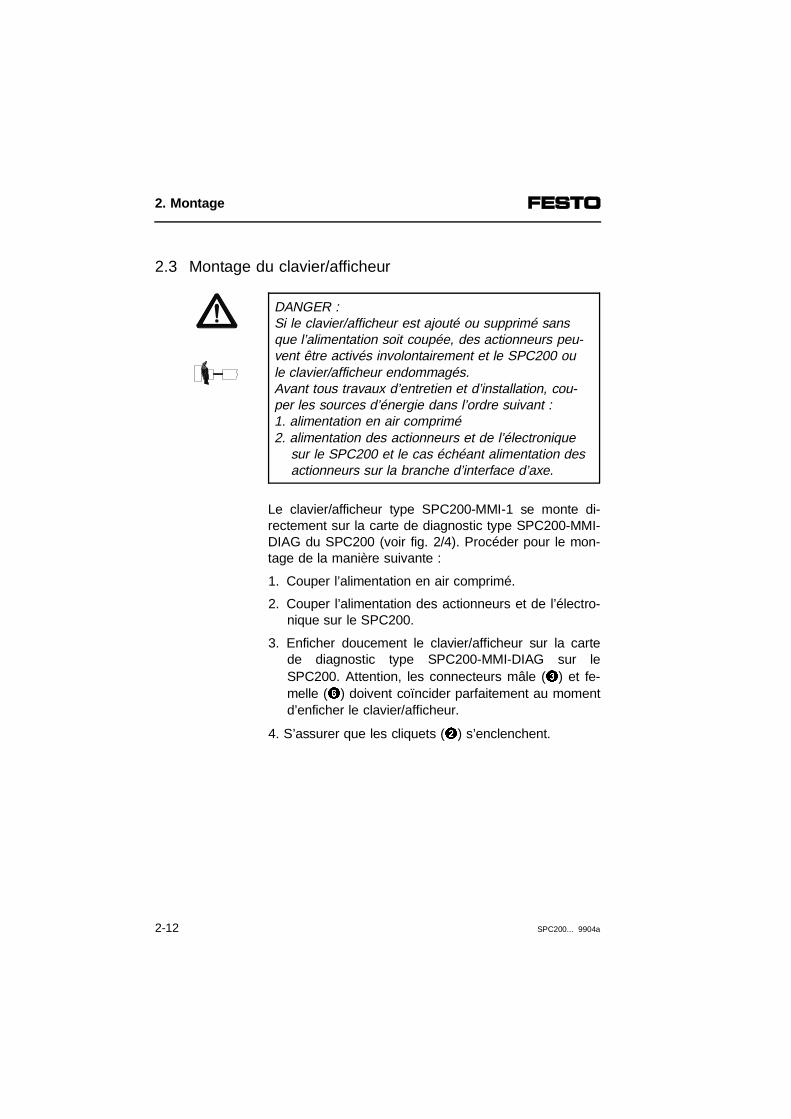
Le clavier/afficheur type SPC200-MMI-1 se monte di-rectement sur la carte de diagnostic type SPC200-MMI-DIAG du SPC200 (voir fig. 2/4). Procéder pour le mon-tage de la manière suivante :
1. Couper l’alimentation en air comprimé.
2. Couper l’alimentation des actionneurs et de l’électro-nique sur le SPC200.
3. Enficher doucement le clavier/afficheur sur la cartede diagnostic type SPC200-MMI-DIAG sur leSPC200. Attention, les connecteurs mâle (3) et fe-melle (6) doivent coïncider parfaitement au momentd’enficher le clavier/afficheur.
4. S’assurer que les cliquets (2) s’enclenchent.
2. Montage
2-12 SPC200... 9904a
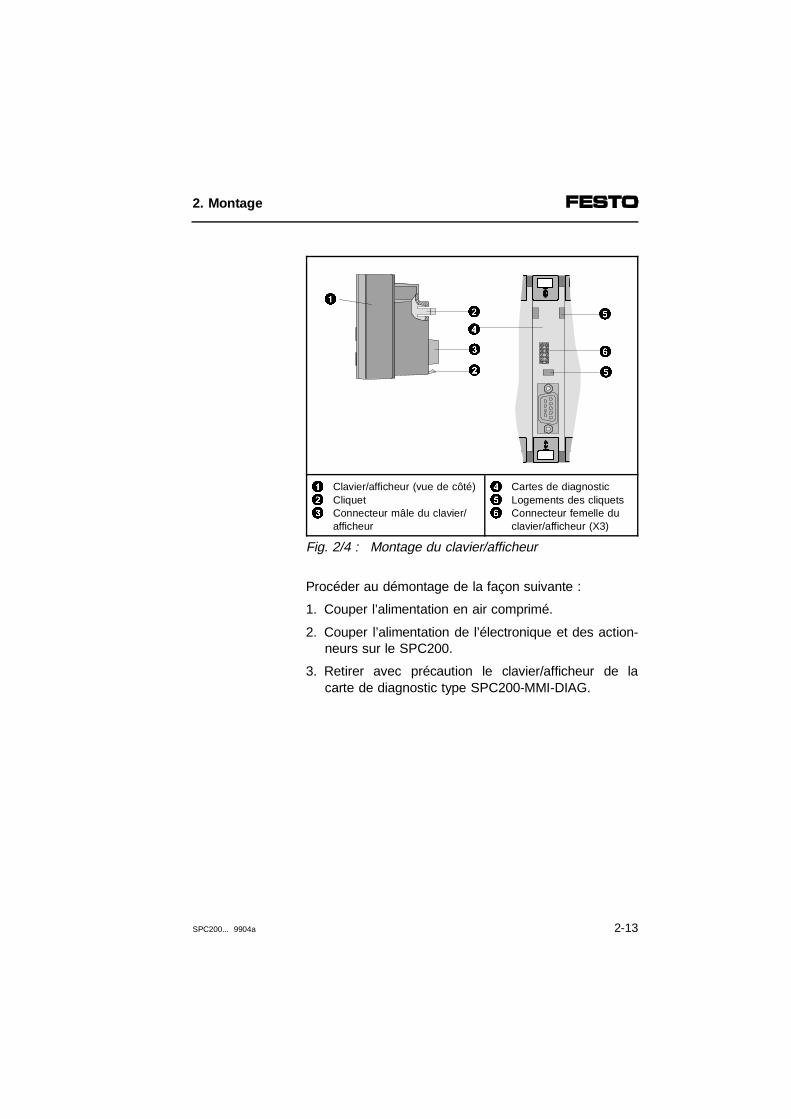
123
Clavier/afficheur (vue de côté)CliquetConnecteur mâle du clavier/ afficheur
456
Cartes de diagnostic Logements des cliquetsConnecteur femelle duclavier/afficheur (X3)
Fig. 2/4 : Montage du clavier/afficheur
Procéder au démontage de la façon suivante :
1. Couper l’alimentation en air comprimé.
2. Couper l’alimentation de l’électronique et des action-neurs sur le SPC200.
3. Retirer avec précaution le clavier/afficheur de lacarte de diagnostic type SPC200-MMI-DIAG.
2
1
3
4
5
6
5
2
2. Montage
SPC200... 9904a 2-13
2.4 Montage de l’interface d’axe et des modules d’E/Sfonctionnels
Ce chapitre décrit comment installer le module d’E/Sfonctionnel type SPC-FIO-... et l’interface d’axe typeSPC-AIF-... .
Montage de l’interface d’axe
Les équerres de maintien jointes permettent de fixerl’interface d’axe type SPC-AIF-... verticalement ou hori-zontalement sur une surface plane. L’encombrementest le suivant en fonction du mode de fixation :
Mode de fixation Encombrement
Horizontal env. 66 mm x 70 mm
Vertical env. 66 mm x 30 mm
La figure suivante donne la cotation des quatre trousfiletés pour les vis M4 ainsi que pour le montage deséquerres de maintien.
2. Montage
2-14 SPC200... 9904a
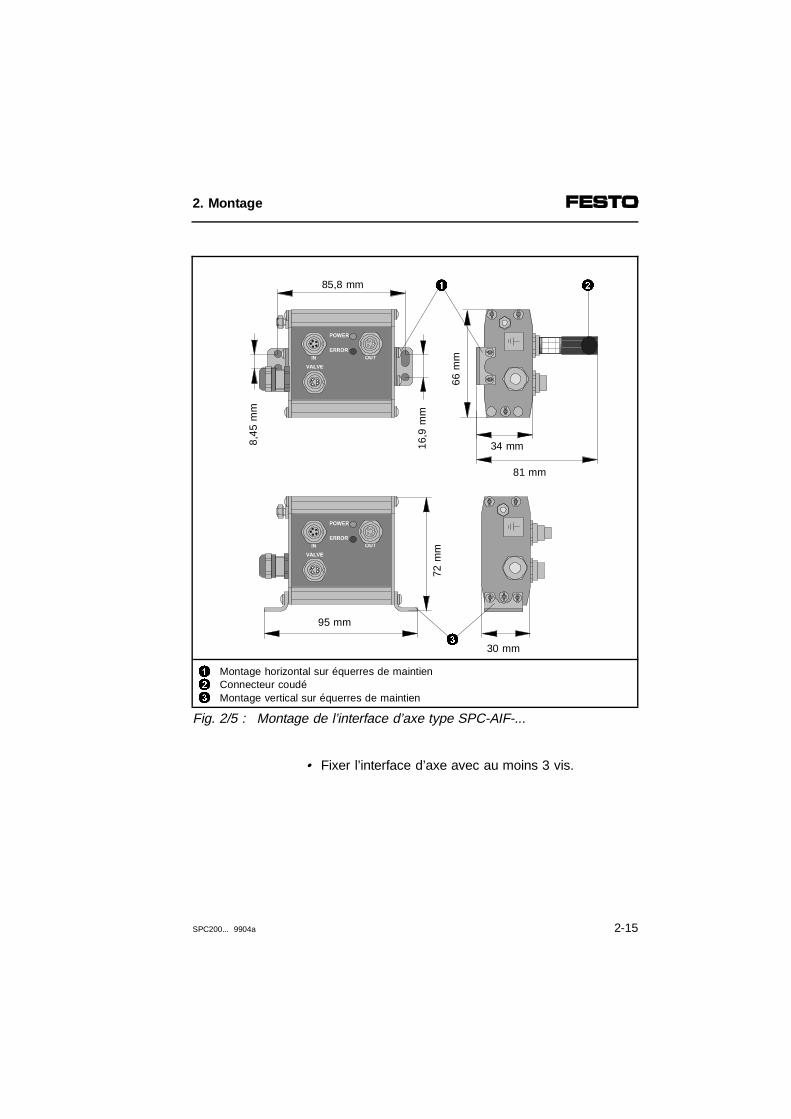
123
Montage horizontal sur équerres de maintienConnecteur coudéMontage vertical sur équerres de maintien
Fig. 2/5 : Montage de l’interface d’axe type SPC-AIF-...
• Fixer l’interface d’axe avec au moins 3 vis.
66 m
m
8,45
mm
72 m
m16
,9 m
m
95 mm
85,8 mm
30 mm
2
81 mm
34 mm
3
1
2. Montage
SPC200... 9904a 2-15
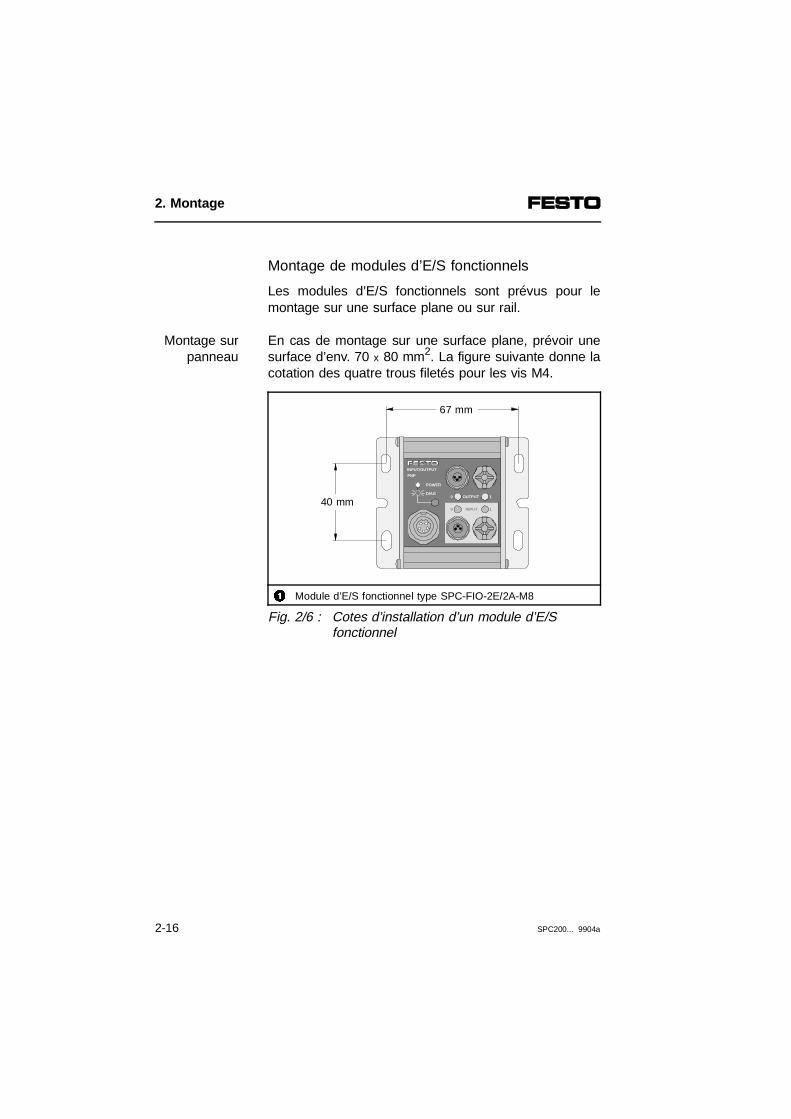
Montage de modules d’E/S fonctionnels
Les modules d’E/S fonctionnels sont prévus pour lemontage sur une surface plane ou sur rail.
En cas de montage sur une surface plane, prévoir unesurface d’env. 70 x 80 mm2. La figure suivante donne lacotation des quatre trous filetés pour les vis M4.
Montage surpanneau
1 Module d’E/S fonctionnel type SPC-FIO-2E/2A-M8
Fig. 2/6 : Cotes d’installation d’un module d’E/Sfonctionnel
POWER
DIAGOUTPUT
PNP
0 1
INPUT/OUTPUT
INPUT0 140 mm
67 mm
2. Montage
2-16 SPC200... 9904a
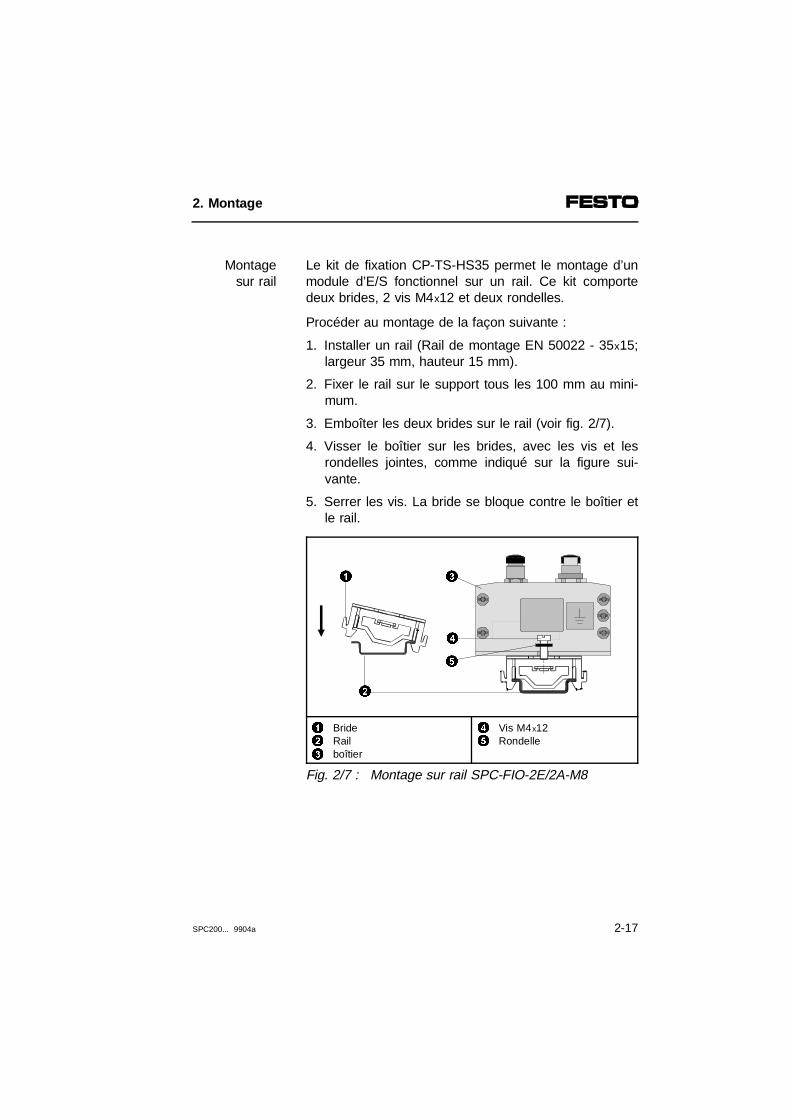
Le kit de fixation CP-TS-HS35 permet le montage d’unmodule d’E/S fonctionnel sur un rail. Ce kit comportedeux brides, 2 vis M4x12 et deux rondelles.
Montagesur rail
Procéder au montage de la façon suivante :
1. Installer un rail (Rail de montage EN 50022 - 35x15;largeur 35 mm, hauteur 15 mm).
2. Fixer le rail sur le support tous les 100 mm au mini-mum.
3. Emboîter les deux brides sur le rail (voir fig. 2/7).
4. Visser le boîtier sur les brides, avec les vis et lesrondelles jointes, comme indiqué sur la figure sui-vante.
5. Serrer les vis. La bride se bloque contre le boîtier etle rail.
123
BrideRailboîtier
45
Vis M4x12Rondelle
Fig. 2/7 : Montage sur rail SPC-FIO-2E/2A-M8
1
2
3
5
4
2. Montage
SPC200... 9904a 2-17
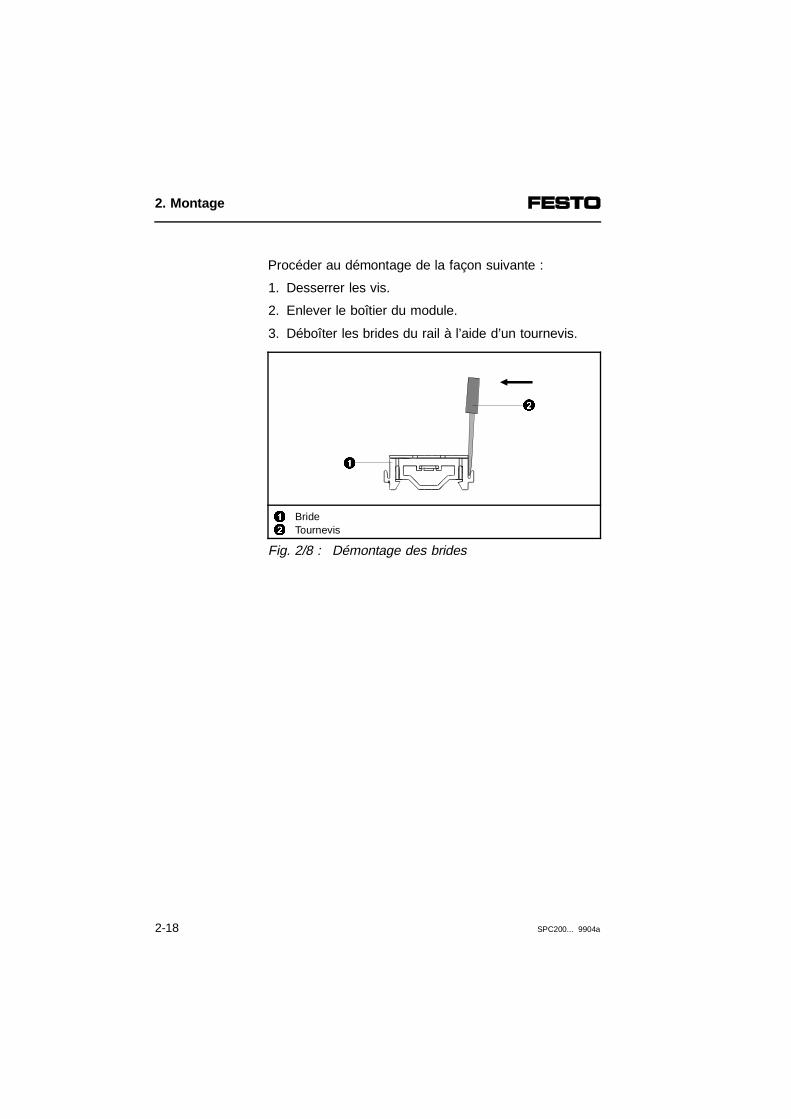
Procéder au démontage de la façon suivante :
1. Desserrer les vis.
2. Enlever le boîtier du module.
3. Déboîter les brides du rail à l’aide d’un tournevis.
12
BrideTournevis
Fig. 2/8 : Démontage des brides
1
2
2. Montage
2-18 SPC200... 9904a
2.5 Remarques concernant le montage des axespneumatiques
NOTE : Monter le vérin, le système de mesure du déplace-ment et le distributeur en fonctions des indicationsdes notices d’utilisation correspondantes.
Les paragraphes suivants précisent les règles géné-rales à respecter impérativement pour assurer un fonc-tionnement sûr d’un axe pneumatique.
Distributeur proportionnel
– Installer le distributeur proportionnel le plus près pos-sible du vérin. Des tuyaux courts garantissent unemeilleure réactivité du système.
– Lorsque le distributeur proportionnel est installé surdes pièces mobiles, le placer perpendiculairement ausens de déplacement. Ceci limite les effets des accé-lérations sur le mouvement du tiroir.
– En présence de fortes perturbations électriques, iso-ler électriquement le distributeur proportionnel de sonsupport.
– Utiliser un silencieux de grand débit.
Systèmes de mesure avec chariot
– Pour installer un système de mesure avec chariotdans des conditions particulièrement sévères, tournerla face avec le chariot vers le bas. La bande d’étan-chéité empêche un trop fort encrassement de la sur-face de glissement.
2. Montage
SPC200... 9904a 2-19
Vérin
ATTENTION :Installer un amortisseur sur le vérin, même si le vérincomporte un système d’amortissement réglable(PPV). Ceci évite d’endommager le vérin en cas d’erreur système ou d’erreur de commande.
ATTENTION :Limiter la plage de déplacements par des butéesfixes lorsque le système de mesure du déplacements’applique sur une plage plus courte que la plage dedéplacement. Ceci évite que le système de mesuredu déplacement soit détérioré en cas d’erreur sys-tème ou d’erreur de commande.
Important pour la précision de positionnement
– Le vérin, le guidage, le système de mesure du dépla-cement et la charge doivent, dans le sens de dépla-cement, être liés rigidement, sans jeu et dans l’ali-gnement.
– Le jeu entre l’entraînement, le guidage, la masse etle système de mesure du déplacement doit être 10fois plus faible que la tolérance demandée (max.0,1 mm).
2. Montage
2-20 SPC200... 9904a
Chapitre 3
Installation
3. Installation
SPC200... 9904a 3-1
Sommaire
3. Installation
3.1 Consignes générales d’installation . . . . . . . . . . . . . . . . . . . . . . . . 3-43.2 Consignes concernant l’installation pneumatique . . . . . . . . . . . . 3-53.2.1 Circuit d’arrêt d’urgence pneumatique . . . . . . . . . . . . . . . . . . . . 3-153.2.2 Raccordement en cas de fonctionnement à chariot
fixe et à chariot mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-193.3 Installation du SPC200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-213.3.1 Choix du bloc d’alimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-223.3.2 Raccordement de la carte d’alimentation. . . . . . . . . . . . . . . . . . 3-243.3.3 Raccordement de la carte de diagnostic . . . . . . . . . . . . . . . . . . 3-303.3.4 Raccordement de la carte d’E/S SPC200-DIO-... . . . . . . . . . . . 3-333.3.5 Raccordement des cartes d’entrées analogiques
SPC200-2AI-U . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-423.3.6 Raccordement d’une carte de sous-contrôleur
SPC200-SCU-AIF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-453.4 Installation des modules sur une branche d’interface d’axe . . . 3-473.4.1 Installation de l’interface d’axe SPC-AIF-... . . . . . . . . . . . . . . . . 3-513.4.2 Installation d’un module d’E/S fonctionnel
SPC-FIO-2E/2A-M8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-56
3. Installation
3-2 SPC200... 9904a
Ce chapitre présente l’installation des axes pneumati-ques ainsi que l’installation de l’unité de base SPC200avec les cartes et modules suivants :
Contenu dece chapitre
– Carte d’alimentation type SPC200-PWR-AIF
– Carte de diagnostic type SPC200-MMI-DIAG
– Carte d’E/S type SPC200-DIO
– Carte d’entrées analogiques type SPC200-2AI-U
– Carte de sous-contrôleur type SPC200-SCU-AIF
– Interface d’axe type SPC-AIF-...
– Module d’E/S fonctionnel type SPC-FIO-2E/2A-M8
D’autre part il donne quelques règles de base essen-tielles concernant la structure d’une branche d’interfaced’axe.
Les consignes d’installation des cartes bus de terrain etinterfaces d’axes électriques figurent dans les manuelsrespectifs de ces cartes.
Autresinformations
Pour obtenir des informations plus détaillées sur lessystèmes de positionnement électriques, se reporter aumanuel "Système de positionnement électrique" typeP.BE-ATP-...
3. Installation
SPC200... 9904a 3-3
3.1 Consignes générales d’installation
ATTENTION :Pour le montage ou le câblage du système, utiliserexclusivement des composants Festo compatiblesentre eux. Ceci est indispensable pour garantir le parfait fonctionnement du système.
DANGER :Avant tous travaux d’entretien et d’installation, cou-per les sources d’énergie dans l’ordre suivant :1. alimentation en air comprimé2. alimentation de l’électronique et des actionneurs
sur le SPC200 et le cas échéant l’alimentation desactionneurs sur la branche d’interface d’axe.
On évite ainsi :
– des mouvements incontrôlés des vérins connectés,
– des mouvements incontrôlés des tuyaux débranchés,
– des états de commutation indéfinis.
3. Installation
3-4 SPC200... 9904a
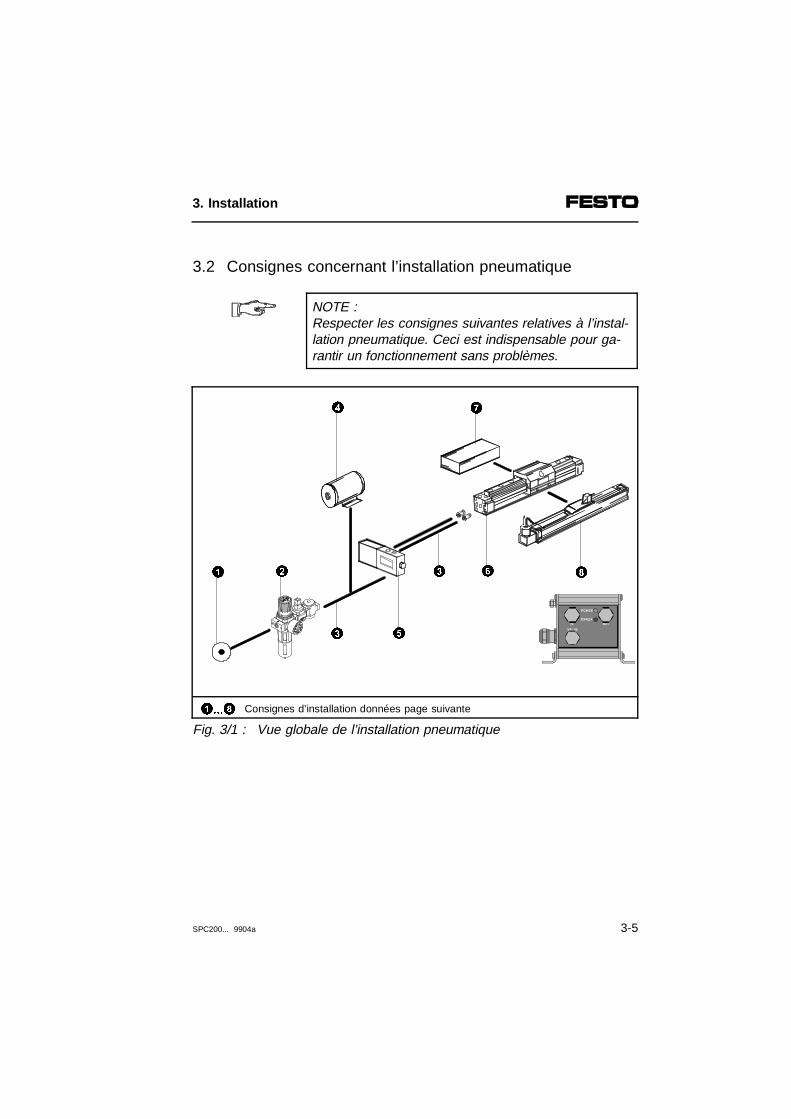
3.2 Consignes concernant l’installation pneumatique
NOTE :Respecter les consignes suivantes relatives à l’instal-lation pneumatique. Ceci est indispensable pour ga-rantir un fonctionnement sans problèmes.
1...8 Consignes d’installation données page suivante
Fig. 3/1 : Vue globale de l’installation pneumatique
21
5
3 6 8
3
74
3. Installation
SPC200... 9904a 3-5

1 Air comprimé
• Utiliser exclusivement de l’air comprimé sec, non lu-brifié et filtré à 5 µm sous une pression de 4 à 8 bar,tolérance 1 bar. Respecter la plage de pressionadmissible en fonction des composants utilisés.
Une unité de conditionnement d’air équipée d’un filtrede 5 µm est nécessaire pour ne pas endommager ledistributeur proportionnel.
2 Unité de conditionnement
• Utiliser une unité de conditionnement composée d’unfiltre mano-détendeur et d’une distributeur de réglage(p. ex. type LFR-...-D-... avec une cartouche de5 µm) ainsi qu’un distributeur de mise en pressionprogressive (p. ex. HEL-...-...) :
– pas de lubrificateur
– filtre 5 µm
– avec un débit nominal d’air suffisant pour le déplace-ment des axes raccordés.Valeur indicative : deux fois le débit nominal du distri-buteur (type MPYE-5-...).
– Utiliser un filtre fin si la source d’air comprimé trans-met inévitablement un léger brouillard d’huile.
3. Installation
3-6 SPC200... 9904a
3 Flexibles d’air comprimé et raccords
• Utiliser dans la mesure du possible des raccords dela série QS ou QSM. Pour les entraînements avecraccords 3/8", les raccords CK type CK-3/8-PK-13sont également autorisés.
• Utiliser exclusivement des raccords droits. Si les rac-cords coudés sont indispensables, utiliser des rac-cords rapides de la série Quick Star de Festo.
• Utiliser des raccords du plus gros diamètre possible.Lorsque les diamètres de raccordement du vérin etdu distributeur diffèrent, choisissez le plus grand dia-mètre du plus petit des raccords encore compatible.
• Choisir toujours les diamètres de flexibles maximauxen fonction des raccords utilisés.
• Ne pas installer de limiteur de débit.
• Disposer les flexibles de telle manière qu’ils n’interfè-rent pas dans la zone de déplacement.
• Utiliser exclusivement des flexibles et des raccordspropres.
• Utiliser si possible des flexibles courts.
Le catalogue Pneumatique comporte des indicationssur les plages de températures et de pression admissi-bles pour les flexibles et les raccords.
Pour assurer que les déplacements s’effectuent dansde bonnes conditions, les variations de pression à l’en-trée du distributeur proportionnel ne doivent pas dépas-ser 1 bar. Pour contrôler la stabilité de la pression d’ali-mentation, prévoir si nécessaire un point de mesurejuste avant le distributeur proportionnel.
3. Installation
SPC200... 9904a 3-7
4 Accumulateur pneumatique
• Installer entre l’unité de conditionnement et le distri-buteur proportionnel un accumulateur pneumatique(p. ex. type VZS-...-B), si la qualité du positionne-ment ne répond pas aux exigences et si les écartsde pression mesurés sur le point de mesure sont su-périeurs à 1 bar.
Celui-ci réduit les variations de pression pendant lesdéplacements. Les faibles dépassements des plagesde variations admissibles peuvent être atténués, en uti-lisant une conduite d’alimentation de plus grande sec-tion.
Volume de l’accumulateur :
Le volume de l’accumulateur dépend du volume du vé-rin correspondant et doit être au moins égal au doublede ce dernier.
VP = 2 * VZ
V P = Volume tampon ;V Z = Volume du vérin (VZ = r2 * π * LZ )L Z = Course du vérinr = Diamètre du vérin / 2
3. Installation
3-8 SPC200... 9904a
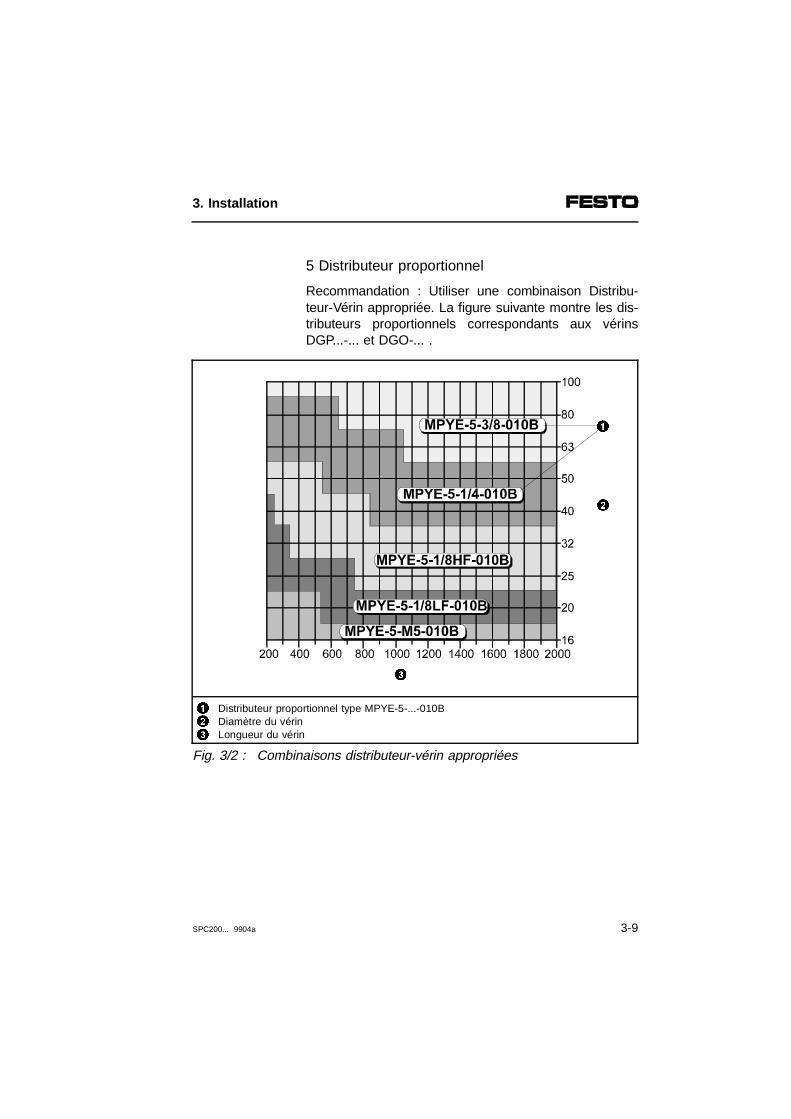
5 Distributeur proportionnel
Recommandation : Utiliser une combinaison Distribu-teur-Vérin appropriée. La figure suivante montre les dis-tributeurs proportionnels correspondants aux vérinsDGP...-... et DGO-... .
123
Distributeur proportionnel type MPYE-5-...-010BDiamètre du vérinLongueur du vérin
Fig. 3/2 : Combinaisons distributeur-vérin appropriées
3
1
2
3. Installation
SPC200... 9904a 3-9
• Positionner le distributeur proportionnel le plus prèspossible du vérin. Des tuyaux courts garantissentune meilleure réactivité du système.
• En présence de fortes perturbations électriques, iso-ler électriquement le distributeur proportionnel de sonsupport.
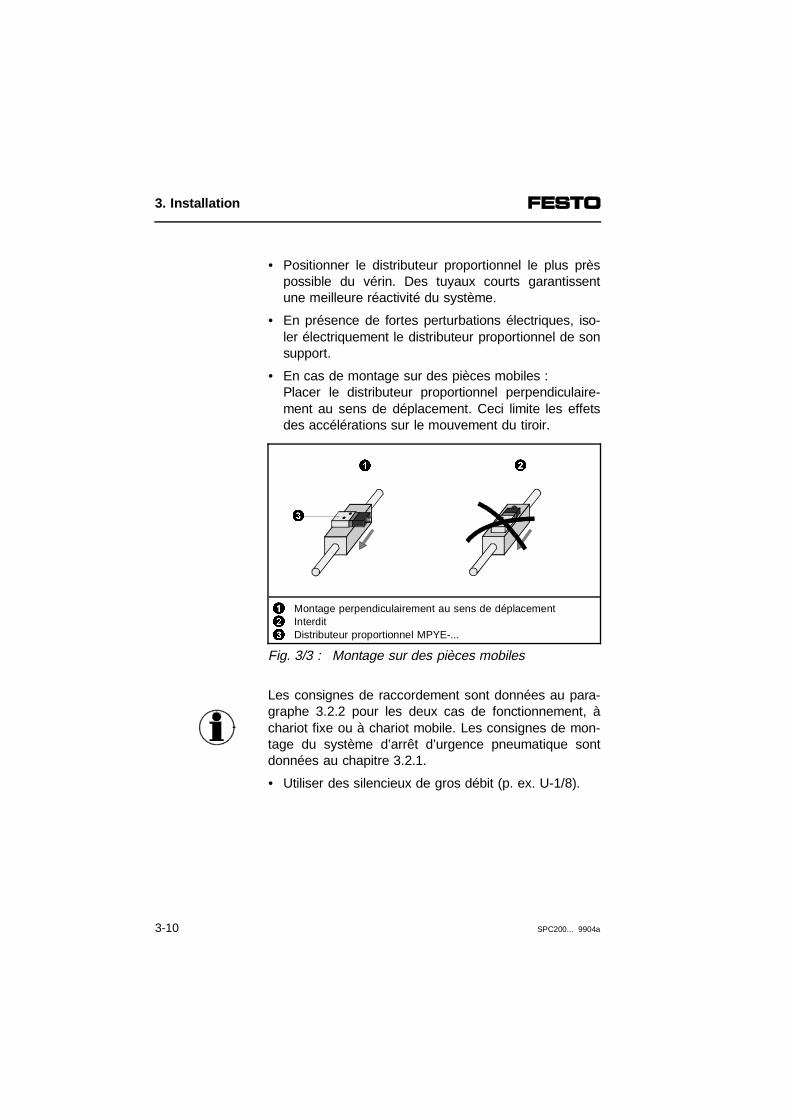
• En cas de montage sur des pièces mobiles :Placer le distributeur proportionnel perpendiculaire-ment au sens de déplacement. Ceci limite les effetsdes accélérations sur le mouvement du tiroir.
123
Montage perpendiculairement au sens de déplacementInterditDistributeur proportionnel MPYE-...
Fig. 3/3 : Montage sur des pièces mobiles
Les consignes de raccordement sont données au para-graphe 3.2.2 pour les deux cas de fonctionnement, àchariot fixe ou à chariot mobile. Les consignes de mon-tage du système d’arrêt d’urgence pneumatique sontdonnées au chapitre 3.2.1.
• Utiliser des silencieux de gros débit (p. ex. U-1/8).
21
3
3. Installation
3-10 SPC200... 9904a
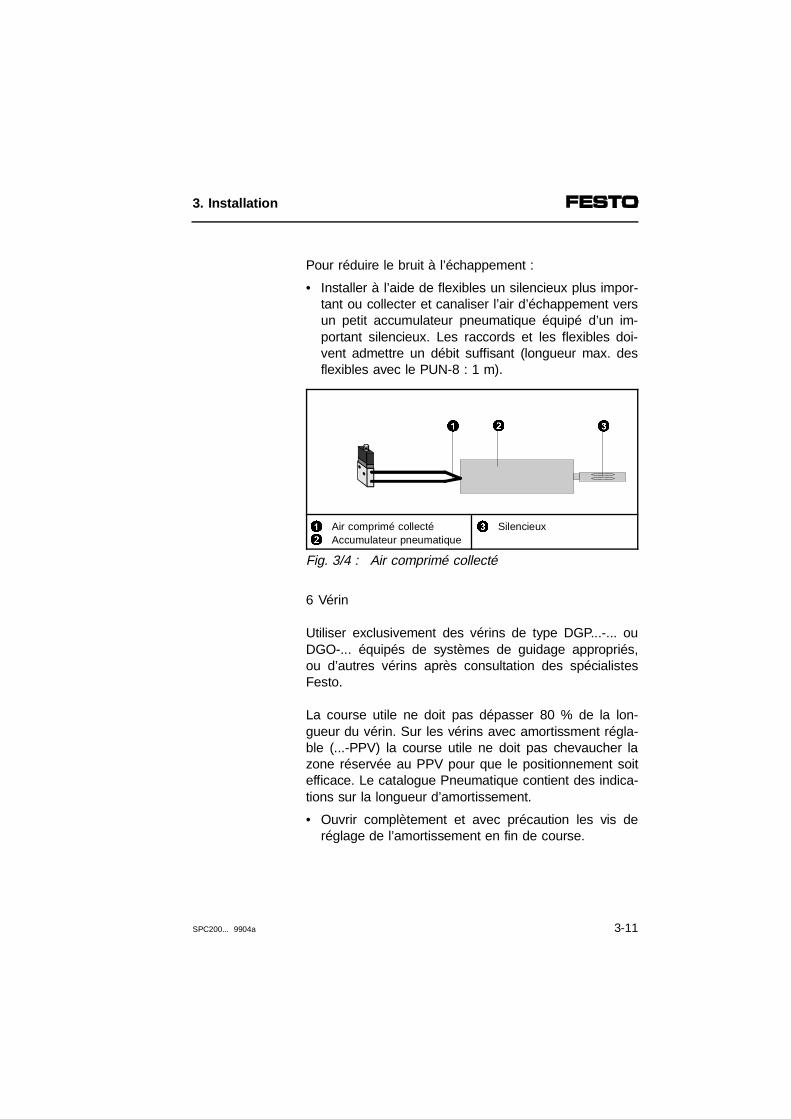
Pour réduire le bruit à l’échappement :
• Installer à l’aide de flexibles un silencieux plus impor-tant ou collecter et canaliser l’air d’échappement versun petit accumulateur pneumatique équipé d’un im-portant silencieux. Les raccords et les flexibles doi-vent admettre un débit suffisant (longueur max. desflexibles avec le PUN-8 : 1 m).
12
Air comprimé collectéAccumulateur pneumatique
3 Silencieux
Fig. 3/4 : Air comprimé collecté
6 Vérin
Utiliser exclusivement des vérins de type DGP...-... ouDGO-... équipés de systèmes de guidage appropriés,ou d’autres vérins après consultation des spécialistesFesto.
La course utile ne doit pas dépasser 80 % de la lon-gueur du vérin. Sur les vérins avec amortissment régla-ble (...-PPV) la course utile ne doit pas chevaucher lazone réservée au PPV pour que le positionnement soitefficace. Le catalogue Pneumatique contient des indica-tions sur la longueur d’amortissement.
• Ouvrir complètement et avec précaution les vis deréglage de l’amortissement en fin de course.
1 32
3. Installation
SPC200... 9904a 3-11

ATTENTION :Limiter la plage de déplacement avec des butées defin de course de telle sorte que le système de me-sure du déplacement couvre toute la plage de dépla-cement. Ceci évite des dégradations du système demesure.
12
Longueur du vérinCourse utile (80 %), hors PPV
3 Butée de fin decourse
Fig. 3/5 : Course utile autorisée
• Pour les vérins DGP(L) dont la longueur est supé-rieure à 600 mm, utiliser une alimentation en aircomprimé par les deux côtés pour garantir unebonne qualité de positionnement.
• Lubrifier le guidage du vérin en respectant les inter-valles figurant dans la notice d’entretien du vérin.
Exigences mécaniques :
– Le vérin, le guidage, le système de mesure du dépla-cement et la charge doivent, dans le sens de dépla-cement, être liés rigidement, sans jeu et dans l’ali-gnement.
– Choisir si nécessaire une chaîne porte-câble qui sup-prime les efforts exercés par le câble, qui pourraitaffecter la qualité du positionnement.
1
3
2
3. Installation
3-12 SPC200... 9904a
7 Charge
Pour garantir une bonne qualité de positionnement,l’axe pneumatique doit respecter la charge admissible.La charge correspond au poids total qui doit être dépla-cé, y compris le poids du chariot et du piston. Elle secompose du poids du matériel auquel s’ajoute celui dela charge utile.
La charge admissible dépend de :
– du diamètre du vérin utilisé,
– de la position de montage,
– de la pression de fonctionnement.
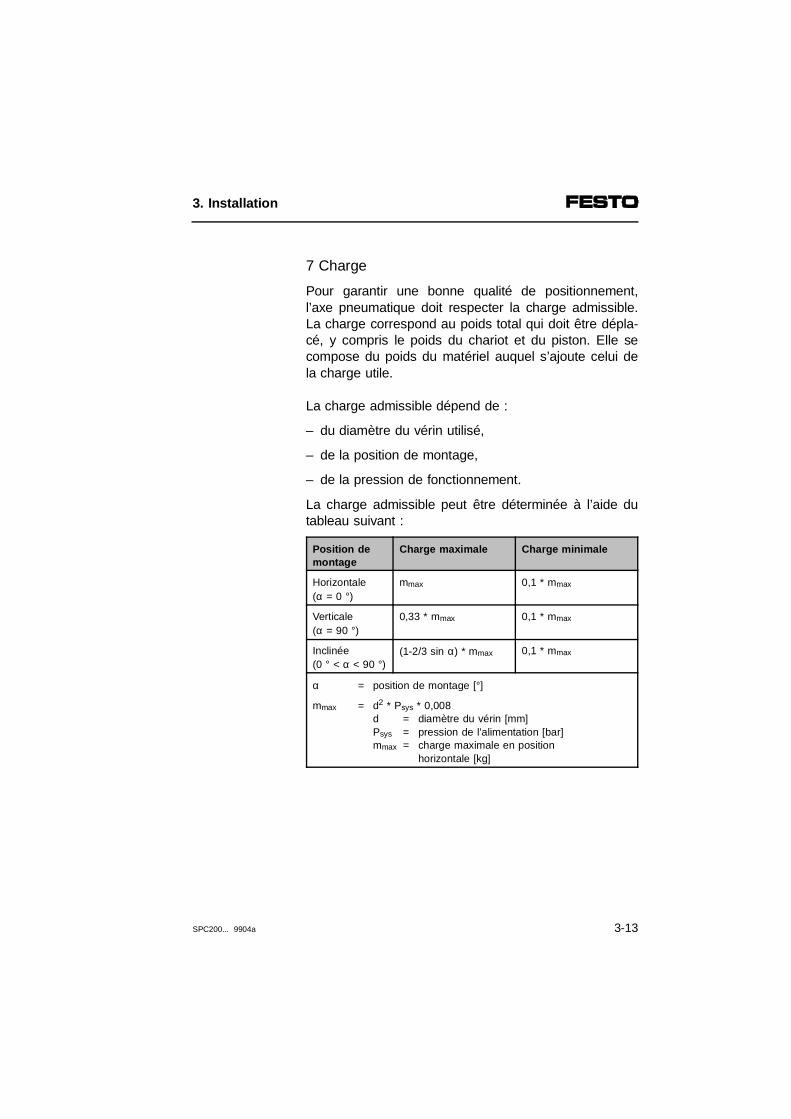
La charge admissible peut être déterminée à l’aide dutableau suivant :
Position demontage
Charge maximale Charge minimale
Horizontale(α = 0 °)
mmax 0,1 * mmax
Verticale(α = 90 °)
0,33 * mmax 0,1 * mmax
Inclinée(0 ° < α < 90 °)
(1-2/3 sin α) * mmax 0,1 * mmax
α = position de montage [°]
mmax = d2 * Psys * 0,008d = diamètre du vérin [mm]Psys = pression de l’alimentation [bar]mmax = charge maximale en position
horizontale [kg]
3. Installation
SPC200... 9904a 3-13
S’assurer que :
– le poids du matériel est supérieur ou égal à la chargeminimale obtenue. De cette manière la charge totalen’est pas inférieure à la charge minimale lors de dé-placements sans charge utile (recommandation).Ajouter si nécessaire une charge de base correspon-dante.
– la charge utile ajoutée au poids du matériel ne dé-passe pas la charge maximale admissible.
– les variations de la charge en cours du fonctionne-ment sont prises en compte avec la commande M37.
8 Système de mesure
• Utiliser exclusivement des système de mesure typeMLO-POT-...-TLF ou MME-MTS-...-AIF ou des vérinsavec système de mesure intégré type DGPI(L)-...-AIF.
• Pour installer un potentiomètre linéaire avec chariotdans des conditions particulièrement sévères (pous-sière), tourner la face avec le chariot vers le bas. Labande d’étanchéité empêche un trop fort encrasse-ment de la surface de glissement.
• Isoler électriquement le potentiomètre linéaire sur lasurface de montage à l’aide des brides de blocagejointes.
NOTE :Attention, la précision du positionnement dépend dutype de système de mesure retenu.
3. Installation
3-14 SPC200... 9904a
3.2.1 Circuit d’arrêt d’urgence pneumatique
Pour mettre en sécurité le système en cas d’incident, ilest nécessaire de prévoir un circuit d’arrêt d’urgencepneumatique. En fonction de la conception et du modede fonctionnement de l’installation, il est possible dechoisir entre plusieurs solutions :
– mise hors pression du vérin en cas d’arrêt d’urgence
– blocage du piston en cas d’arrêt d’urgence
– retour du piston en cas d’arrêt d’urgence dans unedes positions de fin de course à droite ou à gauche.
3. Installation
SPC200... 9904a 3-15
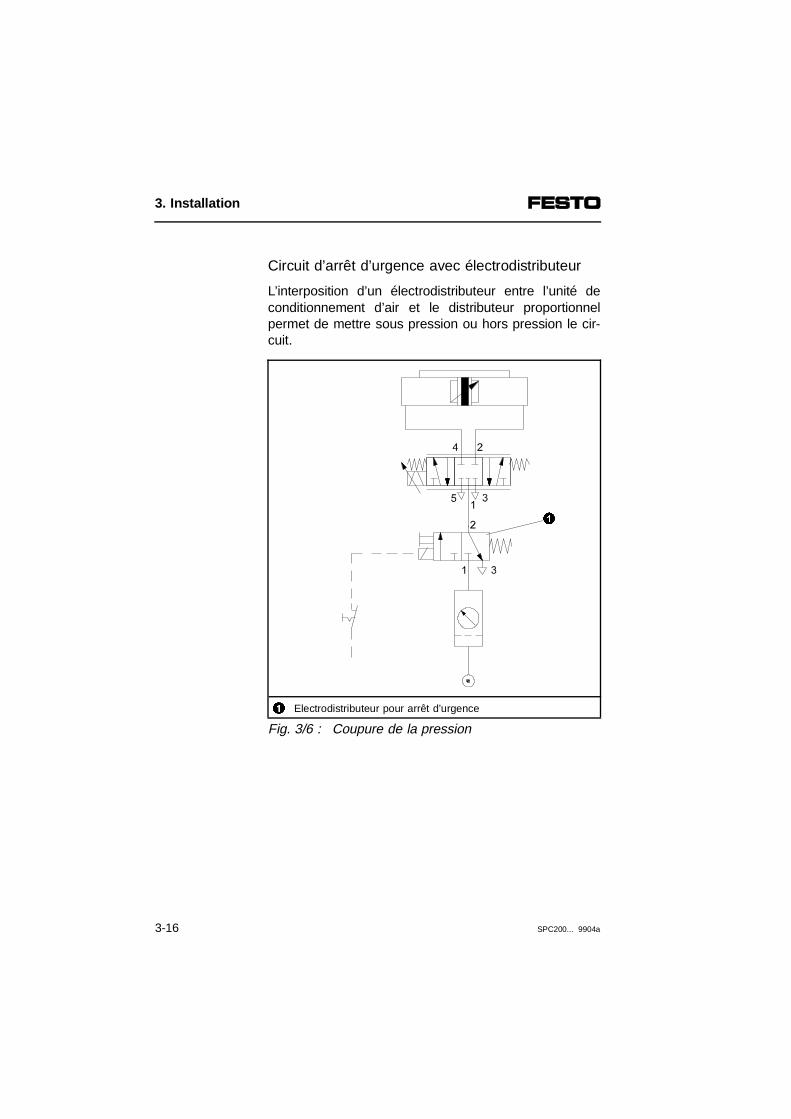
Circuit d’arrêt d’urgence avec électrodistributeur
L’interposition d’un électrodistributeur entre l’unité deconditionnement d’air et le distributeur proportionnelpermet de mettre sous pression ou hors pression le cir-cuit.
1 Electrodistributeur pour arrêt d’urgence
Fig. 3/6 : Coupure de la pression
1
3. Installation
3-16 SPC200... 9904a
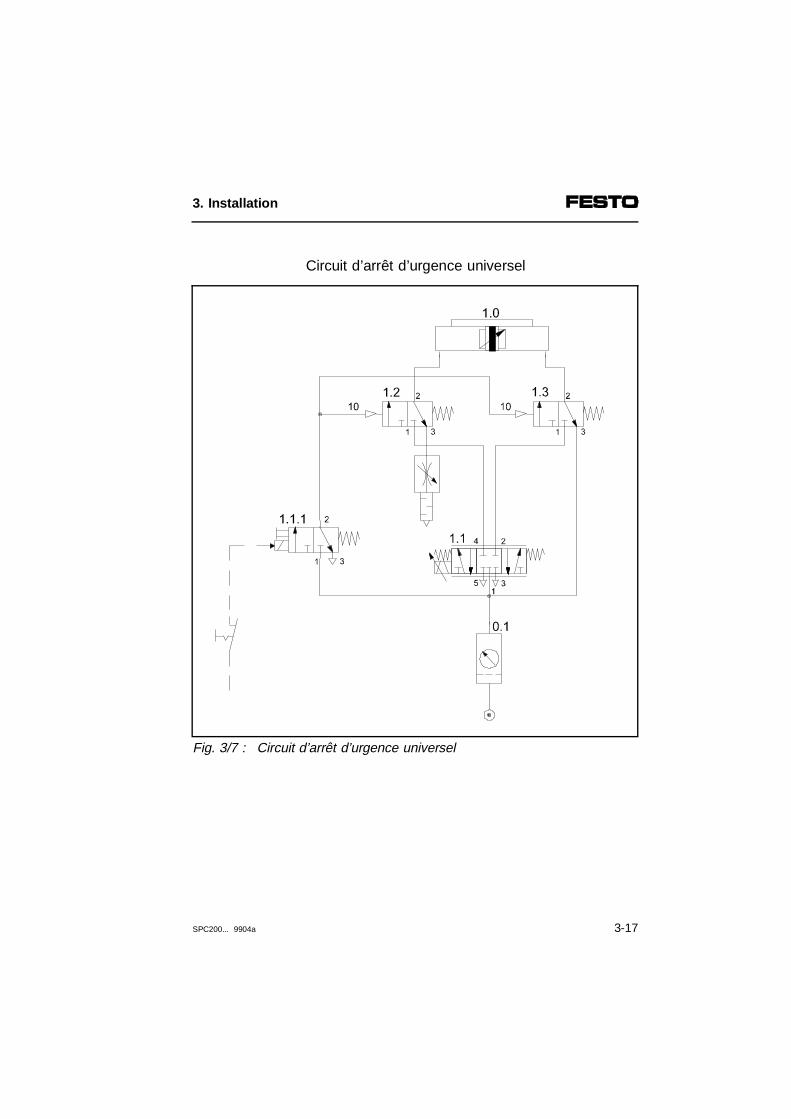
Circuit d’arrêt d’urgence universel
Fig. 3/7 : Circuit d’arrêt d’urgence universel
3. Installation
SPC200... 9904a 3-17

Le circuit d’arrêt d’urgence présenté sur la figure 3/7laisse le choix entre les trois solutions en cas d’arrêtd’urgence. La réaction du vérin diffère selon que le rac-cord 3 des distributeurs 1.2 et 1.3 est obturé, mis souspression ou équipé d’un limiteur de débit et d’un silen-cieux.
Réaction du vérin Raccord 3 du distributeur 1.2 Raccord 3 du distributeur 1.3
Vérin hors pression Raccorder un limiteur de débitavec silencieux 1)
Raccorder un limiteur de débitavec silencieux 1)
Blocage du piston Obturer avec un bouchon Obturer avec un bouchon
Fin de course àdroite
Raccorder l’air comprimé Raccorder un limiteur de débitet un silencieux
Fin de course àgauche
Raccorder un limiteur de débitavec silencieux
Raccorder l’air comprimé
1) Les limiteurs de débit atténuent la violence des impacts en cas de défaut de fonctionnement d’un distributeur d’arrêt d’urgence.
3. Installation
3-18 SPC200... 9904a
3.2.2 Raccordement en cas de fonctionnement à chariot fixe et àchariot mobile
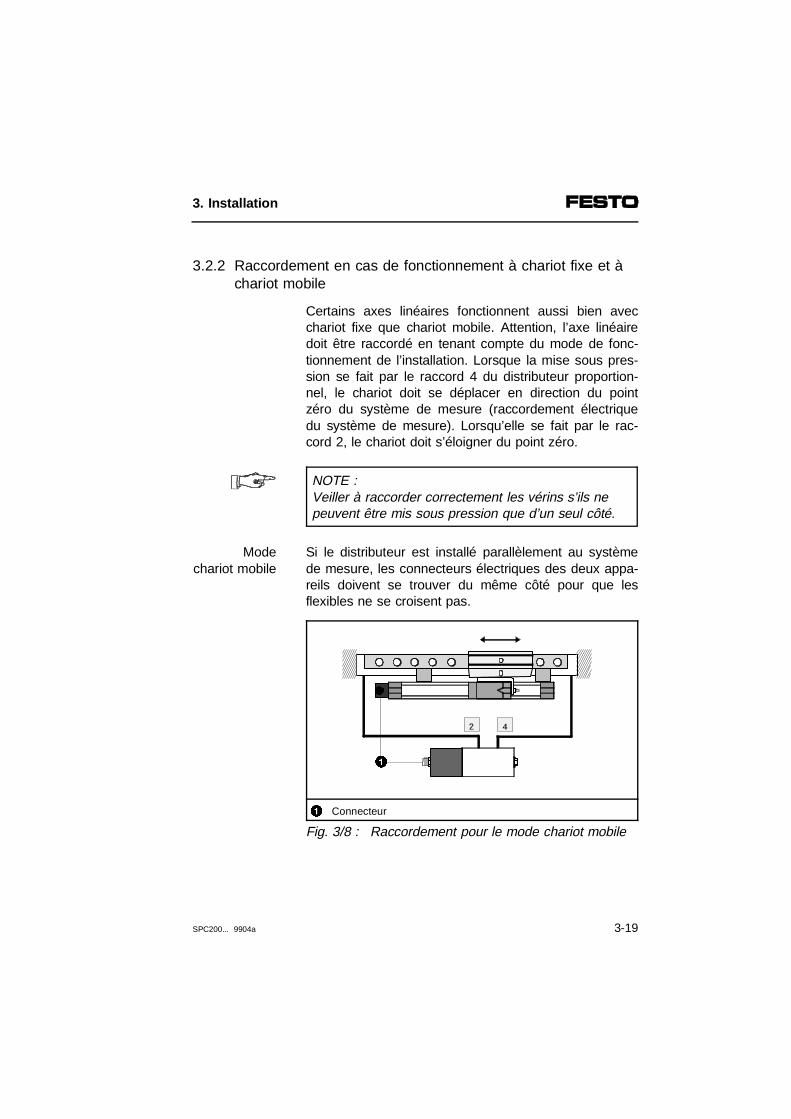
Certains axes linéaires fonctionnent aussi bien avecchariot fixe que chariot mobile. Attention, l’axe linéairedoit être raccordé en tenant compte du mode de fonc-tionnement de l’installation. Lorsque la mise sous pres-sion se fait par le raccord 4 du distributeur proportion-nel, le chariot doit se déplacer en direction du pointzéro du système de mesure (raccordement électriquedu système de mesure). Lorsqu’elle se fait par le rac-cord 2, le chariot doit s’éloigner du point zéro.
NOTE :Veiller à raccorder correctement les vérins s’ils nepeuvent être mis sous pression que d’un seul côté.
Si le distributeur est installé parallèlement au systèmede mesure, les connecteurs électriques des deux appa-reils doivent se trouver du même côté pour que lesflexibles ne se croisent pas.
Modechariot mobile
1 Connecteur
Fig. 3/8 : Raccordement pour le mode chariot mobile
1
3. Installation
SPC200... 9904a 3-19
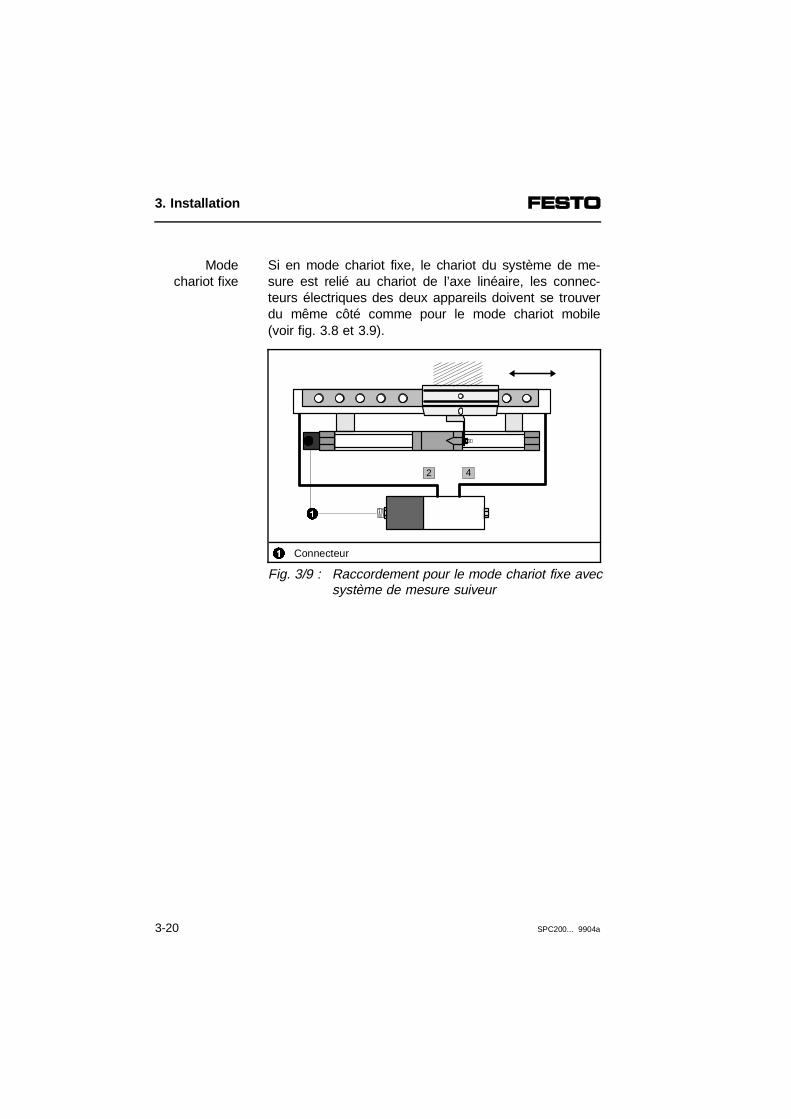
Si en mode chariot fixe, le chariot du système de me-sure est relié au chariot de l’axe linéaire, les connec-teurs électriques des deux appareils doivent se trouverdu même côté comme pour le mode chariot mobile(voir fig. 3.8 et 3.9).
Modechariot fixe
1 Connecteur
Fig. 3/9 : Raccordement pour le mode chariot fixe avec système de mesure suiveur
2 4
1
3. Installation
3-20 SPC200... 9904a

3.3 Installation du SPC200
DANGER :Avant tous travaux d’entretien et d’installation, cou-per les sources d’énergie dans l’ordre suivant :1. Alimentation en air comprimé2. - Alimentation des modules de terrain et des
distributeurs proportionnels (connecteur X2, broche 1).
- Alimentation des sorties(connecteurs X6/X8, broche 8)
- ou alimentation de la branche d’interface d’axe.- Alimentation de l’électronique interne du
SPC200 et des modules de terrain (connecteur X2, broche 2).
On évite ainsi :
– des mouvements incontrôlés des vérins connectés,
– des mouvements incontrôlés des tuyaux débranchés,
– des états de commutation indéfinis.
NOTE :Repérer le câble raccordé au SPC200. Ceci évitedes inversions lors d’interventions si les connecteurssont de même modèle.
3. Installation
SPC200... 9904a 3-21
3.3.1 Choix du bloc d’alimentation
DANGER :N’utilisez que des blocs d’alimentation garantissantune isolation électrique sûre de la tension d’alimenta-tion selon la norme CEI 742/EN 60742/VDE 0551avec une tension d’isolement d’au moins 4 kV (Très Basse Tension, TBT). Les blocs d’alimentation à découpage sont autoriséssi leur isolement répond à la norme EN 60950/VDE 0805.
L’utilisation de blocs d’alimentation TBT assure la pro-tection du SPC200 contre les chocs électriques (protec-tion contre les contacts directs ou indirects) selon lesindications des normes EN 60204-1/CEI 204. Les blocsd’alimentation TBT doivent être alimentés par l’intermé-diaire de transformateurs de sécurité marqués par lesigne ci-contre. La mise à la terre du SPC200 permetde garantir son bon fonctionnement (p. ex. CEM).
Recommandation :
• Utiliser une alimentation stabilisée.
• Choisir un bloc d’alimentation disposant d’une ré-serve de puissance pour les extensions futures.
• La consommation dépend du nombre et du type decomposants raccordés. Lors du choix d’alimentation,vérifier si celle-ci offre une puissance suffisante. Cal-culer si nécessaire la consommation totale à l’aidedu tableau suivant.
3. Installation
3-22 SPC200... 9904a
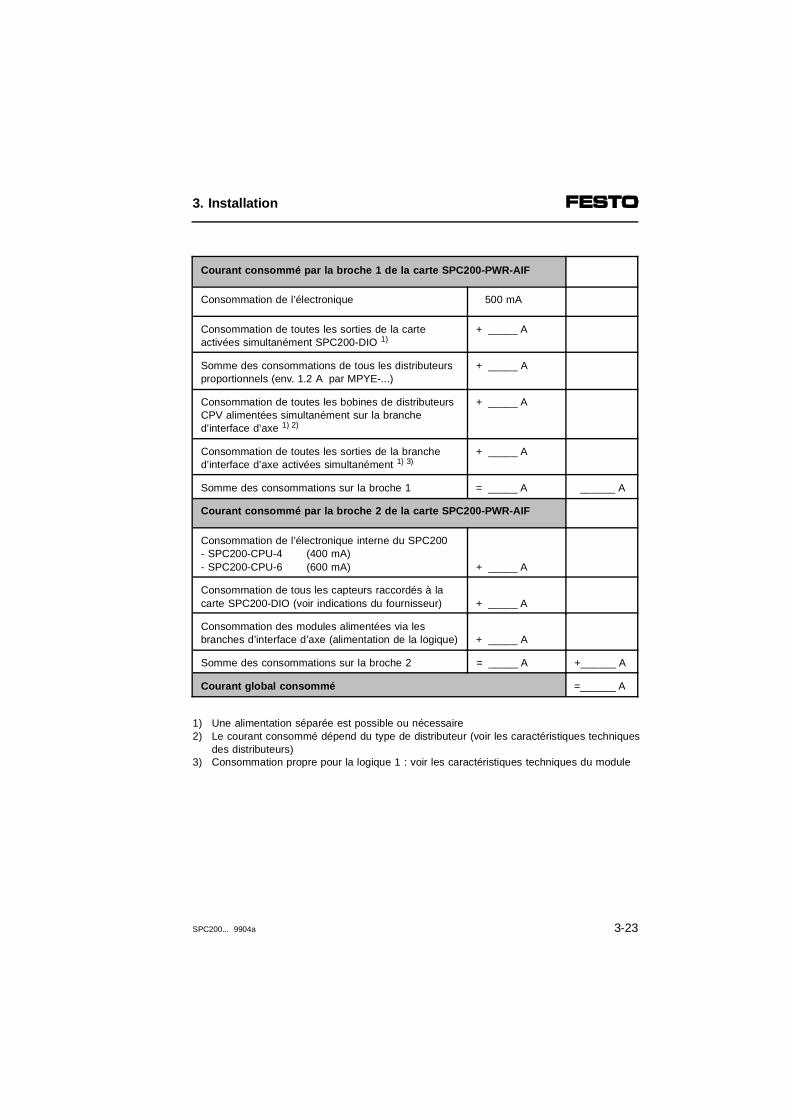
Courant consommé par la broche 1 de la carte SPC200-PWR-AIF
Consommation de l’électronique 500 mA
Consommation de toutes les sorties de la carte activées simultanément SPC200-DIO 1)
+ _____ A
Somme des consommations de tous les distributeursproportionnels (env. 1.2 A par MPYE-...)
+ _____ A
Consommation de toutes les bobines de distributeursCPV alimentées simultanément sur la branche d’interface d’axe 1) 2)
+ _____ A
Consommation de toutes les sorties de la branche d’interface d’axe activées simultanément 1) 3)
+ _____ A
Somme des consommations sur la broche 1 = _____ A ______ A
Courant consommé par la broche 2 de la carte SPC200-PWR-AIF
Consommation de l’électronique interne du SPC200- SPC200-CPU-4 (400 mA)- SPC200-CPU-6 (600 mA) + _____ A
Consommation de tous les capteurs raccordés à lacarte SPC200-DIO (voir indications du fournisseur) + _____ A
Consommation des modules alimentées via lesbranches d’interface d’axe (alimentation de la logique) + _____ A
Somme des consommations sur la broche 2 = _____ A +______ A
Courant global consommé =______ A
1) Une alimentation séparée est possible ou nécessaire2) Le courant consommé dépend du type de distributeur (voir les caractéristiques techniques
des distributeurs)3) Consommation propre pour la logique 1 : voir les caractéristiques techniques du module
3. Installation
SPC200... 9904a 3-23
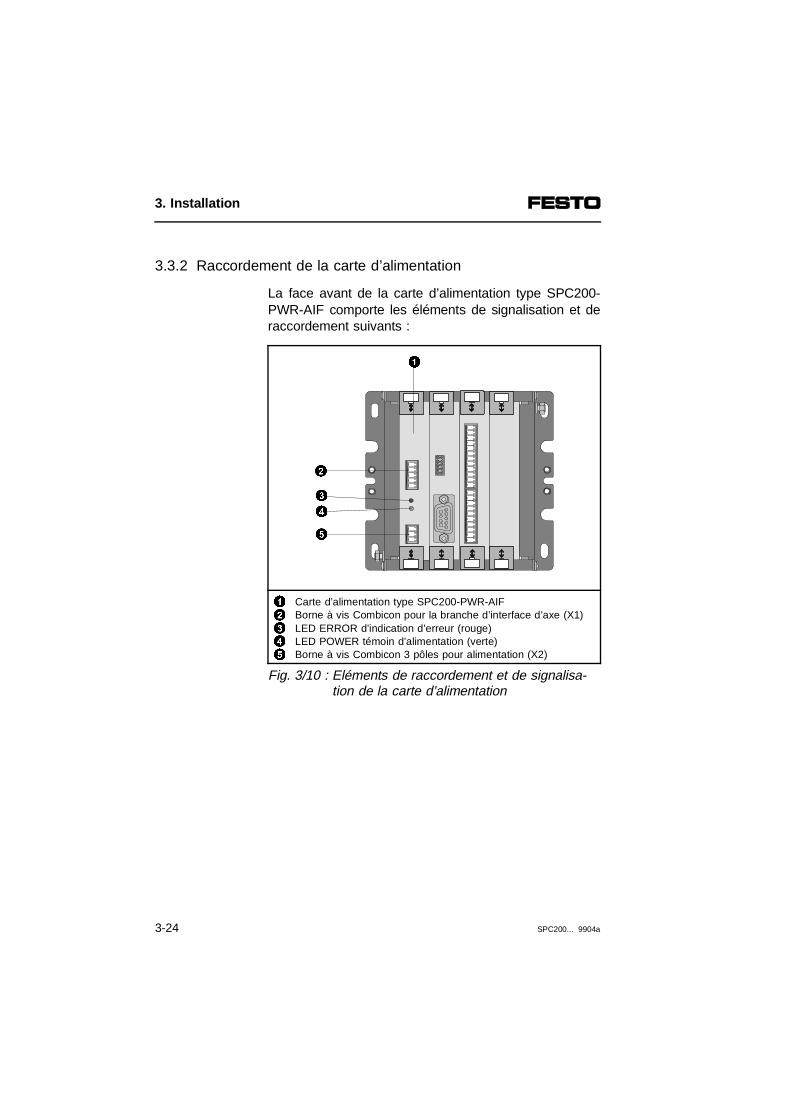
3.3.2 Raccordement de la carte d’alimentation
La face avant de la carte d’alimentation type SPC200-PWR-AIF comporte les éléments de signalisation et deraccordement suivants :
12345
Carte d’alimentation type SPC200-PWR-AIFBorne à vis Combicon pour la branche d’interface d’axe (X1)LED ERROR d’indication d’erreur (rouge)LED POWER témoin d’alimentation (verte)Borne à vis Combicon 3 pôles pour alimentation (X2)
Fig. 3/10 : Eléments de raccordement et de signalisa- tion de la carte d’alimentation
4
3
5
1
2
3. Installation
3-24 SPC200... 9904a
Connecteur d’alimentation (X2)
Les composants suivants sont alimentés en + 24 V CCpar le connecteur d’alimentation (X2) :
– alimentation des modules de terrain et du distributeurproportionnel, déclenchable ; broche 1 : + 24 V CC,tolérance - 5 %/+ 25 %
– cartes électroniques du SPC200, des modules rac-cordés et des système de mesure; broche 2 : + 24 VCC, tolérance - 5 %/+ 25 %.
NOTE :Attention, la tolérance de - 5 % à + 25 % pour l’ali-mentation doit être respectée pour les deux circuitsd’alimentation !
NOTE :Rechercher dans le cadre du système d’ARRETD’URGENCE, quelles mesures doivent être prisessur la machine/l’installation pour la maintenir en sécu-rité en cas d’ARRET D’URGENCE (p. ex. coupurede l’alimentation, coupure de la pression).
• Contrôler l’alimentation 24 V des sorties en cours defonctionnement. S’assurer que la tension d’alimenta-tion des sorties reste toujours dans la tolérance ad-missible, même en régime maximal.
3. Installation
SPC200... 9904a 3-25
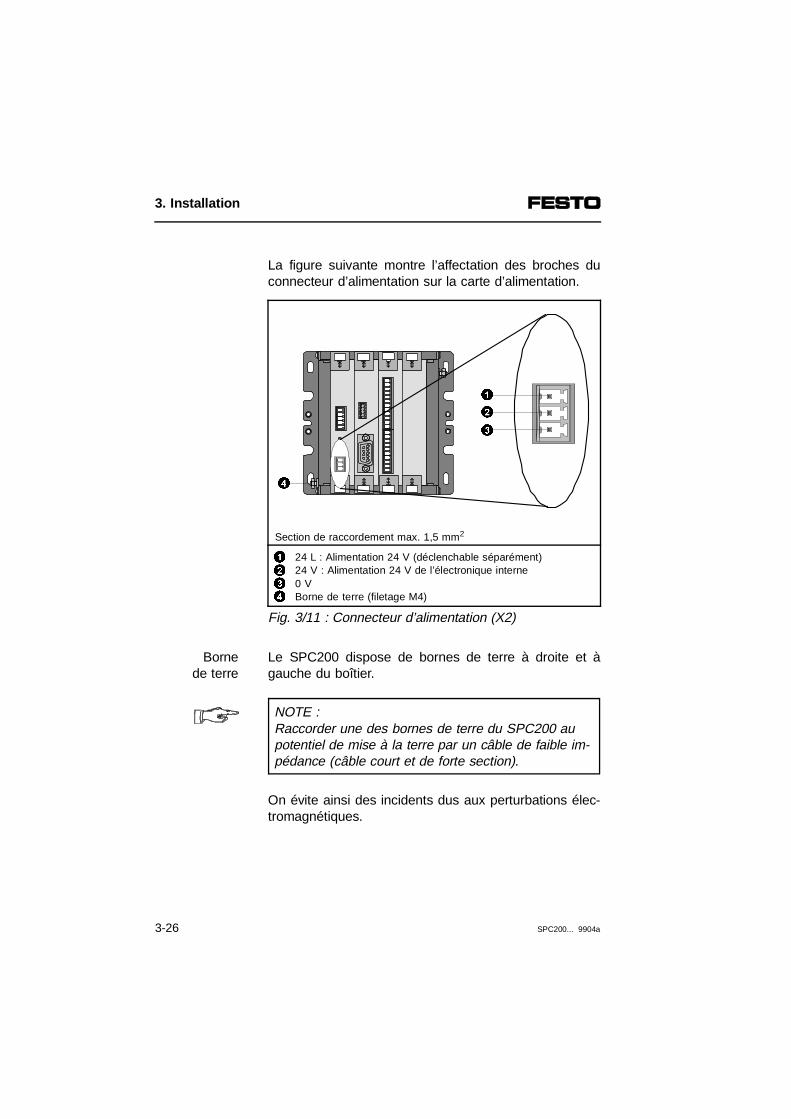
La figure suivante montre l’affectation des broches duconnecteur d’alimentation sur la carte d’alimentation.
Section de raccordement max. 1,5 mm2
1234
24 L : Alimentation 24 V (déclenchable séparément) 24 V : Alimentation 24 V de l’électronique interne0 VBorne de terre (filetage M4)
Fig. 3/11 : Connecteur d’alimentation (X2)
Le SPC200 dispose de bornes de terre à droite et àgauche du boîtier.
Bornede terre
NOTE :Raccorder une des bornes de terre du SPC200 aupotentiel de mise à la terre par un câble de faible im-pédance (câble court et de forte section).
On évite ainsi des incidents dus aux perturbations élec-tromagnétiques.
2
4
3
1
3. Installation
3-26 SPC200... 9904a
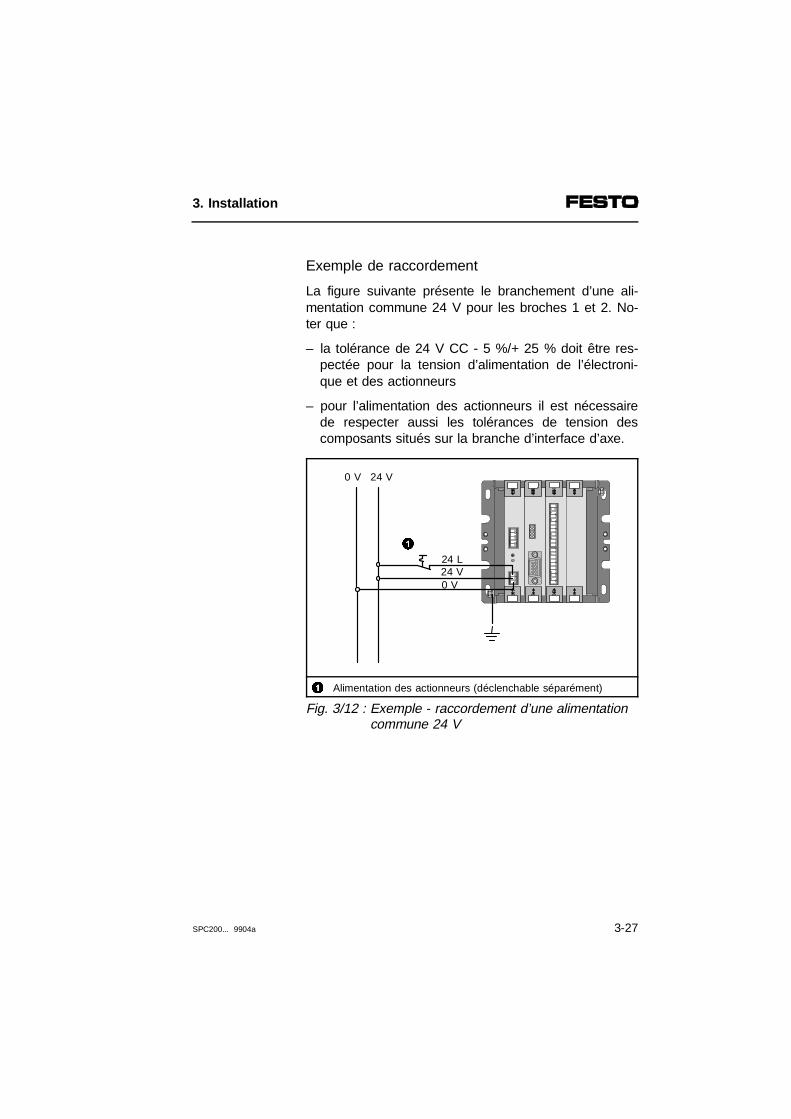
Exemple de raccordement
La figure suivante présente le branchement d’une ali-mentation commune 24 V pour les broches 1 et 2. No-ter que :
– la tolérance de 24 V CC - 5 %/+ 25 % doit être res-pectée pour la tension d’alimentation de l’électroni-que et des actionneurs
– pour l’alimentation des actionneurs il est nécessairede respecter aussi les tolérances de tension descomposants situés sur la branche d’interface d’axe.
1 Alimentation des actionneurs (déclenchable séparément)
Fig. 3/12 : Exemple - raccordement d’une alimentation commune 24 V
1
0 V 24 V
24 V0 V
24 L
3. Installation
SPC200... 9904a 3-27
Connecteur de la branche d’interface d’axe (X1)
ATTENTION :Utiliser pour le raccordement de l’interface d’axe lescâbles Festo spéciaux (type KSPC-AIF-...).Ne pas dépasser la longueur maximale des câblessur une branche d’interface d’axe (voir paragraphe3.4).
On évite ainsi des défauts de fonctionnement duSPC200 et des modules raccordés sur la branche d’in-terface d’axe.
Le connecteur 5 pôles de la carte d’alimentation trans-met les signaux de bus, l’alimentation de l’électroniqueet des modules de terrain raccordés.
3. Installation
3-28 SPC200... 9904a
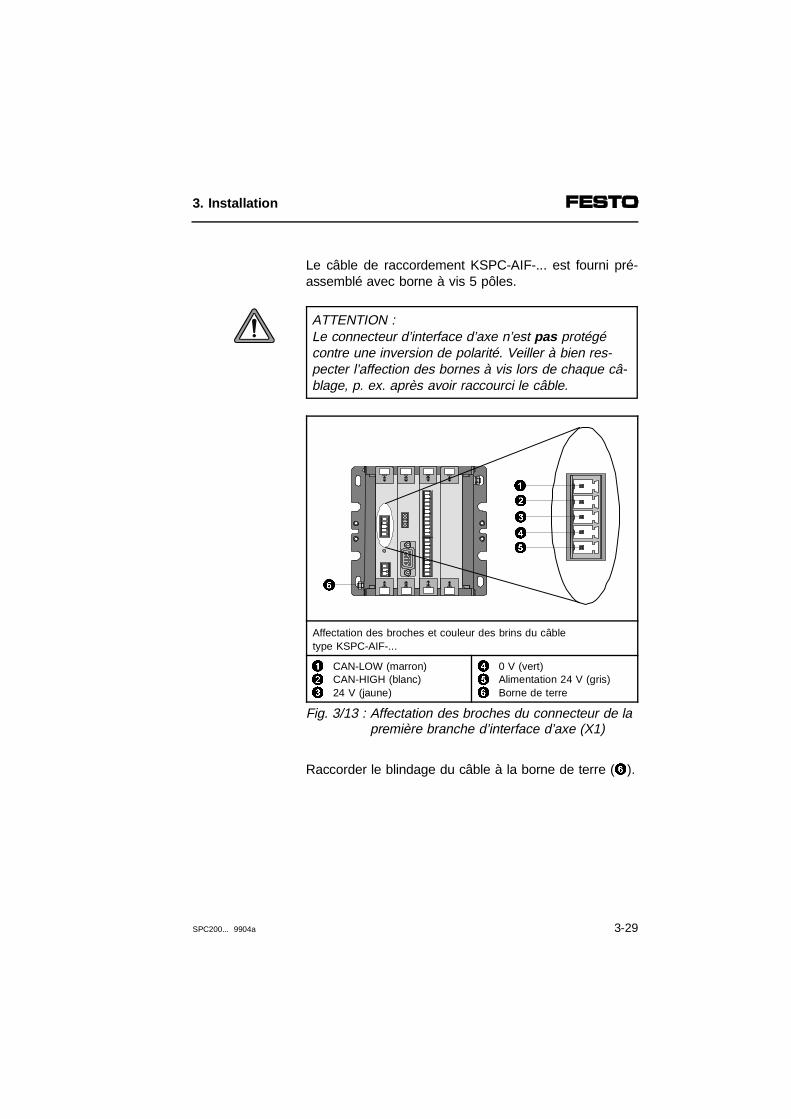
Le câble de raccordement KSPC-AIF-... est fourni pré-assemblé avec borne à vis 5 pôles.
ATTENTION :Le connecteur d’interface d’axe n’est pas protégécontre une inversion de polarité. Veiller à bien res-pecter l’affection des bornes à vis lors de chaque câ-blage, p. ex. après avoir raccourci le câble.
Affectation des broches et couleur des brins du câble type KSPC-AIF-...
123
CAN-LOW (marron)CAN-HIGH (blanc)24 V (jaune)
456
0 V (vert)Alimentation 24 V (gris)Borne de terre
Fig. 3/13 : Affectation des broches du connecteur de la première branche d’interface d’axe (X1)
Raccorder le blindage du câble à la borne de terre (6).
1
3
4
2
6
5
3. Installation
SPC200... 9904a 3-29
3.3.3 Raccordement de la carte de diagnostic
La mise en service, la programmation et le diagnosticsont assurés par la carte de diagnostic type SPC200-MMI-DIAG. Cette carte de diagnostic dispose des inter-faces série suivantes :
– un connecteur pour clavier/afficheur type SPC-MMI-1
– un connecteur pour PC. Cette interface série est mu-nie d’un connecteur Submin-D 9 pôles conforme à lanorme RS 232.
Les paramètres de l’interface série sont les suivants :
– vitesse de transmission : 9,6...115,2 kBaud
– bits de données : 8 Bit
– parité : paire
– 1 bit d’arrêt
– pas de Handshake
Le raccordement d’un PC nécessite :
– un câble de liaison blindé (p. ex. câble de diagnosticFesto type KDI-PPA-3-BU9)
– un PC avec interface série (RS 232) et le logiciel deprogrammation et de mise en service WinPISA typeP.SW-WIN-PISA-... .
3. Installation
3-30 SPC200... 9904a
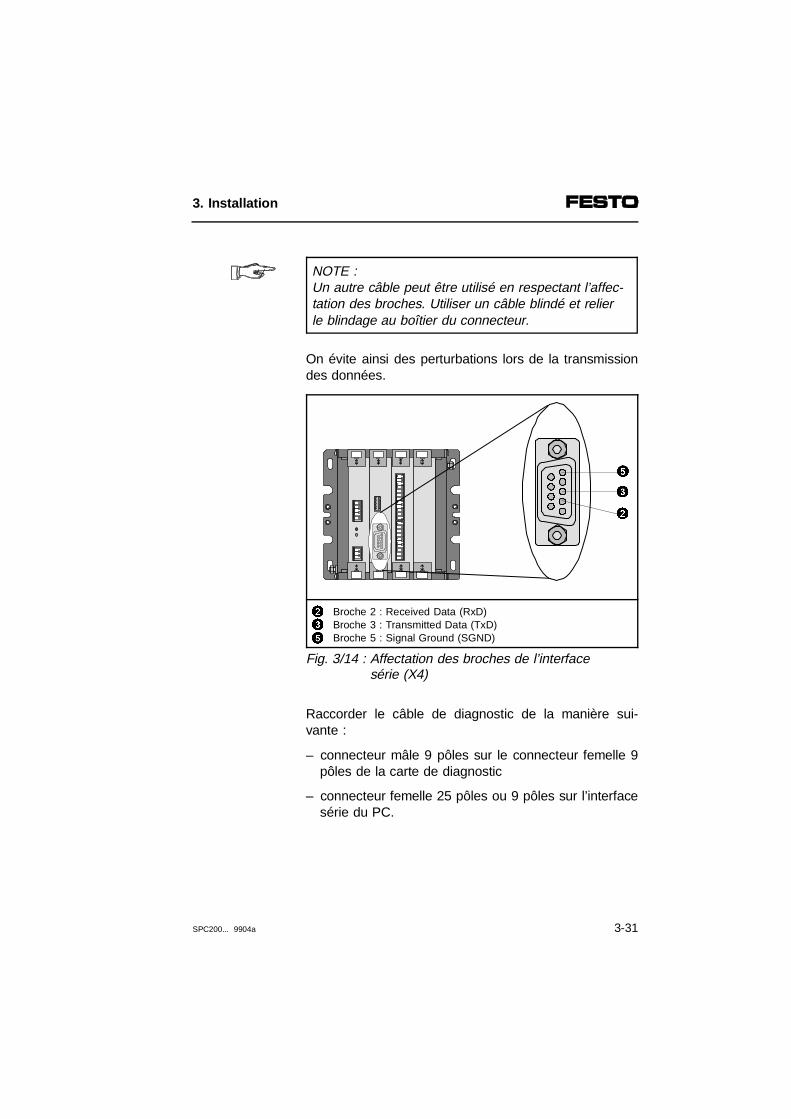
NOTE :Un autre câble peut être utilisé en respectant l’affec-tation des broches. Utiliser un câble blindé et relierle blindage au boîtier du connecteur.
On évite ainsi des perturbations lors de la transmissiondes données.
235
Broche 2 : Received Data (RxD)Broche 3 : Transmitted Data (TxD)Broche 5 : Signal Ground (SGND)
Fig. 3/14 : Affectation des broches de l’interface série (X4)
Raccorder le câble de diagnostic de la manière sui-vante :
– connecteur mâle 9 pôles sur le connecteur femelle 9pôles de la carte de diagnostic
– connecteur femelle 25 pôles ou 9 pôles sur l’interfacesérie du PC.
2
5
3
3. Installation
SPC200... 9904a 3-31
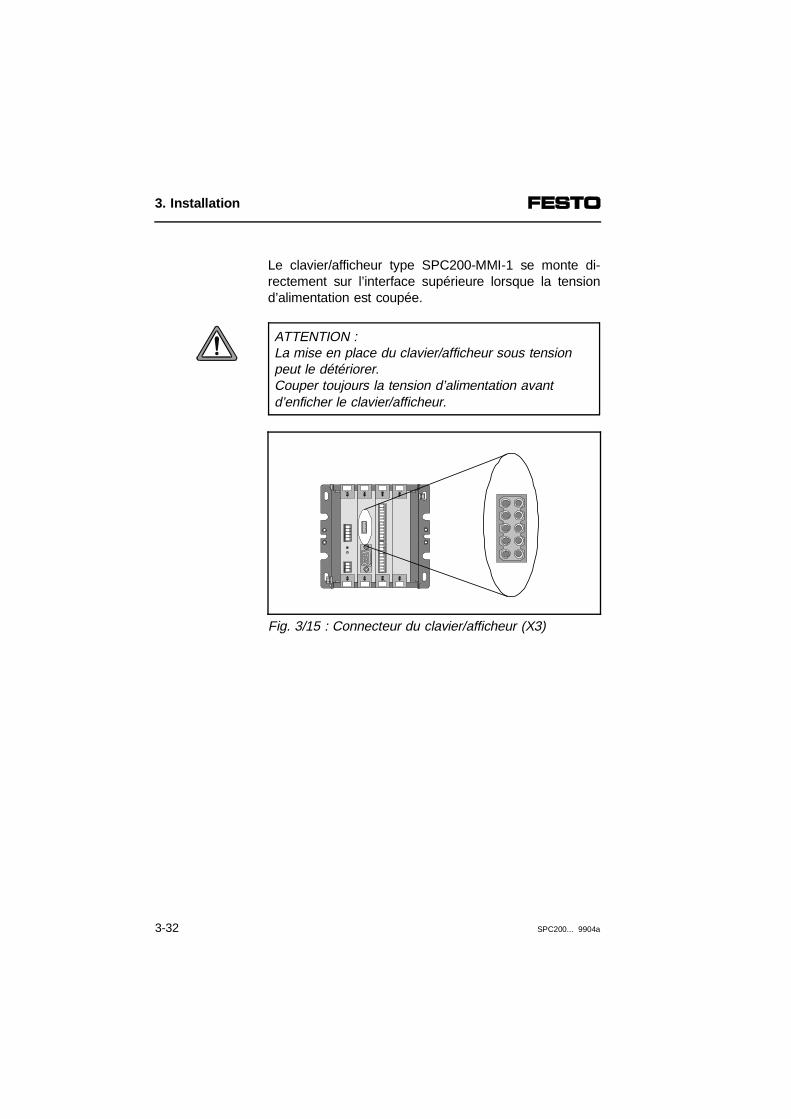
Le clavier/afficheur type SPC200-MMI-1 se monte di-rectement sur l’interface supérieure lorsque la tensiond’alimentation est coupée.
ATTENTION :La mise en place du clavier/afficheur sous tensionpeut le détériorer.Couper toujours la tension d’alimentation avant d’enficher le clavier/afficheur.
Fig. 3/15 : Connecteur du clavier/afficheur (X3)
3. Installation
3-32 SPC200... 9904a
3.3.4 Raccordement de la carte d’E/S SPC200-DIO-...
La commande d’un SPC200 par l’intermédiaire des E/STOR fait appel à une carte d’E/S type SPC200-DIO-....Cette carte possède 10 entrées TOR et 8 sorties TORpour les fonctions suivantes :
– mise à disposition d’E/S TOR pour la commande duSPC200 (en l’absence de carte de bus de terrain)
– mise à disposition d’E/S TOR librement programma-bles pour la commande de la périphérie.
NOTE :En cas de fonctionnement avec un bus de terrain, le nombre de cartes d’E/S ne doit pas être supérieurà 3. Le boîtier peut recevoir 4 cartes d’E/S en l’ab-sence de carte de bus de terrain.
Les fonctions logiques des entrées/sorties TOR dépen-dent du mode de fonctionnement choisi. Les E/S libre-ment programmables ne sont accessibles qu’en modeMarche/Arrêt.
La commande via les E/S de la carte d’E/S n’est possi-ble qu’en l’absence de carte de bus de terrain. L’identi-fication de toutes les cartes présentes est automatiqueà partir de la carte d’alimentation puis de la gauchevers la droite. Les figures suivantes montrent l’affecta-tion des connecteurs X5/X7 (entrées) et des connec-teurs X6/X8 (sorties).
3. Installation
SPC200... 9904a 3-33
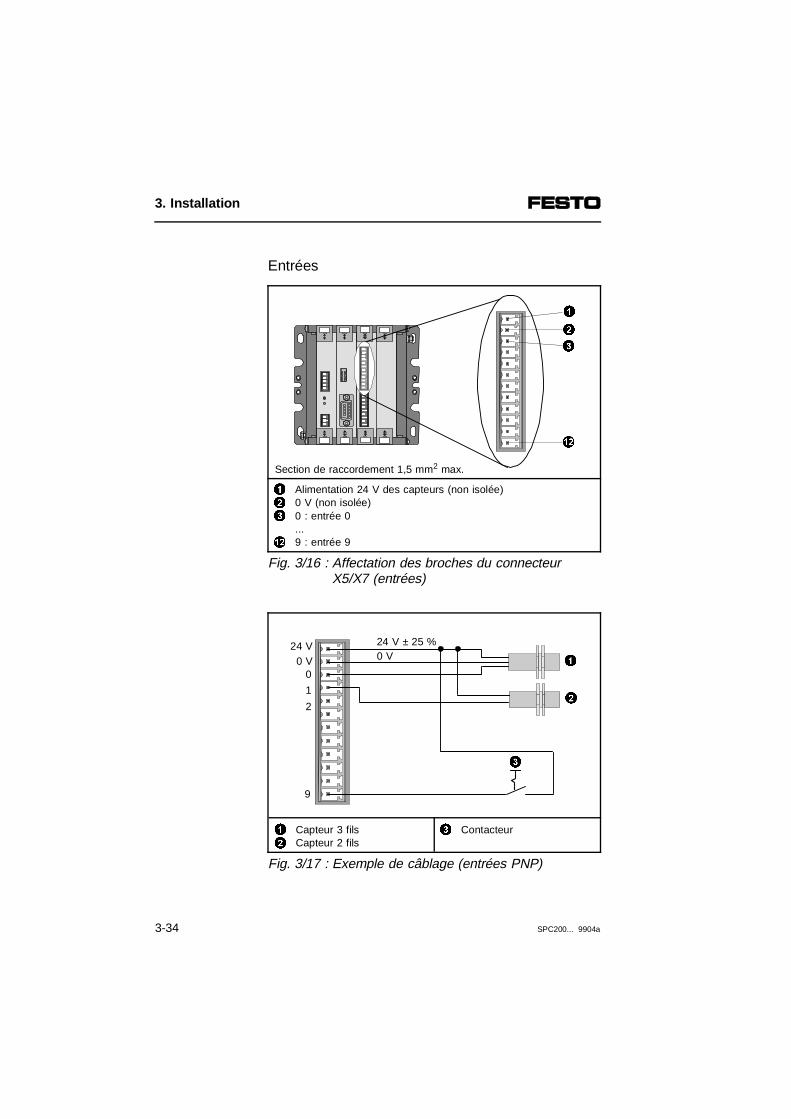
Entrées
Section de raccordement 1,5 mm2 max.
123
"
Alimentation 24 V des capteurs (non isolée)0 V (non isolée)0 : entrée 0...9 : entrée 9
Fig. 3/16 : Affectation des broches du connecteurX5/X7 (entrées)
12
Capteur 3 filsCapteur 2 fils
3 Contacteur
Fig. 3/17 : Exemple de câblage (entrées PNP)
3
2
"
1
2
1
3
0 V 24 V ± 25 %
9
0
1
2
24 V 0 V
3. Installation
3-34 SPC200... 9904a
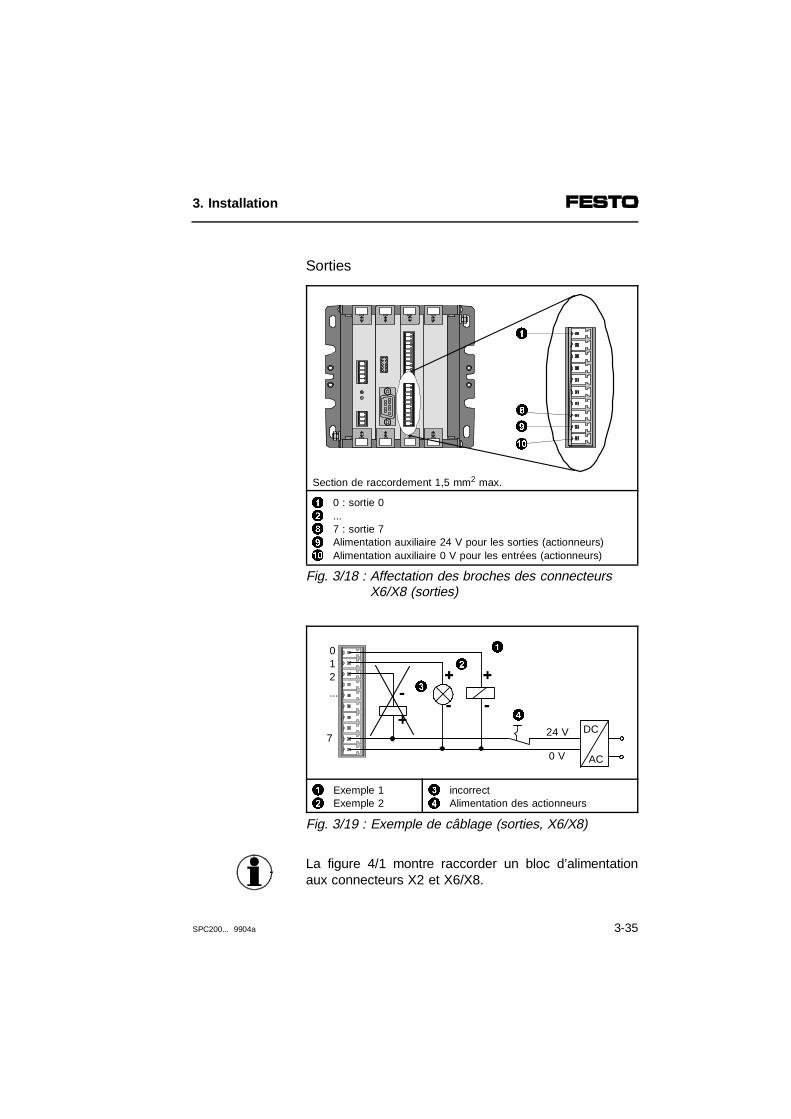
Sorties
Section de raccordement 1,5 mm2 max.
12890
0 : sortie 0...7 : sortie 7Alimentation auxiliaire 24 V pour les sorties (actionneurs)Alimentation auxiliaire 0 V pour les entrées (actionneurs)
Fig. 3/18 : Affectation des broches des connecteurs X6/X8 (sorties)
12
Exemple 1Exemple 2
34
incorrectAlimentation des actionneurs
Fig. 3/19 : Exemple de câblage (sorties, X6/X8)
La figure 4/1 montre raccorder un bloc d’alimentationaux connecteurs X2 et X6/X8.
1
0
8
9
4
1
2
3
DC
AC0 V
24 V
012
...
7
3. Installation
SPC200... 9904a 3-35
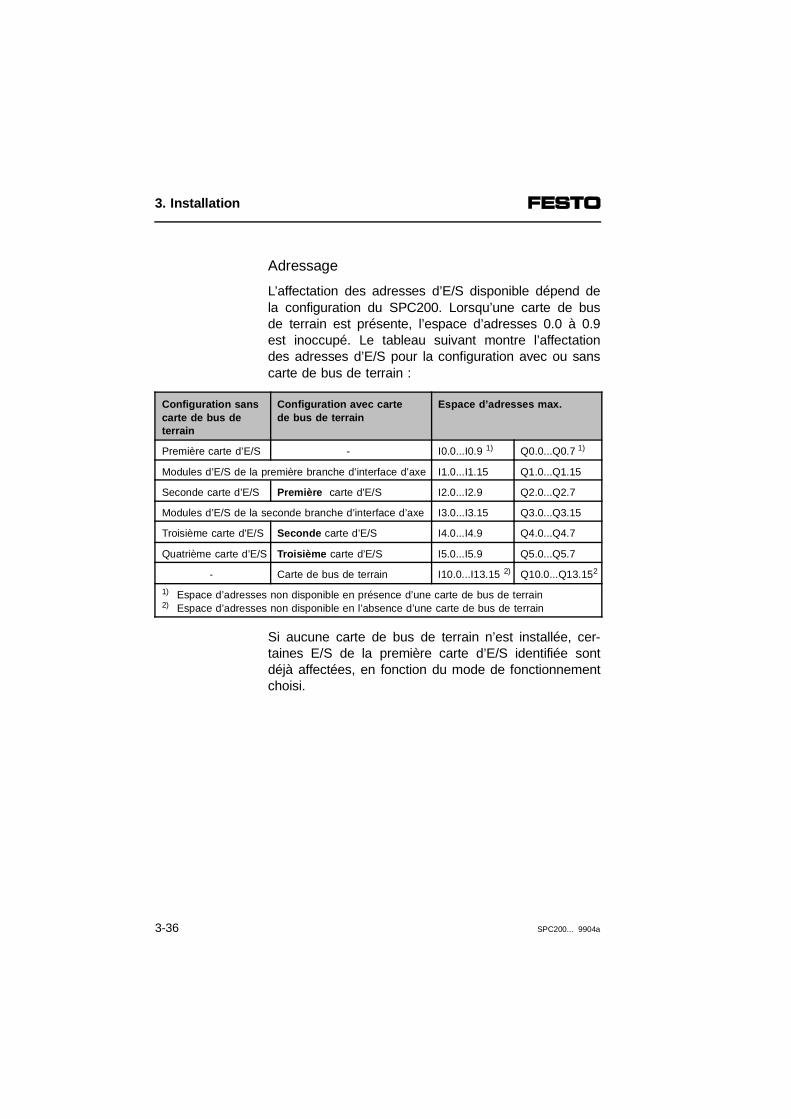
Adressage
L’affectation des adresses d’E/S disponible dépend dela configuration du SPC200. Lorsqu’une carte de busde terrain est présente, l’espace d’adresses 0.0 à 0.9est inoccupé. Le tableau suivant montre l’affectationdes adresses d’E/S pour la configuration avec ou sanscarte de bus de terrain :
Configuration sanscarte de bus de terrain
Configuration avec carte de bus de terrain
Espace d’adresses max.
Première carte d’E/S - I0.0...I0.9 1) Q0.0...Q0.7 1)
Modules d’E/S de la première branche d’interface d’axe I1.0...I1.15 Q1.0...Q1.15
Seconde carte d’E/S Première carte d’E/S I2.0...I2.9 Q2.0...Q2.7
Modules d’E/S de la seconde branche d’interface d’axe I3.0...I3.15 Q3.0...Q3.15
Troisième carte d’E/S Seconde carte d’E/S I4.0...I4.9 Q4.0...Q4.7
Quatrième carte d’E/S Troisième carte d’E/S I5.0...I5.9 Q5.0...Q5.7
- Carte de bus de terrain I10.0...I13.15 2) Q10.0...Q13.152
1) Espace d’adresses non disponible en présence d’une carte de bus de terrain2) Espace d’adresses non disponible en l’absence d’une carte de bus de terrain
Si aucune carte de bus de terrain n’est installée, cer-taines E/S de la première carte d’E/S identifiée sontdéjà affectées, en fonction du mode de fonctionnementchoisi.
3. Installation
3-36 SPC200... 9904a
Lorsque plusieurs cartes d’E/S sont installées sur unboîtier, les règles suivantes s’appliquent :
Règlesde base
– La carte d’E/S placée à gauche au plus près de lacarte d’alimentation est la première carte d’E/S. Lesautres cartes d’E/S sont comptées ensuite de lagauche vers la droite.
– Lorsqu’aucune carte de bus de terrain n’est installée,la première carte d’E/S met à disposition cinq en-trées et trois sorties librement programmables et desE/S pour la commande du SPC200 (I0.0...I0.9 etQ0.0...Q0.7). Toutes les autres E/S sont librementprogrammables.
– Lorsqu’une carte de bus de terrain est installée, l’es-pace d’adresses I0.0...I0.9 et Q0.0...Q0.7 n’est pasdisponible. La première carte d’E/S occupe lesadresses I2.0...I2.9 et Q2.0...Q2.7. Ainsi leurs E/Ssont librement programmables.
La chapitre 5 apporte des explications sur les signauxde commande des E/S dans les divers modes de fonc-tionnement.
3. Installation
SPC200... 9904a 3-37

Affectation des broches du connecteur X5 sur la pre-mière carte d’E/S en cas de fonctionnement sanscarte de bus de terrain.
Lorsqu’aucune carte de bus de terrain n’est installée, lapremière carte d’E/S met à disposition les entrées decommande suivantes :
Entrées avec fonctions de commande
N debroche
Dés.1) Adresse 2) Mode Marche/Arrêt Mode de sélection de bloc
1 24 V - Alimentation 24 V pour capteurs (non isolée)
2 0 V - 0 V (non isolée)
3 0 I0.0
Libr. prog.
SATZNR 1
4 1 I0.1 SATZNR 2
5 2 I0.2 SATZNR 4
6 3 I0.3 SATZNR 8
7 4 I0.4 SATZNR 16
8 5 I0.5 SYNC_IB CLK_B
9 6 I0.6 SYNC_IA CLK_A
10 7 I0.7 STOP STOP
11 8 I0.8 START/RESET3) RESET3)
12 9 I0.9 FREIGABE FREIGABE
1) Désignation de la carte 2) Adresses de la première carte d’E/S pour la configuration sans carte de bus de terrain
(I=Entrée)3) RESET (Réinitialisation du programme) en fonction du Signal 0 sur l’entrée STOP
3. Installation
3-38 SPC200... 9904a

Affectation des broches du connecteur X6 sur la pre-mière carte d’E/S en cas de fonctionnement sanscarte de bus de terrain.
Lorsqu’aucune carte de bus de terrain n’est installée, lapremière carte d’E/S met à disposition les sorties decommande suivantes :
Sorties avec fonctions de commande
N debroche
Dés.1) Adresse 2) Mode Marche/Arrêt Mode de sélection de bloc 3)
1 0 Q0.0Libr. prog.
-
2 1 Q0.1 -
3 2 Q0.2 -
4 3 Q0.3 MC_B RC_B
5 4 Q0.4 MC_A RC_A
6 5 Q0.5 SYNC_OB ACK_B
7 6 Q0.6 SYNC_OA ACK_A
8 7 Q0.7 READY READY
9 24 V Alimentation auxiliaire 24 V des sorties
10 0 V Alimentation auxiliaire 0 V des sorties
1) Désignation de la carte2) Adresses de la première carte d’E/S pour la configuration sans carte de bus de terrain
(Q=Sortie)3) Ce mode de fonctionnement ne possède aucune E/S librement programmable.
3. Installation
SPC200... 9904a 3-39

Affectation des broches des cartes d’E/S sans fonctionsde commande spécifiques
Le numéro de mot (ici x) dépend de la configuration duSPC200.
Configuration
Numéro de mot x
Sans cartede bus de terrain
Avec carte de bus de terrain
Seconde carte d’E/S Première carte d’E/S 2
Troisième carte d’E/S Seconde carte d’E/S 4
Quatrième carte d’E/S Troisième carte d’E/S 5
Entrées sans fonctions de commande
N debroche
Dés.1) Adresse 2) Mode Marche/Arrêt Mode de sélection de bloc 3)
1 24 V - Alimentation 24 V pour capteurs (non isolée)
2 0 V - 0 V (non isolée)
3 0 Ix.0
Libr. prog.
-
4 1 Ix.1 -
5 2 Ix.2 -
6 3 Ix.3 -
7 4 Ix.4 -
8 5 Ix.5 -
9 6 Ix.6 -
10 7 Ix.7 -
11 8 Ix.8 -
12 9 Ix.9 -
1) Désignation de la carte2) Le numéro de mot (ici x) dépend de la configuration (I=Entrée)3) Ce mode ne possède aucune E/S librement programmable
3. Installation
3-40 SPC200... 9904a

Affectation des broches des carte d’E/S sans fonctionsde commande spécifiques
Le numéro de mot (ici x) dépend de la configuration duSPC200.
Configuration
Numéro de mot x
Sans carte de bus de terrain
Avec cartede bus de terrain
Seconde carte d’E/S Première carte d’E/S 2
Troisième carte d’E/S Seconde carte d’E/S 4
Quatrième carte d’E/S Troisième carte d’E/S 5
Sorties sans fonctions de commande
N debroche
Dés.1) Adresse 2) Mode Marche/Arrêt Mode de sélection de bloc 3)
1 0 Qx.0
Libr. prog.
-
2 1 Qx.1 -
3 2 Qx.2 -
4 3 Qx.3 -
5 4 Qx.4 -
6 5 Qx.5 -
7 6 Qx.6 -
8 7 Qx.7 -
9 24 V Alimentation auxiliaire 24 V des sorties
10 0 V Alimentation auxiliaire 0 V des sorties
1) Désignation de la carte2) Le numéro de mot (ici x) dépend de la configuration (Q=Sortie)3) Ce mode ne possède aucune E/S librement programmable
3. Installation
SPC200... 9904a 3-41
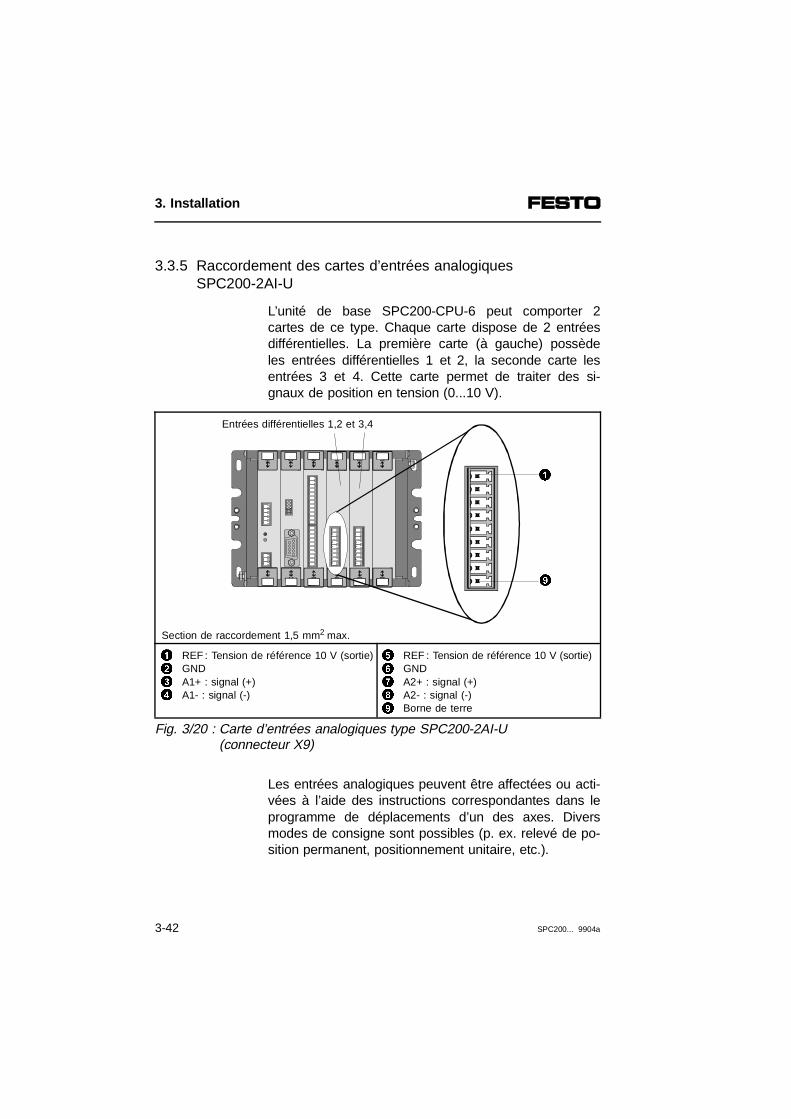
3.3.5 Raccordement des cartes d’entrées analogiquesSPC200-2AI-U
L’unité de base SPC200-CPU-6 peut comporter 2cartes de ce type. Chaque carte dispose de 2 entréesdifférentielles. La première carte (à gauche) possèdeles entrées différentielles 1 et 2, la seconde carte lesentrées 3 et 4. Cette carte permet de traiter des si-gnaux de position en tension (0...10 V).
Entrées différentielles 1,2 et 3,4
Section de raccordement 1,5 mm2 max.
1234
REF : Tension de référence 10 V (sortie)GNDA1+ : signal (+) A1- : signal (-)
56789
REF : Tension de référence 10 V (sortie) GNDA2+ : signal (+)
A2- : signal (-) Borne de terre
Fig. 3/20 : Carte d’entrées analogiques type SPC200-2AI-U (connecteur X9)
Les entrées analogiques peuvent être affectées ou acti-vées à l’aide des instructions correspondantes dans leprogramme de déplacements d’un des axes. Diversmodes de consigne sont possibles (p. ex. relevé de po-sition permanent, positionnement unitaire, etc.).
1
9
3. Installation
3-42 SPC200... 9904a
La plage de tensions est comprise entre 0 et 10 V. Leprogramme permet de sélectionner à l’intérieur de laplage de déplacements de l’axe une certaine plage dedépassement de la consigne analogique. La relationentre la tension et la position est la suivante :
Tension Description
0 V......10 V
Plus faible valeur de position......Plus grande valeur de position
Raccordement de capteurs analogiques
DANGER :Une installation non conforme peut entraîner des dé-fauts de fonctionnement et p. ex. des déplacementsincontrôlés des actionneurs. Respecter impérative-ment les consignes d’installation suivantes.
• Utiliser pour la transmission de la consigne analogi-que un câble blindé torsadé par paires.
• Ne pas disposer les fils de signaux à proximité ouparallèlement à des fils émettant de fortes perturba-tions. Utiliser si nécessaire des goulottes et desnappes de câblage séparées ou encore des câblesdistincts.
• Relier toujours le blindage des fils de signaux analo-giques d’un côté à la borne de terre (broche 9).
Recommandation : les fils de signaux doivent être aussicourts que possible. Leur longueur ne doit pas dépas-ser 4 m.
3. Installation
SPC200... 9904a 3-43
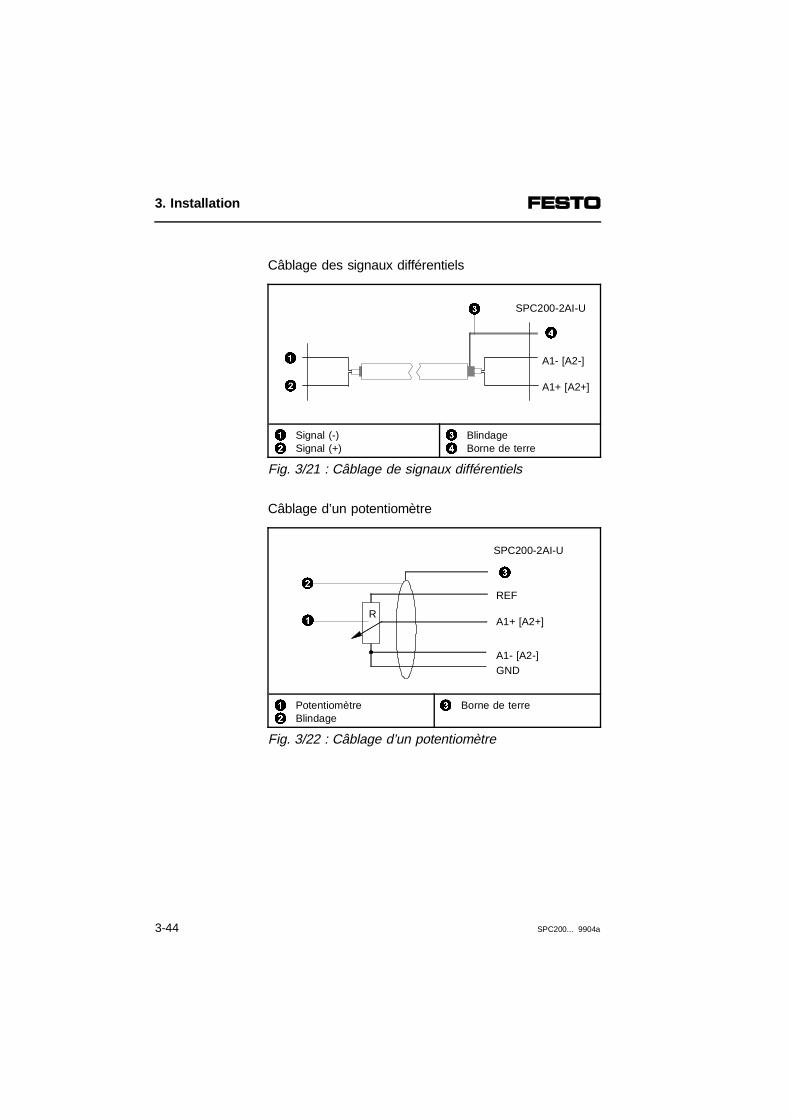
Câblage des signaux différentiels
12
Signal (-)Signal (+)
34
BlindageBorne de terre
Fig. 3/21 : Câblage de signaux différentiels
Câblage d’un potentiomètre
12
PotentiomètreBlindage
3 Borne de terre
Fig. 3/22 : Câblage d’un potentiomètre
1
2
SPC200-2AI-U
A1+ [A2+]
A1- [A2-]
4
3
1R
SPC200-2AI-U
GNDA1- [A2-]
A1+ [A2+]
3
REF2
3. Installation
3-44 SPC200... 9904a
3.3.6 Raccordement d’une carte de sous-contrôleurSPC200-SCU-AIF
Dans sa version de base, le SPC200 est en mesured’assurer la régulation de position de deux axes pneu-matiques. La carte de sous-contrôleur permet alorsd’exploiter au maximum 4 axes pneumatiques avec unSPC200. La carte de sous-contrôleur dispose d’unconnecteur pour une deuxième branche d’interfaced’axe et assure la régulation de position des axes rac-cordés. On admet au maximum deux axes pneumati-ques par branche d’interface d’axe.
ATTENTION :Utiliser pour le raccordement de l’interface d’axe lescâbles Festo spéciaux (type KSPC-AIF-...).Ne pas dépasser la longueur maximale des câblessur une branche d’interface d’axe (voir paragraphe3.4).
On évite ainsi des défauts de fonctionnement duSPC200 et des modules raccordés sur la branche d’in-terface d’axe.
Le connecteur 5 pôles de la carte d’alimentation trans-met les signaux de bus, l’alimentation de l’électroniqueet des modules de terrain raccordés. Le câble de rac-cordement KSPC-AIF-... est fourni préassemblé avecborne à vis 5 pôles.
ATTENTION :Le connecteur d’interface d’axe n’est pas protégécontre une inversion de polarité. Veiller à bien res-pecter l’affection des bornes à vis lors de chaque câ-blage, p. ex. après avoir raccourci le câble.
3. Installation
SPC200... 9904a 3-45
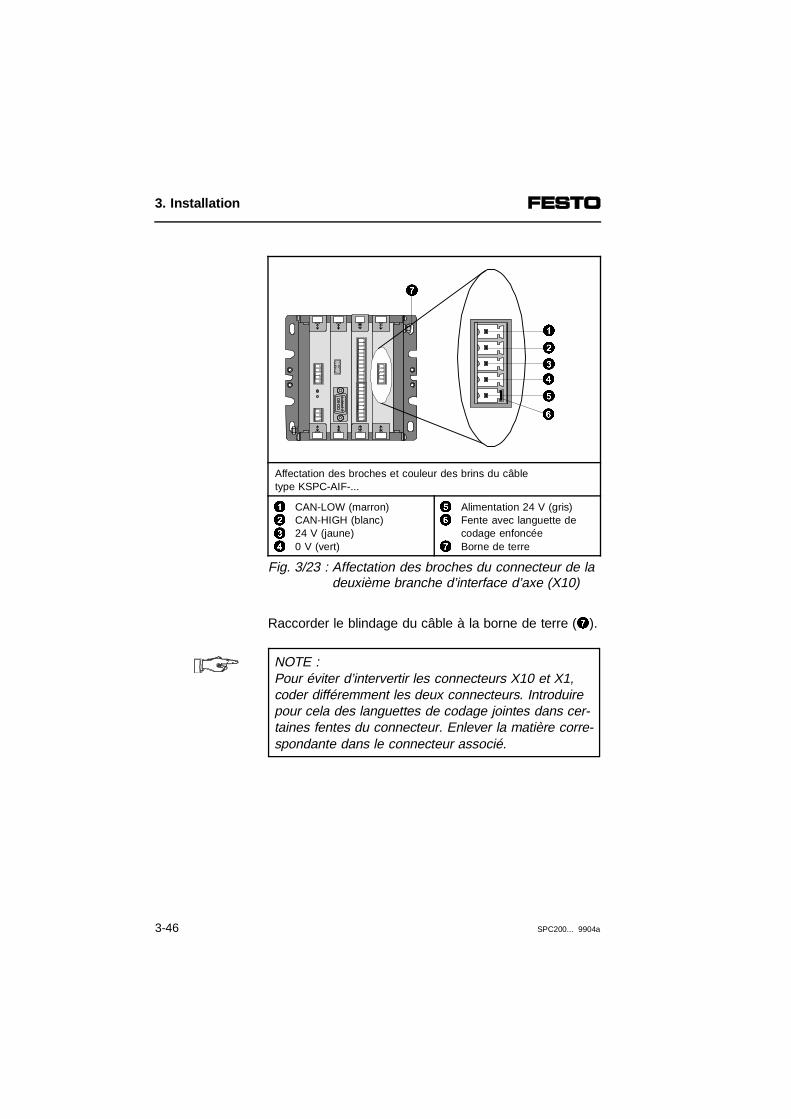
Affectation des broches et couleur des brins du câble type KSPC-AIF-...
1234
CAN-LOW (marron)CAN-HIGH (blanc)24 V (jaune)0 V (vert)
56
7
Alimentation 24 V (gris)Fente avec languette decodage enfoncéeBorne de terre
Fig. 3/23 : Affectation des broches du connecteur de ladeuxième branche d’interface d’axe (X10)
Raccorder le blindage du câble à la borne de terre (7).
NOTE :Pour éviter d’intervertir les connecteurs X10 et X1,coder différemment les deux connecteurs. Introduirepour cela des languettes de codage jointes dans cer-taines fentes du connecteur. Enlever la matière corre-spondante dans le connecteur associé.
1
3
4
2
7
6
5
3. Installation
3-46 SPC200... 9904a
3.4 Installation des modules sur une branche d’interface d’axe
DANGER :Les câbles à haut niveau de bruit peuvent provoquerdes perturbations électromagnétiques sur le circuit.Ne pas les disposer à proximité des câbles suivants :- Câble CP- Câble du système de mesure- Câble du distributeur proportionnel.
NOTE :Raccorder la borne de terre des modules par un câble de faible impédance (câble court et de fortesection) au potentiel de mise à la terre.
On évite ainsi des incidents dus aux perturbations élec-tromagnétiques.
3. Installation
SPC200... 9904a 3-47
L’installation de modules sur une branche d’interfaced’axe doit respecter les règles suivantes.
Règlesde base
1) Longueur maximale de chaque branche
– La longueur maximale des branches est de 30 m.
2) Alimentation externe des actionneurs
– En cas d’utilisation des modules suivants, une ali-mentation des actionneurs type SPC-AIF-SUP-24Vdoit être raccordée juste avant le module :- Module d’E/S fonctionnel (type SPC-FIO-2E/2A)- Sur les systèmes à deux axes : terminal de distribu- teurs CP (type CPV...).
Une chute de tension proportionnelle à la charge seproduit sur la branche d’interface d’axe. La tension d’a-limentation des actionneurs peut chuter en dessous dela tolérance si l’installation est incorrecte.
3) Configuration de la branche d’interface d’axe
– Raccorder tout d’abord sur le SPC200 deux inter-faces d’axe au maximum. Raccorder ensuite si né-cessaire sur la dernière branche les modules d’E/Sfonctionnels ou d’abord un module CP avec des sor-ties puis un module CP avec des entrées.
4) Résistance de terminaison
– Si un module d’E/S CP, un terminal de distributeursCP ou une interface d’axe se trouve à l’extrémité dela branche d’interface d’axe, installer une résistancede terminaison type KABS-M9-R100 sur le câble sor-tant (p. ex. connecteur OUT) de ce module.
3. Installation
3-48 SPC200... 9904a
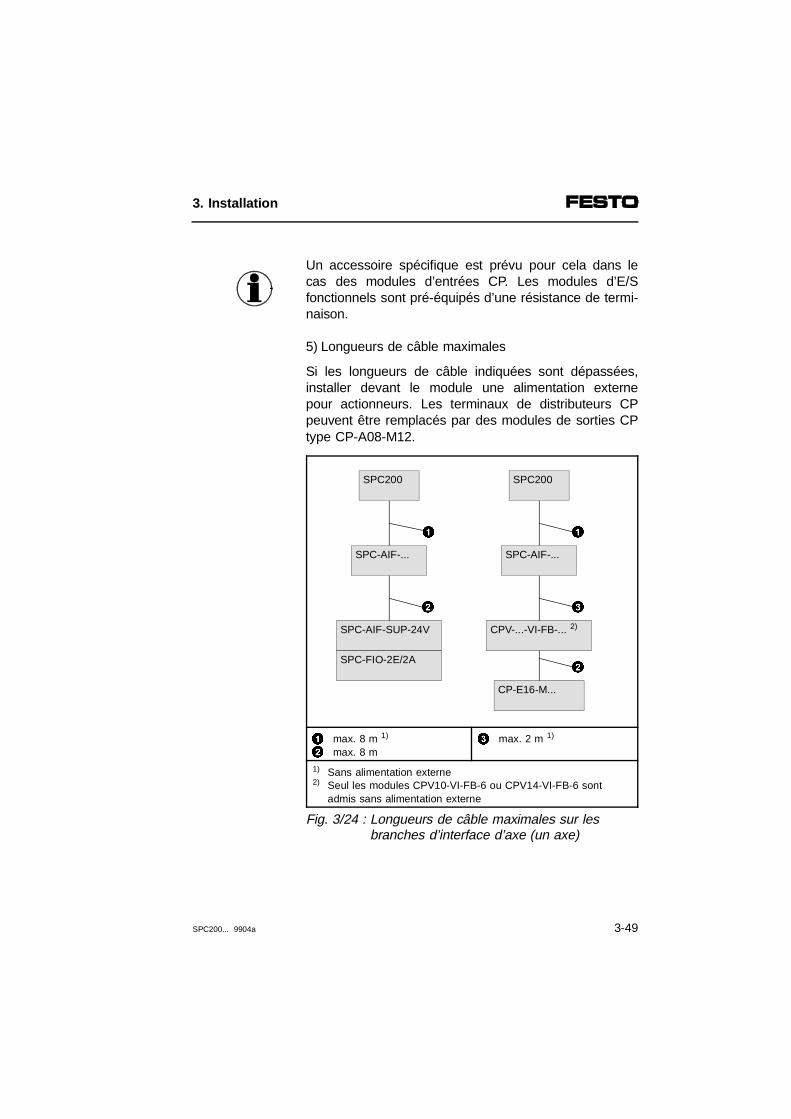
Un accessoire spécifique est prévu pour cela dans lecas des modules d’entrées CP. Les modules d’E/Sfonctionnels sont pré-équipés d’une résistance de termi-naison.
5) Longueurs de câble maximales
Si les longueurs de câble indiquées sont dépassées,installer devant le module une alimentation externepour actionneurs. Les terminaux de distributeurs CPpeuvent être remplacés par des modules de sorties CPtype CP-A08-M12.
12
max. 8 m 1)
max. 8 m3 max. 2 m 1)
1) Sans alimentation externe2) Seul les modules CPV10-VI-FB-6 ou CPV14-VI-FB-6 sont
admis sans alimentation externe
Fig. 3/24 : Longueurs de câble maximales sur les branches d’interface d’axe (un axe)
SPC200
SPC-AIF-...
CPV-...-VI-FB-... 2)
CP-E16-M...
SPC200
SPC-AIF-...
SPC-AIF-SUP-24V
SPC-FIO-2E/2A
11
3
2
2
3. Installation
SPC200... 9904a 3-49
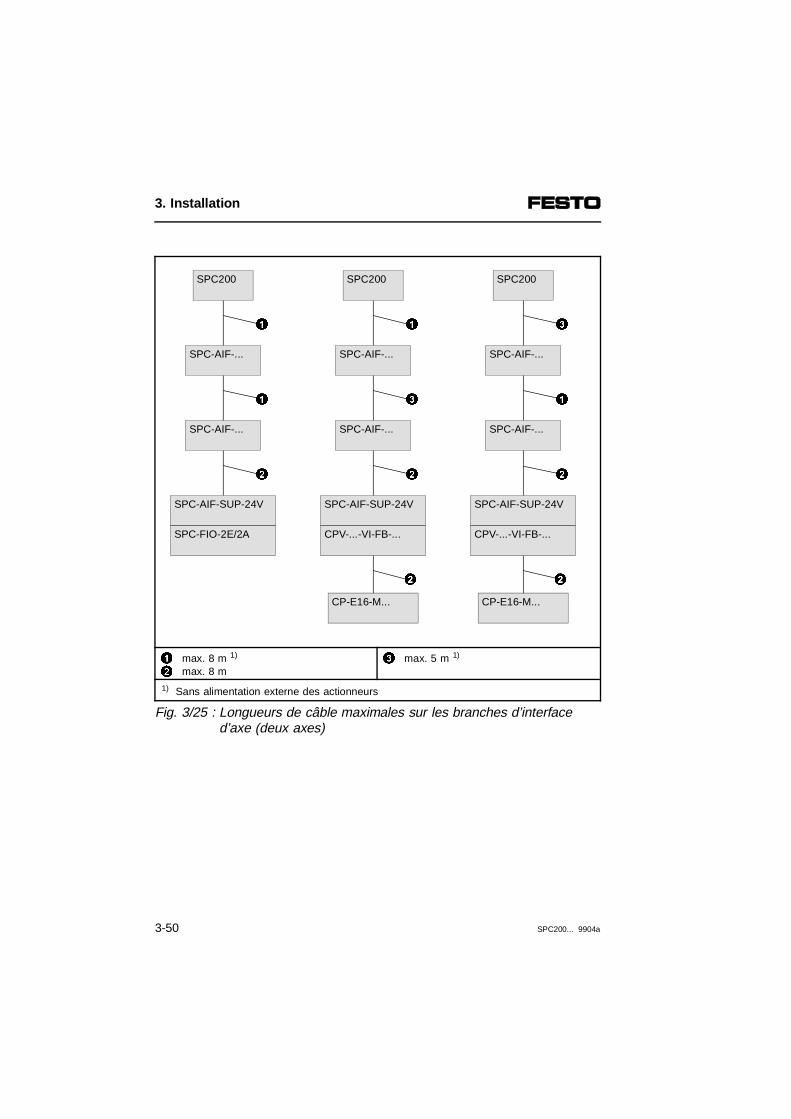
12
max. 8 m 1)
max. 8 m3 max. 5 m 1)
1) Sans alimentation externe des actionneurs
Fig. 3/25 : Longueurs de câble maximales sur les branches d’interface d’axe (deux axes)
SPC200
1
SPC-FIO-2E/2A
SPC-AIF-...
1
SPC-AIF-...
2
SPC-AIF-SUP-24V
SPC200
SPC-AIF-...
CPV-...-VI-FB-...
CP-E16-M...
3
2
1
SPC-AIF-...
2
SPC-AIF-SUP-24V
SPC200
SPC-AIF-...
CPV-...-VI-FB-...
CP-E16-M...
1
2
3
SPC-AIF-...
2
SPC-AIF-SUP-24V
3. Installation
3-50 SPC200... 9904a
3.4.1 Installation de l’interface d’axe SPC-AIF-...
DANGER :Les perturbations électromagnétiques peuvent provo-quer des réactions brusques des axes. Respecterles consignes d’installation suivantes pour éviter lesdysfonctionnements dus aux perturbations électroma-gnétiques.
– Raccorder la borne de terre de l’interface d’axe aupotentiel de mise à la terre par un câble de faibleimpédance (câble court et de forte section).
– Ne pas disposer le câble de l’interface d’axe, le câbleCP, le câble du système de mesure ou du distribu-teur proportionnel à proximité ou parallèlement à uncâble émettant de fortes perturbations.
– N’utiliser que des câbles d’origine. Bloquer lesconnecteurs à l’aide des écrous-raccord afin d’évitertout desserrage à la suite p. ex. de vibrations.
– Obturer les connecteurs inutilisés avec les bouchonsétanches. C’est la seule façon de garantir l’indice deprotection IP65.
NOTE :Au maximum deux interfaces d’axe doivent être rac-cordées sur une branche d’interface d’axe. Les diffé-rents types de système de mesure peuvent cohabiter.
3. Installation
SPC200... 9904a 3-51
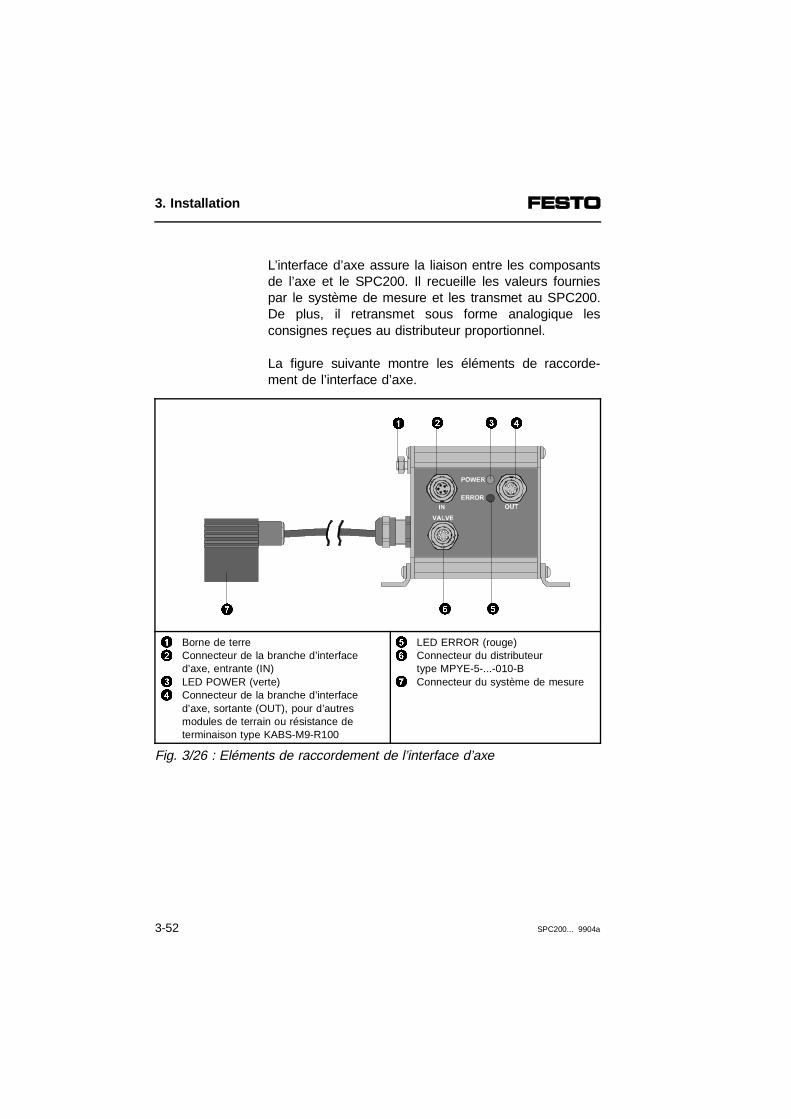
L’interface d’axe assure la liaison entre les composantsde l’axe et le SPC200. Il recueille les valeurs fourniespar le système de mesure et les transmet au SPC200.De plus, il retransmet sous forme analogique lesconsignes reçues au distributeur proportionnel.
La figure suivante montre les éléments de raccorde-ment de l’interface d’axe.
12
34
Borne de terreConnecteur de la branche d’interfaced’axe, entrante (IN)LED POWER (verte)Connecteur de la branche d’interfaced’axe, sortante (OUT), pour d’autresmodules de terrain ou résistance determinaison type KABS-M9-R100
56
7
LED ERROR (rouge)Connecteur du distributeurtype MPYE-5-...-010-BConnecteur du système de mesure
Fig. 3/26 : Eléments de raccordement de l’interface d’axe
7 6
432
5
1
3. Installation
3-52 SPC200... 9904a

Raccordement de l’interface d’axe sur le SPC200
DANGER :Tenir compte des longueurs de câble maximales entre les différents modules de la branche d’interfaced’axe et le SPC200 (voir paragraphe 3.4).Utiliser pour le raccordement exclusivement un câbled’origine.
Type de câble Description
KSPC-AIF-1-WD-... Câble de connexion du premier axe
KVI-CP-2-... *) Câble de connexion du second axe oudes modules d’E/S
KVI-CP-1-...
*) Compatible avec les chaînes à câbles
• Raccorder le connecteur IN de l’interface d’axe dupremier axe à la borne à vis 5 pôles de la carte d’ali-mentation.
• Raccorder selon le cas sur le connecteur OUT l’inter-face d’axe du second axe ou les modules d’en-trées/sorties.
• Si l’interface d’axe se trouve à l’extrémité de labranche, brancher la résistance de terminaison sur leconnecteur OUT type KABS-M9-R100.
• Bloquer les connecteurs à l’aide d’écrous-raccordpour éviter tout desserrage du p. ex. à des vibra-tions.
3. Installation
SPC200... 9904a 3-53

Raccordement du système de mesure
L’interface d’axe est concue pour l’un des systèmes demesure suivants :
Interface d’axe Type de système de mesure
SPC-AIF-POT Système analogiquePotentiomètre linéaire type MLO-POT-...-TLF
SPC-AIF-MTS Système numériqueTemposonic type MME-MTS-...-TLF-AIF ousystème intégré type DGPI(L)-...-...-...-AIF
Le câble du système de mesure est fixé sur l’interfaced’axe. La longueur du câble est d’env. 0,30 m.
NOTE :N’utiliser que des câbles d’origine. Ne jamais rallon-ger un câble. Les câbles de faible longueur sontmoins sensibles aux perturbations électromagnéti-ques.
3. Installation
3-54 SPC200... 9904a
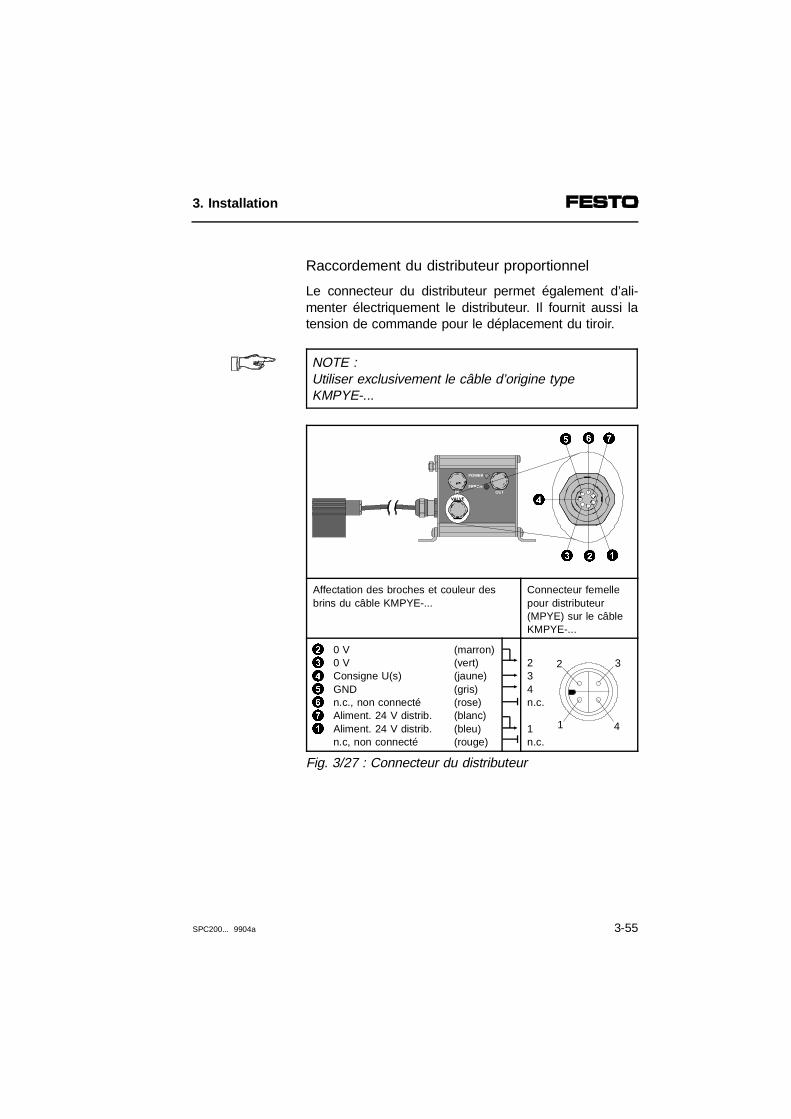
Raccordement du distributeur proportionnel
Le connecteur du distributeur permet également d’ali-menter électriquement le distributeur. Il fournit aussi latension de commande pour le déplacement du tiroir.
NOTE :Utiliser exclusivement le câble d’origine type KMPYE-...
Affectation des broches et couleur desbrins du câble KMPYE-...
Connecteur femellepour distributeur(MPYE) sur le câbleKMPYE-...
2345671
0 V (marron)0 V (vert)Consigne U(s) (jaune)GND (gris)n.c., non connecté (rose)Aliment. 24 V distrib. (blanc)Aliment. 24 V distrib. (bleu)n.c, non connecté (rouge)
234n.c.
1n.c.
Fig. 3/27 : Connecteur du distributeur
1
7
4
3 2
65
41
32
3. Installation
SPC200... 9904a 3-55
3.4.2 Installation d’un module d’E/S fonctionnel SPC-FIO-2E/2A-M8
DANGER :Les perturbations électromagnétiques peuvent provo-quer des réactions brusques des axes. Respecterles consignes d’installation suivantes pour éviter lesdysfonctionnements dus aux perturbations électroma-gnétiques.
– Raccorder la borne de terre du module d’E/S fonc-tionnel au potentiel de mise à la terre par un câblede faible impédance (câble court et de forte section).
– Utiliser pour le raccordement du module exclusive-ment un câble d’origine type KVI-CP-2-... . Bloquerles connecteurs à l’aide de bagues afin d’éviter toutdesserrage à la suite p. ex. de vibrations.
NOTE :Une alimentation pour actionneurs type SPC-AIF-SUP-24V est indispensable pour le raccordementd’un module d’E/S fonctionnel. Ne pas dépasser leslongueurs maximales de câbles sur une branche d’interface d’axe (voir paragraphe 3.4).
Utiliser pour le raccordement de capteurs et d’action-neurs le câble type KM8-M8-GSGD-... et le connecteravec bague de blocage et filetage M8x1. Obturer lesconnecteurs inutilisés avec les bouchons étanches.C’est la seule façon de garantir l’indice de protectionIP65.
3. Installation
3-56 SPC200... 9904a
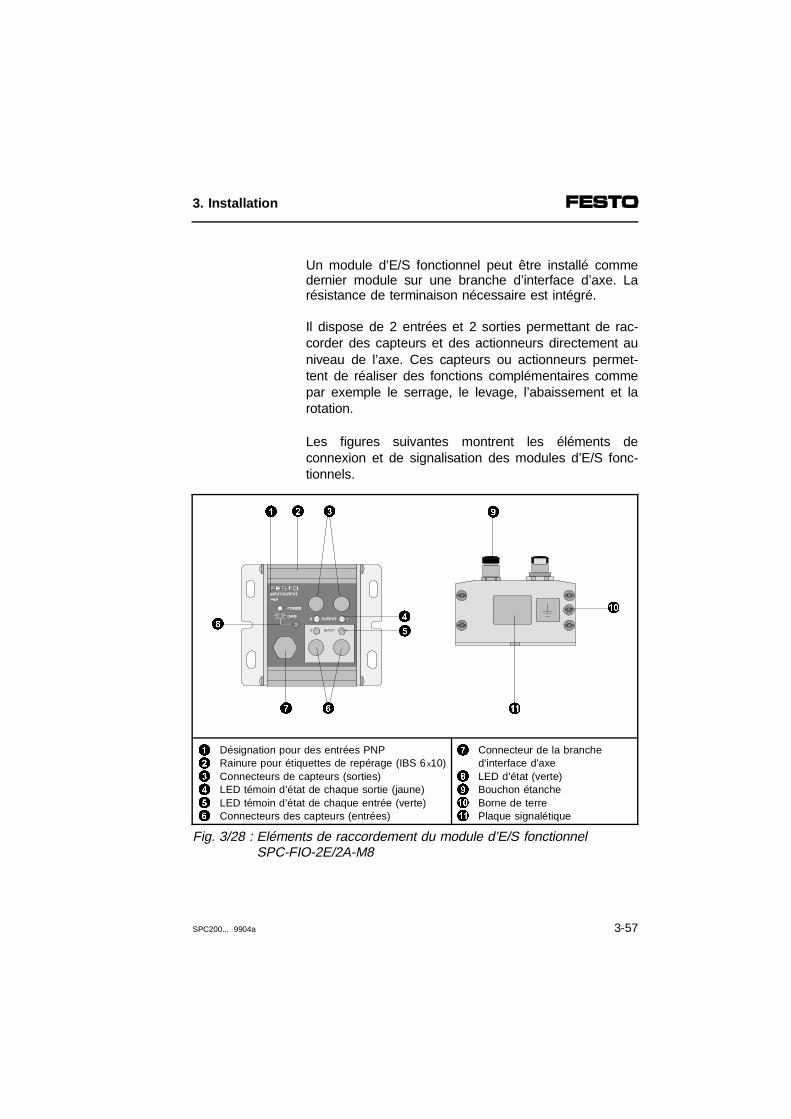
Un module d’E/S fonctionnel peut être installé commedernier module sur une branche d’interface d’axe. Larésistance de terminaison nécessaire est intégré.
Il dispose de 2 entrées et 2 sorties permettant de rac-corder des capteurs et des actionneurs directement auniveau de l’axe. Ces capteurs ou actionneurs permet-tent de réaliser des fonctions complémentaires commepar exemple le serrage, le levage, l’abaissement et larotation.
Les figures suivantes montrent les éléments deconnexion et de signalisation des modules d’E/S fonc-tionnels.
123456
Désignation pour des entrées PNPRainure pour étiquettes de repérage (IBS 6x10)Connecteurs de capteurs (sorties)LED témoin d’état de chaque sortie (jaune)LED témoin d’état de chaque entrée (verte)Connecteurs des capteurs (entrées)
7
890!
Connecteur de la branched’interface d’axeLED d’état (verte)Bouchon étancheBorne de terrePlaque signalétique
Fig. 3/28 : Eléments de raccordement du module d’E/S fonctionnelSPC-FIO-2E/2A-M8
0
!
93
6
45
7
21
8
3. Installation
SPC200... 9904a 3-57
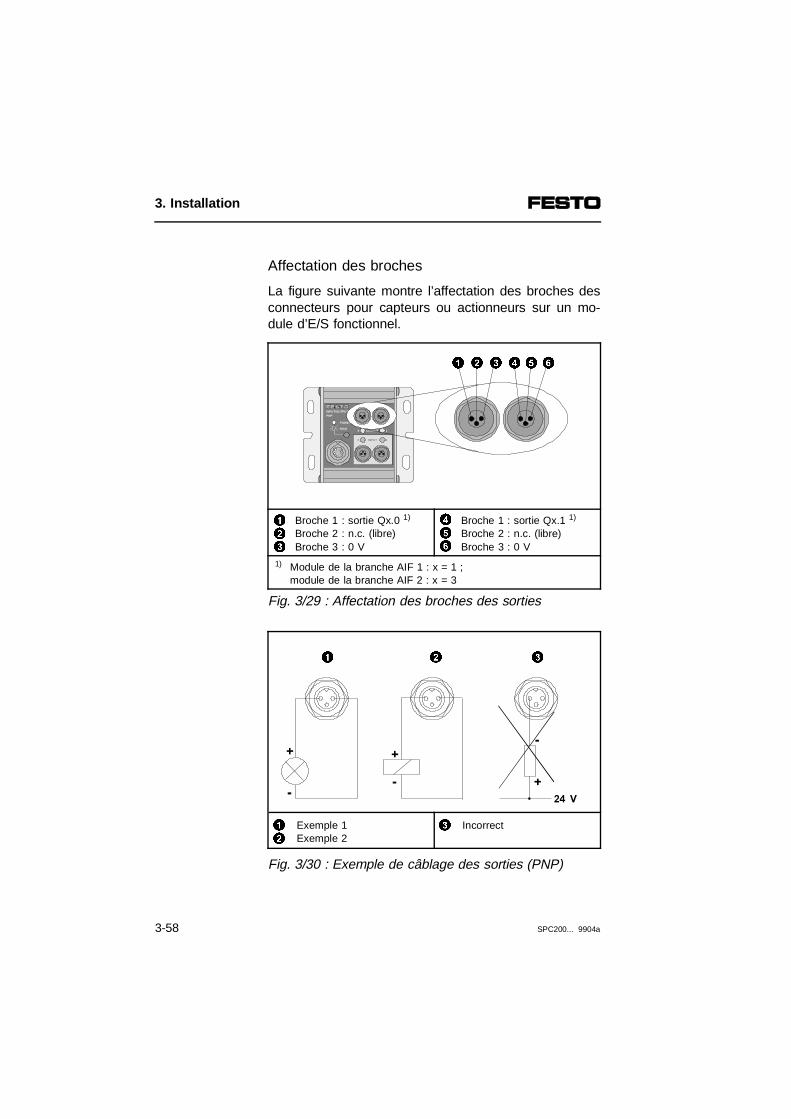
Affectation des broches
La figure suivante montre l’affectation des broches desconnecteurs pour capteurs ou actionneurs sur un mo-dule d’E/S fonctionnel.
123
Broche 1 : sortie Qx.0 1)
Broche 2 : n.c. (libre)Broche 3 : 0 V
456
Broche 1 : sortie Qx.1 1)
Broche 2 : n.c. (libre)Broche 3 : 0 V
1) Module de la branche AIF 1 : x = 1 ; module de la branche AIF 2 : x = 3
Fig. 3/29 : Affectation des broches des sorties
12
Exemple 1Exemple 2
3 Incorrect
Fig. 3/30 : Exemple de câblage des sorties (PNP)
POWER
DIAGOUTPUT
PNP
0 1
INPUT/OUTPUT
INPUT0 1
3 651 42
2 31
3. Installation
3-58 SPC200... 9904a
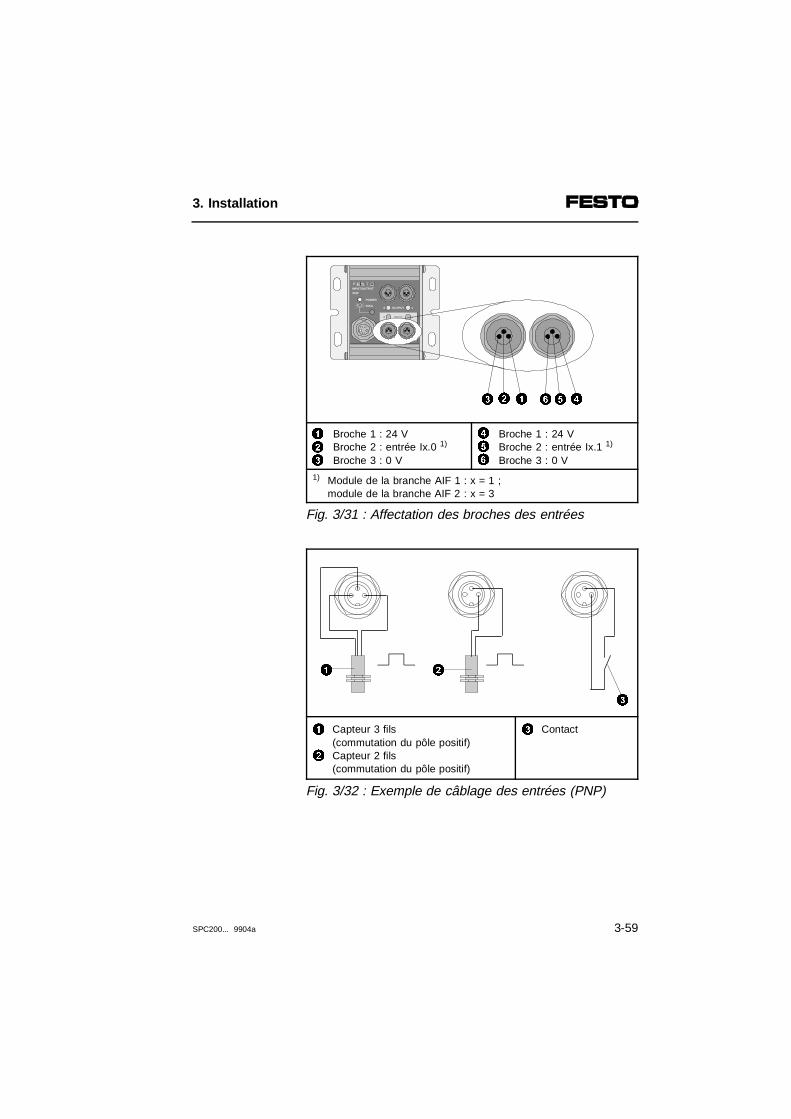
123
Broche 1 : 24 VBroche 2 : entrée Ix.0 1) Broche 3 : 0 V
456
Broche 1 : 24 VBroche 2 : entrée Ix.1 1)
Broche 3 : 0 V
1) Module de la branche AIF 1 : x = 1 ; module de la branche AIF 2 : x = 3
Fig. 3/31 : Affectation des broches des entrées
1
2
Capteur 3 fils (commutation du pôle positif)Capteur 2 fils (commutation du pôle positif)
3 Contact
Fig. 3/32 : Exemple de câblage des entrées (PNP)
POWER
DIAGOUTPUT
PNP
0 1
INPUT/OUTPUT
INPUT0 1
46513 2
2
3
1
3. Installation
SPC200... 9904a 3-59

3. Installation
3-60 SPC200... 9904a

Chapitre 4
Mise en service
4. Mise en service
SPC200... 9904a 4-1

Sommaire
4. Mise en service
4.1 Procédure de mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-54.2 Raccordement d’un système à un seul axe pour sa
première mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-94.3 Mise en service à l’aide du clavier/afficheur . . . . . . . . . . . . . . . 4-164.3.1 Enregistrement de la configuration matérielle . . . . . . . . . . . . . . 4-164.3.2 Mise en service d’axes pneumatiques . . . . . . . . . . . . . . . . . . . . 4-204.3.3 Remarques concernant la mise en service de systèmes
multiaxiaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-38
4. Mise en service
4-2 SPC200... 9904a
Ce chapitre décrit la mise en service d’un axe pneuma-tique avec un contrôleur SPC200 et à l’aide d’un cla-vier/afficheur SPC200-MMI-1.
Contenu dece chapitre
Le mise en service est présentée sur l’exemple d’unsystème à un seul axe commandé par une carte d’E/S.La procédure de base ainsi que la description des si-gnaux de commande des E/S s’applique aussi aux sys-tèmes commandés par une carte de bus de terrain.
Il est indispensable de bien connaître les fonctions duclavier/afficheur pour pouvoir effectuer la mise en ser-vice à l’aide de ce clavier/afficheur. Le chapitre 6 ap-porte des informations détaillées.
Autresinformations
Les informations sur la mise en service avec WinPISAfigurent dans le manuel WinPISA. Pour la mise en ser-vice sur un bus de terrain ou la mise en service desaxes électriques, se reporter aux manuels respectifsdes composants.
4. Mise en service
SPC200... 9904a 4-3
DANGER :Avant tous travaux d’entretien et d’installation, cou-per les sources d’énergie dans l’ordre suivant :1. alimentation en air comprimé2. alimentation de l’électronique et des actionneurs
sur le SPC200 et le cas échéant l’alimentation desactionneurs sur la branche d’interface d’axe.
On évite ainsi :
– des mouvements incontrôlés des tuyaux débranchés,
– des mouvements incontrôlés des vérins connectés,
– des états de commutation indéfinis.
ATTENTION :Le SPC200 est préréglé en usine pour certains para-mètres d’axes et d’application. Avant de mettre lesystème sous pression, vérifier que les réglages exi-stants conviennent dans le cas d’application et pourl’axe utilisé.
On évite ainsi :
– des mouvements incontrôlés des vérins connectés.
4. Mise en service
4-4 SPC200... 9904a
4.1 Procédure de mise en service
Monter les composants comme indiqué au chapitre 2.Pour les composants pneumatiques, se reporter auxconsignes d’installation du chapitre 3. Prévoir un sys-tème d’arrêt d’urgence pneumatique pour mettre l’instal-lation en sécurité en cas d’incident.
Avant de mettre sous pression ou sous tension lesaxes, indiquer au SPC200 les conditions d’applicationdu système de positionnement et le type de compo-sants présents. Ces réglages peuvent être réalisés :
• sur le clavier/afficheur
• avec le progiciel WinPISA.
Pour effectuer la mise en service à l’aide du clavier/affi-cheur, il est indispensable de bien en connaître toutesles fonctions. Le chapitre 6 apporte des informationsdétaillées.
4. Mise en service
SPC200... 9904a 4-5
Etapes de la mise en service
Avant d’effectuer la mise en service des axes, il faut aupréalable établir et enregistrer la configuration maté-rielle de l’installation. Ensuite seulement les axes pour-ront être mis en service puis le système tout entier.
Les étapes nécessaires pour la mise en service avec leclavier/afficheur sont les suivantes :
1. Etablir la configuration matérielle souhaitée.
2. Enregistrer cette configuration matérielle commeconfiguration théorique (voir paragraphe 4.3.1).
3. Mettre en service les axes raccordés (voir para-graphe 4.3.2).
4. Mettre le système en service.
Les axes sont configurés et mis en service après enre-gistrement de la configuration matérielle. La liste sui-vante donne les étapes de configuration nécessairespour les axes pneumatiques.
4. Mise en service
4-6 SPC200... 9904a
Mise en service d’axes pneumatiques
La liste suivante donne un aperçu des opérations à réa-liser pour la mise en service des axes pneumatiquesaprès enregistrement de la configuration matérielle :
1. Régler les paramètres spécifiques au projet.Régler les paramètres d’axe, d’application et deconfiguration (voir paragraphe 4.3.2, étape 1).
2. Contrôler les flexibles (le cas échéant).Effectuer un test de déplacement avec le clavier/affi-cheur ou WinPISA (voir paragraphe 4.3.2, étape 2).
3. Effectuer une passe d’identification statique ou dy-namique. Lors de la passe d’identification, les carac-téristiques du système comme le frottement, l’hysté-résis, l’accélération et le temps de réponse sont re-levés et enregistrés (voir paragraphe 4.3.2, étape 3).
4. Si nécessaire étalonner le système de mesure (seu-lement pour un potentiomètre avec logiciel WinPI-SA). L’étalonnage compense les écarts entre les po-sitions réelles et les positions relevées (voir para-graphe 4.3.2, étape 4).
5. Déplacer l’axe manuellement (le cas échéant). Cecipermet de contrôler sommairement le fonctionne-ment du contrôleur ainsi que l’efficacité des fin decourse logicielles (voir paragraphe 4.3.2, étape 5).
4. Mise en service
SPC200... 9904a 4-7
6. Spécifier un programme test (voir paragraphe 4.3.2,étape 6).
7. Définir le mode de fonctionnement et le programmede démarrage (voir paragraphe 4.3.2, étape 7).
8. Tester le programme en mode unitaire ou en fonc-tionnement continu. Observer alors le comportementde l’axe lors au positionnement (voir paragraphe4.3.2, étape 7).
Mise en service du système
Lorsque tous les axes sont opérationnels, la mise enservice du système de positionnement complet peutcommencer. Les étapes nécessaires dépendent de lastructure du système.
Le paragraphe suivant décrit la mise en service d’unaxe pneumatique sur l’exemple d’un système à un seulaxe sans carte de bus de terrain.
4. Mise en service
4-8 SPC200... 9904a
4.2 Raccordement d’un système à un seul axe pour sapremière mise en service
Pour certaines étapes de la mise en service, les si-gnaux de commande ENABLE (autorisation), START etSTOP sont nécessaires pour la commande des axes.
Lorsqu’une carte de bus de terrain est installée :
WinPISA possède un mode Test. En mode Test, les en-trées et sorties peuvent être manipulées librement,sans modifier le câblage.
L’état de la sortie READY ainsi que des sorties ACKutilisées par le système (ACK_A, ACK_B, seulement enmode Sélection de bloc) est remis à jour en perma-nence par le système d’exploitation et ne peut donc pasêtre modifié.
Lorsqu’aucune carte de bus de terrain n’estinstallée :
Lorsqu’aucune carte de bus de terrain n’est installée, lapremière carte d’E/S installée déclenche les signaux decommande. Le schéma de raccordement suivant mon-tre le câblage nécessaire dans ce cas.
4. Mise en service
SPC200... 9904a 4-9
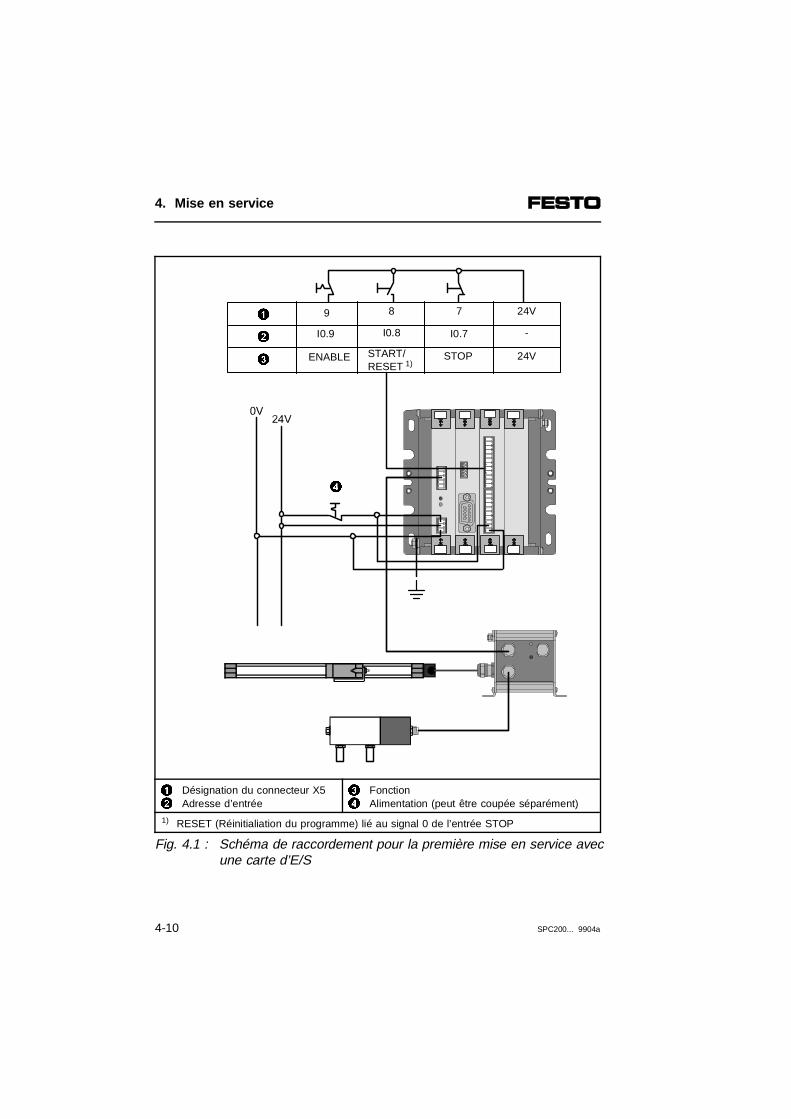
12
Désignation du connecteur X5Adresse d’entrée
34
FonctionAlimentation (peut être coupée séparément)
1) RESET (Réinitialiation du programme) lié au signal 0 de l’entrée STOP
Fig. 4.1 : Schéma de raccordement pour la première mise en service avec une carte d’E/S
4
9
ENABLE
I0.9
7
STOP
I0.7
8
START/ RESET 1)
I0.8
24V
24V
-2
1
3
4. Mise en service
4-10 SPC200... 9904a

ATTENTION :• L’alimentation en air comprimé doit rester coupée. • Le SPC200 est préréglé en usine pour certains pa-
ramètres d’axes et d’application. Avant de mettre le système sous pression, vérifier que les réglagesexistants conviennent dans le cas d’application etpour l’axe utilisé.
On évite ainsi :
– des mouvements incontrôlés des actionneurs
Raccorder les composants comme indiqué sur la figure4.1. La mise à la terre n’est pas représentée par soucide simplification.
NOTE :Une mise à la terre incorrecte ou manquante peutprovoquer des perturbations. Par conséquent, effec-tuer systématiquement les opérations de mise à laterre décrites au paragraphe 3.3.1.
4. Mise en service
SPC200... 9904a 4-11
Explication des signaux d’E/S
L’entrée ENABLE (autorisation) permet d’activer lecontrôleur. Lorsque cette entrée présente un signal 0, lecontrôleur est désactivé. Plus aucune commande dedéplacement n’est acceptée. Lorsque la pression estcoupée, l’axe peut être déplacé manuellement.
EntréeENABLE
Dès que l’entrée ENABLE présente de nouveau un si-gnal 1, les axes se déplacent sur les consignes de po-sitions (arrêt régulé).
NOTE :Lorsque l’alimentation électrique est coupée (arrêtd’urgence), le tiroir du distributeur prend la positionmédiane. L’asymétrie de la courbe caractéristique detension du distributeur proportionnel permet au cha-riot de se déplacer lentement jusque dans la positionde fin de course lorsque le système est sous pres-sion.
Un Signal 0 sur l’entrée ENABLE a pour effet :
– de couper le contrôleur et de régler la tension decommande du distributeur à une valeur moyenne(Offset). Plus aucune commande de déplacementn’est acceptée.
– la sortie READY du SPC200 est réinitialisée (voir fig.4.2).
4. Mise en service
4-12 SPC200... 9904a
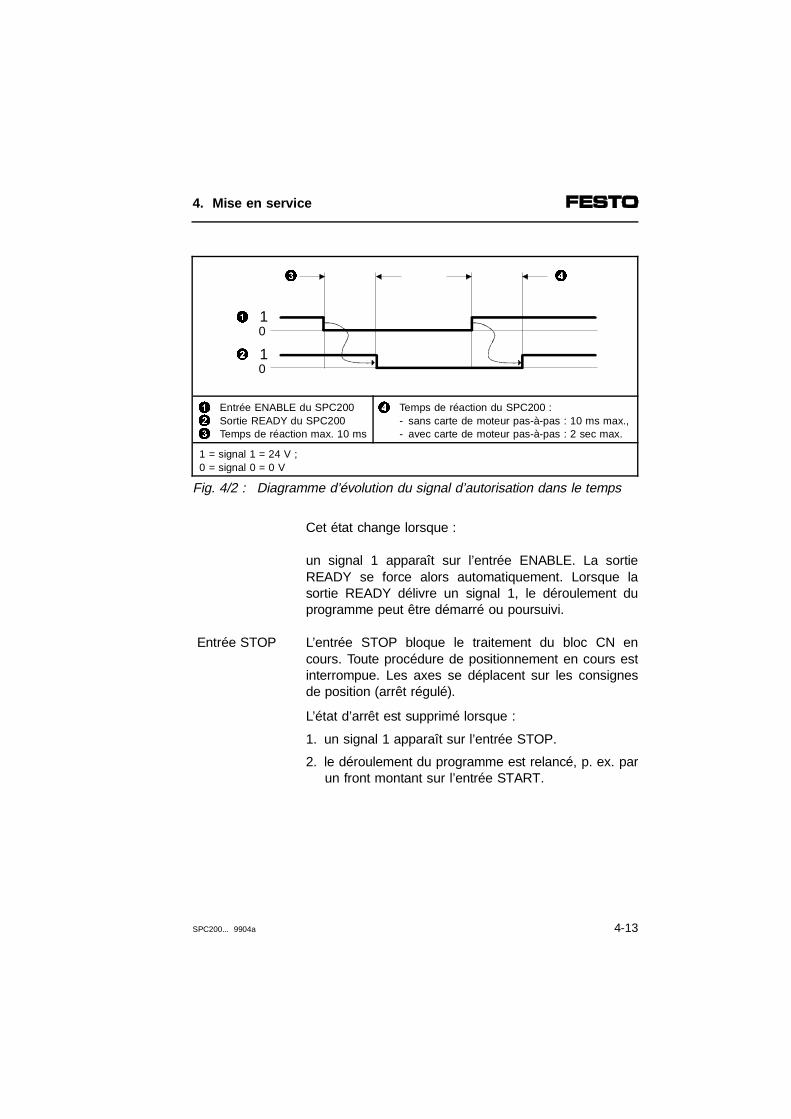
123
Entrée ENABLE du SPC200Sortie READY du SPC200Temps de réaction max. 10 ms
4 Temps de réaction du SPC200 :- sans carte de moteur pas-à-pas : 10 ms max., - avec carte de moteur pas-à-pas : 2 sec max.
1 = signal 1 = 24 V ; 0 = signal 0 = 0 V
Fig. 4/2 : Diagramme d’évolution du signal d’autorisation dans le temps
Cet état change lorsque :
un signal 1 apparaît sur l’entrée ENABLE. La sortieREADY se force alors automatiquement. Lorsque lasortie READY délivre un signal 1, le déroulement duprogramme peut être démarré ou poursuivi.
L’entrée STOP bloque le traitement du bloc CN encours. Toute procédure de positionnement en cours estinterrompue. Les axes se déplacent sur les consignesde position (arrêt régulé).
Entrée STOP
L’état d’arrêt est supprimé lorsque :
1. un signal 1 apparaît sur l’entrée STOP.
2. le déroulement du programme est relancé, p. ex. parun front montant sur l’entrée START.
10
10
1
2
43
4. Mise en service
SPC200... 9904a 4-13
Cette sortie délivre un signal 1, lorsque le système estprêt à fonctionner. La présence d’un Signal 0 sur cettesortie signale que le SPC200 n’est pas encore opéra-tionnel, qu’une erreur de système ou de positionnementest survenue ou que le signal d’autorisation (ENABLE)est manquant.
SortieREADY
Mise sous tension de l’alimentation
DANGER :L’alimentation en air comprimé doit être coupée. Sile système est sous pression, les actionneurs ris-quent d’effectuer des petits déplacements brusqueslors de la mise sous tension de l’alimentation.Veiller à ce que personne ne se trouve dans le zonede déplacement de la masse en mouvement etqu’aucun objet étranger ne s’y trouve.
• Couper l’alimentation du SPC200 et celle des action-neurs.
A sa mise sous tension, le SPC200 effectue automati-quement un test interne. Si le clavier/afficheur est ins-tallé, il indique en cas d’erreur le numéro d’erreur actuel(voir paragraphe 8.2). A la première mise sous tension,le code d’erreur suivant peut s’afficher.
ERRORNO. 00004001
Ceci signifie que la configuration réelle du SPC200 et laconfiguration de la branche d’interface d’axe ne corres-pondent pas à la configuration théorique. Procéderdans ce cas comme indiqué au paragraphe 4.3.1 sous"Enregistrement de la configuration matérielle".
4. Mise en service
4-14 SPC200... 9904a
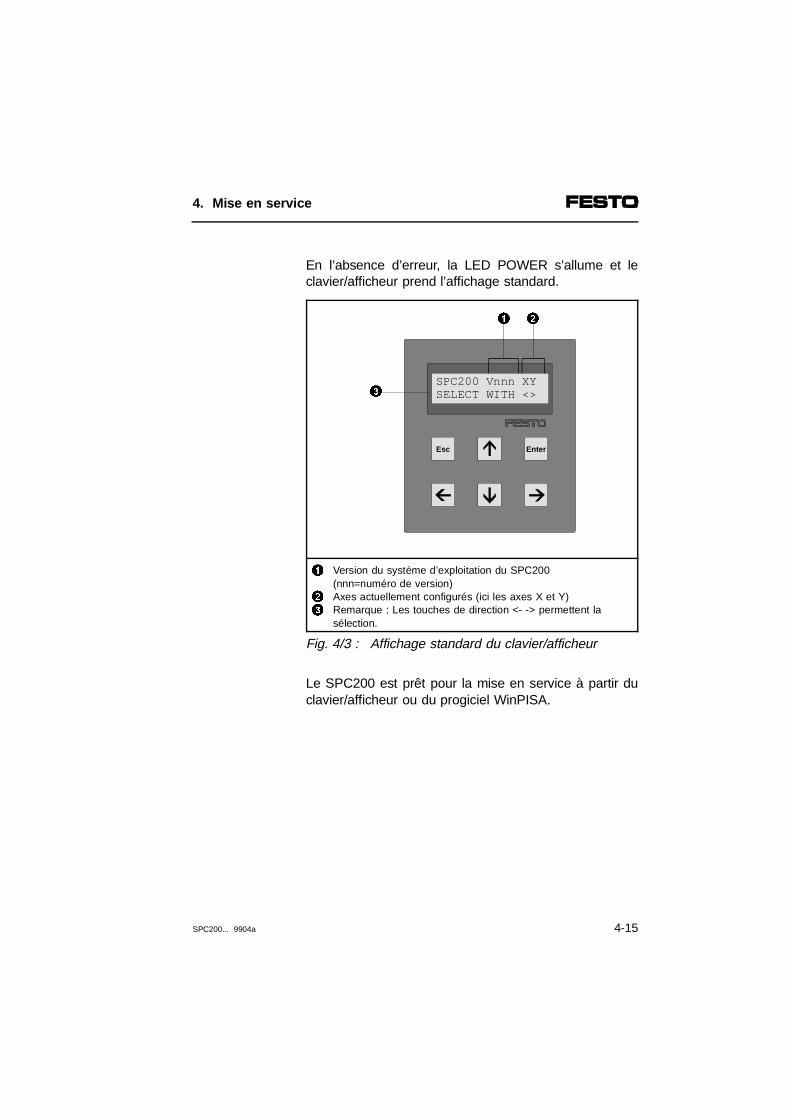
En l’absence d’erreur, la LED POWER s’allume et leclavier/afficheur prend l’affichage standard.
1
23
Version du système d’exploitation du SPC200 (nnn=numéro de version) Axes actuellement configurés (ici les axes X et Y)Remarque : Les touches de direction <- -> permettent lasélection.
Fig. 4/3 : Affichage standard du clavier/afficheur
Le SPC200 est prêt pour la mise en service à partir duclavier/afficheur ou du progiciel WinPISA.
EnterEsc
SPC200 Vnnn XYSELECT WITH <>
1 2
3
4. Mise en service
SPC200... 9904a 4-15
4.3 Mise en service à l’aide du clavier/afficheur
Pour effectuer la mise en service à l’aide du clavier/affi-cheur, il est indispensable de bien en connaître toutesles fonctions. L’alimentation en air comprimé doit êtrecoupée. La paragraphe 6.1.1 donne un aperçu des me-nus du clavier/afficheur. Procéder ensuite de la manièresuivante :
4.3.1 Enregistrement de la configuration matérielle
En phase de démarrage, le SPC200 attribue les dési-gnations d’axes aux axes raccordés en fonction de leurposition. Si des modifications sont apportées ultérieure-ment à la position des axes, une nouvelle affectationdes désignations a lieu. Dans ce cas, toutes les don-nées utilisateur déjà définies comme les paramètres,les programmes et la liste des positions sont caduquespour la nouvelle configuration.
ATTENTION :Lors de l’enregistrement de la configuration maté-rielle, toutes les données saisies sont remplacéespar les données définies en usine ou effacées (fonc-tion "Reset data"). Commencer toujours par définir la configuration maté-rielle correcte. Enregistrer la configuration matérielleavant de spécifier les paramètres et les programmes.
Le logiciel WinPISA permet de mémoriser des pro-grammes et des paramètres de configuration pour leSPC200 sur des supports de données externes.
4. Mise en service
4-16 SPC200... 9904a
Le SPC200 compare pendant la phase de démarragela configuration matérielle avec la configuration théori-que enregistrée. Il détecte alors les composants instal-lés ainsi que l’affectation des branches.
A chaque module d’E/S sur une branche d’interfaced’axe est associé un domaine d’adresses d’E/S fixe. Achaque interface d’axe et chaque carte d’indexation demoteur pas-à-pas est associé une désignation d’axe.
La préparation de la mise en service consiste à définiret enregistrer la configuration matérielle désirée.
Enregistre-ment de la
configuration
Le SPC200 est paramétré pour enregistrer automat-iquement lors de la première phase de démarrage laconfiguration existante comme configuration théorique.Si la configuration matérielle définitive peut être définieavant le première mise sous tension, il est par consé-quent inutile d’enregistrer manuellement la configurationmatérielle.
4. Mise en service
SPC200... 9904a 4-17
Si la configuration réelle diffère de la configuration théo-rique enregistrée, procéder de la manière suivante :
1. Contrôler si toutes les cartes sont installées, si tousles modules sont bien raccordés sur la branche d’in-terface d’axe et si le câble CP est fixé correctementà l’aide d’une bague. Contrôler également que lebloc d’alimentation est suffisamment dimensionné.
2. Mettre sous tension.Les LED témoins d’état des modules s’allument. Sila configuration matérielle présente ne correspondpas à la configuration théorique, un message d’er-reur est émis (code d’erreur 0000 4001).
3. Vérifier que toutes les LED témoins d’état sont allu-mées. Ceci signifie que les modules ont été recon-nus.
Si nécessaire, il est possible de visualiser la configura-tion réelle détectée pendant la phase de démarragegrâce au clavier/afficheur en utilisant l’instruction AC-TUAL CONFIG. du menu CONFIG. SYSTEM (voirparagraphe 6.2).
4. Si la configuration réelle détectée n’est pas la confi-guration souhaitée :Mettre hors tension et établir la configuration souhai-ter.
5. Si la configuration réelle détectée est bien la confi-guration souhaitée, appuyer sur une touche quelcon-que pour valider le message d’erreur. Le clavier/affi-cheur prend alors l’affichage standard.
4. Mise en service
4-18 SPC200... 9904a
6. Dans le menu CONFIG. SYSTEM, sélectionner l’in-struction SET CONFIGUR., et appuyer sur la toucheEnter.
SET CONFIGUR.SAVE CONFIGUR. ?
7. Appuyer sur la touche Enter pour enregistrer laconfiguration réelle comme configuration théorique.
8. Si des modifications ont été apportées à la configu-ration des axes, le message suivant apparaît :
RESTORE FACTORYSETTINGS ?
NOTE : Ce message signale que tous les paramètres vont re-prendre leur valeur définie en usine. Tous les para-mètres et programmes saisis sont perdus.
9. Appuyer sur la touche ESC, pour abandonner. Ouappuyer sur la touche Enter pour effacer toutes lesdonnées du SPC200 et enregistrer la configurationmatérielle.
Après enregistrement de la configuration matérielle pré-sente, la configuration réelle est retenue comme confi-guration théorique. Le clavier/afficheur prend l’affichagestandard.
4. Mise en service
SPC200... 9904a 4-19

4.3.2 Mise en service d’axes pneumatiques
Lorsque la configuration matérielle désirée est définie etenregistrée, les axes pneumatiques peuvent être misen service de la manière suivante :
Définir les paramètres spécifiques au projetEtape 1
Régler tous les paramètres spécifiques au projet. Il s’a-git :
Paramètres spécifiques au projet Menu duclavier/afficheur
Paramètres d’axe AXIS PARAM.
Paramètres d’application APPLIC. PARAM.
Configuration du système CONFIG. SYSTEM
L’alimentation en air comprimé doit être coupée. Procé-der ensuite comme indiqué au paragraphe 6.2 "Défini-tion des paramètres spécifiques au projet".
Pour activer le contrôleur lors de la première mise enservice et lorsque les paramètres spécifiques au projetsont définis, un front montant est nécessaire sur l’en-trée ENABLE (autorisation). Le contrôleur est ensuiteactivé par une signal 1 si le système ne présente pasd’erreur.
4. Mise en service
4-20 SPC200... 9904a
Contrôle du raccordement pneumatique des axes(le cas échéant)
Etape 2
Contrôler le raccordement pneumatique des axes. Enplus d’un contrôle visuel (voir paragraphe 3.2.2) ou d’uncontrôle par le progiciel WinPISA, il est possible d’utili-ser également le clavier/afficheur. Le menu à utiliser estTEST/DIAG, puis l’instruction MOVEMENT TEST (testde déplacements).
La tension de commande du distributeur peut être mo-difiée au cours du test de déplacement. Lorsque lapression est coupée, le comportement du tiroir du distri-buteur peut être suivi à travers la fenêtre du distribu-teur, ce qui permet de contrôler son bon fonctionne-ment.
Signaux de commande nécessaires :signal 1 sur ENABLE, STOP et READY.
ATTENTION :Le contrôleur est arrêté pendant le test de déplace-ment. Les fins de course logicielles définies dans lesparamètres d’application sont donc inefficaces. Il estdonc recommandé d’effectuer le test de déplacementsous une faible pression de 3 bars et sans charges.
On évite ainsi :
– une détérioration de l’axe en cas d’erreur de manipu-lation.
4. Mise en service
SPC200... 9904a 4-21
Procéder pour le test de déplacement de la manièresuivante :
1. Enlever la charge utile et les charges de matériel.La charge déplacée doit être la plus faible possible,pour réduire les efforts à l’accélération.
2. Mettre sous pression et régler une pression de 3bars max.
3. Sélectionner dans le menu TEST/DIAG le sous-menu AXIS, et appuyer sur la touche Enter.
TEST/DIAG. AXISX:
4. Le curseur se positionne sur la désignation desaxes. Sélectionner l’axe désiré avec les touches dedirection ↑ ↓ (ici X), et appuyer sur la touche Enter.La première instruction du sous-menu AXIS s’af-fiche.
TEST/DIAG. AXISJOG AXIS >
5. Sélectionner ensuite avec les touches ← → l’instruc-tion MOVEMENT TEST (test de déplacement).
TEST/DIAG. AXISMOVEMENT TEST >
4. Mise en service
4-22 SPC200... 9904a
6. Appuyer ensuite sur la touche Enter. Ceci déclenchele test du distributeur. La tension appliquée au distri-buteur est alors fixée à 5 Volt. La tension du distri-buteur s’affiche juste après la désignation de l’axe.
MOVEMENT TESTX:05.00 +0.01
7. La tension du distributeur peut être réduite ou aug-mentée par pas de 0,01 Volt. Choisir le sens désiréà l’aide des touches ↑ ↓.
Tension de commande Sens
> 5 Volt Négatif (en direction du point zérodu vérin)
< 5 Volt Positif
Pour combattre les phénomènes d’adhérence, la ten-sion de commande doit être augmentée ou réduite enconséquence. La tension du distributeur augmente oudiminue par pas de 0,01 Volt lorsqu’on appuie sur latouche Enter. Appuyer sur la touche ESC pour rétablirla tension de commande sur 5,0 Volt.
8. Maintenir la touche Enter appuyée jusqu’à ce que lechariot se déplace. Appuyer sur la touche ESC pourarrêter le chariot.
Contrôler lors du test que le sens de déplacement duchariot est correct (voir 7.). Modifier le raccordementdes flexibles si le chariot se déplace dans la mauvaisedirection (voir aussi paragraphe 3.2.2). Appuyer à plu-sieurs reprises sur la touche ESC pour retourner sur laposition de départ.
4. Mise en service
SPC200... 9904a 4-23

Effectuer une passe d’identificationEtape 3
NOTE :Sans passe d’identification, la qualité du positionne-ment risque d’être de moins bonne qualité.En cas de modification des paramètres d’axe, de laposition de montage ou de la pression d’alimentationde plus de 1 bar, les paramètres relevés lors de l’identification sont effacés. Dans ce cas, effectuerune nouvelle passe d’identification.
Les caractéristiques du système sont recherchées etenregistrées pendant la passe d’identification. Le sys-tème de positionnement doit être opérationnel pour ef-fectuer la passe d’identification.
4. Mise en service
4-24 SPC200... 9904a

On distingue 2 types d’identification différents :
Type Description
Identification statique L’identification statique recherche les gran-deurs agissant sur le comportement dusystème au début et à la fin du déplace-ment. Il s’agit par exemple de l’adhérencedu vérin et des propriétés du distributeurautour de la position médiane (hystérésis).
Identification dynamique- avec charge utile- sans charge utile
L’identification statique concerne la vitessemaximale atteinte ainsi que l’accélération etle temps de réponse du système d’entraîne-ment. Cette identification est nécessairepour les axes amenés à se déplacer à lavitesse maximale (instruction CN G00). Sila charge utile varie fortement en cours defonctionnement, l’identification devra se réaliser sans et avec charge utilerespectivement.
Pour garantir un bon comportement au positionnement,réaliser impérativement l’identification statique et aumoins une identification dynamique. L’instruction CN"G00" ne peut pas être utilisée sans identification dyna-mique.
Si l’alimentation en air comprimé ne remplit pas les exi-gences (tolérance de 1 bar en service) de manièrefiable, respecter les consignes du paragraphe A.3.1.
4. Mise en service
SPC200... 9904a 4-25
L’identification statique est nécessaire lors de lapremière mise sous tension et après remplacementd’un des composants. L’identification dynamique est né-cessaire lors de la première mise en service, aprèsremplacement d’un composant ainsi que lors d’une mo-dification de configuration de l’entraînement (position demontage, raccordement des flexibles ou pression d’ali-mentation).
Signaux de commande nécessaires :signal 1 sur ENABLE, STOP et READY.
ATTENTION :Des paramètres d’axes et d’application erronés peu-vent provoquer des collisions lors des passes d’iden-tification. Ceci concerne surtout la longueur de l’axe,le décalage d’origine et les fins de course logicielles.
DANGER :Pour l’identification dynamique, on met en déplace-ment un axe avec la charge maximale et sous l’accé-lération maximale. S’assurer alors que :- toute la plage de déplacements de l’axe est libre, - les paramètres d’axe et d’application sont exacts.
4. Mise en service
4-26 SPC200... 9904a
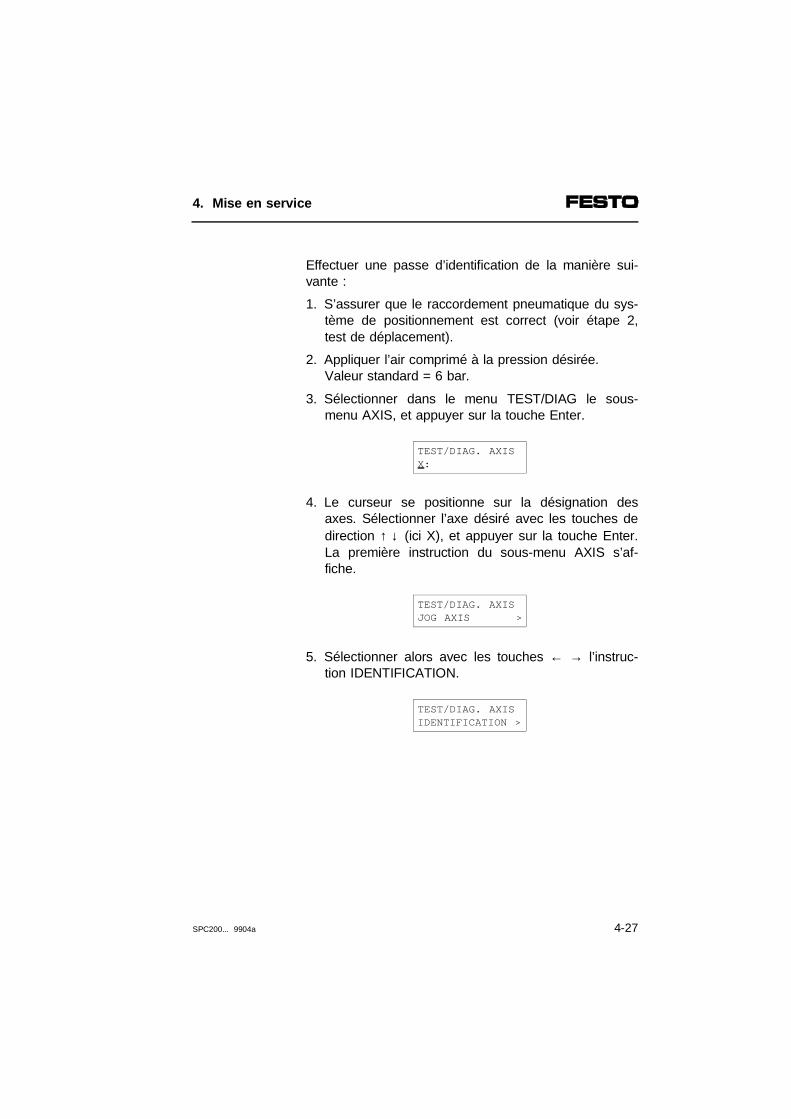
Effectuer une passe d’identification de la manière sui-vante :
1. S’assurer que le raccordement pneumatique du sys-tème de positionnement est correct (voir étape 2,test de déplacement).
2. Appliquer l’air comprimé à la pression désirée.Valeur standard = 6 bar.
3. Sélectionner dans le menu TEST/DIAG le sous-menu AXIS, et appuyer sur la touche Enter.
TEST/DIAG. AXISX:
4. Le curseur se positionne sur la désignation desaxes. Sélectionner l’axe désiré avec les touches dedirection ↑ ↓ (ici X), et appuyer sur la touche Enter.La première instruction du sous-menu AXIS s’af-fiche.
TEST/DIAG. AXISJOG AXIS >
5. Sélectionner alors avec les touches ← → l’instruc-tion IDENTIFICATION.
TEST/DIAG. AXISIDENTIFICATION >
4. Mise en service
SPC200... 9904a 4-27
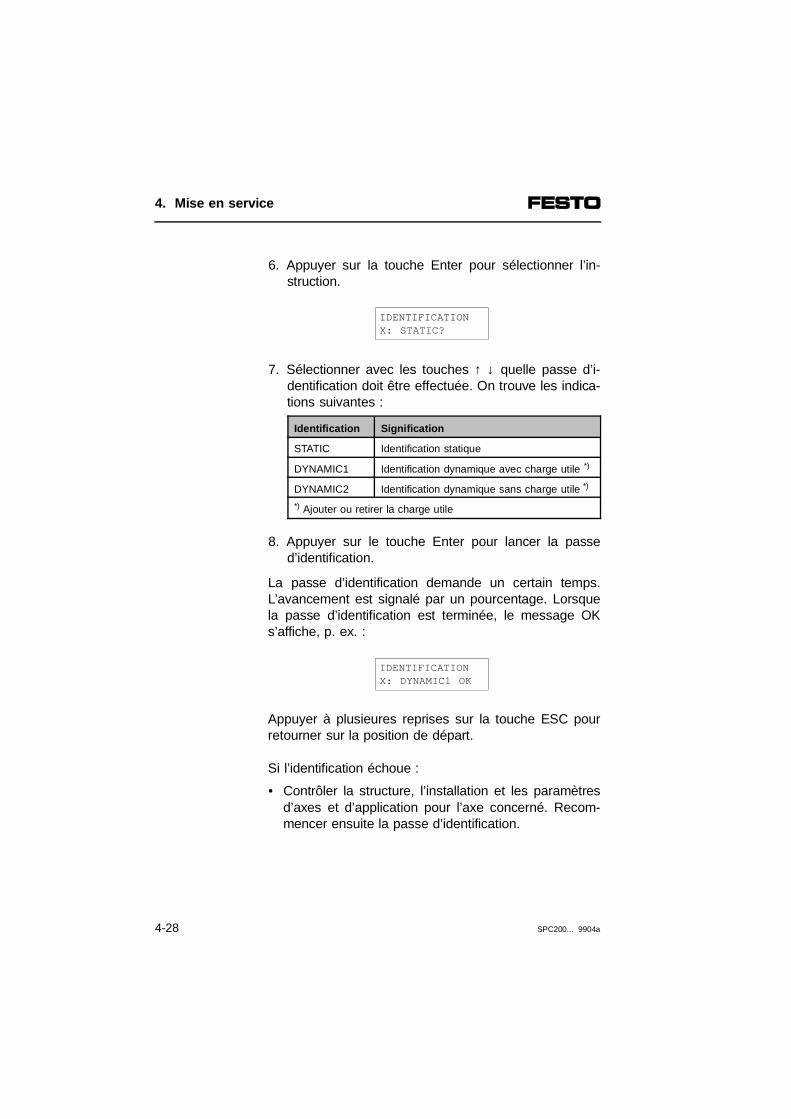
6. Appuyer sur la touche Enter pour sélectionner l’in-struction.
IDENTIFICATIONX: STATIC?
7. Sélectionner avec les touches ↑ ↓ quelle passe d’i-dentification doit être effectuée. On trouve les indica-tions suivantes :
Identification Signification
STATIC Identification statique
DYNAMIC1 Identification dynamique avec charge utile *)
DYNAMIC2 Identification dynamique sans charge utile *)
*) Ajouter ou retirer la charge utile
8. Appuyer sur le touche Enter pour lancer la passed’identification.
La passe d’identification demande un certain temps.L’avancement est signalé par un pourcentage. Lorsquela passe d’identification est terminée, le message OKs’affiche, p. ex. :
IDENTIFICATIONX: DYNAMIC1 OK
Appuyer à plusieures reprises sur la touche ESC pourretourner sur la position de départ.
Si l’identification échoue :
• Contrôler la structure, l’installation et les paramètresd’axes et d’application pour l’axe concerné. Recom-mencer ensuite la passe d’identification.
4. Mise en service
4-28 SPC200... 9904a
Etalonnage du système de mesure (en optionavec WinPISA)
Etape 4
L’étalonnage compense les variations de relevé de laposition réelle. Il corrige les valeurs de position électri-ques relevées en fonction d’une échelle réelle.
Cet étalonnage permet de contrôler ou d’améliorer laprécision de positionnement.
4. Mise en service
SPC200... 9904a 4-29
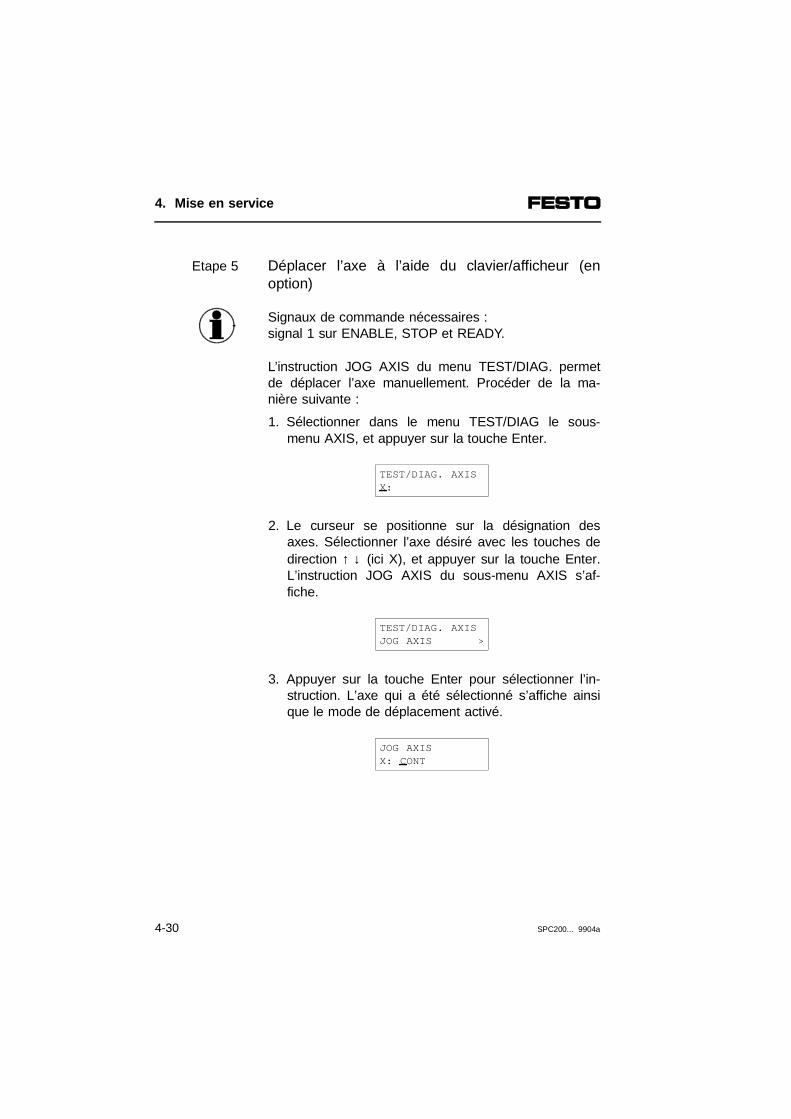
Déplacer l’axe à l’aide du clavier/afficheur (enoption)
Etape 5
Signaux de commande nécessaires :signal 1 sur ENABLE, STOP et READY.
L’instruction JOG AXIS du menu TEST/DIAG. permetde déplacer l’axe manuellement. Procéder de la ma-nière suivante :
1. Sélectionner dans le menu TEST/DIAG le sous-menu AXIS, et appuyer sur la touche Enter.
TEST/DIAG. AXISX:
2. Le curseur se positionne sur la désignation desaxes. Sélectionner l’axe désiré avec les touches dedirection ↑ ↓ (ici X), et appuyer sur la touche Enter.L’instruction JOG AXIS du sous-menu AXIS s’af-fiche.
TEST/DIAG. AXISJOG AXIS >
3. Appuyer sur la touche Enter pour sélectionner l’in-struction. L’axe qui a été sélectionné s’affiche ainsique le mode de déplacement activé.
JOG AXISX: CONT
4. Mise en service
4-30 SPC200... 9904a
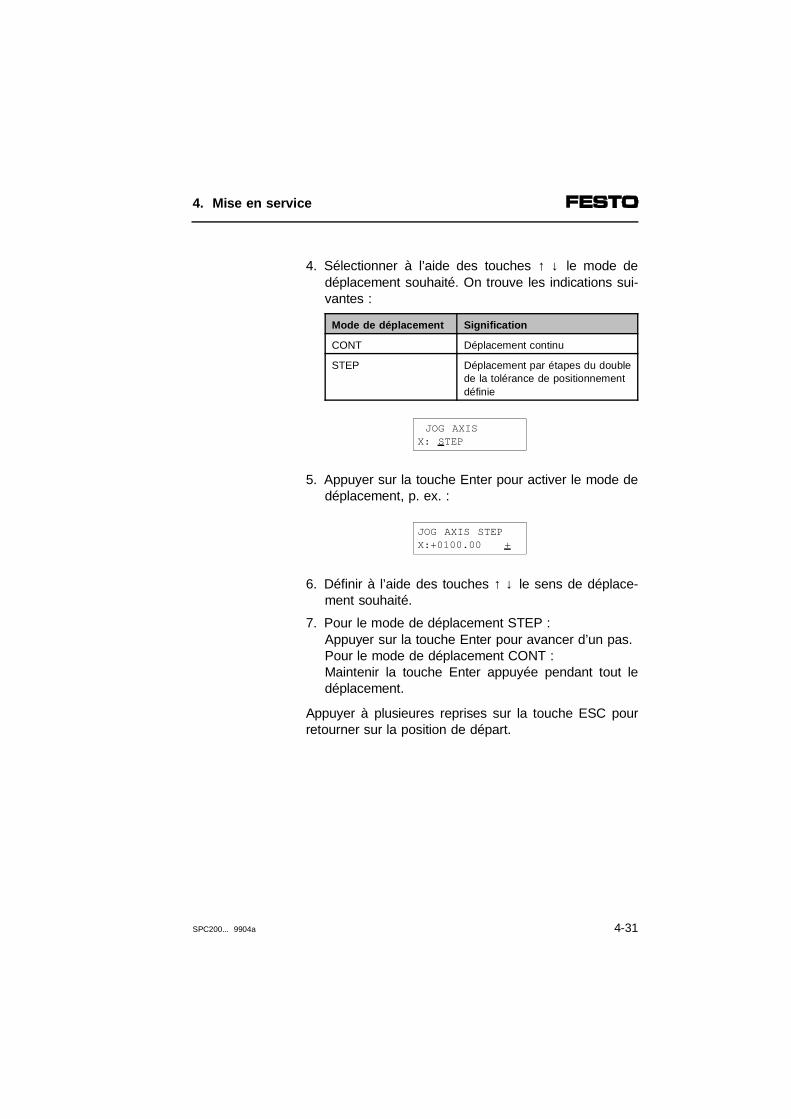
4. Sélectionner à l’aide des touches ↑ ↓ le mode dedéplacement souhaité. On trouve les indications sui-vantes :
Mode de déplacement Signification
CONT Déplacement continu
STEP Déplacement par étapes du doublede la tolérance de positionnementdéfinie
JOG AXISX: STEP
5. Appuyer sur la touche Enter pour activer le mode dedéplacement, p. ex. :
JOG AXIS STEPX:+0100.00 +
6. Définir à l’aide des touches ↑ ↓ le sens de déplace-ment souhaité.
7. Pour le mode de déplacement STEP :Appuyer sur la touche Enter pour avancer d’un pas.Pour le mode de déplacement CONT :Maintenir la touche Enter appuyée pendant tout ledéplacement.
Appuyer à plusieures reprises sur la touche ESC pourretourner sur la position de départ.
4. Mise en service
SPC200... 9904a 4-31
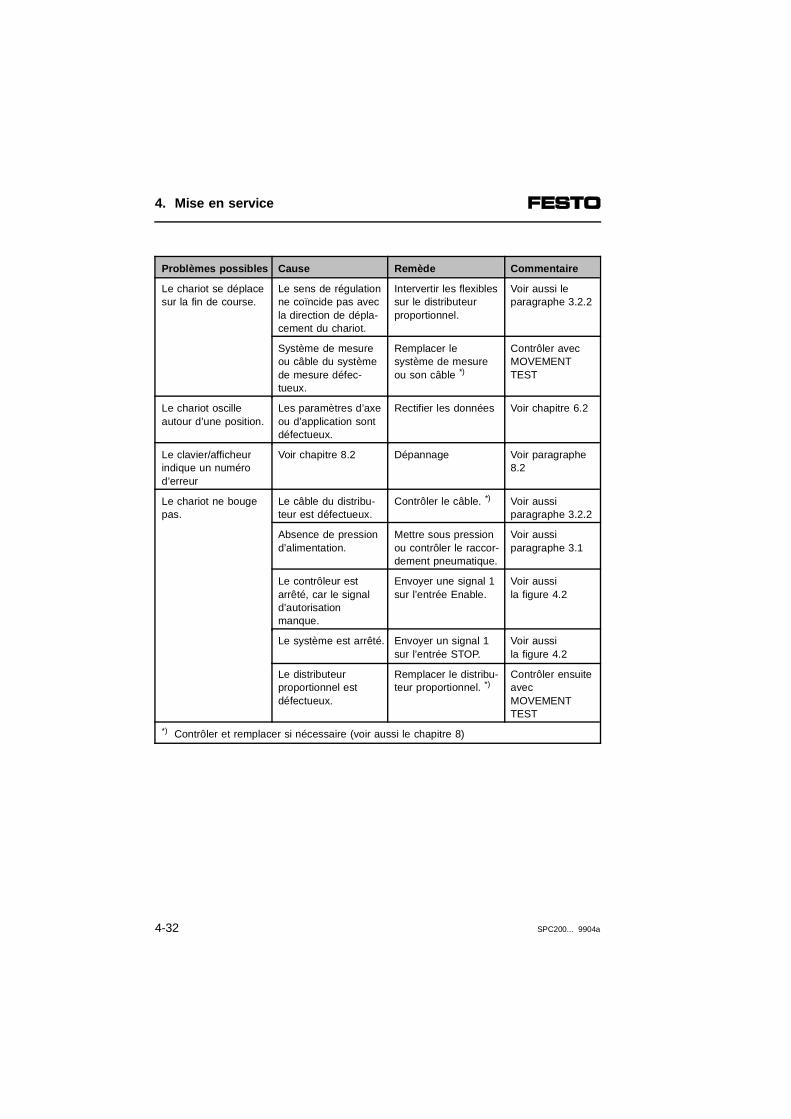
Problèmes possibles Cause Remède Commentaire
Le chariot se déplacesur la fin de course.
Le sens de régulationne coïncide pas avecla direction de dépla-cement du chariot.
Intervertir les flexiblessur le distributeurproportionnel.
Voir aussi leparagraphe 3.2.2
Système de mesureou câble du système de mesure défec-tueux.
Remplacer lesystème de mesureou son câble *)
Contrôler avecMOVEMENTTEST
Le chariot oscille autour d’une position.
Les paramètres d’axeou d’application sontdéfectueux.
Rectifier les données Voir chapitre 6.2
Le clavier/afficheur indique un numérod’erreur
Voir chapitre 8.2 Dépannage Voir paragraphe8.2
Le chariot ne bougepas.
Le câble du distribu-teur est défectueux.
Contrôler le câble. *) Voir aussi paragraphe 3.2.2
Absence de pressiond’alimentation.
Mettre sous pressionou contrôler le raccor-dement pneumatique.
Voir aussiparagraphe 3.1
Le contrôleur estarrêté, car le signald’autorisationmanque.
Envoyer une signal 1sur l’entrée Enable.
Voir aussi la figure 4.2
Le système est arrêté. Envoyer un signal 1sur l’entrée STOP.
Voir aussi la figure 4.2
Le distributeurproportionnel estdéfectueux.
Remplacer le distribu-teur proportionnel. *)
Contrôler ensuiteavec MOVEMENTTEST
*) Contrôler et remplacer si nécessaire (voir aussi le chapitre 8)
4. Mise en service
4-32 SPC200... 9904a
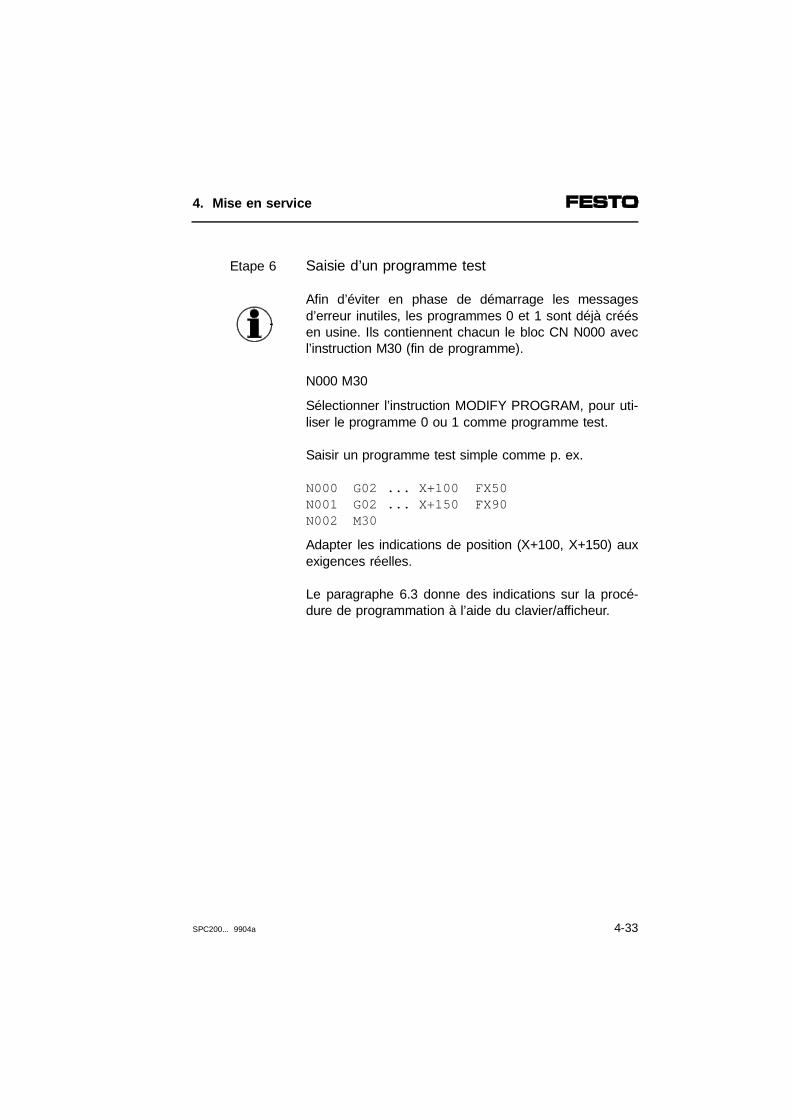
Saisie d’un programme testEtape 6
Afin d’éviter en phase de démarrage les messagesd’erreur inutiles, les programmes 0 et 1 sont déjà créésen usine. Ils contiennent chacun le bloc CN N000 avecl’instruction M30 (fin de programme).
N000 M30
Sélectionner l’instruction MODIFY PROGRAM, pour uti-liser le programme 0 ou 1 comme programme test.
Saisir un programme test simple comme p. ex.
N000 G02 ... X+100 FX50N001 G02 ... X+150 FX90N002 M30
Adapter les indications de position (X+100, X+150) auxexigences réelles.
Le paragraphe 6.3 donne des indications sur la procé-dure de programmation à l’aide du clavier/afficheur.
4. Mise en service
SPC200... 9904a 4-33
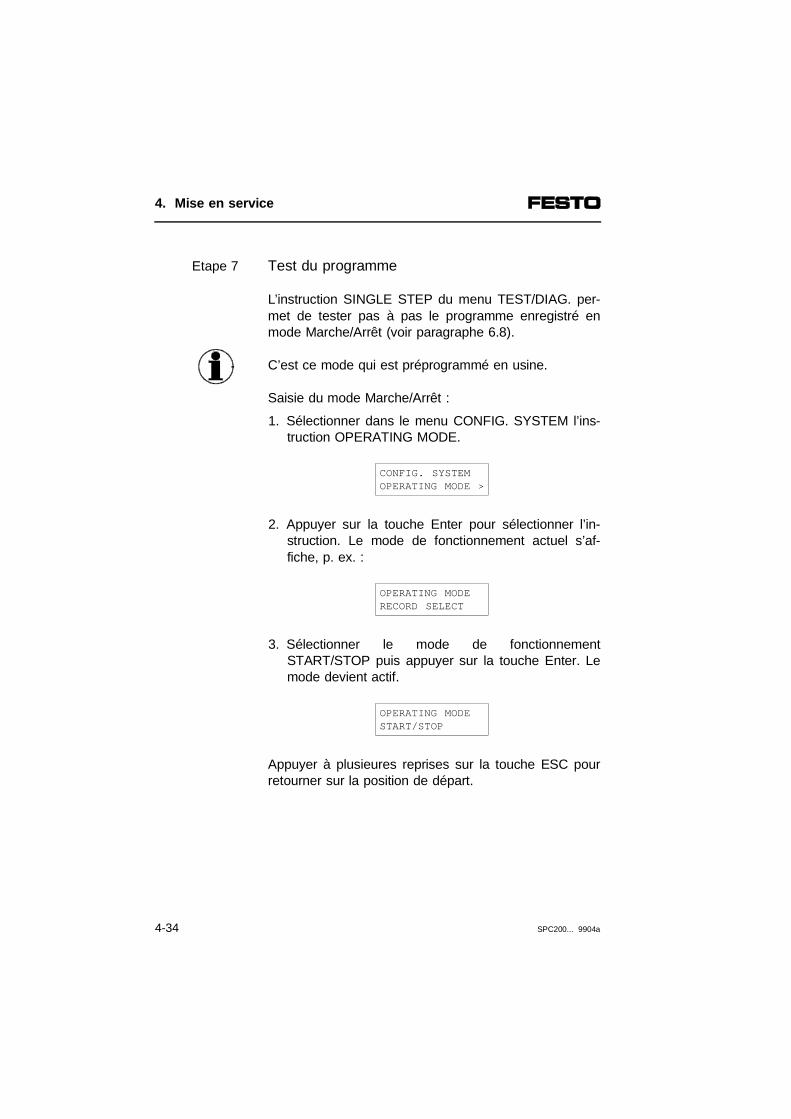
Test du programmeEtape 7
L’instruction SINGLE STEP du menu TEST/DIAG. per-met de tester pas à pas le programme enregistré enmode Marche/Arrêt (voir paragraphe 6.8).
C’est ce mode qui est préprogrammé en usine.
Saisie du mode Marche/Arrêt :
1. Sélectionner dans le menu CONFIG. SYSTEM l’ins-truction OPERATING MODE.
CONFIG. SYSTEMOPERATING MODE >
2. Appuyer sur la touche Enter pour sélectionner l’in-struction. Le mode de fonctionnement actuel s’af-fiche, p. ex. :
OPERATING MODE RECORD SELECT
3. Sélectionner le mode de fonctionnementSTART/STOP puis appuyer sur la touche Enter. Lemode devient actif.
OPERATING MODE START/STOP
Appuyer à plusieures reprises sur la touche ESC pourretourner sur la position de départ.
4. Mise en service
4-34 SPC200... 9904a
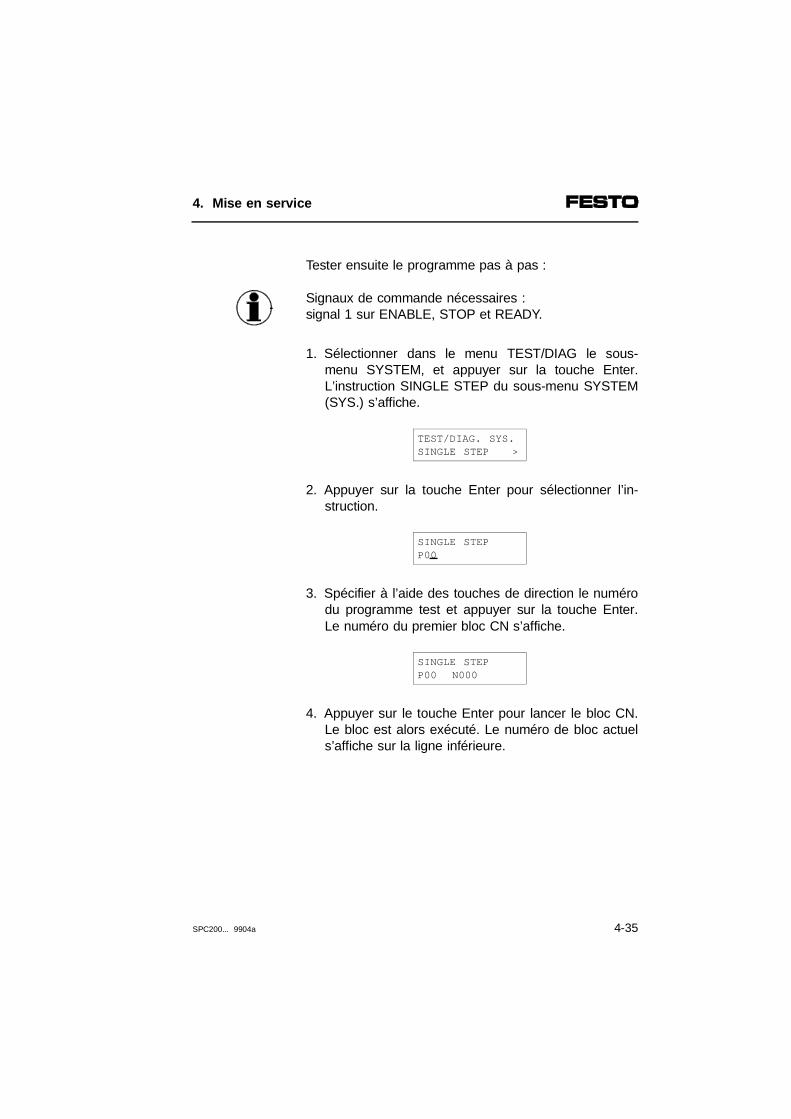
Tester ensuite le programme pas à pas :
Signaux de commande nécessaires :signal 1 sur ENABLE, STOP et READY.
1. Sélectionner dans le menu TEST/DIAG le sous-menu SYSTEM, et appuyer sur la touche Enter.L’instruction SINGLE STEP du sous-menu SYSTEM(SYS.) s’affiche.
TEST/DIAG. SYS.SINGLE STEP >
2. Appuyer sur la touche Enter pour sélectionner l’in-struction.
SINGLE STEPP00
3. Spécifier à l’aide des touches de direction le numérodu programme test et appuyer sur la touche Enter.Le numéro du premier bloc CN s’affiche.
SINGLE STEPP00 N000
4. Appuyer sur le touche Enter pour lancer le bloc CN.Le bloc est alors exécuté. Le numéro de bloc actuels’affiche sur la ligne inférieure.
4. Mise en service
SPC200... 9904a 4-35

5. Répéter le point 4, lorsque l’exécution du bloc CNactivé est terminée pour lancer l’exécution du blocCN affiché.
Appuyer à plusieures reprises sur la touche ESC pourretourner sur la position de départ.
4. Mise en service
4-36 SPC200... 9904a
Définition du programme de démarrage
Pour tester un programme en mode "normal", définir ceprogramme comme un programme de démarrage. (voirMENÜ CONFIG. SYSTEM, instruction DEFINETASKS). Un programme défini comme programme dedémarrage peut être démarré à l’aide de l’entréeSTART ou avec l’instruction START SYSTEM dans lemenu SYSTEM CONTROL.
En sortie d’usine, le programme 0 est défini commeprogramme de démarrage.
NOTE :Pour la définition des programmes de démarrage,respecter les remarques du paragraphe 7.1.
Pour améliorer la qualité du positionnement, optimiserles pararamètres du contrôleur lors de la mise en ser-vice (voir annexe A).
4. Mise en service
SPC200... 9904a 4-37

4.3.3 Remarques concernant la mise en service de systèmesmultiaxiaux
Mettre les axes en service un par un comme indiquédans ce chapitre.
Pour utiliser deux programmes de démarrage, veiller àce que les deux programmes s’exécutant en parallèledisposent bien de la sortie READY et des entréesENABLE, STOP et START/RESET.
Le chapitre 7.1.1 contient des indications sur les modessynchronisé et autonome.
4. Mise en service
4-38 SPC200... 9904a
Chapitre 5
Commande du SPC200
5. Commande du SPC200
SPC200... 9904a 5-1
Sommaire
5. Commande du SPC200
5.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-45.2 Mode Marche/Arrêt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-95.2.1 Description de tous les signaux d’E/S en mode
Marche/Arrêt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-115.3 Mode de sélection de bloc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-175.3.1 Description des signaux d’E/S en mode
de sélection de bloc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
5. Commande du SPC200
5-2 SPC200... 9904a
Le SPC200 offre les deux modes de fonctionnementsuivants pour exécuter des programmes CN en mé-moire :
Contenu dece chapitre
– mode Marche/Arrêt
– mode de sélection de bloc.
Les fonctions affectées aux entrées et sorties TOR ain-si qu’aux commandes CN dépendent du mode de fonc-tionnement choisi. Ce chapitre décrit la commande duSPC200 dans les modes de fonctionnement cités. Lacommande du SPC200 par l’intermédiaire d’une carted’E/S est présentée sur la base de quelques exemplesde câblage d’E/S. Tous les signaux de commande desE/S sont décrits avec leur réaction dans le temps.
Le chapitre 7 contient des informations sur la com-mande d’axes par le SPC200 en mode autonome etsynchronisé.
Autresinformations
Pour la mise en service sur un bus de terrain ou lamise en service des axes électriques, se reporter auxmanuels respectifs des composants.
5. Commande du SPC200
SPC200... 9904a 5-3
5.1 Généralités
Modes de fonctionnement du SPC200
En mode Marche/Arrêt, le SPC200 est capable de gé-rer seul des tâches de positionnement. La synchronisa-tion éventuelle avec des processus externes reste pos-sible grâce à la fonction "Arrêt programmé" (instructionM00).
Marche/arrêt
Le mode de sélection de bloc fait fonctionner leSPC200 en étroite liaison avec l’API/PCI de niveau su-périeur. Lorsqu’il est commandé par une carte d’E/S,les 5 entrées TOR peuvent appeler jusqu’à 32 blocsCN du programme de démarrage défini. Ce mode per-met d’exécuter des commandes de déplacement et dedéfinir des conditions de déplacement ou des instruc-tions de réglage de la qualité du positionnement (voirparagraphe 5.3).
Sélectionde bloc
Avec ce mode, le SPC200 peut exécuter deux pro-grammes en parallèle. Un seul SPC200 peut ainsi com-mander deux postes de travail aussi bien de manièreautonome que synchronisée.
Spécifier sur le clavier/afficheur le mode souhaité ainsique le programme de démarrage dans le menuCONFIG. SYSTEM.
Choixdu mode defonctionne-
ment
5. Commande du SPC200
5-4 SPC200... 9904a
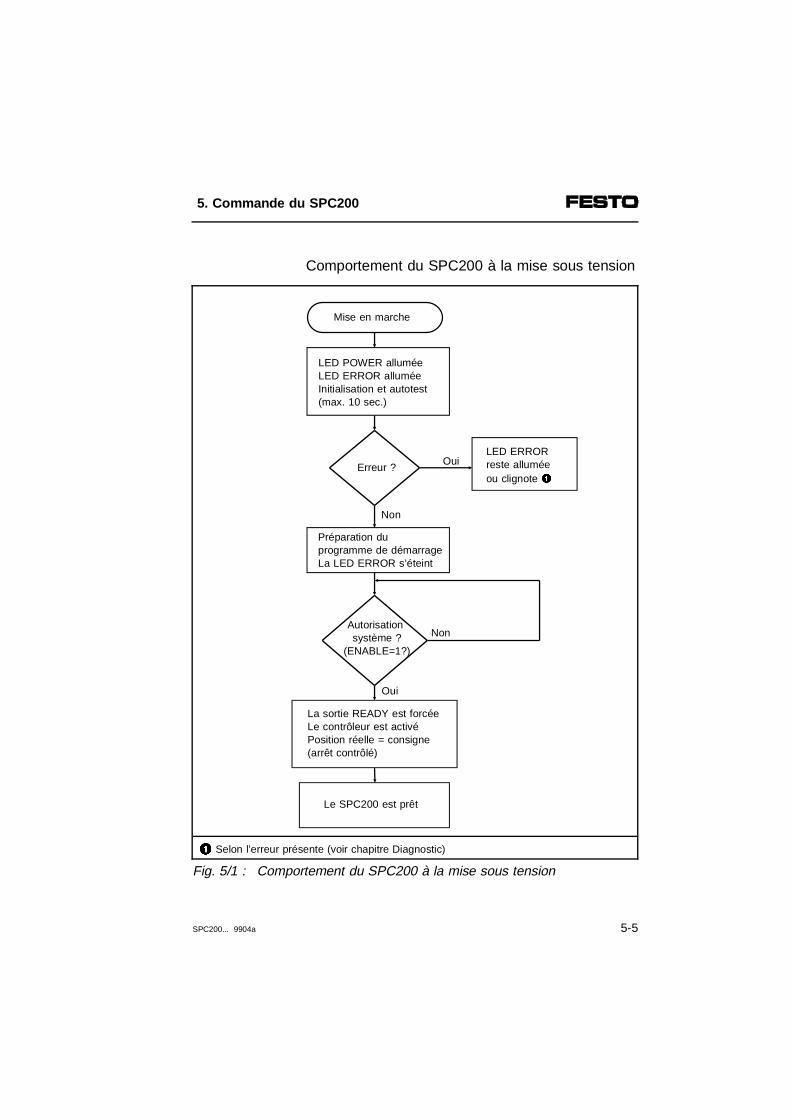
Comportement du SPC200 à la mise sous tension
1 Selon l’erreur présente (voir chapitre Diagnostic)
Fig. 5/1 : Comportement du SPC200 à la mise sous tension
Mise en marche
LED POWER alluméeLED ERROR alluméeInitialisation et autotest(max. 10 sec.)
Erreur ?
LED ERROR reste allumée ou clignote 1
Non
Non
Oui
Oui
Autorisation système ?
(ENABLE=1?)
Le SPC200 est prêt
Préparation du programme de démarrageLa LED ERROR s’éteint
La sortie READY est forcéeLe contrôleur est activéPosition réelle = consigne(arrêt contrôlé)
5. Commande du SPC200
SPC200... 9904a 5-5
Avec un signal 1 sur l’entrée ENABLE, l’absence detension d’alimentation provoque l’émission d’un mes-sage d’erreur. Mettre sous tension avant de forcer l’en-trée ENABLE avec un signal 1.
A la mise sous tension de l’alimentation, le SPC200 ef-fectue une initialisation et un autotest. S’il ne détecteaucune erreur, le mode de fonctionnement choisi estactivé et le programme de démarrage est préparé.Lorsque le signal 1est présent sur l’entrée ENABLE(autorisation) :
– le contrôleur est activé. Le système se place sur laconsigne de position.
– la sortie READY est forcée.
Selon la complexité de l’installation, ceci peut prendreun certain temps (max. 10 sec.).
L’exécution d’un programme ou le processus de posi-tionnement peut commencer lorsque l’entrée STOP pré-sente un signal 1 et que la sortie READY délivre unsignal 1.
5. Commande du SPC200
5-6 SPC200... 9904a
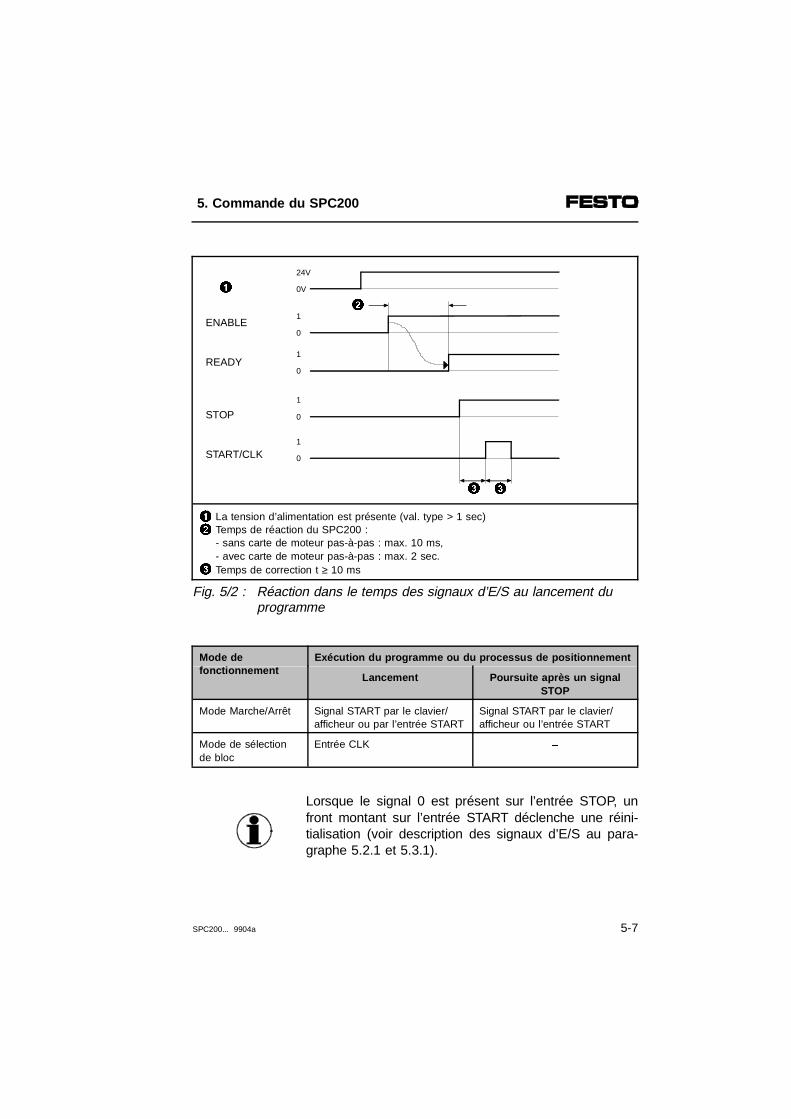
ENABLE
READY
STOP
START/CLK
12
3
La tension d’alimentation est présente (val. type > 1 sec)Temps de réaction du SPC200 :- sans carte de moteur pas-à-pas : max. 10 ms, - avec carte de moteur pas-à-pas : max. 2 sec.Temps de correction t ≥ 10 ms
Fig. 5/2 : Réaction dans le temps des signaux d’E/S au lancement duprogramme
Mode de fonctionnement
Exécution du programme ou du processus de positionnement
Lancement Poursuite après un signalSTOP
Mode Marche/Arrêt Signal START par le clavier/ afficheur ou par l’entrée START
Signal START par le clavier/ afficheur ou l’entrée START
Mode de sélection de bloc
Entrée CLK -
Lorsque le signal 0 est présent sur l’entrée STOP, unfront montant sur l’entrée START déclenche une réini-tialisation (voir description des signaux d’E/S au para-graphe 5.2.1 et 5.3.1).
0
1
0
1
0
1
0
1
0V
24V
33
2
1
5. Commande du SPC200
SPC200... 9904a 5-7
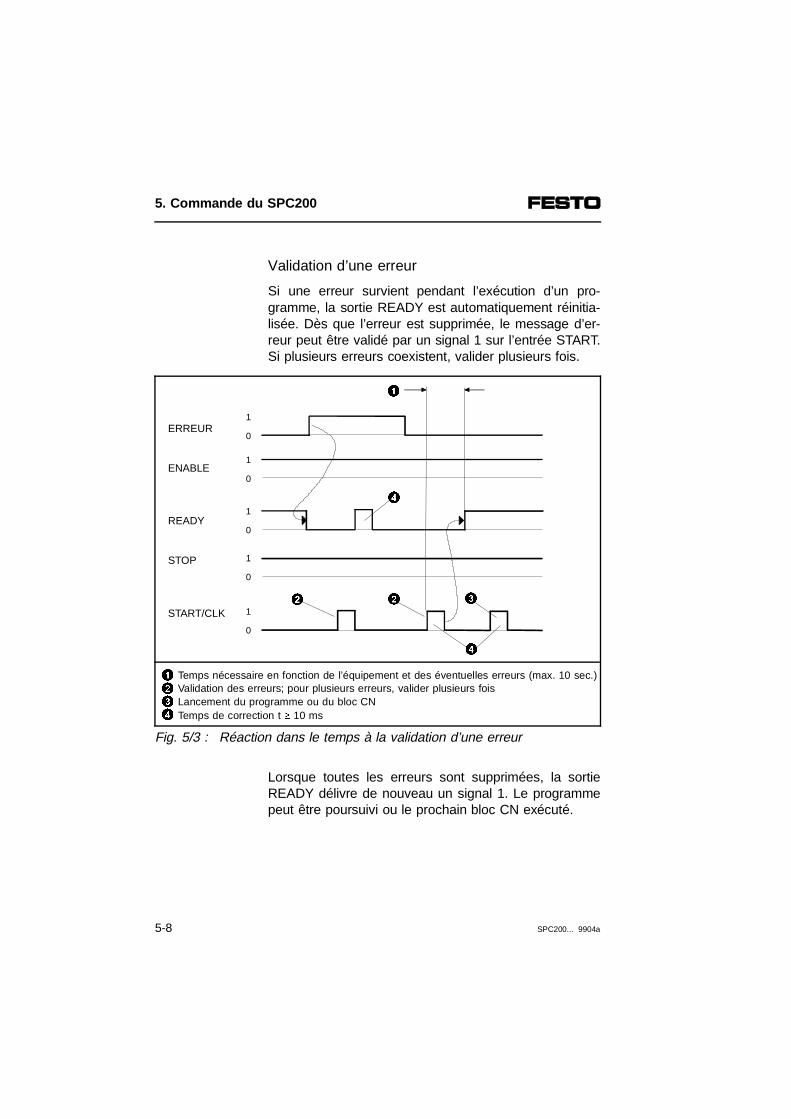
Validation d’une erreur
Si une erreur survient pendant l’exécution d’un pro-gramme, la sortie READY est automatiquement réinitia-lisée. Dès que l’erreur est supprimée, le message d’er-reur peut être validé par un signal 1 sur l’entrée START.Si plusieurs erreurs coexistent, valider plusieurs fois.
ERREUR
ENABLE
READY
STOP
START/CLK
1234
Temps nécessaire en fonction de l’équipement et des éventuelles erreurs (max. 10 sec.)Validation des erreurs; pour plusieurs erreurs, valider plusieurs foisLancement du programme ou du bloc CNTemps de correction t 10 ms
Fig. 5/3 : Réaction dans le temps à la validation d’une erreur
Lorsque toutes les erreurs sont supprimées, la sortieREADY délivre de nouveau un signal 1. Le programmepeut être poursuivi ou le prochain bloc CN exécuté.
0
1
0
1
0
1
0
1
0
1
1
32 2
4
4
5. Commande du SPC200
5-8 SPC200... 9904a
5.2 Mode Marche/Arrêt
En mode Marche/Arrêt, le SPC200 peut effectuer destâches de positionnement de manière autonome. Dèslors que le SPC200 est équipé d’une carte d’E/S, cemode dispose :
– de cinq entrées librement programmables
– de trois sorties librement programmables
– de toutes les instructions CN.
Chaque carte d’E/S supplémentaire donne accès à dixnouvelles entrées librement programmables et huit nou-velles sorties librement programmables. Des fonctionsspécifiques d’E/S peuvent être ajoutées directement auniveau de l’axe à l’aide de modules raccordés sur labranche d’interface d’axe.
En mode Marche/Arrêt, l’exécution de programmespeut être commandée aussi bien par le clavier/afficheurque par des E/S numériques. En cas de commande parun API/PCI de niveau supérieur, le couplage peut êtreinterrompu avec l’instruction Arrêt programmé (M00).Cette instruction permet de synchroniser le déroulementdu programme du SPC200 avec des processus ex-ternes.
La figure suivante présente le câblage d’E/S permettantde commander les fonctions Start, Stop et Enable de-puis un pupitre externe. La commande peut égalementse faire à partir d’un API/PCI.
5. Commande du SPC200
SPC200... 9904a 5-9
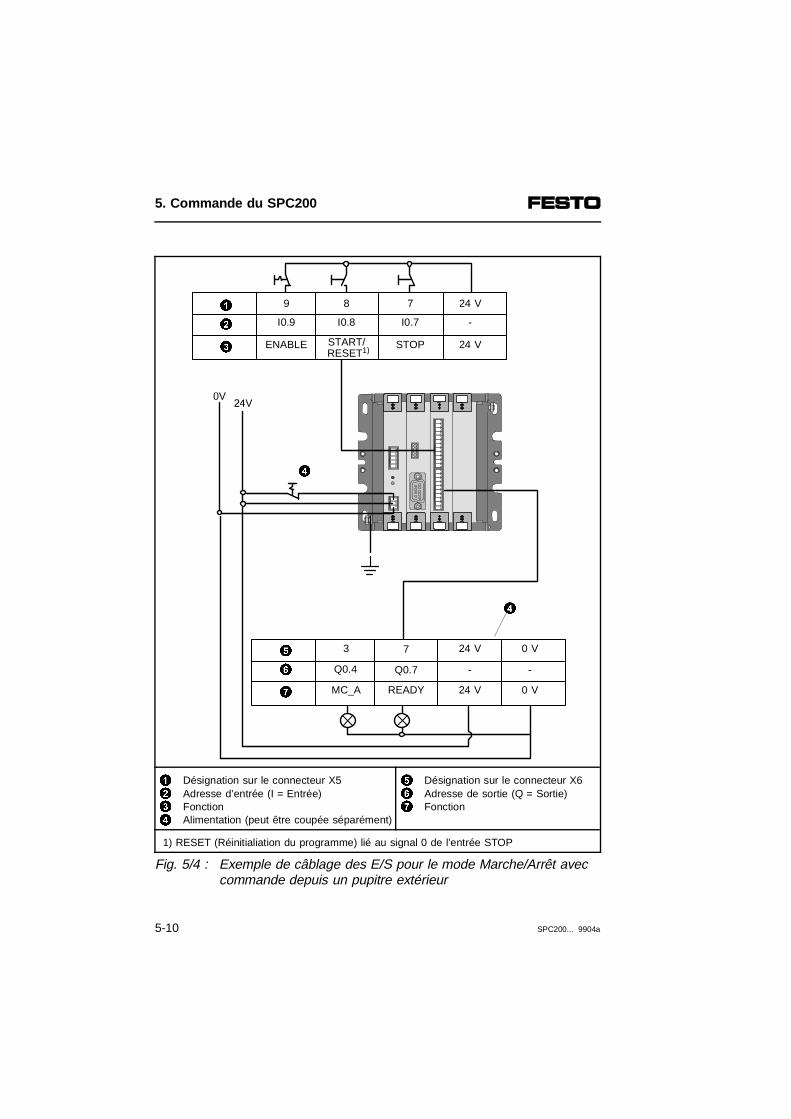
1234
Désignation sur le connecteur X5 Adresse d’entrée (I = Entrée)FonctionAlimentation (peut être coupée séparément)
567
Désignation sur le connecteur X6Adresse de sortie (Q = Sortie)Fonction
1) RESET (Réinitialiation du programme) lié au signal 0 de l’entrée STOP
Fig. 5/4 : Exemple de câblage des E/S pour le mode Marche/Arrêt aveccommande depuis un pupitre extérieur
4
4
9
ENABLE
I0.9
7
STOP
I0.7
8
START/ RESET1)
I0.8
24 V
24 V
-2
1
3
3
MC_A
Q0.4
7
READY
Q0.7
24 V
24 V
-
0 V
0 V
-6
5
7
5. Commande du SPC200
5-10 SPC200... 9904a
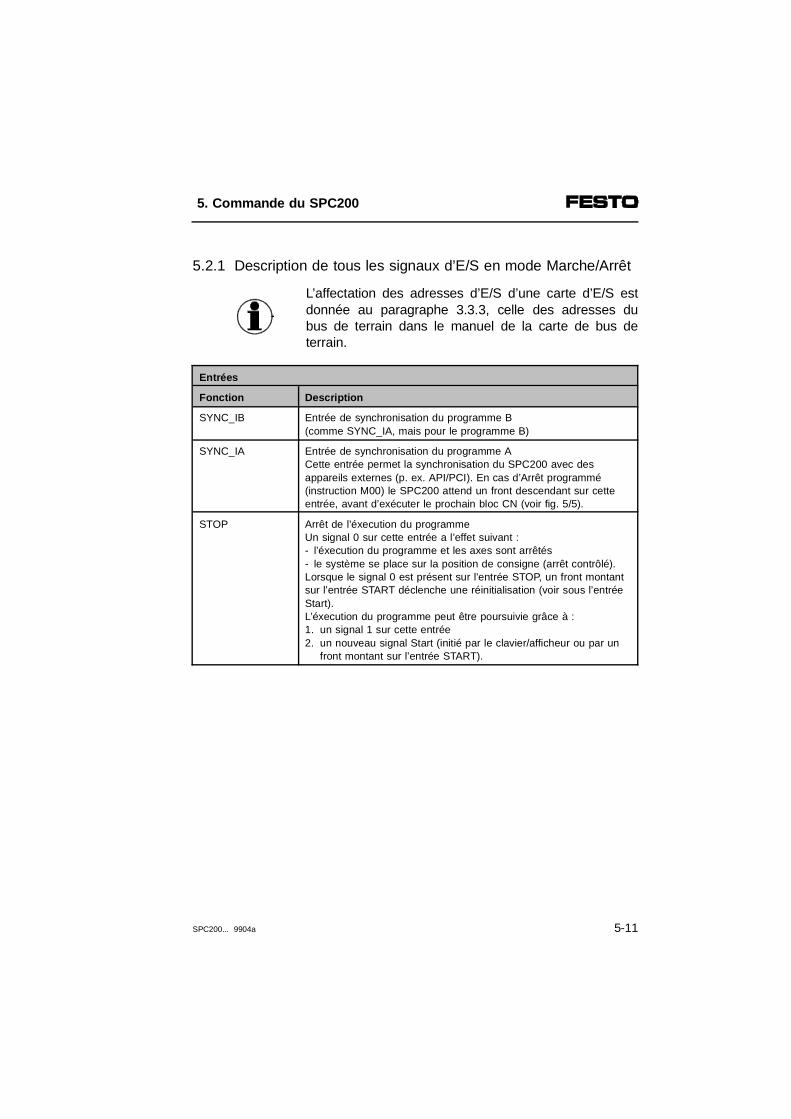
5.2.1 Description de tous les signaux d’E/S en mode Marche/Arrêt
L’affectation des adresses d’E/S d’une carte d’E/S estdonnée au paragraphe 3.3.3, celle des adresses dubus de terrain dans le manuel de la carte de bus deterrain.
Entrées
Fonction Description
SYNC_IB Entrée de synchronisation du programme B(comme SYNC_IA, mais pour le programme B)
SYNC_IA Entrée de synchronisation du programme ACette entrée permet la synchronisation du SPC200 avec desappareils externes (p. ex. API/PCI). En cas d’Arrêt programmé(instruction M00) le SPC200 attend un front descendant sur cetteentrée, avant d’exécuter le prochain bloc CN (voir fig. 5/5).
STOP Arrêt de l’éxecution du programmeUn signal 0 sur cette entrée a l’effet suivant :- l’éxecution du programme et les axes sont arrêtés- le système se place sur la position de consigne (arrêt contrôlé).Lorsque le signal 0 est présent sur l’entrée STOP, un front montant sur l’entrée START déclenche une réinitialisation (voir sous l’entréeStart).L’éxecution du programme peut être poursuivie grâce à :1. un signal 1 sur cette entrée2. un nouveau signal Start (initié par le clavier/afficheur ou par un
front montant sur l’entrée START).
5. Commande du SPC200
SPC200... 9904a 5-11
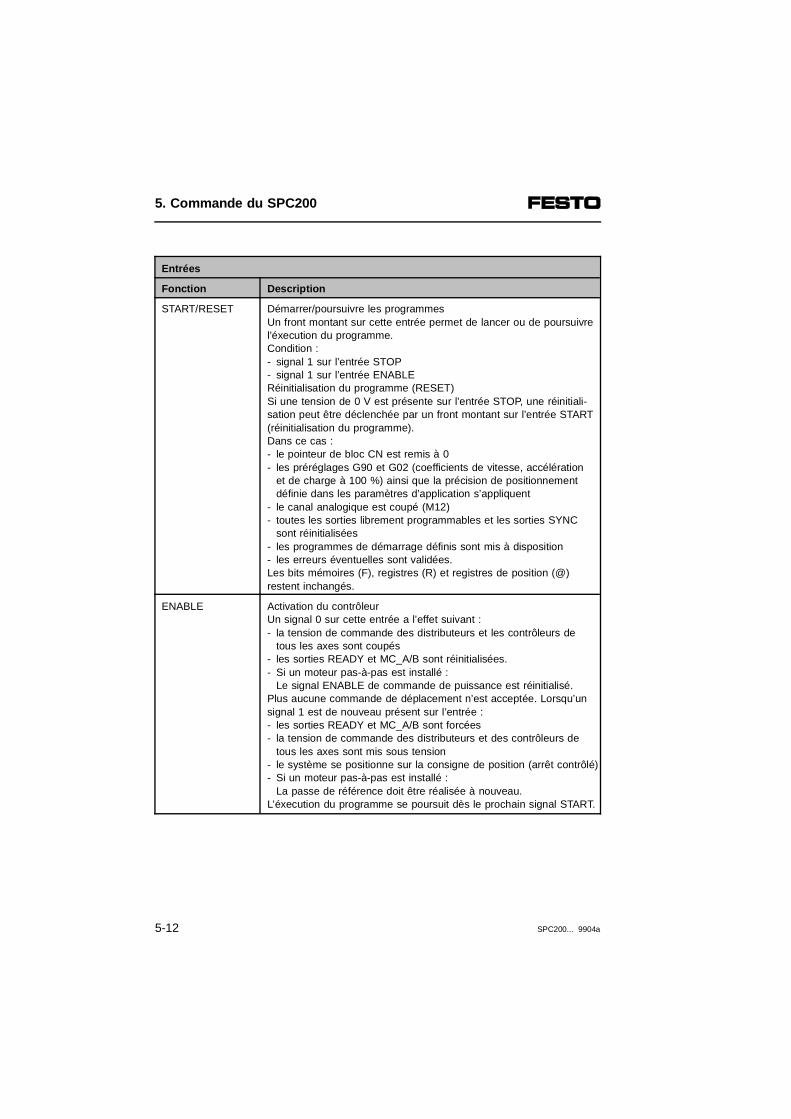
Entrées
Fonction Description
START/RESET Démarrer/poursuivre les programmesUn front montant sur cette entrée permet de lancer ou de poursuivrel’éxecution du programme.Condition :- signal 1 sur l’entrée STOP- signal 1 sur l’entrée ENABLERéinitialisation du programme (RESET)Si une tension de 0 V est présente sur l’entrée STOP, une réinitiali-sation peut être déclenchée par un front montant sur l’entrée START(réinitialisation du programme).Dans ce cas :- le pointeur de bloc CN est remis à 0- les préréglages G90 et G02 (coefficients de vitesse, accélération
et de charge à 100 %) ainsi que la précision de positionnementdéfinie dans les paramètres d’application s’appliquent
- le canal analogique est coupé (M12)- toutes les sorties librement programmables et les sorties SYNC
sont réinitialisées- les programmes de démarrage définis sont mis à disposition- les erreurs éventuelles sont validées.Les bits mémoires (F), registres (R) et registres de position (@) restent inchangés.
ENABLE Activation du contrôleurUn signal 0 sur cette entrée a l’effet suivant :- la tension de commande des distributeurs et les contrôleurs de
tous les axes sont coupés- les sorties READY et MC_A/B sont réinitialisées.- Si un moteur pas-à-pas est installé :
Le signal ENABLE de commande de puissance est réinitialisé. Plus aucune commande de déplacement n’est acceptée. Lorsqu’unsignal 1 est de nouveau présent sur l’entrée :- les sorties READY et MC_A/B sont forcées- la tension de commande des distributeurs et des contrôleurs de
tous les axes sont mis sous tension - le système se positionne sur la consigne de position (arrêt contrôlé)- Si un moteur pas-à-pas est installé :
La passe de référence doit être réalisée à nouveau. L’éxecution du programme se poursuit dès le prochain signal START.
5. Commande du SPC200
5-12 SPC200... 9904a
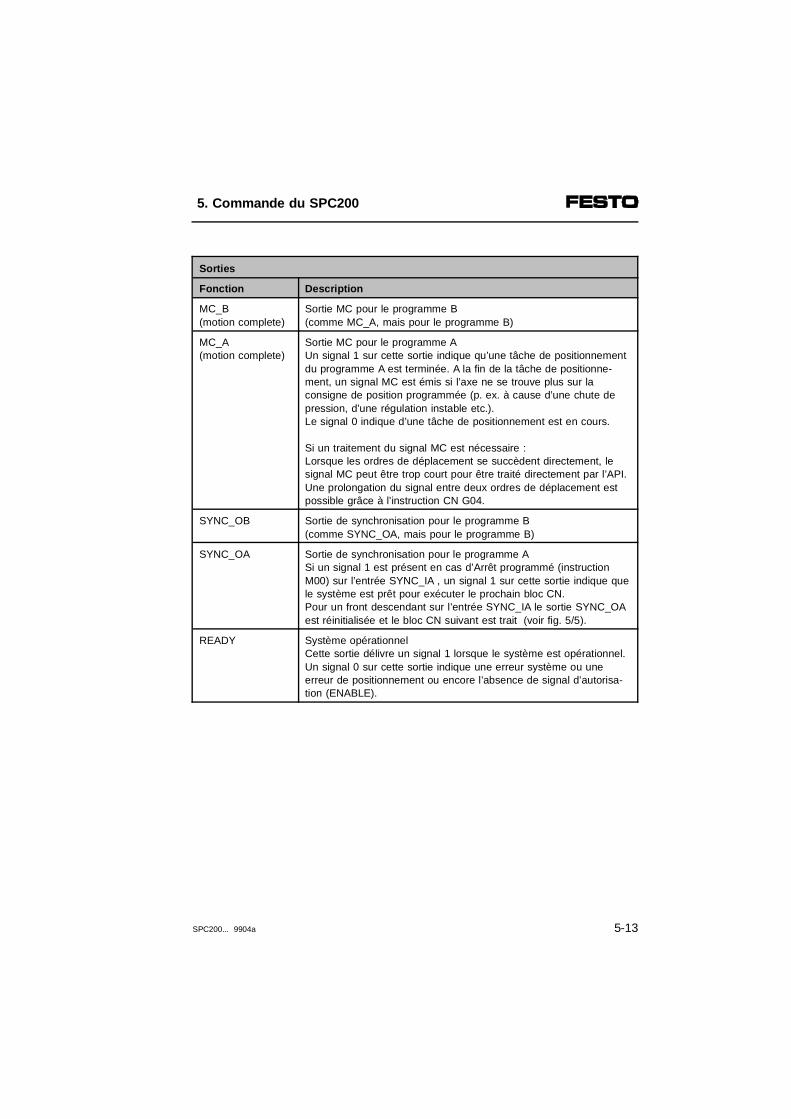
Sorties
Fonction Description
MC_B(motion complete)
Sortie MC pour le programme B(comme MC_A, mais pour le programme B)
MC_A(motion complete)
Sortie MC pour le programme AUn signal 1 sur cette sortie indique qu’une tâche de positionnementdu programme A est terminée. A la fin de la tâche de positionne-ment, un signal MC est émis si l’axe ne se trouve plus sur laconsigne de position programmée (p. ex. à cause d’une chute depression, d’une régulation instable etc.). Le signal 0 indique d’une tâche de positionnement est en cours.
Si un traitement du signal MC est nécessaire :Lorsque les ordres de déplacement se succèdent directement, lesignal MC peut être trop court pour être traité directement par l’API.Une prolongation du signal entre deux ordres de déplacement estpossible grâce à l’instruction CN G04.
SYNC_OB Sortie de synchronisation pour le programme B(comme SYNC_OA, mais pour le programme B)
SYNC_OA Sortie de synchronisation pour le programme ASi un signal 1 est présent en cas d’Arrêt programmé (instructionM00) sur l’entrée SYNC_IA , un signal 1 sur cette sortie indique quele système est prêt pour exécuter le prochain bloc CN.Pour un front descendant sur l’entrée SYNC_IA le sortie SYNC_OA est réinitialisée et le bloc CN suivant est trait (voir fig. 5/5).
READY Système opérationnelCette sortie délivre un signal 1 lorsque le système est opérationnel.Un signal 0 sur cette sortie indique une erreur système ou une erreur de positionnement ou encore l’absence de signal d’autorisa-tion (ENABLE).
5. Commande du SPC200
SPC200... 9904a 5-13
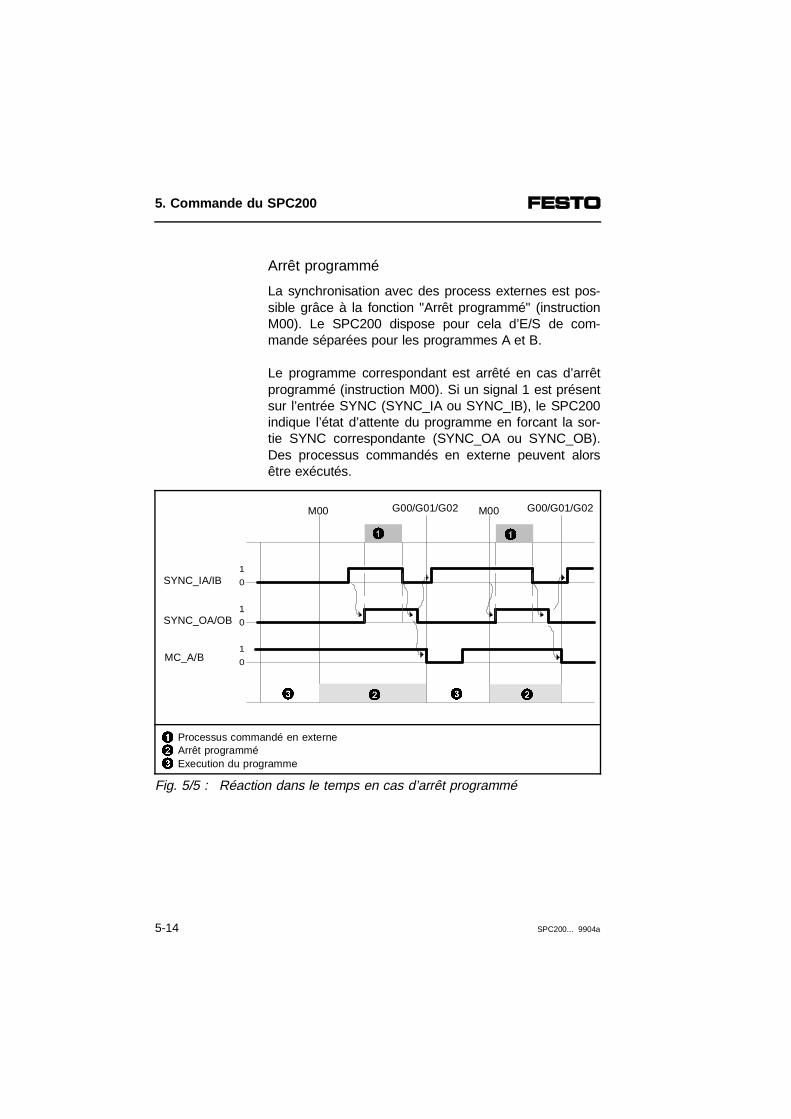
Arrêt programmé
La synchronisation avec des process externes est pos-sible grâce à la fonction "Arrêt programmé" (instructionM00). Le SPC200 dispose pour cela d’E/S de com-mande séparées pour les programmes A et B.
Le programme correspondant est arrêté en cas d’arrêtprogrammé (instruction M00). Si un signal 1 est présentsur l’entrée SYNC (SYNC_IA ou SYNC_IB), le SPC200indique l’état d’attente du programme en forcant la sor-tie SYNC correspondante (SYNC_OA ou SYNC_OB).Des processus commandés en externe peuvent alorsêtre exécutés.
123
Processus commandé en externeArrêt programméExecution du programme
Fig. 5/5 : Réaction dans le temps en cas d’arrêt programmé
1
0
1
0
1
0
SYNC_IA/IB
SYNC_OA/OB
M00 G00/G01/G02 M00 G00/G01/G02
MC_A/B
11
223 3
5. Commande du SPC200
5-14 SPC200... 9904a
La sortie SYNC est réinitialisée lorsqu’un front descen-dant se présente sur l’entrée SYNC et l’éxecution duprogramme se poursuit. La poursuite de l’éxecution duprogramme est réprésentée sur la fig. 5/5 par le signalMC.
NOTE :La sortie MC (MC_A/B) n’est réintialisée que lorsquel’instruction de positionnement est traitée (G00, G01,G02 und M10).
5. Commande du SPC200
SPC200... 9904a 5-15

Résumé du mode Marche/Arrêt
En mode Marche/Arrêt, le SPC200 dispose d’entrées etsorties librement programmables. Arrêt programmé (in-struction M00) permet de synchroniser en externe, parexemple à partir d’un API/PCI, deux programmes s’exé-cutant en parallèle avec d’autres processus.
Conditions de départ
- Le programme est en mémoire- Paramètres d’axe, d’application et système
définis correctement- Mode Marche/Arrêt activé- Signal 1 sur les entrées ENABLE et STOP
Commande à partir du clavier/afficheur
Fonctions de commande - Start, Stop, Reset par le menu
SYSTEM CONTROL du clavier/afficheur
Commande à partir d’E/S
Fonctions de commande- Start par un front montant sur l’entrée
START- Stop par un signal 0 sur l’entrée STOP- Poursuivre le programme avec un signal 1
sur l’entrée STOP et un front montant surl’entrée START
- Réinitialisation du programme par unsignal 0 sur l’entrée STOPet un front montant sur l’entrée START
5. Commande du SPC200
5-16 SPC200... 9904a
5.3 Mode de sélection de bloc
En mode de sélection de bloc le SPC200 est comman-dé par un API/PCI de niveau supérieur. L’API/PCI trans-met les ordres de positionnement au SPC200 sous leforme de numéros de blocs codés en binaire, par l’in-termédiaire d’E/S TOR. Le SPC200 exécute alors lebloc CN et attend le prochain ordre de positionnement.Lorsqu’il est commandé par une carte d’E/S, l’API/PCIpeut appeler les blocs CN 0 à 31 des programmes dedémarrage par l’intermédiaire des 5 entrées TOR.
Mode desélection de
bloc
Comme l’exécution du programme CN est pilotée parun API/PCI de niveau supérieur, ce mode ne comportepas de commandes CN gérant le déroulement du pro-gramme.
5. Commande du SPC200
SPC200... 9904a 5-17
Ce mode permet d’exécuter des commandes de dépla-cement et de définir des conditions de déplacement oudes instructions de réglage de la qualité du positionne-ment. Il s’agit de :
InstructionCN
Description
G00 Positionnement à vitesse maximale
G01 Positionnement à une vitesse prédéfinie
G02 Positionnement avec accélération sans secousses,Positionnement à la fréquence Start/Stop
G08 Accélération pour la rampe de démarrage
G09 Accélération pour la rampe de freinage
G60 Arrêt précis
G61 Réglage de la précision de positionnement
G62 Arrêt rapide
G74 Lancement d’une passe de référence
G90 Cotation en valeur absolue(préréglage au lancement du programme)
G91 Cotation relative
La figure suivante montre un exemple de câblage desE/S pour le mode de sélection de bloc.
5. Commande du SPC200
5-18 SPC200... 9904a
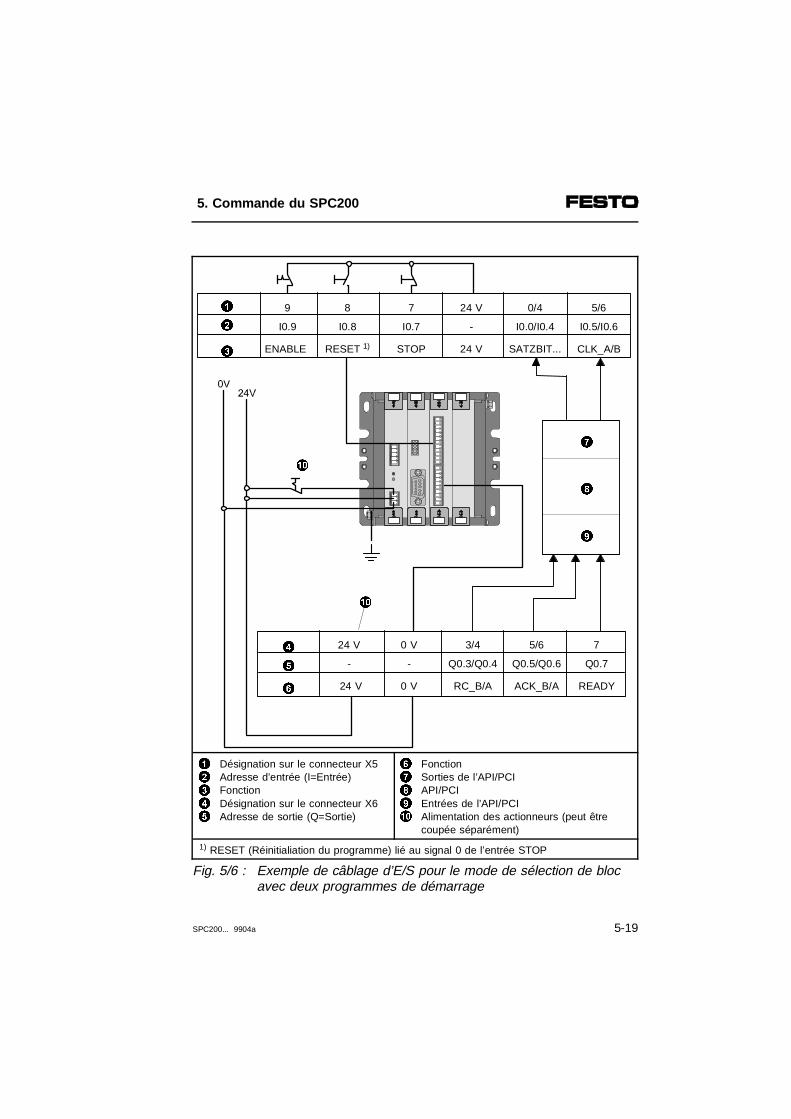
12345
Désignation sur le connecteur X5 Adresse d’entrée (I=Entrée)FonctionDésignation sur le connecteur X6Adresse de sortie (Q=Sortie)
67890
FonctionSorties de l’API/PCIAPI/PCIEntrées de l’API/PCIAlimentation des actionneurs (peut êtrecoupée séparément)
1) RESET (Réinitialiation du programme) lié au signal 0 de l’entrée STOP
Fig. 5/6 : Exemple de câblage d’E/S pour le mode de sélection de blocavec deux programmes de démarrage
8
9
7
0
0
ENABLE
I0.9
8
RESET 1)
I0.8
7
STOP
I0.72
3
0/4
SATZBIT...
I0.0/I0.4
5/6
CLK_A/B
I0.5/I0.6
91 24 V
24 V
-
24 V
24 V
-
0 V
0 V
-
3/4
RC_B/A
Q0.3/Q0.45
6
4 5/6
ACK_B/A
Q0.5/Q0.6
7
READY
Q0.7
5. Commande du SPC200
SPC200... 9904a 5-19
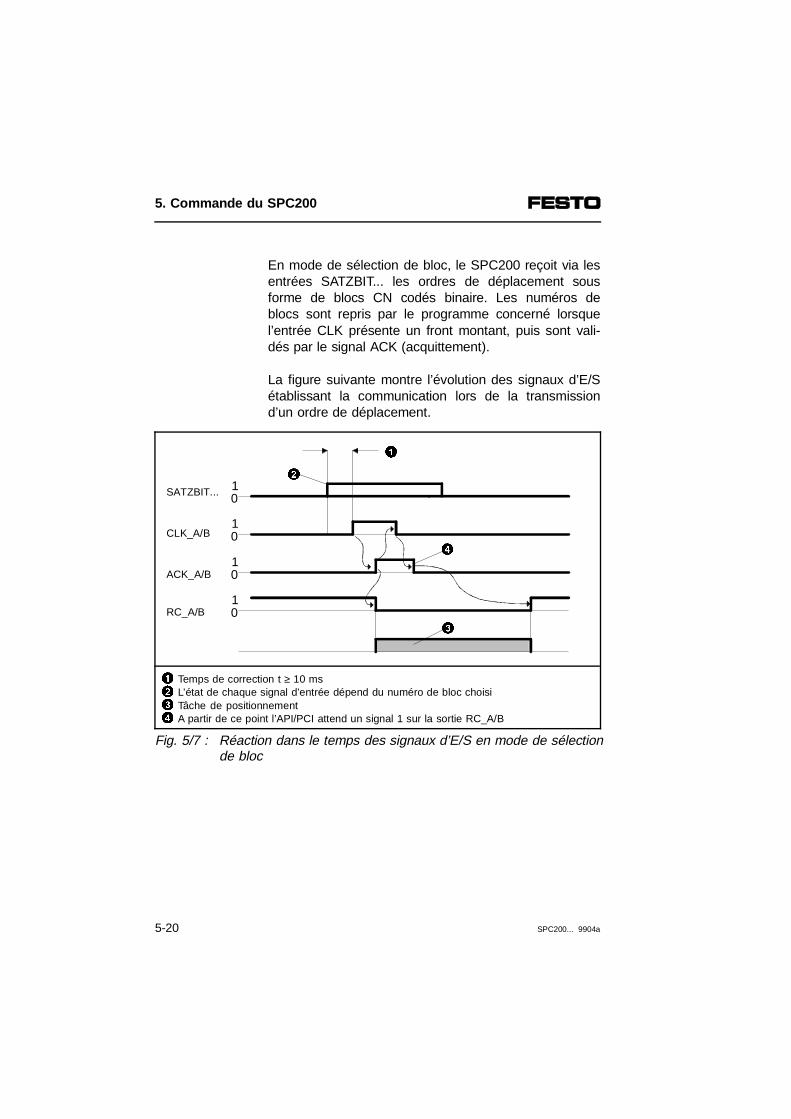
En mode de sélection de bloc, le SPC200 reçoit via lesentrées SATZBIT... les ordres de déplacement sousforme de blocs CN codés binaire. Les numéros deblocs sont repris par le programme concerné lorsquel’entrée CLK présente un front montant, puis sont vali-dés par le signal ACK (acquittement).
La figure suivante montre l’évolution des signaux d’E/Sétablissant la communication lors de la transmissiond’un ordre de déplacement.
1234
Temps de correction t ≥ 10 msL’état de chaque signal d’entrée dépend du numéro de bloc choisi Tâche de positionnementA partir de ce point l’API/PCI attend un signal 1 sur la sortie RC_A/B
Fig. 5/7 : Réaction dans le temps des signaux d’E/S en mode de sélectionde bloc
10
10
10
10
SATZBIT...
RC_A/B
2
ACK_A/B
CLK_A/B
1
4
3
5. Commande du SPC200
5-20 SPC200... 9904a
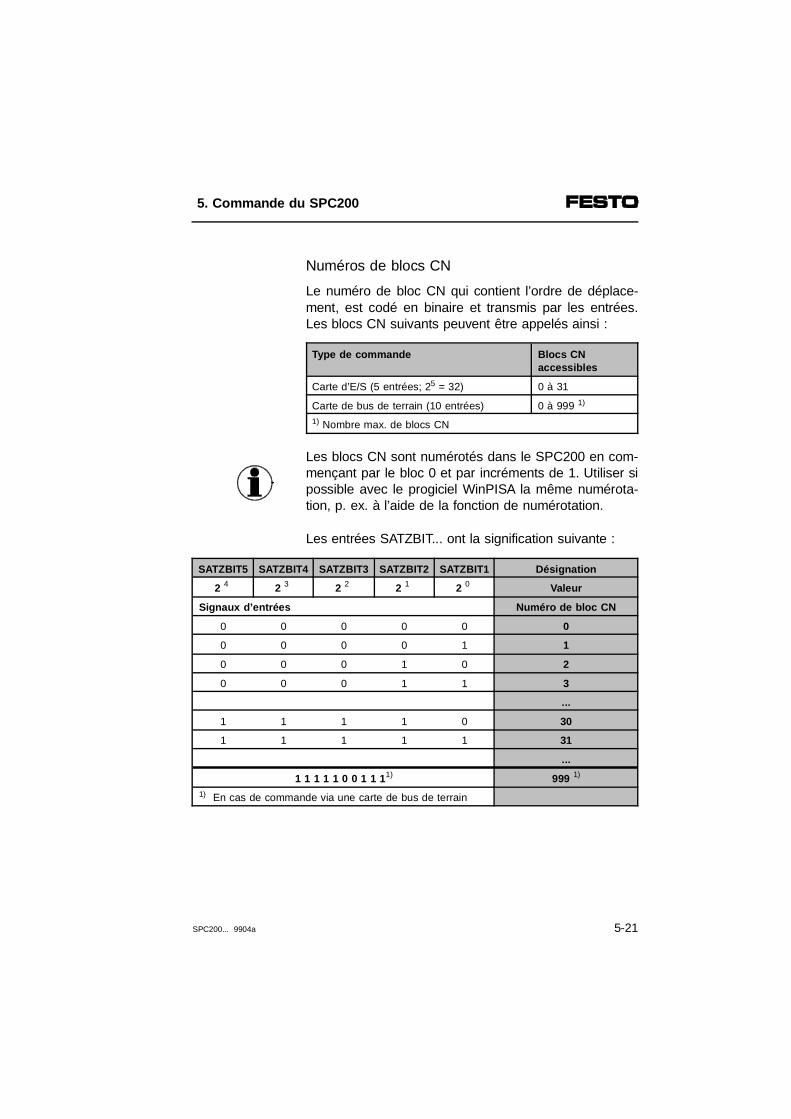
Numéros de blocs CN
Le numéro de bloc CN qui contient l’ordre de déplace-ment, est codé en binaire et transmis par les entrées.Les blocs CN suivants peuvent être appelés ainsi :
Type de commande Blocs CNaccessibles
Carte d’E/S (5 entrées; 25 = 32) 0 à 31
Carte de bus de terrain (10 entrées) 0 à 999 1)
1) Nombre max. de blocs CN
Les blocs CN sont numérotés dans le SPC200 en com-mençant par le bloc 0 et par incréments de 1. Utiliser sipossible avec le progiciel WinPISA la même numérota-tion, p. ex. à l’aide de la fonction de numérotation.
Les entrées SATZBIT... ont la signification suivante :
SATZBIT5 SATZBIT4 SATZBIT3 SATZBIT2 SATZBIT1 Désignation
2 4 2 3 2 2 2 1 2 0 Valeur
Signaux d’entrées Numéro de bloc CN
0 0 0 0 0 0
0 0 0 0 1 1
0 0 0 1 0 2
0 0 0 1 1 3
...
1 1 1 1 0 30
1 1 1 1 1 31
...
1 1 1 1 1 0 0 1 1 11) 999 1)
1) En cas de commande via une carte de bus de terrain
5. Commande du SPC200
SPC200... 9904a 5-21
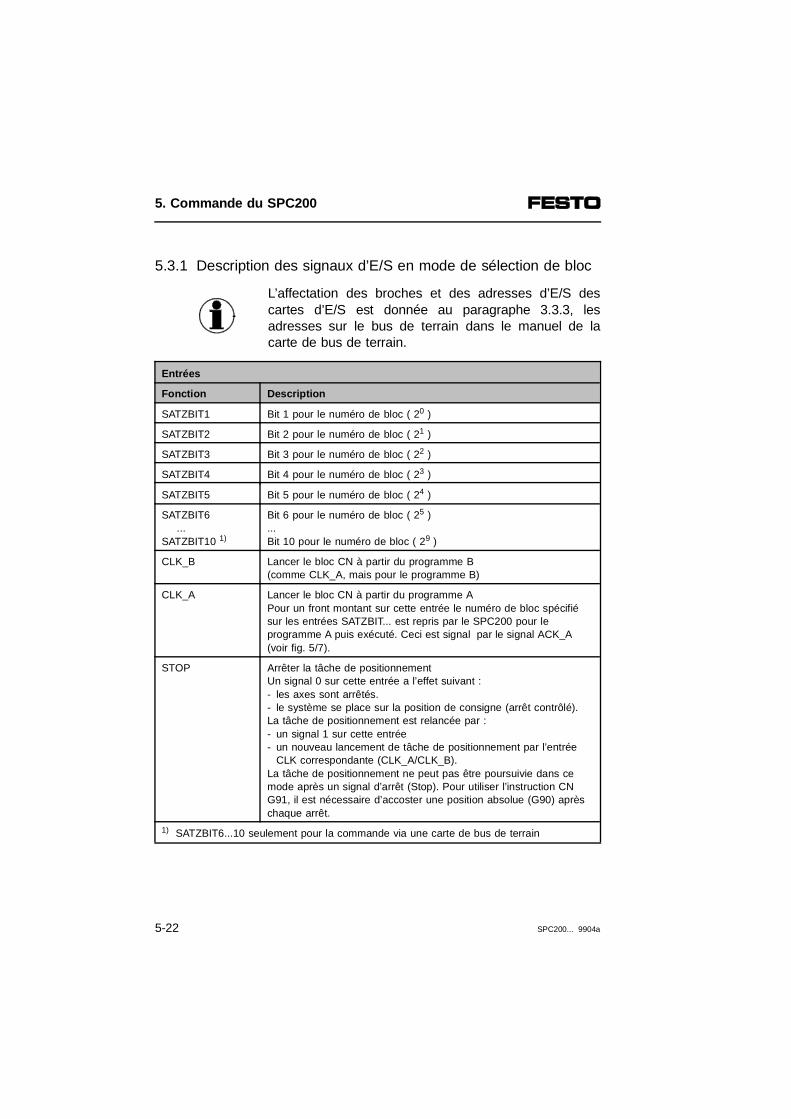
5.3.1 Description des signaux d’E/S en mode de sélection de bloc
L’affectation des broches et des adresses d’E/S descartes d’E/S est donnée au paragraphe 3.3.3, lesadresses sur le bus de terrain dans le manuel de lacarte de bus de terrain.
Entrées
Fonction Description
SATZBIT1 Bit 1 pour le numéro de bloc ( 20 )
SATZBIT2 Bit 2 pour le numéro de bloc ( 21 )
SATZBIT3 Bit 3 pour le numéro de bloc ( 22 )
SATZBIT4 Bit 4 pour le numéro de bloc ( 23 )
SATZBIT5 Bit 5 pour le numéro de bloc ( 24 )
SATZBIT6...
SATZBIT10 1)
Bit 6 pour le numéro de bloc ( 25 ) ...Bit 10 pour le numéro de bloc ( 29 )
CLK_B Lancer le bloc CN à partir du programme B(comme CLK_A, mais pour le programme B)
CLK_A Lancer le bloc CN à partir du programme APour un front montant sur cette entrée le numéro de bloc spécifié sur les entrées SATZBIT... est repris par le SPC200 pour leprogramme A puis exécuté. Ceci est signal par le signal ACK_A(voir fig. 5/7).
STOP Arrêter la tâche de positionnementUn signal 0 sur cette entrée a l’effet suivant :- les axes sont arrêtés.- le système se place sur la position de consigne (arrêt contrôlé).La tâche de positionnement est relancée par :- un signal 1 sur cette entrée- un nouveau lancement de tâche de positionnement par l’entrée
CLK correspondante (CLK_A/CLK_B).La tâche de positionnement ne peut pas être poursuivie dans cemode après un signal d’arrêt (Stop). Pour utiliser l’instruction CNG91, il est nécessaire d’accoster une position absolue (G90) aprèschaque arrêt.
1) SATZBIT6...10 seulement pour la commande via une carte de bus de terrain
5. Commande du SPC200
5-22 SPC200... 9904a
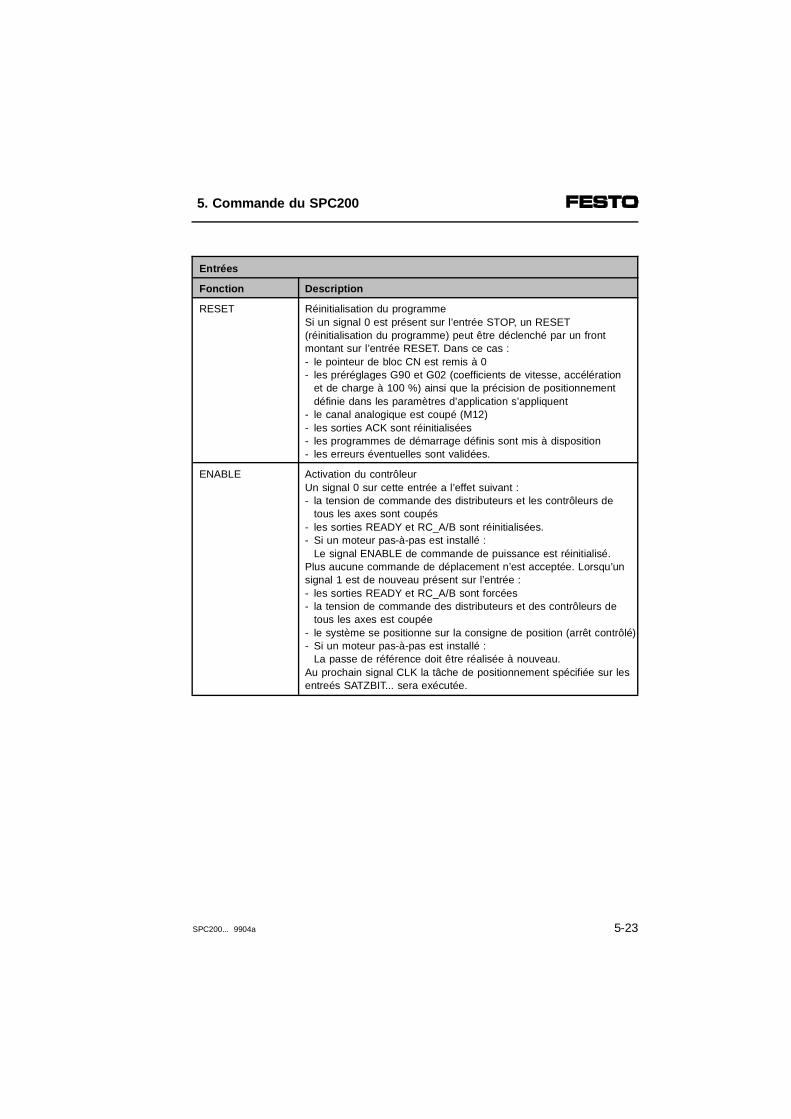
Entrées
Fonction Description
RESET Réinitialisation du programmeSi un signal 0 est présent sur l’entrée STOP, un RESET(réinitialisation du programme) peut être déclenché par un frontmontant sur l’entrée RESET. Dans ce cas :- le pointeur de bloc CN est remis à 0- les préréglages G90 et G02 (coefficients de vitesse, accélération
et de charge à 100 %) ainsi que la précision de positionnement définie dans les paramètres d’application s’appliquent
- le canal analogique est coupé (M12)- les sorties ACK sont réinitialisées- les programmes de démarrage définis sont mis à disposition- les erreurs éventuelles sont validées.
ENABLE Activation du contrôleurUn signal 0 sur cette entrée a l’effet suivant :- la tension de commande des distributeurs et les contrôleurs de
tous les axes sont coupés- les sorties READY et RC_A/B sont réinitialisées.- Si un moteur pas-à-pas est installé :
Le signal ENABLE de commande de puissance est réinitialisé. Plus aucune commande de déplacement n’est acceptée. Lorsqu’unsignal 1 est de nouveau présent sur l’entrée :- les sorties READY et RC_A/B sont forcées- la tension de commande des distributeurs et des contrôleurs de
tous les axes est coupée - le système se positionne sur la consigne de position (arrêt contrôlé)- Si un moteur pas-à-pas est installé :
La passe de référence doit être réalisée à nouveau.Au prochain signal CLK la tâche de positionnement spécifiée sur lesentreés SATZBIT... sera exécutée.
5. Commande du SPC200
SPC200... 9904a 5-23
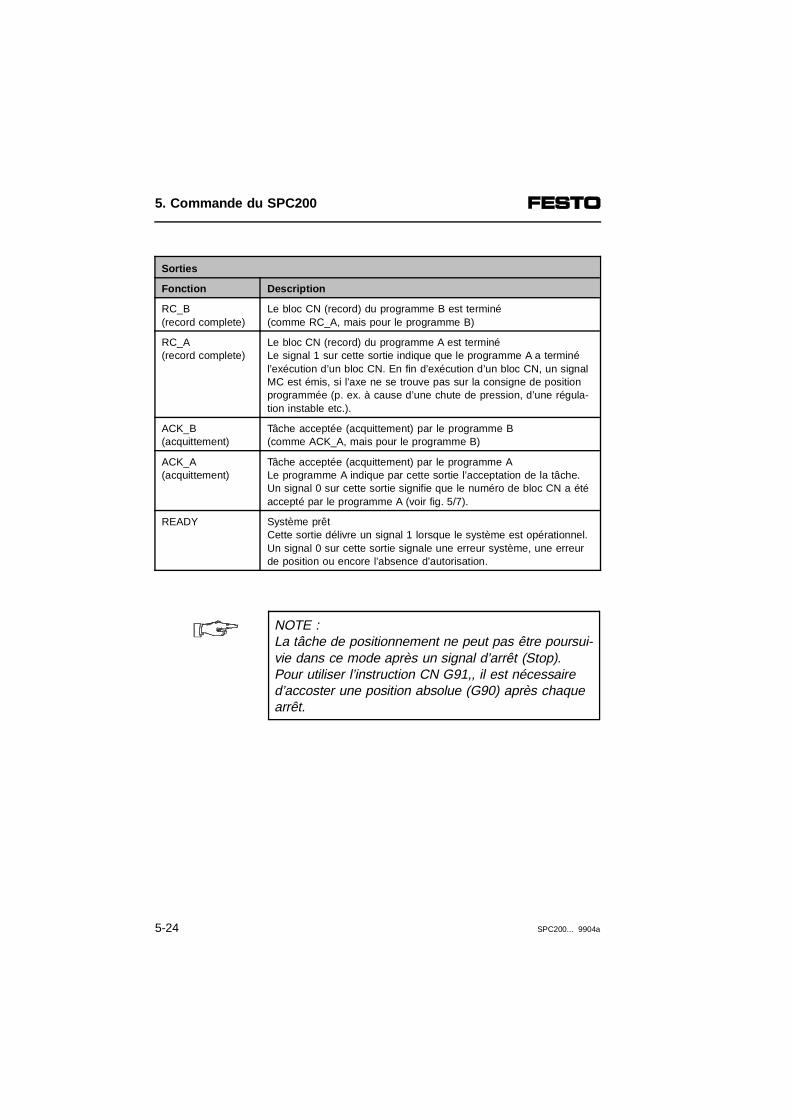
Sorties
Fonction Description
RC_B(record complete)
Le bloc CN (record) du programme B est terminé(comme RC_A, mais pour le programme B)
RC_A(record complete)
Le bloc CN (record) du programme A est terminé Le signal 1 sur cette sortie indique que le programme A a terminél’exécution d’un bloc CN. En fin d’exécution d’un bloc CN, un signalMC est émis, si l’axe ne se trouve pas sur la consigne de positionprogrammée (p. ex. à cause d’une chute de pression, d’une régula-tion instable etc.).
ACK_B(acquittement)
Tâche acceptée (acquittement) par le programme B(comme ACK_A, mais pour le programme B)
ACK_A(acquittement)
Tâche acceptée (acquittement) par le programme ALe programme A indique par cette sortie l’acceptation de la tâche.Un signal 0 sur cette sortie signifie que le numéro de bloc CN a étéaccepté par le programme A (voir fig. 5/7).
READY Système prêtCette sortie délivre un signal 1 lorsque le système est opérationnel.Un signal 0 sur cette sortie signale une erreur système, une erreurde position ou encore l’absence d’autorisation.
NOTE :La tâche de positionnement ne peut pas être poursui-vie dans ce mode après un signal d’arrêt (Stop).Pour utiliser l’instruction CN G91,, il est nécessaired’accoster une position absolue (G90) après chaquearrêt.
5. Commande du SPC200
5-24 SPC200... 9904a
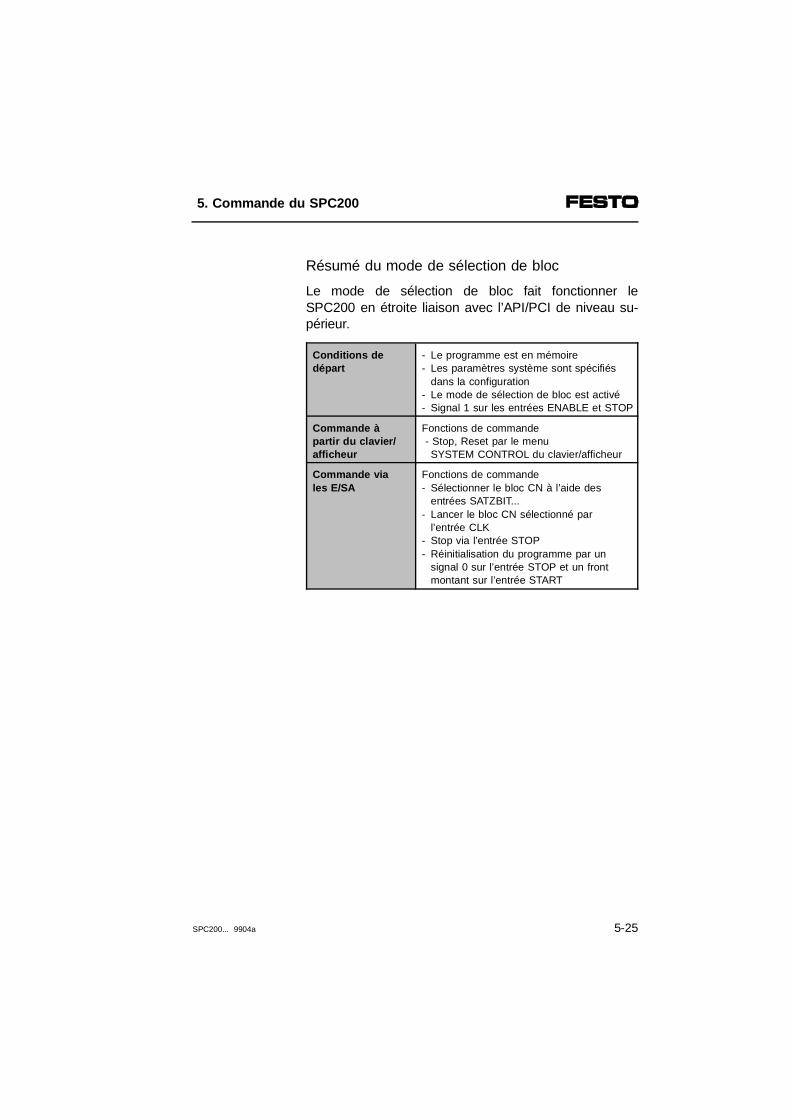
Résumé du mode de sélection de bloc
Le mode de sélection de bloc fait fonctionner leSPC200 en étroite liaison avec l’API/PCI de niveau su-périeur.
Conditions de départ
- Le programme est en mémoire- Les paramètres système sont spécifiés
dans la configuration- Le mode de sélection de bloc est activé- Signal 1 sur les entrées ENABLE et STOP
Commande à partir du clavier/afficheur
Fonctions de commande - Stop, Reset par le menu
SYSTEM CONTROL du clavier/afficheur
Commande via les E/SA
Fonctions de commande- Sélectionner le bloc CN à l’aide des
entrées SATZBIT...- Lancer le bloc CN sélectionné par
l’entrée CLK- Stop via l’entrée STOP- Réinitialisation du programme par un
signal 0 sur l’entrée STOP et un front montant sur l’entrée START
5. Commande du SPC200
SPC200... 9904a 5-25
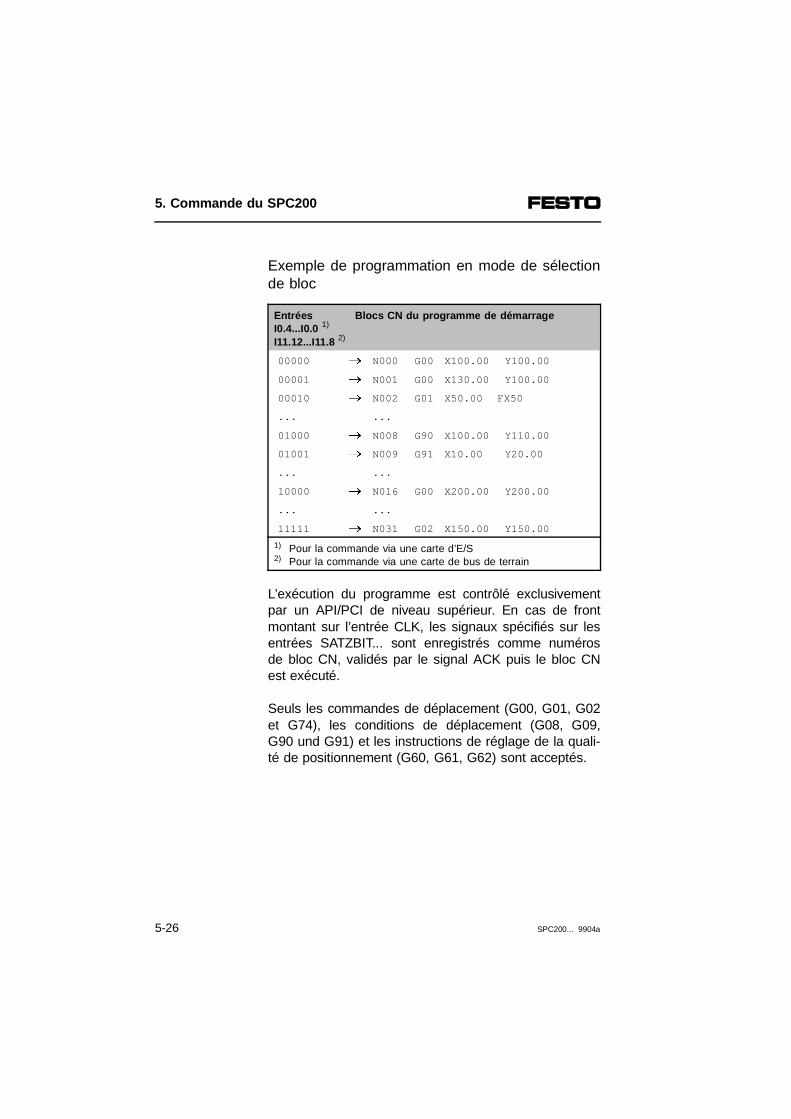
Exemple de programmation en mode de sélectionde bloc
Entrées Blocs CN du programme de démarrageI0.4...I0.0 1)
I11.12...I11.8 2)
00000 N000 G00 X100.00 Y100.00
00001 N001 G00 X130.00 Y100.00
00010 N002 G01 X50.00 FX50
... ...
01000 N008 G90 X100.00 Y110.00
01001 N009 G91 X10.00 Y20.00
... ...
10000 N016 G00 X200.00 Y200.00
... ...
11111 N031 G02 X150.00 Y150.00
1) Pour la commande via une carte d’E/S2) Pour la commande via une carte de bus de terrain
L’exécution du programme est contrôlé exclusivementpar un API/PCI de niveau supérieur. En cas de frontmontant sur l’entrée CLK, les signaux spécifiés sur lesentrées SATZBIT... sont enregistrés comme numérosde bloc CN, validés par le signal ACK puis le bloc CNest exécuté.
Seuls les commandes de déplacement (G00, G01, G02et G74), les conditions de déplacement (G08, G09,G90 und G91) et les instructions de réglage de la quali-té de positionnement (G60, G61, G62) sont acceptés.
5. Commande du SPC200
5-26 SPC200... 9904a
Chapitre 6
Commande du SPC200 par leclavier/afficheur
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-1

Sommaire
6. Commande du SPC200 par le clavier/afficheur
6.1 Structure et fonctions du clavier/afficheur . . . . . . . . . . . . . . . . . . 6-46.1.1 Présentation des menus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86.2. Définir des paramètres spécifiques au projet. . . . . . . . . . . . . . . 6-146.3 Edition de programmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-286.3.1 Création d’un nouveau programme . . . . . . . . . . . . . . . . . . . . . . 6-296.3.2 Consignes d’édition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-356.3.3 Instructions disponibles sur le clavier/afficheur . . . . . . . . . . . . . 6-376.3.4 Edition d’un programme existant . . . . . . . . . . . . . . . . . . . . . . . . 6-406.3.5 Suppression d’un programme . . . . . . . . . . . . . . . . . . . . . . . . . . 6-426.4 Traitement d’un registre de position. . . . . . . . . . . . . . . . . . . . . . 6-436.5 Commande du déroulement du programme . . . . . . . . . . . . . . . 6-476.6 Affichage des opérandes et des états du système . . . . . . . . . . 6-496.7 Réglage des coefficients de régulation . . . . . . . . . . . . . . . . . . . 6-516.8 Fonctions de test et de diagnostic du clavier/afficheur . . . . . . . 6-53
6. Commande du SPC200 par le clavier/afficheur
6-2 SPC200... 9904a
Ce chapitre décrit les menus et les fonctions de com-mande du clavier/afficheur type SPC200-MMI-... .
Contenu dece chapitre
Les divers paramètres et les fonctions de commandedes axes pneumatiques sont décrits en détail ainsi queles principales fonctions de commande système.
Les fonctions du clavier/afficheur concernant les cartesd’extension, comme les cartes d’indexation de moteurpas-à-pas ou de bus de terrain, sont simplement réper-toriées sans description spécifique.
Les fonctions du clavier/afficheur concernant les cartesd’extension, comme les cartes d’indexation de moteurpas-à-pas ou de bus de terrain sont décrites dans lesmanuels des cartes.
Autresinformations
WinPISA offre globalement les même fonctions de com-mande et paramètres que le clavier/afficheur. Pour plusd’informations, se reporter au manuel WinPISA.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-3
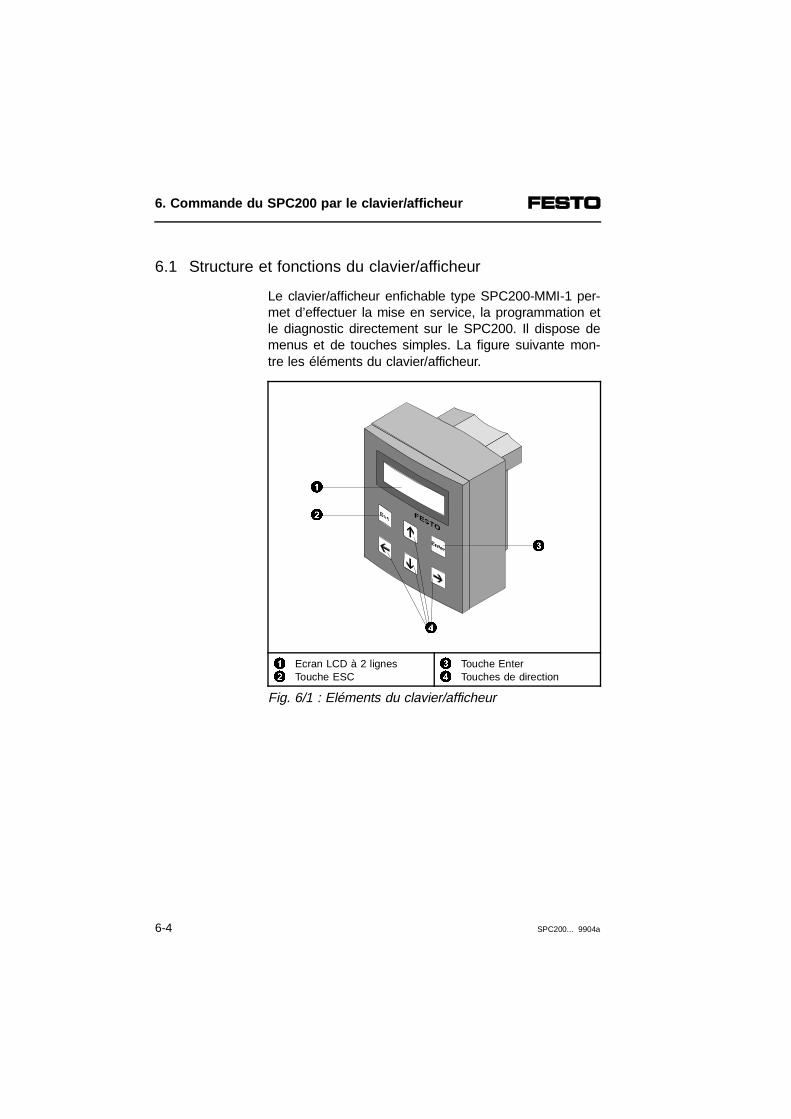
6.1 Structure et fonctions du clavier/afficheur
Le clavier/afficheur enfichable type SPC200-MMI-1 per-met d’effectuer la mise en service, la programmation etle diagnostic directement sur le SPC200. Il dispose demenus et de touches simples. La figure suivante mon-tre les éléments du clavier/afficheur.
12
Ecran LCD à 2 lignesTouche ESC
34
Touche Enter Touches de direction
Fig. 6/1 : Eléments du clavier/afficheur
1
2
4
3
6. Commande du SPC200 par le clavier/afficheur
6-4 SPC200... 9904a

L’écran LCD à deux lignes affiche les textes en anglais.Chaque ligne comporte au maximum 16 caractères. Leclavier à effleurement comporte 6 touches. Ces touchespermettent d’appeler les fonctions de commande etd’afficher les paramètres de réglage en suivant les indi-cations des menus.
Touche Description
- Revient sur le menu précédent- Annule la saisie en cours (interruption de la saisie)- Supprime le bloc CN actuel, lorsque le curseur se
trouve dans l’éditeur sur le repère de numéro de blocCN (N).
- Confirme la sélection d’un menu- Enregistre un réglage effectué
ou une fonction de commande dans le SPC200- Insère une copie du bloc CN actuel, lorsque le
curseur se trouve dans l’éditeur sur le repère de numéro de bloc CN (N).
- Sélectionne l’option de menu ou le paramètre le plusproche
- Positionne le curseur vers la droite ou la gauche
- Modifie le paramètre pour une position de curseurdonnée* Augmente ou diminue une valeur numérique* Sélectionne un axe (désignation des axes)* Sélectionne un instruction CN ou une fonction de
diagnostic
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-5

Comportement à la mise sous tension
A sa mise sous tension, le SPC200 effectue automat-iquement un test interne. Le clavier/afficheur indiquependant la courte phase de test la version de logicieldu clavier/afficheur (ici Vn.n).
MMI SPC200 Vn.nINITIAL TEST
Le SPC200 est alors prêt à traiter les saisies des opé-rateurs sur le clavier/afficheur. Si une erreur survient, leclavier/afficheur indique le numéro d’erreur actuel (voirchapitre 8.2). En l’absence d’erreur affiche le menuprincipal.
6. Commande du SPC200 par le clavier/afficheur
6-6 SPC200... 9904a
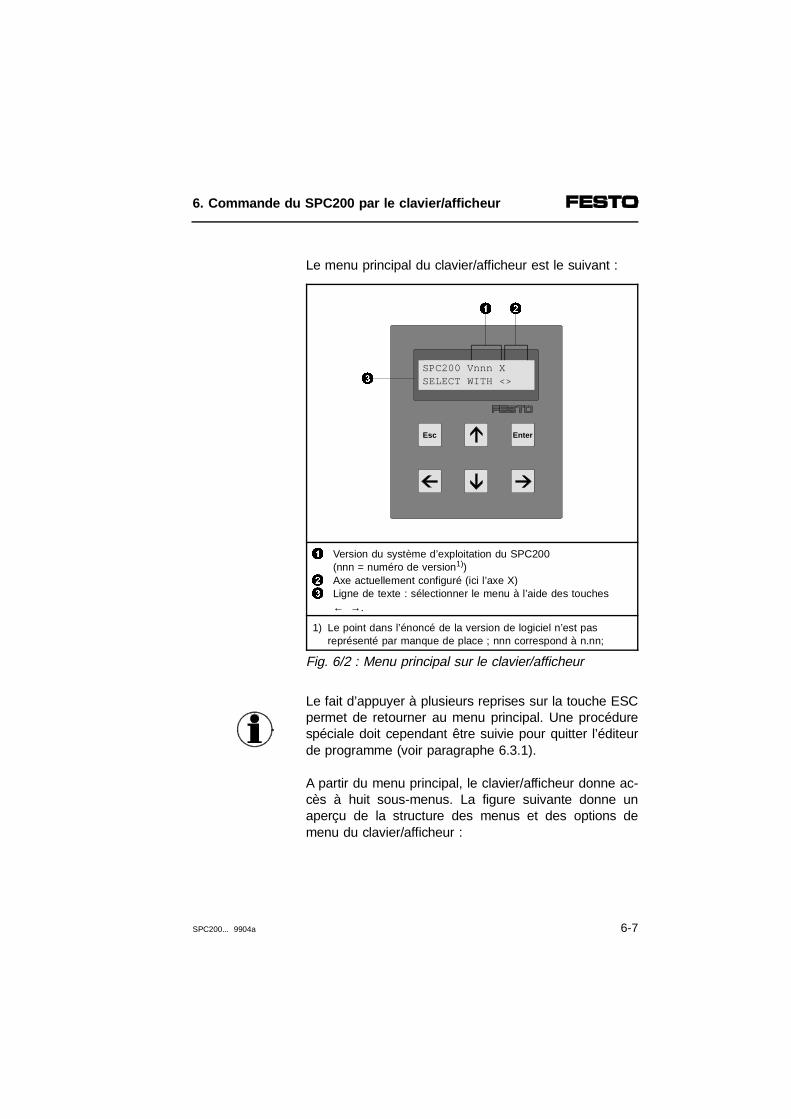
Le menu principal du clavier/afficheur est le suivant :
1
23
Version du système d’exploitation du SPC200 (nnn = numéro de version1))Axe actuellement configuré (ici l’axe X)Ligne de texte : sélectionner le menu à l’aide des touches ← →.
1) Le point dans l’énoncé de la version de logiciel n’est pas représenté par manque de place ; nnn correspond à n.nn;
Fig. 6/2 : Menu principal sur le clavier/afficheur
Le fait d’appuyer à plusieurs reprises sur la touche ESCpermet de retourner au menu principal. Une procédurespéciale doit cependant être suivie pour quitter l’éditeurde programme (voir paragraphe 6.3.1).
A partir du menu principal, le clavier/afficheur donne ac-cès à huit sous-menus. La figure suivante donne unaperçu de la structure des menus et des options demenu du clavier/afficheur :
EnterEsc
SPC200 Vnnn XSELECT WITH <>
1 2
3
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-7
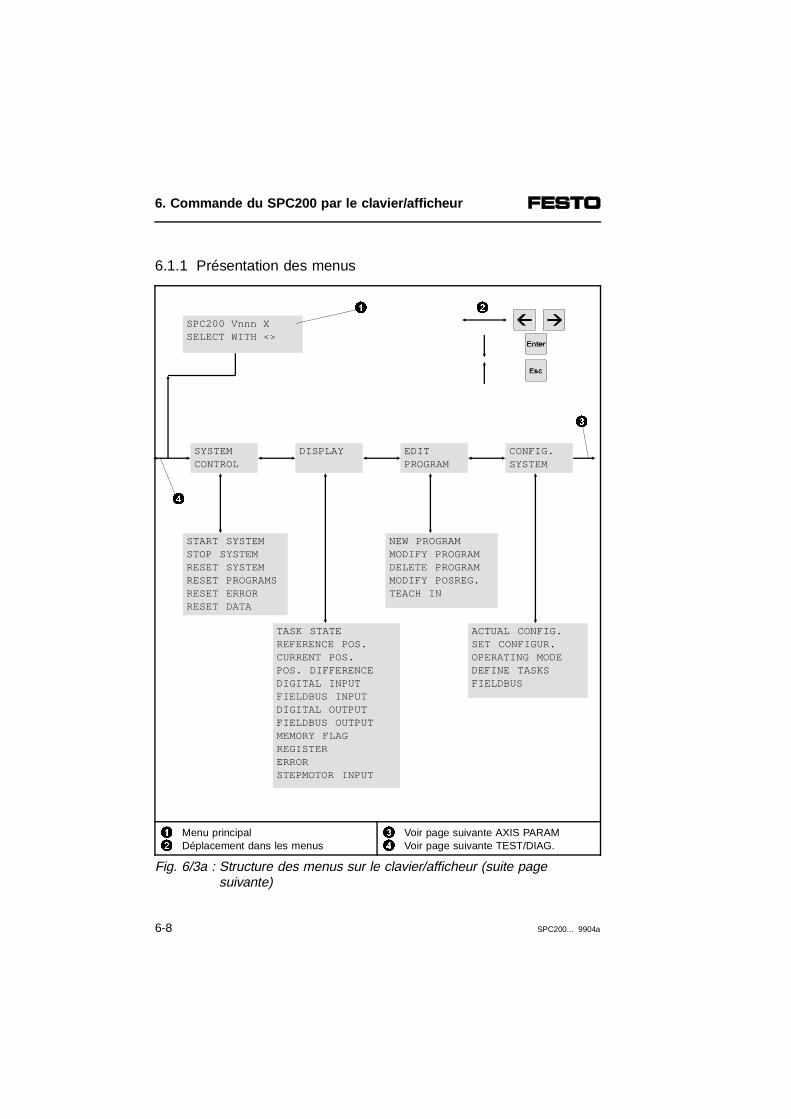
6.1.1 Présentation des menus
12
Menu principalDéplacement dans les menus
34
Voir page suivante AXIS PARAMVoir page suivante TEST/DIAG.
Fig. 6/3a : Structure des menus sur le clavier/afficheur (suite pagesuivante)
SYSTEMCONTROL
CONFIG.SYSTEM
EDITPROGRAM
START SYSTEMSTOP SYSTEMRESET SYSTEMRESET PROGRAMSRESET ERRORRESET DATA
ACTUAL CONFIG.SET CONFIGUR.OPERATING MODEDEFINE TASKSFIELDBUS
SPC200 Vnnn XSELECT WITH <>
DISPLAY
NEW PROGRAMMODIFY PROGRAMDELETE PROGRAMMODIFY POSREG.TEACH IN
TASK STATEREFERENCE POS.CURRENT POS.POS. DIFFERENCEDIGITAL INPUTFIELDBUS INPUTDIGITAL OUTPUTFIELDBUS OUTPUTMEMORY FLAGREGISTERERRORSTEPMOTOR INPUT
1 2
4
3
6. Commande du SPC200 par le clavier/afficheur
6-8 SPC200... 9904a
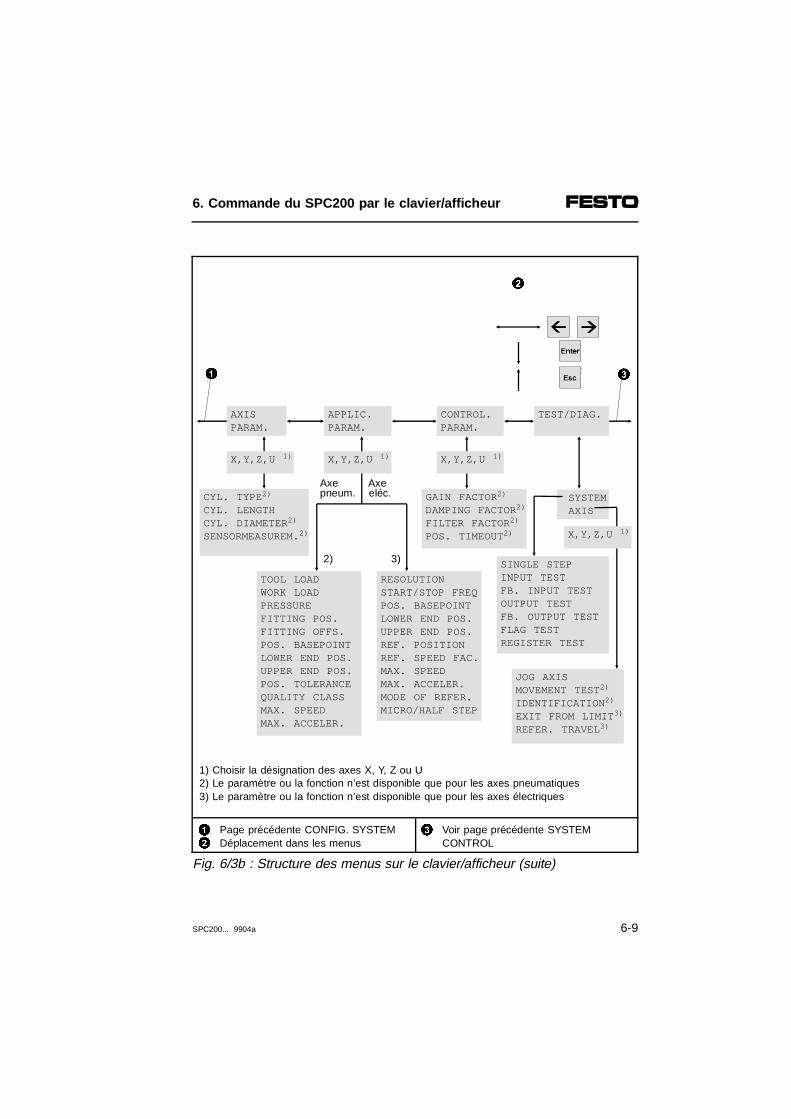
Axe Axepneum. eléc.
2) 3)
1) Choisir la désignation des axes X, Y, Z ou U2) Le paramètre ou la fonction n’est disponible que pour les axes pneumatiques3) Le paramètre ou la fonction n’est disponible que pour les axes électriques
12
Page précédente CONFIG. SYSTEMDéplacement dans les menus
3 Voir page précédente SYSTEMCONTROL
Fig. 6/3b : Structure des menus sur le clavier/afficheur (suite)
AXISPARAM.
TEST/DIAG.CONTROL.PARAM.
CYL. TYPE2)
CYL. LENGTHCYL. DIAMETER2)
SENSORMEASUREM.2)
APPLIC.PARAM.
GAIN FACTOR2) DAMPING FACTOR2)
FILTER FACTOR2)
POS. TIMEOUT2)
1
2
3
SINGLE STEPINPUT TESTFB. INPUT TEST OUTPUT TESTFB. OUTPUT TESTFLAG TESTREGISTER TEST
JOG AXISMOVEMENT TEST2)
IDENTIFICATION2)
EXIT FROM LIMIT3)
REFER. TRAVEL3)
RESOLUTIONSTART/STOP FREQPOS. BASEPOINTLOWER END POS.UPPER END POS.REF. POSITIONREF. SPEED FAC.MAX. SPEEDMAX. ACCELER.MODE OF REFER.MICRO/HALF STEP
TOOL LOADWORK LOADPRESSUREFITTING POS.FITTING OFFS.POS. BASEPOINTLOWER END POS.UPPER END POS.POS. TOLERANCEQUALITY CLASSMAX. SPEEDMAX. ACCELER.
SYSTEM AXIS
X,Y,Z,U 1)
X,Y,Z,U 1) X,Y,Z,U 1)X,Y,Z,U 1)
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-9
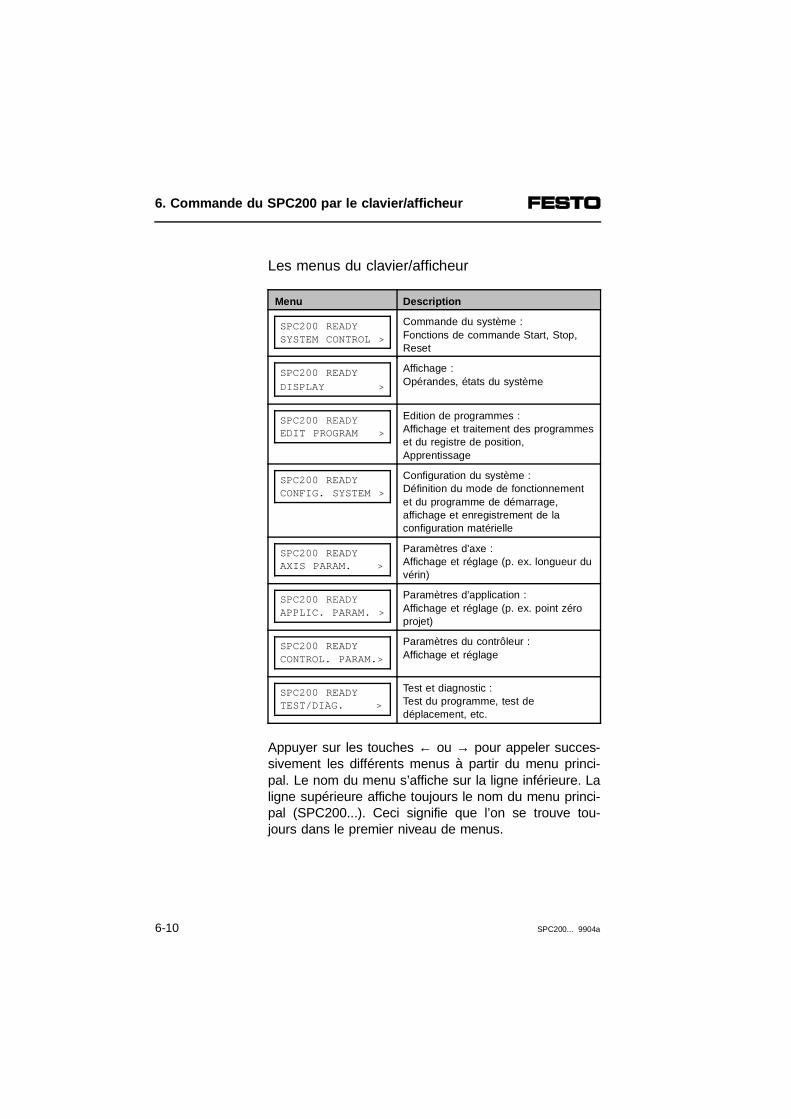
Les menus du clavier/afficheur
Menu Description
SPC200 READY SYSTEM CONTROL >
Commande du système :Fonctions de commande Start, Stop,Reset
SPC200 READY
DISPLAY >
Affichage :Opérandes, états du système
SPC200 READYEDIT PROGRAM >
Edition de programmes :Affichage et traitement des programmeset du registre de position,Apprentissage
SPC200 READYCONFIG. SYSTEM >
Configuration du système :Définition du mode de fonctionnementet du programme de démarrage,affichage et enregistrement de laconfiguration matérielle
SPC200 READYAXIS PARAM. >
Paramètres d’axe :Affichage et réglage (p. ex. longueur duvérin)
SPC200 READYAPPLIC. PARAM. >
Paramètres d’application :Affichage et réglage (p. ex. point zéroprojet)
SPC200 READYCONTROL. PARAM.>
Paramètres du contrôleur :Affichage et réglage
SPC200 READYTEST/DIAG. >
Test et diagnostic :Test du programme, test dedéplacement, etc.
Appuyer sur les touches ← ou → pour appeler succes-sivement les différents menus à partir du menu princi-pal. Le nom du menu s’affiche sur la ligne inférieure. Laligne supérieure affiche toujours le nom du menu princi-pal (SPC200...). Ceci signifie que l’on se trouve tou-jours dans le premier niveau de menus.
6. Commande du SPC200 par le clavier/afficheur
6-10 SPC200... 9904a
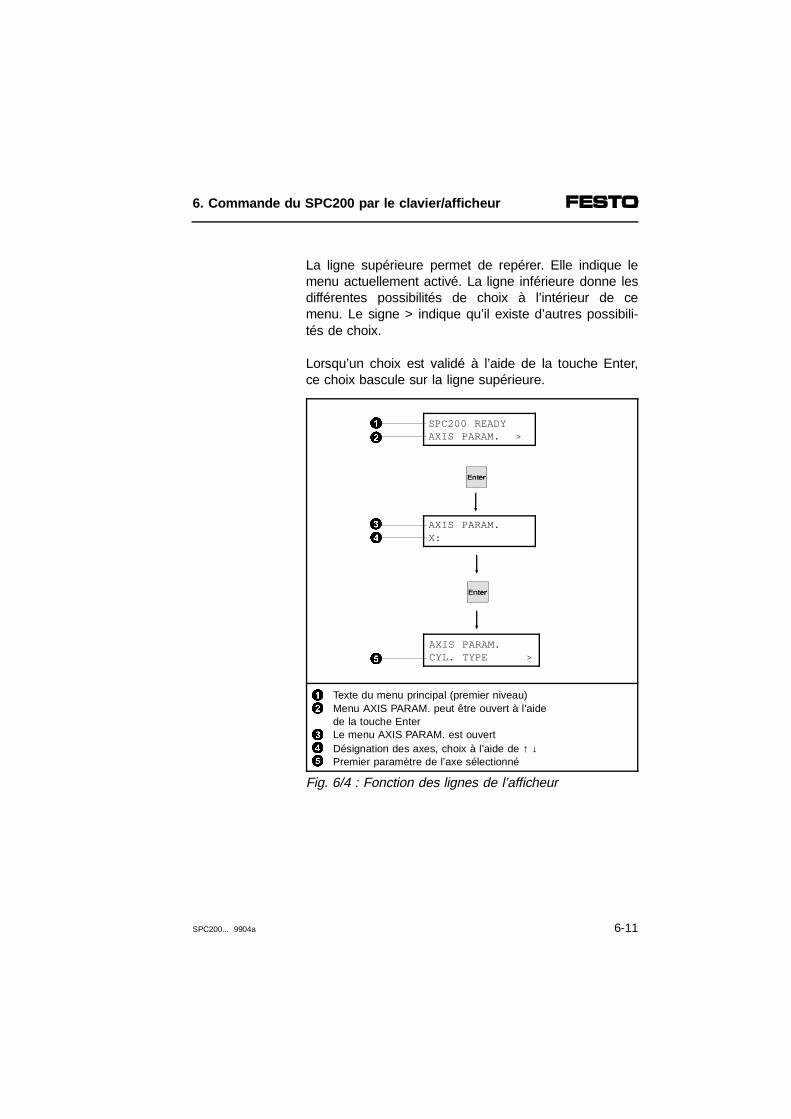
La ligne supérieure permet de repérer. Elle indique lemenu actuellement activé. La ligne inférieure donne lesdifférentes possibilités de choix à l’intérieur de cemenu. Le signe > indique qu’il existe d’autres possibili-tés de choix.
Lorsqu’un choix est validé à l’aide de la touche Enter,ce choix bascule sur la ligne supérieure.
12
345
Texte du menu principal (premier niveau)Menu AXIS PARAM. peut être ouvert à l’aide de la touche EnterLe menu AXIS PARAM. est ouvertDésignation des axes, choix à l’aide de ↑ ↓ Premier paramètre de l’axe sélectionné
Fig. 6/4 : Fonction des lignes de l’afficheur
SPC200 READYAXIS PARAM. >
12
AXIS PARAM. X:
34
AXIS PARAM. CYL. TYPE >5
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-11
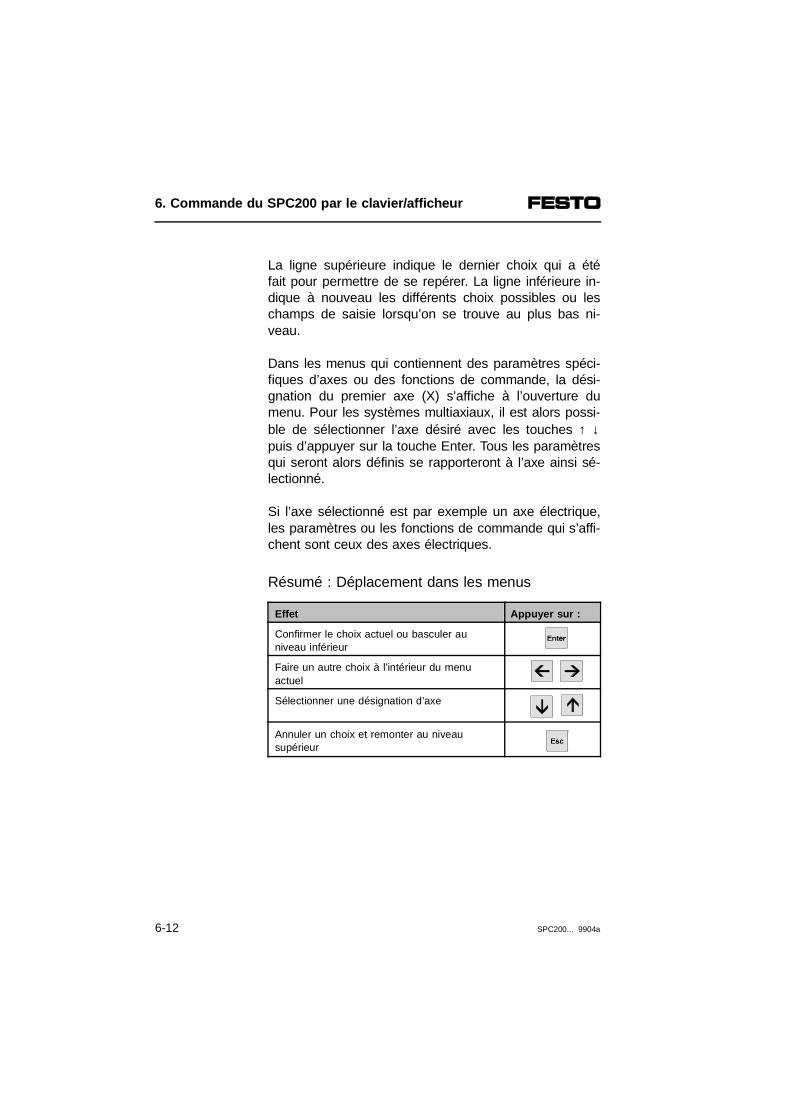
La ligne supérieure indique le dernier choix qui a étéfait pour permettre de se repérer. La ligne inférieure in-dique à nouveau les différents choix possibles ou leschamps de saisie lorsqu’on se trouve au plus bas ni-veau.
Dans les menus qui contiennent des paramètres spéci-fiques d’axes ou des fonctions de commande, la dési-gnation du premier axe (X) s’affiche à l’ouverture dumenu. Pour les systèmes multiaxiaux, il est alors possi-ble de sélectionner l’axe désiré avec les touches ↑ ↓puis d’appuyer sur la touche Enter. Tous les paramètresqui seront alors définis se rapporteront à l’axe ainsi sé-lectionné.
Si l’axe sélectionné est par exemple un axe électrique,les paramètres ou les fonctions de commande qui s’affi-chent sont ceux des axes électriques.
Résumé : Déplacement dans les menus
Effet Appuyer sur :
Confirmer le choix actuel ou basculer au niveau inférieur
Faire un autre choix à l’intérieur du menu actuel
Sélectionner une désignation d’axe
Annuler un choix et remonter au niveau supérieur
6. Commande du SPC200 par le clavier/afficheur
6-12 SPC200... 9904a
Procéder de la manière suivante pour sélectionner uneoption de menu ou un paramètre :
1. Appuyer sur la touche ESC jusqu’à ce que le menuprincipal s’affiche. La première ligne de l’afficheur in-dique alors SPC200 suivi du numéro de version dusystème d’exploitation.
2. Appuyer sur la touche ← ou →, jusqu’à ce que lemenu désiré s’affiche sur la ligne inférieure.
3. Appuyer sur la touche Enter. Le menu s’ouvre et lepremier paramètre ou la première fonction de com-mande du menu s’affiche.
4. Lorsqu’une désignation d’axe est demandée, sélec-tionner l’axe désiré avec les touches ↑ ↓ et appuyerensuite sur la touche Enter.
5. Lorsqu’un paramètre ou une fonction de commandes’affiche, les touches ← ou → permettent de fairedéfiler les menus, jusqu’à ce que le paramètre dési-ré ou la fonction désirée s’affiche sur la ligne infé-rieure.
6. Appuyer sur la touche Enter, pour sélectionner unecommande ou un paramètre.
Les paragraphes suivants indiquent comment effectuerles réglages, la programmation et déclencher les fonc-tions de commande.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-13
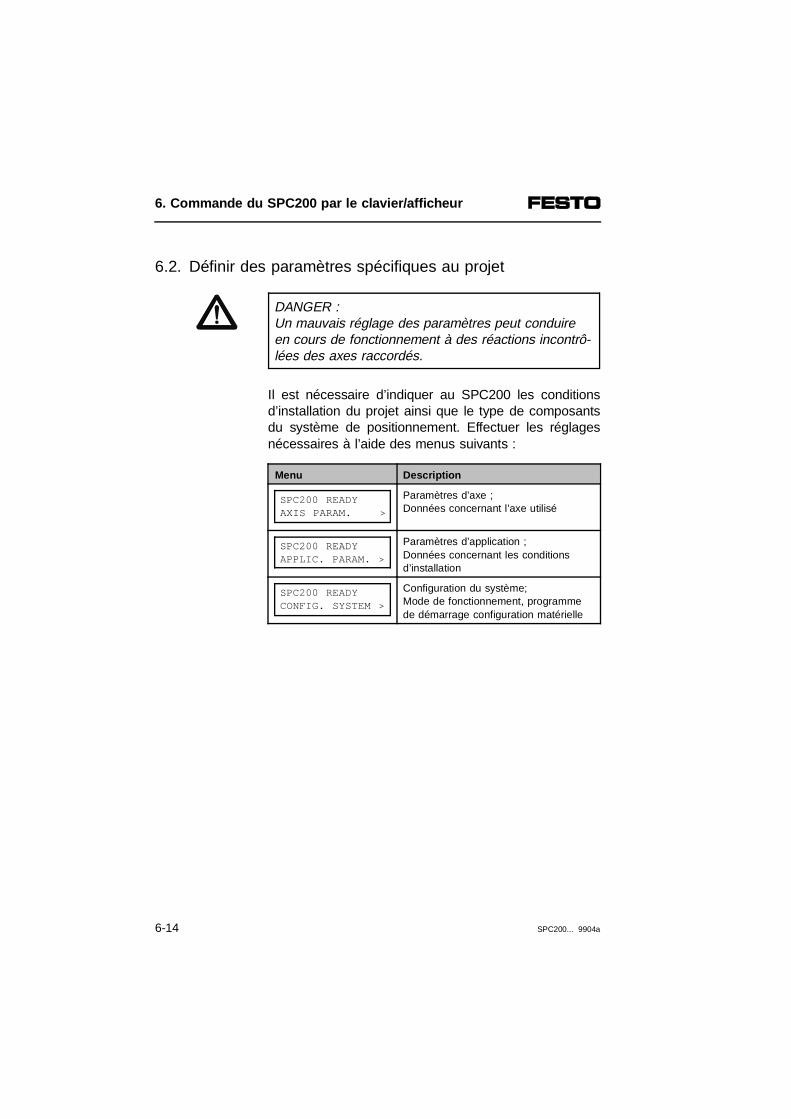
6.2. Définir des paramètres spécifiques au projet
DANGER :Un mauvais réglage des paramètres peut conduireen cours de fonctionnement à des réactions incontrô-lées des axes raccordés.
Il est nécessaire d’indiquer au SPC200 les conditionsd’installation du projet ainsi que le type de composantsdu système de positionnement. Effectuer les réglagesnécessaires à l’aide des menus suivants :
Menu Description
SPC200 READYAXIS PARAM. >
Paramètres d’axe ;Données concernant l’axe utilisé
SPC200 READYAPPLIC. PARAM. >
Paramètres d’application ;Données concernant les conditionsd’installation
SPC200 READYCONFIG. SYSTEM >
Configuration du système;Mode de fonctionnement, programmede démarrage configuration matérielle
6. Commande du SPC200 par le clavier/afficheur
6-14 SPC200... 9904a
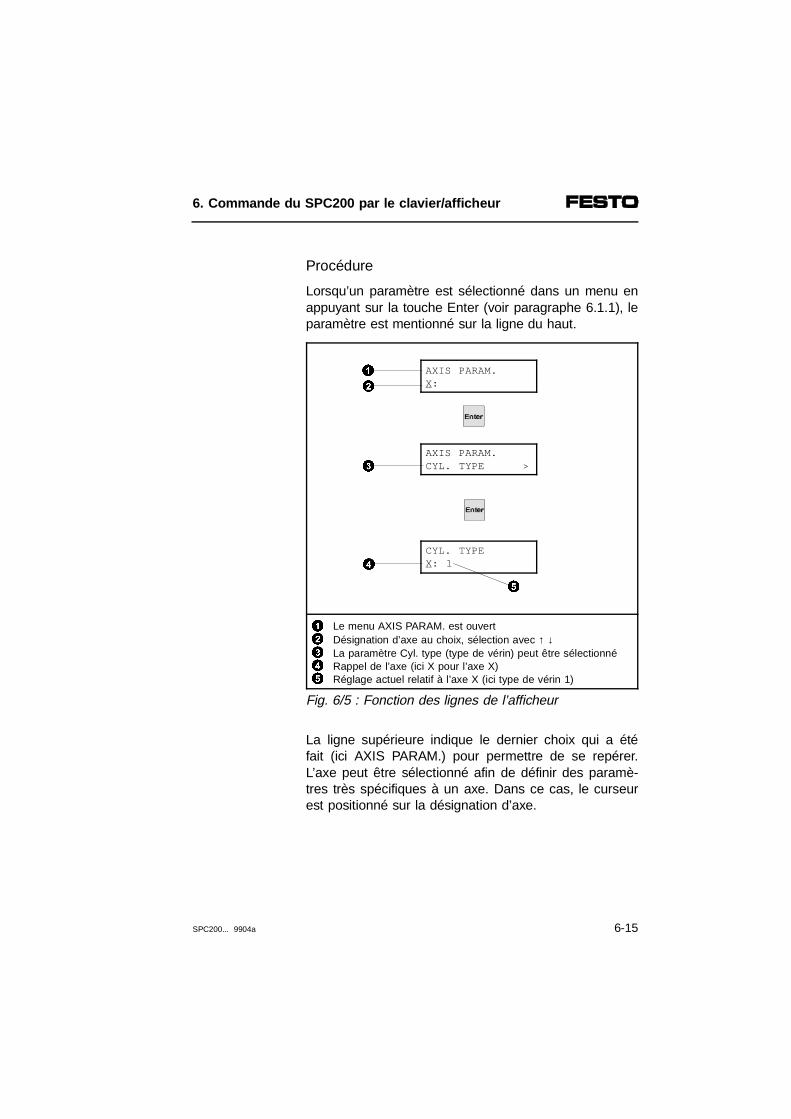
Procédure
Lorsqu’un paramètre est sélectionné dans un menu enappuyant sur la touche Enter (voir paragraphe 6.1.1), leparamètre est mentionné sur la ligne du haut.
12345
Le menu AXIS PARAM. est ouvertDésignation d’axe au choix, sélection avec ↑ ↓ La paramètre Cyl. type (type de vérin) peut être sélectionnéRappel de l’axe (ici X pour l’axe X)Réglage actuel relatif à l’axe X (ici type de vérin 1)
Fig. 6/5 : Fonction des lignes de l’afficheur
La ligne supérieure indique le dernier choix qui a étéfait (ici AXIS PARAM.) pour permettre de se repérer.L’axe peut être sélectionné afin de définir des paramè-tres très spécifiques à un axe. Dans ce cas, le curseurest positionné sur la désignation d’axe.
CYL. TYPEX: 1
5
12
AXIS PARAM. X:
AXIS PARAM. CYL. TYPE >3
4
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-15
Pour que l’axe apparaisse, il doit être relié au SPC200et être enregistré dans la configuration matérielle.
Les touches ↑ ↓ permettent de sélectionner l’axe dontles paramètres vont être modifiés. Lorsque l’axe est sé-lectionné, la ligne inférieure affiche la valeur actuelle duparamètre.
Pour modifier un paramètre, positionner le curseur àl’aide des touches ← → sur le chiffre à modifier sur leparamètre affiché. Modifier alors le chiffre à l’aide destouches ↑ ↓. Pendant la modification de la valeur d’unparamètre, le signe ? s’affiche sur la ligne inférieure.
6. Commande du SPC200 par le clavier/afficheur
6-16 SPC200... 9904a

1
23
Le cararctère clignote (ici souligné) = position actuelle ducurseurIndique que la valeur est en cours de modificationLa nouvelle valeur est enregistrée (le ? disparaît)
Fig. 6/6 : Réglage de la valeur des paramètres
Le signe ? rappelle que la valeur de paramètre ne seraprise en compte par le SPC200 qu’après avoir appuyésur la touche Enter. Le signe ? disparaît lorsqu’on ap-puie sur Enter. Ceci signifie que la nouvelle valeur duparamètre est enregistrée.
Les prochains chapitres fournissent une description dé-taillée des paramètres qui doivent être adaptés à cha-que cas d’installation.
CYL. TYPEX: 1
CYL. TYPEX: 2 ?
1
CYL. TYPEX: 2 3
2
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-17
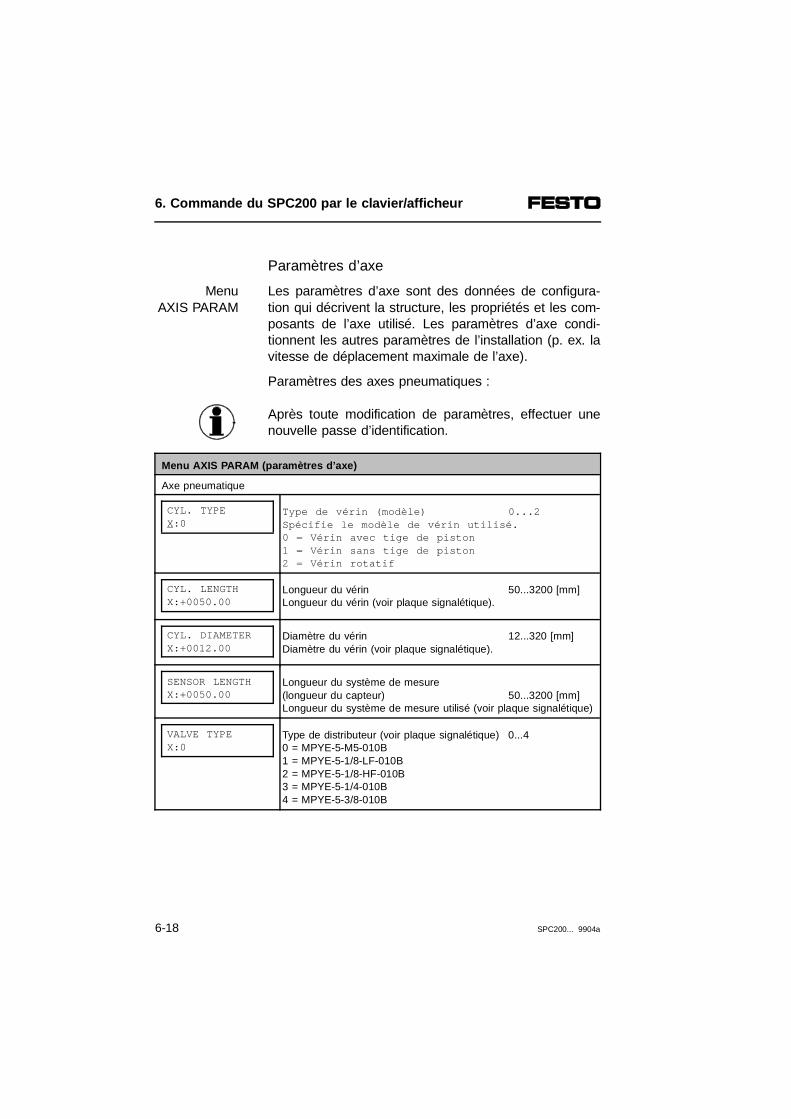
Paramètres d’axe
Les paramètres d’axe sont des données de configura-tion qui décrivent la structure, les propriétés et les com-posants de l’axe utilisé. Les paramètres d’axe condi-tionnent les autres paramètres de l’installation (p. ex. lavitesse de déplacement maximale de l’axe).
MenuAXIS PARAM
Paramètres des axes pneumatiques :
Après toute modification de paramètres, effectuer unenouvelle passe d’identification.
Menu AXIS PARAM (paramètres d’axe)
Axe pneumatique
CYL. TYPEX:0
Type de vérin (modèle) 0...2Spécifie le modèle de vérin utilisé.0 = Vérin avec tige de piston1 = Vérin sans tige de piston2 = Vérin rotatif
CYL. LENGTHX:+0050.00
Longueur du vérin 50...3200 [mm]Longueur du vérin (voir plaque signalétique).
CYL. DIAMETERX:+0012.00
Diamètre du vérin 12...320 [mm]Diamètre du vérin (voir plaque signalétique).
SENSOR LENGTHX:+0050.00
Longueur du système de mesure (longueur du capteur) 50...3200 [mm]Longueur du système de mesure utilisé (voir plaque signalétique)
VALVE TYPEX:0
Type de distributeur (voir plaque signalétique) 0...40 = MPYE-5-M5-010B1 = MPYE-5-1/8-LF-010B2 = MPYE-5-1/8-HF-010B3 = MPYE-5-1/4-010B4 = MPYE-5-3/8-010B
6. Commande du SPC200 par le clavier/afficheur
6-18 SPC200... 9904a
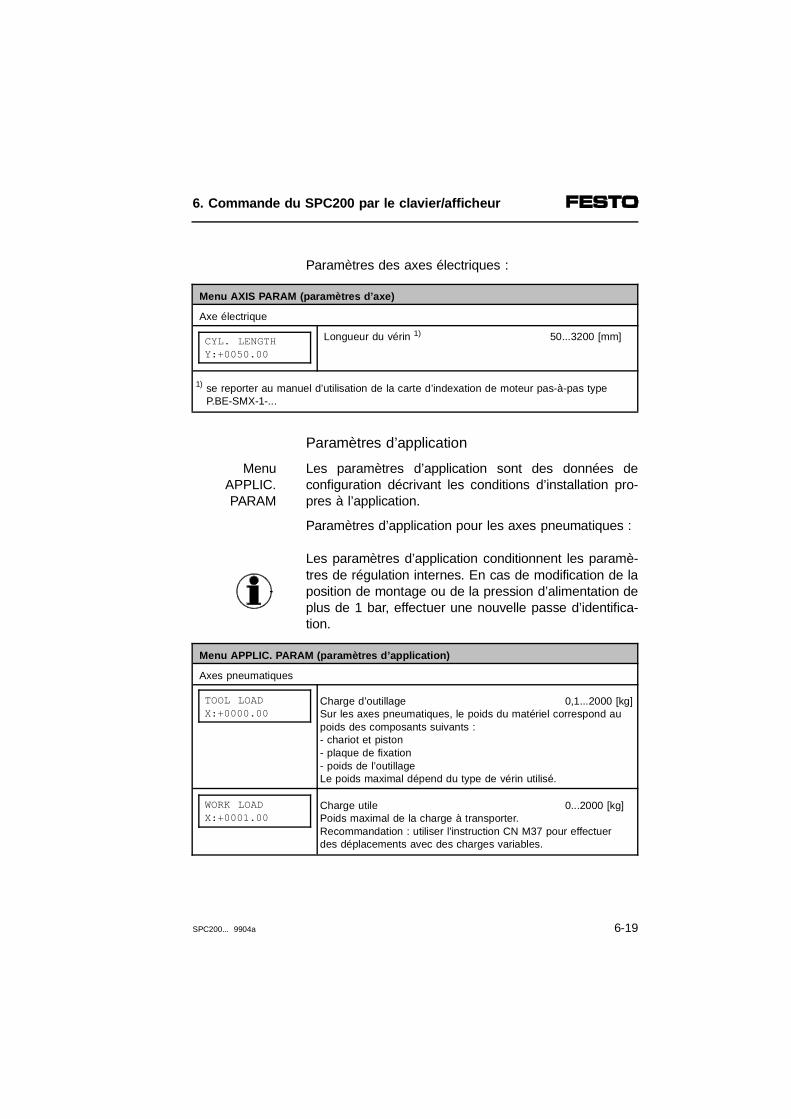
Paramètres des axes électriques :
Menu AXIS PARAM (paramètres d’axe)
Axe électrique
CYL. LENGTHY:+0050.00
Longueur du vérin 1) 50...3200 [mm]
1) se reporter au manuel d’utilisation de la carte d’indexation de moteur pas-à-pas type P.BE-SMX-1-...
Paramètres d’application
Les paramètres d’application sont des données deconfiguration décrivant les conditions d’installation pro-pres à l’application.
MenuAPPLIC.PARAM
Paramètres d’application pour les axes pneumatiques :
Les paramètres d’application conditionnent les paramè-tres de régulation internes. En cas de modification de laposition de montage ou de la pression d’alimentation deplus de 1 bar, effectuer une nouvelle passe d’identifica-tion.
Menu APPLIC. PARAM (paramètres d’application)
Axes pneumatiques
TOOL LOADX:+0000.00
Charge d’outillage 0,1...2000 [kg]Sur les axes pneumatiques, le poids du matériel correspond aupoids des composants suivants :- chariot et piston- plaque de fixation- poids de l’outillageLe poids maximal dépend du type de vérin utilisé.
WORK LOADX:+0001.00
Charge utile 0...2000 [kg]Poids maximal de la charge à transporter. Recommandation : utiliser l’instruction CN M37 pour effectuerdes déplacements avec des charges variables.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-19
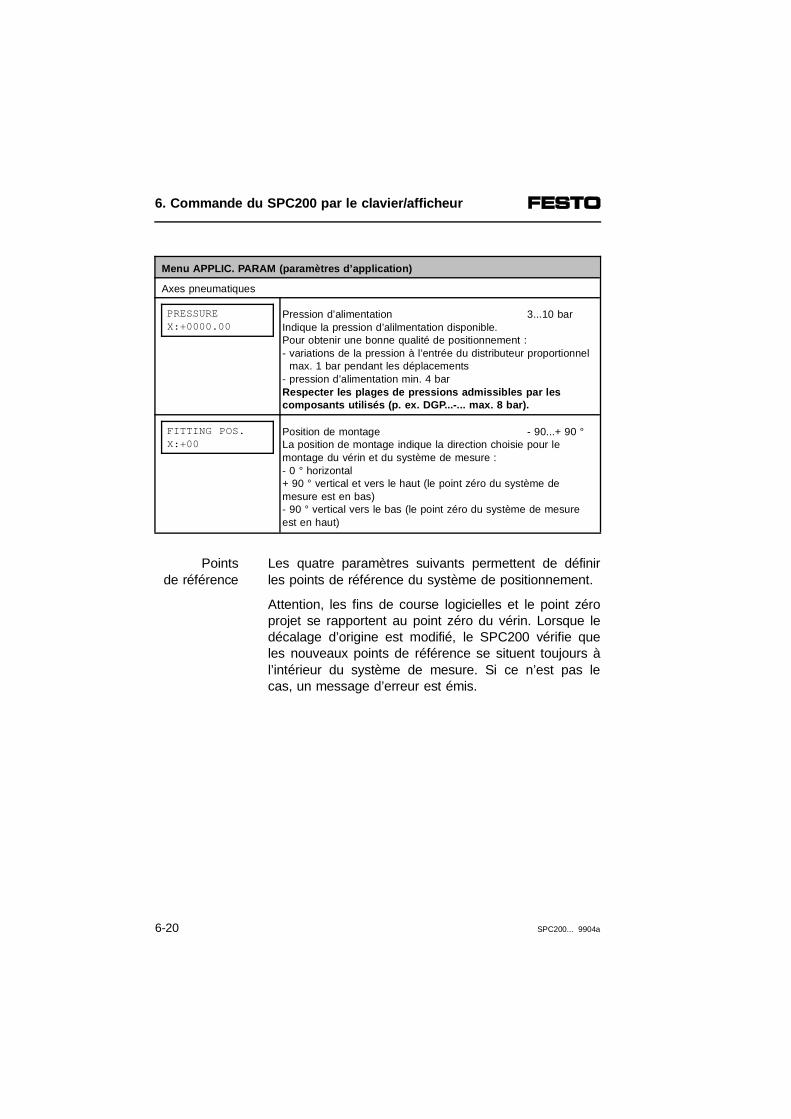
Menu APPLIC. PARAM (paramètres d’application)
Axes pneumatiques
PRESSUREX:+0000.00
Pression d’alimentation 3...10 barIndique la pression d’alilmentation disponible. Pour obtenir une bonne qualité de positionnement :- variations de la pression à l’entrée du distributeur proportionnel max. 1 bar pendant les déplacements- pression d’alimentation min. 4 barRespecter les plages de pressions admissibles par lescomposants utilisés (p. ex. DGP...-... max. 8 bar).
FITTING POS.X:+00
Position de montage - 90...+ 90 °La position de montage indique la direction choisie pour lemontage du vérin et du système de mesure :- 0 ° horizontal+ 90 ° vertical et vers le haut (le point zéro du système demesure est en bas)- 90 ° vertical vers le bas (le point zéro du système de mesureest en haut)
Les quatre paramètres suivants permettent de définirles points de référence du système de positionnement.
Pointsde référence
Attention, les fins de course logicielles et le point zéroprojet se rapportent au point zéro du vérin. Lorsque ledécalage d’origine est modifié, le SPC200 vérifie queles nouveaux points de référence se situent toujours àl’intérieur du système de mesure. Si ce n’est pas lecas, un message d’erreur est émis.
6. Commande du SPC200 par le clavier/afficheur
6-20 SPC200... 9904a
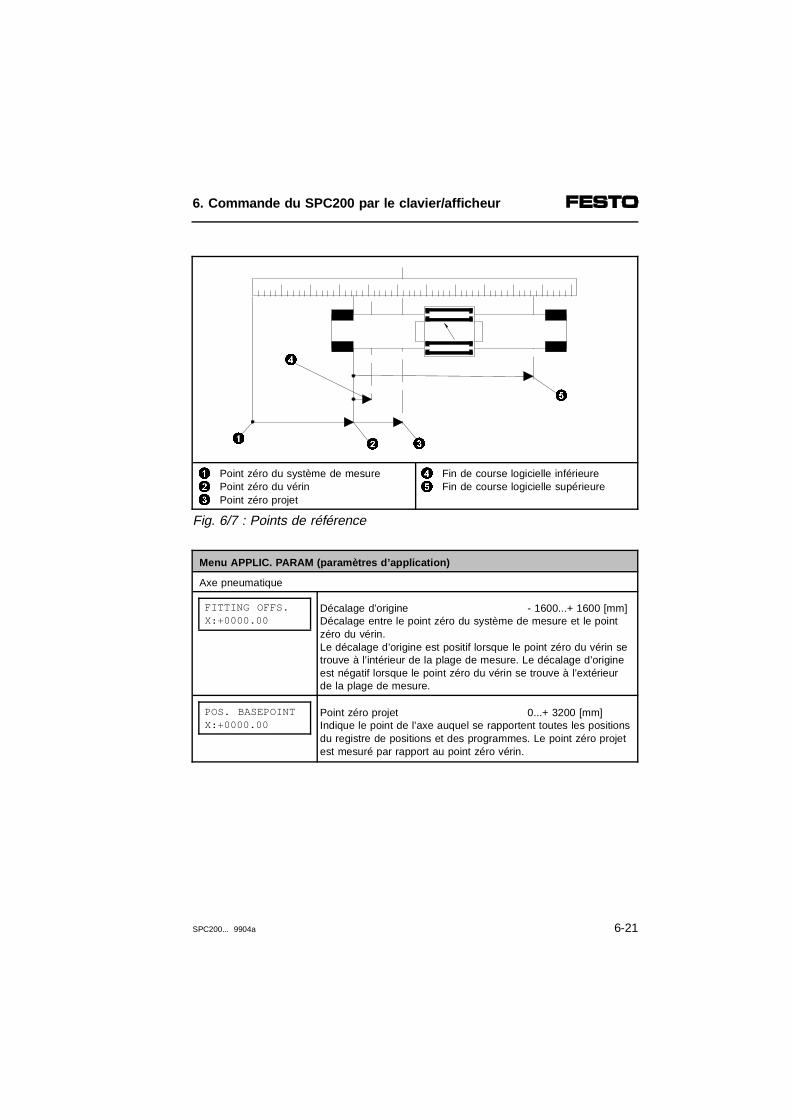
123
Point zéro du système de mesurePoint zéro du vérinPoint zéro projet
45
Fin de course logicielle inférieure Fin de course logicielle supérieure
Fig. 6/7 : Points de référence
Menu APPLIC. PARAM (paramètres d’application)
Axe pneumatique
FITTING OFFS.X:+0000.00
Décalage d’origine - 1600...+ 1600 [mm]Décalage entre le point zéro du système de mesure et le pointzéro du vérin.Le décalage d’origine est positif lorsque le point zéro du vérin setrouve à l’intérieur de la plage de mesure. Le décalage d’origineest négatif lorsque le point zéro du vérin se trouve à l’extérieurde la plage de mesure.
POS. BASEPOINTX:+0000.00
Point zéro projet 0...+ 3200 [mm]Indique le point de l’axe auquel se rapportent toutes les positionsdu registre de positions et des programmes. Le point zéro projetest mesuré par rapport au point zéro vérin.
4
2 3
5
1
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-21
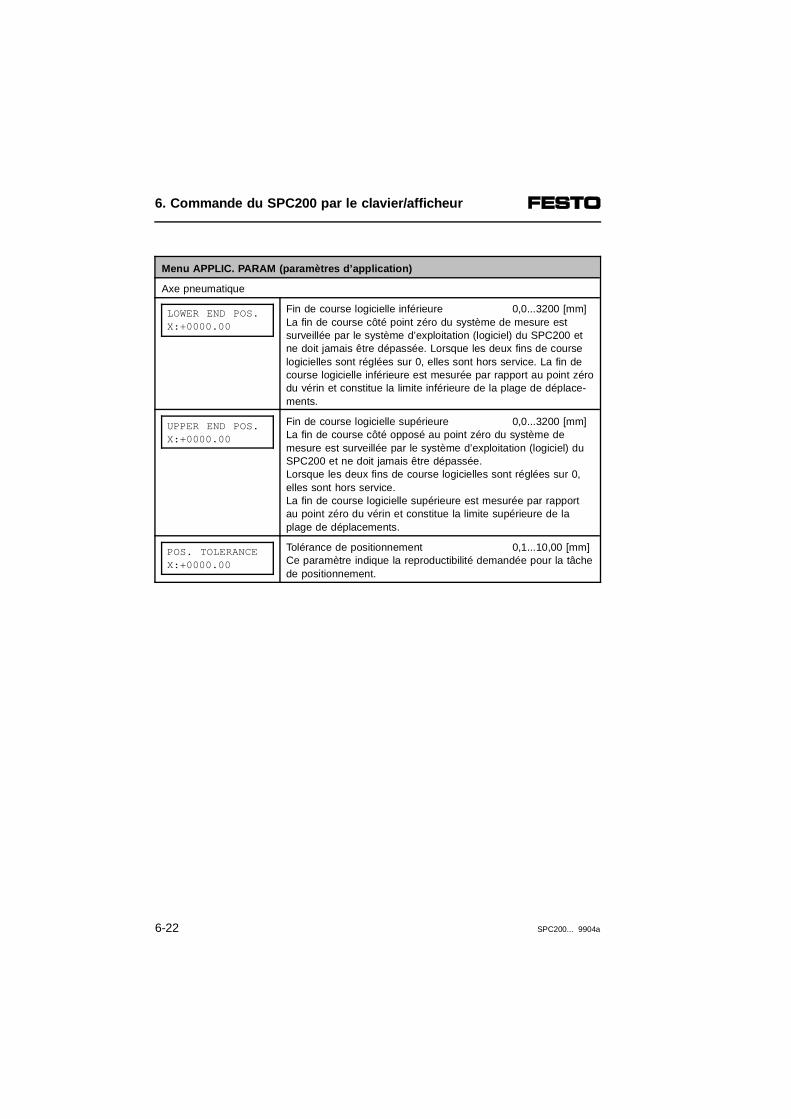
Menu APPLIC. PARAM (paramètres d’application)
Axe pneumatique
LOWER END POS.X:+0000.00
Fin de course logicielle inférieure 0,0...3200 [mm]La fin de course côté point zéro du système de mesure estsurveillée par le système d’exploitation (logiciel) du SPC200 etne doit jamais être dépassée. Lorsque les deux fins de courselogicielles sont réglées sur 0, elles sont hors service. La fin decourse logicielle inférieure est mesurée par rapport au point zérodu vérin et constitue la limite inférieure de la plage de déplace-ments.
UPPER END POS.X:+0000.00
Fin de course logicielle supérieure 0,0...3200 [mm]La fin de course côté opposé au point zéro du système demesure est surveillée par le système d’exploitation (logiciel) duSPC200 et ne doit jamais être dépassée.Lorsque les deux fins de course logicielles sont réglées sur 0,elles sont hors service. La fin de course logicielle supérieure est mesurée par rapportau point zéro du vérin et constitue la limite supérieure de laplage de déplacements.
POS. TOLERANCEX:+0000.00
Tolérance de positionnement 0,1...10,00 [mm]Ce paramètre indique la reproductibilité demandée pour la tâchede positionnement.
6. Commande du SPC200 par le clavier/afficheur
6-22 SPC200... 9904a
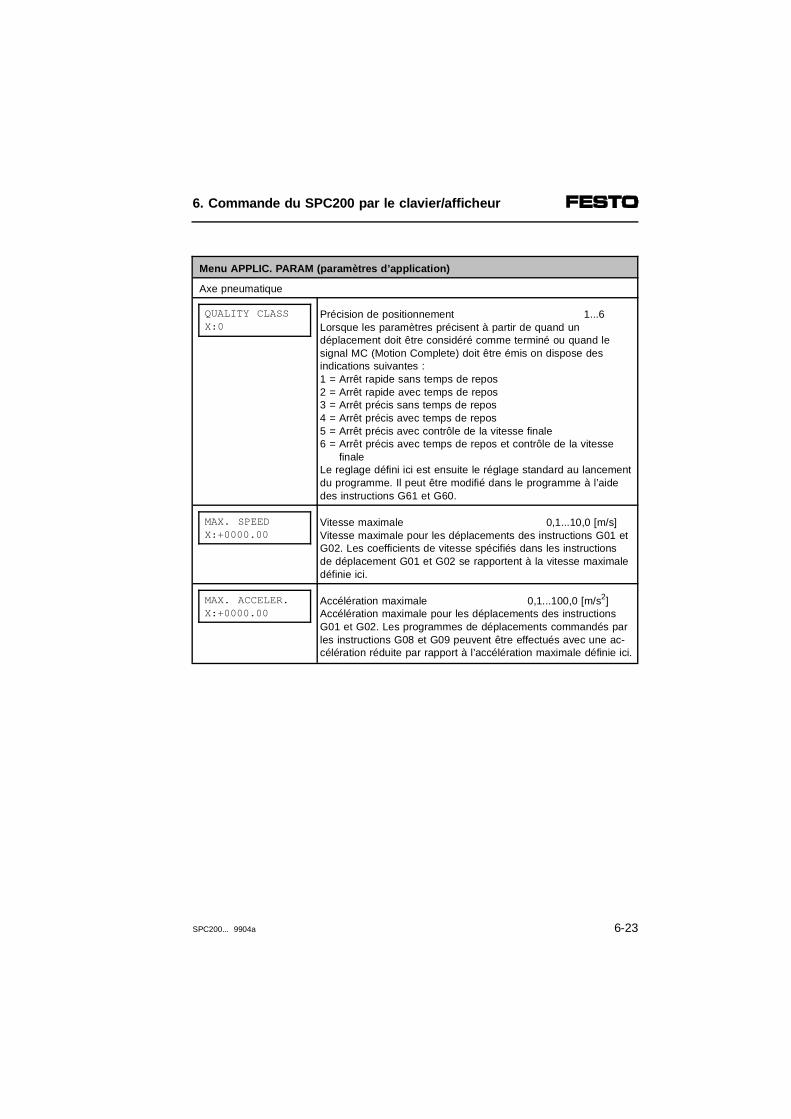
Menu APPLIC. PARAM (paramètres d’application)
Axe pneumatique
QUALITY CLASSX:0
Précision de positionnement 1...6Lorsque les paramètres précisent à partir de quand undéplacement doit être considéré comme terminé ou quand lesignal MC (Motion Complete) doit être émis on dispose desindications suivantes :1 = Arrêt rapide sans temps de repos2 = Arrêt rapide avec temps de repos3 = Arrêt précis sans temps de repos4 = Arrêt précis avec temps de repos5 = Arrêt précis avec contrôle de la vitesse finale6 = Arrêt précis avec temps de repos et contrôle de la vitesse finaleLe reglage défini ici est ensuite le réglage standard au lancementdu programme. Il peut être modifié dans le programme à l’aidedes instructions G61 et G60.
MAX. SPEEDX:+0000.00
Vitesse maximale 0,1...10,0 [m/s]Vitesse maximale pour les déplacements des instructions G01 etG02. Les coefficients de vitesse spécifiés dans les instructionsde déplacement G01 et G02 se rapportent à la vitesse maximaledéfinie ici.
MAX. ACCELER.X:+0000.00
Accélération maximale 0,1...100,0 [m/s2]Accélération maximale pour les déplacements des instructionsG01 et G02. Les programmes de déplacements commandés parles instructions G08 et G09 peuvent être effectués avec une ac-célération réduite par rapport à l’accélération maximale définie ici.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-23
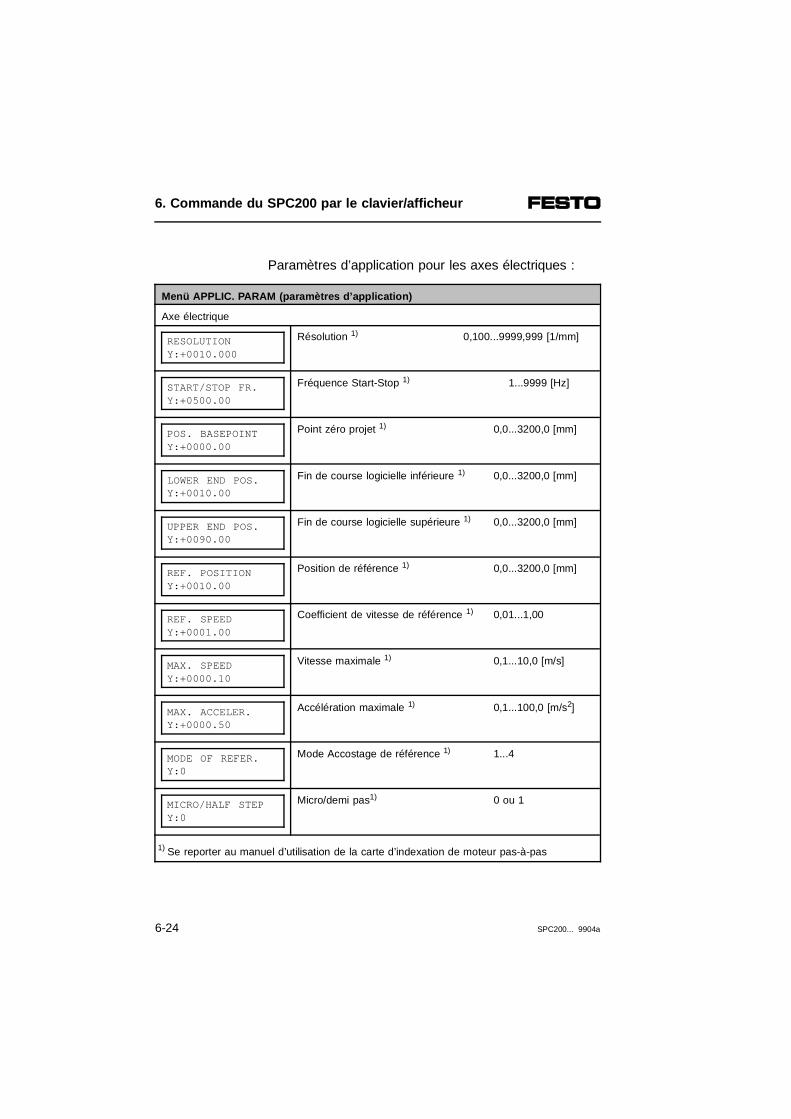
Paramètres d’application pour les axes électriques :
Menü APPLIC. PARAM (paramètres d’application)
Axe électrique
RESOLUTIONY:+0010.000
Résolution 1) 0,100...9999,999 [1/mm]
START/STOP FR.Y:+0500.00
Fréquence Start-Stop 1) 1...9999 [Hz]
POS. BASEPOINTY:+0000.00
Point zéro projet 1) 0,0...3200,0 [mm]
LOWER END POS.Y:+0010.00
Fin de course logicielle inférieure 1) 0,0...3200,0 [mm]
UPPER END POS.Y:+0090.00
Fin de course logicielle supérieure 1) 0,0...3200,0 [mm]
REF. POSITIONY:+0010.00
Position de référence 1) 0,0...3200,0 [mm]
REF. SPEED Y:+0001.00
Coefficient de vitesse de référence 1) 0,01...1,00
MAX. SPEEDY:+0000.10
Vitesse maximale 1) 0,1...10,0 [m/s]
MAX. ACCELER.Y:+0000.50
Accélération maximale 1) 0,1...100,0 [m/s2]
MODE OF REFER.Y:0
Mode Accostage de référence 1) 1...4
MICRO/HALF STEPY:0
Micro/demi pas1) 0 ou 1
1) Se reporter au manuel d’utilisation de la carte d’indexation de moteur pas-à-pas
6. Commande du SPC200 par le clavier/afficheur
6-24 SPC200... 9904a
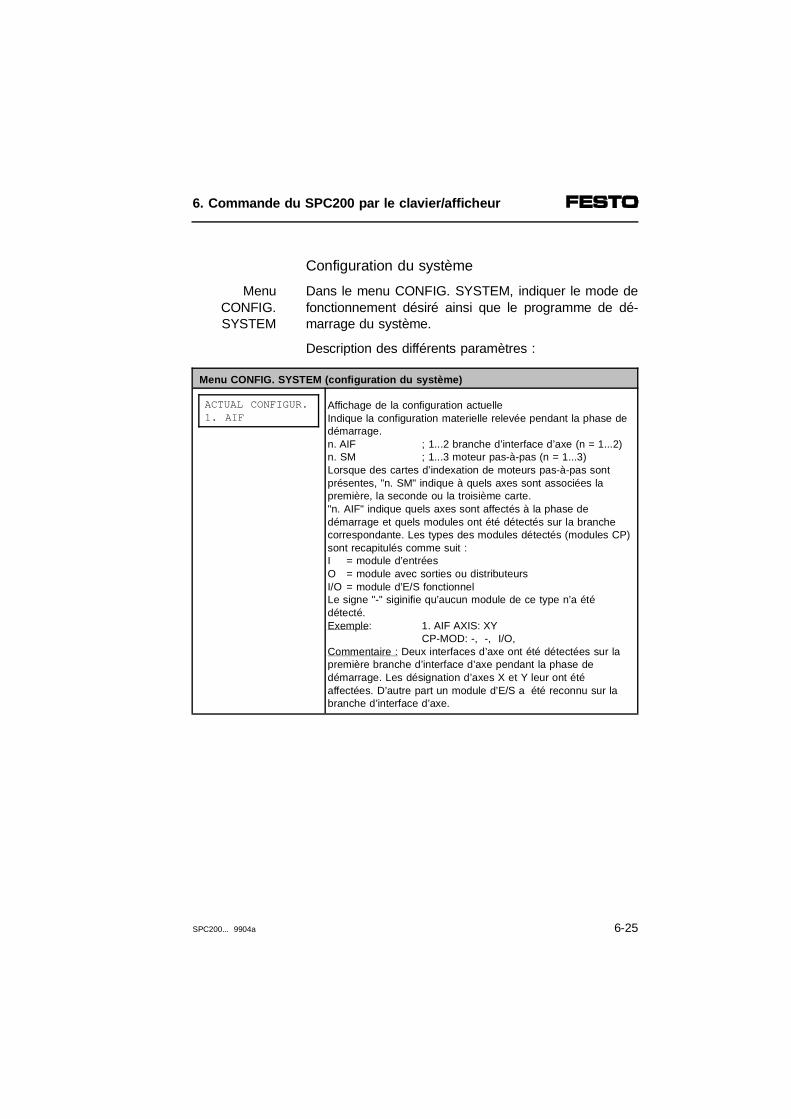
Configuration du système
Dans le menu CONFIG. SYSTEM, indiquer le mode defonctionnement désiré ainsi que le programme de dé-marrage du système.
MenuCONFIG.SYSTEM
Description des différents paramètres :
Menu CONFIG. SYSTEM (configuration du système)
ACTUAL CONFIGUR.1. AIF
Affichage de la configuration actuelleIndique la configuration materielle relevée pendant la phase dedémarrage.n. AIF ; 1...2 branche d’interface d’axe (n = 1...2)n. SM ; 1...3 moteur pas-à-pas (n = 1...3)Lorsque des cartes d’indexation de moteurs pas-à-pas sontprésentes, "n. SM" indique à quels axes sont associées la première, la seconde ou la troisième carte."n. AIF" indique quels axes sont affectés à la phase dedémarrage et quels modules ont été détectés sur la branchecorrespondante. Les types des modules détectés (modules CP)sont recapitulés comme suit :I = module d’entréesO = module avec sorties ou distributeursI/O = module d’E/S fonctionnelLe signe "-" siginifie qu’aucun module de ce type n’a étédétecté.Exemple: 1. AIF AXIS: XY
CP-MOD: -, -, I/O,Commentaire : Deux interfaces d’axe ont été détectées sur lapremière branche d’interface d’axe pendant la phase dedémarrage. Les désignation d’axes X et Y leur ont étéaffectées. D’autre part un module d’E/S a été reconnu sur labranche d’interface d’axe.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-25
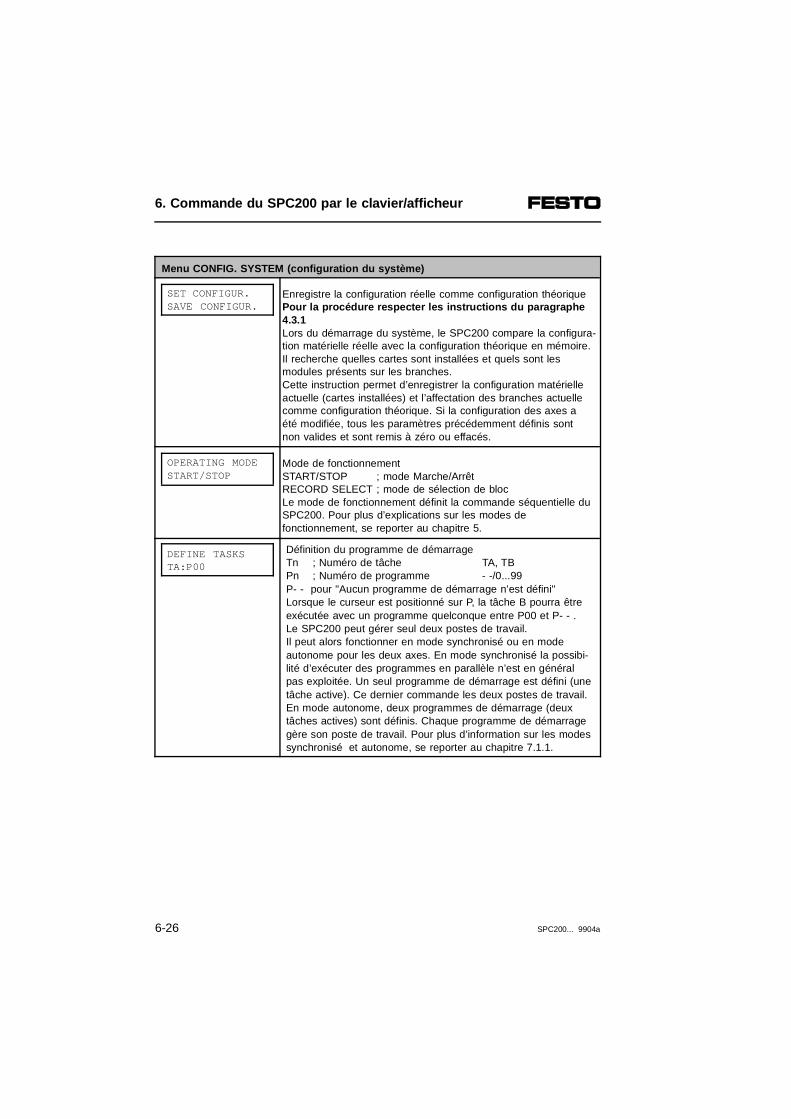
Menu CONFIG. SYSTEM (configuration du système)
SET CONFIGUR.SAVE CONFIGUR.
Enregistre la configuration réelle comme configuration théoriquePour la procédure respecter les instructions du paragraphe4.3.1Lors du démarrage du système, le SPC200 compare la configura-tion matérielle réelle avec la configuration théorique en mémoire.Il recherche quelles cartes sont installées et quels sont lesmodules présents sur les branches.Cette instruction permet d’enregistrer la configuration matérielleactuelle (cartes installées) et l’affectation des branches actuellecomme configuration théorique. Si la configuration des axes aété modifiée, tous les paramètres précédemment définis sontnon valides et sont remis à zéro ou effacés.
OPERATING MODESTART/STOP
Mode de fonctionnementSTART/STOP ; mode Marche/ArrêtRECORD SELECT ; mode de sélection de blocLe mode de fonctionnement définit la commande séquentielle duSPC200. Pour plus d’explications sur les modes defonctionnement, se reporter au chapitre 5.
DEFINE TASKSTA:P00
Définition du programme de démarrageTn ; Numéro de tâche TA, TBPn ; Numéro de programme - -/0...99P- - pour "Aucun programme de démarrage n’est défini"Lorsque le curseur est positionné sur P, la tâche B pourra êtreexécutée avec un programme quelconque entre P00 et P- - .Le SPC200 peut gérer seul deux postes de travail.Il peut alors fonctionner en mode synchronisé ou en modeautonome pour les deux axes. En mode synchronisé la possibi-lité d’exécuter des programmes en parallèle n’est en généralpas exploitée. Un seul programme de démarrage est défini (unetâche active). Ce dernier commande les deux postes de travail.En mode autonome, deux programmes de démarrage (deuxtâches actives) sont définis. Chaque programme de démarragegère son poste de travail. Pour plus d’information sur les modessynchronisé et autonome, se reporter au chapitre 7.1.1.
6. Commande du SPC200 par le clavier/afficheur
6-26 SPC200... 9904a
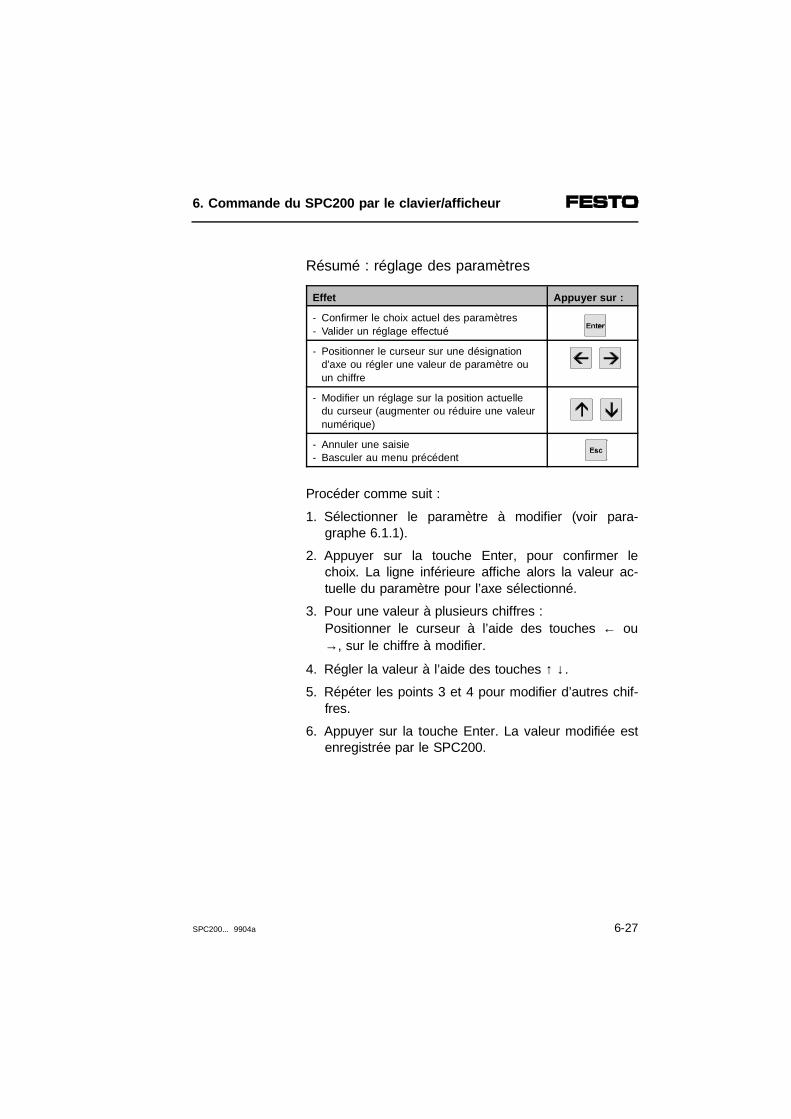
Résumé : réglage des paramètres
Effet Appuyer sur :
- Confirmer le choix actuel des paramètres - Valider un réglage effectué
- Positionner le curseur sur une désignationd’axe ou régler une valeur de paramètre ou un chiffre
- Modifier un réglage sur la position actuelle du curseur (augmenter ou réduire une valeurnumérique)
- Annuler une saisie- Basculer au menu précédent
Procéder comme suit :
1. Sélectionner le paramètre à modifier (voir para-graphe 6.1.1).
2. Appuyer sur la touche Enter, pour confirmer lechoix. La ligne inférieure affiche alors la valeur ac-tuelle du paramètre pour l’axe sélectionné.
3. Pour une valeur à plusieurs chiffres :Positionner le curseur à l’aide des touches ← ou→, sur le chiffre à modifier.
4. Régler la valeur à l’aide des touches ↑ ↓.
5. Répéter les points 3 et 4 pour modifier d’autres chif-fres.
6. Appuyer sur la touche Enter. La valeur modifiée estenregistrée par le SPC200.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-27
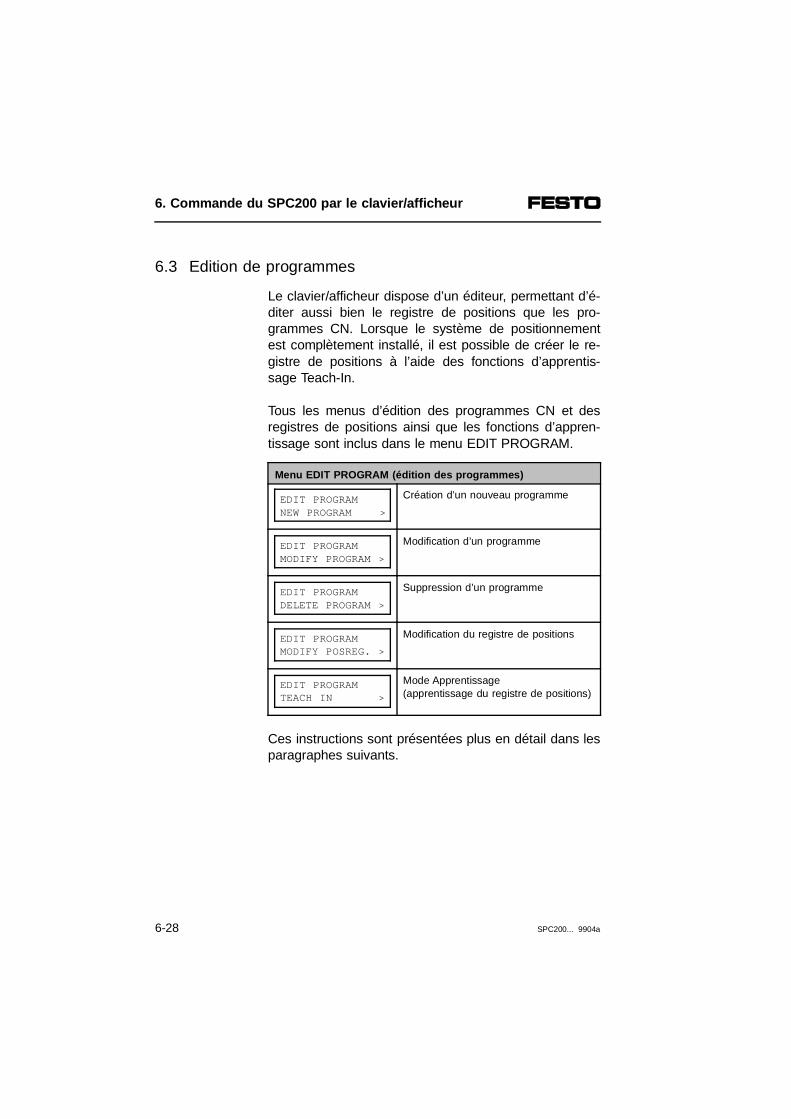
6.3 Edition de programmes
Le clavier/afficheur dispose d’un éditeur, permettant d’é-diter aussi bien le registre de positions que les pro-grammes CN. Lorsque le système de positionnementest complètement installé, il est possible de créer le re-gistre de positions à l’aide des fonctions d’apprentis-sage Teach-In.
Tous les menus d’édition des programmes CN et desregistres de positions ainsi que les fonctions d’appren-tissage sont inclus dans le menu EDIT PROGRAM.
Menu EDIT PROGRAM (édition des programmes)
EDIT PROGRAMNEW PROGRAM >
Création d’un nouveau programme
EDIT PROGRAMMODIFY PROGRAM >
Modification d’un programme
EDIT PROGRAMDELETE PROGRAM >
Suppression d’un programme
EDIT PROGRAMMODIFY POSREG. >
Modification du registre de positions
EDIT PROGRAMTEACH IN >
Mode Apprentissage(apprentissage du registre de positions)
Ces instructions sont présentées plus en détail dans lesparagraphes suivants.
6. Commande du SPC200 par le clavier/afficheur
6-28 SPC200... 9904a
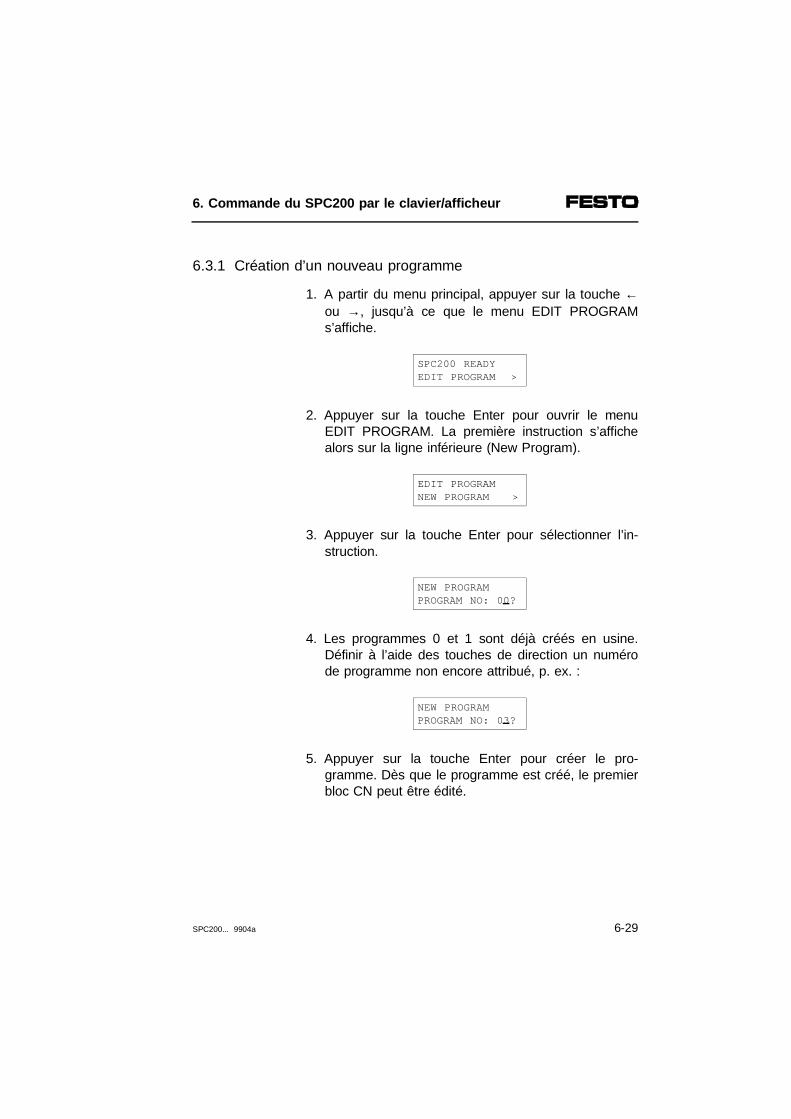
6.3.1 Création d’un nouveau programme
1. A partir du menu principal, appuyer sur la touche ←ou →, jusqu’à ce que le menu EDIT PROGRAMs’affiche.
SPC200 READY EDIT PROGRAM >
2. Appuyer sur la touche Enter pour ouvrir le menuEDIT PROGRAM. La première instruction s’affichealors sur la ligne inférieure (New Program).
EDIT PROGRAM NEW PROGRAM >
3. Appuyer sur la touche Enter pour sélectionner l’in-struction.
NEW PROGRAM PROGRAM NO: 00?
4. Les programmes 0 et 1 sont déjà créés en usine.Définir à l’aide des touches de direction un numérode programme non encore attribué, p. ex. :
NEW PROGRAMPROGRAM NO: 03?
5. Appuyer sur la touche Enter pour créer le pro-gramme. Dès que le programme est créé, le premierbloc CN peut être édité.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-29
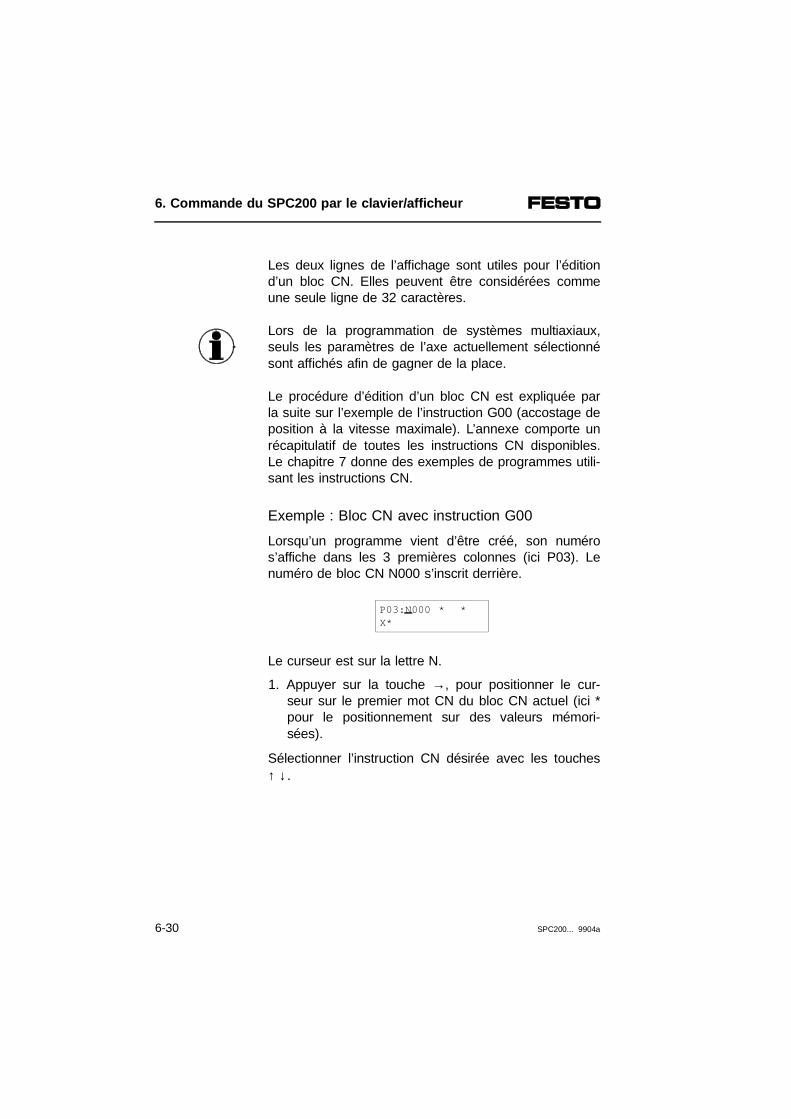
Les deux lignes de l’affichage sont utiles pour l’éditiond’un bloc CN. Elles peuvent être considérées commeune seule ligne de 32 caractères.
Lors de la programmation de systèmes multiaxiaux,seuls les paramètres de l’axe actuellement sélectionnésont affichés afin de gagner de la place.
Le procédure d’édition d’un bloc CN est expliquée parla suite sur l’exemple de l’instruction G00 (accostage deposition à la vitesse maximale). L’annexe comporte unrécapitulatif de toutes les instructions CN disponibles.Le chapitre 7 donne des exemples de programmes utili-sant les instructions CN.
Exemple : Bloc CN avec instruction G00
Lorsqu’un programme vient d’être créé, son numéros’affiche dans les 3 premières colonnes (ici P03). Lenuméro de bloc CN N000 s’inscrit derrière.
P03:N000 * *X*
Le curseur est sur la lettre N.
1. Appuyer sur la touche →, pour positionner le cur-seur sur le premier mot CN du bloc CN actuel (ici *pour le positionnement sur des valeurs mémori-sées).
Sélectionner l’instruction CN désirée avec les touches↑ ↓.
6. Commande du SPC200 par le clavier/afficheur
6-30 SPC200... 9904a
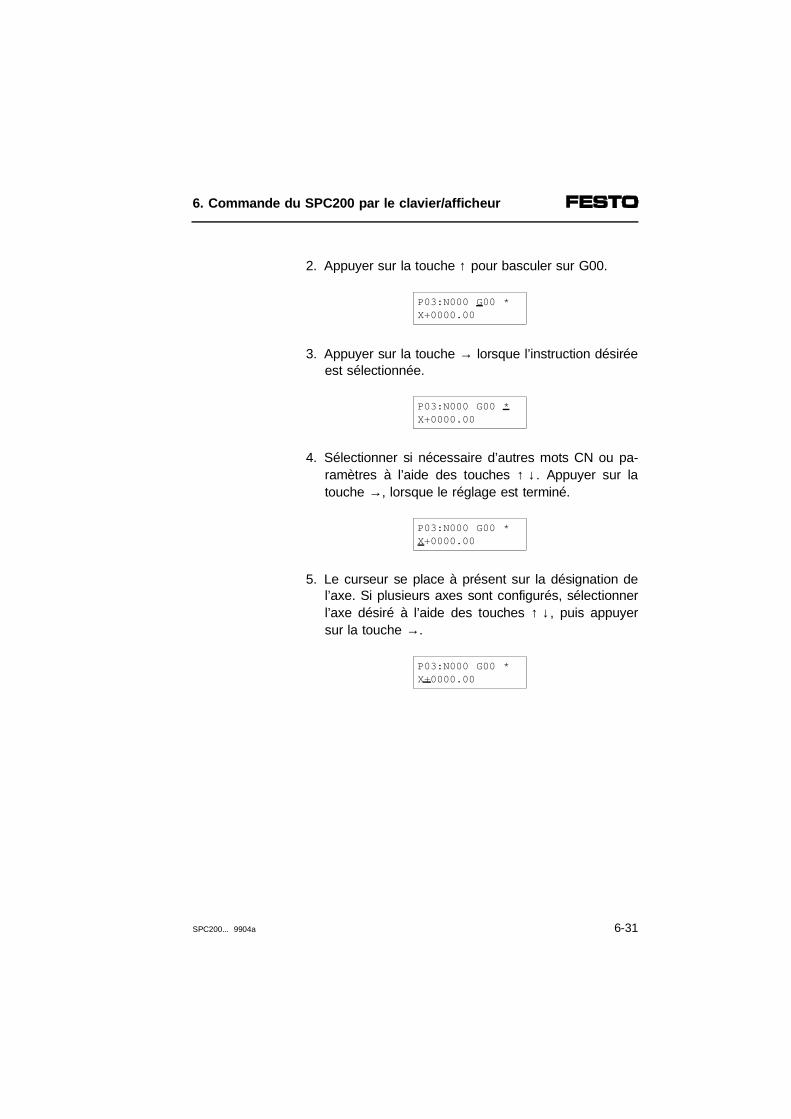
2. Appuyer sur la touche ↑ pour basculer sur G00.
P03:N000 G00 *X+0000.00
3. Appuyer sur la touche → lorsque l’instruction désiréeest sélectionnée.
P03:N000 G00 *X+0000.00
4. Sélectionner si nécessaire d’autres mots CN ou pa-ramètres à l’aide des touches ↑ ↓. Appuyer sur latouche →, lorsque le réglage est terminé.
P03:N000 G00 *X+0000.00
5. Le curseur se place à présent sur la désignation del’axe. Si plusieurs axes sont configurés, sélectionnerl’axe désiré à l’aide des touches ↑ ↓, puis appuyersur la touche →.
P03:N000 G00 *X+0000.00
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-31
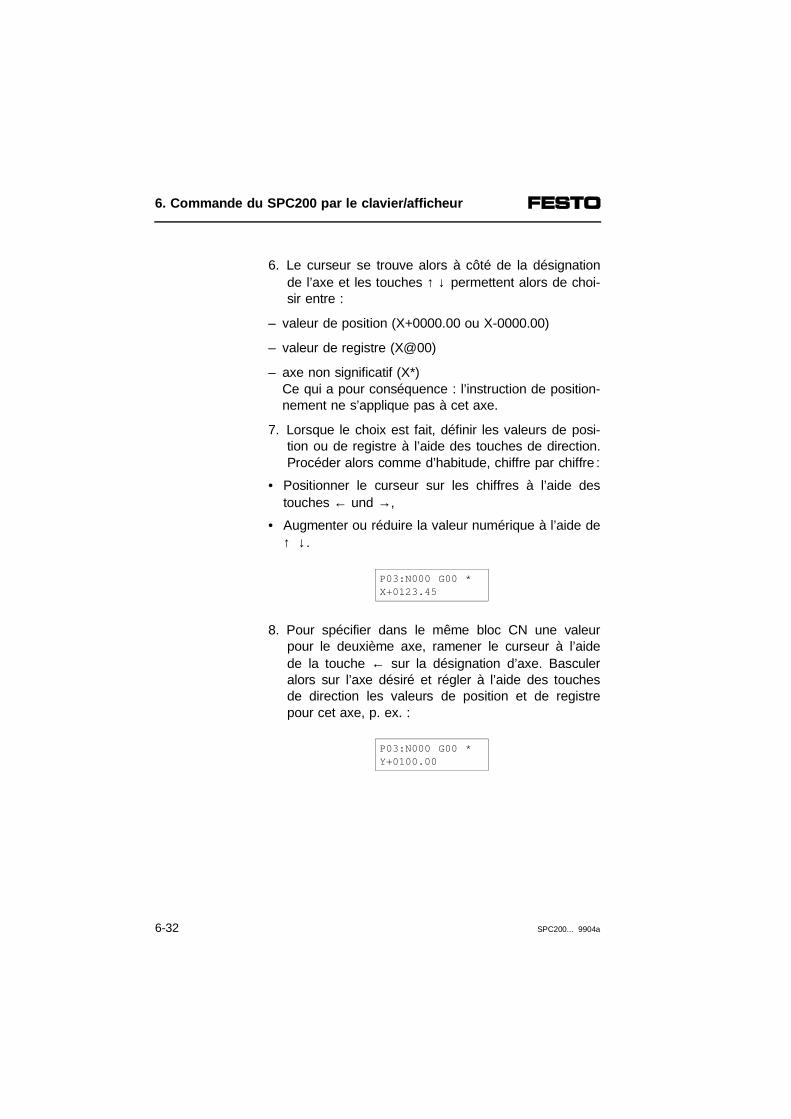
6. Le curseur se trouve alors à côté de la désignationde l’axe et les touches ↑ ↓ permettent alors de choi-sir entre :
– valeur de position (X+0000.00 ou X-0000.00)
– valeur de registre (X@00)
– axe non significatif (X*) Ce qui a pour conséquence : l’instruction de position-nement ne s’applique pas à cet axe.
7. Lorsque le choix est fait, définir les valeurs de posi-tion ou de registre à l’aide des touches de direction.Procéder alors comme d’habitude, chiffre par chiffre :
• Positionner le curseur sur les chiffres à l’aide destouches ← und →,
• Augmenter ou réduire la valeur numérique à l’aide de↑ ↓.
P03:N000 G00 *X+0123.45
8. Pour spécifier dans le même bloc CN une valeurpour le deuxième axe, ramener le curseur à l’aidede la touche ← sur la désignation d’axe. Basculeralors sur l’axe désiré et régler à l’aide des touchesde direction les valeurs de position et de registrepour cet axe, p. ex. :
P03:N000 G00 *Y+0100.00
6. Commande du SPC200 par le clavier/afficheur
6-32 SPC200... 9904a
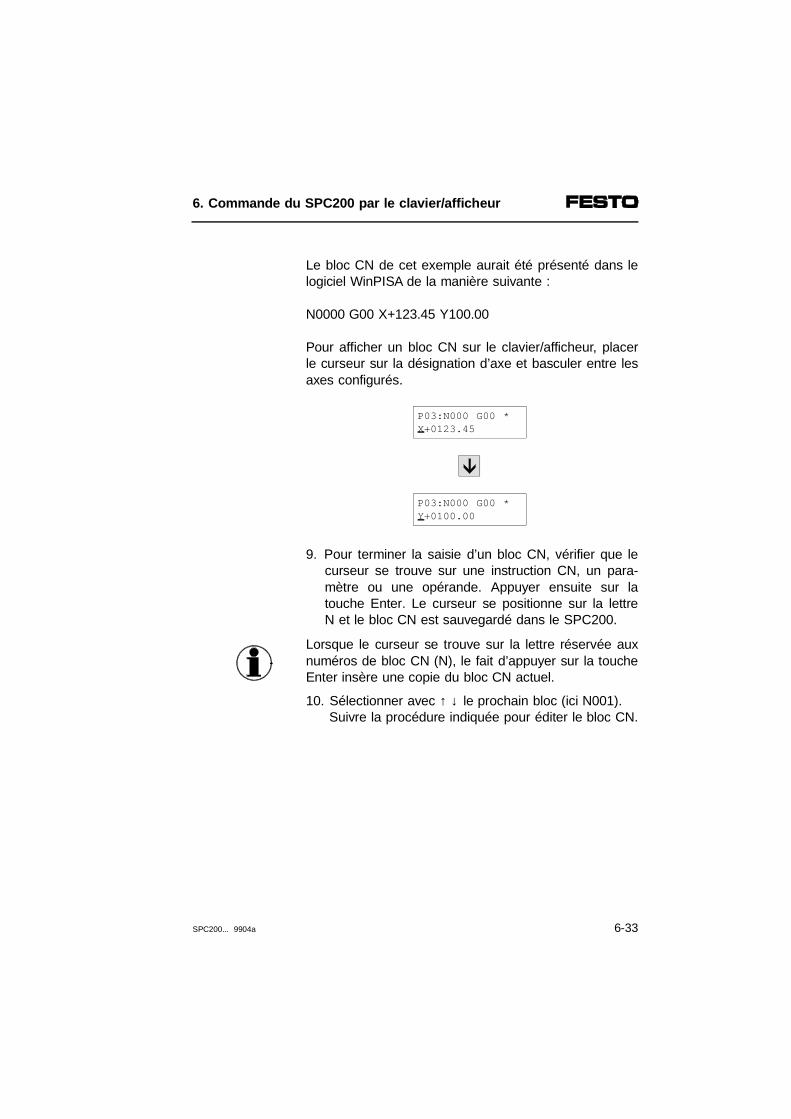
Le bloc CN de cet exemple aurait été présenté dans lelogiciel WinPISA de la manière suivante :
N0000 G00 X+123.45 Y100.00
Pour afficher un bloc CN sur le clavier/afficheur, placerle curseur sur la désignation d’axe et basculer entre lesaxes configurés.
P03:N000 G00 *X+0123.45
P03:N000 G00 *Y+0100.00
9. Pour terminer la saisie d’un bloc CN, vérifier que lecurseur se trouve sur une instruction CN, un para-mètre ou une opérande. Appuyer ensuite sur latouche Enter. Le curseur se positionne sur la lettreN et le bloc CN est sauvegardé dans le SPC200.
Lorsque le curseur se trouve sur la lettre réservée auxnuméros de bloc CN (N), le fait d’appuyer sur la toucheEnter insère une copie du bloc CN actuel.
10. Sélectionner avec ↑ ↓ le prochain bloc (ici N001). Suivre la procédure indiquée pour éditer le bloc CN.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-33
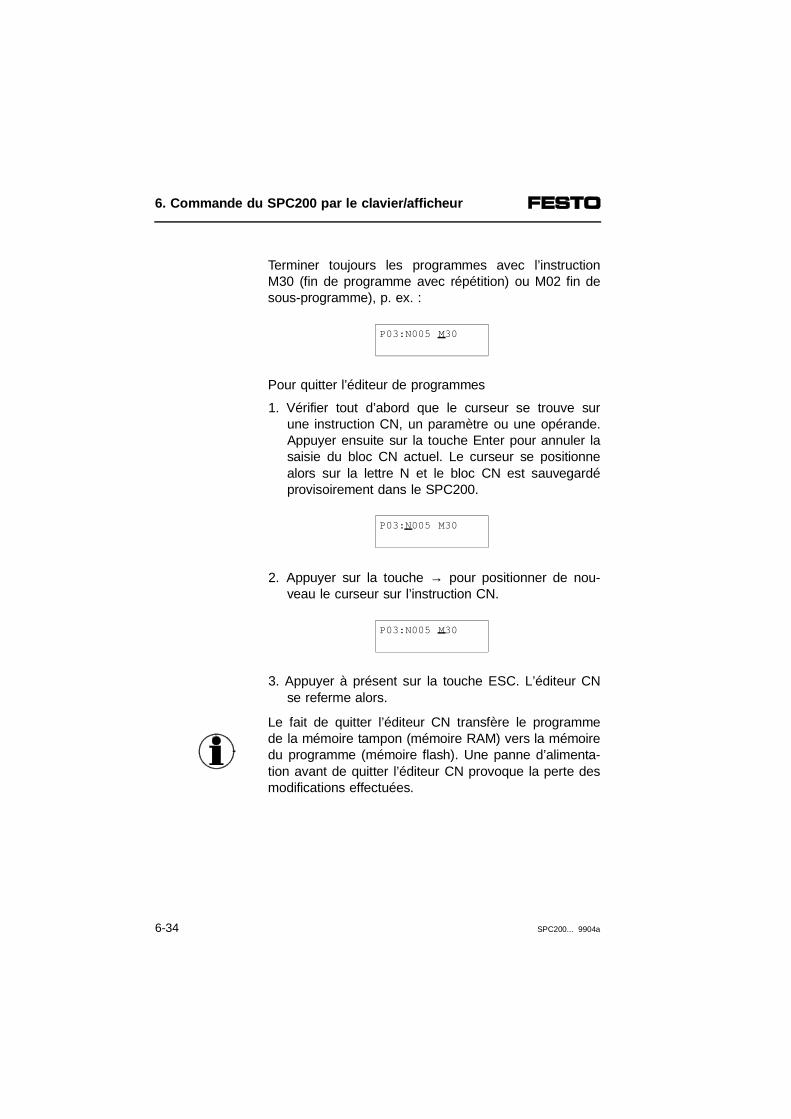
Terminer toujours les programmes avec l’instructionM30 (fin de programme avec répétition) ou M02 fin desous-programme), p. ex. :
P03:N005 M30
Pour quitter l’éditeur de programmes
1. Vérifier tout d’abord que le curseur se trouve surune instruction CN, un paramètre ou une opérande.Appuyer ensuite sur la touche Enter pour annuler lasaisie du bloc CN actuel. Le curseur se positionnealors sur la lettre N et le bloc CN est sauvegardéprovisoirement dans le SPC200.
P03:N005 M30
2. Appuyer sur la touche → pour positionner de nou-veau le curseur sur l’instruction CN.
P03:N005 M30
3. Appuyer à présent sur la touche ESC. L’éditeur CNse referme alors.
Le fait de quitter l’éditeur CN transfère le programmede la mémoire tampon (mémoire RAM) vers la mémoiredu programme (mémoire flash). Une panne d’alimenta-tion avant de quitter l’éditeur CN provoque la perte desmodifications effectuées.
6. Commande du SPC200 par le clavier/afficheur
6-34 SPC200... 9904a
6.3.2 Consignes d’édition
Une panne d’alimentation avant de quitter l’éditeur CNprovoque la perte des modifications effectuées. Quitteroccasionellement le programme au cours de la saisied’un programme volumineux afin d’effectuer des sauve-gardes.
Veiller à la syntaxe lors de la programmation et n’utili-ser que des opérandes existantes. Les deux lignes del’afficheur sont utiles pour l’affichage d’un bloc CN. Lorsde la programmation de systèmes multiaxiaux, seuls lesparamètres de l’axe actuellement sélectionné sont affi-chés afin de gagner de la place.
Pour déplacer le curseur, considérer que l’afficheur necomporte qu’une seule ligne de 32 caractères. Sélec-tionner successivement à l’aide des touches ← et les différents mots CN et les paramètres. Le curseur sedéplace vers la gauche ou vers la droite.
Si le programme CN comporte plusieurs lignes, il estpossible d’insérer ou d’effacer des blocs CN mais éga-lement de faire défiler le programme. Le curseur doitpour cela se trouver sur la lettre N (numéro de blocCN) (p. ex. N001). On peut alors :
Insérer,effacer
des lignes
– faire défiler le programme à l’aide des touches ↑ ↓
– insérer une copie du bloc CN actuel en appuyant surla touche Enter.
– effacer le bloc CN actuel en appuyant sur la toucheESC. L’effacement doit être confirmé avec la toucheEnter ou annulé avec la touche ESC.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-35
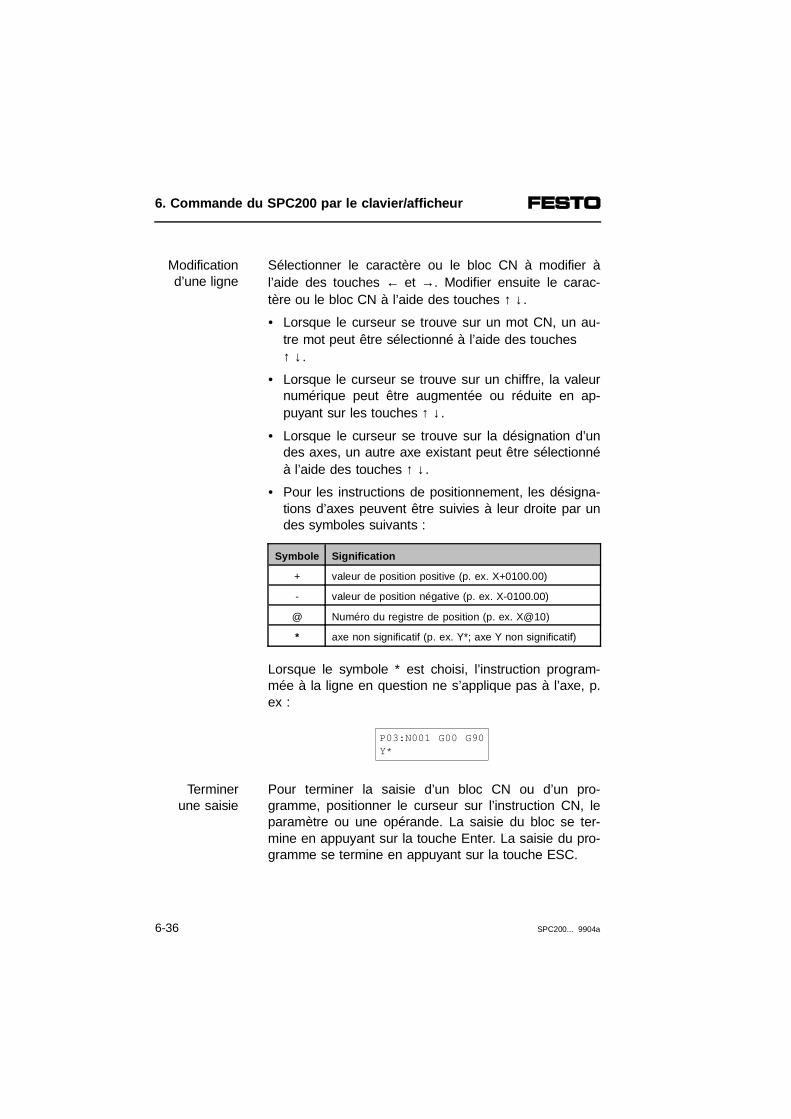
Sélectionner le caractère ou le bloc CN à modifier àl’aide des touches ← et →. Modifier ensuite le carac-tère ou le bloc CN à l’aide des touches ↑ ↓.
Modificationd’une ligne
• Lorsque le curseur se trouve sur un mot CN, un au-tre mot peut être sélectionné à l’aide des touches ↑ ↓.
• Lorsque le curseur se trouve sur un chiffre, la valeurnumérique peut être augmentée ou réduite en ap-puyant sur les touches ↑ ↓.
• Lorsque le curseur se trouve sur la désignation d’undes axes, un autre axe existant peut être sélectionnéà l’aide des touches ↑ ↓.
• Pour les instructions de positionnement, les désigna-tions d’axes peuvent être suivies à leur droite par undes symboles suivants :
Symbole Signification
+ valeur de position positive (p. ex. X+0100.00)
- valeur de position négative (p. ex. X-0100.00)
@ Numéro du registre de position (p. ex. X@10)
* axe non significatif (p. ex. Y*; axe Y non significatif)
Lorsque le symbole * est choisi, l’instruction program-mée à la ligne en question ne s’applique pas à l’axe, p.ex :
P03:N001 G00 G90Y*
Pour terminer la saisie d’un bloc CN ou d’un pro-gramme, positionner le curseur sur l’instruction CN, leparamètre ou une opérande. La saisie du bloc se ter-mine en appuyant sur la touche Enter. La saisie du pro-gramme se termine en appuyant sur la touche ESC.
Terminerune saisie
6. Commande du SPC200 par le clavier/afficheur
6-36 SPC200... 9904a
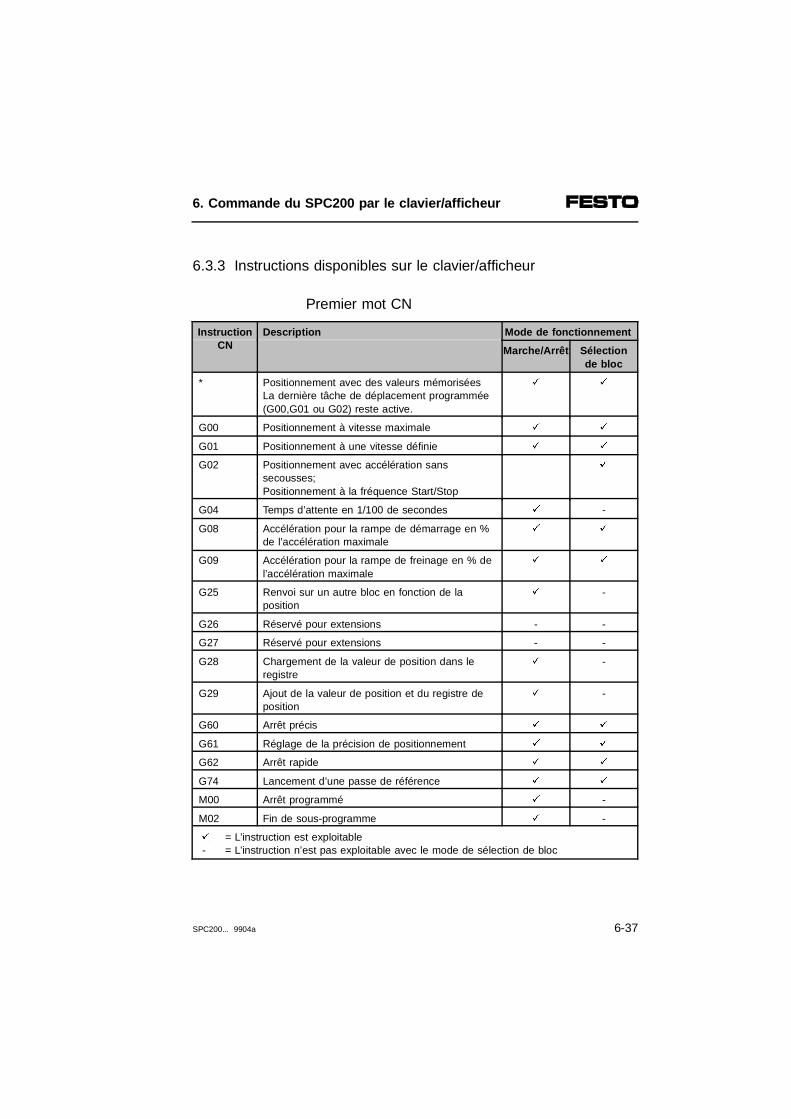
6.3.3 Instructions disponibles sur le clavier/afficheur
Premier mot CN
InstructionCN
Description Mode de fonctionnement
Marche/Arrêt Sélectionde bloc
* Positionnement avec des valeurs mémoriséesLa dernière tâche de déplacement programmée(G00,G01 ou G02) reste active.
á á
G00 Positionnement à vitesse maximale á á
G01 Positionnement à une vitesse définie á á
G02 Positionnement avec accélération sanssecousses;Positionnement à la fréquence Start/Stop
á
G04 Temps d’attente en 1/100 de secondes á -
G08 Accélération pour la rampe de démarrage en %de l’accélération maximale
á á
G09 Accélération pour la rampe de freinage en % del’accélération maximale
á á
G25 Renvoi sur un autre bloc en fonction de laposition
á -
G26 Réservé pour extensions - -
G27 Réservé pour extensions - -
G28 Chargement de la valeur de position dans leregistre
á -
G29 Ajout de la valeur de position et du registre deposition
á -
G60 Arrêt précis á á
G61 Réglage de la précision de positionnement á á
G62 Arrêt rapide á á
G74 Lancement d’une passe de référence á á
M00 Arrêt programmé á -
M02 Fin de sous-programme á -
á = L’instruction est exploitable - = L’instruction n’est pas exploitable avec le mode de sélection de bloc
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-37
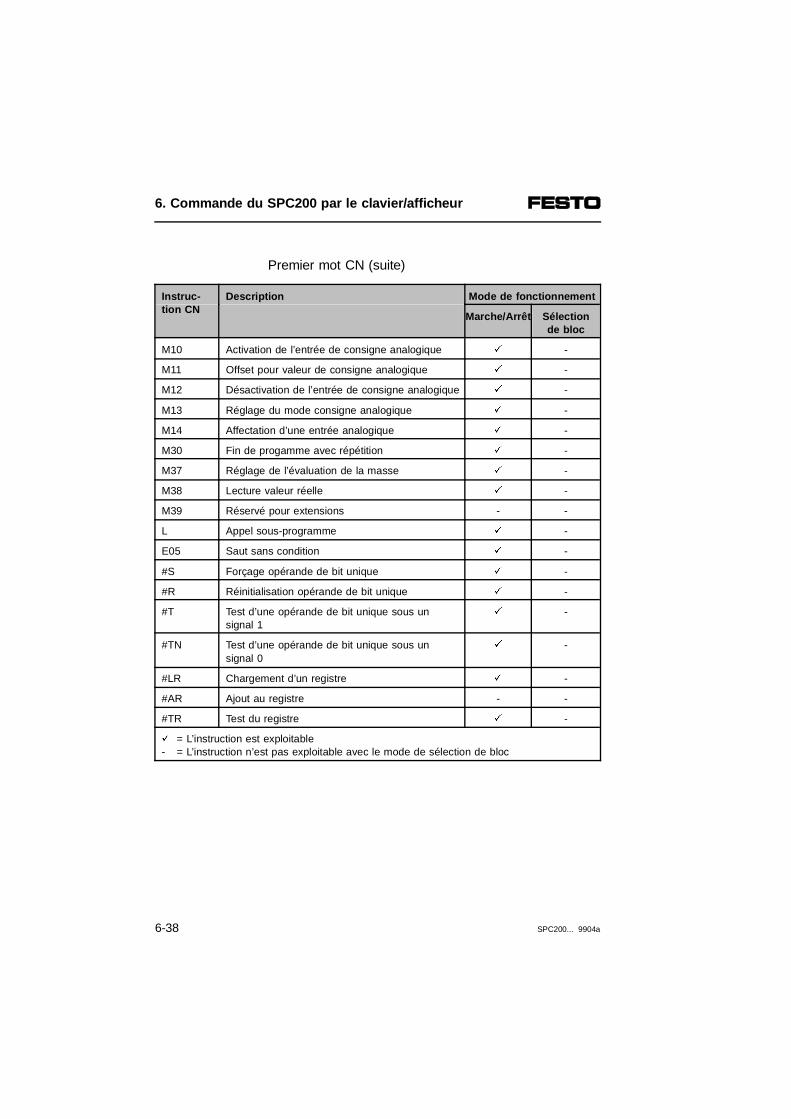
Premier mot CN (suite)
Instruc-tion CN
Description Mode de fonctionnement
Marche/Arrêt Sélectionde bloc
M10 Activation de l’entrée de consigne analogique á -
M11 Offset pour valeur de consigne analogique á -
M12 Désactivation de l’entrée de consigne analogique á -
M13 Réglage du mode consigne analogique á -
M14 Affectation d’une entrée analogique á -
M30 Fin de progamme avec répétition á -
M37 Réglage de l’évaluation de la masse á -
M38 Lecture valeur réelle á -
M39 Réservé pour extensions - -
L Appel sous-programme á -
E05 Saut sans condition á -
#S Forçage opérande de bit unique á -
#R Réinitialisation opérande de bit unique á -
#T Test d’une opérande de bit unique sous unsignal 1
á -
#TN Test d’une opérande de bit unique sous unsignal 0
á -
#LR Chargement d’un registre á -
#AR Ajout au registre - -
#TR Test du registre á -
á = L’instruction est exploitable - = L’instruction n’est pas exploitable avec le mode de sélection de bloc
6. Commande du SPC200 par le clavier/afficheur
6-38 SPC200... 9904a

Second mot CN
InstructionCN
Description Mode de fonctionnement
Marche/Arrêt Sélectionde bloc
* Utilisation du dernier mode de positionnement(G90, G91) Le dernier mode de positionnementprogrammé reste activé (déplacement relatif ouabsolu).
á á
G90 Cotation absolue (préréglé au lancement duprogramme)
á á
G91 Cotation relative á á
á = L’instruction est exploitable; - = L’instruction n’est pas exploitable avec le mode de sélection de bloc
Le chapitre 7 donne des exemples de programmes utili-sant les instructions CN.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-39
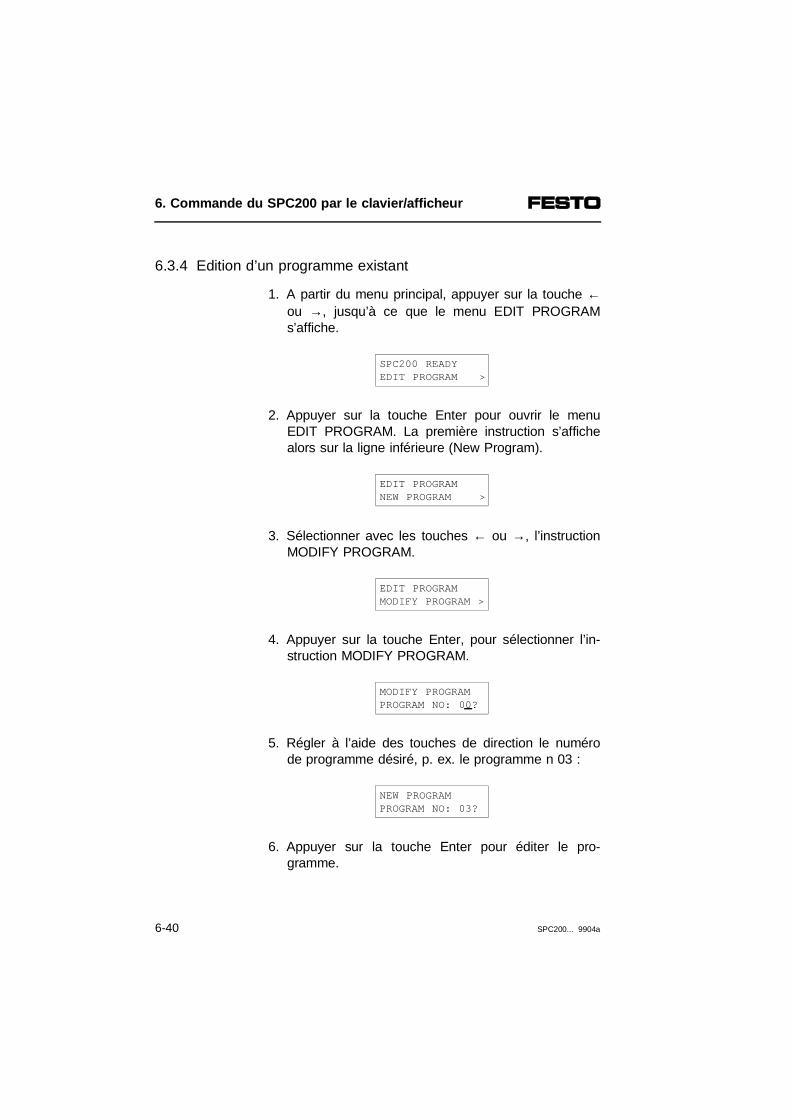
6.3.4 Edition d’un programme existant
1. A partir du menu principal, appuyer sur la touche ←ou →, jusqu’à ce que le menu EDIT PROGRAMs’affiche.
SPC200 READYEDIT PROGRAM >
2. Appuyer sur la touche Enter pour ouvrir le menuEDIT PROGRAM. La première instruction s’affichealors sur la ligne inférieure (New Program).
EDIT PROGRAMNEW PROGRAM >
3. Sélectionner avec les touches ← ou →, l’instructionMODIFY PROGRAM.
EDIT PROGRAMMODIFY PROGRAM >
4. Appuyer sur la touche Enter, pour sélectionner l’in-struction MODIFY PROGRAM.
MODIFY PROGRAMPROGRAM NO: 00?
5. Régler à l’aide des touches de direction le numérode programme désiré, p. ex. le programme n 03 :
NEW PROGRAM PROGRAM NO: 03?
6. Appuyer sur la touche Enter pour éditer le pro-gramme.
6. Commande du SPC200 par le clavier/afficheur
6-40 SPC200... 9904a
Lorsqu’un programme vient d’être créé, son numéros’affiche dans les 3 premières colonnes (ici P03). Il estsuivi par le premier bloc CN du programme, p. ex. :
P03:N000 G00 *X+0100.00
Le curseur se trouve sur la lettre réservée aux numérosde bloc CN (ici N000). Les touches ↑ ↓ permettent defaire défiler les blocs CN du programme.
Lors de la programmation de systèmes multiaxiaux,seuls les paramètres de l’axe actuellement sélectionnésont affichés afin de gagner de la place.
Des consignes d’édition sont données au chapitre6.3.2.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-41
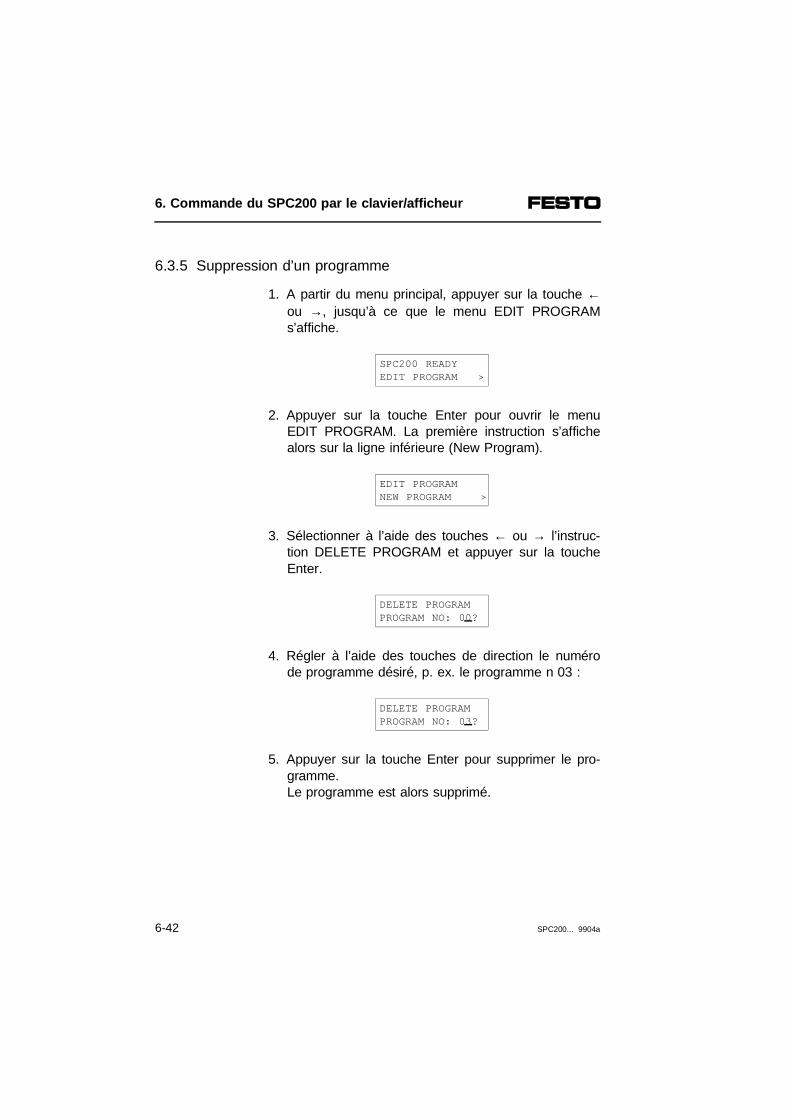
6.3.5 Suppression d’un programme
1. A partir du menu principal, appuyer sur la touche ←ou →, jusqu’à ce que le menu EDIT PROGRAMs’affiche.
SPC200 READYEDIT PROGRAM >
2. Appuyer sur la touche Enter pour ouvrir le menuEDIT PROGRAM. La première instruction s’affichealors sur la ligne inférieure (New Program).
EDIT PROGRAMNEW PROGRAM >
3. Sélectionner à l’aide des touches ← ou → l’instruc-tion DELETE PROGRAM et appuyer sur la toucheEnter.
DELETE PROGRAMPROGRAM NO: 00?
4. Régler à l’aide des touches de direction le numérode programme désiré, p. ex. le programme n 03 :
DELETE PROGRAM PROGRAM NO: 03?
5. Appuyer sur la touche Enter pour supprimer le pro-gramme.Le programme est alors supprimé.
6. Commande du SPC200 par le clavier/afficheur
6-42 SPC200... 9904a
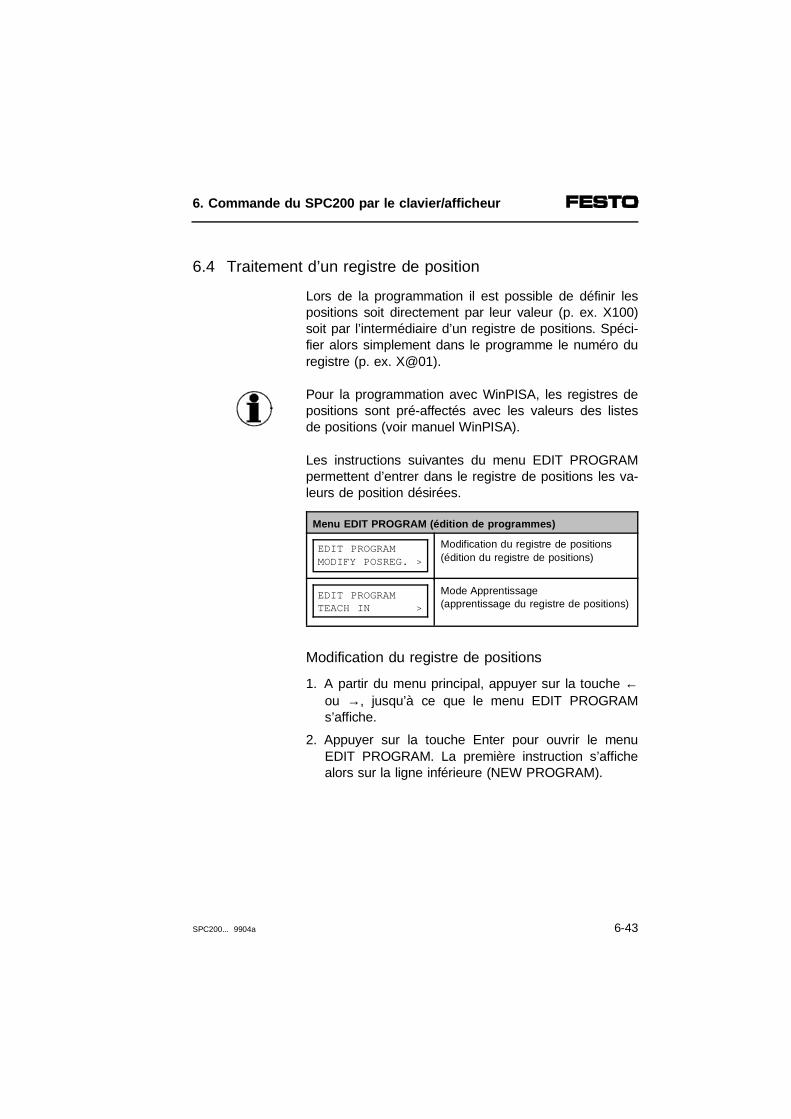
6.4 Traitement d’un registre de position
Lors de la programmation il est possible de définir lespositions soit directement par leur valeur (p. ex. X100)soit par l’intermédiaire d’un registre de positions. Spéci-fier alors simplement dans le programme le numéro duregistre (p. ex. X@01).
Pour la programmation avec WinPISA, les registres depositions sont pré-affectés avec les valeurs des listesde positions (voir manuel WinPISA).
Les instructions suivantes du menu EDIT PROGRAMpermettent d’entrer dans le registre de positions les va-leurs de position désirées.
Menu EDIT PROGRAM (édition de programmes)
EDIT PROGRAMMODIFY POSREG. >
Modification du registre de positions(édition du registre de positions)
EDIT PROGRAMTEACH IN >
Mode Apprentissage(apprentissage du registre de positions)
Modification du registre de positions
1. A partir du menu principal, appuyer sur la touche ←ou →, jusqu’à ce que le menu EDIT PROGRAMs’affiche.
2. Appuyer sur la touche Enter pour ouvrir le menuEDIT PROGRAM. La première instruction s’affichealors sur la ligne inférieure (NEW PROGRAM).
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-43

3. Sélectionner à l’aide des touches ← ou → l’instruc-tion MODIFY POSRG et appuyer sur la touche En-ter.
MODIFY POSREG.X:@00
4. Définir à l’aide des touches de direction la désigna-tion de l’axe et le numéro de registre désiré, p. ex.X:@03 et appuyer sur la touche Enter. La valeur ac-tuelle du registre s’affiche.
MODIFY POSREG.X:@03 +0123.00
La valeur -9999.99 est réservée pour indiquer un regis-tre de positions non utilisé.
5. Modifier alors la valeurs à l’aide des touches de di-rection. Appuyer sur la touche Enter pour enregistrerles modifications.
6. Pour modifier un autre registre de positions, appuyersur la touche ESC et reprendre aux points 4 et 5.
6. Commande du SPC200 par le clavier/afficheur
6-44 SPC200... 9904a
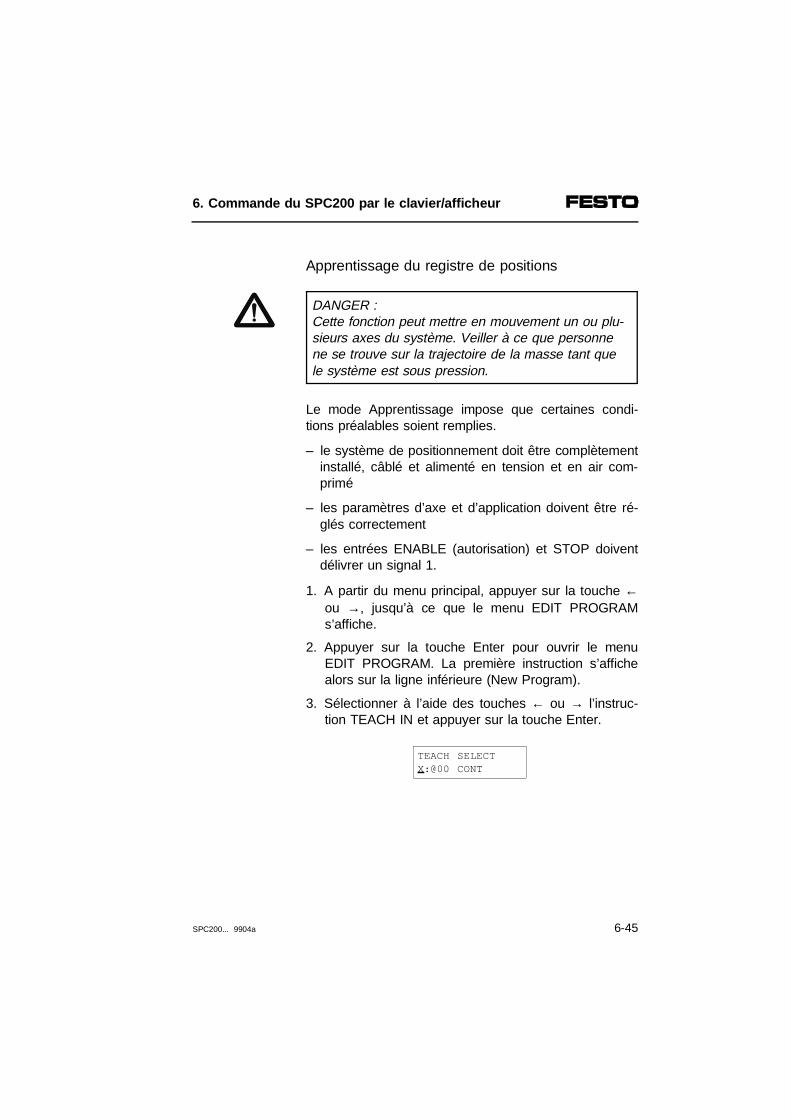
Apprentissage du registre de positions
DANGER :Cette fonction peut mettre en mouvement un ou plu-sieurs axes du système. Veiller à ce que personnene se trouve sur la trajectoire de la masse tant quele système est sous pression.
Le mode Apprentissage impose que certaines condi-tions préalables soient remplies.
– le système de positionnement doit être complètementinstallé, câblé et alimenté en tension et en air com-primé
– les paramètres d’axe et d’application doivent être ré-glés correctement
– les entrées ENABLE (autorisation) et STOP doiventdélivrer un signal 1.
1. A partir du menu principal, appuyer sur la touche ←ou →, jusqu’à ce que le menu EDIT PROGRAMs’affiche.
2. Appuyer sur la touche Enter pour ouvrir le menuEDIT PROGRAM. La première instruction s’affichealors sur la ligne inférieure (New Program).
3. Sélectionner à l’aide des touches ← ou → l’instruc-tion TEACH IN et appuyer sur la touche Enter.
TEACH SELECTX:@00 CONT
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-45
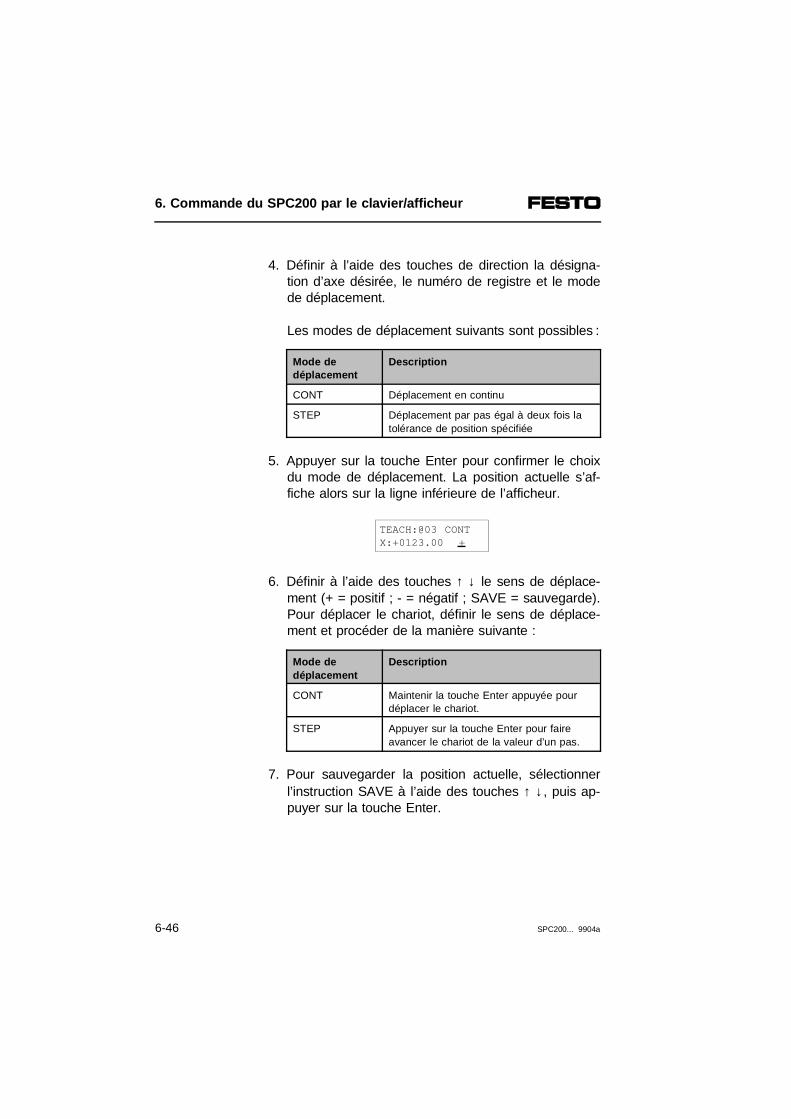
4. Définir à l’aide des touches de direction la désigna-tion d’axe désirée, le numéro de registre et le modede déplacement.
Les modes de déplacement suivants sont possibles :
Mode de déplacement
Description
CONT Déplacement en continu
STEP Déplacement par pas égal à deux fois latolérance de position spécifiée
5. Appuyer sur la touche Enter pour confirmer le choixdu mode de déplacement. La position actuelle s’af-fiche alors sur la ligne inférieure de l’afficheur.
TEACH:@03 CONTX:+0123.00 +
6. Définir à l’aide des touches ↑ ↓ le sens de déplace-ment (+ = positif ; - = négatif ; SAVE = sauvegarde).Pour déplacer le chariot, définir le sens de déplace-ment et procéder de la manière suivante :
Mode de déplacement
Description
CONT Maintenir la touche Enter appuyée pourdéplacer le chariot.
STEP Appuyer sur la touche Enter pour faireavancer le chariot de la valeur d’un pas.
7. Pour sauvegarder la position actuelle, sélectionnerl’instruction SAVE à l’aide des touches ↑ ↓, puis ap-puyer sur la touche Enter.
6. Commande du SPC200 par le clavier/afficheur
6-46 SPC200... 9904a
6.5 Commande du déroulement du programme
DANGER :Veiller à ce que personne ne se trouve dans la zonede déplacement de la masse en mouvement etqu’aucun objet étranger ne s’y trouve.
Pour commander le déroulement d’un programme àpartir du clavier/afficheur, les conditions suivantes doi-vent être remplies :
Conditionspréalables
– le système de positionnement doit être complètementinstallé, câblé et alimenté en tension et en air com-primé
– les paramètres des menus AXIS PARAM, APLIC.PA-RAM et CONFIC. SYSTEM sont réglés correctement
– les entrées ENABLE (autorisation) et STOP délivrentun signal 1
– la mémoire comporte au moins un programme.
Les instructions suivantes du menu SYSTEMCONTROL permettent de démarrer, arrêter et réinitiali-ser le système.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-47
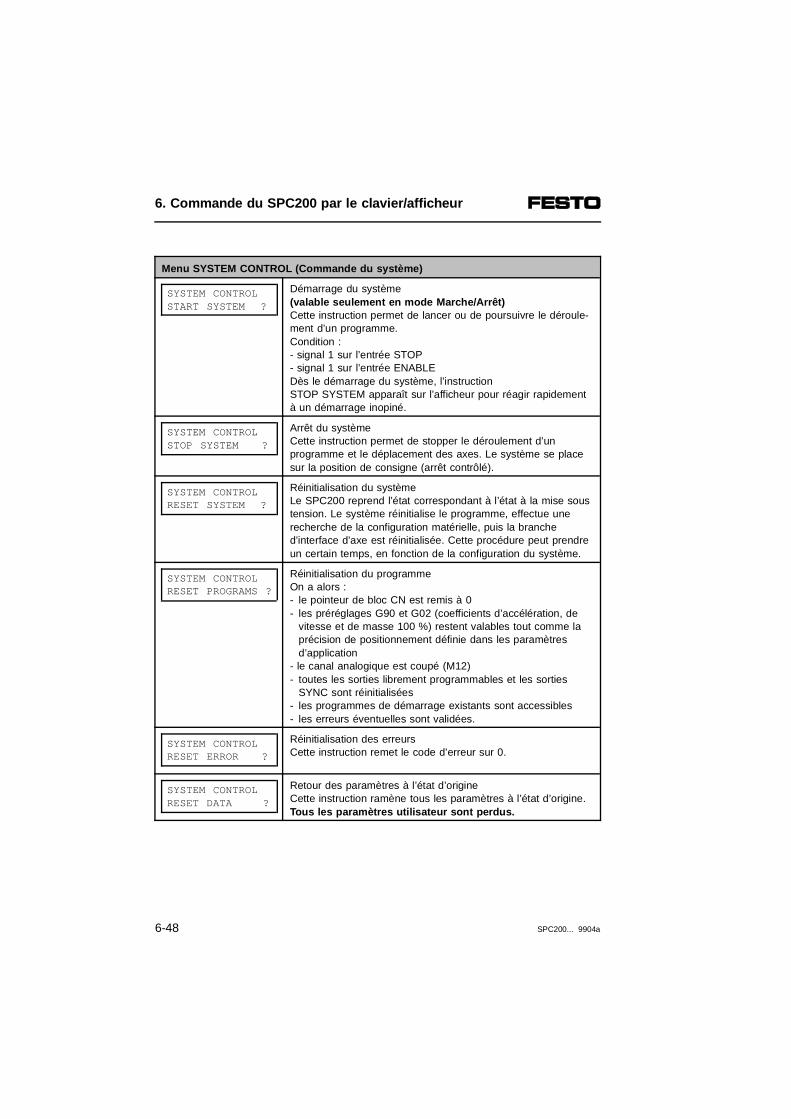
Menu SYSTEM CONTROL (Commande du système)
SYSTEM CONTROLSTART SYSTEM ?
Démarrage du système(valable seulement en mode Marche/Arrêt)Cette instruction permet de lancer ou de poursuivre le déroule-ment d’un programme. Condition :- signal 1 sur l’entrée STOP- signal 1 sur l’entrée ENABLEDès le démarrage du système, l’instruction STOP SYSTEM apparaît sur l’afficheur pour réagir rapidementà un démarrage inopiné.
SYSTEM CONTROLSTOP SYSTEM ?
Arrêt du systèmeCette instruction permet de stopper le déroulement d’unprogramme et le déplacement des axes. Le système se placesur la position de consigne (arrêt contrôlé).
SYSTEM CONTROLRESET SYSTEM ?
Réinitialisation du systèmeLe SPC200 reprend l’état correspondant à l’état à la mise soustension. Le système réinitialise le programme, effectue unerecherche de la configuration matérielle, puis la branched’interface d’axe est réinitialisée. Cette procédure peut prendreun certain temps, en fonction de la configuration du système.
SYSTEM CONTROLRESET PROGRAMS ?
Réinitialisation du programmeOn a alors :- le pointeur de bloc CN est remis à 0- les préréglages G90 et G02 (coefficients d’accélération, de
vitesse et de masse 100 %) restent valables tout comme laprécision de positionnement définie dans les paramètresd’application
- le canal analogique est coupé (M12)- toutes les sorties librement programmables et les sorties
SYNC sont réinitialisées- les programmes de démarrage existants sont accessibles- les erreurs éventuelles sont validées.
SYSTEM CONTROLRESET ERROR ?
Réinitialisation des erreursCette instruction remet le code d’erreur sur 0.
SYSTEM CONTROLRESET DATA ?
Retour des paramètres à l’état d’origineCette instruction ramène tous les paramètres à l’état d’origine.Tous les paramètres utilisateur sont perdus.
6. Commande du SPC200 par le clavier/afficheur
6-48 SPC200... 9904a
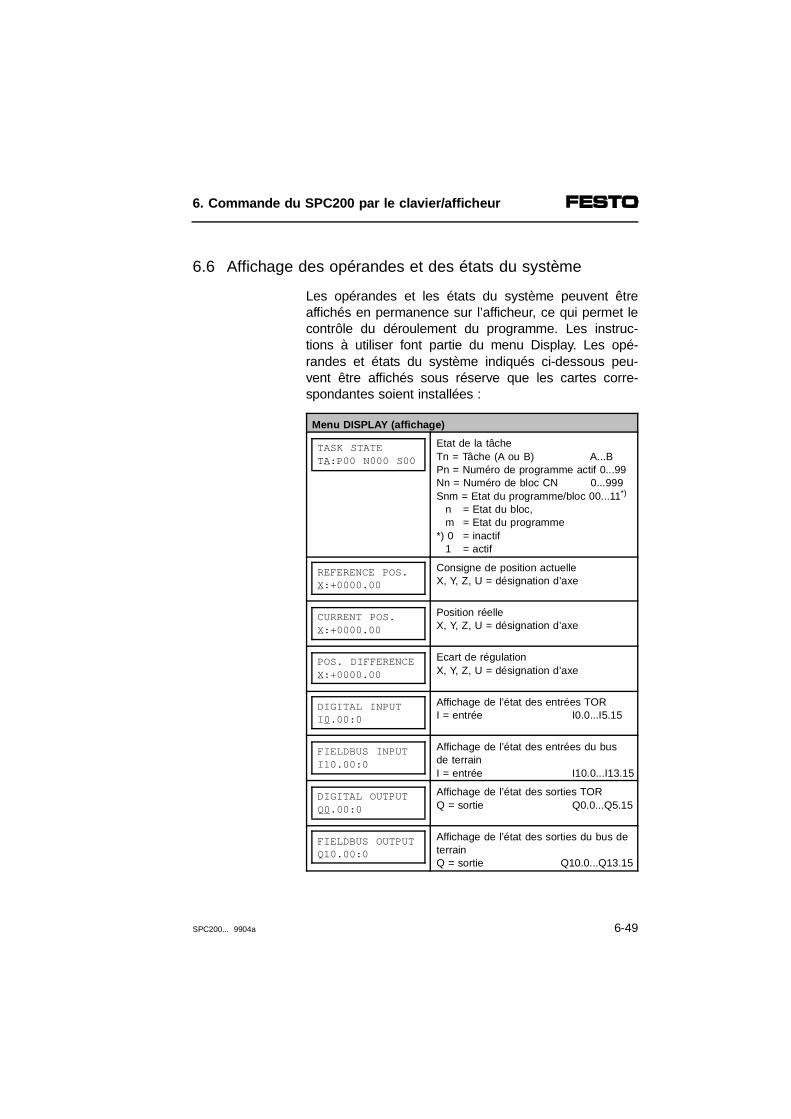
6.6 Affichage des opérandes et des états du système
Les opérandes et les états du système peuvent êtreaffichés en permanence sur l’afficheur, ce qui permet lecontrôle du déroulement du programme. Les instruc-tions à utiliser font partie du menu Display. Les opé-randes et états du système indiqués ci-dessous peu-vent être affichés sous réserve que les cartes corre-spondantes soient installées :
Menu DISPLAY (affichage)
TASK STATETA:P00 N000 S00
Etat de la tâcheTn = Tâche (A ou B) A...BPn = Numéro de programme actif 0...99Nn = Numéro de bloc CN 0...999Snm = Etat du programme/bloc 00...11*)
n = Etat du bloc, m = Etat du programme
*) 0 = inactif 1 = actif
REFERENCE POS.X:+0000.00
Consigne de position actuelleX, Y, Z, U = désignation d’axe
CURRENT POS.X:+0000.00
Position réelle X, Y, Z, U = désignation d’axe
POS. DIFFERENCEX:+0000.00
Ecart de régulationX, Y, Z, U = désignation d’axe
DIGITAL INPUTI0.00:0
Affichage de l’état des entrées TORI = entrée I0.0...I5.15
FIELDBUS INPUTI10.00:0
Affichage de l’état des entrées du busde terrainI = entrée I10.0...I13.15
DIGITAL OUTPUTQ0.00:0
Affichage de l’état des sorties TORQ = sortie Q0.0...Q5.15
FIELDBUS OUTPUTQ10.00:0
Affichage de l’état des sorties du bus deterrainQ = sortie Q10.0...Q13.15
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-49
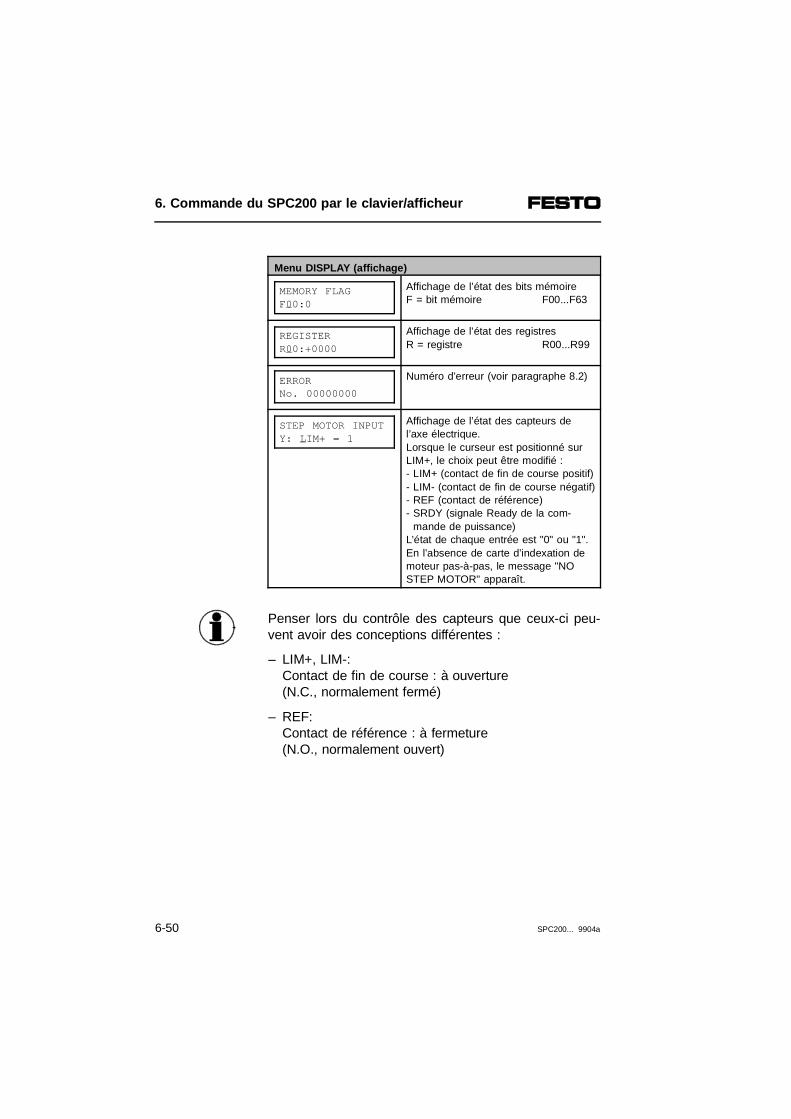
Menu DISPLAY (affichage)
MEMORY FLAGF00:0
Affichage de l’état des bits mémoireF = bit mémoire F00...F63
REGISTERR00:+0000
Affichage de l’état des registresR = registre R00...R99
ERRORNo. 00000000
Numéro d’erreur (voir paragraphe 8.2)
STEP MOTOR INPUTY: LIM+ = 1
Affichage de l’état des capteurs del’axe électrique.Lorsque le curseur est positionné surLIM+, le choix peut être modifié :- LIM+ (contact de fin de course positif)- LIM- (contact de fin de course négatif)- REF (contact de référence)- SRDY (signale Ready de la com- mande de puissance)L’état de chaque entrée est "0" ou "1".En l’absence de carte d’indexation demoteur pas-à-pas, le message "NOSTEP MOTOR" apparaît.
Penser lors du contrôle des capteurs que ceux-ci peu-vent avoir des conceptions différentes :
– LIM+, LIM-:Contact de fin de course : à ouverture (N.C., normalement fermé)
– REF:Contact de référence : à fermeture (N.O., normalement ouvert)
6. Commande du SPC200 par le clavier/afficheur
6-50 SPC200... 9904a
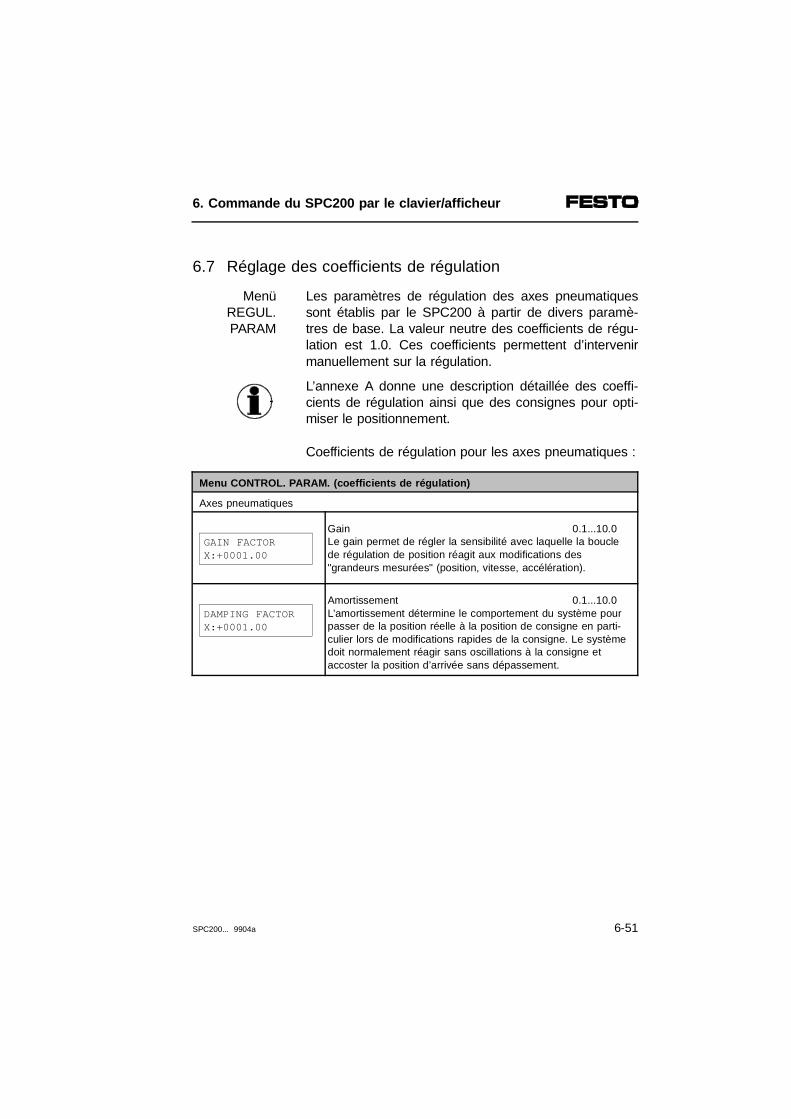
6.7 Réglage des coefficients de régulation
Les paramètres de régulation des axes pneumatiquessont établis par le SPC200 à partir de divers paramè-tres de base. La valeur neutre des coefficients de régu-lation est 1.0. Ces coefficients permettent d’intervenirmanuellement sur la régulation.
MenüREGUL.PARAM
L’annexe A donne une description détaillée des coeffi-cients de régulation ainsi que des consignes pour opti-miser le positionnement.
Coefficients de régulation pour les axes pneumatiques :
Menu CONTROL. PARAM. (coefficients de régulation)
Axes pneumatiques
GAIN FACTORX:+0001.00
Gain 0.1...10.0Le gain permet de régler la sensibilité avec laquelle la bouclede régulation de position réagit aux modifications des"grandeurs mesurées" (position, vitesse, accélération).
DAMPING FACTORX:+0001.00
Amortissement 0.1...10.0L’amortissement détermine le comportement du système pourpasser de la position réelle à la position de consigne en parti-culier lors de modifications rapides de la consigne. Le systèmedoit normalement réagir sans oscillations à la consigne etaccoster la position d’arrivée sans dépassement.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-51

Menu CONTROL. PARAM. (coefficients de régulation)
Axes pneumatiques
FILTER FACTORX:+0001.00
Coefficient de filtrage du signal 0.1...10.0La vitesse et l’accélération sont dérivés du signal de positionet filtrés pour améliorer la qualité du signal. Si la qualité dusignal est déteriorée p. ex. par des perturbations électriques, ilest possible d’agir sur le filtrage du signal grâce au coefficientde filtrage. Un trop fort filtrage peut déstabiliser la régulation.
POS. TIMEOUTX:01.00
Délai de positionnement 0,0...99,99 sSurveille si les processus de positionnement sont effectuésassez rapidement. Le SPC200 délivre un message d’erreur MClorsque :- l’entraînement ne réagit pas à la réception d’un ordre de
positionnement dans le délai imparti- l’entraînement dépasse le temps maximal alloué au positionne-
ment (somme du temps de positionnement calculé en interne et du délai de positionnement).
L’entraînement est arrêté en cas d’erreur MC. La positionactuelle est reprise comme consigne de position. L’erreur peutêtre validée par un nouvel ordre de déplacement.Choisir le délai de positionnement pour que les déplacementspuissent, de manière sûre, être effectués pendant cette durée(p. ex. 0.5 à 1.0 secondes). La valeur "0,0" annule la surveil-lance du temps de positionnement.
6. Commande du SPC200 par le clavier/afficheur
6-52 SPC200... 9904a
6.8 Fonctions de test et de diagnostic du clavier/afficheur
Pour certaines instructions de ce menu, il est néces-saire que le système soit opérationnel. Les conditionssuivantes doivent être remplies :
• le système de positionnement doit être complètementinstallé, câblé et alimenté en tension et en air com-primé
• les paramètres d’axe et d’application doivent être ré-glés correctement
• les entrées ENABLE et STOP doivent délivrer un si-gnal 1.
Le menu permet ensuite de tester :
– soit les fonctions système (SYSTEM)
– soit les fonctions d’axe (AXIS)
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-53
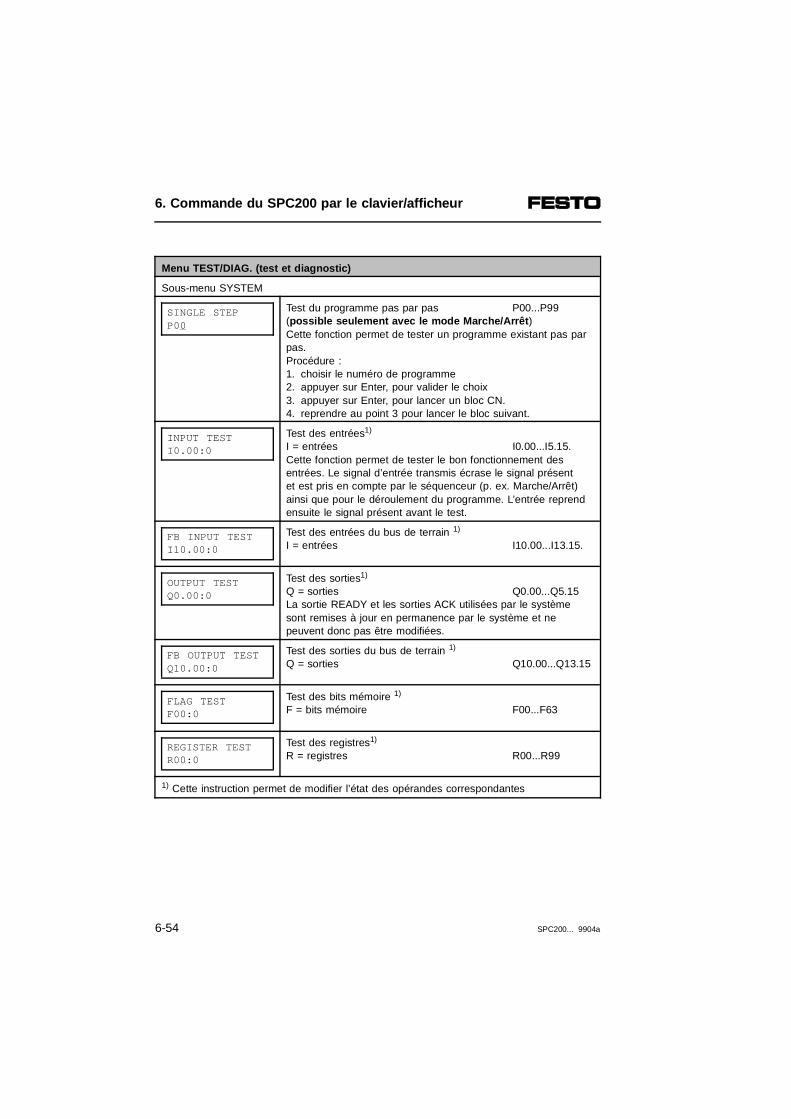
Menu TEST/DIAG. (test et diagnostic)
Sous-menu SYSTEM
SINGLE STEPP00
Test du programme pas par pas P00...P99(possible seulement avec le mode Marche/Arrêt )Cette fonction permet de tester un programme existant pas parpas.Procédure :1. choisir le numéro de programme2. appuyer sur Enter, pour valider le choix3. appuyer sur Enter, pour lancer un bloc CN.4. reprendre au point 3 pour lancer le bloc suivant.
INPUT TESTI0.00:0
Test des entrées1)
I = entrées I0.00...I5.15.Cette fonction permet de tester le bon fonctionnement desentrées. Le signal d’entrée transmis écrase le signal présentet est pris en compte par le séquenceur (p. ex. Marche/Arrêt)ainsi que pour le déroulement du programme. L’entrée reprendensuite le signal présent avant le test.
FB INPUT TESTI10.00:0
Test des entrées du bus de terrain 1)
I = entrées I10.00...I13.15.
OUTPUT TESTQ0.00:0
Test des sorties1)
Q = sorties Q0.00...Q5.15La sortie READY et les sorties ACK utilisées par le systèmesont remises à jour en permanence par le système et nepeuvent donc pas être modifiées.
FB OUTPUT TESTQ10.00:0
Test des sorties du bus de terrain 1)
Q = sorties Q10.00...Q13.15
FLAG TESTF00:0
Test des bits mémoire 1)
F = bits mémoire F00...F63
REGISTER TESTR00:0
Test des registres1)
R = registres R00...R99
1) Cette instruction permet de modifier l’état des opérandes correspondantes
6. Commande du SPC200 par le clavier/afficheur
6-54 SPC200... 9904a
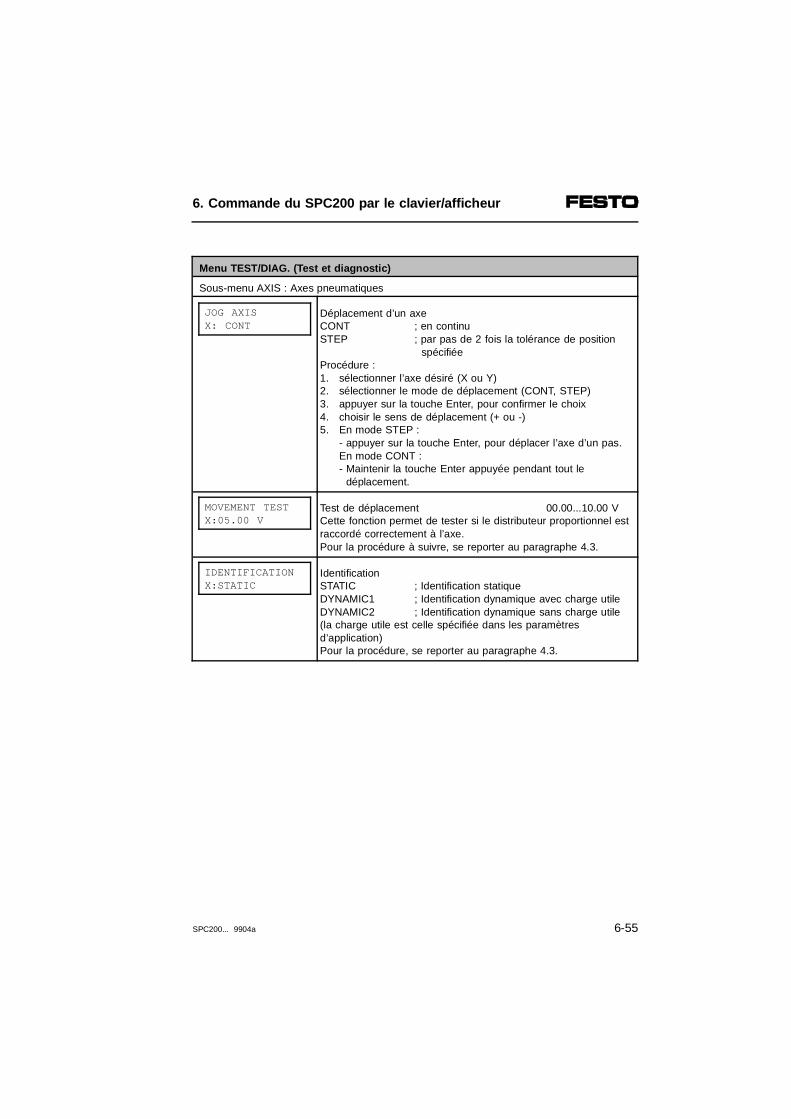
Menu TEST/DIAG. (Test et diagnostic)
Sous-menu AXIS : Axes pneumatiques
JOG AXISX: CONT
Déplacement d’un axe CONT ; en continuSTEP ; par pas de 2 fois la tolérance de position
spécifiéeProcédure :1. sélectionner l’axe désiré (X ou Y)2. sélectionner le mode de déplacement (CONT, STEP)3. appuyer sur la touche Enter, pour confirmer le choix4. choisir le sens de déplacement (+ ou -)5. En mode STEP :
- appuyer sur la touche Enter, pour déplacer l’axe d’un pas.En mode CONT :- Maintenir la touche Enter appuyée pendant tout le déplacement.
MOVEMENT TESTX:05.00 V
Test de déplacement 00.00...10.00 VCette fonction permet de tester si le distributeur proportionnel estraccordé correctement à l’axe.Pour la procédure à suivre, se reporter au paragraphe 4.3.
IDENTIFICATIONX:STATIC
IdentificationSTATIC ; Identification statiqueDYNAMIC1 ; Identification dynamique avec charge utile DYNAMIC2 ; Identification dynamique sans charge utile(la charge utile est celle spécifiée dans les paramètresd’application)Pour la procédure, se reporter au paragraphe 4.3.
6. Commande du SPC200 par le clavier/afficheur
SPC200... 9904a 6-55
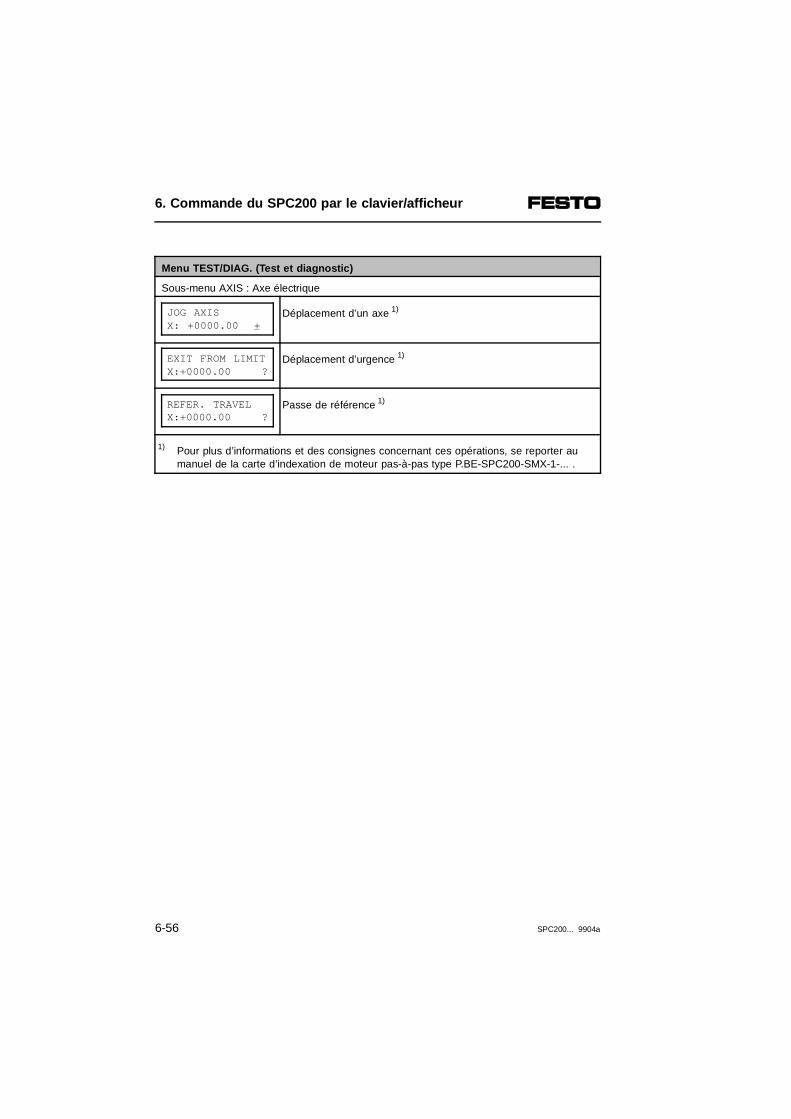
Menu TEST/DIAG. (Test et diagnostic)
Sous-menu AXIS : Axe électrique
JOG AXISX: +0000.00 +
Déplacement d’un axe 1)
EXIT FROM LIMITX:+0000.00 ?
Déplacement d’urgence 1)
REFER. TRAVELX:+0000.00 ?
Passe de référence 1)
1) Pour plus d’informations et des consignes concernant ces opérations, se reporter aumanuel de la carte d’indexation de moteur pas-à-pas type P.BE-SPC200-SMX-1-... .
6. Commande du SPC200 par le clavier/afficheur
6-56 SPC200... 9904a
Chapitre 7
Description des instructions
7. Description des instructions
SPC200... 9904a 7-1
Sommaire
7. Description des instructions
7.1 Remarques générales sur la programmation. . . . . . . . . . . . . . . 7-47.1.1 Mode synchronisé et autonome . . . . . . . . . . . . . . . . . . . . . . . . . 7-57.2 Remarques pour la programmation à l’aide du
clavier/afficheur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-87.2.1 Explication des instructions CN sur le clavier/afficheur . . . . . . 7-13
7. Description des instructions
7-2 SPC200... 9904a
Ce chapitre contient des informations générales sur laprogrammation du SPC200 avec le clavier/afficheur.Les modes synchronisé et autonome sont décrits ainsique toutes les instructions CN.
Sommairede ce
chapitre
Pour la programmation à l’aide du clavier/afficheur, ilest indispensable de bien connaître les fonctions duclavier/afficheur. Le chapitre 6 décrit la manière decréer, d’appliquer et d’éditer des programmes CN àl’aide du clavier/afficheur.
Informationcomplémen-
taire
WinPISA offre des fonctions d’édition confortables. Pourplus d’informations à ce sujet, se reporter au manueld’utilisation de WinPISA.
7. Description des instructions
SPC200... 9904a 7-3
7.1 Remarques générales sur la programmation
Lors de la création de programmes CN, tenir compte :
– du mode de fonctionnement dans lequel est employéle SPC200. En mode Marche/Arrêt, toutes les ins-tructions CN sont possibles. En mode de sélectionde bloc, seules les commandes de déplacement(G00, G01, G02, G74), les conditions de déplace-ment (G08, G09, G90 et G91) et les instructions pourrégler la précision de positionnement (G60, G61,G62) sont possibles.
– du nombre de programmes de démarrage défini.Si le SPC200 commande un système à un seul axeou un système multiaxial, en règle générale, un seulprogramme de démarrage est défini. Si deux postesde travail indépendants sont commandés, un pro-gramme de démarrage propre à chaque poste de tra-vail doit être défini (mode autonome de deux postesde travail).
Programmation parallèle
Pour réaliser à moindre coût deux postes de travail in-dépendants avec un SPC200, le SPC200 offre la possi-bilité d’une programmation parallèle. Pour cela, deuxprogrammes doivent être définis comme programmesde démarrage qui peuvent ensuite être traités parallèle-ment comme Tâche A et Tâche B.
Chaque tâche et donc chaque programme de démar-rage et sous-programme ne doit contenir que des ins-tructions pour le poste de travail concerné.
7. Description des instructions
7-4 SPC200... 9904a
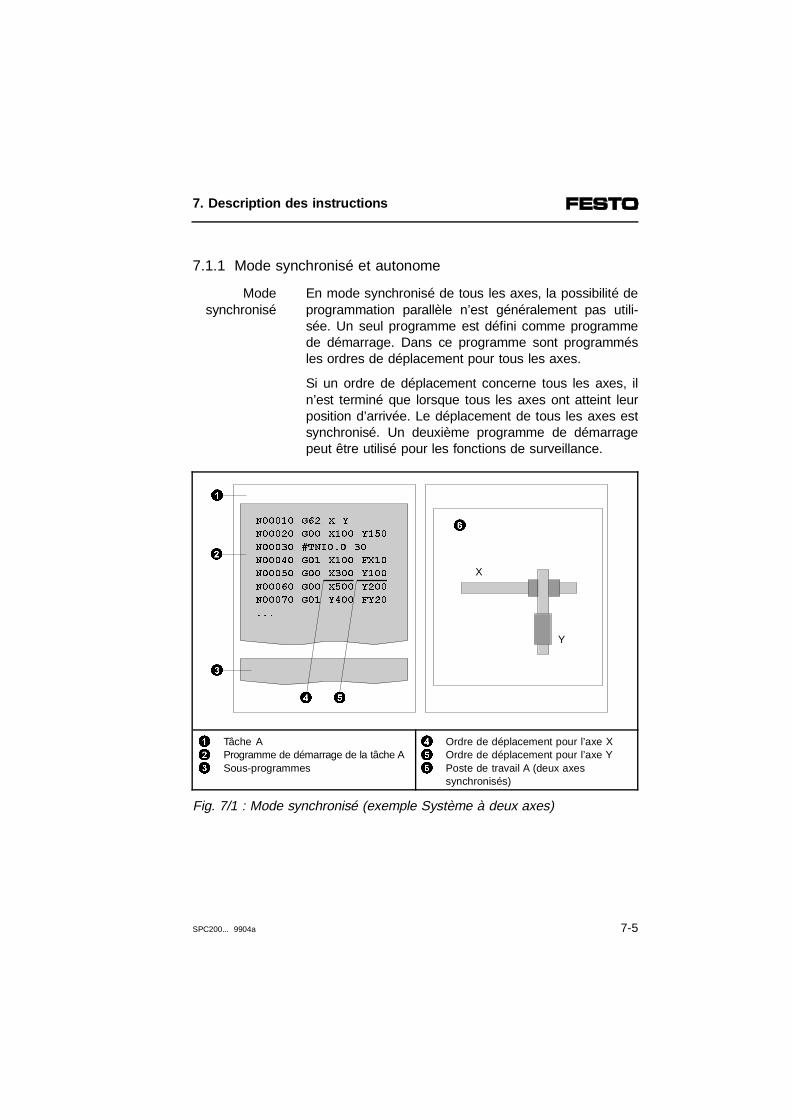
7.1.1 Mode synchronisé et autonome
En mode synchronisé de tous les axes, la possibilité deprogrammation parallèle n’est généralement pas utili-sée. Un seul programme est défini comme programmede démarrage. Dans ce programme sont programmésles ordres de déplacement pour tous les axes.
Modesynchronisé
Si un ordre de déplacement concerne tous les axes, iln’est terminé que lorsque tous les axes ont atteint leurposition d’arrivée. Le déplacement de tous les axes estsynchronisé. Un deuxième programme de démarragepeut être utilisé pour les fonctions de surveillance.
123
Tâche AProgramme de démarrage de la tâche ASous-programmes
456
Ordre de déplacement pour l’axe XOrdre de déplacement pour l’axe YPoste de travail A (deux axessynchronisés)
Fig. 7/1 : Mode synchronisé (exemple Système à deux axes)
1*;<1*;<171,1*;);1*;<1*;<1*<)<
4 5
1
2
3
X
Y
6
7. Description des instructions
SPC200... 9904a 7-5
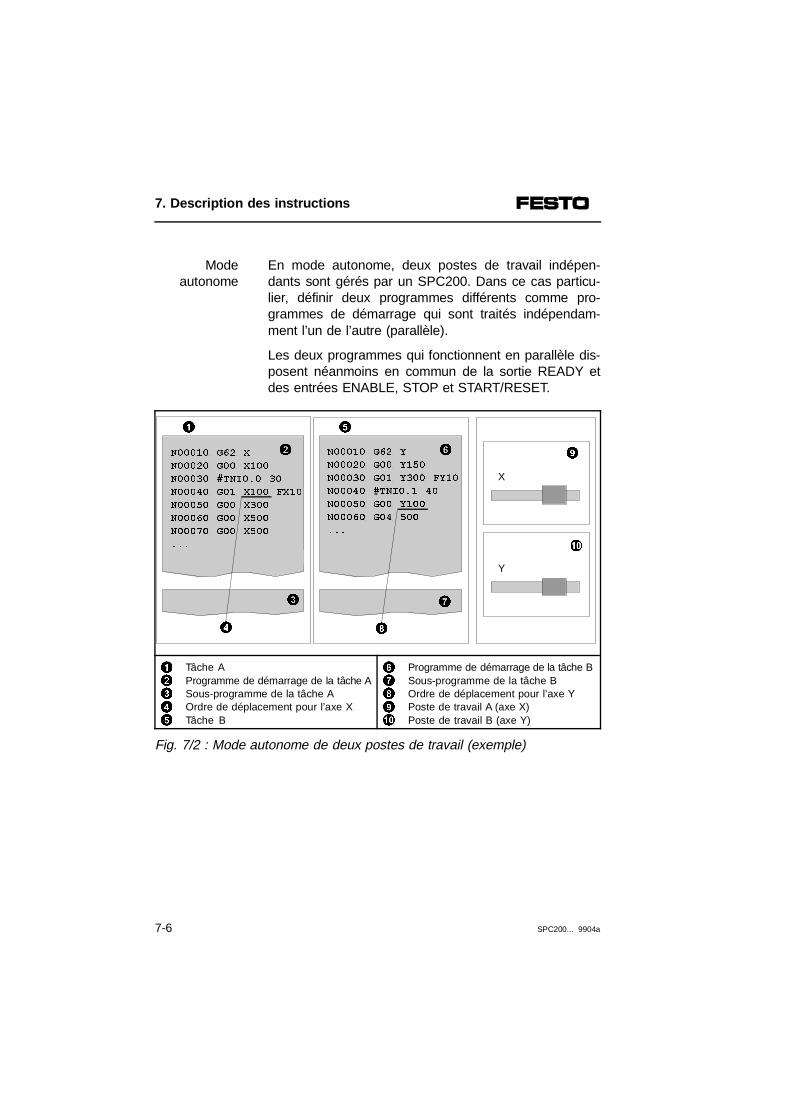
En mode autonome, deux postes de travail indépen-dants sont gérés par un SPC200. Dans ce cas particu-lier, définir deux programmes différents comme pro-grammes de démarrage qui sont traités indépendam-ment l’un de l’autre (parallèle).
Modeautonome
Les deux programmes qui fonctionnent en parallèle dis-posent néanmoins en commun de la sortie READY etdes entrées ENABLE, STOP et START/RESET.
12345
Tâche A Programme de démarrage de la tâche ASous-programme de la tâche AOrdre de déplacement pour l’axe XTâche B
67890
Programme de démarrage de la tâche BSous-programme de la tâche BOrdre de déplacement pour l’axe YPoste de travail A (axe X)Poste de travail B (axe Y)
Fig. 7/2 : Mode autonome de deux postes de travail (exemple)
1*<1*<1*<)<171,1*<1*
1*;1*;171,1*;);1*;1*;1*;
X
Y
84
51
62
7
9
0
3
7. Description des instructions
7-6 SPC200... 9904a
En mode autonome, le déroulement du programme sedéroule de façon autonome pour chaque poste de tra-vail. Via les E/S programmables (mode Marche/Arrêt)ou les E/S de commande (mode de sélection de bloc),chaque poste de travail peut être commandé indépen-damment des autres.
A respecter lors de l’utilisation de la programmation pa-rallèle :
– Les programmes de démarrage ne doivent pas êtreappelés comme sous-programmes.
– Les sous-programmes qui contiennent des ordres dedéplacement ne doivent être utilisés que par un pro-gramme de démarrage.
– Chaque tâche et donc tous les programmes utilisésne doivent contenir que les commandes de déplace-ment pour le poste de travail correspondant, p. ex. :Tâche A uniquement instructions pour l’axe XTâche B uniquement instructions pour l’axe Y
7. Description des instructions
SPC200... 9904a 7-7
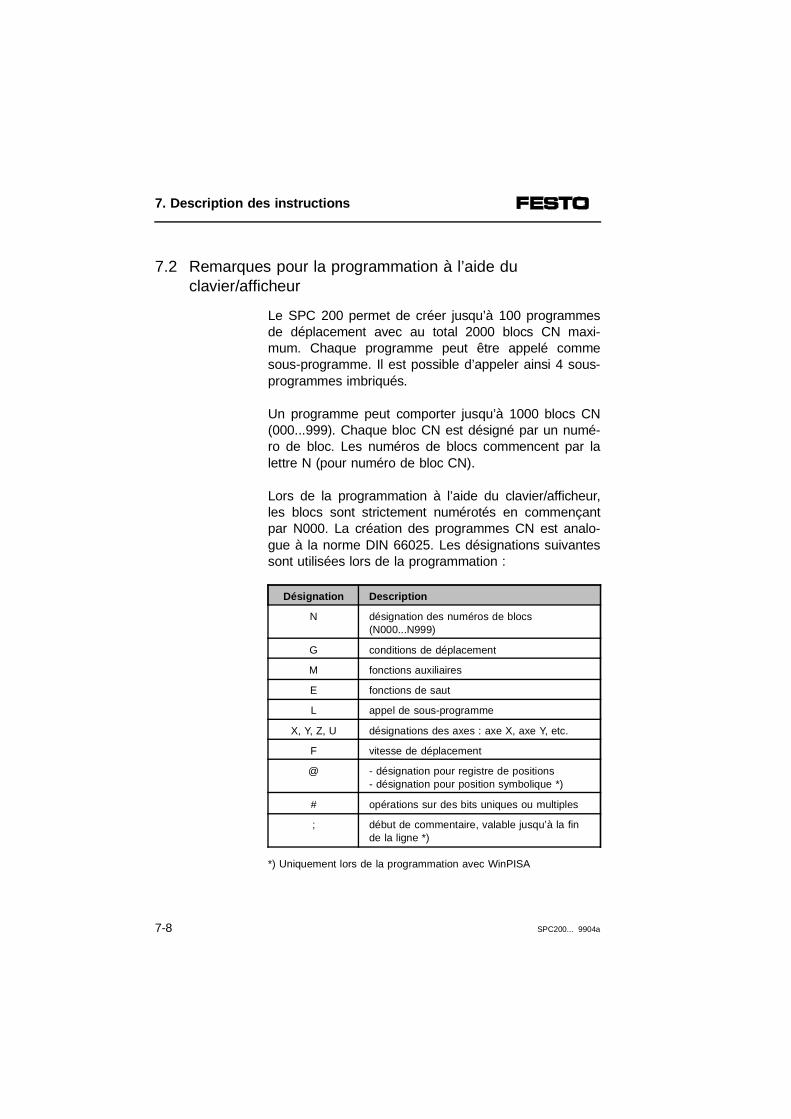
7.2 Remarques pour la programmation à l’aide duclavier/afficheur
Le SPC 200 permet de créer jusqu’à 100 programmesde déplacement avec au total 2000 blocs CN maxi-mum. Chaque programme peut être appelé commesous-programme. Il est possible d’appeler ainsi 4 sous-programmes imbriqués.
Un programme peut comporter jusqu’à 1000 blocs CN(000...999). Chaque bloc CN est désigné par un numé-ro de bloc. Les numéros de blocs commencent par lalettre N (pour numéro de bloc CN).
Lors de la programmation à l’aide du clavier/afficheur,les blocs sont strictement numérotés en commençantpar N000. La création des programmes CN est analo-gue à la norme DIN 66025. Les désignations suivantessont utilisées lors de la programmation :
Désignation Description
N désignation des numéros de blocs(N000...N999)
G conditions de déplacement
M fonctions auxiliaires
E fonctions de saut
L appel de sous-programme
X, Y, Z, U désignations des axes : axe X, axe Y, etc.
F vitesse de déplacement
@ - désignation pour registre de positions- désignation pour position symbolique *)
# opérations sur des bits uniques ou multiples
; début de commentaire, valable jusqu’à la finde la ligne *)
*) Uniquement lors de la programmation avec WinPISA
7. Description des instructions
7-8 SPC200... 9904a
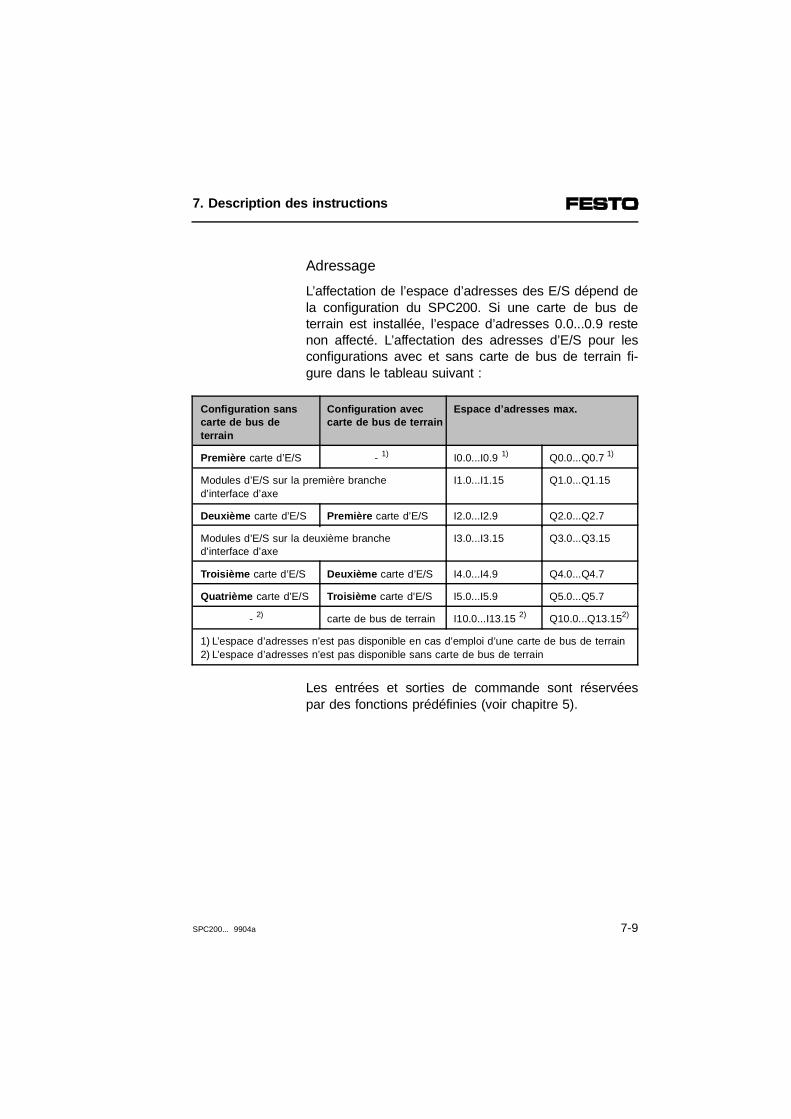
Adressage
L’affectation de l’espace d’adresses des E/S dépend dela configuration du SPC200. Si une carte de bus deterrain est installée, l’espace d’adresses 0.0...0.9 restenon affecté. L’affectation des adresses d’E/S pour lesconfigurations avec et sans carte de bus de terrain fi-gure dans le tableau suivant :
Configuration sanscarte de bus de terrain
Configuration aveccarte de bus de terrain
Espace d’adresses max.
Première carte d’E/S - 1) I0.0...I0.9 1) Q0.0...Q0.7 1)
Modules d’E/S sur la première branche d’interface d’axe
I1.0...I1.15 Q1.0...Q1.15
Deuxième carte d’E/S Première carte d’E/S I2.0...I2.9 Q2.0...Q2.7
Modules d’E/S sur la deuxième branche d’interface d’axe
I3.0...I3.15 Q3.0...Q3.15
Troisième carte d’E/S Deuxième carte d’E/S I4.0...I4.9 Q4.0...Q4.7
Quatrième carte d’E/S Troisième carte d’E/S I5.0...I5.9 Q5.0...Q5.7
- 2) carte de bus de terrain I10.0...I13.15 2) Q10.0...Q13.152)
1) L’espace d’adresses n’est pas disponible en cas d’emploi d’une carte de bus de terrain2) L’espace d’adresses n’est pas disponible sans carte de bus de terrain
Les entrées et sorties de commande sont réservéespar des fonctions prédéfinies (voir chapitre 5).
7. Description des instructions
SPC200... 9904a 7-9
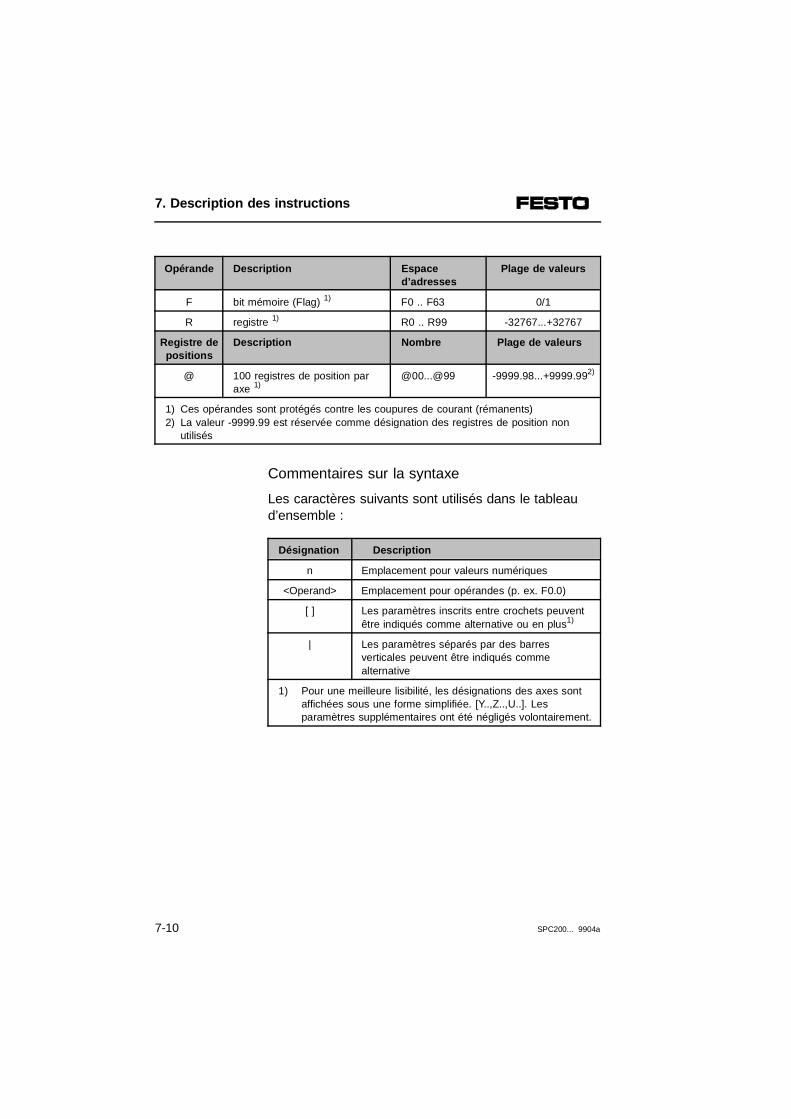
Opérande Description Espaced’adresses
Plage de valeurs
F bit mémoire (Flag) 1) F0 .. F63 0/1
R registre 1) R0 .. R99 -32767...+32767
Registre depositions
Description Nombre Plage de valeurs
@ 100 registres de position paraxe 1)
@00...@99 -9999.98...+9999.992)
1) Ces opérandes sont protégés contre les coupures de courant (rémanents)2) La valeur -9999.99 est réservée comme désignation des registres de position non
utilisés
Commentaires sur la syntaxe
Les caractères suivants sont utilisés dans le tableau d’ensemble :
Désignation Description
n Emplacement pour valeurs numériques
<Operand> Emplacement pour opérandes (p. ex. F0.0)
[ ] Les paramètres inscrits entre crochets peuventêtre indiqués comme alternative ou en plus1)
| Les paramètres séparés par des barresverticales peuvent être indiqués commealternative
1) Pour une meilleure lisibilité, les désignations des axes sontaffichées sous une forme simplifiée. [Y..,Z..,U..]. Les paramètres supplémentaires ont été négligés volontairement.
7. Description des instructions
7-10 SPC200... 9904a
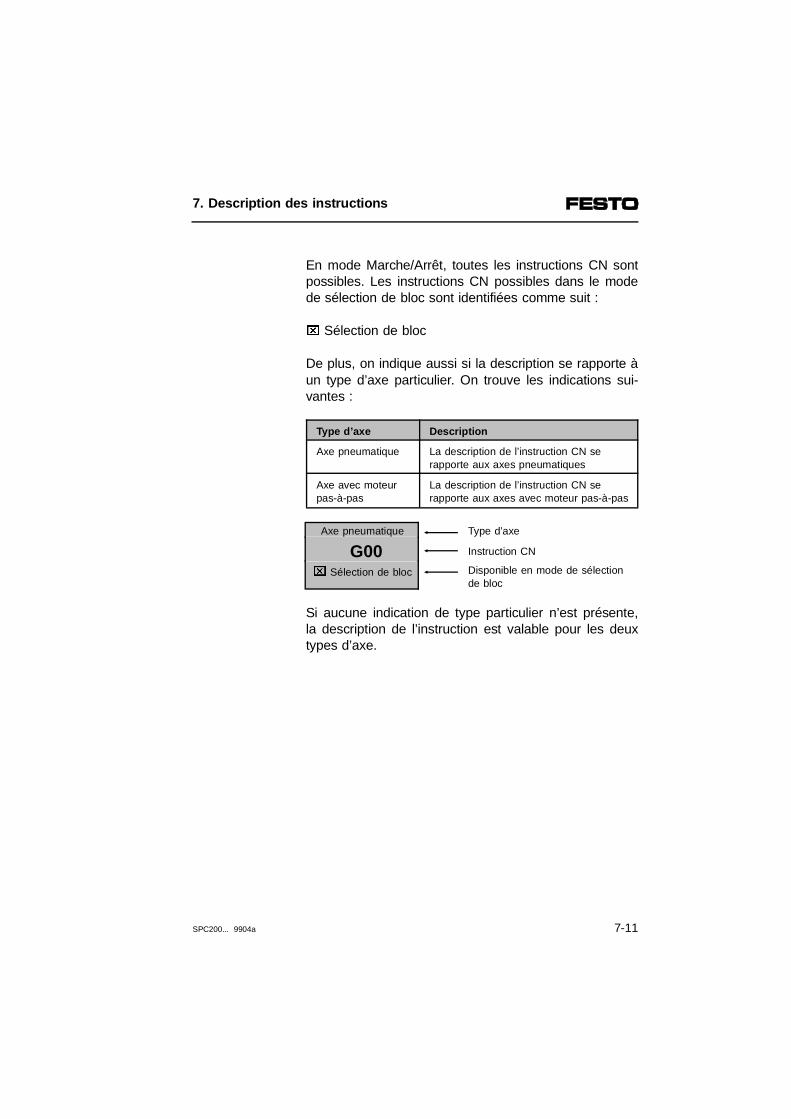
En mode Marche/Arrêt, toutes les instructions CN sontpossibles. Les instructions CN possibles dans le modede sélection de bloc sont identifiées comme suit :
x Sélection de bloc
De plus, on indique aussi si la description se rapporte àun type d’axe particulier. On trouve les indications sui-vantes :
Type d’axe Description
Axe pneumatique La description de l’instruction CN serapporte aux axes pneumatiques
Axe avec moteurpas-à-pas
La description de l’instruction CN serapporte aux axes avec moteur pas-à-pas
Axe pneumatique Type d’axe
G00 Instruction CN
x Sélection de bloc Disponible en mode de sélectionde bloc
Si aucune indication de type particulier n’est présente,la description de l’instruction est valable pour les deuxtypes d’axe.
7. Description des instructions
SPC200... 9904a 7-11
Préréglages lors du positionnement :Préréglage
– Commande de déplacement G02Pour les axes pneumatiques : Accoster la position àune vitesse définie sans à-coups d’accélération(G02) ;Pour les axes avec moteur pas-à-pas : Accoster laposition avec fréquence Start/Stop
– Positionnement absolu (G90)
– Pour les axes pneumatiques :La précision de positionnement réglée pour les para-mètres d’application (1...6) est valable.Les coefficients de vitesse, d’accélération et decharge sont de 100 %.
Les instructions sont expliquées dans l’ordre où ellesapparaissent sur le clavier/afficheur.
7. Description des instructions
7-12 SPC200... 9904a
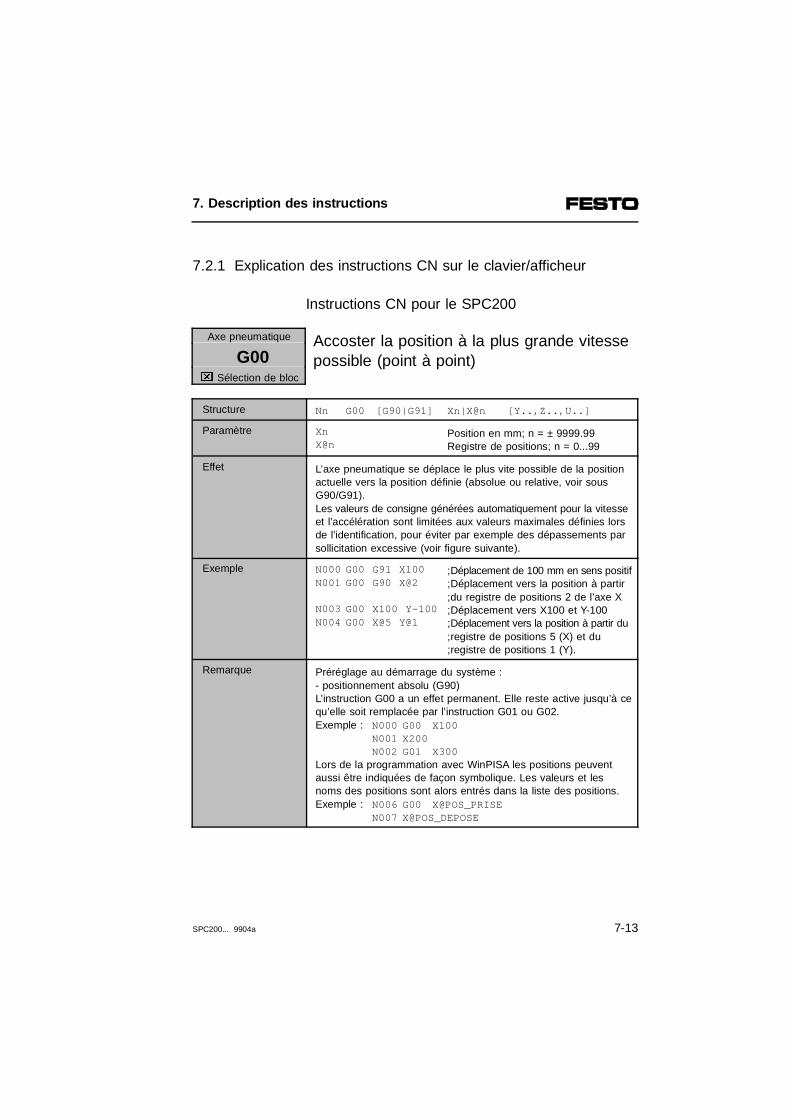
7.2.1 Explication des instructions CN sur le clavier/afficheur
Instructions CN pour le SPC200
Axe pneumatique Accoster la position à la plus grande vitessepossible (point à point)G00
x Sélection de bloc
Structure Nn G00 [G90|G91] Xn|X@n [Y..,Z..,U..]
Paramètre XnX@n
Position en mm; n = ± 9999.99Registre de positions; n = 0...99
Effet L’axe pneumatique se déplace le plus vite possible de la positionactuelle vers la position définie (absolue ou relative, voir sousG90/G91).Les valeurs de consigne générées automatiquement pour la vitesseet l’accélération sont limitées aux valeurs maximales définies lorsde l’identification, pour éviter par exemple des dépassements parsollicitation excessive (voir figure suivante).
Exemple N000 G00 G91 X100N001 G00 G90 X@2
N003 G00 X100 Y-100N004 G00 X@5 Y@1
;Déplacement de 100 mm en sens positif;Déplacement vers la position à partir;du registre de positions 2 de l’axe X;Déplacement vers X100 et Y-100;Déplacement vers la position à partir du;registre de positions 5 (X) et du ;registre de positions 1 (Y).
Remarque Préréglage au démarrage du système :- positionnement absolu (G90)L’instruction G00 a un effet permanent. Elle reste active jusqu’à cequ’elle soit remplacée par l’instruction G01 ou G02.Exemple : N000 G00 X100
N001 X200N002 G01 X300
Lors de la programmation avec WinPISA les positions peuventaussi être indiquées de façon symbolique. Les valeurs et lesnoms des positions sont alors entrés dans la liste des positions.Exemple : N006 G00 X@POS_PRISE
N007 X@POS_DEPOSE
7. Description des instructions
SPC200... 9904a 7-13
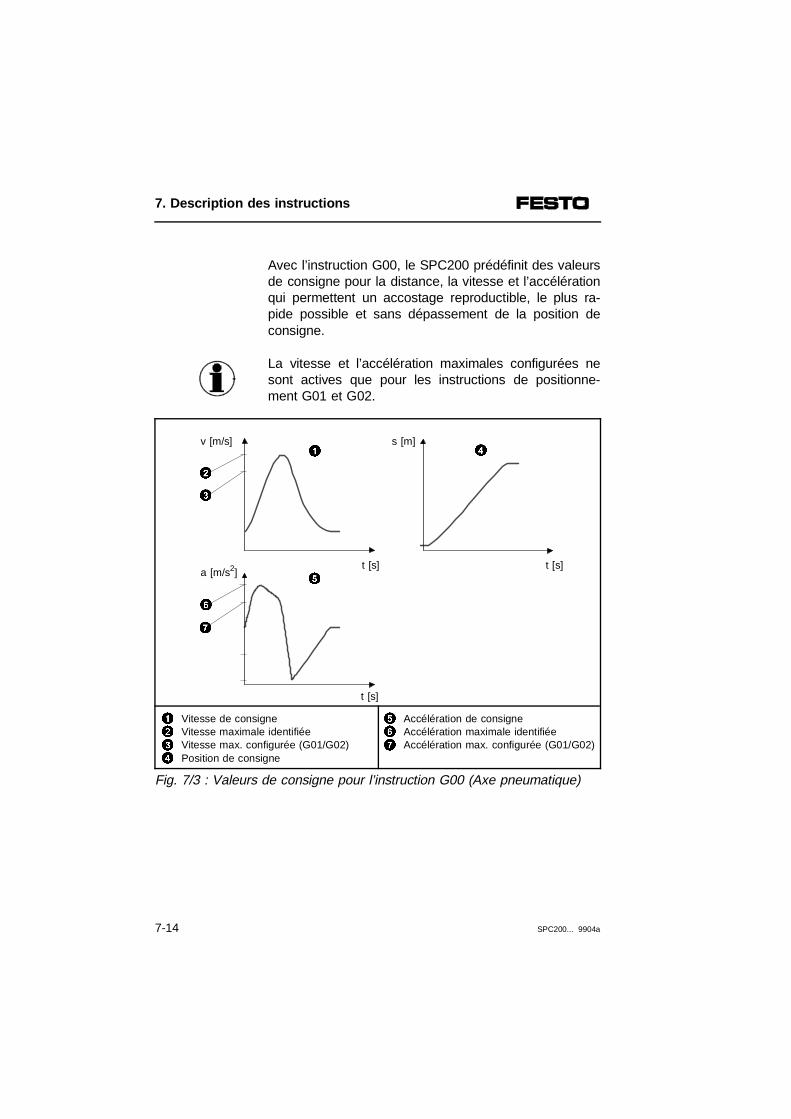
Avec l’instruction G00, le SPC200 prédéfinit des valeursde consigne pour la distance, la vitesse et l’accélérationqui permettent un accostage reproductible, le plus ra-pide possible et sans dépassement de la position deconsigne.
La vitesse et l’accélération maximales configurées nesont actives que pour les instructions de positionne-ment G01 et G02.
1234
Vitesse de consigneVitesse maximale identifiéeVitesse max. configurée (G01/G02)Position de consigne
567
Accélération de consigneAccélération maximale identifiéeAccélération max. configurée (G01/G02)
Fig. 7/3 : Valeurs de consigne pour l’instruction G00 (Axe pneumatique)
1 4
7
6
5
2
3
s [m]v [m/s]
t [s]
a [m/s2]t [s]t [s]
7. Description des instructions
7-14 SPC200... 9904a

Axe avec moteur pas-à-pas
Accoster la position à la plus grande vitessepossible (point à point)G00
x Sélection de bloc
Structure Nn G00 [G90|G91] Xn|X@n [Y..,Z..,U..]
Paramètre XnX@n
Position en mm; n = ± 9999.99Registre de positions; n = 0...99
Effet L’axe avec moteur pas-à-pas se déplace à la vitesse maximale etavec l’accélération maximale indiquées dans les paramètresd’application de la position actuelle à la position définie (absolueou relative, voir sous G90/G91).
Exemple Comme pour les axes pneumatiques(voir sous G00 pour Axe pneumatique)
Remarque Comme pour les axes pneumatiques(voir sous G00 pour Axe pneumatique)
7. Description des instructions
SPC200... 9904a 7-15
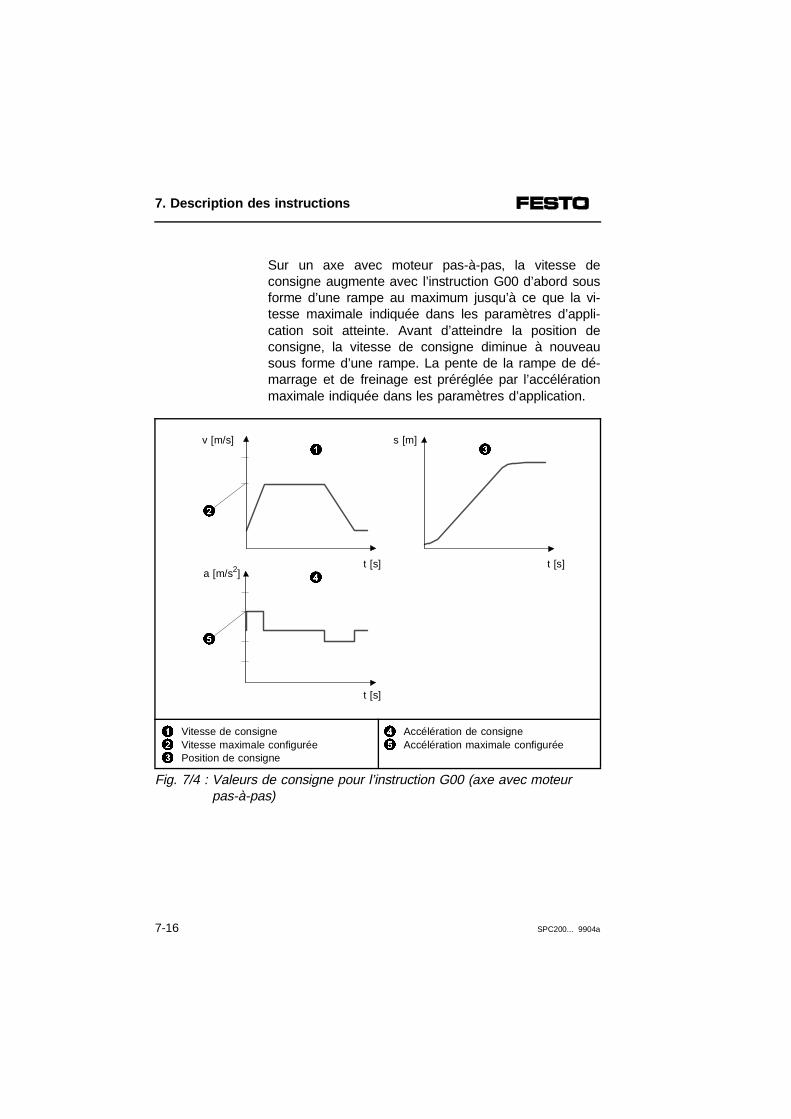
Sur un axe avec moteur pas-à-pas, la vitesse deconsigne augmente avec l’instruction G00 d’abord sousforme d’une rampe au maximum jusqu’à ce que la vi-tesse maximale indiquée dans les paramètres d’appli-cation soit atteinte. Avant d’atteindre la position deconsigne, la vitesse de consigne diminue à nouveausous forme d’une rampe. La pente de la rampe de dé-marrage et de freinage est préréglée par l’accélérationmaximale indiquée dans les paramètres d’application.
123
Vitesse de consigneVitesse maximale configuréePosition de consigne
45
Accélération de consigne Accélération maximale configurée
Fig. 7/4 : Valeurs de consigne pour l’instruction G00 (axe avec moteur pas-à-pas)
1 3
4
2
s [m]v [m/s]
t [s]
a [m/s2]t [s]t [s]
5
7. Description des instructions
7-16 SPC200... 9904a
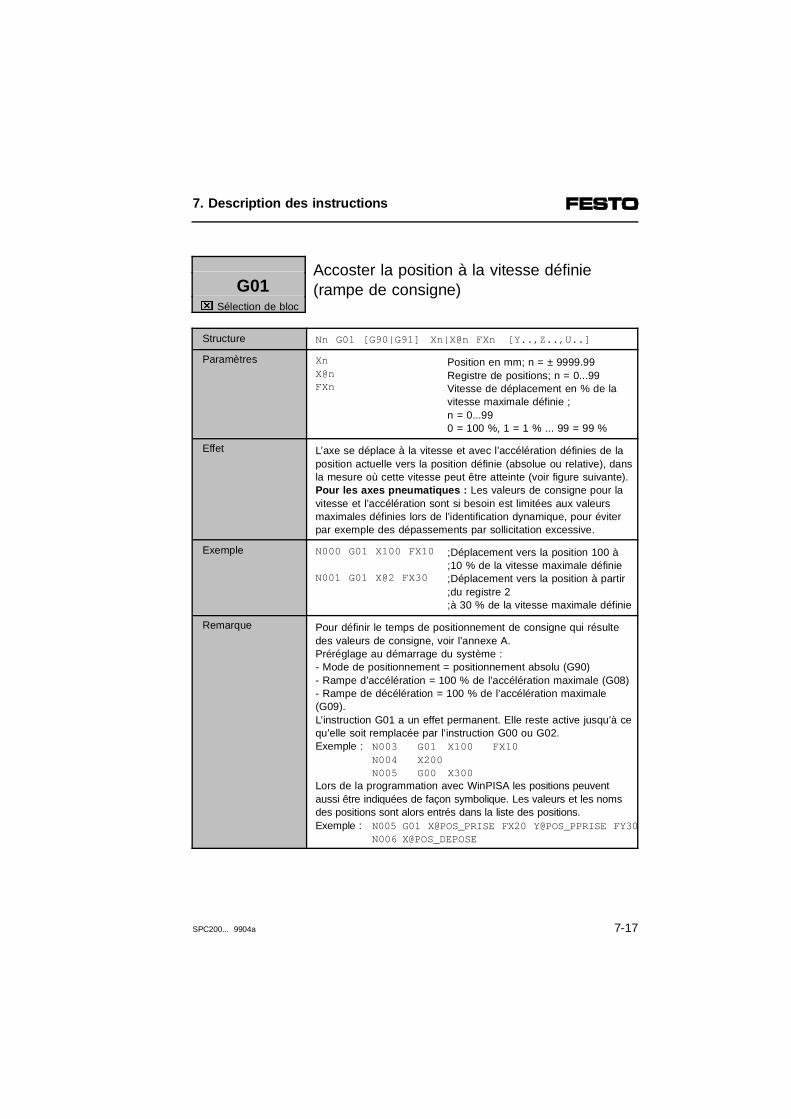
Accoster la position à la vitesse définie(rampe de consigne)G01
x Sélection de bloc
Structure Nn G01 [G90|G91] Xn|X@n FXn [Y..,Z..,U..]
Paramètres XnX@nFXn
Position en mm; n = ± 9999.99Registre de positions; n = 0...99Vitesse de déplacement en % de lavitesse maximale définie ;n = 0...990 = 100 %, 1 = 1 % ... 99 = 99 %
Effet L’axe se déplace à la vitesse et avec l’accélération définies de laposition actuelle vers la position définie (absolue ou relative), dansla mesure où cette vitesse peut être atteinte (voir figure suivante).Pour les axes pneumatiques : Les valeurs de consigne pour lavitesse et l’accélération sont si besoin est limitées aux valeursmaximales définies lors de l’identification dynamique, pour éviterpar exemple des dépassements par sollicitation excessive.
Exemple N000 G01 X100 FX10
N001 G01 X@2 FX30
;Déplacement vers la position 100 à;10 % de la vitesse maximale définie;Déplacement vers la position à partir;du registre 2;à 30 % de la vitesse maximale définie
Remarque Pour définir le temps de positionnement de consigne qui résultedes valeurs de consigne, voir l’annexe A.Préréglage au démarrage du système :- Mode de positionnement = positionnement absolu (G90)- Rampe d’accélération = 100 % de l’accélération maximale (G08)- Rampe de décélération = 100 % de l’accélération maximale(G09).L’instruction G01 a un effet permanent. Elle reste active jusqu’à cequ’elle soit remplacée par l’instruction G00 ou G02.Exemple : N003 G01 X100 FX10
N004 X200N005 G00 X300
Lors de la programmation avec WinPISA les positions peuventaussi être indiquées de façon symbolique. Les valeurs et les nomsdes positions sont alors entrés dans la liste des positions.Exemple : N005 G01 X@POS_PRISE FX20 Y@POS_PPRISE FY30
N006 X@POS_DEPOSE
7. Description des instructions
SPC200... 9904a 7-17
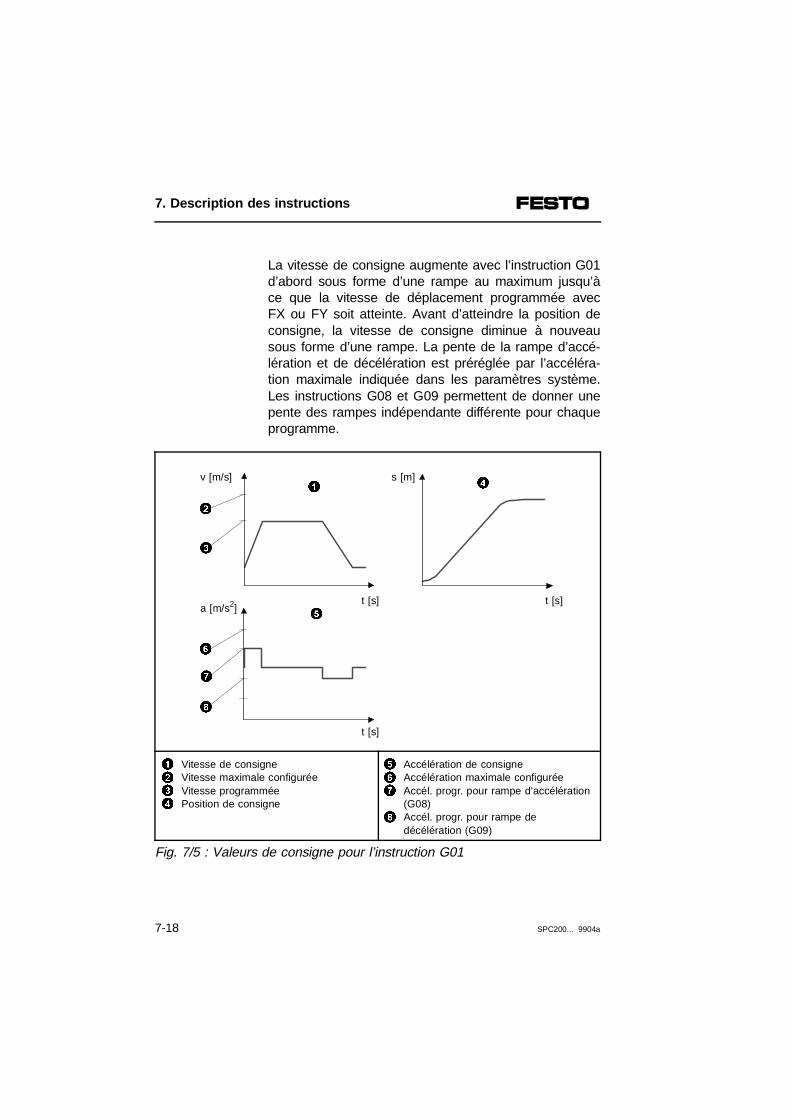
La vitesse de consigne augmente avec l’instruction G01d’abord sous forme d’une rampe au maximum jusqu’àce que la vitesse de déplacement programmée avecFX ou FY soit atteinte. Avant d’atteindre la position deconsigne, la vitesse de consigne diminue à nouveausous forme d’une rampe. La pente de la rampe d’accé-lération et de décélération est préréglée par l’accéléra-tion maximale indiquée dans les paramètres système.Les instructions G08 et G09 permettent de donner unepente des rampes indépendante différente pour chaqueprogramme.
1234
Vitesse de consigneVitesse maximale configuréeVitesse programmée Position de consigne
567
8
Accélération de consigne Accélération maximale configuréeAccél. progr. pour rampe d’accélération(G08)Accél. progr. pour rampe de décélération (G09)
Fig. 7/5 : Valeurs de consigne pour l’instruction G01
1 4
6
5
2
3
s [m]v [m/s]
t [s]
a [m/s2]t [s]t [s]
8
7
7. Description des instructions
7-18 SPC200... 9904a
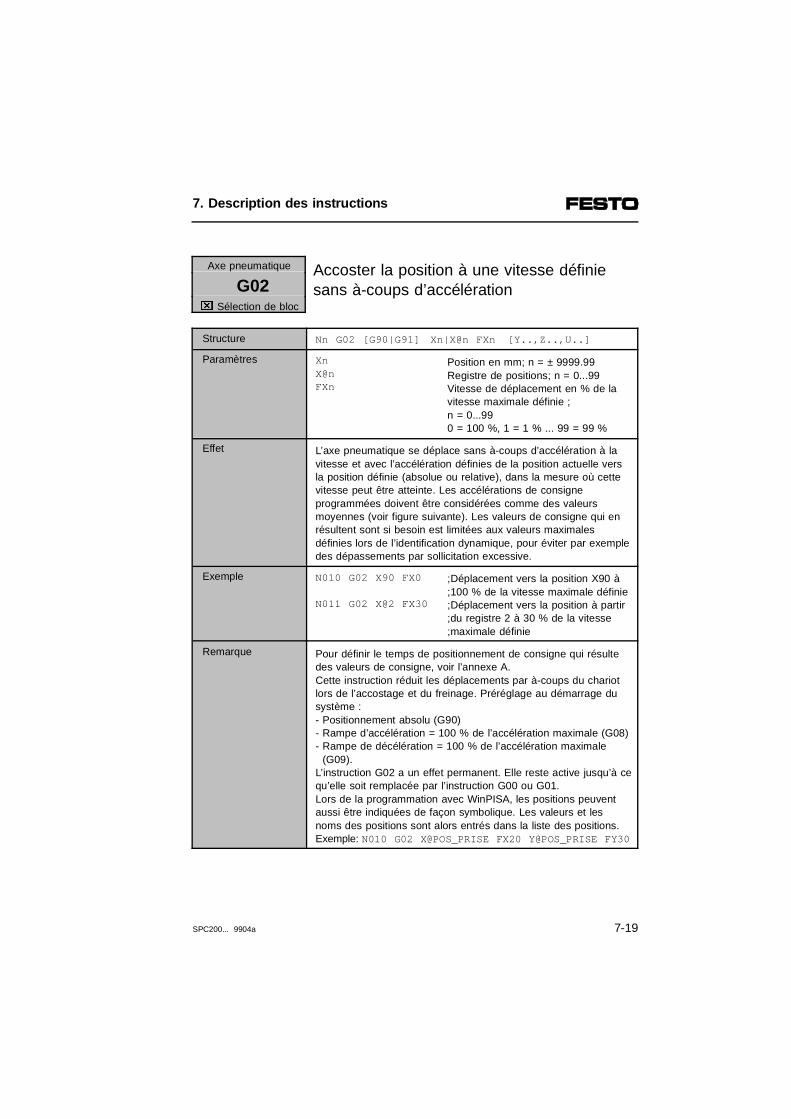
Axe pneumatique Accoster la position à une vitesse définiesans à-coups d’accélérationG02
x Sélection de bloc
Structure Nn G02 [G90|G91] Xn|X@n FXn [Y..,Z..,U..]
Paramètres XnX@nFXn
Position en mm; n = ± 9999.99Registre de positions; n = 0...99Vitesse de déplacement en % de lavitesse maximale définie ;n = 0...990 = 100 %, 1 = 1 % ... 99 = 99 %
Effet L’axe pneumatique se déplace sans à-coups d’accélération à lavitesse et avec l’accélération définies de la position actuelle versla position définie (absolue ou relative), dans la mesure où cettevitesse peut être atteinte. Les accélérations de consigneprogrammées doivent être considérées comme des valeursmoyennes (voir figure suivante). Les valeurs de consigne qui enrésultent sont si besoin est limitées aux valeurs maximalesdéfinies lors de l’identification dynamique, pour éviter par exempledes dépassements par sollicitation excessive.
Exemple N010 G02 X90 FX0
N011 G02 X@2 FX30
;Déplacement vers la position X90 à;100 % de la vitesse maximale définie;Déplacement vers la position à partir;du registre 2 à 30 % de la vitesse;maximale définie
Remarque Pour définir le temps de positionnement de consigne qui résultedes valeurs de consigne, voir l’annexe A.Cette instruction réduit les déplacements par à-coups du chariotlors de l’accostage et du freinage. Préréglage au démarrage dusystème :- Positionnement absolu (G90)- Rampe d’accélération = 100 % de l’accélération maximale (G08)- Rampe de décélération = 100 % de l’accélération maximale (G09).L’instruction G02 a un effet permanent. Elle reste active jusqu’à cequ’elle soit remplacée par l’instruction G00 ou G01.Lors de la programmation avec WinPISA, les positions peuventaussi être indiquées de façon symbolique. Les valeurs et lesnoms des positions sont alors entrés dans la liste des positions.Exemple: N010 G02 X@POS_PRISE FX20 Y@POS_PRISE FY30
7. Description des instructions
SPC200... 9904a 7-19
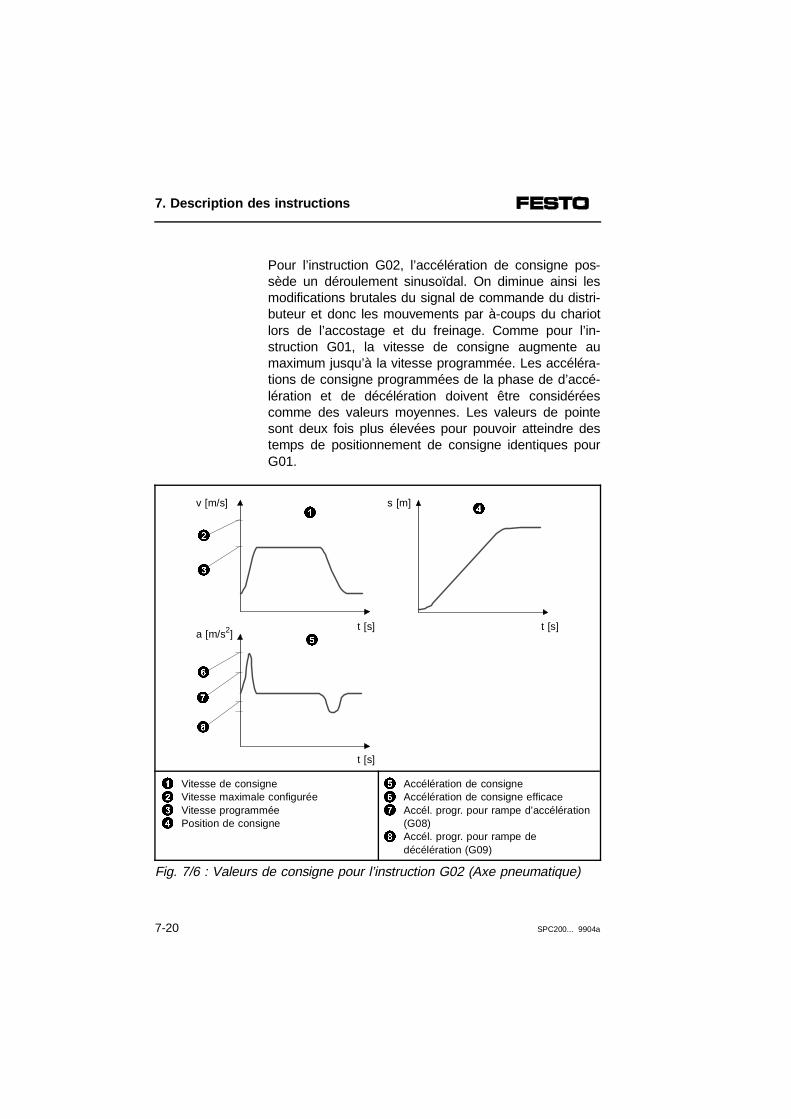
Pour l’instruction G02, l’accélération de consigne pos-sède un déroulement sinusoïdal. On diminue ainsi lesmodifications brutales du signal de commande du distri-buteur et donc les mouvements par à-coups du chariotlors de l’accostage et du freinage. Comme pour l’in-struction G01, la vitesse de consigne augmente aumaximum jusqu’à la vitesse programmée. Les accéléra-tions de consigne programmées de la phase de d’accé-lération et de décélération doivent être considéréescomme des valeurs moyennes. Les valeurs de pointesont deux fois plus élevées pour pouvoir atteindre destemps de positionnement de consigne identiques pourG01.
1234
Vitesse de consigneVitesse maximale configuréeVitesse programmée Position de consigne
567
8
Accélération de consigne Accélération de consigne efficaceAccél. progr. pour rampe d’accélération(G08)Accél. progr. pour rampe de décélération (G09)
Fig. 7/6 : Valeurs de consigne pour l’instruction G02 (Axe pneumatique)
1 4
6
5
2
3
s [m]v [m/s]
t [s]
a [m/s2]t [s]t [s]
8
7
7. Description des instructions
7-20 SPC200... 9904a
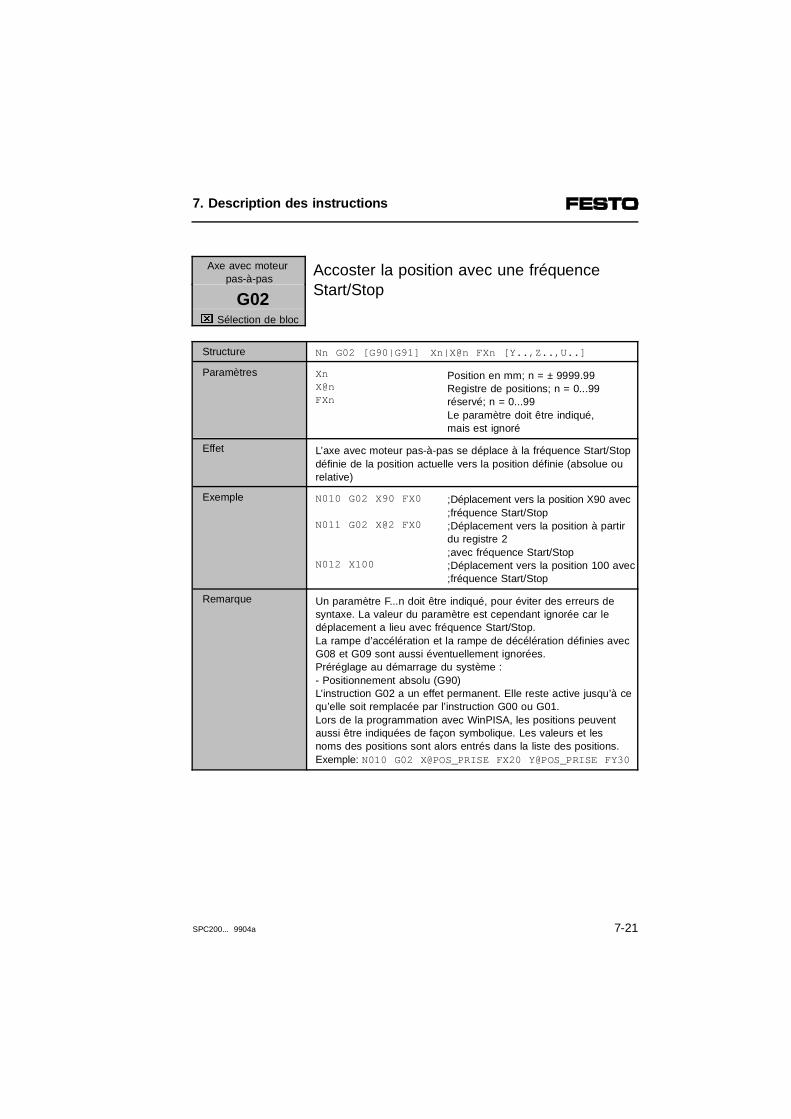
Axe avec moteur pas-à-pas
Accoster la position avec une fréquenceStart/StopG02
x Sélection de bloc
Structure Nn G02 [G90|G91] Xn|X@n FXn [Y..,Z..,U..]
Paramètres XnX@nFXn
Position en mm; n = ± 9999.99Registre de positions; n = 0...99réservé; n = 0...99Le paramètre doit être indiqué,mais est ignoré
Effet L’axe avec moteur pas-à-pas se déplace à la fréquence Start/Stopdéfinie de la position actuelle vers la position définie (absolue ourelative)
Exemple N010 G02 X90 FX0
N011 G02 X@2 FX0
N012 X100
;Déplacement vers la position X90 avec;fréquence Start/Stop;Déplacement vers la position à partirdu registre 2;avec fréquence Start/Stop;Déplacement vers la position 100 avec;fréquence Start/Stop
Remarque Un paramètre F...n doit être indiqué, pour éviter des erreurs desyntaxe. La valeur du paramètre est cependant ignorée car ledéplacement a lieu avec fréquence Start/Stop.La rampe d’accélération et la rampe de décélération définies avecG08 et G09 sont aussi éventuellement ignorées.Préréglage au démarrage du système :- Positionnement absolu (G90)L’instruction G02 a un effet permanent. Elle reste active jusqu’à cequ’elle soit remplacée par l’instruction G00 ou G01.Lors de la programmation avec WinPISA, les positions peuventaussi être indiquées de façon symbolique. Les valeurs et lesnoms des positions sont alors entrés dans la liste des positions.Exemple: N010 G02 X@POS_PRISE FX20 Y@POS_PRISE FY30
7. Description des instructions
SPC200... 9904a 7-21
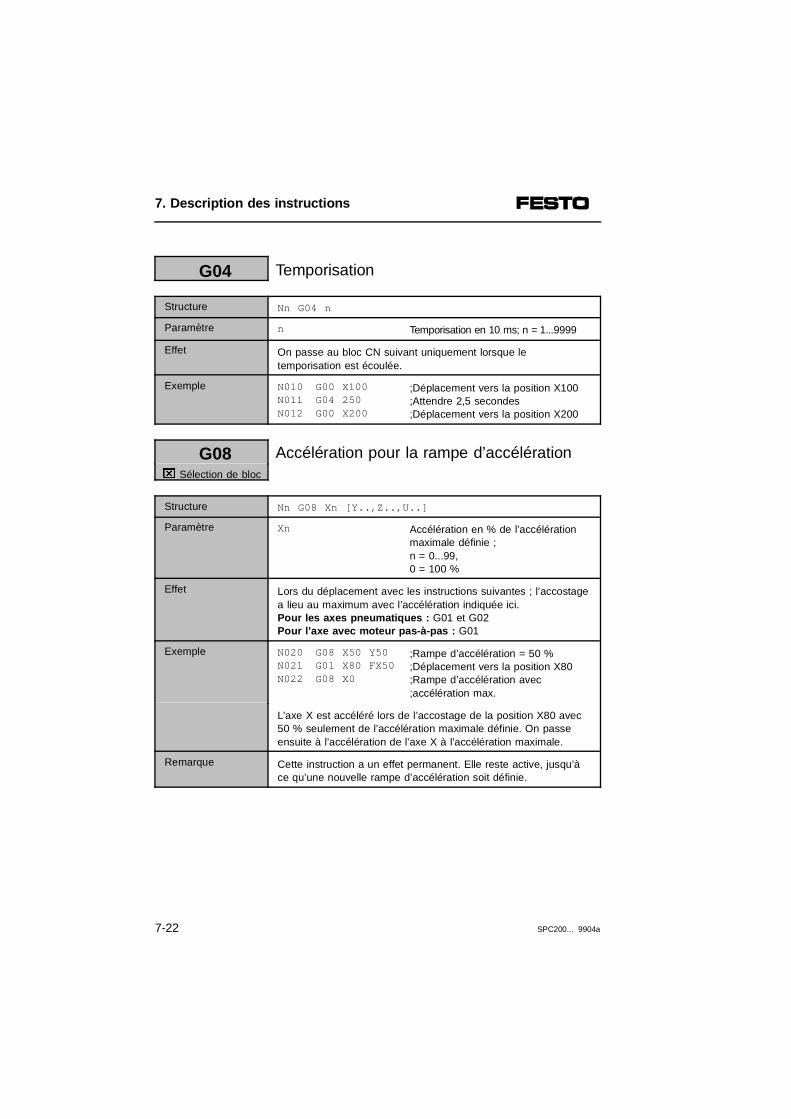
G04 Temporisation
Structure Nn G04 n
Paramètre n Temporisation en 10 ms; n = 1...9999
Effet On passe au bloc CN suivant uniquement lorsque letemporisation est écoulée.
Exemple N010 G00 X100N011 G04 250N012 G00 X200
;Déplacement vers la position X100;Attendre 2,5 secondes;Déplacement vers la position X200
G08 Accélération pour la rampe d’accélérationx Sélection de bloc
Structure Nn G08 Xn [Y..,Z..,U..]
Paramètre Xn Accélération en % de l’accélérationmaximale définie ;n = 0...99,0 = 100 %
Effet Lors du déplacement avec les instructions suivantes ; l’accostagea lieu au maximum avec l’accélération indiquée ici.Pour les axes pneumatiques : G01 et G02 Pour l’axe avec moteur pas-à-pas : G01
Exemple N020 G08 X50 Y50N021 G01 X80 FX50N022 G08 X0
;Rampe d’accélération = 50 %;Déplacement vers la position X80;Rampe d’accélération avec ;accélération max.
L’axe X est accéléré lors de l’accostage de la position X80 avec50 % seulement de l’accélération maximale définie. On passeensuite à l’accélération de l’axe X à l’accélération maximale.
Remarque Cette instruction a un effet permanent. Elle reste active, jusqu’àce qu’une nouvelle rampe d’accélération soit définie.
7. Description des instructions
7-22 SPC200... 9904a
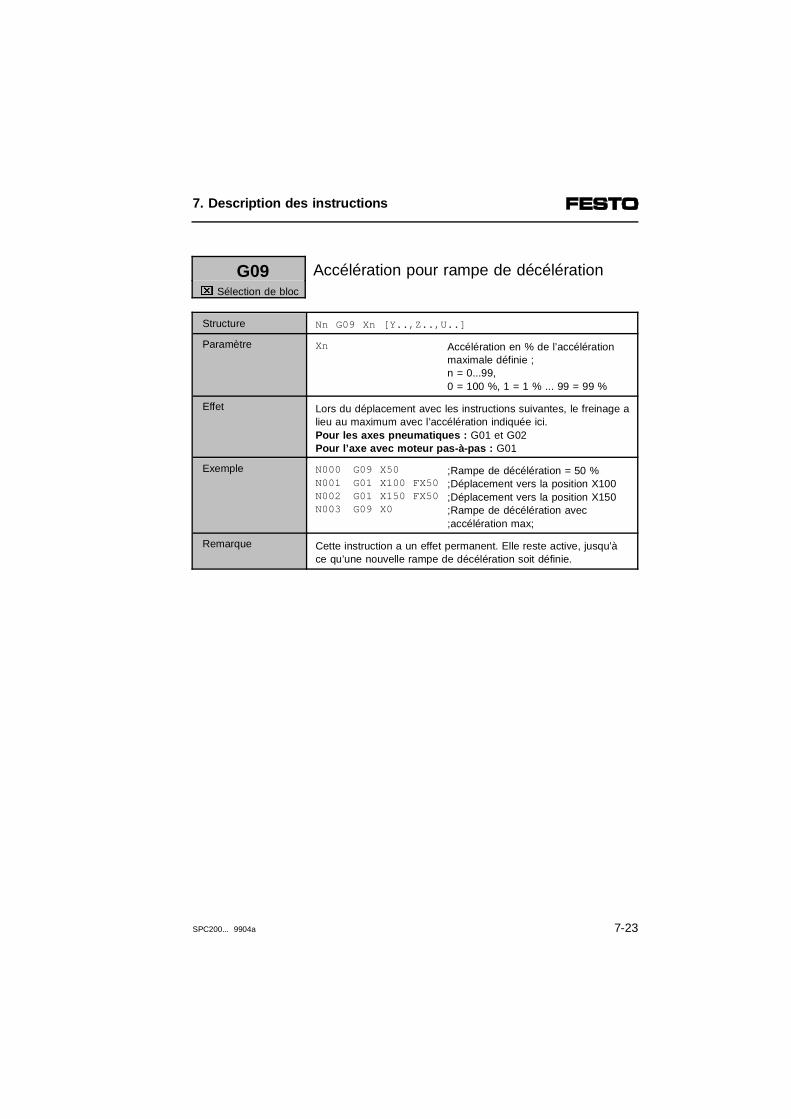
G09 Accélération pour rampe de décélérationx Sélection de bloc
Structure Nn G09 Xn [Y..,Z..,U..]
Paramètre Xn Accélération en % de l’accélérationmaximale définie ;n = 0...99,0 = 100 %, 1 = 1 % ... 99 = 99 %
Effet Lors du déplacement avec les instructions suivantes, le freinage alieu au maximum avec l’accélération indiquée ici.Pour les axes pneumatiques : G01 et G02 Pour l’axe avec moteur pas-à-pas : G01
Exemple N000 G09 X50N001 G01 X100 FX50N002 G01 X150 FX50N003 G09 X0
;Rampe de décélération = 50 %;Déplacement vers la position X100;Déplacement vers la position X150;Rampe de décélération avec;accélération max;
Remarque Cette instruction a un effet permanent. Elle reste active, jusqu’àce qu’une nouvelle rampe de décélération soit définie.
7. Description des instructions
SPC200... 9904a 7-23
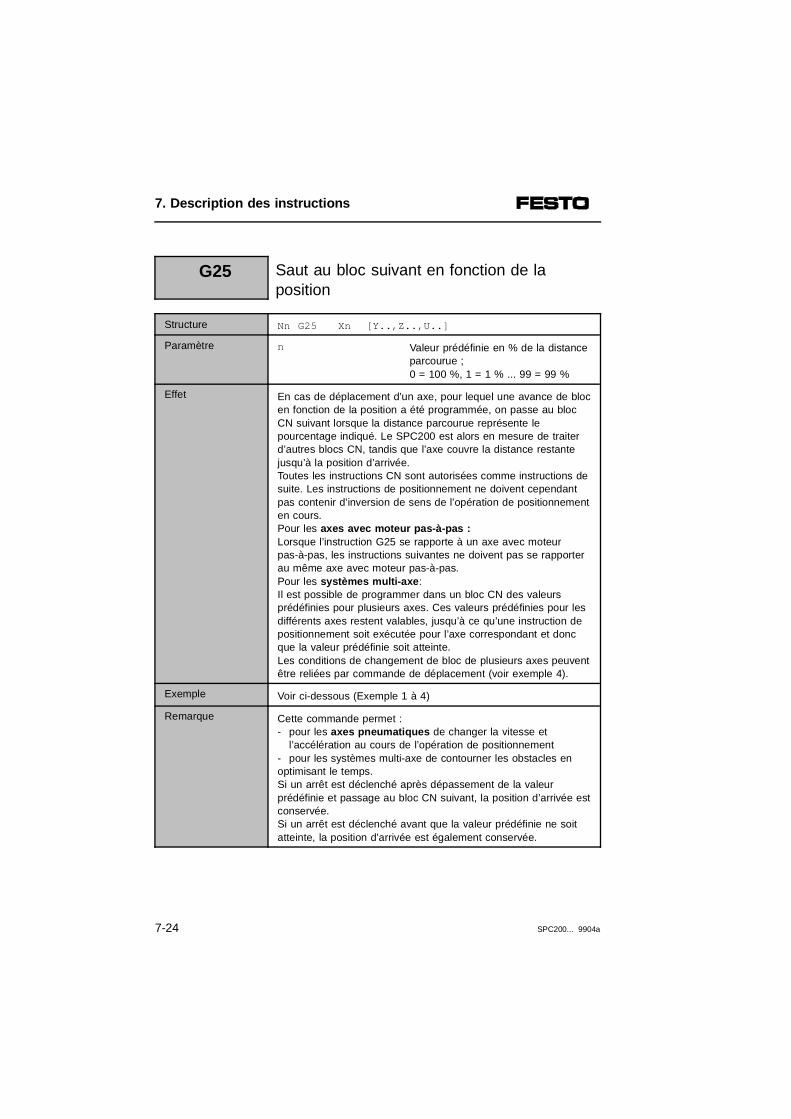
G25 Saut au bloc suivant en fonction de laposition
Structure Nn G25 Xn [Y..,Z..,U..]
Paramètre n Valeur prédéfinie en % de la distanceparcourue ;0 = 100 %, 1 = 1 % ... 99 = 99 %
Effet En cas de déplacement d’un axe, pour lequel une avance de blocen fonction de la position a été programmée, on passe au blocCN suivant lorsque la distance parcourue représente lepourcentage indiqué. Le SPC200 est alors en mesure de traiterd’autres blocs CN, tandis que l’axe couvre la distance restantejusqu’à la position d’arrivée.Toutes les instructions CN sont autorisées comme instructions desuite. Les instructions de positionnement ne doivent cependantpas contenir d’inversion de sens de l’opération de positionnementen cours.Pour les axes avec moteur pas-à-pas :Lorsque l’instruction G25 se rapporte à un axe avec moteur pas-à-pas, les instructions suivantes ne doivent pas se rapporterau même axe avec moteur pas-à-pas.Pour les systèmes multi-axe :Il est possible de programmer dans un bloc CN des valeursprédéfinies pour plusieurs axes. Ces valeurs prédéfinies pour lesdifférents axes restent valables, jusqu’à ce qu’une instruction depositionnement soit exécutée pour l’axe correspondant et doncque la valeur prédéfinie soit atteinte.Les conditions de changement de bloc de plusieurs axes peuventêtre reliées par commande de déplacement (voir exemple 4).
Exemple Voir ci-dessous (Exemple 1 à 4)
Remarque Cette commande permet :- pour les axes pneumatiques de changer la vitesse et
l’accélération au cours de l’opération de positionnement- pour les systèmes multi-axe de contourner les obstacles enoptimisant le temps.Si un arrêt est déclenché après dépassement de la valeurprédéfinie et passage au bloc CN suivant, la position d’arrivée estconservée.Si un arrêt est déclenché avant que la valeur prédéfinie ne soitatteinte, la position d’arrivée est également conservée.
7. Description des instructions
7-24 SPC200... 9904a
Changement de vitesse/d’accélération(uniquement pour les axes pneumatiques)
Le passage à une nouvelle vitesse de consigne s’effec-tue à l’aide des valeurs actuellement réglées pour l’ac-célération de démarrage ou le ralentisssement. Il n’y apas de limitation automatique à des valeurs d’accéléra-tion réalisables.
ATTENTION :Des accélérations de consigne excessivement éle-vées peuvent entraîner de forts dépassement et pro-voquer des dégâts sur l’axe. S’assurer lors de l’utili-sation de l’instruction G25 que les accélérations deconsigne réglées sont réalisables au vu de l’axe utili-sé et de la distance restant à parcourir.
Si la distance à parcourir restante ne suffit pas pourarriver à l’arrêt avec le ralentissement réglé, un arrêtest déclenché automatiquement (numéro d’erreurnnn03x06). Avancer dans ce cas la condition de pas-sage ou régler une rampe de freinage plus pentue.
Avec les commandes de déplacement G02, un arrêtautomatique peut aussi être déclenché lorsque la condi-tion pour l’avance de bloc tombe dans la phase de ra-lentissement. Utiliser dans ce cas la commande de dé-placement G01 (formules de calcul voir l’annexe A).
7. Description des instructions
SPC200... 9904a 7-25
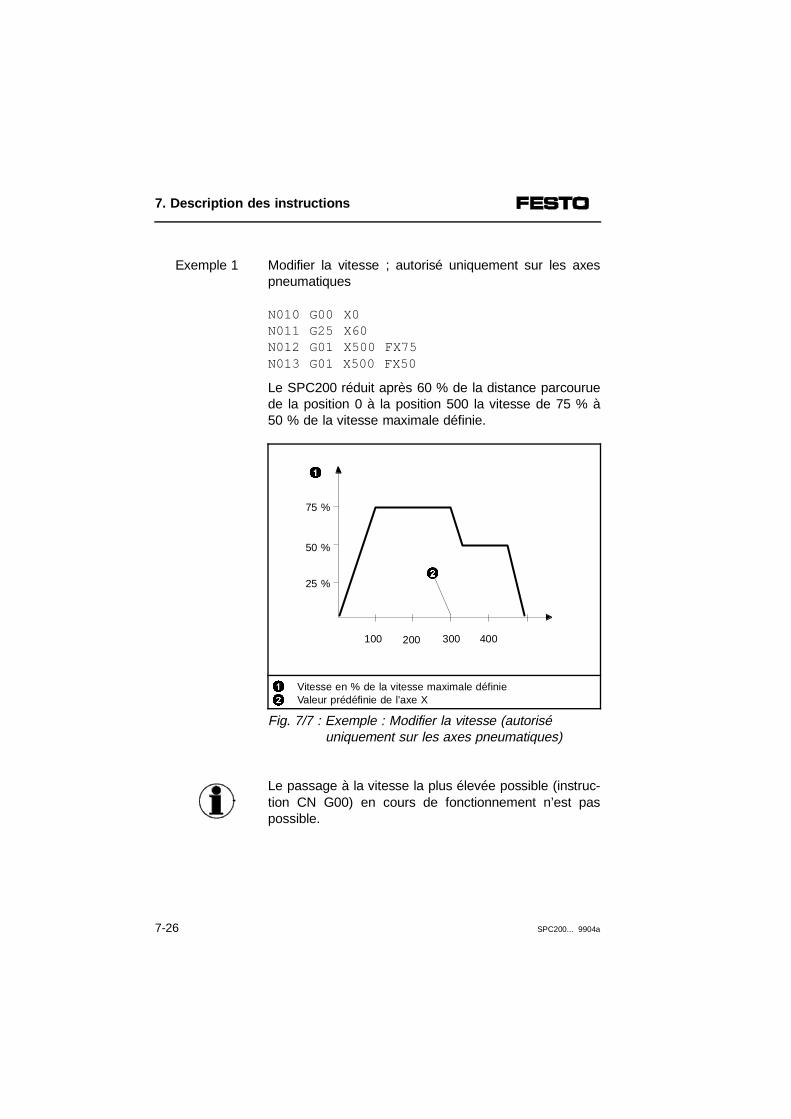
Modifier la vitesse ; autorisé uniquement sur les axespneumatiques
Exemple 1
N010 G00 X0N011 G25 X60N012 G01 X500 FX75N013 G01 X500 FX50
Le SPC200 réduit après 60 % de la distance parcouruede la position 0 à la position 500 la vitesse de 75 % à50 % de la vitesse maximale définie.
12
Vitesse en % de la vitesse maximale définieValeur prédéfinie de l’axe X
Fig. 7/7 : Exemple : Modifier la vitesse (autorisé uniquement sur les axes pneumatiques)
Le passage à la vitesse la plus élevée possible (instruc-tion CN G00) en cours de fonctionnement n’est paspossible.
100
50 %
75 %
25 %
300 400200
1
2
7. Description des instructions
7-26 SPC200... 9904a
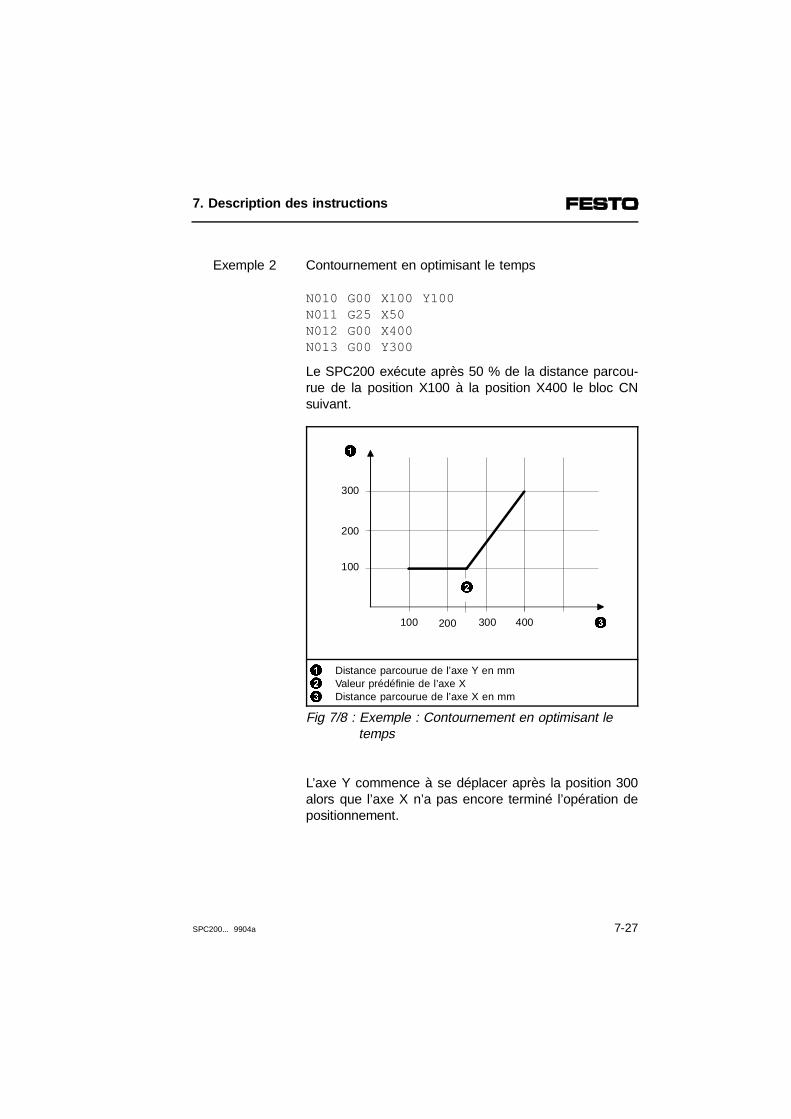
Contournement en optimisant le tempsExemple 2
N010 G00 X100 Y100N011 G25 X50N012 G00 X400N013 G00 Y300
Le SPC200 exécute après 50 % de la distance parcou-rue de la position X100 à la position X400 le bloc CNsuivant.
123
Distance parcourue de l’axe Y en mmValeur prédéfinie de l’axe XDistance parcourue de l’axe X en mm
Fig 7/8 : Exemple : Contournement en optimisant letemps
L’axe Y commence à se déplacer après la position 300alors que l’axe X n’a pas encore terminé l’opération depositionnement.
100
200
300
100
300 400200
1
2
3
7. Description des instructions
SPC200... 9904a 7-27
Avance de bloc en fonction des événementsExemple 3
N010 G00 X0N011 G25 X1N012 G01 X500 FX60N013 #TNI0.0 13N014 G01 X500 FX10
Après que 1 % de la distance de X0 à X500 a étécouverte, le SPC200 passe au bloc CN N013. On restedans ce bloc jusqu’à ce que l’événement ait lieu (icisignal 1 sur l’entrée I0.0). C’est à ce moment seule-ment que l’on passe si nécessaire pendant le déplace-ment à l’ordre de déplacement suivant (ici réduction dela vitesse).
Si l’événement a lieu après que la position d’arrivée estatteinte, l’ordre de déplacement suivant dans cet exem-ple est sans effet car la même position d’arrivée (X500)a été programmée.
7. Description des instructions
7-28 SPC200... 9904a
Condition d’avance de bloc liéeExemple 4
N010 G01 X0 FX0 Y0 FY0 Z0 FZ0N011 G25 X10 Y10 Z10N012 G01 X100 FX10N013 #SQ0.0N014 G01 Y100 FY10 Z100 FZ10N015 .......
Dans le bloc CN N011 le SPC200 enregistre les valeursprédéfinies pour les axes X, Y, et Z. Dans le bloc CNsuivant, seul l’axe X est déplacé. Lorsque l’axe X a at-teint la valeur prédéfinie, la sortie Q0.0 est forcée.
Dans le bloc CN N014, les axes Y et Z sont déplacés.On passe au bloc CN suivant lorsque les deux axes ontatteint la valeur prédéfinie programmée dans N011 (lienlogique ET).
Si d’autres axes que l’axe pour lequel une valeur pré-définie a été programmée doivent être déplacés avec lemême bloc CN , la valeur prédéfinie est pour eux de100 %.
N015 G01 X0 FX0 Y0 FY0N016 G25 X50N017 G01 X200 FX0 Y200 FY0N018 #SQ0.0N019 .......
La sortie Q0.0 est forcée lorsque l’axe Y a atteint laposition Y200 et l’axe X la valeur prédéfinie program-mée (ici X100).
7. Description des instructions
SPC200... 9904a 7-29
G26 Réservé pour des extensions ultérieures
Structure
Paramètre
Effet
Exemple
Remarque
G27 Réservé pour des extensions ultérieures
Structure
Paramètre
Effet
Exemple
Remarque
7. Description des instructions
7-30 SPC200... 9904a

G28 Charger la valeur de position dans leregistre de positions
Structure Nn G28 @n Xn [Y..,Z..,U..]ouNn G28 @n X@n [Y..,Z..,U..]
Paramètre @n
XnX@n
Registre de positions d’arrivée ; n = 0...99Position en mm ; n = ± 9999.99Registre de positions de départ ; n = 0...99
Effet Charge la valeur de position ou la valeur de registre dans leregistre de positions d’arrivée.
Exemple N010 G28 @0 X10 Y10
N011 G28 @1 X@99
;Charge dans le registre de positions 0;des axes X et Y la valeur 10 ;Charge dans le registre de positions 1;de l’axe X la valeur provenant du;registre de positions 99 de l’axe X
Remarque Les registres de position sont protégés contre les coupures decourant (rémanents).Un bloc de registre de positions existe pour chaque axe configuré.Il stocke les positions contenues dans la liste des positions.
7. Description des instructions
SPC200... 9904a 7-31

G29 Ajouter la valeur de position et le registre depositions
Structure Nn G29 @n Xn [Y..,Z..,U..]ouNn G29 @n X@n [Y..,Z..,U..]
Paramètre @n
XnX@n
Registre de positions d’arrivée ; n = 0...99Position en mm ; n = ± 9999.99Registre de positions de départ ; n = 0...99
Effet Forme la somme de la valeur de position et de la valeur duregistre ou de deux valeurs de registre et stocke le résultat dansle registre d’arrivée.
Exemple (registre @X10=20)N010 G29 @10 X+10.5 ;Ajoute la valeur de position et
;valeur du registre de positions de;l’axe X
La valeur de position 10.5 et la valeur du registre de positions 10de l’axe X (ici 20) sont ajoutées. Le résultat (30.5) est enregistrédans le registre de positions 10 de l’axe X.
Remarque Les registres de position sont protégés contre les coupures decourant (rémanents).Un bloc de registre de positions existe pour chaque axe confi-guré. Il stocke les positions contenues dans la liste des positions.
7. Description des instructions
7-32 SPC200... 9904a
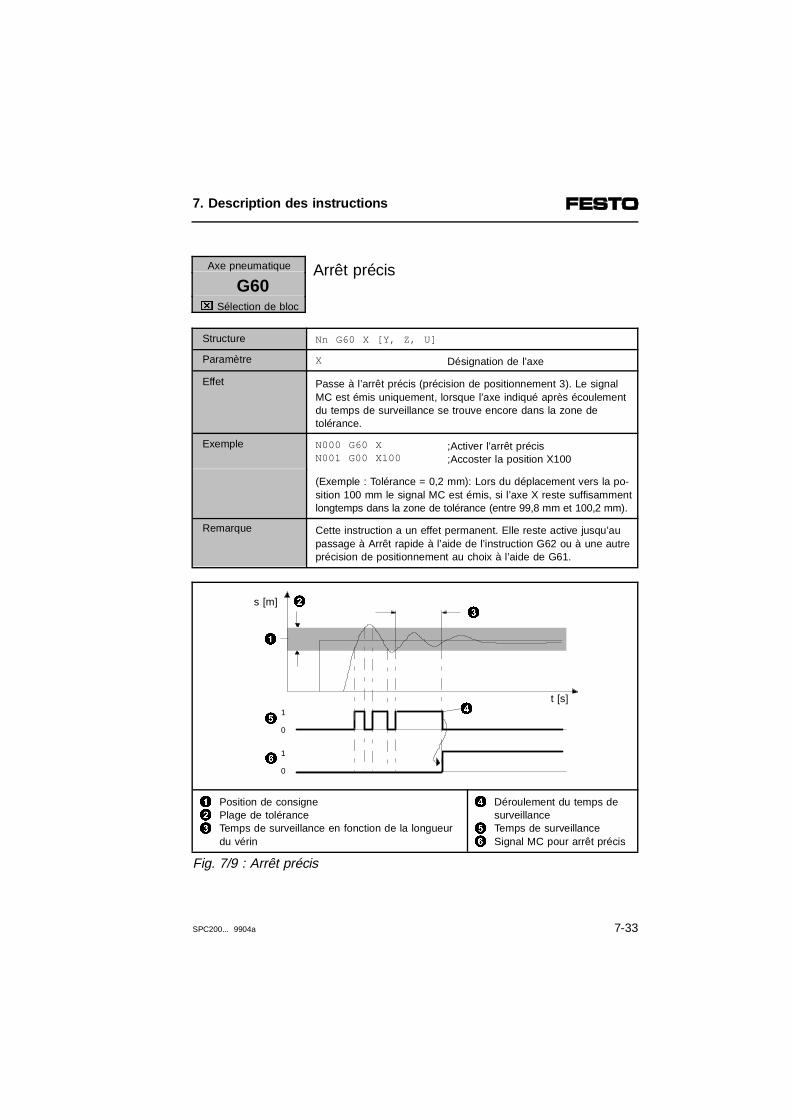
Axe pneumatique Arrêt précisG60
x Sélection de bloc
Structure Nn G60 X [Y, Z, U]
Paramètre X Désignation de l’axe
Effet Passe à l’arrêt précis (précision de positionnement 3). Le signalMC est émis uniquement, lorsque l’axe indiqué après écoulementdu temps de surveillance se trouve encore dans la zone detolérance.
Exemple N000 G60 XN001 G00 X100
;Activer l’arrêt précis;Accoster la position X100
(Exemple : Tolérance = 0,2 mm): Lors du déplacement vers la po-sition 100 mm le signal MC est émis, si l’axe X reste suffisammentlongtemps dans la zone de tolérance (entre 99,8 mm et 100,2 mm).
Remarque Cette instruction a un effet permanent. Elle reste active jusqu’aupassage à Arrêt rapide à l’aide de l’instruction G62 ou à une autreprécision de positionnement au choix à l’aide de G61.
123
Position de consignePlage de toléranceTemps de surveillance en fonction de la longueurdu vérin
4
56
Déroulement du temps desurveillanceTemps de surveillanceSignal MC pour arrêt précis
Fig. 7/9 : Arrêt précis
0
1
0
1
1
6
23
45
s [m]
t [s]
7. Description des instructions
SPC200... 9904a 7-33

Axe pneumatique Régler la précision de positionnementG61
x Sélection de bloc
Structure Nn G61 Xn [Y..,Z..,U..]
Paramètre Xn Précision de positionnement ; n = 0...6
Effet Passe à la précision de positionnement réglée. Le signal MC (mo-tion complete) est émis uniquement lorsque l’axe a atteint les cri-tères exigés de la précision de positionnement réglée (voir fig. 7/9).
Exemple N005 G61 X1
N006 G00 X100N007 G60 X
;Précision de positionnement = 1, ;Arrêt rapide;Accoster la position 100 mm ;Arrêt précis
Lors du déplacement vers la position X100 le signal MC est émis,lorsque l’axe entre dans la zone de tolérance (Arrêt rapide). Onpasse ensuite à Arrêt précis.
Remarque L’instruction G61 a un effet permanent. La précision depositionnement reste active, jusqu’au passage à une autreprécision de positionnement. Les différentes précisions depositionnement sont décrites dans le tableau suivant.
7. Description des instructions
7-34 SPC200... 9904a
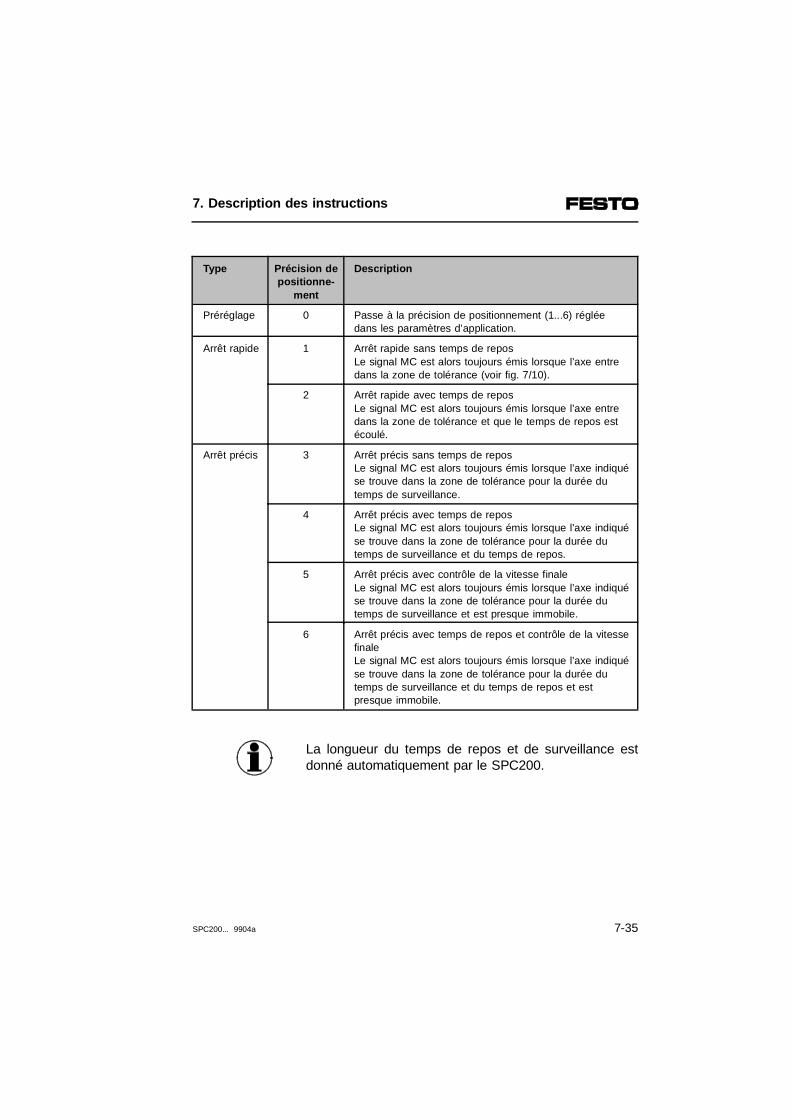
Type Précision depositionne-
ment
Description
Préréglage 0 Passe à la précision de positionnement (1...6) régléedans les paramètres d’application.
Arrêt rapide 1 Arrêt rapide sans temps de reposLe signal MC est alors toujours émis lorsque l’axe entredans la zone de tolérance (voir fig. 7/10).
2 Arrêt rapide avec temps de reposLe signal MC est alors toujours émis lorsque l’axe entredans la zone de tolérance et que le temps de repos estécoulé.
Arrêt précis 3 Arrêt précis sans temps de reposLe signal MC est alors toujours émis lorsque l’axe indiquése trouve dans la zone de tolérance pour la durée dutemps de surveillance.
4 Arrêt précis avec temps de reposLe signal MC est alors toujours émis lorsque l’axe indiquése trouve dans la zone de tolérance pour la durée dutemps de surveillance et du temps de repos.
5 Arrêt précis avec contrôle de la vitesse finaleLe signal MC est alors toujours émis lorsque l’axe indiquése trouve dans la zone de tolérance pour la durée dutemps de surveillance et est presque immobile.
6 Arrêt précis avec temps de repos et contrôle de la vitessefinaleLe signal MC est alors toujours émis lorsque l’axe indiquése trouve dans la zone de tolérance pour la durée dutemps de surveillance et du temps de repos et estpresque immobile.
La longueur du temps de repos et de surveillance estdonné automatiquement par le SPC200.
7. Description des instructions
SPC200... 9904a 7-35
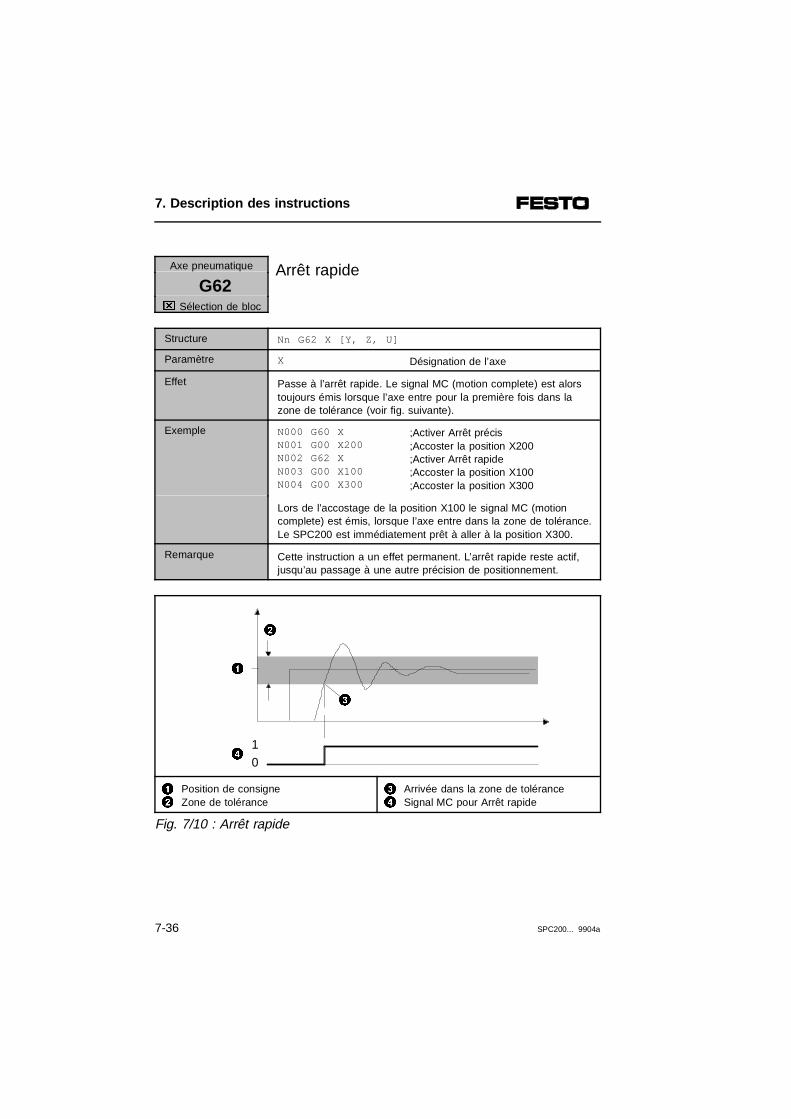
Axe pneumatique Arrêt rapideG62
x Sélection de bloc
Structure Nn G62 X [Y, Z, U]
Paramètre X Désignation de l’axe
Effet Passe à l’arrêt rapide. Le signal MC (motion complete) est alorstoujours émis lorsque l’axe entre pour la première fois dans lazone de tolérance (voir fig. suivante).
Exemple N000 G60 XN001 G00 X200N002 G62 XN003 G00 X100N004 G00 X300
;Activer Arrêt précis ;Accoster la position X200;Activer Arrêt rapide;Accoster la position X100;Accoster la position X300
Lors de l’accostage de la position X100 le signal MC (motioncomplete) est émis, lorsque l’axe entre dans la zone de tolérance.Le SPC200 est immédiatement prêt à aller à la position X300.
Remarque Cette instruction a un effet permanent. L’arrêt rapide reste actif,jusqu’au passage à une autre précision de positionnement.
12
Position de consigneZone de tolérance
34
Arrivée dans la zone de toléranceSignal MC pour Arrêt rapide
Fig. 7/10 : Arrêt rapide
01
1
2
3
4
7. Description des instructions
7-36 SPC200... 9904a
Axe avec moteur pas-à-pas
Lancement d’une prise de référence
G74x Sélection de bloc
Structure Nn G74 Xn [Y..,Z..,U..]
Paramètre Xn Mode de prise de référence ; n = 0...4
Effet Lance la prise de référence dans le mode indiqué(voir fig. suivante)
Exemple N000 G74 X0 ;Accepter la position actuelle comme;point de référence
Remarque Toutes les positions se rapportent indirectement au point deréférence.La position précise du point de commutation dépend du mode deprise de référence choisi.
Mode Description
0 Acceptation de la position actuelle de l’axe comme point deréférence
1 Prise de référence en sens négatif jusqu’au contact de référence(REF) avec acceptation comme point de référence
2 Prise de référence en sens négatif jusqu’au contact de fin decourse négatif (LIM-) avec acceptation comme point de référence
3 Prise de référence en sens positif jusqu’au contact de référence(REF) avec acceptation comme point de référence
4 Prise de référence en sens positif jusqu’au contact de fin decourse positif (LIM+) avec acceptation comme point de référence
7. Description des instructions
SPC200... 9904a 7-37

Mode 0 :
Mode 1 :Cas a :
Cas b :
Mode 2 :
Mode 3 :Cas a :
Cas b :
Mode 4 :
12
Position de départPosition acceptée commepoint de référence
3 Zones de commutationdes contacts de fin decourse et des contacts deréférence
Fig. 7/11 : Modes de prise de référence
Des indications détaillées sur l’exécution de la passe deréférence figurent dans le manuel d’utilisation de lacarte de moteur pas-à-pas type P.BE-SPC200-SMX-... .
3
1
2
7. Description des instructions
7-38 SPC200... 9904a
G90 Mesure absoluex Sélection de bloc
Structure Nn G90 Xn [Y..,Z..,U..]
Paramètre XnX@n
Position en mm ; n = ± 9999.99Registre de positions ; n = 0...99
Effet Passe au positionnement absolu et se déplace à la vitesseactuelle et avec éventuellement la rampe de façon absolue vers laposition indiquée. Toutes les positions suivantes dans leprogramme sont interprétées comme mesure absolue. Le modede positionnement est valable jusqu’à ce qu’un nouveau modesoit réglé (voir aussi sous G00/G01/G02).
Exemple N000 G00 G90 X200
N001 X100
N002 X@5 Y@1
N003 G90 Y100
N004 G91 X100
;Déplacement absolu à la plus grande;vitesse possible vers la position X200;Déplacement absolu à la plus grande;vitesse possible vers la position X100;Déplacement vers la position à partir,du registre 5 et du registre 1;Déplacement absolu vers la position;Y100;Déplacement de 100 mm en sens ;positif
Remarque Préréglage lors du positionnement :- Positionnement absolu (G90)L’instruction G90 a un effet permanent. Elle reste active jusqu’à cequ’elle soit remplacée par l’instruction G91.Exemple : N010 G90 X100
N011 X200N012 G91 X300
Lors de la programmation avec WinPISA les positions peuventaussi être indiquées de façon symbolique. Les valeurs et lesnoms des positions sont alors entrés dans la liste des positions.Exemple : N010 G90 X@POS_PRISE
N011 X@POS_DEPOSE
7. Description des instructions
SPC200... 9904a 7-39
G91 Mesure relativex Sélection de bloc
Structure Nn G91 Xn [Y..,Z..,U..]
Paramètre XnX@n
Position en mm; n = ± 9999.99Registre de positions ; n = 0...99
Effet Passe au positionnement relatif et se déplace à la vitesse actuelleet avec éventuellement la rampe de façon relative de la distanceindiquée. Toutes les positions suivantes dans le programme sontinterprétées comme mesure relative.Le mode de positionnement est valable jusqu’à ce qu’un nouveaumode soit réglé (voir aussi sous G00/G01/G02).
Exemple N000 G00 G91 X200
N001 X100
N002 G90 X@5 Y@1
N003 G91 X-100
N004 X200
;Déplacement relatif à la plus grande;vitesse possible de 200 mm;Déplacement relatif à la plus grande;vitesse possible de 100 mm;Déplacement vers la position à partir;du registre 5 et du registre 1;Déplacement de 100 mm en sens ;négatif;Déplacement de 200 mm en sens ;positif
Remarque Préréglage lors du positionnement :- Positionnement absolu (G90)L’instruction G91 a un effet permanent. Elle reste active jusqu’àce qu’elle soit remplacée par l’instruction G90.Exemple : N010 G91 X100
N011 X200N012 G90 X300
Lors de la programmation avec WinPISA les positions peuventaussi être indiquées de façon symbolique. Les valeurs et lesnoms des positions sont alors entrés dans la liste des positions.Exemple : N013 G91 X@POS_PRISE
N014 X@POS_PRISE
7. Description des instructions
7-40 SPC200... 9904a
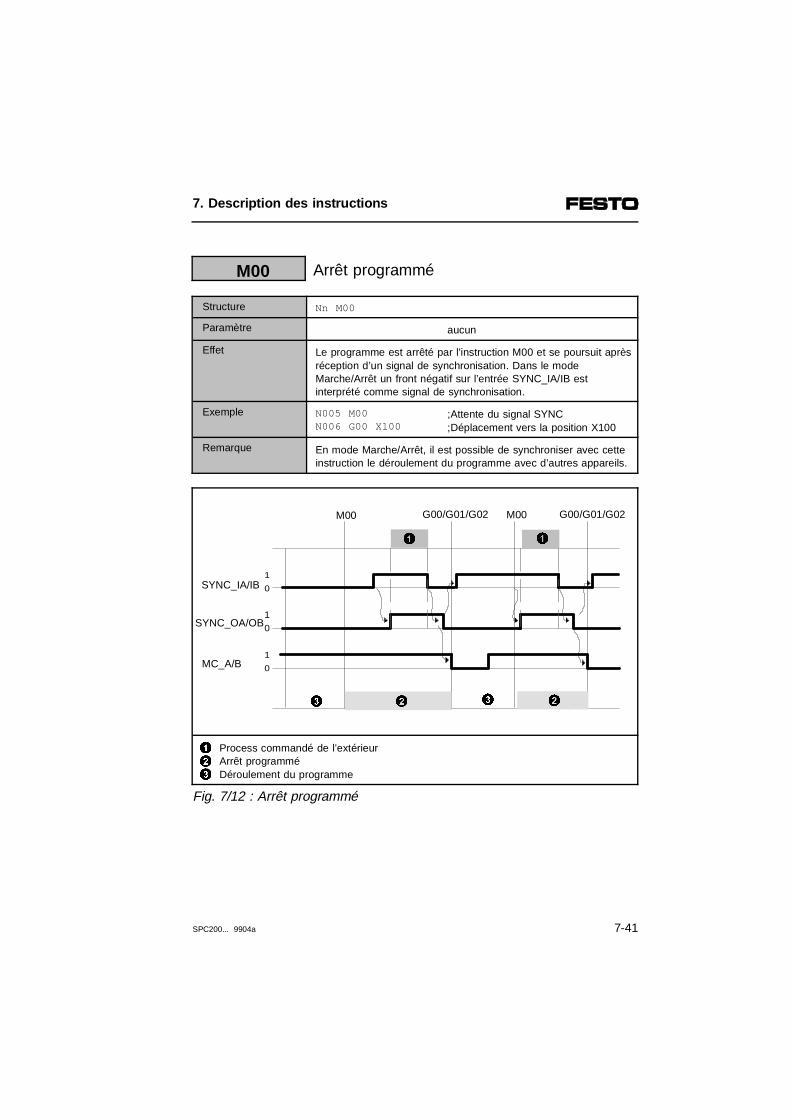
M00 Arrêt programmé
Structure Nn M00
Paramètre aucun
Effet Le programme est arrêté par l’instruction M00 et se poursuit aprèsréception d’un signal de synchronisation. Dans le modeMarche/Arrêt un front négatif sur l’entrée SYNC_IA/IB estinterprété comme signal de synchronisation.
Exemple N005 M00N006 G00 X100
;Attente du signal SYNC;Déplacement vers la position X100
Remarque En mode Marche/Arrêt, il est possible de synchroniser avec cetteinstruction le déroulement du programme avec d’autres appareils.
123
Process commandé de l’extérieurArrêt programméDéroulement du programme
Fig. 7/12 : Arrêt programmé
1
0
1
0
1
0
SYNC_IA/IB
SYNC_OA/OB
M00 G00/G01/G02 M00 G00/G01/G02
MC_A/B
11
223 3
7. Description des instructions
SPC200... 9904a 7-41
M02 Fin de sous-programme
Structure Nn M02
Paramètre aucun
Effet Avec cette instruction, la fin des sous-programmes doit êtrerepérée. Si le programme est appelé comme programme principalil est exécuté une fois. Il doit ensuite être de nouveau créé.
Exemple Voir sous L
Remarque Voir aussi sous M30
M10 Activer entrée analogique
Structure Nn M10 Xn [Y..,Z..,U..]
Paramètre Xn Coefficient d’échelle en mm/V;n = 0.1...9999.9 (voir fig. 7/13)
Effet L’entrée pour l’indication de consigne analogique est activée. Ondistingue cinq modes d’indication de consigne analogique. Définirle mode désiré à l’aide de l’instruction M13. Le mode 0 estpréréglé (suivi permanent de la position). Le coefficient d’échelle(mm/V) permet d’indiquer quelle distance doit être couverte parl’indication de consigne analogique (0-10 V) (p. ex. coefficient =20, distance possible = 200 mm).
Exemple Voir pages suivantes
Remarque Le point de référence de la zone de déplacement est le point zéroprojet.Il est possible de déplacer le point de référence en indiquant ledécalage (instruction "M11") (voir fig. 7/13).Dans les modes 0 et 1, l’entrée analogique doit être désactivéeavec M12, avant d’être à nouveau activée avec M10.Pour les axes avec moteur pas-à-pas : Les modes 0 et 1 nesont pas possibles.
7. Description des instructions
7-42 SPC200... 9904a
ATTENTION :Le mode analogique 1 n’offre pas de surveillance defin de déplacement MC. Une activation successive ra-pide de l’entrée analogique peut donc entraîner unedérive de l’actionneur. Eviter dans ce cas la dérive en programmant une"course zéro" (G00 G91 X0).
L’instruction M12 permet de désactiver à nouveau lecanal analogique. Il est désactivé automatiquement :
– pendant un état d’arrêt (arrêt contrôlé)
– en cas d’absence d’autorisation (signal 0 sur l’entréeENABLE ).
Si après un arrêt ou une absence d’autorisation un si-gnal 1 se trouve toujours sur l’entrée correspondante, lecanal analogique est réactivé automatiquement.
7. Description des instructions
SPC200... 9904a 7-43

Exemples
Suivi permanent de la positionMode 0
....N010 M11 X100 ;Décalage 100 mmN011 M13 X0 ;Régler mode 0
;Déplacement en coursN012 M10 X30 ;Activer entrée de consigne
;Coefficient d’échelle = 30 mm/VN013 #TNI0.0 013 ;Attendre que I0.0 fournisse un
;signal 1N014 M12 X ;Désactiver l’entrée de consigne........ N020 M30 ;Fin du programme avec répétition
Dans cet exemple, l’entrée analogique reste active jus-qu’à ce que l’entrée I0.0 fournisse un signal 1. Lorsquel’entrée fournit un signal 1, le déroulement du pro-gramme se poursuit à la ligne N014 et l’entrée analogi-que est désactivée.
Indication de consigne analogique sans suivi, RampeMode 3
N001 M11 X100 ;Offset 100 mmN002 M13 X3 ;Régler mode 3
;Déplacement uniqueN003 G01 G91 X0 FX30 ;Déplacement relatif 0 mm
;Rampe de vitesse = 30 %N004 G61 X1 ;Arrêt rapideN005 M10 X30 ; Coefficient = 30, Déplacement unique
;vers la position donnée analogiqueN006 G00 X300 ;Déplacement vers la position 300..........N020 M30 ;Fin de programme avec répétition
La rampe de vitesse peut être préréglée à l’aide desinstructions G01 et G02. On programme pour cela undéplacement relatif de 0 mm (voir ligne N003). Ainsi larampe de vitesse indiquée dans ce bloc est validéesans opération de positionnement.
7. Description des instructions
7-44 SPC200... 9904a
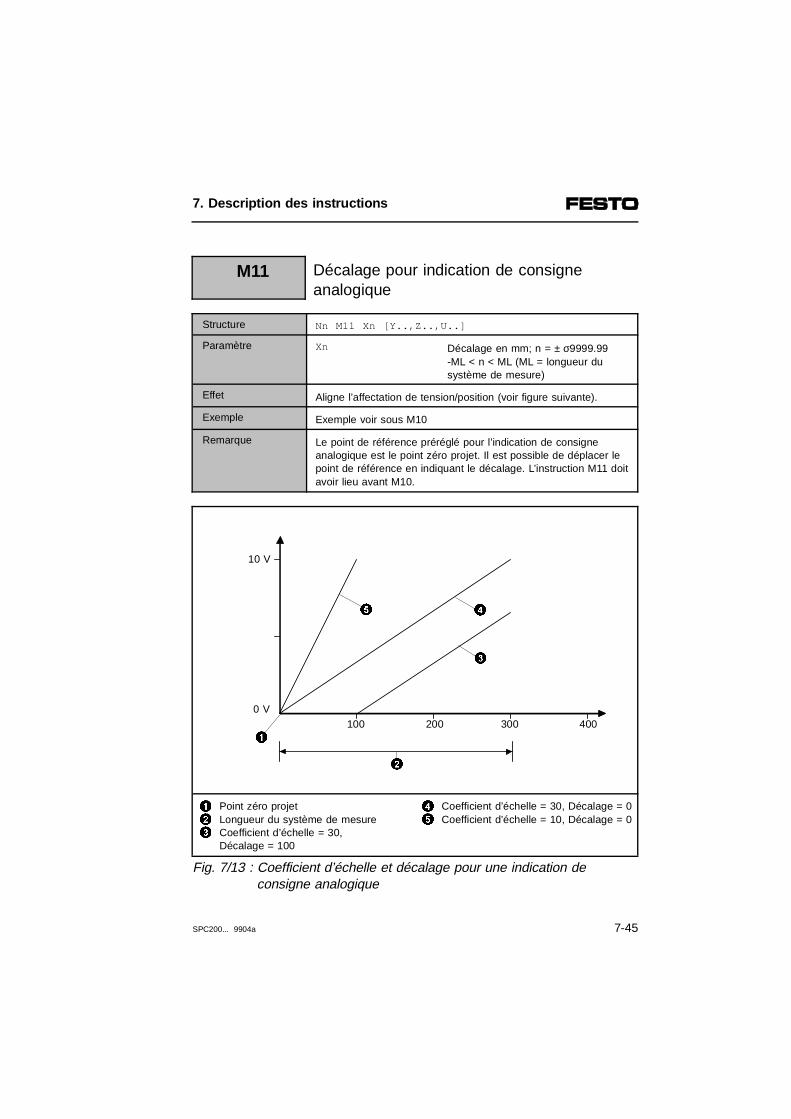
M11 Décalage pour indication de consigneanalogique
Structure Nn M11 Xn [Y..,Z..,U..]
Paramètre Xn Décalage en mm; n = ± σ9999.99-ML < n < ML (ML = longueur dusystème de mesure)
Effet Aligne l’affectation de tension/position (voir figure suivante).
Exemple Exemple voir sous M10
Remarque Le point de référence préréglé pour l’indication de consigneanalogique est le point zéro projet. Il est possible de déplacer lepoint de référence en indiquant le décalage. L’instruction M11 doitavoir lieu avant M10.
123
Point zéro projet Longueur du système de mesureCoefficient d’échelle = 30, Décalage = 100
45
Coefficient d’échelle = 30, Décalage = 0Coefficient d’échelle = 10, Décalage = 0
Fig. 7/13 : Coefficient d’échelle et décalage pour une indication deconsigne analogique
100
10 V
200 300 4000 V
4
1
5
3
2
7. Description des instructions
SPC200... 9904a 7-45

M12 Désactiver l’entrée de consigne analogique
Structure Nn M12 X [Y, Z, U]
Paramètre X Désignation de l’axe
Effet Tous les axes cités sont arrêtés. Les entrées correspondantespour l’indication de consigne analogique sont désactivées.
Exemple Exemple voir sous M10
Remarque Dans les modes 0 et 1 l’entrée analogique doit être désactivéeavec M12, avant d’être à nouveau activée avec M10.
7. Description des instructions
7-46 SPC200... 9904a
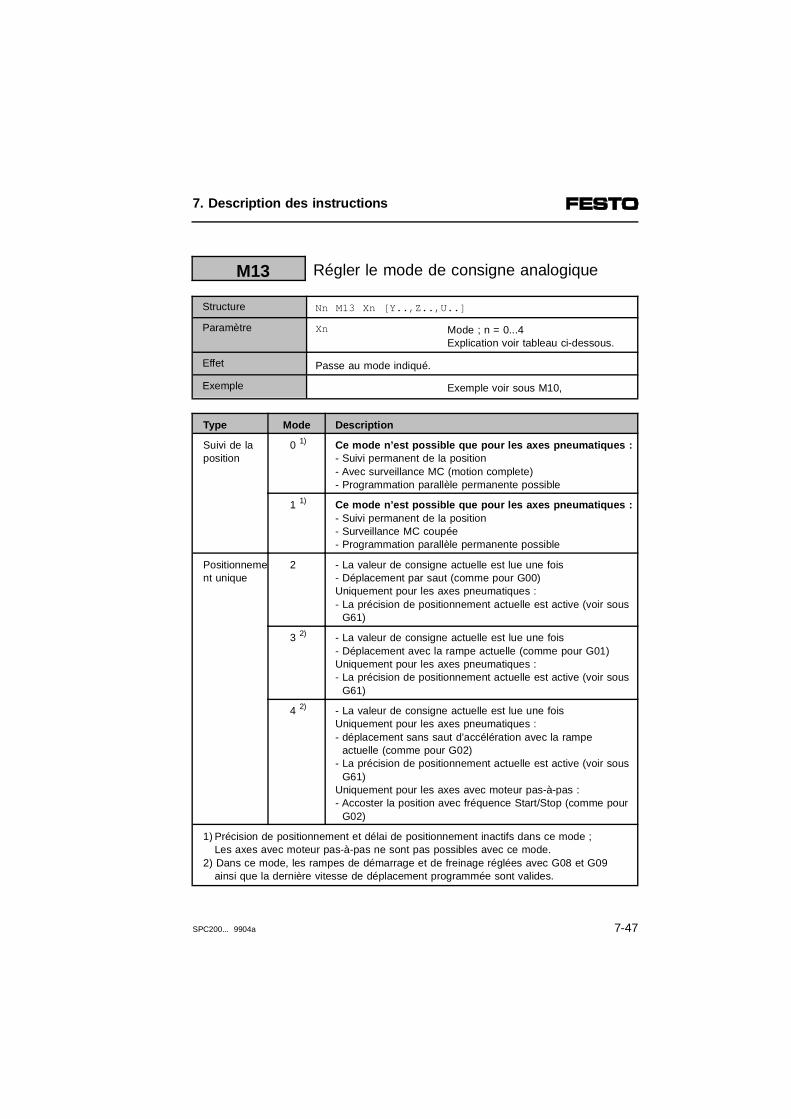
M13 Régler le mode de consigne analogique
Structure Nn M13 Xn [Y..,Z..,U..]
Paramètre Xn Mode ; n = 0...4Explication voir tableau ci-dessous.
Effet Passe au mode indiqué.
Exemple Exemple voir sous M10,
Type Mode Description
Suivi de laposition
0 1) Ce mode n’est possible que pour les axes pneumatiques :- Suivi permanent de la position- Avec surveillance MC (motion complete)- Programmation parallèle permanente possible
1 1) Ce mode n’est possible que pour les axes pneumatiques :- Suivi permanent de la position- Surveillance MC coupée- Programmation parallèle permanente possible
Positionnement unique
2 - La valeur de consigne actuelle est lue une fois - Déplacement par saut (comme pour G00) Uniquement pour les axes pneumatiques :- La précision de positionnement actuelle est active (voir sous G61)
3 2) - La valeur de consigne actuelle est lue une fois - Déplacement avec la rampe actuelle (comme pour G01)Uniquement pour les axes pneumatiques : - La précision de positionnement actuelle est active (voir sous G61)
4 2) - La valeur de consigne actuelle est lue une fois Uniquement pour les axes pneumatiques :- déplacement sans saut d’accélération avec la rampe actuelle (comme pour G02) - La précision de positionnement actuelle est active (voir sous G61)Uniquement pour les axes avec moteur pas-à-pas :- Accoster la position avec fréquence Start/Stop (comme pour G02)
1) Précision de positionnement et délai de positionnement inactifs dans ce mode ;Les axes avec moteur pas-à-pas ne sont pas possibles avec ce mode.
2) Dans ce mode, les rampes de démarrage et de freinage réglées avec G08 et G09 ainsi que la dernière vitesse de déplacement programmée sont valides.
7. Description des instructions
SPC200... 9904a 7-47
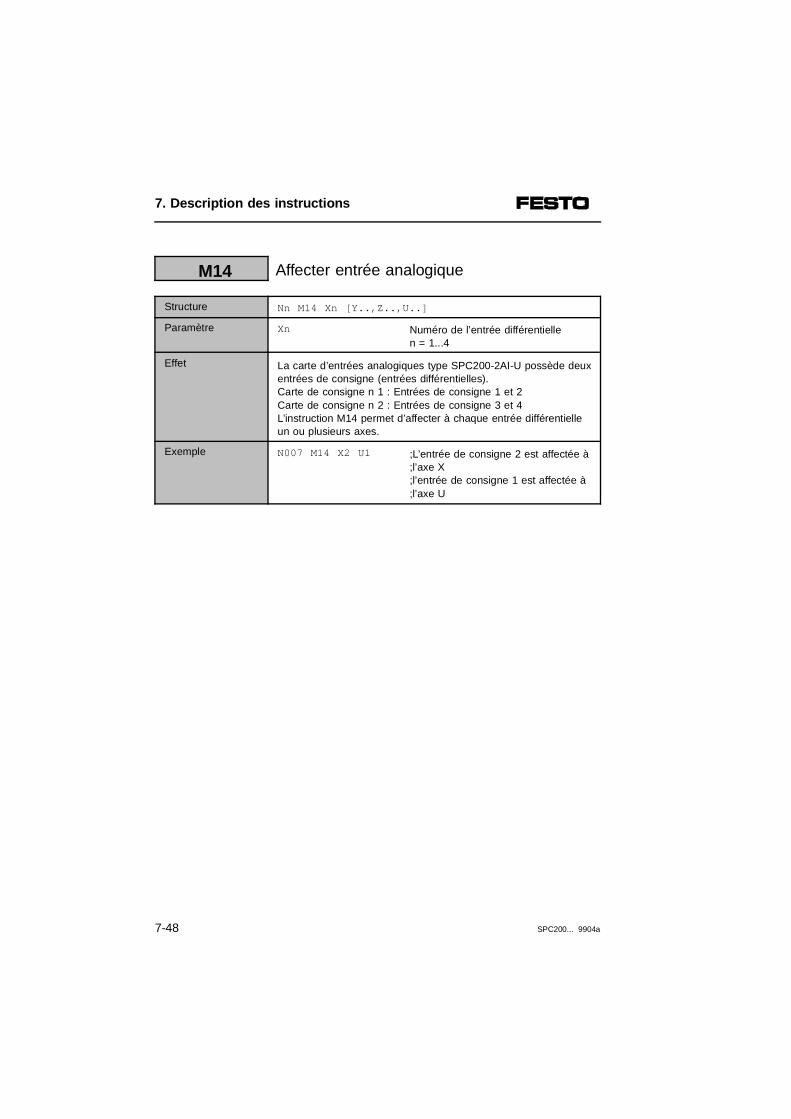
M14 Affecter entrée analogique
Structure Nn M14 Xn [Y..,Z..,U..]
Paramètre Xn Numéro de l’entrée différentiellen = 1...4
Effet La carte d’entrées analogiques type SPC200-2AI-U possède deuxentrées de consigne (entrées différentielles).Carte de consigne n 1 : Entrées de consigne 1 et 2Carte de consigne n 2 : Entrées de consigne 3 et 4L’instruction M14 permet d’affecter à chaque entrée différentielleun ou plusieurs axes.
Exemple N007 M14 X2 U1 ;L’entrée de consigne 2 est affectée à;l’axe X;l’entrée de consigne 1 est affectée à;l’axe U
7. Description des instructions
7-48 SPC200... 9904a
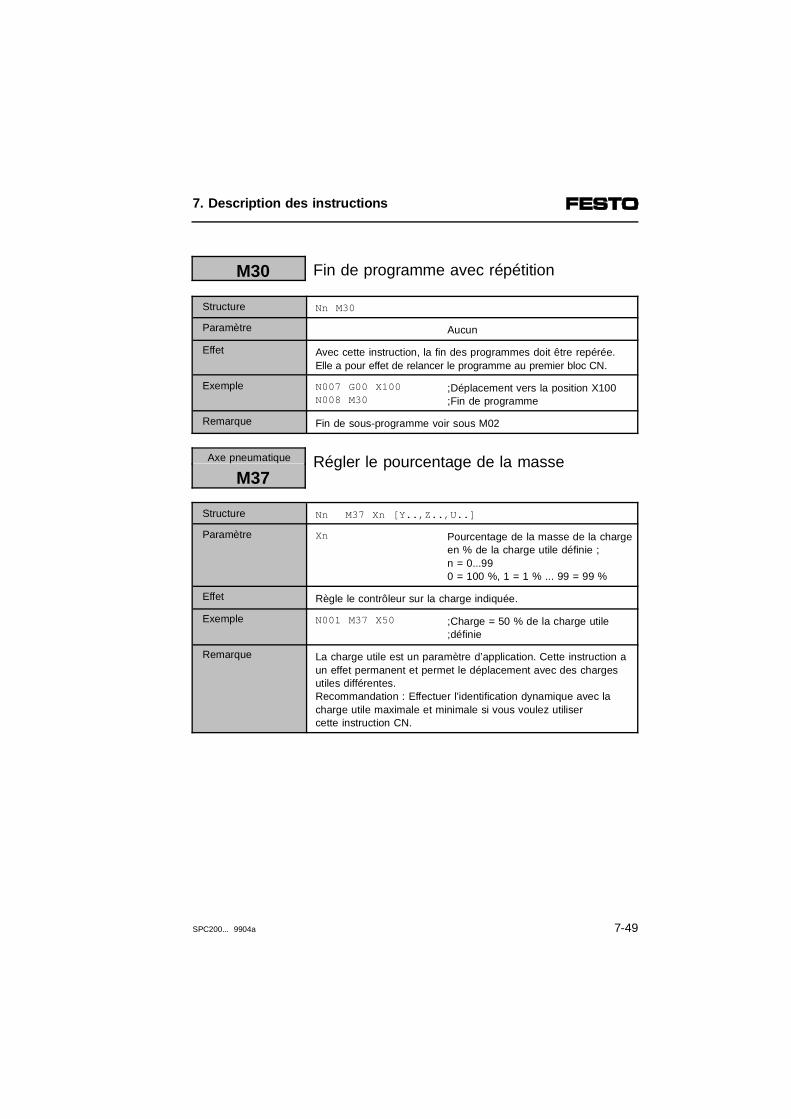
M30 Fin de programme avec répétition
Structure Nn M30
Paramètre Aucun
Effet Avec cette instruction, la fin des programmes doit être repérée.Elle a pour effet de relancer le programme au premier bloc CN.
Exemple N007 G00 X100N008 M30
;Déplacement vers la position X100;Fin de programme
Remarque Fin de sous-programme voir sous M02
Axe pneumatique Régler le pourcentage de la masseM37
Structure Nn M37 Xn [Y..,Z..,U..]
Paramètre Xn Pourcentage de la masse de la chargeen % de la charge utile définie ; n = 0...990 = 100 %, 1 = 1 % ... 99 = 99 %
Effet Règle le contrôleur sur la charge indiquée.
Exemple N001 M37 X50 ;Charge = 50 % de la charge utile ;définie
Remarque La charge utile est un paramètre d’application. Cette instruction aun effet permanent et permet le déplacement avec des chargesutiles différentes.Recommandation : Effectuer l’identification dynamique avec lacharge utile maximale et minimale si vous voulez utilisercette instruction CN.
7. Description des instructions
SPC200... 9904a 7-49
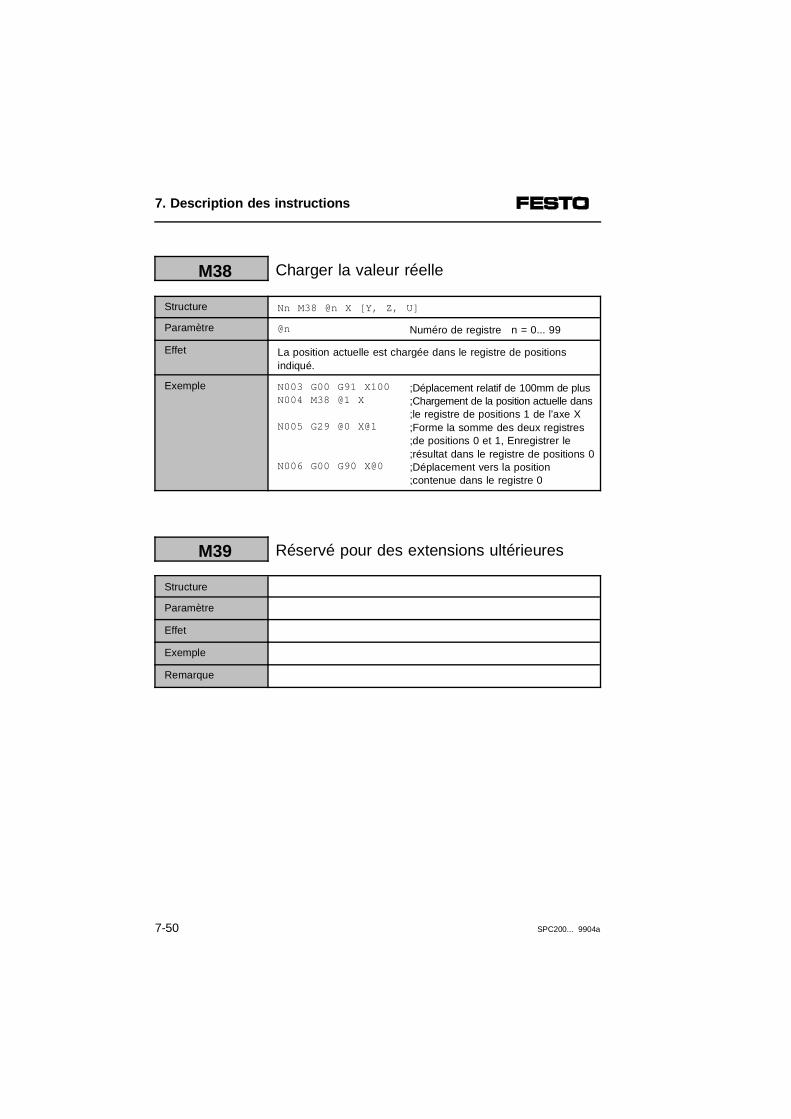
M38 Charger la valeur réelle
Structure Nn M38 @n X [Y, Z, U]
Paramètre @n Numéro de registre n = 0... 99
Effet La position actuelle est chargée dans le registre de positionsindiqué.
Exemple N003 G00 G91 X100N004 M38 @1 X
N005 G29 @0 X@1
N006 G00 G90 X@0
;Déplacement relatif de 100mm de plus;Chargement de la position actuelle dans;le registre de positions 1 de l’axe X;Forme la somme des deux registres;de positions 0 et 1, Enregistrer le;résultat dans le registre de positions 0;Déplacement vers la position;contenue dans le registre 0
M39 Réservé pour des extensions ultérieures
Structure
Paramètre
Effet
Exemple
Remarque
7. Description des instructions
7-50 SPC200... 9904a
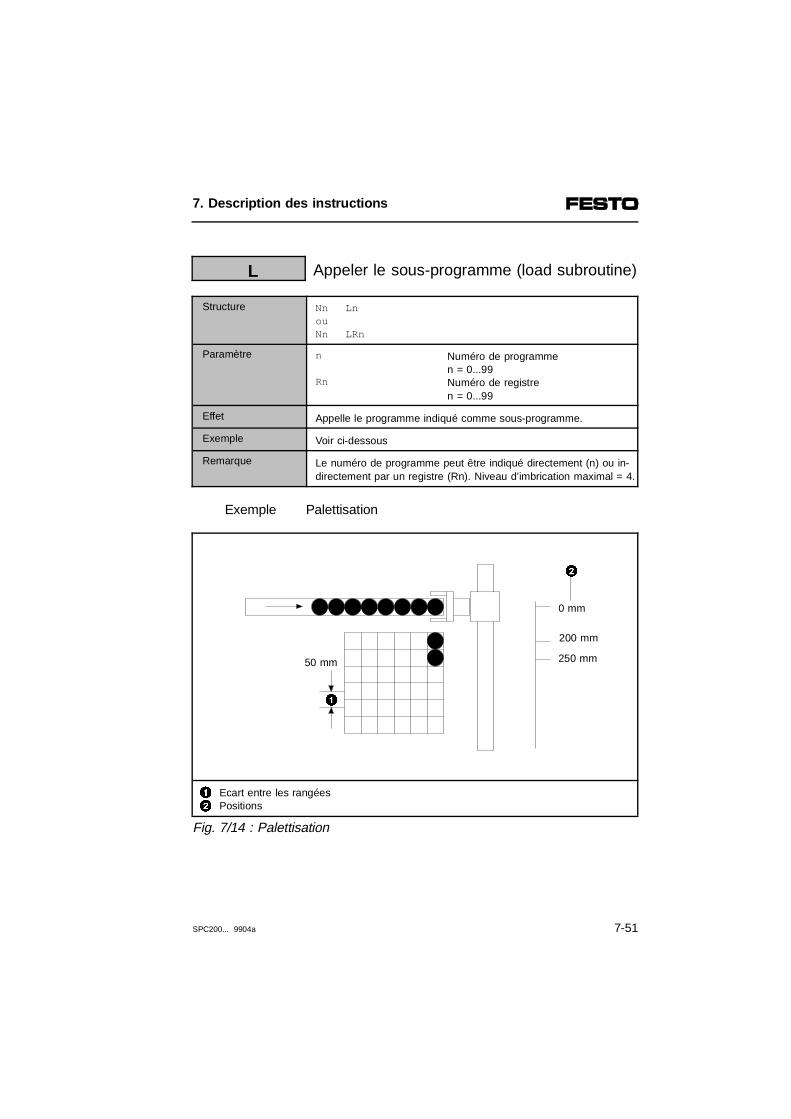
L Appeler le sous-programme (load subroutine)
Structure Nn LnouNn LRn
Paramètre n
Rn
Numéro de programmen = 0...99Numéro de registren = 0...99
Effet Appelle le programme indiqué comme sous-programme.
Exemple Voir ci-dessous
Remarque Le numéro de programme peut être indiqué directement (n) ou in-directement par un registre (Rn). Niveau d’imbrication maximal = 4.
PalettisationExemple
12
Ecart entre les rangéesPositions
Fig. 7/14 : Palettisation
0 mm
250 mm50 mm
200 mm
2
1
7. Description des instructions
SPC200... 9904a 7-51

Programme 0
...N003 G28 @1 X200 ;Charger la rangée supérieure
;de la paletteN004 G28 @2 X50 ;Charger l’écart entre les rangéesN005 #LR0=6 ;Initialiser le nombre de rangéesN006 L1 ;Appeler le programme 1N007 #AR0=-1 ;Actualiser le compteurN008 #TR0=0 10 ;Colonne remplie ?N009 E05 6 ;Saut à N006... ;Autres instructions... N080 M30 ;Fin de programme
Sous-programme 1 : Remplir la colonne de palettes
N000 #TNI0.0 0 ;Attendre la pièceN001 G00 X0 ;Prendre la pièce, Position 0 mmN002 #SQ0.0 ;Fermer la pinceN003 G00 X@1 ;Accoster la position de la paletteN004 #RQ0.0 ;Ouvrir la pince, déposer la pièceN005 G29 @1 X@2 ;Calculer la position suivante... ;Autres instructions...N016 M02 ;Fin de sous-programme
Le registre de positions @1 contient la position actuellede la palette. Le registre de positions @2 contient l’é-cart entre les rangées. Ces registres de positions sontinitialisés dans la ligne N003 et N004 (Programme 0).
Le registre R0 sert de compteur de boucles et est initia-lisé avec le nombre de rangées. Le sous-programme 1est appelé 6 fois et la colonne de palettes est ainsiremplie.
7. Description des instructions
7-52 SPC200... 9904a
E05 Saut inconditionnel
Structure Nn E05 n|Rn
Paramètre n
Rn
Numéro de bloc CN n = 0...99999R<Numéro de registre>Rn = R0...R99
Effet Le déroulement du programme se poursuit toujours à ladestination de saut indiquée.
Exemple N005 #TNI1.1 5N006 G00 X100N007 E05 5
;Attente du signal 1 sur l’entrée I1.1;Déplacement vers la position X100 ;Saut vers le bloc CN 5
Dans le bloc CN 7 le programme passe toujours au bloc CN 5.
#S Forcer un opérande de bit unique
Structure Nn #S<Operand>
Paramètre <Operand> Les opérandes autorisés sont des opérandes de bit unique, mais pasd’entrées.Bit mémoire : F0...F63Sorties : toutes les sortiesprogrammables
Effet L’opérande de bit unique indiqué est forcé.
Exemple N010 #SQ0.0 ;Forcer la sortie Q0.0
La sortie Q0.0 fournit après exécution de ce bloc un signal 1.
Remarque Certaines sorties sont réservées par des fonctions préaffectées.Les bits mémoire sont rémanents.
7. Description des instructions
SPC200... 9904a 7-53
#R Remise à zéro d’un opérande de bit unique
Structure Nn #R<Operand>
Paramètre <Operand> Les opérandes autorisés sont des opérandes de bit unique, mais pasd’entrées.Bit mémoire : F0...F63Sorties : toutes les sortiesprogrammables
Effet L’opérande de bit unique indiqué est réinitialisé.
Exemple N010 #RQ0.0 ;Remise à zéro de la sortie Q0.0
La sortie Q0.0 fournit après exécution de ce bloc un signal 0.
Remarque Certaines sorties sont réservées par des fonctions préaffectées.Les bits mémoire sont rémanents.
#T Tester l’opérande de bit unique sur le signal 1
Structure Nn #T<Operand> <Numéro de bloc>
Paramètre <Operand>
<Numéro de bloc>
Tous les opérandes de bit unique sontadmis.Bit mémoire : F0 ... F63Entrées autorisées :toutes les entrées disponiblesSorties autorisées :toutes les sorties disponibles
Donnée du numéro de bloc commevaleur numérique ou numéro deregistre.<Numéro de bloc> = 0...999ou<Numéro de bloc> = R0...R99
Effet On passe au bloc CN indiqué, lorsque l’opérande de bit uniquefournit un signal 1. Dans le cas contraire, le bloc CN suivant esttraité.
Exemple voir ci-dessous
Remarque Voir aussi sous "Tester le registre".
7. Description des instructions
7-54 SPC200... 9904a
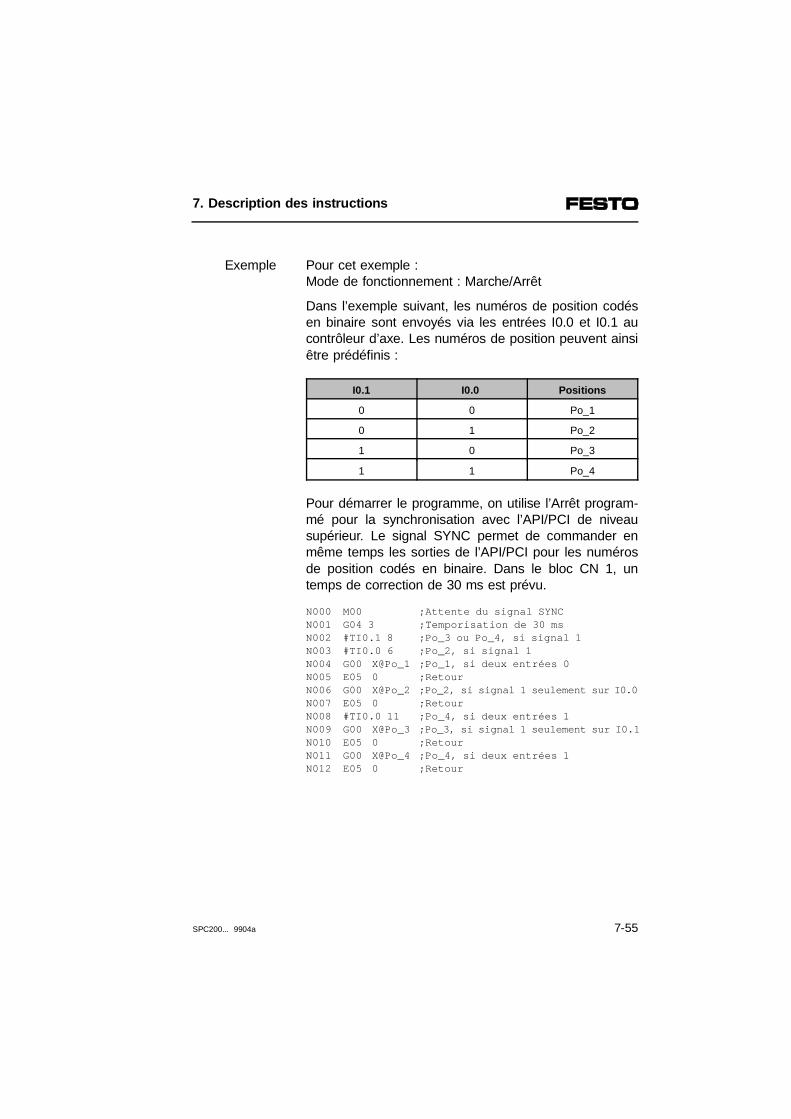
Pour cet exemple :Mode de fonctionnement : Marche/Arrêt
Exemple
Dans l’exemple suivant, les numéros de position codésen binaire sont envoyés via les entrées I0.0 et I0.1 aucontrôleur d’axe. Les numéros de position peuvent ainsiêtre prédéfinis :
I0.1 I0.0 Positions
0 0 Po_1
0 1 Po_2
1 0 Po_3
1 1 Po_4
Pour démarrer le programme, on utilise l’Arrêt program-mé pour la synchronisation avec l’API/PCI de niveausupérieur. Le signal SYNC permet de commander enmême temps les sorties de l’API/PCI pour les numérosde position codés en binaire. Dans le bloc CN 1, untemps de correction de 30 ms est prévu.
N000 M00 ;Attente du signal SYNCN001 G04 3 ;Temporisation de 30 msN002 #TI0.1 8 ;Po_3 ou Po_4, si signal 1N003 #TI0.0 6 ;Po_2, si signal 1N004 G00 X@Po_1 ;Po_1, si deux entrées 0N005 E05 0 ;RetourN006 G00 X@Po_2 ;Po_2, si signal 1 seulement sur I0.0N007 E05 0 ;RetourN008 #TI0.0 11 ;Po_4, si deux entrées 1N009 G00 X@Po_3 ;Po_3, si signal 1 seulement sur I0.1N010 E05 0 ;RetourN011 G00 X@Po_4 ;Po_4, si deux entrées 1N012 E05 0 ;Retour
7. Description des instructions
SPC200... 9904a 7-55
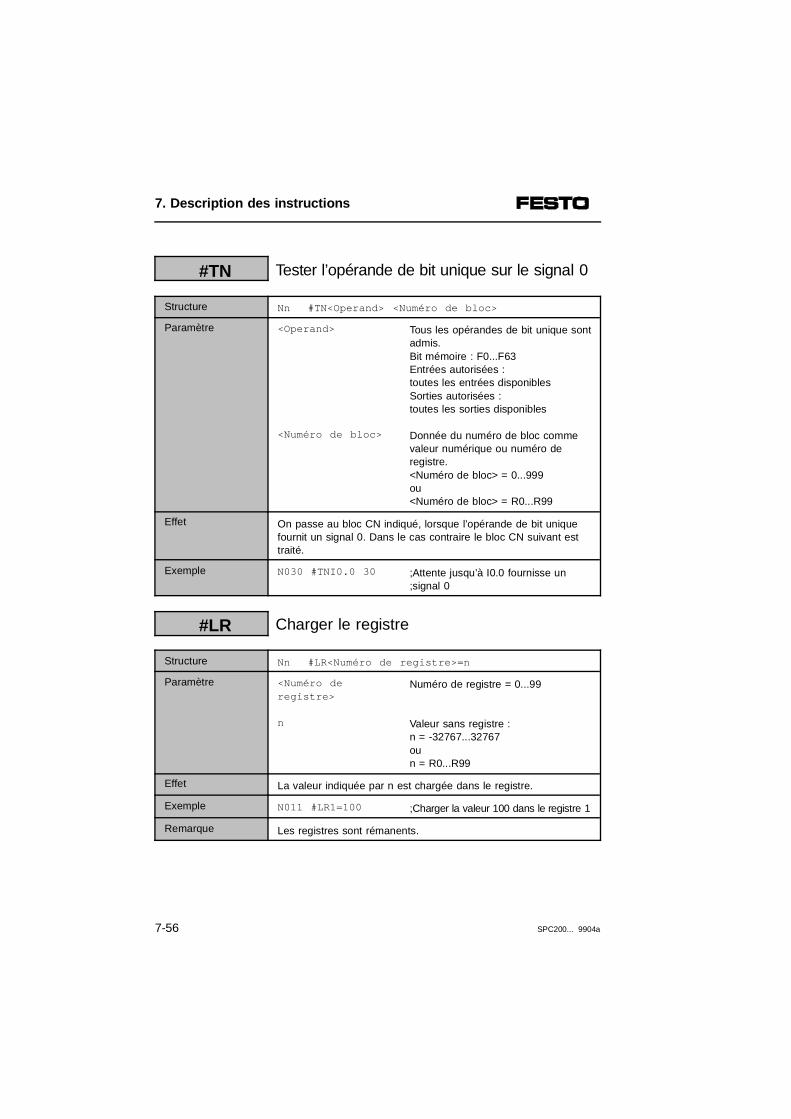
#TN Tester l’opérande de bit unique sur le signal 0
Structure Nn #TN<Operand> <Numéro de bloc>
Paramètre <Operand>
<Numéro de bloc>
Tous les opérandes de bit unique sontadmis.Bit mémoire : F0...F63Entrées autorisées :toutes les entrées disponiblesSorties autorisées :toutes les sorties disponibles
Donnée du numéro de bloc commevaleur numérique ou numéro deregistre.<Numéro de bloc> = 0...999ou<Numéro de bloc> = R0...R99
Effet On passe au bloc CN indiqué, lorsque l’opérande de bit uniquefournit un signal 0. Dans le cas contraire le bloc CN suivant esttraité.
Exemple N030 #TNI0.0 30 ;Attente jusqu’à I0.0 fournisse un;signal 0
#LR Charger le registre
Structure Nn #LR<Numéro de registre>=n
Paramètre <Numéro de registre>
n
Numéro de registre = 0...99
Valeur sans registre :n = -32767...32767oun = R0...R99
Effet La valeur indiquée par n est chargée dans le registre.
Exemple N011 #LR1=100 ;Charger la valeur 100 dans le registre 1
Remarque Les registres sont rémanents.
7. Description des instructions
7-56 SPC200... 9904a
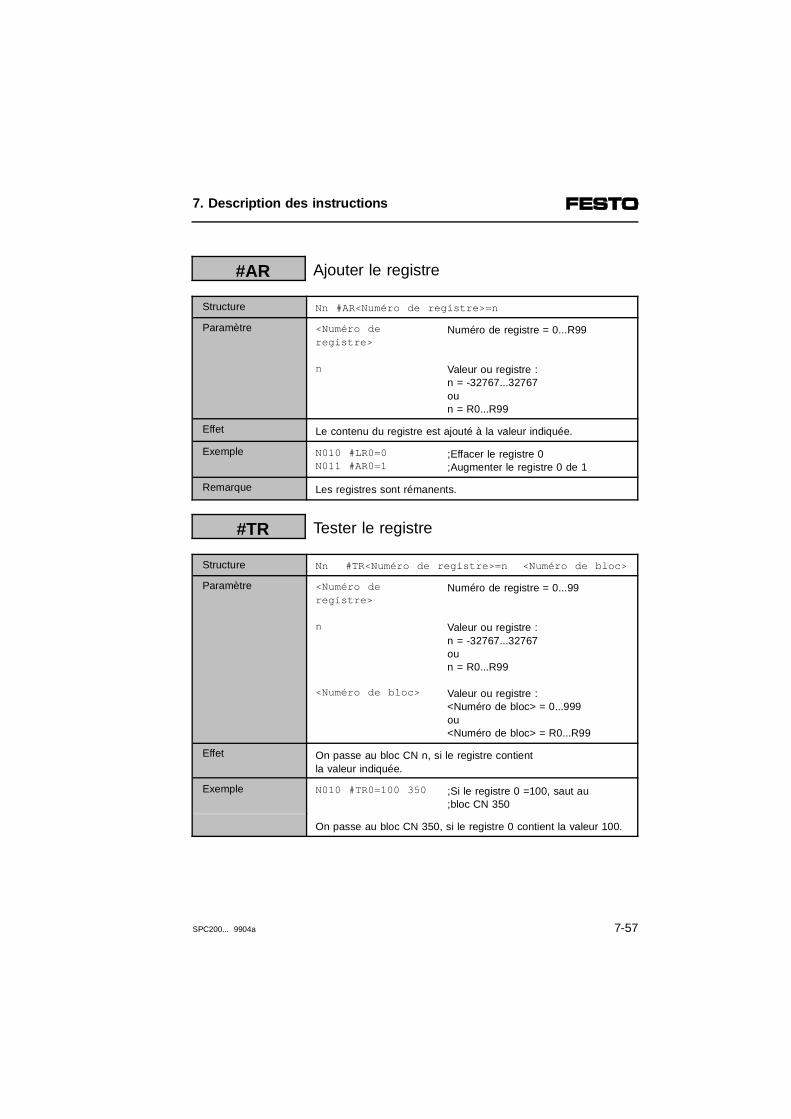
#AR Ajouter le registre
Structure Nn #AR<Numéro de registre>=n
Paramètre <Numéro de registre>
n
Numéro de registre = 0...R99
Valeur ou registre :n = -32767...32767oun = R0...R99
Effet Le contenu du registre est ajouté à la valeur indiquée.
Exemple N010 #LR0=0N011 #AR0=1
;Effacer le registre 0 ;Augmenter le registre 0 de 1
Remarque Les registres sont rémanents.
#TR Tester le registre
Structure Nn #TR<Numéro de registre>=n <Numéro de bloc>
Paramètre <Numéro de registre>
n
<Numéro de bloc>
Numéro de registre = 0...99
Valeur ou registre :n = -32767...32767oun = R0...R99
Valeur ou registre :<Numéro de bloc> = 0...999ou<Numéro de bloc> = R0...R99
Effet On passe au bloc CN n, si le registre contient la valeur indiquée.
Exemple N010 #TR0=100 350 ;Si le registre 0 =100, saut au;bloc CN 350
On passe au bloc CN 350, si le registre 0 contient la valeur 100.
7. Description des instructions
SPC200... 9904a 7-57
7. Description des instructions
7-58 SPC200... 9904a
Chapitre 8
Diagnostic et traitement des erreurs
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-1

Sommaire
8. Diagnostic et traitement des erreurs
8.1 Diagnostic local. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-48.2 Messages d’erreur sur le clavier/afficheur . . . . . . . . . . . . . . . . . . 8-98.3 Elimination des incidents sur le système . . . . . . . . . . . . . . . . . . 8-248.3.1 Incidents à la mise sous tension . . . . . . . . . . . . . . . . . . . . . . . . 8-248.3.2 Incidents de positionnement. . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-25
8. Diagnostic et traitement des erreurs
8-2 SPC200... 9904a
Le SPC200 offre des possibilités de diagnostic éten-dues et de traitement des erreurs. Ces possibilités sontprésentées ci-dessous et décrites plus en détail dansce chapitre :
Contenu dece chapitre
– les LED du SPC200 et des modules de terrain rac-cordés signalent directement les erreurs de configu-ration, les pannes matérielles, les erreurs sur lesbranches, etc.
– le clavier/afficheur affiche des messages d’erreur dé-taillés sous forme hexadécimale. Ces messages d’er-reur décrivent précisément la classe d’erreur, le nu-méro d’erreur avec des informations supplémentairessur la localisation de l’erreur (voir paragraphe 8.2).
WinPISA indique en mode Online les messages d’er-reur en toutes lettres. Les manuels des différentescartes fournissent des informations sur les LED situéessur les cartes de bus de terrain ou sur les cartes d’in-dexation de moteurs pas-à-pas.
Autresinformations
L’évolution dans le temps des signaux d’E/S lors de lavalidation des erreurs est décrite au chapitre 5.
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-3
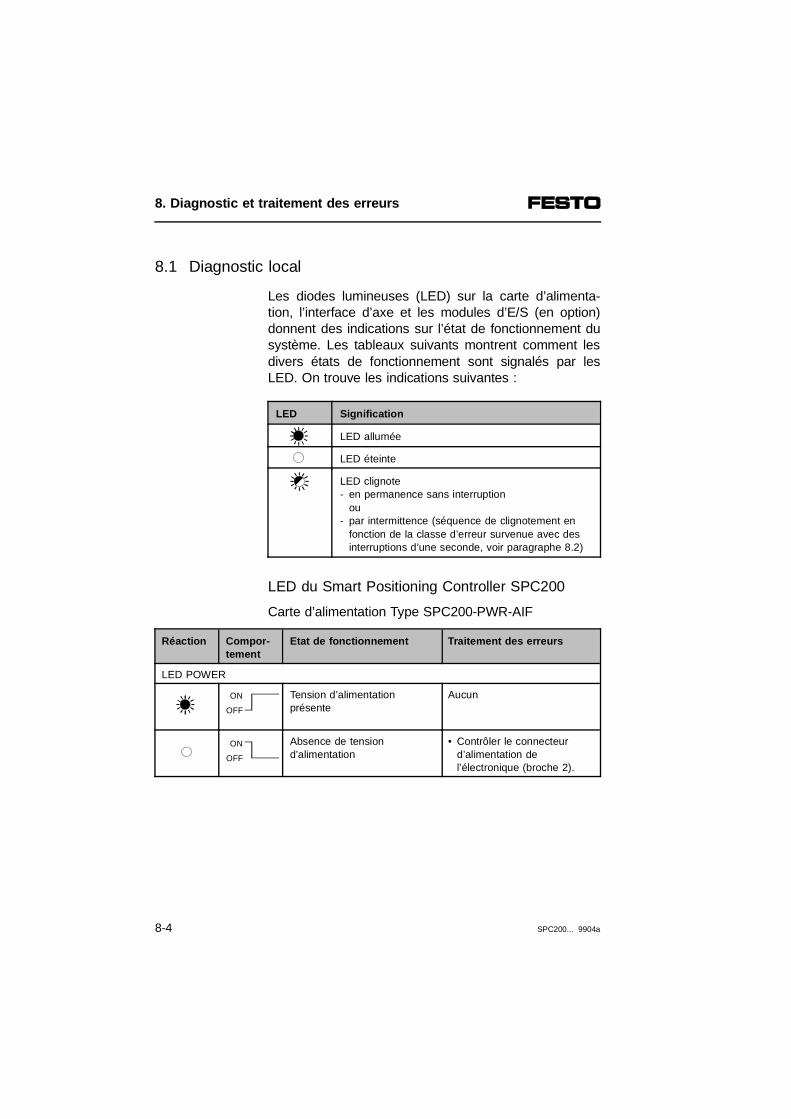
8.1 Diagnostic local
Les diodes lumineuses (LED) sur la carte d’alimenta-tion, l’interface d’axe et les modules d’E/S (en option)donnent des indications sur l’état de fonctionnement dusystème. Les tableaux suivants montrent comment lesdivers états de fonctionnement sont signalés par lesLED. On trouve les indications suivantes :
LED Signification
LED allumée
LED éteinte
LED clignote - en permanence sans interruption
ou- par intermittence (séquence de clignotement en
fonction de la classe d’erreur survenue avec desinterruptions d’une seconde, voir paragraphe 8.2)
LED du Smart Positioning Controller SPC200
Carte d’alimentation Type SPC200-PWR-AIF
Réaction Compor-tement
Etat de fonctionnement Traitement des erreurs
LED POWER
Tension d’alimentation présente
Aucun
Absence de tensiond’alimentation
• Contrôler le connecteur d’alimentation del’électronique (broche 2).
ON
OFF
ON
OFF
8. Diagnostic et traitement des erreurs
8-4 SPC200... 9904a
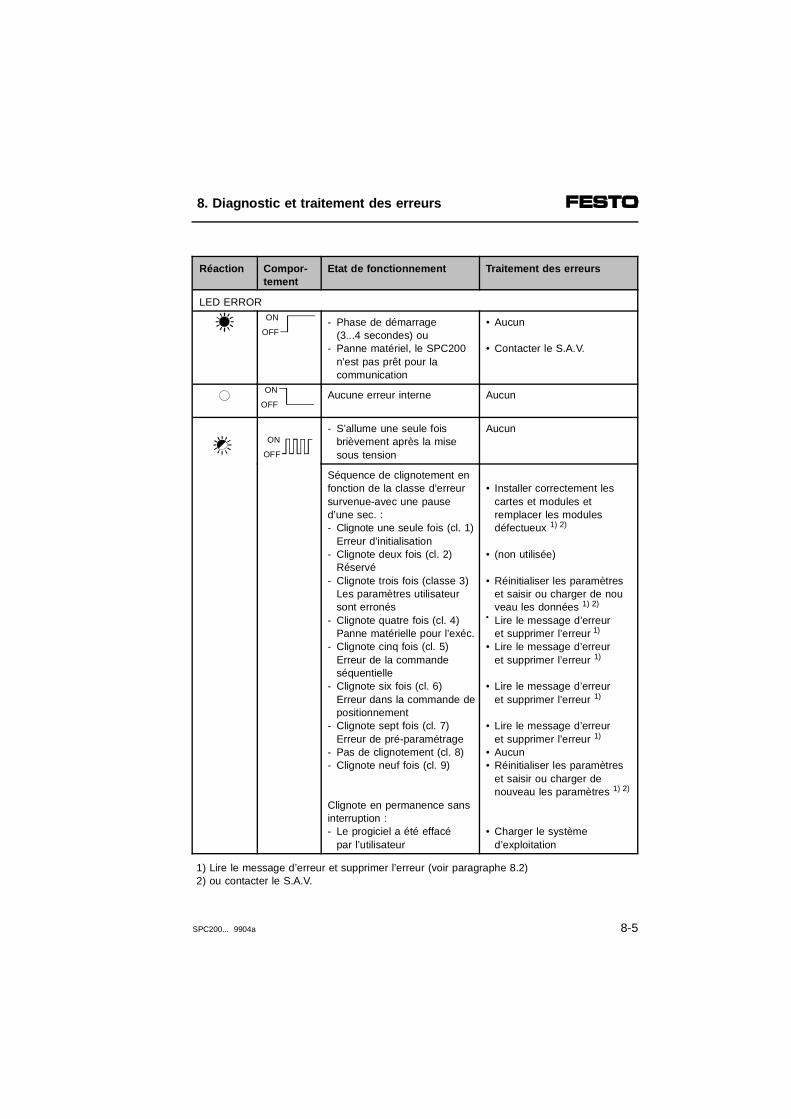
Réaction Compor-tement
Etat de fonctionnement Traitement des erreurs
LED ERROR
- Phase de démarrage (3...4 secondes) ou
- Panne matériel, le SPC200n’est pas prêt pour lacommunication
• Aucun
• Contacter le S.A.V.
Aucune erreur interne Aucun
- S’allume une seule foisbrièvement après la misesous tension
Aucun
Séquence de clignotement enfonction de la classe d’erreursurvenue-avec une paused’une sec. :- Clignote une seule fois (cl. 1)
Erreur d’initialisation- Clignote deux fois (cl. 2)
Réservé- Clignote trois fois (classe 3)
Les paramètres utilisateur sont erronés
- Clignote quatre fois (cl. 4)Panne matérielle pour l’exéc.
- Clignote cinq fois (cl. 5)Erreur de la commandeséquentielle
- Clignote six fois (cl. 6)Erreur dans la commande de positionnement
- Clignote sept fois (cl. 7)Erreur de pré-paramétrage
- Pas de clignotement (cl. 8)- Clignote neuf fois (cl. 9)
Clignote en permanence sansinterruption :- Le progiciel a été effacé
par l’utilisateur
• Installer correctement lescartes et modules et remplacer les modulesdéfectueux 1) 2)
• (non utilisée)
• Réinitialiser les paramètreset saisir ou charger de nouveau les données 1) 2)
• Lire le message d’erreur et supprimer l’erreur 1)
• Lire le message d’erreur et supprimer l’erreur 1)
• Lire le message d’erreur et supprimer l’erreur 1)
• Lire le message d’erreur et supprimer l’erreur 1)
• Aucun• Réinitialiser les paramètres
et saisir ou charger de nouveau les paramètres 1) 2)
• Charger le système d’exploitation
1) Lire le message d’erreur et supprimer l’erreur (voir paragraphe 8.2) 2) ou contacter le S.A.V.
ON
OFF
ON
OFF
ON
OFF
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-5
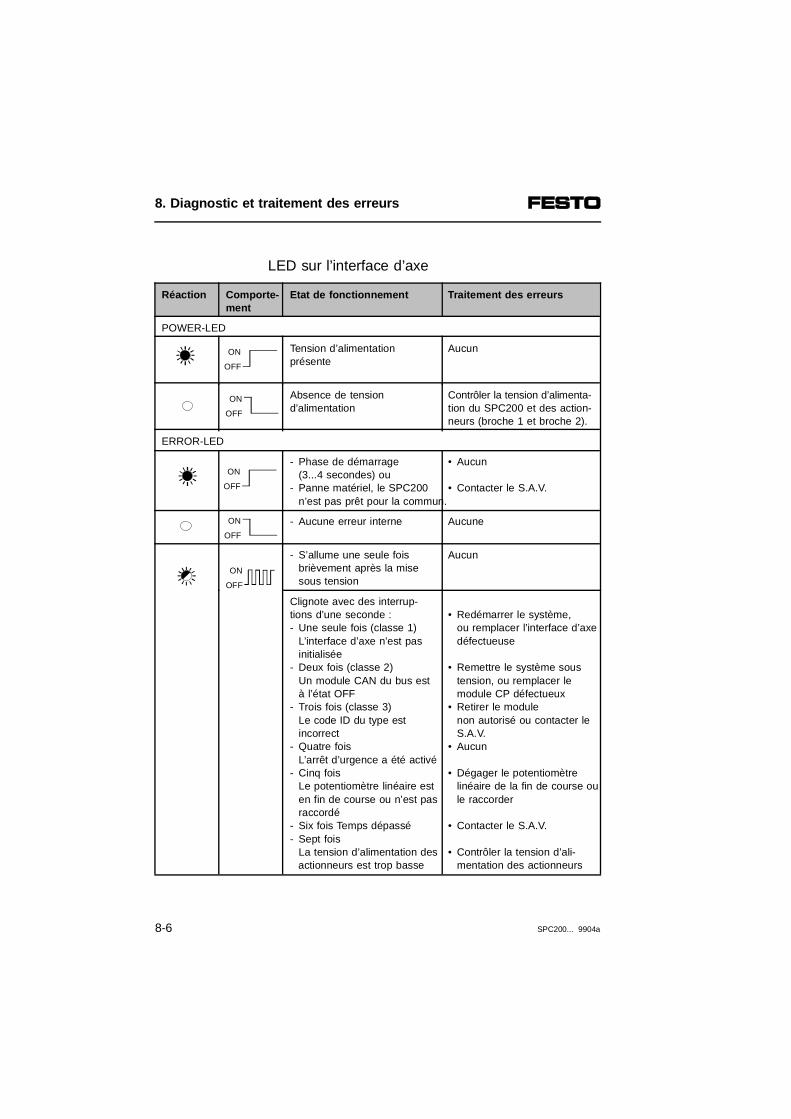
LED sur l’interface d’axe
Réaction Comporte-ment
Etat de fonctionnement Traitement des erreurs
POWER-LED
Tension d’alimentationprésente
Aucun
Absence de tensiond’alimentation
Contrôler la tension d’alimenta-tion du SPC200 et des action-neurs (broche 1 et broche 2).
ERROR-LED
- Phase de démarrage (3...4 secondes) ou
- Panne matériel, le SPC200n’est pas prêt pour la commun.
• Aucun
• Contacter le S.A.V.
- Aucune erreur interne Aucune
- S’allume une seule foisbrièvement après la misesous tension
Aucun
Clignote avec des interrup-tions d’une seconde :- Une seule fois (classe 1)
L’interface d’axe n’est pas initialisée
- Deux fois (classe 2)Un module CAN du bus est à l’état OFF
- Trois fois (classe 3)Le code ID du type estincorrect
- Quatre foisL’arrêt d’urgence a été activé
- Cinq foisLe potentiomètre linéaire esten fin de course ou n’est pasraccordé
- Six fois Temps dépassé- Sept fois
La tension d’alimentation des actionneurs est trop basse
• Redémarrer le système,ou remplacer l’interface d’axedéfectueuse
• Remettre le système soustension, ou remplacer lemodule CP défectueux
• Retirer le module non autorisé ou contacter le S.A.V.
• Aucun
• Dégager le potentiomètrelinéaire de la fin de course oule raccorder
• Contacter le S.A.V.
• Contrôler la tension d’ali-mentation des actionneurs
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
8. Diagnostic et traitement des erreurs
8-6 SPC200... 9904a
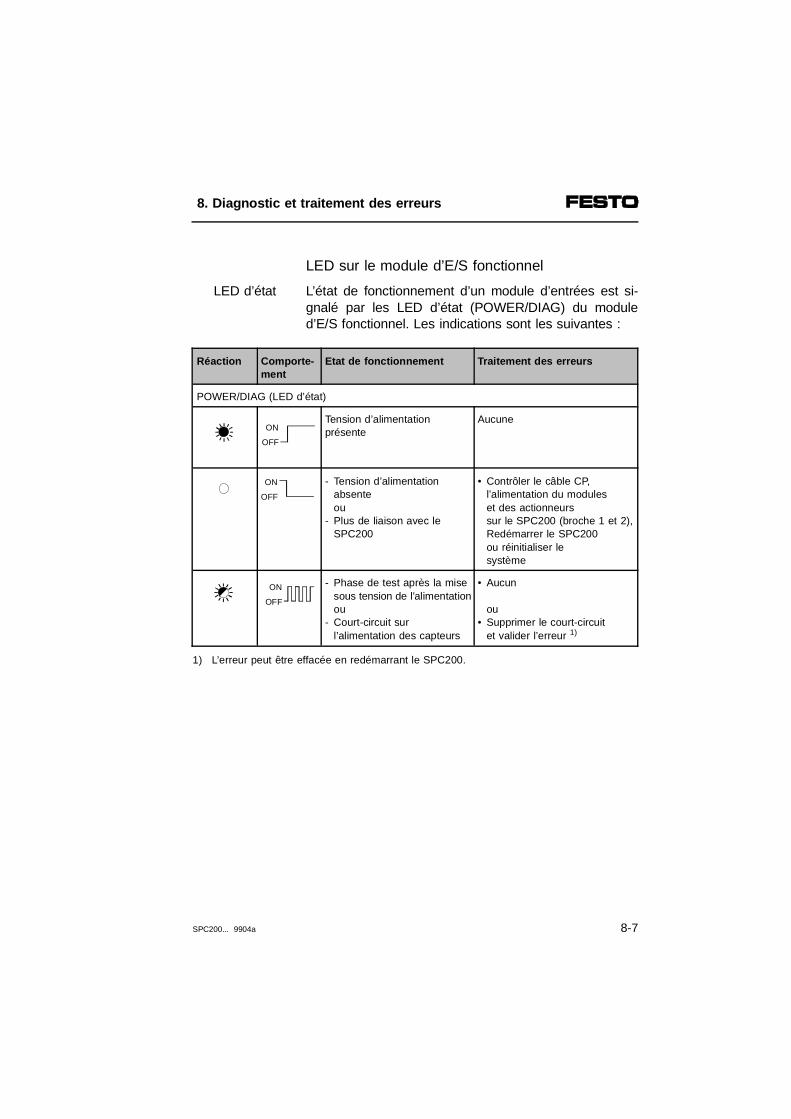
LED sur le module d’E/S fonctionnel
L’état de fonctionnement d’un module d’entrées est si-gnalé par les LED d’état (POWER/DIAG) du moduled’E/S fonctionnel. Les indications sont les suivantes :
LED d’état
Réaction Comporte-ment
Etat de fonctionnement Traitement des erreurs
POWER/DIAG (LED d’état)
Tension d’alimentationprésente
Aucune
- Tension d’alimentation absenteou
- Plus de liaison avec leSPC200
• Contrôler le câble CP, l’alimentation du modules et des actionneurs sur le SPC200 (broche 1 et 2),Redémarrer le SPC200ou réinitialiser le système
- Phase de test après la misesous tension de l’alimentationou
- Court-circuit sur l’alimentation des capteurs
• Aucun
ou• Supprimer le court-circuit
et valider l’erreur 1)
1) L’erreur peut être effacée en redémarrant le SPC200.
ON
OFF
ON
OFF
ON
OFF
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-7
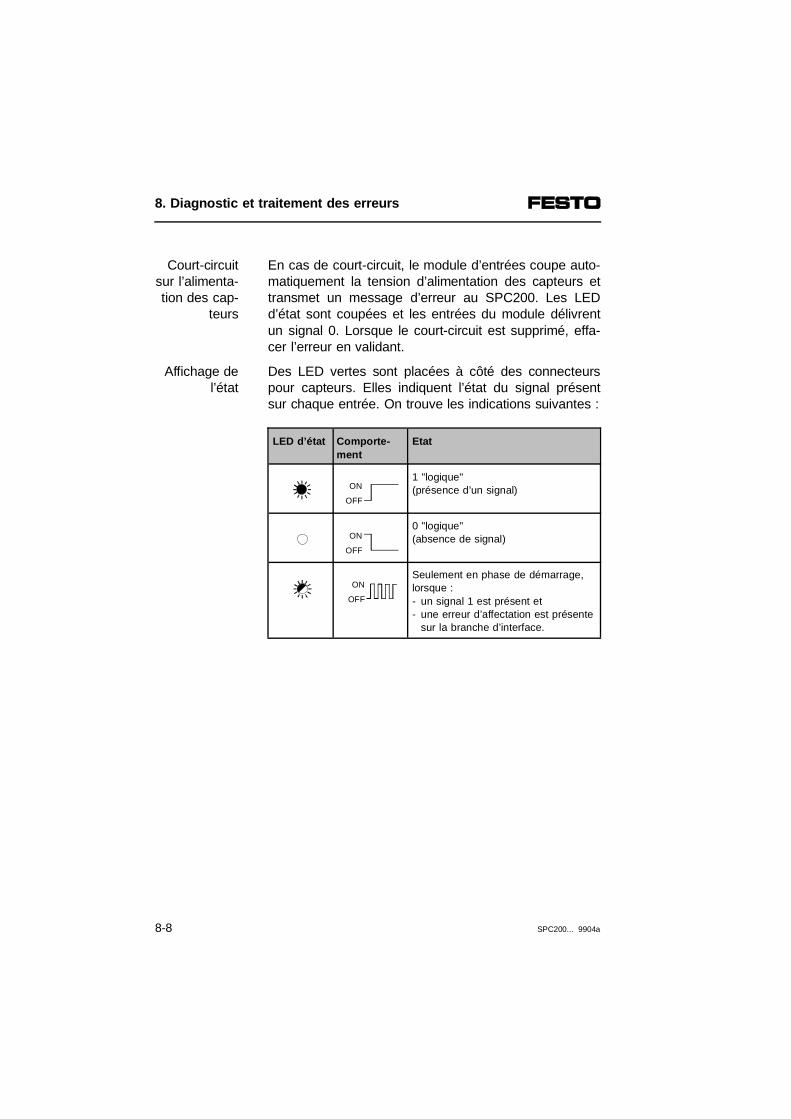
En cas de court-circuit, le module d’entrées coupe auto-matiquement la tension d’alimentation des capteurs ettransmet un message d’erreur au SPC200. Les LEDd’état sont coupées et les entrées du module délivrentun signal 0. Lorsque le court-circuit est supprimé, effa-cer l’erreur en validant.
Court-circuitsur l’alimenta-tion des cap-
teurs
Des LED vertes sont placées à côté des connecteurspour capteurs. Elles indiquent l’état du signal présentsur chaque entrée. On trouve les indications suivantes :
Affichage del’état
LED d’état Comporte-ment
Etat
1 "logique"(présence d’un signal)
0 "logique"(absence de signal)
Seulement en phase de démarrage,lorsque :- un signal 1 est présent et - une erreur d’affectation est présente
sur la branche d’interface.
ON
OFF
ON
OFF
ON
OFF
8. Diagnostic et traitement des erreurs
8-8 SPC200... 9904a
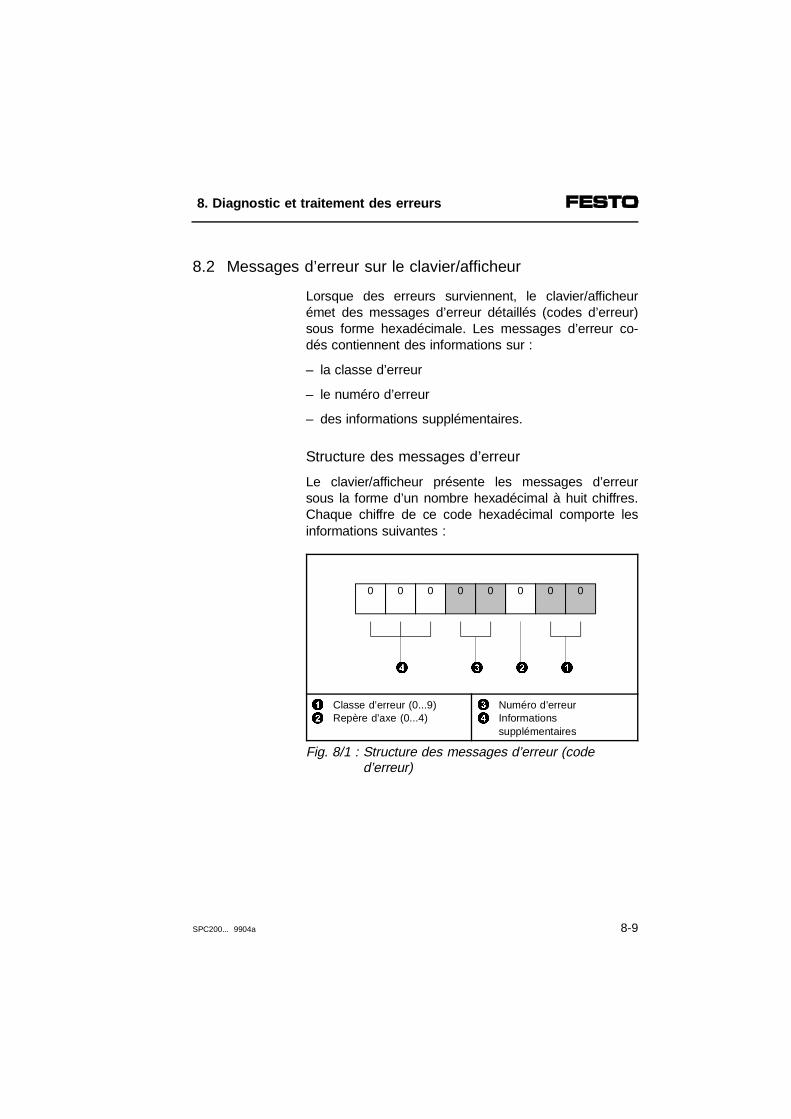
8.2 Messages d’erreur sur le clavier/afficheur
Lorsque des erreurs surviennent, le clavier/afficheurémet des messages d’erreur détaillés (codes d’erreur)sous forme hexadécimale. Les messages d’erreur co-dés contiennent des informations sur :
– la classe d’erreur
– le numéro d’erreur
– des informations supplémentaires.
Structure des messages d’erreur
Le clavier/afficheur présente les messages d’erreursous la forme d’un nombre hexadécimal à huit chiffres.Chaque chiffre de ce code hexadécimal comporte lesinformations suivantes :
12
Classe d’erreur (0...9)Repère d’axe (0...4)
34
Numéro d’erreurInformationssupplémentaires
Fig. 8/1 : Structure des messages d’erreur (code d’erreur)
0 00 00 0 0 0
234 1
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-9

La classe d’erreur indique le type d’erreur (p. ex. pannematériel, erreur de configuration etc.). Si le SPC200 estprêt pour la communication, la LED ERROR clignoted’une manière caractéristique de la classe d’erreur cor-respondante.
Classed’erreur
Lorsque l’erreur est due à un axe, le repère d’axe indi-que l’axe sur lequel l’erreur s’est produite. On trouveles indications suivantes :
Repère d’axe
Repère d’axe Description
0 L’erreur n’est pas due à un axe (erreur système)
1 Erreur sur l’axe X
2 Erreur sur l’axe Y
3 Erreur sur l’axe Z
4 Erreur sur l’axe U
Le numéro d’erreur décrit la source de l’erreur. Pourcertains numéros d’erreur des informations supplémen-taires sont fournies par le nombre hexadécimal à troischiffres qui renseigne sur la localisation de l’erreur.
Numérod’erreur et
informations supplémen-
taires
8. Diagnostic et traitement des erreurs
8-10 SPC200... 9904a
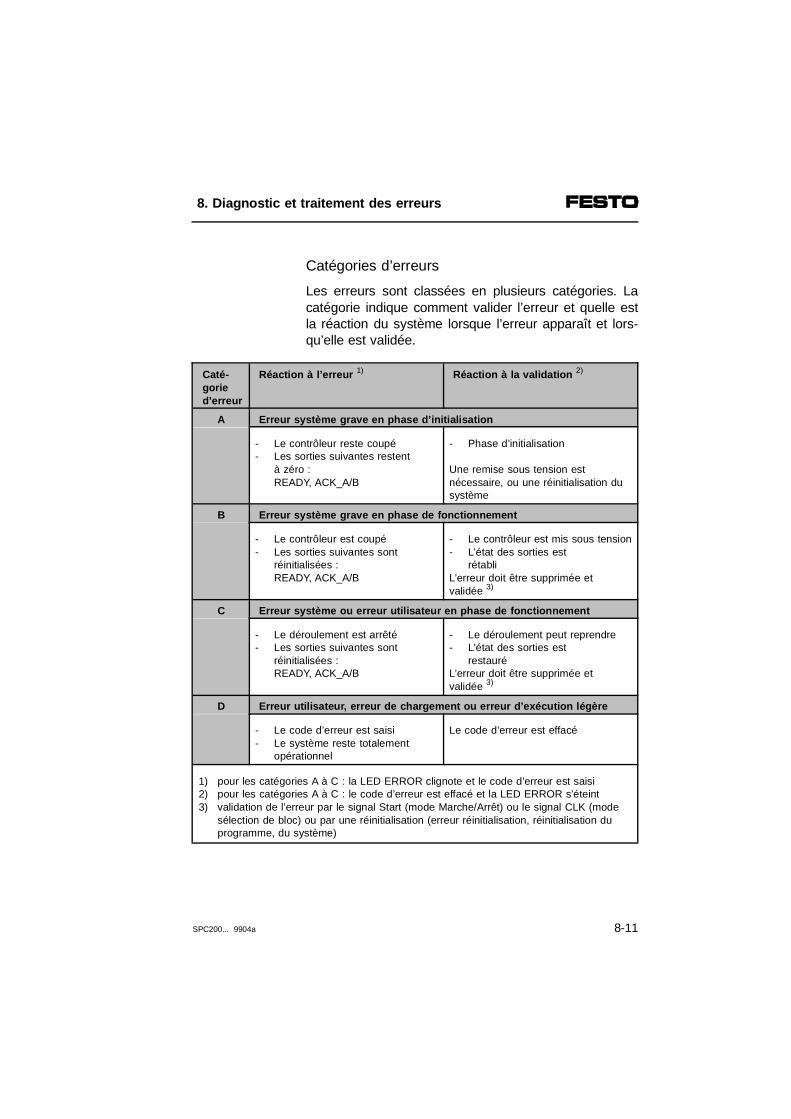
Catégories d’erreurs
Les erreurs sont classées en plusieurs catégories. Lacatégorie indique comment valider l’erreur et quelle estla réaction du système lorsque l’erreur apparaît et lors-qu’elle est validée.
Caté-goried’erreur
Réaction à l’erreur 1) Réaction à la validation 2)
A Erreur système grave en phase d’initialisation
- Le contrôleur reste coupé- Les sorties suivantes restent
à zéro :READY, ACK_A/B
- Phase d’initialisation
Une remise sous tension estnécessaire, ou une réinitialisation dusystème
B Erreur système grave en phase de fonctionnement
- Le contrôleur est coupé- Les sorties suivantes sont
réinitialisées :READY, ACK_A/B
- Le contrôleur est mis sous tension- L’état des sorties est
rétabliL’erreur doit être supprimée etvalidée 3)
C Erreur système ou erreur utilisateur en phase de fonctionnement
- Le déroulement est arrêté - Les sorties suivantes sont
réinitialisées :READY, ACK_A/B
- Le déroulement peut reprendre- L’état des sorties est
restauréL’erreur doit être supprimée etvalidée 3)
D Erreur utilisateur, erreur de chargement ou erreur d’exécution légère
- Le code d’erreur est saisi - Le système reste totalement
opérationnel
Le code d’erreur est effacé
1) pour les catégories A à C : la LED ERROR clignote et le code d’erreur est saisi 2) pour les catégories A à C : le code d’erreur est effacé et la LED ERROR s’éteint3) validation de l’erreur par le signal Start (mode Marche/Arrêt) ou le signal CLK (mode
sélection de bloc) ou par une réinitialisation (erreur réinitialisation, réinitialisation du programme, du système)
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-11

Les tableaux suivants trient les messages d’erreur se-lon la classe d’erreur et précisent les catégories d’er-reurs correspondantes.
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppressiondes erreurs
0 00000000 Aucune erreur n’est signalée
1
(A)
zzzyyx01 Phase de démarrage : Erreur lors de l’initialisation des cartes et des modules
sss01001 Erreur système interne • Contacter leS.A.V.
zzz02001 Erreur lors de l’initialisation de la branched’interface d’axe.zzz = information supplémentaire (1...D ou11...1D)1....D : erreur sur la 1ère branche IFA
1 ou B : erreur sur le premier système demesure2 ou C : erreur sur le second système de mesure3 ou 9 : erreur sur la première IFA4 ou A : erreur sur la seconde IFA5 : erreur sur le premier module CP6 : erreur sur le second module CP7 ou 8 ou D : erreur du bus
11....1D : erreur sur la 2e branche IFA11 ou 1B : erreur sur le premier système de mesure12 ou 1C : erreur sur le second système de mesure13 ou 19 : erreur sur la première IFA14 ou 1A : erreur sur la seconde IFA15 : erreur sur le premier module CP16 : erreur sur le second module CP17 ou 18 ou 1D : erreur du bus
• Contrôler lesmodules ou les composants sur la brancheIFA et les rem-placer sinécessaire
(A) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe, sss = informations supplémentaire pour le personnel S.A.V.;
IFA = Interface d’axe
8. Diagnostic et traitement des erreurs
8-12 SPC200... 9904a
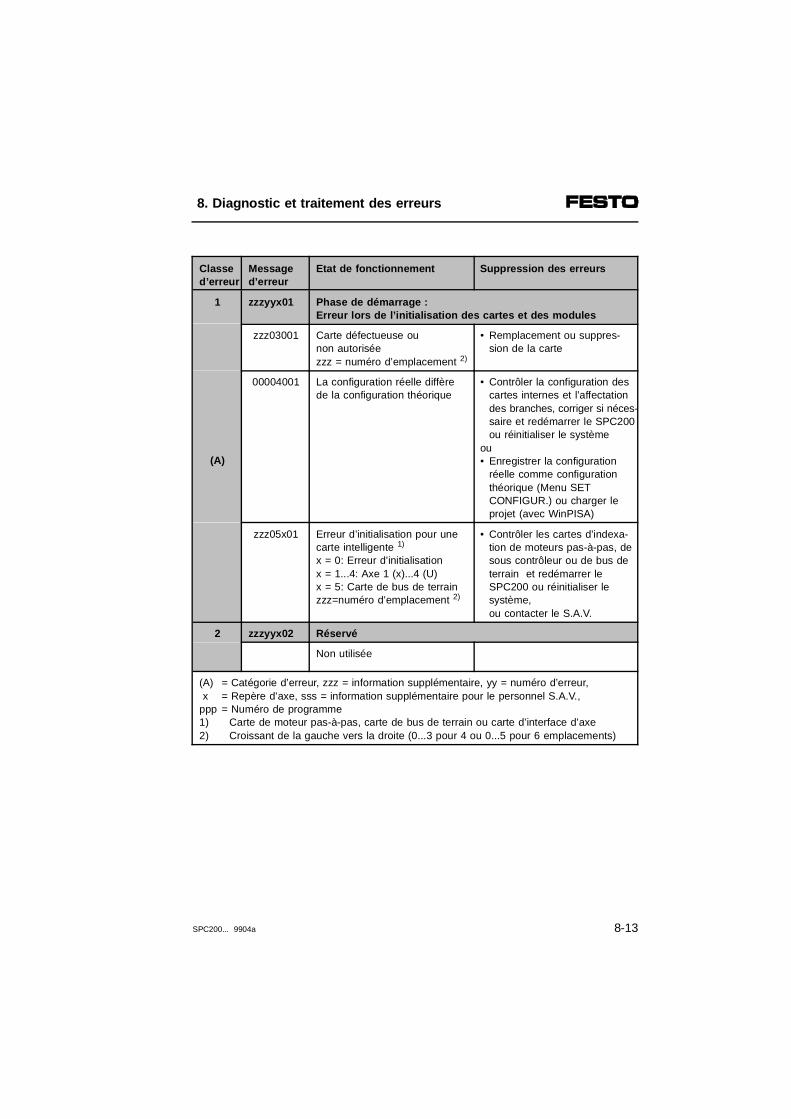
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
1
(A)
zzzyyx01 Phase de démarrage : Erreur lors de l’initialisation des cartes et des modules
zzz03001 Carte défectueuse ou non autorisée zzz = numéro d’emplacement 2)
• Remplacement ou suppres-sion de la carte
00004001 La configuration réelle diffèrede la configuration théorique
• Contrôler la configuration des cartes internes et l’affectationdes branches, corriger si néces-saire et redémarrer le SPC200ou réinitialiser le système
ou• Enregistrer la configuration
réelle comme configurationthéorique (Menu SETCONFIGUR.) ou charger leprojet (avec WinPISA)
zzz05x01 Erreur d’initialisation pour unecarte intelligente 1)
x = 0: Erreur d’initialisationx = 1...4: Axe 1 (x)...4 (U)x = 5: Carte de bus de terrain zzz=numéro d’emplacement 2)
• Contrôler les cartes d’indexa-tion de moteurs pas-à-pas, desous contrôleur ou de bus deterrain et redémarrer leSPC200 ou réinitialiser lesystème,ou contacter le S.A.V.
2 zzzyyx02 Réservé
Non utilisée
(A) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe, sss = information supplémentaire pour le personnel S.A.V.,ppp = Numéro de programme1) Carte de moteur pas-à-pas, carte de bus de terrain ou carte d’interface d’axe2) Croissant de la gauche vers la droite (0...3 pour 4 ou 0...5 pour 6 emplacements)
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-13

3
(A)
zzzyyx03 Phase de démarrage : Paramètres d’application endommagés
ppp01003 Programme utilisateurendommagé
• Réinitialiser les paramètreset les saisir ou les chargerde nouveau
ou• Contacter le S.A.V.
00002003 La liste des positions estendommagée
00003x03 Paramètres de configurationendommagés
00004x03 Paramètres systèmeendommagés
00005x03 Données d’identificationdynamique endommagées
00006x03 Données d’identificationstatique endommagées
00007x03 Données PROFIBUSincorrectes
00008x03 Données INTERBUS incorrectes
(A) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe, sss = information supplémentaire pour le personnel S.A.V., ppp = Numéro de programme
8. Diagnostic et traitement des erreurs
8-14 SPC200... 9904a
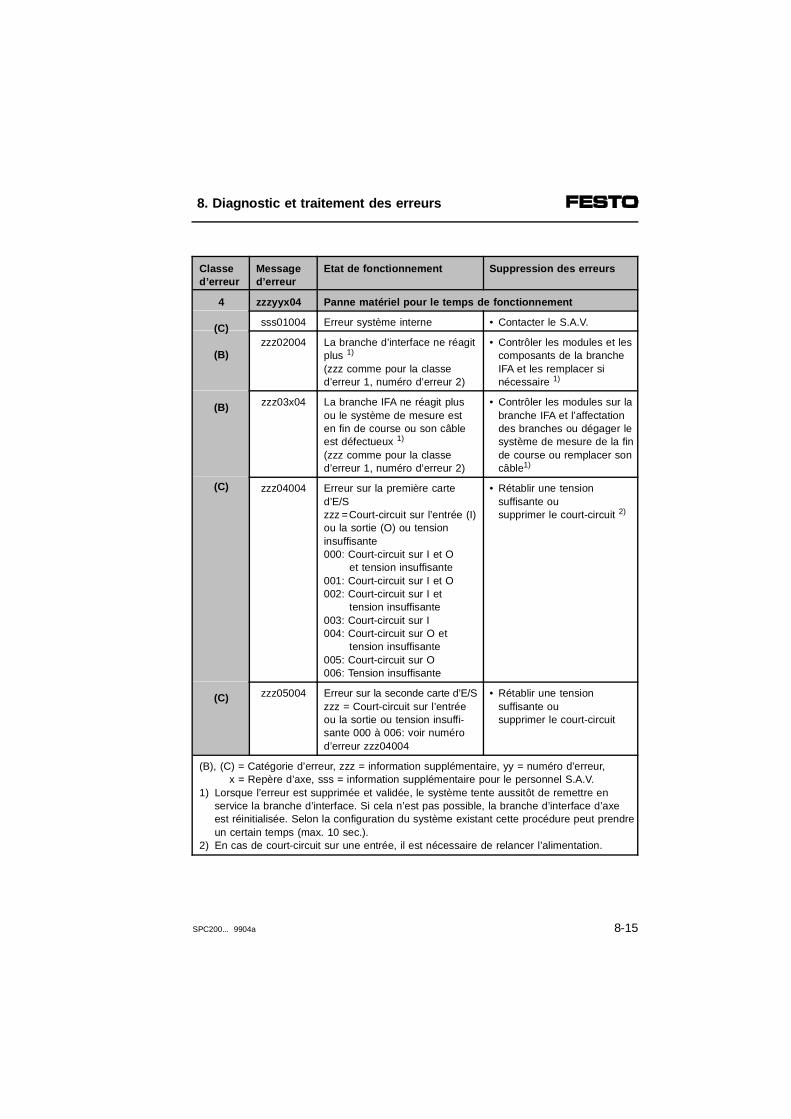
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
4
(C)
(B)
(B)
(C)
(C)
zzzyyx04 Panne matériel pour le temps de fonctionnement
sss01004 Erreur système interne • Contacter le S.A.V.
zzz02004 La branche d’interface ne réagit plus 1)
(zzz comme pour la classed’erreur 1, numéro d’erreur 2)
• Contrôler les modules et lescomposants de la brancheIFA et les remplacer si nécessaire 1)
zzz03x04 La branche IFA ne réagit plusou le système de mesure esten fin de course ou son câbleest défectueux 1)
(zzz comme pour la classed’erreur 1, numéro d’erreur 2)
• Contrôler les modules sur labranche IFA et l’affectation des branches ou dégager lesystème de mesure de la finde course ou remplacer soncâble1)
zzz04004 Erreur sur la première carted’E/Szzz =Court-circuit sur l’entrée (I)ou la sortie (O) ou tensioninsuffisante000: Court-circuit sur I et O
et tension insuffisante001: Court-circuit sur I et O 002: Court-circuit sur I et
tension insuffisante 003: Court-circuit sur I004: Court-circuit sur O et
tension insuffisante 005: Court-circuit sur O006: Tension insuffisante
• Rétablir une tensionsuffisante ou supprimer le court-circuit 2)
zzz05004 Erreur sur la seconde carte d’E/Szzz = Court-circuit sur l’entréeou la sortie ou tension insuffi-sante 000 à 006: voir numérod’erreur zzz04004
• Rétablir une tensionsuffisante ou supprimer le court-circuit
(B), (C) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe, sss = information supplémentaire pour le personnel S.A.V.
1) Lorsque l’erreur est supprimée et validée, le système tente aussitôt de remettre en service la branche d’interface. Si cela n’est pas possible, la branche d’interface d’axeest réinitialisée. Selon la configuration du système existant cette procédure peut prendreun certain temps (max. 10 sec.).
2) En cas de court-circuit sur une entrée, il est nécessaire de relancer l’alimentation.
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-15
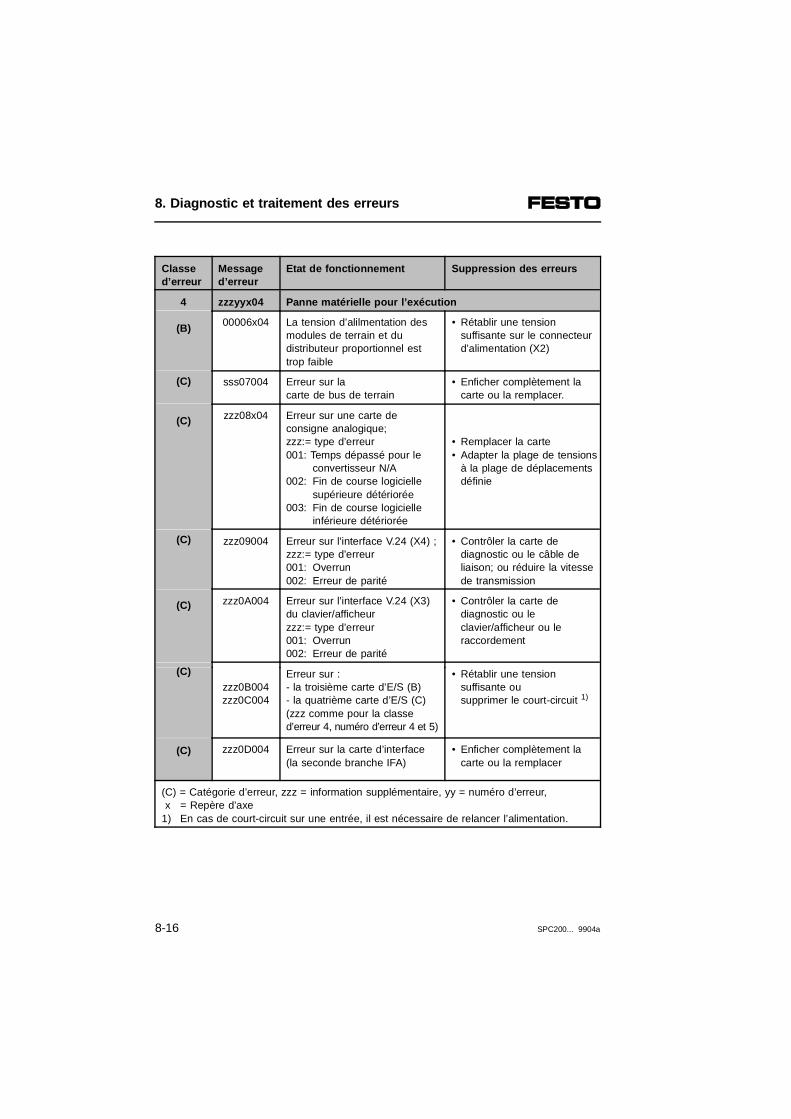
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
4
(B)
(C)
(C)
(C)
(C)
(C)
(C)
zzzyyx04 Panne matérielle pour l’exécution
00006x04 La tension d’alilmentation desmodules de terrain et dudistributeur proportionnel esttrop faible
• Rétablir une tensionsuffisante sur le connecteurd’alimentation (X2)
sss07004 Erreur sur la carte de bus de terrain
• Enficher complètement lacarte ou la remplacer.
zzz08x04 Erreur sur une carte deconsigne analogique;zzz:= type d’erreur001: Temps dépassé pour le
convertisseur N/A002: Fin de course logicielle
supérieure détériorée003: Fin de course logicielle
inférieure détériorée
• Remplacer la carte • Adapter la plage de tensions à la plage de déplacements
définie
zzz09004 Erreur sur l’interface V.24 (X4) ;zzz:= type d’erreur001: Overrun002: Erreur de parité
• Contrôler la carte dediagnostic ou le câble deliaison; ou réduire la vitessede transmission
zzz0A004 Erreur sur l’interface V.24 (X3)du clavier/afficheur zzz:= type d’erreur001: Overrun002: Erreur de parité
• Contrôler la carte dediagnostic ou le clavier/afficheur ou leraccordement
zzz0B004zzz0C004
Erreur sur :- la troisième carte d’E/S (B)- la quatrième carte d’E/S (C)(zzz comme pour la classed’erreur 4, numéro d’erreur 4 et 5)
• Rétablir une tensionsuffisante ou supprimer le court-circuit 1)
zzz0D004 Erreur sur la carte d’interface (la seconde branche IFA)
• Enficher complètement lacarte ou la remplacer
(C) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe 1) En cas de court-circuit sur une entrée, il est nécessaire de relancer l’alimentation.
8. Diagnostic et traitement des erreurs
8-16 SPC200... 9904a
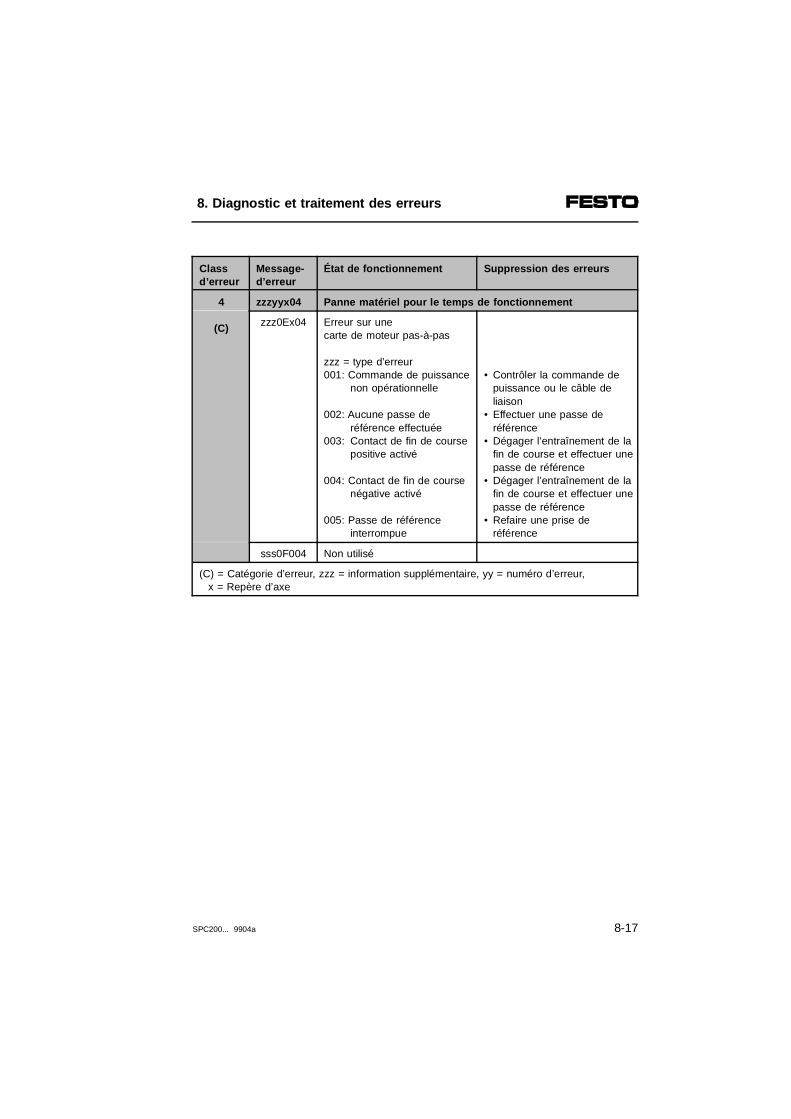
Classd’erreur
Message-d’erreur
État de fonctionnement Suppression des erreurs
4
(C)
zzzyyx04 Panne matériel pour le temps de fonctionnement
zzz0Ex04 Erreur sur une carte de moteur pas-à-pas
zzz = type d’erreur 001: Commande de puissance
non opérationnelle
002: Aucune passe deréférence effectuée
003: Contact de fin de coursepositive activé
004: Contact de fin de coursenégative activé
005: Passe de référenceinterrompue
• Contrôler la commande depuissance ou le câble deliaison
• Effectuer une passe deréférence
• Dégager l’entraînement de lafin de course et effectuer unepasse de référence
• Dégager l’entraînement de lafin de course et effectuer unepasse de référence
• Refaire une prise deréférence
sss0F004 Non utilisé
(C) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-17
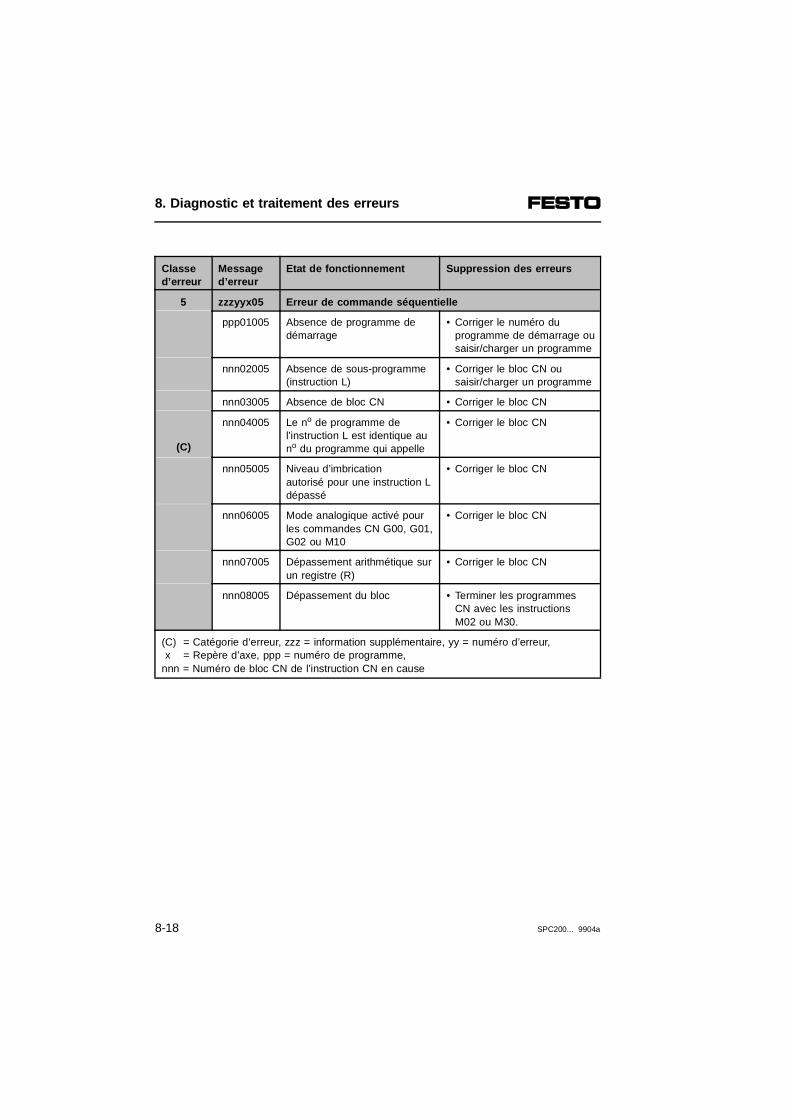
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
5
(C)
zzzyyx05 Erreur de commande séquentielle
ppp01005 Absence de programme dedémarrage
• Corriger le numéro duprogramme de démarrage ousaisir/charger un programme
nnn02005 Absence de sous-programme(instruction L)
• Corriger le bloc CN ou saisir/charger un programme
nnn03005 Absence de bloc CN • Corriger le bloc CN
nnn04005 Le no de programme del’instruction L est identique auno du programme qui appelle
• Corriger le bloc CN
nnn05005 Niveau d’imbrication autorisé pour une instruction Ldépassé
• Corriger le bloc CN
nnn06005 Mode analogique activé pourles commandes CN G00, G01,G02 ou M10
• Corriger le bloc CN
nnn07005 Dépassement arithmétique surun registre (R)
• Corriger le bloc CN
nnn08005 Dépassement du bloc • Terminer les programmes CN avec les instructionsM02 ou M30.
(C) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe, ppp = numéro de programme,nnn = Numéro de bloc CN de l’instruction CN en cause
8. Diagnostic et traitement des erreurs
8-18 SPC200... 9904a
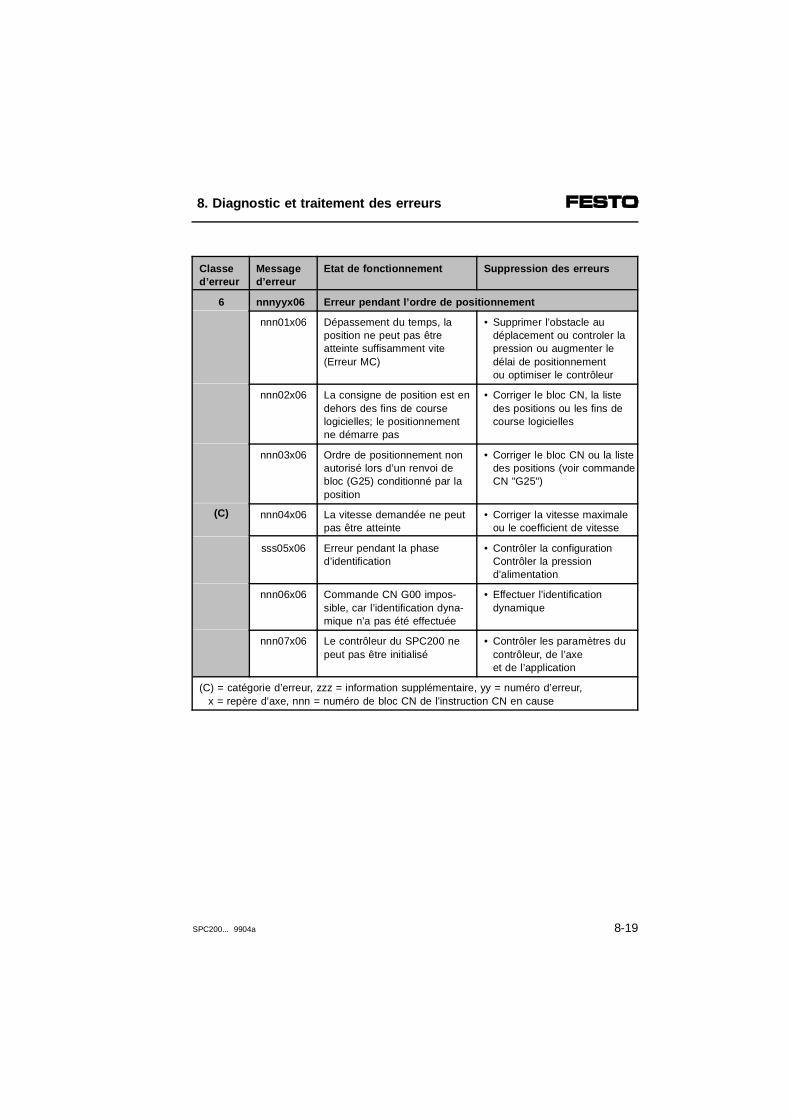
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
6
(C)
nnnyyx06 Erreur pendant l’ordre de positionnement
nnn01x06 Dépassement du temps, laposition ne peut pas êtreatteinte suffisamment vite(Erreur MC)
• Supprimer l’obstacle audéplacement ou controler lapression ou augmenter le délai de positionnementou optimiser le contrôleur
nnn02x06 La consigne de position est endehors des fins de course logicielles; le positionnementne démarre pas
• Corriger le bloc CN, la listedes positions ou les fins decourse logicielles
nnn03x06 Ordre de positionnement nonautorisé lors d’un renvoi debloc (G25) conditionné par laposition
• Corriger le bloc CN ou la liste des positions (voir commandeCN "G25")
nnn04x06 La vitesse demandée ne peutpas être atteinte
• Corriger la vitesse maximaleou le coefficient de vitesse
sss05x06 Erreur pendant la phased’identification
• Contrôler la configurationContrôler la pressiond’alimentation
nnn06x06 Commande CN G00 impos-sible, car l’identification dyna-mique n’a pas été effectuée
• Effectuer l’identificationdynamique
nnn07x06 Le contrôleur du SPC200 nepeut pas être initialisé
• Contrôler les paramètres ducontrôleur, de l’axe et de l’application
(C) = catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = repère d’axe, nnn = numéro de bloc CN de l’instruction CN en cause
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-19

Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
6
(C)
(C)
(C)
(B)
(B)
(C)
(C)
zzzyyx06 Erreur pendant l’ordre de positionnement
nnn08x06 L’ordre est refusé • Corriger le bloc CN ouarrêter le système avant d’exécuter l’opération.
nnn09x06 Le contenu d’un registre depositions est erroné
• Corriger le bloc CN
nnn0Ax06 Non utilisé Non utilisé
0000Bx06 Identification interrompue, carle signal d’autorisation manque
• Forcer l’entrée ENABLE etrecommencer l’identification
nnn0Cx06 L’axe oscille (régulation instable)nnn=numéro de bloc CN, si unprogramme est activé
• Contrôler le contrôleur
nnn0Dx06 Mauvaise qualité depositionnement nnn=numéro de bloc CN, si unprogamme est activé
• Contrôler les paramètres ducontrôleur, de l’axe et de l’application
0000Ex06 Les données d’identificationsont erronées
• Recommencer l’identification
nnn0Fx06 La précision depositionnement est incorrecte
• Corriger le bloc CN
(B), (C) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe,
nnn = Numéro de bloc CN de l’instruction CN en cause
8. Diagnostic et traitement des erreurs
8-20 SPC200... 9904a
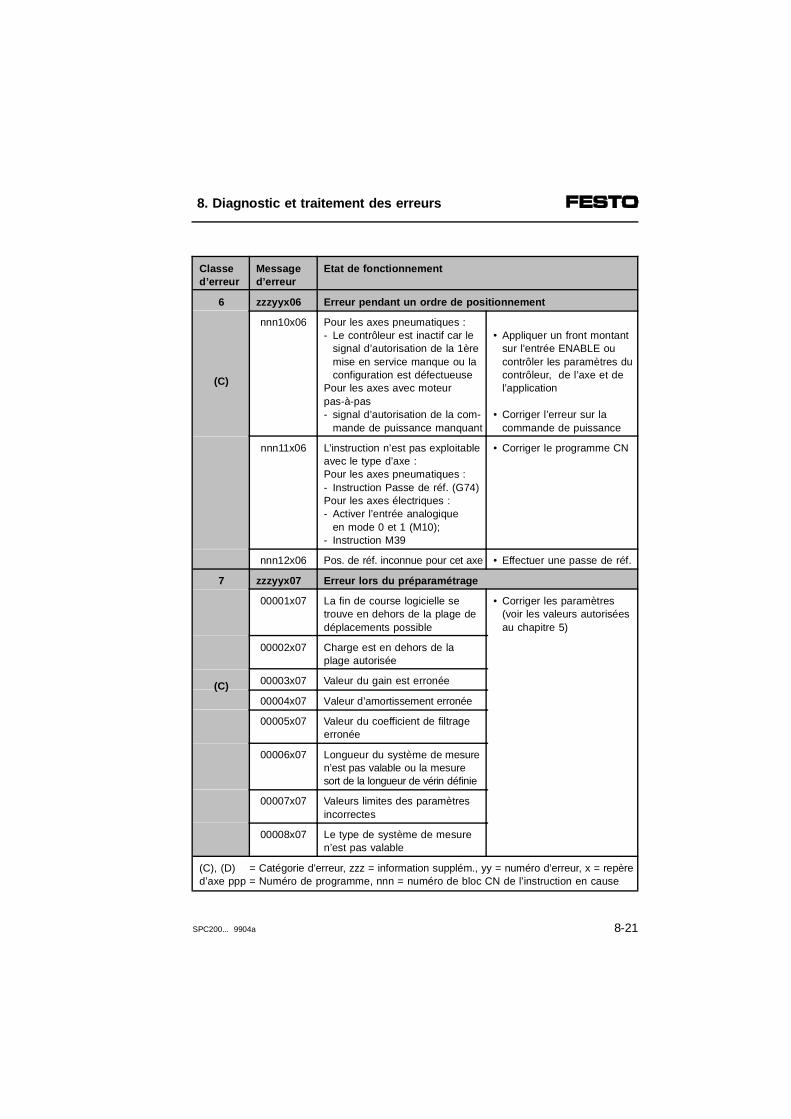
Classed’erreur
Messaged’erreur
Etat de fonctionnement
6
(C)
zzzyyx06 Erreur pendant un ordre de positionnement
nnn10x06 Pour les axes pneumatiques :- Le contrôleur est inactif car le
signal d’autorisation de la 1èremise en service manque ou laconfiguration est défectueuse
Pour les axes avec moteurpas-à-pas- signal d’autorisation de la com-
mande de puissance manquant
• Appliquer un front montantsur l’entrée ENABLE oucontrôler les paramètres ducontrôleur, de l’axe et del’application
• Corriger l’erreur sur lacommande de puissance
nnn11x06 L’instruction n’est pas exploitableavec le type d’axe :Pour les axes pneumatiques :- Instruction Passe de réf. (G74)Pour les axes électriques :- Activer l’entrée analogique
en mode 0 et 1 (M10);- Instruction M39
• Corriger le programme CN
nnn12x06 Pos. de réf. inconnue pour cet axe • Effectuer une passe de réf.
7
(C)
zzzyyx07 Erreur lors du préparamétrage
00001x07 La fin de course logicielle setrouve en dehors de la plage dedéplacements possible
• Corriger les paramètres(voir les valeurs autorisées au chapitre 5)
00002x07 Charge est en dehors de laplage autorisée
00003x07 Valeur du gain est erronée
00004x07 Valeur d’amortissement erronée
00005x07 Valeur du coefficient de filtrageerronée
00006x07 Longueur du système de mesuren’est pas valable ou la mesuresort de la longueur de vérin définie
00007x07 Valeurs limites des paramètres incorrectes
00008x07 Le type de système de mesuren’est pas valable
(C), (D) = Catégorie d’erreur, zzz = information supplém., yy = numéro d’erreur, x = repèred’axe ppp = Numéro de programme, nnn = numéro de bloc CN de l’instruction en cause
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-21
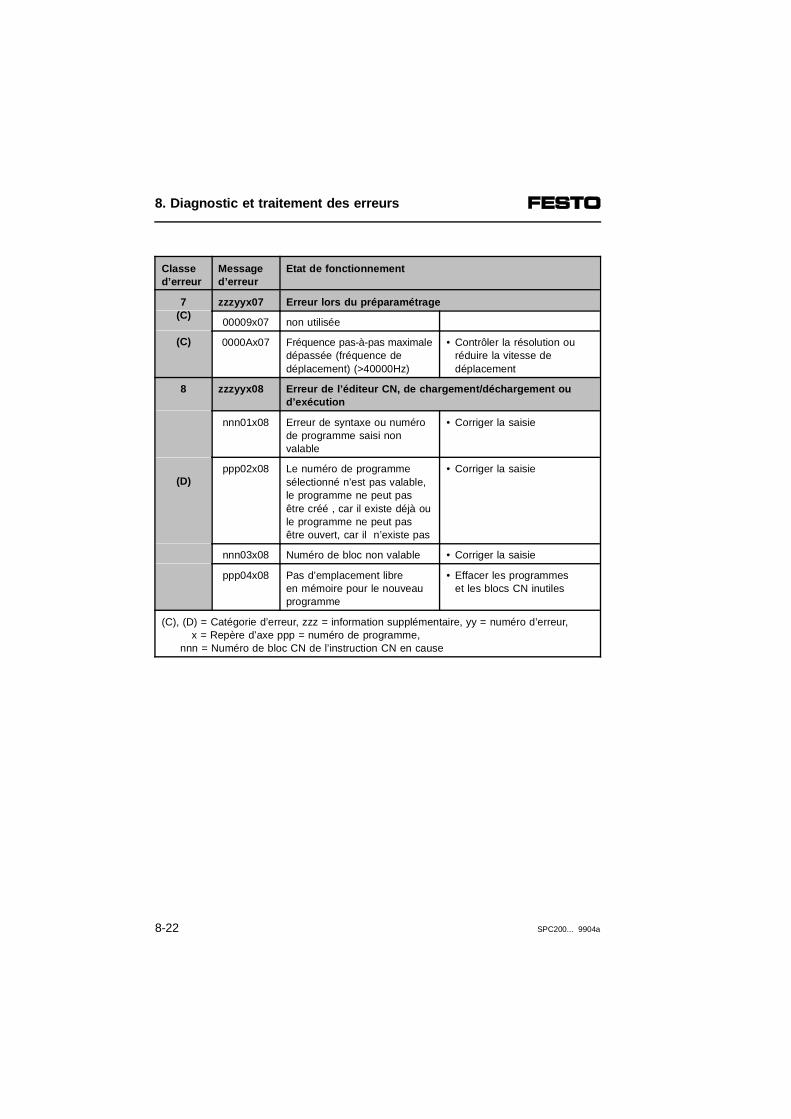
Classed’erreur
Messaged’erreur
Etat de fonctionnement
7(C)
(C)
zzzyyx07 Erreur lors du préparamétrage
00009x07 non utilisée
0000Ax07 Fréquence pas-à-pas maximaledépassée (fréquence dedéplacement) (>40000Hz)
• Contrôler la résolution ou réduire la vitesse de déplacement
8
(D)
zzzyyx08 Erreur de l’éditeur CN, de chargement/déchargement oud’exécution
nnn01x08 Erreur de syntaxe ou numérode programme saisi nonvalable
• Corriger la saisie
ppp02x08 Le numéro de programme sélectionné n’est pas valable,le programme ne peut pasêtre créé , car il existe déjà ou le programme ne peut pasêtre ouvert, car il n’existe pas
• Corriger la saisie
nnn03x08 Numéro de bloc non valable • Corriger la saisie
ppp04x08 Pas d’emplacement libreen mémoire pour le nouveauprogramme
• Effacer les programmes et les blocs CN inutiles
(C), (D) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe ppp = numéro de programme,
nnn = Numéro de bloc CN de l’instruction CN en cause
8. Diagnostic et traitement des erreurs
8-22 SPC200... 9904a
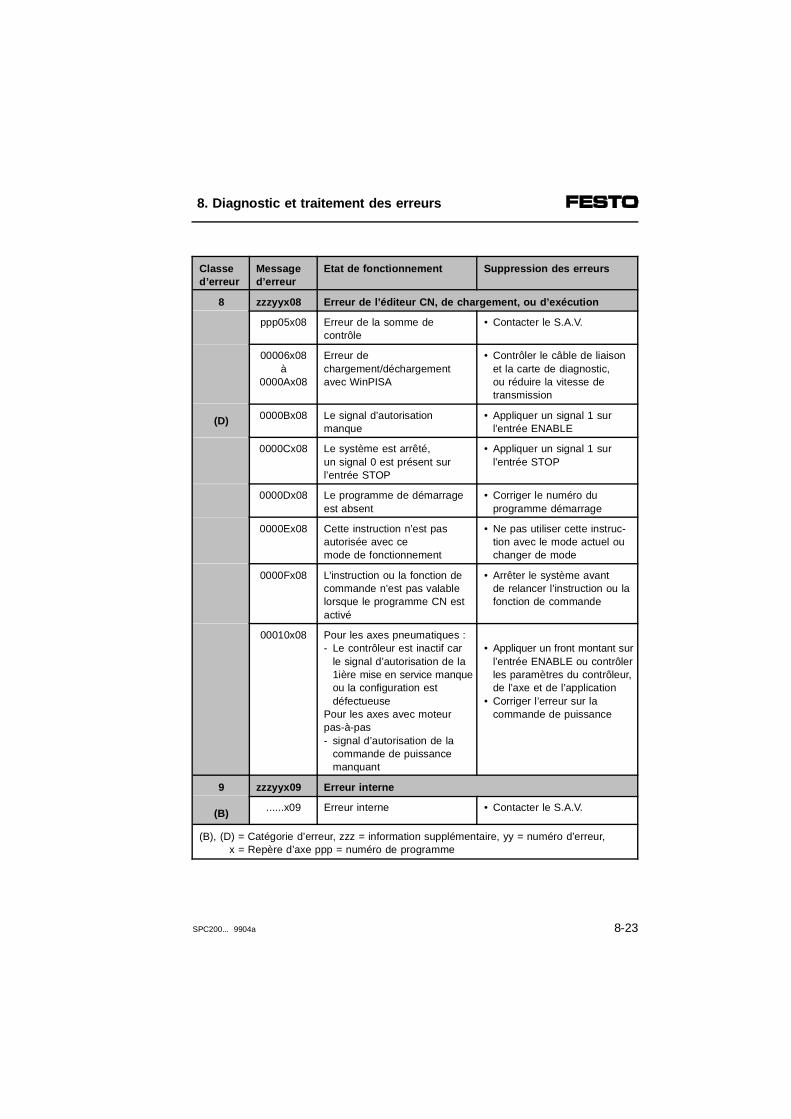
Classed’erreur
Messaged’erreur
Etat de fonctionnement Suppression des erreurs
8
(D)
zzzyyx08 Erreur de l’éditeur CN, de chargement, ou d’exécution
ppp05x08 Erreur de la somme decontrôle
• Contacter le S.A.V.
00006x08à
0000Ax08
Erreur dechargement/déchargementavec WinPISA
• Contrôler le câble de liaison et la carte de diagnostic,ou réduire la vitesse detransmission
0000Bx08 Le signal d’autorisationmanque
• Appliquer un signal 1 surl’entrée ENABLE
0000Cx08 Le système est arrêté,un signal 0 est présent sur l’entrée STOP
• Appliquer un signal 1 sur l’entrée STOP
0000Dx08 Le programme de démarrageest absent
• Corriger le numéro duprogramme démarrage
0000Ex08 Cette instruction n’est pasautorisée avec ce mode de fonctionnement
• Ne pas utiliser cette instruc-tion avec le mode actuel ouchanger de mode
0000Fx08 L’instruction ou la fonction decommande n’est pas valablelorsque le programme CN estactivé
• Arrêter le système avant de relancer l’instruction ou la fonction de commande
00010x08 Pour les axes pneumatiques :- Le contrôleur est inactif car
le signal d’autorisation de la1ière mise en service manqueou la configuration estdéfectueuse
Pour les axes avec moteurpas-à-pas- signal d’autorisation de la
commande de puissancemanquant
• Appliquer un front montant surl’entrée ENABLE ou contrôlerles paramètres du contrôleur,
de l’axe et de l’application• Corriger l’erreur sur la
commande de puissance
9
(B)
zzzyyx09 Erreur interne
......x09 Erreur interne • Contacter le S.A.V.
(B), (D) = Catégorie d’erreur, zzz = information supplémentaire, yy = numéro d’erreur, x = Repère d’axe ppp = numéro de programme
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-23
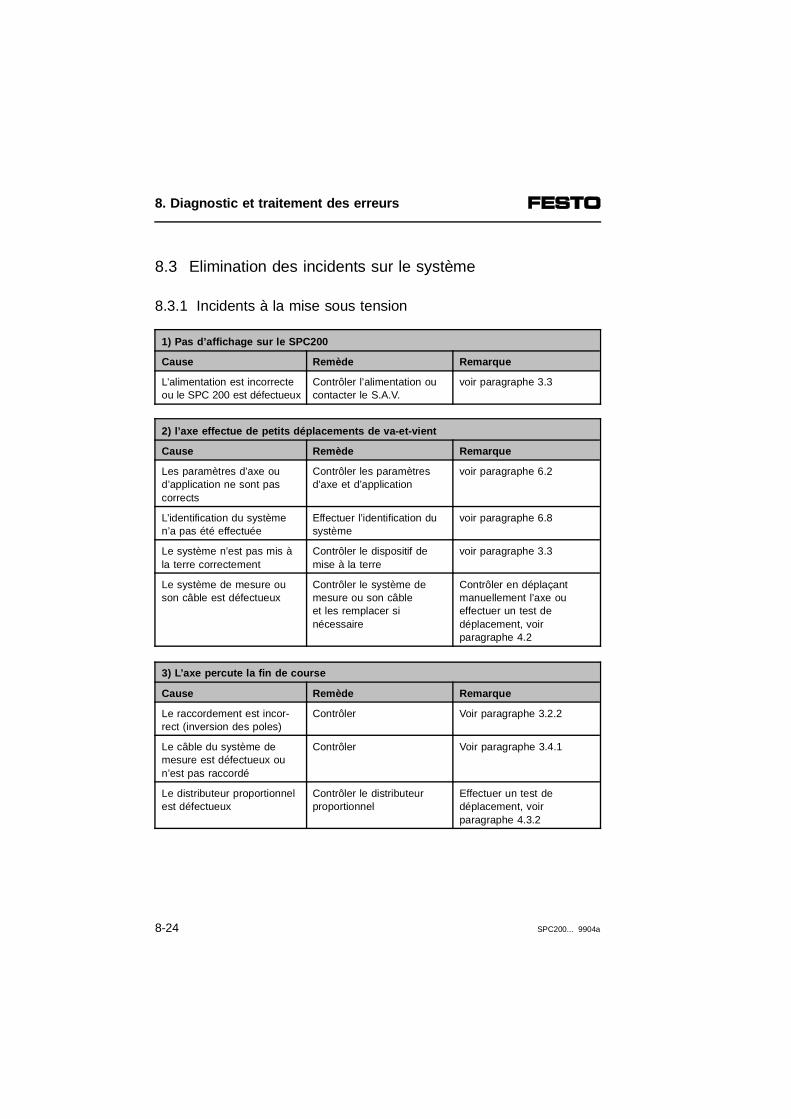
8.3 Elimination des incidents sur le système
8.3.1 Incidents à la mise sous tension
1) Pas d’affichage sur le SPC200
Cause Remède Remarque
L’alimentation est incorrecteou le SPC 200 est défectueux
Contrôler l’alimentation oucontacter le S.A.V.
voir paragraphe 3.3
2) l’axe effectue de petits déplacements de va-et-vient
Cause Remède Remarque
Les paramètres d’axe ou d’application ne sont pas corrects
Contrôler les paramètresd’axe et d’application
voir paragraphe 6.2
L’identification du systèmen’a pas été effectuée
Effectuer l’identification dusystème
voir paragraphe 6.8
Le système n’est pas mis àla terre correctement
Contrôler le dispositif demise à la terre
voir paragraphe 3.3
Le système de mesure ouson câble est défectueux
Contrôler le système demesure ou son câble et les remplacer sinécessaire
Contrôler en déplaçantmanuellement l’axe oueffectuer un test de déplacement, voirparagraphe 4.2
3) L’axe percute la fin de course
Cause Remède Remarque
Le raccordement est incor-rect (inversion des poles)
Contrôler Voir paragraphe 3.2.2
Le câble du système de mesure est défectueux oun’est pas raccordé
Contrôler Voir paragraphe 3.4.1
Le distributeur proportionnelest défectueux
Contrôler le distributeurproportionnel
Effectuer un test dedéplacement, voirparagraphe 4.3.2
8. Diagnostic et traitement des erreurs
8-24 SPC200... 9904a
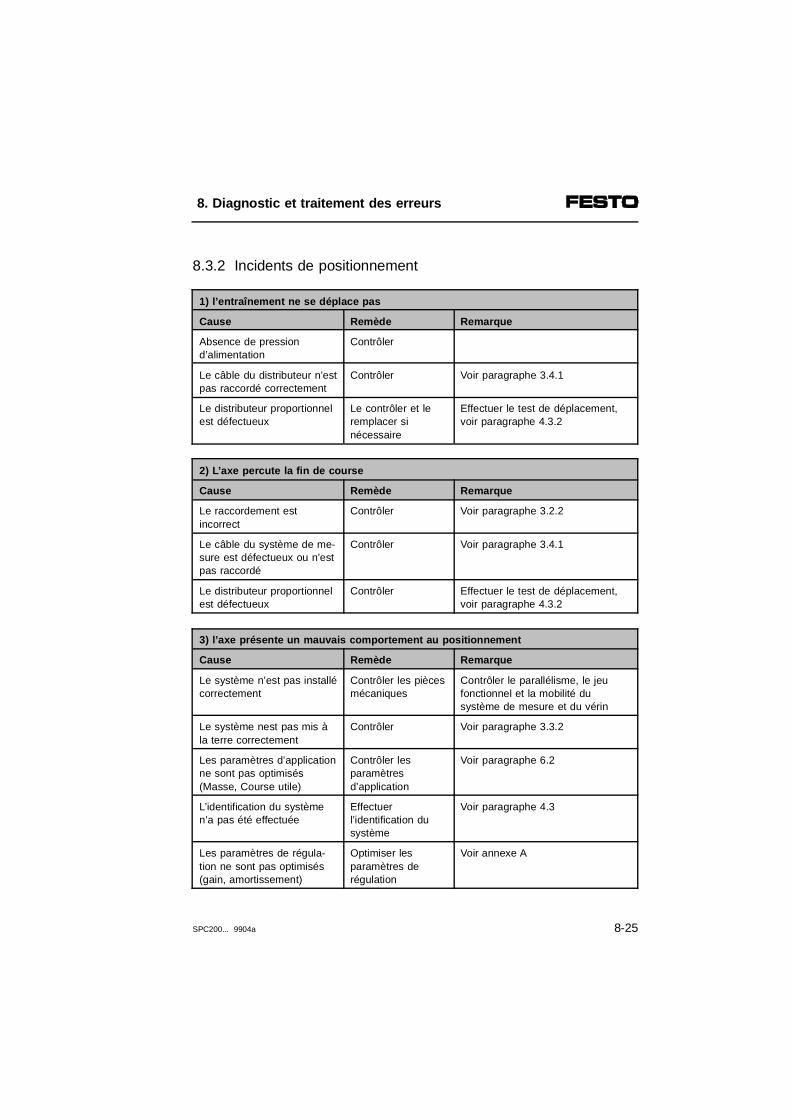
8.3.2 Incidents de positionnement
1) l’entraînement ne se déplace pas
Cause Remède Remarque
Absence de pression d’alimentation
Contrôler
Le câble du distributeur n’estpas raccordé correctement
Contrôler Voir paragraphe 3.4.1
Le distributeur proportionnelest défectueux
Le contrôler et leremplacer sinécessaire
Effectuer le test de déplacement,voir paragraphe 4.3.2
2) L’axe percute la fin de course
Cause Remède Remarque
Le raccordement est incorrect
Contrôler Voir paragraphe 3.2.2
Le câble du système de me-sure est défectueux ou n’estpas raccordé
Contrôler Voir paragraphe 3.4.1
Le distributeur proportionnelest défectueux
Contrôler Effectuer le test de déplacement,voir paragraphe 4.3.2
3) l’axe présente un mauvais comportement au positionnement
Cause Remède Remarque
Le système n’est pas installécorrectement
Contrôler les piècesmécaniques
Contrôler le parallélisme, le jeufonctionnel et la mobilité dusystème de mesure et du vérin
Le système nest pas mis àla terre correctement
Contrôler Voir paragraphe 3.3.2
Les paramètres d’applicationne sont pas optimisés(Masse, Course utile)
Contrôler lesparamètresd’application
Voir paragraphe 6.2
L’identification du systèmen’a pas été effectuée
Effectuerl’identification dusystème
Voir paragraphe 4.3
Les paramètres de régula-tion ne sont pas optimisés(gain, amortissement)
Optimiser lesparamètres derégulation
Voir annexe A
8. Diagnostic et traitement des erreurs
SPC200... 9904a 8-25

8. Diagnostic et traitement des erreurs
8-26 SPC200... 9904a
Annexe A
Optimisation du comportement aupositionnement
A. Optimisation du comportement au positionnement
SPC200... 9904a A-1

Sommaire
A. Optimisation du comportement au positionnement
A.1 Principe de base de la régulation. . . . . . . . . . . . . . . . . . . . . . . . . A-3A.2 Description des coefficients de régulation . . . . . . . . . . . . . . . . . . A-6A.3 Optimisation du positionnement . . . . . . . . . . . . . . . . . . . . . . . . . . A-9A.3.1 Procédure en cas de pression d’alimentation instable . . . . . . . A-15
A. Optimisation du comportement au positionnement
A-2 SPC200... 9904a
A.1 Principe de base de la régulation
La régulation des axes pneumatiques se base sur unmodèle de boucle de régulation, placé en arrière-plandans le SPC200. Ce modèle suppose que l’axe pneu-matique soit conforme aux réglementations, p. ex.concernant :
– l’air comprimé mis à disposition
– la combinaison vérin/distributeur utilisée
– la charge admissible
– les diamètres et les longueurs des conduites, etc.
Les paramètres de la boucle de régulation sont :
– les paramètres d’axe et d’application qui doivent êtrespécifiés
– les paramètres internes, relevés lors de l’identifica-tion du système et de l’adaptation.
Lors de la mise en service, l’identification du systèmerecherche certaines grandeurs comme la vitesse et l’ac-célération maximale, le frottement ou les caractéristi-ques du distributeur.
Identificationdu système
L’adaptation surveille en permanence et en cours defonctionnement, le comportement au positionnement.Les paramètres de régulation internes sont alors adap-tés à l’état réel de l’axe, pour compenser p. ex. l’usuredu système en fonction du temps d’utilisation.
Adaptation
A. Optimisation du comportement au positionnement
SPC200... 9904a A-3
La régulation du SPC200 permet, en plus du position-nement point à point (G00), d’imposer aussi aux axespneumatiques de suivre un profil de déplacement théo-rique (G01/G02).
Dans le positionnement point à point, le SPC200 gé-nère des profils théoriques pour les déplacements, lesvitesses et les accélérations. Ces profils théoriques doi-vent permettre d’accoster la position de consigne demanière reproductible, rapide et sans dépassement(voir paragraphe 7.2.1, instruction G00).
Point à point
Pour le déplacement selon un profil, les profils théori-ques sont calculées à partir des valeurs de consigne deposition, vitesse et accélération programmées par l’utili-sateur (voir paragraphe 7.2.1, instructions G01, G02).
Déplacementselon un
profil
Le temps de positionnement théorique est alors lasomme des temps correspondant à chacune desphases suivantes (voir fig. suivante) :
– phase d’accélération
– phase de freinage
– phase de déplacement régulier
Veiller à ce que les valeurs d’accélération et de vitessequi ont été programmées soient automatiquement limi-tées par des valeurs réalisables. Les valeurs maximalesréalisables sont définies par le SPC200 lors de l’identifi-cation dynamique, pour chaque axe individuellement.
A. Optimisation du comportement au positionnement
A-4 SPC200... 9904a
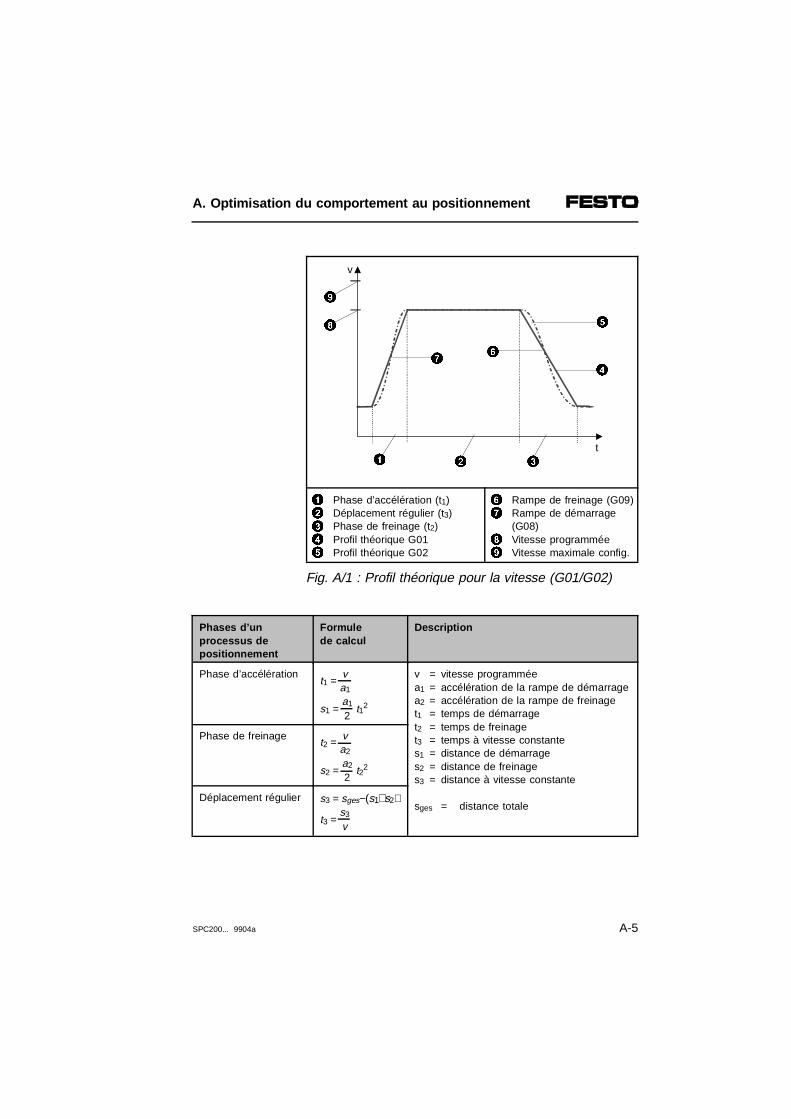
12345
Phase d’accélération (t1)Déplacement régulier (t3)Phase de freinage (t2)Profil théorique G01Profil théorique G02
67
89
Rampe de freinage (G09)Rampe de démarrage(G08)Vitesse programméeVitesse maximale config.
Fig. A/1 : Profil théorique pour la vitesse (G01/G02)
Phases d’unprocessus de positionnement
Formulede calcul
Description
Phase d’accélérationt1 =
va1
s1 = a1
2 t12
v = vitesse programméea1 = accélération de la rampe de démarragea2 = accélération de la rampe de freinaget1 = temps de démarraget2 = temps de freinaget3 = temps à vitesse constantes1 = distance de démarrages2 = distance de freinages3 = distance à vitesse constante
sges = distance totale
Phase de freinaget2 =
va2
s2 = a2
2 t22
Déplacement régulier s3 = sges−(s1+s2)
t3 = s3
v
9
1 2 3
4
5
67
8
v
t
A. Optimisation du comportement au positionnement
SPC200... 9904a A-5
A.2 Description des coefficients de régulation
Les paramètres de régulation des axes pneumatiquessont établis par le SPC200 à partir de divers paramè-tres de base. Ils déterminent la dynamique (rapidité)ainsi que le régime transitoire (amortissement) de régu-lation. L’objectif est d’obtenir un positionnement rapide,précis avec de faibles erreurs de poursuite (écarts derégulation dynamiques).
Les paramètres de régulation obtenus par le SPC200sont donc en principe déjà des valeurs optimisées. Lesaxes pneumatiques réellement installés ne correspon-dent toutefois pas toujours exactement aux axes idéauxpris en compte dans les paramètres de régulation. Pourtenir compte des éventuels écarts, les paramètres derégulation sont modulés par des coefficients.
Des consignes pour optimiser le positionnement sontdonnées au chapitre A.3.
La valeur neutre des coefficients de régulation est 1.0.Pour des valeurs supérieures (>1) les valeurs des para-mètres sont augmentées en conséquence, pour des va-leurs inférieures (<1) elles sont réduites.
A. Optimisation du comportement au positionnement
A-6 SPC200... 9904a
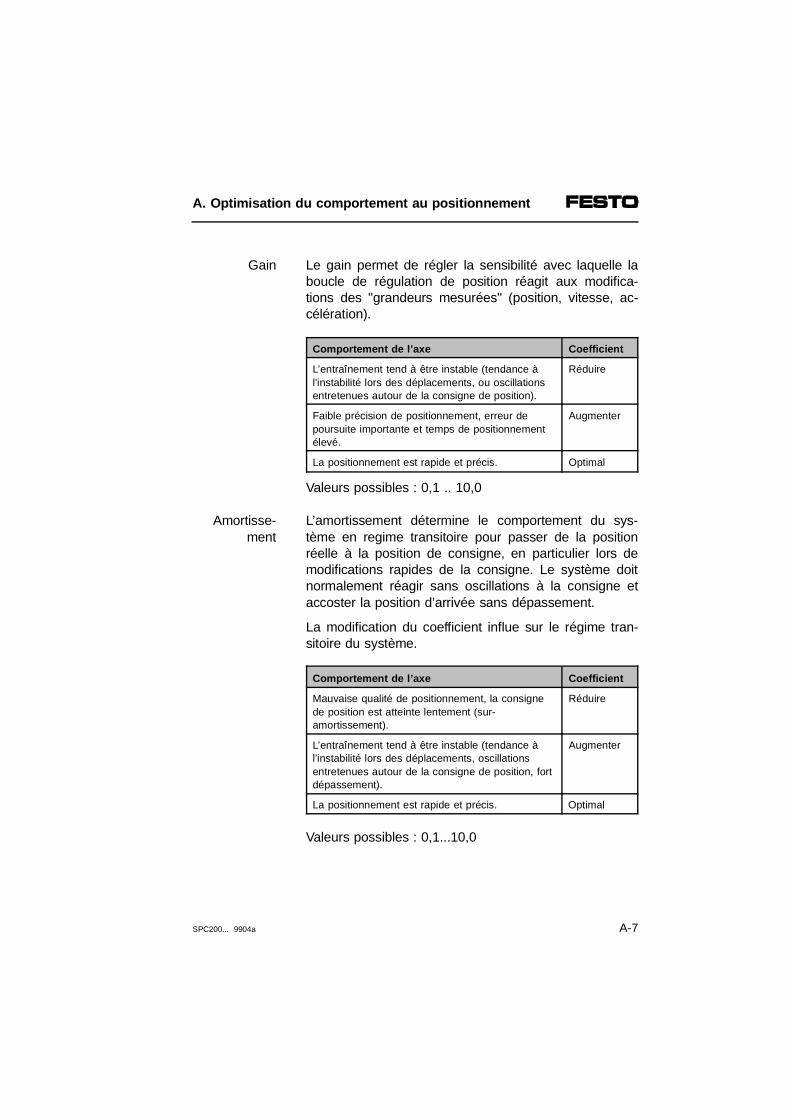
Le gain permet de régler la sensibilité avec laquelle laboucle de régulation de position réagit aux modifica-tions des "grandeurs mesurées" (position, vitesse, ac-célération).
Gain
Comportement de l’axe Coefficient
L’entraînement tend à être instable (tendance àl’instabilité lors des déplacements, ou oscillationsentretenues autour de la consigne de position).
Réduire
Faible précision de positionnement, erreur depoursuite importante et temps de positionnementélevé.
Augmenter
La positionnement est rapide et précis. Optimal
Valeurs possibles : 0,1 .. 10,0
L’amortissement détermine le comportement du sys-tème en regime transitoire pour passer de la positionréelle à la position de consigne, en particulier lors demodifications rapides de la consigne. Le système doitnormalement réagir sans oscillations à la consigne etaccoster la position d’arrivée sans dépassement.
Amortisse-ment
La modification du coefficient influe sur le régime tran-sitoire du système.
Comportement de l’axe Coefficient
Mauvaise qualité de positionnement, la consignede position est atteinte lentement (sur-amortissement).
Réduire
L’entraînement tend à être instable (tendance àl’instabilité lors des déplacements, oscillations entretenues autour de la consigne de position, fort dépassement).
Augmenter
La positionnement est rapide et précis. Optimal
Valeurs possibles : 0,1...10,0
A. Optimisation du comportement au positionnement
SPC200... 9904a A-7

La vitesse et l’accélération sont dérivés du signal deposition et filtrés pour améliorer la qualité du signal. Sila qualité du signal est déteriorée p. ex. par des pertur-bations électriques, il est possible d’agir sur le filtragedu signal grâce au coefficient de filtrage.
Coefficientde filtrage du
signal
Un trop fort filtrage peut déstabiliser la régulation.
Comportement de l’axe Coefficient
L’entraînement tend à être instable (malgré unfaible gain et un fort amortissement)
Réduire
"Bruits" ou bruit important du distributeur(contrôler le gain; peut être trop élevé).
Augmenter
Le positionnement est rapide et précis, faible bruitdu distributeur.
Optimal
Valeurs possibles : 0,1...10,0
A. Optimisation du comportement au positionnement
A-8 SPC200... 9904a
A.3 Optimisation du positionnement
Les problèmes suivants peuvent survenir au cours dupositionnement.
– Plusieurs paliers prématurés lors du déplacement del’axe,
– Oscillations autour de la consigne de position,
– Problèmes de stabilité et oscillations rapides autourde la consigne de position,
– Dépassement de la consigne,
– Sur-amortissement.
Toutefois avant de commencer à optimiser l’axe, suivreles étapes suivantes :
• Vérifier que l’axe pneumatique est conforme aux pre-scriptions (voir chapitre 3).
• S’assurer que les paramètres d’axe et d’applicationsont correctement définis.
• Effectuer systématiquement une identification stati-que et au moins une des identifications dynamiques.
• Effectuer ensuite quelques cycles de positionnement.Ceci permet de garantir l’efficacité de l’adaptation.
A. Optimisation du comportement au positionnement
SPC200... 9904a A-9
Si alors les problèmes surviennent, procéder de la ma-nière suivante :
1. Respecter le comportement au positionnement. Utili-ser si possible les fonctions du progiciel WinPISA.WinPISA permet de répertorier et de représentergraphiquement les valeurs de consigne et les va-leurs réelles pour les déplacements, les vitesses etles accélérations.
Pour plus d’informations, se reporter au manuelWinPISA.
2. Comparer le comportement observé ou les graphi-ques établis avec WinPISA aux exemples figurantsur les pages suivantes.
3. Optimiser le comportement au positionnementcomme indiqué dans l’exemple approprié. Recher-cher de haut en bas les causes les plus probableset tester les remèdes proposés.
A. Optimisation du comportement au positionnement
A-10 SPC200... 9904a
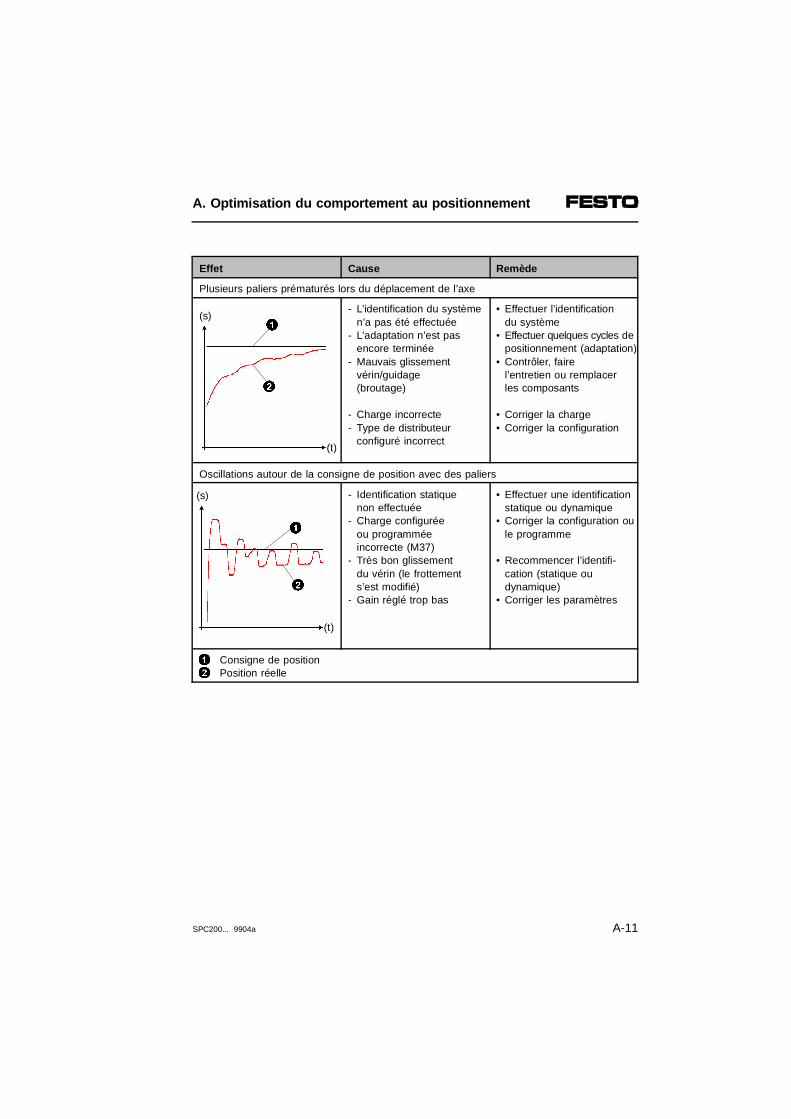
Effet Cause Remède
Plusieurs paliers prématurés lors du déplacement de l’axe
- L’identification du systèmen’a pas été effectuée
- L’adaptation n’est pas encore terminée
- Mauvais glissement vérin/guidage(broutage)
- Charge incorrecte- Type de distributeur
configuré incorrect
• Effectuer l’identification du système
• Effectuer quelques cycles depositionnement (adaptation)
• Contrôler, faire l’entretien ou remplacer les composants
• Corriger la charge• Corriger la configuration
Oscillations autour de la consigne de position avec des paliers
- Identification statique non effectuée
- Charge configuréeou programmée
incorrecte (M37)- Très bon glissement
du vérin (le frottements’est modifié)
- Gain réglé trop bas
• Effectuer une identificationstatique ou dynamique
• Corriger la configuration ou le programme
• Recommencer l’identifi-cation (statique ou dynamique)
• Corriger les paramètres
12
Consigne de positionPosition réelle
(t)
(s)
2
1
(t)
(s)
2
1
A. Optimisation du comportement au positionnement
SPC200... 9904a A-11
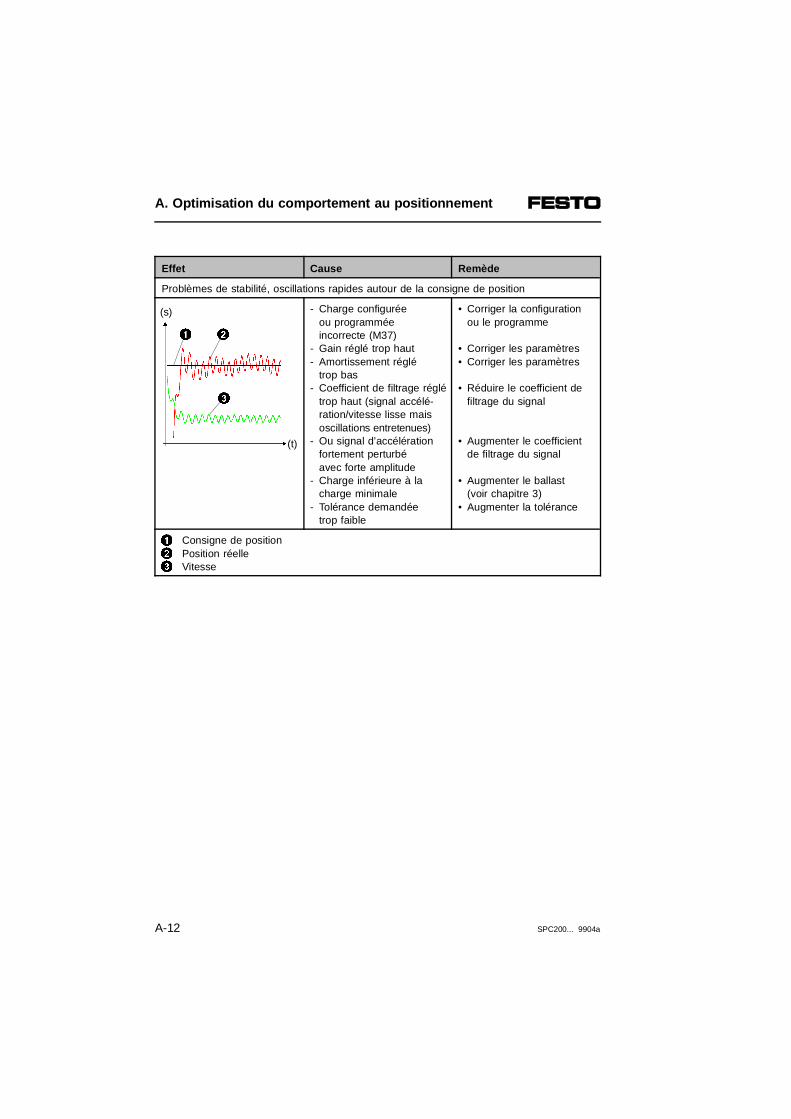
Effet Cause Remède
Problèmes de stabilité, oscillations rapides autour de la consigne de position
- Charge configuréeou programmée incorrecte (M37)
- Gain réglé trop haut- Amortissement réglé trop bas- Coefficient de filtrage réglé
trop haut (signal accélé-ration/vitesse lisse maisoscillations entretenues)
- Ou signal d’accélérationfortement perturbéavec forte amplitude
- Charge inférieure à lacharge minimale
- Tolérance demandée trop faible
• Corriger la configurationou le programme
• Corriger les paramètres• Corriger les paramètres
• Réduire le coefficient de filtrage du signal
• Augmenter le coefficientde filtrage du signal
• Augmenter le ballast(voir chapitre 3)
• Augmenter la tolérance
123
Consigne de positionPosition réelleVitesse
(t)
(s)
1
3
2
A. Optimisation du comportement au positionnement
A-12 SPC200... 9904a
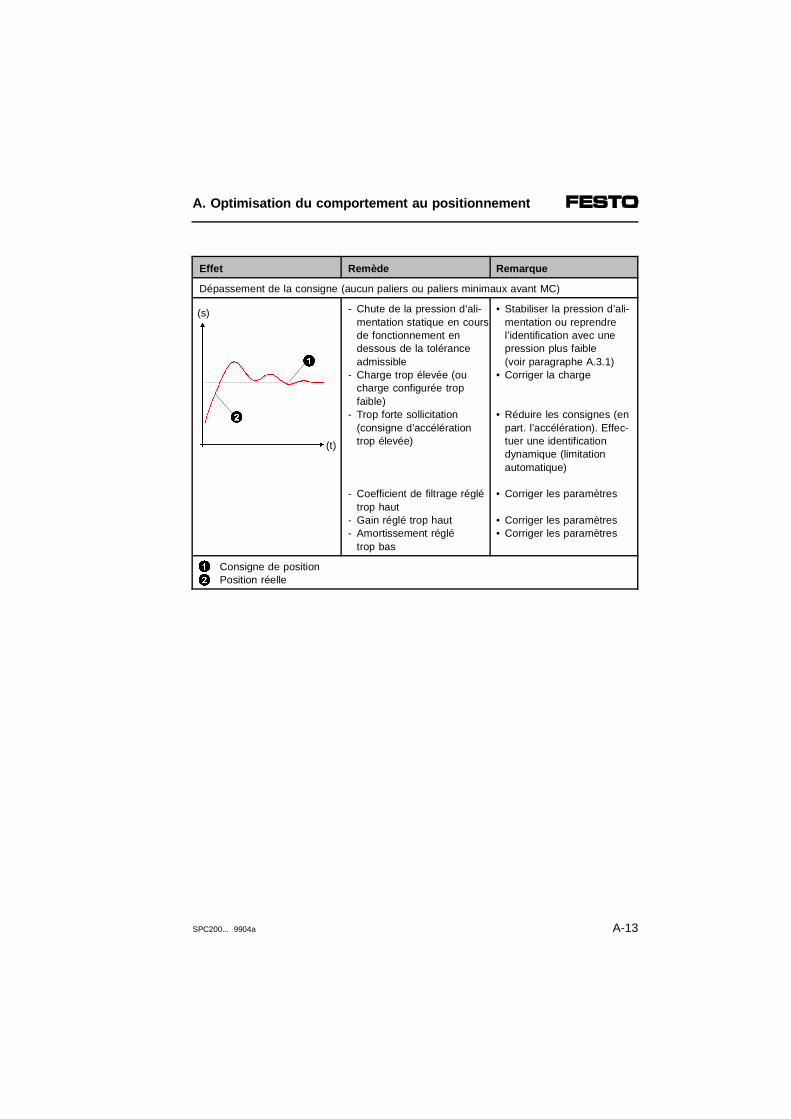
Effet Remède Remarque
Dépassement de la consigne (aucun paliers ou paliers minimaux avant MC)
- Chute de la pression d’ali-mentation statique en coursde fonctionnement endessous de la tolérance admissible
- Charge trop élevée (oucharge configurée trop faible)
- Trop forte sollicitation (consigne d’accélérationtrop élevée)
- Coefficient de filtrage réglé trop haut
- Gain réglé trop haut- Amortissement réglé
trop bas
• Stabiliser la pression d’ali-mentation ou reprendrel’identification avec unepression plus faible(voir paragraphe A.3.1)
• Corriger la charge
• Réduire les consignes (enpart. l’accélération). Effec-tuer une identificationdynamique (limitationautomatique)
• Corriger les paramètres
• Corriger les paramètres• Corriger les paramètres
12
Consigne de positionPosition réelle
(t)
(s)
2
1
A. Optimisation du comportement au positionnement
SPC200... 9904a A-13
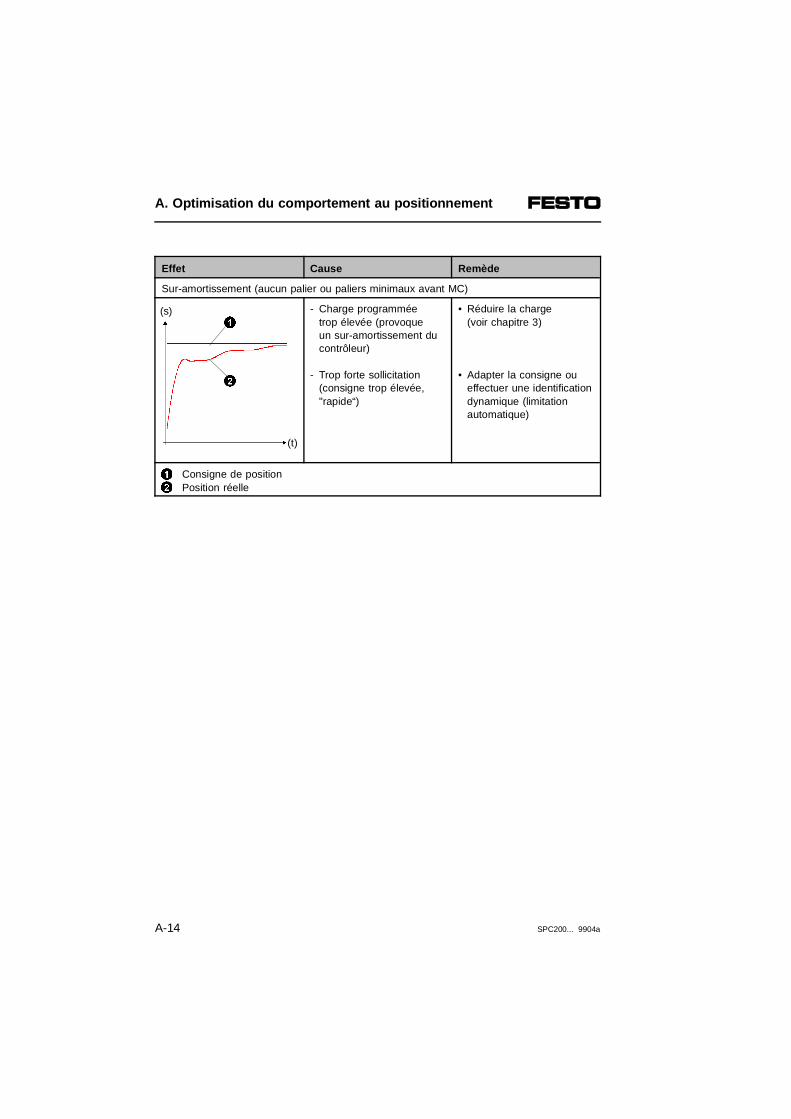
Effet Cause Remède
Sur-amortissement (aucun palier ou paliers minimaux avant MC)
- Charge programmée trop élevée (provoque un sur-amortissement ducontrôleur)
- Trop forte sollicitation (consigne trop élevée, "rapide“)
• Réduire la charge(voir chapitre 3)
• Adapter la consigne ou effectuer une identificationdynamique (limitationautomatique)
12
Consigne de positionPosition réelle
(t)
(s)
2
1
A. Optimisation du comportement au positionnement
A-14 SPC200... 9904a
A.3.1 Procédure en cas de pression d’alimentation instable
Lorsque l’alimentation en air comprimé ne remplit pastoujours les exigences (tolérances de 1 bar en ser-vice) alors qu’un accumulateur pneumatique a été ins-tallé (voir paragraphe 3.2), certaines des valeurs d’ac-célération et de ralentissement obtenues lors de l’identi-fication ne peuvent pas être atteintes dans certainescirconstances.
Les conséquences sont par exemple des dépasse-ments de position lorsque la pression de service néces-saire pour la ralentissement n’est pas disponible.
Afin d’éviter de telles réactions, la dynamique du sys-tème peut être atténuée. Procéder pour cela de la ma-nière suivante :
1. Rechercher sur le circuit d’air comprimé le point oùla pression statique est la plus faible pour effectuerdes déplacements.
2. Faire chuter le pression d’alimentation à cette valeurde pression.
3. Effectuer une nouvelle identification dynamique.
4. Dès la fin de l’identification, relever la pression d’ali-mentation à la valeur définie dans les paramètresd’application.
A. Optimisation du comportement au positionnement
SPC200... 9904a A-15

A. Optimisation du comportement au positionnement
A-16 SPC200... 9904a
Annexe B
Annexe technique
B. Annexe technique
SPC200... 9904a B-1

Sommaire
B. Annexe technique
B.1 Structure interne des entrées/sorties . . . . . . . . . . . . . . . . . . . . . . B-3B.2 Caractéristiques techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-7B.2.1 Caractéristiques techniques du SPC200 . . . . . . . . . . . . . . . . . . . B-7B.2.2 Caractéristiques techniques de l’interface d’axe type
SPC-AIF-... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-13B.2.3 Caractéristiques techniques des modules d’E/S fonctionnels
type SPC-FIO-... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-14B.2.4 Caractéristiques techniques du clavier/afficheur type
SPC200-MMI-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-15
B. Annexe technique
B-2 SPC200... 9904a
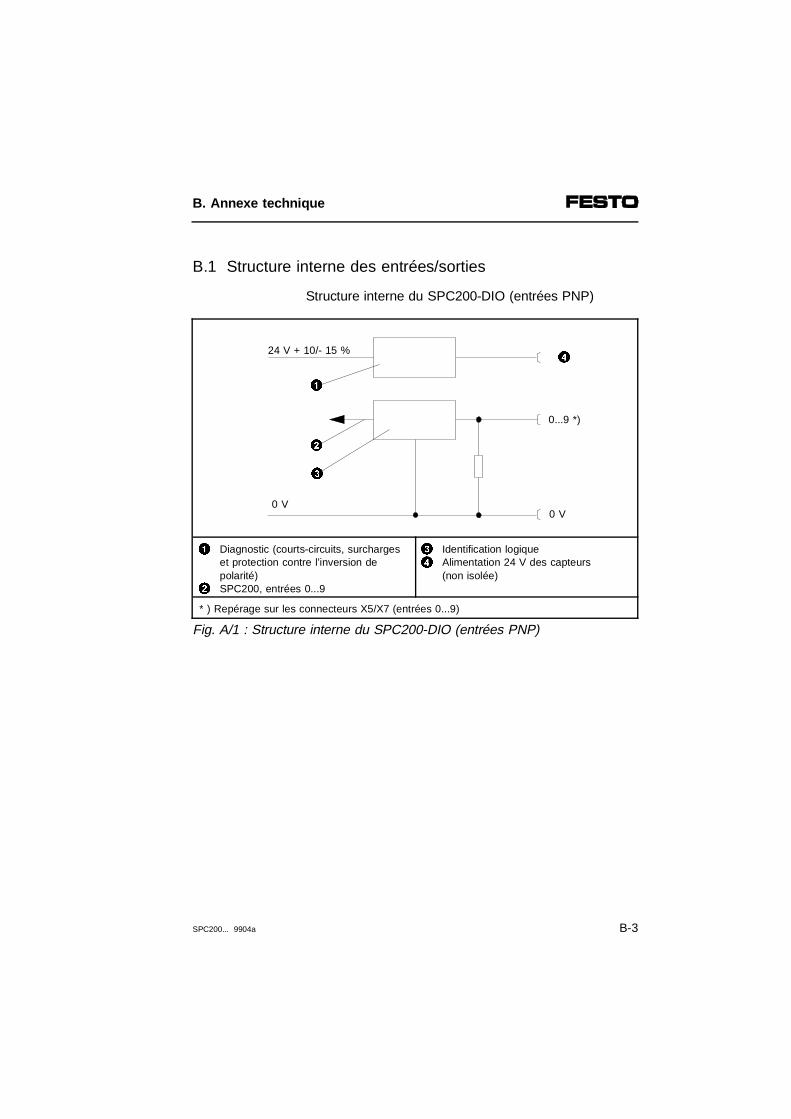
B.1 Structure interne des entrées/sorties
Structure interne du SPC200-DIO (entrées PNP)
1
2
Diagnostic (courts-circuits, surchargeset protection contre l’inversion depolarité)SPC200, entrées 0...9
34
Identification logique Alimentation 24 V des capteurs (non isolée)
* ) Repérage sur les connecteurs X5/X7 (entrées 0...9)
Fig. A/1 : Structure interne du SPC200-DIO (entrées PNP)
0...9 *)
0 V
1
2
3
4
0 V
24 V + 10/- 15 %
B. Annexe technique
SPC200... 9904a B-3

Structure interne du SPC200-DIO (sorties PNP)
123
Alimentation des actionneursSPC200, sorties 0...7Isolation galvanique
4 Diagnostic (courts-circuits, surchargecoupure d’alimentation)
* ) Repérage sur les connecteurs X6/X8 (sorties 0...7)
Fig. A/2 : Structure interne du SPC200-DIO (sorties PNP)
0...7 *)
0 V
1
3
2
4
0 V
+ 24 V
B. Annexe technique
B-4 SPC200... 9904a
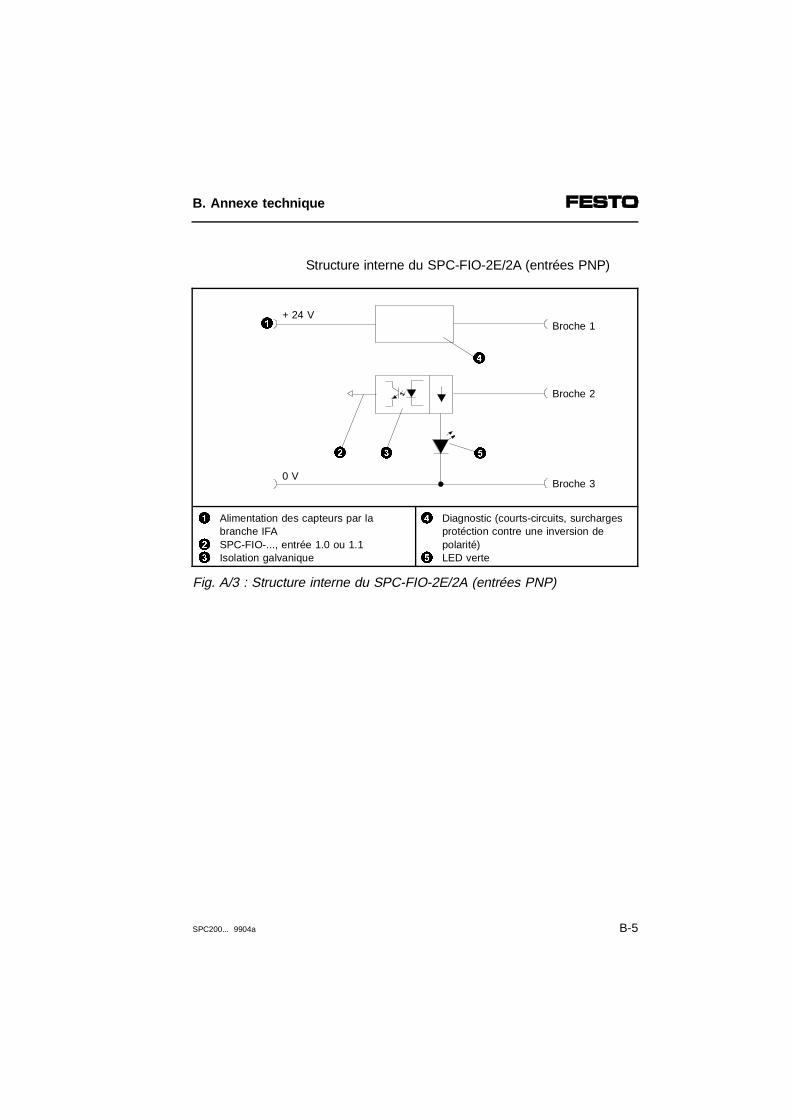
Structure interne du SPC-FIO-2E/2A (entrées PNP)
1
23
Alimentation des capteurs par labranche IFASPC-FIO-..., entrée 1.0 ou 1.1Isolation galvanique
4
5
Diagnostic (courts-circuits, surchargesprotéction contre une inversion depolarité)LED verte
Fig. A/3 : Structure interne du SPC-FIO-2E/2A (entrées PNP)
1
4
2
0 V
+ 24 V
53
Broche 1
Broche 2
Broche 3
B. Annexe technique
SPC200... 9904a B-5

Structure interne du SPC-FIO-2E/2A (sorties PNP)
1
2
Alimentation des actionneurs par labranche IFADiagnostic (courts-circuits, surchargescoupure d’alimentation)
34
SPC-FIO-..., sortie 1.0 ou 1.1 Isolation galvanique
* ) Repères sur les connecteurs X6/X8 (sortie 0...7)
Fig. A/4 : Structure interne du SPC-FIO-2E/2A (sorties PNP)
2
0 V
3
4
1 Broche 2(n.c.)
Broche 1
Broche 3
B. Annexe technique
B-6 SPC200... 9904a
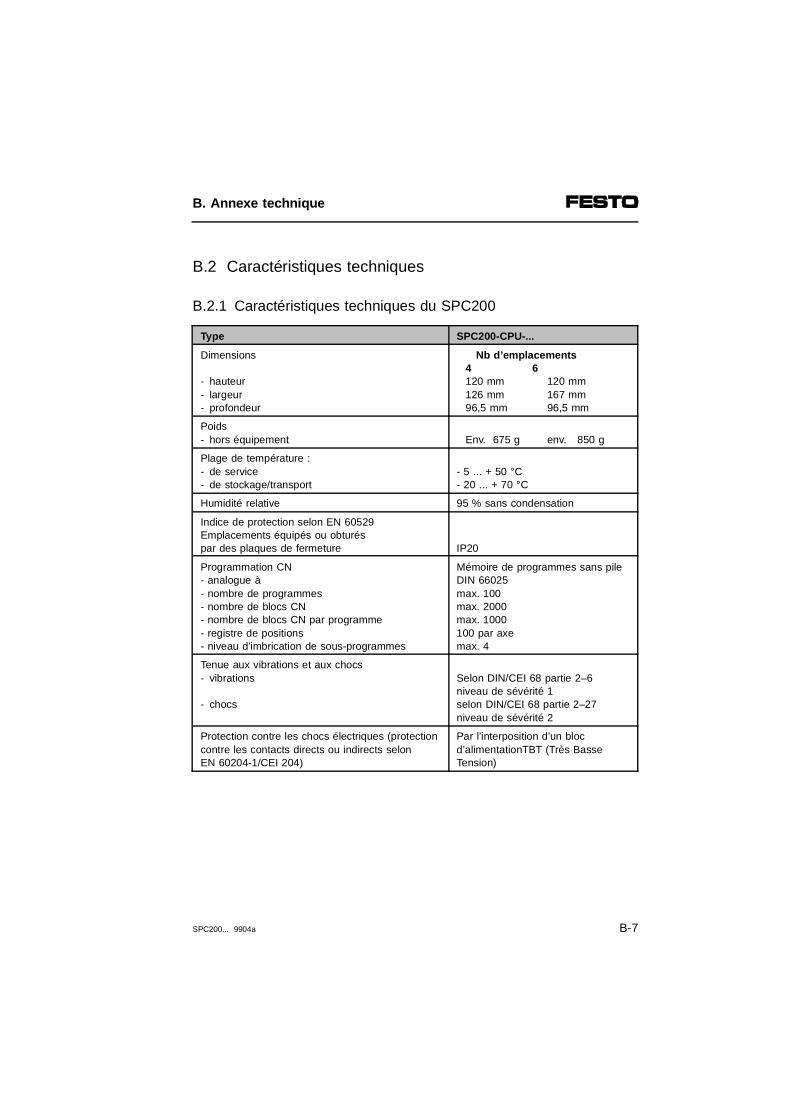
B.2 Caractéristiques techniques
B.2.1 Caractéristiques techniques du SPC200
Type SPC200-CPU-...
Dimensions
- hauteur- largeur- profondeur
Nb d’emplacements4 6120 mm 120 mm126 mm 167 mm96,5 mm 96,5 mm
Poids- hors équipement Env. 675 g env. 850 g
Plage de température :- de service- de stockage/transport
- 5 ... + 50 °C- 20 ... + 70 °C
Humidité relative 95 % sans condensation
Indice de protection selon EN 60529Emplacements équipés ou obturés par des plaques de fermeture IP20
Programmation CN- analogue à- nombre de programmes- nombre de blocs CN- nombre de blocs CN par programme- registre de positions- niveau d’imbrication de sous-programmes
Mémoire de programmes sans pileDIN 66025max. 100max. 2000max. 1000100 par axemax. 4
Tenue aux vibrations et aux chocs- vibrations - chocs
Selon DIN/CEI 68 partie 2–6niveau de sévérité 1selon DIN/CEI 68 partie 2–27niveau de sévérité 2
Protection contre les chocs électriques (protectioncontre les contacts directs ou indirects selonEN 60204-1/CEI 204)
Par l’interposition d’un blocd’alimentationTBT (Très BasseTension)
B. Annexe technique
SPC200... 9904a B-7
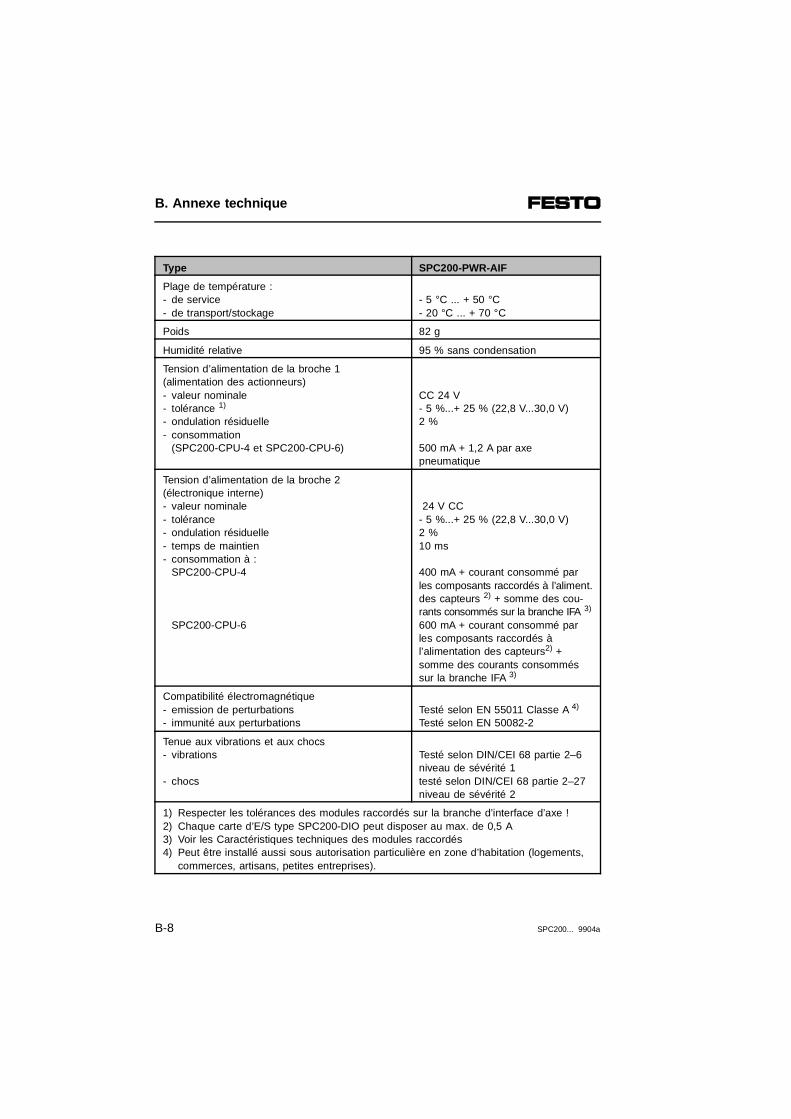
Type SPC200-PWR-AIF
Plage de température :- de service- de transport/stockage
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids 82 g
Humidité relative 95 % sans condensation
Tension d’alimentation de la broche 1(alimentation des actionneurs)- valeur nominale- tolérance 1)
- ondulation résiduelle- consommation
(SPC200-CPU-4 et SPC200-CPU-6)
CC 24 V- 5 %...+ 25 % (22,8 V...30,0 V)2 %
500 mA + 1,2 A par axe pneumatique
Tension d’alimentation de la broche 2(électronique interne)- valeur nominale- tolérance- ondulation résiduelle- temps de maintien- consommation à :
SPC200-CPU-4
SPC200-CPU-6
24 V CC- 5 %...+ 25 % (22,8 V...30,0 V)2 %10 ms
400 mA + courant consommé parles composants raccordés à l’aliment.des capteurs 2) + somme des cou-rants consommés sur la branche IFA 3)
600 mA + courant consommé parles composants raccordés àl’alimentation des capteurs2) +somme des courants consomméssur la branche IFA 3)
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe A 4)
Testé selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Testé selon DIN/CEI 68 partie 2–6niveau de sévérité 1testé selon DIN/CEI 68 partie 2–27niveau de sévérité 2
1) Respecter les tolérances des modules raccordés sur la branche d’interface d’axe !2) Chaque carte d’E/S type SPC200-DIO peut disposer au max. de 0,5 A3) Voir les Caractéristiques techniques des modules raccordés 4) Peut être installé aussi sous autorisation particulière en zone d’habitation (logements,
commerces, artisans, petites entreprises).
B. Annexe technique
B-8 SPC200... 9904a
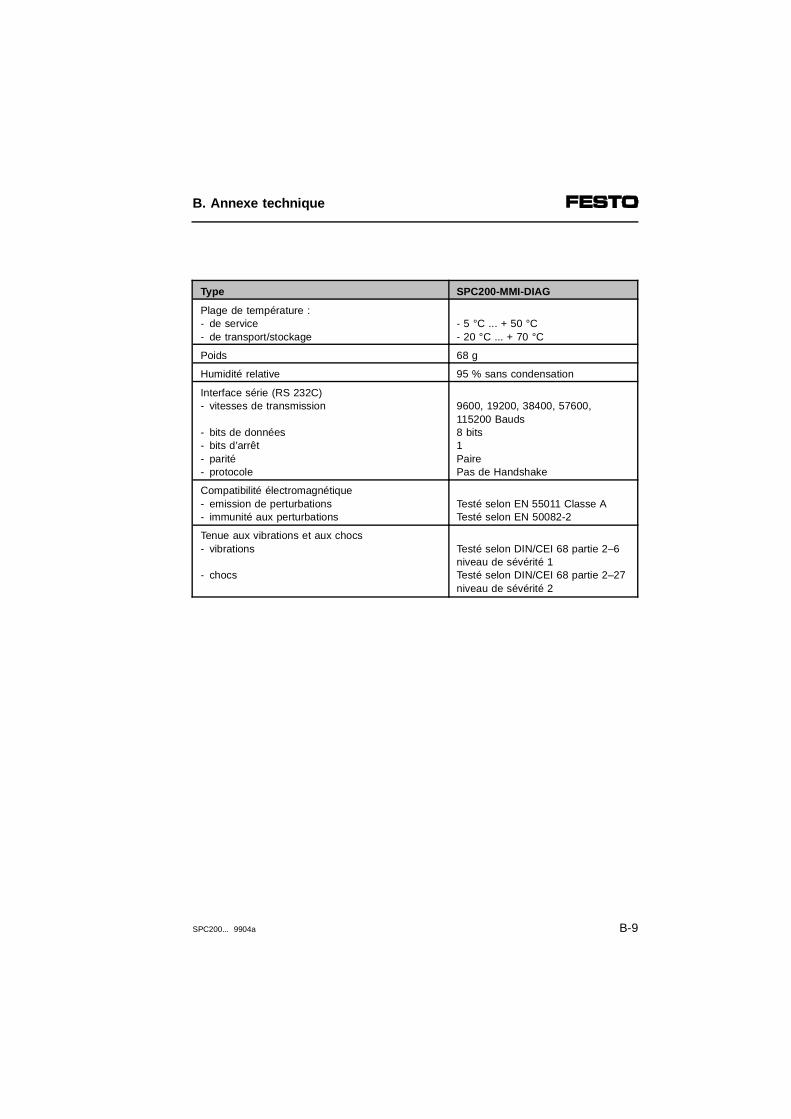
Type SPC200-MMI-DIAG
Plage de température :- de service- de transport/stockage
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids 68 g
Humidité relative 95 % sans condensation
Interface série (RS 232C)- vitesses de transmission
- bits de données- bits d’arrêt- parité- protocole
9600, 19200, 38400, 57600, 115200 Bauds8 bits1PairePas de Handshake
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Testé selon DIN/CEI 68 partie 2–6niveau de sévérité 1Testé selon DIN/CEI 68 partie 2–27niveau de sévérité 2
B. Annexe technique
SPC200... 9904a B-9
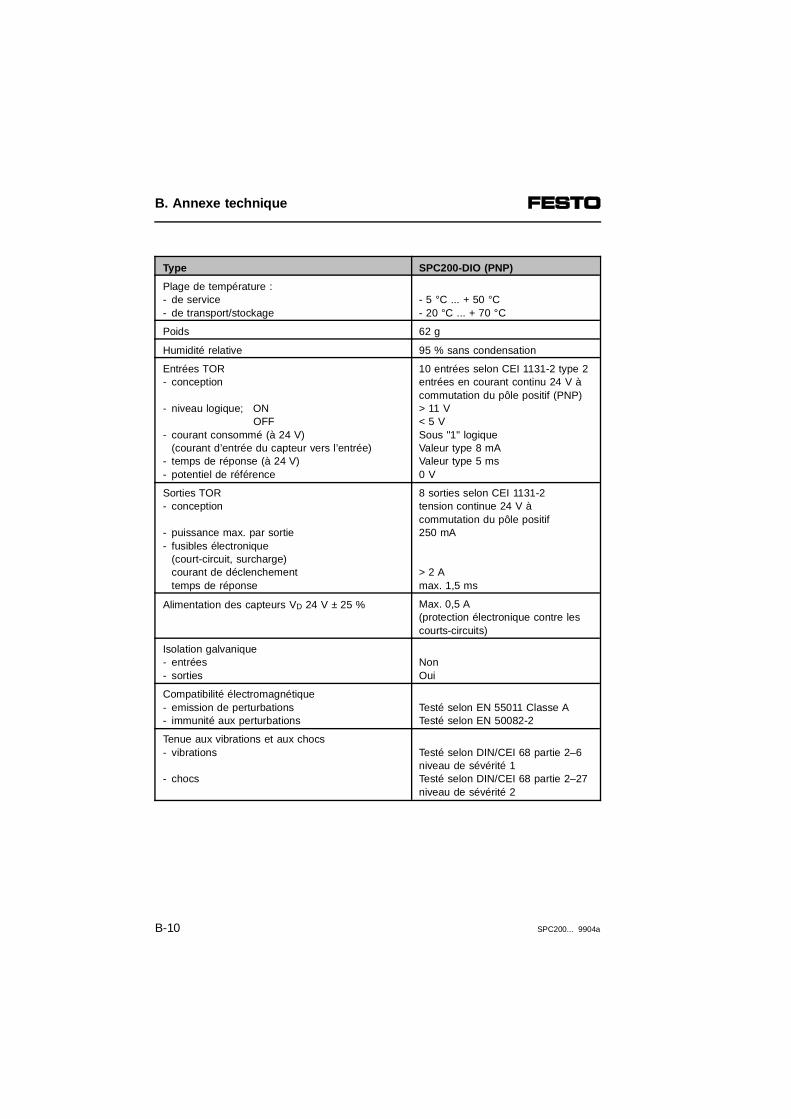
Type SPC200-DIO (PNP)
Plage de température :- de service- de transport/stockage
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids 62 g
Humidité relative 95 % sans condensation
Entrées TOR- conception
- niveau logique; ONOFF
- courant consommé (à 24 V)(courant d’entrée du capteur vers l’entrée)
- temps de réponse (à 24 V)- potentiel de référence
10 entrées selon CEI 1131-2 type 2entrées en courant continu 24 V àcommutation du pôle positif (PNP)> 11 V< 5 VSous "1" logiqueValeur type 8 mAValeur type 5 ms0 V
Sorties TOR- conception
- puissance max. par sortie- fusibles électronique
(court-circuit, surcharge)courant de déclenchementtemps de réponse
8 sorties selon CEI 1131-2tension continue 24 V àcommutation du pôle positif250 mA
> 2 A max. 1,5 ms
Alimentation des capteurs VD 24 V ± 25 % Max. 0,5 A(protection électronique contre lescourts-circuits)
Isolation galvanique- entrées- sorties
NonOui
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Testé selon DIN/CEI 68 partie 2–6niveau de sévérité 1Testé selon DIN/CEI 68 partie 2–27niveau de sévérité 2
B. Annexe technique
B-10 SPC200... 9904a
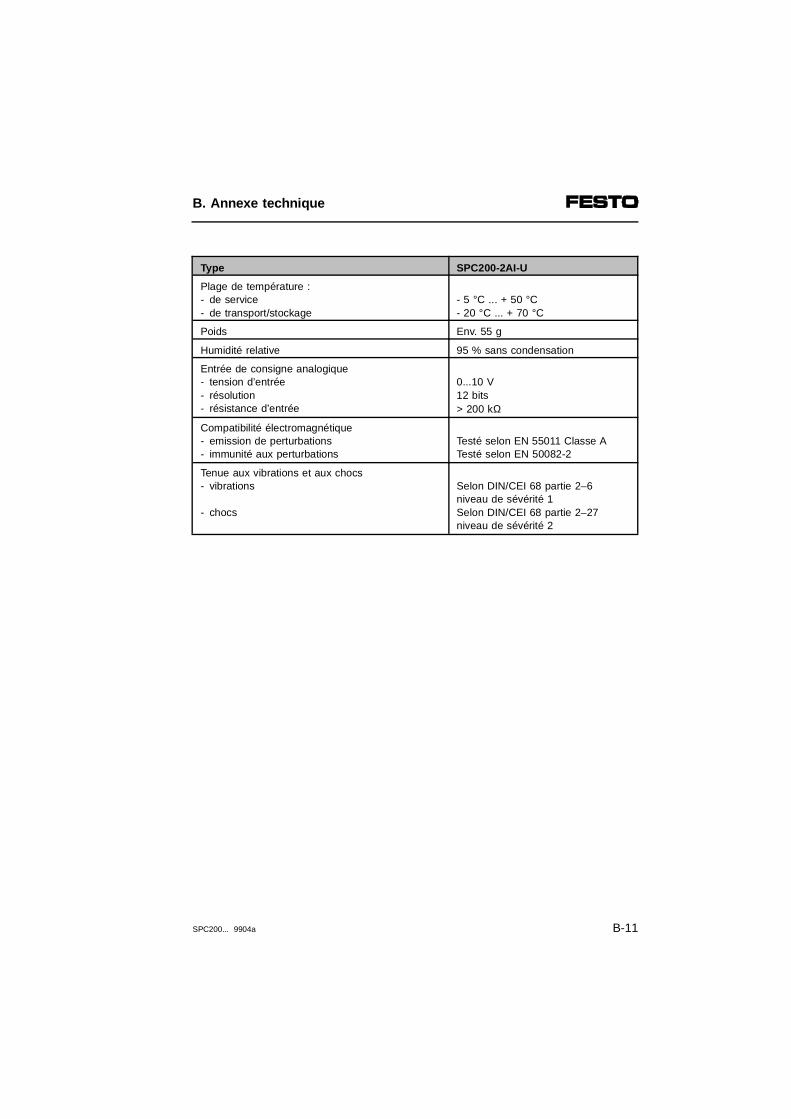
Type SPC200-2AI-U
Plage de température :- de service- de transport/stockage
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids Env. 55 g
Humidité relative 95 % sans condensation
Entrée de consigne analogique- tension d’entrée- résolution- résistance d’entrée
0...10 V12 bits> 200 kΩ
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Selon DIN/CEI 68 partie 2–6niveau de sévérité 1Selon DIN/CEI 68 partie 2–27niveau de sévérité 2
B. Annexe technique
SPC200... 9904a B-11
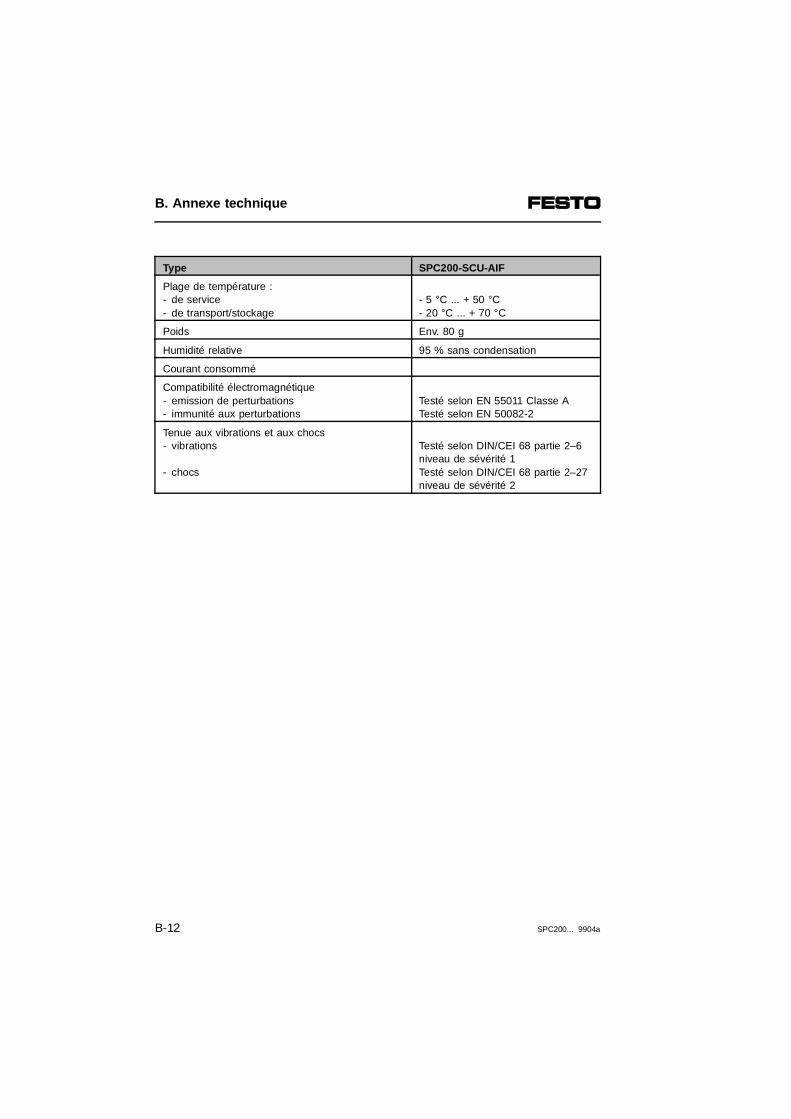
Type SPC200-SCU-AIF
Plage de température :- de service- de transport/stockage
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids Env. 80 g
Humidité relative 95 % sans condensation
Courant consommé
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Testé selon DIN/CEI 68 partie 2–6niveau de sévérité 1Testé selon DIN/CEI 68 partie 2–27niveau de sévérité 2
B. Annexe technique
B-12 SPC200... 9904a
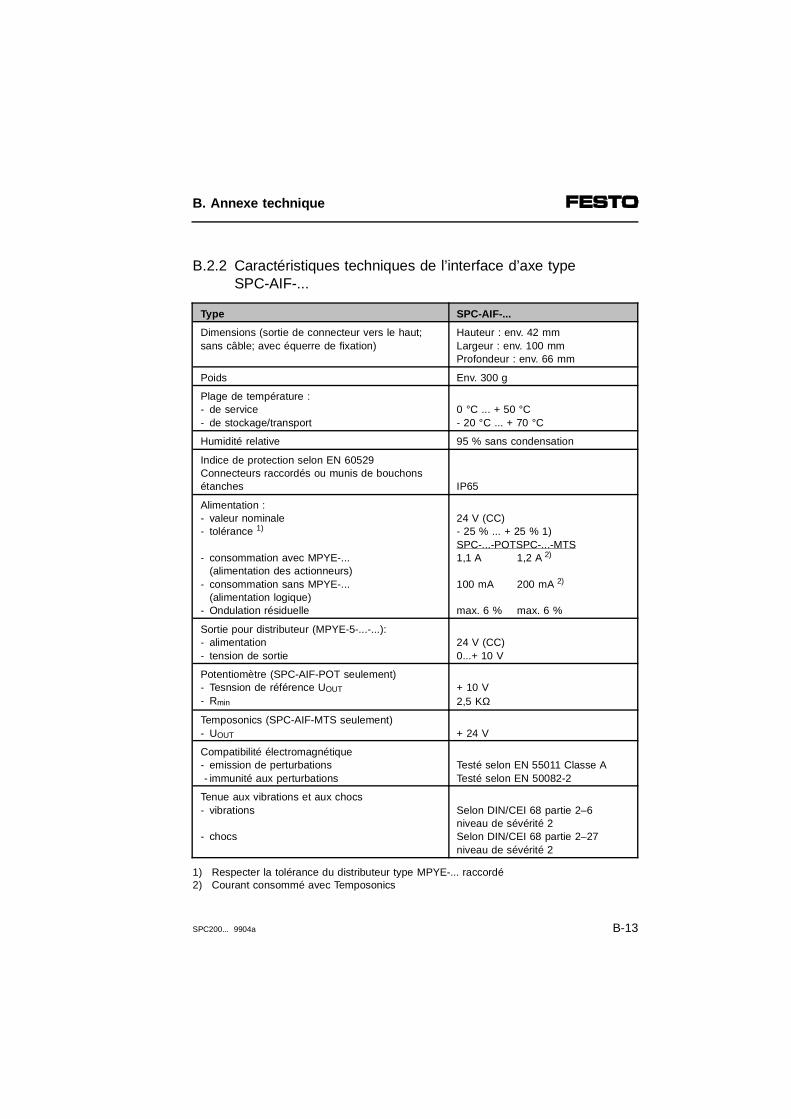
B.2.2 Caractéristiques techniques de l’interface d’axe typeSPC-AIF-...
Type SPC-AIF-...
Dimensions (sortie de connecteur vers le haut;sans câble; avec équerre de fixation)
Hauteur : env. 42 mmLargeur : env. 100 mmProfondeur : env. 66 mm
Poids Env. 300 g
Plage de température :- de service- de stockage/transport
0 °C ... + 50 °C- 20 °C ... + 70 °C
Humidité relative 95 % sans condensation
Indice de protection selon EN 60529Connecteurs raccordés ou munis de bouchonsétanches IP65
Alimentation :- valeur nominale- tolérance 1)
- consommation avec MPYE-... (alimentation des actionneurs)
- consommation sans MPYE-... (alimentation logique)
- Ondulation résiduelle
24 V (CC)- 25 % ... + 25 % 1)SPC-...-POTSPC-...-MTS1,1 A 1,2 A 2)
100 mA 200 mA 2)
max. 6 % max. 6 %
Sortie pour distributeur (MPYE-5-...-...):- alimentation- tension de sortie
24 V (CC)0...+ 10 V
Potentiomètre (SPC-AIF-POT seulement)- Tesnsion de référence UOUT
- Rmin
+ 10 V2,5 KΩ
Temposonics (SPC-AIF-MTS seulement)- UOUT + 24 V
Compatibilité électromagnétique- emission de perturbations - immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Selon DIN/CEI 68 partie 2–6niveau de sévérité 2Selon DIN/CEI 68 partie 2–27niveau de sévérité 2
1) Respecter la tolérance du distributeur type MPYE-... raccordé 2) Courant consommé avec Temposonics
B. Annexe technique
SPC200... 9904a B-13
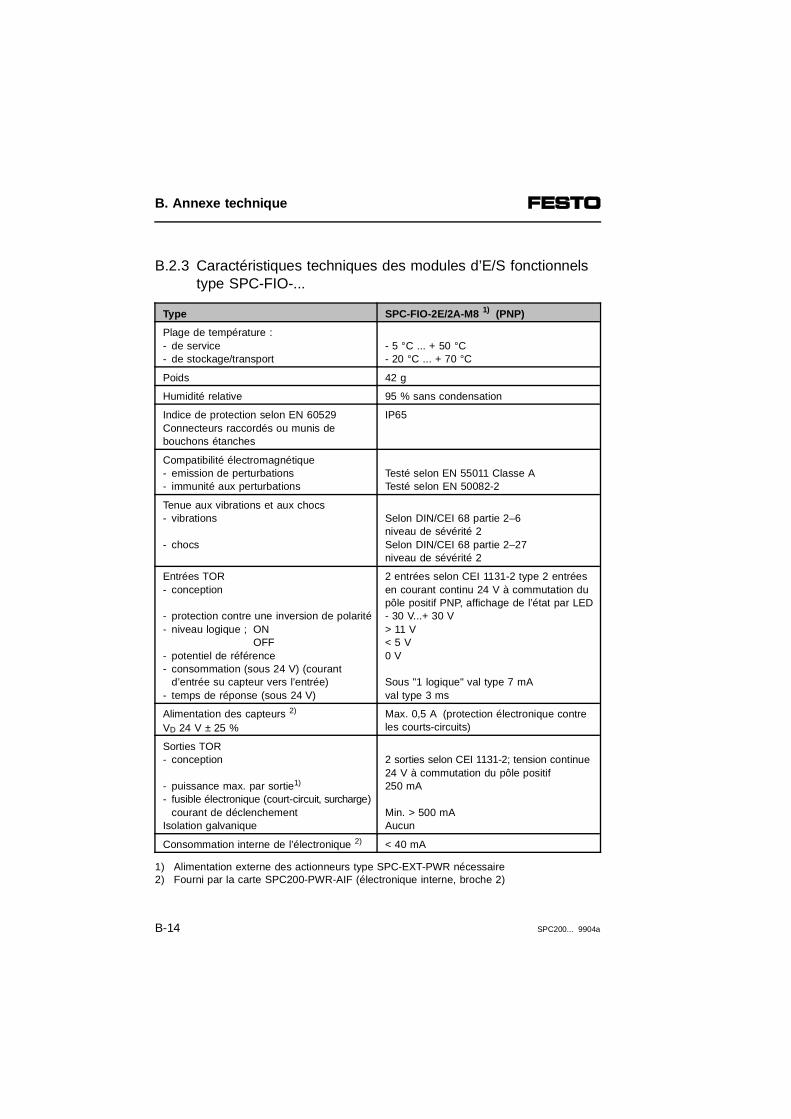
B.2.3 Caractéristiques techniques des modules d’E/S fonctionnelstype SPC-FIO-...
Type SPC-FIO-2E/2A-M8 1) (PNP)
Plage de température :- de service- de stockage/transport
- 5 °C ... + 50 °C- 20 °C ... + 70 °C
Poids 42 g
Humidité relative 95 % sans condensation
Indice de protection selon EN 60529Connecteurs raccordés ou munis de bouchons étanches
IP65
Compatibilité électromagnétique- emission de perturbations- immunité aux perturbations
Testé selon EN 55011 Classe ATesté selon EN 50082-2
Tenue aux vibrations et aux chocs- vibrations - chocs
Selon DIN/CEI 68 partie 2–6niveau de sévérité 2Selon DIN/CEI 68 partie 2–27niveau de sévérité 2
Entrées TOR- conception
- protection contre une inversion de polarité- niveau logique ; ON
OFF- potentiel de référence- consommation (sous 24 V) (courant
d’entrée su capteur vers l’entrée)- temps de réponse (sous 24 V)
2 entrées selon CEI 1131-2 type 2 entréesen courant continu 24 V à commutation dupôle positif PNP, affichage de l’état par LED- 30 V...+ 30 V> 11 V < 5 V 0 V
Sous "1 logique" val type 7 mAval type 3 ms
Alimentation des capteurs 2) VD 24 V ± 25 %
Max. 0,5 A (protection électronique contreles courts-circuits)
Sorties TOR- conception
- puissance max. par sortie1)
- fusible électronique (court-circuit, surcharge)courant de déclenchement
Isolation galvanique
2 sorties selon CEI 1131-2; tension continue24 V à commutation du pôle positif250 mA
Min. > 500 mAAucun
Consommation interne de l’électronique 2) < 40 mA
1) Alimentation externe des actionneurs type SPC-EXT-PWR nécessaire2) Fourni par la carte SPC200-PWR-AIF (électronique interne, broche 2)
B. Annexe technique
B-14 SPC200... 9904a
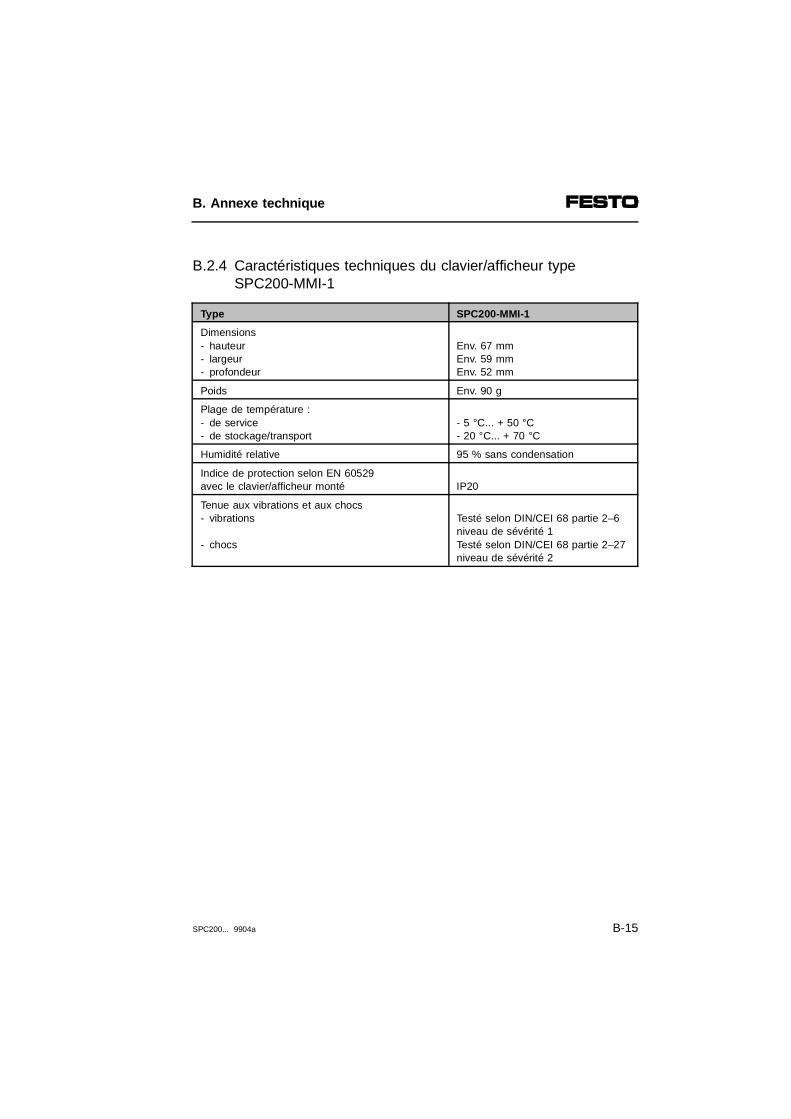
B.2.4 Caractéristiques techniques du clavier/afficheur typeSPC200-MMI-1
Type SPC200-MMI-1
Dimensions- hauteur- largeur- profondeur
Env. 67 mmEnv. 59 mmEnv. 52 mm
Poids Env. 90 g
Plage de température :- de service- de stockage/transport
- 5 °C... + 50 °C- 20 °C... + 70 °C
Humidité relative 95 % sans condensation
Indice de protection selon EN 60529avec le clavier/afficheur monté IP20
Tenue aux vibrations et aux chocs- vibrations - chocs
Testé selon DIN/CEI 68 partie 2–6niveau de sévérité 1Testé selon DIN/CEI 68 partie 2–27niveau de sévérité 2
B. Annexe technique
SPC200... 9904a B-15

B. Annexe technique
B-16 SPC200... 9904a
Annexe C
Index
C. Index
SPC200... 9904a C-1

C. Index
C-2 SPC200... 9904a
C.1 Index
Aaccélération maximale . . . . . . . . . . . . . . . . . 6-23 - 6-24arrêt programmé . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14axe pneumatique
consigne d’installation pneumatique . . . . . . . . . . 3-5axes pneumatiques
composants . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-14
Bbranche d’interface d’axe
installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-47règle de base. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-48structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-17
Ccaractéristiques techniques
type SPC-AIF-.... . . . . . . . . . . . . . . . . . . . . . . . . B-13type SPC-FIO-... . . . . . . . . . . . . . . . . . . . . . . . . B-14type SPC200-2AI-U . . . . . . . . . . . . . . . . . . . . . . B-11type SPC200-CPU-.... . . . . . . . . . . . . . . . . . . . . . B-7type SPC200-DIO (PNP). . . . . . . . . . . . . . . . . . B-10type SPC200-MMI-1 . . . . . . . . . . . . . . . . . . . . . B-15type SPC200-MMI-DIAG . . . . . . . . . . . . . . . . . . . B-9type SPC200-PWR-AIF . . . . . . . . . . . . . . . . . . . . B-8type SPC200-SCU-AIF . . . . . . . . . . . . . . . . . . . B-12
carte d’alimentationconnecteur d’alimentation . . . . . . . . . . . . . . . . . 3-26éléments de raccordement et de signalisation . 3-24
carte d’E/SAffectation des broches des connecteurs de sortie (X6/X8) . . . . . . . . . . . . . . . . . . . . . . . . 3-35affectation des broches pour les entrées (X5/X7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-34
C. Index
SPC200... 9904a C-3

carte d’entrées analogiquesaffectation des broches des entrées différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-42
carte de diagnosticaffectation des broches de l’interface série . . . . 3-31affectation des broches du connecteur MMI . . . 3-32
cartes- démontage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8- montage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
charge utile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19circuit d’arrêt d’urgence
exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17clavier/afficheur
fonctions de test et de diagnostic . . . . . . . . . . . 6-53structure des menus . . . . . . . . . . . . . . . . . . . . . . 6-8structure et fonctions . . . . . . . . . . . . . . . . . . . . . . 6-4
clavier/afficheur - montage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
coefficient de vitesse de référence . . . . . . . . . . . . . 6-24composants
- de montage d’un axe pneumatique. . . . . . . . . 1-14gamme d’appareils pour le SPC200 . . . . . . . . . . 1-7
concepts et abréviations . . . . . . . . . . . . . . . . . . . . . . . XIconfiguration matérielle
- enregistrement. . . . . . . . . . . . . . . . . . . . . . . . . 4-16court-circuit
alimentation des capteurs . . . . . . . . . . . . . . . . . . 8-8
Ddécalage d’origine . . . . . . . . . . . . . . . . . . . . . . . . . . 6-21demi pas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24désignation des axes
affectation des désignations . . . . . . . . . . . . . . . 1-17diamètre du vérin . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-18distributeur proportionnel
- montage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19- raccordement. . . . . . . . . . . . . . . . . . . . . . . . . . 3-55
C. Index
C-4 SPC200... 9904a
Eerreur
problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-32validation d’une erreur . . . . . . . . . . . . . . . . . . . . . 5-8
espace d’adressescartes SPC200 et modules d’E/S . . . . . . . . . . . 1-28règles de base. . . . . . . . . . . . . . . . . . . . . . . . . . 3-37
Ffin de course logicielle inférieure . . . . . . . . . 6-22, 6-24fin de course logicielle supérieure . . . . . . . . 6-22, 6-24fréquence Start-Stop . . . . . . . . . . . . . . . . . . . . . . . . 6-24
Iidentification
- effectuer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-27identification dynamique . . . . . . . . . . . . . . . . . . 4-25identification statique . . . . . . . . . . . . . . . . . . . . . 4-25
instruction d’utilisation . . . . . . . . . . . . . . . . . . . . . . . 0-VIIinstructions CN
description des instructions CN . . . . . . . . . . . . 7-13interface d’axe
- raccordement. . . . . . . . . . . . . . . . . . . . . . . . . . 3-51éléments de raccordement . . . . . . . . . . . . . . . . 3-52
LLED
LED d’état du module d’E/S fonctionnel . . . . . . . 8-7LED de l’interface d’axe . . . . . . . . . . . . . . . . . . . 8-7LED Power sur l’interface d’axe . . . . . . . . . . . . . 8-6sur le SPC200 . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-4
longueur du vérin . . . . . . . . . . . . . . . . . . . . . 6-18 - 6-19
C. Index
SPC200... 9904a C-5
Mmenu
déplacement dans les menus . . . . . . . . . . . . . . 6-12structure des menus sur le clavier/afficheur . . . . 6-8
menu principal du clavier/afficheur . . . . . . . . . . . . . . 6-7messages d’erreur . . . . . . . . . . . . . . . . . . . . . . . . . . 8-12
structure des messages d’erreur . . . . . . . . . . . . . 8-9Micro pas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24mode Accostage de référence . . . . . . . . . . . . . . . . . 6-24mode autonome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6mode chariot fixe . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-20mode chariot mobile. . . . . . . . . . . . . . . . . . . . . . . . . 3-19mode de fonctionnement . . . . . . . . . . . . . . . . . . . . . 6-26
mode de sélection de bloc. . . . . . . . 1-22, 5-4, 5-17mode Marche/Arrêt . . . . . . . . . . . . . . 1-21, 5-4, 5-9
mode de sélection de blocinstructions CN admissibles. . . . . . . . . . . . . . . . 7-11résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-25
mode Marche/Arrêtinstructions CN admissibles. . . . . . . . . . . . . . . . 7-11résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
mode synchronisé . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5module d’E/S fonctionnel
- raccordement. . . . . . . . . . . . . . . . . . . . . . . . . . 3-56affectation des broches des entrées . . . . . . . . . 3-59affectation des broches des sorties . . . . . . . . . . 3-58élément de raccordement . . . . . . . . . . . . . . . . . 3-57
montagedistributeur proportionnel . . . . . . . . . . . . . . . . . . 2-19système de mesure du déplacement . . . . . . . . 2-19
Pparamètres d’application
paramètres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19paramètres d’axe
paramètres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-18
C. Index
C-6 SPC200... 9904a
paramètres de régulation. . . . . . . . . . . . . . . . . . . . . 6-51pictogrammes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIIIpoids du matériel . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19point zéro projet . . . . . . . . . . . . . . . . . . . . . . . 6-21, 6-24position de montage . . . . . . . . . . . . . . . . . . . . . . . . 6-20position de référence . . . . . . . . . . . . . . . . . . . . . . . . 6-24précision de positionnement . . . . . . . . . . . . . . . . . . 6-23pression d’alimentation . . . . . . . . . . . . . . . . . . . . . . 6-20programmation
consignes d’édition . . . . . . . . . . . . . . . . . . . . . . 6-35description des instructions CN. . . . . . . . . . . . . 7-13instructions disponibles sur le clavier/afficheur . 6-37remarques générales. . . . . . . . . . . . . . . . . . . . . . 7-4remarques pour la programmation . . . . . . . . . . . 7-8
programme- création . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-29- suppression . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-42- tester . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-34programmation parallèle . . . . . . . . . . . . . . . . . . . 7-4
programmes- édition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-28
Rréaction dans le temps
- au lancement du programme . . . . . . . . . . . . . . 5-7- en cas d’arrêt programmé. . . . . . . . . . . . . . . . 5-14- les signaux d’E/S en mode de sélection de bloc . . . . . . . . . . . . . . . . . . . . . . . 5-20- validation d’une erreur. . . . . . . . . . . . . . . . . . . . 5-8
registre de position . . . . . . . . . . . . . . . . . . . . . . . . . 6-43registre de positions
- apprentissage . . . . . . . . . . . . . . . . . . . . . . . . . 6-45- modification . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-43
réglage des paramètresrésumé. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-27
résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
C. Index
SPC200... 9904a C-7
Ssignes d’énumération . . . . . . . . . . . . . . . . . . . . . . . . . VIIISPC200
cartes d’extension . . . . . . . . . . . . . . . . . . . . . . . 1-11cartes de base . . . . . . . . . . . . . . . . . . . . . . . . . . 1-10comportement à la mise sous tension. . . . . . . . . 6-6espace d’adresses . . . . . . . . . . . . . . . . . . . . . . . 1-28modes de fonctionnement . . . . . . . . . . . . . . . . . 1-21modes de fonctionnement du SPC200 . . . . . . . . 5-3
système de mesure- étalonnage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-29- raccordement. . . . . . . . . . . . . . . . . . . . . . . . . . 3-54
Ttolérance de positionnement . . . . . . . . . . . . . . . . . . 6-22type de distributeur . . . . . . . . . . . . . . . . . . . . . . . . . 6-18type de vérin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-18
Uunité de base
- montage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9utilisateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0-VII
Vvitesse maximale . . . . . . . . . . . . . . . . . . . . . 6-23 - 6-24
WWinPISA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-26
C. Index
C-8 SPC200... 9904a





























