Embed Size (px)
Citation preview

T VI
Theoretische Hydrodynamik
Prof. Dr. Harald Lesch1 Dr. G.T. Birk2
Universitats-Sternwarte Munchen
LMU
Prof. Dr. Hartmut Zohm3
Max-Planck-Insitut fur Plasmaphysik
geTEX-t von
Hanna Kotarba4
[email protected]@[email protected]@physik.uni-muenchen.de

2

Inhaltsverzeichnis
1 Einfuhrung 1
2 Bilanzgleichungen idealer Flussigkeiten 7
2.1 Kontinuitatsgleichung ⇔ Massenerhaltung . . . . . . . . . . . 7
2.2 Die Eulersche Gleichung . . . . . . . . . . . . . . . . . . . . . 11
2.3 Hydrostatik . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Bedingung fur das Fehlen der Konvektion . . . . . . . . . . . 21
2.5 Die Bernoullische Gleichung . . . . . . . . . . . . . . . . . . . 24
2.6 Die Energiestromdichte / Die Energiebilanzgleichung . . . . . 30
2.7 Erhaltung der Zirkulation und die Helmholtzschen Wibelsatze 32
3 Die Potentialstromungen 41
4 Wellen 61
4.1 Schwerewellen . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Schallwellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5 Kompressible Stromungen 77
6 Viskose Fluide 89
6.1 Die Navier-Stokes-Gleichung . . . . . . . . . . . . . . . . . . . 89
6.2 Energiedissipation in inkompressiblen viskosen Fluiden . . . . 96
6.3 Laminare Stromungen . . . . . . . . . . . . . . . . . . . . . . 97
6.4 Kriterien fur verschiedene Stromungstypen, Skalierungsgesetze 106
6.5 Grenzschichttheorie, Prandtl . . . . . . . . . . . . . . . . . . 109
6.6 Ein einfaches Modell zur Viskositat in Gasen . . . . . . . . . 121
7 Hydrodynamische Instabilitaten 123
7.1 Die Rayleigh-Taylor- und die Kelvin-Helmholtz-Instabilitat . 123
7.2 Die Gravitations-Instabilitat . . . . . . . . . . . . . . . . . . . 132
8 Die Rayleight-Benard-Konvektion 135
i

ii INHALTSVERZEICHNIS
9 Turbulenz 1459.1 Wirbelablosung hinter einem umstromten Zylinder . . . . . . 1499.2 Die vollstandig entwickelte Turbulenz . . . . . . . . . . . . . 1539.3 Geschwindigkeitskorrelationen . . . . . . . . . . . . . . . . . . 156
10 Die Korteweg-de Vries-Gleichung / Solitonenlosungen 165
A Maple-Files 173
B Thermodynamik 177
C Vektoranalysis 179C.1 Identitaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179C.2 Kugelkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . 181C.3 Zylinderkoordinaten . . . . . . . . . . . . . . . . . . . . . . . 183

Kapitel 1
Einfuhrung
Literatur
1) Landau/Lifschitz - Lehrbuch der theoretischen Physik VIHydrodynamik, Akademie-Verlag
2) Greiner/Stock - Theoretische Physik Band 2AHydrodynamik, Harri Deutsch Verlag
3) Guyon/Hulin/Petit - Hydrodynamik, Vieweg-Verlag
4) Sommerfeld - Theoretische Physik IIMechanik der deformierbaren Medien
Hydrodynamik: Beschreibung der Dynamik kontinuierlicher Medien,i.e. Fluide (Flussigkeiten, Gase).
kontinuierlich: stetig vom Fluid erfullte Raumvolumina,in denen wir makroskopische Großen(Massendichte ρ(r, t), Geschwindigkeit v(r, t) und Druck p(r, t))definieren und messen konnen.
Ein Fluid lasst sich aus Fluidelementen der Lineardimension a zusammen-gesetzt beschreiben mit λ ≪ a ≪ L, wobei λ die freie Weglange der Ato-me/Molekule des Fluids und L die charakteristische Ausdehnung des be-trachteten hydrodynamischen Systems ist. Fur die Fluidelemente ergebensich die physikalischen Großen als Mittelwerte der atomaren/molekularenGroßen (im lokalen thermischen Gleichgewicht).Die Hydrodynamik stellt mithin eine approximative Beschreibung der Dy-namik einer Klasse von Vielteilchensystemen dar.Gilt
hn13√
3mkBT≪ 1
1

2 KAPITEL 1. EINFUHRUNG
h: Plancksches Wirkungsquantum, n: Teilchendichte, m: Teilchenmasse,
T: Teilchentemperatur, kB : Boltzmann-Konstante
d.h. die Wellenpakete der Einzelteilchen uberlappen nicht, so liegt ein klas-sisches Ensemble von N Teilchen vor, das System ist also im Prinzip durchdie 2N (Hamiltonschen) Bewegungsgleichungen 1. Ordnung
~ri = ~∇piH (1.1)
~pi = −~∇riH (1.2)
H: Hamiltonfunktion des Systems
beschreibbar, bzw. durch die DGL in (6N+1) Variablen namens Liouville-Gleichung fur ξ (Wahrscheinlichkeitsfunktion)
∂tξ =N∑
i=1
~∇~riH · ~∇~piξ − ~∇~pi
H · ~∇~riξ (1.3)
wobei ξ(~r1, . . . , ~rN , ~p1, . . . , ~pN , t)d3r1 . . . d
3rN . . . d3p1 . . . d
3pN den Anteil desEnsembles, der zur Zeit t im Volumenelementd3r1 . . . d
3rN . . . d3p1 . . . d
3pN des 6N-dimensionierten Phasenraums anzutref-fen ist, darstellt.ξ-Erhaltung: Ensemblemitglieder werden nicht zerstort/erzeugt. Fur großeTeilchenzahlen (man erinnere sich, ein Mol eines Gases enthalt ∼ 1023
Molekule) ist die vollstandige mikroskopische Beschreibung naturlich nichtdurchfuhrbar und auch nicht erforderlich!
Die nchste Beschreibungsebene, bei der man bereits Detailinformation ver-liert, bedient sich der statistischen Beschreibung mit einer Wahrscheinlichkeits-bzw. Verteilungsfunktion
f(~x, ~u, t)
wobeif(~x, ~u, t)d3xd3u
die Wahrscheinlichkeit ist, ein Teilchen am Ort ~x mit Geschwindigkeit ~u(Einzelteilchen-Geschwindigkeit) zu finden. Das ist eine klassische vollstandi-ge Beschreibung, da ~x und ~u (bzw. ~p) unabhangige Großen sind.Mit Hilfe dieser Funktion kann man die hydrodynamischen Grundgleichungenherleiten.Die Gleichung fur die Zeitentwicklung der Verteilungsfunktion lautet
df
dt=∂f
∂t+d~x
dt~∇xf +
d~u
dt~∇uf
Liouville: Teilchenzahlerhaltung entlang Trajektorien.Entlang Trajektorien gilt:
d~x
dt= ~u
d~u
dt=~F
m

3
⇒ ∂f
∂t+ ~u~∇xf +
~F
m~∇uf = 0
Doch es bleibt das Problem dass~F immer noch von allen anderen Teilchen
abhangt (Stoße, Wechselwirkung,...)
Abhilfe:Krafte werden uber das Volumenelement gemittelt⇒ “Stoßraten”, alle Wechselwirkungen zwischen den den Einzelteilchen wer-den hier hinein gepackt, nur die makroskopischen Krafte (Gravitation, Druck,...)
bleiben ubrig (~F → ~F ).
⇒ Die zeitliche Entwicklung der neuen, gemittelten, makroskopische Ver-teilungsfunktion f gehorcht der kinetischen Gleichung:
∂tf +~u
m· ~∇xf +
~F
m· ~∇uf = (∂tf)Coll
︸ ︷︷ ︸
Stoßintegral
(1.4)
(nichtlineare Integro-Differential-Gleichung in 7 Variablen)
Stoßintegral: Verschiedene Situationen brauchen unterschiedliche Stoßansatze(geladen, neutral,...)Die Auswertung des Stoßintegrals ist sehr komplex, selbst bei Beschrankungauf Zweierstoße, aber naturlich moglich (unendliche Reihe,...)Im stoßfreien Fall ist (1.4) Ausdruck der Teilchenzahlerhaltung.
Momente der Verteilungsfunktion
∫
~pmfd3p m = 0, 1, 2, . . .
fuhren auf makroskopische, mess- und beobachtbare Großen:
ρ(~r, t): Massendichte~v(~r, t): Fluidgeschwindigkeitp(~r, t): thermischer Druck
Momente der kinetischen Gleichung fuhren auf makroskopische Bilanzglei-chungen:
0.tes −→ Kontinuitatsgleichung1.tes −→ Bewegungsgleichungen
Eine mathematisch exakte als auch phanomenologisch uber Bilanzen, d.h.Massen-, Impuls- und Energieerhaltung, motivierte Herleitung dieser Bilanz-gleichungen wird im Kapitel 2 durchgefuhrt.

4 KAPITEL 1. EINFUHRUNG
Also: Fluid als Kontinuum
Man hat zwei verschiedene Beschreibungsweisen, Lagrange und Euler.
Lagrange:Man beschreibt die Bewegung der einzelnen Fluidelemente. Befindet sich einFE zur Zeit t0 am Ort ~r0, so ist
~u = dt~r|~r=~r0
die Geschwindigkeit des FE−→ Perspektive des mitbewegten BeobachtersIn der Praxis ist es umstandlich/schwierig die Dynamik aller FEs zu verfol-gen, zudem ist man i.A. nicht am Schicksal der einzelnen FEs interessiert,sondern man mochte den Stromungszustand an jedem festen Raumpunktund seine zeitliche Veranderung kennen.
Euler:In allen Raumpunkten wird das Fluid durch physikalische Felder, d.h. Zu-weisung skalarer oder vektorieller Werte, charakterisiert.−→ Perspektive eines ortsfesten BeobachtersWir haben
p(~r, t) ρ(~r, t) ~v(~r, t)
d.h. Fluid fliesst zur Zeit t am Ort ~r mit der Geschwindigkeit ~v, dabei bleibtdie Bahn auf der sich ein FE, das zur Zeit t am Ort ~r ist, unbekannt (amOrt ~r wird zu verschiedenen Zeiten die Geschwindigkeit verschiedener FEebestimmt).Ein Ubergang zwischen den Darstellungsarten ist im Prinzip immer moglich.
Berechnung der zeitlichen Anderung einer Feldgroße (Skalar- oder Vektor-komponente) im bewegten Fluid, d.h. Anderung der Feldgroße eines FEs:
A+ dA = A(~r + ~vdt, t+ dt) (1.5)
(FE ist zum Zeitpunkt t+dt an den Ort ~r + ~vdt gewandert,wobei ~v die Geschwindigkeit langs einer Stromlinie ist)
Taylor-Entwicklung bis zur 1. Ordnung:
A+ dA = A(~r, t) + ∂tAdt+ ~v · ~∇Adt (1.6)
⇒ dtA = ∂tA+ ~v · ~∇A (1.7)

5
dtA substantielle AbleitungLagrangesche ZeitableitungAnderung mit FE mitbewegt
∂tA explizite zeitliche Anderung(an einem festen Ort)Eulersche Zeitableitung
~v · ~∇A Anderung durch Stromung
Illustration von Stromungen kann mithilfe von Stromlinien erfolgen.Stromlinien sind Linien des Vektorfelds ~v(~r, t), die zu einer gegebenen Zeitt0 dadurch definiert sind, dass ihre Tangenten an jedem Punkt mit demGeschwindigkeitsvektor ubereinstimmen.Mathematische Definition:
dx
vx=dy
vy=dz
vz(1.8)
I.A. gibt es keine Beziehung zwischen FEen und Stromlinien (diese werdenzu verschiedenen Zeiten von verschiedenen FEen gebildet).Fur stationare Stromungen ∂t=0, insbesondere also ∂t~v = 0 stimmen dieStromlinien mit den Bahnlinien (Wege, die die FEe mit der Zeit durchlau-fen, Tangenten geben hierbei die Richtung der Geschwindigkeit bestimmterFEe zu aufeinanderfolgenden Zeitpunkten an) der FEe ubereinStromlinien sind z.B. durch Farbstoffe visualisierbar.
Analogie zur Elektrodynamik:~∇ · ~B = 0 ⇒ Dichte der Feldlinien ist Maß fur FeldstarkeInkompressibel: ρ~∇ · ~v = 0 ⇒ StromlinienKompressibel, stationar: ~∇ · (ρ~v) = 0 ⇒ Massenstrom-Bahnlinien,
Stromlinien sind Massenfluß!

6 KAPITEL 1. EINFUHRUNG

Kapitel 2
Bilanzgleichungen idealerFlussigkeiten
Erhaltungsgleichungen sind von ganz besonderer Bedeutung.Durch ρ(r, t), v(r, t), p(r, t) ist die vollstandige Beschreibung des Bewegungs-zustandes eines Fluids moglich −→ thermische Relationen.
2.1 Kontinuitatsgleichung ⇔ Massenerhaltung
Wir werden nur die Integraleigenschaften des Stoßterms benutzen
∫ (∂f
∂t
)
Colld3u = 0 Teilchenzahlerhaltung
∫
~u
(∂f
∂t
)
Colld3u = 0 Impulserhaltung innerhalb
einer Flussigkeitskomponente
(andert sich fur Mehrflussigkeitstheorie)
Im nachsten Schritt werfen wir die Informationen im Geschwindigkeitsraumweg.Annahme einer Temperatur (lokales thermisches Gleichgewicht), keine kine-tischen Effekte!⇒ Integration der mit ~uk multiplizierten kinetischen Gleichung“Momentenbildung” der Verteilungsfunktion z.B. 0tes Moment:
∫
f(~u, ~x, t)d3u = n(~x, t)
n(~x, t): Anzahldichte, [1/m3]
7

8 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
0te Ordnung:
∫ ∂f∂t d
3u +∫~u · ~∇xfd
3u +∫ ~Fm · ~∇ufd
3u = 0
↓ ↓ ~u und ~x
sind unabhangig!↓
∂t
∫
fd3u︸ ︷︷ ︸
∫
ui∂xifd3u
︸ ︷︷ ︸
~F
m
∫
~∇ufd3u
︸ ︷︷ ︸
∂tn ∂xi
∫
uifd3u
︸ ︷︷ ︸
↓ f |Grenzen
~∇ · (n~v) 0muss normierbar
bleiben!
mit∫~ufd3u = n~v
~v: Stromungsgeschwindigkeit, Schwerpunktsgeschwindigkeit,
gerichtete Geschwindigkeit
Achtung, hier gilt wieder die Einstein’sche Summenkonvention: Ein einzelner Index ist frei
(beliebige Komponente), ein doppelter Index hingegen ist gebunden! → Summation
Also: uiuj=Matrix, uiui=Skalar
⇒ ∂n
∂t+ ~∇(n~v) = 0
mit ρ = mn: Massendichte
⇒ ∂ρ
∂t+ ~∇(ρ~v) = 0 Kontinuitatsgleichung
AnschaulichMan betrachte ein Volumen V0 (ρ: Dichte, ρ = nm, n: Teilchendichte, m:Masse eines Teilchens).Die Masse im Volumen ergibt sich zu
M =
∫
V0
ρdV (2.1)
Pro Zeiteinheit fließt durch das Flachenelement d~f der Oberflache des Vo-lumens die Flussigkeitsmenge ρ~v · d~f .|d~f |: Flache des Flachenelementsd~f zeigt in Richtung der Normalen (Vereinbarung: nach Außen).
⇒ ρ~v · d~f > 0 wenn die Flussigkeit herausfließt
ρ~v · d~f < 0 wenn die Flussigkeit hineinfließt

2.1. KONTINUITATSGLEICHUNG ⇔ MASSENERHALTUNG 9
Die gesamte Flussigkeitsmenge, die pro Zeiteinheit aus dem Volumen fließt,ist
− ∂tM =
∫
ρ~v · d~f (2.2)
Die Integration wird uber die ganze geschlossene Oberflache erstreckt, diedas betrachtete Volumen einschließt.Andererseits kann man die Abnahme der Flussigkeitsmenge in der form
− ∂
∂t
∫
ρdV
schreiben. Setzten wie diese Ausdrucke gleich, dann bekommen wir
−∫
V0
∂ρ
∂tdV =
∫
F
ρ~v · d~f (2.3)
Mit dem Satz von Gauss wird aus∫
F
ρ~v · d~f =
∫
V
~∇ · (ρ~v)dV (2.4)
und es ergibt sich schließlich:
∫
V
[∂ρ
∂t+ ~∇ · (ρ~v)
]
dV = 0 (2.5)
Die Gleichung (2.5) gilt fur jedes Volumen und beim Ubergang zu eineminfinitesimal kleinem Volumen stimmen die Großen ρ und ~v mit den lokalenGroßen uberein.Deshalb gilt als lokale Aussage:
∂ρ
∂t+ ~∇ · (ρ~v) = 0 (2.6)
Das ist die Kontinuitatsgleichung wie schon vorher.⇒ Bei Teilchenzahlerhaltung ist die Anderung der Massendichte im Volu-men durch die Divergenz des Massenflusses (Stromdichtevektors) gegeben;reines “Durchfließen” andert M nicht.
Der Vektor ~j = ρ~v wird auch Stromdichtevektor des Fluids genannt. Furstationare Systeme ∂t = 0 gilt also ~∇ ·~j = 0.Verallgemeinerung der Kontinuitatsgleichung fur den Fall lokaler Fluidpro-duktion:
−∫
∂tρdV +Q =
∫
ρ~v · d~f (2.7)

10 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Q =∫qdV : erzeugte Fluidmasse pro Zeiteinheit, Quellterm
−→ ∂tρ+ ~∇ · (ρ~v) = q (2.8)
Kontinuitatsgleichung unter Berucksichtigung der Dichte q der Massenpro-duktion pro Zeiteinheit.
Bemerkung zur Stromungsgeschwindigkeit
Stromung wird durch “Stromlinien” illistriert, d.h. durch Linien, deren Tan-gentenvektoren mit ~v ubereinstimmen. Das sind die Linien, entlang denenFlussigkeitselemente laufen, wenn die Stromung stationar ist!Visualisierung: Farbstoffe, Windkanal
Erinnerung: Mathematische Definition von Stromlinien:
dx
vx=dy
vy=dz
vz
(Infenitesimale Elemente verhalten sich wie Langenabschnitte der Kompo-nenten des Geschwindigkeitsvektors)
Beispiel fur die Anwendung der Kontinuitatsgleichung:Rohr mit Engstelle
Z.B. fur ρ = const. :
Engstelle auf der Autobahn
links: ρ1 , v1 , F1
rechts: ρ2 , v2 , F2 = 0.5 · F1
ρ1v1 = ρ2v2
⇒ rechts muss doppelt so schnell fließen!

2.2. DIE EULERSCHE GLEICHUNG 11
Wasserhahn
~∇ · (ρ~v) = 0
oder (ρ = const.) ρ~∇ · ~v = 0
v1 · F1 = v2 · F2
⇒ Wenn v zunimmt, muß F abneh-men!Die Kurve des Wasserstrahls wirdbeschrieben durch
r ∼ 1√√
n+ v0
(Lasst sich leicht zeigen mitBeschleunigung = Gravitationsbe-schleunigung)
2.2 Die Eulersche Gleichung
1te Ordnung, k = 1⇒ Die kinetische Gleichung wird mit ~u multipliziert und uber d3u integriert.
⇒∫
~u∂tfd3u
︸ ︷︷ ︸
A
+
∫
~u(~u · ~∇xf)d3u︸ ︷︷ ︸
B
+
∫
~u
(~F
m· ~∇uf
)
d3u
︸ ︷︷ ︸
C
= 0
1. SummandDa ~u und ~x nicht explizit von der Zeit abhangen gilt:
A = ∂t
∫
~ufd3u = ∂t(n~v)
2. Summandi-te Komponente von B:
∫
uiuj∂xjfd3u = ∂xj
∫
uiujfd3u (Tensor ~u⊗ ~u)
Dieser Term hat mit dem Quadrat der GEschwindigkeit, d.h. mit Energie(Druck) zu tun!Zwei Anteile:
~u = ~v + ~w
~v : makroskopische Schwepunktsgeschwindigkeit von ~u
~w : Mittelwert der thermischen Geschwindigkeit

12 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
∂xj
∫
(vi + wi)(vj + wj)df3u = ∂xj
∫
(vivj + viwj︸ ︷︷ ︸
=0
+ vjwi︸ ︷︷ ︸
=0︸ ︷︷ ︸
(v rausziehen,∫~wfd3u = 0
laut Definition
+wiwj)fd3u
= ∂xj(vivjn)
︸ ︷︷ ︸
v kann aus dem Inegral
herausgezogen werden,
ist bereits gemittelt
+ ∂xj
∫
wiwjfd3u
︸ ︷︷ ︸
= 1m· Drucktensor Pij
= ∂xj(vivjn) + ∂xj
Pijm
isotrop= ∂xj
(vivjn)︸ ︷︷ ︸
~∇·~v⊗~v
+1
m~∇p
i 6= j ⇒ wenn unkorreliert → 0
i = j ⇒ 1
2
∫
~w2fd3u thermische Energie
Beispiel ideales Gas:
3
2nkT
!=
1
2m
∫
~w2fd3u
⇒ nkT =1
3m
∫
~w2d3u
In Komponenten:
~w2 = wxwx + wywy + wzwz = Spur(~w ⊗ ~w)
3. Summandi-te Komponente von C:
Ci =
∫
uiFjm∂uj
fd3u
Mit
∂uj
(
uiFjmf
)
=Fjmf ∂uj
ui︸ ︷︷ ︸
δij
+uimf∂uj
Fj︸ ︷︷ ︸
= 0Kraft hangt nicht von ~u ab!
(nicht fur Lorentz-Kraft!)
+uiFjm∂uj
f

2.2. DIE EULERSCHE GLEICHUNG 13
folgt
Ci = −∫Fimfd3u+
∫
∂uj
(
uiFjmf
)
d3u︸ ︷︷ ︸
uiFjmf
∣∣∣Grenzen
→0
= −Fim
∫
fd3u
⇒ C = −n~F
m
Fasst man alles zusammen und multipliziert mit m so erhalt man
∂t(ρ~v)︸ ︷︷ ︸
gesamte
Impulsanderung
= −~∇p︸ ︷︷ ︸
Druck
−~∇(ρ~v ⊗ ~v)︸ ︷︷ ︸
“um die Ecke
stromen”
+ n~F︸︷︷︸
Einzelteilchenkraft
z.B. Gravitation ρ~g
(2.9)
Bilanzgleichung fur Impuls, “Impulsstromdichte”
EinschubAlso:
∂
∂t(ρvi) = −∂Πik
∂xk
(2.10)
Dabei ist der Tensor der Impulsstromdichte Πik definiert als:
Πik = pδik + ρvivk (2.11)
Er ist ein symmetrischer Tensor, also Πik = Πki.
Integration von (2.10) uber irgendein Volumen liefert:
∂
∂t
∫
ρvidV = −∫
∂Πik
∂xk
dV = −∮
Πikdfk (2.12)
Also ist die zeitliche Anderung der i-ten Impulskomponente im Volumen gleich der Mengedes Impulses, die pro Zeiteinheit in eine Richtung durch die das Volumen begrenzendeFlache fließt.Masse und Energie sind Skalare, Masse- und Energiestrom sind Vektoren. Der Impuls istein Vektor, dementsprechend ist der Impulsstrom ein Tensor.
Nebenberechnung
Wir betrachten nun ein kleines Volumenelement ∆V im Fluid, welches durch eine Man-telflache M und die Stirnflachen F1 und F2 gegeben ist.~n: Einheitsvektor der Flachennormalen
Auf den Stirnflachen gilt:
F1 : −~nv1 = ~v1
F2 : −~nv2 = ~v2
Auf der Mantelflache gilt:
~n · ~v = 0

14 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Das Volumen wird hinreichend klein gewahlt, so dass die Stromdichte senkrecht auf F1
und F2 steht.Mit
dFk = nkdF und Πiknk = pni + ρvivknk (vgl. 2.11)
ergibt sich fur die zeitliche Anderung der Impulsdichte im Volumenelement ∆V :
∂t
∫
∆V
ρ~vdV = −∮
S∆V
(p~n+ ρ~v(~v · ~n))dF (2.13)
= −∫
F1
(p+ ρv2)d ~F1 −∫
F2
(p+ ρv2)d ~F2 −∫
M
pd ~M (2.14)
Transversal ist also die Imulsstromdichte gleich p.
Gleichung (2.9) kann umgeformt werden in eine Gleichung fur die zeitlicheEntwicklung des Geschwindigkeitsfeldes:Fur die linke Seite gilt:
∂t(ρ~v) = ~v∂tρ+ ρ∂t~vKontiglg
= −~v~∇ · (ρ~v) + ρ∂t~v
Fur ~∇(ρ~v ⊗ ~v) gilt (i-te Komponente):
∂xj(ρvjvi) = vi∂xj
ρvj + ρvj∂xjvi = ~v~v~∇ · (ρ~v) + ρ(~v · ~∇)~v
⇒ −~v~∇ · (ρ~v) + ρ∂t~v = −~∇p− ~v~∇ · (ρ~v) − ρ(~v · ~∇)~v + n~F
⇒ ρ(
∂t~v + (~v · ~∇)~v)
= −~∇p+ n~F
Euler-Gleichung
Bedeutung: ∂t + ~v · ~∇ heißt “substanzielle Ableitung” ddt .
Sie beschreibt die Anderung im Ruhesystem (Gegenteil: Lagrange, verfolgtFlussigkeitselemente)Anderung durch lokale Veranderung → ∂tAnderung durch Strome → ~v · ~∇Formel:
d
dt=
∂
∂t+
∂
∂x
dx
dt+
∂
∂y
dy
dt+
∂
∂z
dz
dt=
∂
∂t+ ~v · ~∇
Beispiel zum Unterschied zwischen Euler und Lagrange:
Zeitliche Anderung der Massendichte in einem Raumgebiet:
∂ρ
∂t= −~∇(ρ~v) Euler

2.2. DIE EULERSCHE GLEICHUNG 15
Zeitliche Anderung der Massendichte im Fluidelemt:
dρ
dt=
∂ρ
∂t+ (~v · ~∇)ρ
= −~∇ · (ρ~v) + (~v · ~∇)ρ− ∂
∂xj(ρvj) + vk
∂
∂xkρ
= −ρ ∂
∂xjvj − vj
∂ρ
∂xj+ vk
∂ρ
∂xk
= −ρ~∇ · ~v Lagrange
Auch die Kraftgleichung kann man heuristisch herleiten:Wie die Bewegung von Masseteilchen durch die wirkenden Krafte bestimmtist, so sind auch die Krafte fur die Bewegung von Flussigkeiten verantwort-lich.Wir grenzen in der Flussigkeit irgendein Volumen ab. Die gesamte Kraft dieauf das herausgegriffene Volumen wirkt
~K = −∫
∆Vpd~f (2.15)
uber den Druck p im Volumen ∆V , deshalb muss in (2.15) ein negativesVorzeichen berucksichtigt werden, wenn die Kraft auf das Volumen ∆V aus-geubt wird.
Durch Umwandlung in ein Volumenintegral erhalt man
−∫
pd~f = −∫
~∇pdV (2.16)
Auf jedes Volumenelement dV wirkt von der Flussigkeit die Kraft −~∇pdV ,i.e. pro Volumenelement wirkt die Kraft −~∇p.−→ Bewegungsgleichung fur ein Volumenelement (FE) der Flussigkeit:
ρd~v
dt= −~∇p (2.17)
Massendichte*Beschleunigung=Kraftdichte
Mit der substantiellen Ableitung (1.7) ergibt sich:
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p (2.18)

16 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Euler-GleichungBewegungsgleichung der Flussigkeit
Auf der rechten Seite von (2.18) konnen alle moglichen zusatzlichen Kraft-dichten stehen.Befindet sich die Flussigkeit im Schwerefeld, wirkt auf jede Volumeneinheitnoch die Kraft ρ~g, dabei ist ~g die Schwerebeschleunigung.
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p+ ~g (2.19)
(bzw. −~∇Φ, Φ: Gravitationspotential)
Bei der Herleitung der Bewegungsgleichungen haben wir Prozesse derEnergiedissipation nicht berucksichtigt. Innere Reibung und/oder Warme-austausch wurden zur Dissipation fuhren.
Ideale Flussigkeit:Warmeleitung / Zahigkeit werden vernachlassigt!
Dies muss immer uberpruft / gerechtfertigt werden!
Einschub
d~vdt in (2.17) gibt die zeitliche Anderung der Geschwindigkeit eines sich be-wegenden FEs an.
Die Beschleunigung des Fluidelements hat i.A. zwei Ursachen:
1.Explizite zeitliche Anderung des Geschwindigkeitsfeldes mit der ZeitFur nicht stationare Stromungen:
~v(~r, t) − ~v(~r, t+ ∆t)
∆t
2.Bewegung des FEs in einem nicht gleichformigen Geschwindigkeitsfeld
~v(~r, t) − ~v(~r + ∆~r, t)
∆~r

2.2. DIE EULERSCHE GLEICHUNG 17
⇒ ∆~v = ~v(~r2, t′) − ~v(~r1, t) = ∂t~v∆t+ ∂x~v∆x+ ∂y~v∆y + ∂z~v∆z
Damit ist ~v(~r + ~v∆t, t+ ∆t) − ~v(~r, t) ermittelt bis zur Ornung ~v∆t, ∆t.
bzw.
dt~v = lim∆t→0
∆~v
∆t= ∂t~v + (~v · ~∇)~v
Das Fehlen des Warmeaustausches zwischen Flussigkeitsteilchen (und zwi-schen Flussigkeit und Wanden, thermische Isolation) bedeutet, dass die Be-wegung adiabatisch verlauft - uberall.
Bewegung einer idealen Flussigkeit≡
adiabatische Bewegung
Bei einer adiabatischen Bewegung bleibt die Entropie eines jeden FEs kon-stant, wenn es sich im Raum bewegt.Die Entropie pro Masseneinheit sei s.
adiabatische Bewegung:ds
dt= 0
bzw.
∂s
∂t+ (~v · ~∇)s = 0 (2.20)
allgemeine Gleichung fur adiabatische Bewegung
⇒ Kontinuitatsgleichung fur Entropie:
∂(ρs)
∂t+ ~∇ · (ρs~v) = 0 (2.21)
vgl. Kontinuitatsgleichung (2.6)
ρs~v: Entropiestromdichte
I.A. ist die adiabatische Gleichung viel einfacher, gewohnlich ist die Entropiezu einer gegebenen Anfangszeit raumlich und zeitlich in allen Punkten derFlussigkeit konstant. Dann bleibt sie es auch:
s=const
isentrope Bewegung

18 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Einschub
Wie, also nach welcher Gleichung, andert sich die Massendichte an einemfesten Raumpunkt mit der Zeit?
Antwort: ∂tρ = −~∇· (ρ~v) (2.21a)
Wie andert sich die Massendichte in einem Fluidelement mit der Zeit?
Antwort: dtρ = ∂tρ+ ~v · ~∇ρ = −ρ~∇ · ~v (2.21b)
RandbemerkungIsentropie kann man ausnutzen um die Bewegungsgleichung (2.18) in eineranderen Form darzustellen.Wir verwenden die bekannte thermodynamische Beziehung:
dw = Tds+ V dp (2.22)
w = ǫ+ pV
dǫ = Tds− pdV
Enthalpie = Summe aus innerer Energie + pV (Verdrangungsarbeit)
ǫ︸︷︷︸
Zustandsgroeße
→ dtǫ = dtQ︸︷︷︸
W aermemenge
T ds
+ dtR︸︷︷︸
geleistete
V olumenarbeit−pdV
w Enthalpie pro MasseneinheitV = 1
ρ spezifisches Volumen, Volumen der Masseneinheit
T Temperatur
Da s=const gilt:
dw = V dp =dp
ρ⇒ 1
ρ~∇p = ~∇w
Aus (2.18) wird dann:
∂~v
∂t+ (~v · ~∇)~v = −~∇w (2.23)
Eine weitere Variante der Euler-Gleichung enthalt nur die Geschwindigkeit:
~∇v2
2= ~v × (~∇× ~v) + (~v · ~∇)~v (2.24)

2.3. HYDROSTATIK 19
Damit ergibt sich:
∂~v
∂t− ~v × (~∇× ~v) = −~∇
(
w +v2
2
) ∗
(2.25)
~∇×(2.25) ergibt:
∂
∂t(~∇× ~v) = ~∇× (~v × ~∇× ~v) (2.26)
* + konservative Kraftdichte ~f = −~∇u
2.3 Hydrostatik
Fur eine ruhende Flussigkeit ( ~v = 0, ∂t = 0) im homogenen Schwerefeldnimmt die eulersche Gleichung (2.19) die Gestalt
~∇p = ρ~g (2.27)
an.(2.27) beschreibt das mechanische Gleichgewicht der Flussigkeit.Ohne außere Krafte gilt die Gleichgewichtsbedingung ~∇p = 0, heißt p =const. Der Druck ist in allen Punkten der Flussigkeit gleich.
Sei ρ = const, d.h. keine merkliche Kompression in z-Richtung:
∂p
∂x= 0
∂p
∂y= 0
∂p
∂z= −ρg (2.28)
Ergo:
p = −ρgz + const (2.29)
Hat eine ruhende Flussigkeit eine freie Oberflache (in der Hohe H) und istder außere Druck auf diese Oberflache uberall p0, dann muss diese Oberflache

20 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
die horizontale z = H sein. Aus p = p0 fur z = H erhalten wir const =p0 + ρgH.
p = p0 + ρg(H − z) (2.30)
(p− p0 ∼ H)
Am Auftrieb von Korpern in Flussigkeiten und Gasen sieht man, dass auchdie Form eine Rolle spielt.
Hangt die Dichte ausschließlich und linear vom Druck ab, d.h.
ρ = Ap mit A =ρ0
p0=ρ
p= const
wie es in idealen Gasen bei konstanter Temperatur der Fall ist, so ist:
∂p
∂z=dp
dz= −Agp (2.31)
p = p0 exp(−Ag(z − z0)) = p0 exp
(
−ρ0
p0g(z − z0)
)
(2.32)
Barometrische Hohenformel
Fur isotherme Atmosphare gilt:
p = nkT =ρ
mkT → ρ0
p0=
m
kT0
Eine (weitere) Folgerung aus (2.28):Befindet sich eine Flussigkeit / ein Gas im Schwerefeld im statischen Gleich-gewicht, dann kann p nur von der Hohe z abhangen.Denn: Wenn der Druck in einer Hohe an verschiedenen Stellen verschiedenware, wurde eine Bewegung auftreten!
⇒ ρ = −1
g
dp
dz(2.33)
Die Dichte ist eine Funktion die nur von z abhangt.p und ρ bestimmen die Temperatur (hier wird nicht angenommen, dassρ = Ap).⇒ T ist ebenfalls eine Funktion die nur von z abhangt.Ein statisches Gleichgewicht ist nicht moglich, wenn T an verschiedenenStellen in ein und derselben Hohe verschieden ist.

2.4. BEDINGUNG FUR DAS FEHLEN DER KONVEKTION 21
Astrophysikalische AnwendungGleichgewichtsbedingung fur große Flussigkeits- / Gasmengen, deren Teiledurch Gravitationskrafte zusammengehalten werden, also Sterne.
Nebenbemerkung
ϕ sei das Newtonsche Gravitationspotential des von der Flussigkeit erzeug-ten Feldes (selbstgravitierendes Fluid). Es genugt der DGL
∆ϕ = 4πGρ (2.34)
mit der newtonschen Gravitationskonstante G.Die Feldstarke des Gravitationsfeldes ist −~∇ϕ,und damit die Volumenkraftdichte auf die Massendichte ρ: −ρ~∇ϕ.Daher lautet die Gleichgewichtsbedingung:
~∇p = −ρ~∇ϕ (2.35)
Teilen wir (2.35) durch ρ, bilden die Divergenz und verwenden (2.34), ergibtsich:
~∇ ·(
1
ρ~∇p)
= −4πGρ (2.36)
(nur mechanisches Gleichgewicht)
Ein vollkommenes thermisches Gleichgewicht ist nicht vorausgesetzt!
Falls der Korper nicht rotiert, wird er im Gleichgewicht Kugelgestalt ha-ben, die Verteilung von Dichte und Druck werden in ihm kugelsymmetrischsein.Gleichung (2.36) hat fur Kugelsymmetrie in Kugelkoordinaten die Form:
1
r2d
dr
(
r2
ρ
dp
dr
)
= −4πGρ (2.37)
Diese lasst sich fur z.B. isotherme Gaskugeln (p = ρmkT , T = const) leicht
integrieren.
2.4 Bedingung fur das Fehlen der Konvektion
Eine Flussigkeit kann sich im statischen Gleichgewicht befinden (keinerleimakroskopische Bewegung sichtbar), ohne dass sie dabei im thermischen

22 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Gleichgewicht ist.
Gleichung (2.27) (Bedingung fur mechanisches Gleichgewicht) kann auchdann erfullt sein wenn T nicht konstant ist.
Ist ein solches Gleichgewicht stabil?
Nur unter bestimmten Bedingungen.Sind diese nicht erfullt, dann ist das Gleichgewicht instabil, es treten Stromun-gen auf, die die Flussigkeit so zu vermischen suchen, dass T = const erreichtwird.⇒ Konvektion
Stabilitat eines mechanischen Gleichgewichts=
Bedingung fur das Fehlen von Konvektion
1.)Betrachte ein FE in Hohe z mit spezifischem Volumen V (p, s) = 1
ρ .p und s: Gleichgewichtsdruck und Gleichgewichtsentropie in z
2.)FE wird um eine kleine Strecke ∆z ≪ z adiabatisch nach oben verschoben:V (p, s) ⇒ V (p′, s)p′: Druck in z + ∆z
3.)Fur die Stabilitat des Gleichgewichts ist es notwendig (i.A. nicht hinrei-chend), dass die dabei auftretende Kraft bestrebt ist, das FE in die Aus-gangslage zuruckzutreiben.
Das betrachtete Volumenelement muss schwerer sein als die von ihm in derneuen Lage verdrangte Flussigkeit. Das spezifische Volumen der letzteren istV (p′, s′) (s′: Gleichgewischtsentropie von z + ∆z).
Stabilitatsbedingung
V (p′, s′) − V (p′, s) > 0 bzw.1
ρp′s′− 1
ρp′s> 0
Diese Differenz entwickeln wir nach Potenzen von
s′ − s =ds
dz∆z ∆z > 0
V (p′, s′) = V (p′, s) + ∆s(∂sV )p

2.4. BEDINGUNG FUR DAS FEHLEN DER KONVEKTION 23
(∂V
∂s
)
p
ds
dz> 0 (2.38)
Nach thermodynamischen Beziehungen gilt:
(∂V
∂s
)
p=T
cp
(∂V
∂T
)
p(2.39)
cp: spezifische Warme bei konstantem Druck p (cp = T (∂TS)p)cp, T sind immer positiv
Deshalb kann man (2.38) umformen in:
(∂V
∂T
)
p
ds
dz> 0 (2.40)
Die meisten Stoffe dehnen sich bei Erwarmung aus, d.h.
(∂V
∂T
)
p> 0
⇒ Das Fehlen der Konvektion bedeutet dass die Entropie mit der Hohezunimmt:
ds
dz> 0 (2.41)
Aus (2.41) kann man mit der thermodynamischen Relation (∂ps)T = −(∂TV )peine Bedingung fur dT
dz ableiten:
dǫ = Tds− pdV also ǫ(T, p)
oder auch ǫ(s, V ) ⇒ dǫ = ∂sǫds+ ∂V ǫdV
⇒ T = (∂sǫ)V p = (∂V ǫ)s
⇒ (∂V T )p = −(∂sp)T
ds
dz=
(∂s
∂T
)
p
dT
dz+
(∂s
∂p
)
T
dp
dz=cpT
dT
dz−(∂V
∂T
)
p
dp
dz> 0 (2.42)
Außerdem gilt:
ρ = −1
g
dp
dz⇒ gρ = −dp
dz⇒ dp
dz= − g
V(2.43)

24 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
(2.42) und (2.43) fuhren zu:
− dT
dz< g
T
cp
1
V
(∂V
∂T
)
p= gβ
T
cp(2.44)
β =1
V
(∂V
∂T
)
p
: Koeffizient der thermischen Ausdehnung
Fur ein ideales Gas gilt βT = 1, ergo:
−dTdz
<g
cp(2.45)
(2.45) ist eine Stabilitatsbedingung. Konvektion wird bei Verletzung von(2.45) auftreten, d.h. wenn die Temperatur in Richtung von unten nachoben abnimmt und ihr Gradient dabei den Wert g
cpubersteigt.
Anschaulich:
ρgdz = dWgrav − ρTds = −dWtherm = −ρcpdT
⇒ Stabilitat fur δWgrav > δWtherm
2.5 Die Bernoullische Gleichung
Fur stationare Flussigkeitsstromungen vereinfachen sich die Gleichungen derHydrodynamik betrachtlich:
Unter einer stationaren Stromung versteht man eine Stromung, bei der dieStromgeschwindigkeit in jedem Punkt zeitlich konstant bleibt, d.h. ~v ist einereine Ortsfunktion!Ergo:
∂~v
∂t= 0
Gleichung (2.25) vereinfacht sich zu:
~∇v2
2− ~v × ~∇× ~v = −
~∇pρ
(2.46)
(→ Stromliniendefinition, Gleichung (1.8))Multiplikation von (2.46) in jedem Punkt einer Stromlinie mit dem Ein-heitsvektor in Tangentenrichtung der Stromlinie, ~l, also die Projektion desGradienten auf eine gewisse Richtung (auf die Stromlinien), ist gleich der in
dieser Richtung gebildeten Ableitung. Die gesuchte Projektion von − ~∇pρ · ~el
ist damit
−~∇w · ~el falls Isentropie vorliegt, oder
−~∇(p
ρ
)
· ~el falls ρ = const.

2.5. DIE BERNOULLISCHE GLEICHUNG 25
Der Vektor ~v × ~∇ × ~v steht senkrecht auf ~v, ⇒ seine Projektion auf dieRichtung ~l ist gleich Null.Damit erhalten wir z.B. fur Isentropie:
∂
∂l
(
v2
2+ w
)
= 0 (2.47)
Es folgt, dass entlang einer Stromlinie gilt:
v2
2+ w = const (2.48)
Bernoulli-Gleichung
Die Konstante in (2.48) ist i.A. fur verschiedene Stromlinien unterschiedlich.Erfolgt die Fluidstromung im Schwerefeld, so wird aus (2.47):
∂l
(
v2
2+ w + ϕ
)
= 0
ϕ: Gravitationspotential
Bzw. mit ~g ·~l = −g∂lz − g~ez ·~l = −g~∇z ·~l
∂l
(
v2
2+ w + gz
)
= 0
Und damit also:
v2
2+ w + gz = const (2.49)
Fur ρ=const, gilt:
w =p
ρ
Und aus (2.49) wird damit:
ρv2
2+ p+ ρgz = const (2.50)
Also der Energieerhaltungssatz.
ρv2
2 : kinetische Energiedichteρgz : potentielle Energiedichtep : potentielle Energiedichte der im Fluid wirkenden inneren Krafte
Allgemein ist (2.50) die Bernoulli-Gleichung fur stationare inkompressibleFluide.

26 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Inkompressibilitat bedeutet, dass die FEe wahrend ihrer Bewegung konstan-te Dichte behalten, also dtρ = 0,somit
∂tρ+ ~v · ~∇ρ = 0
und zudem wissen wir bereits:
∂tρ+ ~∇ · (ρ~v) = 0
Nach Gleichung (2.21b) (Kapitel 2.2) gilt:
∂tρ = −~v · ~∇ρ Kontigleichung⇒ ~∇ · ~v = 0
Inkompressibilitat und ~∇ · ~v = 0 sind also aquivalent.
Inkompressibilitat + Stationaritat → Homogenitat
Homogene, inkompressible Fluide konnen nur der stationaren Kontiglei-chung genugen (ρ = const raumlich und zeitlich).Homogene, stationare Fluide sind inkompressibel.
Die Bernoulli-Gleichung hat viele technische Anwendungen und erlaubt ofteinen Einblick in komplexere Fluiddynamik.
Zwei Beispiele
a) Aufstau vor Hindernis
Befindet sich in einer gleichformigenStromung mit v0 ein Hindernis, sostaut sich die Stromung und zerteiltsich.
Im Mittelpunkt (= Staupunkt) kommt die Stromung vollig zur Ruhe.p1: Druck am Staupunkt
p1
ρ+ 0 =
p0
ρ+v20
2⇒ p1 = p0 + ρ
v20
2
Der Ausdruck
p1 − p0 =ρv2
0
2
heißt Staudruck, bzw. dynamischer Druck.
Gesamtdruck = statischer Druck + dynamischer Druck

2.5. DIE BERNOULLISCHE GLEICHUNG 27
b) Prandl’sches Staurohr
Am Staupunkt:
ps = p∞ + ρv2∞2
⇒ ps − p∞ = ρv2∞2
⇒ Geschwindigkeitsmessung relativ zum Medium
Achtung:Hier spielen Hohenunterschiede keine Rolle, d.h. der hydrostatische Druckwird langs einer Stomlinie als konstant angenommen.
Solche Umstromungsprobleme werden in Kapitel 3 noch ausfuhrlicher be-handelt.
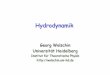
c) Stromung uber ein Hindernis
Man betrachtet die Stromlinie an der Oberflache.Die Flussmenge ist konstant, die Stromung ist vertikal gleichmaßig und inz-Richtung unendlich ausgedehnt. ρ = const.
ρu0h0 = u(x)h(x)ρ (i)

28 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Bernoulli:
p0 +1
2ρu2
0 + ρgh0 = p0 +1
2ρu2(x) + ρg(h(x) + e(x)) (ii)
p0: atmospharischer Druck
∂x(i) ρu(x)∂xh+ ρh(x)∂xu = 0 (iii)
∂x(ii) ρu(x)∂xu+ ρg(∂xh+ ∂xe) = 0 (iv)
Sei
u20 − gh0 < 0
Fr < 1
Froude-Zahl: Fr = u(x)√gh(x)
√gh(x): Geschwindigkeit von Schwereoberflachenwellen
(siehe Kapitel Wellen)
Es existieren zwei Stromungsformen bei x = xm:
(iii) = (iv) mit ∂xh = − 1
u(x)h(x)∂xu ergibt:
1
u(x)∂xu(−gh(x) + u2(x)) + g∂xe = 0 (v)
Losung 1:
∂xu|x=xm = 0(iii)→ ∂xh|x=xm = 0
D.h. hier wechselt die Anderung von h das Vorzeichen, die Schichtdickewachst also wieder an.Fr bleibt < 1.
Gravitationsbestimmte Losung

2.5. DIE BERNOULLISCHE GLEICHUNG 29
Losung 2:
u2|x=xm = gh|x=xm
D.h. ∂xu wechselt das Vorzeichen nicht, die Geschwindigkeit wachst hinterxm also weiter an.Fr uberschreitet den Wert 1 genau an der Stelle xm.
Tragheitssbestimmte Losung
Ubergang von einem zum anderen Regime am Maximum des Hindernisses.
Experimentell:Man verandert u0, bis man an xm den Ubergang Fr ≥ 1 erreicht:
u0 =u(xm)h(xm)
h0=
√gh
32 (xm)
h0(vi)
da u(xm) =√
gh(xm) fur Fr = 1 an x = xm
Anmerkung: Eine direkte Losung der algebraischen Gleichungen ist auchmoglich (3. Ordnung Polynom). → Froude.mws

30 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
2.6 Die Energiestromdichte / Die Energiebilanz-
gleichung
Wir wahlen irgendein festes Volumenelement und bestimmen, wie sich dieEnergie im Laufe der Zeit andert.Energie pro Volumeneinheit der Flussigkeit:
ρv2
2︸︷︷︸
kinetische Energie
+ ρǫ︸︷︷︸
innere Energie
(ǫ: innere Energie der Flussigkeit pro Masseneinheit)Die Anderung dieser Energie ergibt sich aus:
∂
∂t
[
ρv2
2+ ρǫ
]
∂
∂t
(
ρv2
2
)
=v2
2
∂ρ
∂t+ ρ~v · ∂~v
∂t(2.51)
Mit Konti.-Gleichung : ∂ρ∂t + ~∇ · (ρ~v) = 0
und Euler-Gleichung : ∂~v∂t + (~v · ~∇)~v = −1
ρ~∇p
ergibt sich:
∂
∂t
(
ρv2
2
)
= −v2
2~∇ · (ρ~v) − ~v · ~∇p− ρ~v · (~v · ~∇)~v (2.52)
Es ist
~v · (~v · ~∇)~v =~v
2~∇v2
und den Druckgradienten ersetzen wir mit der thermodynamischen Bezie-hung:
dw = Tds+1
ρdp
dp = ρdw − ρTds → ~∇p = ρ~∇w − ρT ~∇s (2.53)
Also:
∂t
(
ρv2
2
)
= −v2
2~∇ · (ρ~v) − (ρ~v) · ~∇
(
v2
2+ w
)
+ ρT~v · ~∇s (2.54)
Es bleibt ∂t(ρǫ) zu betrachten:
dǫ = Tds− pdV = Tds+p
ρ2dρ (2.55)

2.6. DIE ENERGIESTROMDICHTE / DIE ENERGIEBILANZGLEICHUNG31
mit ǫ = w − pV = w − pρ folgt (w: spezifische Enthalpie):
d(ρǫ) = ǫdρ+ ρdǫ
=
(
w − p
ρ
)
dρ+ ρ
(
Tds+p
ρ2dρ
)
= wdρ+ ρTds (2.56)
und damit:
∂t(ρǫ) = w∂tρ+ ρT∂ts
= − w~∇ · (ρ~v)︸ ︷︷ ︸
→ Konti-Gleichung
− ρT~v · ~∇s︸ ︷︷ ︸
→ dts = 0Adiabatengleichung, (2.20)
(2.57)
Zusammenfassend ergibt sich fur die Energieanderung:
∂
∂t
[
ρv2
2+ ρǫ
]
= −[
v2
2+ w
]
~∇ · (ρ~v) − ρ~v · ~∇[
v2
2+ w
]
(2.58)
Mit ~∇ · (F ~A) = F ~∇ · ~A + ~A · ~∇F erhalt man fur die Energieanderung dieBilanzgleichung:
∂
∂t
[
ρv2
2+ ρǫ
]
= −~∇ ·[
ρ~v
(
v2
2+ w
)]
(2.59)
Die Bedeutung dieser Gleichung ergibt sich durch Integration uber irgendeinVolumen:
∂
∂t
∫(
ρv2
2+ ρǫ
)
dV = −∫
~∇ ·[
ρ~v
(
v2
2+ w
)]
dV (2.60)
Rechte Seite von (2.60) ⇒ Oberflachenintegral
Ergo:
∂
∂t
∫(
ρv2
2+ ρǫ
)
dV = −∮
ρ~v
(
v2
2+ w
)
d~f (2.61)
Energieanderung der Flussig-keit pro Zeiteinheit in einemgegebenem Volumen
Energiemenge, die pro Zeit-einheit aus dem betrachtetenVolumen herausfließt
Damit ist
~jE = ρ~v
(
v2
2+ w
)

32 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
der Vektor der Energiestromdichte.Sein Betrag gibt die Energiemenge an, die pro Zeiteinheit durch eine zurRichtung der Geschwindigkeit senkrechten Flacheneinheit aua einem Volu-menelement fließt.Die Flussigkeit fuhrt pro Masseneinheit bei der Bewegung die Energie w+ v2
2mir sich.
Warum betrachten wir die Enthalpie und nicht einfach die Energie ρǫ?
Wir setzten w = ǫ+ pρ .
Der gesamte Energiestrom durch die geschlossene Flache ist dann:
−∮
~jEd~f = −∮
ρ~v
(
v2
2+ ǫ
)
d~f −∮
ρ~vp
ρd~f
= −∮
ρ~v(v2
2︸︷︷︸
kinetische
Energie-
Dichte
+ ǫ︸︷︷︸
innere
Energie-
Dichte
)d~f −∮
p~vd~f (2.62)
−∮ρ~v(v
2
2 + ǫ)d~f :Energie, die mit der Masse der Flussigkeit (pro Zeiteinheit)unmittelbar durchdie Oberflache transportiert wird.
−∮p~vd~f :
Arbeit, die von Druckkraften an der Flussigkeit innerhalb der Flache proZeiteinheit geleistet wird.
2.7 Erhaltung der Zirkulation und die Helmholtz-
schen Wibelsatze
Das Integral
Γ =
∮
C
~v · d~s (2.63)
uber eine geschlossene Kurve C heißt Zirkulation.Verschwindet Γ uberall im Fluid, so ist die Stromung wirbelfrei, da:
~n · ~∇× ~v = limF→0
1
F
∮
C
~v · d~s (2.64)
~n: Normalenvektor in einem Punkt innerhalbder durch C berandeten Flache

2.7. ERHALTUNG DER ZIRKULATION UND DIE HELMHOLTZSCHEN WIBELSATZE33
Eine wirbelfreie Stromung ist eine Potentialstromung.
Eine Potentialstromung kann endliche Zirkulation aufweisen, da die Euler-Gleichung nur fur einfach zusammenhangende Punktmengen/Gebiete, alsoPunktmengen, bei denen jede Flache jeder geschlossenen Linie noch ganz inder Punktmenge liegt, gultig ist.
Wirbel in idealen Flussigkeiten
Γ ist mit der Verwirbelung der Flussigkeit verknupft:
Γ 6= 0 Γ = 0
Satz von Stokes:
Γ =
∮
~vd~s =
∫
~∇× ~vd~F
Doch Vorsicht:Stokes gilt nur in einfach zusammenhangenden Bereichen, d.h. eine von einerim Bereich liegenden Kurve umschlossene Flache liegt ihrerseits ganz indiesem Bereich. ⇒Wenn Γ = 0, dann auch ~∇× ~v = 0 uberall,doch wenn ~∇× ~v = 0 uberall im Gebiet, kann trotzdem Γ 6= 0 sein!Beispiel:
In wirbelfreien Stromungen ist Γ konstant auf Kurven, die durch Verformungineinander ubergehen (gleiche Typologie).

34 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
“Die” Zirkulation,unabhangig von der Kurve!
∮
C1
~vd~s−∮
C2
~vd~s+
∫
l
~vd~s−∫
l
~vd~s
wirbelfrei=
∫
C
~∇× ~vd~F = 0
C: Ganze Flache, einfach
zusammenhangend
⇒∮
C1
~vd~s =
∮
C2
~vd~s
Beispiel:
~v =
0v00
~∇× ~v =1
r
∂(rv0)
∂r=v0r
Wirbelfeld
~v =
0v0r0
~∇× ~v =1
r
∂
∂rv0 = 0 kein Wirbelfeld?
Vorsicht:Im Ursprung divergiert der zweite Ausdruck, die gesamte Wirbelstarke istim Zentrum vereinigt!
⇒ einfach zusammenhangend
~∇×~v 6= 0 wenn der “Mittelpunkt” eingeschlossen wird, das ist im folgendenzweifach zusammenhangendem Beispiel nicht der Fall:
⇒ zweifach zusammenhangend

2.7. ERHALTUNG DER ZIRKULATION UND DIE HELMHOLTZSCHEN WIBELSATZE35
Γ =
∮
C
~vd~s = 2πrv0r
= 2πv0
Endliche Zirkulation aber gleich fur alle r (da ~∇× ~v = 0)!
Die vorangehenden Uberlegungen fuhren zur Definition der Wirbelstarke:
~ω =1
2~∇× ~v
Beispiel: Starre Rotation
~v =
0Ωr0
Ω = const.
~ω =1
2~∇× ~v =
1
2
1
r
∂
∂r(rΩr) =
1
2
1
rΩ2r = Ω
(daher auch das 12
in der Definition)
~ω ist die “Quelle” der Wirbelstromung
Einnerung:Vektorfelder konnen Wirbel- und Potentialanteile haben (Helmholtz’schesTheorem):
Beispiel Elektrostatik: ~E = −~∇Φ ⇒ ~∇× ~E = 0
Beispiel Magnetfeld: ~B = ~∇× ~A ⇒ ~∇ · ~B = 0
Beispiel Elektrodynamik: ~E = −~∇Φ − ∂ ~A
∂t⇒ beide Anteile!
Untersuchung der zeitlichen Entwicklung von Γ in isentropen Fluiden mitHilfe des Konzepts der flussigen Linie zeigt, dass Teilchen, die die geschlos-sene Linie C zum Zeitpunkt t = t0 konstituieren, dies auch zum Zeitpunktt > t0 tun, sie durfen sich aber bewegen und somit bewegt/verformt sichauch die Kurve.
Was passiert mit der Zirkulation langs dieser Kurve?
Wir berechnen dazu
dΓ
dt=
d
dt
∮
~v · ~s (2.65)
Hier ddt
, weil wir die Anderung langs einer Flussigkeitskurve suchenund nicht langs einer Kurve, die im Raum festliegt.

36 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Bei der zeitlichen Differentiation dieses Integrals ist zu beachten, dasssich nicht nur ~v, sondern auch die Kurve selbst (d.h. deren Gestalt) andert,ergo:
d
dt
∮
C
~v · d~s =
∮d~v
dt· d~s+
∮
~v · dd~sdt
(2.66)
Die Geschwindigkeit ~v ist nichts anderes als die Zeitableitung des Ortsvek-tors:
~v · dd~sdt
= ~v · dd~sdt
= ~v · d~v = dv2
2(2.67)
Das Integral uber ein vollstandiges Differential langs einer geschlossenenKurve ist jedoch gleich Null. Deshalb verschwindet das zweite der aufge-schriebenen Integrale. Es bleibt mit dem Satz von Stokes:
d
dt
∮
~v · d~s =
∮d~v
dt· d~s =
∫ (
~∇× d~v
dt
)
· d~f (2.68)
Wir setzten fur die Beschleunigung die Euler-Gleichung fur isentrope Stromun-gen ein (2.23):
d~v
dt= −~∇w
Da ~∇× (~∇w) = 0 erhalten wir:
∫ (
~∇× d~v
dt
)
· d~f = 0
Zuruck zu (2.63) ergibt sich endgultig:
dΓ
dt=
d
dt
∮
~v · d~s = 0
bzw. Γ =
∮
~v · d~s = const (2.69)
Satz von Thomson
In einer idealen Flussigkeit andert sich die Zirkulation langs einer geschlos-senen Kurve zeitlich nicht!Das gilt auch fur inkomressible homogene Fluide (~∇ρ = 0).Fur isentrope und inkompressible homogene Stromungen gilt also:
dΓ
dt= 0

2.7. ERHALTUNG DER ZIRKULATION UND DIE HELMHOLTZSCHEN WIBELSATZE37
Die Helmholtzschen Wirbelsatze
Wir betrachten Wirbel in inkompressiblen idealen Flussigkeiten.Wirbelvektor:
~ω =1
2~∇× ~v (2.70)
|~ω|: Winkelgeschwindigkeit der lokalen Rotation eines FEesDas Wirbelfeld wird durch die Wirbellinien veranschaulicht, deren Tangen-ten uberall die Richtung des Wirbelvektors ~ω haben.
~∇ · ~ω =1
2~∇ · ~∇× ~v = 0 (2.71)
Wirbellinien im Inneren von Flussigkeiten konnen weder anfangen noch en-den. Es gibt also weder Quellen noch Senken. Sie bilden entweder geschlos-sene Kurven oder fuhren zu den Begrenzungen der Flussigkeit.
Wirbelrohre:Schlauchartige Flache, die von Wirbellinien gebildet wird.
Eine Wirbelrohre mit kleinem Querschnitt nennt man Wirbelfaden.Wir betrachten einen Teil einer Wirbelrohre, d.h. ein Volumen, das durchzwei Querschnitte F1 und F2 sowie die Mantelflache begrenzt wird.
Einschub zur Terminologie
~ω = ~∇× ~v heißt oftmals Wirbeldichtevektor.Der Faktor 1
2in (2.71) ist folgenermaßen zu motivieren:
Man betrachtet die Rotation eines FEes in der x-y-Ebene um die z-Achse mit der Winkel-geschwindigkeit ~Ω. Dann hat ~v = ~Ω × ~r in Zylinderkoordinaten die Komponenten vr = 0,vθ = Ωr, vz = 0, also
~∇× ~v = (∂rvθ +vθ
r)~ez = 2Ω~ez

38 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Fur die Integration uber eine ganze Oberflache ergibt sich mit dem Satzvon Gauss:
∫
~ω · d~f =
∫
~∇ · ~ω︸ ︷︷ ︸
=0
dV = 0 (2.72)
~ω liegt per Definition der Wirbelrohre in der Mantelflache. d~f (auf der Man-telflache) ist stets senkrecht zu ~ω.⇒ Nur die Querschnittsflachen tragen zum Oberflachenintegral bei:
∫
F1
~ω · d~f +
∫
F2
~ω · d~f = 0 (2.73)
d~f ist aber stets nach Aussen gerichtet!
⇒ Der Wirbelfluss ist in allen Querschnitts-flachen der Rohre derselbe
Fur einen Wirbelfaden gilt:
|~ω1|f1 = |~ω2|f2 (2.74)
Der Querschnitt ist so klein, dass |~ω| konstant an der Querschnittsflache ist.
In einem Wirbelfaden ist dieDrehgeschwindigkeit
an verschiedenen Stellen
∼ 1
Querschnitt
Z.B. Tornados, Hurrikans...
Anders gesagt:Mit (2.71):
Wirbelstarke: 2|~ω|f = f |~∇× ~v|
Also ist sie langs des Wirbelfadens konstant.
Fur die Zirkulation um eine Wirbelrohre folgt nach dem Satz von Stokes:
∫
offene Flache/Querschnitt
~ω · d~f =1
2
∫
(~∇× ~v) · d~f =1
2
∮
~v · d~s =Γ
2(2.75)
1. Helmholtzsche Gleichung

2.7. ERHALTUNG DER ZIRKULATION UND DIE HELMHOLTZSCHEN WIBELSATZE39
Die Zirkulation um eine Wirbelrohre ist also an allen Stellen gleich großandererseits ist der Wirbelfluss einer Wirbelrohre zeitlich konstant ((2.69),Satz von Thomson, dtΓ = 0).
Zeitliche Anderung von Wirbeln / Helmholtzsche Wirbelgleichung
Mit der Euler-Gleichung in der Form (2.23) sowie den außeren Kraften inder Form f = −~∇u (konservative Krafte) ergibt sich fur inkompressibleFlussigkeiten (ρ = const):
∂~v
∂t+ ~∇v2
2− ~v × (~∇× ~v) = −~∇(u+
p
ρ) (2.76)
Bilden wir davon die Rotation, verwenden ~ω = 12~∇ × ~v (2.71) und dass
~∇× ~∇funktion = 0 ist, so erhalten wir:
∂~ω
∂t− ~∇× (~v × ~ω) = 0 (2.77)
Im Fall von Inkompressibilitat gilt:
~∇ · ~v = 0 und auch ~∇ · ~ω = 0
⇒ ~∇× (~v × ~ω) = (~∇ · ~ω)~v − (~∇ · ~v)~ω + (~ω · ~∇)~v − (~v · ~∇)~ω
= (~ω · ~∇)~v − (~v · ~∇)~ω (2.78)
(2.78) eingesetzt in (2.77):
∂~ω
∂t+ (~v · ~∇)~ω = (~ω · ~∇)~v (2.79)
2. Helmholtzsche Gleichung
Oder:
d~ω
dt= (~ω · ~∇)~v (2.80)
Falls ein FE zu irgendeiner Zeit ~ω = 0 hat, wird es in einer inkompressiblenidealen Flussigkeit auch kein ~ω erhalten.
Wirbel konnen in einer inkompressiblen idealen Flussigkeitweder entstehen noch vergehen.
Die Wirbelstarke einer Wirbelrohre hat auf ihrer gesamten Lange und zuallen Zeiten den gleichen Wert.In Wirklichkeit jedoch entstehen und vergehen Wirbel doch.

40 KAPITEL 2. BILANZGLEICHUNGEN IDEALER FLUSSIGKEITEN
Sind Reibungskrafte eine mogliche Ursache?Leider nein, denn die obigen Betrachtungen gelten auch fur Flussigkeitenmit Reibung (Euler → Navier-Stokes).Wirbel konnen nur uber die Randflachen in die Flussigkeit einwandern. Anden Wanden entstehen und vergehen bei zahen Flussigkeiten Haftkrafte, dieWirbel verursachen.Mit Viskositat lautet die Bewegungsgleichung fur den Wirbelvektor (2.79):
∂t~ω + (~v · ~∇)~ω = (~ω · ~∇)~v + ν∆~ω (2.81)
ν: Kinematische Viskositat, siehe spater.

Kapitel 3
Die Potentialstromungen
Eine Stromung, fur die im ganzen Raum gilt
~∇× ~v = 0
heißt Potentialstromung bzw. wirbelfreie Stromung.Wegen
dtΓ = dt
∮
C
~v · d~s = 0
(Satz von Thomson) folgt, dass eine Potentailstromung fur alle Zeiten einesolche bleibt.Aber:Langs einer Stromlinie, die entlang der Oberflache eines umstromten Korpersverlauft, gibt es keine geschlossene Kurve C, die die Stromlinie vollstandigumschließt. → Hier ist der Thomsonsche Satz / Helmholtzsche Wirbelsatznicht anwendbar.In dunnen Grenzschichten um umstromte Korper ist die Stromung i. A. kei-ne Potentialstromung, → Wirbelbildung, Instabilitaten von viskosen Grenz-schichten.Von Interesse ist jedoch, dass bei Korpern mit Stromlinienform die Abwei-chung von einer Potentialstromung nur sehr nahe der Oberflache und ineiner engumgrenzten Region hinter dem Korper auftritt.
Wir betrachten stetige Potentialstromungen in idealen Flussigkeiten mitisentropen Bewegungen.
Ist die Stromung wirbelfrei, so kann das Geschwindigkeitsfeld aus dem Ge-schwindigkeitspotential Φ abgeleitet werden:
~v = ~∇Φ (3.1)
41

42 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Die Euler-Gleichung (2.25) verliert fur eine solche Stromung den Beitrag~v × (~∇× ~v), also:
∂t~v = −~∇(
w +v2
2
)
Lassen sich die außeren Krafte ~f aus einem Potential ableiten, also ~f = −~∇u,so lautet die Euler-Gleichung:
~∇∂Φ
∂t+
1
2~∇(~∇Φ)2 = −~∇(u+ w) (3.2)
Ein allgemeines Integral dieser Gleichung ist:
∂Φ
∂t+~v2
2+ u+ w = f(t) (3.3)
f(t): Beliebige Zeitfunktion, kann o.B.d.A. gleich Null gesetzt werden, denndas Geschwindigkeitspotential ist ebenfalls nur bis auf eine Zeitfunktion be-stimmt.Setzen wir
Φ′ = Φ +
∫
f(t)dt (3.4)
so andert sich ~v nicht:
~v = ~∇Φ = ~∇Φ′ (3.5)
Wir erhalten:
∂Φ′
∂t+~v2
2+ u+ w = 0 (3.6)
Bernoulli-Gleichung fur nichtstationare Stromungen
Fur eine stationare Stromung kann Φ auch zeitunabhangig gewahlt werden,d.h. ∂tΦ = 0.(3.6) geht dann uber in die Bernoulli-Gleichung (siehe (2.48), (2.49)):
~v2
2+ u+ w = const (3.7)
Achtung!
Die Aussage der Bernoulli-Gleichung ist unterschiedlich fur eine Potenti-alstromung und fur eine Stromung, die nicht wirbelfrei ist.I.A. lautet die Bernoulli-Gleichung langs einer Stromlinie:
~v2
2+ u+ w = const

43
Sie variiert jedoch i.A. von Stromlinie zu Stromlinie.Fur eine Potentialstromung hat aber
~v2
2+ u+ w
im ganzen Flussigkeitsbereich den gleichen Wert. Dieser Umstand gibt derBernoulli-Gleichung bei Potentialstromungen eine besondere Bedeutung.
Wir betrachten nun inkopressible Flussigkeiten.Wegen der Konstanz der Dichte in einer inkompressiblen Flussigkeit verein-facht sich die Konti-Gleichung zu ~∇ · ~v = 0.Dies wird fur eine Potentialstromung zu:
∆Φ = 0 (3.8)
Die elliptische DGL (3.8) muss noch durch Randbedingungen erganzt wer-den, die Angaben uber die Geschwindigkeit an den Flachen, mit denen dieFlussigkeit in Beruhrung kommt, enthalten.Da die Flussigkeit nicht durch die Wande hindurchtritt, muss die Normal-komponente vn des Geschwindigkeitfeldes mit der Geschwindigkeit, mit dersich die Flache in Richtung ihrer Normalen bewegt, ubereinstimmen.
vn = ~n · ~v = ~n · ~∇Φ =∂Φ
∂n(3.9)
Normalableitung des Geschwindigkeitspotentials
Oder mit einer Funktion von Raum und Zeit s(~r, t):
∂Φ
∂n
∣∣∣∣σ
= sσ(~r, t) (3.10)
Der Index σ soll andeuten, dass es sich um eine Funktion handelt, die langsder Flussigkeitsoberflache zu berucksichtigen ist.
Unter welchen Bedingungen kann eine Stromung als inkompressibel ange-sehen werden?
Bei einer adiabatischen Druckanderung andert sich die Dichte der Flussig-keit:
∆ρ =
(∂ρ
∂p
)
s
∆p (3.11)
Adiabatische Zustandsgleichung: dt(p/ργ) = 0
Nach der Bernoulli-Gleichung gilt fur die Drukschwankungen in einer stati-onaren Stromung:
∆p ∼ ρv2

44 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Die Thermodynamik zeigt:
(∂ρ
∂p
)
s
= c−2s
cs: Schallgeschwindigkeit
Ergo:
∆ρ ∼ ρv2
c2s(3.12)
Inkompressibilitat ⇔ ∆ρ≪ ρ
Also fur stationare Stromungen:
v ≪ cs
Fur nicht-stationare Stromungen:τ , l: Zeiten und Langen der charakteristischen AnderungenNach Euler ist:
∂~v
∂t∼
~∇ = p
ρ⇒ v
τ∼ ∆p
lρoder ∆p ∼ ρvl
τ
mit ∆ρ ∼ 1
c2s∆p folgt ∆ρ ∼ lρv
τc2s(3.13)
Nun zur Kontigleichung:
mitρ
τ= ρ
v
lund
∆ρ
ρ≪ 1 folgt
∆ρ
τ≪ ρ
v
l
und damit mit (3.13):
τ ≫ l
cs︸︷︷︸
Schallzeit
Fur Inkompressibilitat gilt also:
τ ≫ Schallzeit v ≪ Schallgeschwindigkeit
Aber: Bei einer Schallwelle (Beispiel fur kompressible Hydrodynamik) ist∆ρ klein, aber τ
l = cs.

45
Hangt das Geschwindigkeitsfeld eines bewegten Fluids nur von zwei Koor-dinaten (x,y) ab und erfolgt die Bewegung parallel zur x-y-Ebene, so nenntman die Stromung zweidimensional oder eben.Zur Behandlung von 2D-Stromungsproblemen inkompressibler Fluide ist dieEinfuhrung der Stromfunktion nutzlich:
Anhand der Kontigleichung
~∇ · ~v =∂vx∂x
+∂vy∂y
= 0
erkennt man, dass die Geschwindigkeitskomponenten auch als Ableitungengeschrieben werden konnen:
∂vx∂x
= −∂vy∂y
vx =∂ψ
∂yvy = −∂ψ
∂x(3.14)
Dabei ist ψ(x, y) die Stromfunktion. Sie erfullt automatisch die Kontiglei-chung.
Bilanzgleichung fur die StromfunktionEinsetzen von (3.14) in (2.26) (Rotation der Eulergleichung; inkompressibel)ergibt:
∂
∂t∆ψ − ∂ψ
∂x
∂
∂y∆ψ +
∂ψ
∂y
∂
∂x∆ψ = 0 (3.15)
Kennt man die Stromfunktion, so kennt man auch die Stromlinien fur einestationare Stromung!
DGL fur Stromlinien (ebene Stromung):
dx
vx=dy
vy(3.16)
Oder:
vydx− vxdy = 0 (3.17)
⇒ Tangente an eine Stromlinie stimmt in jedem Punkt mit der Richtungder Geschwindigkeit uberein!Setzt man vx und vy aus (3.14) ein, so erhalt man als totales Differential furstationare Stromung:
dψ = ∂xψdx+ ∂vψdy = 0 (3.18)

46 KAPITEL 3. DIE POTENTIALSTROMUNGEN
⇒ ψ = const.Die Stromlinien bilden eine Kurvenschar, die man erhalt, wenn man dieStromfunktion ψ(x, y) = const setzt.
An der Oberflache eines umstromten Korpers muss vj = 0 gelten (Geschwin-digkeit darf nicht in den Korper eindringen).Die Korperberandung fallt mit der Stromlinie zusammen, die Stromfunktionmuss dort konstant sein.Ein Problem sind dabei die Randschichten (Viskositat).Leistungsfahige Methoden zur Berechnung von Potentialstromungen inkom-pressibler Fluide um Hindernisse liefert die Funktionentheorie.
Die Grundlage fur diese Anwendung besteht im Folgenden:
Das Potential und die Stromfunktion hangen mit den Geschwindigkeitskom-ponenten folgendermaßen zusammen (Die Existenz der Stromfunktion hangtnur mit der ebenen Stromung zusammen, es wird nicht gefordert, dass einePotentialstromung vorliegt):
vx =∂Φ
∂x=∂ψ
∂yvy =
∂Φ
∂y= −∂ψ
∂x(3.19)
Vom mathematischen Standpunkt entspricht (3.19) den Cauchy-RiemannschenDGLn. Diese Gleichungen sind die Bedingung dafur, dass der komplexe Aus-druck
w = Φ + iψ = f(z) (3.20)
eine differentierbare Funktion des Argumentes z = x+ iy ist.Die Funktion w(z) muss dann in jedem Punkt eine bestimmte Ableitunghaben:
dzw =∂w
∂x=∂f
∂z
∂z
∂x= f ′(z) =
∂Φ
∂x+ i
∂ψ
∂x= vx − ivy (3.21)
idzw =∂w
∂y=∂f
∂z
∂z
∂y= if ′(z) =
∂Φ
∂y+ i
∂ψ
∂y= vy + ivx
Durch Elimination von f ′(z) = dfdz gelangen wir zur Gleichung:
∂Φ
∂x− ∂ψ
∂y︸ ︷︷ ︸
Realteil
+i
(∂ψ
∂x+∂Φ
∂y
)
︸ ︷︷ ︸
Imaginarteil
= 0 (3.22)
Das Verschwinden einer komplexen Zahl bedeutet:
Realteil = 0 ⇒ ∂Φ
∂x=
∂ψ
∂y(3.23)
Imagnarteil = 0 ⇒ ∂Φ
∂y= −∂ψ
∂x(3.24)

47
Das sind die Cauchy-Riemannschen DGLn. Aus ihnen folgt sofort:
∂2Φ
∂x2+∂2Φ
∂y2= 0
∂2ψ
∂x2+∂2ψ
∂y2= 0 (3.25)
Laplace-Gleichungen
Explizit:Zwei unterschiedliche Bedingungen:
~∇× ~v = 0
? SS
SSw
Φ
∆Φ = 0
~∇ · ~v = 0
?
/
ψ
∆ψ = 0
Außerdem kann man, indem man (3.23) mit ∂xψ aus (3.24) multipliziert,zeigen:
∂Φ
∂x
∂ψ
∂x+∂Φ
∂y
∂ψ
∂y= (~∇Φ) · (~∇ψ) = 0 (3.26)
(3.26) druckt aus, dass die 2-dimensionalen Kurvenscharen
Φ(x, y) = const ψ(x, y) = const (3.27)
orthogonal zueinander sind!
Die Funktion w = Φ + iψ heißt komplexes Geschwindigkeitspotential.dwdz heißt komplexe Geschwindigkeit.In der Gaussschen Zahlenebene gilt:
dw
dz= veiϑ ϑ=6 (~v,~ex)
|dzw| =√
(∂xΦ)2 − (∂yψ)2 =√
v2x + v2
y
Kurzer Ausflug in die Funktionentheorie und zur Bedeutungdes Residuensatzes
Cauchyscher Integralsatz:
∮
C
f(z)dz = 0 (3.28)
C: beliebiger geschlossener Wegf(z) differenzierbar

48 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Dabei ist das komplexe Kurvenintegral∮f(z)dz allgemein aus zwei re-
ellen Kurvenintegralen aufgebaut:
f(z) = u(x, y) + iv(x, y)
∮
f(z)dz =
∮
(u(x, y) + iv(x, y))(dx+ idy)
=
∮
(u(x, y)dx− v(x, y)dy) + i
∮
(v(x, y)dx+ u(x, y)dy) (3.29)
Cauchysche Integrationsformel (bedingt durch den Cauchyschen Integral-satz):
f(z0) =1
2πi
∮
C
f(z)
z − z0dz (3.30)
f (n)(z0) =n!
2πi
∮
C
f(z)
(z − z0)n+1dz (3.31)
Ist f(z) analytisch (differenzierbar) in einem Gebiet zwischen zwei konzen-trischen Kreisen um z0, so ist f(z) in einer Laurent-Reihe entwickelbar:
f(z) =∞∑
k=−∞ak(z − z0)
k
Und zwar mit den Koeffizienten:
ak =1
2πi
∮f(z)
(z − z0)k+1(3.32)
Falls f(z) eine Singularitat in z0 hat, dann gilt:
a−1 =1
2πi
∮
C um z0
f(z)dz = Res[f(z), z0]
=1
(m− 1)!limz→z0
dm−1
dzm−1[(z − z0)
mf(z)] (3.33)
Letzteres gilt, falls f(z) in z0 einen m-fachen Pol besitzt (an = 0, n < −m).Es handelt sich hierbei um eine nutzliche Rechenvorschrift fur die Berech-nung des Integrals
∮f(z).
Residuensatzf(z) sei analytisch außer in singularen Punkten zr (r = 1, 2, . . .), dann gilt:
∮
C
f(z)dz = 2πi∑
r
Res[f(z), zr] (3.34)

49
Damit lassen sich komplizierte komplexe Integrale einfach durch Berechnungder Residuen an ihren singularen Stellen berechnen.
Beispiele:i) f(z) = c
z−z0 , Pol 1. Ordnung in z = z0
∮c
z − z0= 2πiRes
[c
z − z0, z0
]3.33= 2πi(z − z0)
c
z − z0= 2πic
ii) f(z) = eiz
z2+z20, Pol 1. Ordnung in z = ±iz0
1
2πi
∮eiz
z2 + z20
= Res
[
eiz
z2 + z20
, iz0
]
+Res
[
eiz
z2 + z20
,−iz0]
= limz→iz0
(
(z − iz0)eiz
z2 + z20
)
+ limz→−iz0
(
(z + iz0)eiz
z2 + z20
)
= limz→iz0
eiz
z + iz0+ limz→−iz0
eiz
z − iz0=e−z0
2iz0− ez0
2iz0
Ebene Stromung um ein Hindernis
Sie ist invariant in einer Richtung (wahle kartesische z-Komponente).Man legt den Koordinatenursprung in den Schwerpunkt des Hindernisses,d.h. die Stromungsgeschwindigkeit ist im Unendlichen konstant.
limx,y→∞
v = const
Die Terme zm, m > 0 kommen nicht vor.Wenn dw
dz um z0 = 0 analytisch ist, so gilt:
dw
dz=
∞∑
n=0
anzn
(3.35)
Integration von (3.35) liefert:
w(z) = a0z + a1 ln z −∞∑
n=2
an(n− 1)zn−1
(3.36)
lim|z|→∞
w(z) = lim|z|→∞
a0z (3.37)
dw
dz= vx − ivy ⇒ a0 = vx∞ − ivy∞ (3.38)

50 KAPITEL 3. DIE POTENTIALSTROMUNGEN
a0 ist die komplexe Geschwindigkeit im Unendlichen.Auch der Koeffizient a1 hat eine physikalische Bedeutung.
Integration von dzw uber den Rand einer zur x-y-Ebene parallelen Schnitt-flache des umstromten Korpers:
∮
dzwdz =
∮
(vx − ivy)(dx+ idy)
=
∮
(vxdx+ vydy)︸ ︷︷ ︸
=∮~v·d~s=Γ
+i
∮
(vxdy − vydx)︸ ︷︷ ︸
=dψ=0 (3.18)
(3.39)
Der zweite Term ist auch ansonsten gleich Null, denn die Kontur des Hin-dernisses stellt eine Stromlinie dar.
Γ =
∮
dzwdzResiduensatz
= 2πia1 (3.40)
a1 entspricht hierbei a−1 in Gleichung (3.33).
Nun berechnen wir die Kraft, die von der stromenden Flussigkeit (stati-onare, inkompressible Potentialstromung) auf das Hindernis ausgeubt wird.
Keine außere Kraft ⇒ Druckkraft
~K = −∮
pd~f (3.41)
Mit Bernoulli gilt in großer Entfernung (p∞, v∞):
ǫ∞ = p∞ +ρ
2v2∞ = p+
ρ
2v2 (3.42)
⇒ p = ǫ∞ − ρ
2v2 (3.43)
Also:
~K = −∮
(ǫ∞ − ρ
2v2)(Ldy~ex − Ldx~ey) (3.44)
L: Lange in z-Richtung
Erinnerung

51
Eine Flache sei gegeben durch die Koordinaten u und v.~e1 und ~e2 spannen die Tangentialebene auf.Der Normalenvektor wird berechnet durch:
~e1 × ~e2|~e1 × ~e2|
|d~f |: Flacheninhalt des von (u2, v2), (u2 +∆u, v2), (u2, v2 +∆v)aufgespannten Parallelograms
Einschub zu (3.44)∮
d~f =
∮
~ndf
~n = cos θ~ex + sin θ~ey
∮
d~f =
∮
(cos θ~ex + sin θ~ey)rdθ
x = r cos θ y = r sin θ
dθx = −r sin θ dθy = r cos θ
⇒ dx = −r sin θdθ dy = r cos θdθ∮
d~f =
∮
(dy~ex − dx~ey)
Kraftkomponenten:
1
LKx = −ǫ∞
∮
dy +ρ
2
∮
(v2x + v2
y)dy
1
LKy = ǫ∞
∮
dx− ρ
2
∮
(v2x + v2
y)dx (3.45)
Die Kontur des Hindernisses ist eine geschlossene Kurve.
⇒∮
dx =
∮
dy = 0
(3.45) ausgedruckt als komplexe Kraft Z = 1L(Ky + iKx):
Z = −ρ2
∮
(v2x + v2
y)(dx− idy) (3.46)

52 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Zu diesem Integral addieren wir Null in der Form:
0 = 2i (vxdy − vydx)︸ ︷︷ ︸
=0 langs der Kontur
(vx − ivy)
Also:
Z = −ρ2
∮
(v2x − 2ivxvy − v2
y)(dx+ idy) = −ρ2
∮
(dzw)2dz (3.47)
dzw = vx − ivy
Mit der Reihenentwicklung (3.35) ergibt sich aus (3.47):
Z = −ρ2
∮
a20 +
2a1a0
z+
2a0a2 + a21
z2+ . . .
dz (3.48)
dzw analytisch in Umgebung um z = 0
Nun verwenden wir wieder den Residuensatz:Das Integral uber eine geschlossene Kurve um den Ursprung ist gleich 2πimal Koeffizient bei 1
z der Reihenentwicklung (= Residuum), also:
Z = −ρ22πi2a1a0
3.40= −ρa0Γ
3.38= −ρΓ(vx∞ − ivy∞) (3.49)
Kx = ρΓvy∞L Ky = −ρΓvx∞L (3.50)
Kutta-Joukowski-Auftriebsformel
→ Ubergang zum Komplexen:Kein explizites Losen des Kraftintegrals, keine konkrete Form der Stromungvorgegeben → allgemeine Aussage in Γ und den asymptotischen Geschwin-digkeiten.
(3.50) druckt das d’Alembertsche Paradoxon aus.
Betrachtet man eine 1-dimensionale Flussstromung in ~ex, dann ist vy∞ = 0,also Kx = 0.Demnach sollte z.B. auf einen Bruckenpfeiler nur eine Kraft senkrecht derFlussrichtung auftreten. Das widerspricht jedoch der Erfahrung!Losung:An der Oberflache des Hindernisses ist Reibung von Bedeutung. Daraus re-sultiert eine Wirbelbildung hinter dem Hindernis und somit eine Kraft (einDruckgradient) parallel der Flussrichtung. Die Idealisierung fuhrt hier alsozu einem unphysikalischen Ergebnis.

53
Ebenso fuhrt die Viskositat bei einem rotierenden Zylinder oder einer rotie-renden Kugel dazu, dass das Fluid an der Oberflache mitgefuhrt wird. Da-durch entsteht eine endliche Zirkulation und nach (3.50) eine Kraft senkrechtzur Stromrichtung. → Magnuseffekt, z.B. bei angeschnittenen Tischtennis-oder Fußballen.
Ebene Stromung um einen Kreiszylinder
Es besteht Invarianz entlang der Zylinderachse, also parallel zu ~ez.
~v∞ = v∞~ex
Γ = 0 Γ = 3πv0R
Γ = 5πv0R Γ = 8πv0R
Flow Around Circle.mws zur Stromung um einen Kreiszylinder. Es sind beliebige Werte
der Zirkulation moglich; fur Γ < 4πv0R liegen die Staupunkte auf dem Zylinder, fur
Γ > 4πv0R wandern sie auf die imaginare Achse.

54 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Der Kreis r = R stellt eine Stromlinie dar, hierbei verschwindet dieNormalkomponente von ~v relativ zur Oberflache, es gibt also keinen Stromdurch die Oberflache.Fur r ≫ R erhalten wir eine ungestorte Translationsstromung.
(3.36) : w(z) = a0z + a1 ln z −∞∑
n=2
cn + ibn(n− 1)zn−1
(3.38) : a0 = v∞ (3.40) : a1 =Γ
2πi
z = reiϕ ln z = ln(reiϕ) = ln r + iϕ
Randbedingung:
f(ϕ)!6= ψ|r=R !
= const = Im(w(z))|r=R =
v∞R sinϕ− Γ
2πlnR+
∞∑
n=2
cn sin((n− 1)ϕ)
(n− 1)Rn−1−
∞∑
n=2
bn cos((n− 1)ϕ)
(n− 1)Rn−1
︸ ︷︷ ︸
nur Imaginarteil der Summe von oben
(3.51)
f(ϕ) 6= ψ|r=R ⇒ bn = 0 n ≥ 2
cn = 0 n ≥ 3
c2 = −v∞R2
⇒ w(z) =Γ
2πiln z + v∞
(
z +R2
z
)
(3.52)
ln(ab) = ln a+ ln b Re(ln(reiϕ)) = Re(ln r + iϕ) = ln r Im(ln(reiϕ)) = ϕ
Daraus folgt alles andere:
Stromfunktion:
ψ = Im(w(z)) = − Γ
2πln r + v∞r sinϕ
(
1 − R2
r2
)
= − Γ
4πln(x2 + y2) + v∞y
(
1 − R2
x2 + y2
)
(3.53)
ln√x =
1
2lnx x = r cosϕ y = r sinϕ
Geschwindigkeitspotential:
Φ = Re(w(z)) =Γ
2πϕ+ v∞r cosϕ
(
1 +R2
r2
)
=Γ
2πarctan
y
x+ v∞x
(
1 +R2
x2 + y2
)
(3.54)

55
[(a1, b1)
(a2, b2)=
(a1a2 + b1b2a22 + b22
,a2b1 − a1b2a22 + b22
)
(a1, b1)(a2, b2) = (a1a2 − b1b2, a1b2 + a2b1)
]
Komplexe Geschwindigkeit einer ebenen Potentialstromung um einen Kreis-zylinder:
dzw = vx + ivy =Γ
2πiz+ v∞
(
1 − R2
z2
)
(3.55)
(vergleiche z-Ableitung von (3.52))
Die Nullstellen von dzw geben die Lage der Staupunkte an, d.h. vx = 0 undvy = 0, also (3.55)= 0:
z1,2 = − Γ
4πiv∞±√
R2 − Γ2
16π2v2∞(3.56)
|a| =√
α2 + β2
Fur reelle Wurzeln gilt |z1,2| = R, die Staupunkte liegen also auf der Zylin-deroberflache.Der Imaginarteil von z1 und z2 ist gleich.
z1,2 = Reiϕ1,2
Mit (3.56) folgt:
sinϕ1 = sinϕ2 =Γ
4πv∞Rcosϕ1 = − cosϕ2 =
√
1 −(
Γ
4πRv∞
)2
(3.57)
Falls Γ = 0 folgt y = r sinϕ = 0
Die Staupunkte liegen also auf der x-Achse, wir erhalten eine symmetrischeStromung um das Hindernis.
Das Verstandnis des Problems der Zylinderumstromung erlangt besonde-re Bedeutung durch die Anwendbarkeit konformer Abbildungen. Hierdurchkann die Berechnung der Umstromung komplizierterer Profile auf die Zylin-derumstromung zuruckgefuhrt werden.
Konforme AbbildungenSeien z = x+ iy und ζ = η + iξ komplexe Variablen. Die stetige Abbildungζ = f(z) bildet Gebiete der z- und ζ-Ebene aufeinander ab, beispielsweiseein Gitter Φ = const, ψ = const.Ist f(z) differentierbar, so ist die Abbildung konform, d.h. winkel- und maß-stabserhaltend.Die Mercator-Projektion ist beispielsweise eine konforme Abbildung von

56 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Erdoberflachensegmenten auf eine 2-dimensionale flache Oberflache. Durchentsprechende Wahl einer Abbildung ζ = f(z) kann ein kompliziertes Stromungs-profil auf ein einfaches/bekanntes zuruckgefuhrt, also abgebildet, werden.
Beispiel: Frage nach Eckstromung
φ(x, y) ψ(x, y) φ(η, ξ) ψ(η, ξ)
eckstroemung.mws: Visualisierung einer Eckstromung durch konforme Abbildung der
reellen Achse auf einen beliebigen Winkelausschnitt. Durch zα wird die positive reelle
Achse auf sich selbst abgebildet, die negative reele Achse ergibt sich aus einer Geraden
mit Winkel γ = 180/α zur positiven reellen Achse. Hier: α=1,3 und 5.
Konforme Abbildung:Gitter, das an den ψ = const-, φ = const-Linien gebildet wird, wird winke-lerhaltend abgebildet.Komplexes Geschwindigkeitspotential fur eine ebene Translationsstromung:
w = U0ζ = U0η + iU0ξ = φ(η, ξ) + iψ(η, ξ)
∂ηw = ∂ηφ+ i∂ηψ = U0 = vη (vgl. 3.21)
konforme Abbildung: ζ = zα (ϕ→ αϕ− π)
⇒ w(z) = w(ζ(z)) = U0zα = φ(x, y) + iψ(x, y)
dzw = dζwdzζ = αU0zα−1 → vx, vy

57
Das Problem reduziert sich also auf die Frage nach der richtigen konformenAbbildung.Ma verwendet iterative (numerische) Verfahren, um sukzessive (durch An-wendung mehrerer, moglichst einfacher konformer Abbildungen) komplizier-te Stromungsprofile zu konstruieren bzw. berechnen.Eine Vielzahl von ebenen Stromungen um beliebige Profile kann auf Proble-me der Umstromung eines Kreiszylinders zuruckgefuhrt werden
Es stellt sich jetzt naturlich die Frage nach der konformen Abbildung vonStromungen um beliebige Profile auf eine Stromung um einen Kreiszylinder.Sei w(ζ) das zur Stromung um einen Kreiszylinder gehorige komplexe Po-tential.ζ(z) vermittelt als konforme Abbildung das gesuchte Potential.
w(z) = w(ζ(z)) (3.58)
Der Mittelpunkt des Kreises ζ = Reiϕ kann mit
ζ = µ− µ0 oder µ = µ0 + ζ (3.59)
an jeden beliebigen Punkt µ0 gelegt werden (Kreis in µ-Ebene durch Abbil-dung ζ(µ))Ubergang zu beliebigen Profilen:
z =1
µ+ µ (3.60)
Der Kreis geht in mannigfaltige Kurven uber.Was macht (3.60) aus dem Einheitskreis?
µ = eiϕ µ0 = 0
⇒ z = e−iϕ + eiϕ = 2 cosϕ (3.61)
Strecke −2 ≤ z ≤ 2
Andere Kreise, R 6= 1, liefern Ellipsen:

58 KAPITEL 3. DIE POTENTIALSTROMUNGEN
Der Kreis
µ = iµ0 + eiϕ√
1 + µ20 (3.62)
hat seinen Mittelpunkt auf der imaginaren Achse bei µ = iµ0.
⇒ z = i
(
µ0 −1
µ0
)
+
(
µ0 +1
µ0
)
eiϕ
Z.B µ0 = 13(1 − i), R = 1
3
√17.
Siehe auch: konform.mws zur Visualiserung konformer Abbildungen.
Flow Around Any Object.mws zur Stromung um einen Zylinder beliebigen
Querschnitts. Der Querschnitt muss zunachst durch u(z) (Umkehrfunktion von
z = 1/(u+ u0) + u+ u0) auf einen Kreis abgebildet werden. Hier: Γ = −5.
Quintessenz
Die konforme Abbildung ζ(z) mit
z =1
µ0 + ζ+ µ0 + ζ (3.63)
uberfuhrt verschiedene Profile in der z-Ebene- auf Kreise in der µ-Ebene- auf Kreis mit Mittelpunkt im Ursprung in der ζ-Ebene.Also (3.58):
w(z) = w(ζ(z))

59
Das gesuchte w(z) ist nun einfach berechenbar.Kreiszylinder (3.52):
w(ζ) =Γ
2πiln ζ + v∞
(
ζ +R2
ζ
)
Hier wird nun (3.60) eingesetzt
w(z) = w(ζ(z))
und dwdz berechnet usw...
Hydro
-Statik
ungestorte Geschwindigkeit ~v = 0 = ~v gestorte Geschwindigkeit
⇒ stationare, statische Losungen
-Kinematik∂
∂t= 0 statioare Stromungen, aber
~v 6= 0 z.B. stationare ebene Potentialstromungen
-Dynamik∂t 6= 0
~v = 0 ~v′ 6= 0
WellenInstabilitaten
⇓Oberflachenwellen
Wellen in der Flussigkeit
~v 6= 0 ~v′ = 0
stationare Stromungen
~v 6= 0 ~v′ 6= 0
WellenInstabilitaten

60 KAPITEL 3. DIE POTENTIALSTROMUNGEN

Kapitel 4
Wellen
4.1 Schwerewellen
Hierbei handelt es sich um Wellenausbreitung auf der Oberflache einer Flussig-keit unter dem Einfluss der Schwerkraft.Wir nehmen kleine Geschwindigkeiten an, so dass in der Euler-Gleichungder Term (~v · ~∇)~v vernachlassigt werden kann.Inkompressibilitat bedeutet ρ = const.
∂t~v = −~∇(p
ρ+ gz
)
(4.1)
bedeutet, dass es sich um eine Potentialstromung handelt (~∇×(4.1)= 0).Der Druck auf der Oberflache sei konstant p = p0.
p = p0 = −ρgz − ∂Φ
∂tρ (4.2)
Oder mit einem verallgemeinerten Geschwindigkeitspotential (~v = ~∇Φ):
Φ = Φ +p0
ρt (4.3)
(Kein Einfluss auf ~v = ~∇Φ.)(
gz +∂Φ
∂t
)
Oberflache= 0 (4.4)
Sei ζ die vertikale Verschiebung der Flussigkeitsoberflache bei den Schwin-gungen (im Gleichgewicht: ζ = 0).
ζ(x, y, t)
Allgemein gilt:
Gζ +∂Φ
∂t
∣∣∣∣∣z=ζ
= 0 (4.5)
61

62 KAPITEL 4. WELLEN
Es ist aber:
vz =∂ζ
∂t=∂Φ
∂z
∣∣∣∣∣z=ζ
(4.6)
⇒ ∂ζ
∂t= −1
g
∂2Φ
∂t2
∣∣∣∣∣z=ζ
bzw.
(
∂Φ
∂z+
1
g
∂2Φ
∂t2
)
z=ζ
= 0 (4.7)
Randbedingung an der freien Flussigkeitsoberflache unter Vernachlassigungder Oberflachenspannung.Kleine Schwingungen: ζ ≪ 1 ((4.7) auch an z = 0 gultig)Das Problem wird vollstandig bestimmt durch
∆Φ = 0 inkompressible Potentialstromung
Erste Randbedingung:
(
∂Φ
∂z+
1
g
∂2Φ
∂t2
)
z=0
= 0 (4.8)
Wir nehmen an, dass im tiefen Wasser keine Abhangigkeit von den Rand-bedingungen am Boden besteht.Wir betrachten eine Schwerewelle die sich in x-Richtung ausbreitet und iny-Richtung homogen ist (∂y = 0). Wir suchen nach raumlich/zeitlich peri-odischen Losungen.
Φ = f(z) cos(kx− ωt) (4.9)
k = 2πλ
: Wellenzahl, ω: Wellenfrequenz
Laplace-Gleichung:
d2f
dz2− k2f = 0 (4.10)
TiefwasserlosungEs herrschen keine Randbedingungen fur Grund z = −h.Die Losungen mogen mit zunehmender Wassertiefe abnehmen:
f(z) = Aekz (4.11)
|kh| = 2πh
λ→ ∞ fur h≫ λ (Tiefwasser)

4.1. SCHWEREWELLEN 63
(f(z) ∼ e−kz impliziert eine unendliche Amplitude am Grund.)
⇒ Φ = Aekz cos(kx− ωt) (4.12)
Jetzt bleibt noch die Randbedingung aus (4.8) zu erfullen.
k − ω2
g= 0 (4.13)
ω(k): Dispersionsrelation
Fur die Geschwindigkeitskomponenten ergibt sich aus (4.12):
vx = −Akekz sin(kx− ωt)
vz = Akekz cos(kx− ωt) (4.14)
limz→−h
vz = 0
vPhase =ω
kPhasengeschwindigkeit der Welle
vG =dω
dk=
1
2
√g
kGruppengeschwindigkeit der Welle (4.15)
≡ Ausbreitungsgeschwindigkeit der Welle
Einschub: Phasen- und Gruppengeschwindigkeit
Bemerkung:Bei Wellen mit linearer Dispersionsrelation (Schall, elektromagnetische Wel-le) ist vPhase = vG = const. Hier ist dies nicht der Fall und man muss un-terscheiden.
Wellenpakete und deren Ausbreitung
Amplitude im k-Raum um k0 herum lokalisiert⇒ A(k − k0)

64 KAPITEL 4. WELLEN
a(x, t) =
∞∫
−∞dkA(k − k0)e
i(kx−ωt)
1.) Lineare Phasenbeziehung: ω = c · k
a(x, t) =
∞∫
−∞dkA(k − k0)e
ik(x−ct)
Substituiere: k − k0 = k′ dk → dk′
=
∞∫
−∞dk′A(k′)eik
′(x−ct)eik0(x−ct)
= eik0(x−ct)︸ ︷︷ ︸
Phasenfaktor
ei(k0x−ω0t)
∞∫
−∞dk′A(k′)eik
′(x−ct)
︸ ︷︷ ︸
Fouriertransformierte von A(k′)
A(x− ct) lauft mit c
2.) Allgemeine Phasenbeziehung ω = ω(k) i.A. nicht linearLokalisiert um k0 herum: Taylorentwicklung
ω(k) = ω0 +dω
dk
∣∣∣∣k0
(k − k0) + . . .
a(x, t) =
∞∫
−∞dkA(k − k0)e
i(kx−ω0t− dωdk |k0
(k−k0)t)
wieder k − k0 → k′ und dk → dk′
=
∞∫
−∞dk′A(k′)e
i(k′x+k0x−ω0t− dωdk |k0
k′t)
= ei(k0x−ω0t)︸ ︷︷ ︸
immernoch Phasenfaktorlauft mit ω0
k0= vPhase
∞∫
−∞dk′A(k′)e
ik′(x− dωdk |k0
t)
︸ ︷︷ ︸
Fouriertransformiert
A(x− dωdk
∣∣k0
t)
lauft mit dωdk
∣∣k0
= vG
SeichtwasserlosungWir betrachten eine endliche Tiefe z = −h.Nun ist in 4.11 f(z) ∼ e−kz nicht mehr unphysikalisch.
Φ = (Aekz +Be−kz) cos(kx− ωt) (4.16)

4.1. SCHWEREWELLEN 65
Auf dem Grund z = −h muss gelten (zweite Randbedingung):
∂Φ
∂z
∣∣∣∣∣z=−h
= 0 (4.17)
Ae−kh −Bekh = 0 (4.18)
Man fuhrt nun eine neue Konstante ein:
1
2C = Ae−kh = Bekh (4.19)
Aus (4.16) folgt dann:
Φ =C
2(ek(z+h) + e−k(z+h)) cos(kx− ωt)
= C cosh(k(z + h)) cos(kx− ωt) (4.20)
Nun benutzt man die Randbedingung (4.8):
(
∂Φ
∂z+
1
g
∂2Φ
∂t2
)
z=0
= 0
gk sinh(k(0 + h)) cos(kx− ωt) − ω2 cosh(k(0 + h)) cos(kx− ωt) = 0(4.21)
Dispersionsrelation fur Oberflachen-Schwerewellen im Seichtwasser:
ω2 = gk tanh(k(0 + h)) (4.22)
vG =dω
dk=
1
2
√
g
k tanh(kh)
[
tanh(kh) +kh
cosh2(kh)
]
(4.23)
Die Wellenlange ist groß gegenuber der Tiefe h:
|kh| ≪ 1 tanh(kh) ≈ kh
ω2
k2= gh ⇒ vPhase =
ω
k=√
gh (4.24)
Beispiel 1Wenn man einen Stein ins Wasser wirft, entstehen viele Wellen, nicht nureine. Das liegt an der nichtlinearen Dispersion.
Beispiel 2Wellen brechen erst am Strand, da erst dort h die Großenordnung von λ

66 KAPITEL 4. WELLEN
erreicht.
Beispiel 3Schiffe im Wasser generieren Wellen, die im Fall der Bugwelle mit der Ge-schwindigkeit des Schiffes laufen mussen. Fur v ≪ √
gL konnen sich vieleWellenlangen unter dem Schiff befinden. Wenn v steigt, muß auch λ steigen,damit die Welle mit dem Schiff mitlaufen kann, fur v ≈ √
gL paßt geradenoch eine Welle unter das Schiff ⇒ Maximale Geschwindigkeit fur ein Schiffdas nach diesem Prinzip fahrt (Seglerjargon: “Lange lauft”).Fur v ≫ √
gL (Erinnerung: Das bedeutet Froude ≫ 1) “gleitet das Schiff”,d.h. es schwebt auf seiner eigenen Bugwelle, ahnlich einem Uberschallflug-zeug (bei Motorbooten kann man auch sehen wie das Boot seine eigeneBugwelle “hochfahrt”)
Motorboot bei “Uberschall” (v ≫ √gL)

4.1. SCHWEREWELLEN 67
Motorboot mit v ≪ √gL
Quelle (und weitere Bilder): FLOW PAST MOUNTAINS (23. Marz 06)
Schwerewellen innerhalb inkompressibler Fluide
Im Schwerefeld ist die Dichte inhomogen. Wir betrachten Wellenstromungderen Wellenlange kleiner ist als die Inhomogenitatslange (→ ~∇ · ~v = 0erfullt), d.h. Dichteanderungen durch Druckanderungen werden vernachlassigt,aber infolge Entropieanderungen erlaubt.Anders gesagt: ∂ρ/∂t kann nicht aus der Kontinuitatsgleichung berechnetwerden, aber es gibt dennoch eine Dichtestromung!
∂ts1 + ~v1 · ~∇s0 = 0 (4.25)
ρ1 = ∂s0ρ0|ps1 (4.26)
∂t~v1 = −~∇p1
ρ0︸ ︷︷ ︸
≈~∇ p1ρ0
+~g
ρ0∂s0ρ0|ps1 (4.27)
Es gilt:
~v1 = v1ei(~k·~r−ωt)
Und ebenso fur s1, p1.Kontigleichung:
~∇ · ~v1 = 0

68 KAPITEL 4. WELLEN
Denn:∂tρ1 + ~v1 · ~∇ρ0 = ∂ts1 + ~v1 · ~∇s0 = 0
⇒ ~v1 · ~k = 0 Transversalwellen
Also:
iωs1 = ~v1 · ~∇s0 (4.28)
−iω~v1 =1
ρ0∂s0ρ0|ps1~g − i
~k
ρ0p1 | · ~k (4.29)
ik2p1 = ∂s0ρ0|ps1(~g · ~k) (4.30)
⇒ s1 = ik2p1
∂s0ρ0|p(~g · ~k)Aus (4.29) folgt:
~v1 = i∂s0ρ0|ps1~g
ωρ0+
~k
ωρ0p1
Und damit aus (4.28):
iωs1 =
(
i∂s0ρ0|ps1~g
ωρ0+
~k
ωρ0p1
)
· ~∇s0 (4.31)
s1 von oben eingesetzt:
−ωk2p1
∂s0ρ0|p(~g · ~k)=
(
− k2p1∂s0ρ0|p~gωρ0∂s0ρ0|p(~g · ~k)
+~kp1
ωρ0
)
· ~∇s0 (4.32)
−ω2k2 = −k2∂s0ρ0|p~g · ~∇s0
ρ0+ ~k · ~∇s0
∂s0ρ0|p(~g · ~k)ρ0
(4.33)
−ω2 =∂s0ρ0|pgdzs0
ρ0− ∂s0ρ0|pgdzs0 cos2 θ
ρ0(4.34)
Damit also:
ω2 = ω20 sin2 θ (4.35)
∂s0ρ = − 1
v20
∂s0v0 = − 1
v20
T
cp∂T0
v0|p︸ ︷︷ ︸
<0
Mit
ω20 = −∂s0ρ|pg
ρ0dzs0 > 0 fur dzs0 > 0
θ = 6 (~k,~ez)
Erinnerung: dzs > 0 war die Bedingung fur das Fehlen von Konvektion (vgl.(2.38)). Sie kann auch als “Stabiler Ast der Konvektion” bezeichnet werdenund findet ihre Anwendung z.B. bei Meeresstromungen.

4.2. SCHALLWELLEN 69
4.2 Schallwellen
Schallwellen sind Schwingungsbewegungen kleiner Amplitude in einer kom-pressiblen Flussigkeit.Zur Erinnerung: Fluide sind in guter Naherung als inkompressibel anzuse-hen fur Geschwindigkeiten v ≪ cs (aber ∆ρ
ρ trotzdem klein).Schallwellen breiten sich mit cs aus.In Schallwellen wird die Flussigkeit an jedem Ort abwechselnd verdich-tet/komprimiert und verdunnt.Die Beschreibung erfolgt mit Hilfe linearisierter Kontinuitats- und Eulerglei-chung (da jetzt kompressibel).
∂ρ
∂t+ ~∇ · (ρ~v) = 0 (4.36)
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p (4.37)
ρ = ρ0 + ρ1 ; p = p0 + p1
ρ0, p0 seien konstante Dichte und Druck im Gleichgewicht, ~v0 = 0.ρ1, p1 seien die Anderungen von Dichte und Druck in der Schallwelle mitρ1 ≪ ρ0, p1 ≪ p0.Die Storgroßen in 2-ter Ordnung werden vernachlassigt.Linearisierte Konti- und Eulergleichung:
∂ρ1
∂t+ ρ0
~∇ · ~v1 = 0 (4.38)
∂~v1∂t
+1
ρ0
~∇p1 = 0 (4.39)
Eine Schallwelle in einer idealen Flussigkeit stellt einen adiabatischen Vor-gang dar.Die Anderung von p(ρ, s) erfolgt nur gemaß ρ im adiabatischen Fall.
p =∂p
∂ρ
∣∣∣∣s
ρ |∂t
∂p1
∂t+ ρ0
∂p0
∂ρ0
∣∣∣∣s
︸ ︷︷ ︸
=c2s
~∇ · ~v1 = 0 (4.40)
~v1 ist wirbelfrei (siehe (4.39)).Außerdem: Wenn Schall aus der Ruhe entstunde, ware er mit Wirbeln ver-bunden (Helmholtzsche Wirbelsatze).
~v1 = ~∇Φ1

70 KAPITEL 4. WELLEN
Aus (4.39) folgt:
p1 = −ρ0∂Φ1
∂t(4.41)
Eingesetzt in (4.40):
∂2Φ1
∂t2− c2sφ1 = 0 mit cs =
√
∂p0
∂ρ0
∣∣∣∣s
(4.42)
Mit ∂t(4.40), (4.39) ist dies ebenso erfullt, also ist p1 Wellengleichung, unddamit auch ρ1 (p1 = c2sρ1).
Liegt nur eine Abhangigkeit von einer Koordinate vor, so handelt es sichum ebene Wellen.
∂2xΦ1 −
1
c2s∂2tΦ1 = 0 (4.43)
Variablentransformation:
ξ = x− cst η = x+ cst (4.44)
⇒ ∂2ξηΦ1 = 0 (4.43) (4.45)
Integration uber ξ:
∂ηΦ1 = F1(η) (4.46)
Integration uber η liefert die allgemeine Losung im 1-dim. Fall:
Φ1 = f1(η) + f2(ξ) = f1(x+ cst) + f2(x− cst) (4.47)
Selbiges kann man fur ρ und p durchfuhren.Die Form von f ist hier noch nicht spezifiziert.
Sei f1 = 0.Hat z.B. die Dichte zur Zeit t = 0 am Ort x den Wert f2(x), so hat sie nachder Zeit t am Ort x′ = x+ cst den selben Wert.⇒ f1 bzw. f2 beschreibt die fortschreitende ebene Welle in negativer bzw.positiver x-Richtung.
Nebenrechnung zu (4.45):
∂Φ
∂ξ=
∂Φ
∂x
∂x
∂ξ+
1
cs
∂Φ
∂t
cs∂t
∂ξ
=∂Φ
∂x− 1
cs
∂Φ
∂t
∂η
(∂Φ
∂x− 1
cs
∂Φ
∂t
)
=∂(∂Φ∂x − 1
cs∂Φ∂t
)
∂x
∂x
∂η+∂(∂Φ∂x − 1
cs∂Φ∂t
)
cs∂t
cs∂t
∂η
=∂2Φ
∂x2− 1
c2s
∂2Φ
∂t2

4.2. SCHALLWELLEN 71
Jede beliebige Welle lasst sich als Summe ebener, monochromatischer (alleGroßen sind einfache periodische Funktionen der Zeit) Wellen mit verschie-denen Wellenvektoren und Frequenzen darstellen (Fourier- / Spektraldar-stellung).Monochromatische Welle:
Φ = ReAei(~k·~r−ωt) (4.48)
~k = ωcs~n = 2π
λ ~n: Wellenzahlvektor~n: Einheitsvektor in AusbreitungsrichtungA = aeiα: komplexe Amplitude (durch geeignete Wahl der Anfangsbedin-gungen immer reell schreibbar)α: Phase
ebene Welle ∼ cos(kx− ωt+ α︸︷︷︸
evtl.
)
(Vergleiche Oberflachen-Schwerewellen)
Bewegte Schallquellen
Im ruhenden Medium ist ω = cs · k.Wenn sich das Medium mit v bewegt, kann man 2 Falle unterscheiden:
a) Medium und Schallquelle bewegen sich, z.B. ein Punktstrahler (Ku-gelwellen)⇒ konzentrische Kreise, aquivalent zum ruhenden System und relativzum Medium bewegtem Beobachter⇒ k bleibt erhalten, aber c→ c+ v
⇒ ω = c · k ωBeobachter = (c+ v)k = ω0
(
1 +v
c
)
Genauer: Man muss den Winkel zwischen ~v und ~k berucksichtigen:
⇒ ωBeobachter = ω0
(
1 +~k · ~vc
)
= ω0
(
1 +v
ccos θ
)

72 KAPITEL 4. WELLEN
Mach0.0.mpg
b) Schallquelle bewegt sich relativ zum Medium, Beobachter ruht im Me-dium⇒ verschobene Kreise!Die Wellenlange wird langs der Bewegungsrichtung reduziert:
λBeobachter = λ0 − v · T0
(
T0 =2π
ω0
)
Fur den Beobachter (im Medium) breitet sich die Welle mit c aus:
ω =2πc
λBeobachter=
2πc
λ0 − vT0=
2πc
λ0
1
1 − vT0λ0
= ω01
1 − vc
Mach0.3.mpg
Nebenbemerkung:Diese beiden Falle sind offensichtlich nicht aquivalent (ausser im Limit v
c →0, wenn 1
1−v/c ≈ 1 + vc )

4.2. SCHALLWELLEN 73
Unterschied zur elektromagnetischen Welle (Licht):
Es gibt ein Medium, also einen “Ather”, welches ein Bezugssystem auszeich-net (namlich das mit v bewegte)!Daher auch verschiedene Grenzfalle fur v
c → 1:Beobachter bewegt sich relativ zum Medium: ω = 2ω0
Quelle bewegt sich relativ zum Medium: ω → ∞Was passiert hier?⇒ Alle Wellen addieren sich in Phase am Bug auf⇒ “Uberschallknall”
Fur v > c : Schall lauft nicht mehr vor Quelle her
Mach1.3.mpg
sinα =c
v⇒ sinα =
1
Ma
mit Machzahl Ma =v
c
⇒ “Mach’scher Kegel”, nur Beobachter innerhalb des Kegels horen etwas!
Fuer Ma > 1 trifft eine Stromung daher “blind” auf ein Hindernis, sie kannsich nicht an die durch ein Strom aufwarts befindliches Hindernis erzwunge-ne Randbedingung anpassen (fur Ma < 1 baut sich vor dem Hindernis derStaudruck auf; durch ihn erhalt die Stromung Kenntnis von einem Stromaufwarts befindlichen Hindernis). Dies fuhrt zur Ausbildung sogenannterStoßwellen beim Auftreffen einer Ueberschallstromung auf ein Hindernis(siehe Kap. 5).
Fur Ma > 1 qualitativ neue Physik ⇒ siehe Kapitel 5

74 KAPITEL 4. WELLEN
Bemerkung:Fur Ma ≥ 1 ist Inkompressibilitat keine gute Annahme und die thermody-namische Zustandsgleichung muss mitgenommen werden (diese hatten wirdurch ~∇ · ~v = 0 ersetzt).⇒ Dieses Gebiet heisst auch “Gasdynamik”
Die Energie einer Schallwelle
Energiedichte pro Volumeneinheit des Fluids:
E = ρǫ+ ρv2
2
ρ = ρ0 + ρ1 ǫ = ǫ0 + ǫ1 v = v1
Die mit 1 indizierten Werte stellen die Abweichung von den Werten imruhenden Fluid dar.Entwicklung bis zur 2. Ordnung in den Storgroßen um ρ0:
E = ρ0ǫ0 + ρ1∂ρ|ρ=ρ0(ρǫ) +ρ21
2∂2ρ |ρ=ρ0(ρǫ) +
ρ20
2v21 (4.49)
Die Vorgange in Schallwellen laufen adiabatisch ab.
dǫ = T ds︸︷︷︸
=0
+p
ρ2dρ (2.55)
Daher entwickelt man in (4.49) nur um ρ0 (ǫ andert sich wie ρ).Die Ableitungen in (4.49) sind also bei konstanter Entropie zu bilden.
∂ρ|ρ=ρ0(ρǫ)|s = ǫ0 +p0
ρ0= w0 spezifische Enthalpie (4.50)
dǫ = Tds− pdV dw = Tds+ V dp
∂2ρ(ρǫ)|s = ∂ρw|s = ∂pw|s ∂ρp|s
︸ ︷︷ ︸
→c2s
(4.51)
Mit (4.50) folgt:
∂2ρ(ρǫ)|s =
c2sρ
(4.52)
Energie des Fluids pro Volumeneinheit:
E = ρ0ǫ0 + ρ1w0 +ρ21c
2s
2ρ0+ρ0
2v21 (4.53)

4.2. SCHALLWELLEN 75
Da die Gesamtmenge des Fluids unverandert bleibt (∫ρ1dV = 0) ergibt sich
fur die gesamte Energieanderung des Fluids durch die Schallwelle:
E =
∫(
ρ21c
2s
2ρ0+ρ0
2v21
)
︸ ︷︷ ︸
Dichte der Schallenergie
dV (4.54)
Nun betrachten wir den Fall einer ebenen, in positiver x-Richtung fortschrei-tenden Welle:
v1 = ∂xΦ1 = f ′(x− cst) (4.55)
Der Strich steht hier fur die Ableitung nach dem Argument in Klammern.
Euler-Gleichung 1-dim. raumlich integriert:
p1 = −ρ0∂tΦ1 = ρ0csf′(x− cst) (4.56)
Also:v1 =
p1
ρ0csmit p1 = c2sρ1
⇒ ρ21 =
p21
c4s=v21ρ
20c
2s
c4s⇒ ρ1 =
v1ρ0
cs
Damit folgt aus (4.54):
E =
∫
ρ0v21dV (4.57)

76 KAPITEL 4. WELLEN

Kapitel 5
Kompressible Stromungen
Stationare Stromungen mit beliebiger Machzahl⇒ isentrop, d.h. w kann anstelle von p/ρ benutzt werden⇒ stationar, d.h. Bernoulli gilt nach wie vor!
Erinnerung:v2
2+ w = const. auf einer Stromlinie
Wenn auf der Stromlinie irgendwo v = 0 ist, dann ist dort w = w0 und esgilt:
w0 =v2
2+ w (5.1)
⇒ maximale Geschwindigkeit auf einer Stromlinie vmax =√
2w0 fur w = 0,d.h. T = 0 (Ausstromen ins Vakuum).
Beispiel: Großer Kessel
Jetzt berechnen wir die Massenstromdichte ρ · v als Funktion der Geschwin-digkeit v auf einer Stromlinie
d(ρv)
dv= v
dρ
dv+ ρ (5.2)
Nun muss also dρdv berechnet werden.
Aus der stationaren Eulergleichung (~v · ~∇)~v = −~∇w folgt langs einer Strom-linie:
~∇v2
2= −~∇w ⇒ d
v2
2= −dw (5.3)
77

78 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
Mit dw = Tds+ dpρ folgt wegen s = const. (ds = 0) auf einer Stromlinie:
vdv = −dw = −dpρ
⇒ dp
dv= −ρv ⇒ dρ
dv=dρ
dp
dp
dv= − 1
c2sρv (5.4)
Einsetzen in (5.2) ergibt:
d(ρv)
dv= ρ
(
1 − v2
c2s
)
(5.5)
⇒ ρv nimmt fur v < cs mit v zuρv nimmt fur v > cs mit v ab.
⇒ Maximaler Massenfluss fur v = c (da ρ abnimmt)!
UnterschallMa < 1
UberschallMa > 1
Der maximale Fluß wird auch durch “∗” gekennzeichnet, also
ρ∗ , v∗ (= c∗) am Maximum
(N.B.: c variiert mit√T !, ist keine Konstante in kompressibler Stromung!)
Diese kritischen Großen konnen explizit mit denen bei v = 0 verknupftwerden, wenn man eine Zustandsgleichung hinzunimmt.Annahme: ideales Gas, d.h. die Enthalpie schreibt sich als
w = ǫ+ p · V(
ǫ = Energie pro Masseneinheit, V =1
ρ
)
(5.6)
ideales Gas⇒ w =f
2V · nkT
︸︷︷︸
=p
+pV =
(f
2+ 1
)p
ρ
f : Zahl der Freiheitsgrade
Mit
γ =f + 2
f⇒ f
2+ 1 =
γ
γ − 1
ist
w =γ
γ − 1
p
ρ=
c2
γ − 1Enthalpie des idealen Gases (5.7)

79
Einsetzen in die vorherigen Beziehungen ergibt:
vmax =√
2w0 = c0
√
2
γ − 1(5.8)
Erinnerung: Der Index “0” entspricht Punkt mit v = 0.In der Praxis: Kleine v, z.B. Eintritt in Stromungskanal
Aus w + v2
2 = w0 folgt auch w∗ + v2∗2 = w0 und mit v∗ = c∗ folgt
c2∗γ − 1
+c2∗2
=c20
γ − 1⇒ c∗ = c0
√
2
γ + 1(5.9)
und damit
vmaxc∗
=
√
γ + 1
γ − 1(5.10)
Die Geleichung fur die Temperatur langs der Stromlinie leitet sich folgen-dermaßen ab:
w0 = w +v2
2⇒ c20
γ − 1=
c2
γ − 1+v2
2⇒ c2 = c20
(
1 − γ − 1
γ + 1
v2
c2∗
)
Und wegen c2 = γ kTm ist c2
c20= T
T0, und damit
T (v/c∗) = T0
(
1 − γ − 1
γ + 1· v
2
c2∗
)
(5.11)
Die Dichte langs der Stromlinie lasst sich aus der Adiabatengleichung be-rechnen:
p
ργ= const. =
p0
ργ0⇒ p
p0=
(ρ
ρ0
)γ
⇒ ρkT
ρ0kT0=
(ρ
ρ0
)γ
⇒ T
T0=
(ρ
ρ0
)γ−1
Und damit:
ρ = ρ0
(T
T0
)1/(γ−1)
= ρ0
(
1 − γ − 1
γ + 1
v2
c2∗
)1/(γ−1)
(5.12)
Damit kann jetzt ρ · v als Funktion von v explizit angegeben werden:
ρ · v = vρ0
(
1 − γ − 1
γ + 1
(v
c∗
)2)1/γ−1
=v
c∗ρ0c∗
(
1 − γ − 1
γ + 1
(v
c∗
)2)1/γ−1
(5.13)
Probe: Fur v2max = c2∗
γ+1γ−1 werden T , ρ und ρ · v gleich Null.
√⇒ Plot von T , ρ und ρ · v fur Luft (γ = 1.4) ⇒ vmax =
√6 = 2.44
Maximal fur v = c∗√

80 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
Die Grafiken wurden erzeugt mit Gasdynamik.mws
Praktische Anwendung: Stromung durch eine DuseHier setzt man voraus, dass sich der Querschnitt “adiabatisch” andert, d.h.dhdx ≪ 1. Damit konnen Aussagen fur Stromlinien direkt ubertragen werden.
Annahme: Stromungsparameter konstant uber Querschnitt (Naherung furdhdx ≪ 1)Anwendung der Kontigleichung:Kontinuitat des Massenstromes: I = F · ρ · v(eigentlich
∫
Fρ ·~v · d~F , aber man nimmt Konstanz uber den Querschnitt an)
I = const. = F1 · ρ1 · v1 = F2 · ρ2 · v2 ⇒ ρ2v2ρ1v1
=F1
F2(5.14)

81
Wenn der Querschnitt in Stromrichtung abnimmt (Kompressionsduse), mussρ · v zunehmen. Da ρ mit v immer abnimmt (siehe oben)⇒ Einstromen mit Ma < 1 ⇒ v nimmt zu
Einstromen mit Ma > 1 ⇒ v nimmt ab (!)
In einer Kompressionsduse ist F am Ausgang minimal, also ist ρ · v amDusenausgang maximal⇒ Beim Einstromen mit Ma < 1 wird Ma = 1 erst am Ende der Duseerreicht (egal, wie hoch der Druck am Eingang ist)!Denn: Wenn Ma bereits vorher = 1 ware, gabe es fur den folgenden Bereichkein Ma, bei dem eine hohere Massenstromdichte erreicht werden konnte.
In einer Duse zur Erzeugung von Uberschall muss an die Kompressions-strecke eine Expansionsstrecke anschließen (Laval-Duse).
Rechenanweisung fur ein vorgegebenes Profil h(x) (in der Regel nicht ana-lytisch moglich) mit I = const. und F (x) = πh2(x):Berechne ρ · v aus z.B. Ma∗ = 1 bei F = minimal und daraus v(x) (nu-merisch!), daraus wiederum ρ(x), T (x), p(x), alles als Funktionen der Ein-gangsdaten.
Siehe auch Gasdynamik.mws.
Bis jetzt wurden stationare Stromungen mit stetigen Anderungen von p,ρ,... behandelt. Wenn man nun zur Ausbreitung von Stromungen mit großerAmplitude, v1 “beliebig”, ubergeht, bricht die Linearisierung zusammen.
Was passiert nun?Linearisierung:
Schallwelle andert das Medium nichtGroße Stromung wird auch das Medium verandernWenn hinter der Wellenfront T > T0, lauft die Welle hinter der Frontschneller ⇒ Aufheizen (c ∼
√T !)

82 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
Beispiel: Explosion
Frontbreite nur durch freie Weglange der Gasteilchen bestimmt (sonst 0!)⇒ “Stoßwelle”, Anderung der Parameter (z.B. Dichte) durch die Front
unstetigVorkommen: Geschosse, Flugzeug, Explosion
Quelle: DGLR - Ludwig Prandtl Gedachtnis-Vorlesung (03. April 06)
Quelle: DGLR - Ludwig PrandtlGedachtnis-Vorlesung (03. April 06)
Quelle: TUM - ModulvorstellungNumerische Simulation (03. April 06)

83
Quelle: TUM - ModulvorstellungNumerische Simulation (03. April 06)
Quelle: Weite Schusse (03. April 06)
Bemerkung: Stoßwelle lost auch das Paradoxon der “blinden” Ma > 1Stromung auf ⇒ das passiert am Ubergang zu Ma > 1!
Die thermodynamischen Großen andern sich unstetig, aber die erhaltenenGroßen andern sich stetig, Masse fließt durch Front hindurch (keine “Wand”,Verdichtungsstoß)
Bilanzgleichungen (Erinnerung an Kapitel 1):
∂ρ
∂t= −~∇ · (ρ~v) Massenerhaltung (5.15)
∂(ρ~v)
∂t= −~∇(p+ ρ~v ⊗ ~v) Impulserhaltung (5.16)
∂(
ρv2
2 + ǫ)
∂t= −~∇ ·
(
ρ~v
(
v2
2+ ω
))
(5.17)
Bemerkung: Wie ublich ist das kein geschlossenes System, aber wenn maneine Zustandsgleichung hinzunimmt (z.B. adiabatisch, dS = 0, dw = −dp
ρ ),dann wird es eins.
Die Bilanzgleichungen kann mann uber die Stoßfront hinweg benutzen:∂∂t → 0 ⇒ Stationare Zustande, Bezugssystem in dem die Stoßfront ruht,eindimensional.Z.B. Kolben, der eine Welle vor sich her druckt:
~v1 = −~vFront~v2 = ~vKolben − ~vFront

84 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
(Genauere Behandlung folgt spater)
Wie behandelt man eine Bilanzgleichung?
∂ρ
∂t= −~∇ · (ρ~v) ⇒ ∂
∂t
∫
ρdV = −∫
~v · (ρ~v)dV = −∮
ρ~v · d~F
∂∂t → 0 ⇒ ρ · ~v ist Fluß durch die Flache, der erhalten bleibt.Eindimensional, x-Richtung:
⇒ ρ1v1 = ρ2v2 (5.18)
Aus der Ernergie-Bilanzgleichung erhalt man analog:
ρ1v1
(
v21
2+ w1
)
= ρ2v2
(
v22
2+ w2
)
⇒ v21
2+ w1 =
v22
2+ w2 (5.19)
Fur den Impuls ergibt sich:
0 =
∫∂(ρ~v)
∂tdV = −
∮
(p+ ρ~v × ~v)d~F (Allg: dFk = dV∂
∂xk)
⇒ Impuls ist ein Vektor, der durch die Flache hindurch transportiert wird.
Πik = pδik + ρvivk : i-te Komponente des Impulses wird durch Flache ink-Richtung transportiert.
Hier: x-Richtung, d.h. d~F|d~F | = (1, 0, 0)
p+ ρv2x ρvxvy ρvxvz
ρvyvx p+ ρv2y ρvyvz
ρvzvx ρvzvy p+ ρv2z
·
100
=
p+ ρv2x
ρvyvxρvzvx
︸ ︷︷ ︸
Impulsstrom (3 Komp.)der durch x-Flache
hindurchfließt
(5.20)
⇒ 3 Bedingungen, aber in unserer Geometrie ist nur die x-Komponenterelevant
⇒ p1 + ρ1v21 = p2 + ρ2v
22 (5.21)
3 Bilanzgleichungen → 3 Beziehungen zwischen 1 und 2Einsetzen der Definition des (Massen-)Stromes durch die Flache
j = ρ1v1 = ρ2v2 v1 = j/ρ1 v2 = j/ρ2

85
in die Impulsbilanz ergibt:
p1 +j2
ρ1= p2 +
j2
ρ2⇒ j2 =
p2 − p1
ρ2 − ρ1ρ1ρ2
Damit j2 > 0 muss also gelten:p2 > p1 und ρ2 > ρ1, oderp2 < p1 und ρ2 < ρ1
Unter Berucksichtigung des 2. Haupsatzes (S2 > S1) findet man (ohne Be-weis), dass nur p2 > p1 und ρ2 > ρ1 auftritt (“Verdichtungsstoß”)
Einsetzen in die Energiebilanz ergibt:
w1 +j2
2ρ21
= w2 +j2
2ρ22
⇒ w2 − w1 =j2
2
ρ22 − ρ2
1
ρ21ρ
22
=1
2
p2 − p1
ρ2 − ρ1
ρ1ρ2
ρ21ρ
22
(ρ22 − ρ2
1)
=1
2(p2 − p1)
ρ2 + ρ1
ρ1ρ2
“Hugoniot’sche Adiabate”
Folgerung aus dieser Adiabate:
Sekantensteigung: − p2 − p1
1/ρ1 − 1/ρ2= −p2 − p1
ρ2 − ρ1ρ1ρ2 = −j2
Man sieht sofort: Im Punkt 1 ist
∂p
∂1/ρ= −ρ2 ∂p
∂ρ> −j2

86 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
(−j2 ist negativer als ∂p∂1/ρ , Sekante ist steiler als die Kurve!)
⇒ ∂p
∂ρ
∣∣∣∣1
<j2
ρ21
= v21
Mit ∂p∂ρ ≈ ∂p
∂ρ
∣∣∣S
folgt c21 < v21 und damit Ma1 > 1 !!
(Diese Naherung ist gut erfullt)
Analog: Ma2 < 1, Stoßfront vermittelt immer Ubergang von Uber- zu Un-terschall
Normale Adiabate:
p = const. · ργ ⇒ p1 = const. · ργ1 ⇒ const. =p1
ργ1
unabhangig von der Wahl von p1 und ρ1.
⇒ ρ2
ρ1=
(p2
p1
)1/γ
⇒ Nur eine Kurve, unabhangig vom Anfangszustand, dagegen Hugoniot:Zweiparametrige Schar, Verlauf der Adiabate hangt vom Anfangspunkt ab.
Die Stoßadiabate verlauft steilerals die “normale” Adiabate
Die Stoßadiabate variiert mit p1 undρ1, die “normale” Adiabate nicht
Siehe auch stoss adiabate.mws
Konkretes Beispiel (wie immer) ideales Gas, w = γp(γ−1)ρ = c2
γ−1
⇒ γ
γ − 1(p2/ρ2 − p1/ρ1) =
1
2(p2 − p1)
ρ2 + ρ1
ρ2ρ1
...ρ2
ρ1=
(γ + 1)p2 + (γ − 1)p1
(γ + 1)p1 + (γ − 1)p2

87
Temperaturen:
ρ2T2
ρ1T1=p2
p1⇒ T2
T1=p2
p1· (γ + 1)p1 + (γ − 1)p2
(γ + 1)p2 + (γ − 1)p1
Geschwindigkeiten:
Differenz v1 − v2 = j
(1
ρ1− 1
ρ2
)
= . . . =
√
(p2 − p1)(ρ2 − ρ1)
ρ2ρ1
Grenzfalle:
• “schwacher Stoß”, p2 ≈ p1
ρ2
ρ1→ 1
T2
T1→ 1 v1 − v2 → 0 (v1 → c+ v2 → c−)
⇒ Schallwelle, linearisierte, kleine Storung
• “starker Stoß”, p2 ≫ p1
ρ2
ρ1→ γ + 1
γ − 1beschrankt (4 fur γ =
5
3)
T2
T1→ p2
p1
γ − 1
γ + 1unbeschrankt
Bei beliebig starkem Stoß kann Dichte nicht uber γ+1γ−1 erhoht werden,
der Rest der Energie geht in Entropie (T ).
Abhilfe: Serie von Stoßen “pulse shaping”:Die Kompressionswelle lauft nacht innen, wird reflektiert und dann muss dieIntensitat erhoht werden.Beispiel: Tragheitsfusion (= Kompression eines Wasserstoffpellets durch La-serstrahlung
Schließlich nochmal zuruck zum System Kolben-im-Rohr:

88 KAPITEL 5. KOMPRESSIBLE STROMUNGEN
Es istvFrontvKolben
=−v1
v2 + vFront= − v1
v2 − v1=
v1v1 − v2
=1
1 − v2v1
Kontinuitatsgleichung:
ρ1v1 = ρ2v2 ⇒ v2v1
=ρ1
ρ2
Fur einen starken Stoß ergab sich ρ2ρ1
→ γ+1γ−1
⇒ vFrontvKolben
→ 1
1 − γ−1γ+1
=γ + 1
2
γ= 53=
4
3
⇒ Die Front lauft vor dem Kolben (Stoßerzeuger) her und bewegt sich relativvon ihm weg (vFront = 4
3 · vKolben).

Kapitel 6
Viskose Fluide
6.1 Die Navier-Stokes-Gleichung
Bisher haben wir uns ausfuhrlich mit idealen Flussigkeiten beschaftigt. Jetztbetrachten wir Flussigkeiten mit Energiedissipation (keine Warmeleitung).Dissipation ≡ innere Reibung (Zahigkeit)Diese Prozesse bringen die immer mehr oder weniger vorhandene thermo-dynamische Irreversibilitat der Stromung zum Ausdruck.
Bewegung zaher Flussigkeiten ⇒ Bewegungsgleichung fur ideale Flussigkei-ten + Zusatzterme zur Beschreibung der Reibungskrafte
Die Kontigleichung gilt fur beliebige Flussigkeiten.(Massenerhaltung ist von viskosen Effekten unbeeinflusst.)
Die Euler-Gleichung muss geandert werden!
Ideale Formulierung:
∂
∂t(ρvi) = − ∂
∂xkΠik (6.1)
Πik : Tensor der Impulsstromdichte≡ rein reversible Impulsubertragung≡ mechanische Fortbewegung der verschiedenen Flussigkeitsteile
von einem Ort zum anderen + die in der Flussigkeit wirkendenDruckkrafte
Πik|ideal = pδik + ρvivk (6.2)
Die Zahigkeit (innere Reibung) der Flussigkeit außert sich im Auftreten einerzusatzlichen irreversiblen Impulsubertragung von einem Ort mit großererGeschwindigkeit an einen Ort mit kleinerer Geschwindigkeit.
89

90 KAPITEL 6. VISKOSE FLUIDE
Ergo:Zum idealen Impulsstrom kommt ein zusatzliches Glied σ′ik das den zahen,irreversiblen Impulstransport in der Flussigkeit angibt:
Πik|nichtideal = pδik + ρvivk − σ′ik = −σik + ρvivk (6.3)
Der Tensor
σik = −pδik + σ′ik (6.4)
heißt Spannungstensor.σ′ik ≡ zaher Spannungstensor (Reibungstensor)σik : Gibt den Teil des Impulsstromes an, der nicht mit dem
unmittelbaren Transport des Impulses gemeinsam mit derMasse der bewegten Flussigkeit zusammenhangt.
Wie sieht σ′ik aus?
Exakte Herleitung aus dem 1. Moment der Boltzmann-Gleichung → Stoßin-tegral (kompliziert aber machbar)!
Phanomenologisches zur inneren Reibung
Zwischen einer bewegten und ei-ner ruhenden Platte bildet sich einlineares (stationares) Geschwindig-keitsprofil aus.Sein Gradient bestimmt die zumVerschieben notige Kraft.
Um die Platte der Flache A mit konstanter Geschwindigkeit ~v parallel zurWand zu verschieben braucht man eine Kraft:
~F = ηA~v
∆z(6.5)
η: Viskositat (Eigenschaft der Flussigkeit) [η] = kgms
A im Zahler ist klar (je großer, desto mehr Kraft).~v im Zahler ist klar (je schneller, desto mehr Kraft).Schichtdicke im Nenner?Es handelt sich nicht um Reibung zwischen Flussigkeit und Festkorper -die an den Wanden angrenzenden Schichten haften an diesen - sondern umReibung zwischen den einzelnen Flussigkeitsschichten: Je kleiner ∆z bei ge-gebenem ~v, desto schneller mussen die einzelnen Molekulschichten uberein-ander weggleiten.

6.1. DIE NAVIER-STOKES-GLEICHUNG 91
Im Spalt zwischen den ebenen Platten andert sich die Stromungsgeschwin-digkeit ~v linear mit der Koordinate z. Im allgemeinen Fall ist dieser Zusam-menhang nicht linear. Dann kann man ~F ∼ A ~v
∆z nur jeweils auf eine sehrdunne Schicht dz anwenden.An ihr muss beiderseits die Kraft
~F = ηAd~v
dz(6.6)
angreifen, wobei auch noch A hinreichend klein sein muss, falls sich d~vdz senk-
recht zu z andert.Wie reden besser von der viskosen Schubspannung.
ση =dF
dA= η
dv
dz(6.7)
Kraft pro Flache = Druck.ση ist nur Teil einer Komponente des Reibungstensors σ′ik.Eine Stromung, deren Verhalten durch die innere Reibung bestimmt wird,heißt laminare oder schlichte Stromung (Gegensatz: turbulente Stromung).Flusse oder Wasser in Leitungen sind i.A. turbulent! Die Blutzirkulation istlaminar.In laminaren Stromungen gleiten selbst dunne Flussigkeitsschichten uber-einander.Bei turbulenten Stromungen wirbeln sie ineinander.Ein theoretisches Kriterium ob eine laminare oder turbulente Stromung vor-liegt gibt die Reynolds-Zahl (siehe spater).
Reibungskrafte in stromenden Flussigkeiten
Wir betrachten ein Volumenelement dV = dxdydz in einer Flussigkeit, inder die Stromung in y-Richtung erfolgt und ein Geschwindigkeitsgefalle inx-Richtung hat.Auf die linke Stirnflache eines Volumenelements wirkt die Kraft:
dF1 = −η ∂v∂x
∣∣∣∣links
dydz (6.8)

92 KAPITEL 6. VISKOSE FLUIDE
Analog ist die Kraft entgegengesetzter Richtung auf die rechte Stirnflachebestimmt durch das dortige Gefalle, das einen anderen Wert haben kann.
dF2 = η∂v
∂x
∣∣∣∣rechts
dydz = η
(
∂v
∂x
∣∣∣∣links
+∂2v
∂x2dx
)
dydz (6.9)
Taylor-Entwicklung
dFr = dF2 + dF1 = η∂2v
∂x2dxdydz = η
∂2v
∂x2dV (6.10)
ist nur dann verschieden von Null, wenn das Geschwindigkeitsprofil ge-krummt ist (sonst gibt es zwar Drehmomente, aber keine translatorischenKrafte).Wenn sich die Geschwindigkeit nicht in x-Richtung andert, leistet jede Ko-ordinate ihren Beitrag:
dFr = η∆vdV = η
(
∂2v
∂x2+∂2v
∂y2+∂2v
∂z2
)
dV (6.11)
Laplace-Operator: ∆ =∂2
∂x2+
∂2
∂y2+
∂2
∂z2
Die Kraftdichte, d.h. Kraft pro Volumen, fur die innere Stromung ist vek-toriell gegeben durch:
~fr = η∆~v = ρ∂t~v (6.12)
Nach Newton ubertragt die Kraftdichte Beschleunigung auf das Volumen-element.In Kombination mit der Euler-Gleichung ergibt sich:
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p+
η
ρ∆~v (6.13)
Navier-Stokes-Gleichung(fur inkompressible Flussigkeiten)
Fur kompressible Flussigkeiten:
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p+
η
ρ∆~v +
(
ξ +η
3
)
~∇(~∇ · ~v) (6.14)
η = Scherungskoeffizient/Viskositat, ξ = Kompressionskoeffizient der Vis-kositat und ν = η
ρ heißt kinematische Viskositat.
Anwendung der Navier-Stokes-Gleichung im laminaren Bereich:Stromung zwischen bewegten Platten

6.1. DIE NAVIER-STOKES-GLEICHUNG 93
Das System sei auch in x-Richtung unendlich ausgedehnt.Laminare Stromung:
~v =
vx00
∂vx∂x
= 0 (Kontinuitatsgleichung mit ρ = const.)
Der außere Druck sei konstant (Bewegung kommt durch Plattenbewegung)
∂p
∂x= 0
⇒ Navier Stokes
stationar:∂~v
∂t= 0 (~v · ~∇)~v → vx
∂
∂xvx
︸ ︷︷ ︸
=0
= 0
x-Komponente:
⇒ 0 = η∂2vx∂y2
⇒ vx = c1 · y + c2
Randbedingungen:
vx(0) = 0 ⇒ c2 = 0
vx(h) = vP ⇒ c1 =vPh
⇒ vx(y) =vPh
· y (unabhangig von η!)
y-Komponente:∂p
∂y= 0 ⇒ p = const.
Die Kraft, die benotigt wird, um die Platte mit vP zu bewegen, hangt jedochvon η ab!Berechnung:
∂
∂t(ρvi) =
KraftiV olumen
= − ∂
∂xkΠik

94 KAPITEL 6. VISKOSE FLUIDE
⇒ Kraft:
Ki = −∫
∂
∂xkΠikdV = −
∮
Πik · dFk “Skalarprodukt mit Tensor”
Wenn das Volumen klein ist, ist Πik ≈ const. und man kann das Integralweglassen.
dKi
dF= −Πiknk
nk ist Normalenvektor in k-Richtung
⇒ dKi
dF= −(ρvivk + pδik − σik)nk
An der Wand ist vk · nk = 0 (kein Fluß in die Wand)
dKi
dF=
(
−pδik + η
(∂vi∂xk
+∂vk∂xi
))
nk
(inkompressibel, d.h.∂vj
∂xj= 0)
In unserem Beispiel: n = (0,−1, 0) bei x = h
⇒ dKi
dF = pδi2 −η(∂vi
∂x2+∂v2∂xi
)
↓ ↓ ↓Ky = p · F ∂vx
∂y Term verschwindet
in x-Richtung da vy = 0(da vy = vz = 0)
(Scherkraft)
Mit vx = vP · yh folgt
Kx = −Fη∂vx∂y
= −FηvPh
als Gegenkraft zur Scherkraft.Bei x = 0 ist n = (0, 1, 0) ⇒ Kraft in Richtung der Flussigkeit, “Mitreißen”Generell: Druck senkrecht zur Wand, Schwerkraft parallel zur Wand
Skizzierter Nachweis von (6.14):Also zuruck zu der Frage nach der Gestalt von σ′ik:
(6.1) : ∂t(ρvi) = −∂xkΠik
(6.3) : Πik = pδik + ρvivk − σ′ik
(Details: Greiner, 257ff)Innere Reibung tritt nur fur eine Relativbewegung zwischen verschiedenen

6.1. DIE NAVIER-STOKES-GLEICHUNG 95
FEen auf → σ′ik = f(~∇v).Wir nehmen an, dass die Impulsubertragung durch die Viskositat in ∂xk
vilinear ist, d.h. die Geschwindigkeitsgradienten sollen nicht zu groß sein, son-dern σ′ik = 0 fur gleichmaßige Rotation des Fluids (~v = ~ω × ~x).Allgemeinste Form eines Tensors 2. Stufe, der diesen Bedingungen genugt:
σ′ik = η(∂xkvi + ∂xi
vk −2
3δik∂xl
vl) + ξδik∂xlvl (6.15)
Also ergibt sich fur die allgemeinste Form der i-ten Komponente der Bewe-gungsgleichung fur ein zahes Fluid:
ρ(∂tvi + vk∂xkvi) = −∂xi
p︸ ︷︷ ︸
Euler- Gleichung
+ ∂xk[η(∂xk
vi + ∂xivk
− 2
3δik∂xl
vl)] + ∂xi(ξ∂xl
vl) (6.16)
∂t(ρvi) = vi∂tρ+ ρ∂tvi = −∂xkΠik = −∂xk
[δikp+ ρvivk − σ′ik]
vi∂tρ+ vi∂xk(ρvk)
︸ ︷︷ ︸
=0 Kontigleichung
+ρ∂tvi + ρvk∂xkvi = −∂xi
p+ ∂xkσ′ik
Meistens konnen η, ξ als konstant im ganzen Fluid angesehen werden →(6.14), bzw. fur ∂xl
vl = ~∇ · ~v = 0 → (6.13).Der Spannungstensor fur ein inkompressibles Fluid lautet also:
σik = −pδik + η(∂xkvi + ∂xi
vk)︸ ︷︷ ︸
σ′ik
(6.17)
Im weiteren werden wir uns ausschließlich mit inkompressiblen viskosen Flui-den beschaftigen.
Zur Losung der Navier-Stokes-Gleichung (6.13) bedarf es noch der Anga-be von Randbedingungen. Zwischen der Oberflache von Korpern und zahenFluiden wirken molekulare Anziehungskrafte, die die unmittelbar an derFlache anliegende Fluidschicht festhalten, d.h.
~v|Rand = ~vtan|Rand+~vnormal|Rand = ~vtan|Wand+~vnormal|Wand = ~v|Wandoft= 0
Bei idealen Fluiden war nur eine Randbedingung erforderlich, namlich~vnormal = 0.
Navier-Stokes ∼ ∆~v 2. Ableitung
Euler ∼ (~v · ~∇)~v 1. Ableitung

96 KAPITEL 6. VISKOSE FLUIDE
Wie sieht im viskosen Fall die Transportgleichung fur die Wirbeldichte~ω = ~∇× ~v aus?Vgl. (2.80):
dt~ω = (~ω · ~∇)~v
Bilde die Rotation der Navier-Stokes-Gleichung (6.13) mit
(~v · ~∇)~v = ~∇v2
2− ~v × ~ω
⇒ ∂t~ω − ~∇× (~v × ~ω) = ~∇×(
1
rho~∇p)
+ ~∇×(η
ρ∆~v
)
(6.18)
Sei nun ρ = const, η = const (was eigentlich sowieso der Fall ist). Nun ist:
~∇× (~v × ~ω) = (~ω · ~∇)~v − (~v · ~∇)~ω
∆~v = ~∇(~∇ · ~v) − ~∇× ~∇× ~v = −~∇× ~ω
~∇× ~∇× ~ω = −∆~ω + ~∇(~∇ · ~ω) = −∆~ω
⇒ dt~ω = (~ω · ~∇)~v +η
ρ∆~ω (6.19)
Wenn also ~ω = 0 zur Zeit t = 0 ist, dann bleibt das Fluid wirbelfrei. (Aber:Denke an das mogliche Einwandern von Wirbeln uber den Rand!)
6.2 Energiedissipation in inkompressiblen visko-
sen Fluiden
Viskositat in Fluiden fuhrt zur Dissipation kinetischer (gerichteter) Energiein Warme. Die kinetische Energie andert sich mit der Zeit gemaß
∂t
(ρ
2v2)
= ρvi∂tviNavier-Stokes
= ρvi
[
−vk∂xkvi −
1
ρ∂xi
p+1
ρ∂xk
σ′ik
]
(6.20)
bzw.
∂t
(ρ
2v2)
= −~∇ · [ ρ~v(
v2
2+p
ρ
)
︸ ︷︷ ︸
Energiestrom inidealem Fluid
−~vσ′] − σ′ik∂xkvi (6.21)
Wobei
ρ~v · (~v · ~∇)~v = ρ~v · ~∇v2
2= ~∇ ·
(
ρ~vv2
2
)

6.3. LAMINARE STROMUNGEN 97
~v · (~v × (~∇× ~v)) = 0
inkompressibel: ρ = const ~∇ · ~v = 0
verwendet wurde und ~vσ′ den Vektor mit den Komponenten viσ′ik darstellt.
Viskositat bewirkt einen Impulsstrom σ′ik, mit diesem ist insbesondere einEnergiestrom viσ
′ik verbunden.
Integration von (6.21) uber ein beliebiges Volumen:
∂t
∫ρ
2v2dV
Gauss= −
∮[
ρ~v
(
v2
2+p
ρ
)
− ~vσ′]
d~f −∫
σ′ik∂xkvidV (6.22)
Der erste Term der rechten Seite gibt die Anderung der kinetischen Energiein V infolge des Energiestromes durch die Oberflache dieses Volumens an.Der zweite Term beschreibt die Dissipation der kinetischen Energie.Bei Integration uber das gesamte Fluidvolumen verschwindet das Ober-flachenintegral (entweder lim|~x|→∞ |~v| = 0 fur ein unbegrenztes Fluid, oder|~v||Rand = 0 fur ein begrenztes Fluid).
⇒ ∂t
∫ρ
2v2dV = −1
2
∫
σ′ik(∂xkvi + ∂xi
vk)dV
Dies erlaubt die Symmetrie des Tensors σ′ik. Mit σ′ik aus (6.17) folgt:
∂t
∫ρ
2v2dV = −η
2
∫
(∂xkvi + ∂xi
vk)2dV (6.23)
6.3 Laminare Stromungen
Laminare Stromung:Sie erfordert eine hohe Viskositat, ein diffusiver Impulstransport η
ρ∆~v istdominant.
Die Bewegung des Fluids erfolgt, als wenn Schichten verschiedener Ge-schwindigkeit aneinander vorbeigleiten wurden → keine Turbulenz. I.A. han-delt es sich hierbei um recht stabile Stromungen, die durch ein Gleichgewichtvon treibender Kraft (außere Kraft, Druckgradient) und Reibungskraft cha-rakterisiert sind.
a) Laminare Spaltstromung
Wir betrachten eine stationare Stromung zwischen ruhenden parallelen Ebe-nen mit dem Abstand h, welche durch einen Druckgradienten in x-Richtungverursacht wird.

98 KAPITEL 6. VISKOSE FLUIDE
~v = vx(y)~ex
Stationare Navier-Stokes-Gleichung:
∂2yvx =
1
η∂xp ∂yp = 0 = ∂zp (6.24)
vx 6= f(x) laut Voraussetzung, aber auch ∂yp = 0.⇒ Das Gleichgewicht kann nur erfullt sein, wenn beide Seiten konstant sind.dxp = const ⇒ p lineare Funktion von x.
vx =1
2ηdxpy
2 + ay + b (6.25)
Die Integrationskonstanten a und b bestimmen sich aus den Randbedingun-gen:
vx(y = 0) = vx(y = h) = 0 ⇒ b = 0 a = − 1
2ηdxph
⇒ vx =1
2ηdxpy(y − h) (6.26)
→ Parabolisches Geschwindigkeitsprofil quer zur Fluidschicht, vx,max beiy = h
2 .Die Geschwindigkeit wachst mit zunehmendem Abstand von den Randern.Fur die mittlere, uber die Dichte der Fluidschicht gemittelte, Geschwindig-keit in x-Richtung ergibt sich:
vx =1
h
h∫
0
1
2ηdxp(y
2 − yh)dy = − h2
12ηdxp︸︷︷︸
<0
(6.27)
Die auf die Ebenen wirkende Flachenreibungskraft (Schubspannung, vgl.(6.7)) ist:
σ′xy6.17= η∂yvx|y=0 = −h
2dxp = −η∂yvx|y=0 (6.28)
dyvx =1
2ηdxp[y − h+ y]
b) Die laminare Rohrstromung
Wir betrachten eine stationare Laminarstromung einer homogenen inkom-pressiblen Flussigkeit durch ein Rohr vom Radius R und der Lange l zwi-schen dessen beiden Enden. Es herrscht die Druckdifferenz δp = p1 − p2.

6.3. LAMINARE STROMUNGEN 99
Wie sehen die Druckverteilung, die v-Verteilung und die Stromstarke (dasdurch die Querschnittsflache pro Zeiteinheit fließendes Fluidvolumen) aus?
Wir verwenden die Navier-Stokes-Gleichung:
∂~v
∂t+ (~v · ~∇)~v = −1
ρ~∇p+
η
ρ∆~v
+ Inkompressibilitat:~∇ · ~v = 0
+ Gegebenenfalls Kontigleichung:
∂ρ
∂t+ ~∇ · (ρ~v) = 0
Fur eine stationare Stromung (∂ρ∂t = 0) liefert die Kontigleichung ρ = const.Laminarstromung bedeutet, dass kreiszylindrische Flussigkeitsschichten an-einander vorbeigleiten. ⇒ Die Flussigkeit fließt uberall parallel zur Rohrach-se.
~v = ~ezv
~∇ · ~v = 0 liefert dann:∂v
∂z= 0
D.h. v = v(x, y).Das Problem ist zylindersymmetrisch, weswegen man Zylinderkoordinaten(r, ϕ, z) verwendet. Axialsymmetrie bedeutet ∂
∂ϕ = 0!
Fur eine stationare Stromung, d.h. ∂~v∂t = 0, geht die stationare Navier-Stokes-
Gleichung wegen (~v · ~∇)~v = ~ezv∂v∂z = 0 uber in:
0 = −~∇p+ η~ez∆v (6.29)
⇒ ∂p
∂x=∂p
∂y= 0 oder
∂p
∂r=∂p
∂ϕ= 0
Nach Voraussetzung herrscht ein endlicher Druckgradient entlang des Roh-res.
p = p(z)

100 KAPITEL 6. VISKOSE FLUIDE
∆ =1
r
∂
∂r
(
r∂
∂r
)
+1
r2∂2
∂ϕ2+
∂2
∂z2
Wir bedenken dass v = v(r) (axialsymmetrisch), damit folgt aus (6.29):
dp
dz︸︷︷︸
unabhangig von r
= η1
r
d
dr
(
rdv
dr
)
︸ ︷︷ ︸
unabhangig von z
(6.30)
Gleichheit herrscht nur, falls beide Seiten konstant und gleich sind:
dp
dz= C (6.31)
d
dr
(
rdv
dr
)
=C
ηr (6.32)
In z1 herrscht Druck p1.
z2 = z1 + l p2 = p1 − δp
Approximation:
C ≈ −δpl
(6.33)
C als Maß fur das Druckgefalle.Integration von (6.32) ergibt das Geschwindigkeitsprofil:
∫
d
(
rdv
dr
)
=
∫C
ηrdr =
C
2ηr2 + C1
rdv
dr=C
2ηr2 + C1 (6.34)
Nochmalige Integration:
∫
dv =
∫C
2ηrdr +
∫C1
rdr (6.35)
v =C
4ηr2 + C1 ln r + C2 (6.36)
Mit den Integrationskonstanten C1 und C2.Auf der Rohrachse (r = 0) ist v endlich ⇒ C1 = 0.An der Rohrwand (r = R) ist v = 0 ⇒ C2 = − C
4ηR2.
Damit ergibt sich fur die Stromungsgeschwindigkeit:
v =C
4η(r2 −R2) ≈ δp
4ηl(R2 − r2) (6.37)

6.3. LAMINARE STROMUNGEN 101
Wir erhalten ein parabolisches Geschwindigkeitsprofil.p> = p1 sei der großere Druck an den Rohrenden, d der Abstand vom linkenRohrende. Aus
dp
dz= C = −∂p
l
folgt durch Integration:
p = p> − δpd
l(6.38)
Die Stromstarke Q, also das in einer Zeiteinheit durch einen Querschnitt desRohres (Kreisflache
∫2πrdr) stromende Flussigkeitsvolumen, ist:
Q =
∫
vdf =
2π∫
0
dϕ
R∫
0
rv(r)dr6.37= 2 pi
δp
4ηl
R∫
0
(R2 − r2)rdr =πR4
8ηlδp (6.39)
Hagen-Poiseuille
Oder Masse, die pro Sekunde durch den Kreisrohrquerschnitt fließt:
ρQ =πR4
8νlδp (6.40)
Hagen-Poisseuille verliert seine Gultigkeit wenn bei gegebenem Rohrdurch-messer die mittlere Geschwindigkeit v einen kritischen Wert uberschreitet.
Das Geschwindigkeitsprofil ist ein Paraboloid. Auf der Achse herrscht ma-ximale Geschwindigkeit.
v0 =R2δp
4ηl(6.41)
Die gemittelte Stromungsgeschwindigkeit ist:
v =Q
πR2=δpR2
8ηl(6.42)
Die gesamte Druckkraft ist:
F = πR2δp
FR = −8πηlv (6.43)
Das ist die Stokessche Reibung in viskosen Flussigkeiten, die inkompressibelsind. In kompressiblen Gasen eher Newtonsche Reibung FR ∼ v2. Im stati-onaren Fall gilt Fp = FR .

102 KAPITEL 6. VISKOSE FLUIDE
c) Laminare Stromung um Kugeln (Stokes)
Zieht man eine Kugel vom Radius r mit der Ge-schwindigkeit ~v durch eine Flussigkeit, so haf-ten die unmittelbar benachbarten Flussigkeits-schichten an der Kugel. (Ein ahnliches Kraftge-setz finden wir fur die Stokessche Reibung umeine Kugel.) In einiger Entfernung herrscht dieStromungsgeschwindigkeit Null.
Diese Entfernung ist von der Großenordnung r.⇒ Geschwindigkeitsgefalle: dv
dz ∼ vr .
Auf der Oberflache (4πr2) der Kugel greift die bremsende Kraft
F ≈ −ηdvdz
4πr2 ≈ −4πηvr (6.44)
an. Man muß also mit einer Kraft von dieser Großenordnung ziehen, um dieGeschwindigkeit v zu erreichen.
Explizite Rechnung zum Kugel-Stromungswiderstand
Annahmen: laminare Stromung, Re≪ 1 ⇒ Reibung dominantWas bedeutet das fur (~v · ~∇)~v ?
(~v · ~∇)~v ∼ v01L0v0
ν∆~v ∼ ν · v0L2
0
⇒ Verhaltnis:|(~v · ~∇)~v||ν∆~v| ∼ v2
0L20
L0v0ν=v0L0
ν= Re
⇒ Re≪ 1 bedeutet auch, dass (~v · ~∇)~v vernachlassigt werden kann (war beiHagen-Poiseuille aufgrund der Geometrie Null)
Kugelkoordinaten:
0 ≤ θ ≤ π
0 ≤ ϕ ≤ 2π
Wahlt man das Koordinatensystem so, dass die Stromung aus Richtung derz-Achse kommt, dann ist das Problem von ϕ unabhangig.

6.3. LAMINARE STROMUNGEN 103
Zunachst ergibt sich fur den Druck:
~∇·(η∆~v− ~∇p) = η~∇·(∆~v)−∆p = η ~∇ · (~∇× ~∇× ~v︸ ︷︷ ︸
~∇·~∇×(...)=0
−~∇ (~∇ · ~v)︸ ︷︷ ︸
0 wegenInkompr.
)−∆p = 0
⇒ ∆p = 0
In Kugelkoordinaten:
1
r2∂
∂r
(
r2∂p
∂r
)
+1
r2 sin2 θ
∂
∂θ
(
sin θ∂p
∂θ
)
+1
r21
sin2 θ
∂2p
∂ϕ2︸ ︷︷ ︸
→0, da ∂∂ϕ
→0
= 0
Die Losung dieser Potential (Laplace) Gleichung in Kugelkoordinaten sinddie Multipole:
p(r, θ, ϕ) =∞∑
ℓ=0
ℓ∑
m=−ℓ
(
c1ℓmrℓ +
c2ℓmrℓ+1
)
Y mℓ (θ, ϕ)
Wegen ϕ-Unabhangigkeit ist nur m = 0 zu berucksichtigen und die Kugel-flachenfunktionen Y m
ℓ (θ, ϕ) gehen in Kugelfunktionen Pℓ(cos θ) uber (Le-gendrepolynome), mit
P0 = 1 P1 = − cos θ P2 =1
2(3 cos2 θ − 1) . . .
Randbedingung: p verschwinde im Unendlichen ⇒ rℓ-Terme mussen ver-schwinden.
p(r, θ) = const.+A0
r− A1
r2cos θ + . . . (r → ∞ : const. = p0)
Jetzt betrachten wir die r-Komponente von Navier-Stokes:
η
[1
r2∂
∂r
(
r2∂vr∂r
)
+1
r2 sin θ
∂
∂θ
(
sin θ∂vr∂θ
)
− 2vrr2
− 2
r2∂vθ∂θ
− 2 cot θvθr2
]
=∂p
∂r
Problem: Es taucht auch vθ auf! Um dieses zu eliminieren benutzt man dieKontigleichung:
~∇ · ~v = 0 ⇒ 1
r2∂
∂r(r2vr) +
1
r sin θ
∂
∂θ(sin θvθ) = 0
( ∂∂ϕ
= 0 wie vorher)
⇒ 1
r sin θvθ cos θ +
1
r sin θsin θ
∂vθ∂θ
= − 1
r2∂
∂r(r2vr)
Eingesetzt in die r-Komponente von Navier-Stokes:
⇒ η
[1
r2∂
∂r
(
r2∂vr∂r
)
+1
r2 sin θ
∂
∂θ
(
sin θ∂vr∂θ
)
− 2vrr2
+2
r3∂
∂r(r2vr)
]
=∂p
∂r

104 KAPITEL 6. VISKOSE FLUIDE
Zusammengefasst:
η1
r2
[
∂2
∂r2(r2vr) +
1
sin θ
∂
∂θ
(
sinθ∂vr∂θ
)]
=∂p
∂r
Die rechte Seite dieser Gleichung ist nach Potenzen von cos θ entwickelt (vgl.oben)
⇒ Ansatz: vr(r, θ) = R(r) · cos θ
⇒ η1
r2[∂2
∂r2(r2R) cos θ − 1
sin θ
∂
∂θ(R sin2 θ)
︸ ︷︷ ︸
R1
sin θ2 sin θ cos θ
︸ ︷︷ ︸
2R cos θ
] = −A0
r2+
2A1
r3cos θ − . . .
Mit A0 = 0, An = 0 fu n > 1 und nach Kurzen von cos θ erhalt man eineDGL fur R(r):
η1
r2
(
∂2
∂r2(r2R) − 2R
)
=2A1
r3
⇒ R′′ +4R′
r=
2A1
η
1
r3
Letzteres ist eine gewohnliche DGL 2ter Ordnung, ihre Losung setzt sichzusammen aus der Losung der zugehorigen homogenen DGL und einer Par-tikularlosung.Homogene DGL:
R′′ +4R′
r= 0 ⇒ Ansatz: R(r) = Brα + C
⇒ Bα(α− 1)rα−2 + 4Bαrα−2 = 0 ⇒ α2 + 3α = 0
α1 = 0 (trivial) α2 = −3
Die homogene Losung lautet also:
R(r) = B1
r3+ C
Von der inhomogenen DGL ist nur eine Losung gesucht. Da 1r in beiden
Summanden auf der linken Seite der inhomogenen DGL einen Ausdruck mit1r3
ergibt, “rat” man sinnvollerweise:
R(r) = D1
r⇒ 2
D
r3− 4
D
r3=
2A1
η
1
r3⇒ D = −A1
η
Die Partikularlosung lautet also:
R(r) = −A1
η
1
r

6.3. LAMINARE STROMUNGEN 105
Damit ergibt sich die gesamte Losung zu:
R(r) = −A1
η
1
r+B
r3+ C
⇒ vr(r, θ) =
(
−A1
η
1
r+B
r3+ C
)
cos θ
Die vθ-Komponente erhalt man aus der Inkompressibilitat (~∇ · ~v = 0):
1
r2∂
∂r(r2vr) +
1
r sin θ
∂
∂θ(sin θvθ) = 0 Ansatz: vθ = R2(r) sin θ
vr und vθ eingesetzt ergibt:
cos θ1
r2
(
−A1
η− B
r2+ 2Cr
)
+1
r sin θ(cos θR2 sin θ + sin θR2 cos θ) = 0
⇒ R2(r) =A1
2η
1
r+B
2
1
r3− C
⇒ vθ(r, θ) =
(A1
2η
1
r+B
2
1
r3− C
)
sin θ
Die drei freien Konstanten lassen sich aus der Randbedingung bei ∞ und 2Randbedingungen bei r = R0 bestimmen.Fur r ⇒ ∞ hat man einen ungestorten Fluss parallel zur z-Achse:
vr = v0 cos θ vθ = −v0 sin θ ⇒ C = v0
Fur r = R0 (an der Oberflache) gilt:
v⊥ = vr = 0 und v‖ = vθ = 0
vr = 0 : −A1
η
1
R0+
B
R30
+ v0 ⇒ B =A1
ηR2
0 − v0R30
In vθ = 0 :A1
2η
1
R0+A1
2η
1
R0− v0
2− v0 = 0 ⇒ A1
η
1
R0=
3
2v0
⇒ A1
η=
3
2v0R0 ⇒ B =
1
2v0R
30
Die vollstandige Losung lautet also:
vr = v0
(
1 − 32R0r + 1
2
(R0r
)3)
cos θ
vθ = v0
(
34R0r + 1
4
(R0r
)3− 1
)
sin θ
p = p0 − 32ηv0R0
cos θr2

106 KAPITEL 6. VISKOSE FLUIDE
Visualisierung mit Stokes.mws
Ohne Rechnung erhalt man daraus fur die Kraft:
K = 6πηR0v0
2πηR0v0 vom asymmetrischen Druck4πηR0v0 von Schwerkraft
6.4 Kriterien fur verschiedene Stromungstypen, Ska-
lierungsgesetze
Welcher Stromungstyp (ideal, laminar, turbulent) gilt unter gegebenen Be-dingungen (char. Abmessungen l, char. Stromungsgeschwindigkeit v, Dichteρ, Viskositat η)?
Wir betrachten stationare Stromungen (Geschwindigkeit hangt nicht vonder Zeit ab). Die Geschwindigkeit kann an den einzelnen Stellen verschiedensein. Das Flussigkeitsvolumen kann durch (~v · ~∇)~v durchaus beschleunigtwerden. Die Beschleunigung steigt, je großer ~∇~v ∼ v
l1wird.
(~v · ~∇)~v ∼ v2
l1
Druckkraft:~∇p ∼ p
l2
Reibungskraft:
η∆~v ∼ ηv
l23
ρv2
l1≈ p
l2+ η
v
l23(6.45)
l1, l2, l3 sind dabei die jeweiligen Gradientenskalen.

6.4. KRITERIEN FUR VERSCHIEDENE STROMUNGSTYPEN, SKALIERUNGSGESETZE107
Diskussion von (6.45):
a) Reibung zu vernachlassigen
ηv
l3≪ p
l2≃ ρ
v2
l1(6.46)
fur l2 ≃ l1 p ≃ 1
2ρv2
(6.46) beschreibt die ideale Stromung (keine Reibung), aber auch turbulenteStromung ohne nennenswerte Reibung! → Staudruck, dynamischer Auftrieb
b) Tragheit zu vernachlassigen
ρv2
l1≪ p
l2≃ v
l23(6.47)
~∇p ≃ η∆~v ⇒ laminare Stromung
c)p
l2≪ ρ
v2
l1≃ η
v
l23Ist von geringer praktischer Bedeutung.
Ubergang von a) nach b)
ηv
l23≃ p
l2≃ ρ
v2
l1(6.48)
oderρvl23ηl1
≃ 1 undpl1ρv2l2
≃ 1 (6.49)
Diese beiden Kriterien beherrschen die Hydrodynamik.
Die dritte Beziehung,pl23ηvl2
≃ 1, folgt aus der zweiten automatisch.
Ahnlichkeitstheorie:Ein verkleinertes oder vergroßertes Modell einer Stromung (z.B. im Wind-kanal) liefert nur dann ein physikalisch richtiges Bild, wenn die Verhaltnisse(6.49) den gleichen Wert im Modell haben wie in Wirklichkeit. → ahnlicheStromungen
Wenn die geometrische Ahnlichkeit garantiert ist, kann man die l’s “kurzen”(Gradientenskalen verhalten sich ahnlich zueinander) und nur die Uberein-stimmung von
ρvl
η= Reynolds- Zahl =
Tragheit
Viskositat=ρ~v~∇~vη∆~v
(6.50)

108 KAPITEL 6. VISKOSE FLUIDE
und von p/ρv2 fordern. Das ist die einzige mogliche dimensionslose Kombi-nation der Großen ν = η
ρ , v und l.Im Allgemeinen gilt:
Die Stromung ist laminar fur sehr kleine Werteρvl23ηl1
und sonst turbulent.Da i. A. l3 6= l1 kann man nicht erwarten, dass der Umschlag gerade beieiner Reynolds-Zahl Re = ρvl
η ≃ 1 erfolgt, wobei l die makroskopische Ab-messung der um- oder durchstromten Objekte darstellt. Die Abmessungender großten Turbulenz-Wirbel l3 (vgl. Kapitel 9) sind namlich kleiner als z.B. im Fall der Rohrstromung der Rohrradius l1 = R.Dementsprechend findet man den Umschlag bei der Rohrstromung fur ρvR
η ≃103! Typische Wirbelabmessungen sind 1
30 des Rohrradius!
laminar → turbulentStromungswiderstand
v → v2
Stokes Newton
”Wenn ich in den Himmel kommen sollte,
erhoffe ich Aufklarung uber zwei Dinge:
Quantenfeldtheorie und Turbulenz.
Was den ersten Wunsch betrifft
bin ich ziemlich zuversichtlich.”
Horace Lamb (1932)
“Laminar” und “turbulent” stellen zwei Aggregatzustande dar. Jeder ist un-ter verschiedenen Bedingungen stabil.Der laminare kann “unterkuhlt” werden (Re > Recrit), da die Turbulenzent-stehung eine Art Keimbildung fordert.
Eine Flussigkeit durchstrome ein Rohr laminar mit parallelen Stromlinien.
Irgendwo trete eine kleine Strorung auf, die eine Stromlinie etwas nach obenverbiegt.

6.5. GRENZSCHICHTTHEORIE, PRANDTL 109
⇒ Die daruber liegende Stromrohre wird verengt ⇒ Die Flussigkeit mussschneller fließen ⇒ Der Druck dort verringert sich (p = const − 1
2ρv2). In
der unteren Rohre (1) erhoht sich der Druck ⇒ Weiteres Ausdehenen undVerengen der daruber liegenden Stromrohre. Dem wirkt die innere Reibungentgegen, sie versucht, das Geschwindigkeitsgefalle abzubauen (∼ η und ∼vr )Unter dem Einfluss der Tragheit allein, die proportional zu ρv2 ist, wurdedie Storung sich vergroßern ⇒ Stromung wird instabil ⇒ TurbulenzDas Verhaltnis von Tragheit zu Reibung entscheidet die Reynolds-Zahl.
6.5 Grenzschichttheorie, Prandtl
Wir betrachten die Stromlinien einer idealen Flussigkeit um eine Kugel.Diese weichen symmetrisch zur Aquatorebene aus.
An den Polen p und p’ befinden sich die Staugebiete (v = 0). Am schnellstenstromt die Flussigkeit am Aquator.Nach Bernoulli nimmt der statische Druck vom Pol zum Aquator hin ab unddann genau symmetrisch zum anderen Pol wieder zu. Diese symmetrischeDruckverteilung kann keine resultierende Kraft auf die Kugel ausuben.Eine Kugel bote einer idealen Flussigkeit keinen Widerstand. Um sie mitkonstanter Geschwindigkeit durch die Ruhende Flussigkeit zu ziehen brauchtman keine Kraft (Γ = 0)!Das widerspricht der Erfahrung!
Losung:Das Stromungsbild sieht nur am Anfang so symmetrisch aus, nach kurzerZeit andert die unvermeidliche Reibung in der Grenzschicht um die Ku-gel das Stromungsbild. → Wirbel (Totwasser im Lee) → Die statistischenDrucke sind nicht mehr symmetrisch, die Wirbel zerreiben sie.
F ∼ cwv2ρA . . .
Grenzschicht:Es herrscht senkrecht zur Oberflache ein Geschwindigkeitsgefalle dv
dz , es istumso steiler, je dunner die Schicht, also in Flussigkeiten geringer Viskositat.Große Raynolds-Zahlen Re entsprechen einer kleinen Zahigkeit, d.h. quasi

110 KAPITEL 6. VISKOSE FLUIDE
ideal!Dies gilt jedoch nicht an / in der Nahe von festen Wanden.
ideal: vn|Wand = 0 zah: vn|Wand = 0 und vtan|Wand = 0 (6.51)
Fur große Re geht v in einer dunnen Grenzschicht mit großen dvdz auf Null
zuruck.Die Grenzschicht kann laminar oder turbulent sein.Wir betrachten nur den laminaren Fall (Prandtl), also einen stetigen Uber-gang.
dvdz wird durch die Zahigkeit verursacht, die Zahigkeit darf also trotz großerRe nicht vernachlassigt werden.Grenzschicht: η∆~v, wichtig, wo ~v → 0.
PhanomenologieAn jedem durch die Flussigkeit gezogenem Korper hangt eine laminareSchicht, die Grenzschicht. Das Geschwindigkeitsgefalle in ihr vermittelt deno.g. Ubergang.Dieses Gefalle ist linear (dzv ∼ z), wenn die Dicke δ dieser Schicht kleingegen die Abmessungen l des Korpers ist. Dann ”sieht” die Flussigkeit prak-tisch nur ein ebenes Wandstuck.
NochmalWir betrachten die Stromung eines idealen Fluids um eine Kugel. Die Stau-punkte befinden sich an den Polen p und p’. Das Fluid stromt am schnell-sten am Aquator. Die Stromlinien weichen symmetrisch zur Aquatorebeneaus. Die symmetrische Druckverteilung bedeutet, dass es keine resultieren-de Kraft gibt. Dies widerspricht der Erfahrung, vgl. auch d’AlembertschesParadoxon.Losung:Das Stromungsbild ist in Realitat nicht symmetrisch, die unvermeidlicheReibung fuhrt zur Ausbildung einer viskosen Grenzschicht. Das hat eineVeranderung der Stromung (Wirbelablosung) und der Druckverhaltnisse zurFolge, und damit dann auch eine effektive Kraft.Fur große Re geht die Stromungsgeschwindigkeit in einer dunnen Grenz-schicht gegen Null.
Bedeutung der laminaren Grenzschicht nach Prandtl (1904):Die Grenzschicht sei klein gegen die Abmessung des umstromten Korpersδ ≪ RKrummung → ebenes ProblemDa sich zudem die Geschwindigkeit nur in Wandnahe andert, kann sie indem an die Randschicht anschließendem Gebiet als konstant angenommenwerden.

6.5. GRENZSCHICHTTHEORIE, PRANDTL 111
Als Randschicht bezeichnet man die kleine Ubergangsschicht fur die endli-che Geschwindigkeit auf Null.Unter diesen beiden Annahmen erfolgt die Behandlung der laminaren Grenz-schicht nach Prandtl (1904).
Wichtiger Hinweis:Die Naherung Navier-Stokes-Gleichung geht uber in Euler-Gleichung ist furgroße Raynold-Zahlen nicht erlaubt.⇒ Randbedingungen:Ohne η∆~v ist die Bewegungsgleichung von 1. Ordnung und die 2. Rand-bedingung, ~vtan = 0, die zusammen mit ~vn = 0 das Fließen des Fluidsan der Korperoberflache beschreibt, ist nicht mehr zulassig. Das Problemder Losung der Euler-Gleichung ware dann uberbestimmt. Die Nichtberuck-sichtigung dieser 2. Randbedingung lasst letztendlich die Beschreibung derEntstehung von Wirbeln nicht zu.
Prandtlsche Grenzschichttheorie fur inkopressible homogene FluideAls Ausgangspunkt nehmen wir die Kontigleichung und die Navier-Stokes-Gleichung.
∂tρ+ ~∇ · (ρ~v) = 0 → ~∇ · ~v = 0
(6.13):
ρ(∂t~v + (~v · ~∇)~v) = −~∇p+ η∆~v
Wir mochten wieder die Großenordnungen der einzelnen Terme abschatzen.Mit der Transformation:
t = Tt∗ ~v = V ~v∗ ~∇ =1
L~∇∗ p = V 2ρp∗
T = LV : typische dynamische Zeitskala
L: Lange, so dass Re = ρLVη ≫ 1, typische Ausdehnung des Fluids
V : typische (∼ mittlere) Geschwindigkeit
erhalt man eine dimensionslose Schreibweise
∂~v∗
∂t∗+ (~v∗ · ~∇∗)~v∗ = −~∇∗p∗ +
1
Re∆∗~v∗ (6.52)
∂t~v ∼ η
ρ∆~v → V
T∂t∗~v
∗ ∼ ηV
ρL2∆∗~v∗ → ∂t∗~v
∗ ∼ η
ρV L∆∗~v∗
Im Abstand > δ ist ~v∗ ≃ 1, an den Wanden geht ~v∗ von ≪ 1 bis 0.Da Re ≫ 1 ist der Reibungsterm i.A. vernachlassigbar, das gilt aber nichtam Rand, dort wird ∆∗~v∗ groß !
Wir lassen nun die Sterne weg.

112 KAPITEL 6. VISKOSE FLUIDE
∂~v
∂t+ (~v · ~∇)~v = −~∇p+
1
Re∆~v (6.53)
Konti-Gleichung:
~∇ · ~v =∂vx∂x
+∂vy∂y
+∂vz∂z
= 0 (6.54)
Wir betrachten eine 2-dim. Stromung mit vz = 0.Randbedingungen:
y = 0 : vx = vy = vz = 0 y = δ : vx = 1 vz = 0 (6.55)
vx = 1 an y = δ so schnell wie die Stromungvz verschwindet auf beiden Seiten, uberall 0!(6.53) und (6.54) werden zu einem 2-dimensionalen Problem:
∂vx∂t
+ vx∂vx∂x
+ vy∂vx∂y
= −∂p∂x
+1
Re
(
∂2vx∂x2
+∂2vx∂y2
)
(6.56)
∂vy∂t
+ vx∂vy∂x
+ vy∂vy∂y
= −∂p∂y
+1
Re
(
∂2vy∂x2
+∂2vy∂y2
)
(6.57)
∂vx∂x
+∂vy∂y
= 0 (6.58)
Nun schatzen wir die Großenordnung der verschiedenen Terme ab.In der Schicht wachst vx von 0 bis 1 (maximal), dasselbe gilt fur∂vx
∂x , ∂2vx
∂x2 , ∂p∂x .
Aus (6.58) folgt∂vy
∂y ∼ 1 und vy ∼ δ (vy ∼ ∂xvxdy, fur sehr dunne Schichtsteht “=”), ergo:
∂vy∂x
∼ δ∂2vy∂x2
∼ δ
In der Schicht fallt vx von 1 auf 0:
∂vx∂y
∼ 1
δ
∂2vx∂y2
∼ 1
δ2

6.5. GRENZSCHICHTTHEORIE, PRANDTL 113
Einsetzten der 1. Ordnungen in (6.56) liefert:
1
Reδ2∼ 1 oder δ ∼ 1√
ReDicke der Grenzschicht (6.59)
Bei großen Reynold-Zahlen ist das Fluid praktisch reibungsfrei.(6.48) liefert mit Re ∼ 1
δ2:
∂p
∂y∼ 1
Reδ∼ δ
Innerhalb der Grenzschicht ist der Druckunterschied also sehr gering.
p(δ) = p(0) + ∂ypδ︸ ︷︷ ︸
=δ2
Innerhalb der Schicht ist der Druckunterschied ∆p ∼ δ2 ≪ 1.Quer zur Schicht ist der Druck quasi konstant!
Einschub
Prandtlsche Grenzschichtgleichung
vy ≪ vx : vy ∼ δ∂p
∂y≪ ∂p
∂x=dp
dx
vx∂vx
∂x+ vy
∂vx
∂y− η
ρ
∂2vx
∂y2= −1
ρ
dp
dx
∂vx
∂x+∂vy
∂y= 0
Fur eine Potentialstromung ausserhalb der Grenzschicht mit U(x) gilt:
p+ ρv2
2= const (Bernoulli) − 1
ρ
dp
dx= U
dv
dx
Wirbelablosung fur stationare Stromung:
∂tvx = ∂tvy = 0
In unmittelbarer Umgebung der Wand (y ≪ δ) gilt:
vx|Wand = vy|Wand = 0 ∂2xvx ≪ ∂2
yvx
Fur das Geschwindigkeitsprofil erhalt man so aus (6.56) die Bestimmungs-gleichung:
∂2vx∂y2︸ ︷︷ ︸
f(y)
= Re∂p
∂x︸ ︷︷ ︸
f(x)
= const (6.60)

114 KAPITEL 6. VISKOSE FLUIDE
Grenzschichtablosung an einem Zylinder
Vor dem Zylinder herrscht Potentialstromung. An der Zylinderoberflachebildet sich eine Grenzschicht aus. Der Druck nimmt von A nach B auf derVorderseite ab und steigt an der Ruckseite wieder an. Die Grenzschicht reisstin C ab und bildet ein sogenanntes Totwassergebiet mit Wirbeln, welchesvon der Hauptstromung entkoppelt ist. Am Ende desselben werden die Wir-bel in einer Karmanschen Wirbelstraße mit der Stromung transportiert.Auflosung des d’Alembertschen Paradoxons:Das Abreissen der Grenzschicht und die Ausbildung der Wirbelstraße fuhrenzu einer Druckasymmetrie von Vorder- und Ruckseite, und somit zu einereffektiven Druckkraft.
Grenzschichtablosung
Interessante neue Physik: Grenzschicht kann sich ablosen und das Eindrin-gen von Wirbeln uber den Rand ermoglichen.Wie ist das moglich?Idealisiertes Modell der Grenzschicht nahe der Wand (y ≪ δ):Der Tragheitsterm ist unwichtig (|~v~∇ · ~v|/|ν∆~v| = Re !) und es gilt
dp∗
dx∗=∂2v∗x∂y∗2
(Von idealer Stromung aufgepragter Druckgradient von Reibung bilanziert)⇒ Das Vorzeichen von dp∗
dx∗ bestimmt die Krummung des Geschwindigkeitspro-fils v∗x(y)|z=const.
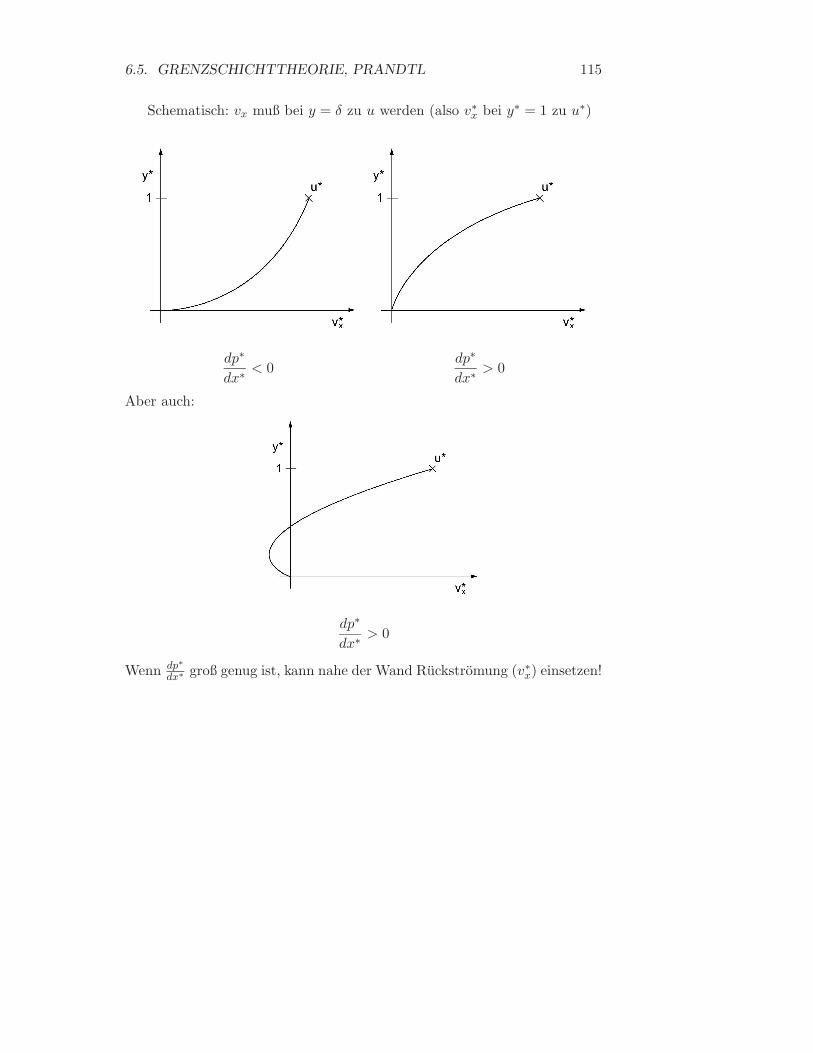
6.5. GRENZSCHICHTTHEORIE, PRANDTL 115
Schematisch: vx muß bei y = δ zu u werden (also v∗x bei y∗ = 1 zu u∗)
dp∗
dx∗< 0
dp∗
dx∗> 0
Aber auch:
dp∗
dx∗> 0
Wenn dp∗
dx∗ groß genug ist, kann nahe der Wand Ruckstromung (v∗x) einsetzen!

116 KAPITEL 6. VISKOSE FLUIDE
Erinnerung:
Bei einem umstromten Zylinder (ideal) nimmt p langs des Objektes ab, an-schliessend wieder zu. ⇒ Hinter p = pmin ist Gegenstromung moglich (abernicht notwendigerweise)
Naherungslosung unter Vernachlassigung des Tragheitsterms (gute Nahe-rung fur y∗ → 0, schlecht fur y∗ → 1 (y → δ)):
Randbedingung bei y∗ = 0 : v∗x = 0 , v∗y = 0
bei y∗ = 1 : v∗x = u∗(x)
Bernoulli:u2
2+p
ρ=v20
2⇒ u∗2
2v20 +
p∗
ρρv2
0 =v20
2⇒ u∗2 = 1 − 2p∗
Zur leichteren Schreibweise werden nun die “∗” weggelassen.
∂2vx∂y2
=dp
dx= p′
⇒ ∂vx∂y
= p′ · y + c1(x) ⇒ vx =1
2p′y2 + c1(x) · y + c2(x)
vx(y = 0) = 0 ⇒ c2(x) = 0
vx(y = 1) = u =√
1 − 2p ⇒√
1 − 2p =1
2p′ + c1(x)
⇒ c1(x) =√
1 − 2p− 1
2p′
⇒ vx =1
2p′y2 +
(√
1 − 2p− 1
2p′)
y
vy bestimmt man aus der Kontinuitatsgleichung (diese gilt auch in normier-ten Koordinaten):
∂vx∂x
v0L0
+∂vy∂y
v0δ
L0· 1
δ= 0

6.5. GRENZSCHICHTTHEORIE, PRANDTL 117
∂vy∂y
= −∂vx∂x
= −1
2p′′y2 −
(
−1
2
2p′√1 − 2p
− 1
2p′′)
y
⇒ vy = −1
6p′′y3 +
1
4
(2p′√1 − 2p
+ p′′)
y2 + c3(x)
vy(y = 0) = 0 ⇒ c3(x) = 0
⇒ vy = −1
6p′′y3 +
1
4
(2p′√1 − 2p
+ p′′)
y2
⇒ Vollstandiges Stromungsmuster
Explizites Beispiel: einfacher Ansatz mit Minimum
p(x) = p0x2
⇒ u =√
1 − 2p0x2
p0 = 1 ⇒ Staupunkte bei ± 1√2∼ 0.7
plot von -0.7 bis 0.7, y = 1plot von -0.7 bis -0.6 → Einstromenplot von 0.6 bis 0.7 → Umkehr
Visualisierung mit Grenzschicht.mws, wobei im Zoom die Vektorpfeile zurbesseren Sichtbarkeit skaliert sind.

118 KAPITEL 6. VISKOSE FLUIDE
⇒ Ablosung im Gebiet mit dpdx > 0 (aber nicht bei dp
dx = 0 !)Kriterium:
dv
dy
∣∣∣∣y=0
= 0 ⇒ 1
2p′ =
√
1 − 2p
xUmkehr =1√3≈ 0.577 in unserem Zahlenbeispiel
Konsequenz: Separation der idealen Stromung vom Gebiet hinter dem Korper,diese fuhrt ein Eigenleben (“Totwasser”)⇒ Ausbildung von Wirbeln hinter dem umstromten KorperBeispiel: Karmann’sche Wirbelstrasse
Video: karmann.mpg
Anderes Beispiel: Fluß mit Wandstelle
Stromung um einen Zylinder:
Mit Reibung: vx hat einen Umkehrpunkt (Ablosung).Anschaulich:Stromung wird im Gebiet dp
dx < 0 beschleunigt und bremst im Gebiet dpdx > 0
wieder ab. Im symmetrischen Fall gibt es zwei Staupunkte, mit Reibungwandert der hintere Staupunkt nach vorne und es kommt zur Ablosung.Druck bilanziert sich nicht mehr ⇒ Auflosung des d’Alembert’schen Para-doxons!

6.5. GRENZSCHICHTTHEORIE, PRANDTL 119
Video: prandtl.mpg
Siehe auch: Turbulence Scott.mpg: Turbulenz in einem magnetisierten Plas-ma; gezeigt ist die fluktuierende Teilchendichte (Quelle: B. Scott, MPI furPlasmaphysik).
Das Totwassergebiet ist i.A. verwirbelt, es gibt aber auch laminares Tot-wasser.
Bemerkung:Zur Ablosung ist die turbulente Grenzschicht nicht notwendig (aber siebegunstigt die turbulente Ablosung).
In laminaren Stromungen kann auch Ablosung vorkommen.Naives Argument:Nach dem Satz von Thomson ist die Zirkulation in einem Flussigkeitselementerhalten. ⇒ Wenn im Unendlichen ~∇× ~v = 0, dann gilt dies in stationarenStromungen fur die ganze Stromlinie (einmal Potentialstromung, immer Po-tentialstromung). Dies beruht aber darauf, dass Rotation um eine Stromlinieherum gebildet wird. Stromlinien auf der Oberflache lassen keine Kurve umsich herum zu, konnen also ein anderes Verhalten zeigen.

120 KAPITEL 6. VISKOSE FLUIDE
In der idealen Hydrodynamik moglich:
“Tangentiale Unstetigkeitsflache”: Hier springt v‖ auf 0! ⇒ Sprung von v‖bedeutet Flachenrotation (analog zu Sprung von B‖ ⇒ ~∇× ~B = µ ·~j)Tangentiale Unstetigkeitsflachen sind instabil und brechen in Wirbel auf(Kelvin-Helmholtz-Instabilitat, siehe spater).
Mit Viskositat:Es enden beliebig viele Stromlinien auf der Oberflache des Korpers ⇒ Wir-bel konnen “einwandern”.
Konsequenz der Wirbelbildung:Turbulente Stromung hat andere v-Abhangigkeit des Stromungswiderstan-des:Erinnerung: laminar (Hagen-Poiseuille): ~∇p ∼ v
turbulent: ~∇p ∼ v2 !Hangt von der Form des Korpers ab:
Kraft K = cw · ρv2AA: Stirnflachecw: “Widerstandsbeiwert”, dimensionslose Kennzahl, welche die
Formabhangigkeit beschreibtKonsequenz: Leistung d
dt
∫Kds ∼
∫Kdv ∼ v3 !
Beispiel Kfz: 50 PS → 150 km/h, 150 PS → 3√
3·150 km/h = 216 km/h

6.6. EIN EINFACHES MODELL ZUR VISKOSITAT IN GASEN 121
Beeinflussung der Ablosung:
Quelle: Aerodynamik (30. Marz 06)Vor dem Umschlagspunkt: dp
dx < 0
Nach dem Umschlagspunkt: dpdx > 0
Stromlinienform (kleine dpdx im Bereich dp
dx > 0)Absaugen der Grenzschicht (Phantom-Triebwerk)
6.6 Ein einfaches Modell zur Viskositat in Gasen
Die Viskositat als Transportkoeffizient ist nicht selbstkonsistent im Rahmender Fluidtheorie beschreibbar. Die genaue mikroskopische Berechnung er-folgt durch Auswertung des Boltzmannschen Stoßintegrals, also der rechtenSeite der Boltzmanngleichung.Hier betrachten wir eine einfache Abschatzung der Viskositat, genauer desScherungskoeffizienten der Viskositat η, fur verdunnte Gase mit
L≪ l ≪ d
L: Lineardimension des betrachteten Systemsl: Freie Weglange der Gasmolekuled: Molekuldurchmesser
Wir betrachten eine Stromung.

122 KAPITEL 6. VISKOSE FLUIDE
Es seien n Gasteilchen pro Fluidvolumeneinheit gegeben. 13n besitzt dann ei-
ne gemittelte thermische Geschwindigkeit u in z-Richtung. 16 u, die Halfte al-
so, hat eine mittlere Geschwindigkeit in positiver bzw. negativer z-Richtung.Gasteilchen, die die Ebene y = 0 von unten (oben) passieren, haben im Mit-tel ihren letzten Stoß an y − l (y + l) erfahren, sie haben also im Mitteldie makroskopische Schwerpunktgeschwindigkeit vx(y − l) (vx(y + l)). DieGasteilchen transportieren also einen mittleren Impuls in x-Richtung von16mnuvx(y ± l) pro Zeit und Fluideinheit. Der resultierende Impulsfluss proFluideinheit ist somit:
J =1
6mnu[vx(y − l) − vx(y + l)]
Taylor-Entwicklung:
J =1
6mnu(−2∂yvxl) =
Kx
F=
Kraft
Flacheneinheit= −η∂yvx
η =1
3mnul ν =
1
3ul
Da l ∼ 1n ist η interessanterweise dichteunabhangig.

Kapitel 7
HydrodynamischeInstabilitaten
7.1 Die Rayleigh-Taylor- und die Kelvin-Helmholtz-Instabilitat
Dynamische Prozesse:a) Stromungenb) Wellenc) Instabilitaten
Instabilitaten:Ausgangspunkt ist immer ein stationares System, sei es ein hydrostatischesv0 = 0, oder ein hydrodynamisches v0 6= 0 (Stromungen, Wellen).Die Frage, die sich stellt, lautet:Ist das betrachtete System stabil, d.h. wird das System in dem vorliegendenZustand verharren?Genauer:Ist das System stabil gegen kleine Storungen, d.h. werden lineare Stromun-gen gedampft oder wachsen sie (exponentiell) mit der Zeit?Ein mechanisches Analogon stellt eine Kugel auf einem Berg bzw. in einemTal dar.
123

124 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
Wie bei der Beschreibung von Wellenphanomenen gilt es auch hier die Di-spersionsrelation ω(k) aufzustellen.Bei Stromungen ∼ e−iωt bedeutet
ω ∈ R: rein oszillierende Losung→ ungedampfte stabile Welle
Imω 6= 0: Imω > 0: exponentiell anwachsende Mode→ Instabilitat
Imω < 0 : exponentiell gedampfte Mode→ Stabilitat
Fur Imω > 0, Reω 6= 0 spricht man von einer “uberstabilen Mode”, dieseist also instabil. Dabei handelt es sich um Oszillatoren, deren Amplitudemit der Zeit exponentiell anwachst.
Wir fragen nun nach der Stabilitat einer Grenzschicht zwischen zwei Flussig-keiten, z.B. zwischen zwei unterschiedlichen Luftstromungen in der Amo-sphare (allgemein: Wasser-Luft).
Methode: Normalmodenanalyse, das ist eine lineare Stabilitatsanalyse →nichtlineare Terme in den als klein angenommenen Storgroßen werden ver-nachlassigt.
Jede beliebige periodische Stromung, die durch linearisierte Gleichungenbeschrieben wird, lasst sich als Superposition ihrer Fourier-Komponenten
(∼ ei(~k·~r−ωt)) darstellen. → Gestorte Großen werden als monochromatische
Moden angesetzt (siehe IV Wellen).

7.1. DIE RAYLEIGH-TAYLOR- UND DIE KELVIN-HELMHOLTZ-INSTABILITAT125
Wir betrachten nun folgendes System:
Die Fluide stromen mit der konstanten Geschwindigkeit u bzw u′ in posi-tiver x-Richtung. Wir nehmen an, dass die Fluide inkompressibel sind. DieKonfiguration erfullt damit die die stationare (∂t = 0) Kontinuitats- und
Euler-Gleichung (~v0 · ~∇)~v0 = − ~∇p0ρ0
− ~∇ψ (+~g)).Die Frage ist nun, ob die Auslenkungen der Grenzschicht |ζ1(x, t)| aus demstationaren Ausgangszustand ζ0(x) = 0 mit der Zeit anwachsen, gedampftwerden oder oszillieren.
~∇× ~v0 = ~∇× ~v′0 = 0
Helmholtz→ ~∇× ~v1 = ~∇× ~v′1 = 0
Formulierung mit Hilfe des Geschwindigkeitspotentials:
Φ = ux+ Φ1 (7.1)
Φ′ = u′x+ Φ′1 (7.2)
Vertikale Geschwindigkeit eines FEes: vz1 = dtζ1
∂Φ1
∂z=
∂ζ1∂t
+ u∂ζ1∂x
︸ ︷︷ ︸
Linearisierung
(7.3)
∂Φ′1
∂z=
∂ζ1∂t
+ u′∂ζ1∂x
(7.4)
Die konvektiven Terme bei Wellen werden nicht betrachtet, da die Wellenin ruhendem Fluid betrachtet wurden.Fourier-Komponenten-Ansatz fur Storgroßen:
ζ1 = ζe−iωt+ikx ebene Oberflachenwelle (vgl. (4.48)) (7.5)
Analog geht man fur Φ1, Φ′1 (in Abhangigkeit von x und t) vor.
Φ1, Φ′1 mussen der Laplace-Gleichung genugen (Inkompressibilitat).

126 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
→ Φ1 ∼ f(z) Φ′1 ∼ f ′(z)
z-Abhangigkeit
Bestimmungsgleichung fur f(z), f ′(z):
d2f
dz2− k2f = 0 vgl. (4.10)
Und damit:
Φ1 = Φe−iωt+ikx+kz (7.6)
Φ′1 = Φ′e−iωt+ikx−kz (7.7)
Das Vorzeichen in kz ist so, dass die Stromung im jeweiligen Fluid mitzunehmendem Abstand von der Grenzschicht abklingt.Zur Erinnerung: f ∼ ekz +e−kz, vgl. Diskussion der Schwerewellen fur tiefesWasser.Die Wellenlange sei hinreichend klein gegenuber der vertikalen Ausdehnungder Fluide.(7.5)-(7.7) in (7.3) und (7.4) ergibt:
kΦekz = i(−ω + ku)ζ (7.8)
−kΦ′e−kz = i(−ω + ku′)ζ (7.9)
Das sind zwei Gleichungen, die die unbekannten Amplituden Φ, Φ′ und ζmiteinander verbinden. Wir benotigen nun eine 3. Gleichung.Randbedingung aus Bernoulli fur nichtstationare Stromung:
ρ∂Φ
∂t+
1
2ρ(~∇Φ)2 + p+ ρgz = F (t) vgl. (3.3)
Der Druck sei uber der Grenzflache stetig. Mit dem Ubergang
Φ → Φ +
∫
F (t)dt
ist das Geschwindigkeitspotential bis auf eine Zeitfunktion bestimmt.Randbedingung (ρ1 = 0 wegen Inkompressibilitat):
ρ
(∂Φ
∂t+
1
2(~∇Φ)2 + gζ1
)∣∣∣∣z=ζ1
= −pDruckstetig= −p′
= ρ′(∂Φ′
∂t+
1
2(~∇Φ′)2 + gζ1
)∣∣∣∣z=ζ1
(7.10)

7.1. DIE RAYLEIGH-TAYLOR- UND DIE KELVIN-HELMHOLTZ-INSTABILITAT127
Linearisiert:
~∇Φ2 = 2u∂Φ1
∂x~∇Φ′2 = 2u′
∂Φ′1
∂x
Somit erhalten wir:
ρ0
(∂Φ1
∂t+ u
∂Φ1
∂x+ gζ1
)∣∣∣∣z=ζ
= −p1|z=0 = −p′1|z=0
= ρ′0
(∂Φ′
1
∂t+ u′
∂Φ′1
∂x+ gζ1
)∣∣∣∣z=ζ
(7.11)
Bzw. mit den Storansatzen (7.5)-(7.7):
ρ0(i(−ω + ku)Φekz + gζ) = ρ′0(i(−ω + ku′)Φ′e−kz + gζ) (7.12)
Das ist also die 3. Bestimmungsgleichung fur Φ, Φ′ und ζ.(7.8) und (7.9) in (7.12):
ρ0(i(−ω + ku)i(−ω + ku) + gk)
− ρ′0(−i(−ω + ku′)i(−ω + ku′) + gk) = 0 (7.13)
⇒ Dispersionsrelation ω(k) fur Stromungen der Grenzschicht zwischen zweiFluiden:
a) Sei u = u′ = 0:
7.13→ −ρ0ω2 + ρ0gk − ρ′0ω
2 − ρ′0gk = 0 (7.14)
oderω
k= ±
√
g
k
ρ0 − ρ′0ρ0 + ρ′0
(7.15)
Sei ρ′0 ≪ ρ0 (z.B. Luft auf Wasser):
→ ω = ±√
gk (7.16)
Das ist die Dispersionsrelation fur eine Schwerewelle in der Tiefwassernahe-rung (vgl. (4.13)).ω ∈ R rein oszillierende ModeImω = 0 keine Dampfung / keine Instabilitat
b) Sei wieder u = u′ = 0.Nun aber ρ′0 > ρ0, d.h. ein schwereres Fluid ruht auf einem leichten. Wieauch intuitiv einleuchtend ist, ist eine solche Konfiguration instabil; dasschwerere Fluid hat die Tendenz unter das leichtere zu sinken.

128 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
Mathematischer Ausdruck dieser Instabilitat des hydrostatischen Gleichge-wichtes:Die Wurzel in (7.15) wird imaginar fur ρ′0 > ρ0, die positive imaginare Wur-zel beschreibt die instabile Mode mit der Anwachsrate:
|Imω| =
∣∣∣∣∣
√
kg
ρ0 + ρ′0Im√
ρ0 − ρ′0
∣∣∣∣∣
(7.17)
Rayleigh-Taylor-Instabilitat
Die negative Wurzel beschreibt die gedampfte Mode, das ist hier nicht vonInteresse.
c) u 6= 0, u′ 6= 0ρ > ρ′: Rayleigh-Taylor stabilLose (7.13) in quadratische Gleichung in ω auf:
ω2 − 2ρ0ku+ ρ′0ku
′
ρ0 + ρ′0ω − ρ0 − ρ′0
ρ0 + ρ′0gk +
ρ0k2u2 + ρ′0k
2u′2
ρ0 + ρ′0= 0 (7.18)
Mit der Losung:
ω =ρ0ku+ ρ′0ku
′
ρ0 + ρ′0
±
√√√√
(ρ0ku+ ρ′0ku
′
ρ0 + ρ′0
)2
+ρ0 − ρ′0ρ0 + ρ′0
gk − ρ0k2u2 + ρ′0k2u′2
ρ0 + ρ′0(7.19)
Bzw.:
ω
k=ρ0u+ ρ′0u
′
ρ0 + ρ′0±√
g
k
ρ0 − ρ′0ρ0 + ρ′0
− ρ0ρ′0(u− u′)2
(ρ0 + ρ′0)2
(7.20)
(ρ0u+ ρ′0u′)2
(ρ0 + ρ′0)2
− ρ0u2 + ρ′0u
′2
(ρ0 + ρ′0)2
(ρ0 + ρ′0) =
1
(ρ0 + ρ′0)2(2ρ0ρ
′
0uu′ − ρ0ρ
′
0u2 − ρ0ρ
′
0u′2) = −ρ0ρ
′0(u− u′)2
(ρ0 + ρ′0)2
Dispersionsrelation (7.20) beschreibt Instabilitat fur
ρ0ρ′0(u− u′)2 >
g
k(ρ2
0 − ρ′20 ) (7.21)
Kelvin (1871) - Helmholtz (1868) - Instabilitat
Mit der Anwachsrate:
|Imω| =
∣∣∣∣∣kIm
√
g
k
ρ0 − ρ′0ρ0 + ρ′0
− ρ0ρ′0(u− u′)2
(ρ0 + ρ′0)2
∣∣∣∣∣
(7.22)

7.1. DIE RAYLEIGH-TAYLOR- UND DIE KELVIN-HELMHOLTZ-INSTABILITAT129
Es ist Reω 6= 0. Jede instabile Mode ist eine uberstabile Mode → Anregungvon Wellen mit exponentiell anwachsender Amplitude.Beispiel: Wind blast uber ein Gewasser → sich aufsteilende Wellen
Fur g → 0 ist (7.21) immer erfullt → intergalaktische Jets
Instabilitatsbedingung ∼ k >∼ 1
(u− u′)2
Fur kleine Relativgeschwindigkeiten sind Stromungen mit kleiner Wellenlangeinstabil, aber λ≫ λStoß (vgl. Modifikation bei Berucksichtigung der Ober-flachenspannung).
Berucksichtigung der Oberflachenspannung
Was ist Oberflachenspannung?Flussiger Aggregatszustand ist gekennzeichnet durch kurzreichweitige Wech-selwirkung (Van-der-Waals-Krafte zwischen Molekulen)
Effektives Potential zwischen Molekulen:
1 Abstoßend fur kleine r ⇒ Mi-nimalabstand 6= 0
2 Verschwindet fur r → ∞ ⇒frei beweglich auf großen Ska-len
Im Innern: Alle Molekule haben nachste Nachbarn, Krafte heben sich auf.Oberflache: Nachste Nachbarn nur zur Flussigkeit hin → Kraftwirkung
Beschreibung im Flussigkeitsbild:
Gekrummte Oberflache zwischen 1 und 2
Gerade = minimale Flache, jedeKrummung vergroßert die Oberflache
Bei Verschiebung (Ausdehnung) von 1 in Richtung 2 muß Arbeit geleistetwerden.Bei Verschiebung um δs ist
Kraft =
∫
(p2 − p1)dF Arbeit =
∫
(p2 − p1)dF · δs = δWDruck

130 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
Beitrag der Oberflachenspannung: Anderung der Oberflache
Eindimensional: Lokale Naherung durch Schmiegekreis
Oberflache ∼ Lange des Kreisbogens Rdθ
δWOberfl. = α · δF (α: Oberflachenspannung )
= α ·∫
((R+ δs)dθ −Rdθ) = α ·∫
δsdθ
= α ·∫δs
RRdθ = α ·
∫
dFδs
R
⇒ gesamte Arbeit:
∫
(p2 − p1)dF · δs+ α
∫δs
RdF = δW
Im Gleichgewicht ist gerade δW = 0:∫
δsdF
(
p2 − p1 + α1
R
)!= 0 fur beliebige δs
⇒ Gleichgewichtsbedingung an der Oberflache:
p2 − p1 + α1
R= 0
⇒ Effekt der Oberflachenspannung:Bei gekrummter Oberflache gibt es einen Druckunterschied
p1 > p2 da p1 = p2 + α1
R
Fur R→ ∞: Drucke gleich, Oberflache andert sich nichtFur R → 0: Sehr großer Druck p1 notwendig, um Oberflache auszudehnen⇒ Aufblasen eines Luftballons geht am Anfang am schwersten!
Beispiel Gleichgewicht zwischen zwei Luftballons:Stabiler Zustand ist nicht R1 = R2, sondern ein Radius minimal, der anderemaximal.
Erweiterung auf zweidimensionale Flache: “Hauptachsen”-Krummung

7.1. DIE RAYLEIGH-TAYLOR- UND DIE KELVIN-HELMHOLTZ-INSTABILITAT131
Zuruck zum Eindimensionalen:Fur ζ ≪ λ gilt
1
R≈ ∂2ζ
∂x2
Die Oberflachenspannung α hat die Tendenz die Grenzflache zu minimieren,sie unterdruckt kleinste Wellenlangen.In der Randbedingung fur den Druck (7.11) gilt nun:
ρ0(∂tΦ1 + u∂xΦ1 + gζ1)|z=0 = (−p1 + α∂2xζ1)|z=0
= −p′1|z=0 = ρ′0(∂tΦ′1 + u′∂xΦ
′1 + gζ1)|z=0 (7.23)
Bzw. mit den Storansatzen (7.5)-(7.7), (7.8) und (7.9):
ρ0(i(−ω + ku)i(−ω + ku) + gk)
= ρ′0(−i(−ω + ku′)i(−ω + ku′) + gk) − αk3 (7.24)
Auflosen in quadratische Gleichung in ω:
ω2 − 2ρ0ku+ ρ′0ku
′
ρ0 + ρ′0ω +
ρ0k2u2 + ρ′0k
2u′2
ρ0 + ρ′0
− ρ0 − ρ′0ρ0 + ρ′0
gk − αk3
ρ0 + ρ′0= 0 (7.25)
Mit der Losung:ω
k=ρ0u+ ρ′0u
′
ρ0 + ρ′0
±√
g
k
ρ0 − ρ′0ρ0 + ρ′0
+αk
ρ0 + ρ′0− ρ0ρ′0(u− u′)2
(ρ0 + ρ′0)2
(7.26)

132 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
Die Oberflachenspannung α modifiziert das Stabilitatsverhalten, es hilftnicht mehr, k beliebig groß zu machen.Instabilitat fur:
|u− u′| !=
√
ρ0 + ρ′0ρ0ρ′0
(g
k(ρ0 − ρ′0) + αk
)
(7.27)
Es ist eine endliche Relativgeschwindigkeit notwendig.ρ0 ≫ ρ′0:
|u− u′| >√
ρ0
ρ′0
g
k+αk
ρ′0(7.28)
Rayleigh-Taylor:u = u′ = 0, ρ′0 > ρ0 genugt nicht.Instabilitatsbedingung:
g
k(ρ0 − ρ′0) + αk < 0 ρ′0 − ρ0 >
α
gk2
Es existiert eine kritische Wellenlange, kleinste Wellenlangen werden unter-druckt.
7.2 Die Gravitations-Instabilitat
Ein Fluid im stabilen Gleichgewicht unter dem Einfluss von Selbstgravitati-on kann instabil sein.Linearisierte Euler- und Konti-Gleichung (~v0 = 0):
∂tρ1 + ~v1 · ~∇ρ0 + ρ0~∇ · ~v1 = 0 (7.29)
∂t~v1 = −c2s ~∇(ρ1
ρ0
)
− ~∇ψ1 (7.30)
p1 = c2sρ1
Poisson-Gleichung:
∆ψ1 = 4πGρ1 (7.31)
Jeans (1961): ρ0 und cs (→ isotherm) sind konstant.~∇·(7.30):
∂t~∇ · ~v1 7.29= −∂
2t ρ1
ρ0= −c2s
∆ρ1
ρ0− ∆ψ1
7.31= −c2s
∆ρ1
ρ0− 4πGρ1 (7.32)
Mit ρ1 = ρei(~k·~r−ωt) folgt:
ω2 = c2s(k2 − k2
c ) (7.33)

7.2. DIE GRAVITATIONS-INSTABILITAT 133
mit der kritischen Wellenlange:
k2c =
4πGρ0
c2s(7.34)
k < kc → Imω > 0 → InstabilitatSoweit, so schon, aber:ρ0 und cs konstant bedeutet fur das Gleichgewicht:
~∇p0 = ~∇(c2sρ0)︸ ︷︷ ︸
=0
= −ρ0~∇ψ0 → ψ0 = const
Die Poisson-Gleichung im Gleichgewicht lautet aber ∆ψ0 = 4πGρ0
→ ρ0 = 0!⇒ Die Analyse ist fur eine endliche Massendichte nicht gultig!→ ”Jeans-Swindle”
Betrachte eine 1-dim. selbstgravitierende Schicht im Gleichgewicht.
ρ0(z) ψ0(z) cs = const
∂zp0 = c2s∂zρ0 = −ρ0∂zψ0 (7.35)
bzw. dz
(1
ρ0dzρ0
)
= −4πG
c2sρ0 (7.36)
Die Losung ist:
ρ0 = ρ0(0) cosh−2(z
H
)
= ρ0(0)(1 − ω2) (7.37)
mit H =
(kT
2πGmρ0(0)
) 12
und ω = tanh
(z
H
)
sowie c2s =kT
mim isothermen Fall
Nun betrachte die marginale Mode ω = 0, also Imω > 0 Instabil und kmdie Wellenzahl der marginalen Mode.Divergenz der Euler-Gleichung (7.32) mit ω = 0:
0 = −c2s∆ρ1
ρ0− 4πGρ1 = (d2
z − k2m)θ +
4πGρ0
c2sθ (7.38)
mit θ =ρ1
ρ0
Nun ist
dzθ = dωθdzω = dωθ(1 − ω2)
d2zθ = (1 − ω2)2d2
ωθ − 2ω(1 − ω2)dωθ

134 KAPITEL 7. HYDRODYNAMISCHE INSTABILITATEN
⇒ H2(
d2ωθ −
2ω
1 − ω2dωθ
)
+
(
2
1 − ω2− ν2
(1 − ω2)2
)
θ = 0 (7.39)
mit ν = kmH
Legendreartige Gleichung mit der Losung:
θ(ω) = A1
(1 + ω
1 − ω
) ν2
(ν − ω) +A2
(1 − ω
1 + ω
) ν2
(ν + ω) (7.40)
θ bleibt endlich fur ω = 1 → ν = 1
→ k2m =
1
H2=
2πGmρ0(0)
kT(7.41)
Instabilitat fur k < km = 12kc,Jeans fur homogene Dichte ρ0(0).

Kapitel 8
Die Rayleight-Benard-Konvektion
Unter Konvektion versteht man eine durch einen Temperaturgradienten ver-ursachte Fluidbewegung. Der Warmetransport wird mit einem Massentrans-port assoziiert.Wir betrachten ein Fluid mit externer Warmezufuhr Q.
Ist der Temperaturgradient hinreichend klein |~∇T | < ~∇crit, so wird dieWarme durch Warmeleitung im Fluid transportiert (ahnlich wie im Festkorper).Ist |~∇T | > ~∇crit, so setzt die konvektive Bewegung von Fluidelementen ein,die die Warme transportieren.→ Uberkritisches Phanomen / Instabilitat
Zur Beschreibung der Benard-Konvektion:a) Auffinden eines stationaren Zustandes / Anfangskonfiguration, gekenn-zeichnet durch Warmeleitungb) Linearmodenanalyse einer Storung dieses ZustandesMaßgebliche Bilanzgleichungen:
∂tρ+ ~∇ · (ρ~v) = 0 (8.1)
ρ(∂t~v + (~v · ~∇)~v) = −~∇p+ ρ~g + ν∆~v (8.2)
135

136 KAPITEL 8. DIE RAYLEIGHT-BENARD-KONVEKTION
Sowie die Bilanz der inneren Energiedichte unter Berucksichtigung der Warme-leitung:
ρ(∂tǫ+ ~v · ~∇ǫ) − ~∇ · (K~∇T ) + p~∇ · ~v = 0 (8.3)
K: WarmeleitfahigkeitVerzicht auf Herleitung der Warmeleitung, die als hoheres Moment bei Her-leitung der Bilanzgleichungen aus der statistischen Beschreibung (Vertei-lungsfunktion, Boltzmann-Gleichung und Momentenbildung), in (8.3) auf-tritt.(→ Kreuzer: Non-Equilibrium Thermodynamics)
Wir nehmen an, das Fluid sei “annahernd inkompressibel”, d.h. eigentlichist das Fluid inkompressibel (~∇ · ~v = 0), aber man erlaubt, dass die Dich-te sich lokal mit ansteigender Temperatur vermindert. Dieser Effekt fuhrtgenau zur Konvektionsbewegung, zum Aufsteigen warmerer, leichterer Flui-delemente (s. spater).Zunachst nehmen wir aber an:
~∇ · ~v = 0
Im inkompressiblen Fall gilt zudem die thermodynamische Beziehung:
dǫ = cpdT cp = spezifische Warme
Damit geht (8.3) uber in:
∂tT + ~v ~∇T = χ∆T (8.4)
χ = Kρcp
: thermometrische Leitfahigkeit unter der Annahme
konstanter Warmeleitfahigkeit
Statisches Gleichgewicht: ~v0 = 0Randbedingungen: T0(0) = Ta, T0(d) = TbStationare Losung von (8.4):
T0(z) = Ta − βz β =Ta − Tb
d(8.5)

137
Die thermische Ausdehnung des Fluids ist linear anzunehmen.
ρ(T ) = ρa(1 − α(T − Ta)) (8.6)
α: Expansionskoeffizient, i.A. ≪ 1Also (8.5) in (8.6):
ρ0(z) = ρa(1 + αβz) ρ0(0) = ρa (8.7)
Statische, stationare Losung von (8.2):
dp0
dz= −ρ0g → p0(z) = pa − gρa(z +
1
2αβz2) (8.8)
Es ist experimentell bekannt, dass eine solche Losung, (8.5), (8.7). und (8.8),nur fur relativ kleine Temperaturgradienten stabil ist. Der kritische Para-meter ist dabei β (Maß fur den Temperaturgradienten).
Exkurs
Dieses stationare System wird beschrieben durch (8.5), (8.7) und (8.8).
T0(z) = Ta − βz
ρ0(z) = ρa(1 + αβz)
p0(z) = pa − gpa(z +1
2αβz2)
Ist es Rayleigh-Taylor-instabil?Wir betrachten Stromung um z′. In einer Umgebung ǫ um z′ gilt:
ρ0(z′ + ǫ) > ρ0(z
′ − ǫ)
Stabilitatsanalyse wie in Kapitel 6 mit den Storgroßen Φ+ǫ1 , Φ−ǫ
1 , ζ1, die alsFourier-Moden anzusetzen sind.
~v+ǫ0 = ~v−ǫ0 = 0
Φ(1)1 ∼ eikx−iωt±kz ∂zΦ1 = ∂tζ1

138 KAPITEL 8. DIE RAYLEIGHT-BENARD-KONVEKTION
Wie in (7.8) und (7.9) erhalten wir:
−kΦ+ǫe−kz = i(−ω + ku+ǫ︸ ︷︷ ︸
→0
)ζ1 (a)
kΦ−ǫekz = i(−ω + ku−ǫ︸ ︷︷ ︸
→0
)ζ1 (b)
Die 3. Bestimmungsgleichung erhalt man aus Bernoulli + der Stetigkeit desDruckes:
ρ+ǫ(
∂tΦ+ǫ +
1
2(~∇Φ+ǫ)2 + gζ1
)∣∣∣∣z=ζ1
= ρ−ǫ(
∂tΦ−ǫ +
1
2(~∇Φ−ǫ)2 + gζ1
)∣∣∣∣z=ζ1
(c)
ζ1 ≪ 1 auch Randbedingung an z = 0
Linearisierung, d.h. Kleinheitsparameter werden nur bis zur linearen Ord-nung berucksichtigt
ρ±ǫ0 = ρa(1 + αβ(z ± ǫ)) = ρ0(z) ± ρaαβǫ︸ ︷︷ ︸
Kleinheitsparameter
α≪ 1 ǫ≪ 1 homogenes Medium: β ≤ 0
und dann noch mit den Storgroßen multipliziert.
Φ = Φ0 + Φ1~∇Φ0
~∇Φ1 = 0
Gleichung (c) linearisiert:
ρ0(∂tΦ+ǫ1 + gζ1)|z=0 = ρ0(∂tΦ
−ǫ1 + gζ1)|z=0 (d)
Fourier-Ansatze: Φ±ǫ1 ∼ e−iωt
ρ0(−iωΦ+ǫe−kz + gζ) = ρ0(−iωΦ−ǫekz + gζ)
Mit (a) und (b) folgt:
Φ+ǫe−kz = iωζ
kΦ−ǫekz = −iω ζ
k
ρ0(ω2 + gk) = ρ0(−ω2 + gk)
⇒ ω = 0
Lineare Stabilitatsanalyse
Boussinesq-Approximation:In einem “annahernd inkompressiblen” Fluid, d.h. ρ = const raumlich und

139
zeitlich, ist ρ1 = 0 (ρ0 = ρa) in allen Gleichungen, außer im Gravitations-term der Bewegungsgleichung. In der Tat ist die thermische Expansion (vgl.(8.6)) in den meisten Fluiden sehr klein, aber im gravitativen Term fuhrtdieser Effekt genau zum Einsatz der Konvektion (Auftriebskraft).Streng mathematisch ist diese Vorgehensweise fragwurdig, da keine strengeEinhaltung der Abschatzung nach Großenordnungen besteht, aber sie isterfolgreich, d.h. Experiment wird hinreichend gut beschrieben.
Also in Konti- (8.1), Bewegungs- (8.2) und Warmetransportgleichung (8.4):
T = T0 + T1
ρ = ρ0︸︷︷︸
=ρa
+ρ1(T1) d.h. mit (8.6): ρ = ρa − ρaαT1
Dichtestorung entsteht nur durch Storung in thermischer Expansion.
~v = ~v0 + ~v1
Da ρ1 nur im gravitativen Term berucksichtigt werden soll, ergeben sich dielinearisierten Gleichungen zu:
8.1→ ∂t(ρ0 + ρ1) = −~∇ · [(ρ0 + ρ1)(~v0 + ~v1)]
→ ~∇ · ~v1 = 0 (8.9)
8.2→ (ρ0 + ρ1)(∂t(~v0 + ~v1) + (~v0 + ~v1)~∇ · (~v0 + ~v1))
= −~∇(p0 + p1) + (ρ0 + ρ1)~g + η∆(~v0 + ~v1) (8.10)
Hier gabe es ohnehin keinen anderen ρ1-Term.
ρ0∂t~v1 = −~∇p1 + ρ1~g + η∆~v1
→ ∂t~v1 = −~∇(p1
ρa
)
− αT1~g + ν∆~v1 ν =η
ρa(8.11)
Hier ist wiederrum ρ0 = ρa.
8.4→ ∂tT1 + ~v1~∇T0 = chi∆T1
bzw. mit (8.5) (T0 = Ta − βz):
∂tT1 − v1zβ = χ∆T1 (8.12)

140 KAPITEL 8. DIE RAYLEIGHT-BENARD-KONVEKTION
Zweifache Anwendung der Rotation auf (8.11) (erste eliminiert Abhangigkeitvon p1, zweite fuhrt zur 2. Ableitung von T1 wie in (8.12)) ergibt fur die z-Komponente:
∂t~∇2v1z = αg(∂2xT1 + ∂2
yT1) + ν ~∇4v1z (8.13)
~∇× ~∇× ~v1 = −~∇2~v1 fur ~∇ · ~v1 = 0
mit ν =η
ρa= kinematische Viskositat
~∇× (T1~g) = ~∇T1 ×~g ~∇× (~∇T1 ×~g) = ~∇T1~∇·~g−~g~∇· (~∇T1)+(~g · ~∇)~∇T1 − (~∇T1 · ~∇)~g
(8.12) und (8.13) sind lineare Differentialgleichungen fur T1 und v1z (∂2zT1
hebt sich raus).⇒ Eine beliebige Storung ist als Superposition von Fourier-Komponentendarstellbar (Normal-Moden):
v1z = w(z)eωt+ikxx+ikyy (8.14)
T1 = θ(z)eωt+ikxx+ikyy (8.15)
periodische x,y-Abhangigkeit
Mit den Ansatzen (8.14) und (8.15) folgt:
8.12→ ωθ − βw = χ(d2z − k2
x − k2y)θ (8.16)
8.13→ ω(d2z − k2
x − k2y)w = −αg(k2
x + k2y)θ + ν(d2
z − k2x − k2
y)2w(8.17)
(Kein algebraisches Gleichungssystem fur Storamplituden → gewohnlicheDGLs fur w, θ.)Der Stabilitatsubergang liegt bei ω = 0 (ω > 0: Instabilitat, ω < 0: Stabi-litat).
EinschubMan kann allgemein zeigen, dass fur Gleichgewichtssysteme (8.16), (8.17):ω ∈ R.(8.17)·(d2
z − k2 − ω):
ω(d2z−k2)(d2
z−k2−ω)w = −αgk2(d2z−k2−ω)θ+ν(d2
z−k2)2(d2z−k2−ω)w
ω(d2z − k2)(d2
z − k2 − ω)w8.16=
αgβk2
χw + ν(d2
z − k2)2(d2z − k2 − ω)w
(d2z − k2)(d2
z − k2 − ω)(d2z − k2 − ω
ν)w = −αgβk
2
νχw (a)

141
Mit den Hilfsfunktionen G(z) = (d2z − k2)w und F (z) = (d2
z − k2 − ων )G(z)
wird (a) zu:
(d2z − k2 − ω)F (z) = − αgβk2
νχ︸ ︷︷ ︸
=γ
w(z) (b)
∫
Schicht
F ∗(b)dz∫
F ∗d2zF = F ∗dzF −
∫
|dzF |2dz (c)
∫F ∗d2F ergibt sich aus dem 1. Term der linken Seite von (b).
F ∗dzF → 0, denn (8.17) mit F ergibt F (z) = αgk2
ν θ und die Randbedingun-gen lauten θ(0) = θ(d) = 0.Rechte Seite von
∫F ∗(b)dz:
∫
wF ∗dz =
∫
w(d2z − k2 − ω∗
ν)G∗dz =
∫
G∗(d2z − k2 − ω∗
ν)wdz
Letzteres durch zweifache partielle Integration von∫G∗d2
zwdz. Mit der De-finition von G ergibt sich:
∫
wF ∗dz =
∫
G∗Gdz − ω∗
ν
∫
G∗wdz
=
∫
G∗Gdz − ω∗
ν
∫
w(d2z − k2)w∗dz
=
∫
G∗Gdz +ω∗
ν
∫
[|dzw|2 + k2|w|2]dz (d)
(Letzteres wieder durch partielle Integration.)Somit ergibt sich insgesamt fur
∫
Schicht
(b)F ∗dz:
−∫
dz(|dzF |2 + (k2 + ω)|F |2) = −γ∫
dz(|G|2 +ω∗
ν(|dzw|2 + k2|w|2)) (e)
Der Imaginiarteil von (e) ist:
Imω
∫
dz (|F |2 +γ
ν(|dzw|2 + k2|w|2)
︸ ︷︷ ︸
positiv definit
= 0 (f)
⇒ Imω = 0
Setze ω = 0 und eliminiere θ:
8.16,8.17→ νχ(d2z − k2
x − k2y)
3w = −αβgk2w (8.18)

142 KAPITEL 8. DIE RAYLEIGHT-BENARD-KONVEKTION
Bzw. mit der normierten Wellenlange kx,y = kx,yd und der normierten z-Richtung z = z
d (d: Schichtdicke):
(d2z − k2
x − k2y)
3w = −Rak2w (8.19)
Mit der Rayleigh-Zahl:
Ra =αβgd4
χν
(Erinnerung: β misst den Temperaturgradienten.)(8.19) ist eine Differentialgleichung 6. Ordnung, zu ihrer Losung sind somit6 Randbedingungen vonnoten (Details: Chandrasekhar, Hydrodynamic andHydromagnetic Stability, Oxford University Press, 1961).Die Temperatur am oberen / unteren Rand sei konstant und das Fluidverbleibe in der Schicht zwischen z = 0 und z = d.
θ(0) = θ(d)︸ ︷︷ ︸
ist in der Tat RB fur w
→s.8.16∫ ∫
w=θ
= w(0)︸ ︷︷ ︸
v1z(0)
= w(d)︸ ︷︷ ︸
v1z(d)
= 0
︸ ︷︷ ︸
(d2z−k2
x−k2y)w(0)=
(d2z−k2
x−k2y)w(d)=0
4RB
Die Losung ist hier besonders einfach.Fur freie Oberflache gilt:Viskose Schubspannungen (σ′ik, vgl. (6.17)) verschwinden, an der Oberflachewird keine Arbeit verrichtet.(Fur feste Oberflache / Rand ist v1x = v1y = 0, ~∇ · ~v1 = 0 → ∂v1z
∂z = 0.)Vergleiche Kapitel 5.
σ′xz = η(∂zv1x + ∂xv1z) = 0 = σ′yz = η(∂zv1y + ∂yv1z)
v1z = 0 auf den Oberflachen z = 0 und z = d(Fourier: kx,yw(0) = kx,yw(d) = 0).
→ ∂xv1z = ∂yv1z = 0 → ∂zv1x = ∂zv1y = 0|z=0,d
∂z ~∇ · ~v1 = ∂x∂zv1x + ∂y∂zv1y + ∂2zv1z = ∂2
zv1z = 0 bei z = 0, d 2RB
Das ist freilich nicht sehr realistisch (zwei freie Oberflachen), fuhrt aber aufdie einfache Losung des Eigenwertproblems:
w(z) = w sin(nπz) n = 1, 2, 3, . . . (8.20)
Losung (8.20) in (8.19):Die Rayleigh-Zahl kann nur die Eigenwerte
Ra =(n2π2 + k2)3
k2(8.21)

143
annehmen, d.h.
Ra =(n2 + k2)3
k2
(
Ra =αβgd4
χν
)
ist niedrigster Eigenwert.Minimalisierung nach k2 liefert kritische Rayleigh-Zahl
Rc =27
4π4 ∼ 657
an kritischer Wellenzahl:
k2crit =
π2
2
Ra ∼ β(∼ ~∇T )
Fur kleine Ra sind die Eigenwerte nicht fur reelle k erfullbar → keine Insta-bilitat.Ra < Rc: System findet stationare Losung (8.5), (8.7), (8.8).WirdRa erhoht (durch Erhohung der Warmezufuhr), so wird beiRc zunachstdie Fourier-Komponente mit kcrit instabil, bei weiterer Erhohung von Rawird ein ganzer Bereich der Wellenzahlen instabil (vollstandige Losung von(8.16), (8.17)).
Kritische Rayleigh-Zahlen fureine feste und eine freie Oberflache: 1100zwei feste Oberflachen: 1700
→ Randstabilisierung
Wir haben also nicht die Dispersionsrelation explizit aufgestellt, sondern”nur” eine marginale lineare Stabilitatsanalyse durchgefuhrt.Eine vollstandige Losung (ω 6= 0) von (8.16) und (8.17) ist moglich und fuhrt

144 KAPITEL 8. DIE RAYLEIGHT-BENARD-KONVEKTION
ebenso auf ω > 0 fur Ra > Rc (zuvor war nur durch Zusatzinformation klar,dass der Ubergang von ω = 0 (marginale Mode) zu ω > 0 fur Ra > Rc undnicht fur Ra < Rc stattfindet).
Konvektionszellen sind ihrerseits stabil, d.h. die Storamplituden wachsennur in einem kurzen linearen Stadium (im Sinne der Storungsrechnung) ex-ponentiell an.
Muster der Konvektionszellenw(z) ist bekannt als:
w(z) = v0 sin(nπz)
Doch was ist mit vx, vy?Sei vz = w(z) cos(2π
L x).Das einfachste Konvektionsmuster zeigt Rollen parallel zu einer, sagen wirder y-Achse, in Abhangigkeit nur von der x-Achse.
vy = 0 ~∇ · ~v = 0
→ vx = −∫
dzw(z) cos(2π
Lx)dx = − L
2πdzw sin(
2π
Lx)

Kapitel 9
Turbulenz
Die lineare Stromung von Fluiden ist die Ausnahme, i. A. ist die Dynamikvon Fluiden turbulent.Z.B. Jet-Stromung in der oberen Troposphare, Wasserstromungen unterhalbder Ozeanoberflache, Golf-Strom, Fluss- / Kanalstromungen, Kummulus-Wolken.
Hauptcharakteristik turbulenter Stromungen:
-Irregularitat: Es ist keine streng deterministische Beschreibung moglich,sondern nur eine statistische Beschreibung von Turbulenz (s. spater).-Stark fluktuierende Vortizitat / Wirbelstarke-Große Reynoldszahlen Re = ρvl
η
-Dissipation durch kleinskalige viskose Scherspannungen (σ′ik in (6.17) und(6.22)). Die benotigte Energiequelle fur Turbulenz sind oftmals Scherstromun-gen vi(rj).-Turbulenz entsteht aus laminarer Stromung durch Instabilitaten fur hoheReynoldszahlen.
Wir betrachten zwei unterschiedliche Fragestellungen:
1) Bei welchem Re wird eine Stromung instabil?
2) Wie kann man den vollentwickelten turbulenten Zustand sinnvoll cha-rakterisieren?
Mathematisch exakt sieht das folgendermaßen aus:Navier-Stokes linearisieren → Storungsansatz → ω(k) → Stabilitatskriteri-umAchtung: Das ist eine lineare Theorie, sie liefert keine Aussage bzgl. Frage 2Ausgangspunkt: Navier-Stokes-Gleichung fur Wirbel
145

146 KAPITEL 9. TURBULENZ
Es ist:~ω = ~∇× ~v Wirbelstarke
~∇×(∂~v
∂t+ (~v · ~∇)~v +
1
ρ~∇p− ν∆~v
)
= 0
(~v · ~∇)~v =1
2~∇v2 − ~v × (~∇× ~v)
⇒ ~∇× (~v · ~∇)~v~∇× 1
2~∇v2=0= −~∇× (~v × ~ω) = −
[
(~ω · ~∇)~v − (~v · ~∇)~ω]
∆~v = ~∇(~∇ · ~v)︸ ︷︷ ︸
=0 da kompressibel
−~∇× (~∇× ~v) = −~∇× ~ω
⇒ ~∇× ∆~v = −~∇× ~∇× ~ω = − ~∇(~∇ · ~ω)︸ ︷︷ ︸
=0 (Rotationsfeld)
+∆~ω
∂~ω
∂t− (~ω · ~∇)~v + (~v · ~∇)~ω − ν∆~ω = 0
⇒ ∂~ω
∂t+ (~v · ~∇)~ω = (~ω · ~∇)~v + ν∆~ω
⇒ d~ω
dt= (~ω · ~∇)~v + ν∆~ω
(ν = 0 ⇒ Helmholtz’sche Wirbelgleichung)
Nebenbemerkung: Nach wie vor entstehen fur ~ω = 0 keine Wirbel (aber mandenke an das Einwandern...)Jetzt betrachten wir eine vereinfachte Geometrie, ebene (2dim) Stromung,z.B.
vz = 0∂
∂z= 0
~v0 = v0(y)~ex
Fur diese Stromung gilt:
~ω = ~∇× ~v =
∣∣∣∣∣∣∣
i j k∂x ∂y ∂zvx vy vz
∣∣∣∣∣∣∣
=
00
∂vy
∂x − ∂vx
∂y
=
00ωz
⇒ Man hat nur die Gleichung fur ωz zu betrachten:
∂ωz∂t
+ (v · ~∇)ωz = ν∆ωz

147
(in der z-Komponente ist (~ω · ~∇)~v = 0, da vz = 0)
Storungsansatz in ~v (in x-y-Ebene):
~v = ~v0 + ~v1 = v0(y)~ex + ~v1(x, y)
⇒ ωz = −dv0dy
+ ω1z
Linearisieren von (~v · ~∇)ωz:
(
(v0~ex + ~v1) · ~∇)
(ω1z −dv0dy
) =
(
v0∂
∂x+ v1x
∂
∂x+ v1y
∂
∂y
)(
ω1z −dv0dy
)
1. Ordnung:
⇒ v0∂ω1z
∂x− v1y
d2v0dy2
(v0 hangt nur von y ab)
⇒ ∂ω1z
∂t+ v0
∂ω1z
∂x− v1y
d2v0dy2
= ν∆ω1z
Wie bereits bekannt lassen sich inkompressible zweidimensionale Wirbelfel-der bequem mit einer Stromfunktion ψ darstellen:
v1x =∂ψ1
∂yv1y = −∂ψ1
∂x
⇒ ~∇ · ~v = 0 und ~∇× ~v1 = ω1z =∂v1y∂x
− ∂v1x∂y
= −∆ψ1
⇒ − ∂
∂t∆ψ1 − v0
∂
∂x∆ψ1 +
∂ψ1
∂x
d2v0dy2
= −ν∆∆ψ1
Jetzt folgt Fouriertransformation in x und t (Problem hangt explizit von yab!)
ψ1 = ψ(y) · ei(kx−ωt)
ACHTUNG: ω = Frequenz, ω1z = Wirbelstarke
⇒ (iω − ikv0)
(
−k2 +d2
dy2
)
ψ +d2v0dy2
ikψ = −ν(
−k2 +d2
dy2
)2
ψ | · ik
(
v0 −ω
k
)(
d2ψ
dy2− k2ψ
)
− d2v0dy2
ψ = − iνk
(
d4ψ
dy4− 2k2d
2ψ
dy2+ k4ψ
)
Orr-Sommerfeld-Gleichung
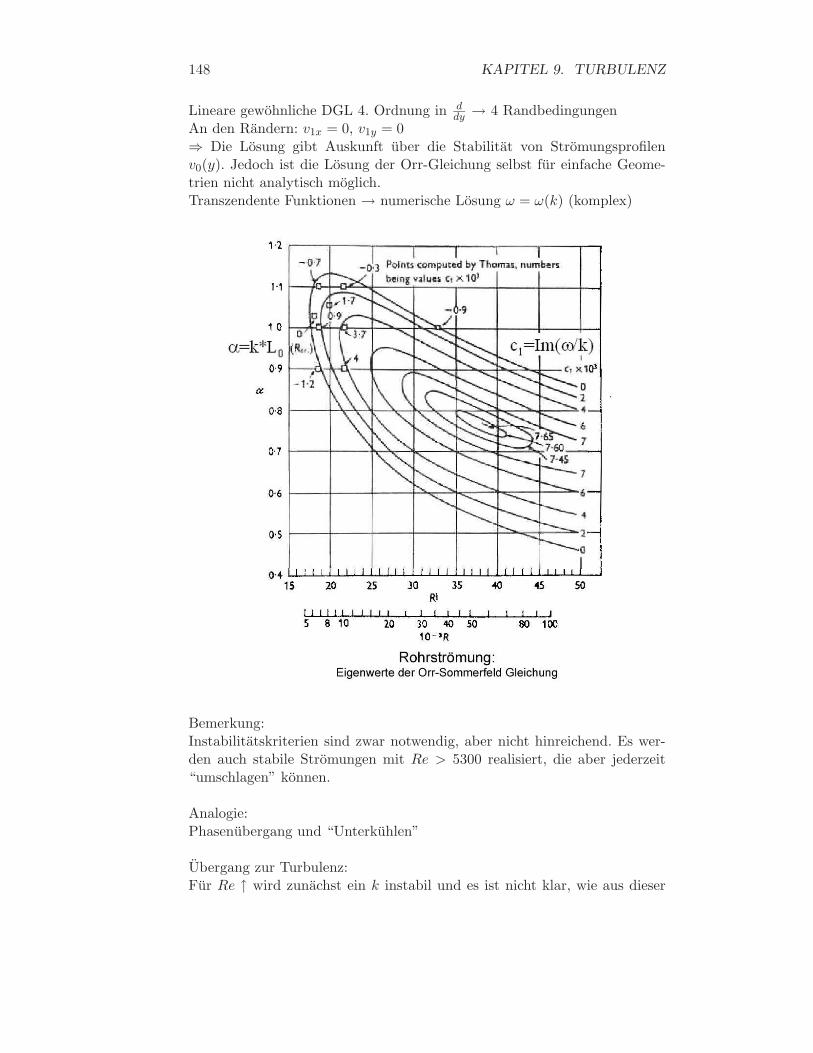
148 KAPITEL 9. TURBULENZ
Lineare gewohnliche DGL 4. Ordnung in ddy → 4 Randbedingungen
An den Randern: v1x = 0, v1y = 0⇒ Die Losung gibt Auskunft uber die Stabilitat von Stromungsprofilenv0(y). Jedoch ist die Losung der Orr-Gleichung selbst fur einfache Geome-trien nicht analytisch moglich.Transzendente Funktionen → numerische Losung ω = ω(k) (komplex)
Bemerkung:Instabilitatskriterien sind zwar notwendig, aber nicht hinreichend. Es wer-den auch stabile Stromungen mit Re > 5300 realisiert, die aber jederzeit“umschlagen” konnen.
Analogie:Phasenubergang und “Unterkuhlen”
Ubergang zur Turbulenz:Fur Re ↑ wird zunachst ein k instabil und es ist nicht klar, wie aus dieser

9.1. WIRBELABLOSUNG HINTER EINEM UMSTROMTEN ZYLINDER149
sinusformigen Instabilitat eine turbulente Stromung entsteht (die aus vielenk’s besteht). Im weiteren wird das Landau-Modell fur den Ubergang zurTurbulenz herangezogen.
9.1 Wirbelablosung hinter einem umstromten Zy-
linder
Landau-ModellEin Fluid umstromt einen Zylinder.Es existiert ein Ubergang von stationarer laminarer Stromung zu nichtsta-tionarer und schließlich turbulenter Stromung. Landaus Modell behandeltden Ubergang Re ≥ Recrit, also den Einsatz der Instabilitat, die von la-minar zu turbulent fuhrt, und den asymptotischen Grenzwert, den die Ge-schwindigkeitsamplitude annehmen wird. Die Stromung ist nichtstationar,die Wirbelablosung ist periodisch in der Zeit mit Frequenz ∼ u.Bei sehr großen Re uberlagern inkoharente turbulente Bewegungen auf sehrkleinen raumlichen Skalen l ∼ 1√
Redie ausgedehnten koharenten Fluidstruk-
turen.
Das Verhalten eines physikalischen Systems in der Umgebung eines Uber-gangs, wie hier von laminar zu turbulent, lasst sich mit Hilfe eines Ord-nungsparameters in Abhangigkeit von einem Kontroll- / kritischen Parame-ter beschreiben.Erinnerung an die Benard-Konvektion:v1: Ordnungsparameter (Einsatz der Konvektionsbewegung)Ra: kritischer ParameterHier:
ǫ =Re−Re|critRe|crit
(9.1)
kritischer Parameter
Er misst den relativen Abstand zum Ubergang von stationarer, laminarerStromung zur periodischen Wirbelablosung.
Ay = 0, ǫ < 0 |A|2 ∼ ǫ, ǫ > 0 (9.2)
Ordnungsparameter
Ay ist die Amplitude der versalen Oszillation der Geschwindigkeitsamplitu-de.Bifurkationsdiagramm:

150 KAPITEL 9. TURBULENZ
Beschreibung des Landau-Modells
Man denke sich die (laminare) Stromung, die furRe < Re|crit stabil ist, uber-lagert durch kleine nichtstationare Abweichungen mehrerer Instabilitatsmo-den, die durch den Index j durchnummeriert werden.
~vj =∑
j
Aj(t)~fj(~r) (9.3)
Fur ihre Amplituden Aj(t) nehmen wir an, dass sie fur eine gegebene Modevon der Form eσjt sind, wobei
σj = σrj + iσij
die komplexen Anwachsraten der Instabilitat sind.Der Imaginarteil entspricht der Oszillation oberhalb Re|crit, der Realteil derVerstarkung (σrj > 0) oder Dampfung (σrj < 0).
Re < Re|crit Alle Storungen werden exponentiell gedampft,also σrj < 0 fur alle j
Re = Re|crit σrj < 0 fur alle Moden bis auf eine Mode k,
die marginal stabil ist und σrk = 0Re > Re|crit σrj < 0 fur die Mehrzahl der Moden, aber es
existiert mindestens eine mit σrk > 0
Wir interessieren uns fur die dominante Mode mit dem großten Wert vonσrj , eine diskrete Sprechweise wie in (9.3) ist also nicht unbedingt notig, wirbetrachten im Weiteren nur die k-Mode.
Fur Re > Re|crit entwickelt sich Instabilitat zur Wirbelablosung. Fur ei-ne kurze Zeit (in der linearen Phase der Instabilitat) wachst die Amplitudeder Geschwindigkeit exponentiell (sobald Re > Re|crit). Der Index bei Aiist immer k.
A(t) = ceσrkteiσ
ikt (9.4)

9.1. WIRBELABLOSUNG HINTER EINEM UMSTROMTEN ZYLINDER151
Die Amplitude muss aber schließlich einen endlichen Grenzwert annehmen(das ist bei bloßer Linearmodenanalyse ohne Interesse und außer Reichwei-te). Diesen wollen wir im Folgenden bestimmen. Zunachst bilden wir diezeitliche Ableitung des Betragsquadrates der Amplitude.
|A|2 = (ReA)2 + (ImA)2
= c2(e2σrt cos2(σit) + e2σrt sin2(σit))
= c2e2σrt
d
dt|A(t)|2 = 2σrk|A(t)|2 (9.5)
Dies ist gultig im Rahmen der Stabilitatsbetrachtung.Wenn A(t) so groß ist, dass nichtlineare Terme in den Bilanzgleichungenwichtig werden, kann die rechte Seite von (9.5) als erster Term einer Rei-henentwicklung von d
dt |A|2 nach Potenzen von A und A∗ aufgefasst werden.
Wir verlassen nun den Bereich des unmittelbaren Ubergangs von laminarzu turbulent.Mit wachsender Amplitude werden weitere Terme der Potenzreihenentwick-lung bedeutsam. dt|A|2 ist eine gerade Funktion in |A|2, weswegen nur geradePotenzen in der Reihenentwicklung auftauchen.
dt|A|2 = |A|2∞∑
m=0
am|A|2m (9.6)
a0 = 2σrk. Wir berucksichtigen den 2. Term mit a1 = −α (α kann negativ,positiv als auch Null sein, wir wahlen α > 0 um die exponentielle Divergenzvon |A| auszugleichen):
dt|A|2 = 2σrk|A|2 − α|A|4 (9.7)
Nichtlineare Gleichung der Riccati-Form
y′ = f(x)y2 + g(x)y + h(x)
geht mit
y = − y′
f(x)y
in eine lineare DGL uber:
y′′f − (f ′ + fg)y′ + f2hy = 0
Hier also:
d2t |A|2 − 2σrkdt|A|2 = 0

152 KAPITEL 9. TURBULENZ
Mit der Losung:|A|2 = c1 + c2e
2σrkt
|A|2 = 2σrkc2e
2σrkt
(c1 + c2e2σr
kt)α
Oder:
1
|A|2 =α
2σrr+ const. · e−2σr
kt (9.8)
Asymptotisch strebt |A|2 gegen den endlichen Grenzwert:
|A|2max =2σrkα
(9.9)
Dieser ist auch direkt als stationare Amplitude aus (9.7) erhaltlich.σrk ist als eine Funktion der Raynoldszahl auffassbar. In der Nahe von Re|critkann sie in eine Potenzreihe nach (Re−Re|crit) entwickelt werden. Nach derDefinition von σrk ist:
σrk(Re|crit) = 0 (9.10)
In erster Naherung folgt aus Taylor (σ = σ(Re|crit)+(Re−Re|crit)∂Reσ|Re|crit
+ . . ., bzw. σ =∑∞s=0 as(Re−Re|crit)s):
σrk ∼ const. · (Re−Re|crit) (9.11)
Und damit mit (9.9):
|A|max ∼√
Re−Re|crit (9.12)
Es lasst sich freilich nicht ausschließen, dass α ≤ 0 ist. In dem Fall mussein negativer Term hoherer Ordnung in der Reihenentwicklung fur d
dt |A|2berucksichtigt werden (vgl. (9.6)).
−β|A|6 (β > 0)
Die Losung |A|2max der quadratischen Gleichung die stationar aus (9.7) mit−β|A|6-Term folgt, lautet:
|A|2max =|α|2β
±√
α2
4β2+
2
βσrk (9.13)
Die fur die Dynamik der Instabilitat charakteristische Zeitkonstante aus(9.5)
2|A|dt|A| = 2σrk|A|2
→ |A|dt|A|
=1
σrk∼ 1
Re−Re|crit(9.14)

9.2. DIE VOLLSTANDIG ENTWICKELTE TURBULENZ 153
stimmt mit den experimentellen Beobachtungen uberein, sowohl oberhalb(σrk > 0) als auch unterhalb der Instabilitatsschwelle (→ gedampfte Mode).Die Zeitkonstante divergiert fur:
Re→ Re|crit
Experimentelle Analyse zeigt, dass die Proportionalitatskonstante in (9.14)
gleich 5d2
ν ist (d: Durchmesser des Hindernisses).
9.2 Die vollstandig entwickelte Turbulenz
Einige qualitative AussagenBei hohen Re ist die turbulente Stromung durch starke unregelmaßige (ort-liche wie zeitliche) Geschwindigkeitsanderungen gekennzeichnet. Die wahreFluidgeschwindigkeit lasst sich in der Reynolds-Dekomposition darstellenals:
~v = ~v + ~v′ (9.15)
~v: zeitlich gemittelte Geschwindigkeit~v′: Geschwindigkeitsschwankungen
Mit wachsender Re treten zuerst Turbulenzelemente (TE) mit großen Ab-messungen l ∼ L (L: charakteristische Ausdehnung der Stromung) auf. DieseTE haben die großten Geschwindigkeitsamplituden:
v′TE ∼ ∆v
∆v: Anderung der mittleren Geschwindigkeit auf der Langenskala lFrequenz der Geschwindigkeitsschwankungen:
ω ∼ ∆v
l
Kleinere TE mit hoheren Frequenzen und kleineren Amplituden lassen sichals Detailstrukturen ansehen, die den großen TE uberlagert sind. Uber klei-ne raumliche Skalen δ ≪ l werden die Geschwindigkeitsschwankungen durchkleinen TE mit v′ ≪ ∆lv aber v′ ≫ ∆δv bestimmt.
Wir betrachten nun den Ubergang von globalen Re fur die Stromung imGanzen zu Re der TE mit der Skala λ und v′λ:
Reλ =v′λλν
(9.16)
Fur große TE, Reλ ≫ 1, ist die Viskositat und damit die Energiedissipationunbedeutend.

154 KAPITEL 9. TURBULENZ
Andererseits sind diese großen TE mit großen Reλ instabil und zerfallen inimmer kleinere TE, bis die Viskositat bedeutsam wird bei λ0 mit Reλ0 ∼ 1.Auf dieser Skala, durch die TE mit λ0, welche fur die globale Stromung ei-gentlich unbedeutend sind, findet die turbulente Energiedissipation statt.Also:Energie, die von außen permanent zugefuhrt wird, wird quasi dissipationsfreivon großen zu kleinen TE, l → λ > λ0, transportiert um schließlich durchdie kleinsten TE auf λ0 dissipiert zu werden.
Nun schatzen wir die pro Zeit- und Masseneinheit dissipierte Energie, die jazunachst in den großen TE auf l getragen wird / enthalten ist, aus typischenGroßen (ρ, v, l) ab.
[ǫ] =J
kgs=m2
s3
⇒ ǫ ∼ (∆v)3
l(9.17)
→ Selbstahnlichkeit: Unterschiede entstehen nur durch Langen- und Ge-schwindigkeits/Zeitskalen.Eine turbulente Stromung ist eine Stromung mit turbulenter Viskositat.
[ν] = [η
ρ] =
kg
ms
m3
kg=m2
s
⇒ νturb ∼ ∆vl (9.18)
Es ist also:
νturbν
∼ Re≫ 1 (9.19)
Und damit aus (9.17) und (9.18):
ǫ ∼ νturb
(∆v
l
)2
(9.20)
In dem Bereich l ∼ L, dem Energie- oder Quellenbereich, ist der wesentlicheTeil der kinetischen Energie deponiert.Der Bereich λ ≤ λ0 bildet den Dissipationsbereich.Wir betrachten nun den Bereich λ0 ≪ λ ≪ L, den sogenannten Inertialbe-reich.Aus (9.17) und Dimensionsanalyse fur ǫ, ρ und λ folgt:
vλ ∼ (ǫλ)13 (9.21)
Gesetz von Kolmogoroff und Oburlow

9.2. DIE VOLLSTANDIG ENTWICKELTE TURBULENZ 155
Die Geschwindigkeitsanderung der turbulenten Bewegung auf der Strecke λ(und nicht wie in (9.17) auf der Strecke l) ist direkt proportional der Ge-schwindigkeit der turbulenten Bewegung/TE der Abmessung λ (die Ande-rung von ∆v auf λ-Skala ist vernachlassigbar).Das Gesetz von Kolmogoroff lasst sich auch spektral als E(k) mit der Wel-lenzahl der Geschwindigkeitsschwankung k ∼ 1
λ darstellen, wobei E(k)dkdie kinetische Energiedichte pro Masseneinheit der Flussigkeit in einer Ge-schwindigkeitsschwankung mit dk um k ist.
[E(k)] =m3
s2
Wenn man E(k) aus ǫ und k bis zur Dissipationslange bildet, so erhalt manfur den Inertialbereich, innerhalb dessen ǫ von großeren zu kleineren Wirbelntransportiert wird:
E(k) ∼ ǫ23k−
53 (9.22)
→∞∫
k
E(k)dk ∼ ǫ23
k23
∼ (ǫλ)23
9.21→ E ∼ v2λ
Typisches Spektrum fur vollentwickelte, homogene, isotrope Turbulenz nachKolmogoroff (die Stromungseigenschaften sind auf den Skalen l ≪ L in allenRichtungen gleich):
Gemessenes Spektrum der turbulenten Fluktuationen in einer Stromung. Essind Quellgebiet, Inertialgebiet mit -5/3 Abfall und Dissipationsgebiet klarzu unterscheiden.

156 KAPITEL 9. TURBULENZ
Schließlich wollen wir noch die Frage nach der raumlichen Skala λ0 (sie heißtauch innere Turbulenzskala im Gegensatz zur außeren l) der Energiedissipa-tion beantworten.Zusammenhang zwischen der lokalen Reλ und der globalen Re:
Reλ ∼ vλλ
ν9.21∼ ǫ
13λ
43
ν9.17∼ ∆vλ
43
νl13
∼ Re
(λ
l
) 43
(9.23)
da Reλ0 ∼ 1 folgt: λ0 ∼ l
Re34
(9.24)
9.3 Geschwindigkeitskorrelationen
Die statistische Turbulenzbeschreibung
Eine turbulente Stromung ist eine irregulare Stromung mit inkoharentenBewegungen der FE.Eine deterministische Beschreibung der nichtlinearen Dynamik ist nicht moglich→ statistische Theorie der mittleren physikalischen Parameter der Turbu-lenz.Anders gesagt:

9.3. GESCHWINDIGKEITSKORRELATIONEN 157
Das zeitliche Anwachsen instabiler Stromungsmoden fuhrt zu einer nicht-linearen Entwicklung zum stochastischen Geschwindigkeitsfeld und somitzum Verlust der lokalen Vorhersagbarkeit.Stochastische Beschreibung (Aufteilen der Geschwindigkeit):
~v = ~v + ~v′ (9.25)
~v: mittlere Geschwindigkeit~v′: Fluktuation der Geschwindigkeit um ~v (turbulenter Anteil)
~v =1
∆T
t0+∆T2∫
t0−∆T2
~vdt mit ∂t~v = 0 (9.26)
ist die stationare mittlere Stromung (Mittelung soll unabhangig von t0 sein,die Zeitabhangigkeit wurde rausintegriert).Die Mittelung uber den fluktuierenden Geschwindigkeitsanteil verschwindetdefinitionsgemaß:
~v′ = ~v − ~v =1
∆T
t0+∆T2∫
t0−∆T2
(~v − ~v)dt = 0 (9.27)
Mithin ist die einfache Mittelung fur Aussagen uber fluktuierende Geschwin-digkeit nicht hilfreich.
⇒ Beschreibung von ~v′ uber hohere Momente → ~v′2
Allgemeinste Form von ~v′2: Tensor (dyadisches Produkt)
v′iv′k =
1
T
T∫
0
v′xv′x v′xv
′y v′xv
′z
v′yv′x v′yv
′y v′yv
′z
v′zv′x v′zv
′y v′zv
′z
“Reynold’scher Spannungstensor”, analog zum Impulsfluß im laminaren Fall:
∂
∂t(ρ~v) = −~∇·
↔Π
Erinnerung:
ideal: Πik = pδik + ρvivk
mit Viskositat: Πik = pik + ρvivk − σik (zaher Spannungstensor)
jetzt: Πik = pik + ρvivk − σik + ρv′iv′k
I.A. dominant: ρv′iv′k ≫ |σik| im turbulenten Fall (Re≫ 1)
Turbulenz fuhrt zu Kraften auf benachbarte Flussigkeitselemente.

158 KAPITEL 9. TURBULENZ
Bemerkung:Auch Nebendiagonalen besetzt: Schub- und Scherkrafte!Uber diese Krafte “versorgt” ein Wirbel die Nachbargebiete mit Impuls undEnergie.
Der Spannungstensor ist i.A. sehr schwer zu berechnen!Heuristischer Ansatz: Prandtl’sche Mischungslange
~v′ ∼ ~v mit Lange l ∼ “
∣∣∣∣
1
~∇
∣∣∣∣ ”
⇒ l ist aus Experiment zu bestimmen, sie entspricht einer Korrelationslange,Lange, welche Turbulenzelemente quer zur Hauptstromung zurucklegen, be-vor sie wieder zerfallen.
⇒ Geschwindigkeitskorrelationen, d.h. der Zusammenhang zwischen den Ge-schwindigkeiten an zwei nahe beieinander liegenden Orten der Stromung.Gleichung (9.21), vλ ∼ (ǫλ)
13 , gibt qualitativ eine solche Korrelation an.
Einschub: Korrelationsfunktionen
Charakterisierung der Abhangigkeit zweier Signale f(x), g(x)Definitionen:
Mittelwert: f =1
x0
x0/2∫
−x0/2
f(x)dx
Streuungsquadrat: (∆f)2 = (f − f)2
Kovarianz: cov(f, g) = (f − f)(g − g)
Das muß noch normiert werden:
Korrelation: cor(f, g) =cov(f, g)
∆f · ∆g = r
−1 ≤ r ≤ 1 Zahl, die die Abhangigkeit mißt (Korrelationskoeffizient)Aber: Wenn die Signale identisch aber verschoben sind, wird das in r nichtausgedruckt.Verallgemeinerung: r als Funktion der Verschiebung:
Korrelationsfunktion: cor(x) =
1x0
x0/2∫
−x0/2
f(x′)g(x′ − x)dx′
∆f∆g

9.3. GESCHWINDIGKEITSKORRELATIONEN 159
Mißt Korrelation zwischen verschiedenen Orten.Dies kann auch fur eine Funktion angewendet werden:
Autokorrelation:
1x0
x0/2∫
−x0/2
f(x′)f(x′ − x)dx′
(∆f)2
Beispiel: korrelationsfunktion.mws
f = Amp f · sin(x− x f)
(x− x f)
g = Amp fg · sin(x− x g)
(x− x g)
identisches Signal
Amp f = Amp g = 1 x f = x g = 0
⇒ cor(f, g) = r = 1
Amp f = 5
⇒ Kovarianz andert sich (mal 5)Korrelationskoeffizient bleibt gleich(r=1)

160 KAPITEL 9. TURBULENZ
Amp f = −1
⇒ perfekte Antikorrelation
x f = −2 , x g = 2
⇒ weniger UberlappKorrelation kleiner, aber Korrelati-onsfunktion hat Maximum bei x = 4⇒ Verschiebung um 4 Einheiten re-produziert das Signal!
Autokorrelation
Nun wollen wir qualitativer den prinzipiellen Zusammenhang zwischen Ge-schwindigkeitsfluktuationen und makroskopischer dissipativer Dynamik be-trachten.Bilde Korrelationstensor:
~v′(~x, t) ⊗ ~v′(~x+ ~r, t) = R(~x,~r) (9.28)
Korrelationstensor
= Allgemeine Form der Charakterisierung von TurbulenzEr ist 6= 0 innerhalb der Korrelationslange ∆r.Außerhalb von ∆r ist der Mittelwert des Produktes zweier stochastisch un-abhangiger Großen gleich dem Produkt ihrer Mittelwerte. → R = 0 außer-halb von ∆r.Nebenbemerkung: Dyadisches Produkt→ Tensor Rij = v′iv
′j (neun Komponenten)

9.3. GESCHWINDIGKEITSKORRELATIONEN 161
Die Bestimmung des Korrelationtensors ist das Problem der Turbulenztheo-rie. Seine Bedeutung fur die makroskopische Dynamik resultiert aus derTatsache, dass sich turbulente Transportkoeffizienten, wie turbulente Visko-sitat und Warmeleitung, aus R (und ggf. Tensoren hoherer Stufe) bestimmenlassen.
Im Weiteren betrachten wir homogene, isotrope Turbulenz inkompressiblerFluide, also:
~v = 0
keine Vorzugsrichtung
Im weiteren gilt fur die fluktuierende Geschwindigkeit:
~∇ · ~v = 0
Einfachste Aussagen:Homogene Turbulenz (sieht an jedem Ort gleich aus):
vi(~x)vj(~x+ ~r) 6= f(~x)
Isotrope Turbulenz (sieht in jede Richtung gleich aus):
vi(~x)vj(~x+ ~r) 6= f(~r
|~r| , ~x)
Ist nur abhangig vom Betrag von ~r und nicht von seiner Richtung.→ Korrelationstensor:
Rij(r) = vi(~x)vj(~x+ ~r)
r: Betrag von ~rEs lasst sich zeigen, dass der Korrelationstensor Rij mit der Dissipation ki-netischer Energie in zahen Flussigkeiten zusammenhangt, z.B. kann ǫλ = v3
λ
exakt hergeleitet werden (→ Landau/Lifschitz: Hydrodynamik).
Die Fouriertransformierte von R ist direkt mit dem Energiespektrum E(k)verknupft.

162 KAPITEL 9. TURBULENZ
Aufgrund der Isotropie ist Rij symmetrisch.Allgemeine Form eines symmetrischen Tensors 2. Stufe lautet
Rij(r) = A(r)δij +B(r)ninj (9.29)
wobei ~n der Einheitsvektor in Richtung ~r ist.Wir betrachten nun die Geschwindigkeit zweier Fluidpunkte im Abstand r.
Rll: Mittelwert des Quadratesder Relativgeschwindigkeitder benachbarten Fluidpunktegegeneinander
Rnn: Mittelwert des Quadratesder Geschwindigkeit derRotationsbewegung derFluidpunkte umeinander
Wegen der Wahl des Koordinatensystems, ~r ‖~ne, folgt aus (9.29):
Rll = A+B Rnn = A Rln = 0 (9.30)

9.3. GESCHWINDIGKEITSKORRELATIONEN 163
Also kann man schreiben:
Rij = Rll(r)ninj +Rnn(r)(δij − ninj) (9.31)
Rll, Rnn: longitudinale und transversale Geschwindigkeitskorrelationsfunk-tionenRnn ist aus Rll bestimmbar.→ Ist die longitudinale Korrelationsfunktion bekannt, so ist der Korrelati-onstensor bestimmt.In der Tat gilt jedoch fur homogene isotrope Turbulenz:
Rll = ar2
a: Konstante, die mit der mittleren Energiedissipation ǫD und der kinema-tischen Viskositat uber
a =ǫ
15ν
verknupft ist.Andererseits gilt (gemaß der mittleren Energiedissipation in viskosen Flui-den):
a =1
15(∂xj
vi)2
(vi ist hier wahre Geschwindigkeit.)→ Zusammenhang zwischen Mikro- und Makroskopik
Abschließend die Spektraldarstellung des Korrelationstensors:Fourier-Transformation:
Φij(~k) =1
(2π)3
∫
Rijei~k·~rd~r (9.32)
Isotrope Turbulenz:
Rij(~r) = Rij(−~r)
→ Φij(~k) = Φij(−~k) = Φ∗ij(~k) (9.33)
Also ist der spektrale Korrelationstensor reel.Inverse Fourier-Transformation:
Rij(~r) =
∫
Φij(~k)e−i~k·~rd~k (9.34)
∂rjRij entspricht ikj · Φij (Achtung: Summenkonvention!).
Wegen ~∇ · ~v=0 folgt
kjΦij = 0 (9.35)

164 KAPITEL 9. TURBULENZ
mit der allgemeinen Form:
Φij = c(k)kikj +1
2D(k)δij (9.36)
→ −c(k)k2 = D(k)
Φij(k) = D(k)
(
δij −kikjk2
)
(9.37)
→ Symmetrie, nur Abhangigkeit vom Betrag von k.Mit einer neuen skalaren Funktion E(k) erhalt man:
Φij(k) =E(k)
4πk4(k2δij − kikj) (9.38)
E(k) hat eine physikalische Bedeutung:
9.28→ Rij = vi(~x, t)vj(~x+ ~r, t)
→ 1
2v2 =
1
2Rii(~r = 0)
9.34=
1
2
∫
Φii(k)d~k
Achtung: Summenkonvention!
=1
2
∫
(Φxx + Φyy + Φzz) 4πk2dk︸ ︷︷ ︸
spharisch symmetrischerIntegrand
9.38=
1
2
∫E(k)
k2(3k2 − k2
x − k2y − k2
z)dk
=
∫
E(k)dk (9.39)
E(k) ist also das Energiespektrum der Turbulenz, nun also quantifiziert uberdie Geschwindigkeitskorrelationen (vgl. (9.21), Kolmogoroff Turbulenz).

Kapitel 10
Die Korteweg-deVries-Gleichung /Solitonenlosungen
Differentialgleichungen, die die Wellenausbreitung beschreiben, sind in derRegel nichtlinear → (~v · ~∇)~v-Term in der Eulergleichung.In Kapitel 4 wurden Wellen in der linearen Naherung behandelt, nun wollenwir nichtlineare lange Oberflachen-Schwerewellen in seichtem Wasser be-trachten.
x-y-Ebene am Grund des Fluids
ρ = const ~∇ · ~v = 0
zudem sei: ~∇× ~v = 0
~v = ~∇Φ ∆Φ = 0
∂t~v + (~v · ~∇)~v = −~∇p
ρ− g~ez (10.1)
(~v · ~∇)~v = −~v × ~∇× ~v +1
2~∇v2
oder ~∇(
∂tΦ +v2
2+ gz +
p
ρ
)
= 0 bzw.
∂tΦ +v2
2+ gz +
p
ρ= F (t) (10.2)
165

166KAPITEL 10. DIE KORTEWEG-DE VRIES-GLEICHUNG / SOLITONENLOSUNGEN
Die Fluidoberflache wird durch z = ζ(x, t) parametrisiert.Ebene Welle: ζ(x, t) 6= f(y)Wir betrachten lange Wellen, d.h. die Feldgroßen variieren schwach in x-Richtung, insbesondere gilt |∂xζ| ≪ 1.Der Druck an der Oberflache ist der Atmospharendruck pa, bzw. unterBerucksichtigung der Oberflachenspannung α:
pa − α∂2xζ
(10.2) gilt auch an der Oberflache. Durch raumliche Differentiation wird Feliminiert.∂x(10.2) an der Oberflache ergibt:
0 = ∂xpaρ
= −∂2txΦo − ∂x
v2o
2− g∂xζ +
α
ρ∂3xζ (10.3)
Index o kennzeichnet Oberflache
Randbedingungen an Φ:
∂zΦ|z=0 = 0 ∂zΦo = ∂tζ + ∂xΦo∂xζ (vgl. 7.3) (10.4)
Fur gegebene Anfangsbedingungen ist das Problem der Fluidoberflachenbe-wegung somit vollstandig beschrieben.
Entwicklung von Φ(x, z, t) in einer Potenzreihe um z ergibt:
Φ =∞∑
n=0
znFn(x, t)
∆Φ = 0 =∞∑
n=0
n(n− 1)zn−2Fn + zn∂2xFn
=∞∑
n=2
n(n− 1)Fn + ∂2xFn−2zn−2 (10.5)
Und aus der Randbedingung am Boden erhalt man:
∂zΦ|z=0 = 0 =∞∑
n=0
nzn−1Fn|z=0 = F1(x, t) (10.6)
(Anmerkung: 00 ist eigentlich nicht definiert, es existiert nur der Grenzwertlimx→+0 0x, dies ist fur n ≥ 1 gegeben.). . . in (10.5) muss fur jedes n verschwinden.Mit F1 sind aber alle Funktionen F mit ungeradem Index Null.
6F3 + ∂2xF1 = 0
20F5 + ∂2xF3 = 0
etc.

167
F2n+1(x, t) = 0
Fur jedes n mussen sich die Fn- und Fn−2-Terme in (10.5) aufheben. Furgerade Terme gilt:
F2 = − 1
2(2 − 1)∂2xF0
F4 = − 1
12∂2xF2 =
1
24∂4xF0
F6 = − 1
30∂2xF4 = − 1
30 · 24∂6xF0
etc.
Es schreibt sich also fur gerade Indizes:
F2n = (−1)n1
(2n)!∂2nx F0 (10.7)
Mithin ergibt sich fur Φ gemass der Potenzreihenentwicklung:
Φ = F0(x, t) −z2
2∂2xF0(x, t) +
z4
24∂4xF0(x, t) ± . . . (10.8)
Somit ist in (10.3):
∂x∂tΦo = ∂x
∞∑
n=0
(−1)nζ2n
(2n)!∂2nx ∂tF0
= ∂xζ∞∑
n=1
(−1)nζ2n−1
(2n− 1)!∂2nx ∂tF0
+∞∑
n=0
(−1)nζ2n
(2n)!∂2n+1x ∂tF0 (10.9)
Das ist der erste Term in (10.3).Fur die Randbedingungen an der Oberflache ∂zΦo, ∂xΦo gilt:
∂zΦo =∞∑
n=1
(−1)nζ2n−1
(2n− 1)!∂2nx F0 (10.10)
∂xΦo = ∂xζ∞∑
n=1
(−1)nζ2n−1
(2n− 1)!∂2nx F0 +
∞∑
n=0
(−1)nζ2n
(2n)!∂2n+1x F0 (10.11)
(10.3) und Randbedingungen (10.4) an der Oberflache geben so ein Glei-chungssystem fur F0 und ζ, welches aber nicht geschlossen gelost werdenkann.

168KAPITEL 10. DIE KORTEWEG-DE VRIES-GLEICHUNG / SOLITONENLOSUNGEN
Fur lange Wellen fuhrt jede Differentiation nach x zu einer Große, die klei-ner ist als die nachst niedrigere Ableitung.⇒ Losung durch sukzessive ApproximationAlso zu RB (10.4) → mit (10.10) folgt fur n = 1:
∂zΦo ≈ −ζ∂2xF0 (10.12)
Und mit (10.11):
∂xΦo∂xζ ≈ −∂2xζζ∂
2xF0 + ∂xF0∂xζ ≈ ∂xF0∂xζ (10.13)
Setzte ζ = ς + ξ und ∂xF0 = V + W mit der konstanten mittleren Hoheder Fluidoberflache ς und der mittleren Ausbreitungsgeschwindigkeit derOberflachenwellen V , sowie |ξ| ≪ ς und |W | ≪ V .Damit folgt aus (10.4) mit (10.12) und (10.13) in niedrigster Ordnung:
0 = ∂tξ + V ∂xξ + ς∂xW (10.14)
Entsprechend folgt aus (10.3) in niedrigster Ordnung:
0 = ∂tW︸ ︷︷ ︸
=∂x∂tF0
+V ∂xW + g∂xξ (10.15)
V ∂xW → 1
2∂x(vo)
2 =1
2∂x[∂xΦ2
o + ∂zΦ2o]
=1
2∂x[∂xF
20 + ζ2
2
(∂xF0)2
︸ ︷︷ ︸
→0
]
= V ∂xW
(10.14) und (10.15) lassen sich mit dem Ansatz ξ = G(W ) uberfuhren in(” ′ ”ist die Ableitung nach dem Argument):
0 = G′∂tW + (V G′ + ς)∂xW (10.16)
0 = ∂tW + (V + gG′)∂xW (10.17)
Nichtlineare Losung fur G′2 = ςg (wahle G′ = −
√ςg = −G0) in niedrigster
Approximation:
ξ = −G0W (10.18)
In der nachsten Approximationsstufe mag ξ von diesem einfachen Zusam-menhang abweichen:
ζ = −G0(W + ψ) mit |ψ| ≪ |W | (10.19)

169
⇒ (10.4) und (10.3) bis zu 2. niedrigster Ordnung:
0 = G0∂tW + V G0(∂xW + ∂xψ) − ς∂xW
+2G0W∂xW +ς3
3∂3xW (10.20)
0 = ∂tW − gG0(∂xW + ∂xψ) + V ∂xW
+W∂xW +
(
α
ρG0 −
ς2
2V
)
∂3xW (10.21)
Eliminieren von ∂xψ aus (10.20) und (10.21) liefert eine Gleichung fur W :
0 = (V + gG0)∂tW + (V 2 − gς)∂xW + (2gG0 + V )W∂xW
+
(
gς3
6− ς2
2V 2 +
α
ρG0V
)
∂3xW (10.22)
V ist noch nicht mit den anderen Konstanten verknupft. Mit
V =√gς
(vgl. (4.24): Phasengeschwindigkeit fur linearisierte Wellen in Seichtwasser)folgt Aus (10.22) (Elimination von ∼ ∂xW ):
∂tW +3
2W∂xW − V
2
(
ς3
3− α
ρg
)
∂3xW = 0 (10.23)
Korteweg - de Vries - Gleichung
(10.23) kann durch geeignete Skalierung in der Form
∂tW +W∂xW + δ2∂3xW = 0 (10.24)
geschrieben werden, mit
W (x, t) = W (χ) χ = x− ut
→ ∂x = dχ ∂t = −udχ
→ gewohnliche, nichtlineare Differentialgleichung:
W ′(W − u) + δ2W ′′′ = 0 (10.25)
→ numerische Losung!
Losung W (ξ)

170KAPITEL 10. DIE KORTEWEG-DE VRIES-GLEICHUNG / SOLITONENLOSUNGEN
Unbeschrankte periodische Wellenberge. Der Abstand d varriiert. Es existie-ren auch Losungen mit d→ ∞, das sind dann solitare Wellen.
Solitare Wellen sind fortschreitende Wellen, bei denen der Ubergang voneinem konstanten Wert bei −∞ zu dem (moglicherweise unendlichen) Wertbei +∞ auf einen kleinen ξ-Bereich beschrankt ist → “wandernde Stufe”.Details: Whitham, Gerald Beresford - Linear and Nonlinear Waves, WileySeries, N.Y.
Es existieren solitare Wellen, die nach einer Kollision wieder die gleiche Ge-stalt und Geschwindigkeit wie zuvor aufweisen, die Solitonen (stabile nicht-lineare Wellenphanomene).Wesentlich ist dabei der dispersive und nichtlineare Effekt.Eine Soliton-Losung zu (10.24) und (10.25):
W (x, t) ∼ cosh−2(x− ut)
Wir suchen nun eine Solitonlosung, die im Unendlichen verschwindet fur dieKdV-Gleichung in der Form:
∂tW + αW∂xW + ∂3xW = 0
Transformation:
ξ = x− ut also ∂x = ∂ξ ∂t = −u∂ξ
∂ξW (αW − u) + ∂3ξW = 0

171
Direkte Integration:
∂2ξW = uW − α
2W 2 + c1
Mit W verschwinden auch die Ableitungen bei ±∞, also c1 = 0.Die Losung multipliziert mit ∂ξW lasst sich integrieren zu:
1
2(∂ξW )2 =
u
2W 2 − α
6W 3 + c2 c2 = 0
1
u(∂ξW )2 = W 2 − α
3uW 3
Substituiere (nach Multiplikation mit ψ6) W (ξ) = ψ−2(ξ):
4
u(∂ξψ)2 = ψ2 − α
3u
Separation der Variablen:
√u
2ξ =
∫dψ
√
ψ2 − α3u
= arc cosh
(
ψ
√
3u
α
)
Also:
cosh
(√u
2ξ
)
= ψ
√
3u
α
Bzw.:
W (x, t) =3u
αcosh−2
(√u
2(x− ut)
)

172KAPITEL 10. DIE KORTEWEG-DE VRIES-GLEICHUNG / SOLITONENLOSUNGEN
Anhang A
Maple-Files
Einige einfache Programme, die in der Vorlesung behandelte Probleme vi-sualisieren. Vorsicht: Die Programme sind NICHT optimal programmiert,jeder Verbesserungsvorschlag wird gerne angenommen.
Stromung uber ein HindernisMaple-file Froude.mws zur Stromung uber ein Hindernis. Es existieren zweiunterschiedliche Losungszweige:Froude-Zahl< 1: Gravitation uberwiegt, Flussigkeit beschleunigt beim Uber-fliessen des Hindernisses;Froude-Zahl > 1: Tragheit uberwiegt, Flussigkeit verlangsamt beim Uber-fliessen des Hindernisses
Dazu: Animation einiger typischer Losungen:Gravitationsbestimmte LosungTragheitssbestimmte LosungUbergang von einem zum anderen Regime am Maximum des Hindernisses.
Potentialstromungen
Maple-file Flow Around Circle.mws zur Stromung um einen Kreiszylinder.Es sind beliebige Werte der Zirkulation moglich; fur Γ < 4πv0R liegen dieStaupunkte auf dem Zylinder, fur Γ > 4πv0R wandern sie auf die imaginareAchse.
Maple-file eckstroemung.mws: Visualisierung einer Eckstromung durch kon-forme Abbildung der reellen Achse auf einen beliebigen Winkelausschnitt.Durch zα wird die positive reelle Achse auf sich selbst abgebildet, die ne-gative reele Achse ergibt sich aus einer Geraden mit Winkel γ = 180/α zurpositiven reellen Achse.
173

174 ANHANG A. MAPLE-FILES
Maple-file konform.mws zur Visualiserung konformer Abbildungen. Durchz(u) wird der Kreis mit Radius R in der u-Ebene auf beliebige andereKonturen abgebildet. Die in der Vorlesung verwendete Abbildung lautetz = 1/(u+ u0) + u+ u0
Maple-file Flow Around Any Object.mws zur Stromung um einen Zylinderbeliebigen Querschnitts. Der Querschnitt muss zunachst durch u(z) (Um-kehrfunktion von z = 1/(u+u0)+u+u0) auf einen Kreis abgebildet werden.
Schwerewellen
Animationen von Schwerewellen durch Verfolgen von Flussigkeitselementenauf ihren Kreisbahnen an der Oberflache:
wave single.mpg Kreisbewegung einiger weniger Elemente. Obwohl die Pha-se bereits der Wellenlosung entspricht, ist die Wellendynamik noch nicht zuerkennen.
wave.mpg wie vorher, aber mit genugend vielen Elementen, um die Wel-lenbewegung zu erkennen.
wave long.mpg wie vorher, aber uber drei raumliche Perioden dargestellt.
wave packet.mpg wahrend in den vorherigen Beispiele nur monochromati-sche Wellen dargestellt wurden, wird hier ein Wellenpaket gezeigt (dreieckigek-Verteilung um k = 0.5 (d.h. λ = 10) herum mit δk = 0.1). Gemass dernichtlinearen Dispersionrelation bewegt sich die Einhullende mit einer an-deren Geschwindigkeit als die einzelnen Tragerwellen; das Maximum wirdzu verschiedenen Zeitpinkten von verschiedenen Tragerwellen aufgebaut.
wave packet linear.mpg Ein Wellenpaket analog zum vorherigen Beispiel,aber mit linearer Dispersionrelation (also analog Schall- oder elektromagne-tischen Wellen).
Mit diesen Maple-Programmen wurden die Einzelbilder fur die Videos er-zeugt:wave.mwswave packet.mws
Schallausbreitung in bewegten Medien
Animationen zur Ausbreitung von Schallwellen: Ein Punktstrahler sitzt imKoordinatenursprung und sendet Kugelwellen aus (symbolisiert durch Wel-lenfronten, die alle 10 Zeitschritte loslaufen). Das Medium in dem sich der
175
Schall aubreitet bewegt sich relativ dazu mit der Machzahl Ma. Dieser Fallist aquivalent zu einer Schallquelle, die sich mit Machzahl Ma durch dasruhende Medium bewegt.
Mach0.0.mpg keine Bewegung, die Wellenfronten bilden konzentrische Krei-se.
Mach0.3.mpg Bewegung mit Ma = 0.3 (100 m/s, d.h. ca. 300 km/h, alsoSchumi’s Ferrari): die Zentren der Kreise sind bereits deutlich gegeneinan-der verschoben. Ein Beobachter, der sich mit dem Medium von rechts nachlinks bewegt, registriert zunachst eine kurzere Wellenlange, dann eine lange-re (Doppler-Effekt).
Mach0.9.mpg Bewegung mit Ma = 0.9 (300 m/s, d.h. ca. 1000 km/h, alsoeine Boeing 747 mit voller Geschwindigkeit): die Zentren der Kreise sindstark gegeneinander verschoben.
Mach1.0.mpg Bewegung mit Ma = 1.0 (330 m/s, d.h. ca. 1200 km/h, alsodie Concorde beim Durch brechen der Schallmauer): die Zentren der Krei-se sind so stark gegeneinander verschoben, dass sich die Welle nicht mehrin positive x-Richtung ausbreitet. Alle Wellenfronten addieren sich an derSpitze des Objekts in Phase (“Uberschallknall”).
Mach1.3.mpg Bewegung mit Ma = 1.3 (430 m/s, d.h. ca. 1500 km/h, einBundeswehr-Jet?): die Kreise losen sich von der Quelle ab. Es bildet sich einBereich aus, auf den der Schall beschrankt ist (Machscher Kegel).
Mach2.0.mpg Bewegung mit Ma = 2.(660 m/s, d.h. ca. 2400 km/h, eineRakete?): Der Offnungswinkel des Machschen Kegels wird kleiner...
Gasdynamik
Als Gasdynamik bezeichnet man i.A. die Stromumgslehre mit beliebigerMachzahl, d.h. die Einschrankung der Inkompressibilitat (die ja v ≪ c be-dingte) wird aufgegeben.
Gasdynamik.mws plottet den Verlauf der thermodynamischen Grossen ineiner Rohrstromung als Funktion der Machzahl. Als Anwendung ist der Ver-lauf der Geschwindigkeit in einer Laval-Duse gezeigt.
stoss adiabate.mws zeigt den Verlauf der “normalen” Adiabate und der Stos-sadiabate fur ein ideales Gas. Durch Variation der Ausgangsparameter kannman sich davon uberzeugen, dass man zwei adiabatische Verdichtungen imUnterschallbereich durch eine einzige ersetzen kann; im Fall des Stosses ist

176 ANHANG A. MAPLE-FILES
das nicht moglich.
Viskose Stromungen
Animationen zur Visualisierung von viskosen Stromungen:
Stokes.mws Stokes’sches Problem: Die Umstromung einer Kugel in einerviskosen Flussigkeit (d.h. der Tragheitsterm wurde gegen den Reibungstermvernachlassigt).
Grenzschicht.mws Prandtl’sche Grenzschichtablosung: Grenzschicht einer vis-kosen Stromung in vereinfachter Geometrie (ebene Abrollung). Die Stau-punkte befinden sich bei ± 0.714. Es findet eine Ablosung der Grenzschichtim Bereich zunehmenden Drucks statt.
Turbulenz
Animationen zur Visualisierung von turbulenten Stromungen:
prandtl.mpg Umstromung eines Zylinders, die Stromlinien wurden durchMetallspane in der Stromung sichtbar gemacht. Man erkennt zunachst dieAblosung zweier Wirbel und dann den Zerfall dieser in eine turbulenteStromung.
karmann.mpg Simulation der Ausbildung einer Karmannschen Wirbelstras-se in einer Stromung mit mittlerer Reynoldszahl.
Turbulence Scott.mpg Turbulenz in einem magnetisierten Plasma; gezeigtist die fluktuierende Teilchendichte (Quelle: B. Scott, MPI fur Plasmaphy-sik).
korrelationsfunktion.mws Berechnung der Korrelationsfunktion von zwei Funk-tionen der Art sin(x)/x. Bei Verschiebung gegeneinander sinkt der Korre-lationskoeffizient; durch Einfuhrung der Korrelationsfunktion kann diesemUmstand Rechnung getragen werden und man erhalt wieder 100berucksich-tigt.
Correlation.ppt Gemessene und gerechnete Korrelationsfunktion in einerturbulenten Stromung. Die Korrelation fallt mit zunehmender Separationder beiden Messpositionen ab, was einer endlichen Ausdehnung der Wirbelentspricht.

Anhang B
Thermodynamik
Grundannahme: Systeme sind eindeutig definiert, so dass bei “Bewegungim Phasenraum” (Zustandsanderungen) am Ende des Kreisprozesses wiederder selbe Punkt erreicht wird.⇒ totale Differentiale, Potentiale
Es gibt 3 Energieformen, deren Summe (d.h. die innere Energie U des Sy-stems) erhalten ist:
Warme : δQ = TdS
Arbeit : δW = −pdVchemische Energie : δWc =
µ
TdN
dU = TdS − pdV +µ
TdN
︸ ︷︷ ︸
bei uns Null
Dieses Potential kann beliebig (sinnvoll) umgeformt werden, um einer gege-benen physikalischen Situation Rechnung zu tragen.dU ist sinnvoll, wenn z.B. dS = 0 (adiabatische Zustandsanderung)
⇒ dU = −pdV
Wird V konstant gehalten, benutzt man mit Vorteil die Enthalpie
W = U + pV
⇒ dW = TdS + V dp
D.h. bei adiabatischer Zustandsanderung ist dW = V dp.Falls dT = 0 ist es sinnvoller mit der freien Energie F = U−TS zu arbeiten.
⇒ dF = dU −TdS−SdT = −SdT = −SdT −pdV dT=0⇒ dF = −pdV
177

178 ANHANG B. THERMODYNAMIK
Daruber hinaus gibt es auch die freie Enthalpie (geeignet fur kontrolliertesVolumen und isotherme Systeme).
Φ = U − TS + pV ⇒ dΦ = −SdT + V dp

Anhang C
Vektoranalysis
C.1 Identitaten
Quelle: NRL Plasma Formulary (24. Marz 06)
Notation: f , g, sind Skalare, ~A, ~B sind Vektoren, T ist ein Tensor undI ist die Einheits-Dyade.
~A · ~B × ~C = ~A× ~B · ~C = ~B · ~C × ~A = ~B × ~C · ~A= ~C · ~A× ~B = ~C × ~A · ~B (C.1)
~A× ( ~B × ~C) = (~C × ~B) × ~A = ( ~A · ~C) ~B − ( ~A · ~B)~C (C.2)
~A× ( ~B × ~C) + ~B × (~C × ~A) + ~C × ( ~A× ~B) = 0 (C.3)
( ~A× ~B) · (~C × ~D) = ( ~A · ~C)( ~B · ~D) − ( ~A · ~D)( ~B · ~C) (C.4)
( ~A× ~B) × (~C × ~D) = ( ~A× ~B · ~D)~C − ( ~A× ~B · ~C) ~D (C.5)
~∇(fg) = ~∇(gf) = f ~∇g + g~∇f (C.6)
~∇ · (f ~A) = f ~∇ · ~A+ ~A · ~∇f (C.7)
~∇× (f ~A) = f ~∇× ~A+ ~∇f × ~A (C.8)
~∇ · ( ~A× ~B) = ~B · ~∇× ~A− ~A · ~∇× ~B (C.9)
~∇× ( ~A× ~B) = ~A(~∇ · ~B) − ~B(~∇ · ~A)
+( ~B · ~∇) ~A− ( ~A · ~∇) ~B (C.10)
~A× (~∇× ~B) = (~∇ ~B) · ~A− ( ~A · ~∇) ~B (C.11)
~∇( ~A · ~B) = ~A× (~∇× ~B) + ~B × (~∇× ~A)
+( ~A · ~∇) ~B + ( ~B · ~∇) ~A (C.12)
~∇2f = ~∇ · ~∇f (C.13)
~∇2 ~A = ~∇(~∇ · ~A) − ~∇× ~∇× ~A (C.14)
~∇× ~∇f = 0 (C.15)
~∇ · ~∇× ~A = 0 (C.16)
179

180 ANHANG C. VEKTORANALYSIS
Mit Einheitsvektoren ~e1, ~e2, ~e3 kann ein Tensor zweiter Ordnung geschriebenwerden als
T =∑
i,j
Tij~ei~ej (C.17)
In kartesischen Koordinaten ist die Divergenz eines Tensors ein Vektor mitden Komponenten
(~∇ · T )i =∑
j
(∂Tij/∂xj) (C.18)
Im Allgemeinen gilt:
~∇ · ( ~A~B) = (~∇ · ~A) ~B + ( ~A · ~∇) ~B (C.19)
~∇ · (fT ) = ~∇f · T + f ~∇ · T (C.20)
Sei ~r =
xyz
der Radiusvektor mit Betrag r, dann gilt:
~∇ · ~r = 3 (C.21)
~∇× ~r = 0 (C.22)
~∇r = ~r/r (C.23)
~∇(1/r) = −~r/r3 (C.24)
~∇ · (~r/r3) = 4πδ(~r) (C.25)
~∇~r = I (C.26)
Sei V ein Volumen mit Oberflache S, ~n der Normalenvektor auf V undd~S = ~ndS. Dann gilt:
∫
VdV ~∇f =
∫
Sd~Sf (C.27)
∫
VdV ~∇ · ~A =
∫
Sd~S · ~A (C.28)
∫
VdV ~∇ · T =
∫
Sd~S · T (C.29)
∫
VdV ~∇× ~A =
∫
Sd~S × ~A (C.30)
∫
VdV (f ~∇2g − g~∇2f) =
∫
Sd~S(f ~∇g − g~∇f) (C.31)
∫
VdV ( ~A · ~∇× ~∇× ~B − ~B · ~∇× ~∇× ~A)
=
∫
Sd~S · ( ~B × ~∇× ~A− ~A× ~∇× ~B) (C.32)

C.2. KUGELKOORDINATEN 181
Sei S eine offene Oberflache und C ihr Rand mit Linienelement d~l, danngilt:
∫
Sd~S × ~∇f =
∮
Cd~lf (C.33)
∫
Sd~S · ~∇× ~A =
∮
Cd~l · ~A (C.34)
∫
S(d~S × ~∇) × ~A =
∮
Cd~l × ~A (C.35)
∫
Sd~S · (~∇f × ~∇g) =
∮
Cfdg = −
∮
Cgdf (C.36)
C.2 Kugelkoordinaten
Quelle: Mathematik-Online-Lexikon (19. Marz 06)
Der Winkel ϕ ist nur bis auf ein Vielfaches von 2π bestimmt. Als Stan-dardbereich wird meist (−π, π] vereinbart.Es gilt
x = r cosϕ sin θ , y = r sinϕ sin θ , z = r cos θ (C.37)
r =√
x2 + y2 + z2 , ϕ = arctan(y/x) , θ = arccos(z/√
x2 + y2 + z2)
Orthonormale Basis:
~er =
cosϕ sin θsinϕ sin θ
cos θ
, ~eθ =
cosϕ cos θsinϕ cos θ− sin θ
, ~eϕ =
− sinϕcosϕ
0
Vektorfeld:
~F (x, y, z) = Fx~ex + Fy~ey + Fz~ez → ~F (r, θ, ϕ) = Fr~er + Fθ~eθ + Fϕ~eϕ

182 ANHANG C. VEKTORANALYSIS
mitFr = ~F · ~er , Fθ = ~F · ~eθ , Fϕ = ~F · ~eϕ
Skalarfeld:U(x, y, z) → Φ(r, θ, ϕ)
Flachenelement fur eine durch
(
θϕ
)
→
R sin θ cosϕR sin θ sinϕR cos θ
parametrisierte Sphare mit Radius R ist
dS = R2 sin θdθdϕ (C.38)
Damit gilt fur das Integral einer Funktion f in Kugelkoordinaten:
∫
S
fdS =
2π∫
0
π∫
0
f(R, θ, ϕ)R2 sin θdθdϕ (C.39)
Das Volumenelement ist:
dxdydz = r2 sin θdrdθdϕ (C.40)
Damit gilt fur das Integral einer Funktion f auf einer Kugel K : 0 ≤ r ≤ R
∫
K
f =
2π∫
0
π∫
0
R∫
0
f(r, θ, ϕ)r2 sin θdrdθdϕ (C.41)
Differentialoperatoren:
Gradient ~∇U = ∂rΦ~er +1
r∂θΦ~eθ +
1
r sin θ∂ϕΦ~eϕ (C.42)
Laplace ∆U =1
r2∂r(r
2∂rΦ) +1
r2 sin2 θ∂2ϕΦ
+1
r2 sin θ∂θ(sin θ∂θΦ) (C.43)
Divergenz ~∇ · ~F =1
r2∂r(r
2Fr) +1
r sin θ∂ϕFϕ
+1
r sin θ∂θ(sin θFθ) (C.44)
Rotation ~∇× ~F =1
r sin θ(∂θ(sin θFϕ) − ∂ϕFϕ)~er
+1
r sin θ(∂ϕFr − sin θ∂r(rFϕ))~eθ
+1
r(∂r(rFθ) − ∂θFr)~eϕ (C.45)

C.3. ZYLINDERKOORDINATEN 183
Laplace eines Vektors
(∆ ~A)r = ∆Ar −2Arr2
− 2
r2∂Aθ∂θ
− 2 cot θAθr2
− 2
r2 sin θ
∂Aϕ∂ϕ
(C.46)
(∆ ~A)θ = ∆Aθ +2
r2∂Ar∂θ
− Aθr2 sin2 θ
− 2 cos θ
r2 sin2 θ
∂Aϕ∂ϕ
(C.47)
(∆ ~A)ϕ = ∆Aϕ − Aϕ
r2 sin2 θ+
2
r2 sin θ
∂Ar∂ϕ
+2 cos θ
r2 sin2 θ
∂Aθ∂ϕ
(C.48)
Damit gilt bei der Transformation einer skalaren Funktion auf Kugelkoordi-naten f(x, y, z) → f(r, θ, ϕ) fur den Gradienten mit gi(r, θ, ϕ) = ∂if(r, θ, ϕ):
~∇f = gr~er +1
rgθ~eθ +
1
r sin θgϕ~eϕ
C.3 Zylinderkoordinaten
Quelle: Mathematik-Online-Lexikon (19. Marz 06)
Es gilt:
x = ρ cosϕ , y = ρ sinϕ , z = z (C.49)
bzw.
ρ =√
x2 + y2 , ϕ = arctan(y/x) , z = z
Orthonormale Basis:
~eρ =
cosϕsinϕ
0
, ~eϕ =
− sinϕcosϕ
0
, ~ez =
001

184 ANHANG C. VEKTORANALYSIS
Vektorfeld und Skalarfeld analog zu Kugelkoordinaten:
~F (x, y, z) → ~F (ρ, ϕ, z)
U(x, y, z) → Φ(ρ, ϕ, z)
Das Flachenelement fur einen durch
(
ϕz
)
→
ρ cosϕρ sinϕz
parametrisierten Mantel S eines Zylinders mit Radius ρ ist
dS = ρdϕdz (C.50)
Damit gilt fur das Integral einer Funktion f in Zylinderkoordinaten:
∫
SfdS =
zmax∫
zmin
2π∫
0
f(ρ, ϕ, z)ρdϕdz (C.51)
Das Volumenelement lautet:
dxdydz = ρdρdϕdz (C.52)
Damit gilt fur das Integral einer Funktion f auf einem Zylinder Z : 0 ≤ ρ ≤ρ0, 0 ≤ z ≤ z0
∫
Z
f =
z0∫
0
2π∫
0
ρ0∫
0
f(ρ, ϕ, z)ρdρdϕdz (C.53)
Differentialoperatoren:
Gradient ~∇U = ∂ρΦ~eρ +1
ρ∂ϕΦ~eϕ + ∂zΦ~ez (C.54)
Laplace ∆U =1
ρ∂ρ(ρ∂ρΦ) +
1
ρ2∂2ϕΦ∂2
zΦ (C.55)
Divergenz ~∇ · ~F =1
ρ∂ρ(ρFρ) +
1
ρ∂ϕFϕ + ∂zFz (C.56)
Rotation ~∇× ~F =
(1
ρ∂ϕFz − ∂zFϕ
)
~eρ + (∂zFρ − ∂ρFz)~eϕ
+1
ρ(∂ρ(ρFϕ) − ∂ϕFρ)~ez (C.57)
Laplace eines Vektors
(∆ ~A)ρ = ∆Aρ −2
ρ2
∂Aϕ∂ϕ
− Aρρ2
(C.58)
(∆ ~A)ϕ = ∆Aϕ +2
ρ2
∂Aρ∂ϕ
− Aϕρ2
(C.59)
(∆ ~A)z = ∆Az (C.60)

C.3. ZYLINDERKOORDINATEN 185
Damit gilt bei der Transformation einer skalaren Funktion auf Zylinder-koordinaten f(x, y, z) → f(ρ, ϕ, z) fur den Gradienten mit gi(ρ, ϕ, z) =∂if(ρ, ϕ, z):
~∇f = gρ~eρ + ρ−1gϕ~eϕ + gz~ez (C.61)
186 ANHANG C. VEKTORANALYSIS