Embed Size (px)
Citation preview

FACULDADE ENIAC
ENGENHARIA MECATRÔNICA
DIEGO SILVA SOARES
JURANDIR XAVIER GOMES FILHO
ESTUDO DE TÉCNICAS DE PROCESSAMENTO DE SINAL EMG
PARA USO EM PRÓTESES MIOELÉTRICAS
GUARULHOS
2013
DIEGO SILVA SOARES
JURANDIR XAVIER GOMES FILHO
ESTUDO DE TÉCNICAS DE PROCESSAMENTO DE SINAL EMG
PARA USO EM PRÓTESES MIOELÉTRICAS
Trabalho de conclusão de curso apresentado à Faculdade Eniac, como requisito parcial para a obtenção do título de Bacharel em Engenharia Mecatrônica. Orientador: Prof.º Sérgio Fernandes Freitas
GUARULHOS
2013

ESTUDO DE TÉCNICAS DE PROCESSAMENTO DE SINAL EMG
PARA USO EM PRÓTESES MIOELÉTRICAS
Banca Examinadora:
________________________________________ Nome do(a) Professor(a) Orientador(a)
________________________________________ Nome do(a) Professor(a) Orientador(a)
________________________________________ Nome do(a) Professor(a) Orientador(a)

AGRADECIMENTOS
Agradecemos a todos os amigos e familiares que direta ou indiretamente contribuíram
para que esse sonho fosse concretizado, que mesmo estando longe nos enviaram suas
vibrações positivas, as quais nos deram forças para seguir em frente e concluir esse trabalho.
Agradecemos também a instituição, por nos dar a infraestruturar necessária para que
desenvolvêssemos o nosso aprendizado; a todos os nossos mestres que nos agraciaram com
um pouco de seu valioso conhecimento e experiência, não só profissional, mas também de
vida, sem os quais esse momento simplesmente não existiria; e em especial ao nosso
orientador técnico Sérgio Fernandes Freitas e o nosso professor de TCC Marcos Celestino,
que sempre nos tranquilizaram e souberam mostrar o caminho certo para que esse trabalho se
concluísse.

Comece fazendo o que é necessário, depois o que é possível, e de repente você estará fazendo o impossível.
São Francisco de Assis
A mente que se abre a uma nova idéia jamais voltara ao seu tamanho original.
Albert Einsten

RESUMO
Este trabalho apresenta um estudo de alguns meios pelos quais é possível captar o sinal elétrico gerado pelo músculo durante sua contração e tratá-lo de forma a tornar possível sua aplicação no comando de membros eletrônicos ou próteses mioelétricas. Para isso, articulamos o conceito de que, por meio de biossensores aplicados sobre o músculo de um ser humano consegue-se coletar o sinal gerado na contração muscular, o qual é amplificado, a fim de se melhorar seu nível de percepção e posteriormente filtra-lo tornando-o apropriado para ser convertido em um sinal digital e aplicado no controle de uma prótese.
Palavras chaves: Sistema Nervoso. Biossensores. Sinal EMG. Próteses Mioelétricas.

ABSTRACT
This paper presents a study of some means by which it is possible to capture the electrical signal generated by the muscle during its contraction and treat it so as to make possible their application in command of electronic limbs or myoelectric prostheses. For this purpose, the concept that articulated by means of biosensors applied on the muscle of a human being can be collecting the generated signal muscle contraction, which is amplified in order to improve its level of perception and subsequently filtered so making it suitable for being converted to a digital signal and applied to control a prosthesis.
Keywords: Nervous System. Biosensors. EMG signal. Myoelectric Prostheses.
LISTA DE FIGURAS
Figura 1 - Neurônio. ................................................................................................................. 11
Figura 2 - Sinapse neuromuscular. ........................................................................................... 12
Figura 3 - Sinapse entre neurônios. .......................................................................................... 12
Figura 4 - Arco reflexo. ............................................................................................................ 13
Figura 5- Variação de tensão na membrana celular nervosa durante o potencial de açao. ...... 15
Figura 6 - Musculatura estriada braço humano. ....................................................................... 15
Figura 7 - Unidade muscular Sarcômero. ................................................................................. 16
Figura 8 - Impulsos bioelétricos. .............................................................................................. 17
Figura 9 - Eletrodo de superfície EEG. .................................................................................... 18
Figura 10 - Sensor de superfície EMG. .................................................................................... 19
Figura 11 - Esquema de geração de um MUAP. ...................................................................... 20
Figura 12 - Esquema de geração de um sinal EMG através da somatória dos MUAPTs. ....... 21
Figura 13 - Sinal EMG do grupo Extensor durante extensão do punho. .................................. 22
Figura 14 - Representação de um Amplificador Diferencial captando o sinal EMG. .............. 24
Figura 15 - Amplificador diferencial. ....................................................................................... 25
Figura 16 - Amplificador de instrumentação clássico. ............................................................. 26
Figura 17 - Circuito interno do amplificador de instrumentação INA333. .............................. 26
Figura 18 - Encapsulado do INA333. ....................................................................................... 27
Figura 19 - Circuito reduzido e adaptado sugerido pelo fabricante para uso biológico. .......... 27
Figura 20 - Filtro passa-baixa, passa-alta, passa-faixa e rejeita-faixa. ..................................... 29
Figura 21 - Filtro rejeita banda série e filtro rejeita banda paralelo. ........................................ 29
Figura 22 - Curva de resposta de um filtro notch. .................................................................... 30
Figura 23 - Filtro notch duplo T. .............................................................................................. 31
Figura 24 - Sinal analógico EMG e a sequência digital resultante de sua amostragem a 2 kHz.
.................................................................................................................................................. 33
Figura 25 - Diagrama de blocos de um ADC. .......................................................................... 34
Figura 26 - ADC - TLC3544. ................................................................................................... 35
Figura 27 - Conversor NI USB 6009 DAQ. ............................................................................. 36
Figura 28 - Plataforma de estudos de sinal EMG criada com o LabVIEW.............................. 36
Figura 29 - Exemplo de prótese estética ................................................................................... 38
Figura 30 - Exemplo de prótese passiva ................................................................................... 38
Figura 31 - Exemplo de prótese ativa por tração ...................................................................... 39
Figura 32 - Esquema de funcionamento de uma prótese mioelétrica. ...................................... 40
Figura 33 - Prótese de membro periférico superior i-LIMB .................................................... 41
Figura 34 - Prótese de extremidade inferior C-Leg. ................................................................. 41
SUMÁRIO
Introdução ............................................................................................................................... 10
1 Sistema nervoso humano ............................................................................................ 11
1.1 - Sistema nervoso central periférico e seus subsistemas .................................................... 13
1.2 - Potencial de ação .............................................................................................................. 14
1.3 - Contrações musculares ..................................................................................................... 15
2 Captação do sinal mioelétrico ..................................................................................... 17
2.1 - Eletrodos Invasivos .......................................................................................................... 18
2.2 - Eletrodos não invasivos .................................................................................................... 19
3 Processamento do sinal mioelétrico ........................................................................... 20
3.1 - Tipo de Sinal .................................................................................................................... 20
3.1.1 - Principais ruídos encontrados em sinais EMG .............................................................. 22
3.2 - Amplificação .................................................................................................................... 23
3.2.1 - Amplificador diferencial de instrumentação ................................................................. 25
3.3 - Filtragem .......................................................................................................................... 28
3.3.1 - Filtros ............................................................................................................................ 28
3.4 - Conversão analógico/digital ............................................................................................. 32
3.4.1 - Conversores ................................................................................................................... 33
3.4.2 - LabVIEW© ................................................................................................................... 35
4 Próteses ......................................................................................................................... 37
4.1 - Classificação das próteses de acordo com a fonte de energia .......................................... 37
4.1.1 - Próteses Passivas ........................................................................................................... 37
4.1.2 - Próteses Ativas .............................................................................................................. 38
4.2 - Próteses Mioelétricas........................................................................................................ 39
Considerações Finais .............................................................................................................. 42
Referências Bibliográficas ..................................................................................................... 43
10
INTRODUÇÃO
Este trabalho mostra algumas técnicas de captação e processamento de sinal EMG, para
aplicação em próteses mioelétricas. Partindo deste principio, foi feito um estudo minucioso
por meio do qual é possível identificar a origem desse sinal no corpo humano e suas
principais características, para que a partir disso ele possa ser captado, processado e
posteriormente aplicado em um possível sistema de controle de um membro eletrônico.
No nosso cotidiano é muito comum nos depararmos com casos de pessoas que tiveram
membros do corpo amputados, como braços e pernas. Um dos grandes desafios da engenharia
moderna é o desenvolvimento de sistemas que ajudem e facilitem a vida da sociedade.
Portanto, é função dos engenheiros encontrar soluções ou meios que contribuam com a
socialização dessas pessoas. Dentre essas soluções podemos citar os membros eletrônicos ou
próteses inteligentes, desenvolvidos a partir da parceria entre médicos e engenheiros, eles
possuem interfaces que entendem a necessidade do paciente, diferentemente das próteses
convencionais. Porém, para que esse entendimento se torne possível é necessário que seja
feita a leitura e interpretação dos sinais que comandariam esses mecanismos biônicos (TANJI,
2012).
O cérebro comanda a movimentação do corpo humano por meio de impulsos elétricos
enviados aos músculos através do sistema nervoso. Quando uma pessoa tem um membro
amputado, por exemplo, seu cérebro continua enviando esses impulsos que provocam a
contração dos músculos gerando um sinal chamado de mioelétrico (SME) ou eletromiográfico
(EMG). Partindo do princípio de que é possível captar e identificar o sinal EMG, poderíamos
então: dar a pessoas amputadas uma nova expectativa de vida, com a implantação de próteses
motoras, controladas por sua vontade; dar a oportunidade de tetraplégicos poderem controlar
dispositivos com os sinais do músculo de sua face; criar robôs controlados a distância, por
meio de uma roupa especial que captasse os sinais e os transmitissem através de meios
específicos, para que realizassem todas as ações do seu controlador; etc.
Para isso, primeiramente é apresentado à origem do sinal EMG e o processo através do
qual ele é conduzido até os músculos, na sequência é descrito a forma de captação desse sinal
e os sensores que são usados para tal função. No Capitulo 3 é descrito algumas formas pelas
quais esse sinal deve ser processado para que posteriormente possa ser introduzido em um
sistema de controle de uma prótese inteligente como as que serão mostradas no capitulo
seguinte. Por fim são apresentadas as considerações finais acerca desse fascinante trabalho de
conclusão de curso.

11
1 SISTEMA NERVOSO HUMANO
O sistema nervoso atua através da condução elétrica realizada em células nervosas, a
principal delas é o neurônio mostrado na Figura 1. No cérebro existem aproximadamente 100
bilhões de células desse tipo formando uma rede neural complexa.
Figura 1 - Neurônio.
Fonte: Google imagens
Segundo Oda (2012), os neurônios se dividem basicamente em três partes:
• Dendritos- São numerosos prolongamentos dos neurônios que atuam na recepção de
estímulos nervosos do ambiente ou de outros neurônios e na transmissão desses para o
corpo da célula, ou precário.
• Corpo celular ou núcleo - O corpo celular está normalmente localizado no sistema
nervoso central ou ainda nos gânglios, localizados próximo da coluna vertebral.
• Axônio – É a parte do neurônio responsável pela condução dos impulsos elétricos que
partem do corpo celular, até outro local mais distante, como um músculo ou outro
neurônio. Em suas extremidades, o axônio ramifica-se formando seus terminais que
contém estruturas minúsculas chamadas de botões sinápticos.
Os impulsos elétricos são gerados nos dendritos dos neurônios pré-sinápticos que passam
pelo corpo celular percorrem todo axônio até seus terminais. A Figura 2 ilustra um terminal
axônio em uma sinapse neuromuscular.

12
Figura 2 - Sinapse neuromuscular.
Fonte: Google imagens
Ao receber esse impulso nos terminais, o neurônio pré-sináptico libera uma substância
neurotransmissora para o neurônio pós-sináptico, substancia essa que tem como finalidade
realizar comunicação entre os neurônios. Assim como circuitos eletrônicos possuem foto
acopladores para proteção, os neurônios não possuem uma ligação direta, existindo um espaço
entre eles chamadas de fenda sináptica, onde os neurotransmissores são enviados aos
dendritos dos neurônios receptores realizando a sinapse (GUYTON, 1988 apud ORTOLAN,
2002).
Figura 3 - Sinapse entre neurônios.
Fonte: Google imagens

13
A Figura 3 ilustra a comunicação entre neurônio através do impulso eletroquímico,
coordenando diversas funções do corpo.
1.1 - Sistema nervoso central periférico e seus subsistemas
O sistema nervoso central é o mais importante por esse motivo há uma maior proteção na
região craniana e espinhal. O sistema nervoso pode ainda ser dividido em dois subsistemas:
sistema nervoso somático e sistema nervoso autônomo
Segundo Oda (2012), o sistema nervoso somático controla a musculatura estriada
esquelética que é responsável pelo movimento voluntário dos membros periféricos como
pernas, braços, peitoral e abdominal, cujo neurotransmissor responsável por essa função é a
acetilcolina1.
O sistema nervoso somático em alguns casos pode trabalhar de maneira involuntária.
Quando um membro periférico é submetido à dor ou a presença de calor excessivo a
musculatura contrai-se involuntariamente como mecanismo natural de defesa denominado de
atos reflexos ou arco reflexo.
Figura 4 - Arco reflexo.
Fonte: Google imagem
Na Figura 4 o arco reflexo ocorre quando o nervo aferente2 capta o estimulo de dor e envia
ao neurônio associativo localizado no sistema nervoso central encéfalo e é conduzido ao
1O primeiro neurotransmissor descoberto. 2 Nervo periférico que tem a finalidade captar estímulos sensoriais externos.
14
nervo eferente3 realizando o movimento involuntário. Qualquer ruptura entre os nervos
aferente ou eferente esse estímulo pode deixar de ser realizado de maneira efetiva.
O sistema nervoso autônomo é responsável por movimentos de parte do corpo, como
próprio nome já diz, com autonomia que é o caso das pupilas e toda musculatura denominada
lisa.
1.2 - Potencial de ação
A variação muito rápida dos potenciais externos e internos da membrana celular nervosa
pode ser definida como potencial de ação. Estes potenciais. Desloca-se por todo axônio até os
seus terminais. Cada potencial de ação tem inicio na variação de amplitude potencial de
repouso, para um potencial positivo e rapidamente retorna a um potencial negativo realizando
sucessivos ciclos de potenciais.
Os subitens que seguem foram inspirados nos escritos de Guyton (1988 apud ORTOLAN,
2002).
• Repouso - Neste estado, a membrana celular é permeável a íons cálcio (Ka+) e
apresenta grande concentração do mesmo em seu interior. A membrana sendo
impermeável a o íon sódio (Na+) libera carga positiva para parte externa por meio de
difusão gerando um potencial negativo em seu interior da ordem de -70mv.
• Despolarização- Quando submetida a qualquer estimulo, a membrana celular poderá
obter um ganho considerável de permeabilidade ao íon (Na+), que rapidamente se
deslocam para o interior da membrana, carregando seu interior positivamente dando
inicio ao potencial de ação.
• Repolarização- A membrana volta a reduzir a permeabilidade ao íon (Na+)
parcialmente até que os íons (Ka+) retornem totalmente ao interior da membrana
ficando impermeável ao íon (Na+).
3 Nervo periférico motor responsável pelo envio de sinais do encéfalo para o músculo.
15
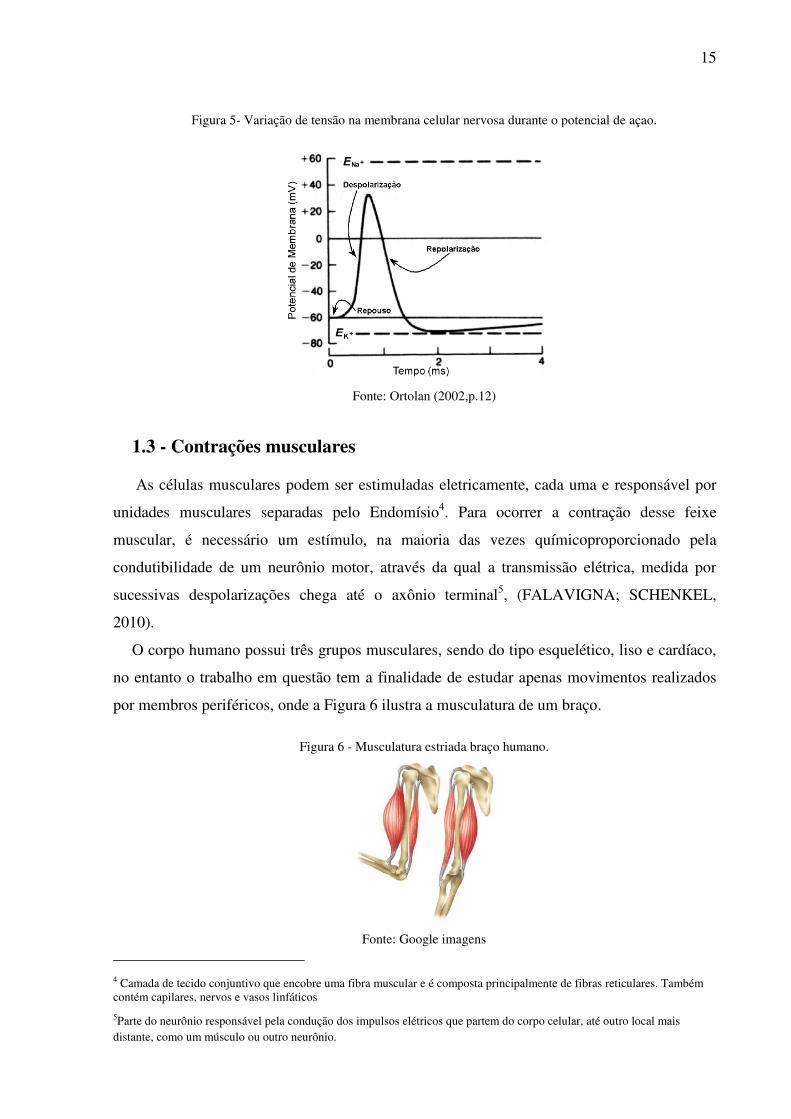
Figura 5- Variação de tensão na membrana celular nervosa durante o potencial de açao.
Fonte: Ortolan (2002,p.12)
1.3 - Contrações musculares
As células musculares podem ser estimuladas eletricamente, cada uma e responsável por
unidades musculares separadas pelo Endomísio4. Para ocorrer a contração desse feixe
muscular, é necessário um estímulo, na maioria das vezes químicoproporcionado pela
condutibilidade de um neurônio motor, através da qual a transmissão elétrica, medida por
sucessivas despolarizações chega até o axônio terminal5, (FALAVIGNA; SCHENKEL,
2010).
O corpo humano possui três grupos musculares, sendo do tipo esquelético, liso e cardíaco,
no entanto o trabalho em questão tem a finalidade de estudar apenas movimentos realizados
por membros periféricos, onde a Figura 6 ilustra a musculatura de um braço.
Figura 6 - Musculatura estriada braço humano.
Fonte: Google imagens
4 Camada de tecido conjuntivo que encobre uma fibra muscular e é composta principalmente de fibras reticulares. Também contém capilares, nervos e vasos linfáticos
5Parte do neurônio responsável pela condução dos impulsos elétricos que partem do corpo celular, até outro local mais distante, como um músculo ou outro neurônio.
16
Apóstolo (2013) afirma que as células musculares esqueléticas possuem tendões que se
fixam aos ossos de cada músculo e é formado por um conjunto de fibras circundadas por
tecidos conjuntivo6 e adiposo7. Devido as suas dimensões as células dos músculos
esqueléticos também são chamadas de fibras musculares medem cerca de 100 micrometros de
largura e podem ser muito longas podendo alcançar quatro centímetro de comprimento.
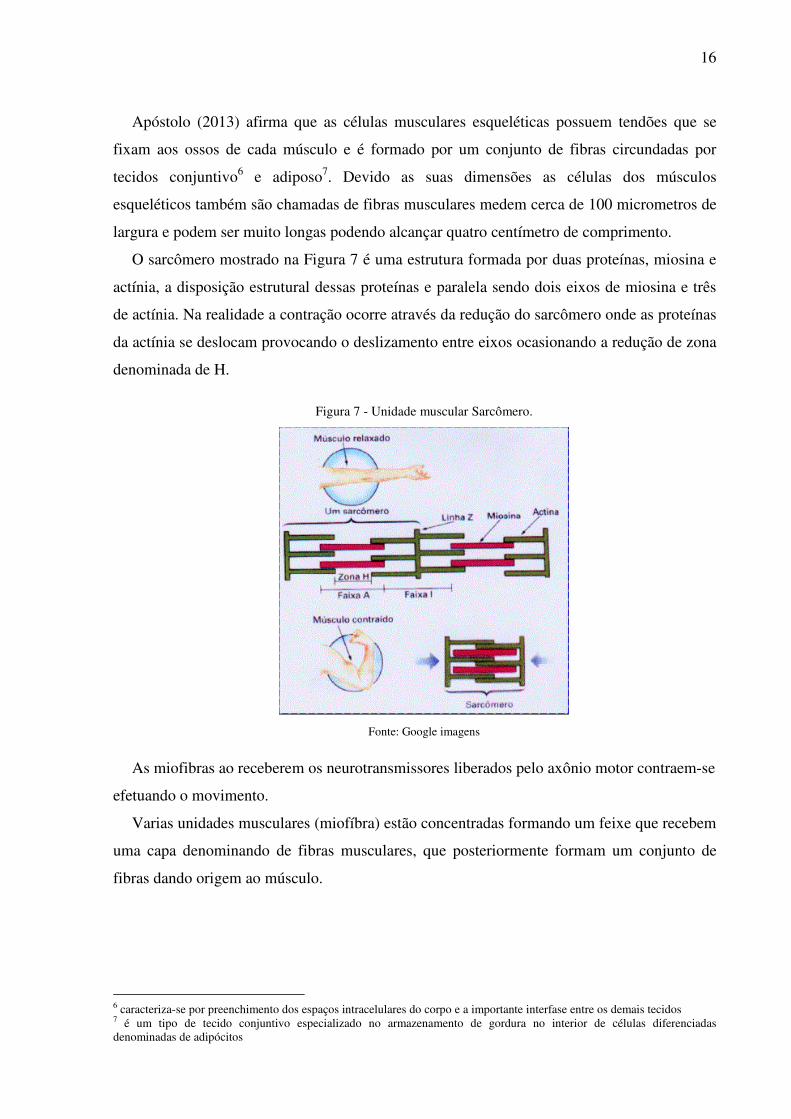
O sarcômero mostrado na Figura 7 é uma estrutura formada por duas proteínas, miosina e
actínia, a disposição estrutural dessas proteínas e paralela sendo dois eixos de miosina e três
de actínia. Na realidade a contração ocorre através da redução do sarcômero onde as proteínas
da actínia se deslocam provocando o deslizamento entre eixos ocasionando a redução de zona
denominada de H.
Figura 7 - Unidade muscular Sarcômero.
Fonte: Google imagens
As miofibras ao receberem os neurotransmissores liberados pelo axônio motor contraem-se
efetuando o movimento.
Varias unidades musculares (miofíbra) estão concentradas formando um feixe que recebem
uma capa denominando de fibras musculares, que posteriormente formam um conjunto de
fibras dando origem ao músculo.
6 caracteriza-se por preenchimento dos espaços intracelulares do corpo e a importante interfase entre os demais tecidos 7 é um tipo de tecido conjuntivo especializado no armazenamento de gordura no interior de células diferenciadas denominadas de adipócitos
17
2 CAPTAÇÃO DO SINAL MIOELÉTRICO
Atualmente a capitação de sinais mioelétricos restringem-se aos avanços tecnológicos
biomédicos, devido à necessidade de grande quantidade de eletrônica embarcada, tipos de
materiais e as suas dimensões, que devem ser micro para realização de uma extensa gama de
exames clínicos.
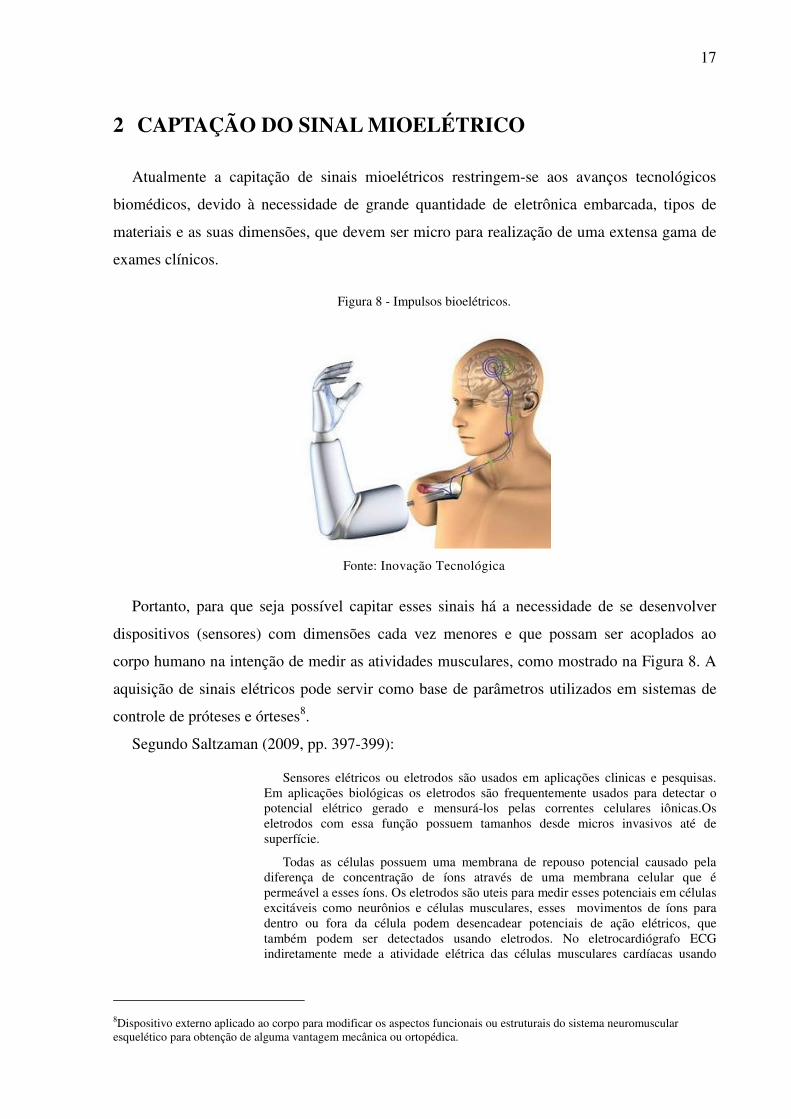
Figura 8 - Impulsos bioelétricos.
Fonte: Inovação Tecnológica
Portanto, para que seja possível capitar esses sinais há a necessidade de se desenvolver
dispositivos (sensores) com dimensões cada vez menores e que possam ser acoplados ao
corpo humano na intenção de medir as atividades musculares, como mostrado na Figura 8. A
aquisição de sinais elétricos pode servir como base de parâmetros utilizados em sistemas de
controle de próteses e órteses8.
Segundo Saltzaman (2009, pp. 397-399):
Sensores elétricos ou eletrodos são usados em aplicações clinicas e pesquisas. Em aplicações biológicas os eletrodos são frequentemente usados para detectar o potencial elétrico gerado e mensurá-los pelas correntes celulares iônicas.Os eletrodos com essa função possuem tamanhos desde micros invasivos até de superfície.
Todas as células possuem uma membrana de repouso potencial causado pela diferença de concentração de íons através de uma membrana celular que é permeável a esses íons. Os eletrodos são uteis para medir esses potenciais em células excitáveis como neurônios e células musculares, esses movimentos de íons para dentro ou fora da célula podem desencadear potenciais de ação elétricos, que também podem ser detectados usando eletrodos. No eletrocardiógrafo ECG indiretamente mede a atividade elétrica das células musculares cardíacas usando
8Dispositivo externo aplicado ao corpo para modificar os aspectos funcionais ou estruturais do sistema neuromuscular esquelético para obtenção de alguma vantagem mecânica ou ortopédica.
18
eletrodos de superfície fixados a pele. De modo similar, às atividades cerebrais podem ser medidas através de eletrodos fixados ao crânio9.
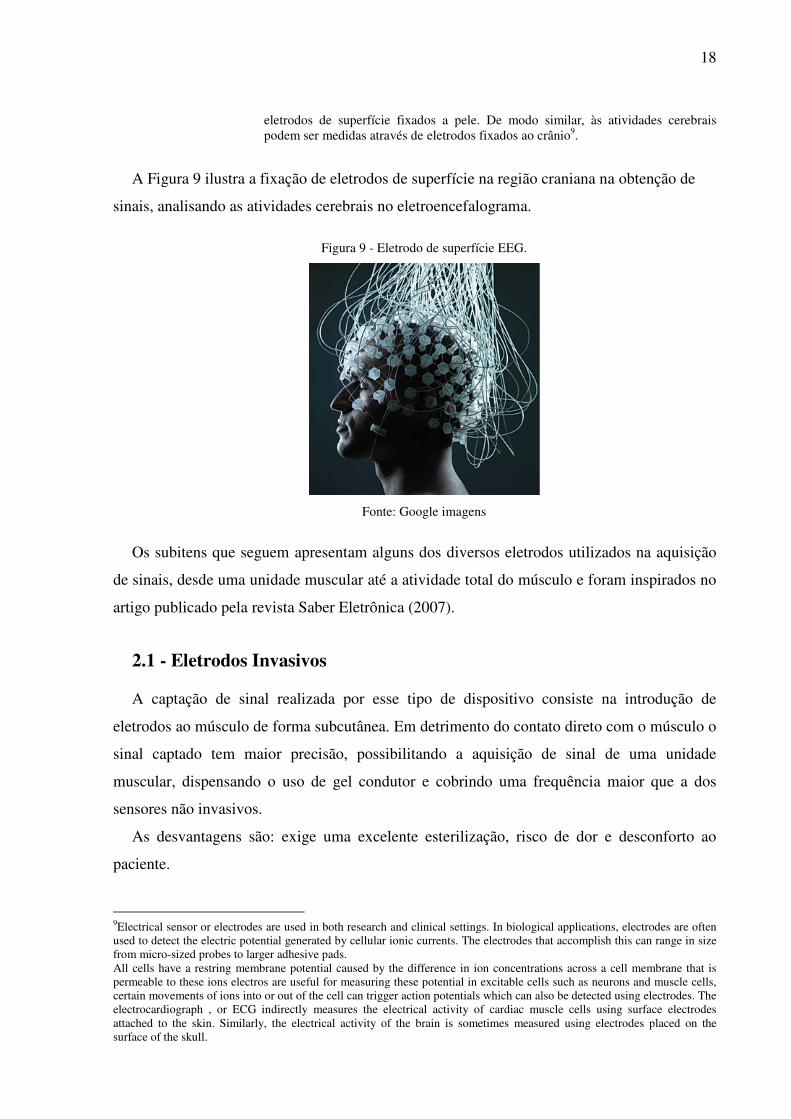
A Figura 9 ilustra a fixação de eletrodos de superfície na região craniana na obtenção de
sinais, analisando as atividades cerebrais no eletroencefalograma.
Figura 9 - Eletrodo de superfície EEG.
Fonte: Google imagens
Os subitens que seguem apresentam alguns dos diversos eletrodos utilizados na aquisição
de sinais, desde uma unidade muscular até a atividade total do músculo e foram inspirados no
artigo publicado pela revista Saber Eletrônica (2007).
2.1 - Eletrodos Invasivos
A captação de sinal realizada por esse tipo de dispositivo consiste na introdução de
eletrodos ao músculo de forma subcutânea. Em detrimento do contato direto com o músculo o
sinal captado tem maior precisão, possibilitando a aquisição de sinal de uma unidade
muscular, dispensando o uso de gel condutor e cobrindo uma frequência maior que a dos
sensores não invasivos.
As desvantagens são: exige uma excelente esterilização, risco de dor e desconforto ao
paciente.
9Electrical sensor or electrodes are used in both research and clinical settings. In biological applications, electrodes are often used to detect the electric potential generated by cellular ionic currents. The electrodes that accomplish this can range in size from micro-sized probes to larger adhesive pads. All cells have a restring membrane potential caused by the difference in ion concentrations across a cell membrane that is permeable to these ions electros are useful for measuring these potential in excitable cells such as neurons and muscle cells, certain movements of ions into or out of the cell can trigger action potentials which can also be detected using electrodes. The electrocardiograph , or ECG indirectly measures the electrical activity of cardiac muscle cells using surface electrodes attached to the skin. Similarly, the electrical activity of the brain is sometimes measured using electrodes placed on the surface of the skull.
19
2.2 - Eletrodos não invasivos
Conhecidos por eletrodos de superfície eles são fixados a pele disponibilizando
informações mais grosseiras que as dos eletrodos invasivos, captando a atividade total do
músculo analisado, necessitando de gel condutor para diminuição da impedância e retirada de
pelos do local de fixação.
Esse tipo de eletrodo pode ser do tipo descartável ou reutilizável, e a faixa de atuação varia
entre 50µV a 5mV com faixa de frequência de 500Hz.
Esses sensores podem ser classificados como:
• Eletrodos não invasivos Passivos - São eletrodos que não realizam tratamento,
condicionamento e manipulação do sinal captado enviando apenas o sinal ao aparelho
que fará todo o tratamento do sinal.
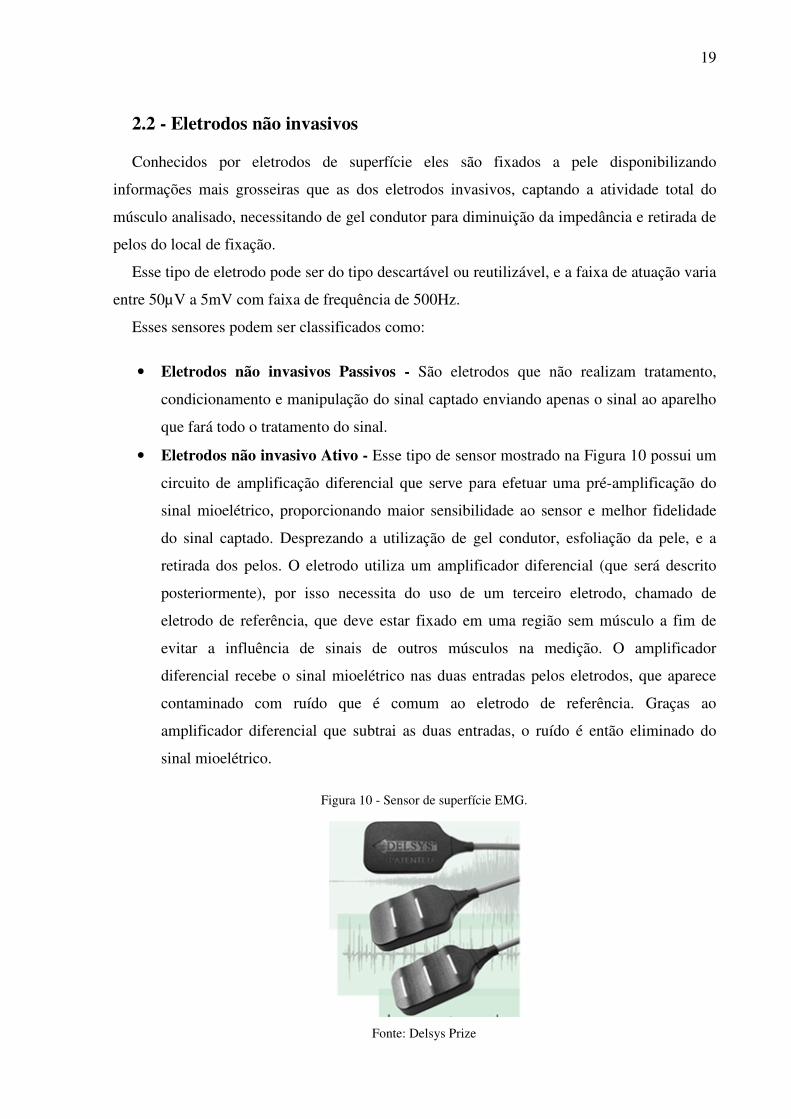
• Eletrodos não invasivo Ativo - Esse tipo de sensor mostrado na Figura 10 possui um
circuito de amplificação diferencial que serve para efetuar uma pré-amplificação do
sinal mioelétrico, proporcionando maior sensibilidade ao sensor e melhor fidelidade
do sinal captado. Desprezando a utilização de gel condutor, esfoliação da pele, e a
retirada dos pelos. O eletrodo utiliza um amplificador diferencial (que será descrito
posteriormente), por isso necessita do uso de um terceiro eletrodo, chamado de
eletrodo de referência, que deve estar fixado em uma região sem músculo a fim de
evitar a influência de sinais de outros músculos na medição. O amplificador
diferencial recebe o sinal mioelétrico nas duas entradas pelos eletrodos, que aparece
contaminado com ruído que é comum ao eletrodo de referência. Graças ao
amplificador diferencial que subtrai as duas entradas, o ruído é então eliminado do
sinal mioelétrico.
Figura 10 - Sensor de superfície EMG.
Fonte: Delsys Prize
20
3 PROCESSAMENTO DO SINAL MIOELÉTRICO
O sinal EMG que é capturado pelos sensores descritos anteriormente é puramente
analógico, sendo afetado por diversos outros provenientes de diferentes fontes que se
misturam a ele dificultando assim sua aplicação, portanto não está pronto para ser utilizado,
antes disso, é preciso extrair dele o potencial de ação da unidade motora (MUAP), que é a
porção que nos interessa nesse sobreposto de ondas, para tanto, é necessário passá-lo por um
processamento que é composto basicamente por uma etapa de amplificação e uma de
filtragem, para que possa então ser convertido em um sinal digital que possa ser
compreendido pelo circuito de controle.
3.1 - Tipo de Sinal
O sinal EMG é extremamente complexo e recebe influência das propriedades anatômicas e
fisiológicas dos músculos, do esquema de controle do sistema nervoso periférico, bem como
das características dos instrumentos que são usados para detectá-lo (ANDRADE, 2000).
Conforme apresentado no capitulo 1, em condições normais o potencial de ação é
transportado pelo motoneurônio e ativa todas as fibras musculares por ele inervadas. A
despolarização da membrana pós-sináptica se propaga em ambas as direções na membrana
muscular, isto gera uma movimentação iônica através da membrana que produz um campo
eletromagnético. Este campo pode ser detectado por um eletrodo colocado próximo as fibras
ativas, e o resultado é uma onda chamada de potencial de ação da unidade motora (MUAP).
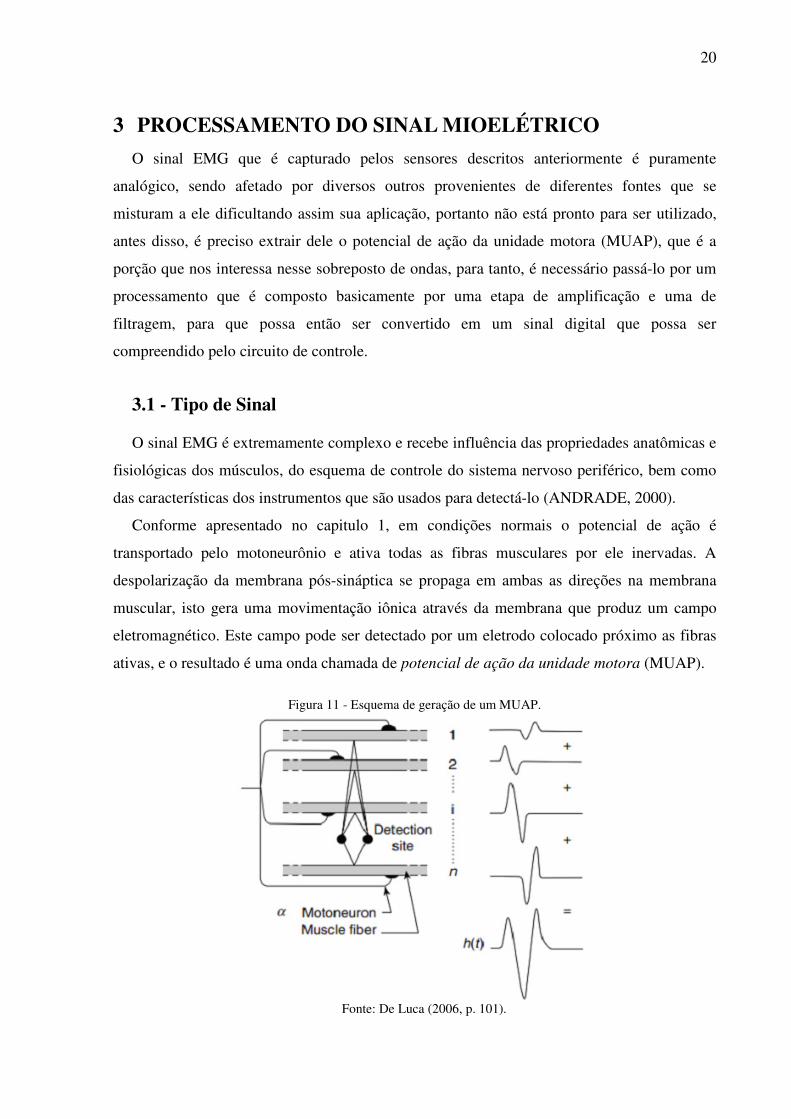
Figura 11 - Esquema de geração de um MUAP.
Fonte: De Luca (2006, p. 101).

21
Na Figura 11 é apresentada uma representação esquemática da geração do MUAP, o qual é
indicado por h(t).A duração de um MUAP é de aproximadamente 2 a 10 ms com amplitudes
na faixa de 100 µV a 2 mV e banda de frequência de 5 Hz a 10 kHz(ALMEIDA, 1997).
Devido ao fato de um MUAP ter um período relativamente pequeno (2 a 10 ms),as
unidades motoras devem ser ativadas repetitivamente para que se possa sustentar uma
contração muscular por períodos maiores. Esta sequência de MUAPs é denominada trem de
potenciais de ação da unidade motora ou MUAPT.
Os MUAPTs de cada unidade motora são diferentes devido às variações nas sequências de
acionamento de cada unidade motora e às diferentes características dos MUAPs de cada
unidade que os compõem, portanto o sinal EMG de cada músculo é composto pela somatória
desses trens de pulso.
Figura 12 - Esquema de geração de um sinal EMG através da somatória dos MUAPTs.
Fonte: Basmagian; De Luca (1985 apud ORTOLAN, 2002, p. 19).
A Figura 12, ilustra a representação esquemática da geração do Sinal EMG de um
músculo, a partir da somatória dos trens de MUAPs das n unidades motoras destemúsculo.
Contrações musculares que exigemgrandes esforços são realizadas por grupos musculares
(conjuntos de músculos que podem realizar um mesmo movimento), portanto o sinal EMG,
quando captado com eletrodos de superfície,pode conter sinais de vários músculos.
Em virtude da diferença entre os MUAPs, da irregularidade na taxa dedisparo dos
neurônios motores e também pelo fato de que uma contração poder ter mais de um músculo
envolvido, o sinal mioelétrico foi descrito comoum processo estocástico (aleatório) (DE
LUCA, 1979).
Parkr et al. (1977) aproximaram a função de densidade de probabilidadedo sinal por uma
22
função gaussiana, implicando que a amplitude instantâneado sinal é uma variável gaussiana
de média zero. No entanto Hudgins et al. (1993) encontraram características determinísticas
no sinal EMGdurante os 200 ms iniciais de uma contração muscular.
O sinal EMG obtido com eletrodos de superfície é afetado pelaspropriedades de filtro das
camadas epiteliais e da interface eletrodo-pele, deforma que apresenta componentes
frequenciais desde DC até cerca de500 Hz, manifestando maior concentração do sinal dentro
da faixa de 50 a 150 Hz (DE LUCA, 2002). As amplitudes máximas deste sinal estão
compreendidos entre 50µV e 5mV,segundo Almeida(1997). Estes valores variam de acordo
com otipo de músculo analisado, o nível de contração muscular, e também o tipo ea
localização dos eletrodos utilizados.
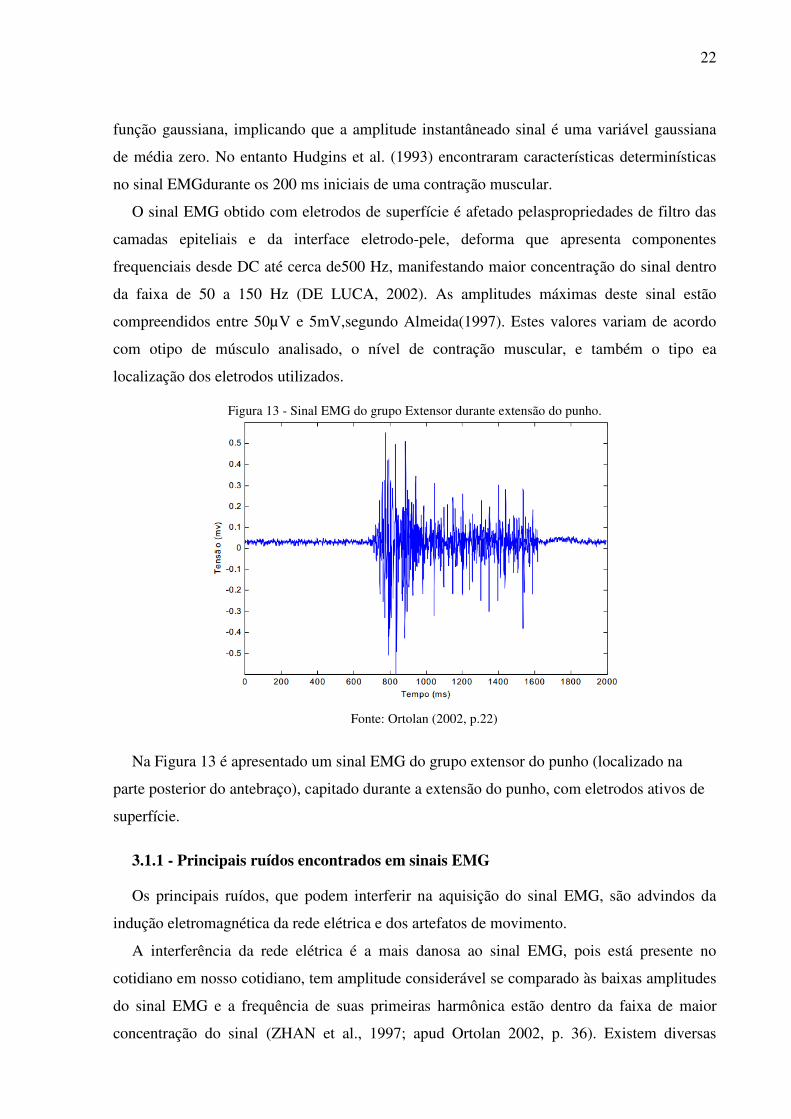
Figura 13 - Sinal EMG do grupo Extensor durante extensão do punho.
Fonte: Ortolan (2002, p.22)
Na Figura 13 é apresentado um sinal EMG do grupo extensor do punho (localizado na
parte posterior do antebraço), capitado durante a extensão do punho, com eletrodos ativos de
superfície.
3.1.1 - Principais ruídos encontrados em sinais EMG
Os principais ruídos, que podem interferir na aquisição do sinal EMG, são advindos da
indução eletromagnética da rede elétrica e dos artefatos de movimento.
A interferência da rede elétrica é a mais danosa ao sinal EMG, pois está presente no
cotidiano em nosso cotidiano, tem amplitude considerável se comparado às baixas amplitudes
do sinal EMG e a frequência de suas primeiras harmônica estão dentro da faixa de maior
concentração do sinal (ZHAN et al., 1997; apud Ortolan 2002, p. 36). Existem diversas
23
formas de atenuar essa interferência, porém, mesmo utilizando-as, ainda podemos estar
expostos à interferência da rede. A fim de implementar um sistema com maior confiabilidade,
que capte o sinal EMG, sem a interferência da rede elétrica, é interessante que seja
desenvolvido um filtro para atenuar o ruído de 60 Hz. Pelo fato da frequência de 60 Hz estar
dentro da banda de maior concentração de energia do sinal, o filtro desenvolvido para
cancelar o ruído deve ter uma banda de corte estreita, de forma a atenuar o ruído, mas não
prejudicar o sinal.
Outra fonte de ruído é proveniente dos artefatos de movimento, que está relacionada com o
movimento dos cabos e dos eletrodos de captação do sinal. Quando um músculo se contrai a
pele também se movimenta, desta forma os eletrodos de superfície podem ter um pequeno
deslocamento em relação à pele durante uma contração. Este deslocamento dos eletrodos, e
também o movimento dos cabos durante uma captação, podem gerar um ruído de baixa
frequência, relacionado com a variação da tensão média do sinal, que interfere na aquisição
do sinal, pois altera as suas características. Como a interferência dos artefatos de movimento é
de baixa frequência, um filtro passa alta é capaz de atenuar a ação deste ruído. De acordo com
De Luca (2002) é recomendo o uso de filtros passa alta, com frequência de corte igual a 20 Hz
para evitar a aquisição do sinal da taxa de disparo das unidades motoras, que são
particularmente instáveis em virtude das suas características semi-aleatórias.
3.2 - Amplificação
Segundo Bronzino (2000) as medidas dos sinais EMG envolvem tensões em níveis muito
baixos, tipicamente variando entre 1µv e 100mv, com alta fonte de impedância e altos níveis
de interferência de sinal e ruído, portanto, precisam ser amplificados para tornarem-se
compatíveis com dispositivos como displays, gravadores, ou conversores A/D10.
No entanto, devem-se ter alguns cuidados para que não se modifiquem as características do
sinal, tendo em vista alguns pontos como: características do ruído, razão sinal/ruído, ganho,
taxa de rejeição de modo comum (CMRR),largura de banda, impedância de entrada e input
bias current.
O ruído é qualquer sinal EMG não desejado ao longo do sinal detectado que seja diferente
dos MUAPs descritos no item 3.1 e pode resultar de fontes distantes, tais como linhas de
força, outros aparelhos e músculos vizinhos. A detecção bipolar fornece um método de
remover o ruído, desde que o sinal ruidoso possa idealmente ser idêntico em ambos os
10 Conversor analógico-digital
24
eletrodos. A redução do nível de ruído também pode ser obtida por meio de redução da
impedância da pele, possibilitando assim uma menor impedância de entrada. Eletrodos
associados a amplificadores de instrumentação (eletrodos ativos) podem reduzir a
contaminação do sinal EMG.
Segundo De Luca (2006) a qualidade de um sinal EMG amplificado pode ser descrita
através da razão sinal/ruído, onde quanto menor for à razão, menor será a redução do ruído e
vice versa.
O ganho,nada mais é, do que a quantidade de amplificação aplicada ao sinal EMG.
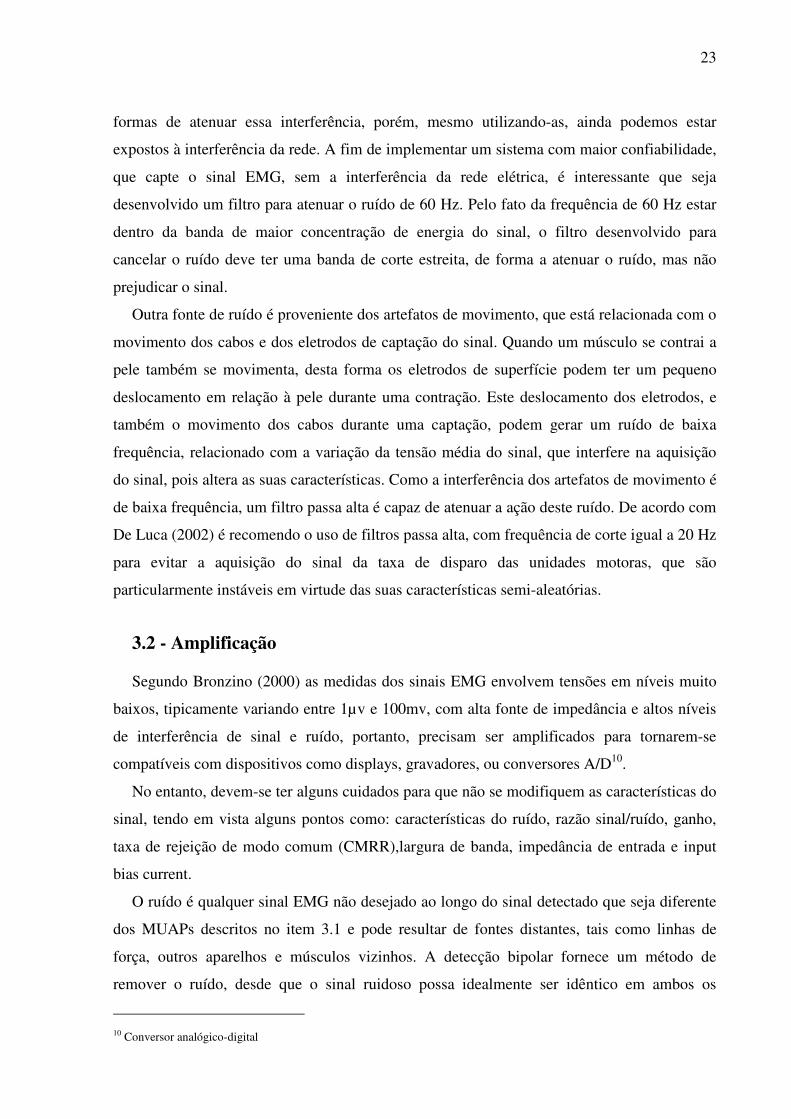
A capacidade de um amplificador diferencial em eliminar o sinal de modo comum chama-
se taxa de rejeição de modo comum (common mode rejection ratio, CMRR). O sinal de modo
comum é aquele captado em ambos os eletrodos, como por exemplo, interferências da rede
elétrica, músculos distantes ou batimentos cardíacos, considerados ruídos. Com isso, o
amplificador diferencial é utilizado para que o ruído (n), que é induzido nas duas entradas,
seja subtraído e, portanto minimizado na saída.
Figura 14 - Representação de um Amplificador Diferencial captando o sinal EMG.
Fonte: De Luca (2002, p.4).
Na Figura 14 é representado um amplificador diferencial captando o sinal mioelétrico (mi)
com ruído (n). Para que este tipo de amplificador desempenhe sua função da melhor maneira
deve ter uma alta impedância de entrada e alto CMRR.
Quanto mais alta for essa taxa de rejeição de modo comum, melhor será o cancelamento do
sinal de modo comum. Geralmente, uma taxa de rejeição de 32.000 vezes ou 90 decibéis é
suficiente para suprimir ruídos elétricos segundo De Luca (2006).
25
Os amplificadores possuem limites de variação em sua frequência, na região situada entre
esses limites encontra-se a frequências de trabalho que é denominada de largura de banda do
amplificador, portanto, os sinais EMG dentro desse intervalo de frequências são captados,
enquanto que as outras frequências são suprimidas ou eliminadas. Em movimentos rápidos de
um determinado músculo, por exemplo, pode ser necessário aumentar as frequências de corte,
porque os artefatos de movimento podem conter componentes de alta frequência. Isto pode
ser feito sem eliminar o sinal EMG útil, ajustando a frequência de corte em valores
ligeiramente acima do sinal desejado.
Pelo corpo possuir alta condutância devido às concentrações de íons movendo-se
livremente, os tecidos causam uma variação da resistência de 100 a 1000 Ω, e podem ser
consideradas fontes de impedância. O input bias current é a mínima corrente constante
requerida para manter o amplificador ativo, e qualquer corrente do sinal EMG menor que essa
não é amplificada (DE LUCA, 2006).
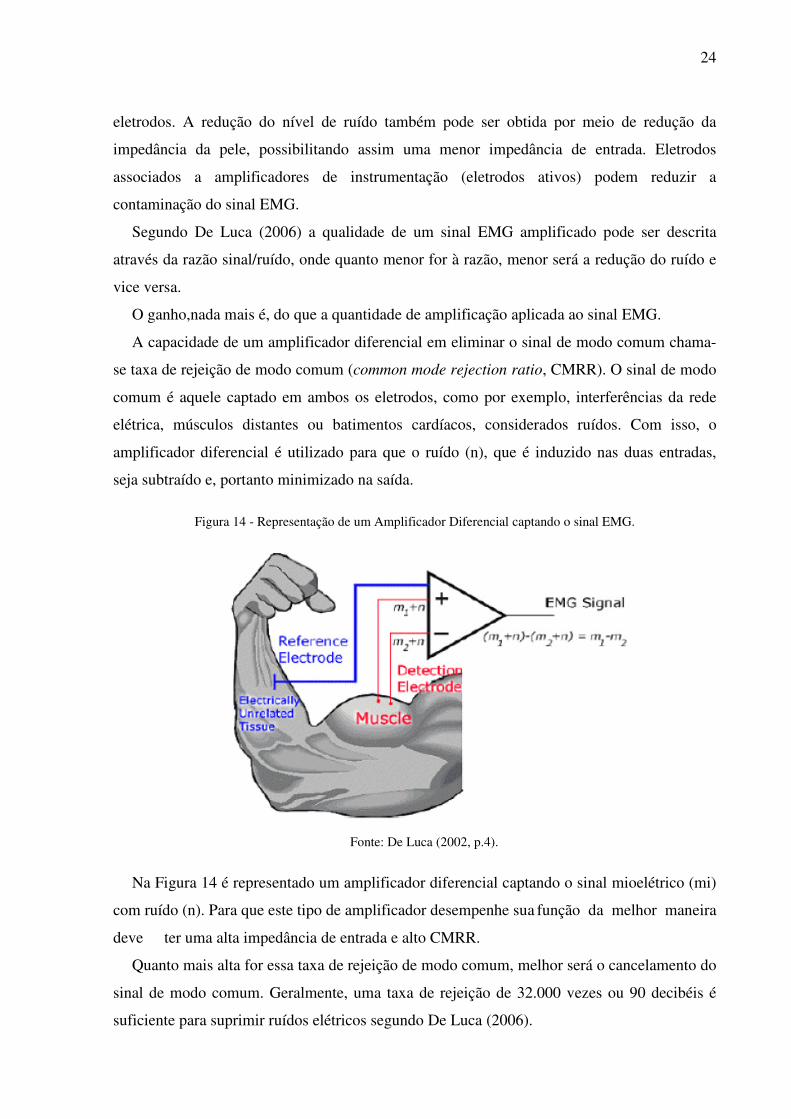
3.2.1 - Amplificador diferencial de instrumentação
Um amplificador diferencial trata-se de um circuito constituído por um amplificador
operacional de elevado ganho de tensão, elevada taxa de rejeição em modo comum CMRR e
muito baixa corrente de entrada, ligado numa montagem subtratora, como mostrado na Figura
15.
Figura 15 - Amplificador diferencial.
Fonte: Sedra e Smith (2000, p. 82).
O amplificador subtrator é uma combinação de um amplificador inversor com um não
inversor. A maior desvantagem dessa configuração é a sua baixa resistência de entrada e o
fato do ganho não poder ser mudado facilmente (SEDRA; SMITH, 2000). Isto pode ser
resolvido colocando amplificadores como buffers à entrada, não alterando assim a sua função
de transferência e passando a resistência de entrada do circuito amplificador a ser a resistência

26
de entrada do buffer, portanto muito alta. Para contornar estas dificuldades utiliza-se o
circuito da Figura 16 chamado de amplificador de instrumentação.
Figura 16 - Amplificador de instrumentação clássico.
Fonte: Horowitz e Hill (1989, p. 425).
Esse circuito é a configuração de amplificador diferencial mais usada em instrumentação
por possuir um alto ganho, uma alta impedância de entrada e elevado CMRR.
Na prática não precisamos construir um amplificador de instrumentação, pois o mesmo já
se encontra integrado com os três AOs em um mesmo encapsulamento. A Figura 17 mostra
um exemplo do circuito internodo INA333 da Texas Intruments.
Figura 17 - Circuito interno do amplificador de instrumentação INA333.
Fonte: Texas Instruments (2008, p. 1).
27
Matematicamente a operação realizada por esses dispositivos é a representada na Equação
1, em que Vo é a tensão de saída, G é o ganho e V1 e V2 são as tensões de cada uma das
entradas do amplificador (SEDRA;SMITH,2000).
1 2 1
O INA333 representado na Figura 18 permite variar o ganho através de um resistor externo
RG. Como o amplificador vem perfeitamente balanceado de fabrica, não precisamos nos
preocupar com o ajuste de offset. Esse modelo de amplificador de instrumentação é bastante
utilizado em instrumentação biomédica na captação de sinais EMG, pois como já foi citado
possui uma altíssima impedância de entrada.
Figura 18 - Encapsulado do INA333.
Fonte: Texas Instruments
A vantagem da alta impedância é a corrente que flui pelos terminais de entrada ser
praticamente nula. Isto evita o dreno excessivo de corrente da fonte geradora de sinais (neste
caso os eletrodos), e a consequente degradação ou distorção do sinal adquirido (MARTINS,
2012).
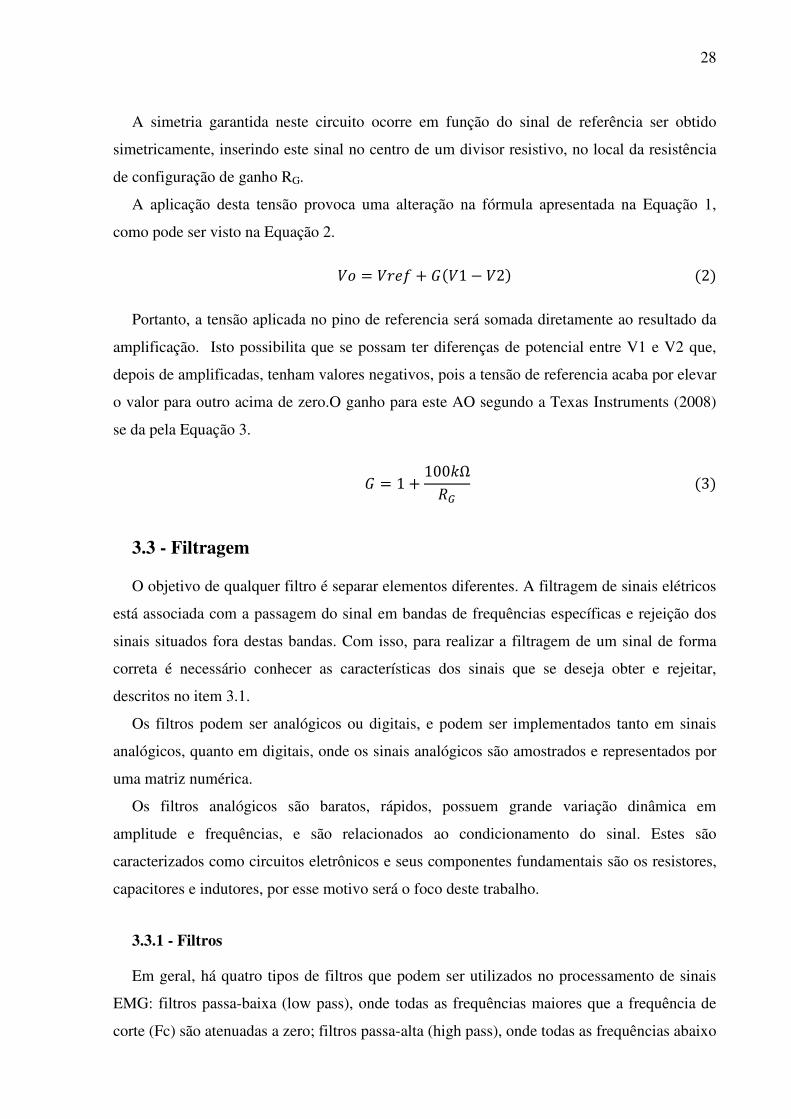
Um circuito adaptado tipicamente para leitura de sinais biológicos, sugerido pelo
fabricante no datasheet do produto é mostrado na Figura 19.
Figura 19 - Circuito reduzido e adaptado sugerido pelo fabricante para uso biológico.
Fonte: Texas Instruments (2008, p. 14).
28
A simetria garantida neste circuito ocorre em função do sinal de referência ser obtido
simetricamente, inserindo este sinal no centro de um divisor resistivo, no local da resistência
de configuração de ganho RG.
A aplicação desta tensão provoca uma alteração na fórmula apresentada na Equação 1,
como pode ser visto na Equação 2.
1 2 2
Portanto, a tensão aplicada no pino de referencia será somada diretamente ao resultado da
amplificação. Isto possibilita que se possam ter diferenças de potencial entre V1 e V2 que,
depois de amplificadas, tenham valores negativos, pois a tensão de referencia acaba por elevar
o valor para outro acima de zero.O ganho para este AO segundo a Texas Instruments (2008)
se da pela Equação 3.
1 100Ω
3
3.3 - Filtragem
O objetivo de qualquer filtro é separar elementos diferentes. A filtragem de sinais elétricos
está associada com a passagem do sinal em bandas de frequências específicas e rejeição dos
sinais situados fora destas bandas. Com isso, para realizar a filtragem de um sinal de forma
correta é necessário conhecer as características dos sinais que se deseja obter e rejeitar,
descritos no item 3.1.
Os filtros podem ser analógicos ou digitais, e podem ser implementados tanto em sinais
analógicos, quanto em digitais, onde os sinais analógicos são amostrados e representados por
uma matriz numérica.
Os filtros analógicos são baratos, rápidos, possuem grande variação dinâmica em
amplitude e frequências, e são relacionados ao condicionamento do sinal. Estes são
caracterizados como circuitos eletrônicos e seus componentes fundamentais são os resistores,
capacitores e indutores, por esse motivo será o foco deste trabalho.
3.3.1 - Filtros
Em geral, há quatro tipos de filtros que podem ser utilizados no processamento de sinais
EMG: filtros passa-baixa (low pass), onde todas as frequências maiores que a frequência de
corte (Fc) são atenuadas a zero; filtros passa-alta (high pass), onde todas as frequências abaixo
29
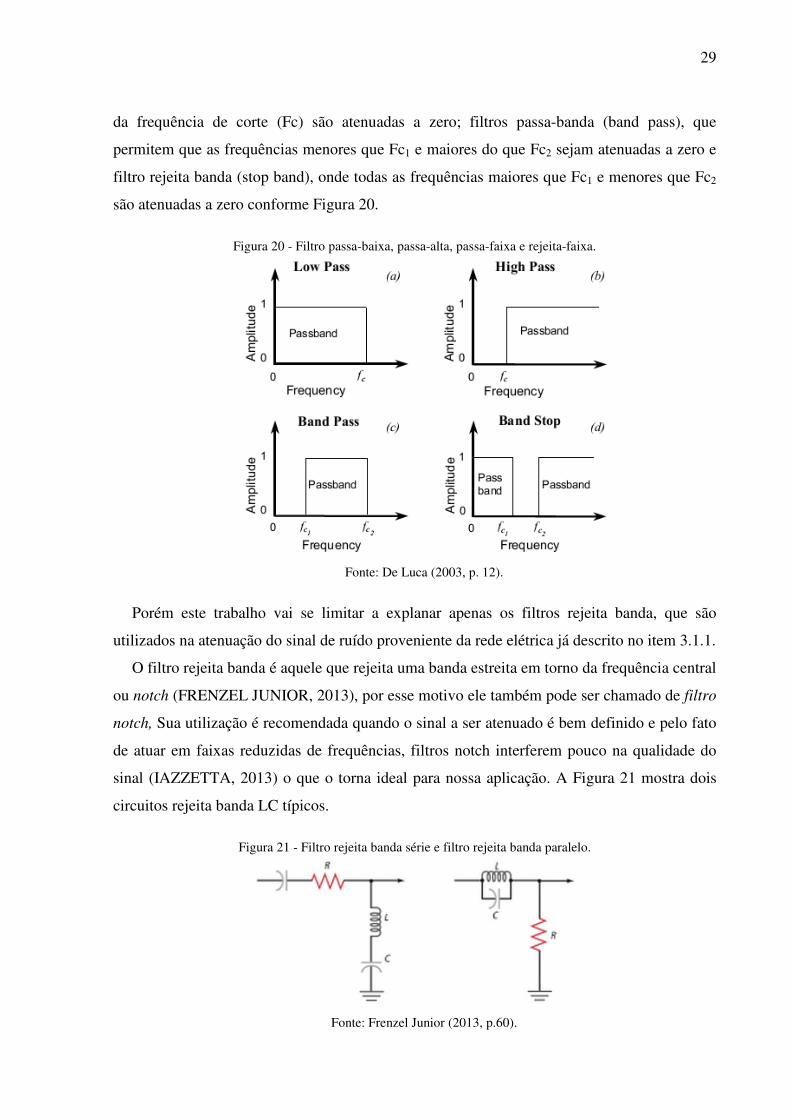
da frequência de corte (Fc) são atenuadas a zero; filtros passa-banda (band pass), que
permitem que as frequências menores que Fc1 e maiores do que Fc2 sejam atenuadas a zero e
filtro rejeita banda (stop band), onde todas as frequências maiores que Fc1 e menores que Fc2
são atenuadas a zero conforme Figura 20.
Figura 20 - Filtro passa-baixa, passa-alta, passa-faixa e rejeita-faixa.
Fonte: De Luca (2003, p. 12).
Porém este trabalho vai se limitar a explanar apenas os filtros rejeita banda, que são
utilizados na atenuação do sinal de ruído proveniente da rede elétrica já descrito no item 3.1.1.
O filtro rejeita banda é aquele que rejeita uma banda estreita em torno da frequência central
ou notch (FRENZEL JUNIOR, 2013), por esse motivo ele também pode ser chamado de filtro
notch, Sua utilização é recomendada quando o sinal a ser atenuado é bem definido e pelo fato
de atuar em faixas reduzidas de frequências, filtros notch interferem pouco na qualidade do
sinal (IAZZETTA, 2013) o que o torna ideal para nossa aplicação. A Figura 21 mostra dois
circuitos rejeita banda LC típicos.
Figura 21 - Filtro rejeita banda série e filtro rejeita banda paralelo.
Fonte: Frenzel Junior (2013, p.60).

30
No rejeita banda série, para sinais abaixo da frequência de rejeição, ou notch, o indutor do
circuito apresenta baixa reatância, enquanto que o capacitor apresenta uma alta reatância,
comportando-se, portanto como um curto-circuito e um circuito aberto respectivamente, desta
forma a maior parcela de tensão estará sobre o capacitor, fazendo com que a tensão de saída
seja praticamente igual à de entrada. Para sinais acima da frequência de rejeição o indutor do
circuito apresenta alta reatância, enquanto que o capacitor apresenta uma baixa reatância,
comportando-se, portanto como um circuito aberto e um curto-circuito respectivamente, desta
forma a maior parcela de tensão estará sobre o indutor, fazendo com que a tensão de saída
também seja praticamente igual à de entrada. Para sinais dentro da frequência de rejeição, ou
seja, sinais cujas frequências estiverem numa faixa próxima à frequência de ressonância do
circuito, o indutor e o capacitor juntos apresentarão baixa reatância e tenderão a comporta-se
como um curto-circuito, fazendo com que a maior parcela de tensão fique sobre o resistor e a
da saída seja praticamente nula.
No rejeita banda paralelo,para sinais abaixo da frequência de rejeição, o indutor do circuito
apresenta baixa reatância (curto-circuito), enquanto que o capacitor apresenta uma alta
reatância (chave aberta), como os dois estão em paralelo a maior parcela da tensão de entrada
estará sobre o resistor de saída. Para sinais acima da frequência de rejeição, o capacitor do
circuito apresenta baixa reatância (curto-circuito), enquanto que o indutor apresenta uma alta
reatância (chave aberta), como os dois estão em paralelo a maior parcela da tensão de entrada
estará sobre o resistor de saída. Para sinais dentro da frequência de rejeição, o indutor e o
capacitor juntos apresentarão alta reatância e tenderão a comporta-se como uma chave aberta,
fazendo com que a maior parcela da tensão de entrada fique sobre o circuito LC, atenuando a
saída. A Figura 22 mostra uma curva de resposta típica desses circuitos.
Figura 22 - Curva de resposta de um filtro notch.
Fonte: Sedra e Smith (2000, p.834).
31
Segundo Sedra e Smith (2000) para um filtro tipo notch a frequência de corte ω0é obtida
pela Equação 4.
1
√ 4
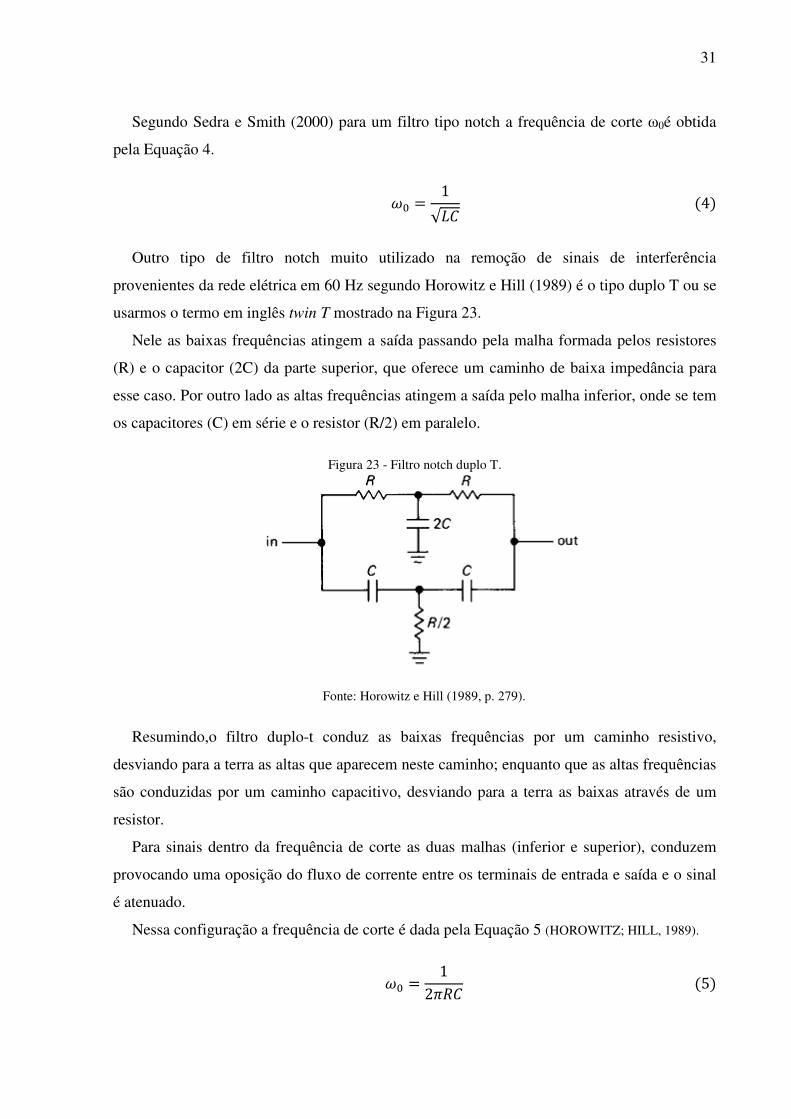
Outro tipo de filtro notch muito utilizado na remoção de sinais de interferência
provenientes da rede elétrica em 60 Hz segundo Horowitz e Hill (1989) é o tipo duplo T ou se
usarmos o termo em inglês twin T mostrado na Figura 23.
Nele as baixas frequências atingem a saída passando pela malha formada pelos resistores
(R) e o capacitor (2C) da parte superior, que oferece um caminho de baixa impedância para
esse caso. Por outro lado as altas frequências atingem a saída pelo malha inferior, onde se tem
os capacitores (C) em série e o resistor (R/2) em paralelo.
Figura 23 - Filtro notch duplo T.
Fonte: Horowitz e Hill (1989, p. 279).
Resumindo,o filtro duplo-t conduz as baixas frequências por um caminho resistivo,
desviando para a terra as altas que aparecem neste caminho; enquanto que as altas frequências
são conduzidas por um caminho capacitivo, desviando para a terra as baixas através de um
resistor.
Para sinais dentro da frequência de corte as duas malhas (inferior e superior), conduzem
provocando uma oposição do fluxo de corrente entre os terminais de entrada e saída e o sinal
é atenuado.
Nessa configuração a frequência de corte é dada pela Equação 5 (HOROWITZ; HILL, 1989).
1
2 5
32
Dentre as vantagens de se empregar essa topologia de filtro, é possível citar a utilização de
resistores e capacitores, não demandando a presença de indutores e, além disso, a alta
seletividade (Q), que representa um índice de mérito de filtros rejeita-faixa, pois quanto maior
a seletividade, somente os sinais próximo da frequência de rejeição serão atenuados.
3.4 - Conversão analógico/digital
Este estágio é o responsável por transformar o sinal analógico já adquirido, amplificado e
filtrado em códigos digitais que podem ser utilizados por um sistema de controle.
O processo de digitalização de um sinal EMG analógico é realizado por conversores
analógico para digital (analog-to-digital converter, ADC). Estes dispositivos são componentes
comuns encontrados nos equipamentos eletrônicos e são utilizados para capturar sinais de
voltagem (analógico) e expressar a informação em formato numérico (digital). Uma vez
digitalizada, a informação pode ser processada pelo software e hardware de um sistema de
controle para alcançar objetivos específicos. O processo de digitalização impõe limites
inerentes ao grau de precisão, contudo, se a tarefa é representar corretamente o sinal original,
este então, pode ser reconstruído sem perda de informação (DE LUCA, 2006).
Informação digital é diferente de sua contraparte contínua em dois aspectos importantes: é
amostrada, e é quantizada. Ambos podem restringir a quantidade de informação de um sinal
digital, por isso é importante à compreensão da informação que você precisa manter e quais
informações você pode realmente eliminar. Por sua vez, esta determina a seleção da
frequência de amostragem, número de bits da digitalização e do tipo de filtragem analógica
necessários para a conversão entre os sistemas analógico e digital.
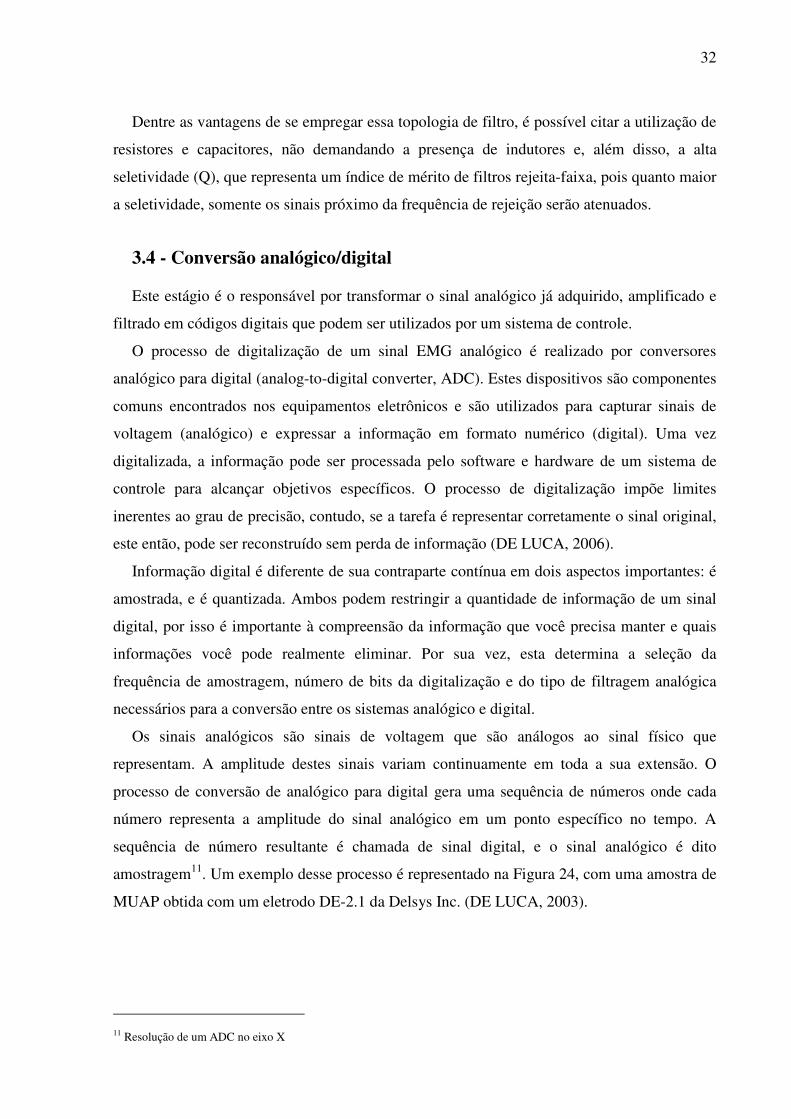
Os sinais analógicos são sinais de voltagem que são análogos ao sinal físico que
representam. A amplitude destes sinais variam continuamente em toda a sua extensão. O
processo de conversão de analógico para digital gera uma sequência de números onde cada
número representa a amplitude do sinal analógico em um ponto específico no tempo. A
sequência de número resultante é chamada de sinal digital, e o sinal analógico é dito
amostragem11. Um exemplo desse processo é representado na Figura 24, com uma amostra de
MUAP obtida com um eletrodo DE-2.1 da Delsys Inc. (DE LUCA, 2003).
11 Resolução de um ADC no eixo X
33
Figura 24 - Sinal analógico EMG e a sequência digital resultante de sua amostragem a 2 kHz.
Fonte: De Luca (2003, p. 2).
Todos os ADC possuem um número fixo de bits para quantificar a voltagem do sinal de
entrada detectado. Omais comum é a utilização de resoluções em torno de 8, 12 e 16 bits. A
digitalização do sinal de voltagem (analógico) é especificada por um intervalo particular,
definido por uma voltagem de entrada máxima e mínima. Por definição, este intervalo é dado
pelo esquema de quantização n-bit, e a precisão ou resolução do ADC pode ser caracterizado
pela Equação 6 (MARCHETTI; DUARTE, 2006):
çã "#$%&
2# 6
3.4.1 - Conversores
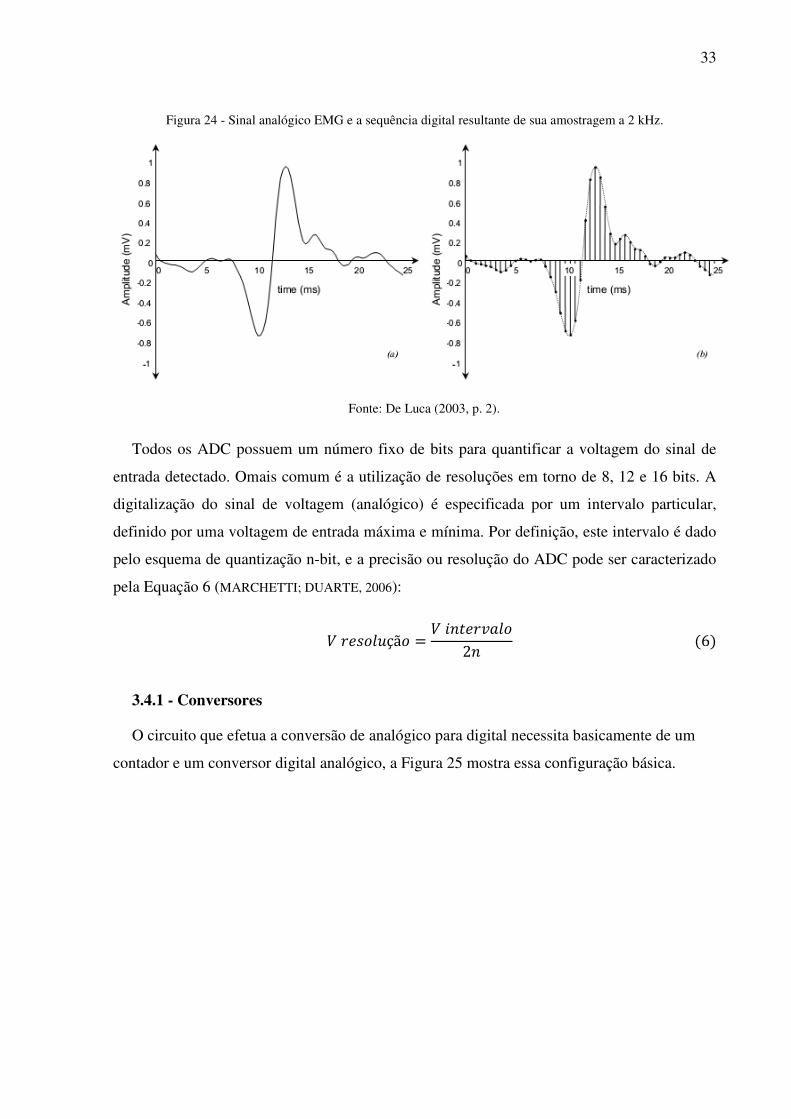
O circuito que efetua a conversão de analógico para digital necessita basicamente de um
contador e um conversor digital analógico, a Figura 25 mostra essa configuração básica.
34
Figura 25 - Diagrama de blocos de um ADC.
Fonte: Capuano e Idoeta (1984, p. 329).
O circuito é formado basicamente por um contador década que gera um código BCD 8421
nas saídas A’, B’, C’, e D’. Essas saídas são injetadas em um conversor D/A12, fazendo com
que este apresente na saída uma tensão de referência, que por sua vez é injetada em uma das
entradas de um circuito comparador, montado a partir de um AO; na outra entrada é injetado o
sinal analógico a ser convertido. A saída deste comparador gera o clock dos flip-flops do
circuito de saída e também aciona uma chave digital (porta AND), que bloqueia ou não a
entrada do clock do contador (CAPUANO; IDOETA, 1984).
Os conversores A/D mais comuns são:
• Conversor A/D tipo contador de rampa;
• Conversor A/D tipo contador de rampa contínuo;
• Conversor A/D integrador por dupla inclinação;
• Conversor A/D de aproximação sucessiva.
O conversor por aproximação sucessiva é o mais usado em processamento de sinais EMG,
devido a sua elevada velocidade de conversão.
Um modelo de conversor A/D que utiliza aproximação sucessiva é o TLC3544, fabricado
pela Texas Instruments, mostrado na Figura 26.
12 Conversor digital - analógico
35
Figura 26 - ADC - TLC3544.
Fonte: Texas Instruments
Este dispositivo conta com resolução de 14 bits, 4 entradas analógicas unipolares, e
frequência de throughput máxima de 200000 amostras por segundo (200kHz);esse último
parâmetro indica a maior velocidade possível de se converter dados;o CI13 aceita em suas
entradas valores analógicos de 0 a 5V e trabalha com níveis de tensão de 0 a 3,3V em suas
entradas digitais (TEXAS INSTRUMENT, 2003).
Os quatro canais desse CI são multiplexados dentro do conversor por um multiplexador do
tipo break-before-make com redistribuição de cargas. Segundo Armstrong Júnior (2004) a
vantagem deste tipo de mux é a interrupção da passagem dos canais de entrada antes da troca
do canal que será vinculado à saída. Isto evita a que haja curto-circuito entre as entradas do
conversor. A redistribuição de cargas atenua o efeito de memória que pode existir no
conversor quando se troca de um canal para outro. Seria como se o nível do sinal
anteriormente adquirido provocasse uma atenuação ou amplificação do nível do sinal
adquirido imediatamente.
3.4.2 - LabVIEW©
Outra ferramenta que pode ser utilizada nesta etapa do processamento do sinal EMG é o
LabVIEW©, ele é o software base da plataforma de projeto da National Instruments, ideal
para o desenvolvimento de qualquer sistema de medição ou controle. Integrando todas as
ferramentas de que os engenheiros e cientistas precisam para desenvolver uma ampla gama de
aplicações em um tempo significativamente menor.
Através de um dispositivo de aquisição de dados como o mostrado na Figura 27 é possível
converter o sinal analógico já tratado em um sinal digital e trabalha-lo no ambiente virtual do
LabVIEW©.
13 Circuito Integrado

36
Figura 27 - Conversor NI USB 6009 DAQ.
Fonte: National Instruments (2013)
Este dispositivo conta com resolução de 12 bits, oito entradas analógicas, duas saídas
analógicas e mais doze digitais padrão TTL, é um conversor A/D de aplicação geral para uso
com PC através da entrada USB do mesmo, com uma velocidade de amostragem de 48000
amostras/segundo por canal e faixa de operação entre ± 10V (NationalInstruments).
A Figura 28 mostra um ambiente criado por Martins (2012) utilizando o LabVIEW©, para
o estudo de sinais EMG no LABORE (Laboratório de Robótica e Reabilitação) do Instituto
Federal de São Paulo.
Figura 28 - Plataforma de estudos de sinal EMG criada com o LabVIEW.
Fonte: Martins (2012, p. 80)
37
4 PRÓTESES
Este capítulo tem como objetivo, mostrar a classificação das próteses, focando
principalmente naquelas que se utilizam de sinais mioelétricos, justificando a necessidade
cada vez maior da realização de estudos voltados para o desenvolvimento das técnicas de
processamento de sinais EMG.
Segundo a Associaçao Médica Brasileira ( 2011):
Prótese: dispositivo permanente ou transitorio que subistitui total ou parcialmente um membro,órgao ou tecido. [...] Ortese: dispositivo permanente ou transitório, utilizado par auxiliar as funçoes de um membro, órgao ou tecido, evitando deformidades ou sua progreção e/ou compensando influências funcionais.
4.1 - Classificação das próteses de acordo com a fonte de energia
A principal classificação de uma prótese se dá de acordo com o nível de amputação, mas
sob o ponto de vista da engenharia seria mais interessante classificar as próteses em relação a
sua fonte de energia, características de construção e capacidade funcional. Analisando o
problema por este aspecto, criou-se um método de classificação, adaptado a partir da proposta
feita pela empresa Otto Bock Industry Inc (BLOHMKE, 1992).
Segundo essa classificação, as próteses podem ser divididas em dois principais grupos:
Passivas e Ativas.
4.1.1 - Próteses Passivas
As Próteses Passivas são dispositivos estáticos que não possuem articulações ou
mecanismos, e desse modo, não realizam movimentos. Podemos dividir esse grupo em duas
categorias: Próteses Estéticas e Passivas para Trabalho.
As Próteses Estéticas, são dispositivos que imitam com grande eficiência o aspecto estético
da mão humana conforme Figura 29, entretanto, não possuem a funcionalidade da mesma. O
objetivo de tais próteses é de restabelecer o aspecto externo do corpo do paciente.

38
Figura 29 - Exemplo de prótese estética
Fonte: Camargo (2008, p. 21)
As Próteses Passivas para Trabalhos apesar de serem dispositivos estáticos, possuem
grande funcionalismo, pois geralmente esses tipos de prótese possuem uma ferramenta na
ponta, como por exemplo a ilustrada na Figura 30, tais dispositivos portanto servem para
auxiliar ao paciente a executar seu trabalho (BLOHMKE, 1994).
Figura 30 - Exemplo de prótese passiva
Fonte: Camargo (2008, p. 21)
4.1.2 - Próteses Ativas
As próteses ativas têm uma certa mobilidade e seus movimentos são controlados dealguma
forma pelo paciente. A fonte de energia utilizada para a movimentação destetipo de prótese
pode ser proveniente do próprio paciente, externa a ele ou umacombinação dos casos
anteriores. Estas próteses, também conhecidas como próteses ativas portração têm os
movimentos das juntas efetuados por intermédio de cabos ou tirantes, que por sua vez são
controlados por esforços e movimentos dos ombros ou do próprio coto14 do paciente como a
da Figura 31.
14Quando se fica sem mão, posteriormente resulta naquela parte redondinha chamada coto.
39
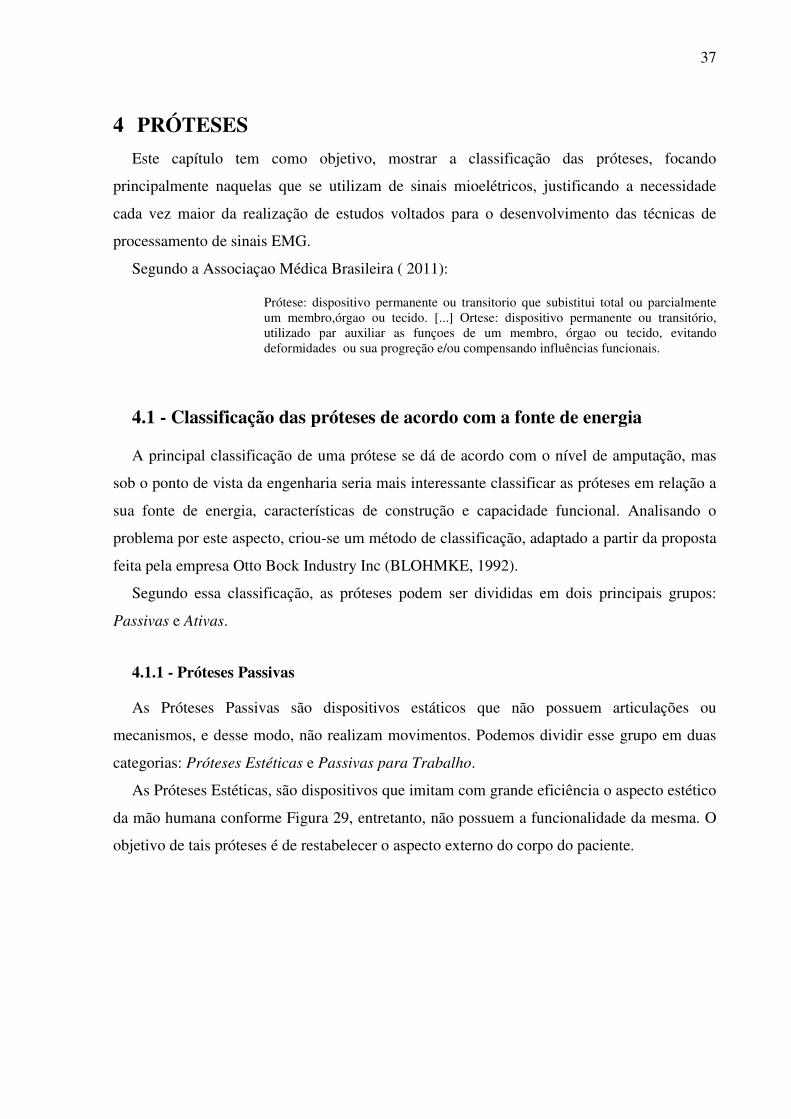
Figura 31 - Exemplo de prótese ativa por tração
Fonte: Blohmke (1992, p. 39)
Estas próteses, na sua maioria, têm elementos finais (mãos) geralmente muito rústicos,
porém muito funcionais, são os conhecidos ganchos com movimentos de abertura e as mãos
acionadas por cabos. Não possuem características humanas e seu acionamento causa um certo
constrangimento ao paciente, pois exerce vários movimentos que não são naturais. Além
disso, requer grande concentração e esforço do amputado, o que pode causar fadiga muscular
durante o uso e perda de interesse pelo paciente (BLOHMKE, 1992).
Podemos subdividir o grupo de próteses ativas acionada por força externa, em
Pneumáticas e Elétricas. As Próteses Pneumáticas são acionadas por meio de um reservatório
de gás comprimido ou CO2 (normalmente localizado na região das axilas), que aciona
atuadores pneumáticos fazendo o dispositivo executar determinado movimento. O controle
deste tipo de prótese é feito através de válvulas comandadas por contração muscular do coto.
Os principais motivos de rejeição deste dispositivo são alto ruído de funcionamento, seu peso
elevado, pouca autonomia, além de não se ter controle de força (BLOHMKE, 1992).
Já as Próteses Elétricas têm seu acionamento semelhante às pneumáticas; essas possuem
interruptores em contato com a pele acionados por contração muscular. Os interruptores
controlam os motores que por sua vez acionam os mecanismos da prótese. Esses dispositivos
possuem as mesmas desvantagens da prótese pneumática, com exceção do peso, pois possuem
uma bateria ao invés do reservatório de ar (CUNHA, 2002).
As próteses elétricas que melhor aliam uma grande funcionalidad com um aspecto estético
atraente são as controladas por sinais EMG (AIRES, 1991; BLOHMKE, 1994; DUPONT e
MORIN, 1994; PARK e MEEK, 1993; PINTO, 1996 apud CUNHA, 2002).
4.2 - Próteses Mioelétricas
As próteses controladas por sinais EMG são denomina Próteses Mioelétricas, elas
possuem uma série de vantagens sobre as demais próteses, tais como, possuir acionamento
40
independente de cabos, fácil adaptação de um controle proporcional, além do sinal EMG
poder ser detectado através de eletrodos não invasivos como já foi mostrado anteriormente.
Apesar de tais dispositivos dependerem de circuitos eletrônicos, esses podem ser
continuamente melhorados e miniaturizados, daí a importância de estudos voltados para essa
área. Essas próteses mioelétricas multifuncionais são capazes de realizar diversos movimentos
naturais e devem ser utilizadas por pacientes cuja necessidade envolva esses requisitos.
Um esquema de funcionamento destas próteses pode ser observada na Figura 32.
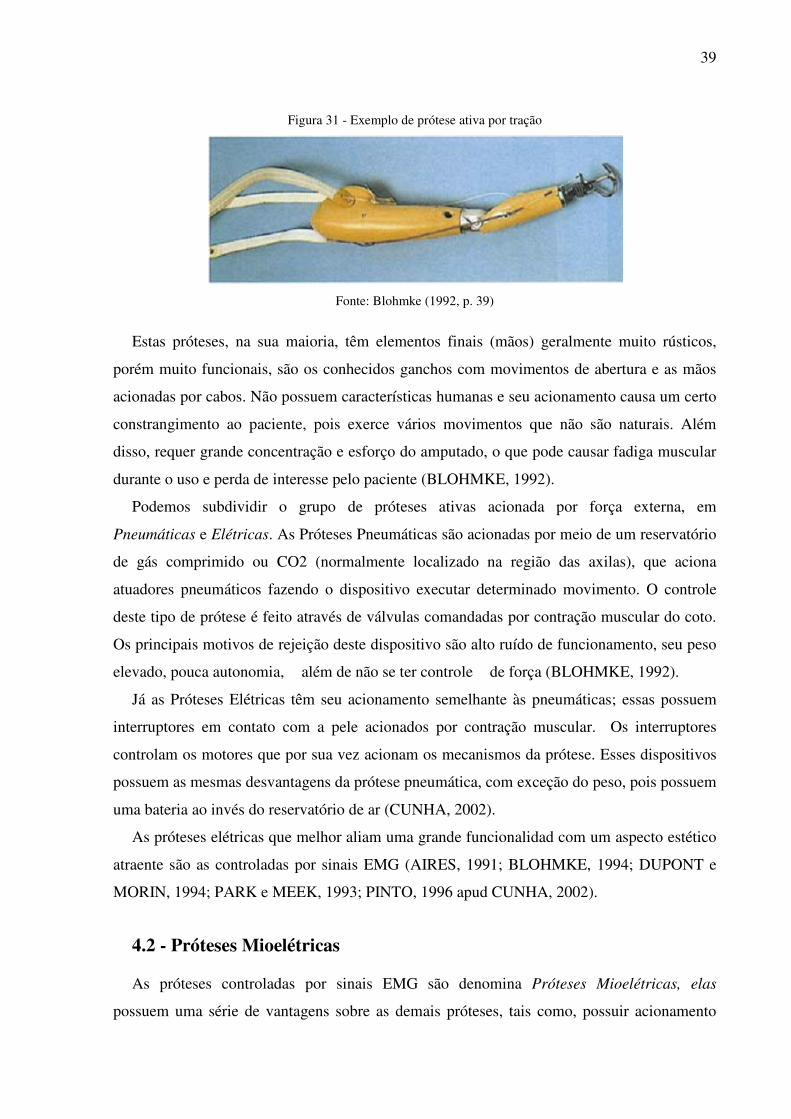
Figura 32 - Esquema de funcionamento de uma prótese mioelétrica.
Fonte: Cunha (1999 apud CUNHA, 2002).
O músculo recebe um impulso elétrico proveniente do cérebro, por um motoneurônio. O
sinal EMG é captado, amplificado, tratado e usado como valor de referência para o controle
do motor (ou motores) que acionará o mecanismo da prótese. A realimentação é visual.
Com a ajuda de softwares e microprocessadores, engenheiros e médicos estão criando
membros artificiais cada vez mais semelhantes aos reais. “Trata-se de um novo conceito
conhecido como biônico, quando a interface da prótese passa a entender a necessidade do
paciente”, afirma o fisioterapeuta José André Carvalho, diretor do instituto de Prótese e
Órtese (IPO), em Campinas (TANJI, 2012).
Mesmo que a perfeita integração entre homem e máquina ainda não tenha sido totalmente
alcançada, os membros eletrônicos disponíveis hoje já auxiliam seus usuários de maneira
significativa.
A prótese de membro periferico superior i-LIMB produzida pela companhia escocesa
Touch Bionics mostrada na Figura 33, é um exemplo desses novos membros eletrônicos,
41
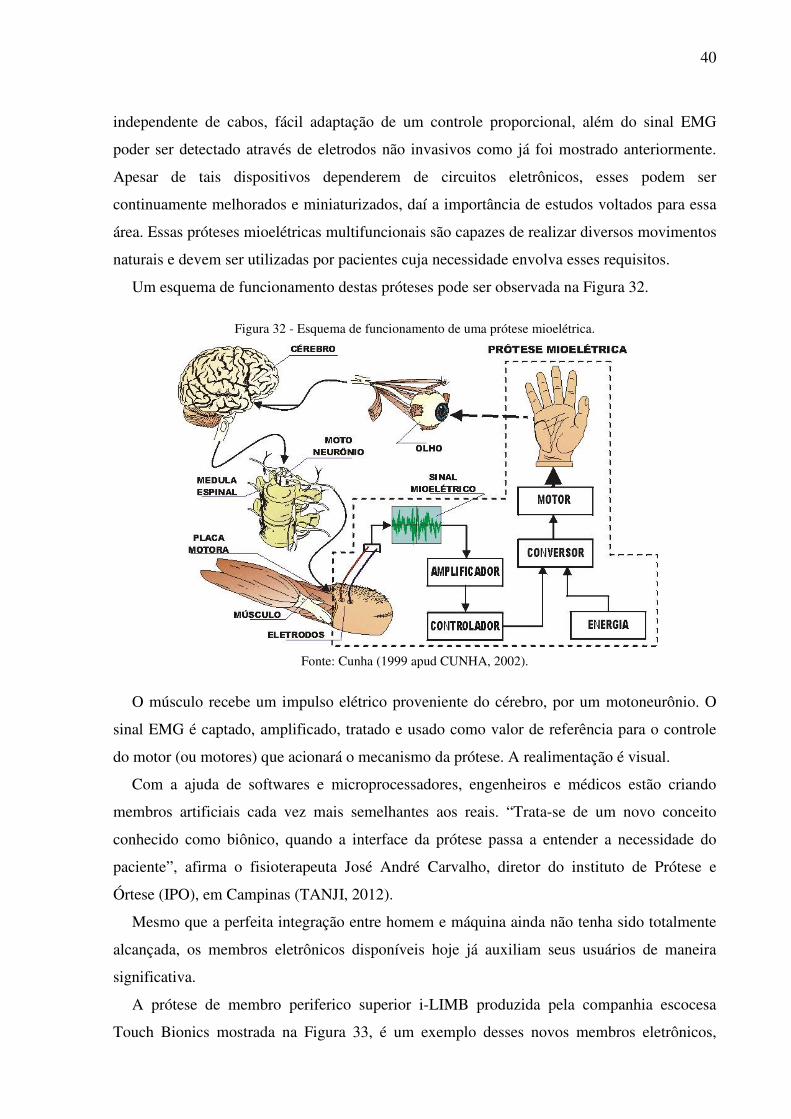
possui uma funçao intuitiva permitindo com que a prótese, através de uma conexão sem fio
Bluetooth realize seleções de padrões de sensibilidade desejada, incluindo a opção de
treinamento da utilização da prótese. A mão protética tem ainda a capacidade de aumentar
gradualmente a força de seu domínio sobre um objeto.
Figura 33 - Prótese de membro periférico superior i-LIMB
Fonte: (TOUCH BIONICS)
O principio de funcionamento da prótese i-Limb consiste na capitação de sinais
mioelétricos emitidos pela contração do músculo da parte do braço não amputado.
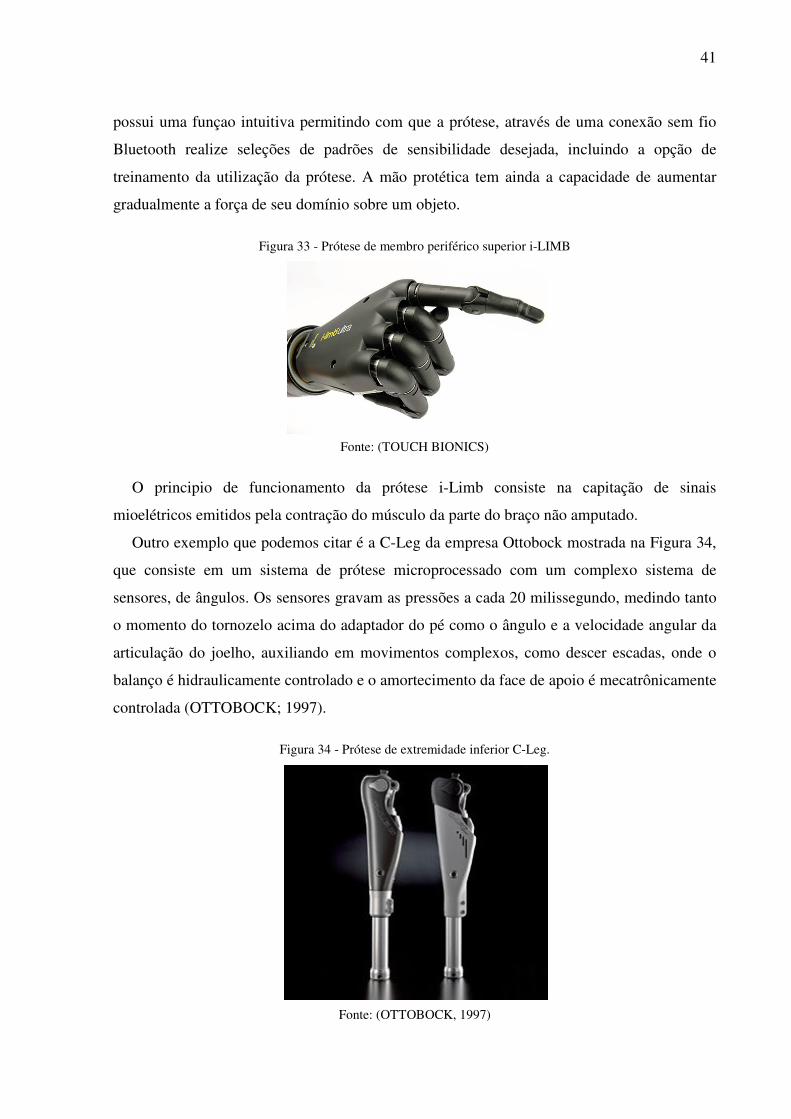
Outro exemplo que podemos citar é a C-Leg da empresa Ottobock mostrada na Figura 34,
que consiste em um sistema de prótese microprocessado com um complexo sistema de
sensores, de ângulos. Os sensores gravam as pressões a cada 20 milissegundo, medindo tanto
o momento do tornozelo acima do adaptador do pé como o ângulo e a velocidade angular da
articulação do joelho, auxiliando em movimentos complexos, como descer escadas, onde o
balanço é hidraulicamente controlado e o amortecimento da face de apoio é mecatrônicamente
controlada (OTTOBOCK; 1997).
Figura 34 - Prótese de extremidade inferior C-Leg.
Fonte: (OTTOBOCK, 1997)
42
CONSIDERAÇÕES FINAIS
As pesquisas referentes ao tema só puderam ter inicio após a compreensão da origem do
sinal, onde o ponto chave foi o estudo fisiológico humano, desde um neurônio e sua
comunicação, até a contração muscular.
Inicialmente acreditava-se que o sinal mioelétrico era uma função periódica, mas logo
percebeu que na verdade se tratava de um sistema aleatório e que a forma mais adequada para
a análise do sinal resultante das contrações musculares envolviam técnicas avançadas como,
por exemplo, séries de Fourier, algo extremamente interessante e que deve ter continuidade
em trabalhos futuros, já que não foi possível desenvolver neste, portanto decidiu-se focar a
pesquisa apenas na captação e processamento do sinal, para futuramente ser aplicado no
controle de uma prótese, onde a análise do sinal seria primordial.
A maior dificuldade de se trabalhar com sinais mioelétricos está na implementação do
processo por meio do qual é possível torná-lo compreensível para um sistema de controle,
pois ele necessita de tratamento tanto de amplificação devido a sua baixa amplitude, como de
filtragem devido ao alto nível de ruído gerado por outros músculos, artefatos de movimento e
principalmente pela rede elétrica cujo a frequência de 60Hz é a mais prejudicial. Esse
processo requer o uso de dispositivos, ferramentas e técnicas bastante específicos, além de um
bom conhecimento do sinal que se deseja tratar, ambos apresentados no trabalho, o que
fornece uma excelente base de dados para que tem interesse nessa área.
Os constantes avanços tecnológicos são responsáveis pela criação de um mundo de
possibilidades na área de engenharia biomédica e engenharia de reabilitação. Para
acompanhar esse avanço, médicos e engenheiros são constantemente desafiados a estarem
preparados para trabalharem em conjunto na criação de membros eletrônicos cada vez mais
próximos de um membro real, tanto no que diz respeito à aparência, quanto à funcionalidade.
Com vista neste desafio que esse trabalho não deve parar, mas sim prosseguir no
desenvolvimento de um protótipo que coloque em prática as técnicas aqui estudadas, tornando
possível o aperfeiçoamento delas e a redução dos custos dos produtos já existentes.
43
REFERÊNCIAS BIBLIOGRÁFICAS
ALMEIDA, Maria Aparecida Fernandes. Filtragem Digital de Sinais Biomédicos. 1997. 116 f. Dissertação (Mestrado) - Curso Pós-Graduação em Engenharia Elétrica, UFSC, Florianópolis, 1997. ANDRADE, Adriano de Oliveira. Sinais EMG no Controle de Membros Artificiais. 2000. 124 f. Dissertação (Mestrado) - Curso de Mestrado em Engenharia Elétrica, Universidade Federal de Uberlândia, Uberlândia, 2000. APÓSTOLO, Hélio.Tecido Hematopoiético e Tecido Muscular Parte 2 Disponível em <http://www.youtube.com/watch?v=enWcIJbyJNE>. Acesso em 15 ago. 2013. ARMSTRONG JÚNIOR, Nilton Barbosa. Sistema de Reconhecimento de Comandos Baseados em Sinais de Eletromiografia (EMG). 2004. 95 f. Monografia (Graduação) - Curso de Engenharia da Computação, Unicenp, Curitiba, 2004. Disponível em: <http://www.leandrohsouza.com.br/engcomp/attachments/article/12/2004_RecEMG_Nilton.pdf>. Acesso em: 25 out. 2013. ASSOCIAÇAO MEDICA BRASILEIRA. (8 de setembro de 2011). Gilherme Pitta.com., disponível em< http://guilhermepitta.com/?p=3624> Acesso em 11 de novembro de 2013 BLOHMKE, Fritz. Otto Bock Prosthetic Compedium. Berlim: Max Näder, 1992. 95 p. BRONZINO, Joseph D..The Biomedical Engineering Hand Book. 2. ed. Flórida: Crc Press Llc, 2000. 3188 p. Disponível em: <ftp://idc18.seu.edu.cn/Pub2/EBooks/Books_from_EngnetBase/pdf/8594/fm.pdf>. Acesso em: 15 set. 2013. CAMARGO, Daniel Rodrigues de. Desenvolvimento do Protótipo de uma Prótese Antropomórfica para Membros Superiores. 2008. 188 f. Dissertação (Mestrado) - Curso de Mestrado em Engenharia Elétrica, USP, São Carlos, 2008. Disponível em: <http://www.teses.usp.br/teses/disponiveis/18/18151/tde-15102008-134653/pt-br.php>. Acesso em: 16 set. 2013. CAPUANO, Francisco Gabriel; IDOETA, Ivan Veleije. Elementos de eletrônica digital. 28 ed. São Paulo: Érica, 1998. 528 p. CENTRAL BRASILEIRA DE IMPLANTE COCLEAR E PRÓTESES IMPLANTÁVEIS. (s.d.). Ouvido Biônico. Disponível em: <http://www.ouvidobionico.org.br/implante%20coclear/Home.aspx> Acesso em 11 de dezembro de 2013 CONGRESSO NACIONAL DE INICIAÇÃO CIENTIFICA DA CONIC SEMESP, 7., 2007 São Paulo. Anais eletrônicos. São Paulo: CONIC SEMESP; 2007. Disponível em:<htttp://www sare.anhanguera.com/index.php/anuic/article/download/1364/918 >. Acesso em 20 out 2013.

44
CUNHA, Fransérgio Leite da. Mão de São Carlos, uma Prótese Multifunção para Membros Superiores. 2002. 258 f. Tese (Doutorado) - Curso de Doutorado em Engenharia USP, São Carlos, 2002. Disponível em: <http://www.teses.usp.br/teses/disponiveis/18/18133/tde-13032006-124951/pt-br.php>. Acesso em: 16 set. 2013. DE LUCA. Carlos J..Electromyography. Encyclopediaof Medical Devicesand Instrumentation, 2006. Disponível em: <http://www.delsys.com/Attachments_pdf/Electromyography%20Medical%20Encyclopedia.pdf >. Acesso em 10 de ago. de 2013. DE LUCA. Carlos J. Fundamental Concepts in EMG Signal Acquisition. Delsys Inc., 2003. Disponível em: <http://www.delsys.com/Attachments_pdf/WP_Sampling1-4.pdf>. Acesso em 10 de ago.de 2013. DE LUCA, Carlos J..Physiology and Mathematics of Myoelectric Signals. Ieee Transactions Biomedical Engineering. Chicago, p. 313-325. jun. 1979.Disponível em: <http://www.bu.edu/nmrc/files/2011/02/011.pdf>. Acesso em: 07 set. 2013. DE LUCA. Carlos J..Surface Electromyography: Detection and Recording. Delsys Inc., 2002. Disponível em: <http://www.delsys.com/Attachments_pdf/WP_SEMGintro.pdf >. Acesso em: 10 de ago. de 2013. DE LUCA. Carlos J. The Use of Surface Electromyography in Biomechanics. Delsys Inc., 2002. Disponível em: <http://www.delsys.com/Attachments_pdf/WP_Biomechanics.pdf>. Acesso em: 10 de ago. de 2013. FALAVIGNA, Asdrubal; SCHENKEL Paulo Cavalheiro. Fisiologia Prática. Caxias do Sul: Educs, 2010. 129 p. Disponível em <http://eniac.bv3.digitalpages.com.br/users/publications/9788570615640%20/pages/129>. Acesso em 1ago. 2013. FRENZEL JUNIOR, Louis E.. Fundamentos de Comunicação Eletrônica. 3. ed. Porto Alegre: Amgh, 2013. 348 p GOOGLE IMAGENS - Arco reflexo - Disponível em <http://crentinho.wordpress.com/2009/11/05/tecido-nervoso-e-sistema-nervoso/> Acesso em 04 ago. 2013. GOOGLE IMAGENS - Eletrodo de superfície EEG - Disponível em <http://braincomputerinterface.wordpress.com/> Acesso em 04 ago. 2013. GOOGLE IMAGENS - Musculatura estriada braço humano - Disponível em <http://sistemaesqueletico303.blogspot.com.br/2010_08_01_archive.html > Acesso em 04 ago. 2013. GOOGLE IMAGENS - Neurônio - Disponível em <http://www.tecnologiasdeultimogrito.com/individualmente-os-neurnios-tm-capacidades-computacionais/#.UlXzYFB6bfI> Acesso em 04 ago. 2013.

45
GOOGLE IMAGENS -Sinapse entre neurônios - Disponível em <http://doutormadrid.blogs.sapo.pt/tag/neurotransmissores> Acesso em 04 ago. 2013. GOOGLE IMAGENS - Sinapse neuromuscular - Disponível em <http://sistemaesqueletico303.blogspot.com.br/2010_08_01_archive.html > Acesso em 04 ago. 2013. GOOGLE IMAGENS - Unidade muscular Sarcômero - Disponível em <http://www.afh.bio.br/sustenta/Sustenta4.as> Acesso em 04 ago. 2013. HOROWITZ, Paul; HILL, Winfield. The Art of Electronics. 2. ed. Cambridge: Cambridge University Press, 1989. 1125 p. HUDGINS, Bernard; PARKER, Philip; SCOTT, Robert N.. A New Strtegy for Multifunction Myoeletric Control. Ieee Transactions Biomedical Engineering. Chicago, p. 82-94. jan. 1993. Disponível em: <http://www.smpp.northwestern.edu/savedLiterature/HuginsParker(1993) IEEEtransBME40(1)82-94.pdf>. Acesso em: 12 ago. 2013. INOVAÇÃO TECNOLÓGICA - impulsos bioelétricos - Disponível em <http://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo=protese-robotica-controlada-pelo-pensamento&id=010180121211> Acesso em 04 ago. 2013. IAZZETTA, Fernando. Tutoriais de Áudio e Acústica. Disponível em: <http://www.eca.usp.br/prof/iazzetta/tutor/audio/filtros/filtros.html>. Acesso em: 20 out. 2013. MARCHETTI, Paulo Henrique; DUARTE, Marcos. Instrumentação em Eletromiografia. Laboratório de Biofísica, Escola de Educação Física e Esporte, USP. Disponível em: <http://www.fefiso.edu.br/grupoestudo/pdfs/06.pdf>. Acesso em: 26 ago. 2013. MARTINS, Hugo Magalhães. Plataforma de Estudos de Sinal Eletromiográfico Destinado ao Acionamento de Prótese De Mão. 2012. 129 f. Dissertação (Mestrado) - Curso de Mestrado em Automação Industrial, IFSP, São Paulo, 2012. NATIONAL INSTRUMENTS. NI USB-6008/6009. Disponível em: <http://www.ni.com/pdf/manuals/371303m.pdf>. Acesso em: 15 nov. 2013. ODA, Rubens. Fisiologia Humana 2: Sistema Nervoso. Disponível em<http://www.youtube.com/watch?v=jU1aIrV86ak>. Acesso em 15 ago. 2013. ODA, Rubens. Tecido Nervoso: Introdução. Disponível em< http://www.youtube.com/watch?v=7o5nini9Vjg>. Acesso em 15 ago. 2013. ORTOLAN, Rodrigo Lício. Estudo e Avaliação de Técnicas de Processamento do Sinal Mioelétrico para o Controle de Sistemas de Reabilitação. 2002. 135 f. Dissertação (Mestrado) - Curso de Mestrado em Engenharia Elétrica, USP, São Carlos, 2002. Disponível em: <http://www.teses.usp.br/teses/disponiveis/18/18133/tde-19112002-153337/pt-br.php>. Acesso em: 12 ago. 2013.
46
OTTOBOCK. (1997). Prótese de Extremidade Inferior. disponível em: <http://www.ottobock.com.br/cps/rde/xchg/ob_br_pt/hs.xsl/3565.html> Acesso em 11 de Dezembro de 2013 REVISTA SABER ELETRÔNICA Ano 43 Edição 408 Jan/07. Disponível em<http://www.sabereletronica.com.br/> Acesso em 05 out 2013. SALTZMAN, W Mark. Biomedical engineering: bridging medicine and technology, California university press, 2009.633p. SEDRA, Adel S.; SMITH, Kennet C.. Microeletrônica. 4. ed. São Paulo: Pearson Education, 2000. 1270 p. TANJI, Thiago. Superação Ciborgue. Exame Info, São Paulo, n. 316, p.58-69, maio 2013. TEXAS INSTRUMENTS. INA333. Disponível em: <http://www.ti.com/lit/ds/symlink/ina333.pdf>. Acesso em: 16 out. 2013. TEXAS INSTRUMENTS. TLC3544, TLC3548. Disponível em: <http://www.ti.com/lit/ds/symlink/tlc3544.pdf>. Acesso em: 15 nov. 2013. TOUCH BIONICS. i-Limb. Disponível em: <http://www.touchbionics.com/products/active-prostheses/i-limb-ultra/> Acesso em 11 de Dezembro de 2013
47
Termo de compromisso e responsabilidade
Autenticidade e exclusividade sob as penas da Lei 9810/98
Pelo presente, o abaixo assinado declara, sob as penas da lei, que o presente trabalho é
inédito e original, desenvolvido especialmente para os fins educacionais a que se destina e
que, sob nenhuma hipótese, fere o direito de autoria de outrem.
Para maior clareza, firmamos o presente termo de originalidade.
Guarulhos, ____ de ___________________ de 2013.
Nome do aluno
________________________________________________
Diego Silva Soares
________________________________________________
Jurandir Xavier Gomes Filho



























![TCC Rudiberto IBE[1] Corrigido](https://img.pdfslide.tips/doc/110x75/5571fd9349795991699969d6/tcc-rudiberto-ibe1-corrigido.jpg)

