-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 1
TD 1Ordonnancement
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 2
Ordonnancement EDFOn considre 3 tches priodiques :
Tp1 : (r0 = 0, C = 5, D = 25, P = 30) Tp2 : (r0 = 0, C = 10, D =
40, P = 50) Tp3 : (r0 = 0, C = 20, D = 55, P = 75)
1) quelle est la priode dtude ?2) cette configuration est-elle
ordonnanable par EDF3) tracer le chronogramme. Identifier les temps
creux.
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 3
Ordonnancement priode d'tude :
PPCM(30, 50, 75) = 150 Ordonnanabilit par EDF
condition suffisante :
CH = 5/25 + 10/40 + 20/55 = 0,81
CH=i=1
n Ci
Di
1
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 4
Ordonnancement EDF
0
0
0
30 60 90 120 150
Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 150140
55 75 150130
Tp1 : (r0 = 0, C = 5, D = 25, P = 30) Tp2 : (r0 = 0, C = 10, D =
40, P = 50) Tp3 : (r0 = 0, C = 20, D = 55, P = 75)
5
5 15
15 30 35
35 40
60
65
90
95
95 100
5040 7565 120110 125 1500 5 15 60 9590 100
125
100 110
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 5
Ordonnancement EDF
0
0
0
30 60 90 120 150
Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 150140
55 75 150130
5
5 15
15 30 35
35 40
60
65
90
95
95 100
5040 7565 120110 125 1500 5 15 60 9590 100
125
100 110
temps creux : [40, 50], [65, 75], [110, 120], [125, 150]
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 6
Ordonnancement EDF
temps creux : [40, 50], [65, 75], [110, 120], [125, 150]
0
0
0
30 60 90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 1500
-
F.TouchardCoursTempsRelESILDpartementd'Informatique3meanne200920107
Ordonnancement EDF On introduit 5 tches apriodiques :
Tap1 : (r0 = 40, C = 10, D = 15) Tap2 : (r0 = 70, C = 15, D =
35) Tap3 : (r0 = 100, C = 20, D = 40) Tap4 : (r0 = 105, C = 5, D =
25) Tap5 : (r0 = 120, C = 5, D = 15)
Quelles sont les tches qui peuvent tre ordonnances dans les
temps creux des tches priodiques ?
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 8
Ordonnancement EDF
Tap1 (r=40, C=10, D=15) accepte dans le temps creux [40, 50]
0
0
0
30 60
90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 150
Tap1
Tap1 40 55
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 9
Ordonnancement EDF
Tap2 (r=70, C=15, D=35) n'est pas accepte car il n'y a pas de
temps creux suffisant
pour l'excuter avant son chance t=105
0
0
0
30 60
90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 150
Tap1Tap2
75 105
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 10
Ordonnancement EDF
Tap3 (r=100, C=20, D=40) est accepte car elle peut s'excuter
dans les temps creux
[110, 120] et [125, 150] et se terminer avant son chance
t=140
0
0
0
30 60
90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 150
Tap1 Tap3110 135
Tap3100 140
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 11
Ordonnancement EDF
Tap4 (r=105, C=5, D=25) peut tre accepte car son excution
retarde la terminaison
de Tap3 sans remettre en cause le respect de l'chance
0
0
0
30 60
90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 150
Tap1 Tap3
Tap3Tap4Tap1140
Tap4105 130
140
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 12
Ordonnancement EDF
Tap5 (r=120, C=5, D=15) ne peut tre accepte car son excution
retarderait la
terminaison de Tap3 et remettrait en cause le respect de
l'chance
0
0
0
30 60
90 120 150Tp1
Tp2
Tp3
25 55 85 115 145
5040 90 100 150140
55 75 150130
5040 7565 120110 125 150
Tap1 Tap3
Tap1 Tap3Tap4
Tap5
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 13
Serveur sporadique 2 tches priodiques + 1 serveur sporadique
J1 : t1 = 0, C1 = 1, T1 = 5 J2 : t2 = 0, C2 = 4, T2 = 15 SS : Cs
= 5, Ts = 10
tches apriodiques : A1 : ta1 = 4, Ca1 = 2 A2 : ta2 = 8, Ca2 =
2
ordonnancement : J1
J2
SSactive
tchesapriodiques
CS
0 2 20 2 2
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 14
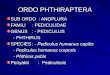
La mission Pathfinder sur Mars
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 15
La mission Pathfinder sonde sur Mars, arrive le 4 juillet 1997
robot mobile Sojourner charg de diffrentes tches
photos relevs mto prlvements
poids : 11.5kg vitesse : 24m/h puissance totale : 30W liaison
UHF avec la sonde
Pathfinder
bug dans la gestion des ressources critiques perte de donnes
importantes
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 16
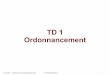
monoprocesseur RS6000 (architecture RISC de IBM)(+ un processeur
Intel 8085 pour les automatismes de base du robot)
Architecture
Processeur MmoiresInterfacecamra
Interfaceradio
Interfacealtimtre
Interfaceacclromtre
Interfaceenregistreur
Interfacebus
Interfacecapteur
Interfacevannes
Interfacemoteurs
Interfaceanalyseur
camrametteurradio
enregistreurmto
acclromtrealtimtrealtimtre
moteurs vannes capteurssolaires
analyseurd'toiles
busVME
bus1553
bus1553
SondePathfinder
RobotSojourner
Coupleur
Coupleur
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 17
Spcification fonctionnelle le systme de gestion de la sonde
communique avec
l'extrieur par la carte radio pour les liaisons avec la terre la
carte de liaison avec la camra l'interface avec le bus 1553 pour
les autres
capteurs/actionneurs
Gestionsonde
Pathfinder
Carteradio
Cartecamra
Rception
Emission
Images
Commandescamra
Donnesmesures
Commandes
Interfacebus1553
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 18
Architecture logicielle multitche gre par le noyau Vxworks (Wind
River) 25 tches
priodiques (ex. : gestion du bus 1553) apriodiques (ex. :
analyse des erreurs) communication et synchronisation par des files
de
messages suivant les phases de la mission (vol
interplantaire,
aterrissage, exploration par le robot), toutes les tches ne sont
pas utiles
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 19
Architecture logicielle Liste des tches et priorits
relatives
Priorit Tche Naturedelatche
Maximum ORDO_BUS ordonnanceurdubus1553
DISTRIBUTION_DONNEES distributiondesdonnesdubus1553
TCHE_PILOTAGE pilotagedel'application(robot) TCHE_RADIO
gestiondescommunicationsradio TCHE_CAMRA gestiondelacamra
TCHE_MESURES mesures
Minimum TCHE_METEO gestiondesdonnesmto
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 20
Architecture logicielle Architecture en tches
ORDO_BUS
HTR
commandes
TCHE_CAMRAHTR
commandecamra
TCHE_RADIOHTR
mission
images
rception
DISTRIBUTION_DONNES
HTR
TCHE_PILOTAGEHTR
TCHE_MESUREHTR
TCHE-MTOHTR
LIRE
CRIRE
Tampon_donnes
donnes mesures
(HTR : horloge temps rel)
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 21
Utilisation du bus 1553 la gestion du bus est pilote par une
horloge 8 Hz
(125ms) 2 tches pour rguler le transfert des donnes
ORDO_BUS priorit maximale vrifie que le transfert des donnes a t
correctement
effectu et prpare le transfert suivant DISTRIBUTION_DONNES
2 me priorit collecte les donnes sur le bus et les place dans la
mmoire
tampon
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 22
Caractristiques des tches
pour CMTO = 2, U=0.72 et pour CMTO = 3, U=0.725 analyse Rate
Monotonic pourrait s'appliquer (URMA=0.729), mais partage de la
ressource MMOIRE_TAMPON analyse dtaille
Paramtres(ms) Paramtresrduits
Tche Priorit Ci Pi Ci Pi
Tempsutilisationressource
ORDO_BUS 7 25 125 1 5
DISTRIBUTION_DONNES 6 25 125 1 5 1TCHE_PILOTAGE 5 25 250 1 10
1TCHE_RADIO 4 25 250 1 10 TCHE_CAMRA 3 25 250 1 10 TCHE_MESURES 2
50 5000 2 200 2TCHE_MTO 1 [50,75] 5000 [2,3] 200 [2,3]
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 23
recherche d'ordonnancement priode d'tude thorique : 5000ms
mais on va se contenter d'tudier sur 250ms en considrant que les
tches MESURES et MTO viennent de se terminer et en se mettant sur
la priode suivante
tudier les cas CMTO = 2 et CMTO = 3 remplir les chronogrammes
dans le cas o lhritage de
priorit nest pas activ
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 24
diagramme d'excution pour C=2
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
ORDO_BUS
TCHE_RADIO
TCHE_CAMRA
TCHE_MESURES
TCHE_MTO
RR R
R R
DISTRIBUTION_DONNES
TCHE_PILOTAGE
R R
R R
R
R
Inversion de priorit
Inversion de priorit
R
R R R R
R R
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 25
diagramme d'excution pour C=3ORDO_BUS
DISTRIBUTION_DONNES
TCHE_PILOTAGE
TCHE_RADIO
TCHE_CAMRA
TCHE_MESURES
TCHE_MTO R R
Inversion de priorit
Inversion de priorit
R R
RR R R R
R R R
ResetALARME0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20
21 22 23 24 25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
-
F. Touchard Introduction aux systmes temps rels TD
Ordonnancement 26
C=3 avec hritage de prioritORDO_BUS
TCHE_RADIO
TCHE_CAMRA
TCHE_MESURES
TCHE_MTO
RDISTRIBUTION_DONNES
TCHE_PILOTAGE R
R
R
R R R R
R
R R
R R
R R
R
R
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 80 19 20 21 22 23 24
25
R
Hritagedepriorit
Diapo 1Diapo 2Diapo 3Diapo 4Diapo 5Diapo 6Diapo 7Diapo 8Diapo
9Diapo 10Diapo 11Diapo 12Diapo 13Diapo 14Diapo 15Diapo 16Diapo
17Diapo 18Diapo 19Diapo 20Diapo 21Diapo 22Diapo 23Diapo 24Diapo
25Diapo 26