-
Guida tecnica N. 7Guida tecnica N. 7
Il dimensionamento di un azionamento
-
2 Guida tecnica N. 7 - Il dimensionamento di un azionamento
-
3Guida tecnica N. 7 - Il dimensionamento di un azionamento
Indice
1. Introduzione
.......................................................... 5
2. Lazionamento
....................................................... 6
3. Descrizione generale di una procedura didimensionamento
................................................. 7
4. Il motore a induzione in c.a. ..............................
9
4.1 Nozioni di
base........................................................ 94.2
Corrente del motore................................................
11
4.2.1 Campo di flusso costante ..........................
124.2.2 Range di indebolimento di campo ............. 13
4.3 Potenza del motore
................................................ 14
5. Le leggi principali della meccanica .................. 15
5.1 La
rotazione.............................................................
155.2 Gli ingranaggi e il momento di inerzia ...................
18
6. Tipologie di carico
................................................ 20
7. Capacit di carico del motore ...........................
23
8. La selezione del convertitore di frequenzae del motore
.......................................................... 24
8.1 Esempio di applicazione pump and fan ................ 248.2
Esempio di applicazione a coppia costante ......... 278.3 Esempio
di applicazione a potenza costante ....... 29
9. Raddrizzatore e trasformatore di ingresso ..... 33
9.1 Raddrizzatore
.......................................................... 339.2
Trasformatore
.......................................................... 34
10. Indice analitico
..................................................... 36
-
4 Guida tecnica N. 7 - Il dimensionamento di un azionamento
-
5Guida tecnica N. 7 - Il dimensionamento di un azionamento
Generalit
Capitolo 1 - Introduzione
Il dimensionamento di un azionamento un compito cherichiede
unattento esame di tutti i fattori e presuppone unaconoscenza
completa del sistema, compresi elementi qualilalimentazione
elettrica, la macchina comandata, lecondizioni ambientali, il
motore e gli azionamenti. Il tempodedicato alla fase del
dimensionamento sar compensatosuccessivamente dalla possibilit di
realizzare notevolirisparmi.
-
6 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Un singolo azionamento in c.a. comprende normalmenteun
trasformatore di ingresso o un alimentatore elettrico,un
convertitore di frequenza, un motore in c.a. e un carico.Allinterno
del singolo convertitore di frequenza si trovanoun raddrizzatore,
un collegamento in c.c. e ununit inverter.
Capitolo 2 - Lazionamento
Figura 2.1 Un singolo convertitore di frequenza comprende1)
raddrizzatore, 2) collegamento in c.c., 3) unit inverter e4)
alimentatore elettrico.
Nei sistemi ad azionamento multiplo si utilizza
normalmenteununit raddrizzatore separata. Le unit inverter
sonocollegate direttamente a un collegamento in c.c comune.
Figura 2.2 Un azionamento che comprende 1) una sezione
dialimentazione separata, 2) un collegamento in c.c. comune,3)
sezioni azionamento e 4) alimentatore elettrico.
-
7Guida tecnica N. 7 - Il dimensionamento di un azionamento
Nel presente capitolo vengono illustrate le fasi
principalinececessarie per il dimensionamento del motore e del
con-vertitore di frequenza.
1) Verificare le condizioni iniziali.Per selezionare il
convertitore di frequenza e il motore inmodo corretto, verificare
il livello di tensione (380 V 690 V)e di frequenza (50 Hz 60 Hz)
della rete di alimentazione.La frequenza della rete di
alimentazione non limita la gam-ma di velocit dellapplicazione.
2) Verificare i requisiti di processo. E necessaria una cop-pia
di avviamento? Quale gamma di velocit utilizzata?Quale tipo di
carico previsto? Segue una descrizione delletipologie di carico pi
diffuse.
3) Selezionare il motore.Il motore elettrico va considerato come
una sorgente dicoppia. Il motore deve resistere a sovraccarichi di
proces-so ed essere in grado di produrre una determinata quanti-t
di coppia. La capacit di sovraccarico termico del mo-tore non deve
essere superata. Per determinare la coppiamassima disponibile nella
fase del dimensionamento ne-cessario prevedere un margine del 30%
per la coppia mas-sima del motore
4) Selezionare il convertitore di frequenzaIl convertitore di
frequenza viene selezionato in base allecondizioni iniziali e al
motore selezionato. E necessarioverificare che convertitore di
frequenza sia idoneo a pro-durre la corrente e la potenza
richieste. E opportuno con-siderare la capacit di sovraccarico
potenziale del con-vertitore di frequenza in caso di un carico
ciclico di brevetermine.
Capitolo 3 - Descrizione generale di unaprocedura di
dimensionamento
-
8 Guida tecnica N. 7 - Il dimensionamento di un azionamento
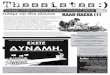
Fase di dimensionamento Rete Convertitore Motore Carico
1) Verificare le condizioniiniziali della rete e delcarico
2) Selezionare il motore inbase a: Capacit di
sovraccarico termico Gamma di velocit Coppia massima
richiesta
3) Selezionare il convertitoredi frequenza in base a: Tipologia
del carico Corrente massima e
continua Condizioni della rete
fN=50Hz, 60Hz
UN=380...690V
Tcarico
T
n min n max
Tcarico
T
TS
n min n max
Imax
IN
n min n max
TS
Descrizione generale di una procedura di dimensionamento
Figura 3.1 Descrizione generale della procedura di
dimensionamento.
-
9Guida tecnica N. 7 - Il dimensionamento di un azionamento
I motori a induzione sono diffusamente utilizzati in
ambitoindustriale. Nel presente capitolo se ne descrivono
alcunecaratteristiche di base.
I motori a induzione convertono lenergia elettrica in ener-gia
meccanica. La conversione dellenergia si basa sullin-duzione
elettromagnetica. Il fenomeno dellinduzione de-termina lo
scorrimento del motore.Tale scorrimento viene spesso definito come
il punto no-minale del motore (frequenza ( fn ), velocit ( nn ),
coppia( Tn ), tensione ( Un ), corrente ( In ) e potenza ( Pn )).
Al puntonominale corrisponde uno scorrimento nominale:
4.1Nozioni dibase
Capitolo 4 - Il motore a induzione in c.a.
(4.1)
quando ns la velocit sincrona:
(4.2)
Quando il motore collegato a unalimentazione contensione e
frequenza costanti, ne risulta una curva dellacoppia come la
seguente:
Figura 4.1 Tipica curva coppia/velocit di un motore a
induzionecollegato alla rete di alimentazione (D.O.L.,
Direct-On-Line).Nellimmagine a) la coppia bloccata del rotore, b)
la coppiadarresto, c) la coppia massima del motore, Tmax e d) il
puntonominale del motore.
numero poli
-
10 Guida tecnica N. 7 - Il dimensionamento di un azionamento
COPPIA
VELOCITA
Un motore a induzione in c.a.
La coppia massima di un motore a induzione standard( Tmax, detta
anche coppia massima in esercizio continuo ocoppia alla tensione di
scarica) normalmente pari a 2-3volte la coppia nominale. La coppia
massima disponibilecon scorrimento smax, che maggiore dello
scorrimentonominale. Per utilizzare in modo efficiente un motore
ainduzione, lo scorrimento del motore dovrebbe rientrarenel campo -
smax ... smax, che si ottiene controllando latensione e la
frequenza. Il controllo pu essere effettuatoutilizzando un
convertitore di frequenza.
Figura 4.2 Curve della coppia e della velocit di un motore a
induzionealimentato da un convertitore di frequenza. Tmax
disponibile persovraccarichi di breve termine al di sotto del punto
di indebolimento dicampo. I convertitori di frequenza, tuttavia,
limitano normalmente lacoppia massima disponibile al 70% di
Tmax.
Il campo di frequenza al di sotto della frequenza nominale
denominato campo a flusso costante. Al di sopra
dellafrequenza/velocit nominali, il motore funziona nel rangedi
indebolimento di campo. Nel range di indebolimento dicampo, il
motore pu funzionare a potenza costante, epertanto il range di
indebolimento di campo viene talvoltadefinito campo di potenza
costante.
La coppia massima di un motore a induzione proporzionale al
quadrato del flusso magnetico ( Tmax ~ 2 ).Ci significa che la
coppia massima tendenzialmentecostante in corrispondenza del campo
di flusso costante.Al di sopra del punto di indebolimento di campo,
lariduzione della coppia massima inversamenteproporzionale al
quadrato della frequenza.
( Tmax ~ ).
-
11Guida tecnica N. 7 - Il dimensionamento di un azionamento
Campo di flusso costante VELOCITARange di indebolimento di
campo
Flusso
Tmax
Tensione
Un motore a induzione in c.a.
4.2 Corrente delmotore
Figura 4.3 Coppia massima, tensione e flusso in funzione
dellavelocit relativa.
La corrente del motore a induzione comprende due com-ponenti:
corrente reattiva ( isd ) e corrente attiva ( isq ). Lacomponente
di corrente reattiva comprende la corrente dimagnetizzazione (
imagn ), mentre la corrente attiva la cop-pia che produce la
componente di corrente. Le compo-nenti della corrente attiva e
reattiva sono perpendicolarifra loro.
La corrente di magnetizzazione ( imagn ) rimane
approssi-mativamente costante nel campo di flusso costante (al
disotto del punto di indebolimento di campo). Nel range
diindebolimento di campo, la riduzione della corrente
dimagnetizzazione proporzionale alla velocit.Una stima abbastanza
corretta della corrente dimagnetizzazione nel campo a flusso
costante consistenella corrente reattiva ( isd ) in corrispondenza
del puntonominale del motore.
Figura 4.4 La corrente statorica ( is ) comprende le componenti
dicorrente reattiva ( isd ) e di corrente attiva ( isq ),
perpendicolari fra loro.Il flusso statorico indicato da s.
-
12 Guida tecnica N. 7 - Il dimensionamento di un azionamento
essere stimata come segue:
La formula approssimativa per la corrente totale del motorecon
coppia al 120% da:
La formula approssimativa stata utilizzata in quanto la cop-
pia corrispondeva alla condizione 0,8 * Tn Tload 0,7 * Tmax
, quanto 0,8 * Tn Tload 0.7 * Tmax
Al di sopra del punto di indebolimento di campo, le com-ponenti
di corrente possono essere approssimatecomesegue:
Si pu riscontrare che a coppia motore uguale a zero,
lacomponente di corrente attiva uguale a zero. Con valoridi coppia
pi elevati, la corrente del motore diventa quasiproporzionale alla
coppia. Una buona approssimazionedella corrente totale del motore
:
4.2.1 Campo diflusso costante
La corrente totale del motore pari a:
(4.5)
Esempio 4.1:Il motore da 15 kW caratterizzato da una
correntenominale di 32 A e da un fattore di potenza di 0,83. Qual
approssimativamente la corrente di magnetizzazione delmotore al
punto nominale? Qual la correnteapprossimativa totale al 120 %
della coppia al di sotto delpunto di indebolimento di campo?
Soluzione 4.1:Al punto nominale la corrente di magnetizzazione
pu
(4.6)
(4.3)
(4.4)
Un motore a induzione in c.a.
-
13Guida tecnica N. 7 - Il dimensionamento di un azionamento
e
Nel range di indebolimento di campo la correntesupplementare
necessaria per mantenere un determinatolivello della coppia
proporzionale alla velocit relativa.
Esempio 4.2:La corrente nominale del motore pari a 71 A.
Quantacorrente necessaria per mantenere una coppia al 100%con
velocit nominale di 1,2 volte (Tmax = 3 * Tn).
Soluzione 4.2:La corrente pu essere calcolata utilizzando la
formula diapprossimazione:
4.2.2 Range diindebolimentodi campo
Al di sopra del punto di indebolimento di campi lecomponenti di
corrente dipendono anche dalla velocit.
La corrente totale del motore pari a:
(4.8)
(4.7)
(4.10)
(4.9)
La corrente del motore pu essere approssimata in modoabbastanza
preciso allinterno di una determinata areaoperativa. La corrente
del motore diventa proporzionalealla potenza relativa. Una formula
approssimativa per lacorrente :
Lapprossimazione pu essere utilizzata quando:
(4.11)
(4.12)
Un motore a induzione in c.a.
-
14 Guida tecnica N. 7 - Il dimensionamento di un azionamento
4.3 Potenzadel motore
La potenza (di uscita) meccanica del motore pu esserecalcolata
partendo dalla velocit e dalla coppia utilizzandola seguente
formula:
Poich la potenza del motore spesso espressa in kilowatt
e (1 kW = 1000 W) e la velocit in giri/min (revolutions
per minute, giri al minuto, 1 giro/min = rad/s), pu
essere utilizzata la seguente formula:
La potenza di ingresso del motore pu essere calcolata apartire
dalla tensione, dalla corrente e dal fattore di potenza:
Lefficienza del motore il valore della potenza di uscitadiviso
per la potenza di ingresso:
Esempio 4.3:La potenza nominale del motore pari a 15 kW e la
velocitnominale a 1.480 giri/min. Qual la coppia nominale
delmotore?
Soluzione 4.3:La coppia nominale del motore si calcola come
segue:
Esempio 4.4:Qual lefficienza nominale di un motore da 37 kW (Pn
= 37 kW,Un =380 V, In =71 A e cos(n) = 0,85)?
Soluzione 4.4:Lefficienza nominale :
(4.13)
(4.14)
(4.15)
(4.16)
Un motore a induzione in c.a.
-
15Guida tecnica N. 7 - Il dimensionamento di un azionamento
La componente di coppia dinamica determinata da unmomento di
inerzia variabile a velocit costante n[giri/min]risulta:
Capitolo 5 - Le leggi principali dellameccanica
5.1 Larotazione
Una delle principali equazioni del motore a induzionedescrive la
relazione tra il momento di inerzia ( J [kgm2]),la velocit angolare
( [rad/s]) e la coppia ( T [Nm]).Lequazione risulta come segue:
(5.1)
Nella precedente equazione si suppone una variazione siadella
frequenza che del momento di inerzia. Spesso perla formula tale che
il momento di inerzia consideratouna costante:
(5.2)
Se la velocit e il momento di inerzia sono costanti,
lacomponente dinamica ( Tdyn ) uguale a zero.
La componente di coppia dinamica
determinatadallaccelerazione/decelerazione di un momento di
inerziacostante (la velocit del motore cambia da n [giri/min]
intempo t [s], J costante) risulta:
(5.3)
(5.4)
La coppia Tload rappresenta il carico del motore. Il
caricoconsiste nellattrito, nellinerzia e nello stesso carico.
Alvariare della velocit del motore, la coppia del motore
sidifferenzia da Tload . La coppia del motore pu essereconsiderata
come linsieme di una componente dinamicae di una componente di
carico:
(5.5)
-
16 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Le leggi principali della meccanica
Se il momento di inerzia varia
contemporaneamenteallaccelerazione del motore, la componente di
coppiadinamica pu essere calcolata utilizzando un
determinatointervallo di campionamento discreto. Per quanto
riguardail dimensionamento termico spesso invece
sufficienteconsiderare il momento di inerzia medio durante la fase
diaccelerazione.
Esempio 5.1:Il momento di inerzia totale, 3 kgm2, viene
accelerato dauna velocit di 500 giri/min a 1.000 giri/min in 10
secondi.Qual la coppia totale necessaria se la coppia di
caricocostante pari a 50 Nm?
Quale sar la velocit di decelerazione del motore a0 giri/min se
lalimentazione elettrica del motore vienescollegata?
Soluzione 5.1:Il momento di inerzia totale costante. La
componente di
La coppia totale durante la fase di accelerazione :
coppia dinamica necessaria per laccelerazione :
Se lalimentazione elettrica del motore viene scollegata a1.000
giri/min, il motore decelera a causa della coppia dicarico costante
(50 Nm). Ne consegue la seguenteequazione:
Il tempo di decelerazione da 1.000 giri/min a 0
giri/minrisulta:
Esempio 5.2:Laccelerazione di un ventilatore alla velocit
nominaleviene effettuata con la coppia nominale. La coppia
allavelocit nominale pari all87%. Il momento di inerzia
delventilatore di 1.200 kgm2 e il momento di inerzia delmotore pari
a 11 kgm2. Le caratteristiche di carico delventilatore Tload sono
illustrate nella figura 5.1.
La potenza nominale del motore pari a 200 kW, mentre lavelocit
nominale di 991 giri/min.
-
17Guida tecnica N. 7 - Il dimensionamento di un azionamento
VELOCITA
CO
PP
IA
Le leggi principali della meccanica
Figura 5.1 Caratteristiche della coppia di un ventilatore.
Velocit ecoppia sono illustrate utilizzando valori relativi.
Calcolare il tempo di avviamento approssimativo da velocitzero a
velocit nominale.
Soluzione 5.2:La coppia nominale del motore :
Il tempo di avviamento viene calcolato dividendo il campodi
velocit in cinque settori. In ciascun settore (198,2 giri/min)la
coppia si presume costante. La coppia per ciascun set-tore viene
desunta dal punto medio del settore. Si tratta diuna soluzione
abbastanza accettabile in quanto il compor-tamento quadratico nel
settore approssimato con riferi-mento allandamento lineare.
Il tempo per accelerare il motore (ventilatore) con
coppianominale pu essere calcolato con la seguente formula:
-
18 Guida tecnica N. 7 - Il dimensionamento di un azionamento
I tempi di accelerazione per diverse sezioni di velocit
sono:
0-198,2 giri/min
198,2-396,4 giri/min
396,4-594,6 giri/min
594,6-792,8 giri/min
792,8-991 giri/min
Il tempo di avviamento totale 0-991 giri/min di circa
112secondi.
, ,
,
5722 9,
Gli azionamenti sono comunemente dotati di ingranaggi.Nel
calcolo della coppia del motore e del campo di velocit necessario
tenere conto degli ingranaggi. Essi sonopreposti a una riduzione
tra il lato carico e il lato motore inbase alle seguenti equazioni
(si veda inoltre la figura 5.2 ):
5.2 Gliingranaggi e ilmomento diinerzia
Figura 5.2 Un meccanismo di trasmissione con efficienza . Il
rapportodi trasmissione n1:n2 .
Le leggi principali della meccanica
(5.6)
(5.7)
(5.8)
Direzione dellenergia
-
19Guida tecnica N. 7 - Il dimensionamento di un azionamento
E inoltre necessario conoscere i momenti di inerzia( J [kgm2])
allinterno del sistema. Se non sono noti, possibilecalcolarli, ma
piuttosto difficile farlo con precisione.Normalmente i fornitori di
macchine dispongono dei datinecessari.
Esempio 5.3:Il cilindro costituisce una forma piuttosto comune
di carico(rulli, tamburi, giunti, ecc.). Qual linerzia di un
cilindro inrotazione (massa = 1.600 kg, raggio = 0,7 m)?
Soluzione 5.3:Linerzia di un cilindro in rotazione, (con massa m
[kg] eraggio r [m]) si calcola come segue:
Nel caso di un ingranaggio, il momento di inerzia
allalberomotore deve essere ridotto. Lesempio successivo mostracome
operare la riduzione con gli ingranaggi in un sistemadi
sollevamento. Altre formule si trovano nei manuali diprogettazione
di base.
Esempio 5.4:Riduzione del momento di inerzia allalbero motore
delseguente azionamento di sollevamento.
Figura 5.3 Un azionamento di sollevamento utilizzato nellesempio
5.4.
Soluzione 5.4:Il momento di inerzia totale consiste di J1=10
kgm2,J2=30 kgm2, r=0,2 m e m=100 kg.Il momento di inerzia J2 e la
massa m sono dietro una sca-tola di trasmissione con un rapporto di
trasmissionen1:n2=2:1.
Al momento di inerzia J2 viene ridotto moltiplicandolo peril
quadrato dellinverso del rapporto di trasmissione. Lamassa m del
sistema di sollevamento viene ridotta molti-plicandola per il
quadrato del raggio r e, trovandosi dietrouna scatola di
trasmissione, deve essere anchessa molti-plicata per il quadrato
dellinverso del rapporto di trasmis-sione.
In tal modo il momento di inerzia totale del sistema
risulta:
Le leggi principali della meccanica
-
20 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Nel settore industriale vi sono alcune tipologie di
caricocaratteristiche. Per selezionare un motore e un convertito-re
di frequenza idonei allapplicazione essenziale cono-scere il
profilo del carico (campo di velocit, coppia e po-tenza)
Vengono illustrate di seguito alcune tipologie di carico trale
pi comuni. Possono inoltre presentarsi diverse combi-nazioni di
queste tipologie.
1. Coppia costanteIl carico a coppia costante tipico dei sistemi
preposti allamovimentazione di volumi fissi. Alcune applicazioni
tipichedi carico a coppia costante sono, ad esempio, i compres-sori
a vite, gli alimentatori e i nastri trasportatori. La coppia
costante e la potenza lineare in proporzione alla veloci-t.
Figura 6.1 Curve tipiche di coppia e potenza in unapplicazione
acoppia costante.
2. Coppia quadraticaLa coppia quadratica il tipo di carico pi
comune, ampia-mente utilizzato, ad esempio, nelle pompe centrifughe
enei ventilatori. La coppia proporzionale al quadrato e lapotenza
al cubo della velocit.
Capitolo 6 - Tipologie di carico
Figura 6.2 Curve tipiche di coppia e potenza in unapplicazione
acoppia quadratica.
-
21Guida tecnica N. 7 - Il dimensionamento di un azionamento
3. Potenza costanteIl carico a potenza costante normalmente
utilizzato perla laminazione di materiali nei quali il diametro
cambia du-rante la laminazione. La potenza costante e la
coppiainversamente proporzionale alla velocit.
Figura 6.3 Curve tipiche di coppia e potenza in unapplicazione
apotenza costante.
4. Potenza/coppia costanteQuesto tipo di carico comune
nellindustria cartaria. Sitratta di una combinazione del carico a
potenza costantee di quello a coppia costante. Questo tipo di
carico dipen-de spesso dal dimensionamento dellazionamento per
as-sicurare una determinata potenza ad alta velocit.
Figura 6.4 Curve tipiche di coppia e potenza in unapplicazione
apotenza/coppia costante.
5. Richiesta di coppia di avviamento/spuntoIn alcune
applicazioni necessario assicurare una coppiaelevata a basse
frequenze. Tale requisito va consideratoquando si procede al
dimensionamento. Applicazioni tipi-che di questo tipo di carico
sono ad esempio gli estrusorie le pompe a vite.
Tipologie di carico
-
22 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Tipologie di carico
Figura 6.5 Curva di coppia tipica in unapplicazione che richiede
unacoppia di avviamento.
Esistono inoltre altre tipologie di carico, ma sono piutto-sto
difficili da descrivere in una presentazione generica.Per citarne
alcune, vi sono diversi tipi di carichi simmetrici(laminatoi, gru,
ecc.) e asimmetrici. La simmetria/asimmet-ria della coppia pu
essere in funzione dellangolazione odel tempo. Questi tipi di
carico devono essere dimensionaticon estrema cura tenendo conto dei
margini di capacit disovraccarico del motore e del convertitore di
frequenzaoltre che della coppia media del motore.
-
23Guida tecnica N. 7 - Il dimensionamento di un azionamento
T / Tn
Velocit relativa
Capitolo 7 - Capacit di carico delmotore
Per il dimensionamento di un azionamento occorre tenereconto
della capacit di carico termico del motore. Essadefinisce definisce
la capacit di carico massima del motorea lungo termine.
I motori a induzione standard sono dotati di
ventilazionepropria. A causa di questa caratteristica, la capacit
dicarico termico del motore decresce proporzionalmente
alladiminuzione della sua velocit. Questo tipo di compor-tamento
limita la coppia continua disponibile alle bassevelocit.
I motori con sistema di raffreddamento separato possonoessere
caricati anche alle basse velocit. Spesso il sistemadi
raffreddamento dimensionato in modo tale che leffettoraffreddante
sia lo stesso di quello al punto nominale.
Sia con sistemi di raffreddamento propri che separati, la coppia
termicamente limitata nel range di indebolimento di campo.
Figura 7.1 La capacit di carico tipica di un motore a induzione
agabbia di tipo standard in un azionamento controllato in
frequenza1) senza sistema di raffreddamento separato e 2) con
sistema diraffreddamento separato.
Epossibile sovraccaricare un motore in c.a. per breviperiodi di
tempo senza surriscaldarlo. Il sovraccarico dibreve termine
prevalentemente limitato da Tmax (verificarei margini di
sicurezza).
In termini generici, la capacit di sovraccarico termico dibreve
termine del convertitore di frequenza spesso picritica di quella
del motore. Il tempo di rialzo termico delmotore normalmente
superiore ai 15 minuti (motori dipiccole dimensioni) fino a qualche
ora (motori pi grandi)in base alle dimensioni del motore. Il tempo
di rialzo termicodel convertitore di frequenza (normalmente di
pochi minuti) specificato nei manuali dei singoli prodotti.
-
24 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Capitolo 8 - La selezione delconvertitore di frequenza e del
motore
Il motore viene selezionato in base ai dati principali di
pro-cesso. Campo di velocit, curve di coppia, metodo di
ven-tilazione e capacit di carico del motore forniscono
indi-cazioni per la selezione del motore. Spesso vale la pena
diconsiderare diversi tipi di motore in quanto il motore
sele-zionato influisce sulle dimensioni del convertitore di
fre-quenza.
Per selezionare un convertitore di frequenza idoneo van-no
considerati vari elementi. I produttori di convertitori difrequenza
dispongono in genere di apposite tabelle di se-lezione, dove
vengono specificati i tipici livelli di potenzamotore per ciascuna
taglia di convertitore.
Conoscendo le caratteristiche della coppia inoltre pos-sibile
calcolare la corrente di dimensionamento. I valori dicurva
corrispondenti possono essere calcolati dal profilodella coppia e
confrontati a limiti di corrente del converti-tore. La corrente
nominale del motore fornisce qualche in-dicazione. Tuttavia non si
tratta sempre del miglior criteriodi dimensionamento a causa della
possibilit di dec-lassamento dei motori (temperatura ambiente, area
peri-colosa, ecc.).
Prima di scegliere un convertitore di frequenza
opportunocontrollare la tensione di alimentazione. Le variazioni
dellatensione di rete influiscono sulla potenza resa del
motoredisponibile. Se la tensione di alimentazione inferiore
allapotenza nominale, il punto di indebolimento di campo si sfasaa
una frequenza inferiore e nel range di indebolimento dicampo si
riduce la coppia massima disponibile del motore.
Spesso la coppia massima disponibile limitata dal con-vertitore
di frequenza. Anche di questo fattore occorre te-nere conto per la
selezione del motore. Il convertitore difrequenza pu limitare la
coppia del motore prima di quantoaffermato nelle schede tecniche
fornite dal produttore.
La coppia massima disponibile inoltre influenzata da
tra-sformatori, reattori, cavi, ecc. presenti nel sistema in
quantodeterminano un calo di tensione e, di conseguenza, pu
ve-rificarsi anche un calo della coppia massima disponibile.
Leperdite del sistema vanno compensate con i valori del
con-vertitore di frequenza.
Alcune fasi nel dimensionamento di unapplicazione pumpand
fan:
- Verificare il campo di velocit e calcolare la potenza
allamassima velocit.
- Controllare i requisiti di coppia di avviamento.
8.1 Esempio diapplicazionepump and fan
-
25Guida tecnica N. 7 - Il dimensionamento di un azionamento
n
- Scegliere il numero di poli del motore. La frequenza
diesercizio pi economica si trova spesso nel range diindebolimento
di campo.
- Determinare la potenza del motore in modo tale dagarantire la
disponibilit di potenza alla massima velocit.Considerare la capacit
di carico termico.
- Selezionare il convertitore di frequenza. Utilizzare i
valorinominali delle applicazioni pump and fan. Se non
sonodisponibili, selezionare il convertitore di frequenza in baseal
profilo di corrente del motore.
Esempio 8.1:Una pompa presenta un carico di 150 kW alla velocit
di2.000 giri/min. Non necessaria una coppia di avviamento.
Soluzione 8.1:La coppia necessaria a 2.000 giri/min risulta:
Sembra che per questa applicazione siano possibili
duealternative: i motori bipolari o quadripolari.
La selezione del convertitore di frequenza e del motore
Figura 8.1 Curve di capacit di carico del motore in
unapplicazione pumpand fan. Confronto tra motori 1) bipolari e 2)
quadripolari.
1) motore p=2Per un motore bipolare, la capacit di carico a
2.000 giri/min inbase alla curva di capacit di carico risulta
approssimativamentepari al 95%. La coppia nominale del motore deve
essere almenopari a:
-
26 Guida tecnica N. 7 - Il dimensionamento di un azionamento
La selezione del convertitore di frequenza e del motore
La potenza nominale corrispondente deve essere pertantoalmeno
pari a:
Viene scelto un motore da 250 kW (400 V, 431 A, 50 Hz,2975
giri/min e 0,87). La coppia nominale del motore risulta:
La corrente del motore alla velocit di 2.000 giri/min (campodi
flusso costante) approssimativamente:
La corrente continua minima del convertitore di frequenzarisulta
pertanto pari a 384 A.
2) motore p=4Per un motore quadripolare, la capacit di carico
a2.000 giri/min risulta pari a 75%.La coppia nominale minima del
motore pari a:
La potenza minima per un motore quadripolare risulta:
Un motore da 160 kW (400 V, 305 A, 50 Hz, 1.480 giri/min e0,81)
risponde alle condizioni richieste. La correnteapprossimativa alla
velocit di 2.000 giri/min (66,7 Hz)risulta:
E opportuno calcolare con precisione la corrente se lacorrente
nominale del convertitore di frequenza selezionatoha un valore
simile a quello della corrente approssimativadel motore.
I motori quadripolari richiedono meno corrente in
corrispon-denza del punto di intervento della pompa. Si tratta
pro-babilmente di una scelta pi economica rispetto al
motorebipolare.
-
27Guida tecnica N. 7 - Il dimensionamento di un azionamento
n
Seguono alcune fasi del dimensionamento e diunapplicazione a
coppia costante:
- Verificare il campo di velocit.- Verificare la coppia costante
richiesta.- Verificare le possibili accelerazioni. Se sono
necessarie
accelerazioni, verificare i momenti di inerzia.- Verificare la
possibile coppia di avviamento richiesta.- Scegliere il motore in
modo che la coppia sia inferiore
alla curva di capacit di carico termico
(ventilazioneseparata/propria?). Normalmente la velocit nominale
delmotore ha un valore centrale rispetto al campo di
velocitautorizzato.
- Selezionare un convertitore di frequenza idoneo in basealla
corrente di dimensionamento.
Esempio 8.2:Un estrusore ha un campo di velocit di 300-1.200
giri/min. Ilcarico a 1.200 giri/min pari a 48 KW. La coppia di
avviamentorichiesta di 200 Nm. Il tempo di accelerazione da
velocitzero a 1.200 giri/min di 10 secondi. Il motore dotato
diventilazione propria e la tensione nominale pari a 400 V.
Soluzione 8.2:Il requisito di coppia costante risulta:
Risulta idoneo un motore quadripolare o a 6 polarit.
La selezione del convertitore di frequenza e del motore
8.2 Esempio diapplicazione acoppiacostante
Figura 8.2 Curve di capacit di carico motori in unapplicazione
coppiacostante. Confronto tra motori 1) quadripolare e 2)
esapolare.
-
28 Guida tecnica N. 7 - Il dimensionamento di un azionamento
1) Motore quadripolareAlla velocit di 300 giri/min la capacit di
carico termico pari all80%. La coppia nominale minima stimata
risulta:
La potenza nominale minima del motore pari a:
Un motore idoneo potrebbe essere ad esempio un motoreda 75 kW
(400 V, 146 A, 50 Hz, 1.473 giri/min e 0,82). Lacoppia nominale del
motore pari a:
La corrente del motore approssimativamente (T/Tn 0,8)pari a:
In base alla corrente del motore calcolata possibilescegliere un
convertitore di frequenza idoneo perfunzionamento a coppia
costante.
I requisiti di coppia di avviamento (200 Nm) non costi-tuiscono
un problema per questo tipo di motore.
Se il momento di inerzia del motore pari a 0,72 kgm2, lacoppia
dinamica durante laccelerazione risulta pari a:
Pertanto la coppia totale durante laccelerazione pari a391 Nm,
valore inferiore alla coppia nominale del motore.
2) Motore esapolareAlla velocit di 300 giri/min e 1.200
giri/min, la capacit dicarico del motore pari all84%. Pertanto la
coppianominale minima di un motore esapolare risulta:
Il valore minimo della potenza nominale del motore risulta:
La selezione del convertitore di frequenza e del motore
-
29Guida tecnica N. 7 - Il dimensionamento di un azionamento
Un motore idoneo potrebbe essere ad esempio un motoreda 55 kW
(400 V, 110 A, 50 Hz, 984 giri/min e 0,82). La coppianominale del
motore pari a:
La corrente di dimensionamento pu essere
calcolataapprossimativamente alla velocit di 1.200 giri/min:
La corrente nominale (continua) del convertitore difrequenza
deve essere superiore a 96 A.
I requisiti di coppia di avviamento sono inferiori alla
coppianominale del motore.
Se linerzia del motore pari a 1,2 kgm2, la coppia
dinamicadurante laccelerazione risulta:
La coppia totale richiesta durante laccelerazione pari a397 Nm,
valore inferiore alla coppia nominale del motore.
La corrente di un motore esapolare risulta inferiore di 19
Arispetto a quella di un motore quadripolare. La scelta finaledel
motore/convertitore di frequenza dipende dalla taglia edal costo
del convertitore di frequenza del motore.
Alcune fasi del dimensionamento di unapplicazione a po-tenza
costante:
- Verificare il campo di velocit.- Calcolare la potenza
richiesta. Gli avvolgitori sono tipiche
applicazioni a potenza costante.- Dimensionare il motore in modo
tale che venga utilizzato
il range di indebolimento di campo.
Esempio 8.3:Una filiera controllata da un convertitore di
frequenza. Lavelocit superficiale del rullo di 12 m/s e la tensione
paria 5.700 N. I diametri del rullo sono rispettivamente di630 mm
(rullo vuoto) e di 1.250 (rullo pieno). E presenteuna trasmissione
con un rapporto di trasmissionen2 :n1 = 1:7.12 e con un livello di
efficienza pari a 0,98.
Selezionare un motore e convertitore idonei allapplicazione.
8.3 Esempio diapplicazione apotenzacostante
La selezione del convertitore di frequenza e del motore
-
30 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Figura 8.3 Diagramma di base di un avvolgitore.
Nel movimento rettilineo, la potenza : P = Fv
Nel movimento rotatorio la potenza : P = T
La relazione tra la velocit superficiale e la velocit
angolarerisulta:
La coppia un prodotto della forza e del raggio: T = Fr
E possibile selezionare il motore utilizzando le formulesopra
riportate:
Soluzione 8.3:Il concetto fondamentale dellavvolgitore consiste
nelmantenere tensione e velocit superficiali costanti alvariare del
diametro.
La selezione del convertitore di frequenza e del motore
-
31Guida tecnica N. 7 - Il dimensionamento di un azionamento
Per selezionare il motore idoneo necessario consideraregli
ingranaggi. E opportuno ridurre i valori di velocit, coppiae
potenza:
1) Motore bipolareSe si seleziona un motore bipolare, la capacit
di caricoalla velocit di 1.305 giri/min approssimativamentedell88%,
e del 97% a 2.590 giri/min. La potenza nominaleminima del motore
risulta:
Con un motore da 200 kW (400 V, 353 A, 50 Hz, 2.975 giri/mine
0,86) la coppia nominale del motore risulta:
La corrente di dimensionamento viene calcolata in base auna
coppia di 511 Nm:
2) Motore quadripolareSe si seleziona un motore quadripolare,
risulta dalla curvadella capacit di carico che la capacit di carico
allavelocit di 1.305 giri/min corrisponde approssimativamenteal
98%, mentre a 2.590 giri/min al 60% . La potenzanominale minima del
motore risulta:
La selezione del convertitore di frequenza e del motore
-
32 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Se si seleziona un motore da 90 kW (400 V, 172 A, 50 Hz,1.473
giri/min e 0,83), la coppia nominale del motore risul-ta:
In questo caso il dimensionamento viene effettuato in basea una
corrente motore di 1.305 giri/min. La corrente delmotore risulta
pertanto:
Con un motore bipolare, il range di indebolimento di cam-po (a
potenza costante) non stato utilizzato, con la con-seguenza di un
eccessivo sovradimensionamento. Il mo-tore quadripolare costituisce
una scelta ottimale per que-sta applicazione.
La selezione del convertitore di frequenza e del motore
-
33Guida tecnica N. 7 - Il dimensionamento di un azionamento
COPPIA
CORRENTE DI LINEA
Capitolo 9 - Raddrizzatore etrasformatore di ingresso
Sono in commercio diversi tipi di raddrizzatore di ingres-so. La
tipologia di raddrizzatore utilizzata pu limitare
ilfunzionamento.
I raddrizzatori di tipo convenzionale sono raddrizzatori adiodi
a 6 o 12 impulsi. I raddrizzatori a diodi supportanosolo carichi
motore dove il flusso di potenza avviene soloin una direzione.
In alcuni processi nei quali il carico pu essere generatore,
necessario assorbire lenergia prodotta. Per carichi ge-neratori di
breve durata, unaltra soluzione comunementeutilizzata consiste in
una resistenza di frenatura, dove lapotenza generata va trasformata
in perdita. Tuttavia, se ilcarico sempre generatore necessario
utilizzare unraddrizzatore a quattro quadranti.
Sia il trasformatore di ingresso che il raddrizzatore
devonoessere dimensionati in base alla potenza resa del motore
ealle perdite. Ad esempio, anche in presenza di una coppiaelevata a
bassa velocit , la potenza meccanica rimanepiuttosto bassa.
Pertanto, un sovraccarico elevato non si-gnifica necessariamente
potenza elevata per quanto con-cerne il raddrizzatore.
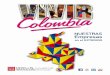
9.1Raddrizzatore
(9.1)
(9.2)
Figura 9.1 Corrente di linea in unapplicazione a coppia
costante. Lacorrente di linea ridotta a bassa velocit.
I raddrizzatori vengono dimensionati in base alla potenzaresa
del motore. E possibile selezionare un raddrizzatoredi ingresso per
un singolo azionamento utilizzando la for-mula di
approssimazione:
Negli azionamenti dotati di collegamento comune in c.c.possono
essere presenti contemporaneamente potenzamotrice e generatrice. La
potenza del raddrizzatore vienepertanto calcolata
approssimativamente come segue:
-
34 Guida tecnica N. 7 - Il dimensionamento di un azionamento
La potenza del trasformatore di ingresso pu essere calcola-ta
come segue:
Nelle formule sopra riportate:
Ptotal la potenza resa totale del motore
k la capacit di carico del trasformatore (fattore k)
1,05 sta per la caduta di tensione del
trasformatore(impedenza)
lefficienza del raddrizzatore
cos() langolo di controllo del raddrizzatore (= 1,0 peril
raddrizzatore a diodi)
lefficienza dellinduttanza in c.a. (se presente)
lefficienza dellinverter
lefficienza del motore
Normalmente la potenza resa totale viene moltiplicata perun
coefficiente 1,2 - 1,35.
Esempio 9.1:In unapplicazione a coppia costante la potenza
resamassima necessaria pari a 48 kW alla velocit di 1.200giri/min.
E stato selezionato un motore da 55 kW e uninverter da 70 kVA.
Selezione del raddrizzatore e del trasformatore di ingresso.Si
utilizza un alimentatore a diodi a 6 impulsi, presente uninduttanza
in c.c. nel collegamento in c.c., lefficienzadellinverter pari a
0,97 e lefficienza del motore pari a0,95.
Soluzione 9.1:La potenza stimata del raddrizzatore risulta:
9.2Trasformatore
(9.3)
Raddrizzatore trasformatore di ingresso
-
35Guida tecnica N. 7 - Il dimensionamento di un azionamento
Raddrizzatore trasformatore di ingresso
Lefficienza dellinduttanza inclusa nellefficienzadellinverter.
Con lunit di alimentazione a diodi, cos() = 1.La potenza del
trasformatore di ingresso pari a (k=0,95):
-
36 Guida tecnica N. 7 - Il dimensionamento di un azionamento
Capitolo 10 - Indice analitico
4-quadrant 33
Aaccelerazione 18alimentatore elettrico 6alimentazione 6,
7attrito 14
Ccampo a flusso costante 10campo di flusso 10capacit di
sovraccarico 7capacit di sovraccaricotermico 23carico ciclico
7collegamento in c.c. 6convertitore di frequenza 6coppia 9,
10coppia alla tensione di scarica10coppia costante 20coppia di
arresto 9coppia di avviamento 7coppia di avviamento/spunto 21coppia
massima 10coppia massima in eserciziocontinuo 10coppia quadratica
20corrente attiva 11corrente reattiva 11coupling 19
Ddecelerare 16
Eefficienza 14
Ffan 16, 20fattore di potenza 12frequenza 7, 9
Gigamma di velocit 7generatore 33
Iinduzione 9ingranaggi 18inverter 34,35
Kkilowatt 14
Lload 6load profile 20load type 20locked rotor torque 9
Mmeccanica 14momento dinerzia 15motore 9motore a induzione
9motore in c.a. 6
Ppompe centrifughe 20potenza 9, 14potenza costante 10, 21potenza
motrice 33potenza resa 33proporzionale al cubo 20proporzionale al
quadrato 20punto nominale 9, 12
Rraddrizzatore 33raddrizzatore a diodi 33raffreddamento separato
23range di indebolimento dicampo 10rullo 19
Sscatola di trasmissione19scorrimento 9
-
37Guida tecnica N. 7 - Il dimensionamento di un azionamento
Indice analitico
Ttamburi 19
tensione 9tensione di alimentazione 7, 24trasformatore
6trasformatore 6
Uunit raddrizzatore 6
Vvelocit 9velocit angolare 14ventilazione propria 23
-
38 Guida tecnica N. 7 - Il dimensionamento di un azionamento
-
39Guida tecnica N. 7 - Il dimensionamento di un azionamento
-
Cop
yrig
ht
AB
B A
utom
atio
n G
roup
Ltd
, 200
03B
FE
6441
5794
R
0104
S
peci
fiche
sog
gette
a m
odific
he s
enza
pre
avvi
so.
IT 1
0.12
.200
0
ABB Industria S.p.A.Viale Edison 5020099 Sesto S. Giovanni
(Mi)Tel: 02 - 26 23 27 32Fax: 02 - 26 23 29 79Internet:
[email protected]