Embed Size (px)
Citation preview

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIREMINISTERE DE L'ENSEIGNEMENT SUPERIEUR
ET DE LA RECHERCHE SCIENTIFIQUEUNIVERSITE D'ORAN ES-SENIA
FACULTE DES SCIENCESDEPARTEMENT D'INFORMATIQUE
MEMOIREPrésenté par
Melle YOUNSI Fatima ZohraPour obtenir
LE DIPLOME DE MAGISTERSpécialité Informatique
Option : Informatique et Automatique
Proposition d'un modèle Décisionnel en Aménagement du
Territoire par Utilisation des SIG et des Réseaux de Neurones
Soutenu à la salle de conférences de la faculté des sciences devant les membres du jury:
D. BENHAMAMOUCHE Professeur, Université d'Oran PrésidentB. BELDJILALI Professeur, Université d'Oran ExaminateurK. BOUAMRANE Maître de Conférence, Université d'Oran ExaminateurMme F.GOURINE Chargé de Cours, Université d'Oran InvitéA. BENYETTOU Professeur, Université USTOMB RapporteurMme D. HAMDADOU Chargé de Cours, Université d'Oran, ES-Sénia Rapporteur

Résumé
Prendre de bonnes décisions en aménagement du territoire est une tâche qui devient deplus en plus di�cile. Plusieurs méthodes de classi�cation ont été développées ces dernièresannées, chacune possédent ses propres avantages ainsi que ses limites d'utilisation.Pour atteindre les objectifs souhaités en aménagement du territoire, il est essentiel d'assu-rer la participation de tous les acteurs, de mettre en place des plateformes de négociationet d'avoir une stratégie de communication.Dans cette étude, le travail présenté a pour objectif principal d'élaborer une méthodolo-gie décisionnelle a�n d'apporter une aide pertinente aux décideurs du territoire dans laréalisation des di�érents projets d'aménagement. Cette stratégie d'aménagement o�re desfacilités de plani�cation et de dimensionnement et permet à la fois l'acquisition des donnéesrelatives ainsi que la gestion des infrastructures urbaines et des services auxiliaires.Le processus d'aide à la décision proposé, dans ce mémoire, intègre plusieurs variantes quicontribuent à analyser le contexte du projet urbain. Il est basé sur une utilisation com-binée de " Systèmes d'informations Géographiques " (SIG), et des " réseaux de neuronesarti�ciels " (RNA) pour l'évaluation multicritère. L'aspect connexionniste a été introduitcomme essai préliminaire et constitue, de ce fait, l'originalité de ce travail. Le modèle estaccompagné par une procédure d'utilisation : une carte d'adéquation pour l'habitat a étéréalisée pour concrétiser cette proposition.
Mots Clés : Aménagement du territoire (AT), Aide à la décision spatiale, Systèmed'Information Géographiques (SIG), Réseaux de neurones arti�ciels (RNA), PerceptronMultiCouches (PMC).

Abstract
Making good decisions for territory planning is a task that has become increasingly dif-�cult. Recentely, several classi�cation methods have been developed, each with its ownadvantages and its limitations.To achieve the desired objectives in territory planning, it is essential to ensure the partic-ipation of all the actors, set up trading platforms and have a communication strategy.In this study, the presented work's main objective is to develop a methodology for decision-making to assist the relevant decision makers in the territory in carrying out various devel-opment projects. This development strategy facilitates planning, design and allows eitherthe acquisition of data and nor of urban infrastructure management and ancillary services.The decision making support process proposed in this memory includes several componentsthat contribute in the analysis of the urban project context . It is based on a combinationof " Geographical Information Systems "(GIS), and " Arti�cial Neural Networks "(ANN)for multicriteria evaluation. The connectionism aspect has been introduced as a prelimi-nary try and constitues the originality of this work fact. The model is accompanied by usea procedure : a map of habitation suitability was carried out to implement this proposal.
Keywords : Territory planning (TP), Spatial decision-making, Geographical InformationSystems (GIS), Arti�cial Neural Networks (ANN), MultiLayer Perceptron (MLP).
Remerciements
Mes remerciements s'adressent en premier lieu à toutes les personnes qui ont contri-bué au bon déroulement de ce travail.
Je tiens à remercier tout d'abord le rapporteur de ce mémoire le Professeur AbdelkaderBenyettou de l'université d'USTOMB pour son soutien et l'intérêt qu'il a porté à ceprojet et aussi pour m'avoir accueillie au sein de son laboratoire SIMPA (Laboratoire SIgnalIMage PArole). Je le remercie aussi pour sa bonne humeur et sa rigueur scienti�que.
J'adresse mes plus sincères remerciements à Mme. Djamila Hamdadou, Chargé de coursau Département d'informatique de l'université d'Es-Sénia, Oran, qui m'a guidée le long deces années. Je tiens à exprimer ici ma reconnaissance pour son soutien, ses encouragementset pour les discussions toujours constructives, j'ai réellement apprécié de travailler à sescôtés. Merci Madame, pour votre patience et votre disponibilité qui m'ont permis de menerce travail à son terme.
Je tiens également à remercier les personnes qui ont accepté de participer à mon jury demémoire :
Le Professeur Djilali Benhamamouche, Professeur au Département d'Informatique del'Université d'Es-Sénia, Oran, pour m'avoir fait l'honneur de présider ce jury ainsi quepour le temps qu'il m'a accordé en acceptant de participer à ce jury.
Le Professeur Bouziane Beldjilali, Professeur au Département d'Informatique de l'Uni-versité d'Es-Sénia, Oran, d'avoir accepté de juger ce travail en qualité d'examinateur. Jele remercie également pour la bienveillance de son accueil pendant ces années de magisterdans son équipe de recherche, ainsi que pour tous ses précieux conseils. Qu'il reçoie ici untémoignage de ma gratitude.
i

Mr. Karim Bouamrane, Maître de Conférence au Département d'Informatique de l'Uni-versité d'Es-Senia,Oran, d'avoir bien voulu être examinateur dans ce jury. Quil trouve icitoute ma reconnaissance.
Je remercie chaleureusement, Mme. Farida Gourine , Chargé de cours au Départementde Géographie à l'université d'Es-Sénia,Oran, d'avoir accepté de participer à mon jury demémoire. J'ai pu apprécier l'importance de son savoir et béné�cier tout particulièrementde ses connaissances dans le domaine de Cartographie.
Ma reconnaissance s'adresse également à Mme. Ha�da Sanhadji , et Mme. FatihaMidoun
, Chargés de Cours au Département de Géographie à l'université d'Es-Sénia, pour leursaide et leurs commentaires, ainsi que pour les qualités humaines qu'elles ont manifestédepuis le début de mon travail.
Je souhaite, de plus, exprimer ma gratitude à Mr. Abdellatif Dehni et Mr. MouhamedMidoun , de m'avoir accueillie au sein du Laboratoire de Géomatique au CTS (Centre desTechniques Spatiales),Arzew . Je les remercie vivement pour leurs patiences et pertinencesqui m'ont permis de préciser et d'améliorer mon travail.
J'adresse également mes remerciements à tous les membres du Laboratoire SIMPA (Labo-ratoire SIgnal IMage PArole) pour leurs aides, je remercie sincèrement M r. AdderahmaneBendahmane , Mr. Nabil neggaz et Melle. Asmaa Ourdigi.
Je tiens à temoigner ma gratitude à tous mes amis de l'équipe "Informatique et Automa-tique" qui m'ont rendu de si nombreux services et qui ont contribué à faire de ces annéesune période heureuse : Melle.Djamila Bouhalouan , Mme. Amel Riad , Mme. SouadKaouadji ainsi que Mme. soraya Taghezout ingénieur en informatique, et tous ceux quine sont pas cités mais que je n'oublie pas pour autant.
Finalement, je réserve une pensée toute particulière à mes parents et ma famille et leurexprime ici toute ma gratitude pour leurs soutiens sans limite, sans lesquels ce travailn'aurait pu être réalisé.
ii

Acronymes
Acronyme Dé�nition
AD Aide à la DécisionAMCD Aide MultiCritère à la DécisionAT Aménagement du TerritoireBD Base de DonnéesBDG Base de Données GéographiqueMODAT-RN MOdèle Décisionnel en Aménagement du Territoire
par utilisation des Réseaux de NeuronesPMC Perceptron Multi-CouchesRNA Les Réseaux de Neurones Arti�cielsRP Algorithme de la Rétro Propagation des erreursSIG Système d'Information Géographique
iii

Table des matières
Remerciements i
Acronymes iii
Préambule 1
I Partie I 3Introduction Générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41. Contexte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42. Problématique et contribution . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1 Aide à la Décision : État de l'art 91.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Concepts fondamentaux de l'Aide à la Décision . . . . . . . . . . . . . . . 10
1.2.1 Dé�nition de l'aide à la décision . . . . . . . . . . . . . . . . . . . . 101.2.2 Décision et décideur . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.3 Décision de groupe : participation et négociation . . . . . . . . . . . 111.2.4 Processus de décision . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3 Les systèmes d'aide à la décision en AT . . . . . . . . . . . . . . . . . . . . 151.3.1 L'Aide MultiCritère à la Décision (AMCD) . . . . . . . . . . . . . . 151.3.2 Les Systèmes Multi Agents . . . . . . . . . . . . . . . . . . . . . . 171.3.3 Les Réseaux de Neurone Arti�ciels . . . . . . . . . . . . . . . . . . 18
1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Réseaux de Neurones 202.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Le neurone biologique : Principe général . . . . . . . . . . . . . . . 212.2.2 Le neurone formel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2.3 Réseaux de Neurones Arti�ciels . . . . . . . . . . . . . . . . . . . . 23
iv

2.2.4 Quelques modèles de RNA . . . . . . . . . . . . . . . . . . . . . . . 242.3 Quelques réseaux célèbres . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Le Perceptron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.3.2 Les Perceptrons MultiCouches (PMC) . . . . . . . . . . . . . . . . 262.3.3 Les réseaux de Hop�eld . . . . . . . . . . . . . . . . . . . . . . . . 262.3.4 Les réseaux de Kohonen . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4 L'apprentissage des réseaux de neurones . . . . . . . . . . . . . . . . . . . 282.5 Généralisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.6 Avantages et limites des RNA . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.6.1 Les avantages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.6.2 Les inconvénients . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.7 Les réseaux multicouches . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.8 Aide à la décision et réseaux de neurones . . . . . . . . . . . . . . . . . . 342.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Le Modèle Proposé 363.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.2 Dé�nition de la problématique . . . . . . . . . . . . . . . . . . . . . . . . 373.3 Nature des problèmes décisionnels à référence spatiale . . . . . . . . . . . 38
3.3.1 Qu'est ce que l'analyse spatiale ? . . . . . . . . . . . . . . . . . . . 383.3.2 Caractéristiques spéci�ques des problèmes décisionnels . . . . . . . 39
3.4 La description du modèle spatial proposé . . . . . . . . . . . . . . . . . . . 403.4.1 Le modèle du territoire . . . . . . . . . . . . . . . . . . . . . . . . . 403.4.2 Le modèle neuronal . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.4.3 Le modèle de négociation . . . . . . . . . . . . . . . . . . . . . . . . 46
3.5 Structure générale de la stratégie d'intégration SIG-RNA proposée . . . . 503.6 Modèle MODAT-RN : Discussion . . . . . . . . . . . . . . . . . . . . . . . 513.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4 Conception et Mise en Oeuvre 534.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.2 Les outils de développement . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.1 C++ Builder 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.2.2 Delphi 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.2.3 MapInfo 7.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.2.4 MapX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.2.5 Vertical Mapper 3.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3 La description de l'architecture du prototype . . . . . . . . . . . . . . . . 564.3.1 Module SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
v
4.3.2 Module RNA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.3.3 Les �ux internes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.3.4 Les �ux externes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4 Etude de cas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.4.1 Problématique abordée . . . . . . . . . . . . . . . . . . . . . . . . . 594.4.2 Délimitation de la région d'étude . . . . . . . . . . . . . . . . . . . 594.4.3 Identi�cation des critères . . . . . . . . . . . . . . . . . . . . . . . 604.4.4 Construction des cartes critères . . . . . . . . . . . . . . . . . . . . 60
4.5 Mise en oeuvre des réseaux de neurones . . . . . . . . . . . . . . . . . . . . 634.5.1 Apprentissage et test . . . . . . . . . . . . . . . . . . . . . . . . . . 634.5.2 Construction du RNA . . . . . . . . . . . . . . . . . . . . . . . . . 644.5.3 L'application des réseaux de neurones en AT . . . . . . . . . . . . 654.5.4 Validation des résultats obtenus . . . . . . . . . . . . . . . . . . . . 70
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Conclusion Générale 72
II ANNEXES 75
A Aménagement du Territoire 76A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76A.2 Dé�nitions de L'AT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
A.2.1 Les objectifs d'AT . . . . . . . . . . . . . . . . . . . . . . . . . . . 77A.3 Problématiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78A.4 Les principes fondamentaux de l'AT . . . . . . . . . . . . . . . . . . . . . . 78
A.4.1 La coordination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79A.4.2 La coopération et la participation . . . . . . . . . . . . . . . . . . . 79
A.5 Les réalisations concrètes en AT . . . . . . . . . . . . . . . . . . . . . . . . 80A.5.1 L'Analyse du territoire . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.6 Dé�nition des critères environnementaux . . . . . . . . . . . . . . . . . . . 82A.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
B Système d'information Géographique (SIG) 84B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
B.1.1 Dé�nitions de SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . 84B.2 Les données dans les SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
B.2.1 La structure d'un SIG . . . . . . . . . . . . . . . . . . . . . . . . . 85B.2.2 Les modes de représentation des données spatiales . . . . . . . . . . 86B.2.3 Les informations géographiques . . . . . . . . . . . . . . . . . . . . 88
vi
B.3 Les avantages d'un SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89B.4 Utilités des SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90B.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
C Les Réseaux de Neurones 91C.1 Dé�nition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91C.2 Fonctions d'activations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92C.3 L'apprentissage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
C.3.1 Notion des bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93C.3.2 L'algorithme d'apprentissage . . . . . . . . . . . . . . . . . . . . . . 94
C.4 Rétropropagation des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . 95C.4.1 L'algorithme de la rétropropagation des erreurs . . . . . . . . . . . 95C.4.2 Calcul des sensibilités . . . . . . . . . . . . . . . . . . . . . . . . . . 97C.4.3 Algorithme d'entraînement . . . . . . . . . . . . . . . . . . . . . . . 97C.4.4 Critère d'arrêt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
C.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Bibliographie 100
Index 107
vii

Table des �gures
1.1 Modèle du processus décisionnel de Simon [Sim, 60] . . . . . . . . . . . . . 121.2 Phases et étapes de la procédure proposée pour l'évaluation environnemen-
tale adaptée par Pictet [Pic, 96] . . . . . . . . . . . . . . . . . . . . . . . . 131.3 Processus décisionnel pour l'aide à la décision spatiale proposé par Chakhar
[Cha, 06] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1 Neurone biologique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2 Un neurone formel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3 Représentation du Perceptron . . . . . . . . . . . . . . . . . . . . . . . . . 262.4 Représentation du modèle de Hop�eld . . . . . . . . . . . . . . . . . . . . 272.5 Connectivité dans les cartes topologiques de Kohonen . . . . . . . . . . . . 272.6 Exemple de réseau à trois couches . . . . . . . . . . . . . . . . . . . . . . . 322.7 Minimum local et vrai minimum . . . . . . . . . . . . . . . . . . . . . . . . 33
3.1 Les principales composantes du modèle de territoire . . . . . . . . . . . . . 413.2 Étapes de la conception d'une base de données . . . . . . . . . . . . . . . . 423.3 Démarche générale de la classi�cation . . . . . . . . . . . . . . . . . . . . 443.4 Les principales composantes du modèle neuronal . . . . . . . . . . . . . . . 453.5 Architecture du réseau de neurone proposé . . . . . . . . . . . . . . . . . . 463.6 Le modèle de négociation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.7 Le modèle décisionnel MODAT-RN . . . . . . . . . . . . . . . . . . . . . . 493.8 Démarche d'aide à la décision proposée . . . . . . . . . . . . . . . . . . . 51
4.1 L'architecture du prototype . . . . . . . . . . . . . . . . . . . . . . . . . . 584.2 Carte de communes et districts . . . . . . . . . . . . . . . . . . . . . . . . 604.3 Représentations schématiques d'une carte critère . . . . . . . . . . . . . . . 624.4 Le fonctionnement de RP . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.5 Architecture du PMC adopté . . . . . . . . . . . . . . . . . . . . . . . . . 654.6 Visualisation de la région d'étude . . . . . . . . . . . . . . . . . . . . . . . 664.7 Fenêtre de présentation des résultats fournis par le RNA . . . . . . . . . . 674.8 Fenêtre d'a�chage des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . 68
viii

4.9 Fenêtre d'a�chage des Taux de reconnaisance . . . . . . . . . . . . . . . . 684.10 Fenêtre d'a�chage des résultats en mode textuel . . . . . . . . . . . . . . . 694.11 Fenêtre d'a�chage des résultats en mode graphique . . . . . . . . . . . . . 694.12 Résultats de classi�cation . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
A.1 Principes de l'aménagement du territoire . . . . . . . . . . . . . . . . . . . 79A.2 Les di�érentes plans de l'analyse du territoire . . . . . . . . . . . . . . . . 82
B.1 Les 4 composantes d'un Système d'Information Géographique . . . . . . . 85B.2 La structure d'un SIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86B.3 Les données rasters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86B.4 Les données vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87B.5 Exemple des di�érentes couches thématiques . . . . . . . . . . . . . . . . . 88
C.1 Représentation matricielle d'un perceptron MultiCouches de trois couches . 95C.2 Le phénomène de sur-apprentissage et la validation croisée . . . . . . . . . 98
ix

Liste des tableaux
2.1 Les di�érentes architectures des RNA . . . . . . . . . . . . . . . . . . . . . 25
3.1 Les fonctinnalités techniques d'un SIG . . . . . . . . . . . . . . . . . . . . 43
4.1 Objectifs et outils utilisés . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.2 Les paramètres du réseau de neurones utilisé . . . . . . . . . . . . . . . . . 704.3 Les paramètres du réseau de neurones utilisé . . . . . . . . . . . . . . . . . 71
A.1 Critères et facteurs de l'adéquation du territoire pour l'habitat . . . . . . . 83
B.1 Quelques domaines d'activités d'utilisation de SIG . . . . . . . . . . . . . . 90
C.1 Fonctions d'activation a=f(n) . . . . . . . . . . . . . . . . . . . . . . . . . 92

Préambule
Jusqu'aux années 70, les systèmes de décision étaient associés à des méthodologiespropres à la recherche opérationnelle, l'analyse des données, de calcul optimal.
Le but de ces systèmes était de résoudre des problèmes par la recherche d'une solutionoptimale en calculant les maxima ou les minima de fonctions mathématiques exprimantun objectif à atteindre. Grâce aux progrès informatiques, l'une des évolutions des systèmesd'aide à la décision a été de se rapprocher des utilisateurs pour leur permettre d'intervenirdans le processus de décision [Mat et al, 99].
Cependant, l'objectif de l'aide à la décision vise à fournir des outils permettant deprogresser dans la résolution d'un problème de décision où plusieurs objectifs, souventcontradictoires, doivent être pris en compte. La divergence des objectifs nécessite la re-cherche d'une solution des meilleurs compromis possibles. Ces applications sont diverses etvariées : Intelligences arti�cielle, ingénieries, environnement, �nance, plani�cation, gestionde projet, �abilité des systèmes, . . .
L'AT est l'un des domaines qui a béné�cié de l'évolution de la discipline d'aide à ladécision, car le territoire est une espèce d'espace, constituant une dimension fondamentalede la vie en société.Dans les situations où les aménagistes doivent dé�nir leurs propositions d'aménagement entenant compte de points de vue di�érents, à la limite contradictoires, il convient d'admettrela faiblesse des approches méthodologiques utilisées par les acteurs territoriaux.La mise en application du concept de développement durable nécessite une approche globaledu territoire et une démarche à la fois pluridisciplinaire et interdisciplinaire pour l'analyseet la résolution des problèmes de développement. Pour ce faire, il est nécessaire de récol-ter, gérer, traiter et di�user une masse considérable d'informations. Les responsables del'aménagement et de la gestion du territoire sont ainsi confrontés à une colossale tâche desynthétisation pour organiser et transformer ces informations a�n d'en extraire les donnéessigni�catives et indispensables à une prise de décision éclairée et justi�ée [Pee, 01].
Dans cette optique, les aménagistes sont souvent, en face de problèmes de nature multi-critère et à référence spatiale, où ils doivent respecter quelques facteurs dans leurs choix delocalisation tels que : la distance, le coût de prestation, le choix de localisation de servicesou équipements,. . .
1

Pour répondre à ces besoins et assurer la collaboration des di�érents acteurs concernéspar cette tâche, on a besoin d'un outil d'aide à la décision e�cace ainsi qu'un processusdécisionnel à référence spatiale qui regroupe les di�érents modules concernés.
Dans la présente étude, nous nous intéressons aux problèmes décisionnels en AT. A cete�et, nous détaillons dans ce travail quelques problèmes décisionnels à référence spatiale, etnous proposons un modèle décisionnel succeptible de résoudre des problèmes décisionnelscollectifs par la dé�nition des solutions possibles et en utilisant une nouvelle approche declassi�cation à savoir les réseaux de neurones arti�ciels .
2
Première partie
Partie I
3

Introduction Générale
1. Contexte
L'objectif de tout AT, est une meilleure organisation spatiale des agents et des activitéséconomiques a�n de lutter contre les disparités spatiales .Dans cette logique, il devient pri-mordial de procéder souvent à des évaluations des di�érentes politiques et un rééquilibragespatial 1.Les territoires évoluent, d'une part un vaste mouvement de globalisation régule l'écono-mie mondiale et remet en cause la pertinence du cadre national dans sa capacité à dé�niret mettre en oeuvre des politiques publiques adaptées. D'autre part, les mécanismes dudéveloppement ne relèvent plus de logiques sectorielles cloisonnées. Les territoires et lesprojets qui s'y développent se construisent sur des démarches transversales et s'appuientsur des structures (les régions, les communautés, les pays) qui deviennent progressivementles nouveaux acteurs des politiques publiques.
Les con�its liés à l'utilisation de l'espace par la société sont nombreux. La géographiese distingue par son objet qui est l'étude de l'espace terrestre et son organisation.En géographie, nous nous intéressons aux caractéristiques qui structurent l'espace. Ce der-nier est vu en tant qu'étendue terrestre utilisée et aménagée par les sociétés. Il comprendl'ensemble des lieux et de leurs relations [Bru et al, 92]. Le géographe est capable de for-maliser des liens entre les données localisées et les systèmes d'information conçus pour lesgérer : les Systèmes d'Information Géographique (SIG). Dans une démarche de recherche, legéographe utilise alors ces systèmes pour analyser les répartitions spatiales des phénomènesque ces données transcrivent [Cun, 04].
Certaines problématiques territoriales sont de nature complexe et font intervenir denombreux critères issus de domaines di�érents, de nature qualitative et/ou quantitative.Les systèmes d'information à référence spatiale, maintenant, très répandus dans le mondescienti�que, sont reconnus comme des outils valables dans toutes les disciplines qui s'inté-ressent à la surface de la terre et à ses populations. Ces systèmes sont, également, considéréscomme une technologie d'intégration qui recouvre plusieurs disciplines et brouille les fron-
1 La distribution des ménages et des entreprises dans une région.
4

tières qui les séparent [Goo, 00].Toutefois, cette technologie sou�re encore de plusieurs lacunes dues en grande partie à unmanque de capacités analytiques capables de supporter les problèmes spatiaux. La solutionla plus di�usée pour faire évoluer les SIG vers un vrai outil d'aide à la décision est de lescoupler avec des méthodes d'analyse multicritère, car la maîtrise de la complexité des pro-blèmes décisionnels à référence spatiale nécessite l'utilisation de méthodes, de techniqueet d'outils d'analyse puissants, qui doivent non seulement gérer mais aussi analyser desdonnées géographique d'origine et de nature diverses. Récapitulons les caractéristiques desproblèmes à référence spatiale, selon [Laa, 00] :
� Les problématiques décisionnelles traditionnelles (choix, tri, rangement, description)pourraient se poser pour les problèmes décisionnels à référence spatiale avec, toutefois,une certaine prépondérance pour le type de choix, où la di�érenciation en terme dechoix d'une solution ou d'un ensemble réduit de solutions trouve son importance;
� L'information disponible, obtenue à partir de la base de données à référence spatiale,peut être appréhendée sur toutes les échelles de mesure, mais elle pourrait s'avérerinsu�sante pour le processus décisionnel (par exemple l'information de type socio-économique);
� Les types de résultats qui mesurent l'étendue de l'impact du phénomène spatial donton rend compte; ils sont de type ponctuel ou réparti.
L'AT vise essentiellement à améliorer l'équilibre fonctionnel des espaces régionaux parrapport aux revendications des acteurs territoriaux. Le processus décisionnel associé estcomplexi�é en raison de la multiplicité des données, des acteurs et des intérêts à prendreen compte à chaque phase de l'élaboration des choix [Car, 95]. Les éléments de référenceutilisés sont généralement insu�sants pour permettre aux aménagistes et aux décideurs[Pré et al, 03] :
� De gérer l'ensemble des interrelations connues dans les processus décisionnels ;� De tenir compte de la complexité de l'AT dans la perspective du développementdurable ;
� De répondre à la demande sociale d'information sur l'environnement a�n de rehausserla participation publique;
� De rechercher les consensus territoriaux facilitant le processus décisionnel.En e�et, dans les situations où les aménagistes doivent dé�nir leur proposition d'aménage-ment en tenant compte de points de vue di�érents, à la limite contradictoires, il convientd'admettre la faiblesse des approches méthodologiques classiques utilisées. Cependant,ilest possible d'aborder l'intégration des SIG et de l'analyse multicritère et de préciser lamanière d'opérer cette intégration dans le même processus décisionnel.
5

Considérons le contexte de ce travail et les implications sociales et environnementalesdes décisions, il est évident qu'il n'existe pas un visage unique de la décision en AT. Lesconditions sont très variables depuis un individu isolé jusqu'aux grands modèles pour l'aideà la décision et la négociation. Ces décisions sont :
1. Spatiales : inscrites et dé�nies en fonction de l'espace et des entités présentes ;
2. Multi Échelles : le plus souvent, il existe un ra�nement progressif d'un unique cadrede décision en fonction de l'échelle spatiale, temporelle ou organisationnelle ;
3. Multi Acteurs : par leur extension spatiale, la complexité de leurs e�ets, leur vocationconcertée, ces décisions touchent de nombreux acteurs ;
4. Multi Objectifs : les objectifs plus ou moins explicites, les acteurs peuvent être detrès nombreuses natures (humaniste, électoraliste, politique, écologique, économique,. . . ) ;
5. Multi Critères : les critères (dimensions de lecture d'un projet) sont aussi variés queles lectures possibles de l'espace et du fonctionnement social.
Le processus de décision ainsi que les méthodologies d'évaluation ont évolué rapidementces dernières années. Grâce aux innovations en technologie de l'information, le choix d'unesurface ou celui du type de l'utilisation du sol n'est plus une a�aire traditionnelle s'appuyantseulement sur les avis d'experts ou d'aménagistes, mais il est devenu de plus en plusautomatisé et amélioré a�n de répondre aux besoins de décideurs.
Le choix d'une ou, de plusieurs installations des projets urbains est très complexe dupoint de vue technique, et trés con�ictuel du point de vue social, économique et politique. Ilest confronté à la pluridisciplinarité et au devoir d'information. La solution la plus optimalese trouve dans un équilibre entre les di�érents facteurs techniques, sociaux, économiques etpolitiques. Les systèmes d'Information à Référence Spatiale, la télédétection et les réseauxde neurones se proposent comme des outils originaux et des méthodes bien adaptées à cetteproblématique illustrant au mieu l'approche multidisciplinaire de l'AT.
Depuis une dizaine d'années, les modèles connexionnistes (réseaux neuronaux arti�-ciels), ont fait leur apparition en psychologie cognitive. Ils sont aujourd'hui utilisés pourprendre en compte des phénomènes cognitifs divers : des processus de bas niveau tels quela perception visuelle ou la reconnaissance de phonèmes, le développement moteur, jusqu'àdes processus de haut niveau telles que la catégorisation, la prise de décision, la mémoirebilingue ou encore l'acquisition du langage [Arb, 95].Mais c'est en intelligence arti�cielle, et dans ses applications concrètes, qu'ils se sont leplus fortement développés et sont utilisés de manière beaucoup plus pragmatique. Les ré-seaux de neurones arti�ciels sont vus avant tout comme des outils mathématiques servantà optimiser des résolutions de problèmes.
6

Les domaines d'application sont à l'heure actuelle en pleine expansion : analyse d'élec-trocardiogrammes, simulation boursière, plani�cation d'un crédit d'assurances, tra�c �u-vial, gestion d'un réseau informatique,. . . [Arb, 95].
2. Problématique et contribution
La nature multicritère et complexe des problèmes spatiaux fait que le modèle linéairede Simon [Sim, 60] ainsi que les extensions qui y sont apportées sont insu�santes pour ré-pondre à la complexité décisionnelle de ces problèmes. La problématique traitée se résumealors à la divergence entre l'optimisation et la prise de décision en ingénierie urbaine.Dans les SIG, plusieurs approches d'intégration existent dans la littérature, nous citons : lesméthodes d'analyse multicritère, les systèmes multi agents, la logique �oue, les algorithmesgénétiques, les automates cellulaires, . . . . Chacune des approches possède ses propres avan-tages et présente ses limites d'utilisation.Le but de cette étude est de présenter une autre approche de classi�cation par utilisationdes réseaux de neurones traitant à la fois des grandes bases de données et n'exigeant pasune grande participation des décideurs. Le modèle décisionnel suggéré dans ce travail in-tègre des variantes qui contribuent aux mieux pour analyser le contexte du projet urbain.Il est basé sur une utilisation combinée de SIG 'Systèmes d'informations Géographiques' etdes réseaux de neurones arti�ciels de type : perceptron multicouche, et comme algorithmed'apprentissage : la rétropropagation du gradient.
Le réseau de neurone proposé possède une seule couche cachée complètement connectéeaux unités d'entrée, et trois neurones de sortie connectés aux unités cachées, les neuronescachés et ceux de sortie constituent des unités binaires.Le modèle décisionnel que nous proposons permet de résoudre deux problématiques enAT :
1. La problématique qui consiste en la recherche d'une surface sur une carte géogra-phique satisfaisant au mieux certains critères (degré de nuisances et de pollution,bruit, climat, équipements, critères topographiques et géotechniques, . . . );
2. La problématique qui consiste en la segmentation d'une carte géographique en régions(réseau de polygones) où on a�ecte à chaque région la meilleure utilisation possible(construction d'un hôpital, école, zone touristique, . . . ).
7

Structure du document:Le mémoire est organisé de la manière suivante :
Chapitre 1. Système d'aide à la décision :Ce chapitre présente un bref panorama des systèmes d'aide à la décision. Nous intro-duisons, dans un premier temps, quelques concepts de base utilisés en AD, puis nousdécrivons quelques processus décisionnels en AT.
Chapitre 2. Les réseaux de neurones :Dans ce chapitre, nous exposons quelques généralités sur les RNA, suivies par unebrève présentation de quelques architectures et modèles des plus célèbres dans cecontexte. Les di�érents types d'apprentissage, et de généralisation sont égalementdécrits. Par la suite, nous introduisons le perceptron multicouches ainsi que la mé-thode de rétropropagation du gradient. L'application des RNA en AD spatiale estabordée à la �n de ce chapitre.
Chapitre 3. Le modèle proposé :Ce chapitre décrit le modèle d'aide à la décision que nous proposons et qui tente derépondre aux besoins de l'AT, ce modèle propose une intégration SIG et RNA dansune approche structurée et globale de la problématique traitée.
Le chapitre 4. Mise en oeuvre :L'utilisation du modèle décisionnel suggéré pour réaliser des cartes d'adéquation duterritoire constituant un support pour la prise de décision est abordée, dans ce cha-pitre après avoir présenter un aperçu sur l'environnement de développement utilisé.
Nous terminons par une conclusion, où nous suggérons aussi des développements futurs.Trois annexes complètent le manuscrit. Le premier décrit les principes fondamentaux del'AT, le deuxième introduit les SIG et le troisième annexe présente les Réseaux de Neuronesainsi que les algorithmes associés.
8

Chapitre 1
Aide à la Décision : État de l'art
1.1 Introduction
La discipline de l'aide à la décision a fait l'objet de recherches menées par plusieursscienti�ques issus de di�érents domaines, elle a donc constitué un pôle attractifpour diverses études et applications. Parmi ces applications, nous retrouvons plu-sieurs cas relatifs à des problèmes à référence spatiale [Anc, 95],[Roy, 85],[Sim, 60],et[Kee, 76] : plani�cation urbaine, transport, gestion des ressources en eau, gestionenvironnementale, évaluation du territoire, localisation des activités industrielles,. . .
A�n de mieux cerner la portée de l'application des méthodes d'aide à la décision auxproblématiques territoriales et la nécessité d'améliorer les méthodes classiques , ilconvient de faire un bref rappel de l'évolution de ce champ d'études.
Ce chapitre a pour but de donner un aperçu sur les notions élémentaires de l'aide à
la décision en général et sur l'aide à la décision multicritère en particulier.
9

1.2 Concepts fondamentaux de l'Aide à la Décision
1.2.1 Dé�nition de l'aide à la décision
Bernard Roy [Roy, 85] dé�nit l'aide à la décision comme étant: "L'activité de celuiqui, prenant appui sur des modèles clairement explicités mais non nécessairement complè-tement formalisés, aide à obtenir des éléments de réponses aux questions que se pose unintervenant dans un processus de décision, éléments concourant à éclairer la décision etnormalement à recommander , ou simplement à favoriser, un comportement de nature àaccroître la cohérence entre l'évolution du processus d'une part, les objectifs et le systèmede valeurs au service desquels cet intervenant se trouve placé d'autre part" .En e�et, l'appréhension des préférences du décideur nécessite une bonne dose d'informa-tions pour permettre une modélisation adéquate.
1.2.2 Décision et décideur
Dans la littérature spécialisée, décider est souvent l'acte d'" identi�er et résoudre lesproblèmes que rencontre toute organisation ". Dans cette dé�nition, c'est le terme "ré-soudre" qui soulève le plus de critiques et est même considéré comme inapproprié pourfaire état des problèmes complexes, où le concept de décision ne peut être séparé de celuidu processus de décision [Roy, 85]. Nous allons dé�nir, dans ce qui suit, les notions dedécision, de décideur, de décision de groupe et de processus de décision.
1. Décision: Il est di�cile de dé�nir le terme décision [Pom, 97]. Cependant, ce dernierréfère souvent à � un choix entre plusieurs actions, solutions �, chacune est suscep-tible d'être implémentée. En face d'un problème de décision, le décideur ne se basepas seulement sur des techniques scienti�ques et d'outils d'analyse mais égalementsur sa créativité. De ce fait, il est souvent admis que la prise de décision est à la foisun art et une science [Van, 60]. On peut citer quelques exemples de décisions dansl'espace géographique, que la plupart des décideurs sur le territoire, sont menés àprendre :Quel est le meilleur itinéraire pour construire l'autoroute? Quel est le meilleur sitequ'il faudrait choisir pour implémenter un barrage, une centrale hydroélectrique, unaéroport, un site d'enfouissement de déchets,. . . ?
2. Décideur: Le décideur, est un intervenant principal à qui s'adresse l'aide à la déci-sion et occupe une place centrale dans le processus de décision. La notion de décideurdésigne en dernier ressort : "l'entité qui apprécie le "possible" et les �nalités, exprimeles préférences et est sensé les faire prévaloir dans l'évolution du processus "[Roy, 85].Dans les problèmes relativement complexes, le décideur est généralement guidé parl'homme d'étude dont le rôle consiste entre autres à : "expliciter le modèle, à l'ex-
10

ploiter en vue d'obtenir des éléments de réponses, à éclairer le décideur sur les consé-quences de tel ou tel comportement en lui rendant intelligibles, éventuellement enprescrivant (préconisant, conseillant) une ou une série d'actions ou encore une mé-thodologie" [Roy, 85].
1.2.3 Décision de groupe : participation et négociation
Dans la réalité, les problèmes décisionnels suscitent des intérêts divergents, appréhendéspar des points de vues di�érents et par conséquent, concernant des acteurs (décideurs)multiples.
1. La participation : Dans la décision de groupe, une des options qui consiste à atté-nuer les e�ets des obstacles à la prise de décision collective est la démarche partici-pative.Dans [Met, 92], dé�nit la participation comme étant " l'ensemble des possibilités dé-mocratiques o�ertes à la population pour collaborer à la prise de décision. Une parti-cipation authentique est alors un engagement actif des citoyens dans la résolution desproblèmes qu'ils jugent essentiels et pertinents dont ils peuvent e�ectivement concou-rir à contrôler des solutions".Fondé sur une base volontariste, la démarche participative consiste à développer uneculture de participation, dans laquelle on met à contribution l'expérience et le savoirfaire 1 de chaque participant.
2. La négociation : Di�érentes dé�nitions ont été proposées pour le concept de lanégociation. Nous retiendrons celle de Dupont [Dup, 94] : " la négociation est uneactivité mettant face à face deux ou plusieurs acteurs, qui confrontés à des divergencesse sentent interdépendants, choisissent la recherche e�ective d'un rangement pourmettre �n à cette divergence et de cette manière créer, maintenir ou développer unerelation entre eux ".Comment évaluer l'impact d'un projet d'aménagement sur l'environnement?Ce problème, qui se pose désormais avec acuité un peu partout dans le monde, suscitegénéralement des débats. L'intérêt des méthodes multicritères réside dans le fait quetoutes les di�cultés relatives au choix des critères et de leur pondération peuventêtre négociées. L'étude d'impact environnemental serait ainsi au service d'une vraienégociation environnementale [Sim, 90].
1 Cette expression rassemble deux notions essentielles le "Savoir" qui est représenté par l'acquisition
d'une forme de connaissance, le "Faire" qui est l'art de mettre en action cette connaissance au sein d'un
objectif déterminé.
11

1.2.4 Processus de décision
Mintzberg [Min et al, 76] propose la dé�nition : "le processus décisionnel est considérécomme un ensemble d'activités déclenché par un stimulus, et aboutissant à un engagementspéci�que à l'action ".Simon [Sim, 60] a proposé un modèle du processus décisionnel, dé�ni en trois grandesphases :
1. Celle relative à l'intelligence pour identi�er le problème;
2. La conception pour générer les solutions possibles et dé�nir les critères ;
3. Le Choix pour sélectionner une (ou plusieurs) solutions parmi celles retenues auterme de la phase précédente (Fig. 1.1).
Fig. 1.1 � Modèle du processus décisionnel de Simon [Sim, 60]
Ce modèle, qui est le plus connu dans le domaine de l'aide à la décision, a inspiré plusieursautres travaux qui lui ont apporté des modi�cations, et notamment des extensions allantau delà de l'étape du choix pour l'implantation et la mise en oeuvre des résultats. Parmices travaux, nous citons le modèle proposé par Pictet [Pic, 96], qui propose une démarched'aide à la décision adaptée au domaine de l'environnement. Elle comprend trois phasesprincipales, la structuration du modèle, l'exploitation du modèle et la concrétisation desrésultats. Cette procédure couvre la problématique décisionnelle dans son ensemble, c'est-à-dire depuis l'émergence d'un problème, jusqu'au contrôle de la mise en oeuvre des décisions.
12
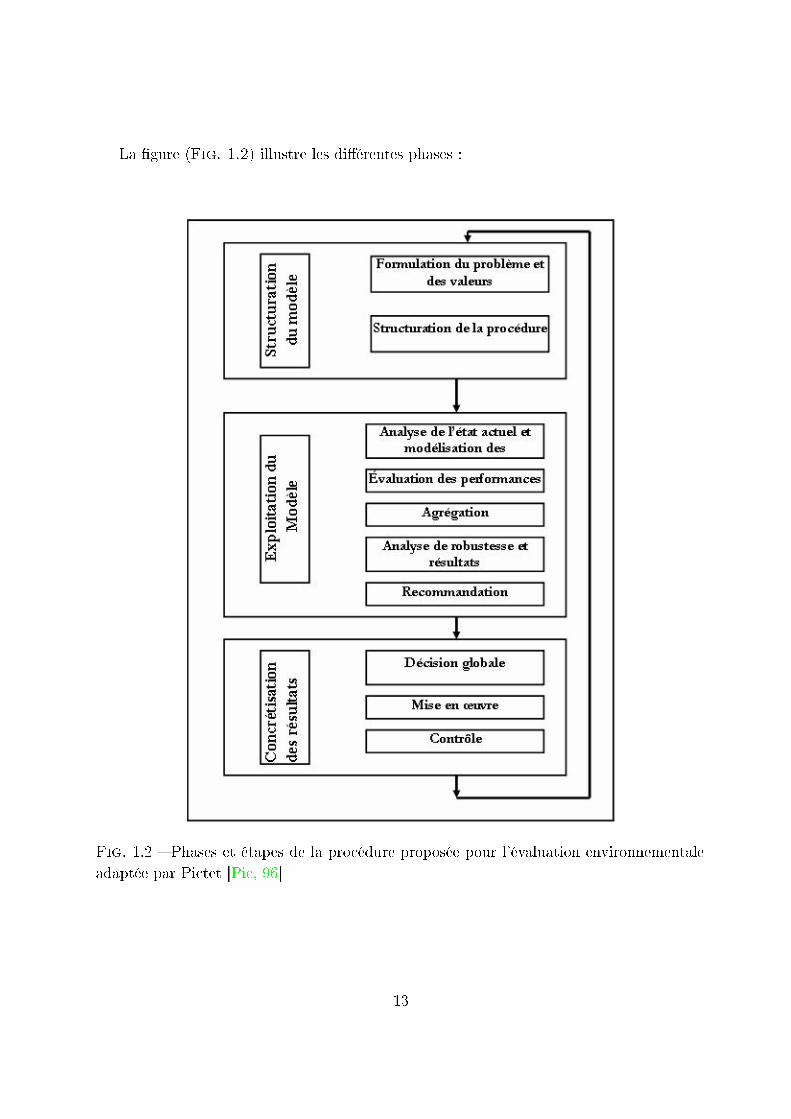
La �gure (Fig. 1.2) illustre les di�érentes phases :
Fig. 1.2 � Phases et étapes de la procédure proposée pour l'évaluation environnementaleadaptée par Pictet [Pic, 96]
13
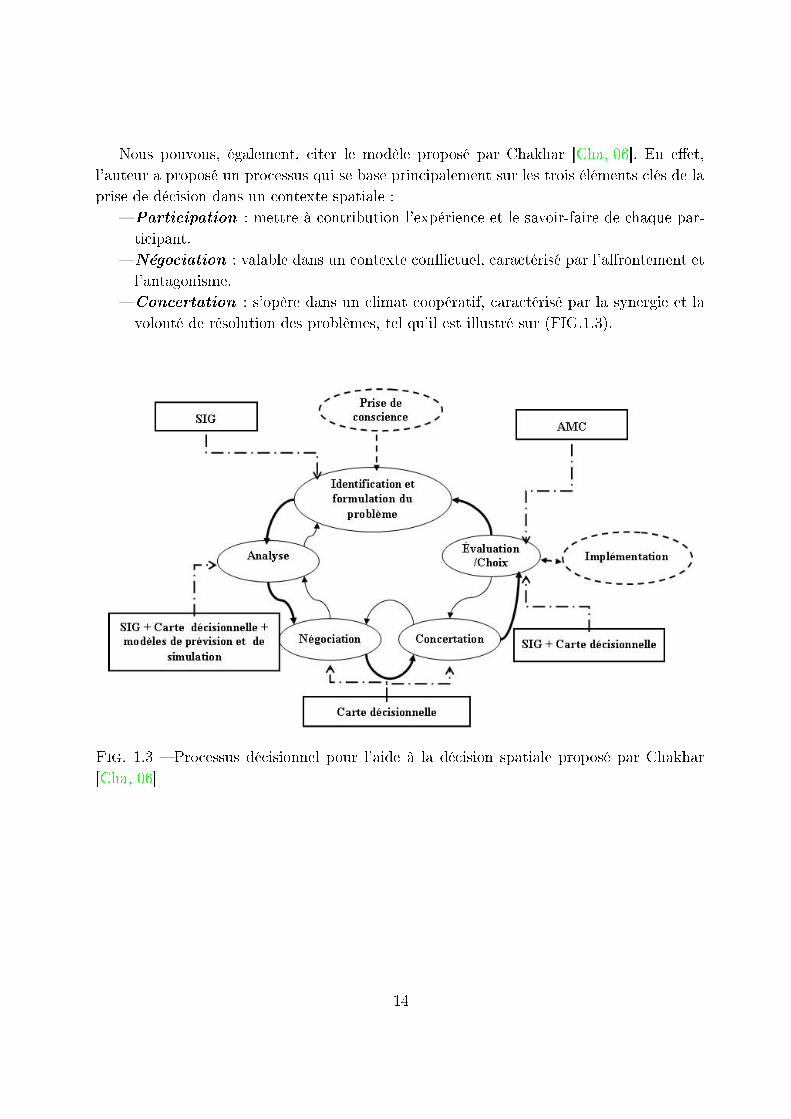
Nous pouvons, également, citer le modèle proposé par Chakhar [Cha, 06]. En e�et,l'auteur a proposé un processus qui se base principalement sur les trois éléments clés de laprise de décision dans un contexte spatiale :
� Participation : mettre à contribution l'expérience et le savoir-faire de chaque par-ticipant.
� Négociation : valable dans un contexte con�ictuel, caractérisé par l'a�rontement etl'antagonisme.
� Concertation : s'opère dans un climat coopératif, caractérisé par la synergie et lavolonté de résolution des problèmes, tel qu'il est illustré sur (FIG.1.3).
Fig. 1.3 � Processus décisionnel pour l'aide à la décision spatiale proposé par Chakhar[Cha, 06]
14

1.3 Les systèmes d'aide à la décision en AT
1.3.1 L'Aide MultiCritère à la Décision (AMCD)
Vincke [Vin, 89] a dé�ni l'AMCD ainsi :"l'aide multicritère à la décision vise, commeson nom l'indique à fournir à un décideur des outils lui permettant de progresser dans larésolution d'un problème de décision où plusieurs points de vue, souvent contradictoires,doivent être pris en compte".
L'aide multicritères à la décision oeuvre à apporter un éclairage et des explications àune catégorie de problèmes ou, selon Martel [Mar, 88] :
� Plusieurs critères quantitatifs et qualitatifs sont pris en considération;� Ces critères sont souvent hétérogènes;� Ces critères sont généralement con�ictuels;� Ces critères sont généralement considérés d'inégale importance.Plusieurs modèles et algorithmes d'AMCD ont été proposés par les chercheurs des deux
côtés de l'Atlantique.Selon mousseau [Mou, 05], l'application de méthodologies multicritère d'aide à la dé-
cision dans des processus de décision issus de problèmes réels permet de tester la validitéopérationnelle des concepts et outils ; ceci est d'autant plus pertinent en ce qui concerneles outils d'élicitation des préférences. Ces applications visent bien sûr aussi à améliorer lesprocessus de décision en question par l'introduction d'un modèle "supportant" cette déci-sion. Ces applications conduisent souvent à ouvrir des problèmes nouveaux et des champsde recherche à explorer.Pour l'approche multicritère, il ne s'agit nullement de rechercher une vérité cachée maisplûtot d'aider le décideur à maitriser les données de son problème, souvent complexes, etainsi à progresser vers une solution. celle-ci dépend de [Vin, 89]:
� La personnalité du décideur;� Le contexte dans lequel s'opère l'aide à la décision;� La façon dont on formule le problème;� La méthode d'aide à la décision utilisée.Par ailleurs, les développements informatiques ont rendu possible la mise en oeuvre et
le développement des méthodes multicritère, lesquelles, à leur tour ont entraîné la multipli-cation des terrains d'application dans les organisations privées et publiques, l'industrie, lecommerce, la plani�cation et la gestion, le système bancaire, l'agriculture, la plani�cationrégionale et environnementale,. . .L'approche Multicritère de l'aide à la décision, qui a connu un essor important au cours deces dernières années, apporte des éléments de réponse au problème de l'évaluation selon demultiples points de vue contradictoires. La revue de la littérature nous permet de constaterque les outils d'aide à la décision multicritère ont fait l'objet d'applications diversi�ées dans
15

des domaines tels que:� L'environnement : Citons le travail de Brousseau [Bro, 02], dont l'étude est baséesur l'utilisation des SIG (Système d'Information Géographiques) et d'analyse mul-ticritère pour la prise en compte des utilisateurs de la forêt lors de la plani�cationdes opérations forestières. De sa part, Risse [Ris, 03] utilise les méthodes multicri-tères pour une évaluation environnementale stratégique et propose un processus dedécision public. Citons aussi le travail de Graillot [Gra et al, 98], relatif aux systèmesd'information environnementaux et d'Aide à la Décision. Dans ce travail, il a dé�nitle système SIGURA : méthodes et outils pour l'aménagement du territoire,. . .
� La gestion des ressources naturelles : Dans [Rac, 03], l'auteur est arrivé à fairele choix de stratégies de limitation des impacts des eaux de ruissellement, et dans[Vai, 02], l'auteur établit un équité ainsi que des scénarios mondiaux de réductiondes gaz à e�et de serre: une approche multicritère dynamique.
� Réseaux de transport urbain où les méthodes multicritère permettent [You, 04]:
1. D'évaluer l'apport du réseau en un point ou en un ensemble de points d'unterritoire donné ;
2. De comparer plusieurs variantes de réseau d'un point de vue local ;
3. D'évaluer les hiérarchies des lieux que les réseaux organisent dans le territoire ;
4. D'évaluer localement et globalement les e�ets qu'entraînent sur le territoire lesmodi�cations des réseaux qui les traversent;
5. D'identi�er et d'évaluer les problèmes d'accès au réseau selon des points devue désagrégés (accès aux équipements, aux lieux d'activité commerciale ouculturelle,. . . ) immédiatement perceptibles par les populations et les décideursurbains concernés ;
6. D'évaluer en�n l'adéquation d'un réseau de transport à la distribution territo-riale des activités urbaines.
Plusieurs travaux se présentent dans ce domaine, citons les plus récents : choix devariantes d'infrastructures routières : un travail réalisé par Tille [Til, 00] et celui deBorken [Bor, 05] concernant l'évaluation des indicateurs environnementales pour letransport urbain et utilisant la méthode multicritère ELECTRE III.
� La plani�cation minière, La gestion énergétique : Choix du système de distri-bution d'énergie dans un quartier [You, 04].
� La Gestion des déchets, la localisation, la plani�cation économique, lagestion �nancière et bancaire : L'octroi de subventions où nous trouvons, l'uti-lisation de la méthode PROMETHEE et ELECTRE TRI. Dans [Ber, 04], l'auteurtouche dans ce travail au domaine de la plani�cation et au développement durable. Ila proposé de nouvelles pratiques d'aménagement régional. Pelletier [Pel, 99], essaye
16

dans son étude de faire une plani�cation des techniques d'aide à la décision et à laplani�cation sanitaire régionale.
� L'évaluation et la sélection de projets : Les méthodes d'analyse multicritèresont très utilisées dans le domaine d'AT, où nous retrouvons une foule de références :Dans [Lao, 05], l'auteur arrive à établir une contribution pour l'aide à l'évaluation deprojets de déplacements urbains, et dans [Joe, 97], MEDUSAT est proposé pour lalocalisation de l'emplacement d'une usine de traitement des déchets en Tunisie. Plusrécement, Chakhar [Cha, 05] réalise des cadres conceptuels intégrant trois élémentsclés de la prise de décision dans un cadre spatial: La participation, la négociation etla concertation, et dans [Tso, 04], l'auteur introduit le concept de processus d'aide àla décision comme extension de celui de processus de décision, il subdivise le proces-sus d'aide à la décision en quatre phases : représentation du problème, formulationdu problème, évaluation et recommandation �nales. Dans [Ham et al, 06], les auteursoptent pour l'utilisation de l'intégrale de Choquet comme opérateur d'agrégationdans les AMCD utilisant la méthode ELECTRE TRI. Et dans [Ham et al, 07], ilsproposent un processus décisionnel spatial utilisant les AMCD et les mésures �oues.Cette liste n'est certainement pas exhaustive et les applications concrètes d'outilsd'aide à la décision restent toujours possibles.Dans cette optique, les méthodes associées connaissent aujourd'hui de multiples ap-plications dans des domaines aussi variés que le dépouillement d'appels d'o�re, lechoix de localisation, la programmation d'investissements, le lancement de nouveauxproduits, la gestion de l'eau, la lutte contre la pollution, la sélection de projets derecherche.
1.3.2 Les Systèmes Multi Agents
Dans le concert des travaux sur la vie et l'intelligence arti�cielle, les Systèmes MultiAgents (SMA) permettent d'établir des relations spatiales plus complexes que la contiguïtéainsi que des relations non explicitement spatiales. Malgré leur jeune âge, les systèmes multiagents connaissent une grande expansion et touchent une grande variété de domaines d'ap-plications :Drogoul [Dro, 93] modélise le fonctionnement d'une fourmilière en attribuant aux fourmisdes statuts d'agents dont les caractéristiques varient avec les di�érentes spatialisations deces insectes au sein de la société des fourmis. Aussi, Nils Ferrand dans [Fer, 97] a proposéune démarche qui s'appuie sur deux modèles : le système SMAALA, pour l'aide à la loca-lisation d'infrastructures et SANPA, un système pour l'aide à la négociation de projets enAT, de façon distribuée et asynchrone. [Ham et al, 08] proposent un modèle d'intégrationSIG - SMA par utilisation d'un nouveau protocole de négociation. Dans [Bon et al, 01] ontsimulé l'usage de la forêt par une communauté de bergers, chacun ayant un troupeau, ils
17

arrivent à démontrer qu'il existe une rétroaction très forte entre la manière de construireles représentations utilisées pour les choix d'actions et la transformation en retour des re-présentations elles-mêmes.D'autres méthodes en intelligence arti�cielle sont mises en oeuvre dans le domaine urbain,comme la logique �oue. De nombreux aspects de la logique �oue sont utilisés commedes outils de classi�cation et d'évaluation pour l'utilisation du sol. Par exemple, Wang[Wan et al, 90] décrit une méthode ainsi qu'une représentation d'information et de trans-formation �oue dans le contexte des SIG, permettant l'élaboration d'une méthode d'éva-luation d'aptitude �oue.Plusieurs études utilisent la notion de la fonction d'appartenance �oue en liaison avecl'AMCD pour le développement des SIG pour une utilisation adéquate du sol [Jia, 00],[Ben et al, 96].Les principales di�cultés liées à l'application de l'approche de la logique �oue pour l'ATest l'absence d'une méthode dé�nitive pour la détermination de la de fonction de logique�oue (A fuzzy membership function type) [Mal, 04].
1.3.3 Les Réseaux de Neurone Arti�ciels
Les réseaux de neurones sont déjà largement exploités dans les domaines de la classi�-cation ainsi que la reconnaissance des formes ou de la parole.Dans l'optique de l'intégration des RNA en AT, nous retrouvons plusieurs références oùl'association (SIG-RNA) était novatrice au service de l'évaluation environnementale et afourni, par conséquent, des résultats très satisfaisants.Selon Thurston [Thu, 02], l'intégration des RNA dans les SIG peut être expérimentée dansbeaucoup d'applications pour améliorer les processus décisionnels. Wang [Wan, 94] utilisela classi�cation par des réseaux de neurones arti�ciels a�n d'estimer le niveau de conve-nance aux di�érents types d'agriculture. Dans [Ban, 89] l'auteur a proposé un systèmepour l'évaluation, ce dernier intègre à la fois un système expert, SIG, et les RNA. Dansune étude similaire à Wang, Sui [Sui, 93] a intégré Réseau de neurones arti�ciels de typerétro-propagation à un SIG pour développer une analyse pertinente. Il a démontré que leréseau de neurones basés sur approche de modélisation SIG peut se rapprocher des déci-sions d'expert. Dans [You et al, 07], les auteurs proposent un modèle décisionnel en ATpar l'ulisation du SIG et des RNA, ce modèle est accompagné d'une démarche d'aide à ladécision.
Aussi, les applications SIG-AG (Algorithme Génétique) pour la résolution des di�é-rentes problématiques d'AT ont gagné en popularité ces dernières années. [Bro, 02] a dé-montré que les AG peuvent améliorer les approches classiques pour l'utilisation adéquatedu sol grâce à leurs capacités d'identi�cation des sites spéci�ques pour la localisation desactivités.
18

[Mat et al, 99] suggèrent qu'un AG peut être un élément clé de l'AT et de l'appui à lagestion du système.
les Automates Cellulaires peuvent aussi être appliqués dans les approches multi-modèle [Eng et al, 99], et même dans l'intégration des SIG et AMCD pour une évaluationmulticritère [Wu, 98].L'intégration de l'IA et les SIG est un domaine relativement nouveau de recherche etde développement de logiciels. Les méthodes d'évaluation actuellement disponibles sontnombreuses et variées, elles présentent toutes des avantages et des inconvénients. Dans cetravail, nous essayons d'intégrer les réseaux de neurones dans un SIG au service de la prisede décision spatiale. En e�et, les réseaux de neurones formels connaissent depuis quelquesannées un développement important, constituant une méthodologie de plus en plus utiliséedans de nombreux domaines allant de la recherche fondamentale à des applications de datamining, de prévisions commerciales et gestion des risques, en production industrielle,. . .
1.4 Conclusion
Le développement des méthodes basé sur l'intégration des outils informatiques avec desSIG pour l'exploitation adéquate du sol a évolué au cours des 30 dernières années.Dans ce chapitre nous avons présenté quelques concepts fondamentaux de l'aide à la déci-sion, nous avons présenté également un extrait des travaux d'intégration SIG avec d'autresoutils informatiques tels que les AMC, SMA, Logique Flou, AG et les Automates Cellu-laires.En résumé, les applications d'intégration SIG et IA fournissent des systèmes d'aide à la déci-sion. Notons aussi que les techniques de l'IA pourraient examiner des problèmes complexesde prise de décision spatiale. Plus précisément, l'approche IA est généralement plus adap-table à celles des méthodes traditionnelles dans les situations comportant [Gim et al, 94]:
(i) De grandes bases de données ;(ii) Les modes cachés important des tâches de prise de décision;(iii) Les opinions de l'homme et les composantes mal dé�nies de la situation dedécision.
Le chapitre suivant est consacré à la description des RNA, nous abordons quelques notionsde bases et quelques modèles, puis nous détaillons le modèle du RNA utilisé dans notreétude .
19

Chapitre 2
Réseaux de Neurones
2.1 Introduction
Les réseaux de neurones constituent une méthodologie de plus en plus utilisée dansde nombreux domaines allant de la recherche fondamentale à des applicationsde datamining, de prévisions commerciales et gestion des risques, en productionindustrielle.
Le principe des réseaux de neurones arti�ciels est né dans les années 40 à partir
d'une analogie avec le système nerveux humain. Le terme désigne aujourd'hui
un très grand nombre de modèles, dont beaucoup n'ont plus grande chose à voir
avec le fonctionnement des neurones biologiques, et doit donc être pris comme
une métaphore. Ces di�érents modèles ont en commun l'utilisation d'automates,
appelés neurones ou unités, capables de réaliser chacun un traitement très simple et
d'échanger des informations entre eux. Dans ce chapitre nous décrivons le principe
et les concepts de base qui conduisent à l'élaboration et l'utilisation d'un réseau
de neurones.
20

2.2 Généralités
Nous abordons dans ce qui suit certaines notions de base relatives aux réseaux deneurones, ainsi que les di�érentes modèls et types existant dans la littérature.
2.2.1 Le neurone biologique : Principe général
Les réseaux de neurones arti�ciels ont été construits au départ sur la base du modèledu cerveau humain. Les premiers travaux ont été écrits dans les années 1940 ([Mcc, 43],[Heb, 49]), mais l'essor réel de cette technologie date des années 1980 ([Hop, 82], [Cle, 86]).Le cerveau humain est constitué d'environ 1011 cellules nerveuses appelées neurones (Fig.2.1). Ces cellules par lesquelles transitent des informations sous forme d'impulsions élec-triques, sont liées entre elles par des liaisons synaptiques.
Un neurone biologique est composé [Bei, 02] :
1. D'un corps cellulaire (soma) : contient le noyau de la cellule neuronale. Il estle centre où s'e�ectue la synthèse des constituants nécessaires à la structure et auxfonctions du neurone.
2. De dendrites : sont des prolongements du corps cellulaire qui acheminent l'infor-mation à l'intérieur du soma.
3. D'un axone : Une fois l'information traitée dans le corps cellulaire, elle est entraînéele long de l'axone.
4. Des rami�cations terminales de l'axone : Ces rami�cations sont responsablesde la transmission des signaux vers les autres neurones.
Les neurones sont connectés entre eux via des synapses qui sont les zones de contact entreles neurones, qui transmettent l'in�ux nerveux.
21

Fig. 2.1 � Neurone biologique
2.2.2 Le neurone formel
Le neurone formel qui représente la brique de base des RNA est un automate dont lemodèle s'inspire de celui d'un neurone biologique. Il e�ectue une somme pondérée suivantles poids synaptiques des informations reçues provenant de neurones voisins. A cette sommeest appliquée une fonction seuil. Le résultat est transmis en sortie à d'autres neurones.Un poids synaptique positif correspond à une synapse excitatrice, et un poids synaptiquenégatif correspond à une synapse inhibitrice. Ces poids sont modi�és au cours du processusd'apprentissage du réseau de neurones.Ainsi, on peut le décrire par les éléments suivants (pour un neurone d'indice i):
� Son état (aussi appelé activation) a , qui peut être une valeur réelle ou booléenne.Cet état est généralement choisi comme valeur de sortie du neurone ;
� Ses connexions d'entrée auxquelles sont associés des poids wij (j est l'indice du neu-rone partageant la connexion) ;
� Sa fonction d'entrée réalisant un prétraitement (généralement une somme pondérée)des entrées ;
� Sa fonction d'activation (ou de transfert) f , qui calcule à partir du résultat de lafonction d'entrée l'activation du neurone.
Le modèle mathématique d'un neurone arti�ciel est illustré par la �gure (F ig. 2.2).Un neurone formel est essentiellement constitué d'un intégrateur qui e�ectue la sommepondérée de ses entrées et le résultat (n) de cette somme est ensuite transformé par une
22

fonction de transfert f qui produit la sortie a du neurone.
n =R∑
j=1
wi,jPj et a = f(n)
Fig. 2.2 � Un neurone formel
2.2.3 Réseaux de Neurones Arti�ciels
Plusieurs dé�nitions se présentent dans la littérature, selon Jodouin: " Un réseau deneurone est un graphe orienté et pondéré. Les noeuds de ce graphe sont des automatessimples nommés neurones formels (ou unité connexionnistes) et dotés d'un simple état in-terne, l'activation, par lequel ils in�uencent les autres neurones du réseau. Cette activité sepropage dans le graphe le long d'arcs pondérés appelés liens synaptiques ; par extension, onappelle poids synaptique la pondération d'un lien synaptique. La règle qui détermine l'ac-tivation d'un neurone en fonction de l'in�uence de ses paires est appelée règle ou fonctiond'activation " [Jod, 94].
Fonctions d'activations : Cette fonction permet de dé�nir l'état interne du neurone enfonction de son entrée totale. Di�érentes fonctions de transfert pouvant être utilisées commefonctions d'activation du neurone sont énumérées par le tableau (Tab. c.1) (Annexe C).Les trois les plus utilisées sont les fonctions "seuil", "linéaire" et "sigmoïde".
D'une autre manière, un réseau de neurones formels est constitué d'un grand nombrede cellules de base interconnectées. De nombreuses variantes sont dé�nies selon le choixde la cellule élémentaire, de l'architecture du réseau et de sa dynamique . Il se caractériseprincipalement par le type des unités utilisées et par sa topologie. On distingue souventdeux types de neurones particuliers dans un réseau : les neurones d'entrée recevant lesdonnées du monde extérieur, et les neurones de sortie fournissant le résultat du traitemente�ectué. Les autres unités sont généralement quali�ées de cachées.
23

2.2.4 Quelques modèles de RNA
Les connexions entre les neurones qui composent le réseau décrivent la topologie dumodèle. Elles peuvent être quelconques, mais le plus souvent il est possible de distinguerune certaine régularité. Le tableau (Tab. 2.1) présente quelques architectures [Tou, 92].
Réseaux de neurones Description ArchitectureRéseaux mul-ticouches
Les neurones sont rangés parcouches. Il n'y a pas de connexionentre les neurones d'une mêmecouche et les connexions ne se fontqu'avec les neurones des couchesen avale. Par extension, on ap-pelle couche d'entrée l'ensembledes neurones d'entrée, couche desortie l'ensemble des neurones desortie. Les couches intermédiairesn'ayant aucun contact avec l'ex-térieursont appelées couches ca-chées.
Réseaux àconnexionslocales
Il s'agit d'une structure multi-couche. Chaque neurone entretiendes relations avec un nombre ré-duit et localisé de neurones dela couche en aval. Les connexionssont donc moins nombreuses quedans le cas d'un réseau multi-couche classique.
Suite page suivante . . .
24
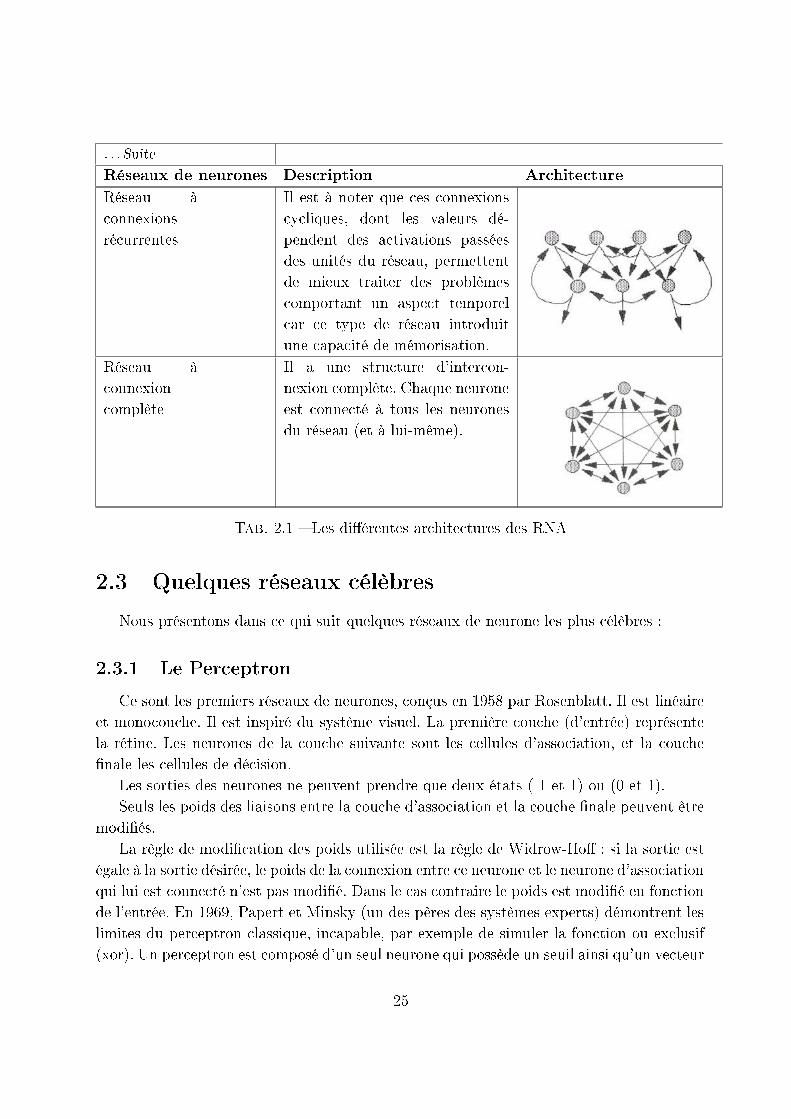
. . . Suite
Réseaux de neurones Description ArchitectureRéseau àconnexionsrécurrentes
Il est à noter que ces connexionscycliques, dont les valeurs dé-pendent des activations passéesdes unités du réseau, permettentde mieux traiter des problèmescomportant un aspect temporelcar ce type de réseau introduitune capacité de mémorisation.
Réseau àconnexioncomplète
Il a une structure d'intercon-nexion complète. Chaque neuroneest connecté à tous les neuronesdu réseau (et à lui-même).
Tab. 2.1 � Les di�érentes architectures des RNA
2.3 Quelques réseaux célèbres
Nous présentons dans ce qui suit quelques réseaux de neurone les plus célèbres :
2.3.1 Le Perceptron
Ce sont les premiers réseaux de neurones, conçus en 1958 par Rosenblatt. Il est linéaireet monocouche. Il est inspiré du système visuel. La première couche (d'entrée) représentela rétine. Les neurones de la couche suivante sont les cellules d'association, et la couche�nale les cellules de décision.
Les sorties des neurones ne peuvent prendre que deux états (-1 et 1) ou (0 et 1).Seuls les poids des liaisons entre la couche d'association et la couche �nale peuvent être
modi�és.La règle de modi�cation des poids utilisée est la règle de Widrow-Ho� : si la sortie est
égale à la sortie désirée, le poids de la connexion entre ce neurone et le neurone d'associationqui lui est connecté n'est pas modi�é. Dans le cas contraire le poids est modi�é en fonctionde l'entrée. En 1969, Papert et Minsky (un des pères des systèmes experts) démontrent leslimites du perceptron classique, incapable, par exemple de simuler la fonction ou exclusif(xor). Un perceptron est composé d'un seul neurone qui possède un seuil ainsi qu'un vecteur
25

de poids synaptiques ajustables (Fig. 2.3), tout comme le modèle de neurone de McCullochPitts [Mcc, 43] :
Fig. 2.3 � Représentation du Perceptron
2.3.2 Les Perceptrons MultiCouches (PMC)
Ils constituent une amélioration du perceptron comprenant une ou plusieurs couchesintermédiaires dites couches cachées. Ils utilisent, pour modi�er leurs poids, un algorithmede rétropropagation du gradient (RP), qui est une généralisation de la règle de Widrow-Ho�. Il s'agit toujours de minimiser l'erreur quadratique, ce qui est assez simple quand onutilise une fonction f dérivable (la sigmoïde par exemple). On propage la modi�cation despoids de la couche de sortie jusqu'à la couche d'entrée.
Les PMC agissent comme un séparateur non linéaire et peuvent être utilisés pour laclassi�cation, le traitement de l'image ou l'aide à la décision [Bou, 91].
2.3.3 Les réseaux de Hop�eld
Un réseau de Hop�eld réalise une mémoire adressable par son contenu. Il s'agit d'unréseau constitué de neurones de McCulloch et Pitts (à deux états,-1 et 1 ou 0 et 1), dontla loi d'apprentissage est la règle de Hebb (1949), qui veut qu'une synapse améliore sonactivité si et seulement si l'activité de ses deux neurones est corellée (C'est à dire que lepoids wij d'une connexion entre un neurone i et un neurone j augmente quand les deuxneurones sont activés au même temps). La �gure (Tab. 2.4) présente le modèle de hop�eld.
26

Fig. 2.4 � Représentation du modèle de Hop�eld
2.3.4 Les réseaux de Kohonen
Contrairement aux réseaux de Hop�eld où les neurones sont modélisés de la façon laplus simple possible, on recherche ici un modèle de neurone plus proche de la réalité.
Ces réseaux sont inspirés des observations biologiques du fonctionnement des systèmesnerveux de perception des mammifères. Une loi de Hebb modi�ée (tenant compte de l'oubli)est utilisée pour l'apprentissage. La connexion est renforcée dans le cas ou les neurones reliésont une activité simultanée, et diminuée dans le cas contraire, dans les carte de Kohonen, chaque cellule de la couche supérieure est reliée a l'ensemble des cellules de la carteinférieure (Fig. 2.5) . Les réseaux de Kohonen ont des applications dans la classi�cation,le traitement de l'image, l'aide à la décision et l'optimisation [Ley et al, 03].
Fig. 2.5 � Connectivité dans les cartes topologiques de Kohonen
27

2.4 L'apprentissage des réseaux de neurones
L'un des principaux attraits des RNA concerne les capacités d'apprentissage que pos-sèdent certains modèles. On entend généralement par apprentissage la modi�cation auto-matique des poids des connexions ou plus rarement du nombre et de l'organisation desneurones, a�n d'adapter le traitement e�ectué par le réseau à une tâche particulière. L'ap-prentissage est en général un processus graduel, itératif, où les poids du réseau sont modi�ésplusieurs fois avant d'atteindre leurs valeurs �nales.
Les principales applications des réseaux de neurones sont l'optimisation et l'apprentis-sage. En apprentissage, les réseaux de neurones sont essentiellement utilisés pour [Jod, 94]:
� L'apprentissage supervise pour lequel il est nécessaire de disposer d'un ensemblede couples de données entrées du réseau ; sorties désirées correspondantes, appelésexemples ou patrons. La di�érence entre la sortie du réseau et la sortie désirée donneainsi une mesure d'erreur quantitative sur le calcul e�ectué par le réseau, qui estutilisée pour réaliser l'adaptation ;
� L'apprentissage semi-supervisé ou apprentissage par renforcement pour lequelseule une mesure d'erreur qualitative (échec ou réussite) est disponible ;
� L'apprentissage non supervisé pour lequel il n'y a pas de réponse désirée. Latâche du réseau peut être, par exemple, dans ce cas, la création des regroupementsde données selon des propriétés communes (catégorisation).
2.5 Généralisation
L'intérêt majeur des RNA réside dans leur capacité à généraliser ce qu'ils ont appris,c'est-à-dire qu'ils sont parfois capables, lorsqu'on leur présente une entrée non apprise, dedonner une sortie correcte, cohérente avec l'ensemble sur lequel s'est fait l'apprentissage.Pour être capable de généralisation, un réseau doit extraire des lois générales à partir del'ensemble d'apprentissage, et réagir en fonction de ces lois générales.
La généralisation a été formalisée de manière théorique par Vapnik, et dans sa théorie del'apprentissage statistique [Vap, 95], il étudie en particulier la distance entre le risque aprèsl'apprentissage, et quoi il est important de mesurer la capacité du classi�eur à e�ectuerune classi�cation correcte sur de nouvelles données d'entrée. L'espérance de l'erreur sur denouvelles données est appelée erreur de généralisation et le but de l'apprentissage consisteà minimiser cette erreur.
28

Le phénomène de sur-apprentissage
Dans les problèmes de régression, on fait souvent l'analogie avec la régression polyno-miale : un réseau de neurones qui dispose de très peu de paramètres (qui est peu complexe)n'a pas assez de �exibilité pour apprendre les données correctement. C'est une situationqu'on appelle le sous-apprentissage. Par contre, un réseau avec trop de paramètres disposede trop de �exibilité (trop de degrés de liberté) et les utilise pour apprendre toutes lesparticularités des données, c'est ce qu'on appelle le sur-apprentissage, apprentissage parcoeur ou over �tting. Empiriquement, cette situation pourrait être évitée en cherchantle minimum de l'erreur de généralisation sur un ensemble de validation (indépendant del'ensemble d'apprentissage) et en arrêtant l'apprentissage avant la convergence du réseau(early stopping). Ainsi, on espère que les poids qui minimisent l'erreur sur l'ensemble devalidation, généralisent mieux [Tor, 97].
2.6 Avantages et limites des RNA
2.6.1 Les avantages
On peut résumer les avantages des techniques connexionnistes par les points suivants :� Puissance d'approximation : les réseaux de neurones multicouches en " théorie " sontcapables d'approximer n'importe quelle fonction de transfert si le nombre d'unitéscachées n'est pas grand;
� Apprentissage discriminant : en classi�cation, avec un critère des moindres carrés, lesréseaux de neurones modélisent les surfaces de séparations entre les classes. L'avan-tage d'un tel apprentissage est qu'il vise à diminuer l'erreur de classi�cation, pourcela il prend en compte la structure inter-classe des données, ce qui n'est pas le casdans les autres techniques;
� Codage et extraction : sur les couches cachées, les unités aident à extraire et coderles informations discriminantes;
� Robustesse : comme le montre la majorité des expériences, les techniques connexion-nistes sont très e�caces pour des tâches très di�ciles;
� Flexibilité : une comparaison des techniques connexionnistes avec d'autres techniquesnon paramétriques, comme les K plus proches voisins (KNN), montre que les modèlesconnexionnistes sont plus adaptés à l'incorporation des connaissances à priori sur leproblème à résoudre;
� Mises en oeuvre parallèles : les réseaux connexionnistes, grâce à leurs architecturesmassivement parallèles, sont facilement implémentables sur des cercuits VLSI.
29

2.6.2 Les inconvénients
Les réseaux de neurones sou�rent de quelques inconvénients selon l'architecture adoptéeet le domaine abordé, nous citons quelques uns:
� Temps d'apprentissage : la plupart des applications utilisant les techniques connexion-nistes montrent que cette approche est très coûteuse en temps pendant l'apprentis-sage. Cependant plusieurs chercheurs ont travaillé sur l'amélioration des algorithmesconnexionnistes, tant au niveau de la qualité d'apprentissage qu'au niveau du tempsd'apprentissage ;
� Initialisation aléatoire des poids et de nombre neurones des couches cachées ainsi quele problème de minima locaux;
� Dans l'aide à la décision, les RNA agissent comme des boites noires, par conséquent,les intervenants (décideur et homme d'étude) n'ont pas une grande participation dansle processus décisionnel;
� Malgré ses succès [Sej, 87], [Lec et al, 89], [Pom, 97] , la méthode de rétropropagationdu gradient décrite présente l'inconvénient majeur du choix de l'architecture : iln'existe pas de critères pour commencer avec une architecture bien dé�nit.
2.7 Les réseaux multicouches
Un réseau multicouche n'est rien d'autre qu'un assemblage de couches concaténées lesunes aux autres, de la gauche vers la droite, en prenant les sorties d'une couche et en lesinjectant comme les entrées de la couche suivante. Dans l'annexe C, nous avons développél'algorithme dit de "rétropropagation des erreurs" qui permet d'entraîner un réseau multi-couche. Pour être utile, un réseau multicouche doit toujours posséder des neurones avec desfonctions de transfert non-linéaires sur ses couches cachées. Sur sa couche de sortie, selonle type d'application, il pourra comporter des neurones linéaires ou non-linéaires [Par, 04].
La construction de réseau neuronal multicouche pour l'identi�cation d'une fonction nonlinéaire à plusieurs variables dépend de 4 points essentiels :
1. Le choix du type de neurones à utiliser dans le réseau: le choix de la fonction d'acti-vation des neurones cachés.
2. Le choix de la topologie du réseau: le choix du nombre de couches et de neuronescachés.
3. L'initialisation du réseau ou le choix du point de départ du réseau avant de lancerla phase d'apprentissage. Il existe trois types de RNA multicouches de type Feedfor-ward, dont chacun est basé sur des fonctions d'activation di�érentes: Le PerceptronMulticouche PMC, le réseau RBFNN (Radial-Basis-Function Neural Network or Lo-calized Receptive Field Network), le réseau d'ondelettes WNN .
30

4. L'apprentissage du réseau.
Perceptron multicouche ou la rétro propagation du gradient
Les réseaux multicouches avec apprentissage par rétropropagation du gradient sontsouvent très utilisés et permettent d'obtenir des résultats intéressants dans divers domainesd'application. Dans ce qui suit nous abordons quelque concepts fondamentaux relatifs àcette approche :
1. Propriété : Les réseaux monocouche (couche d'entrée et /ou de couche de sor-tie) peuvent être entraînés avec des règles d'apprentissage relativement simples. Encontrepartie, ce genre de réseau est limité au calcul des fonctions très simples. D'oùl'intérêt de créer des réseaux plus élaborés, contenant par exemple des neurones ca-chés. Cependant, l'apprentissage ou l'attribution des poids des connexions devienttrès di�cile. Les réseaux multicouches comme par exemple, le PMC utilise l'algo-rithme de la rétro-propagation du gradient pour e�ectuer la mise en place de lapondération du réseau [Jod, 94].Funahashi [Fun, 89] a démontré qu'un réseau de neurone avec au moins une couchecachée et utilisant des fonctions d'activation de type sigmoïde est capable d'approchern'importe quelle fonction de Rn dans Rn, si cette couche possède su�samment decellules.Nous traitons dans cette section exclusivement une forme de réseau de neuronesappelée perceptron multicouche (PMC). Il s'agit du modèle actuellement le plusutilisé dans le domaine d'aide à la décision.
2. Principe du PMC: Dans les réseaux de neurones (ou réseaux connexionnistes),toutes les connaissances sont représentées par des liaisons entre les unités (neu-rones) et leurs poids synaptiques (valeurs) associés, par analogie avec la neurobiologie[Hér, 94], [Her et al, 94]. Un réseau de neurones est donc caractérisé par son archi-tecture ; la structure selon laquelle les neurones qui le composent sont reliés les unsaux autres.
Dans le cadre de notre étude, nous utilisons un réseau de neurones multicouches, le mo-dèle du PMC (perceptron multicouches), qui, en plus d'une couche de neurones d'entréeet d'une couche de sortie, possède également une ou plusieurs couches intermédiaires. Cescouches, nommées couches cachées, n'ont aucun contact avec l'environnement extérieur,leur rôle étant uniquement d'e�ectuer des calculs intermédiaires. Dans ce type d'architec-ture, les unités d'une couche sont reliées à toutes celles de la couche suivante. L'apprentis-sage dans un réseau de type perceptron multicouches utilisé dans notre système est réalisépar une règle de rétro-propagation de l'erreur [Rum et al, 86], qui permet d'entraîner d'unepart les unités de sortie du réseau et, d'autre part, les unités cachées grâce à une techniquede propagation en arrière de l'erreur à travers les couches du réseau (F ig. 2.6).
31

L'algorithme de rétro-propagation du gradient est utilisé dans le percetron multicouche,la phase la plus importante de son exploitation est bien évidement l'apprentissage. L'algo-rithme consiste dans un premier temps a propager vers l'avant les entrées jusqu'à obtenirune sortie calculée par le réseau. La seconde étape compare la sortie calculée par rapport àla sortie réelle connue. On modi�e alors les poids de telle sorte qu'à la prochaine itération,l'erreur commise entre la sortie calculée et celle connue soit minimisée.
Il ne faut pas oublier que l'on dispose de couches cachées, on rétro-propage alors l'erreurcommise vers l'arrière jusqu'à la couche d'entrée tout en modi�ant la pondération, onrépète ce processus sur tous les exemples jusqu'à ce que l'on obtienne une erreur de sortienégligeable. Les deux principaux pièges qui peuvent être rencontrés lors de l'utilisation
Fig. 2.6 � Exemple de réseau à trois couches
d'un réseau de neurones sont l'existence de minima locaux dans la fonction d'erreur et unpossible sur-apprentissage [Sri, 05].
Dans le cas des perceptron multicouche, il n'y a pas de garantie de convergence dela procédure de descente de gradient. En cherchant à minimiser l'erreur par descente degradient, on peut se retrouver dans un minimum local.
L'apprentissage peut donc se retrouver piégé dans un minimum local (f ig. 2.7), ce quipeut produire des entraînements longs et di�ciles.
32

Fig. 2.7 � Minimum local et vrai minimum
L'algorithme de perceptron est basé sur la correction d'erreur. De manière simpli�ée,l'apprentissage peut être donné par :
Algorithm 1 ApprentissageInitialiser les poids à l'aide de valeurs choisies au hasard ;Répéter jusqu'à convergencePour chaque exemple (couple(entres (xi); sorties (ai)))
Calculer la valeur de sortie du réseau ;Tant que (valeur de sortie 6= valeur de sortie désirée (ai))Ajuster les poids (wi) ;Fin Tant que
Fin PourFin répéter
À la �n de l'apprentissage, lorsque le réseau a appris à modéliser son environnement,le comportement souhaité du réseau est le suivant : on présente un vecteur d'entrée auréseau ; celui-ci propage vers la sortie les valeurs d'activation correspondantes (en utilisantla règle de propagation) a�n de générer par l'intermédiaire du neurone de sortie, une valeurde sortie. Celui-ci devrait correspondre à la sortie désirée, telle qu'elle a été apprise lors dela phase d'apprentissage.
N.B : Le coe�cient d'apprentissage in�uence signi�cativement la convergence de l'al-gorithme d'apprentissage.
33

Convergence
Lorsqu'on montre au réseau un exemple, le signal se propage de la rétine à la sortie aucours des di�érentes vagues de propagation. Les sorties ainsi atteintes par les neurones desortie sont alors comparées à la sortie désirée de l'exemple pour calculer l'erreur quadra-tique : c'est le carré de la distance euclidienne entre les vecteurs de sortie e�ective et desortie désirée.
Erreur quadratique =∑
i∈sortie
(sortiei − sortie di)2
sortie : l'aire de sortie, contenant tous les neurones isortie i : la sortie du ime neurone de sortiesortie di : vaut 0 ou 1 selon que la sortie désirée pour l'exemple courant contient ou
non la caractéristique codée par le neurone i .Une itération consiste à montrer une et une seule fois chaque exemple du lot d'exemples
avec lequel on travaille (ensemble d'apprentissage). On calcule l'erreur quadratique globale,somme des erreurs quadratiques obtenues à chaque exemple. On lance plusieurs itérations,et on considère que le réseau converge quand l'erreur quadratique globale devient nulle.
2.8 Aide à la décision et réseaux de neurones
Les réseaux de neurones sont en passe de devenir une composante incontournable del'aide à la décision. Les applications des réseaux de neurone sont très nombreuses : dansle domaine de la reconnaissance des formes (chi�res et caractères manuscrits ou impri-més, images, parole, signaux temporels...), mais également dans bien d'autres domaines(économie, �nance, sociologie, traitement du langage...).
Il faut noter que le classi�eur n'est pas nécessairement conçu pour donner une réponsecomplète : il peut apporter seulement un élément de réponse. Il faut bien, en e�et, distinguerl'aide à la décision et la décision elle-même : un classi�eur peut apporter une information quiaidera un être humain, ou un système automatique, à prendre une décision concernant l'ap-partenance de l'objet inconnu à telle ou telle classe. Historiquement, les premiers réseauxde neurones utilisés pour la classi�cation étaient conçus pour fournir une décision. Grâceaux progrès accomplis dans la compréhension des propriétés fondamentales des réseaux deneurones, on sait à présent qu'ils peuvent donner une information beaucoup plus riche et�ne qu'une simple décision binaire : ils peuvent estimer la probabilité d'appartenance del'objet inconnu à chacune des classes, ce qui leur permet notamment de s'intégrer dansdes systèmes de reconnaissance complexes qui utilisent plusieurs systèmes de classi�cationdi�érents, chacun d'eux fournissant une estimation de la probabilité d'appartenance del'objet inconnu à chacune des classes. La décision �nale est prise au vu de ces estimations,et en fonction, par exemple, des " spécialités " de chacun des classi�eurs[Dry et al, 04].
34

2.9 Conclusion
Les réseaux de neurones sont depuis quelque temps un point de focalisation des médias,du public et des scienti�ques. Les travaux menés dans le domaine des sciences de la cog-nition arti�cielle ont été marqués par quelques apports non négligeables mais surtout parbeaucoup d'optimisme. Les années qui viennent concrétiseront cet optimisme ou bien re-lègueront cette technique parmi les nombreuses"recettes"informatiques. Dans ce chapitre,nous avons présenté un aperçu sur l'approche neuronale, nous avons présenté également,quelques modèles et réseaux les plus célèbres.
Dans le chapitre suivant, nous allons mettre l'approche neuronale au service de l'aideà la décision et l'AT, nous essayons à travers une intégration (SIG-RNA) d'exploiter lefonctionnement du RNA pour une évaluation multicritère.
35

Chapitre 3
Le Modèle Proposé
3.1 Introduction
La complexité croissante de la prise de décision est un problème de plus en pluspréoccupant pour les décideurs. A cet e�et, une démarche d'aide à la décisionconsiste à utiliser un modèle pour reproduire la problématique abordée. La notiondu modèle décisionnel (ou modèle d'aide à la décision) met en évidence la distancequi sépare la problématique réelle et la présentation simpli�ée, utilisée pour aider ledécideur. En e�et, les décisions en AT s'appuient toujours sur une représentation(modélisation du territoire) au travers de cartes ou de SIG qui re�ètent un pointde vue sur ses composantes.
Dans le chapitre précédent, nous avons cité quelques modèles dédiés aux problèma-
tiques d'AT. Dans le présent chapitre, nous allons proposer un modèle décisionnel
adapté aux caractéristiques des problèmes spatiaux. Ce modèle est composé de trois
modules connectés à une interface de dialogue. Cet ensemble de modules est consti-
tué d'un modèle neuronal, un modèle territorial et d'un modèle de négociation. A
cet e�et, nous allons préciser le fonctionnement général de ce modèle, puis nous
détaillerons le contenu et le rôle de chaque composante du modèle proposé.
36

3.2 Dé�nition de la problématique
S'il n'y a pas de dé�nition o�cielle du contenu des espaces urbanisés, il faut donc savoirquels sont les objets, sur le terrain, qui doivent être pris en compte [You et al, 07]:
� Doit-on distinguer les fonctions d'occupation du sol (habitat, activité, équipement)et si oui, comment ?
� Doit-on distinguer l'habitat dense de type centre-ville de l'habitat dispersé de typehameau (village)?
� Doit-on prendre en compte les jardins de l'habitat individuel ou pas ?� Doit-on distinguer les grands équipements urbains (écoles, lycées, universités, hôpi-taux, casernes,. . . )?
Si l'on part du principe qu'un territoire est une portion d'espace terrestre approprié parune société humaine, on peut estimer que celle-ci a - même super�ciellement - marqué ceterritoire. Ce territoire est donc forcément aménagé. L'aménagement étant à la fois l'actiondélibérée conduisant à une modi�cation du territoire et le résultat de cette action.
Concrètement, la préparation et la réalisation d'un projet de localisation spatiale d'unéquipement peuvent se résumer en trois interrogations :
1. Quels sont les besoins à satisfaire ? Cette question renvoie à la dé�nition de la de-mande et de sa répartition géographique sur le territoire considéré.
2. Quelles sont les possibilités de réponses ? On se met alors dans une logique d'analysede l'o�re dé�nie aussi bien par les équipements existants que par les modi�cationstechniquement et économiquement réalisables que l'on peut y apporter ainsi que lesnouveaux équipements qu'il conviendrait d'installer.
3. Comment ajuster l'o�re à la demande ? En d'autres termes, il faut proposer lesmeilleures options qui tiennent compte des contraintes du développement durable.
Prendre des décisions en aménagement du territoire nécessite non seulement de posséderdes informations nécessaires relatives au territoire dans sa globalité, mais encore de disposerde méthodes de raisonnement e�caces.
Une bonne décision en matière d'AT doit donc aboutir, à court, moyen et long terme, àmaintenir ou à améliorer globalement l'état du système que constitue le territoire dans laperspective d'un développement durable des sociétés humaines en rapport avec leur espacegéographique. Nous avons décrit, dans le chapitre précédent, un état de l'art sur les pro-cessus décisionnels standards et à référence spatiale tels que celui de : H.Simon [Sim, 60],Vance [Van, 60], Jacquet-Lagrèze [Jac, 81] et Tsoukias [Tso, 04]. Dans ce chapitre, nousproposons un nouveau processus décisionnel hybride en couplant au SIG les ré-seaux de neurones.
37

Sachant que les problèmes décisionnels à référence spatiale sont complexes, de naturemulticritère et semi structurés, les processus cités s'avèrent malheureusement incapablesde supporter les trois éléments clés de la prise de décision: Participation, négociation etconcertation.
L'objectif du modèle proposé est de fournir aux aménagistes un outil souple et simpled'aide à la décision qui assiste e�cacement dans sa recherche de solutions dans un projeturbain d'aménagement du territoire. Nous nous intéressons aux deux problématiques enAT citées par Joerin [Joe, 97] (voir annexe A) à savoir : celle relative à la recherche d'unesurface satisfaisant au mieux certains critères et celle consistant à la réalisation du pland'utilisation du sol.
3.3 Nature des problèmes décisionnels à référence spa-
tiale
3.3.1 Qu'est ce que l'analyse spatiale ?
L'analyse spatiale consiste à extraire les relations existantes entre di�érents élémentslorsque ces relations sont déterminées par leurs positions dans l'espace. Elle est fondée surl'étude de la géomatique 1, des relations topologiques ainsi que la statistique [Goo, 00].
L'analyse spatiale met en évidence des structures et des formes d'organisation spatialerécurrentes, que résument par exemple les modèles centre périphérie, les champ d'interac-tion de type gravitaire, les trames urbaines hiérarchisées, les divers types de réseaux ou deterritoires,. . .
Elle analyse des processus qui sont à l'origine de ces structures, à travers des conceptscomme ceux de distance, d'interaction spatiale, de portée spatiale, de polarisation, decentralité, de stratégie ou choix spatial, de territorialité. . .
Des lois de la spatialité relient ces formes et ces processus, et sont intégrées dans desthéories et des modèles du fonctionnement et de l'évolution des systèmes spatiaux.
1 L'ensemble des applications de l'informatique au traitement des données géographique, et en particu-
lier à la cartographie.
38

Pour Densham, l'analyse spatiale a deux objectifs en prise de décision [Den, 91] :
1. Augmenter le niveau de compréhension d'un système : consiste à la consti-tution d'un accord entre les décideurs et les acteurs locaux;
2. Générer des solutions alternatives : pour résoudre un problème donné en per-mettant d'évaluer les interférences et identi�er les caractéristiques imprévues ou in-désirables de certaines solutions.
3.3.2 Caractéristiques spéci�ques des problèmes décisionnels
Dans ce qui suit, nous présentons les éléments caractéristiques des problèmes décision-nels par rapport aux données à référence spatiale et plus spéci�quement par rapport àl'information nécessaire à leur analyse :
� Les problèmes décisionnels à référence spatiale nécessitent une quantité considérabled'informations spatialisées, car les impacts spatiaux concernent plusieurs domaineset activités sur le territoire. Mandelbrot [Man, 82] a�rme que plusieurs distributionsspatiales, comme celles des variables de sol, sont par nature complexes révélant plusd'information à haute résolution spatiale, apparemment sans limite. De sa part Keller[Kel, 90] qui a établit une classi�cation des problèmes à référence spatiale sur la basedu nombre de critères et de celui des décideurs, constate que la plupart des problèmesobservés dans le monde réel comprennent par nature plusieurs critères et concernentplusieurs décideurs.
� L'information, malgré son abondance, est généralement incomplète face à la com-plexité des problèmes décisionnels à référence spatiale [Laa, 00].
� La mesure de l'information relative à un problème décisionnel à référence spatialen'est pas seulement quantitative mais aussi qualitative (par exemple la notion dequalité du paysage) ; cette dernière est généralement di�cile à appréhender. Ceciest de nature à rendre di�cile l'évaluation et la comparaison des e�ets du problèmedécisionnel [Laa, 00].
Pour surmonter les insu�sances des SIG dans le domaine de la prise de décision territorialeet spatiale, la solution adaptée dans le contexte de notre étude est l'intégration des SIG avecles Réseaux de Neurones. Lorsque les décideurs parviennent à identi�er des actions et descritères, les procédures spatiales du SIG permettent d'attribuer aux di�érents critères, unevaleur et par la suite l'ensemble de ces valeurs forme les entrées du RNA, et à travers cetteidenti�cation (critères, actions), on arrive à identi�er la base d'apprentissage, associantdes formes présentées à un résultat désiré. Le lien entre les actions et le territoire est ainsimaintenu tout au long de la procédure.
39

3.4 La description du modèle spatial proposé
Les décisions en AT s'appuient toujours sur une représentation au travers de cartes oude SIG qui re�ètent un point de vue sur ces composantes. Par ailleurs, il est impossiblede considérer toutes les actions potentielles et tous les critères qui peuvent in�uencer ladécision. Certains éléments du système sont donc négligés.
Dans ce chapitre, nous proposons un modèle d'aide à la décision que nous désignonsMODAT-RN, pour "MOdèle Décisionnel en Aménagement du Territoire par utilisationdes Réseaux de Neurones " incluant une dimension spatiale. Son rôle est double, il consisteà informer l'utilisateur sur la situation du sol à utiliser et à l'assister dans sa recherched'utilisation. Le modèle décisionnel MODAT-RN est constitué de trois sous modèles in-terconnectés : un modèle neuronal, un modèle territorial et un modèle de négociation[You et al, 07].
3.4.1 Le modèle du territoire
Le management territorial est une réponse plausible aux problèmes de la gestion del'environnement urbain. Il peut être dé�ni comme un �ux de décisions visant à optimiserl'évolution du cadre de vie en s'appuyant sur les informations re�étant la réalité de cedernier. Cette dé�nition met en évidence deux faits importants :
Premièrement, il s'agit d'un processus décisionnel et, deuxièmement, ce processus estbasé sur une observation attentive de la réalité urbaine. Contrairement à l'aménagement duterritoire traditionnel qui s'occupe de la mise en forme de l'espace, le management territorialse concentre sur la prise de décisions contribuant à cette mise en forme [Hus, 99].Le modèle du territoire de MODAT-RN constitué par le SIG et les modèles de simulationest le support des procédures et d'analyse spatiale. Nous présentons dans la �gure (F ig.3.1) les principales composantes de MODAT-RN.
Lorsque les décideurs parviennent à identi�er des variantes (Actions) et des critères,ces procédures permettent de donner aux di�érentes actions une valeur (note) pour chaquecritère.
40

Fig. 3.1 � Les principales composantes du modèle de territoire
Le modèle du territoire de MODAT-RN est composé principalement de :
1. Le territoirePlusieurs dé�nitions se présentent dans la littérature, nous pouvons dire que le ter-ritoire est :
(a) Une portion de la surface terrestre que se réserve une collectivité humaine quil'aménage en fonction de ses besoins [Leb, 93].
(b) L'étendue de la surface sur laquelle vit un groupe humain et spécialement unecollectivité politique nationale 2.
(c) L'étendue de pays sur laquelle s'exerce une autorité, une juridiction 3.
Ce territoire doit être aménagé et doit être organisé de manière à ce que l'on trouveune fonctionnalité à l'enchâssement socio-économique. Le territoire est alors un sup-port de la croissance. Il est décrit par un ensemble de données, géographique ou non,gérées par un SIG.Pour l'obtention de la base de données, nous devrons suivre le passage du systèmeréel vers le système numérique qui se déroule en plusieurs étapes, la �gure (F ig. 3.2),présente les di�érentes étapes de la conception d'une base de données.
2D'après le dictionnaire petit Robert.3Aménagement du territoire : le bulletin d'information de la botte du Hainaut.
41

Fig. 3.2 � Étapes de la conception d'une base de données
2. La base de données géographique
L'une des structures les plus adéquates pour le stockage de l'information géographiquenumérique est la Base de Données Géographique (BDG). Selon que l'information géo-graphique soit présentée en mode vecteur ou raster (voir annexe B), nous parlons debase de données géographiques vecteurs ou rasters. Dans la suite, nous nous intéresse-rons qu'au mode vecteur. Cette représentation est mieux adaptée à une modélisationobjet des entités manipulées et de leurs relations. La spéci�té des BDG, par rapportaux bases de données dites standards, repose sur la représentation de la localisationet de la forme des informations géographiques. Nous pouvons considérer une BDGcomme une extension d'une BD standard à la représentation géométrique des ob-jets qu'elle regroupe et souvent aussi, à la représentation de leur topologie. Dans lecontexte MODAT-RN, cette BD peut être complétée par l'utilisation des modèles ma-thématique permettant de simuler des processus tels que l'évolution des population,la di�usion de pollution ou la dynamique de glissement du terrain, d'inondation,. . . .Le couplage SIG - Modèle de simulation permet de décrire le système considéré.Il constitue un modèle du territoire qui est le support des ré�exions précédant ladécision.
3. Pourquoi le SIG ?
Les systèmes d'information géographique (SIG) utilisent des données référenciées géo-graphiquement, des données non spatiales ainsi que des opérations d'analyse spatiale.Les SIG deviennent incontournables dans toute étude de plani�cation, d'implantationou d'aménagement du territoire. Dans le modèle MODAT-RN, le SIG a pour objectifd'avoir des éléments de description du territoire ou de la région d'étude qui servirontà aider les gestionnaires dans leur travail. De plus, les renseignements contenus dansla base permettront aux décideurs d'obtenir des états synthétiques de la zone d'étude.Ils peuvent aussi être utilisés comme des vecteurs de communication par toutes lesparties prenantes du projet. Il s'agit d'un outil de traitement de données spatiales etde simulation permettant d'améliorer la gestion territoriale et les projets qui y sontmenés. Il constitue le support des fonctions d'analyse spatiale (les 5A) [Did, 90] :
42

Abstraction, Acquisition, Archivage, A�chage et Analyse (Tab. 3.1). Les Systèmesd'Information Géographique (SIG) permettent non seulement la saisie et le stockagede l'information, mais également son exploitation dans les dimensions thématiques,spatiales et temporelles à �n de description, d'analyse et de prévision de la réalité dela zone [Sil, 07].
Les fonctionnalités techniques dans un SIG
Les fonctinnalités techniques d'un SIG sont communément synthétisées selon le mo-dèle de 5A:
Le modèle des 5A
Abstraction Modélisation de la base de données en dé�nissant les objets,leurs attributs et leurs relations.
Acquisition Alimentation du SIG en données : il faut d'une part dé�nir laforme des objets géographiques et d'autre part leurs attributset leurs relations.
Archivage Transfert les données de l'espace de travail vers l'espace d'ar-chivage .
Analyse Réponse aux questions posées.A�chage Production des cartes de façon automatique.
Tab. 3.1 � Les fonctinnalités techniques d'un SIG
3.4.2 Le modèle neuronal
Les méthodes de classi�cation consistent à a�ecter des objets, caractérisés par des attri-buts, dans des catégories. Il existe une bibliographie importante concernant les méthodesde classi�cation, que ce soit en analyse de données, en statistique ou en IA. Parmi cesméthodes nous choisirons les réseaux de neurones arti�ciels.
Les RNA sont des assemblages fortement connectés d'unités de calcul, l'objectif d'uti-lisation du RNA dans le modèle proposé est pour la classi�cation des di�érentes zones dela région d'étude dans le but d'obtenir une meilleure carte d'adéquation de l'occupationdu sol de cette région.
Les méthodes de classi�cations permettent d'a�ecter des objets dans des classes, sansprendre en compte les préférences des décideurs.
Le principe des méthodes neuronales est de reproduire les di�érentes fonctions duraisonnement humain. Ce sont des méthodes de classi�cation opérant en deux phases :une phase d'apprentissage à partir d'exemples, suivie d'une phase d'a�ectation. Elles per-
43

mettent de réaliser une approximation d'une fonction complexe destinée à être utilisée pourl'a�ectation de nouveaux objets. La �gure (Fig. 3.3), illustre la démarche générale de cetteclassi�cation.
Fig. 3.3 � Démarche générale de la classi�cation
Les RNA sont souvent appelés des "boîtes noires" car la fonction mathématique re-présentée devient rapidemant trop complexe pour l'analyser [Jam et al, 91]. Aussi, ils pré-sentent un caractère peu explicatif.
Parmi les di�érentes architectures des réseaux de neurones arti�ciels existantes, nousavons opté dans cette étude pour le perceptron multicouches PMC.
Les réseaux monocouche (couche d'entrée et /ou de couche de sortie) peuvent êtreentraînés avec des règles d'apprentissage relativement simples. En contrepartie, ce genrede réseau est limité au calcul des fonctions très simples. D'où l'intérêt de créer des réseauxplus élaborés, contenant par exemple des neurones cachés.
Cependant, l'apprentissage ou l'attribution des poids des connexions devient très dif-�cile. Les réseaux multicouches comme par exemple, le Perceptron Multi-Couche utilisel'algorithme de la rétro-propagation du gradient pour e�ectuer la mise en place de la pon-dération du réseau [Sri, 05].
La littérature des RNA a�rme que la majorité des études utilisent la méthode de PMC.Le choix du réseau de neurone utilisé par MODAT-RN tient compte, d'une part de la naturedu problème à traiter et d'autre part, des choix des décideurs.
44

Nous présentons dans la �gure (Fig. 3.4), les principales composantes de ce modèle :
Fig. 3.4 � Les principales composantes du modèle neuronal
Les cinq types de problématiques de l'aménagement [Joe, 97] doivent être abordés avecdes approches di�érentes quant à leur réalisation. Néanmoins, les approches sont semblablesdans leur principe.
Pour traiter les deux problématiques considérées dans notre étude,MODAT-RN exploiteun réseau de neurone de type Perceptron Multi-Couches (PMC) composé de trois 3 couchesà savoir la couche d'entrée, la couche cachée et la couche de sortie.
En e�et, la couche d'entrée regroupe les di�érents critères environnementaux identi�és,et la couche de sortie regroupe trois catégories de classes pour l'a�ectation des zones àune catégorie (bonne, douteuse ou mauvaise) pour la construction. La couche cachée uti-lise une règle de rétropropagation de l'erreur pour entraîner le réseau à reconnaître unesortie déterminée. Les poids des connexions sont modi�és par une règle d'apprentissage derétropropagation de l'erreur.
1. L'architecture du réseau : L'architecture du RNA proposé est illustrée par la�gure (Fig. 3.5), ce réseau présente les caractéristiques suivantes :
� Il comporte une seule couche d'entrée et une seule couche de sortie;� Il comporte une seule couche cachée;� Chaque neurone est uniquement relié aux neurones de la couche suivante;� La fonction de transfert est une sigmoïde :
f(x) =1
1 + exp(−x).
45

Fig. 3.5 � Architecture du réseau de neurone proposé
2. Le Principe : Dans le modèle neuronal, l'algorithme de rétro-propagation du gra-dient est utilisé dans le perceptron multicouche, la fonction d'activation est de typesigmoïde pour l'évaluation multicritère. Le modèle MODAT-RN propose à l'entréedu RNA, les di�érents critères identi�és, ces critères constitue la matrice d'appren-tissage. Cette matrice est gérée par le SIG (Fig. 3.7), la phase la plus importanted'exploitation du RNA est bien évidement l'apprentissage. Pour la validation du mo-dèle neuronal, nous passons par la phase de test et validation, dans cette phase nousutilisations un échantillon de notre BDG pour valider le RNA. Les sorties obtenuesseront par la suite utilisées par le modèle de négociation.
3.4.3 Le modèle de négociation
La démarche participative est appropriée à des problèmes décisionnels qui s'opèrentdans un climat coopératif, caractérisé par la synergie et la volonté de résolution de pro-blèmes. Mais tel n'est généralement pas le cas pour les problèmes décisionnels dans uncontexte con�ictuel, caractérisé par l'a�rontement et l'antagonisme. Dans ce cas, on peutavoir recours à une autre démarche : celle de la négociation.
Le modèle décisionnel MODAT-RN assure la mise en oeuvre de cette approche.Durant la phase de négociation, chaque intervenant (individu ou groupe) essaie de
"promouvoir" et de défendre ses idées.L'activité d'aide à la décision territoriale s'articule autour des processus de récolte,
d'analyse et d'échange d'informations permettant aux acteurs concernés par la décision deconstruire, de renforcer ou de modi�er leurs préférences. La �gure (F ig. 3.6) présente lesdi�érentes parties du modèle de négociation du MODAT-RN.
46

Fig. 3.6 � Le modèle de négociation
Dans le cadre de MODAT-RN, la comparaison entre les di�érentes actions est réaliséepar l'utilisation de l'approche neuronale qui permet de gérer une ou plusieurs propositions,ce sont bien, évidemment, les résultats (sorties) obtenus par le RNA (F ig. 3.7). Les acteurscontribuent de manière fondamentale à la génération de cette proposition en �xant desparamètres subjectifs. Il peuvent, ainsi, exprimer leur point de vue et leurs intentions surl'aménagement envisagé.
Le modèle de négociation doit respecter quelques conditions concernant les acteursparticipants, et qui sont:
1. Organisation de la participation à l'évaluationLe choix des personnes à rencontrer constitue un point sensible auquel il convientd'apporter une grande attention. De ce choix dépendra en grande partie la pertinencedes informations collectées.Les personnes choisies l'ont été soit pour leur connaissance du territoire, soit pourleur rôle et leur importance sur le territoire ou dans les processus de gestion actuels,soit pour leur rôle dans la mise en oeuvre d'une gestion concertée de ce territoire 4.� Dans le cadre d'une démarche de projet à caractère participatif urbain, commentorganiser la participation autour de l'évaluation ?
L'évaluation partagée suppose un enrichissement du projet par l'avis des di�érentspartenaires. Dans son esprit, elle repose sur un travail commun de recherche de so-lutions face aux enjeux et aux di�cultés rencontrées.
4L'enseignement agricole partenaire des territoires : un guide pour l'action.
47

2. L'intégration des responsables communaux dans le processus décisionnelLe choix des sites pour un futur projet de développement territorial se fait selon deuxphases di�érentes :
(a) Une Phase Objective : Le site est évalué par rapport à un certain nombre decritères dont les valeurs à attribuer correspondent à des situations déterminées.L'attribution des points est donc contrôlable à tout moment.
(b) Une Phase Subjective : L'importance relative attribuée à chaque critère,sous-groupe et groupe de critères est un acte purement subjectif. Il est in�uencépar les sensibilités respectives des personnes qui doivent faire cette pondération.
Un choix basé sur l'appréciation subjective de personnes est un choix toujours cri-tiquable. Dans la mise en oeuvre du plan directeur, il est important que le choixdé�nitif se base sur un consensus le plus large que possible.
3. La prise en compte des compétences et des besoins des utilisateurs
Pour assurer l'e�cacité opérationnelle de la base des données sols, le soin apporté à laprospection du terrain, aux déterminations analytiques et au traitement informatiquedes données est crucial.Mais bien d'autres activités sont aussi essentielles, par exemple:
(a) La coopération avec les utilisateurs des données sur le sol pour les applications;
(b) L'implication des utilisateurs du terroir à tous les niveaux;
(c) L'amélioration de la compréhension entre les di�érentes disciplines impliquées;
(d) La vulgarisation des informations concernant le sol.
Chacune de ces activités prend beaucoup de temps. Cependant, il est importantde donner rapidement une première réponse aux problèmes prioritaires pour gérerau mieux le territoire. Plutôt que de mobiliser tous les e�orts pour produire unecarte de sols "parfaite", il vaudrait mieux reconnaître l'utilité de construire la basedes données- sols à travers une série d'approximations successives, qui pourraientcorrespondre à des niveaux di�érents de qualité.Par exemple la première approximation de la base des données sols pourrait être[Fil, 04] :
(a) Un premier outil pour répondre concrètement aux questions posées d'abordpar les utilisateurs de la base des données-sols, et en même temps enrichir lesinformations sur le sol grâce aussi aux apports des utilisateurs eux-mêmes etdes spécialistes des autres disciplines;
(b) Un point de départ concret pour produire les approximations successives a�nde mieux satisfaire les demandes des usagers.
48

Le regroupement des trois modèles cités précédemment : le modèle du territoire, lemodèle neuronal et le modèle de négociation construisent le modèle décisionnel MODAT-RN.
La �gure (Fig. 3.7) illustre le modèle décisionnel proposé :
Fig. 3.7 � Le modèle décisionnel MODAT-RN
49

3.5 Structure générale de la stratégie d'intégration SIG-
RNA proposée
De nombreux travaux d'intégration SIG-AMC ont été publiés depuis le début des années1990 [Mal, 06], comme dans la majorité des travaux déjà existants, nous trouvons plusieursmodes d'intégration SIG-AMC, dans cette section, nous proposons une nouvelle démarched'aide à la décision qui consiste à incorporer dans le SIG le réseau de neurones. Cettedémarche d'aide à la décision est inspirée de celle adapté au domaine d'environnementproposé par Goodchild [Goo, 91].
Il existe trois types de mode d'intégration dé�nit par [Mal, 06]: Intégration indirecte,encastrée, et complète.
� Intégration indirecte. Les deux outils, un SIG et un logiciel d'évaluation multicritère,restent indépendants et le dialogue entre eux se fait à travers un système intermé-diaire.
� Intégration encastrée. Les deux logiciels restent indépendants mais une seule interface(le plus souvent celle du SIG) est utilisée.
� Intégration complète. Une intégration complète permet d'avoir un système SIG - unlogiciel d'évaluation multicritère intégré possédant une interface unique et une basede données commune.
Le schéma général de la stratégie d'intégration SIG - RNA est donné en (F ig. 3.8). Ladémarche décisionnelle adoptée a utilisé les fonctionnalités du SIG pour préparer les en-trées nécessaires à l'application d'une approche neuronale. En e�et, elle correspond à uneintégration indirecte avec le SIG.
Opérationnellement, le système SIG-RNA intégré commence par la dé�nition du pro-blème, où les capacités analytiques du SIG sont utilisées pour générer l'ensemble des cri-tères.
Ensuite, la procédure d'évaluation multicritère par l'utilisation du RNA est utilisée,cette procédure est incorporée par la dé�nition des actions et des paramètres utilisés par leRNA. Finalement, nous passons par une phase de validation a�n de visualiser les résultatsde l'analyse. La �gure (Fig. 3.8) présente le schéma général d'intégration SIG-RNA ainsique la démarche décisionnelle associée.
50

Fig. 3.8 � Démarche d'aide à la décision proposée
3.6 Modèle MODAT-RN : Discussion
Bien évidemment, le modèle décisionnel MODAT-RN est itératif et séquentiel. Il estfondé sur une démarche participative dans laquelle on met à contribution la compétence etl'expérience de chaque intervenant dans le processus décisionnel. La qualité de ce modèleest donc in�uencée par le contenu de la base de données, le choix des critères et de leursméthodes d'évaluation.
L'objectif de ce modèle est l'aide à la décision ou bien d'une autre manière l'obtentionde la bonne décision. MODAT-RN contribue à la conformité à la réalité, d'une part grâceaux informations gérées par le SIG et d'autre part grâce aux procédures d'analyse spatialequi améliorent la �abilité de l'évaluation des critères.
Concernant les acteurs, le groupe de décideurs doit être complet car si un acteur est né-gligé, la décision sera sans valeur. Le modèle décisionnel proposé doit être aussi accepté parl'ensemble de ces acteurs, sur ce point on peut noter que les SIG facilite la communicationgrâce a ses fonctionnalités de représentation spatiale et de cartographie.
Nous pensons que le modèle MODAT-RN est plus adapté aux besoins des utilisateurs etaux caractéristiques des problèmes spatiaux. Il intègre plusieurs variantes qui contribuentaux mieux pour analyser le contexte urbain. Notre contribution est d'expérimenter pourla première fois les RNA pour les problèmes de localisation.
Bien que l'utilisation des RNA dans le domaine d'évaluation des projets urbains soitlimité, leurs avantages résident dans le traitement de grandes bases de données et dansleur capacité d'apprentissage automatique, ce qui permet de résoudre des problèmes com-
51

plexes, tout en étant tolérant aux erreurs. De plus les RNA ne demandent pas une grandeparticipation des décideurs, ce qui n'est pas le cas pour d'autres approches tels que lesAMCD.
3.7 Conclusion
Les problèmes décisionnels à référence spatiale réfèrent à tout problème de décisiondont l'espace géographique constitue un élément prépondérant en tant que milieu de vie,d'activité et d'intervention humaine, en tant que support d'évaluation de toute décision,et aussi en tant que lieu d'implémentation de cette décision. Ces problèmes spatiaux sont :
(i) de nature multidimensionnelle, interdisciplinaire et semi structuré;(ii) impliquant plusieurs personnes et institutions, ayant généralement des pré-férences et des objectifs con�ictuels;(iii) nécessitant la dé�nition de plusieurs critères contradictoires et dont l'im-portance n'est pas la même;(iv) demandent une quantité considérable des données quantitatives et quali-tatives.
Ces spéci�cités des problèmes spatiaux font que le modèle classique du processus dedécision linéaire de Simon [Sim, 60] et les di�érentes extensions qui y sont apportées sontinsu�santes pour faire face à cette complexité décisionnelle.
Dans ce chapitre nous avons présenté un modèle décisionnel en AT (MODAT-RN) quin'est probablement pas adapté à toutes les formes de décision en AT, il est donc importantde préciser tout d'abord le type de la problématique abordée. Dans le chapitre suivant,nous allons essayer de mettre en oeuvre le modèle proposé et le valider sur un exempled'application.
52

Chapitre 4
Conception et Mise en Oeuvre
4.1 Introduction
Dans le chapitre précédent, nous avons proposé un modèle décisionnel MODAT-RN,nous avons décrit ses di�érents composants, ainsi que la stratégie d'intégrationadoptée par ce modèle.
Dans ce chapitre, nous allons mettre en oeuvre le modèle MODAT-RN, nous com-
mençons tout d'abord par une description des outils de développement, ensuite
nous présentons l'architecture du prototype, et nous terminons ce chapitre par
une étude de cas. Le but de cette mise en oeuvre est l'élaboration d'un outil d'aide
à la décision pour l'aménagement du territoire.
53

4.2 Les outils de développement
4.2.1 C++ Builder 6
C++ Builder est un environnement de développement proposé par Borland fondé surle C++. C'est un outil RAD ( Rapid Application Development ) , c'est-à-dire tourné vers ledéveloppement rapide d'applications sous Windows. Il repose sur un ensemble très completde composants (visuels et non visuels) prêts à l'emploi. La quasi-totalité des contrôles Win-dows (boutons, boîtes de saisie, listes déroulantes, menus,. . . ) y est représentée, regroupéspar famille. Leurs caractéristiques sont éditables directement dans une fenêtre spéciale in-titulée éditeur d'objets. L'autre volet de cette même fenêtre permet d'associer du code aucontrôle sélectionné.
Par la diversité des technologies utilisées, C++Builder 6 nous permet de concevoir desapplications �ables et compatibles avec les standards les plus récents. Avec la nouvellelibrairie CLX, on peut désormais réutiliser le même code sous Windows et sous Linux.
Avec C++Builder 6, de nombreux nouveaux composants vont faciliter la conception desécrans et aussi pour le développement Web (SOAP, IN Y, WEBSNAP,. . . ). De nombreuxexperts pour aider à créer toutes sortes d'applications, un éditeur de code SQL puissant(SQL builder), une aide en ligne de qualité, une aide à la saisie de document en code HTML,. . . , autant d'atouts qui contribuent à faire de C++Builder 6 l'outil le plus puissant auservice des développeurs C++. En e�et, nous allons choisit cet environnement pour ledéveloppement du RNA par la mise en oeuvre du PMC.
4.2.2 Delphi 5
Delphi désigne à la fois un environnement de développement intégré et un langagede programmation orienté objet. L'EDI Delphi est un EDI propriétaire fonctionnant sousWindows créé en 1995 et édité par Borland. À l'époque, créer des programmes graphiquessous Windows se faisait en grande majorité en utilisant soit la chaîne de compilationVisual C++, soit le RAD Visual Basic. Le premier outil étant excessivement complexeet le second assez peu structuré, Delphi apparait alors comme une alternative viable pourbeaucoup de développeurs qui souhaitaient créer des programmes standard pour Windows.Delphi fournit tous les outils nécessaires pour développer, tester, déboguer et déployerdes applications, incluant une importante bibliothèque de composants réutilisables, unensemble d'outils de conception, des modèles d'applications et de �ches, ainsi que desexperts de programmation. Dans le cadre de la création de notre prototype MODAT-RN,cet outil joue le rôle d'un système intermédiaire assurant la communication entre MapXqui s'intègre facilement sur le Delphi et Builder C++ d'ou notre RNA sera implémenté.
54

4.2.3 MapInfo 7.5
MapInfo 7.5 Professional est un outil de type Système d'Information Géographiquequi sert à créer de l'information géographique, à traiter de l'information et à la cartogra-phier.
MapInfo est un logiciel qui est conçu pour fonctionner dans un environnement Windows.Il respecte donc les " Guides de style Windows " ainsi que les règles d'ergonomie desenvironnements Windows. Les utilisateurs de logiciels Microsoft seront à l'aise dans lesfonctionnalités de base et retrouveront les préceptes de souplesse qui permettent d'accéderà une fonctionnalité du logiciel en mode débutant ; par menu déroulant, habitué par boutonou expert par raccourci clavier. Ce qui lui rend un outil puissant assurant nos besoins, soitlors de la création de la base de données géographiques ou bien lors de la visualisation desrésultas géographiques.
4.2.4 MapX
MapX est un composant ActiveX qui permet l'utilisation des fonctionnalités dispo-nibles sur le SIG en l'intégrant dans l'environnement de développement. A l'aide de cecomposant on peut appliquer des opérations géographiques sur les données, a�cher lesrésultats sur une carte géographique et toucher à la base de données spatiales.
Avec MAPX, on peut a�cher les données spatiales comme des points, des régionsthématiques,. . .
Voici la liste des fonctionnalités les plus fréquentes :
1. La thématique : visualiser les données sur la carte géographique ou les attacher àdes équipements puis leur associer un codage coloré.
2. L'annotation : rendre la carte géographique informatisée en lui ajoutant du texte,des symboles et des labels.
3. L'a�chage en couches : Contrôle l'a�chage d'une couche de la carte de façon à luipermettre elle seule d'apparaître. Le concept de cartographie en couches est utiliséaussi pour traiter des tables de données séparément.
4. La sélection : sélectionner un ensemble de régions par glissement de souris, ou selonune propriété commune. . .
5. L'édition : On peut donner à l'utilisateur la capacité d'ajouter, de modi�er et desupprimer des éléments sur la carte.
6. La connectivité à des serveurs de base de données : Les tables Créées surMapInfo peuvent être connectées à des systèmes de gestion de base de données viaMapX, et leur appliquer toutes les opérations sur une table ordinaire notamment lesrequêtes SQL.
55

L'utilité de ce composant pour notre application réside dans la visualisation et le traitementdes cartes géographiques.
4.2.5 Vertical Mapper 3.0
Travaillant en transparence dans MapInfo Professional, Vertical Mapper 3.0 est unoutil e�cace pour a�cher, gérer et interpréter l'information spatiale. Vertical Mapperpossède une capacité d'analyse spatiale robuste et des options de visualisation �exiblesqui permettent de transformer les données (X, Y et Z) en grille intélligente (smart grid).Vertical Mapper transforme les données ponctuelles en surfaces continues ou en "grid"lesquelles peuvent être cartographiées thématiquement et/ou représentées en 3D a�n devisualiser les tendances. Il est également possible d'e�ectuer des requêtes sur les "grid" pourdécouvrir les relations entre leurs multiples couches. Il o�re une série d'outils disponiblespour éditer, analyser et visualiser les "grid".
Nous allons utiliser le vertical Mapper pour la visualisation des cartes critères, ainsique les di�érentes traitements des données de ces cartes.
4.3 La description de l'architecture du prototype
Une multitude d'outils informatiques di�érents pour l'aide à la décision spatiale estaujourd'hui disponible, chacun d'eux vise un problème particulier, comme le tracé d'uneautoroute, ou la régularisation d'un réseau de transport, chacun de ces systèmes nécessitedes données en entrées selon le type de problématique traîté.
L'objectif de cette section est de présenter les diverses composantes du système d'aideen localisation spatiale et leur interconnexion.
Pour constituer le prototype MODAT-RN, il faut répondre à une série de conditions :� Aider à une meilleure formulation des problèmes à référence spatiale;� O�rir une interface utilisateur puissante et facile;� Aider l'utilisateur à explorer les solutions possibles;� Proposer une variété de styles de prise de décision facilement adaptable aux besoinsdu décideur.
Dans cette partie, nous présentons une brève description du prototype MODAT-RN déve-loppé. Le schéma général de ce prototype est donné par la Figure (F ig. 4.1). Il comporteprincipalement les deux modules : module d'évaluation multicritère (RNA) et module SIG.Ces deux modules sont interconnectés par un système intermédiaire.
L'utilisateur se met en interactivité avec l'ensemble du système depuis l'interface quiest le module assurant le lien entre le système et l'extérieur.
56

4.3.1 Module SIG
Les di�érentes manipulations sont opérées grâce au �noyau� du SIG, qui permet égale-ment l'acquisition de données externes, la cartographie et la visualisation des scénarii ainsique l'a�chage des résultats statistiques sous forme numérique, tabulaire et/ou graphique.
4.3.2 Module RNA
Le RNA modélise le problème de décision à référence spatial, après avoir �xer lesparamètres (nombre de neurone d'entrée, de couches cachées et de sorties), il permet laclassi�cation grâce au PMC et la mise en oeuvre de son Algorithme de RP.
4.3.3 Les �ux internes
Il s'agit de la circulation des informations et des données à l'intérieur du système ; ces�ux ne sont pas perceptibles par l'utilisateur du système. Une fois les données stockéesdans la BDG, puis l'interrogation lancée par l'utilisateur, le module RNA e�ectue la tâched'évaluation. Et dans le sens inverse, le système fournit des résultats intermédiaires ou nonsous forme cartographique et tabulaire à l'utilisateur via le noyau du SIG.
4.3.4 Les �ux externes
Les résultats de l'analyse (complètement e�ectuée par le logiciel du RNA) peuvent êtrevisualisés directement par le logiciel du RNA ou exportés, via le système intermédiaire, versle SIG. Et inversement pour le SIG, les résultats de l'analyse (complètement e�ectuée parle logiciel du SIG) peuvent être visualisés directement par le logiciel de SIG ou exportés,via le système intermédiaire, vers le RNA.
57

Fig. 4.1 � L'architecture du prototype
Le tableau (Tab. 4.1), présente la correspondance entre les di�érentes étapes du modèledécisionnel MODAT-RN ainsi que les outils adéquats pour répondre aux objectifs de chaqueétape. En se referant au tableau 1, notre étude se base principalement sur trois concepts :SIG, RNA et la Carte Décisionnel1.
Processus Objectifs OutilsIdenti�cationet formu-lation duproblème
Dé�nition des enjeux et des ob-jectifs, Production des données.
Outils de gestion des don-nées spatiales : SIG.
Analyse Dé�nition des critères, des al-ternatives, évaluation des consé-quences et des impacts.
Outils de modélisation duproblème, de génération desalternatives : SIG + Cartedécisionnelle + modèles desimulation.
Suite page suivante . . .
1Une Carte Décisionnelle est une version avancée de la carte géographique qui est enrichie avec de
l'information préférentielle et destinée à éclairer une décision. Elle se présente comme un ensemble d'unités
homogènes.
58

. . . Suite
Processus Objectifs OutilsNégociation Faire surgir les alternatives dac-
tion supportées par les di�érentsintervenants.
Outils de communication :Carte décisionnelle.
Evaluation Evaluation et comparaison des al-ternatives,
Outils de classi�cation mul-ticritère : RNA.
Choix Recommandation d'une ou plu-sieurs alternatives daction.
Outils de di�usion : SIG.
Tab. 4.1 � Objectifs et outils utilisés
4.4 Etude de cas
4.4.1 Problématique abordée
Dans [Joe, 97], l'auteur distingue cinq types de problématiques d'aménagement (voirannexe A) , dans le contexte de notre étude, nous nous intéressons à:
� La recherche d'une surface satisfaisant au mieux certains critères;� La conception d'un réseau de polygones permettant la meilleure utilisation du sol.
La démarche proposée dans ce travail consiste à o�rir à l'aménagiste un ensemble decartes d'adéquation pour les principales catégories d'utilisation du sol. Une carte d'adé-quation a pour but de quali�er le potentiel du territoire à un moment donné pour uneutilisation particulière. L'AT est relativement familier avec la notion de carte d'adéquation[Joe, 97].
La problématique abordée dans cette étude concerne le tri sur l'ensemble des actionsappartenant à la région d'étude. Le résultat de ce tri est l'obtention de trois catégories ;la catégorie C1 regroupe les bonnes actions (ilôts destinés pour l'habitat), la catégorie C2regroupe les moins bonnes (douteuses), et la troisième regroupe les mauvaises actions.
4.4.2 Délimitation de la région d'étude
La région d'étude se trouve dans le canton de Vaud, à environ 15 km au nord deLausanne. Ces limites géographiques dans le système de cordonnées suisse sont 532 750-532 500(m) et 158 000-164 000 (m), la surface de la région d'étude est de 52 500 km2, elleest couverte en mode raster par 84'000 de 25 m2. Cette zone dispose d'un grand nombrede données spatiales. En e�et, cette zone a déjà été prise comme exemple dans l'étude dejoerin [Joe, 97].
59
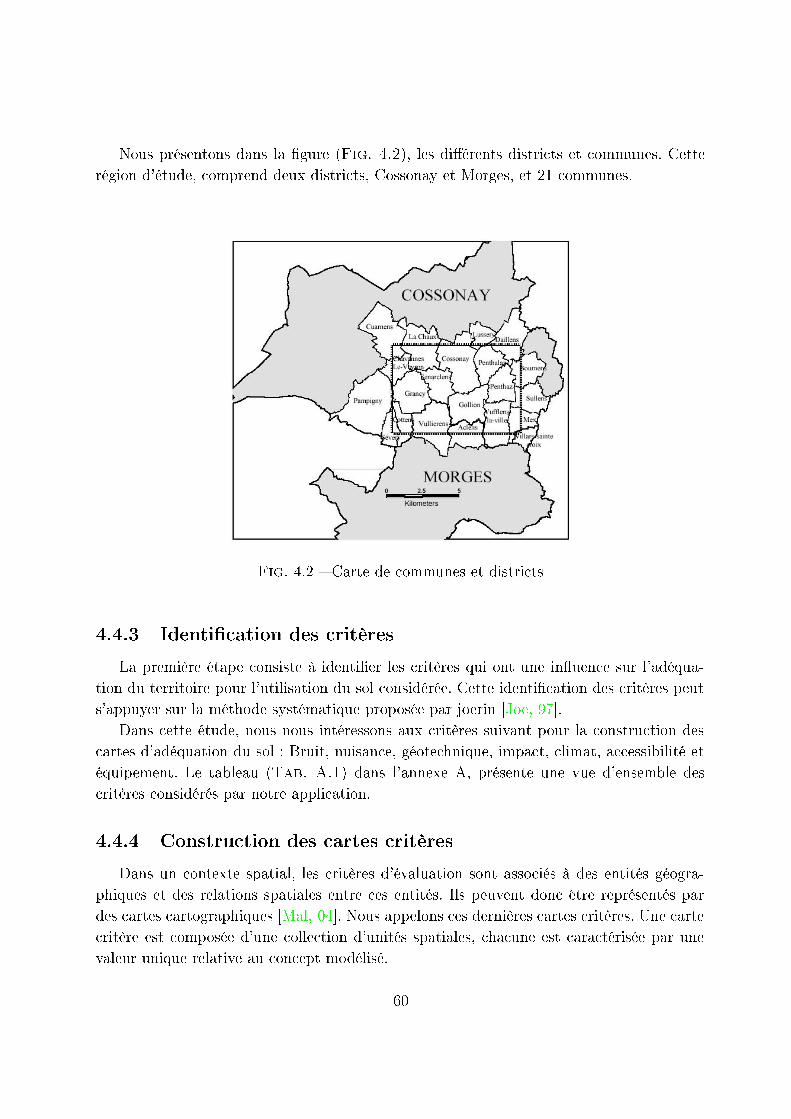
Nous présentons dans la �gure (Fig. 4.2), les di�érents districts et communes. Cetterégion d'étude, comprend deux districts, Cossonay et Morges, et 21 communes.
Fig. 4.2 � Carte de communes et districts
4.4.3 Identi�cation des critères
La première étape consiste à identi�er les critères qui ont une in�uence sur l'adéqua-tion du territoire pour l'utilisation du sol considérée. Cette identi�cation des critères peuts'appuyer sur la méthode systématique proposée par joerin [Joe, 97].
Dans cette étude, nous nous intéressons aux critères suivant pour la construction descartes d'adéquation du sol : Bruit, nuisance, géotechnique, impact, climat, accessibilité etéquipement. Le tableau (Tab. A.1) dans l'annexe A, présente une vue d'ensemble descritères considérés par notre application.
4.4.4 Construction des cartes critères
Dans un contexte spatial, les critères d'évaluation sont associés à des entités géogra-phiques et des relations spatiales entre ces entités. Ils peuvent donc être représentés pardes cartes cartographiques [Mal, 04]. Nous appelons ces dernières cartes critères. Une cartecritère est composée d'une collection d'unités spatiales, chacune est caractérisée par unevaleur unique relative au concept modélisé.
60

Il faut distinguer une carte critère d'un simple plan d'information. En e�et, une cartecritère permet de modéliser les préférences du décideur concernant un concept donné, gé-néralement sans existence physique, alors qu'un plan d'information représente des donnéesréelles. Autrement dit, une carte critère représente de l'information subjective dans le sensoù deux personnes di�érentes peuvent évaluer di�éremment la même unité spatiale. Parexemple, les mesures de distance peuvent être utilisées pour calculer certaines mesuresd'accessibilité ; d'autres facteurs, telle que la disponibilité de la main d'oeuvre, peuventêtre mesurés par l'agrégation de zones de recensement appropriées, relatives à des donnéessocio-économiques.
La technologie du SIG est particulièrement adaptée pour la construction des cartescritères. Nous présentons dans la Figure (Fig. 4.3) une représentation schématique desdi�érentes cartes critères de la zone d'étude.
61

Fig. 4.3 � Représentations schématiques d'une carte critère
62

4.5 Mise en oeuvre des réseaux de neurones
Plusieurs types de réseaux de neurones multicouches ont été développés. Nous focalisonsnotre étude sur le type PMC. Dans le processus de la construction de ce type de classi�eur,l'apprentissage a comme objectif d'adapter les poids des connexions entre les neuronesde sorte que le réseau donne en sortie la classe d'appartenance des formes qui lui sontproposées en entrée.Nous présontons dans la Figure (Fig. 4.4) la stratégie générale defonctionnement de la RP.
Fig. 4.4 � Le fonctionnement de RP
4.5.1 Apprentissage et test
Pour les deux tâches (apprentissage et test) , on souhaite que notre RNA donne lesbonnes sorties sur un ensemble d'exemples, appelé ensemble de test. Pour cela, on va utiliserun ensemble d'exemples sur lequel le réseau va s'entraîner et apprendre. Cet ensembles'appelle l'ensemble d'apprentissage. Les exemples de l'ensemble de test n'appartiennentpas à l'ensemble d'apprentissage. L'ensemble de test est beaucoup plus grand que l'ensembled'apprentissage.
L'ensemble opérationnel est composé de tous les exemples réels rencontrés au cours del'utilisation �nale du réseau de neurones. Avec cette méthode basée sur la distinction entreensemble d'apprentissage et ensemble de test, on constate que le réseau de neurones doitêtre capable de généralisation.
La mise en oeuvre du réseau de neurones nécessite :� De déterminer les entrées pertinentes, dans cette étude les entrées présentent lesdi�érents critères liés au territoire;
� De collecter les données nécessaires à l'apprentissage et à l'évaluation des perfor-mances du réseau de neurones;
� De trouver le nombre de neurones cachés nécessaires pour obtenir une approximation
63

satisfaisante, d'estimer les valeurs des paramètres correspondant à un minimum dela fonction de coût, c'est-à-dire d'e�ectuer un apprentissage;
� D'évaluer les performances du réseau de neurones à l'issue de l'apprentissage.
4.5.2 Construction du RNA
En fonction des résultats obtenus lors des deux phases citées précédemment, il peut êtrenécessaire d'e�ectuer plusieurs itérations de tout ou partie de cette procédure. Avant depouvoir utiliser les capacités de classi�cation du RNA, il faut le construire. Ceci se dérouleen quatre temps:
1. La construction de la structure du réseau .
2. La constitution d'une base de données de vecteurs représentant au mieux le domained'AT. Celle-ci est scindée en deux parties : une partie servant à l'apprentissage duréseau (on parle de base d'apprentissage) et une autre partie aux tests de cet appren-tissage (on parle de base de test).
3. Le paramétrage du réseau par apprentissage. Au cours de l'apprentissage, l'algo-rithme d'apprentissage ajuste le poids du réseau. L'apprentissage se termine lorsquel'algorithme atteint un état stable.
4. La phase de reconnaissance qui consiste à présenter au réseau chacun des vecteursde la base de test. La sortie correspondante est calculée en propageant les vecteursà travers le réseau. La réponse du réseau est lue directement sur les unités de sortieet comparée à la réponse attendue. Une fois que le réseau présente des performancesacceptables, il peut être utilisé pour répondre au besoin de la classi�cation.
Selon [Dry et al, 04], il n'existe pas, à l'heure actuelle, de résultat théorique permettant deprévoir le nombre de neurones cachés nécessaires pour obtenir une performance spéci�éedu modèle, compte tenu des données disponibles .
64

4.5.3 L'application des réseaux de neurones en AT
L'adéquation du territoire pour l'habitat intègre, pour cette application sept critères :Impact, climat, géotechnique et risques naturels, bruit, nuisances, accessibilité, équipementet distance aux localités . Et 650 zones à classer (alternatives). L'architecture générale duRNA adoptée est présentée par la �gure (Fig. 4.5) à l'itération i:
Fig. 4.5 � Architecture du PMC adopté
Le système de solution correspond à une thématique globale liée à la question suivante :" Comment déterminer les zones les plus adéquates pour l'habitation dans le canton deVaud? ". En vue de répondre à cette question, nous proposons une résolution en deuxphases :
La première phase vise à améliorer la démarche d'aménagement, elle permet l'utilisationdes SIG. La seconde phase approfondit les éléments de solution découlant de l'utilisationconjointe des SIG et de RNA a�n de mieux intégrer les dimensions sociales et politiques duprocessus décisionnel et de favoriser l'échange d'informations stratégiques entre les acteursconcernés.
Dans cette section, nous présentons quelques vues de logiciel développé relatives àl'évaluation multicritère par utilisation du RNA.
Lorsque l'utilisateur active le système d'aide à la décision, trois étapes principales sedéroulent :
� Génération des �chiers en entrée :" �chier.gst";� Évaluation multicritère par l'utilisation du RNA de type PMC en utilisant les di�é-
65

rentes BD (apprentissage, généralisation, test et BDG);� A�chage �nale de la carte géographie, en présentant les trois catégories obtenues.
La Figure (Fig. 4.6) présente l'interface relative à la visualisation de la carte géographiquede la région concernée par l'étude. A partir de cette fenêtre nous pouvons choisir la cartegéographique a étudier comme nous pouvons a�ecter plusieurs opérations telles que: chan-ger l'unité de distance, faire projeter la carte selon une catégorie donnée,. . .
Fig. 4.6 � Visualisation de la région d'étude
La Figure (Fig. 4.7) illustre l'interface principale du réseau de neurone à travers lequel nous illustrons le graphe montrant l'erreur par rapport au nombre d'itérations, ainsique les di�érentes bases :
� La Base d'apprentissage composée de 177 enregistrements 2 ;� La Base de généralisation composée de 50 enregistrements;� La Base de test composée de 423 enregistrements et la base de données géographiquequi est composée de 650 enregistrements.
2Instances ou occurrences.
66

Fig. 4.7 � Fenêtre de présentation des résultats fournis par le RNA
L'apprentissage du RNA sur la base d'apprentissage permet d'améliorer les perfor-mances du réseau en phase de test. Le RNA est entraîné sur la base de généralisation etd'apprentissage est stoppé par une validation croisée, (le taux de reconnaissance du RNAdépasse 93%). Nous présentons, également, l'évolution de l'erreur en fonction du nombred'itération, nous remarquons que plus le nombre d'itérations est important plus l'erreur estfaible. A travers cette interface nous pouvons aussi a�cher les di�érentes calculs e�ectuéspar le RNA : le calcul d'erreur (Fig. 4.8), ainsi que le taux de reconnaissance obtenu (Fig.4.9). Le tableau (Tab. 4.2) résume les di�érentes caractéristiques du RNA.
67

Fig. 4.8 � Fenêtre d'a�chage des erreurs
Fig. 4.9 � Fenêtre d'a�chage des Taux de reconnaisance
La �gure (Fig. 4.10) présente les résultats numériques fournis par le RNA, ces résultatssont les trois catégories de classi�cation. Comme nous pouvons présenter ces résultats enmode graphique (carte géographique) tels qu'ils sont illustrés par la �gure (F ig. 4.11) touten exploitant les fonctionnalités de SIG.
68
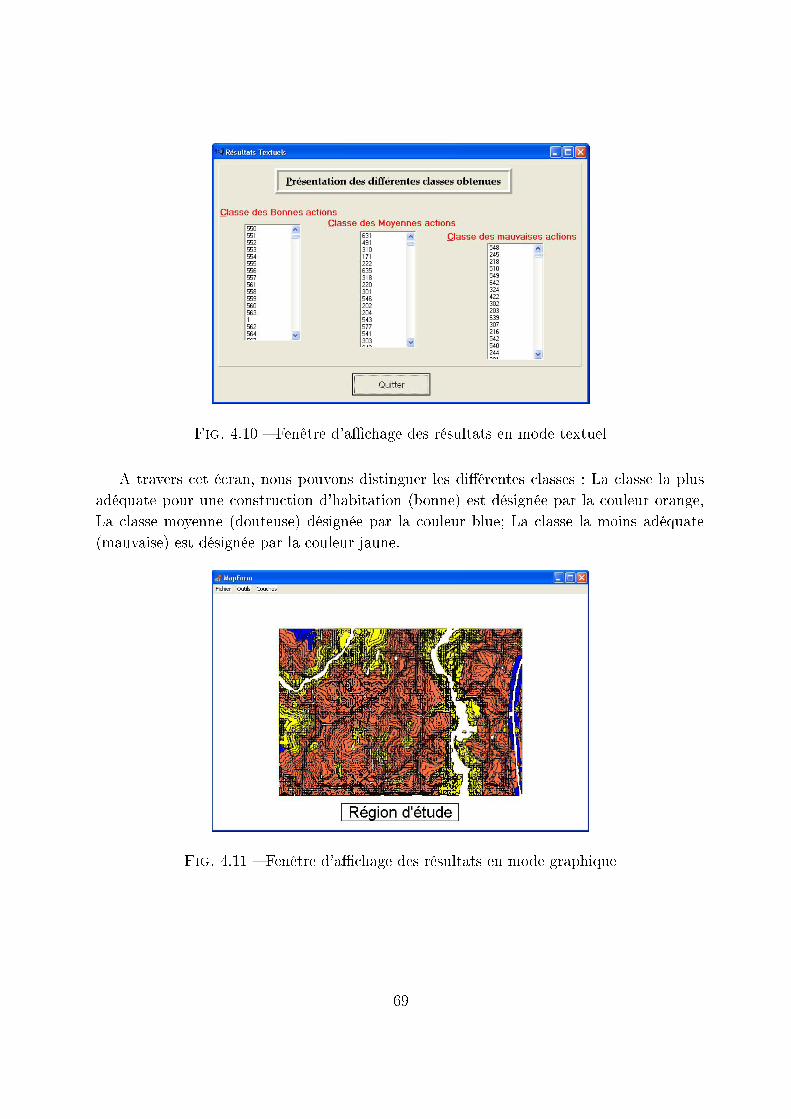
Fig. 4.10 � Fenêtre d'a�chage des résultats en mode textuel
A travers cet écran, nous pouvons distinguer les di�érentes classes : La classe la plusadéquate pour une construction d'habitation (bonne) est désignée par la couleur orange,La classe moyenne (douteuse) désignée par la couleur blue; La classe la moins adéquate(mauvaise) est désignée par la couleur jaune.
Fig. 4.11 � Fenêtre d'a�chage des résultats en mode graphique
69

4.5.4 Validation des résultats obtenus
La validation du modèle s'e�ectue en utilisant un ensemble de données test. Une mé-thode d'évaluation de la performance de généralisation d'un classi�cateur consiste à e�ec-tuer une mesure de qualité des prédictions. Pour un classi�cateur à deux classes (0 et 1),la performance peut être évaluée en calculant les taux de reconnaissance et les erreurs :
Les résultats obtenus par cette méthode, sont illustrés sur le tableau (Tab. 4.2) :
Erreur Taux
Apprentissage 0,068 95,48Généralisation 0,076 92Test 0,075 93,62
Tab. 4.2 � Les paramètres du réseau de neurones utilisé
Nous avons testé le modèle de réseau de neurones avec des données géographique. L'ap-prentissage ainsi que la capacité de généralisation ont été évalués. La courbe de progressionde l'erreur et les résultats des tests de validation du modèle et des tests donne une mêmevaleur de sensibilité et de spéci�cité.
La �gure (Fig. 4.12), illustre les résultats de classi�cation fournis par le RNA, cesrésultats sont représentés sous forme d'un histogramme présentant le nombre de zonesa�ectées à chaque catégories (catégorie 1, catégorie 2, catégorie 3) .
Fig. 4.12 � Résultats de classi�cation
Dans le tableau (Tab. 4.3) nous résumons l'ensemble de paramètres du réseau deneurones utilisé :
70

Architecture Perceptron MultiCouches (PMC)
Couche cachée 1Règle d'apprentissage Rétropropagation des erreursNombres de neurones Couche d'entrée 7
Couche cachée 7Couche de sortie 3
La fonction de transfert sigmoïdeLes entrées Critères : Impact, climat, géotechnique, bruit,
nuisances, accessibilité, équipementLes sorties Classes : bonnes, moyennes et mauvaisesBase de données géo-
graphiqueComposée de 650 zones à classer
Tab. 4.3 � Les paramètres du réseau de neurones utilisé
4.6 Conclusion
Le grand avantage des réseaux de neurones réside dans leur capacité d'apprentissageautomatique, ce qui permet de résoudre des problèmes sans l'écriture de règles complexes,tout en étant tolérant aux erreurs. Cependant, ceux sont de véritables boites noires qui nepermettent pas d'interpréter les modèles construits. En e�et, en cas d'erreurs du système,il est quasiment impossible d'en déterminer la cause.
71

Conclusion Générale
De nos jours, l'environnement des décideurs est de plus en plus complexe et évoluerapidement. La tendance est plutôt attribuée à l'accroissement de cette complexité dûà plusieurs facteurs : la technologie de l'information et des ordinateurs, la complexitéstructurelle des décisions, la forte compétition, l'ouverture au marché international, . . .
Les problèmes d'aide à la décision ont atteint le domaine géographique, et plus préci-sément l'aménagement du territoire.
Cette étude a démontré que les variables spatiales sont d'une grande importance dansla résolution des problèmes de sélection des sites pour une construction donnée, et quele développement d'un système d'aide à la décision basé sur une intégration SIG-RNAfournit aux décideurs un outil qui permet la génération de solutions faisables basées surles di�érents points de vue sociaux, économiques et environnementaux.
Le traitement de problèmes spatiaux requiert en entrée un ensemble de données géo-référenciées. Le système d'information géographique, SIG, par sa capacité dans le stockage,la gestion, l'analyse, la modélisation et l'a�chage de données à référence spatiale, se pré-sente comme l'outil le plus adéquat pour appréhender ces problèmes. Néanmoins, la tech-nologie SIG actuelle sou�re encore de plusieurs lacunes dans le domaine de l'aide à ladécision à référence spatiale. Particulièrement, les SIG ne disposent pas (ou très peu) decapacités analytiques capables de supporter la nature multicritère des problèmes spatiaux.Pour renforcer les SIG en aide à la décision à référence spatiale, la plupart des chercheursadoptent l'idée de coupler la technologie SIG avec des fonctionnalités analytiques plus so-phistiquées issues de la recherche opérationnelle. Une solution possible parmi les solutionsqui existent consiste en l'intégration du SIG et les réseaux de neurones arti�ciels RNA.
Les phénomènes, tant sociaux et économiques qu'environnementaux, de même que laprésence de groupes d'acteurs ayant des intérêts divergents et contradictoires, mettent enévidence la complexité de la conduite de projets urbains. De nouvelles formes de conduiteet de gestion de tels projets s'avèrent indispensables.
Dans ce contexte, plusieurs travaux mis en oeuvre exploitant le paradigme d'intégrationdes SIG avec d'autres technologies ont aboutit à de bons résultats.
72

Au terme de ce mémoire, nous avons proposé un modèle décisionnel fondé sur l'asso-ciation SIG et RNA au service de la prise de décision spatiale.Ainsi, le modèle du territoireconstitué par les SIG et les modèles de simulation, constituent le support des procéduresd'analyse spatiale. Notre système permet de donner des solutions à des problèmes de déci-sion multicritère. Dans le chapitre 1, nous avons présenté les concepts fondamentaux d'AD,ainsi que quelques processus décisionnels en AT, ce chapitre a été consacré à l'exposé d'unétat de l'art sur l'AD. Dans le chapitre 2, nous avons décrit la partie RNA, nous avonsabordé les principaux concepts de ce concept ainsi qu'un aperçu sur la méthode PMC etl'algorithme de RP, qui constitue une partie de notre système. Dans le chapitre 3, nousavons présenté le modèle décisionnelle MODAT-RN à la fusion du RNA (PMC)dans le SIG.Aussi, nous avons présenté le type de stratégie d'intégration ainsi que la démarche déci-sionnel du modèle. La mise en oeuvre du modèle MODAT-RN par le développement d'unRNA qui permet la classi�cation des critères selon leurs préférences, et l'interprétation decette classi�cation sous une forme géographique est abordée au chapitre 4. L'avantage decette mise en oeuvre est de dé�nir un système adaptatif élaborant lui-même une décisionmulticritère pour une bonne utilisation du sol relative à la région d'étude en intégrant lesconnaissances expertes existantes.
Ce présent travail, permet de fournir aux décideurs un outil d'aide à la décision àréférence spatiale qui intègre à la fois les fonctionnalités des SIG et du RNA. Notre e�orta porté sur la proposition de solutions conceptuelles, expérimentales et méthodologiques.
Dans le cadre conceptuel, notre approche préconise une intégration des réseaux deneurones tout a fait indépendante de la base de données géographique. Cette intégrationexige une structure générale qui pourrait s'adapter aux problèmes décisionnels à référencespatiale de natures di�érentes (dans notre cas l'élaboration d'une carte adéquate pourl'habitat).
Dans le cadre expérimental, un cas d'application relatif, d'une part, à une probléma-tique d'a�ectation à des catégories prédé�nies et d'autre part, à une problématique declassi�cation, de l'ensemble des zones homogènes .
Ce cas d'application nous a permis l'élaboration d'un système d'aide à la décisionspatial.
Dans le cadre méthodologique, le modèle proposé pourrait satisfaire une partie desbesoins de l'AT, l'utilisation des SIG et de procédures d'analyse spatiale permettrait dedécrire avec précision l'environnement des di�érentes zones. Cet outil combiné à des mo-dèles de simulation, pourrait être utilisé pour évaluer les di�érentes variantes vis-à-vis descritères énoncés par le ou les décideur (s).
73

En perspective, nous proposons d'intégrer dans le système d'aide à la décision suggéréd'autres approches, tels que : Les Algorithmes Génétiques pour permettre la réduction dutemps nécessaire pour obtenir un réseau optimal et améliorer la robustesse des algorithmesde descente de gradient.
Les systèmes experts pour permettre l'enrichissement de ses fonctionnalités. L'avantagede tels systèmes réside dans l'acquisition des connaissances relatives aux problématiquesde localisation spatiale .
La logique �oue pour permettre la représentation de la connaissance encodée dans leréseau de neurones par un langage compréhensible composé de règles �oues.
Aussi, il serait souhaitable d'enrichir les BDG par la mise en oeuvre de la terre nu-mérique. Cette technologie a été évoquée dans un discours écrit en vue de l'ouverture duCalifornia Science Center de Los Angeles, en janvier 1998, ou le vice président américain AlGore proposait " une représentation tridimensionnelle à résolution multiple de la planètequi pourrait receler de vastes quantités de données géoréférenciées " . Dans son discours,la Terre numérique est un milieu d'immersion à partir duquel un utilisateur, plus particu-lièrement un enfant, peut explorer la planète, son environnement et ses sociétés humaines.Cette représentation pourrait être accessible à partir de musées ou de bibliothèques, et uneversion plus modeste pourrait être di�usée par l'entremise des fureteurs courants du Webtournant sur des ordinateurs personnels ordinaires.
L'avantage d'un tel concept est de remettre en question l'état de nos connaissances àpropos de la planète, non seulement au chapitre des données brutes, mais aussi en ce quiconcerne l'accès aux données et la capacité de les communiquer de manière visuelle.
74

Deuxième partie
ANNEXES
75
Annexe A
Aménagement du Territoire
A.1 Introduction
L'AT s'occupe essentiellement de la répartition et de l'implantation des activités (lo-gement, bureau, industrie, commerce,...) dans l'espace et le temps. Cette répartition desactivités nécessite une vision globale du territoire concerné que le plani�cateur s'attache àobtenir a�n d'atteindre le but ultime de toute plani�cation: créer un environnement attrac-tif, fonctionnel et viable de manière durable. Caractérisées par ses fonctions de prévision,d'organisation et de gestion de l'espace, les actions de l'aménageur sont l'expression dechoix politiques devant permettre un développement optimal et une réduction des dispari-tés régionales.
A.2 Dé�nitions de L'AT
Compte tenue de la complexité de cette discipline, il n'y a pas une seule manière dedé�nir l'aménagement du territoire;
� "C'est l'ensemble des actions et moyens des pouvoirs publics visant à orienter etréguler l'appropriation de l'espace, en particulier au travers de la politique publiqued'aménagement du territoire mais aussi par le biais d'autres politiques publiques àimpact spatial participant à la gestion du territoire. L'aménagement du territoireprend parfois la forme de travaux scienti�ques ou d'actes techniques, mais il estd'abord un processus social 1";
� "L'AT est l'art ou la technique (plutôt que la science) de disposer avec ordre, à traversl'espace d'un pays et dans une vision prospective, les hommes et leurs activités, les
1Charte C.E.A.T: Communauté d'Etudes pour l'AT.
76

équipements et les moyens de communication qu'ils peuvent utiliser, en prenant encompte les contraintes naturelles, humaines et économiques, voire stratégiques 2";
� "L'AT est l'ensemble des actions visant à orienter le développement spatial des activi-tés sociales et économiques ainsi que l'environnement naturel, construit et social surun territoire déterminé. Le terme générique d'aménagement englobe tous les plansd'aménagement des collectivités publiques à tous les niveaux de l'état, dans les do-maines sectoriels (transports, environnement, économie, société, . . . )" [Lév et al, 04].
L'AT n'est donc pas un acte en soi mais l'outil qui permettra la mise en oeuvre du déve-loppement et l'expression d'un projet de société.
A.2.1 Les objectifs d'AT
La réalisation des objectifs de l'AT est essentiellement une tâche politique. De nom-breux organismes privés et publics contribuent à développer ou à modi�er l'organisationde l'espace. L'AT traduit une volonté d'intégration et de coordination à caractère interdis-ciplinaire et de coopération entre les autorités concernées. Il impliquant une participationde la population.
Madiot [Mad, 93], cite les objectifs suivants :� Le rééquilibrage du couple "ville-campagne";� La réduction des disparités régionales a�n de favoriser une répartition plus homogènedes populations;
� Le maintien d'un tissu rural et d'une façade urbaine cohérente avec les habitudessocio - culturelles;
� La préservation du cadre naturel (préoccupation plus récente).Aussi, nous citons d'autes objectifs plus fondamentaux 3:
� Le développement socio-économique équilibré des régions;� L'amélioration de la qualité de la vie;� La gestion responsable des ressources naturelles et la protection de l'environnement ;� L'utilisation rationnelle du territoire.
2Dictionnaire de l'urbanisme et de l'aménagement.3CEMAT : La Conférence européenne des ministres responsables de l'aménagement du Territoire, 2003.
77
A.3 Problématiques
On peut distinguer cinq types de problématiques en aménagement du territoire quibéné�cient de l'apport des SIG [Joe, 97]:
1. La recherche d'une surface satisfaisant au mieux certains critères : Il s'agit, parexemple, de la localisation d'une infrastructure tel qu'un bâtiment administratif, uneusine, une station d'épuration . . .
2. La recherche de plusieurs surfaces : Dans ce cas, en plus de la localisation des sur-faces,la problématique peut aussi concerner leur nombre, leur ordre de réalisation ouleur combinaison si toutes les surfaces ne sont pas destinées à la même utilisation.
3. La recherche d'un tracé reliant deux points : Ce tracé pourrait être celui d'une ligneélectrique, d'une route, d'une conduite d'eau, . . . ) : Cette problématique considèrenon seulement la localisation du tracé mais aussi la forme du tronçon.
4. La conception d'un réseau linéaire devant relier plusieurs points : Ce réseau peut,cette fois aussi, être un réseau électronique, routier, d'approvisionnement en eau,. . . .La forme du réseau et le nombre de noeuds et de tronçons doivent être pris en compte.
5. La conception d'un réseau de polygones : L'objectif ne se restreint pas à attribuer àchaque endroit la meilleure utilisation du sol, il faut aussi considérer le voisinage deszones et l'organisation globale du plan proposé.
A.4 Les principes fondamentaux de l'AT
L'AT s'appuie sur trois grands principes 4: la coordination, la coopération et laparticipation. La fonction de coordination de l'aménagement du territoire résulte direc-tement de la loi concernant l'aménagement du territoire. Celle-ci n'est possible que si unecoopération entre et avec les politiques sectorielles est assurée. La mise en oeuvre d'unepolitique cohérente d'AT exige, par ailleurs, l'implication des acteurs concernés à tous lesniveaux, ce qui répond au principe de la participation.
4Rapport du ministère de l'intèrieur. Grand-Duche de Luxembourg.
78
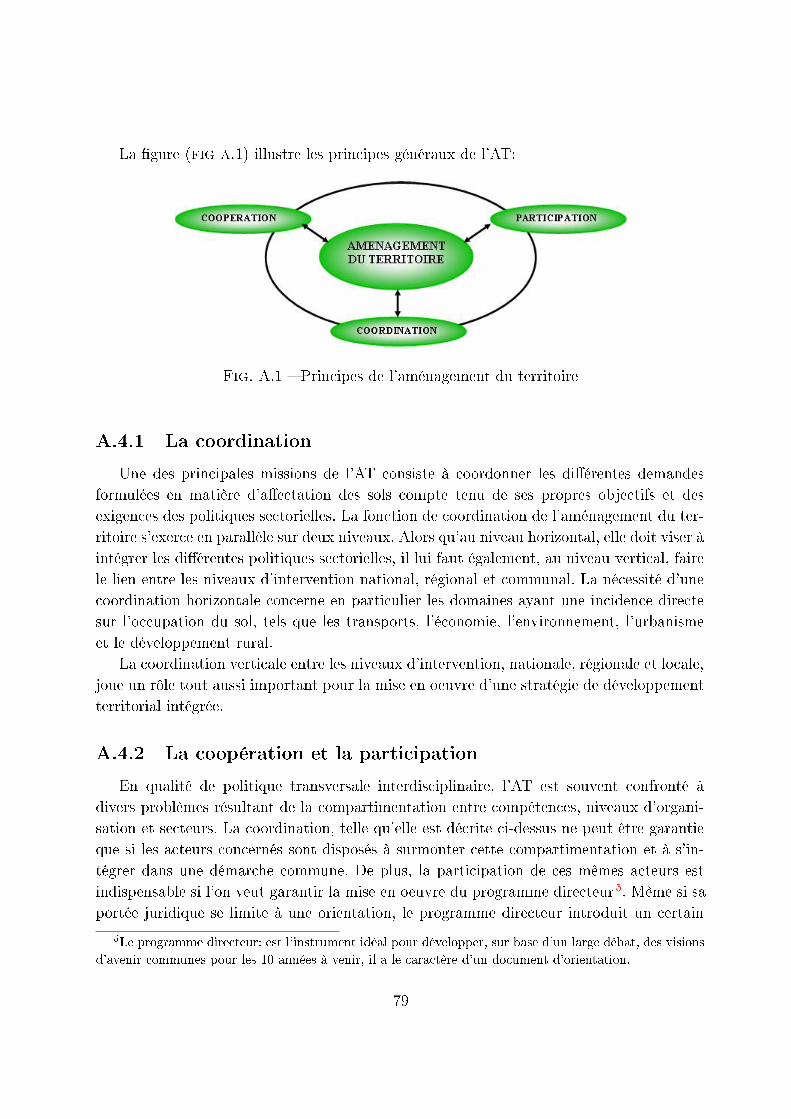
La �gure (fig a.1) illustre les principes généraux de l'AT:
Fig. A.1 � Principes de l'aménagement du territoire
A.4.1 La coordination
Une des principales missions de l'AT consiste à coordonner les di�érentes demandesformulées en matière d'a�ectation des sols compte tenu de ses propres objectifs et desexigences des politiques sectorielles. La fonction de coordination de l'aménagement du ter-ritoire s'exerce en parallèle sur deux niveaux. Alors qu'au niveau horizontal, elle doit viser àintégrer les di�érentes politiques sectorielles, il lui faut également, au niveau vertical, fairele lien entre les niveaux d'intervention national, régional et communal. La nécessité d'unecoordination horizontale concerne en particulier les domaines ayant une incidence directesur l'occupation du sol, tels que les transports, l'économie, l'environnement, l'urbanismeet le développement rural.
La coordination verticale entre les niveaux d'intervention, nationale, régionale et locale,joue un rôle tout aussi important pour la mise en oeuvre d'une stratégie de développementterritorial intégrée.
A.4.2 La coopération et la participation
En qualité de politique transversale interdisciplinaire, l'AT est souvent confronté àdivers problèmes résultant de la compartimentation entre compétences, niveaux d'organi-sation et secteurs. La coordination, telle qu'elle est décrite ci-dessus ne peut être garantieque si les acteurs concernés sont disposés à surmonter cette compartimentation et à s'in-tégrer dans une démarche commune. De plus, la participation de ces mêmes acteurs estindispensable si l'on veut garantir la mise en oeuvre du programme directeur 5. Même si saportée juridique se limite à une orientation, le programme directeur introduit un certain
5Le programme directeur: est l'instrument idéal pour développer, sur base d'un large débat, des visions
d'avenir communes pour les 10 années à venir, il a le caractère d'un document d'orientation.
79
nombre d'options qui seront précisés lors d'une prochaine étape par les plans directeursrégionaux et les plans directeurs sectoriels. Le fait de mener un large débat politique autourdu programme directeur permet aux acteurs concernés de se familiariser avec la matière,de s'intégrer dans le processus d'élaboration et de s'approprier le sujet.
A.5 Les réalisations concrètes en AT
Les nouveaux principes de l'urbanisme et de la gestion des territoires insistent sur l'idéede projet : se projeter dans l'avenir, imaginer les territoires urbains dans le futur est devenuun préalable nécessaire à la plani�cation : c'est en connaissant ce vers quoi l'on veut tendredemain que l'on peut aujourd'hui prévoir et réglementer.
La concrétisation des politiques d'AT se fait "dans l'espace6 ", qu'elle prenne la formede constructions, ou d'attribution de statuts particuliers, et des aides a�érentes, à des zonesdu territoire.
Nous citons dans ce qui suit quelques exemples de réalisations [Leb, 93]:� Les aménagements routiers, ferroviaires, énergétiques, touristiques : les infrastruc-tures ;
� Les implantations industrielles, ou de services (centrales de traitement, écoles, postes) ;� Les schémas de développement, schémas de bassin, de gestion des eaux;� Les POS (Plan d'Occupation du Sol), les plans d'urbanisme ;� Les politiques d'attribution de subventions, selon les zones et l'activité ;� Le génie paysager, et la préservation des paysages ;� La création de parcs, réserves, zones réglementées ;� Le classement de sites.
Au nombre des préoccupations de l'AT, �gurent les problématiques de localisation spa-tiale. En e�et, les questions de localisation se posent lors du choix du ou des meilleur(s)emplacement(s) pour l'implantation d'une infrastructure , la ou le(s) meilleure(s) activitéscorrespondante(s) à un site compte tenu de ses caractéristiques .
6D'après le dictionnaire Robert : l'espace est le lieu plus ou moins bien délimité où peut se situer quelque
chose.
80

A.5.1 L'Analyse du territoire
L'usage des SIG comme outil d'analyse du territoire a pour objet de mettre en évi-dence les faits spatialisés. Ce type d'usage vise la validation d'une hypothèse, la con�r-mation d'une présomption ou encore la compréhension d'un phénomène localisé [Bor, 05].Cette analyse du territoire implique l'exploitation des informations géographiques dans lecadre de procédures ou de protocoles établis en vue d'une meilleure gestion des objetsgéographiques décrits.
L'analyse du territoire conduit à identi�er des morceaux de territoire ou micro-territoires,lieux de con�it mais aussi potentiellement de dynamique et d'évolution [Rau, 06]. La ré-�exion sur le territoire comme support d'action conduit à s'intéresser à la constitutiondes con�gurations organisationnelles territorialisées (mise en place des coopérations, éla-boration des activités,. . . ), à leurs modes de fonctionnement (dispositifs, pratiques et com-pétences,...) et à leur dynamique d'évolution (apprentissage, rôle des critères de perfor-mance...) [Gro et al, 04].
L'analyse du territoire, par l'exploitation de données géographiques permet de suivreles indicateurs de développement et à terme de proposer des scénarios d'évolution, elletouche souvent les plans suivants:
� Cartes d'occupation des sols� Globales (type Corine Land Cover),� Socio-économiques (carte de potentialité des terres ou de vocation agro-économique).
� Infrastructure� Mise en place de SIG sur les réseaux (eau, transport).
� Schémas directeurs d'aménagement� Cartographie et délimitation des zones urbanisées,� Analyse des évolutions.
� Caractérisation des espaces urbains� Typologie des quartiers.
� Plans cadastraux� plans cadastraux digitalisés.
81

Nous trouvons dans la �gure (fig. a.2) un exemple illustrant les di�érentes plans d'uneanalyse du territoire:
Fig. A.2 � Les di�érentes plans de l'analyse du territoire
A.6 Dé�nition des critères environnementaux
La construction d'un quartier d'habitation, à coté d'une réserve naturelle, peut consti-tuer une menace faune et �ore (cueillette, animaux domestiques,. . . ), il s'agit la d'un con�itde voisinage. Le con�it d'utilisation du sol a lieu si un projet d'extension d'un quartierconvoite le site d'une réserve [Joe, 97].
Cette di�érence entre les con�its de voisinage et l'utilisation du sol clari�é l'évaluationdes facteurs principaux liés à l'environnement. En e�et, les con�its de voisinage sont géné-ralement évalués sur des échelles cardinales (distance, décibels, concentration), alors queles con�its d'utilisation sont plutôt de nature ordinale (ex : il est exclu, peu souhaitable oupossible, de construire dans cette réserve naturelle).
Le tableau (Tab. a.1), présente une vue d'ensemble des facteurs considérés dans lescritères sociaux et environnementaux [Joe, 97]
Critères FacteursImpact Monuments historiques, Intégration paysagère, Paysage, Sites
protégés, Archéologie, Eaux souterraines, Biotopes, Gèotopes,Impact sur le régime hydrologique, Impact sur un milieu na-turel.
Suite page suivante . . .
82

. . . Suite
Critères FacteursClimat Ensoleillement, Température, Brouillard.
Géotechnique et risques na-turels
Risques géologiques, Inondation.
Bruit Bruit.Nuisances Pollutions atmosphériques et odeurs, Rayonnement.
Accessibilité Proximité du lieu de travailÉquipement et distance auxlocalités
Raccordement au réseau routier, Raccordement au réseau dé-goûts Raccordement au réseau électrique, Éloignement auxécoles, centres sportifs, commerces,. . .
Tab. A.1 � Critères et facteurs de l'adéquation du territoire pour l'habitat
A.7 Conclusion
Face aux mutations urbaines et à l'émergence d'une multitude d'enjeux territoriaux dé-fendus par des acteurs maîtrisant de mieux en mieux les outils administratifs et juridiques,l'aménagement du territoire est amené à se placer dans le référentiel du développementdurable. Ce concept introduit des aspects temporels, des échelles spatiales multiples, ainsique la concertation basée sur l'information régulatrice. Il apporte aussi un changementd'optique par l'intégration des sphères économiques, sociale et environnementale.
83

Annexe B
Système d'information Géographique(SIG)
B.1 Introduction
Du fait de l'augmentation des performances des ordinateurs et de la disponibilité debases de données géographiques plus accessibles, l'utilisation des logiciels de type SIG s'estétendue à tous les métiers de l'AT.
Développés depuis des années 60, les systèmes dinformation géographiques (SIG) ontpour objectifs le traitement de l'information géographique. Cette dernière se compose d'élé-ments graphiques (position géographique, surface,. . . ) et de données descriptives (nature,propriétés, . . . ) attenantes à ces éléments.
B.1.1 Dé�nitions de SIG
Selon [Jol, 96], un SIG peut se dé�nir comme:
1. " Un ensemble puissant doutils pour rassembler, stocker, extraire à volonté et visua-liser des données spatiales du monde réel pour un ensemble particulier dobjectifs ".
2. " Un projet constitué d'un aspect matériel, logiciel, de données et en�n de personnel ".
3. " L'ensemble des structures, des méthodes, des outils et des données constituées pourrendre compte de phénomènes localisés dans un espace spéci�que et faciliter les déci-sions à prendre sur cet espace", cette dé�nition est appliquée au domaine de l'envi-ronnement.
84

Un SIG est composé principalement d'un ensemble de : matériels, logiciels, données, etpersonnels. Ces éléments élémentaires sont illustrés par la �gure (F ig. b.1).
Fig. B.1 � Les 4 composantes d'un Système d'Information Géographique
B.2 Les données dans les SIG
Les données géographiques présentent des caractéristiques qui les rendent particulièreslors de leur modélisation ou de leur traitement informatique. En e�et, il est important deprésenter à la fois la structure d'un SIG, puis les di�érentes informations ainsi que les typesde données qu'un SIG peut gérer.
B.2.1 La structure d'un SIG
Il existe diverses dé�nitions des SIG. Laurini [Lau, 93] en propose deux : la premièreest orientée vers les besoins de l'utilisateur et la seconde est tournée d'avantage vers lesdécideurs. Il en suit que les SIG ont une fonction double, ce sont des outils de gestion etégalement des outils d'aide à la décision. Ces deux fonctions dé�nissent la structure propredes SIG.En e�et, tout SIG se compose de quatre groupes de fonctionnalités (F ig. b.2), qui sont :
� L'acquisition des données ;� La gestion des données ;� L'analyse spatiale ;� La présentation des données.
85

Fig. B.2 � La structure d'un SIG
B.2.2 Les modes de représentation des données spatiales
Les données spatiales peuvent être initialisées, gérées, stockées, sous deux modes dif-férents : le mode vecteur et le mode raster. Ces données permettent de constituer lesdi�érentes couches d'information.
1. Les données rasters : Le mode raster correspond à une division régulière de l'espacesous la forme de cellules carrées appelées pixels. La taille de ces pixels va déterminerla résolution de l'image. La �gure (Fig. b.3) donne une vision schématique de cetype de données.
Fig. B.3 � Les données rasters
86

Dans le mode raster, la représentation graphique de l'information se fait sous la formed'une matrice de points. C'est le cas, par exemple, des images satellites, des cartesscannées1 ou de certains modèles numériques de terrain. Cette présentation est facileà utiliser car les données sont sous forme de tableau.
2. Les données vecteurs : Dans le mode vecteur, la représentation graphique se fait àl'aide d'une succession de points dé�nis géométriquement par leurs coordonnées. C'estle cas obtenu après une digitalisation ou provenant de module dans des logiciels deCAO (Conception assistée par Ordinateur) et DAO (Dessin Assisté par Ordinateur).Le mode vecteur est représenté dans un repère cartésien souvent à deux dimensions.La �gure (Fig. b.4) présente une représentation de ce type de données.
Fig. B.4 � Les données vecteurs
L'avantage majeur de ce type de données tient dans la base attributaire associéequi permet la réalisation de requêtes (géographiques et attributaires) et d'analysesthématiques à partir de ces dernières.
Un Système d'Information Géographique traduit un sous ensemble imparfait de la réalitésous forme de couches d'information (Fig. b.5).
1Anglicisme très utilisé en science géographique qui signi�e numériser un objet par un scanner.
87

Fig. B.5 � Exemple des di�érentes couches thématiques
B.2.3 Les informations géographiques
Les informations géographiques peuvent être de nature di�érente. Elles sont classées,par Blomac [Blo et al, 94], en trois grandes catégories.
Les informations peuvent alors référer la localisation, la description ou la relation devoisinage.
� La localisation dé�nit la position des objets dans l'espace. Une entité peut être loca-lisée de diverses manières :
1. Par des coordonnées absolues (bi ou tridimensionnelles), sur une sphère ou dansle plan d'un système de projection ;
2. Par des coordonnées relatives ;
3. À l'aide d'informations de géo-référencement.
� La description permet de dé�nir une entité du monde réel au sein du SIG, en utilisantses caractéristiques propres. Cette description se retrouve sous la forme d'attributstels que le débit d'un cours d'eau, la population d'un commun ou autre attribut. Elleest appelée en géomatique : l'information attributaire.
� La nature géographique de l'information nécessite aussi de connaître les liens spatiauxentre les entités. La topologie répond à ce besoin. Elle suppose la structure desdonnées sous la forme d'un graphe qui permet de connaître les relations entre lesobjets d'un réseau.
88

B.3 Les avantages d'un SIG
Les béné�ces apportés par l'implantation d'un SIG sont di�ciles à évaluer car ils ne sontpas quanti�ables. De plus, ces béné�ces sont spéci�ques à chaque SIG et dépendent desdi�érentes applications installées. Cependant, on peut distinguer les avantages classiquessuivants [Sma, 05]:
� Un SIG permet d'abaisser les coûts de production des cartes et des plans. Dans denombreuses communes, les cartes et plans sont établis à la main, avec des délais etdes coûts de correction, de mise à jour, de dessin,. . . . Le SIG permet de les établirplus rapidement et à moindre frais;
� Un SIG permet aussi d'établir des cartes et des plans que l'on ne pouvait pas réaliserà la main. Grâce à l'informatique, il est possible de réaliser des produits nouveauxqu'il était impossible de réaliser à la main;
� Un SIG évite d'avoir à refaire plusieurs fois les mêmes levers. Il évite que des servicesdi�érents procèdent à des levers topographiques sur la même zone et évite les pertesd'information avec le temps en accumulant l'information recueillie sur le terrain;
� Lorsque le SIG est en place, installer une nouvelle application nécessite un investis-sement modeste et le retour sur investissement est rapide;
� Un SIG facilite la réalisation d'étude pour tous les projets ayant une composantegéographique. Il permet de multiplier les représentations visuelles et facilite ainsi laprise de décision tout en diminuant les risques d'erreurs;
� Le SIG améliore le service rendu à l'usager en permettant de lui fournir avec rapiditéet �abilité une information de qualité dont il a besoin. Par exemple, tous les rensei-gnements délivrés par le service urbanisme seront, en principe, à jour et complets;
� Le SIG permet des calculs utiles à la prise de décision. Cela va du calcul simple,la superposition cartographique, au calcul complexe d'analyse spatiale intégrant ungrand nombre de paramètres.Finalement, grâce à la facilité d'accès à l'information cartographique provenant desources diverses apportée par les SIG, cet outil représente une plate-forme de langagecommun entre les di�érentes disciplines.
89

B.4 Utilités des SIG
Les champs d'utilisation des SIG sont multiples. L'objectif de cette section est de dresserun inventaire non exhaustif des domaines d'application, nous présentons dans le tableau(Tab. b.1) les principaux domaines d'utilisation de SIG.
Domaines d'activités Exemples d'utilisation
Ressources naturelles Protection des zones humides, études d'impacts,gestion des produits dangereux,. . . .
Réseaux urbains Localisation, plani�cation des transports, sélectiond'itinéraires,. . . .
Administration munici-pale
Gestion du cadastre, gestion de la qualité des eaux,schémas d'aménagement,. . . .
Gestion des installations Plani�cation et entretiens des installations, locali-sation des câbles et des conduites souterraines,. . . .
Commerce Analyse de la structure des marchés, plani�cationet développements, ciblage de la clientèle,. . . .
Santé Epidémiologie, distribution des services so-ciaux,. . . .
Protection de l'environ-nement
Suivi des changements climatiques, d'occupationsdes sols,. . . .
Tab. B.1 � Quelques domaines d'activités d'utilisation de SIG
B.5 Conclusion
Les SIG représentent également un outil particulièrement intéressant dans l'approchede l'échelle spatiale des phénomènes étudiés, les SIG peuvent traiter une quantité énormede données, pour synthétiser l'information et l'a�cher sur une simple carte.
Les SIG, bases de données repérables dans l'espace, deviennent des outils incontour-nables d'aide à la décision dans de nombreux domaines. Ils sont basés sur l'informationgéographique, constituée de donnés graphiques et alphanumériques, qui s'appuie sur lesproductions des grands organismes. Leurs applications se développent rapidement, en par-ticulier dans les domaines relatifs à l'économie, l'aménagement, l'urbanisme et l'environ-nement.
90

Annexe C
Les Réseaux de Neurones
C.1 Dé�nition
Un réseau de neurones est un ensemble de cellules neuronals, inter-connectées par desliaisons synaptiques. Le neurone est l'unité de base du traitement neuronal, le neuroneformel, modélisé par McCulloch et Pitts, e�ectue simplement une transformation de lasomme pondérée des signaux qu'il reçoit en entrée :
a =∑
i
(wi ∗ pi)
� a: est l'activation ou la sortie du neurone qui représente l'intensité du signal émis parle neurone sur ses arcs sortants;
� pi i=1,..,n: sont les signaux portés par les connexions entrantes;� wi i=1,..,n: sont les coe�cients de pondération portés par les arcs entrants, appe-lés coe�cients synaptiques par analogie avec le neurone biologique (ce coe�cientreprésentait initialement la "force" de la liaison synaptique);
91

C.2 Fonctions d'activations
Dans le tableau (Tab. c.1) nous exposons quelques fonctions couramment utiliséescomme fonctions d'activation [Par, 04]:
Tab. C.1 � Fonctions d'activation a=f(n)
92

C.3 L'apprentissage
Dans un réseau de neurones de type perceptron, l'apprentissage s'e�ectue en modi�antles poids du réseau de façon à minimiser l'erreur entre la valeur obtenue par le neurone desortie et la valeur attendue, telle qu'elle est donnée par l'exemple d'apprentissage. Il s'agitd'un algorithme basé sur la correction d'erreur [Sri, 05].
La mise en oeuvre de cet algorithme nécessite un enchaînement des opérations mathé-matiques données comme suit [Par, 04] :
C.3.1 Notion des bases
� Les scalaires seront désignés par des lettres minuscules italiques ex.a,b,c,. . .� Un "vecteur" désigne une colonne de nombres.Poids d'une couche de neurone
� Wk(t) : désigne la matrice des poids pour la couche k d'un réseau au temps t.� wk
j (t) : désigne le vecteur correspondant à la colonne j de Wk(t)
� iwk(t) : désigne le vecteur rangé correspondant à la ligne i de Wk(t)
� wki,j(t) : désigne l'élément (i, j) de Wk(t) (i désigne toujours une ligne et j une colonne).
Biais d'une couche de neurones� bk(t) : désigne le vecteur des biais pour la couche k d'un réseau au temps t.� bki (t) : désigne l'élément i de bk(t)
Stimulus d'un réseau� p(t) : désigne un vecteur stimulus présenté à l'entrée d'un réseau au temps t.� pi(t): désigne l'élément i de p(t).Niveaux d'activation d'une couche de neurones
� nk(t) : désigne un vecteur des sorties pour la couche k d'un réseau au temps t.� nk
i (t) : désigne l'élément i de nk(t)
Sorties d'une couche de neurones� ak(t) : désigne le vecteur des niveaux d'activation pour la couche k d'un réseau autemps t.
� aki (t) : désigne l'élément i de ak(t)
Cibles d'un réseau� d(t) : désigne un vecteur cible pour les sorties désirées d'un réseau au temps t.� di(t): désigne l'élément i de d(t).
Base d'apprentissage� (p1, d1), (p2, d2), . . . , (pQ, dQ): désigne un ensemble de Q association stimulus/ciblepour l'apprentissage supervisé.
93

C.3.2 L'algorithme d'apprentissage
De manière simpli�ée, l'apprentissage dans un perceptron à trois couches peut êtrereprésenté par :
Algorithm 2 ApprentissageDébutInitialisation des poids wij à des valeurs réelles aléatoires ;Répétition jusqu'au critère d'arrêt du cycle d'apprentissage suivant :Permutation des motifs d'apprentissagePour chaque motif d'apprentissagePasse avant(passage à la couche cachée)Application du motif aux unités d'entréePour chaque unité de chaque coucheCalcul de la fonction d'activation (al
j) comme étant la somme pondérée des entrées del'unitéCalcul de la sortie de chaque unité : a = f(n) (f : fonction logistique)Confrontation des sorties calculées aux sorties désiréesCalcul de l'erreur pour chaque unité de la couche de sortie
e3i = (di − a3i )f(n3
i )
Passe arrière (retour à la couche cachée)Calcul de l'erreur pour chaque unité de la couche cachée
e2i = f(n)nbrdesortie∑
i=1
a3iw
3ji
Mise à jour des poids des connexions avec le coe�cient d'apprentissage η
wkji = wk
ji + η ∗ eki a
ki
�n
N.B :Le coe�cient d'apprentissage in�uence signi�cativement la convergence de l'al-
gorithme d'apprentissage.
94

C.4 Rétropropagation des erreurs
L'apprentissage de PMC est attaché à l'algorithme de la rétropropagation des erreurs.Cette algorithme, utilisé par les réseaux de neurone multicouches, consiste simplement enune descendante de gradient, qui est une méthode d'optimisation universelle. On chercheà minimiser une fonction de coût (qui représente l'erreur désirée et la sortie obtenue), ensuivant les lignes de plus grande pente [Rum et al, 86].
Fig. C.1 � Représentation matricielle d'un perceptron MultiCouches de trois couches
C.4.1 L'algorithme de la rétropropagation des erreurs
L'équation qui décrit les sorties d'une couche k dans un perceptron multicouche estdonnée par:
ak = fk(Wkak−1 − bk), pour k = 1, . . . ,M. (C.1)
où M désigne le nombre total de couches et a0 = p dé�nit le cas de base de cetteformule de récurrence.
Les sorties du RN correspondent alors à aM . L'algorithme de rétropropagation utilisecomme indice de performance l'erreur quadratique moyenne, et permet un apprentissagede type supervisé avec un ensemble d'association stimulus/cible (pQ, dQ), p = 1, . . . , Q, oùpq représente un vecteur stimulus (entrées) et dq un vecteur cible(sorties désirées).
À chaque instant t,on peut propager vers l'avant un stimulus di�érent p(t) à travers leréseau de la �gure (Fig c.1) pour obtenir un vecteur de sorties a(t). Ceci nous permet decalculer l'erreur e(t) entre ce que le réseau produit en sortie pour ce stimulus et la cibled(t) qui lui est associée :
e(t) = d(t)− a(t) (C.2)
L'indice de performance F permet de minimiser l'erreur quadratique moyenne:
F (x) = E[eT (t)e(t)] (C.3)
95

où E [.] désigne l'espérance mathématique et le vecteur x regroupe l'ensemble des poids etdes biais du réseau, nous allons approcher cet indice par l'erreur instantanée :
F (x) = eT (t)e(t) (C.4)
Nous utilisons la méthode de la descente du gradient pour optimiser x:
∆wki,j(t) = −η ∂F
∂wki,j
(C.5)
∆bki (t) = −η ∂F∂bki
(C.6)
où η désigne le taux d'apprentissage.Nous caluculons par la suite les dérivées partielles de ces deux équations (C.5) (C.6):
∂F
∂wki,j
=∂F
∂nki
∗ ∂ki
∂wki,j
(C.7)
∂F
∂bki=∂F
∂nki
∗ ∂ki
∂bki(C.8)
Posons ski ≡ ∂F
∂nki:
∂F
∂wki,j
= ski a
k−1j (C.9)
∂F
∂bki= −sk
i (C.10)
On peut réécrire les équations (C.7) et (C.8) de la façon suivante:
∆wki,j(t) = −ηsk
i (t)ak−1j (t) (C.11)
∆bki (t) = ηski (t) (C.12)
Ce qui donne en notation matricielle:
∆Wk(t) = −ηsk(t)(ak−1j )T (t) (C.13)
∆bk(t) = ηsk(t) (C.14)
avec
sk ≡ ∂F
∂nk=
∂F∂nk
1
∂F∂nk
2...
∂F∂nk
sk
(C.15)
96

C.4.2 Calcul des sensibilités
Il reste maintenant à calculer les sensibilités sk, ce qui requerra une nouvelle applicationde la règle de chaînage des dérivés. Dans ce cas, nous obtiendrons une formule de récurrenceoù la sensibilité des couches en amont (entrées) dépendra de la sensibilité des couches enaval (sorties). C'est de là que provient l'expression "rétropropagation", car le sens de lapropagation de l'information est inversé par rapport à celui de l'équation ak.
La relation de récurrence pour les sensibilités est donneé par:
sk =∂F
∂nk=
(∂nk+1
∂nk
)T∂F
∂nk+1= F
k(nk)(Wk+1)T ∂F
∂nk+1(C.16)
= Fk(nk)(Wk+1)T sk+1 (C.17)
Cette équation nous permet de calculer s1 à partir de s2, qui lui-même est calculé àpartir de s3,. . . , jusqu'à sM . Ainsi les sensibilités sont rétropropagées de la couche de sortiejusqu'à la couche d'entrée de la manère suivante:
sM → sM−1 → . . . s2 → s1 (C.18)
En notation matricielle,on peut écrire:
sM = −2FM
(nM)(d− aM) (C.19)
C.4.3 Algorithme d'entraînement
Nous présentons dans cette section, un résumé de la démarche à suivre pour entraînerun perceptron multicouche utilisant les formules vues précédemment:
1. Initialiser tous les poids du réseau à de petites valeurs aléatoires.
2. Pour chaque association (pq, dq) dans la base d'apprentissage :� Propager les entrées pq vers l'avant à travers les couches du réseau :
a0 = pq
ak = fk(Wkak−1 − bk), pour k = 1, . . . ,M.(C.20)
� Rétropropager les sensibilités vers l'arrière à travers les couches du réseau :
sM = −2FM
(nM)(dq − aM)
sk = Fk(nk)(Wk+1)T ∂F
∂nk+1 , pour k = M − 1, . . . , 1(C.21)
� Mettre à jour les poids et biais :
∆Wk(t) = −ηsk(t)(ak−1j )T (t), pour k = 1, . . . ,M
∆bk(t) = ηsk(t) pour, k = 1, . . . ,M(C.22)
97

3. Si le critère d'arrêt est atteint, alors stop.
4. Sinon, permuter l'ordre de présentation des associations de la base d'apprentissage.
5. Aller à l'étape b.
C.4.4 Critère d'arrêt
Pour éviter le phénomène de sur-appentissage,une solution à ce problème consiste àutiliser un autre critère d'arrêt basé sur une technique dite de validation croisée (en anglais"cross-validation"). Cette technique consiste à utiliser deux ensembles indépendants dedonnées pour entraîner le réseau : un pour l'apprentissage (l'ajustement des poids) etl'autre pour la validation, c'est-à-dire le calcul d'un indice de performance (une erreur,un taux de reconnaissance ou tout autre mesure pertinente à l'application). Le critèred'arrêt consiste alors à stopper l'apprentissage lorsque l'indice de performance calculé surles données de validation cesse de s'améliorer pendant plusieurs périodes d'entraînement.La �gure (Fig c.2) illustre le critère de la validation croisée dans le cas d'un indice deperformance que l'on cherche à minimiser.
Fig. C.2 � Le phénomène de sur-apprentissage et la validation croisée
98

C.5 Conclusion
Le grand avantage des réseaux de neurones réside dans leur capacité d'apprentissageautomatique, ce qui permet de résoudre des problèmes ne nécessitant pas l'écriture derègles complexes, tout en étant tolérant aux erreurs. Cependant, ceux sont de véritablesboites noires qui ne permettent pas d'interpréter les modèles construits. En cas, d'erreursdu système, il est quasiment impossible d'en déterminer la cause.
99

Bibliographie
[Anc, 95] J.P.Ancot, J.H.P. Paelinck. Multi-criteria analysis,combinatorial mathematics, andzero-one programming Working paper,1979/16,Netherlands Economic Institute, 1972.
[Arb, 95] M. Arbib(Ed.). The handbook of brain theory and neural networks .MA:MIT Press.Cambridge, 1995.
[Ban, 89] J.C. Bandibas. A Land Evaluation System Using Arti�cal Neural Network Based Ex-pert's Knowledge and GIS. GISdevelopment, Canada, 1989.
[Bei, 02] C.M.L. Beigneux. Eléments de maintenance préventive de machines tournantes dansle cas de défauts combinés d'engrenages et de roulements . Thèse Doctorat, Institut nationaldes sciences appliquées de Lyon, Lyon, 2002.
[Ben et al, 96] D.A. Bennett , M.P. Armstrong, G.A. Wade. Agent mediated consensus-building for environmental problems: a genetic algorithm approach. Proceedings, Third In-ternational Conference/Workshop on Integrating GIS and Environmental Modeling, SantaFe, NM, National Center for Geographic Information and Analysis, Santa Barbara, Canada,1996.
[Ber, 04] F. Bertrand. Plani�cation et développement durable :vers de nouvelles pratiquesd'aménagement régional ?. Université François Rabelais-Tours, 2004.
[Blo et al, 94] F. Blomac, R. Gal, M. Hybert, D. Richard, C. Tourret . Arc/Info Conceptset applications en géomatique. Hermès, 247 pages,Paris, 1994.
[Bon et al, 01] J.L. Bonnefoy, C. Le Page, J. Rouchier, F. Bousquet. Modelling spatialpractices and social representations of space using multi-agent systems. UFR de géogra-phie,Université de Provence, 2001.
[Bor, 05] J. Borken. Evaluation of environmental indicators for transport with ELECTRE III.Séminaire PIE of INRETS,French National Institute for Transport, Lyon, 2005.
[Bou, 91] P. Bourret , J. Reggia , M. Samuelides. Les réseaux neuronaux : une approcheconnexionniste de l'Intelligence Arti�cielle. Teknea, 1991.
[Bro, 97] C.J. Brookes. A parameterized region-growing programme for site allocation on rastersuitability maps. International Journal of Geographical Information Science ,P.375-396,1997.
[Bro, 02] L. Brousseau. Le SIG et l'analyse multicritère pour la prise en compte des autresutilisateurs de la forêt lors de la plani�cation des opérations forestières. Colloque sur la
100

plani�cation forestière, l'aménagement intégré des ressources en milieu forestier : conceptset outils, 2002.
[Bru et al, 92] R. Brunet , R. Ferras , H. Théry. Les mots de la géographie ; dictionnairecritique. La Documentation Française; GIP RECLUS, Paris, 1992.
[Bru, 97] R. Brunet. Le point sur l'aménagement. L'aménagement du territoire en France.LaDocumentation Française P.2-8; Paris, 1997.
[Car, 95] A. Caron. La prise de décision en urbanisme. Volume A ,2e édition revue et augmentée.Les Publications du Québec . Sainte-Foy, Canada,1995.
[Cha, 05] S. Chakhar , V. Mousseau , C. Pusceddu , B. Roy . Decision map for spatialdecision making in urban planning. CUPUM'05,London, 2005.
[Cha, 06] S. Chakhar , V. Mousseau . Generation of spatial decision alternatives based ona planar subdivision of the study area. In Proceedings The 2006 ACM/IEEE InternationalConference on Signal-Image Technology and Internet-Based Systems (SITIS 2006), Lecture-Notes in Computer Science,Hammamet, Tunisia, 2006.
[Cle, 86] M. Clelland ,D. E. Rumelhart. Parallel Distributed Processing. Volume 1 ,Founda-tions, Bradford Books, MIT Press, 1986.
[Cow, 91] D.J. Cowen, W.L. Shirley . Integrated planning information systems. GeographicalInformation Systems : Principles and Applications, Volume 2, p.297-310. London, 1991.
[Cun, 04] C. Cunty. Systemes d'information géographique et sécurité :une application pour leRATP. Th.de doct,université ParisI sorbonne,Paris,2004.
[Den, 91] P.J. Densham. Spatial decision support systems. Geographical Information Systems,Longman Scienti�c Technical,Volume 1, p. 403-412. New-York,1991.
[Did, 90] M. Didier . Utililité et valeur de l'information géographique. Economica, 1990.
[Dro, 93] A. Drogoul, A. Fresneau . Manta : new exprimental results on the emegence of(arti�cial) and societies. simulating societies sympo-sium. sienne, C.Castelfranchi, 1993.
[Dry et al, 04] G.M. Dryfus, J.Martnez, M. Samulides, M.B. Gorden, F. Badran. Réseaude neurones : méthodologie et applications. Groupe Eyrolls, 2004.
[Dup, 94] C. Dupont. La négociation : Conduite,théorie,applications. Dalloz, Paris, 1994.
[Eng et al, 99] G. Engelen, S. Geertman, P. Smits, C. Wessels. Dynamic GIS and strategicphysical planning support : A practical application. Geographical information and planning,p. 87-111,New York, 1999.
[Fer, 97] N. Ferrand. Modèles pour un outil d'aide à la décision et la négociation en aména-gement du territoire : approche multi agents. Thèse Doctorat, Université Joseph Fourier,Grenoble, 1997.
[Fil, 04] N. Filippi. La réalisation de la base de données géographique des sols d'Italie à l'échellede 1/250 000. Centre Commun de Recherches, IES, Unité sols et déchets, TP 280, 21020Ispra (VA), Italia.2004
101
[Fis, 03] R. Fischler. Vers un nouvel urbanisme pour de nouveaux quartiers : revue des nouveauxcourants nord-américains en urbanisme et aménagement et de leurs possibilités d'applicationa Montréal. Service du Développement économique et urbain, O�ce de l'Habitation. Mont-réal, 2003.
[Fun, 89] K. Funahashi. On the Approximate Realization of Continuous Mappings by NeuralNetworks. Neural Networks, Volume 2, p.183-192, 1989.
[Gau, 92] E. Gauthier. Utilisation des Réseaux de Neurones Arti�ciels pour la Commanded'un Véhicule Autonome.Thèse de doctorat, l'Institut National Polytechnique De Grenoble,Grenoble1992.
[Geo, 83] A.M. Geoffrion. Can OR/MS evolve fast enough ?. Interfaces, Volume 13, p. 10-25,1983.
[Gim et al, 94] R.H. Gimblett, G.L. Ball, A.W. Guise. Autonomous rule generation and as-sessment for complex spatial modeling. Landscapeand Urban Planning, Volume 30, p. 1326.1994.
[Goo, 91] M.F.Goodchild. Process on the GIS research agenda. In Second European Conferenceon GIS (ESIG91) Proceedings, volume 1, p.342350, Brussels, Belgium, 1991.
[Goo, 00] M.F. Goodchild. Les systèmes d'information à référence spatiale. TOOLKIT, Trousseà outils, isuma,2000.
[Gra et al, 98] D. Graillot, R. Laurini, P. Dumolard , T. Joliveau. Systèmes dInformationEnvironnementaux et dAide à la Décision. SIGURA : méthodes et outils pour laménagementdu territoire. Numéro spécial de la revue internationale de Géomatique déc.98, Hermès ,Paris, 1998.
[Gro et al, 04] M. Grosjean, J. Henry, A. Barcet, j. Bonamy. La négociation constitutiveet instituante Les co-con�gurations du service en réseau de soins. Négociations, Volume 2,p.75-90, 2004.
[Ham et al, 06] D. Hamdadou, K. Bouamrane, K. Labed. Un Processus Décisionnel par Utili-sation des SIG et des Méthodes Multicritères pour l'Aménagement du Territoire : PRODUS-MAT. MCSEAI 06 ,9 e Conférence Maghrébine sur la Technologie de l'Information Agadir,2006.
[Ham et al, 07] D. Hamdadou, K. Bouamrane . Multicriterion SDSS for the Space ProcessControl : Towars a Hybrid Approach . MICAI 07 , Advances in Arti�cial Intelligence, LNCS,Springer ISSN, 0302-9743, P.139-150, 2007.
[Ham et al, 08] D. Hamdadou, S. Oufellah, B. Beldjilali. Proposition d'un modèle d'aide àla négociation pour les problèmes d'aménagement du territoire. MCSEAI 07 ,10 e ConférenceMaghrébine sur la Technologie de l'Information Oran, 2008.
[Heb, 49] D.O. Hebb . The Organization of Behavior : A Neuropsychological Theory. Wiley, NewYork, 1949.
[Hér, 94] J. Hérault, C. Jutten. Réseaux neuronaux et traitement du signal. Hermès, Paris,1994.
102

[Her et al, 94] J. Hertz, A. Krogh, G. Palmer . Introduction to the Theory of Neural Com-putation. Addison Wesley, 1991.
[Hop, 82] J.J. Hopfield. Neural networks and physical systems with emergent collective compu-tational abilities. Proceedings of the National Academy of Sciences of the USA, volume 79 ,p.2554-2558 USA, 1982.
[Hus, 99] C. Hussy. Gestion et developpement des applications de l'information en genie civilurbain : La Commune de Meyrin. université de geneve, Geneve, 1999.
[Jac, 81] A. James, A. Freeman, D.M. Skapura . Neural Networks : Algorithms, ApplicationsandProgramming Techniques. Addison-Wesley, 1991.
[Jam et al, 91] E. Jacquet-Lagrèze . Systèmes de décision et acteurs multiples-Contributionà une théorie de l'action pour les sciences des organisations. Thèse d'État, Université ParisDauphine, Paris, 1981.
[Jia, 00] H. Jiang , J.R. Esatman. Applications of fuzzy measures in multi-criteria evaluationin GIS. International Journal of Geographical Information Science, Volume 14 ,p.173-184,2000.
[Jod, 94] J.F. Jodouin . Les réseaux de neurones : principes et dé�nitions. Hermès, p.13-14,Paris, 1994.
[Joe, 97] F. Joerin . Décider sur le territoire : Proposition d'une approche par l'utilisation deSIG et de méthodes multicritère. Thèse Doctorat, École Polytechnique Fédérale de Lausanne,Lausanne, 1997.
[Jol, 96] T. Joliveau . Gérer l'environnement avec des SIG : mais qu'est ce qu'un SIG ?. Revuede Géographie de Lyon, Volume 71 ,p.9, Lyon, 1996.
[Kee, 76] R.L. Keeney,H. Raiffa. Decisions with multiple objectives:Preferences and value tra-deo�s. Wiley Sons,New York, 1976.
[Kel, 90] C.P. Keller. Decision support multiple Criteria Methods. NCGIA Core Curricu-lum,Nationel Center for Geographic Information and Analysis,University of California,Cali-fornia, 1990.
[Laa, 00] A. Laaribi. SIG et analyse multicritère. Hermès Sciences Publications,Paris,2000.
[Lao, 05] R. Laouar. Contribution pour l'aide à l'évaluation des projets de déplacements urbains., Thèse Doctorat, Laboratoire d'Automatique, de Mécanique, et d'Informatique industrielleset Humaines (LAMIH), Université de Valenciennes et du Hainaut Cambrésis France, 2005.
[Lau, 93] R. Laurini,F.Milleret-Raffort. Les bases de données en géomatique. Hermès, 337pages, Paris, 1993.
[Leb, 93] M. Le Berre . l'Encyclopédie de la géographie. Economica, 1992.
[Lec et al, 89] Y. B. LeCun, J. S. Boser, B. Denker, R. E. Henderson. Backpropagationapplied to hand-written zip code recognition.Neural Computation, Volume 4,p.541-551, 1989.
[Lév et al, 04] J. Lévy, F. Golay, M. Schuler, J. Macquat, B. Beaude. Théorie du terri-toire.Thèse Doctorat, Cours d'aménagement du territoire, EPFL, , Lausanne, Suisse, 2004.
103

[Ley et al, 03] A. Lyes, S. Agostino, P. Collard . Introduction à la reconnaissance de ca-ractères par reseaux neuronals.Rapport interne,Universite de Nice Sophia Antipolis , Nice,2003.
[Mad, 93] Y. Madiot . L'aménagement du territoire. Masson,Paris, 1993.
[Mal, 04] J. Malczewski . GIS-based land-use suitability analysis : A critical overview.Harperand Row, Progress in Planning,Volume 62 , p.3-65, 2004.
[Mal, 06] J. Malczewski . A GIS-based multicriteria decision analysis : A survey of the litera-ture.International Journal of Geographical Information Science,Volume 20 , 703726, 2006.
[Man, 82] B.B. Mandelbrot . The Fractal Geometry of nature.Freeman, San Fransisco .1982 .
[Mar, 97] P. Maret, J.M. Pinon . Ingénierie des savoir-faire - compétences individuelles etmémoire collective. Hermès, Paris, 1997.
[Mar, 88] J.M. Martel . Aide à la décision. Document interne, département d'opération etsystèmes de décision, université de Laval, Canada, 1988.
[Mat et al, 99] K.B. Matthews,A.R. Sibbald,S. Craw. Implementation of a spatial decisionsupport system for rural land use planning: Integrating geographic information system andenvironmental models with search and optimisation algorithms. Computers and Electronicsin Agriculture, Volume 23 , p.9-26, 1999.
[Mcc, 43] W. McCulloch , W. Pitts. A Logical Calculus of Ideas Immanent in Nervous Acti-vity. Bulletin of Mathematical Biophysics, Volume 5, p.115-133 1943.
[Met, 92] S. Mettan. La négociation : son rôle, sa place dans l'aménagement du territoire et laprotection de l'environnement. Paris, 1992.
[Min et al, 76] H. Mintzberg ,D. Raisinghani , A. Théorêt. The structure of "unstructured"decision process.Administrative Science Quarterly, Volume 21, P.246-275, 1976.
[Mou, 05] V. Mousseau . A general framework for constructive learning preference elicitationin multiple criteria decision aid. Cahiers du LAMSADE 223, Université de Paris Dauphine,Paris, 2005.
[Par, 04] M. Parizeau . Réseaux de neurones. GIF - 21140 et GIF - 64326, Document interne,université de Laval, Canada. 2004.
[Pee, 01] D. Peeters, I. Thomas . Localisation des services publics : de la théorie aux applica-tions. Hermès, Paris, 2001.
[Pel, 99] C. Pelletier. Application des techniques d'aide à la décision à la plani�cation sanitairerégionale.Thèse Doctorat, Université de Grenoble 1, Saint-Martin-d'Hères , France, 1999.
[Pic, 96] J. Pictet . Dépasser l'évaluation environnementale, procédure d'étude et insertiondans la décision globale. Collection Meta, Presse Polytechnique et Universitaires Romandes,Lausanne, 1996.
[Pom, 97] J.C. Pomerol,S. Barbara-Romero . Choix multicritères dans l'entreprise principeet pratique. Hermès. Paris, 1979.
104

[Pré et al, 03] C. Prévil,M. Thériault,J. Rouffignat. Analyse multicritère et SIG pour fa-ciliter la concertation en aménagement du territoire : vers une amélioration du processusdécisionnel?. Cahiers de Géographie du Québec,Volume 45 ,N�130.Canada,2003.
[Rac, 03] C. Rachel . Choix de stratégies de limitation des impacts des eaux de ruissellementà l'aide d'une méthode multicritère. Thèse Doctorat, École Polytechnique Fédérale de Lau-sanne, Lausanne, 2003.
[Rau, 06] N. Raulet-Croset . Action publique et territoires locaux : la gestion de situations �intermédiaires �. Atelier Stratégies, Espaces et Territoires de lAIMS, Rouen, 2006.
[Ris, 03] N. Risse . Evaluation environnementale stratégique et processus de décision publics :contributions méthodologiques. Institut de Gestion de l'Environnement et d'Aménagementdu Territoire, ULB, 2004.
[Roy, 85] B. Roy . Méthodologie multicritère d'aide à la décision. Economica, 1985.
[Rum et al, 86] D.E. Rumelhart, G.E. Hinton, R.J. Williams . Learning internal represen-tations by error propagation. Parallel Distributed Processing, MIT Press, 1986.
[Sej, 87] J. T. Sejnowski, C.R. Rosenberg . Parallel networks that learn to pronunce englishtext. Complex Systems.Volume 1, p.145-168, USA, 1987.
[Sil, 07] w. Silverio . La gestion durable des ressources en eau en milieu de haute montagne,à l'aide des Systèmes d'Information Géographique : Le cas de la Cordillera Blanca (Pé-rou).Projet de thèse Dépt. de Géographie / UTED-S Sciences de la Terre, Genève, 2007.
[Sim, 60] H.A. Simon . The New Science of Management Decision.Harper and Row, New York,1960.
[Sim, 90] J. Simos. Évaluer l'impact sur l'environnement : Une approche originale par l'analysemulticritère et la négociation. Presses Polytechniques et Universitaires Romandes,Lausanne,1990.
[Sma, 05] N. Smahi. Apport des SIG dans l'estimation de la consommation en eau des communesde la province d'Eljadida.Mémoire DESA, Université Chouaïb Doukkali, Maroc, 2005.
[Sri, 05] P. Sridhar. Developing Neural Network Applications Using Labview.Th. Master, Uni-versity of Missouri-Columbia, USA, 2005.
[Sui, 93] D. Sui. Integrating neural networks with GIS for spatial decision making. OperationalGeographer n�11, Volume 2, p.13-201993.
[Thu, 02] J. Thurston. GIS Arti�cial Neural Networks: Does Your GIS Think?. GISVisionMagazine , 2002.
[Til, 00] M. Tille. Choix de Variantes d'Infrastructures Routières : Méthodes Multicritères.ThèseDoctorat, Ecole Polytechnique Fédérale De Lausanne (EPLF), Lausanne , 2000.
[Tor, 97] J.M. Torres-Moreno . Apprentissage et généralisation par des réseaux de neurones :étude de nouveaux algorithmes constructifs.Thèse Doctorat, Institut Nationnel PolytechniqueDe Grenoble, Grenoble , 1997.
105
[Tou, 92] C. Touzet. Les Réseaux de Neurones Arti�ciels : introduction au connexionnisme.Cours et TD . 1992.
[Tso, 04] A. Tsoukias. From Decision theory to a Decision Aiding Methodology. Annales duLAMSADE, CNRS, Université Paris Dauphine,Paris, 2004.
[Vai, 02] K. Vaillancourt,J.P. Waaub. Équité et scénarios mondiaux de réduction des gaz àe�et de serre: une approche multicritère dynamique. , 2002.
[Van, 60] S. Vance. Management décision simulation. McGraw-Hill,New York, 1960.
[Vap, 95] V.N. Vapnik. The Nature of Statistical Learning Theory. Springer-Verlag,Berlin, 1995.
[Vin, 89] P. Vincke. L'aide multicritère à la décision. Editions de l'université de Bruxelles ,Bruxelles 1989.
[Wan et al, 90] F. Wang , G.B. Hall , A. Subaryono. Fuzzy information representation andprocessing in conventional GIS software: Database design and application. International Jour-nal of Geographical Information Systems,Volume 4, p.261-283, 1990.
[Wan, 94] F. Wang . Incorporating a neural network into GIS for agricultural land suitabilityanalysis..GIS/LIS'94 , p.804-815, 1994.
[Wu, 98] F. Wu. Simland: a prototype to simulate land conversion through the integrated GISand CA with AHPderived transition rules. International Journal of Geographical InformationScience,vol 12, p.63-82,1998.
[You, 04] F.Z. Younsi,S. Taghezout. Conception et implémentation d'une bibliothèque des mé-thodes multicritère. Mémoire d'ingéniorat,Université d'Oran, Oran, 2004.
[You et al, 07] F.Z. Younsi, D. Hamdadou, A. Benyettou. Proposition d'un modèle Décision-nel en Aménagement du Territoire par Utilisation des SIG et Réseaux de Neurones. COSI 07, Colloque sur l'Optimisation et les Systèmes d'Information Oran, 2007.
106

Résumé. Prendre de bonnes décisions en aménagement du territoire est une tâche quidevient de plus en plus di�cile. Plusieurs méthodes de classi�cation ont été développéesces dernières années, chacune possédent ses propres avantages ainsi que ses limites d'utili-sation. Pour atteindre les objectifs souhaités en aménagement du territoire, il est essentield'assurer la participation de tous les acteurs, de mettre en place des plateformes de négocia-tion et d'avoir une stratégie de communication. Dans cette étude, le travail présenté a pourobjectif principal d'élaborer une méthodologie décisionnelle a�n d'apporter une aide perti-nente aux décideurs du territoire dans la réalisation des di�érents projets d'aménagement.Cette stratégie d'aménagement o�re des facilités de plani�cation et de dimensionnementet permet à la fois l'acquisition des données relatives ainsi que la gestion des infrastruc-tures urbaines et des services auxiliaires. Le processus d'aide à la décision proposé, dans cemémoire, intègre plusieurs variantes qui contribuent à analyser le contexte du projet ur-bain. Il est basé sur une utilisation combinée de " Systèmes d'informations Géographiques" (SIG), et des " réseaux de neurones arti�ciels " (RNA) pour l'évaluation multicritère.L'aspect connexionniste a été introduit comme essai préliminaire et constitue, de ce fait,l'originalité de ce travail. Le modèle est accompagné par une procédure d'utilisation : unecarte d'adéquation pour l'habitat a été réalisée pour concrétiser cette proposition.
Mots Clés : Aménagement du territoire (AT), Aide à la décision spatiale, Systèmed'Information Géographiques (SIG), Réseaux de neurones arti�ciels (RNA), PerceptronMultiCouches (PMC).
Abstract.Making good decisions for territory planning is a task that has become increasingly dif-�cult. Recentely, several classi�cation methods have been developed, each with its ownadvantages and its limitations. To achieve the desired objectives in territory planning, it isessential to ensure the participation of all the actors, set up trading platforms and have acommunication strategy. In this study, the presented work's main objective is to develop amethodology for decision-making to assist the relevant decision makers in the territory incarrying out various development projects. This development strategy facilitates planning,design and allows either the acquisition of data and nor of urban infrastructure manage-ment and ancillary services. The decision making support process proposed in this memoryincludes several components that contribute in the analysis of the urban project context .It is based on a combination of " Geographical Information Systems "(GIS), and " Arti-�cial Neural Networks "(ANN) for multicriteria evaluation. The connectionism aspect hasbeen introduced as a preliminary try and constitues the originality of this work fact. Themodel is accompanied by use a procedure : a map of habitation suitability was carried outto implement this proposal.
Keywords : Territory planning (TP), Spatial decision-making, Geographical Informa-tion Systems (GIS), Arti�cial Neural Networks (ANN), MultiLayer Perceptron (MLP).