Embed Size (px)
Citation preview

Tesi di Master UniversitarioTesi di Master Universitario
Applicazione Sperimentale SoftPLC e SCADA
Candidati: Ing. Frigoli LucaGregorio Ing. Lapris Stefano Ing. Sidoti Pinto Giuseppe
Tutor aziendale: Ing. Ziliani FedericoTutor universitario: Prof. Leva AlbertoSede del tirocinio: Cormano (Mi)

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [2]
ObiettiviObiettivi
Realizzazione di un’applicazione sperimentale innovativa di
automazione di basso livello basata su tecnologia PC e bus di
campo CANOpen, per la remotazione di Controlli asse e I/O e
la Distribuzione del Processing.
Il lavoro svolto presso la sede di Cormano della Osai s.p.a. è stato presentato alla fiera SPS/IPC/Drives 2004 di Norimberga

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [3]
Ambiente di SviluppoAmbiente di Sviluppo
Microsoft ActiveSync RS232 USB ETHERNET
Collegamento
Sistema operativo Windows CE.NET 4.2 Software SCADA MoviconCEOnBoard (Progea) con SoftPLC integrato
TECHMOcontrol
sistema operativo Microsoft Windows (98, 2000, XP). Movicon 9.1 Hilscher Sycon
PC Desktop

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [4]
Organizzazione del lavoroOrganizzazione del lavoro
Impianto Fisico
Configurazione Rete
Configurazione Hardware
Implementazione Software

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [5]
Impianto FisicoImpianto Fisico
Componenti :
Robot cartesiano dotato di Pinza Nastro Trasportatore
Slitte Spingipezzo

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [6]
Configurazione Hardware (1)Configurazione Hardware (1)
Architettura distribuita
• Il modulo PLC/controllo assi viene assorbita in parte dai servo intelligenti, in parte dallo SCADA
Semplificazione del Sistema

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [7]
Configurazione Hardware (2)Configurazione Hardware (2)
• Protocollo di alto livello basato su CAN ( Field Bus standard )
• Comunicazione seriale, broadcast, Multimaster
• Arbitraggio CSMA/CA (Carrier Sens Multiple Acces / Collision Avoidance )
• Sincronizzazione mediante bit-stuffing
Field Bus CANOpen

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [8]
Configurazione Hardware (3)Configurazione Hardware (3)
• Questi drive sono interfacciati in CANOpen secondo il profilo DSP402 e includono sia la parte di potenza che la logica di controllo del movimento.
Driver
• I/O remoti modulari e compatti per la gestione ed il controllo tramite rete CANOpen degli input/output distribuiti dell'impianto.
RIO Modular System

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [9]
Configurazione Hardware (4)Configurazione Hardware (4)
Il nodo slave RIO si compone aggregando più moduli di espansione (digitali, analogici e intelligenti) ad un modulo bus coupler
• Modulo Analogico : 4 In / 4 Out
• Modulo Digitale : 16 In / 16 Out
• Modulo Contatore Hardware : Gestione Bi-direzionale
5 WORD di controllo :
• 1 Control Data Word
• 4 Configuration Word

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [10]
Configurazione Rete (1)Configurazione Rete (1)
SYCON definizione della rete (file .DBM) : • Struttura e componenti
• Mappatura dei nodi (secondo il profilo DSP402)
• 1 nodo Master• 1 nodo Slave

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [11]
Configurazione Rete (2)Configurazione Rete (2)
SYCON definizione della rete (file .DBM)
Active SYNC collegamento PC Desktop – TECHMOcontrol :
• Connessione Seriale Partnership
• Drivers della scheda e libreria SOFTMotion.
• Connessione USB o Ethernet

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [12]
Configurazione Rete (3)Configurazione Rete (3)
SYCON definizione della struttura della rete (file .DBM)
Active SYNC collegamento PC Desktop - TECHMOcontrol
HILSCHER definizione indirizzi variabili :
Indirizzo Lato Movicon uguale all’indirizzo fisico di partenza Lato Dispositivo
• Tipo di incarico
• Indirizzo (mappatura)
• Formato dati

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [13]
Descrizione Software (1)Descrizione Software (1)
Movicon 9.1 (Progea)
• Codice AWL
• Programmazione ad oggetti – HMI
• Simulazione locale
• Scambio dati attraverso “incarichi” mappatura I/O fisici
Caratteristiche
Struttura• Logica Generale• Database • Sinottici

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [14]
CODICE AWL
• Instruction List
Descrizione Software (2)Descrizione Software (2)
Gestisce variabili locali e variabili fisiche di I/O
• Timer• Accumulatori• RLC• Gestione allarmi

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [15]
HMI – SINOTTICI
Descrizione Software (3)Descrizione Software (3)
MainVisualizzazione e gestione del normale ciclo di lavoro
Movimentazione manuale attraverso tutti i comandi di gestione diretta dell’Impianto
Diagnostica

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [16]
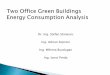
Implementazione Software (1)Implementazione Software (1)
PROGETTO LOGICO
homing
[start]
inizio
[not start, stop]
dopo: 1 sec
manualeintrattenimento
richiesta pezzi
auto_apprendimento
dopo: 10 sec[MAN]
[ALL Chocolates or Take Chocolate]
[apprendi]
[posizione OK]
[Riavvio_ciclo or All chocholates or Take Chocolate or STOP
or fine_intrattenimento]
[ pezzi ricetta == 0]
ciclo di lavorazione
[0< pezzi ricetta <= pezzi rimanenti ]
[not start]
STOP[stop or errore]
[not stop]
[reset]
[uscita zona di lavoro] / errore
[posizione KO]
[pezzi NON disponibili]
• Intrattenimento
• Autoapprendimento
• Richiesta pezzi
• Ciclo di lavorazione

Applicazione Sperimentale SoftPLC e SCADA - L.G. Frigoli, S. Lapris, G. Sidoti Pinto ® [17]
Implementazione Software (2)Implementazione Software (2)
Intrattenimento
fase1
fase4
fase5
fase6
fase3
fase2
caso1 caso2
[caso2] [caso1]
[pezzo preso in posizione 1]
[pezzo rilasciato in posizione 2]
[pezzo preso in posizione 3]
[pezzo rilasciato in posizione 1]
[pezzo preso in posizione 2]
[pezzo rilasciato in posizione 3] / fine_intrattenimento
[pezzo preso in posizione 3]
[pezzo preso in posizione 2]
Stato 0
Stato 1
Stato 2

Il progetto è stato realizzato in un ambiente lavorativo che ha favorito la cooperazione ed il lavoro di gruppo, permettendoci di ampliare le nostre conoscenze attraverso una collaborazione attiva con il personale tecnico che ci ha assistito.
ConclusioniConclusioni