-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
1/102
SELECCIÓN DE HIPERPARÁMETROS EN MÁQUINAS DE
SOPORTE VECTORIAL
PorRicardo Henao
[email protected]
Director:
Jorge Eduardo Hurtado Gómez
ENVIADO EN PARCIAL CUMPLIMIENTO DE LOS
REQUERIMIENTOS PARA EL GRADO DE
MSC. EN CONTROL Y AUTOMATIZACIÓN INDUSTRIAL
EN LA
UNIVERSIDAD NACIONAL DE COLOMBIA
MANIZALES, COLOMBIA
MAYO 2004
c Derechos Reservados por Ricardo Henao, 2004
mailto:[email protected]:[email protected]
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
2/102
UNIVERSIDAD NACIONAL DE COLOMBIA
FACULTAD DE
INGENIEŔIAS ELÉCTRICA, ELECTRÓNICA Y COMPUTACIÓN
Los abajo firmantes certifican haber leido y recomendado a la
facultad
de Facultad de Ingenieŕıa y Administración la aceptación de
la tesis titulada
“Selección de Hiperparámetros en Máquinas de Soporte
Vectorial”
por Ricardo Henao en parcial cumplimiento de lor
requerimientos para el
grado de Msc. en Control y Automatización Industrial.
Fecha: Mayo 2004
Director:Jorge Eduardo Hurtado Gómez
Jurados:Germán Castellanos D.
Julio Fernando Suárez
Oscar Ortega L.
II
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
3/102
UNIVERSIDAD NACIONAL DE COLOMBIA
Fecha: Mayo 2004
Autor: Ricardo Henao
Tı́tulo: Selección de Hiperparámetros en Máquinas de
Soporte
Vectorial
Facultad: Ingenierı́as Eléctrica, Electrónica y
ComputaciónGrado: M.Sc. Término: Julio
Año: 2004
Con esta se concede permiso a la Universidad Nacional de
Colombia de circular
y copiar este trabajo para propósitos no comerciales y a
discresión ante solicitud de
individuales o instituciones.
Firma del Autor
EL AUTOR SE RESERVA OTROS DERECHOS DE PUBLICACION Y NILA TESIS
NI EXTRACTOS EXTENSOS DE ELLA PUEDEN SER PUBLICADOS OREPRODUCIDOS
EN OTRA FORMA SIN LA AUTORIZACION POR ESCRITO DELAUTOR.
EL AUTOR CERTIFICA QUE HA OBTENIDO PERMISO PARA EL USO
DECUALQUIER MATERIAL CON DERECHOS RESERVADOS QUE APARECIERE ENLA
TESIS (EXCEPTO EXTRACTOS CORTOS QUE UNICAMENTE REQUIEREN
UNRECONOCIMIENTO APROPIADO EN EL CASO ESCRITOS ACADEMICOS) Y QUETAL
USO ES CLARAMENTE RECONOCIDO.
III
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
4/102
Índice General
Índice General IV
Índice de Tablas VII
Índice de Figuras VIII
Resumen IX
Abstract X
Agradecimientos XI
1. Introducción 1
1.1. Trabajo Previo . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 2
1.2. Objetivos Principales del Trabajo . . . . . . . . . .
. . . . . . . . . . . . . . 4
1.3. Estructura del Documento . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 4
2. Máquinas de Soporte Vectorial 5
2.1. Clasificacíon con Vectores de Soporte . . . . . . . .
. . . . . . . . . . . . . . 5
2.2. Caso Linealmente no Separable . . . . . . . . . . .
. . . . . . . . . . . . . . 8
2.3. Máquinas de Soporte no Lineales . . . . . . . . . .
. . . . . . . . . . . . . . 9
2.4. Capacidad de Generalización . . . . . . . . . . . .
. . . . . . . . . . . . . . 11
2.4.1. Riesgo Actual, Riesgo Emṕırico y Dimensión VC .
. . . . . . . . . . 11
2.4.2. La Dimensión VC de las SVM . . . . . . . . . . .
. . . . . . . . . . 13
IV
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
5/102
2.4.3. Procedimiento Leave-One-Out . . . . . . . . . . .
. . . . . . . . . . 13
2.4.4. Cotas para el Estimador de Leave-One-Out . . . . .
. . . . . . . . . 14
2.5. Algoritmo de Entrenamiento . . . . . . . . . . . . .
. . . . . . . . . . . . . 18
2.5.1. Método de Descomposición . . . . . . . . . . . .
. . . . . . . . . . . 18
2.5.2. Selección del Conjunto de Trabajo y Criterio de Parada
. . . . . . . 19
2.5.3. Convergencia del Método de Descomposición . . .
. . . . . . . . . . 22
2.5.4. Solucíon Anaĺıtica . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 23
2.5.5. Cálculo de b . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 26
2.5.6. Contraccíon . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 27
2.5.7. Caching . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 29
2.5.8. Complejidad Computacional . . . . . . . . . . . .
. . . . . . . . . . 29
2.6. Máquinas de Soporte Multi Clase . . . . . . . . . .
. . . . . . . . . . . . . . 30
3. Selección de Hiperparámetros en Máquinas de Soporte
Vectorial 32
3.1. Búsqueda en Malla . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 33
3.2. Búsqueda en Ĺınea . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 33
3.2.1. Cota de Radio/Margen para L2 . . . . . . . . . . . .
. . . . . . . . . 35
3.2.2. Cota de Radio/Margen para L1 . . . . . . . . . . . .
. . . . . . . . . 36
3.3. Limitaciones Actuales . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 37
4. Estrategias Evolutivas 39
4.1. Adaptación Arbitraria de Distribuciones Normales .
. . . . . . . . . . . . . 41
4.2. Adaptación de la Matriz de Covarianza . . . . . . .
. . . . . . . . . . . . . 43
4.3. Trayectoria Evolutiva: Cumulación . . . . . . . . .
. . . . . . . . . . . . . . 45
4.4. El Algoritmo (µW , λ)-CMA-ES . . . . . . . . .
. . . . . . . . . . . . . . . . 46
4.5. Valores para los Parámetros Internos . . . . . . .
. . . . . . . . . . . . . . . 49
4.6. Limitaciones y Aspectos Prácticos . . . . . . . . .
. . . . . . . . . . . . . . 50
5. Método Propuesto 51
5.1. CMA-ES-SVM . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 52
5.2. Caracteŕısticas del CMA-ES-SVM . . . . . . . . . .
. . . . . . . . . . . . . 54
V
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
6/102
5.3. Implementación y Aspectos Prácticos . . . . . . . .
. . . . . . . . . . . . . . 55
6. Resultados Numéricos 56
6.1. Conjuntos Artificiales . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 56
6.1.1. Balanceado . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 57
6.1.2. No Balanceado . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 58
6.1.3. Damero . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 59
6.1.4. Dos Curvas . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 60
6.1.5. Dos Anillos . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 60
6.1.6. Anillos Cruzados . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 62
6.2. Conjuntos Estándares . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 646.3. Conjunto Multi Clase .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.4. Resultados con Kernel Polinomial . . . . . . . . . . .
. . . . . . . . . . . . . 68
6.5. Conjuntos de Problemas Reales . . . . . . . . . . .
. . . . . . . . . . . . . . 69
6.5.1. Identificación de Voces Patológicas . . . . . .
. . . . . . . . . . . . . 69
6.5.2. Clasificación de Arritmias en ECG . . . . . . . .
. . . . . . . . . . . 70
7. Discusión Final, Sumario y Trabajo Posterior 73
A. Kernels 76A.1. Kernels Definidos Positivos . .
. . . . . . . . . . . . . . . . . . . . . . . . . 77
A.2. Reproducción de un Mapeo con Kernel . . . . . . . .
. . . . . . . . . . . . . 77
A.3. Reproducción de un Espacio de Hilbert mediante Kernels
. . . . . . . . . . 79
A.4. El Kernel de Mercer . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 79
A.5. Ejemplos y Propiedades de Kernels . . . . . . . . .
. . . . . . . . . . . . . . 81
B. Algoritmo BFGS 83
Apéndices 76
VI
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
7/102
Índice de Tablas
4.1. Parámetros defecto para (µW , λ) . . . . . . .
. . . . . . . . . . . . . . . . . 49
6.1. Estructura de los conjuntos artificiales . . . . . .
. . . . . . . . . . . . . . . 57
6.2. Resultados para el conjunto balanceado . . . . . . .
. . . . . . . . . . . . . 58
6.3. Resultados para el conjunto no balanceado . . . . .
. . . . . . . . . . . . . 59
6.4. Resultados para el conjunto damero . . . . . . . . .
. . . . . . . . . . . . . 61
6.5. Resultados para el conjunto dos curvas . . . . . . . .
. . . . . . . . . . . . . 61
6.6. Resultados para el conjunto dos anillos . . . . . . .
. . . . . . . . . . . . . . 63
6.7. Resultados para el conjunto anillos cruzados . . . . .
. . . . . . . . . . . . . 63
6.8. Estructura de los conjuntos estándares . . . . . .
. . . . . . . . . . . . . . . 65
6.9. Resultados para los conjuntos estándar . . . . . . .
. . . . . . . . . . . . . . 66
6.10. Resultados para los conjuntos estándar. (Continuación)
. . . . . . . . . . . 67
6.11. Estructura de los conjuntos multi clase . . . . . .
. . . . . . . . . . . . . . . 68
6.12. Resultados para conjuntos multi clase . . . . . . .
. . . . . . . . . . . . . . 68
6.13. Resultados para kernel polinomial . . . . . . . . .
. . . . . . . . . . . . . . 69
6.14. Estructura del conjunto para identificación de voces
patológicas . . . . . . . 70
6.15. Resultados para identificación de voces patológicas
. . . . . . . . . . . . . . 71
6.16. Estructura del conjunto para clasificación de arritmias
en ECG . . . . . . . 72
6.17. Resultados para clasificación de arritmias en ECG
. . . . . . . . . . . . . . 72
VII
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
8/102
Índice de Figuras
2.1. Hiperplanos que separan correctamente los datos . .
. . . . . . . . . . . . . 7
2.2. Mapeo del espacio de entrada en otro de dimensión alta
. . . . . . . . . . . 102.3. Solución anaĺıtica de un
problema de optimización de dos variables . . . . . 24
4.1. Ĺıneas de igual densidad de probabilidad en dos
distribuciones normales . . 40
6.1. Izquierda: Conjunto balanceado. Derecha: Conjunto no
balanceado . . . . . 57
6.2. Izquierda: Conjunto damero. Derecha: Conjunto dos curvas
. . . . . . . . . 60
6.3. Izquierda: Conjunto dos anillos. Derecha: Conjunto anillos
cruzados . . . . 62
A.1. Problema de clasificación mapeado con kernel
polinomial . . . . . . . . . . . 76
VIII
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
9/102
Resumen
Este trabajo de tesis presenta un nuevo método de selección
automática de hiperparámetros
en maquinas de soporte vectorial utilizando estrategias
evolutivas y cotas efectivas del error
de validación o riesgo emṕırico. El desarrollo descrito en
esta tesis involucra una técnica
de estrategias evolutivas denominada adaptación de matriz de
covarianza, que a grandes
rasgos reduce el tiempo de convergencia en la medida que un
menor número de evaluaciones
de la función objetivo son necesarias y que desaleatoriza al
máximo el procedimiento para
obtener soluciones más estables. En particular, dos cotas del
error de validación fueron
empleadas, la validación cruzada como generalización del
esquema LOO y el span como
medida efectiva tanto teórica como práctica ya que no necesita
múltiples evaluaciones de
la SVM, es continua, posee conexión directa con otras como
Radio/Margen y requiere una
carga computacional considerablemente pequeña. Además, permite
la posibilidad de em-
plear diferentes funciones kernel debido a que no exige
diferenciabilidad en dicha funci ón,
esquemas multi clase y selección de múltiples parámetros sin
tener que reformular substan-
cialmente todo el algoritmo. Por último, los resultados
numéricos muestran un desempeño
bastante competitivo con las otras técnicas revisadas en este
trabajo.
IX
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
10/102
Abstract
This thesis work introduces a new method for automatic
hiperparameter selection for
support vector machines using evolutive strategies and
validation error or empirical risk
bounds. The actual approach involves an evolution strategy
technique designated as covari-
ance matrix adaptation, which in general terms reduces the
convergence rates and obtain
steady solutions due to its derandomized nature. In particular,
two empirical risk bounds
where used, crossvalidation as generalized LOO scheme and
span bound because do not
require multiple SVM evaluations, is continuous, and hold direct
connection with some
others like Radius/Margin and its computational cost is low as
well. Besides, this method
allows a wide variety of kernel functions since do not demand
differentiability, multi-class
schemes and multiple parameter selection without substantial
reformulation of the entire
algorithm. Finally, the numerical results reveal a competitive
performance related to an-
other considered methods within this work.
X
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
11/102
Agradecimientos
El autor quiere agradecer al Profesor Jorge Eduardo Hurtado
supervisor de esta tesis, por
sus múltiples sugerencias y apoyo constante no solo durante el
tiempo que duró este trabajo
sino desde que estoy trabajando con él. Tambíen, al Profesor
Germán Castellanos por todo
el apoyo prestado desde que estoy trabajando en investigaci
ón.
Además, a los profesores S.S. Keerthi, C.J. Lin y N. Hansen por
toda la ayuda prestada a
través de correos electrónicos.
Finalmente, Fabian Ojeda y Juan Carlos Riaño por la ayuda
prestada con la revisión de
este trabajo y comentarios pertinentes, al grupo de Control y
Procesamiento Digital de
Señales por proporcionar un espacio apropiado para el trabajo
de investigación, incluso
más allá del alcance de este trabajo. Los demás supongo saben
quienes son.
Esta investigaci´ on fue realizada en el marco de la
investigaci´ on “An´ alisis y procesamiento
digital de im´ agenes médicas y se˜ nales
bioeléctricas” realizada por la Universidad Nacional
de Colombia sede Manizales mediante la orden contractual 472 de
2003 emitida por el
DIMA.
Manizales, Colombia Ricardo HenaoJulio 22, 2004
XI
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
12/102
Caṕıtulo 1
Introducción
“I shall certainly admit a system as empirical or scientific
only if it is capable of being tested by
experience. These considerations suggest that not the
verifiability but the falsifiability of a system is
to be taken as a criterion of demarcation. It must be possible
for an empirical scientific system to
be refuted by experience.”
K. Popper. The Logic of Scientific Discovery (1934, ch. 1, sect.
6)
En el área de reconocimiento de patrones y más
espećıficamente en la parte de clasificación, las
máquinas de soporte vectorial (SVM), se han convertido en los
últimos años en una de las técnicas
más importantes sobre otras muy populares como: k−ésimo
vecino cercano (KNN), redes neu-ronales artificiales (ANN) y
árboles de clasificación (CART); dado que su aparato matemático
está
fundamentado sobre bases muy sólidas
[ver Vapnik, 1995] que hacen que posea múltiples
ventajas
sobre las otras técnicas mencionadas [ver
Vapnik, 1998, Schölkopf and Smola, 2002].
Sinembargo,
Lin [2003] presenta en perspectiva la posibilidad
de hacer que las máquinas de soporte vectorial
se conviertan en el principal método de clasificación (según
“KDNuggets 2002 Poll 1
”, las redesneuronales y los árboles de clasificación
permanecen como principales herramientas) argumentando
que el problema de las SVM es el mal empleo que se
les da probablemente por falta de conocimiento
1http:://www.kdnuggets.com, A Site for Data Mining, Knowledge
Discovery, Genomic Mining, WebMining.
1
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
13/102
2
de la metodoloǵıa. Lo que usualmente los usuarios desprevenidos
están haciendo es (ver blackboard
http://www.kernel-machines.org): convertir la información a
clasificar al formato de algún progra-
ma SVM disponible sin tener en cuenta en la mayoŕıa de los
casos las implicaciones del formato,
escalamiento, etc, para luego tratar aleatoriamente con valores
de parámetros y kernels indiscrimi-
nadamente sin hacer validaci´ on y sin
saber de antemano que los parámetros por defecto en dichos
programas son sorprendentemente importantes y el hecho es que
muchos de los usuarios obtienen
como resultado valores de error y generalización
insatisfactorias.
Lo mı́nimo que se espera que haga el usuario según Lin
[2003] es escalar los datos para validación
y entrenamiento, considerar el kernel RBF (Radial Basis
Function) y encontrar valores adecuados
para C y σ2 (o γ ). Ahora,
esto de encontrar “valores adecuados” a veces no es
tarea f ácil, sin
mencionar que lo que se pretende no es encontrar valores
adecuados sino los mejores valores paraun caso dado. Hasta el
momento, las técnicas de selección de parámetros o selección
del modelo
como también es llamado son las siguientes: búsqueda manual
intuitiva, cotas para LOO (leave one
out) o para riesgo emṕırico, búsqueda en dos sentidos y
búsqueda en malla.
1.1. Trabajo Previo
En el tema de selección de hiperparámetros en SVM no se ha
hecho mucho hasta el momento debido
a que es un tema relativamente nuevo, sinembargo el trabajo
realizado es bastante significativo. En
el trabajo con reconocimiento de patrones y m ás
espećıficamente en el área de clasificadores es
necesario encontrar medidas que sean proporcionales al error de
clasificación (función de riesgo y
dimensión VC), es decir, que sean referentes al momento de
seleccionar los parámetros en la SVM
sin tener que realizar un proceso de validación, que
dependiendo del volumen de los datos puede
ser prohibitivo en términos de tiempo y recursos
computacionales. [Wahba et al., 2000] establece
mediante demostraciones matemáticas y pruebas numéricas la
consistencia de la validación cruzada
(en particular LOO) como medida del error en SVM con relación a
medidas de margen en el
hiperespacio de SVM. Joachims [2000] realiza
pruebas con SVM utilizando como medidas del error:
error de entrenamiento, “hold-out testing”, Boostrap, Jack-knife
y validación cruzada en contraste a
una técnica introducida por el llamada estimador ξ
α basada en la solución de los α en el
problema
dual de SVM y las pérdidas del entrenamiento ξ ,
obteniendo mejores resultados que validación
cruzada y Boostrap en varias bases de datos estándar.
Vapnik and Chapelle [2000] introduce el
concepto de span de los vectores de soporte
como forma de obtener parámetros óptimos en SVM
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
14/102
3
por este ser una medida bastante precisa de el error de
validación. Jaakkola and Haussler [1999]
realiza pruebas matemáticas para llegar a una formulación que
genera una cota superior para
LOO analizando la solución de la función de costo de SVM.
Opper and Winther [2000] utilizan un
método inspirado en la teoŕıa de respuesta lineal y prueban
que bajo el supuesto de que los vectores
de soporte no cambian cuando se remueve un ejemplo bajo el
esquema de LOO se puede obtener
una matriz de productos punto entre los vectores de soporte que
deriva en una cota superior para
la estimación del error. Vapnik [1998] propone bajo el
supuesto que la solución de SVM no presenta
errores de entrenamiento, una cota para el error de validación
basada en LOO que es la relación entre
el margen y el radio de los vectores de soporte de la máquina
entrenada. Keerthi and Ong [2000]
hace un análisis del aporte del valor del corrimiento en la
formulación de SVM en la optimalidad del
entrenamiento. Sundararajan and Keerthi [2001] deriva
resultados de la probabilidad surrogativa
de Geisser (GPP), error predictivo de Geisser (GPE) y error de
validaci ón cruzada para escoger los
parámetros del kernel en el caso RBF. Lee and
Lin [2001] propone un método de selección
automática
basada en LOO y una reducción simple del espacio de búsqueda
de los hiperparámetros utilizando
una descomposición matricial del problema dual de SVM (BSVM).
Chapelle et al. [2002] propone
una metodoloǵıa fundamentada en la diferenciabilidad del
kernel, el criterio de Radio/Margen y
su dependencia con la solución del problema de optimización de
SVM para derivar un esquema
de gradiente descendiente para obtener hiperparámetros
óptimos. Keerthi and Lin [2003] hacen un
análisis del comportamiento asintótico de los parámetros de
SVM con kernel gaussiano y derivan
un procedimiento heuŕıstico para encontrarlos y obtener un
error de generalización bajo. Keerthi
[2002] presenta una implementación del método de
Chapelle et al. [2002] utilizando kernel RBF,NPA
(algoritmo de punto cercano) como algoritmo de optimización
iterativo para SVM, SMO
(optimización secuencial mı́nima) para resolver el problema de
Radio/Margen y quasi-Newton como
procedimiento de gradiente descendiente. Chung et al.
[2003] utiliza la cota Radio/Margen con kernel
gaussiano para hacer una modificación en el esquema de SVM y
derivar a partir de L1-SVM y L2-
SVM un método de selección automática de parámetros.
Duan et al. [2003] hace una evaluación
empı́rica del desempeño de varias medidas para selección de
hiperparámetros, entre ellos: error de
validación (como referente), validación cruzada, cota χi
− alpha, cota VC (Vapnik-Chervonekis),Span aproximado y D2
w2, utilizando bases de datos estándar en reconocimiento de
patrones.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
15/102
4
1.2. Objetivos Principales del Trabajo
Las publicaciones reportadas hasta la fecha presentan un marcado
interés por encontrar cotas del
riesgo empı́rico de manera que no sea necesario llevar a cabo
una validación para evaluar la solución
obtenida por una SVM para un problema dado. En la medida en que
ha sido posible se han
desarrollado métodos de selección automática de
hiperparámetros haciendo uso de dichas cotas y
métodos de optimización. Con esto, no es parte de esta tesis
realizar un trabajo de investigación
acerca de las cotas, ni de la forma o caracteŕısticas del
espacio de los hiperparámetros o relaciones
entre ellos. Teniendo en cuenta las consideraciones anteriores,
los objetivos de este trabajo son:
Profundizar en las técnicas actuales basándose en la teorı́a
de SVM con el fin de desarrollar
un algoritmo de selección automática de hiperparámetros en
SVM con miras obtener un buen
desempeño de los clasificadores en cuanto a error de
validación y costo computacional.
Analizar las técnicas actuales de selección de parámetros
para identificar sus ventajas y
desventajas, como base del trabajo a realizar. Investigar acerca
de métodos de optimización,
búsqueda y parámetros efectivos en SVM para luego desarrollar
un algoritmo de selecci ón
de hiperparámetros automática que ofrezca ventajas sobre las
otras desarrolladas hasta el
momento.
Para finalizar, se debe decir que en cuanto a los experimentos
numéricos realizados, las compara-
ciones con otras técnicas han de realizarse de acuerdo a las
posibilidades y el criterio del autor.
1.3. Estructura del Documento
Partiendo del hecho que se considera primordial que este
documento sea lo más compacto y completo
posible, en los caṕıtulos 2 y 4 se
presentan respectivamente, los fundamentos teóricos y
considera-
ciones prácticas de las SVM y la clase de estrategias
evolutivas empleadas en este trabajo. En el
capı́tulo 3 se describen los métodos de
selección automática como componentes del marco com-
parativo usado para los experimentos en el caṕıtulo 6.
En el caṕıtulo 5 se describe y se hacenlas
consideraciones pertinentes con respecto al algoritmo propuesto. El
documento termina con
un sumario de los resultados obtenidos e ideas para un trabajo
posterior, además de un apéndice
concerniente a kernels como complemento a los fundamentos
teóricos de las SVM.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
16/102
Caṕıtulo 2
Máquinas de Soporte Vectorial
Las Máquinas de Soporte Vectorial (SVM), han mostrado en los
últimos años su capacidad en la
clasificación y reconocimiento de patrones en general. El
objetivo de este capı́tulo es presentar los
fundamentos básicos, tanto teóricos como prácticos de las SVM
y soportar su potencial en tareas
de clasificación. Intuitivamente, dado un grupo de datos
distribuidos en dos clases, una SVM lineal
busca un hiperplano de tal manera que la mayor cantidad de
puntos de la misma clase queden
al mismo lado, mientras se maximiza la distancia de dichas
clases al hiperplano. De acuerdo a
Vapnik [1995], este hiperplano minimiza el riesgo de
clasificaciones erróneas en el grupo tomadopara realizar el
proceso de validación.
2.1. Clasificación con Vectores de Soporte
Para un grupo de entrenamiento de
tamaño N compuesto de pares atributo-etiqueta (xi,
yi)1≤i≤N ,
siendo xi ∈ Rn y yi ∈ {−1, 1}, se desea
obtener una ecuación para un hiperplano que divida dichogrupo de
entrenamiento, de manera que aquellos puntos con igual etiqueta
queden al mismo lado
del hiperplano. Esto significa encontrar un w y
un b tal que
yi(wxi + b) > 0, i = 1,...,N
(2.1)
5
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
17/102
6
Si existe un hiperplano que satisfaga (2.1), se dice que los
datos son linealmente separables . En este
caso, w y b se pueden escalar aśı,
ḿın1≤i≤N
yi(wxi + b) ≥ 1
de tal manera, que el punto mas cercano al hiperplano tenga como
distancia 1/w. Luego (2.1) sepuede escribir como
yi(wxi + b) ≥ 1 (2.2)
aśı, entre todos los posibles hiperplanos, aquel cuya distancia
al punto más cercano es máxima se
denomina el “óptimo hiperplano de separación” (OSH). Mientras
la distancia al hiperplano óptimo
sea 1/w, encontrar el OSH equivale a resolver el siguiente
problema
ḿınw,b
1
2ww
sujeto a yi(wxi + b) ≥ 1, ∀i
(2.3)
La cantidad 2/w es llamada “margen” y el hiperplano que
maximiza dicho margen, OSH. Elmargen puede ser visto como una
medida de la dificultad del problema, ası́, entre más pequeño
sea
el margen más difı́cil es el problema; o de otro modo, se
espera una mejor capacidad de generalización
si el margen es más grande (ver figura 2.1).
Mientras ww sea convexo, minimizar la
ecuación (2.3) sujeto a (2.2) es posible utilizando
multipli-
cadores de Lagrange [Burges, 1998]. Sean α
= {α1,...,αN } los N
multiplicadores de Lagrange nonegativos asociados a (2.2), para
minimizar (2.3) se debe encontrar el punto de silla de la
siguiente
función de Lagrange
L(w,b,α) = 1
2
ww−
N
i=1 αi[yi(wxi + b) − 1] (2.4)Para encontrar dicho
punto, hay que minimizar la función (2.4) sobre w y
b, y luego maximizarla
sobre los multiplicadores de Lagrange αi ≥ 0.
El punto de silla debe satisfacer las condiciones de
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
18/102
7
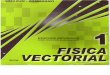
Figura 2.1: Hiperplanos que separan correctamente los datos. El
OSH de la derecha tieneun margen mayor por lo tanto se espera una
mejor generalizaci ón
Karush-Kuhn-Tucker (KKT) [Burges, 1998],
∂L(w,b,α)
b =
N i=1
yiαi = 0
∂L(w,b,α)
w = w −
N i=1
αiyixi = 0
(2.5)
Substituyendo (2.5) en (2.4) el problema de optimización
apunta ahora a resolver
máx
N i
αi − 12
N i,j
αiαj yiyj xixj
sujeto aN
i=1
yiαi = 0 y αi ≥ 0, ∀i(2.6)
Esto puede ser logrado utilizando métodos de programación
cuadrática estándar [Burges, 1998].
Una vez el vector α0 = {α0i ,...,α0N }
solución de (2.6) ha sido encontrado, a partir de
(2.5), el OSH(w, b) tiene la siguiente forma
w0 =N
i=1
α0i yixi (2.7)
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
19/102
8
mientras b0 puede ser obtenido a partir de las
condiciones de KKT
α0i [yi(wxi + b) − 1] = 0 (2.8)
Nótese que de la ecuación (2.8), los puntos para los cuales
α0i > 0, satisfacen la desigualdad en
(2.2). Geométricamente, esto significa que aquellos puntos son
los más cercanos al OSH (ver figura
2.1). Estos puntos juegan un papel importante debido a que son
los únicos valores necesarios en la
expresión para el OSH (ver ecuación 2.7) y son llamados
“vectores de soporte” (SV), por el hecho
que dan “soporte” a la expansíon de w0.
Dado un vector de soporte xi, el parámetro b
puede ser obtenido de las condiciones KKT como
b0 = yi − w0xi
El problema de clasificar un nuevo punto x, es resuelto
examinando el signo de w0x + b0. Ahora,
considerando la expansión (2.7) de w0, la función de
decisión f (x) para el hiperplano puede ser
escrita como
f (x) = sign
N
i=1α0i yix
ix + b
2.2. Caso Linealmente no Separable
Si los datos son linealmente no separables, buscar un OSH carece
completamente de sentido. Con
la finalidad de posibilitar las violaciones, se pueden
introducir variables “slack” (de relajación)
(ξ 1,...,ξ N ), para ξ i ≥
0 [Cortes and Vapnik], de manera que la expresión
(2.2) se puede escribircomo
yi(wxi + b) ≥ 1 + ξ i, ∀i
El propósito de las variables ξ i es permitir
puntos erróneamente clasificados, los cuales correspondan
a ξ i > 1, por lo tanto,
i ξ es una cota superior del número de errores de
entrenamiento. El OSH
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
20/102
9
generalizado puede ser obtenido como la solución del siguiente
problema
ḿınw,b
1
2ww + C
N i=1
ξ i
sujeto a yi(wxi + b) ≥ 1 + ξ i y
ξ ≥ 0, ∀i
(2.9)
El primer término es minimizado para controlar la capacidad de
aprendizaje del mismo modo que
en el caso separable; el segundo término permite mantener bajo
control el número de clasificaciones
erróneas. El parámetro C es elegido por el
usuario de manera que un valor grande es equivalente
a asignar una alta penalización a los errores. En analoǵıa con
el caso separable, la utilización de
multiplicadores de Lagrange deriva en el siguiente problema de
optimización,
máxN i
αi − 12
N i,j=0
αiαj yiyj xixj
sujeto a
i
yiαi = 0 y 0 ≥ αi ≥ C, ∀i(2.10)
de la ecuación (2.10) se puede notar que la única diferencia
hasta el momento con el caso separable
es que ahora α tiene una cota superior
C .
2.3. Máquinas de Soporte no Lineales
El principio de SVM no lineal consiste en mapear el espacio de
entrada a un espacio de representación
de dimensión alta a través de una función no lineal elegida a
priori [Boser et al., 1992], ver figura
2.2.
Sinembargo en este caso, surge un problema computacional, la
dimensión del espacio de repre-
sentación puede ser muy alta y la dificultad radica en cómo
construir un hiperplano de separación
en este espacio. La respuesta al problema parte de que para
construir dicho hiperplano, el mapeo
z = φ(x) no necesita ser expĺıcito, de manera que
reemplazando x por φ(x) en (2.6) se tiene
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
21/102
10
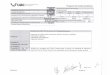
Figura 2.2: La SVM mapea el espacio de entrada en otro de
representación de dimensiónalta y luego construye un OSH sobre
este último
máxN i
αi − 12
N i,j
αiαj yiyj φ(xi)φ(xj )
sujeto a
N i=1
yiαi = 0 y αi ≥ 0, ∀i
de lo anterior, el algoritmo de entrenamiento solo depende de
los datos a través de los productos
punto en el espacio de representación, esto es, funciones de la
forma φ(xi)φ(xj ). Sea dada una fun-
ción kernel simétrica K tal
que K (xi, xj) = φ(xi)φ(xj ), de modo que el
algoritmo de entrenamiento
dependa solo de K y el mapeo φ no
sea usado expĺıcitamente.
Dado φ : Rd → H, el kernel K
es K (xi, xj ) = φ(xi)φ(xj ), pero de manera
inversa, dado un kernelK se deben establecer las
condiciones para que el mapeo exista. Tales condiciones son
aseguradas
por las condiciones de Mercer (ver apéndice A):
Teorema 1 Sea K (x, y) una
funci´ on simétrica continua en L2(C ),
luego, existe un mapeo φ y una
expansi´ on, tal que
K (x, y) =∞
i=1
φ(x)iφ(y)i (2.11)
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
22/102
11
si y solo si, para alg´ un g ∈ L2(C ),
tal que
C ×C
K (x, y)g(x)g(y)dxdy ≥ 0 (2.12)
Nótese que para casos espećıficos, puede no ser fácil mostrar
cuando las condiciones de Mercer son
cumplidas, mientras que (2.12) debe mantenerse para
algún g ∈ L2(C ). Sin embargo, es fácil probarque
la condición se cumple para el kernel polinomial K (x,
y) = (xy) p [ver Burges, 1998].
Los primeros kernels investigados para reconocimiento de
patrones fueron los siguientes
Polinomial: K (x, y) = (xy + c)d para c
> 0
Función de base radial (RBF): K (x, y) =
exp(−γ x − y2) para γ > 0
Sigmoide: tanh(κxy + ν )
El primero resulta en un clasificador con función de decisión
polinomial, el segundo un clasificador
con función de base radial y el último un tipo particular de
red sigmoidal de dos capas. Para el caso
de RBF, el número de centros (número de SV), los centros (SV),
los pesos (αi) y el desplazamiento
(b) son generados automáticamente por la SVM en la etapa de
entrenamiento y dan excelentes
resultados en comparación a la red RBF
clásica [Schölkopf et al., 1996]. De la misma forma,
para el
caso del perceptrón multicapa (MLP), la arquitectura (número
de nodos ocultos) es determinada
por el entrenamiento de la SVM.
2.4. Capacidad de Generalización
En esta sección, se dan algunas bases teóricas que describen
la capacidad de generalización de las
SVM.
2.4.1. Riesgo Actual, Riesgo Emṕırico y Dimensión VC
Suponiendo que se tienen N observaciones (xi,
yi)1≤i≤N para xi ∈ Rn y
yi ∈ {−1, 1} donde yi esla etiqueta
para xi, se asume existe una probabilidad P (x, y)
para la cual los datos están descritos.
Sea dada una máquina cuya tarea es aprender a mapear
xi → yi, dicha máquina es ciertamente
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
23/102
12
definida como un grupo de posibles mapeos
x → f (x, α) donde las funciones
f (x, α) son descritaspor los parámetros
ajustables α. Una elección particular de α, genera una
“máquina entrenada” en
particular. Esto es, por ejemplo, una red neuronal con una
arquitectura fija, donde α corresponde
a los pesos y los desplazamientos, es en efecto una m áquina de
aprendizaje.
La esperanza del error de validación, para una máquina
entrenada es por consiguiente [Vapnik,
1995]:
R(α) =
1
2|y − f (x, α)|dP (x, y)
La cantidad R(α) es llamada riesgo esperado o simplemente
“riesgo”. Se llamará aquı́ riesgo actual
para enfatizar que es la cantidad en la que finalmente se est á
interesado. El “riesgo emṕırico”,
Remp(x) está definido como la medida de error en un grupo dado
de validaci ón:
Remp(α) = 1
2N
N i=1
|yi − f (x, α)|
La cantidad Q((xi, yi), α) = 12 |yi − f (x, α)|
es llamada “pérdida”. Para el caso descrito aqúı, solo
toma valores entre 0 y 1. Si se escoge un η , de manera
que 0 ≤ η ≤ 1, luego, con una probabilidadde al menos 1 − η,
la siguiente cota se mantiene [Vapnik, 1995]
R(α) ≤ Remp(α) +
h(log(2N/h) + 1) − log(η/4)N
donde h es un entero no negativo llamado dimensión
de Vapnik-Chervonenkis (VC) y es la medida
de la capacidad de la máquina de aprendizaje. El segundo
término de la desigualdad es llamado
“confidencia VC”, el cual es tan pequeño como la dimensión VC,
por lo tanto una forma de controlar
la capacidad de generalización de una máquina es manipular la
dimensión VC.
Sea definido un grupo de funciones {f (α)}, tal que
para un grupo dado de N puntos, se puedanetiquetar
de todas las posibles 2N formas, y para cada etiqueta, un
miembro del grupo {f (α)} puedaencontrar la manera de asignar
dichas etiquetas. Se dice que este grupo de puntos es
fragmentado
por el grupo de funciones. La dimensión VC para el grupo de
funciones {f (α)} está definido comoel número
máximo de puntos de entrenamiento que pueden ser fragmentados
por {f (α)}.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
24/102
13
2.4.2. La Dimensión VC de las SVM
Primero, se presenta un teorema que establece una cota de la
dimensión VC para hiperplanos de
separación
Teorema 2 Sea X ⊂ Rn un
conjunto de vectores, ∀x ⊂ X , x2
< R. Un subconjunto S de hiperplanos,
tales que ∀(w, b) ⊂ S ,
inf x⊂X
|wx + b| = 1
|w| ≤ A
tiene una dimensi´ on VC acotada por
V C dim < ḿın(R2A2, n) + 1
De manera que minimizando ww, tambíen la cota de la
dimensión VC para los hiperplanos de
separación y, por lo tanto una mejor generalización esperada.
Nótese que en el caso de SVM no lineal,
este teorema debe ser aplicado sobre el espacio de
representación, aśı, la capacidad de generalización
está bajo control, incluso si el espacio es infinito
dimensional.
2.4.3. Procedimiento Leave-One-Out
Una manera de predecir el desempeño de generalización de una
SVM es estimar la dimensi ón VC
calculando el término R2ww. Otra manera es utilizar un
estimador Leave-one-Out (LOO) [Vapnik,
1998]. Dada una muestra de N + 1 ejemplos de
entrenamiento, el procedimiento para LOO consiste
en seguir los siguientes pasos (∀i):
Remover el ejemplo xi del grupo de entrenamiento
Entrenar la máquina con el nuevo grupo de entrenamiento a fin
de obtener los αi
Probar si xi es correctamente clasificado
El número de errores cometidos por la máquina en el
procedimiento LOO está denotado por LN +1.Por definición
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
25/102
14
LN +1 =
N +1
n=1 Q((xi, yi), α)La cantidad
LN +1N +1 , es la estimación del error de
generalización. Gracias a esto el siguiente teorema
es válido
Teorema 3 (Luntz y Brailovsky, 1969) El estimador LOO es
no sesgado, esto es
E
LN +1N + 1
= E (RN )
La esperanza del término del lado izquierdo es tomada del grupo
de entrenamiento de tamañoN + 1 y
E (RN ) es la esperanza del riesgo actual para OSH
construidos sobre la base de un grupo
de entrenamiento de tamaño N . Entonces, para
controlar la capacidad de generalización se debe
tratar de minimizar el número de errores cometidos en el
procedimiento LOO.
Nota 1 Para SVM, el procedimiento LOO se debe realizar
solo en los vectores de soporte, los no
vectores de soporte ser´ an reconocidos correctamente
debido a que un no vector de soporte no afecta
la funci´ on de decisi´ on.
2.4.4. Cotas para el Estimador de Leave-One-Out
Se muestran aqúı, diferentes cotas para el estimador LOO en
SVM.
Número de SV
Debido al hecho presentado en la nota 1, se puede
restringir la sumatoria solo a los vectores de
soporte y luego acotar superiormente cada término en la suma
por 1, de lo cual se obtiene la
siguiente cota del número de errores cometidos por el
procedimiento LOO [Vapnik, 1995]
T = N SV
N
de donde N SV es el número de vectores
de soporte.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
26/102
15
Jaakkola-Haussler
Para SVM sin valor de desplazamiento, analizando el proceso de
optimizaci ón del algoritmo de SVM
cuando se calcula el error LOO, Jaakkola and
Haussler [1999] provee la siguiente desigualdad
y p(f 0(x p) − f p(x p)) ≤
α0 pK (x p, x p) = U p
de la cual se extrae la siguiente cota
T = 1
N
N
p=1 Ψ(α0 pK (x p, x p)
−1)
En [Wahba et al., 2000] se propone una
estimación de los errores producidos bajo el esquema LOO,
para el cual en el caso de SVM con margen ŕıgido
(C = ∞) se vuelve
T = 1
N
α0 pK (x p, x p)
lo cual se puede ver como una cota superior de Jaakkola-Haussler
siempre y cuando Ψ(x − 1) ≤ xpara x ≥ 0.
Opper-Winther
En el caso de SVM con margen rı́gido sin desplazamiento,
Opper and Winther [2000] utiliza un
método basado en la teorı́a de respuesta lineal para probar que
ba jo el supuesto que un grupo de
vectores de soporte no cambia cuando se remueve un ejemplo
p, se tiene
y p(f 0(x p) − f p(x p)) =
α0 p
(K −1SV ) pp
donde K SV es la matriz de productos
internos entre los vectores de soporte y que lleva a la
siguiente
estimación
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
27/102
16
T = 1
N
N
p=1 Ψ(α0 p
(K −1SV ) pp −1)
Radio-Margen
Sea que el margen óptimo es igual a M y que las
imágenes φ(xi) de los vectores de entrenamiento
xi, están contenidas en una esfera de radio R. Entonces,
el siguiente teorema se mantiene [Vapnik
and Chapelle, 2000]
Teorema 4 Dado un conjunto de entrenamiento
Z = {(x1, y1), ..., (xN , yN )}, un
espacio de repre-sentaci´ on en
H y un hiperplano (w, b), el
margen M (w,b,Z ) y el radio
R(Z ) son definidos como
M (w,b,Z ) = mı́n(xi,yi)∈Z
yi(wφ(xi) + b)w
R((Z )) = mı́na,xi
φ(xi) + a
El algoritmo de margen m´ aximo, LN : (X
× Y )N → H × R toma como entrada el conjunto
de entrenamiento de longitud N y
devuelve un hiperplano en el espacio de representaci´ on, tal
que
el margen es maximizado. N´ otese que asumiendo que dicho
grupo de entrenamiento es separable,
entonces M (w,b,Z ) > 0.
Bajo este supuesto, para todas las medidas de
probabilidad P (Z ), la
probabilidad esperada de clasificaci´ on err´ onea
es
perr(w, b) = P (sign(wφ(X ) + b)
= Y )
con la cota
E { perr(LN −1(Z ))} ≤ 1N
E
R2(Z )
M 2(L(Z ), Z )
(2.13)
donde la esperanza es tomada sobre un subconjunto aleatorio
de Z de longitud N − 1
para el ladoizquierdo y N para el
derecho en ( 2.13 ).
Este teorema se ajusta a la idea de construcción de un
hiperplano que separe los datos con un margen
grande (entre más grande sea dicho margen, mejor sera el
desempeño del hiperplano construido).
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
28/102
17
De acuerdo al teorema 4, el desempeño promedio
depende de E
R2
M 2
y no simplemente de cuan
grande sea el margen M .
Para SVM sin desplazamiento y sin errores de entrenamiento,
Vapnik [1998] propone la siguiente
cota superior para el número de errores cometidos por LOO
T = 1
N
R2
M 2(2.14)
donde R y M son respectivamente el
radio y el margen definidos en el teorema 4.
Span de los Vectores de Soporte
Vapnik and Chapelle [2000] derivaron otra estimación utilizando
el concepto del span de los vectores
de soporte. Bajo el supuesto de que los SV permanecen intactos
durante el procedimiento de LOO,
la siguiente igualdad es cierta
y p(f 0(x p) − f p(x p)) =
α0 pS 2 p
donde S p es la distancia entre el punto
φ(xi) y la colección Λ p, y a su vez,
Λ p =
i= p , α0i>0
λiφ(xi) ,i= p
λ = 1
de lo que se obtiene, el número exacto de errores cometidos por
LOO bajo el supuesto previo. Ası́,
la cota para LOO se define como sigue
T = 1
N
N
p=1Ψ(α0 pS
2 p − 1) (2.15)
Además, la estimación del span puede ser
relacionada con las otras mencionadas con formulaciones
simples [Chapelle et al., 2002].
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
29/102
18
2.5. Algoritmo de Entrenamiento
Considerando la fórmula general para la SVM, es decir, no
lineal y no separable:
máx
N i
αi − 12
N i,j
αiαj yiyj K (xi, xj )
sujeto aN
i=1
yiαi = 0 y 0 ≤ αi ≤ C, ∀i(2.16)
el método de descomposición es tenido en cuenta considerando
la densidad de la matriz kernel
K (xi, xj ) de la ecuación (2.11). Buena parte del trabajo
al rededor de este método puede ser
encontrado en [Osuna et al., 1997,
Joachims, 1999, Platt, 1999, Saunders et al.,
1998].
2.5.1. Método de Descomposición
Partiendo de la ecuación (2.16) se puede realizar la siguiente
representación vectorial:
ḿınα
1
2αQα − eα
sujeto a y α = 0 y 0≤
αi ≤
C,
∀i
(2.17)
donde Qij = yiyj K (xi, xj ) y e
= 1, ∀i.
Algoritmo 1
Dado un n´ umero q < N , como tama˜ no
del conjunto de trabajo, se encuentra α1
soluci´ on
inicial y se hace k = 1
Si αk es la soluci´ on ´ optima de la
ecuaci´ on ( 2.17 ) se termina, de otro modo se
busca un con-
junto B ⊂ {1,...,N } con
tama˜ no q . Se definen L ≡
{1,...,N }\B, αkB y αkL como
subvectores
de αk
correspondientes a B y a L
respectivamente
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
30/102
19
Se resuelve el siguiente problema respecto de αB:
ḿınαB
12
αBQBB αB − (eB + QBLαkL)αB
sujeto a yBαB = −yLαkL y 0 ≤ (αB)i ≤
C, ∀i(2.18)
donde
QBB QBL
QLB QLL
es una permutaci´ on de la matriz Q
Se deja αk+1B como soluci´ on
´ optima de ( 2.18 ) y αk+1L ≡
αkL. Se hace k = k + 1 y se
vuelve al
paso 2
La idea básica del algoritmo de descomposición es que en cada
iteración los ı́ndices
{1,...,N
} del
conjunto de entrenamiento, sean separados en dos más
pequeños B y L, donde B es el de
trabajo. El
vector αL es fijado de manera que el objetivo
sea 12α
BQBB αB − (eB − QBLαL)αB + 12αLQLLαL −
eLαL. Luego, se resuelve un subproblema respecto de αB
, B es actualizado en cada iteración (nótese
que para simplificar la notación se utiliza B en vez
de B k) y el decrecimiento estricto de la función
objetivo se sostiene (ver sección 2.5.3 referente a
la convergencia teórica del algoritmo).
2.5.2. Selección del Conjunto de Trabajo y Criterio de
Parada
Una de las partes importantes en el algoritmo de descomposición
es la selección del grupo de trabajo
B. La condición de Karush-Kuhn Tucker (KKT) en la ecuación
(2.17) muestra que existe un escalar
y dos vectores no negativos λ y µ, tales
que
Qα + e + by = λ − µλiαi = 0, µi(C −
α)i = 0
λi ≥ 0, µi ≥ 0, ∀i(2.19)
Nótese que si se escriben las condiciones de KKT para el
primario y el dual, resultan ser las mismas y
el multiplicador de Lagrange de la restricción lineal y
α = 0 coincide con el valor de desplazamientob en la
función de decisión. Luego, la ecuación (2.19) puede
reescribirse como
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
31/102
20
Qα + e + by
≥0, si α = 0
= 0, si 0 < α < C
≤ 0, si α = C
ahora, utilizando y = ±1, ∀i y asumiendo
que C > 0, se tiene que
y = 1, αt < C ⇒ (Qα + e)t +
b ≥ 0 ⇒ b ≥ −(Qα + e)t = −∇f (α)ty = −1, αt
> 0 ⇒ (Qα + e)t − b ≤ 0 ⇒ b ≥ (Qα + e)t
= ∇f (α)t
y = −1, αt < C ⇒ (Qα + e)t − b ≥
0 ⇒ b ≤ (Qα + e)t = ∇f (α)t
y = 1, αt > 0 ⇒ (Qα +
e)t + b ≤ 0 ⇒ b ≤ −(Qα + e)t =
−∇f (α)tdonde f (α) = 12α
Qα + eα y ∇f (α) es el gradiente de
f (α) en α y considerando
i ≡ argmax({−∇f (α)t|yt = 1, αt < C },
{∇f (α)t|yt = −1, αt > 0}) j ≡
argmin({∇f (α)t|yt = −1, αt < C },
{−∇f (α)t|yt = 1, αt > 0})
(2.20)
de manera que B = {i, j} puede usarse como
grupo de trabajo para el subproblema en la ecuaci ón(2.18) del
método de descomposición, donde i y j son
los dos elementos que más violan las condi-
ciones de KKT. La idea de utilizar dos elementos como grupo de
trabajo son tomadas del algoritmo
de optimización secuencial mı́nima (SMO) de Platt [1999].
La principal ventaja de esto, es que
la solución anaĺıtica de la ecuación (2.17) puede ser
obtenida sin la necesidad de un programa de
optimización comercial. Nótese que la ecuación (2.20)
es un caso especial del método SV M light
en Joachims [1999]. Para ser más preciso, en S
V M light, si α es la solución actual del
problema, el
siguiente es resuelto
ḿınd ∇f (α)dyd = 0, −1 ≤ d ≤ 1,
dt ≥ 0, si αt = 0, dt ≤ 0, si
αt = 0
(2.21)
|{dt dt = 0}| = q (2.22)
nótese que |{dt dt = 0}| es el conjunto
de componentes de d que no son cero. La restricción en
laecuación (2.22) implica que la componente descendiente involucra
solamente q variables. Luego, las
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
32/102
21
componentes de α con dt diferentes de
cero son incluidas en el grupo de trabajo B utilizado
para
construir el subproblema en la ecuación (2.18). En efecto,
d únicamente se usa para identificar B
y
no para encontrar la dirección de búsqueda.
Puede ser visto claramente que si q = 2 la
solución de la ecuación (2.21) es
i = argmin{∇f (α)tdt|ytdt = 1; dt ≥
0, si αt = 0; dt ≤ 0, si
αt = C } j =
argmin(∇f (α)tdt|ytdt = −1; dt ≥ 0,
si αt = 0; dt ≤ 0, si αt =
C }
la cual es igual a la ecuación (2.20) y corresponde a la
segunda modificación del algoritmo SMO en
Keerthi et al. [1999].
Ahora, se pueden definir
gi ≡
−∇f (α)i si yi = 1, αi <
C ∇f (α)i si yi = −1, αi >
0
(2.23)
y
gj ≡
−∇f (α)j si yj = −1, αj <
C
∇f (α)j si yj = 1, αj
> 0
(2.24)
De la ecuación (2.21) se tiene que
gi ≤ −gj (2.25)
lo cual implica que α es una solución óptima de
la ecuación (2.16), de manera que el criterio de
parada puede ser escrito e implementado de la siguiente forma
como
gi ≤ −gj + (2.26)
donde es una constante positiva pequeña.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
33/102
22
2.5.3. Convergencia del Método de Descomposición
La convergencia de los métodos de descomposición fue
inicialmente estudiada en Chang et al. [2000]
sinembargo, no coinciden con las implementaciones existentes. En
esta sección, solo se tienen en
cuenta resultados de convergencia para el método especı́fico de
descomposición de la sección 2.5.1.
A partir de Keerthi and Gilbert [2002] se tiene que
Teorema 5 Dado cualquier > 0
después de un n ́umero finito de iteraciones la
expresi´ on en ( 2.26 )
ser´ a satisfecha.
El teorema 5 establece la llamada propiedad de
terminación finita, de modo que se tiene la seguridad
de que luego de un número finito de pasos el algoritmo
terminará.
Teorema 6 Si {αk} es la secuencia
generada por el algoritmo de descomposici´ on en la
secci´ on 2.5.1, el ĺımite de cualquiera de sus
subsecuencias convergentes es soluci´ on ´ optima de la
ecuaci´ on
( 2.17 ).
El teorema 5 no implica el teorema 6 si se
consideran gj y gj en la ecuación (2.26)
como funciones de
α que no son continuas. Por consiguiente no se puede tomar
el lı́mite en ambos lados de la ecuación
(2.26) y afirmar que cualquier punto convergente ya satisface
las condiciones de KKT.
El teorema 6 fue inicialmente demostrado como una caso
especial de los resultados generales en Lin
[2001c] donde algunos supuestos son necesarios. Partiendo de la
demostraci ón en Lin [2001a], los
supuestos son eliminados, por tanto el teorema es completamente
v álido.
Considerando la convergencia local, debido a que el algoritmo
utilizado es una caso especial de uno
discutido en Lin [2001b], se tiene el siguiente
teorema
Teorema 7 Si Q es definida positiva y
el dual del problema de optimizaci´ on es degenerado
(ver
supuesto 2 en Lin [2001b ]), existe
un c < 1, tal que luego de que k
suficientemente grande,
f (αk+1)−
f (α∗)≤
c(f (αk)−
f (α∗))
donde α∗ es la soluci´ on ´ optima de
( 2.17 ).
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
34/102
23
Con esto, el método de descomposición aqúı descrito es
linealmente convergente. Los resultados
mostrados en esta sección, son válidos para kernels que pueden
ser considerados como el producto
punto entre dos vectores de caracteŕısticas, esto es, Q
es semidefinida positiva. Por ejemplo, para
algunos kernels como el sigmoidal (ver ecuación A.5)
Q puede no ser semidefinida positiva por
tanto la ecuación (2.17) es un problema de optimización no
convexo que puede contener varios
mı́nimos locales. Sinembargo, con unas pequeñas modificaciones
del algoritmo 1 se puede garantizar
la convergencia a un mı́nimo local (ver Lin and Lin
[2003]).
2.5.4. Solución Analı́tica
Con la selección del grupo de trabajo en la sección
2.5.2, la ecuación (2.18) se convierte en unproblema
de dos variables
ḿınαi,αj
1
2[αiαj ]
Qii Qij
Qji Qjj
αi
αj
+ (Qi,LαL − 1)αi + (Qj,LαL − 1)αj
sujeto a yiαi + yj αj = 0 ≡ −yLαkL0 ≤ αi,
αj ≤ C
(2.27)
En Platt [1999] se sustituye αi por
yi(−yLαL − yj αj) en la función objetivo de la ecuación
(2.18)
y se resuelve la minimización sin restricciones respecto a
αi, obteniéndose la siguiente solución
αnewj ≡ αj +
−Gi−GjQii+Qjj+2Qij
si yi = yjαj +
Gi+GjQii+Qjj−2Qij si yi = yj
(2.28)
donde
Gi ≡ ∇f αi y Gj ≡ ∇f (α)j
Si este último valor está por fuera de de la posible región
para αi, el valor en la ecuación (2.28) es
truncado y asignado a αnewj . Por ejemplo,
si yi = yj y C ≤ αi +
αj ≤ 2C , αnewj debe satisfacer
L ≡ αi + αj − C ≤ αnewj ≤
C ≡ H
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
35/102
24
de modo que el máximo valor para αnewi
y αnewj es C . Por consiguiente
αj + Gi + Gj
Qii + Qjj − 2Qij ≤ L
entonces αnewj = L y
αnewi = αi + αj − αnewj
= C (2.29)
Esto puede ser ilustrado en la figura 2.3 en la
cual se optimiza una función cuadrática sobre un
segmento de recta. El segmento de recta es la intersección
entre la restricción lineal yiαi + yj αj
y
las restricciones acotadas 0 ≤ αi y αj ≤
C .
Figura 2.3: Solución anaĺıtica de un problema de optimización
de dos variables
No obstante, la igualdad en la ecuación (2.29) podŕıa no
mantenerse si la operación de punto flotante
causara que αi + αj −αnewj = αi + αj − (αi + αj
−C ) lo cual es diferente de C . Luego, en la
mayorı́ade los casos, una pequeña tolerancia α es
especificada de manera que todo αi ≥ C − α es
una cotasuperior y αi ≤ α = 0. Esto último
es necesario ya que algunos datos podŕıan ser
consideradoserróneamente como vectores de soporte. En adición el
cálculo del valor de desplazamiento también
necesita corrección para aquellos valores libres de αi
(0 ≤ αi ≤ C ).
En Hsu and Lin [2002b] es señalado que si todos los
αi obtienen sus valores mediante asignaciones
directas, no es necesario utilizar un valor de α. Para ser
más precisos, en una operación de punto
flotante si αi ← C es asignado, una
futura comparación entre αi y
C retornará verdadero siemprey cuando contengan
la misma representación interna.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
36/102
25
Otro pequeño problema es que el denominador en la ecuación
(2.28) puede ser cero. Cuando esto
sucede,
Qij = ±(Qii + Qij )/2
por lo tanto
QiiQjj − Q2ij = QiiQjj − (Qii + Qjj
)2/4 = −(Qii − Qij)2/a ≤ 0
Ahora, considerando que QBB es definida positiva, el
denominador cero en la ecuación (2.28) no es
posible. De ahı́ que este problema solo pueda suceder cuando
Q sea singular de 2×2. A continuaciónse discuten dos
situaciones en las cuales dicha matriz puede ser singular
La función φ no mapea los datos en vectores
independientes en el espacio de alta dimensio-
nalidad haciendo que Q sea solo semidefinida
positiva. Por ejemplo utilizando un kernel lineal
o polinomial de orden bajo.
Algunos kernels tienen una interesante propiedad por la cual
φ(xi) ∀(i) son independientessiempre y
cuando xi = xj . Un ejemplo de esto es el kernel RBF
(ver Micchelli [1986]), debidoa que en muchas situaciones
prácticas algunos xi son los mismos lo cual implica
columnas (o
filas) de Q que son exactamente iguales y con esto
la posibilidad de que QBB sea singular.
De cualquier manera, incluso si el denominador en la ecuación
(2.28) es cero no hay problemas
numéricos desde que en la ecuación (2.26) se puede ver que
gi + gj ≥
y durante el proceso de iteración
gi + gj = ±(−Gi − Gj ), si
yi = yj , (y)gi + gj = ±(Gi − Gj
), si yi = yj
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
37/102
26
Si la matriz del kernel no es semidefinida positiva Qii +
Qjj ±2Qij puede no ser positiva entonces laecuación (2.28)
puede no producir una actualización de modo que el valor objetivo
sea disminuido.
Además el algoritmo puede permanecer en un solo punto
quedándose en un ciclo infinito. En Lin
and Lin [2003] se estudia este problema en detalle y se propone
la siguiente modificaci ón
αnewj ≡ αj +
−Gi−Gjmáx(Qii+Qjj+2Qij,0)
si yi = yjαj +
Gi+Gjmáx(Qii+Qjj−2Qij,0) si yi =
yj
aśı, se garantiza el decrecimiento estricto de la función
objetivo.
2.5.5. Cálculo de b
Después de encontrar la solución α al problema de
optimización la variable b debe ser calculada para
ser utilizada en la función de decisión. Las condiciones KKT
de la ecuación (2.17) fueron mostradas
en la ecuación (2.20). Ahora, para el caso de y = 1
si existen αi que satisfagan 0 ≤ αi ≤ C
entoncesse hace, r1 = ∇f (α)i. Para evitar errores
numéricos, se promedian como
r1 =
0≤αi≤C,yi=1 ∇f (α)i
0≤αi≤C,yi=1 1
Por otro lado, si no existe tal αi, r1 debe
satisfacer
máxαi=C,yi=1
∇f (α)i ≤ r1 ≤ ḿınαi=0,yi=1
∇f (α)i
de donde r1 toma el punto medio del rango. Para
yi = −1 un r2 se calcula de manera
similar yluego de que ambos r1 y r2 son
obtenidos,
−b = r1 − r22
Nótese que las condiciones de KKT pueden ser escritas como
máxαi>0,yi=±1
∇f (α)i ≤ ḿınαi
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
38/102
27
de modo que el siguiente criterio de parada puede ser utilizado
pr ácticamente: el algoritmo de
descomposición para si en la iteración α
satisface
máx( − ḿınαi0,yi=1
∇f (α)i,
− ḿınαi0,yi=−1
∇f (α)i) <
donde > 0 es una constante elegida como tolerancia
de parada.
2.5.6. Contraccíon
Considerando que en muchos de los problemas prácticos, el
número de vectores de soporte libres
(0 ≤ αi ≤ C ) es pequeño, la
técnica de contracción reduce el tamaño del problema de
trabajosin considerar algunas variables acotadas
[Joachims, 1999]. En un punto cercano al final del pro-
ceso iterativo, el método de descomposición identifica un
posible conjunto A de modo que todos
los vectores de soporte libres queden contenidos en él. Para
esto, el siguiente teorema muestra
que en las iteraciones finales de la descomposición propuesta
en la sección 2.5.2 solo las variables
correspondientes a un conjunto pequeño tienen la posibilidad de
moverse [Lin, 2002]
Teorema 8 Si ĺımk→∞ αk = ᾱ
por el teorema 6, entonces, ᾱ es
una soluci´ on ´ optima. Incluso,
cuando k es suficientemente grande, solo los
elementos en
{t| − yt∇f (ᾱ)t = máx( máxᾱi0,yi=−1
∇f (ᾱ)i)
= mı́n( mı́nᾱi0,yi=1
−∇f (ᾱ)i)
pueden todav́ıa seguir siendo modificados.
por lo tanto, se tiende a pensar que si la variable αi
es igual a C para algunas iteraciones, al
final
de la solución, ésta permanece como cota superior. De ah́ı que
en vez de resolver todo el problema
de la ecuación (2.17), se trabaja con uno de menor tamaño
ḿınαA
1
2αAQAAαA − (eA + QALαkL)αA
sujeto a y AαA = −yLαkL y 0 ≤ (αA)i ≤
C, ∀i(2.30)
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
39/102
28
donde L = {1,...,N }\A. Sinembargo, esta
heuŕıstica puede fallar si la solución de la ecuación (2.30)no
es una parte correspondiente a la de la ecuación (2.17). Cuando
esto sucede, el problema completo
se vuelve a optimizar desde un punto donde αB es una
solución óptima de la ecuación (2.30) y αL
son variables acotadas identificadas antes del proceso de
contracción. Nótese que mientras que se
está resolviendo el problema de contracción solo se conoce el
gradiente QAAαA + QALαL + eA
de la ecuación (2.30). Considerando esto último, cuando se
optimiza de nuevo el problema de la
ecuación (2.17) se debe reconstruir completamente el gradiente
de f (α)i lo cual es un tanto costoso
en términos computacionales. Para evitar esto, en vez de
iniciar el proceso de contracción al final
del proceso iterativo, se inicia desde el principio como
sigue:
Luego de cada mı́n(N, 1000) iteraciones se tratan de contraer
algunas variables. Aśı, durante
el proceso iterativo,
mı́n({∇f (αk)t|yt = −1, αt < C },
{−∇f (αk)t|yt = 1, αt > 0}) = −gii<
máx({−∇f (αk)t|yt = 1, αt < C },
{∇f (αk)t|yt = −1, αt > 0}) =
gjj
la ecuación (2.25) no se satisface todav́ıa. Entonces, se
supone que si gi ≤ −gii de la ecuación(2.23)
y αt está dentro del rango, es muy posible que αt
no vuelva a cambiar, por lo tanto se
desactiva esa variable. Similarmente para −gj ≥
gjj de la ecuación (2.24) con αt dentro
delrango. De esta manera, el conjunto A de variables
activas es dinámicamente reducido cada
ḿın
{L, 1000
} iteraciones.
Es claro que la estrategia de contracción arriba mencionada es
muy agresiva considerando
que el método de descomposición tiene una convergencia lenta y
una gran cantidad de las
iteraciones es consumida alcanzando el d́ıgito final de
precisión requerido, no es deseado que
se pierdan iteraciones innecesariamente debido a una
contracción errónea. Con esto, cuando el
método de descomposición alcanza primero la
tolerancia gi ≤ −gj +10, el gradiente completoes
reconstruido. Luego, basados en la información correcta, se
utilizan las ecuaciones (2.23)
y (2.24) para desactivar algunas variables y continuar con el
método de descomposición.
Como el tamaño del conjunto A es dinámicamente
reducido, para disminuir el costo computacional
del gradiente ∇f (α) durante las iteraciones se
mantiene siempre
Ḡi = C
αj=c
q ij , ∀i
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
40/102
29
Ası́, para el gradiente ∇f (α)i con i A
se tiene
∇f (α)i =i=1
Qij αj = Ḡi +
0
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
41/102
30
y
∇f (αk+1) = ∇f (αk) + Q:,B(αk+1b − αkB)
(2.32)
donde Q:,B es la submatriz de Q con
ı́ndices en B. Esto es, en la k−ésima iteración
con ∇f (αk)conocido y la parte derecha de la ecuaci ón
(2.31) como constructor del subproblema. Luego de
que el subproblema es resuelto, la ecuación (2.32) es empleada
para obtener el próximo ∇f (αk+1).Como B
contiene solo dos elementos y resolver el subproblema es
fácil, el costo sustancial reside
en el cálculo de Q:,B(αk+1b − αkB). La operación
en śı toma O(2N ), sinembargo si Q:,B no
está
disponible en el cache y cada operación del kernel
cuesta O(n) en efecto, cada columna de Q:,Bnecesita
O(nN ). De manera que la complejidad es
iteraciones
×O(N ) o iteraciones
×O(N n) según
sea el caso teniendo en cuenta que si se utiliza contracción,
N disminuye gradualmente. Desafor-
tunadamente, no se sabe mucho acerca de la complejidad del
número de iteraciones. Sinembargo,
algunos resultados interesantes fueron obtenidos por Hush
and Scovel [2003] aunque solo para los
métodos de descomposición descritos en Chang et al.
[2000].
2.6. Máquinas de Soporte Multi Clase
En esta sección se discute el método para SVM multi clase “uno
contra uno” [Knerr et al., 1990],
en el cual k(k − 1)/2 clasificadores deben ser construidos
para entrenar pares de diferentes clases.La primera utilización de
este método con SVM fue en Friedman [1996], KreSSel
[1999]. Para el
entrenamiento de las clases i−ésima y j−ésima se
resuelve el siguiente problema binario:
ḿınwij,bij,ξij
1
2(wij)wij + C
t
(ξ ijt )
(wij )φ(xt) + bij ≥ 1 − ξ ijt , si xt
∈ I (wij )φ(xt) + bij ≥ −1 + ξ ijt ,
si xt ∈ J ξ ij
t ≥0
En la clasificación se utiliza la estrategia de votación de
manera que la clase se asigna para cada
punto x como la resultante con mayor número de
votos o en el caso que dos clases tengan igual
número de votos, simplemente la de menor ı́ndice.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
42/102
31
La otra técnica más usada para SVM multi-clase es “uno contra
todos” en la cual se construyen
k modelos binarios entre la clase i
−ésima y el resto de las muestras de las otras clases
juntas.
Sinembargo, no se considera debido a que en la literatura
[Weston and Watkins, 1998, Platt et al.,
2000] presenta un menor desempeño que “uno contra uno”.
Además, si bien se entrenan más clasificadores k(k −
1)/2, cada problema es más pequeño (ademásrelativamente
balanceado) haciendo que el tiempo de entrenamiento total no sea
mayor al de “uno
contra todos”. Algunos detalles comparativos de estas y otras
técnicas puede ser encontrado en Hsu
and Lin [2002a].
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
43/102
Caṕıtulo 3
Selección de Hiperparámetros en
Máquinas de Soporte Vectorial
En el problema de aprendizaje supervisado se toma un conjunto de
pares entrada salida y se
trata de construir una función f que mapea
los vectores de entrada xi ∈ Rn en etiquetas
yi ∈{−1, 1}. El objetivo consiste entonces en encontrar
una f ∈ F que minimize el riesgo
emṕırico Remp(ver sección 2.4.1) en ejemplos
posteriores. Los algoritmos de aprendizaje usualmente dependen
de
parámetros que controlan el tamaño de la
clase F o en la forma como la búsqueda es
realizadaen F . Actualmente existen varias técnicas para
encontrar dichos parámetros. El riesgo emṕırico oerror de
generalización puede ser estimado o bien utilizando algunos de los
datos no empleados en el
entrenamiento (validación de muestra independiente o
validación cruzada) o mediante alguna cota
dada por el análisis teórico (ver sección 2.4.4).
Usualmente existen múltiples parámetros para ajustar al mismo
tiempo, es mas, la estimación del
error no es una función explı́cita de tales valores de manera
que la estrategia natural es una búsqueda
exhaustiva en el espacio de los parámetros lo cual corresponde
a correr el algoritmo de entrenamiento
en cada valor posible previamente almacenado en un vector
(sujeto a alguna discretización). Otra
manera, es encontrar una metodoloǵıa que automáticamente los
ajuste, en el caso de la SVM,
tomando ventaja tanto de sus propiedades de formulación como de
su algoritmo.
De manera especı́fica, los parámetros de los cuales depende la
SVM son: el denotado como C que
32
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
44/102
33
controla el balance entre la maximización del margen y la
penalización del error, aśı como todos
los que aparecen en el mapeo no lineal al espacio de
representación o kernel. Como es ampliamente
conocido, uno de los factores más importantes en el desempeño
de las SVM es la selección de la
función kernel, sinembargo, en la práctica muy pocos son
utilizados debido a la dificultad inherente
en el ajuste de dichos parámetros.
3.1. Búsqueda en Malla
Esta técnica ha sido utilizada durante los últimos años,
aunque nunca fue presentada formalmente.
Debido a su simplicidad, es usada ampliamente por muchos
investigadores del área de aprendizaje
de máquina. Esta procedimiento consiste en construir una malla
acotada de vectores de parámetros
conteniendo todas las posibles combinaciones en un espacio
acotado de búsqueda y para un paso
de discretización escogido. Debido a que es necesario utilizar
alguna medida del desempeño de la
SVM, la validación cruzada de n particiones es
usada de modo que el vector de parámetros elegido
es aquel para el cual el error de validación sea menor para una
tarea en espećıfico. La búsqueda en
malla para el kernel RBF está dada por la siguiente
definición:
Definición 9 Para un par de par´ ametros de la SVM
y el kernel: C y σ
respectivamente, con
C min, σmin como cotas inferiores,
C max, σmax como cotas superiores
y C ∆, σ∆ como los pasos de
discretizaci´ on, la malla de entrenamiento puede ser
construida como sigue:
(C i, σj ) = (C min + iC δ,
σmin + jσδ) para 0 ≤ i ≤ n y 0 ≤ j ≤
m
donde n = C max−C minC ∆ ,
m = σmax−σmin
σ∆y (C i, σj ) conforman una matriz de
tama˜ no n × m.
Dado que todas las combinaciones son necesarias para calcular
una solución, un total de (n+1)(m+
1) optimizaciones de la función de SVM son empleadas.
3.2. Búsqueda en Ĺınea
Esta técnica inicialmente presentada por Chapelle et al.
[2002] emplea el hecho de que la cota
de Radio/Margen (ver sección 2.4.4) es diferenciable, con
el objeto de desarrollar un algoritmo
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
45/102
34
“óptimo” para encontrar los parámetros de la SVM partiendo de
la idea que la búsqueda exhaustiva
en el espacio de parámetros puede ser prohibitiva. Esta
metodoloǵıa propone tomar ventaja de
propiedades especı́ficas de la formulación de la SVM para
minimizar una cota de la estimaci ón del
error de generalización empleando un algoritmo de gradiente
descendiente sobre un conjunto de
parámetros dados.
Reescribiendo la fórmula de Radio/Margen dada en la ecuación
(2.14) se tiene
LOO ≤ 4R2w2 (3.1)
donde w es la solución de (2.3) y R es
el radio de la esfera más pequeña conteniendo todos
los φ(xi).
Además, Vapnik [1998] muestra que R2 es el
valor objetivo del siguiente problema de optimización:
ḿınβ
1 − β Kβ
sujeto a 0 ≤ β i , i =
1,...,leT β = 1
(3.2)
sinembargo, debido a que es posible que los φ(xi) sean no
linealmente separables no es práctico usar
(2.3). Además, un φ altamente no lineal, puede
producir fácilmente sobre entrenamiento. Luego, es
mejor resolver una de las siguientes variaciones
de (2.9),
ḿınw,b,
1
2ww + C
N i=1
ξ i L1 − SVM (3.3)
o
ḿınw,b,
1
2ww +
C
2
N i=1
ξ 2i L2 − SVM (3.4)
De modo que ahora se puede hacer referencia a dos clases de SVM,
L1-SVM y L2-SVM respecti-vamente dependiendo si los errores son
penalizados lineal o cuadr áticamente. A continuación, se
describen los métodos de selección para Radio/Margen
utilizando L1 y L2.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
46/102
35
3.2.1. Cota de Radio/Margen para L2
Con relación a la formulación para L2-SVM en (3.4) y
haciendo K (xi, xj ) = zi.zj , el problema de
SVM puede ser convertido a margen rı́gido como:
ḿınw
1
2 w2
sujeto a yi( wi.zi + b) ≥ 0 ∀i
(3.5)donde zi denota la transformación a un espacio de
representación modificado dado por:
zi.zj = K (xi, xj ) = K (xi, xj ) +
1C
δ ij
con δ ij = 1, si i = j
y 0 en otro caso. Aśı, la expresión en (3.1) puede ser
volverse a escribir como
se muestra en Vapnik and Chapelle [2000]
LOO ≤ f (C, σ) 1N
R2 w2 (3.6)siendo
w como la solución de (3.5). Debido a que (3.6) es
diferenciable respecto de C y σ , es
apro-
piado utilizar alguna de las técnicas basadas en gradiente
descendiente, por ejemplo el algoritmo
Quasi-Newton para minimizar f (C, σ). El cálculo del
gradiente de f (C, σ) requiere que w2 y
R2sean conocidos, sinembargo, recientemente Chapelle et
al. [2002] provee un resultado bastante útil
que hace fácil la obtención de dichos gradientes una vez los
duales de (3.4) y (3.2) son resueltos.
Con esto último se mantiene que:
∂f
∂C =
1
N [
∂ w2∂C
R2 + w2 ∂R2∂C
] ∂f
∂σ2 =
1
N [
∂ w2∂σ2
R2 + w2 ∂R2∂σ2
]
∂ w2∂C
=
i
αiC 2
∂ w2∂σ2
= −i,j
αiαj yiyj K (xi, xj )xi − xj22σ4
∂R
2
∂C = −i
β iC 2 (1 − β i) ∂R2
∂σ2 = −i,j
β iβ j K (xi, xj )xi − xj22σ4luego, si
w2, R2, α y β están
disponibles, el gradiente de f (C, σ) es fácil de
obtener. Como essugerido en Chapelle et al. [2002], u1
= ln C y u2 = ln σ
2 deben ser usados en vez de C
and σ2.
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
47/102
36
Para este trabajo, BFGS como algoritmo quasi-Newton es empleado
para minimizar f (C, σ) (ver
apéndice B). Como se presenta en Keerthi [2002],
una técnica de gradiente descendiente requiere
muchas más evaluaciones debido a la sensibilidad de tal
procedimiento a errores de cálculo numérico
en f (c, σ2) y sus gradientes. Para el algoritmo
BFGS, se escogi ó ζ = 1 (ver ecuación
B) como
parámetro inicial y C = 1, σ2 = n
como condiciones iniciales donde n es la
dimensión de xi. El
criterio de parada fue tomado como |f (u + 1) −
f (u)| ≤ 10−5f (u), según sugerencia en
Keerthi[2002].
3.2.2. Cota de Radio/Margen para L1
En Chung et al. [2003] se propone la siguiente
modificación de (3.1) para L1-SVM:
(R2 + ∆
C )(w2 + 2C
N i=1
ξ i) (3.7)
siendo ∆ una constante positiva cercana a 1. Denotando (3.7)
como f (C, σ2) y usándola como cota
de (3.3) las derivadas parciales se calculan como:
A = w2 + 2C N
i=1ξ i B = R
2 + ∆
C
∂f
∂C =
∂A
∂C B +
∂ B
∂C A
∂f
∂σ2 =
∂A
∂σ2B +
∂B
∂σ2A
∂A
∂C = 2
i
ξ i∂A
∂σ2 = −
i,j
αiαj yiyj K (xi, xj )xi − xj22σ4
∂B
C = − ∆
C 2∂B
σ2 = −
i,j
β iβ j K (xi, xj )xi − xj22σ4
donde se toma el valor ∆ = 1 según Chung et al. [2003].
Del mismo modo que para L2-SVM,
la transformación de variable, algoritmo de optimización y
condiciones iniciales fueron usadas.
Para el parámetro de BFGS, ζ = 1
2
(ver ecuación B) fue elegido debido a que es
probable que se
obtengan valores mas allá de la región considerada
([-10,10]x[-10,10] para este trabajo) generando
una posible inestabilidad numérica. Además, para el criterio
de parada se prefiere utilizar la siguiente
formulación compuesta:
-
8/16/2019 Tesis Mg - Seleccion de Hiperparametros en Maquinas de
Soporte Vectorial. Univ Colombia.2004
48/102
37
∇f (xk)∇f (x0) ≤
10−3 or ∇
f (xk)
≤10−3
donde x0 es la solución inicial. En Chung et al.
[2003] se afirma que el criterio de parada propuesto
por Keerthi [2002] puede no ser adecuado para este caso,
por eso se sigue m ás bien el lineamiento
de Lin and More [1999].
3.3. Limitaciones Actuales
En esta sección se presentan algunas discusiones acerca de la
viabilidad y limitaciones de las técnicas
arriba descritas.
Para el caso de búsqueda en malla, los requerimientos en cuanto
a evaluaciones de la función de SVM
pueden tornarse prohibitivos para grupos de datos de
entrenamiento de mediano y gran tamaño.
Si bien se sugiere que los valores máximos y mı́nimos para
C y σ sean [-10,10]x[-10,10] como
por
defecto, el tamaño del paso es todav́ıa una incógnita porque
un valor grande no es suficiente para
obtener resultados satisfactorios y por el contrario uno
pequeño, incrementa dramáticamente el
número de evaluaciones sin de ninguna manera garantizar buenos
resultados. En cuanto a ventajas,
dado que este procedimiento utiliza solamente validación
cruzada como medida de riesgo, el uso
indiscriminado de kernels y esquemas multi-clase es posible pero
teniendo en cuenta que múltiples
parámetros tornan más complejo el espacio de búsqueda, por lo
tanto, se espera un incremento
considerable en la carga computacional y por consiguiente es
importante tener cuidado al escoger el
tamaño del paso. Otro asunto importante es que el tamaño de la
partición en la validación cruzada,
es directamente proporcional al número de evaluaciones de la
función de SVM ası́ que también debe
tenerse en cuenta.
En es esquema de búsqueda en ĺınea utilizando Radio/Margen
solo son necesarias una pocas evalu-
aciones de la función de SV