Embed Size (px)
DESCRIPTION
NEUMATICA
Citation preview

TECSUP – PFR Sistemas Neumáticos
143
UNIDAD VII
HHEERRRRAAMMIIEENNTTAASS DDEESSCCRRIIPPTTIIVVAASS DDEE LLOOSS
AAUUTTOOMMAATTIISSMMOOSS
1. Descripción tecnológica (textual). 2. Diagramas desplazamiento fase. 3. Ecuaciones booleanas. 4. Diagramas lógicos. 5. Diagramas de contactos o escalera. 6. Diagramas de Flujo. 7. El gráfico funcional, el GRAFCET.
Desde el momento que un automatismo está siendo concebido en la cabeza de los proyectistas, se hacen necesario contar con herramientas descriptivas que puedan expresar claramente las condiciones de funcionamiento esperadas. En esta etapa es la expresión textual, la usada para describir las condiciones de funcionamiento del sistema. Esto se acompaña de los llamados diagramas desplazamientos fase, o tablas de secuencia, que explicara los movimientos de los actuadores. Cuando esto no es suficiente se tiene al GRAFCET en un primer nivel, para las especificaciones funcionales.
A continuación se pasará al análisis de factibilidad y búsqueda de las mejores soluciones técnicas y tecnológicas. Es esta etapa de descripción técnica donde el GRAFCET pasa a un segundo nivel donde se visualiza las especificaciones tecnológicas involucrando álgebra boleana. Probablemente en esta etapa se haga uso también de los organigramas, o diagramas de flujo.
La siguiente etapa se desarrolla la parte de mando, se establecen normativas, nomenclaturas, se desarrollan esquemas eléctricos, o diagramas lógicos, si la aplicación del mando estará en un lugar con peligro de explosión, el desarrollo de diagramas neumáticos será una alternativa a considerar. Para condiciones especiales de comportamiento los diagramas de flujo son una herramienta útil y también fácil de comprender.
Lo interesante de todo esto es que muchas de las herramientas descriptivas de los automatismos son ahora aceptados como lenguajes de programación en los ya populares PLC. La norma IEC 1131-3 indica que los diagramas de funciones (diagramas lógicos), el lenguaje literal (tipo PASCAL), el diagrama secuencial (tipo GRAFCET), el diagrama escalera (tipo circuitos eléctricos), son ahora herramientas de programación. Esto por supuesto redundará en menor tiempo de realización y montaje de la parte del mando, así como en la puesta a punto de la maquina y en el futuro en la reparación.
Veamos ahora un poco más en detalle cada una de estas y otras herramientas descriptivas involucradas en los automatismos.

Sistemas Neumáticos TECSUP - PFR
144
1. EXPRESIÓN TEXTUAL Y LENGUAJE LITERAL
La descripción en forma de texto se usa principalmente para especificar los límites globales del sistema a realizar. Utilizando un lenguaje simple, se enumera lo que este automatismo debe hacer describiendo cada etapa y precisando las condiciones que debe satisfacer en cada momento. En la actualidad es indispensable usar también herramientas gráficas para complementar esta explicación, puesto que los automatismos a realizar en producción son cada vez más complejos y tienen de condiciones muy difíciles de explicar con solo texto.
Figura 1
TECSUP – PFR Sistemas Neumáticos
145
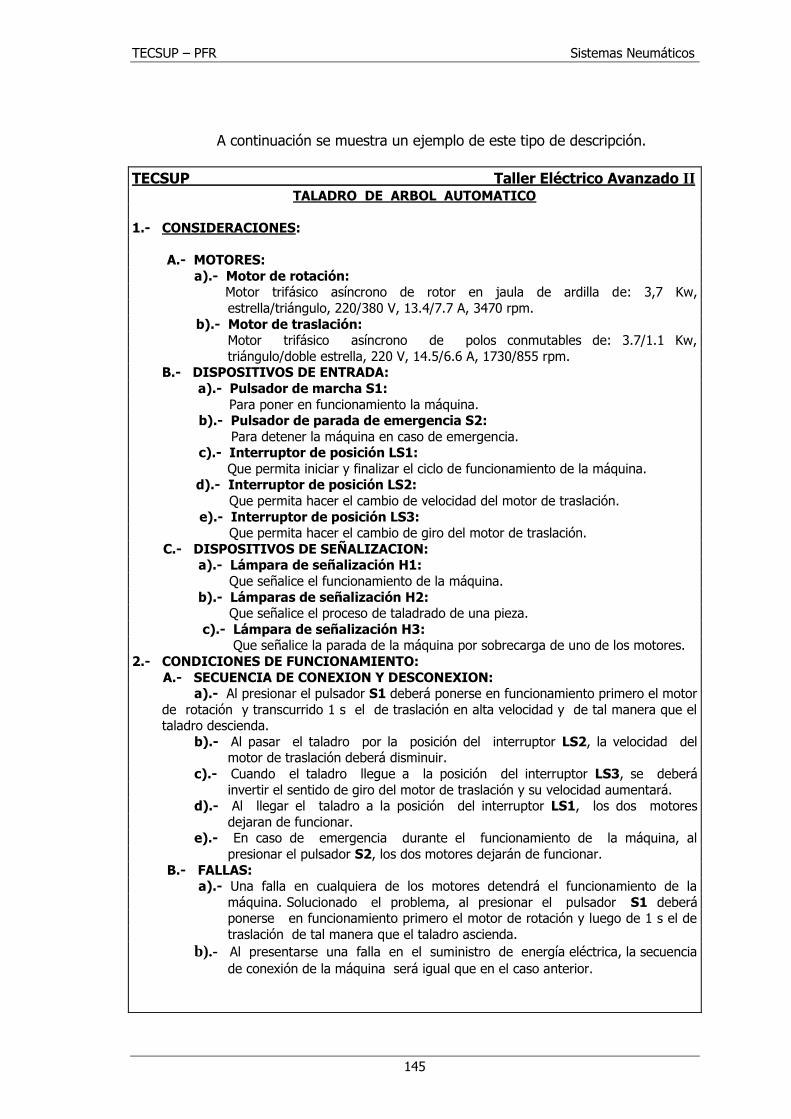
A continuación se muestra un ejemplo de este tipo de descripción.
TECSUP Taller Eléctrico Avanzado II TALADRO DE ARBOL AUTOMATICO
1.- CONSIDERACIONES:
A.- MOTORES:
a).- Motor de rotación: Motor trifásico asíncrono de rotor en jaula de ardilla de: 3,7 Kw,
estrella/triángulo, 220/380 V, 13.4/7.7 A, 3470 rpm.
b).- Motor de traslación: Motor trifásico asíncrono de polos conmutables de: 3.7/1.1 Kw,
triángulo/doble estrella, 220 V, 14.5/6.6 A, 1730/855 rpm. B.- DISPOSITIVOS DE ENTRADA:
a).- Pulsador de marcha S1:
Para poner en funcionamiento la máquina. b).- Pulsador de parada de emergencia S2:
Para detener la máquina en caso de emergencia. c).- Interruptor de posición LS1:
Que permita iniciar y finalizar el ciclo de funcionamiento de la máquina. d).- Interruptor de posición LS2:
Que permita hacer el cambio de velocidad del motor de traslación.
e).- Interruptor de posición LS3: Que permita hacer el cambio de giro del motor de traslación.
C.- DISPOSITIVOS DE SEÑALIZACION: a).- Lámpara de señalización H1:
Que señalice el funcionamiento de la máquina.
b).- Lámparas de señalización H2: Que señalice el proceso de taladrado de una pieza.
c).- Lámpara de señalización H3: Que señalice la parada de la máquina por sobrecarga de uno de los motores.
2.- CONDICIONES DE FUNCIONAMIENTO:
A.- SECUENCIA DE CONEXION Y DESCONEXION: a).- Al presionar el pulsador S1 deberá ponerse en funcionamiento primero el motor
de rotación y transcurrido 1 s el de traslación en alta velocidad y de tal manera que el taladro descienda.
b).- Al pasar el taladro por la posición del interruptor LS2, la velocidad del motor de traslación deberá disminuir.
c).- Cuando el taladro llegue a la posición del interruptor LS3, se deberá
invertir el sentido de giro del motor de traslación y su velocidad aumentará. d).- Al llegar el taladro a la posición del interruptor LS1, los dos motores
dejaran de funcionar. e).- En caso de emergencia durante el funcionamiento de la máquina, al
presionar el pulsador S2, los dos motores dejarán de funcionar.
B.- FALLAS: a).- Una falla en cualquiera de los motores detendrá el funcionamiento de la
máquina. Solucionado el problema, al presionar el pulsador S1 deberá ponerse en funcionamiento primero el motor de rotación y luego de 1 s el de
traslación de tal manera que el taladro ascienda.
b).- Al presentarse una falla en el suministro de energía eléctrica, la secuencia
de conexión de la máquina será igual que en el caso anterior.

Sistemas Neumáticos TECSUP - PFR
146
2. DIAGRAMAS DE DESPLAZAMIENTO
DESPLAZAMIENTO-FASE La representación gráfica se la posición de los accionamientos o del estado lógico de las variables se realiza en función del tiempo.
Figura 2
DESPLAZAMIENTO-FASE
Figura 3

TECSUP – PFR Sistemas Neumáticos
147
Símbolos para elementos, líneas y combinaciones para representación en el diagrama desplazamiento fase.
Figura 4
Figura 5
Sistemas Neumáticos TECSUP - PFR
148
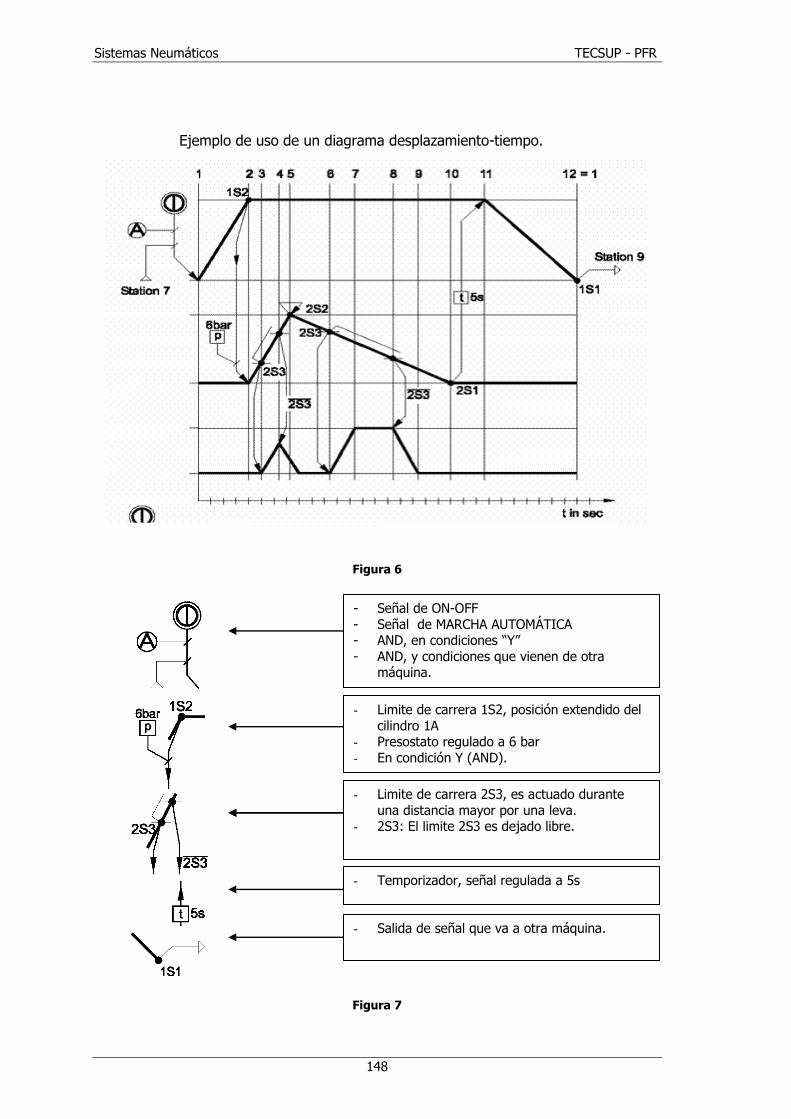
Ejemplo de uso de un diagrama desplazamiento-tiempo.
Figura 6
Figura 7
- Señal de ON-OFF
- Señal de MARCHA AUTOMÁTICA - AND, en condiciones “Y”
- AND, y condiciones que vienen de otra máquina.
- Limite de carrera 1S2, posición extendido del
cilindro 1A - Presostato regulado a 6 bar
- En condición Y (AND).
- Limite de carrera 2S3, es actuado durante
una distancia mayor por una leva. - 2S3: El limite 2S3 es dejado libre.
- Temporizador, señal regulada a 5s
- Salida de señal que va a otra máquina.
TECSUP – PFR Sistemas Neumáticos
149
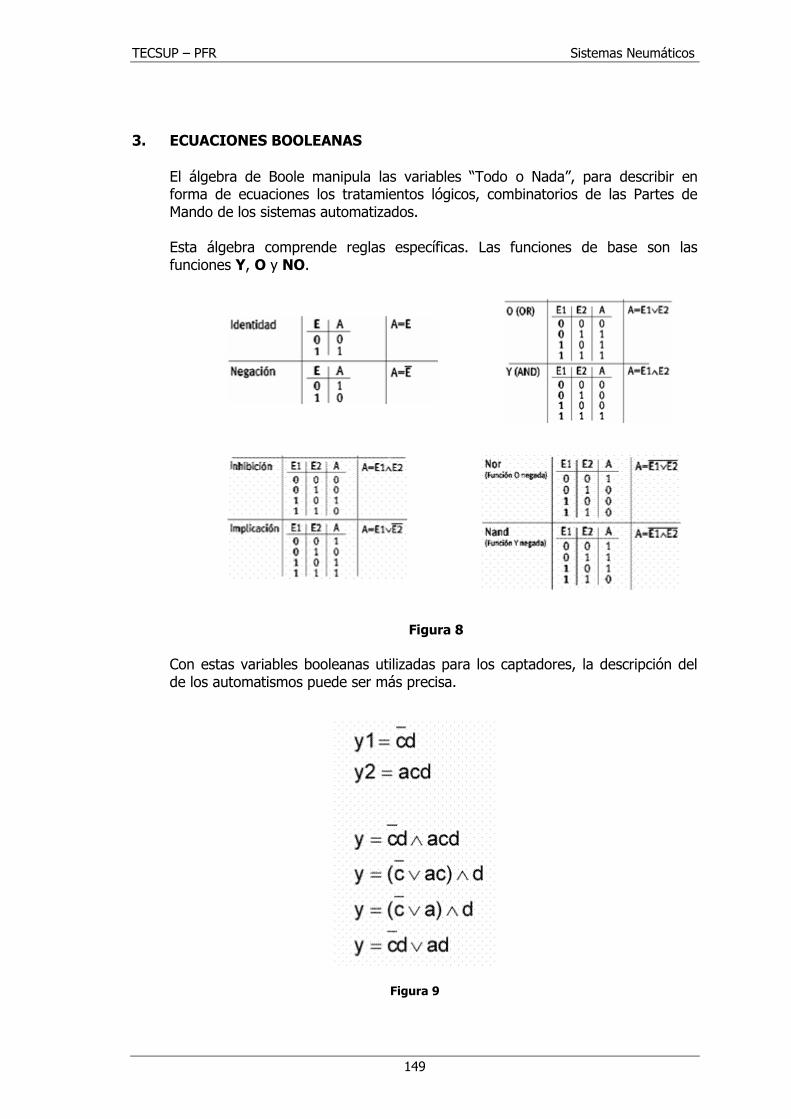
3. ECUACIONES BOOLEANAS
El álgebra de Boole manipula las variables “Todo o Nada”, para describir en forma de ecuaciones los tratamientos lógicos, combinatorios de las Partes de Mando de los sistemas automatizados. Esta álgebra comprende reglas específicas. Las funciones de base son las funciones Y, O y NO.
Figura 8
Con estas variables booleanas utilizadas para los captadores, la descripción del de los automatismos puede ser más precisa.
Figura 9

Sistemas Neumáticos TECSUP - PFR
150
4. DIAGRAMA LÓGICO
El ensamblaje gracias a sus diferentes entradas y salidas de los diferentes bloques que simbolizan cada función lógica permite la descripción gráfica del tratamiento de la parte de mando
4.1. FUNCIONES COMBINATORIAS
Anteriormente hemos visto que la parte de mando de un sistema automatizado:
Recibe diversas señales (desde los captadores, desde el tablero de mando, pupitre, etc.), estas son las variables de Entrada; Emite señales diversas (hacia la máquina, hacia el operador), estas son
las variables de Salida.
Cuando a cada combinación de variables de Entrada sólo corresponde un estado de una variable de Salida, la relación se denomina “combinatoria” y también puede expresarse sencillamente en forma lógica, ejemplo: S = a.b.(c + d.e)
Figura 10
4.2. FUNCIONES SECUENCIALES
Cuando por el contrario el estado de la variable Salida depende también de los acontecimientos precedentes, el problema se denomina “secuencial”. En la expresión de un problema secuencial se debe introducir el concepto de memoria. Este concepto se puede describir y realizar de diferentes formas: Funciones de memoria, circuitos con realimentación, GRAFCET.
TECSUP – PFR Sistemas Neumáticos
151
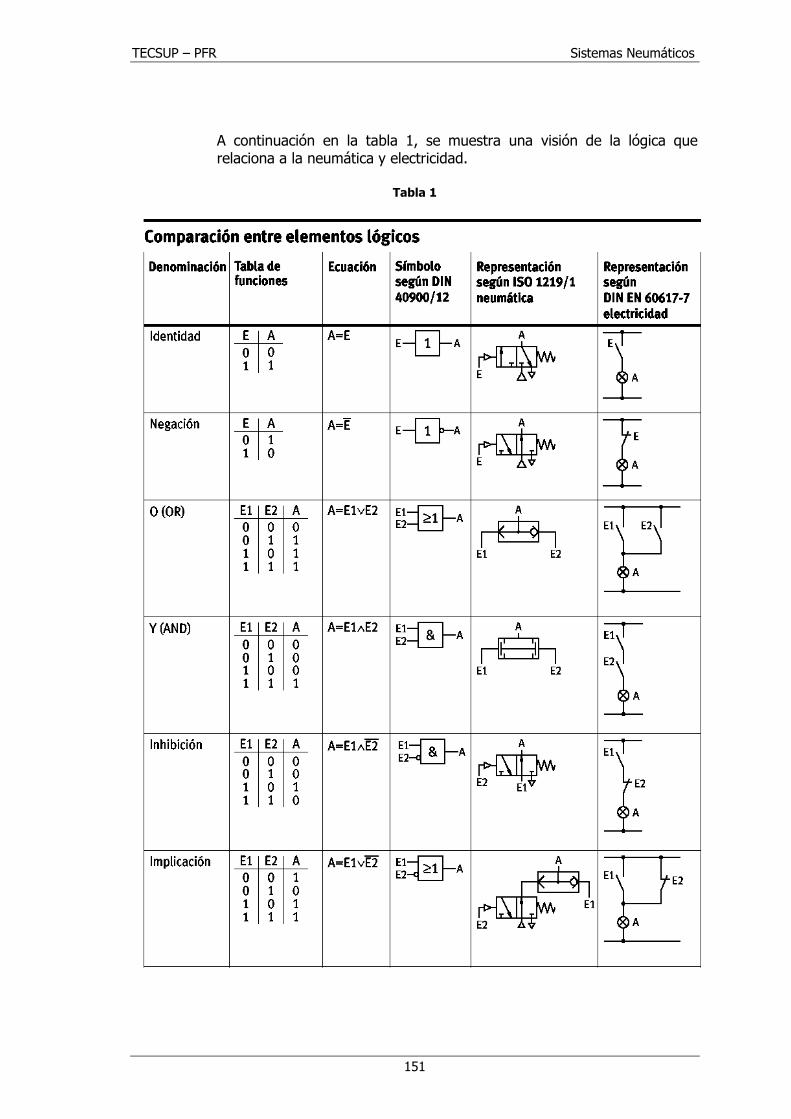
A continuación en la tabla 1, se muestra una visión de la lógica que relaciona a la neumática y electricidad.
Tabla 1

Sistemas Neumáticos TECSUP - PFR
152
6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8

TECSUP – PFR Sistemas Neumáticos
153
5. ESQUEMAS DE CONTACTOS
Basado sobre una lógica eléctrica de contactos y de relés, esta herramienta gráfica permite describir una realización cableada efectiva, un tratamiento lógico o una programación. La forma de su representación, depende para cada tipo de utilización: Circuito eléctrico cableado de mando o de potencia. Expresión lógica generalmente con vistas a una programación.
5.1. ESQUEMAS DE CONTACTOS PARA REALIZACIÓN CABLEADA
Los esquemas de contactos igualmente denominados esquemas desarrollados conciernen tanto a los circuitos de mando como a los
circuitos de potencia.
Figura 11

Sistemas Neumáticos TECSUP - PFR
154
Figura 12
Más allá de la representación lógica de los contactos eléctricos, estos esquemas tienen por vocación especificar los componentes realmente instalados, completadas con informaciones, que pueden comprender:
La simbolización de las funciones de cada elemento o componente; La identificación de los bornes y de los tipos de alimentación; El direccionamiento de cada contacto a su elemento principal; La identificación geográfica en los diferentes folios (planos).
Figura 13

TECSUP – PFR Sistemas Neumáticos
155
5.2. DIAGRAMA EN ESCALERA PARA EXPRESIÓN LÓGICA
La utilización del diagrama en escala para especificar funciones lógicas generalmente programadas sólo requiere una identificación funcional de los componentes y de sus contactos asociados.
Figura 14
5.3. ORGANIGRAMAS Y DIAGRAMA DE FLUJO
El grafismo y el simbolismo de este útil permiten principalmente la descripción secuencial de los mandos programables y precisando a medida en que se producen los tratamientos a realizar,
Figura 15

Sistemas Neumáticos TECSUP - PFR
156
Descripción del modo de operación basado en el paso 2 de la secuencia, lo cual es representativo para las demás acciones.
Figura 6.16
Figura 16
6. EL GRÁFICO FUNCIONAL (GRAFCET)
El GRAFCET permite una representación gráfica de las especificaciones funcionales del equipo. Gráfico de descripción Los grafismos de base del Gráfico Funcional (etapas, uniones, transiciones...), permiten la representación clara de un sistema automatizado.
Al extenderse el cilindro 1 A activa el límite de carrera 1S2. La señal de 1S2...
...Y la señal de un interruptor del sensor de presión (presostato)
B1...
...Aplica energía al solenoide 2Y1...
...también desactiva al solenoide 2Y2...
...El elemento de control (válvula electro-neumática) del cilindro 2A cambia de posición y...
... el cilindro 2A se extiende.

TECSUP – PFR Sistemas Neumáticos
157
Figura 17
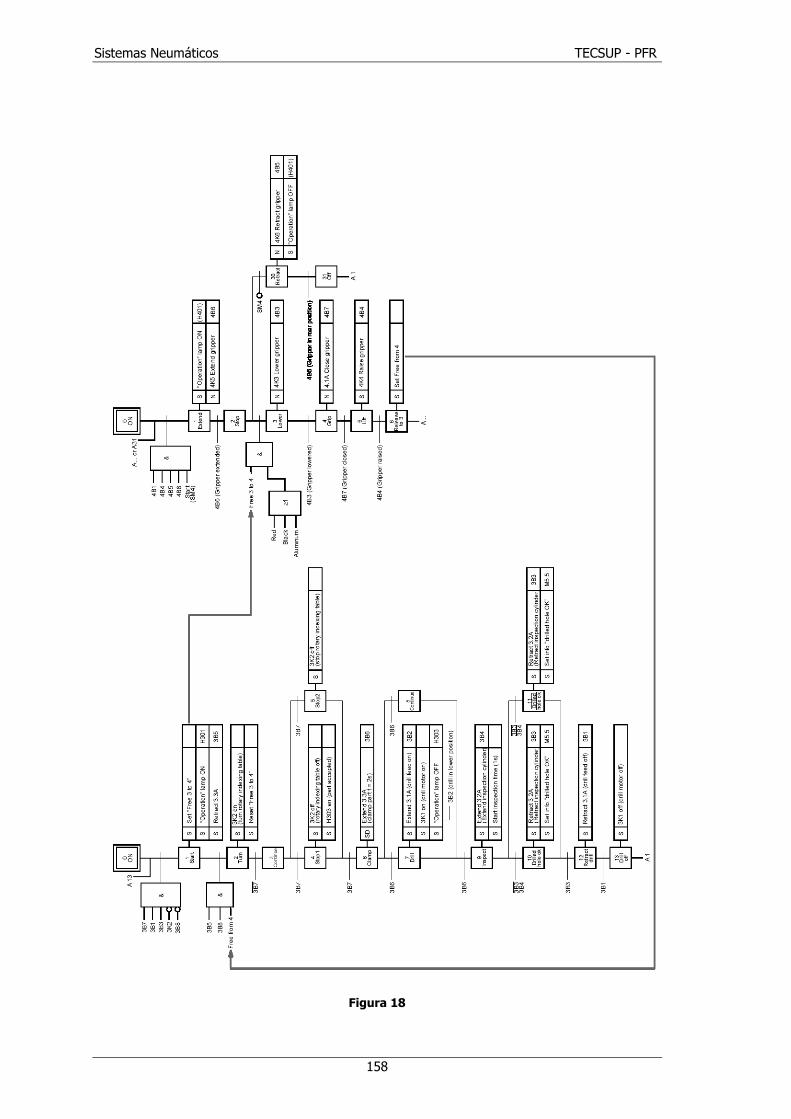
Además de las secuencias lineales, el Gráfico Funcional ofrece la posibilidad de describir las secuencias opcionales (direccionamientos) o las secuencias simultáneas (paralelismo).
Sistemas Neumáticos TECSUP - PFR
158
Figura 18






