Embed Size (px)
Citation preview
ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาค ดวยวงจรเรยงกระแสควบคมไดสามเฟส
นายจรเดช ปญญาเพชร นายวชญชรนทร สายวงษ นายอดศกด ออนใจ
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร
มหาวทยาลยเทคโนโลยราชมงคลลานนา ปการศกษา 2557
ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยงกระแสควบคมไดสามเฟส
นายจรเดช ปญญาเพชร นายวชญชรนทร สายวงษ นายอดศกด ออนใจ
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต
สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา
ปการศกษา 2557

Three Phase Controlled Rectifier for 4 Quadrant DC Motor Drive
Mr. Jeeradesh Phunyapet Mr. Witcharin Saiwong Mr. Adisuk Onjai
THIS PROJECT REPORT SUBMITTED PARTIAL FULFILLMENT OF THE REQUIREMENT
FOR THE DEGREE OF BACHELOR OF ENGINEERING DEPARTMENT OF ELECTRICAL ENGINEERING
RAJAMANGALA UNIVERSITY OF TECHNOLOGY LANNA ACADEMIC YEAR 2014
ปรญญานพนธเรอง ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยง
กระแสควบคมไดสามเฟส ชอนกศกษา นายจรเดช ปญญาเพชร นายวชญชรนทร สายวงษ นายอดศกด ออนใจ หลกสตร วศวกรรมศาสตรบณฑต สาขาวชา วศวกรรมไฟฟา อาจารยทปรกษา ผชวยศาสตราจารยสรศกด อยสวสด อาจารยศภลกษณ ศรตา ปการศกษา 2557
……………………………………………………………………………………………………………………………………………… คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา อนมตใหปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรปรญญาวศวกรรมศาสตรบณฑต หวหนาสาขาวชาวศวกรรมไฟฟา
( นายสาคร ปนตา )
คณะกรรมการสอบโครงงานวศวกรรมไฟฟา ประธานกรรมการ
( ผศ.สรศกด อยสวสด )
กรรมการ ( นายศภลกษณ ศรตา )
กรรมการ ( นายพรอมรบ ค าธาร )
ลขสทธของคณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา
ง
ปรญญานพนธเรอง ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยง กระแสควบคมไดสามเฟส ชอนกศกษา นายจรเดช ปญญาเพชร นายวชญชรนทร สายวงษ นายอดศกด ออนใจ หลกสตร วศวกรรมศาสตรบณฑต สาขาวชา วศวกรรมไฟฟา คณะ วศวกรรมศาสตร ปการศกษา 2557
บทคดยอ โครงการนน าเสนอการออกแบบและสรางชดทดลองการควบคมมอเตอรไฟฟากระแสตรงแบบสจตภาคโดยใชวงจรเรยงกระแสควบคมไดสามเฟส เพอใชในการเรยนการสอนภาคปฏบตและวชาอเลกทรอนกสก าลง ชดทดลองประกอบดวยวงจรก าลงซงใชเอสซอารตอแบบบรดจสามเฟสจ านวนหนงค ระบบควบคมประมวลผลดวยไมโครคอนโทรลเลอร PIC 18F4550 ชดทดลองมขนาดพกดแรงดนเอาตพต 220 โวลต ดซ 400 วตต โดยมความสามารถควบคมความเรว กลบทางหมน และแสดงการท างานไดทงสจตภาค ผลการทดสอบชดทดลองการขบเคลอนมอเตอรไฟฟากระแสตรงแบบสจตภาค ระบบสามารถควบคมความเรวมอเตอรเรมเดนไดจนถงพกด 2,400 รอบตอนาท และการกลบทางหมนสามารถ กลบทางหมนของมอเตอรไดอยางตอเนอง พรอมทงแสดงการท างานทงส จตภาค คอ จตภาคท 1 การหมนฟอรเวรด จตภาคท 2 การเบรกชวงฟอรเวรด จตภาคท 3 การหมน รเวรส และจตภาคท 4 การเบรกชวงรเวรส
จ
Project Title Three Phase Controlled Rectifier for 4 Quadrant DC Motor Drive
Student(s) Mr. Jeeradesh Phunyapet Mr. Witcharin Saiwong Mr. Adisuk Onjai ProjectAdvisors Assistant Professor Surasak Yousawat Mr. Suparak Srita Curriculum Bachelor of Engineering Major Field Electrical Engineering Academic Year 2014
ABSTRACT
This project presents design and implementation of a four quadrant dc motor drive using by PIC18F4550 microcontroller three phase controlled rectifier. The proposed system consists of a dual three phase bridge SCR connection that control by PIC18F4550. The rated output voltage and output power are set at 220V and 400W, respectively. With features such as speed control from zero to maximum speed, 4 quadrant control, and 4 quadrant LED display. The experimental results of the proposed system are show that the speed is varied from zero to 2,400 rpm. First quadrant is forward run, second quadrant is forward breaking, third quadrant reverse run, and forth quadrant is reverse breaking.
ฉ
กตตกรรมประกาศ
ความส าเรจในการจดท าโครงการชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยงกระแสควบคมไดสามเฟส(Three Phase Controlled Rectifier for 4Quadrant DC Motor Drive)น ผจดท าขอขอบพระคณ ผชวยศาสตราจารยสรศกด อยสวสด ทไดใหค าปรกษาทางดานวชาการและขอมลทเกยวของ ตลอดจนใหความอนเคราะหในการใชเครองมออปกรณและ หองปฏบตการ ซงเปนประโยชนอยางมากทท าใหผจดท าโครงการนส าเรจลลวง ขอบพระคณทานอาจารยศภลกษณ ศรตา ทไดแนะน าขอมลในสวนของการใชโปรแกรม ในโครงการน ขอบพระคณคณาอาจารยแผนกวชาไฟฟาก าลงทกทานทไดใหความรแกผจดท าใหโครงการนจนมความสามารถในการท าโครงการ ครงนส าเรจลลวง คณะผจดท าขอขอบพระคณ เจาหนาทหองสมด มหาวทยาลยเทคโนโลยราชมงคลลานนา ภาคพายพ ทใหความสะดวกในการคนหาหนงสออางองประกอบการท าโครงการน
คณะผจดท า
นายจรเดช ปญญาเพชร นายวชญชรนทร สายวงษ
นายอดศกด ออนใจ
ช
สารบญ
หนา
บทคดยอภาษาไทย ง บทคดยอภาษาองกฤษ จ กตตกรรมประกาศ ฉ สารบญรป ฌ สารบญตาราง ญ บทท 1 บทน า 1
1.1 ความเปนมาและความส าคญของปญหา 1 1.2 วตถประสงคของโครงการ 1 1.3 ขอบเขตของโครงการ 2 1.4ประโยชนทจะไดรบ 2
บทท 2 ทฤษฏทเกยวของ 3 2.1 บทน า 3 2.2 มอเตอรไฟฟากระแสตรง 3 2.3 มอเตอรไฟฟากระแสตรงทควบคมดวยวงจรเรยงกระแส 6 (Rectifier Control of DC Motor) 2.4 ประเภทของคอนเวอรเตอร 12 2.5 หลกการขบเคลอนมอเตอรดวยคอนเวอรเตอร 14 บทท 3 การออกแบบสรางวงจรก าลงและวงจรควบคม 20 3.1การออกแบบและสรางวงจรเรยงกระแสควบคมไดสามเฟส 20 3.2 การออกแบบชดวงจรควบคม 23 บทท 4 การทดลอง 26 4.1การทดลองท 1.1: การทดสอบความเรวรอบมอเตอร 26 4.2การทดลองท 2.1: การทดสอบการกลบทางหมนของมอเตอร 30

ซ
สารบญ(ตอ)
หนาบทท 5 สรปผลของโครงงาน 36 5.1บทน า 36 5.2สรปผลโครงงาน 36 5.3ปญหาและอปสรรค 36 5.4 ขอแนะน าในการพฒนาโครงการ 36 บรรณานกรม 37 ภาคผนวก 38 ประวตผเขยน 54
ฌ
สารบญรป
รป หนา 2.1 มอเตอรไฟฟากระแสตรง (ก) โครงสราง 4 ขว (ข) วงจรอางอง 3 2.2 แรงดนไฟฟาของมอเตอรไฟฟากระแสตรงขณะทสนามแมเหลกอมตว 5 2.3 แผนภาพกรอบแบบเสนตรงการควบคมมอเตอร ไฟฟากระแสตรงดวย 6 วงจรเรยงกระแสแบบควบคมได 2.4 วงจรเรยงกระแสแบบควบคมไดเตมท 8 2.5 คณลกษณะการเรยงกระแสควบคมไดเตมท 9 2.6 การท างานบนสองจตภาคของวงจรเรยงกระแสควบคมไดเตม 11 ทจายใหมอเตอรไฟตรงแบบกระตนแยก 2.7 แสดงขวและทศทางกระแสไฟฟาของแหลงจายและมอเตอร 12 ในการท างานแตละจตภาค 2.8 หลกการควบคมมอเตอรดวยคอนเวอรเตอร 15 2.9 บลอกไดอะแกรมของคอนเวอรเตอรคชนดมกระแสไหลวน 16 2.10 แสดงการท างานทควบคมใหมอเตอรท างานทงสจตภาค 16 2.11 บลอกไดอะแกรมของคอนเวอรเตอรคชนดไมมกระแสไหลวน 18 2.12 แสดงการท างานทควบคมใหมอเตอรท างานทงสจตภาค 18 3.1 หนาปดชดทดลอง 20 3.2 วงจรก าลง 21 3.3 ลายวงจรก าลงของวงจรเรยงกระแสควบคมไดสามเฟส 22 3.4 การวางอปกรณ (วงจรก าลง) 22 3.5 วงจรการท างานทง 4 จตภาค 23 3.6 ชดไมโครคอนโทรลเลอร 23 3.7 แผนผงการท างานของโปรแกรม 24 3.8 แผนผงการท างานของโปรแกรม 25 3.9 ชดทดลองเครองควบคมมอเตอรกระแสตรงดวยวงจรเรยงกระแส 25 ควบคมไดสามเฟส 4.1 การทดสอบความเรวรอบมอเตอรโดยการปรบมม 27 4.2 กราฟแสดงความเรวรอบขณะปรบมม ของฟอรเวรดและรเวรส 29 4.3 กราฟแสดงแรงดนอารเมเจอร ของฟอรเวรดและรเวรส 29 4.4 กราฟแสดกระแสอารเมเจอร ของฟอรเวรดและรเวรส 30 4.5 วงจรการทดสอบการกลบทางหมนของมอเตอร 31

ญ
สารบญรป (ตอ)
รป หนา 4.6 สญญาณแรงดนโหลดและกระแสโหลด ชวง Forward Run 32 4.7 สญญาณแรงดนโหลดและกระแสโหลด ชวง Forward breaking 33 4.8 สญญาณแรงดนโหลดและกระแสโหลด ชวง Reverse Run 33 4.9 สญญาณแรงดนโหลดและกระแสโหลด ชวง Reverse breaking 34 4.10 แอลอดแสดงสภาวะการท างานของมอเตอร 34
ฎ
สารบญตาราง ตารางท หนา ตารางท 2.1 แสดงประเภทของคอนเวอรเตอรเฟสเดยว 13 ตารางท 2.2 แสดงประเภทของคอนเวอรเตอรสามเฟส 14 ตารางท 4.1 ผลการทดลองการทดสอบความเรวรอบมอเตอร 28 ชวงฟอรเวรดในขณะไมมโหลดและมโหลด ตารางท 4.2 ผลการทดลองการทดสอบความเรวรอบมอเตอร 28 ชวงรเวรสในขณะไมมโหลดและมโหลด
บทท 1
บทน ำ
1.1 ควำมเปนมำและควำมส ำคญของปญหำ ปจจบนความเจรญกาวหนาทางเทคโนโลยไดพฒนาไดอยางรวดเรวและเพมสงขน โดยเฉพาะอยางยงงานอตสาหกรรมยานพาหนะการขนสงในปจจบน โดยมมอเตอรเปนสวนประกอบทส าคญของเครองจกรและในสวนตางๆ ของระบบการผลตและการขนสง โครงการนจะใชการควบคมความเรวรอบของมอเตอรกระแสตรง ดวยวงจรเรยงกระแสควบคมไดสามเฟส(Three Phase Controlled Rectifier Circuits) ซงควบคมดวย คอนโทรลเลอร ระบบควบคมเปนแบบระบบเปด (Open Loop Control) โดยจะมการตรวจวดความเรวรอบของมอเตอร และสามารถควบคมการหมนของมอเตอรไดสองทศทาง คอ หมนตามเขมนาฬกา (Forward) และหมนทวนเขมนาฬกา (Reverse)มการแสดงสถานะของการท างานของมอเตอรทง 4 จตภาค
1.2 วตถประสงคของโครงงำน 1.2.1 เพอศกษาและออกแบบการควบคมความเรวมอเตอรกระแสตรง โดยใชวงจรเรยงกระแส
ควบคมไดสามเฟสแบบ 4 จตภาค 1.2.2 เพอจดท าชดทดลองวงจรเรยงกระแสควบคมไดสามเฟสแบบ 4 จตภาค 1.2.3 น าไปใชเปนชดทดลองและสาธตประกอบการเรยนวชาอเลกทรอนกสก าลง
2
1.3 ขอบเขตของโครงงำน จดท าชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยงกระแสควบคมไดสามเฟส โดยจะแยกชดวงจรในการควบคมมอเตอรเปน 2 ชด 1.3.1 ชดวงจรก าลงในสวนของชดวงจรนจะออกแบบโดยใชหลกการของวงจรเรยงกระแสควบคมไดสามเฟส โดยชดวงจรนจะตองแปลงแรงดนอนพทใหแตละเฟส 90 v สามารถทนก าลงไฟฟาไดสง 400 wความถ 50 Hz และในชดวงจรนจะใช SCR 6 ตวตอเปนวงจรบรดจของแตละฝง Forward และ Reverse จงจะสามารถควบคมไดทง 4 จตภาค 1.3.2 ชดวงจรควบคมในสวนของชดนจะออกแบบโดยใชหลกการของ Microcontroller ในการควบคมซงเราจะใชอปกรณPIC 18f4550ในการควบคมการจดฉนวนเกตมอเตอรสามเฟส ควบคมความเรวของมอเตอรตงแตมมอลฟา 0-120องศา และควบคมการเปลยนการท างานของมอเตอรทง Forward และ Reverse 1.4 ประโยชนทจะไดรบจำกกำรศกษำ 1.4.1 นกศกษามความรและความสามารถทางดานอเลกทรอนกสก าลงมากขน 1.4.2 ชดทดลองทสรางขนสามารถควบคมความเรวมอเตอรกระแสตรงขนาด 220 V 400 W 1.4.3 ท าใหการเรยนการสอนในวชาอเลกทรอนกสก าลงมประสทธภาพมากขน 1.4.4 นกศกษาสามารถน าความรไปประยกตใชในการท างานทเกยวกบอเลกทรอนกสก าลงได
บทท 2 ทฤษฎทเกยวของ
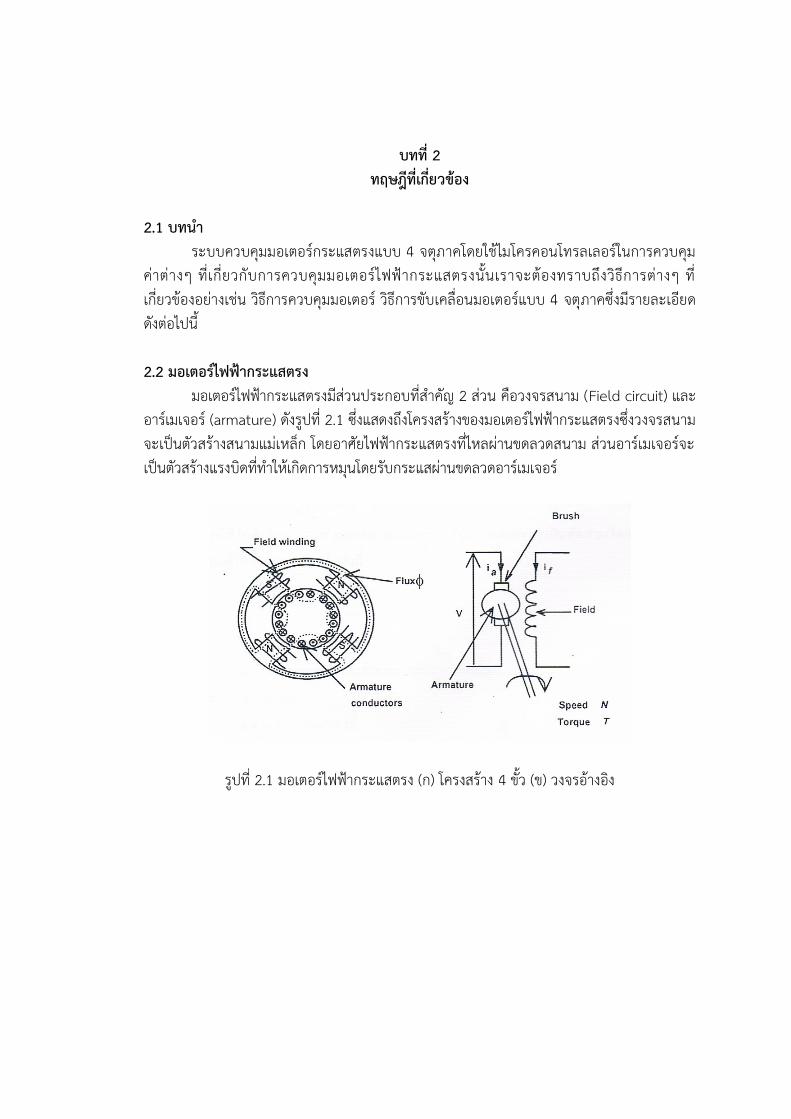
2.1 บทน ำ ระบบควบคมมอเตอรกระแสตรงแบบ 4 จตภาคโดยใชไมโครคอนโทรลเลอรในการควบคมคาตางๆ ทเกยวกบการควบคมมอเตอรไฟฟากระแสตรงนนเราจะตองทราบถงวธการตางๆ ทเกยวของอยางเชน วธการควบคมมอเตอร วธการขบเคลอนมอเตอรแบบ 4 จตภาคซงมรายละเอยดดงตอไปน 2.2 มอเตอรไฟฟำกระแสตรง มอเตอรไฟฟากระแสตรงมสวนประกอบทส าคญ 2 สวน คอวงจรสนาม (Field circuit) และอารเมเจอร (armature) ดงรปท 2.1 ซงแสดงถงโครงสรางของมอเตอรไฟฟากระแสตรงซงวงจรสนามจะเปนตวสรางสนามแมเหลก โดยอาศยไฟฟากระแสตรงทไหลผานขดลวดสนาม สวนอารเมเจอรจะเปนตวสรางแรงบดทท าใหเกดการหมนโดยรบกระแสผานขดลวดอารเมเจอร
รปท 2.1 มอเตอรไฟฟากระแสตรง (ก) โครงสราง 4 ขว (ข) วงจรอางอง

4
2.2.1 สมกำรแรงเคลอนไฟฟำ (Electromotive force Equation, EMF) สมการแรงเคลอนไฟฟาจะใหคาแรงดนไฟฟาเหนยวน าในอารเมเจอรของเครองมอเตอรไฟฟากระแสตรง สมการสามารถวเคราะหไดจากกฎของฟาราเดย โดยทแรงเคลอนไฟฟาหาไดจาก
(2-1)
เมอe=แรงเคลอนไฟฟา ,โวลต = เสนแรงแมเหลกตอขว , เวเบอร P=จ านวนขวแมเหลก , n=ความเรวของอารเมเจอรเรเดยน/วนาท Z=จ านวนลวดตวน าของอารเมเจอร A=จ านวนทางขนาน หรอ
(2-2)
เมอ
(rad/sec)
ในกรณทไมคดในชวงอมตวของอ านาจแมเหลก เสนแรงแมเหลกจะเปนสดสวนโดยตรงกบกระแสทปอนเขาทขวสนามแมเหลกดงน (2-3)
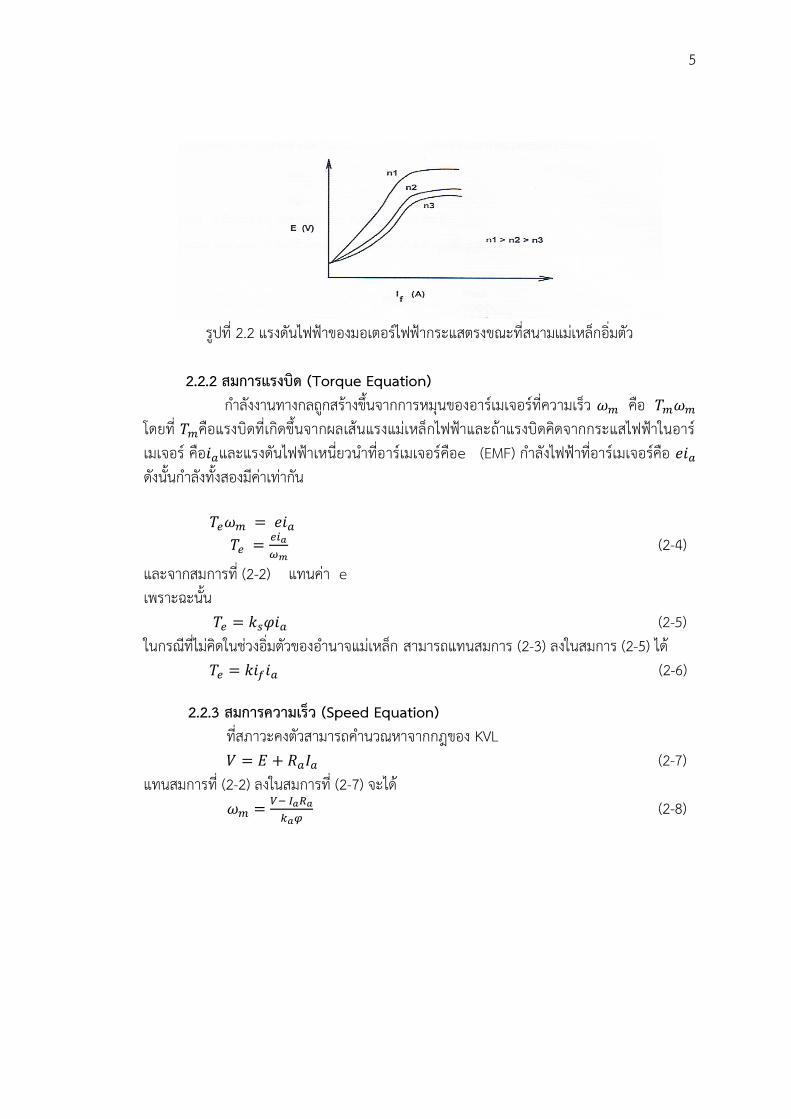
เมอ =คาคงท =กระแสทปอนเขาขดลวดสนามแมเหลก ดงนน เมอ ส าหรบกรณทคดคาความตวของสนามแมเหลก แรงดนไฟฟาทเก ดขนเนองจากกระแสสนามแมเหลกจะเปนแบบไมเปนเชงเสนดงแสดงในรปท 2.2
5
รปท 2.2 แรงดนไฟฟาของมอเตอรไฟฟากระแสตรงขณะทสนามแมเหลกอมตว
2.2.2 สมกำรแรงบด (Torque Equation) ก าลงงานทางกลถกสรางขนจากการหมนของอารเมเจอรทความเรว คอ โดยท คอแรงบดทเกดขนจากผลเสนแรงแมเหลกไฟฟาและถาแรงบดคดจากกระแสไฟฟาในอารเมเจอร คอ และแรงดนไฟฟาเหนยวน าทอารเมเจอรคอe (EMF) ก าลงไฟฟาทอารเมเจอรคอ ดงนนก าลงทงสองมคาเทากน
(2-4)
และจากสมการท (2-2) แทนคา e เพราะฉะนน (2-5) ในกรณทไมคดในชวงอมตวของอ านาจแมเหลก สามารถแทนสมการ (2-3) ลงในสมการ (2-5) ได (2-6)
2.2.3 สมกำรควำมเรว (Speed Equation) ทสภาวะคงตวสามารถค านวณหาจากกฎของ KVL (2-7) แทนสมการท (2-2) ลงในสมการท (2-7) จะได
(2-8)
6
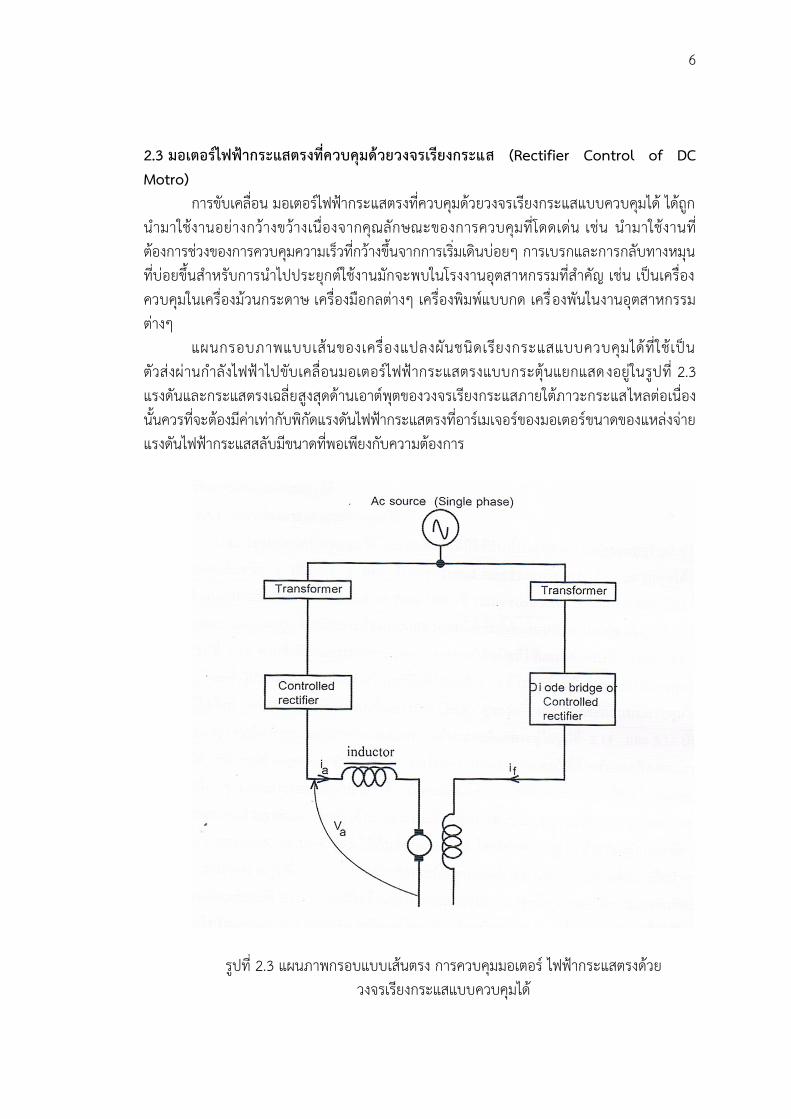
2.3 มอเตอรไฟฟำกระแสตรงทควบคมดวยวงจรเรยงกระแส (Rectifier Control of DC Motro) การขบเคลอน มอเตอรไฟฟากระแสตรงทควบคมดวยวงจรเรยงกระแสแบบควบคมได ไดถกน ามาใชงานอยางกวางขวางเนองจากคณลกษณะของการควบคมทโดดเดน เชน น ามาใชงานทตองการชวงของการควบคมความเรวทกวางขนจากการเรมเดนบอยๆ การเบรกและการกลบทางหมนทบอยขนส าหรบการน าไปประยกตใชงานมกจะพบในโรงงานอตสาหกรรมทส าคญ เชน เปนเครองควบคมในเครองมวนกระดาษ เครองมอกลตางๆ เครองพมพแบบกด เคร องพนในงานอตสาหกรรมตางๆ แผนกรอบภาพแบบเสนของเครองแปลงผนชนดเรยงกระแสแบบควบคมไดทใชเปนตวสงผานก าลงไฟฟาไปขบเคลอนมอเตอรไฟฟากระแสตรงแบบกระตนแยกแสดงอยในรปท 2.3 แรงดนและกระแสตรงเฉลยสงสดดานเอาตพตของวงจรเรยงกระแสภายใตภาวะกระแสไหลตอเนองนนควรทจะตองมคาเทากบพกดแรงดนไฟฟากระแสตรงทอารเมเจอรของมอเตอรขนาดของแหลงจายแรงดนไฟฟากระแสสลบมขนาดทพอเพยงกบความตองการ
รปท 2.3 แผนภาพกรอบแบบเสนตรง การควบคมมอเตอร ไฟฟากระแสตรงดวย วงจรเรยงกระแสแบบควบคมได
7
ในการแปลงผน บางครงวงจรกระแสจะถกตอโดยตรงจากแหลงจายไฟฟากระแสสลบเลย หรอไมจะใชหมอแปลงไฟฟามคาอตราสวนของรอบ (turns ratio) ทเหมาะสม น าไปตอเขาระหวางแหลงจายไฟฟากระแสสลบและวงจรเรยกกระแสพรอมกบตวกรองกระแส (filter inductor) ซงตวกรองกระแสจะถกตอระหวางวงจรเรยงกระแสและขดลวดอารเมเจอรของมอเตอร เพอชวยลดการกระเพอมกระแสใหกบมอเตอร โดยทวไปแลวก าลงไฟฟาทจายใหกบขดลวดสนามแมเหลกจะถกจายสงผานหมอแปลงและไดโอดตอแบบสายพาน (field constant) ซงจะใชแหลงจายไฟฟากระสลบเดยวกนกบแหลงจายทวงจรอารเมเจอรของมอเตอร อตราสวนรอบ ของหมอแปลงไฟฟาจะถกออกแบบไวแลวดวยคาทเหมาะสมเพอคาแรงดนไฟฟาเฉลยทขดลวดสนามไดรบจากวงจรเรยงกระแสจะตองมคาเทากบคาแรงดนพกดพอด แตถาเราตองการทจะควบคมทขดลวดสนามกระตนดวย (field control) วงจรเครองแปลงผนทใชเครองไดโอดตแบบสะพานจะถกแทนทดวยวงจรเรยงกระแสแบบควบคมได
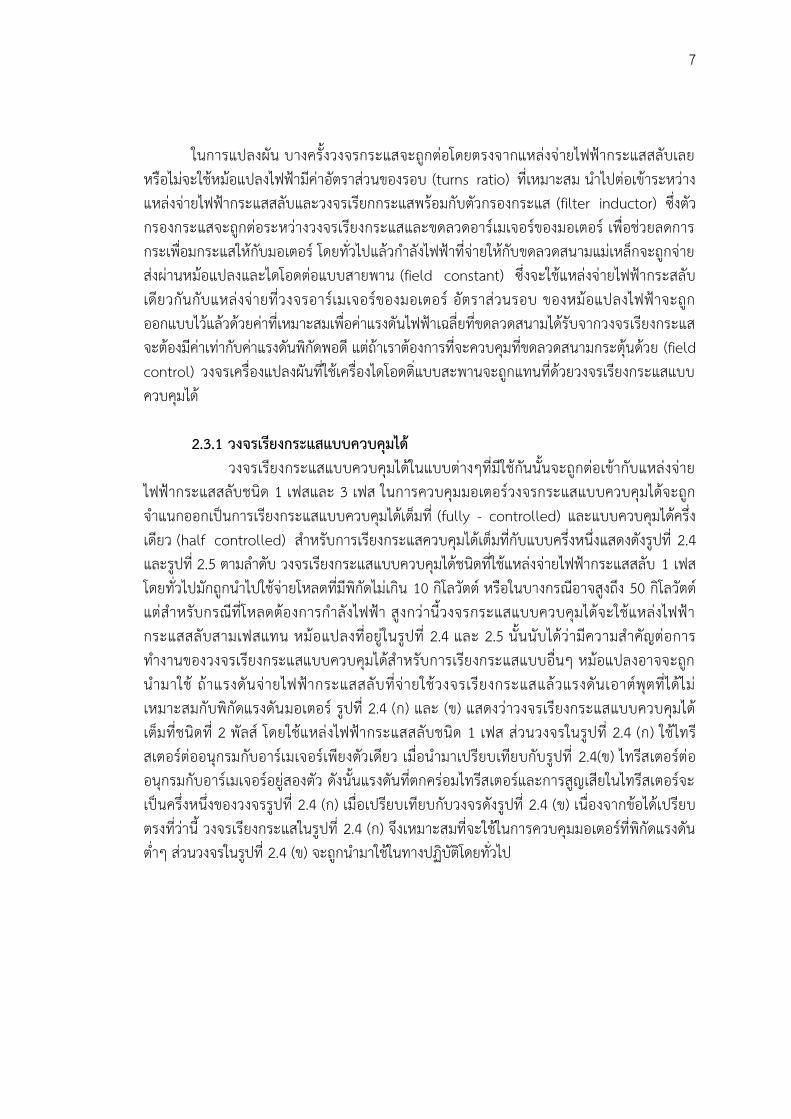
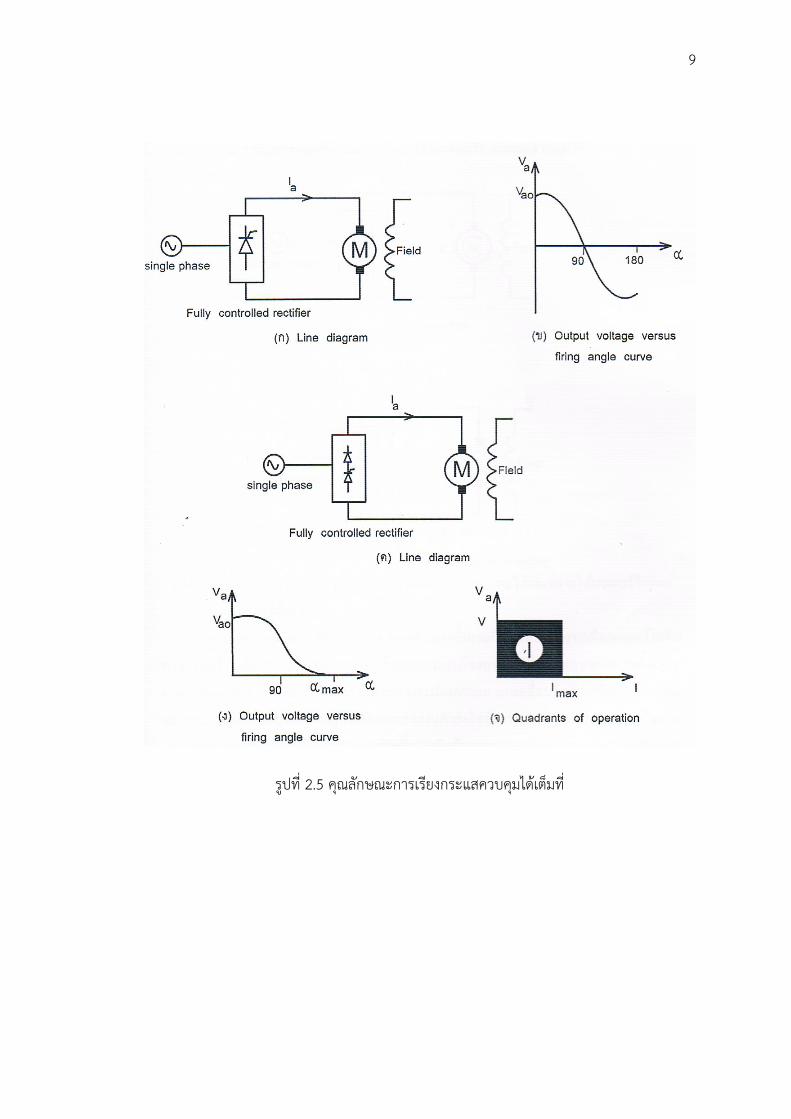
2.3.1 วงจรเรยงกระแสแบบควบคมได วงจรเรยงกระแสแบบควบคมไดในแบบตางๆทมใชกนนนจะถกตอเขากบแหลงจายไฟฟากระแสสลบชนด 1 เฟสและ 3 เฟส ในการควบคมมอเตอรวงจรกระแสแบบควบคมไดจะถกจ าแนกออกเปนการเรยงกระแสแบบควบคมไดเตมท (fully - controlled) และแบบควบคมไดครงเดยว (half controlled) ส าหรบการเรยงกระแสควบคมไดเตมทกบแบบครงหนงแสดงดงรปท 2.4 และรปท 2.5 ตามล าดบ วงจรเรยงกระแสแบบควบคมไดชนดทใชแหลงจายไฟฟากระแสสลบ 1 เฟส โดยทวไปมกถกน าไปใชจายโหลดทมพกดไมเกน 10 กโลวตต หรอในบางกรณอาจสงถง 50 กโลวตต แตส าหรบกรณทโหลดตองการก าลงไฟฟา สงกวานวงจรกระแสแบบควบคมไดจะใชแหลงไฟฟากระแสสลบสามเฟสแทน หมอแปลงทอยในรปท 2.4 และ 2.5 นนนบไดวามความส าคญตอการท างานของวงจรเรยงกระแสแบบควบคมไดส าหรบการเรยงกระแสแบบอนๆ หมอแปลงอาจจะถกน ามาใช ถาแรงดนจายไฟฟากระแสสลบทจายใชวงจรเรยงกระแสแลวแรงดนเอาตพตทไดไมเหมาะสมกบพกดแรงดนมอเตอร รปท 2.4 (ก) และ (ข) แสดงวาวงจรเรยงกระแสแบบควบคมไดเตมทชนดท 2 พลส โดยใชแหลงไฟฟากระแสสลบชนด 1 เฟส สวนวงจรในรปท 2.4 (ก) ใชไทรสเตอรตออนกรมกบอารเมเจอรเพยงตวเดยว เมอน ามาเปรยบเทยบกบรปท 2.4(ข) ไทรสเตอรตออนกรมกบอารเมเจอรอยสองตว ดงนนแรงดนทตกครอมไทรสเตอรและการสญเสยในไทรสเตอรจะเปนครงหนงของวงจรรปท 2.4 (ก) เมอเปรยบเทยบกบวงจรดงรปท 2.4 (ข) เนองจากขอไดเปรยบตรงทวาน วงจรเรยงกระแสในรปท 2.4 (ก) จงเหมาะสมทจะใชในการควบคมมอเตอรทพกดแรงดนต าๆ สวนวงจรในรปท 2.4 (ข) จะถกน ามาใชในทางปฏบตโดยทวไป
8
รปท 2.4 วงจรเรยงกระแสแบบควบคมไดเตมท
สญลกษณวงจรส าหรบวงจรเรยงกระแสแบบควบคมไดเตมทแสดงดงรปท 2.5 (ก) VaและIa
ก าหนดใหเปนคาเฉลยของกระแสดานออกและแรงดนของเครองแปลงผนตามล าดบการเปลยนแปลงของ Vaขนอยกบจดชนวน สมมตใหในขณะนภาวะกระแสไหลอยางตอเนอง การไหลอยางตอเนองนนเอง แรงดนขาออกสามารถทจะควบคมจากบวกเตมท (+ Vao)ไปจนถงลบ(- Vao) ดวยการควบคมทจดชนวนจาก 0oถง 180oในทางปฏบตคามมสงสดของ จะถกจ ากดไวท 170oเพอหลกเลยงขอบกพรองในการสบเปลยน (commutation failure) ของไทรสเตอร (สภาวะนเกดขนเมอโหลดมอเตอรทมขนาดแรงมาสงในภาวะทมการจดฉนวนท มากวา 170oมอเตอรยงคงมกระแสไหลแตกระแสทไหลมคาสงเนองจากมความเหนยวน าทมมากและไมต ากวาสภาวะคงกระแส (Holding current) จงท าใหไทรสเตอรท างานผดพลาด) ดวยเหตนแรงดนดานออกสามารถทจะควบคมในทศทางได ๆ กได วงจรเรยงกระแสแบบควบคมไดเตมทเปนเครองแปลงผนแบบจตภาค ก าหนดการท างานอยในจตภาคทหนงและจตภาคทส ของระนาบ Va – Ia แสดงดงรปท 2.5 (ค) Imax
เปนพกดของวงจรเรยงกระแส ดวยแรงดนดานออกทเปนคาลบ การท างานเรยงกระแสเหมอนกบอนเวอรเตอร (inversion mode) และก าลงๆ ไฟฟาไหลจากโหลดไหลสแหลงจายไฟฟากระแสสลบสวนการเรยงกระแสควบคมเครองเดยวแสดงรปท 2.7 ส าหรบการควบคมมอเตอรทมพกดเปนแรงมาเศษสวน วงจรหนงพลสรปท 2.5 (ก) อาจน ามาใชไดโดยการปลดไดโอดเบยงเบนเสรออกไปยงวงจรเรยงกระแสควบคมเครองเดยวแบบสองพลส หนงเฟสไดจากการน าเอาไดโอดเบยงเบนเสรมาตอเพมเขาวงจรเรยงกระแสแบบควบคมเตมทดงรปท 2.4 (ก) และ (ข) หรออาจสลบกนใชวงจรเรยงกระแสควบคมเครองเดยวดงรปท 2.5 (ก) วงจรดงรปท (ค) ในบางเวลาถกน ามาใชเพอลดตนทนของการขบเคลอน
9
รปท 2.5 คณลกษณะการเรยงกระแสควบคมไดเตมท
10
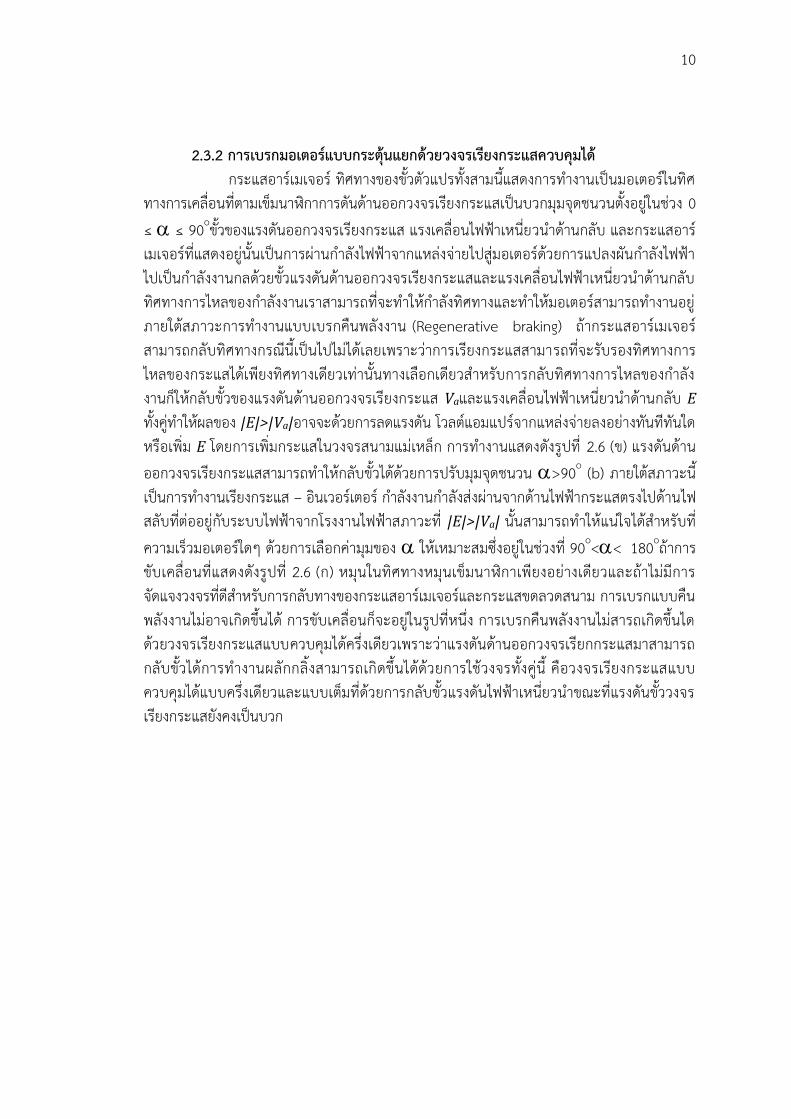
2.3.2 กำรเบรกมอเตอรแบบกระตนแยกดวยวงจรเรยงกระแสควบคมได กระแสอารเมเจอร ทศทางของขวตวแปรทงสามนแสดงการท างานเปนมอเตอรในทศทางการเคลอนทตามเขมนาฬกาการดนดานออกวงจรเรยงกระแสเปนบวกมมจดชนวนตงอยในชวง 0 ≤ ≤ 90oขวของแรงดนออกวงจรเรยงกระแส แรงเคลอนไฟฟาเหนยวน าดานกลบ และกระแสอารเมเจอรทแสดงอยนนเปนการผานก าลงไฟฟาจากแหลงจายไปสมอเตอรดวยการแปลงผนก าลงไฟฟาไปเปนก าลงงานกลดวยขวแรงดนดานออกวงจรเรยงกระแสและแรงเคลอนไฟฟาเหนยวน าดานกลบ ทศทางการไหลของก าลงงานเราสามารถทจะท าใหก าลงทศทางและท าใหมอเตอรสามารถท างานอยภายใตสภาวะการท างานแบบเบรกคนพลงงาน (Regenerative braking) ถากระแสอารเมเจอรสามารถกลบทศทางกรณนเปนไปไมไดเลยเพราะวาการเรยงกระแสสามารถทจะรบรองทศทางการไหลของกระแสไดเพยงทศทางเดยวเทานนทางเลอกเดยวส าหรบการกลบทศทางการไหลของก าลงงานกใหกลบขวของแรงดนดานออกวงจรเรยงกระแส Vaและแรงเคลอนไฟฟาเหนยวน าดานกลบ E ทงคท าใหผลของ |E|>|Va|อาจจะดวยการลดแรงดน โวลตแอมแปรจากแหลงจายลงอยางทนททนใดหรอเพม E โดยการเพมกระแสในวงจรสนามแมเหลก การท างานแสดงดงรปท 2.6 (ข) แรงดนดานออกวงจรเรยงกระแสสามารถท าใหกลบขวไดดวยการปรบมมจดชนวน >90o (b) ภายใตสภาวะนเปนการท างานเรยงกระแส – อนเวอรเตอร ก าลงงานก าลงสงผานจากดานไฟฟากระแสตรงไปดานไฟสลบทตออยกบระบบไฟฟาจากโรงงานไฟฟาสภาวะท |E|>|Va| นนสามารถท าใหแนใจไดส าหรบทความเรวมอเตอรใดๆ ดวยการเลอกคามมของ ใหเหมาะสมซงอยในชวงท 90o<< 180oถาการขบเคลอนทแสดงดงรปท 2.6 (ก) หมนในทศทางหมนเขมนาฬกาเพยงอยางเดยวและถาไมมการจดแจงวงจรทดส าหรบการกลบทางของกระแสอารเมเจอรและกระแสขดลวดสนาม การเบรกแบบคนพลงงานไมอาจเกดขนได การขบเคลอนกจะอยในรปทหนง การเบรกคนพลงงานไมสารถเกดขนไดดวยวงจรเรยงกระแสแบบควบคมไดครงเดยวเพราะวาแรงดนดานออกวงจรเรยกกระแสมาสามารถกลบขวไดการท างานผลกกลงสามารถเกดขนไดดวยการใชวงจรทงคน คอวงจรเรยงกระแสแบบควบคมไดแบบครงเดยวและแบบเตมทดวยการกลบขวแรงดนไฟฟาเหนยวน าขณะทแรงดนขววงจรเรยงกระแสยงคงเปนบวก
11
รปท 2.6 การท างานบนสองจตภาคของวงจรเรยงกระแสควบคมไดเตม ทจายใหมอเตอรไฟตรงแบบกระตนแยก
2.3.3 กำรท ำงำนหลำยจตภำค การท างานหลายจตภาคของมอเตอรแยกกระตนโดยสวนใหญจะใช อปกรณอเลกทรอนกสก าลงในการควบคมการหมนและการเบรกแบบคนพลงงาน เพอใหเปนพนฐานและสะดวกตอการท าความเขาใจในทนจงขอแสดงใหเหนถงขวของแหลงจาย แรงดนไฟฟาตานกลบ และกระแสไฟฟาทไหลผานอารเมเจอร ในการท างานของแตละจตภาคดวยรปท 2.7 ตอไปน
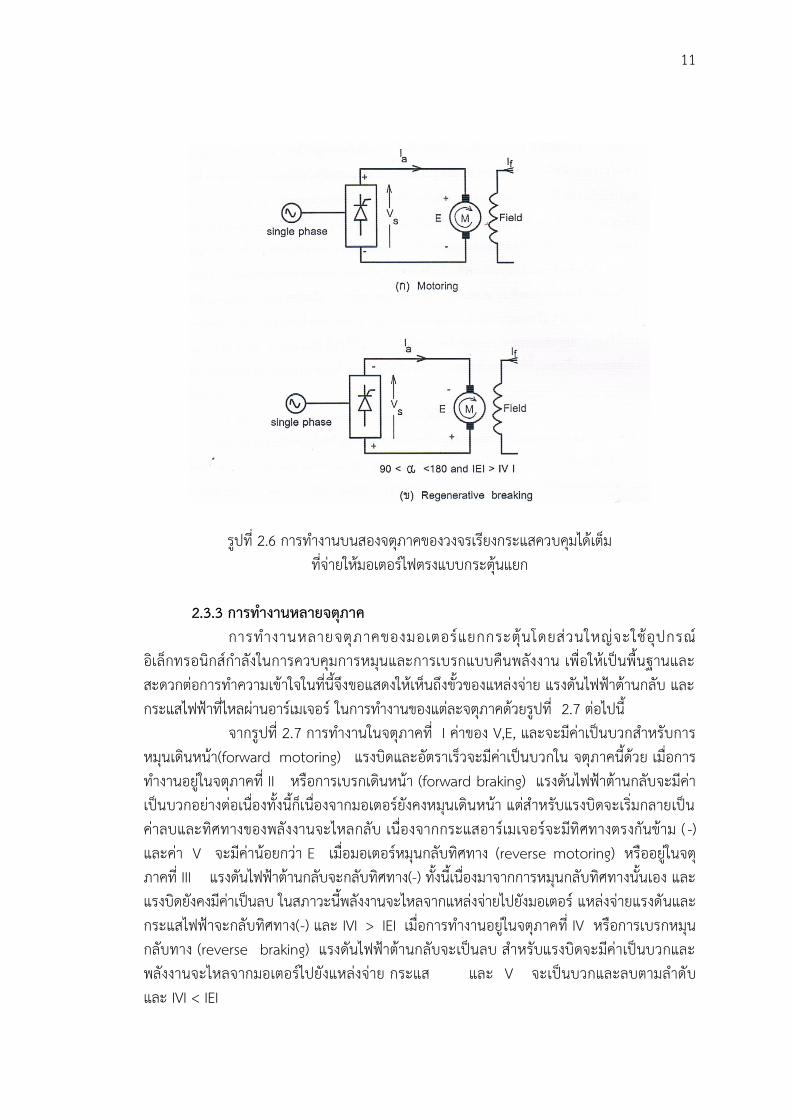
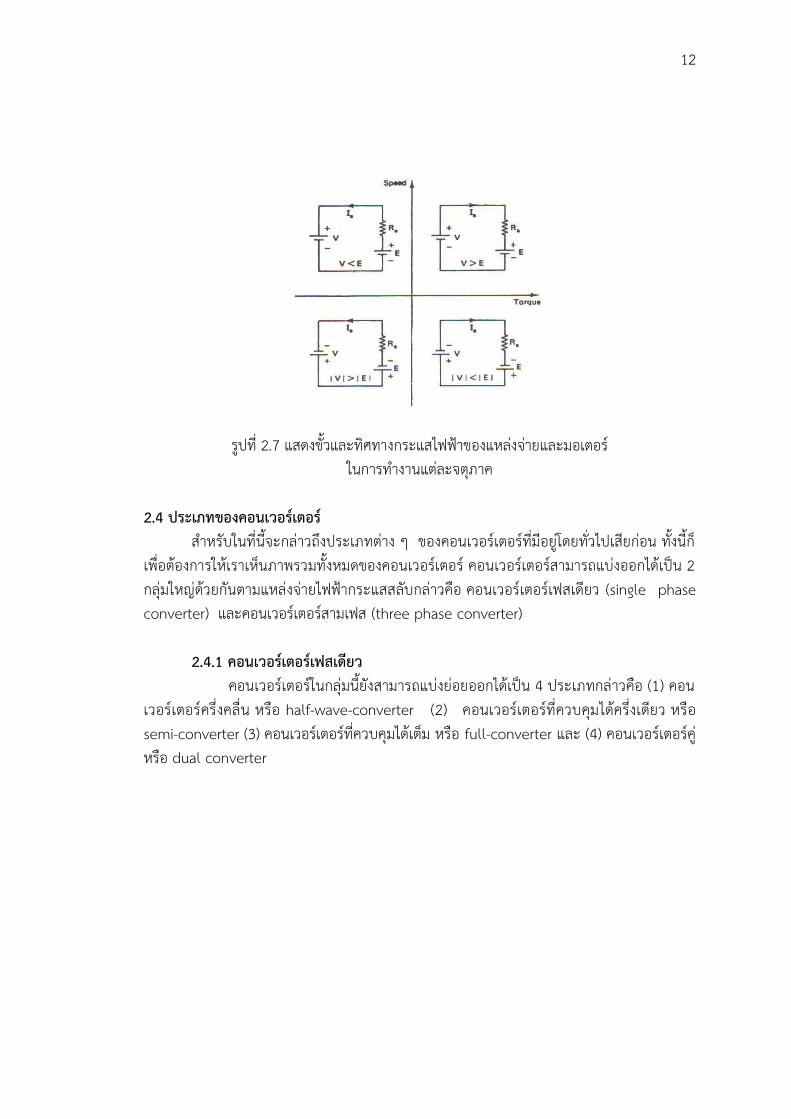
จากรปท 2.7 การท างานในจตภาคท I คาของ V,E, และจะมคาเปนบวกส าหรบการหมนเดนหนา(forward motoring) แรงบดและอตราเรวจะมคาเปนบวกใน จตภาคนดวย เมอการท างานอยในจตภาคท II หรอการเบรกเดนหนา (forward braking) แรงดนไฟฟาตานกลบจะมคาเปนบวกอยางตอเนองทงนกเนองจากมอเตอรยงคงหมนเดนหนา แตส าหรบแรงบดจะเรมกลายเปนคาลบและทศทางของพลงงานจะไหลกลบ เนองจากกระแสอารเมเจอรจะมทศทางตรงกนขาม ( -) และคา V จะมคานอยกวา E เมอมอเตอรหมนกลบทศทาง (reverse motoring) หรออยในจตภาคท III แรงดนไฟฟาตานกลบจะกลบทศทาง(-) ทงนเนองมาจากการหมนกลบทศทางนนเอง และแรงบดยงคงมคาเปนลบ ในสภาวะนพลงงานจะไหลจากแหลงจายไปยงมอเตอร แหลงจายแรงดนและกระแสไฟฟาจะกลบทศทาง(-) และ IVI > IEI เมอการท างานอยในจตภาคท IV หรอการเบรกหมนกลบทาง (reverse braking) แรงดนไฟฟาตานกลบจะเปนลบ ส าหรบแรงบดจะมคาเปนบวกและพลงงานจะไหลจากมอเตอรไปยงแหลงจาย กระแส และ V จะเปนบวกและลบตามล าดบ และ IVI < IEI
12
รปท 2.7 แสดงขวและทศทางกระแสไฟฟาของแหลงจายและมอเตอร ในการท างานแตละจตภาค
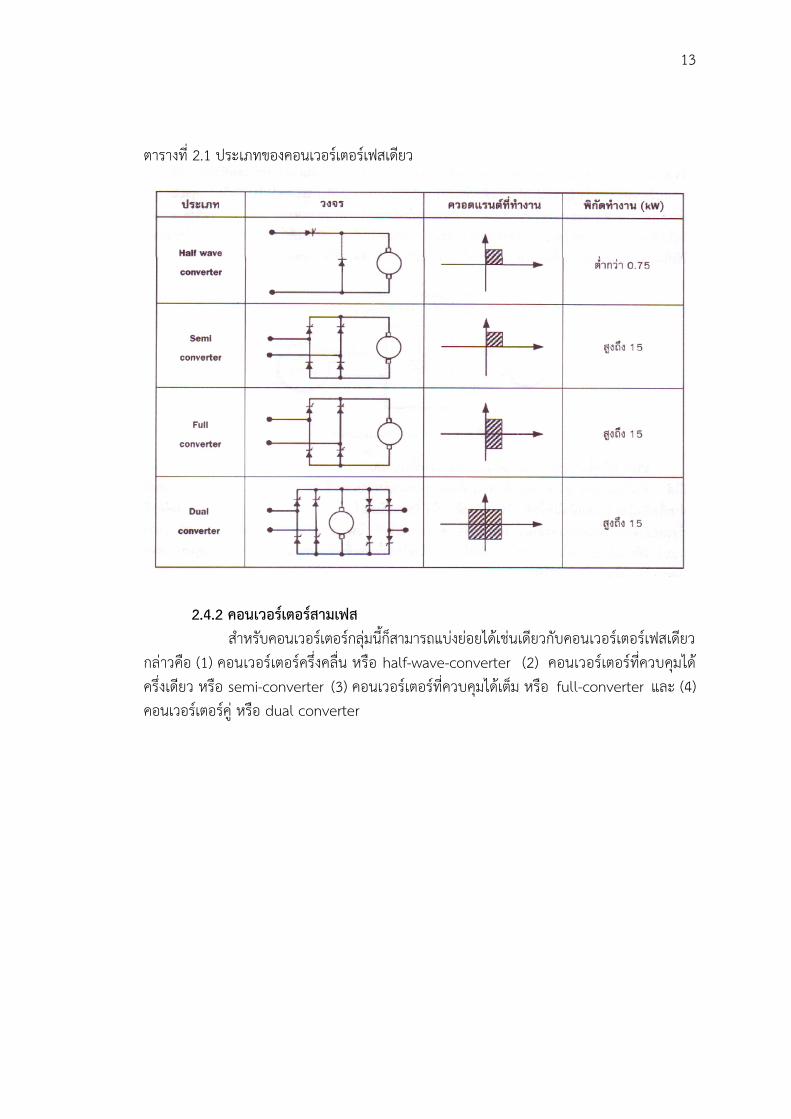
2.4 ประเภทของคอนเวอรเตอร ส าหรบในทนจะกลาวถงประเภทตาง ๆ ของคอนเวอรเตอรทมอยโดยทวไปเสยกอน ทงนกเพอตองการใหเราเหนภาพรวมทงหมดของคอนเวอรเตอร คอนเวอรเตอรสามารถแบงออกไดเปน 2 กลมใหญดวยกนตามแหลงจายไฟฟากระแสสลบกลาวคอ คอนเวอรเตอรเฟสเดยว (single phase converter) และคอนเวอรเตอรสามเฟส (three phase converter) 2.4.1 คอนเวอรเตอรเฟสเดยว คอนเวอรเตอรในกลมนยงสามารถแบงยอยออกไดเปน 4 ประเภทกลาวคอ (1) คอนเวอรเตอรครงคลน หรอ half-wave-converter (2) คอนเวอรเตอรทควบคมไดครงเดยว หรอ semi-converter (3) คอนเวอรเตอรทควบคมไดเตม หรอ full-converter และ (4) คอนเวอรเตอรค หรอ dual converter
13
ตารางท 2.1 ประเภทของคอนเวอรเตอรเฟสเดยว
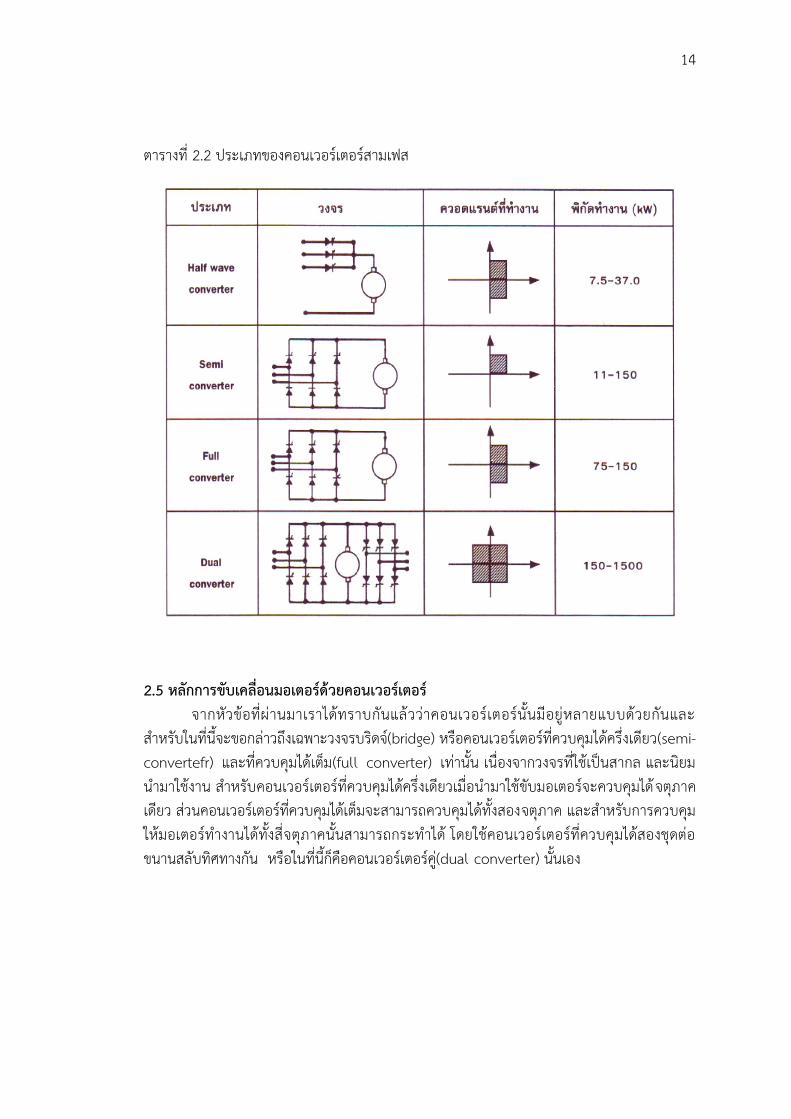
2.4.2 คอนเวอรเตอรสำมเฟส ส าหรบคอนเวอรเตอรกลมนกสามารถแบงยอยไดเชนเดยวกบคอนเวอรเตอรเฟสเดยว กลาวคอ (1) คอนเวอรเตอรครงคลน หรอ half-wave-converter (2) คอนเวอรเตอรทควบคมไดครงเดยว หรอ semi-converter (3) คอนเวอรเตอรทควบคมไดเตม หรอ full-converter และ (4) คอนเวอรเตอรค หรอ dual converter
14
ตารางท 2.2 ประเภทของคอนเวอรเตอรสามเฟส
2.5 หลกกำรขบเคลอนมอเตอรดวยคอนเวอรเตอร จากหวขอทผานมาเราไดทราบกนแลววาคอนเวอรเตอรนนมอยหลายแบบดวยกนและส าหรบในทนจะขอกลาวถงเฉพาะวงจรบรดจ(bridge) หรอคอนเวอรเตอรทควบคมไดครงเดยว(semi-convertefr) และทควบคมไดเตม(full converter) เทานน เนองจากวงจรทใชเปนสากล และนยมน ามาใชงาน ส าหรบคอนเวอรเตอรทควบคมไดครงเดยวเมอน ามาใชขบมอเตอรจะควบคมได จตภาคเดยว สวนคอนเวอรเตอรทควบคมไดเตมจะสามารถควบคมไดทงสองจตภาค และส าหรบการควบคมใหมอเตอรท างานไดทงสจตภาคนนสามารถกระท าได โดยใชคอนเวอรเตอรทควบคมไดสองชดตอขนานสลบทศทางกน หรอในทนกคอคอนเวอรเตอรค(dual converter) นนเอง
15
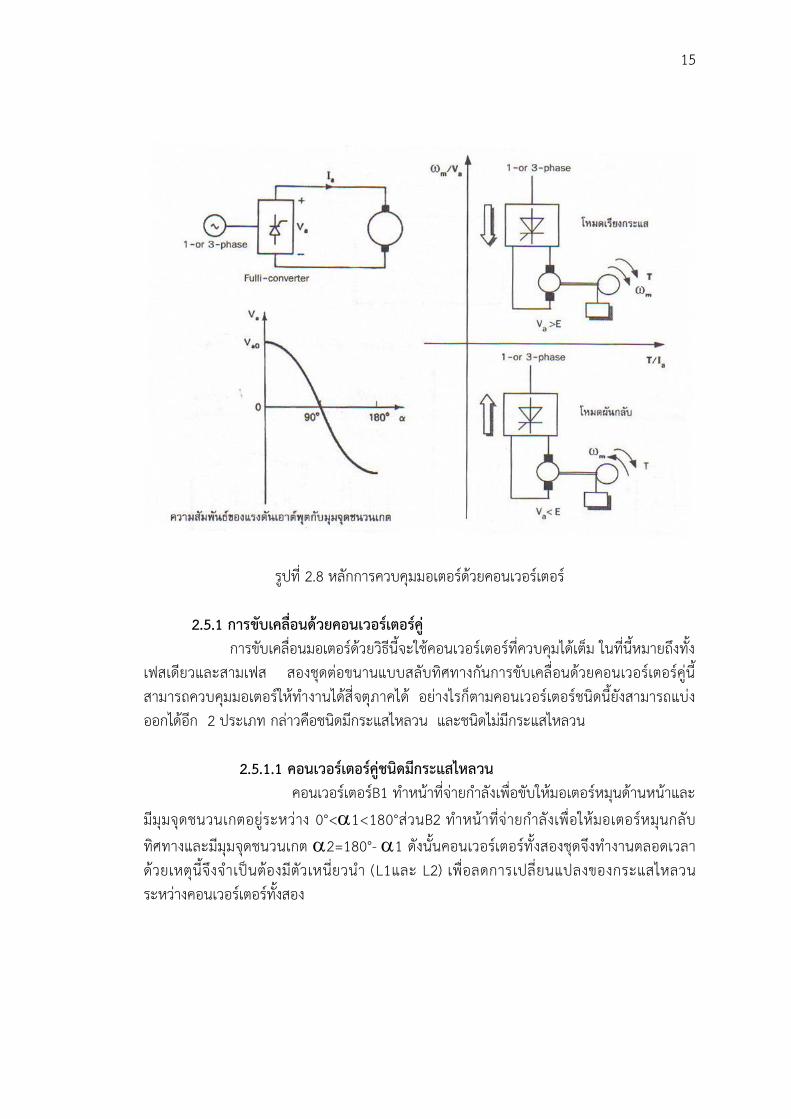
รปท 2.8 หลกการควบคมมอเตอรดวยคอนเวอรเตอร 2.5.1 กำรขบเคลอนดวยคอนเวอรเตอรค การขบเคลอนมอเตอรดวยวธนจะใชคอนเวอรเตอรทควบคมไดเตม ในทนหมายถงทงเฟสเดยวและสามเฟส สองชดตอขนานแบบสลบทศทางกนการขบเคลอนดวยคอนเวอรเตอรคนสามารถควบคมมอเตอรใหท างานไดสจตภาคได อยางไรกตามคอนเวอรเตอรชนดนยงสามารถแบงออกไดอก 2 ประเภท กลาวคอชนดมกระแสไหลวน และชนดไมมกระแสไหลวน 2.5.1.1 คอนเวอรเตอรคชนดมกระแสไหลวน คอนเวอรเตอรB1 ท าหนาทจายก าลงเพอขบใหมอเตอรหมนดานหนาและมมมจดชนวนเกตอยระหวาง 0°<1<180°สวนB2 ท าหนาทจายก าลงเพอใหมอเตอรหมนกลบทศทางและมมมจดชนวนเกต 2=180°- 1 ดงนนคอนเวอรเตอรทงสองชดจงท างานตลอดเวลาดวยเหตนจงจ าเปนตองมตวเหนยวน า (L1และ L2) เพอลดการเปลยนแปลงของกระแสไหลวนระหวางคอนเวอรเตอรทงสอง
16
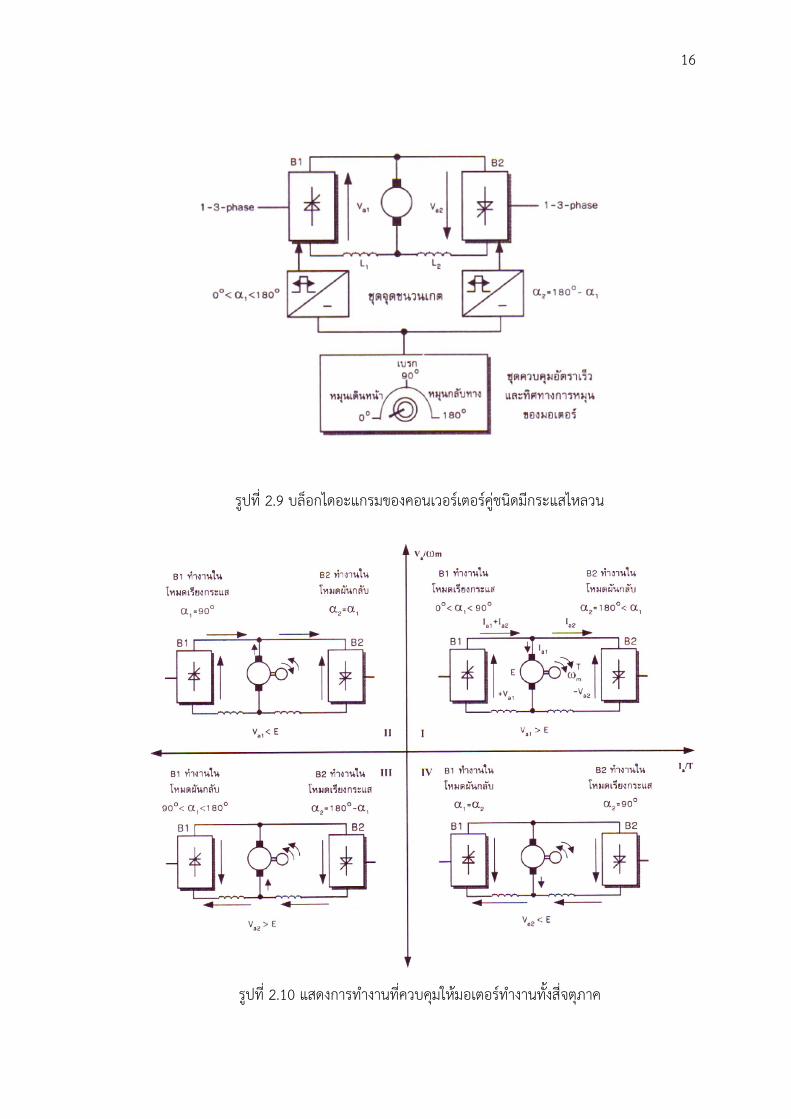
รปท 2.9 บลอกไดอะแกรมของคอนเวอรเตอรคชนดมกระแสไหลวน
รปท 2.10 แสดงการท างานทควบคมใหมอเตอรท างานทงสจตภาค
17
จากรปท 2.10 ลกษณะการท างานของคอนเวอรเตอรB1 และ B2 ในแตละจตภาคสามารถสรปไดดงน 1. เมอ 0
1
0 900 คอนเวอรเตอรB1 จะท างานในโหมดเรยงกระแส แต B2 จะท างานในโหมดผนกลบดงนน
1aV เปนบวก 2aV เปนลบ ท าให สงผลใหมอเตอรหมนเดนหนาในจตภาคท1 2. เมอ 0
1 90 คอนเวอรเตอรB1 จะท างานในโหมดเรยงกระแส สวน B2 ท างานในโหมดผนกลบเพราะ 0
21 90 สงผลใหมอเตอรเบรกคนพลงงาน เนองจาก 021 aa VV และกระแสทไหลผาน B2 มคาเปน 21 aa II ในขณะน EVa 1 ท าใหมอเตอรเบรกเดนหนาในจตภาคท II และเตรยมพรอมทจะกลบทางหมนหาก 3. เมอ 0
1
0 18090 คอนเวอรเตอรB1 จะท างานในโหมดผนกลบ สวน B2 จะท างานในโหมดเรยงกระแส ผลคอ เปนบวก 2aV และ 1aV เปนลบ ท าให EVa 2 สงผลใหมอเตอรกลบทางหมนในจตภาคท III 4.เมอ คอนเวอรเตอร B1 และ B2 จะท างานเหมอนเดมเพราะวา 0
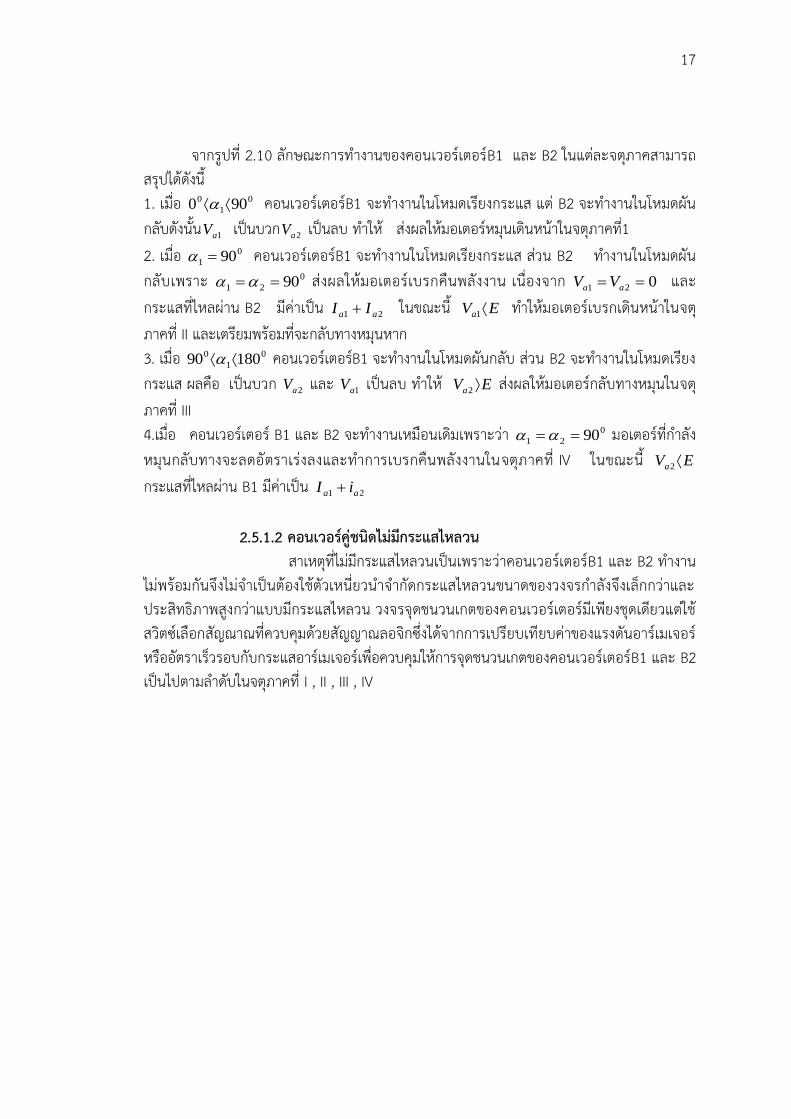
21 90 มอเตอรทก าลงหมนกลบทางจะลดอตราเรงลงและท าการเบรกคนพลงงานในจตภาคท IV ในขณะน EVa 2 กระแสทไหลผาน B1 มคาเปน 21 aa iI 2.5.1.2 คอนเวอรคชนดไมมกระแสไหลวน สาเหตทไมมกระแสไหลวนเปนเพราะวาคอนเวอรเตอรB1 และ B2 ท างานไมพรอมกนจงไมจ าเปนตองใชตวเหนยวน าจ ากดกระแสไหลวนขนาดของวงจรก าลงจงเลกกวาและประสทธภาพสงกวาแบบมกระแสไหลวน วงจรจดชนวนเกตของคอนเวอรเตอรมเพยงชดเดยวแตใชสวตซเลอกสญณาณทควบคมดวยสญญาณลอจกซงไดจากการเปรยบเทยบคาของแรงดนอารเมเจอรหรออตราเรวรอบกบกระแสอารเมเจอรเพอควบคมใหการจดชนวนเกตของคอนเวอรเตอรB1 และ B2 เปนไปตามล าดบในจตภาคท I , II , III , IV
18
รปท 2.11 บลอกไดอะแกรมของคอนเวอรเตอรคชนดไมมกระแสไหลวน
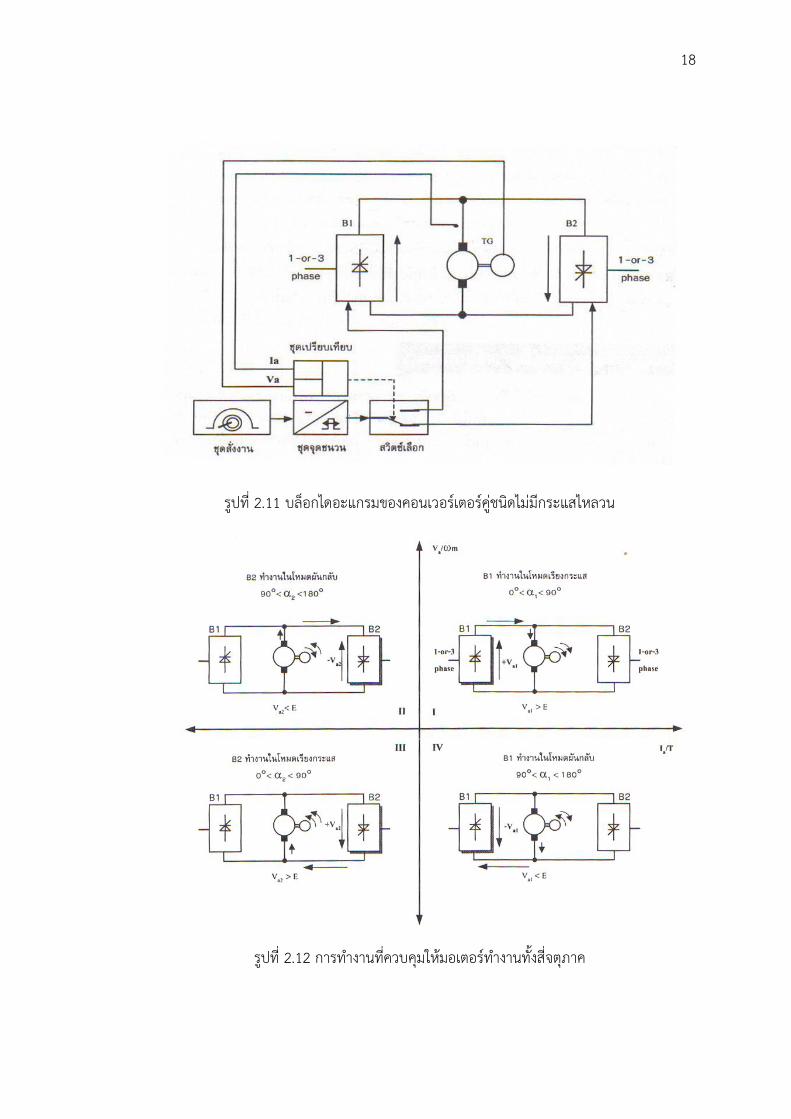
รปท 2.12 การท างานทควบคมใหมอเตอรท างานทงสจตภาค

19
จากรปท 2.12 การท างานในจตภาคท I , II , III และ IV จะมลกษณะคลายกลบ คอนเวอรเตอรชนดมกระแสไหลวน กลาวคอ 1 จตภาคท I คอนเวอรเตอร B1 ท างานในโหมดเรยงกระแสมอเตอรจะหมนเดนหนา 2 จตภาคท II คอนเวอรเตอรB1 หยดท างาน B2 จะท างานแทนในโหมดผนกลบมอเตอรเบรกเดนหนา 3 จตภาคท III คอนเวอรเตอรB2 ท างานตอในโหมดเรยงกระแสมอเตอรจะหมนกลบทาง 4 จตภาคท IV คอนเวอรเตอรB2 หยดท างาน B1 จะท างานแทนในโหมดผนกลบมอเตอรทหมนกลบทางจะเบรก
บทท 3 การด าเนนงาน
การออกแบบสรางวงจรก าลงและวงจรควบคม บทน า การควบคมมอเตอรไฟฟากระแสตรงดวยวงจรเรยงกระแสควบคมไดสามเฟสวงจรเรยงกระแสควบคมไดสามเฟสเปน สวนส าคญในการควบคมมอเตอรในภาควงจรก าลงท าหนาทเปลยนระดบแรงดนไฟฟากระแสตรงใหแกมอเตอร โดยแรงดนอนพตของวงจรเรยงกระแสควบคมไดสามเฟสมาจากแหลงจายไฟฟากระแสตรงการออกแบบวงจรเรยงกระแสควบคมไดสามเฟสในโครงการนจะออกแบบให เปนวงจร เรยงกระแสควบคมไดสามเฟสแบบ 4จตภาค มระบบควบคมเปนไมโครคอนโทรลเลอร 3.1 การออกแบบและสรางวงจรเรยงกระแสควบคมไดสามเฟส
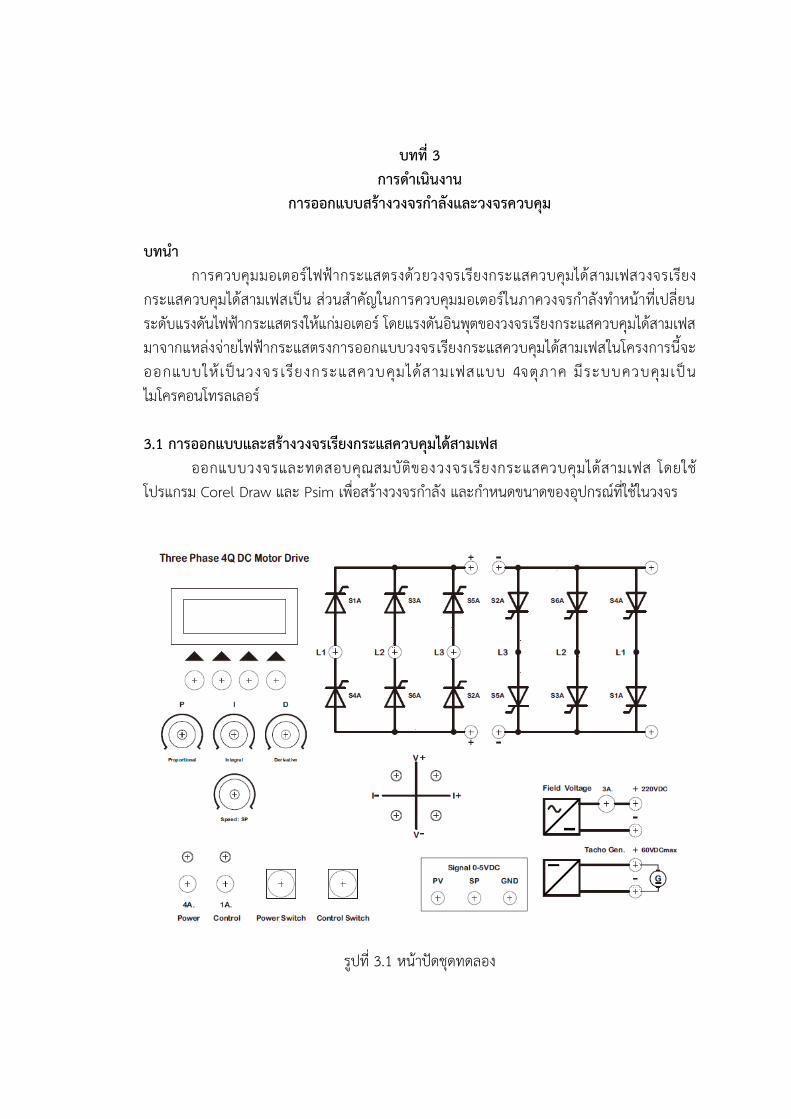
ออกแบบวงจรและทดสอบคณสมบตของวงจรเรยงกระแสควบคมไดสามเฟส โดยใชโปรแกรม Corel Draw และ Psim เพอสรางวงจรก าลง และก าหนดขนาดของอปกรณทใชในวงจร
รปท 3.1 หนาปดชดทดลอง
21
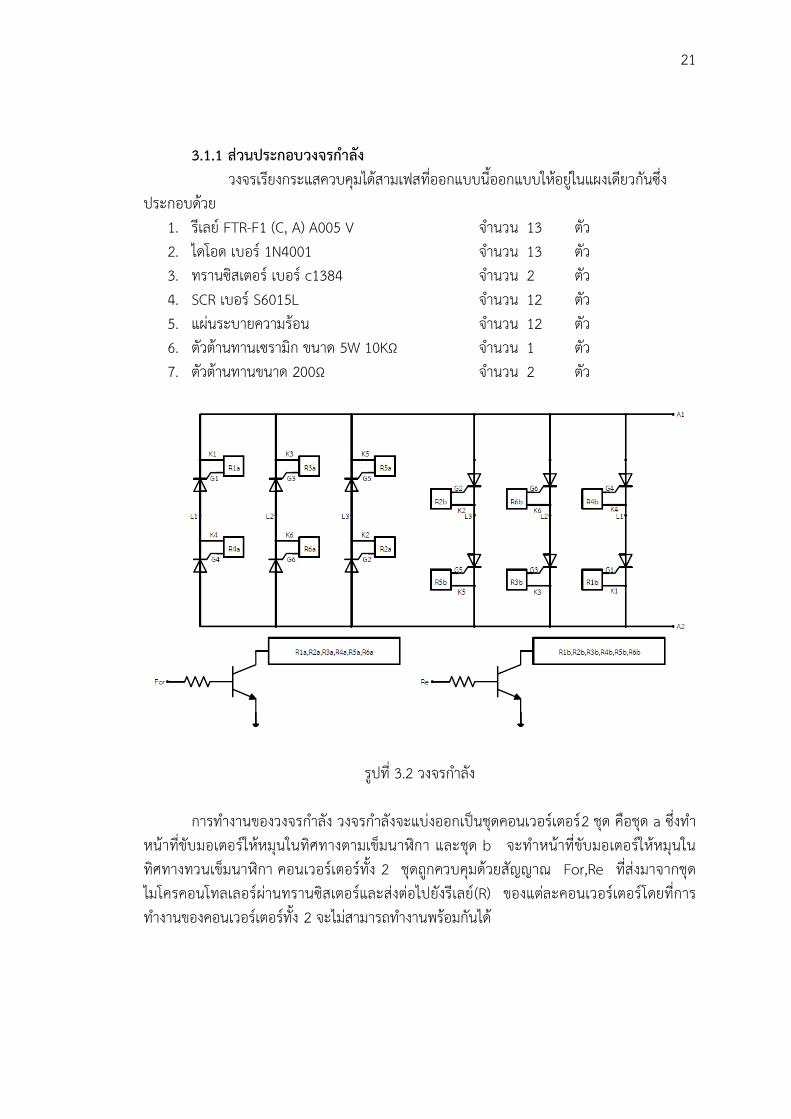
3.1.1 สวนประกอบวงจรก าลง วงจรเรยงกระแสควบคมไดสามเฟสทออกแบบนออกแบบใหอยในแผงเดยวกนซงประกอบดวย
1. รเลย FTR-F1 (C, A) A005 V จ านวน 13 ตว 2. ไดโอด เบอร 1N4001 จ านวน 13 ตว 3. ทรานซสเตอร เบอร c1384 จ านวน 2 ตว 4. SCR เบอร S6015L จ านวน 12 ตว 5. แผนระบายความรอน จ านวน 12 ตว 6. ตวตานทานเซรามก ขนาด 5W 10KΩ จ านวน 1 ตว 7. ตวตานทานขนาด 200Ω จ านวน 2 ตว
รปท 3.2 วงจรก าลง
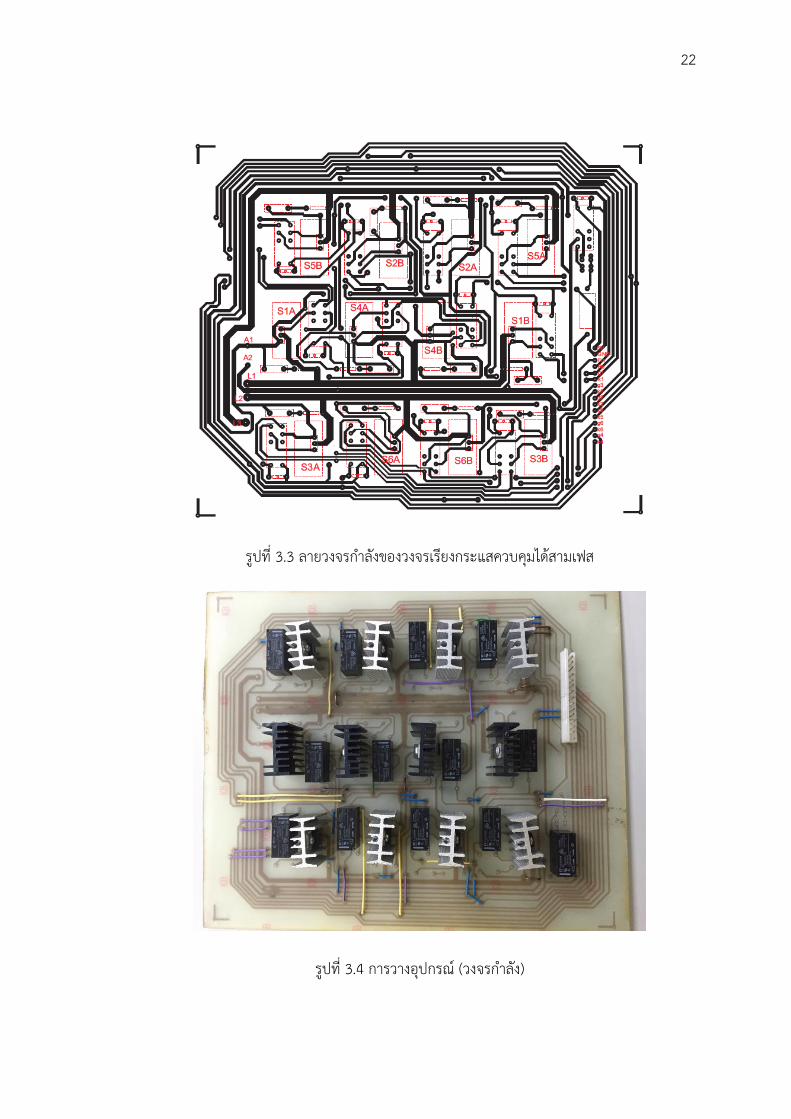
การท างานของวงจรก าลง วงจรก าลงจะแบงออกเปนชดคอนเวอรเตอร2 ชด คอชด a ซงท าหนาทขบมอเตอรใหหมนในทศทางตามเขมนาฬกา และชด b จะท าหนาทขบมอเตอรใหหมนในทศทางทวนเขมนาฬกา คอนเวอรเตอรทง 2 ชดถกควบคมดวยสญญาณ For,Re ทสงมาจากชดไมโครคอนโทลเลอรผานทรานซสเตอรและสงตอไปยงรเลย(R) ของแตละคอนเวอรเตอรโดยทการท างานของคอนเวอรเตอรทง 2 จะไมสามารถท างานพรอมกนได
22
รปท 3.3 ลายวงจรก าลงของวงจรเรยงกระแสควบคมไดสามเฟส
รปท 3.4 การวางอปกรณ (วงจรก าลง)
23
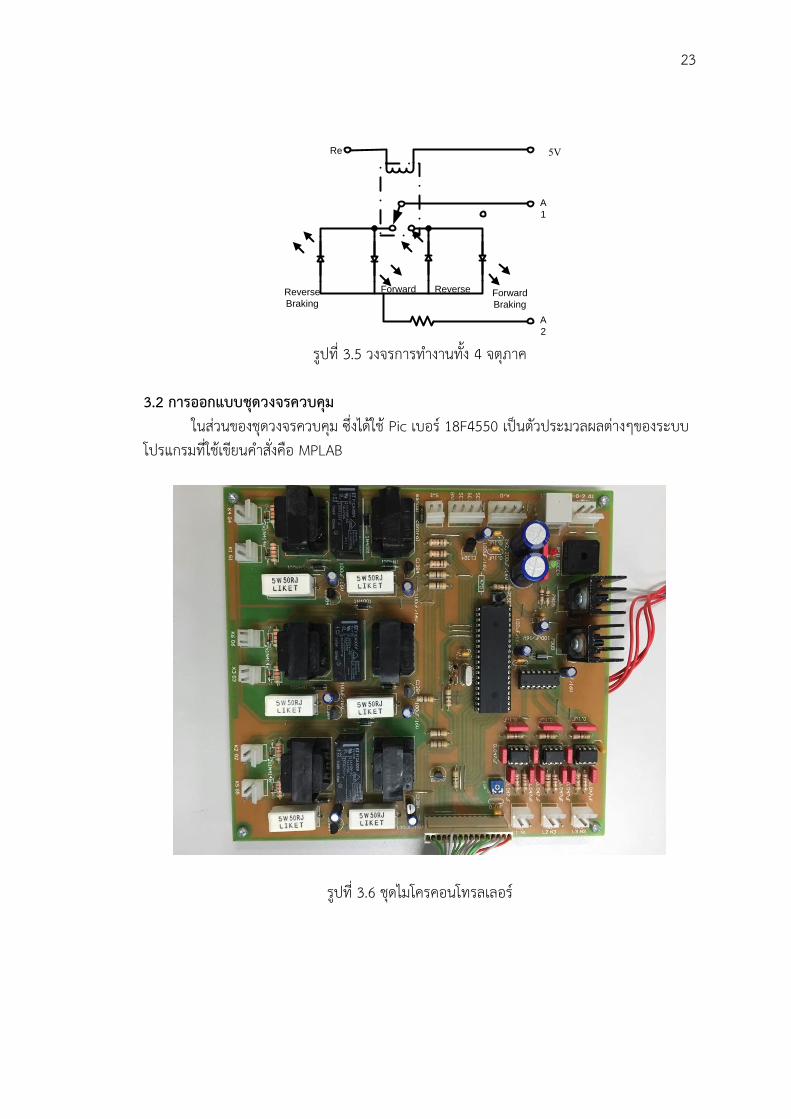
รปท 3.5 วงจรการท างานทง 4 จตภาค
3.2 การออกแบบชดวงจรควบคม ในสวนของชดวงจรควบคม ซงไดใช Pic เบอร 18F4550 เปนตวประมวลผลตางๆของระบบ โปรแกรมทใชเขยนค าสงคอ MPLAB
รปท 3.6 ชดไมโครคอนโทรลเลอร
A
1
A
2
15
V
Reverse
Braking
Reverse Forward
Braking
Forward
Re 5V
24
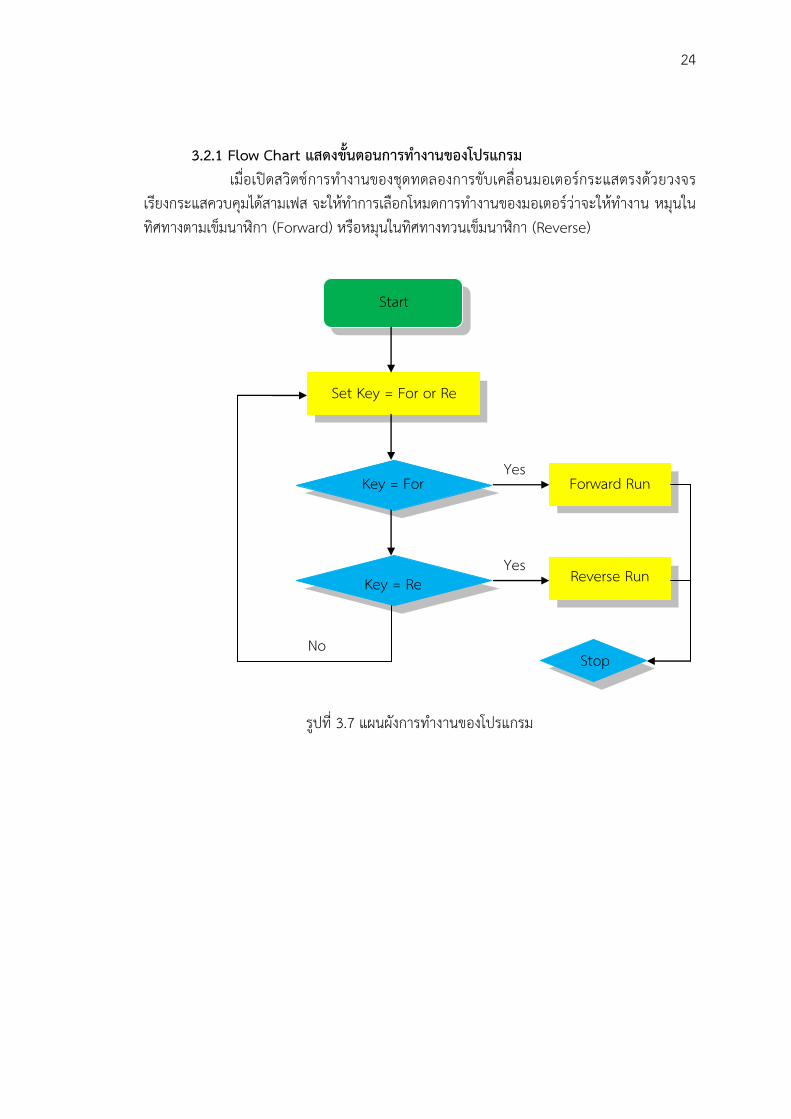
3.2.1 Flow Chart แสดงขนตอนการท างานของโปรแกรม เมอเปดสวตชการท างานของชดทดลองการขบเคลอนมอเตอรกระแสตรงดวยวงจรเรยงกระแสควบคมไดสามเฟส จะใหท าการเลอกโหมดการท างานของมอเตอรวาจะใหท างาน หมนในทศทางตามเขมนาฬกา (Forward) หรอหมนในทศทางทวนเขมนาฬกา (Reverse)
รปท 3.7 แผนผงการท างานของโปรแกรม
Start
Forward Run Yes
Set Key = For or Re
Key = For
Key = Re Reverse Run Yes
Stop No
25
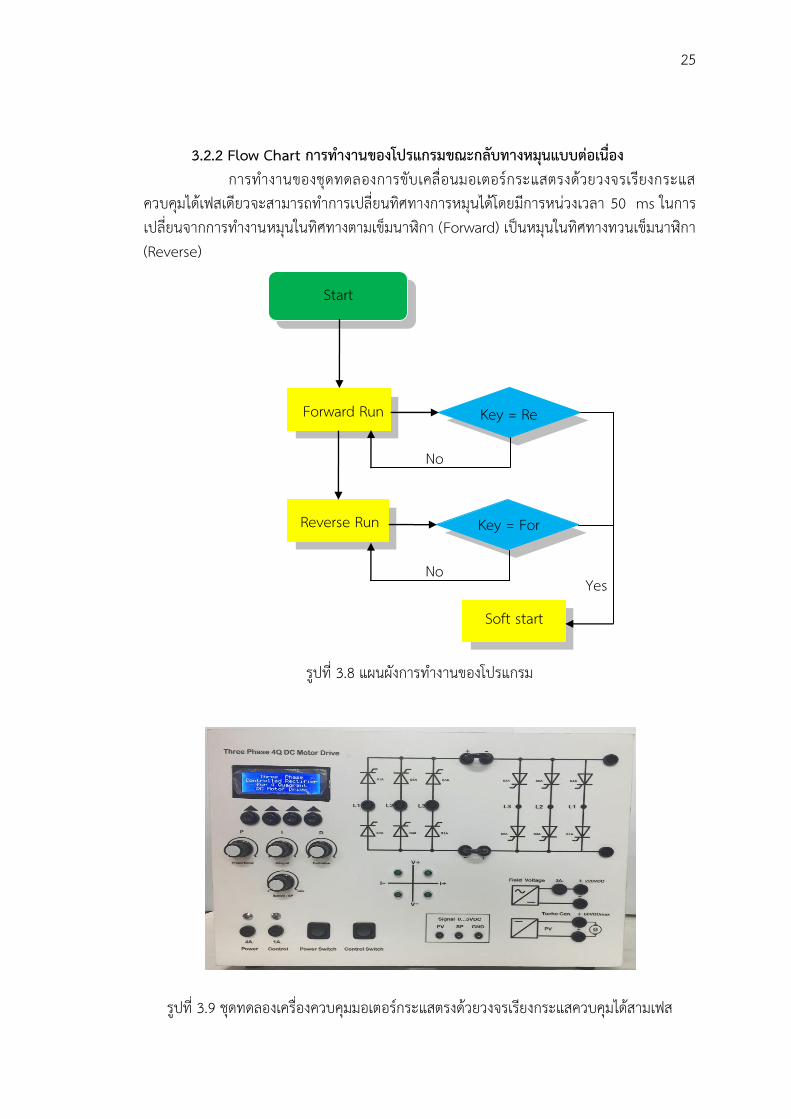
3.2.2 Flow Chart การท างานของโปรแกรมขณะกลบทางหมนแบบตอเนอง การท างานของชดทดลองการขบเคลอนมอเตอรกระแสตรงดวยวงจรเรยงกระแส
ควบคมไดเฟสเดยวจะสามารถท าการเปลยนทศทางการหมนไดโดยมการหนวงเวลา 50 ms ในการเปลยนจากการท างานหมนในทศทางตามเขมนาฬกา (Forward) เปนหมนในทศทางทวนเขมนาฬกา (Reverse)
รปท 3.8 แผนผงการท างานของโปรแกรม
รปท 3.9 ชดทดลองเครองควบคมมอเตอรกระแสตรงดวยวงจรเรยงกระแสควบคมไดสามเฟส
Key = Re
Reverse Run
Forward Run
Key = For
Soft start
Start
No
No
Yes No
No
บทท 4 ผลการทดสอบ
บทน า การทดสอบชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาค ดวยวงจรเรยงกระแสควบคมไดสามเฟส ไดแบงการทดสอบเปน 2 การทดลองดงน
1. การทดสอบความเรวรอบมอเตอรโดยการปรบมม 2. การทดสอบการกลบทางหมนของมอเตอร 4.1 การทดลองท 1: การทดสอบความเรวรอบมอเตอรโดยการปรบมม 1.1 วตถประสงค 1.ศกษาความเรวมอเตอร 2.เปรยบเทยบความเรวในขณะท มม เปลยน 1.2 เครองมอและอปกรณการทดลอง จ านวน - ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาค 1 ดวยวงจรเรยงกระแสควบคมไดสามเฟส - มอเตอรกระแสตรง 220 V ( DC Motor ) 1 - ออสซลโลสโคป (Digital Storage Oscilloscope) 1 - DC Tachogenerator 30V/1000rpm 1
27
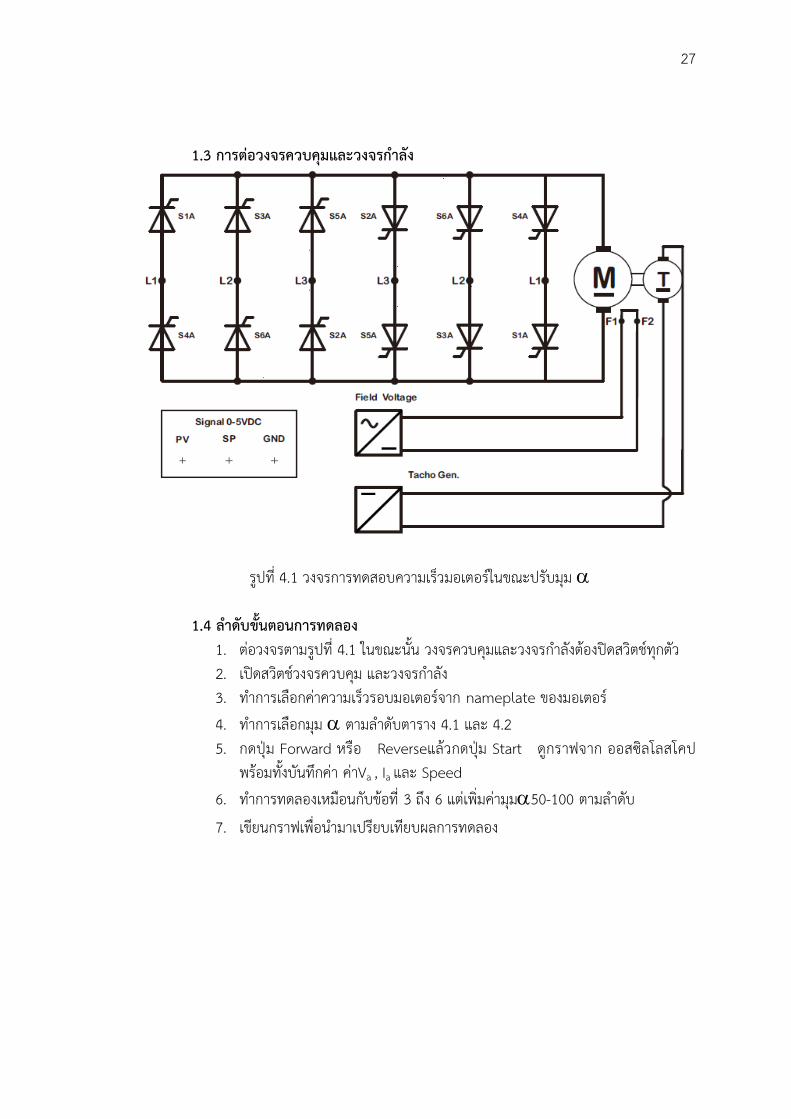
1.3 การตอวงจรควบคมและวงจรก าลง
รปท 4.1 วงจรการทดสอบความเรวมอเตอรในขณะปรบมม 1.4 ล าดบขนตอนการทดลอง
1. ตอวงจรตามรปท 4.1 ในขณะนน วงจรควบคมและวงจรก าลงตองปดสวตชทกตว 2. เปดสวตชวงจรควบคม และวงจรก าลง 3. ท าการเลอกคาความเรวรอบมอเตอรจาก nameplate ของมอเตอร 4. ท าการเลอกมม ตามล าดบตาราง 4.1 และ 4.2 5. กดปม Forward หรอ Reverseแลวกดปม Start ดกราฟจาก ออสซลโลสโคป
พรอมทงบนทกคา คาVa , Ia และ Speed 6. ท าการทดลองเหมอนกบขอท ง 6 แตเพมคามม50-100 ตามล าดบ 7. เขยนกราฟเพอน ามาเปรยบเทยบผลการทดลอง
28
1.5 ผลการทดลอง
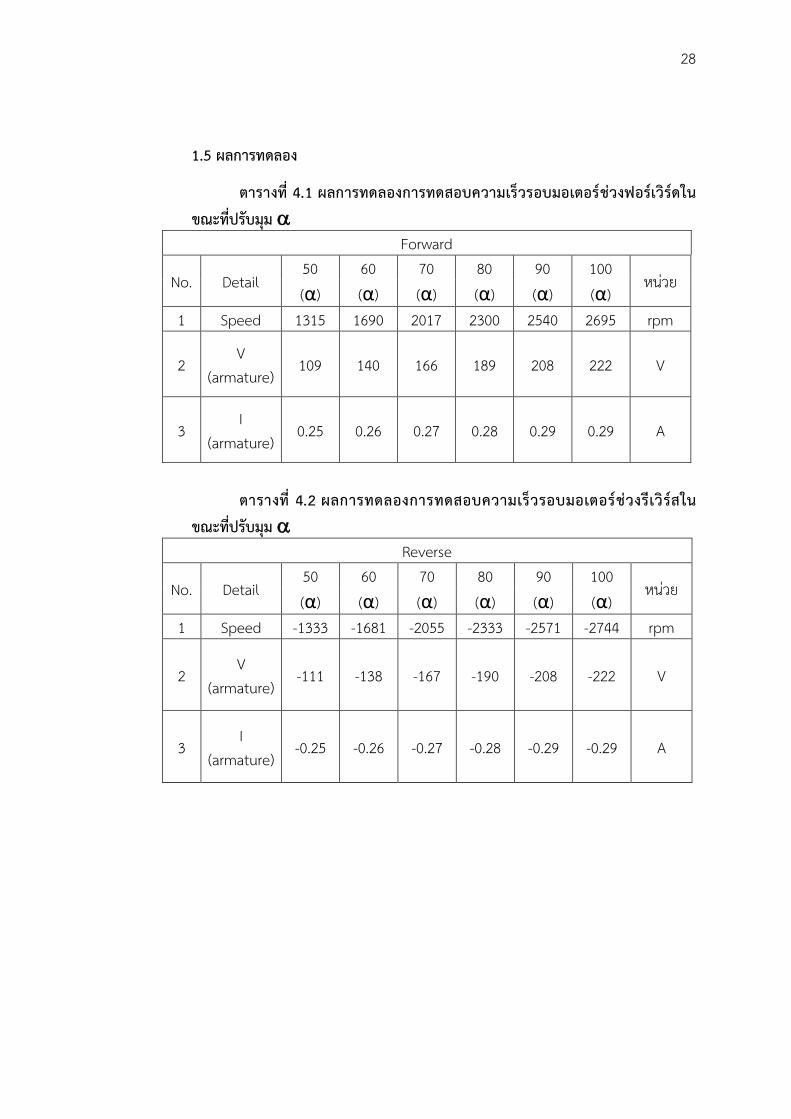
ตารางท 4.1 ผลการทดลองการทดสอบความเรวรอบมอเตอรชวงฟอรเวรดในขณะทปรบมม
Forward
No. Detail 50 60 70 80 90 100
หนวย (α) (α) (α) (α) (α) (α)
1 Speed 1315 1690 2017 2300 2540 2695 rpm
2 V
(armature) 109 140 166 189 208 222 V
3 I
(armature) 0.25 0.26 0.27 0.28 0.29 0.29 A
ตารางท 4.2 ผลการทดลองการทดสอบความเรวรอบมอเตอรชวงรเวรสในขณะทปรบมม
Reverse
No. Detail 50 60 70 80 90 100
หนวย (α) (α) (α) (α) (α) (α)
1 Speed -1333 -1681 -2055 -2333 -2571 -2744 rpm
2 V
(armature) -111 -138 -167 -190 -208 -222 V
3 I
(armature) -0.25 -0.26 -0.27 -0.28 -0.29 -0.29 A
29
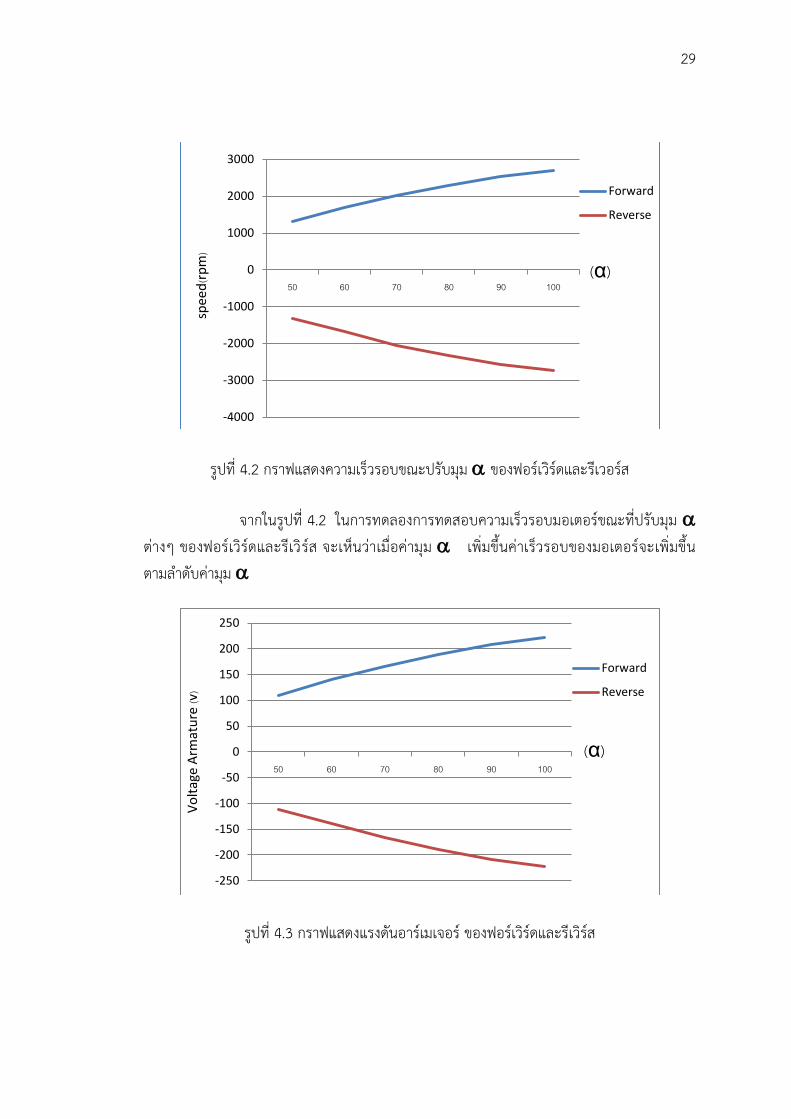
รปท 4.2 กราฟแสดงความเรวรอบขณะปรบมม ของฟอรเวรดและรเวอรส จากในรปท 4.2 ในการทดลองการทดสอบความเรวรอบมอเตอรขณะทปรบมม ตางๆ ของฟอรเวรดและรเวรส จะเหนวาเมอคามม เพมขนคาเรวรอบของมอเตอรจะเพมขนตามล าดบคามม
รปท 4.3 กราฟแสดงแรงดนอารเมเจอร ของฟอรเวรดและรเวรส
-4000
-3000
-2000
-1000
0
1000
2000
3000
50 60 70 80 90 100
Forward
Reversesp
eed(rp
m)
(α)
-250
-200
-150
-100
-50
0
50
100
150
200
250
50 60 70 80 90 100
Forward
Reverse
(α)
Vo
ltag
e A
rmat
ure
(v)
30
จากกราฟในรปท 4.3 ในการทดลองการทดสอบความเรวรอบมอเตอรขณะทปรบมม ตางๆ ของฟอรเวรดและรเวอรส จะเหนไดวาเมอคามม เพมขนแรงดนอารเมเจอรจะเพมขนตามล าดบคามม
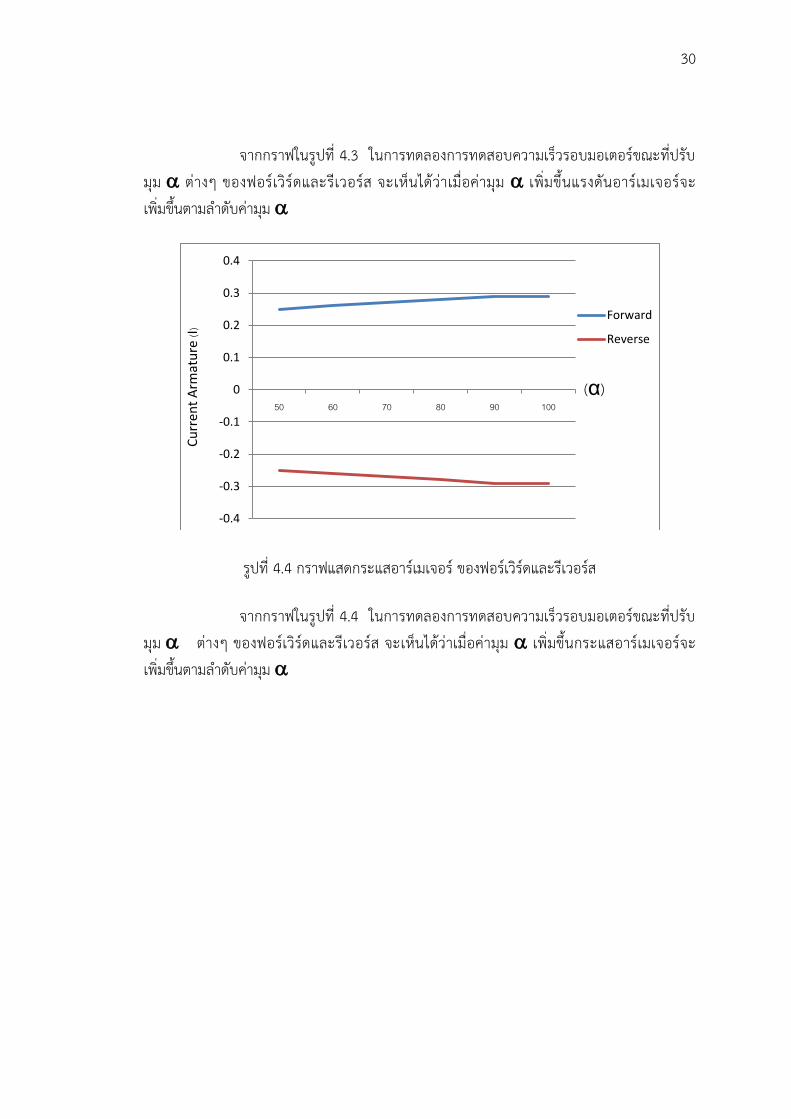
รปท 4.4 กราฟแสดกระแสอารเมเจอร ของฟอรเวรดและรเวอรส
จากกราฟในรปท 4.4 ในการทดลองการทดสอบความเรวรอบมอเตอรขณะทปรบมม ตางๆ ของฟอรเวรดและรเวอรส จะเหนไดวาเมอคามม เพมขนกระแสอารเมเจอรจะเพมขนตามล าดบคามม
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
50 60 70 80 90 100
Forward
Reverse
(α)
Cu
rren
t A
rmat
ure
(I)
31
4.2 การทดลองท 2: การทดสอบการกลบทางหมนของมอเตอร 2.1วตถประสงค 1.ศกษาแรงดนและกระแสตางๆในขณะมอเตอรหมนแบบ ฟอรเวรด 2.ศกษาแรงดนและกระแสตางๆในขณะมอเตอรหมนแบบ รเวอรส 3.ศกษาและเปรยบเทยบความเรวทางดาน ฟอรเวรดและรเวอรส 4.ศกษาสานะและระยะเวลาการกลบทางหมนแบบทนททนใด
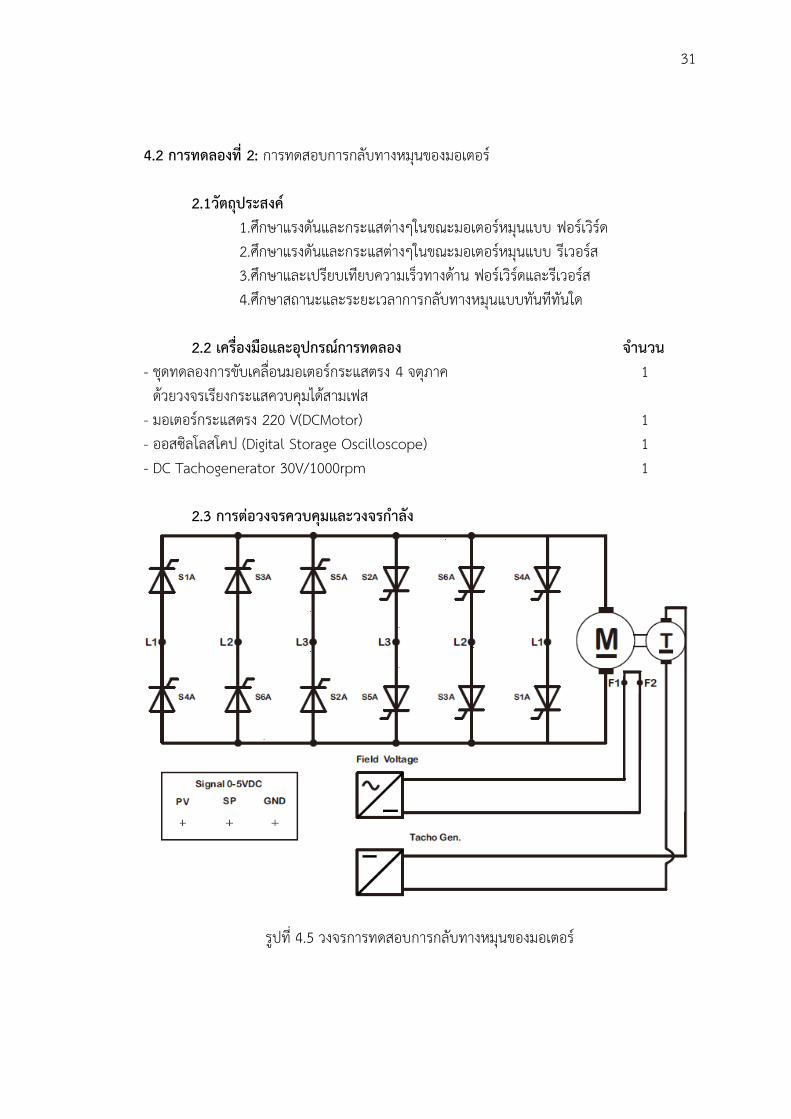
2.2 เครองมอและอปกรณการทดลอง จ านวน - ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาค 1 ดวยวงจรเรยงกระแสควบคมไดสามเฟส - มอเตอรกระแสตรง 220 V(DCMotor) 1 - ออสซลโลสโคป (Digital Storage Oscilloscope) 1 - DC Tachogenerator 30V/1000rpm 1 2.3 การตอวงจรควบคมและวงจรก าลง
รปท 4.5 วงจรการทดสอบการกลบทางหมนของมอเตอร
32
2.4 ล าดบขนตอนการทดลอง 1. ตอวงจรตามรปท 4.5 ในขณะนน วงจรควบคมและวงจรก าลงตองปดสวตชทกตว 2. เปดสวตชวงจรควบคม และวงจรก าลง 3. ท าการเลอกคาความเรวรอบมอเตอรจาก nameplate ของมอเตอร 4. ท าการเลอกคา lower limit เปน 35° 5. ปรบมม α=35° กดปม Forward แลวกดปม Start ดกราฟจาก ออสซลโลสโคป 6. กดปม Reverseสงเกตการกลบทางหมนของมอเตอร การเปลยนแปลงของหลอด
แอลอดและระยะเวลาทท าใหความเรวมอเตอรคงท 7. กดปม Forward สงเกตการกลบทางหมนของมอเตอร การเปลยนแปลงของหลอด
แอลอด 2.5 ผลการทดลอง
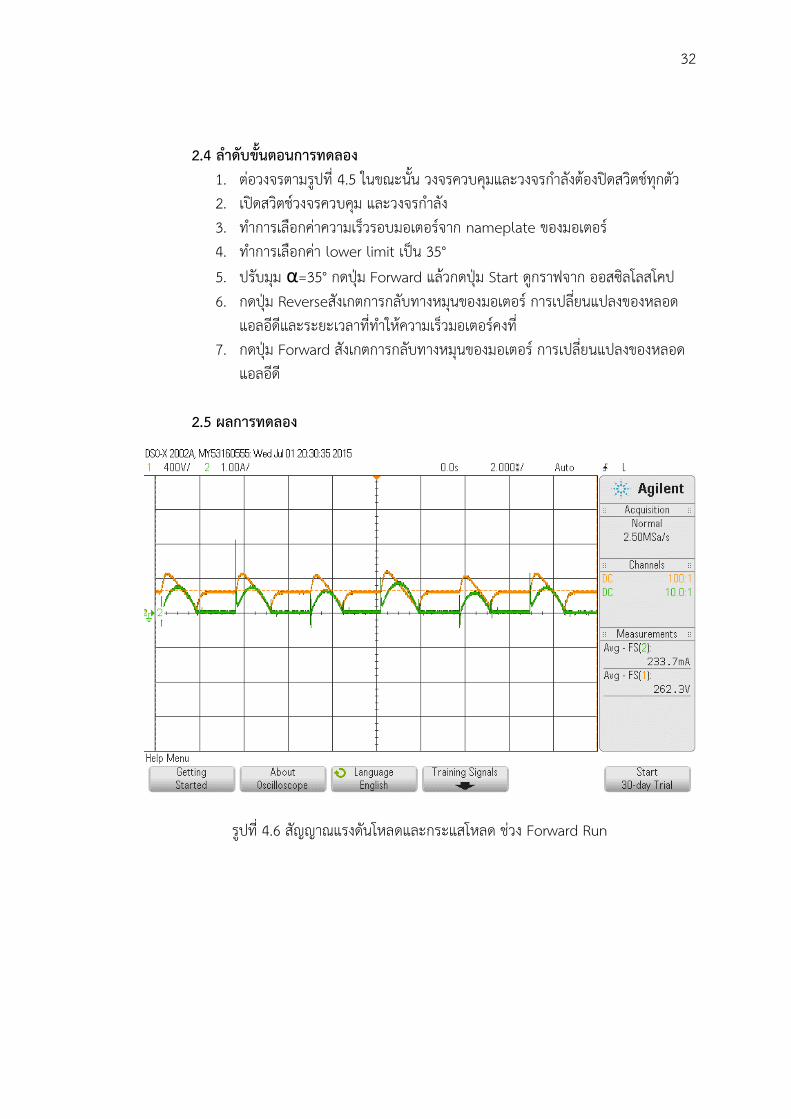
รปท 4.6 สญญาณแรงดนโหลดและกระแสโหลด ชวง Forward Run

33
รปท 4.7 สญญาณแรงดนโหลดและกระแสโหลด ชวง Forward breaking
รปท 4.8 สญญาณแรงดนโหลดและกระแสโหลด ชวง Reverse Run
34
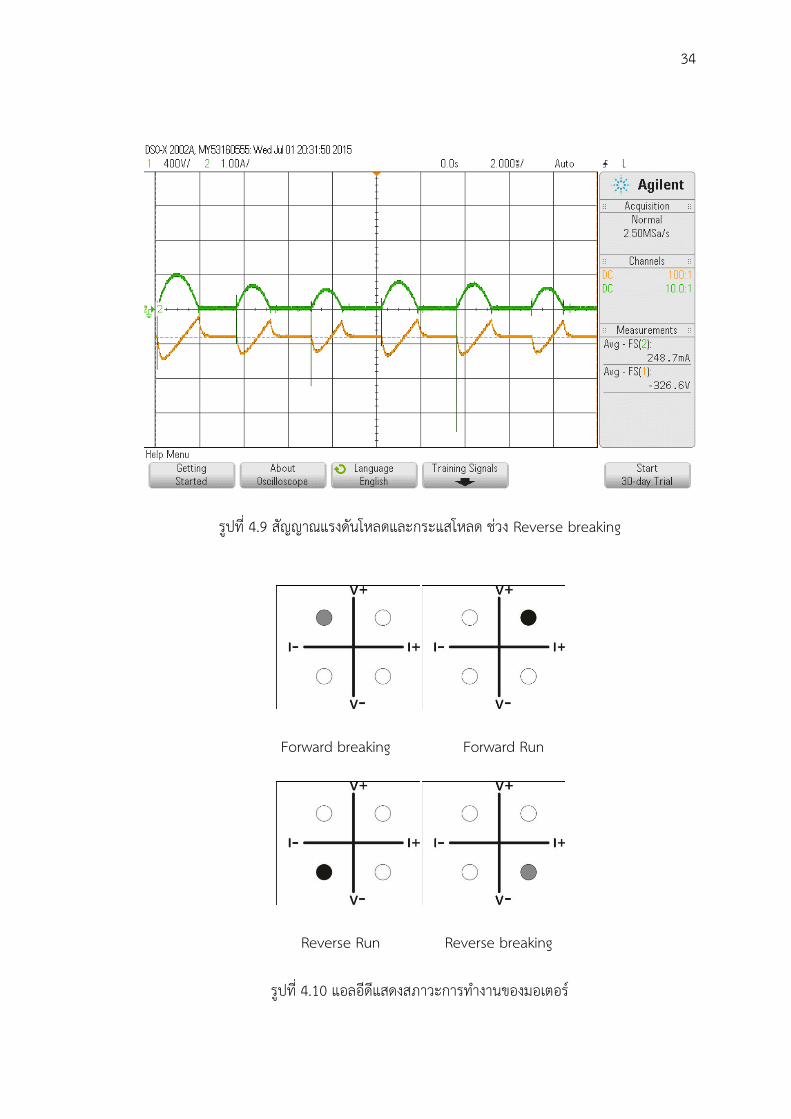
รปท 4.9 สญญาณแรงดนโหลดและกระแสโหลด ชวง Reverse breaking
Forward breaking Forward Run
Reverse Run Reverse breaking
รปท 4.10 แอลอดแสดงสภาวะการท างานของมอเตอร
35
จากรป 4.10 เมอสงเกตหลอดแอลอดแสดงทชดทดลอง เมอมอเตอรเรมหมนแบบฟอรเวรดหลอดแอลอดจะสวางทจตภาค1 และเมอกลบทางหมนเปนแบบรเวรส หลอดแอลอด จตภาค2 จะสวางชวครตอจากนน แอลอดจตภาคท 3 จะสวาง และาสงใหมอเตอรหมนแบบ ฟอรเวรดหลอดแอลอดจตภาค 4 จะสวางชวครตอจากนนแอลอดจตภาค1จะสวางจนกวาจะกลบทางหมนอกครง ซงแอลอดทง 4 หลอด แสดงงการท างานทง 4 จตภาค สรปผลการทดลอง จากการทดสอบในบทท4 เราสามารสรปผลการทดสอบชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยงกระแสควบคมไดสามเฟส ไดดงน การทดลองท 1: การทดสอบความเรวรอบมอเตอรโดยการปรบมม จากการทดลองการควบคมความเรวรอบของมอเตอร จะพบวาความเรวรอบมอเตอร คาแรงดนและกระแสของอารเมเจอรจะเพมหรอลดอยทการปรบมมม ทเราตองการควบคมความเรวมอเตอร การทดลองท 2: การทดสอบการกลบทางหมนของมอเตอร การกลบทางหมนของมอเตอรในการทดสอบครงนมอเตอรท างานแบบ 4 จตภาค คอมอเตอรสามารหมนและเบรกได โดยการเบรกใชแบบการเบรกคนพลงงานเขาสแหลงจายซงในการกลบทางหมนของมอเตอรสามารกลบทางหมนไดทนททนใดโดยตอเนอง การท างานแบบ 4 จตภาค คอ
จตภาค1 การหมน ฟอรเวรด จตภาค2 การเบรกการหมน ฟอรเวรด จตภาค3 การหมน รเวรส จตภาค4 การเบรกการหมน รเวรส โดยเราสามารทจะใหมอเตอรสามารเรมท างานทจตภาค1 หรอจตภาค3 กอนกได สวนจต
ภาค2 และจตภาค4 เปนผลมาจากการท างานของจตภาค1 และจตภาค 3 การทดสอบการกลบทางหมนน สามารกลบทางหมนแบบทนททนใด ภายในเวลา ประมาณ 0.5 วนาท และ ประมาณ 1.25 วนาท ทสามารท าใหความเรวคงท
บทท 5
สรปผลของโครงงาน
5.1 บทน า จากการทดสอบชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคดวยวงจรเรยงกระแสควบคมไดสามเฟสควบคมมอเตอรกระแสตรงขนาด 0.5 แรงมา สามารถควบคมระดบความเรวรอบของมอเตอรกระแสตรงไดตงแตเรมเดนจนถงความเรวสงสด ทงแบบฟอรเวรดและรเวรส การกลบทางหมนมอเตอรสามารถกลบทางหมนแบบทนททนใดไดอยางตอเนองพรอมทงแสดงการท างานทง 4 จตภาค
5.2 สรปผลโครงงาน โครงงานชด ชดทดลองการขบเคลอนมอเตอรกระแสตรง 4 จตภาคประกอบดวยชดวงจรก าลงซงมวงจรเรยงกระแส ทใชเอสซอาร ทงหมด 12 ตว และแอลอด แสดงสภาวะทง 4 จตภาคชดวงจรควบคม โดยใชไมโครคอนโทรลเลอรเปนวงจรจดชนวนเกตเอสซอาร ซงสามารถปรบคามมจดชนวนเกตไดตงแต 0°-120°และใชเปนวงจรกลบทางหมนแบบตอเนอง
5.3 ปญหาในการท าโครงงาน 5.3.1 การออกแบบลายวงจรของชดทดลองตองท าดวยความระมดระวงและตองใชโปรแกรมออกแบบCorel Draw ซงผจดท าไมมความรเลยจ าเปนตองศกษาจงท าใหใชระยะเวลานานในการออกแบบลายวงจร
5.3.2 เนองจากเกดสญญาณรบกวนไปท จอ LCD และตวควบคมท าใหโปรแกรมมการคางหรอท างานผดปกต จอแสดงผลรวน
5.3.3 พอรต PIC พอรตอนพตไมพอท าใหตองลดปมควบคมลง
5.4 ขอเสนอแนะในการพฒนาโครงงาน 5.4.1 ควรมระบบปองกนสญญาณรบกวนเพอปองกนสญญาณรบกวนท ไปจอ LCD และตวควบคม
5.4.2 ควรใชการควบคมแบบ PID เพอใหความเรวรอบขณะมโหลดมเสถยรภาพ 5.4.3 ควรม Relay ส าหรบตดสนามแมเหลกเมอมอเตอรหยดหมน
37
บรรณานกรม 1. ชยยงค แกวมงคล , นภทร วจนเทพนทร, อเลกทรอนกสก ำลง 1 (วงจรคอนเวอรเตอร), บรษท สยำมสปอรต ชนดเคท จ ำกด, 2540 2. ประจกษ สขอรำม และ สทธพร ยำทะโน. ชดควบคมมอเตอรกระแสตรงแบบสจตภำคโดยไมโคร คอนโรลเลอร. วทยำนพนธปรญญำวศวกรรมศำสตรบณฑต สำขำวศวกรรมไฟฟำ. มหำวทยำลย เทคโนโลยรำชมงคลลำนนำภำคพำยพ, 2543 3. พรจต ประทมสวรรณ,พนฐำนกำรขบเคลอนดวยอเลกทรอนกสก ำลง,ISBN , 2547 4. ศวะ หงษนภำ,หลกกำรประยกตใชงำนดซไดรฟ, บรษท กดวลลไดเรคชน จ ำกด, 2547 5. Gopal K. Dubay, Power semiconductor controller drives U.S.A, 1989
ภาคผนวก
39
Coad Microcontroller
#include <p18f4550.h> #include <delays.h> #include <timers.h> #include <portb.h> #pragma config PLLDIV = 5 #pragma config CPUDIV = OSC2_PLL3 #pragma config PBADEN = OFF #pragma config FOSC = HSPLL_HS #pragma config WDT = OFF #pragma config LVP = OFF #pragma config CP0 = ON #pragma config CP1 = ON #pragma config CP2 = ON #pragma config CP3 = ON #define Gate1 LATCbits.LATC0 #define Gate2 LATAbits.LATA2 #define Gate3 LATCbits.LATC1 #define Gate4 LATAbits.LATA3 #define Gate5 LATCbits.LATC2 #define Gate6 LATAbits.LATA4 #define Relay1 LATCbits.LATC6 #define Relay2 LATCbits.LATC7 #define Black_light LATDbits.LATD2 #define Delay_pulse Delay100TCYx(16); void InitializePeriperal(); void InterruptHandlerHigh(void); void InterruptVectorHigh(void); void sampling_B6_Full_Control(void); void sampling_M3_Half_Control(void); void sampling_Triac_AC_Voltage(void); void sampling_SCR_AC_Voltage(void);
40
void sampling_B6_Half_Control(void); void sampling_1P_SCR (void); void sampling_Select_Circuit(void); void Select_Circuit(void); void status_fw(void); void status_stop_fw(void); void status_rw(void); void status_stop(void); void stop_gate(void); void soft_start(void); void forward(void); void reward(void); void status_run(void); void showbutton(void); union unsigned char all; struct unsigned e0:1; unsigned e1:1; unsigned e2:1; unsigned e3:1; unsigned e4:1; unsigned e5:1; unsigned e6:1; unsigned e7:1; ; SC; union unsigned int all; struct unsigned char l; unsigned char h; ; ta;
41
union unsigned int all; struct unsigned char l; unsigned char h; ; tb; union unsigned int all; struct unsigned char l; unsigned char h; ; angle; union unsigned int all; struct unsigned char l; unsigned char h; ; select; struct unsigned a:1; unsigned b:1; unsigned c:1; unsigned SC1:1; unsigned SC2:1; unsigned SC3:1; unsigned display:1; unsigned tran:1; Myfg;
42
unsigned short long vx,vy,mul; unsigned char count,alpha,v0[3],count1; unsigned int angle_buff,angle_limit,angle1; unsigned int run = 0; unsigned int rew = 0; unsigned int fow = 1; unsigned int in_ang = 0; unsigned int update = 1; unsigned int b1_count = 0; unsigned int b2_count = 0; unsigned int b3_count = 0; unsigned int soft_s,soft,start; #pragma code InterruptVectorHigh = 0x08 void InterruptVectorHigh(void) _asm goto InterruptHandlerHigh _endasm #pragma code #pragma interrupt InterruptHandlerHigh void InterruptHandlerHigh(void) if(INTCONbits.RBIF) if (PORTBbits.RB5 == 0) Delay10KTCYx(150); if(run==1) run = 0; stop_gate(); else run = 1; // status_run();
43
Delay10KTCYx(150); b1_count++; if (PORTBbits.RB5 == 0) // foward if (PORTBbits.RB3 == 0) // foward if(run==1 && rew==1) run = 0; stop_gate(); soft_start(); run = 1; Delay10KTCYx(100); fow = 1; rew = 0; Delay10KTCYx(100); b2_count++; if (PORTBbits.RB4 == 0) // reverse if(run==1 && rew==1) run = 0; stop_gate(); soft_start(); run = 1; Delay10KTCYx(100); fow = 0; rew = 1; b3_count++; Delay10KTCYx(100);
44
if(run==1)// && (fow==1 || rew==1) if(PIR1bits.TMR2IF) PR2=150; T2CONbits.TMR2ON=0; Gate1=0; Gate2=0; Gate3=0; Gate4=0; Gate5=0; Gate6=0; PIR1bits.TMR2IF=0; if(INTCONbits.INT0IF) if(Myfg.a) T2CONbits.TMR2ON=0; INTCONbits.INT0IF=0; T0CONbits.TMR0ON=0; TMR0H=ta.h; TMR0L=ta.l; T0CONbits.TMR0ON=1; Myfg.a=0; INTCON2bits.INTEDG0=1; Gate1=0; Gate2=0; Gate4=0; Gate5=0; else T2CONbits.TMR2ON=0; INTCONbits.INT0IF=0; T0CONbits.TMR0ON=0; TMR0H=ta.h; TMR0L=ta.l; T0CONbits.TMR0ON=1; Myfg.a=1;
45
INTCON2bits.INTEDG0=0; Gate1=0; Gate2=0; Gate4=0; Gate5=0; if(INTCON3bits.INT1IF) if(Myfg.b) INTCON3bits.INT1IF=0; T1CONbits.TMR1ON=0; TMR1H=ta.h; TMR1L=ta.l; T1CONbits.TMR1ON=1; Myfg.b=0; INTCON2bits.INTEDG1=1; else INTCON3bits.INT1IF=0; T1CONbits.TMR1ON=0; TMR1H=ta.h; TMR1L=ta.l; T1CONbits.TMR1ON=1; Myfg.b=1; INTCON2bits.INTEDG1=0; if(INTCON3bits.INT2IF) if(Myfg.c) INTCON3bits.INT2IF=0; T3CONbits.TMR3ON=0; TMR3H=ta.h; TMR3L=ta.l; T3CONbits.TMR3ON=1;
46
Myfg.c=0; INTCON2bits.INTEDG2=1; else INTCON3bits.INT2IF=0; T3CONbits.TMR3ON=0; TMR3H=ta.h; TMR3L=ta.l; T3CONbits.TMR3ON=1; Myfg.c=1; INTCON2bits.INTEDG2=0; if(INTCONbits.TMR0IF) INTCONbits.TMR0IF = 0; T0CONbits.TMR0ON = 0; if(Myfg.a) Gate1=1; Gate6=1; T2CONbits.TMR2ON=1; else Gate4=1; Gate3=1; T2CONbits.TMR2ON=1; if(PIR1bits.TMR1IF) PIR1bits.TMR1IF = 0; T1CONbits.TMR1ON = 0; if(Myfg.b) Gate3=1; Gate2=1; T2CONbits.TMR2ON=1;
47
else Gate5=1; Gate6=1; T2CONbits.TMR2ON=1; if(PIR2bits.TMR3IF) PIR2bits.TMR3IF = 0; T3CONbits.TMR3ON = 0; if(Myfg.c) Gate5=1; Gate4=1; T2CONbits.TMR2ON=1; else Gate2=1; Gate1=1; T2CONbits.TMR2ON=1; sampling_B6_Full_Control(); void InitializePeriperal() TRISA = 0b11100011; //--pppppp TRISB = 0b11111111; //pppppppp TRISC = 0b00111000; //pp---ppp TRISD = 0b11111111; //pppppppp TRISE = 0b00000111; //-----ppp
48
//**************************LCD Display Start up ************************ Delay10KTCYx(200); //delay 0.25s Delay10KTCYx(200); //delay 0.25s Delay10KTCYx(200); //delay 0.25s Delay10KTCYx(200); //delay 0.25s //*************************LCD Display Start up *************************** //*****************************Initialize A/D******************************** ADCON1=0b00001101; //ADCON2=0b10111110; //ADCON1 = 0xFF; ADCON2 = 0xFF; CMCON = 0x07; //****************************Initialize A/D********************************* //***************************Initialize PWM******************************** //***************************Initialize PWM******************************** //***************************Initialize UART******************************** //***************************Initialize UART******************************** //******************** *****Initialize Timer0******************************** T0CON = 0b10000001; //**************************Initialize Timer0******************************** //**************************Initialize Timer1******************************** OpenTimer1(TIMER_INT_OFF & T1_16BIT_RW & T1_SOURCE_INT & T1_PS_1_4 & T1_OSC1EN_OFF); //**************************Initialize Timer1********************************
49
//**************************Initialize Timer2******************************** T2CON=2; PR2=150; //*************************Initialize Timer2******************************** //*************************Initialize Timer3******************************** OpenTimer3(TIMER_INT_OFF & T3_16BIT_RW & T3_SOURCE_INT & T3_PS_1_4); //*************************Initialize Timer3******************************** //***********************Initialize INTERRUPT****************************** INTCONbits.GIE=1; INTCONbits.PEIE=1; INTCONbits.INT0IE=1; //INTCONbits.TMR0IE=1; INTCON3bits.INT1IE=1; INTCON3bits.INT2IE=1; INTCONbits.RBIE=1; INTCON2bits.RBPU=0; PIE1bits.TMR2IE=1; //***********************Initialize INTERRUPT****************************** //****************************Initialize I2C********************************* //****************************Initialize I2C*********************************
50
void sampling_B6_Full_Control() ADCON0=0b00000011; //ADCON0=0xFF; while (ADCON0bits.GO_DONE) angle.h=ADRESH; angle.l=ADRESL; if(angle.all<=angle_limit) angle1=angle_limit; else angle1=angle.all; vy=(728*(unsigned short long)angle1)/1023; ta.all=62200-(vy*19); if(fow==1 && run ==1) forward();//soft_start(); if(rew==1 && run ==1) reward();//soft_start(); void soft_start(void) soft_s = ta.all; ta.all = 48364; //120 if (soft_s < 48364)ta.all = 48364; else ta.all = 48364; if (soft_s < 49517)ta.all = soft_s; else ta.all = 49517; Delay1KTCYx(250); Delay1KTCYx(250);//110 if (soft_s < 50670)ta.all = soft_s; else ta.all = 50670; Delay1KTCYx(250); Delay1KTCYx(250);//100 if (soft_s < 51823)ta.all = soft_s; else

51
ta.all = 51823; Delay1KTCYx(250); Delay1KTCYx(250);//90 if (soft_s < 52976)ta.all = soft_s; else ta.all = 52976; Delay1KTCYx(250); Delay1KTCYx(250);//80 if (soft_s < 54129)ta.all = soft_s; else ta.all = 54129; Delay1KTCYx(250); Delay1KTCYx(250);//70 if (soft_s < 55282)ta.all = soft_s; else ta.all = 55282; Delay1KTCYx(250); Delay1KTCYx(250);//60 if (soft_s < 56435)ta.all = soft_s; else ta.all = 56435; Delay1KTCYx(250); Delay1KTCYx(250);//50 if (soft_s < 57588)ta.all = soft_s; else ta.all = 57588; Delay1KTCYx(250); Delay1KTCYx(250);//40 if (soft_s < 58741)ta.all = soft_s; else ta.all = 58741; Delay1KTCYx(250); Delay1KTCYx(250);//30 if (soft_s < 59894)ta.all = soft_s; else ta.all = 59894;
52
Delay1KTCYx(250); Delay1KTCYx(250);//20 if (soft_s < 61047)ta.all = soft_s; else ta.all = 61047; Delay1KTCYx(250); Delay1KTCYx(250);//10 if (soft_s < 62200)ta.all = soft_s; else ta.all = 62200; Delay1KTCYx(250); Delay1KTCYx(250);//0 soft = 0; void stop_gate() Gate1=0; Gate2=0; Gate3=0; Gate4=0; Gate5=0; Gate6=0; Relay1 = 0; Relay2 = 0;

53
void main () InitializePeriperal(); Myfg.a=1; Myfg.b=1; Myfg.c=1; while(1) void forward(void) LATCbits.LATC7 = 0; LATCbits.LATC6 = 1; void resetfw(void) LATCbits.LATC7 = 0; LATCbits.LATC6 = 0; void reward(void) LATCbits.LATC6 = 0; LATCbits.LATC7 = 1;
54
ประวตผเขยน
ชอ ชอสกล นายจรเดช ปญญาเพชร วนเดอนปเกด เกดวนท 9 กมภาพนธ 2534 ภมล าเนา บานเลขท 156 หม 2
ต.หนองหอย อ.เมอง จ.เชยงใหม 50000
ตดตอ เบอรโทร 0871777340 E-mail [email protected]
ประวตการศกษา ระดบมธยมศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคเชยงใหม พ.ศ.2552 ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
55
ประวตผเขยน
ชอ ชอสนก นายวชญชรนทร สายวงษ เกดเดอนปเกด เกดวนท 26 สงหาคม 2534 ภมล าเนา บานเลขท 30 หม 3
ต.ปาบง อ.สารภ จ.เชยงใหม 50140
ตดตอ เบอรโทร 0992700648 E-mail [email protected]
ประวตการศกษา ระดบมธยมศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคเชยงใหม พ.ศ.2552 ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
56
ประวตผเขยน
ชอ ชอสกล นายอดศกด ออนใจ วนเดอนปเกด เกดวนท 23 มกราคม 2535 ภมล าเนา บานเลขท 282 หม 2
ต.พชย อ.เมอง จ.ล าปาง 52000
ตดตอ เบอรโทร 0918560325 E-mail [email protected]
ประวตการศกษา ระดบมธยมศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคล าปาง พ.ศ.2552 ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557





























