Embed Size (px)
Citation preview

TÍNH TOÁN THIẾT KẾ ROBOT
MỤC LỤC
1. Phân tích lựa chọn cấu trúc 2
a. Khái quát về robot 2
b. Cấu trúc động học robot 4
c. Các phương án thiết kế cấu trúc phù hợp cho các khâu khớp 7
d. Phân tích, chọn, thiết kế cấu trúc được chọn 8
2. Giải bài toán động học 12
a. Cho 1 quy luật chuyển động của các khâu robot 14
b. Tính vận tốc điểm tác động cuối E, vận tốc góc khâu thao tác 15
c. Đồ thị theo t 16
d. Xây dựng một quy luật chuyển động thao tác của robot 18
e. Khảo sát bài toán động lực học ngược 19
3. Tính toán lực 20
4. Tính toán động lực học 21
5. Thiết kế hệ dẫn động cho khớp thứ nhất 22
6. Thiết kế hệ thống điều khiển 23
a. Chọn luật điều khiển phù hợp 24
b. Sử dụng thư viện SimMechanis với mô hình robot Robot được xuất ra 25 từ solidwork
GVHD: ĐINH KHẮC TOẢN Page 1

TÍNH TOÁN THIẾT KẾ ROBOT
1. Phân tích lựa chọn cấu trúc
a. Khái quát về robot
Cùng với sự phát triển không ngừng của các nghành khoa học kỹ thuật đặc
biệt là lĩnh vực cơ khí, điện tử điều khiển và tin học đã làm cho robot ngày càng có
những chức năng gần giống như con người nhiều hơn, trong robot có các bộ phận
như cơ cấu chấp hành, hệ dẫn động và hệ thống điều khiển. Cơ cấu chấp hành cũng
như cánh tay chân con người, hệ dẫn động chính là các cơ bắp và được trái tim con
người tương ứng với động cơ đặt trong robot vận hành, hệ thống điều khiển là bộ
não điểu khiển mọi hoạt động của robot.
Cuộc sống ngày càng văn minh hiện đại, mức sống của người dân ngày càng được
nâng cao, đòi hỏi phải nâng cao năng suất và chất lượng của sản phẩm. Vì vậy càng
phải ứng dụng rộng rãi các phương tiện tự động hoá vào sản xuất nên càng tăng
GVHD: ĐINH KHẮC TOẢN Page 2
Não ( hệ thống điều khiển)
Bắp thịt, huyết quản(Các bộ truyền chuyển động)
Trái tim( Động cơ)
Xương ( Khung robot)
Mắt, mũi, tai(Các senser cảm ứng)
Tay (Bàn kẹp, mang dụng cụ gia công)
Da (Vỏ bọc robot)
Khớp (Các khớp động robot)

TÍNH TOÁN THIẾT KẾ ROBOT
nhanh nhu cầu về ứng dụng robot để tạo ra các hệ thống sản xuất tự động và linh
hoạt.Robot có những đặc điểm nổi trội đó là:
Có thể thực hiện công việc một cách bền bỉ, không biết mệt mỏi nên chất lượng sản
phẩm được giữ ổn định. Giá thành sản phẩm hạ do giảm được chi phí cho người lao
động. Ở nước ta trong những năm gần đây ở nhiều doanh nghiệp, khoản chi phí về
lương bổng cũng chiếm tỷ lệ khá cao trong giá thành sản phẩm, càng cần phải ứng
dụng công nghệ robot vào dây chuyền sản xuất.
Nhất là ở nhiều nơi hiện nay cũng cần ứng dụng công nghệ robot để cải thiện điều
kiện lao động vì trong thực tế sản xuất người lao động phải làm việc suốt buổi trong
môi trường bụi bặm, ẩm ướt, ồn ào…quá mức cho phép nhiều lần. Thậm chí phải
làm việc trong môi trường độc hại, nguy hiểm đến sức khoẻ con người.
Mặt khác, khi áp dụng công nghệ robot vào sản xuất ta cũng cần lưu ý và phân tích
kỹ toàn bộ hệ thống sản xuất sao cho phù hợp với các nguyên công và phù hợp với
tình hình sản xuất của nhà máy. Cần xét đến đầy đủ các chi phí phụ và hiệu quả
mang lại cho toàn bộ hệ thống. Khi xác định đưa robot vào hệ thống sản xuất thì
cũng cần phải xét xem khả năng liệu robot có thay thế được hay không và có hiệu
quả hơn không. Vì trong thực tế sản xuất cho thấy xu hướng thay thế hoàn toàn
bằng robot nhiều khi không hiệu quả bằng việc giữ lại một số công đoạn mà cần
phải có sự khéo léo của con người.
Kỹ thuật robot có ưu điểm quan trọng nhất là tạo nên khả năng linh hoạt hóa sản
xuất. Mà trong đó kĩ thuật robot và máy vi tính đã đóng vai trò quan trọng trong
việc tạo ra các dây chuyền tự động linh hoạt.Vì vậy trong những năm gần đây
không những chỉ các nhà khoa học mà cả các nhà sản xuất đã tập trung sự chú ý
vào việc hình thành và áp dụng các hệ sản xuất linh hoạt.
So với lúc mới ra đời, ngày nay công nghệ robot đã có những bước phát triển
vượt bậc. Đặc biệt là vào những năm 60 của thế kỉ trước, với sự góp mặt của máy
tính. Ở giai đoạn đầu người ta rất quan tâm đến việc tạo ra những cơ cấu tay máy
nhiều bậc tự do, được trang bị cảm biến để thực hiện những công việc phức tạp.
Ngày càng có những cải tiến quan trọng trong kết cấu các bộ phận chấp hành, tăng
độ tin cậy của các bộ phận điều khiển, tăng mức thuận tiện và dễ dàng khi lập trình.
GVHD: ĐINH KHẮC TOẢN Page 3

TÍNH TOÁN THIẾT KẾ ROBOT
Tăng cường khả năng nhận biết và xử lý tín hiệu từ môi trường làm việc để mở rộng
phạm vi ứng dụng cho robot. Trong tương lai số lượng lao động được thay thế ngày
càng nhiều vì một mặt giá thành robot ngày càng giảm do mặt hàng vi điện tử liên
tục giảm giá đồng thời chất lượng liên tục tăng. Mặt khác chi phí về lương và các
khoản phụ cấp cho người lao động ngày càng tăng. Robot ngày càng vạn năng hơn
để có thể làm được nhiều việc trên các dây chuyền.
Công đoạn lắp ráp thường chiếm tỷ lệ cao so với tổng thời gian sản xuất trên
toàn bộ dây chuyền. Công việc lại đòi hỏi phải cẩn thận, nhẹ nhàng tinh tế và chính
xác. Nên nếu là công nhân thì cần phải thợ có tay nghề cao và làm việc đơn điệu,
căng thẳng. Robot đã có mặt nhiều trên các công đoạn lắp ráp phức tạp do được
thừa hưởng kĩ thuật cảm biến, kĩ thuật tin học với những ngôn ngữ lập trình bậc cao.
Robot tự hành cũng sẽ phát triển mạnh trong tương lai, có thể đi được bằng
chân để thích hợp với mọi địa hình ví dụ như có thể tự leo bậc thang… Việc tạo ra
các cơ cấu chấp hành cơ khí vừa bền vững, nhẹ nhàng chính xác và linh hoạt như
chân tay người là đối tượng nghiên cứu chủ yếu.Kỹ thuật robot cũng từng bước áp
dụng các kết quả nghiên cứu về trí khôn nhân tạo và đưa vào ứng dụng trong công
nghiệp. Cải tiến và bổ xung các modul cảm biến và các modul phần mềm phù hợp
có thể cải tiến và thông minh hoá nhiều loại robot. Điều quan trọng là các cơ cấu
chấp hành của robot phải hoạt động chính xác.
b. Cấu trúc động học robot
Ta có thể khái quát định nghĩa robot theo cách nhìn của cơ học là một chuỗi
động, mỗi khâu được ghép với nhau bởi các khớp nối, hoạt động linh hoạt nhờ hệ
dẫn động và được điều khiển bằng hệ thống điều khiển.Dưới đây là một số hình
robot liên tục được ứng dụng nhiều trong các lĩnh vực:
Trong gia công cơ khí: thường sử dụng trong các máy hàn tự động, máy khoan,
trong các dây truyền lắp ráp, v…v…
Trong dây truyền sản xuất: Tham gia vào một số dây truyền sản xuất như gia công,
phun sơn, đóng gói bao bì, v…v…
Trong vận tải thường dùng để bốc xếp hàng hóa .
GVHD: ĐINH KHẮC TOẢN Page 4

Hình 1.3 Robot Puma
TÍNH TOÁN THIẾT KẾ ROBOT
Hình 1.4 robot Kuka
Hình 1.5 Laser Robotic. Hình 1.2 Robot Hipo
Trong bài tập lớn này em xin chọn mô hình robot Scara 4 bậc tự do RRTR.
SCARA là viết tắt của Selectively Compliance Assembly Robot Arm. Như cái tên
của nó, robot tuân thủ chỉ hướng dẫn cụ thể (X và Y) và có độ cao theo hướng khác
(Z), và do đó, đã được thiết kế chủ yếu cho tự động hóa của công trình lắp ráp. Hiện
nay, nó được sử dụng trong các nghành sản xuất khác nhau như là một robot đó là
rất hiệu quả không chỉ trong việc lắp ráp các công trình nhưng cũng có trong thành
phần mang công trình (chọn & đặt các tác phẩm) vì tốc độ xuất sắc của nó. Thông
thường robot scara loại RRTR được thực hiện dẫn động bởi động cơ bước,các khớp
động thường song song nhau.
Robot scara G10 của hãng espon
GVHD: ĐINH KHẮC TOẢN Page 5

TÍNH TOÁN THIẾT KẾ ROBOT
1.2 Bậc tự do của robot
Cơ cấu tay của robot phải được cấu tạo sao cho khâu cuối phải có vị trí và
theo một hướng nhất định nào đó và dễ dàng di chuyển dễ dàng trong vùng làm
việc. Muốn vậy cơ cấu tay của robot phải đạt được một số bậc tự do chuyển động.
Để tính số bậc tự do của robot thì ta có nhiều cách tính dưới đây ta đưa ra cách tính
dựa vào định lý Gruebler. Theo Gruebler thì bậc tự do f được tính theo công thức:
(1.1)
Trong đó :
: Là số bậc tự do của cơ cấu.
: Bậc tự do của một vật rắn không chụi liên kết trong không gian làm việc của
robot ( = 3 ứng với không gian làm việc trong mặt phẳng, = 6 ứng với không
gian làm việc trong không gian).
: Số khâu ( kể cả giá cố định).
: Số bậc tự do của khớp thứ i.
: Tổng số khớp của cơ cấu.
GVHD: ĐINH KHẮC TOẢN Page 6

TÍNH TOÁN THIẾT KẾ ROBOT
: Số bậc tự do thừa
Thông thường robot 3 bậc tự do đảm bảo được yêu cầu về không gian thao tác.
Theo yêu cầu đặt ra của bài toán, robot có hướng kẹp vật tùy ý nên ta tăng thêm
1 bậc tự do để đảm bảo độ linh hoạt về hướng thao tác của robot cho phù hợp với
đặc điểm làm việc của robot vận chuyển.
c. Các phương án thiết kế cấu trúc phù hợp cho các khâu khớp
Theo yêu cầu đầu bài, robot vận chuyển có hướng thao tác tùy ý nên ta chọn 4
bậc để đảm bảo độ linh hoạt khi hoạt động.
Sau đây là một số cấu trúc robot đề ra
Hình 1.1. Cấu trúc 1
GVHD: ĐINH KHẮC TOẢN Page 7

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 1.2. Cấu trúc 2
Hình 1.3 Cấu trúc 3
Hình 1.4. Cấu trúc 4
GVHD: ĐINH KHẮC TOẢN Page 8

TÍNH TOÁN THIẾT KẾ ROBOT
d. Phân tích, chọn, thiết kế cấu trúc được chọn
Ta lựa chọn sử dụng cấu trúc 4 do cấu trúc này có khâu 3 chuyển động tịnh tiến
đảm bảo độ linh hoạt về phương chiều hoạt động, khâu 4 chuyển động quay quanh
trục khâu 3 nên tay kẹp robot có độ kinh hoạt về hướng tác động khi cầm nắm vận
chuyển.
Khâu để
GVHD: ĐINH KHẮC TOẢN Page 9

TÍNH TOÁN THIẾT KẾ ROBOT
Khâu 1
Khâu 2
GVHD: ĐINH KHẮC TOẢN Page 10

TÍNH TOÁN THIẾT KẾ ROBOT
Khâu 3
Khâu 4 và tây kẹp
GVHD: ĐINH KHẮC TOẢN Page 11

TÍNH TOÁN THIẾT KẾ ROBOT
Tổng Thể robot
2. Giải bài toán động học
a. Cho 1 quy luật chuyển động của các khâu robot
a1= 25cm, a2=20 cm, d3= 20cm
Cho θ1= , θ2= ,
θ4= , d3= 0.1t
GVHD: ĐINH KHẮC TOẢN Page 12

TÍNH TOÁN THIẾT KẾ ROBOT
Xác định ma trận chuyển vị thành phần mô tả vị trí của khâu thứ i so với khâu thứ
i-1
Dạng tổng quát:
Quy ước viết tắt :
Ta có bảng thông số Danevit- Hatenberg của robot scara:
Bảng hệ tọa độ Danevit-Hatenberg
d A
1 0 a1 0
2 0 a2
3 0 0 0
GVHD: ĐINH KHẮC TOẢN Page 13

TÍNH TOÁN THIẾT KẾ ROBOT
4 0 0
Các ma trận Ai
Với quy luật của các khâu như đã cho ta tính được
GVHD: ĐINH KHẮC TOẢN Page 14

TÍNH TOÁN THIẾT KẾ ROBOT
Ma trận chuyển vị thuần nhất mô tả hướng và vị trí của các khâu:
Khâu 1 so với khâu cơ sở:
Khâu 2 so với khâu cơ sở:
Khâu 3 so với khâu cơ sở
GVHD: ĐINH KHẮC TOẢN Page 15

TÍNH TOÁN THIẾT KẾ ROBOT
Khâu 4 so với khâu cơ sở
Vậy tọa độ điểm E có dạng:
Với thông số quy luật các khâu đã cho ta tính được:
Ta tính được các ma trận:
GVHD: ĐINH KHẮC TOẢN Page 16

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 17

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 18

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 19

TÍNH TOÁN THIẾT KẾ ROBOT
dfadsfadfaf
GVHD: ĐINH KHẮC TOẢN Page 20

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 21

TÍNH TOÁN THIẾT KẾ ROBOT
Vị trí và vận tốc điểm tác động cuối E:
GVHD: ĐINH KHẮC TOẢN Page 22

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 23

TÍNH TOÁN THIẾT KẾ ROBOT
c. Đồ thị theo t
Đồ thị tọa độ điểm tác động cuối xE(t), yE(t),zE(t):
Đồ thị xE(t):
GVHD: ĐINH KHẮC TOẢN Page 24

TÍNH TOÁN THIẾT KẾ ROBOT
Đồ thị yE(t):
Đồ thị zE(t):
GVHD: ĐINH KHẮC TOẢN Page 25

TÍNH TOÁN THIẾT KẾ ROBOT
d. Xây dựng một quy luật chuyển động thao tác của robot
Vấn đề thiết kế quỹ đạo chuyển động liên quan mật thiết đến bài toán điều
khiển robot di chuyển từ vị trí này đến vị trí khác trong không gian làm việc. Đường
đi và quỹ đạo được thiết kế là các lượng đặt cho hệ thống điều khiển vị trí của robot.
Do đó độ chính xác của quỹ đạo sẽ ảnh hưởng đến chất lượng di chuyển của robot.
Thông thường, quỹ đạo ở dạng đa thức bậc cao sẽ đáp ứng được các yêu
cầu về vị trí, tốc độ, gia tốc ở mỗi điểm giữa 2 đoạn di chuyển.
Yêu cầu của thiết kế quỹ đạo là :
- Khâu chấp hành phải đảm bảo đi qua lần lượt các điểm trong không gian làm
việc hoặc di chuyển theo một quỹ đạo xác định.
- Quỹ đạo của robot phải là đường cong đảm bảo tính liên tục về vị trí trong
một khoảng nhất định.
- Không có bước nhảy về vận tốc, gia tốc.
GVHD: ĐINH KHẮC TOẢN Page 26

TÍNH TOÁN THIẾT KẾ ROBOT
- Quỹ đạo thường là đường cong thông thường.
Trên thực tế hiên nay có nhiều quỹ đạo là dạng đường cong dạng :
- Đa thức bậc 2 :x(t)=a+bt+ct2
- Đa thức bậc 3 : x(t)=a+bt+ct2+dt3
- Đa thức bậc cao : x(t)=a+bt+……..ktn
Trong bài tập lớn này em sử dụng dạng quỹ đạo là đa thức bậc 3 có dạng:
X(t)=a+bt+ct2+dt3
Thiết kế quỹ đạo đa thức bậc 3
Từ vị trí ban đầu và hướng của tay robot, sử dụng phương trình động học
ngược ta xác định các giá trị biến khớp tương ứng. Bài toán thiết kế quỹ đạo cho
khớp là xác định đường biểu diễn của vị trí khớp (góc quay của khớp quay hoặc
khoảng tịnh tiến của khớp tịnh tiến) theo thời gian khi di chuyển từ vị trí ban đầu qo
đến vị trí cuối cùng qc trong thời gian tc với q là biến khớp tổng quát. Quỹ đạo di
chuyển của khớp giữa 2 vị trí sẽ thỏa mãn 4 điều kiện: vị trí ban đầu và vị trí cuối
cùng, tốc độ tại vị trí ban đầu và vị trí cuối cùng. Do đó đa thức bậc 3 sẽ thích hợp
cho quỹ đạo chuyển động của khớp robot:
(2.1)
Với các điều kiện đầu, cuối là:
(2.2a)
GVHD: ĐINH KHẮC TOẢN Page 27

TÍNH TOÁN THIẾT KẾ ROBOT
(Với i là biến khớp, i=1,2,3)
Trong thực tế, tốc độ tại vị trí ban đầu và vị trí cuối cùng của khớp bằng không:
(2.2b)
Đạo hàm phương trình (3.1) ta có:
(2.3)
Sử dụng các điều kiện đầu và cuối (3.2) ta nhận được 4 phương trình sau:
(2.4)
Giải các phương trình trên ta được các hệ số:
GVHD: ĐINH KHẮC TOẢN Page 28

TÍNH TOÁN THIẾT KẾ ROBOT
Từ 4 hệ số trên ta sẽ có quỹ đạo dạng đa thức (3.1) rồi từ đó ta xác định vị trí của
các khớp tại thời điểm bất kỳ. Những giá trị đó là tín hiệu đặt cho bộ điều khiển vị
trí để truyển động khớp di chuyển đến vị trí tương ứng.
Ví dụ:
Bài toán: Thiết kế quỹ đạo chuyển động cho robot RRTR từ vị trí A đến vị trí
B trong khoảng thời gian 4s. Với điểm: A (45, 0 ,-20) điểm :
B (25√3
2, 32.5 ,−40)
Từ phương trình động học ngược ta tính được giá trị các biến khớp tại các điểm A,
B
Tại điểm A (45, 0 ,-20)
Tại điểm B (25√32
, 32.5 ,−40) suy ra
GVHD: ĐINH KHẮC TOẢN Page 29

TÍNH TOÁN THIẾT KẾ ROBOT
θ1 = 30o
θ2 = 60o
θ3 = 0o
θ4 = 90o
Theo (3.3) ta xác định được các hệ số của các khớp:
Khớp 1
1a0 = 1θ0 = 0 1a1 = 0, 1a2 = 3.6 1a3= -0.32
Suy ra: θ1(t)= 3.6t2 - 0.32t3
θ1’(t)= 7.2t - 0.96t2
θ1’’(t)= 7.2 – 1.92t
Khớp 2
2a0 = 2θ0 = 0 2a1 = 0, 2a2 = 7.2 2a3= -0.96
Ta có :
θ1(t)= 7.2t2 - 0.96t3
GVHD: ĐINH KHẮC TOẢN Page 30

TÍNH TOÁN THIẾT KẾ ROBOT
θ1’(t)= 14.4t - 2.88t2
θ1’’(t)= 14.4 – 5.76t
Khớp 3
3a0 = 2d0 = 0 3a1 = 0, 3a2 = 2.4 3a3= -0.32
Ta có :
θ1(t)= 2.4t2 - 0.32t3
θ1’(t)= 4.8t - 0.96t2
θ1’’(t)= 4.8 – 0.96t
Khớp 4
4a0 = 4θ0 = 0 4a1 = 0, 4a2 = 10.8 4a3= -1.44
Ta có :
θ1(t)= 2.4t2 - 1.44t3
GVHD: ĐINH KHẮC TOẢN Page 31

TÍNH TOÁN THIẾT KẾ ROBOT
θ1’(t)= 4.8t - 4.32t2
θ1’’(t)= 4.8 – 8.64t
e. Khảo sát bài toán động lực học ngược
Đầu vào của bài toán: xE=-30, yE=-30, zE=-20Đi tìm q1,q2,q3,q4 ( θ1, θ2, d3, θ4)Chương trình maple giải bài toán động học ngược
>
>
>
GVHD: ĐINH KHẮC TOẢN Page 32

TÍNH TOÁN THIẾT KẾ ROBOT
>
Kết quả:
θ1=-2.658696334 rad
θ2= 0.6840812318 rad
d3 =0
θ4 tùy ý
3. Tính toán lực
Các thông số vật lý của robot:
Chiều dài các khâu:
a1= 0.25 m
a2 =0.2 m
d3= 0.2 m
Khối lượng các khâu
m1= 6 Kg
m2= 4 Kg
m3= 3 Kg
m4= 0.5 Kg
GVHD: ĐINH KHẮC TOẢN Page 33

TÍNH TOÁN THIẾT KẾ ROBOT
Tọa độ trọng tâm của các khâu:
Thiết kế trên phần mềm solidworks. Ta xuất ra được tọa độ trọng tâm của chi tiết.
Viết theo hệ tọa độ khớp i của khâu thứ i. ta được:
Khâu 1:
1rc1 = [0, 0, 0.33241]T
Khâu 2:
2rc2= [0, 0, 0.125]T
Khâu 3:
3rc3=[0, 0, 0.03]T
Khâu 4:
4rc4=[0, 0, 0.33894]T
Lực tác dụng trên khâu cuối.
Do tính toán trong trường hợp tĩnh, mô hình robot gắp vật nặng 30 kg, lực tác động
theo mô hình trên chỉ có trọng lực của vật, có phương theo phương Z.
FE,4= [0, 0, mv x g]T= [0, 0, 30 x 9.81]T=[0, 0, 294.3 ]T (N)
Các momen tác động lên khâu cuối đều bằng 0.
Tiến hành tính toán lực tĩnh học cho robot scara.
Xét khâu 4:
GVHD: ĐINH KHẮC TOẢN Page 34

TÍNH TOÁN THIẾT KẾ ROBOT
Các ngoại lực tác động lên khâu 4:
Lực đã nêu ở trên.
Trọng lực:
P4=[0, 0, m4× g] = [0, 0, 0.5× 9.81] =[0, 0, 4.905] (N)
Ma trận định hướng của khâu 4:
0R4 = [C 12 C 4+S 12 S 4 S12 C 4−C 12 S 4 0S12 C 4−C 12 S 4 −C 12 C 4−S 12 S 4 0
0 0 −1]Ta có:
4rc4= [ 00
0.33894]0rc4= 0R4.4rc4=[C 12 C 4+S 12 S 4 S12 C 4−C 12 S 4 0
S12 C 4−C 12 S 4 −C 12 C 4−S 12 S 4 00 0 −1][ 0
00.33894 ]=[ 0
0−0.33894 ]
0r4=0R4.4r4=[C 12 C 4+S 12 S 4 S12 C 4−C 12 S 4 0S12 C 4−C 12 S 4 −C 12 C 4−S 12 S 4 0
0 0 −1][ 00
0.2]=[ 00
−0.2]
0~rc4=[ 0 0.33894 0−0.33894 0 0
0 0 0]0~r4=[ 0 0.2 0
−0.2 0 00 0 0]
Thay vào hệ tổng quát:
GVHD: ĐINH KHẮC TOẢN Page 35

TÍNH TOÁN THIẾT KẾ ROBOT
F3,4= [ 00
294.3+4.905 ]= [ 00
299.2]
Xét khâu 3:
Các lực tác động lên khâu 3:
Lực đã nêu ở trên.
Trọng lực P3=[ 00
m3× g]
=[ 00
3× 9.81]=[ 00
29.43](N )
Ma trận định hướng của khâu 3:
0R3= [C 12 −S 12 0S 12 C 12 0
0 0 −1]Ta có:
3r3=[ 00
d3 ]3rc3 =[0.09834
00.03 ]
0rc3=0R3.3rc3=[C 12 −S 12 0S 12 C 12 0
0 0 −1][ 00
0.5 d 3 ]=[ 00
−0.5 d 3]
GVHD: ĐINH KHẮC TOẢN Page 36

TÍNH TOÁN THIẾT KẾ ROBOT
0r3=0R3.3r3=[C 12 −S 12 0S 12 C 12 0
0 0 −1][ 00
d3 ]=[ 00
−d 3]3~rc3=[ 0 0.5 d 3 0
−0.5 d 3 0 00 0 0]
3~r3=[ 0 d 3 0−d 3 0 0
0 0 0]
Thay vào hệ tổng quát:
F
3,2=[ 00
299.2+29.43]=[ 00
328.63]
Xét khâu 2:
Các lực tác động lên khâu 2:
Lực đã nêu ở trên.
Trọng lực
P2= [ 00
−m2. g]=[ 00
−4 × 9.81]=[ 00
−39.24 ]GVHD: ĐINH KHẮC TOẢN Page 37

TÍNH TOÁN THIẾT KẾ ROBOT
Ma trận định hướng của khâu 2:
0R2=[C 12 −S 12 0S 12 C 12 0
0 0 −1]Ta có:
2rc2=[0.100 ]
2r2=[0.200 ]
0rc2= 0R2. 2rc2 [C 12 −S 12 0S 12 C 12 0
0 0 −1][0.100 ]=[0.1C 12
0.1 S120 ]
0r2= 0R2. 2r2 [C 12 −S 12 0S 12 C 12 0
0 0 −1][0.200 ]=[0.2C 12
0.2 S120 ]
0~rc2=[ 0 0 0.1C 120 0 −0.1C 12
−0.1C 12 0.1 C 12 0 ]0~r2=[ 0 0 0.2C 12
0 0 −0.2C 12−0.2C 12 0.2 C 12 0 ]
Thay vào hệ tổng quát:
F2,1=[ 00
39.24+328.63]=[ 00
367.88 ]
GVHD: ĐINH KHẮC TOẢN Page 38

TÍNH TOÁN THIẾT KẾ ROBOT
M2,1=[ 36.788 C 12−36.788 C 12
0 ]−[7.848C 127.848C 12
0 ] =
[− 28.94C 1244.636 C 12
0 ]Xét khâu 1:
Các lực tác động lên khâu 1:
Lực đã nêu ở trên..
Trọng lực
P1= [ 00
−m1. g]=[ 00
−6 ×9.81]=[ 00
−59.04 ]Ma trận định hướng của khâu 1:
0R1=[C 1 −S1 0S 1 C 1 00 0 1]
Ta có:
0rc1=[0.12500 ]
0r1=[0.2500 ]
0rc1= 0R1. 0rc1 [C 1 −S1 0S 1 C 1 00 0 1][0.125
00 ]=[0 .125 C 1−0.125 S 1
0.125 S 1+0.125 C 10 ]
0r1= 0R1. 1r1 [C 1 −S1 0S 1 C 1 00 0 1][0.25
00 ]=[0 .25 C 1−0.25S 1
0.25 S 1+0.25 C 10 ]
GVHD: ĐINH KHẮC TOẢN Page 39

TÍNH TOÁN THIẾT KẾ ROBOT
0~rc1=[ 0 0 0.125 S 1+0.125 C 10 0 −0.125 C 1−0.125 S 1
−0.125 S 1−0.125 C 1 0.125C 1+0.125 S1 0 ]0~r1=[ 0 0 0.25 S1+0.25 C 1
0 0 −0.25C 1−0.25S 1−0.25 S 1−0.25C 1 0.25C 1+0.25 S 1 0 ]
Thay vào hệ tổng quát:
F1,0=[ 00
59.24+328.63]=[ 00
387.67 ]M1,0=[ 96.875 S1+96.875 C 1+28.94 C 12
−96.875 C 1−96.875 S 1−44.636 C 120 ]
Tính toán lực tĩnh lớn nhất tại các khớp:
Qua tính toán tĩnh học ở trên nhận thấy momen tại các khớp 3 và khớp 4 đếu bằng 0
Lực tại khớp 3 (khớp tịnh tiến) có giá trị cố định :
F3,2 ¿ [ 00
328.63]Khảo sát momen tĩnh học tại khớp 2 (khớp quay):
M2,1= [− 28.94 C 1244.636 C 12
0 ]F2,1=[ 0
0367.88]
Giá trị của Momen tại khớp 2:
M2= √ Mx2+ My2+Mz2=53.19676772
GVHD: ĐINH KHẮC TOẢN Page 40

TÍNH TOÁN THIẾT KẾ ROBOT
Khảo sát tại khớp 1 (khớp quay):
F1,0=[ 00
59.04+328.63]=[ 00
387.88]M1,0=[ 96.875 S1+96.875 C 1+28.94 C 12
−96.875 C 1−96.875 S 1−44.636 C 120 ]
Giá trị của Momen tại khớp 1:
M1= √ Mx2+ My2+Mz2 = √21559.42735+3759.0625 S 1C 1+11214.25 C 12
Nhận thấy giá trị của momen tại khớp 1 là một hàm số theo biến khớp θ1,θ2. Dễ
dàng thấy được giá trị lớn nhất của hàm số trên đạt được khi θ1=θ2. Hay nói cách
khác , cấu hình của robot lúc đó góc giữa khâu 1 và khâu 2 đang bằng 180 độ, cánh
tay đang vươn ra xa nhất. Giá trị momen lúc đó sẽ là :
M1= √21559.42735+3759.0625+11214.25=365327,3985 (N/m)
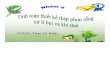
GVHD: ĐINH KHẮC TOẢN Page 41

z2,z3,z4
x4
x3
x2
x1
z1Zoo
Xo
L1
L2 L3
L4
G1
G2
G3
G4
TÍNH TOÁN THIẾT KẾ ROBOT
4. Tính toán động lực học
Chọn tọa độ suy rộng là :
GVHD: ĐINH KHẮC TOẢN Page 42

TÍNH TOÁN THIẾT KẾ ROBOT
Bảng mô tả vị trí trọng tâm, khối lượng, momen quán tính khối của từng khâu của
robot :
Khâu Vị trí trọng tâm so
với tọa độ gắn trên
khâu
Khối
lượng
Momen quán tính khối từng khâu
xGi yGi ZGi Ixx Iyy Izz Ixy Ixz Iyz
1 -a1+L1 0 0 M1 I1x I1y I1z 0 0 0
2 -a1+L2 0 0 M2 I2x I2y I2z 0 0 0
3 0 0 -L3 M3 I3x I3y I3z 0 0 0
4 0 0 -L4 M4 I4x I4y I4z 0 0 0
Theo kết quả của phần tính toán động học thuận ta có các ma trận DH biến đổi các
khâu về khâu cơ sở như sau :
GVHD: ĐINH KHẮC TOẢN Page 43

TÍNH TOÁN THIẾT KẾ ROBOT
Từ các ma trận Ti (i=1,2,3,4), ta xác định được tọa độ khối tâm của các khâu đối
với hệ tọa độ R0.
Vị trí khối tâm của khâu thứ nhất:
(3.1)
Đạo hàm biểu thức trên theo thời gian ở trong hệ quy chiếu cố định ta được vận tốc
khối tâm
Suy ra vận tốc khối tâm khâu thứ nhất:
GVHD: ĐINH KHẮC TOẢN Page 44

TÍNH TOÁN THIẾT KẾ ROBOT
(3.2)
Ma trận Jacobi tịnh tiến của khâu thứ nhất:
(3.3)
Vị trí khối tâm của khâu thứ 2:
(3.4)
Vận tốc khối tâm của khâu thứ 2:
GVHD: ĐINH KHẮC TOẢN Page 45

TÍNH TOÁN THIẾT KẾ ROBOT
(3.5)
Ma trận Jacobi tịnh tiến của khâu thứ 2:
(3.6)
Vị trí khối tâm của khâu thứ 3:
(3.7)
Vận tốc khối tâm của khâu thứ 3:
GVHD: ĐINH KHẮC TOẢN Page 46

TÍNH TOÁN THIẾT KẾ ROBOT
(3.8)
Ma trận Jacobi tịnh tiến của khâu thứ 3:
(3.9)
Vị trí khối tâm của khâu thứ 4:
(3.10)
GVHD: ĐINH KHẮC TOẢN Page 47

TÍNH TOÁN THIẾT KẾ ROBOT
Vận tốc khối tâm của khâu thứ 4:
(3.11)
Ma trận Jacobi tịnh tiến của khâu thứ 4:
(3.12)
Từ các ma trận Ti ta suy ra được các ma trận cosin chỉ hướng của các khâu là:
Ma trận cosin chỉ hướng của khâu thứ nhất:
GVHD: ĐINH KHẮC TOẢN Page 48

TÍNH TOÁN THIẾT KẾ ROBOT
Ma trận cosin chỉ hướng của khâu thứ 2:
Ma trận cosin chỉ hướng của khâu thứ 3:
Ma trận cosin chỉ hướng của khâu thứ 4:
Toán tử sóng véc-tơ vận tốc góc khâu thứ nhất:
(3.13)
GVHD: ĐINH KHẮC TOẢN Page 49

TÍNH TOÁN THIẾT KẾ ROBOT
Suy ra vec-to vận tốc góc trọng hệ R0 là:
(3.14)
Ma trận Jacobi quay của khâu thứ nhất:
(3.15)
Toán tử sóng véc-tơ vận tốc góc khâu thứ 2:
(3.16)
Suy ra:
GVHD: ĐINH KHẮC TOẢN Page 50

TÍNH TOÁN THIẾT KẾ ROBOT
(3.17)
Ma trận Jacobi quay của khâu thứ 2:
(3.18)
Toán tử sóng của véc-tơ vận tốc góc khâu thứ 3:
(3.19)
Suy ra:
GVHD: ĐINH KHẮC TOẢN Page 51

TÍNH TOÁN THIẾT KẾ ROBOT
(3.20)
Ma trận Jacobi quay của khâu thứ 3:
(3.21)
Toán tử sóng của véc-tơ vận tốc góc khâu thứ 4:
(3.22)
(3.23)
Ma trận Jacobi quay của khâu thứ 4:
GVHD: ĐINH KHẮC TOẢN Page 52

TÍNH TOÁN THIẾT KẾ ROBOT
(3.24)
Các ma trận momen quán tính của các khâu, tính đối với các hệ tọa độ đi qua khối
tâm tương ứng và có các trục song song với các trục của hệ tọa độ Ri
Đối với khâu thứ nhất:
(3.25)
Đối với khâu thứ 2:
(3.26)
GVHD: ĐINH KHẮC TOẢN Page 53

TÍNH TOÁN THIẾT KẾ ROBOT
Đối với khâu thứ 3:
(3.27)
Đối với khâu thứ 4:
(3.28)
Ma trận khối lượng xác định
GVHD: ĐINH KHẮC TOẢN Page 54

TÍNH TOÁN THIẾT KẾ ROBOT
Ma trận C xác định theo công thức : nên ta có :
Biểu thức động năng của hệ có dạng :
(3.29)
Biểu thức thế nắng của hệ có dạng :
(3.30)
GVHD: ĐINH KHẮC TOẢN Page 55

TÍNH TOÁN THIẾT KẾ ROBOT
Đạo hàm biểu thức theo qi ta sẽ thu được các lực suy rộng có thế như sau :
Nếu đưa vào thành phần lực cản nhớt ở khớp động thì hàm hao tán có dạng :
Đạo hàm biểu thức theo ta sẽ thu được các lực cản nhớt (là thành phần lực
không thế) như sau:
(3.31)
Gọi là các lực (nếu đặt tại khớp tịnh tiến ) hoặc ngẫu lực (nếu nó đặt tại khớp
quay) trực tiếp làm cho khớp chuyển động . Như vậy ta ký hiệu véc tơ lực động cơ
tạo nên dịch chuyển ở các khớp động là :
(3.32)
Thay vào phương trình :
GVHD: ĐINH KHẮC TOẢN Page 56

TÍNH TOÁN THIẾT KẾ ROBOT
Ta thu được hệ phương trình chuyển động vi phân của robot như sau :
Nếu viết dưới dạng ma trận thì thu được hệ phương trình như sau:
(3.33)
Mô phỏng một số bài toán đông lực học bằng phần mềm maple
Bài toán thuận
Cho biết , các thông số động học của robot đã biết trước, ta cần tìm các quy
luật chuyển động của các khớp tương ứng.
Giải hệ phương trình (*) phía trên bằng Maple với các thông số đầu vào như sau:
Điều kiện đâu :
Các thông số động học :
a1 = 0,5m ; a2 = 0,4m ; d4 = 0,1m ; g =9,81m/s2
L1 = 0,25m ; L2 = 0,2m ; L4 = 0,05m
b1 = 0,5; b2 = 0,5; b3 = 0,5; b4 = 0,5;
GVHD: ĐINH KHẮC TOẢN Page 57

TÍNH TOÁN THIẾT KẾ ROBOT
m1 = 10,238 kg m2 = 3,606 kg m3 = 2,134 kg
m4 = 0,511 kg
Các thông số động lực học :
I1x = 1,980 ; I1y = 2,081 ; I1z = 0,238 (kg.m2)
I2x = 0,011 ; I2y = 0,104; I2z = 0,107;
I3x = 0,005 ; I3y = 0,040; I3z = 0,041;
I4x = 0,081 ; I4y = 0,081 ; I4z = 0,000;
Kết quả mô phỏng trong khoảng thời gian t = [0,2.5] như sau :
GVHD: ĐINH KHẮC TOẢN Page 58

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 59

TÍNH TOÁN THIẾT KẾ ROBOT
1.
GVHD: ĐINH KHẮC TOẢN Page 60

TÍNH TOÁN THIẾT KẾ ROBOT
Bài toán ngược
Cho quy luật của X(t) như sau, xét trong khoảng thời gian T = 4s
auk hi giải bài toán động lực học ngược, ta sẽ tìm được q(t),dạo hàm q(t) theo t ta sẽ tìm được vận tốc, gia tốc tương ứng của biến khớp. Thay vào phương trình vi phân chuyển động (3.33) ta sẽ tìm được Lt. Tiến hành mô phỏng số ta được:
GVHD: ĐINH KHẮC TOẢN Page 61

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 62

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 63

TÍNH TOÁN THIẾT KẾ ROBOT
5. Thiết kế hệ dẫn động cho khớp thứ nhất
Thông số đầu vào
Mô men lớn nhất Mmax = 365,32 Nm = 365320 Nmm
Vận tốc góc khâu 1 lớn nhất wmax = 30 vòng/ phút = π (rad/s)
Tính toán
Tính sơ bộ công suất
Công suất của khâu 1
GVHD: ĐINH KHẮC TOẢN Page 64

Động cơ
Hộp giảm tốc
Khâu 1
TÍNH TOÁN THIẾT KẾ ROBOT
P1= T.w= 365,32. π =1147.687 W = 1,148 kW
Công suất sơ bộ của trục động cơ
Pdc=P1
η
Với: η=η1 . η2 .η3 . η4 .. .
Trong đó ηi là hiệu suất của các bộ truyền và các cặp ổ lăn trong hệ dẫn động.
Tính toán sơ bộ hệ dẫn động khâu 1 gồm có 2 bộ truyền bánh răng trụ (hiệu suất η1 ), 3 cặp ổ lăn (hiệu suất η2 ), Ta tra bảng 2.3[1], ta được:
η 1 = 0,97, η 2= 0.995
Ta có: η = η 12 η 2
3=0.956
Do đó công suất sơ bộ động cơ:
Pđc= P 1η
=1.1480.956
=1,2 Kw
Tính chọn động cơ
Theo phụ lục bảng P1.3 sách tính toán thiết kế hệ dẫn động cơ khí ta chọn được động cơ
- Model : 4A100L8Y3
GVHD: ĐINH KHẮC TOẢN Page 65

TÍNH TOÁN THIẾT KẾ ROBOT
- Tốc độ vòng quay đồng bộ: 750 vòng/ phút- Vận tốc quay 698 vòng / phút- Công suất động cơ: 1.5 Kw- Cosφ = 0.65
-TmaxTdn
=1,7
-
Tính toán và phân phối tỷ số truyền
Với động cơ vừa chọn được, ta có tỷ số truyền tổng
uΣ= 75030
=25
Với tỉ số truyền thấp nên ta sẽ chọn hộp giảm tốc bánh răng trụ răng thẳng 2 cấp. Trong quá trình tính toán ta sẽ chỉ tính toán cho 1 cặp bánh răng do đây là bộ truyền 2 cấp giống nhau có cùng tỉ số truyền giữa cấp nhanh và cấp chậm.
Sơ đồ
GVHD: ĐINH KHẮC TOẢN Page 66

TÍNH TOÁN THIẾT KẾ ROBOT
Thông số đầu vào
Công suất trên trục ra (tay quay): P1=1,2 kW
Momen của trục ra: T1 =365320 Nmm
Tốc độ quay trục ra: n1=30 vòng/phút
Tỷ số truyền u=u1.u2=5.5=25
Chọn vật liệu
Do không có yêu cầu gì đặc biệt và theo quan điểm thống nhất hóa trong thiết kế, ở đây chọn vật liệu 2 cấp bánh răng như sau:
Bánh nhỏ: Thép 45 tôi cải thiện đạt độ rắn HB241…285, σb1=850 Mpa, σch1= 580 Mpa
Bánh lớn: Thép 45 tôi cải thiện đạt độ rắn HB192…240, σb2=750 Mpa, σch2= 450 Mpa
Xác định ứng suất cho phép:
Theo bảng 6.2 với thép 45 tôi cải thiện đạt độ rắn HB180…350
σoHlim= 2HB + 70 , SH= 1,1, σo
Flim= 1,8HB, SF= 1.75
Chọn độ rắn bánh răng nhỏ HB1=245, bánh răng lớn HB2=230 khi đó:
σoHlim1=2HB + 70= 2.245+70=560 Mpa
σoFlim1=1,8HB=1,8.245 =441 Mpa
σoHlim2=2HB + 70= 2.230+70= 530 Mpa
σoFlim2=1,8HB=1,8.230=414 Mpa
Theo công thức (6.5) tài liệu
NHo= 30H2,4HB do đó
NHo1=30.2452,4= 1,6. 107
NHo2=30.2302,4= 13.9.107
Theo công thức (6.7) tài liệu
NHE=60cΣ(Ti/Tmax)3.niti
NHE2=60c.n1/u1Σ ti Σ (Ti/Tmax)3.ni.ti
GVHD: ĐINH KHẮC TOẢN Page 67

TÍNH TOÁN THIẾT KẾ ROBOT
Thay số vào ta tính được
NHE2=6,05.107 > NHo2 do đó KHL2=1
Suy ra NHE1 > NHo1
Do đó KHL1=1
Vậy theo ct (6.1a) tính được sơ bộ
[σH] = σHlim.KHL/SH
[σH]1=560.1/1,1=509 Mpa
[σH]2=530.1/1,1=481,8 Mpa
Tính toán bộ truyền
Tính sơ bộ khoảng cách trục:
Thay số ta tính và chọn được:
aw1= 85
Các thông số ăn khớp
m=(0,01...0.02)aw= (0.01…0.02).85=0.85…1.7
Chọn m = 1,5
Z1= 2aw/[m(u+1)]=2.85/[1,5(5+1)]= 18,89
Chọn Z1=19
Z2=u.Z1=5.19= 95
Do đó aw= m.(Z1+Z2)/2=1,5.(19+95)/2=85,5 mm
Lấy aw= 90 mm do đó cần dịch chỉnh để tăng khoảng cách trục từ 85,5 lên 90
GVHD: ĐINH KHẮC TOẢN Page 68

TÍNH TOÁN THIẾT KẾ ROBOT
Hệ số dịch tâm y= aw/m-0,5(Z1+Z2)= 90/1,5-0,5.(19+95)= 3 mmky=1000y/Zt = 1000.0,5/(19+95)= 4,386
Theo bảng 6.10a tài liệu ta tra được
kx= 0,05
Hệ số giảm đỉnh răng:
Δy= kx.Zt/1000 = 0,05.(19+95)/1000=0,00057
Tổng hệ số dịch chỉnh :
x = y+ Δy=3 +0,00057 =3,00057bw=88(σH/[σH])2= 35
Các thông số và kích thước bộ truyền
Khoảng cách trục lăn aw 90
Khoảng cách trục chia
a 85,5
Đường kính chia bánh nhỏ
d1 28,5
Đường kính chia bánh lớn
d2 142,5
Modul m 1,5
Tỷ số truyền u 5
Số răng bánh răng nhỏ
Z1 19
Số răng bánh răng lớn
Z2 95
GVHD: ĐINH KHẮC TOẢN Page 69

TÍNH TOÁN THIẾT KẾ ROBOT
Hệ số dịch chỉnh x 3,00057
Chiều rộng vành răng bw 35
Chọn sơ bộ ổ lăn
Dựa vào đường kính sơ bộ các trục, và điều kiện sử dụng bánh răng trụ răng thẳng ta chọn loại ổ lăn: ổ bi đỡ cỡ trungSử dụng phần mềm solid work chúng em đã chọn được ổ lăn:
GVHD: ĐINH KHẮC TOẢN Page 70

TÍNH TOÁN THIẾT KẾ ROBOT
Sử dụng phần mềm solidwork chúng em đã vẽ được hôp giảm tốc và động cơ
Động cơ
Hộp giảm tốc
GVHD: ĐINH KHẮC TOẢN Page 71

TÍNH TOÁN THIẾT KẾ ROBOT
6. Thiết kế hệ thống điều khiển
a. Chọn luật điều khiển phù hợp
Khi thiết kế thống điều khiển ta có thể bỏ qua động học của cơ cấu chấp hành,quán tính của động cơ và bộ biến đổi.Như vậy từ chức năng của bộ điều khiển là tạo ra một moomen cần thiết để truyền động khớp robot đảm bảo khớp robot luôn bám theo vị trí đặt .
Ta chọn thiết kế hệ theo hệ thống phản hồi trong không gian khớp
Hình 6.1 Sơ đồ tổng quát của hệ thống điều khiển phản hồi
Luật điều khiển :
GVHD: ĐINH KHẮC TOẢN Page 72

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.2 Sơ đồ cấu trúc hệ thống điều khiển robot với bộ điều khiển PD
Ta có phương trình động lực học : , gọi
H(q)=M(q)tránh nhầm với M là vector momen và ,
tiếp đến ta coi robot không chịu tác dụng của ngoại lực vì luật điều khiển bám quỹ
đạo như vậy phương trình động lực học được rút gọn như sau:
Luật điều khiển :
(6.1)
Trong đó : - ma trận đường chéo các hệ số khuếch đại của từng khớp riêng biệt.
-ma trận đường chéo các hệ số khuếch đại đạo hàm của từng khớp riêng biệt. Với luật điều khiển này đã giả thiết thành phần momen trọng lực G(p) đã được bù hoàn toàn. Hệ thống điều khiển với cấu trúc bộ điều khiển như trên, ổn định tuyệt đối toàn cục. Thực vậy chọn hàm Liapunov có dạng như sau:
(6.2) Hàm VL biểu thị tổng năng lượng của hệ thống robot: Thành phần chứa Kp tỷ lệ với năng lượng đầu vào, thành phần sau là động năng của robot mà Kp và H là các ma trận có hệ số dương .Nên hàm VL> 0 với q khác qd. Tính đạo hàm cấp 1 của VL ta nhận được:
GVHD: ĐINH KHẮC TOẢN Page 73

TÍNH TOÁN THIẾT KẾ ROBOT
Do tính chất đối xứng của các thành phần , , ta rút gọn được
Từ phương trình động lực học với giả thiết không có thành phần momen trọng lực G(q), nhận được phương trình sau :
Sử dụng thuộc tính của phương trình động lực học và áp dụng luật điều khiển (6.1) ta có
Trong đó: .
Do ma trận là ma trận đối xứng ngược =>
(6.3)
Từ (6.2) ,(6.3) cho thấy rằng, mức độ dương của VL phụ thuộc vào Kp; mức độ
âm của phụ thuộc vào Kd . Do đó tăng tốc độ hội tụ bằng tăng giá trị Kd. Nâng cao độ chính xác tinh của hệ thống điều khiển đạt được bằng tăng hệ số Kp của khâu khuếch đại. Tuy nhiên ,Kp và Kd quá lớn sẽ làm giảm độ ổn định và chất lượng quá trình quá độ như độ quá điều chỉnh , thời gian quá độ tăng.
b. Mô phỏng bằng Matlab
Sử dụng thư viện SimMechanis với mô hình robot Robot được xuất ra từ solidwork
GVHD: ĐINH KHẮC TOẢN Page 74

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.3 mô hình mô phỏng
Từ mô hình bản vẽ lắp của mô hình robot RR này ta xuất sang file *.xml rồi dùng matlab đọc xuất ra file dưới dạng simulink, rồi thiết kếdưới dạng các khối của hệ thống điều khiển ma trận Jacobien chuyển vị.
Hình 6.4 Sơ đồ khối điều khiển ma trận jacobien chuyển vị
Các khối con nhỏ như sau :
GVHD: ĐINH KHẮC TOẢN Page 75

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.5 khối PD
Trong khối robot RR phần quan trọng nhất là phần xuất từ soid sang có sơ đồ khối như sau:
GVHD: ĐINH KHẮC TOẢN Page 76

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.5 Khối con robot xuất ra từ Solidwork
Với quỹ đạo của các khớp đã thiết lập trong phần thiết lập quỹ đạo
Ta chọn các hệ số khuếch đại tỉ lệ và đạo hàm được lựa chọn như sau :
,
Trong đó :
qd, vd là tín hiệu quỹ đạo đặt và vận tốc đặt vào các khớp của robot đươc thiết lập trong phần thiết lập quỹ đạo
q, v là các tín quỹ đọa và vận tốc phản hồi lại từ robot(quỹ đạo thực)
ở đây ta sử dụng các khối:
+khối Gain dùng để khếch đại các tín hiệu đầu vào
+khối mux chập các tín hiệu đơn thành các tín hiệu tổng hợp và tách thành nhiều tín hiệu
GVHD: ĐINH KHẮC TOẢN Page 77

TÍNH TOÁN THIẾT KẾ ROBOT
+khối input, ouput đầu vào và ra của tín hiệu
+khối hàm biểu diễn một hàm toán học khi có tín hiệu đi vào là các biến và tín hiệu đầu ra là giá trị của hàm
qd 1=(7.2∗u (1)2−0.96∗u (1)3)∗pi /180;
qd 2=(3.6*u(1)^2-0.48*u(1)^3)*pi/180
qd 3=(7.2*u(1)^2-0.96*u(1)^3)*pi/180
vd 1=(14.4*u(1)-2.88*u(1)^2)*pi/180
vd 2=(7.2*u(1)-1.44*u(1)^2)*pi/180
vd 3=(14.4*u(1)-2.88*u(1)^2)*pi/180
+ khối scope hiển thị tín hiệu đầu ra của quá trình mô phỏng theo thời gian.
+ khối thời gian đặt giá trị bằng 8(s)
Hình 6.6 Sơ đồ hệ thống
Kết quả mô phỏng:
GVHD: ĐINH KHẮC TOẢN Page 78

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.7
Hình 6.8 Sai số biến khớp theo thời gian
GVHD: ĐINH KHẮC TOẢN Page 79

TÍNH TOÁN THIẾT KẾ ROBOT
Hình 6.9 Vị trí các khớp theo thời gian
Hình 6.10 Vận tốc các khớp theo thời gian
GVHD: ĐINH KHẮC TOẢN Page 80

TÍNH TOÁN THIẾT KẾ ROBOT
ContentsMỤC LỤC.............................................................................................................................1
1. Phân tích lựa chọn cấu trúc.............................................................................................2
a. Khái quát về robot............................................................................................................2
Mắt, mũi, tai..........................................................................................................................2
b. Cấu trúc động học robot..................................................................................................4
1.2 Bậc tự do của robot........................................................................................................6
c. Các phương án thiết kế cấu trúc phù hợp cho các khâu khớp.........................................7
d. Phân tích, chọn, thiết kế cấu trúc được chọn...................................................................8
2. Giải bài toán động học...................................................................................................12
3. Tính toán lực..................................................................................................................31
4. Tính toán động lực học..................................................................................................39
Mô phỏng một số bài toán đông lực học bằng phần mềm maple......................................48
Bài toán thuận....................................................................................................................48
5. Thiết kế hệ dẫn động cho khớp thứ nhất.......................................................................60
6. Thiết kế hệ thống điều khiển..........................................................................................68
Do tính chất đối xứng của các thành phần , , ta rút gọn được.....................69
Sử dụng thư viện SimMechanis với mô hình robot Robot được xuất ra từ solidwork..........70
Hình 6.11 Mômen các khớp theo thời gian
GVHD: ĐINH KHẮC TOẢN Page 81

TÍNH TOÁN THIẾT KẾ ROBOT
GVHD: ĐINH KHẮC TOẢN Page 82