Embed Size (px)
DESCRIPTION
Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011Tổng hợp điều khiển cho hệ bám điện cơ trên cơ sở phương pháp Backstepping kết hợp điều khiển trong chế độ trượt Synthesizing controller for electro-mechanical servo systems based on Backstepping sliding mode control methodNguyễn Thanh Tiên – Học viện KTQS e-Mail: [email protected] Nguyễn Trọng Thanh – Trường cao đẳng Điện tử Điện lạnh Hà nội e- Mail: [email protected] Tóm tắtBài báo trình bày phương pháp tổng hợp bộ điều
Citation preview

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
Tổng hợp điều khiển cho hệ bám điện cơ trên cơ sở phương pháp
Backstepping kết hợp điều khiển trong chế độ trượt
Synthesizing controller for electro-mechanical servo systems based on
Backstepping sliding mode control method
Nguyễn Thanh Tiên – Học viện KTQS
e-Mail: [email protected]
Nguyễn Trọng Thanh – Trường cao đẳng Điện tử Điện lạnh Hà nội
e- Mail: [email protected]
Tóm tắt Bài báo trình bày phương pháp tổng hợp bộ điều
khiển cho đối tượng điện cơ. Hệ truyền động cơ khí
khi xét đến động học của động cơ chấp hành một
chiều đây là hệ phi tuyến bậc 3. Luật điều khiển được
xây dựng trên cơ sở thuật toán Backstepping kết hợp
với điều khiển trong chế độ trượt. Xét bài toán điều
khiển động cơ một chiều. Thuật toán tổng hợp được
kiểm chứng mô phỏng trên Matlab-Simulink
Abstract: This paper presents an synthesizing
controller for electro-machnical servo system.
Mechanical transmission system when it comes to the
execution of the motor is third-order nonlinear
systems. Controller synthesised based on
Backstepping algorithm with sliding mode control.
Considering the problem of a DC motor control.
Synthesis algorithms are tested on Matlab-Simulink
simulation.
Ký hiệu Ký hiệu Đơn vị Ý nghĩa
f hàm phi tuyến
M Nm Mô men
J Mô men quán tính
Ru , Lu Ω, H Điện trở, điện cảm phần
ứng của động cơ
rad/s vận tốc góc rotor
φ rad Góc quay
Iu A Dòng điện phần ứng
U V Điện áp phần ứng
1. Phần mở đầu Phương pháp pháp tổng hợp điều khiển hệ phi tuyến
trên cơ sở lý thuết điều khiển hệ thống có cấu trúc
thay đổi, đặc biệt là điều khiển trong chế độ trượt
được nhiều nhà nghiên cứu quan tâm và có nhiều ưu
điểm trong tổng hợp hệ thống phi tuyến [4, 6, 7], đó
là: Bất biến với nhiễu loạn tác động lên hệ thống và
các thành phần không xác định; kích thước của hệ
thống giảm xuống khi xuất hiện chế độ trượt trên mặt
trượt. Hệ phi tuyến có tính kết tầng có thể ứng dụng
phương pháp tổng hợp Backstepping. Khi kết hợp
Backstepping với điều khiển trong chế độ trượt cho
phép dễ dàng tổng hợp cấu trúc mặt trượt [6, 7]
2. Nội dung chính 2.1 Xây dựng mô hình
Xét mô hình hệ điện cơ có cấu trúc trong Hình 1. Ta
xây dựng mô hình biểu diễn toán học cho hệ thống
bao gồm :
- Phương trình động lực học chuyển động phần cơ
- Phương trình động học của động cơ chấp hành
α
Khớp nối
Động cơ
điện
Bộ biến đổi
công suất
Bộ tạo luật
điều khiển
Đo lường góc, bộ quan
sát
Giá trị góc
bám sát
Giá trị góc
đặt H. 1 Cấu trúc của hệ thống điện cơ
Phương trình mô tả chuyển động của đối tượng điều
khiển (chuyển động của cơ cấu công tác) có dạng:
eq ct c
dJ M M
dt
w (1)
trong đó, cM - mô men cản qui đổi về trục cơ cấu
công tác; ctM - mô men đặt lên trục quay của cơ cấu
công tác, sinh bởi động cơ điện một chiều thông qua
hộp đổi tốc, thanh truyền…; - tốc độ góc của cơ cấu
công tác; Jeq - mô men quán tính tương đương quy đổi
về đầu trục quay của cơ cấu công tác: bao gồm mô
men quán tính của rô to động cơ, mô men quán tính
của cơ cấu công tác…
Ma sát trên các ổ khớp
Lực ma sát của các phần cơ khí (ma sát trên ổ khớp và
phần quay) có dạng rất phức tạp: ma sát nhớt, ma sát
khô... Ta có thể quy đổi về mô men cản tác động lên
trục quay phía tải với dạng:
0 1c t c cM M M sign Mj w (2)
Trong đó, tM - Mô men tải. 0cM - hệ số ma sát tĩnh,
thành phần ma sát phụ thuộc vào chiều chuyển động;
1cM - hệ số ma sát nhớt phụ thuộc vào tốc độ chuyển
động. Khi xấp xỉ hóa mô men cản quy đổi lên trục
phía tải sinh ra do thành phần ma sát trên các ổ khớp
68

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
bằng một hàm trơn thì ta cũng có thể xét như một
thành phần không xác định của hệ thống.
Các thành phần ảnh hưởng đến mô men quán tính
Trong hệ thống cơ khí truyền động quay còn có sự
tham gia của các thành phần chuyển động khác, mà
các thành phần này sẽ ảnh hưởng đến mô men quán
tính tương đương quy đổi về đầu trục quay của cơ cấu
công tác. Đồng thời, sự không đồng trục của các cơ
cấu quay cũng ảnh hưởng đến mô men quán tính,
0eq eqJ J J (3)
Giả thiết thành phần 0eqJ được xác định, J là thành
phần không xác định chính xác được trong quá trình
chuyển động của góc quay, nhưng ta biết được giá trị
giới hạn cực đại của nó.
0( )eq ct c
dJ J M M
dt
w (4)
Như vậy, các thành phần cản trở chuyển động của cơ
cấu góc quay mang tính không xác định là:
c
dM M J
dt
w (5)
0eq ct
dJ M M
dt
w
Phương trình mô men điện từ sinh ra bởi động cơ
chấp hành, động cơ điện một chiều kích từ nam châm
vĩnh cửu:
dc i uM K i (6)
trong đó, dcM - mô men điện từ sinh bởi động cơ chấp
hành; iK - hệ số phụ thuộc kết cấu động cơ; ui - dòng
điện phần ứng của động cơ.
Khi quy đổi về trục quay cơ cấu công tác thông qua
hộp đổi tốc, ta có mối quan hệ giữa mô men công tác
và mô men điện từ như sau: ct ct dcM K M
trong đó, ctK - hệ số quy đổi giữa mô men điện từ và
mô men trên trục cơ cấu công tác.
Theo mạch vòng phần ứng của động cơ ta có phương
trình cân bằng điện áp:
uu u u b
diu R i L e
dt (7)
trong đó, ui - dòng điện phần ứng; u - điện áp phần
ứng; uL - điện cảm phần ứng;
uR - điện trở phần ứng của động cơ; be - sức điện
động do cuộn dây phần ứng sinh ra, b b rotoe K w
uu u u b
diL R i K u
dtw (8)
Đặt các biến trạng thái: Góc quay: 1x j ; tốc độ góc
2
dx
dt
jw , dòng điện phần ứng của động cơ
3 ux i ,
Ta có:
1 2x x (9)
2 3
0 0eq eq
K Mx x
J J (10)
3 2 3
1b u
u u u
K Rx x x u
L L L (11)
trong đó, i ctK K K
Trong bài báo này, chúng tôi xin trình bày thuật toán
tổng hợp luật điều khiển khi xét đến các thành phần
không xác định chính xác của mô men cản quy đổi về
trục cơ cấu công tác M . Giả thiết rằng thành phần
không xác định này là hàm khả vi. Thông qua các
bước biến đổi ta có thể đưa thành phần không xác
định này về phương trình cuối cùng. Khi đó ta có thể
xây dựng luật điều khiển chế áp chúng.
Bài toán đặt ra là tổng hợp quy luật của giá trị điện áp
đặt vào phần ứng của động cơ một chiều để giá trị góc
đầu ra bám sát theo giá trị góc đầu vào 1 1dx x , với
giả thiết giá trị góc đầu vào là hàm trơn theo thời gian
(có tồn tại đạo hàm đến bậc 3). Giả thiết đo lường đầu
ra ta đo được giá trị góc trên cơ cấu công tác.
2.2 Tổng hợp điều khiển
Với mục tiêu so sanh để tìm ra ưu nhược điểm của
phương pháp tổng hợp Backstepping, và
Backstepping khết hợp với điều khiển trong chế độ
trượt ta xét bài toán bám sát cho hệ bậc 3 tổng quát có
dạng:
1 1 1 2( )x f x x (12)
2 2 1 2 3( , )x f x x x (13)
3 3 1 2 3( , , )x f x x x bu (14)
1y x (15)
Trong đó: các hàm phi tuyến khả vi mô tả động học
hệ thống và tín hiệu đo được.
Bài toán điều khiển được đặt ra như sau: Tổng hợp
điều khiển để hệ là ổn định tiệm cận theo thuật toán
Backstepping [5]
Bước 1:
Định nghĩa biến mới: 1 1z x . So sánh với các bước
tổng hợp trước thì 1z tương đương với 1e , giá trị
bám sát là 0
1 1 1 2( )z f x x (16)
ta xem 2x như là tín hiệu điều khiển đầu vào của hệ
(12) và được xây dựng có dạng 1a , đặt 2z là sai khác
giữa điều khiển 2x thực và điều khiển mong muốn
1a , 2 2 1z x a
Như vậy, có thể viết (16) trong hệ tọa độ trạng thái
mới như sau:
1 1 1 1 2( )z f x za (17)
Trong bước này, mục đích của chúng ta là tìm điều
khiển 1 sao cho 01 z .
Xét hàm điều khiển Lyapunov có dạng: 2
1 1
1
2V z
Vi phân theo thời gian khi tính đến (17) ta được:
1 1 1 1 1 1 1 2[ ( ) ]V z z z f x za
1 1 1 1 1 1 2( ( ) )V z f x z za
Khi chọn: 1 1 1 1 1( )c z f xa
Suy ra:
69

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
1 11 1 1 1
1
1 11 1 1 2
1
( )
( )( )( ( )
f xc z x
x
f xc f x x
x
a
trong đó, 1c là hằng số dương và khi đó vi phân của
hàm Lyapunov có dạng: 2
1 1 1 1 2V c z z z
Dễ dàng thấy rằng, nếu 2 0z thì 2
1 1 1V c z và
1z sẽ hội tụ tiệm cận đến 0.
Bước 2:
Xét vi phân của sai số 2 2 1z x a là: 2 2 1z x a
1 12 2 1 2 3 1 1 1 2
1
( )( , ) ( )( ( ) )
f xz f x x x c f x x
x (18)
Tương tự bước 1, 3x được xem như điều khiển tác
động lên hệ (18) và được xây dựng luật điều khiển 2a
và sai khác 3 3 2z x a .
Thế 3 3 2x z a vào (18) ta được:
2 2 1 2 3 2
1 11 1 1 2
1
( , )
( )( )( ( ) )
z f x x z
f xc f x x
x
a
(19)
và nhiệm vụ của luật điều khiển 2 là đảm bảo sao
cho 2 0z . Khi đó ta chọn hàm Lyapunov có dạng:
2
2 1 2
1
2V V z
2 1 2 2
2
1 1 1 2 2 3 2 1 2
1 12 1 1 1 2
1
[ ( , )
( )( )( ( ) )]
V V z z
c z z z z z f x x
f xc f x x
xa
Ta chọn:
2 1 2 2 2 1 2
1 11 1 1 2
1
( , )
( )( )( ( ) )
z c z f x x
f xc f x x
x
a
2 1 22 1 2 2 1
1
2
2 1 2 1 12 1 1 2 12
2 1
1 1 1 11 1 2
1 1
( , )
( , ) ( )( ( ) )
( ) ( )( )( )
f x xz c z x
x
f x x f xx f x x x
x x
f x f xc x x
x x
a
Ta nhận được:
2
2 2 2
2 1 1 2 2 2 3 2 3
1
i i
i
V c z c z z z c z z z
Bước 3:
Xét sai số 3 3 2z x a , ta có: 3 3 2z x a
3 3 1 2 3 1 2 2
2 1 2 2 1 21 2
1 2
2
1 11 1 2 12
1
1 1 1 11 1 2
1 1
( , , )
( , ) ( , )
( )( ( ) )
( ) ( )( )( )
z f x x x bu z c z
f x x f x xx x
x x
f xf x x x
x
f x f xc x x
x x
suy ra:
3 1 2 3 1 2 3( , , , , , )z x x x z z z bu (20)
Trong đó
3 1 2 3 1 2 2
2 1 2 2 1 21 2
1 2
2
1 11 1 2 12
1
1 1 1 11 1 2
1 1
(.) ( , , )
( , ) ( , )
( )( ( ) )
( ) ( )( )( )
f x x x z c z
f x x f x xx x
x x
f xf x x x
x
f x f xc x x
x x
Chọn
2
3 2 3
1
2V V z , Xét 3 2 3 3V V z z
Chọn điều khiển:
2 3 3 (.)bu z c z (21)
thì khi đó: 3
2
3
1
0,i i i
i
V c z z
Nhận xét: Khi ta chọn điều khiển có dạng (21) thì hệ
(12-15) đảm bảo hội tụ tiệm cận. Tổng hợp điều khiển
theo (21) là phức tạp và khó khăn trong việc tính toán
và xác định các tham số trạng thái trên quan điểm
thực hiện kỹ thuật luật điều khiển.
Backstepping – sliding mode control
Kết hợp Backstepping – sliding mode control ta xét
một thuật toán chuyển từ hệ thống ban đầu về hệ mới
theo biến sai số. Thủ tục chuyển đổi về hệ thống trong
hệ tọa độ sai số trong bài toán bám sát. Quỹ đạo mang
muốn 1dx là đường cong trơn.
Bước 1:
Định nghĩa sai số 1 1 1de x x , ta xét vi phân theo
thời gian của nó:
1 1 1 1 1 2 1( )d de x x f x x x (22)
trong đó, 2x xem như là điều khiển đầu vào và ta có
thể lựa chọn như sau:
2 1 1 1 1 1 2( ) dx k e f x x e (23)
Trong đó, 2e sai khác giữa giá trị lựa chọn và giá trị
thực của 2x . Thế (12) vào (22) ta được:
1 1 1 2e k e e (24)
Bước 2:
Từ (23) ta có: 2 1 1 1 1 1 2( ) de k e f x x x
Xét vi phân của nó, ta có:
70

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
1 12 1 1 1 1 2
1
( )d
f xe k e x x x
x (25)
Thay thế các phương trình của hệ thống (12),(13) vào
(25) ta được:
2 1 1 1 2
1 11 1 2 1 2 1 2 3
1
( )
( )( ( ) ) ( , )d
e k k e e
f xf x x x f x x x
x
Đặt 1 11 1 1 2 1 2 1 2
1
( )(.) ( ( ) ) ( , )d
f xf x x x f x x
x
Khi đó ta được:
2 1 1 1 2 1 3( ) (.)e k k e e x (26)
với 3x xem như là điều khiển tác động vào đầu vào
của hệ (26) và được chọn như sau:
3 1 2 2 3(.)x k e e (27)
Thế (27) vào (26) ta nhận được:
2 1 1 1 2 2 2 3( )e k k e e k e e (28)
Bước 3:
Ta xét vi phân của 3 3 1 2 2(.)e x k e
1 13 3 1 2
1 2
1 1 11 1 1 2 2
1 1 1
(.) (.)
(.) (.) (.)d d d
d d d
e x x xx x
x x x k ex x x
Thế các phương trình mô tả hệ thống (14) vào ta nhận
được:
1 13 1 1 2 2 1 2 2
1 2
1 1 11 1 1
1 1 1
2 1 1 1 2 2 2 3 3 1 2 3
(.) (.)( ( ) ) ( ( , ) )
(.) (.) (.)
[ ( ) ] ( , , )
d d d
d d d
e f x x f x x xx x
x x xx x x
k k k e e k e e f x x x bu
Đặt
1 12 1 1 2 2 1 2 2
1 2
1 1 11 1 1
1 1 1
3 1 2 3
(.) (.)(.) ( ( ) ) ( ( , ) )
(.) (.) (.)
( , , )
d d d
d d d
f x x f x x xx x
x x xx x x
f x x x
Ta nhận được: 2 2
3 1 2 1 1 2 2 2 2 2 3 2 (.)e k k e k k e k e k e bu (29)
Kết hợp các bước biến đổi ta nhận được hệ trong biến
trạng thái mới e là:
1 1 1 2
2
2 1 1 2 1 2 3
2 2
3 1 2 1 1 2 2 2 2 2 3 2
( )
(.)
e k e e
e k e k k e e
e k k e k k e k e k e bu
(30)
Khi thực hiện các bước biến đổi trên từ hệ ban đầu có
các hàm phi tuyến không nằm trong không gian điều
khiển ta nhận được hệ mới (30) có hàm phi tuyến nằm
trong không gian điều khiển.
Như vậy, khi lựa chọn điều khiển:
3 3 2 (.)bu k e (31)
Khi đó, động học của hệ thống phụ thuộc vào việc lựa
chọn các hệ số 1 2 3, ,k k k
Khi lựa chọn điều khiển có dạng:
3 3( )bu k sign e (32)
Nếu 3k thỏa mãn điều kiện trượt trên mặt trượt
3 0e , thì khi đó hệ thống đã thu gọn:
1 1 1 2e k e e
2
2 1 1 2 1 2( )e k e k k e
Để giảm dao động trên mặt trượt ta lựa chọn điều
khiển có dạng :
3 3ˆ (.) ( )bu k arctg le (33)
Nhận xét: Khi kết hợp Backstepping và điều khiển
trượt ta sẽ thấy tổng hợp điều khiển có cấu trúc đơn
giản hơn. Luật điều khiển (32) chỉ phụ thuộc vào hàm
dấu của 3e . Khi các các thành phần trong hàm 2 (.)
có chứa các bất định hoặc thay đổi theo thời gian, thì
vẫn đảm bảo tính bền vững.
Xét bài toán truyền động bám sát góc quay (9, 10, 11)
được giải trên cơ sở phương pháp Backstepping trượt
như sau:
Bước 1: ta nhận được:
1 1 1 1 2 1 1 1 2d de c e x e x c e e (4)
nếu 2 0e thì 1 1 1e c e hội tụ về 0 theo dạng hàm
mũ.
Bước 2:
2
2 1 1 1 2 3 1
0 0
d
eq eq
K Me c e c e x x
J J
Lựa chọn 3 2 2 1 3
0 0
d
eq eq
K Mx c e x e
J J, với 3e
là sai khác của 3x lựa chọn và 3x , 2 0c . Khi đó ta
nhận được
2
2 1 1 2 1 2 3( )e c e c c e e (6)
Bước 3: Mục tiêu của bước này là đảm bảo 3 0e
nhanh nhất có thể. Ta xét vi phân của nó 3e :
2
3 1 2 1 1
0
2 1 2 2 2
0
2 3 1
0 0
1 1
0 0
( )
[( ) ]
( ) ( )
1
b
eq u
b u
eq u u
u bd
u eq eq u
u ud d
u u eq eq u
KKe c c c e
J L
K RKc c c c e
J L L
R Kd M Kc e x
L dt J J L
R R M Kx x u
L L J J L
Ta viết dưới dạng sau:
3 1 1 2 2 3 3 1 1 1( , , , )d d de c e c e c e x x x M bu
71

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
trong đó : 0
1
eq u
Kb
J L; 2
1 1 2 1
0
( )b
eq u
KKc c c c
J L;
2 2 2 1 2
0
( )b u
eq u u
K RKc c c c c
J L L; 3 2
u
u
Rc c
L;
1 1 1 1 1
0
1
0 0
( , , , )
( )
b ud d d d d
eq u u
ud
u eq eq
K RKx x x M x x
J L L
R M d Mx
L J dt J
Kết hợp các bước ta được hệ thống trong không gian
mới 1 2 3, ,e e e
1 1 1 2e c e e
2
2 1 1 2 1 2 3( )e c e c c e e (34)
3 1 1 2 2 3 3 1 1 1( , , , )d d de c e c e c e x x x M bu
Việc lựa chọn điều khiển có thể tiến hành như sau:
1 1 2 2 3 3
1 1 1 3 3( , , , )d d d
bu c e c e c e
x x x M c e (35) (9)
Ta thu được hệ có dạng:
1 1 1 2e c e e
2
2 1 1 2 1 2 3( )e c e c c e e
3 3 3e c e
Phụ thuộc vào việc lựa chọn các hệ số 1 2 3, ,c c c để có
được 1 2 30, 0, 0e e e . Tuy nhiên để xây dựng
luật điều khiển (35) trên thực tế gặp rất nhiều khó
khăn vì phải đo lường và đánh giá các tham số.
Trong bài báo này chúng tôi đề xuất xây dựng luật
điều khiển có dạng:
3 3bu c signe (36) (10)
Khi đó,
3 1 1 2 2 3 3
1 1 1 3 3( , , , )d d d
e c e c e c e
x x x M c signe
Khi 3c thỏa mãn điều kiện xuất hiện chế độ trượt trên
mặt trượt 3 0e , thì hệ có dạng:
1 1 1 2e c e e
2
2 1 1 2 1 2( )e c e c c e
Như vậy, khi tổng hợp điều khiển dạng (36) ta sẽ thực
hiện dễ dàng hơn (35) về mặt kỹ thuật. Để giảm dao
động trên mặt trượt ta có thể xây dựng điều khiển
dạng (37)
3 3ˆ( ) (.)bu c arctg le (37)
2.3 Bài toán quan sát thực hiện điều khiển theo
đầu ra
Để tạo luật điều khiển ta cần biết thông tin về 3e và
đánh giá của hàm ˆ (.) . Giả thiết chỉ đo lường được
giá trị góc quay 1y x . Để giải quyết vấn đề này, ta
xây dựng mô hình bộ quan sát cho hệ (34)
1 1 1 2 1z c z z n
2
2 1 1 2 1 2 3 2( )z c z c c z z n (38)
3 1 1 2 2 3 3 3z c z c z c z bu
trong đó, 1 2 3, ,z z z là các biến quan sát của
1 2 3, ,e e e ;
1 2 3, ,n n n là các lượng tác động vào phương trình quan
sát để đảm bảo z → e.
Phương trình sai số e ze , ta có:
1 1 1 2 1ce e e n
2
2 1 1 2 1 2 3 2( )c c ce e e e n
3 1 1 2 2 3 3 1 1 1 3( , , , )d d dc c c x x x Me e e e n
Cũng tương tự các bước ở phần trên, ta có thể xây
dựng bộ quan sát trong chế độ trượt như sau:
Bước 1: Ta lựa chọn 1 1 1v m signe . Với lựa chọn
1 02m e sẽ xuất hiện chế độ trượt trên mặt trượt
1 0e . Với 1 0e ta có thể có được đánh giá của
2 1eqve nhờ bộ lọc thông thấp.
Bước 2: Tương tự bước 1, ta chọn 2 2 2v m signe với
lựa chọn 2 03m e cũng sẽ xuất hiện chế độ trượt
trên mặt trượt 2 0.e Khi 2 0e thì từ điều khiển
tương đương ta cũng có được đánh giá của 3 2eqve
nhờ bộ lọc thông thấp có hằng số thời gian đủ nhỏ.
Bước 3: Tương tự ta chọn: 3 3 3v m signe . Khi lựa
chọn 3 (.)m sẽ xuất hiện chế độ trượt trên mặt
trượt 3 0e . Với 3 0e , từ điều khiển tương đương
ta có được đánh giá của 3ˆ (.) eqv nhờ bộ lọc thông
thấp.
2.4 Xây dựng mô hình mô phỏng
Xây dựng mô hình mô phỏng trong môi trường
Matlab Simulink cho (9,10,11) với thành phần không
xác định giả thiết là một hàm ngẫu nhiêu, Đo lường
giả thiết chỉ đo được góc quay đầu ra trên cơ cấu công
tác. Mô hình bộ quan sát được xây dựng theo (38)
(Hình 2). Luật điều khiển xây dựng theo (36). Các
tham số mô phỏng giả định. Kết quả mô phỏng cho 2
trường hợp :
- Khi tất cả các tham số trạng thái đo được, và xác
định hoàn toàn (hình 3 a)
- Khi chỉ đo lường được đầu ra là góc quay, và luật
điều khiển xây dựng nhờ bộ quan sát, (hình 3 b)
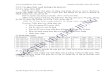
Kết quả mô phỏng nhận được trên H3 cho thấy tính
bền vững của luật điều khiển trước các tác đông của
thành phần không xác định.
72

Hội nghị toàn quốc về Điều khiển và Tự động hoá - VCCA-2011
VCCA-2011
H. 2 Mô hình mô phỏng
(a) (b)
H. 3 Kết quả mô phỏng giá trị góc đặt và góc bám sát 11 , xx d :
(a) Khi tất cả các tham số đo được; (b) Khi chỉ đo được giá trị góc đầu ra.
3. Kết luận Bài báo đã trình bày các bước tổng hợp luật điều
khiển hệ truyền động bám góc có tính đến thành phần
không xác định chính xác của mô hình, ma sát. Luật
điều khiển được tổng hợp theo (37) trong chế độ trượt
dựa trên bộ quan sát. Kết quả mô phỏng chứng minh
tính bền vững của luật điều khiển. Với kết quả này, ta
hoàn toàn có thể tổng hợp bộ điều khiển các hệ thống
bám sát với động cơ chấp hành một chiều trong các hệ
truyền động súng pháo…
Tài liệu tham khảo [1] Krstíc, M.; Kanellakopoulos I.; Kokotovíc, P.:
Nonlinear and Adaptive Control Design. John
Wiley & Sons, Inc., New York 1995
[2] Khalil H. K., Nonlinear Systems, Prentice Hall,
2002.
[3] Slotine J. J. E., Li W., Applied Nonlinear
Control, Prentice Hall International, 1991.
[4] Utkin V., Guldner J, Shi J., Sliding Mode
Control in Electromechanical Systems, CRC
Press LLC, 1999.
[5] Jing Zhou, Changyun Wen : Adaptive
backstepping control of uncertain systems,
Springer Verlag Berlin Heidelberg 2008
[6] Краснова С. А., Уткин В. А., Каскадный
синтез наблюдателей состояния
динамических систем, Наука, Москва, 2006.
[7] Lê Hồng Phương, Nguyễn Thanh Tiên, Tổng
hợp điều khiển truyền động bám góc trên cơ sở
điều khiển trong chế độ trượt, Tạp chí Khoa học
và Kỹ thuật – số 138 (12-2010) Học viện KTQS.
Nguyễn Thanh Tiên Sinh năm 1973. Nhận bằng Kỹ sư Điện – điện tử tại Học viện Kỹ thuật Quân sự năm 1995 và Thạc sỹ tự động hóa và điều khiển từ xa tại Học viện KTQS năm 2004, và nhận bằng Tiến sỹ Kỹ thuật Điều khiển tại Viện các vấn đề về điều khiển – Viện hàn lâm khoa học Liên bang Nga năm 2008. Hiện là giảng viên Khoa Kỹ thuật điều khiển – Học viện KTQS.
Nguyễn Trọng Thanh Sinh năm 1980. Nhận bằng
Kỹ điện – điện tử tại trường Đại học Bách khoa Hà
nội 2006, và bằng Thạc sỹ tự động hóa tại Học viện
KTQS năm 2009. Hiện là giảng viên Trường cao đẳng
Điện tử Điện lạnh Hà nội
73