Embed Size (px)
Citation preview
FACULDADE DE TECNOLOGIA DE SÃO JOSÉ DOS CAMPOS
FATECPROFESSOR JESSEN VIDAL
BRUNO COELHO LIMA
PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E
APLICAÇÕES
São José dos Campos
2013
ii
BRUNO COELHO LIMA
PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E
APLICAÇÕES
Trabalho de Graduação apresentado à
Faculdade de Tecnologia São José dos
Campos, como parte dos requisitos
necessários para a obtenção do título de
Tecnólogo em Manufatura Aeronáutica.
Orientador Externo: Ph.D. Paulo Gilberto de Paula Toro
Orientador Interno: Prof. Msc. Marcos Souza Silva
São José dos Campos
2012
iii
Dados Internacionais de Catalogação-na-Publicação (CIP)
Divisão de Informação e Documentação
REFERÊNCIA BIBLIOGRÁFICA
Lima, Bruno Coelho. Projeto Aerodinâmico De Um Tubo De Choque e Aplicações.
2013.62f???. Trabalho de Graduação - FATEC de São José dos Campos: ProfessorJessen
Vidal.
CESSÃO DE DIREITOS
NOME DO AUTOR: Bruno Coelho Lima
TÍTULO DO TRABALHO:Projeto Aerodinâmico De Um Tubo De Choque e Aplicações
TIPO DO TRABALHO/ANO: Trabalho de Graduação / 2013.
É concedida à FATEC de São José dos Campos:ProfessorJessen Vidal permissão para
reproduzir cópias deste Trabalho e para emprestar ou vender cópias somente para propósitos
acadêmicos e científicos. O autor reserva outros direitos de publicação e nenhuma parte deste
Trabalho pode ser reproduzida sem a autorização do autor.
____________________________________
Bruno Coelho Lima
Rua Polar, 160 Jardim Satélite.
CEP 12230-240– São José dos Campos–São Paulo
BRUNO COELHO LIMA
Lima, Bruno Coelho.
Projeto Aerodinâmico De Um Tubo De Choque e Aplicações
São José dos Campos, 2012.
62f.???
Trabalho de Graduação – Curso de Tecnologia Manufatura Aeronáutica, FATEC de São José
dosCampos: Professor Jessen Vidal, 2013.
Orientador Externo: PhD. Paulo Gilberto de Paula Toro.
Orientador Interno: Prof.
1. Engenharia Aeronáutica. 2. Tubo de Choque. I. Faculdade de Tecnologia. FATEC de São
José dos Campos: Professor Jessen Vidal. Divisão de Informação e Documentação. II. Projeto
Aerodinâmico De Um Tubo De Choque e Aplicações.
iv
PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E
APLICAÇÕES
Trabalho de Graduação apresentado à
Faculdade de Tecnologia São José dos
Campos, como parte dos requisitos
necessários para a obtenção do título de
Tecnólogo em Manufatura Aeronáutica.
___________________________________________________________________
Paulo Gilberto de Paula Toro, PhD - IEAv
__________________________________________________________________
Marcos Souza Silva, Prof. Msc. – FATEC SJC
__________________________________________________________________
– FATEC SJC
__________________________________________________________________
Rita de Cássia Mendonça Sales Contini, Prof.ªDra – FATEC SJC
_____/_____/_____

v
Dedico este trabalho aos meus pais Amintas
Esteves Lima e Maria do Rosário de Fátima
Coelho, a minha esposa Camila Renata
Ferreira Maia Lima, minha irmã Priscila
Coelho Lima, meu cunhado Bráulio Marques
Horta, ao meu Filho Heitor Augusto Maia
Lima e também o dedico ao orientador Paulo
Gilberto de Paula Toro.
vi
AGRADECIMENTOS
Agradeço aos orientadores Dr. Paulo Gilberto de Paula Toro e Prof. Msc. Marcos Silva
Souza, pela orientação deste trabalho e sempre estarem disponíveis para me atender, e a
Prof.ªDrª Rita de Cássia Mendonça Sales Contini, pelas sugestões. Sou grato também, a todos
do Laboratório de Aerotermodinâmica e Hipersônica Prof. Henry T. Nagamatsu: David
Romanelli Pinto, Thiago Victor Cordeiro Marcos, Victor Alves Barros Galvão, Jayme
Rodrigues Teixeira da Silva, Felipe Jean da Costa, Álvaro Francisco Santos Pivetta,
Alexandre Carvalhal, Renan Vilela, Bruno Coelho Lima, Sidney BarianiCruzelles, 1° Ten.
Eng. GianninoPonchio Camillo, 1° Ten. Eng. Thiago Lima de Assunção, 1° Ten. Matheus
Torres Alvarenga Silva, Eng. Bruno Ferreira Porto.

vii
“Em momentos importantes não devemos
abaixar a cabeça, e sim, crescer com a
pressão.”
Bruno Coelho Lima
viii
RESUMO
Não é de hoje que os dados experimentais são extremamente importantes na área de
pesquisa, pois eles que iram validar os dados encontrados nos cálculos e comprovar
fenômenos físicos e químicos. E como uma ferramenta bastante interessante o tubo de choque
se mostra de grande valia em varias áreas, principalmente na indústria aeroespacial e
aeronáutica. Desde meados de 1950 tem sido largamente usado no mundo inteiro para estudos
de altas temperaturas, entalpias e pressões. Mas não é um recurso muito difundido dentre os
estudantes de graduação. Objetivo deste trabalho é realizar o estudo de um projeto
aerodinâmico e as aplicações de um tubo de choque. Mostrando seu funcionamento,
modelamento matemático, características, vantagens e desvantagens. Aprofundando em três
aplicações que são: calibração dinâmica de sensores de pressão, ensaios aerodinâmicos e a
transformação de um tubo de choque em um túnel de choque. Esta ultima sendo com certeza a
melhor característica de um tubo de choque. Pois, apesar de versátil ele apresenta algumas
limitações e podem ser melhoradas transformando-o em um túnel de choque. Mostrar que
apesar de esquecido o tubo de choque é um equipamento poderoso de teste em solo, de valor
razoavelmente baixo, e é capaz de baratear o custo de uma pesquisa aeroespacial. Pois irá
diminuir em muito os testes em condições reais, que sem duvidas é a porção de maior gasto
em um projeto. Com a criação de um código computacional utilizando a linguagem Fortran,
criar dados necessários para gerar gráficos que facilitarão a analise de limites dos tuneis de
choque, e visualização rápida de dados sem a necessidade de recorrer as grandes tabelas. E
apresentar um relatório sobre calibração dinâmica de sensores, realizado no Laboratório de
Aerotermodinâmica e Hipersônica Prof. Henry T. Nagamatsu, do Instituto de Estudos
Avançados (IEAv).
Palavras-Chave: Tubo de Choque; Calibração de Transdutores de Pressão; ...

ix
ABSTRACT
Bfghghfghfg

x
LISTA DE FIGURAS
Figura 1: Figura 1- Tubo de choque em sua configuração básica 16 Figura 2: Tubo de choque em sua configuração básica - vista em corte Erro! Indicador não
definido.18 Figura 3: Pressão e Temperatura Iniciais 19 Figura 4: Momento Em Que O Diafragma É Rompido Erro! Indicador não definido.20

xi
LISTA DE TABELAS
Tabela 1: Erro! Indicador não definido.6

xii
LISTA DE ABREVIATURAS E SIGLAS
xiii
LISTA DE SÍMBOLOS
m metros
mm milímetros
m/s metros por segundo, unidade de velocidade
p Pressão
T Temperatura
ρ massa especifica
M Número de Mach
V velocidade
u velocidade normal
w componente tangencial da velocidade
γ razão de calores específicos
Atm Pressão atmosférica
xiv
SUMÁRIO
Bruno Coelho Lima ..................................................................................................................... i PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E APLICAÇÕES ................. i
bruno coelho lima ....................................................................................................................... ii
PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E APLICAÇÕES ................ ii PROJETO AERODINÂMICO DE UM TUBO DE CHOQUE E APLICAÇÕES ............... iv
AGRADECIMENTOS ............................................................................................................ vi LISTA DE figuras ...................................................................................................................... x LISTA DE tabelas ..................................................................................................................... xi
LISTA DE abreviaturas e siglas ............................................................................................... xii LISTA DE SÍmbolos ............................................................................................................... xiii
Sumário .................................................................................................................................... xiv 1- INTRODUÇÃO ................................................................................................................ 15
1.1- Considerações Iniciais .............................................................................................. 15 1.2- Motivação ................................................................................................................. 15
1.3- Objetivos do Trabalho .............................................................................................. 16 1.3.1- Objetivo Geral .................................................................................................. 16
1.3.2- Objetivos Específicos Não atualizado .............................................................. 16 1.4- Conteúdo do Trabalho de Graduação ....................................................................... 17
2- Fundamentação Teórica .................................................................................................... 17
2.1- Operação de um Tubo de Choque ............................................................................ 17 2.1.2 Sistemas de Abertura do diafragma .......................................................................... 23
2.1.2.1 Abertura diferença de pressão .......................................................................... 24 2.1.2.2 Double Diaphragm Section System (DDS) ................................................... 25
2.1.2.3 Sistema de Abertura do Diafragma por Punção ............................................. 27 2.2- Modelamento Matemático do Escoamento em um Tubo de Choque ....................... 28
2.3 Limitações de um tubo de choque ...................................................................................... 37 2.3.1 Analisando os limites operacionais ................................................................................. 37 2.3.2 Tunel de choque............................................................................................................... 45
2.4 Utilizações de um tubo de Choque ................................................................................. 48 2.4.1 Calibração dinâmica de sensores ............................................................................. 48 2.4.1.1 Sensores piezo elétricos ........................................................................................ 49
3 Materiais e Métodos .............................................................................................................. 50 3.2 Calibrações dinâmica de sensores PCB modelo 112 A 22 ............................................. 50
4 resultados e discussões .......................................................................................................... 53 5- ConclusÃO ....................................................................................................................... 60
6- SUGESTOES PARA TRABALHOS FUTUROS ........................................................ 60 6.1- Análise estrutural e térmica................................................................................... 60 6.2- Análise da aerodinâmica considerando arrasto e combustão ............................ 60
REFERÊNCIAS ....................................................................................................................... 61
15
1- INTRODUÇÃO
1.1- Considerações Iniciais
A proposta deste trabalho é estudar o funcionamento de um tubo de choque e os
fenômenos físicos que os cercam. Os tubos de choque são equipamentos de ensaios com
grande capacidade de simular várias condições de escoamento de gases. E têm sido
largamente utilizados em pesquisas em vários campos como física, química, e astrofísicas.
Sua habilidade em reproduzir escoamentos de altas velocidades com altas temperaturas e alta
entalpia, o transforma em um equipamento de teste bem poderoso e versátil, pois, apresenta
aplicações na indústria aeroespacial, no estudo da combustão, da cinética química, no impacto
de explosões, na compreensão de abalos sísmicos e na calibração dinâmica de sensores.
Nas aéreas aeroespaciais e aeronáuticas onde seu uso é mais difundido, apesar de seu
curto tempo de teste(na casa de milésimos de segundos), é possível simular condições de voo
supersônico sem a necessidade da realização de ensaios em voos. Diminuindo absurdamente o
custo de uma pesquisa porque os testes em condições reais (voo cativo em um foguete, por
exemplo) demandam muito tempo e dinheiro para serem realizados, e serão feitos apenas para
validar os experimentos feitos em solo.
Apesar de grande utilidade na pesquisa o tubo de choque é pouco conhecido no Brasil,
principalmente por alunos de graduação. Desde 1950 tubos de choques são ferramentas
indispensáveis em pesquisas aerodinâmicas para condições de voos em velocidades
supersônicas e hipersônicas. Sua capacidade de simular escoamento de gases em condições
brandas ou até mesmo em condições bem extremas que são difíceis de serem simuladas em
outros dispositivos (altas temperaturas, pressões, entalpia...) como, por exemplo, condições
iniciais de uma combustãooua reentrada de um veiculo aeroespacial na atmosfera terrestre.
1.2- Motivação
A motivação deste trabalho é obter um estudo sobre túneis de choque, aprofundando
no assunto e assim adquirindo mais conhecimento, que poderá um dia servir de base no
auxilio da aprendizagem sobre este dispositivo, o entendimento de algumas propriedades e
16
fenômenos físicos que o cercam. E também ajudar na divulgação deste dispositivo pouco
estudado e utilizado em nosso país.
Figura 1- Tubo de choque em sua configuração básica
Fonte: Autor (2013).
1.3- Objetivos do Trabalho
1.3.1- Objetivo Geral
O objetivo geral deste trabalho é mostrar as propriedades de um tubo de choque e sua
operação. Também será apresentado um estudo aerodinâmico (analítico), falando sobre alguns
fenômenos físicos que ocorrem durante sua utilização, expor suas características e
peculiaridades.
1.3.2- Objetivos Específicos Não atualizado
Realizar pesquisa bibliográfica sobre Tubos de Choque
17
1.4- Conteúdo do Trabalho de Graduação
Neste capítulo, é exposta a motivação e a importância que estimulou o presente autor,
a pesquisar sobre a utilização de tubos de choques que apesar de “esquecidos” são de grande
valia para estudos de escoamentos de alta entalpia e temperaturas.
O Capítulo 2 apresenta a fundamentação teórica de um tubo de choque e algumas de
suas apresentações.
Adiante, no Capítulo 3,
No Capitulo 4
Finalmente, o Capítulo 5
Capítulo 6
2- FUNDAMENTAÇÃO TEÓRICA
2.1- Operação de um Tubo de Choque
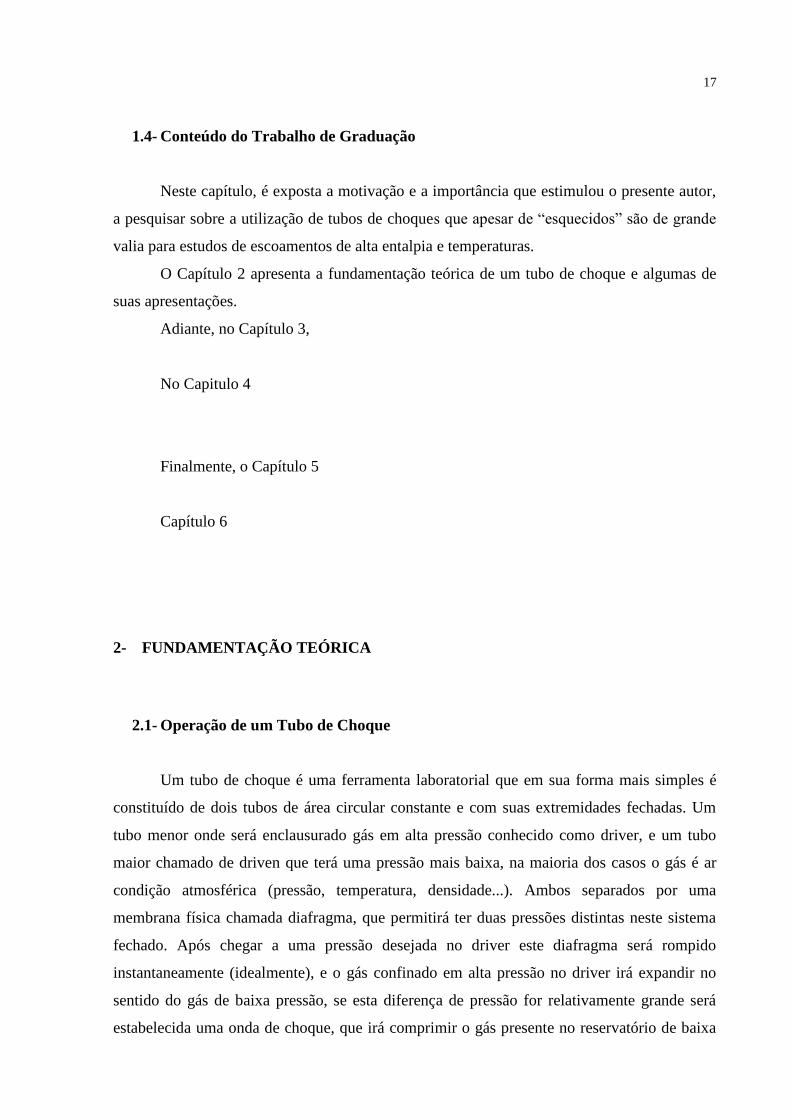
Um tubo de choque é uma ferramenta laboratorial que em sua forma mais simples é
constituído de dois tubos de área circular constante e com suas extremidades fechadas. Um
tubo menor onde será enclausurado gás em alta pressão conhecido como driver, e um tubo
maior chamado de driven que terá uma pressão mais baixa, na maioria dos casos o gás é ar
condição atmosférica (pressão, temperatura, densidade...). Ambos separados por uma
membrana física chamada diafragma, que permitirá ter duas pressões distintas neste sistema
fechado. Após chegar a uma pressão desejada no driver este diafragma será rompido
instantaneamente (idealmente), e o gás confinado em alta pressão no driver irá expandir no
sentido do gás de baixa pressão, se esta diferença de pressão for relativamente grande será
estabelecida uma onda de choque, que irá comprimir o gás presente no reservatório de baixa
18
pressão. Criando as condições necessárias para que o ensaio aconteça, estas condições irão
permanecer constantes por poucos milésimos de segundo, conhecido com tempo de teste, e
sempre acontece no final do driven.
Para facilitar o estudo das propriedades dos gases pressurizados, como temperatura,
pressão, velocidade dos gases entre outros foi adotados índices. Na literatura, o gás
enclausurado na região de alta pressão recebeu o índice (4), já o outro gás (região de baixa
pressão) recebeu o índice (1) (Figura 2).
Figura 2- Tubo de choque em sua configuração básica - vista em corte
Inicialmente, o driver (região de baixa pressão)é pressurizado, isoentropicamente a
temperatura ambiente 4T , com pressão 4p , enquanto por sua vez o reservatório de baixa
pressão (driven) , conhecido como driven, é pressurizado, isoentropicamente a temperatura
ambiente 1T , com pressão 1p . Consequentemente, teremos em 0t , o sistema emequilíbrio
termodinâmico 14 TT , porém apresentará um pressão diferente entre as seção de baixa e alta
pressão. (Figura 3).
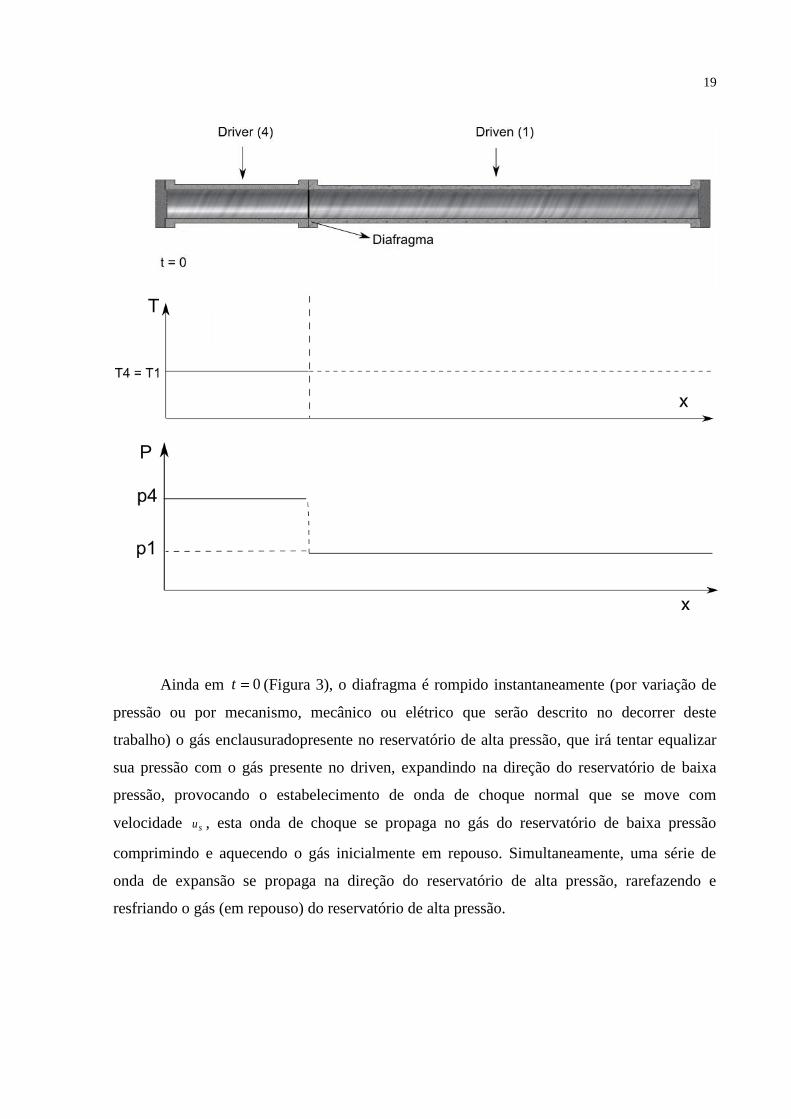
Figura 3- Pressões e Temperaturas Iniciais
19
Ainda em 0t (Figura 3), o diafragma é rompido instantaneamente (por variação de
pressão ou por mecanismo, mecânico ou elétrico que serão descrito no decorrer deste
trabalho) o gás enclausuradopresente no reservatório de alta pressão, que irá tentar equalizar
sua pressão com o gás presente no driven, expandindo na direção do reservatório de baixa
pressão, provocando o estabelecimento de onda de choque normal que se move com
velocidade su , esta onda de choque se propaga no gás do reservatório de baixa pressão
comprimindo e aquecendo o gás inicialmente em repouso. Simultaneamente, uma série de
onda de expansão se propaga na direção do reservatório de alta pressão, rarefazendo e
resfriando o gás (em repouso) do reservatório de alta pressão.
20
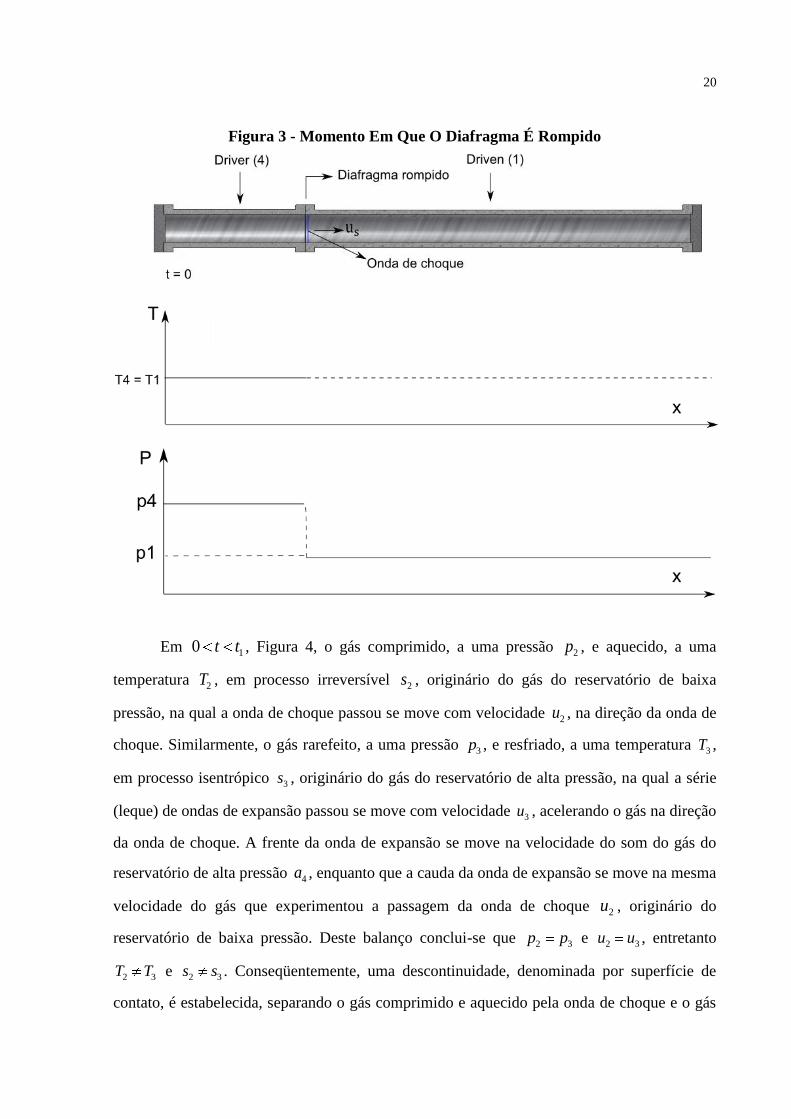
Figura 3 - Momento Em Que O Diafragma É Rompido
Em 10 tt , Figura 4, o gás comprimido, a uma pressão 2p , e aquecido, a uma
temperatura 2T , em processo irreversível 2s , originário do gás do reservatório de baixa
pressão, na qual a onda de choque passou se move com velocidade 2u , na direção da onda de
choque. Similarmente, o gás rarefeito, a uma pressão 3p , e resfriado, a uma temperatura 3T ,
em processo isentrópico 3s , originário do gás do reservatório de alta pressão, na qual a série
(leque) de ondas de expansão passou se move com velocidade 3u , acelerando o gás na direção
da onda de choque. A frente da onda de expansão se move na velocidade do som do gás do
reservatório de alta pressão 4a , enquanto que a cauda da onda de expansão se move na mesma
velocidade do gás que experimentou a passagem da onda de choque 2u , originário do
reservatório de baixa pressão. Deste balanço conclui-se que 32 pp e 32 uu , entretanto
32 TT e 32 ss . Conseqüentemente, uma descontinuidade, denominada por superfície de
contato, é estabelecida, separando o gás comprimido e aquecido pela onda de choque e o gás
21
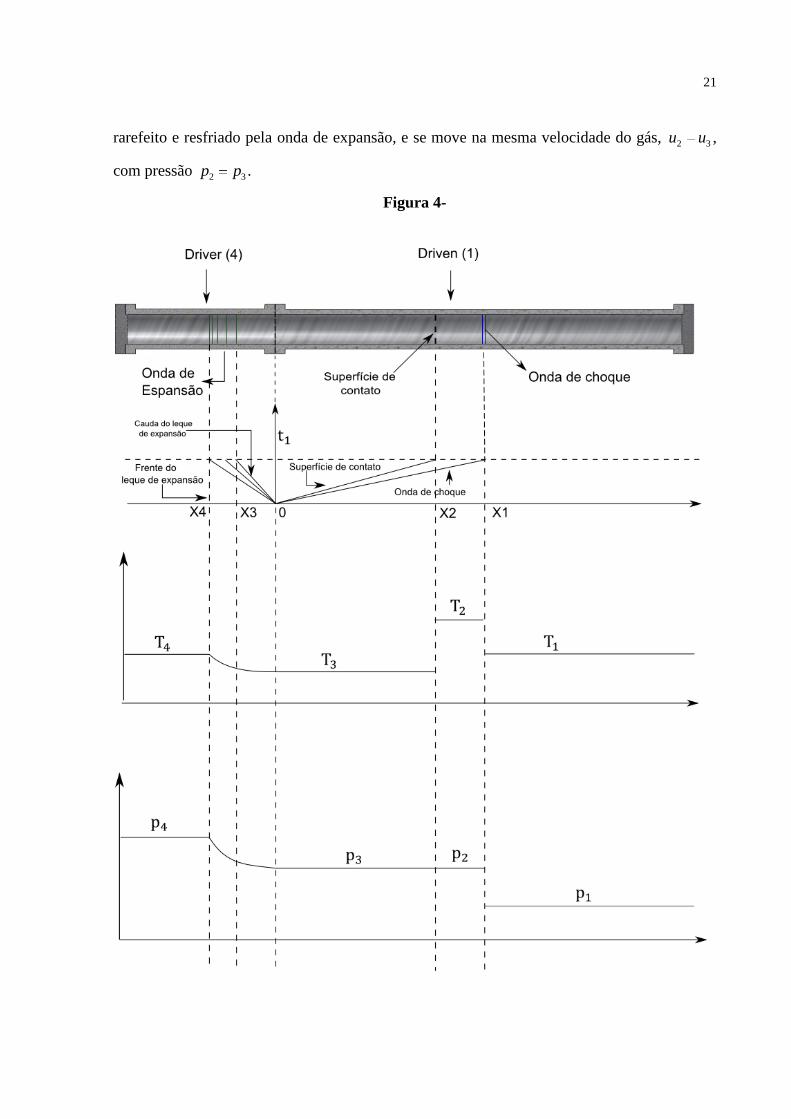
rarefeito e resfriado pela onda de expansão, e se move na mesma velocidade do gás, 32 uu ,
com pressão 32 pp .
Figura 4-
22
Em 2tt , Figura 4, a onda de choque e/ou a frente do leque da onda de expansão
atingem as extremidades fechadas, dos reservatórios de baixa e de alta pressão,
respectivamente, e as ondas são totalmente refletidas.
Figura 5-
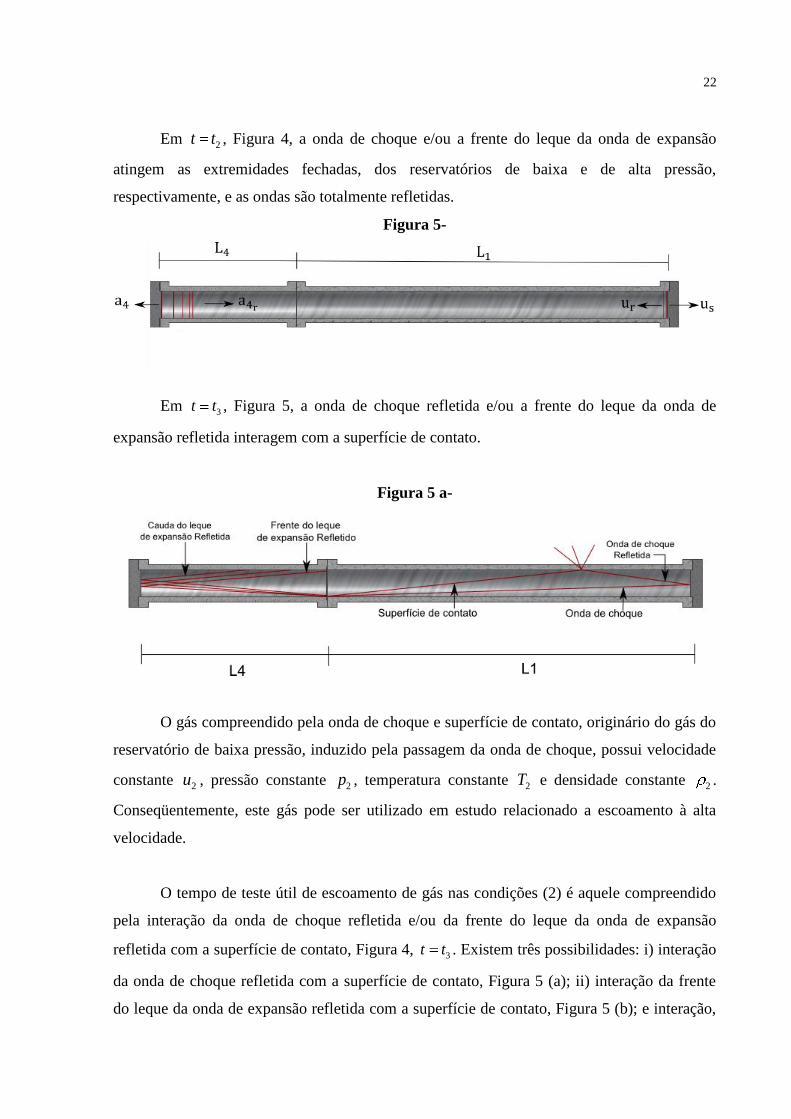
Em 3tt , Figura 5, a onda de choque refletida e/ou a frente do leque da onda de
expansão refletida interagem com a superfície de contato.
Figura 5 a-
O gás compreendido pela onda de choque e superfície de contato, originário do gás do
reservatório de baixa pressão, induzido pela passagem da onda de choque, possui velocidade
constante 2u , pressão constante 2p , temperatura constante 2T e densidade constante 2 .
Conseqüentemente, este gás pode ser utilizado em estudo relacionado a escoamento à alta
velocidade.
O tempo de teste útil de escoamento de gás nas condições (2) é aquele compreendido
pela interação da onda de choque refletida e/ou da frente do leque da onda de expansão
refletida com a superfície de contato, Figura 4, 3tt . Existem três possibilidades: i) interação
da onda de choque refletida com a superfície de contato, Figura 5 (a); ii) interação da frente
do leque da onda de expansão refletida com a superfície de contato, Figura 5 (b); e interação,
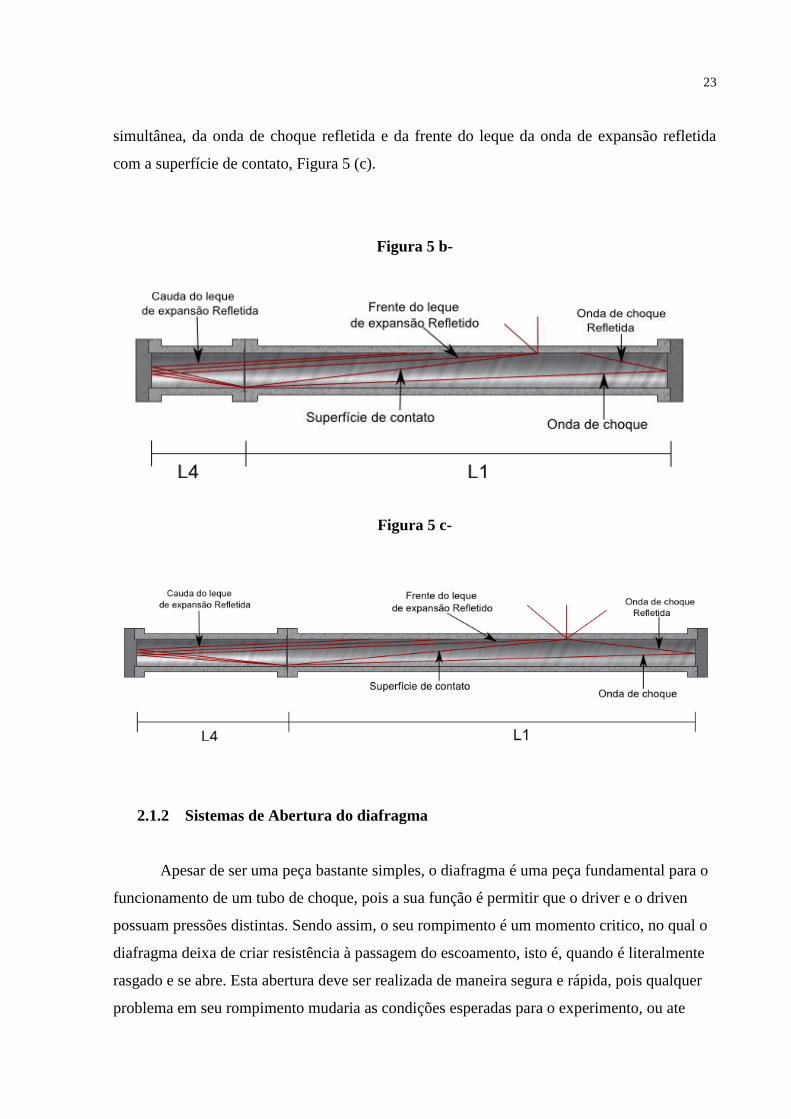
23
simultânea, da onda de choque refletida e da frente do leque da onda de expansão refletida
com a superfície de contato, Figura 5 (c).
Figura 5 b-
Figura 5 c-
2.1.2 Sistemas de Abertura do diafragma
Apesar de ser uma peça bastante simples, o diafragma é uma peça fundamental para o
funcionamento de um tubo de choque, pois a sua função é permitir que o driver e o driven
possuam pressões distintas. Sendo assim, o seu rompimento é um momento critico, no qual o
diafragma deixa de criar resistência à passagem do escoamento, isto é, quando é literalmente
rasgado e se abre. Esta abertura deve ser realizada de maneira segura e rápida, pois qualquer
problema em seu rompimento mudaria as condições esperadas para o experimento, ou ate
24
mesmo poderia obrigar que a missão seja abortada. Há três sistemas de abertura de diafragmas
que são mais utilizados, que serão discutidas abaixo mostrando suas qualidades e defeitos.
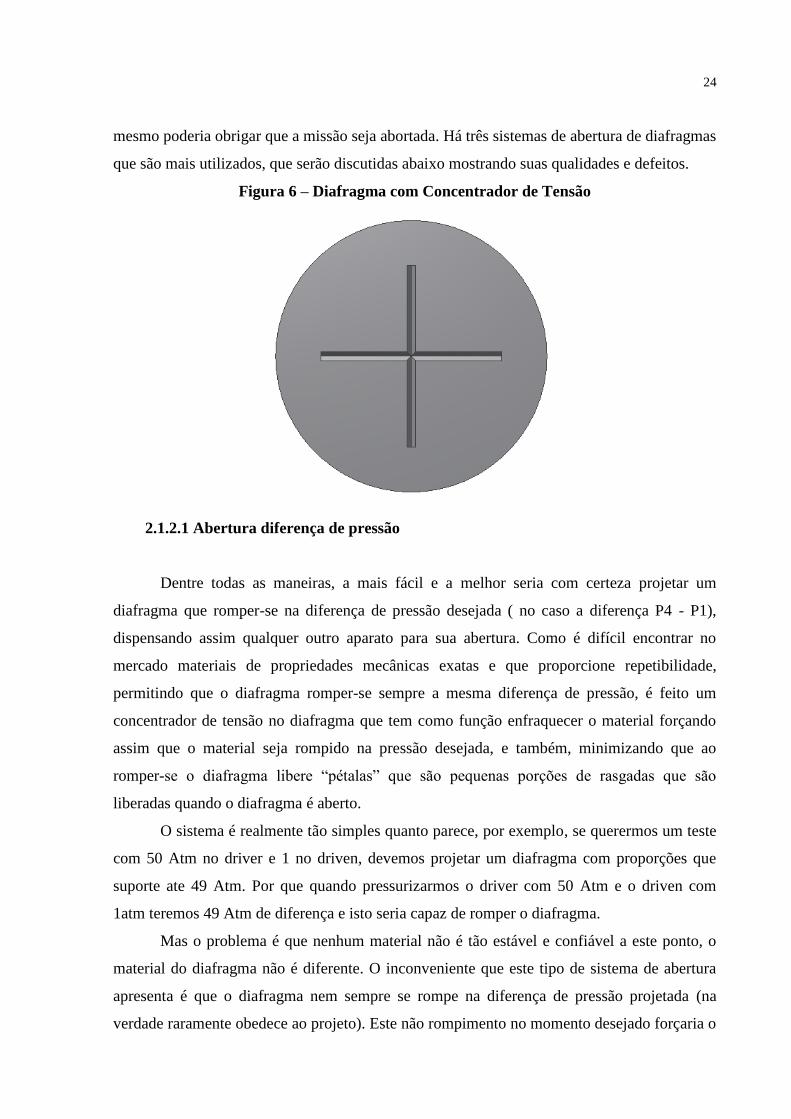
Figura 6 – Diafragma com Concentrador de Tensão
2.1.2.1 Abertura diferença de pressão
Dentre todas as maneiras, a mais fácil e a melhor seria com certeza projetar um
diafragma que romper-se na diferença de pressão desejada ( no caso a diferença P4 - P1),
dispensando assim qualquer outro aparato para sua abertura. Como é difícil encontrar no
mercado materiais de propriedades mecânicas exatas e que proporcione repetibilidade,
permitindo que o diafragma romper-se sempre a mesma diferença de pressão, é feito um
concentrador de tensão no diafragma que tem como função enfraquecer o material forçando
assim que o material seja rompido na pressão desejada, e também, minimizando que ao
romper-se o diafragma libere “pétalas” que são pequenas porções de rasgadas que são
liberadas quando o diafragma é aberto.
O sistema é realmente tão simples quanto parece, por exemplo, se querermos um teste
com 50 Atm no driver e 1 no driven, devemos projetar um diafragma com proporções que
suporte ate 49 Atm. Por que quando pressurizarmos o driver com 50 Atm e o driven com
1atm teremos 49 Atm de diferença e isto seria capaz de romper o diafragma.
Mas o problema é que nenhum material não é tão estável e confiável a este ponto, o
material do diafragma não é diferente. O inconveniente que este tipo de sistema de abertura
apresenta é que o diafragma nem sempre se rompe na diferença de pressão projetada (na
verdade raramente obedece ao projeto). Este não rompimento no momento desejado forçaria o
25
operador do túnel a subir a pressão do driver, para que assim atingir-se uma pressão alta o
suficiente para que o material do diafragma rompesse e libera-se o acesso do gás do driver.
Este aumento de pressão mudaria com certeza as propriedades do teste anulando assim o
experimento.
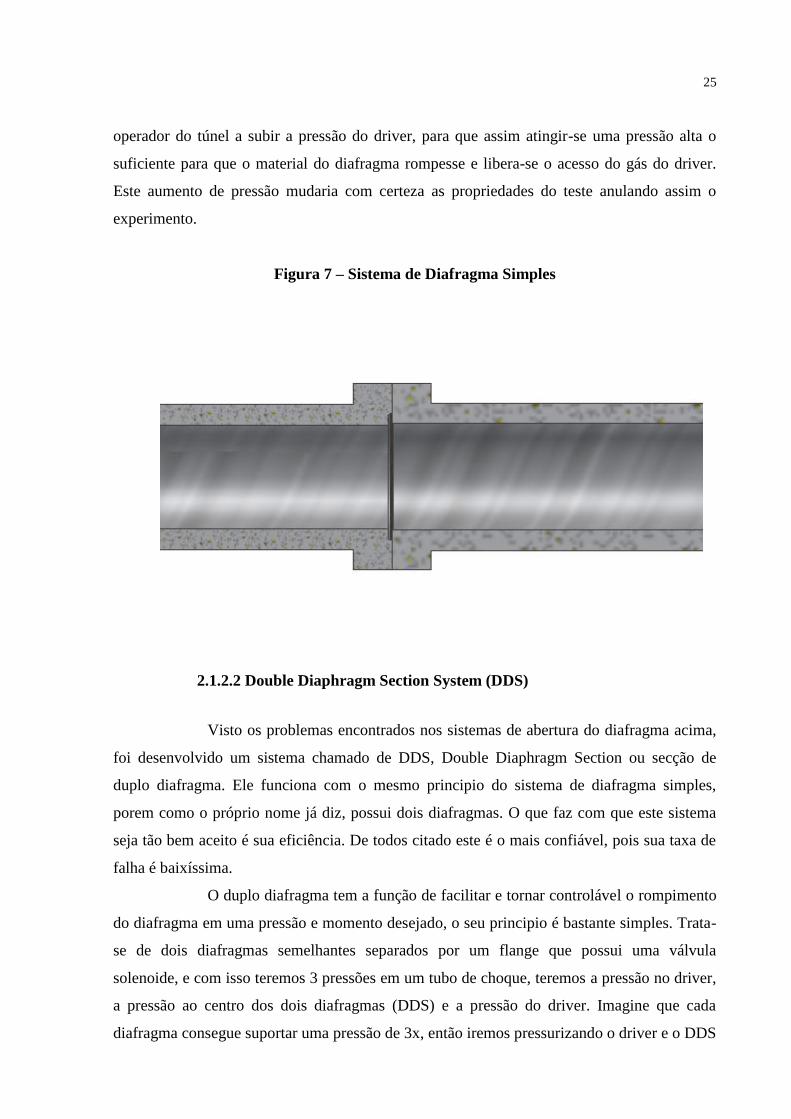
Figura 7 – Sistema de Diafragma Simples
2.1.2.2 Double Diaphragm Section System (DDS)
Visto os problemas encontrados nos sistemas de abertura do diafragma acima,
foi desenvolvido um sistema chamado de DDS, Double Diaphragm Section ou secção de
duplo diafragma. Ele funciona com o mesmo principio do sistema de diafragma simples,
porem como o próprio nome já diz, possui dois diafragmas. O que faz com que este sistema
seja tão bem aceito é sua eficiência. De todos citado este é o mais confiável, pois sua taxa de
falha é baixíssima.
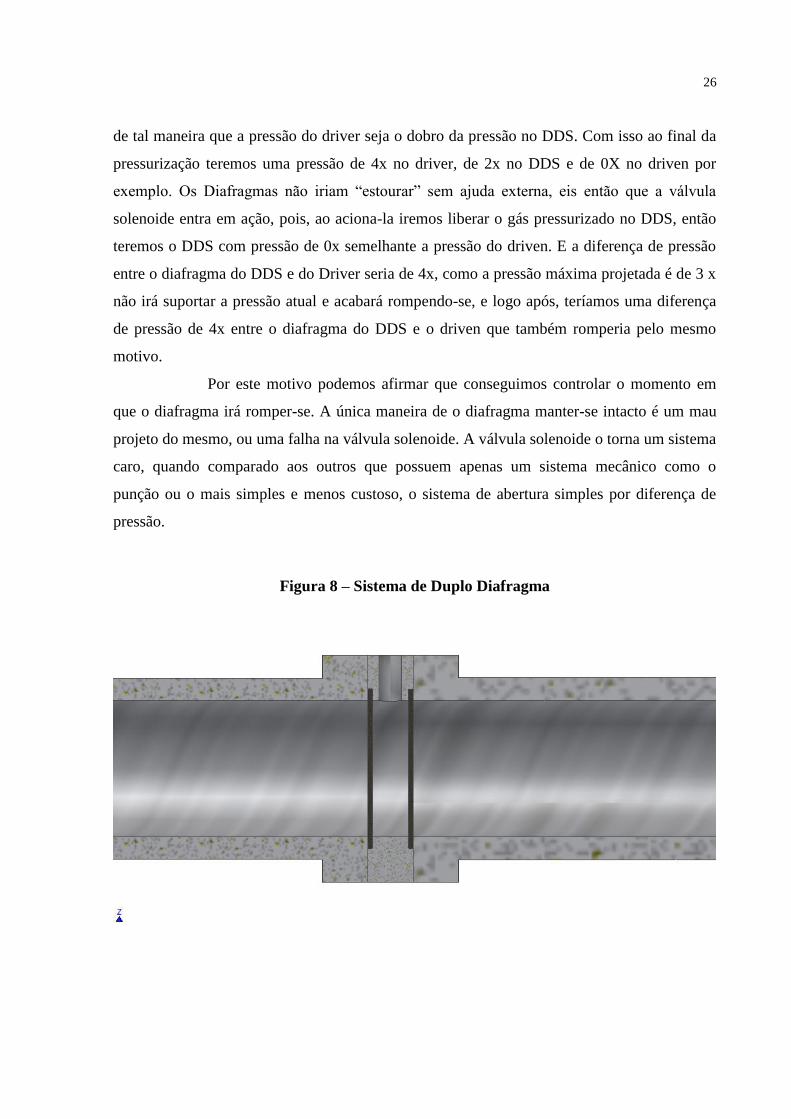
O duplo diafragma tem a função de facilitar e tornar controlável o rompimento
do diafragma em uma pressão e momento desejado, o seu principio é bastante simples. Trata-
se de dois diafragmas semelhantes separados por um flange que possui uma válvula
solenoide, e com isso teremos 3 pressões em um tubo de choque, teremos a pressão no driver,
a pressão ao centro dos dois diafragmas (DDS) e a pressão do driver. Imagine que cada
diafragma consegue suportar uma pressão de 3x, então iremos pressurizando o driver e o DDS
26
de tal maneira que a pressão do driver seja o dobro da pressão no DDS. Com isso ao final da
pressurização teremos uma pressão de 4x no driver, de 2x no DDS e de 0X no driven por
exemplo. Os Diafragmas não iriam “estourar” sem ajuda externa, eis então que a válvula
solenoide entra em ação, pois, ao aciona-la iremos liberar o gás pressurizado no DDS, então
teremos o DDS com pressão de 0x semelhante a pressão do driven. E a diferença de pressão
entre o diafragma do DDS e do Driver seria de 4x, como a pressão máxima projetada é de 3 x
não irá suportar a pressão atual e acabará rompendo-se, e logo após, teríamos uma diferença
de pressão de 4x entre o diafragma do DDS e o driven que também romperia pelo mesmo
motivo.
Por este motivo podemos afirmar que conseguimos controlar o momento em
que o diafragma irá romper-se. A única maneira de o diafragma manter-se intacto é um mau
projeto do mesmo, ou uma falha na válvula solenoide. A válvula solenoide o torna um sistema
caro, quando comparado aos outros que possuem apenas um sistema mecânico como o
punção ou o mais simples e menos custoso, o sistema de abertura simples por diferença de
pressão.
Figura 8 – Sistema de Duplo Diafragma
27
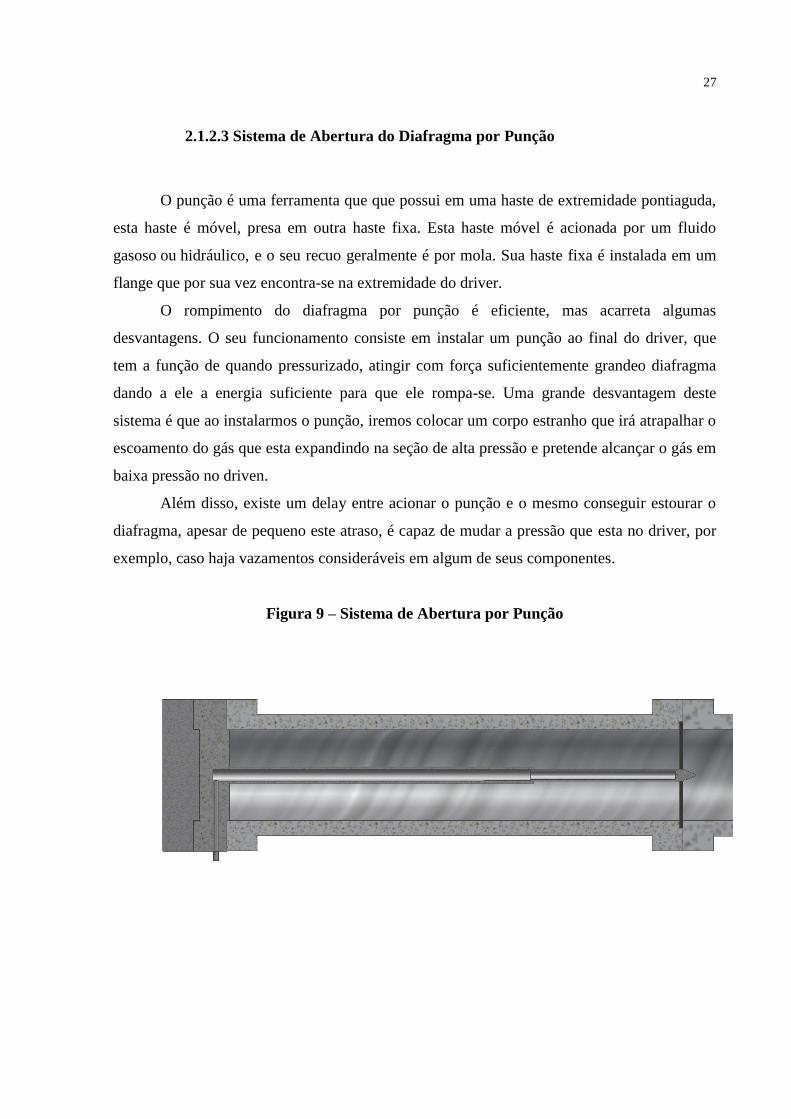
2.1.2.3 Sistema de Abertura do Diafragma por Punção
O punção é uma ferramenta que que possui em uma haste de extremidade pontiaguda,
esta haste é móvel, presa em outra haste fixa. Esta haste móvel é acionada por um fluido
gasoso ou hidráulico, e o seu recuo geralmente é por mola. Sua haste fixa é instalada em um
flange que por sua vez encontra-se na extremidade do driver.
O rompimento do diafragma por punção é eficiente, mas acarreta algumas
desvantagens. O seu funcionamento consiste em instalar um punção ao final do driver, que
tem a função de quando pressurizado, atingir com força suficientemente grandeo diafragma
dando a ele a energia suficiente para que ele rompa-se. Uma grande desvantagem deste
sistema é que ao instalarmos o punção, iremos colocar um corpo estranho que irá atrapalhar o
escoamento do gás que esta expandindo na seção de alta pressão e pretende alcançar o gás em
baixa pressão no driven.
Além disso, existe um delay entre acionar o punção e o mesmo conseguir estourar o
diafragma, apesar de pequeno este atraso, é capaz de mudar a pressão que esta no driver, por
exemplo, caso haja vazamentos consideráveis em algum de seus componentes.
Figura 9 – Sistema de Abertura por Punção
28
2.2- Modelamento Matemático do Escoamento em um Tubo de Choque
A movimentação (escoamento) de gases em Tubo de Choque é governada pelos
princípios da natureza, que é modelada por quatro leis físicas:
i) Principio da Conservação da Massa (equação da continuidade);
ii) Principio da Conservação da Quantidade de Movimento Linear (2ª Lei de Newton);
iii) Principio da Conservação da Energia (1ª Lei da Termodinâmica);
iv) Segunda Lei da Termodinâmica (aumento da entropia).
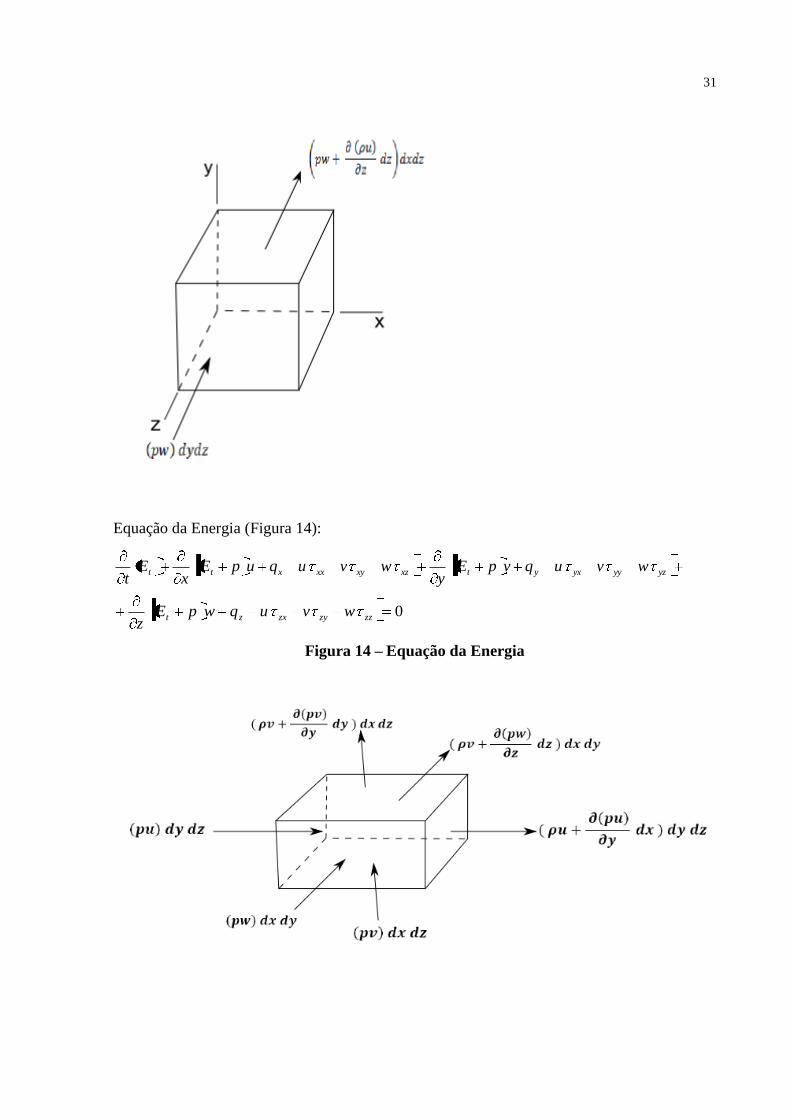
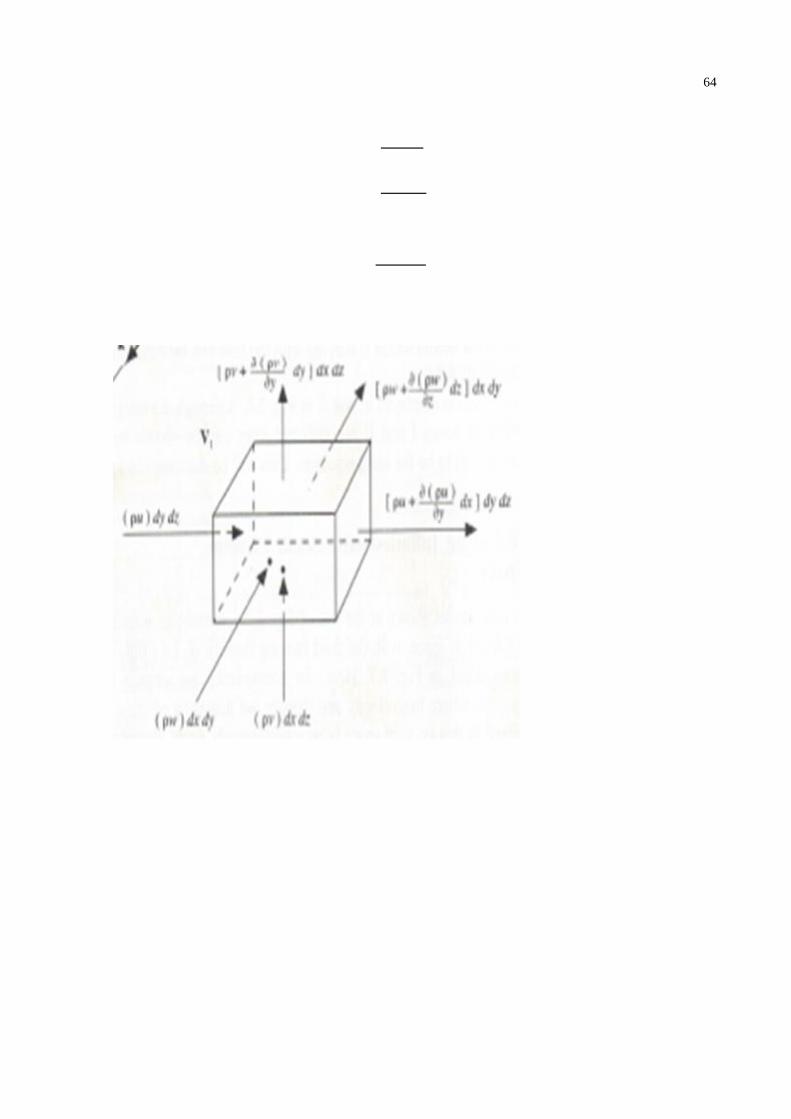
Considerando modelo de elemento (de fluido) infinitesimalmente pequeno (Figura 5),
fixo no espaço, em coordenadas cartesianas, na forma conservativa e ignorando as forças de
campo, têm-se as equações diferenciais parciais não lineares, hiperbólicas:
Figura 10 – Escoamento
Equação da continuidade (Figura 11),:
0 wz
vy
uxt
29
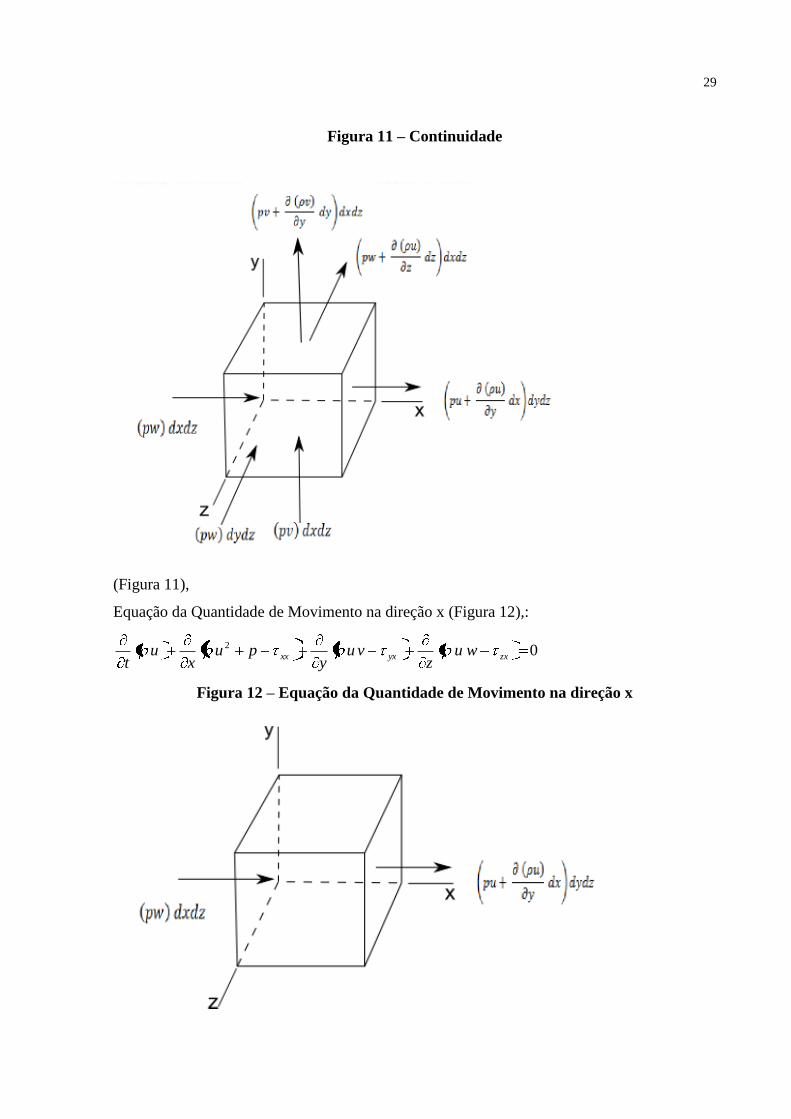
Figura 11 – Continuidade
(Figura 11),
Equação da Quantidade de Movimento na direção x (Figura 12),:
0 2
zxyxxx wuz
vuy
pux
ut
Figura 12 – Equação da Quantidade de Movimento na direção x
30
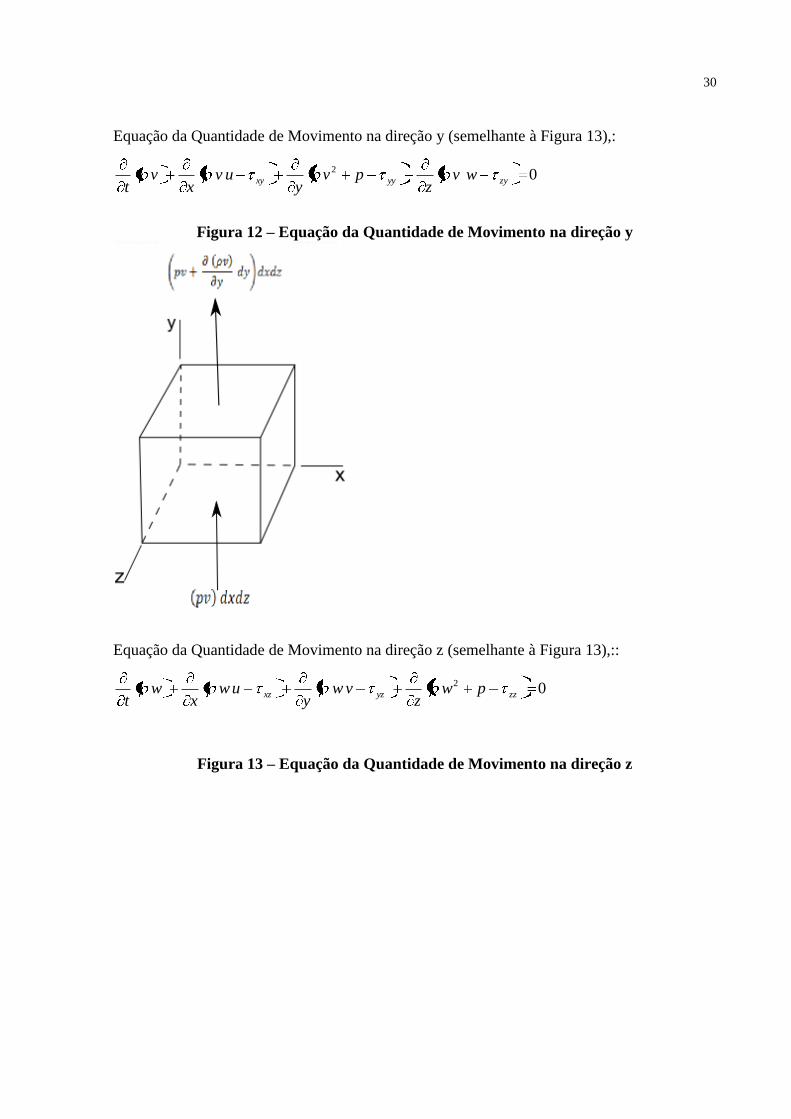
Equação da Quantidade de Movimento na direção y (semelhante à Figura 13),:
0 2
zyyyxy wvz
pvy
uvx
vt
Figura 12 – Equação da Quantidade de Movimento na direção y
Equação da Quantidade de Movimento na direção z (semelhante à Figura 13),::
0 2
zzyzxz pwz
vwy
uwx
wt
Figura 13 – Equação da Quantidade de Movimento na direção z
31
Equação da Energia (Figura 14):
yzyyyxytxzxyxxxtt wvuqvpEy
wvuqupEx
Et
0zzzyzxzt wvuqwpEz
Figura 14 – Equação da Energia

32
onde:
x
uVxx 2.
y
vVyy 2.
z
wVzz 2.
3
2
x
v
y
uyxxy
x
w
z
uzxxz
z
v
y
wzyyz
x
Tkqx
y
Tkq y
z
Tkq y
2
2
VeEt
kwjviuV
222 wvuV
Considerando escoamento permanente ( 0t
), unidimensional na direção x ( 0v
e 0w ), não viscoso ( 0 ) e sem troca de calor ( 0zyx qqq ), obtêm-se equações
diferenciais ordinárias dy
d. Ainda, considerando que, matematicamente, 0função
dy
d
constantefunção , e algumas manipulações matemáticas (apêndice 1), têm-se,
resumidamente, as equações que governam o escoamento em um tubo de choque:
33
Equação da continuidade:
1Cu
Equação da Quantidade de Movimento na direção x:
2
2 Cpu
Equação da Energia:
6
2
C2
uh
Aplicação das Equações de Governo em Tubo de Choque
Quando a onda de choque normal se propaga no reservatório de baixa pressão driven
com velocidade su , induz um movimento de massa, após a onda de choque, com velocidade
2u , e pressão 2p . A superfície de contato entre os gases do driver e driven se move com
velocidade 2u e pressão 2p . A onda de expansão se propaga na direção do driver suave e
continuamente decrescendo a pressão para a pressão 2p atrás da cauda da onda de expansão.
Considerando (fixo para em movimento)
As equações de governo do escoamento, para uma onda de choque não estacionária,
incidente, unidimensional, são dadas por:
Continuidade: 2s2s1 uuρuρ (2.1)
Momentum: 2
2s22
2
s11 uuρpuρp (2.2)
Energia: 2
2s2
2
s1 uu2
1hu
2
1h (2.3)
Equação de Estado: 2222 ,phh (2.4)
Uma vez que as condições após a onda de choque incidente são determinadas, as
condições existentes na onda de choque refletida podem ser determinadas, observando que a
velocidade u5 =0.
Novamente, as equações de governo do escoamento, para uma onda de choque
refletida unidimensional, são dadas por:
Continuidade: r5r22 uuu (2.5)
Momentum: 2
r55
2
r222 upuup (2.6)
34
Energia: 2
r5
2
r22 u2
1huu
2
1h (2.7)
Equação de Estado: 5555 ,phh (2.8)
Se as condições encontradas no tubo driven são suficientemente altas para que a
dissociação, ionização ou mesmo recombinação ocorra no gás, uma equação de gás real
(condições de alta entalpia de estagnação) precisa ser utilizada. A equação de gás perfeito
pode ser utilizada nas condições de baixa entalpia de estagnação ( KT 2000 ).
Para gás caloricamente perfeito as propriedades a jusante da onda de choque incidente,
são funções somente do número de Mach da onda de choque incidente, e das propriedades a
montante da onda de choque incidente.
Para este caso particular o modelagem do escoamento é apresentado a seguir. As
razões de pressão, massa especifica e temperatura na seção transversal, ao movimento da onda
de choque incidente, são dadas, respectivamente, por:
Considerando gás caloricamente perfeito tem-se que o calor específico a pressão
constante, pc , e o calor específico a volume constante, vc , são constantes.
Conseqüentemente, as relações da energia interna e da entalpia podem ser calculadas por:
Tch p
Tce v
p
v
c
c
vp ccR
p RT
cR
v 1
The viscosity and thermal conductivity are given by Sutherland’s law:
145810
110 4
6 3 2. .
.
/T
T, k
cp
Pr (7)
Manipulando
35
1
1M2
p
p
1
1
2
s1
1
2 (2.9)
2M1
M12
s1
2
s1
1
2 ou
1
2
1
1
1
2
1
1
1
2
p
p
1
1
p
p
1
11
(2.10)
2
1
1
2
1
2
p
p
T
T
1
2
1
2
p
p
ou
2M1
M1
1
1M2
M1
2M1
1
1M2
T
T
2
s1
2
s1
1
1
2
s1
2
s1
2
s1
1
1
2
s1
1
2 (2.11)
A velocidade induzida transmitida pela onda de choque incidente, movendo-se a
velocidade constante 2u , pode ser determinada pela condição de continuidade através da onda
de choque incidente e é dada por:
2
s
2
s
s
1
2M
1Mu
1
2u ou
s
s1
1
2M
1Ma
1
2u ou
1
2
1
1
1
1
1
212
p
p
1
1
1
2
1p
pau (2.12)
onde o número de Mach da onda de choque incidente é dada por 1
s
sa
uM .
O número de Mach induzido 2M , após a onda de choque incidente, é dada como
função do número de Mach incidente sM , ou seja
MM
M M
s
s s
2
2
1
2
1
2
1
2 1
1 2 2 1 (2.13)
Simultaneamente, uma onda de rarefação propaga-se no reservatório de alta pressão
driver. Assumindo expansão isentrópica a razão de pressão 3
4
pp
é dada por:
36
1
2
3
4
3
44
4
a
a
p
p (2.14)
As condições relacionando os estados dos gases em ambos os lados da superfície de
contato são aquelas onde a velocidade e a pressão são constantes através da superfície de
contato e são dadas por u u2 3 e p p2 3 . Finalmente, a razão de pressão entre o driver e
driven pode ser dada por
1
2
s
2
s
14
41
1
2
1
44
4
M
1M
1a
1a1
p
p
p
p ou
1
2
1
2
1
1
1
2
4
1
1
4
1
2
1
4
4
4
12
11
1
2
11
p
p
p
p
a
a
p
p
p
p (2.15)
Para uma dada razão de pressão entre o driver e o driven, 1
4
pp
, uma maior
temperatura (influencia a razão entre as velocidades do som, 4
1
aa
) ou um menor peso
molecular do gás do driver ( 4 ) do que o gás do driven maximizará a intensidade da onda de
choque incidente.
Após a onda de choque incidente alcançar a extremidade do tubo driven, o gás entra
em repouso, e a onda de choque é totalmente refletida. A temperatura e a pressão do gás do
escoamento, após a onda de choque refletida, são aumentadas. A onda de choque refletida
produz uma velocidade do escoamento induzido igual e em sentido oposto à velocidade u2 de
maneira a levar o gás ao repouso. O número de Mach após o movimento da onda de choque
incidente é dado em função do número de Mach da onda de choque refletida por:
r
r
2
22
M
1M
1
2
a
uM (2.16)
O número de Mach da onda de choque refletida pode ser reescrita como função do
número de Mach da onda de choque incidente dada por:
2
s
1
2
s
1
1
2
s
s
2
r
r
M
111M
1
121
1M
M
1M
M (2.17)
37
Um procedimento iterativo precisa ser utilizado para resolver a equação implícita do
número de Mach da onda de choque refletida.
A razão de pressão, massa especifica e temperatura, após a onda de choque refletida,
considerando gás caloricamente perfeito, podem ser calculadas como função do número de
Mach da onda de choque refletida, por
1
12
1
1
2
1
2
5 rM
p
p (2.19)
2M1
M12
r1
2
r1
2
5 (2.20)
5
2
2
5
2
5
p
p
T
T (2.21)
2.3 LIMITAÇÕES DE UM TUBO DE CHOQUE
2.3.1 ANALISANDO OS LIMITES OPERACIONAIS
Todas as propriedades do escoamento de um tubo de choque como foram visto é
encontrado em através de razões. E em grande numero as razões não têm saídas lineares,
sendo assim, elas possuem restrições operacionais. Eles podem ser impossíveis de serem
alcançado devido à limitação mecânica dos materiais, tecnológica ou inviável
economicamente. Utilizando um código computacional desenvolvido em FORTRAN, foram
criados gráficos todos em função do MS (Mach Incidente) para facilitar a visualização destes
limites. Os valores reais podem ser encontrados facilmente aplicando limites tendendo ao
infinito das razões acima apresentadas.
38
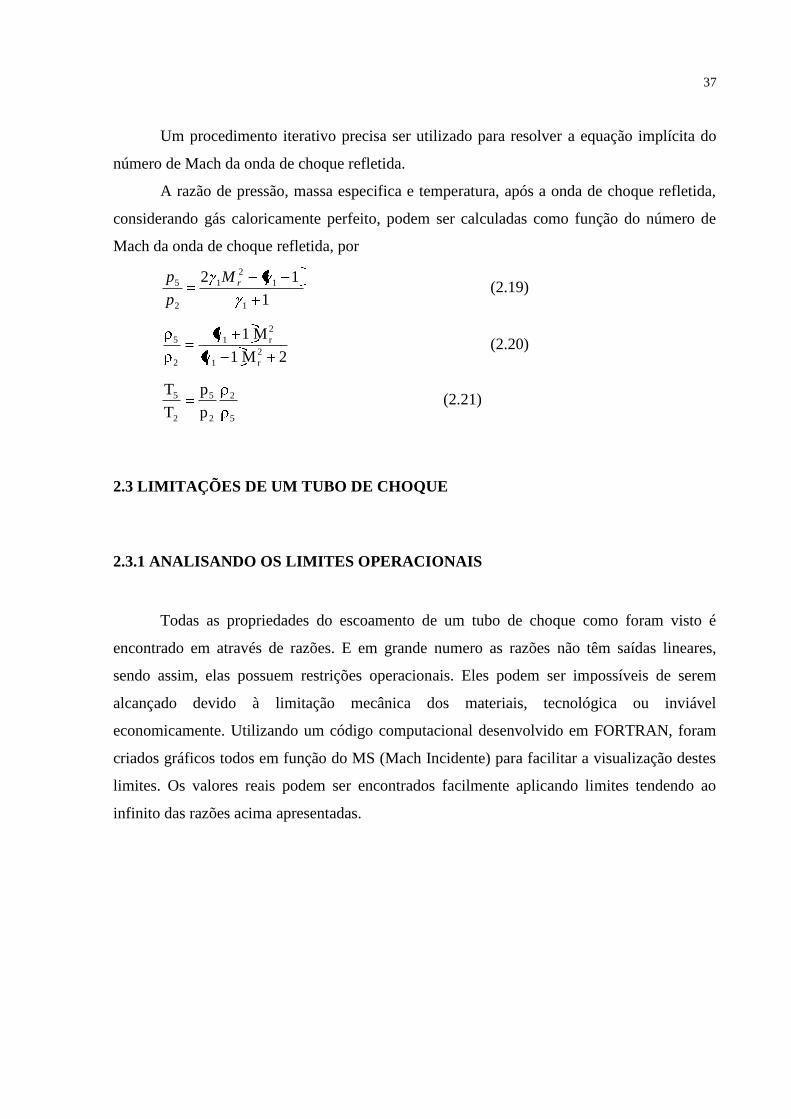
Figura 15 – Variação do escoamento perturbado pela onda de choque em função do
mach incidente
Figura 16 – Variação da velocidade da onda de choque refletida em função do mach
incidente
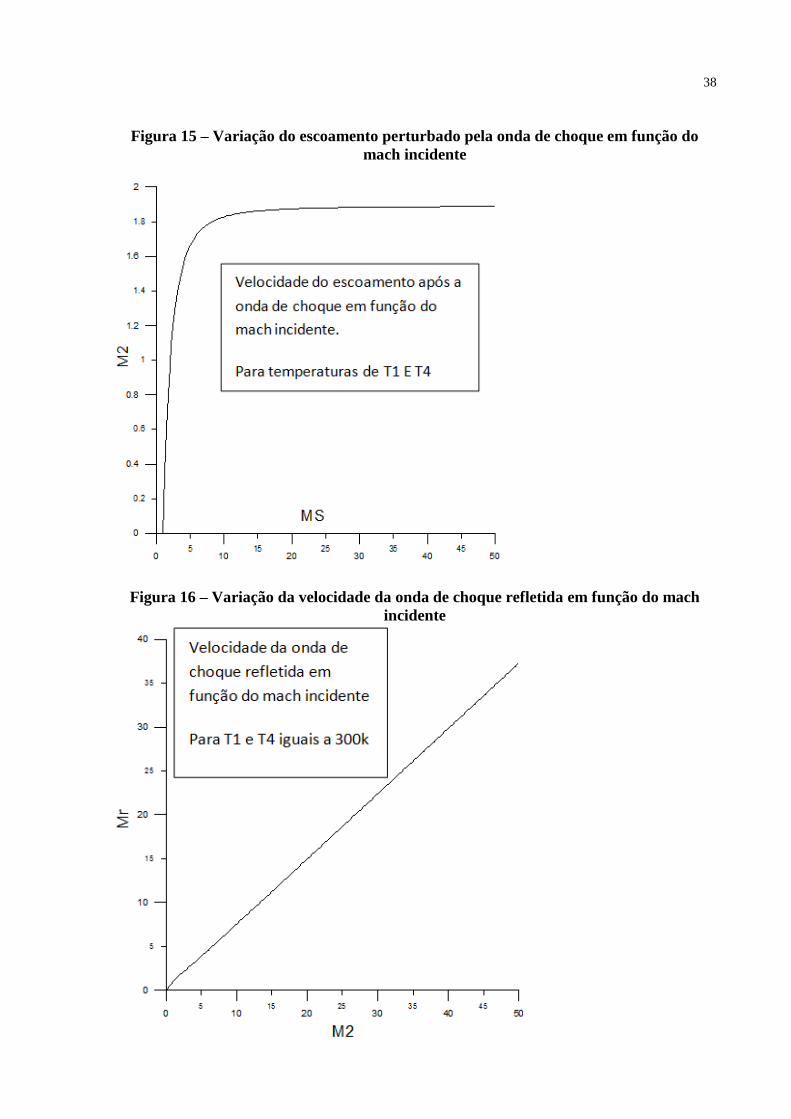
39
Figura 17 – Variação da razão de pressão entre o escoamento após a onda de choque e o
escoamento não perturbado em função do mach incidente
Figura 18 – Variação da razão de pressão no driver e no driven em função do mach
incidente
40
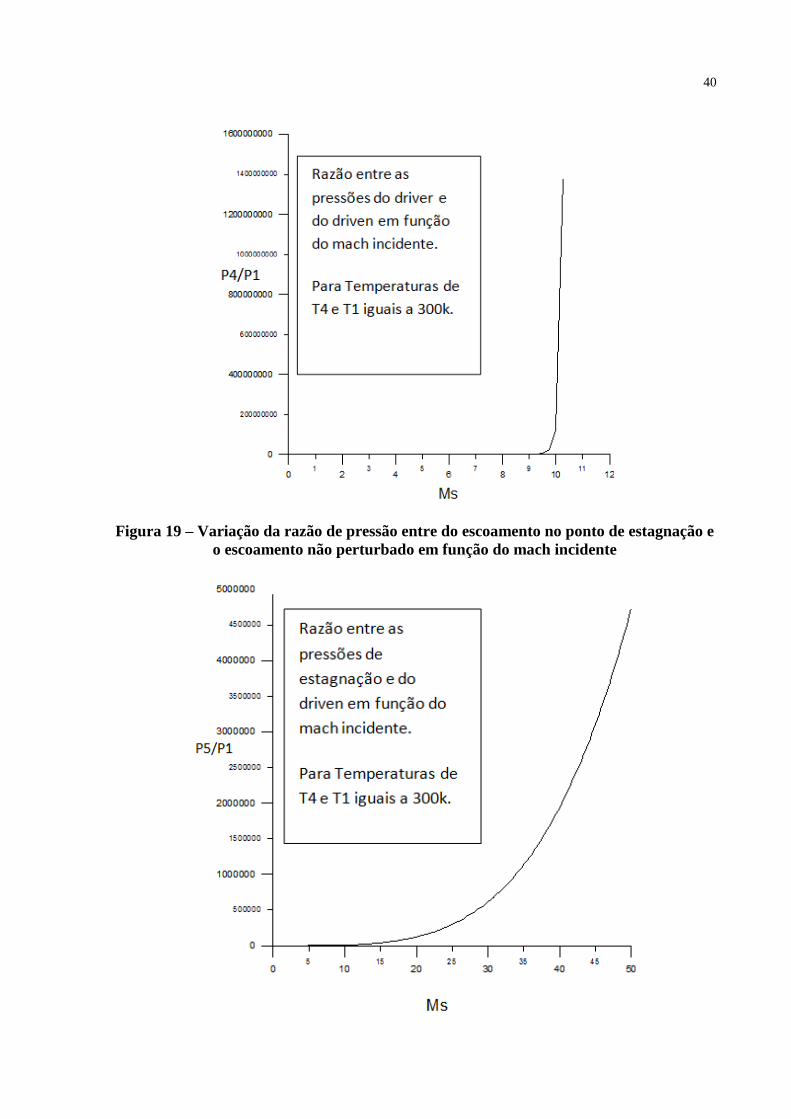
Figura 19 – Variação da razão de pressão entre do escoamento no ponto de estagnação e
o escoamento não perturbado em função do mach incidente
41
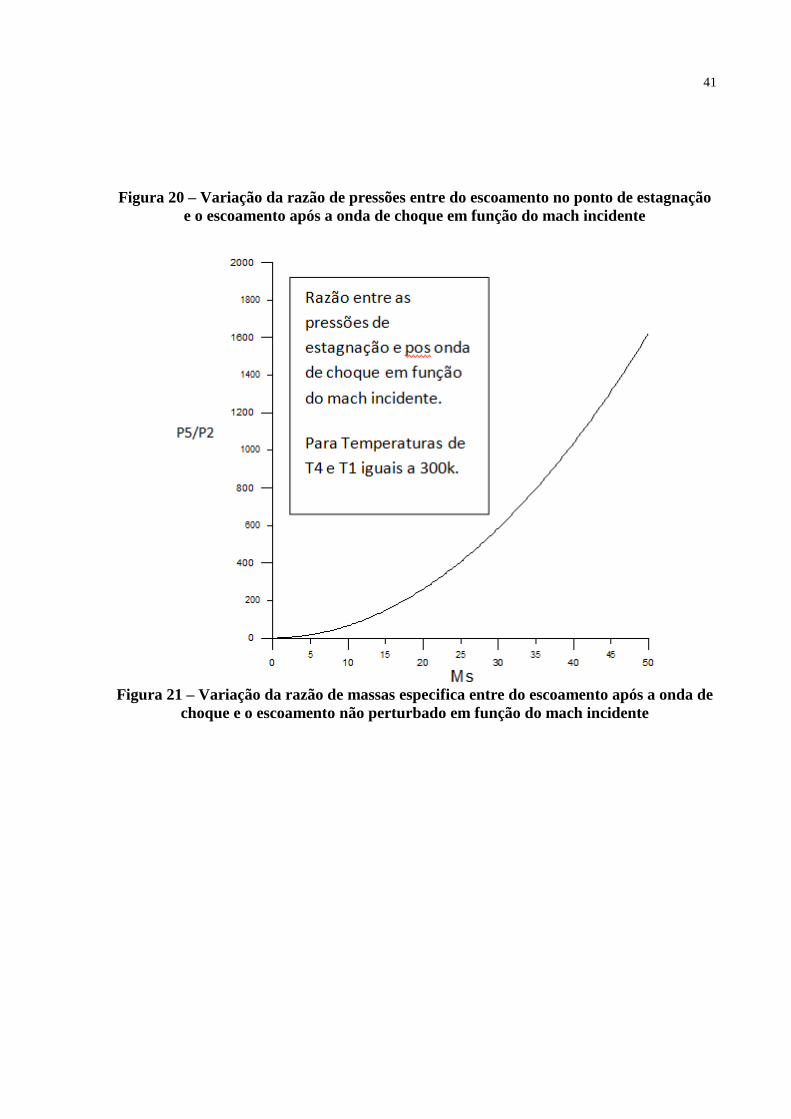
Figura 20 – Variação da razão de pressões entre do escoamento no ponto de estagnação
e o escoamento após a onda de choque em função do mach incidente
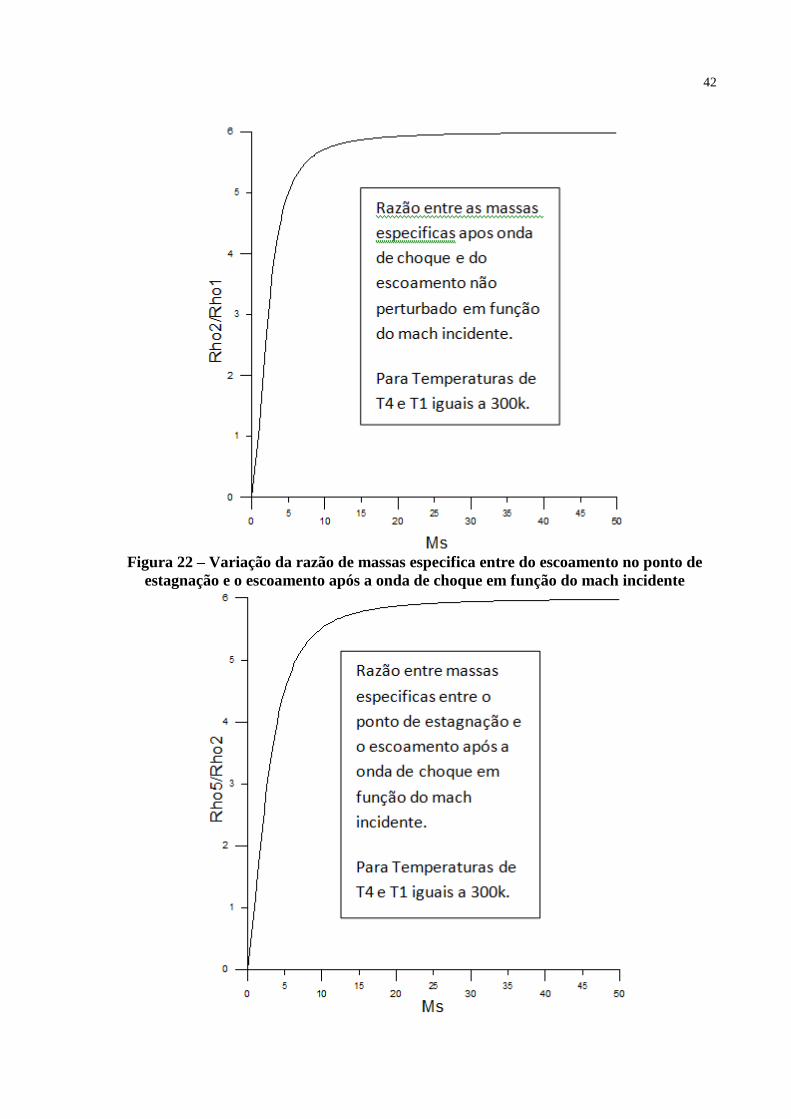
Figura 21 – Variação da razão de massas especifica entre do escoamento após a onda de
choque e o escoamento não perturbado em função do mach incidente
42
Figura 22 – Variação da razão de massas especifica entre do escoamento no ponto de
estagnação e o escoamento após a onda de choque em função do mach incidente
43
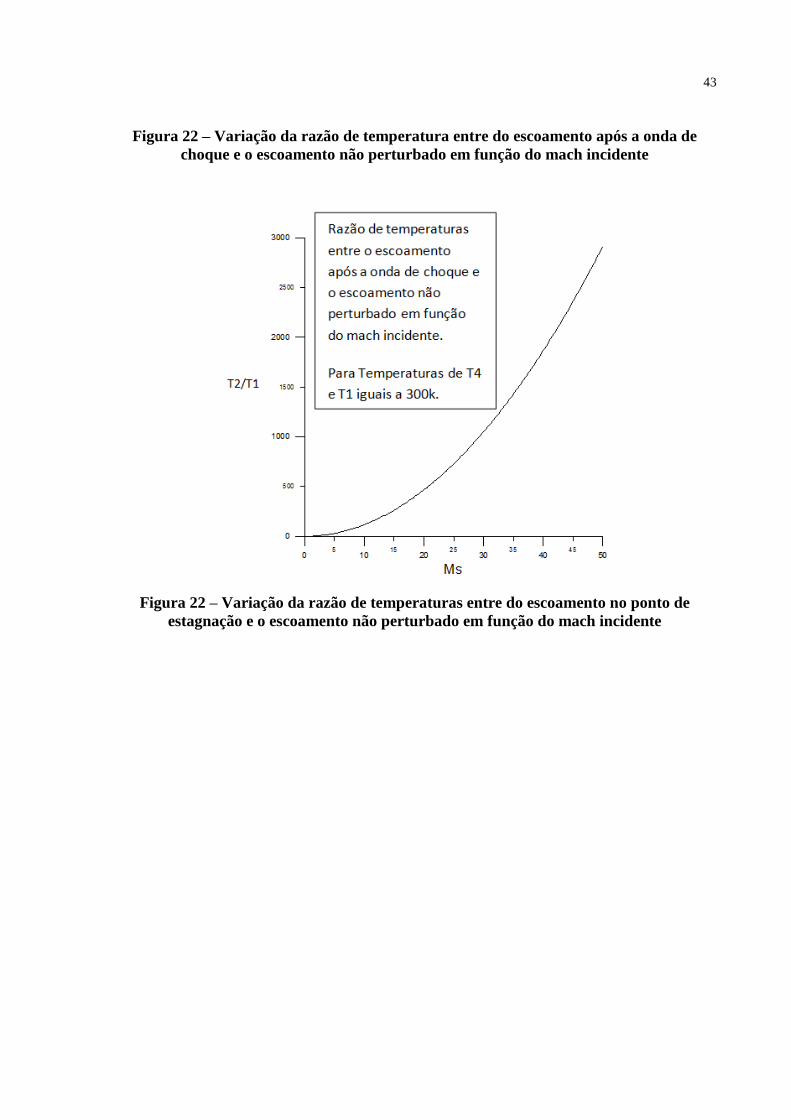
Figura 22 – Variação da razão de temperatura entre do escoamento após a onda de
choque e o escoamento não perturbado em função do mach incidente
Figura 22 – Variação da razão de temperaturas entre do escoamento no ponto de
estagnação e o escoamento não perturbado em função do mach incidente
44
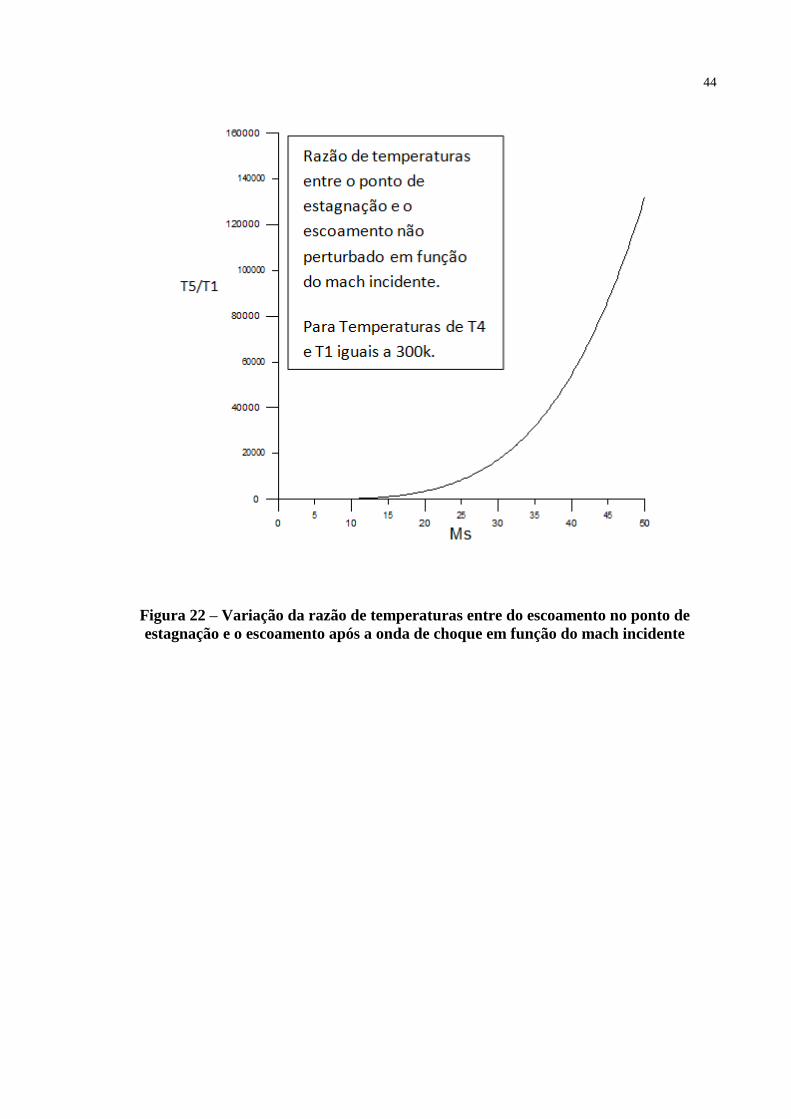
Figura 22 – Variação da razão de temperaturas entre do escoamento no ponto de
estagnação e o escoamento após a onda de choque em função do mach incidente
45
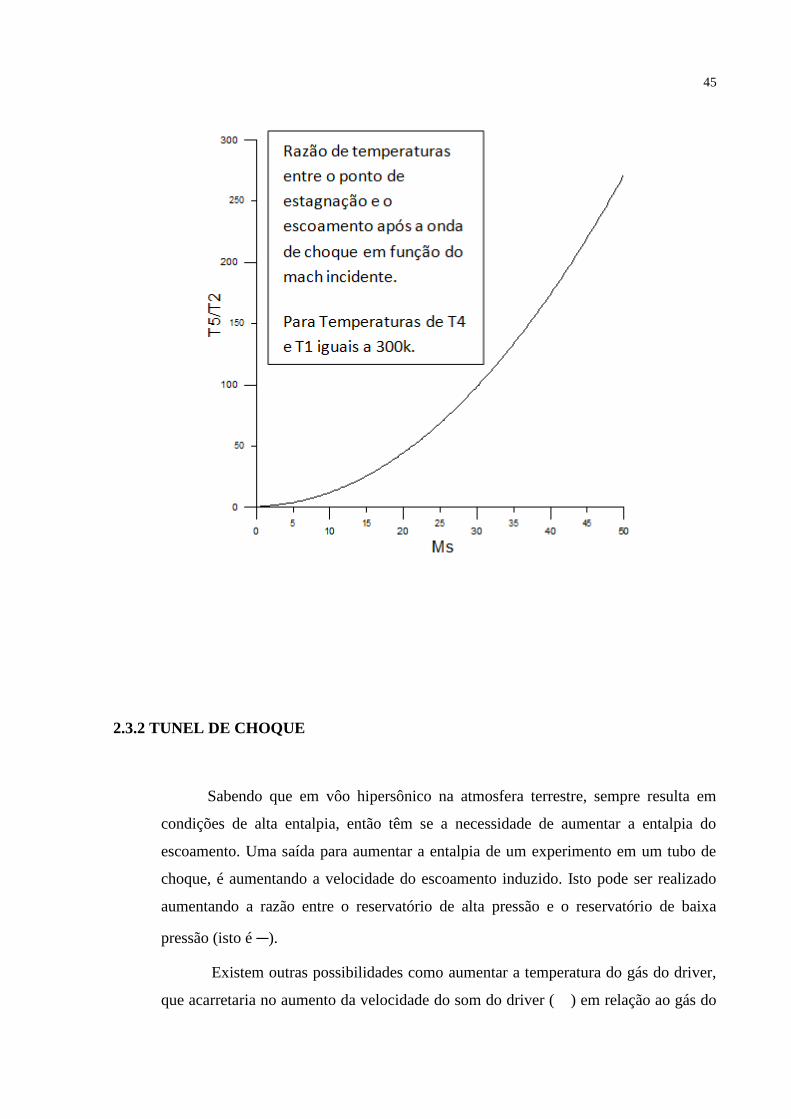
2.3.2 TUNEL DE CHOQUE
Sabendo que em vôo hipersônico na atmosfera terrestre, sempre resulta em
condições de alta entalpia, então têm se a necessidade de aumentar a entalpia do
escoamento. Uma saída para aumentar a entalpia de um experimento em um tubo de
choque, é aumentando a velocidade do escoamento induzido. Isto pode ser realizado
aumentando a razão entre o reservatório de alta pressão e o reservatório de baixa
pressão (isto é ).
Existem outras possibilidades como aumentar a temperatura do gás do driver,
que acarretaria no aumento da velocidade do som do driver ( ) em relação ao gás do
46
driven ( ). Também é possível a utilização de um gás de menor peso molecular no
driver, como Hélio ou até mesmo Hidrogênio que apresentaria altos valores de 4 .
Mas todo este esforço para aumentar a entalpia de um escoamento no tubo de
choque tem um limite, pois ao usarmos somente ar caloricamente perfeito, for usando
em ambos driver e driven, o valor do mach incidente não ira ultrapassar dois.
Visto esta limitação da velocidade do mach incidente e sabendo a dificuldade
de controle da velocidade do escoamento (pois uma pequena variação entre P4/P1
poderia mudar a velocidade do escoamento), pequena área útil de teste (seção de
teste), entre outros. Entendendo estes problemas foi desenvolvido o túnel de choque,
que torna possível melhorar algumas dessas características negativas de um tubo de
choque. Para efetuar essa “transformação”, de maneira grosseira, é adicionar um bocal
convergente/divergente denominado tubeira ao final do driven, logo após uma seção
de teste e um dumptank. Com isso iremos possibilitar o aumento da velocidade do
escoamento, além de ser possível controlá-la.
O aumento da seção de teste é outra vantagem considerável, como haverá uma
tubeira convergente divergente na extremidade do driven, e o final da seção divergente
da tubeira que possibilita aumentar a área da seção de teste.
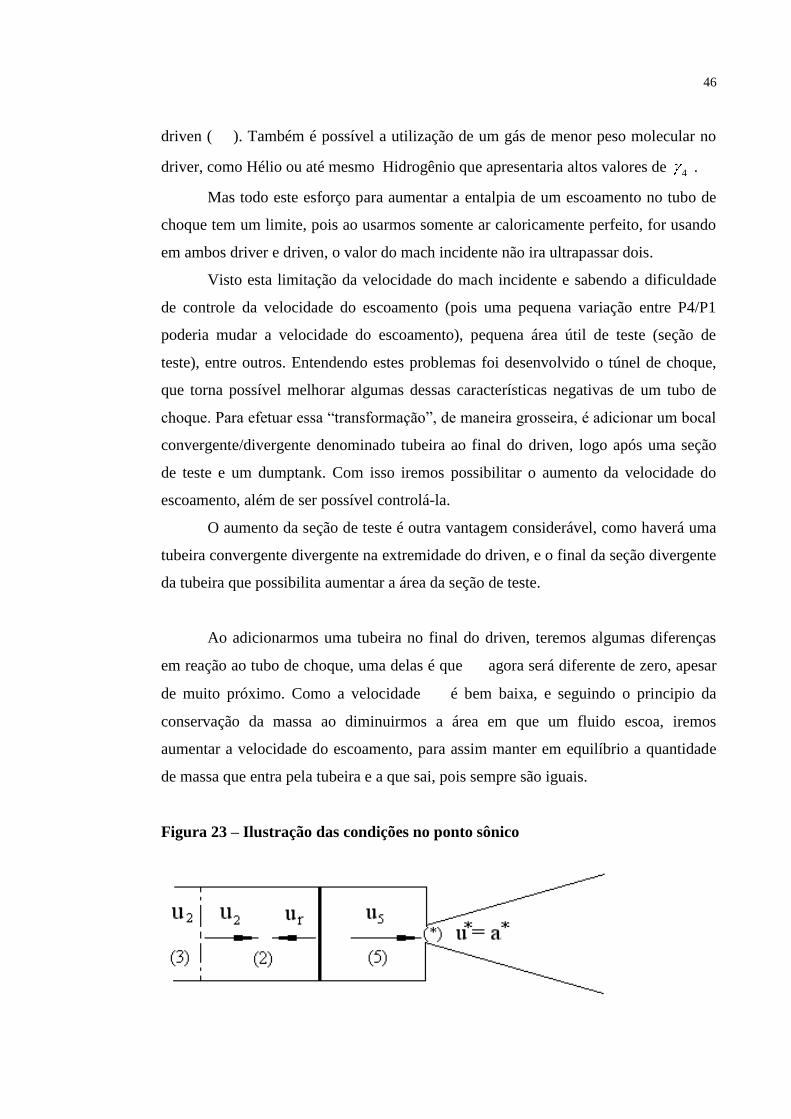
Ao adicionarmos uma tubeira no final do driven, teremos algumas diferenças
em reação ao tubo de choque, uma delas é que agora será diferente de zero, apesar
de muito próximo. Como a velocidade é bem baixa, e seguindo o principio da
conservação da massa ao diminuirmos a área em que um fluido escoa, iremos
aumentar a velocidade do escoamento, para assim manter em equilíbrio a quantidade
de massa que entra pela tubeira e a que sai, pois sempre são iguais.
Figura 23 – Ilustração das condições no ponto sônico
47
Existe uma razão de área ideal para cada túnel de choque, isto é, uma razão
entre área do ponto de estagnação (P5) e uma área chamada de ponto sônico que adota
* como índice. O Ponto sônico é o ponto onde que o escoamento ao ser acelerado
(adiabaticamente) pela estricção do canal alcançará a velocidade do som, o contrario
também é valido, se temos uma velocidade sônica e queremos acelerá-la a uma
velocidade maior.
O calculo entre as razões das áreas é dado pela formula abaixo, onde A é a área
do túnel de choque e A* é a área do ponto sônico. Esta formula é valida tanto para o
calculo da área no regime subsônico, quanto para o regime supersônico.
Com isto conseguiremos controlar a velocidade do escoamento, pois agora ela
não irá depender da razão entre p4/p1, e sim da tubeira adequada para a velocidade
desejada. Após a tubeira teremos a seção de teste e ao fim o dumptank, cuja única
finalidade é confinar o escoamento acelerado pela tubeira, não permitindo que o
mesmo entre em contato com o ambiente em volta do túnel de choque. E também
diminuir a pressão final do túnel de choque, pois ao final do experimento, a mesma
esta em equilíbrio isto é, igual em todas as seções. O ideal que é esta pressão
mantenha-se sempre abaixo de duas atmosferas.
As outras propriedades também são encontradas a partir de razões entre
a propriedade no final do driven e a propriedade desejada após o ponto sônico. E são
dadas por as formulas abaixo descritas:
48
2.4 Utilizações de um tubo de Choque
Acima foi visto o modo de se operar um tubo de choque e o modelamento
matemático do escoamento e os fenômenos físicos que o cerca. Agora serão mostradas
algumas maneiras de utilizar este versátil equipamento. Será abordado como é
realizado calibração dinâmica de sensores, ensaios aerodinâmicos, e de combustão. E
no próximo capítulo estão os resultados e a metodologia dos ensaios.
2.4.1 Calibração dinâmica de sensores
Os sensores piezelétricos têm seu uso difundido em várias áreas de
pesquisa, por serem seguros, rápidos e confiáveis. Mas para que sua resposta seja a
mesma que a esperada, temos que ter certeza que o sensor esteja bem aferido. Todo
sensor quando comprado, vem com sua curva de calibração individual de fabrica que
especifica sua sensibilidade, e com o passar do tempo e ciclos (testes) que irão
desgastar os sensores, alterando assim sua calibração.
Esta alteração em sua sensibilidade não torna os sensores sucatas,
apenas força que uma calibração dinâmica seja feita. O objetivo desta calibração é
obter uma nova curva de calibração, mostrando sua sensibilidade. Vale lembrar que
para cada faixa de pressão os sensores apresentam uma sensibilidade diferente, pois os
sensores comportam-se diferente se comparamos a tensão de saída em relação a uma
grande diferença de deformação aplicada.
Antes de darmos inicio a calibração dos sensores é vital saber a faixa de
pressão em que os sensores irão atuar, para criar a curva de calibração ideal para o
modelo a ser testado. Esta pressão ideal pode ser adquirida com uma analise teórica ou
conferindo a pressão esperada no projeto. Já a pressão que teremos que configurar o
tubo de choque é encontrado pelas diferenças de pressões e temperaturas entre o driver
e o driven.
49
2.4.1.1 Sensores piezo elétricos
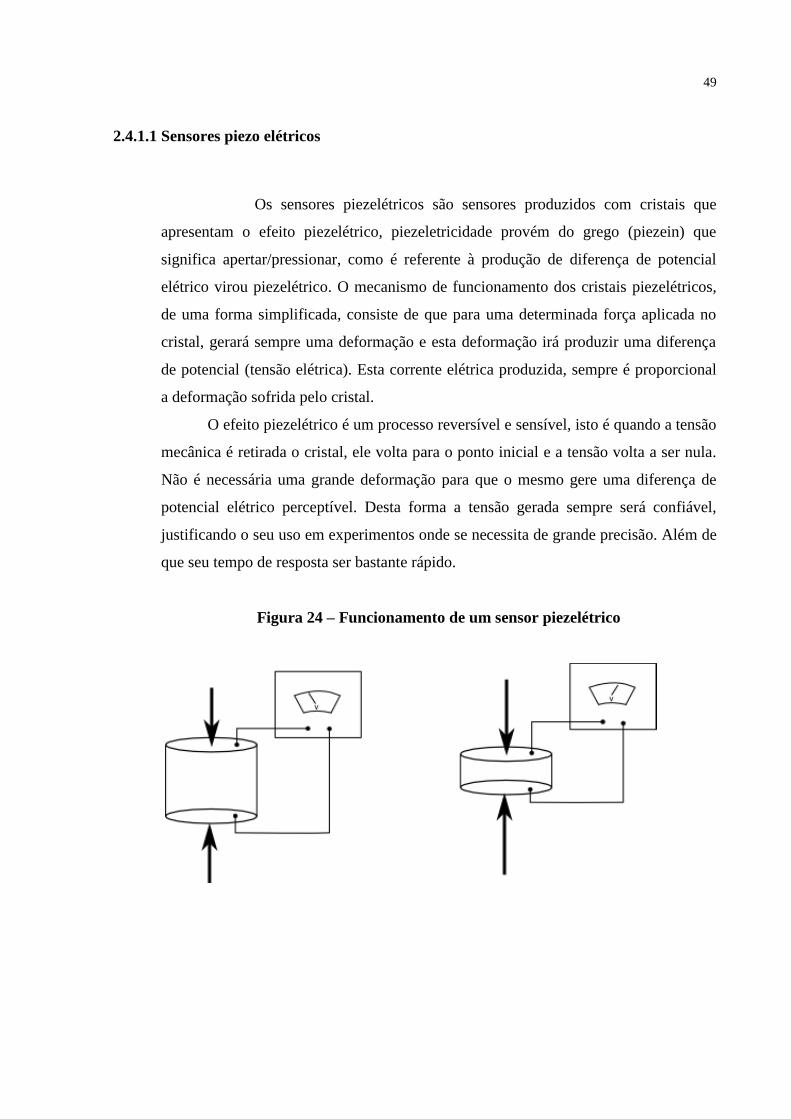
Os sensores piezelétricos são sensores produzidos com cristais que
apresentam o efeito piezelétrico, piezeletricidade provém do grego (piezein) que
significa apertar/pressionar, como é referente à produção de diferença de potencial
elétrico virou piezelétrico. O mecanismo de funcionamento dos cristais piezelétricos,
de uma forma simplificada, consiste de que para uma determinada força aplicada no
cristal, gerará sempre uma deformação e esta deformação irá produzir uma diferença
de potencial (tensão elétrica). Esta corrente elétrica produzida, sempre é proporcional
a deformação sofrida pelo cristal.
O efeito piezelétrico é um processo reversível e sensível, isto é quando a tensão
mecânica é retirada o cristal, ele volta para o ponto inicial e a tensão volta a ser nula.
Não é necessária uma grande deformação para que o mesmo gere uma diferença de
potencial elétrico perceptível. Desta forma a tensão gerada sempre será confiável,
justificando o seu uso em experimentos onde se necessita de grande precisão. Além de
que seu tempo de resposta ser bastante rápido.
Figura 24 – Funcionamento de um sensor piezelétrico
50
3 MATERIAIS E MÉTODOS
3.2 Calibrações dinâmica de sensores PCB modelo 112 A 22
Neste sub-capitulo encontraremos o procedimento para a produção de uma
nova curva de calibração de sensores piezelétrico PCB modelo 112 A 22, estes sensores foram
projetados para atuar em pressões entre XXX- XXX. A calibração dinâmica destes modelos
de transdutores de pressão utilizando tubos de choque é indicada pelo fabricante, como consta
em seu manual.
3.2.1 PARTE EXPERIMENTAL
Materiais utilizados
- 01 Tubo de Choque T1;
- 03 Sensores Kistler modelo 701 A
- 05 Sensores PCB
- 08 Cabos Microdot/BNC;
- 02 Oscilógrafos Yokogawa DL 750
- 01 Condicionador de Sinal (PCB);
- 03 Amplificadores (Kistler);
- 02 Chaves de Boca, nº11 e nº 13;
- 02 Chaves Allen;
- Gás Hélio;
- Gás Argônio;
- Diafragmas de Celofane;
Preparação do túnel
51
Para começar a calibração é importante conferir se todos os dispositivos do
túnel estão funcionando perfeitamente. Então são conferidos os anéis de vedação (o-ring),
válvulas de alivio e controladora(s) (válvulas solenóides). O Segundo passo é a instalação de
diafragmas novos e em bom estado, e ao fechar o túnel sempre o fazer com o torque
especificado no projeto. O próximo passo é realizar o vácuo no túnel, ele ira expor qualquer
defeito no posicionamento do diafragma, pois um diafragma mal instalado não irá permitir um
bom vácuo. Finalmente o procedimento de teste mais perigoso, verificar a pressões presentes
nos cilindros os gases que irão pressurizar o DDS e o Driver.
Ajustar os equipamentos eletrônicos (oscilógrafos, amplificadores...);
É de extrema importância que o sistema eletrônico, principalmente o sistema
de aquisição de dados esta completamente operante, pois se não, iremos desperdiçar dinheiro
e tempo já que não teremos os dados do experimento. Para configurar o sistema de aquisição
de dados é necessário que a utilização de 3 amplificadores de sinais Kistler, 3 sensores kistler
(que serão utilizados como P5, 1º P2 e 2º P2, e 1 oscilógrafo e um condicionador de sinais
PCB além de cabos para a correta ligação.
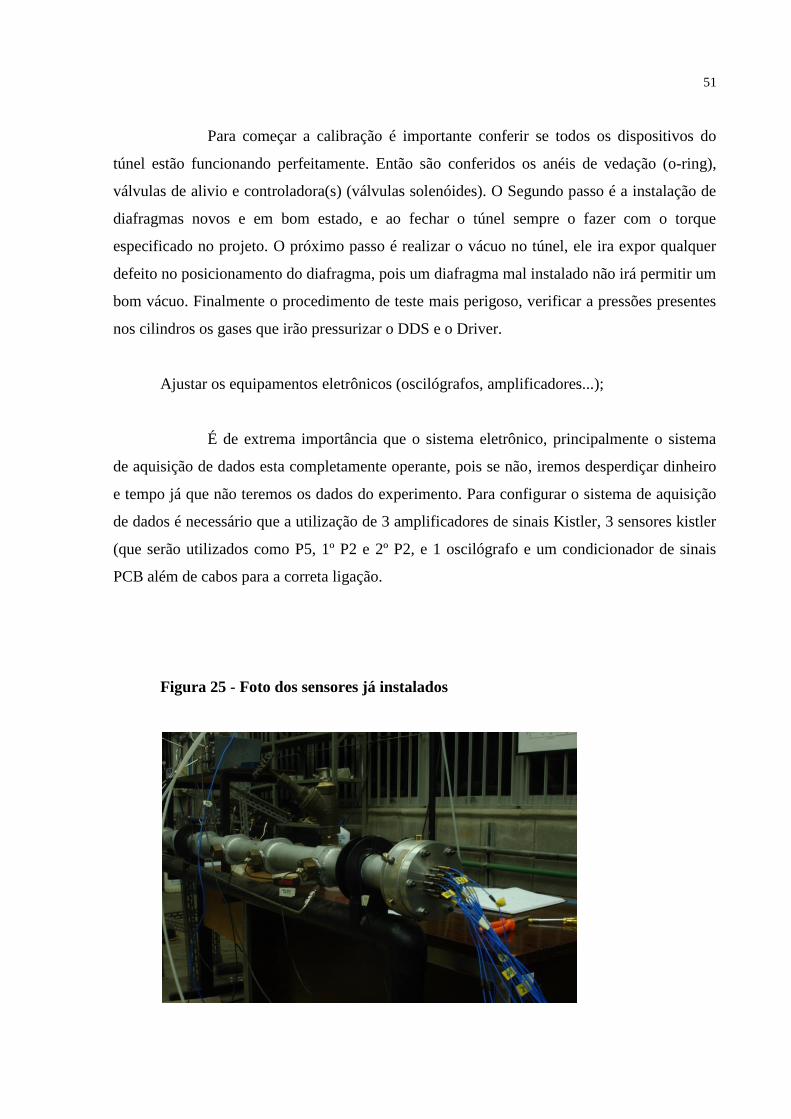
Figura 25 - Foto dos sensores já instalados
52
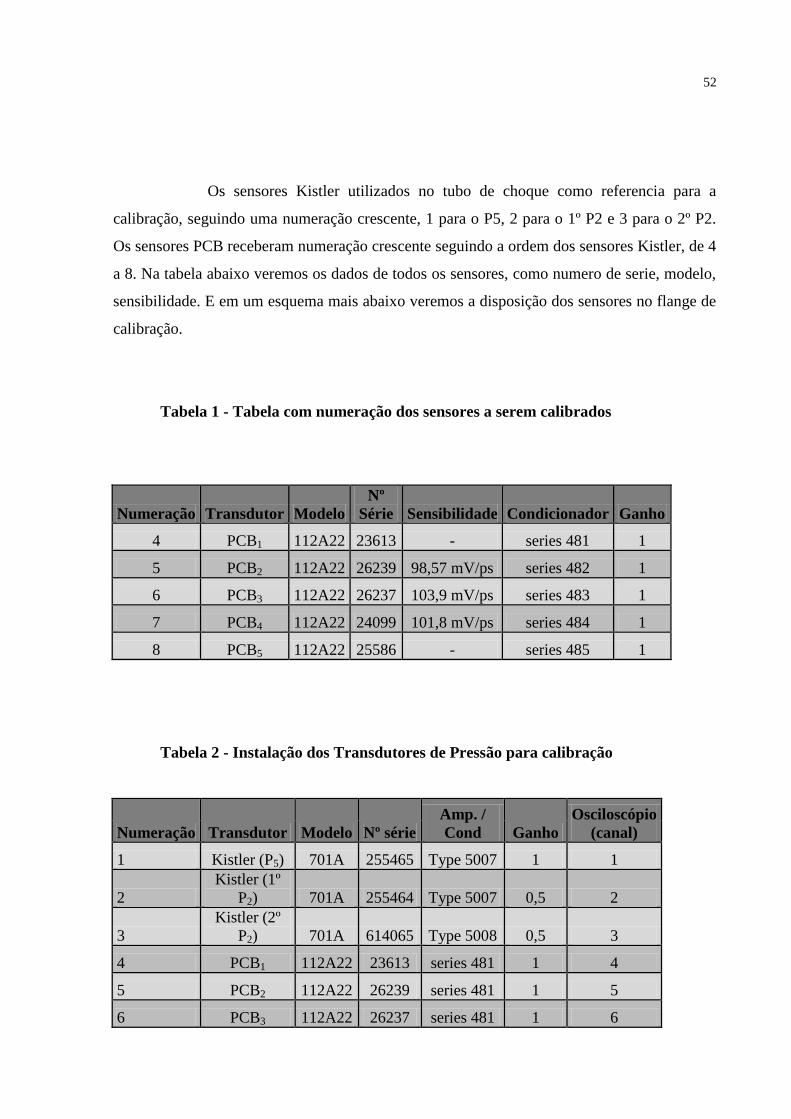
Os sensores Kistler utilizados no tubo de choque como referencia para a
calibração, seguindo uma numeração crescente, 1 para o P5, 2 para o 1º P2 e 3 para o 2º P2.
Os sensores PCB receberam numeração crescente seguindo a ordem dos sensores Kistler, de 4
a 8. Na tabela abaixo veremos os dados de todos os sensores, como numero de serie, modelo,
sensibilidade. E em um esquema mais abaixo veremos a disposição dos sensores no flange de
calibração.
Tabela 1 - Tabela com numeração dos sensores a serem calibrados
Numeração Transdutor Modelo
Nº
Série Sensibilidade Condicionador Ganho
4 PCB1 112A22 23613 - series 481 1
5 PCB2 112A22 26239 98,57 mV/ps series 482 1
6 PCB3 112A22 26237 103,9 mV/ps series 483 1
7 PCB4 112A22 24099 101,8 mV/ps series 484 1
8 PCB5 112A22 25586 - series 485 1
Tabela 2 - Instalação dos Transdutores de Pressão para calibração
Numeração Transdutor Modelo Nº série
Amp. /
Cond Ganho
Osciloscópio
(canal)
1 Kistler (P5) 701A 255465 Type 5007 1 1
2
Kistler (1º
P2) 701A 255464 Type 5007 0,5 2
3
Kistler (2º
P2) 701A 614065 Type 5008 0,5 3
4 PCB1 112A22 23613 series 481 1 4
5 PCB2 112A22 26239 series 481 1 5
6 PCB3 112A22 26237 series 481 1 6
53
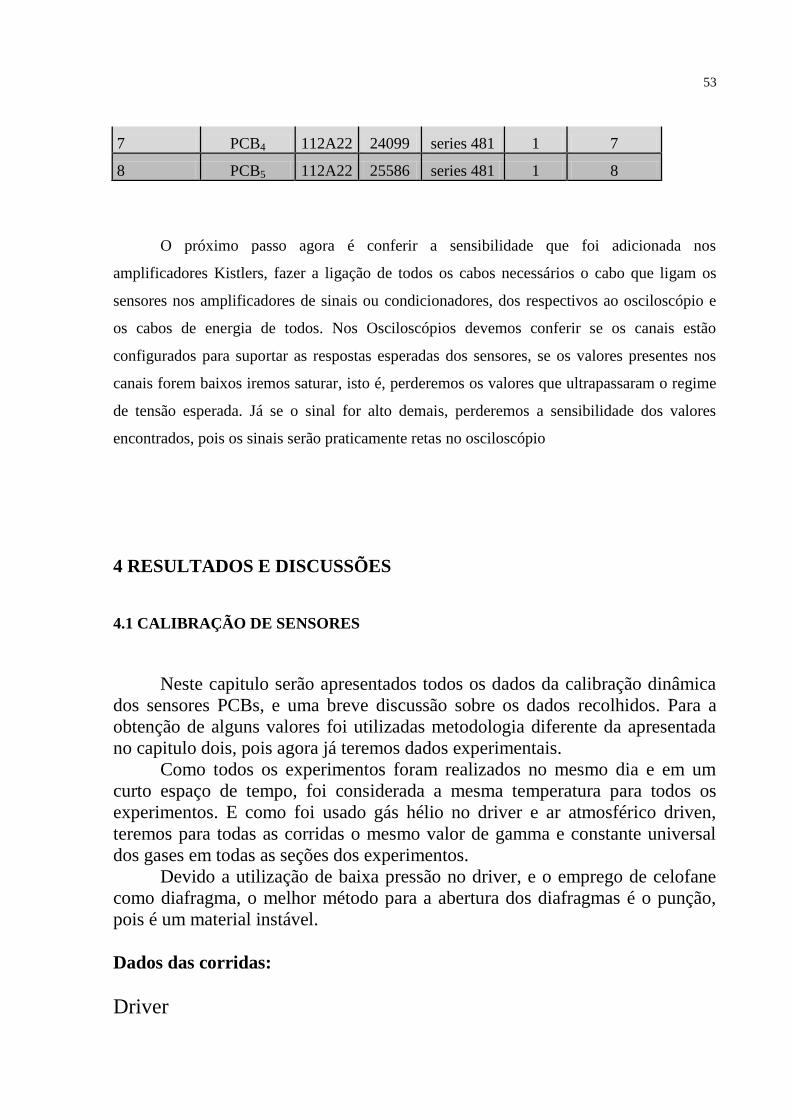
7 PCB4 112A22 24099 series 481 1 7
8 PCB5 112A22 25586 series 481 1 8
O próximo passo agora é conferir a sensibilidade que foi adicionada nos
amplificadores Kistlers, fazer a ligação de todos os cabos necessários o cabo que ligam os
sensores nos amplificadores de sinais ou condicionadores, dos respectivos ao osciloscópio e
os cabos de energia de todos. Nos Osciloscópios devemos conferir se os canais estão
configurados para suportar as respostas esperadas dos sensores, se os valores presentes nos
canais forem baixos iremos saturar, isto é, perderemos os valores que ultrapassaram o regime
de tensão esperada. Já se o sinal for alto demais, perderemos a sensibilidade dos valores
encontrados, pois os sinais serão praticamente retas no osciloscópio
4 RESULTADOS E DISCUSSÕES
4.1 CALIBRAÇÃO DE SENSORES
Neste capitulo serão apresentados todos os dados da calibração dinâmica
dos sensores PCBs, e uma breve discussão sobre os dados recolhidos. Para a
obtenção de alguns valores foi utilizadas metodologia diferente da apresentada
no capitulo dois, pois agora já teremos dados experimentais.
Como todos os experimentos foram realizados no mesmo dia e em um
curto espaço de tempo, foi considerada a mesma temperatura para todos os
experimentos. E como foi usado gás hélio no driver e ar atmosférico driven,
teremos para todas as corridas o mesmo valor de gamma e constante universal
dos gases em todas as seções dos experimentos.
Devido a utilização de baixa pressão no driver, e o emprego de celofane
como diafragma, o melhor método para a abertura dos diafragmas é o punção,
pois é um material instável.
Dados das corridas:
Driver
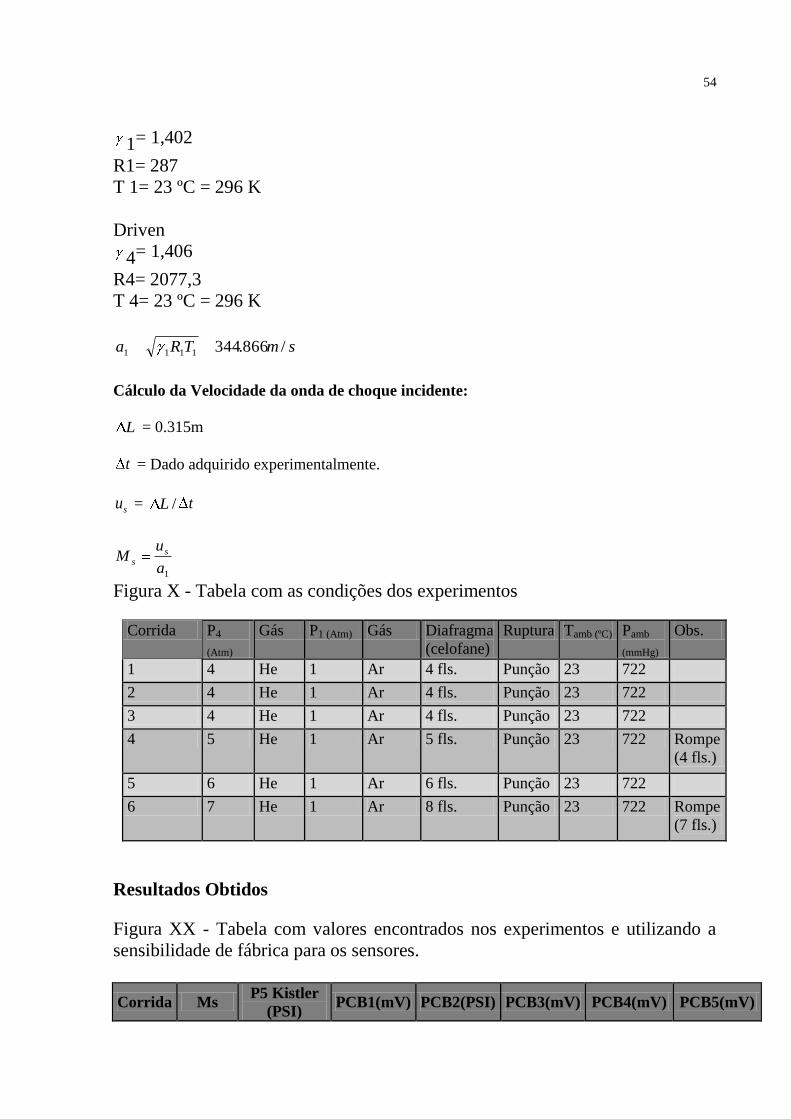
54
1= 1,402
R1= 287
T 1= 23 ºC = 296 K
Driven
4= 1,406
R4= 2077,3
T 4= 23 ºC = 296 K
smTRa /866.3441111 Cálculo da Velocidade da onda de choque incidente:
L = 0.315m
t = Dado adquirido experimentalmente.
su = L / t
1a
uM s
s
Figura X - Tabela com as condições dos experimentos
Corrida P4
(Atm)
Gás P1 (Atm) Gás Diafragma
(celofane)
Ruptura Tamb (ºC) Pamb
(mmHg)
Obs.
1 4 He 1 Ar 4 fls. Punção 23 722
2 4 He 1 Ar 4 fls. Punção 23 722
3 4 He 1 Ar 4 fls. Punção 23 722
4 5 He 1 Ar 5 fls. Punção 23 722 Rompe
(4 fls.)
5 6 He 1 Ar 6 fls. Punção 23 722
6 7 He 1 Ar 8 fls. Punção 23 722 Rompe
(7 fls.)
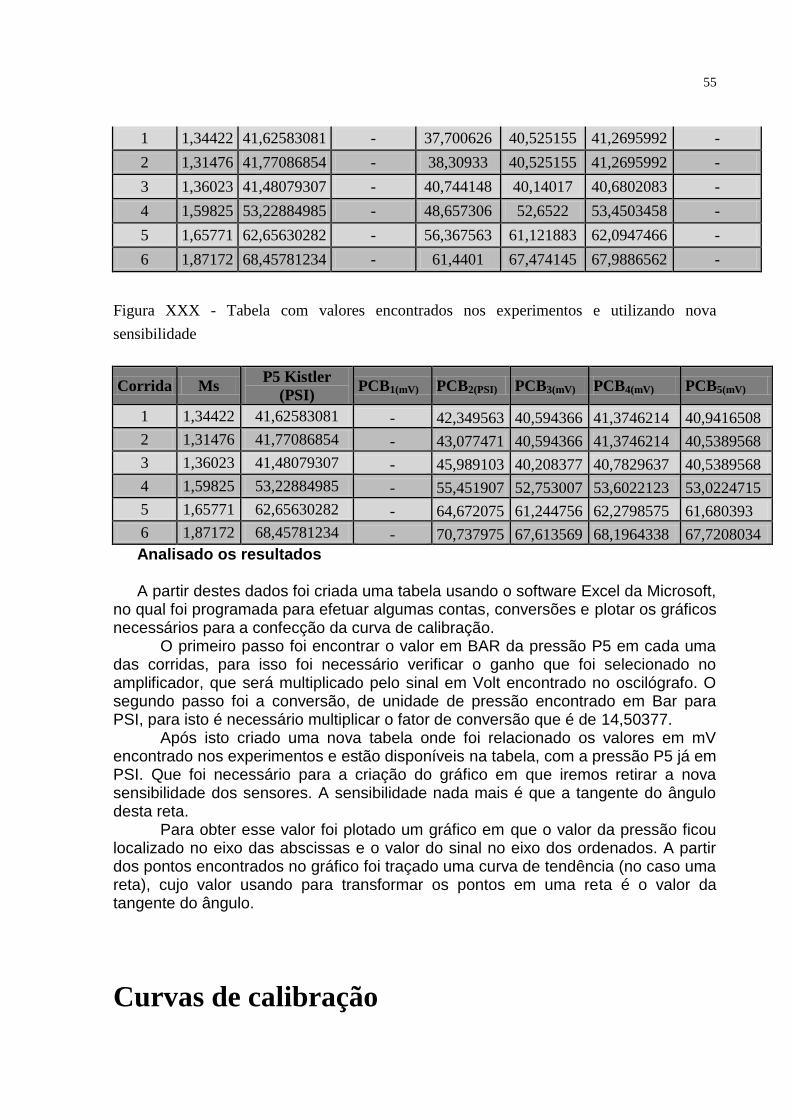
Resultados Obtidos
Figura XX - Tabela com valores encontrados nos experimentos e utilizando a
sensibilidade de fábrica para os sensores.
Corrida Ms P5 Kistler
(PSI) PCB1(mV) PCB2(PSI) PCB3(mV) PCB4(mV) PCB5(mV)
55
1 1,34422 41,62583081 - 37,700626 40,525155 41,2695992 -
2 1,31476 41,77086854 - 38,30933 40,525155 41,2695992 -
3 1,36023 41,48079307 - 40,744148 40,14017 40,6802083 -
4 1,59825 53,22884985 - 48,657306 52,6522 53,4503458 -
5 1,65771 62,65630282 - 56,367563 61,121883 62,0947466 -
6 1,87172 68,45781234 - 61,4401 67,474145 67,9886562 -
Figura XXX - Tabela com valores encontrados nos experimentos e utilizando nova
sensibilidade
Corrida Ms P5 Kistler
(PSI) PCB1(mV) PCB2(PSI) PCB3(mV) PCB4(mV) PCB5(mV)
1 1,34422 41,62583081 - 42,349563 40,594366 41,3746214 40,9416508
2 1,31476 41,77086854 - 43,077471 40,594366 41,3746214 40,5389568
3 1,36023 41,48079307 - 45,989103 40,208377 40,7829637 40,5389568
4 1,59825 53,22884985 - 55,451907 52,753007 53,6022123 53,0224715
5 1,65771 62,65630282 - 64,672075 61,244756 62,2798575 61,680393
6 1,87172 68,45781234 - 70,737975 67,613569 68,1964338 67,7208034
Analisado os resultados A partir destes dados foi criada uma tabela usando o software Excel da Microsoft,
no qual foi programada para efetuar algumas contas, conversões e plotar os gráficos necessários para a confecção da curva de calibração. O primeiro passo foi encontrar o valor em BAR da pressão P5 em cada uma das corridas, para isso foi necessário verificar o ganho que foi selecionado no amplificador, que será multiplicado pelo sinal em Volt encontrado no oscilógrafo. O segundo passo foi a conversão, de unidade de pressão encontrado em Bar para PSI, para isto é necessário multiplicar o fator de conversão que é de 14,50377. Após isto criado uma nova tabela onde foi relacionado os valores em mV encontrado nos experimentos e estão disponíveis na tabela, com a pressão P5 já em PSI. Que foi necessário para a criação do gráfico em que iremos retirar a nova sensibilidade dos sensores. A sensibilidade nada mais é que a tangente do ângulo desta reta. Para obter esse valor foi plotado um gráfico em que o valor da pressão ficou localizado no eixo das abscissas e o valor do sinal no eixo dos ordenados. A partir dos pontos encontrados no gráfico foi traçado uma curva de tendência (no caso uma reta), cujo valor usando para transformar os pontos em uma reta é o valor da tangente do ângulo.
Curvas de calibração
56
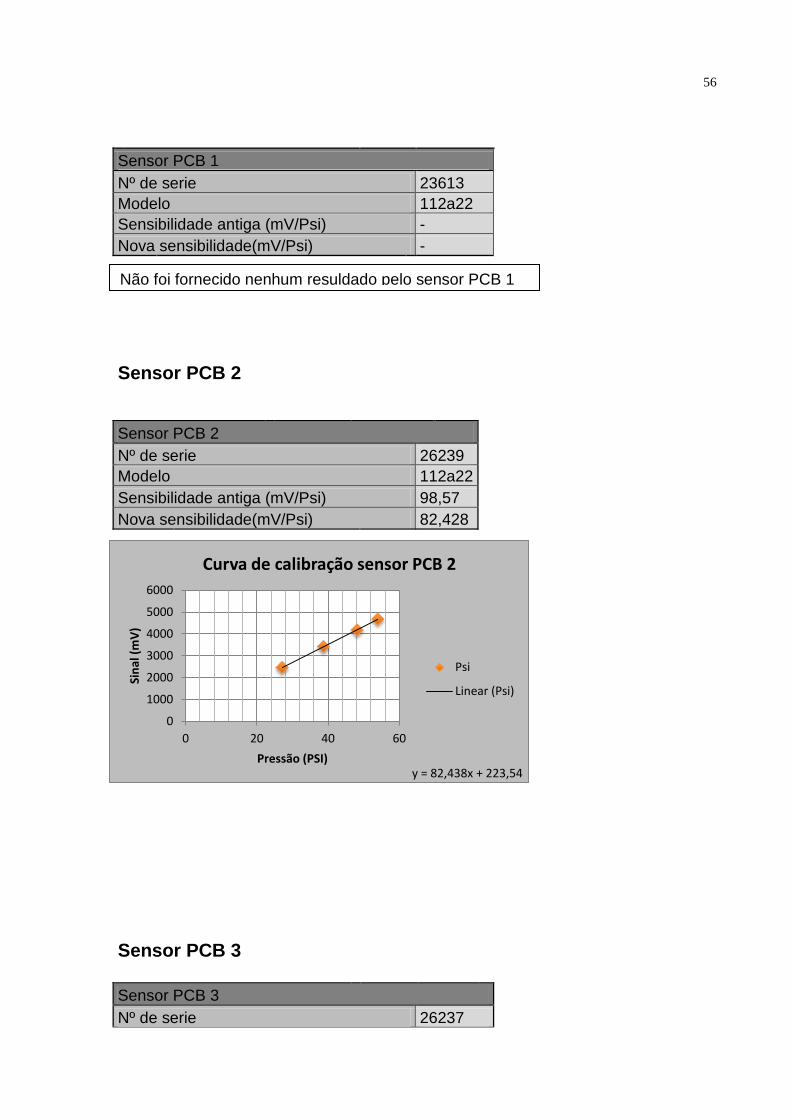
Sensor PCB 1
Nº de serie 23613
Modelo 112a22
Sensibilidade antiga (mV/Psi) -
Nova sensibilidade(mV/Psi) -
Sensor PCB 2
Sensor PCB 2
Nº de serie 26239
Modelo 112a22
Sensibilidade antiga (mV/Psi) 98,57
Nova sensibilidade(mV/Psi) 82,428
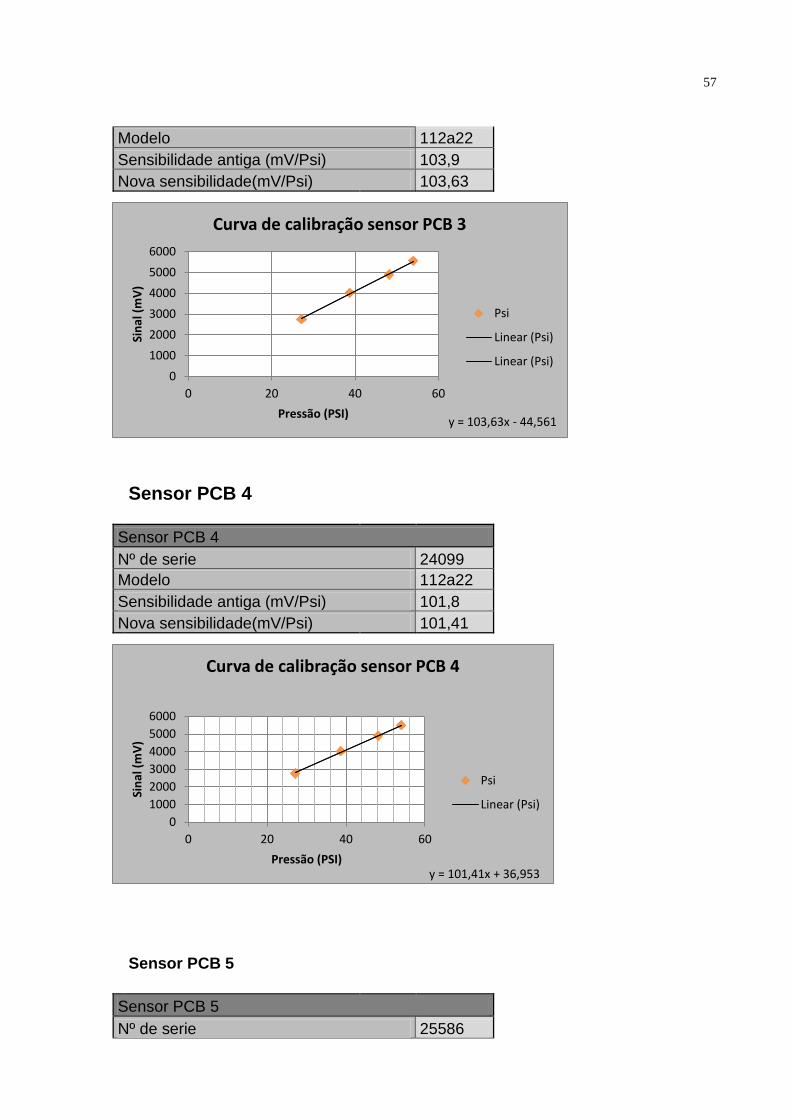
Sensor PCB 3
Sensor PCB 3
Nº de serie 26237
Não foi fornecido nenhum resuldado pelo sensor PCB 1
y = 82,438x + 223,54
0
1000
2000
3000
4000
5000
6000
0 20 40 60
Sin
al (
mV
)
Pressão (PSI)
Curva de calibração sensor PCB 2
Psi
Linear (Psi)
57
Modelo 112a22
Sensibilidade antiga (mV/Psi) 103,9
Nova sensibilidade(mV/Psi) 103,63
Sensor PCB 4
Sensor PCB 4
Nº de serie 24099
Modelo 112a22
Sensibilidade antiga (mV/Psi) 101,8
Nova sensibilidade(mV/Psi) 101,41
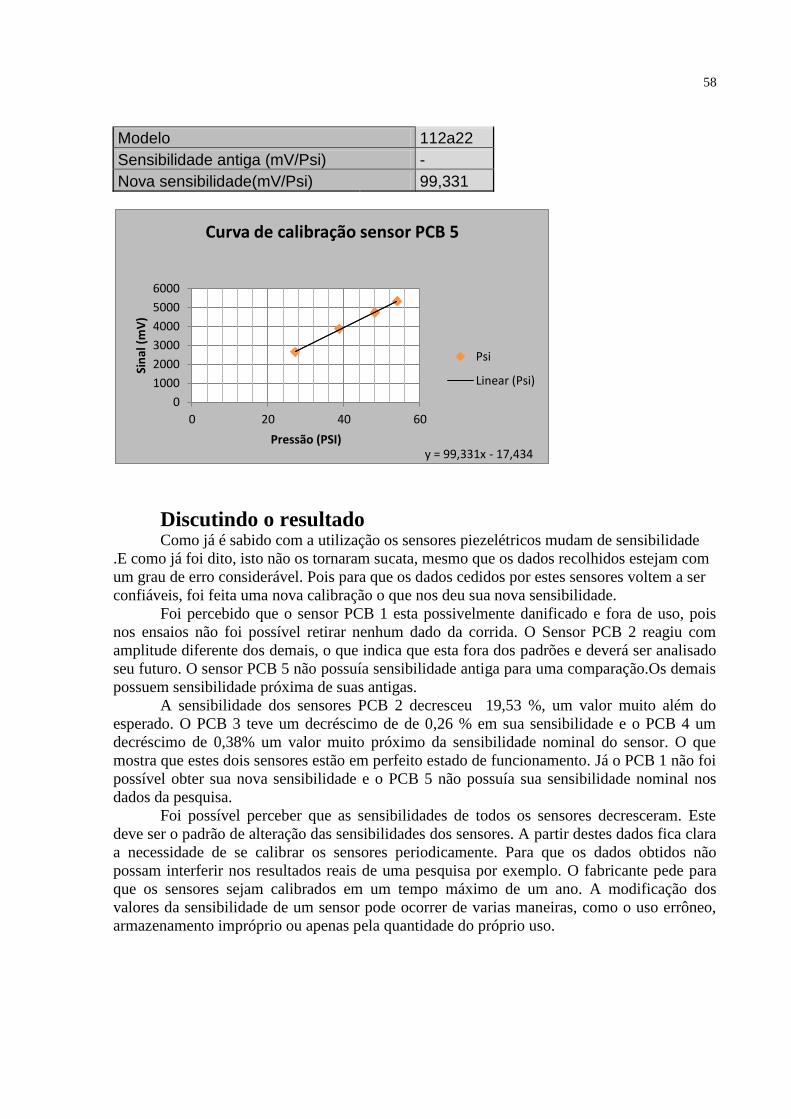
Sensor PCB 5
Sensor PCB 5
Nº de serie 25586
y = 103,63x - 44,561
0
1000
2000
3000
4000
5000
6000
0 20 40 60
Sin
al (
mV
)
Pressão (PSI)
Curva de calibração sensor PCB 3
Psi
Linear (Psi)
Linear (Psi)
y = 101,41x + 36,953
0
1000
2000
3000
4000
5000
6000
0 20 40 60
Sin
al (
mV
)
Pressão (PSI)
Curva de calibração sensor PCB 4
Psi
Linear (Psi)
58
Modelo 112a22
Sensibilidade antiga (mV/Psi) -
Nova sensibilidade(mV/Psi) 99,331
Discutindo o resultado Como já é sabido com a utilização os sensores piezelétricos mudam de sensibilidade
.E como já foi dito, isto não os tornaram sucata, mesmo que os dados recolhidos estejam com
um grau de erro considerável. Pois para que os dados cedidos por estes sensores voltem a ser
confiáveis, foi feita uma nova calibração o que nos deu sua nova sensibilidade.
Foi percebido que o sensor PCB 1 esta possivelmente danificado e fora de uso, pois
nos ensaios não foi possível retirar nenhum dado da corrida. O Sensor PCB 2 reagiu com
amplitude diferente dos demais, o que indica que esta fora dos padrões e deverá ser analisado
seu futuro. O sensor PCB 5 não possuía sensibilidade antiga para uma comparação.Os demais
possuem sensibilidade próxima de suas antigas.
A sensibilidade dos sensores PCB 2 decresceu 19,53 %, um valor muito além do
esperado. O PCB 3 teve um decréscimo de de 0,26 % em sua sensibilidade e o PCB 4 um
decréscimo de 0,38% um valor muito próximo da sensibilidade nominal do sensor. O que
mostra que estes dois sensores estão em perfeito estado de funcionamento. Já o PCB 1 não foi
possível obter sua nova sensibilidade e o PCB 5 não possuía sua sensibilidade nominal nos
dados da pesquisa.
Foi possível perceber que as sensibilidades de todos os sensores decresceram. Este
deve ser o padrão de alteração das sensibilidades dos sensores. A partir destes dados fica clara
a necessidade de se calibrar os sensores periodicamente. Para que os dados obtidos não
possam interferir nos resultados reais de uma pesquisa por exemplo. O fabricante pede para
que os sensores sejam calibrados em um tempo máximo de um ano. A modificação dos
valores da sensibilidade de um sensor pode ocorrer de varias maneiras, como o uso errôneo,
armazenamento impróprio ou apenas pela quantidade do próprio uso.
y = 99,331x - 17,434
0
1000
2000
3000
4000
5000
6000
0 20 40 60
Sin
al (
mV
)
Pressão (PSI)
Curva de calibração sensor PCB 5
Psi
Linear (Psi)

59
60
5- CONCLUSÃO
Inicialmente
6- SUGESTOES PARA TRABALHOS FUTUROS
6.1- Análise estrutural e térmica
A análise
6.2- Análise da aerodinâmica considerando arrasto e combustão
Para a.
61
REFERÊNCIAS
ANDERSON JR., J. D.ModernCompressibleFlow,withHistorical Perspective. 3ª ed.
McGraw-Hill, 1990.
A. Paull, R. J. Stalker, Scramjet Testing in the T4 Impulse Facility, AIAA, 1998. (AIAA-
1998-1533-892)
Aeroepaceweb. Programa Hyper-X, Veículo X-43.
Disponível em http://www.aerospaceweb.org/question/propulsion/q0170.shtml
Acesso em 21/08/2012
Aerospaceweb. Programa NASP, Veículo X-30.
Disponível em http://www.aerospaceweb.org/design/waverider/examples.shtml
Acesso em: 21/08/2012
Brasilianspace. Programa Scramspace
Disponívelemhttp://brazilianspace.blogspot.com.br/2011/11/projeto-scramspace-com-
participacao-do.html
Acessoem 31/08/2012
BOYCE, R.AustraliaNationalReport 2011.In: 17th AIAA International Space Planes and
Hypersonic Systems and Technologies Conference, 2011 (Palestra/Plenário), San Francisco,
California, EUA.Anais…2011. 33f.
CALLISTER, Jr. e WILLIAM, D. Ciência e Engenharia de Materiais: Uma
Introdução.7ed., São Paulo: LTC, 2008.
COSTA, F. J. Projeto Dimensional para Manufatura do Veículo Hipersônico Aeroespacial 14-X.
2011. 79f. Trabalho de Graduação - FATEC de São José dos Campos: Professor Jessen Vidal, 2011.
CURRAN, E.T. Scramjet Engines: The First Forty Years. Journal of Propulsion and Power.
Vol. 17, n. 6, p. 1138-1148. Nov.-Dez. 2001.
CURRAN, E.T. e MURTHY, S.N.B. Scramjet Propulsion.Progress in Astronautics and
Aeronautics, Vol. 189.EUA: AIAA, 2000.
FERRI, A. Review of Problems in Application of Supersonic Combustion. Journal of the
Royal Aeronautical Society.Vol.68, n. 645, p. 575–597, 1964.
FERRI, A. Review of Scramjet Propulsion Technology. Journal of Aircraft.Vol.5, p. 3–10,
1968.
FRY, R.S. A Century of Ramjet Propulsion Technology Evolution.Journal of Propulsion
and Power.Vol. 20, n. 1, p. 27-58. Jan.-Feb. 2004.
HALLION, R.P. The Hypersonic Revolution.Case Studies in the History of Hypersonic
Technology. Vol. II. From Scramjet to the National Space-Plane (1964-1986),EUA.Air
Force History and Museums Program. 1998.
HANK, J.M., MURPHY, J.S. e MUTZMAN, R.C.The X-51AScramjet Engine Flight
Demonstration Program. In: 15th AIAA International Space Planes and Hypersonic Systems
and Technologies Conference, 2008 (AIAA 2008-2540), Dayton, Ohio, EUA. Anais… 2008.
13f.
HEISER, H.W. e PRATT, D. T (com DALEY, D.H. e MEHTA, U.B.). Hypersonic
AirbreathingPropulsion.EducationSeries.EUA.AIAA. 1994.
62
IEAv. Plano de DesenvolvimentoInstitucional do IEAv. 2011.
Impulse Specific
Disponível em http://www.grc.nasa.gov/WWW/k-12/airplane/specimp.html
Acesso em: 26/11/2012, 15h51min.
J. Odam, A. Paull, H. Alesi3 D. Hunt, R. Paull, R. Pietsch. HIFiRE 0 FLIGHT TEST DATA.
In: 16th AIAA/DLR/DGLR International Space Planes and Hypersonic Systems and
Technologies Conference, 2009 (AIAA 2009-7293. Anais…2005. 12f.)
KASAL, P, GERLINGER, P., WALTHER, R., WOLFERSDORF, J. VON e WEIGAND, B.
Supersonic Combustion: Fundamental Investigations of AerothermodynamicKey
Problems. AIAA-2002-5119, 2002.
KETSDEVER, A.D., YOUNG. M.P., MOSSMAN, J.B. e PANCOTTI, A.P. An Overview of
Advanced Concepts for Space Access. In: 44th AIAA/ASME/SAE/ASEE Joint Propulsion
Conference & Exhibit, 2008(AIAA 2008-5121), Hartford, Connecticut, EUA. Anais…
2008.27f.
MARSHALL, L.A., CORPENING, G.P. e SHERRILL, R. A. Chief Engineer's View of the
NASA X-43A Scramjet Flight Test.In: AIAA/CIRA 13th International Space Planes and
Hypersonic Systems and Technologies Conference, 2005 (AIAA 2005-3332), Capua,
Italia.Anais… 2005.20f.
MARSHALL, L.A., BAHM, C., CORPENING, G.P. e SHERRILL, R. Overview With
Results and Lessons Learned of the X-43A Mach 10 Flight.In: AIAA/CIRA 13th
International Space Planes and Hypersonic Systems and Technologies Conference, 2005
(AIAA 2005-3336), Capua, Italia.Anais…2005. 23f.
MatWebMaterial Property Data
Disponível emhttp://www.matweb.com
Acessoem 18/10/2012 10:35
McCLINTON, C.R., RAUSCH, D., SITZ, J. e REUKAUF, P. Hyper-X Program Status.In:
AIAA/NAL-NASDA-ISAS 10th International Space Planes and Hypersonic Systems and
Technologies Conference, 2001 (AIAA 2001-1910), Kyoto, Japan. Anais… 2001. 12f.
MINISTÉRIO DA DEFESA/MINISTÉRIO DA CIÊNCIA E TECNOLOGIA. Concepção
Estratégica-Ciência, Tecnologia e Inovação de Interesse da Defesa Nacional.Brasília:
2003.
MOSES, P.L., RAUSCH, V.L., NGUYEN, L.T. e HILL, J.R. NASA hypersonic flight
demonstrators – overview, status, and future plans. ACTAAstronautica, Vol. 55, p. 619-
630, 2004.
MOURA, G. S. Desenvolvimento de um Estato-Reator a Combustão Supersônica. 2011.
25f. Proposta de Tese (Doutorado em Ciência, Engenharia Mecânica e Aeronáutica) –
Instituto Tecnológico de Aeronáutica, São José dos Campos, 2009.
MURTHY, S.N.B. e CURRAN, E.T. High-Speed Flight Propulsion System.Progress in
Astronautics and Aeronautics, vol. 137. EUA: AIAA, 1991.
MURTHY, S.N.B. e CURRAN, E.T. Developing inHigh-Speed Vehicle Propulsion
System.Progress in AstronauticsandAeronautics, vol. 165.EUA: AIAA, 1996.
RODRIGUES, Luiz Eduardo Miranda José.Fundamentos da Engenharia Aeronáutica -
Aplicações ao Projeto SAE-AeroDesign.1. ed.Salto: EdiçãoPrópria, 2009. v. 01. 310p .
63
ROLIM, T. C. Experimental Analysisof a HypersonicWaverider.2009. 120 f. Tese
(Mestrado em Ciência, Engenharia Mecânica e Aeronáutica) - Instituto Tecnológico de
Aeronáutica, São José dos Campos, 2009.
ROMANELLI, P.D. Veículo Hipersônico Aeroespacial 14-X B.Relatório Interno de
Atividades do IEAv,2012. À publicar.
SCHWEIKART, L. The Hypersonic Revolution.Case Studies in the History of
Hypersonic Technology. Vol. III. The Quest for the Orbital Jet: The National Space-
Plane Program (1983-1995).EUA.Air Force History and Museums Program. 1998.
SANTOS, J. D. dos. Métodos Numéricos. Ed. Universitária da UFPE, 2006.
SWITHENBANK, J. Hypersonic Air-Breathing Propulsion. Progresses in
AeronauticalSciences, Vol. 8, p. 229–294, 1966.
SUTTON, P. GEORGE e BIBLARZ, OSCAR.Rocket Propulsion Elements.Ed.John Wiley
and Sons, INC. Vol. 8.2010.
TORO, P. G. P. Analise Teórico-Analítica da Aerodinâmica do Veículo Hipersônico
Aeroespacial 14-X BS, Relatório Interno de Atividades do IEAv, 2012. À publicar.
Tabela US Standard Atmosphere 1976
Disponível em: http://tpsx.arc.nasa.gov/cgi-perl/alt.pl
Acessoem: 17/10/2012,15h39min.
WEBER, R. J. e MACKAY, J.An Analysis of Ramjet Engines Using Supersonic
Combustion.NACA TN 4386, 1958.
64

65





























