Embed Size (px)
DESCRIPTION
Tracking and Motion. 정보산업공학협동과정 정우정. Contents. The Basics of Tracking Corner Finding Subpixel Corners Optical Flow Mean-Shift and Camshift Tracking Motion Templates Estimators The Condensation Algorithm. example. … /opencv/samples/c/ lkdemo.c (optical flow) - PowerPoint PPT Presentation
Citation preview
Tracking and Motion
정보산업공학협동과정정우정
Contents
The Basics of Tracking Corner Finding Subpixel Corners Optical Flow Mean-Shift and Camshift Tracking Motion Templates Estimators The Condensation Algorithm
example
…/opencv/samples/c/ lkdemo.c (optical flow) camshiftdemo.c (mean-shift tracking of colore
d regions) motempl.c (motion template) kalman.c (Kalman filter)
The Basics of Tracking
Understand the motion of object:identification and modeling
IdentificationTo finding the object of interest from the video stream.
ModelingProviding us with noisy measurement of the object’s actual position.
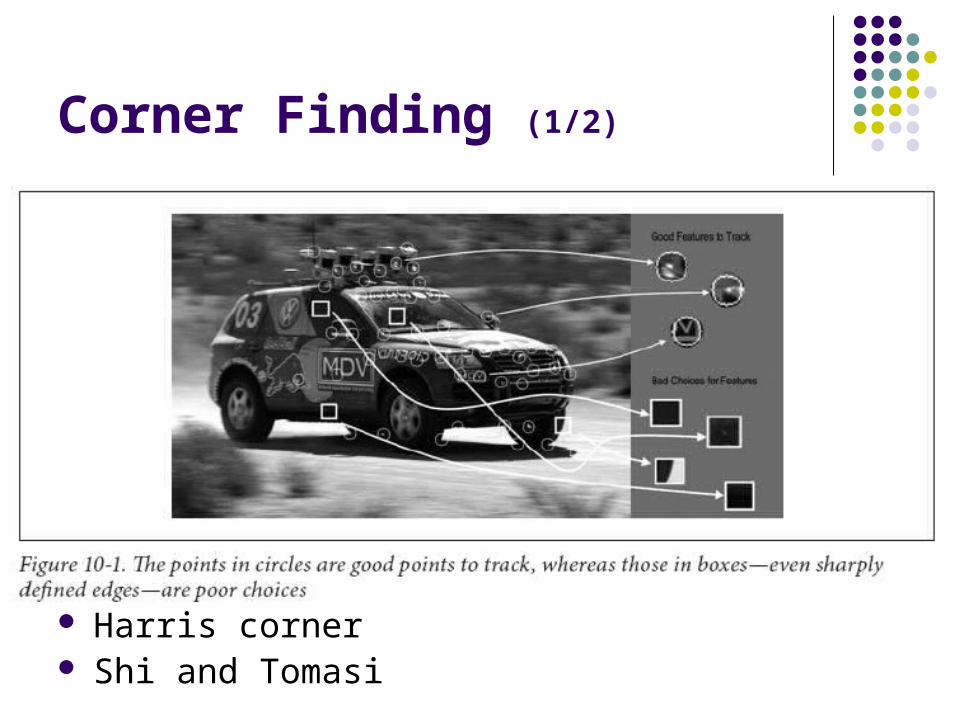
Corner Finding (1/2)
Harris corner Shi and Tomasi
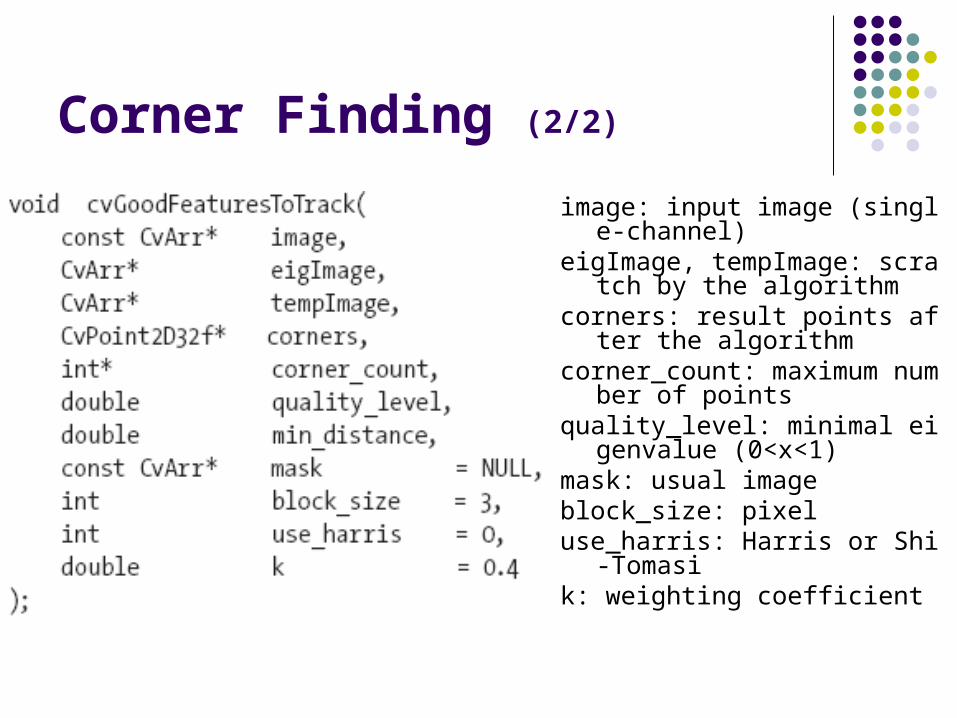
Corner Finding (2/2)
image: input image (single-channel)
eigImage, tempImage: scratch by the algorithm
corners: result points after the algorithm
corner_count: maximum number of points
quality_level: minimal eigenvalue (0<x<1)
mask: usual imageblock_size: pixeluse_harris: Harris or Shi-Tomasik: weighting coefficient
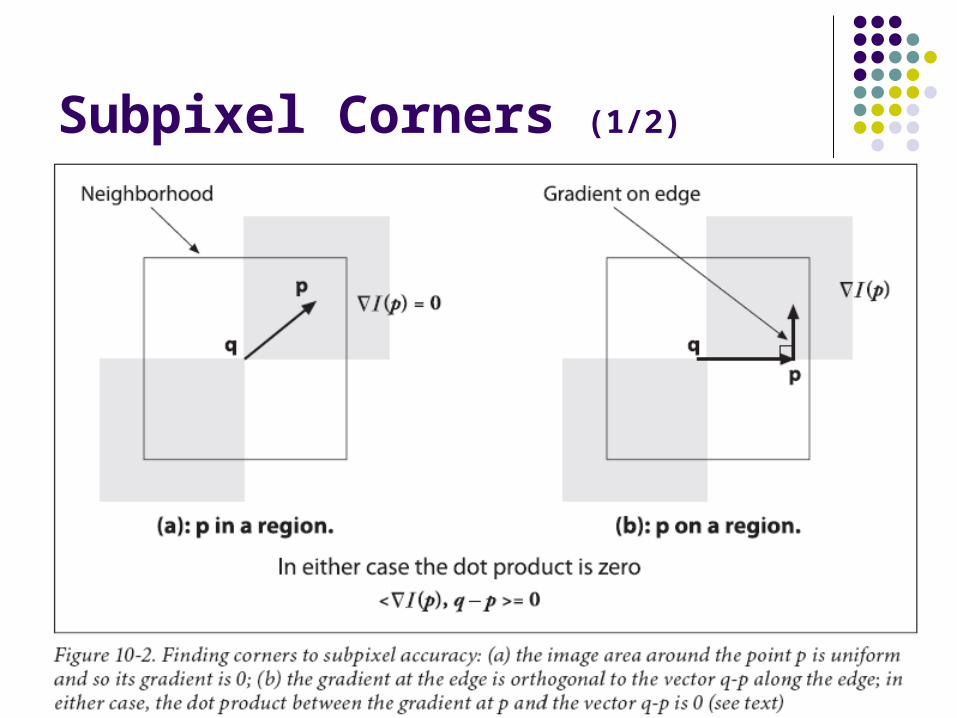
Subpixel Corners (1/2)
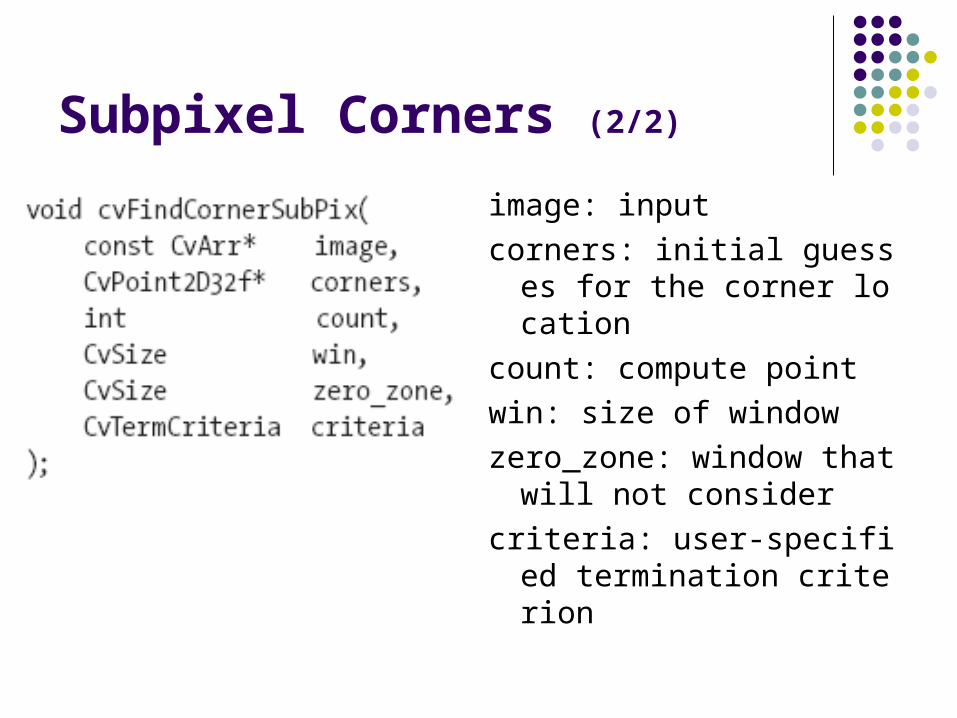
Subpixel Corners (2/2)
image: inputcorners: initial guesses for
the corner locationcount: compute pointwin: size of windowzero_zone: window that will
not considercriteria: user-specified ter
mination criterion
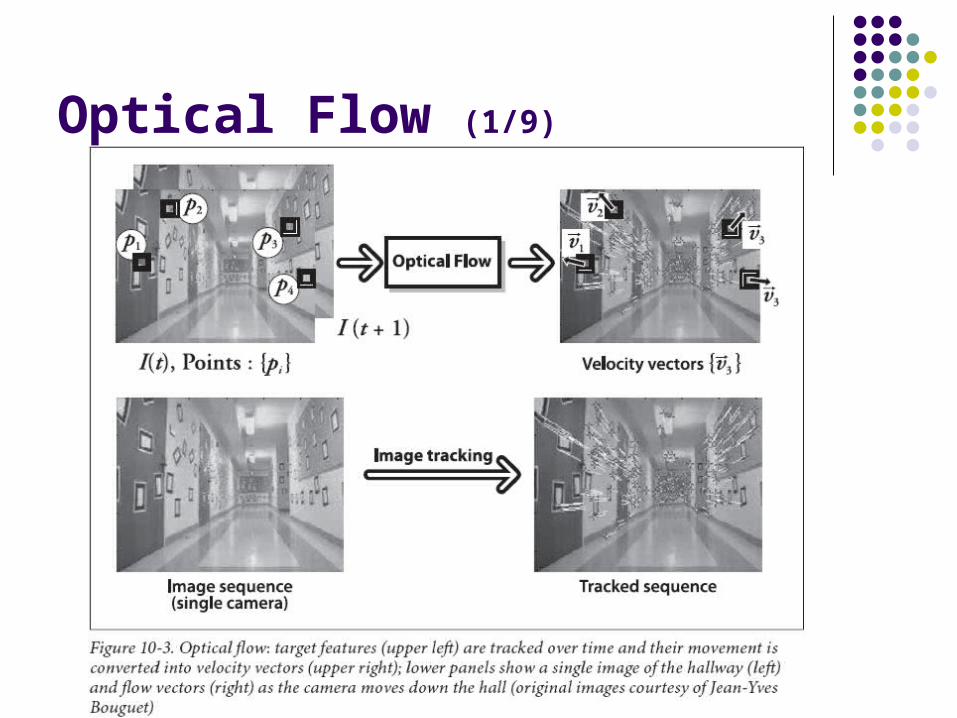
Optical Flow (1/9)
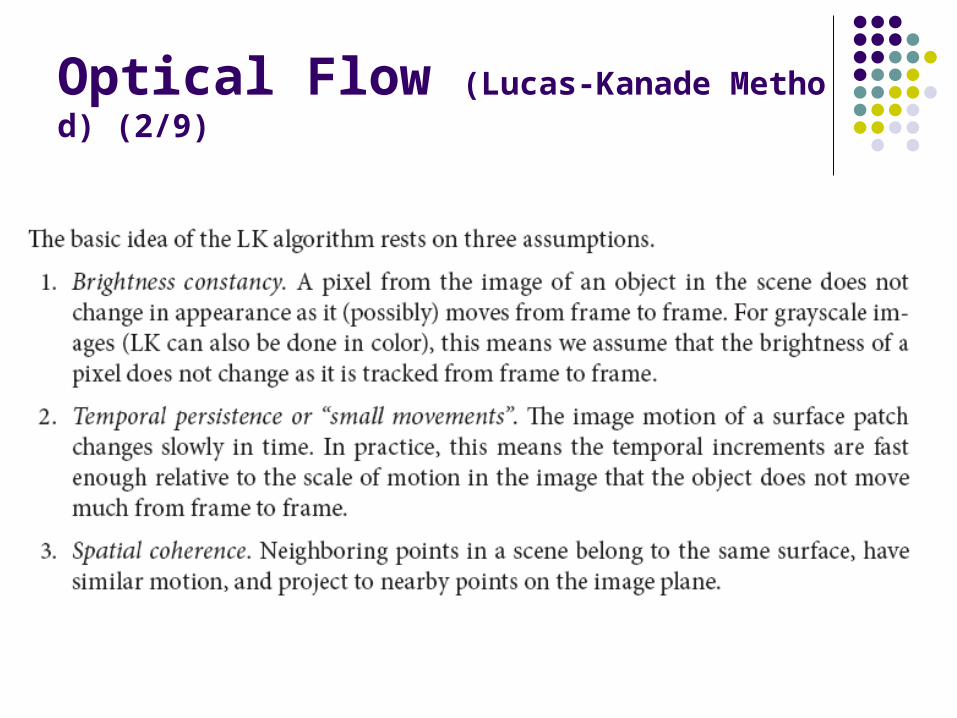
Optical Flow (Lucas-Kanade Method) (2/9)
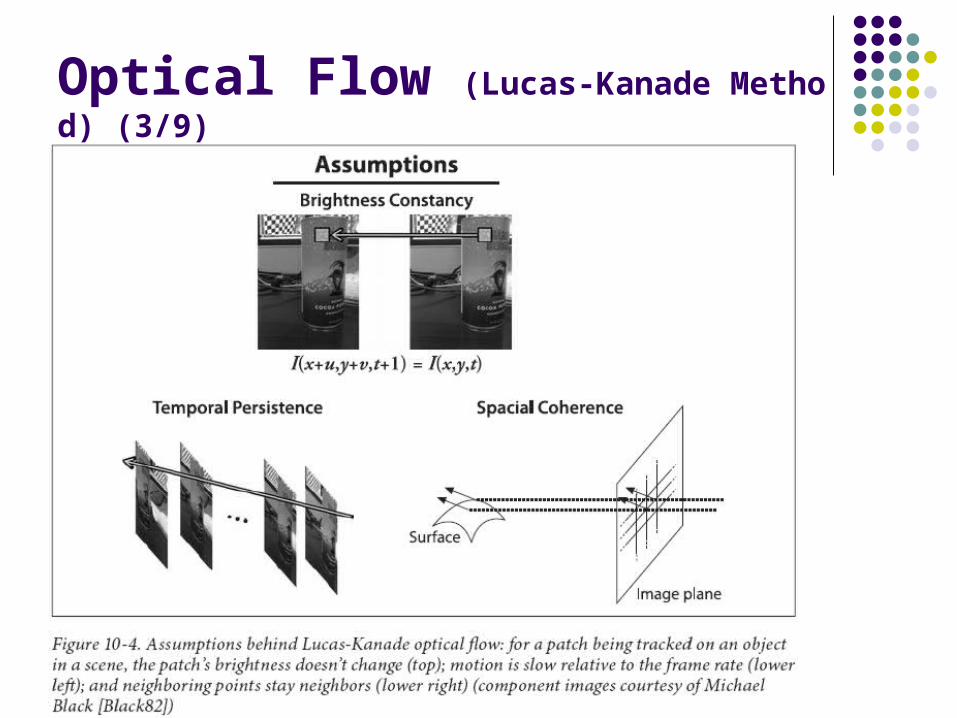
Optical Flow (Lucas-Kanade Method) (3/9)
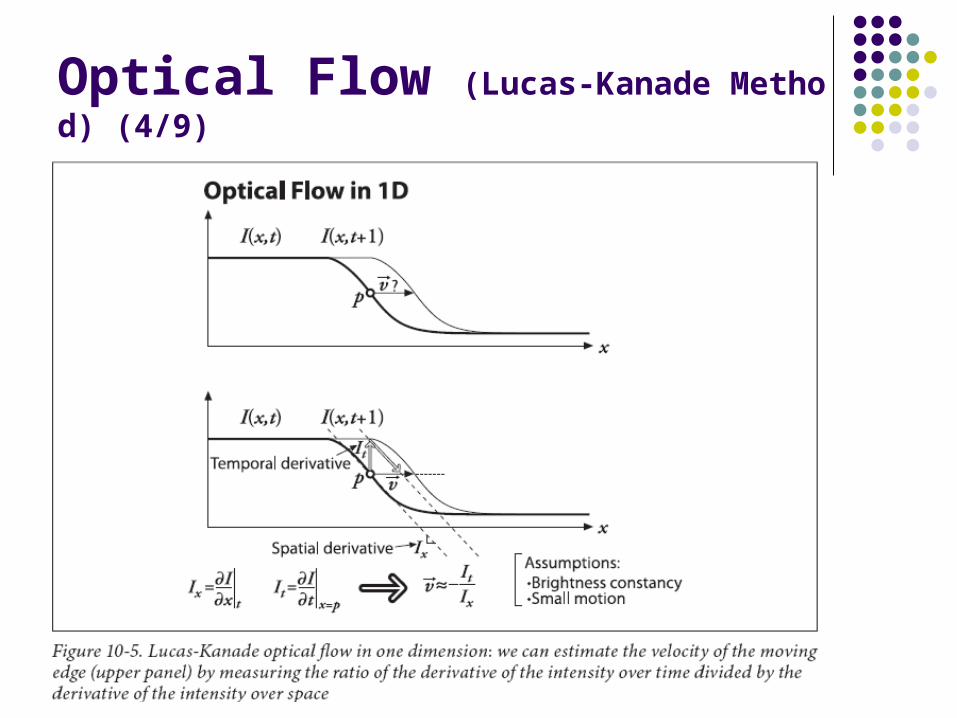
Optical Flow (Lucas-Kanade Method) (4/9)
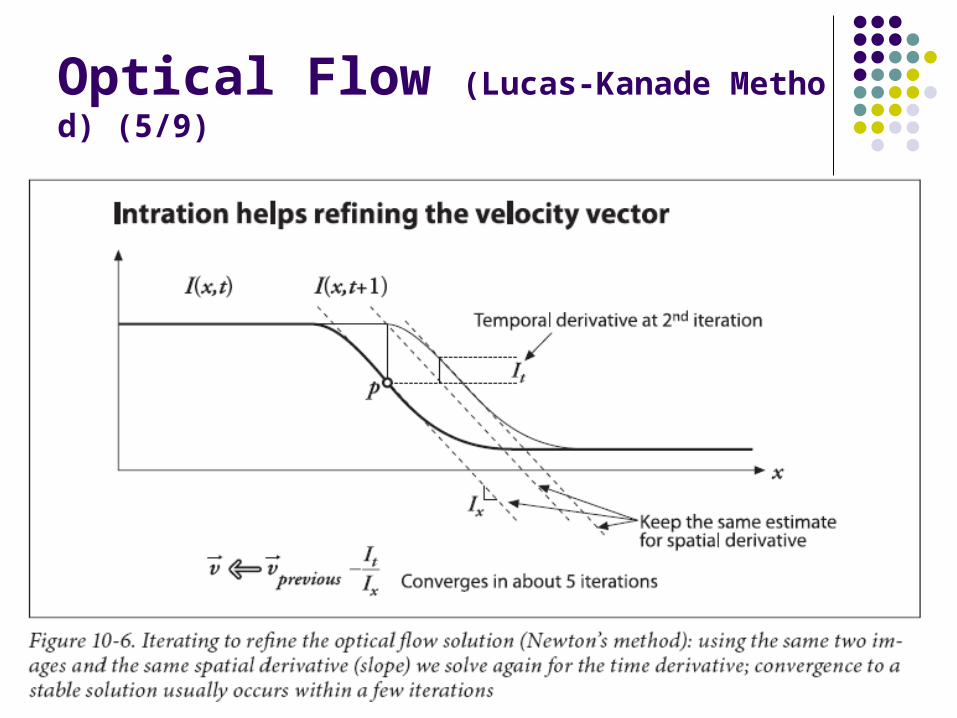
Optical Flow (Lucas-Kanade Method) (5/9)
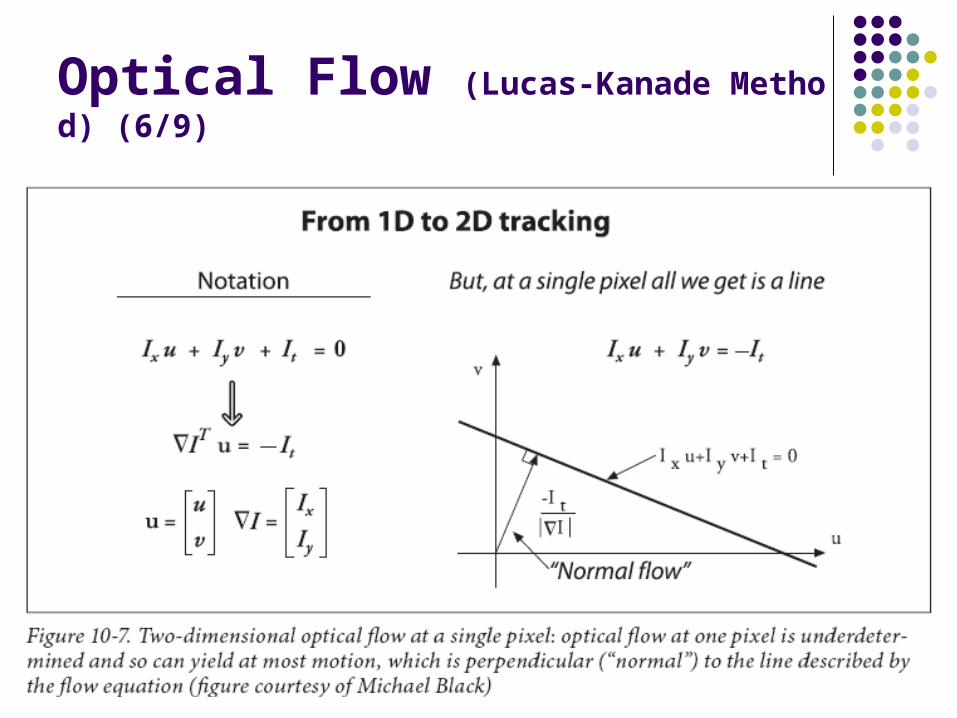
Optical Flow (Lucas-Kanade Method) (6/9)
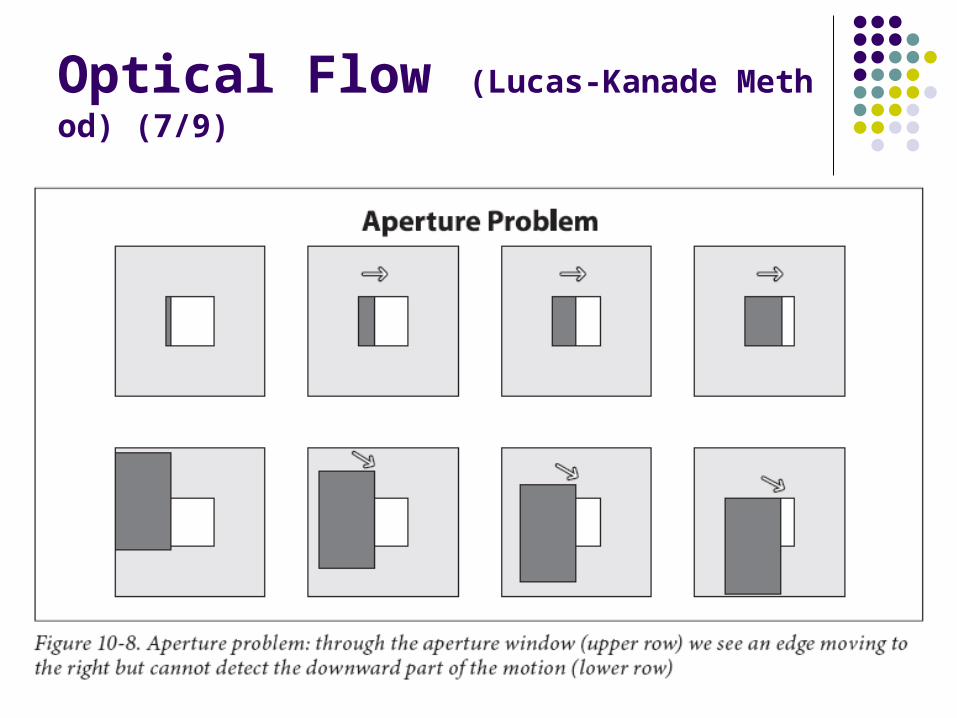
Optical Flow (Lucas-Kanade Method) (7/9)
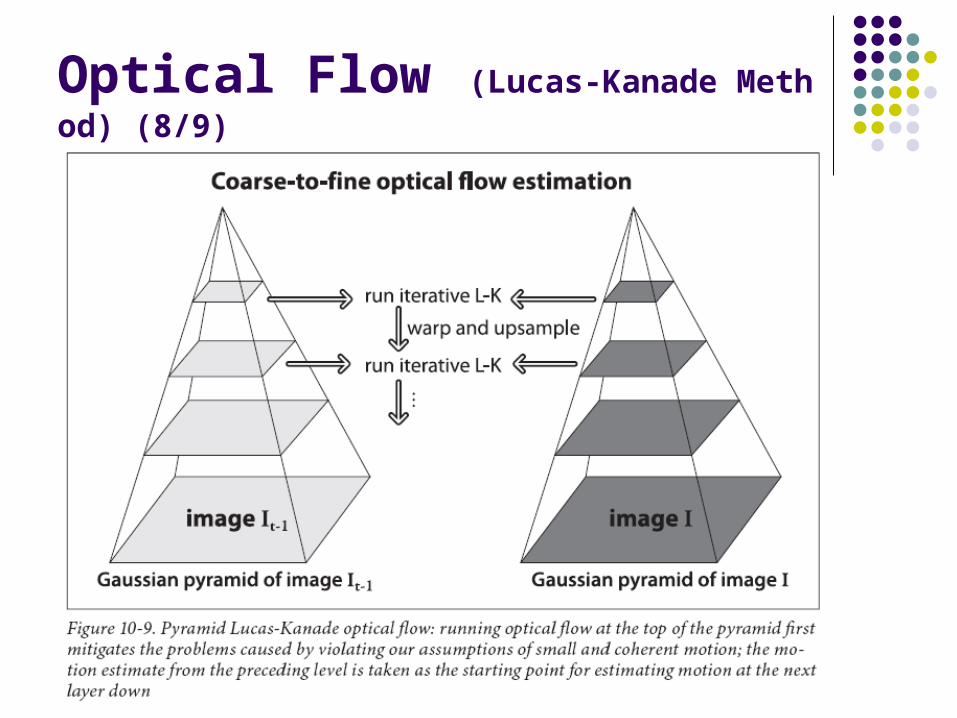
Optical Flow (Lucas-Kanade Method) (8/9)
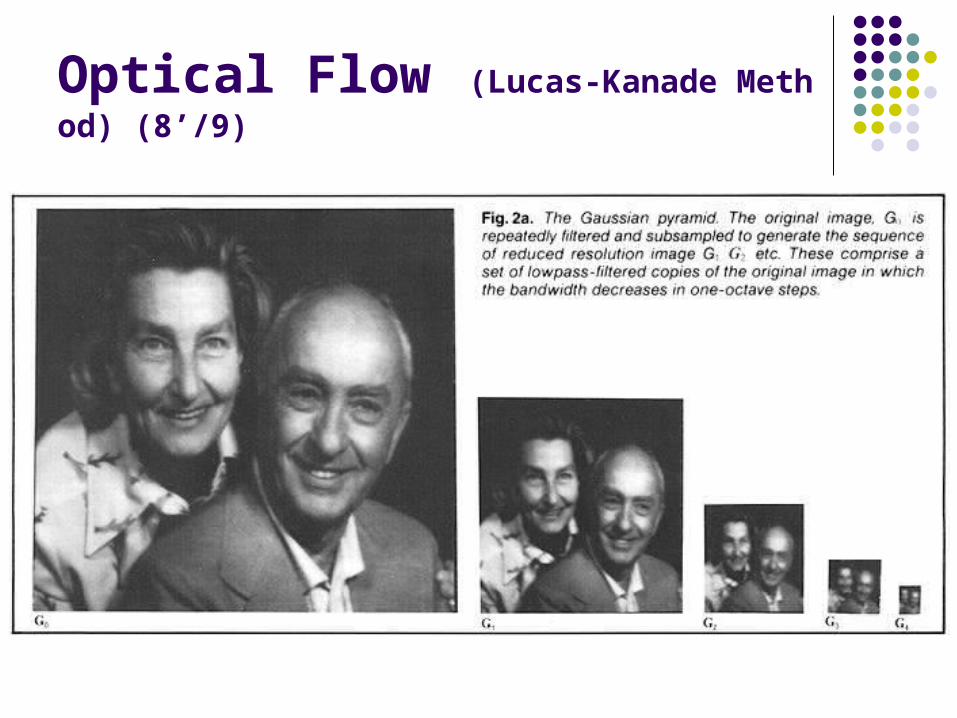
Optical Flow (Lucas-Kanade Method) (8’/9)
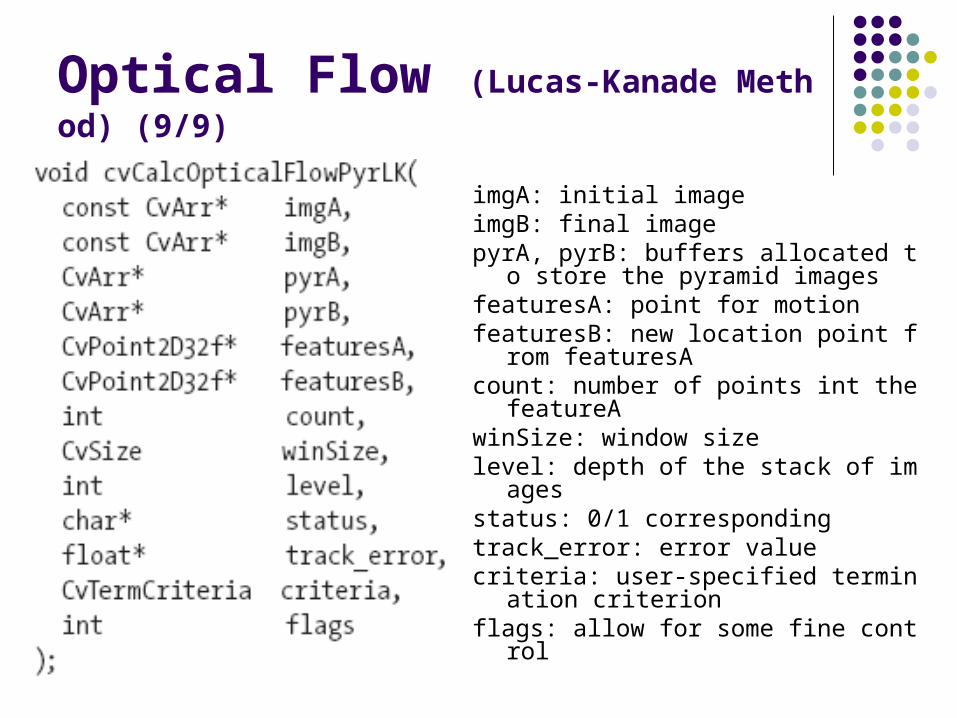
Optical Flow (Lucas-Kanade Method) (9/9)
imgA: initial imageimgB: final imagepyrA, pyrB: buffers allocated to store the
pyramid imagesfeaturesA: point for motionfeaturesB: new location point from featur
esAcount: number of points int the featureAwinSize: window sizelevel: depth of the stack of imagesstatus: 0/1 correspondingtrack_error: error valuecriteria: user-specified termination criteri
onflags: allow for some fine control
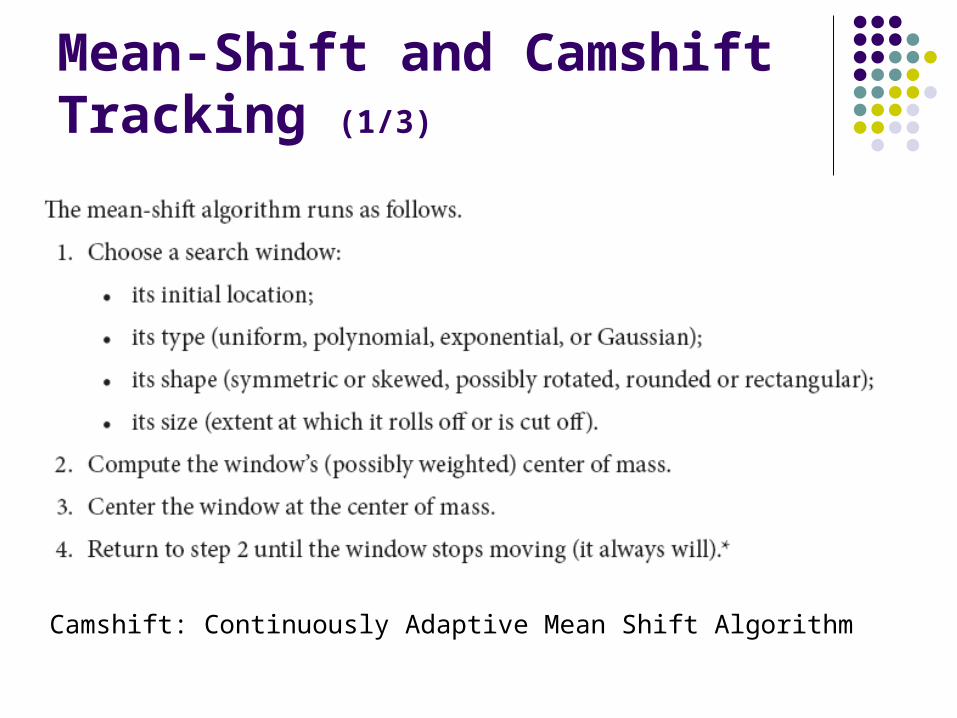
Mean-Shift and Camshift Tracking (1/3)
Camshift: Continuously Adaptive Mean Shift Algorithm
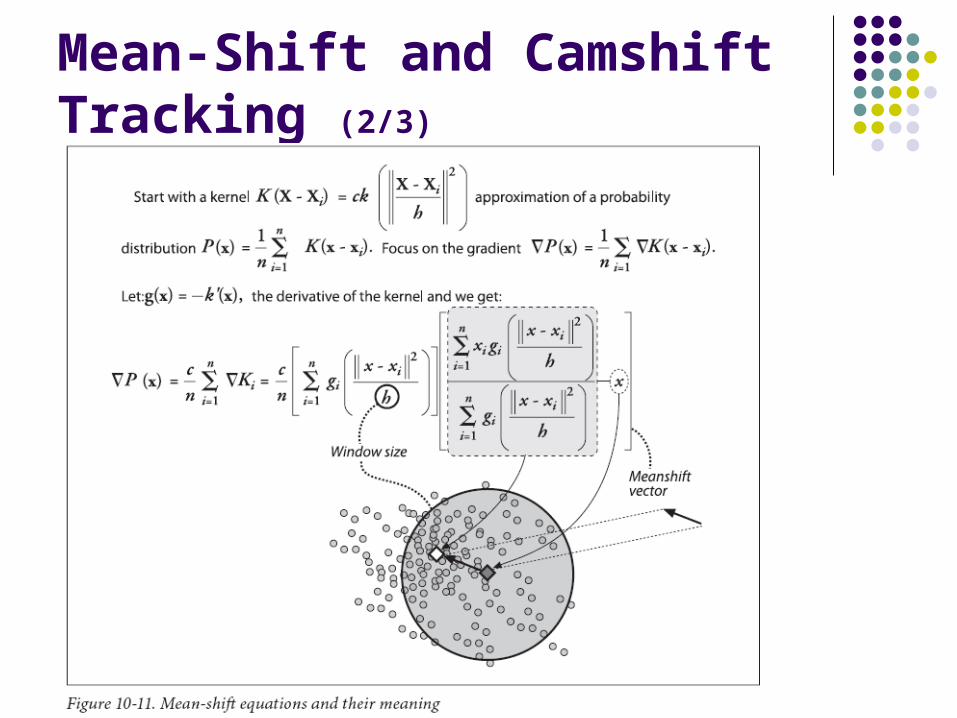
Mean-Shift and Camshift Tracking (2/3)
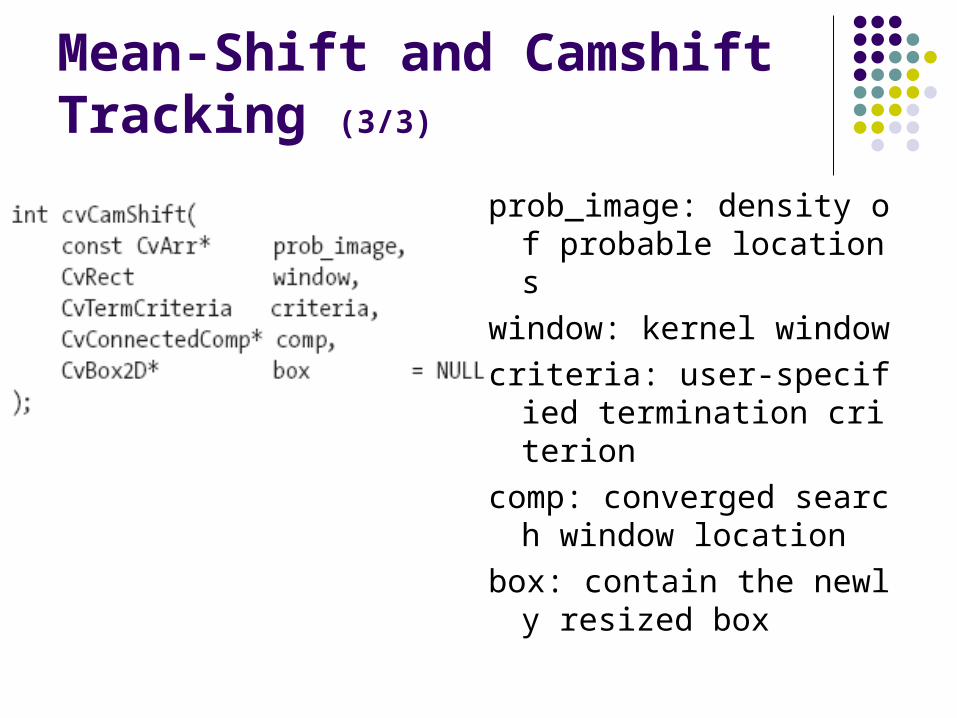
Mean-Shift and Camshift Tracking (3/3)
prob_image: density of probable locations
window: kernel windowcriteria: user-specified ter
mination criterioncomp: converged search wi
ndow locationbox: contain the newly resi
zed box
Motion Templates (1/5)
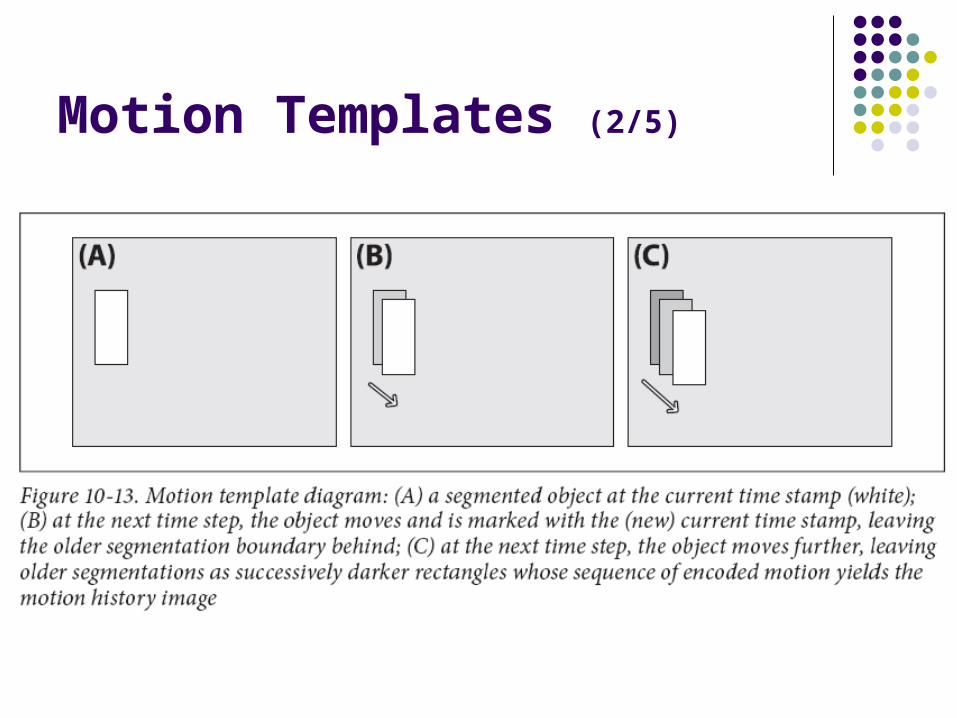
Motion Templates (2/5)
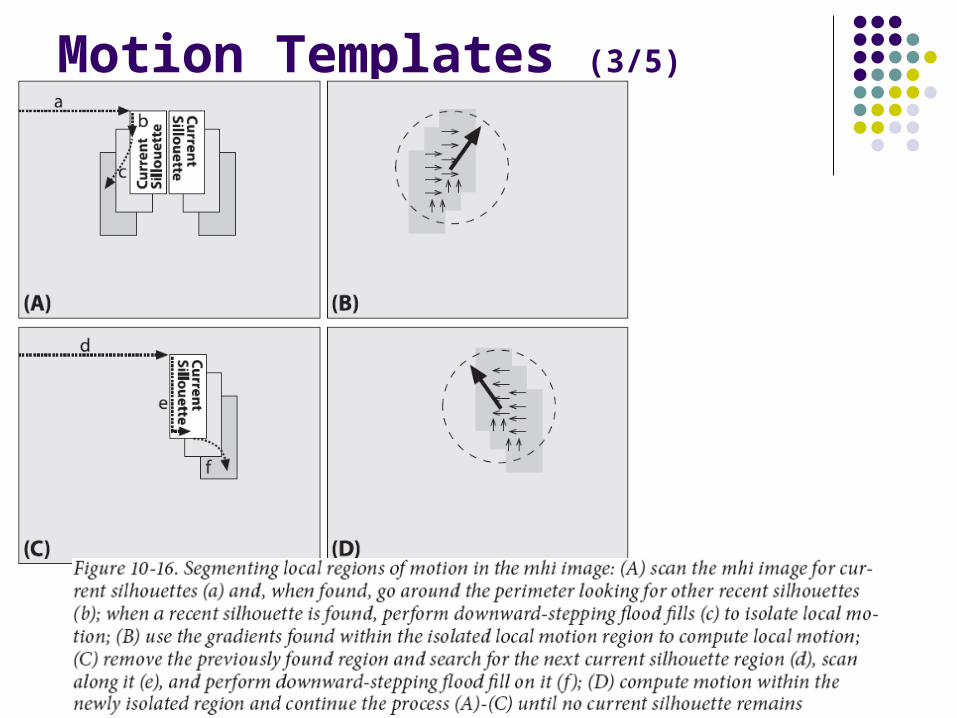
Motion Templates (3/5)
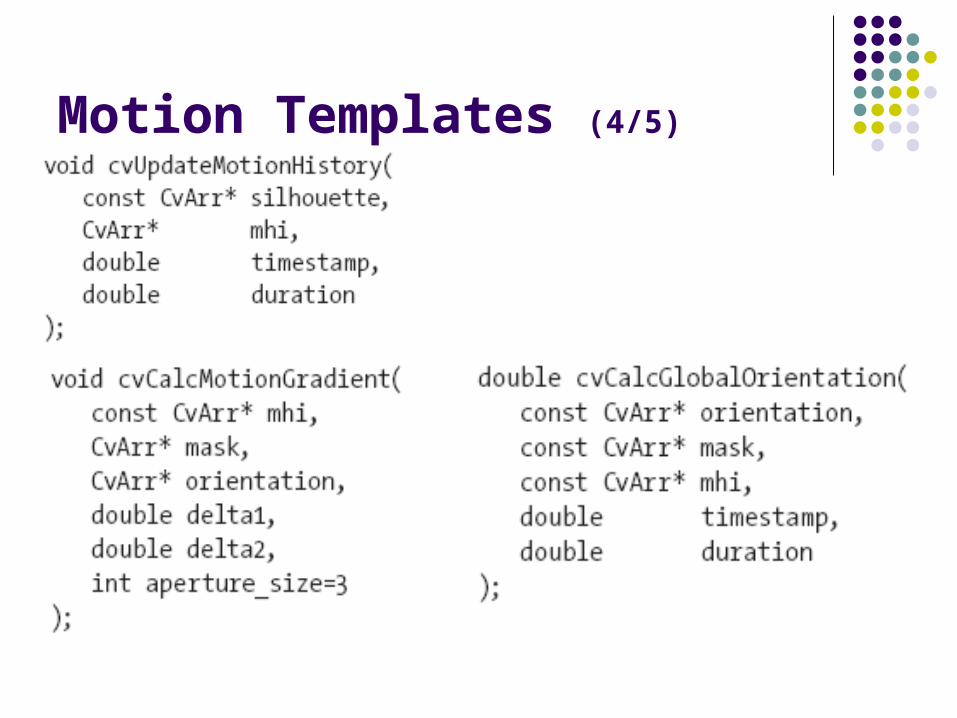
Motion Templates (4/5)
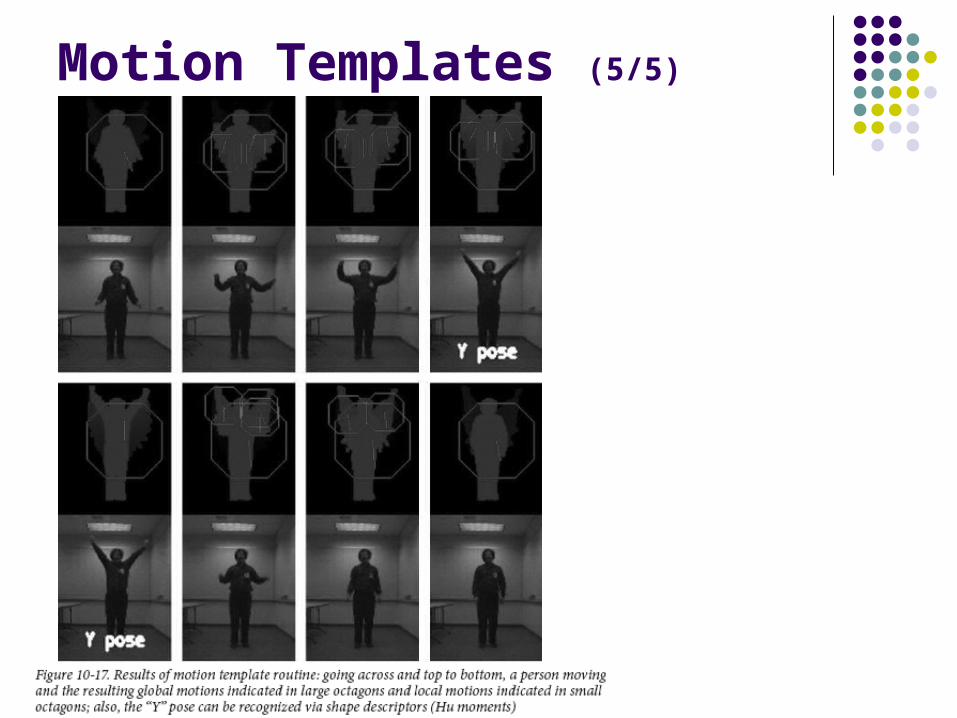
Motion Templates (5/5)
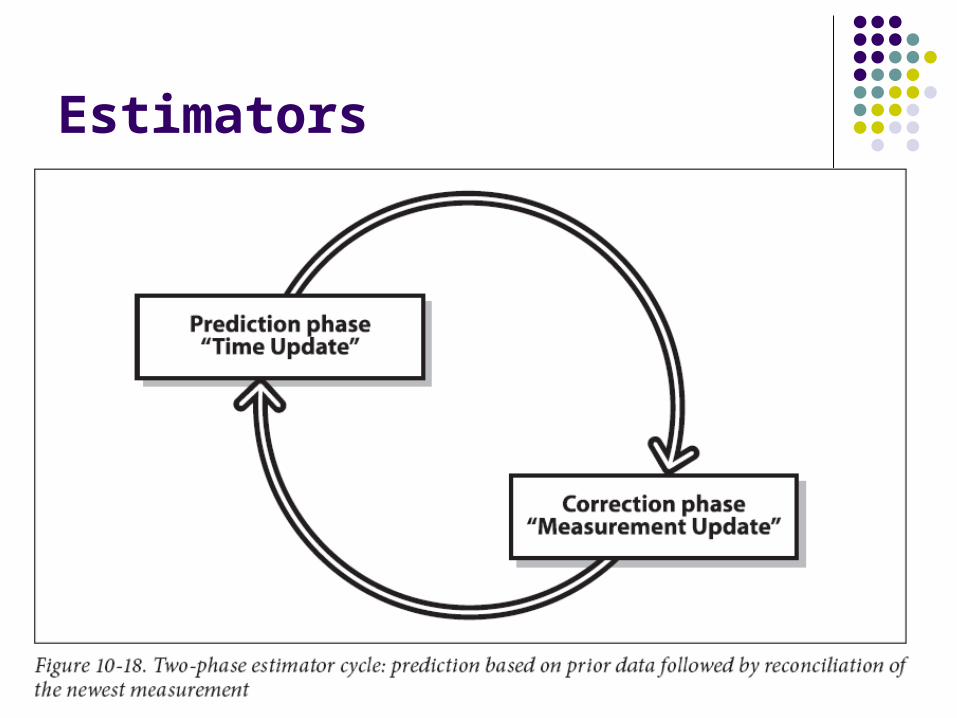
Estimators
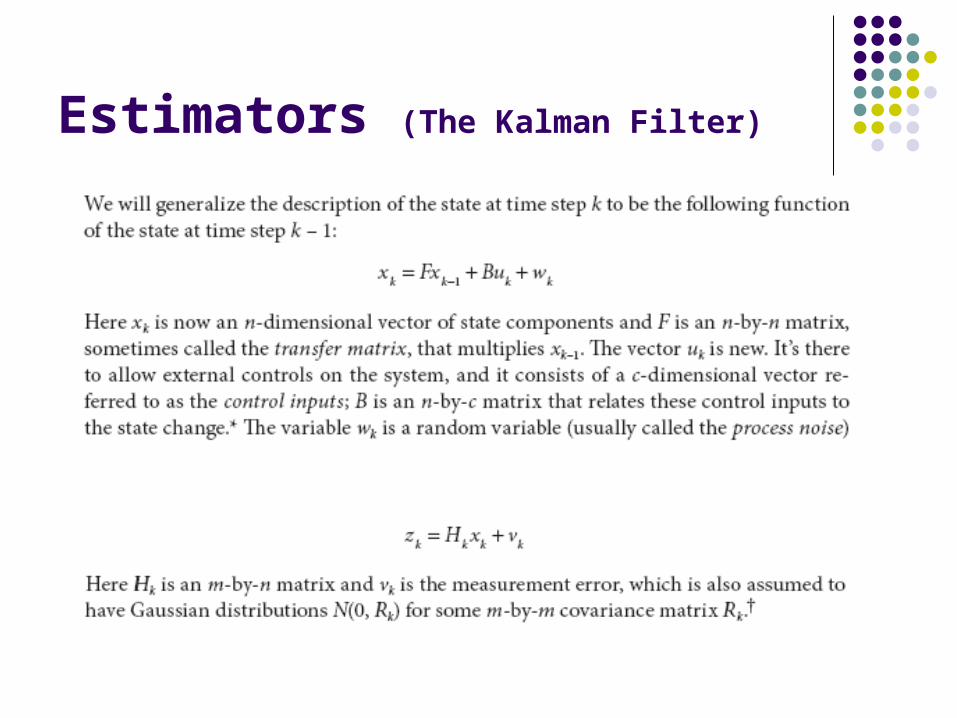
Estimators (The Kalman Filter)
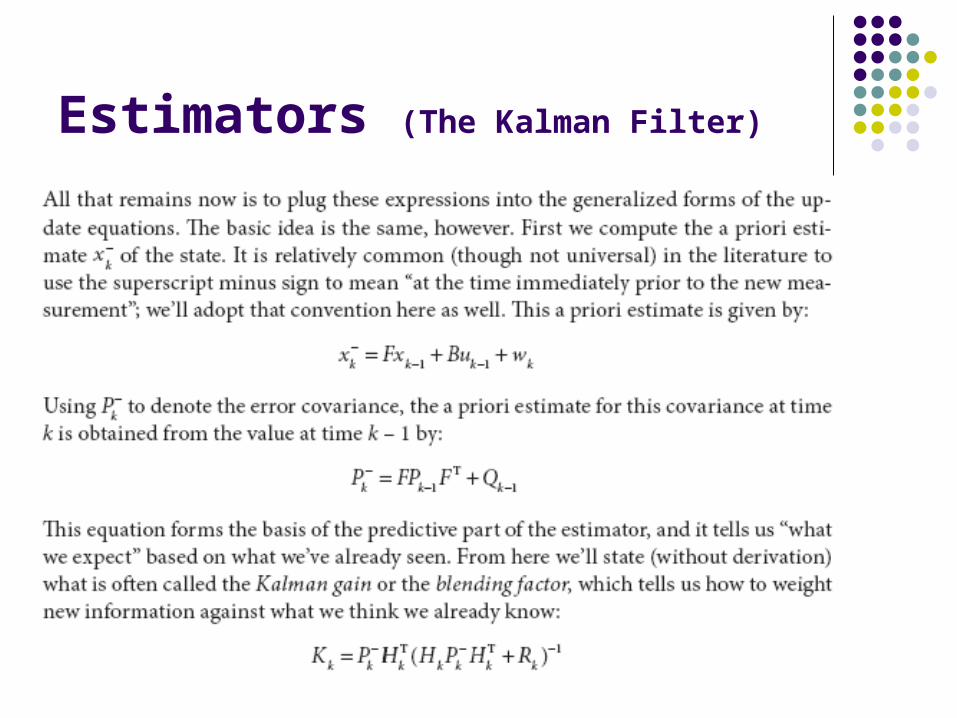
Estimators (The Kalman Filter)
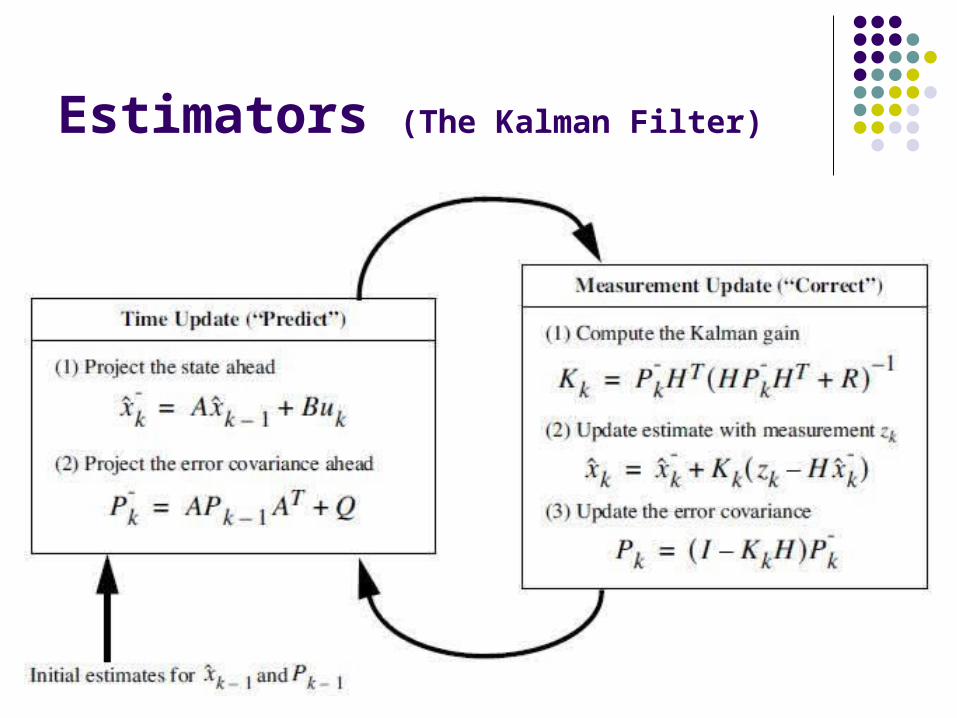
Estimators (The Kalman Filter)
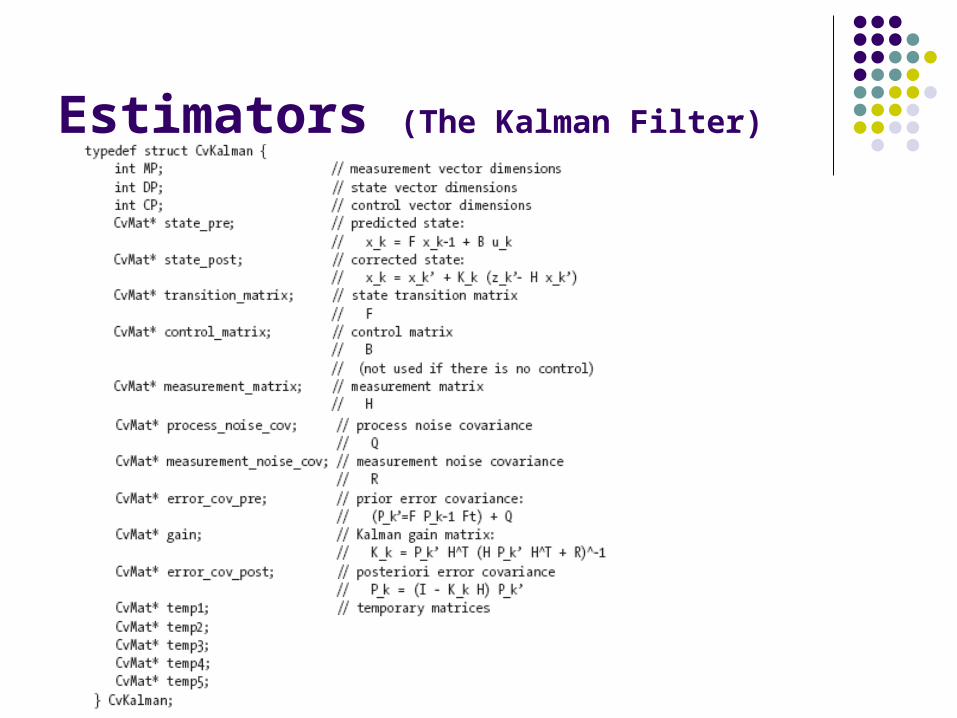
Estimators (The Kalman Filter)
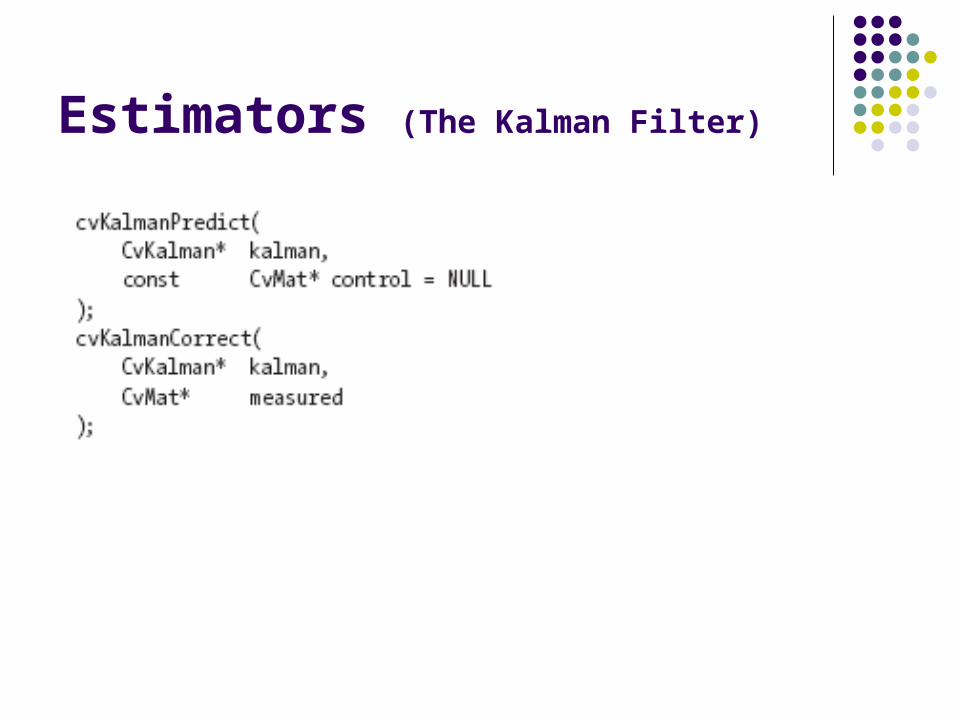
Estimators (The Kalman Filter)
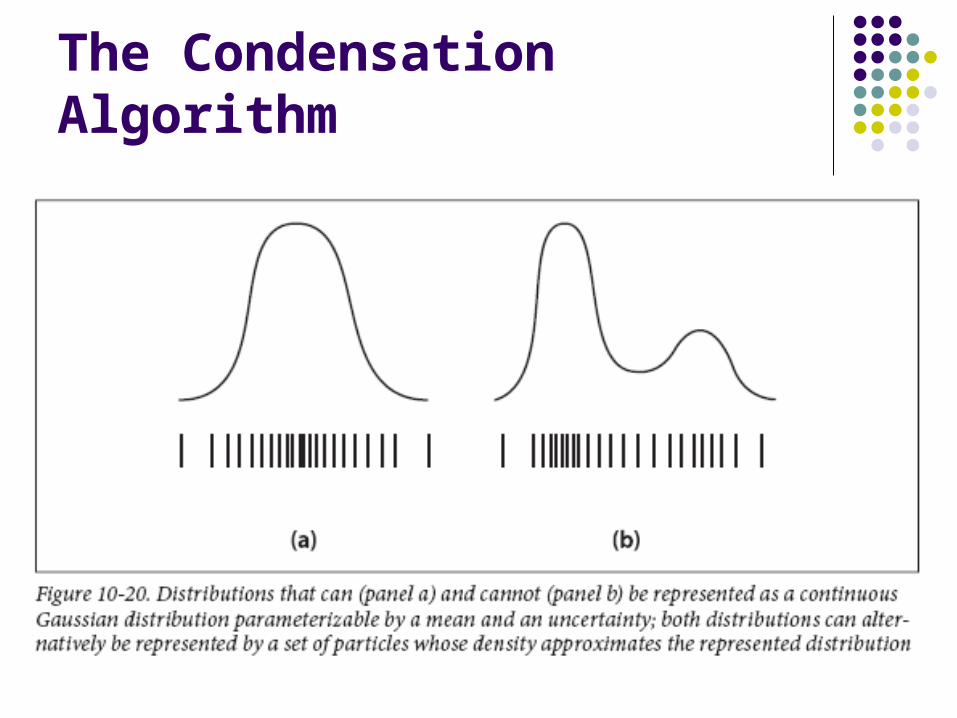
The Condensation Algorithm
감사합니다 (Q&A)










