Embed Size (px)
Citation preview

STANDAR KOMPETENSI
5. Menggunakan konsep matriks, vektor, dan transformasi dalam pemecahan masalah
KOMPETENSI DASAR
5.1 Menggunakan sifat-sifat dan operasi matriks untuk menunjukkan bahwa suatu matriks
persegi merupakan invers dari matriks persegi lain
5.2 Menentukan determinan dan invers matriks 2 x 2
5.3 Menggunakan determinan dan invers dalam penyelesaian sistem persamaan linear dua
variabel
5.4 Menggunakan sifat-sifat dan operasi aljabar vektor dalam pemecahan masalah
5.5 Menggunakan sifat-sifat dan operasi perkalian skalar dua vektor dalam pemecahan
masalah.
5.6 Menggunakan transformasi geometri yang dapat dinyatakan dengan matriks dalam
pemecahan masalah
5.7 Menentukan komposisi dari beberapa transformasi geometri beserta matriks
transformasinya

TRANSFORMASI GEOMETRI
A. Transformasi
Transformasi adalah pemetaan suatu titik A pada suatu bidang ke titik A. Tiitik A
disebut bayangan dari titik A.
Transformasi ada dua, yaitu :
1. Transformasi Isometri
Merupakan transformasi yang memindahkan suatu bangun geometri dari bentuk
nya sebelum dan sesudah transformasi tidak berubah( besarnya tetap). Transformasi
pegeseran,pencerminan,pemutaran,dan perkalian termasuk isometri.
2. Transformasi Non isometri
Merupakan transformasi memindahkan suatu bangun geometri dari bentuknya
semula sebelum dan sesudah transformasi mengalami perubahan ( besarnya berubah ).
Transformasi perkalian termasuk transformasi nonisometri.
Jenis – jenis Transformasi
Dalam transformasi dikenal empat transformasi dasar, yaitu:
a) Pegeseran (translasi)
B B’
A A’
C C’
Translasi
b) Pencerminan (refleksi)
B B’
A A’
C C’
Refleksi

c) Perputaran (rotasi)
B’
C’ B
A’ C
O A
Rotasi
d) Perubahan sekala (dilatasi)
C’
C
A A’
B B’
Dilatasi
a. Pergeseran Atau Translasi
Pergeseran atau translasi adalah suatu transformasi yang memindahkan tiap titik
pada bidang dengan jarak dan arah tertentu. Jarak dan arah tertentu tersebut dapat
diwakili oleh suatu ruas garis berarah atau oleh suatu pasangan bilangan terurut ���� .
���� dinamakan komponen translasi.
Jika translasi T = ���� memetekan titik P’ ( x’, y’ ) maka berlaku hubungan
secara pemetaan dapat dituliskan:
Titik P’ disebut bayangan titik P oleh translasi T = ����
y P’(x+a, y+b)
T= ����
X
x’ = x + a dan y’ = y + b.
T = ���� : P ( x,y ) P’ ( x + a, y + b )
b
a p(x.y)
O

Contoh:
Bayangan titik ( 3,-7 ) oleh translasi ���� adalah….
a. ( 5, -3 ) c. ( 7, -5 ) e. ( 12, -4 )
b. ( -1, -9 ) d. ( 1, 9 )
Penyelesaian:
Misalkan titik P ( 3, -7 )
T = ���� : P ( 3, -7 ) → P’ ( 3+4, -7+2 ) = P’ ( 7, -5 )
Jadi bayangan titik ( 3, -7 ) oleh translasi ���� adalah ( 7, -5 )
Jawaban: C
b. Pencerminan Atau Refleksi
Pencerminan atau refleksi adalah suatu transformasi yang memindahkan titik-titik
dengan menggunakan sifat bayangan oleh suatu cermin. Pencerminan dilambangkan dengan
Ma, dinamakan a adalah sumbu cermin.
Sifat-sifat pencerminan adalah:
a. Jarak dari titik asal kecermin sama dengan jarak cermin ke titik bayangan.
b. Garis yang menghubungkan titik asal dengan titik bayangan tegak lurus terhadap
cermin.
Langkah-langkah menentukan bayangan titik A terhadap garis l
a. Buatlah garis g yang melalui titik A dan memotong garis l tegak lurus.
Misalkan g dan l berpotongan di titik N.
b. Tentukan sebuah A’ pada terusan ruas garis AN sehingga || = | A’N |.
c. Titik A’ adalah bayangan titik A terhadap garis l.
Untuk menentukan bayangan titik A terhadap garis l
L
B B’ Menunjukkan refleksi garis AB terhadap sumbu
Pencerminan l.
A L A’

Y Hasil pencerminan titik p(x,y) di tuliskan pada
Pn(-x,y) P(x,y) table dibawah ini:
X
O
P’(x,-y)
• Pencerminan terhadap sumbu x
Jika titik P ( x,y ) dicerminkan terhadap sumbu X, maka bayangannya adalah titik P’
(x’,y’) dengan x’ = x dan y’ = -y.
Mx : P ( x’,y ) → P’ ( x’,y’ ) = P’ ( x,-y )
Pemetaan P ( x,y ) → P’ ( x’,y’ ) dapat pula ditentukan oleh persamaan matriks
��′ ′� = �1 00 −1� �� �
Matriks �1 00 −1� dinamakan matriks yang bersesuaian dengan pencerminan terhadap
sumbu X.
• Pencerminan terhadap sumbu y
Jika titik P ( x,y ) dicerminkan terhadap sumbu Y, maka bayangannya adalah titik P’
(x’,y’) dengan x’ = -x dan y’ = y.
Secara pemetaan dapat ditulis:
My : P ( x,y ) → P’ ( x’,y’ ) = P’ ( -x,y )
Dengan persamaan matriks
��′ ′� = �−1 00 1� �� �
Matriks �−1 00 1� dinamakan matriks yang bersesuaian dengan pencerminan terhadap
sumbu Y.
• Pencerminan terhadap titik asal O ( 0,0 ).
Jika titik P ( x,y ) dicerminkan terhadap titik asal O ( 0,0 ), maka bayangannya
adalah titik P’ (x’,y’) dengan x’ = -x dan y’ =- y.
Secara pemetaan ditulis:
M0 : P ( x,y ) → P’ ( x’,y’ ) = P’ ( -x,-y )
Dengan persamaan matriks
��′ ′� = �−1 00 −1� �� �
Matriks �−1 00 −1� dinamakan matriks yang bersesuaian dengan pencerminan terhadap
sumbu O ( 0,0 ).
titik Sumbu pencerminan Bayangan
P (x,y) Sumbu x
Sumbu y
(x,-y)
(-x,y)

• Pencerminan terhadap garis y = x
Jika titik P ( x,y ) dicerminkan terhadap garis y = x, maka bayangannya adalah titik
P’ (x’,y’) dengan x’ = y dan y’ = x.
Secara pemetaan ditulis:
My = x : P ( x,y ) → P’ ( x’,y’ ) = P’ ( y,x )
Dengan persamaan matriks
��′ ′� = �0 11 0� �� �
Matriks �0 11 0� dinamakan matriks yang bersesuaian dengan pencerminan terhadap garis y
= x.
• Pencerminan terhadap garis y = -x
Jika titik P ( x,y ) dicerminkan terhadap garis y = -x, maka bayangannya adalah titik
P’ (x’,y’) dengan x’ = -y dan y’ = -x.
Secara pemetaan ditulis:
My =- x : P ( x,y ) → P’ ( x’,y’ ) = P’ ( -y,-x )
Dengan persamaan matriks
��′ ′� = � 0 −1−1 0 � �� �
Matriks � 0 −1−1 0 � dinamakan matriks yang bersesuaian dengan pencerminan terhadap
garis y = -x.
• Pencerminan terhadap garis x = h
Jika titik P ( x,y ) dicerminkan terhadap garis x = h, maka bayangannya adalah titik
P’ (x’,y’) dengan x’ = 2h – x dan y’ = y.
Secara pemetaan ditulis:
Mx = h : P ( x,y ) → P’ ( x’,y’ ) = P’ ( 2h – x, y )
• Pencerminan terhadap garis y = k
Jika titik P ( x,y ) dicerminkan terhadap garis y = k, maka bayangannya adalah titik
P’ (x’,y’) dengan x’ = x dan y’ = 2k - y.
Secara pemetaan ditulis:
My = k : P ( x,y ) → P’ ( x’,y’ ) = P’ ( x, 2k - y )
• Pencerminan terhadap titik ( a,b )
Jika titik P ( x,y ) dicerminkan terhadap titik ( a,b ), maka bayangannya adalah titik
P’ (x’,y’) dengan x’ = 2a – x dan y’ = 2b - y.
Secara pemetaan ditulis:
M( a,b ) : P ( x,y ) → P’ ( x’,y’ ) = P’ ( 2a – x, 2b - y )
Contoh:
Jika garis x – 2y – 3 = 0 dicerminkan terhadap sumbu Y, maka persamaan
bayangannya adalah

a. x + 2y – 3 = 0 c. –x + 2y + 3 = 0 e. –x – 2y – 3 = 0
b. –x – 2y + 3 = 0 d. x – 2y – 3 = 0
Penyelesaian:
Garis x – 2y – 3 = 0 dicerminkan terhadap sumbu Y
��′ ′� = �−1 00 1� �� �
��′ ′� = ��� �
Dengan demikian x’ = -x → x = -x’ dan y’ = y → y = y’
Dengan mensubstitusikan x = -x’ dan y = y’ pada persamaan garis, maka diperoleh:
( -x’ ) -2 ( y’ ) -3 = 0
-x’ – 2y’ – 3 = 0
Jadi bayangan garis x – 2y – 3 = 0 oleh pencerminan terhadap sumbu Y adalah –x – 2y
– 3 =0
Jawaban: E
c. Perputaran atau rotasi
Perputaran atau rotasi adalah transformasi yang memindahkan titik-titik dengan cara
memutar titik-titik tersebut sejauh � terhadap suatu titik pusat rotasi.
Perputaran atau rotasi pada bidang datar ditentukan oleh:
1. Titik pusat rotasi
2. Besar sudut rotasi
3. Arah sudut rotasi
Sudut rotasi adalah sudut antara garis yang menghubungkan titik asal dan pusat rotasi
dengan garis yang menghubungkan titik bayangan dan pusat rotasi.
Jika � ( sudut rotasi ) positif, arah putaran ( rotasi ) berlawanan dengan arah putaran jam .
sebaliknya jika � negatif, arah putaran searah dengan arah putaran jam.
Suatu rotasi dengan pusat P dan sudut rotasi � dinotasikan dengan R ( P, � ).
A Titik A pada gambar dirotasikan terhadap titik O
Sejauh 120o searah dengan perputaran jarum jam.
Bayangan A adalah A’. Rotasi yang berlawanan
120o
arah dengan perputaran jarum jam disebut rotasi
A’ positif, dan begitu pula sebaliknya.
a. Rotasi terhadap titik pusat O ( 0,0 )
Y p’(x’,y’) jika P(x,y) dirotasikan dengan pusat O(0,0) sebesar �
Berlawanan arah perputaran jarum jam, bayangannya
Adalah P’(x’,y') dengan:
� R p(x,y)
� Y
O x
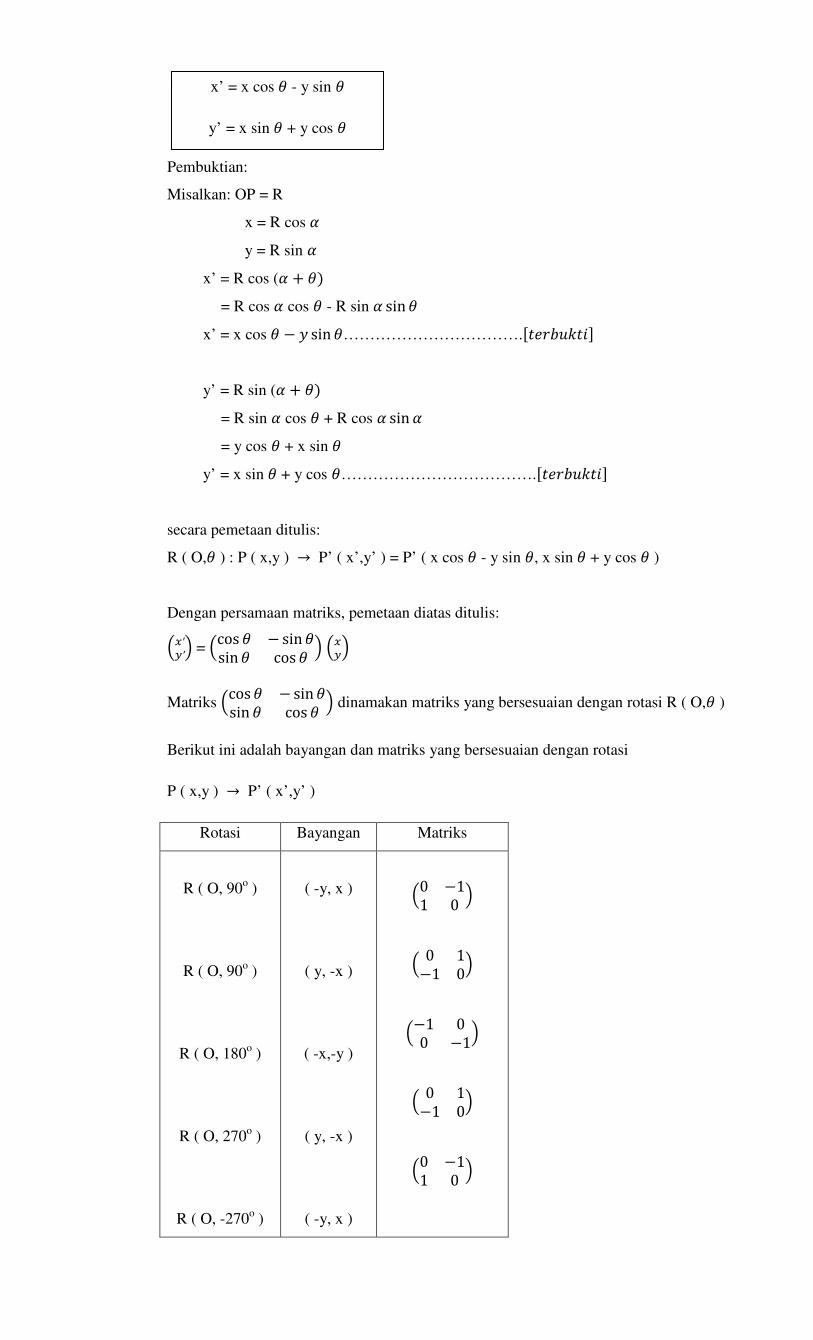
Pembuktian:
Misalkan: OP = R
x = R cos �
y = R sin �
x’ = R cos (� + �)
= R cos � cos � - R sin � sin �
x’ = x cos � − � sin �…………………………….��� !"#�$%
y’ = R sin (� + �)
= R sin � cos � + R cos � sin �
= y cos � + x sin �
y’ = x sin � + y cos �……………………………….��� !"#�$%
secara pemetaan ditulis:
R ( O,� ) : P ( x,y ) → P’ ( x’,y’ ) = P’ ( x cos � - y sin �, x sin � + y cos � )
Dengan persamaan matriks, pemetaan diatas ditulis:
��′ ′� = �cos � − sin �sin � cos � � �� �
Matriks �cos � − sin �sin � cos � � dinamakan matriks yang bersesuaian dengan rotasi R ( O,� )
Berikut ini adalah bayangan dan matriks yang bersesuaian dengan rotasi
P ( x,y ) → P’ ( x’,y’ )
Rotasi Bayangan Matriks
R ( O, 90o )
R ( O, 90o )
R ( O, 180o )
R ( O, 270o )
R ( O, -270o )
( -y, x )
( y, -x )
( -x,-y )
( y, -x )
( -y, x )
�0 −11 0 �
� 0 1−1 0�
�−1 00 −1�
� 0 1−1 0�
�0 −11 0 �
x’ = x cos � - y sin �
y’ = x sin � + y cos �

b. Rotasi terhadap titik pusat A ( a,b )
Y
P’(x’,y’)
R
� R � p(x,y)
b A
O � X
Jika titik P ( x,y ) diputar sebesar � berlawanan arah putaran jam terhadap titik
pusat A ( a,b ), maka diperoleh bayangan P’ ( x’,y’ ) dengan:
Pembuktian:
Misalkan: AP = R, maka
x = � + ( cos �
y = b + R sin �
x – � = ( cos )
y – b = R sin )
x’ = ) + ( cos(� + �)
x’ - ) = R cos � cos � − ( sin � sin �
x’ - ) = ( x – ) ) cos � − ( � − ! ) sin �……………………��� !"#�$%
y’ = b + R sin (� + �)
y’ – b = R sin � cos � + ( cos � sin �
y’ – b = (y-b) cos � + (+ − )) sin �
y’ – b =(x - �) sin � +(y - b)cos �……………………………[ terbukti ]
Dengan persamaan matriks, pemetaan diatas ditulis:
��, ,� = �cos � − sin �sin � cos � � ���� ��� + ����
Contoh:
Titik B ( 5, -1 ) dirotasikan terhadap titik P ( 2,3 ) sejauh 90o searah putaran jam.
Bayangan titik B adalah…..
a. B’ ( -4, -3 ) c. B’ ( -5, -1 ) e. ( 0, -2 )
b. B’ ( -5, 1 ) d. B’ ( -2, 0 )
x’ – a = ( x – a ) cos � - ( y – b ) sin �
y’ – b = ( x – a ) sin � + ( y – b ) cos �

c. Perkalian atau dilatasi
Perkalian atau dilatas adalah suatu transformasi yang mengubah jarak titik-titik
dengan faktor pengali tertentu terhadap suatu titik tertentu. Faktor pengali tertentu disebut
faktor dilatasi atau faktor sekala dan titik tertentu itu dinamakan pusat dilatas.
Dengan demikian dapat dikatakan bahwa suatu dilatasi ditentukan oleh:
a. Faktor skala ( k )
b. Pusat dilatasi
Jika yang dilatasikan suatu bangun, maka dilatasi akan mengubah ukuran tanpa
mengubah bentuk bangun tersebut. Dilatasi yang berpusat di P dengan faktor skala k
dinotasikan desngan ⟨., #⟩
Berdasarkan nilai dari faktor skala k, bangun bayangan yang diperoleh dapat ditetapkan
sebagai berikut:
� Jika k > 1, bangun bayangan diperbesar dan terletak sepihak terhadap pusat dilatasi dan
bangun semula.
� Jika 0 < k < 1 , bangun bayangan diperkecil dan terletak sepihak terhadap pusat dilatasi
dan bangun semula.
� Jika -1 < k < 0 bangun bayangan diperkecil dan terletak tidak sepihak terhadap pusat
dilatasi dan bangun semula.
� Jika k < -1 , bangun bayangan diperbesar dan terletak tidak sepihak terhadap pusat
dilatasi dan bangun semula.
a. Dilatasi terhadap titik pusat O ( 0,0 )
Jika titik P ( x,y ) didilatasikan terhadap titik pusat O ( 0,0 ) dengan faktor skala k,
maka bayangannya adalah P’ ( x’,y’ ) dengan
x’ = kx dan y’ = ky
secara pemetaan dapat ditulis: �1, #% : P ( x,y ) → P’ ( kx, ky )
Dengan persamaan matriks, pemetaan diatas ditulis:
��′ ′� = �# 00 #� �� �
Matriks �# 00 #� dinamakan matriks yang bersesuaian dengan dilatasi �1, #%. b. Dilatasi terhadap titik pusat A ( a,b )
Jika titik P ( x,y ) didilatasikan terhadap titik pusat A ( a,b ) dengan faktor skala k,
maka bayangannya adalah P’ ( x’,y’ ) dengan
x’ – a = k ( x – a ) dan y’ – b = k ( y – b )
Dengan persamaan matriks, pemetaan diatas ditulis:
��′ ′� = �# 00 #� ���� ��� + ����
Matriks �# 00 #� dinamakan matriks yang bersesuaian dengan dilatasi �1, #%.
Contoh:

Bayangan titik P ( -6,3 ) oleh dilatasi terhadap titik pusat O ( 0,0 ) dengan faktor sekala -3�
adalah…..
a. ( 3,- 4� ) c. ( -6
3�, 23� ) e. ( -
4�, 3 )
b. ( - 3, 4� ) d. ( 5
3�, 23� )
Penyelesaian:
��′ ′� = �# 00 #� �� �
��′ ′� = 5− 3� 00 − 3�
6 ��74 �
��′ ′� = 8 4�9:;
d. Transformasi Oleh Suatu Matriks
Jika transformasi yang bersesuaian dengan matriks <) != >? mentransformasikan titik A ( x,y )
Ke A’ ( x’,y’ ), maka hubungan antara koordinat A dan A’ dinyatakan dengan persamaan
matriks:
��′ ′� = �) != >� �� �
contoh:
bayangan titik A ( 3, -4 ) oleh suatu transformasi yang bersesuaian dengan matriks <1 32 5?
adalah….
a. A’ ( -9, -14 ) c. A’ ( 9, -32 ) e. A’ ( -5, -11 )
b. A’ ( 7, 9 ) d. A’ ( 12, -14 )
Penyelesaian:
��′ ′� = �1 32 5� � 4���
��′ ′� = 81.3 + 3 (−4)2.3 + 5 (−4);
��′ ′� = �4�3�7��D�
��′ ′� = � �E�3�� Dengan demikian x’ = -9 dan y’ = -14.
Jadi, bayangan titik A ( 3, -4 ) oleh suatu transformasi yang bersesuaian dengan matriks
�1 32 5� adalah A’ ( -9, -14 )
Jawaban : A
B. KOMPOSISI TRANSFORMASI
Komposisi transformasi adalah pengerjaan dua atau lebih transformasi secara berurutan.
Transformasi T1 dilanjutkan dengan transformasi T2 terhadap sasuatu titik A dapat ditulis:
(T2 o T1) (A) → T2 (T1(A))

Sebaliknya, T1o T2 (baca:T1 komposisi T2) berarti transformasi T2 dilanjutkan T1.
(T1 o T2) (A) → T1 (T2(A))
1. Komposisi Translasi
Jika ditranslasi T1 = �)!� dan T2 = �=>� , maka komposisi translasi T1 dan T2 dapat
diwakili oleh sebuah translasi tunggal yang ditentukan oleh :
T = �) + =! + >�
Sifat- sifat komposisi translasi:
1) Untuk dua translasi berurutan berlaku : T1 o T2 = T2 o T1 (kumutatif)
2) Untuk tiga translasi berurutab berlaku : (T1 o T2) = T1 o (T2 o T3 ) (asosoatif)
Contoh :
Titik A ( 6,3) ditranslasi oleh T1 = � 2−3� kemudian dilajutkan dengan
T2 = �−14 � Bayangan titik A adalah…
A. A’ ( 9, -4 )
B. A’ ( 7, 4 )
C. A’ ( 3, 10 )
D. A’ ( 9, 10)
E. A’ ( 3, -4)
Penyelesaian :
T = T2 o T1 = �−1 + 24 + −3� = �11�
8+ ′� ′; = �63� + �11�
= �47�
Jadi, bayangannya adalah A’ ( 7, 4)
Jawaban : b
2. Komposisi Refleksi
a) Komposisi Dua Refleksi Berurutan Terhadap Dua sumbu Sejajar
B A B1 C B2
A A1 A2
G G2
G1
C C1 C2
B D
� G1 adalah bayangan G karena refleksi terhadap sumbu AB

� G2 adalah bayangan G1 karena refleksi terhadap sumbu CD
� G2 adalah juga merupakan bayangan dari G karena refleksi terhadap
sumbu AB dilanjutkan refleksi terhadap sumbu CD
Perhatikan, melakukan refleksi dua kali berurutan terhadap sumbu sejajar
sama dengan melakukan sebuah translasi. Masalah kita sekarang adalah
menentukan suatu translasi yang ekuivalen dengan komposisi dua refleksi di
atas.
b) Komposisi dua refleksi berurutan terhadap dua sumbu yang sejajar sumbu x
Dua sumbu sejajar yang sejajar terhadap sumbu X misalkan titik P(x’,y )
Dicerminkan terhadap garis y = a , kemudian dicerminkan terhadap garis
Y = b, maka diperoleh bayangan
P” ( x, 2 (b-a) + y).
Secara pemetaan dapat dituliskan :
My = b o My = a : P(x,y) → P” (x,3 (b-a) + y)
Misalkan titk P (x,y) dicerminkan terhadap garis y = b, kemudian dicerminkan
terhadap garis y= a , maka diperoleh bayangan P” (x, 2(a-b) + y)
Secara pemetaan dapat dituliskan :
My = a o My = b : P(x,y) → P” (x,2 (a-b) + y)
c) Komposisi dua refleksi berurutan terhadap dua sumbu yang saling tegak lurus
G H�O H3 G2
A
G G1
C D
G2
B
� Segitiga G direfleksikan dua kali berurutan terhadap sumbu AB lalu sumbu CD
� G1 adalah bayangan G karena refleksi terhadap sumbu AB
� G2 adalah bayangan G1 karena refleksi terhadap sumbu CD
� G2 juga merupakan bayangan dari G karena refleksi berurutan terhadap sumbu AB
dilanjutkan refleksi terhadap sumbu CD.
� Misalkan M1 adalah refleksi terhadap AB dan M2 adalah refleksi terhadap CD,
d.Komposisi dua refleksi berurutan terhadap dua sumbu yang saling berpotongan

� Garis l dan m berpotongan di titik P.
� Garis l dan m membentuk sudut �. � Titik A1 adalah bayangan titik A Karena refleksi terhadap garis l.
� Titik A2 adalah bayangan titik A1 karena refleksi terhadap garis m.
� Titik A2 merupakan bayangan titik A karena dua refleksi berurutan terhadap garis l dan
garis m.
� Misalkan M1 adalah refleksi terhadap sumbu l dan M2 adalah refleksi terhadap sumbu m,
c. Komposisi dua rotasi sepusat yang berurutan
Perhatikan gambar 5.27. titik A1 adalah bayangan titik A karna rotasi sebesar a1 terhadap
pusat P dan A2 adalah bayangan A1 karna rotasi sebesar a1 terhadap pusat P.
Maka titik A dipetaka ke A2oleh rotasi terhadap pusat p sejauh a1 + a2 .
Jadi, transformasi tunggal ekuivalen dengan komposisi dua rotasi yang berurutan terhadap
pusat P sejauh a1 dan a2 adalah rotasi terhadap pusat yang sama jauh (a1 + a2 )
Misalkan R1 = rotasi terhadap pusat P sejauh a1 = Rot(P,a1)
R2 = rotasi terhadap pusat P sejauh a2 = Rot(P,a2)
R2 o R1 = rotasi terhadap pusat P sejauh a1 dilanjutkan rotasi terhadap pusat P sejauh a2
= rotasi terhadap pusat P sejauh (a1 + a2 )
= rot(P, a1 + a2)
Contoh
1. Tentukan bayangan titki (4,2) kerna rotasi sejauh a1 = 10o dilanjutkan rotasi sejauh a2 =50
Terhadap pusat (0,0)
Jawab :

Rotasi sejauh a1 = 100 dilanjutkan rotasi sejauh a2 = 50 ekuivalen dengan rotasi Rot(0,a1 +
a2) = Rot (0,600)
Misalkan (x2,y2,)adalah bayangan titik (4,2) akibat rotasi 2 diatas , maka
��: :� = �IJK 7D –KMN 7DKMN 7D IJK 7D � ���� = 5 2 − 3�3� √3 3�
6 �42�
= 8 2 − √32√3 + 1;
Jadi, bayangan titik ( 4, 2 ) akibat rotasi terhadap pusat O sejauh 10o dilanjutkan 50
o
adalah titik ( 2-√3, 2√3 + 1 )

SOAL
1. Titik (4, −8) dicerminkan terhadap garis x = 6,dilanjutkan dengan rotasi (0, 60D),hasilnya adalah...
a �−4 + 4√3 , 4 − 4√3�
b �−4 + 4√3 , −4 − 4√3�
c �4 + 4√3 ,4 − 4√3�
d �4 + 4√3 − ,4 − 4√3�
e �4 + 4√3, 4√3 − 4�
UAN 2006
2. Garis dengan persamaan 2+ − � − 6 = 0 dicerminkan terhadap garis � = + dilanjutkan
dengan bersesuaian dengan matriks � 2 1−1 0�.persamaan bayangan adalah...
a 2+ + 5� + 6 = 0
b 2+ + 5� − 6 = 0
c 2+ + 3� − 6 = 0
d 2+ + 2� − 6 = 0
e 5+ + 2� + 6 = 0
UAN 2005
3. Garis dengan garis persamaan � = 2+ + 3dicerminkan terhadap sumbuh Q kemudian
diputar dengan ( (1, 90D) .Persamaan bayangan adalah...
a + − 2� − 3 = 0
b + + 2� − 3 = 0
c 2+ − � − 3 = 0
d 2+ + � − 3 = 0
e 2+ + � + 3 = 0
EBTANAS 2000
4. Persamaan peta garis + − 2� + 4 = 0 yang dirotasikan dengan pusat 0(0,0) sejauh 90D,dilanjutkan dengan pencerminan terhadap garis � = + adalah ...
a + + 2� + 4 = 0
b + + 2� − 4 = 0
c 2+ + � + 4 = 0
d 2+ − � − 4 = 0
e 2+ + � − 4 = 0
UAN 2003
5. Bayangan ST, dengan (2,1),S(6,1), T(5,3) karena fefleksi terhadap sumbu U dilanjutkan rotasi (1, 90D) adalah ...
a ′′ (−1, −2) ,S" (1,6 ) dan T ′′ (−3, −5)
b ′′ (−1, −2) ,S" (1, −6 ) dan T ′′ (−3, −5)
c ′′ (1, −2) ,S" (−1,6 ) dan T ′′ (−3, 5)
d ′′ (−1, −2) ,S" (−1, −6 ) dan T ′′ (−3, −5)
e ′′ (−1, 2) ,S" (−1, −6 ) dan T ′′ (−3, −5)
EBTANAS 2001
6. Luas bayangan persegi panjang .W(X dengan

. (−1, 2 ), W ( 3, 2 ), ( ( 3, −1 ), X ( −1, −1 ) karena dilatasi �0 3% dilanjutkan rotasi
dengan pusat 1 sejauh Y� adalah
a 36 satuan luas
b 48 satuan luas
c 72 satuan luas
d 96 satuan luas
e 108 satuan luas
UAN 2007
7. Bayangan garis � = 2+ + 2 yang dicerminkan terhadap garis � = + adalah ...
a � = + + 1
b � = + − 1
c � = 3� + − 1
d � = 3� + + 1
e � = 3� + − 3�
UAN 2005
8. Garis yang persamaannya + − 2� + 3 = 0 dipetakan dengan transformasi yang berkaitan
dengan matriks �1 −32 −5�.Persamaan bayangan garis itu adalah...
a 3+ + 2� − 3 = 0
b −+ + � + 3 = 0
c 3+ − 2� − 3 = 0
d + − � + 3 = 0
e 3+ + 2� + 3 = 0
SNMPTN 2008
9. Persamaan peta garis 2+ − � + 5 = 0 karena refleksi terhadap garis + + 3 =0 dilanjutkan dengan transformasi yang bersesuaian dengan matriks �−2 4−1 1� adalah..
a 3+ − 10� + 17 = 0
b 3+ − 10� + 14 = 0
c 3+ − 10� − 14 = 0
d 3+ + 2� − 7 = 0
e + + 2� − 14 = 0
SNMPTN 2007
10. Persamaan bayangan garis � = −6+ + 3 karena transformasi oleh matriks � 2 1−1 −2�
karena kemudian dilanjutkan dengan matriks �0 21 −2� adalah ...
a + + 2� + 3 = 0
b + + 2� − 3 = 0
c 8+ − 19� + 3 = 0
d 13+ + 11� + 9 = 0
e 13+ + 11� − 9 = 0
SNMPTN 2009
11. Persamaan bayangan garis 4+ − 3� + 5 = 0 oleh translasi sejauh matriks � 2−3�
dilanjutkan dengan pencerminan terhadap garis � = + adalah...
a 4+ − 3� − 12 = 0
b 4+ − 3� + 22 = 0
c 4� − 3+ − 9 = 0

d 4� − 3+ − 12 = 0
e 4� − 3+ + 22 = 0
UAN 2004
12. Titik ′ (6, −1) S′ (1,0) berturut-turut adalah bayangan titik (2,4), >)Z S(+, �) karena
percerminan terhadap garis � = + dilanjutkan dengan translasi [ = � )! + 3�.Koordinat
titik S(+, �). a (6, −1)
b (−1,3)
c (2, −3)
d (2, −6)
e (3, −1)
UAN 2010
13. Bayangan lingkaran (+ − 2)� + (� + 3)� = 25,Oleh transformasi yang bersesuaian
dengan matriks �0 −11 0 �.dilanjutkan dengan pencerminan terhaddap garis � = + adalah
...
a +� +�� −6+ − 4� − 12 = 0
b +� +�� −6+ + 4� − 12 = 0
c +� +�� +4+ − 6� − 12 = 0
d +� +�� −4+ − 6� − 12 = 0
e +� +�� −4+ + 6� − 12 = 0
SNMPTN 2004
14. Persamaan bayangan lingkaran +� +�� −4+ − 6� − 3 = 0 oleh Trnsformasi yang
berkaitan dengan matriks � 0 1−1 0� adalah..
a. +� +�� −6+ − 4� − 3 = 0
b. +� +�� −6+ + 4� − 3 = 0
c. +� +�� −6+ + 4� − 3 = 0
d. +� +�� −4+ + 6� − 3 = 0
e. +� +�� +4+ − 6� + 3 = 0
UAN 2007
15. Persamaan peta suatu kurva oleh rotasi pusat 1 sejauh 3� \ ,dilanjutkan dilatasi (0,2)adalah + = 2 + � − ��.persamaan kurrva semula adalah...
a � = − 3� +� – + + 4
b � = − 3� +� – + − 4
c � = − 3� +� ++ + 4
d � = −2+� – + + 1
e � = 2+� – + − 1
UAN 2003
16. Banyangan garis � = 2+ + 2 yang dicerminkan terhadap garis � = + adalah:
a. � = + + 1
b. � = + − 1
c. � = �� − 1
d. � = �� + 1
e. � = �� − 3�
UAN 2002
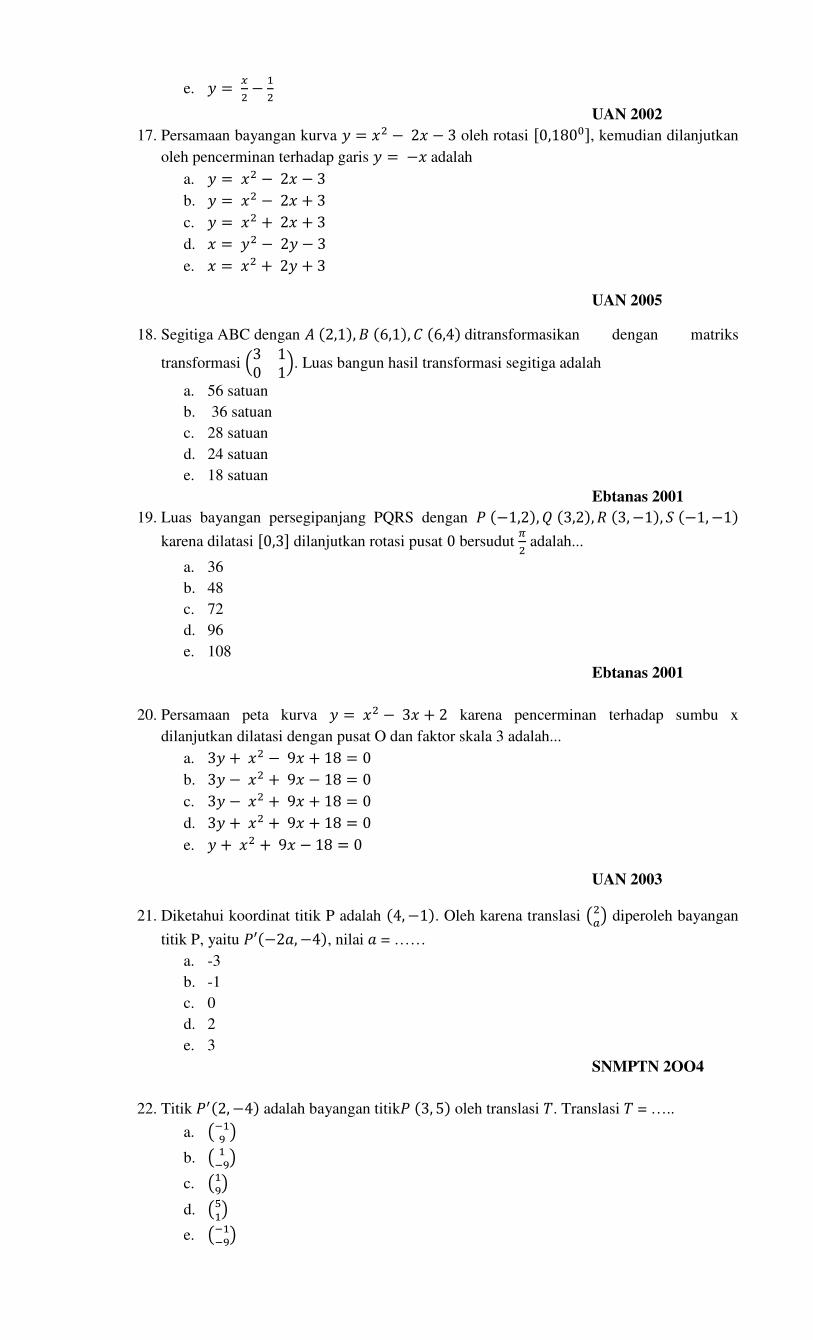
17. Persamaan bayangan kurva � = +� − 2+ − 3 oleh rotasi �0,180D%, kemudian dilanjutkan
oleh pencerminan terhadap garis � = −+ adalah
a. � = +� − 2+ − 3
b. � = +� − 2+ + 3
c. � = +� + 2+ + 3
d. + = �� − 2� − 3
e. + = +� + 2� + 3
UAN 2005
18. Segitiga ABC dengan (2,1), S (6,1), T (6,4) ditransformasikan dengan matriks
transformasi �3 10 1�. Luas bangun hasil transformasi segitiga adalah
a. 56 satuan
b. 36 satuan
c. 28 satuan
d. 24 satuan
e. 18 satuan
Ebtanas 2001
19. Luas bayangan persegipanjang PQRS dengan . (−1,2), W (3,2), ( (3, −1), X (−1, −1)
karena dilatasi �0,3% dilanjutkan rotasi pusat 0 bersudut Y� adalah...
a. 36
b. 48
c. 72
d. 96
e. 108
Ebtanas 2001
20. Persamaan peta kurva � = +� − 3+ + 2 karena pencerminan terhadap sumbu x
dilanjutkan dilatasi dengan pusat O dan faktor skala 3 adalah...
a. 3� + +� − 9+ + 18 = 0
b. 3� − +� + 9+ − 18 = 0
c. 3� − +� + 9+ + 18 = 0
d. 3� + +� + 9+ + 18 = 0
e. � + +� + 9+ − 18 = 0
UAN 2003
21. Diketahui koordinat titik P adalah (4, −1). Oleh karena translasi ���� diperoleh bayangan
titik P, yaitu .′(−2), −4), nilai ) = ……
a. -3
b. -1
c. 0
d. 2
e. 3
SNMPTN 2OO4
22. Titik .^(2, −4) adalah bayangan titik. (3, 5) oleh translasi [. Translasi [ = …..
a. ��3E �
b. � 3�E�
c. �3E�
d. �_3�
e. ��3�E�

Ebtanas 2001
23. Jika garis � = + + 5 ditranslasikan oleh ��4�, maka persamaan bayangannya adalah….
a. � = 2+ + 8
b. � = + + 10
c. � = + + 5
d. � = 2+ + 5
e. � = + + 8
SNMPTN 2000
24. titik (3, −5)dicerminkan terhadap sumbu Q. koordinat bayangan titik adalah….
a. (3, 5)
b. (−3, −5)
c. (−3, −5)
d. ( −5, 3)
e. ( −5, − 3)
UAN 2009
25. Titik P ( -3, 7 ). (−3, 7) dicerminkan terhadap garis � = −+ koordinat bayangan titik . adalah…..
a. (3, −7)
b. (3, −7)
c. (7, −3)
d. (−7, 3)
e. (−7, −3)
UAN 2007
26. Titik (2,1) dirotasikan terhadap titik 1 (0,0) sejauh 90D berlawanan arah putaran jam.
Bayangan titik adalah…
a. ^(−1,2 )
b. ^(−2, 1 )
c. ^(1, −2 )
d. ^(−1, −2 )
e. ^(2, 1 )
SNMPTN 2009
27. Bayangan titik oleh rotasi ( (0, 45D) adalah �−√2, √2�. Koordinat titik adalah….
a. (0, 0)
b. (0, 2)
c. (2, 0)
d. (−2, 0)
e. (0, −2)
UAN 2008
28. Jika garis x – 2y = 5 diputar sejauh 90o terhadap titik ( 2,4 ) berlawanan arah putaran jam,
maka persamaan bayangannya adalah….
a. 2+ + � = −19
b. 2+ + � = 19
c. + − � = 19
d. � − + = 19
e. −+ − � = 19

UAN 2010
29. Bayangan titik . (2, −1) oleh dilatasi terhadap titik pusat (3, 4)dengan faktor skala -3
adalah….
a. .^(−6, 1)
b. .^(−3,15)
c. (6, 19)
d. .^(3, 15)
e. .^(0, 11)
UAN 2007
30. Diketahui bayangan titik . (3, 2)oleh suatu transformasi adalah .^(3,7) dan bayangan
titik W (1, 1) adalah W^(1, 4). Matriks yang bersesuaian dengan transformasi tersebut
adalah…
a. �−1 0−1 −5�
b. � 1 0−1 5�
c. �−1 51 0�
d. �5 −11 0 �
e. � 0 −5−1 1 �
SNMPTN 2008
31. Garis � = 2+ − 3 ditranslasikan oleh �D7� dilanjutkan oleh translasi � ���� persamaan
bayangan garis adalah….
a. � = + − 5
b. � = 2+ + 5
c. � = 2+ − 5
d. � = 3� + + 3
e. � = 3� + − 3
SNMPTN 2009
32. titik W (5, 1)dicerminkan terhadap garis + = 1 kemudian dilanjutkan terhadap garis + = −3 Bayangan terakhir titik W adalah….
a. (5, −7)
b. (5, −3)
c. (−3, 1)
d. (−3, 3)
e. (13, 1)
UAN 2005
33. Titit ( (2, −5) dicerminkan terhadap garis + = 3 kemudian dilanjutkan garis � = 1.
Koordinat bayangan titik R adalah….
a. (4, −5)
b. (−4, 5)
c. (−4, −7)
d. (4, 7)
e. (−4, 7)
UAN 2007
34. Garis + + � = 3 dicerminkan terhadap sumbu U kemudian dicerminkan terhadap sumbu Q. persamaan bayangan adalah….
a. + − � = −3

b. + + � = −3
c. + + � = 3
d. – + + � = −3
e. + − � = 3
UAN 2010
35. Persamaan bayangan garis � = 2+ − 3 yang direfleksikan terhadap garis � = −+ dan di
lanjutkan garis � = + adalah …………..
a. 2� + + + 3 = 0 b. � + 2+ − 3 = 0 c. � − 2+ − 3 = 0 d. 2� + + − 3 = 0 e. 2� − + − 3 = 0
UAN 2009
36. Bayangan garis 2+ − � − 6 = 0 jika dicermikan tehadap sumbu Q dilajutkan rotasi pusat 1
sejauh 90° adalah…………..
a. 2+ + � − 6 = 0
b. + + 2� − 6 = 0
c. + − 2� − 6 = 0
d. + + 2� + 6 = 0
e. + − 2� + 6 = 0
UAN 2008
37. Persamaan bayangan garis 4+ + 3+ − 2 = 0 oleh transformasi yang bersesuaian dengan
matrik �0 −11 1 � di lanjutkan matrik �1 11 −1� adalah……..
a. 8+ + 7� − 4 = 0
b. 8+ + 7� − 2 = 0
c. + − 2� − 2 = 0
d. + + 2� − 2 = 0
e. 5+ + 2� − 2 = 0
UAN 2007
38. Bayangan kurva � = +� − 3 jika dicerminkan terhadap sumbu Q dilanjutkan dengan dilatasi
pusat 1 dan faktor skala 2 adalah ……..
a. � = 3� +� + 6
b. � = 3� +� − 6
c. � = 3� +� − 6
d. � = 6 − 3� +�
e. � = 3 − 3� +�
UAN 2006
39. Persamaan bayangan garis 4+ − � + 5 = 0 oleh transformasi yang bersesuaian dengan matrik
� 2 0−1 3� dilanjutkan pencerminan terhadap sumbu U adalah ………..
a. 3+ + 2� − 30 = 0

b. 6+ + 12� − 5 = 0
c. 7+ + 3� + 30 = 0
d. 11+ + 2� − 30 = 0
e. 11+ − 2� + 30 = 0
UAN 2005
40. Persamaan peta suatu kurva oleh rotasi pusat O bersudut Y�, dilanjutkan dilatasi �0,2% adalah
+ = 2 + � − ��. Persamaan kurva semula adalah
a. � = − 3� +� − + + 4
b. � = − 3� +� + + − 4
c. � = − 3� +� + + + 4
d. � = −2+� + + + 1
e. � = 2+� − + − 1
UAN 2011

PEMBAHASAN
1. Titik P (x,y) dicermin terhadap x = a bayangan adalah P’ (2a-x,y).
Titik P (4,-8) dicerrmin terhadap x = 6 bayangan adalah p’ (2.6-4 ,-8 ) = (8,-8).
Selanjutnya titik P’ (2,-8) dirotasikan (0,60
0) untuk menghasilkan bayangan hasil P(x”,y”)
P’ (8,8) rot (0,60)
P(x”.y”).
Matriks rotasi (0,600) adalah
�cos 60 − sin 60sin 60 cos 60 � = 5 3� − 3� √33� √3 3�6
8+"�"; = 5 3� − 3� √33� √3 3�6 � 8−8�
= 84 + 4√34√ 3 − 4;
Bayangan adalah akhirnya adalah (�4 + 4√3, 4√3 − 4�.
Jawaban: E
2. Matriks yang bersesuaian dengan pencerminan terhadap garis � = + adalah �0 11 0�.
Garis yang persamaan 2+ − � − 6 = 0 dicerminkan terhadap garis � = + dilanjutkan
dengan bersesuaian dengan matriks � 2 1−1 0� bayangannya ditentukan sebagai berikut:
8+"�"; = � 2 1−1 0� �0 11 0� �+��
=�1 20 −1� �+��
�+��=�1 20 −1��3 8+"�";
=3�3�D �1 20 −1� 8+^�^;
�+�� =�1 20 −1� 8+^�^; =8+^ + 2�′−�′ ;
→ + = +^ + 2�^ dan � = �′
Substitusikan harga + dan � kedalam persamaan garis 2+ − � − 6 = 0 didapat : 2(+^ + 2�′) − (−�) − 6 = 0 ↔ 2+^ + 4�^ + �^ − 6 = 0 ↔ 2+^ + 5�^ − 6 = 0
Jadi bayangan akhirnya adalah 2+ + 5� − 6 = 0
Jawaban: B
3. Matriks yang bersesuaian dengan pencerminan terhadap sumbu Q addalah �1 00 −1� dan
matriks yang bersesuaian dengan rotasi ((1, 90D)adalah �1 00 −1�.bayangan garis � = 2+ + 3 dicerminkan terhadap sumbu U kemudian diputar dengan ((1, 90D)
ditentukan sebagai berikut:
8+′�′;=�0 −11 0 � �1 00 −1� �+��

=�0 11 0� �+�� ↔ �+��=�0 11 0��3 8+′�′;
=3�3 � 0 −1−1 0 � 8+′�′;
Di dapat + = �^ dan � = +′.disubsitusikan harga + = �^ dan � = +′ kedalam persamaan
garis � = 2+ + 3 didapat ; +^ = 2�^ ↔ +^ − 2�^ − 3 = 0 .
persamaan bayangan adalah; + − 2� − 3 = 0
Jawaban: A
4. Matriks yang rotasi dengan pusat 1(0,0)sejauh 90D adalah �0 −11 0 �.Matriks rotasi
terhadap garis � = + adalah �0 11 0�.
Persamaan peta garis + − 2� + 4 = 0 yang dirotasikan dengan pusat 1(0,0) percerminan
terhadap garis � = + ditentukan sebagai berikut:
8+′�′;=�1 00 −1� �0 −11 0 � �+��
=�0 11 0� �+��
↔ �+��=�1 00 −1��3 8+′�′;
=3�3 �1 00 −1� 8+′�′;
�+�� = �−1 00 1� 8+′�′; =8−+′�′ ;
Didapat + = −+′ dan � = �′ ke dalam persamaan garis + − 2� + 4 = 0 di dapat : + − 2� + 4 = 0 → +^ − 2(−�) + 4 = 0 ↔ +^ + 2�^ + 4 = 0
jadi persamaan bayanganya adalah: + + 2� + 4 = 0
Jawaban : A
5. Matriks refleksi terhadap sumbu U adalah �−1 00 1� dan matriks rotasi (1, 90D) adalah
�0 −11 0 �.Bayangan titik . (+. �) karena refleksi terhadap sumbu U dilanjutkan dengan
rotasi (1, 90D) ditentukan sebagai berikut :
8+"�"; = �0 −11 0 � �−1 00 1� �+��
=�0 −11 0 � �+��
=8+"�"; =�−+−��
Diperoleh + = −�" dan � = −+" atau ." (−�, −+).Bayangan ketiga titik karena
refleksi terhadap sumbu U dilanjutkan dengan rotasi (1, 90D) adalah:
• (2, ,1) → "(−1, −2)
• S(6,1) → S" (−1, −6)
• T (5,3) → T" (−3, −5)

Jawaban : D
6. Matriks dilatasi �0,3% adalah �3 00 3� danrotasi dengan pusat 1 sejauh Y� adalah �0 −11 0 �
.Dilatasi �0,3% dilanjutkan dengan pusat 1 sejauh Y� ,matriks komposisi trnsformasinya
adalah �0 −11 0 � �3 00 3� = �0 −33 0 �.Persegi panjang .W(X dengan .(−1,2) , W(3,2),((3, −1), X(−1, −1). .W = a(3 + 1)� + (2 − 2)� =√16 + 0 = 4 dan .X = a(−1 + 1)� + (−1 − 2)� = √9 = 3
Luas persegi panjang .W(X :
b = .W × .X = 4 × 3 = 12 X)�")Z b")d .
Luas bayangan persegi panjang .W(X karena dilatasi �0,3% dilanjutkan rotasi
dengan pusat 1 sejauh Y� adalah
b = e0 −33 0 e × b = (0 + 9) × 12 = 108 X)�")Z b")d .
Jawaban : E
7. Matriks refleksi terhadap garis � = + adalah �0 11 0� .Bayangan garis 2+ + 2 yang
dicerminkan terhadap garis � = + ditentukan sebagai berikur:
8+′�′; = �0 11 0� �+�� >$>)f)� � = +^>)Z + = �′.Subsitusikan � = +^>)Z + = �′. Kedalam persamaan garis 2+ + 2 didapat: +^ = 2�^ + 2 → 2�^ = +^ − 2 ↔ �^ = 3� +^ − 1 )�)" � = 3� + − 1
Jawaban : C
8. 8+′�′; = �1 −32 −5� �+�� → �+�� �1 −32 −5��3 8+′�′;
�+�� = 3�_g7 �−5 3−2 1� 8+′�′; = �−5 3−2 1� 8+′�′; = 8−5+^ + 3�′−2+^ + �′ ;
Didapat + = −5+^ + 3�^>)Z �^ − 2+^ + �^. Disubsitusikan nilai + dan � kedalam
persamaan garis + − 2� + 3 = 0 ↔ −5+^ + 3�^ − 2 (−2+^ + �^) + 3 = 0
→ −5+^ + 3�^ + 4+^ − 2�^ + 3 = 0
→ −+^ + �^ + 3 = 0
Persamaan bayangan −+ + � + 3 = 0
Jawaban : B
9. Garis + + 3 = 0 → + = −3 .(+, �) hijkilmn �o�pqqqqqqqqr .^(2) − +, �) 2+ − � + 5 = 0 hijkilmn �o�4pqqqqqqqqqr 2(2(−3) − +) − � + 5 = 0 → 2(−6 − +) − � + 5 = 0 ↔ −2+ − � − 7 = 0

Garis −2+ − � − 7 = 0 ini ditransformasikan oleh matriks �−2 4−1 1�.
Bayangannya ditentukan sebagai berikut:
8+′�′; = �−2 4−1 1� �+�� → �+�� �−2 4−1 1��3 8+′�′; = 8+′�′;=3��g� �1 −41 −2� 8+′�′;
53� −23� 1 6 8+′�′; = 53� +′ −2+′3� �′ −�′ 6 didapat + = 3� +^ − 2�^>)Z �^ = 3� +^ − �′ .Subsitusikan harga-harga ini kedalam persamaan garis −2+ − � − 7 = 0 .
↔ −2 �3� +^ − 2�′� − �3� +^ − �′� − 7 = 0
↔ −+^ + 4�^ − 3� +^ + �^ − 7 = 0
↔ − 4� +^ + 5�^ − 7 = 0
↔ 3+^ − 10�^ + 14 = 0 ↔ 3+ − 10� + 14 = 0
stutvtw: y
10. Bayangan ditentukan sebagai berikut:
8+′�′; = �0 21 −1� � 2 1−1 −2� �+�� = �−2 −44 5 � �+�� → �+�� = �−2 −44 5 ��3 8+′�^;
= 3�3Dg37 � 5 4−4 −2� 8+′�′;
↔ �+�� = 5 _7 �7− �7 − �76 8+′�′; = 5 _�,g� "7���,�� ^7
6 → >$>)f)� + = _�,g� ^7 >)Z � =���,�� ^7
Subsitusikan nilai-nilai + dan � kedalam persamaan garis � = −6+ + 3 didapat:
���,�� ,7 = −6 �_�,g� ,
7 � + 3
↔ −4+^ − 2�^ = 30+^ − 24�^ + 18 ↔
26+^ + 22�^ − 18 = 0 13+^ + 11�^ − 9 = 0 )�)" 13+ + 11� − 9 = 0
Jawaban : E
11. 4+ − 3� + 5 = 0 zo� :{9�pqqqr 4(+ − 2) − 3(� + 3) + 5 = 0 ↔ 4+ − 8 − 3� − 9 + 5 = 0 ↔ 4+ − 3� − 12 = 0
4+ − 3� − 12 = 0 hijkilmn ( o�)pqqqqqqqqqr 4� − 3+ − 12 = 0
Jadi ,persamaan bayangan adalah 4� − 3+ − 12 = 0
Jawaban : D

12. (2,4) hijkilmn o�pqqqqqqqqr (2,4) |h�}mk�mn z� ��g4�pqqqqqqqqqqqr ^(�g�,_g�) = (6, −1) >$>)f)� ) = 2, ! = −6 S(+, �) hijkilmn o�pqqqqqqqqr (�, +)|h�}mk�mn z� ��g4�pqqqqqqqqqqqr S^( g�,�g�g4) = (1,0)didapat � + ) = 1 ↔ � +2 = 1 ↔ � = −1 >)Z + + ! + 3 = 0 ↔ + − 6 + 3 = 0 ↔ + = 3 ~)>$, �$�$# S(3, −1)
Jawaban : E
13. (+ − 2)� + (� + 3)� = 25 ↔ f"d)� (2, −3) >)Z = 5
Matriks Pencerminan ; � = + )>)�)ℎ �0 11 0�
Matriks Komposisi Transformasi ; = �0 11 0� �0 −11 0 � = �1 00 −1�
8+′�′; = �1 00 −1� �+��
↔ 8+^�^; = �1 00 −1��3 8+^�^; �+�� = 3�3�D �−1 00 1� 8+′�′;
= �−1 00 1� 8+′�′; = 8 +′−�′;
>$>)f)� + = +^>)Z � = �^. subsitusikan + = +^ dan � = −�^ kedalam persamaan lingkaran (+ − 2)� + (� + 3)� = 25 didapat (+^ − 2)� + (� + 3)� = 25 ↔ (+^)� − 4+^ + 4 + (�^)� − 6�^ + 9 = 25 ↔ (+′)� + (�′)� − 4+^ − 6�^ − 12 = 0 ↔ +� + �� − 4+ − 6� − 12 = 0
Jawaban : D
14. 8+′�′; = � 0 1−1 0� �+��
↔ �+�� = � 0 1−1 0��3 8+^�^; �+�� = 3Dg3 �0 −11 0 � 8+′�′;
= �0 −11 0 � 8+′�′; = 8−�′+′ ;
>$>)f)� + = −�^>)Z � = +^. subsitusikan + = �^ dan � = + kedalam persamaan +� + �� − 4+ − 6� − 3 = 0
↔ (−�^)� + (+′)� − 4 + (−�′) − 6+′ − 3 = 0 ↔ (�′)� + (+′)� + 4�^ − 6+^ − 3 = 0
↔ +� + �� − 6+ + 4� − 3 = 0

Jawaban : C
15. Matriks Rotasi <1, 3� \? adalah �0 −11 0 � .Matriks dilatasi �1, 2% adalah �2 00 2� misal
persamaan kurva semula adalah � = )+� + !+ + = maka perbayangan ditentukan
sebaggai berikut.
8+′�′; = �2 00 2� �0 −11 0 � �+�� = �0 −22 0 � �+�� ↔ �+�� =�0 −22 0 ��3 8+^�^; = 3 � � 0 2−2 0� 8+^�^;
�+�� = 5 0 3�− 3� 06 8+^�^; = 5 3� �′− 3� +′6
Didapat + = 3� �^>)Z � = − 3� +^ subsitusikan keduanya kedalam persamaan kurva � = )+� + !+ + = >$f� ���ℎ; ↔ − 3� +^ = ) �3� �′�� + ! �3� �′� + =
↔ − 3� +^ = 3� )(�′)� + ! �3� �′� + =
↔ +^ = − 3� )(�′)� − !�^ − 2=
persamaan garis bayangannya adalah; = − 12 )(�^)� − !�^ − 2= ↔ + = −2= − !�−= − 12 )(�^)�.
Karena persamaan bayangannya adalah + = 2 + � − ��maka = = −1, ! = −1, ) = 2. Dengan demikian persamaan kurva semula adalah
� = 2+� − + − 1.
Jawaban : E
16. Rumus dasarnya :
.(+, �) → .(+, �)... (1)
Pencerminan terhadap garis y = x :
.(+, �) → .( �, +)... (2)
Dari (1) dan (2) maka :
+ = � >)Z � = + ... (3)
Substitusi (3) kegaris � = 2+ + 2
+ = 2� + 2 ⟺ 2� = + − 2 � = �� − 1
Hasil pencerminannya adalah � = �� − 1
Jawaban : C

17. 1. Rotasi terhadap R (0, �) = �cos � − sin �sin � cos � �
Maka rotasi terhadap R (0, 180D) = �cos 180D − sin 180Dsin 180D cos 180D �
= �−1 00 −1�
Rotasi sudut – sudut yang lain dapat dihitung sendiri menggunakan kaidah trigonometri.
2. Pencerminan terhadap garis � = −+ . (+, �) → . (−�, −+) matriksnya �−1 00 −1�
Bayangan oleh rotasi �0, 180D%, kemudian dilanjutkan oleh pencerminan terhadap garis � = −+ adalah : �+�� = �−1 00 −1� � 0 −1−1 0 � �+��
= �0 11 0� �+��
= (�, +) + = � ; � = +
Substitusikan pada kurva � = +� − 2+ − 3 + = �� − 2+ − 3 ⇒ + = �� − 2+ − 3
Jawaban: D
18. Misalkan [ = �3 10 1� maka luas bayangan atau transformasi ∆ ABC = |det | x luas ∆ST |det [| = |)> − !=| = |3 − 0| = 3
Luas ∆ST:
Luas ∆ST = 3� )�)d + �$Z��$ =
3� + S + ST
= 3� + 4 + 3
= 6
Luas bayangan/ transformasi ∆ST = |det [|+ �")d ∆ST
= 3 + 6
= 18 d)�")Z
Jawaban: E
19. Dilatasi �0,3#% �0,3#% ∶ . (+, �) ⟶ . (3+, 3�)
Rotasi pusat O bersudut Y� �( <0, Y�?�
. (+, �) → . �– �, +�
�0,3% (−�, +)
. (+, �) → . (3+, 3�) → . (−3�, 3+)

Sehingga :
. (+, �) → . (−3�, 3+)
. (−1, 2), W (3, 2), ((3, −1), X (−1, −1) . (−1,2) → .′ (−6, −3)
W (3,2) → W^(−6,9)
( (3, −1) → (^(3,9)
X (−1, −1) → X^(3, −3)
Sehingga luas transformasinya adalah :
Panjang (p) x lebar (l) = 12 x 9 = 108 satuan luas
Jawaban: E
20. Pencerminan terhadap sumbu x : . (+, �) → . (+, −�)
Dilatasi terhadap titik pusat 1 (0,0) dengan faktor skalar 3 : �1, #% ∶ . (+, �) → . (#+, #�) �1, 3#% ∶ . (+, �) → . (3+, 3�)
Pencerminan terhadap sumbu x dilanjutkan dilatasi dengan pusat O dan faktor skalar 3 : . (+, �) → .^(+, −�) → . (3+, −3�)
+′ = 3+ ⇒ + = 13 +′ �^ = −3� ⇒ � = − 13 �′ Substitusi pada persamaan � = +� − 3+ + 2 menjadi :
− 13 �′ = 813 +^;� − 3. 13 +′ + 2
⇔ − 13 �^ = 19 +^� − +^ + 2 |+9| ⇔ −3� = +′� − 9+^ + 18
⇔ 3�^ + +�� − 9+^ = 0 ⇒ 3� + +� − 9+ + 18 = 0
stutvtw ∶ �
21. Penyelesaian: [ = �2)� :. (4, 1) → .^(−2), −4)
.^(−2), −4) = .^�2 + 4, ) + (−1)�
Jadi : −2) = 6 dan ) + (−1) = −4
) = −3 ) = −3
Jawaban: A
22. Penyelesaian: [ = �)!� ∶ . (3, 5) → : P (3,5) .^ ((3 + ), 5 + !) = .^(2, −4)
Sehingga diperoleh :

3 + ) = 2 → ) = −1
5 + ! = −4 → ! = −9
Jadi transslasi [ = ��3�E�
Jawaban : E
23. Penyelesaian:
8+′�′;= �+�� + �23�
Dengan demikian +^ = + + 2 → + = +^ − 2, dan �^ = � + 3 → + = �^ − 3
Dengan mensubtitusikan + = +^ − 2 dan + = �^ − 3 pada persamaan garis,
Diperoleh: �^ − 3 = (+^ − 2) + 5 �^ = +^ − 2 + 5 + 3 �^ = +^ + 6
Jadi, persamaan bayangan garis � = + + 5 oleh translasi �23� adalah � = + + 6
Jawabann: C
24. Penyelesaian : H� = . (3, −5) → .^(+^, �′)
Kita gunakan persamaan matriks untuk menentukan +^ dan �′ 8+′�′; = �1 00 −1� �+��
⟺ 8+′�′; = �1 00 −1� � 3−5�
⟺ 8+′�′; = 8 1.3 + 0 (−5)0.3 + (−1)(−5);
= �35�
Jadi bayangan titik (3, −5) oleh pencerminan terhadap sumbu + adalah ^(3, 5)
Jawaban: A
25. Penyelesaian:
8+′�′; = � 0 −1−1 0 � �+��
⟺ 8+′�′; = � 0 −1−1 0 � �−37 �
⟺ 8+′�′; = 80. (−3) + (−1). 7(−1)(−3) + 0.7 ;
⟺ 8+^�^; = �−73 �
Jadi, bayangan titik . (−3, 7) oleh pencerminan terhadap garis � = −+ adalah .^(−7, 3)
Jawaban: D
26. Penyelesaian:
8+′�′; = �0 −11 0 � �+��
⟺ 8+′�′; = �0 −11 0 � �21�
⟺ 8+′�′; = �−12 �
Dengan demikian +^ = −1 dan �^ = 2
Jadi bayangan titik (2, 1) oleh rotasi terhadap titik 1 (0,0) sejauh 90D berlawanan
arah putaran jam adalah ^(−1, 2)
Jawaban: A

27. Penyelesaian:
Misalkan koordinat titik A adalah ( x, y ).
8+′�′; = �cos � − sin �sin � cos � � �+��
Karena � = 45D, maka
8+ ′� ′;=�cos 45 − sin 45sin 45 cos 45 � �+��
⟺ 8−√2√2 ; = 53� √2 − 3� √23� √2 3� √2 6 �+��
⟺ 8−√2√2 ; = 53� √2+ − 3� a2�3� √2+ 3� √2� 6
Dengan demikian , 3� √2+ − 3� a2� = −√2 … … … . (1) 3� √2+ + 3� a2� = √2 … … … . (2)
Dengan menyelesaikan persamaan 1 dan 2 diatas,diperoleh x=0 dan y=2.
Jadi koordinat titik A adalah (0,2)
Jawaban : B
28. 8+ ′� ′;=�0 −11 0 � 8+ − 2� − 4; + �24�
⟺ 8+ ′� ′;=�4 − �+ + 2� + �24�
⟺ 8+ ′� ′;=�6 − �+ + 2�
Dengan demikian + ′ = 6 − � ⟶ � = 6 − + ′dan y′ = x + 2 ⟶ x = y′ − 2
Dengan mensubsitusikan + = � ′ − 2 dan y = 6 − x′pada persamaan ,diperoleh; (� ′ − 2) − 2(6 − + ′) = 5 � ′ − 2 − 12 + 2+ ′ = 5 + ′ + � ′ = 5 + 2 + 12 + ′ + � ′ = 19
Jadi ,persamaan bayangan garis + − 2� = 5 oleh rotasi sejauh 90°terhadap titik(2,4)
berlawanan arah putaran jam adalah 2+ + � = 19
Jawaban : B
29. ⇔. 8+ ′� ′;=�−3 00 −3� � 2 − 3−1 − 4� + �34�
⇔. 8+′�′;=�−3 00 −3� �−1−5� + �34�
⇔. 8+ ′� ′;=� 315� + �34�
⇔. 8+′�′;=� 619�
Dengan demikian + , = 6 dan � , = 19
Jadi , banyangan titik P (2, 1) oleh dilatasi terhadap titik pusat A (3, 4 )adalah ., ( 6, 9 )
Jawaban : C
30. 8+′�′;=�) != >� �+��
�37�=�) != >� �32�

⇔. �37�=�3) + 2!3= + 2>�
Dengan demikian
3) + 2! = ⋯ … … … … … … … … . ..(1)
3= + 2> = 7 … … … … … … … … . . . (2)
Untuk titik W
�14�=�) != >� �11�
⇔. �14�=�) + != + >�
Dengan demikian
) + ! = 1 … … … … … … … … … . . . . (3)
= + > = 4 … … … … … … … … … . … . (4)
Dengan menyelesaikan persamaan 1 dan 3 diperoleh ) = 1 dan ! = 0,dengan
menyelesaikan persamaan 2 dan 4diperoleh = = −1 dan > = 5.jadi ,matriks yang
bersesuaian dengan transformasi itu adalah:
� 1 0−1 5�
Jawaban : B
31. Misalkan [3o �06� Dan [� = � 2−4�
T = T� oT3o � 2 + 0−4 + 6� = �22�
8+′�′; = �+�� + �22�
⟺ 8+′�′; = 8+ + 2� + 2;
Dengan demikian + ′ = + + 2 → + = + ′ − 2 dan � ′ = � + 2
Dengan mensubsitusikan + = + ′ − 2 dan � = � ′ − 2 kepersamaan � = 2+ − 3 diperoleh
: � ′ − 2 = 2(+ ′ − 2) − 3 ⇔ � ′ − 2 = 2+ ′ − 4 − 3 ⇔ � ′ = 2+ ′ − 5
Jadi persamaan garis bayangan adalah � = 2+ − 5
Jawaban : C
32. H�o} � H�o� = W(+, �) → W"(2(Z − ) + +, �) H�o�4 � H�o3 = W(5,1) → W"(2(−3 − 1) + 5,1 = W"(−3,1)
Jadi bayangan adalah W′(−3,1)
Jawaban : C
33. H¡o¢ � H o£ = H o£ o M¥o¦ = M ((P, Q)) H o3 o M¥o4 = M ((3,1))
Pencerminan terhadap garis + = 3 dilanjutkan terhadap garis � = 1 ekuivalen dengan
pencerminan terhadap titik (3,1) H(�,�) ∶ ( (+, �) → (′(2) − +, 2) − �) H(4,3) :((2, −5) → (′(2.3 − 2, 21— 5 = (′(4,7)
Dengan demikian H o3 o M¥o4 = R(2, −5) → R′(4,7)

Jadi bayangan adalah R’(4,7)
Jawaban D
34. Matriks H� = <1 00 −1? dan M« = <−1 00 1?
Matriks H� o H« = H¥ × M«
= <1 00 −1? × <−1 00 1?
= <−1 00 −1?
8+′�′; = <−1 00 −1? �+��
¬+′�′ = <−+−�? Dengan demikian + ′ = −+ → + = −+ ′dan � ′ = −� → � = −�′ Dengan mensubsitusikan + = −+ ′>)Z � = −�′ kepersamaan + + � = 3
Diperoleh ; (−+ ′) + (−� ′) = 3 ↔ −+ ′ − � ′ = 3 + ′ + � ′ = −3
Jadi persmamaan bayangan adalah + + � = −3
Jawaban B
35. Langkah 1: � = 2+ − 3 direfleksikan terhadap garis � = −+ matriks yang bersesuaian dengan � = −+ = � 0 −1−1 0 �
8+^�^; = � 0 −1−1 0 � �+��
8+′�′; = �−�−+�
Dengan demikian: +^ = −� → � = +^ �^ = −+ → + = −�^ � = 2+ − 3 o��pqqr − + = −2� − 3
Langkah 2:
−+ = −2� − 3 direfleksikan terhadap garis � = +. Matriks yang bersesuaian dengan.
� = + = �0 11 0�
8+′�′; = �0 11 0� �+��
8+′�′; = ��+�
Dengan demikian +^ = �
�^ = +
−+ = 2� − 3 o�pqr − � = 2+ − 3

� − 2+ − 3 = 0
Jawaban : C
36. Matriks H� = �1 00 −1� dan ( (0, 90D) = �0 −11 0 �
Matriks ( = (0, 90�) + H� = �0 −11 0 � �1 00 −1� = �0 11 0�
8+′�′; = �0 11 0� �+�� = ��+�
Dengan demikian + ′ = � dan � ′ = +
Dengan mensubstitusikan + ′ = � dan � ′ = + kepersamaan 2+ − � − 6 = 0 diperoleh
2� − + − 6 = 0
+ − 2� − 6 = 0
Jawaban : E
37. garis 4� + 3+ − 2 = 0 ditransformasikan oleh matriks �0 −11 1 � dilanjutkan oleh
�1 11 −1�
8+′�′; = �1 11 −1� �0 −11 1 � �+�� 8+′�′; = � 1 0−1 −2� �+�� ................... (1)
�+�� = � 1 0−1 −2��3 8+′�′;
= − 3� � 2 0−1 −1� 8+′�′;
− 3� � 2 0−1 −1� 8+′�′; = − 3� � 2 0−1 −1� � 1 0−1 −2� �+�� ®−1 03� 3�¯ 8+′�′; = = − 3� �2 00 2� �+�� ® −+′− 3� +^ + 3� �^¯ = �−+−�� =
® +′3� +^ − 3� �^¯ = �+��
Hasil transformasi garis 4� + 3+ − 2 = 0 adalah
4 ® +′3� +^ − 3� �^¯ + 3 (+′) − 2 = 0
−2+^ − 2�^ + 3+^ − 2 = 0
+^ − 2�^ − 2 = 0
+ − 2� − 2 = 0

Jadi persamaan bayangannya adalah + − 2� − 2 = 0
Jawaban : C
38. Diketahui kurva � = +� − 3 dicerminkan terhadap sumbu −Q kemudian �0, 2% Ditanyakan bayangan akhir kurva
Matriks yang berhubungan dengan refleksi terhadap sumbu – Q adalah �1 00 −1�
Matriks yang berhubungan dengan �0,2 % adalah �2 00 2�
Dengan demikian matriks yang berhubungan dengan transformasi refleksi terhada
sumbu – Q dilanjutkan �0,2 % adalah
�2 00 2� �1 00 −1� = �2 00 −2�
Bayangan x dan y oleh transformasi diatas adalah
8+′^�^^; = �2 00 −2� �+��
= 8 2+−2�;
+^^ = 2+, maka + = 3� +′′ ..... (1)
�^^ = −2�, maka � = − 3� �′′ ......(2)
Substitusikan (1) dan (2) ke persamaan kurva
� = +� − 3
− 3� �^^ = �3� +′′�� − 3
− 3� �^^ = 3� (+′′)� − 3
�^^ = 6 − 3� (+′′)�
Atau � = 6 − 3� +�
Jadi bayangan kurva oleh transformasi diatas adalah � = 6 − 3� +�
Jawaban : D
39. misalkan [3 = transformasi yang bersesuaian dengan matriks H3 = � 2 0−1 3� [� = transformasi pencerminan terhadap sumbu Y H� = �−1 00 1�
Persamaan garis 4+ − � + 5 = 0 ditransformasikan oleh [3 kemudian oleh [�. ([� � [3)
Komposisi transformasi [� � [3 bersesuaian dengan perkalian matriks H�. H3, yaitu

H�. H3 = �−1 00 1� � 2 0−1 3�
Bayangan
8+′�′; = �−1 00 1� � 2 0−1 3� �+�� = �−2 0−1 3� �+��
= 8 −2+−+ + 3�;
+^ = −2+ → + = − 3� +′ �^ = −+ + 3�
Dengan mensubstitusikan + = − 3� +′ pada �^= −+ + 3� maka diperoleh:
�^= − � − 3� +^ � + 3�
�^= 3� +^ + 3� �^- 3� +^ = 3�
� = 34 �^ − 37 +^ Substitusikan + = �3� +^ dan � = 34 �^ − 37 +^ pada persamaan garis 4+ + � =50 diperoleh: 4 �− 3� +^� − �34 �^ − 37 +^� + 5 = 0 kalikan kedua ruas dengn 6, sehingga di peroleh: 12+^ − 2�^ + +^ + 30 = 0 −11+^ − 2�^ + 30 = 0 11+^ + 2�^ − 30 = 0
Jadi persamaan bayangan garis 4+ − � + 5 = 0 adalah 11+ = 2� − 3 = 0
Jawaban: D
40. Rotasi ��, Y�� = �0 −11 0 �
Dilatasi (0,2) = �2 00 2�
Rotasi ��, Y�� dilanjutkan dengan dilatasi (0,2) bersesuaian dengan matrik:
�2 00 2� �0 −11 0 � �+�� = 8+^�^;
�0 −22 0 � �+�� = 8+^�^;
�+�� = 3� � 0 2−2 0� = 8+^�^;
�+�� = 5 3� �^�3� +^6
+^ = −2� �^ = 2+
Dimisalkan persamaan peta suatu kurva oleh rotasi (0, 90°) dilanjutkan dilatasi(0,2)
adalah +^ = 2 + �^ − �^� maka persamaan kurva semula : +^ = 2 + �^ − �^� ⇔ −2� = 2 + 2+ − (2+�) ⇔ −2� = 2 + 2+ − 4+�
: 2
� = 2+� − + − 1
Jawaban : E