Embed Size (px)
Citation preview
1
Faculdade de Ciências e Tecnologia
da
Universidade Nova de Lisboa
EXERCÍCIOS RESOLVIDOS de SINAIS e SISTEMAS para a CADEIRA de
TEORIA DE SINAIS
por
Cesaltina Morgado
(Prof. da Escola Náutica Infante D. Henrique)
e
Manuel Duarte Ortigueira
(Prof. Auxiliar com Agregação do DEE da FCT da UNL)
Julho de 2004
2
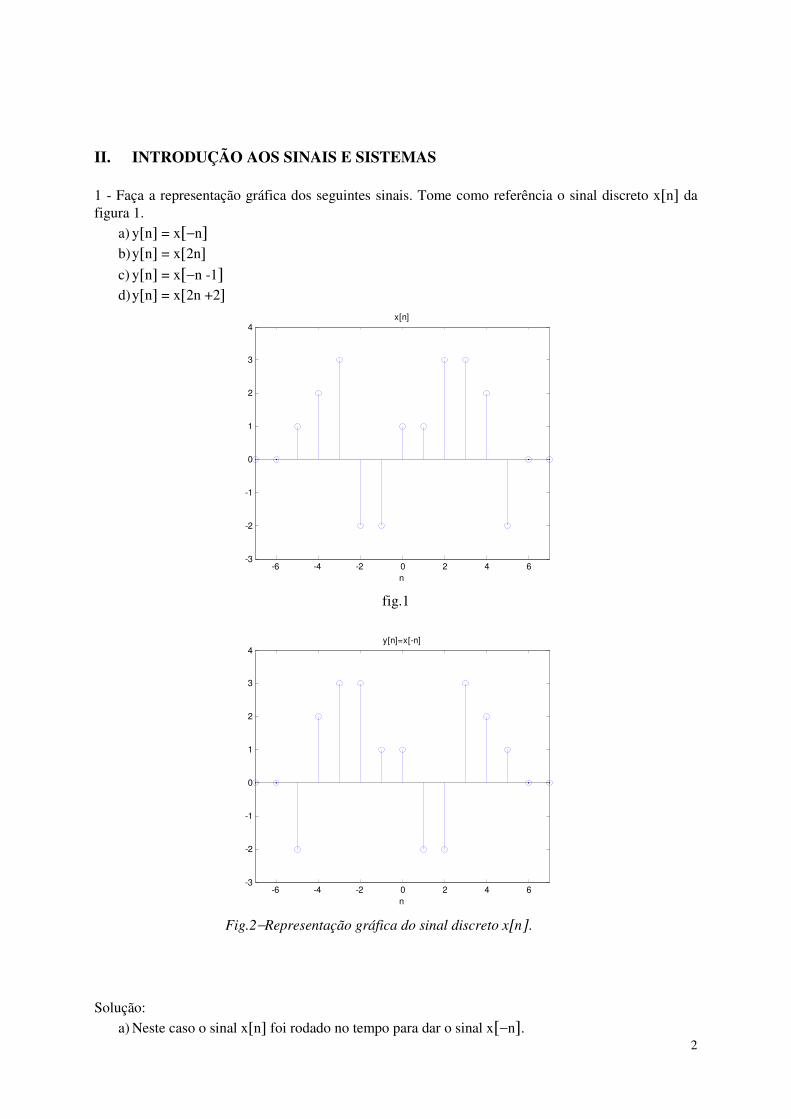
II. INTRODUÇÃO AOS SINAIS E SISTEMAS
1 - Faça a representação gráfica dos seguintes sinais. Tome como referência o sinal discreto x[ ]n da
figura 1.
a) y[ ]n = x[ ]−n
b) y[ ]n = x[ ]2n
c) y[ ]n = x[ ]−n -1
d) y[ ]n = x[ ]2n +2
-6 -4 -2 0 2 4 6-3
-2
-1
0
1
2
3
4
n
x[n]
fig.1
-6 -4 -2 0 2 4 6-3
-2
-1
0
1
2
3
4
n
y[n]=x[-n]
Fig.2−Representação gráfica do sinal discreto x[ ]n .
Solução:
a) Neste caso o sinal x[ ]n foi rodado no tempo para dar o sinal x[ ]−n .
3
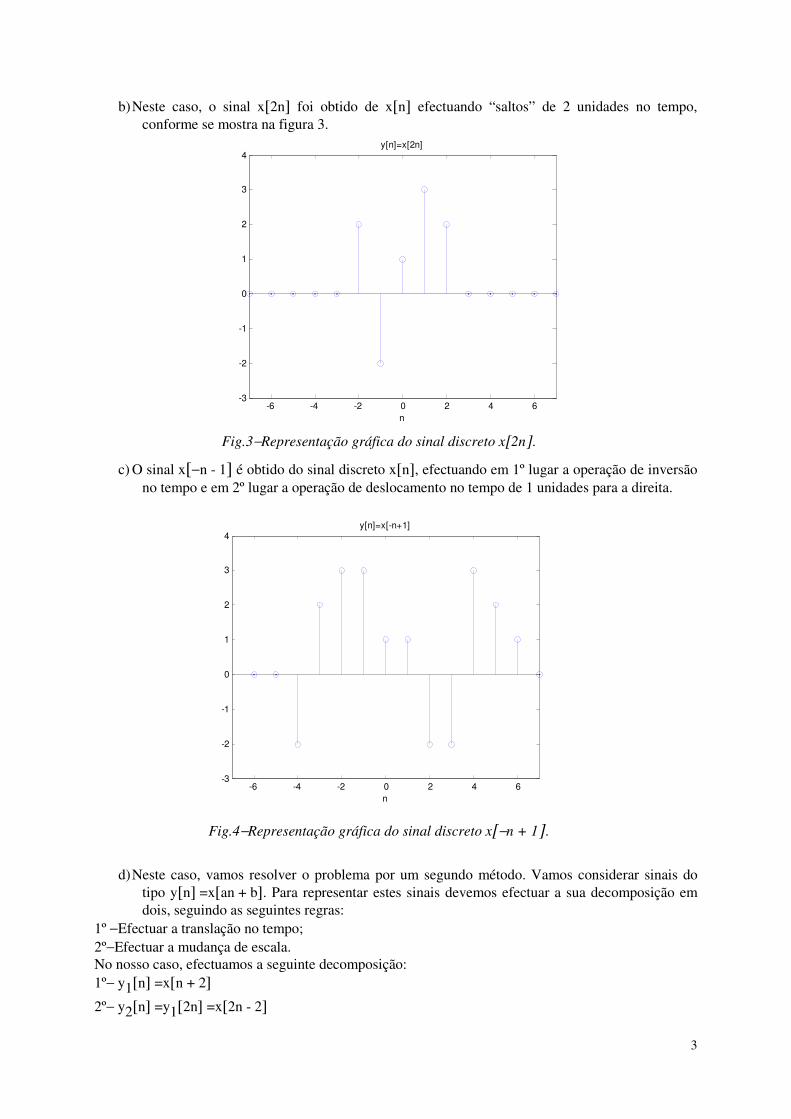
b) Neste caso, o sinal x[ ]2n foi obtido de x[ ]n efectuando “saltos” de 2 unidades no tempo,
conforme se mostra na figura 3.
-6 -4 -2 0 2 4 6-3
-2
-1
0
1
2
3
4
n
y[n]=x[2n]
Fig.3−Representação gráfica do sinal discreto x[ ]2n .
c) O sinal x[ ]−n - 1 é obtido do sinal discreto x[ ]n , efectuando em 1º lugar a operação de inversão
no tempo e em 2º lugar a operação de deslocamento no tempo de 1 unidades para a direita.
-6 -4 -2 0 2 4 6-3
-2
-1
0
1
2
3
4
n
y[n]=x[-n+1]
Fig.4−Representação gráfica do sinal discreto x[ ]−n + 1 .
d) Neste caso, vamos resolver o problema por um segundo método. Vamos considerar sinais do
tipo y[ ]n =x[ ]an + b . Para representar estes sinais devemos efectuar a sua decomposição em
dois, seguindo as seguintes regras:
1º −Efectuar a translação no tempo;
2º−Efectuar a mudança de escala.
No nosso caso, efectuamos a seguinte decomposição:
1º− y1[ ]n =x[ ]n + 2
2º− y2[ ]n =y1[ ]2n =x[ ]2n - 2
4
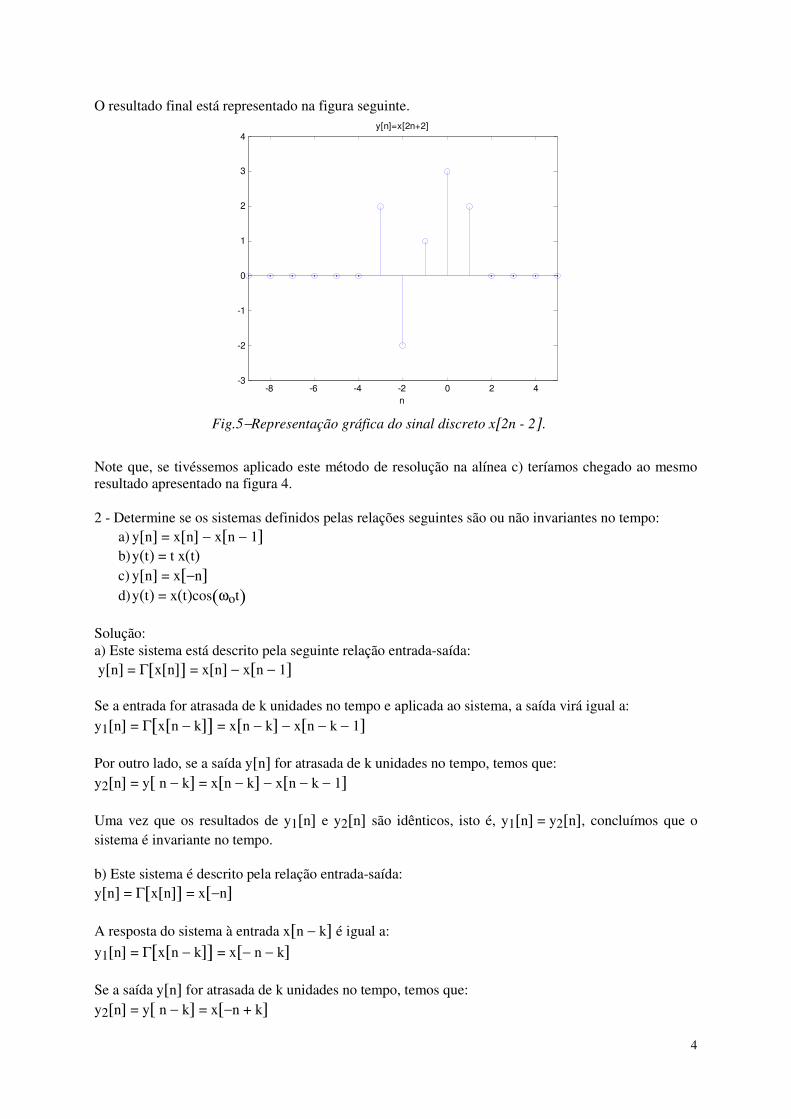
O resultado final está representado na figura seguinte.
-8 -6 -4 -2 0 2 4-3
-2
-1
0
1
2
3
4
n
y[n]=x[2n+2]
Fig.5−Representação gráfica do sinal discreto x[ ]2n - 2 .
Note que, se tivéssemos aplicado este método de resolução na alínea c) teríamos chegado ao mesmo
resultado apresentado na figura 4.
2 - Determine se os sistemas definidos pelas relações seguintes são ou não invariantes no tempo:
a) y[ ]n = x[ ]n − x[ ]n − 1
b) y( )t = t x( )t
c) y[ ]n = x[ ]−n
d) y( )t = x( )t cos( )ωot
Solução:
a) Este sistema está descrito pela seguinte relação entrada-saída:
y[ ]n = Γ[ ]x[ ]n = x[ ]n − x[ ]n − 1
Se a entrada for atrasada de k unidades no tempo e aplicada ao sistema, a saída virá igual a:
y1[ ]n = Γ[ ]x[ ]n − k = x[ ]n − k − x[ ]n − k − 1
Por outro lado, se a saída y[ ]n for atrasada de k unidades no tempo, temos que:
y2[ ]n = y[ ] n − k = x[ ]n − k − x[ ]n − k − 1
Uma vez que os resultados de y1[ ]n e y2[ ]n são idênticos, isto é, y1[ ]n = y2[ ]n , concluímos que o
sistema é invariante no tempo.
b) Este sistema é descrito pela relação entrada-saída:
y[ ]n = Γ[ ]x[ ]n = x[ ]−n
A resposta do sistema à entrada x[ ]n − k é igual a:
y1[ ]n = Γ[ ]x[ ]n − k = x[ ]− n − k
Se a saída y[ ]n for atrasada de k unidades no tempo, temos que:
y2[ ]n = y[ ] n − k = x[ ]−n + k

5
Como y1[ ]n ≠ y2[ ]n , concluímos que o sistema é variante no tempo.
3 - Determine se os sistemas descritos pelas seguintes relações de entrada-saída são lineares ou não
lineares.
a) y[n]=nx[n]
b) y[ ]n = x[ ]n2
c) y( )n = x2( )n
Solução:
a) Para as entradas x1( )t e x2( )t , as correspondentes saídas são:
y1( )t = t x1( )t
y2( )t = t x2( )t
A combinação linear dos dois sinais de entrada, resulta na saída:
y3( )t = Γ[ ]a x1( )t + b x2( )t = t[ ]a x1( )t + b x2( )t = a t x1( )t + b t x2( )t
Por outro lado, a combinação linear dos dois sinais de saída y1( )t e y2( )t , resulta no sinal:
y4( )t = a y1( )t + b y2( )t = a t x1( )t + b t x2( )t
Como y3( )t = y4( )t , concluímos que o sistema é linear.
b) Procedendo de forma similar ao exemplo anterior, as saídas correspondentes aos sinais de
entradas x1[ ]n e x2[ ]n são:
y1[ ]n = x1[ ]n2
y2[ ]n = x2[ ]n2
A combinação linear dos dois sinais de entrada, resulta na saída:
y3[ ]n = Γ[ ]a x1[ ]n + b x2[ ]n = a x1[ ]n2
+ b x2[ ]n2
Por outro lado, a combinação linear dos dois sinais de saída y1[ ]n e y2[ ]n , resulta no sinal:
y4[ ]n = a y1[ ]n + b y2[ ]n = a x1[ ]n2
+ b x2[ ]n2
Como y3[ ]n = y4[ ]n , concluímos que o sistema é linear.
c) As respostas do sistema aos sinais de entrada x1( )t e x2( )t são:
y1( )t = x12( )t
y2( )t = x22( )t
A combinação linear dos dois sinais de entrada, resulta na saída:
y3( )t = Γ[ ]a x1( )t + b x2( )t = [ ]a x1( )t + b x2( )t 2 = a
2 x1
2( )t + 2ab x1( )t x2( )t + b2 x2
2( )t
Por outro lado, a combinação linear dos dois sinais de saída y1( )t e y2( )t , resulta no sinal:
y4( )t = a y1( )t + b y2( )t = a x12( )t + b x2
2( )t
Como y3( )t ≠ y4( )t , concluímos que o sistema é não linear.
4 - Determine se os seguintes sistemas são ou não causais.
a) y[ ]n = x[ ]n − x[ ]n − 1
6
b) y[ ]n = ∑k=−∞
n
x[ ]k
c) y[ ]n = x[ ]n + 3 x[ ]n + 4
d) y[ ]n = x[ ]n2
Solução: O sistemas descritos nas alíneas a), b), e c) são causais, porque as saídas dependem apenas
das entradas presentes e passadas. Por outro lado, os sistemas das alíneas d), e), e f) são não causais,
porque as saídas dependem dos valores futuros da entrada. O sistema da alínea g) é não causal: por
exemplo, se seleccionarmos o instante t = −1, temos para a saída y( )−1 = x( )1 . Assim, a saída no
instante t = −1, depende da entrada no instante futuro t =1.
5 - Determine a resposta dos seguintes sistemas ao sinal de entrada
a) x[ ]n = | |n −3 ≤ n ≤ 3
0 c.c
b) y[ ]n = x[ ]n
c) y[ ]n = x[ ]n − 1
d) y[ ]n = x[ ]n + 1
e) y[ ]n = 1/2[ ]x[ ]n − 1 + x[ ]n + x[ ]n − 1
Solução:
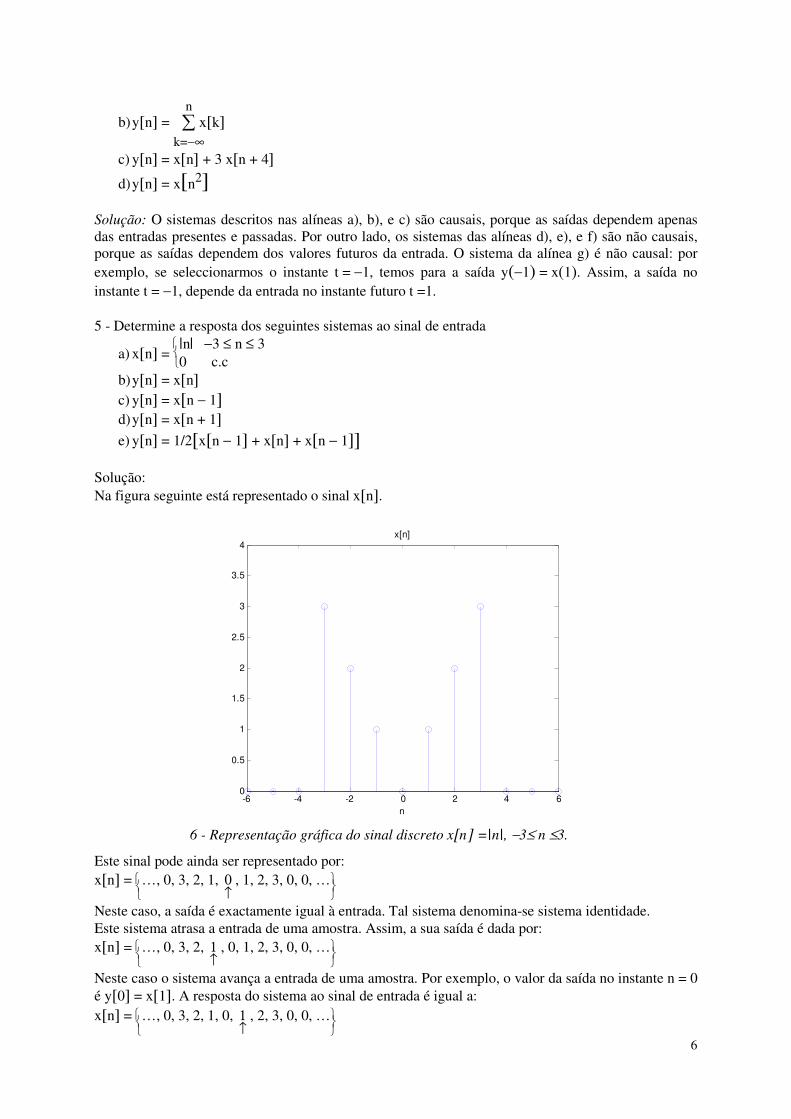
Na figura seguinte está representado o sinal x[ ]n .
-6 -4 -2 0 2 4 60
0.5
1
1.5
2
2.5
3
3.5
4
n
x[n]
6 - Representação gráfica do sinal discreto x[ ]n =| |n , −3≤ n ≤3.
Este sinal pode ainda ser representado por:
x[ ]n =
…, 0, 3, 2, 1,
↑0 , 1, 2, 3, 0, 0, …
Neste caso, a saída é exactamente igual à entrada. Tal sistema denomina-se sistema identidade.
Este sistema atrasa a entrada de uma amostra. Assim, a sua saída é dada por:
x[ ]n =
…, 0, 3, 2,
↑1 , 0, 1, 2, 3, 0, 0, …
Neste caso o sistema avança a entrada de uma amostra. Por exemplo, o valor da saída no instante n = 0
é y[ ]0 = x[ ]1 . A resposta do sistema ao sinal de entrada é igual a:
x[ ]n =
…, 0, 3, 2, 1, 0,
↑1 , 2, 3, 0, 0, …

7
A saída deste sistema, em qualquer instante, é igual ao valor médio da amostra anterior, actual e
posterior. Por exemplo, a saída no instante n = 0, é:
y[ ]0 = 1
2[ ]x[ ]−1 + x[ ]0 + x[ ]1 = 1
2 ( )1 + 0 + 1 =
2
3
Repetindo este cálculo para todo o valor de n obtemos o seguinte sinal de saída:
x[ ]n =
…, 0, 1, 5/3, 2, 1,
↑
32 , 1, 2, 5/3, 1, 0, …

8
III. ANÁLISE DE SINAIS E SISTEMAS NO DOMÍNIO DO TEMPO
7 - Determine a convolução entre os seguintes sinais discretos:
a) x[ ]n =
1 0≤n≤4
0 c.c h[ ]n =
(2/3)n 0≤n≤6
0 c.c
b) x[ ]n = (1.2)n u[ ]n m[ ]n = u[ ]n
Solução:
Para calcular a convolução entre 2 sinais discretos x[ ]n e h[ ]n , vamos aplicar o resultado:
y[ ]n =x[ ]n *h[ ]n = ∑k=−∞
+∞ x[ ]k h[ ]n-k
com base nos seguintes passos:
1º Efectuar a inversão no tempo do sinal h[ ]k : obtemos h[ ]−k
2º Deslocar h[ ]−k de “n1”: obtemos h[ ]−k + n1
3º Multiplicar x[ ]k por h[ ]−k + n1 e somar: obtemos y[ ]n1
4º Repetir os passos anteriores, fazendo variar “n” de −∞ a +∞: obtemos y[ ]n .
Note que a operação de convolução goza da propriedade comutativa, isto é:
y[ ]n = x[ ]n *h[ ]n = h[ ]n *x[ ]n
Vejamos o exemplo da alínea a):
1º Situação:
Para n<0, não há intersecção dos sinais, logo y[ ]n = 0.
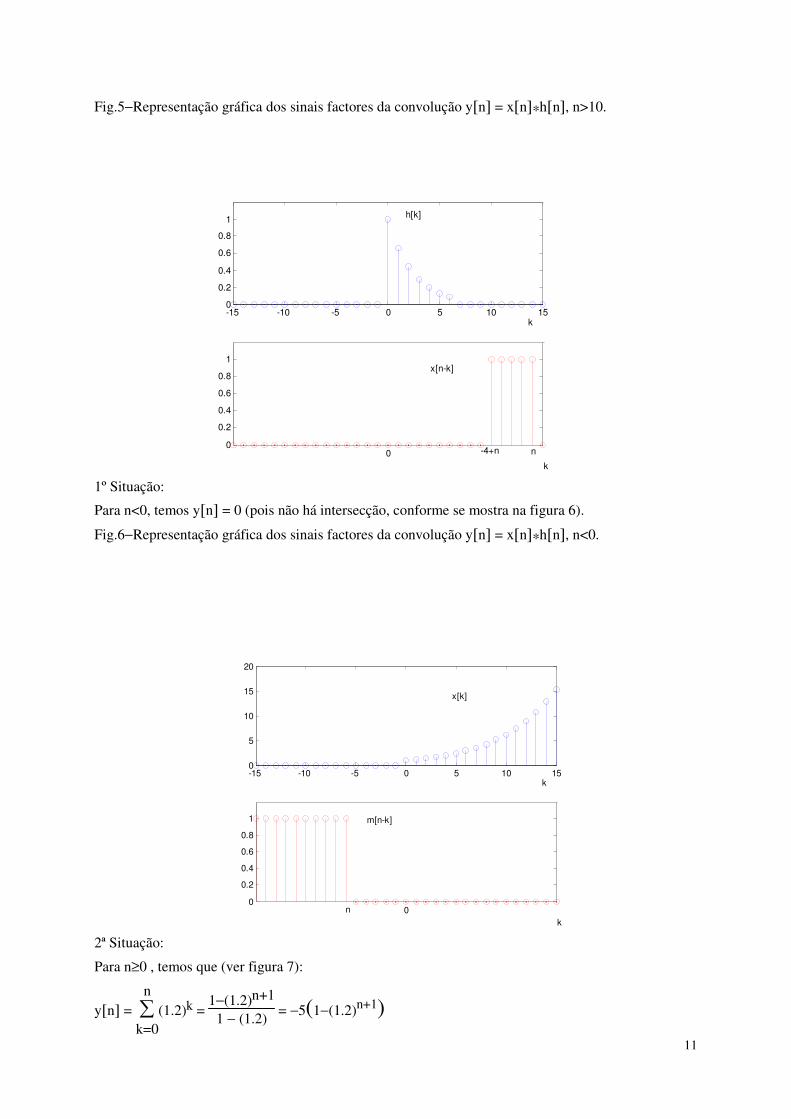
Fig.1−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n = h[ ]n *x[ ]n , n <0.
2ª Situação:
Para n≥0 ∧ n −4≤0, i. e, 0≤n≤4, vem que (ver figura 2−zona de intersecção):
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1
x[n-k]h[k]
n -4+n 0 6
9
y[ ]n = ∑k=0
n
(2/3)k = 1−(2/3)n+1
1 − (2/3) = 3( )1−(2/3)
n+1
Fig.2−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n = h[ ]n *x[ ]n , 0≤n≤4.
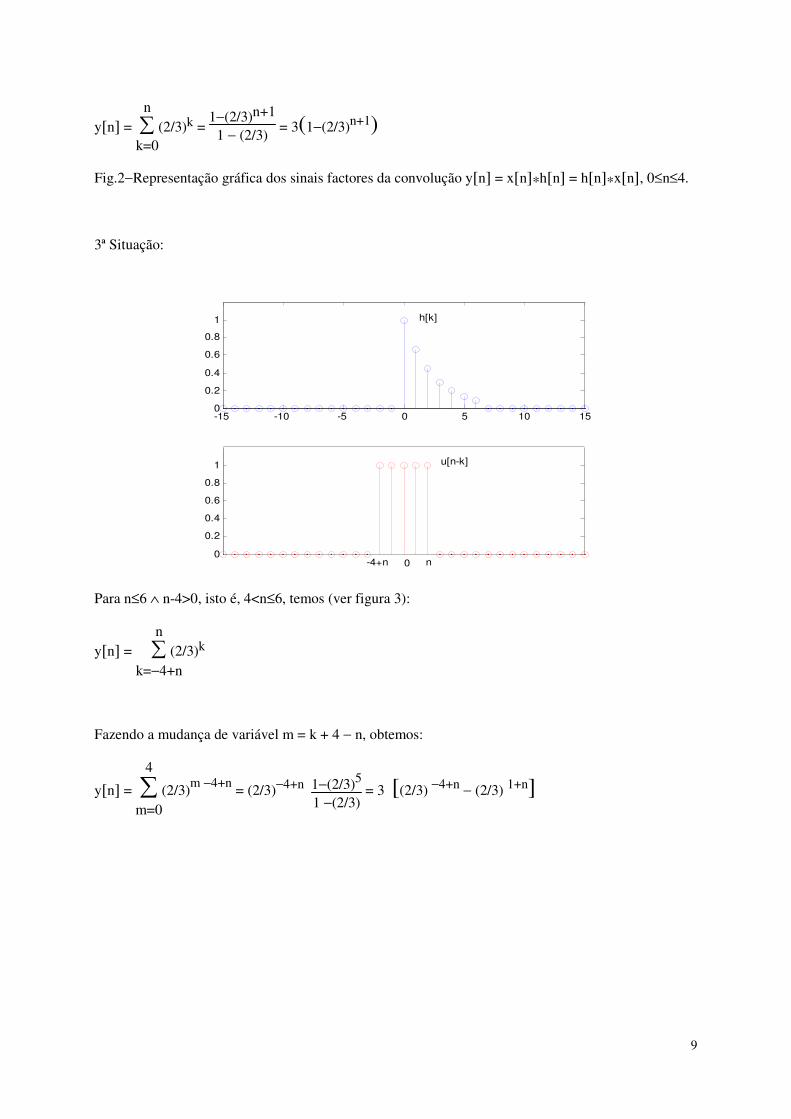
3ª Situação:
Para n≤6 ∧ n-4>0, isto é, 4<n≤6, temos (ver figura 3):
y[ ]n = ∑k=−4+n
n
(2/3)k
Fazendo a mudança de variável m = k + 4 − n, obtemos:
y[ ]n = ∑m=0
4
(2/3)m −4+n
= (2/3)−4+n
1−(2/3)5
1 −(2/3) = 3 [ ](2/3)
−4+n − (2/3)
1+n
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1 h[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1 u[n-k]
n -4+n 0
10
Fig.3−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n , 4<n≤6.
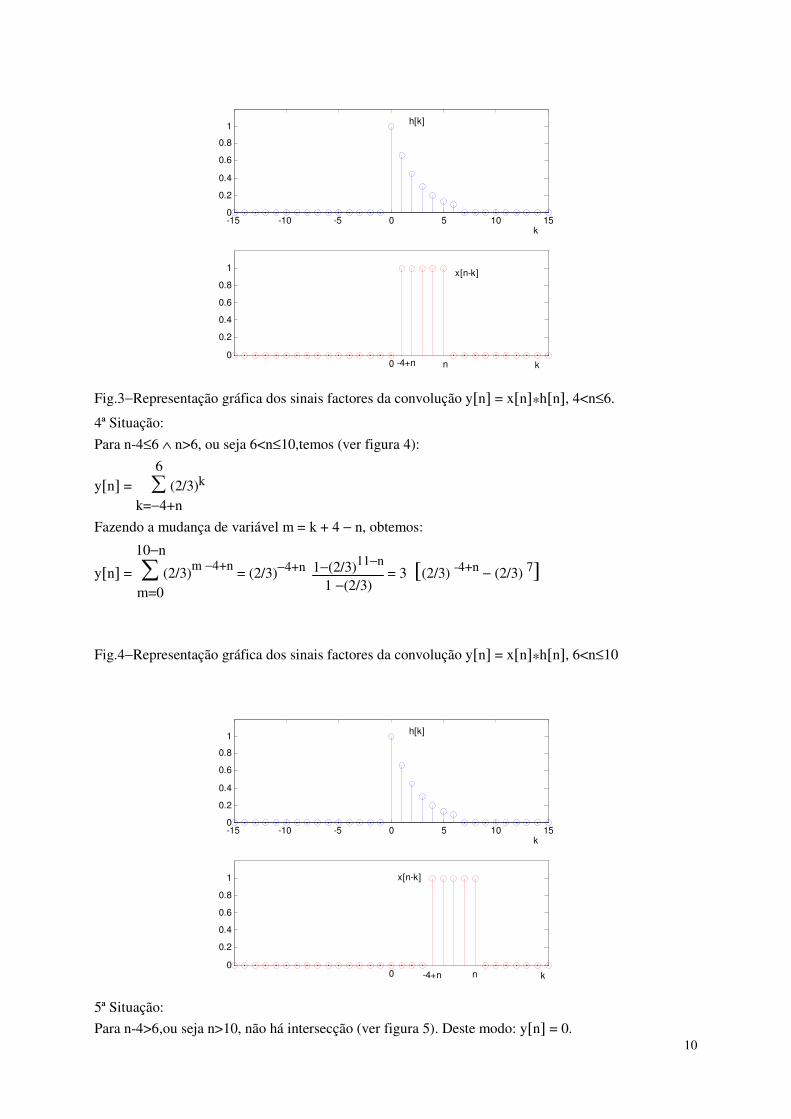
4ª Situação:
Para n-4≤6 ∧ n>6, ou seja 6<n≤10,temos (ver figura 4):
y[ ]n = ∑k=−4+n
6
(2/3)k
Fazendo a mudança de variável m = k + 4 − n, obtemos:
y[ ]n = ∑m=0
10−n
(2/3)m −4+n
= (2/3)−4+n
1−(2/3)11−n
1 −(2/3) = 3 [ ](2/3)
-4+n − (2/3)
7
Fig.4−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n , 6<n≤10
5ª Situação:
Para n-4>6,ou seja n>10, não há intersecção (ver figura 5). Deste modo: y[ ]n = 0.
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1h[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1x[n-k]
kn -4+n 0
k
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1h[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1 x[n-k]
-4+n 0
k
n k
11
Fig.5−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n , n>10.
1º Situação:
Para n<0, temos y[ ]n = 0 (pois não há intersecção, conforme se mostra na figura 6).
Fig.6−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n , n<0.
2ª Situação:
Para n≥0 , temos que (ver figura 7):
y[ ]n = ∑k=0
n
(1.2)k = 1−(1.2)n+1
1 − (1.2) = −5( )1−(1.2)
n+1
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1h[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1x[n-k]
-4+n 0
k
k
n
-15 -10 -5 0 5 10 150
5
10
15
20
x[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1 m[n-k]
0
k
k
n

12
-15 -10 -5 0 5 10 150
5
10
15
20
x[k]
-15 -10 -5 0 5 10 150
0.2
0.4
0.6
0.8
1 m[n-k]
0
k
k
n
Fig.7−Representação gráfica dos sinais factores da convolução y[ ]n = x[ ]n *h[ ]n , n≥0 .
8 - Determine a resposta impulsional da associação em série de dois sistemas LIT tendo como repostas
impulsivas:
h1[ ]n = 1
2
n u[ ]n e h2[ ]n =
1
4
n u[ ]n
Solução:
Para determinar a resposta impulsional global dos dois sistemas ligados em série, efectuamos a
convolução de h1[ ]n com h2[ ]n . Deste modo, obtemos:
h[ ]n = h1[ ]n *h2[ ]n = ∑k=−∞
+∞ h1[ ]k h2[ ]n-k
onde h2[ ]n é invertido e deslocado no tempo, como referido no problema anterior.
1ª Situação:
Para n < 0, temos que h[ ]n = 0.
2ª Situação:
Para n ≥ 0, temos que:
h[ ]n = ∑k=−∞
+∞ h1[ ]k h2[ ]n-k = ∑
k=0
+∞
( )1/2 k( )1/4 n-k = ( )1/4 n ∑k=0
+∞
2k = ( )1/4 n ( )2n+1 − 1
= ( )1/2 n [ ]2 −( )1/2 n
9 - Calcule a sequência de autocorrelação do sinal x[ ]n = an u[ ]n , 0 < a <1.
Solução:
A autocorrelação do sinal x[ ]n é, por definição, dada por:
Rx[ ]n = x[ ]n *x[ ]−n = ∑k=−∞
+∞
x[ ]k x[ ]k − n
13
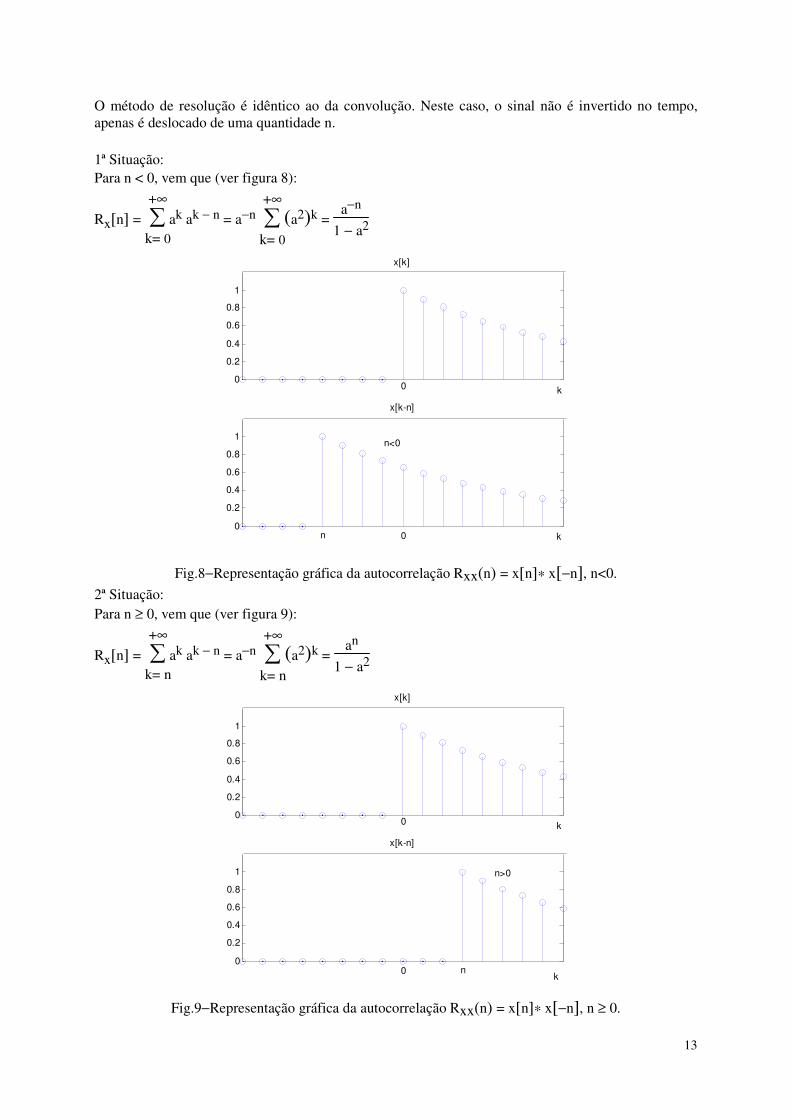
O método de resolução é idêntico ao da convolução. Neste caso, o sinal não é invertido no tempo,
apenas é deslocado de uma quantidade n.
1ª Situação:
Para n < 0, vem que (ver figura 8):
Rx[ ]n = ∑k= 0
+∞
ak ak − n = a−n ∑k= 0
+∞
( )a2 k = a−n
1 − a2
-8 -6 -4 -2 0 2 4 6 80
0.2
0.4
0.6
0.8
1
x[k]
k
-8 -6 -4 -2 0 2 4 6 80
0.2
0.4
0.6
0.8
1
x[k-n]
0
0 n k
n<0
Fig.8−Representação gráfica da autocorrelação Rxx( )n = x[ ]n * x[ ]−n , n<0.
2ª Situação:
Para n ≥ 0, vem que (ver figura 9):
Rx[ ]n = ∑k= n
+∞
ak ak − n = a−n ∑k= n
+∞
( )a2 k = an
1 − a2
-8 -6 -4 -2 0 2 4 6 80
0.2
0.4
0.6
0.8
1
x[k]
k
-8 -6 -4 -2 0 2 4 6 80
0.2
0.4
0.6
0.8
1
x[k-n]
0
0 n k
n>0
Fig.9−Representação gráfica da autocorrelação Rxx( )n = x[ ]n * x[ ]−n , n ≥ 0.
14
Note que quando n é negativo, a−n
= a| |n. Deste modo, as 2 equações anteriores podem ser combinadas
na seguinte expressão:
Rx[ ]n = a| |n
1 − a2 −∞ < n < ∞
10 - Determine a resposta de um sistema LIT discreto com resposta impulsional h[ ]n = ( )1/2n u[ ]n ao
sinal de entrada x[ ]n = ej π n/2
, - ∞ < n < ∞.
Solução:
A resposta de um SLIT é, no domínio do tempo, dada por:
y[ ]n = x[ ]n *h[ ]n = ∑k=−∞
+∞
x[ ]k h[ ]n − k (1)
Então, podemos observar que a resposta do sistema ao sinal de entrada:
x[ ]n = ejΩo n
(2)
é igual a:
y[ ]n = x[ ]n H( )Ωo (3)
onde,
H( )Ωo = ∑k= - ∞
∞
h[ ]k e-j Ωo k
(4)
é a transformada de Fourier da resposta impulsional h[ ]n do sistema calculada à frequência Ωo.
Na resolução do problema proposto, iremos aplicar a expressão (3), vindo:
y[ ]n = ej Ωon
H( )Ωo (5)
onde, Ωo = π/2.
Da equação (4), obtemos:
Hπ
2= ∑
k= 0
∞
1
2 k
e-j π k/2
= ∑k= 0
∞
1
2 e
-j π /2 k
ou ainda:
H( )π/2 = 1
1 - 1
2 e
- j π/2 =
1
1 + j 1
2
= 2
5 e
- j 26.6o
Substituindo este resultado na equação (5), resulta:
y[ ]n =
2
5 e
- j 26.6o
ej π n/2
11 - Determine a resposta de um SLIT com resposta impulsional h[ ]n = ( )1/2n
u[ ]n ao sinal de
entrada:
x[ ]n = cos( )π n , - ∞ < n < ∞
Solução:
Vamos considerar x[ ]n = cos( )Ωon . Decompondo em sinais exponenciais complexos, teremos:
15
x[ ]n = cos( )Ωo = ej Ωon
+ e-j Ωon
2 = x1[ ]n + x2[ ]n (6)
Procedendo de forma idêntica à do exercício anterior, poderemos mostrar que:
y[ ]n = | |H( )Ωo cos( )Ωon + Φ( )Ωo (7)
Note que:
H( )Ωo = | |H( )Ωo e jΦ( )Ωo
Particularizando estes resultados para os dados do problema, resulta que:
Ωo = π
x[ ]n = cos( )πn ⇒ y[ ]n = | |H( )π cos( )π n + Φ( )π (8)
Da equação (4), determinamos:
H( )Ωo = ∑k= 0
∞
1
2 e
−j Ωo k =
1
1 − 1
2 e
−j Ωo
⇔ H( )π = 1
1 - 1
2 e
-j π =
1
1+ 1/2 =
2
3
Desta forma, virá para (8), que:
y[ ]n = 2
3 cos( )πn , - ∞ < n < ∞

16
IV. REPRESENTAÇÃO DE SINAIS PERIÓDICOS POR SÉRIES DE FOURIER
12 - Determine o espectro dos sinais seguintes:
x[ ]n é periódico com período N = 4 e x[ ]n = 1,1,0,0
x[ ]n = cos( )πn/3
x[ ]n = cos( )21/2πn
Solução:
Neste caso, o espectro é determinado pela equação:
ck = 1
N ∑
n= 0
N-1
x[ ]n e -j k( )2π/N n
k= 0, 1, 2, …, N-1
onde N é o período fundamental do sinal x[ ]n .
Temos, então, que:
ck = 1
4 ∑n= 0
3
x[ ]n e -j k( )2π/N n
= 1
4 ∑n= 0
1
e -j k( )2π/N n
= 1
4 ( )1 + e
-j πk/2 com k= 0, 1, 2, 3
ou ainda:
co = 1
2 c1 =
1
4 ( )1 - j c2 = 0 c3 =
1
4 ( )1 + j
Na figura seguinte estão representados os espectros de amplitude e de fase deste sinal.
-4 -3 -2 -1 0 1 2 3 40
0.2
0.4
k
|ck|
-4 -3 -2 -1 0 1 2 3 4
-50
0
50
k
angulo e
m g
raus
fig.b)
fig.a)
Fig.4−Representação gráfica do espectro do sinal x[ ]n periódico: a) Espectro de amplitude | |ck (no
topo);
b) Espectro de fase θ( )ck (em baixo).
Neste caso, é mais simples decompor x[ ]n em exponenciais complexas da forma:
x[ ]n = cos( )2πn/6 = 1
2 ( )e
j 2πn/6 + e
-j 2πn/6
e comparar com a série de Fourier (DTFS):
17
x[ ]n = ∑k= ⟨N⟩
ck e j k( )2π/N n
= ∑k= ⟨N=6⟩
ck e j k( )2π/6 n
Deste modo, obtemos os seguintes coeficientes ck:
c-1 = 1
2 c1 =
1
2
Note que os ck são também periódicos com período N=6. Deste modo, podemos notar que:
c-1 = c-1+6 = c5 = 1
2
c1 = c1+ 6 = c7 = 1
2
etc.
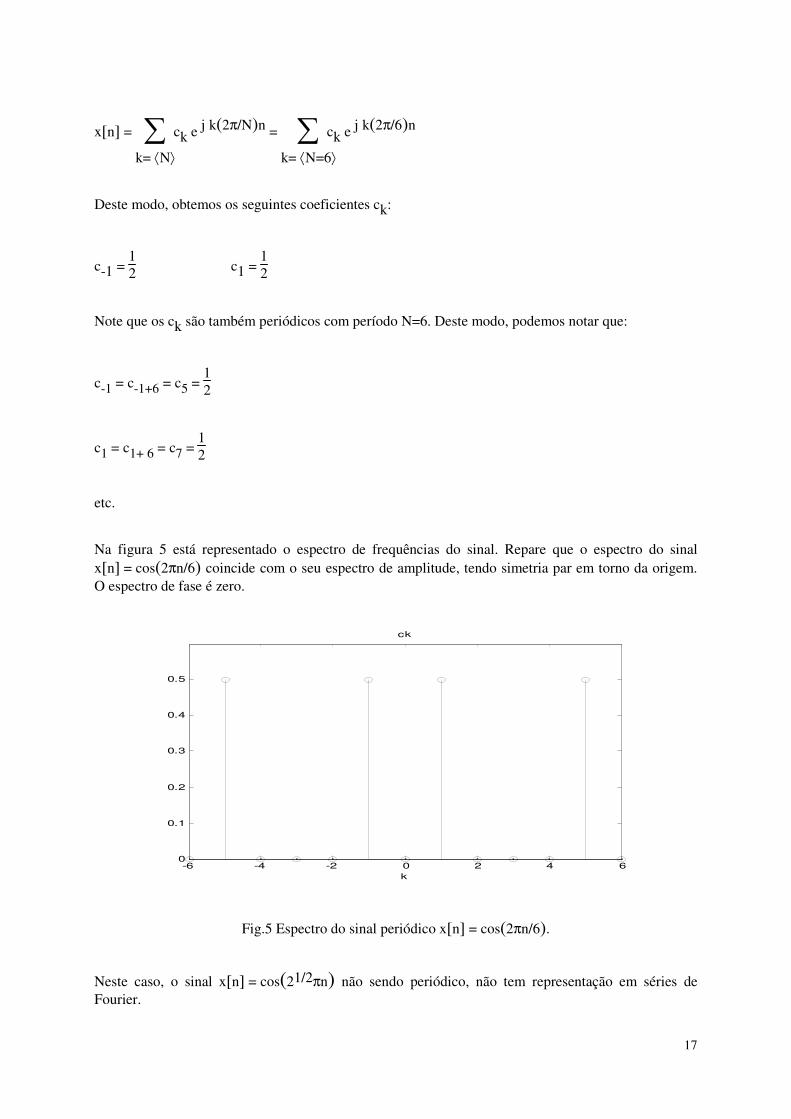
Na figura 5 está representado o espectro de frequências do sinal. Repare que o espectro do sinal
x[ ]n = cos( )2πn/6 coincide com o seu espectro de amplitude, tendo simetria par em torno da origem.
O espectro de fase é zero.
-6 -4 -2 0 2 4 60
0.1
0.2
0.3
0.4
0.5
k
ck
Fig.5 Espectro do sinal periódico x[ ]n = cos( )2πn/6 .
Neste caso, o sinal x[ ]n = cos( )21/2πn não sendo periódico, não tem representação em séries de
Fourier.
18
V. TRANSFORMADA DE FOURIER DE SINAIS APERIÓDICOS A TEMPO
DISCRETO
13 - Considere o sinal discreto seguinte:
x[ ]n = an
u[ ]n , | |a <1
a) Determine a transformada de Fourier do sinal x[ ]n .
b) Calcule a densidade espectral de energia do sinal x[ ]n .
c) Calcule a energia do sinal:
Solução:
Podemos observar que x[ ]n satisfaz a condição:
∑n=−∞
+∞
| |x[ ]n = ∑n=0
+∞
| |a2 =
1
1 −| |a <1
Logo, x[ ]n tem transformada de Fourier. Aplicando a definição, teremos que:
X( )Ω = ∑n=−∞
+∞
x[ ]n e−j Ωn
= ∑n=0
+∞
( )a e−j Ω n
= 1
1 − ae−jΩ
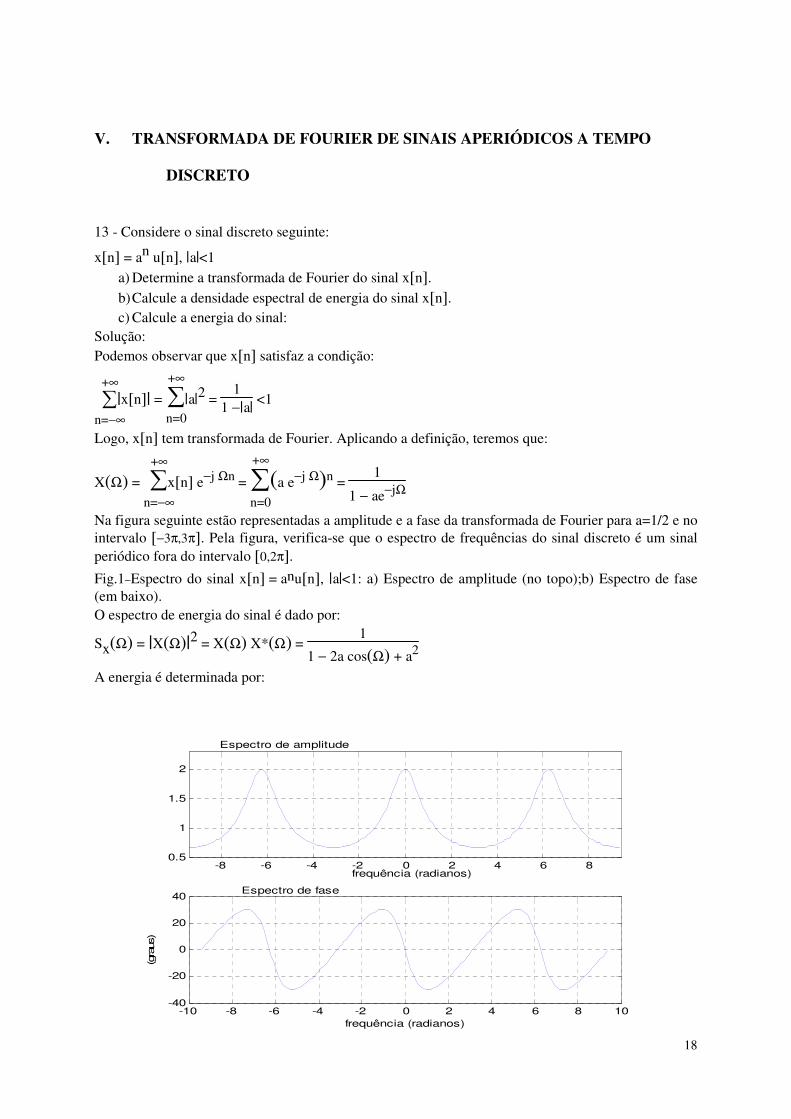
Na figura seguinte estão representadas a amplitude e a fase da transformada de Fourier para a=1/2 e no
intervalo [ ]−3π,3π . Pela figura, verifica-se que o espectro de frequências do sinal discreto é um sinal
periódico fora do intervalo [ ]0,2π .
Fig.1−Espectro do sinal x[ ]n = anu[ ]n , | |a <1: a) Espectro de amplitude (no topo);b) Espectro de fase
(em baixo).
O espectro de energia do sinal é dado por:
Sx( )Ω = | |X( )Ω 2 = X( )Ω X*( )Ω =
1
1 − 2a cos( )Ω + a2
A energia é determinada por:
-8 -6 -4 -2 0 2 4 6 80.5
1
1.5
2
frequência (radianos)
-10 -8 -6 -4 -2 0 2 4 6 8 10-40
-20
0
20
40Espectro de fase
frequência (radianos)
(gra
us)
Espectro de amplitude
19
Ex = ∑n=−∞
+∞
| |x[ ]n2 = ∑
n=0
+∞
| |a2n
= 1
1 − | |a2n
<1
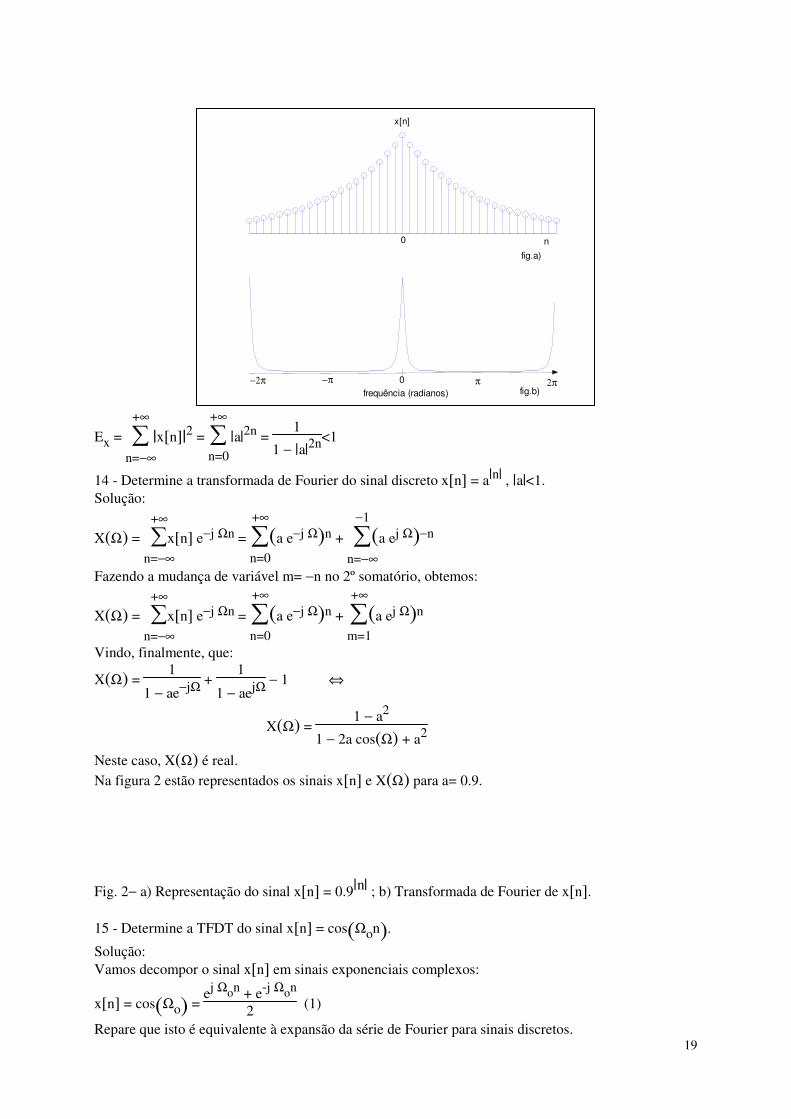
14 - Determine a transformada de Fourier do sinal discreto x[ ]n = a| |n , | |a <1.
Solução:
X( )Ω = ∑n=−∞
+∞
x[ ]n e−j Ωn = ∑n=0
+∞
( )a e−j Ω n + ∑n=−∞
−1
( )a ej Ω −n
Fazendo a mudança de variável m= −n no 2º somatório, obtemos:
X( )Ω = ∑n=−∞
+∞
x[ ]n e−j Ωn = ∑n=0
+∞
( )a e−j Ω n + ∑m=1
+∞
( )a ej Ω n
Vindo, finalmente, que:
X( )Ω = 1
1 − ae−jΩ
+ 1
1 − aejΩ
− 1 ⇔
X( )Ω = 1 − a
2
1 − 2a cos( )Ω + a2
Neste caso, X( )Ω é real.
Na figura 2 estão representados os sinais x[ ]n e X( )Ω para a= 0.9.
Fig. 2− a) Representação do sinal x[ ]n = 0.9| |n ; b) Transformada de Fourier de x[ ]n .
15 - Determine a TFDT do sinal x[ ]n = cos( )Ωon .
Solução:
Vamos decompor o sinal x[ ]n em sinais exponenciais complexos:
x[ ]n = cos( )Ωo = ej Ωon
+ e-j Ωon
2 (1)
Repare que isto é equivalente à expansão da série de Fourier para sinais discretos.
-20 -15 -10 -5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
-6 -4 -2 0 2 4 60
5
10
15
20
n 0
0 2π −2π π −π
fig.a)
fig.b) frequência (radianos)
x[n]

20
Aplicando de seguida o seguinte resultado em (1):
TFDT ej Ωo = ∑
k=−∞
+∞
2πδ( )Ω − Ωo − 2πk (ver tabela de Transformadas de Fourier)
Obteremos que:
X( )Ω =TFDT x( )n = ∑k=−∞
+∞
π [ ]δ( )Ω − Ωo − 2πk + δ( )Ω + Ωo − 2πk
Repare que o sinal é periódico de período 2π.
16 - Considere um SLIT discreto com resposta impulsional h[ ]n = 1
3
n u[ ]n .
Determine a resposta em frequência do sistema.
Determine a resposta do sistema ao sinal de entrada x[ ]n = 1
2
n u[ ]n .
Solução:
H( )Ω = TFDT h[ ]n = ∑n=−∞
+∞
h[ ]n e−jΩn
= ∑n=0
+∞
( )1/3n e
−jΩn ⇔
H( )Ω = 1
1 − 1
3 e
−jΩ
Nota: Este resultado pode também ser obtido directamente através da tabela de Transformadas de
Fourier.
Através da propriedade da convolução pode obter-se para a resposta de um SLIT discreto, que:
y[ ]n = h[ ]n * x[ ]n TF↔ Y( )Ω = H( )Ω .X( )Ω (1)
Vamos determinar a transformada de Fourier de x[ ]n e substituir na equação (1) o resultado.
X( )Ω = TFDT x[ ]n = ∑n=−∞
+∞
x[ ]n e−jΩn
= ∑n=0
+∞
( )1/2n e
−jΩn =
1
1 − 1
2 e
−jΩ
Deste modo, teremos que:
Y( )Ω = H( )Ω .X( )Ω = 1
1 −
1
3 e
−jΩ.
1 −
1
2 e
−jΩ (2)
Aplicando o método dos resíduos na equação (2), poderemos ainda obter:
Y( )Ω = H( )Ω .X( )Ω = A
1 − 1
3e−jΩ
+ B
1 − 1
2e−jΩ
(3)
onde:
A =
1
1 − 1
2e−jΩ
e-j Ω =3
= −2 B =
1
1 − 1
3e−jΩ
e-j Ω =2
= 3
Finalmente determinamos a transformada de Fourier inversa de (3) (ver tabela de transformadas de
Fourier):
y[ ]n = -21
3
n u[ ]n + 3
1
2
n u[ ]n

21
17 - Considere o SLIT discreto descrito pela equação:
y[ ]n − 3
4 y[ ]n − 1 +
1
8 y[ ]n − 2 = 2x[ ]n (1)
Determine:
a) a resposta impulsional do sistema.
b) a resposta do sistema ao sinal de entrada x[ ]n = 1
4
n u[ ]n
Solução:
Para determinarmos a resposta impulsional do sistema, h[ ]n , vamos calcular a transformada de Fourier
inversa de H( )Ω .
Reescrevendo (1), no domínio da frequência (ver propriedade do deslocamento no tempo para sinais
discretos), obtemos:
Y( )Ω
1 −
3
4e−jΩ
+ 1
8e−j2Ω
= 2 X( )Ω
ou, ainda:
H( )Ω = Y( )Ω
X( )Ω =
2
1 − 3
4 e
−jΩ +
1
8 e
−j2Ω =
2
1 −
1
2e−jΩ
1 −
1
4e−jΩ
Aplicando o método dos resíduos:
H( )Ω = 2
1 − 3
4 e
−jΩ +
1
8 e
−j2Ω =
2
1 −
1
2e−jΩ
1 −
1
4e−jΩ
= 4
1 − 1
2e−jΩ
− 2
1 − 1
4e−jΩ
(2)
A transformada de Fourier inversa de (2) (consultar tabelas de Transformada de Fourier), é dada por:
h[ ]n = 41
2
n u[ ]n − 2
1
4
n u[ ]n
Através da propriedade da convolução pode obter-se para a resposta de um SLIT discreto, que:
y[ ]n = h[ ]n * x[ ]n TF↔ Y( )Ω = H( )Ω .X( )Ω (1)
Determinando a TFDT de x[ ]n , obtemos:
X( )Ω = TFDT x[ ]n = ∑n=−∞
+∞
x[ ]n e−jΩn
= ∑n=0
+∞
( )1/4n e
−jΩn =
1
1 − 1
4 e
−jΩ
Substituindo este resultado na equação (1), virá que:
Y( )Ω = 2
1 −
1
2e−jΩ
1 −
1
4e−jΩ 2
Aplicando o método dos resíduos, obtemos:
Y( )Ω = 8
1 − 1
2e−jΩ
− 4
1 − 1
4e−jΩ
− 2
1 −
1
4e−jΩ 2
O cálculo da transformada de Fourier inversa deste resultado (ver tabela de transformadas de Fourier),
dá:
y[ ]n = 81
2
n u[ ]n − 4
1
4
n u[ ]n − 2( )n + 1
1
4
n u[ ]n

22
23
VI. TRANSFORMADA Z
18 - Determine a transformada z do sinal x[ ]n = 1
2n u[ ]n .
Solução:
Aplicando a definição de transformada z, vem que:
X( )z = ∑n=−∞
+∞
x[ ]n z−n
= ∑n=0
+∞
( )1/2 nz−n
= ∑n=0
+∞
( )1/2 .z−1 n
Para que X( )z seja convergente é necessário que
X( )z = ∑n=0
+∞
1
2 z
−1 n < ∞
A região de convergência (ROC) contém o intervalo de valores de Z para os quais
1
2 z
−1 n < 1, isto é,
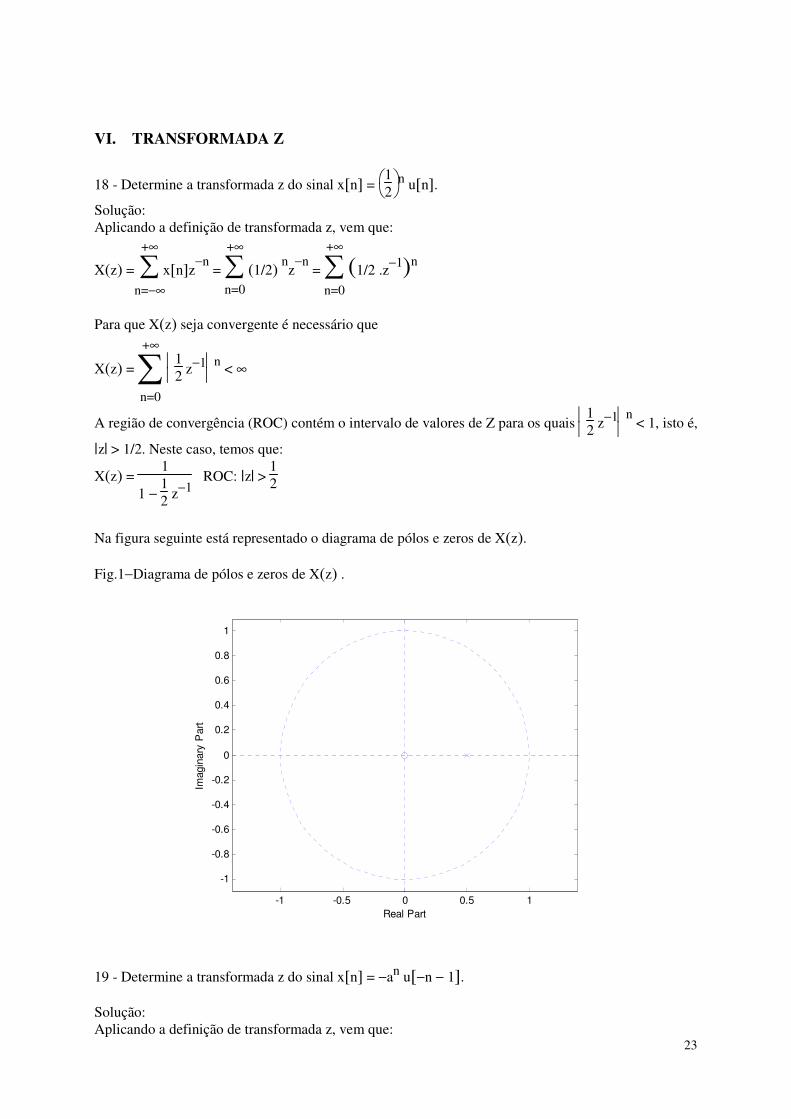
| |z > 1/2. Neste caso, temos que:
X( )z = 1
1 − 1
2 z
−1 ROC: | |z >
1
2
Na figura seguinte está representado o diagrama de pólos e zeros de X( )z .
Fig.1−Diagrama de pólos e zeros de X( )z .
19 - Determine a transformada z do sinal x[ ]n = −an u[ ]−n − 1 .
Solução:
Aplicando a definição de transformada z, vem que:
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
24
X( )z = ∑n=−∞
+∞
x[ ]n z−n
= − ∑n=−∞
−1
anz−n
= ∑n=−∞
−1
( )az−1 n
Fazendo a mudança de variável m = −n na equação anterior, resulta que:
X( )z = ∑m=1
+∞
( )a−1
zm
= 1 − ∑m=0
+∞
( )a−1
zm
x[ ]n tem transformada z se | |z a−1
< 1, isto é, | |z < a. Nestas condições:
X( )z = 1 − 1
1 − a−1
z =
1
1 − az−1
= z
z − a ROC: | |z < a
20 - Determine a transformada Z do sinal discreto x[ ]n = an u[ ]n + b
n u[ ]−n − 1 .
Solução:
Neste exercício vamos usar a tabelas de transformadas z.
A TZ de x[ ]n é igual a (aplicando a propriedade da linearidade):
X( )z = X1( )z + X2( )z (1)
Das tabelas de TZ podemos obter:
X1( )z = TZ an u[ ]n =
1
1 − az−1
ROC1: | |z > | |a (2)
X2( )z = TZ bn u[ ]−n − 1 = −
1
1 − bz−1
ROC2: | |z < | |b (3)
Substituindo (2) e (3) na equação (1), vem que:
X( )z = 1
1 − az−1
− 1
1 − bz−1
, | |z > | |a e | |z < | |b
A transformada Z de x[ ]n existirá para todos os valores de a e b tais que | |a < | |b . Neste caso, a ROC é
| |a < | |z < | |b . De notar que se | |a ≥ | |b , X( )z não existe, porque a intersecção das ROC’s de X1( )z e
X2( )z é o conjunto vazio.
21 - Dada a função de transferência H( )z = 1
1 −1.5z−1
+ 0.5 z−2
Determine a resposta impulsional do sistema para as seguintes regiões de convergência:
a) | |z > 1
b) | |z < 0.5
c) 0.5 < | |z < 1
Solução:
Vamos determinar a expansão em fracções parciais de H( )z .
Multiplicando o numerador e denominador por z2, eliminamos as potência negativas de H( )z .
Obtemos:

25
H( )z = z2
z2 − 1.5z + 0.5
= z2
( )z − 1 ( )z − 0.5
Efectuando o desenvolvimento em fracções simples:
H( )z
z =
z
( )z − 1 ( )z − 0.5 =
A
z − 1 +
B
z − 0.5 (1)
onde:
A =
z
z − 0.5 z =1
= 2 B =
z
z − 1 z =0.5
= −1
Podemos ainda rescrever a equação (1), como:
H( )z = 2
1 − z−1
− 1
1 − 0.5z−1
(2)
Neste caso como a ROC é | |z > 1, o sinal h[ ]n é causal; logo, ambos os termos de (2) são causais.
Consultando a tabela de transformadas z, obtemos para a transformada z inversa de H( )z , que:
h[ ]n = 2 ( )1n u[ ]n − ( )0.5
n u[ ]n = [ ]2 − ( )0.5
n u[ ]n
Como a ROC é | |z < 0.5, o sinal h[ ]n é anti-causal. Deste modo, ambos os termos de (2) correspondem
a sinais anti-causais.
h[ ]n = TZ −1 H( )z = [ ]−2 + ( )0.5
n u[ ]−n − 1 (ver tabela de TZ)
Neste caso, a ROC é 0.5 < | |z < 1 é uma coroa, o que implica que o sinal é bilateral. Assim, o 1º termo
de (2) corresponde a um sinal causal e o 2º termo a um sinal anti-causal. Deste modo, obtemos:
h[ ]n = −2 ( )1n u[ ]−n − 1 − ( )0.5
n u[ ]n (ver tabela de TZ)
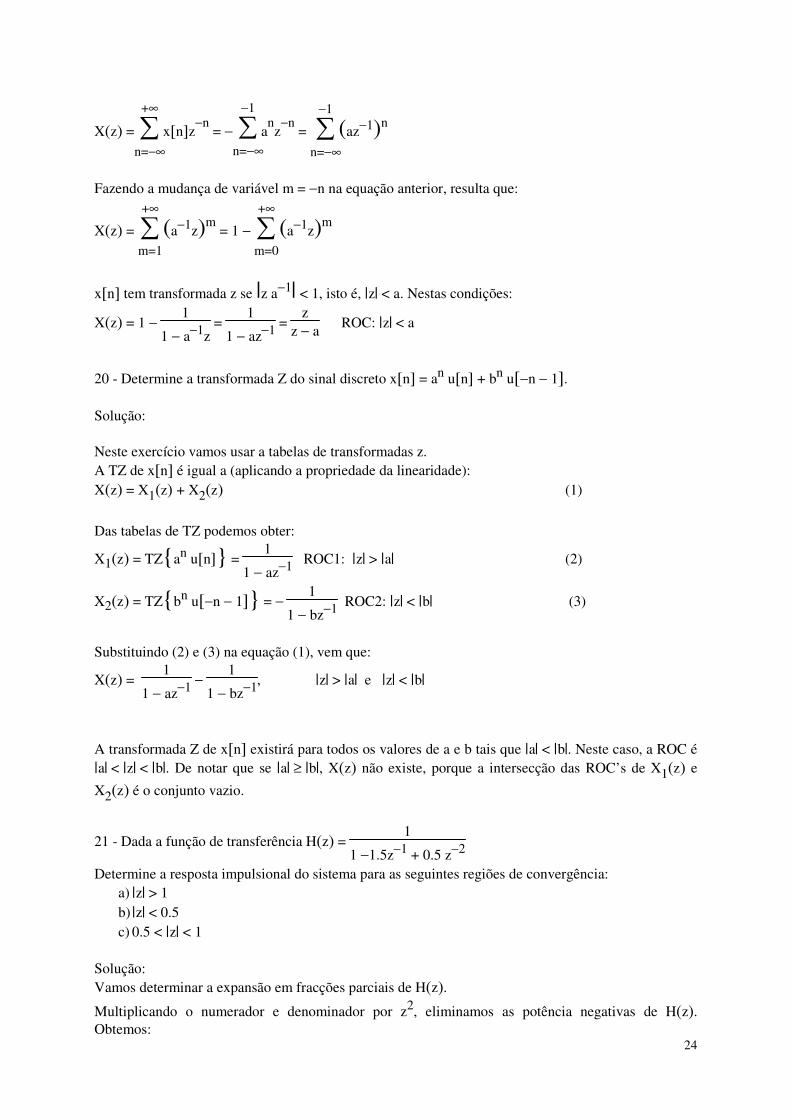
22 - Um sistema LIT é caracterizado pela função de transferência
H( )z = 3 − 4 z
−1
1 −3.5 z−1
+ 1.5 z−2
= 1
1 − 1
2 z
−1 +
2
1 − 3 z−1
Especifique a ROC de H( )z e determine h[ ]n para as seguintes condições:
a) sistema é estável.
b) sistema é causal.
c) sistema é anti-causal.
Solução:
Na figura seguinte está representado o diagrama de pólos e zeros de H( )z .
26
-1 -0.5 0 0.5 1 1.5 2 2.5 3
-1.5
-1
-0.5
0
0.5
1
1.5
Real Part
Imagin
ary
Part
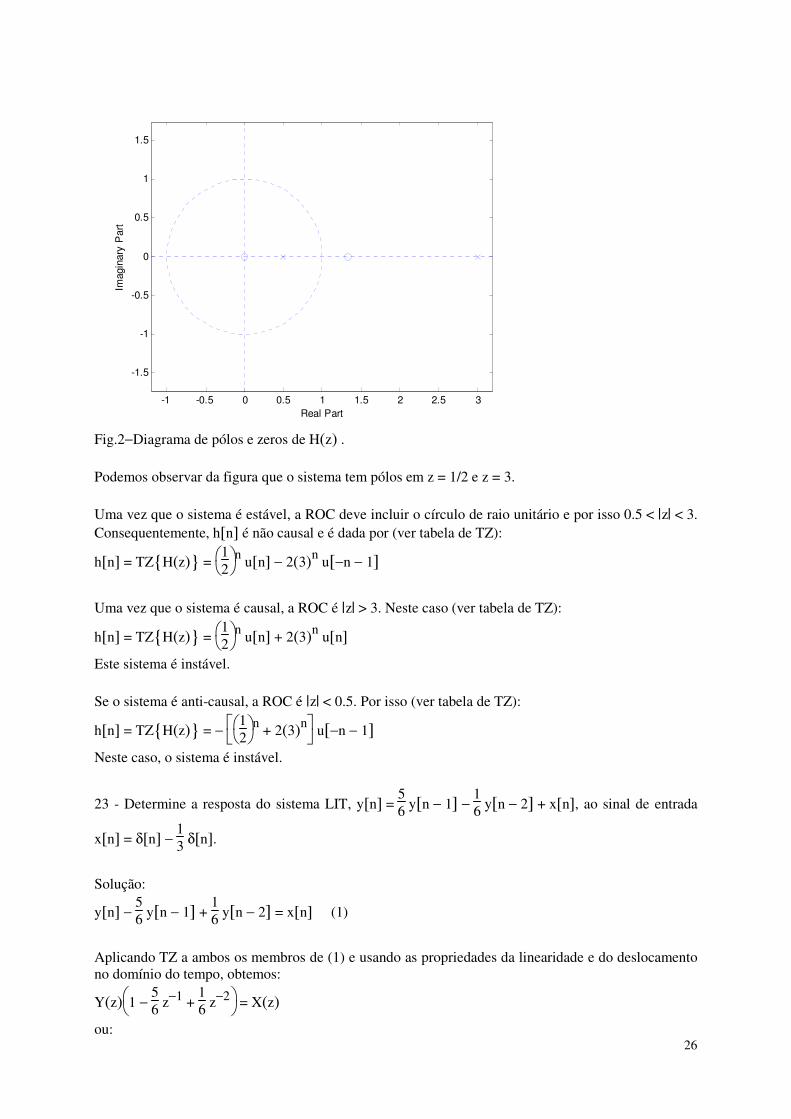
Fig.2−Diagrama de pólos e zeros de H( )z .
Podemos observar da figura que o sistema tem pólos em z = 1/2 e z = 3.
Uma vez que o sistema é estável, a ROC deve incluir o círculo de raio unitário e por isso 0.5 < | |z < 3.
Consequentemente, h[ ]n é não causal e é dada por (ver tabela de TZ):
h[ ]n = TZ H( )z = 1
2n u[ ]n − 2( )3
n u[ ]−n − 1
Uma vez que o sistema é causal, a ROC é | |z > 3. Neste caso (ver tabela de TZ):
h[ ]n = TZ H( )z = 1
2n u[ ]n + 2( )3
n u[ ]n
Este sistema é instável.
Se o sistema é anti-causal, a ROC é | |z < 0.5. Por isso (ver tabela de TZ):
h[ ]n = TZ H( )z = −
1
2n + 2( )3
n u[ ]−n − 1
Neste caso, o sistema é instável.
23 - Determine a resposta do sistema LIT, y[ ]n = 5
6 y[ ]n − 1 −
1
6 y[ ]n − 2 + x[ ]n , ao sinal de entrada
x[ ]n = δ[ ]n − 1
3 δ[ ]n .
Solução:
y[ ]n − 5
6 y[ ]n − 1 +
1
6 y[ ]n − 2 = x[ ]n (1)
Aplicando TZ a ambos os membros de (1) e usando as propriedades da linearidade e do deslocamento
no domínio do tempo, obtemos:
Y( )z
1 −
5
6 z
−1 +
1
6 z
−2 = X( )z
ou:
27
H( )z = Y( )z
X( )z =
1
1 − 5
6 z
−1 +
1
6 z
−2 =
1
1 −
1
2 z
−1
1 −
1
3 z
−1 (2)
A transformada z de x[ ]n é (ver tabela de TZ):
X( )z = TZ x[ ]n = 1 − 1
3 z
−1 (3)
Note que, aplicando a propriedade da convolução à resposta do sistema LIT, y[ ]n = h[ ]n *x[ ]n , temos
que:
Y( )z = H( )z X( )z (4)
E, após substituir (2) e (3) em (4):
Y( )z = H( )z X( )z =
1 − 1
3 z
−1
1 −
1
2 z
−1
1 −
1
3 z
−1 =
1
1 − 1
2 z
−1 ROC: | |z > 0.5 (5)
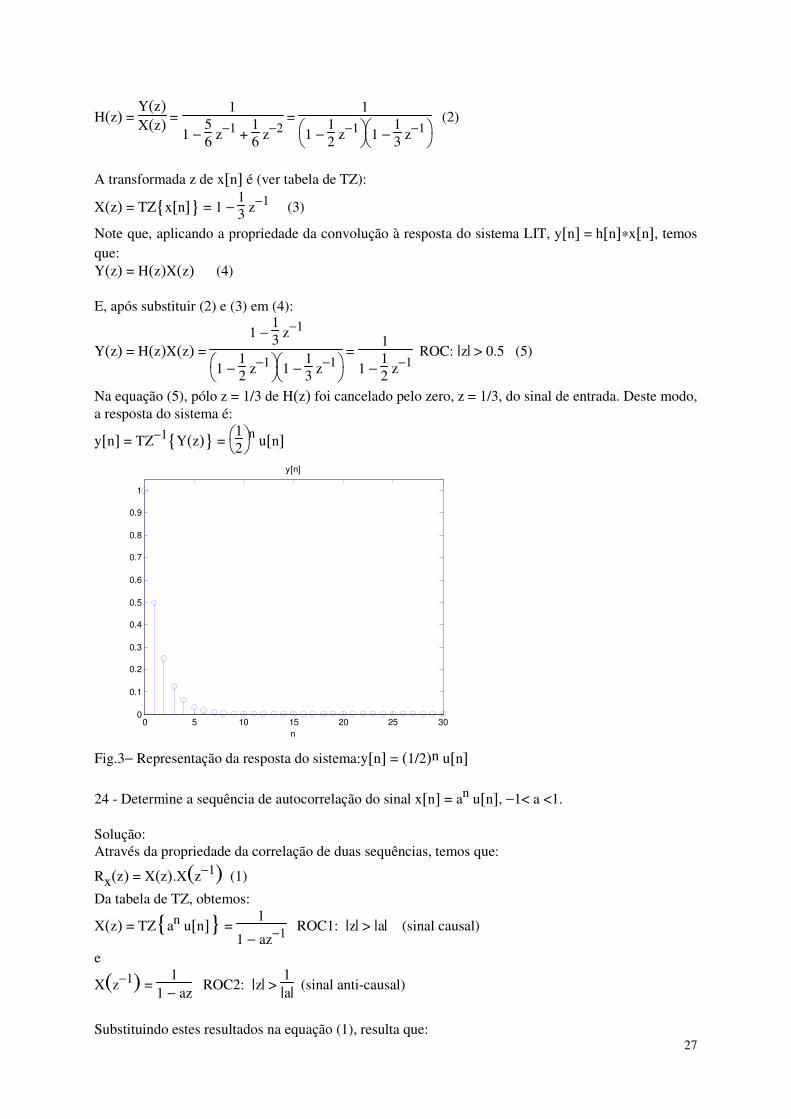
Na equação (5), pólo z = 1/3 de H( )z foi cancelado pelo zero, z = 1/3, do sinal de entrada. Deste modo,
a resposta do sistema é:
y[ ]n = TZ−1 Y( )z =
1
2n u[ ]n
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
n
y[n]
Fig.3− Representação da resposta do sistema:y[ ]n = ( )1/2 n u[ ]n
24 - Determine a sequência de autocorrelação do sinal x[ ]n = an u[ ]n , −1< a <1.
Solução:
Através da propriedade da correlação de duas sequências, temos que:
Rx( )z = X( )z .X( )z−1
(1)
Da tabela de TZ, obtemos:
X( )z = TZ an u[ ]n =
1
1 − az−1
ROC1: | |z > | |a (sinal causal)
e
X( )z−1
= 1
1 − az ROC2: | |z >
1
| |a (sinal anti-causal)
Substituindo estes resultados na equação (1), resulta que:

28
Rx( )z = 1
1 − az−1.
1
1 − az ROC1∩ROC2: | |a < | |z <
1
| |a (2)
Dado que ROC deste sinal é um anel, rx [ ]n é um sinal bilateral, mesmo com x[ ]n causal. Efectuando
a decomposição do sinal (2) em 2 fracções e aplicando a transformada z inversa, obtemos:
rx [ ]n = 1
1 − a2 a
| |n, −∞< n< ∞
25 - Determine a transformada z do sinal discreto x[ ]n = nan u[ ]n .
Solução:
Vamos rescrever o sinal como x[ ]n = nx1[ ]n , onde x1[ ]n = an u[ ]n .
Da tabela de TZ, temos que:
X1( )z = TZ an u[ ]n =
1
1 − az−1
ROC: | |z > | |a
Aplicando nesta expressão a propriedade da derivação no domínio z:
TZ nx[ ]n = −z dX( )z
dz
obtemos que:
X( )z = TZ nx1[ ]n = −z dX1( )z
dz =
az−1
( )1 − z−1 2 ROC: | |z > | |a
26 - Determine a convolução x[ ]n dos sinais:
x1[ ]n = 1, −2, 1 x2[ ]n = 1 0 ≤ n ≤ 5
0 c.c
Solução:
Calculemos a transformada z de ambos os sinais pela definição:
X( )z = ∑n=−∞
+∞
x[ ]n z−n
(1)
Resulta que:
X1( )z = 1 − 2z−1
+ z−2
X2( )z = 1 + z−1
+ z−2
+ z−3
+ z−4
+ z−5
De acordo com a propriedade da convolução:
X( )z = X1( )z X2( )z = 1 − z−1
− z−6
+ z−7
Comparando este resultado com (1), obtemos:
x[ ]n = 1, −1, 0, 0, 0, 0, −1, 1
27 - Determine a transformada z unilateral dos seguintes sinais:
a) x1[ ]n =
↑1 , 2, 5, 7, 0, 1
b) x2[ ]n = δ[ ]n − k
c) x3[ ]n = δ[ ]n + k
d) x4[ ]n =
1,2,
↑5 , 7, 0, 1
e) x5[ ]n = x[ ]n − 2 onde x[ ]n = an, −1< a <1.

29
Solução:
Vamos aplicar a definição de transformada z unilateral:
X+( )z = ∑
n=0
∞
x[ ]n z−n
X1+( )z = 1 + 2z
−1 + 5z
−2 + 7z
−3 + z
−5
X2+( )z = z
−k
X3+( )z = 0
X4+( )z = 5 + 7z
−1 + z
−3
Vamos aplicar a propriedade do deslocamento:
X+( )z = ∑
n=0
∞
x[ ]n − k z−n
= z−k
X
+( )z + ∑n=1
k
x[ ]− n zn
k>0
com k = 2. Iremos obter:
X5+( )z = z
−2 ( ) X
+( )z + x[ ]−1 z + x[ ]−2 z2
= z−2
X+( )z + x[ ]−1 z
−1 + x[ ]−2 (1)
Uma vez que x[ ]−1 = a−1
, x[ ]−2 = a−2
e por outro lado:
X+( )z = ∑
n=0
∞
x[ ]n z−n
= ∑n=0
∞
( )az−1 n
= 1
1 − az−1
Virá para a equação (1), que:
X5+( )z =
z−2
1 − az−1
+ a−1
z−1
+ a−2
28 - Determine a resposta ao escalão do sistema
y[ ]n = ay[ ]n − 1 + x[ ]n , −1< a <1 (1)
para a condição inicial y[ ]−1 = 1.
Solução:
Aplicando a transformada z unilateral a ambos os membros de (1), obtemos:
Y+( )z = a [ ]z
−1Y
+( )z + y[ ]−1 + X+( )z (2)
Substituindo y[ ]−1 = 1 e
X+( )z = ∑
n=0
∞
u[ ]n z−n
= ∑n=0
∞
( )z−1 n
= 1
1 − z−1
na equação (2), obtemos:
Y+( )z =
a
1 − az−1
+ 1
( )1 − az−1 ( )1 − z
−1 (3)
Efectuando a decomposição de (3) em fracções parciais e tomando a transformada z inversa do
resultado, obtemos:

30
y[ ]n = an+1
u[ ]n + 1 − a
n + 1
1 − a u[ ]n
ou, ainda:
y[ ]n = 1
1 − a ( )1 − a
n + 2u[ ]n
29 - Um sistema LIT causal é descrito pela equação y[ ]n = 0.5y[ ]n − 1 + x[ ]n + 0.5x[ ]n − 1 .
Determine:
a) a resposta impulsional do sistema.
b) a resposta do sistema ao sinal de entrada x[ ]n = u[ ]n , com y[ ]−1 = 0.
c) a resposta do sistema ao sinal x[ ]n = cos( )nπ/12 u[ ]n com y[ ]−1 = 0.
Solução:
Vamos 1º calcular a função de frequência H( )z do sistema e depois aplicar-lhe a transformada z
inversa: obtemos h[ ]n .
Aplicando TZ a ambos os membros de y[ ]n = 0.5y[ ]n − 1 + x[ ]n + 0.5x[ ]n − 1 e usando a propriedade
do deslocamento, chegamos ao resultado:
H( )z = Y( )z
X( )z =
1 + 0.5z−1
1 − 0.5z−1
= z + 0.5
z − 0.5 ROC: | |z > 0.5
Expandindo H( )z /z em fracções parciais:
H( )z
z =
z + 0.5
z( )z − 0.5 =
−1
z +
2
z − 0.5
Multiplicando H( )z /z por z, obtemos:
H( )z = −1 + 2z
z − 0.5 ROC: | |z > 0.5
Aplicando TZ inversa (ver tabela de TZ), teremos finalmente que:
h[ ]n = −δ[ ]n + 2( )0.5n u[ ]n
A TZ de x[ ]n pode ser determinada por:
X( )z = TZ an u[ ]n =
1
1 − az−1
ROC: | |z > | |a
fazendo a =1.Vamos substituir o resultado na equação Y( )z = H( )z X( )z . Obtemos, que:
Y( )z = H( )z X( )z = z + 0.5
z − 0.5 ×
z
1 − z−1 ROC: | |z > 1
Seguindo o procedimento usual para expansão em fracções parciais (no domínio z), temos que:
Y( )z
z = H( )z X( )z =
z + 0.5
z − 0.5 ×
1
1 − z−1 = −2
z − 0.5 +
3
1 − z−1
e, após aplicarmos a transformada z inversa (ver tabela de TZ), obtemos:
y[ ]n = [ ]−2( )0.5n + 3 u[ ]n
31
Seguindo o mesmo raciocínio da alínea b), obtemos:
Y( )z = H( )z X( )z = z + 0.5
z − 0.5 ×
z( )z − cos( )π/2
z2 − 2zcos( )π/2 + 1 =
z + 0.5
z − 0.5 ×
z( )z − 0.966
z2 − 1.932z + 1 ROC: | |z > 1
Nesta situação:
Y( )z
z =
z + 0.5
z − 0.5 ×
z − 0.966
z2 − 1.932z + 1 =
−1.641
z − 0.5 +
1.397e−j 0.332
z − ej 0.262 + 1.397ej 0.332
z − e−j 0.262
e após multiplicar esta equação por z para dar Y( )z , obtemos para a transformada z inversa (ver tabela
TZ):
y[ ]n = [ ]−1.641( )0.5n + 2.794cos( )nπ/12 −0.332 u[ ]n