Engineering Note : 13311008
Engineering Note : 13311008
TUNING PID ZIEGLER NICHOLSMetode tuning untuk kontrol proses ini
diperkenalkan oleh Ziegler-Nichols pada tahun 1942 . Metode ini
dilakukan dengan 2 cara yaitu metode Loop Terbuka dan metode Loop
Tertutup. Metode Loop Terbuka dilakukan dengan terlebih dahulu
mengamati hasil respon sistem terhadap sinyal uji step untuk
selanjutnya dilakukan metode Kurva Reaksi Proses. Sementara itu
metode Loop Tertutup dilakukan dengan Ultimate Cyling Method. Pada
note ini akan lebih dibahas metode kontrol Loop Tertutup.Berikut
langkah-langkah tuning PID Ziegler Nichols Loop Tertutup :1. Sistem
yang akan dituning diharapkan sudah stabil maksudnya tidak ada
perubahan pada proses misalnya, perubahan beban (load), perubahan
produk, perubahan grade.2. Jika loop proses berosilasi, pastikan
bahwa PV berhenti berosilasi saat pengontrol diubah ke mode
Manual.3. Menghilangkan aksi kontrol Integral pada pengontrol ;
Jika digunakan tipe pengontrol dengan aksi Integral Time (menit,
detik, siklus) diperbesar parameter waktu hingga membuat aksi
pengontrol tersebut tidak ada pengaruhnya. Jika digunakan tipe
pengontrol Integral Gain (Siklus per detik, Silklus per menit) maka
diubah parameter Integral Gain menjadi zero (nol).4. Menghilangkan
aksi Derivatif dengan setting parameter ke nilai zero (nol).5.
Pengubahan ke mode Otomatis jika loop proses masih dalam mode
manual.6. Lakukan perubahan Set Point dan amati responnya.7. Jika
PV tidak berosilasi maka Proportional Gain dilipatgandakan.8. Jika
PV berosilasi namun dengan peak amplitude yang semakin lama teredam
maka naikkan Gain 50% (atau kurang jika mendekati amplitude konstan
) dan berlaku sebaliknya (jika didapat PV berosilasi dengan peak
amplitude semakin lama meningkat maka dilakukan pengurangan gain
50% (atau kurang jika mendekati amplitude konstan)9. Jika PV
berosilasi konstan maka dapat diperoleh Ultimate Gain ( dan
Ultimate Periode . Jika pengontrol mempunyai PB (Proportional Band)
maka digunakan Setelah didapat parameter dan maka dilakukan
kalkulasi menurut aturan Ziegler-Nichols.
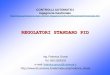
Figure 1 Metode Tuning Ziegler-Nichols Loop Tertutup, PV
(Process Variable), CO (Controller Output)Metode tuning ini
didesain mempunyai bentuk respon quarter decay ratio. Hasil tuning
tersebut menunjukan saat dilakukan perubahan set point maka PV akan
overshoot di sekitar set point yang telah diubah. Setting yang
berbeda juga ditambahkan pada jenis pengontrol agar didapatkan
respon yang robust dan tingkat stabilitas tinggi. Nilai setting
parameter dapat berubah kriteria sesuai dengan tipe proses plant
yang spesifik pula.Aturan Kalkulasi Untuk Pengontrol PIController
Gain () jika digunakan Proportional Band maka digunakan
Ziegler-Nichols (Loop Tertutup)
Robust ControlLevel Control (integrating process)
Aturan Kalkulasi untuk Pengontrol PIDController Gain ()
Ziegler-Nichols (Loop Tertutup)
Robust ControlLevel Control (integrating process)Level Control
(integrating process)
Quarter- Amplitude DampingSeperti yang dijelaskan sebelumnya
bahwa tujuan dari tuning Ziegler-Nichols tersebut untuk memperoleh
respon quarter amplitude damping. Oleh karena itu hasil respon loop
tertutup menunjukkan bahwa metode ini sangat cepat menolak
disturbance akan tetapi menyebabkan loop sangat berosilasi dan
sering berdampak pada interaksi dengan loop yang sejenisnya.
Quarter amplitude damping dapat berakibat tidak stabil jika proses
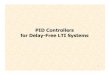
gain atau dead time meningkat.Algoritma Pengontrol PIDPengontrol
PID mempunyai 3 jenis algoritma yaitu interactive, noninteractive,
dan parallel. Akan tetapi algoritma yang seing dipakai pada
pengontrolan PID yaitu tipe interactive.
Figure 2 Algoritma Pengotrol PIDLimit Range of Process
DynamicsDaerah kerja tuning Ziegler-Nichols untuk menghasilkan
performa yang baik tidaklah luas. Hal ini dibatasi oleh syarat time
constant sekurang-kurangnya 2 kali dari dead time. Misalnya untuk
temperature dan tekanan gas, jika digunakan metode ini akan
menghasilkan performa yang buruk pada flow loop dan liquid pressure
loop karena loop- loop ini mempunyai kesamaan time constant dan
dead time. Lebih jauh lagi metode ini sangat tidak baik jika
bekerja pada proses dengan dominant dead time.