Embed Size (px)
Citation preview

TurtleReal2ー Raspberry PiとROSで動かす安価な2軸駆動ロボット Ver.2 -
第七回ROS勉強会 2015/10/4

2
目次
第七回ROS勉強会 2015/10/4
1. TurtleRealとは2. 目的3. 特徴4. Turtulerealの進化5. レーザーレンジファインダ6. ステッピングモータ採用のメリット・デメリット7. TurtleReal2構造8. ハードウェア 8.1 ハードウェアブロック図 8.2 コスト9. ソフトウェア 9.1 ソフトウェア構成 9.2 PC・RaspberryPi間通信 9.3 Twistメッセージ10. 結論

3
1. TurtuleRealとは
第七回ROS勉強会 2015/10/4
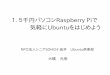
TurtleSimはROSでよく使われるウミガメロボットのシミュレーター、それを実機化したのがTurtleReal
操作ノード トピックシミュレータノード
Turtlesim Turtlesimのグラフ

4
2. 目的
第七回ROS勉強会 2015/10/4
ROSで動く安価なロボットでSLAMを試してみたい。
DCモータと位置センサで1号機を製作したが
走行環境に制限があった。
ステッピングモータ搭載の2号機の製作

5
3. 特徴
第七回ROS勉強会 2015/10/4
(1) 安価(ロボット本体¥7000台)、小型
(2) Raspberry PiとROSでロボットを制御
(3) レーザーレンジファインダー搭載

6
4. TurtleRealの進化
第七回ROS勉強会 2015/10/4
TurtleReal2
TurtleReal2 +
レーザレンジファインダ
レーザレンジファインダ
TurtleReal1
SLAMなどソフトウェアをメインとした次のステップへ

7
5. レーザーレンジファインダ
第七回ROS勉強会 2015/10/4
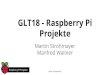
赤外線レーザポインタ+Webカメラ+OpenCVで安価(¥6000台)なレーザレンジファインダを製作
レーザーレンジファインダ
レーザーレンジファインダからのLaserScanメッセージをrvizで可視化

8
6. ステッピングモータ利用のメリット・デメリット
第七回ROS勉強会 2015/10/4
一号機の問題を解決するためステッピングモータを採用
●メリット ・制御が簡単(オープンループ) ・ダイレクトドライブなので機構のガタがない。
●デメリット ・モータ自体が高価(¥4000) → 安いモータが見つかった(¥700) ・モータ軸に直接付けられるタイヤが高価(¥5000) → 模型用モータの利用(¥600) ・消費電流が大きい → モータドライバのPWM制御で電流抑制

9
目次
第七回ROS勉強会 2015/10/4
1. TurtleRealとは2. 目的3. 特徴4. Turtulerealの進化5. レーザーレンジファインダ6. ステッピングモータ採用のメリット・デメリット7. TurtleReal2構造8. ハードウェア 8.1 ハードウェアブロック図 8.2 コスト9. ソフトウェア 9.1 ソフトウェア構成 9.2 PC・RaspberryPi間通信 9.3 Twistメッセージ10. 結論

10第七回ROS勉強会 2015/10/4
ステッピングモータに付いているプーリに穴を開けて模型用タイヤを取り付けることで低コストを実現
7. TurtleReal2構造 (1/5)

11第七回ROS勉強会 2015/10/4
ステッピングモータをアルミフレームに固定
7. TurtleReal2構造 (2/5)

12第七回ROS勉強会 2015/10/4
7. TurtleReal2構造 (3 /5)
2つのモータをアルミフレームに固定した状態

13第七回ROS勉強会 2015/10/4
モータドライバ等の回路基板をアルミフレームに載せる。
7. TurtleReal2構造 (4/5)

14第七回ROS勉強会 2015/10/4
Raspberry Piを取り付けて完成!
7. TurtleReal2構造 (5/5)

15
目次
第七回ROS勉強会 2015/10/4
1. TurtleRealとは2. 目的3. 特徴4. Turtulerealの進化5. レーザーレンジファインダ6. ステッピングモータ採用のメリット・デメリット7. TurtleReal2構造8. ハードウェア 8.1 ハードウェアブロック図 8.2 コスト9. ソフトウェア 9.1 ソフトウェア構成 9.2 PC・RaspberryPi間通信 9.3 Twistメッセージ10. 結論

16
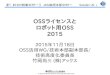
8.1 ハードウェアブロック図
第七回ROS勉強会 2015/10/4
Webカメラ
WLAN
USB ハブ
右モータモータ
ドライバRaspberry
Pi
DCDCコンバータ
単3電池4個
6V
5V
左モータ
GPIO
USBPWM

17第七回ROS勉強会 2015/10/4
Raspberry Piと、その周辺を除いたコスト ¥3860
8.2 コスト
部品名 型番/仕様 メーカー 購入先 個数 単価 小計
ステッピングモータ 17PM-K044-AKZ ミネベア 秋月電子 2 ¥700 ¥1,400
ナロータイやセット 58mm径 タミヤ Amazon 1 ¥520 ¥520
モータードライバ NJM2670 日本無線 秋月電子 2 ¥300 ¥600
基板 75 x 92mm - 秋月電子 1 ¥200 ¥200
電池ケース 単3 x 4 - 秋月電子 1 ¥60 ¥60
DC-DCコンバータ OKL-T/3-W12N-C
村田製作所
秋月電子 1 ¥500 ¥500
電源スイッチ 3極トグル - 秋月電子 1 ¥80 ¥80
アルミ板、ネジ等雑費
- - - - ¥500 ¥500
合計 ¥3,860

18
目次
第七回ROS勉強会 2015/10/4
1. TurtleRealとは2. 目的3. 特徴4. Turtulerealの進化5. レーザーレンジファインダ6. ステッピングモータ採用のメリット・デメリット7. TurtleReal2構造8. ハードウェア 8.1 ハードウェアブロック図 8.2 コスト9. ソフトウェア 9.1 ソフトウェア構成 9.2 PC・RaspberryPi間通信 9.3 Twistメッセージ10. 結論

19第七回ROS勉強会 2015/10/4
全体のソフトウェア構成は下図のようになります。PCの「turtlesim_teleop_key」とRaspberry Piの「制御プログラム」がメッセージ通信を行います。
9.1 ソフトウェア構成
ネットワーク
turtlesim_teleop_key
Linux
ROSsshsmb
Linux
ROS
PC Raspberry Pi
制御プログラム

20第七回ROS勉強会 2015/10/4
PCからネットワーク経由でTwistメッセージをRaspbery Piへ送ることによって遠隔操作が出来ます。
/teleop_turtleノード
Twistメッセージ
ネットワーク
PC Raspberry Pi
9.2 PC→Raspberry Piのメッセージ通信
/turtlereal2制御ノード

21
9.3 Twistメッセージ
第七回ROS勉強会 2015/10/4
TurtleSimで使っている位置・姿勢指令のメッセージ構造 geometry_msgs/Twist ← メッセージ名 geometry_msgs/Vector3 linear float64 x ← X位置 float64 y ← Y位置 float64 z ← Z位置(今回未使用) geometry_msgs/Vector3 angular float64 x ← X軸回りの回転角(今回未使用) float64 y ← Y軸回りの回転角(今回未使用) float64 z ← Z軸回りの回転角

22第七回ROS勉強会 2015/10/4
Raspberry Piと合わせても\7000程度でROS搭載ロボットが作れます。
10. 結論

ご静聴ありがとうございました。
詳しくは「安曇野 ROS」で検索!



![Raspberry Piで始める電子工作 - j-school.acvol8][H_Satou]StartElectronic...ロボット ... ラズパイ本体 Raspberry Pi 3 Model B ⇒4,585 ... GPIO2から出力を制御](https://img.pdfslide.tips/doc/110x75/5aa8f9087f8b9a81188c2fdb/raspberry-pi-j-vol8hsatoustartelectronic.jpg)