Embed Size (px)
DESCRIPTION
Učenje pojačavanjem Reinforcement Learning. Igor Gorečan Daniel Zrno. O čemu ćemo govoriti?. Problemi kod klasičnog pristupa strojnom učenju Svojstva agenta kod RL učenja / učenje strategije Q-učenje Proširenje modela za Q učenje TD učenje Metode generalizacije Primjeri realnih. - PowerPoint PPT Presentation
Citation preview

Učenje pojačavanjem
Reinforcement Learning
Igor Gorečan
Daniel Zrno

O čemu ćemo govoriti?
•Problemi kod klasičnog pristupa strojnom učenju
•Svojstva agenta kod RL učenja / učenje strategije
•Q-učenje
•Proširenje modela za Q učenje
•TD učenje
•Metode generalizacije
•Primjeri realnih

Reinforcement Learning, in general
Po autoru T. Dietterich, 1997. razvoj u strojnom učenju se dijeli na 4 glavna smjera:
•Ensambles of classifiers
•Methods of scaling up supervised learning algorithms
•Learning of complex stochastic models
•Reinforcement learning

Česti problemi kod klasičnog pristupa strojnog učenja
Problem odgođene nagrade (DELAYED REWARD)
Problem djelomično vidljivog okoliša (PARTIALLY OBSERVABLE STATES)
Problem istraživanja (EXPLORATION)
Problem učenja "za cijeli život" (LIFE-LONG LEARNING)

Problem odgođene nagrade (DELAYED REWARD)
Ne postoji kvalificirani učitelj koji određuje ispravnost svake akcije (kao kod supervised learning), nego se ocjenjuje samo uspješnost CIJELOG niza akcija (npr. pobjeda ili poraz u šahu)
Kako će stroj odrediti važnost svakog pojedinog koraka u nizu
akcija za postizanje krajnjeg rezultata?
Stroj ne zna posljedicu vlastitih akcija tj. način na koje one transformiraju stanje okoliša
Kako učiti s nepostojećim početnim znanjem?

Problem djelomično vidljivog okoliša(PARTIALLY OBSERVABLE STATES)
Stroj ne može u svakom trenutku percipirati cijelo stanje okoliša
Kako iskoristiti prošla opažanja i koje je akcije potrebno izvršiti da se poboljša percepcija/znanje o okolišu?

Problem istraživanja (EXPLORATION)
Kako suprostaviti istraživanje nepoznatog prema iskorištavanju poznatog i naučenog
Kada smatramo da je stroj zadovoljavajuće naučio rješavati problem?

Problem učenja "za cijeli život"(LIFE-LONG LEARNING)
Kod učenja novih spoznaja/načina rješavanja problema, mora iskoristiti i nadograditi se na već naučeno
Kako prepoznati rješenje problema u okviru postojećeg znanja?

Konkretna svojstva agenta u RL primjeni
percipira konačan skup stanja okoliša, i za svako od njih može odabrati akciju iz konačnog skupa akcija
ishod akcija je deterministički ili nedeterministički može (ili ne može) unaprijed odrediti novo stanje okoliša
uzrokovano poduzetom akcijom postoji (ili ne postoji) učitelj koji pokazuje optimalne nizove
akcija Jel vam jasno (ili ne?)

Kako stvar radi?
u svakom diskretnom vremenskom koraku, agent percipira stanje okoliša st, odabire i obavlja akciju at
feedback iz okoliša je: trenutna nagrada/kazna rt = r(st,at) (+ nagrada, - kazna)
sljedeće stanje st+1 = (st,at)

O okolišu
funkcije r i ne trebaju biti unaprijed poznate agentu ne ovise o prijašnjim stanjima/akcijama
ovako zadani okoliš zove se i Markov Decision Process (MDP)
(zove se “Markovljev” zbog sličnog značenja kao kod Markovljevog lanca)
Postoje Deterministički i Nedeterministički MDP Partially Observable MDP (POMDP) nastaje kada stanje okoliša
nije vidljivo sve dok agent ne poduzme posebnu vrste akcije - promatranje kojom otkriva stanje svijeta

Cilj učenja
Cilj agenta je naučiti strategiju odabira akcije
: S A
tako da je
(st)=at
U skladu sa idejom nagrađivanja, želimo onu strategiju koja će rezultirati najvećom ukupnom nagradom. Tako počevši od početnog stanja st i koristeći strategiju za odabir akcija, dobivamo ukupnu vrijednost V(st):
V(st) rt + rt+1 + 2rt+2 + ...
0iit
i r

Cilj učenja(2)
Niz nagrada rt+i se generira počevši od stanja st, ali uz to da se smanjuje značaj odgođenih nagrada u odnosu na one dodijeljene odmah. Ovaku definiciju opravdavamo činjenicom da u većini slučajeva preferiramo nagradu prije nago kasnije. To se obavlja faktorom Za blizu 1, odgođene nagrade su jako bitne, dok za =0, strategija se obazire samo na trenutni dobitak.
Cilj učenja je pronaći optimalnu strategiju tako da je
argmax V(st),(s)

Da li radi (ili ne)?
Funkciju vrijednosti za označavamo V*(s).
Agent preferira stanje s1 od stanja s2 ako je V*(s1) > V*(s2), no on odabire akcije, ne stanja. Tako je optimalna akcija a ona koja maksimizira zbroj trenutne nagrade i vrijednosti V* sljedećeg stanja s obzirom na faktor
(s) argmax[r(s,a) +V*((s,a))] a
Međutim, ova formula se ne može koristiti zbog nepoznavanja funkcija r i/ili ...

Temporal Difference metode u RL
TD metode su klasa metoda koje su uvele revoluciju u RL po načinu na koji ujedinjavaju princip Monte Carlo metoda i Dynamic Programming metoda
Dynamic Programming - klasa metoda za rješavanje sekvencijalnih problema odlučivanja a kompozicijskom strukturom cijene (kazne) akcije. Najpoznatije su Bellmanove jednadžbe.
Monte Carlo - klasa metoda za učenje vrijednosnih funkcija, koje procjenjuju vrijednosti stanja tako da izvrše veći broj akcija počevši iz tog stanja a zatim izračunaju srednju vrijednost svih nagrada po pokušaju

Rješenje problema Q-učenje
Definirajmo novu funkciju Q(s,a):
Q(s,a) r(s,a) + V*((s,a))Onda je:
(s) argmax Q(s,a)a
Time cilj učenja više nije doznati funkciju vrijednosti V* nego Q.

Q-učenje (2)
No pošto učenje funkcije Q odgovara učenju idealne strategije, time odgovara i učenju njene vrijednosne funkcije V*:
V*(s) = max Q(s,a’)a’
Sada smo dobili rekurzivnu definiciju Q funkcije:Q(s,a) = r(s,a) + max Q(s,a’)
a’
Ovakva definicija je baza algoritma koji iterativno traži aproksimaciju funkcije .),( asQ
),( asQ

Algoritam Q-učenja
Za svako stanje s,a inicijaliziraj polje u tablici na 0.
Promatraj trenutno stanje s Zauvijek radi:
odaberi akciju a i izvrši ju primi trenutnu nagradu r promotri novo stanje s promijeni polje u tablici na sljedeći način:
ss’
)','(max),('
asQrasQa
),( asQ

Konvergencija algoritma / Odabir akcije
Može se pokazati da ako vrijedi:1) sistem je deterministički MDP
2) vrijednosti r funkcije su ograničene konačnom vrijednosti
3) agent odabire akcije tako da beskonačno puta obiđe par stanje-akcija
tada konvergira prema . Ovaj algoritam pokazuje kako agent uči, no nismo odgovorili na
pitanje: KAKO ODABRATI AKCIJU? Rješenje bi bilo za stanje s odabrati akciju a tako da vrijedi:
a = max a’
No, na ovaj način brzo ćemo upasti u lokalno optimalno rješenje dobiveno početnim vrijednostima.
),( asQ
),( asQ
)',( asQ

Uvođenje vjerojatnosti
Da bi se izbjeglo upadanje u lokalne optimume u vrijednosnoj funkciji, uvodi se vjerojatnost odabira akcije:
Konstanta k utječe na odnos istraživanja i iskorištavanja okoliša koje agent izvodi. Za male k, agent će odabrati akcije koje imaju manju vrijednost, stavljajući naglasak na istraživanje okoliša. Za veće k, agent će odabrati akcije koje imaju veću vrijednost, te pritom maksimalno iskorištavati dosad naučeno. U tu svrhu, agent bi na početku djelovanja trebao koristiti male k i postepeno preći na veće.
j
asQ
asQ
i j
i
k
ksaP
),(ˆ
),(ˆ
)|(
Q
Q

Načini poboljšavanja učenja
Pošto algoritam za učenje agenta ne zahtjeva treniranje na optimalnim nizovima akcija, učenje se može izvesti nasumičnim odabirom stanja i akcije te promaranja rezultirajuće nagrade i sljedećeg stanja (sve dok se svaki par ne obiđe beskonačan broj puta!)
Poboljšanje se može postići tako da tijekom izvođenja određenog broja akcija bilježimo pripadne nagrade i promjene stanja, a algoritam učenja upotrebimo na niz akcija u suprotnom smjeru od izvedenog.
Također druga ideja je da zapamtimo niz stanja-akcija i njihove nagrade, te da treniranje na tom nizu preriodički ponavljamo. Ovo je pogotovo efikasno ako je interna simulacija izvođenja puno brža od realizacije u stvarnom svijetu (npr. kod robotike).

Nedeterminizam kod Q-učenja Kad razdiobe funkcija i r ovise samo o trenutnom stanju s i akciji a,
onda ovakav model sustava nazivamo nedeterministički MDP. Ovakav pristup je potreban kod čestog problema šumova u senzorima i
efektorima robotskih sustava. Q funkcija se zato redefinira kao:
što daje promijenjeni algoritam Q-učenja:
gdje je n faktor koji pada s brojem iteracija, tako da su promjene funkcije sve manje (ovo je nužno kako bi se osigurala konvergencija procesa učenja).
'
')','(max),|'(),(),(
sa
asQassPasrEasQ
),(1
1
)','(ˆmax),(ˆ)1(),(ˆ1
'1
asvisits
asQrasQasQ
nn
na
nnnn

Primjer - Elevator Dispatching Crites i Barto primijenili su RL-učenje na ovaj problem, na
primjeru 4 dizala u zgradi sa 10 katova.
Metode dinamičkog programiranja nisu se pokazale dobrima jer sustav ima oko 1022 stanja (svako dizalo ima svoju poziciju, smjer kretanja, brzinu i skup stanja koji određuje na kojem katu ljudi koji su trenutno unutra žele izaći)

Elevator Dispatching (2) Uspješnost sustava se mjeri sljedećim faktorima:
prosječno vrijeme čekanja (koliko osoba čeka da lift stigne) prosječno sistemsko vrijeme (koliko se osoba vozi u liftu) postotak putnika koji čekaju više od 60 sekundi
Crites i Barto koristili su one-step Q-learning uz neke dodatne početne uvjete (o smjeru kretanja, prolasku katova...)
Kao nagrada agentu koristi se negativna suma kvadrata vremena čekanja svih putnika zajedno problem: ne zna se koliko putnika čeka na nekom katu, zna se samo
da netko čeka rješeno neuronskom mrežom koja predviđa koliko je ljudi na
pojedinom katu Složena su 2 sustava: RL1 (svako dizalo ima svoju neuronsku mrežu)
i RL2 (sva dizala imaju jednu zajedničku neuronsku mrežu)

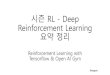
Elevator Dispatching (3) Nakon 4 dana učenja na procesoru od 100 mips-a postignuti su
sljedeći rezultati:
SECTOR - trenutno najkorištenija metoda RL1 i RL2 - one-step Q-learning

TD( learning
U prethodnom algoritmu pratili smo razliku u procjeni samo dva susjedna vremenska trenutka
Cilj je izgraditi algoritam koji će razmatrati duže vremenske intervale (više parova stanje-akcija odjednom):
),(max),( 1)1( asQrasQ t
attt
),(max...),( 1)1(
1)( asQrrrasQ nt
a
nnt
ntttt
n
),(max),( 22
1)2( asQrrasQ t
atttt

TD( learning (2)
1988 Sutton je uveo metodu kombiniranja ovakvih procjena različitih vremenskih pomaka.
Ako isto zapišemo rekurzivno, dobivamo potrebni algoritam:
Za =0 dobivamo originalno Q-učenje (koje razmatra samo jedan korak razlike u procjeni funkcije). Povećanjem algoritam pridaje sve veći značaj budućim aproksimacijama Q vrijednosti.
...),(),(),()1(),( )3(2)2()1( tttttttt asQasQasQasQ
),(),(ˆmax)1(),( 111 ttta
ttt asQasQrasQ

TD learning u praksi - Dynamic Channel Allocation
Problem: Kako učinkovito iskoristiti širinu frekvencijskog pojasa tako da se na mrežu može priključiti što veći broj mobilnih uređaja? Isti uređaji smiju koristiti istu frekvenciju ako su dovoljno udaljeni da ne
smetaju jedan drugome Svaka bazna stanica (ćelija) dobije neke od kanala na korištenje (dio
bandwidtha) npr.
Ako se želimo spojiti na baznu stanicu koja nema slobodni kanal, poziv je blokiran
Cilj: minimizirati broj blokiranih poziva

Dynamic Channel Allocation (2)
Poznata rješenja: Fixed Assingment Method (FA) Dynamic Assingment Method (BDCL)
tipična mreža ima npr. 49 ćelija sa 70 kanala, što daje 7049 konfiguracija sustava!
uzeta je najbolja dinamička metoda "Borrowing with Directional Channel Locking" (BDCL)
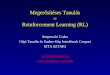
Reinforced Learning (RL) - TD(0) "nagrada" agentu je broj poziva koji je u nekom trenutku na danoj baznoj
stanici
Rezultat:

Generaliziranje iz primjera
Do sada se pretpostavilo da je ciljna funkcija Q predstavljena dvodimenzionalnim poljem stanje-akcija. To je bilo potrebno za dokaz konvergencije algoritma zbog pretpostavke da će se svaki par stanje-akcija obići beskonačno puta.
Problemi ovog pristupa su: agent nije pokušavao induktivno procijeniti Q vrijednosti do tog trenutka
neviđenog para stanje-akcija Kartezijev produkt prostora stanja i akcija je vrlo velik u realnim
primjenama (npr. samo za šah 101) nemoguće je prikazati kontinuirane ulazne podatke
Moguće rješenje je Q funkciju prikazati: neuronskom mrežom s Backpropagation algoritmom stablom odlučivanja LMS algoritmom

Literatura
Dr. A. Gosavi - A Master's Thesis in Reinforcement Learning (http://faculty.uscolo.edu/gosavi/rl.html)
S. Singh, P. Norvig, D. Cohn - How to Make Software Agents Do the Right Thing: An Introduction to Reinforcement Learning (http://envy.cs.umass.edu/People/singh/RLMasses/RL.html)
Reinforcement Learning Repository, University of Massachusetts, Amherst (http://www-anw.cs.umass.edu/rlr/)
R. Sutton, A. Barto - Reinforcement Learning: An Introduction (http://www-anw.cs.umass.edu/~rich/book/the-book.html)
S. Russell and P. Norvig - Artificial Intelligence : A Modern Approach T. Mitchell - Machine Learning T. Dietterich - Machine-Learning Research (Four Current Directions) G. Tesauro - Temporal Difference Learning and TD-Gammon R. Williams – Practical Issues in Temporal Difference Learning