Embed Size (px)
Citation preview
1
UNIVERSIDAD DE CÓRDOBA
INGENIERÍA Y ARQUITECTURA
Escuela Politécnica Superior de Córdoba
MODELADO Y SIMULACIÓN DE
GENERADORES EÓLICOS
Milton Fabricio Pérez Gutiérrez
Trabajo fin de Máster en Control de Procesos Industriales.
Córdoba, Septiembre 2011
2
D. Jorge Eugenio Jiménez Hornero, profesor de la Escuela Politécnica Superior de la Universidad de Córdoba, perteneciente al Área de Ingeniería de Sistemas y Automática del departamento de Informática y Análisis Numérico. INFORMA Que el alumno Milton Fabricio Pérez Gutiérrez ha desarrollado, bajo su dirección, el Trabajo Fin de Máster titulado “Modelado y simulación de generadores eólicos”, habiendo superado, a su juicio, todos los objetivos inicialmente propuestos. Y para que así conste
Córdoba, septiembre de 2011.
Fdo: Prof. Dr. Jorge Eugenio Jiménez Hornero
3
AGRADECIMIENTOS
Expreso mi agradecimiento a todos los profesores, compañeros y amigos, del
Máster de Control de Procesos Industriales y de la Universidad de Córdoba, que
con su ayuda continua tanto a nivel científico como personal han colaborado en
la realización de este trabajo, especialmente a Antonio que me brindo su amistad
al estar tan lejos de mi familia.
Agradezco a mi familia, fundamentalmente a mi padre, a mi madre, hermano,
hermana, mi esposa y mis hijos que con su ánimo desde el otro lado del mundo
me apoyaron en los buenos y en los malos momentos.
Finalmente, mi más especial agradecimiento al director de este trabajo, Dr. D.
Jorge Eugenio Jiménez Hornero, por su rigurosidad científica, experiencia
investigadora y, sobre todo, por su paciencia, dedicación y apoyo diario. Sin
todo ello, habría sido imposible la realización de este trabajo.

4
ÍNDICE
AGRADECIMIENTOS ...............................................................................................................3
TABLA DE FIGURAS ................................................................................................................5
1. INTRODUCCIÓN ...............................................................................................................6
2. OBJETIVOS ........................................................................................................................8
3. REVISIÓN DEL ESTADO DEL ARTE ..............................................................................8
3.1 Los aerogeneradores y su impacto en el medio ambiente. ................................................8
3.2 Potencialidad del programa FAST utilizado en el cálculo y simulación del funcionamiento del aerogenerador. ..............................................................................................9
3.3 Revisión bibliográfica con relación al recurso eólico. .................................................... 12
3.4 Modelización Matemática de la Eficiencia Aerodinámica de Aerogeneradores de Eje Horizontal. ................................................................................................................................. 14
4. RESULTADOS .................................................................................................................. 22
5. CONCLUSIONES ............................................................................................................. 41
6. PLANTEAMIENTO DE TRABAJO FUTURO ................................................................. 43
7. REFERENCIAS BIBLIOGRÁFICAS ............................................................................... 44
5
TABLA DE FIGURAS
Figura 1.Sustentación del ala. ..................................................................................................... 16Figura 2. Efecto capa límite ....................................................................................................... 16Figura 3. Efecto Coanda ............................................................................................................. 17Figura 4. Resistencia Aerodinámica según la forma ................................................................... 19Figura 5: Esquema de programas usados en FAST .................................................................... 21Figura 6. Balanceo del Rotor con viento uniforme. .................................................................... 25Figura 7. Balanceo del rotor con turbulencia .............................................................................. 25Figura 8. Momento por el movimiento de la torre viento constante ........................................... 27Figura 9. Momento por el movimiento de la torre viento turbulento .......................................... 27Figura 10.Par en LSS con viento uniforme ................................................................................. 29Figura 11. Par en LSS con turbulencia ....................................................................................... 29Figura 12. Dirección de la Góndola con viento uniforme ........................................................... 31Figura 13. Dirección de la Góndola con turbulencias. ................................................................ 31Figura 14. Aceleración angular en LSS viento uniforme ............................................................ 35Figura 15. Aceleración angular en LSS viento turbulento. ......................................................... 35Figura 16. Error estimado de la orientación de la Góndola con viento uniforme ........................ 37Figura 17. Error estimado de la orientación de la Góndola con viento turbulento. ..................... 37Figura 18. Momento de giro de la corona de orientación viento uniforme ................................. 39Figura 19. Momento de giro de la corona de orientación viento turbulento ............................... 39
6
1. INTRODUCCIÓN
El aprovechamiento por el hombre de las fuentes de energía renovables, entre ellas
la energía solar, eólica e hidráulica, es muy antiguo; desde muchos siglos antes de
nuestra era ya se utilizaban y su empleo continuó durante toda la historia hasta la
llegada de la "Revolución Industrial", en la que, debido al bajo precio del petróleo,
fueron abandonadas.
Durante los últimos años, debido al incremento del coste de los combustibles fósiles
y los problemas medioambientales derivados de su explotación, estamos asistiendo a un
renacer de las energías renovables.
Es una de las fuentes más baratas, puede competir en rentabilidad con otras fuentes
energéticas tradicionales como las centrales térmicas de carbón (considerado
tradicionalmente como el combustible más barato), las centrales de combustible e
incluso con la energía nuclear, si se consideran los costes de reparar los daños
medioambientales.
El generar energía eléctrica sin que exista un proceso de combustión o una etapa de
transformación térmica supone, desde el punto de vista medioambiental, un
procedimiento muy favorable por ser limpio, exento de problemas de contaminación,
etc. Se suprimen radicalmente los impactos originados por los combustibles durante su
extracción, transformación, transporte y combustión, lo que beneficia la atmósfera, el
suelo, el agua, la fauna, la vegetación, etc.
Las energías renovables son inagotables, limpias y se pueden utilizar de forma
autogestionada (ya que se pueden aprovechar en el mismo lugar en que se producen).
Además tienen la ventaja adicional de complementarse entre sí, favoreciendo la
integración entre ellas. Por ejemplo, la energía solar fotovoltaica suministra electricidad
los días despejados (por lo general con poco viento), mientras que en los días fríos y
ventosos, frecuentemente nublados, son los aerogeneradores los que pueden producir
mayor energía eléctrica.
Al contrario de lo que puede ocurrir con las energías convencionales, la energía
eólica no produce ningún tipo de alteración sobre los acuíferos ni por consumo, ni por
7
contaminación por residuos o vertidos. La generación de electricidad a partir del viento
no produce gases tóxicos, ni contribuye al efecto invernadero, ni destruye la capa de
ozono, tampoco crea lluvia ácida. No origina productos secundarios peligrosos ni
residuos contaminantes.
La electricidad producida por un aerogenerador evita que se quemen diariamente
miles de litros de petróleo y miles de kilogramos de lignito negro en las centrales
térmicas. Ese mismo generador produce idéntica cantidad de energía que la obtenida
por quemar diariamente 1.000 Kg. de petróleo. Al no quemarse esos Kg. de carbón, se
evita la emisión de 4.109 Kg. de CO2, lográndose un efecto similar al producido por
200 árboles. Se impide la emisión de 66 Kg. de dióxido de azufre -SO2- y de 10 Kg. de
óxido de nitrógeno -NOx- principales causantes de la lluvia ácida.
La energía eólica es independiente de cualquier política o relación comercial, se
obtiene en forma mecánica y por tanto es directamente utilizable.
Al finalizar la vida útil de la instalación, el desmantelamiento no deja huellas.
Un Parque de 10 MW:
• Evita: 28.480 Tn. Al año de CO2.
• Sustituye: 2.447 Tep. (Toneladas equivalentes de petróleo).
• Aporta: Trabajo a 130 personas al año durante el diseño y la construcción.
• Proporciona: Industria y desarrollo de tecnología.
• Genera: Energía eléctrica para 11.000 familias. (Energía Renovables:
ventajas y desentajas de la energía eólica, 2006)
8
2. OBJETIVOS • Obtener el modelo matemático de un aerogenerador.
• Simular el modelo matemático de un aerogenerador con el Programa FAST.
3. REVISIÓN DEL ESTADO DEL ARTE
3.1 Los aerogeneradores y su impacto en el medio ambiente.
La generación eléctrica por medio de aerogeneradores aumenta cada año en
el mundo tomando en consideración, que es una energía renovable que no
contamina el medio ambiente con emisiones de efecto invernadero, como lo que
ocurre con las centrales de energía termoeléctricas del tipo convencional, que
generan dióxido de carbono y otros contaminantes atmosféricos, debido al
proceso de combustión del aire con petróleo, carbón o gas. La Comisión
Nacional Europea estima que con la producción de 1 Kw de energía eléctrica
generada por el viento se dejaría de producir la emisión de 2 toneladas de
dióxido de carbono al año, además, se generarían ahorros considerables por
concepto de combustibles fósiles no quemados en un proceso de combustión.
(Energía Renovables: ventajas y desentajas de la energía eólica, 2006)
Los impactos negativos de utilizar la generación eólica están representados
en la fase de construcción, lo que repercute en impactos directos e indirectos en
la vegetación. Sin embargo, los aerogeneradores de 40 a 50 metros de diámetro
(SÁNCHEZ & VIEDMA, 2003), solo afectan alrededor del 5% del terreno
donde se instalan y al resto del mismo, es factible darle su utilización inicial.
Otro impacto negativo que se le atribuye a la energía eólica para la producción
de electricidad, es la contaminación acústica. En la actualidad este impacto
negativo se encuentra prácticamente superado, debido a que los aerogeneradores
se instalan a una distancia tal que los habitantes no están expuestos a los ruidos
que superen los 45 db, por lo general la distancia que cumple con esta condición
es inferior a 1000 metros.
El impacto visual, es un factor que a veces se considera negativo, sin
embargo, actualmente los aerogeneradores tienen una aceptación que está por
sobre el 80% en la mayoría de los países donde se encuentran instaladas granjas
de aerogeneradores. Esta estadística abarca en forma especial a los habitantes
9
que tienen su residencia cercana a la central, quienes la visualizan como una
tecnología atractiva y generadora de empleo.
Otro efecto atribuible a las Granjas eólicas está relacionado con la
mortalidad de las aves. En la práctica se ha demostrado que aún cuando las
palas aerodinámicas tienen una gran envergadura dependiendo de su potencia
nominal, estudios realizados en países como Alemania, Dinamarca, Reino
Unido y otros, han concluido que los aerogeneradores no representan una
amenaza para las aves; el mayor problema que tienen éstas se relaciona con las
líneas de transmisión de energía eléctrica.
La Asociación Europea de Energía Eólica plantea que los aerogeneradores a
pesar de su tamaño y sus palas en movimiento no representan un problema
particular para la vida de las aves (SÁNCHEZ & VIEDMA, 2003). En general,
las granjas de turbinas de viento tienen beneficios que las hacen atractivas en la
actualidad por la contribución a la disminución del efecto invernadero y a la
contaminación atmosférica, ellas generan un ambiente positivo frente al cambio
climático global. Por otra parte, el aumento de estas centrales en el mundo
provoca la menor dependencia del consumo de combustibles fósiles.
3.2 Potencialidad del programa FAST utilizado en el cálculo y
simulación del funcionamiento del aerogenerador.
Teniendo en consideración el avance tecnológico de los sistemas eólicos, ha
sido necesario desarrollar herramientas computacionales para tomar datos en
campo de los vientos existentes en un lugar determinado donde se considere
necesario llevar adelante un emplazamiento eólico, o híbridos relacionados con
esta vital energía del viento. Para el análisis de aerogeneradores y sistemas
eólicos, existen varios programa que permiten analizar el comportamiento y la
producción de potencia y energía de dichos sistemas, en este caso particular se
estudiará el programa FAST (Fatigue, Aerodynamics, Structures, and
Turbulence) por sus siglas en inglés.
“El código de FAST es un simulador integral, capaz de predecir tanto la
carga extrema y carga de fatiga de dos y tres palas de aerogeneradores de eje
horizontal (HAWTs). El código FAST es el resultado de la unión de tres
códigos distintos, el Código FAST2 de dos palas HAWTs, el Código FAST3 de
tres palas HAWTs, y el Aerodyn subrutinas aerodinámica para HAWTs
10
(LAINO & HANSEN, 2001). Una versión intermedia de FAST, llamada
FAST_AD, utiliza diferentes archivos ejecutables de turbina de dos y tres palas.
La versión de FAST que fue desarrollado en 2002, utiliza un único archivo
ejecutable para ambos tipos de turbinas. Estos cambios dieron lugar a que el
código se ejecutara muy rápidamente, por lo que el código es, en efecto, rápido.
En 2003, las características adicionales fueron incluidos en el Código de
FAST, incluyendo la capacidad de desarrollar matrices de estado periódicas
linealizadas para el diseño de los controles y la capacidad de utilizar FAST
como un preprocesador para la generación de bases de datos ADAMS ®
(LAINO & CRAIG HANSEN, 2001) de modelos de aerogeneradores.
Algoritmos de predicción de ruidos aeroacústicos también se han introducido.
Las características adicionales se agregaron de nuevo al Código FAST en
2004. El nuevo modelo añade nuevas características incluido el ángulo de
desplazamiento lateral y la inclinación del eje del rotor, balanceo del rotor,
balanceo de la cola, la inercia y la aerodinámica de cola, control de orientación,
y control de freno del eje de alta velocidad (HSS). Una interfaz se ha
desarrollado entre FAST y un controlador maestro implementado como un
proceso dynamic-link-library (librerías de unión dinámicas) (DLL) en el estilo
de paquete de programa Bladed Garrad Hassan de aerogeneradores (Bossanyi E.
A., 2003). Una interfaz también ha sido desarrollado entre FAST y Simulink ®
con MATLAB ®, lo que permite a los usuarios implementar controles
avanzados de turbinas en Simulink con la conveniente forma de diagrama de
bloques. En 2005, FAST y Adams con Aerodyn fueron evaluados por el
Germanischer Lloyd Windenergie y considerado adecuado para "el cálculo,
diseño y certificación de las cargas de turbinas eólicas en tierra" (MANJOCK,
2005). Estas características adicionales se sumaron también a los Códigos
anteriormente mencionados. Estos incluyen nuevas unidades de medición
inercial en la góndola y galgas extensiométricas en las salidas de la torre;
mejoras en el modelo de control simple de velocidad variable, y el movimiento
de la nueva plataforma de apoyo y la funcionalidad de carga. A pesar de la
incorporación en la plataforma de seis nuevos grados de libertad (DOF), el
Código fue también optimizado para que se ejecute un 15% más rápido que las
versiones anteriores (dependiendo de las opciones que está siendo modelado).
Este manual es un subconjunto actualizada de uno escrito originalmente de
Oregon State University (OSU) (WILSON, WALKER, & HEH, 1999). El

11
manual original incluyó una discusión detallada de la teoría detrás de
FAST_AD (una encarnación anterior de FAST) y la validación del código. Para
estos dos temas, por favor refiérase a la original (WILSON, WALKER, & HEH,
1999). También está disponible Buhl y otros (BUHL, WRIGHT, & PIERCE,
2001), que es una verificación estructural de FAST_AD vs Adams. FAST y
ADAMS utilizan el conjunto de subrutinas Aerodyn, por lo que el estudio de
verificación estructural, no aportó ninguna verificación de la aerodinámica del
FAST_AD. Una verificación más reciente de FAST a través de ADAMS se
presenta en Jonkman y Buhl (Jonkman & Buhl, 2004).
Los modos de operación del capítulo describe los diferentes tipos de análisis
disponibles en el programa FAST y una breve descripción sobre la forma de
ejecutar el código se presenta en el capítulo (RUNNING FAST) Ejecución
FAST. Si desea volver a compilar FAST, usted puede encontrar la información
que necesita en el capítulo (COMPILING FAST) Compilación FAST. El
capítulo (MODEL DESCRIPTION) Descripción del Modelo se analizan los
grados de libertad para aerogeneradores de dos y tres palas HAWTs. El capítulo
(CONTROLS) Controladores describe los métodos para controlar activamente
en muchos aspectos la operación de la turbina durante la simulación.
El Control activo también puede ser implementado en Simulink como se
describe en el capítulo (SIMULINK INTERFACE) Interfaz de Simulink. El
capítulo (Linearization) Linealización documenta cómo extraer modelos lineales
de aerogeneradores de FAST. La funcionalidad del uso de FAST como un
preprocesador para crear conjuntos de datos ADAMS está documentada en el
capítulo (ADAMS PREPROCESSOR) Preprocesador ADAMS. El capítulo de
(INPUT FILES) Archivos de Entrada se describe los archivos de varios
programas de entrada que necesita el programa para su ejecución. Finalmente, el
capítulo (OUTPUT FILES) Archivos de Salida lista los parámetros de salida
posible luego de su ejecución. También se describe el resumen opcional y los
archivos de elemento de salida.
Un estudio sobre la estimación de la energía del viento en terrenos
complejos realiza (Yang, 2004), la formulación de un modelo hidrostático en 3-
D permite evaluar la energía para emplazamientos donde existen altas
velocidades de viento y no están disponibles o son muy limitados los datos de
viento.
12
La propuesta de extrapolar la velocidad promedio anual de un lugar donde
se ha medido la velocidad del viento durante un año, a otro sitio donde no se
tienen mediciones de esta, se realiza por medio de una red neural de acuerdo a
lo planteado por (Becharakis, 2004). El modelo no requiere para la
extrapolación de datos meteorológicos y topográficos, por lo que representa un
modelo de utilidad para tener una aproximación de la energía que se genera en
otro lugar donde se requiere conocer la disponibilidad energética a partir del
conocimiento de la velocidad promedio de un lugar determinado.
La modelización de cada uno de los subsistemas se realiza como caja negra
donde se tiene una entrada y una salida.
3.3 Revisión bibliográfica con relación al recurso eólico.
“La evaluación del recurso eólico (KOSE, ARIF, & ERBUS, 2004) realiza
un análisis de los datos de viento que fueron medidos en Kutahya, Turquía, a
una altura de 10 y 30 metros, en su análisis encuentra que el modelo
probabilístico de Weibull predice la energía disponible del viento de mejor
manera que los resultados que se logran con el modelo de Raileigh, esta
aseveración es válida para el emplazamiento especifico donde se han realizado
las mediciones.
Un modelo de predicción numérica es desarrollado por (MURAKAMI,
MOCHIDU, & KATO, 2003), denominado predicción de la energía del viento
local, encontrándose que los resultados que se obtienen con el modelo numérico
son promisorios con relación a lo resultados que se logran con los valores
medidos de la velocidad del viento.
Existe la contribución de (IMAMURA, TSUMAMUNA, & KUROKAWA,
2004), que realiza una investigación sobre el rendimiento de un aerogenerador
en terreno complejo, donde el problema para estimar el recurso eólico aun no
está resuelto, específicamente en la estimación de la magnitud de la velocidad
del viento sobre este tipo de terreno. Mediante la aplicación de métodos
numéricos al modelo desarrollado, se obtienen resultados que se contrastan con
resultados experimentales en un túnel de viento, encontrándose resultados
favorables.

13
Una contribución en este ámbito lo desarrolla (TAYLOR & WALMSLEY,
1986) quien diseña un programa computacional con el propósito de analizar el
efecto de la capa límite en un terreno. El modelo teórico que se plantea predice
cual es la variación espacial de la velocidad del viento cerca de la superficie por
causa de la rugosidad de ésta.
Un estudio sobre la estimación de la energía del viento en terrenos
complejos realiza (YANG & XUE, 2004), la formulación de un modelo
hidrostático en 3-D permite evaluar la energía para emplazamientos donde
existen altas velocidades de viento y no están disponibles o son muy limitados
los datos de viento.
La propuesta de extrapolar la velocidad promedio anual de un lugar donde
se ha medido la velocidad del viento durante un año, a otro sitio donde no se
tienen mediciones de esta, se realiza por medio de una red neural de acuerdo a
lo planteado por (BECHRAKIS & DEANE, 2004). El modelo no requiere para
la extrapolación de datos meteorológicos y topográficos, por lo que representa
un modelo de utilidad para tener una aproximación de la energía que se genera
en otro lugar donde se requiere conocer la disponibilidad energética a partir del
conocimiento de la velocidad promedio de un lugar determinado.
La propuesta de una metodología para evaluar la energía generada in situ
(POLLABAZER, 1995), quien define dos parámetros por los cuales se puede
optimizar el emplazamiento del sistema eólico, siendo ellos: la velocidad de
corte y la razón existente entre la potencia de salida del aerogenerador y la
potencia disponible del viento. Al aumentar la velocidad de corte para una
potencia nominal determinada se puede convertir más la energía del viento, al
igual que si se optimiza la relación de potencia de salida con respecto a la
potencia de entrada.
Se desarrolla un modelo numérico tridimensional del flujo incompresible y
viscoso del aire en estado estable para evaluar de la energía eólica sobre
regiones aisladas de Venezuela (BERRIOS & CERROLAZA, 1996). Además,
es posible obtener las características globales del campo de viento en la zona de
análisis, mediante la solución numérica de las ecuaciones de Navier-Stokes. Por
otra parte, se puede construir mapas locales de la velocidad y energía del viento,
teniendo en consideración los valores de dirección y velocidad del viento que
previamente se han medido con estaciones anemométricas.” (OYARZO
PEREZ, 2008)

14
CENER en colaboración con la Universidad de Atenas, ha desarrollado una
metodología para el cálculo de mapas de viento a escala regional a partir del
modelo de mesoscala SKIRON.
Estos mapas tienen dos características destacables:
• Se construyen a partir de las simulaciones hora a hora durante
periodos de hasta 10 años
• Resolución hasta 0.02º x 0.02º (1.5 km x 1.5 km aproximadamente)
Los mapas de viento generados por CENER permiten identificar las zonas
con mejores condiciones para la instalación de parques eólicos, así como
disponer de “estaciones de viento virtuales” (series horarias a altura de buje de
10 años) en cualquier punto del área simulada. Estas estaciones virtuales son
útiles para realizar cálculos de producción energética de parque eólico y como
referencias válidas a largo plazo.
En la imagen se presenta como ejemplo el mapa de velocidades medias de
viento de Europa y sur del Mediterráneo a una resolución de 0.2º x 0.2º. El
mapa de 10 años y las series horarias de viento están disponibles para cualquier
punto del dominio que aparece en la figura.
En Noviembre de 2008 se publicará el mapa eólico de España a una
resolución de 0.02º x 0.02º con posibilidad de acceso mediante un sistema de
información geográfica vía web. (GASTÓN, 2008).
Para nuestro trabajo se requiere usar los programas propios de NWRL para
la obtención de archivos de viento para usarlos en la ejecución de FAST.
(Center, 2010) (JONKMAN, 2009)
3.4 Modelización Matemática de la Eficiencia Aerodinámica de
Aerogeneradores de Eje Horizontal.
Se iniciará el estudio de las Leyes Básicas y Efectos de Aerodinámica
utilizando una verdad que en principio, cabe decir que existe sólo una ley
universal que rige toda dinámica; de hecho, con tan sólo una ley, principio o
como se quiera llamar, está definida toda la Aerodinámica, sea de
aerogeneradores, coches de competición, Aeronaves, Motos, barcos, etc.; la ley
dice:

15
“Todas las partículas tienden a situarse en aquel estado de mínima energía”.
Ya lo decía Einstein: “El Universo es perezoso”
Por ello mismo, por ejemplo, el aire siempre circula desde una zona de alta
presión hacia otra de baja presión.
Parece simple, pero no lo es; existen diferentes tipos de energía en un fluido;
básicamente 3: por altura o cota, por velocidad y por presión. Por si fuera poco,
existe otra ley de la termodinámica que dice “la energía ni se crea ni se destruye,
sólo se transforma”; se ha definido los 3 tipos de energía existentes, y además se
ha encontrado la relación entre ellas. Las ecuaciones matemáticas o modelo
matemático que recopila todo lo dicho, se denomina Ecuaciones de Navier-
Stokes (Jonkman J. , 2003) (F1 Revolution, una mirada diferente, 2009);
resolviendo dichas ecuaciones o modelos, seríamos capaces de averiguar
cualquier aerodinámica o dinámica en cualquier contexto; incluso podríamos
saber si dentro de 2 años, 15 días y 32 segundos, lloverá o no lloverá…. pero
existe un problema: son unas ecuaciones que no se pueden resolver
analíticamente; hay que resolverlas numéricamente, es decir: con ordenador y
técnicas CFD (Cálculo de Dinámica de Fluidos).
Efecto Venturi / Principio de Bernouilli
Prácticamente ya se ha definido; existen 3 tipos de energía; la potencial (por
cota o altura), la cinética (por velocidad) y la de presión; al tener que
conservarse, en todo proceso, la cantidad total de energía, la suma de las 3
energías, ha de permanecer constante. Esa es la ecuación o principio de
Bernouilli; de esta forma, si la presión aumenta, la velocidad ha de disminuir y
viceversa; es decir que la presión es inversa a la velocidad.
El efecto Venturi, también es una consecuencia directa: si en cierto
fenómeno por donde pasa el aire, hay un cambio de sección, por ejemplo de
mayor a menor, la cantidad de aire que entra ha de ser la misma que la que sale
(cosa lógica por otra parte), con lo que por la sección mayor, la velocidad del
aire será menor que la velocidad del mismo aire al pasar por la sección menor.
Esto es el efecto Venturi: al aumentar la velocidad, la presión disminuye y
viceversa.
16
Bajo este principio, se puede entender y comprender la sustentación de un
ala cualquiera (o perfil aerodinámico en general):
Figura 1.Sustentación del ala.
En la zona “A” la velocidad es mayor, pues ha de recorrer una distancia
mayor, con lo que la presión disminuye; Esta depresión “succiona” el ala hacia
arriba en este caso, produciéndose sustentación.
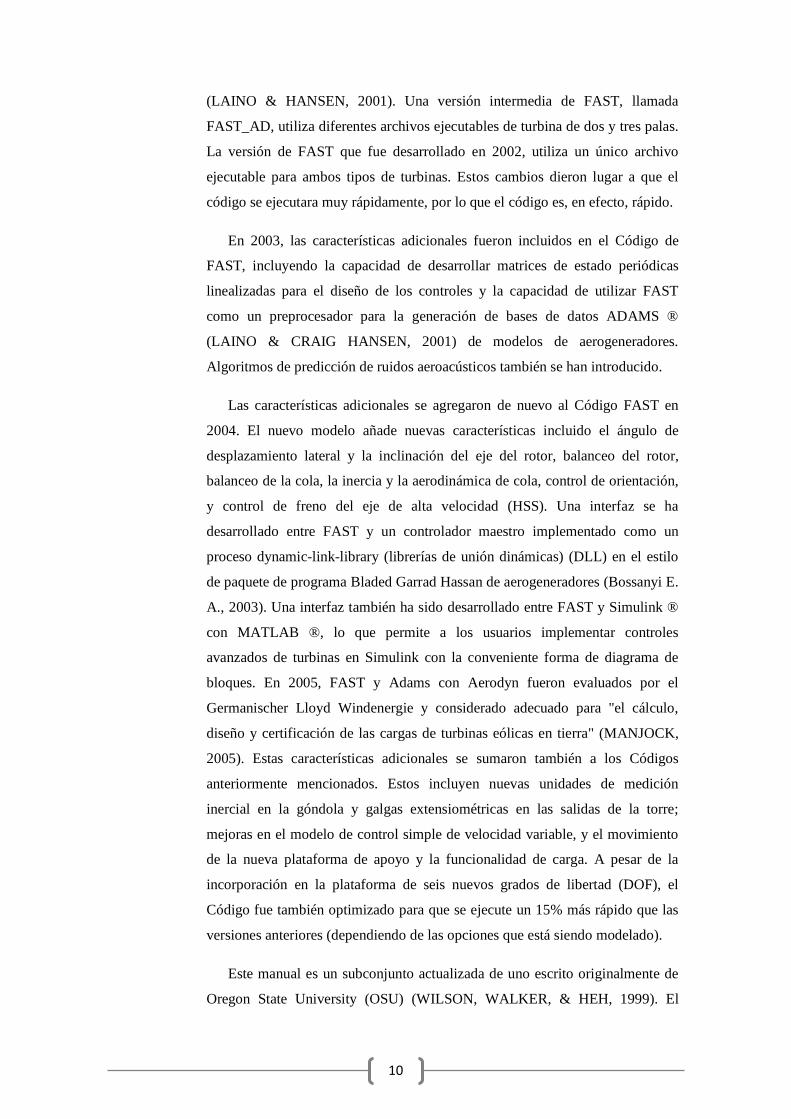
Efecto capa límite
Figura 2. Efecto capa límite
En la evolución del aire alrededor de un cuerpo cualquiera, dicho aire se
pega sobre el cuerpo, creando una capa muy fina de moléculas en principio. Al
discurrir sobre esta fina capa, más moléculas del mismo aire, y debido a la
viscosidad principalmente, éstas últimas ralentizan su velocidad, debido a que
discurren sobre otras moléculas; así capa tras capa, se forma una capa de
moléculas de aire, cuya última, posee ya casi la misma velocidad del aire que
circunda al cuerpo; esta capa se denomina capa límite; técnicamente se define
17
capa límite y su espesor, como el espesor a partir del cual, la velocidad es del
99% del flujo real.
En cuerpos relativamente pequeños como lo es un coche de competición,
suele tener como máximo unos pocos milímetros, y ni tan siquiera tanto…. todo
depende de la longitud del cuerpo, en relación al sentido de la dinámica; por
esta razón, en trenes y al final de ellos, la capa límite puede llegar hasta 0.5
metros; de hecho y si lo pudiéramos hacer, podríamos sacar la mano al final y
sobre el techo de este último vagón, y apenas notaríamos la velocidad del aire.
Podemos concluir diciendo, que la velocidad del aire, justo en la superficie
de todo cuerpo en movimiento, es cero. Esta capa límite, es la responsable del
siguiente efecto que podemos apreciar.
Efecto Coanda
Todo fluido, tiende a pegarse sobre una superficie; este es el efecto Coanda;
parece simple y de hecho hasta lo es, pero también es extremadamente
importante y decisivo en todo diseño, por cuanto se puede, en cierta forma,
canalizar aire allí donde se quiera o se necesite, sin necesidad de desviarlo, con
la resistencia que ello supone.
Figura 3. Efecto Coanda

18
En algunos aviones de transporte, y dado que transportan mucha carga, y
sobre todo en el despegue, los motores a reacción o las hélices en su caso,
descargan su flujo directamente sobre las alas, y aumentando el ángulo de
incidencia de las mismas, el aire no se despega de ellas, generando una fuerza
de sustentación inmensa.
Cuando vimos el fenómeno de la sustentación, pudimos apreciar que el aire
se pega sobre la superficie, observando también el efecto Coanda sobre ella.
Resistencia Aerodinámica o Arrastre.
La combinación de los efectos anteriores sobre un objeto que se desplace a
través de cualquier fluido (aire en nuestro caso), lleva implícita una resistencia
al avance. La cantidad resistencia al avance dependerá de:
• La densidad del fluido a atravesar.
• El ángulo de incidencia entre el objeto y la componente direccional
de avance (de lo que se deduce que cada forma de objeto tiene una
resistencia específica).
• La cantidad de superficie en contacto con el fluido.
• La velocidad a la que se desplaza el objeto a través del fluido (o
viceversa).
Resumiendo, su fórmula simple es: D = 0.5(δ)(v2)(S)(Cd)
Donde:
• 𝐷 = Drag, Arrastre, o Resistencia aerodinámica.
• 𝛿 = Densidad del fluido (para nosotros densidad del aire)
• 𝑣 = Velocidad
• S = Superficie de impacto (superficie frontal que choca contra el
viento)
• Cd = Coeficiente aerodinámico del objeto.
De lo que se desprende que la resistencia aerodinámica es proporcional al
cuadrado de la velocidad.

19
Figura 4. Resistencia Aerodinámica según la forma
Creo que todo el mundo conoce y habrá podido comprobar este hecho de
múltiples maneras. (F1 Revolution, una mirada diferente, 2009) (Rodríguez
Amenedo, Burgos Díaz, & Arnalte Gómez, 2003) (Anaya-Lara, Jenkins,
Ekanayake, Cartwright, & Hughes, 2009) (OYARZO PEREZ, 2008)
Indicado los principios básicos se requiere usar un programa adecuado para
los cálculos, en la actualidad uno de los más utilizados es FAST.
El programa FAST es un programa simulador integral capaz de predecir
tanto la carga en el extremo de la pala así como la fatiga en las turbinas HAWT
de dos y tres palas.
El código de FAST es la unión de tres distintos códigos; el FAST2 para dos
palas; el FAST3 para tres palas y el Aerodyn subrutinas aerodinámicas, estos
tres códigos son para aerogeneradores tipo HAWT. [ (Jason M. Jonkman,
2005)]
El FAST tiene dos diferentes formas de operación o modos de análisis. El
Modo Analógico (AnalMode) en la entrada del archivo primario de entrada es
usada para controlar este modo. El primer modo de análisis es el tiempo de
marcha de las ecuaciones no lineales de movimiento. Durante la simulación, la
turbina de viento aerodinámica y la respuesta estructural a las condiciones de la
entrada del viento se determinan en el tiempo. Los controles activos para
determinar muchos aspectos de la operación de la turbina pueden ser
implementados durante el análisis de la simulación. Las salidas de la simulación
incluyen series de datos en el tiempo sobre las cargas aerodinámicas como

20
también cargas y deflexiones de los miembros estructurales de las turbinas de
viento.
Estas salidas pueden ser usadas, por ejemplo, para predecir tanto las cargas
en los extremos así como la fatiga de HAWT. La aeroacústica de una turbina de
viento es otra salida que puede ser obtenida de la simulación.
El análisis de la simulación puede ser ejecutado usando el programa
ejecutable dynamic-link-library (DLL) que se utiliza como interfaz con
simulink.
Cuando corre la versión ejecutable de FAST, activa controles que pueden
ser implementados a través de rutinas definidas por el usuario que han sido
unidas con FAST durante la creación del ejecutable o como un controlador
maestro implementado como un DLL en el estilo del paquete informático de las
turbinas de viento Garrad Hassan’s Bladed. Cuando se ejecuta FAST a través
del interfaz DLL en SIMULINK, activan controles que pueden ser
implementados en el ambiente SIMULINK en adición a la implementación
habilitada con el ejecutable FAST.
La segunda forma de análisis proporcionado en FAST es la Linealización,
tiene la capacidad de extraer representaciones linealizadas de los modelos de
turbinas de viento no linealizadas aeroelásticas. Esta capacidad de análisis es
útil para desarrollar matrices de estado de una turbina de viento para ayudar en
control de diseños y análisis. Es también usada para determinar los modos de
sistemas completos de una operación estacionaria HAWT a través del uso de un
simple eigenanalysis. (Jason M. Jonkman, 2005)
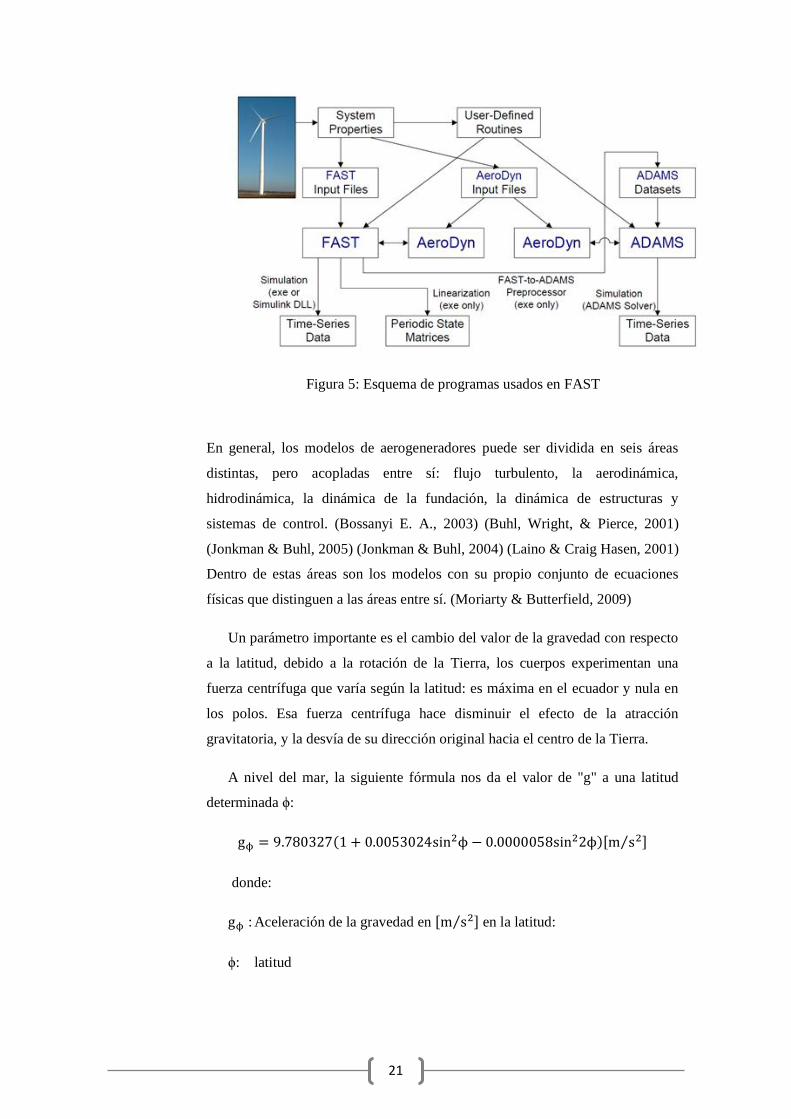
Un esquema de las diferentes áreas de modelado de la turbina y la forma en
que interactúan se muestra en la Figura 5. Este esquema representa el flujo
típico de la información en la mayoría de los códigos de diseño de
aerogeneradores para la predicción de la potencia de salida, las cargas de diseño
y también el comportamiento del sistema de control. Este trabajo se centrará
principalmente en el desarrolló modelos NREL (Jonkman J. , 2003) (Laino,
David J.; Hansen, A. Craig, 2001), sin embargo muchos de los modelos y las
limitaciones que aquí se presenta son similares, si no idénticas, a las de otros
códigos existentes que se utilizan en la industria (por ejemplo, Bladed (Bossanyi
E. A., 2003), HawC2 (Larsen, 2007), y FLEX5 (Øye, 1991)).
21
Figura 5: Esquema de programas usados en FAST
En general, los modelos de aerogeneradores puede ser dividida en seis áreas
distintas, pero acopladas entre sí: flujo turbulento, la aerodinámica,
hidrodinámica, la dinámica de la fundación, la dinámica de estructuras y
sistemas de control. (Bossanyi E. A., 2003) (Buhl, Wright, & Pierce, 2001)
(Jonkman & Buhl, 2005) (Jonkman & Buhl, 2004) (Laino & Craig Hasen, 2001)
Dentro de estas áreas son los modelos con su propio conjunto de ecuaciones
físicas que distinguen a las áreas entre sí. (Moriarty & Butterfield, 2009)
Un parámetro importante es el cambio del valor de la gravedad con respecto
a la latitud, debido a la rotación de la Tierra, los cuerpos experimentan una
fuerza centrífuga que varía según la latitud: es máxima en el ecuador y nula en
los polos. Esa fuerza centrífuga hace disminuir el efecto de la atracción
gravitatoria, y la desvía de su dirección original hacia el centro de la Tierra.
A nivel del mar, la siguiente fórmula nos da el valor de "g" a una latitud
determinada ϕ:
gϕ = 9.780327(1 + 0.0053024sin2ϕ − 0.0000058sin22ϕ)[m s2⁄ ]
donde:
gϕ : Aceleración de la gravedad en [m s2⁄ ] en la latitud:
ϕ: latitud

22
4. RESULTADOS
El programa FAST usado con SIMULINK requiere de tres archivos principales para
la simulación que son Test##.fst, Test##.cru, Test##_AD.ipt (Jason M. Jonkman, 2005);
dentro de los cuales se debe configurar datos como Número de Palas, diámetro del
rotor, potencia generada, Frecuencia de trabajo de la red eléctrica, etc.
Por tanto se realizará varias simulaciones para la obtención de resultados que
permitan comparar el comportamiento del mismo tipo de aerogenerador pero con
distintos tipos de viento, cada una de estas características se las enumerará en cada
ejemplo propuesto a continuación.
Nombre del
Archivo
Primer Ejemplo.
Nombre de la Turbina
Número de palas
Diámetro del Rotor
(m)
Potencia Generada
(Kw)
Descripción de la prueba
Test03 AWT-27CR2
2 27 175 Construcción flexible, orientación libre, viento uniforme.
Test04 AWT-27CR2
2 27 175 Construcción flexible, orientación libre, viento turbulento.
Como se puede observar en la tabla anterior se tiene la misma turbina con las
mismas características de funcionamiento variando la forma del viento.
Para esta primera simulación de utilizarán en forma individual dos simulaciones con
los archivos Test03 y Test04, de todos los parámetros que se pueden configurar solo se
tomará algunos representativos:
1. Nombre de la turbina: AWT-27CR2
2. Número de palas: 2
3. Diámetro del rotor: 27m
4. Potencia generada: 175kW
5. Construcción: Flexible
6. Orientación libre (Free yaw)

23
7. Aceleración de la Gravedad: 9.80665
8. Desplazamiento Inicial de la punta de la pala a fuera del plano (Initial out of
plane blade tip displacement) 0.0
9. Deflexión inicial de la punta de la pala hacia dentro del plano (Initial in-plane
blade-tip deflection) 0.0
10. Ángulo inicial o fijo de Balanceo (Initial or fixed teeter angle (degrees) [unused
for 3 blades]) 0.0
11. Masa de la Corona de orientación (Yaw bearing mass) 0,0 (kg)
12. Masa de la Góndola (Nacelle mass) 5.015,43 (kg)
13. Masa del buje (Hub mass) 1.330,00 (kg)
14. Masa del freno de la punta de la pala (Tip-brake mass), pala 1, (11,34 kg)
15. Masa del freno de la punta de la pala (Tip-brake mass), pala 2, (11,34 kg)
16. Inercia de la Góndola con respecto al eje de orientación (Nacelle inertia about
yaw axis) 4.604,84 (kg m ^ 2)
17. Inercia del Generador con respecto a HSS (Generator inertia about HSS) (59,26
kg m ^ 2)
18. Inercia del buje con respecto al eje del rotor [3 hojas] o el eje de la bisagra [2
hojas] (Hub inertia about rotor axis [3 blades] or teeter axis [2 blades] ) (335,34
kg m ^ 2)
Las características anteriores son iguales para los dos ejemplos, la diferencia está en
el viento que se usará para el movimiento del aerogenerador, para el ejemplo Test03 el
viento tiene las siguientes características:
• Tipo de Viento: Uniforme
• Velocidad: 18 m/s
• Dirección: 30 grados
Para el ejemplo Test04 las características del viento turbulento son:
• Modelo de turbulencia utilizado = IEC von Karman
• Turbulencia característica = A
• Tipo de turbulencia IEC = Modelo de turbulencia normal
• Norma IEC 61400-1 IEC = Ed. 2: 1999
• Velocidad media del viento en la altura del buje = 12,000 m / s
• Valor de tipo característico de intensidad de la turbulencia a 15 m / s =
18,000%
• Pendiente desviación estándar = 2,000

24
• Valor característico de la desviación estándar = 2,340 m / s
• Escala de turbulencia = 21.000 m
• Escala integral isotrópica = 73,500 m
• Valor característico de la intensidad de la turbulencia del buje = 19,500%
• Número Gradiente de Richardson = 0,000.
Una vez descrito los parámetros más representativos de los dos primeros ejemplos
(Test03 y Test04), se debe comentar que se trabaja con las palasen posición vertical se
nombrará pala 1 a la superior y pala 2 como referencia de la explicación que se va a
detallar a continuación. Se realizan las simulaciones respectivas para obtener los
siguientes resultados, como análisis comparativo se tomará algunas salidas importantes
de esta simulación:
25
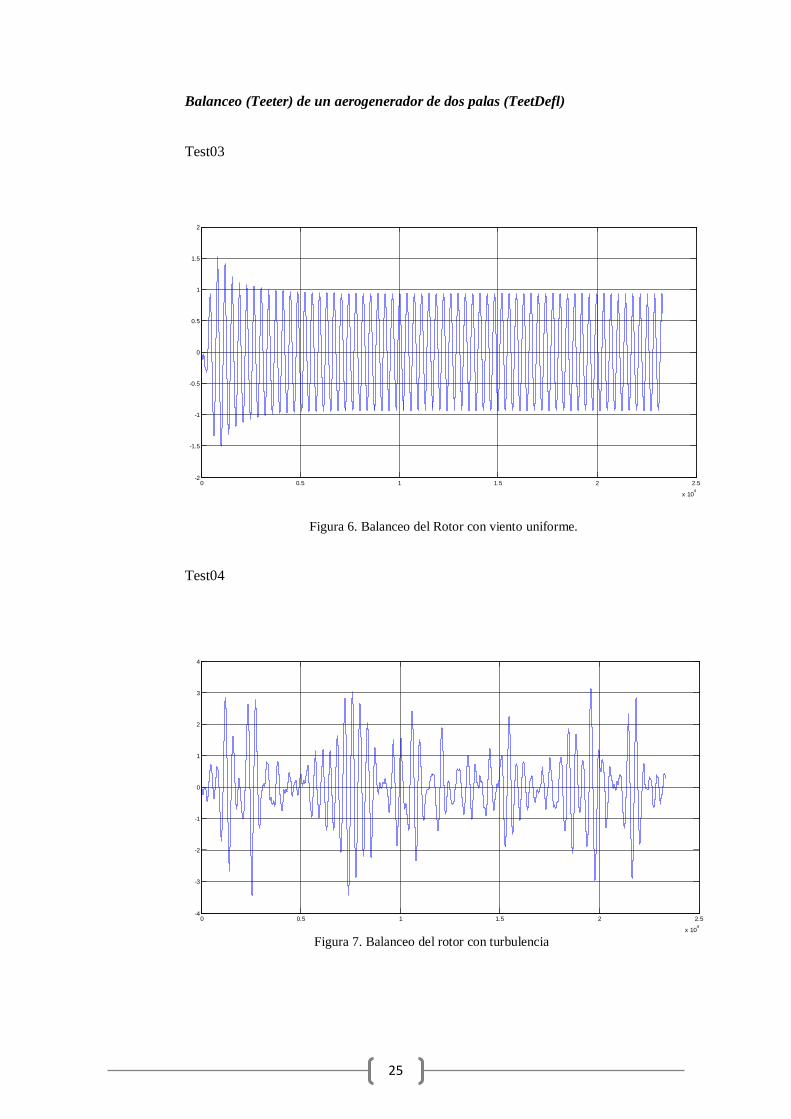
Balanceo (Teeter) de un aerogenerador de dos palas (TeetDefl)
Test03
Figura 6. Balanceo del Rotor con viento uniforme.
Test04
Figura 7. Balanceo del rotor con turbulencia
0 0.5 1 1.5 2 2.5
x 104
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.5 1 1.5 2 2.5
x 104
-4
-3
-2
-1
0
1
2
3
4

26
El viento uniforme ejerce una fuerza constante en las palas generando sobre ellas
una fuerza perpendicular (flapwise) también constante que le permite moverse un
ángulo inicialmente dado por la dirección del viento y por la estructura de la
góndola, pero a la vez las palas hacen que el rotor inicie su rotación, por tanto las
palas a la vez cambian su dirección es decir la pala 1 que estaba arriba ahora está
abajo y viceversa, en la simulación solo se analizará la pala 1, por tanto si al iniciar
su movimiento el ángulo estaba en una posición inicial ϴ al ir girando va cambiar el
ángulo progresivamente hasta llegar a su posición final -ϴ, pero como sigue rotando
por la acción del viento esta cambia hasta llegar a su posición original ϴ, la gráfica
generada por este movimiento es oscilatorio (figura 6), pero cuando el viento es
turbulento las fuerzas y direcciones cambian a cada momento, la dirección de la
fuerza perpendicular también variara proporcionalmente al viento que la ejerce, por
tanto el movimiento del ángulo también cambiará en torno a estas fuerzas (figura
7).
27
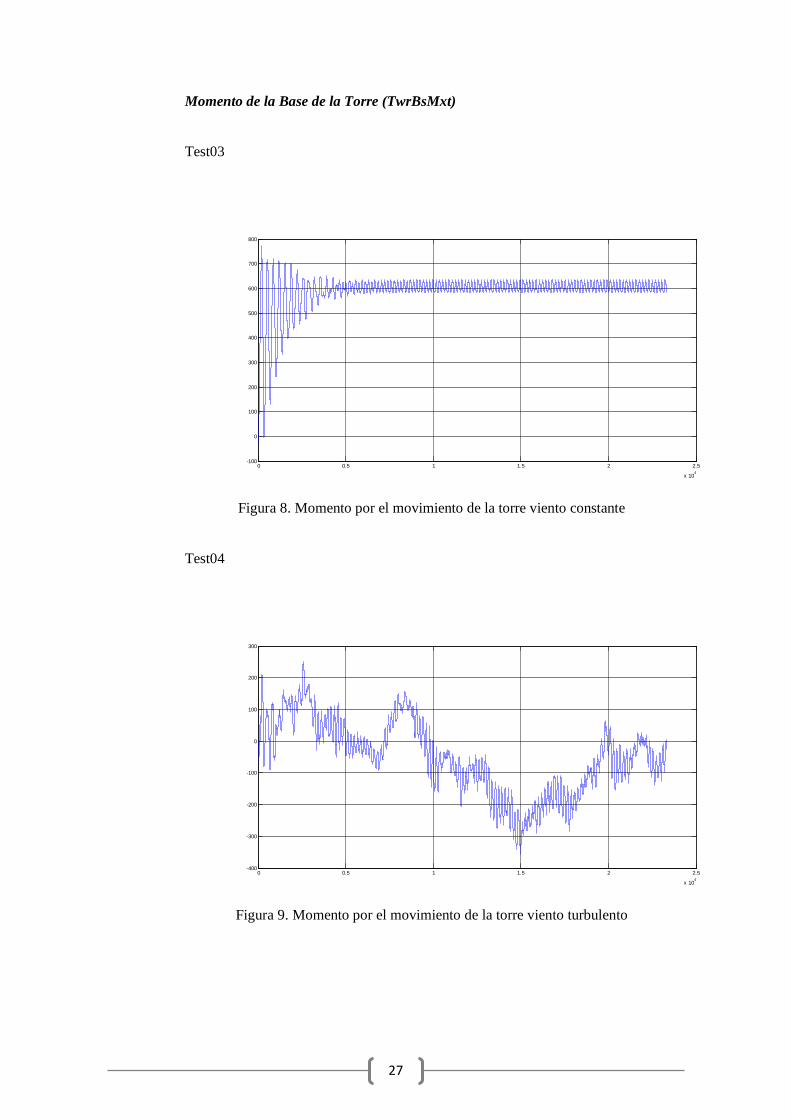
Momento de la Base de la Torre (TwrBsMxt)
Test03
Figura 8. Momento por el movimiento de la torre viento constante
Test04
Figura 9. Momento por el movimiento de la torre viento turbulento
0 0.5 1 1.5 2 2.5
x 104
-100
0
100
200
300
400
500
600
700
800
0 0.5 1 1.5 2 2.5
x 104
-400
-300
-200
-100
0
100
200
300

28
El viento uniforme ejerce una fuerza en las palas para permitir su movimiento
giratorio, estas fuerzas hacen que la torre deba soportar la fuerza perpendicular del
viento y fuerzas propias del aerogenerador como el peso de sus distintos
componentes, estos hacen que la torre soporte Momentos inicialmente altos pero a
medida que transcurre el tiempo, el movimiento de las palas cada vez son más
uniformes el Momento también se va haciendo constante y oscilatorio, y se
mantiene dentro de un rango aceptable (figura 7), pero cuando el viento es
turbulento las fuerzas ejercidas sobre las palas cambian constantemente y eso hace
que el Momento total que soporta la torre también tenga un cambios de valores
constantes acorde a las fuerzas ejercidas por el viento circundante (figura 8).

29
Par en el lado del eje de baja velocidad LSS (RotTorq)
Test03
Figura 10.Par en LSS con viento uniforme
Test04
Figura 11. Par en LSS con turbulencia
0 0.5 1 1.5 2 2.5
x 104
0
5
10
15
20
25
30
35
40
0 0.5 1 1.5 2 2.5
x 104
0
10
20
30
40
50
60
70
80

30
Ahora se analizara el comportamiento del par en el eje del lado de baja velocidad
LSS, cuando el viento es uniforme el par producido por el movimiento de las palas
en el rotor va cambiando progresiva y oscilatoriamente por el balanceo (teeter)
hasta llegar a su rango óptimo de funcionamiento (figura 9); al tener turbulencias el
rotor debe soportar fuerzas variables provocadas por el cambio de velocidad y de
orientación, que originará variaciones en el par que soportará el eje principal (figura
10).
31
Orientación de la Góndola (NacYaw)
Test03
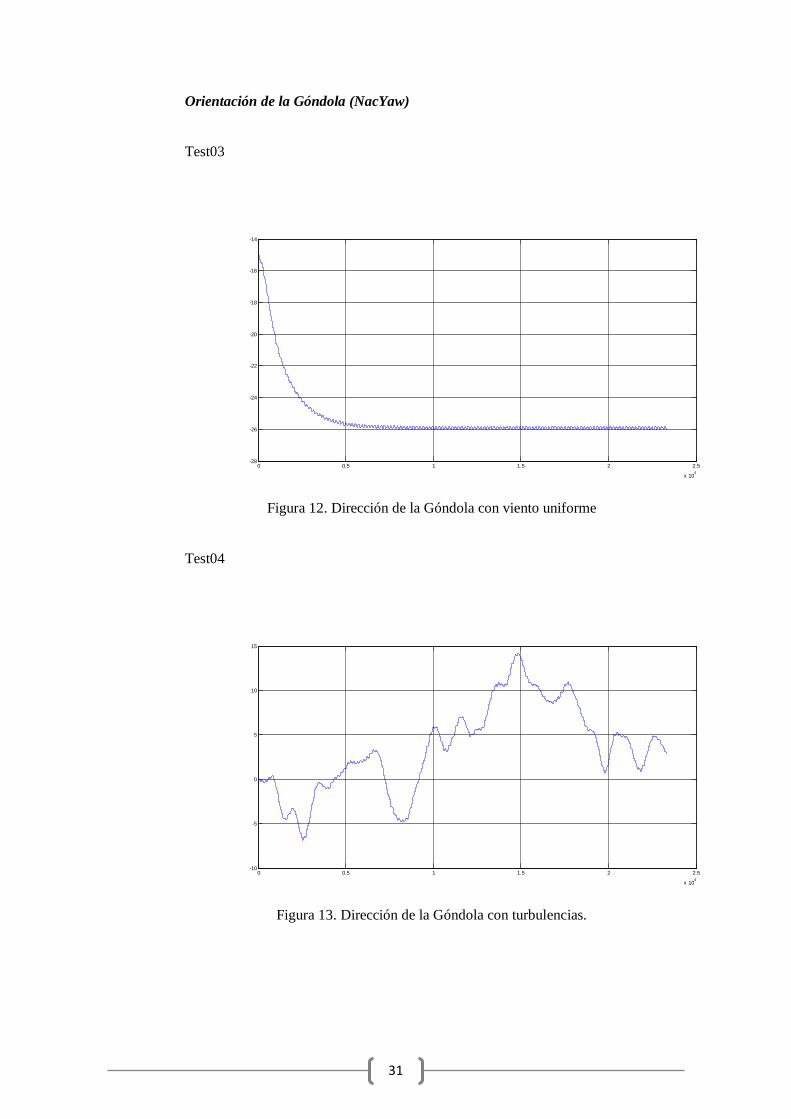
Figura 12. Dirección de la Góndola con viento uniforme
Test04
Figura 13. Dirección de la Góndola con turbulencias.
0 0.5 1 1.5 2 2.5
x 104
-28
-26
-24
-22
-20
-18
-16
-14
0 0.5 1 1.5 2 2.5
x 104
-10
-5
0
5
10
15

32
La orientación de la góndola depende de la dirección del viento que llega al rotor, si
el viento es uniforme la góndola se orientara hacia la dirección del viento en forma
constate para producir el movimiento de las palas (figura 11), pero al tener una
turbulencia se puede observar que se va orientando de acuerdo a la dirección del
viento que se encuentre en ese momento (figura12) como es aleatorio tendrá varias
direcciones, estas no pueden ser instantáneas ya que por el peso y la estructura del
rotor no pueden hacer giros bruscos.

33
Ejemplo 2
Nombre del
Archivo
Nombre de la Turbina
Número de palas
Diámetro del Rotor
(m)
Potencia Generada
(Kw)
Descripción de la prueba
Test12 WP 1,5 MW 3 70 1500 Construcción flexible, velocidad variable y control de inclinación, evento ECD viento uniforme con escalón.
Test13 WP 1,5 MW 3 70 1500 Construcción flexible, velocidad variable y control de inclinación, viento turbulento
1) Nombre de la turbina: WP 1,5 MW
2) Número de palas: 3
3) Diámetro del rotor: 70m
4) Potencia generada: 1500kW
5) Construcción: Flexible
6) Velocidad variable (variable speed)
7) Control de Inclinación (pitch control)
8) Aceleración de la Gravedad: 9.80665
9) Desplazamiento Inicial de la punta de la pala a fuera del plano (Initial out of plane
blade tip displacement) 0.0
10) Deflexión inicial de la punta de la pala hacia dentro del plano (Initial in-plane
blade-tip deflection) 0.0
11) Ángulo inicial o fijo de Balanceo (Initial or fixed teeter angle (degrees) [unused for
3 blades]) 0.0
12) Masa de la Corona de orientación (Yaw bearing mass) 0,0 (kg)
13) Masa de la Góndola (Nacelle mass) 51.170,00 (kg)
14) Masa del buje (Hub mass) 15.148,00 (kg)
15) Masa del freno de la punta de la pala (Tip-brake mass), pala 1, (0,00 kg)
16) Masa del freno de la punta de la pala (Tip-brake mass), pala 2, (0,00 kg)
17) Inercia de la Góndola con respecto al eje de orientación (Nacelle inertia about yaw
axis) 49.130,00 (kg m ^ 2)
18) Inercia del Generador con respecto a HSS (Generator inertia about HSS) (53,036
kg·m^2)
34
19) Inercia del buje con respecto al eje del rotor [3 Palas] o el eje de la bisagra [2 Palas]
(Hub inertia about rotor axis [3 blades] or teeter axis [2 blades] ) (34.600,00
kg·m^2)
A continuación se enumerará las características del viento del ejemplo Test12:
• El transitorio se produce a los 10 segundos
• La velocidad de la ráfaga máxima es de 15 m/s
• La velocidad del viento máxima será de 26.80 m/s
• El máximo se produce a los 16 segundos
• El cambio de dirección máxima es de 61.02 grados
• Este máximo se produce a los 16 segundos
• El ángulo de inclinación del flujo del viento es 0.0 grados con respecto a la
horizontal
Mientras que las características del viento del ejemplo Test13 son:
• Modelo de turbulencia utilizado = IEC Kaimal
• Turbulencia característica = A
• Turbulencia Tipo IEC = Modelo de turbulencia normal
• Norma IEC: IEC 61400-1 = Ed. 3: 2005
• Velocidad media del viento en la altura del buje = 12,000 m / s
• Valor previsto de la intensidad de la turbulencia a 15 m / s = 16,000%
• Valor característico de la desviación estándar = 2,336 m / s
• Escala de turbulencia = 42.000 m
• Escala integral u-component = 340,200 m
• Escala coherente: 340.200 m
• Valor característico de la intensidad de la turbulencia del buje = 19,467%
• Número Gradiente de Richardson = 0,000.
Por tanto al realizar la simulación tenemos los siguientes parámetros a analizar:
35
Aceleración angular en el lado del multiplicador del eje de baja velocidad LSS
(LSSGagA) (deg/sec^2)
Test12
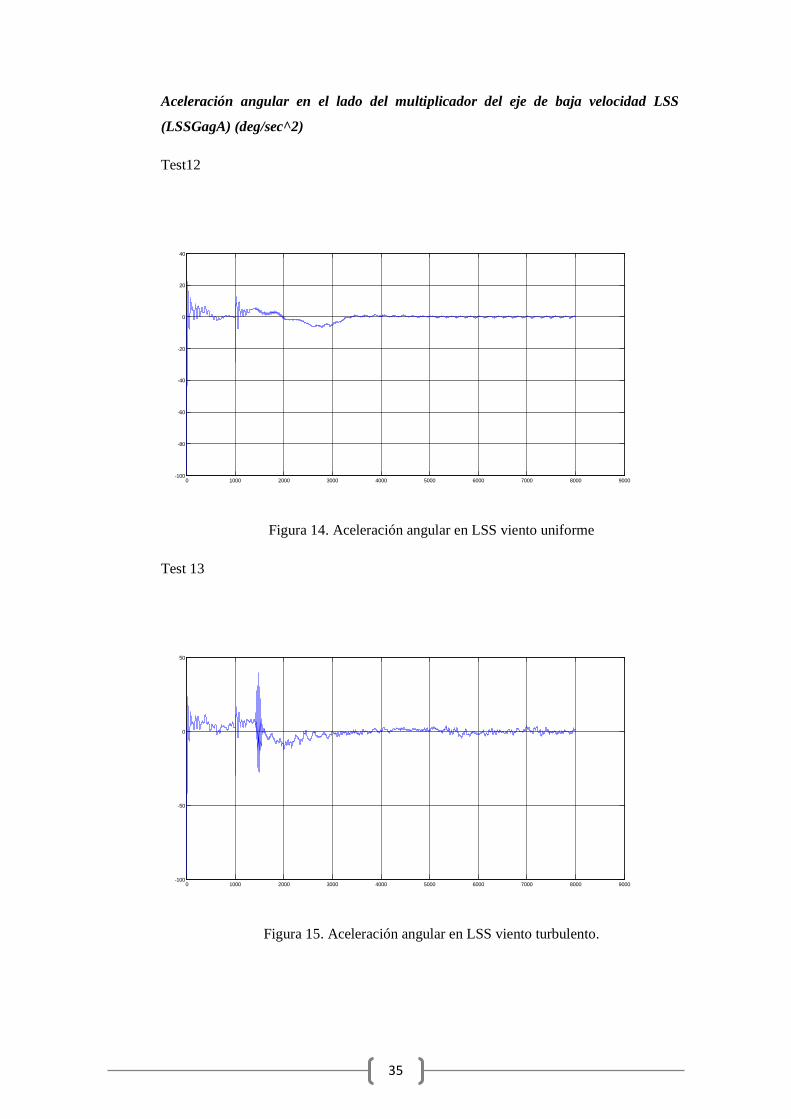
Figura 14. Aceleración angular en LSS viento uniforme
Test 13
Figura 15. Aceleración angular en LSS viento turbulento.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000-100
-80
-60
-40
-20
0
20
40
0 1000 2000 3000 4000 5000 6000 7000 8000 9000-100
-50
0
50
36
La fuerza constante ejercida por el viento uniforme hace que la aceleración vaya
incrementándose a medida que las palas van aumentando su velocidad y cuando estas
han llegado a su valor máximo la aceleración prácticamente es cero ya que su velocidad
final es constante (figura 13) existen dos picos porque pasan por dos cambios de
velocidad pero las dos son uniformes por tanto la aceleración final es cero, en el
segundo caso (figura 14) como es viento turbulento las fuerzas son cambiantes la
aceleración producida para compensar ese nuevo cambio hace que varíe
constantemente.
37
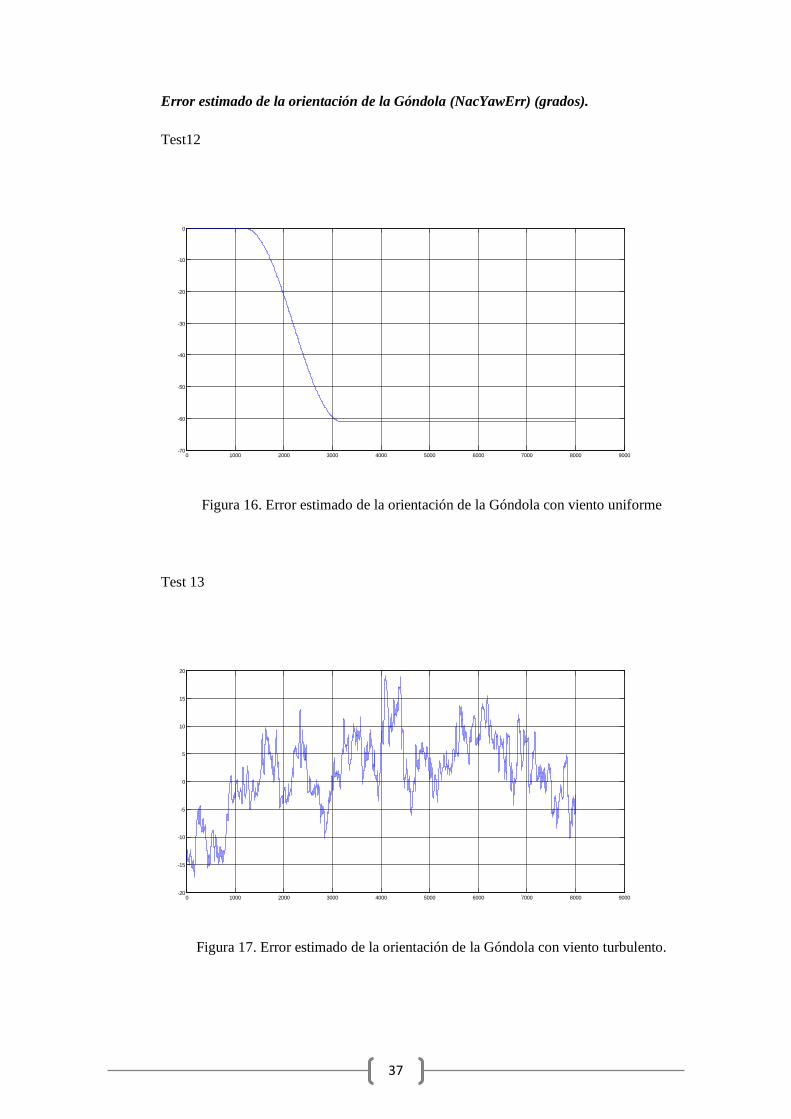
Error estimado de la orientación de la Góndola (NacYawErr) (grados).
Test12
Figura 16. Error estimado de la orientación de la Góndola con viento uniforme
Test 13
Figura 17. Error estimado de la orientación de la Góndola con viento turbulento.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000-70
-60
-50
-40
-30
-20
-10
0
0 1000 2000 3000 4000 5000 6000 7000 8000 9000-20
-15
-10
-5
0
5
10
15
20

38
El error estimado para la orientación de la góndola es la diferencia entre la
referencia (ubicación actual) y el valor de la dirección del viento, por tanto el error
estimado (figura 17) es de valor negativo porque la dirección ejercida por el viento
es contrario a la referencia, pero cuando es turbulento la dirección cambia
constantemente en valores positivos y negativos ya que la góndola trata de estar
siempre en forma perpendicular a la dirección del viento (figura 18).
39
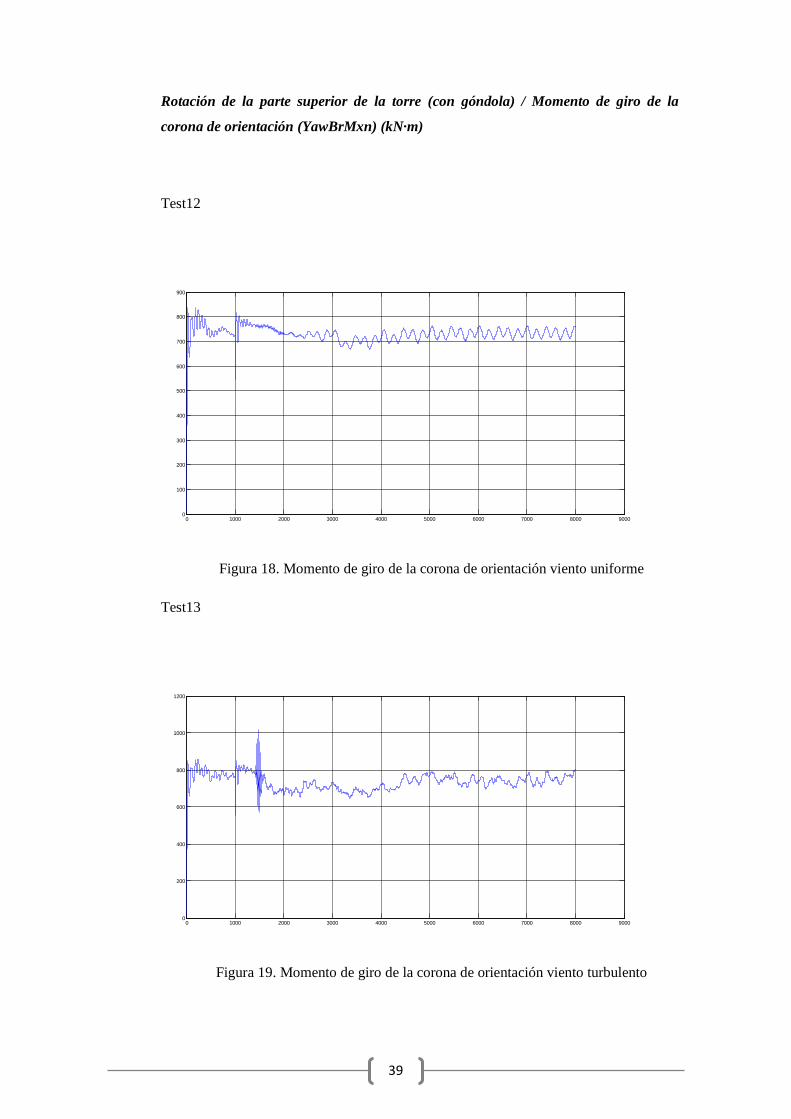
Rotación de la parte superior de la torre (con góndola) / Momento de giro de la
corona de orientación (YawBrMxn) (kN·m)
Test12
Figura 18. Momento de giro de la corona de orientación viento uniforme
Test13
Figura 19. Momento de giro de la corona de orientación viento turbulento
0 1000 2000 3000 4000 5000 6000 7000 8000 90000
100
200
300
400
500
600
700
800
900
0 1000 2000 3000 4000 5000 6000 7000 8000 90000
200
400
600
800
1000
1200

40
La orientación de la corona depende de la dirección del viento, pero el giro del rotor
depende de la fuerza que tenga en ese momento el viento, por tanto esta fuerza produce
un Momento que hace que la góndola completa se mueva horizontalmente de un lado a
otro (figura 21) este movimiento aumenta hasta su valor característico y en un momento
determinado se vuelve oscilatorio y constante, pero cuando cambiamos a un viento
turbulento las fuerzas ejercidas así como la dirección varían en el tiempo y su Momento
variar de acuerdo a estas fuerzas producidas por la variación del viento (figura 22).
41
5. CONCLUSIONES
A lo largo del presente trabajo se analizó los aspectos físicos que rodean al
aerogenerador y su movimiento y se encontró distintas ecuaciones matemáticas que
representaban a cada uno de estos principios físicos para generar un modelo
matemático, llegando a la conclusión después de un exhaustiva investigación
bibliográfica que las ecuaciones a resolver son las Ecuaciones de Navier-Stokes para
obtener resultados de las distintas partes del aerogenerador en cualquier
condición, pero estas ecuaciones (modelo matemático) se deben resolver en
forma numérica, es decir con la ayuda de un ordenador y técnicas CFD (Cálculo
de Dinámica de Fluidos), como es el caso del programa FAST y Simulink de
Matlab este último tiene los algoritmos necesarios para realizar los cálculos
numéricos en la resolución del modelo matemático. El programa FAST es un programa libre del gobierno de EEUU,
Departamento de Energía de la Oficina de Eficiencia Energética y Energía
Renovable (NREL National Renewable Energy Laboratory) que permite obtener
resultados a través del programa Simulink de Matlab, estos resultados son
valores numéricos que se pueden observar en cualquier programa que pueda
dibujar valores en tablas, se puede cambiar varios parámetros entre los que se
encuentran las características físicas del aerogenerador como peso, diámetro de
las palas, etc.
Existe un problema con este programa que el momento que no se
configura los parámetros de salida correctamente genera un error y el programa
deja de ejecutarse, por tanto debe conocerse más a profundidad el programa
como para poder realizar cambios en sus parámetros sin producir un error.
Otro problema es la cantidad de archivos adjuntos que tiene FAST
necesarios para ejecutar la simulación, se debe tener mucha precaución el
momento de cambiar los parámetros en alguno de estos archivos incluidos los
más básicos indicados en los resultados, ya que un simple cambio producirá un
error en la simulación y no se obtendrá ningún resultado.
Para demostrar el funcionamiento de FAST se realizo dos ejemplos con
dos aerogeneradores diferentes y cada uno de ellos variando la forma del viento,
se obtuvo las siguientes conclusiones:
42
Para el ejemplo 1 el viento uniforme provoca fuerzas constantes sobre el
aerogenerador, estas producirán movimiento en el rotor por medio de las palas y
estas generaran movimiento oscilatorios ya que no es un sistema balanceado,
tomando referencia esto vemos que en el Balance, el Momento en la torre y el
Par en LSS llegan a un valor determinado constate pero con oscilaciones propias
de un sistema desbalanceado, incluso al observar la orientación de la góndola
tenemos estas oscilaciones presentes, pero el comportamiento varía cuando
cambiamos a un viento turbulento donde la velocidad y la dirección son siempre
cambiantes y esto hace que el comportamiento del aerogenerador sea variable,
en muchos casos es tan errático que se debería detener el aerogenerador para que
no sufra desperfectos.
Para el ejemplo 2, como en el caso anterior cuando existe viento que
ejerce una fuerza las oscilaciones constantes son producidas por el movimiento
del rotor por el viento uniforme, en el caso de la aceleración, irá en aumento
hasta que llegue a su valor máximo de rotación y en ese momento esta
aceleración será cero porque la velocidad es uniforme, en el caso del error de la
orientación de la góndola se encontrará por la diferencia entre su referencia y su
valor que en ese momento tenga, como el viento es uniforme llega a su dirección
máxima, y el momento de giro de la corona de orientación se producirá por las
fuerzas ejercidas por las palas que se explico anteriormente y por la fuerza
ejercida del viento al cambiar su posición para encontrar su máximo valor que es
en sentido perpendicular, todas estas tienen una oscilación constante. El mismo
aerogenerador pero con viento turbulento se observa que existe variaciones
aleatorias, cambios constantes de velocidad y dirección, y estos deben adaptarse
a estos nuevos cambios y producen movimientos erráticos en la orientación y la
aceleración porque a cada momento tiene que cambiar a una nueva velocidad y
esto hace que haya aceleraciones muy pequeñas hasta que exista un nuevo
cambio, el error producido es más grande ya que sus cambios son constantes
para llegar a una nueva posición, en todas ellas los cambios pasan de un valor a
otro muy rápido, como en el caso anterior hay que analizar la situación y detener
cuando se necesite hacerlo.
43
6. PLANTEAMIENTO DE TRABAJO FUTURO
Las investigaciones que podrían desarrollarse a partir de este trabajo pueden ser:
• Estudio de un cambio de perfiles aerodinámicos en AeroDyn y
geometrías de pala que permitan conocer mejor aún las influencias de
determinados parámetros en la estructura del aerogenerador.
• Comparativa de resultados mediante estudios numéricos de gran
precisión. En este proyecto se ha utilizado los modelos de FAST para
generar resultados con ayuda del programa de desarrollo matemático
SIMULINK de MATLAB. Sin embargo un estudio 3D de la estructura
sometiéndola también a una distribución de cargas generadas por el
viento permitiría observar la respuesta numérica dinámica del sistema,
obteniendo resultados mucho más precisos.
• Muchas de las mejoras pertenecen al campo de la mecánica.
Considerando este tema complejo y relevante, lo más oportuno es que la
optimización en esta área la lleve a cabo un estudiante de ingeniería
mecánica.
• El sistema de control propuesto es básico. No obstante, se pueden
realizar estudios de algoritmos de control como control experto, óptimo,
robusto, adaptativo, neuronal, o la variación de ellos
44
7. REFERENCIAS BIBLIOGRÁFICAS
Adsuar, J. C. (2006). Principio de Vuelo. En J. C. Adsuar, Principio de Vuelo (págs. 43 - 44). Madrid: Thomson Paraninfo.
Anaya-Lara, O., Jenkins, N., Ekanayake, J., Cartwright, P., & Hughes, M. (2009). WIND ENERGY GENERATION Modelling an Control. West Sussex: John Wiley & Sons. Ltd.
BECHRAKIS, D., & DEANE, J. (2004). Wind Resourse Assessment of and Area Using Short Term Data Correlated to a Long Term Data Set. Solar Energy, Volumen 76, Elsevier Ltd. , 725-732.
BERRIOS, R., & CERROLAZA, M. (1996). Tridimensional Numerical Model for the Wind Energy Autonomy Evaluation Over Some Isolated Venezuela Coast Regions. Proceeding of the 1996 3rd International Congress on Numerical , 87-94.
Bossanyi, E. (2003). GH BLADED VERSION 3.6 USER MANUAL . Garrad Hassan asn Partners.
Bossanyi, E. A. (December de 2003). GH Bladed Theory Manual. Bristol, United Kingdom: Garrad Hassan and Partners.
Buhl, J. M. (29 de April de 2002). NWTC Design Ccodes (Modes) .
BUHL, J. M., WRIGHT, A. D., & PIERCE, K. G. (2001). The 20th ASME Wind Energy Symposium Reno, Nevada, January 8-11, 2001. NREL/CP-500-28848. FAST_AD Code Verificaction: A Comparison to ADAMS. Reno, Nevada: National Renewable Energy Laboratory.
Buhl, J. M., Wright, A., & Pierce, K. (8 - 11 de January de 2001). The 20th ASME Wind Energy Symposium, Reno, Nevada. FAST_AD Code Verification: A Comparison to ADAMS . Golden, Colorado, USA: National Renewable Energy Laboratory.
Buhl, Jr. M.L. (5 de April de 2002). Installing NWTC Design Codes on PCs Runnign Windows NT®. Golden, Colorado, USA: National Renewable Energy Laboratory.
Center, N. W. (18 de March de 2010). NWTC Design Codes. Recuperado el 2 de August de 2011, de http://wind.nrel.gov/designcodes/preprocessors/iecwind/
Crespo Martínez, A. (2006). Mecánica de Fluidos. Madrid: INDUSTRIALES Paraninfo.
ed., I. 6.-1. (2001). Wind Turbine Generator Systems.
Energía Renovables: ventajas y desentajas de la energía eólica. (2006). Recuperado el 2011, de http://www.revistafuturos.info/futuros14/energia_eolica.htm
F1 Revolution, una mirada diferente. (19 de February de 2009). Recuperado el 20 de August de 2011, de http://f1revolution.com/2009/02/capitulo-5-fundamentos-basicos-de-aerodinamica/
GASTÓN, M. (16 de April de 2008). Wind resources map of Spain at mesoscale. Methodology and validation. Recuperado el 2 de August de 2011, de http://secure.cener.com/documentos/wind-resources-map-mesoscale-PaperEwec08.pdf
45
Hewitt, P. G. (2004). Física Conceptual. En P. G. Hewitt, Física Conceptual (págs. 276 - 281). Addison Wesley.
IMAMURA, H., TSUMAMUNA, T., & KUROKAWA, J. (2004). Study on the Wind Measurements and Performance Evaluation of a WTGS in Complex Terrain. Japan Society of Mechanical Engineers, Volumen 70, Tokyo, Japan , 1230-1236.
Jason M. Jonkman, M. L. (August de 2005). FAST User’s Guide . 1617 Cole Boulevard, Golden, Colorado 80401-3393, Colorado, USA.
JONKMAN, B. J. (September de 2009). TurbSim User's Guide. Golden, Colorado: National Renewable Energy Laboratory.
Jonkman, B. J., & Buhl, J. M. (26 de May de 2005). TurbSim User's Guide. Recuperado el 11 de August de 2005, de http://wind.nrel.gov/designcodes/preprocessors/turbsim/turbsim.pdf
Jonkman, J. (December de 2003). Modeling of the UAE Wind Turbine for Refinement of FAST_AD . 1617 Cole Boulevard Golden, Colorado, USA.
Jonkman, J. M., & Buhl, J. M. (2004). New Development's for the NWTC's FAST Aerroelastic HAWT Simulator. The 23rd ASME Wind Energy Symposium, Reno, Nevada January 5-8, 2004 . Golden, Colorado, USA: National Renewable Energy Laboratory.
Kane, J. W., & Sterheim, M. M. (2007). Física. Barcelona: REVERTÉ.
KOSE, R., ARIF, M., & ERBUS, O. (2004). The Analysis of Wind Data and Wind Energy Potencial in Kutaya, Turkey. Renowable and Sustainable Energy Reviews, Volumen 8 , 277-288.
Laino, D. (12 de May de 2000). Recuperado el 9 de July de 2002, de hhtp://wind.nrel.gov/designcodes/preprocessors/windmaker/
Laino, D. (19 de June de 2001). Recuperado el 9 de July de 2011, de http://wind.nrel.gov/designcodes/preprocessors/iecwind/
LAINO, D. J., & CRAIG HANSEN, A. (06 de September de 2001). AeroDyn Interface for ADAMS®. USER'S GUIDE to the Computer Software Routines . Salta Lake City, Utah: National Renewable Energy Laboratory.
Laino, D. J., & Craig Hasen, A. (06 de Sep de 2001). USER'S GUIDE to the Computer Software Routines AeroDyn Interface for ADAMS®. Salt Lake City, Utah, USA: National Renewable Energy Laboratory - Windward Engineering.
LAINO, D. J., & HANSEN, A. C. (August de 2001). User's Guide to the Wind Turbine Dynamics Computer Software AeroDyn . Salt Lake City, Utah: Windward Engineering, LC.
Laino, David J.; Hansen, A. Craig. (24 de August de 2001). AERODYN USER'S GUIDE to the Wind Turbine Aerodynamics Computer Software . Salt Lake City, Utah, USA: Utah: Windward Engineering, LC.
Larsen, T. H. (December de 2007). How 2 HAWC2, the user's manual. Roskilde, Denmark: Risø National Laboratory, Technical University of Denmark.
Manjock, A. (26 de May de 2005). Evaluation Report: Design Codes FAST and ADAMS® for Load Calculations of Onshore Wind Turbines . Humburg, Germany: Germanischer Lloyd WindEnergie GmbH.

46
MANJOCK, A. (26 de May de 2005). Evaluation Report: Design Codes FAST and ADAMS® for Load Calculations of Onshore Wind Turbines. Report Nº. 72042 . Humburg, Germany: Germanischer Lloyd WindEnergie GmbH.
Moriarty, P. J., & Butterfield, S. B. (2009). Wind Turbine Modeling Overview for Control Engineers. 6.
Munteanu, I., Iuliana Bratcu, A., Cutululis, A., & Ceanga, E. (2008). Optimal Control of Wind Energy Systems. London: Springer-Verlag London Limited.
MURAKAMI, S., MOCHIDU, A., & KATO, S. (2003). Development of Local Area Wind Prediction System for Selecting Suitable Site for Windmill. Journal of Wind Engineering and Industrial Aerodynamics, Volumen 91, Elsevier Ltd. , 1759-1776.
OYARZO PEREZ, H. (2008). Modelización matemática para evaluar energías para sistemas eólicos e híbridos eólico-diesel , 19-20. Madrid.
Øye, S. (1991). Simulations of Loads on a Wind Turbine including Turbulence. Stockholm, Sweden: IEA Meeting.
POLLABAZER, R. (1995). Evaluation of Wind-Generator Potentiality. Solar Energy. Volumen 55, Pergamon Press Inc. Tarrytowm. NY. USA , 49-59.
Rodríguez Amenedo, J. L., Burgos Díaz, J. C., & Arnalte Gómez, S. (2003). Sistemas Eólicos de Producción de Energía Eléctrica. Madrid: Rueda S.L.
SÁNCHEZ, A., & VIEDMA, A. (2003). Energía Eólica. España: Editorial Horacio Escarabajal.
Sanchis Sabater, A. (1999). Fundamentos Físicos para Ingenieros. En A. Sanchis Sabater, Fundamentos Físicos para Ingenieros (págs. 368 - 370). Valencia: REPROVAL S. L.
TAYLOR, P., & WALMSLEY, J. (1986). Guidelines and Models for Estimating Wind Speed at WECS in Complex Terrain. New York, NY, USA: Pergamon Press.
van Dam, J., Link, M., Meadors, M., & Bianchi, J. (June de 2002). Wind Turbine Generator System Safety and Function Test. Golden, Colorado, USA: National Renewable Energy Laboratory.
Wilson, R. E., Walker, S. N., & Heh, P. (May de 1999). Technical and User's Manual for the FAST_AD Advanced Dynamics Code . Oregon, USA: Oregon State University.
WILSON, R. E., WALKER, S. N., & HEH, P. (May de 1999). Technical and User's Manual for the FAST_AD Advanced Dynamics Code. Oregon: OSU/NREL Report 99-01. Corvallis.
YANG, Z., & XUE, H. (2004). Study on the Estimation of Wind Energy over Complex Terrain. Science Press, Begin, 100085, China.Volumen 25 , 744-749.
47
ANEXO
48
PROCEDIMIENTO DE USO DEL PROGRAMA FAST
Este programa se puede ejecutar de dos formas: bajo entorno Windows o bajo el entorno Matlab, a continuación se procederá a explicar cada una de ellas.
ENTORNO WINDOWS.
Introducción
Instalar y ejecutar las aplicaciones de consola como es el código diseñado por National Wind Technology Center (NWTC) es muy diferente a las aplicaciones normales de Windows de 32 o 64 bits. Por lo general, el usuario tendrá que instalar los códigos de tal forma que se ejecuta desde una ventana de comandos y de cualquier carpeta. Este documento será una guía de la instalación de los códigos para el sistema operativo Windows 7®. En este tutorial el código que será instalado es FAST, pero estas instrucciones deben trabajar para cualquiera de los otros códigos que distribuye NWTC.
Inicialmente debe descargar el archivo de un código del servidor web http://wind.nrel.gov/designcodes/. El archivo almacenado debe tener un nombre como FAST_v70001a-bjj.exe. Crear una carpeta llamada FAST en algún lugar de la unidad C y poner los archivos entro de ella. Para este ejemplo, asumiremos que el nombre de la carpeta es C:\DesignCodes\Fast\. Puede hacer doble clic en el archivo desde el Explorador de Windows o ingresar FAST_v70001a-bjj en la ruta de archivos de la carpeta Fast como directorio actual. Esto creará algunos archivos y carpetas. Incluido en la carpeta Fast estará un archivo llamado Fast.exe. Este es el archivo ejecutable para FAST.
Configurar una carpeta Batch para los archivos del programa FAST.
Esto es algo que necesita hacer sólo una vez. Después de que haya hecho para este código, no será necesario repetir el proceso para otros códigos. Crear una carpeta en algún lugar de su sistema de archivos. Este tutorial se utiliza C:\Batch. Ahora, agregue la carpeta a la ruta de búsqueda, debe tener privilegios de administrador en el PC para hacer esto. En Windows 7, haga clic en Inicio, Panel de control, Sistema y Seguridad, Sistema, Configuración avanzada del sistema. En la pestaña Opciones Avanzadas dar un clic sobre Variables de entorno en la parte inferior derecha del cuadro de dialogo. Esto abrirá un cuadro de dialogo con dos ventanas una de variables de usuario y otra de variables del sistema. Seleccione Ruta de la lista Variables del sistema y haga clic en Editar.
La palabra Path se mostrará en el cuadro Nombre de variable y la ruta de búsqueda actual se situará por debajo en el cuadro Valor de variable. Escriba "C:\Batch," al inicio de la ruta en el cuadro Valor de variable. No olvide poner en el separador punto y coma. Haga clic en el botón Aceptar para cerrar todas las ventanas que usa para cambiar la ruta y poner el cambio en vigor.
El cambio que acaba de hacer será permanente y se aplicará a todas los nuevos comandos de Windows que usted abre. No es necesario reiniciar el PC. Las rutas de búsqueda para Windows que ya estaban abiertas cuando se hace el cambio no se actualizan, por lo que no se puede utilizar para ejecutar el código.

49
Crear un archivo en la carpeta Batch
El siguiente paso es crear un archivo para traer el código. El uso de un editor de texto nos ayudará a crear un archivo llamado fast.bat en la carpeta C:\Batch. Sólo es necesaria una línea en el archivo fast.bat. Su contenido debe ser algo similar a esto:
C:\DesignCodes\Fast\Fast.exe% *
Esto le dice al sistema operativo para encontrar un archivo ejecutable llamado Fast.exe en la carpeta Fast. El %* indica al archivo para pasar de argumento en la línea de comandos para Fast.exe.
Invocando el Código
Para ejecutar un código, necesita inicialmente copiar los tres archivos que se muestran a continuación Test##.fst, Test##.cru y Test##_AD.ipt (##: Número de archivo a ser ejecutado, estos archivos se encuentran en la carpeta CertTest.) en la carpeta donde se encuentra Fast.exe
Se escribe la siguiente línea de código:
Fast Test##.fst
Recomendación: El momento de ejecutar Fast.exe con el archivo a analizar, si existe algún error el programa va indicando en pantalla que error se produce, principalmente los archivos adicionales que necesita para ejecutar, el momento que suceda esto, se debe buscar el archivo y copiarlo en la carpeta donde se encuentra FAST.exe, esto puede suceder varias veces, por eso es preferible crear una carpeta diferente donde se vaya copiando todos los archivos que necesita para realizar una correcta ejecución.
Cuando el archivo se ejecuta correctamente debe salir la siguiente ventana (figura 1) y dentro de la carpeta existe un archivo con nombre test##.out donde se encuentran valores numéricos para graficar en cualquier programa que permita su visualización como por ejemplo Excel.
Figura 20. Ejecución correcta
50
Entorno SIMULINK
Descripción General
SIMULINK es una herramienta de simulación popular para el diseño de controles que vende Mathworks, Inc., en un solo paquete con MATLAB.
Simulink tiene la capacidad de incorporar rutinas personalizadas Fortran en un bloque llamado S-function. Las subrutinas de FAST han sido unidas con una subrutina estándar de MATLAB con el fin de utilizar las ecuaciones de movimiento de FAST en un S-función que se puede incorporar en un modelo Simulink. Esto introduce una gran flexibilidad en los controles de turbina de viento implementados durante la simulación.
Los módulos control del generador de par, control de orientación de la góndola, y los módulos de control de inclinación pueden ser diseñados en el entorno de Simulink y simular mientras hacen uso de las ecuaciones completas de movimiento no lineales aeroelásticas de la turbina de viento disponible en FAST.
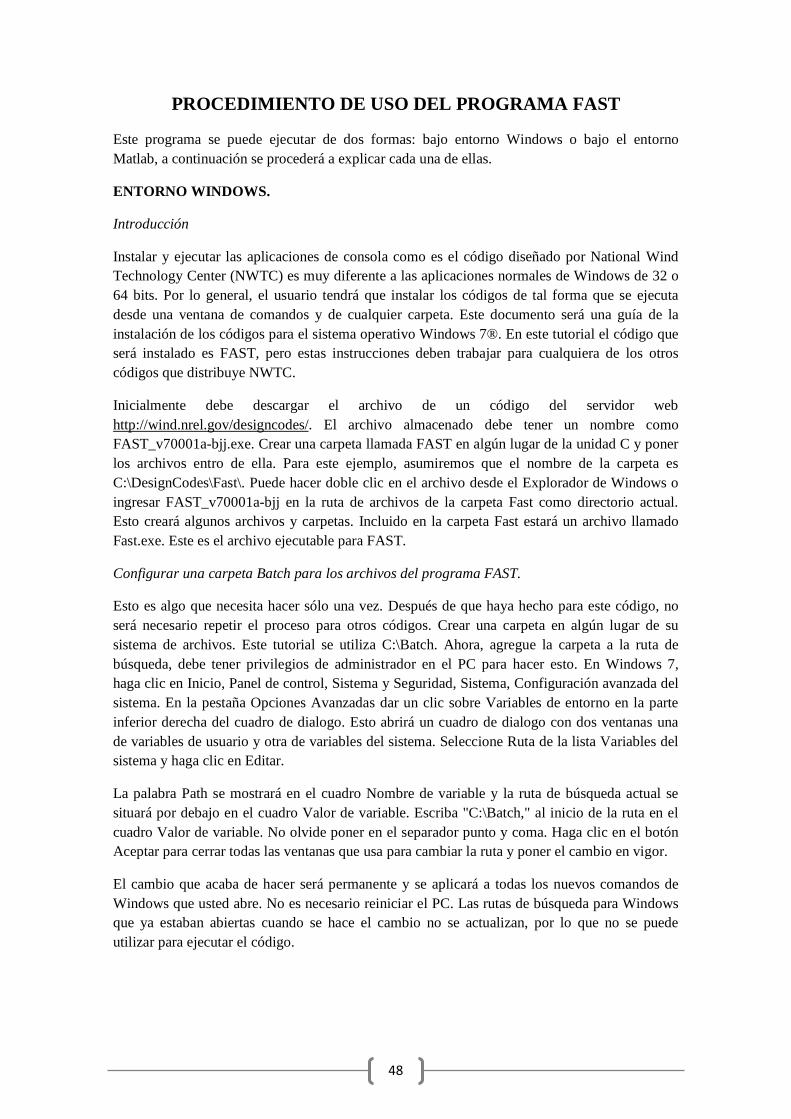
El bloque de la turbina de viento, como se muestra en la Figura 2, contiene el bloque S-Function con las ecuaciones de movimiento de FAST. También contiene los bloques que integran los grados de libertas (DOF por sus siglas en inglés) como el desplazamiento, velocidad y aceleración. Así, las ecuaciones de movimiento son formuladas en la S-Function de FAST, pero resuelve usando los solvers de Simulink.
Figura 21. S-Function bloque turbina de viento.
La interfaz entre FAST y Simulink es muy similar a la interfaz desarrollada para el código Dinámica Simbólica (SymDyn), que es una herramienta de control orientada a análisis HAWT desarrollado por investigadores del NREL. El modelo estructural de FAST, sin embargo, es de mayor fidelidad que la de SymDyn.
Primeros pasos
Para construir un modelo Simulink que usa turbina de viento dinámica en FAST en S-Function, usted debe comprar el software comercial MATLAB con el paquete adicional de Simulink. MATLAB está disponible en The Mathworks, Inc. (http://www.mathworks.com/). El conocimiento práctico de desarrollo de modelos de Simulink es también esencial.
51
El archivo FAST contiene varios archivos que son pertinentes a la interfaz FAST con Simulink, como se describe a continuación:
FAST_SFunc.mex32 La compilación S-Función de FAST tiene un vínculo dinámico librería (DLL) de Matlab llamada mexw32. Esta DLL contiene las rutinas dinámicas estructurales de FAST, las rutinas de aerodinámica de Aerodyn, y las interfaces con Simulink.
Simsetup.m Este archivo de MATLAB solicita al usuario el nombre del archivo a ser analizado por FAST y llama a Read_FAST_Input.m, que inicializa las variables del modelo. Debe ser llamado desde el espacio de trabajo MATLAB antes de ejecutar un modelo de Simulink con la S-Function de FAST.
Read_FAST_Input.m Este archivo de MATLAB es llamado por Simsetup.m y lee los archivos de entrada FAST para inicializar los parámetros de un modelo Simulink. Los usuarios no deberían modificar este archivo.
OpenLoop.mdl Un ejemplo de modelo Simulink que contiene el bloque de S-Function FAST, estos bloques que integran los grados de libertad (DOFs) y los bloques de entrada de lazo abierto constante.
Test01_SIG.mdl U ejemplo de un modelo Simulink que contiene el bloque S-Function de FAST, los bloques que integran los grados de libertad (DOFs), y el simple modelo de generador de inducción para FAST con certificación prueba # 01 implementado en Simulink.
Para ejecutar un modelo de FAST en Simulink se debe usar solo plataformas Windows y Matlab de 32 bits, ya que en 64 bits da errores de versión por la librería DLL.
1) Se crea una carpeta donde se realizará las simulaciones 2) Se copia los archivos Simsetup.m, Read_FAST_Input.m, FAST_SFunc.mex32 y
OpenLoop.mdl que se encuentran dentro de la carpeta FAST (lea apartado ENTORNO WINDOWS)
3) Copiar todos los archivos que se encuentras dentro de la carpeta CertTest en la carpeta generada para la simulación.
4) Se ejecuta Matlab, luego se busca en la ventana Directorio Actual (Current Directory) la carpeta donde se encuentran los archivos anteriormente copiados.
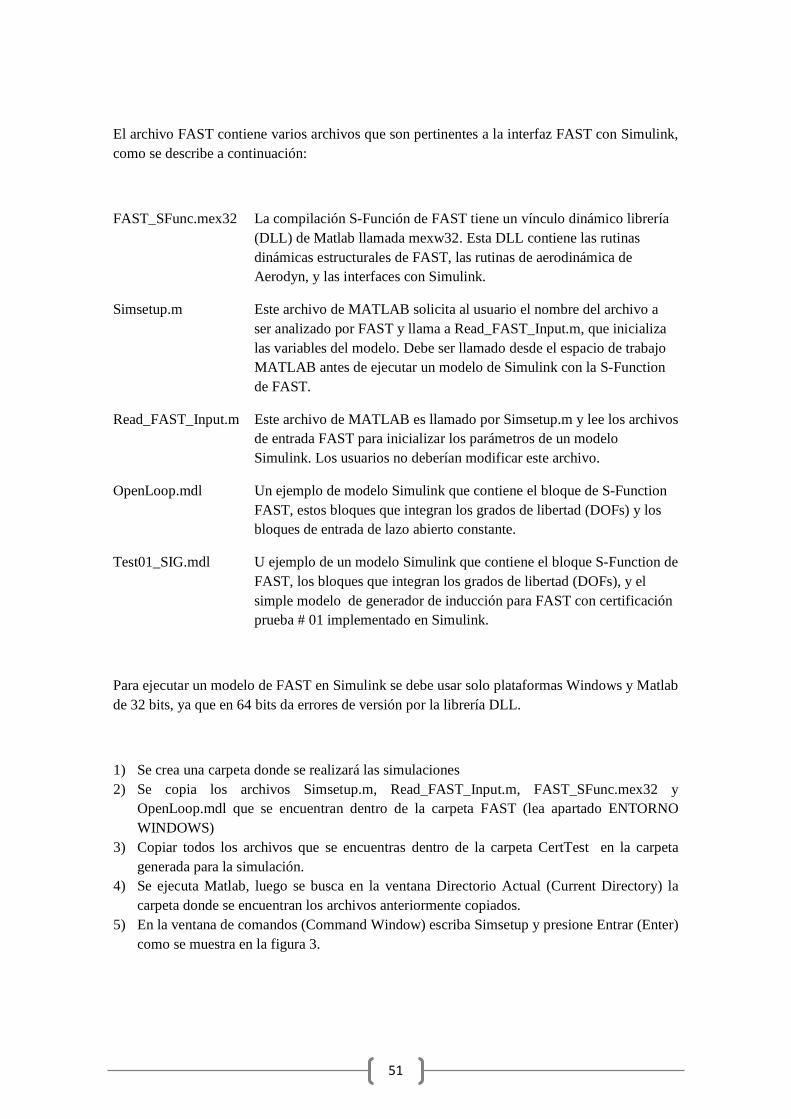
5) En la ventana de comandos (Command Window) escriba Simsetup y presione Entrar (Enter) como se muestra en la figura 3.
52
Figura 22. Ejecución Simsetup
6) El siguiente paso es escribir el archivo a ser analizado Test##.fst 7) Si es correcta la ejecución tendrá una ventana como se muestra en la figura 4.
Figura 23. Ejecución archivo Test##.fst
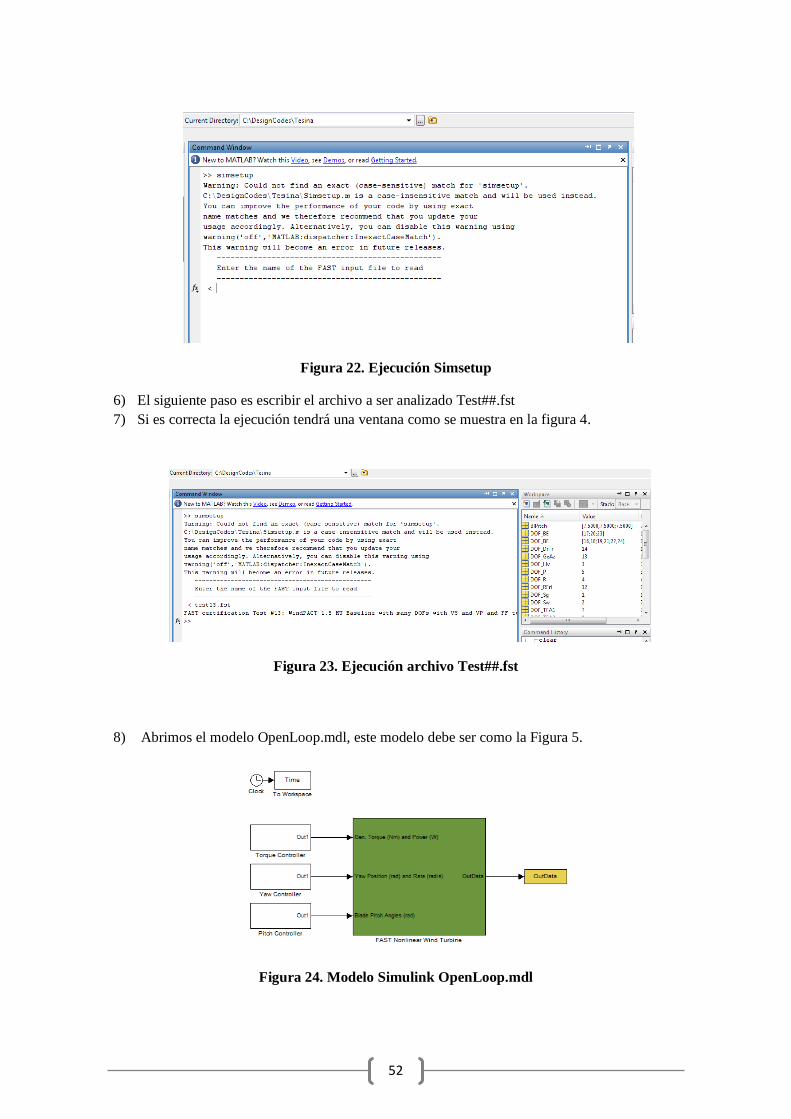
8) Abrimos el modelo OpenLoop.mdl, este modelo debe ser como la Figura 5.
Figura 24. Modelo Simulink OpenLoop.mdl
53
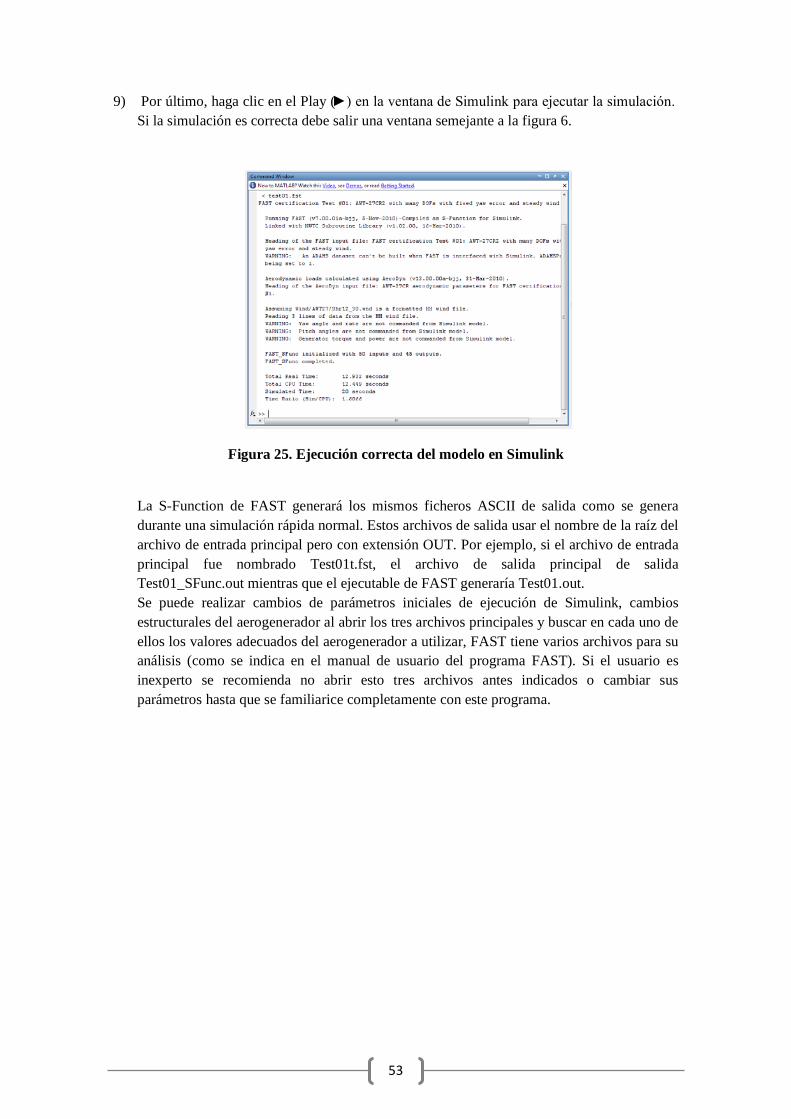
9) Por último, haga clic en el Play (►) en la ventana de Simulink para ejecutar la simulación. Si la simulación es correcta debe salir una ventana semejante a la figura 6.
Figura 25. Ejecución correcta del modelo en Simulink
La S-Function de FAST generará los mismos ficheros ASCII de salida como se genera durante una simulación rápida normal. Estos archivos de salida usar el nombre de la raíz del archivo de entrada principal pero con extensión OUT. Por ejemplo, si el archivo de entrada principal fue nombrado Test01t.fst, el archivo de salida principal de salida Test01_SFunc.out mientras que el ejecutable de FAST generaría Test01.out. Se puede realizar cambios de parámetros iniciales de ejecución de Simulink, cambios estructurales del aerogenerador al abrir los tres archivos principales y buscar en cada uno de ellos los valores adecuados del aerogenerador a utilizar, FAST tiene varios archivos para su análisis (como se indica en el manual de usuario del programa FAST). Si el usuario es inexperto se recomienda no abrir esto tres archivos antes indicados o cambiar sus parámetros hasta que se familiarice completamente con este programa.