Embed Size (px)
Citation preview

Življenje je nenadoma postalo enostavno! S SIMATIC WinCC in WinCC/Web Navi-gator lahko porabite manj časa na cesti in več za boljše poslovanje. Odločate se naosnovi trenutno veljavnih podatkov. Z uporabo Microsoft Thin-client tehnologijelahko upravljate in nadzirate vaš avtomatiziran proces preko Interneta oz. Intraneta.Uporabljate lahko različne informacijske platforme: namizne in prenosne.
SIMATIC HMI; vse kar potrebujete za nadzor in upravljanje.
Ustvarite si lastne IT perspektive
Vizualizacijsko programsko orodje
za pristop do podatkov preko svetovnega spleta
Več informacij najdete na spletni strani http://www.siemens.com/wincc-it
AVTOMATIKA 326/2002
Pozdravljeni,
čeprav je revija malo bolj poletno obarvana od ostal-ih, se nam zdi zanimiva in upam da tudi vam.Velikoaktualnih novičk z različnih področij je navsezadnjepomembna prvina te revije.Mogoče boste opazili, da smo se tokrat robotike lotilile na malo drugačen način, saj snovalci robotskegažogobrc-teama razlagajo probleme in prijeme v temšportu. Seveda se vsi ti prijemi lahko uporabijo tudi
v industriji. Kako so se tega lotili v podjetju FDS Reserch si lahko preberete včlaku gospoda Trdiča, ki govori o problematiki optične kontrole izdelkov natekočem traku. Sistemi za avtomatsko optično kontrolo podjetja FDS Researchso namreč svetovno znani, zato so njihovi nasveti upoštevanja vredni."Mala šola programiranja Cybro" ni le ”recept za programiranje nekega krmil-nika”. Tudi CyBro ni kar tako, saj je plod domačega razvoja, narejen na osnoviVCP jedr, kar pa pomeni standardizirano programiranje. Razvojna programs-ka oprema CyPro, ki se uporablja za programiranje malega krmilnika je nam-reč skladna s standardom IEC-61133-3. Torej. Če se naučite programirati CyBro,boste načeloma obvladali vse krmilnike, ki se jih programira po tem standar-du, saj se ga drži vse več proizvajalcev.Na izraz ”Thin Client” smo naleteli že marsikdaj, predvsem v povezavi s sistemiza nadzor in vodenje. Kaj je "Thin Client", kaj prinaša, kakšne so rešitve inzadrege pa si preberite v članku, ki so ga pripravili strokovnjaki iz Siemensa.Problematika merjenja prahu v zraku in kvantifikacija številčnega rezultataje sicer senzorika, a tokrat kot tudi vse drugo, na rahlo drugačen način. Polegkonkretnega inštrumentarija govori članek dr. Holobarja tudi o vrstah prahuin njihovih škodljivostih ter načinih merjenja.
Vaš urednik,
Založba: HYDRA & Co. d.o.o.
Sostrska cesta 43C, 1000 Ljubljanae-mail: [email protected]/fax: 01/5428-570
Glavni urednik: Branko Badrljica
tel.: 031/460-871 [email protected]
Naslov za pošiljanje materialov in dopisov:Hydra & Co. d.o.o.
Revija AVTOMATIKAP.P. 5807, 1261 Ljubljanae-mail: [email protected]
Grafična oprema in filmi:Tiskarna MA-TISK d.d..
Maribor
Tisk: MA-TISK d.d.Maribor
Cena 1.000 SIT, za celoletno naročnino prizna-vamo 10% popust, poštnina za SLO in DDV stavključena v ceno. Vse pravice pridržane. Ponatiscelote ali posameznih delov je dovoljen samo zdovoljenjem založnika in vedno z navedbo vira.Nepodpisane fotografije so iz fotoarhiva ured-
ništva revije Avtomatika. Revija izhaja 11-krat letno,julij/avgust je dvojna številka.
Revija za avtomatizacijo procesov, profesionalno elektroniko in telekomunikacije
SEZNAMSEZNAM OGLAŠEVALCEVOGLAŠEVALCEV
AKA ..................................................... 30ALMA ELECTRONIC ......................... 51AROBA ............................................... 47ALKATRON ......................................... 44BELMET ............................................... 45CADCAM ........................................... 41DU-MA ............................................... 43ECHO .................................................. 46ELBACOMP ........................................ 8EVJ ELEKTROPROM ........................... 46EXOR - E-PLAN ................................... 34FBS ELEKTRONIK .............................. 19FDS RESEARCH ................................. 37
FIBERNET ............................................ 36FLEXTRONICS .................................... 13HTE-LJUBLJANA ................................. 11INEA .................................................. 39KEVIK .................................................. 19KOPS .................................................. 25LEOSS ................................................ 22LINGVA .............................................. 30LJUBLJANSKI SEJEM ......................... 52LPKF ..................................................... 51LUMIC ................................................. 31MAGNETI LJUBLJANA ..................... 31METRONIK ......................................... 7MIEL ELEKTRONIKA ......................... 9MOBISUX ........................................... 37
MOTOMAN ROBOTEC ................... 10NATIONAL INSTRUMENTS ............. 18NETSI.NET ......................................... 3POINT ELECTRONIC ......................... 31PROMIKRA ......................................... 16PS ........................................................ 18RAGA .................................................. 6RITTAL ............................................. 14ROBOTINA ................................... 27, 30SIEMENS ........................................... 2SILON ................................................. 12SLOTECH ........................................... 3SYNATEC ............................................ 15TIPTEH ................................................. 18TSP ELEKTRONIKA ............................ 22

INFORMACIJE/EXPRESS NOVICE/DOGODKIUvodnik in kolofon ............................................................................... 3Kazalo vsebine ..................................................................................... 4Digitalne snemalne naprave ............................................................... 4Strokovnjaki svetujejo ........................................................................... 5SODOBNA ELEKTRONIKA 2002 ..................................................... 6GE Fanuc predstavlja 100BASE-TX Ethernet vmesnik za serijo i-CNCjev ............................................................................... 7Novi CIMPLICITY® PalmView Omogoča Real-Time, mobilni dostop do avtomatizacije in proizvodnih sistemov ............ 7Novi ventilatorski krmilniki .................................................................. 8Microchip izdal "Technical Library CD ROM 2002" ...................... 9Novi I2C serijski EEPROMi ................................................................. 9Flextronics odprl vrata ......................................................................... 12GE Fanucov redundantni napajalnik za krmilnike serije 90™-30 ....................................................................... 15Pomnilniške mreže in mrežno upravljanje ......................................... 17Izšla nova verzija centralne historizacijske baze IndustrialSQL 8.0 ....................................................................... 17PX2000-107 ......................................................................................... 19
RAČUNALNIŠKA OPREMANove multifunkcijske enote Brother .................................................... 10
48AVTOMATIZACIJA INDUSTRIJSKIH PROCESOVAvtomatizacija magnetnih meritev paličastih magnetov .................. 31Sistemi za avtomatsko optično kontrolo izdelkov ............................. 35Kriteriji hitrega strojnega vida na osnovi barvne segmentacije ...... 38
OPREMA ZA PROCESNO AVTOMATIZACIJOXSystem - celovita rešitev za avtomatizacijo ..................................... 14Thin Client - kaj se skriva za tem ........................................................ 20Šola programiranja krmilnika CyBro .................................................. 23
MERILNA TEHNIKAFotografski IR termometer PhotoTemp™ MX6 ................................... 16Zmogljivi prenosni instrument Wens 700S ........................................ 19MERJENJE PRAHU ............................................................................... 43
Zadnja novicaDIGITALNE SNEMALNE NAPRAVEInformacije: Miran Mencin, Iskra PRINS, d.d., LjubljanaPomemben segment varovanja oseb in premoženja, ki je pre-poznaven po strmem vzponu v zadnjem času, predstavljajovideo nadzorni sistemi. V Iskra PRINSU želimo v okviru podro-čja sistemov za telekomunikacije, zaščite in nadzora pribli-žati uporabnikom sodobne koncepte in nove tehnologije vi-deo nadzornih sistemov in pripadajočih naprav. Zadnje gene-racije naprav so zasnovane na ideji kakovostnega digitalne-ga zajemanja slikovnih podatkov, njihovega arhiviranja natrde diske ter povezovanja v večje sisteme. Opazna je tudiprednost, ki se kaže v obliki možnega daljinskega prenosain upravljanja na daljavo. Visoka profesionalnost in združljivost z mednarodnimi stan-dardi za podatkovne prenose in kompresijo omogoča tovrst-nim snemalnim napravam vgradnjo v zahtevnejša okolja. Zaradi različnih pristopov nadzora in specifičnosti varovanja,se naprave med seboj razlikujejo, čeprav so na prvi pogledidentične. Programska oprema se razlikuje in je prilagojenabančnim ustanovam, industriji, bencinskim črpalkam ali igral-nicam… Na lokalnem nivoju se lahko naprave povezujejo vLAN omrežja, pri prenosih na velike razdalje pa v javna tele-komunikacijska ISDN omrežja.
DALLMEIER DMS-180/II je digitalna snemalna naprava zashranjevanje in pregled slik video nadzornih sistemov. Slike seshranjujejo na trdi disk. Glede na zahtevano dolžino arhiva,se določi velikost diska. Končno število kamer priključenih naeno napravo je 18. Prednost naprave je v tem, da ne obreme-njuje uporabnika z zahtevnim rokovanjem. Dostop do želeneinformacije s pomočjo virtualne tipkovnice in miške je enostav-nejši in hitrejši. Vse kasnejše razširitve sistema se izvršijo zgoljs preprosto posodobitvijo programske opreme.
Naprava omogoča zaznavo gibanja z nastavitvijo polj inobčutljivosti. Samodejno prepoznava izpad video signala.Tedenski urnik za vsak kamerin vhod je individualno nastav-ljiv. Arhiviranje posameznih slik na disku je v Wavelet forma-tu. Shranjevanje slik je možno na disketo, CD rom, JAZ-pogon,MOD-rekorder ali HDD. Vse nastavitve sistema se lahko shra-nijo na disketo, kar poenostavlja servisiranje in vzdrževanje.
Ko gre za vašo varnost, se ne zanašajte na srečo - zaupajtedigitalnemu očesu, ki vam ga ponujamo v sodelovanju z Dall-meier electronic. Pokličite 01/ 4 769 831, www.iskraprins.si
KAZALO VSEBINE

AVTOMATIKA 526/2002
Tomaž Lasiè , univ. dipl. inž. rac., vodja segmenta fleksibilne avto-matizacije v podjetju ABB d.o.o. , Tel: (01) 58-75-480. Svetuje s podrocja robotike, frekvencnnih pretvornikov in instru-mentacije. Vprašanja lahko pošljete na elektronski naslov:[email protected]
Iztok Pirnat, univ. dipl. inž., vodja Avtomatske Identifikacije,EMA d.o.o., tel.: 03 428 48 00Strokovnjak za oznacevanje izdelkov, materialov in transportnihenot s crtno kodo in RFID tagi. Vodenje projektov s podrocja ozna-cevanja in sledljivosti v proizvodnji ter brezžicnih komunikacij zmobilnimi terminali v skladišcih.Info na tel.: 03 428 48 34 ali e-mil: [email protected]
AVTOMATSKA IDENTIFIKACIJA - SLEDLJIVOST
dr. Francelj Trdiè , FDS Research, Computer Vision Group, tel. 01/589-75-81, e-pošta: [email protected]. Je vrhunski strokovnjak na podrocju racunalniškega vida in direk-tor mednarodno priznanega podjetja. Svetuje pri uvajanju in inte-graciji sistemov racunalniškega vida (tudi termovizije) v industrij-ske procese. Poklicete ga lahko na telefon 01/589-75-81 ali pošljete vprašanjepo elektronski pošti.
dr. Saša Sokoliæ , univ. dipl. inž., direktor marketinga in prodaje,Metronik d.o.o. , tel. 01/514-08-14e-pošta: [email protected] specialist za sisteme za upravljanje in nadzor (SCADA sistemi- programska oprema). Poklicete lahko vsak torek med 10. in 12.uro ali pošljete vprašanje po e-pošti.
mag. Janez Žmuc , univ. dipl. inž., teh. direktor, Metronik d.o.o. ,tel. 01/514-08-00, e-pošta: [email protected]. G. Žmuc je spe-cialist z bogatimi izkušnjami z izvedbo sistemov/projektov avto-matizacije. Poklicete ga lahko vsak torek med 10. in 12. uro alipošljete vprašanje po e-pošti.
Kristan Corn, PS, d.o.o. , Logatec, tel: 01-750-85-10, e-mail: [email protected] s podrocja uporabe servo pogonov, frekvencnih pretvorni-kov in pozicijskih krmilnikov.Poklicete ga lahko na telefon 01-750-85-10 ali pošljete vprašanjepo elektronski pošti.
Vito Koprivnikar, ing, tehnicni direktor SILON d.o.o., tel.: 01/42-33-796, e-pošta: [email protected]
g. Koprivnikar je specialist za nacrtovanje in izvedbo odprtih siste-mov avtomatizacije zgradb in procesov.Svetuje vsak ponedeljek med 8. in 10. uro ali po elektronski pošti.
Tomaž Tekavec, univ. dipl. inž., Sipronika d.o.o.tel. 01/421-52-50, e-pošta: [email protected] ukvarja z natancnim dolocanjem casa, sinhronizacijo sistemskihcasov in casovnim usklajevanjem celotnega informacijskega siste-ma. Svetoval vam bo vsak ponedeljek med 10. in 12. uro, lahko papošljete tudi e-pošto.
Andrej Planina , univ. dipl. ing, Špica International d.o.o.> tel. (01) 5680 833Strokovnjak za sisteme za avtomatsko identifikacijo, mobilnoracunalništvo, tehnologijo crtne kode in uvajanje sistemov v proiz-vodnjo. Vaša vprašanja lahko pošljete na naslov: [email protected].
mag. Marijan Vidmar, dir. PE SPE II Zastopstva, distrib. in prodaja racunal-niške opreme, INEA d.o.o. , e-pošta: marijan.vidmar@ inea.siZahtevnejše rešitve s FactoryLink SCADA paketom: distribuirani sistemi,uporaba internet/intranet tehnologij za vodenje. Dvonivojske in trinivojskeaplikacije strežnik-odjemalec (na osnovi SQL podatkovnih strežnikov inMicrosoft DNA arhitekture). Komunikacijski protokoli za povezavo naSCADA paket. Vprašanja lahko pošljete po elektronski pošti ali pa poklicetepo telefonu: 061 718 005.
Štefan Oštir , FBS Elektronik d.o.o. , tel. 03/89-83-712 ali e-mail:[email protected] na podrocju varovanja in zašcite s svetlobnimi zavesamivarnostnega nivoja 4 in varnostnega nivoja 2.Poklicete ga lahko na telefon: 03 - 89 83 712 E-pošta: [email protected]
Matej Šimon , FBS Elektronik d.o.o. , tel. 03/89-70-341 ali e-mail: [email protected] s podrocja uporabe induktivnih, kapacitivnih in opto sen-zorjev za uporabo v avtomatizaciji industrijskih procesov.Poklicete ga lahko na telefon: 03 - 89 70 341. E-pošta: [email protected]
Janez Mohoriè, univ. dipl. inž., ELSYST d.o.o., tel. 01/83-10-425.
Ukvarja se s sistemom inteligentnih elektroinstalacij (EIB instalacije) v vseh fazah od projektiranja do izvedbe.Po telefonu vam bo svetoval vsak ponedeljek med 8. in 10. uro.
Ivan Morano, univ. dipl. ing. el., vodja proj. v Robotina d.o.o. ,tel.: 05/66-32-424 med 7:30 in 8:30 ali e-mail: [email protected].
Svetuje glede uporabe frekvencnih regulatorjev, mehkih zagonov,zašcite motorjev.
Marjan Strnad , univ. dipl. ing. el., teh. direktor v Robotinad.o.o., tel. 01/4273-855 ali e-mail: [email protected]
Svetuje glede uporabe in izbire tehnologije za merjenje nivojev(nivojska stikala, merilniki nivojev ter ostala nivojska tehnika)
Damijan Jager , univ. dipl. inž., Tipteh d.o.o., tel.: 01/200-51-50, e-pošta: [email protected] pri izboru in pravilni namestitvi varnostnih elementov kotso svetlobne zavese, svetlobne mreže, "muting" sistemi, dvorocnivklopi, izklopi v sili in varnostna stikala. Nanj se lahko obrnetetudi z vprašanji o senzoriki. Poklicete ga lahko na telefon 061/20051 50, ali pošljete vprašanje po e-pošti.
Mag. David Èuk, direktor poslovne enote vodenje procesov vINEA d.o.o., [email protected] že dlje casa ukvarja z vodenjem industrijskih zveznih in šaržnihprocesov. Svetoval vam bo s podrocja regulacij vsak ponedeljek od11:00 do 12:00 na telefonu: 01/721-80-20, 041/694-742 ali pošljete vprašanje po e-pošti.
Dr. Alenka Žnidaršiè , univ. dipl. inž. rac., Vodja projektov, INEA d.o.o.Domžale, Tel. 01/721-80-23, e-pošta: [email protected] Podrocje dela: vodenje projektov s podrocja višjihnivojev vodenja v vseh fazah od analize zahtev do implementacije. V todomeno sodijo proizvodni informacijski sistemi (t.j. sistemi MES), sistemiza razvršcanje ter problematika integracije s poslovnimi informacijskimisistemi. Po telefonu Vam bo svetovala vsak ponedeljek med 10. In 12.uro, vprašanja pa lahko pošljete po e-pošti.
SENZORJI ZA AVTOMATIZACIJO
VARNOSTNE SVETLOBNE ZAVESE
AVTOMATIZACIJA ZGRADB - EIB INTELIGENTNE INSTALACIJE
ELEKTRONSKA REGULACIJA ELEKTROMOTORJEV
MERITVE NIVOJEV
VARNOSTNI ELEMENTI-SENZORIKA
VIŠJI NIVOJI VODENJA
AVTOMATIZACIJA PROCESOV - VODENJE INDUSTRIJSKIH PROCESOV
PROIZVODNI INFORMACIJSKI SISTEMI
RAČUNALNIŠKI VID - OPTIČNA KONTROLA IZDELKOV IN PROCESOV
AVTOMATIZACIJA PROCESOV - NADZORNI SISTEMI (SCADA)
AVTOMATIZACIJA PROCESOV - IZVEDBA SISTEMOV
AVTOMATIZACIJA STROJEV - SERVO POGONI
AVTOMATIZACIJA ZGRADB - načrtovanje odprtih sistemov
AVTOMATIZACIJA PROCESOV - SINHRONIZACIJA ČASOV
AVTOMATSKA IDENTIFIKACIJA - ČRTNA KODA
ROBOTIKA
Maks Tuta, univ. dipl. ing., Synatec, d.o.o. Tel. 041 765 785, e-pošta: [email protected] pri avtomatizaciji zajemanja podatkov v proizvodnji,posredovanju podatkov v poslovne informacijske sisteme in priposredovanju podatkov za krmiljenje proizvodnje iz poslovnegainformacijskega sistema v proizvodnjo ter pri avtomatizaciji stro-jev in naprav.
INFORMATIZACIJA PROIZVODNJE - avtomatizacija zajemanja podatkov
Janez Kokalj, univ.dipl.inž., tehnicni direktor ELSING d.o.o.tel. 01/562-60-44, e-pošta: [email protected]
Svetuje pri zašciti in krmiljenju asinhronskih elektromotorjev terpri dimenzioniranju ostale nizkonapetostne stikalne opreme.Dosegljiv je na zgornjem telefonu ali po e-pošti.
AVTOMATIZACIJA PROCESOV IN STROJEV - Stikalna oprema
STROKOVNJAKI SVETUJEJO - Ponudba brezplačnega svetovanja (osnovne informacije)

AVTOMATIKA6 26/2002
EXPRESS NOVICE - Sejemske dejavnosti
Informacije: Gorazd Majcen, Ljubljanski sejem d.d.
SODOBNA ELEKTRONIKA 2002ejem SODOBNA ELEKT-RONIKA, ki se bo letospredstavil že devetinštiri-
desetič po vrsti, štejemo za starostovseh sodobnih sejemskih priredi-tev v slovenski prestolnici.Prva prireditev namrečsega v leto 1953, ko jebila na ogled 1. medna-rodna razstava radia,združena z zametkiprofesionalne elektro-nike. Sejem je preraščal svoje okvire intrenutno predstavlja profesionalno elek-troniko: od industrijske avtomatizacije,telekomunikacij in proizvodne opreme,preko sestavnih delov inelektromateriala, doavdio-video elektronike.
Sejem SODOBNA ELEKT-RONIKA je tudi lani potr-dil sloves najpomembnej-še slovenske prireditve spodročja elektronike inohranil ugled regionalnopomembnega mednarodnega sejma,tako po razstavljavcih kot tudi po obisko-valcih; slednjih smo zabeležili približno24.000. Na sejmu, ki je zasedel okoli 7000m2 neto razstavnih površin, se je predsta-vilo skupaj 472 razstavljavcev iz štiri in d-vajsetih držav, od tega 209 neposrednoin 263 preko zastopnika. Ti so obiskoval-ce seznanili z novostmi v industrijskielektroniki, telekomunikacijah, avdio invideo elektroniki, komponentah in pro-izvodni opremi, v veliki meri pa tudielektroinštalacijah, kabelsko satelitskitehniki in pisarniški avtomatizaciji. Kotnov program sejma se je predstaviloelektronsko varovanje za industrijske inindividualne kupce. Predstavljene pa sobile tudi tehnološke rešitve v mobilni infiksni telefoniji in vsi aktivni operaterji vtelekomunikacijah. Močno pa je bilozastopano tudi širše področje elektroteh-nike.
Prijave na letošnji sejem še vedno spreje-mamo, tako da o končnem številu raz-stavljavcev še ne moremo govoriti. Pri-jave nam bodo tudi razkrile, katera po-dročja bodo letos najmočneje zastopana,katere novosti bodo uzrle luč sveta nasejmu, katera imena, domača in tuja, in
katere blagovne znamke bomo po-zdravili ter kolikšna kvadraturarazstavnega prostora na Gospodar-skem razstavišču v Ljubljani bo za-kupljena .
Kot vsako leto, bodo tudi le-tošnji sejem v okviru sejem-
skega foruma spremlja-li številni strokovnidogodki, med njimistrokovni posvet z na-slovom Sistem inteli-
gentne zgradbe, ki ga organizira Zdru-ženje za inženiring pri GZS, in ki bo pote-kal 1.10.2002. Naslednji dan, 2.10. 2002,bo v organizaciji Združenja za elektro-
industrijo pri GZS po-tekal EE FORUM, od 3.do 4.10.2002 pa bo Elek-trotehniška zveza Slo-venije organizirala že 10.mednarodni simpozijo elektroniki v prome-tu, imenovan ISEP 2002.Ti in ostali strokovni do-godki se bodo prav tako
zvrstili na Gospodarskem razstavišču vLjubljani.
Sejem, ki bo vabil k ogledu med 30. sep-tembrom in 4. oktobrom 2002, si bomogoče ogledati vsak dan med 9.30 in18. uro. Cena redne vstopnice bo znaša-la 1.500 SIT, za vstopnico s popustom, kije namenjena šolajoči se mladini in upo-kojencem, pa bo treba odšteti 950 SIT.Brezplačno si bodo sejem ponovno lah-ko ogledali otroci do 7. leta starosti ter in-validi na vozičkih s spremljevalcem.
Tudi za letošnji obisk Sodobne elektroni-ke bodo Slovenske železnice pri nakupuvozovnic nudile popust, in sicer 20%popust pri nakupu povratne vozovniceza vožnjo z vlaki 1. in 2. razreda (vseh vla-kov razen ICS), pri čemer se potniki izka-žejo z vstopnico za ogled sejma ter 30%popust pri skupinskih potovanjih mladi-ne do 26. leta starosti ter pri skupinskihpotovanjih upokojencev (ki jih organizi-rajo upokojenska društva).
Več o programu in razstavljavcih najdetena spletu: www.ljubljanski-sejem.si.
S
A

Novi GE Fanucov PDA "CIMPLICITY®
PalmView" vsebuje CIMPLICITY collab-orative production management pro-gramje in brezžično Ethernet kartico. Obuporabi najnovejših "Thin" klientov in
wireless Ethernet technologije omogočaCIMPLICITY PalmView operaterjem vp-ogled v viewavtomatizaci-jske sistemev realnem ča-su. Možnostdvosmernekomunikaci-je omogočauporabnik-om interakci-jo s proizvo-dnimi siste-mi skozi po-pularni Com-paq-HPjev iP-AQ PDA.Licenco za Palmview CIMPLICITY lahkoinstaliramo na obstoječi HMI strežnik,delujoč v Windows® 2000 ali WindowsNT® okolju. Pri tem je možna podpora si-stemu z več kot 75 I/O točkami.
vmesniki pa novi vmes-nik samodejno prepoz-nava 10-Base-T ali 100-Base-TX. GE Fanuc bodemonstriral nove vme-snike na prihajajočems e j m u " I M T S 2 0 0 2show", ki bo 4. septem-bra, v hali D-4202.Dodali so tudi v svetuinterneta že dolgo pop-ularno "ping" funkcijoza lažje vzdrževanje innastavitve. Operaterjilahko prenašajo podat-ke, programe, makroje
itd kar preko standardnega FTP protoko-la. Možno je dodati tudi opcijsko FLASHATA kartico, kjer lahko CNC izvaja pro-grame neposredno ali pa jih naloži v svojpomnilnik.
AVTOMATIKA 726/2002
EXPRESS NOVICE - 100BASE-TX na CNC-jih/Mobilni dostop do proizvodnih sistemov
A
A
Informacije: Metronik d.o.o.
GE Fanuc predstavlja 100BASE-TXEthernet vmesnik za serijo i-CNCjev
Informacije: Metronik d.o.o.
Novi CIMPLICITY® PalmView OmogočaReal-Time, mobilni dostop do avto-matizacije in proizvodnih sistemov
100BASE-TX Ethernetvmesnik iz GE FanucAutomation zagotavljahitro komunikacijo medCNC stroji serije 15i,16i,18i in 21i ter proizvo-dno mrežo. Novi vmes-nik ponuja TCP//IP inFTP Ethernet komunika-cijo preko FOCUS1/Eth-ernet vmesnika. Novivmesnik zagotavlja prib-ližno desetkrat višje pre-nosne hitrosti kot stariCNC 10BASE-T Ethernetvmesnik. Poleg tega jemoč vzpostaviti 20 istočasnih povezav vnasprotju s starimi desetimi, podatkovnistrežnik pa je trikrat hitrejši kot na prej-šnjem vmesniku.Za zagotovitev združljivosti s starimi

AVTOMATIKA8 26/2002
EXPRESS NOVICE - Nove elektronske komponente
Informacije: Ivan Pirnat, ElbaComp d.o.o., Ljubljana
Novi ventilatorski krmilnikiicrochipovi novi krmilniki ven-tilatorjev vsebujejo termistorza termično zaščito in detekcijo
odpovedi motorja in so prvi SMBUSkrmilniki te vrste, ki vsebujejo enojnoin dvojno motorno krmilje. Ventilatorski krmilniki TC654, TC655, TC-664 in TC665 nadzorujejo hitrost vrtenja inlahko zaznajo obrabljene ležaje, kar dajeuporabnikom čas za zamenjavo ventilatorja.Čipi vsebujejo FanSense™ tehnologijo indelujejo pri 5V, 12V, 24V in 48V napajanjuter tokovih do 1A ob dodatnem močnost-nem stikalu. FanSense je Microchipovapatentirana metoda zaznavanja prisotnostiindeksnih impulzov z rotorja ventilatorja, kidovoljuje detekcijo napak. Poleg daljše živ-ljenske dobe ventilatorja prinašajo krmilnikitudi možnost nastavitve hitrosti vrtenja, karrecimo pomeni nastavitve intezivnosti hla-jenja glede na trenutno temperaturo sklopa in s tem tišje hlajenje. Hitrost lahko nastavimo preko zunanjega termistorja ali prekoSMBUS vmesnika.TC654/5 lahko nadzirata hkrati dva ventilatorja, medtem ko sta TC664/5 namenjena enoventilatorskim sistemom. Poleg tega imataTC655 in TC665 tudi izhod za signalizacijo pregrevanja, kar pomeni prihranek pri eksternih termičnih senzorjih. A
M

EXPRESS NOVICE - Nove elektronske komponente
AVTOMATIKA 926/2002
Informacije: Ivan Pirnat, ElbaComp d.o.o., Ljubljana
Microchip izdal "TechnicalLibrary CD ROM 2002"
icrochip Tech-nology je izdalnovo verzijo sv-
ojega "Technical Lib-rary CD-ROM 2002", kiga sestavljata dva CDja zverno kopijo Microchip-ovega Websitea (www.microchip.com) in pokaterem se lahko spreha-jamo z navadnim HTMLbrskalnikom. Prvi diskvsebuje dokumentacijoo PICmicro® mikrokrmil-nikih, non-volatile pom-nilnikih, analognih/in-terface proizvodih, KeeloQ® autentifika-cijskih napravah, RFID-jih, rfPIC™-ih innovi dsPIC™ družini.
Drugi CD vsebuje celotno zbirko Micro-chipovih "aplikacijskih zapiskov" in iz-
vorne kode, razvojnih orodij in pripomo-čkov. Novost so torej analogne kompone-nte, ki zaokrožajo ponudbo mikrokrmil-nikov, saj so bile doslej potrebne v prak-tično vsaki aplikaciji, a so jih načrtovalcimorali iskati drugje. A
M
Informacije: Ivan Pirnat, ElbaComp d.o.o., Ljubljana
Novi I2C serijski EEPROMiovi EEPROM-i so v majhnem 8-pinskem MSOP ohišju, ki je za 23%manjše odklasičnega TSSOP-a in ponujajo kapacitete od 128 Kbit do 256 Kbit, zato sooptimalni za baterijske aplikacije in prostorsko kriotično uporabo.
Tloris ohišje je približno 14.7 mm2, kar pomeni približno pol manj kot popularni
SOIC-8. Vsi modeli serije 24LCXX lahko delujejo pri napetostih do samo 2.5V in24AAxx družina ponuja delo pri napetostih 1.8V. Pri aktivnem toku 1 mA in tokumirovanja 1 µA sta družini optimalna izbira za baterijsko napajane sisteme.
N
A

AVTOMATIKA10 26/2002
EXPRESS NOVICE - Nove multifunkcijske enote
ADF, pri modelih MFC-580, MFC-9070 inMFC-9660 pa pomični ADF. Ločljivost jepri vseh modelih kar 600x2400 točk.Slike pa potem enostavno prenesete vobdelavo s programom OCR.
Poleg tega, da z multifunkcijsko enotoprihranite obilo dragocenega prostora,prihranite bistveno tudi pri potrošnemmaterialu. Vsaka barva je namreč samo-stojna, prav tako je pri laserskih tiskalni-kih valj ločen od tonerja, zato menjate letisti del, ki se vam je v celoti iztrošil.
Multifunkcijske enote Brother imajo šte-vilne zanimive in posebne funkcije, kiomogočajo udobno "poigravanje" z nji-mi. Bistvena prednost je možnost hkrat-nega izvajanja večih operacij. Tako lahkohkrati faksirate in tiskate, ali faksirate infotokopirate, tudi fotokopirate in tiskate.Posebnosti faksiranja so npr., da lahkoisti dokument pošljete hkrati na več šte-vilk (funkcija "Broadcasting"). Pošiljanjefaksov lahko tudi odložite, npr. na čas, koje tarifa nižja. Poleg tega je izredno zani-miv tudi nadzor na daljavo. Če niste vsvoji pisarni, lahko tako vnesete številkodrugega faksa, ki vam je trenutno dosto-pen in nanj se posredujejo prejeta fakssporočila. Pri posebnih funkcijah tiska-nja smo omenili že pomanjšave iz 2 in 4na en list in poster tiskanje 3x3. Dotiska-te lahko tudi datum in čas tiskanja. Mož-no je tudi duplex tiskanje. Pri skeniranjulahko prenesete skenirane motive nepo-sredno na elektronsko pošto. Tudi za fo-tokopiranje velja možnost pomanjšav inposter tiskanja.
Posebne funkcije so odvisne od modela.Več podrobnosti najdete na strani: http://solutions.brother.com.
Priklop multifunkcijskih enot Brother jeenostaven, preko vzporednega ali USBvmesnika. Modela MFC-9660 in MFC-9880 pa imata opcijsko tudi mrežni pri-
Multifunkcijske enote Brother združuje-jo digitalni fotokopirni stroj, faks, PCfaks, tiskalnik in optični čitalnik v enisami enoti. Ponujajo bistven prihranekprostora in denarja, s svojo praktičnostjopa vam prihranijo tudi kar precej časa innejevolje. Vse enostavno opravite naenem mestu.
Z digitalnim fotokopirnim strojem lahkokopirate do 14 strani na minuto, kopirate2 ali 4 strani na eno stran ali naredite ce-lo lasten poster, velikosti 3x3 in tako do-bite sliko povečano na 9 straneh. Posterfotokopiranja drugače ne ponuja praktič-no noben samostojen fotokopirni stroj inpredstavlja zato pravo posebnost.
Faks tiska dopise na klasičen papir. Izje-mna je njegova hitrost prenosa, ki je primodelih MFC-9660 in MFC-9880 kar33.600 bps, kar je najvišja meja, doseženado zdaj (ostali 14.400 bps). Omogoča tu-di shranitev do 132 številk. Pomnilnik sh-rani tudi prejete fakse, ki se niso izpisali,ker je npr. zmanjkalo papirja ali tonerja.Pofaksirate lahko tudi dokumente nepo-sredno iz računalnika, ne da bi jih pred-hodno stiskali, kar omogoča PC faks. Hit-ro, zanesljivo in brez nepotrebnih stroš-kov tonerja in papirja zaradi predhodne-ga tiskanja.
Tiskalnik ima pri MFC-580 in MFC-590ink-jet tehnologijo izpisa, ostali modelipa so laserski. Visoka ločljivost, 2400 x1200 točk pri ink-jet in 600 x 600 pri la-serskih, zagotavlja oster izpis. Na doku-mente vam ne bo treba niti dolgo čakati,saj je hitrost izpisa od 8 do 14 strani naminuto, odvisno od modela. V podajalnikpapirja lahko namestite od 100 do 250 +250 listov papirja, kar vam prihrani po-gosto preverjanje njegove količine inomogoča nemoteno delo.
Optični čitalnik je pri modelih MFC-590,MFC-9180 in MFC-9880 barvni ploski in
Informacije: MEDIS d.o.o., Ljubljana
Nove multifunkcijske enote BrotherSte imeli kdaj občutek, da vas obkrožajo sami stroji? Za vsakoopravilo druga naprava? No, ljudje smo dognali že marsikateropametno rešitev, pa se je tudi tukaj našla. Zelo praktična rešitev
za vsako pisarno je multifunkcijska enota. Brother si je že dobro utrdilmesto na tem področju in zdaj predstavlja 6 novih še zmogljivejših mod-elov: MFC-580, MFC-590, MFC-9070, MFC-9180, MFC-9660 in MFC-9880.
Z

AVTOMATIKA 1126/2002
EXPRESS NOVICE - Nove multifunkcijske enote
klop. Cene modelov se gibljejo od 69.900 do 239.000 SIT +DDV. Nakup multifunkcijske enote je cenovno racionalna odlo-čitev tako pri nakupu enote kot potrošnega materiala, saj vasvse te enote posamično stanejo bistveno več.
Multifunkcijske enote Brother in druge izdelke Brother zastopaza Slovenijo družba Medis, d.o.o. iz Ljubljane. A
MFC-580 MFC-590 MFC-9070 MFC-9180

AVTOMATIKA12 26/2002
EXPRESS NOVICE - Otvoritev Flextronicsa v Sloveniji
Krovna družba je Flextronics Interna-tional s sedežem v Singapurju. Ta dose-ga 12 milijard USD prometa in zaposluje70.000 ljudi po vsem svetu, njene delnicepa kotirajo na Nasdaq("FLEX").Je multinacionalno po-djetje za design z inže-nirskimi, proizvodnimiin logističnimi enota-mi v 27 državah in 4kontinentih.
Investicija FlextronicsSemiconductor v slo-venski Flextronicsd.o.o. znaša cca. 1.6mio EUR, predvsem vobliki visokotehnolo-ških orodij za načrtova-nje submikronskih integriranih vezij.Predvidevajo tudi sodelovanje s sloven-skimi fakultetami, investicija pa ima tudikonkretne kadrovske koristi, saj v končnifazi predvidevajo 31 novoustvarjenihdelovnih mest, od tega 29 visokoizobra-ženih in usposobljenih v razvoju submi-kronskih vezij, programske opreme intiskanih vezij.
Ena od glavnihdejavnosti pod-jetja Flextronicsje ASIC design, vokviru katere sk-upina 10 inženir-jev razvija proce-sorska jedra inrazlične perifer-ne enote. Polegtega v Ljubljaninačrtujejo tudi ti-skana vezja inprogramsko op-remo (Embedd-ed Linux).
Direktor podjet-
ja je Damjan Lampret, srečal pa sem tudinekaj znanih obrazov (denimo Igor Mo-hor), ki se jih bralci naših prvih številkmogoče spomnijo iz serije člankov o raz-
voju OpenCores pro-cesorjev.
Pokazali so mi tudipri njih razvito tiska-nino z ogromnim Vir-tex 1500 FPGA čipom,ki ima na sebi obiljevmesnikov, SDRAM,SRAM ima premnogokonektorjev, preko ka-terih jo lahko na želje-ni sklop enostavnopriklopijo in ga stesti-rajo. Plošča je mišljenakot čimbolj univerzal-
ni testni poligon za tipične projekte.Tako sem si lahko ogledal konfiguracijo32-bitnega procesorja v FPGA čipu, nakaterem so nato pognali Linux. Na danotvoritve pa so na enaki plošči na proce-sorju zagnali MPG dekoder, ki je na VGAmonitorju zelo prepričljivo zavrtel karnekaj minut filma "Matrica" - skupaj spredvajanjem zvoka seveda. Najbolj zani-
Avtor: Branko Badrljica
Flextronics odprl vrataV petek, 26 julija je bila svečana otvoritev podjetjaFlextronics na Vodovodni 99 v Ljubljani. Slavnostna go-sta otvoritve sta bila prof. dr. Tea Petrin, ministrica zagospodarstvo in gospod Elli Yanniv, direktor Flextro-nics Semiconductor, ki je 100% lastnik podjetja Flex-tronics d.o.o.
Direktor Damjan Lampret
Lastnik Flextronics International g.Elli Yanniv, direktor g.Damjan Lampret inministrica za delo ga. Tea Petrin na slavnostni otvoritvi
/4(0)(0)
/4

AVTOMATIKA 1326/2002
EXPRESS NOVICE - Otvoritev Flextronicsa v Sloveniji
mivo je, da deluje tako procesorsko jedropri frekvenci samo 25 MHz, res pa je, daso za dekodiranje MPG-a vdelali v pre-ostanek FPGA-ja nekaj sklopov za hard-versko dekompresijo, katerim je proce-sor nudil asistenco. Na isti plošči sem si lahko ogledal pred-vajanje slike z miniaturne kamere v real-nem času. Tu je bila najbolj zanimiva veli-kost same kamere, katere senzorček jebil skupaj z optičnim delom velikostikakih 1/4 cm3!
Kamerica je prosto bingljala na prevod-nem traku in je dajala presenetljivo dob-ro sliko, po moji oceni kakih 320 x 240 x16b.
Skrajno zanimiva stvar je tudi posebna"VGA kartica", ki je bila na ogled. Pa nezaradi ločljivosti, barv ali kakšne poseb-ne hitrosti. Zanimivost je bila v tem, da jebila mišljena kot demonstracija prepust-nosti PCI mostu v FPGAju. V bistvu jebila uporabljena razvojna kartica podjet-ja Insight Electronics, ki je razvojno oko-lje za delo z PCI vmesnikom. Kartica imaPCI konektor, na njej pa je namestonamenskih vezij FPGA čip. Kartici sododali vezje z nekaj upori in kvarčnimoscilatorjem za D/A pretvorbo in generi-ranje taktnega signala. V čip so spravilipoleg PCI mostu tudi VGA krmilnik. Poinicializaciji FPGA-ja so aktivirali tudiPCI-most in VGA prikazovalnik in stvar jedala od sebe sliko!To je bila najbolj prepričljiva demonstra-cija zmogljivosti PCI-mostu, ki je brezhib-no zagotavljal podatke za generiranjeslike 640 x 480 x 16b (12 bitov uporab-ljenih).
PCI-most je jedro, ki je bilo razvito prinas in poleg mnogih drugih projektovobjavljeno na http://www.opencores.org/. A
Pano s programom podjetja Flextronics

AVTOMATIKA14 26/2002
EXPRESS NOVICE - Oprema za avomatizacijo
Informacije: Maks Tuta, univ.dipl.inž., [email protected]
XSystem - celovita rešitevza avtomatizacijo
System ponuja enostavno rešitev za izvedbo zapletenihprimerov avtomatizacije. Pri današnjih komponentah zaavtomatizacijo je običajno potrebno povezovati večje število
posameznih enot s programskimi in strojnimi vmesniki, poleg tegapa je potrebno posamezne enote programirati in parametrirati zrazličnimi programskimi paketi.
X
Družina izdelkov XSystem poskušazmanjšati obilico vmesnikov, kjer je lemogoče. S tem se zmanjšajo stroški tudipri izvedbi zahtevnih krmilnih sistemov.XSystem združuje krmilnike (PLC), vhod-no-izhodne module (I/O), upravljalneterminale (HMI) in programsko opremov eno celoto. Potrebno število vhodnih
in izhodnih kanalov se v sistemunatančno prilagodi z uporabo že poz-nanih XI/ON modulov in novih kompak-tnih XI/OC modulov. XSystem imamožnost komuniciranja z okolico spomočjo procesnih vodil CANopen inPROFIBUS.
Z uporabo motorskih zaganjalnikovXStart odpade vsako dodatno ožičenjekontaktnih elementov za pridobivanjepodatkov o njihovem stanju. Manjožičenja prispeva k večji obratovalnivarnosti in zanesljivosti.
Za vsa potrebna programska opravilapotrebujemo samo eno programskoorodje - XSoft. Poleg uporabe program-skih jezikov po standardu IEC1131-3
omogoča zmogljiv grafični urejevalnikCFC (Continuous Flow Chart) izdelavozapletenih grafičnih sekvenc. XSoftomogoča z direktnim dostopom do spre-menljivk v krmilnem programu enos-tavno izdelavo zaslonskih slik, ki uporab-niku omogočajo enostavno spremljanjein upravljanje procesa. To pa pomeni, da
je za izdelavo uporabniku prijazneaplikacije potrebno manj inženirskegadela, ker se vsi gradniki sistema ujemajomed seboj.
Krmilniki družine XSystem imajo vgra-jen Ethernet vmesnik (TCP/IP) in spletnistrežnik (Web server). Za povezavo s sve-tovnim spletom ga je treba le priključitina usmerjevalnik (ruter) in s tem je žeomogočeno povezovanje sistemov. Vprogramsko opremo je vključen tudiOPC strežnik, ki omogoča, da nadrejenikrmilni nivo dobi operativne podatkebrez uporabe dragih povezovalnih pro-gramov.
XSystem nudi že danes to, kar bo jutristandard! A

EXPRESS NOVICE - GE redundančni napajalniki
AVTOMATIKA 1522/2002
Informacije: Metronik d.o.o.
GE Fanucov redundantni napajal-nik za krmilnike serije 90™-30
Povečanje zanesljivosti v aplikacijah z zahtevno stalno dostopnostjo
primeru odpovedi osnovneganapajanja na seriji 90™-30 PLC,ponuja GE Fanuc Automation
novi redundančni napajalniški sistem(RPSS), ki samodejno preklaplja napa-janje na rezervni napajalnik brez vmes-ne prekinitve procesov. RPSS pripomo-re k daljšim obratovalnim časom breznapak ("uptime") v aplikacijah z zahte-vano visoko dostopnostjo, kot so deni-mo črpalke, procesne linije, zasilni ge-neratorji, zmanjšuje pa tudi proizvodneizgube zaradi napak in prekinitev vnapajalnem sistemu..Sistem je sestavljen iz osnovne plošče, na kateri sta dva napajalnika in adapter zaredundančno napajanje. RPSS je združljiv z vsemi napajalniki serije 90-30 ter CPU inI/O razširitvenimi vodili. Adapter montiramo v slot za napajalno enoto v katerokoliCPU ali I/O razširiveno vodilo. RPSS dovoljuje tudi napajanje iz različnih napajalnihomrežij hkrati. Tako lahko denimo primarni napajalnik priklopimo na 220V omrežjein rezervnega denimo na 24Vdc (seveda, ob ustreznih napajalnikih).Vdelane diagnostične funkcije lahko vdelamo v krmilnik ali zunanji alarmni sklop zaenostavno iskanje napak. V primeru odpovedi enega od napajalnikov v sistemu galahko zamenjamo med delovanjem sistema ("hot swapping") .
V
A
RAZLOGI, ZAKAJ SE SPLAČA POSTATINAROČNIK REVIJE AVTOMATIKA!
•Naročnik dobi revijo na dom/delovno mesto!•Naročnik dobi eno številko revije - brezplačno!
•Naročnik dobi arhivsko zgoščenko - brezplačno!•Naročnik dobi zgoščenko CD HYDRA, na kateri je tudi revija ELEKTRONIKA in vse tisto, kar ne prenese papir!
Tudi to - BREZPLAČNO!

AVTOMATIKA16 26/2002
EXPRESS NOVICE - Brezkontaktno merjenje temperature
odjetje Raytek je preds-tavilo svoj novi IRtermo-meter, ki ga pa odlikuje
dejstvo, da lahko posname foto-grafijo merjenega mesta in jopreko USB kabla tudi prenese vračunalnik. Ker poteka meritevz IR sondo, je odčitek odvisenod emisivnosti materiala, zato jepred meritvijo za doseganježeljenih natančnosti potrebnonastaviti določene faktorje. Telahko nastavimo ročno ali paprenašamo in popravljamo zračunalnika. Pri meritvi vdelaneLED diode okrog merilne točkeizrišejo točke v radiju, ki označu-je področje merjenja. Z inštru-mentom lahko zajemamo meri-tve na terenu in jih nato skupaj sfotografijami prenesemo v raču-nalnik. Omogočen je tudi vpismeritve v samo fotografijo, kardodatno poenostavlja komuni-kacijo med zaposlenimi, saj je ževse v sliki, ki jo lahko vdelajo vWord dokument, pošljejo po e-mailu itd.
Tabela 1 - Osnovne lastnosti Merilnik je namenjen vzdrževanju elek-tričnih naprav, diagnostiki, požarni
varnosti, preverjanju kon-strukcij, HVAC in splošne-mu nadzoru kakovosti.
Prednost pred podobnimiinštrumenti s takim nači-nom zajema je v nizki ce-ni, predvsem pa v učinko-viti označbi merjenegapodročja in fotografiranjumerjenega področja.
Več informacij o inštru-mentu najdete na prilože-nem CDju.
Informacije: Belmet d.o.o., Ljubljana
Fotografski IR termometerPhotoTemp™ MX6
P
A
AVTOMATIKA 1726/2002
EXPRESS NOVICE - Sejemske dejavnosti, pomnilniške mreže, industrijske baze podatkov
pravljanje z datotečnimi sistemi v mrežah postaja vsebolj zanimiva tema, ki je bila prej šport največjih podje-tij, sedaj pa so se cene tovrstnih sistemov že toliko zni-
žale, da so dostopnejši srednjim in manjšim podjetjem.Ocenjujejo, da se bodo intenzivnejše investicije v tovrstne siste-me začele koncem leta 2002, ko se bodo začeli uvajati, najprejv varnostnih sistemih, Web serverjih in kot čiste podatkovnebanke.Sejem SYSTEMS 2002 se bointenzivneje ukvarjal s podatko-vnimi mrežami. Pravzaprav bo temu trgu namenjena kar celo-tna hala B1, kjer se bosta pojavila dva glavna koncepta: SAN inNAS.
SAN pomeni Storage Area Network in pomeni deljeno razpo-reditev pomnilniških zmogljivosti v celi ali v nekem delu mrež-ne strukture. najbolj vidne prednosti SAN rešitev so pospešendostop in prenos podatkov zaradi 2 Gb/s prenosnih hitrosti, iz-redna fleksibilnost in možna zahtevana redundanca, kjer doda-janje ali sprememba pomnilniških sistemov ne zahteva ustavit-ve delovanja celotnega sistema. Na žalost pri interoperabilnostiopreme različnih proizvajalcev zaenkrat škriplje.NAS ("Network Attached Storage") sisteme odlikuje enostav-nost instalacije, saj se priklopijo na obstoječo mrežno infra-strukturo in zagotavljajo delovnim skupinam skupen dostopdo vseh datotek. Tu prihaja do znatnih performačnih razlik gle-de na način implementacije dostopa, bodisi v samem kerneluoziroma skoziv iš jenivojskeprograme. Vdoločeni merilahko uporablja-mo neke high-end sisteme tudikot podatkovnebanke. Sejem SYSTEMS2002, ki je ena-indvajseti med-narodni sejeminformacijske tehnologije, bo v novem münchenskem sejem-skem centru od 14-18 Oktobra 2002. Dodatne informacije sona razpolago na http://www.systems-world.de.
Informacije: www.systems-world.de
Pomnilniške mreže inmrežno upravljanje
U
Izšla nova verzija centralne historizacijske bazeIndustrialSQL 8.0
Informacije: IC elektronika d.o.o.Kot smo že dalj časa najavljali je sedaj končno izšla nova ver-zija centralnega historizacijskega strežnika IndustrialSQL8.0. Program podpira kot edino platformo Windows 2000Server SP2 in je že na voljo pri vašem distributerju. Vsi regis-trirani uporabniki z naročenim programom "ComprehensiveSupport" dobijo Upgrade (po želji) zastonj.Za začetek si na zgoščenki lahko ogledate prospektno podlo-go, konkretnejše predstavitve sledijo jeseni po dopustih..
Centralno organizirani podatki: Kadarkoli katerikoli podatek iz kate-regakoli izvora
Izšla nova verzija Internet portala SuiteVoyager 2.0Informacije: WW EngineeringDolgo pričakovan izid verije 2.0 Internet portala SuiteVoya-ger se je končno realiziral! Izjemno učinkovito in enostavnoorodje za pos-tavitev proiz-vodnega por-tala (vizualiza-cija, brskanjepo klasičnihbazah podat-kov, preglediiz Industrial-SQL strežni-ka...) je enakokot zgoraj om-enjeni proioz-vodni strežnik že na voljo pri vašem distributerju. Za poku-šino si lahko ogledate DEMO "v živo" na naslovu http://suitevoyager.wonderware.com/SuiteVoyager/useng/main/default.asp.
Za vse dodatne infoemacije so vaminformacije neprestano na voljona e-mail [email protected] ...
A

AVTOMATIKA18 26/2002
EXPRESS NOVICE
Informacije: National Instruments d.o.o.
PX2000-107
istim, ki razvijajo nove I/O vmesnikeje namenjena prototipna PXI karticaiz National Instrumentsa PX2000-107
PXI Development Breadboard module.To je kartica namenjena eksperimentiranju
in implementaciji novih funkcij po me-ri uporabnikove apli-
kacije. Karticaima poleg os-novnega delaelektronike zakomunikacijos PXI vodilom
tudi posebenkonektor, na katerega lahko priklop-
imo dodatno elektroniko, tako da lotanje spo-jev na sami kartici PX2000 ni potrebno.Na kartici je tudi Latticejev CPLD, katereganeuporabljeno logiko lahko poljubno spro -gramiramo. Priloženi krmilniki pomagajoprogramju komunicirati neposredno z imple-mentiranimi registri.
edavno je Comtron preselil prostores Parmove na Dunajsko cesto 128 vLjubljani (tel: 01/565-83-66). V nas-
protju s prejšnjo lokacijo, kjer so imeli samopisarno in servis, je na Dunajski prav zanimi-va trgovina.Comtron jeorganiziranv nekaj os-novnih eno-tah:• inženir -
ing info-r m a c i j -skih sis -temov
• sistemski inženiring za sistemsko progra-msko opremo
• komunikacijski inženiring za komunikacij -sko opremo, ožičenja, omrežja
• razvoj poslovne programske opreme• veleprodaja, distribucija računalniške op-
reme• maloprodaja računalniške opremeComtron je partner podjetij Microsoft, IBM,Nowel;Wincor Nixdorf, Siemens, Cisco, Bicc.Poleg tega je pooblaščeni zastopnik in servis-er za opremo podjetij Epson, Fujitsu, 3Com,Hewlett Packard, Eizo in blagovni zastopnikznamk ASUS, IIYAMA, GOLDSTAR, TVM,GENIUS, CHAINTEC, COMPEX.
T
Informacije: National Instruments d.o.o.
Comtron
N
ü
ü
UNIMOTORUNIMOTORq
q
q q q
Brezkrtačni servo motorji od 1,2 Nmdo 73,2 NmMajhni lastni vztrajnostni momenti izredna dinamikaUNIDRIVE ali M'Ax servo regulatorjiStalno na zalogiProgramska oprema za izbiro servo pogonov
d.o.o.
A
A

AVTOMATIKA 1926/2002
EXPRESS NOVICE - Merilna oprema
a tiste, ki razmišljajo o nakupu maloboljšega digitalnega merilnega ins-trumenta, ki bi po-
leg "true RMS" voltme-tra premogel še kajdrugega, je mogočenova ponudba proiz-vodnega programapodjetja Wens - mod-el 700S optimalna iz-bira. Tu očitno ne greza merilno opremonajvišjega točnostne-ga razreda, bolj zazmogljiv inštrument,ki bo ob dostojni na-tančnosti, veliko fun-kcij in povezljivosti sPCjem zadovoljil velikdel serviserjev, mon-tažerjev in drugihprofesionalcev, ki pridelu rabijo več kotmultimeter, niso pa pri-pravljeni plačevati boga-stva za kakovosti, ki jih ne potrebujejo. Wens-700S tehta skupaj z akumulatorji in zaščitnogumijasto prevleko kak kilogram. Ima klasič-ne štiri puše, kot večina drugih multimetrov,vendar pa grafični LCD zaslon z možnostjovklopa LED osvetlitve. Na vrhu inštrumenta je9-pinski RS-232 konektor, preko katerga galahko povežemo na PC s hitrostjo od 1200 do9600 baudov.Inštrument poleg klasičnih funkcij (amper -meter, voltmeter, ohmmeter, merilnik kapaci-tivnosti in napetosti diode) vsebuje še oscilo-skop, frekvencmeter in števec, enostavnilogični analizator, merilnik kapacitivnosti incelo funkcijski generator !Vdelani voltmeter ponuja merjenje takoizmenične kot enosmerne napetosti pri vhod-ni upornosti 10 MOhm. Na voljo je pet meril-nih dosegov. od 400mV do 1000V za VDC inod 400mV do 700V za VAC. Merilne doesegelahko prestavlja inštrument sam ali jih nastav-ljamo ročno. Točnost meritve je vedno v okvi-rih 1%+10x vrednost zadnje decimalke v vrek-venčnem območju 50 Hz do 1 kHz, s frekven-co pa točnost pada.Ohmmeter ima 6 merilnih dosegov od 400Ohm do 40 MOhm s točnostjo 0.5 % + 10 x vr-ednost zadnje decimalke, razen na najvišjem
dosegu, kjer znaša 1%+10x vrednost zadnjedecimalke.
Diodni test lahko meridiode z napetostjo kole-
na do 5V, njegova na-tančnost pa je 1 mV.Merjenju kapacitiv-nosti je namenjenihpet dosegov, od 40nF do 100 µF z dekla-rirano točnostjo 2 %
+ 10 dec.Tokove lahko meri-mo v štirih dosegih,od 40 mA do 20 A(tako DC kot AC) in
točnost pri mrežnihfrekvencah znaša cca.2%. V inštrument vde-lani A/D pretvornikzmore 8-bitno pretvor-bo pri 20 Msps in v
enem "preletu" lahkozajame 256 vzorcev. Mo-
žna je uporaba klasičnih na-petostnih ali časovnih kurzorjev.Frekvencmeter/števec lahko dela s frekven-cami od 5 Hz do 1.3 GHz, kaže pa rezultat na8 decimalk. Možna je meritev period pri frek-vencah od 5Hz do 100 MHz in časom zajema100ms 1s in 10s. Tu imamo na voljo dva kana-la in sicer kanal A lahko uporabljamo do 40MHz in kanal B do 1.3 GHz.Digitalni osciloskop je enokanalni, deklari-rana pasovna širina je 5 MHz, hitrost vzorče-nja AD pretvornika je 25 Ms/s, vhod pa jezaščiten do vhodnih napetosti 600Vpp.Možni "časi preleta" so od 125 ns/rd do 2s/rdz možnostjo samodejne nastavitve. Proženjeje lahko samodejno ali ročno z izbiro roba innastavitvijo nivoja. Pri tem je vhodna impe-danca glavnega kanala A 1 MOhm, kanala Bpa 50 MOhm.Funkcijski generator lahko generira sinus,trikotnik in četverko v razponu od 40 Hz do 5MHz v 6 območjih. Prikaz vrekevence jenatančen na 3 decimalke, izhodna imbedancapa je 600 Ohm. Na razpolago so izhodne am-plitude od 2V-10Vpp in nesimetričnosti od25% do 75%.Logični analizator ima en kanal z vhodnoimpedanco 1 MOhm in prenapetostno zašči-to 50Vpp. A
Informacije: Belmet d.o.o., Ljubljana
Zmogljivi prenosniinstrument Wens 700S
Z
AVTOMATIKA20 26/2002
OPREMA ZA AVTOMATIZACIJO - Thin-Client in WinCE posluževalni panoji
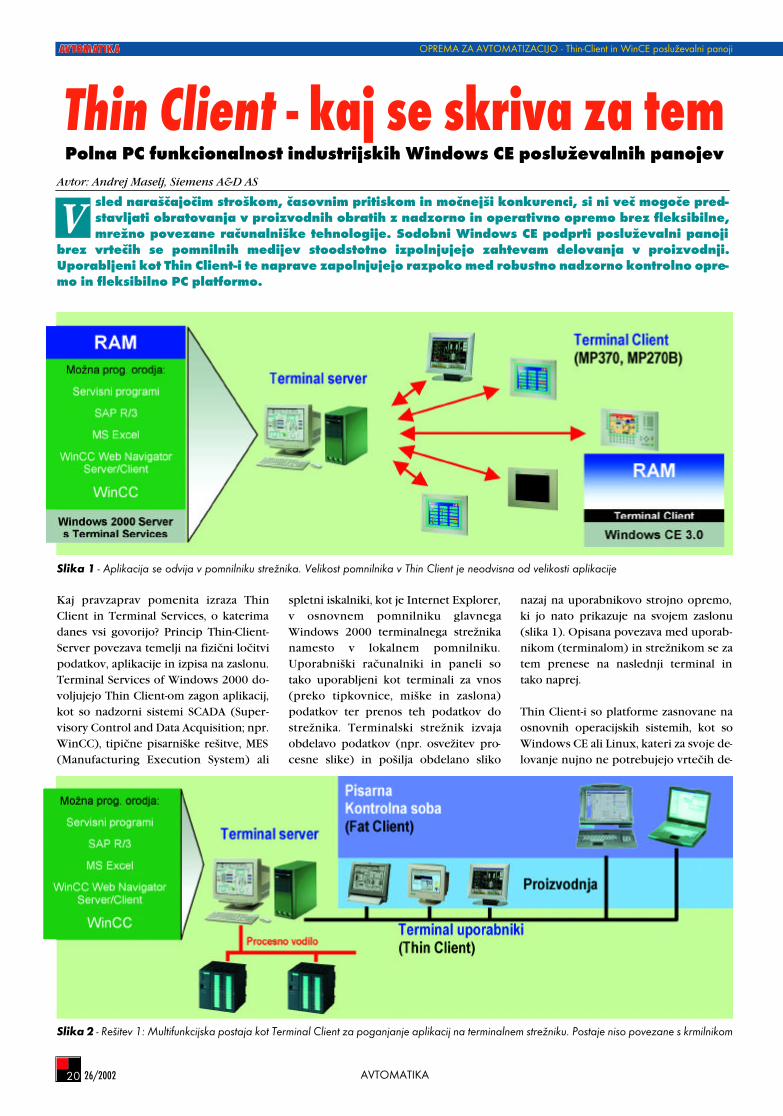
Kaj pravzaprav pomenita izraza ThinClient in Terminal Services, o katerimadanes vsi govorijo? Princip Thin-Client-Server povezava temelji na fizični ločitvipodatkov, aplikacije in izpisa na zaslonu.Terminal Services of Windows 2000 do-voljujejo Thin Client-om zagon aplikacij,kot so nadzorni sistemi SCADA (Super-visory Control and Data Acquisition; npr.WinCC), tipične pisarniške rešitve, MES(Manufacturing Execution System) ali
spletni iskalniki, kot je Internet Explorer,v osnovnem pomnilniku glavnegaWindows 2000 terminalnega strežnikanamesto v lokalnem pomnilniku.Uporabniški računalniki in paneli sotako uporabljeni kot terminali za vnos(preko tipkovnice, miške in zaslona)podatkov ter prenos teh podatkov dostrežnika. Terminalski strežnik izvajaobdelavo podatkov (npr. osvežitev pro-cesne slike) in pošilja obdelano sliko
nazaj na uporabnikovo strojno opremo,ki jo nato prikazuje na svojem zaslonu(slika 1). Opisana povezava med uporab-nikom (terminalom) in strežnikom se zatem prenese na naslednji terminal intako naprej.
Thin Client-i so platforme zasnovane naosnovnih operacijskih sistemih, kot soWindows CE ali Linux, kateri za svoje de-lovanje nujno ne potrebujejo vrtečih de-
Avtor: Andrej Maselj, Siemens A&D AS
Thin Client - kaj se skriva za temPolna PC funkcionalnost industrijskih Windows CE posluževalnih panojev
sled naraščajočim stroškom, časovnim pritiskom in močnejši konkurenci, si ni več mogoče pred-stavljati obratovanja v proizvodnih obratih z nadzorno in operativno opremo brez fleksibilne,mrežno povezane računalniške tehnologije. Sodobni Windows CE podprti posluževalni panoji
brez vrtečih se pomnilnih medijev stoodstotno izpolnjujejo zahtevam delovanja v proizvodnji.Uporabljeni kot Thin Client-i te naprave zapolnjujejo razpoko med robustno nadzorno kontrolno opre-mo in fleksibilno PC platformo.
V
Slika 1 - Aplikacija se odvija v pomnilniku strežnika. Velikost pomnilnika v Thin Client je neodvisna od velikosti aplikacije
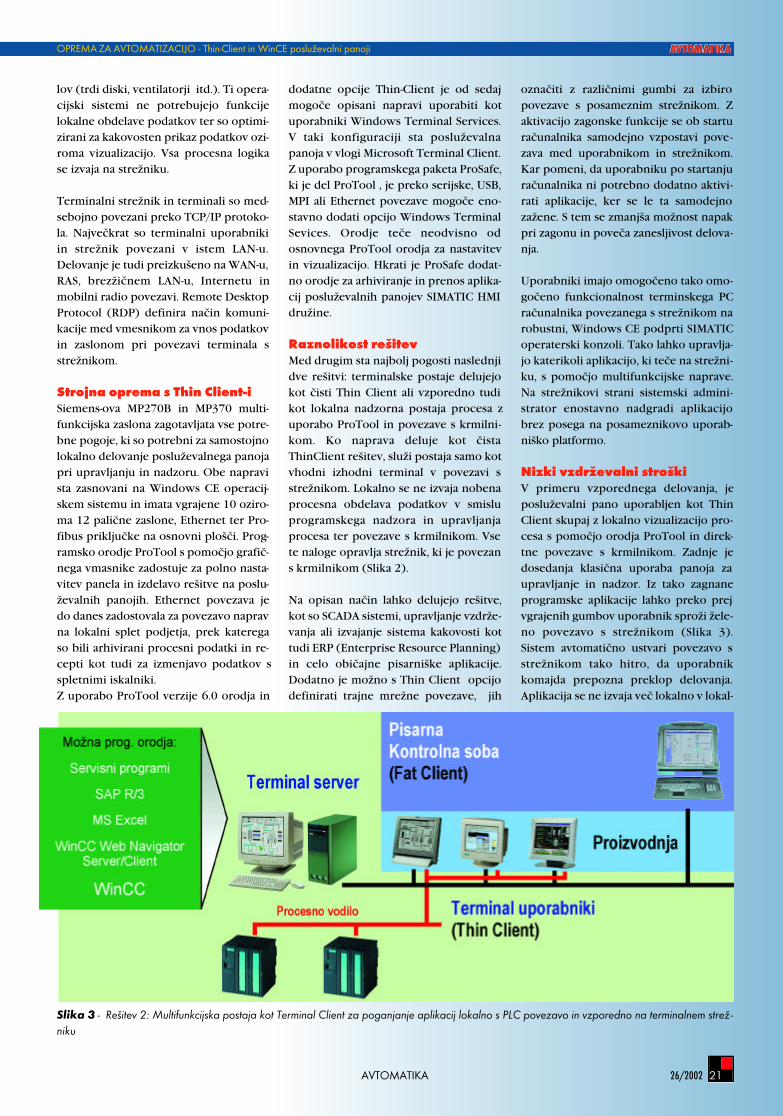
Slika 2 - Rešitev 1: Multifunkcijska postaja kot Terminal Client za poganjanje aplikacij na terminalnem strežniku. Postaje niso povezane s krmilnikom
AVTOMATIKA 2126/2002
OPREMA ZA AVTOMATIZACIJO - Thin-Client in WinCE posluževalni panoji
dodatne opcije Thin-Client je od sedajmogoče opisani napravi uporabiti kotuporabniki Windows Terminal Services.V taki konfiguraciji sta posluževalnapanoja v vlogi Microsoft Terminal Client. Z uporabo programskega paketa ProSafe,ki je del ProTool , je preko serijske, USB,MPI ali Ethernet povezave mogoče eno-stavno dodati opcijo Windows TerminalSevices. Orodje teče neodvisno odosnovnega ProTool orodja za nastavitevin vizualizacijo. Hkrati je ProSafe dodat-no orodje za arhiviranje in prenos aplika-cij posluževalnih panojev SIMATIC HMIdružine.
Raznolikost rešitevMed drugim sta najbolj pogosti naslednjidve rešitvi: terminalske postaje delujejokot čisti Thin Client ali vzporedno tudikot lokalna nadzorna postaja procesa zuporabo ProTool in povezave s krmilni-kom. Ko naprava deluje kot čistaThinClient rešitev, služi postaja samo kotvhodni izhodni terminal v povezavi sstrežnikom. Lokalno se ne izvaja nobenaprocesna obdelava podatkov v smisluprogramskega nadzora in upravljanjaprocesa ter povezave s krmilnikom. Vsete naloge opravlja strežnik, ki je povezans krmilnikom (Slika 2).
Na opisan način lahko delujejo rešitve,kot so SCADA sistemi, upravljanje vzdrže-vanja ali izvajanje sistema kakovosti kottudi ERP (Enterprise Resource Planning)in celo običajne pisarniške aplikacije.Dodatno je možno s Thin Client opcijodefinirati trajne mrežne povezave, jih
lov (trdi diski, ventilatorji itd.). Ti opera-cijski sistemi ne potrebujejo funkcijelokalne obdelave podatkov ter so optimi-zirani za kakovosten prikaz podatkov ozi-roma vizualizacijo. Vsa procesna logikase izvaja na strežniku.
Terminalni strežnik in terminali so med-sebojno povezani preko TCP/IP protoko-la. Največkrat so terminalni uporabnikiin strežnik povezani v istem LAN-u.Delovanje je tudi preizkušeno na WAN-u,RAS, brezžičnem LAN-u, Internetu inmobilni radio povezavi. Remote DesktopProtocol (RDP) definira način komuni-kacije med vmesnikom za vnos podatkovin zaslonom pri povezavi terminala sstrežnikom.
Strojna oprema s Thin Client-i Siemens-ova MP270B in MP370 multi-funkcijska zaslona zagotavljata vse potre-bne pogoje, ki so potrebni za samostojnolokalno delovanje posluževalnega panojapri upravljanju in nadzoru. Obe napravista zasnovani na Windows CE operacij-skem sistemu in imata vgrajene 10 oziro-ma 12 palične zaslone, Ethernet ter Pro-fibus priključke na osnovni plošči. Prog-ramsko orodje ProTool s pomočjo grafič-nega vmasnike zadostuje za polno nasta-vitev panela in izdelavo rešitve na poslu-ževalnih panojih. Ethernet povezava jedo danes zadostovala za povezavo napravna lokalni splet podjetja, prek kateregaso bili arhivirani procesni podatki in re-cepti kot tudi za izmenjavo podatkov sspletnimi iskalniki.Z uporabo ProTool verzije 6.0 orodja in
Slika 3 - Rešitev 2: Multifunkcijska postaja kot Terminal Client za poganjanje aplikacij lokalno s PLC povezavo in vzporedno na terminalnem strež -niku
označiti z različnimi gumbi za izbiropovezave s posameznim strežnikom. Zaktivacijo zagonske funkcije se ob starturačunalnika samodejno vzpostavi pove-zava med uporabnikom in strežnikom.Kar pomeni, da uporabniku po startanjuračunalnika ni potrebno dodatno aktivi-rati aplikacije, ker se le ta samodejnozažene. S tem se zmanjša možnost napakpri zagonu in poveča zanesljivost delova-nja.
Uporabniki imajo omogočeno tako omo-gočeno funkcionalnost terminskega PCračunalnika povezanega s strežnikom narobustni, Windows CE podprti SIMATICoperaterski konzoli. Tako lahko upravlja-jo katerikoli aplikacijo, ki teče na strežni-ku, s pomočjo multifunkcijske naprave.Na strežnikovi strani sistemski admini-strator enostavno nadgradi aplikacijobrez posega na posameznikovo uporab-niško platformo.
Nizki vzdrževalni stroškiV primeru vzporednega delovanja, jeposluževalni pano uporabljen kot ThinClient skupaj z lokalno vizualizacijo pro-cesa s pomočjo orodja ProTool in direk-tne povezave s krmilnikom. Zadnje jedosedanja klasična uporaba panoja zaupravljanje in nadzor. Iz tako zagnaneprogramske aplikacije lahko preko prejvgrajenih gumbov uporabnik sproži žele-no povezavo s strežnikom (Slika 3).Sistem avtomatično ustvari povezavo sstrežnikom tako hitro, da uporabnikkomajda prepozna preklop delovanja.Aplikacija se ne izvaja več lokalno v lokal-

AVTOMATIKA22 26/2002
OPREMA ZA AVTOMATIZACIJO - Thin-Client in WinCE posluževalni panoji
nem pomnilniku ampak se začne izvajatina samem strežniku. To pomeni idealnorešitev za preskok iz lokalno pogojeneganadzora v višji nivo z večjim obsegompreko cele proizvodnje. Od tu lahko upo-rabnik pregleduje podatke iz celotneproizvodnje, kot so alarmi, trendi, analizeipd. Druge možnosti vsebujejo klicevzdrževalnih programov za specifičnestroje ali postroje oziroma klice orodij zaobvladovanje naročil s katerim je mogo-če preveriti status naročila. To pomeni,da je mogoče klicati arhivirane podatkesamo za lokalni stroj, ki so shranjeni nastrežniku. Za vse navedene primere jepotreben Windows 2000 Server na strež-nikovi strani. V primerjavi z dosedanjimiarhitekturami strežnik-uporabnik imaterminalni strežnik z multifunkcijskoplatformo prednost pred klasičnimi PCuporabniki tudi v manjših letnih vzdrže-valnih stroških in številu administrativ-nih posegov na uporabnikovi strani vsajza tri do petkrat.
Ponovljiva naložitev rešitve Thin Clientza multifinkcijsko platformo (z uporaboterminalskega uporabnika) zagotavlja
enostavno vgradnjo PC funkcionalnostina robustne sisteme. Predhodna nastavi-tev programskih orodij dovoljuje upo-rabniku enostavno vzpostavitev poveza-ve s strežnikom brez predhodnega zna-nja o informacijskih mrežah. Če povza-memo opisano, je mogoče že danes upo-rabljati nadzorne sisteme (SCADA) inpisarniška orodja na robustnih WindowsCE sistemih s strežniško podporo v oza-dju.
Povzeto po "Thin Clients - What's Behindthe Concept, Moritz Mauer, MSR Maga-zine March 2002" A
AVTOMATIKA 2326/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
1.1 Uvod v CyBro in CyProCyBro, mali krmilnik velikih zmoglji-vosti, je član družine VCP. Krmilnik jezgrajen okrog sistemskega jedra VCPin ponuja izjemne prednosti svojimuporabnikom: • v celoti razvit determinističen sis-
tem, ki ga je možno naložiti in os-vežiti
• standardizirana programska opre-ma in orodja,
• razširljivost na nivoju krmilnika,• povezljivost krmilnika na nivoju sistema,• podpira standardne industrijske komunikacije,• velika hitrost, obširen pomnilnik.
Na tako ambiciozni in odprti zasnovi zgrajen krmilnik presegaokvire malega krmilnika, ker v kompaktnem osnovnem ohišjuže vsebuje:• 8 digitalnih vhodov 24 VDC,• izvor napetosti 24 VDC za napajanje lastnih vhodov,• 6 digitalnih relejskih izhodov s kontaktno zmogljivostjo 1A
/250V,• dva prosta slota za vgradnjo analognih vhodov in izhodov
kot opcija v osnovnem ohišju,• IEX port za priklop razširitvenih modulov in operacijskega
panela OP1,• COM1 za povezavo na PC, s katerim krmilnik programira-
mo ali na SCADO,• A bus port, preko katerega lahko CyBro krmilnike poveže-
mo med seboj v mrežo.
Kot opcije so lahko že v osnovnem ohišju vgrajeni:• hitri vhodi za štetje ali za priklop signalov inkrementalnega
enkoderja, • ura realnega časa,• COM2 za povezavo na druge naprave s serijsko komunikaci-
jo npr. tehtnica, tiskalnik, operaterski panel, modem aliGSM modem, ki v času hitrega prodora mobilne telefonije vnaše življenje ponuja vsak dan neštete nove možnosti pre-nosa sporočil, alarmov, nastavitev ali ukazov na daljavo med
krmilnikom in našim GSM aparatom.Osnovno konfiguracijo na nivoju krmilni-ka lahko dopolnimo z analognimi enoka-nalnimi IEX karticami (analogni vhodi inizhodi) ter razširimo s celo paleto samo-stojnih IEX razširitvenih enot, ki so pri-ključene na IEX port. Te enote so lahko:
• digitalni vhodi in izhodi• analogni vhodi• analogni izhodi• operaterski panel z dvovrstičnim prika-
zovalnikom in tipkamiPreko A-bus porta lahko krmilnike med seboj z eno paricopovežemo v mrežo. Za programiranje z osebnim računalnikom uporabljamo pro-gramsko orodje CyPro, ki deluje v Windows okolju, je skladenz mednarodnim standardom IEC 61131-3, je brezplačen in jevedno na razpolago na: www.cybro-plc.com/downloads.
1.2 Uvod v programiranje Vožnje kolesa se ne moremo naučiti iz knjige, moramo ga zaja-hati in ujeti ravnotežje. Podobno je s programiranjem krmilni-ka: dobro je, če imamo krmilnik CyBro pred seboj. Na osebni
Šola programiranja krmilnika CyBroProgramiranje krmilnikov skladno s standardom IEC-61133-3 - 1. del
Avtor: Dušan Draksler, Robotina d.o.o., Izola
V Sloveniji si med malimi krmilniki uspešno utira svojo pot na tržiš-če tudi izdelek podjetja Robotina d.o.o. iz Izole. CyBro, mali krmil-nik velikih zmogljivosti je član družine VCP. Krmilnik, zgrajen ok-
rog sistemskega jedra VCP ponuja izjemne prednosti svojim uporabni-kom, med drugim tudi to, da je njegovo programiranje skladno z mednar-
odnim standardom IEC 61131-3. To pa pomeni, da se ni potrebno za vsakkrmilnik na novo učiti jezika za programiranje, uporabljate lahko že znane
rutine, itd. In programiranja po standardu IEC 61131-3 se bomo na primeru krmilnika CyBro učilitukaj v nekaj naslednjih številkah revije Avtomatika...
Slika 1 - CyBro-mali krmilnik velikih zmogljivosti
Slika 2 - CyBro + CyPro - komplet za programiranje
AVTOMATIKA24 26/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
računalnik namestimo programsko orodje CyPro, povežemoračunalnik in CyBro s kablom za programiranje in poskusimonapisati svoj program. Pri tem nam bo v pomoč pričujoči čla-nek.
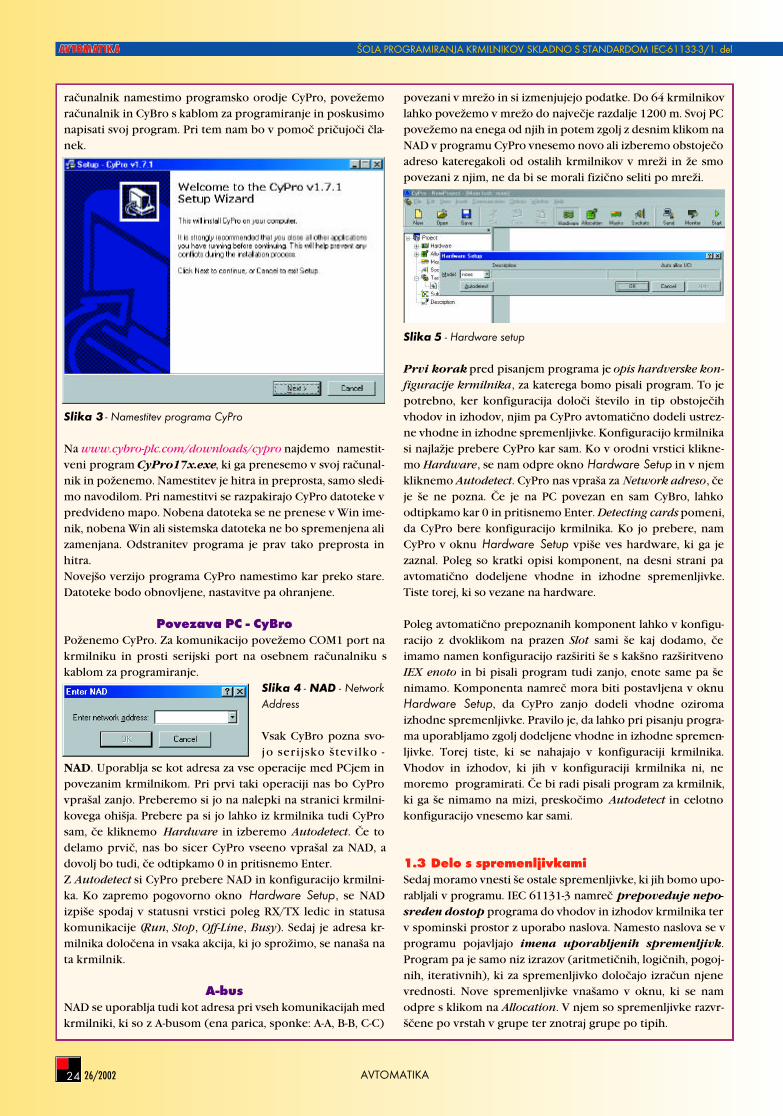
Slika 3 - Namestitev programa CyPro
Na www.cybro-plc.com/downloads/cypro najdemo namestit-veni program CyPro17x.exe, ki ga prenesemo v svoj računal-nik in poženemo. Namestitev je hitra in preprosta, samo sledi-mo navodilom. Pri namestitvi se razpakirajo CyPro datoteke vpredvideno mapo. Nobena datoteka se ne prenese v Win ime-nik, nobena Win ali sistemska datoteka ne bo spremenjena alizamenjana. Odstranitev programa je prav tako preprosta inhitra. Novejšo verzijo programa CyPro namestimo kar preko stare.Datoteke bodo obnovljene, nastavitve pa ohranjene.
Povezava PC - CyBroPoženemo CyPro. Za komunikacijo povežemo COM1 port nakrmilniku in prosti serijski port na osebnem računalniku skablom za programiranje.
Slika 4 - NAD - NetworkAddress
Vsak CyBro pozna svo-jo serijsko številko -
NAD. Uporablja se kot adresa za vse operacije med PCjem inpovezanim krmilnikom. Pri prvi taki operaciji nas bo CyProvprašal zanjo. Preberemo si jo na nalepki na stranici krmilni-kovega ohišja. Prebere pa si jo lahko iz krmilnika tudi CyProsam, če kliknemo Hardware in izberemo Autodetect. Če todelamo prvič, nas bo sicer CyPro vseeno vprašal za NAD, adovolj bo tudi, če odtipkamo 0 in pritisnemo Enter. Z Autodetect si CyPro prebere NAD in konfiguracijo krmilni-ka. Ko zapremo pogovorno okno Hardware Setup, se NADizpiše spodaj v statusni vrstici poleg RX/TX ledic in statusakomunikacije (Run, Stop, Off-Line, Busy). Sedaj je adresa kr-milnika določena in vsaka akcija, ki jo sprožimo, se nanaša nata krmilnik.
A-busNAD se uporablja tudi kot adresa pri vseh komunikacijah medkrmilniki, ki so z A-busom (ena parica, sponke: A-A, B-B, C-C)
povezani v mrežo in si izmenjujejo podatke. Do 64 krmilnikovlahko povežemo v mrežo do največje razdalje 1200 m. Svoj PCpovežemo na enega od njih in potem zgolj z desnim klikom naNAD v programu CyPro vnesemo novo ali izberemo obstoječoadreso kateregakoli od ostalih krmilnikov v mreži in že smopovezani z njim, ne da bi se morali fizično seliti po mreži.
Slika 5 - Hardware setup
Prvi korak pred pisanjem programa je opis hardverske kon-figuracije krmilnika, za katerega bomo pisali program. To jepotrebno, ker konfiguracija določi število in tip obstoječihvhodov in izhodov, njim pa CyPro avtomatično dodeli ustrez-ne vhodne in izhodne spremenljivke. Konfiguracijo krmilnikasi najlažje prebere CyPro kar sam. Ko v orodni vrstici klikne-mo Hardware, se nam odpre okno Hardware Setup in v njemkliknemo Autodetect. CyPro nas vpraša za Network adreso, čeje še ne pozna. Če je na PC povezan en sam CyBro, lahkoodtipkamo kar 0 in pritisnemo Enter. Detecting cards pomeni,da CyPro bere konfiguracijo krmilnika. Ko jo prebere, namCyPro v oknu Hardware Setup vpiše ves hardware, ki ga jezaznal. Poleg so kratki opisi komponent, na desni strani paavtomatično dodeljene vhodne in izhodne spremenljivke.Tiste torej, ki so vezane na hardware.
Poleg avtomatično prepoznanih komponent lahko v konfigu-racijo z dvoklikom na prazen Slot sami še kaj dodamo, čeimamo namen konfiguracijo razširiti še s kakšno razširitvenoIEX enoto in bi pisali program tudi zanjo, enote same pa šenimamo. Komponenta namreč mora biti postavljena v oknuHardware Setup, da CyPro zanjo dodeli vhodne oziromaizhodne spremenljivke. Pravilo je, da lahko pri pisanju progra-ma uporabljamo zgolj dodeljene vhodne in izhodne spremen-ljivke. Torej tiste, ki se nahajajo v konfiguraciji krmilnika.Vhodov in izhodov, ki jih v konfiguraciji krmilnika ni, nemoremo programirati. Če bi radi pisali program za krmilnik,ki ga še nimamo na mizi, preskočimo Autodetect in celotnokonfiguracijo vnesemo kar sami.
1.3 Delo s spremenljivkamiSedaj moramo vnesti še ostale spremenljivke, ki jih bomo upo-rabljali v programu. IEC 61131-3 namreč prepoveduje nepo-sreden dostop programa do vhodov in izhodov krmilnika terv spominski prostor z uporabo naslova. Namesto naslova se vprogramu pojavljajo imena uporabljenih spremenljivk.Program pa je samo niz izrazov (aritmetičnih, logičnih, pogoj-nih, iterativnih), ki za spremenljivko določajo izračun njenevrednosti. Nove spremenljivke vnašamo v oknu, ki se namodpre s klikom na Allocation. V njem so spremenljivke razvr-ščene po vrstah v grupe ter znotraj grupe po tipih.

AVTOMATIKA 2526/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
vrednost je slika stanja na tem vhodu. V vhodno spremenljiv-ko ne moremo vpisovati vrednosti, ker je le-ta odvisna odelektričnega signala, ki na ta vhod prihaja iz stroja ali proce-sa. Lahko pa to vrednost beremo.
Izhodne spremenljivke določajo stanje na izhodih krmilni-ka. Vsak izhod ima svojo izhodno spremenljivko, njena vred-nost določa stanje na tem izhodu. Z vpisovanjem ustreznihvrednosti v izhodno spremenljivko dobimo na izhodu krmil-nika električne signale, ki jih potrebujemo za krmiljenje stro-ja ali procesa.
Interne spremenljivke generira krmilnik, ker jih potrebujepri svojem delu, njihove vrednosti pa so dostopne tudi upo-rabniškemu programu. To so npr. clock_10ms, clock_100ms,clock_1s, bit first_scan, števili scan_time in scan_frequencyin druge. V te spremenljivke vrednosti ne moremo vpisovati,ampak jih le uporabljamo v programu.
Uporabniške spremenljivke so tiste, ki jih v programupotrebujemo za hranjenje vmesnih rezultatov (npr. številonarejenih kosov, nastavitve stroja, dosežena stanja pri sek-venčnem delovanju) in jih v program dodamo sami.
Ko torej odpremo okno Allocation Editor, bomo v grupi I/OVariables že našli vhodne in izhodne spremenljivke, torejtiste, ki so vezane na konfiguracijo, postavljeno v oknu Hard-
Slika 6 - Allocation
Vrste in tipi spremenljivkPri pisanju programa uporabljamo več vrst spremenljivk:vhodne in izhodne v grupi I/O Variables, interne v grupiInternal Variables ter uporabniške v grupi User Variables.Podobno kot spremenljivke uporabljamo v programu tudikonstante, le da se njihova vrednost med delom krmilnika nespreminja. Vhodne spremenljivke odražajo stanje na vhodih krmilnika.Vsak vhod krmilnika ima svojo vhodno spremenljivko, katere
AVTOMATIKA26 26/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
ware Setup. Če izberemo grupo Internal Variables, si nadesni strani okna lahko ogledamo interne spremenljivke, kiso nam na razpolago v programu. Vmesne in ostale spremen-ljivke, ki jih še potrebujemo v programu, pa moramo vnestisami v grupo User Variables.
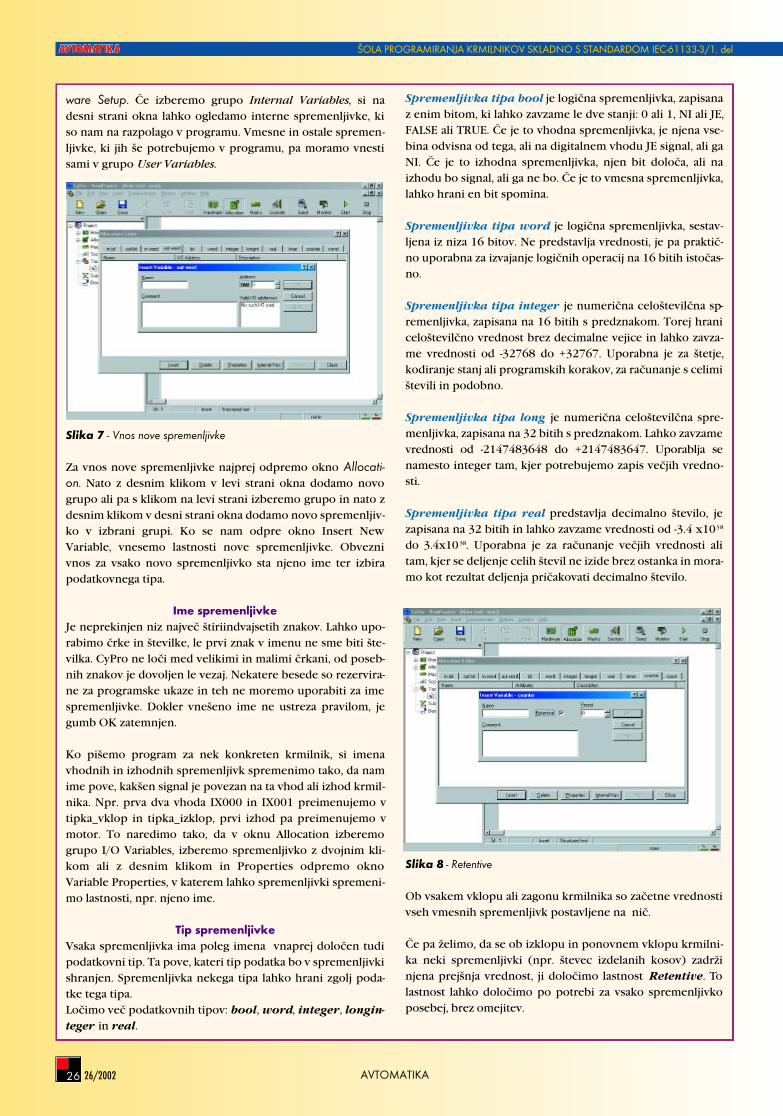
Slika 7 - Vnos nove spremenljivke
Za vnos nove spremenljivke najprej odpremo okno Allocati-on. Nato z desnim klikom v levi strani okna dodamo novogrupo ali pa s klikom na levi strani izberemo grupo in nato zdesnim klikom v desni strani okna dodamo novo spremenljiv-ko v izbrani grupi. Ko se nam odpre okno Insert NewVariable, vnesemo lastnosti nove spremenljivke. Obveznivnos za vsako novo spremenljivko sta njeno ime ter izbirapodatkovnega tipa.
Ime spremenljivkeJe neprekinjen niz največ štiriindvajsetih znakov. Lahko upo-rabimo črke in številke, le prvi znak v imenu ne sme biti šte-vilka. CyPro ne loči med velikimi in malimi črkani, od poseb-nih znakov je dovoljen le vezaj. Nekatere besede so rezervira-ne za programske ukaze in teh ne moremo uporabiti za imespremenljivke. Dokler vnešeno ime ne ustreza pravilom, jegumb OK zatemnjen.
Ko pišemo program za nek konkreten krmilnik, si imenavhodnih in izhodnih spremenljivk spremenimo tako, da namime pove, kakšen signal je povezan na ta vhod ali izhod krmil-nika. Npr. prva dva vhoda IX000 in IX001 preimenujemo vtipka_vklop in tipka_izklop, prvi izhod pa preimenujemo vmotor. To naredimo tako, da v oknu Allocation izberemogrupo I/O Variables, izberemo spremenljivko z dvojnim kli-kom ali z desnim klikom in Properties odpremo oknoVariable Properties, v katerem lahko spremenljivki spremeni-mo lastnosti, npr. njeno ime.
Tip spremenljivke Vsaka spremenljivka ima poleg imena vnaprej določen tudipodatkovni tip. Ta pove, kateri tip podatka bo v spremenljivkishranjen. Spremenljivka nekega tipa lahko hrani zgolj poda-tke tega tipa. Ločimo več podatkovnih tipov: bool, word, integer, longin-teger in real.
Spremenljivka tipa bool je logična spremenljivka, zapisanaz enim bitom, ki lahko zavzame le dve stanji: 0 ali 1, NI ali JE,FALSE ali TRUE. Če je to vhodna spremenljivka, je njena vse-bina odvisna od tega, ali na digitalnem vhodu JE signal, ali gaNI. Če je to izhodna spremenljivka, njen bit določa, ali naizhodu bo signal, ali ga ne bo. Če je to vmesna spremenljivka,lahko hrani en bit spomina.
Spremenljivka tipa word je logična spremenljivka, sestav-ljena iz niza 16 bitov. Ne predstavlja vrednosti, je pa praktič-no uporabna za izvajanje logičnih operacij na 16 bitih istočas-no.
Spremenljivka tipa integer je numerična celoštevilčna sp-remenljivka, zapisana na 16 bitih s predznakom. Torej hraniceloštevilčno vrednost brez decimalne vejice in lahko zavza-me vrednosti od -32768 do +32767. Uporabna je za štetje,kodiranje stanj ali programskih korakov, za računanje s celimištevili in podobno.
Spremenljivka tipa long je numerična celoštevilčna spre-menljivka, zapisana na 32 bitih s predznakom. Lahko zavzamevrednosti od -2147483648 do +2147483647. Uporablja senamesto integer tam, kjer potrebujemo zapis večjih vredno-sti.
Spremenljivka tipa real predstavlja decimalno število, jezapisana na 32 bitih in lahko zavzame vrednosti od -3.4 x1038
do 3.4x1038. Uporabna je za računanje večjih vrednosti alitam, kjer se deljenje celih števil ne izide brez ostanka in mora-mo kot rezultat deljenja pričakovati decimalno število.
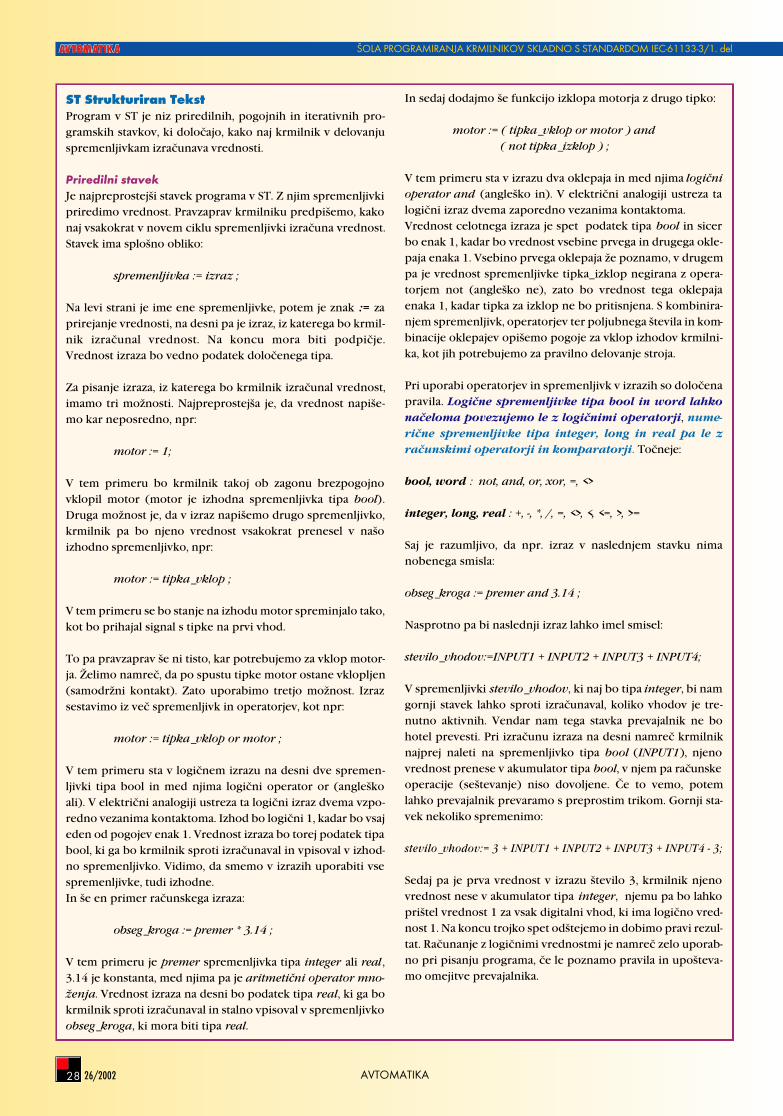
Slika 8 - Retentive
Ob vsakem vklopu ali zagonu krmilnika so začetne vrednostivseh vmesnih spremenljivk postavljene na nič.
Če pa želimo, da se ob izklopu in ponovnem vklopu krmilni-ka neki spremenljivki (npr. števec izdelanih kosov) zadržinjena prejšnja vrednost, ji določimo lastnost Retentive. Tolastnost lahko določimo po potrebi za vsako spremenljivkoposebej, brez omejitev.

AVTOMATIKA 2726/2002
Slika 9 - Ciklična narava delovanja krmilnika
Krmilnik v stanju RUN svoje delo izvaja ciklično: prebere sta-nje na vhodih, nato vsem spremenljivkam po programu izra-čuna nove vrednosti, nazadnje postavi izhode glede na novevrednosti izhodnih spremenljivk in potem v novem ciklu spetbere stanje na vhodih... To ciklično naravo izvajanja programamoramo imeti ves čas v mislih, če hočemo pravilno razumetidogajanje v krmilniku. Čas, ki ga potrebuje krmilnik za encikel, lahko preberemo v spremenljivki scan_time, številociklov v sekundi pa vsebuje spremenljivka scan_frequency.
1.4 Pisanje programa
Slika 10 - Vnos programske kode
Pri pisanju programa sta nam na razpolago dva od jezikov izstandarda IEC 61131-3. To sta Inštrukcijska lista inStrukturiran Tekst. Inštrukcijska lista je nižji programskijezik, podoben Assemblerju. Strukturiran tekst pa je višji pro-gramski jezik, s sintakso podobno kot Pascal, vendar posebejnamenjen za programiranje industrijskih krmilnikov, zato ganajpogosteje uporabljamo.
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
AVTOMATIKA28 26/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
ST Strukturiran TekstProgram v ST je niz priredilnih, pogojnih in iterativnih pro-gramskih stavkov, ki določajo, kako naj krmilnik v delovanjuspremenljivkam izračunava vrednosti.
Priredilni stavek Je najpreprostejši stavek programa v ST. Z njim spremenljivkipriredimo vrednost. Pravzaprav krmilniku predpišemo, kakonaj vsakokrat v novem ciklu spremenljivki izračuna vrednost.Stavek ima splošno obliko:
spremenljivka := izraz ;
Na levi strani je ime ene spremenljivke, potem je znak := zaprirejanje vrednosti, na desni pa je izraz, iz katerega bo krmil-nik izračunal vrednost. Na koncu mora biti podpičje.Vrednost izraza bo vedno podatek določenega tipa.
Za pisanje izraza, iz katerega bo krmilnik izračunal vrednost,imamo tri možnosti. Najpreprostejša je, da vrednost napiše-mo kar neposredno, npr:
motor := 1;
V tem primeru bo krmilnik takoj ob zagonu brezpogojnovklopil motor (motor je izhodna spremenljivka tipa bool).Druga možnost je, da v izraz napišemo drugo spremenljivko,krmilnik pa bo njeno vrednost vsakokrat prenesel v našoizhodno spremenljivko, npr:
motor := tipka_vklop ;
V tem primeru se bo stanje na izhodu motor spreminjalo tako,kot bo prihajal signal s tipke na prvi vhod.
To pa pravzaprav še ni tisto, kar potrebujemo za vklop motor-ja. Želimo namreč, da po spustu tipke motor ostane vklopljen(samodržni kontakt). Zato uporabimo tretjo možnost. Izrazsestavimo iz več spremenljivk in operatorjev, kot npr:
motor := tipka_vklop or motor ;
V tem primeru sta v logičnem izrazu na desni dve spremen-ljivki tipa bool in med njima logični operator or (angleškoali). V električni analogiji ustreza ta logični izraz dvema vzpo-redno vezanima kontaktoma. Izhod bo logični 1, kadar bo vsajeden od pogojev enak 1. Vrednost izraza bo torej podatek tipabool, ki ga bo krmilnik sproti izračunaval in vpisoval v izhod-no spremenljivko. Vidimo, da smemo v izrazih uporabiti vsespremenljivke, tudi izhodne. In še en primer računskega izraza:
obseg_kroga := premer * 3.14 ;
V tem primeru je premer spremenljivka tipa integer ali real ,3.14 je konstanta, med njima pa je aritmetični operator mno-ženja. Vrednost izraza na desni bo podatek tipa real, ki ga bokrmilnik sproti izračunaval in stalno vpisoval v spremenljivkoobseg_kroga, ki mora biti tipa real.
In sedaj dodajmo še funkcijo izklopa motorja z drugo tipko:
motor := ( tipka_vklop or motor ) and ( not tipka_izklop ) ;
V tem primeru sta v izrazu dva oklepaja in med njima logičnioperator and (angleško in). V električni analogiji ustreza talogični izraz dvema zaporedno vezanima kontaktoma. Vrednost celotnega izraza je spet podatek tipa bool in sicerbo enak 1, kadar bo vrednost vsebine prvega in drugega okle-paja enaka 1. Vsebino prvega oklepaja že poznamo, v drugempa je vrednost spremenljivke tipka_izklop negirana z opera-torjem not (angleško ne), zato bo vrednost tega oklepajaenaka 1, kadar tipka za izklop ne bo pritisnjena. S kombinira-njem spremenljivk, operatorjev ter poljubnega števila in kom-binacije oklepajev opišemo pogoje za vklop izhodov krmilni-ka, kot jih potrebujemo za pravilno delovanje stroja.
Pri uporabi operatorjev in spremenljivk v izrazih so določenapravila. Logične spremenljivke tipa bool in word lahkonačeloma povezujemo le z logičnimi operatorji, nume-rične spremenljivke tipa integer, long in real pa le zračunskimi operatorji in komparatorji. Točneje:
bool, word : not, and, or, xor, =, <>
integer, long, real : +, -, *, /, =, <>, <, <=, >, >=
Saj je razumljivo, da npr. izraz v naslednjem stavku nimanobenega smisla:
obseg_kroga := premer and 3.14 ;
Nasprotno pa bi naslednji izraz lahko imel smisel:
stevilo_vhodov:=INPUT1 + INPUT2 + INPUT3 + INPUT4;
V spremenljivki stevilo_vhodov, ki naj bo tipa integer, bi namgornji stavek lahko sproti izračunaval, koliko vhodov je tre-nutno aktivnih. Vendar nam tega stavka prevajalnik ne bohotel prevesti. Pri izračunu izraza na desni namreč krmilniknajprej naleti na spremenljivko tipa bool (INPUT1), njenovrednost prenese v akumulator tipa bool, v njem pa računskeoperacije (seštevanje) niso dovoljene. Če to vemo, potemlahko prevajalnik prevaramo s preprostim trikom. Gornji sta-vek nekoliko spremenimo:
stevilo_vhodov:= 3 + INPUT1 + INPUT2 + INPUT3 + INPUT4 - 3;
Sedaj pa je prva vrednost v izrazu število 3, krmilnik njenovrednost nese v akumulator tipa integer, njemu pa bo lahkoprištel vrednost 1 za vsak digitalni vhod, ki ima logično vred-nost 1. Na koncu trojko spet odštejemo in dobimo pravi rezul-tat. Računanje z logičnimi vrednostmi je namreč zelo uporab-no pri pisanju programa, če le poznamo pravila in upošteva-mo omejitve prevajalnika.
AVTOMATIKA 2926/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
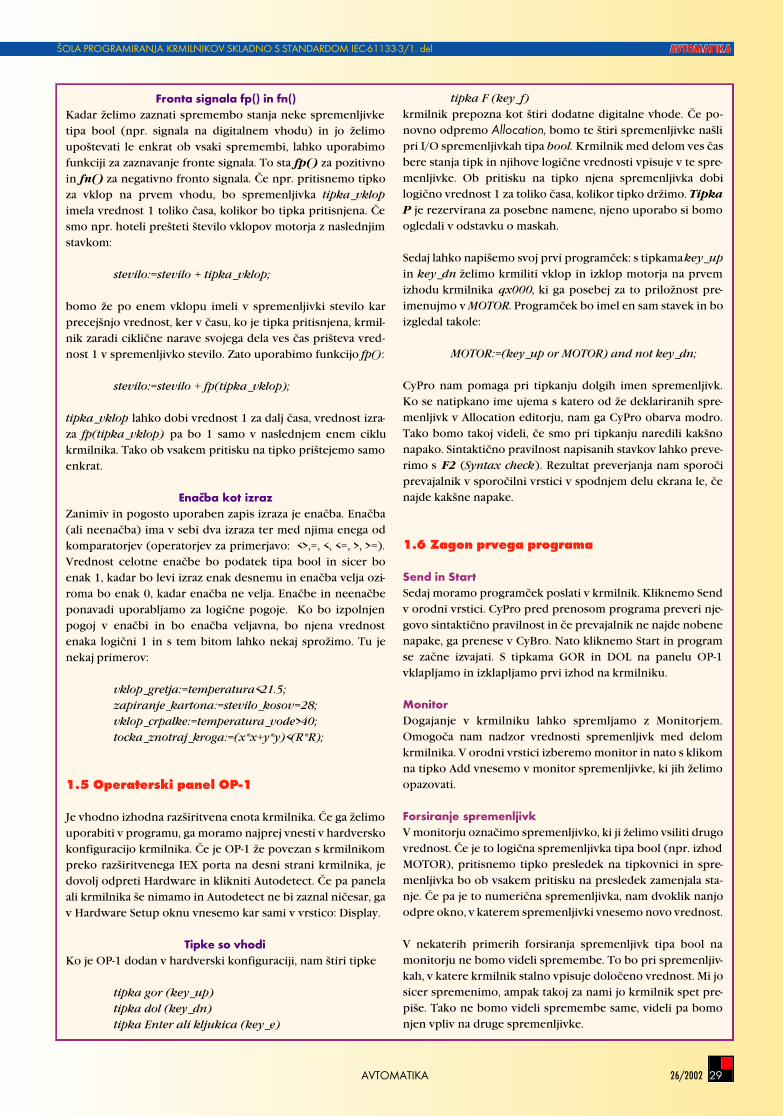
Fronta signala fp() in fn()Kadar želimo zaznati spremembo stanja neke spremenljivketipa bool (npr. signala na digitalnem vhodu) in jo želimoupoštevati le enkrat ob vsaki spremembi, lahko uporabimofunkciji za zaznavanje fronte signala. To sta fp() za pozitivnoin fn() za negativno fronto signala. Če npr. pritisnemo tipkoza vklop na prvem vhodu, bo spremenljivka tipka_vklopimela vrednost 1 toliko časa, kolikor bo tipka pritisnjena. Česmo npr. hoteli prešteti število vklopov motorja z naslednjimstavkom:
stevilo:=stevilo + tipka_vklop;
bomo že po enem vklopu imeli v spremenljivki stevilo karprecejšnjo vrednost, ker v času, ko je tipka pritisnjena, krmil-nik zaradi ciklične narave svojega dela ves čas prišteva vred-nost 1 v spremenljivko stevilo. Zato uporabimo funkcijo fp():
stevilo:=stevilo + fp(tipka_vklop);
tipka_vklop lahko dobi vrednost 1 za dalj časa, vrednost izra-za fp(tipka_vklop) pa bo 1 samo v naslednjem enem ciklukrmilnika. Tako ob vsakem pritisku na tipko prištejemo samoenkrat.
Enačba kot izrazZanimiv in pogosto uporaben zapis izraza je enačba. Enačba(ali neenačba) ima v sebi dva izraza ter med njima enega odkomparatorjev (operatorjev za primerjavo: <>,=, <, <=, >, >=).Vrednost celotne enačbe bo podatek tipa bool in sicer boenak 1, kadar bo levi izraz enak desnemu in enačba velja ozi-roma bo enak 0, kadar enačba ne velja. Enačbe in neenačbeponavadi uporabljamo za logične pogoje. Ko bo izpolnjenpogoj v enačbi in bo enačba veljavna, bo njena vrednostenaka logični 1 in s tem bitom lahko nekaj sprožimo. Tu jenekaj primerov:
vklop_gretja:=temperatura<21.5; zapiranje_kartona:=stevilo_kosov=28; vklop_crpalke:=temperatura_vode>40; tocka_znotraj_kroga:=(x*x+y*y)<(R*R);
1.5 Operaterski panel OP-1
Je vhodno izhodna razširitvena enota krmilnika. Če ga želimouporabiti v programu, ga moramo najprej vnesti v hardverskokonfiguracijo krmilnika. Če je OP-1 že povezan s krmilnikompreko razširitvenega IEX porta na desni strani krmilnika, jedovolj odpreti Hardware in klikniti Autodetect. Če pa panelaali krmilnika še nimamo in Autodetect ne bi zaznal ničesar, gav Hardware Setup oknu vnesemo kar sami v vrstico: Display.
Tipke so vhodiKo je OP-1 dodan v hardverski konfiguraciji, nam štiri tipke
tipka gor (key_up)tipka dol (key_dn)tipka Enter ali kljukica (key_e)
tipka F (key_f) krmilnik prepozna kot štiri dodatne digitalne vhode. Če po-novno odpremo Allocation, bomo te štiri spremenljivke našlipri I/O spremenljivkah tipa bool. Krmilnik med delom ves časbere stanja tipk in njihove logične vrednosti vpisuje v te spre-menljivke. Ob pritisku na tipko njena spremenljivka dobilogično vrednost 1 za toliko časa, kolikor tipko držimo. TipkaP je rezervirana za posebne namene, njeno uporabo si bomoogledali v odstavku o maskah.
Sedaj lahko napišemo svoj prvi programček: s tipkama key_upin key_dn želimo krmiliti vklop in izklop motorja na prvemizhodu krmilnika qx000, ki ga posebej za to priložnost pre-imenujmo v MOTOR. Programček bo imel en sam stavek in boizgledal takole:
MOTOR:=(key_up or MOTOR) and not key_dn;
CyPro nam pomaga pri tipkanju dolgih imen spremenljivk.Ko se natipkano ime ujema s katero od že deklariranih spre-menljivk v Allocation editorju, nam ga CyPro obarva modro.Tako bomo takoj videli, če smo pri tipkanju naredili kakšnonapako. Sintaktično pravilnost napisanih stavkov lahko preve-rimo s F2 (Syntax check). Rezultat preverjanja nam sporočiprevajalnik v sporočilni vrstici v spodnjem delu ekrana le, čenajde kakšne napake.
1.6 Zagon prvega programa
Send in StartSedaj moramo programček poslati v krmilnik. Kliknemo Sendv orodni vrstici. CyPro pred prenosom programa preveri nje-govo sintaktično pravilnost in če prevajalnik ne najde nobenenapake, ga prenese v CyBro. Nato kliknemo Start in programse začne izvajati. S tipkama GOR in DOL na panelu OP-1vklapljamo in izklapljamo prvi izhod na krmilniku.
MonitorDogajanje v krmilniku lahko spremljamo z Monitorjem.Omogoča nam nadzor vrednosti spremenljivk med delomkrmilnika. V orodni vrstici izberemo monitor in nato s klikomna tipko Add vnesemo v monitor spremenljivke, ki jih želimoopazovati.
Forsiranje spremenljivkV monitorju označimo spremenljivko, ki ji želimo vsiliti drugovrednost. Če je to logična spremenljivka tipa bool (npr. izhodMOTOR), pritisnemo tipko presledek na tipkovnici in spre-menljivka bo ob vsakem pritisku na presledek zamenjala sta-nje. Če pa je to numerična spremenljivka, nam dvoklik nanjoodpre okno, v katerem spremenljivki vnesemo novo vrednost.
V nekaterih primerih forsiranja spremenljivk tipa bool namonitorju ne bomo videli spremembe. To bo pri spremenljiv-kah, v katere krmilnik stalno vpisuje določeno vrednost. Mi josicer spremenimo, ampak takoj za nami jo krmilnik spet pre-piše. Tako ne bomo videli spremembe same, videli pa bomonjen vpliv na druge spremenljivke.
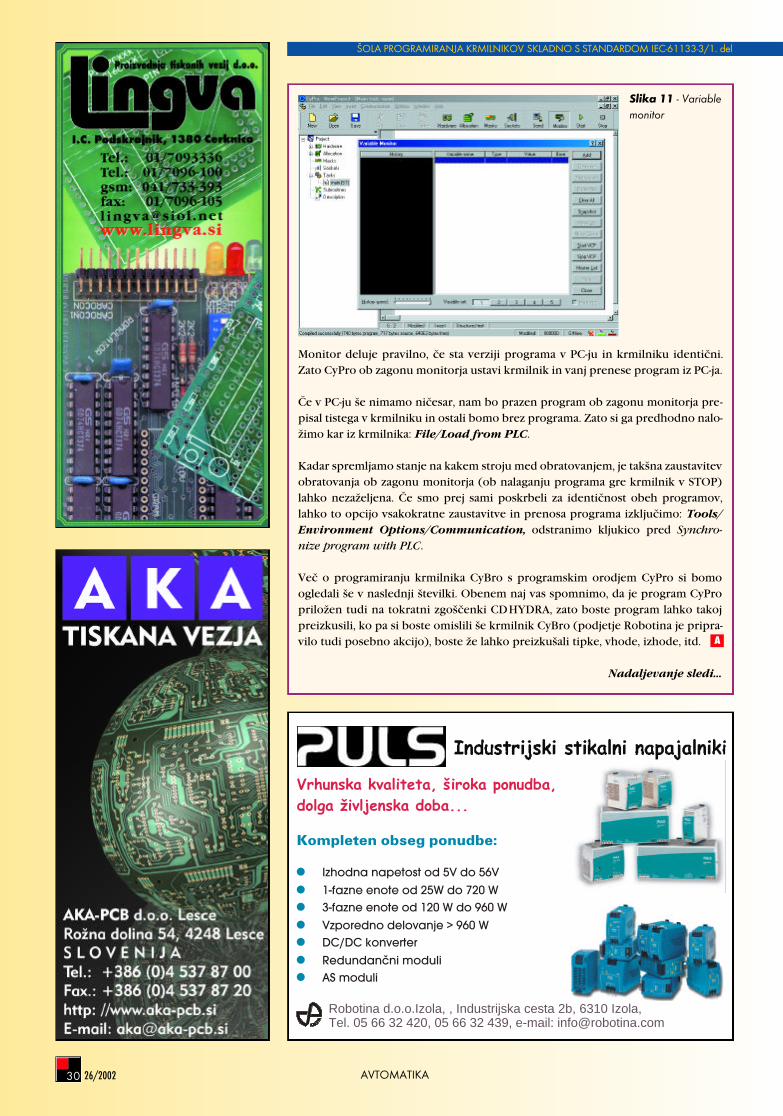
AVTOMATIKA30 26/2002
ŠOLA PROGRAMIRANJA KRMILNIKOV SKLADNO S STANDARDOM IEC-61133-3/1. del
Slika 11 - Variablemonitor
Monitor deluje pravilno, če sta verziji programa v PC-ju in krmilniku identični.Zato CyPro ob zagonu monitorja ustavi krmilnik in vanj prenese program iz PC-ja.
Če v PC-ju še nimamo ničesar, nam bo prazen program ob zagonu monitorja pre-pisal tistega v krmilniku in ostali bomo brez programa. Zato si ga predhodno nalo-žimo kar iz krmilnika: File/Load from PLC.
Kadar spremljamo stanje na kakem stroju med obratovanjem, je takšna zaustavitevobratovanja ob zagonu monitorja (ob nalaganju programa gre krmilnik v STOP)lahko nezaželjena. Če smo prej sami poskrbeli za identičnost obeh programov,lahko to opcijo vsakokratne zaustavitve in prenosa programa izključimo: Tools/Environment Options/Communication, odstranimo kljukico pred Synchro-nize program with PLC.
Več o programiranju krmilnika CyBro s programskim orodjem CyPro si bomoogledali še v naslednji številki. Obenem naj vas spomnimo, da je program CyPropriložen tudi na tokratni zgoščenki CDHYDRA, zato boste program lahko takojpreizkusili, ko pa si boste omislili še krmilnik CyBro (podjetje Robotina je pripra-vilo tudi posebno akcijo), boste že lahko preizkušali tipke, vhode, izhode, itd.
Nadaljevanje sledi...
A
Vrhunska kvaliteta, široka ponudba,dolga življenska doba...
Robotina d.o.o.Izola, , Industrijska cesta 2b, 6310 Izola, Tel. 05 66 32 420, 05 66 32 439, e-mail: [email protected]
Kompleten obseg ponudbe:
!!!!!!!
Izhodna napetost od 5V do 56V1-fazne enote od 25W do 720 W3-fazne enote od 120 W do 960 WVzporedno delovanje > 960 WDC/DC konverterRedundančni moduliAS moduli
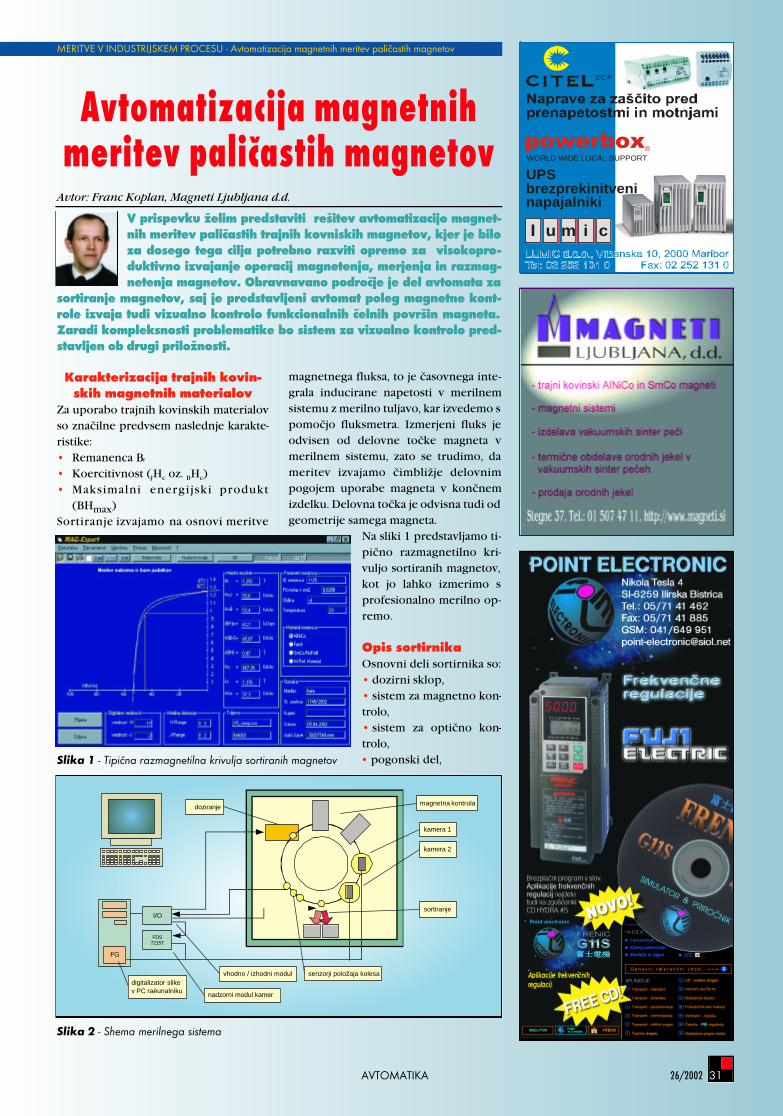
AVTOMATIKA 3126/2002
MERITVE V INDUSTRIJSKEM PROCESU - Avtomatizacija magnetnih meritev paličastih magnetov
Karakterizacija trajnih kovin-skih magnetnih materialov
Za uporabo trajnih kovinskih materialovso značilne predvsem naslednje karakte-ristike:• Remanenca Br
• Koercitivnost (JHc oz. BHc)• Maksimalni energijski produkt
(BHmax)Sortiranje izvajamo na osnovi meritve
magnetnega fluksa, to je časovnega inte-grala inducirane napetosti v merilnemsistemu z merilno tuljavo, kar izvedemo spomočjo fluksmetra. Izmerjeni fluks jeodvisen od delovne točke magneta vmerilnem sistemu, zato se trudimo, dameritev izvajamo čimbližje delovnimpogojem uporabe magneta v končnemizdelku. Delovna točka je odvisna tudi odgeometrije samega magneta.
Na sliki 1 predstavljamo ti-pično razmagnetilno kri-vuljo sortiranih magnetov,kot jo lahko izmerimo sprofesionalno merilno op-remo.
Opis sortirnikaOsnovni deli sortirnika so:• dozirni sklop,• sistem za magnetno kon-trolo,• sistem za optično kon-trolo,• pogonski del,
Avtomatizacija magnetnihmeritev paličastih magnetov
V prispevku želim predstaviti rešitev avtomatizacijo magnet-nih meritev paličastih trajnih kovniskih magnetov, kjer je biloza dosego tega cilja potrebno razviti opremo za visokopro-duktivno izvajanje operacij magnetenja, merjenja in razmag-netenja magnetov. Obravnavano področje je del avtomata za
sortiranje magnetov, saj je predstavljeni avtomat poleg magnetne kont-role izvaja tudi vizualno kontrolo funkcionalnih čelnih površin magneta.Zaradi kompleksnosti problematike bo sistem za vizualno kontrolo pred-stavljen ob drugi priložnosti.
Avtor: Franc Koplan, Magneti Ljubljana d.d.
magnetna kontroladoziranje
kamera 1
kamera 2
sortiranje
senzorji položaja kolesa
I/O
FDS7215T
FG
vhodno / izhodni modul
nadzorni modul kamer
digitalizator slikev PC raèunalniku
Slika 1 - Tipična razmagnetilna krivulja sortiranih magnetov
Slika 2 - Shema merilnega sistema
powerbox®WORLD WIDE LOCAL SUPPORT
u m i cu m i c
UPSbrezprekinitveni napajalniki
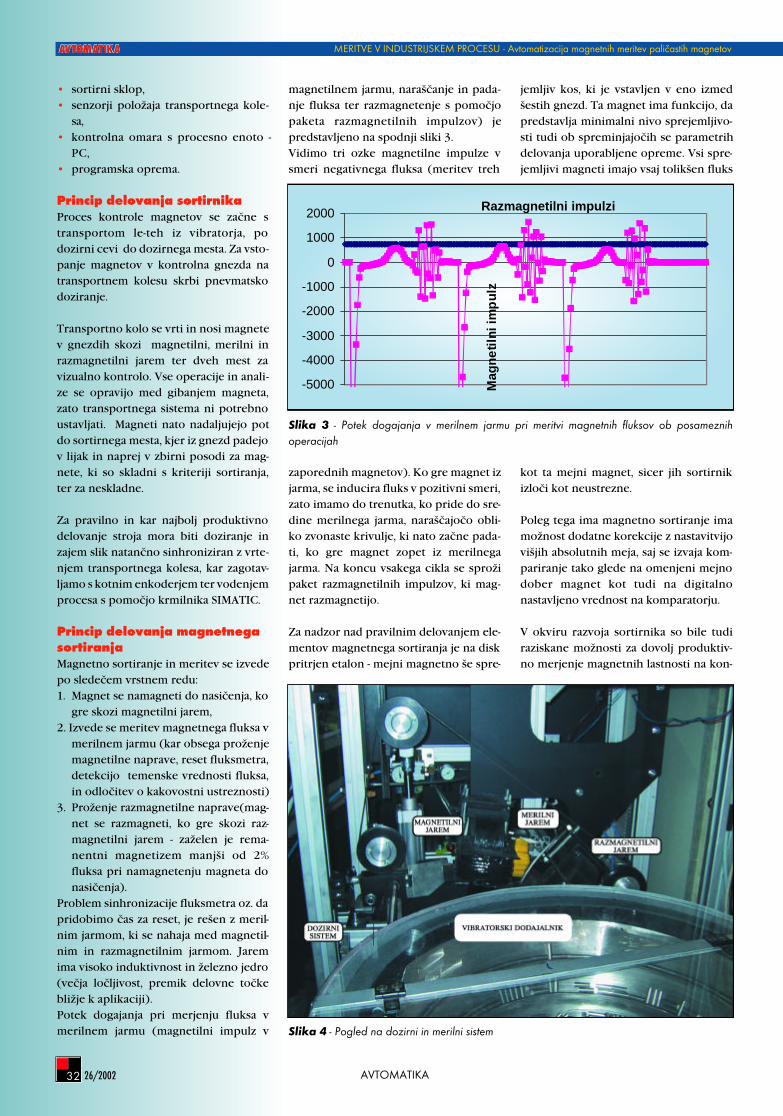
AVTOMATIKA32 26/2002
MERITVE V INDUSTRIJSKEM PROCESU - Avtomatizacija magnetnih meritev paličastih magnetov
magnetilnem jarmu, naraščanje in pada-nje fluksa ter razmagnetenje s pomočjopaketa razmagnetilnih impulzov) jepredstavljeno na spodnji sliki 3. Vidimo tri ozke magnetilne impulze vsmeri negativnega fluksa (meritev treh
zaporednih magnetov). Ko gre magnet izjarma, se inducira fluks v pozitivni smeri,zato imamo do trenutka, ko pride do sre-dine merilnega jarma, naraščajočo obli-ko zvonaste krivulje, ki nato začne pada-ti, ko gre magnet zopet iz merilnegajarma. Na koncu vsakega cikla se sprožipaket razmagnetilnih impulzov, ki mag-net razmagnetijo.
Za nadzor nad pravilnim delovanjem ele-mentov magnetnega sortiranja je na diskpritrjen etalon - mejni magnetno še spre-
jemljiv kos, ki je vstavljen v eno izmedšestih gnezd. Ta magnet ima funkcijo, dapredstavlja minimalni nivo sprejemljivo-sti tudi ob spreminjajočih se parametrihdelovanja uporabljene opreme. Vsi spre-jemljivi magneti imajo vsaj tolikšen fluks
kot ta mejni magnet, sicer jih sortirnikizloči kot neustrezne.
Poleg tega ima magnetno sortiranje imamožnost dodatne korekcije z nastavitvijovišjih absolutnih meja, saj se izvaja kom-pariranje tako glede na omenjeni mejnodober magnet kot tudi na digitalnonastavljeno vrednost na komparatorju.
V okviru razvoja sortirnika so bile tudiraziskane možnosti za dovolj produktiv-no merjenje magnetnih lastnosti na kon-
• sortirni sklop,• senzorji položaja transportnega kole-
sa,• kontrolna omara s procesno enoto -
PC,• programska oprema.
Princip delovanja sortirnikaProces kontrole magnetov se začne stransportom le-teh iz vibratorja, podozirni cevi do dozirnega mesta. Za vsto-panje magnetov v kontrolna gnezda natransportnem kolesu skrbi pnevmatskodoziranje.
Transportno kolo se vrti in nosi magnetev gnezdih skozi magnetilni, merilni inrazmagnetilni jarem ter dveh mest zavizualno kontrolo. Vse operacije in anali-ze se opravijo med gibanjem magneta,zato transportnega sistema ni potrebnoustavljati. Magneti nato nadaljujejo potdo sortirnega mesta, kjer iz gnezd padejov lijak in naprej v zbirni posodi za mag-nete, ki so skladni s kriteriji sortiranja,ter za neskladne.
Za pravilno in kar najbolj produktivnodelovanje stroja mora biti doziranje inzajem slik natančno sinhroniziran z vrte-njem transportnega kolesa, kar zagotav-ljamo s kotnim enkoderjem ter vodenjemprocesa s pomočjo krmilnika SIMATIC.
Princip delovanja magnetnegasortiranjaMagnetno sortiranje in meritev se izvedepo sledečem vrstnem redu:1. Magnet se namagneti do nasičenja, ko
gre skozi magnetilni jarem, 2. Izvede se meritev magnetnega fluksa v
merilnem jarmu (kar obsega proženjemagnetilne naprave, reset fluksmetra,detekcijo temenske vrednosti fluksa,in odločitev o kakovostni ustreznosti)
3. Proženje razmagnetilne naprave(mag-net se razmagneti, ko gre skozi raz-magnetilni jarem - zaželen je rema-nentni magnetizem manjši od 2%fluksa pri namagnetenju magneta donasičenja).
Problem sinhronizacije fluksmetra oz. dapridobimo čas za reset, je rešen z meril-nim jarmom, ki se nahaja med magnetil-nim in razmagnetilnim jarmom. Jaremima visoko induktivnost in železno jedro(večja ločljivost, premik delovne točkebližje k aplikaciji).Potek dogajanja pri merjenju fluksa vmerilnem jarmu (magnetilni impulz v
-5000
-4000
-3000
-2000
-1000
0
1000
2000 Razmagnetilni impulzi
Mag
netil
niim
pul
z
Slika 3 - Potek dogajanja v merilnem jarmu pri meritvi magnetnih fluksov ob posameznihoperacijah
Slika 4 - Pogled na dozirni in merilni sistem

AVTOMATIKA 3326/2002
MERITVE V INDUSTRIJSKEM PROCESU - Avtomatizacija magnetnih meritev paličastih magnetov
Diagnostični program omogoča opazo-vanje dogodkov v merilnem ciklusu terprepoznavanje potreb po morebitni sin-hronizaciji ali odpravi opredeljenihnapak v delovanju.
Posebej se instrument odlikuje po krat-kem času reseta integratorja (0,05 sec . vprimerjavi z 0,40 ali celo 0,70 sekundepri opremi, ki jo ponujajo svetovni proiz-vajalci), veliki hitrosti vzorčenja, vredno-tenja in izdaje podatkov, visoki stopnjineobčutljivosti za motnje iz okolja in pri-merno majhnem lezenju (driftu) termožnosti stalnega (tudi daljinskega) nad-zora merilnega sistema in samokorekcijena osnovi nastavitev absolutnih meja spomočjo dvojnega kompariranja (etalonin digitalna meja), pa tudi nadzoru mag-netilno / razmagnetilnega sistema in javljanju napak.
Prototip opisanega fluksmetra je pred-stavljen na sliki 6.
Magnetilno razmagnetilnanapravaZa izvedbo predpisanih magnetenj inkakovostnih razmagnetenj magnetov stabila izdelana magnetizer in demagneti-zer s taktom 1 impulz na sekundo. Takohitre opreme na svetovnem trgu v okvirustandardne opreme nismo mogli kupiti.Kondenzatorska izvedba naprave omo-goča galvansko ločitev in zaradi manjšihmotenj ugodno vpliva na meritve mag-netnih fluksov.
Karakteristike izdelane naprave so :• omogoča delo na magnetilnem jarmu
(dve navitji) in razmagnetilnem jarmu(eno navitje) z jedrom CU180a,
• kondenzatorski tip naprave • krmiljenje je izvedeno s pomočjo
struiranem avtomatu (1 presortiran kosna 2 sekundi). Izkazalo se je, da z obstoje-čo ponudbo merilne opreme na sveto-vnem trgu ni bilo mogoče zagotoviti spo-sobnih merilnih sistemov z magnetilno /merilnim ciklom, krajšim od 0,5 sekun-de. Pri tem se namreč več kot 90% časaizgubi za resetiranje instrumenta, ki semora obvezno izvesti po magnetilneminpulzu. Hkrati smo želeli integrirati tudinadzorno funkcijo nad delovanjem mag-netilne in merilne opreme s pomočjoponavljajočega se merjenja na disk pritr-jenega etalonskega magneta (sledenjenotranje variabilnosti sistema, ugotavlja-nje slabljenja magnetilne naprave, vplivokolja ipd.). Izkazalo se je, da je bilopotrebno razviti lasten hiter fluksmeter,ki bo deloval sinhronizirano z aplikacijoter bo imel zelo kratek čas reseta.
Elektronski fluksmeter za dina-mična merjenja magnetnih fluk-sov V nadaljevanju bo predstavljen fluksme-ter, ki je bil posebej razvit za opisanisortirnik in je ključen element za zago-tavljanje ekonomske učinkovitosti sortir-nika. Izdelani merilni instrument omo-goča dinamično merjenje fluksov, topomeni, magneta ni potrebno kot pri kla-sičnem postopku vstaviti v tuljavo, reseti-rati instrument in magnet izvleči iz tulja-ve, ampak lahko opazujemo naraščanjefluksa do temenske vrednosti in njegovo
padanje, ko gre magnet npr. brezzaustavljanja skozi tuljavo.
Razviti fluksmeter ima sledečesklope: CPU s CMOS mikroproce-sorjem, 32 k RAM spomina, 8 kprograma v EPROM vezju, galvan-sko ločeno serijsko vodilo, logikoza interno krmiljenje funkcij(integrator, A/D pretvornik pointegracijskem principu, resetintegratorja), watchdog resetvezje, vhodni ojačevalnik, galvan-sko ločene sinhronizacijskevhode in izhode z LED signaliza-cijo statusa magneta, relejskimizhodom za sortirnik,BCD komparatorje-ma in številne druge funkcije.
Programska oprema obsega inicializacijovrednosti ob vklopu, reset integratorja,sinhronizacijske vhode (reset, peak, eta-lon), branje BCD kodirnih stikal kotdodatno omejitev za zmanjšanje notranjevariabilnosti sistema merjenja, prepozna-vanje dogodkov, merjenje in pomnjenjevrednosti ter kompariranje tako glede naetalon kot tudi BCD komparator, nadzorstatusa krmilnih vhodov, merjenje ana-logne vrednosti integratorja s pomočjoA/D pretvornika, izdajo vrednosti v for-matirani obliki na serijsko vodilo in LCDekran, sledenje in digitalno pomnjenje temenske vredno-sti.
Slika 5 - Pogled na merilni sistem z druge strani - vidni so sinhronizacijski senzorji za zagotav-ljanje podprocesov
Slika 6 - Prototip hitrega fluksmetra za magnetno sorti-ranje netov

AVTOMATIKA34 26/2002
MERITVE V INDUSTRIJSKEM PROCESU - Avtomatizacija magnetnih meritev paličastih magnetov
krmilnika LOGO,• napravo lahko prožimo avtomatsko (s
sortirnikom) ali ročno,• energijska vsebina 175 J.
Za pravilno delovanje je predvsem po-membna oblika razmagnetilnega impul-
za (slika 7), ki je odvisna od pravilnekombinacije induktivnosti jarma ter kon-denzatorske baterije. Naprava je predsta-vljena na sliki 8.
ZaključekSortirni avtomat se je pri uporabi v pro-
izvodnem procesu izkazal zanesljiv, pro-duktiven in kakovosten agregat, ki jeizpolnil zastavljene cilje projekta, zatopodjetje načrtuje podobne rešitve tudipri izvajanju drugih 100% magnetnihpreskušanj.
Slika 7 - Oblika razmagnetilnega impulzaSlika 8 - Magnetilno razmagnetilna naprava
A

AVTOMATIKA 3526/2002
NADZOR KAKOVOSTI - Sistemi za avtomatsko optično kontrolo
Zakaj avtomatska optična kontrola?Najpomembnejši razlog za vpeljevanjeavtomatskih optičnih kontrol je elimina-cija subjektivnega faktorja človeka iz pro-cesa optične kontrole in s tem povečanjeponovljivosti postopka. Kot drugi pogla-vitni razlog sta hitrost in natančnost. Naprimer, če proizvodni proces producira1 kos na sekundo in vsebuje izdeleknekaj sto dimenzij, ki so ključne za njego-vo funkcionalnost, se takega izdelka neda izmeriti v realnem času in še posebejne dovolj natačno.
Pri proizvodnih procesih, ki producirajonekaj ali celo nekaj deset kosov izdelkovna sekundo, je moč vršiti kontrolo le zbrezkontaktnimi merilnimi metodami,kontaktne merilne metode so s stališčamanipulacij in s stališča obrabe merilaneuporabne.
Tretji razlog je zamenjava vzorčne kon-trole s 100% kontrolo. Avtomobilskaindustrija zahteva od svojih proizvajalcevpolizdelkov praktično popolno kontrolovsakega izdelka.
Nenazadnje, avtomatska optična kontro-la zmanjšuje proizvodne stroške, ker mi-
nimizira število reklamacij, izdelki sorti-rani na ustrezne in neustrezne že ob kon-cu proizvodnega procesa. Omogoča patudi korekcijske vplive in optimizacijoproizvodnih procesov.
Kdaj je izdelek ustrezen zaoptično kontrolo?Pogoj, da sistem za avtomatsko optičnokontrolo lahko opravlja svojo nalogo jevizualna izraženost veličine, ki jo že-limo kontrolirati. Načelno so to vsi para-metri na izdelku, ki jih je moč optičnoprojecirati na ravnino zaznavala ka-mere pod ustreznimi svetlobnimi po-goji.
V osnovi so svetlobni efekti določeni zdvema kategorijama osvetlevanja .Prva je osvetlitev v ozadju, in je idealnater nujna predvsem pri natančnih merje-njih. Druga kategorija je široka paleta
izpeljank reflektiv-nih metod, ki so bistveno bolj omejene sstališča natančnega merjenja, omogočajopa tudi povšinsko kontrolo izdelka.
Bolj nenatančni rezultati za dimenzijskamerjenja pri reflektivnih metodah izhaja-jo predvsem iz oblik robov na izdelku.
Praktično ni izdelka, na katerem bi robpo mehanski ali drugi obdelavi ostal po-polnoma oster. Vsak rob je deformiran innajvečkrat je ta deformacija nestacionar-na skozi daljši čas v teku proizvodnegaprocesa. Vzroki so predsem v obrabi oro-dij in rezil ter nehomogenosti materiala.Neoster rob generira navidezno drugač-no dimenzijo pri reflektivnih merilnihmetodah. Napaka je večja čim večja jedeformacija robu (svetloba se v sferič-nem ali drugače oblikovanem delu robane odbije v isto smer, kakor na ravnemdelu).
Iz tega sledi, da je izdelek, kateremu ježeljene dimenzije moč meriti s presvetlit-venimi optičnimi postopki naravnostidealen za avtomatsko optično kontrolo.Z reflektivnimi merilnimi metodami pavršimo kontrolo površine, kjer so tuditolerančna območja mnogokrat bistveno
večja, kot pri dimenzijah, ki so pogojenas funkcionalnostjo izdelka. K temu soditudi dejavnik programske opreme. Pro-gramsko matematični modeli za dimen-zijsko kontrolo so mnogo enostavnejši,kakor modeli za kontrolo površinskeustreznosti.
Sistemi za avtomatsko optično kontrolo izdelkovRačunalniški vid kot tehnologija modernih industrijskih okolijAvtor: Franelj Trdič, FDS Research d.o.o.
Nenehne zahteve po dvigovanju kvalitete izdelkov in na drugi strani zahteve po nižanju proizvodnihstroškov sta najbolj ključna razloga za prodor sistemov avtomatske optične kontrole v moderne innapredne proizvodne procese. Glede na to, da je s funkcionalnostjo izdelka pogojena tudi večinaoptično izraženih veličin, je optična kontrola najpogosteje sestavni del vsakega popolnoma avtoma-tiziranega tehnološkega procesa.
Slika 1 - Zunanji izgled samostojnega sistema za avtomatsko optičnokontrolo kolektorjev.
Slika 2 - Osvetljevanje: največja "uganka" vseh zahtevnejših vision sis-temov. Različni svetlobni efekti in ustrezne postavitve so osnovni pogojza ustrezno vidnost.

AVTOMATIKA36 26/2002
NADZOR KAKOVOSTI - Sistemi za avtomatsko optično kontrolo
Ali je kamera sistem za avto-matsko optično kontrolo?Odgovor je NE. Marsikdo si predstavlja,da postavimo kamero na proizdvodnitrak in zadeva je rešena. Vendar v praksiobičjano ni tako preprosto. Zelo malo jetistih izdelkov, ki jih je moč optično kon-trolirati neposredno na proizvodnih lini-jah, ali pa vsaj popolnoma ne. Osnovnivzrok je v zagotavljanju svetlobnih pogo-jev na izdelku, ki so osnova, da zaznavalokamere lahko detektira optične raznoli-kosti na izdelku. Izdelek je potrebnoustrezno osvetliti (dinamika zaznavanjana kameri ni tako velika, kakor je dinami-ka človekovega očesa).
Osvetlevanje izdelka zahteva prostor; toso različni položaji, različni koti in različ-ne projekcije svetlobnih snopov iz celo-tnega spektra svetilnih teles. K temu sodiše ustrezna postavitev kamer, in dejstvo,da predvsem pri natančnih dimenzijskihmeritvah mora biti izdelek pravokotenna zaznavalo kamere. Če se vrši dejanska100% optična kontrola je potebno izde-
lek obračati in zagotavljati tako svetlob-ne pogoje, kakor poglede kamer na izde-lek iz vseh strani.
Skupek vseh teh dejavnikov daje naza-dnje odgovor, da je sistem za avtomatskooptično kontrolo običajno samostojensistem z nekaj ali celo več kot desetkamerami, celo paleto optike in svetilnihteles ter pripadajočimi transportnimisistemi, računalniškimi enotami in prida-jajočo programsko opremo.
Transportni sistemi transportirajo izdel-ke skozi različna merilna mesta, projekti-rana za kontrolo različnih napak v različ-nih pogledih na izdelek. So sicer podro-čja, kjer tudi ena sama kamera lako mar-sikaj kontrolira, nikakor pa ne izdelka vceloti.
Ali se lahko vrši kontrola izdel-ka med gibanjem?Z zagotavljanjem svetlobnih pogojev soneposredno povezani razpoložljivi eks-pozicijski časi kamer, ki so funkcija pred-vsem hitrosti gibanja izdelkov. Kameralahko posname izdelek v gibanju alimirovanju. Če se izdelek giblje, mora bitiekspozicijki čas kamere tako majhen, dase izdelek ne premakne za več, kakor je
zmožnost minimalne detekcije sistema.Običajno je to pod velikostjo enega sli-kovnega piksla.
Slika 3 - Velik telecentrični objektiv. Samakamera je zanemarljiva komponenta aplikaci-je

AVTOMATIKA 3726/2002
NADZOR KAKOVOSTI - Sistemi za avtomatsko optično kontrolo
Pri izjemno kratkih ekspozicijskih časih je obseg možnih sve-tlobnih virov izjemno omejen zaradi energije, ki jo je zmožengenerirati v tako kratkem času. Na primer, če svetlobni virtemelji na LED tehniki zato, da ga je mogoče hitro prižigati inugašati, nastopi hkrati problem na drugi strani, ker dani vir ne
generira dovolj energije, da bi dani parameter na izdelku gene-riral drugačen svetlobni odboj kakor pa okolica. Alternativnaizbira močnejšega svetlobnega vira pa ne omogoča dovoljhitrih preklopov ali pa je celo neustrezna s stališča svetlobnihkarakteristik vira za dano napako.
Slika 5 - Osvetlevanje in transportne enote v sistemu avtomatskeoptične kontrole izdelkov
Dalje, pri zajemu slik izdelkov v gibanju nemalokrat nastopiproblem, da izdelek iz različnih razlogov ni na istem mestu. Sstališča programske opreme oz. optike je problem sicer eno-stavno rešljiv, ni pa tako enostavno rešljiv s področja metodosvetlevanja. Na primer, neka napaka na izdelku je vidna samopod določenim kotom svetlobnega snopa. Če izdelek ni v pol-ožaju za katere so projektirane svetlobne razmere bo napakaenostavno nevidna. V izogib navedenim problemom, se izdelki največkrat ustavljajona točkah optičnih kontrol. Ustavljanje je skorajda nujno pred-vsem pri zelo natančnih dimenzijskih merjenjih. V aplikacijahkjer gre pa zgolj za kontrole bolj grobih napak se pa kontrolalahko vrši med gibanjem. A

AVTOMATIKA38 26/2002
SISTEMI ZA AVTOMATIZACIJO IN ROBOTIZACIJO - Strojni vid na osnovi barvne segmentacije
Sliko iz kamere najprej razčlenimo v boljenostavne in samostojne enote. To nare-dimo z ugotavljanjem področij na sliki naosnovi barvne informacije posameznegaslikovnega elementa. Področja nato raz-vrstimo z upragovljanjem v predhodnodefinirano število razredov (razred žoga,robot1 identifikacijska značka, robot1timska značka, ...). Sosednja področjaistega razreda združimo in nato z nekajlogike izberemo področja, ki z večjo ver-jetnostjo predstavljajo določen objekt.Izračunamo težišča področij, ki označu-jejo objekt ter orientacijo objekta.Omenjene postopke smo uspeli združiti,tako da jih izvedemo le z enkratnim pre-letom slike. S tem smo dosegli zahtevanohitrost obdelave slike, ki jo narekuje frek-venca kamere (25 Hz).V delu najprej na hitro opišemo izgledsistema, nato pa podamo osnovne zahte-ve glede strojne opreme in zahteve, kijim mora zadostiti program za računalni-ški vid. Sledi prikaz izgrajene aplikacijeter razložitev delovanja programa, njego-vih sestavnih delov ter vgrajenih in pred-videnih opcij. Delovanje nato preverimoin določimo zmogljivosti vida, to je nje-govo zanesljivost delovanja, robustnostin hitrost razpoznavanja. Iz posnetegadelovanja vida (ocenjenih pozicij ob vsa-kem časovnem intervalu) ocenimo dina-miko in deviacije robotov ter žoge. Dob-ljene ocene uporabimo pri vključevanjuKalmanovega filtra k vidu. Delo zaključi-mo z nekaj ugotovitvami ter idejami zanadaljnje delo.
2. Shema vidaShematičen prikaz računalniškega vidaprikazuje slika 1.
Avtorji: Gregor Klančar, Sašo Blažič, Rihard Karba, Fakulteta za elektrotehniko, Univerza v Ljubljani
Kriteriji hitrega strojnega vida na osnovibarvne segmentacije
(uporaba pri robotskem nogometu)
V prispevku predstavljamo izgradnjo računalniškega vida za sleden-je robotov in žoge v robotskem nogometu. V literaturi zasledimo vrstopristopov in metod, ki so uporabni pri razpoznavanju robotov z barvn-imi srajčkami iz barvne slike kamere. Večina pristopov skuša razvrsti-ti slikovne elemente slike v predhodno definirano število razredov.
Najbolj uporabljeni pristopi so: barvno upragovljanje, razvrščanje s K najbližjih sosedov, nevronskemreže kot razvrščevalnik, razvrščanje z uporabo odločitvenih dreves, razvrščanje z uporabo verjet-nostnih pristopov ter ostali pristopi [6], [1], [2].
Kamera posname trenutni prizor iz oko-lja, to je igrišča. Na izhodu kamere dobi-mo zvezni signal, ki se nato digitalizira vvzorčevalniku slike (frame grabber) inzapiše v del rezerviranega pomnilnika vračunalniku. Sledi obdelava slike v raču-nalniku, tako da na koncu obdelave iden-tificiramo pozicije in orientacije objek-tov.
Pri obdelavi slike moramo najprej določi-ti značilke slike, s pomočjo katerih bomolahko ločili igrišče od objektov zanima-nja. Za značilke je bila v našem primeruizbrana barvna informacija ter dodatnoše informacija o medsebojni poziciji invelikosti pack (barvnih zaplat na srajčkirobota).
Postopek računalniške obdelave slike,prikazan na sliki 1, lahko opišemo z nas-lednjimi točkami [4]:• Trenutni slikovni element primerja-
mo s pragovi, ki jih določimo na začet-ku z učenjem. Ti pragovi predstavljajov tridimenzionalnem RGB prostorukvadre (vsako področje, ki ga želimoslediti, ima pripadajoč kvader oz. pra-gove). Če trenutni slikovni element
pade znotraj enega izmed kva-drov, ga razvrstimo v razred, kipripada temu kvadru.• Slikovne elemente, ki pripa-dajo enemu razredu in se držijoskupaj, združimo v povezanapodročja, ter jih poimenujemoz istim imenom. Vsa področjadobljena na ta način zapišemov bazo področij. Od vsakegapodročja si zapomnimo imepodročja (številka), barvo, šte-
vilo elementov (ploščino) ter koordi-nate centra področja.
• Filtriranje izvedemo posredno, takoda vzamemo v obzir le področja z veli-ko ploščino, vendar ne večja kot jelahko površina packe na objektu. Nata način se nam ni treba bati, da bi sfiltriranjem okrnili informacijo. Takolahko področje, ki predstavlja objektizberemo tudi v slučaju ko ima le enslikovni element in seveda področje zvečjo ploščino enake barve ne obstaja.
• V zadnjem koraku s preprosto logikopreverimo katera področja (en robotima dve barvni znački, identifikacij-ska barva in timska barva) sovpadajo.Tu je pomembna v naprej znana infor-macija o medsebojni poziciji značk.
3. Izbira ustrezne strojne opremeIzbira ustrezne strojne opreme je pome-mben korak pri razvoju vsake aplikacije.Nadaljnja programska oprema oziromaprogramiranje je v veliki meri vezano nazmogljivosti strojne opreme.
3.1. KameraKamere so v večini standardne PAL s 25Hz oziroma NTSC sistem s 30 Hz.
Slika 1 - Shematičen prikaz računalniškega vida
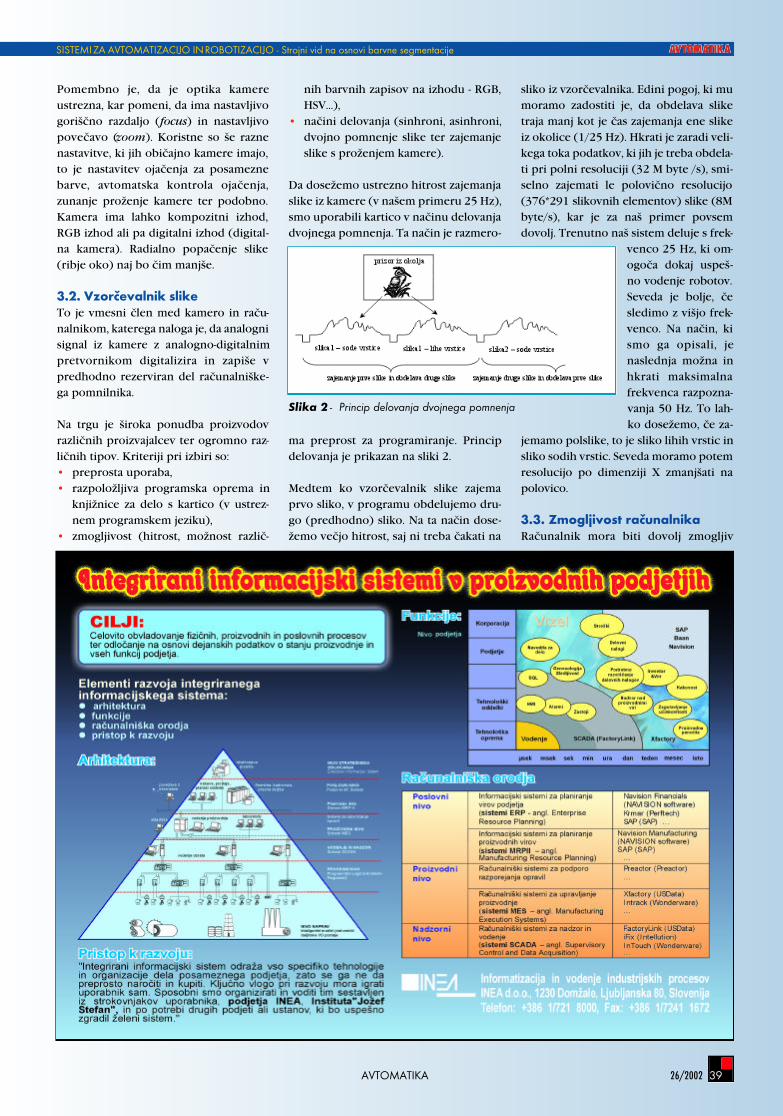
AVTOMATIKA 3926/2002
SISTEMIZA AVTOMATIZACIJO INROBOTIZACIJO - Strojni vid na osnovi barvne segmentacije
Pomembno je, da je optika kamereustrezna, kar pomeni, da ima nastavljivogoriščno razdaljo (focus) in nastavljivopovečavo (zoom). Koristne so še raznenastavitve, ki jih običajno kamere imajo,to je nastavitev ojačenja za posameznebarve, avtomatska kontrola ojačenja,zunanje proženje kamere ter podobno.Kamera ima lahko kompozitni izhod,RGB izhod ali pa digitalni izhod (digital-na kamera). Radialno popačenje slike(ribje oko) naj bo čim manjše.
3.2. Vzorčevalnik slikeTo je vmesni člen med kamero in raču-nalnikom, katerega naloga je, da analognisignal iz kamere z analogno-digitalnimpretvornikom digitalizira in zapiše vpredhodno rezerviran del računalniške-ga pomnilnika.
Na trgu je široka ponudba proizvodovrazličnih proizvajalcev ter ogromno raz-ličnih tipov. Kriteriji pri izbiri so:• preprosta uporaba,• razpoložljiva programska oprema in
knjižnice za delo s kartico (v ustrez-nem programskem jeziku),
• zmogljivost (hitrost, možnost različ-
nih barvnih zapisov na izhodu - RGB,HSV...),
• načini delovanja (sinhroni, asinhroni,dvojno pomnenje slike ter zajemanjeslike s proženjem kamere).
Da dosežemo ustrezno hitrost zajemanjaslike iz kamere (v našem primeru 25 Hz),smo uporabili kartico v načinu delovanjadvojnega pomnenja. Ta način je razmero-
ma preprost za programiranje. Principdelovanja je prikazan na sliki 2.
Medtem ko vzorčevalnik slike zajemaprvo sliko, v programu obdelujemo dru-go (predhodno) sliko. Na ta način dose-žemo večjo hitrost, saj ni treba čakati na
sliko iz vzorčevalnika. Edini pogoj, ki mumoramo zadostiti je, da obdelava sliketraja manj kot je čas zajemanja ene slikeiz okolice (1/25 Hz). Hkrati je zaradi veli-kega toka podatkov, ki jih je treba obdela-ti pri polni resoluciji (32 M byte /s), smi-selno zajemati le polovično resolucijo(376*291 slikovnih elementov) slike (8Mbyte/s), kar je za naš primer povsemdovolj. Trenutno naš sistem deluje s frek-
venco 25 Hz, ki om-ogoča dokaj uspeš-no vodenje robotov.Seveda je bolje, česledimo z višjo frek-venco. Na način, kismo ga opisali, jenaslednja možna inhkrati maksimalnafrekvenca razpozna-vanja 50 Hz. To lah-ko dosežemo, če za-
jemamo polslike, to je sliko lihih vrstic insliko sodih vrstic. Seveda moramo potemresolucijo po dimenziji X zmanjšati napolovico.
3.3. Zmogljivost računalnikaRačunalnik mora biti dovolj zmogljiv
Slika 2 - Princip delovanja dvojnega pomnenja
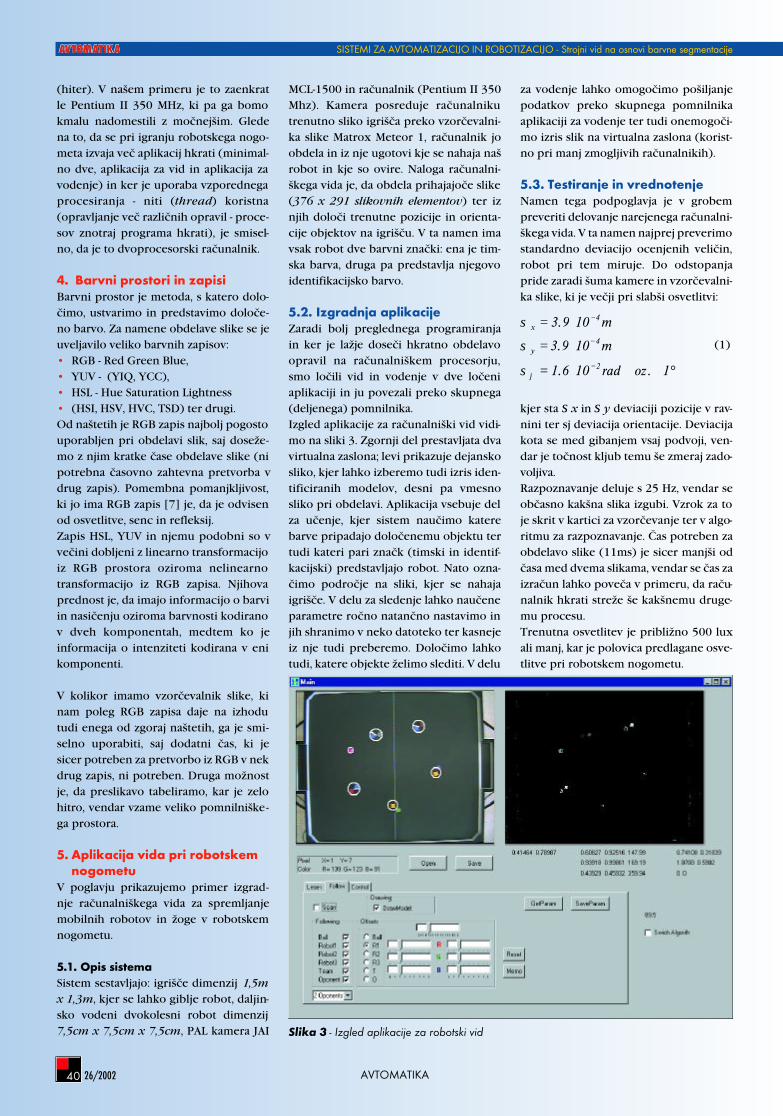
AVTOMATIKA40 26/2002
SISTEMI ZA AVTOMATIZACIJO IN ROBOTIZACIJO - Strojni vid na osnovi barvne segmentacije
(hiter). V našem primeru je to zaenkratle Pentium II 350 MHz, ki pa ga bomokmalu nadomestili z močnejšim. Gledena to, da se pri igranju robotskega nogo-meta izvaja več aplikacij hkrati (minimal-no dve, aplikacija za vid in aplikacija zavodenje) in ker je uporaba vzporednegaprocesiranja - niti (thread) koristna(opravljanje več različnih opravil - proce-sov znotraj programa hkrati), je smisel-no, da je to dvoprocesorski računalnik.
4. Barvni prostori in zapisiBarvni prostor je metoda, s katero dolo-čimo, ustvarimo in predstavimo določe-no barvo. Za namene obdelave slike se jeuveljavilo veliko barvnih zapisov: • RGB - Red Green Blue, • YUV - (YIQ, YCC), • HSL - Hue Saturation Lightness • (HSI, HSV, HVC, TSD) ter drugi. Od naštetih je RGB zapis najbolj pogostouporabljen pri obdelavi slik, saj doseže-mo z njim kratke čase obdelave slike (nipotrebna časovno zahtevna pretvorba vdrug zapis). Pomembna pomanjkljivost,ki jo ima RGB zapis [7] je, da je odvisenod osvetlitve, senc in refleksij.Zapis HSL, YUV in njemu podobni so vvečini dobljeni z linearno transformacijoiz RGB prostora oziroma nelinearnotransformacijo iz RGB zapisa. Njihovaprednost je, da imajo informacijo o barviin nasičenju oziroma barvnosti kodiranov dveh komponentah, medtem ko jeinformacija o intenziteti kodirana v enikomponenti.
V kolikor imamo vzorčevalnik slike, kinam poleg RGB zapisa daje na izhodutudi enega od zgoraj naštetih, ga je smi-selno uporabiti, saj dodatni čas, ki jesicer potreben za pretvorbo iz RGB v nekdrug zapis, ni potreben. Druga možnostje, da preslikavo tabeliramo, kar je zelohitro, vendar vzame veliko pomnilniške-ga prostora.
5. Aplikacija vida pri robotskemnogometu
V poglavju prikazujemo primer izgrad-nje računalniškega vida za spremljanjemobilnih robotov in žoge v robotskemnogometu.
5.1. Opis sistemaSistem sestavljajo: igrišče dimenzij 1,5mx 1,3m, kjer se lahko giblje robot, daljin-sko vodeni dvokolesni robot dimenzij7,5cm x 7,5cm x 7,5cm, PAL kamera JAI
MCL-1500 in računalnik (Pentium II 350Mhz). Kamera posreduje računalnikutrenutno sliko igrišča preko vzorčevalni-ka slike Matrox Meteor 1, računalnik joobdela in iz nje ugotovi kje se nahaja našrobot in kje so ovire. Naloga računalni-škega vida je, da obdela prihajajoče slike(376 x 291 slikovnih elementov) ter iznjih določi trenutne pozicije in orienta-cije objektov na igrišču. V ta namen imavsak robot dve barvni znački: ena je tim-ska barva, druga pa predstavlja njegovoidentifikacijsko barvo.
5.2. Izgradnja aplikacijeZaradi bolj preglednega programiranjain ker je lažje doseči hkratno obdelavoopravil na računalniškem procesorju,smo ločili vid in vodenje v dve ločeniaplikaciji in ju povezali preko skupnega(deljenega) pomnilnika.Izgled aplikacije za računalniški vid vidi-mo na sliki 3. Zgornji del prestavljata dvavirtualna zaslona; levi prikazuje dejanskosliko, kjer lahko izberemo tudi izris iden-tificiranih modelov, desni pa vmesnosliko pri obdelavi. Aplikacija vsebuje delza učenje, kjer sistem naučimo katerebarve pripadajo določenemu objektu tertudi kateri pari značk (timski in identif-kacijski) predstavljajo robot. Nato ozna-čimo področje na sliki, kjer se nahajaigrišče. V delu za sledenje lahko naučeneparametre ročno natančno nastavimo injih shranimo v neko datoteko ter kasnejeiz nje tudi preberemo. Določimo lahkotudi, katere objekte želimo slediti. V delu
za vodenje lahko omogočimo pošiljanjepodatkov preko skupnega pomnilnikaaplikaciji za vodenje ter tudi onemogoči-mo izris slik na virtualna zaslona (korist-no pri manj zmogljivih računalnikih).
5.3. Testiranje in vrednotenjeNamen tega podpoglavja je v grobempreveriti delovanje narejenega računalni-škega vida. V ta namen najprej preverimostandardno deviacijo ocenjenih veličin,robot pri tem miruje. Do odstopanjapride zaradi šuma kamere in vzorčevalni-ka slike, ki je večji pri slabši osvetlitvi:
(1)
kjer sta σx in σy deviaciji pozicije v rav-nini ter sj deviacija orientacije. Deviacijakota se med gibanjem vsaj podvoji, ven-dar je točnost kljub temu še zmeraj zado-voljiva.Razpoznavanje deluje s 25 Hz, vendar seobčasno kakšna slika izgubi. Vzrok za toje skrit v kartici za vzorčevanje ter v algo-ritmu za razpoznavanje. Čas potreben zaobdelavo slike (11ms) je sicer manjši odčasa med dvema slikama, vendar se čas zaizračun lahko poveča v primeru, da raču-nalnik hkrati streže še kakšnemu druge-mu procesu.Trenutna osvetlitev je približno 500 luxali manj, kar je polovica predlagane osve-tlitve pri robotskem nogometu.
Slika 3 - Izgled aplikacije za robotski vid
°⋅=
⋅=
⋅=
−
−
−
1.ozrad101.6
m103.9
m103.9
2
4y
4x
ϕσ
σ
σ

AVTOMATIKA 4126/2002
SISTEMI ZA AVTOMATIZACIJO IN ROBOTIZACIJO - Strojni vid na osnovi barvne segmentacije
6. Razširjeni Kalmanov filterTrenutne ocenjene veličine (koordinatepozicije in orientacija) so motene sšumom kamere, vzorčevalnika ter razni-mi motnjami, ki se zgodijo pri vodenjurobota (radijski prenos, spodrsavanjekoles, itd.). Hkrati imamo zaradi obdela-ve slike približno en časovni vzoreczastarelo informacijo (slika 2). Vse našte-te slabosti skušamo izboljšati z uporaboKalmanovega filtra.
6.1. Teoretično ozadjeObnašanje dinamičnih sistemov lahkoopišemo z množico spremenljivk v pros-toru stanj (stanja sistema). V praksi posa-mezna stanja ne moremo natančno dolo-čiti le iz razpoložljivih meritev, saj so le talahko funkcija večih stanj in so bolj alimanj pošumljena. Proces pa je pogostopodvržen tudi naključnim motnjam izokolja. Da dobimo vrednosti stanj, mora-mo le te oceniti iz pošumljenih meritevvhoda in izhoda.
Obnašanje mobilnega robota lahko opi-šemo z naslednjimi diferencialnimi enač-bami
(2)
kjer so: v linearna hitrost robota, w krož-na hitrost robota, x in y koordinati pozi-cije ter ϕ orientacija robota glede na glo-balni koordinatni system. Če enačbo (2)zapišemo v diskretni obliki, dobimo
(3)
kjer je T čas vzorčenja. Krajši zapis enač-be (3) z upoštevanjem pošumljenosti sig-nalov je
(4)
Vektor v(k) predstavlja statistično neod-visen vhodni šum, n(k) statistično neod-visen izhodni šum ter C enotina matrikaI3. Za šum predpostavimo, da ima sred-njo vrednost enako nič in diagonalni
⋅
=
)t(
)t(v
10
0))t(sin(
0))t(cos(
)t(
)t(y
)t(x
ωϕϕ
ϕ&&&
+≈+⋅++≈+⋅++≈+
)k(T)k()1k(
))k(2T)k(sin()k(Tv)k(y)1k(y
))k(2T)k(cos()k(Tv)k(x)1k(x
ωϕϕωϕωϕ
n(k)Cx(k)y(k)
v(k))),f(x(k),u(k1)x(k
+==+
kovariančni matriki šumov V in N [5],[3]. Rekurzivni algoritem razširjenegaKalmanovega filtra lahko opišemo zdvema deloma, del za predikcijo (5) indel za korekcijo (6).
(5)kjer je F(k) vhodna matrika šuma, ki jeenaka vhodni matriki sistema, ker šumv(k) vstopa na vhodu sistema. V delu zakorekcijo določimo korekcijsko matrikoK(k) iz predikcij stanj iz prejšnjega kora-ka x*(k) in iz predikcije kovariančnevrednosti matrike P*(k) vektorja napake[5]. Nato določimo oceno vektorja stanjter izračunamo kovariančno matriko vek-torja napake iz njene predikcije.
(6)Z linearizacijo (3) okoli trenutne ocenestanj in vrednosti vhodov dobimo
Design Centar CadCamCadCam
CadCam Design Centar d.o.o.Kraljeviceva 3
10000 Zagreb, HrvatskaTel/fax: + 385-1-2302-454
E-mail: [email protected]: http://www.cadcam.hr
CadCam Lab d.o.o.Tržaška 2
1000 Ljubljana, SlovenijaTel/fax: 01-4267-333
E-mail: [email protected]: http://www.cadcam.hr
design systemFrom
PCB
Altium.
Board-level design systemFrom Altium.
from
Embedded software development
Altium.
FPGA
from design system
Altium.
Circuit board
from CAM system
Altium.
The virtual electronics lab from Altium.
Complete from
support systemAltium.
TT*
*
)k()k()k()k(�
)k()1k(
))k(),k(�(f)1k(
VFFAPAP
uxx
+=+
=+
[ ][ ]
)k()k()k()k(�
)k()k()k()k()k(�)k()k()k(
**
**
1T*T*
CPKPP
CxyKxx
NCCPCPK
−=
−+=
+=−
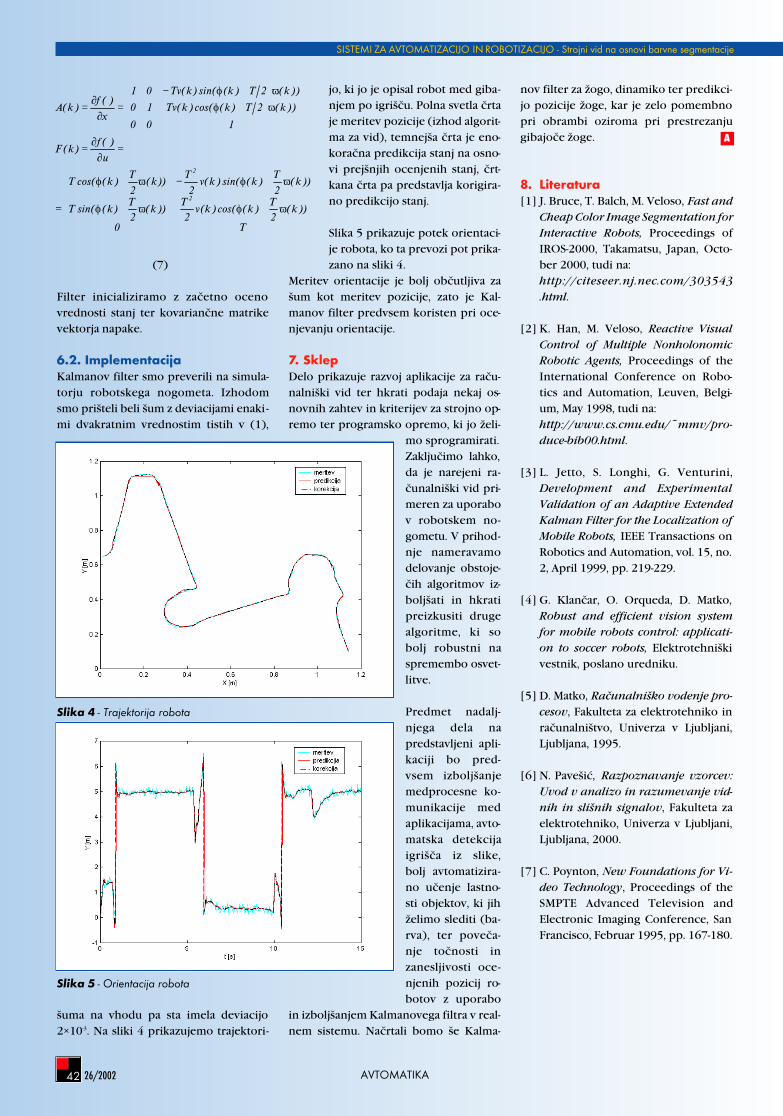
AVTOMATIKA42 26/2002
SISTEMI ZA AVTOMATIZACIJO IN ROBOTIZACIJO - Strojni vid na osnovi barvne segmentacije
(7)
Filter inicializiramo z začetno ocenovrednosti stanj ter kovariančne matrikevektorja napake.
6.2. ImplementacijaKalmanov filter smo preverili na simula-torju robotskega nogometa. Izhodomsmo prišteli beli šum z deviacijami enaki -mi dvakratnim vrednostim tistih v (1),
šuma na vhodu pa sta imela deviacijo2×10-3. Na sliki 4 prikazujemo trajektori-
jo, ki jo je opisal robot med giba-njem po igrišču. Polna svetla črtaje meritev pozicije (izhod algorit-ma za vid), temnejša črta je eno-koračna predikcija stanj na osno-vi prejšnjih ocenjenih stanj, črt-kana črta pa predstavlja korigira-no predikcijo stanj.
Slika 5 prikazuje potek orientaci-je robota, ko ta prevozi pot prika-zano na sliki 4.
Meritev orientacije je bolj občutljiva zašum kot meritev pozicije, zato je Kal-manov filter predvsem koristen pri oce-njevanju orientacije.
7. SklepDelo prikazuje razvoj aplikacije za raču-nalniški vid ter hkrati podaja nekaj os-novnih zahtev in kriterijev za strojno op-remo ter programsko opremo, ki jo želi-
mo sprogramirati.Zaključimo lahko,da je narejeni ra-čunalniški vid pri-meren za uporabov robotskem no-gometu. V prihod-nje nameravamodelovanje obstoje-čih algoritmov iz-boljšati in hkratipreizkusiti drugealgoritme, ki sobolj robustni naspremembo osvet-litve.
Predmet nadalj-njega dela napredstavljeni apli-kaciji bo pred-vsem izboljšanjemedprocesne ko-munikacije medaplikacijama, avto-matska detekcijaigrišča iz slike,bolj avtomatizira-no učenje lastno-sti objektov, ki jihželimo slediti (ba-rva), ter poveča-nje točnosti inzanesljivosti oce-njenih pozicij ro-botov z uporabo
in izboljšanjem Kalmanovega filtra v real-nem sistemu. Načrtali bomo še Kalma-
nov filter za žogo, dinamiko ter predikci-jo pozicije žoge, kar je zelo pomembnopri obrambi oziroma pri prestrezanjugibajoče žoge.
8. Literatura[1] J. Bruce, T. Balch, M. Veloso, Fast and
Cheap Color Image Segmentation forInteractive Robots, Proceedings ofIROS-2000, Takamatsu, Japan, Octo-ber 2000, tudi na:http://citeseer.nj.nec.com/303543.html.
[2] K. Han, M. Veloso, Reactive VisualControl of Multiple NonholonomicRobotic Agents, Proceedings of theInternational Conference on Robo-tics and Automation, Leuven, Belgi-um, May 1998, tudi na:http://www.cs.cmu.edu/~mmv/pro-duce-bib00.html.
[3] L. Jetto, S. Longhi, G. Venturini,Development and ExperimentalValidation of an Adaptive ExtendedKalman Filter for the Localization ofMobile Robots, IEEE Transactions onRobotics and Automation, vol. 15, no.2, April 1999, pp. 219-229.
[4] G. Klančar, O. Orqueda, D. Matko,Robust and efficient vision systemfor mobile robots control: applicati-on to soccer robots, Elektrotehniškivestnik, poslano uredniku.
[5] D. Matko, Računalniško vodenje pro-cesov, Fakulteta za elektrotehniko inračunalništvo, Univerza v Ljubljani,Ljubljana, 1995.
[6] N. Pavešić, Razpoznavanje vzorcev:Uvod v analizo in razumevanje vid-nih in slišnih signalov, Fakulteta zaelektrotehniko, Univerza v Ljubljani,Ljubljana, 2000.
[7] C. Poynton, New Foundations for Vi-deo Technology, Proceedings of theSMPTE Advanced Television andElectronic Imaging Conference, SanFrancisco, Februar 1995, pp. 167-180.
ω+ϕω+ϕ
ω+ϕ−ω+ϕ
=
=∂
⋅∂=
ω⋅+ϕω⋅+ϕ−
=∂
⋅∂=
T0
))k(2T
)k(cos()k(v2
T))k(
2T
)k(sin(T
))k(2
T)k(sin()k(v
2
T))k(
2
T)k(cos(T
u
)(f)k(F
100
))k(2T)k(cos()k(Tv10
))k(2T)k(sin()k(Tv01
x�)(f
)k(A
2
2
Slika 4 - Trajektorija robota
Slika 5 - Orientacija robota
A

AVTOMATIKA 4326/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
dihalnih poteh povzroča specifično reak-cijo organizma. Znana je npr. perforacijaseptuma v nosni votlini pri delavcih, kiimajo opraviti s kromati, npr. pri galvani-zerjih, in druge bolezni.Alergogeni prah povzroča alergičnereakcije v gornjih dihalnih poteh ali vpljučih. Značilno je, da lahko daljša izpo-stavljenost povzroči preobčutljivost(senzibilizacijo) na določene alergene.Alergene reakcije v pljučih (npr. alergo-geni alveolitis) povzročajo številne vrsteprahu predvsem organskega izvora, bio-geni prah, kot je cvetni pelod, prah kave,nekatere kovine, kot so krom, nikelj,kobalt, platina, zlato, kemikalije za galva-niziranje, fotografske kemikalije, prahnekaterih močno razširjenih umetnihplastičnih mas (npr. TDI=toluendiisocia-nat) idr. Značilne bolezni alergogenegaprahu so poklicna bronhialna astma,alergeni alveolitis, bisinoza delavcev, kidelajo pri predelavi konoplje, lanu, bom-baža, bolezen rejcev ptic, seneni nahodidr.Kancerogene vrste so npr. azbesta, kipovzroča pljučnega raka in raka pleure(mesoteliom), kromati, nikelj in spojine,berilij, arsen in spojine, kobalt in spojine,nekatere vrste prahu trdih lesov (bukev,hrast), saje, dim katrana, cigaretni dim,radioaktivne snovi ali prah, ki vsebujeradioaktivne snovi, npr. razpadne pro-dukte radona, idr. Obstaja sum na kance-rogenost steklenih vlaken in vlakenmineralne volne, vendar je treba prioceni kancerogenosti vlaknastega mate-riala upoštevati tudi dimenzije vlaken intopnost. Zato so steklena vlakna, s kakrš-nimi imamo največkrat opraviti, zaradivečjih dimenzij in topnosti v pljučnihtekočinah, kot so dimenzije in topnostpraktično netopnega azbesta, po današ-njem znanju manj nevarna od azbesta.Seznami dokazano kancerogenih snovi
Avtor: Andrej Holobar, Marija Beras
MERJENJE PRAHUPodjetje Echo d.o.o. iz Slovenskih Konjic je specializirano za svetovanje inizvedbo merjenja fizikalnih in kemijskih parametrov. Eden od pogostihproblemov v proizvodnji je prah, ki lahko s svojim delovanjem vpliva naproizvodni proces, kakor tudi škodljivo vpliva na zdravje. V podjetju Echod.o.o. opravljajo meritve prahu že vrsto let v sodelovanju z nemškim pod -jetjem GRIMM v okviru katerega vam predstavljamo GRIMM-ove merilnikeprahu.
PrahPrah je lahko nevarna, škodljiva in mote-ča snov. V primerjavi s plini ali hlapi imaprah pri delovanju na organizem nekate-re posebnosti. Tako lahko različne vrsteprahu razdelimo po načinu delovanja naorganizem:• inertni prah,• fibrogeni prah,• toksični prah,• dražljivi prah,• prah s specifičnim delovanjem na
zgornje dihalne poti,• alergogeni• kancerogeni,• mutageni in• teratogeni prah.
Inertni prah imenujemo tisti prah, ki ssvojo navzočnostjo obremenjuje pred-vsem dihala. Praviloma je obremenitevorganizma z internim prahom reverzibil-na, kar pomeni, da si organizem po kon-čani izpostavljenosti prej ali slej opomo-re in vrne v prvotno stanje. Značilnipredstavniki so npr. prah apnenca, prahpremoga (brez prostega kremena), smu-kec (brez prostega kremena), dim železo-vega oksida, nekateri silikati kot so por-celan, keramika, aluminijev oksid, neka-tere plastične mase, sladkor idr.Fibrogeni prah povzroča razraščanje inbrazgotinjenje pljučnega veznega tkiva,ki ni reverzibilno, ampak je trajno inpogosto napredujoče. Značilni predstav-niki takšnega prahu so npr. prostikamen, minerali, ki vsebujejo kremen,premogov prah, ki vsebuje kremen idr.(obolenje zaradi prostega kremena seimenuje silikoza), barit (baritoza), azbest(azbestoza) ipd. Pogosto lahko obolenjeposledično spremljajo tudi druge bolez-ni, npr. tuberkuloza, v tem primeru joimenujemo silikotuberkuloza ipd.Toksični (strupeni) prah prehaja izdihal v organe in tkiva tako, da se raztap-lja na sluznicah dihalnih poti ali pa v pre-
bavnem traktu. Raztopljen se prenaša poorganizmu kot škodljiva snov in sicer skrvjo, s hranilnimi snovmi ali pa z drugi-mi telesnimi tekočinami in zastrupljaorgane, tkiva ali sisteme. Predstavniki toksičnih vrst prahu so npr.prah strupenih topnih anorganskih soli,prah snovi, ki vsebuje težke kovine, kotso živo srebro, svinec, kositer, antimon,vanadij, platina, prah, ki vsebuje kovineprehodnih elementov, kot so berilij, kad-mij, selen in telur, talij, arzen ali prah, kivsebuje npr. fluor ali fluoride, pesticide,insekticide, umetna gnojila, fungicidi,zaščitna barvila, ki vsebujejo težke kovi-ne, npr. minij. Med značilna obolenja spa-dajo npr. saturnizem kot posledicazastrupitve s Pb, magnezijem zaradi zas-trupitve z Mn, livarska mrzlica pri delav-cih v livarnah zlitin Zn-Cu-Mg idr.Dražljivi prah draži sluznice dihal,lahko tudi sluznice oči ali kože. Nekateriznačilni predstavniki so prah živegaapna ali drugih jedki anhidridov lugov,prah ali megle jedkih kislin, prah nekate-rih vrst eksotičnih leskov, pa tudi nekate-re kemično sicer nevtralne snovi, kot somineralna ali steklena volna idr.Prah s specifičnim delovanjem na gornjedihalne poti je praviloma grobi prah, kise usede v zgornjih dihalnih poteh, npr.spojine vanadija, kromati idr. V zgornjih
AVTOMATIKA44 26/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
ali snovi, za katere se utemeljeno sumi,da so kancerogene, (npr. MAK-WerteZRN in drugi seznami) se z novimi spon-zorji iz leta v leto daljšajo.Mutagene (povzročajo mutacijo, škodlji-vo vplivajo na potomstvo) in teratogene(škodljivo delujejo na plod) vrste prahuso najbolj pogosto organske spojine, npr.snovi pri izdelavi poljedelskih prepara-tov itd.
Vidimo torej, da klasifikacija včasih nienoznačna, ker lahko določena vrstasnovi škodljivo vpliva istočasno na večrazličnih načinov: kromati npr. lahkopoškodujejo dihalne poti (perforacijanosnega pretina) in kancerogeni, azbestkot fibrogena in kot rakotvorna snov ipd.Škodljivost prahu je odvisna tudi od vrsteprahu. Mera s katero opišemo stopnjoškodljivosti določene snovi, je maksimal-na dovoljena koncentracija in jo označu-jemo s kratico MDK. Ogroženost delavcazaradi izpostavljenosti prahu ni odvisnasamo od MDK, ampak tudi od drugihvplivov (časa izpostavljenosti, vrsteprahu…). Z vidika predpisov je MDK šte-vilčno točno določena vrednost, ki jepredpisana kot pravna norma. Določa sena podlagi epidemioloških študij na boljali manj omejenem vzorcu populacijeljudi ali na živalih. Maksimalna dovoljenakoncentracija je po definiciji tista tistakoncentracija škodljive snovi (prahu) vzraku, ki ne povzroča zdravstvene okvarezaradi izpostavljenosti prahu (plinu,pari) odraslega in zdravega delavca obfizično lahkem delu.Za pravilno uporabo MDK moramo po-znati metodo merjenja in način primerja-nja izmerjene vrednosti z MDK. Metodamerjenja je tako sestavni del redpisanemejne vrednosti (MDK).Zaprašenost v delovnem okolju ni pov-sod stalno enaka, ampak je koncentracijaodvisna od mesta in časa opazovanja. Zaoceno ogroženosti delavca je posebnegapomena časovna odvisnost koncentraci-je prahu na delovnem mestu.
Omenili smo že, da je posebnost prahukot zmesi trde faze (prah) v plinski fazi(zraku), da se prah s časom izloča izzraka po mehanizmih. Zaradi te lastnostise prah v odvisnosti od aerodinamičnegapremera usede na različnih mestih oziro-ma različno globoko v dihalih. Zatomoramo ločiti pri obravnavanju škodlji-vega delovanja prahu na človeka več frak-cij.
Od celotnega prahu, ki nastaja pri dolo-čenem postopku, se zelo veliki delci izlo-čijo iz zraka že v neposredni bližinimesta nastanka in zato ne dospejo vobmočje dihal delavca. Ostali delci lebdi-jo manj ali dalj časa v zraku in zato nedospejo v območje dihal človeka. Od tehdelcev ločimo tri funkcije, ki sopomembne za vpliv prahu na človeka insicer:• Inhalabina, inspirabilna ali groba frak-
cija je tisti del celotnega kolektivnegaprahu v zraku, ki ga pri dihanju vdiha-vamo skozi nos ali usta. Kot inhalabi-no štejemo tudi tisto frakcijo, ki jovsrka (zajame) sesalna šoba instru-menta za merjenje prahu, če je hitrostvsesanega zraka na ustju šobe 1,25m/s. Inhalabilna frakcija je definiranakot tista frakcija, ki jo prepusti filter,katerega prepustnost za različno veli-ke aerodinamične premer delcev(privzeta je gostota 103 kg/m3), izraže-na v % je naslednja:
Tabela 1 - Podatki inhalabilne frakcije
Groba frakcija je pomembna pri ocenje-vanju tveganja zaradi tistih vrst prahu, kise lahko v dihalnem ali prebavnem trak-tu topijo in preidejo v človekov organi-zem, ali tistih vrst, ki lahko škodljivodelujejo že v zgornjih dihalnih poteh.Praviloma so to vse toksične (strupene)snovi in snovi, ki povzročajo draženje alipoškodbe v zgornjih dihalnih poteh alinosni votlini.• Aleveolarna, respirabilna ali fina frak-
cija. Del vdihanega prahu (inhabilnefrakcije) je tako fin, da uide obram-bnemu sistemu gornjih dihalnih potiin se deponira v pljučnem tkivu naobmočju bronhiol in aleol globlje oddosega ciliarnega mehanizma čišče-nja. Alveolarna frakcija je pomembnaza prahove, ki povzročajo škodljiveposledice globoko v pljučih, npr. zafibrogeni prah, za prah, ki povzročaalergeni alveolitis ipd. Prvotno sodefinirali alveolarno frakcijo kot tisto
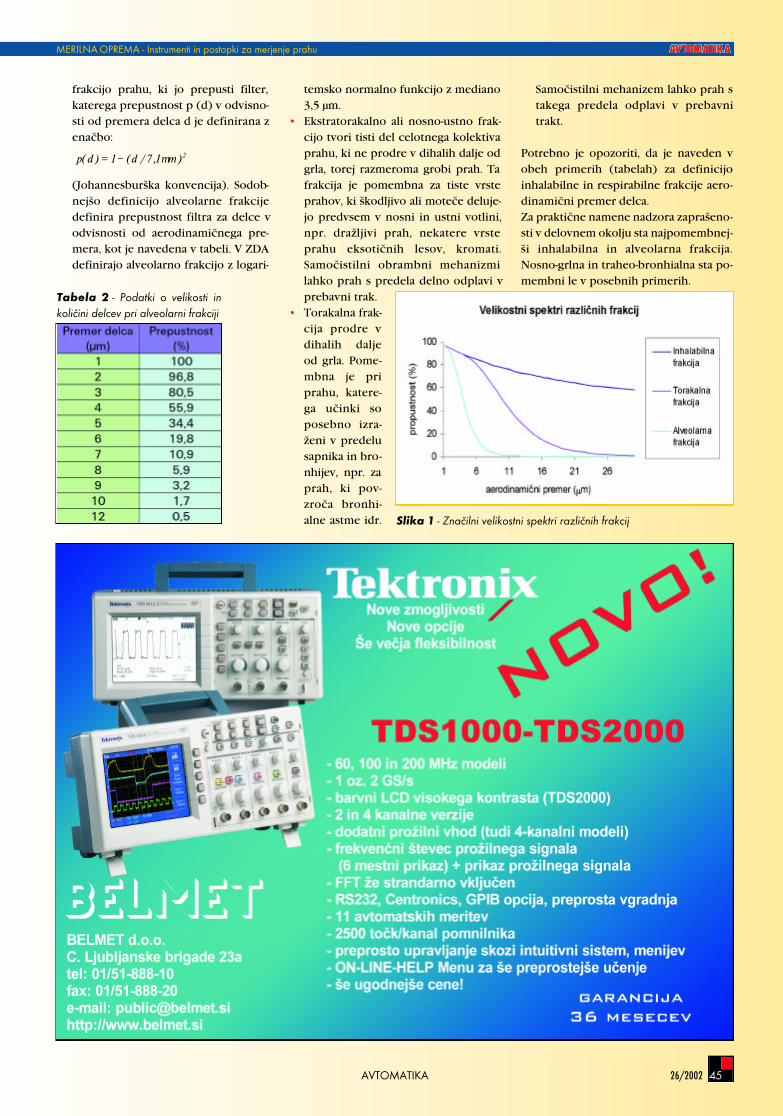
AVTOMATIKA 4526/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
frakcijo prahu, ki jo prepusti filter,katerega prepustnost p (d) v odvisno-sti od premera delca d je definirana zenačbo:
(Johannesburška konvencija). Sodob-nejšo definicijo alveolarne frakcijedefinira prepustnost filtra za delce vodvisnosti od aerodinamičnega pre-mera, kot je navedena v tabeli. V ZDAdefinirajo alveolarno frakcijo z logari-
temsko normalno funkcijo z mediano3,5 µm.
• Ekstratorakalno ali nosno-ustno frak-cijo tvori tisti del celotnega kolektivaprahu, ki ne prodre v dihalih dalje odgrla, torej razmeroma grobi prah. Tafrakcija je pomembna za tiste vrsteprahov, ki škodljivo ali moteče deluje-jo predvsem v nosni in ustni votlini,npr. dražljivi prah, nekatere vrsteprahu eksotičnih lesov, kromati.Samočistilni obrambni mehanizmilahko prah s predela delno odplavi vprebavni trak.
• Torakalna frak-cija prodre vdihalih daljeod grla. Pome-mbna je priprahu, katere-ga učinki soposebno izra-ženi v predelusapnika in bro-nhijev, npr. zaprah, ki pov-zroča bronhi-alne astme idr.
Samočistilni mehanizem lahko prah stakega predela odplavi v prebavnitrakt.
Potrebno je opozoriti, da je naveden vobeh primerih (tabelah) za definicijoinhalabilne in respirabilne frakcije aero-dinamični premer delca.Za praktične namene nadzora zaprašeno-sti v delovnem okolju sta najpomembnej-ši inhalabilna in alveolarna frakcija.Nosno-grlna in traheo-bronhialna sta po-membni le v posebnih primerih.
2)m1,7/d(1)d(p µ−=
Tabela 2 - Podatki o velikosti inkoličini delcev pri alveolarni frakciji
Slika 1 - Značilni velikostni spektri različnih frakcij

AVTOMATIKA46 26/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
Ocena stanja v delovnem okolju in zanes-ljivost ocene je odvisna od številnihpogojev in sicer od:• poznavanja delovnega postopka in
snovi, ki so v zraku delovnega okolja, • izbire merilne metode,• izbire merilne tehnike,• izkušenosti in znanje merilca,• načina interpretacije rezultatov meri-
tev.Meritev zaprašenosti zahteva veliko zna-nja in izkušenj in skrbno strokovno pred-pripravo, ki je prilagojena cilju merjenja:oceni obremenjenosti delavca in posred-no oceni ogroženosti.Kadar imamo opravka s snovmi, ki delu-jejo akutno je najbolje uporabljati takšenmerilnik, da lahko z njim zapisujemo spisalnikom trenutne koncentracije. Če toni mogoče,pa je potrebni uporabitimerilnik z velikim pretokom zraka zato,da dobimo že v kratkem času vzorčenjadovolj veliko množino prahu in vzorči-mo večkrat zapovrstjo v krajših časovnihintervalih.Tako se merilni instrumenti razlikujejopo nalednjih lastnostih:• po občutljivosti• preciznosti• točnosti• selektivnosti• obsegu• merilnem območju in • zahtevnosti merilnega postopka.
Občitljivost pove, ko-likšna je najmanjša ve-likost merjene veličine(koncentracije), ki jomerilnik še zazna.Preciznost je mera zaponovljivost pri merje-nju enake velikosti me-rjene količine. Točnostje odvisna od umeritvemerilnika. Na točnostvpliva tudi preciznost.Selektivnost je mera, kipove koliko na rezultatmeritve vplivajo drugeistočasno prisotne ko-ličine. Obseg je razlika mednajvečjo in najmanjšovelikostjo merjene ko-ličine.Merilno območje jerazlika med največjo innejmanjšo velikostjomerjene količine naenem merilnem obmo-
čju. Pri instrumentih, pri katerih se ob-močje avtomatično spreminja z velikost-jo merjene količine, je obseg enak obmo-čju.
Pri praktičnem nadzoru delovnega oko-lja se uporabljajo gravimetrični merilni-ki, torej takšni pri katerih dobimo rezul-tat meritve v µg/m3.Merilniki se razlikujejo tudi glede namesto merjenja in sicer jih delimo na sta-cionarne in na osebne. Stacionarni soprirejeni tako, da jih postavimo na dolo-čeno stalno mesto na katerem merimokoncentracijo prahu. Ti merilniki soponavadi večji in težji in zahtevajo pri-ključek na omrežno napetost. Ker imajona razpolago dovolj pogonske energije jenjihova zmogljivost velika in lahko zatozajamejo dovolj veliko množino prahu,da je mogoče vzorec pozneje analiziratitudi z manj občutljivimi metodami, kot jenpr. rentgenometrično določanje kreme-na v vzorcu. Osebni dozimeter pa jeme-rilnik, ki ga pripnemo delavcu in ga dela-vec nosi s seboj med opravljanjem delo-vnih nalog. Ti merilniki so manjši, njiho-vo napajanje je preko baterije, imajo pamanjšo zmogljivost.Prav tako se merilniki razlikujejo tudi potrajanju merjenja. Tako ločimo trenutnemerilnike in merilnike povprečne kon-centracije. Trenutni merilniki kažejorezultat zvezno, izmerjena koncentracija
q
q
q
q
q
q
Senzorji in merilniki fizikalnih in kemijskih parametrov: vlaga, temperatura, tlak, koncentracija plinov, merilniki in kontro-lerji pretoka plinov…
Laserski merilniki koncentracije in poraz-delitve prašnih delcev v zraku.
Optika: laserji, uporaba optičnih vlaken in miniaturni modularni spektrometri.
Sistemi za zajemanje in obdelavo podat-kov.
Kalibracija plinskih detektorjev in merilni-kov. Kalibracijski plini.
Svetovanje in izdelava projektnih rešitev s področja senzorske tehnike.
Tabela 3 - Numerične vrednosti konvencije v procentih

AVTOMATIKA 4726/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
pa se odčitava v zelo kratkih časovnihintervalih (nekaj sekund do nekaj mi-nut). Merilniki povprečne koncentracijepa merijo koncentracijo najmanj eno uroali cel delavnik, kot rezultat pa dobimopovprečje koncentracije v merjenem in-tervalu. Ti merilniki so primerni za mer-jenje kumulativno delujočih vrst prahu.
V nadaljevanju so opisani nekateri izmedGrimmovih merilnikov prahu, ki se upo-rabljajo za merjenje na delovnih mestih,kjer je prisoten zelo fin prah oziromakjer se zahtevajo zelo natančne meritve,merilnik prahu v kombinaciji z merje-njem vlage in temperature ter merilnikza merjenje aerosolov, ki ima lahko
Stacionarni merilniki prahu0.1-2.5 µm fini delciGRIMM-ov merilnik, serije 1.400 je sta-cionarni merilnik za določanje finegaprahu. Namenjen je za meritve v okolju,kjer se zahteva zelo natančna meritevvsebnosti prahu v zraku, oziroma v oko-ljih, kjer je prisoten zelo fin prah. Meril-nik serije 1.400 je kompakten in trpežen,tako da je primeren za širšo uporabo vekologiji pri različnih aplikacijah. Nekatere prednosti in značilnosti mode-la, serije 1.400:• Merilnik vsebuje lasersko diodo in
precizno optiko za zagotovitev visokeresolucije
• Kompaktnost in trpežnost. Meritve ni-so odvisne od spreminjajočih se delo-vnih pogojev ali zunanjih vplivov.
• Učinkovito lahkomerimo pri spre-minjanju hitrostizraka od 0 do 20m/sek.
• On-line sistemmerjenja je pri-meren za stalennadzor nad izpo-stavljenostjo pra-hu
• Enota je lahkonastavljiva tovar-niško ali ročno zaspecifično okol-je, na željo upo-rabnika.
• Prilagodljiv alarm z relejnim kontak-tom. Rele sistem se lahko uporabi zaaktiviranje izpušnega sistema, alarma.
• Enostaven za vzdrževanje. Vzdrževan-je je enostavno in ga je potrebno izva-jati približno enkrat na šest mesecev.
Kalibracija:Kalibracija senzorja je zagotovljena s stra-ni proizvajalca z univerzalnim generator-jem stearinskega aerosola in referenčne-ga merilnika. Kalibracijski certifikat jezagotovljen za vsak instrument.Za zagotovitev ustreznega delovanjainstrumenta lahko uporabnik izvede dia-gnostično kalibracijo kadar koli.
Opis instrumenta:Območje merjenja:
15 - 5000 µg/m3Meja detekcije:
Delci od 0.1 - 10 µmStopnja hrupa:
± 0.005 µg/m3 za 1 minuteKalibracija:
Tovarniška kalibracija s stan-dardnim prahom
Delovna temperatura:+ 4 do 50°C
Ohišje: Plinsko zaščiteno ohišjeZvočni signal:
Prilagodljiv v celotnem območ-ju.
Izhodni signal:4-20 mA in 0-10 V
Moč: 6-32 VDC, odvisno od obreme-nitve
Povprečna poraba:150 mA + grelec
Nastavitvena lokacija:Odvisno od modela
Zaščita inštrumenta:Odporen na prah, vodo, sprej in EMI
Pregled različnih modelov merilnikov izserije 1.400 glede na namen uporabe: 1.140
Indikator za merjenje prahu, ki se vdi-hava v zaprtih prostorih (s črpalko invzorčno glavo za shranjevanje in pri-
Slika 2 - Stacionarini merilniki prahu

AVTOMATIKA48 26/2002
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
okolici je idealen za kontinuirana merjenje na prostem zaPM10, PM2.5 in PM1. Omogoča merjenje in kontrolo tempera-ture in relativne vlažnosti. Merilnik meri porazdelitev delcevpreko 15 različnih območij. Ta popolnoma avtomatski sistemlahko ima shranjene podatke več kot eno leto, katere je možnoprenašati tudi preko modema. Možno je napajanje s pomočjosončnih celic pri 18 VDC ali 110/220 V, enostavno pa ga je upo-rabljati z GRIMM Software programom. Vzorci prahu se zbira-jo v 47 mm filtru. Merilnik je zaščiten pred neugodnimi vre-menskimi razmerami in je velik 40 x 40 x 20 cm.
Osnovni podatki:Prikaz podatkov: vsako minuto v eni uriMerilno območje: >0.3 ….. 12 mikrometrovEPA merjenje: PM10, PM2.5, PM1Senzor za temperaturo: 0…100%
Konfiguracijski sistema:Teža: 15 kgVelikost: 400 x 400 x 200 mmDvojna-tehnologija: razprševanje svetlobe in filter za
merjenjeElektrični priključek: 220 (110 VAC) in akumulatorShranjevanje podatkov: kartica za shranjevanje - od enega
dneva do enega letaGrelec: Jemanje vzorcev in ogrevano ohišje
kot zaščita pred vremenomRedčenje zraka: pri 85% zračni vlažnosti se prične
avtomatsko sušenje in filtriranje zraka
Ohišje, kot zaščita pred celoten sistem je v ohišju vremenom: iz legiranega jekla
GRIMM-ov softwar omogoča časovne paralelke ali naknadnoobdelavo in prikaz merilnih rezultatov v numerični ali grafičniobliki v ASCI formatu.
Model Grimm 1.107 - sistem za merjenje finega prahu v okoljulahko deluje na baterije ali pa se lahko priključi na omrežnonapetost. Je zelo majhen in prenosljiv analizator. Delci v zrakuse merijo v µg/m3. Model 1.107 vključuje prenosen 47 mm PTFEfilter, ki se lahko uporablja za optično analizno gravimetrijo kot
pomočki. Možno merjenje v okolju, pisarnah, sobah za kaje-nje…)
1.411Indikator prahu, kjer se izvaja prezračevanje (v ceveh, kana-lih in pri drugih serijskih izvedbah)
1.412Indikator prahu pri segretih objektih (tuneli, podhodi, sploš-ni podzemeljski in vlažni objekti)
1.413Plinski indikator, ki se uporablja pri objektih s tlakom (tlač-ne pipe z mehansko opremo na vstopu in izstopu).
8 kanalna prenosni laserski merilnik prahu (tip 1.105)Merilno območje:Območje velikosti: 0.5 do 15 mikronovObmočje mase: 1 do 100.000 µg/m3
Kanali za maso: 0.5/1/2/3.5/5/7.5/10 in 15 µmKanali za štetje: 0.75/1/2/3.5/5/7.5/10 in 15µmMerjenje: kontinuirno, prikaz rezultatov v 0.1
minuti ali 1 minutiDovajanje: 1.2 l/min, kontrola pretokaSvež zrak: od 0.8 lt/minTehnične značilnosti: Resolucija: 1 µg/m3
Reprodukcija: ± 4 µg/m3 nad zgornjo mejoKalibracija velikosti delcev:
z NBS lateksomKalibracija mase delcev: s stearin generatorjemTemperatura delovanja: +4 do 45°C (35-110°F)Shranjevanje podatkov: od 16K do 1 MbitaOmrežna napetost: 110/220 VAC ali baterijaDelovanje baterije: 7 ur, nato je potrebno ponovno pol-
njenjeSerijski priključek: RS-232Teža in barva: 2.5 kg, belaVelikost: 24 x 12 x 6 cmSonde za vzorčenje:Sonde za vzorčevanje se lahko uporabljajo za merjenje na delo-vnih mestih in za ekološke meritve. Sonde za vzorčevanje so sle-deče:• laminarna vzorčna glava za merjenje v prostorih• izokinetična vzorčna glava (hitrost gibanja zraka od 2 m/sek
do 20 m/sek)Predstavitev podatkov:Prikazovalnik: LCD 2x16 znakovPredstavitev: prikaz rezultata vsakih 6 sekundEPA: PM10 in PM2.5Masa: 8 kanalovAnalogni vhod: 3 vhodi za dodatne senzorjeAlarm: audio alarmMožnost priklopa dodatnih senzorjev na merilnik:• Temperatura + vlaga• Temperatura, vlaga + hitrost gibanja zraka• Temperatura, vlaga + CO2 v zraku• Temperatura, vlaga + tlak
Analizator finega prahu v okolju (merjenje imisije).Nova vrsta prenosnega merilnika za merjenje finega prahu v
Slika 3 - Shema delovanja laserskega merilnika prahu za kontinuirnemeritve

MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
tudi druge kemijske analize. Vsak merilni sistem tipa 1.107 jeopremljen z avtomatskim kontrolnim sistemom.
Opis delovanja:Aparat 1.107 jemlje vzorce iz zraka preko vgrajene črpalke, kiregulira volumen in laserske merilne celice. Vsebovani delciomogočajo sipanje svetlobe pod kotom 90°C. Signal sipanesvetlobe se transportira preko "High Speed" fotodiode, sprem-ljanje pa se vrši na impulznem analizatorju. Vsakih 6 sekund sepreko števca na displeju vrši prikaz. Preko RS-232 vmesnika inpreko softwer programa se podatki prikazujejo v mg/m3 v US-EPA območjih (PM10, PM2.5 in PM1).
Lastnosti modela 1.107-aparat za merjenjeprahu v okolju:Merilno območje: 0-6.500 µg/m3
Kanali: ustreza EPA: PM10, PM2.5 in PM1Testiranje zraka: 1.2 l/min ± 5%Odstopanje: (velikostni kanal): ± 2 µg/m3
Električna napetost: 220 (110) VAC ali akomulator
Lastnosti modela 1.165 - Ohišje, za zaščito predvremenom:• Zaprtost z ohišjem iz legiranega jekla s 50 cm cevjo za jema-
nje vzorcev. • Klimatski senzorji: (standardni) za temperaturo in relativno
vlažnost• Zračna vlaga: pri 85% zračne vlažnosti se vzorec avtomatsko
razredčuje z čistim suhim zrakom. Uporaba čistega zrakazadostuje za 3 mesečno uporabo.Na sliki 4. je prikazana postavitev merilnika v vremenskoodporno ohišje.
Slika 4 - Merilnik prahuza kontinuirne meritve vokolju.
Software 1.178:Software za MS-win-dows (3.1 ali novejši)za prenos podatkov vrealnem času, shranje-vanje in naknadnoobdelavo:• numerični in grafič-
ni prikaz podatkov• tri različne velikosti
merjenja, ki so vskladu z EPA stan-dardi
• stalen prikaz vred-nosti na klimatskemsenzorju
• Izhod v ASCI forma-tu
Štetje delcev:Kadar je potrebno merjenje števila delcev v zraku, se lahko tamodel dopolni z modelom 1.106. Ta prenosen aparat za merje-nje finega prahu omogoča štetje delcev v merilnem območju
od 0.3 do 6.5 µm v osmih različnih območjih merjenja(0.3/0.5/0.75/1/2/3.5/5/6.5 µm). Razen teh območij merjenja selahko merjenje izvaja tudi pri PM2.5 in PM1 v µg/m3.Izpis podatkov se izvaja na enak način kot pri 1.107.
Instrument za precizno merjenje velikosti in koli-čine prahu tipa 1.108 (Mini spektrometer zamerjenje prahu in aerosolov v 15 merilnihobmočjih)
Spektrometer tipa 1.108 za merjenje aerosolov od Grimm-a je šeeden izmed merilnikov, ki je lahko na baterije ali pa je priklju-čen na omrežno napetost. Spektrometer se uporablja za določa-nje delcev, ki se nahajajo v visokih koncentracijah v zraku,rezultat pa je podan v številu delcev na liter, masa prahu pa vµg/m3 v 15 merilnih območjih. Poleg tega ima možnost določa-nja vrste delcev na teflonskem filtru z gravimetrično ali kemič-no analizo. Programska oprema omogoča prenos podatkov izmerilnika v računalnik, ter statistično obdelavo. • Štetje delcev v 15 velikostnih območjih od >0.3…>20 µm• Količina prahu v 15 velikostnih območjih od 1 do 100.000
µg/m3
• Ustreza EN 481• Ustreza US-EPA-standardu: PM-10/PM-2.5/PM-1• Priključitev na senzorje za merjenje ozračja: temperatura,
relativna vlaga, zračni tlak in hitrost gibanja zraka
Slika 5 - Model 1.108 (spektrometer za merjenje aerosolov)
Opis delovanja:Spektrometer tipa 1.108 za merjenje aerosolov, ki se uporabljaza merjenje ozračja je opremljen s črpalko, ki prečrpa določenvolumen vzorca zraka v merilno celico v kateri je nameščenlaserski vir svetlobe in detektor. Vsebovani delci sipajo svetlo-bo, ki jo merimo pod kotom 90°. Signal sipane svetlobe se meris hitro fotodiodo, spremljanje pa se vrši na 15-kanalnem impulz-nem analizatorju. Osveževanje podatkov na zaslonu se vrši vsa-kih 6 sekund, rezultat pa je prikazan v delcih/liter ali µg/m3.
Uporaba:Model 1.108 je prenosen merilni aparat. Ima baterijo, ki senapolni in lahko drži do 7 ur, pri čemer se meritve shranjujejona kartico za shranjevanje podatkov, ti pa se kasneje analizirajo.
Uporablja se za :• Meritve na delovnih mestih in v medicini• Merjenje kvalitete zraka v proizvodnji • Kontrola filtrov za filtracijo zraka• Kontrola filtracije vhodnega in izhodnega zraka
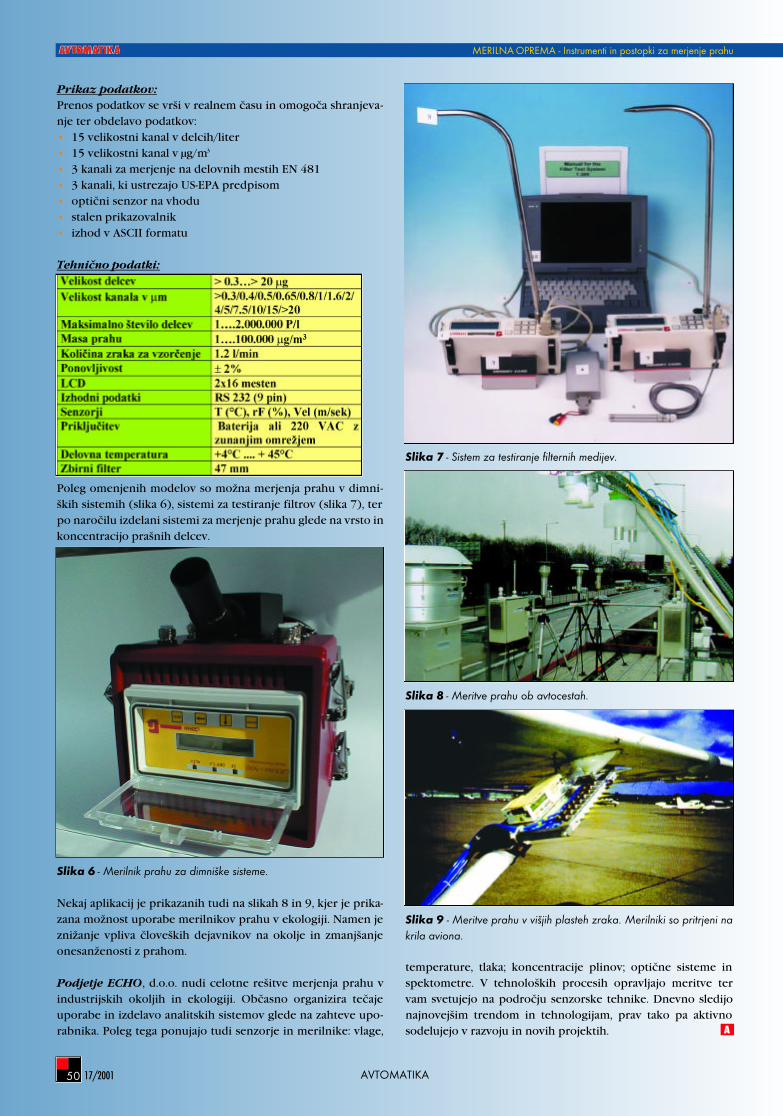
AVTOMATIKA50 17/2001
MERILNA OPREMA - Instrumenti in postopki za merjenje prahu
temperature, tlaka; koncentracije plinov; optične sisteme inspektometre. V tehnoloških procesih opravljajo meritve tervam svetujejo na področju senzorske tehnike. Dnevno sledijonajnovejšim trendom in tehnologijam, prav tako pa aktivnosodelujejo v razvoju in novih projektih. A
Prikaz podatkov:Prenos podatkov se vrši v realnem času in omogoča shranjeva-nje ter obdelavo podatkov:• 15 velikostni kanal v delcih/liter• 15 velikostni kanal v µg/m3
• 3 kanali za merjenje na delovnih mestih EN 481• 3 kanali, ki ustrezajo US-EPA predpisom• optični senzor na vhodu• stalen prikazovalnik• izhod v ASCII formatu
Tehnično podatki:
Poleg omenjenih modelov so možna merjenja prahu v dimni-ških sistemih (slika 6), sistemi za testiranje filtrov (slika 7), terpo naročilu izdelani sistemi za merjenje prahu glede na vrsto inkoncentracijo prašnih delcev.
Slika 6 - Merilnik prahu za dimniške sisteme.
Nekaj aplikacij je prikazanih tudi na slikah 8 in 9, kjer je prika-zana možnost uporabe merilnikov prahu v ekologiji. Namen jeznižanje vpliva človeških dejavnikov na okolje in zmanjšanjeonesanženosti z prahom.
Podjetje ECHO, d.o.o. nudi celotne rešitve merjenja prahu vindustrijskih okoljih in ekologiji. Občasno organizira tečajeuporabe in izdelavo analitskih sistemov glede na zahteve upo-rabnika. Poleg tega ponujajo tudi senzorje in merilnike: vlage,
Slika 7 - Sistem za testiranje filternih medijev.
Slika 8 - Meritve prahu ob avtocestah.
Slika 9 - Meritve prahu v višjih plasteh zraka. Merilniki so pritrjeni nakrila aviona.

AVTOMATIKA 5126/2002
NOVO!NOVO! Vabimo vas, da obiščeteVabimo vas, da obiščete