Embed Size (px)
Citation preview
Uydu JeodezisiLisans Ders Notları
Aydın ÜSTÜN
Selçuk ÜniversitesiMühendislik Fakültesi
Harita Mühendisligi Bölümü
Konya, 2014
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 1 / 66
Içerik I
1 GirisTemel kavramlarTarihçeUyduların jeodezide kullanımı
2 Uydu Jeodezisinin TemelleriReferans koordinat sistemleri datum dönüsümleriKonvansiyonel inersiyal sistemlerZaman sistemleri ve aralarındaki iliskilerElektromanyetik dalgalar ve atmosferde yayılımı
3 Uyduların Yörünge HareketiGöksel mekaniklerKepler yörüngeleri
Düzlemde hareket
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 2 / 66
Jeodezi ve uydular
Jeodezinin temel görevi;
Geometrik problem: Yerin seklinin ve boyutlarının belirlenmesi,tamamının ya da bir kısmının haritaya aktarılması
Fiziksel problem: Yerçekim alanının belirlenmesi
Dinamik problem: Iç ve dıs kuvvetler nedeniyle yerkabugunda veyerçekim alanında meydana gelen degisimlerin izlenmesi
Yapay yer uyduları 1957’den beri bu görevlerin yerine getirilmesi amacıylakullanılmaktadır.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 3 / 66
Jeodezi ve uydular
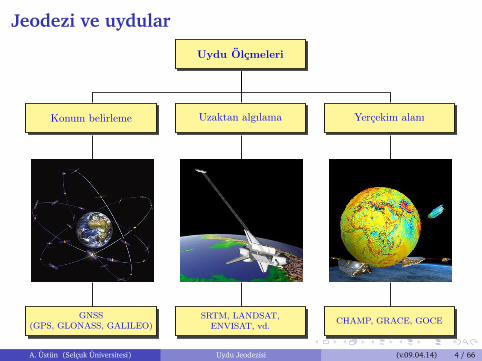
Uydu Olcmeleri
Konum belirleme Uzaktan algılama Yercekim alanı
GNSS(GPS, GLONASS, GALILEO)
SRTM, LANDSAT,ENVISAT, vd.
CHAMP, GRACE, GOCE
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 4 / 66
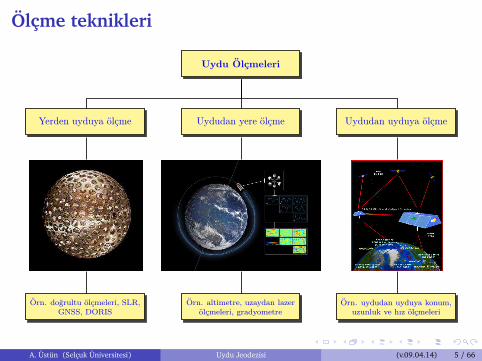
Ölçme teknikleri
Uydu Olcmeleri
Yerden uyduya olcme Uydudan yere olcme Uydudan uyduya olcme
Orn. dogrultu olcmeleri, SLR,GNSS, DORIS
Orn. altimetre, uzaydan lazerolcmeleri, gradyometre
Orn. uydudan uyduya konum,uzunluk ve hız olcmeleri
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 5 / 66
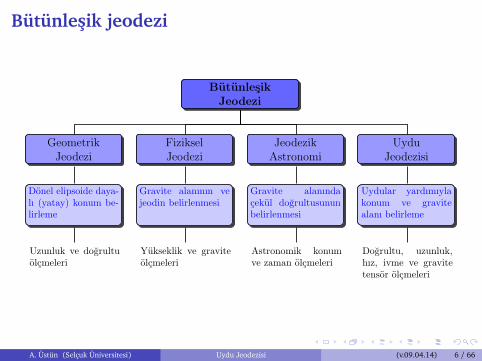
Bütünlesik jeodezi
Butunlesik
Jeodezi
GeometrikJeodezi
FizikselJeodezi
JeodezikAstronomi
UyduJeodezisi
Donel elipsoide daya-lı (yatay) konum be-lirleme
Gravite alanının vejeodin belirlenmesi
Gravite alanındacekul dogrultusununbelirlenmesi
Uydular yardımıylakonum ve gravitealanı belirleme
Uzunluk ve dogrultuolcmeleri
Yukseklik ve graviteolcmeleri
Astronomik konumve zaman olcmeleri
Dogrultu, uzunluk,hız, ivme ve gravitetensor olcmeleri
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 6 / 66
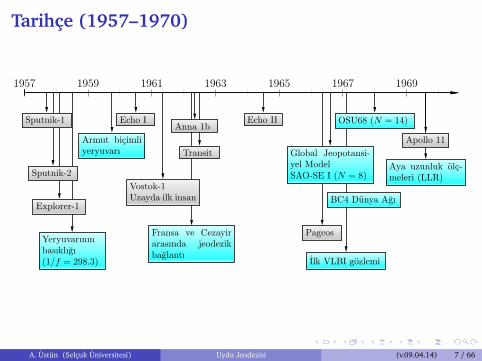
Tarihçe (1957–1970)
1957 1959 1961 1963 1965 1967 1969
Sputnik-1
Sputnik-2
Explorer-1
Yeryuvarınınbasıklıgı(1/f = 298.3)
Armut bicimliyeryuvarı
Vostok-1Uzayda ilk insan
Fransa ve Cezayirarasında jeodezikbaglantı
Global Jeopotansi-yel ModelSAO-SE I (N = 8)
OSU68 (N = 14)
BC4 Dunya Agı
Pageos
Echo I Echo II
Transit
Anna 1b
Apollo 11
Aya uzunluk olc-meleri (LLR)
Ilk VLBI gozlemi
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 7 / 66
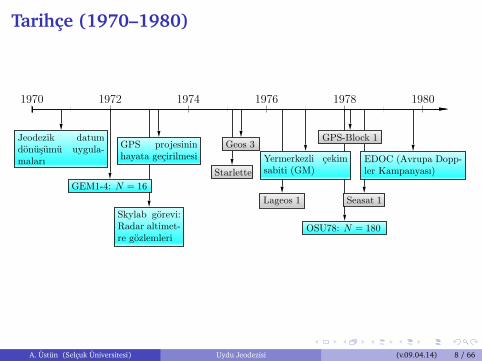
Tarihçe (1970–1980)
1970 1972 1974 1976 1978 1980
Jeodezik datumdonusumu uygula-maları
GEM1-4: N = 16
Skylab gorevi:Radar altimet-re gozlemleri
GPS projesininhayata gecirilmesi EDOC (Avrupa Dopp-
ler Kampanyası)
OSU78: N = 180
Starlette
Geos 3
Lageos 1
Yermerkezli cekimsabiti (GM)
Seasat 1
GPS-Block 1
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 8 / 66
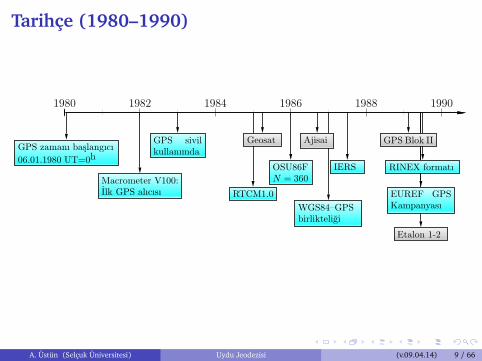
Tarihçe (1980–1990)
1980 1982 1984 1986 1988 1990
AjisaiGPS sivilkullanımdaGPS zamanı baslangıcı
06.01.1980 UT=0h
WGS84–GPSbirlikteligi
Macrometer V100:Ilk GPS alıcısı
RINEX formatı
GPS Blok II
EUREF GPSKampanyası
Etalon 1-2
Geosat
OSU86FN = 360
RTCM1.0
IERS
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 9 / 66
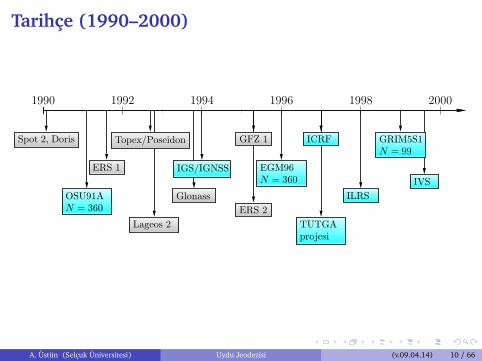
Tarihçe (1990–2000)
1990 1992 1994 1996 1998 2000
Spot 2, Doris
ERS 1
Topex/Poseidon
Lageos 2
Glonass
IGS/IGNSS
ERS 2
EGM96N = 360
OSU91AN = 360
ILRS
IVS
GFZ 1 GRIM5S1N = 99
ICRF
TUTGAprojesi
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 10 / 66
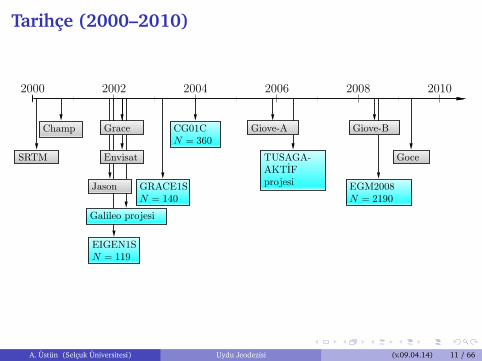
Tarihçe (2000–2010)
2000 2002 2004 2006 2008 2010
Champ
SRTM
Grace
Envisat
Jason
Galileo projesi
EIGEN1SN = 119
GRACE1SN = 140
EGM2008N = 2190
CG01CN = 360
TUSAGA-AKTIFprojesi
Giove-A Giove-B
Goce
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 11 / 66
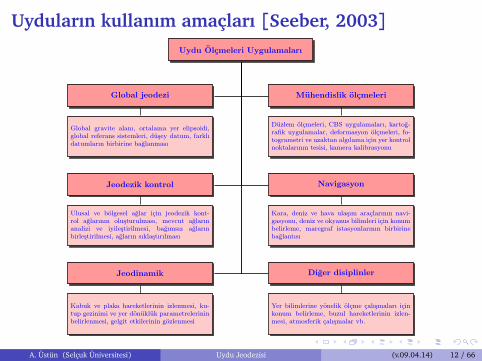
Uyduların kullanım amaçları [Seeber, 2003]
Uydu Olcmeleri Uygulamaları
Global jeodezi Muhendislik olcmeleri
Global gravite alanı, ortalama yer elipsoidi,global referans sistemleri, dusey datum, farklıdatumların birbirine baglanması
Duzlem olcmeleri, CBS uygulamaları, kartog-rafik uygulamalar, deformasyon olcmeleri, fo-togrametri ve uzaktan algılama icin yer kontrolnoktalarının tesisi, kamera kalibrasyonu
Jeodezik kontrol Navigasyon
Ulusal ve bolgesel aglar icin jeodezik kont-rol aglarının olusturulması, mevcut aglarınanalizi ve iyilestirilmesi, bagımsız aglarınbirlestirilmesi, agların sıklastırılması
Kara, deniz ve hava ulasım araclarının navi-gasyonu, deniz ve okyanus bilimleri icin konumbelirleme, maregraf istasyonlarının birbirinebaglantısı
Jeodinamik Diger disiplinler
Kabuk ve plaka hareketlerinin izlenmesi, ku-tup gezinimi ve yer donukluk parametrelerininbelirlenmesi, gelgit etkilerinin gozlenmesi
Yer bilimlerine yonelik olcme calısmaları icinkonum belirleme, buzul hareketlerinin izlen-mesi, atmosferik calısmalar vb.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 12 / 66
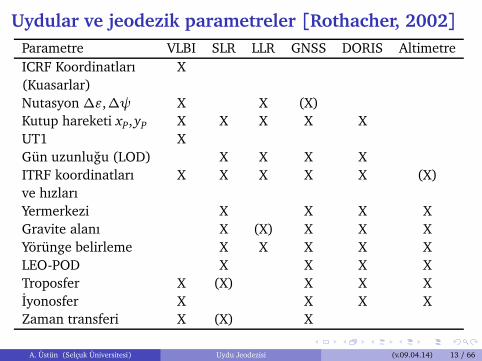
Uydular ve jeodezik parametreler [Rothacher, 2002]
Parametre VLBI SLR LLR GNSS DORIS AltimetreICRF Koordinatları X(Kuasarlar)Nutasyon ∆ǫ,∆ψ X X (X)Kutup hareketi xP,yP X X X X XUT1 XGün uzunlugu (LOD) X X X XITRF koordinatları X X X X X (X)ve hızlarıYermerkezi X X X XGravite alanı X (X) X X XYörünge belirleme X X X X XLEO-POD X X X XTroposfer X (X) X X XIyonosfer X X X XZaman transferi X (X) X
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 13 / 66
Uydu jeodezisinde koordinat sistemleri
GörevleriUyduların uzaydaki konum ve hareketlerini tanımlamak
Uydu gözlemlerini modellemek
Uydu ölçmelerinden elde edilen sonuçları (yersel noktalarınkoordinatları, yerçekim alanı vb.) göstermek
ÖzellikleriGlobal ve yermerkezlidir (jeosentrik)
Zaman sistemleriyle bütünlesiktir
Kullanılan uydu ölçme teknigi, veri miktarı, dagılımı ve zamandilimine göre farklı referans sistemi gerçeklesmeleri (frame) ortayaçıkar
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 14 / 66
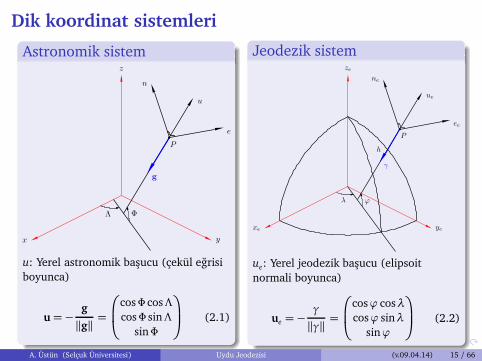
Dik koordinat sistemleri
Astronomik sistem
x y
z
u
g
b
P
e
n
Λ Φ
u: Yerel astronomik basucu (çekül egrisiboyunca)
u =−g
‖g‖ =
cosΦ cosΛcosΦ sinΛ
sinΦ
(2.1)
Jeodezik sistem
xe ye
ze
ue
γ
h
b
P
ee
ne
λ ϕ
ue: Yerel jeodezik basucu (elipsoitnormali boyunca)
ue =−γ
‖γ‖ =
cosϕ cosλcosϕ sinλ
sinϕ
(2.2)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 15 / 66
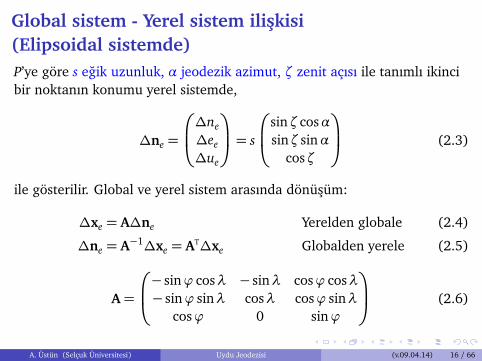
Global sistem - Yerel sistem iliskisi(Elipsoidal sistemde)P’ye göre s egik uzunluk, α jeodezik azimut, ζ zenit açısı ile tanımlı ikincibir noktanın konumu yerel sistemde,
∆ne =
∆ne
∆ee
∆ue
= s
sinζ cosαsinζ sinα
cosζ
(2.3)
ile gösterilir. Global ve yerel sistem arasında dönüsüm:
∆xe = A∆ne Yerelden globale (2.4)
∆ne = A−1∆xe = AT∆xe Globalden yerele (2.5)
A=
− sinϕ cosλ − sinλ cosϕ cosλ− sinϕ sinλ cosλ cosϕ sinλ
cosϕ 0 sinϕ
(2.6)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 16 / 66
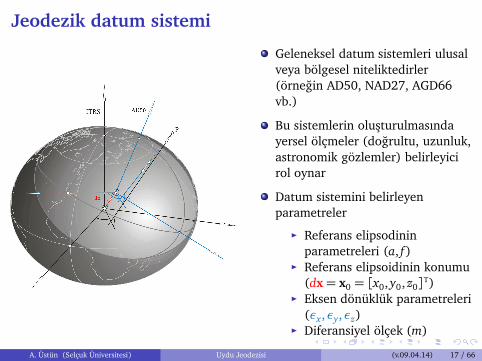
Jeodezik datum sistemi
Geleneksel datum sistemleri ulusalveya bölgesel niteliktedirler(örnegin AD50, NAD27, AGD66vb.)
Bu sistemlerin olusturulmasındayersel ölçmeler (dogrultu, uzunluk,astronomik gözlemler) belirleyicirol oynar
Datum sistemini belirleyenparametreler
Referans elipsodininparametreleri (a, f)
Referans elipsoidinin konumu(dx= x0 = [x0,y0, z0]
T) Eksen dönüklük parametreleri
(εx,εy,εz) Diferansiyel ölçek (m)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 17 / 66
Üç boyutta koordinat dönüsümü
x y
z
x′
y′
z′
ǫx
ǫy
ǫz
bP
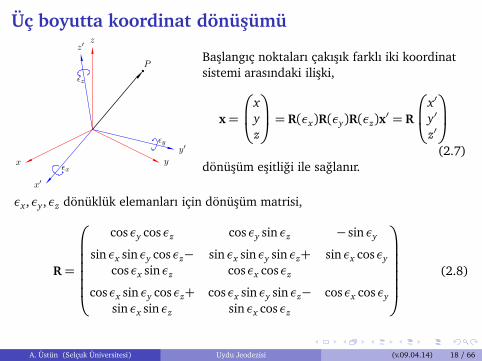
Baslangıç noktaları çakısık farklı iki koordinatsistemi arasındaki iliski,
x=
x
y
z
= R(εx)R(εy)R(εz)x
′ = R
x′
y′
z′
(2.7)dönüsüm esitligi ile saglanır.
εx,εy,εz dönüklük elemanları için dönüsüm matrisi,
R=
cosεy cosεz cosεy sinεz − sinεy
sinεx sinεy cosεz− sinεx sinεy sinεz+ sinεx cosεy
cosεx sinεz cosεx cosεz
cosεx sinεy cosεz+ cosεx sinεy sinεz− cosεx cosεy
sinεx sinεz sinεx cosεz
(2.8)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 18 / 66
Üç boyutta koordinat dönüsümü (devam)
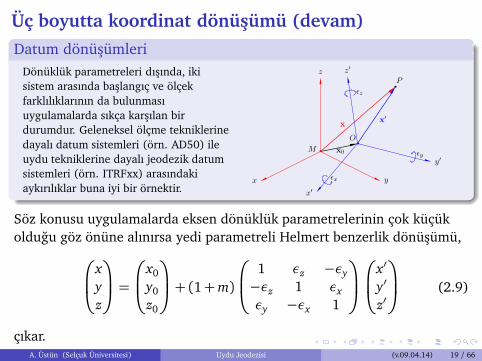
Datum dönüsümleri
Dönüklük parametreleri dısında, ikisistem arasında baslangıç ve ölçekfarklılıklarının da bulunmasıuygulamalarda sıkça karsılan birdurumdur. Geleneksel ölçme tekniklerinedayalı datum sistemleri (örn. AD50) ileuydu tekniklerine dayalı jeodezik datumsistemleri (örn. ITRFxx) arasındakiaykırılıklar buna iyi bir örnektir.
x y
z
x′
y′
z′
ǫx
ǫy
ǫz
x0
x′
x
bP
bO
bM
Söz konusu uygulamalarda eksen dönüklük parametrelerinin çok küçükoldugu göz önüne alınırsa yedi parametreli Helmert benzerlik dönüsümü,
x
y
z
=
x0
y0
z0
+ (1+m)
1 εz −εy
−εz 1 εx
εy −εx 1
x′
y′
z′
(2.9)
çıkar.A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 19 / 66
Üç Boyutta Benzerlik Dönüsümü (AD50→TUTGA99A)
x y
z
x′
y′
z′
ǫx
ǫy
ǫz
x0
x′
x
bP
bO
bM
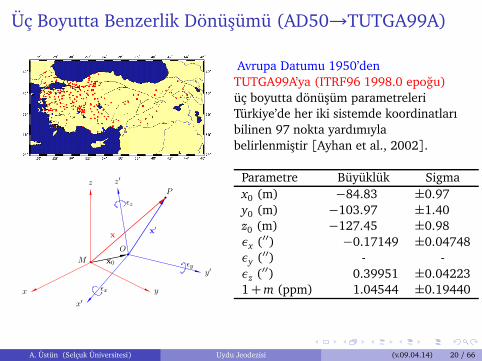
Avrupa Datumu 1950’denTUTGA99A’ya (ITRF96 1998.0 epogu)üç boyutta dönüsüm parametreleriTürkiye’de her iki sistemde koordinatlarıbilinen 97 nokta yardımıylabelirlenmistir [Ayhan et al., 2002].
Parametre Büyüklük Sigmax0 (m) −84.83 ±0.97y0 (m) −103.97 ±1.40z0 (m) −127.45 ±0.98εx (′′) −0.17149 ±0.04748εy (′′) - -εz (′′) 0.39951 ±0.042231+m (ppm) 1.04544 ±0.19440
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 20 / 66
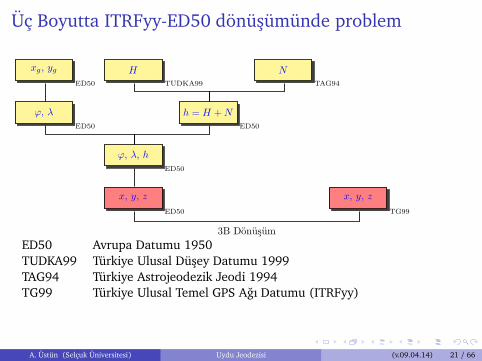
Üç Boyutta ITRFyy-ED50 dönüsümünde problem
xg, yg H N
ϕ, λ h = H + N
ϕ, λ, h
x, y, z x, y, z
3B Donusum
ED50 TUDKA99 TAG94
ED50 ED50
ED50
ED50 TG99
ED50 Avrupa Datumu 1950TUDKA99 Türkiye Ulusal Düsey Datumu 1999TAG94 Türkiye Astrojeodezik Jeodi 1994TG99 Türkiye Ulusal Temel GPS Agı Datumu (ITRFyy)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 21 / 66

Iki Boyutta ITRFyy-ED50 Dönüsümü
Elipsoit yüzeyinde dönüsüm:
xg, yg x, y, z
q, λ ϕ, λ, h
ϕ, λ ϕ, λ
2B Donusum
ED50
ED50
ED50
TG99
TG99
TG99
b
b
b P (ϕ,λ)TG99
b
b merkez
bc
bc
bc P (ϕ, λ)ED50
bc
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 22 / 66
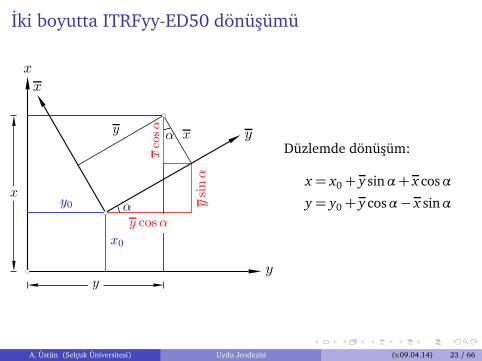
Iki boyutta ITRFyy-ED50 dönüsümü
x0
y0
y cosα
ysin
α
xco
sα
xy
y
xα
α
x
y
x
y
bc
bc
bc
Düzlemde dönüsüm:
x = x0 + y sinα+ x cosα
y = y0 + y cosα− x sinα
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 23 / 66
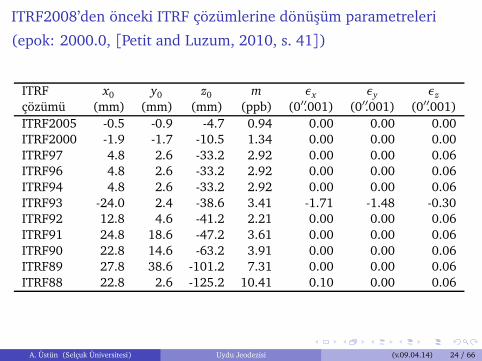
ITRF2008’den önceki ITRF çözümlerine dönüsüm parametreleri
(epok: 2000.0, [Petit and Luzum, 2010, s. 41])
ITRF x0 y0 z0 m εx εy εz
çözümü (mm) (mm) (mm) (ppb) (0′′.001) (0′′.001) (0′′.001)ITRF2005 -0.5 -0.9 -4.7 0.94 0.00 0.00 0.00ITRF2000 -1.9 -1.7 -10.5 1.34 0.00 0.00 0.00ITRF97 4.8 2.6 -33.2 2.92 0.00 0.00 0.06ITRF96 4.8 2.6 -33.2 2.92 0.00 0.00 0.06ITRF94 4.8 2.6 -33.2 2.92 0.00 0.00 0.06ITRF93 -24.0 2.4 -38.6 3.41 -1.71 -1.48 -0.30ITRF92 12.8 4.6 -41.2 2.21 0.00 0.00 0.06ITRF91 24.8 18.6 -47.2 3.61 0.00 0.00 0.06ITRF90 22.8 14.6 -63.2 3.91 0.00 0.00 0.06ITRF89 27.8 38.6 -101.2 7.31 0.00 0.00 0.06ITRF88 22.8 2.6 -125.2 10.41 0.10 0.00 0.06
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 24 / 66
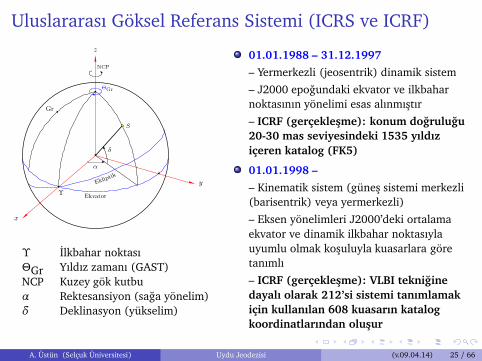
Uluslararası Göksel Referans Sistemi (ICRS ve ICRF)
x
y
z
Gr
Υ
ΘGr
NCP
S
α
δb
b
Eklipti
k
Ekvator
b
b
b
Υ Ilkbahar noktasıΘGr Yıldız zamanı (GAST)NCP Kuzey gök kutbuα Rektesansiyon (saga yönelim)δ Deklinasyon (yükselim)
01.01.1988 – 31.12.1997
– Yermerkezli (jeosentrik) dinamik sistem
– J2000 epogundaki ekvator ve ilkbaharnoktasının yönelimi esas alınmıstır
– ICRF (gerçeklesme): konum dogrulugu20-30 mas seviyesindeki 1535 yıldıziçeren katalog (FK5)
01.01.1998 –
– Kinematik sistem (günes sistemi merkezli(barisentrik) veya yermerkezli)
– Eksen yönelimleri J2000’deki ortalamaekvator ve dinamik ilkbahar noktasıylauyumlu olmak kosuluyla kuasarlara göretanımlı
– ICRF (gerçeklesme): VLBI tekniginedayalı olarak 212’si sistemi tanımlamakiçin kullanılan 608 kuasarın katalogkoordinatlarından olusur
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 25 / 66
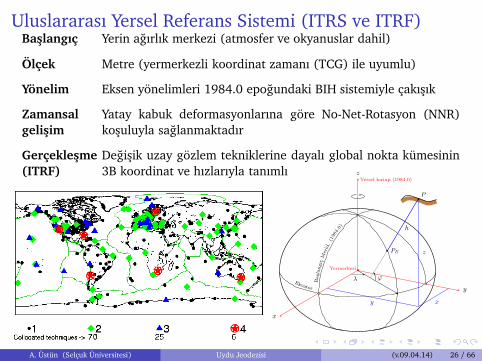
Uluslararası Yersel Referans Sistemi (ITRS ve ITRF)Baslangıç Yerin agırlık merkezi (atmosfer ve okyanuslar dahil)
Ölçek Metre (yermerkezli koordinat zamanı (TCG) ile uyumlu)
Yönelim Eksen yönelimleri 1984.0 epogundaki BIH sistemiyle çakısık
Zamansalgelisim
Yatay kabuk deformasyonlarına göre No-Net-Rotasyon (NNR)kosuluyla saglanmaktadır
Gerçeklesme(ITRF)
Degisik uzay gözlem tekniklerine dayalı global nokta kümesinin3B koordinat ve hızlarıyla tanımlı
x
y
z
Baslangıc
Merid.(1984.0)
Ekvator
h
y x
z
b
b
b
λ
Yermerkezi
Yersel kutup (1984.0)
P
PE
ϕ
b
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 26 / 66
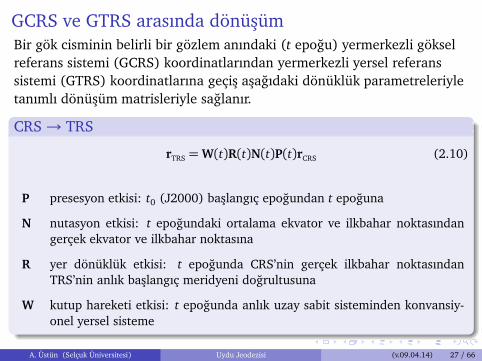
GCRS ve GTRS arasında dönüsümBir gök cisminin belirli bir gözlem anındaki (t epogu) yermerkezli gökselreferans sistemi (GCRS) koordinatlarından yermerkezli yersel referanssistemi (GTRS) koordinatlarına geçis asagıdaki dönüklük parametreleriyletanımlı dönüsüm matrisleriyle saglanır.
CRS→ TRS
rTRS =W(t)R(t)N(t)P(t)rCRS (2.10)
P presesyon etkisi: t0 (J2000) baslangıç epogundan t epoguna
N nutasyon etkisi: t epogundaki ortalama ekvator ve ilkbahar noktasındangerçek ekvator ve ilkbahar noktasına
R yer dönüklük etkisi: t epogunda CRS’nin gerçek ilkbahar noktasındanTRS’nin anlık baslangıç meridyeni dogrultusuna
W kutup hareketi etkisi: t epogunda anlık uzay sabit sisteminden konvansiy-onel yersel sisteme
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 27 / 66
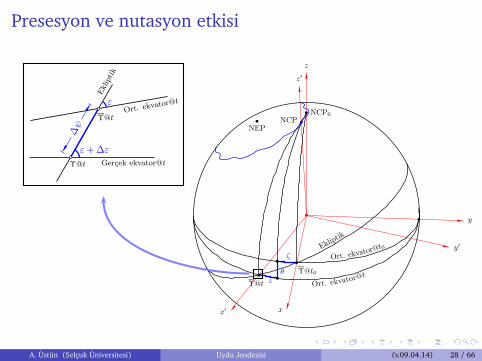
Presesyon ve nutasyon etkisi
x
y
z
x′
y′
z′
Ort. ekvator@
t0Ekliptik
Ort. ekvator@
t
bb
b
b NCP0
b
Υ@t0
ζ
θz
bb
Υ@t
bNCPb
NEP
Gercek ekvator@t
Ort. ekvator@t
∆ψ
Ekliptik
ε+∆ε
ε
Υ@t
Υ@t
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 28 / 66

IAU76 presesyon modeliInersiyal bir sisteme göre yerin dönme ekseni presesyon konisi üzerindeuzun periyotlu bir hareket gerçeklestirir. Bunun sonucu olarak, ortalamagök kutbu ve ekvator düzlemi ile tanımlanan ekvatoral koordinatsisteminin eksenlerinde meydana gelen degisim asagıdaki presesyonelemanıyla ifade edilir:
ζ = 2306′′.2181t+ 0′′.30188t2+ 0′′.017998t3
θ = 2004′′.3109t− 0′′.42665t2− 0′′.041833t3
z = 2306′′.2181t+ 1′′.09468t2+ 0′′.018203t3
ǫ = 84381′′.448− 46′′.815t− 0′′.00059t2− 0′′.001813t3
(2.11)
Burada zaman degisimi,
t=t(TT)− t0(J2000)
36525=
JD− 2451545.0
36525(2.12)
J2000 (1 Ocak 2000, 12h) baslangıç anından itibaren geçen Jülyenyüzyılıdır.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 29 / 66
Presesyon matrisi
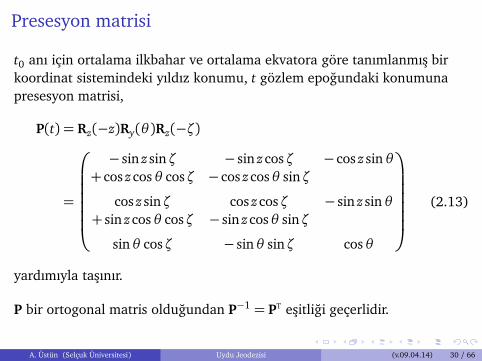
t0 anı için ortalama ilkbahar ve ortalama ekvatora göre tanımlanmıs birkoordinat sistemindeki yıldız konumu, t gözlem epogundaki konumunapresesyon matrisi,
P(t) = Rz(−z)Ry(θ)Rz(−ζ)
=
− sin z sinζ − sin zcosζ − cos z sinθ+ cos zcosθ cosζ − cos zcosθ sinζ
cos z sinζ cos zcosζ − sin z sinθ+ sin zcosθ cosζ − sin zcosθ sinζ
sinθ cosζ − sinθ sinζ cosθ
(2.13)
yardımıyla tasınır.
P bir ortogonal matris oldugundan P−1 = PT esitligi geçerlidir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 30 / 66
IAU80 nutasyon modeliEkliptik egimi (ǫ) ve nutasyon açıları (∆ǫ ve ∆ψ), t anındaki CRS eksendogrultularının ortalama ekvator ve ekinoksdan gerçek ekvator ve ekinoksayöneltilmesini saglar. t epogundaki nutasyon açıları,
∆ψ =
106∑
i=1
(Ai + A′it) sin(ARGUMAN)
∆ǫ =
106∑
i=1
(Bi+ B′it) cos(ARGUMAN)
(2.14)
burada ARGUMAN =∑5
jNjFj dir. 106 terimli nutasyon serilerinin A,A′,B,B′
katsayıları ile ay ve günese iliskin Fj temel argümanların (l, l′,F,D,Ω) tamsayı
çarpanları (Nj) [McCarthy, 1996]’de verilmektedir. Ilerleyen yıllarda VLBI ve LLRgözlemleriyle IAU76/80 modellerinde belirlenen eksiklikler IERS tarafındandüzenli olarak izlenmekte ve yayımlanmaktadır. δ∆ψ (dpsi) ve δ∆ǫ (deps)düzeltme terimleri eklenmis nutasyon elemanları:
∆ψ =∆ψ(IAU80) +δ∆ψ , ∆ǫ =∆ǫ(IAU80) + δ∆ǫ (2.15)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 31 / 66
Nutasyon matrisiǫ′ = ǫ+∆ǫ esitligi geçerli olmak üzere nutasyon matrisi,
N(t) = Rx(−ǫ′)Rz(−∆ψ)Rx(ǫ)
=
cos∆ψ − cosǫ sin∆ψ − sin ǫ sin∆ψ
cosǫ′ sin∆ψ cosǫ cosǫ′ cos∆ψ sin ǫ cosǫ′ cos∆ψ+ sinǫ sinǫ′ − cosǫ sin ǫ′
sin ǫ′ sin∆ψ cosǫ sin ǫ′ cos∆ψ sinǫ sin ǫ′ cos∆ψ− sin ǫ coscosǫ′ + cosǫ cosǫ′
(2.16)
ile gösterilir.
Güncel modeller [Petit and Luzum, 2010]Çok yüksek dogruluk gerektiren hesaplamalar için presesyon ve nutasyonmatrisleri güncel modeller yardımıyla olusturulmalıdır. IAU2000A veIAU2000/2006 modelleri, presesyon ve nutasyon büyüklükleri için etkisi 1 ms’denküçük düzeltme terimlerinin yanı sıra degisik uygulama seçeneklerini beraberindegetirmektedir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 32 / 66
Greenwich Yıldız Zamanı (GAST)Presesyon-nutasyon modelleri yeryuvarının dönme eksenini baska bir deyisleGöksel Efemeris Kutbunu (CEP) anlık konumuna (CIP) getirir. Bu eksen etrafındagerçek ekinoksun saat açısı (GAST) kadar gerçeklestirilecek döndürme islemininkoordinat sistemine etkisi,
GAST = GMST+∆ψ cosǫ+ 0′′.00264sinΩ+ 0′′.000063sin 2Ω (2.17)
olmak üzere [McCarthy, 1996],
R(t) = Rz(GAST) =
cos(GAST) sin(GAST) 0− sin(GAST) cos(GAST) 0
0 0 1
(2.18)
dönüsüm matrisiyle ifade edilir.
GAST ya da ERA
GAST (ya da GST) hesabı için kullanılan güncel esitlikler yer dönüklük açısını(ERA = θ(Tu)) içermektedir. Ekinoks tabanlı dönüsümler GAST’a, GökselEfemeris Orijin (CEO) tabanlı dönüsümler ise ERA açısına göre gerçeklestirilir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 33 / 66

GAST ve kutup hareketi etkisi
xC
yC
zC
xI yI
zI
xΥ
y
b
b
b b
b
bCTP
b
CEP
b
b
xp
yp
yp
xp
GAST
Υ
Konvansiyonel ekvato
r
Gercek ekvator
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 34 / 66
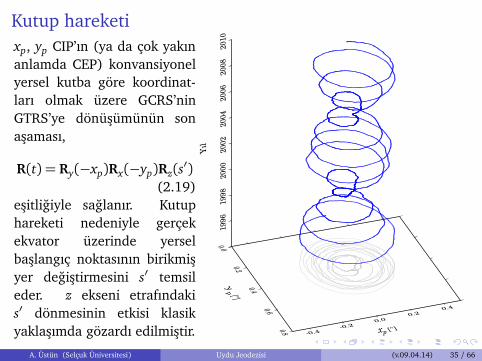
Kutup hareketixp, yp CIP’ın (ya da çok yakınanlamda CEP) konvansiyonelyersel kutba göre koordinat-ları olmak üzere GCRS’ninGTRS’ye dönüsümünün sonasaması,
R(t) = Ry(−xp)Rx(−yp)Rz(s′)
(2.19)esitligiyle saglanır. Kutuphareketi nedeniyle gerçekekvator üzerinde yerselbaslangıç noktasının birikmisyer degistirmesini s′ temsileder. z ekseni etrafındakis′ dönmesinin etkisi klasikyaklasımda gözardı edilmistir.
0.0
0.2
0.4
0.6
0.8
yp [″]
-0.4-0.2
0.0
0.2
0.4
xp [″]
1996
1998
2000
2002
2004
2006
2008
2010
Yıl
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 35 / 66
Uydu jeodezisiYerin kendi ekseni etrafındaki dönme hareketine dayalı
Yeryüzünde gerçeklestirilen gözlemlerin zaman kaydı için UT (UT1) Dünya zamanı UTC Koordinatlandırılmıs Dünya zamanı (UT1 ile uyumlu atomik) GST Yıldız zamanı
Gök cisimlerinin yörünge hareketine dayalı
Uydu hareketlerinin izlenmesi için TT Yersel Zaman: Günes sisteminin efemeris zaman standardı TCG (Yermerkezli) ve TCB (Barisentrik) Koordinat Zamanı TDB Barisentrik Dinamik Zaman
Fiziksel (nükleer) süreçlere dayalı
Sinyalin yol alma sürelerinin ölçümü ve gözlem denklemlerininolusturulması için TAI Uluslararası Atomik Zaman: Resmi zaman standardı GPS zamanı: GPS konum ölçmelerinin zaman sistemi
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 36 / 66

Uydu jeodezisinde zaman sistemleri
TAI
−∆AT +32s.184
∆UT−∆AT UTC +∆TT
+∆UT1
UT1 +∆T TT
Dogrusal
TAI TCG
−19s 4D f(TDB,UT1,konum)
GPS TCB
Dogrusal
TDB
Sistem Tarih ZamanUTC 15.01.2006 21:24:37.500000TAI 15.01.2006 21:25:10.500000GPS 15.01.2006 21:24:51.500000UT1 15.01.2006 21:24:37.834100TT 15.01.2006 21:25:42.684000TCG 15.01.2006 21:25:43.322690TDB 15.01.2006 21:25:42.683799TCB 15.01.2006 21:25:56.893378
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 37 / 66
Elektromanyetik dalgaların özellikleri
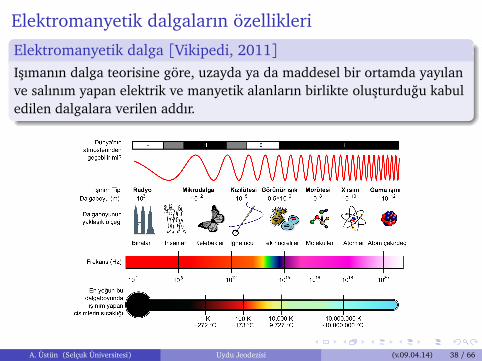
Elektromanyetik dalga [Vikipedi, 2011]
Isımanın dalga teorisine göre, uzayda ya da maddesel bir ortamda yayılanve salınım yapan elektrik ve manyetik alanların birlikte olusturdugu kabuledilen dalgalara verilen addır.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 38 / 66
Elektromanyetik dalgaların özellikleri (devam)
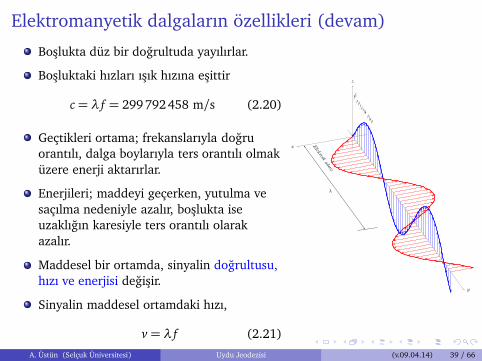
Boslukta düz bir dogrultuda yayılırlar.
Bosluktaki hızları ısık hızına esittir
c= λ f = 299792458 m/s (2.20)
Geçtikleri ortama; frekanslarıyla dogruorantılı, dalga boylarıyla ters orantılı olmaküzere enerji aktarırlar.
Enerjileri; maddeyi geçerken, yutulma vesaçılma nedeniyle azalır, boslukta iseuzaklıgın karesiyle ters orantılı olarakazalır.
Maddesel bir ortamda, sinyalin dogrultusu,hızı ve enerjisi degisir.
Sinyalin maddesel ortamdaki hızı,
v = λ f (2.21)
x
y
z
λ
Elektrik
alanı
Manyetik
alan
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 39 / 66

Sinyal yayılımının temelleri [Seeber, 2003]Periyot, açısal frekans ve dalga sayısı,
P= 1/f , ω = 2π f , k= 2π/λ (2.22)
Kırılma indisi ve kırıcılık katsayısı,
n=c
v=λBosluk
λ=
kBosluk
k, N = (n− 1)106 (2.23)
t anında alınan sinyalin fazı ve faz açısı ve sinüzoidal dalga denklemi
Φ =t
P+Φ0 , ϕ = 2πΦ , y = A sin(ωt+ϕ0) (2.24)
bt0
bt1
ϕ0
ϕ0 + ωt1
ϕ
y
b
b
y0 = A sinϕ0
y1 = A sin(ϕ0 + ωt1)
A
t
y
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 40 / 66
Atmosferik sinyal gecikmesi etkisi
Atmosfer: molekül, nötr atom ve yüklü partiküllerden meydana gelir.
Örnegin i uydusundan çıkan GNSS sinyalinin k alıcısına varıncaya dekalınan yol (v = ds/dt= c/n’den),
cdt = nds ⇒ cδik=
∫ k
i
nds (2.25)
ve ρik
(n= 1) dogrusal i− k uzunlugu olmak üzere atmosferik etki,
∆=
∫ k
i
nds−ρik
(2.26)
esitligi ile gösterilir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 41 / 66
Iyonosferik ve troposferik etki
Elektromanyetik dalgalar üzerindeki kırıcılık etkisine göre ikikatmana indirgenebilir: troposfer ve iyonosfer.
Iyonosfer: içinde pozitif iyon ve serbest elektron bulunduran saçıcıortam. Kırıcılık etkisi iyonosferdeki toplam elektron yogunlugunabaglıdır:
TEC =
∫ k
i
Eds , ∆I = ±40.3
f2TEC (2.27)
Troposfer: Içerdigi kuru gaz ve su molekülleriyle atmosferin en altkatmanıdır. Troposferik etki kuru (Nd) ve ıslak ortamın kırıcılık etkisi(Nw) için ayrı ayrı göz önüne alınır:
∆ρ = 10−6
∫
Ndds+
∫
Nwds
(2.28)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 42 / 66
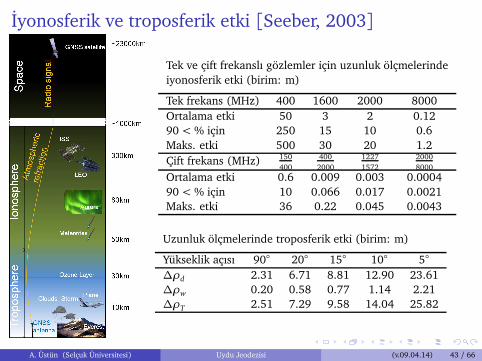
Iyonosferik ve troposferik etki [Seeber, 2003]
Tek ve çift frekanslı gözlemler için uzunluk ölçmelerindeiyonosferik etki (birim: m)
Tek frekans (MHz) 400 1600 2000 8000Ortalama etki 50 3 2 0.1290 < % için 250 15 10 0.6Maks. etki 500 30 20 1.2Çift frekans (MHz) 150
4004002000
12271572
20008000
Ortalama etki 0.6 0.009 0.003 0.000490 < % için 10 0.066 0.017 0.0021Maks. etki 36 0.22 0.045 0.0043
Uzunluk ölçmelerinde troposferik etki (birim: m)
Yükseklik açısı 90 20 15 10 5
∆ρd 2.31 6.71 8.81 12.90 23.61∆ρw 0.20 0.58 0.77 1.14 2.21∆ρT 2.51 7.29 9.58 14.04 25.82
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 43 / 66
Giris
Göksel mekaniklerBasta günes sistemindeki gezegenler olmak üzere gök cisimlerininhareketini (mekanik davranısını) inceleyen astronomi dalı
Göksel mekanikte hareketten söz edildiginde, karsılıklı kütle çekimetkisi altındaki hareket anlasılır
Hareket Kepler yörünge elemanları cinsinden ifade edilir
Günümüz bilim dalı olarak göksel mekanikler Kepler ve Newton’unteorileri üzerine kuruludur
Fiziksel ve matematiksel temelleri Kütle çekiminin bir sonucu olarak Kepler ve Newton (hareket) yasaları Çogunlukla diferansiyel denklemlerle gösterilen hareket
denklemlerinin analitik ve sayısal integrasyon teknikleriyle çözümü
Sonuç ürün: gök cisimlerinin (gezegenler ve uyduların) uzaydakikonumu ve zaman ölçümü
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 44 / 66
Newton mekanikleri
Temel olarak evrendeki her türlü cismin hareketini açıklamaya çalısır(ısık hızına yaklasanlar ile atom ve atom-altı hareket biçimleri hariç)
Newton hareket yasaları
Her cisim, kendisine bir dıs kuvvetuygulanmadıgı sürece, duragan konumunu yada dogrusal hareketini sürdürme egilimindedir
Cismin hareketindeki baska bir deyislemomentumundaki degisim, uygulanan dıskuvvetin büyüklügü ile orantılı ve kuvvetindogrultusu yönündedir
Her etkiye mutlaka karsı bir tepki vardır (ikicismin birbirine uyguladıkları etki karsılıklıolarak esit, ancak karsıt yönlerdedir)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 45 / 66
Newton hareket yasalarından ne anlıyoruz?Yasa I (eylemsizlik yasası): Cisme etki eden kuvvetlerin biliskesi 0 isecismin hareket durumu degismez:
∑
F= 0 ⇒dv
dt= 0 (3.1)
I. yasa koordinat sistemlerine uygulanırsa inersiyal (ivmesiz,eylemsiz) referans koordinat sistemleri ortaya çıkar.
Yasa II: Cismin momentum (p =mv) degisimi baska bir deyisle kütlesive ivmesi biliniyorsa, cisme uygulanan net kuvvet,
F=dp
dt=
d(mv)
dt=m
dv
dt=ma (3.2)
Yasa III (etki-tepki yasası): Karsılıklı olarak birbirine etki eden ikicismin uyguladıgı kuvvet
F2,1 = −F1,2
m1a1 = −m2a2(3.3)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 46 / 66

Enerji korunumuInersiyal bir referans koordinat sisteminde,
x = (x,y, z) konum (3.4)
v=dx
dt= x hız (3.5)
a=dv
dt=
d2x
dt2 = x ivme (3.6)
olmak üzere m kütleli bir cisme etkiyen net kuvvet,
F =mx = −gradV = −∇V = −
∂ V
∂ x,∂ V
∂ y,∂ V
∂ z
(3.7)
ile ifade edilebiliyorsa, F’ye korunumlu kuvvet, V’ye potansiyel enerjidenir. Korunumlu kuvvet (vektör) alanında toplam enerji degismez:
E = K(t1) + V(t1) = K(t2) + V(t2) = sabit (3.8)
Burada K = 12mv2 = 1
2m‖x‖2 ile kinetik enerjidir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 47 / 66
Iki-cisim problemi
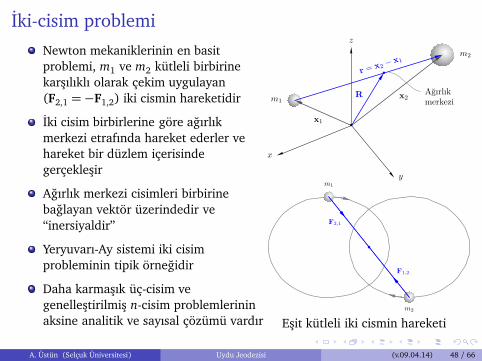
Newton mekaniklerinin en basitproblemi, m1 ve m2 kütleli birbirinekarsılıklı olarak çekim uygulayan(F2,1 =−F1,2) iki cismin hareketidir
Iki cisim birbirlerine göre agırlıkmerkezi etrafında hareket ederler vehareket bir düzlem içerisindegerçeklesir
Agırlık merkezi cisimleri birbirinebaglayan vektör üzerindedir ve“inersiyaldir”
Yeryuvarı-Ay sistemi iki cisimprobleminin tipik örnegidir
Daha karmasık üç-cisim vegenellestirilmis n-cisim problemlerininaksine analitik ve sayısal çözümü vardır
x
y
z
r =x2 −
x1
x1
x2
b
m1
m2
b
R Agırlıkmerkezi
F2,1
F1,2
b
m1
m2
Esit kütleli iki cismin hareketi
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 48 / 66
Iki-cisim problemi (devam)
Agırlık merkezinin konumu
R=m1x1 +m2x2
m1 +m2(3.9)
Agırlık merkezinin ivmesi
F2,1 = −F1,2
m1x1 = −m2x2
«
m1x1 +m2x2
m1 +m2= R= 0 (3.10)
R ve r= x2 − x1 için m1 ve m2’nin hareketi, (3.9)’dan
x1 = R−m2
m1 +m2r , x2 = R+
m1
m1 +m2r (3.11)
Indirgenmis iki-cisim problemi (F = F2,1 = −F1,2’den)
r=
−F
m1−
F
m2
⇒ F = −m1m2
m1+m2r (3.12)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 49 / 66
Kepler yörünge hareketi
Iki cisim probleminin özel bir hali, cisimlerden birinin kütlebakımından digerine göre ihmal edilebilir düzeyde küçük olmasıdır(yeryuvarı ve yapay uydu gibi)
Göksel mekanikler açısından Kepler yörünge hareketi, kütlesi ihmaledilebilir cismin eliptik yörünge davranısını ortaya koyar
Bu hareketin geometrik özelliklerini, ilk kez J. Kepler (1571–1630)gezegenlerin Günes etrafındaki dolanımlarını açıklamak içinkullanmıstır
Iki cisim probleminin Kepler yörünge hareketine indirgenmesinin enönemli sonuçları, kuvvet vektörlerinin merkezilesmesi (çeken cisminagırlık merkezine dogru) ve korunumlu olmasıdır:
r= −∇V (3.13)
V =GM
rG= 6.673 · 10−11 m3kg−1s−2 (3.14)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 50 / 66
Uyduların yörünge hareketi ve yerden izleme
b
b
b
x
y
z
b
bb
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 51 / 66
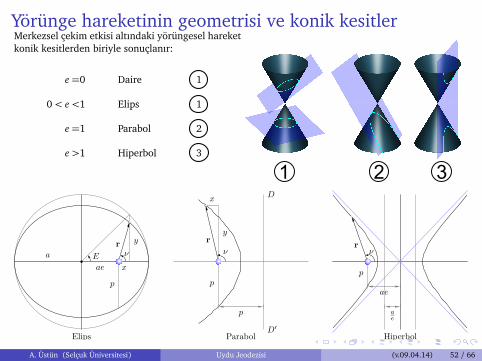
Yörünge hareketinin geometrisi ve konik kesitlerMerkezsel çekim etkisi altındaki yörüngesel hareketkonik kesitlerden biriyle sonuçlanır:
e=0 Daire 1
0< e<1 Elips 1
e=1 Parabol 2
e>1 Hiperbol 3
yr
xae
p
a νEb b
Elips
y
x
p
p
r
ν
D
D′
Parabol
p
ae
ae
rν
Hiperbol
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 52 / 66
Kepler yasaları (1)
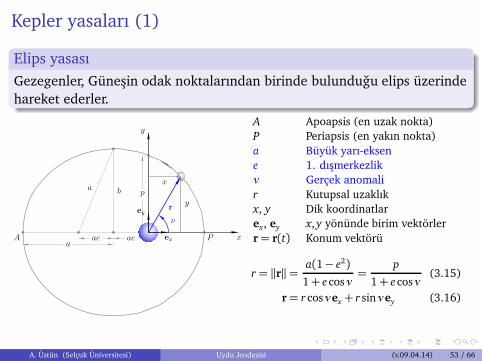
Elips yasası
Gezegenler, Günesin odak noktalarından birinde bulundugu elips üzerindehareket ederler.
a b
a
p
aeae x
y
ex
eyr
x
y
νb
Pb
A
b
bb
b
A Apoapsis (en uzak nokta)P Periapsis (en yakın nokta)a Büyük yarı-eksene 1. dısmerkezlikν Gerçek anomalir Kutupsal uzaklıkx, y Dik koordinatlarex, ey x, y yönünde birim vektörlerr= r(t) Konum vektörü
r = ‖r‖=a(1− e2)
1+ ecosν=
p
1+ ecosν(3.15)
r= r cosνex + r sinνey (3.16)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 53 / 66
Kepler yasaları (2)
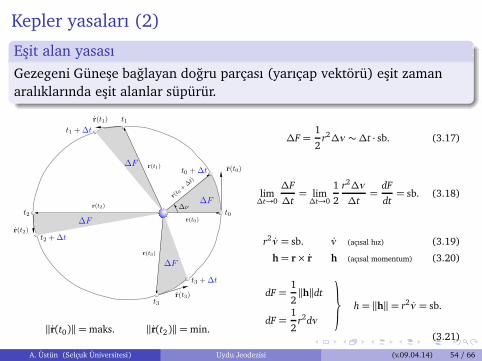
Esit alan yasası
Gezegeni Günese baglayan dogru parçası (yarıçap vektörü) esit zamanaralıklarında esit alanlar süpürür.
r(t0)
r(t1)
r(t2)
r(t3)
∆F
r(t0)
r(t0
+∆t)
∆Fr(t1)
∆F
r(t2)
∆F
r(t3)
∆νt2 t0
t0 +∆t
t1t1 +∆t
t2 +∆t
t3
t3 +∆t
‖r(t0)‖=maks. ‖r(t2)‖=min.
∆F =1
2r2∆ν ∼∆t · sb. (3.17)
lim∆t→0
∆F
∆t= lim∆t→0
1
2
r2∆ν
∆t=
dF
dt= sb. (3.18)
r2 ν = sb. ν (açısal hız) (3.19)
h= r× r h (açısal momentum) (3.20)
dF =1
2‖h‖dt
dF =1
2r2dν
h= ‖h‖ = r2ν = sb.
(3.21)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 54 / 66
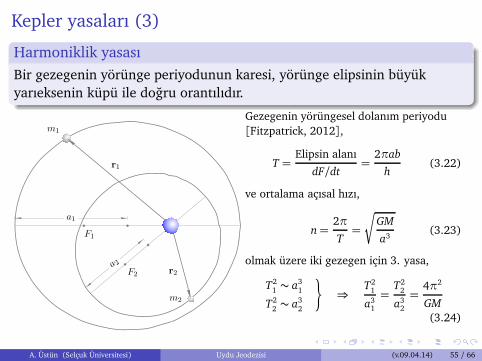
Kepler yasaları (3)
Harmoniklik yasası
Bir gezegenin yörünge periyodunun karesi, yörünge elipsinin büyükyarıeksenin küpü ile dogru orantılıdır.
m1
bb
F1
a1
r1
b
a 2 b
F2
m2
r2
Gezegenin yörüngesel dolanım periyodu[Fitzpatrick, 2012],
T =Elipsin alanı
dF/dt=
2πab
h(3.22)
ve ortalama açısal hızı,
n=2π
T=
r
GM
a3(3.23)
olmak üzere iki gezegen için 3. yasa,
T21 ∼ a3
1
T22 ∼ a3
2
«
⇒T2
1
a31
=T2
2
a32
=4π2
GM
(3.24)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 55 / 66
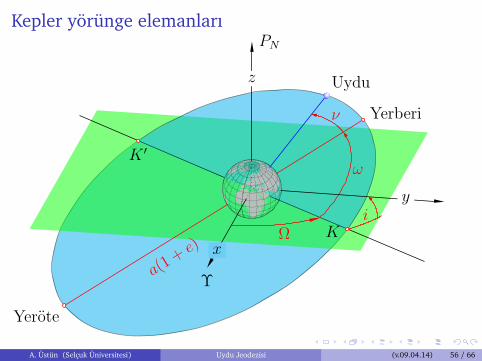
Kepler yörünge elemanları
Υ
PN
Ω
ω
ν
i
a(1+e)
K
K ′
Yerberi
Yerote
Uydu
x
z
y
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 56 / 66
Zamana baglı yörünge hareketiKepler’in 2. yasası zamana baglı hareketi tanımlar. (3.17)’den,
dt=1
C[r(ν)]2dν =
p2
C
1
1+ e cosν
2
dν , C = sb. (3.25)
yazılır ve esitligin her iki yanı için integral uygulanırsa,
t=p2
C
∫
dν
(1+ e cosν)2(3.26)
bulunur. Yeryuvarı için uydunun perige geçis anına (ν = 0) karsılık gelenzaman baslangıcı t0 olmak üzere, (3.26)’nın integrali zamana baglıhareket denklemini,
n(t− t0) = 2 arctan
r
1− e
1+ etanν
2
!
−ep
1− e2 sinν
1+ e cosν(3.27)
verir [Capderou, 2005].A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 57 / 66
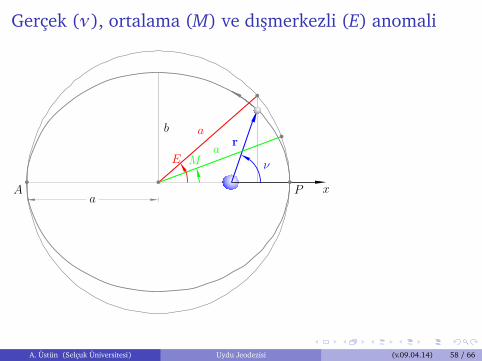
Gerçek (ν), ortalama (M) ve dısmerkezli (E) anomali
b
ax
ra
a
νE M
b
Pb
Ab
b
b
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 58 / 66
Gerçek (ν), ortalama (M) ve dısmerkezli (E) anomali(devam)(3.27) t’den gerçek anomali ν ’ye geçis için elverisli degildir. Esitliginsagındaki terimler için,
tanν
2=
r
1+ e
1− etan
E
2(3.28)
dönüsümü uygulanarak,
n(t− t0) = E− e sin E (3.29)
sonucuna ulasılabilir [Beutler, 2005]. Dısmerkezli anomali E, gerçekanomaliyi zamana baglayan ara büyüklüktür. (3.29)’a Kepler denklemi adıverilir. Seçenek olarak uydunun perige (geçis) anından itibaren geçensüreye karsılık ortalama anomali,
n(t− t0) =M (3.30)
tanımlanabilir. n Kepler’in üçüncü yasasından türetilmis ortalama açısalhızdır.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 59 / 66

Kepler probleminin çözümü
Belirli bir t anı için ortamala ve dısmerkezli anomali arasındaki iliskiyitanımlayan,
n(t− t0) =M = E− e sin E (3.31)
esitliginde M’ye baglı E’nin sonlu bir çözüm yoktur. Yineleme tekniginedayalı sayısal çözüm, Newton-Raphson yöntemiyle olusturulabilir. Bununiçin yukarıdaki esitlik,
f(E) = E− e sin E−M = 0 (3.32)
biçiminde yeniden düzenlenir ve xk+1 = xk−f(xk)
f ′(xk)kuralı uygulanırsa,
Ek+1 = Ek−Ek− e sin Ek−M
1− e cosEk
(3.33)
yineleme (iterasyon) esitligi bulunur. Iterasyon için baslangıç deger seçimiE0 =M ile yapılabilir.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 60 / 66
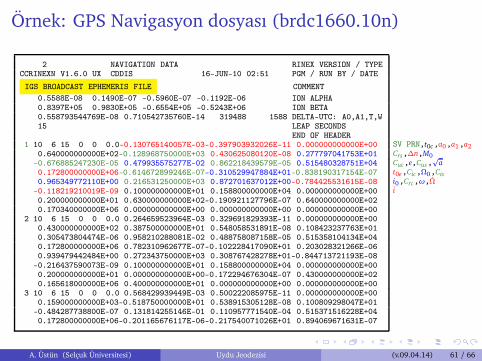
Örnek: GPS Navigasyon dosyası (brdc1660.10n)
2 NAVIGATION DATA RINEX VERSION / TYPECCRINEXN V1.6.0 UX CDDIS 16-JUN-10 02:51 PGM / RUN BY / DATE
IGS BROADCAST EPHEMERIS FILE COMMENT
0.5588E-08 0.1490E-07 -0.5960E-07 -0.1192E-06 ION ALPHA0.8397E+05 0.9830E+05 -0.6554E+05 -0.5243E+06 ION BETA0.558793544769E-08 0.710542735760E-14 319488 1588 DELTA-UTC: A0,A1,T,W15 LEAP SECONDS
END OF HEADER1 10 6 15 0 0 0.0-0.130765140057E-03-0.397903932026E-11 0.000000000000E+00
0.640000000000E+02-0.128968750000E+03 0.430625080120E-08 0.277797041753E+01-0.676885247230E-05 0.479935575277E-02 0.862218439579E-05 0.515480328751E+040.172800000000E+06-0.614672899246E-07-0.310529947884E+01-0.838190317154E-070.965349772110E+00 0.216531250000E+03 0.872701637012E+00-0.784425531615E-08-0.118219210019E-09 0.100000000000E+01 0.158800000000E+04 0.000000000000E+000.200000000000E+01 0.630000000000E+02-0.190921127796E-07 0.640000000000E+020.170340000000E+06 0.000000000000E+00 0.000000000000E+00 0.000000000000E+00
2 10 6 15 0 0 0.0 0.264659523964E-03 0.329691829393E-11 0.000000000000E+000.430000000000E+02 0.387500000000E+01 0.548058531891E-08 0.108423237763E+010.305473804474E-06 0.958210288081E-02 0.488758087158E-05 0.515358104134E+040.172800000000E+06 0.782310962677E-07-0.102228417090E+01 0.203028321266E-060.939479442484E+00 0.272343750000E+03 0.308767428278E+01-0.844713721193E-08-0.216437590073E-09 0.100000000000E+01 0.158800000000E+04 0.000000000000E+000.200000000000E+01 0.000000000000E+00-0.172294676304E-07 0.430000000000E+020.165618000000E+06 0.400000000000E+01 0.000000000000E+00 0.000000000000E+00
3 10 6 15 0 0 0.0 0.568429939449E-03 0.500222085975E-11 0.000000000000E+000.159000000000E+03-0.518750000000E+01 0.538915305128E-08 0.100809298047E+01-0.484287738800E-07 0.131814255146E-01 0.110957771540E-04 0.515371516228E+040.172800000000E+06-0.201165676117E-06-0.217540071026E+01 0.894069671631E-07
SV PRN,t0c,a0,a1,a2Crs,∆n,M0Cuc,e,Cus,
pa
t0e,Cic,Ω0,Cisi0,Crc,ω,Ωi
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 61 / 66
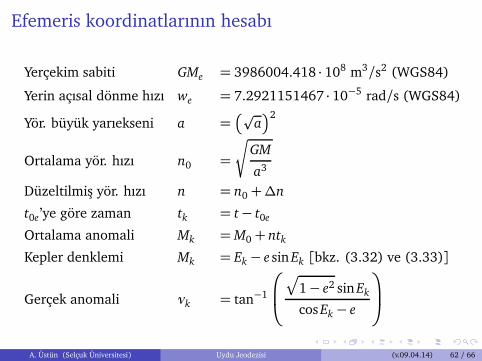
Efemeris koordinatlarının hesabı
Yerçekim sabiti GMe = 3986004.418 · 108 m3/s2 (WGS84)
Yerin açısal dönme hızı we = 7.2921151467 · 10−5 rad/s (WGS84)
Yör. büyük yarıekseni a =p
a2
Ortalama yör. hızı n0 =
r
GM
a3
Düzeltilmis yör. hızı n = n0 +∆n
t0e’ye göre zaman tk = t− t0e
Ortalama anomali Mk =M0 + ntk
Kepler denklemi Mk = Ek− e sin Ek [bkz. (3.32) ve (3.33)]
Gerçek anomali νk = tan−1
p
1− e2 sin Ek
cosEk− e
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 62 / 66
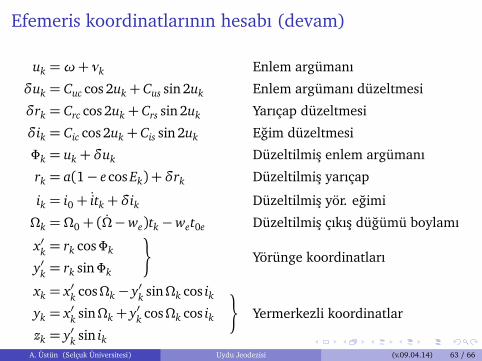
Efemeris koordinatlarının hesabı (devam)
uk =ω+ νk Enlem argümanı
δuk = Cuc cos 2uk+ Cus sin 2uk Enlem argümanı düzeltmesi
δrk = Crc cos2uk+ Crs sin 2uk Yarıçap düzeltmesi
δik = Cic cos2uk+Cis sin 2uk Egim düzeltmesi
Φk = uk+ δuk Düzeltilmis enlem argümanı
rk = a(1− e cos Ek) + δrk Düzeltilmis yarıçap
ik = i0 + itk+ δik Düzeltilmis yör. egimi
Ωk = Ω0 + (Ω−we)tk−wet0e Düzeltilmis çıkıs dügümü boylamı
x′k= rk cosΦk
y′k= rk sinΦk
«
Yörünge koordinatları
xk = x′k
cosΩk− y′k
sinΩk cos ik
yk = x′k
sinΩk+ y′k
cosΩk cos ik
zk = y′k
sin ik
«
Yermerkezli koordinatlar
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 63 / 66
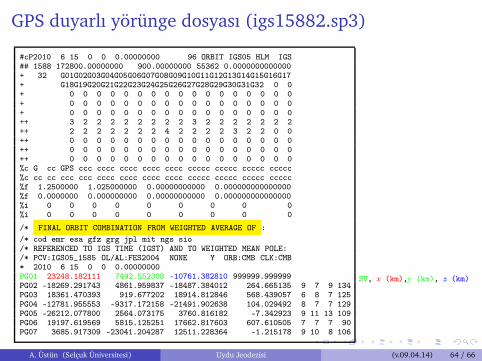
GPS duyarlı yörünge dosyası (igs15882.sp3)
#cP2010 6 15 0 0 0.00000000 96 ORBIT IGS05 HLM IGS## 1588 172800.00000000 900.00000000 55362 0.0000000000000+ 32 G01G02G03G04G05G06G07G08G09G10G11G12G13G14G15G16G17+ G18G19G20G21G22G23G24G25G26G27G28G29G30G31G32 0 0+ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0+ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0+ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0++ 3 2 2 2 2 2 2 2 2 3 2 2 2 2 2 2 2++ 2 2 2 2 2 2 2 4 2 2 2 2 3 2 2 0 0++ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0++ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0++ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0%c G cc GPS ccc cccc cccc cccc cccc ccccc ccccc ccccc ccccc%c cc cc ccc ccc cccc cccc cccc cccc ccccc ccccc ccccc ccccc%f 1.2500000 1.025000000 0.00000000000 0.000000000000000%f 0.0000000 0.000000000 0.00000000000 0.000000000000000%i 0 0 0 0 0 0 0 0 0%i 0 0 0 0 0 0 0 0 0
/* FINAL ORBIT COMBINATION FROM WEIGHTED AVERAGE OF :
/* cod emr esa gfz grg jpl mit ngs sio/* REFERENCED TO IGS TIME (IGST) AND TO WEIGHTED MEAN POLE:/* PCV:IGS05_1585 OL/AL:FES2004 NONE Y ORB:CMB CLK:CMB* 2010 6 15 0 0 0.00000000PG01 23248.182111 7492.552308 -10761.382810 999999.999999PG02 -18269.291743 4861.959837 -18487.384012 264.665135 9 7 9 134PG03 18361.470393 919.677202 18914.812846 568.439057 6 8 7 125PG04 -12781.955553 -9317.172158 -21491.902638 104.029492 8 7 7 129PG05 -26212.077800 2564.073175 3760.816182 -7.342923 9 11 13 109PG06 19197.619569 5815.125251 17662.817603 607.610505 7 7 7 90PG07 3685.917309 -23041.204287 12511.228364 -1.215178 9 10 8 106
SV, x (km),y (km), z (km)
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 64 / 66
Kaynaklar I
Ayhan, M. E., Demir, C., Lenk, O., Kılıçoglu, A., Aktug, B., Açıkgöz, M., Fırat, O., Sengün, Y. S.,
Cingöz, A., Gürdal, M. A., Kurt, I., Ocak, M., Türkezer, A., Yıldız, H., Bayazıt, N., Ata, M., Çaglar,Y., and Özerkan, A. (2002).Türkiye Ulusal Temel GPS Agı-1999A.Harita Dergisi, Özel Sayı:16.
Beutler, G. (2005).Astronomy and Astrophysics Library.Springer-Verlag.
Capderou, M. (2005).Satellites Orbits and Missions.Springer-Verlag.S. Lyle (T).
Fitzpatrick, R. (2012).An introduction to celestial mechanics.http://farside.ph.utexas.edu/teaching/celestial/Celestial.pdf [Erisim:20.01.2012].
McCarthy, D. (1996).IERS conventions (1996).Technical Report IERS Technical Note: 21, Central Bureau of IERS.
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 65 / 66
Kaynaklar II
Petit, G. and Luzum, B. (2010).IERS conventions (2010).Technical Report IERS Technical Note: 36, Bundesamts für Kartographie und Geodäsie.
Rothacher, M. (2002).Combination of space-geodetic techniques.In IVS 2002 General Meeting Proceedings, pages 33–43.
Seeber, G. (2003).Satellite Geodesy.Walter de Gruyter, Berlin, 2nd edition.
Vikipedi (2011).
Elektromanyetik dalga — Vikipedi, Özgür ansiklopedi.http://tr.wikipedia.org/wiki/Elektromanyetik_dalga [Erisim: 26.04.2011].
A. Üstün (Selçuk Üniversitesi) Uydu Jeodezisi (v.09.04.14) 66 / 66
















![GNSS Teknikleri [1.5ex]Lisans Ders Notlarıgalileo.selcuk.edu.tr/~aydin/docs/gnsstek.pdf · GNSS Teknikleri Lisans Ders Notları Aydın ÜSTÜN Kocaeli Üniversitesi Harita Mühendisli˘gi](https://img.pdfslide.tips/doc/110x75/5e3433f7abcd3214eb75e1c5/gnss-teknikleri-15exlisans-ders-notlar-aydindocsgnsstekpdf-gnss-teknikleri.jpg)











