Embed Size (px)
Citation preview

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 1/18
Vi xử lý 1Trong chương trình học ngành Công nghệ Kỹ thuật Điện, Điện tử, sinh viên sẽ được học 6 tín
chỉ về Vi xử lý, bao gồm: 1. Vi xử lý 1
2. Vi xử lý 2
3. Thực hành Vi xử lý & Vi điều khiển Các học phần này được học sau học phần Kỹ thuật số. Không chỉ là học phần cơ sở ngành, Vi
xử lý & Vi điều khiển còn có nhiều ứng dụng thực tế. Đồ án môn học 2, các cuộc thi sáng tạo kỹ thuật vàRobocon do khoa tổ chức cũng gắn liền với môn học này. Có thể nói, đây là các học phần rất thú vịnhưng sinh viên cũng gặp nhiều khó khăn với nhiều khái niệm mới. Vi xử lý 1: Nội dung học phần Vi xử lý 1 bao gồm 2 phần chính: - vi xử lý 80x86
- vi điều khiển 8051
Phần đầu cung cấp cho các em các kiến thức cơ bản về kiến trúc hệ vi xử lý, cấu trúc và nguyêntắc hoạt động của CPU, tổ chức bộ nhớ và các thiết bị ngoại vi, cách mã hóa lệnh, các chế độ định địa
chỉ, tập lệnh và cách viết chương trình cho 80x86, ngắt và truy nhập trực tiếp bộ nhớ DMA. Tiếp theo các em sẽ học về Vi điều khiển họ 8051. Đây là một họ vi điều khiển khá phổ biến vàsinh viên dễ tiếp cận. Khi có kiến thức về họ vi điều khiển này, các em sẽ dễ dàng học về các họ vi điềukhiển khác như PIC, AVR, v.v. Các em sẽ được học về cấu trúc, các chế độ định địa chỉ, tập lệnh, viếtchương trình hợp ngữ cho vi điều khiển 8051. Ngắt và timer/counter cũng được giới thiệu cùng với mộtsố bài tập ứng dụng.
Để học tốt học phần này ngoài tài liệu, các em cần một số phần mềm hỗ trợ lập trình, mô phỏngnhư EMU8086, Pinnacle 52.
Địa chỉ trang chủ EMU8086: http://www.emu8086.com/
Địa chỉ trang chủ Pinnacle 52: http://www.vaultbbs.com/
Các em cần cài đặt các phần mềm đã giới thiệu, học cách sử dụng chúng. Các tài liệu hướngdẫn sử dụng phần mềm thầy đã gửi link ở phần dưới. Các em nên làm một số ví dụ mẫu để biết quy trìnhsử dụng, sau đó làm các bài tập, học cách mô phỏng từng bước chương trình để kiểm tra so sánh giữa ýhiểu và kết quả thực tế.
Một số vấn đề khi học phần vi xử lý 80x86
1. Cách mã hóa lệnh
Qua cách mã hóa lệnh các em sẽ hiểu được cách thức một lệnh được viết dưới dạng mã nhịphân mà vi xử lý có thể hiểu được. Từ đó giúp các em hiểu rằng tất cả lệnh và dữ liệu trong hệ vi xử lý
đều tồn tại dưới dạng nhị phân và tại sao khi đọc một chuỗi số nhị phân vi xử lý biết được phải làm gì. Các em không phải nhớ xem lệnh MUL có mã nhị phân là bao nhiêu mà cần hiểu một lệnh được xâydựng từ các trường nào? ý nghĩa của mỗi trường ra sao? Từ đó em có thể biết cách mã hóa một lệnhgợi nhớ bất kỳ. Ví dụ, lệnh MOV AL, BL được mã hóa dưới dạng nhị phân thế nào?
Tra trong tài liệu ta sẽ thấy lệnh MOV được mã hóa bởi một trường gồm 6 bit.Tiếp theo để chuyển dữ liệu vào thanh ghi AL, vậy AL được xác định bằng các trường nào? Chúng tathấy có các trường hướng D (D=1 dữ liệu đi tới thanh ghi, D=0 dữ liệu đi từ thanh ghi), trường W (W=0:

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 2/18
toán hạng byte, W=1 toán hạng word), trường REG gồm 3 bit dùng để xác định thanh ghi. Để xác định thanh ghi BL sẽ cần các trường MOD và R/M. Tra bảng ta sẽ thấy hai trường này kết hợpvới nhau để tạo ra chế độ định địa chỉ thanh ghi để truy nhập đến BL. Với việc xác định như vậy, các em sẽ lần lượt xác định được giá trị của các trường và bit tương ứng từđó biết được mã lệnh của cả lệnh.
Sau khi mã hóa, cần gõ lệnh vào phần mềm, hợp dịch để kiểm tra mã nhị phân tương ứng của lệnh cóđúng với cách tính toán không.
2. Học lệnh
Vi xử lý 80x86 có tập lệnh rất lớn và các em không cần thiết phải học tất cả các lệnh. Điều các emcần học làhọc cách tra cứu và sử dụng một lệnh bất kỳ. Sau một quá trình làm các bài tập và ví dụ, cácem sẽ tự nhớ một số lệnh hay được sử dụng.
Trước tiên các em cần tổ chức các lệnh thành các nhóm lệnh cho dễ học, ví dụ nhóm lệnh dichuyển dữ liệu, nhóm lệnh số học, nhóm lệnh logic, nhóm lệnh rẽ nhánh chương trình, v.v. Với mỗi nhómlệnh này cần liệt kê một vài lệnh.
Với mỗi lệnh cần tìm hiểu cú pháp của lệnh bao gồm: mã lệnh, toán hạng (có bao nhiêu toán
hạng, có thể sử dụng chế độ định địa chỉ nào), tác dụng của lệnh và ảnh hưởng lên các cờ thế nào. Vớimỗi lệnh tài liệu đã giải thích rõ. Tuy nhiên, để thực sự hiểu và vận dụng được lệnh các em cần sử dụngphần mềm để kiểm chứng ý hiểu của mình. Lấy ví dụ em muốn biết lệnh DIV có ý nghĩa gì và cách sử dụng như thế nào?
Các em tra trong tài liệu sẽ thấy cú pháp của lệnh có dạng: DIV Toánhạng Lệnh này thực hiện chia 2 toán hạng. - Trường hợp Toánhạng kiểu byte, lấy nội dung thanh ghi AX chia cho toán hạng. Kết quả phần dư lưutrên AH, phần nguyên lưu trên AL
- Trường hợp Toánhạng kiểu word, lấy nội dung thanh ghi DX AX chia cho toán hạng. Kết quả phầnnguyên lưu trên thanh ghi AX, phần dư lưu trên DX.
Để kiểm tra ý hiểu của mình có đúng không, các em cần làm một vài ví dụ nhỏ để kiểm tra kết quả
trên phần mềm. Nếu kết quả trùng với suy đoán thì em đã hiểu hoạt động của lệnh. Ví dụ, trong trườnghợp này, nếu ta nạp giá trị 102 vào thanh ghi AX và giá trị 100 vào thanh ghi BL thì kết quả phép chia DIV
BL sẽ phải cho thanh ghi AH giá trị 2 và AL giá trị 1. Viết đoạn lệnh sau:
org 100h
mov ax,102
mov bl,100
div bl
Dịch và thực hiện lệnh từng bước. Sau khi thực hiện xong lệnh DIV, nếu thanh ghi AH và AL cho cùng
giá trị như suy đoán thì ta đã hiểu đúng sự thực hiện của lệnh.
Một số vấn đề khi học vi điều khiển 8051
1. Sự khác biệt giữa Vi xử lý và Vi điều khiển?
Vi xử lý (microprocessor) là một chip chứa thành phần trung tâm của một hệ vi xử lý: CPU. Để hệvi xử lý có thể hoạt động được thì một mình chip vi xử lý là chưa đủ. Hệ thống cần bổ xung các thànhphần khác như bộ nhớ, các thiết bị vào ra và mạch phụ trợ. Việc xây dựng các hệ thống dựa trên chip vixử lý thường khá phức tạp và thường là các hệ đa mục đích với khả năng tính toán, xử lý dữ liệu nhanh.
Khác với vi xử lý, các vi điều khiển (microcontroller) là một hệ thống trên chip, nghĩa là bên trong
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 3/18
một chip đã tổ hợp sẵn không chỉ bộ vi xử lý mà còn tích hợp cả bộ nhớ, các mạch ngoại vi phụ trợ. Cáchệ thống xây dựng dựa trên chip vi điều khiển thường đơn giản hơn rất nhiều so với các hệ thống xâydựng dựa trên vi xử lý. Các hệ thống dựa trên vi điều khiển thường đáp ứng cho một nhiệm vụ cụ thể khiđược xây dựng. Chúng thường là các hệ thống điều khiển có yêu cầu tính toán xử lý dữ liệu không đòihỏi tốc độ và khối lượng lớn ví dụ như máy giặt, lò vi sóng, VCR, v.v. Các hệ thống dựa trên vi điều khiển
thường có kích thước nhỏ, tiêu tốn ít năng lượng và giá thành thấp hơn so với các hệ thống dựa trên vixử lý. Đối với sinh viên ngành điện tử, việc tiếp cận với vi xử lý thông qua các chip vi điều khiển thường
dễ dàng hơn trong việc tự xây dựng một ứng dụng thực tế, giá thành thấp.
2.Tại sao học vi điều khiển 8051?
Vi điều khiển 8051 được Intel thiết kế và sản xuất từ những năm cuối thập kỷ 80s. So với xuhướng thiết kế các lõi vi xử lý ngày nay dựa trên kiến trúc RISC thì 8051 thiết kế trên kiến trúc CISC vớimột số đặc trưng như tập lệnh lớn, thời gian thực hiện lệnh thay đổi, độ dài lệnh không cố định. Điều nàygây khó khăn cho các trình biên dịch trong việc tối ưu mã, tốc độ thực hiện lệnh của vi xử lý chậm.
Tuy nhiên, do là một vi điều khiển ra đời sớm, Intel đã cho phép các nhà sản xuất khác (Atmel,Siemens, Phillips v.v.) sản xuất các vi điều khiển giữ nguyên lõi 8051, vi điều khiển 8051 trở nên phổ biếnvới số lượng và chủng loại đa dạng đáp ứng nhiều mục đích sử dụng và thiết kế. Việc thay đổi các ICcùng họ của các nhà sản xuất khác nhau hầu như không phải viết lại chương trình. Bên cạnh đó sốlượng các nhà phát triển hỗ trợ phần mềm hợp dịch, biên dịch, mô phỏng và nạp chương trình lớn. Cáctài liệu hướng dẫn phong phú cũng góp phần làm cho họ vi điều khiển 8051 trở nên phổ biến. Đây lànhững lý do khiến việc tiếp cận với vi điều khiển trở nên dễ dàng hơn.
Hiện nay có nhiều họ vi điều khiển đang phát triển mạnh mẽ và ngày càng chiếm được cảm tìnhcủa người thiết kế như PIC, AVR, ARM,v.v. . Chúng được thiết kế dựa trên kiến trúc RISC với khả nănghỗ trợ tốt ngôn ngữ lập trình bậc cao dẫn đến thời gian thiết kế và cho ra đời các sản phẩm nhanh hơn.Các họ vi điều khiển khác nhau có tập lệnh và cấu trúc khác nhau, việc học đồng thời tất cả các họ viđiều khiển là không thể. Tuy nhiên, việc nắm bắt tốt kiến trúc, cách thức thực hiện lệnh ở mức assembly,
cách vẽ lưu đồ thuật toán khi học vi điều khiển 8051 cũng tạo điều kiện dễ dàng cho sinh viên tiếp cậnvới các họ vi điều khiển khác. Hơn nữa, với mỗi vi điều khiển của các họ khác thì gần như cũng có khảnăm tìm được một vi điều khiển tương đương họ 8051.
3. Tại sao học ngôn ngữ hợp ngữ (Assembly)?
Lập trình cho vi điều khiển có thể viết bằng nhiều ngôn ngữ khác nhau như Assembly, C, Basic,Pascal, v.v. Tại sao chúng ta lại học ngôn ngữ Assembly trong chương trình? Nhiệm vụ của học phần vixử lý 1 giải quyết hai nhiệm vụ: i) cung cấp cho các em các kiến thức cơ bản về tổ chức và hoạt độngcủa hệ vi xử lý, ii) một số ứng dụng của vi xử lý, vi điều khiển trong thực tế.
Để đáp ứng được nhiệm vụ thứ nhất thì việc học và lập trình bằng ngôn ngữ Assembly là thích
hợp nhất. Qua việc hiểu cách thức mã hóa lệnh, quy trình thực hiện lệnh các em có được kiến thức vềcấu trúc và nguyên tắc hoạt động cũng như chức năng của các thành phần trong hệ vi xử lý. Cách thứcmà các lệnh được hệ vi xử lý mã hóa và giải mã dưới dạng nhị phân. Những chương trình dù phức tạpđến đâu để thực hiện được trên hệ vi xử lý đều phải chuyển đổi thành dạng mã nhị phân để máy có thểhiểu được. Các chương trình viết bằng ngôn ngữ bậc cao để thực hiện được trên hệ vi xử lý cần phảibiên dịch và hợp dịch để chuyển thành các lệnh cơ bản của máy. Các em cũng hiểu được tại sao cầnphải có trình biên dịch và hợp dịch. Tại sao chạy trên các hệ vi xử lý với các họ vi xử lý khác nhau thì cầnphải có các trình biên dịch và hợp dịch phù hợp. Tại sao viết chương trình bằng ngôn ngữ Assemblythường cho khả năng tối ưu hơn về tốc độ và dung lượng. Rất nhiều khái niệm sẽ khó giải thích nếu các

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 4/18
em không có được các kiến thức cơ bản về assembly. Để đáp ứng được nhiệm vụ thứ hai thì có thể học và sử dụng các ngôn ngữ bậc thấp cũng như
bậc cao. Tất nhiên, việc học và sử dụng ngôn ngữ bậc cao trong xây dựng các chương trình ứng dụngsẽ nhanh chóng và thuận tiện hơn.
Để đáp ứng được cả hai nhiệm vụ này, trong chương trình chúng ta sử dụng ngôn ngữ Assembly
để dạy và học. Điều này cũng gợi ý cho các em cần tiếp tục học hỏi để có thể viết các chương trình ứngdụng bằng ngôn ngữ bậc cao. Trong học phần vi xử lý 2 chúng ta sẽ sử dụng ngôn ngữ bậc cao để họcvà viết chương trình.
4. Làm thế nào để môn học trở nên thú vị hơn?
Để môn học trở nên thú vị hơn, các em có thể làm các mạch đơn giản ứng dụng vi điều khiển ví dụnhư mạch quang báo dùng led với các kiểu sáng khác nhau. Dù làm một mạch đơn giản nhưng các emsẽ tích lũy được nhiều kiến thức bổ ích từ thiết kế, thực hành điện tử cơ bản, lập trình, mô phỏng sửa lỗi,nạp chương trình. Tất nhiên, để làm được các mạch này các em cần có một số thiết bị và linh kiện cơbản như: + Đồng hồ vạn năng
+ Board cắm
+ Mạch nạp chương trình
+ Vi điều khiển (thường dùng AT89S51, AT89S52 hoặc AT89C51, AT89C52) + Thạch anh (thường dùng 12Mhz hoặc 11,0592Mhz) , led phát quang, trở (220 Ohm, 4.7K, 10K), tụ (tụ
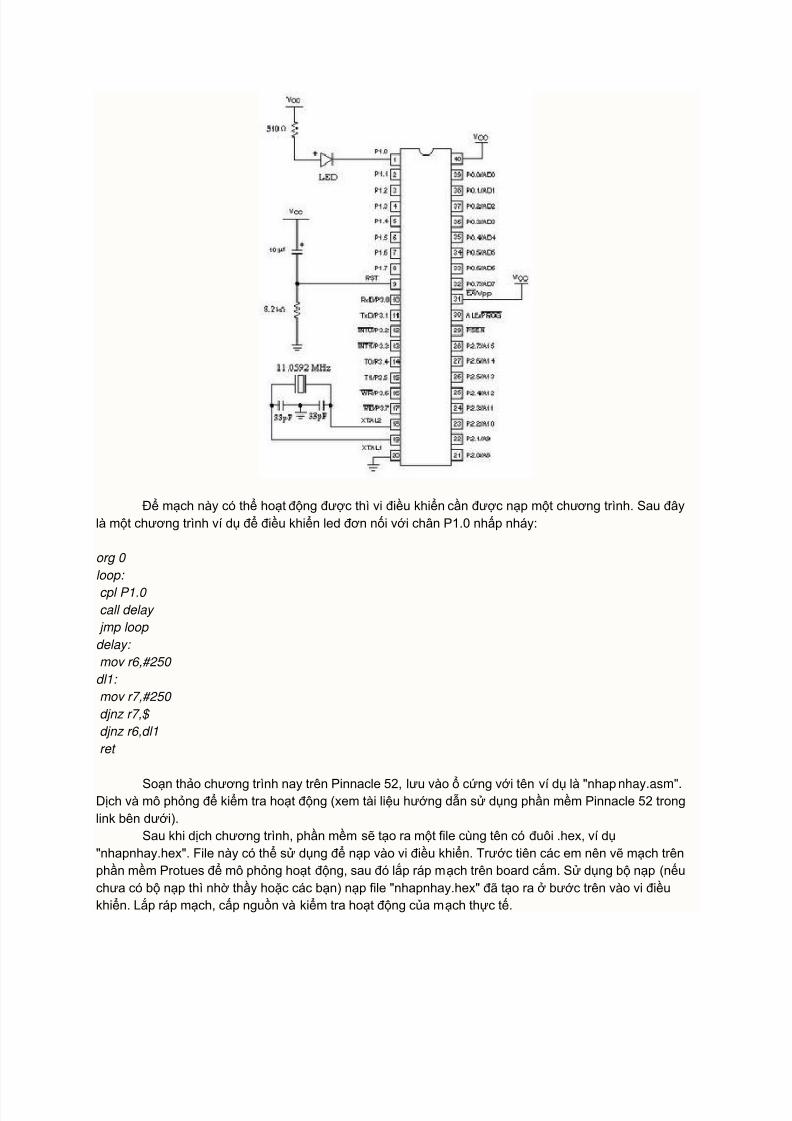
gốm 33pF, tụ hóa 10uF), dây nối. + Nguồn 5V (có thể dùng Pin hoặc nguồn máy tính cũ) Dưới đây là một mạch đơn giản thể hiện các điều kiện tối thiểu để một vi điều khiển hoạt động: điềukhiển một led đơn nối với chân P1.0 sáng nhấp nháy. Cần lưu ý: Chân 31(/EA/Vpp) nối với Vcc=5V. Tụ nối chân Reset là tụ hóa. Trở nối chân Reset có thểthay đổi trị số thành 4,7K hoặc 10K.
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 5/18
Để mạch này có thể hoạt động được thì vi điều khiển cần được nạp một chương trình. Sau đâylà một chương trình ví dụ để điều khiển led đơn nối với chân P1.0 nhấp nháy:
org 0
loop:
cpl P1.0 call delay
jmp loop
delay:
mov r6,#250
dl1:
mov r7,#250
djnz r7,$
djnz r6,dl1
ret
Soạn thảo chương trình nay trên Pinnacle 52, lưu vào ổ cứng với tên ví dụ là "nhapnhay.asm".Dịch và mô phỏng để kiểm tra hoạt động (xem tài liệu hướng dẫn sử dụng phần mềm Pinnacle 52 tronglink bên dưới).
Sau khi dịch chương trình, phần mềm sẽ tạo ra một file cùng tên có đuôi .hex, ví dụ"nhapnhay.hex". File này có thể sử dụng để nạp vào vi điều khiển. Trước tiên các em nên vẽ mạch trênphần mềm Protues để mô phỏng hoạt động, sau đó lắp ráp mạch trên board cắm. Sử dụng bộ nạp (nếuchưa có bộ nạp thì nhờ thầy hoặc các bạn) nạp file "nhapnhay.hex" đã tạo ra ở bước trên vào vi điềukhiển. Lắp ráp mạch, cấp nguồn và kiểm tra hoạt động của mạch thực tế.

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 6/18
Như vậy các em đã hoàn thành một mạch đơn giản ứng dụng vi điều khiển. Qua công việc này,các em sẽ hiểu được quy trình làm việc với vi điều khiển và quan trọng hơn là thấy được sự thú vị của viđiều khiển.
Để có hứng thú và trực quan hơn các em nên sử dụng thêm phần mềm Protues, đây là phầnmềm cho phép mô phỏng các vi điều khiển khá trực quan.
5. Tổ chức bộ nhớ
8051 có bộ nhớ tổ chức kiểu Harvard (có bộ nhớ chương trình tách biệt với bộ nhớ dữ liệu). 8051có các bộ nhớ chính bao gồm:
- bộ nhớ chương trình ROM (khả năng quản lý 64Kbyte, tích hợp sẵn 4Kbyte). Địa chỉ được đánhtừ 0000H-0FFFFH, trong đó vùng ROM on-chip chiếm vùng địa chỉ thấp.
- bộ nhớ dữ liệu RAM trong (128 byte). Địa chỉ được đánh từ 00H-7FH. Bộ nhớ RAM trong đượcchia thành 3 vùng: các banks thanh ghi, vùng nhớ bit, vùng RAM đa mục đích.
- bộ nhớ RAM ngoài (khả năng quản lý 64Kybte). Địa chỉ được đánh từ 0000H-0FFFFH
-các thanh ghi chức năng đặc biệt SFRs.Địa chỉ từ 80H-0FFH. SFRs có không gian nhớ 128 byte,tuy nhiên chỉ một phần trong số này được sử dụng. Các địa chỉ không sử dụng không được phép truy
nhập. Các vùng nhớ này được phân biệt với nhau bởi chức năng và cách thức truy nhập đến chúng.
Đối với RAM trong có thể truy nhập theo các chế độ định địa chỉ: trực tiếp, gián tiếp và thanh ghi. ROM có chế độ định địa chỉ duy nhất là chỉ số thanh ghi SFRs được truy nhập bằng chế độ định địa chỉ trực tiếp
6. Các chế độ định địa chỉ Để truy nhập đến các vùng nhớ khác nhau, 8051 có các chế độ định địa chỉ sau:
- Chế độ định địa chỉ tức thời. Ví dụ: MOV A, #10 ;di chuyển giá trị 10 vào thanh ghi A. Sau lệnh này thanh ghi A có giá trị bằng
10.Như vậy, trong chế độ định địa chỉ tức thời thì giá trị của toán hạng được chỉ ra và nằm sau mã
lệnh. - Chế độ định địa chỉ trực tiếp.
Ví dụ: MOV A, 10 ;di chuyển nội dung ô nhớ có địa chỉ bằng 10 trong RAM trong vào thanh ghi A.Sau lệnh này thanh ghi A có giá trị bằng nội dung ô nhớ trong RAM trong có địa chỉ bằng 10.
Trong chế độ định địa chỉ trực tiếp, địa chỉ của toán hạng được chỉ ra sau mã lệnh. - Chế độ định địa chỉ thanh ghi
Ví dụ: MOV A, R0 ; di chuyển nội dung thanh ghi R0 vào thanh ghi A. Sau lệnh này, thanh ghi A có
giá trị bằng nội dung thanh ghi R0. Trong chế độ định địa chỉ thanh ghi, toán hạng là một thanh ghi từ R0-R7.
- Chế độ định địa chỉ gián tiếp Ví dụ: MOV A, @R0 ; di chuyển nội dung ô nhớ trong RAM trong có địa chỉ là nội dung của thanh ghiR0 vào thanh ghi A.
Trong chế độ định địa chỉ gián tiếp, địa chỉ của toán hạng được xác định gián tiếp thông qua mộtthanh ghi.Các thanh ghi được sử dụng để định địa chỉ gián tiếp bao gồm: R0, R1 và DPTR
- Chế độ định địa chỉ chỉ số thanh ghi: Ví dụ: MOVC A, @A+DPTR ;di chuyển nội dung ô nhớ trong ROM có địa chỉ xác định bởi tổng 2
thanh ghi A và DPTR vào thanh ghi A.
Trong chế độ định địa chỉ chỉ số thanh ghi, địa chỉ của ô nhớ trong ROM được xác định thông qua
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 7/18
nội dung hai thanh ghi A và DPTR (hoặc PC).Ngoài ra, có một chế độ định địa chỉ đặc biệt thanh ghi. Ví dụ hai lệnh MOV A, #10 và MOV Acc,
#10 cho cùng kết quả là thanh ghi Acc có giá trị bằng 10 nhưng khi dịch ra mã máy thì khác nhau vềdung lượng. Lệnh thứ nhất có dung lượng 2 byte trong khi lệnh thứ hai có dung lượng 3 byte. Trong ví dụtrên toán hạng A được gọi là định địa chỉ đặc biệt thanh ghi trong khi toán hạng Acc được định địa chỉ
trực tiếp. Các chế độ định địa chỉ được sử dụng để truy nhập đến các vùng nhớ khác nhau. Có thể tổng kết nhưsau:
- RAM trong có 3 chế độ định địa chỉ có thể truy nhập tới là: trực tiếp, thanh ghi và gián tiếp
- RAM ngoài có duy nhất chế độ định địa chỉ gián tiếp sử dụng lệnh MOVX
- ROM có chế độ định địa chỉ duy nhất là chỉ số thanh ghi, sử dụng lệnh MOVC A, @A+DPTR hoặcMOVC A, @A+PC
- SFRs có chế độ định địa chỉ trực tiếp
Phân biệt giữa truy nhập giữa RAM trong và SFRs ở chế độ định địa chỉ trực tiếp là RAM trong cóđịa chỉ từ 0-7FH trong khi SFRs có địa chỉ từ 80H-0FFH
7. Tập lệnh
Vi điều khiển 8051 thiết kế theo kiến trúc CISC là kiến trúc có tập lệnh phức tạp với số lượng lệnhlớn, độ dài và thời gian thực hiện lệnh thay đổi. Để nhớ các lệnh của vi điều khiển 8051 chúng ta chiathành 5 nhóm lệnh chính bao gồm: - nhóm lệnh di chuyển dữ liệu (MOV, MOVX, MOVC, XCH, SWAP) - nhóm lệnh logic (ANL, ORL, XRL, RR, RRC, RL, RLC, CLR, CPL) - nhóm lệnh số học (ADD, ADDC, INC, SUBB, DEC, MUL, DIV)
- nhóm lệnh rẽ nhánh chương trình: bao gồm lệnh rẽ nhánh có điều kiện và các lệnh rẽ nhánh không điềukiện
+ các lệnh rẽ nhánh không điều kiện (JMP, CALL, RET, RETI) + các lệnh rẽ nhánh có điều kiện (DJNZ, CJNE, JC, JNC, JB, JNB, JZ, JNZ)
- nhóm lệnh xử lý toán hạng bit (SETB, CLR, CPL) Với mỗi lệnh các em cần biết cú pháp (bao gồm số toán hạng, chế độ định địa chỉ tương ứng với
từng toán hạng), ý nghĩa của lệnh, kết quả thực hiện lệnh lưu ở đâu, ảnh hưởng đến các cờ nào trongthanh ghi trạng thái chương trình PSW, thời gian thực hiện lệnh và độ dài lệnh.
Để hiểu cách thức thực hiện lệnh, cần lấy một vài ví dụ, mô phỏng từng bước và quan sát kết quả thựchiện lệnh để so sánh giữa ý hiểu và kết quả thực tế.
8. Phân biệt giữa lệnh nhảy JMP và lệnh gọi CALL
Cả hai lệnh JMP và lệnh CALL cùng thực hiện rẽ nhánh chương trình không điều kiện, tức là cùngnhảy tới một địa chỉ được chỉ ra bởi nhãn. Tuy nhiên, hai lệnh này không được sử dụng thay thế cho
nhau.- Lệnh JMP rẽ nhánh chương trình đến địa chỉ được chỉ ra bởi nhãn
- Lệnh CALL cũng rẽ nhánh chương trình đến địa chỉ được chỉ ra bởi nhãn (tên chương trình con). Đồngthời với việc rẽ nhánh chương trình, lệnh CALL còn cất giữ nội dung con trỏ PC (địa chỉ quay trở về lênngăn xếp) để khi gặp lệnh RET trong chương trình con thì lấy 2 byte trên đỉnh ngăn xếp đưa vào con trỏPC để quay trở về thực hiện lệnh sau lệnh gọi CALL. Do đó nếu sử dụng lệnh JMP thay vì lệnh CALL đểgọi chương trình con sẽ dẫn đến chương trình chạy sai khi gặp lệnh RET. Ngược lại khi sử dụng lệnhCALL thay vì lệnh JMP để nhảy đến chương trình con sẽ dẫn đến ngăn xếp bị thay đổi.

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 8/18
9. Phân biệt giữa lệnh RET và RETI Lệnh RET (RETURN) là lệnh trở về từ chương trình con. Lệnh RETI (RETURN FROM
INTERRUPTS) là lệnh trở về từ chương trình phục vụ ngắt. Ngoài việc lấy 2 byte trên đỉnh ngăn xếp đểnạp vào con trỏ PC để trở về vị trí bị gián đoạn, lệnh RETI còn thực hiện xóa cờ ngắt tương ứng.
10. Lệnh JMP với các dạng SJMP, AJMP và LJMP
Khi dịch sang mã máy, lệnh JMP sẽ được dịch sang một trong 3 dạng là SJMP, AJMP hoặc LJMP.Mặc định các trình hợp dịch sẽ chuyển sang lệnh LJMP. Cả 3 biến thể này đều có tác dụng nhảy đến một nhãn được chỉ ra sau lệnh. Tuy nhiên có sự khác biệtvề dung lượng và vị trí của địa chỉ cần nhảy tới so với lệnh. - Lệnh SJMP nhảy trong phạm vi địa chỉ cách 127 byte về phía trước và 128 byte về phía sau so với vị trícủa lệnh SJMP. Lệnh này có độ lớn 2 byte. - Lệnh AJMP nhảy tới địa chỉ bất kỳ nằm trong phạm vi 2KByte địa chỉ đầu tiên từ 0000H-7FFH. Lệnh nàycó độ lớn 2 byte. - Lệnh LJMP là lệnh nhảy dài có thể nhảy đến vị trí bất kỳ trong bộ nhớ dung lượng 64Kbyte. Lệnh này
có độ lớn 3 byte. Khi lập trình, nên lựa chọn sử dụng 1 trong 3 dạng trên để có dung lượng chương trình tối ưu. Tương tự lệnh CALL có 2 biến thể là ACALL và LCALL.
11. Timer/counter
8051 có 2 bộ timer/counter 16 bit đặt tên lần lượt là timer/counter0 và timer/counter1.Timer/counter thực chất là một bộ đếm 16 bit. Các bộ timer/counter của 8051 là các bộ đếm lên.
Timer/counter hoạt động với chức năng timer khi nguồn xung là dao động bên trong. Số đếm củatimer tăng 1 đơn vị tương ứng với 1 chu kỳ máy của vi điều khiển (12 chu kỳ xung nhịp). Như vậy số đếmcủa timer tăng liên tục, thời gian giữa các số đếm là bằng nhau.
Timer/counter hoạt động với chức năng counter khi nguồn xung đưa tới bộ đếm từ bên ngoài (đưatới chân P3.4 đối với timer/counter0 và P3.5 đối với timer/counter1). Số đếm của counter tăng 1 đơn vịkhi có xung đưa tới đầu vào counter. Như vậy số đếm của counter chỉ tăng lên khi có xung tác động tớicác chân đầu vào.
Để điều khiển hoạt động của timer/counter cần tác động lên các thanh ghi TMOD, TCON, TLx vàTHx (x=0, 1 tương ứng với timer /counter 0 và timer/counter 1).
TMOD là thanh ghi 8 bit, cho phép truy nhập ở mức byte, trong đó 4 bit cao (từ bit 3 đến bit 7) làcác bit điều khiển timer/counter1 và 4 bit thấp (từ bit 0 đến bit 3) là các bit điều khiển timer/counter0. Dohai bộ timer/counter counter hoạt động giống nhau nên các bit điều khiển có chức năng giống nhau.
Timer/counter có 4 mode hoạt động tương ứng với trạng thái của hai bit M1 và M0 trong thanh ghiTMOD. 4 mode này xác lập số đếm lớn nhất mà bộ đếm có thể đếm được.
Để lựa chọn chức năng timer hay counter cần tác động lên bit C/T. Nếu C/T=0, timer/counter làmchức năng timer. Nếu C/T=1, timer/counter làm chức năng counter. GATE là bit lựa chọn điều khiển hoạt động của timer/counter bằng phần cứng hay phần mềm. Nếu
GATE=0, điều khiển hoạt động của timer/counter bằng phần mềm, nghĩa là chỉ cần TRx=1 làtimer/counter hoạt động. Nếu GATE=1, để timer/counter hoạt động (đếm) cần thêm điều kiện có chânP3.2 ( đối với timer/counter0) hoặc P3.3 (đối với timer/counter1) phải ở mức cao.
TCON là thanh ghi 8 bit cho phép truy nhập ở mức bit. Bit TRx là bit cho phép timer/counter hoạtđộng hay dừng. Nếu TRx=0, timer/counter dừng hoạt động. Nếu TRx=1, timer/counter hoạt động haydừng còn phụ thuộc vào trạng thái của bit GATE như trình bày ở phía trên.

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 9/18
Bit TFx trong thanh ghi TCON là cờ tràn. TFx được tự động đặt lên 1 khi timer/counterx đếm tràn.Cờ TFx được xóa về 0 bằng phần mềm hoặc gặp lệnh RETI khi trở về từ chương trình phục vụ ngắt tương ứng. Nghĩa là TF0 được tự động xóa về 0 khi gặp lệnh RETI của chương trình phục vụ ngắttimer/counter0 và TF1 được tự động xóa về 0 khi gặp lệnh RETI của chương trình phục vụ ngắttimer/counter1.
Các thanh ghiTHx và TLx
kết hợp thành các bộ đếm 16 bit, 13 bit hay 8 bit auto-reload phụ thuộcvào mode hoạt động được xác lập bởi các bit M1 và M0. Trong đó THx chứa các bit cao, TLx chứa cácbit thấp.
Hoạt động ở mode 0 (13 bit) và mode 1 (16 bit), khi timer/counter đếm tràn sẽ trở về đếm từ 0.Mode 2 (8 bit) có chức năng auto-reload, nghĩa là khi timer/counter đếm đến giá trị lớn nhất (255), khi
đếm thêm một số đếm nữa thì timer/counter đếm tràn và trở về giá trị được đặt trước trong thanh ghiTHx.
Khi lập trình sử dụng timer/counter cần biết phải sử dụng bộ timer/counter nào. Khi sử dụng vớichức năng timer thì thông thường có thể tùy chọn 1 trong 2 bộ timer. Tuy nhiên, khi sử dụngtimer/counter với chức năng counter thì việc lựa chọn bộ counter0 hay counter1 là do tín hiệu đưa tớichân nào. Nếu tín hiệu đưa tới chân P3.4(T0) thì phải sử dụng bộ counter0, nếu tín hiệu đưa tới chân
P3.5(T1) thì phải sử dụng bộ counter1. Khi sử dụng trong truyền thông nối tiếp để tạo tốc độ baud, timer0
được sử dụng. Ví dụ: chương trình tạo xung vuông có chu kỳ T=0.1 giây, độ rỗng 50% tại chân P1.0. Biết thạch anh sửdụng có tần số 12Mhz.
Với yêu cầu này ta có thể sử dụng timer/counter0 hay timer/counter1 đều được với chức năngtimer. Tần số thạch anh 12Mhz, như vậy trong 1 giây sẽ có 12.10^6/12 =10^6 chu kỳ máy. Vậy để đếmđược 1 giây timer cần đếm được 10^6 số đếm (vì số đếm của timer tăng 1 đơn vị tương ứng với 1 chu kỳmáy).
Xung vuông có chu kỳ T=0.1 giây, độ rỗng 50% vậy xung sẽ có 0.05 giây ở mức cao và 0.05 giây ở mứcthấp. Để tạo được thời gian 0.05 giây, timer cần đếm được 0.05*(10^6)=50.000 số đếm. Ta có thể lựa chọn timer hoạt động ở mode 1 (số đếm lớn nhất là 2^16-1=65.535). Số đếm ban đầu củatimer sẽ là: 65.536-50.000=15.536. Vậy khi timer đếm bắt đầu từ 15.536 trở lên đến khi đếm tràn sẽ đếm
được 50.000 số đếm tương ứng với 0.05 giây. Với các phân tích ở trên ta có thể thiết lập timer như sau: - Sử dụng timer0 (có thể sử dụng timer1) - Mode hoạt động 1: M1=0, M0=0
- Chức năng timer: C/T=0
- Điều khiển bằng phần mềm: Gate=0
- Số đếm ban đầu của timer: 15.536=3CB0H, như vậy TH0=3CH, TL0 = B0H
- Cờ tràn TF0 được xóa
Chương trình có thể viết như sau: org 0
loop:
cpl P1.0 call delay_0_05s
jmp loop
delay_0_05s:
mov TMOD,#00000001B;timer0, mode 1, timer, gate=0
mov TH0,#high(15536) ;phần mềm sẽ tự động lấy byte cao của số 15.536 đưa vào thanh ghi TH0 mov TL0,#low(15536) ;phần mềm lấy byte thấp của 15.536 đưa vào thanh ghi TL0
clr TF0 ; xóa cờ tràn TF0 setb TR0 ; cho phép timer bắt đầu hoạt động

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 10/18
jnb TF0,$ ;khi TF0 bằng 1 nghĩa là timer0 đếm đủ 50000 số đếm
ret
Tất nhiên chương trình này chưa hoàn toàn chính xác do còn một số lệnh tiêu tốn thời gian nhưng khôngđược tính, ta hoàn toàn có thể chỉnh sửa bằng cách thay đổi lại giá trị ban đầu nạp vào TH0 và TL0.
12. Ngắt Ngắt là cơ chế đặc biệt trong các hệ vi xử lý. Khi có một sự kiện xảy ra tại thiết bị ngoại vi (ví dụ như
timer/counter đếm tràn hay truyền/nhận xong một ký tự) sẽ yêu cầu CPU tạm dừng công việc hiện tại đểđáp ứng sự kiện này. Sự kiện ngắt thường không biết trước thời gian xảy ra, nhưng khi sự kiện xảy ra lạiyêu cầu CPU phải đáp ứng nhanh nhất có thể.
8051 có 6 nguồn ngắt tương ứng với 5 vector ngắt. 6 nguồn ngắt bao gồm 2 ngắt ngoài INT0 (P3.2)và INT1 (P3.3), 2 ngắt timer/counter đếm tràn và 2 ngắt của cổng nối tiếp (ngắt truyền và ngắt nhận).Vector ngắt là địa chỉ bắt đầu của chương trình phục vụ ngắt trong bộ nhớ chương trình. Ứng với mỗimột sự kiện ngắt, CPU tạm thời dừng công việc hiện tại để thực hiện chương trình phục vụ ngắt tươngứng nằm tại các vị trí xác định trong bộ nhớ. Cụ thể: Ngắt Vector ngắt INT0 03H
T0 0BH
INT1 13H
T1 1BH
Serial 23H
Nghĩa là nếu có xung đưa tới chân P3.2(INT0) và sự kiện này được xác lập là một sự kiện ngắt, CPU sẽtạm dừng công việc hiện tại để thực hiện lệnh bắt đầu tại địa chỉ 03H.
Mặc định CPU cấm tất cả các ngắt. Để xác lập một sự kiện là ngắt, thiết lập mức ưu tiên ngắtchúng ta phải tác động lên các bit trong các thanh ghi cho phép ngắt IE (Interrupts Enable), thanh ghi ưutiên ngắt IP (Interrupts Priority). Khi lập trình bằng assembly, chúng ta phải nhớ tên và chức năng củatừng bit trong các thanh ghi này.
Thanh ghi IE là thanh ghi 8 bit, cho phép truy nhập ở mức bit. Trong thanh ghi này chứa các bit cho
phép ngắt chung EA, các bit cho phép ngắt tương ứng với các nguồn ngắt cụ thể: EX0, ET0, EX1, ET1,ES.
Để cho phép một ngắt ta phải cho EA=1 và bit cho phép ngắt tương ứng bằng 1. Ví dụ, để cho phép sựkiện timer/counter0 đếm tràn là một ngắt ta phải cho EA=1 và ET0=1.
Khi 2 hoặc nhiều ngắt xảy ra sẽ nảy sinh vấn đề ngắt nào được CPU ưu tiên thực hiện trước. Vềnguyên tắc, CPU chỉ thực hiện được 1 lệnh tại một thời điểm. 8051 có thanh ghi IP xác lập chế độ ưu tiênngắt. Trong IP có các bit tương ứng với các ngắt là PX0, PT0, PX1, PT1 và PS. Khi các bit này ở mứccao thì ngắt tương ứng sẽ có mức ưu tiên cao và ngược lại.
Ví dụ, đoạn chương trình sau sẽ xác lập cho phép 2 sự kiện được coi là ngắt là xung ngoài đưa tớichân P3.2 (INT0) và timer/counter1 đếm tràn. Trong đó ngắt timer/counter1 có mức ưu tiên cao (tức làđược ưu tiên phục vụ trước).
SETB P3.2 ; xác lập P3.2 là chân đầu vào SETB EA ;cho phép ngắt chung SETB EX0; cho phép ngắt ngoài INT0 SETB PT1 ;ưu tiên timer/counter1 ở mức cao
CLR PX0 ;ưu tiên ngắt ngoài INT0 ở mức thấp
Với việc xác lập như trên, khi chương trình phục vụ ngắt INT0 đang được phục vụ mà timer/counter1đếm tràn thì ngắt INT0 tạm thời bị dừng lại để phục vụ ngắt timer/counter1. Sau khi chương trình phục vụngắt timer/counter thực hiện xong mới quay trở lại thực hiện tiếp chương trình phục vụ ngắt ngoài INT0.
Trong trường hợp bit PX0 trong ví dụ trên cũng được đặt bằng 1 (nghĩa là ngắt ngoài INT0 cũng có
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 11/18
mức ưu tiên cao) thì khi 2 ngắt xảy ra đồng thời thì CPU sẽ phục vụ ngắt nào? Việc căn cứ vào thanh gh i
IP là không thể xác định được ngắt nào sẽ được phục vụ trước. Trong trường hợp này, CPU sẽ căn cứvào thứ tự ưu tiên ngắt mặc định. 8051 quy định mức ưu tiên mặc định từ cao xuống thấp như sau: INT0-
>T0->INT1->T1->Serial. Mặc định, ngắt INT0 sẽ có mức ưu tiên cao hơn ngắt timer/counter1. Như vậy,ngắt INT0 trong trường hợp này sẽ được ưu tiên phục vụ trước.
Cấu trúc chương trình phục vụ ngắt: khác với chương trình con có thể nằm tại vị trí bất kỳ trong bộnhớ chương trình, chương trình phục vụ ngắt ứng với mỗi sự kiện ngắt nằm tại một vị trí xác định trongbộ nhớ. Do đó, cấu trúc chương trình phục vụ ngắt có sự khác biệt với chương trình con. Cụ thể, cấutrúc chung của chương trình phục vụ ngắt là:
ORG Vector_ngắt Thân chương t rình
RETI
Ví dụ, với chương trình phục vụ ngắt ngoài INT0 thì vector_ngắt sẽ được thay bằng địa chỉ 03H.Thân chương trình là tập hợp các lệnh của 8051 nhằm thực hiện công việc tương ứng với sự kiện ngắt.
Ví dụ: chương trình đếm xung ngoài đưa tới chân P3.2(INT0), hiển thị số đếm từ 0-200 trên các
led đơn nối với cổng P1. biendem equ 70h
org 0
jmp start
org 03h ;địa chỉ của chương trình phục vụ ngắt ngoài INT0 inc biendem ;tăng biến đếm 1 đơn vị mỗi khi có một ngắt (xung tác động tại sườn xuống) reti
start:
setb P3.2 ;xác lập cho chân P3.2 là đầu vào
mov biendem,#0
mov IE,#10000001B; cho phép ngắt ngoài INT0 setb IT0 ;ngắt tích cực ở sườn xuống
loop:
mov a,biendem mov P1,a
cjne a,#201,loop
mov biendem,#0 ;xóa biến đếm khi số đếm bằng 201
jmp loop
Thông thường, các thanh ghi quan trọng được sử dụng nhiều như PSW, Acc được cất giữ để trạng tháicủa chúng không bị thay đổi khi thực hiện xong chương trình phục vụ ngắt so với trước khi thực hiệnchương trình phục vụ ngắt. Để cất giữ các thanh ghi này ta sử dụng lệnh PUSH, để lấy lại nội dung củathanh ghi ta sử dụng lệnh POP. Một số lỗi rất khó phát hiện do nguyên nhân không cất giữ các thanh ghinày trong chương trình phục vụ ngắt.
13. Giao tiếp nối tiếp UART
Vi điều khiển 8051 tích hợp một cổng giao tiếp nối tiếp bất đồng bộ UART cho phép các vi điều
khiển có thể liên lạc với nhau, với máy tính hoặc các thiết bị khác. Để có thể giao tiếp qua UART cần thiết lập tốc độ truyền, khung dữ liệu, bit chẵn lẻ. Việc thiết lập
này thông qua trạng thái của các bit trong thanh ghi SCON. SCON là thanh ghi 8 bit. Trong đó hai bit SM0 và SM1 tổ hợp thành 4 trạng thái tương ứng với 4
chế độ xác lập truyền: 8 bit hay 9 bit, tốc độ truyền bằng bao nhiêu. Khi hoạt động ở mode 0 và mode 2,tốc độ truyền là cố định dựa trên tần số thạch anh. Mode 1 và mode 3 tốc độ truyền thay đổi dựa trên tốc
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 12/18
độ tràn của timer 1. Bit SM2 sử dụng trong chế độ truyền đa vi xử lý. Bình thường, khi nhận đủ 1 byte, cờ RI (cờ ngắt
nhận) sẽ tự động được đặt lên mức 1 để báo cho chương trình biết đã nhận đủ 1 byte. Tuy nhiên khi bit
SM2 được đặt, cờ RI chỉ được bật lên mức 1 nếu bit thứ 9 nhận được có giá trị bằng 1. Bit REN là bit cho phép nhận. Nếu bit này được đặt bằng 1, dữ liệu có thể được nhận qua cổng nối
tiếp, ngược lại sẽ không cho phép nhận dữ liệu. Như vậy, để có thể nhận được dữ liệu qua cổng nối tiếpbit REN phải được đặt bằng 1. Bit TB8 được sử dụng trong các mode 2 và 3. Trong hai mode này dữ liệu truyền gồm 9 bit. TB8
chứa bit thứ 9 được truyền. Sau khi 8 bit trong thanh ghi SBUF được truyền xong, bit thứ 9 được truyềnlà nội dung của bit TB8. TB8 thường được sử dụng để truyền bit chẵn lẻ.
Bit RB8 cũng hoạt động trong các mode 2 và 3 và có chức năng nhận bit dữ liệu thứ 9. TI là cờ ngắt nhận. Khi dữ cổng nối tiếp truyền xong một byte dữ liệu, bit TI sẽ được tự động đặt
lên mức 1 để báo đã truyền xong 1 byte và sẵn sàng truyền byte tiếp theo. Ví dụ: Lệnh xác lập UART hoạt động ở mode 1 (8 bit dữ liệu, tốc độ truyền do tốc độ tràn timer1
quyết định): MOV SCON,#01010000B
Thanh ghi SBUF là thanh ghi đệm truyền và đệm nhận. Mặc dù chỉ có một tên nhưng thực chất
đây là 2 thanh ghi, một thanh ghi đệm truyền và một thanh ghi đệm nhận. Khi ghi đến SBUF là truy nhậpđến thanh ghi đệm truyền. Khi đọc từ thanh ghi SBUF là đọc từ thanh ghi đệm nhận.
Dữ liệu truyền các bit có trọng số thấp trước, bit trọng số cao sau. Xác lập tốc độ baud:
- Khi hoạt động ở mode 0 và mode 2, tốc độ baud được xác định dựa trên tần số thạch anh sửdụng. Trong mode 0, tốc độ baud luôn luôn bằng tần số dao động thạch anh chia 12. Điều này có nghĩalà nếu tần số thạch anh là 11,0592Mhz, khi hoạt động ở mode 0 tốc độ baud sẽ là 921.600 baud. Khihoạt động ở mode 2, tốc độ baud luôn bằng tần số thạch anh chia 64. Ví dụ nếu sử dụng thạch anh tầnsố 11.0592Mhz, tốc độ baud sẽ là 11,0592*10^6/64=172.800.
- Khi hoạt động ở mode 1 và mode 3, tốc độ baud được xác lập dựa trên tốc độ tràn của timer1.Tốc độ tràn của timer1 càng lớn thì tốc độ baud càng lớn. Thông thường timer1 được hoạt động ở chế
độ auto-reload để tạo tốc độ baud trong đó thanh ghi TH1 sẽ chứa giá trị tái nạp cho TL1. Cũng cần lưu ýrằng khi sử dụng cổng nối tiếp thạch anh thường được sử dụng có tần số là 11,0592Mhz. Tần số này tạo
ra các tốc độ truyền với sai số nhỏ. Ví dụ đoạn chương trình sau xác lập timer1 tạo tốc độ baud 9600 chocổng nối tiếp UART, tần số thạch anh sử dụng là 11,0592Mhz.
MOV TMOD,#20h ;Timer 1 hoạt động trong chế độ auto-reload
MOV TH1,#0FDh ;Giá trị tái nạp cho timer1 khi đếm tràn
MOV TL1,#0FDh ;giá trị đếm ban đầu của timer1
SETB TR1 ; Cho phép timer1 hoạt động
Lưu ý, bit SMOD trong thanh ghi PCON nếu được đặt bằng 1 sẽ nhân đôi tốc độ baud của UART
nếu timer1 được sử dụng để tạo tốc độ baud. Mặc định SMOD bị xóa về 0.
Mô phỏng tương tác kết hợp Keil C và Proteus
Keil C là phần mềm phục vụ soạn thảo, dịch và mô phỏng cho các vi điều khiển 8051 và ARM.Phần mềm hỗ trỡ viết chương trình bằng ngôn ngữ Assembly và C. Keil C được sử dụng phổ biến với sốlượng IC hỗ trợ lớn.
Proteus là phần mềm thiết kế mạch nguyên lý và mạch in. Một điểm mạnh của Proteus làm chophần mềm này được sử dụng rộng rãi trong những năm gần đây là khả năng mô phỏng các họ vi điềukhiển như 8051, PIC, AVR v.v. Không chỉ mô phỏng trực quan, Proteus còn có khả năng kết hợp với các

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 13/18
phần mềm để mô phỏng ở mức lệnh. Để mô phỏng ở mức lệnh kết hợp giữa Keil C và Proeus làm theo các bước sau: - Bước 1: Cài đặt Proteus VSM Keil Driver (đường link download
tại: http://www.labcenter.com/support/vdmkeil.cfm)
- Bước 2: Thiết lập mô phỏng trong Keil C. Trong menu Project, chọn Options for target 'target1'....
Một cửa sổ hiện ra, chọn tab Debug, lựa chọn "Use: Proteus VSM Simulator".
- Bước 3: Khởi động Proteus, mở file nguyên lý. Nháy chuột phải vào IC vi điều khiển, chọn file .hexKeil C đã tạo ra.
- Bước 4: Trong menu Debug của Proteus, chọn Use Remote Debug Monitor
- Bước 5: Mô phỏng từng bước trong Keil C, các lệnh sẽ chạy tương ứng trong Protues
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 14/18
Một số trang web gợi ý một số dự án và hướng dẫn:
http://www.8051projects.info/projects.asp
http://8052.com/
http://www.mikroe.com/eng/products/view/267/architecture-and-programming-of-8051-mcu-s/
http://www.kmitl.ac.th/~kswichit/
Diễn đàn điện tử để trao đổi, tham khảo:
http://www.dientuvietnam.net/forums/
Tài liệu tham khảo chính của môn học:
[1]. Văn Thế Minh. Kỹ thuật Vi xử lý. NXB Giáo Dục. 1997
[2]. Nguyễn Tăng Cường, Phan Quốc Thắng. Cấu trúc và lập trình họ vi điều khiển 8051. NXB KHKT.2003
Ngân hàng câu hỏi (download): Ngân hàng câu hỏi tham khảo
Hướng dẫn sử dụng phần mềm EMU8086 (download): Hướng dẫn sử dụng phần mềm EMU8086
Hướng dẫn sử dụng phần mềm Pinnacle 52 (download): Hướng dẫn sử dụng Pinnacle 52
Tài liệu tiếng Anh tham khảo thêm: [1]. B.Brey, B. The Intel Microprocessors, 8086/8088, 80186/80188, 80286, 80386, 80486, Pentium and
Pentium Pro Processor Architecture, Programming, and Interfacing. Prentice-Hall, Inc, 1997
[2]. Ayala, K. J. The 8051 Microcontroller: Architecture, Programming, and Applications. West Publishing
Company, 1991
[3].8052 Tutorial and Reference download
Ví dụ bài tập cho 8086: 1. Viết chương trình tính tổng 2 số từ 0-9 nhập vào từ bàn phím. Hiển thị kết quả (download): Congso0_9
2. Viết chương trình tính tổng 2 số từ 0-99 nhập vào từ bàn phím. Hiển thị kết quả(download) Congso0_99
Ví dụ bài tập cho 8051:(Các bài tập viết và dịch bằng phần mềm Pinnacle 52) 1. Viết chương trình điều khiển các led đơn nối với cổng P1 và P2 sáng dần từ giữa ra 5 lần sau đó tắtdần 10 lần: sangdan_tatdan
2. Chương trình điều khiển led 7 nối với cổng P0 hiển thị số từ 0-9 (led 7 anode chung): hienthiso0_9
3. Chương trình đếm xung ngoài đưa tới chân P3.2(INT0) sử dụng ngắt ngoài: dem_xung_P3_2
4. Chương trình đếm xung ngoài đưa tới chân P3.4 (T0) sử dụng timer/counter với chức năngcounter: counter0
5. Chương trình đếm xung ngoài đưa tới chân P3.4(T0) sử dụng timer/counter0 với chức năng counter.Hiển thị số đếm từ 0-45 trên 2 led 7 đoạn nối song song với cổng P0. Các led 7 đoạn loại anode chung.Hai chân P2.0 và P2.1 lần lượt điều khiển đóng ngắt hai transistor nối với chân anode của led hàng đơnvị và hàng chục:download
6. Chương trình tạo xung vuông có chu kỳ 0,1 giây. Thạch anh tần số 12Mhz. Sử dụng timer/counter0 vớichức năng timer: xung vuong
7. Chương trình đếm giây từ 0-59, hiển thị giây trên 2 led 7 đoạn nối song song với cổng P0. Các led 7

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 15/18
đoạn loại anode chung. Hai chân P2.0 và P2.1 lần lượt điều khiển đóng ngắt hai transistor nối với chânanode của led hàng đơn vị và led hàng chục. Thạch anh tần số 12Mhz: demgiay
Vi xử lý 2Nội dung học phần Vi xử lý 2 bao gồm kiến thức về các hệ vi xử lý hiện đại. Trong khi học phần Vi
xử lý 1 cung cấp cho sinh viên những kiến thức cơ bản nhất về các thành phần của một hệ vi xử lý,
nguyên tắc hoạt động của hệ thì học phần Vi xử lý 2 giới thiệu kiến trúc của các vi xử lý hiện đại, các giảipháp nâng cao tốc độ của hệ vi xử lý. Trong học phần này sinh viên học về kiến trúc RISC và CISC,đường ống lệnh, tổ chức bộ nhớ đa cấp, xử lý song song.
Cũng giống như học phần Vi xử lý 1, phần sau của học phần Vi xử lý 2 sẽ tìm hiểu một họ vi điềukhiển khá thông dụng hiện nay là họ vi điều khiển PIC. Ngôn ngữ được sử dụng để lập trình là C sử dụngtrình biên dịch CCS C nhúng trong môi trường MPLAB. Mặc dù PIC16F877A được sử dụng để học tập,tuy nhiên các kiến thức này cũng có thể áp dụng cho các vi điều khiển PIC dòng trung khác.
Tài liệu tham khảo chính: [1]. Mostafa AbDelBarr, Hesham ElRewini. Fundamentals of Computer Organization and
Architecture. Wiley Interscience. 2005[2]. Hesham ElRewini, Mostafa AbDelBarr. Advanced Computer Architecture and Parallel Processing.Wiley Interscience. 2005[3]. Martin Bates. Interfacing PIC Microcontrollers Embedded Design by Interactive Simulation. Elsevier.2006.
Phần mềm: Các phần mềm hỗ trợ lập trình vi điều khiển PIC 1. Phần mềm MPLAB Link download 2. Phần mềm CCS C: Trang chủ 3. Link tải MPLAB IDE plug-in: Link download
Mạch nạp qua cổng USB: http://openprog.altervista.org/OP_eng.html
Video: Bước 1 (Cài đặt MPLAB) Video hướng dẫn cách download và cài đặt phần mềm MPLAB: Xem Bước 2 (Cài đặt CCS C) Video hướng dẫn cách cài đặt: xem
Một số trang web hữu ích: Diễn đàn vi điều khiển PIC:
http://www.picvietnam.com/forum/ Hướng dẫn về PIC:
http://www.gooligum.com.au/
http://www.pictutorials.com/index.htm http://www.mikroe.com/eng/products/view/11/book-pic-microcontrollers/ http://www.best-microcontroller-projects.com/index.html http://www.microcontrollerboard.com/index.html
Tài liệu: 1. Datasheet PIC16F877A: Download
2. Microchip Technology Incorporated. (1997) PIC-Micro Mid-range MCU Family Reference Manual: Download
3. CCS C manual: ccs_c_manual.pdf

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 16/18
4. Đường ống lệnh: Download
5. Giới thiệu về vi điều khiển PIC: Download
6. Giới thiệu về timer0: Timer0_PIC.pdf
7. Giới thiệu về ngắt của PIC: Ngat_PIC.pdf
Tiện ích: Tính toán các bộ số của timer tạo thời gian trễ 1 giây: timer_cal.exe
Một số bài tập ví dụ viết cho PIC16F877A:
Các bài tập lập trình cổng làm chức năng vào/ra:
1. Chương trình điều khiển các led đơn nối với PORTB nhấp nháy: Nhapnhay.rar
2. Chương trình điều khiển các led đơn nối với PORTB sáng dần: Sangdan.rar
3. Chương trình điều khiển led 7 đoạn nối với PORTB hiển thị số từ 0-9: Dem0_9.rar
4. Chương trình điều khiển 2 led 7 đoạn nối song song với PORTB hiển thị số từ 0-99: Dem0_99.rar
Các bài tập lập trình sử dụng chức năng timer và ngắt:
5. Chương trình đếm xung ngoài đưa tới chân RA4 hiển thị số đếm từ 0-200 trên các led đơn nối vớiPORTC sử dụng timer0 với chức năng counter Counter0.rar
6. Chương trình đếm xung ngoài đưa tới chân RA4 hiển thị số đếm từ 0-99 trên 2 led 7 đoạn (anodechung) nối song song với PORTB. Chân RA0 và RA1 lần lượt quét led hàng đơn vị và hàngchục Counter0_dem0_99_led7d.rar
7. Chương trình tạo xung vuông có chu kỳ T=0.01 giây, độ rỗng 50%, sử dụng thạch anh tần số4Mhz: Xung_vuong_0_01s_timer0.rar
8. Chương trình đếm giây từ 0-59 hiển thị trên 2 led 7 đoạn nối song song với PORTC, chân RB0 và RB1quét led. Tần số thạch anh sử dụng 4Mhz Dem_giay_0_59_led7d.rar
9. Chương trình đếm xung ngoài đưa tới chân RB0 (chân ngắt ngoài) hiển thị số đếm từ 0-99 trên các led
đơn nối với PORTC Ngat_ngoaiRB0_leddon.rar
10. Chương trình đếm xung ngoài đưa tới chân RC0/T1CKI (chân đầu vào timer1) hiển thị số đếm từ 0-200 trên các led đơn nối với PORTB sử dụng timer1 với chức năngcounter Counter1_dem0_200_led_don.rar
Ngôn ngữ lập trìnhCác phần mềm phát triển hỗ trợ ngôn ngữ C có nhiều như Turbo C, Visual Studio v.v. Trong
chương trình, chúng ta sử dụng phần mềm DevC++ do đây là phần mềm mã nguồn mở, chạy trên môitrường Windows, đòi hỏi cấu hình máy không cao, được sử dụng nhiều trong các cơ sở giáo dục và cáccuộc thi lập trình C quốc gia và quốc tế. Mặc dù còn một số nhược điểm nhưng DevC++ đáp ứng tốtnhững yêu cầu học phần.
Để học tốt học phần Ngôn ngữ lập trình ngoài việc đọc lý thuyết các em cần làm các bài tập, kiểmtra hoạt động của chương trình trên phần mềm. Viết các ví dụ khác nhau để kiểm tra hoạt động thực tế
với ý hiểu để khẳng định lại các kiến thức của mình. Ví dụ, để phân biệt phạm vi sử dụng và cách sửdụng của các biến tự động và biến tĩnh các em có thể viết chương trình sau:
#include <stdio.h>
#include <stdlib.h>
void test(void);
int main(int argc, char *argv[])
{
8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 17/18
test();
test();
system("PAUSE");
return 0;
}
void test(void)
{
int x=10;
static int y=5;
x=x+1;
y=y+1;
printf("x=%d\n",x);
printf("y=%d\n",y);
}
Cho chạy chương trình và giải thích tại sao hai lệnh gọi hàm test() lại cho kết quả là: x=11
y=6
x=11
y=7
các em sẽ hiểu được sự khác nhau cơ bản giữa biến động và biến tĩnh trong.
Tương tự với các khái niệm khác, các em cần làm các ví dụ, so sánh các kết quả để hiểu rõ ý nghĩa củamỗi khái niệm. Gỡ rối (debug) chương trình
Một kỹ năng quan trọng khi lập trình là gỡ rối. Khi viết chương trình, dịch chương trình kết quảkhông có lỗi thì đây mới là hết lỗi về mặt cú pháp. Nhưng chương trình có chạy đúng như yêu cầu haykhông thì cần phải cho chạy chương trình để biết kết quả. Nếu chương trình chạy sai so với kết quả
mong muốn, cần phải thực hiện tìm lỗi chương trình. Quá trình tìm lỗi giải thuật như vậy được gọi là gỡrối.
Một số kỹ thuật thường được sử dụng khi gỡ rối chương trình là: chạy từng lệnh để quan sát kếtquả, chạy chương trình đến vị trí đặt trước, thực hiện một chương trình con như một lệnh v.v. Các em
cần nắm vững các kỹ thuật này mới có thể viết được các chương trình đúng khi số dòng lệnh ngày cànglớn. Tài liệu hướng dẫn gỡ rối bằng DevC++ thầy để ở link bên dưới.
Link download phần mềm DevC++: devcpp-4.9.9.2_setup
Một ví dụ hướng dẫn cách tạo một dự án, soạn thảo, dịch và chạy chương trình với phần mềm DevC++tại đây: Sử dụng DevC++
Hướng dẫn cách gỡ rối (debug) chương trình trong DevC++: Gỡ rối trong DevC++
Một số bài tập và chương trình: 1. Chương trình tìm các số nguyên tố từ 1-100: TimSoNguyenTo.rar
2. Sắp xếp một dãy số nhập vào từ bàn phím theo thứ tự tăng dần: SapXep.rar
3. Tìm giá trị lớn nhất của một ma trận mxn nhập vào từ bàn phím: tim_max.rar
4. Tính tổng các phần tử của hàng của ma trận mxn nhập vào từ bàn phím: TinhTong.rar
Diễn đàn lập trình C: http://congdongcviet.com
Tài liệu tham khảo chính: [1]. Phạm Văn Ất. Kĩ thuật lập trình C cơ sở và nâng cao. NXB Thống kê. 2003
Tài liệu tham khảo thêm:

8/2/2019 Vi xử lý 1
http://slidepdf.com/reader/full/vi-xu-ly-1 18/18
Ngôn ngữ lập trình C/C++ NgonNguLapTrinh
Link hữu ích: http://c-faq.com/index.html





























