Embed Size (px)
DESCRIPTION
VIBRACIJE
Citation preview

VIBRACIJEOSNOVI ANALITIČKE MEHANIKEPOLJE SILE. POTENCIJALNA ENERGIJA. FUNKCIJA SILEPolje sile je fizički prostor u kojem na svaku tačku mehaničkog sistema djeluje sila koja zavisi od položaja tačaka tog mehaničkog sistema. Polje sile je konzervativno ukoliko rad sila zavisi samo od početnog i krajnjeg položaja tačaka mehaničkog sistema, ali ne i od oblika putanje između tih tačaka. Navedeni uslovi će biti ispunjeni ako postoji jednoznačna funkcija koordinata :
U=U ( x1 , y1 , z1,…, xn , yn , zn )….(1)koja se naziva funkcijom sile, a čiji su parcijalni izvodi po koordinatama jednaki odgovarajućim projekcijama sila polja koje djeluju na tačke sistema u tom polju:
F xi=∂U∂xi
;F yi=∂U∂yi
; F zi=∂U∂ zi
…(2)
Da bismo ovo i dokazali, potražimo elementarni rad sila polja:
dA=∑i=1
n
(F xidxi+F yid yi+F z id zi)….(3)
Korištenjem izraza (2) izraz (3) se dobija u obliku:
dA=∑i=1
n
( ∂U∂xi
d xi+∂U∂yi
d yi+∂U∂zi
d zi)…. (4)
Iz (4) i (1) slijedi dA=dU …(5)Što znači da je elementarni rad sila konzervativnog polja jednak totalnom diferencijalu funkcije sile. Rad pri konačnom pomjeranju sistema iz položaja (1) u položaj (2), prema (5) sada je
A(1,2)=∫(1)
(2)
dU=U2−U 1…(6)
Iz (6) se vidi da je rad sila konzervativnog polja jednak razlici vrijednosti funkcije sile u krajnjem i početnom položaju sistema, a to znači da ne zavisi od oblika putanja pojedinih tačaka sistema. Odavde proizilazi zaključak da je polje konzervativno ako postoji funkcija sile koja zadovoljava uslove (2).Za konzervativno polje sila može se definisati i potencijalna energija. Potencijalna energija sistema, u bilo kom položaju unutar konzervativnog polja sila, jednaka je zbiru radova sila polja na pomjeranju sistema iz datog položaja u nulti. Iz same definicije vidi se da je potencijalna energija funkcija položaja, zbog čega se, za razliku od kinetičke energije, ponekad naziva i energijom položaja:
Ep=Ep (x1 , y1 , z1 ,…, xn , yn , zn )…. (7)Također, iz definicije za potencijalnu energiju slijedi da je potencijalna energija sistema u njegovom nultom položaju (kojeg proizvoljno biramo) jednaka nuli, tj. :
Ep0=0…(8)Prema svemu rečenom, rad sile polja na pomjeranju mehaničkog sistema u konzervativnom polju sila, od položaja (1) do položaja (2) biće određen izrazom:
A( 1,2)=E p1−Ep2…. (9 )
1
Korištenjem izraza (2), (6) i (9) dobijamo vezu između potencijalne energije i funkciju sile u obliku:
F xi=∂U∂xi
=−∂ Ep
∂xi; F yi=
∂U∂yi
=−∂ Ep
∂yi;F zi=
∂U∂zi
=−∂ Ep
∂zi…(10)
Odavde slijedi da su projekcije sila konzervativnog polja jednake negativnim parcijalnim izvodima potencijalne energije po odgovarajućim koordinatama.
GENERALISANE SILEGeneralisana sila predstavlja odnos rada sila na pomjeranjima nastalih varijacijom (zamišljenim pomjeranjem) r – te generalisane koordinate (npr. varijacijom δφ). Određena je izrazom:
Qr=δAδ qr
=∑i=1
n
F i ∙ δ ri
δ qr….(1)
Razlika između generalisanih i „običnih“ sila su sljedeće:a) Dimenzija generalisane sile zavisi od dimenzije generalisane koordinate. Tako npr.,
kada generalisana koordinata ima dimenziju dužine, njoj odgovarajuća generalisana sila ima dimenziju „obične“ sile, a kada generalisana koordinata ima dimenziju ugla, njoj odgovarajuća generalisana sila ima dimenziju momenta.
b) Generalisana sila je skalarna veličinac) Generalisana sila se definiše za određenu generalisanu koordinatu i ima ih onoliko
koliko sistem ima stepeni slobode kretanjaI generalisane sile se, kao i „obične“, mogu podijeliti na date i reakcije veze, unutrašnje i spoljašnje, aktivne i inercijalne, konzervativne i nekonzervativne i slično.Ako sistem ima s – stepeni slobode kretanja, tada je radijus vektor i – te tačke sistema funkcija svih s – generalisanih koordinata, tj. :
r i= r i (q1 , q2 ,…. ,qr ,….,qs )…(2)Priraštaj radijus vektora r i uslijed varijacije r – te koordinate je:
δ r i=∂ ri∂qr
δ qr….(3)
Odakle slijedi:
Qr=∑i=1
n
( F i ∙∂ ri∂qr )…(4 )
tj., generalisana sila, koja odgovara r – toj generalisanoj koordinati, jednaka je sumi skalarnih proizvoda „običnih“ sila i parcijalnih izvoda njihovih napadnih tačaka po toj generalisanoj koordinati.
Qr=−∂E p
∂qr….(5)
2

U slučaju sila koje imaju potencijal, generalisana sila, koja odgovara r – toj generalisanoj koordinati, jednaka je negativnoj vrijednosti parcijalnog izvoda potencijalne energije po toj koordinati.
OPŠTA JEDNAČINA DINAMIKE IZRAŽENA PREKO GENERALISANIH SILAAko sistem ima s – stepeni slobode kretanja, pa ako istovremeno variramo svih s – generalisanih koordinata, tada će varijacija radijus vektora i – te tačke biti određena izrazom
δ r i=∑r=1
s ∂ ri∂qr
δ qr
Uvrštavanjem slijedi :
δA=∑r=1
s
(¿∑i=1
n
F ia ∙∂r i∂qr
+∑i=1
n
F ir ∙∂ r i∂qr
+∑i=1
n
Fi¿ ∙∂ r i∂qr
)δ qr=0¿
Prema definiciji generalisane sile, slijedi
δA=∑r=1
s
(Q ra¿+Qr
r+Qr¿)δ qr=0¿
Kako je δ qr≠0, to onda slijedi :Qr
a+Qrr+Q r
¿=0Ova jednačina predstavlja opštu jednačinu dinamike napisanu preko generalisanih sila, a glasi: pri kretanju vezanog mehaničkog sistema zbir generalisane aktivne sile, generalisane reaktivne sile i generalisane inercijalne sile, za bilo koju generalisanu koordinatu, uvijek je jednak nuli.Ako se mehanički sistem pod dejstvom datog sistema aktivnih sila i reaktivnih sila nalazi u stanju mirovanja, tada je:
Qr¿=0
Pa se jednačina svodi na:Qr
a+Qrr=0
Ova jednačina predstavlja opštu jednačinu statike izraženu preko generalisanih sila.
LAGRANŽOVE JEDNAČINE DRUGE VRSTE ZA KONAČNE SILEDiferencijalne jednačine mehaničkog sistema u generalisanim koordinatama mogu se postaviti korištenjem Lagranžovih jednačina druge vrste. Da bismo izveli Lagranžove jednačine druge vrste, pretpostavimo da sistem od n materijalnih tačaka ima s stepeni slobode kretanja. Radijus vektor i – te tačke sistema određen je, preko generalisanih koordinata, izrazom:
δ ri=∂ ri∂qr
δ qr
Diferenciranjem ovoga izraza dobićemo brzinu i – te tačke sistema
vi=∑i=1
s ∂ r i∂qr
qr… (1)
Gdje je qr=d qrdt
- generalisana brzina r – te generalisane koordinate.
3
Kinetička energija sistema:
Ek=12∑i=1
n
mi v i ∙ v i…(2)
Je funkcija kako generalisanih koordinata, tako i generalisanih brzina, tj.:Ek=Ek (q1 , q2 ,…. ,qs , ; ˙q1 , q2 ,…, qs )…(3)
Iz (2) i (3) slijedi:∂E k
∂qr=∑
i=1
n
mi( vi ∙ ∂ v i∂qr)…(4)
∂E k
∂qr=∑
i=1
n
mi( vi ∙ ∂ v i∂ qr)…(5)
Diferenciranjem (5) po vremenu i korištenjem (1) imamo:
ddt
∂ E k
∂ qr=∑
i=1
n
midd t (v i ∙ ∂ v i∂qr
)=∑i=1
n
mi( ai ∙ ∂ ri∂qr )+∑i=1n
mi(v i ∙ ∂ v i∂qr)…(6)
Korištenjem drugog Njutnovog zakona, definicije generalisane sile i izraza (4), izraz (6) se može napisati u obliku:
ddt
∂ E k
∂ qr− ddt
∂ Ek
∂qr=Qr
a+Qrr (r=1,2,…, s )…(7)
Sistem od s diferencijalnih jednačina oblika (7) naziva se Lagranžovim jednačinama druge vrste.Za slučaj idealne veze:
Qrr= δA
δ qr=∑
i=1
n
Fir ∙∂ r i∂qr
=0
Tada se jednačina svodi:ddt
∂ E k
∂ qr− ddt
∂ Ek
∂qr=∑
i=1
n
F ia ∙∂ r i∂qr
=Qr
Prednosti Lagranžovih jednačina II vrste su:1) Sistem se ne mora rastavljati na podsisteme2) Ne moraju se tražiti unutarnje sile čime se pojednostavljuje postupak računanja
korisnih veličina, odnosno postupak formiranja diferencijalnih jednačinaNedostaci:Jedna od glavnih poteškoća u primjeni Lagranžovih jednačina II vrste se javlja u kompleksnosti izraza za kinetičku energiju (za složenije sisteme).
LAGRANŽOVE JEDNAČINE DRUGE VRSTE ZA TRENUTNE (UDARNE) SILEDa bismo došli do Lagranžovih jednačina druge vrste za trenutne sile, početi ćemo od Lagranžovih jednačina druge vrste za konačne sile.
4

ddt
∂ E k
∂ qr− ddt
∂ Ek
∂qr=Qr
a+Qrr (r=1,2,… , s )…(1)
Integriranjem izraza (1) u intervalu vremena u kojem djeluju trenutne sile, tj. u intervalu od t→t+ τ (gdje je τ – „mali“ interval vremena u kojem se dešava udar).
d ( ∂ Ek
∂ qr )−∂Ek
∂qrdt=Qr
adt+Qrrdt… (2)
∫t
t+τ
d ( ∂E k
∂ qr)−∫
t
t+ τ ∂Ek
∂qrdt=∫
t
t+τ
Qradt+∫
t
t+ τ
Qrrdt …(3)
Odakle je :
∫ d( ∂E k
∂ qr)=∂ Ek
∂ qr|¿ t+τ−
∂ E k
∂ qr|¿ t ….(5)
∫ ∂ Ek
∂qrdt≅
∂ Ek
∂qr∙ τ ≈0…(6)
Integrali na desnoj strani jednačine (2) predstavljaju generalisane udarne impulse od spoljašnjih udarnih impulsa i od udarnih reakcija veze.
∫t
t+τ
Qradt=Qr
a ' - generalisani udarni aktivni impuls
∫t
t+τ
Qrrdt=Qr
r ' - generalisani udarni impuls reakcija veze
Lagranžova jednačina druge vrste za trenutne (udarne) sile izgleda :
( ∂ Ek
∂ qr )t+τ−( ∂E k
∂ qr)t=Qr
a'+Qrr '….(7)
Veličina ∂E k
∂qr u jednačini (7) predstavlja generalisanu komponentu količine kretanja koja
odgovara r – toj generalisanoj koordinati.
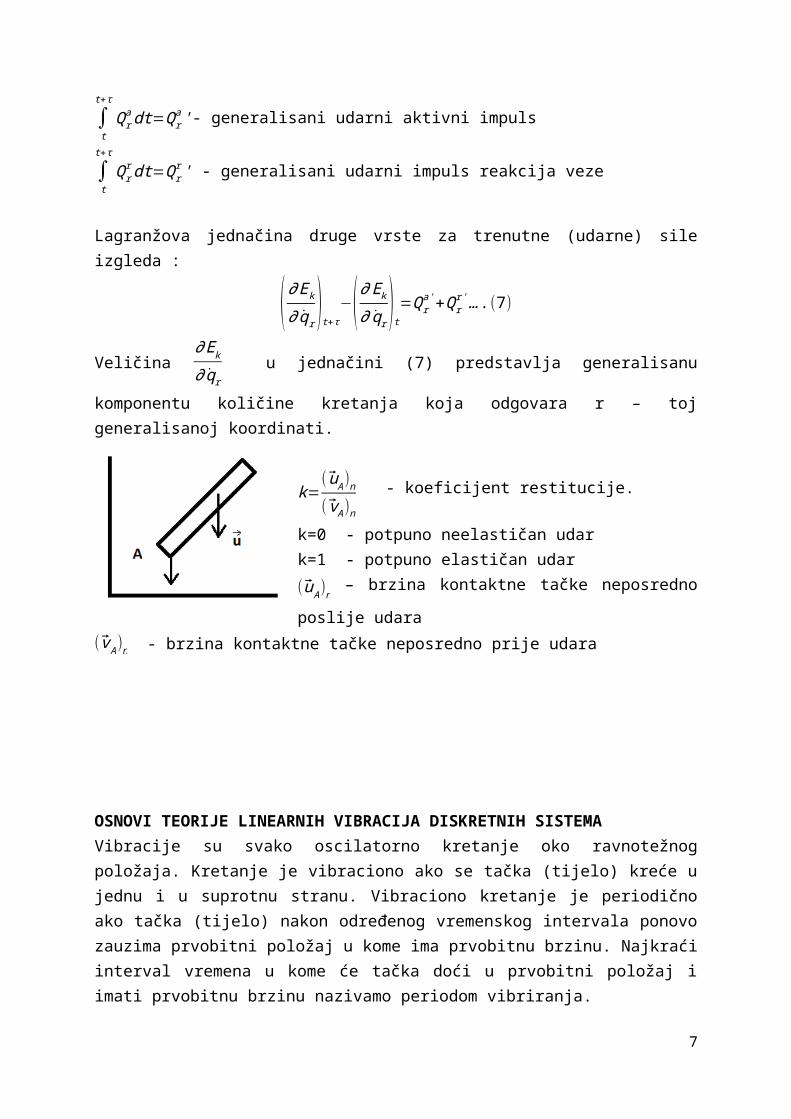
k=(uA)n( vA)n
- koeficijent restitucije.
k=0 - potpuno neelastičan udark=1 - potpuno elastičan udar(uA)n – brzina kontaktne tačke neposredno poslije udara
( v A)n - brzina kontaktne tačke neposredno prije udara
5

OSNOVI TEORIJE LINEARNIH VIBRACIJA DISKRETNIH SISTEMAVibracije su svako oscilatorno kretanje oko ravnotežnog položaja. Kretanje je vibraciono ako se tačka (tijelo) kreće u jednu i u suprotnu stranu. Vibraciono kretanje je periodično ako tačka (tijelo) nakon određenog vremenskog intervala ponovo zauzima prvobitni položaj u kome ima prvobitnu brzinu. Najkraći interval vremena u kome će tačka doći u prvobitni položaj i imati prvobitnu brzinu nazivamo periodom vibriranja. Vibracije se dijele na:
1) Slobodne a. Neprigušene b. Prigušene
2) Prinudne a. Neprigušene b. Prigušene
Neprigušene vibracije – nema disipacije energije. Prigušene vibracije – postoji disipacija energije.
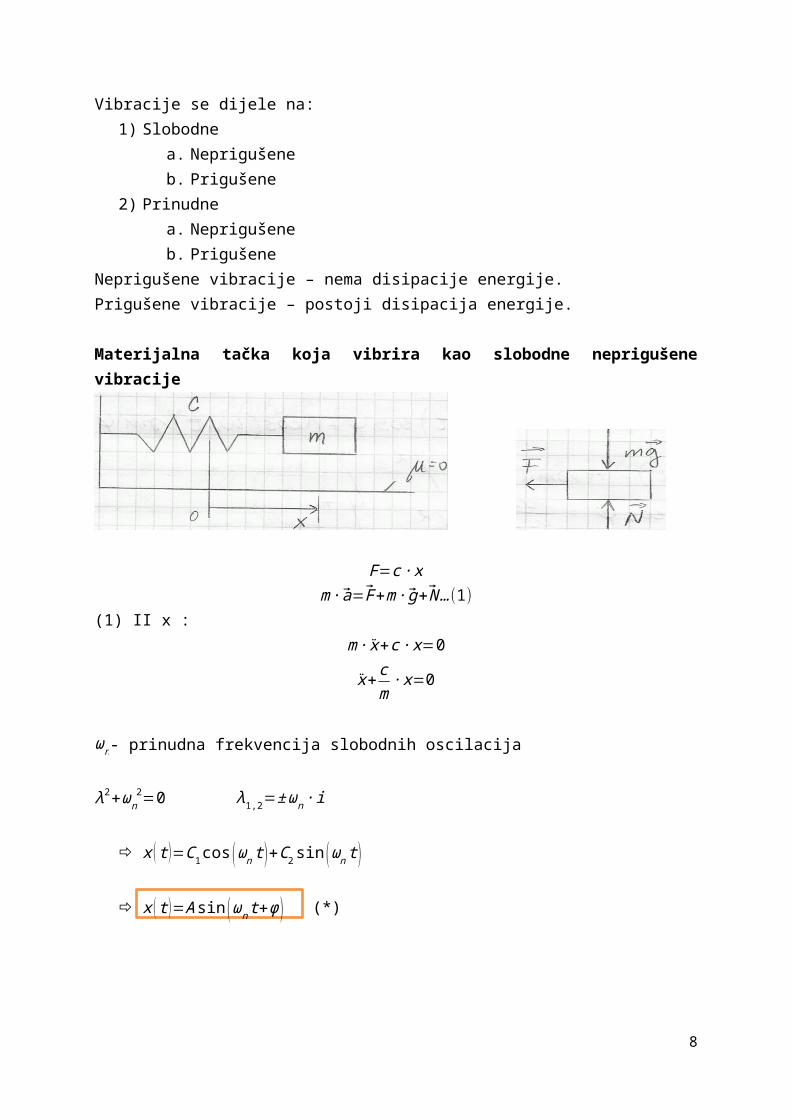
Materijalna tačka koja vibrira kao slobodne neprigušene vibracije
F=c ∙ xm∙ a=F+m∙ g+ N …(1)
(1) II x :m∙ x+c ∙ x=0
x+ cm∙ x=0
ωn- prinudna frekvencija slobodnih oscilacija
λ2+ωn2=0 λ1,2=±ωn ∙i
x (t )=C1 cos (ωnt )+C2sin (ωnt )
x (t )=A sin (ωn t+φ ) (*)
6
x (0 )=x0 x (0 )=v0
x (t )=−C1ωn sin (ωnt )+C2ωncos (ωn t ) x (0 )=x0=C1
x (0 )=v0=C2ωn => C2=v0ωn
x (t )=x0 cos (ωn t )+v0ωnsin (ωnt ) - opšte rješenje
Iz (*) slijedi : x (t )=A sin (ωn t )cos φ+A cos (ωn t ) sin φ
A cosφ=v0ωn
A sinφ=x0
A2 (cos2φ+sin2φ )=x02+( v0ωn
)2
A=√x02+( v0ωn)2
tgφ=x0ωn
v 0 φ=arctg
x0ωn
v0
x (t )=A sin (ωn t+φ )=√x02+( v0ωn)2
sin (ωnt+arctgx0ωn
v0 )
7
ωn=√ cm
Što je veća inercija sistema, manja je frekvencija sistema. Što je veća krutost opruge, veća je i frekvencija sistema.
T=2πωn
=2π √mcPeriod oscilovanja je veći što je veća inercija sistema, a manji što je krutost veća.Primjer:
m∙ a=m∙ g+ S…(1)
(1) II x:
m∙ dvdt
=−mgsinφ
v=l ∙ φ
l ∙φ=−gsinφ
φ=−glsinφ - opšti slučaj gdje zanemarujemo trenje
Za male uglove: sinφ≈φNapomena: ugao je izražen u radijanima.
φ+ glφ=0 ωn=√ gl
Što je jače gravitaciono polje, veća je frekvencija sistema. Što je dužina veća, manja je frekvencija sistema.
T=2πωn
=2π √ lg
f= 1T
=12π √ gl
8

Primjer: Torzione vibracije
d Lo
dt=M …(1)
(1) II z:d L z
dt=−M=−k ∙θ
L z=I 0 ∙ θ - moment količine kretanja diskaI 0 ∙ θ=−k ∙θ
I 0 ∙ θ+k ∙ θ=0
θ+ kI 0∙θ=0
ωn=√ kI 0
gdje je k – torziona krutost.
I 0=m ∙L2
IDISK=m∙R2
2
I PRSTEN=m∙R2
IPOLUGE=m ∙R2
12
9

Slobodne prigušene vibracije
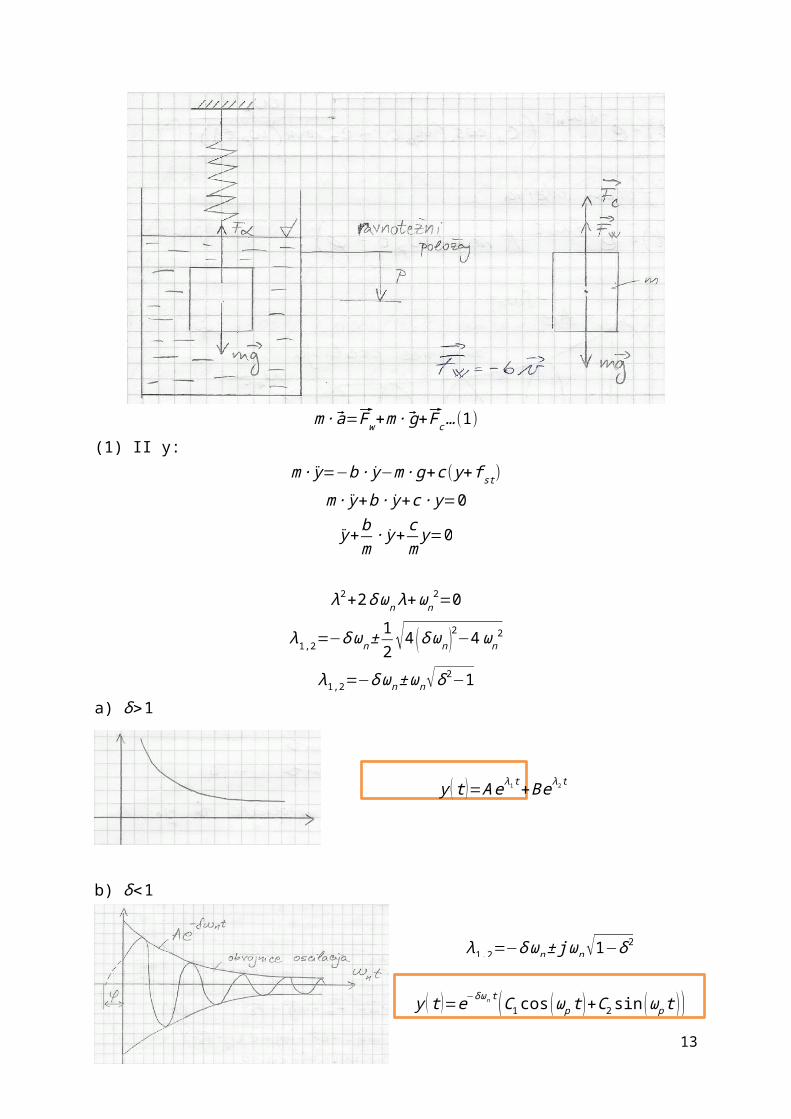
m∙ a=Fw+m∙ g+ Fc…(1)(1) II y:
m∙ y=−b ∙ y−m∙ g+c ( y+ f st)m∙ y+b ∙ y+c ∙ y=0
y+ bm∙ y+ c
my=0
λ2+2δ ωn λ+ωn2=0
λ1,2=−δ ωn±12 √4 (δωn )2−4ωn
2
λ1,2=−δ ωn±ωn√δ2−1a) δ>1
y (t )=A eλ1 t+Be λ2 t
b) δ<1
10

λ1,2=−δ ωn± jωn√1−δ 2
y (t )=e−δωn t (C1cos (ωp t )+C2 sin (ω pt ) )
Bolja forma odzivay ( t )=e−δωn t Asin(ωp t−φ)
Za t=0 y (t 0=0 )= y0 y (t 0=0 )= y0
y (t )=e−δωn t (C1cos (ωp t )+C2 sin (ω pt ) )
y0=C1
y ' (t)=−δωn e−δωn t (C1 cos (ωp t )+C2 sin (ωp t ))+e−δωn t (−C1ωp sin (ω pt )+C2ω p cos (ω pt ))
y ' ( t )|¿ t=0=vo=−δωn+C2ωp
C2=vo+δ ωn
ωp
y ( t )=e−δωn t( y0cos (ωp t )+vo+δ ωn
ωpsin (ωp t ))
ω p=√1−δ2 ∙ωn
y ( t )=e−δωn t (C1cos (ωp t )+C2 sin (ω pt )) Asin (ω pt+φ )=C1cos (ωp t )+C2 sin (ωp t ) φ – fazni pomakAe−δωn t – amplituda
Asin (ω pt )cosφ+Acos (ω p t ) sinφ=C1 cos (ω pt )+C2sin (ωp t )
Asinφ=C1 ; Acosφ=C2
A2 (cos2φ+sin2φ )=C12+C2
2
A2=C12+C2
2
A=√C12+C2
2
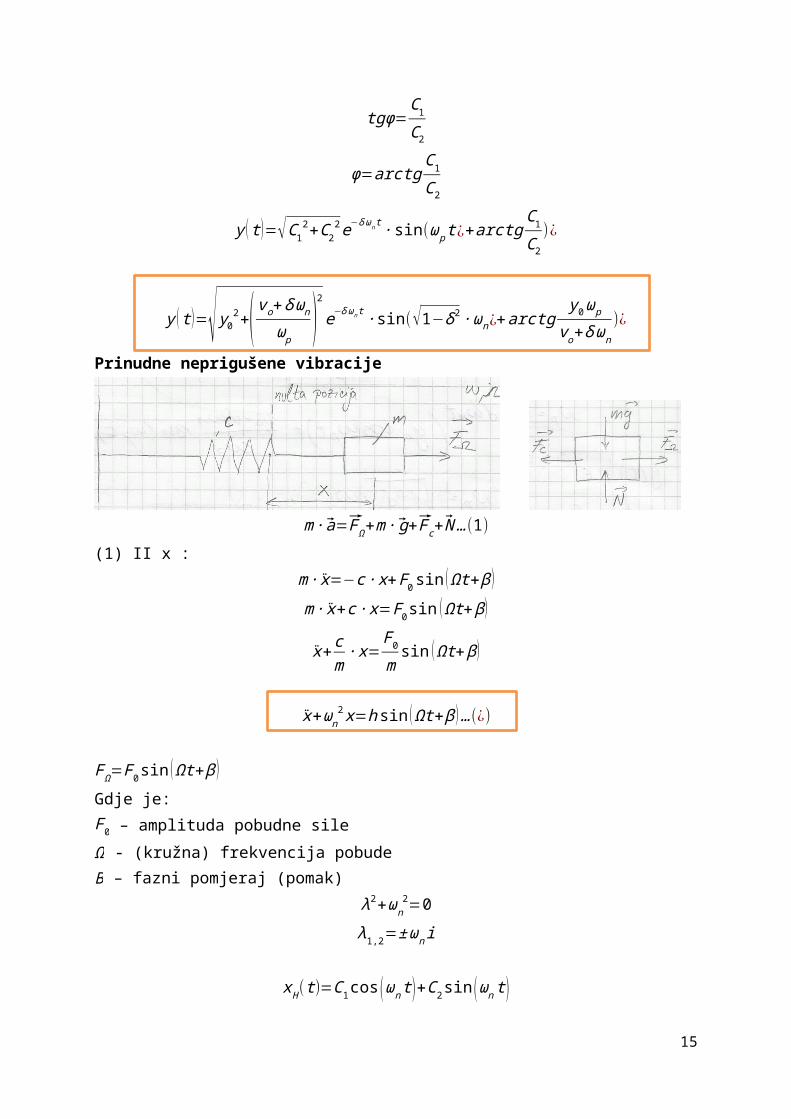
tgφ=C1C2
φ=arctgC1
C2
11

y (t )=√C12+C2
2 e−δωn t ∙sin (ω pt ¿+arctgC1C2
)¿
y ( t )=√ y02+( vo+δ ωn
ωp)2
e−δωn t ∙ sin(√1−δ2 ∙ωn¿+arctgy0ω p
vo+δωn)¿
Prinudne neprigušene vibracije
m∙ a=FΩ+m∙ g+ Fc+ N … (1)
(1) II x :m∙ x=−c ∙ x+F0 sin (Ωt+β )m∙ x+c ∙ x=F0 sin (Ωt+β )
x+ cm∙ x=
F0msin (Ωt+β )
x+ωn2 x=h sin (Ωt+β )…(¿)
FΩ=F0 sin (Ωt+β ) Gdje je: F0 – amplituda pobudne sile Ω - (kružna) frekvencija pobudeΒ – fazni pomjeraj (pomak)
λ2+ωn2=0
λ1,2=±ωn i
xH (t )=C 1cos (ωn t )+C2 sin (ωn t )xH (t )=Asin(ωn t+φ)
xP( t)=D sin (Ωt+β )+E cos (Ωt+β )xP ( t )=DΩcos (Ωt+β )−EΩ sin (Ωt+ β )
xP (t )=−DΩ2 sin (Ωt+β )−EΩ2 cos (Ωt+ β )
U (*) slijedi :−DΩ2 sin (Ωt+β )−EΩ2 cos (Ωt+ β )+ωn
2 (D sin (Ωt+ β )+E cos (Ωt+β ) )=h sin (Ωt+β )
12
−DΩ2+Dωn2=h => D= h
ωn2−Ω2
E (−Ω2+ωn2 )=0 => E=0
x (t )=C1cos (ωnt )+C2sin (ωnt )+ hωn
2−Ω2 sin (Ωt+β )
Početni uslovi:Za t=0 x (t=0 )=x0
t=0 x (t=0 )=v0
x (t )=−C1ωn sin (ωnt )+C2ωncos (ωn t )+ hωn
2−Ω2Ω cos (Ωt+β )
Za t=0x0=C1+A p sinβ C1=x0−Ap sinβ
v0=C2ωn+A pΩcosβ C2=v0−A pΩcosβ
ωn
x (t )=(x0−Ap sinβ)cos (ωn t )+( v0−A pΩcosβωn
)sin (ωn t )+A p sin (Ωt+β )
Prinudne prigušene vibracije
m∙ a=FΩ+m∙ g+ Fc+ N+ Fw…(1)
(1) II x :m∙ x=−c ∙ x−b ∙ x+F0sin (Ωt+β )
x+ bmx+ c
m∙x=
F0msin (Ωt+β )
x+2δωn x+ωn2 x=h sin (Ωt+β )…(¿)
λ2+2δ ωn λ+ωn2=0
Za δ>1
13
λ1,2=−δ ωn±ωn√δ2−1Za δ<1
λ1,2=−δ ωn±ωn√1−δ 2 ∙ i
Za δ>1xH ( t )=C1 e
λ1 t+C2eλ 2 t
λ1,2=−δ ωn±ωn√δ2−1 - aperiodski odziv
Za δ<1
xH ( t )=e−δωn t (C1cos (ωn√1−δ 2t )+C2 sin (ωn√1−δ 2t ))Ili
xH ( t )=e−δωn t Asin (ωn√1−δ 2t+φ )Za δ=1 imamo granični sloj (granični aperiodski odziv)
xH ( t )=e−δωn t (At+B)
xP( t)=D sin (Ωt+β )+E cos (Ωt+β )xP( t)=H sin (Ωt+β+α )xP (t )=HΩcos (Ωt+β+α )
xP ( t )=−HΩ2 sin (Ωt+β+α )
Uvrštavanjem u (*) dobijamo:−HΩ2 sin (Ωt+β+α )+2δ ωnHΩ cos (Ωt+β+α )+ωn
2H sin (Ωt+β+α )=h sin (Ωt+ β )
(ωn2H−H Ω2 ) [sin (Ωt+β ) cosα+cos (Ωt+β ) sinα ]+2δ ωnHΩ[cos (Ωt+ β ) cosα−sin (Ωt+β ) sinα ]=h sin (Ωt+β )
H (ωn2−Ω2 )cosα−2δ ωnHΩsinα=h
H (ωn2−Ω2 ) sinα+2δωnHΩcosα=0
Svojstva prinudnih vibracija:1) Prinudne vibracije su neamortizovane i imaju frekvenciju koja je jednaka frekvenciji
prinudne sile2) Prinudne vibracije ne ovise od početnih uslova kretanja, a amplituda prinudnih
vibracija pri postojanju i bilo koliko malog prigušenja uvijek ima konačnu vrijednost3) Po isteku dosta velikog intervala vremena, sopstvene vibracije (koje su pri postojanju
prigušenja amortizovane) možemo zanemariti i razmatrait samo prinudne vibracije
14
4) Pri maloj amplitudi prinudne sile (F0 ) mogu da nastupe prinudne vibracije sa veoma velikim amplitudama ukoliko je kružna frekvencija prinudne sile Ω bliska kružnoj frekvenciji sopstvenih vibracija ω, a otpor mali; odnosno i pri vrlo velikoj vrijednosti amplitude prinudne sile, amplituda prinudnih vibracija može biti mala ako je frekvencija prinudne sile mnogo veća od frekvencije sopstvenih vibracija (Ω≫ω) .
15





























