Embed Size (px)
Citation preview

WET SNOW DEPTH FROM TANDEM-X SINGLE-PASS INSAR DEM DIFFERENCING
Silvan Leinss(1), Oleg Antropov(2), Juho Vehvilainen(3), Juha Lemmetyinen(3), Irena Hajnsek(1,4), Jaan Praks(2)
(1) ETH Zurich, 8093 Zurich, Switzerland(2) Department of Electronics and Nanoengineering, Aalto University, 00076 Aalto, Finland
(3) Finnish Meteorological Institute, 00101 Helsinki, Finland(4) Microwave and Radar Institute, German Aerospace Center (DLR), 82234 Wessling, Germany
ABSTRACT
Single pass radar interferometry (sp-InSAR) is a well estab-lished technique for generation of digital elevation models(DEM). Differencing two DEMs acquired at different timescan reveal topographic changes. However snow depth estim-ation by DEM differencing is still an ongoing topic in radarresearch: in contrast to snow free surfaces, the snow surfaceelevation is difficult to detect either because of microwavepenetration into dry snow or because of the weak backscat-ter return from wet snow which significantly decorrelates theinterferometric signal. In this study we demonstrate first res-ults of wet snow depth estimation by differencing sp-InSARDEMs acquired by the TanDEM-X satellite mission. The res-ults show, in contrast to dry snow, a clear sensitivity to wetsnow. However, additionally to a high vertical sensitivity ofa few ten centimeters a very low noise-equivalent-sigma-zero(NESZ) is crucial for successful snow depth estimation.
Index Terms— snow depth, wet snow, TanDEM-X, radarinterferometry, DEM generation, DEM differencing.
1. INTRODUCTION
Snow provides a major source of freshwater for 1/6th of theEarth’s population [1]. Consequently snow information suchas snow depth (HS) or snow water equivalent (SWE) is re-quired for needs of water resources management as well asflood predictions during the melt season. In situ snow depthcan be measured relatively simply either by manual stickmeasurements or by automated ultrasonic stations. However,elevation, topography, vegetation and wind drift strongly af-fect the locally measured snow depth which is therefore notrepresentative for larger regions. To determine snow depthover larger regions remote sensing methods come into playoperating in the optical and microwave regime. Optical meth-ods like Lidar [2] or photographic methods [3, 4] can providecm-scale snow depth maps but are limited to daylight, clearweather conditions and often to smaller areas. In contrast topassive microwave methods (e.g. [5, 6]), which are limited bythe inherent coarse spatial resolution, active microwave meth-ods based on single-pass interferometric synthetic aperture
radar systems (sp-InSAR) can provide topographic informa-tion with a spatial resolution on the meter-scale and a verticalresolution on the sub-meter or even centimeter scale. Re-cently, retrieval of snow depth maps for wet snow cover hasbeen demonstrated using the 35.7 GHz, airborne GLISTINsp-InSAR system [7]. With the same system, compared toairborne LiDAR, a limited penetration of about 0.3 to 1 m indry firn on the Greenland ice sheet was reported [8].
Due to the absence of a radar system in space with suf-ficiently high frequency to avoid penetration into dry snow,we focus in this study on data from the TanDEM-X satellitemission [9, 10] operating at 9.65 GHz. As the radar penet-ration into dry snow often exceeds the depth of a seasonalsnowpack we do not expect any sensitivity to dry snow andfocus therefore on snow depth determination during the snowmelt season. Our method is based on differencing two di-gital elevation models (DEMs) where one was acquired dur-ing snow melt and one during snow free conditions. Themethod has already been demonstrated with TanDEM-X ac-quisitions over the Swiss Alps [11], but thus far lacks a com-prehensive demonstration applying in situ data for validation.It is the purpose of this study to provide this demonstration.
2. DATASET
A dedicated experiment including a large set of ground meas-urements was designed for spring 2017 to demonstrate thepotential of X-band sp-InSAR for depth determination of amelting snow pack. For the experiment, an area around theKiilopaa fell in the Urho Kekkonen national park in Saar-iselka, Northern Finland, was chosen (E 27.53◦, N 68.33◦).This site balances the following complementary require-ments: 1) easy access for validation field campaigns, 2)remote enough to avoid conflicting acquisition interests andto allow for temporally dense coverage with TanDEM-X ac-quisitions of different modes, 3) sufficient topography andwind-induced snow drift to provide local-scale variability insnow depth, 4) gentle mountain slopes to avoid shadow, lay-over and phase-unwrapping problems, 5) low vegetation toavoid height bias and coherence loss due to vegetation.
8500978-1-5386-7150-4/18/$31.00 ©2018 IEEE IGARSS 2018

Table 1. Orbit parameters. Beff: effective baseline, HoA:height of ambiguity, NESZ: noise equivalent sigma zero; HS:high resolution spotlight; SM: stripmap; dual: HH,VV.
rel. orbit, pol. Beff (m) HoA (m) θinc NESZ024 (HS,HH) 109...157 67...97 54◦ -20.8 dB039 (SM,HH) 117...145 53...66 44◦ -25.2 dB130 (SM,dual) 110...135 46...56 38◦ -22.7 dB
Between July 2016 and June 2017 the test site was imagedfrom several TanDEM-X orbits with different modes (spot-light, stripmap, single-/dual-pol), incidence angles, and fromascending and descending orbits. Only ascending orbits wereprocessed because descending orbits had a poor vertical sens-itivity. The vertical sensitivity of ascending orbits were in theorder of magnitude of the shallow tundra snow pack whichrarely exceeded 1 m. Table 1 shows the range of height ofambiguities (HoA) for the snow melt period between mid-May and mid-June 2017. The snow free reference DEMswere acquired with a better vertical sensitivity correspondingto HoAs between 21 and 34 m (spotlight: 36...47 m).
Three validation campaigns supported the experiment.The campaigns consisted in manual snow bulk property meas-urements, snow depth and SWE, along several kilometer longtransects (Figs. 1 and 2). Three pairs of radar reflectors wereinstalled to verify the georeferencing of radar and ground dataand for height calibration of the radar DEMs. Additionally,data from three weather stations were available (Fig. 2).
3. METHOD
For each orbit, the entire stack of single-look-complex datawas co-registered to a common master scene. Interferogramswere calculated for each acquisition date with the ”flat”-earthphase (Earth ellipsoid) removed. A residual linear phase rampcaused by baseline-inaccuracies was subtracted. For the snowfree reference acquisitions the remaining phase was conver-ted to height and orthorectified using the ellipsoid to createa first guess of a raw DEM. The raw DEM and the geocod-ing table were iteratively updated to improve the simulatedtopographic phase. The DEM converged after 5-6 iterationssuch that the residual height difference (standard deviationbetween simulated and measured interferogram) of forest-freeareas (coherence> 0.7) was below 0.7 m (1.0 m, 0.5 m) fororbit 039 (orbit 024, orbit 130). To further reduce the heightnoise of the final reference DEM, all snow free DEMs withbaselines larger than 220 m were averaged. The final ref-erence DEM was then used for topographic phase removaland geocoding of the entire stack, providing a DEM differ-ence for each acquisition date. All stripmap radar data (DEMdifference, backscatter signal σ0, interferometric coherence)were converted to geographic coordinates with 5 m resolution(spotlight to 1 m resolution).
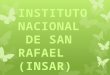
Fig. 1. (a) backscatter image (2017-05-14) with color codedsnow depth transect from 2017-05-20 (blue). (b) minimumcoherence of summer and winter interferograms. Numbersindicate field measurements along the transect. A radar re-flector is located at the red circle; weather station 1 and 2 areat the green ”+”. Axis show latitude and longitude in degree.
Radar reflectors were well visible during dry snow con-ditions and were used to validate the geocoding. However,during snow melt some of the reflectors were no longer vis-ible, likely due to wet snow cover. Therefore, they could notbe used as a height reference. As a workaround a histogramof the height-differences was calculated and the height dif-ference at the lowest 10%-quantil was defined as zero heightdifference. For snow free acquisitions with a zero mean-difference this caused a bias of about 1.3 standard deviationsof the height difference. For wet snow covered scenes thebias is expected to be smaller.
To compare satellite with ground measurements a clas-sification of wet snow cover was required. Wet snow wasdiscriminated from dry snow by a backscatter threshold of -17.5 dB. Fig. 1(a,b) shows that valleys were covered by wetsnow (low backscatter, low coherence) while hill tops werestill covered by dry snow (bright backscatter, high coherence).
4. RESULTS
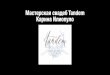
For successful DEM generation the backscatter signal must besignificantly above the noise threshold (NESZ) to limit phasenoise. The backscatter time series (Fig. 2: 3rd panel) showthat during snow melt (gray shading) the backscatter signalfalls frequently below the wet snow threshold of -17.5 dB(blue solid line) which is close to the NESZ (dashed lines).As a result, snow depth can only be determined if a SAR-system provides a low enough NESZ which is well below the
8501

Fig. 2. 1st panel: snow depth from three weather stations onthe test site (station 1:open fjell, 2: slope with mountain birch,3: pine forest). Box plots summarize field campaigns (datesgiven) with median, upper and lower quartil, whiskers indic-ate min. / max. measured snow depth. Gray shadings showperiods of snow melt (Tair > 0◦C). 2nd panel: air and soiltemperature at 2 m and -5 cm. 3rd and 4th panel: backscatterintensity and coherence for three different orbits (indicatedby symbols). Colors indicate three different locations (black= hill top, blue = valley, green = forest). dashed gray lines(3rd panel) show the NESZ for the three different orbits.
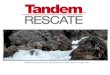
backscatter signal of wet snow. We found that only orbit 039with an NESZ of -25.2 dB was suitable for snow depth estim-ation. For the spotlight acquisitions with an NESZ of -20.8dB the coherence dropped below 0.3 during snow melt pre-venting any successful snow depth estimation. The scatter-plot in Figure 3a shows how coherence decays for differentland cover (color) and for different orbits (symbols) when thebackscatter signal approaches the wet snow threshold.
The six rows in Fig. 4 show snow depth transects fromspring 2017 (satellite data: red) together with the field meas-urements from 2017-05-20 (blue). A scatterplot (satelliteover field data) for each date is shown on the right. Datapoints which are gray or transparent were classified as drysnow. Wet snow was only present for the the middle twoacquisitions (2017-05-14 and 2017-06-05) where the backs-catter signal (black line) falls below the threshold of -17.5dB (dashed line). Considering the suboptimal vertical sens-itivity on 2017-05-14 (HoA = 53 m) the satellite and groundtransects show a reasonable agreement (Fig. 3b). Even two
Fig. 3. (a) coherence over backscatter for different locations(color) and orbits (symbols). (b) scatterplot of snow depthfrom DEM differencing (2017-05-14 vs. summer) over fieldvalidation data from 2017-05-20. Blue dots are pixels coveredby wet snow, gray pixels are pixels classified as dry snow.
weeks after the field measurements, on 2017-06-05, someweak correlation could still be found. During dry snow con-ditions (2017-04-22 and 2017-05-03) the radar snow depthsare well below the field measurements and do not show anycorrelation with them. For future experiments in X-band werecommend NESZ below -25 dB and HoA less than 30m.
5. REFERENCES
[1] T. P. Barnett, J. C. Adam, and D. P. Lettenmaier, “Poten-tial impacts of a warming climate on water availabilityin snow-dominated regions,” Nature, vol. 438, pp. 303–309, 2005.
[2] J. S. Deems, T. H. Painter, and D. C. Finnegan, “Lidarmeasurement of snow depth: a review,” Journal of Gla-ciology, vol. 59, no. 215, pp. 467–479, 2013.
[3] Y. Buhler, M. Marty, L. Egli, J. Veitinger, T. Jonas,P. Thee, and C. Ginzler, “Snow depth mapping in high-alpine catchments using digital photogrammetry,” TheCryosphere, vol. 9, no. 1, pp. 229–243, 2015.
[4] Y. Buhler, M. S. Adams, R. Bosch, and A. Stoffel,“Mapping snow depth in alpine terrain with unmannedaerial systems (uass): potential and limitations,” TheCryosphere, vol. 10, no. 3, pp. 1075–1088, 2016.
[5] R. Kelly, “The amsr-e snow depth algorithm: Descrip-tion and initial results,” Journal of The Remote SensingSociety of Japan, vol. 29, no. 1, pp. 307–317, 2009.
[6] M. Takala, K. Luojus, J. Pulliainen, C. Derksen, J. Lem-metyinen, J.-P. Karna, J. Koskinen, and B. Bojkov, “Es-timating northern hemisphere snow water equivalent for
8502

Fig. 4. Transects of TanDEM-X snow depth (red) for six different acquisitions from orbit 039A. Blue transects show fieldmeasurements from 2017-05-20. The black and green lines are backscatter (σ0) and the interferometric coherence along thetransects. Wet snow was present only for the 3rd and 4th transect. A close-to-zero height difference was observed for the 5thand 6th transect (snow free conditions) and also for the 1st and 2nd transect which were acquired during dry snow conditions.
climate research through assimilation of space-borne ra-diometer data and ground-based measurements,” Re-mote Sensing of Environment, vol. 115, no. 12, pp. 3517– 3529, 2011.
[7] D. Moller, K. M. Andreadis, K. J. Bormann, S. Hensley,and T. H. Painter, “Mapping snow depth from ka-bandinterferometry: Proof of concept and comparison withscanning lidar retrievals,” IEEE Geoscience and RemoteSensing Letters, vol. 14, no. 6, pp. 886–890, June 2017.
[8] S. Hensley, D. Moller, S. Oveisgharan, T. Michel, andX. Wu, “Ka-band mapping and measurements of inter-ferometric penetration of the greenland ice sheets by theglistin radar,” Sel. Topics Appl. Earth Observations andRem. Sens., vol. 9, no. 6, pp. 2436–2450, June 2016.
[9] G. Krieger, M. Zink, H. Fiedler, I. Hajnsek, M. Younis,S. Huber, M. Bachmann, J.H. Gonzalez, D. Schulze,J. Boer, M. Werner, and A. Moreira, “The TanDEM-X Mission: Overview and status,” in Radar Conference,2009 IEEE, may 2009, pp. 1 –5.
[10] G. Krieger, M. Zink, M. Bachmann, et al., “TanDEM-X:A radar interferometer with two formation-flying satel-lites,” Acta Astronautica, vol. 89, pp. 83 – 98, 2013.
[11] S. Leinss, “Depth, anisotropy, and water equivalent ofsnow estimated by radar interferometry and polarimetry,PhD thesis,” 2015, ETH Zurich.
8503