Embed Size (px)
Citation preview

WSPÓŁPRACA MIKROPROCESORA Z UKŁADAMI WE-WY I PAMIĘCIĄ
Do magistrali danych mikroprocesora dołączone są pamięci i układy we-wy.
Możliwe są dwie koncepcje komunikowania się mikroprocesora z tymi układami:
adresowanie jednolite
Adresowanie rozdzielone

ADRESOWANIE JEDNOLITE
Zalety: prostota i brak dodatkowych elementów sterujących
Wady: ograniczanie obszaru adresowego dla pamięci

ADRESOWANIE ROZDZIELONE
Ten typ adresowania może być stosowany tam gdzie mikroprocesory wyposażone są w specjalne rozkazy we-wy i dodatkowe sygnały sterujące do adresowania pamięci i ukł. we-wy.
Zalety: możliwość pełnego wykorzystania przestrzeni adresowej dla pamięci
Wady: dodatkowe sygnały sterujące oraz szersza lista rozkazów obejmujących obsługę ukł. we-wy

ADRESOWANIE UKŁADU WE-WY
Do uaktywnienia układu we-wy stosuje się logiczny układ kombinacyjny zwany dekoderem adresu. Przy określonej kombinacji sygnałów wejściowych (adresowych) wytwarza on sygnał wybierający układ we-wy. Sygnał ten oznacza się CS (chip select).
Bity A0 – A2 doprowadzone są bezpośrednio do układu we-wy i służą do wyboru rejestrów wewnętrznych ustalających tryb pracy albo zawierających informację o stanie układu we-wy. Bity A3 – A9 podawane są do dekodera adresu, który wystawia sygnał CS

Rys. Komunikacja mikroprocesora z ukł. we-wy
Są trzy podstawowe rodzaje układów we-wy:
- Proste (na poj. tranzystorach lub bramkach przeznaczone np. do sygnalizacji
- uniwersalne (programowalne) – ukł. MSI przewidziane do wyprowadzania danych na zewnątrz, np. port równoległy 8255 i port szer. 8251
- specjalizowane przewidziane są do obsługi konkretnego urządzenie zewnętrznego. Wykonane są w postaci układu LSI albo VLSI. Przykładem są karta grafiki. Karta dźwiękowa czy sieciowa
Rodzaje układów we-wy i współpraca z mikroprocesorem

KOMUNIKACJA ZE SPRAWDZANIEM GOTOWOŚCI
Komunikacja ze sprawdzaniem gotowosci polega na okresowym sprawdzaniu ukladow we/wy - czy urzadzenia zewnetrzne ,,nie zycza, sobie" obstugi ze strony mikroprocesora? W tym celu układy we/wy wyposazane sa. w tzw. rejestr stanu. Poszczegolne bity tego rejestru mają okreslone przeznaczenie. Tzw. bit gotowosci informuje o przygotowniu urzadzenia zewnetrznego do wspotpracy z mikrokomputerem (np. podłączenie i wlączenie zasilania drukarki). Bit za.dania obstugi wskazuje natomiast na potrzebe wspotpracy układu we/wy z mikroprocesorem. Sprawdzanie uktadow we/wy polega na odczytaniu rejestru stanu i analizie aktywnosci bitu zadania obstugi. Aktywnosc bitu zadania obslugi wymusza wykonanie podprogramu obsługi układu we/wy.
Zalety – prostota, nie są wymagane dodatkowe sygnały sterujące.
Wady – znaczne obciążenie mikroprocesora

Komunikacja z przerwaniami
Rys. Przerwanie Rys. Wektorowy układ przerwań
Przerwanie jest wejściowym sygnałem sterującym mikroprocesora. Stan wejścia przerwań jest analizowany wewnętrznie przez mikroprocesor pod koniec każdego cyklu rozkazowego. Aktywny stan tego wejścia powoduje natychmiastową zmianę adresu, która wywołuje podprogram obsługi przerwania.
Zalety- mniejsze obciążenie procesora.
Wady – większe skomplikowanie układu

KOMUNIKACJA Z BEZPOŚREDNIM DOSTĘPEM DO PAMIĘCI
Rys. Bezpośredni dostęp do pamięci
Rys. Podłączenie układu DMA
Sygnały sterujące:
DRQ – DMA Request
DACK – DMA Acknowledge
HLDRQ – Hold Request
HLDA – Hold Acknowledge
Zalety - duża szybkość przesyłania danych.
Wady – większe skomplikowanie układu i konieczność stosowania dodatkowych sygnałów sterujących

WSPÓŁPRACA Z URZĄDZENIAMI ZEWNĘTRZNYMI
Współpraca mikrokomputera z urządzeniami zewnętrznymi odbywa się za pomocą tzw. interfejsu. Obejmuje on fizyczne przewody i złącza, oraz specyfikację styków i sygnałów, poziomy sygnałów (napięcia i prądu) oraz ich zależności czasowe.
Do transmisji danych, które są sygnałami elektrycznymi, stosuje się linie transmisyjne przewodowe oraz bezprzewodowe (radiowe i podczerwień).

PRZEWODOWE LINIE TRANSMISYJNE
Linia symetryczna to dwa przewody sygnałowe, po których przekazywany jest ten sam sygnał, lecz w przeciwnych fazach. Dodatkowo przewody są skręcone ze sobą. Powoduje to znaczne zredukowanie zakłóceń. Przykładem takich linii są skrętki stosowane w sieciach komputerowych. Zasięg – ok.. 1000m
Linia niesymetryczna - składa się z przewodu sygnałowego (gorący) oraz „masy”. Linia taka jest bardzo podatna na zakłócenia pochodzące od zewnętrznych pól elektrycznych i magnetycznych i dlatego stosuje się je do połączeń na niewielkie odległosci, max. Kilka metrów.

TRANSMISJA SZEREGOWA
Rys. Układ transmisji równoległej.
Dane mają postać tzw. Słów. Słowo jest sekwencją bitów i zwykle ma długość 8 bitów czyli 1 Bajta. Transmisja bit po bicie nazywa się szeregową. Wymaga małej ilości przewodów ale wydłuża czas transmisji.
Inną metodą jest transmisja równoległa, w której całe wszystkie bity słowa przesyłane jest jednocześnie za pomocą wielu przewodów. Zwiększa to szybkość transmisji ale jednocześnie przy większych odległościach następuje przenikanie sygnałów między liniami i występowanie większej liczby błędów.
Rys. Układ transmisji szeregowej

TRANSMISJA SZEREGOWA
Przy transmisji asynchronicznej zegary nadajnika i odbiornika nie są synchronizowane oraz nie jest określony odstęp czasu między kolejnymi słowami. Transmisja każdego słowa poprzedzona jest bitem startu, a kończona bitem stopu. Dla kontroli poprawności transmisji dołączany jest bit parzystości. Suma jedynek w słowie i bitu parzystości powinna być parzysta. Przed rozpoczęciem transmisji powinno się ustalić parametry połączenia: szybkość transmisji w b/s np. 56600, długość słowa (5-8 bitów), bit parzystości (jest, brak, zanegowany), ilość bitów stopu.
Transmisja synchroniczna wymaga synchronizacji zegarów nadajnika i odbiornika. Można dzięki temu pozbyć się bitów startu i stopu, co zwiększa efektywność transmisji. Dane pogrupowane są w bloki zwane ramkami (frame). Bajty synchronizacji umieszcza się na początku ramki. Służą one do synchronizacji zegara odbiornika
Rys. Transmisja szeregowa asynchroniczna
Rys. Ramka transmisji szeregowej synchronicznej.

TRANSMISJA RÓWNOLEGŁA
Transmisja równoległa odbywa się z wykorzystaniem liczby linii odpowiadającej długości słowa (liczbie bitów). W jednym takcie przesyłane jest całe słowo. Urządzenie zewnętrzne np. drukarka wykorzystuje sygnał strobujący do zapisu odebranych danych. Powolne urządzenia zewnętrzne takie jak drukarka są wyposażone w tzw. Bufor (pamięć RAM), w którym zapisywane są odebrane dane. Uniezależnia to czas trwania transmisji od czasu przetwarzania (np. drukowania)
Sygnał strobujacy aktywny poziomem niskim jest wystawiany w wyniku iloczynu logicznego sygnału gotowości i ustabilizowania danych. Jego zbocze opadające wykorzystywane jest przez urządzenie zewnętrzne (odbiornik) do odczytu informacji. Jednoczesnie odczytywane są sygnały ze wszystkich linii danych.

INTERFEJS RS232C
Jest to interfejs szeregowy, który pierwotnie był przeznaczony do podłączenia modemu. Umożliwia połączenie urządzeń dwojakiego rodzaju:
1.DTE – Data Terminal Equipment – urz. końcowe (komputer, drukarka)
2.DCE – Data Communication Equipment – urz. komunikacyjne – modem.
W pierwotnej wersji korzystał ze złącza 25 – stykowego (DB25 albo D Sub 25). W komputerach PC wykorzystano 9 sygnałów przez co wystarcza złącze 9-stykowe (DB9). Najważniejsze dwa sygnały (TxD i RxD) realizują dwukierunkową transmisję danych. Pozostałe związane są z obsługą modemu. Połączenie urządzeń DTE i DCE wymaga stosowania przewodu połączeniowego „1:1” – tj. w obu urządzeniach łączy się styki o tych samych numerach

INTERFEJS RS232C
Poziomy sygnałów interfejsu dla zwiększenia odporności na zakłócenia zawierają się w granicach od -15V do +15V. W sygnale nadawanym logicznej „1” odpowiada napięcie od -5V do +15V a logicznemu „0” napięcia +5V do +15V. Sygnał odbierany w zakresie +3 do +15V interpretowany jest jako „0” a w zakresie -3 do -15V jako „1”. W komputerach PC RS232C stosuje napięcia ±12V. Max szybkość transmisji 116 kb/s, max. zasięg ok. 10m. Interfejs RS232 jest praktycznie zrealizowany przy pomocy układów UART np. 8251 lub nowszych i szybszych 16550. Układy te pracują na sygnałach TTL dlatego dla pełnej realizacji interfejsu stosuje się tzw. Nadajniki – odbiorniki linii, które transponują sygnały z poziomu TTL na poziom RS232 . Nowocześniejsze wersje interfejsu szeregowego oznaczone są jako RS422 i RS485. Pozwalają uzyskać szybkość transmisji ok. 10Mb/s oraz wydłużenie zasięgu do 1200 m. Komputery PC wymagają do realizacji RS485 specjalnych kart rozszerzeń.

INTERFEJS CENTRONICS Złącze Centronics jest interfejsem równoległym przeznaczonym do podłączenia drukarki. Posiada osiem linii danych i szereg sygnałów sterujących i statusowych. Sygnały mają poziom TTL. Zasięg ok.. 10m przy szybkości transmisji ok. 128kB/s. Od strony komputera ma postać gniazda DB25(CANON) a od strony drukarki złącze AMP, 36-stykowe. Może pracować w 5 trybach: 1. Compatibility Mode – zwykły
jednokierunkowy port równoległy 2. Nibble Mode – mozliwość 4-bitowej
transmisji zwrotnej wykorzystującej linie statusowe portu
3. Byte Mode transmisja dwukierunkowa 4. EPP Mode – dodatkowa kompresja danych

INTERFEJS USB I JEGO WŁAŚCWOŚCI
Rys. Struktura interfejsu USB
Interfejs USB wykorzystuje tylko 4 przewody. Dwa z nich +D i –D, są skręcone i służą do przesyłania danych. Pozostałe dwa to przewód zasilania +5V i masa. Pobór prądu <0,5 A.
Wykorzystano tu linię symetryczną do przesyłania danych, adresów i sygnałów sterujących. Posiada strukturę sieci pozwalającą na podłączenie do 127 urządzeń
Specyfikacja interfejsu USB 1.0 przewidywała dwie szybkości transmisji:
1. Niską – do 1,5 Mb/s z przewodem o długości do 3m
2. Pełną – 12Mb/s z przewodem ekranowanym o długości do 5m
USB 2.0 pozwala odznacza się znacznie lepszym transferem, nawet do 480Mb/s
W 2007 r przedstawiono specyfikację USB 3.0. Charakteryzuje się ona znacznie większym transferem aniżeli poprzednie wersje. Max szybkość wynosi ok. 4,8 Gb/s – tzw. Super speed.
Rys. Linie USB
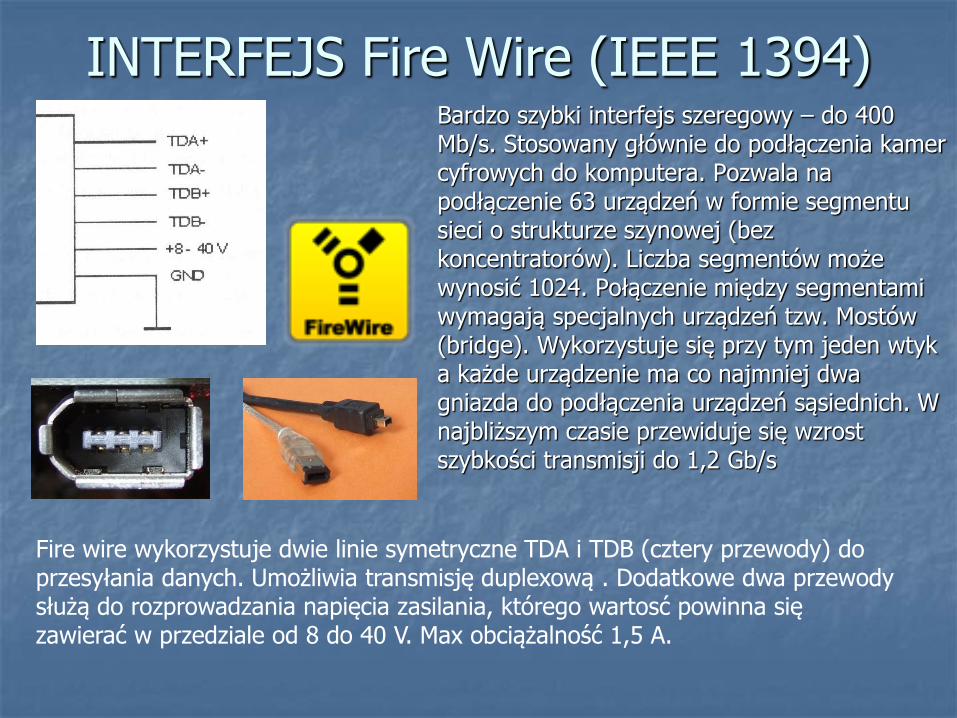
Bardzo szybki interfejs szeregowy – do 400 Mb/s. Stosowany głównie do podłączenia kamer cyfrowych do komputera. Pozwala na podłączenie 63 urządzeń w formie segmentu sieci o strukturze szynowej (bez koncentratorów). Liczba segmentów może wynosić 1024. Połączenie między segmentami wymagają specjalnych urządzeń tzw. Mostów (bridge). Wykorzystuje się przy tym jeden wtyk a każde urządzenie ma co najmniej dwa gniazda do podłączenia urządzeń sąsiednich. W najbliższym czasie przewiduje się wzrost szybkości transmisji do 1,2 Gb/s
INTERFEJS Fire Wire (IEEE 1394)
Fire wire wykorzystuje dwie linie symetryczne TDA i TDB (cztery przewody) do przesyłania danych. Umożliwia transmisję duplexową . Dodatkowe dwa przewody służą do rozprowadzania napięcia zasilania, którego wartosć powinna się zawierać w przedziale od 8 do 40 V. Max obciążalność 1,5 A.

INTERFEJS IEC 625 (GPIB))
Interfejs równoległy ogólnego przeznaczenia GPIB

Jest to interfejs wprowadzony przez firmę Philips do sterowania układami sprzętu
elektronicznego powszechnego użytku (radia, telewizory itp.). Interfejs ten znalazł
jednak zastosowanie również w sprzęcie komputerowym. Jest to interfejs szeregowy,
dwukierunkowy o strukturze szynowej. Szybkość transmisji osiąga 100 kb/s przy
częstotliwości zegara 100 kHz. Wersja Fast umożliwia maksymalną szybkość transmisji
400 kb/s. Pozwala na łączenie urządzeń sterujących (mikrokontrolerów) oraz urządzeń
wykonawczych. Urządzenie wymuszające transmisje wystawia także sygnał zegarowy i
nazywane jest Master. Urządzenie podrzędne nazywane jest Slave.
lnterfejs l2C
Linia SDA służy do przekazywania danych i adresów urządzeń. Linia SCL jest linią sygnału zegarowego. Poziomy sygnałów to poziomy TTL. Wyjścia urządzeń dołączonych do interfejsu są wyjściami typu otwarty kolektor lub otwarty dren. Wymaga to podłączenia rezystorów podciągających R l i R2 (kilka k?). Suma liczby układów zarządzających (master) i podporządkowanych (slave) nie może przekroczyć 128. Ograniczeniem jest sumaryczna pojemność magistrali - maksymalnie 400 pF i maksymalna jej długość - do 4 m.

lnterfejs l2C
Każdy układ posiada adres 7-bitowy i może być nadajnikiem lub odbiornikiem
danych. Stosowana procedura arbitrażu zapobiega utracie informacji w wyniku
próby dostępu do magistrali więcej niż jednego układu zarządzającego. Dane
przesyłane są w bajtach. Możliwe jest przesyłanie danych 16-bitowych. Pierwszy
bajt zawiera adres układu podporządkowanego (7 bitów). Ósmy bit określa kierunek
transmisji. Poprawny odbiór każdego bajtu jest potwierdzany przez odbiornik. Kiedy
magistrala nie jest używana, napięcia, na liniach są zbliżone do +5 V.
Podczas transmisji dane na szynie SDA muszą być stabilne w czasie
wysokiego poziomu sygnału zegarowego. Zmiana danej może następować przy
niskim poziomie sygnału zegarowego.

lnterfejs l2C
Rozpoczęcie transmisji jest sygnalizowane tzw.
warunkiem startu. Poziom sygnału SDA zmienia
się z wysokiego na niski podczas wysokiego
poziomu sygnału SCL. Koniec transmisji
określony jest warunkiem stopu jako zmiana
sygnału SDA z niskiego na wysoki podczas
wysokiego poziomu sygnału SCL. Wymaga to
sprawdzania wartości sygnału danych na
początku i końcu wysokiego stanu linii
zegarowej.
Potwierdzenie prawidłowego odbioru danej następuje przez wystawienie poziomu niskiego na linii danych przez odbiornik podczas dziewiątego impulsu (wysokiego poziomu) sygnału zegarowego.
Interfejs ten jest wykorzystywany do sterowania urządzeń za pomocą mikrokontrolera. Czasami nazywany jest interfejsem 2-przewodowym. Mniejsze znaczenie mają dwa interfejsy 3-przewodowe. Jeden o nazwie Microwire, a drugi SPI. Posiadają oddzielne linie dla danych odbieranych i wysyłanych.

Magistrala 1-Wire Super oszczędna magistrala 1-przewodowa powstała w firmie Dallas (która niedawno została wchłonięta przez firmę Maxim). Magistrala ta przeznaczona jest do dwukierunkowego przesyłania informacji między układem nadrzędnym Master i układami podrzędnymi Slave. W roli układu Master występuje najczęściej odpowiednio zaprogramowany mikrokontroler. Każde urządzenie dołączone do magistrali posiada wyjście typu "otwarty dren". Dlatego linia danych wyposażona jest w rezystor podciągający (5kΩ). Magistrala pełni rolę bramki AND na drucie. Szybkość transmisji osiąga 16,3kb/s. W trybie "przesterowania" (Overdrive) polegającym na skróceniu cykli czasowych można uzyskać 142kb/s. Zasięg przy rezystorze 1kΩ i linii skręcanej osiąga 200m.

Magistrala 1-Wire Biorąc pod uwagę tzw. przewód powrotny - masę, do realizacji tego interfejsu potrzebne są dwa przewody. Interfejs ten stosowany jest w urządzeniach miniaturowych, gdzie oszczędza się na wszystkim, zwłaszcza na poborze energii. Wykorzystywany jest przez układy identyfikacji, tzw. immobilizery, pamięci EEPROM, termometry, zamki elektroniczne itp. Istnieje specyficzna rodzina układów w formie metalowego guzika nazywana iButton, która wykorzystuje ten interfejs. Układy podłączone do magistrali zwykle zasilane są bezpośrednio z niej, nie posiadają odrębnych źródeł zasilania. Ulubionym stanem dla tej magistrali jest stan bezczynności (idle) podczas którego linia DQ znajduje się w stanie wysokim. Każde wstrzymanie transmisji kończy się przejściem do stanu bezczynności. Wystąpienie stanu niskiego przez czas dłuższy niż 120 μs powoduje wyzerowanie wszystkich układów podłączonych do magistrali. Transmisja danych opiera się na czterech charakterystycznych sekwencjach. Są to: - inicjalizacja (zerowanie i zgłoszenie), - zapis 0, - zapis l, - odczyt bitu.

Magistrala 1-Wire Inicjalizacja przeprowadzana jest przez układ Master, który w tym celu wystawia poziom
niski na czas 480 - 960 (Is. Następnie przechodzi do odbioru, wystawiając poziom wysoki. Oczekuje na zgłoszenie układu Slave. Układ Slave informuje o podłączeniu do magistrali poziomem niskim trwającym 60 - 240 (ls. Dopiero teraz układ master może przejść do wyboru układu Slave i wysyłania lub odbioru informacji. Zapis i odczyt bitów odbywa się w tzw. szczelinie czasowej trwającej 60 - 120 μs i wymuszanej przez Master
poziomem niskim. Poziom niski przez czas trwania szczeliny oznacza 0. Zmiana na poziom wysoki na początku szczeliny odpowiada l.
Skomplikowana jest identyfikacja i wybór urządzeń podłączonych do magistrali. Każde posiada 64-bitową pamięć ROM, gdzie zapisany jest 8-bitowy numer rodziny układów, 48-bitowy niepowtarzalny numer identyfikacyjny i 8 bitów sumy kontrolnej
CRC. Dopiero po przeprowadzeniu identyfikacji uzyskuje się dostęp do funkcji charakterystycznych dla urządzenia. Jeśli podłączony jest tylko jeden układ Slave,
można pominąć procedurę identyfikacji wysłaniem komendy OCCH.

Magistrala 1-Wire Do obsługi pamięci ROM (identyfikacji wykorzystuje się następujące polecenia: Read ROM [33h] - odczyt całej zawartości ROM, możliwy tylko w przypadku podłączenia jednego urządzenia Slave, Match ROM [55h] - poprzedza wysłanie 64-bitowego adresu urządzenia i pozwala na szybki wybór urządzenia (wymagana znajomość adresu), Skip ROM [CCh] - pominięcie identyfikacji, możliwe tylko w przypadku podłączenia jednego urządzenia Slave, Search ROM [FOh] - rozpoczyna proces eliminacji w celu identyfikacji 64-bitowego adresu urządzenia podłączonego do magistrali. Po komendzie Search ROM rozpoczyna się powtarzanie trzech czynności realizowane przez program mikrokontrolera dla każdego z 64 bitów: odczyt bitu, odczyt zanegowanej wartości bitu (obydwa odczyty iloczynu logicznego wyjść wszystkich podłączonych układów) i wysłanie l lub 0. Wysłanie l lub 0 eliminuje (wprowadza w stan bezczynności) układy, które na tej pozycji adresu mają inną wartość. Inne wartości odczytywane są jako 00. Jeśli wszystkie układy na tej pozycji mają wartość l, zostaje odczytana kombinacja 10 i wysłane 1. Jeśli wszystkie mają 0 to zostanie odczytana kombinacja 01 i wysłane 0. W ten sposób są eliminowane (odłączane) układy oprócz jednego, którego adres jednocześnie zostanie wystawiony i zapisany w pamięci mikrokontrolera. Powtarzając instrukcję Search ROM, można znaleźć adresy wszystkich układów podłączonych do magistrali. Magistrala 1-Wire pozwala na realizację sieci komputerowej, która nazywana jest Micro LAN. W tym przypadku niezbędne jest sekwencyjne powtarzanie operacji Search ROM dla wykrycia podłączanych urządzeń.
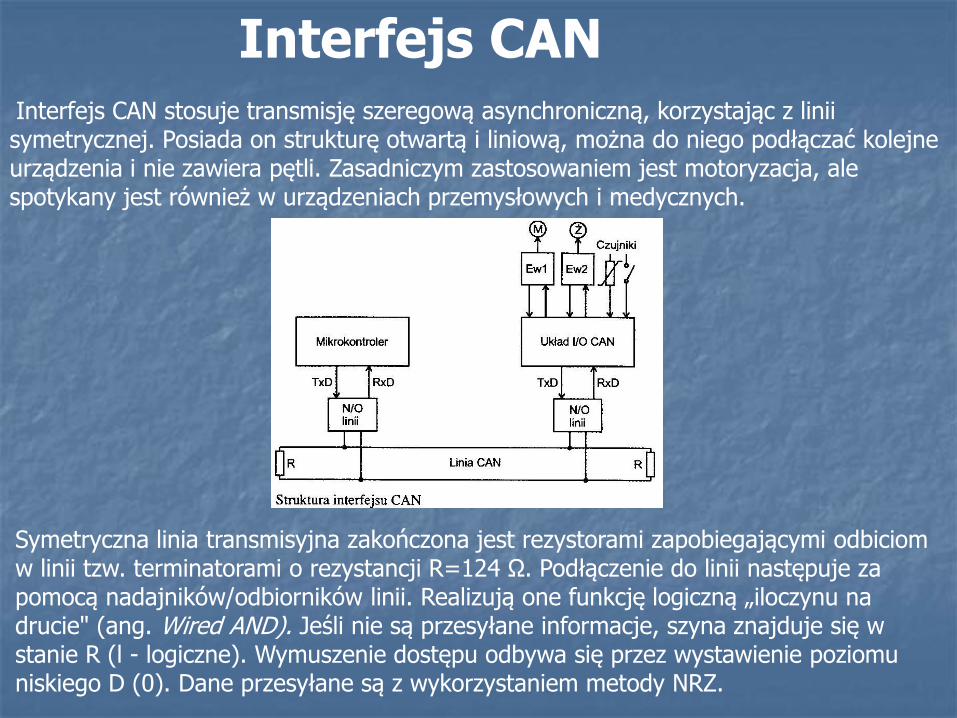
Interfejs CAN Interfejs CAN stosuje transmisję szeregową asynchroniczną, korzystając z linii symetrycznej. Posiada on strukturę otwartą i liniową, można do niego podłączać kolejne urządzenia i nie zawiera pętli. Zasadniczym zastosowaniem jest motoryzacja, ale spotykany jest również w urządzeniach przemysłowych i medycznych.
Symetryczna linia transmisyjna zakończona jest rezystorami zapobiegającymi odbiciom w linii tzw. terminatorami o rezystancji R=124 Ω. Podłączenie do linii następuje za pomocą nadajników/odbiorników linii. Realizują one funkcję logiczną „iloczynu na drucie" (ang. Wired AND). Jeśli nie są przesyłane informacje, szyna znajduje się w stanie R (l - logiczne). Wymuszenie dostępu odbywa się przez wystawienie poziomu niskiego D (0). Dane przesyłane są z wykorzystaniem metody NRZ.

Interfejs CAN
Maksymalna szybkość transmisji wynosi l Mb/s przy długości linii do 40 m.
Stosowane identyfikatory 11-bitowe pozwalają na podłączenie 2048 urządzeń.
Najnowsza wersja, tzw. rozszerzony CAN wykorzystuje identyfikator 29-bitowy i
pozwala na zaadresowanie 536 milionów urządzeń. Rozbudowany system
zabezpieczeń przed błędami transmisji sprawia, że jest on jednym z najbardziej
niezawodnych sposobów przesyłania danych w systemach z mikrokontrolerami.

Interfejs bezprzewodowy Bluetooth Urządzenia łączone za jego pomocą przypominają telefon komórkowy. Posiadają antenę A wysyłającą lub odbierającą fale radiowe, układ transceivera (nadajnik-odbiornik) wielkiej częstotliwości RF, układ kodujący i dekodujący sygnał oraz zapewniający połączenie z mikrokomputerem czy urządzeniem zewnętrznym, zwany procesorem pasma podstawowego BBP (Base Band Processor). Strukturę części transmisyjnej interfejsu pokazuje rysunek poniżej: Tor ten jest łączony za pomocą typowego interfejsu (INT), np. USB z mikrokomputerem czy urządzeniem zewnętrznym. Rozwiązania techniczne interfejsu zmierzają w kierunku minimalizacji kosztów dla uzyskania jego powszechnego stosowania. Tor radiowy (RF) wykorzystuje do transmisji nielicencjonowaną częstotliwość 2,4 GHz. Pasmo transmisyjne obejmuje 79 kanałów odległych od siebie co l MHz (od 2,402 GHz do 2,480 GHz). Stosowana jest technika skokowej automatycznej zmiany częstotliwości. Przy nawiązywaniu łączności wybierane są wolne kanały z szybkością 1600 skoków/s. Bardzo mała moc wyjściowa (l mW) umożliwia uzyskanie zasięgu do 10 m. Po zwiększeniu mocy wyjściowej do 100 mW zasięg może osiągnąć 100 m.

Interfejs IrDA (ang. Infrared Data Association)
Jest to grupa (powstała w 1993 r.), skupiająca kilkudziesięciu producentów sprzętu komputerowego. Celem jej powstania było stworzenie i kontrolowanie międzynarodowych standardów transmisji danych w zakresie podczerwieni. Grupa ta opracowała firmowy system bezprzewodowej transmisji danych cyfrowych z wykorzystaniem promieniowania podczerwonego. Jego elementy przeznaczone są przede wszystkim do tworzenia sieci tymczasowych, w których znajdują się komputery przenośne. Standard ten charakteryzuje się: - prostą i tanią implementacją, - małym poborem mocy, - połączeniami bezpośrednimi typu punkt-punkt, - wydajnym i pewnym transferem danych. Podstawowe usługi, wymienione w opisie systemu obejmują: - przesył plików między komputerami, - drukowanie, - dostęp do zasobów sieci przewodowej, - transmisja danych i mowy między komputerem a telefonem komórkowym, - sterowanie urządzeniami telekomunikacyjnymi. Technologia IrDA wykorzystuje skupioną wiązkę światła w paśmie podczerwonym. Warunkiem zastosowania IrDA jest posiadanie co najmniej dwóch urządzeń, pomiędzy którymi nie ma niczego, co by utrudniało ich wzajemną widoczność.

Interfejs IrDA (ang. Infrared Data Association)
Parametry: 1.Długość fali 850 – 900 nm 2. Typ połączenia punkt-punkt 3. Liczba kanałów Jeden – do transmisji danych 4. Prędkość transmisji 9,6 kb/s, opcjonalnie: 19,2; 38,4 ; 57,6; 115,2kb/s (IrDA 1.0 lub 1.1) oraz 0,1576 Mb/s, 1,152 Mb/s, 4 Mb/s (IrDA 1.1) 5. Zasięg i typ transmisji - do 11 m; urządzenia muszą się "widzieć"; kąt wiązki transmisji 30° 6. Maksymalna liczba aktywnych urządzeń21 połączeń 7. Multipleksacja - przestrzenna 8. Bezpieczeństwo na poziomie łącza 9. Emulacja portu - szeregowy + równoległy
Standard łączności oparty na przesyłaniu danych za pomocą światła podczerwonego (IrDA), staje się obecnie szeroko dostępnym na komputerach osobistych oraz innych urządzeniach zewnętrznych, jest to niedroga oraz efektywna łączność między urządzeniami różnego typu. Standard IrDA rozwijał się bardzo szybko (w porównywaniu do innych standardów), a informacja dotycząca protokołów Irda znana jest już i stosowana na całym świecie. Obecnie specyfikacja IrDA uległa przyśpieszeniu ze względu przystosowanie jej do standardu ISO. Komunikując się przy pomocy protokołu mamy do czynienia z wieloma zagadnieniami, powszechnie wykorzystuje się z podstawowe warstwy protokołu. Jeśli jednak chcemy zapewnić bezpieczeństwo oraz elastyczność w przesyłaniu danych korzysta się także z innych warstw.

Interfejsy dysków twardych
IDE ATA
IDE i ATA, (Integrated Drive Electronic (IDE)
Rodzaj interfejsu, w którym całość logiki sterownika dyskowego przeniesiono do
konstrukcji dysku, ATA zaś to AT Attachment – relacja interfejsu do konstrukcji AT.
Ostatnia wersja - ATA-4 (Ultra ATA) pozwalała na transfer do 33 MB/s
Został wyparty przez SATA

Interfejsy dysków twardych
SATA SATA (ang. Serial Advanced Technology Attachment) - szeregowa magistrala Serial ATA jest
następcą równoległej magistrali ATA. Do transmisji przewidziane są cieńsze i bardziej elastyczne
kable z mniejszą ilością styków, co pozwala na stosowanie mniejszych złączy na płycie głównej w
porównaniu do równoległej magistrali ATA. Interfejs przeznaczony do komunikacji z
przepływnością 150 MB/s, umożliwiający szeregową transmisję danych między kontrolerem a
dyskiem komputera z przepustowością ok. 1,5 Gb/s.
Dodatkowo budowa kabli upraszcza instalację i prowadzenie ich w obudowie, co poprawia
warunki chłodzenia wewnątrz obudowy.
Obecnie w sprzedaży dostępne są dyski z kontrolerem wyposażonym w magistralę SATA-2, która
umożliwia dwukrotnie większy transfer niż jej poprzednik. Planowana jest też trzecia wersja tego
interfejsu, która ma umożliwić przesyłanie danych z prędkością 600 MB/s.
Wtyczka danych SATA Wtyczka zasilania

Długość przewodu SATA może dochodzić do 1 metra. Opracowano trzy generacje interfejsu SATA. Pierwsza, najstarsza wersja SATA I umożliwia szeregową transmisję danych z maksymalną przepustowością 1,5 Gbit/s (ok. 180 MB/s). Druga generacja (SATA II) oferuje przepustowość 3,0 Gbit/s (ok. 375 MB/s). Trzecia generacja (SATA 3), zaprezentowana oficjalnie po raz pierwszy 27 maja 2009 roku udostępnia przepustowość 6,0 Gbit/s (ok. 750 MB/s).
Interfejsy dysków twardych
SATA
Porównanie wtyczek SATA i eSATA
Złącze eSATA (external SATA) to zewnętrzny port SATA 3 Gbit/s, przeznaczony do podłączania pamięci masowych zewnętrznych. Główną ideą eSATA jest zapewnienie identycznej prędkości przesyłania danych w urządzeniach zewnętrznych, jaka osiągalna jest dla napędów wewnętrznych. Osiągane przez ten standard prędkości nie odbiegają od tych oferowanych przez SATA II – maksymalne przepustowości to 150 MB/s oraz 300 MB/s. Jest to prędkość znacznie większa niż maksymalna prędkość przesyłania danych przez port USB 2.0 (480 Mbit/s czyli 57 MB/s), a porównywalna do prędkości złączy USB 3.0. Maksymalna długość kabla eSATA może wynosić 2 metry
xSATA to rozwinięcie standardu eSATA. Jest to zewnętrzne połączenie SATA o długości do 8 metrów przy użyciu ekranowanych kabli i złącz. mSATA (mini-SATA) to złącza SATA. W związku z wciąż postępującą miniaturyzacją pamięci masowych oraz elektroniki w komputerach mobilnych, SATA-IO opracowała nową generację złącza do zastosowań w takich urządzeniach jak netbooki oraz dyski SSD 1.8". Maksymalna przepustowość mSATA wynosi 3 Gbit/s.

Interfejsy dysków twardych
SCSI
Standard SCSI umożliwia połączenie w łańcuch do jednego kontrolera 7, a w
przypadku wersji rozszerzonej WIDE SCSI nawet do 16 urządzeń (łącznie z
kontrolerem). Dla porównania standard EIDE obsługuje tylko 4 urządzenia dzięki
czemu SCSI jest szczególnie przydatny w przypadku dysków twardych, gdyż
umożliwia jednoczesne połączenie więcej niż 4 takich urządzeń. SCSI oferuje również
szybszy transfer danych między urządzeniami, dochodzący do 80 MB/s (EIDE - 66
MB/s)

Odmiany SCSI SCSI-1: pierwsza wersja standardu. Pozwalała na transfer z prędkością 5 MB/s na odległość 6 m, SCSI-2: kolejna wersja standardu. Składa się z dwóch wariantów, zwiększających transfer do 10 lub 20 MB/s (odpowiednio Fast SCSI i Wide SCSI). Maksymalna odległość to około 3 metry, SCSI-3: znany jako Ultra SCSI, prędkość transferu 20-40 MB/s, teoretycznie maksymalna odległość zostaje nadal 3 metry, Ultra2 SCSI: wprowadzono technologię Low Voltage Differential, pozwalającą na zwiększenia maksymalnej odległości do ~12 m. Prędkość transferu 40-80 MB/s, Ultra3 SCSI (Ultra160 SCSI): maksymalny transfer 160 MB/s, dodano funkcje wspomagające wykrywanie i usuwanie przekłamań. Ultra4 SCSI (Ultra320 SCSI): maksymalny transfer 320 MB/s. Ultra 640 SCSI : maksymalny transfer 640 MB/s.
Interfejsy dysków twardych
SCSI

Interfejsy dysków twardych
RAID
RAID (ang. Redundant Array of Independent Disks, Nadmiarowa
macierz niezależnych dysków) - polega na współpracy dwóch
lub więcej dysków twardych w taki sposób, aby zapewnić
dodatkowe możliwości, nieosiągalne przy użyciu jednego dysku.
RAID używa się w następujących celach:
- zwiększenie niezawodności (odporność na awarie)
- przyspieszenie transmisji danych
- powiększenie przestrzeni dostępnej jako jedna całość.

Poziom RAID N = liczba dysków Dostępna przestrzeń Odporność na awarię
RAID 0 2 N 0
RAID 1 2+ 1 N - 1
RAID 2 3+ N - log N 1
RAID 3 3+ N - 1 1
RAID 5 3+ N - 1 1
RAID 6 4+ N - 2 min. 2
RAID 1+0 4 + N * 2 N /2 min. 1
RAID 0+1 4 + N * 2 N /2 1
Standardowe poziomy RAID
RAID

Magistrale I/O
Od czasu wprowadzenia na rynek pierwszego komputera PC opracowano wiele rodzajów magistral I/O. Wynikało to z oczywistego faktu w celu uzyskania wyższej wydajności systemu konieczne jest stosowanie szybszych magistral I/O. Potrzeba zwiększania wydajności jest związana z trzema podstawowymi czynnikami: • szybszym procesorem, • rosnącymi wymaganiami aplikacji, • większymi wymaganiami multimediów. Każdy z wymienionych wymaga zastosowania jak najszybszej magistrali I/O. Jednym z głównych powodów niewielkiej szybkości obecnie stosowanych magistral I/O jest wymóg zachowania kompatybilności, która wiąże przemysł komputerowy z przeszłością. Jednym z czynników, który zdecydował o sukcesie komputerów, osobistych była ich standaryzacja. To ona spowodowała, że tysiące niezależnych firm opracowało swoje karty I/O, z których każda była kompatybilna z oryginalną specyfikacją magistral zastosowanych w komputerach PC. Jeśli zaprojektowano nowy typ magistrali systemowej o dużej wydajności, wtedy przeważnie musiała ona być kompatybilna ze starszymi rozwiązaniami, co wynikało z konieczności zagwarantowania możliwości instalacji wcześniej wyprodukowanych kart. Podstawowa różnica pomiędzy poszczególnymi magistralami wynika głównie z ilości jednocześnie przesyłanych danych, jak również z szybkości działania.

Magistrala ISA
8-bitowa magistrala wykonana zgodnie z architekturą ISA (ang. Industry Standard Architecture) została zastosowana w 1981 r. w oryginalnym komputerze IBM PC. W 1984 r. w komputerze IBM PC/AT pojawiła się jej poszerzona, 16-bitowa wersja. ISA jest podstawową architekturą wykorzystywaną w nowoczesnych komputerach osobistych i w dalszym ciągu stanowi element składowy większości produkowanych systemów. Jeśli za kryterium przyjmiemy ilość danych jednocześnie przesyłanych przez magistralę ISA, można wtedy wyróżnić jej dwie wersje, 8-bitową, i nowszą, 16-bitową. Oryginalna 8-bitowa magistrala ISA zastosowana w komputerach PC i XT była taktowana zegarem 4,77 MHz, natomiast wersja 16-bitowa użyta w systemie AT pracowała z częstotliwością 6 MHz, a później 8 MHz. W późniejszym okresie ustanowiono przemysłowy standard magistrali ISA (8/16-bitowej), w którym ustalono, że, ze względu na zachowanie kompatybilności wstecz, maksymalna jej częstotliwość może wynieść 8,33 MHz. W przypadku niektórych systemów istniała możliwość taktowania magistrali ISA zegarem o wyższej częstotliwości, ale wtedy nie wszystkie karty działały poprawnie. Przesyłanie danych przez magistralę ISA wymaga od dwóch do ośmiu cykli. Wynika z tego, że maksymalny teoretyczny transfer danych przesyłanych przez magistralę ISA wynosi około 8 MB/s.

8-bitowa Magistrala ISA
Architektura 8-bitowej magistrali została zastosowana w oryginalnym komputerze IBM PC. a następnie przez kilka lat była obecna w projektowanych systemach. Karta wyposażona w 62 styki położone wzdłuż jej dolnej krawędzi jest instalowana w gnieździe płyty głównej dysponującym również 62 stykami. Patrząc od strony zastosowanej elektroniki, gniazdo jest wyposażone w 8 linii danych i 20 linii adresowych, które pozwalają na obsłużenie pamięci RAM o pojemności 1 MB. Chociaż budowa magistrali jest dość prosta, to jednak firma IBM czekała aż do 1987 r. na to, aby opublikować pełną specyfikację dotyczącą ustawień linii danych i adresów. Z tego też powodu, za czasów pierwszych systemów kompatybilnych z komputerem IBM PC producenci musieli się sporo natrudzić, aby określić, w jaki sposób wykonać karty instalowane w gniazdach magistrali. Ostatecznie z problemem się uporano, dzięki czemu systemy kompatybilne z IBM PC zostały powszechnie zaakceptowane jako standard przemysłowy. W efekcie producenci dysponowali większą ilością czasu i mieli motywację do projektowania kolejnych kart poprawnie współpracujących z magistralą.

16-bitowa Magistrala ISA
Firma IBM wraz z wprowadzeniem na rynek w 1984 r. komputera AT wyposażonego w procesor 286 wywołała spore zamieszanie w świecie komputerów PC. Procesor 286 dysponował 16-bitową magistralą danych, co oznaczało, że teraz komunikacja pomiędzy procesorem, płytą główną jak również pamięcią mogła się odbywać przez magistralę o szerokości 16 bitów zamiast ośmiobitowej. W przypadku gdy procesor 286 był też zainstalowany na płycie głównej wyposażonej tylko w 8-bitową magistralę I/O, to występował ogromny spadek wydajności dowolnej karty lub innego urządzenia współpracującego z magistralą. W tamtym okresie firma IBM, zamiast opracowywać nową wersję magistrali I/O, stworzyła system, który był kompatybilny zarówno z 8-, jak i 16-bitowymi kartami. Ponadto pozostawiono dotychczas stosowane 8-bitowe gniazda i dodano opcjonalne 16-bitowe złącze rozszerzające. Po raz pierwszy 16-bitowa magistrala ISA pojawiła się w sierpniu 1984 r. w komputerze PC/AT, dlatego też jest ona określana jako magistrala AT (ang. AT-bus). Złącze rozszerzające zastosowane w każdym 16-bitowym gnieździe rozszerzeń dysponuje 36 dodatkowymi końcówkami (w sumie 96 końcówek) służącymi do przenoszenia specjalnych sygnałów związanych z szerszą magistralą danych. Ponadto dokonano modyfikacji dwóch końcówek znajdujących się w 8-bitowej części złącza, jednak nie były one na tyle poważne, aby zmienić sposób działania kart 8-bitowych.

Magistrale 32-bitowe
W momencie wprowadzenia do sprzedaży procesorów 32-bitowych nie istniały jeszcze standardy związane z magistralami 32-bitowymi. Zanim zaprezentowano specyfikacje magistrali MCA i EISA, niektóre firmy rozpoczęły projektowanie własnych 32-bitowych magistral, które oparte były na magistrali ISA. Na szczęście tego typu niestandardowych magistral było niewiele i pojawiały się w dużych odstępach czasowych. Dodatkowa część poszerzonej magistrali zazwyczaj była wykorzystywana przez niestandardowe karty graficzne lub rozszerzające dostępną pamięć. Ponieważ tego typu rozwiązania ze względu na swoją niestandardowość nie są udostępniane, nie jest dostępna ich specyfikacja i schemat rozmieszczenia końcówek.

Magistrala MicroChannel i EISA
Wprowadzenie do sprzedaży procesorów 32-bitowych oznaczało, że magistrala ISA nie wykorzysta możliwości tkwiących w kolejnej generacji procesorów. Procesor 386DX był w stanie jednocześnie przesyłać 32 bity danych, ale magistrala ISA była ograniczona tylko do 16 bitów. Zamiast ponownie rozszerzać magistralę ISA, firma IBM postanowiła opracować projekt nowej magistrali. Rezultatem prac była magistrala MCA. Magistrala MCA (ang. Micro Channel Architecture) jest zupełnie inna niż magistrala ISA i od strony technicznej przewyższają pod każdym względem. Firma IBM nie tylko dążyła do zastąpienia starszego standardu ISA, ale również chciała wymusić na innych producentach zakupienie licencji na określone elementy nowej technologii. Problemy z udzielaniem licencji i kontrolą ich przestrzegania doprowadziły ostatecznie do opracowania konkurencyjnej magistrali EISA, która zmniejszyła szansę odniesienia sukcesu przez magistralę MCA. Systemy wyposażone w magistralę MCA charakteryzowały się jeszcze większą prostotą. Oferowały funkcję Plug and Play, zanim opracowano oficjalną jej specyfikację. Magistrala MCA nie wymagała zastosowania na płycie głównej lub na kartach żadnych zworek i przełączników.

Magistrala VESA Magistrala VESA (ang. Video Electronics Standards Association) Local Bus okazała się najpopularniejszym typem magistrali lokalnej stosowanym w okresie od sierpnia 1992 r. do 1994 r. Standard VL-Bus został opracowany przez komitet VESA, organizację non-profit założoną przez firmę NEC. Początkowo nowa magistrala lokalna była opracowywana z myślą o współpracy z kartami graficznymi. W tym okresie zwiększenie wydajności podsystemu graficznego dla firmy NEC było sprawą najważniejszą, mającą pomóc w osiągnięciu lepszych wyników sprzedaży wysokiej jakości monitorów i komputerów PC przez nią produkowanych. Około roku 1991 wydajność kart graficznych w większości systemów PC okazała się prawdziwym "wąskim gardłem". Magistrala VL-Bus pozwala jednocześnie przesłać 32 bity danych, dzięki czemu możliwa jest komunikacja pomiędzy procesorem a kompatybilnym podsystemem graficznym lub dyskiem twardym odbywająca się przy wykorzystaniu pełnej 32-bitowej szyny danych procesora 486. Magistrala VL-Bus oferuje maksymalną przepustowość wynosząca 133 MB/s. Jej projekt był wyjątkowo prosty. Polegał na przeniesieniu schematu końcówek procesora 486 do gniazda rozszerzeń magistrali. Wynika z tego, że magistrala VL-Bus tak naprawdę jest magistralą procesora 486. Dzięki temu, koszt jej wykonania był niewielki. Nie były wymagane żadne dodatkowe chipsety lub interfejsy. Producent płyt głównych klasy 486 mógł w prosty i tani sposób dodawać do nich gniazda magistrali VL-Bus. Wraz z wprowadzeniem różnych kart wyposażonych w układy elektroniczne wykorzystujących kondensatory i w efekcie wprowadzające pojemności do obwodów zaczęły się pojawiać zakłócenia związane z ich taktowaniem. Ze względu na to, że magistrala VL-Bus pracowała z częstotliwością magistrali procesora, pojawienie się kolejnego szybszego procesora wiązało się z przyspieszeniem jego magistrali, co sprawiało, że utrzymanie pełnej kompatybilności obu magistral było zadaniem trudnym do wykonania. Chociaż magistrala VL-Bus mogła być przystosowana do współpracy z innymi procesorami, takimi jak 386 lub nawet Pentium, to jednak została zaprojektowana z myślą o układzie 486 i z nim działała najlepiej. Wkrótce po wprowadzeniu na rynek nowej magistrali PCI, pomimo niskiej ceny magistrala VL-Bus bardzo szybko popadła w niełaskę. Nigdy nie została zastosowana w systemach opartych na procesorze Pentium, natomiast jej dalszy rozwój był niewielki lub nawet żaden.

Magistrala PCI Na początku roku 1992 firma Intel wyszła z inicjatywą utworzenia kolejnej organizacji zrzeszającej przedstawicieli przemysłu komputerowego. Nowa organizacja miała podobne założenia jak komitet VESA, ale dotyczyły one magistrali PCI. Powstanie organizacji PCI-SIG (ang. PCI Special Interest Group) wynikało z potrzeby opracowania nowej magistrali, która będzie pozbawiona wad swoich poprzedników ISA i EISA. Odkąd w czerwcu 1992 r. pojawiła się specyfikacja standardu PCI w wersji 1.0, opracowano jej kilka aktualizacji. Umieszczenie kolejnej magistrali PCI pomiędzy procesorem a magistralą I/O wpłynęło na zmianę standardowej architektury magistral systemowych komputera PC, która wynikała z zastosowania mostków. Zamiast podłączać nową magistralę, charakteryzującą się, podobnie jak magistrala VL-Bus, specyficznymi wartościami taktowania, bezpośrednio do magistrali procesora, został opracowany zestaw nowych kontrolerów rozszerzających możliwości magistrali PCI. Magistrala PCI pomija zwykłą magistralę I/O, natomiast w celu zwiększenia własnej częstotliwości pracy i pełnego wykorzystania możliwości magistrali danych procesora komunikuje się z magistralą systemową. Systemy wyposażone w magistralę PCI pojawiły się w połowie 1993 r. i od tego czasu stanowią jeden z filarów komputera osobistego. Zazwyczaj magistrala PCI taktowana zegarem 33 MHz przesyła jednocześnie 32 bity danych. Oferuje przepustowość wynoszącą 133 MB/s. Aktualnie 64-bitowa wersja magistrali PCI taktowana zegarem 66 lub 133 MHz jest stosowana tylko w serwerach lub bardziej zaawansowanych stacjach roboczych. Magistrala PCI charakteryzująca się zwiększoną wydajnością, może pracować z szybkością oferowaną przez magistralę procesora, ale nie oznacza to, że ją zastąpi. Obecność obu magistral pozwala przykładowo na to, aby procesor w czasie, gdy magistrala PCI jest zajęta przesyłaniem danych pomiędzy innymi komponentami systemu, mógł przetwarzać dane znajdujące się w zewnętrznej pamięci podręcznej. Jest to jedna z podstawowych zalet wynikających z zastosowania magistrali PCI. W specyfikacji standardu PCI określono trzy różne konfiguracje gniazd, z których każde zostało przewidziane do zastosowania w systemie dysponującym określonymi parametrami zasilania. W każdym wariancie uwzględniono zarówno wersję 32-bitową, jak i dłuższą 64-bitową. Pierwszy wariant konfiguracji dotyczy gniazda zasilanego napięciem 5 V przeznaczonym dla komputerów stacjonarnych, drugi gniazda zasilanego napięciem 3,3 V i stosowanym w komputerach przenośnych, natomiast trzeci ma charakter uniwersalny przystosowany do współpracy z systemami obu typów. Gniazda PCI w wersji 64-bitowej zasilanej napięciem 5 V oraz w wersji uniwersalnej spotykane są głównie na płytach głównych serwerów. Kolejna znacząca korzyść wynikająca z zastosowania magistrali PCI jest związana z tym, że posłużyła za wzorzec przy opracowywaniu specyfikacji Intel PnP. W związku z tym, karty PCI są pozbawione zworek i przełączników, a ich konfiguracja jest wykonywana za pomocą oprogramowania. Prawdziwe systemy PnP potrafią dokonać automatycznej konfiguracji zainstalowanych kart. W przypadku komputerów pozbawionych funkcji PnP i wyposażonych w karty ISA, w celu ustawienia ich parametrów konieczne jest zastosowanie programu, który zazwyczaj stanowi część narzędzia konfiguracyjnego CMOS. Pod koniec roku 1995, większość systemów kompatybilnych z komputerem IBM PC była wyposażona w BIOS PnP pozwalający na automatyczną konfiguracją urządzeń PnP.
Magistrala PCI
W specyfikacji standardu PCI określono trzy różne konfiguracje gniazd, z których każde zostało
przewidziane do zastosowania w systemie dysponującym określonymi parametrami zasilania. W każdym
wariancie uwzględniono zarówno wersję 32-bitową, jak i dłuższą 64-bitową. Pierwszy wariant konfiguracji
dotyczy gniazda zasilanego napięciem 5 V przeznaczonym dla komputerów stacjonarnych, drugi gniazda
zasilanego napięciem 3,3 V i stosowanym w komputerach przenośnych, natomiast trzeci ma charakter
uniwersalny przystosowany do współpracy z systemami obu typów. Gniazda PCI w wersji 64-bitowej
zasilanej napięciem 5 V oraz w wersji uniwersalnej spotykane są głównie na płytach głównych serwerów.
Kolejna znacząca korzyść wynikająca z zastosowania magistrali PCI jest związana z tym, że posłużyła za
wzorzec przy opracowywaniu specyfikacji Intel PnP. W związku z tym, karty PCI są pozbawione zworek i
przełączników, a ich konfiguracja jest wykonywana za pomocą oprogramowania. Prawdziwe systemy PnP
potrafią dokonać automatycznej konfiguracji zainstalowanych kart. W przypadku komputerów
pozbawionych funkcji PnP i wyposażonych w karty ISA, w celu ustawienia ich parametrów konieczne jest
zastosowanie programu, który zazwyczaj stanowi część narzędzia konfiguracyjnego CMOS. Pod koniec roku
1995, większość systemów kompatybilnych z komputerem IBM PC była wyposażona w BIOS PnP
pozwalający na automatyczną konfiguracją urządzeń PnP.

Magistrala AGP
Firma Intel opracowała magistralę AGP jako rozwiązanie przeznaczone do współpracy z bardzo szybkimi kartami graficznymi. Magistrala AGP wzorowana jest na magistrali PCI, ale zawiera kilka dodatków i ulepszeń. Ponadto, pod względem budowy, zastosowanej elektroniki i logicznej architektury jest zupełnie niezależna od magistrali PCI. Gniazdo AGP jest podobne do gniazda PCI, ale jest również wyposażone w dodatkowe końcówki. Poza tym gniazdo AGP inaczej jest usytuowane na płycie głównej. W przeciwieństwie do magistrali PCI, która zawiera kilka gniazd, magistrala AGP dysponuje tylko jednym bardzo wydajnym gniazdem umożliwiającym instalację wyłącznie karty graficznej. Ograniczenie to wynika z faktu, że w systemie może być zainstalowana tylko jedna taka karta. W lipcu 1996 r. firma Intel opracowała pierwszą wersję specyfikacji AGP 1.0, w której określiła magistralę pracującą z częstotliwością 66 MHz i dysponującą trybem x1 i x2. Magistrala AGP była zasilana napięciem 3,3 V. W maju 1998 r. pojawiła się wersja 2.0, w której dodano możliwość pracy magistrali w trybie x4 zasilanej napięciem 1,5 V. W sierpniu 1998 r. została opracowana nowsza wersja specyfikacji AGP Pro 1.0, a następnie dokonano jej modyfikacji i w kwietniu 1999 r. pojawiła się wersja 1.1a. Nowa wersja specyfikacji definiuje trochę dłuższe gniazdo poszerzone o dodatkowe końcówki zasilające umieszczone po obu jej końcach. Ich zadanie polegało na obsłudze większych i szybszych kart AGP zużywających od ponad 25 do maksymalnie 110 W energii. Karty AGP Pro najprawdopodobniej będą wykorzystywane w zaawansowanych stacjach graficznych i raczej nie będą stosowane w typowych komputerach PC. Niezależnie od tego, gniazda AGP Pro są kompatybilne wstecz, co oznacza, że umożliwiają instalację standardowych kart AGP. W związku z tym kilku producentów płyt głównych wyposaża swoje najnowsze modele zamiast gniazd AGP x4 w gniazda AGP Pro. Ze względu na to, że gniazda AGP Pro są dłuższe, instalowane w nich karty AGP x1/x2 mogą być nieprawidłowo zamonkowane, co w efekcie może doprowadzić do ich uszkodzenia. Z tego też powodu niektórzy producenci płyt głównych umieszczają z tylnej strony gniazda AGP Pro osłonę, która powinna być zdejmowana tylko wtedy, gdy zaistnieje potrzeba instalacji karty AGP Pro.

Magistrala AGP Najnowsza wersja 3.0 specyfikacji standardu AGP przeznaczonego dla komputerów PC określa tryb AGP x8. AGP x8 pozwala na osiągnięcie przepustowości 2133 MB/s, która dwukrotnie przewyższa możliwości trybu AGP x4. Specyfikacja AGP x8 po raz pierwszy została oficjalnie zaprezentowana w listopadzie 2000 r. AGP jest bardzo szybką magistralą pracującą z częstotliwością 66 MHz (dokładnie 66,66 MHz), czyli dwukrotnie wyższą niż w przypadku magistrali PCI. Magistrala AGP oferująca tryb podstawowy x1 w ciągu jednego cyklu wykonuje pojedynczą operację przesłania danych. Szerokość magistrali AGP wynosząca 32-bity (4 bajty) i częstotliwość 66 MHz (66 miliony razy na sekundę) pozwala na przesyłanie danych przy przepustowości około 266 MB/s! W oryginalnej wersji specyfikacji standardu AGP określono również tryb x2, który charakteryzuje się tym, że w każdym cyklu są wykonywane dwie operacje przesłania danych, co odpowiada przepustowości 533 MB/s. Początkowo większość pierwszych kart AGP pracowała tylko w trybie x1, ale dość szybko wiele firm rozpoczęło produkcję kart kompatybilnych z trybem x2. W nowszej specyfikacji AGP 2.0 dodano możliwość pracy w trybie x4, który pozwala na przesyłanie danych cztery razy w ciągu cyklu, co odpowiada przepustowości 1066 MB/s. Większość obecnie dostępnych kart AGP obsługuje tryb x4, który jest traktowany jako absolutne minimum. Ponieważ magistrala AGP działa niezależnie od magistrali PCI, dzięki zastosowaniu karty graficznej AGP magistrala PCI jest odciążona i efektywniej obsługuje inne urządzenia wejścia-wyjścia, takie jak kontrolery IDE/ATA lub SCSI, kontrolery USB, karty dźwiękowe itp. Poza wyższą wydajnością kart graficznych, jednym z podstawowych powodów, dla których firma Intel opracowała standard AGP, było utworzenie bezpośredniego szybkiego połączenia karty graficznej z pamięcią RAM, które umożliwiłoby uzyskanie wystarczająco szybkiego i wydajnego podsystemu graficznego charakteryzującego się niższymi kosztami integracji. Magistrala AGP pozwala karcie graficznej na uzyskanie bezpośredniego dostępu do pamięci operacyjnej. Dzięki temu możliwe jest umieszczenie tańszych układów graficznych bezpośrednio na płycie głównej bez konieczności wyposażania ich w dodatkową pamięć RAM lub pozwolenie karcie AGP na korzystanie z podstawowej pamięci operacyjnej. Bardzo wydajne karty graficzne prawdopodobnie w dalszym ciągu będą wyposażane w coraz większą ilość bezpośrednio zintegrowanej pamięci, co ma szczególne znaczenie w przypadku wykorzystywania aplikacji przetwarzających grafikę trójwymiarową wymagających dużej wydajności.
Magistrala PCI E W 2001 r. grupa firm działających pod nazwą Arapahoe Work Group (wśród których główną rolę odgrywała firma Intel) opracowała wstępną wersję specyfikacji bardzo szybkiej magistrali o nazwie kodowej 3GIO (ang. third-generation I/O). W sierpniu 2001 r. organizacja PCI-SIG (ang. PCI Special Interest Group) wyraziła zgodę na przejęcie, nadzorowanie i promowanie specyfikacji dotyczącej architektury 3GIO, która miała zastąpić standard PCI. W kwietniu 2002 r. ukończono wstępną wersję 1.0 specyfikacji 3GIO i zmieniono jej nazwę na PCI Express. . Po przejęciu przez organizację PCI-SIG specyfikacji nowej magistrali PCI Express zostanie ona przygotowana do tego, aby stać się dominującą na rynku architekturą, która będzie w stanie spełnić wymagania związane z coraz większą przepustowością i pozostanie obecna w komputerach PC przez następne 10-15 lat. Do podstawowych właściwości magistrali PCI Express należy zaliczyć: kompatybilność z już istniejącymi wersjami standardu PCI oraz sterownikami urządzeń, możliwość współpracy z różnymi fizycznymi nośnikami danych (miedzianymi, optycznymi) pozwalająca na implementacją przyszłych układów taktujących, jak największa przepustowość (w przeliczeniu na jedną końcówkę) pozwalająca na zastosowanie mniejszych formatów, obniżenie kosztów, uproszczenie budowy kart i ścieżek sygnałowych oraz wyeliminowanie problemów związanych z obniżoną integralnością sygnału, wbudowany układ taktujący, który pozwala na prostszą w porównaniu z taktowaniem synchronicznym modyfikację częstotliwości (szybkości), uproszczone zwiększanie przepustowości (pasma) wraz ze wzrostem częstotliwości i szerokości szyny, zmniejszone opóźnienie mające szczególne znaczenie w przypadku aplikacji przesyłających obraz wideo w trybie strumieniowym wymagających izochronicznego przesyłania danych, funkcje hot-plug i hot-swap, funkcje zarządzania energią.

Magistrala PCI E Magistrala PCI Express jest kolejnym przykładem przejścia z interfejsów równoległych na szeregowe. W przypadku starszych architektur magistral stosowanych w komputerach PC opierano się na interfejsie równoległym, który charakteryzuje się tym, że wiele bitów jest jednocześnie przesyłanych przez kilka równoległych linii. Im więcej jednocześnie przesłanych bitów, tym większa przepustowość magistrali. Taktowanie wszystkich zrównoleglonych sygnałów musi być identyczne, co w przypadku coraz szybszych i dłuższych połączeń staje się coraz trudniejsze do wykonania. Magistrala oparta na interfejsie szeregowym jest o wiele prostsza. Jej działanie polega na jednoczesnym przesłaniu za pomocą jednej linii 1 bitu. Operacja jest wykonywana ze znacznie większą szybkością, która jest niemożliwa do osiągnięcia w przypadku interfejsu równoległego. Dzięki szeregowemu przesyłaniu bitów, taktowanie kolejnych wartości lub długość magistrali nie mają już takiego znaczenia. Poprzez połączenie wielu linii szeregowych możliwe jest uzyskanie przepustowości, która w znaczący sposób przerasta możliwości typowych magistral równoległych.
PCI Express jest bardzo szybką magistralą szeregową, która dodatkowo jest kompatybilna wstecz ze sterownikami aktualnie stosowanej magistrali równoległej PCI. W przypadku magistrali PCI Express dane są przesyłane w trybie pełnego dupleksu (dane przesyłane jednocześnie jednokierunkowymi liniami) dwuparowymi kablami (zasilanymi różnymi napięciami) określanymi mianem torów. Tor oferuje początkową przepustowość 250 MB/s w każdym kierunku. Istnieje możliwość łączenia ze sobą kilku torów w grupy liczące 2, 4, 8, 16 lub 32. Przykładowo, konfiguracja o dużej wydajności licząca 8 torów umożliwia jednoczesne przesłanie w obu kierunkach danych odpowiadających maksymalnej przepustowości 2000 MB/s (w jedną stronę

Magistrala PCI E Aby uzyskać taką przepustowość, wystarczy zaledwie 40 końcówek (32 dla danych i 8 sterujących). Magistrala PCI Express wykorzystuje opracowany przez firmę IBM schemat kodowania 8-bitów na 10-bitów. Umożliwia on przesyłanie sygnałów, które same określają taktowanie, dzięki czemu w przyszłości znacznie łatwiejsze będzie zwiększanie częstotliwości magistrali PCI Express. Początkowa wartość częstotliwości została ustalona na 2,5 GHz, ale w specyfikacji przewidziano jej zwiększenie w przyszłości do maksymalnie 10 GHz, co jest bliskie ograniczeniom technologii opartej na połączeniach wykonanych z miedzi. Wskutek połączenia możliwości zwiększania częstotliwości z użyciem maksymalnie 32 torów, magistrala PCI Express będzie w stanie osiągać w przyszłości przepustowość rzędu 32 GB/s. Magistrala PCI Express jest projektowana jako uzupełnienie i ostatecznie następca aktualnie wykorzystywanych magistral stosowanych w komputerach PC.
Jej użycie nie ograniczy się tylko do roli dodatku do magistrali PCI (i ostatecznie następcy), ale również zastąpi obecnie wykorzystywane interfejsy Intel Hub lub AMD Hypertransport łączące elementy składowe chipsetu płyty głównej. Ponadto magistrala PCI Express zastąpi interfejsy graficzne takie jak AGP i będzie pełnić funkcję magistrali współpracującej z innymi interfejsami takimi jak Serial ATA, USB 2.0, 1394b (FireWire lub iLink) oraz Gigabit Ethernet.