Embed Size (px)
Citation preview

ZÁKLADY VYŠŠÍ A FYZIKÁLNÍ GEODÉZIE
Prof. Ing. Miloš Cimbálník, DrSc. Doc. Ing. Antonín Zeman, DrSc. Prof. Ing. Jan Kostelecký, DrSc.
2008 České vysoké učení technické v Praze

2.9.1 Jednotná evropská nivelační síť ........................................................ 148 2.9.2 EUVN- Evropská výšková referenční síť GPS ..................................... 148
Literatura ke kapitole 2 151
3 ÚVOD DO KOSMICKÉ GEODÉZIE 153 3.1 ELEMENTÁRNÍ PROSTOROVÉ TRANSFORMACE ............................................ 153
3 .1.1 Pravoúhlé a sférické souřadnicové soustavy ......................................................... 153 3.1.2 Transformace pravoúhlých souřadnic ................................................................... 15.3 3.1.3 Transformace pomocí rotačních úhlů eulerovského typu ..................................... 156
3.2 ASTRONOMICKÉ SOUŘADNICOVÉ SOUSTAVY ............................................... 159 3 .2.1 Rovm'kové souřadnicové soustavy ....................................................................... 160 3.2.2 Transformace mezi astronomickými soustavami .................................................. 163
3.3 ZÁKLADNÍ POJMY Z NAUKY O ČASE ................................................................. 165 3.3.1 Juliánské datum, standardní epochy a převody veličin ........................................ 166 3.3.2 Rotační časy ......................................................................................................... 167 3.3.3 Vztah mezi hvězdnými a slunečními časy ........................................................... 169 3.3 .4 Atomový čas ........................................................................................................ 169 3.3.5 Řízený (koordinovaný) čas .................................................................................. 170 3.3.6 Terestrický a barycentrický dynamický čas ......................................................... 172 3.3.7 Čas GPS.: ............................................................................................................. 172
3.4 PRECESE, NUTACE, POHYB PÓLU A VARIACE V ROTACI ZEMĚ ................ 174 3.4.1 Precese a nutace ................................................................................................... 174 3.4.2 Vliv precese na rovm'kové souřadnice Sr2···························································· 175 3.4.3 Vliv nutace na rovm'kové souřadnice ................................................................... 177 3.4.4 Pohyb pólu a variace v rotaci Země ..................................................................... 179
3.4.5 Vliv pohybu pólu na rovníkové souřadnice Srl .. ·················································· 182 3.5 KONVENČNÍ REFERENČNÍ SYSTÉMY ICRS A ITRS ........................................ 183
3.5.1 Deftnice konvečních referenčních systémů ......................................................... 183 3.5.2 Pohyby kontinentů- tektonika desek ................................................................... 184 3.5.3 Transformace mezi ICRF a ITRF ........................................................................ 186 3.5.4 Transformace mezi ICRF a ITRF od roku 2003 .................................................. 187
3.6 PRAKTICKÁ REALIZACE KONVENČNÍHO INERCIÁLNÍHO REFERENČNÍHO SYSTÉMU - SYSTÉM ICRS ............................................................................................ 191
3.6.1 Počátek souřadnicové soustavy ICRS .................................................................. 191 3.6.2 Základní rovina ICRS .......................................................................................... 191 3.6.3 Počátek odečtu rektascenzí ICRS ........................................................................ 192 3.6.4 Realizace ICRF .................................................................................................... 192
3.7 PRAKTICKÁ REALIZACE KONVENČNÍHO TERESTRICKÉHO RÁMCE CTRS-TERESTRICKÝ GEOCENTRICKÝ SOUŘADNICOVÝ SYSTÉM ITRSXX ............... 195
3. 7.1 Konvenční souřadnicový terestrický systém - přesnější deftnice ........................ 195 3.7.2 Příklad realizace CTRS- referenční rámce ITRF2000 a ITRF2005 ................... 200
3.8 SOUŘADNICOVÝ SYSTÉM ETRS89 -REALIZACE V EVROPĚ ....................... 207 3.8.1 Realizace ETRS89 v České republice .................................................................. 209 3.8.2 Realizace souřadnicového systému ETRS89 pomocí sítě permanentních stanic technologie GNSS- síť CZEPOS ................................................................................. 212 3.8.3 Transformace mezi ITRF2000 a ETRF89 na území ČR. ..................................... 214
3.9 SOUŘADNICOVÝ SYSTÉM WGS84 ...................................................................... 215 3.9.1 Deftnice systému .................................................................................................. 215
Literatura ke kapitole 3 218

3 ÚVOD DO KOSMICKÉ GEODÉZIE
3.1 ELEMENTÁRNÍ PROSTOROVÉ TRANSFORMACE
3.1.1 Pravoúhlé a sférické souřadnicové soustavy
Polohu libovolného bodu v euklidovském prostoru dimenze 3 (E3), ve kterém budeme pracovat, můžeme popsat různými typy souřadnic. V sférické astronomii a kosmické geodézii se nejčastěji používá
1) pravoúhlá souřadnicová soustava, 2) sférická souřadnicová soustava.
1) Pravoúhlá souřadnicová soustava
Tři navzájem kolmé jednotkové vektory ex , ey , ez umístěné ve zvoleném počátku O v E3 (viz obrázek 3.1.1) tvoří pravoúhlou (ortogonální) souřadnicovou soustavu. Přímky, které jsou nositelkami vektorů e, nazýváme souřadnicovými osami. Polohu libovolného bodu R,
z R
:z ?--......... ----,-y .·
&•••-••••••••••••••••••""".fo•
X y
Obrázek 3 .1.1 : Pravoúhlá souřadnicová soustava
který můžeme považovat za koncový bod vektoru r, umístěného v počátku O, vyjádříme jednoznačně jako lineární kombinaci vektorů e
r=x.ex +y.ey +z.ez (3.1.1)
Veličiny x, y, z pak nazýváme souřadnicemi bodu R. Vynásobíme-li postupně výraz (3.1.1) skalárně vektory ex , ey , ez , dostáváme v důsledku ortogonality vektorů e
ÚVOD DO KOSMICKÉ GEODÉZIE 153

x= r.ex , y= r.ey, z= r.ez . (3.1.2)
Vzpomeneme-li si na geometrický význam skalárního součinu dvou vektorů vidíme, že souřadnice x, y, z vznikají jako průmět vektoru r na souřadnicové osy. V případě, že i r bude jednotkový vektor, platí
x=cosa, y=cosp, z=cosy, (3.1.3)
kde a, P, r jsou úhly, které svírá vektor r se souřadnicovými osami. Souřadnice jednotkového vektoru pak nazýváme směrové kosiny. Z definice plyne, že splňují podmínku
x2 + y2 + z2 = 1.
Souřadnicová soustava může být pravotočivá, jak je tomu na obrázku 3.1.1, kdy při
pohledu od "konce" osy z přejdeme od osy x k ose y otočením o 90° proti směru hodinových ručiček- tedy v matematicky kladném (a geodeticky záporném) smyslu, podobně od osy y k ose z. Levotočivá soustava by měla orientaci os obráceně.
2) Sférická souřadnicová soustava
Sférickou souřadnicovou soustavu tvoří základní rovina a základní směr, jehož počátek leží v základní rovině. Za základní rovinu si zvolme rovinu xy, tvořenou počátkem
O a souřadnicovými osami x a y , za základní směr pak směr osy x. Polohu bodu R v prostoru pak určují tři souřadnice
r ...... délka průvodiče r , A. ..... úhel mezi osou x a průmětem r do roviny xy, rp ...... úhel mezi průvodičem r a rovinou xy .
Veličiny r, rp, A. se nazývají sférické souřadnice bodu R.
z
.R
y
............... ····· ...... :::~·Ř o
Obrázek 3.1.2: Sférická souřadnicová soustava
Z obrázku 3.1.2 platí
ORo = r cosrp, x = ORo cos A. , y = ORo sin A., z= r sin rp
a dále tedy
ÚVOD DO KOSMICKÉ GEODÉZIE 154

x = r cos rp cos A, y = r cos rp sin A , z=r sm rp
respektive inverzní vztahy
(3.1.4)
r=~x2 + y 2 + z 2 , A=arctan y , rp= arccot j z arcsin~. (3.1.5)
x x2 + y2 r Souřadnicové soustavy můžeme v prostoru umístit a orientovat různým způsobem. Pokud bude orientace v prostoru, resp. v tělese či na jeho povrchu určitým způsobem realizována, můžeme mluvit o souřadnicovém systému.
3.1.2 Transformace pravoúhlých souřadnic
V prostoru E3 zvolme obecnou souřadnicovou soustavu X, Y, Z a předpokládejme, že v této soustavě máme vyjádřen vektor R. Zvolme další dvě ortogonální souřadnicové soustavy: S (x, y, z) a S' (x ', y ', z'), viz obr. 3 .1.3. Předpokládejme, stejně jako v odstavci 3.1, že souřadnicové osy jsou nositelkami jednotkových vektorů ex , ey, ez respektive ex ', ey ', ez'. Nechť r ar' jsou polohové vektory bodu R v soustavě S, resp. S' a Llr je polohový vektor počátku soustavy S' vůči S Jejich vzájemný vztah vyjadřuje rovnice
r= Llr + r'. (3.1.6)
Obrázek 3.1.3.: Transformace souřadnic
Vyjádříme-lir ar' pomocí složek v odpovídajících souřadnicových soustavách, dostáváme
xe +ye +ze =Llr+x'e' +y'e' +z'e' X y Z X y z• (3.1. 7)
Vynásobíme-li skalárně výraz (3 .1. 7) postupně ex , ey, ez , dostaneme v důsledku ortogonality vektorů e:
ÚVOD DO KOSMICKÉ GEODÉZIE 155

(3.1.8)
Nahradíme-li nyní příslušné skalární součiny kosiny úhlů, které svírají příslušné osy, můžeme psát
x=itt+x' cos(x',x)+ y' cos(y' ,x)+ z' cos( z' ,x) , (3.1.9a)
kde (x ',x}, (y ',x), (z ',x} jsou úhly mezi souřadnicovými osami soustavy S' a soustavy S. Obdobně dostaneme pro další dvě souřadnice
Označíme-li nyní
y=Ay+x' cos(x',y)+ y' cos(y' ,y) +z' cos(z',y) , z =Az+x' cos(x',z)+ y' cos(y' ,z)+ z' cos( z' ,z) .
S=(~) =(x,y,z)',S' =(;:) =(x',y',z')' ,M=(~) =(8x,óy,Az)' a dále
(
cos(x',x) cos(y',x)
R = cos(x',y) cos(y',y)
cos(x' ,z) cos(y' ,z)
je možné zapsat (3.1.8) ve tvaru
S =AS+ RS',
cos(z',x)J cos(z',y) ,
cos(z' ,z)
(3.1.9b) (3.1.9c)
(3.1.1 O)
(3.1.11)
(3.1.12)
kde AS je vektor posunu (translace) a R je matice otočení (rotace). Ještě obecnější tvar získáme zavedením matice měřítkových koeficientů K (která má na hlavní diagonále různá měřítka, mimo hlavní diagonálu nuly), pak platí
S=AS+RKS'. (3.1.13)
Pokud je rozměr (délková míra) v obou soustavách stejná, platí K = E, kde E je jednotková matice. V našich případech budeme velmi často pracovat bez translací AS vzhledem k tomu, že studované objekty (hvězdy, kvasary) se nacházejí ve velkých vzdálenostech.
Nejsou-li úhly mezi jednotlivými osami známé, je možné provést transformaci postupně, pomocí tří rotací.
3.1.3 Transformace pomocí rotačních úhlů eulerovského typu
Předpokládejme, že chceme, podobně jako v předchozím odstavci, provést přechod ze soustavy S do soustavy S'.
ÚVOD DO KOSMICKÉ GEODÉZIE 156

Zvolme proto dvě pomocné kartézské souřadnicové soustavy S1(x1, y1, z1,), S2(x2, y2, z2) a definujme postupnou transformaci následujícím způsobem:
a) Přechod z S do S1: Soustavu S1 umístíme vůči S tak, že ztotožníme počátky O a osy z a ZJ, osa x1 je vůči x pootočena v matematicky kladném smyslu o úhel rov rovině xy, viz obr. 3.1.4a, stejně tak osay1 vůčiy. Na základě výsledků předchozího odstavce pak můžeme psát
n ( oosm sinm
~H~l ~: = -s~nm cosm (3.1.14) o
Označme
( oosm SlllOJ
~J Z(m) = -s~ OJ COS OJ (3.1.15) o
transformační matici, kterou můžeme chápat jako pootočení kolem osy z o úhel ro, vedoucí ke ztotožnění obou soustav.
a) b) c)
Obrázek 3.1.4 a, b, c: Transformace pomocí postupných rotací
b) Přechod z S1 do S2: Soustavu S2 umístíme vůči S1 tak, že ztotožníme počátky O a osy x1 a x2, osa y2 je vůči y1 pootočena v matematicky kladném smyslu o úhel Ev rovině YJZJ, viz obrázek 3.1.4b, stejně tak osa z2 vůči z1• Na základě výsledků předchozího odstavce pak můžeme opět psát
o COS& (3.1.16)
-smc
Označme
ÚVOD DO KOSMICKÉ GEODÉZIE 157

o cos s
-sin s
(3.1.17)
transformační matici, kterou opět můžeme chápat jako pootočení kolem osy x o úhel s, vedoucí ke ztotožnění obou soustav.
c) Přechod z S2 do S': Soustavu S' umístíme vůči S2 tak, že ztotožníme počátky O a osy y2 a y ', osa z' je vůči z2 pootočena v matematicky kladném smyslu o úhel \jl v rovině x 'z', viz obr. 3.1.4c, stejně tak osa x' vůči x2. Analogicky k předchozímu pak můžeme opět psát:
(
x:J _ (COSif/ O -sinlf/J (x2J
y - O 1 O . Y2 ·
z' Sinlf/ 0 COSif/ Z2
(3.1.18)
Označme
(
cos 1f O -sin 1f J Y(f//) = O 1 O
sin 1f O cos 1f
(3.1.19)
transformační matici, která reprezentuje pootočení kolem osy y o úhel 'I'·
Spojíme-li nyní všechny výsledky, lze pro přechod (transformaci) ze soustavy S do S' psát:
S' = Y( lf/) X( hj Z( m) S = Rlfl&w S , (3.1.20)
když jsme ještě položili
Rlfl&w = Y(lf/) X(s) Z(m) (3.1.21)
Transformační matice Y(lf/), X(s), Z(m) budeme dále velmi často používat. Povšimněme si, že v podstatě nezáleží, jakým symbolem jsme označili rotační úhly, důležité je pouze zachovat vždy (matematicky) kladný směr otáčení. Nejdůležitějším výsledkem tohoto odstavce je skutečnost, že transformaci z jedné euklidovské soustavy do druhé chápeme jako posloupnost otáčení os o známé úhly takovým způsobem, abychom ztotožnili osy původní a nové soustavy. V prostoru E3 pro takové ztotožnění vystačíme s jednou rotací (pokud bychom znali příslušný úhel), v geodézii používáme zpravidla tři rotace, ale obecně jich může být více, ve speciálních případech poloh os naopak méně.
Další důležitou vlastností matic Y( lf/), X( s), Z(m) je, že jsou ortonormální, tedy platí:
(3.1.22)
a podobně pro X( s) a Z{ál). V důsledku (3.3.9) píšeme pro zpětnou transformaci z S' do S
ÚVOD DO KOSMICKÉ GEODÉZIE 158

(3.1.23)
Jak uvidíme v dalších odstavcích, budeme v převážné míře pracovat s transformacemi jednotkových vektorů, půjde nám především o transformaci směrů; vzdálenosti nebudou hrát v mnoha případech podstatnou úlohu.
V některých případech - zvláště při transformaci geodetických referenčních systémů -se stává, že úhly l.f/, e, OJ nabývají velmi malých hodnot, většinou méně než 5". V tomto případě si pak můžeme dovolit zjednodušení a položit cosl.j/ = 1, sinl.j/ = l.f/, obdobně pro e, m, dále položit s. OJ= O, atd. Pro Rlf/601 z (3 .1.21) pak platí
kde {2} jsou členy druhého řádu.
3.2 ASTRONOMICKÉ SOUŘADNICOVÉ SOUSTA VY
Při definici prostorových souřadnicových systémů a transformací mezi nimi budeme potřebovat souřadnicové soustavy, které používá astronomie.
Pomocí astronomických souřadnicových soustav vyjadřujeme polohu kosmických těles (hvězdy, kvasary, Slunce, družice) v prostoru, a to nejčastěji pomocí sférických nebo pravoúhlých prostorových souřadnic.
Abychom mohli zavést sférickou souřadnicovou soustavu, musíme zvolit sféru (kouli) s určitým poloměrem a základní směry a roviny, které je možné fyzikálně realizovat. Z matematického hlediska je vhodné zvolit poloměr koule roven 1.
Za základní směry zvolíme: svislici v daném bodě pozorování, směr rotační osy Země, směr k pólu ekliptiky. Za základní roviny volíme: rovinu horizontu (obzorníku) v daném bodě pozorování (která je definována jako rovina kolmá ke svislici), rovinu rovníku (která je definována jako rovina, kolmá k rotační ose a procházející počátkem souřadnicové soustavy), rovinu ekliptiky (ekliptika je rovina, ve které vykonává Země pohyb kolem Slunce anebo z hlediska pozorovatele na Zemi, ve které je zdánlivě "umístěno" Slunce na obloze).
Podle základních směrů a rovin rozdělujeme sférické souřadnicové soustavy na:
• obzorníkovou souřadnicovou soustavu • rovníkovou souřadnicovou soustavu (závislou a nezávislou na čase) • ekliptikální souřadnicovou soustavu • galaktickou souřadnicovou soustavu
Některé z uvedených souřadnicových soustav dělíme ještě podle polohy středu koule na
ÚVOD DO KOSMICKÉ GEODÉZIE 159
• topocentrickou • geocentrickou • heliocentrickou, obecně "objektocentrickou", neboť počátek může být ve středu jiných
těles, např. Měsíce, planet • barycentrickou, (počátek je v těžišti sluneční soustavy)
Souřadnicové soustavy, které jsou vázány na hmotný útvar a které se pohybují vzhledem k základnímu (nehybnému) prostoru rovnoměrně a přímočaře, nazýváme inerciální souřadnicové soustavy. Tak například souřadnicová soustava vázaná na systém velmi vzdálených zdrojů kosmického záření (kvasary) tvoří inerciální soustavu, naopak jakákoliv souřadnicová soustava pevně spojená s rotující Zemí není inerciální.
Detailní studium vztahů mezi jednotlivými astronomickými souřadnicovými soustavami je předmětem geodetické astronomie - viz např. [KABELÁČ, KOSTELECKÝ, 1988]. My se v dalším omezíme pouze na ty soustavy, které budeme potřebovat pro definici prostorových souřadnicových systémů a to rovníkové a ekliptikální.
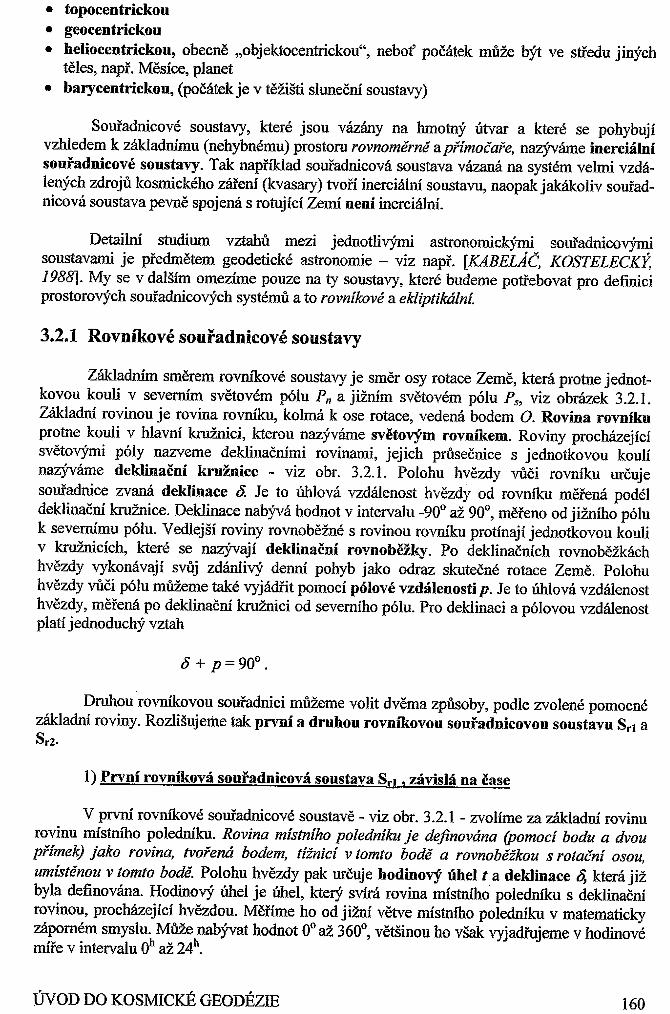
3.2.1 Rovníkové souřadnicové soustavy
Základním směrem rovníkové soustavy je směr osy rotace Země, která protne jednotkovou kouli v severním světovém pólu Pn a jižním světovém pólu Ps, viz obrázek 3.2.1. Základní rovinou je rovina rovníku, kolmá k ose rotace, vedená bodem O. Rovina rovníku protne kouli v hlavní kružnici, kterou nazýváme světovým rovníkem. Roviny procházející světovými póly nazveme deklinačními rovinami, jejich průsečnice s jednotkovou koulí nazýváme deklinační kružnice - viz obr. 3.2.1. Polohu hvězdy vůči rovníku určuje souřadnice zvaná deklinace 8.. Je to úhlová vzdálenost hvězdy od rovníku měřená podél deklinační kružnice. Deklinace nabývá hodnot v intervalu -90° až 90°, měřeno od jižního pólu k severnímu pólu. Vedlejší roviny rovnoběžné s rovinou rovníku protínají jednotkovou kouli v kružnicích, které se nazývají deklinační rovnoběžky. Po deklinačních rovnoběžkách hvězdy vykonávají svůj zdánlivý denní pohyb jako odraz skutečné rotace Země. Polohu hvězdy vůči pólu můžeme také vyjádřit pomocí pólové vzdálenosti p. Je to úhlová vzdálenost hvězdy, měřená po deklinační kružnici od severního pólu. Pro deklinaci a pólovou vzdálenost platí jednoduchý vztah
8 + p=90°.
Druhou rovníkovou souřadnici můžeme volit dvěma způsoby, podle zvolené pomocné základní roviny. Rozlišujeme tak první a druhou rovníkovou souřadnicovou soustavu Sr1 a Sr2·
1) První rovníková souřadnicová soustava Sr1 , závislá na čase
V první rovníkové souřadnicové soustavě- viz obr. 3.2.1 -zvolíme za základní rovinu rovinu místního poledníku. Rovina místního poledníku je definována (pomocí bodu a dvou přímek) jako rovina, tvořená bodem, tížnicí v tomto bodě a rovnoběžkou s rotační osou, umístěnou v tomto bodě. Polohu hvězdy pak určuje hodinový úhel t a deklinace b; která již byla definována. Hodinový úhel je úhel, který svírá rovina místního poledníku s deklinační rovinou, procházející hvězdou. Měříme ho od jižní větve místního poledníku v matematicky záporném smyslu. Může nabývat hodnot 0° až 360°, většinou ho však vyjadřujeme v hodinové míře v intervalu oh až 24h.
ÚVOD DO KOSMICKÉ GEODÉZIE 160

Jak vyplývá z definice, hodinový úhel je závislý na poloze místního poledm'ku. Ten však v důsledku rotace Země mění neustále svou polohu vůči hvězdám a z toho vyplývá i změna hodinového úhlu. První rovníková soustava je tedy vázána na Zemi a spolu s ní rotuje. Má proto zásadní význam pro měření času odvozeného z rotace Země, to je také důvod, proč je hodinový úhel vyjadřován v hodinové míře.
Yr2
Obrázek 3.2.1: Rovníková soustava Srl Obrázek 3.2.2: Rovníková soustava Sr2
Podle obrázku 3.2.1 též platí, že úhel, který svírá rovina rovníku s rovinou obzorníku, je roven 90° ~ rp.
Orientujme pravotočivou pravoúhlou souřadnicovou soustavu tak, že osa +xrl bude procházet průsečíkem místního poledníku s rovníkem, osa +zrl severním pólem Pn a osa +y,J východním bodem E. Aplikujme vztahy (3.1.4) na jednotkovou kouli. Obdržíme vztahy mezi systémem směrových kosinů (x, y, z)n v první rovníkové soustavě a rovníkovými souřadnicemi t, ď v téže soustavě ve tvaru
(x) ( cosďcost)
srl = y = -co~ďsint '
z rl smď
(3.2.1)
respektive
t = arctan(- y) , ď = arcsinzlr1 . X rl
(3.2.2)
2) Druhá rovníková souřadnicová soustava Sr2• nezávislá na čase
Země obíhá kolem Slunce v rovině, která svírá s rovinou světového rovníku úhel přibližně rovný 23.5° a nazývá se rovina ekliptiky. Název pochází z řeckého slova "ekleipsis" a znamená zatmění. Pozoro:vateli na Zemi se skutečný pohyb Země kolem Slunce jeví jako zdánlivý pohyb Slunce po obloze, po hlavní kružnici, zvané ekliptika. Ekliptika protíná světový rovm'k ve dvou bodech~ obr. 3.2.2. Průsečík, kterým prochází Slunce v den
ÚVOD DO KOSMICKÉ GEODÉZIE 161
jarní rovnodennosti, nazýváme jarní bod a označuje se astronomickým symbolem souhvězdí Berana, ~ - Aries (beran). Druhý průsečík, kterým prochází Slunce v den podzimní rovnodennosti, se nazývá podzimní bod a označuje se symbolem ::9::- Libra (váhy).
Za pomocnou základní rovinu druhé rovníkové soustavy zvolíme deklinační rovinu procházející jarním bodem. Takto vytvořenou deklinační kružnici zvolíme za nulovou. Polohu hvězd v této soustavě určujeme pomocí rektascenze a a již definované deklinace 8. Rektascenze je úhel mezi deklinační rovinou procházející jarním bodem a deklinační rovinou hvězdy, nebo na jednotkové kouli úhel mezi jarním bodem a deklinační kružnicí. Při definici pravoúhlé sousta;1 podle obr. 3.2.2 se a měří v matematicky kladném smyslu od jarního bodu v intervalu O až 24h . (Někdy se také označuje AR z latinského "ascensio recta" - pravá vzdálenost).
Porovnáme-li obě rovm'kové souřadnicové soustavy, vidíme, že deklinace je v obou soustavách stejná, nezávislá na rotaci Země a na poloze místa pozorovatele, ale hodinový úhel a rektascenze se liší. Uvědomme si, že rektascenze nezávisí na poloze místa pozorovatele ani na rotaci Země, protože se měří od jarního bodu. Z těchto důvodů druhá rovníková soustava nerotuje - je tak do jisté míry nezávislá na čase - a proto se využívá na sestavení katalogů souřadnic hvězd, efemerid (souřadnic) Slunce, Měsíce a planet. Poznámka: Nezávislost na čase není úplná, protože jak uvidíme dále v odstavci zabývajícími se precesí a nutací, mění jarní bod, rovina rovníku a ekliptiky polohu vůči stálicím. Tato změna je však řádově menší, než změna hodinového úhlu o 360° za den.
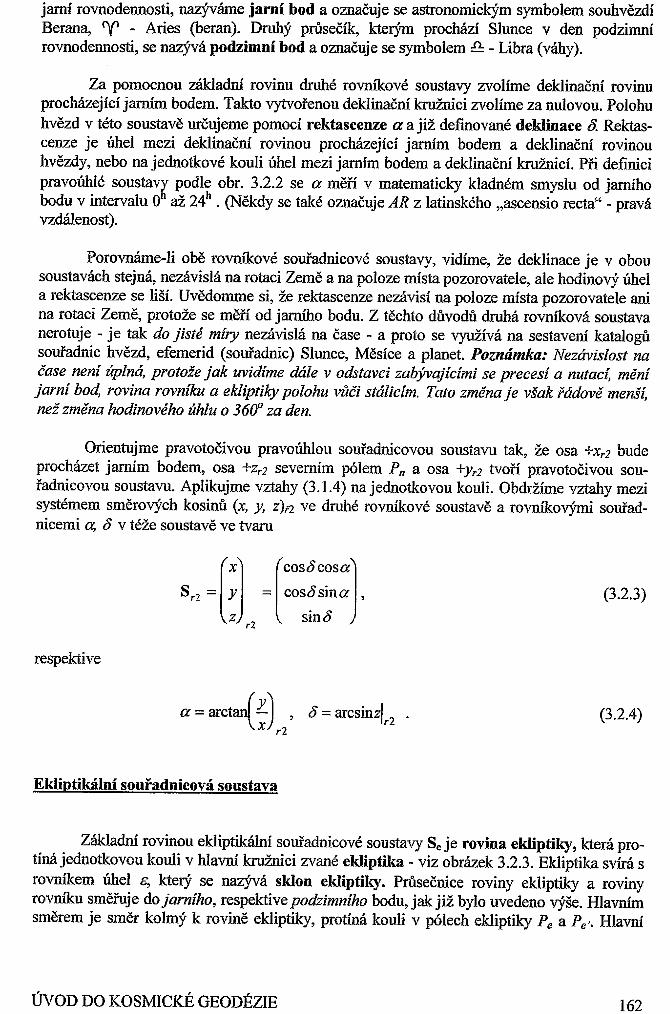
Orientujme pravotočivou pravoúhlou souřadnicovou soustavu tak, že osa +x72 bude procházet jarním bodem, osa +zrl severním pólem Pn a osa +yr2 tvoří pravotočivou souřadnicovou soustavu. Aplikujme vztahy (3.1.4) na jednotkovou kouli. Obdržíme vztahy mezi systémem směrových kosinů (x, y, z)n ve druhé rovníkové soustavě a rovníkovými souřadnicemi a; o v téže soustavě ve tvaru
(x) (cosocosaJ
sr2 = y = cos~sina '
z r2 smo
(3.2.3)
respektive
a= arctan(y) , o= arcsinzlrz . X r2
(3.2.4)
Ekliptikální souřadnicová soustava
Základní rovinou ekliptikální souřadnicové soustavy Seje rovina ekliptiky, která protíná jednotkovou kouli v hlavní kružnici zvané ekliptika- viz obrázek 3.2.3. Ekliptika svírá s rovníkem úhel c, který se nazývá sklon ekliptiky. Průsečnice roviny ekliptiky a roviny rovníku směřuje do jarního, respektive podzimního bodu, jak již bylo uvedeno výše. Hlavním směrem je směr kolmý k rovině ekliptiky, protíná kouli v pólech ekliptiky Pe a Pe·· Hlavní
ÚVOD DO KOSMICKÉ GEODÉZIE 162

roviny proložené osou ekliptiky protínají kouli v šířkových kružnicích. Šířkovou kružnici procházející jarním bodem zvolíme za výchozí (nulovou).
Polohu hvězdy H v ekliptikální souřadnicové soustavě vyjadřujeme ekliptikální délkou A. a ekliptikální šířkou P. Ekliptikální délka je úhel, který svírá nulová šířková rovina s šířkovou rovinou vedenou hvězdou. Měří se od jarního bodu v matematicky kladném smyslu v intervalu 0° až 360°. Ekliptikální šířka je úhel, který svírá směr ke hvězdě OH s rovinou ekliptiky, měří se podél šířkové kružnice. Nabývá hodnot -90° až 90° při měření od Pe· směremkPe.
Ye
Obrázek 3.2.3: Ekliptikální soustava Se
Orientujme pravotočivou pravoúhlou souřadnicovou soustavu tak, že osa +xe bude procházet jarním bodem, osa +ze pólem Pe a osa +ye tvoří pravotočivý systém. Aplikujme vztahy (3.1.4) na jednotkovou kouli. Obdržíme vztahy mezi systémem směrových kosinů (x, y, z)e v ekliptikální soustavě a ekliptikálními souřadnicemi A., fJ v téže soustavě ve tvaru
(x] (cos fJ cos A.]
se = y = cos~sinA. '
z smfJ e
(3.2.5)
respektive
A.= arctan(~) , fJ = arcsinzle . e
(3.2.6)
3.2.2 Transformace mezi astronomickými soustavami
Transformace Sd <=;> S!é
Podle obrázku 3.2.4 a s použitím výsledků odstavce 3.1 vidíme, že ze soustavy Srl přejdeme do Sr2 pootočením o úhel s, který svírá rovina místního poledníku s deklinační rovinou procházející jarním bodem kolem osy Zrl = Zr2 v matematicky záporném smyslu. Naopak, ze soustavy 8,2 přejdeme do Sr1 otáčením kolem téže osy v opačném smyslu, tedy
ÚVOD DO KOSMICKÉ GRODÉZTE 163
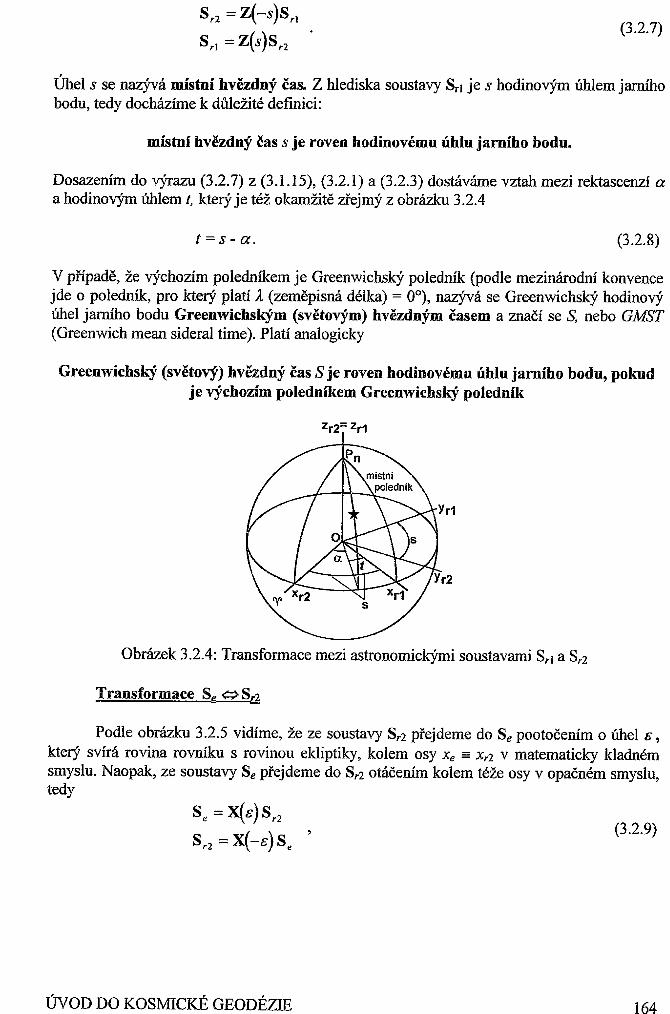
Sr2 = Z(-s)Sr1
S71 = Z(s)Sr2
(3.2.7)
Úhel s se nazývá místní hvězdný čas. Z hlediska soustavy Srl je s hodinovým úhlem jarního bodu, tedy docházíme k důležité definici:
místní hvězdný čas s je roven hodinovému úhlu jarního bodu.
Dosazením do výrazu (3.2.7) z (3.1.15), (3.2.1) a (3.2.3) dostáváme vztah mezi rektascenzí a a hodinovým úhlem t, který je též okamžitě zřejmý z obrázku 3.2.4
t=s-a. (3.2.8)
V případě, že výchozím poledníkem je Greenwichský poledník (podle mezinárodní konvence jde o poledník, pro který platí A. (zeměpisná délka)= 0°), nazývá se Greenwichský hodinový úhel jarního bodu Greenwichským (světovým) hvězdným časem a značí se S, nebo GMST (Greenwich mean sideral time). Platí analogicky
Greenwichský (světový) hvězdný čas S je roven hodinovému úhlu jarního bodu, pokud je výchozím poledníkem Greenwichský poledník
Obrázek 3.2.4: Transformace mezi astronomickými soustavami S,1 a S,2
Transformace Se ~ S!f
Podle obrázku 3.2.5 vidíme, že ze soustavy S,2 přejdeme do Se pootočením o úhel s, který svírá rovina rovníku s rovinou ekliptiky, kolem osy Xe = x,2 v matematicky kladném smyslu. Naopak, ze soustavy Se přejdeme do S,2 otáčením kolem téže osy v opačném smyslu, tedy
Se =X( s) Sr2
Sr2 = X(-e)Se ' (3.2.9)
ÚVOD DO KOSMICKÉ GEODÉZIE 164

kde transformační matice X je definována výrazem (3 .1.17).
Ye
Yr2
Obrázek 3.2.5: Transformace mezi astronomickými soustavami S72 a Se
, , v
3.3 ZAKLADNI POJMY Z NAUKY OCASE
Čas je jednou ze základních fyzikálních veličin. Jeho výsadní postavení mezi těmito veličinami spočívá však v tom, že veškeré dění je funkcí času. Čas je argumentem pohybu, změny hmotnosti, množství světla atd. Čas vyjadřuje trvání dějů. Závislost na čase není přirozeně u všech jevů stejně silná. Tak například změny v poloze umělých družic Země jsou jistě zřetelnější než změny v poloze litosférických bloků (zemských ker). Změny v poloze hvězd vůči obzorníkové souřadnicové soustavě jsou jasně pozorovatelné, kdežto změny v polohách hvězd vůči sobě jsou o mnoho řádů menší. Nebo jinak: odpradávna je zřetelná rotace Země, ale změny v rotaci byly zjištěny jen před několika desítkami let.
O čase, jako filozofické ka~egorii, se hovoří jinde. Úkolem času v astronomii a ve fyzice vůbec je záznam děje, neboli přiřazení časových údajů jednotlivým jevům. Jmenujme například: určení času průchodu hvězdy místním poledníkem, zákryty a zatmění Jupiterových měsíců, zatmění Slunce atd. Tím vzniká první požadavek, a to je měření času. Abychom mohli ve stejném časovém systému zaznamenat dva časově vzdálené jevy, je nutné umět čas udržovat. A to je druhý požadavek. Tyto dvě skutečnosti je možno zajistit:
• pomocí periodických a diskrétních jevů (astronomické úkazy), nebo • pomocí nepřetržitého a měřitelného procesu (hodiny).
Požadavkem je, aby čas byl rovnoměrný z důvodů jeho interpolace a extrapolace. V dalším bude proto snahou veškeré nepravidelnosti vyloučit.
Uchýlíme se nyní k porovnání: abychom mohli pracovat s délkami, je nutné definovat počátek a délku jednotky. O čase platí obdobné. Je tedy nutné definovat počáteční okamžik (epochu) a časové jednotky, jimiž je dáno časové měřítko (etalon, škála), odpovídající zvolenému časovému systému.
Z historického hlediska býval čas záležitostí astronomů. Vedly k tomu periodicky se opakující jevy, např. rotace nebeské sféry, výskyt zatmění a zákrytů hvězd Měsícem ap. Po
ÚVOD DO KOSMICKÉ GEODÉZIE 165

zjištění nepravidelností v rotační rychlosti Země, které jsou relativní velikosti 10"6, přešla tato
starost na fyziky. Měření a uchovávání času se tak stalo záležitostí fyzikální.
Systematickým dělením časů se zabývá astronomie a fyzika. My zde zavedeme pouze nejnutnější pojmy, potřebné pro definici globálních souřadnicových systémů.
3.3.1 Juliánské datum, standardní epochy a převody veličin
Aby bylo možné průběžně vyjadřovat časové údaje v co největším časovém období, bylo zavedeno již v 16. století tzv. juliánské datum (JD) o juliánské periodě 7980 let. Autorem je Francouz Josephus Justus Scaliger (1540 - 1609). Počátek - epocha JD -je ve 12h dne 1. ledna 4713 před n.l., t.j ve 12h dne 1. ledna r. -4712 a je současně počátkem astronomického kalendáře. Časová jednotka je juliánský den, který dělíme na 24 hodin po 60 minutách, minutu po 60 sekundách. Naopak juliánský rok obsahuje 365.25 a juliánské století 36525 juliánských dní. Juliánské datum pro libovolný okamžik se vyjadřuje číslem,
jehož celá část odpovídá začátku daného juliánského dne a desetinná část zlomku tohoto dne od jeho začátku až po daný okamžik - obecný čas. Juliánské datum JD pro Oh UTl (význam
viz dále) libovolného data (dne d, měsíce m, roku r) je možné vypočítat podle vzorce
JD = 1720994.5+[r' · 365.25] + 2 +[ 4~0 J-L:o]+ [30.600l·(m' +I)]+ d (3.3.1)
kde prom= 1, 2 platí r' =r-l, m' = m+ 12, prom= 3, 4, .... , 12 platí r' = r, m' = m. Hranatá
závorka[ .. ] znamená, že je třeba brát do výpočtu pouze celočíselnou část příslušného výrazu. Juliánské datum bývá též pro každý den příslušného roku tabelováno v astronomických ročenkách (v České republice jde o Hvězdářskou ročenku).
Namísto JD se často zavádí (pro snazší počítání) modifikované juliánské datum (MJD). Platí
MJD = JD- 2 400 000.5 . (3.3.2)
Začíná tedy o půlnoci jako kalendářní den a ušetří první dvě cifry. Soustava MJD začíná v MJDo = Oh UTl (zkratka UTl bude vysvětlena později) dne 17. listopadu 1858, kdy je JD rovno 2 400 000.5, což je jeho epochou.
Tabulka 3.3.1 - Standardní juliánské epochy v JD, MJD a v datech občanského kalendáře
Rok 1900 1950 2000
JD 2 415 020.0000 2 433 282.5000 2 451 545.0000 Juliánská MJD 15 019.5000 33 282.0000 51 544.5000 epocha obč. 12h UTl 0.1. 1900 = oh UTl 1.1.1950 12h UTl 1.1.2000
kal. =12h UTl 31.12.1899
Epocha znamená jistý, přesně definovaný okamžik na určité časové škále. K tomuto
okamžiku se vztahují např. souřadnice hvězd různých katalogů, základní elementy, efemeridy
ÚVOD DO KOSMICKÉ GEODÉZIE 166

planet, numerické hodnoty proměnné s časem ap. Rozhodnutím XVIII. valného shromáždění Mezinárodní astronomické unie (IAU) byla zavedena standardní juliánská epocha J2000.0, o níž bližší udává tab. 3.3.1.
Převod veličin z výchozí epochy na jinou epochu a jiný obecný čas popíšeme podle doporučení, platících od 1. ledna 1984. Nechť hledaná veličina X je funkcí času ve tvaru Andoyerových - Eulerových rozvojů
x-(K +K'T+i.\."T2 +K)+(K +K'T+K"T2 +K)t+ - O O O I I I
+(K2 +K2T+Kí_'T2 +K )t 2 +K (3.3.3)
kde K0 ,Kó ,K ,K~>Kí ,K ,K2 ,Kí ,K jsou číselné hodnoty koeficientů platících pro výchozí epochu 12000.0, tedy pro JD 2451545.0. Dále pak
T = ( J s - 2451545.0) I 36525 [juliánské století], (3.3.4)
převádí koeficienty K0 ,Kó,K ,K~>Kí ,K ,K2 ,Kí ,K v rovnici (4.1.3) z epochy 12000.0 na jinou počáteční epochu o juliánském datu Js . Z této epochy přejdeme na obecný čas JE pomocí vztahu
t =(JE- J8 )I 36525 [juliánské století] .
3.3.2 Rotační časy
Rotační časy jsou odvozeny z periodického rotačního pohybu Země kolem její rotační osy. Jsou proto nazývány časy rotačními. Všechny tyto časy jsou nerovnoměmé. V minulosti však tvořily základní časové soustavy. Nyní slouží zejména k popisu nepravidelností rotační rychlosti Země. Podle toho, zda jsou vázány na zdánlivý pohyb hvězd nebo Slunce, je možno je dělit na
• časy hvězdné
• časy sluneční
Rotační časy defmujeme pomocí hodinového úhlu "výchozího objektu". Pro definici hvězdného času je výchozím objektem fiktivní hvězda se souřadnicemi v Sr2: a= Oh, o = 0° Oarní bod). Pak definujeme (ve shodě s definicemi odstavce 3.2):
• hvězdný čas je hodinový úhel jarního bodu: s = t v
Pokud budeme dále precizovat hvězdný čas s ohledem na druh výchozího poledníku, platí • greenwichský (světový) hvězdný čas S je vztažen k základnímu (greenwichskému,
nultému) poledníku. • místní hvězdný čas s je vztažen k místnímu poledníku
Dále je zřejmé, že platí
ÚVOD DO KOSMICKÉ GEODÉZIE 167

s-S=A (3.3.5)
A zde označuje východní zeměpisnou délku.
Pro definici slunečm'ho času je "výchozím objektem" Slunce. Pak definujeme tzv. pravý sluneční čas jako hodinový úhel pravého (tj. skutečného Slunce): p = t
0 + 12h.
(Korekce o 12h je zavedena z toho důvodu, že sluneční čas počítáme od půlnoci).
Pokud budeme dále precizovat sluneční čas s ohledem na druh výchozího poledníku, platí
• Pravý světový (greenwichský) sluneční čas P je hodinový úhel f7 0
pravého (skutečného) Slunce, zvětšený o 12h, t.j.
(3.3.6)
• místní pravý sluneční čas p je:
kde t0
je hodinový úhel pravého Slunce, vztažený k místnímu poledníku. Jistě platí, že
p-P=A, (3.3.7)
A zde opět označuje východní zeměpisnou délku.
Nevýhodou pravého slunečního času je, že je (výrazně) nerovnoměrný. Je to způsobeno dvěma skutečnostmi:
• Slunce se nepohybuje po rovm'ku, ale v ekliptice, takže i v případě rovnoměrného pohybu Slunce v ekliptice se bude hodinový úhel, který je měřen vůči rovníku měnit nerovnoměrně
• Slunce se v ekliptice nepohybuje rovnoměrně v důsledku Keplerových zákonů (viz, [KABELÁČ, KOSTELECKÝ, 1988], kap. 3).
Proto se pro měření slunečního času používá fiktivní Slunce, které je umístěno na rovník, po kterém se pohybuje rovnoměrně. Toto Slunce nazýváme střední Slunce. Vztah mezi pravým a středním slunečním časem určuje pak časová rovnice E, která dosahuje až 16 minut - více viz např. v [KABELÁČ, KOSTELECKÝ, 1988], kap. 10.
Pak analogicky k předchozímu definujeme:
• Střední greenwichský sluneční čas (světový čas UT) M je greenwichský hodinový úhel tu
0 středního Slunce, zvětšený o 12 h, t.j.
M= f/0
+ 12h, (3.3.8)
kde tu 0
je hodinový úhei středního Slunce vztažený k základnímu poledníku.
Pro místní střed.aí sluneční čas m platí, že
ÚVOD DO KOSMICKÉ GEODÉZIE 168
kde t 0
je hodinový úhel středního Slunce, vztažený k místnímu poledníku. Jistě platí, že
m-M= A, (3.3.9)
A zde označuje východní zeměpisnou délku.
Praktický význam bude pro naše úvahy mít pouze střední greenwichský sluneční čas M, který se označuje UTl a nazývá se rotační čas protože kopíruje nerovnoměrnosti v rotaci Země.
3.3.3 Vztah mezi hvězdnými a slunečními časy
V tomto odstavci vyjasníme vztah mezi časovými intervaly ve hvězdném a slunečním čase. Rotace Země kolem své osy způsobuje zdánlivé denní otáčení oblohy. V případě Slunce však ještě k tomuto otáčení musíme přidat jeho vlastní zdánlivý pohyb na obloze - za rok musí "stihnout" oběhnout Zemi (ve skutečnosti Země obíhá kolem Slunce), to znamená, že se "otáčí" rychleji než hvězdy. Definujme den jako dobu, která uplyne mezi dvěma po sobě jdoucími kulminacemi příslušného objektu Garního bodu v případě hvězdného času a fiktivního Slunce v případě slunečního času). Pak po uplynutí hvězdného dne se musí Země za Sluncem ještě pootočit cca o 1°, aby kulminovalo Slunce (to se mezitím v důsledku oběhu Země kolem Slunce posunulo cca o 1 o (plný kruh má 360°, rok 365 dní)). Z toho plyne, že hvězdný den má o něco menší délku než sluneční den a naopak.
Pro matematické vyjádření je výhodnou srovnávací jednotkou je tzv. tropický rok. Ten je definován jako doba, která uplyne mezi dvěma po sobě jdoucími průchody Slunce jarním bodem. Pak platí
tropický rok ve hvězdném čase= (365.24218729 + 1) dnů= 1 + = 1.0027304367
tropický rok ve středním čase 365.24218729 dnů fl
Hodnota 365.2421. ... je zjištěna z dlouhodobých pozorování. Důležité však je, že v čitateli musí být o jedničku více, protože za jeden rok je přesně o jeden hvězdný den více než dnů slunečních. Převodní koeficient 1 + fl je pak možno používat pro převod jakýchkoliv časových intervalů ve slunečním čase na intervaly ve hvězdném čase. Platí např.:
(3.3.10a)
kde So je greenwichský hvězdný čas pro Oh času UTl příslušného dne (tato hodnota je tabelována v astronomických ročenkách). Schematicky můžeme tedy psát
S= /(UTl) (3.3.10b)
3.3.4 Atomový čas
Atomový čas je tzv. fyzikální čas a je následníkem tzv. času efemeridového, který byl odvozen z pohybů planet ve sluneční soustavě. Takto odvozená časová škála je totiž
úvon no Kn~MTrKP rmonP7TF 169
rovnoměrnější, než časová škála odvozená z rotace Země. Rotace Země se totiž v důsledku slapového tření a dalších fyzikálních jevů zpomaluje.
Přesná definice atomové sekundy, která je v souladu s Mezinárodní soustavou měrových jednotek SI, zní: Atomová sekunda je určena dobou 9192 6J1 770 kmitů, které přísluší atomu cesia 1JJ při přechodu mezi hladinami F = 4, M = O a F = J, M = O základního stavu 28112 bez vlivu vnějších magnetických polí. (XIII. konference Mezinárodního komitétu pro váhy a míry, Paříž 1967). Další jednotky atomového času, označme je (A), jsou: 1 d(A) = 24h(A) = 1440m(A) = 864005(A). .
Na této definici byla a je založena škála atomového času, jehož počáteční relativní přesnost byla 10"12
• Vývoj atomového času má svou historii. V současné době se používá soustava atomového času AJ (nový).
Soustava atomového času A3 (nový) byla zavedena 1. ledna 1966 jako zvážený průměr ze všech atomových hodin, pracujících v systému Mezinárodní časové služby BIH (Bureau International de l'Heure). Stanice Boulder, USA, měla váhu 5, všechny ostatní 1. Celkový jejich počet byl deset. Pro Oh dne 1. ledna 1966 platilo UT2 =AJ. (Čas UT2 = UTI + variace, působené slapy, je tedy "rovnoměrnější" než UTl).
V roce 1975 byl systém AJ označen jako systém mezinárodního atomového času lAT (International Atomic Time, označovaný též TAJ) na základě rozhodnutí XIV. Mezinárodní konference pro míry a váhy. Ke konci 70-tých let bylo zapojeno v tomto mezinárodním programu na 30 stanic včetně pražského Ústavu radiotechniky a elektroniky ČSAV (ÚRE ČSA V). Výsledky shromažd'ovala a zpracovávala Mezinárodní časová služba BIH (Bureau International de l'Heure) v Paříži. Atomový čas TAO) j-té laboratoře (stanice) je zjišťován elektronickými metodami. Kromě těchto odečtů jsou jednotlivé časy TA(j) vzájemně porovnávány pomocí televizních signálů, geostacionárních družic a pomocí přenosných atomových hodin, v poslední době též pomocí družic systému NAVSTAR-GPS. Jednotlivé časy TA(j} se liší vzájemně nejen systematickými odchylkami, ale i rozdílnostmi, vyplývajícími z relativistických vlivů v důsledku rotace Země. Závisí tedy na nadmořské výšce a zeměpisné šířce dané laboratoře. Po zavedení oprav je vypočten čas TAJ z jednotlivých opravených TA(j) jako jejich zvážený aritmetický průměr. V roce 1997 mezinárodně spolupracovalo 50 laboratoří s 282 hodinami různých typů, založenými na cesiovém standardu nebo vodíkovém maseru. Relativní přesnost výsledného atomového času TAJ je již asi 1 o-14 a potud je ho možno považovat za rovnoměrný.
Od 1. ledna 1988 přešla Mezinárodní časová služba BIH do kompetence Mezinárodního úřadu pro váhy a míry BIPM (Bureau International des Poids et Mesures). Údaje o TAJ jsou vydávány v cirkuláři Tl BIPM od 1. března 1988. Čas TAJ je základním časem pro astrometrii a kosmickou geodézii včetně GNSS.
3.3.5 Řízený (koordinovaný) čas
Pro účely praktických měření a užití vůbec v občanském životě je čas TAJ nevhodný z teoretických a provozních důvodů. Proto je z něho odvozován tzv. řízený (koordinovaný) světový čas UTC (Universa! Time Coordinated), který slouží především k produkci časových radiových signálů a tím plní funkci občanského času. Jelikož život je vázán na skutečnou, t.j. nepravidelnou rotaci Země, kterou podchycuje rotační světový čas UTI, je nutné vázat UTC
ÚVOD DO KOSMICKÉ GEODÉZIE 170
na čas UTl. Výsledný čas UTC má být však současně v jednoduchém vztahu k času TAJ. Musí proto splňovat následující podmínky, viz obr. 3.3.1:
• Sekunda času UTC je rovna sekundě času TAJ. Chod UTC vůči TAJ je tudíž nulový a čas UTC je časem rovnoměrným
• Rozdíl TAJ - UTC = n, kde n je počet celých kladných nebo záporných sekund. Hodnota n závisí na podmínce, aby
• rozdíl IUTI- VTcj < 0.9 s. Hodnotu DUT1 = UTl - UTC je třeba soustavně určovat astronomicko-geodetickým měřením metodami kosmické geodézie, protože variace v rotaci Země nelze doposud přesně teoreticky modelovat.
Aby byla splněna druhá a třetí podmínka, je nutné měnit čas UTC skokem, a to o +I s, jestliže se UTl - UTC blíží k hodnotě +0.9s, a o -1 s, jestliže se UTl - UTC blíží hodnotě -0.9s. Podle potřeby se tak děje v poslední sekundě 31. prosince a případně i 30. června. Znamená to, že v prvním případě, kdy UTl - UTC ~ 0.9s, je nutno UTC zvětšit skokem o + ls, takže po 23h59m588 UTC následuje za 1 sekundu čas ohomos prvního dne následujícího měsíce. Ve druhém případě, který je častější, kdy UTl - UTC -7 -0.9s, je tedy nutno UTC zmenšit skokem o minus ls, následuje po 23h59m59s UTC za 1 sekundu 23h59m608 UTC a poté ohomos prvního dne následujícího měsíce. Z těchto důvodů byl rozdíl TAJ- UTC v roce 1973.0 roven 12s, v roce 1985.0 již 23s a v roce 2006 je tato hodnota 33s. Vzhledem k tomu, že variace v rotaci, tedy i variace v UTl vůči UTC nelze přesně předvídat, není možné ani vložení či vypuštění sekundy plánovat do budoucna.
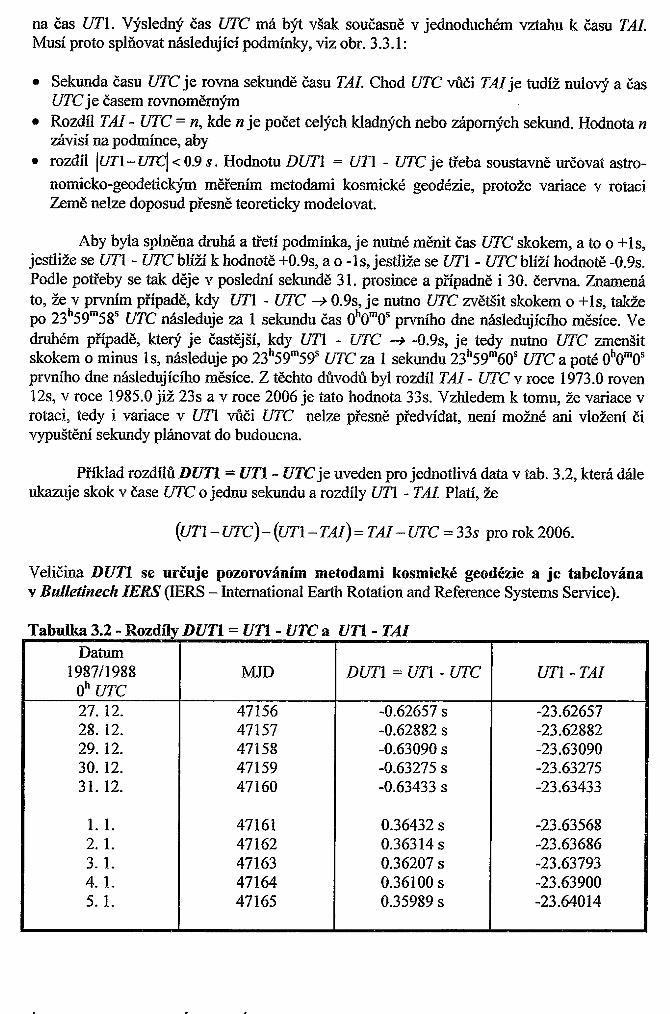
Příklad rozdílů DUTl = UTl - UTC je uveden pro jednotlivá data v tab. 3.2, která dále ukazuje skok v čase UTC o jednu sekundu a rozdíly UTl- TAL Platí, že
(UTl- UTC)- (UTl- TAl)= TAJ- UTC= 33s pro rok 2006.
Veličina DUTl se určuje pozorováním metodami kosmické geodézie a je tabelována v Bulletinech IERS (IERS- International Earth Rotation and Reference Systems Service).
T b lk 3 2 R díl DUTl UTl UTC UTl TAJ a u a • - oz uy = - a -Datum
1987/1988 MJD DUTI = UTl - UTC UTl- TAJ Oh UTC 27. 12. 47156 -0.62657 s -23.62657 28. 12. 47157 -0.62882 s -23.62882 29. 12. 47158 -0.63090 s -23.63090 30. 12. 47159 -0.63275 s -23.63275 31. 12. 47160 -0.63433 s -23.63433
Ll. 47161 0.36432 s -23.63568 2. 1. 47162 0.36314 s -23.63686 3. 1. 47163 0.36207 s -23.63793 4. 1. 47164 0.36100 s -23.63900 5. 1. 47165 0.35989 s -23.64014
ÚVOD no KO~MTC:KR GRODRZTF. 171

Obdobně k času TA(j) j-té observatoře existuje i čas UTC(j), přičemž rozdíly TA(j) -UTC(j) jsou získány elektronicky a řízeny tak, aby byly rovny rozdílu TAJ- UTC, tj. celému počtu sekund.
3.3.6 Terestrický a barycentrický dynamický čas
Na základě rezolucí Mezinárodní astronomické unie IAU z roku 1976 a 1979 byly definovány dva nové časy. Protože se váží na pohyb těles sluneční soustavy, nazývají se dynamické časy. Jsou jimi terestrický dynamický čas TDT {Terrestrial Dynamical Time) a barycentrický dynamický čas TDB (Time Dynamical Barycentric). Oba dva časy jsou vázány na atomový čas TAJ.
Terestrický dynamický čas má délku sekundy shodnou s časem TAJ. Chod času TDTvůči TAJ je tedy nulový, viz obrázek 3.3.1. Platí tak
TDT =TAJ+ 32.184 s . (3.3.11)
Čas TDT je nezávislým časovým argumentem pohybových rovnic a od 1. ledna 1984 je argumentem v efemeridách Slunce, Měsíce a planet. Plně tak nahradil výše zmíněný efemeridový čas. Pro terestrický dynamický čas se používá různého označení, takže
TDT= TT=DČ.
Barycentrický dynamický čas TDB se liší od času TDT o variace působené jako důsledek teorie relativity. Pro praktické použití se většinou nahrazuje časem TDT
3.3.7 Čas GPS
Dalším důležitým časovým standardem je čas GPS, který je definován rovnicí
GPS= TAJ- 195• (3.3.12)
Tento čas byl zvolen tak, aby rozdíl mezi časem GPS a UTC byl roven nule v tzv. standardní epoše GPS 6. ledna 1980.
ÚVOD DO KOSMICKÉ GEODÉZIE 172

TAl - UTC t------'------'-----'~--....~....------~...-----. TDT(=TI) -UTC
65
60
55
50
45 10
TAI-GPS =19 s 40 5
>-"'O 35 c o ::J ~ ET ID 30 Cf)
-5 25
-10 20
-15 -32.184 s 15
10 TAI-TDB
5
TAl- TDT(=TI) o I I I I
1950 1960 1970 1980 1990 2000
rok
Obrázek 3.3.1: Atomový čas TAJ, řízený (koordinovaný) čas UTC, čas GPS, světový čas UTl, dynamický čas terestrický TDT a barycentrický TDB. Index j značí }-tou časovou stanici
ÚVOD DO KOSMICKÉ GEODÉZIE 173

3.4 PRECESE, NUTACE, POHYB PÓLU A VARIACE v
VROTACIZEME
3.4.1 Precese a nutace
Světové póly rovníku a ekliptiky, a spolu s nimi i rovník a ekliptika, mění svoji polohu v prostoru. To znamená, že se ustavičně mění základní směry a roviny rovníkového a ekliptikálního systému a tím i poloha jarního bodu vůči stálicím. Jelikož je jarní bod počátkem obou souřadnicových soustav, mění se rektascenze a ekliptikální délka, díky zrněně polohy rovníku a ekliptiky se mění deklinace a ekliptikální šířka hvězd. Jev precese a nutace je způsoben gravitačním působením Slunce, Měsíce a planet na zploštělou Zemi.
Obrázek 3.4.1: Znázornění jevu precese, nutace, variace v rotaci Země a pohyb pólu, převzato z [KOSTELECKÝ, VONDRÁK, 2003]
Složitý pohyb světových pólů a rovin rozkládáme na
1) sekulární (věkovitou) složku zvanou precese 2) periodické složky zvané nutace
Podle sil, které způsobují jednotlivé složky, rozeznáváme
a) lunisolární precesi a nutaci, kterou způsobuje Měsíc a Slunce, mění se poloha rovníku,
b) planetární precesi a nutaci, která vzniká rušivým působením planet sluneční soustavy na polohu roviny dráhy Země - ekliptiku.
Celkový vliv lunisolární a planetární precese na pohyb jarního bodu se nazývá generální (obecná) precese.
ÚVOD DO KOSMICKÉ GEODÉZIE 174

Precese
Vlivem lunisolární precese - viz obr. 3.4.1 - se zemská osa se pohybuje po plášti kužele s vrcholovým úhlem, který je roven sklonu ekliptiky E = 23.5°. Tento pohyb se děje v matematicky záporném smyslu, doba oběhu trvá přibližně 25800 let, a nazývá se platonský rok. V důsledku pohybu světového pólu mění svou polohu i světový rovník, a tím i jarní bod jako průsečík světového rovníku a roviny ekliptiky. Hodnotu posunu činí 50.3" za rok.
Pohyb středního světového pólu není přesně kruhový, ale spirálovitý, protože se v důsledku planetární precese pohybuje i pól ekliptiky. Pohyb pólu ekliptiky je způsoben rušivým účinkem planet, především Venuše a Jupitera, na dráhu Země kolem Slunce, a tím i na polohu roviny ekliptiky. Výsledkem je, že se pól ekliptiky pohybuje v záporném směru po přibližně kruhové dráze s poloměrem 90'. Jednu otočku, která také není uzavřená, vykoná přibližně za 70000 let. V důsledku tohoto pohybu mění svou polohu i průsečík roviny ekliptiky a rovníku -jarní bod. Tímto způsobem vzniká planetární precese, která je však ve srovnání s lunisolární precesí podstatně menší. Na rozdíl od lunisolární precese se zde mění i sklon ekliptiky & zhruba o -0.4 7" za rok, jarní bod se posune o 0.125" za rok ve směru oběhu Země kolem Slunce.
Světový severní pól Pn se z důvodů precese pohybuje mezi stálicemi. V současné době se nachází blízko hvězdy a Ursae Minoris (Malá Medvědice), která je tak v současnosti naší polární hvězdou - lidově zvanou Polárka. Do roku 2100 se bude Pn stále Polárce přibližovat až na hodnotu 28', potom se bude vzdalovat. Kolem roku 4000 bude světový pól v blízkosti hvězdy yCephei a kolem roku 14000 se naší Polárkou stane a Lyrae.
Nutace
Poloha Měsíce a Slunce se vzhledem k Zemi periodicky mění. Díky tomu se mění moment sil vzájemného působení Země, Měsíce a Slunce. Vliv Měsíce je přibližně dvakrát větší než vliv Slunce. Díky tomu se pak periodicky mění poloha rotační osy vůči ose ekliptiky. Tuto změnu lze také vyjádřit jako periodický - přibližně eliptický - pohyb pólu Pn kolem středního pólu Pn a nazývá se nutace. Pohyb je v prvním přiblížení eliptický a probíhá v matematicky záporném směru při pohledu na kouli zvnějšku. Základní perioda nutace s amplitudou 9.21" a periodou 6798 dnů (18.62 let) je způsobena pohybem uzlové čáry Měsíce (změnou délky výstupního uzlu Měsíce, uzlová čára je spojnice Země s bodem, ve kterém protíná dráha Měsíce ekliptiku). Uzlová čára Měsíce se za tuto dobu otočí o 360° v retrográdním směru v důsledku vlivu zploštění Země na dráhu Měsíce. V současné době je pro redukci nejpřesnějších pozorování nutno uvažovat i planetární nutaci, která je podobně jako precese působena planetami sluneční soustavy.
3.4.2 Vliv precese na rovníkové souřadnice Sr2
Vlivem generální precese se vůči inerciální soustavě (spojené se stálicemi) změní směr osy rotace Země a směr osy ekliptiky a spolu s nimi i polohy základních rovin, poloha rovníku, ekliptiky a poloha jarního bodu. Důsledkem těchto změn je změna rovníkových a ekliptikálních souřadnic. Vzhledem k tomu, že katalogy souřadnic uvádějí polohy hvězd v rovníkové soustavě Sr2, bude nejdůležitější úlohou vyjádřit vliv precese právě na tento typ souřadnic.
ÚVOD DO KOSMICKÉ GEODÉZIE 175

Obrázek 3.4.2: Vliv precese na rovníkové souřadnice
Vyjdeme z obrázku 3.4.2. Střední polohu rovníku, ekliptiky a jarního bodu v základní
epoše to označíme r0 , eo a Xo. Vlivem generální precese zaujmou v epoše t1 novou polohu r, e a :r_. Roviny rovníku v základní epoše a rovníku v epoše t1 se protnou v přímce A, A '. Rovina kolmá k přímce A, A', procházející počátkem O, protne obě polohy rovníku v bodech M,M'.
Definujme nyní nové úhlové veličiny S, e, z následujícím způsobem:
t; je úhlová vzdálenost XoM měřená v rovině rovníku r0 ,
B je úhlová vzdálenost MM' měřená v rovině kolmé k přímce A, A', procházející počátkem O, z je úhlová vzdálenost M' X měřená v rovině rovníku r.
V úvodu jsme se zmínili, že budeme pracovat ve druhé rovníkové souřadnicové soustavě. Zaveďme obvyklým způsobem pravoúhlou soustavu, tak jak jsme to učinili v kapitole 3.1. Osa xo (nulu použijeme pro označení epochy to) bude pak procházet jarním bodem X,0,
osa zo světovým pólem a osa Yo doplní soustavu na pravoúhlou. Pro epochu t1 bude osa x1
procházet jarním bodem X,, osa ZJ světovým pólem v epoše t 1 a osa y1 doplní soustavu na pravoúhlou. Pro přechod ze soustavy v epoše to do soustavy v epoše t1 pak použijeme rotačních matic z kapitoly 3.1 a rotaci provedeme pomocí úhlových veličin S, e, z. Podle obrázku 3.4.2 pak bude platit
(3.4.1)
první rotaci jsme provedli kolem osy zo o úhel t; v matematicky záporném smyslu, druhou kolem osy YI = A,A' v kladném smyslu o úhel e a třetí kolem osy z1 v záporném smyslu o úhel z. Tímto způsobem převedeme souřadnice ze základní epochy to (J2000.0) na tzv. střední souřadnice v epoše lt. (O "středních" souřadnicích hovoříme, zavedeme-li na výchozí souřadnice vliv precese). Zaveďme označení
P =z( -z )Y( e)z( -s) . (3.4.2)
Pak matici P nazýváme precesní matice.
Hodnoty precesních parametrů s, Z, e a sklonu ekliptiky E jsou definovány Mezinárodní astronomickou unií z roku 1976:
ÚVOD DO KOSMICKÉ GEODÉZIE 176

s= (2306.2181" + 1.396 56" T- 0.000 139" T 2) t + (0.301 88"- 0.000 344" 1) t 2 +
+ 0.017998tJ,
z= (2306.2181" + 1.396 56" T- 0.000 139" T 2) t + (1.094 68" + 0.000 066" 1) t 2 +
+ 0.018 203 tJ'
e = (2004.3109" - 0.853 30" T- 0.000 217" T 2) t- (0.426 65" + 0.000 217" 1) t 2
-- 0.041 833 tJ.
Počítáme-li hodnoty parametrů pro epochu t1 ze základní epochy J2000.0, pokládáme T = O a pro t platí
JD(t1)-2451545 t = ---'-'-3-6-52_5 __ .
3.4.3 Vliv notace na rovníkové souřadnice
Jak jsme viděli v předchozím odstavci, nutací rozumíme periodický pohyb světového pólu Pn, kolem jeho střední polohy, kterou ve shodě s obrázkem 3.4.3 označme Pt. Precesí a nutací ovlivněný pól se pak nazývá pravý pól. Přesto, že jde v případě reálné Země o složitý pohyb, je tento pohyb možné modelovat pomocí harmonického rozkladu do součtu konečného počtu sinusovek a kosinusovek. Veličiny, určující nutaci, máme znázorněny na obrázku 3.4.3. Díky změně polohy světového pólu se mění i poloha rovníku. Precesí ovlivněný střední rovník r 1 se posune do polohy r a jarní bod přejde z polohy X.1 do polohy ry>. Díky posunu rovníku se změní i sklon ekliptiky z hodnoty &1 na &. Úhlovou vzdálenost X.t ry> nazýváme nutací v ekliptikální délce a značíme ji Lllfl. Nutace ve sklonu ekliptiky se značí Ll& a platí Ll&=&- &J.
Jak již bylo řečeno vyse, nutační parametry se vyjadřují pomocí harmonických rozvojů. Proto můžeme psát - podle nutační teorie IERS 1996 (International Earth Rotation and Reference Systems Service- viz [IERS, 2006])
263
l1lfl = L(A; + A;t)sin(ARGUMENT) +A;· cos(ARGUMENT) i=l (3.4.3)
263
11&= L(B; + B;t)cos(ARGUMENT)+ B;· sin(ARGUMENT} i=l
kde ARGUMENT je lineární kombinací pěti základních argumentů F.1 zvaných Delaunayovy proměnné, kterými jsou- viz obr. 3.4.4:
F1 = l = střední anomálie Měsíce = 134.96340251 o+ 1717915923.2178" t + 31.8792" j2 + 0.051635" ť- 0.00024470" t4
,
F2= l' = střední anomálie Slunce = 357.52910918° + 129596581.0481" t- o.5532" r-- o.oool36" ť- 0.0000 1149" l,
ÚVOD DO KOSMICKÉ GEODÉZIE 177

F3=F=L-il = 93.27209062° + 1739527262.8478" 1- 12.7512" r- o.oow37" ť + + 0.00000417" t4
,
F4= D = střední elongace Měsíce od Slunce = 297.85019547° + 1602961601.2090" 1- 6.3706" r + o.oo6593" r- 0.00003169" t,
F5 =Q = střední délka výstupního uzlu Měsíce = 125.04455501°- 6962890.2665" 1 + 7.4722" r- o.oo11o2" ť- 0.00005939" t4
kde L je střední délka Měsíce a t je měřeno v Juliánských stoletích od epochy 12000.0, měřeno v dynamickém čase
JD(t1)- 2451545 t= .
36525
dráha Měsíce
pericentrum
Obrázek 3.4.3 a 3.4.4: Vliv nutace, Delaunayovy proměnné
Delaunayovy proměnné jsou obdobou Keplerových elementů. Základní rovinou, ke které jsou vztaženy, je v tomto případě ekliptika, a nikoliv rovník. Pro argument pak platí
5
ARGUMENT= LNjFj I
a N jsou násobné koeficienty. Několik největších koeficientů nutačního rozvoje je patrné z Tabulky 3.4.1 nutačních veličin. Součet 263 členů v (3.4.3) obsahuje "lunisolární" nutaci, která byla donedávna pro běžné redukce dostačující. Z Tabulky je zřejmé, že největší hodnotu obsahuje člen s argumentem Q s periodou 18.62let a amplitudami 17.2" v ekliptikální délce a 9.2" v ekliptikální šířce. Pro zpracování nejpřesnějších astrometrických pozorování (technologie interferometrie s velmi dlouhými základnami) je však i tato nutace nedostačující a je nutno zavádět dalších 118 členů, majících amplitudu větší než 0.000001", působených "plane-
ÚVOD DO KOSMICKÉ GEODÉZIE 178

tární" nutací. Delauneyových proměnných je v tomto případě 1 O, do hry vstupují střední anomálie Venuše, Marsu, Jupitera a Saturnu. Maximální amplituda dosahuje 0.0002". V současné době se do nutace zahrnuje také vliv interakce sil vznikajících mezi zemským pláštěm a jádrem, tato teorie nutace má označení IAU2000- viz dále.
Tabulka 3.4.1 - Nutační veličiny "lunisolární" nutace Násobky N perioda eklipt. délka sklon ekliptiky
I I' F D Q dny A; A'; B; B'; A"; B";
o o o o I -6798.35 -17.206" -0.02" 9.205" 0.001" 0.004" 0.002"
o o 2 -2 2 182.62 1.317" o 0.573" o -0.001" o o o 2 o 2 13.66 -0.228" o 0.098" o o o o o o o 2 -3399.18 0.207" o -0.090" o o o o -1 o o o -365.26 -0.148" o 0.007" o 0.001" o
Podle obrázku 3.4.3 je zřejmé, že rovníkové pravoúhlé souřadnice (směrové kosiny) x, y, z ve druhé rovníkové soustavě Sr2 ovlivněné nutací vypočítáme ze středních poloh XJ, YJ, ZJ
ovlivněných precesí opět transformací pomocí rotačních matic. Zachováme-li standardní směr otáčení, vyjde (&J je sklon ekliptiky neovlivněný nutací)
(3.4.4)
Veličiny (x, y, z)1 jsou souřadnice, ovlivněné precesí, výsledným (x, y, z) se říká pravé souřadnice.
Rovnice (3.4.4) vyjadřují vliv na rovníkové souřadnice Sr2· Zaveďme označení
(3.4.5)
Matici N pak nazýváme nutační matice.
3.4.4 Pohyb pólu a variace v rotaci Země
V tomto odstavci ukážeme, že vůči souřadnicové soustavě pevně spojené se Zemí (terestrické soustavě) vykonává okamžitý vektor rotace (osa rotace) pohyb, který se nazývá pohyb pólu. Díky pohybu pólu se tedy mění souřadnice bodu, pokud bychom je vztáhli ke skutečné rotační ose. Z kapitoly, která pojednává o čase, víme, že ani rotace Země není z různých geofyzikálních příčin rovnoměrná, díky tomu dochází k další změně souřadnic. V dalším tedy budeme rozlišovat střední souřadnice, vztažené ke konvencionální terestrické souřadnicové soustavě (definované vůči střední, konvencionální poloze rotační osy a konvencionálnímu základnímu poledníku), a okamžité souřadnice, (definované vzhledem k okamžité poloze rotační osy a základního poledníku). Poznámka: Vzhledem k pohybu tektonických ker je i realizace systému "pevně spojeného se Zemí" obtížná, ale předpokládejme, že je možná.
Pokud bychom reálnou Zemi aproximovali modelem elastického rotujícího elipsoidu, bude zemský pól R vykonávat- viz obr. 3.4.5:
ÚVOD DO KOSMICKÉ GEODÉZIE 179
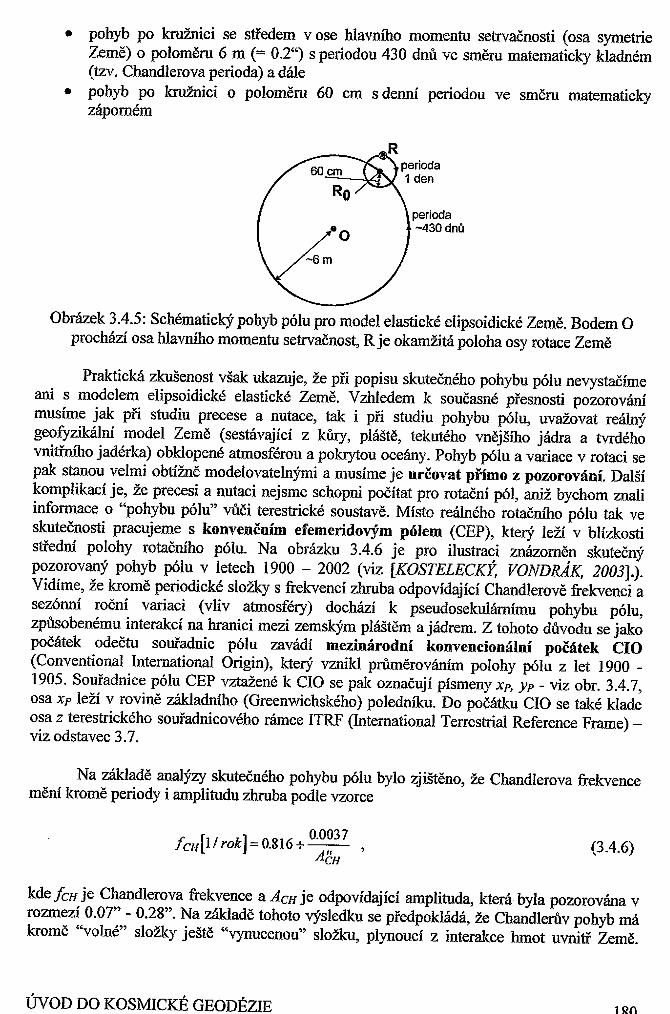
• pohyb po kružnici se středem v ose hlavního momentu setrvačnosti (osa symetrie Země) o poloměru 6 m (= 0.2") s periodou 430 dnů ve směru matematicky kladném (tzv. Chandlerova perioda) a dále
• pohyb po kružnici o poloměru 60 cm s denní periodou ve směru matematicky záporném
perioda -430dnú
Obrázek 3.4.5: Schématický pohyb pólu pro model elastické elipsoidické Země. Bodem O prochází osa hlavního momentu setrvačnost, Rje okamžitá poloha osy rotace Země
Praktická zkušenost však ukazuje, že při popisu skutečného pohybu pólu nevystačíme ani s modelem elipsoidické elastické Země. Vzhledem k současné přesnosti pozorování musíme jak při studiu precese a nutace, tak i při studiu pohybu pólu, uvažovat reálný geofyzikální model Země (sestávající z kůry, pláště, tekutého vnějšího jádra a tvrdého vnitřního jadérka) obklopené atmosférou a pokrytou oceány. Pohyb pólu a variace v rotaci se pak stanou velmi obtížně modelovatelnými a musíme je určovat přímo z pozorování. Další komplikací je, že precesi a nutaci nejsme schopni počítat pro rotační pól, aniž bychom znali informace o "pohybu pólu" vůči terestrické soustavě. Místo reálného rotačního pólu tak ve skutečnosti pracujeme s konvenčním efemeridovým pólem (CEP), který leží v blízkosti střední polohy rotačního pólu. Na obrázku 3.4.6 je pro ilustraci znázorněn skutečný pozorovaný pohyb pólu v letech 1900 - 2002 (viz [KOSTELECKÝ, VONDRÁK, 2003].). Vidíme, že kromě periodické složky s frekvencí zhruba odpovídající Chandlerově frekvenci a sezónní roční variaci (vliv atmosféry) dochází k pseudosekulárnímu pohybu pólu, způsobenému interakcí na hranici mezi zemským pláštěm a jádrem. Z tohoto důvodu se jako počátek odečtu souřadnic pólu zavádí mezinárodní konvencionální počátek CIO (Conventional International Origin), který vznikl průměrováním polohy pólu z let 1900 -1905. Souřadnice pólu CEP vztažené k CIO se pak označují písmeny Xp, yp- viz obr. 3.4.7, osa Xp leží v rovině základního (Greenwichského) poledníku. Do počátku CIO se také klade osa z terestrického souřadnicového rámce ITRF (International Terrestrial Reference Frame)viz odstavec 3. 7.
Na základě analýzy skutečného pohybu pólu bylo zjištěno, že Chandlerova frekvence mění kromě periody i amplitudu zhruba podle vzorce
0.0037 fcH[ll rok]= 0.816 + A" ,
CH (3.4.6)
kde leH je Chandlerova frekvence a AcH je odpovídající amplituda, k.-terá byla pozorována v rozmezí 0.07"- 0.28". Na základě tohoto výsledku se předpokládá, že Chandlerův pohyb má kromě ''volné" složky ještě "vynucenou" složku, plynoucí z interakce hmot uvnitř Země.
ÚVOD DO KOSMICKÉ GEODÉZIE 180

1935
1930
1925 1960 .
.X 1920 o ...
1915
1910
1940 t . 1935~--· ..
-0.2'\ .•.. +~ 0.0'\
~> 0.2 '"'· 0.4 '\
0.6
. Obrázek 3.4.6: Pohyb pólu v letech 1900 až 2002-
převzato z [KOSTELECKÝ, VONDRÁK, 2003]
Obrázek 3.4.7: Souřadnice pólu Xp a Yp v tečné rovině
Mezi hlavní veličiny, ovlivňující pohyb pólu patří:
• elastická deformace Země,
• změny hustoty atmosféry,
• změny oceánské hladiny,
• kolísání podzemní vody a
• atmosférické slapy.
Změna rychlosti rotace Země (změna délky dne) obsahuje kromě periodických složek,
jejichž velikost je řádu milisekund (viz obrázek 3.4.8), ještě sekulární (věkovitý) člen. Jde o
sekulární zpomalování rotace Země v důsledku tzv. slapového tření. Na základě pozorování
byla určena současná hodnota věkovité změny úhlové rotace Země w
181
dm = (- 5.4 ± 0.5)x 1 o-22 rad.s-2
dt (3.4.7)
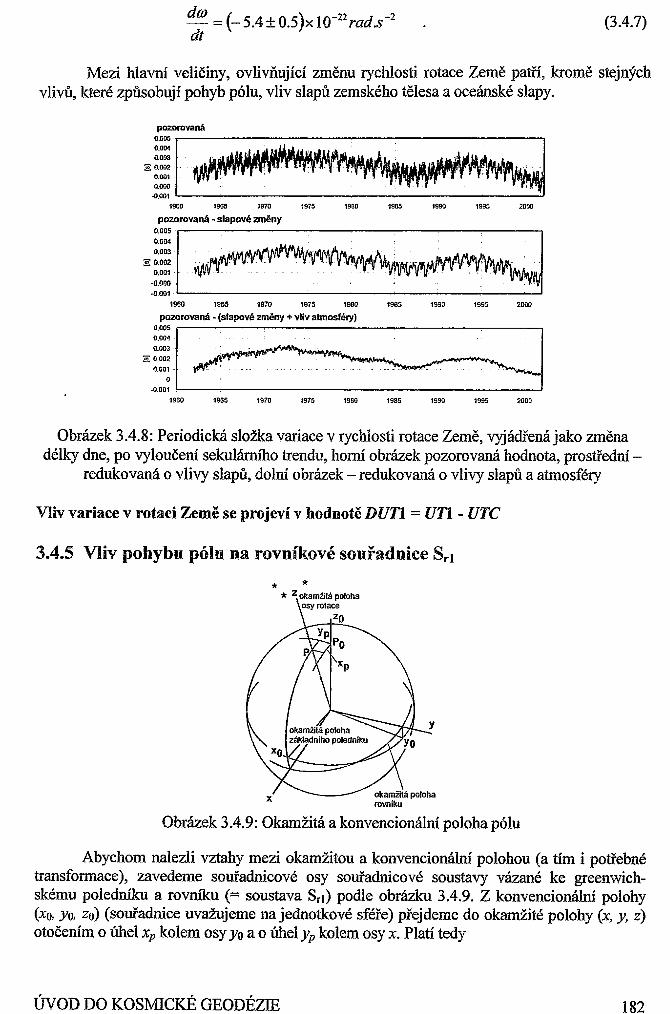
Mezi hlavní veličiny, ovlivňující změnu rychlosti rotace Země patří, kromě stejných vlivů, které způsobují pohyb pólu, vliv slapů zemského tělesa a oceánské slapy.
pozorovaná
0.005·1~ 0.004 • . . 0,003 . . .. .. . . . . . ' . . . . .. . . . .
:e: 0.002 - . . . . - ; - - . ~- . ·- . . -- .: ' ~ .· . . - : . ; .... 0.001 . . .. . . . . 0.000 . . • - . ;
-0.001 . . . . 1960 1965 1970 1975 1980 1985 1990 1995 2000
pozorovaná -slapové změny
~,~ 0.004 . . • . • ; 0.003. . . . . . • . . ·. .. . . . . . • . . . . :
:!!i: 0.002 . . . ... - . . .. . . •. .. .. . . . . ... .. . . -· . •· . . . ~=:=====-=== -0.001 . • • .
1960 1965 1970 1975 1980 1985 1990 1995 2000
pozorovaná -(slapové změny +vliv atmosféry)
1960 1965 1970 1975 1980 1985 1990 1995 2000
Obrázek 3.4.8: Periodická složka variace v rychlosti rotace Země, vyjádřená jako změna délky dne, po vyloučení sekulárního trendu, horní obrázek pozorovaná hodnota, prostřední -
redukovaná o vlivy slapů, dolní obrázek- redukovaná o vlivy slapů a atmosféry
Vliv variace v rotaci Země se projeví v hodnotě DUTl = UTl - UTC
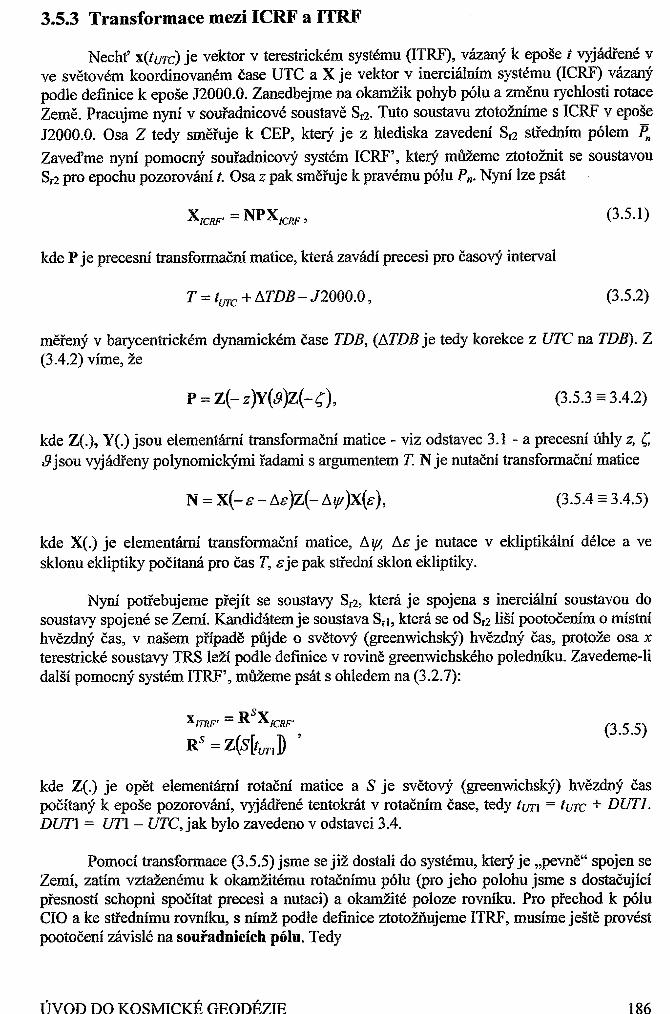
3.4.5 Vliv pohybu pólu na rovníkové souřadnice Sr1
Obrázek 3.4.9: Okamžitá a konvencionální poloha pólu
Abychom nalezli vztahy mezi okamžitou a konvencionální polohou (a tím i potřebné transformace), zavedeme souřadnicové osy souřadnicové soustavy vázané ke greenwichskému poledníku a rovníku (= soustava Sr1) podle obrázku 3.4.9. Z konvencionální polohy (xo, yo, zo) (souřadnice uvažujeme na jednotkové sféře) přejdeme do okamžité polohy (x, y, z) otočením o úhel Xp kolem osy Yo a o úhel Yp kolem osy x. Platí tedy
ÚVOD DO KOSMICKÉ GEODÉZIE 182

(3.4.8)
kde X, Y jsou rotační matice z odstavce 3.1.
v , v , ,
3.5 KONVENCNI REFERENCNI SYSTEMY ICRS A ITRS
3.5.1 Definice konvečních referenčních systémů
Ve vyšší geodézii se používá řada různých prostorových souřadnicových systémů, my zde nastíníme pouze ty nejdůležitější, mající význam při zpracování geodetických měření.
V dalším budeme rozlišovat mezi referenčním systémem a referenčním rámcem.
Definice: (referenční systém) = (soubor konstant, algoritmů, technologie, .. .) + (referenční rámec).
Souborem konstant a algoritmů rozumíme množinu dohodnutých parametrů (např. rychlost světla, hodnota zploštění Země, velikost hlavní poloosy referenčního elipsoidu, ap.) a způsobů výpočtů dalších parametrů (výpočet precese, nutace, ap.), mezinárodně přijatou. Technologiemi rozumíme různé pozorovací techniky a jejich konkrétní použití podle dohodnutého způsobu. Referenční rámec je pak soubor objektů (kvazarů, hvězd, nebo v terénu fyzicky realizovaných bodů - stabilizace), kterým jsou přiřazeny souřadnice a zrněny těchto souřadnic v čase.
V dalším se budeme věnovat dvěma základním systémům, které se principiálně od sebe odlišují. Prvním je konvenční inerciální referenční systém, jehož praktická realizace se nazývá ICRS (lnternational Celestial Reference System - mezinárodní nebeský referenční systém). Podle definice dále platí
ICRS =(konstanty, algoritmy, technologie)+ ICRF,
kde ICRF znamená International Celestial Reference Frame - mezinárodní nebeský referenční rámec. Systém je (přibližně, upřesnění je dáno konkrétní realizací) definován následovně: počátek souřadnicového rámce umístíme do barycentra sluneční soustavy, osu Z ztotožníme s konvenčním efemeridovým pólem CEP (celestial ephemeris pole) v epoše J2000.0 (CEP leží v blízkosti středního rotačního pólu- viz odstavec 3.4) a osa X směřuje do jarního bodu této epochy. Osa Y doplňuje systém na pravoúhlý pravotočivý- viz obr. 3.5.1. Referenční rámec je pak definován souřadnicemi nebeských objektů (primárně radiových zdrojů) v soustavě Sr2 (rektascenze a deklinace).
Druhým systémem je konvenční terestrický systém (CTRS), jehož praktickou realizací je ITRS:xx (International Terrestrial Reference System - mezinárodní terestrický referenční systém), xx je dvojčíslí (případně čtyřčíslí) roku, související s aktuální realizací (viz dále). Opět platí:
l'NOD no KOSMTCKÉ GEODÉZIE 183

ITRSxx =(konstanty, algoritmy, technologie)+ ITRFxx,
Z=CEP z=OCI=CIO
0:/'------Y 0"'.)------ y
X=T x = Greenwich
Obrázek 3.5 .1 : Definice konvenčních systémů
kde ITRF znamená International Terrestrial Reference Frame - mezinárodní terestrický referenční rámec. Systém má počátek ve hmotném středu Země, osa z je ztotožněna s konvenčním mezinárodním počátkem CIO (Conventional International Origin- jde o střední polohu vektoru rotace Země v letech 1900-1905 - viz odstavec 3.4), osa x leží v rovině greenwichského poledníku a osay doplňuje systém na pravoúhlý pravotočivý- viz obr. 3.5.1. Referenčuí rámec je definován souborem stanic, fyzicky realizovaných na zemském povrchu stabilizacemi, s přiřazenými souřadnicemi a jejich časovými změnami. Primárními souřadnicemi jsou pravoúhlé prostorové souřadnice x, y, z, odvozenými souřadnicemi jsou elipsoidické souřadnice: B geodetická zeměpisná šířka, L geodetická zeměpisná délka a H je elipsoidická výška. (Pro vzájemný jednoznačný převod mezi .xyz a BLH existují známé vztahy). Exaktnější definice je uvedena ve spojitosti s konkrétní realizací v odstavci 3. 7.
Z geodetického hlediska bude pro nás dále důležité definovat transformační vztahy mezi oběma systémy. K tomu využijeme poznatků z předchozích odstavců. Dříve, než se budeme věnovat této transformaci, je třeba se zmínit o jevu, který způsobuje časovou změnu souřadnic, vázaných k terestrickému systému TRS.
3.5.2 Pohyby kontinentů - tektonika desek
Vlivem tektonických sil a geologické stavby Země je možné rozdělit zemskou kůru na řadu bloků (ll až 14, podle různých autorů), které se vůči sobě vzájemně pohybují - viz obr 3.5.2. Rychlost tohoto pohybu je možné popsat matematicky pomocí rotačního vektoru mk. Podle obrázku 3.5.3 lze tento vektor definovat na základě výrazu pro časovou změnu polohy stanice B, ležící na k-té tektonické desce:
kde XB je vektor stanice, v je rychlost rotace desky a em je jednotkový vektor - nositel příslušného rotačního vektoru mk a v je velikost úhlové rychlosti. Velikosti rotačních vektorů jsou odvozeny na základě geofyzikálních paleomagnetických pozorování a charakterizují globální horizontální pohyb tektonických ker. Horizontální z toho důvodu, že se doposud nepodařilo potvrdit hypotézu o roztažnosti nebo naopak smršťování Země; vektor m je proto určován tak, aby byl globální vertikální pohyb nulový. Vzájemný pohyb tektonických desek
ÚVOD DO KOSMICKÉ GEODÉZIE 184

ztěžuje definici souřadnicové soustavy "pevně vázané" k zemskému tělesu. Prakticky by bylo možné zvolit jednu z desek jako referenční s nulovým pohybem a vázat počátek souřadnicové soustavy vůči této desce. Z hlediska teorie rotace reálné Země se však ukazuje daleko opodstatněnější definovat souřadnicový systém tak, aby integrální střední hodnota pohybu tektonických desek byla nulová, tedy jinými slovy, aby nedocházelo k rotaci sítě jako celku - podmínka "no net rotation - NNR". Nejpoužívanějšími globálními geofyzikálními modely jsou AM02 a v poslední době NNR-NUVELI. Tyto modely jsou v současné době ověřovány a korigovány pomocí geodetického měření. Poznámka: Na jednotlivých tektonických deskách může samozřejmě docházet k dalším časovým změnám stanic -posunům bodů. Zjišťování jak globálních, tak i regionálních případně lokálních posunů je náplní oboru geodynamika.
50
Q)
"" ~ o
50° l........J
5 cm/year
Plate motions according to NUVEL 1-NNR
100° 150°
"" PCFC
200°
longitude
350°
Obrázek 3.5.2: Rozložení tektonických desek (úsečky znázorňují směr a velikost ročního pohybu stanic, zařazených do ITRS2000, podle geofyzikálního modelu NNR-NUVEL-1)
vektor posunuti bodu B
Obrázek 3.5.3: Definice vektoru rotace tektonických desek
ÚVOD DO KOSMICKÉ GEODÉZIE
3.5.3 Transformace mezi ICRF a ITRF
Nechť x(turc) je vektor v terestrickém systému (ITRF), vázaný k epoše t vyjádřené v ve světovém koordinovaném čase UTC a X je vektor v inerciálním systému (ICRF) vázaný podle definice k epoše 12000.0. Zanedbejme na okamžik pohyb pólu a změnu rychlosti rotace Země. Pracujme nyní v souřadnicové soustavě Sr2· Tuto soustavu ztotožníme s ICRF v epoše
12000.0. Osa Z tedy směřuje k CEP, který je z hlediska zavedení Sr2 středním pólem ~
Zaveďme nyní pomocný souřadnicový systém ICRF', který můžeme ztotožnit se soustavou Sr2 pro epochu pozorování t. Osa z pak směřuje k pravému pólu Pn. Nyní lze psát
XICRF' = NPX/CRF' (3.5.1)
kde P je precesní transformační matice, která zavádí precesi pro časový interval
T = ture + !J..TDB- J2000.0, (3.5.2)
měřený v barycentrickém dynamickém čase TDB, (ATDB je tedy korekce z UTC na TDB). Z (3.4.2) víme, že
P = z(-z)Y(s)z(-c:;), (3.5.3 = 3.4.2)
kde Z(.), Y(.) jsou elementární transformační matice- viz odstavec 3.1 -a precesní úhly z, (, 9 jsou vyjádřeny polynomickými řadami s argumentem T. N je nutační transformační matice
N = X(-c-Ac)z(-A~)X(c), (3.5.4 = 3.4.5)
kde X(.) je elementární transformační matice, Alf/, 11& je nutace v ekliptikální délce a ve sklonu ekliptiky počítaná pro čas T, &je pak střední sklon ekliptiky.
Nyní potřebujeme přejít se soustavy Sr2, která je spojena s inerciální soustavou do soustavy spojené se Zemí. Kandidátem je soustava Srl. která se od Sr2 liší pootočením o místní hvězdný čas, v našem případě půjde o světový (greenwichský) hvězdný čas, protože osa x terestrické soustavy TRS leží podle definice v rovině greenwichského poledníku. Zavedeme-li další pomocný systém ITRF', můžeme psát s ohledem na (3.2.7):
XITRF' = RSXICRF'
Rs = z(s~unD ' (3.5.5)
kde Z(.) je opět elementární rotační matice a S je světový (greenwichský) hvězdný čas počítaný k epoše pozorování, vyjádřené tentokrát v rotačním čase, tedy tur1 =ture+ DUTJ. DUTl = UTl - UTC, jak bylo zavedeno v odstavci 3.4.
Pomocí transformace (3.5.5) jsme se již dostali do systému, který je "pevně" spojen se Zemí, zatím vztaženému k okamžitému rotačnímu pólu (pro jeho polohu jsme s dostačující přesností schopni spočítat precesi a nutaci) a okamžité poloze rovníku. Pro přechod k pólu CIO a ke střednímu rovníku, s nímž podle definice ztotožňujeme ITRF, musíme ještě provést pootočení závislé na souřadnicích pólu. Tedy
ÚVOD DO KOSMICKÉ GEODÉZIE 186

XJTRF = RM XJTRF'
RM = Y(-xP)x(- Yp)' (3.5.6)
jak plyne z výrazu (3.4.8). Úhrnem tedy dostáváme
(3.5.7)
Pro obrácenou transformaci pak platí
X = P'N'R'8R'M X ICRF JTRF• (3.5.8)
kde P' = Z(s)Y(- .9)Z(z ), N' =X(- c )Z(l1VJ )X(c + Ac)
R'8 = Z(-S~unD, R'M = X(yp)y(xp)
Z výrazů (3.5.1) až (3.5.7)je patrné, že platí
kde f je transformační fi.mkce. Pokud tedy známe nějaké vektory v ICRF i v ITRF jsme naopak schopni určovat některé z pěti parametrů, charakterizujících nutaci, rozdíl mezi UTl a UTC, resp. pohyb pólu (parametry charakterizující precesi se neopravují, precese je známa s dostatečnou přesností). Tyto parametry se nazývají parametry orientace Země (Earth Orientation Parameters - EOP).
3.5.4 Transformace mezi ICRF a ITRF od roku 2003
Vzhledem k neustále se zvyšujícím požadavkům na přesnost geodetických pozorování a vzhledem k reálným možnostem observačních technik kosmické geodézie rozhodla v r. 2000 Mezinárodní astronomická unie (IAU) zpřesnit model transformace mezi nebeským systémem CRF a terestrickým systémem TRF. IAU vydala ve svých doporučeních následující konstatování a definice: • Mezinárodní nebeský referenční systém (ICRS) a rámec (ICRF) -viz [.M4, FEISSEL,
1997] a [KABELÁČ, KOSTELECKÝ, 1998], kap.7, str. 157- jsou od 1.1.1998 definovány prostřednictvím přijatých poloh (katalogem) mimogalaktických objektů, vyzařujících
v radiových vlnových délkách. V současnosti je jich celkem 212 definujících, 294 kandidátských a 102 dalších. Přestože jsou jejich vlastní pohyby zanedbatelné, mají tyto objekty různé tvary, které se často mění s časem. Proto je nutné tyto systémy a rámce pravidelně udržovat.
• Katalog Hipparcos - [KABELÁČ, KOSTELECKÝ, 1998], kap.6, str.l51 -je primární realizací ICRS v optické oblasti. Přesto dochází k postupnému posuvu mezi tímto katalogem a ICRF. Některé hvězdy však vykonávají nelineární vlastní pohyb, který se těžko monitoruje. Proto se zřizuje nebeský referenční rámec Hipparcos (Hipparcos Celestial Reference System- HCRF), z jehož realizace jsou tyto hyězdy vyloučeny.
• Neustálé zvyšování přesnosti pozorování vede k tomu, že použití obecné teorie relativity nabývá na důležitosti. Díky tomu se rozšiřuje definice základní nebeské referenční
1R7

soustavy - pro sluneční soustavu se zavádí Barycentrický nebeský referenční systém (BCRS) a pro Zemi Geocentrický nebeský referenční systém (GCRS). Vzájemný vztah obou systémů je realizován post~Newtonovskou transformací obecné teorie relativity.
• Je nově - přesněji - definován vztah mezi Barycentrickým souřadnicovým časem (TCB) a Geocentrickýcm souřadnicovým časem (TCG) - o těchto časech viz [KABELÁČ, KOSTELECKÝ, 1998], kap. 4, str. 81.
• Dosud platný model nutace IERS 1996 ( = IAU 1980)- viz odstavec 3.4- se zavádějí nové modely IAU 2000A (model s plnou přesností cca 0.0002") a ,,kratší" model IAU 2000B (přesnost cca 0.001"). Modely zohledňují vnější síly od planet (ne pouze od Měsíce a Slunce), elastičnost Země, elektromagnetické působení na rozhraních vnějšího tekutého jádra s pláštěm a vnitřním pevným jádrem, roční atmosférické slapy, geodetickou nutaci (projev obecné teorie relativity) a vliv oceánských slapů. Model je konstruován tak, aby popisoval pohyb Celestial Intermediate Pole (CIP) (místo dřívějšího Celestial Ephemeris Pole CEP).
• Definice Celestial Intermediate Pole (CIP). I když k popisu vzájemné orientace mezi terestrickou (TRS) a nebeskou (CRS) soustavou postačují jen tři parametry (např. Eulerovy úhly) existuje zřejmá potřeba dvou dalších, popisujících pohyb konvencionálně zvolené mezilehlé osy. Tato osa musí být zvolena tak, aby byla blízká okamžité ose rotace a aby její pohyb v terestrické soustavě (zvaný pohyb pólu) a v nebeské soustavě (zvaný precese a nutace) byl oddělitelný. Tuto roli hrál doposud CEP, jehož definice byla založena na požadavku, aby nevykonával rychlý téměř jednodenní pohyb ani v jedné z obou referenčních soustav. Tato definice se však stala zastaralou a nerealizovatelnou vzhledem k malým vysokofrekvenčním (periody jeden den a kratší) pohybům okamžité osy rotace vůči oběma soustavám. Proto se zavádí Celestial /ntermediate Pole (CIP) definovaný tak, že jeho periodický pohyb v nebeském systému (nutace) obsahuje pouze členy o periodách delších než dva dny, všechny ostatní pohyby se interpretují jako terestrický pohyb pólu.
• Transformace mezi CRS a TRS se nově obejde bez roviny ekliptiky (kterou nelze prakticky realizovat s dostatečnou přesností). Oficiální konvenční nebeský systém ICRS již tak není založen na ekliptice a ekvinokciu (=jarním bodu). (V definici je psáno, že počátek odečtu rektascenzí leží v blízkosti jarního bodu).
• Místo jarního bodu jsou na okamžitém rovníku (odpovídajícímu CIP) definovány dva nové počátky. Celestial Ephemeris Origin (CEO) (nebeský efemeridový počátek) nahrazuje jarní bod ( = polohu osy X nebeské soustavy) a Terrestrial Ephemeris Origin (TEO) (zemský efemeridový počátek) definuje průsečík konvenčního Greenwichského poledníku s rovníkem ( = polohu osy x terestrické soustavy). CEO leží v blízkosti jarního bodu. Oba leží na rovníku odpovídajícímu CIP.
• Vzájemnou polohy CEO a TEO zprostředkovává Earth Rotation Angle (úhel rotace Země) neboli Stelar Angle (SA) (hvězdný (stelární) úhel), který nahrazuje dosavadní greenwichský (světový) hvězdný čas. Výhodou SA je, že je definován tak, na rozdíl od světového hvězdného času, aby byl pouze lineární funkcí času UTl.
• Transformace mezi terestrickým systémem ITRS a nebeským geocentrickým systémem GCRS ( ~ ICRF) je pak dána polohou CIP v GCRS, polohou CIP v ITRS a úhlem rotace Země (SA).
Na základě výše uvedených definic můžeme psát místo (3.5.8)
(3.5.9)
ÚVOD DO K0&\1ICKÉ GEODÉZIE 188

kde
(3.5.1 O)
a Xp a yp jsou souřadnice pólu CIP vůči terestrické soustavě, význam úhlu s' je patrný z obrázku 3.5.4. Úhel s' nabývá za 100 let hodnot menších než 0.0004". Z obrázku 3.5.4 ještě máme
I
Xp = sing cosF, yP = -singsinF, s'= J(cosg -l)Fdt (3.5.11) I)
y
· základní rovník
Obrázek 3.5.4: Transformace z CIO na CIP
Dále platí
(3.5.12)
kde SAje hvězdný (stelární) úhel, který je lineární funkcí času UTl a je definován výrazem
SA = 2K (0.7790572732640 + 1.00273781191135448. tun),
tun =JD( UTl )-2451545.0.
Precese a nutace jsou v novém pojetí sloučeny (byla vyloučena ekliptika). Proto platí
(3.5.13)
PN"(t)= z(-E) Y(-d)Z(E)Z(s)= z(-[90°+ED X(-d)Z(90°+E)Z(s), (3.5.14)
kde - podle obrázku 3.5.5 -jsou E, d poziční úhly CIP v nebeské soustavě a s je malý úhel, dosahující v epoše J2000.0 hodnoty O" a v epoše J2100.0 hodnoty 0.07". Pro směrové kosiny (X, Y, Z) pólu CIP v nebeské soustavě pak z obrázku 3.5.5 platí
T'T\lf'IT\ T\f'l Vf'lf;.'l\.ATf"'VD n:Cf'IT"\D7TD lQQ

X =sindcosE, Y =sindsinE, Z= cosd, (3.5.15)
pro s máme výraz
s(1) = -f' x{t )f{t )-(j )X{t) dt + {2) I 1 +Z I )
(3.5.16)
Z(GCRS)
so0 '+ E ~-~--------~
J SA - hvězdný (stelární) úhel
Obrázek 3j5.5: Transformace z CIP na GCRS I
a pro t platí jl t = (TT- 2451545.0) I 36525, TT je terestrický dynamický čas ve dnech.
Spojením (3.5.14) a (3.5.15) dostá 1
áme pro precesně-nutační matici výraz
(3.5.17)
1-J2 -aXY PN" = -aXY 1-aY2 z(s), (3.5.18)
-X -Y
a = 11(1 + cos d) a pro hodnoty X a Y plyne z precesního a nutačm'ho modelu
X= -0.016617" + 2004.191743" t- 0.4272190" 12-
- 0.1986205" 13 - 0.0000~60" t 4 + 0.0000060" t 5 +periodické členy
(3.5.19) Y = +0.006951"- 0.0253 76" t + 22.407251 O" t 2 + +0.00184235" 13 -0.0011131" 14 +0.0000099" t 5 +periodické členy
ÚVOD DO KOSMICKÉ GEODÉZIE 190
Prvních 6 členů v každém výrazu vyjadřuje vliv precese, periodické členy vyjadřují pak vliv nutace - srovnej s (3.4.3). Argumentem periodických členů je zde kromě pěti základních argumentů F ještě dalších devět argumentů, zahrnujících vliv planet (Merkur, Venuše, Země, Mars, Jupiter, Saturn, Uran, Neptun) a generální precese v délce. Celkem se jedná o zhruba 1400 členů.
Obrácenou transformaci - z ICRS do ITRS - popíšeme pak standardně pomocí inverzních matic.
, v ,
3.6 PRAKTICKA REALIZACE KONVENCNIHO , , v , , ,
INERCIALNIHO REFERENCNIHO SYSTEMU - SYSTEM ICRS
Jak již bylo řečeno výše, praktickou realizací konvenčního inerciálního systému je systém ICRS. Obecně je možné říci, že ICRS - Intemational Celestial Reference System (Mezinárodní nebeský referenční systém) se skládá z
• algoritmů, konstant a observační technologie, doporučených k použití při jeho realizaci, • referenčního rámce ICRF - Intemational Celestial Reference Frame.
V roce 1991 vznesla Mezinárodní astronomická unie (IAU) požadavek, aby příští referenční sytém byl budován na kinematickém základě, použitím souřadnic vzdálených mimogalaktických zdrojů (kvazarů a aktivních jader galaxií). Dřívější definice totiž upřednostňovala systém založený na dynamickém pohybu Země v prostoru, souřadnice byly tedy vztaženy k dynamicky definovanému rovníku a jarnímu bodu v nějaké referenční epoše (Besselově -Bl950, nebo juliánské- 12000.0 = 1. ledna 2000 ve 12h). Z důvodu zachování kontinuity jsou dřívější konvencionální směry v základní epoše 12000.0 zachovány i v novém systému a to takovým způsobem, že jsou s maximální možnou přesností ztotožněny se základními směry defmovanými katalogem FK5, který je nejpřesněji defmovaným souřadnicovým systémem, vázaným na nebeskou sféru pomocí metod klasické astrometrie- více viz např. [KABELÁČ, KOSTELECKÝ, 1998], kapitola 6.
3.6.1 Počátek souřadnicové soustavy ICRS
Na základě doporučení IAU leží počátek pravoúhlé souřadnicové soustavy X, Y, Z souřadnicového systému ICRF v barycentru sluneční soustavy. Aby tato podmínka mohla být dodržena, je nutno všechna pozorování pojímat v relativistickém čtyřrozměrném časoprostoru a zavádět příslušné korekce. Osa X míří k jarnímu bodu ( =průsečík rovníku a ekliptiky), osa Z ke střednímu pólu, rovinaXYje rovinou rovníku v rovníkové souřadnicové soustavě.
3.6.2 Základní rovina ICRS
Na základě doporučení Mezinárodní IAU leží základní rovina ICRS v blízkosti středního rovníku v epoše J2000.0, definovaného IERS. Základní roviny a směry v epoše 12000.0 jsou doposud definovány přijatými hodnotami precesních konstant (r. 1976) a teorií nutace (r. 1980). Zpracování pozorování technologie VLBI však prokázalo, že hodnoty souřadnic objektů, určených pomocí precesní a nutační teorie se liší od hodnot, určených na
101

základě pozorování. Tento rozdíl činí několik tisícin obloukové vteřiny (mas - miliarcsecond). Na základě výsledků pozorování je možno konstatovat, že při záměně středrn'ho nebeského pólu ICRS se středním pólem J2000.0 IERS se dopustíme chyby 20 mas. Poznámka: Záměnou rozumíme, že pracujeme s pólem JCRS a předpokládáme, že jde o pól/ERS a naopak
IAU dále požaduje, aby směr nového konvenčm'ho středního nebeského pólu byl konsistentní s obdobným pólem hvězdného katalogu FK5 (katalog, který používá geodetická astronomie, jak bylo řečeno výše). Na základě nejistot v určení precesních konstant a jejich promítnutí do vlastních pohybů hvězd je možné konstatovat, že nejistota koincidence pólu FK5 vůči pólu IERS je v rozmezí ± 50 mas.
3.6.3 Počátek odečtu rektascenzí ICRS
Rezoluce IAU požaduje, aby počátek odečtu rektascenzí (poloha osy .X) ležel v blízkosti dynamického středního jarního bodu epochy J2000.0.
Obrázek 3.5.6: PrincipVLBI (vlevo), ukázka antény (vpravo)
Dynamický střední jarní bod koinciduje s přesností 1 O mas s polohou středního jarního bodu IERS, jak bylo zjištěno srovnávacími studiemi. Osa X nebeského systému IERS je implicitně realizována přijetím rektascenzí 23 mimogalaktických zdrojů z katalogů určených třemi americkými institucemi nezávisle (GSFC -Goddard Space Flight Center, JPL- Jet Propulsion Laboratory a NGS - National Geodetic Survey). Tyto katalogy byly sestaveny fixováním hodnoty rektascenze zdroje 3C273B v katalogu FK5 (a= 12h 29m 06.6997s v epoše J2000.0). Na základě různých výzkumů bylo zjištěno, že nejistota realizace polohy středrn'ho jarru.'ho bodu katalogu FK5 je zhruba± 80 mas vůči jarnímu bodu IERS. Na této úrovni nepřesnosti koinciduje i poloha středního jarního bodu ICRS s polohou téhož bodu v systému FK5.
3.6.4 Realizace ICRF
Realizace referenčního rámce ICRF, který je součástí ICRS, byla provedena výhradně použitím technologie interferometrie s velmi dlouhými základnami (VLBI). Podstata této kosmické metody spočívá v určování časového posunu !::.t (= T z obrázku 3.5.6) a změny tohoto časového posunu v čase d.M/dt příchodu stejné vlny radiového záření pocházejícího z mimogalaktických zdrojů na antény alespoň dvou přijímačů (radioteleskopů) na pozorovacích
ÚVOD DO KOSMICKÉ GEODÉZIE 192

stanicích. Z měřených veličin 8.t a d8.t/dt je pak možno určovat úhel 9 (viz obr. 3.5.6) a řadu parametrů, jak je uvedeno dále.
Realizací rámce byla pověřena skupina v Goddard Space Flight Center (GSFC) v USA. Tato skupina měla dobrý přístup k datovým souborům pořízenými dalšími institucemi provozujícími nákladné observace pomocí technologie VLBI a měla dobře propracovanou metodiku zpracování dat.
Zpracování pozorování VLBI je nutno z hlediska určovaných parametrů rozdělit do dvou skupin. Do první skupiny náležejí vnitřní parametry, které jsou určovány pro každou observační seanci zvlášť a jsou závislé na lokálních podmínkách na jednotlivých stanicích, do druhé skupiny patří vnější parametry, nezávislé na místu pozorovatele a použitém přístroji, společné pro všechny pozorovací stanice.
Hledané neznámé byly určovány metodou nejmenších čtverců s možností eliminace vnitřních neznámých (obdoba Helmertovy eliminační metody). Pro každou observační seanci byly určovány následující vnitřní parametry:
• souřadnice referenčního objektu příslušejícího k dané seanci (oprava počátku, VLBI měří úhly a nikoliv směry!),
• dva nutační parametry (oprava stávajícího modelu nutace), • souřadnice stanic jednotlivých přístrojů (antén) (důležité pro definici ITRFl), • variace rotačního času UTl vůči apriorně zadané hodnotě, • troposférické parametry, jedna skupina pro jednu hodinu pozorování, • gradient troposférických parametrů, lineární v čase, • parametry kvadratického polynomu přibližně aproximujícího chování staničních hodin, • parametry změn chodu hodin v intervalu jedné hodiny, • další nutné parametry jako jsou skoky v chodu hodin, vzájemný rozdíl údajů hodin na
jednotlivých základnách (offset).
Mezi vnější parametry, společnými pro více seancí, náležely
• relativní souřadnice radiových zdrojů, • centrační parametry VLBI antén, • 252 parametrů, charakterizujících variaci v rotaci Země (rozdíl UTl vůči UTC)
způsobenou denními a polodenními oceánskými slapy (přílivy a odlivy).
Do závěrečného vyrovnání vstupovalo 1.6 milionu párů měření časového posunu 8.t a jeho změny d8.tldt určených vždy mezi dvěma stanicemi, v časovém intervalu od srpna 1979 do července 1995. Odhadováno bylo 1305 globálních parametrů, cca 650000 vnitřních parametrů, jednotková střední chyba činila 32.6 ps pro časový posun a 0.1 ps/s pro změnu d8.tldt.
Jednou z mála nevýhod definice souřadnicového systému pomocí mimogalaktických radiových zdrojů je ta skutečnost, že některé zdroje mění svoji strukturu. Tuto strukturu je možno ve většině případů detekovat též pomocí VLBI, změna polohy "radiového centra" však znehodnocuje využití takového zdroje pro realizaci souřadnicového systému. Z tohoto a dalších důvodů byla aplikována následující vylučovací kritéria:
• formální střední chyba v poloze v rámci jedné seance byla větší než 1 mas,
10~

• zdroj byl pozorován méně než dvacetkrát, • zdroj byl pozorován po dobu kratší než dva roky, • velký rozptyl v poloze, větší než 3 násobek jednotkové střední chyby, • nepravidelná, měnící se struktura zdroje, • velký vlastní pohyb zdroje (vlastní pohyb je pohyb zdroje vůči okolním hvězdám), • zdroj je výchozím bodem seance (má funci počátku).
Těmito přísnými kritérii prošlo 212 radiových zdrojů, které tak definují rámec ICRF, 294 zdrojů bylo vyloučeno alespoň podle jednoho kritéria, 102 dalších zdrojů mění značně svou strukturu. Rozložení radiových zdrojů na obloze je znázorněno na obrázku 3.5.7
Radiové zdroje definující ICRF
* * * ** 80° * * * * \. * * * * * * * * * * .. * *
* * * * 4* * * * * * * * * * * ** ** * * * * * * * * * * * * * .. ..,
";.* * ** * * .... * * * * * * * * * * * * * * * * * * t ... * * * * * * * *
* .... * * * * .. .. CD * * ..... * * \. ; * * *,.* ,.
* * o * * * * * * "' * ; * * ,. .. * c * * :i! o ** * *
* * CD * "O
* * * * * ,.
* -20 * * * * * * * * * * .. * .. * * * * * * * * * * -60 * ;tt ** * * * * .... * * * .... * * * * * *
oh 2h 4h sh sh 1Qh 12h 14h 16h 18h 2Qh 22h 24h
rektascenze
Obrázek 3.5. 7: Ukázka rozložení radiových zdrojů na obloze
Vzhledem k tomu, že metoda zpracování popsaná výše poskytuje pouze relativní pozice radiových zdrojů, bylo nutno přistoupit k poslednímu kroku realizace ICRS, a to provedení rotace celého systému do rámce ICRS, realizovaného IERS. Pro transformaci bylo použito poslední dostupné realizace ICRS v IERS, souboru označeného RSC(IERS) 95 C 02. Transformační parametry byly vypočteny pomocí 133 identických zdrojů, které obsahovaly oba soubory. Zbytkové chyby po transformaci nepřevyšují hodnotu 0.01 mas.
Výsledné souřadnice mimogalaktických zdrojů ICRS jsou publikovány v katalogu ICRS - ukázku viz [KABELÁČ, KOSTELECKÝ, 1998], kapitola 7, nebo [MA, FEISSEL, 1997]. Katalog obsahuje polohy zdrojů v souřadnicové soustavě Sr2 (rektascenze a deklinace v epoše 12000.0) a jejich chyby, korelace mezi rektascenzí a deklinací, statistické údaje, identifikační čísla a další astrofyzikální údaje. Dále je v katalogu označeno, zda jde o zdroj, který též září ve viditelném světle a bylo ho tedy možné použít k navázání optického katalogu pořízeného družicí Hipparcos na systém ICRS. Střední polohové chyby v rektascenzi dosahují hodnoty 0.0004" a v deklinaci 0.0005",jde tedy o nejpřesnější současný souřadnicový systém.
ÚVOD DO KOSMICKÉ GEODÉZIE 194

, v ,
3.7 PRAKTICKA REALIZACE KONVENCNIHO TERESTRICKÉHO RÁMCE CTRS - TERESTRICKÝ
, v , ,
GEOCENTRICKY SOURADNICOVY SYSTEM ITRSXX
Pro řešení praktických úloh navigace, geodézie, geodynamiky, geofyziky a dalších odvětví je nutné pracovat se souřadnicovými systémy, které jsou nějakým způsobem "pevně" spojeny se zemským tělesem. Je tedy nutné definovat terestrický geocentrický systém, který by umožňoval řešení různých typů úloh (i při nejvyšších náiocích na přesnost) v globálním, celozemském rozměru.
3.7.1 Konvenční souřadnicový terestrický systém- přesnější definice
Podle doporučení Mezinárodní geodetické asociace (IAG) na základě rezoluce č. 2 ze zasedání ve Vídni v roce 1991 je konvenční terestrický referenční systém system (C1RS -Conventional Terrestrial Reference System) defmován následujícím způsobem:
1) CTRS je lokální souřadnicový systém v relativistickém smyslu a je platný pro Zemi a její okolí na hladině relativní přesnosti 1 0"10
•
2) CTRS je kvazikartézský rotující systém, definovaný z geocentrického nerotujícího systému prostorovou rotací. (Geocentrický nerotující systém je definován doporučeními Mezinárodní astronomické unie (IAU)).
3) Souřadnicový čas je geocentrický souřadnicový čas TCG (TCG = 1T + lineární člen). Metrický tenzor definující čtyřrozměrný časoprostor má složky:
(3.7.1)
kde Dij je Kroneckerovo delta, i, j = 0, .. 3, c je rychlost světla a V je gravitační potenciál Země včetně atmosféry. Údaj n v závorce označuje členy n-tého řádu.
4) Čas, příslušející souřadnicovým změnám je identický s TCG. To znamená, že všechny běžně používané časy {TT - terestrický čas, T AI - mezinárodní atomový čas, UTC -mezinárodní koordinovaný čas, TDT - terestrický dynamický čas) se odvozují transformacíviz např. [KABELÁČ, KOSTELECKÝ, 1998], kapitola 4.
5) Počátek systému je geocentrum, t.j. těžiště všech hmot planety Země včetně oceánů a atmosféry.
6) Systém nemá žádné globální reziduální rotace vzhledem k zemské kůře.
7) Přiřadíme-li systému kartézský referenční rámec, osa z směřuje do "IERS reference pole" - referenčru'ho pólu, který je identický s mezinárodním konvencionálním počátkem CIO (Cenventional International Origin -je definován jako střední poloha rotačního pólu v letech 1900 - 1905), tak jak byl realizován v roce 1987. Osy xz tvoří počáteční poledník, který je
ÚVOD DO KOSMTC:KÉ GF.ODÉZTF. 195

identický s realizací téhož poledníku Mezinárodní časovou službou (BIH - Bureau International de 1' Heure) v roce 1984.0.
Tabulka 3.7.1- Vybrané konstanty, defmuj_ící CTRS -_~RS standar~ Označení Hodnota Význam
c 299792458 ms-1 rychlost světla
Wo 62636856.85 m"s"" potenciál geoidu
aE 6378136.49 m rovníkový poloměr Země·' ]z 1082.6359 . 1 o·b "dynamické" zploštění
GM 3.986004418. 101q m_js·" geocentrická gravitační konstanta
(O 7.292115 . 10·' rad.s·• střední úhlová rychlost rotace Země
Ro=GM/Wo 6363672.461 m délkový rozměrový koeficient
*) rovníkový poloměr Země nemusí být nutně shodný s prakticky používaným elipsoidem, pro realizaci CTRS prostřednictvím ITRS je naopak doporučeno užívat elipsoid GRS80 s parametry: aE = 6378137.0 m, e2 = 0.00669438003.
CTRS je realizován
- systémem algoritmů a konstant spjatých s geometrickými a fyzikálními vlastnostmi souřadnicového systému, neúplný výčet je v Tabulce 3.7.1, úplný viz např. v publikacích IERS, -terestrickým referenčním rámcem TRF.
TRF (terestrický referenční rámec) je tvořen konečným počtem bodů na zemském povrchu, které mají přiřazené souřadnice X(t), tyto souřadnice jsou funkcemi času. Na reálné Zemi jsou X(t) ovlivněny tektonickými pohyby, pohybem souvisejícím s odledněním, slapy zemského tělesa, nepřímým vlivem oceánských slapů, polárními slapy (deformace způsobená změnou polohy vektoru rotace vůči zemskému tělesu), vlivem zatížení atmosférou, vlivem změny hladiny podzemních vod, lokálními nestabilitami, seismickými a vulkanickými efekty a variací geocentra. Pro souřadnice v epoše t je tedy možné psát:
(3.7.2)
kde óXx jsou korekce souřadnic o výše uvedené efekty a to je výchozí epocha. Abychom dosáhli relativní přesnosti 10"10 podle doporučení uvedeného výše, je třeba znát korekce s přesností 1 mm. Rychlost dXoldt může být vyjádřena:
dXo --=v plate+ vice+ vr' dt
(3.7.3)
kde Vplate je horizontální rychlost pohybů tektonických desek (viz odstavec 3.5.2),V;ce je vertikální rychlost působená pohyby po odlednění a Vr je residuální rychlost. Xo a Vr jsou produktem analýzy a určování při zpracování měření.
Praktická realizace závisí na konkrétních použitých observačních technikách a metodologii ve zpracovatelských centrech. Zde je nutné si uvědomit, že TRS může být - díky svému globálnímu charakteru - realizován výhradně technologiemi kosmické geodézie. V současnosti jde o technologie:
ÚVOD DO KOSMICKÉ GEODÉZIE 196
a) Interferometrie s velmi dlouhými základnami (V ery Long Baseline Interferometry -VLBI)- metoda, která je popsána v odstavci 3.6.2, slouží primárně k realizaci ICRS, přesto je však produktem měření i hodnota polohového vektoru, spojujícího dvě stanice (střední kvadratická chyba určení vzdálenosti dvou stanic systému ITRS je 2 - 3 cm, jde o relativní metodu, která neurčuje přímo souřadnice, ale souřadnicové rozdíly), dále variace v rychlosti rotace Země a souřadnice pólu Xp, Yp·
b) Laserová lokace družic (Satellite Laser Ranging - SLR) - jde o měření vzdáleností pozemní stanice - družice pomocí pulsního laseru (střední kvadratická chyba určení dráhy družice i souřadnic stanic je 2 - 3 cm). Pro účely definice ITRF se používají pozorování na tzv. geodynamické družice. Jsou to pasivní malé (průměr 30 až 60 cm) a velmi hmotné kulové objekty (až 450 kg), nesoucí na svém povrchu koutové odražeče (nutné pro laserová pozorování). Pro tyto družice lze tedy velmi dobře eliminovat negravitační poruchy. Řešením tzv. orbitální úlohy se určují opravy počátečních podmínek dráhy družic v ICRF, souřadnice stanic, variace v rychlosti rotace Země a souřadnice pólu Xp, Yp •
c) Technologie Globálního navigačního družicového systému GNSS (Global Navigation Satellite System), z nějž největší význam má GPS (Global Positioning System -GPS), - jde o stálá pozorování družic družicového systému NA VST AR pomocí aparatur umístěných na stanicích zapojených v mezinárodní službě GPS (IGS) nebo v regionálních stálých pozorovacích sítích. Pro určování souřadnic drah družic v ICRF a souřadnic stanic v ITRF se využívá kódových a fázových měření (střední kvadratická chyba určení dráhy družic je 5 cm, relativních souřadnic 1 - 2 cm), jde tedy v podstatě o fázový dálkoměr, pracující v pásmu velmi krátkých radiových vln. Řešením orbitální úlohy se určují opravy počátečních podmínek drah družic, souřadnice pozorovacích stanic, krátkoperiodické variace v rychlosti rotace Země a souřadnice pólu Xp, Yp·
d) Technologie DORIS (Doppler Obitography and Radiopositioning Integrated by Satellite) - jde francouzský systém založený na dopplerovském měření změn radiální vzdálenosti mezi pozemní stanicí a družicí (přesnost určení změny vzdálenosti je charakterizována střední kvadratickou chybou 0.4mm./s). Na základě měření je možné určovat polohu družice v ICRF a stanice v ITRF. Družice musí být vybavena speciálním vysílacím a přijímacím zařízením, pozorování se děje pomocí speciálních vysílačů, umístěných na Zemi. Výhodou systému je, že veškerá měřená data jsou přenášena do zpracovatelského centra přes družici (která je pozorována), odpadají tedy problémy s přenosem dat na velké vzdálenosti. Proto je možné vysílací aparatury rozmístit na méně přístupných místech, odlehlých od civilizace a docílit rovnoměrného pokrytí celé Země (na rozdíl od GNSS jsou vysílače systému DORIS na Zemi a přijímač je na družici). Řešením orbitální úlohy se určují opravy počátečních podmínek dráhy příslušné družice a souřadnice pozorovacích stanic.
e) Technologie PRARE (Precise Range And Range-rate Equipment)- jde o německý systém, založený na radiovém měření vzdáleností a změn vzdáleností s časem mezi stanicí a družicí. Pozemní aparatura musí být naváděna na družici. Na základě měření je možné určovat polohu družice v ICRF a stanice v ITRF. Družice musí být vybavena speciálním vysílacím a přijímacím zařízením, pozorování se děje pomocí speciálních aparatur, umístěných na Zemi. Řešením orbitální úlohy se určují opravy počátečních podmínek dráhy příslušné družice a souřadnice pozorovacích stanic.
t) Technologie laserového měření vzdálenosti mezi Zemí a Měsícem (Lunar Laser Ranging - LLR),je principiálně shodná s technologií SLR.
ÚVOD DO KOSMICKÉ GEODÉZIE 1Q7
Přitom se musí dbát na následující zásady:
1) Geocentrické pozice jsou schopny určit pouze "dynamické" techniky SLR, LLR a s jistými výhradami i GPS a DORIS. VLBI musí být na geocentrum připojena vybranými souřadnicemi (alespoň) jedné stanice.
2) Rozměr (měřítko) je určen přes přijatý relativistický model, viz rovnici (3. 7.1 ).
3) Orientace je definována orientačními parametry v referenční epoše, tedy technologie SLR, GPS a DORIS musí v tomto případě při zpracování obsahovat dodatečnou podmínku pro počátek zeměpisných délek.
4) Časová změna orientace je vázána podmínkou "no-net-rotation" (žádná globální rotace celé sítě) pro horizontální posuny přes celou Zemi.
Pro zajištění homogenity, kompatibility a komparability jsou publikovány standardy. Praktická realizace systému na úrovni dnešní cm přesnosti započala s nástupem výše zmíněných kosmických technik (doplněných ještě v minulém období dopplerovským systémem TRANSIT). Výrazný nástup těchto technik umožnil v roce 1983 uspořádat celosvětovou intenzivní observační kampaň MERIT/COTES za účelem zhodnocení klasických a moderních metod určování orientačních parametrů Země (poloha pólu, rychlost rotace) a definice souřadnicového systému. (V kampani bylo pozorováno kromě moderních metod i klasickými astronomickými metodami). Na základě této kampaně byl definován BTS (BIH terrestrial system). Tento souřadnicový systém je vytvořen na základě společného zpracování t.zv. SSC (Set of Stations Coordinates, souborů souřadnic stanic), tak jak je publikovala jednotlivá zpracovatelská centra. Počátek systému byl definován technikami SLR a LLR, měřítko bylo vzato z pozorování SLR. Definitivní orientace byla definována rotací individuálních řešení o úhly určené porovnáním individuálních řešení parametrů rotace Země s parametry určenými BIH.
BTS pak obsahuje:
- SSC - soubor souřadnic stanic, -množinu parametrů 7 prvkové transformace pro každé individuální řešení, - sadu parametrů, určujících orientaci Země (souřadnice pólu a a rozdíl UTl - UTC) v intervalu 0.05 roku.
Celkem byly realizovány BTS84, 85, 86, 87, od BTS 86 se užíval pro tektonické pohyby desek geofyzikální model AM0-2.
Od roku 1988 je realizací geocentrického systému pověřena nově vytvořená IERS (International Earth Rotation and Reference Systems Service - Mezinárodní služba rotace Země a referenčních systémů), se sídlem v Paříži. Tato služba se zabývá realizací ITRS (International Terrestrial Reference System) na základě společného zpracování výsledků určení souřadnic stanic a parametrů orientace Země různými technikami, publikovaných různými zpracovatelskými centry.
ITRS tak obsahuje:
ÚVOD DO KOSMICKÉ GEODÉZIE 198

- soubor konstant a algoritmů - identických s výše zmíněným CTRS, publikovaných v IERS Technical Note- viz [IERS,2006j. - soubor souřadnic stanic a jejich časových změn - ITRF (International Terrestrial Reference Frame - Mezinárodní terestrický referenční rámec), rovněž publikovaný v IERS Technical Note. Časové změny byly bud' určovány, nebo převzaty z geofyzikálrn'ho modelu NNR-NUVEL-IA, v současné dobějsoujiž pro všechny stanice určovány z měření.
ITRF tak vzniká redukcí individuálních SSC ke společné epoše s použitím modelů pohybu tektonických desek a sedmiprvkovou transformací individuálních řešení do společného systému tak, aby byly zaručeny výše uvedené podmínky pro jeho definici. Nejdůležitější roli zde hrají "kolokační" stanice, na kterých je observováno s více než jednou observační technikou. Důležitou roli zde též hraje určování vah jednotlivých řešení. V tabulce 3.7.2 je uvedena geneze souřadnicových rámců ITRF, od jejich počátků až do r. 2005. Zkratka SLR(SSC(CSR)) značí soubor souřadnic, určených na základě laserových pozorování geodynamických družic (SLR) v analytickém centru Centre of Space Research (CSR) v Texas University, Austin, Texas, NNR znamená "no-net-rotation" (nulová rotace celé sítě). Co se týče změn souřadnic, působených hlavně globálními tektonickými pohyby, byl v prvních modelech (až do ITRF91) uvažován ve většině případů geofyzikální model (AM0-2 nebo NNR-NUVELI). ITRF94 však již obsahuje řadu stanic s rychlostmi, určenými na základě pozorování, ITRF96 · a ITRF97 pak přidává další. Roční časové změny souřadnic činí pro euroazijskou desku cca 2.5 cm SV, tato skutečnost je nepřijemná, pokud chceme pro praktickou potřebu definovat geocentrický systém, jehož souřadnice by byly alespoň po jistou dobu neměnné. Z tohoto důvodu byl zaveden systém ETRS89.
Tabulka 3. 7.2 - Geneze vzniku ITRFxx Název k definici počátku k definici měřítka k orientaci použito
použito: použito ITRFO BTS87 BTS87 BTS87 ITRF88 ITRFO ITRFO ITRFO ITRF89 SLR(SSC(CSR)) SLR(SSC(CSR)) NNR vůči ITRF88 ITRF90 SLR(SSC(CSR)) SLR(SSC(CSR)) NNR vůči ITRF89 ITRF91 SLR(SSC(CSR)) SLR(SSC(CSR)) NNR vůči ITRF90 ITRF92 SLR(SSC(CSR)) SLR(SSC(CSR)) NNR vůči ITRF91 ITRF93 vyjímka, později kritizovaná ITRF94 SLR+GPS SLR + GPS + VLBI NNR vůči ITRF92 ITRF96 SLR+GPS SLR + GPS + VLBI NNR vůči ITRF94 ITRF97 SLR+GPS SLR + GPS + VLBI NNR vůči ITRF96
ITRF2000 SLR VLBI+SLR NNR vůči NNR-NUVELIA
ITRF2005 SLR VLBI NNR vůči ITRF2000
Vzhledem k tomu, že primárním typem souřadnic jsou kartézské geocentrické souřadnice, může být referenčnímu rámci přiřazen jakýkoliv geocentrický elipsoid, zpravidla je mu však přiřazován elipsoid, definovaný v mezinárodním systému GRS80 (Geodetic Reference System 1980) .
V Tabulce 3.7.3 jsou uvedeny transformační parametry do systému ITRS89 ze systémů následných. Transformační parametry je nutné přiřadit transformačnímu schématu, převzatému z IERS. Pro transformaci ze systému (x,y,z) do systému (xs,ys,zs) platí
100

xs X Tl I D - R3 R2 X
ys = y + T2 + R3 D - Rl · y (3.7.4) zs z T3 - R2 Rl D z
kde Tl, 72, 13 popisují translace, Rl, R2, R3 rotace aD je měřítkový koeficient. Vzhledem ke odlišnému způsobu tvorby ITRF93 a ITF2000 je nutné při převodu do tohoto systému zavádět časové změny ("/r" v Tabulce 3.7.3 znamená "za rok", "mas" (miliarcsecond) jsou tisíciny obloukové vteřiny, "ppb" znamená par per bilion ~ 111 09
).
Tabulka 3.7.3 Transformace z ITRFxx do ITRF89 Souřadnicový Tl T2 T3 D Rl R2 R3 Epocha
rámec cm cm cm ppb mas mas mas rok
ITRF90 0.5 2.4 -3.8 0.34 0.0 0.0 0.0 1988.0 ITRF91 0.6 2.0 -5.4 0.37 0.0 0.0 0.0 1988.0 ITRF92 1.7 3.4 -6.0 0.51 0.0 0.0 0.0 1988.0 ITRF93 1.9 4.1 -5.3 0.39 0.39 -0.80 0.96 1988.0
+0.29/r -0.04/r -0.08/r +0.11/r +0.19/r -0.05/r ITRF94 2.3 3.6 -6.8 0.43 0.0 0.0 0.0 1988.0 ITRF96 2.3 3.6 -6.8 0.43 0.0 0.0 0.0 1988.0 ITRF97 2.3 3.6 -6.8 0.43 0.0 0.0 0.0 1988.0
ITRF2000 2.97 4.21 -8.65 0.585 0.0 0.0 0.0 1997.0 +0.0/r -0.06/r -0.14/r -0.001/r +0.004/r +0.019/r
3.7.2 Příklad realizace CTRS- referenční rámce ITRF2000 a ITRF2005
Jako příklad realizace konvenčru'ho referenčru'ho systému uvedeme postup realizací souřadnicových rámců ITRF2000 a ITRF2005- viz [ALTAMIMI ET AL., 2002, ALTAMIMI, 2006].
ITRF2000
Tento souřadnicový rámec začal být užíván v lednu 2002 pro zpracování pozorování metod kosmické geodézie. Systém je realizován výhradně metodami kosmické geodézie: VLBI, SLR, LLR, GPS a DORIS, dále byly do výsledků zařazeny i některá kombinovaná řešení s dalšími metodami (např. PRARE). Základním principem tvorby je transformace jednotlivých řešení do společného rámce, při poměrně komplikovaném stanovení vah jednotlivých řešení a stanovení dodatečných podmínek "constraints" (z důvodů numerické stability výsledku).
Souřadnicový rámec vznikl kombinací řešení, uvedených v tabulce 3.7.4.
Tabulka 3.7.4- ITRF2000: submitted TRF solutions
fechnique AC ssc
Data Span Station Constraints 1\.nalysis Center(AC) VLBI
ÚVOD DO KOSMICKÉ GEODÉZIE
Number
200

Geodetic Institute ofBonn University (GIUB) 00 ROl 84-99 51 Loose * Goddard Space Flight Center (GSFC) 00 ROl 79-99 130 Loose * Shanghai Astronomical Observatory (SHA) 00 ROl 79-99 127 Loose * LLR Forschungseinrichtung Satellitengeodaesie (FSG) 00 MOl 77-00 3 Loose * Unversity ofTexas, McDonald Observatory (UTXMO)OO MOl 70-00 5 Tight SLR Australian Surveying and Land Information Group (AUS) 00 LOl 92-00 55 Loose * Centro Geodesia Spaziale, Matera (CGS) 00 LOl 84-99 94 Loose * Centra! Laboratory for Geodesy, Sofia (CLG) 00 LOl 84-00 68 Tight Communications Research Laboratory (CRL) 00 L 02 90-00 60 Loose * Center for Space Research (CSR) 00 LOl 76-00 139 Loose Center for Space Research (CSR) 00 L04 76-00 139 Loose * Delft Ins. Earth Oriented Space Research (DEOS) 00 LOl 83-99 91 Loose * Deutsches GeodM-dtisches Forschungsinstitut (DGFI) 00 L O 1 90-00 43 Removable * Goddard Space Flight Center (GSFC) 00 LOl 86-00 36 Unclear Joint Center for Earth Systém Technology, GSFC (JCET) 00 L 05 93-00 48 Loose * GPS Center for Orbit Determination in Europe (CODE) 00 P 03 93-00 160 Minimum * GeoForschungsZentrum Potsdam (GFZ) 00 POl 93-00 98 Minimum * Intemational GPS Service by Natural Resources Canada (IGS) 00 P 46 96-00 179 Minimum * Jet Propulsion Laboratory (JPL) 00 POl 91-99 112 Minimum * Univ ofNewcastle upon Tyne (NCL) 00 POl 95-99 90 Minimum * NOAA, National Geodetic Survey (NOAA) 00 POl 94-00 165 Removable * DORIS Australian Surveying and Land Information Group (AUS) 00 DOl 98-99 (231 D) 55 Loose Groupe de Recherche de Geodesie Spatiale (GRGS) 00 DOl 93-00 66 Loose * Institut Géographique National (IGN) 00 D 09 92-00 80 Minimum * Multi-technigue (SLR + DORIS + PRARE) GRIM5 project (GRGS+GFZ) (GRIM) 00 COl 85-99 183 Loose * CSR: SLR + DORIS on TOPEX (CSR) 00 COl 147 Loose * GPS Densification South America Network >y Deutsches GeodM-dtisches Forschungsinstitut (DGFI) 00 P O 1 96-00 31 Loose * IAG Subcommission for Europe (EUREF), >y Bundesamt fuer Kartographie und Geodaesie (EUR) 00 P 03 96-00 81 Minimum * ~uropean Vertical Reference Network >yCODE (EUVN) 00 P O 1 (1 W in 97) 217 Removable }eophysical Institute, University of Alaska (GIA) 00 POl 96-99 20 Minimum nstitut Géographique National (IGN) 00 POl 98-00 28 Minimum * · et Propulsion Laboratory (JPL) 00 P 02 91-99 28 Minimum * \ntartica network, 'Y Institut Géographique National (IGN) 00 P 02 95-00 17 Minimum * ITIMA GPS Monitor Network (NIMA) 00 P O 1 95-99 ll Unclear ~ORS Network by NOAA (CORS) 00 POl 94-99 80 Removable * tEGAL Network, France (REGAL) 00 P 03 96-00 29 Minimum * \ntartica SCAR network, 'Y Institut fuer Planetare Geodaesie, TU Dresden (SCAR) 00 P 02 95-99 66 Removable * 'urkey GPS Network (TURK) 00 POl (2 W in 97) 10 Removable
')fil

* Solution included in the analysis
Z tabulky 3.7.4 je patrné, že kromě již dříve vyjmenovaných technik kosmické geodézie bylo do řešení zařazeno řešení, využívající kombinací SLR+DORIS+PRARE - jde o množinu souřadnic stanic, vzniklou na základě tvorby modelu tíhového pole GRIM5 (spolupráce GeoForschungsZentrum Potsdam, Německo a Groupe Recherche Geodesie Spaciale, Toulouse, Francie) a dále kombinované resern, využívající sledování družice TOPEX!Poseidon pomocí technologie SLR+DORIS, prováděná CSR Texas. V položce "GPS Densification" jsou dále uvedena řešení regionálních GPS kampaní, prováděná různými institucemi. Některá z těchto řešení budou zařazena dodatečně, nepodílejí se tedy na primárním řešení. Tabulka zobrazuje přehled dat, která byla k dispozici pro řešení. Na základě jejich chybové analýzy byla pak do výsledného řešení zařazena data, označená hvězdičkou.
Analýza dat probíhala podle následujícího modelu:
Předpokládejme, že pro každé individuální řešení s a každou stanici i známe její souřadnice x: v epoše t; a rychlosti x: vyjádřené v k-tém řešení Kombinací jednotlivých SSC určujeme:
• vektor souřadnic jednotlivých stanic x~TRF v dané epoše to a vektor x~TRF rychlostí v ITRS • transformační parametry Tk , Rk , Dk v epoše tk a jejich časové změny tk,Rk,Dk
vyjadřující vztah ITRF vůči jednotlivým individuálním řešením k.
Obecný fyzikální model je pak vyjádřen výrazem
x: = x~TRF + ~; -to )x~TRF + Tk + DkX~TRF + RkX~TRF +
+ ~; -to )[Tk + Dkx~TRF + akx~TRF l x: = X~rRF + Tk + Dkx~rRF + Rkx~rRF
kde pro každý individuální rámec k je Dk rozměrový koeficient a pro T a R platí
Tik o Tk = T2k ,Rk = R3k
T3k - R2k
(3.7.5)
(3.7.6)
a podobně pro výrazy s tečkou, značící časové změny parametrů. Neznámé parametry se pak určují aplikací MNČ, váhování jednotlivých datových souborů vychází ze známé variančněkovarianční matice.
Referenční rámec ITRF2000 je definován následujícím způsobem (zkratky jsou dekódovány v Tabulce 3.7.4):
• měřítko a jeho změna - váhovaný průměr řešení VLBI (GIUB, GSFC, SHA) a SLR (CGS, CRL, CSR, DGFI, JCET)
• počátek souřadnicové soustavy- váhovaný průměr řešení SLR (CGS, CRL, CSR, DGFI, JCET)
ÚVOD DO KOSMICKÉ GEODÉZIE 202

• orientace - rotace jednotlivých desek přebrány z řešení ITRF97 v epoše 1997.0, změny rotací z podmínky "no net rotation" vzhledem ke geofyzikálnímu modelu NNRNUVEL1A. K určení změn rotace bylo vybráno pouze 50 stanic, které vyhovovaly následujícím podmínkám: 1) pozorování na těchto stanicích bylo prováděno po dobu nejméně 3 let, 2) leží na stabilní části jednotlivých desek, 3) vnitřní střední chyba určení rychlostí změn souřadnic < 3 mm/rok, 4) výsledky určení rychlostí zjednotlivých analytických center se liší méně než 3 mm/rok.
Rozložení stanic systému ITRS2000 je patrné z obrázku 3.7.1.
ITRF2000 ITRF2000 a VLBI stations ITRF2000 ~ SLR statlons
longitude longilude
ITRF200D a GPS stations ITRF2000 a OORIS stations
-50
soo 1000 1500 2000 2500 3000 3500 longltude longitude
Obrázek 3. 7.1 - Rozložení stanic referenčního rámce ITRF2000
Reálná přesnost geocentrických souřadnic charakterizovaná střední kvadratickou chybou je odhadována na 2 až 3 cm v každé souřadnici.
ITRF2005
Až do tvorby souřadnicového systému ITRS 2000 byly souřadnice stanic určovány z jednotlivých pozorovacích technik nezávisle na parametrech orientace Země. Přitom ale všechny používané kosmické techniky nějakým způsobem zprostředkovávají vztah mezi nebeským systémem (ICRS) a terestrickým systémem (ITRS), takže parametry orientace Země (EOP) nelze obejít. Tento principiální nedostatek je odstraněn v ITRS 2005. Data pro tvorbu tohoto systému poskytly služby, které obhospodařují jednotlivé pozorovací techniky v rámci Mezinárodní služby rotace Země a souřadnicových systémů IERS. Jsou to:
• IVS - Intemational VLBI Service - mezinárodní služba pro využití technologie dlouhozákladnové interferometrie VLBI
• ILRS - Intemational Laser Ranging Service - mezinárodní služba pro využití technologie laserového měření vzdáleností ke družicím SLR

• IGS - International GNSS Service - mezinárodní služba pro využití technologie globálních navigačních družicových systémů GNSS
• IDS - International DORIS Service - mezinárodní služba pro využití technologie měření změn vzdáleností stanice-družice, založeném na využití Dopplerovajevu DORIS
Tyto služby zpracovávají data z různých datových a analytických center pro příslušnou technologii. Pro potřeby tvorby ITRS 2005 poskytly data ve formě normálních rovnic, resp. kovariančních matic.
Vstupní data:
Vstupními daty jsou normální rovnice nebo kovarianční matice (což jsou inverzní matice vzhledem k normálním rovnicím) obsahující parametry pro provedení: • týdenního řešení (nazvěme je zkratkou TRF- terrestrial reference frame) pro souřadnice
stanicX(t) • denního řešení pro EOP (parametry orientace Země)- souřadnice pólu>!, jl, .ó.UTI (rozdíl
rotačního času Ull a atomového času UTC), resp. délku dne (LOD -lenghts of day).
Typ dat a jejich časový rozsah je patrný z Tabulky 3.7.5.
Tabulka 3.7.5: Data pro ITRF 2005
Dalo~~~~-+- ~o~:6~t · i ~áfud~~~d~~~;-- -1 ,,_ ' T ''' ----1992.9 ~ 2oo5 .9 r K~~~~i~~Č~í matice, tÝd~~~í ř~š~~í j
-------las__________ -----------r·----- ---------~~~~.~~~~oo6~o--____ _ ______________ r·-~ -~~o~~~i~~č~i-~~ti~~~~d~~~(ř~š~~<~- -~-1 r·-- IDS-IGN-JPL I -_-_._-_____________ ~-~?~:?_~ =~?.~:? __ J Kovarianční matice, týdenní~~~~~~-- ____ J
IDS-LCA I 1993.0-2005.8 Kovarianční matice, týdenní řešení
Definice souřadnicové soustavy referenčního rámce ITRF2005
• Počátek je definován tak, aby posun mezi počátkem TRF a jeho časovou změnou, určenými z dat IRLS SLR byl v epoše 2000.0 nulový.
• Měřítko je definováno tak, že měřítko ITRF 2005 a jeho časová změna jsou v epoše 2000.0 identické s měřítkem určeným z IVS VLBI.
• Orientace rámce je definována tak, že rotace ITRF 2005 a její časová změna je vůči ITRF 2000 je epoše 2000.0 nulová.
-Metodika zpracování dat:
Analýza dat probíhala podle následujícího modelu:
Předpokládejme, že pro každé individuální řešení s a každou stanici i určujeme její souřadnice X~ v epoše t; a rychlosti X~ vyjádřené v k-tém řešení. Dále máme k dispozici normální rovnice (nebo kovarianční matice) pro
ÚVOD DO KOSMICKÉ GEODÉZIE 204

• souřadnice pólu x; ,y; a jejich změny v časex; ,Jl; • AUTls, případně pozorovanou délku dne LODs.
Kombinací jednotlivých TRF určujeme: • vektor souřadnic jednotlivých stanic x~TRF v dané epoše to a vektor x~1RF rychlostí v I1RS • transformační parametry Tk , Rk , Dk v epoše tk a jejich časové změny Tk,Rk,Dk
vyjadřující vztah ITRF vůči jednotlivým individuálním řešením k • souřadnice pólu Jf, ;f , korekci času AUTI (resp. LOD - délku dne) a jejich časové změny
Obecný fyzikální model je pak vyjádřen výrazem
X~~ = x~TRF + ~! -to )x~1RF + Tk + DkX~TRF + RkX~rnF + + ~.! -to lTk + Dkx~rnF + RkX~rRF 1 x~ = x~rRF + Tk + Dkx~rRF + Rkx~1RF
kde pro každý individuální rámec k je Dk rozměrový koeficient a pro T a R platí
Tik o Tk = T2k ,Rk = R3k
T3k - R2k
(3.7.7)
(3.7.8)
a podobně pro výrazy s tečkou, značící časové změny parametrů. Dále, na rozdíl od ITRF 2000, jsou přidány další rovnice, související s určováním EOP:
x: = xP +R2k,
y; =yP +Rlk,
1 AUTIS =AUTI- !R3k,
xP =XP +R2 s k'
Jlt =pP+ Rlk,
AoR LODS =LOD-I 3k,
(3.7.9)
kde f, Ao zohledňuje vztah mezi rotačními úhly a časovými veličinami, charakterizujícími rotaci.
Neznámé parametry se pak určují aplikací MNČ. Jelikož jde z podstaty problému o singulární matici, provádí se regularizace pomocí výrazu
(3.7.10)
coz Je podmínka, vyjadřující minimální změnu čtverců přírůstků souřadnic vybraných referenčních stanic, kde XRS je předem vybraná množina referenčních stanic a A je matice plánu řešené soustavy.
ÚVOD DO KOSMTC:KF OFODP.7TF
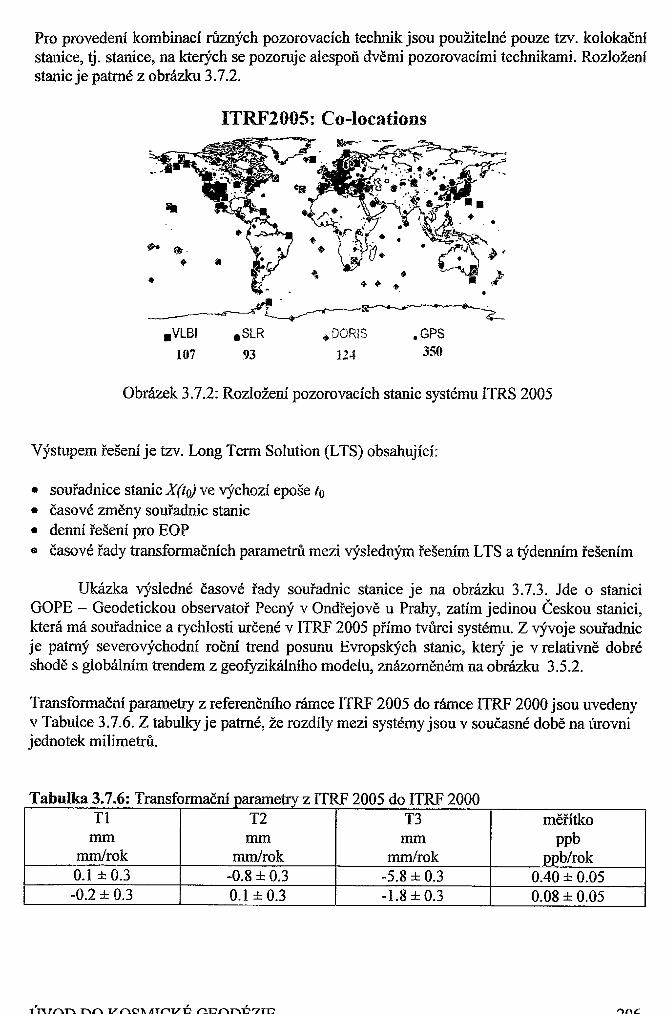
Pro provedení kombinací různých pozorovacích technik jsou použitelné pouze tzv. kolokační stanice, tj. stanice, na kterých se pozoruje alespoň dvěmi pozorovacími technikami. Rozložení stanic je patrné z obrázku 3.7.2.
ITRF2005: Co-locations
•VLBI 107
•SLR 93
.DOR!S
124
.GPS 350
Obrázek 3.7.2: Rozložení pozorovacích stanic systému ITRS 2005
Výstupem řešení je tzv. Long Term Solution (LTS) obsahující:
• souřadnice stanic X(to) ve výchozí epoše to • časové změny souřadnic stanic • denní řešení pro EO P • časové řady transformačních parametrů mezi výsledným řešením L TS a týdenním řešením
Ukázka výsledné časové řady souřadnic stanice je na obrázku 3.7.3. Jde o stanici GOPE- Geodetickou observatoř Pecný v Ondřejově u Prahy, zatím jedinou Českou stanici, která má souřadnice a rychlosti určené v ITRF 2005 přímo tvůrci systému. Z vývoje souřadnic je patrný severovýchodní roční trend posunu Evropských stanic, který je v relativně dobré shodě s globálním trendem z geofyzikálního modelu, znázorněném na obrázku 3.5.2.
Transformační parametry z referenčního rámce ITRF 2005 do rámce ITRF 2000 jsou uvedeny v Tabulce 3.7.6. Z tabulky je patrné, že rozdíly mezi systémy jsou v současné době na úrovni jednotek milimetrů.
Tabulka 3.7.6: Transformační parametry z ITRF 2005 do ITRF 2000 Tl T2 T3 měřítko
mm mm mm ppb mm! rok mm! rok mm/rok ppb/rok 0.1 ± 0.3 -0.8 ± 0.3 -5.8 ± 0.3 0.40 ± 0.05 -0.2 ± 0.3 0.1 ± 0.3 -1.8 ± 0.3 0.08 ± 0.05
ÚVOD DO KOSMICKÉ GEODÉZIE 206

Z tabulky je patrné, že rozdíly mezi systémy jsou v současné době na úrovni jednotek milimetrů.
11502M002 GOPE
EASTcm
·121"-"---.---'-r--'-'---'-o----.----f 1998 1999 2000 2002 2004 2006
NoMhcm
·2
-· -· 1996 1998 2000 2002 2004 2006
UPan
19S6 1999 2000
Reference Position of the flot :
X~ 3979316.195 m Y • 1050312.413 m Z•4857067.055 m
fTRF2DD5 Ae!idUats. anatysts
Obrázek 3.7.3: Časový vývoj souřadnic stanice GOPE v ITRF 2005
v , ,
3.8 SOURADNICOVY SYSTEM ETRS89 - REALIZACE V v
EVROPE
Na základě návrhu podkomise EUREF (European Reference Frame)- viz [EUREF, 2006], která je podkomisí X. komise "Kontinentální sítě" Mezinárodní geodetické asociace (Intemational Asociation of Geodesy, IAG), je doporučeno používat jako uživatelský geocentrický souřadnicový systém ETRS89 (European Terrestrial Reference System), jehož souřadnicový rámec byl odvozen z rámce ITRF Mezinárodní službou rotace Země a souřadnicovývh systémů (IERS). Výhodou tohoto souřadnicového rámce je, že je, na rozdíl od ITRF, spojen s euroazijskou kontinentální deskou; díky tomu jsou roční časové změny souřadnic nejméně o řád menší (mm), než je tomu v případě ITRF (cm).
Stejně jako celosvětový ITRS je i kontinentální ETRS tvořen referenčním rámcem (ETRF - European Terrestrial Reference Frame - Evropský terestrický referenční rámec) a příslušnými konstantami a algoritmy.
V roce 1987 podkomise EUREF rozhodla defmovat European Terrestrial Reference System 89 (ETRS89) s využitím výsledků mezinárodní kampaně EUREF89, jejímž cílem bylo defmovat na základě ITRS evropský geocentrický systém. V této pozorovací kampani bylo využito kromě techniky laserové lokace družic (SLR) a inteďerometrie s velmi dlouhými základnami (VLBI) hlavně metod GPS.
Vzhledem k tomu, že od poloviny roku 1993 byly k dispozici výsledky kampaně EUREF-CS/H-91 (první GPS kampaň na území ČR, organizovaná a sponzorovaná ústavem
y'rur.T'\ T'\1""\ Vr\C'l\lfir"'V"Ó r:!.Dr\T'\D'7TD ~IV'7

aplikované geodézie ve Frankfurtu niM, známější pod starším názvem EUREF-EAST-91), získané na základě předběžného zpracování dat v IfAG Fran:furkt niM- v systému EUREF89, bylo rozhodnuto zpracovávat výsledky všech GPS kampaní (určených pro přesné geodetické a geodynamické účely) v České republice v systému odvozenému z EUREF89 a tím je právě ETRS89.
Systém ETRS89 je definován:
a) ETRF89, který je realizován evropskými stanicemi referenčního rámce ITRF89 technik SLR a VLBI, vztaženými k epoše 1989.0,
b) ETRF90, který je tvořen souřadnicemi evropských stanic ITRF90 vztaženými k epoše 1989.0 a vztažnými vektory (centračními veličinami) mezi GPS stanicemi a stanicemi technik SLR a VLBI na bodech, zařazených do kampaně EUREF89, neobsahuje tedy body, na kterých bylo použito pouze techniky GPS,
c) EUREF89, který zahrnuje IERS stanice v Evropě a všechny stanice GPS kampaně EUREF89. Souřadnicový systém je realizován tím způsobem, že všechny body pozorovací sítě IERS jsou brány jako body definiční (s fixovanými souřadnicemi).
Připomeňme ještě, že (až na výjimky) družice systému GPS NA VST AR, nejsou určeny pro pozorování technikou laserové lokace družic (SLR). Aby bylo možné připojit relativně určené vektory, které produkuje technika GPS, k souřadnicovému systému tvořenému stanicemi užívajícími technologie SLR nebo VLBI, je třeba na těchto stanicích provádět pozorování aparaturami GPS simultánně s pozorováními na určovaných stanicích a provést geodetické připojení (centrace, zpravidla klasickým způsobem) všech použitých technik v rámci jedné tzv. kolokační "stanice".
Data z kampaně předzpracovalo 12 zpracovatelských center, výsledné řešení bylo provedeno smíšenou pracovní skupinou odborníků z University v Bernu, Institute Géographique National (St. Mandé, Francie), Bavorské komise pro mezinárodní měření Země (Mnichov, Německo) a Institutu aplikované geodézie (IfAG), Frankfurt a!M, (Německo).
Přesnost (charakterizovaná střední kvadratickou chybou) výsledků pro body, observované technikami SLR a VLBI je v rozsahu 13 - 23 mm v každé souřadnici, pro body zaměřené pouze technikou GPS je přesnost (v roce 1996) v horizontálním směru I O - 20 mm (v jednotlivé složce souřadnic) a 15- 30 mm ve svislé složce.
Terestrický referenční systém, realizovaný stanicemi kampaně EUREF89 je průběžně doplňován dalšími body.
V následujícím přehledu - Tabulka 3.8.1 -jsou uvedeny některé návazné kampaně, probíhající v dalších letech, kterými byl systém dále rozšířen:
Tabulka 3.8.1- Kampaně EUREF (do r.1999) No Name Time interval Noof Country
stations o ITRF 42 I GPSEUREF89 May89 93 Europe 2 Mobile VLBI 89 June-sept. 89 6 Europe 3 EUREFNW90 July-Aug. 90 39 North West
ÚVOD DO KOSMICKÉ GEODÉZIE 208

4 EUREF CS/H 91 Oct.-Nov. 91 22 Czechoslovakia, Hune;ary 5 Mobile VLBI 92 May-Aug. 92 8 Europe 6 EUREFPOL92 Juty 92 30 Poland 7 EUREFBAL92 Aug.-Sept.92 24 Baltic 8 EUREFBUL92 October92 14 Bulgaria 9 EUREFGB92 October92 31 G. Britain 10 EUREFCYP93 January 93 ll Cyprus ll EUREFD93 May93 27 Gennany, Netherlands 12 EUREF F93 (RRF93) March-April 93 23 France 13 EUREF LUX BD94 March 94 19 Luxemburg, Belgium, Gennany 14 EUREF SLO/CRO 94 May-June 94 22 Croatia, Slovenia 15 EUREFDK94 Aug.-Sept. 94 12 Denmark 16 EUREF Ukraina 94 Jun 94 14 Ukraina 17 EUREFROM94 Sept. 94 17 Romania 18 EUREF NOR 94/95 Sep-Oct 94, 87 Norge
Aug-Oct95 70 19 EUREF A 94/95 Oct 94/95 17 Austria 20 EUREF EIR/GB 95 April95 24 Ireland, GB 21 EUREF Iberia 95 May95 43 Spain, Portugel 22 EUREF Iceland 95 July 95 191 Iceland 23 EUREF FYROM 96 Aug96 10 Macedonia 24 EUREF Malta 96 Oct-Nov96 13 Malta 25 EUREF Balear 98 April98 6 Baleares 26 EUREF Alb., BH, Yug. Sept. 98 29 Albania, Bosnia-Herz., Yugoslavia 27 EUREF Moldova May99 5 Moldova
Ve všech těchto kampaních bylo pozorováno technikou GPS nejen na určovaných bodech, ale zároveň na řadě bodů kolokačních (stanice s více než jednou kosmickou technikou), případně na bodech zaměřených v předchozích kampaních. Od roku 2000 probíhají další kampaně, neuvedené v této tabulce, které se však zpravidla týkají zpřesnění systému na území příslušných států.
Systém ETRF89 je dále zpřesňován novými observacemi, hlavně na základě permanentních pozorování technologie GNSS v rámci EUREF - EPN (Evropská síť permanentních stanic)- viz [EUREF-EPN, 2006]. Vzhledem k jeho úzké návaznosti na systém ITRS existují exaktní transformační vztahy mezi ETRF a ITRF- viz [BOUCHER, ALTAMIMI, 1995]. Díky nim existují ETRF90 až ETRF2005 (podobně jako ITRF), které jsou pouze zpřesněnou realizací ETRF89.
3.8.1 Realizace ETRS89 v České republice
Při výsledné realizaci referenčního rámce ETRF89 systému ETRS89 na území ČR byla využita posloupnost observačních kampaní, provedených technologií GPS. Výchozí kampaní byla kampaň EUREF-CS/H-91 (viz předchozí přehled), kdy bylo na území bývalého Československa (viz obr. 3.8.1) zaměřeno 6 bodů- Pecný, Přední příčka, Kleť v ČR a Velká Rača, K vetoslavov a Šaňkovský grúň na Slovensku. Tato síť šesti bodů byla dále zhuštěna na síť 18 bodů tzv. nultého řádu a zaměřena v kampani CS-NULRAD-92. Síť NULRAD byla na území České republiky dále zhuštěna na síť DOPNUL, která obsahuje 176 bodů, rovnoměrně rozložených na území státu. Tato síť byla zaměřena v devíti observačních kampaních v letech 1993 až 1994. Mimoto byla v roce 1993 realizována kampaň CS-BRD-93, určená k propojení sítě NULRAD s německou sítí DREF.
'}(IQ

Vzhledem k tomu, že od roku 1991, kdy bylo provedeno na území ČR první systematické GPS měření připojené na celoevropský systém, byla na bodech sítě nultého řádu provedena řada kvalitních měření, jevilo se velmi účelným využít tato měření k novému vyrovnání sítě nultého řádu na území ČR. Kromě samozřejmého využití pozorování v kampani DOPNUL jde zejména o výsledky kampaně CS-BRD-93, kdy bylo na území ČR observováno na bodech Smrk, Velká Deštná, Skapce, GOPE (bod GPS služby na Geodetické observatoři Pecný v Ondřejově), Medvědí skála, Kleť.
Protože data z následných kampaní (CS-NULRAD-92, CS-BRD-93, DOPNUL) provedená na bodech sítě nultého řádu jsou kvalitnější, než z kampaně EUREF-CS/H-91 (v následných kampaních bylo observováno delší dobu, pro zpracování bylo vesměs využito přesných efemerid (CODE, IGS)), bylo použito při zpracování následujícího postupu:
a) Kampaň CS-NULRAD-92 byla znovu zpracována softwarem BERNESE (verze 3.5) -viz [BERNESE 3.5, 1993], přičemž definitivně určené souřadnice 6 bodů kampaně EUREF-CS/H-91 v systému ETRS89, byly při řešení fixovány.
b) Pro další zpracování bylo použito výpočetního programu VUGNET- viz [KOSTELECKÝ, KARSKÝ, 1994], pro vyrovnání prostorových GPS sítí. V první fázi byly znovu určeny souřadnice bodů identických s českými body kampaně NULRAD. Pro určení výsledných souřadnic bylo použito výsledků zpracování kampaně CS-BRD-93 a DOPNUL. Zpracování bylo provedeno po jednotlivých seancích. Z výše zmíněných důvodů byly souřadnice určené v rámci zpracování kampaně CS-NULRAD-92 voleny jako opěrné.
Vstupní data pro vyrovnání tvořily výsledky zpracování jednotlivých seancí softwarem BERNESE, konkrétně výsledné geocentrické souřadnice bodů sítě NULRAD, na kterých bylo v té které seanci měřeno (souřadnice ostatních bodů nebyly v této fázi výpočtu použity) v epoše měření.
Pro váhování jednotlivých seancí bylo proto použito průměrných hodnot, které vyšly z vyrovnání programem BERNESE. Na základě provedených experimentů je výsledné řešení vůči volbě vah "robustní" (na rozdíl od volby počtu určovaných parametrů, kde je citlivost značná).
Program VUGNET umožňuje provést vyrovnání prostorové sítě, kdy je kromě hledaných výsledných souřadnic možné, teoreticky pro každou seanci, určovat "dodatečné parametry": změnu měřítka, prostorové rotace a posuny.
ÚVOD DO KOSMICKÉ GEODÉZIE 210

Distribution of the stations realized ETRS-89 on the territory of the Czech Republic
• • • • • • • • 0 e 0 0 0 0 0 • e o ~elká Deštná
o • • e •o ~ 0 0 o GOPE0° 0
• • •lfjll • • • • • • • liiils:Spce • ~ • o • 0 o • o o Strahovice ~ . . . • • • • • •••• • • • •• • • • • • • o • • • • . . . . . . ~· ..
o • • 0 o 0 0 O 0 0 o qředji prička
•Kleť o 0 0 e 0 •Rapotice • •
-~y~:.:.·.· ~ V.Lopeník
D EUREF-CS/H-91 statíons J
• NULRAD stations
O CS-BRD-93 stations
o DOPNUL stations
V. Rača
Obrázek 3 .8.1: Kampaně GPS na území České republiky, pomocí nichž je definován ETRF89
Celkem bylo provedeno sedm variant vyrovnání, při různé volbě dodatečných parametrů (zrněn měřítka, rotací, posunů). Nejstabilnější řešení (s nejmenšími formálními chybami výsledných souřadnic) poskytovala varianta, při které byly určovány pouze posuny, vždy stejné pro skupinu seancí. Souřadnice byly převedeny na stejnou epochu 1989.0 pomocí teoretických hodnot rychlostí posunů vůči ITRF, určených na základě geofyzikálního modelu NNR-NUVELl.
c) Výsledné souřadnice určovaných bodů, které nejsou identické s body kampaně NULRAD, byly určeny sedmiprvkovou podobnostní transformací pomocí programu PROTRA4. Identickými body jsou body určené vyrovnáním pomocí programu VUGNET v předchozím kole (viz bod b)). Průměrné zbytkové odchylky po podobnostní transformaci jsou kolem 3 mm v každé souřadnici, maximální zbytková odchylka v polohové souřadnici je 1 O mm, ve výšce 29 mm. Střední hodnota zrněny měřítka je 0.02 ppm, maximální změna 0.1 ppm.
Hodnocení výsledné přesnosti bylo stíženo tou skutečností, že formální střední chyby výsledných souřadnic, produkované programem BERNESE, jsou silně nadhodnocené. Na základě rozptylu výsledků na bodech, kde se provádělo vícedenní opakované měření (a které byly zpracovány programem VUGNET) vychází střední chyba výsledných souřadnic bodu, zaměřeného v jedné seanci (a to jsou všechny určované body, vyjma bodů NULRAD) v rozmezí
0.008 < m(X) < 0.028 [m], 0.002 < m(Y) < 0.008 [m], 0.008 < m(Z) < 0.028 [m].
I v tomto případě však jde o "formální" chybu z vyrovnání, realita bývá ze zkušenosti poněkud horší, odhadovaná přesnost, charakterizovaná střední kvadratickou chybou, je 2 cm v polohových souřadnicích a 4 cm ve výšce.
"111

V letech 1995 a 1996 byl proveden ve spolupráci civilní a vojenské složky převod veškerých trigonometrických bodů do systému ETRS89. Detaily výše naznačeného postupu jsou uvedeny v [KARSKÝ ET AL.,l993] a [KOLEKTIV AUTORŮ, 1998].
3.8.2 Realizace souřadnicového systému ETRS89 pomocí sítě permanentních stanic technologie GNSS- sít' CZEPOS
Koncepce rozvoje geodetických základů České republiky předpokládá realizaci polohového souřadnicového systému pomocí a) sítě permanentních stanic družicové technologie (sít' CZEPOS) (GPS NAVSTAR, GLONASS, GALILEO), b) řídké sítě trigonometrických bodů (produkt výběrové údržby ZÚ), c) sítě zhušťovacích bodů (produkt projektu zhušt'ování, prováděným KÚ I)- detaily viz [ČERNOHORSKÝ ET AL., 2004].
Sit' permanentních stanice CZEPOS (Česká polohová sit') - je nejdůležitější části systému, protože zajistí v budoucnu realizaci a konzervaci souřadnicového systému při předpokládaném úbytku trvale stabilizovaných bodů jejich zničením.
CZEPOS - rozmístění permanentních stanic GNSS
51
<U ;!:
RAKOVNIK ;ú) • PARDUBICE ·<U 5 • <: GOPE ·á ,.,
"" PLZEN SVITAVY E o PŘIBRAM • <ll • N
TABOR JIHLAVA
• • TUBO •
DACICE ;,
MORAVSKY KRUMLOV • 4
zeměpisná délka
Obrázek 3.8.2- Rozmístění bodů sítě CZEPOS
Účel: Síť permanentních stanic slouží: • jako provozní sít' pro konzervaci a rekonstrukci souřadnicového systému a pro určování
souřadnic statickou metodou GNSS v režimu postprocesingu e pro poskytování korekcí RTCM a pro RTK (aplikace technologie DGPS, cm měření v reálném čase) • jako vědecká sít' pro účely GPS meteorologie a případných dalších vědeckých projektů
Vybavení a konfigurace sítě
Síť pod názvem CZEPOS obsahuje 26 permanentních stanic -obr. 3.8.2. Z toho je 22 stanic základní sítě a 4 stanice jsou vnější (někdy též nazývány externí). Vzájemná vzdálenost stanic je průměrně 60 km. Sít' pokrývá celé území ČR.
ÚVOD DO KOSMICKÉ GEODÉZIE 212

Hardware stanic
Stanice základní sítě jsou umístěny na budovách katastrálních úřadů resp. katastrálních pracovišť. Hardware stanice se (r. 2006) skládá z antény Leica AT504 Dome Margolin Choke Ring, přijímače GRX1200 Pro a příslušenství. Anténa je umístěna nad střechou budovy v místě, kde je dobrý rozhled, kde ji lze připevnit k pevné části stavby a kde je možný přístup. Přijímač je umístěn uvnitř budovy - obvykle v serverovně pracoviště, pokud délka kabelu mezi přijímačem a anténou nepřekročí 30m. Přijímač je přímo napojen do lokální počítačové sítě pracoviště a odtud do virtuální privátní sítě ČÚZK, (sloužící v první řadě pro přenos dat katastru) - viz obr. 3.8.3. V budoucnu se předpokládá, že hardware stanic bude periodicky obnovován, zvláště po zprovoznění GNSS systému GALILEO.
Vnější stanice jsou v síti zařazeny zejména pro pokrytí nejzákladnějších služeb v případě výpadku centrální části sítě. Tyto stanice jsou umístěny na vědeckých a akademických pracovištích (Vysoké škole báňské - Technické universitě Ostrava, Vysokém učení technickém v Brně, VÚGTK (Výzkumný ústav geodetický, topografický a kartografický), Geodetické observatoři Pecný a Západočeské universitě v Plzni). Provoz těchto stanic zajišťuje příslušné pracoviště ve spolupráci s operačním centrem umístěným na Geodetické observatoři Pecný VÚGTK v rámci výzkumné a experimentální sítě pro observace s GNSS. Na vnějších stanicích není použit jednotný hardware. Spojení mezi vnějšími stanicemi a centrálními servery je realizováno přes internet a operační centrum.
~---
ťt stanice na katastrálním pracovišti
6\ vnější stanice
D centrální server
r;g) GSM router
- - data pro postprocesing -- data/služby v reálném čase
Obrázek 3.8.3- Rozmístění komponent CZEPOS a komunikace v počítačové síti
Poskytovaná data a služby
Síť CZEPOS poskytuje dva základní výstupy: -data pro zpracování geodetických a navigačních měření po jejich doměření- tzv. postprocesing, -služby pro aplikace v (prakticky) reálném čase.

Data pro postprocesing jsou k dispozici registrovaným uživatelům přes webové rozhraní v podobě souborů ve formátu RINEX (Receiver INdependent EXchange format) s volitelným rozsahem a obsahem.
Služby v reálném čase jsou tři: - pro diferenční GPS (DGPS), - pro kinematiku v reálném čase (R TK) ve formě virtuálních referenčních stanic, -pro kinematiku v reálném čase (RTK) ve formě plošných korekcí.
Služby v reálném čase jsou k dispozici registrovaným uživatelům buď přes internet (a GPRS připojení) nebo přes GSM. Formát předávaných dat je RTCM (formát Radio-Technical Commision for Maritime services ), v případě distribuce přes internet v obálce NTRIP (Networked Transport ofRTCM via Internet Protocol).
Realizace CZEPOS
Realizací a provozem sítě CZEPOS byl pověřen Zeměměřický úřad (ZÚ) Praha z pozice správce geodetických základů České republiky.
Předběžné geocentrické souřadnice stanic v systému ETRF89 byly určeny na základě kampaní, realizovaných průběžně ZÚ Praha a VÚGTK. Body sítě byly připojeny technologií GPS na nejbližší body sítě DOPNUL, dále bylo měřeno na nejbližších trigonometrických bodech za účelem určení souřadnic v S-JTSK.
Dalším určením souřadnic je globální zpracování dat v rámci analytického centra GOP-LAC (GO Pecný -lokální analytické centrum) sítě EUREF-EPN. Zde jsou souřadnice určovány "připojením" na vybrané stanice evropské sítě EUREF-EPN, k dispozici jsou hodnoty tzv. týdenních řešení, počínaje GPS týdnem 1320 (začátek 24.4.2005).
Úplné informace o síti CZEPOS jsou uvedeny na adrese http://czepos.cuzk.cz (stav v r. 2006).
3.8.3 Transformace mezi ITRF2000 a ETRF89 na území ČR
Vzhledem k tomu, že referenční rámec ITRF2000 obsahuje z území České republiky pouze jeden bod, a to bod GOPE (Geodetická observatoř Pecný Výzkumného ústavu geodetického, topografického a kartografického, Ondřejov u Prahy), na kterém jsou provozována stálá pozorování technologií GPS v rámci mezinárodní GPS služby (IGS), je možné transformaci charakterizovat pouze složkami posunutí.
Pro převod souřadnic bodů určených v ETRF89 na území ČR v systému, realizovaném kampaněmi DOPNUL (a bodů na DOPNUL připojených) je pak možné psát
XITRF2000(1) = XETRF89(1989.0)- 0.174-0.01695 (T- 1997.0) ' YITRF2000(1) = YETRF89(1989.0) + 0.088 + 0.0170 (T- 1997.0)' ZITRF2ooo(1) = ZETRF89(1989.0) + 0.132 + 0.0083 (T- 1997.0),
kde hodnoty souřadnic jsou uvedeny v metrech, hodnoty časových změn v m/rok a T je epocha v letech.
ÚVOD DO KOSMICKÉ GEODÉZIE 214

Uvedený vzorec platí pro bod GOPE, ale vzhledem k velmi malým hodnotám změn rychlostí se změnou polohy, lze vzorec používat i pro ostatní body na území ČR. Přesnost adičních konstant je charakterizována střední kvadratickou chybou 0.015 m, přesnost časových změn veličinou 0.0004 m/rok.
v , ,
3.9 SOURADNICOVY SYSTEM WGS84
3.9.1 Definice systému
WGS84 (World Geodetic System 1984, Světový geodetický systém 1984) je geodetický geocentrický systém armády USA, ve kterém pracuje globální systém určování polohy GPS a který je zároveň standardizovaným geodetickým systémem armád NATO (STANAG 2211-IGEO, ed5 - Geodetic Datums, Ellipsoids, Drids and Grid References, 1991).
WGS84 je konvenční terestrický systém (CTRS), realizovaný na základě modifikace Námořm'ho navigač~o družicového systému (Navy Navigation Satellite System, NNSS). Modifikace spočívá v posunu počátku souřadnicové soustavy, rotaci a změny měřítka dopplerovského systému NSWC 9Z-2 tak, aby systém byl geocentrický a referenční nultý poled.ru'k byl identický se základním poledníkem definovaným Bureau International de l'Heure (BIH).
Počátek souřadnicové soustavy a směry souřadnicových os systému WGS84 jsou definovány následujícím způsobem:
Počátek: těžiště Země
osa Z: směr ke konvečnímu terestrickému pólu (Conventional Terrestrial Pole, CTP, identický s CIO) defmovanému BIH na základě souřadnic stanic definujících systém BIH.
osa X: průsečnice referenčního poledníku WGS84 a roviny rovníku vztaženého k CTP, referenční poledník je nultý poledník definovaný BIH.
osa Y: doplňuje systém na pravotočivý pravoúhlý souřadnicový systém, směr kladné části osy je 90° východně vzhledem k ose X.
WGS84 je globální geocentrický geodetický referenční systém, pevně spojený se zemským tělesem. Systém je definován primárními a sekundárními parametry. Primární parametry definují rozměry referenčm'ho elipsoidu přiřazeného systému, jeho úhlovou rychlost rotace vůči nebeskému referenčnímu systému a součin gravitační konstanty a hmoty Země soustředěné v referenčním elipsoidu. Definiční parametry jsou uvedeny v tabulce 3.9.1.
Sekundární parametry definují model detailní struktury zemského gravitačm'ho pole (Earth Gravity Model, EGM) definovaný pomocí rozvoje geopotenciálu do sférických harmonických funkcí do stupně a řádu 360. Model gravitačního pole WGS84 EGM96 j~ možné využít pro výpočet průběhu plochy geoidu WGS84, tížnicových odchylek, středních hodnot tíhových anomálií v síti 1 O' x 15' .

Tblka391P"' t ť WGS84 a u . nmarm parametry sy_s emu . . . Parametr označení WGS84
velká poloosa refer. elipsoidu a 6378137 m
zploštění f 11298.257223563
úhlová rychlost rotace Země w 7.292115 x 10 -s rad s-t
geocentrická gravitační konstanta GM 398600.4418 km3 s -2 *) (včetně atmosféry)
normovaný zonální harmonický -- 484.16685 X 10-6 koeficient geopotenciálu 2. stupně C2o
") Původní hodnota GM = 398600.5 km3 s"2 byla nahrazena tabelovanou, aby se dosáhlo shody v definici se standardy IERS.
Počátek a orientace souřadnicových os jsou prakticky realizovány souřadnicemi X, Y, Z dvanácti stanic, které monitorují dráhy GPS družic, viz obr 3.9.1. Souřadnice těchto monitorovacích stanic byly (do roku 1994) určeny na základě dopplerovských měření systému TRANSIT na základě zpracování časově dlouhodobých "absolutních" observačních kampaní.
I
r ~-~------,---··---,-...k.--;<"1 =====;:::~==~=--~--..,-1 o 50 1 00 150 200 250 300 350
Obrázek 3.9.1: Stanice, definující WGS84 v roce 2000
Od 1. 1. 1994 jsou WGS84 souřadnice 1 O sledovacích stanic GPS zpřesněny na WGS 84 (G730) a připojeny přesným relativním měřením pomocí technologie GPS k systému ITRF-91, později byl systém rozšířen na 12 stanic v dále zpřesněném systému WGS84 (G873). Od počátku roku 1994 je tedy systém WGS84 ztotožněn- podle definice- se systémem ITRS. (Poznámka: Vzhledem k tomu, že požadovaná přesnost realizace WGS84 je několik dm a jednotlivé realizace ITRSxx jsou v rámci této přesnosti identické, jsou v současné době oba systémy kompatibilní, /TRS má pouze vyšší nároky na přesnost realizace).
V únoru 2001 byla uspořádána 15ti denní GPS kampaň, zaměřená na zpřesnění definice WGS84 a byla definována nová množina stanic definujících systém. Stanice jsou pod správou NIMA (National Imaginery and Mapping Agency, USA) a US Air Force. Během kampaně bylo využito kromě vlastních měření na stávajících a nově určovaných stanicích i observací z některých permanentních stanic sítě IGS (Intemational GPS Service). Vznikla tak realizace
ÚVOD DO KOSMICKÉ GEODÉZIE 216

WGS84 (G1150), která obsahuje 26 stanic, rozložených po celém světě, připojených na systém ITRS2000 s vnitřní střední kvadratickou chybou 1 cm v každé souřadnici.
Přesnost geocentrických souřadnic bodů přímo určených v systému WGS84 na základě technologie GPS, s použitím odpovídajících palubních efemerid a relativního měření ve statickém módu, je tedy srovnatelná s přesností měření prováděném v ITRS2000. Praktické zkušenosti ukazují, že přesnost (charakterizovaná střední kvadratickou chybou) navigačních měření prováděných pomocí kódových měření jednofrekvenčními ručními aparaturami dosahuje na pro území ČR 2 - 3 m v poloze a 5 m ve výšce při dvou až pětiminutových observacích na bodě, přesnost geodetických měření (kódová a fázová měření) je pak závislá na výběru metody a dosahuje řádu jednotek milimetrů.
Na území bývalého Československa bylo započato s realizací systému WGS84 na základě kampaně VGSN'92, organizované DMA (Defense Mapping Agency - mapovací agentura Ministerstva obrany USA, nyní NIMA- National Imaginery and Mapping Agency) a Topografické služby annády ČR.
Od 1.1.1998 je WGS84 zaveden ve vojenském a civilním letectvu a v AČR je běžně používán v rámci kooperace s annádami NATO a v rámci standardizace v geodézii a kartografii.
Důležitost WGS84 v praktické geodézii vyplývá ze skutečnosti, že v tomto systému jsou vysílány palubní efemeridy (broadcast ephemeris) družic systému GPS NAVSTAR. Přesnost těchto efemerid je charakterizována střední kvadratickou chybou 2-5 m (v r. 2006) .
..... ,.,

Literatura ke kapitole 3
Altamimi, Z., 2006: http://itrf.ensg.ign.fr/ITRF _solutions/ITRF2005.php
Altamimi, Z., Sillard, P., and Boucher, C., 2002, "ITRF2000: A New Release of the Intemational Terrestrial Reference Frame for Earth Science Applications," J. Geophys. Res., 107, B10, 10.1029/2001JB000561.
BERNESE 3.5, 1993: Základní funkce software jsou popsány v: Rothacher M., Beutler G., Gurtner W., Brockmann E., Mervart L. (1993): Documentation ofthe Bernese GPS Software Version 3.4. Astronomical Institute, University ofBeme.
Boucher C., Altamimi Z.: 1995, Specifications for reference frame fixing in the analysis of EUREF GPS Campaigns. in: Gubler, E., Horník, H. (eds.): Report on the Symp. ofthe IAG Subcommision for the Euro pean Reference Frame (EUREF) held in Helsinki 3 - 6 May 1995. Veroff. der Bayer. Kommission fur die Intemat. Erdmessung der Bayer. Akad. Wiss., Heft Nr. 56, p. 265-267.
Černohorský J., Kolář R., Kostelecký J., Šimek J.: 2004, Rozvoj geodetických základů České republiky v kontextu EUREF. Geodetický a kartografický obzor, 50/92, 2004, č. 4-5, p. 63-79.
EUREF, 2006: http://www.euref.iag.net/
EUREF-EPN, 2006- http://www.epncb.oma.be/
IERS, 2006: http://www.iers.org/
Kabeláč, J., Kostelecký J.: 1998, Geodetická astronomie 1 O, Vydavatelství ČVUT, 254 s.
Karský, G., Kostelecký, J., Novák, P., Šimek, J.: 1993, Budování sítě Nultého řádu na území České a Slovenské republiky. Publikace VÚGTK č.7, roč. 39, Zdiby 1993.
Kolektiv autorů, 1998: Geodetické referenční systémy v České republice, Vývoj od klasických ke geocentrickým souřadnicovým systémům. Publikace VÚGTK a VZÚ 1998, Roč. 44, No 21. 186 p., 34 obr.
Kostelecký J., Karský G.: 1994, Výpočetní program pro vyrovnání sítě zaměřené metodou GPS (program VUGNET, verze 1.0). Zpráva dílčího úkolu VÚGTK 1-01-20: Výzkum tvorby a využívání subsystému základních bodových polí. VÚGTK 1994.
Kostelecký J., Vondrák J.: 2003, IERS and its importance for global geodynamics. Acta Montana IRSM AS CR (2003), Series A, No. 24 (131 ), p. 7- 19.
Ma C., F eissel M. eds.: 1997, Definition and realization of the Intemational Celestial Reference System by VLBI Astrometry of Extragalactic Objects. IERS Technical Note 23, Observatoire de Paris.
ÚVOD DO KOSMICKÉ GEODÉZIE 218