Embed Size (px)
Citation preview

Geometrické modelováníZS 2018/19
Zbynek Šír
Matematický ústav UKMatematicko-fyzikální fakulta
Zbynek Šír (MÚ UK) - Geometrické modelování 1 / 23

Definice 1.1
Bud’ I ⊆ R interval. Diferencovatelné zobrazení (trídy C∞) c : I → R2
se nazývá parametrizovaná krivka v R2. Množina 〈c〉 := c(I) ⊆ R
2 senazývá obraz krivky. Parametrizovaná krivka se nazývá regulární,jestliže c′(t) 6= (0,0)T pro každé t ∈ I.
Zbynek Šír (MÚ UK) - Geometrické modelování 2 / 23

PoznámkaJe-li I uzavrený nebo polouzavrený interval, rozumímediferencovatelným zobrazením na I restrikci na I diferencovatelnéhozobrazení definovaného na nejakém otevreném nadintervalu.Parametrizovaná krivka je charakterizována dvojicí funkcídefinovaných na I, tedy c(t) = (cx (t), cy (t))T . Casto není treba a propraxi není vhodné, aby c a φ bylo trídy C∞, ale podle situace postacínižší hladkost, napríklad C1, C2, C3.
Zbynek Šír (MÚ UK) - Geometrické modelování 3 / 23

Definice 1.2
Je-li c : I → R2 regulární parametrizovaná krivka a φ : I → I
difeomorfismus intervalu I na I, je c = c ◦ φ : I → R2 regulární
parametrizovaná krivka se stejným obrazem jako c. Difeomorfismus φ
pak nazýváme zmenou parametru a c reparametrizací c. Je-li navícφ′ > 0 na I, nazveme c reparametrizací c zachovávající orientaci.
Zbynek Šír (MÚ UK) - Geometrické modelování 4 / 23

Definice (a lemma) 1.3Býti reparametrizací je relace ekvivalence na množine všechregulárních parametrizovaných krivek a každou její trídu nazývámekrivka. Každého zástupce príslušné trídy ekvivalence nazývámeparametrizací této krivky. Býti reparametrizací zachovávající orientacije rovnež relace ekvivalence na množine všech regulárníchparametrizovaných krivek a každou její trídu nazýváme orientovanákrivka.
Zbynek Šír (MÚ UK) - Geometrické modelování 5 / 23

PoznámkaPokud nebude nebezpecí omylu, budeme slovem krivka (prípadneorientovaná krivka) oznacovat nejen trídu ekvivalence, ale i jejíhoreprezentanta (regulární parametrizovanou krivku), se kterým právepracujeme, nebo dokonce její obraz. V diferenciální geometriistudujeme práve takové vlastnosti krivek, které se nemení prireparametrizaci.
Zbynek Šír (MÚ UK) - Geometrické modelování 6 / 23

PoznámkaNadále budeme používat zkrácený zápis parametrizací téže krivky.Napríklad pokud máme parametrizovanou krivku c(t) budeme jejíreparametrizaci c(s) = c(φ(s)) oznacovat jednoduše c(s). Dálebudeme psát napríklad t(s) namísto t = φ(s) a v dusledku i s(t)namísto s = ϕ−1(t). Konecne kvuli zjenodušení zápisu budeme nekdyvynechávat hodnotu parametru a budeme psát napríklad c′ místo c′(t)a podobne. Pokud nerekneme jinak, cárka znací derivaci d
dt a teckaderivaci d
ds .
Zbynek Šír (MÚ UK) - Geometrické modelování 7 / 23

Lemma 1.4Pro derivace dvou parametrizací c(t) a c(s) = c(t(s)) téže krivky vkaždém odpovídajícím bode platí
cc...c
=
t 0 0t t2 0...t 3t t t3
c′
c′′
c′′′
.
Zbynek Šír (MÚ UK) - Geometrické modelování 8 / 23

Definice (a lemma) 1.5Délku krivky dané parametrizací c(t), t ∈ I = (α, β) definujeme jakourcitý integrál
∫ β
α
||c′(t)||dt ,
který nezávisí na parametrizaci. Funkci rychlosti budeme oznacovatr(t) = ||c′(t)||.
Zbynek Šír (MÚ UK) - Geometrické modelování 9 / 23

Definice (a lemma) 1.6V každém bode orientované krivky dané parametrizací c(t) definujemejejí jednotkový tecný vektor výrazem
~t(t) =c′(t)
||c′(t)||.
Dále definujeme normálový vektor ~n∗(t) tak, aby {~t(t), ~n∗(t)} bylakladne orientovaná ortonormální báze R
2. Tyto vektory se nemení prireparametrizaci zachovající orientaci. Pri reparametrizaci která meníorientaci se tyto vektory mení na opacné vektory.
Zbynek Šír (MÚ UK) - Geometrické modelování 10 / 23

Definice (a lemma) 1.7
Pro regulární parametrizovanou krivku c : I → R2 definujeme v
každém bode znaménkovou krivost
κz(t) =det(c′(t),c′′(t))
||c′(t)||3, t ∈ I.
Znaménková krivost se nemení pri reparametrizaci zachovajícíorientaci. Pri reparametrizaci která mení orientaci mení znaménkovákrivost pouze znaménko. Bod, ve kterém je znaménková krivost nulovánazýváme inflexní.
Zbynek Šír (MÚ UK) - Geometrické modelování 11 / 23

Definice (a lemma) 1.8
Oznacme souradnice bodu v rovine x = (x , y)T . Eukleidovskéshodnosti (isometrie) jsou práve zobrazení x → Ax + a, kde A jeorthonormální matice. Takovou shodnost nazýváme prímou, právekdyž det(A) = 1. Každá prímá shodnost je posunutí (tedy A = I) nebootocení (okolo vhodného bodu).
Veta 1.9Znaménková krivost, tecný a normálový vektor jsou invariantní vuciprímým shodnostem R
2. Presneji mejme prímou shodnost ve tvarux → Ax + a. Máme-li krivku danou parametrizací c(t) a v jejímlibovolném (neinflexním) bode κz ,~t, ~n∗, pak krivka c(t) = Ac(t) + a máv odpovídajícím bode znaménkovou krivost κz = κz , tecný vektor~t = A~t a normálový vektor ~n∗ = A~n∗.
Zbynek Šír (MÚ UK) - Geometrické modelování 12 / 23

Definice 1.10Pro každou krivku c definujeme v každém bode její tecnou prímku jakomnožinu c(t) + 〈~t(t)〉 a dále v každém neinflexním bode definujeme jejíorientovaný polomer krivosti jako R(t) = 1
κz(t), její stred krivosti jako
bod S(t) = c(t) + R(t)~n∗(t) a kružnici se stredem S(t) a polomeremR(t) nazýváme oskulacní kružnice v bode c(t).
Veta 1.11Ve svém každém neinflexním bode má krivka ze všech prímek kontaktnejvyššího rádu s tecnou prímkou a ze všech kružnic má kontaktnejvyššího rádu s oskulacní kružnicí.
Zbynek Šír (MÚ UK) - Geometrické modelování 13 / 23

Veta 1.12
Pro regulární parametrizovanou krivku c : I → R2 platí
~t′(t) = r(t)κz (t)~n∗(t).
Existuje hladká funkce θ(t) : I → R splnující~t(t) = (cos θ(t), sin θ(t)), t ∈ I a pro znaménkovou krivost pak platí
κz(t) =θ′(t)r(t)
, t ∈ I.
Pokud je tedy krivka parametrizována konstantní jednotkovou rychlostír(t) = 1, pak je tedy znaménková krivost rychlostí zmeny smeru krivky.
Zbynek Šír (MÚ UK) - Geometrické modelování 14 / 23

Hermitova interpolace
Jedná se o zobecnení Lagrangeovy interpolace, kdy kromehodnot interpolujeme i derivace.
Zbynek Šír (MÚ UK) - Geometrické modelování 15 / 23

Hermitova interpolace
Jedná se o zobecnení Lagrangeovy interpolace, kdy kromehodnot interpolujeme i derivace.
Máme zadány hodnoty promenné x0, x1, . . . , xn ∈ R, násobnostiderivací k0, k1, . . . , kn ∈ N0 a hodnoty f0, f1, . . . , fn ∈ R a hledámepolynom f (x) stupne nejvýše n, pro který platí
f (ki )(xi) = fi , pro i = 0, . . . ,n.
Zbynek Šír (MÚ UK) - Geometrické modelování 15 / 23

Hermitova interpolace
Jedná se o zobecnení Lagrangeovy interpolace, kdy kromehodnot interpolujeme i derivace.
Máme zadány hodnoty promenné x0, x1, . . . , xn ∈ R, násobnostiderivací k0, k1, . . . , kn ∈ N0 a hodnoty f0, f1, . . . , fn ∈ R a hledámepolynom f (x) stupne nejvýše n, pro který platí
f (ki )(xi) = fi , pro i = 0, . . . ,n.
Úloha opet vede na soustavu lineárních rovnic.
Zbynek Šír (MÚ UK) - Geometrické modelování 15 / 23

Hermitova interpolace
Jedná se o zobecnení Lagrangeovy interpolace, kdy kromehodnot interpolujeme i derivace.
Máme zadány hodnoty promenné x0, x1, . . . , xn ∈ R, násobnostiderivací k0, k1, . . . , kn ∈ N0 a hodnoty f0, f1, . . . , fn ∈ R a hledámepolynom f (x) stupne nejvýše n, pro který platí
f (ki )(xi) = fi , pro i = 0, . . . ,n.
Úloha opet vede na soustavu lineárních rovnic.
Príklad: naleznete polynom stupne 2, pro který platí f (1) = 9,f ′(2) = 11, f ′′(4) = 4.
Zbynek Šír (MÚ UK) - Geometrické modelování 15 / 23

C1 interpolace na [0, 1]
Základní úloha je hledání polynomu stupne nejvýše 3, který nászajímá na itervalu [0,1] a jsou pro nej predepsané hodnoty aderivace v krajních bodech 0 a 1, tedy
f (0) = f0, f ′(0) = f1, f (1) = f2, f ′(1) = f3.
Zbynek Šír (MÚ UK) - Geometrické modelování 16 / 23

C1 interpolace na [0, 1]
Základní úloha je hledání polynomu stupne nejvýše 3, který nászajímá na itervalu [0,1] a jsou pro nej predepsané hodnoty aderivace v krajních bodech 0 a 1, tedy
f (0) = f0, f ′(0) = f1, f (1) = f2, f ′(1) = f3.
Polynom vyjádríme v monomiální bázi M = (1, x , x2, x3) jako
c(x) = a0 + a1x + a2x2 + a3x3
a koeficienty (a0,a1,a2,a3) pak dostaneme jako rešení soustavy
1 0 0 00 1 0 01 1 1 10 1 2 3
a0
a1
a2
a3
=
f0f1f2f3
.
Zbynek Šír (MÚ UK) - Geometrické modelování 16 / 23

Fergusonova báze
Existuje báze R = (r0(x), r1(x), r2(x), r3(x)), ve které bude míttato úloha jednotkovou matici? Tedy v dusledku bude prointerpolacní polynom platit
f (x) = f0r0(x) + f1r1(x) + f2r2(x) + f3r3(x).
Zbynek Šír (MÚ UK) - Geometrické modelování 17 / 23

Fergusonova báze
Existuje báze R = (r0(x), r1(x), r2(x), r3(x)), ve které bude míttato úloha jednotkovou matici? Tedy v dusledku bude prointerpolacní polynom platit
f (x) = f0r0(x) + f1r1(x) + f2r2(x) + f3r3(x).
Napríklad pro r0(x) by muselo platit
r0(0) = 1, r ′0(0) = 0, r0(1) = 0, r ′0(1) = 0.
Zbynek Šír (MÚ UK) - Geometrické modelování 17 / 23

Fergusonova báze
Existuje báze R = (r0(x), r1(x), r2(x), r3(x)), ve které bude míttato úloha jednotkovou matici? Tedy v dusledku bude prointerpolacní polynom platit
f (x) = f0r0(x) + f1r1(x) + f2r2(x) + f3r3(x).
Napríklad pro r0(x) by muselo platit
r0(0) = 1, r ′0(0) = 0, r0(1) = 0, r ′0(1) = 0.
Nebo rychleji: predchozí matice musí být maticí prechodu[id ]M
R, protože analogická úloha v bázi R má mít z definice
jednotkovou matici. Z toho duvodu máme
[id ]RM =
1 0 0 00 1 0 01 1 1 10 1 2 3
−1
=
1 0 0 00 1 0 0−3 −2 3 −12 1 −2 1
.
Zbynek Šír (MÚ UK) - Geometrické modelování 17 / 23

Fergusonova báze
V této poslední matici po sloupeccích cteme koeficientyFergusonovy báze vuci monomiální bázi R a tedy dostáváme
r0(x) = 1 − 3x2 + 2x3
r1(x) = t − 2x2 + x3
r2(x) = 3x2 − 2x3
r3(x) = −x2 + x3.
Zbynek Šír (MÚ UK) - Geometrické modelování 18 / 23

Fergusonova báze
V této poslední matici po sloupeccích cteme koeficientyFergusonovy báze vuci monomiální bázi R a tedy dostáváme
r0(x) = 1 − 3x2 + 2x3
r1(x) = t − 2x2 + x3
r2(x) = 3x2 − 2x3
r3(x) = −x2 + x3.
Jakou matici bude úloha mít v Bernsteinove kubické báziB = (B3
0(t),B31(t),B
32(t),B
33(t)), kde Bn
i (t) =(n
i
)
t i(1 − t)n−i?
Zbynek Šír (MÚ UK) - Geometrické modelování 18 / 23

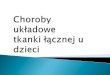
Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Geometrická interpolace dvojoblouky
fU0
fU1
fP0
fP1
Zbynek Šír (MÚ UK) - Geometrické modelování 19 / 23

Výber vhodného dvojoblouku
Stejné secny Rovnobežná tecna Bod na krivce
Zbynek Šír (MÚ UK) - Geometrické modelování 20 / 23

Výber vhodného dvojoblouku
Stejné secny Rovnobežná tecna Bod na krivce
Zbynek Šír (MÚ UK) - Geometrické modelování 21 / 23

Výber vhodného dvojoblouku
Stejné secny Rovnobežná tecna Bod na krivce
Zbynek Šír (MÚ UK) - Geometrické modelování 22 / 23

Asymptotické zlepšování chyby
Error Ratio Error Ratio
1 4.972 2.23 2.233 256 3.32 10−5 5.5524 3.98 10−1 5.594 512 4.32 10−6 7.6998 1.89 10−1 2.110 1024 5.45 10−7 7.92816 4.02 10−2 4.697 2048 6.82 10−8 7.98832 5.93 10−3 6.780 4096 8.57 10−9 7.95664 1.03 10−3 5.767 8192 1.07 10−9 7.979128 1.85 10−4 5.568 16384 1.34 10−10 8.009
Aproximacní stupen 3 nemuže být vylepšen.
Zbynek Šír (MÚ UK) - Geometrické modelování 23 / 23