Естественные моделипараллельных вычислений
Лекция 4 :: Марковские системы
Ершов Н.М.
Проект комиссии Президента РФпо модернизации и техническому развитию экономики России
«Создание системы подготовки высококвалифицированных кадров вобласти суперкомпьютерных технологий и специализированного
программного обеспечения»
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 1 / 48

Марковские системы
Марковские системы (кратко M-системы) являютсяразновидностью строковых перезаписывающих систем, работакоторых основана на использовании строковых подстановок.Как и все рассмотренные выше модели, марковские системыхарактеризуются высокой степенью встроенного параллелизма.Свое название эта модель получила в силу большой ее схожести салгоритмической моделью Маркова.Принципиальным отличием M-систем от других подобныхмоделей является их стохастичность — применение подстановокопределяется вероятностным образом.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 2 / 48

Понятие M-системы
Особенностью марковских систем по сравнению с другимистроковыми перезаписывающимим системами является способприменения подстановок.Текущая цепочка символов на каждом шаге эволюции случайнымобразом разрезается на подцепочки и все такие подцепочкиодновременно заменяются на новые согласно заданному наборуподстановок.Как и в стохастических системах Линденмайера, наборподстановок может содержать более одной подстановки содинаковой левой частью — выбор нужной осуществляетсявероятностным образом.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 3 / 48

Подстановки
Назовем подстановкой тройку σ = (α, β, p), в которой α и β —цепочки в некотором алфавите, цепочка α называется левойчастью подстановки, цепочка β — ее правой частью; p —действительное число из интервала (0, 1], называемоевероятностью применения подстановки.Для подстановки σ будем использовать обозначение
σ : αp−→ β или σ : α→ β, если p = 1.
Назовем M–системой набор подстановок
Σ = {σi , i ∈ [1 . . .N]},
для которого выполняется следующее свойство: суммарнаявероятность всех подстановок, имеющих одинаковую правуючасть, не превышает единицы.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 4 / 48

Алгоритм применения подстановок
Алгоритм состоит из трех шагов:I Разбиение цепочки случайным образом на подцепочки: для
каждого символа цепочки, кроме последнего, с некоторойзаданной вероятностью ω решается вопрос — присоединяется лиэтот символ к следующему символу цепочки или нет.
I Каждая подцепочка α, полученная на первом шаге, заменяется нановую с помощью заданной системы подстановок. Для этоговыбираются все подстановки, левая часть которых совпадает с α.Из них выбирается одна с вероятностью равной вероятности этойподстановки.
I Все новые подцепочки соединяются вместе и образуютрезультирующую цепочку.
Моделирование с помощью марковской системы заключается ввыборе начальной цепочки и последовательном применении к нейописанного алгоритма.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 5 / 48

Алгоритм применения подстановок
100010100101001101X t =
Σ =
{01
1/2−−→ 10,0→ 1.
система подстановок
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 6 / 48

Алгоритм применения подстановок
100010100101001101X t =
100 0 10 10 0 101 0 011 01Σ =
{01
1/2−−→ 10,0→ 1.
система подстановок
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 6 / 48

Алгоритм применения подстановок
100010100101001101X t =
100 0 10 10 0 101 0 011 01
100 1 10 10 0 101 1 011 10
Σ =
{01
1/2−−→ 10,0→ 1.
система подстановок
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 6 / 48

Алгоритм применения подстановок
100010100101001101X t =
100 0 10 10 0 101 0 011 01
100 1 10 10 0 101 1 011 10
100110100101101110X t+1 =
Σ =
{01
1/2−−→ 10,0→ 1.
система подстановок
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 6 / 48

Экспоненциальное затухание
Σ ={
ap−→ λ.
Применение этой системы к цепочкесимволов an (символ a повторенный nраз) приводит к постепенной заменевсех символов a исходной цепочки на«пустые» символы λ. Так каквероятность такой замены все времясохраняется постоянной, токонцентрация символов a (ихколичество, отнесенное к длине n всейцепочки) будет убывать поэкспоненциальному закону. → λ; → a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 7 / 48

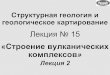
Экспоненциальное затухание
Σ ={
ap−→ λ.
Применение этой системы к цепочкесимволов an (символ a повторенный nраз) приводит к постепенной заменевсех символов a исходной цепочки на«пустые» символы λ. Так каквероятность такой замены все времясохраняется постоянной, токонцентрация символов a (ихколичество, отнесенное к длине n всейцепочки) будет убывать поэкспоненциальному закону.
Зависимость концентрациисимволов a от времени
маркеры — M-система,линия — теоретическая оценка.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 7 / 48

Диффузия
Σ ={
aλ↔ λa.
Под действием данной системыкаждый одиночный символ aсовершает случайные блуждания позаданной цепочке. Если в начальнойцепочке символы a образуютнепрерывный кластер, то результатомприменения данной системы будетпостепенное размытие этого кластера(при том, что количество символов aбудет сохраняться постоянным).
→ λ; → a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 8 / 48

Сепарация
Σ ={
ab → ba.
Под действием этой системы символыa будут двигаться вправо до тех пор,пока там будут оставаться свободныеместа.
→ a; → b.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 9 / 48

Волновая модель
Σ =
r1 : uλ
p−→ λu,r2 : λv
p−→ vλ,r3 : uv → vu,r4 : ux → vx ,r5 : xv → xu.
Непустые символы — частицы, вотсутствие помех движущиеся (r1 иr2) с постоянной скоростью вправо (u)или влево (v). При столкновениичастицы обмениваются скоростями(r3). Цепочка ограничена справа ислева символами x — стенками, откоторых упруго отражаются частицы(r4 и r5).
→ λ; → u, v .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 10 / 48

Модель роста
Σ =
r1 : aλ
p←→ λa,r2 : aλ
q−→ aa,r3 : λa
q−→ aa,p + q ≤ 1.
Объекты (например, бактерии)представляются символами a.Каждый объект совершает случайныеперемещения с вероятностью p поцепочке (r1 и r2). С вероятностью qэти объекты создают свои копии, т.е.делятся на два объекта (r3 и r4), еслирядом с ними есть свободное место. → λ; → a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 11 / 48

Модель роста
Σ =
r1 : aλ
p←→ λa,r2 : aλ
q−→ aa,r3 : λa
q−→ aa,p + q ≤ 1.
Объекты (например, бактерии)представляются символами a.Каждый объект совершает случайныеперемещения с вероятностью p поцепочке (r1 и r2). С вероятностью qэти объекты создают свои копии, т.е.делятся на два объекта (r3 и r4), еслирядом с ними есть свободное место.
Зависимость концентрациисимволов a от времени
«+» – сигмоидальный рост (p > q),«×» – линейный рост (p < q).
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 11 / 48

Типы поведения M-систем
M-системы, несмотря на их принципиальную стохастичность,могут демонстрировать весьма широкий спектр типов поведения— от недетерминированного (неупорядоченного), додетерминированного (упорядоченного).Последнее оказывается возможным благодаря алгоритмическойуниверсальности данной модели.Более того, использование в M-системах специальныхсимволов–разделителей (мембран) позволяет совместить в однойM-системе сразу несколько типов различных поведений.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 12 / 48

Неупорядоченное поведение
Рассмотрим M-систему, которая содержит перемешивающуюподсистему подстановок вида
aiajθ−→ ajai ,
меняющих с вероятностью θ местами любые два соседнихсимвола цепочки, при этом вероятности всех остальныхподстановок системы много меньше θ.Поведение такой системы, которое мы будем называтьнеупорядоченным, определяется концентрациями символов, т.к.расположение отдельных символов в цепочке становится неважным и вся цепочка может рассматриваться в этом случае каксимвольное мультимножество.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 13 / 48

Кинетические уравнения
Можно показать, что скорость изменения концентрациисимвола ai , определяемая подстановкой вида
ai1ai2 . . . aimp−→ aj1aj2 . . . ajm ,
пропорциональна произведению концентраций всех символов,стоящих в левой части подстановки, и выражается следующимдифференциальным уравнением
daidt
= K · ai1ai2 · · · aim , где K = (ri − li )ω2(1− ω)m−1p,
а ri и li — количество символов ai в правой и левой частях даннойподстановки.В химической кинетике такого рода уравнения называютсякинетическими.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 14 / 48

Экспоненциальное затухание
Например, для рассматривавшейся выше M-системы
Σ ={
ap−→ λ,
зависимость концентрации символов a от времени описываетсяуравнением
dadt
= −ω2pa.
Решением этого дифференциального уравнения являетсяэкспонента
a(t) = a0e−ω2pt ,
где a0 — начальная концентрация символов a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 15 / 48

Модель «хищник–жертва»
В том случае, если в системе имеется несколько подстановок, топри составлении кинетических уравнений надо учитывать вкладкаждой из подстановок, просуммировав в правой частидифференциального уравнения соответствующие произведенияконцентраций.В качестве примера такой системы рассмотрим простую модельтипа «хищник–жертва», в которой жертвы представленысимволами x , хищники — символами y (перемешивающаяподсистема для краткости опущена):
Σ =
r1 : λx
p1−→ xx ,r2 : xy
p2−→ yy ,r3 : y
p3−→ λ.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 16 / 48

Модель «хищник–жертва»
Σ =
r1 : λx
p1−→ xx ,r2 : xy
p2−→ yy ,r3 : y
p3−→ λ.
С учетом того, что сумма концентраций всех трех символовравна 1, можно сразу положить, что λ = 1− x − y .Тогда система кинетических уравнений для данной модели будетвыглядеть следующим образом{
x = a(1− x − y)x − bxyy = bxy − cy .
Ее коэффициенты равны
a = ω2(1− ω)p1, b = ω2(1− ω)p2, c = ω2p3.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 17 / 48

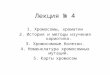
Модель «хищник–жертва»
На рисунке представлен пример численного расчета для данноймодели.
На графике маркерами отмечены фазовые траектории, полученные численныммоделированием M–системы, кривыми — фазовые траектории, полученныерешением соответствующей системы кинетических уравнений.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 18 / 48

Модель «хищник–жертва»
Σ =
r1 : λx
p1−→ xx ,r2 : xy
p2−→ yy ,r3 : y
p3−→ λ,
r4 : xp4−→ λ.
Если понизить вероятностьперемешенивания θ, то системастанет чувствительна кпространственному расположениюотдельных символов. Болееподходящим средством непрерывногоописания таких систем являютсяуравнения в частных производных. → λ; → x ; → y .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 19 / 48

Алгоритмическая универсальность
Для того, чтобы показать алгоритимическую полноту M-систем,рассмотрим каким образом машина Тьюринга может бытьсведена к соответствующей ей марковской системе.Пусть МТ задана стандартным образом в виде набора
{AT ,QT , q1, q0,PT},
где AT — внешний алфавит (алфавит символов ленты МТ),который содержит «пустой» символ Λ; QT — внутреннийалфавит, то есть множество состояний; q1, q0 ∈ QT — начальноеи конечное состояния; PT : AT × (QT\{q0})→ AT × QT ×M —программа для МТ, здесь M = {R, L,H} есть множестводвижений МТ (вправо, влево и на месте).Примем, что в начальный момент времени все ячейки ленты, заисключением конечного их числа, являются пустыми (λ), и приэтом автомат МТ указывает на первую непустую ячейку ленты.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 20 / 48

Построение M-системы
Алфавит A марковской системы, моделирующей заданную МТ,есть объединение внутреннего и внешнего алфавитов МТ идополнительного граничного символа β: A = AT ∪ QT ∪ {β}.Система подстановок M-системы Σ строится по следующемуалгоритму.
I Для каждой команды МТ вида ai , qj → ak ,H, ql в Σ добавляетсяподстановка qjai → qlak .
I Для каждой команды МТ вида ai , qj → ak ,R, ql в Σ добавляетсяподстановка qjai → akql .
I Для каждой команды МТ вида ai , qj → ak ,R, ql и для каждогосимвола as ∈ AT в Σ добавляется подстановка asqjai → qlasak .
I Для каждого состояния qj ∈ QT , за исключением конечного, в Σдобавляются подстановки qjβ → qjΛβ и βqj → βΛqj .
Начальная цепочка X 0 = βq1Sβ, где S — последовательностьсимволов в непустой части ленты МТ.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 21 / 48

Построение M-системы
Идея предложенного преобразования состоит в следующем. Вкаждый момент времени цепочка M-системы состоит (слеванаправо) из 1) символа β, представляющего левуюполубесконечную пустую часть ленты МТ, 2) последовательностисимволов из непустой части ленты (возможно с несколькимипустыми символами справа и слева), 3) еще одного символа β,представляющего теперь правую полубесконечную пустую частьленты.Автомат МТ, находящийся в состоянии qj и указывающий наячейку ленты с символом ai , представляется символом qj ,стоящим перед соответствующим символом ai .Подстановки, построенные согласно пунктам 1–3 вышеописанногоалгоритма, представляют программу МТ. Подстановки,полученные согласно пункту 4, обрабатывают ситуациюдостижения автоматом правого или левого края цепочки,вставляя в нее новые пустые символы.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 22 / 48

Построение M-системы
Машина Тьюринга, прибавляющая 1к числу в двоичной с/с:
λ 0 1S λRA 0LS 1LSA 1HX 1HX 0RA
Соответствующая ей M-система:
Σ =
S0→ 0S , 1S → 1S ,0Sλ→ A0λ, 1Sλ→ A1λA0→ X1, 0A1→ A001A1→ A10, λA1→ Aλ0Aλ→ X1, 0X → X01X → X1
→ λ; → 0; → 1;→ S ; → A; → X .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 23 / 48

Алгоритмическая универсальность
Нетрудно убедиться, что поведение построенной M-системы будетполностью эквивалентным поведению моделируемой МТ.Единственное отличие состоит в том, что применение подстановокв M-системе проиходит в случайные моменты времени, в то времякак выполнение соответствующих команд программы для МТпроизводится строго регулярно.С другой стороны, выполнение шагов в M-системы представляетсобой алгоритм, который может быть реализован с помощьюлюбого вычислительного устройства, т. е. и с помощью МТ.Таким образом, показано, что марковские системы являютсяалгоритмически универсальными и могут служить модельюпараллельных вычислений.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 24 / 48

Параллельные вычисления с помощью M-систем
На рисунке приведен примерэволюции M-системы, реализующейпараллельное вычисление логическоговыражения, содержащего операцииконъюнкции, дизъюнкции иотрицания, логические константы 0и 1 и скобки для явного указанияпорядка вычисления:
Σ =
0∧0→ 0 0∧1→ 01∧0→ 0 1∧1→ 10∨0→ 0 0∨1→ 11∨0→ 1 1∨1→ 1¬0→ 1 ¬1→ 0(0)→ 0 (1)→ 1
→ 0; → 1; → ∧;→ ∨; → ¬; → (, ).
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 25 / 48

Мембраны
Пусть ΣA и ΣB два M-системы над алфавитами A и Bсоответственно, причем A ∩ B = ∅, и m — символ не входящий нив A, ни в B .Построим систему Σ над алфавитом A ∪ B ∪ {m}, включающуювсе подстановки из ΣA и ΣB , и применим ее к цепочке видаX = XAmXB , где XA ∈ A+ и XB ∈ B+.Очевидно, что процесс применения Σ к X сведется кпаралелльному и независимому применению систем ΣA и ΣB кподцепочкам XA и XB соответственно, так как символ m невходит ни в одну подстановку в Σ. Исходя из таких соображений,будем называть символ m (непроницаемой) мембраной.Таким образом, описанный способ объединения системподстановок позволяет реализовать в рамках одного автомата дваи более разных поведения, например, упорядоченное инеупорядоченное.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 26 / 48

Непроницаемая мембрана
Σ =
0λ↔ λ0,Rλ→ λR,RX → LX ,λL→ Lλ,XL→ XR.
→ λ; → X ; → 0;→ L,R .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 27 / 48

Полунепроницаемые мембраны
Принципиальный недостаток предложенной выше схемызаключается в том, что отдельные подцепочки, разделенныемембранами, никак не влияют друг на друга.Чтобы организовать их взаимодействие, добавим в систему Σдополнительный набор подстановок ΣC вида
αmβ → αmβ,
где α, α ∈ A∗, β, β ∈ B∗.При наличии хотя бы одной нетривиальной подстановки такоговида, естественно будет говорить о символе m как ополунепроницаемой мембране. Такой символ обеспечиваетвзаимодействие символов из правой и левой подцепочек, но невсех подряд, а только тех, которые указаны явно в ΣC .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 28 / 48

Полунепроницаемая мембрана
Σ =
0λ↔ λ0,1λ↔ λ1,01↔ 10,λX0→ 0Xλ.
→ λ; → X ; → 0;→ 1.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 29 / 48

Моделирование биологических систем
Использование мембран открываетвозможность моделированияпростейших биологических систем —клеток, окруженных мембраной ипомещенных в некоторую среду. Вкачестве простейшего примераиспользования мембран, рассмотримM-систему, моделирующую ростклетки, потребляющей изокружающей среды специальныепитательные символы a, используямембрану, представленнуюсимволами m:
Σ =
{aλ→ λa, λa→ aλ,ma→ Am, am→ mA.
→ λ; → m; → a;→ A.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 30 / 48

Расширения M-систем
Относительным недостатком рассмотренной выше стандартноймодели M-систем является ее одномерность.Вместе с тем, полноценное моделирование естественныхпроцессов (физических, химических, биологических) должновыполняться как минимум в двумерном пространстве, а в идеале,даже в трехмерном.Далее мы рассмотрим два простых обобщения марковскихсистем, позволяющих выйти за пределы одного измерения:
I двумерные M-системы;I M-системы на графах.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 31 / 48

Двумерные M-системы
Будем представлять пространство M-системы в видепрямоугольной решетки (матрицы) размера n ×m, в каждуюячейку которой помещен символ заданного алфавита.Состояние M-системы меняется со временем по следующемуалгоритму: на каждом шаге эволюции с вероятностью p = 1/2выбирается способ разбиения матрицы символов на цепочки —вертикально (на столбцы) или горизонтально (на строки), послечего, каждая цепочка преобразуется вышеописанным(одномерным) образом.По умолчанию предполагается ориентация слева-направо длястрок матрицы и сверху-вниз — для столбцов.Основное требование к набору подстановок такого рода систем —каждая подстановка должна сохранять длину цепочки.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 32 / 48

Разбиение матрицы
а) разбиение на строки б) разбиение на столбцы
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 33 / 48

Двумерная диффузия
Σ ={
aλ↔ λa.
→ λ; → a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 34 / 48

Двумерная диффузия
Σ ={
aλ↔ λa.
→ λ; → a.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 34 / 48

Дендритный рост
Σ =
{aλ↔ λa,ax → xx .
→ λ; → a; → x .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 35 / 48

Дендритный рост
Σ =
{aλ↔ λa,ax → xx .
→ λ; → a; → x .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 35 / 48

Дендритный рост
Σ =
{aλ↔ λa,ax → xx .
→ λ; → a; → x .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 35 / 48

Модель «хищник–жертва»
Σ =
xλp←→ λx ,
yλp←→ λy ,
xyp←→ yx ,
xλq−→ xx ,
xyq−→ yy ,
yq−→ λ.
p = 0.02, q = 0.1.
→ λ; → x ; → y .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 36 / 48

Модель «хищник–жертва»
Σ =
xλp←→ λx ,
yλp←→ λy ,
xyp←→ yx ,
xλq−→ xx ,
xyq−→ yy ,
yq−→ λ.
p = 0.02, q = 0.1.
→ λ; → x ; → y .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 36 / 48

Полунепроницаемая мембрана
Σ =
aλ↔ λa,∗ma→ Amλ,A∗ ↔ ∗A.
→ λ; → a; → m;→ ∗; → A.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 37 / 48

Полунепроницаемая мембрана
Σ =
aλ↔ λa,∗ma→ Amλ,A∗ ↔ ∗A.
→ λ; → a; → m;→ ∗; → A.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 37 / 48

Моделирование вирусов
Σ =
aλ↔ λa,∗ma→ Amλ,A∗ q−→ ∗A,A∗ p−→ AA,Am
p−→ AM,
AMp−→ Aλ,
M → m,λmλ
p−→ λλλ,
∗λ p−→ λλ
Aλp−→ aλ.
p = 0.1, q = 1− p.
→ λ; → a; → m,M;→ ∗; → A.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 38 / 48

Моделирование вирусов
Σ =
aλ↔ λa,∗ma→ Amλ,A∗ q−→ ∗A,A∗ p−→ AA,Am
p−→ AM,
AMp−→ Aλ,
M → m,λmλ
p−→ λλλ,
∗λ p−→ λλ
Aλp−→ aλ.
p = 0.1, q = 1− p.
→ λ; → a; → m,M;→ ∗; → A.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 38 / 48

Алгоритм параллельных подстановок (АПП)
АПП представляет собой систему, аналогичную M-системам.Основой АПП также служит система подстановок, однако схемаих применения отличается: на каждом шаге применяются всеподстановки, которые могут быть применены к текущей цепочке(матрице) — принцип максимального параллелизма.Отсюда возникает проблема конфликтов, которая приводит кнетривиальной задаче составления бесконфликтных систем.Поведение АПП (в отличие от МА) является абсолютнодетерминированным.Классический пример АПП – параллельный двоичный сумматор.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 39 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 1 0 1
0 1 1 1 1
0 1 0 0 1
5
15
9
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 1 0 1
0 1 1 1 1
0 1 0 0 1
5
15
9
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 1 0 1 0
1 0 0 0 0
0 0 0 1 1
10
16
3
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 1 0 1 0
1 0 0 0 0
0 0 0 1 1
10
16
3
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 0 0 0
0 1 0 1 0
1 0 0 1 1
10
19
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 0 0 0
0 1 0 1 0
1 0 0 1 1
10
19
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 0 0 0
0 0 1 0 0
1 1 0 0 1
4
25
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 0 0 0
0 0 1 0 0
1 1 0 0 1
4
25
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

АПП: параллельный двоичный сумматор
Система подстановок:
0 00 1
11 0
010
01
→ ; →
Пример работы сумматора:
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
1 1 1 0 1 29
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 40 / 48

Параллельный сумматор
Вертикальный шаг:
Σ =
11 0.5−−→ 0∗,11 0.5−−→ ∗0,01→ 10.
Горизонтальный шаг:
Σ =
{0∗ → 10,1∗ → ∗0.
→ 0; → 1; → ∗.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 41 / 48

Параллельный сумматор
Вертикальный шаг:
Σ =
11 0.5−−→ 0∗,11 0.5−−→ ∗0,01→ 10.
Горизонтальный шаг:
Σ =
{0∗ → 10,1∗ → ∗0.
→ 0; → 1; → ∗.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 41 / 48

Параллельный сумматор
Вертикальный шаг:
Σ =
11 0.5−−→ 0∗,11 0.5−−→ ∗0,01→ 10.
Горизонтальный шаг:
Σ =
{0∗ → 10,1∗ → ∗0.
→ 0; → 1; → ∗.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 41 / 48

M-системы на графах
Альтернативный вариант построения нелинейных M-систем —соединение отдельных символьных цепочек в графоподобнуюструктуру.Такая M-система представляет собой набор символьных цепочек,каждая из которых развивается по стандартным правилам дляодномерных M-систем.Информационная взаимосвязь между цепочками реализуется спомощью механизма общих точек. Назовем знакоместом пару,содержащую идентифкатор цепочки и номер символа в этойцепочке. Тогда, общей точкой будет называться любоеподмножество знакомест, размер которого больше одного.Изменение любого знакоместа, т.е. запись в него нового символа,приводит к тому, что этот же символ записывается и во всеостальные знакоместа той же общей точки.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 42 / 48

Эволюция графовых M-системы
Таким образом, структура описанной M-системы может бытьпредставлена графом, в котором вершинами являются всезнакоместа системы, и имеется два типа (направленных) ребер:одни ребра связывают символы в каждой цепочке в линейныйподграф, вторые — соединяют вершины принадлежащие однойобщей точке.Эволюция такой системы выполняется по следующей схеме: накаждом шаге в случайном порядке перебираются все цепочки,каждая цепочка преобразуется стандартным образом согласносистеме подстановок, если эта цепочка содержит какие-тосимволы из общих точек, то производится обновлениесоответствующих символов в других цепочках.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 43 / 48

Моделирование дорожного движения
В качестве простого примера рассмотрим систему,моделирующую дорожное движение со светофором.Дорога представляется цепочкой символов видаBλλ . . . λLλ . . . λλE , где B — источник, генерирующий машины(символы c), λ — пустой участок дороги, L — светофор, которыйможет находится в двух состояниях {R,G}, E — сток,поглощающий машины.Движение моделируется следующим набором подстановок:
Σ =
Bλ
p1−→ Bc — генерация машины,cλ
p2−→ λc — поглощение машины,cE → λE — движение машины,cGλ→ λGc — проезд на зеленый свет.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 44 / 48

Дорожное движение: светофор
Светофор представляется отдельной цепочкой вида Axλλ . . . λL,эволюция которой описывается следующим набором подстановок:
Σ =
xλ→ λx , xG → yR,λy → yλ, xR → yG ,Ay → Ax .
Эти подстановки определяют движение специального символавправо (x) и влево (y) по цепочке. Когда этот символ доходит доправого конца цепочки, он переключает сигнал L с красного назеленый и обратно.Чем длинее будет длина цепочки, тем больше будет периодработы светофора.Общей точкой данной системы является символ L, которыйразделяется обеими цепочками.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 45 / 48

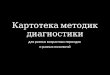
Дорожное движение: пример
→ λ; → c ; → G ; → R ; → A,B,E ; → x ; → y .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 46 / 48

Дорожное движение: пример
→ λ; → c ; → G ; → R ; → A,B,E ; → x ; → y .
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 46 / 48

Библиография
1 Н.М. Ершов, Имитационное моделирование с помощьюмарковских систем — Научная конференция «Тихоновскиечтения», Москва, МГУ, 2011.
2 А.А. Марков, Н.М. Нагорный, Теория алгорифмов — М.: Наука,1984.
3 Т. Тоффоли, Н. Марголус, Машины клеточных автоматов — М.:Мир, 1991.
4 S. Achasova, O. Bandman, V. Markova, et al., Parallel SubstitutionAlgorithm. Theory and Application. — Singapore: World Scientific,1994.
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 47 / 48

Спасибо за внимание!
Ершов Н.М. (ВМК МГУ) Лекция 4 :: Марковские системы ЕМПВ :: 2011 48 / 48
Recommended