第第 55 章 现代控制技术 章 现代控制技术
在经典控制理论中,用传递函数模型来设计和分在经典控制理论中,用传递函数模型来设计和分析单输入单输出系统,但传递函数模型只能反映出析单输入单输出系统,但传递函数模型只能反映出系统的输出变量与输入变量之间的关系,而不能了系统的输出变量与输入变量之间的关系,而不能了解到系统内部的变化情况。在现代理论中,用状态解到系统内部的变化情况。在现代理论中,用状态空间模型来设计和分析多输入多输出系统,便于计空间模型来设计和分析多输入多输出系统,便于计算机求解,同时也为多变量系统的分析研究提供了算机求解,同时也为多变量系统的分析研究提供了有力的工具。有力的工具。

5.15.1采用状态空间的输出反馈设计采用状态空间的输出反馈设计设线性定常系统被控对象的连续状态方程为设线性定常系统被控对象的连续状态方程为
)()(
)()()()()( 00
tt
ttttt tt
Cxy
xxBuAxx
采用状态空间的输出反馈设计法的目的是:利用状态采用状态空间的输出反馈设计法的目的是:利用状态空间表达式,设计出数字控制器空间表达式,设计出数字控制器 D(z)D(z),使得多变量,使得多变量计算机控制系统满足所需要的性能指标,即在控制器计算机控制系统满足所需要的性能指标,即在控制器D(z)D(z)的作用下,系统输出的作用下,系统输出 y(t)y(t)经过经过 NN次采样次采样 (N(N拍拍 ))后,跟踪参考输入函数后,跟踪参考输入函数 r(t)r(t)的瞬变响应时间为最小。的瞬变响应时间为最小。
(( 5.1.15.1.1))

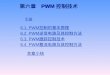
图图 5.15.1具有输出反馈的多变量计算机控制系统的闭环结构形式图具有输出反馈的多变量计算机控制系统的闭环结构形式图
T T
x(t) y(t) u(t) r(t) u(k) e(k)
被控对象
A
C D(z) S
TSe1
B
S
I

55.. 11.. 1 1 连续状态方程的离散化 连续状态方程的离散化
t
t
)τt(0
)tt(
0
0 dτ)τ(e)t(ex(t) Bux AA
Tk
kT
TkTAAT Budexex)1( )( )()()1( kkk
)()(
)()()1(
kk
kkk
Cxy
GuFxx
T AAT BdeGeF0
,

5.1.2 5.1.2 最少拍无纹波系统的跟踪条件最少拍无纹波系统的跟踪条件
由系统输出方程可知, 由系统输出方程可知, y(t)y(t)以最少的以最少的 NN拍跟踪参考输入拍跟踪参考输入r(t)r(t),必须满足条件,必须满足条件
0)()( rNCxNy 仅按上式设计的系统,将是有纹波系统,为设计无纹波系统,还必仅按上式设计的系统,将是有纹波系统,为设计无纹波系统,还必须满足条件须满足条件
0)(
Nx

5.1.3 5.1.3 输出反馈设计法的设计步骤 输出反馈设计法的设计步骤
11.将连续状态方程进行离散化.将连续状态方程进行离散化
)()(
)()()1(
kk
kkk
Cxy
GuFxx

22.求满足跟踪条件和附加条件的控制序列.求满足跟踪条件和附加条件的控制序列{{ u(k)u(k)}的}的 ZZ变换。变换。
0)()()(
NBuNAxNx
1
0
1 0)()(N
j
jN BuGuAF Nj
01
N1N
0k
k
0Nk
k1N
0k
k
0k
k
r1
)(P)(P
r)(P)(P)(u)(U
z
zNzk
zNzkzkz

33.求取误差序列{.求取误差序列{ e(k)e(k)}的}的 ZZ变换变换 E(z)E(z)
)()()()( 0 kkkk Cxryre
1
0
)1(0 )()(
k
j
jk GuCFre jk
0)()( rPu jj
0
1
0
)1( )()( rGPCFIek
j
jk
jk
Nk
kN
k
k
k
k eeeE z)k(z)k(z)k()z(1
000z)k(
Nk
ke
1
00
1
0
)1(1
0
)()()(N
k
kk
j
jkN
k
k rGPCFIeE zjzkz

44.求控制器的脉冲传递函数.求控制器的脉冲传递函数 D(z)D(z)
)(
)()(
z
zz
E
UD

举例举例
二阶单输入单输出系统,其状态方程为 二阶单输入单输出系统,其状态方程为
)()(
)()()(
tt
ttt
Cxy
BuAxx
01
01A
0
1B 10C
采样周期 T=1秒,试设计最少拍无纹波控制器 D(z) 。

55.. 22采用状态空间的极点配置设计法采用状态空间的极点配置设计法 在计算机控制系统中,除了使用输出反馈控制外,还在计算机控制系统中,除了使用输出反馈控制外,还较多地使用状态反馈控制,因为由状态输入就可以完较多地使用状态反馈控制,因为由状态输入就可以完全地确定系统的未来行为。全地确定系统的未来行为。计算机控制系统的典型结构计算机控制系统的典型结构
T
r(k)
y(k)
y(t) u(k) u(t)
控制器 零阶
保持器 被控对象
简化的离散系统结构图简化的离散系统结构图 r(k)
y(k) u(k)
控制器 被控对象

图图 55.. 4 4 调节系统调节系统 (r(k)=0)(r(k)=0) 中控制器的结构 中控制器的结构
T
y(t) u(t)
T
u(k)
x (k) y(k)
控制器
零阶
保持器
被控
对象 观测器 控制规律
^

55.. 22.. 1 1 按极点配置设计控制规律 按极点配置设计控制规律
)()( kk Lxu 设计出反馈控制规律 L,以使闭 环系统具有所需要的极点配置。
)()()1( kk xGLFx

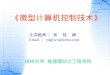
55.. 22.. 2 2 按极点配置设计状态观测按极点配置设计状态观测 器 器
设计状态观测器,根据所量测的输出设计状态观测器,根据所量测的输出 y(k)y(k)和和 u(k)u(k)重重 构全部状态 。因为有些状态无法量测 。 构全部状态 。因为有些状态无法量测 。
常用的状态观测器有三种:预报观测器,现时常用的状态观测器有三种:预报观测器,现时观测器和降阶观测器。观测器和降阶观测器。 常用的观测器方程为 常用的观测器方程为
)()()()()1( kxykkk xCKGuxFx

11 .预报观测器 .预报观测器
设计观测器的关键在于如何合理地选择设计观测器的关键在于如何合理地选择观测器的增益矩阵观测器的增益矩阵 KK
图 5. 6 预报观测器

KCFI zz)(
对于单输入单输出系统,通过比较上式两边 Z的同次幂的系数,可求得 K中 n 个未知数 。

22 .现时观测器 .现时观测器
)1(xC)1(yK)1(x)1(x
)(Gu)(xF)1(x
kkkk
kkk
状态重构误差
)1()1()1()]()([)1()1()1(~
kkkkkkkk xCCxKxGuFxxxx
)k(~
xKCFF
0 KCFIz 现时观测器状态重构误差的特征方程

33 .降阶观测器 .降阶观测器 所能量测到的所能量测到的 y(k)y(k)中,已直接给出了一部分状态变量,这部中,已直接给出了一部分状态变量,这部分状态变量不必通过估计获得。因此,只要估计其余的状态变分状态变量不必通过估计获得。因此,只要估计其余的状态变
量就可以了,这种阶数低于全阶的观测器称为降阶观测器。 量就可以了,这种阶数低于全阶的观测器称为降阶观测器。
将原状态向量分成两部分
)(
)()(
k
kk
b
a
x
xx
)()(
)(
)1(
)1(k
b
a
k
k
k
ku
G
G
x
x
FF
FF
x
x
b
a
bbba
abaa
b
a
状态方程
)()()()1(
)()()()1(
kkakk
kbkkk
babaaaa
ababbbb
xFuGxFx
uGxFxFx

ab
aaaa
aba
bb
b
F
uGxFx
uGxF
F
x
C
Gu
F
x
)k(a)k()1k(
)k(b)k(
)x(
)k(y
)k(
)k(
)(xF)(uG)(xF)1(xK
)(uG)(xF)(xF)1(x
babaaaa
ababbbb
kkakk
kbkkk
)()()()1()1()1(~
kkkkk bbabbbbbb xxKFFxxx
)()(~
kbabbb xKFF
0z abbb KFFI

)()(
)()()(
tty
ttt
Cx
BuAxx
00
10A
1
0B 01C
采样周其为 T=0. 1s,要求确定 K。 (1)设计预报观测器,并将观测器特征方程的两个极点配置在 z1,2=0. 2处。 (2)设计现时预测器,并将观测器特征方程的两个极点配置在 z1,2=0. 2处。 (3)假定 x1是能够量测的状态, x2是需要估计的状态,设计降阶观测器,并将观测器特征方程的极点配置在 Z=0. 2处。

5.2.3 5.2.3 按极点配置设计控制器 按极点配置设计控制器
11.控制器的组成.控制器的组成
按极点配置设计的控制规律和状态观测器,这两部分组成了状态反馈控制器 .
)()(
)()()()()1(
kku
kykukk
xL
kxCKGxFx
2.分离性原理
)()()()1(
)()()1(
kkk
kkk
xKCGLFKCxx
xGLFxx
)(
)(
)1(
)1(
k
k
k
k
x
x
KCGLFKC
GLF
x
x

KCGLFIGLFI
GLGLFI
KCGLFIKC
GLFI
KCGLFKC
GLFI
zz
z
z
z
z)z(
KCFIGLFIKCFI
GLGLFI
zzz
z
0
0)()( zz
闭环系统的特征主程

闭环系统的 2n个极点由两部分组成:一部分是按状态反馈控制规律设计所给定的 n个控制极点;另一部分是按状态观测器设计所给定的 n个观测器极
“ ”点,这就是 分离性原理 。根据这一原理,可以分别设计系统的控制规律和观测器,从而简明化了控
制器的设计。

综上可归纳出采用状态反馈的极点配置法设计控制器的步综上可归纳出采用状态反馈的极点配置法设计控制器的步骤如下:骤如下: (1)(1)按闭环系统的性能要求给定几个控制极点;按闭环系统的性能要求给定几个控制极点; (2)(2)按极点配置设计状态反馈控制规律,计算按极点配置设计状态反馈控制规律,计算 LL (3)(3)合理地给定观测器的极点,并选择观测器的类型,计合理地给定观测器的极点,并选择观测器的类型,计算观测器增益矩阵算观测器增益矩阵 LL (4)(4)最后根据所设计的控制规律和观测器,由计算机来实最后根据所设计的控制规律和观测器,由计算机来实现。现。
3.状态反馈控制器的设计步骤

以上讨论了采用状态反馈控制器的设计,控制极点是按闭环系统的性能要求来设置的,因而控制极点成为整个系统的主导极点。观测器极点的设置应使状态重构具有较快的跟踪速度。如果量测输出中无大的误差或噪声,则可考虑观测器极点都设置在 Z平面的原点。如果量测输出中含有较大的误差或噪声,则可考虑按观测器极点所对应的衰减速度比控制极点对应的衰减速度快约 4或 5倍的要求来设置。观测器的类型选择应考虑以下两点: (1)如果控制器的计算延时与采样周期处于同一数量级,则可考虑选用预报观测器,否则可用现时观测器; (2)如果量测输出比较准确,而且它是系统的一个状态,
则可考虑用降阶观测器,否则用全阶观测器。
4 .观测器及观测器类型选择

5. 2. 4 跟踪系统设计



5. 3 采用状态空间的最优化设计法 5. 3. 1 LQ最优控制器设
计
NT TTT uQuxQxxQx
0 210 )()()()()()( dtttttNTNTJ
)()( tk Lxu
1.问题的描述

2.二次型性能指标函数的离散化
1
021210 )()()()(2)()()()(
N
k
TTTT uQuuQxxQxxQx kkkkkkNNJ
其中 T AttA QQ
T
0 11 dtee
Bdtdee
T t AtA QQ
T
0 0112 )(
TQBQBQT t At AT T
20 0102 )()(
dtdede

3.最优控制规律计算
)()()( kkk xLu
TTT QFSGGSGQL 12
1
2 )1()1()(
kkk
)()(
)()()()1()()(
12121
2
kk
kkkkkk
LQQLQ
LQLGLFSGLFSTT
TT
0)( QS N

55.. 33.. 2 2 状态最优估计器设状态最优估计器设 计 计
11.连续被控对象的状态方程的离散化.连续被控对象的状态方程的离散化
22.. KalmanKalman 滤波公式的推导 滤波公式的推导
33.. KalmanKalman 滤波增益矩阵的计算 滤波增益矩阵的计算

55.. 33.. 3 LQG3 LQG最优控制器设计最优控制器设计 55.. 33.. 4 4 跟踪系统的设计跟踪系统的设计
Recommended