Octávio Páscoa Dias cap.2-1
Electrónica - Curso de Engenharia Electromecânica
2 – Amplificadores Operacionais2 – Amplificadores Operacionais
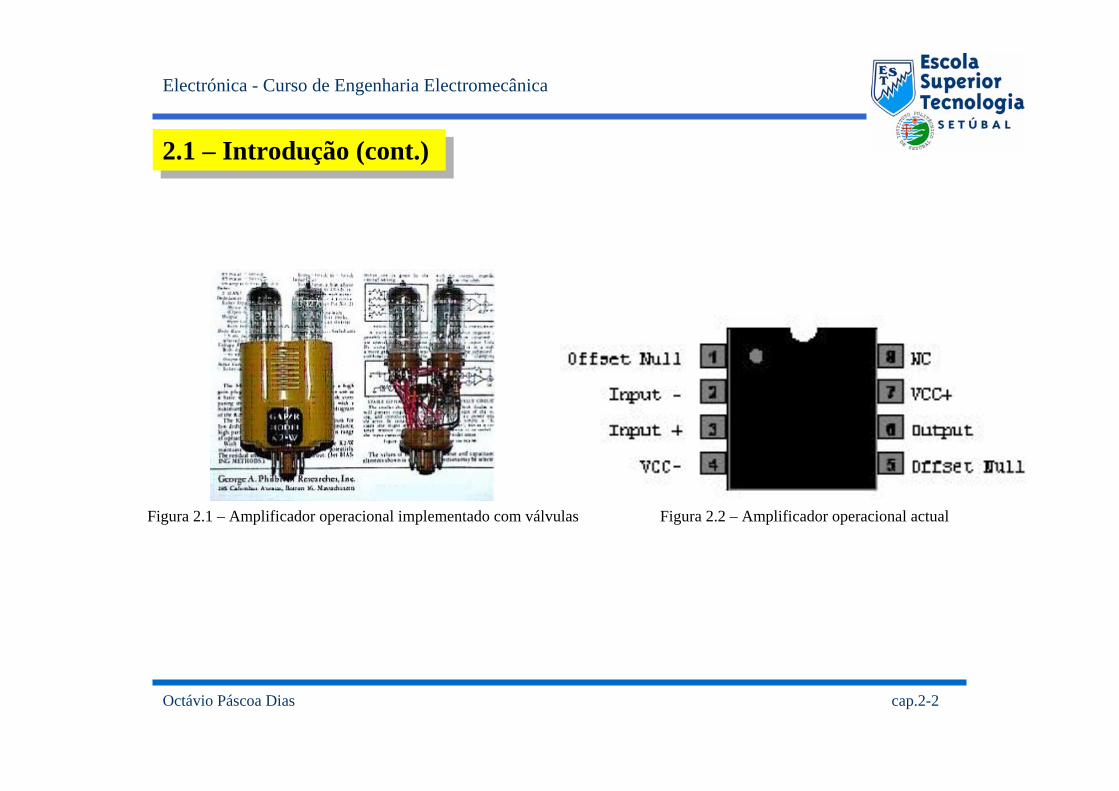
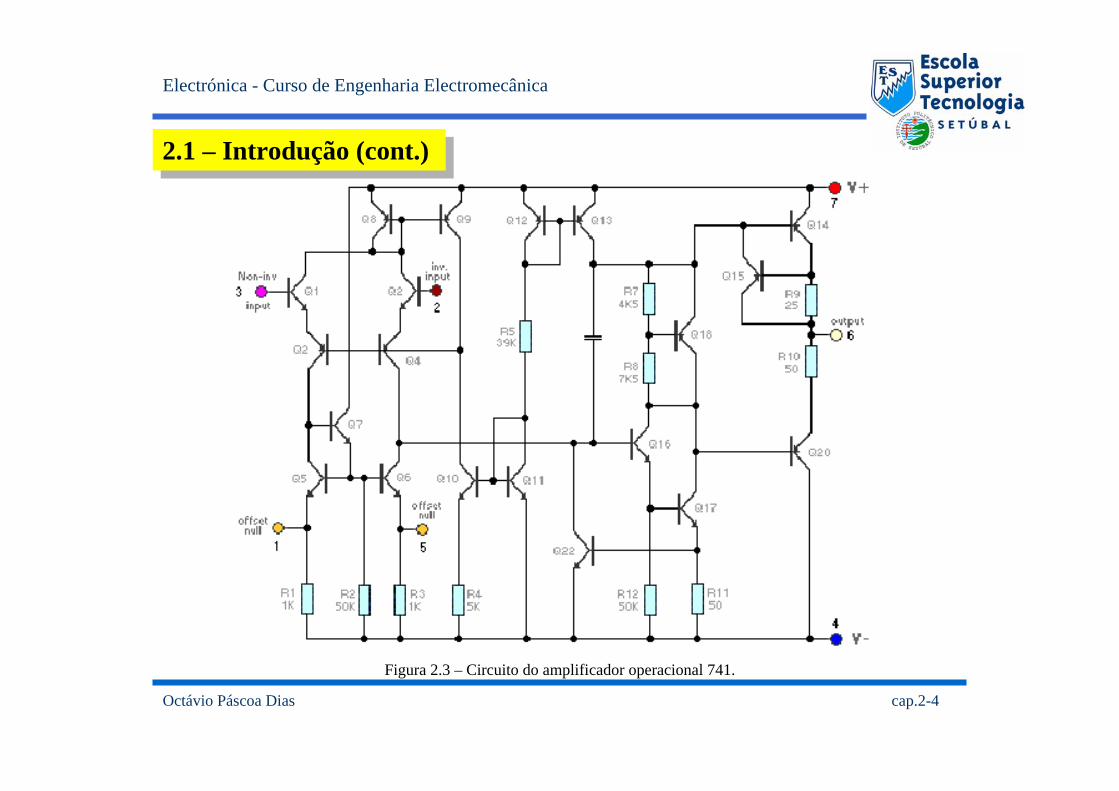
O amplificador operacional (ampop) foi desenvolvido na década de 40. O ampop era construído com base em componentes discretos, primeiro com válvulas (figura 2.1) e mais tarde, final dos anos 40, com transístores. A implementação do ampop com componentes discretos estendeu-se até 1963, ano em que surgiu o primeiro amplificador operacional, construído pela FairChild (µA 702), na forma de um circuito integrado (figura 2.2). Actualmente os ampops são implementados por cerca de 30 transístores associados a resistências e a um condensador (compensação na frequência), com se exemplifica a figura 2.3.
A designação de amplificador operacional, advém do facto de no início, este sistema, ser largamente utilizado para realizar operações matemáticas.
2.1 – Introdução2.1 – Introdução
Octávio Páscoa Dias cap.2-2
Electrónica - Curso de Engenharia Electromecânica
2.1 – Introdução (cont.)2.1 – Introdução (cont.)
Figura 2.1 – Amplificador operacional implementado com válvulas Figura 2.2 – Amplificador operacional actual
Octávio Páscoa Dias cap.2-3
Electrónica - Curso de Engenharia Electromecânica
Com o avanço tecnológico o ampop passou a apresentar características que fazem com que seja utilizado nas mais diversas aplicações, sendo, actualmente, o termo operacional, justificado pela sua versatilidade.
Embora o ampop, seja de facto um sistema complexo, ele pode ser estudado como um componente activo discreto, por intermédio da caracterização do seu comportamento aos terminais. O estudo da sua constituição interna, será feito num capítulo posterior.
2.1 – Introdução (cont.)2.1 – Introdução (cont.)
Octávio Páscoa Dias cap.2-4
Electrónica - Curso de Engenharia Electromecânica
Figura 2.3 – Circuito do amplificador operacional 741.
2.1 – Introdução (cont.)2.1 – Introdução (cont.)
Octávio Páscoa Dias cap.2-5
Electrónica - Curso de Engenharia Electromecânica
2.2 – Os terminais do amplificador operacional2.2 – Os terminais do amplificador operacional
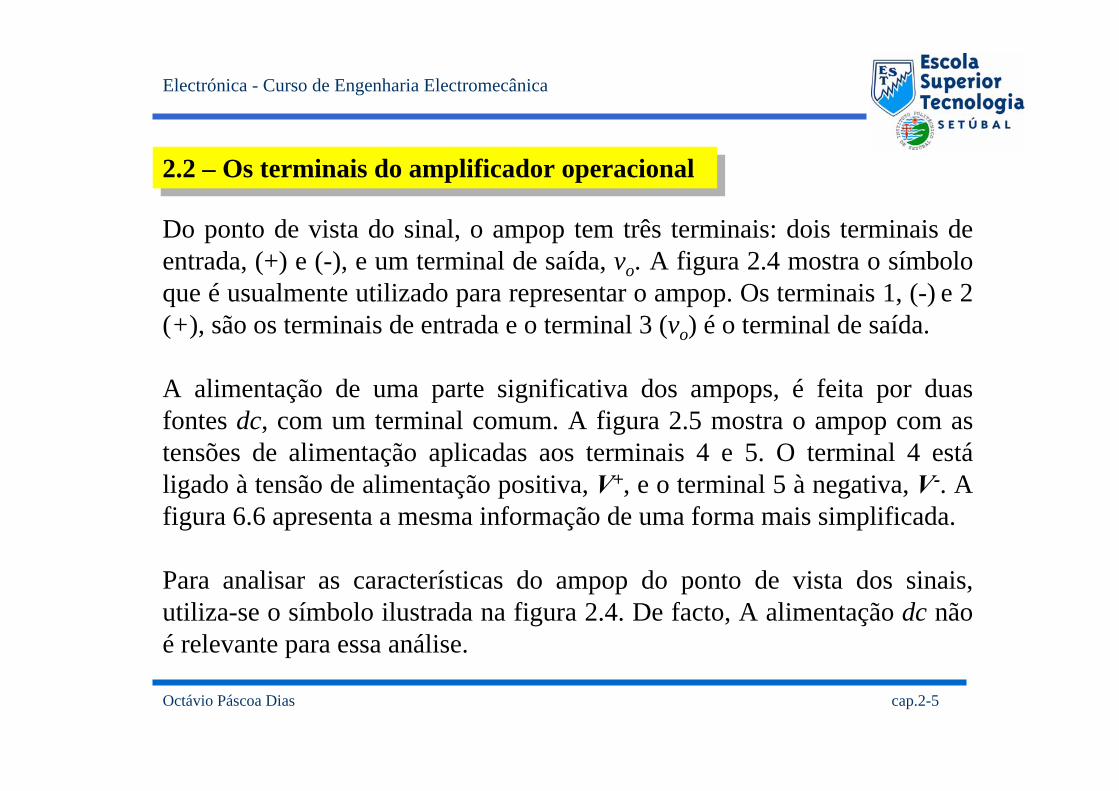
Do ponto de vista do sinal, o ampop tem três terminais: dois terminais de entrada, (+) e (-), e um terminal de saída, vo. A figura 2.4 mostra o símbolo que é usualmente utilizado para representar o ampop. Os terminais 1, (-) e 2 (+), são os terminais de entrada e o terminal 3 (vo) é o terminal de saída.
A alimentação de uma parte significativa dos ampops, é feita por duas fontes dc, com um terminal comum. A figura 2.5 mostra o ampop com as tensões de alimentação aplicadas aos terminais 4 e 5. O terminal 4 está ligado à tensão de alimentação positiva, V+, e o terminal 5 à negativa, V-. A figura 6.6 apresenta a mesma informação de uma forma mais simplificada.
Para analisar as características do ampop do ponto de vista dos sinais, utiliza-se o símbolo ilustrada na figura 2.4. De facto, A alimentação dc não é relevante para essa análise.
Octávio Páscoa Dias cap.2-6
Electrónica - Curso de Engenharia Electromecânica
+v
−v
ov
Figura 2.4 –Símbolo do ampop
Figura 2.5 –Ampop com a fonte de alimentação dc. Figura 2.6 – Representação simplificadado ampop com alimentação dc
2.2 – Os terminais do amplificador operacional (cont.)2.2 – Os terminais do amplificador operacional (cont.)
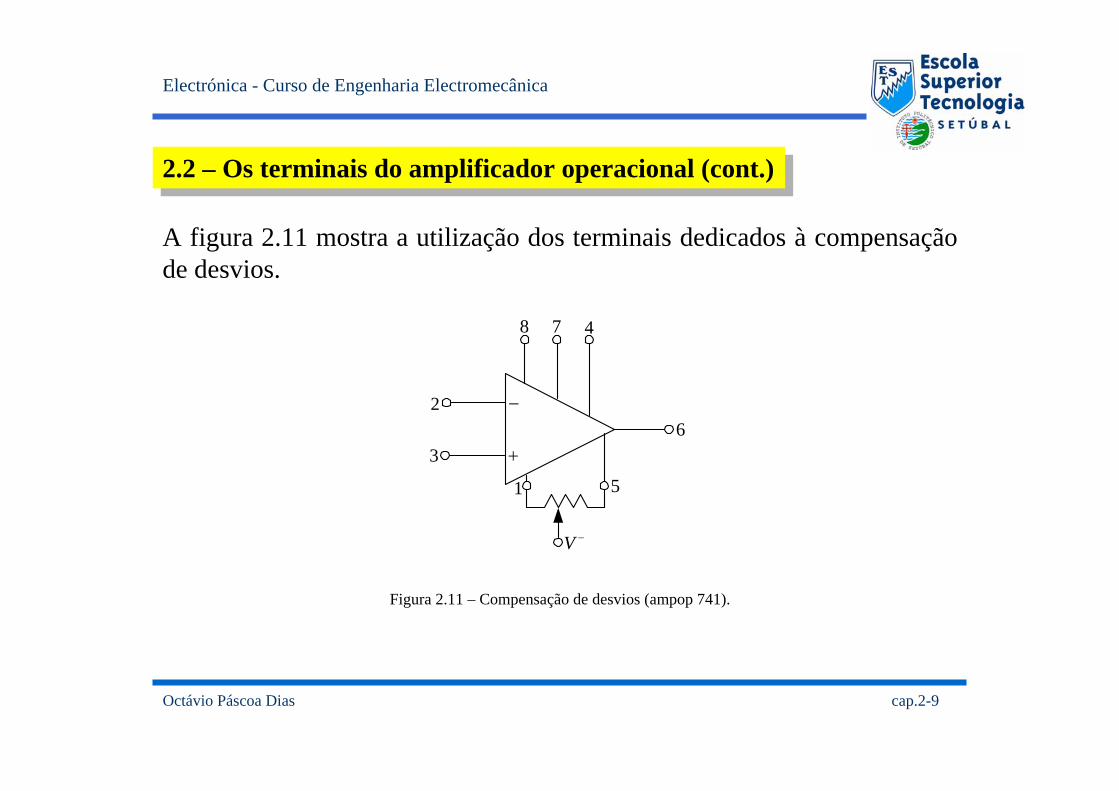
O terminal de referência dos sinais coincide com o ponto comum (massa) das fontes de alimentação. Além dos três terminais para o sinal e dos dois para a alimentação, o ampop tem, usualmente, outros terminais dedicados à compensação dos desvios ao seu comportamento ideal.
Octávio Páscoa Dias cap.2-7
Electrónica - Curso de Engenharia Electromecânica
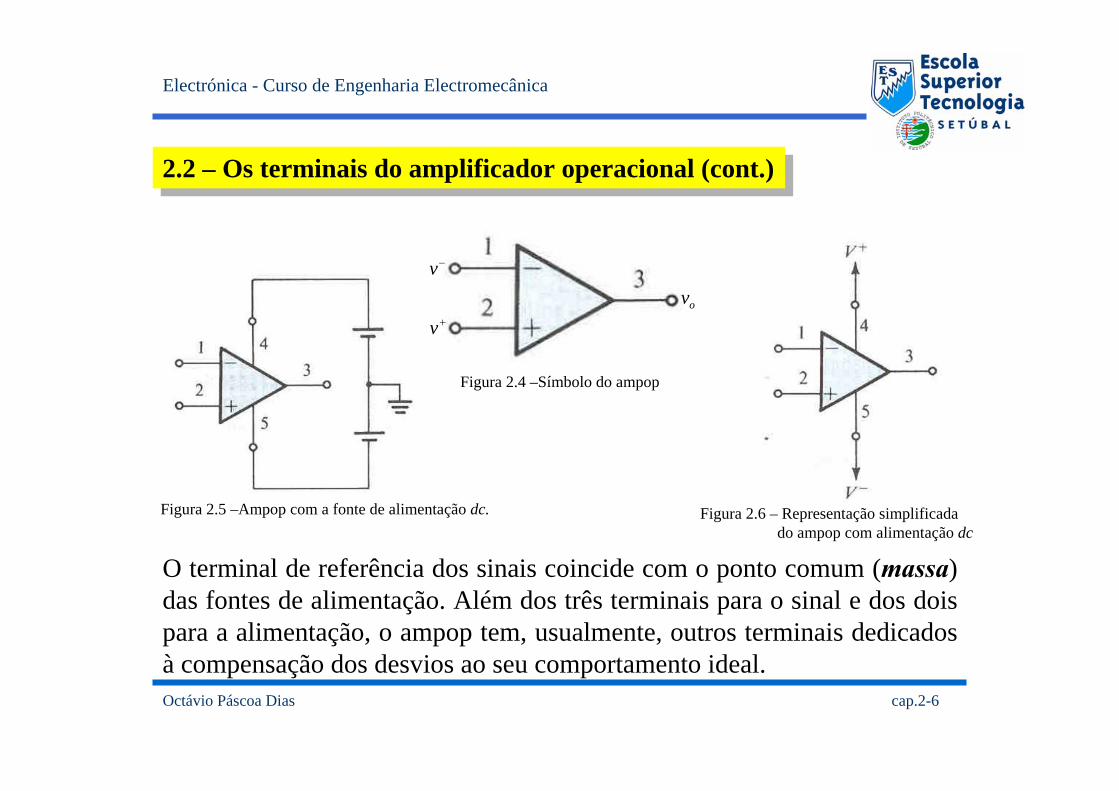
Figura 2.7 –Encapsulamento flat pack (ampop 741).
As figuras 2.7 a 2.9 ilustram alguns encapsulamentos existentes no mercado para o ampop 741.
Figura 2.8 –Encapsulamento metal can (ampop 741).
Figura 2.9 –Encapsulamento DIP (ampop 741).
2.2 – Os terminais do amplificador operacional (cont.)2.2 – Os terminais do amplificador operacional (cont.)
Octávio Páscoa Dias cap.2-8
Electrónica - Curso de Engenharia Electromecânica
+
−)2(; −vinversoraentrada
)3(; +− vinversoranãoentrada)6(; ovsaída
)7(; +Vdctensão
)4(; −Vdctensão
)1(desviodeocompensaçã
)5(desviodeocompensaçã
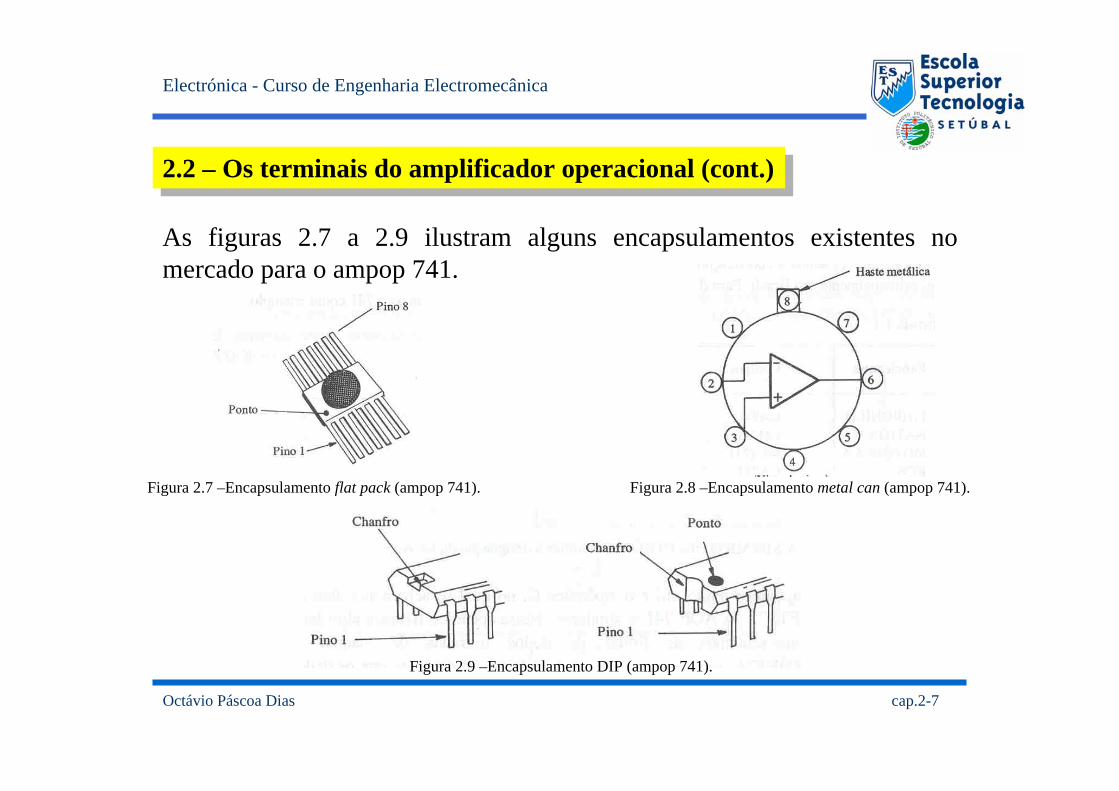
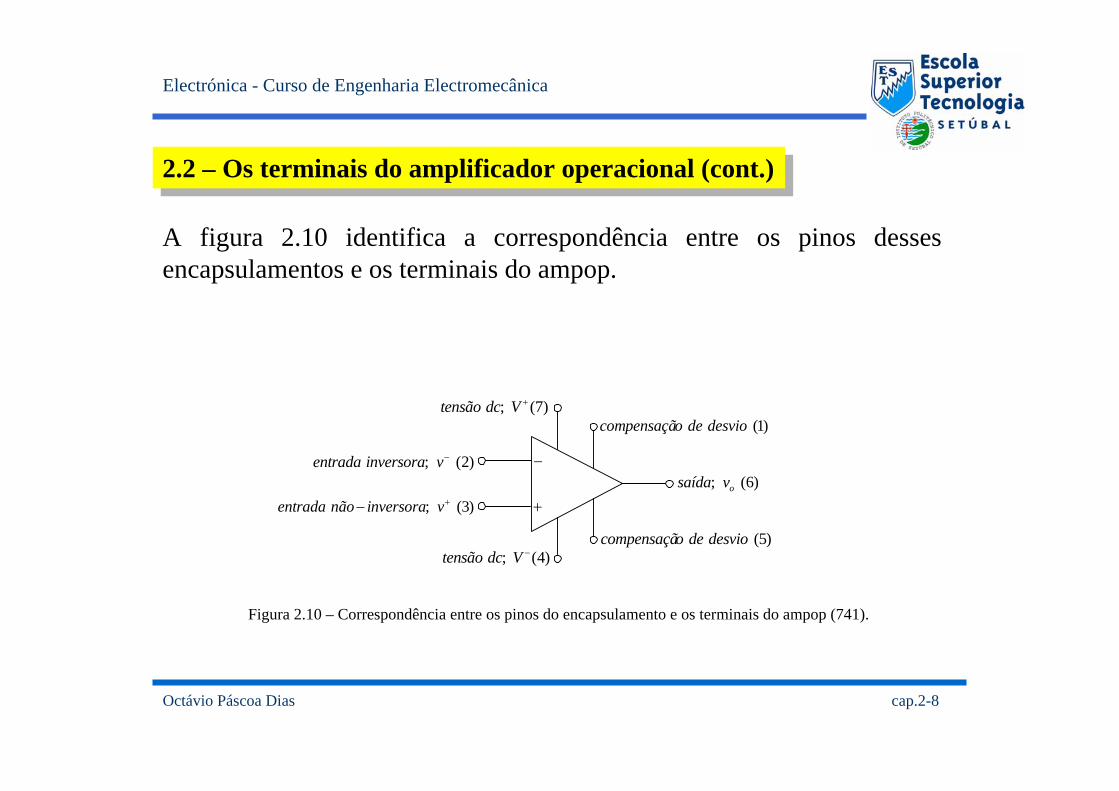
Figura 2.10 – Correspondência entre os pinos do encapsulamento e os terminais do ampop (741).
A figura 2.10 identifica a correspondência entre os pinos dessesencapsulamentos e os terminais do ampop.
2.2 – Os terminais do amplificador operacional (cont.)2.2 – Os terminais do amplificador operacional (cont.)
Octávio Páscoa Dias cap.2-9
Electrónica - Curso de Engenharia Electromecânica
+
−2
36
1 5
−V
8 7 4
Figura 2.11 – Compensação de desvios (ampop 741).
A figura 2.11 mostra a utilização dos terminais dedicados à compensação de desvios.
2.2 – Os terminais do amplificador operacional (cont.)2.2 – Os terminais do amplificador operacional (cont.)
Octávio Páscoa Dias cap.2-10
Electrónica - Curso de Engenharia Electromecânica
2.3 – Características do amplificador ideal2.3 – Características do amplificador ideal
O amplificador operacional é projectado para reagir à diferença entre os sinais aplicados às entradas inversora (-) e não-inversora (+), produzindo uma tensão de saída, vo dada por,
onde,A é um número positivo que representa o ganho do ampop sem realimentação;v + é a tensão aplicada à entrada não-inversora;v - é a tensão aplicada à entrada inversora.
Idealmente, o ampop apenas amplifica a diferença entre os dois sinais presentes nas suas entradas (v+-v-), ignorando qualquer sinal que seja comum às entradas v+ e v-. Assim, se a tensão presente em v+ for igual à tensão presente em v-, a saída, vo, será, idealmente, nula.
)( −+ −= vvAvo
Octávio Páscoa Dias cap.2-11
Electrónica - Curso de Engenharia Electromecânica
Esta característica é designada por rejeição em modo-comum, e o ganho Aé designado por ganho diferencial, uma vez que se refere à amplificação da diferença entre os sinais presentes nas entradas do ampop.
Outra das características do amplificador operacional ideal, consiste em ter as correntes de entrada nulas. Assim, com os sinais de corrente produzidos por v+ e v- nulos, a resistência de entrada do ampop é infinita,
∞=iRQuanto á tensão de saída, é suposto que o ampop se comporte como uma fonte de tensão ideal, ou seja, a tensão medida entre o terminal de saída, vo, e a massa, deve ser igual a A(v+-v-), independentemente da corrente que o ampop forneça a uma carga, isto é, a resistência de saída do ampop deve ser nula,
0=oR
2.3 – Características do amplificador ideal2.3 – Características do amplificador ideal
Octávio Páscoa Dias cap.2-12
Electrónica - Curso de Engenharia Electromecânica
+v
−v
ov
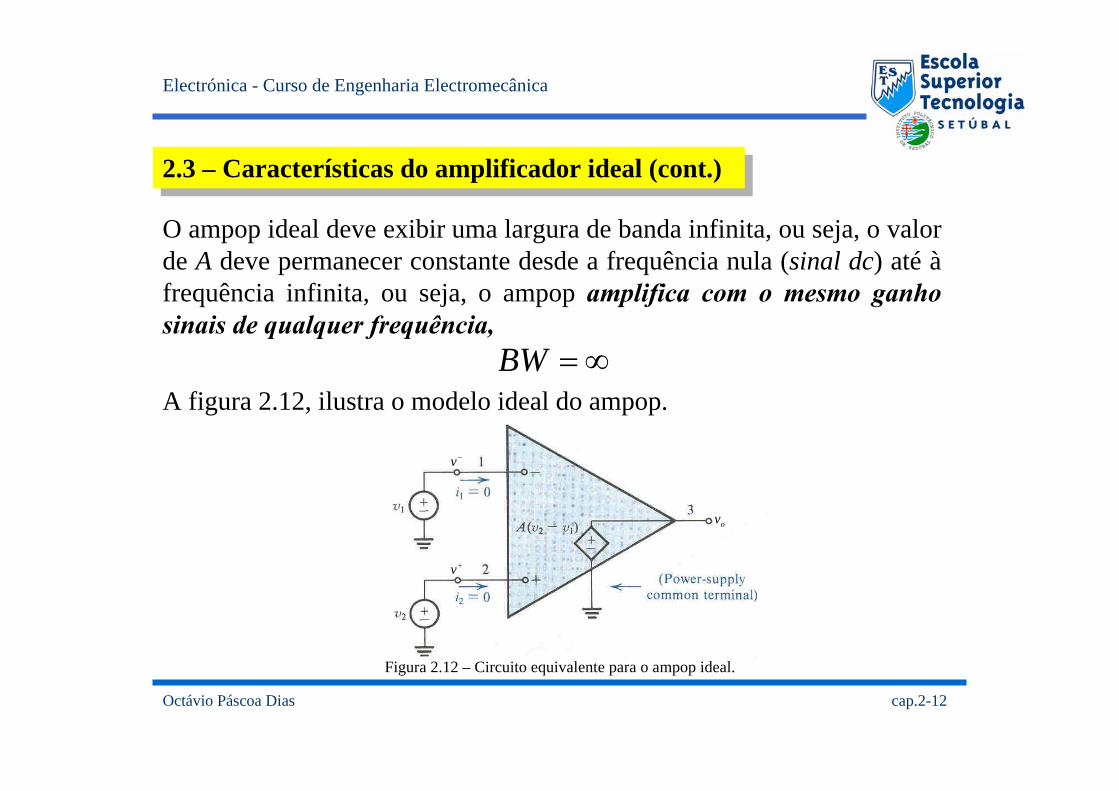
A figura 2.12, ilustra o modelo ideal do ampop.
Figura 2.12 – Circuito equivalente para o ampop ideal.
2.3 – Características do amplificador ideal (cont.)2.3 – Características do amplificador ideal (cont.)
O ampop ideal deve exibir uma largura de banda infinita, ou seja, o valor de A deve permanecer constante desde a frequência nula (sinal dc) até à frequência infinita, ou seja, o ampop amplifica com o mesmo ganho sinais de qualquer frequência,
∞=BW
Octávio Páscoa Dias cap.2-13
Electrónica - Curso de Engenharia Electromecânica
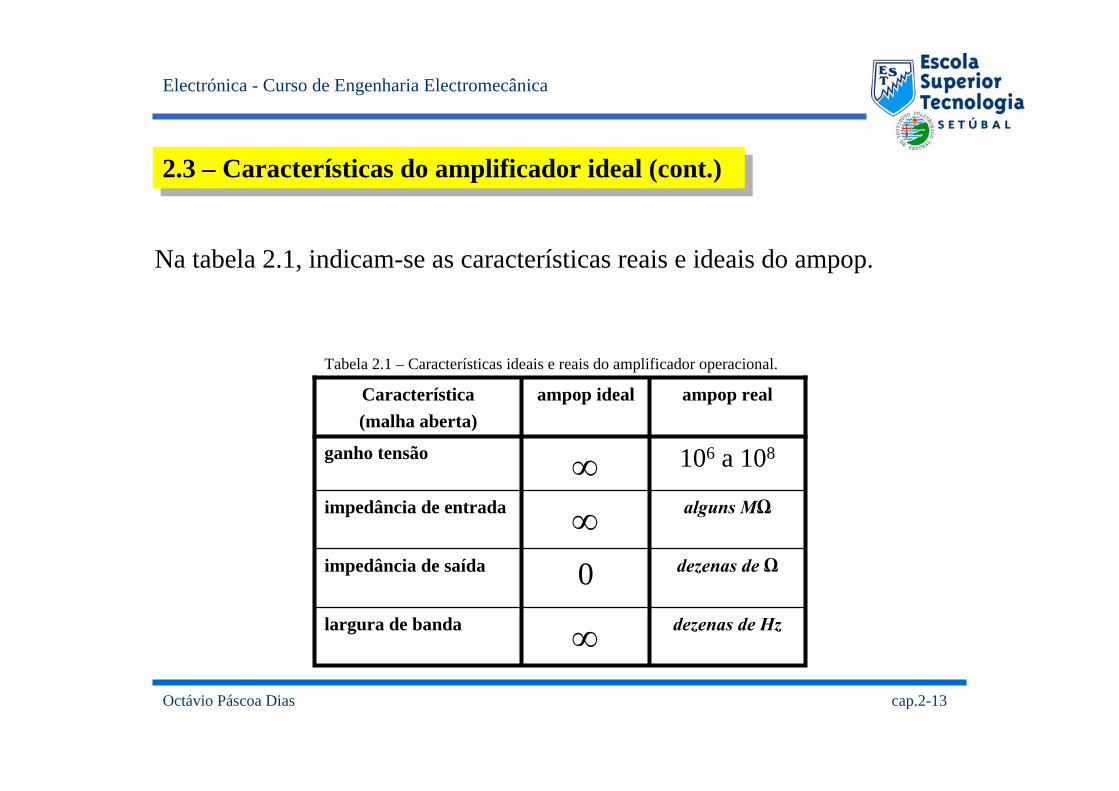
Tabela 2.1 – Características ideais e reais do amplificador operacional.
dezenas de Ω0impedância de saída
dezenas de Hz∞largura de banda
alguns MΩ∞impedância de entrada
106 a 108∞ganho tensão
ampop realampop idealCaracterística(malha aberta)
Na tabela 2.1, indicam-se as características reais e ideais do ampop.
2.3 – Características do amplificador ideal (cont.)2.3 – Características do amplificador ideal (cont.)
Octávio Páscoa Dias cap.2-14
Electrónica - Curso de Engenharia Electromecânica
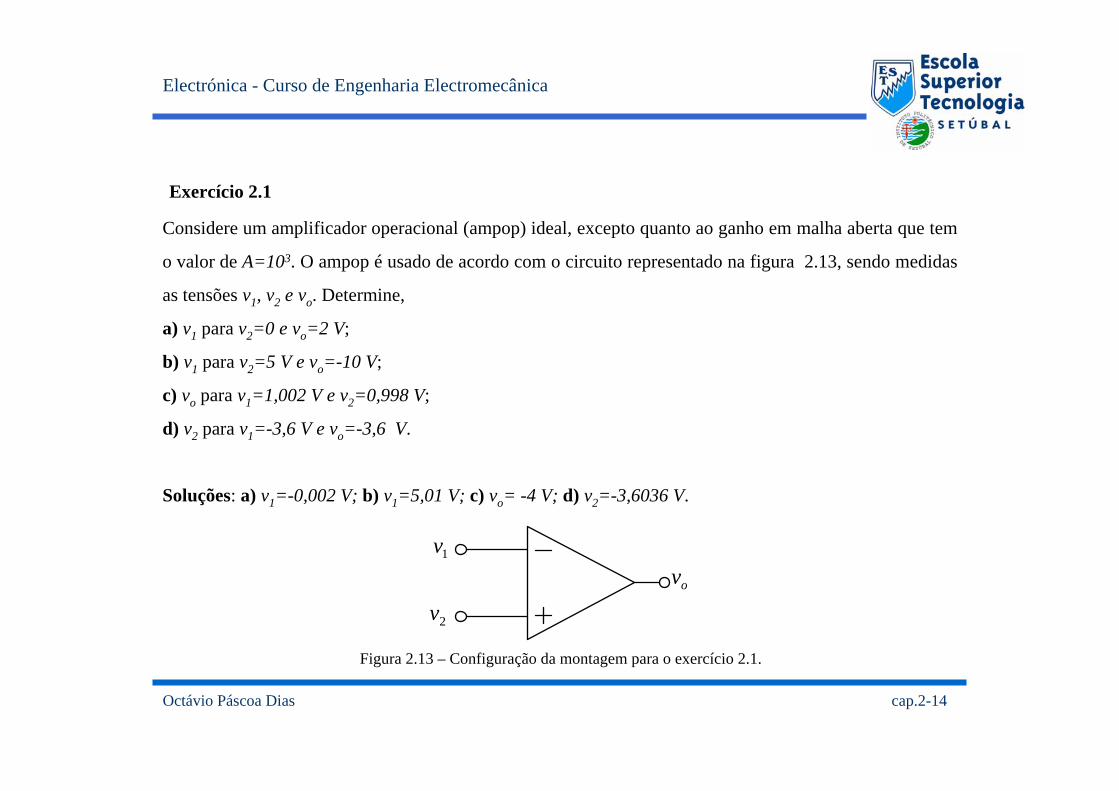
Exercício 2.1
Considere um amplificador operacional (ampop) ideal, excepto quanto ao ganho em malha aberta que tem
o valor de A=103. O ampop é usado de acordo com o circuito representado na figura 2.13, sendo medidas
as tensões v1, v2 e vo. Determine,
a) v1 para v2=0 e vo=2 V;
b) v1 para v2=5 V e vo=-10 V;
c) vo para v1=1,002 V e v2=0,998 V;
d) v2 para v1=-3,6 V e vo=-3,6 V.
Soluções: a) v1=-0,002 V; b) v1=5,01 V; c) vo= -4 V; d) v2=-3,6036 V.
1v
2vov
Figura 2.13 – Configuração da montagem para o exercício 2.1.
Octávio Páscoa Dias cap.2-15
Electrónica - Curso de Engenharia Electromecânica
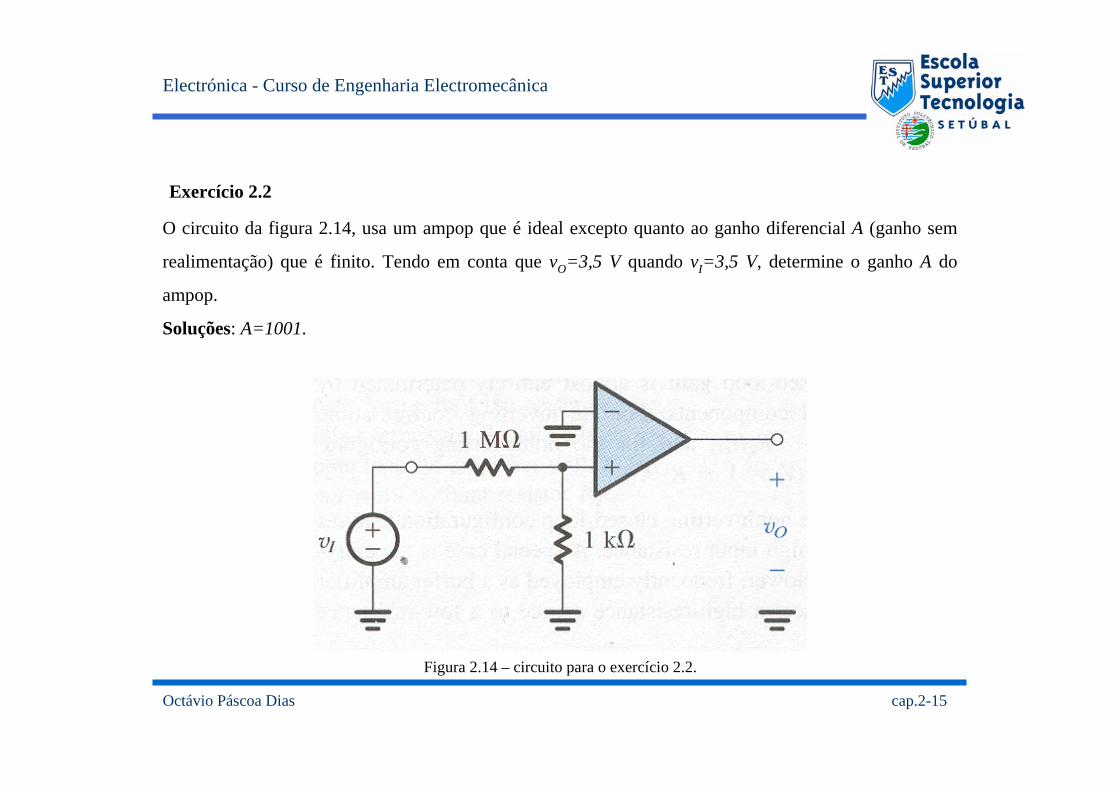
Exercício 2.2
O circuito da figura 2.14, usa um ampop que é ideal excepto quanto ao ganho diferencial A (ganho sem
realimentação) que é finito. Tendo em conta que vO=3,5 V quando vI=3,5 V, determine o ganho A do
ampop.
Soluções: A=1001.
Figura 2.14 – circuito para o exercício 2.2.
Octávio Páscoa Dias cap.2-16
Electrónica - Curso de Engenharia Electromecânica
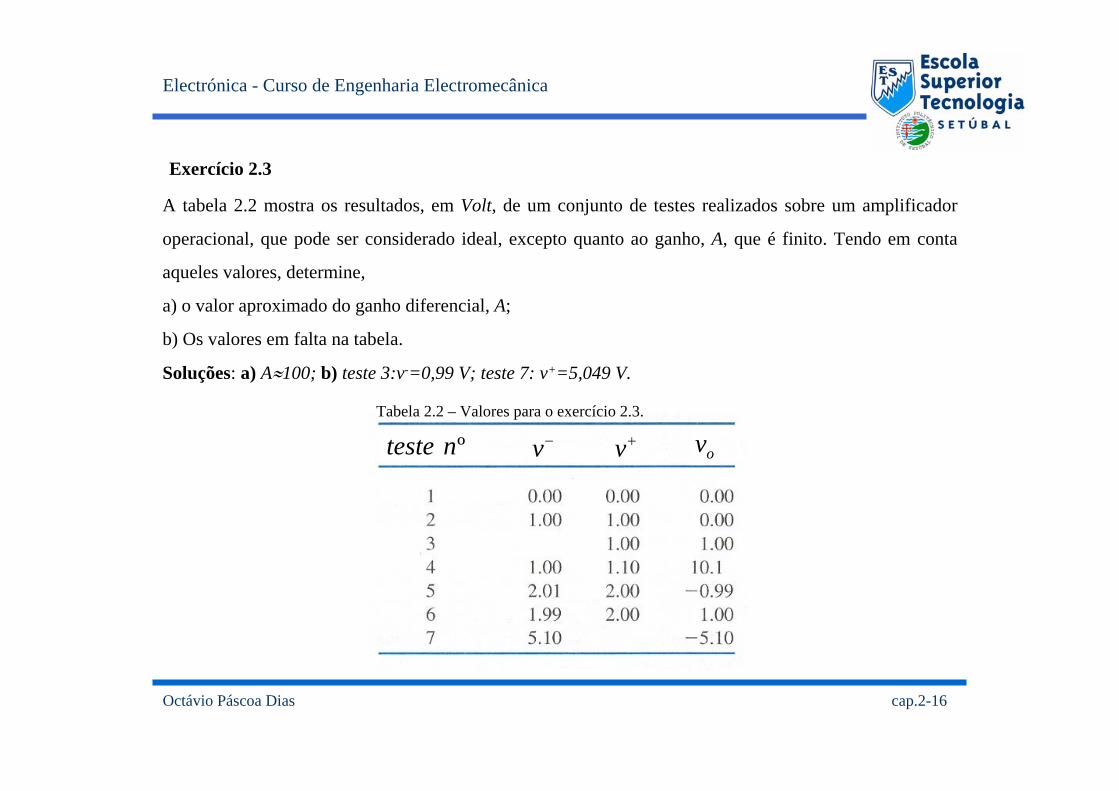
Exercício 2.3
A tabela 2.2 mostra os resultados, em Volt, de um conjunto de testes realizados sobre um amplificador
operacional, que pode ser considerado ideal, excepto quanto ao ganho, A, que é finito. Tendo em conta
aqueles valores, determine,
a) o valor aproximado do ganho diferencial, A;
b) Os valores em falta na tabela.
Soluções: a) A≈100; b) teste 3:v-=0,99 V; teste 7: v+=5,049 V.
ºnteste +v−v ovTabela 2.2 – Valores para o exercício 2.3.
Octávio Páscoa Dias cap.2-17
Electrónica - Curso de Engenharia Electromecânica
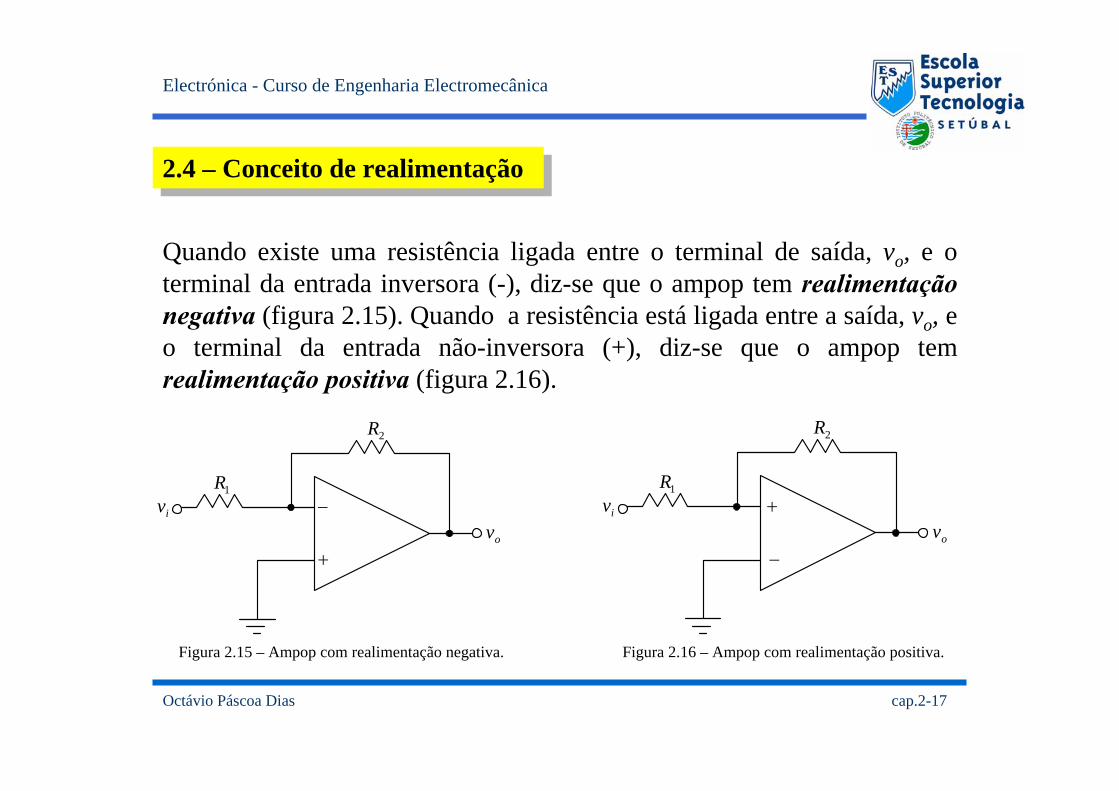
2.4 – Conceito de realimentação2.4 – Conceito de realimentação
Quando existe uma resistência ligada entre o terminal de saída, vo, e o terminal da entrada inversora (-), diz-se que o ampop tem realimentação negativa (figura 2.15). Quando a resistência está ligada entre a saída, vo, e o terminal da entrada não-inversora (+), diz-se que o ampop tem realimentação positiva (figura 2.16).
Figura 2.15 – Ampop com realimentação negativa. Figura 2.16 – Ampop com realimentação positiva.
oviv
2R
+
−1R
oviv
2R
+
−
1R
Octávio Páscoa Dias cap.2-18
Electrónica - Curso de Engenharia Electromecânica
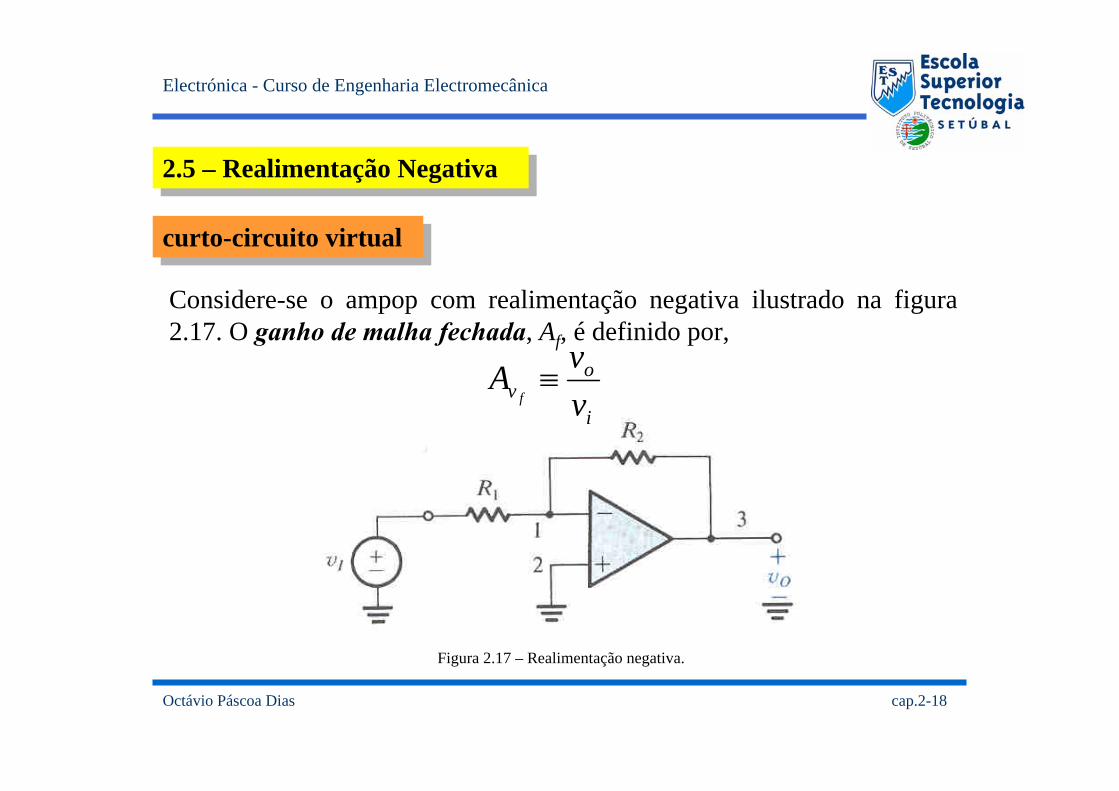
2.5 – Realimentação Negativa2.5 – Realimentação Negativa
Considere-se o ampop com realimentação negativa ilustrado na figura 2.17. O ganho de malha fechada, Af, é definido por,
i
ov v
vAf≡
Figura 2.17 – Realimentação negativa.
curto-circuito virtualcurto-circuito virtual
Octávio Páscoa Dias cap.2-19
Electrónica - Curso de Engenharia Electromecânica
A tensão vo tem um valor finito, e como,
Avvv
vvAv
vvvv
vvAv
o
o
o
=−
−=
==
−=−+
−+
)(
)(
;
)(
12
12
12
dado que, idealmente,∞→A
então,0)( →− −+ vv
isto é, as tensões presentes em v + e v - são praticamente iguais.
curto-circuito virtual (cont.)curto-circuito virtual (cont.)
Octávio Páscoa Dias cap.2-20
Electrónica - Curso de Engenharia Electromecânica
+
−
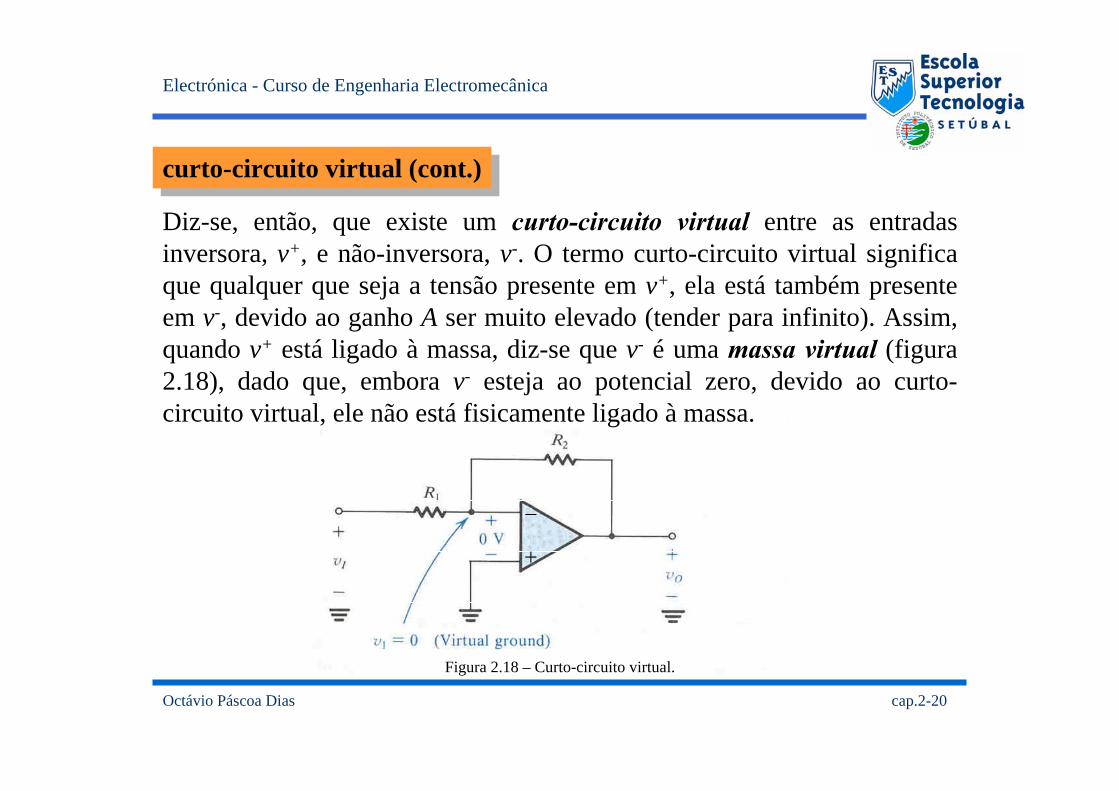
Diz-se, então, que existe um curto-circuito virtual entre as entradas inversora, v+, e não-inversora, v-. O termo curto-circuito virtual significa que qualquer que seja a tensão presente em v+, ela está também presente em v-, devido ao ganho A ser muito elevado (tender para infinito). Assim, quando v+ está ligado à massa, diz-se que v- é uma massa virtual (figura 2.18), dado que, embora v- esteja ao potencial zero, devido ao curto-circuito virtual, ele não está fisicamente ligado à massa.
Figura 2.18 – Curto-circuito virtual.
curto-circuito virtual (cont.)curto-circuito virtual (cont.)

Octávio Páscoa Dias cap.2-21
Electrónica - Curso de Engenharia Electromecânica
+
−
A figura 2.19 ilustra a montagem inversora do amplificador operacional.
2.5.1 – Operação Linear do Ampop2.5.1 – Operação Linear do Ampop
montagem inversoramontagem inversora
Figura 2.19 – Montagem inversora.
1
2
RRAf −=
Octávio Páscoa Dias cap.2-22
Electrónica - Curso de Engenharia Electromecânica
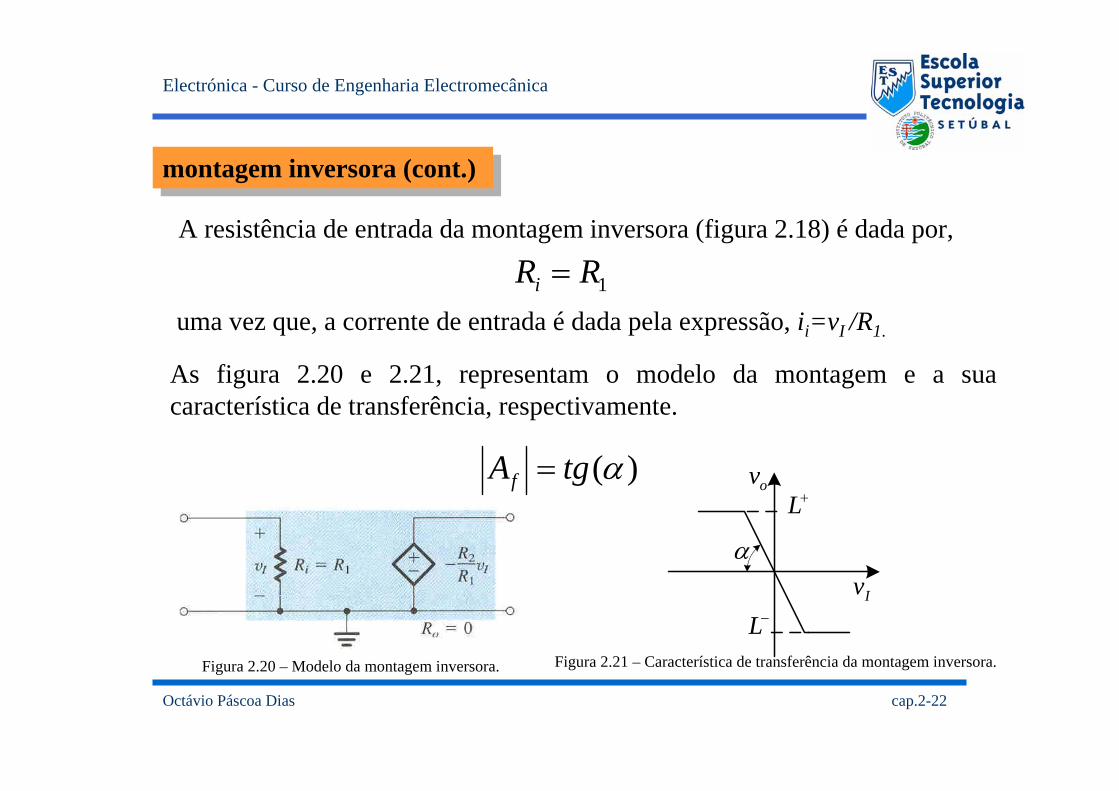
Figura 2.20 – Modelo da montagem inversora.
A resistência de entrada da montagem inversora (figura 2.18) é dada por,
montagem inversora (cont.)montagem inversora (cont.)
1RRi =uma vez que, a corrente de entrada é dada pela expressão, ii=vI /R1.
As figura 2.20 e 2.21, representam o modelo da montagem e a sua característica de transferência, respectivamente.
Figura 2.21 – Característica de transferência da montagem inversora.
α
Iv
ov+L
−L
)(αtgAf =
Octávio Páscoa Dias cap.2-23
Electrónica - Curso de Engenharia Electromecânica
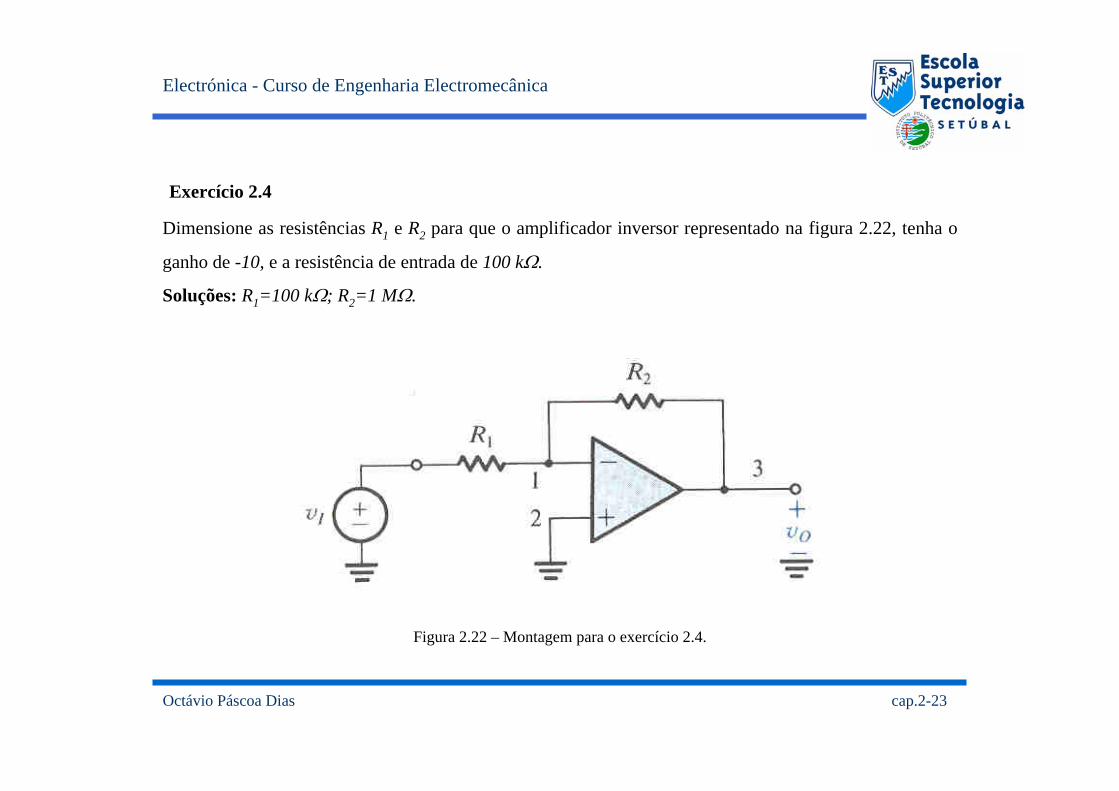
Exercício 2.4
Dimensione as resistências R1 e R2 para que o amplificador inversor representado na figura 2.22, tenha o
ganho de -10, e a resistência de entrada de 100 kΩ.
Soluções: R1=100 kΩ; R2=1 MΩ.
Figura 2.22 – Montagem para o exercício 2.4.
Octávio Páscoa Dias cap.2-24
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.5
Um circuito inversor usa um ampop duas resisências de 10 kΩ.
a) determine o ganho teórico em malha fechada;
b) calcule o valor da tensão de saída, para uma tensão de +3 V aplicada na entrada.
Soluções: a) Av=-1; b) vO=-3 V.
Exercício 2.6
Assuma que tem um ampop ideal e três resistências de 10 kΩ.
a) determine o número de que topologias pode implementar para um circuito amplificador inversor, por
intermédio de combinações série e paralelo das três resistências;
b) identifique a topologia que associa o maior ganho com a maior resistência de entrada da montagem;
c) Identifique a topologia que associa o menor ganho com a maior resistência de entrada da montagem.
Soluções: a) 4 topologias; b) Av=-2 e Ri=10 kΩ; c) Av=-0,5 e Ri=20 kΩ.
Octávio Páscoa Dias cap.2-25
Electrónica - Curso de Engenharia Electromecânica
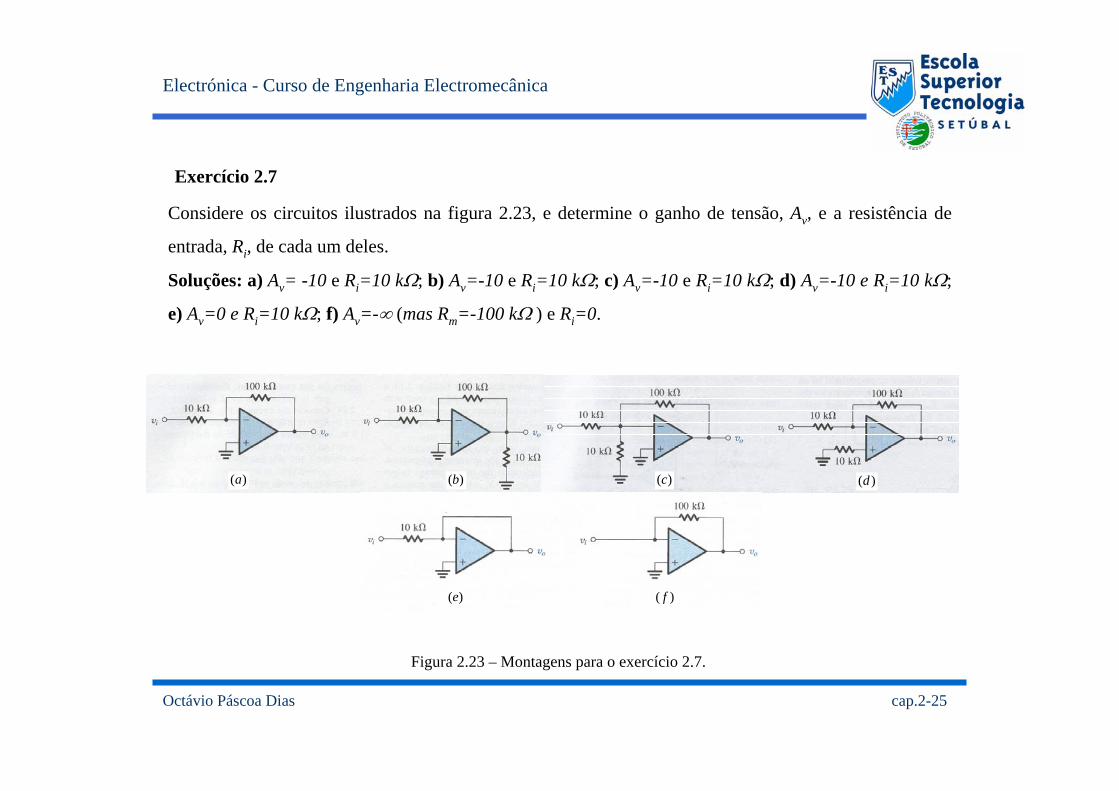
Exercício 2.7
Considere os circuitos ilustrados na figura 2.23, e determine o ganho de tensão, Av, e a resistência de
entrada, Ri, de cada um deles.
Soluções: a) Av= -10 e Ri=10 kΩ; b) Av=-10 e Ri=10 kΩ; c) Av=-10 e Ri=10 kΩ; d) Av=-10 e Ri=10 kΩ;
e) Av=0 e Ri=10 kΩ; f) Av=-∞ (mas Rm=-100 kΩ ) e Ri=0.
Figura 2.23 – Montagens para o exercício 2.7.
)(a )(b )(c )(d
)(e )( f
Octávio Páscoa Dias cap.2-26
Electrónica - Curso de Engenharia Electromecânica
IvOv
Exercício 2.8
Projecte um amplificador inversor com base num ampop. O circuito deve ter um ganho de -4 e o total
das resistências utilizadas deve somar o valor de 100 kΩ.
Soluções: R1=20 kΩ; R2=80 kΩ.
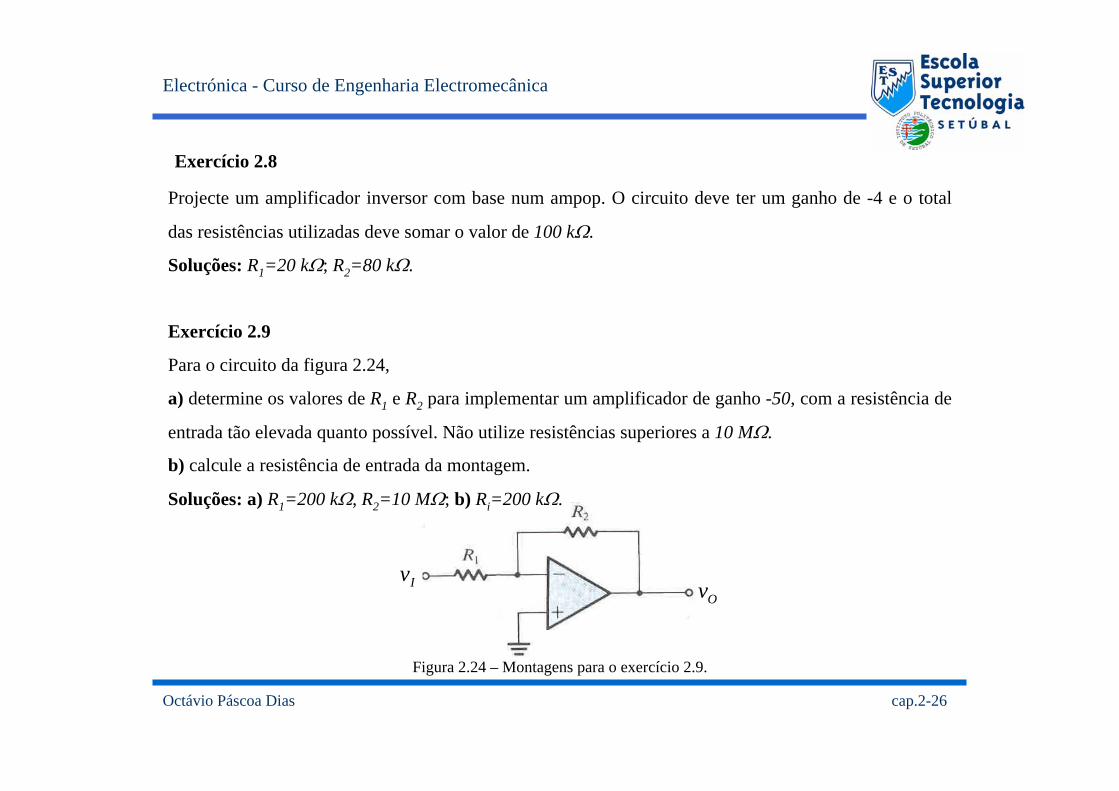
Exercício 2.9
Para o circuito da figura 2.24,
a) determine os valores de R1 e R2 para implementar um amplificador de ganho -50, com a resistência de
entrada tão elevada quanto possível. Não utilize resistências superiores a 10 MΩ.
b) calcule a resistência de entrada da montagem.
Soluções: a) R1=200 kΩ, R2=10 MΩ; b) Ri=200 kΩ.
Figura 2.24 – Montagens para o exercício 2.9.
Octávio Páscoa Dias cap.2-27
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.10
Um circuito amplificador inversor usa um ampop que pose ser considerteado ideal. Sabendo que o ganho
do circuito é de -1000 e que apenas foram utilizadas duas resistências, cujo valor de cada uma delas não
é superior a 100 kΩ, determine o valor,
a) das resistências utilizadas;
b) da resistência de entrada do circuito.
Soluções: a) R1=100 Ω; R2=100 kΩ.; b) 100 Ω
Exercício 2.11
Um ampop com ganho diferencial, A=1000, é usado numa montagem inversora, na qual a tensão de
saída varia entre -10 V e +10 V. Determine o desvio máximo de tensão no nó da entrada inversora, v-,
relativamente à massa virtual.
Solução: ±10 mV.
Octávio Páscoa Dias cap.2-28
Electrónica - Curso de Engenharia Electromecânica
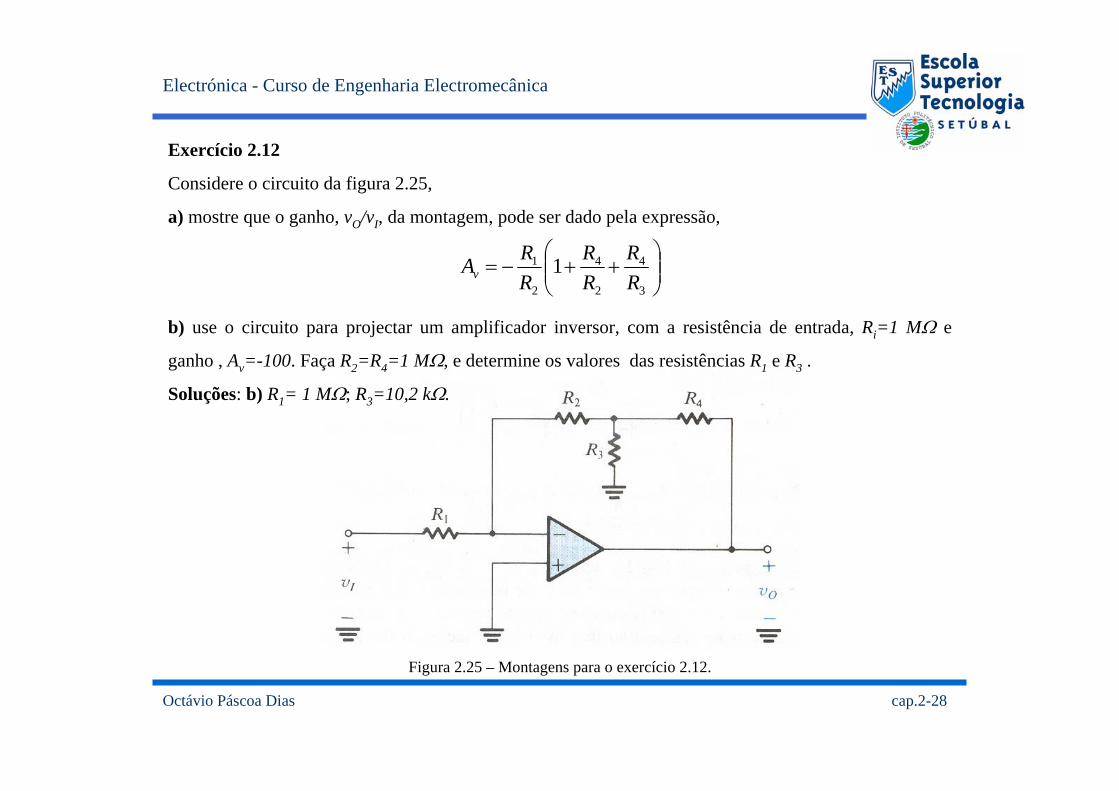
Exercício 2.12
Considere o circuito da figura 2.25,
a) mostre que o ganho, vO/vI, da montagem, pode ser dado pela expressão,
Figura 2.25 – Montagens para o exercício 2.12.
⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
3
4
2
4
2
1 1RR
RR
RRAv
b) use o circuito para projectar um amplificador inversor, com a resistência de entrada, Ri=1 MΩ e
ganho , Av=-100. Faça R2=R4=1 MΩ, e determine os valores das resistências R1 e R3 .
Soluções: b) R1= 1 MΩ; R3=10,2 kΩ.
Octávio Páscoa Dias cap.2-29
Electrónica - Curso de Engenharia Electromecânica
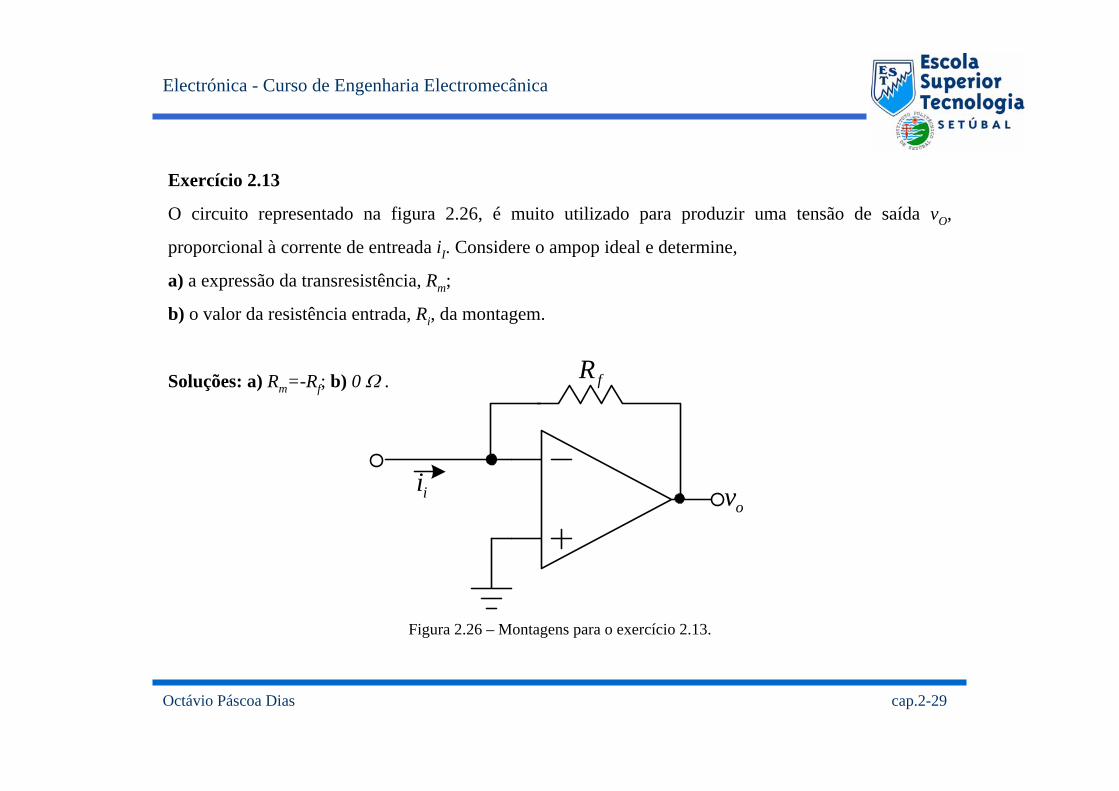
Exercício 2.13
O circuito representado na figura 2.26, é muito utilizado para produzir uma tensão de saída vO,
proporcional à corrente de entreada iI. Considere o ampop ideal e determine,
a) a expressão da transresistência, Rm;
b) o valor da resistência entrada, Ri, da montagem.
Soluções: a) Rm=-Rf; b) 0 Ω .
Figura 2.26 – Montagens para o exercício 2.13.
fR
iiov
Octávio Páscoa Dias cap.2-30
Electrónica - Curso de Engenharia Electromecânica
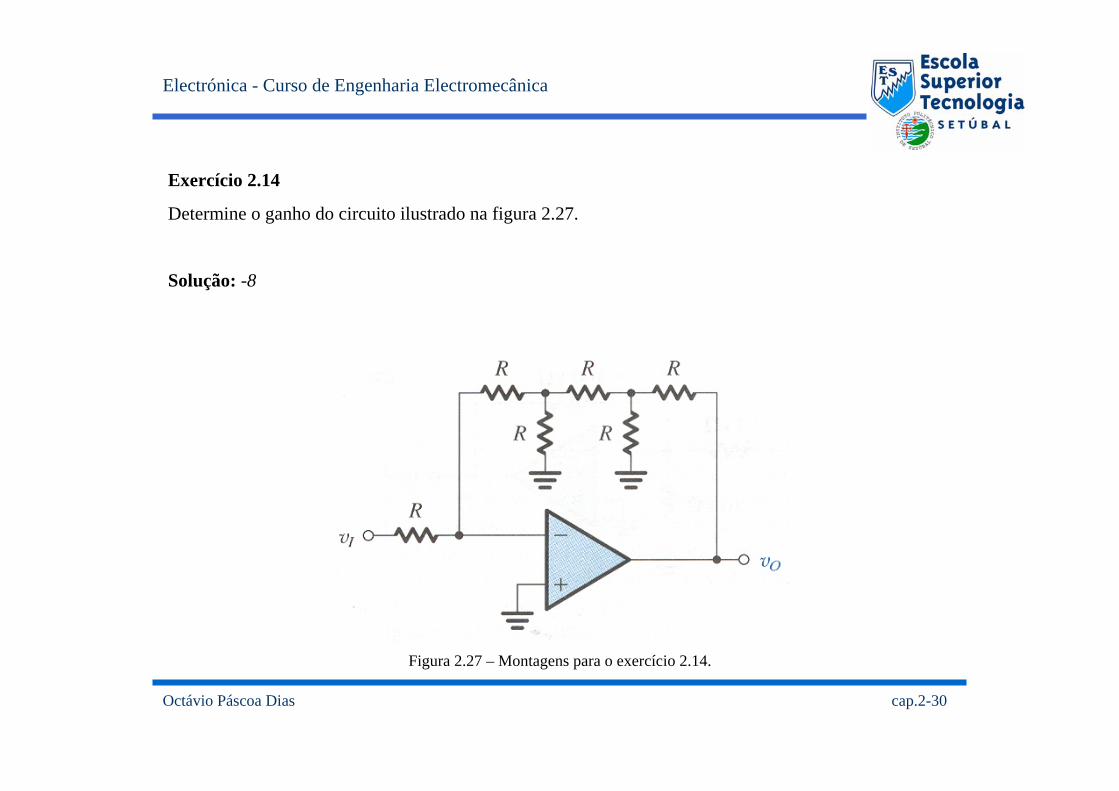
Exercício 2.14
Determine o ganho do circuito ilustrado na figura 2.27.
Solução: -8
Figura 2.27 – Montagens para o exercício 2.14.
Octávio Páscoa Dias cap.2-31
Electrónica - Curso de Engenharia Electromecânica
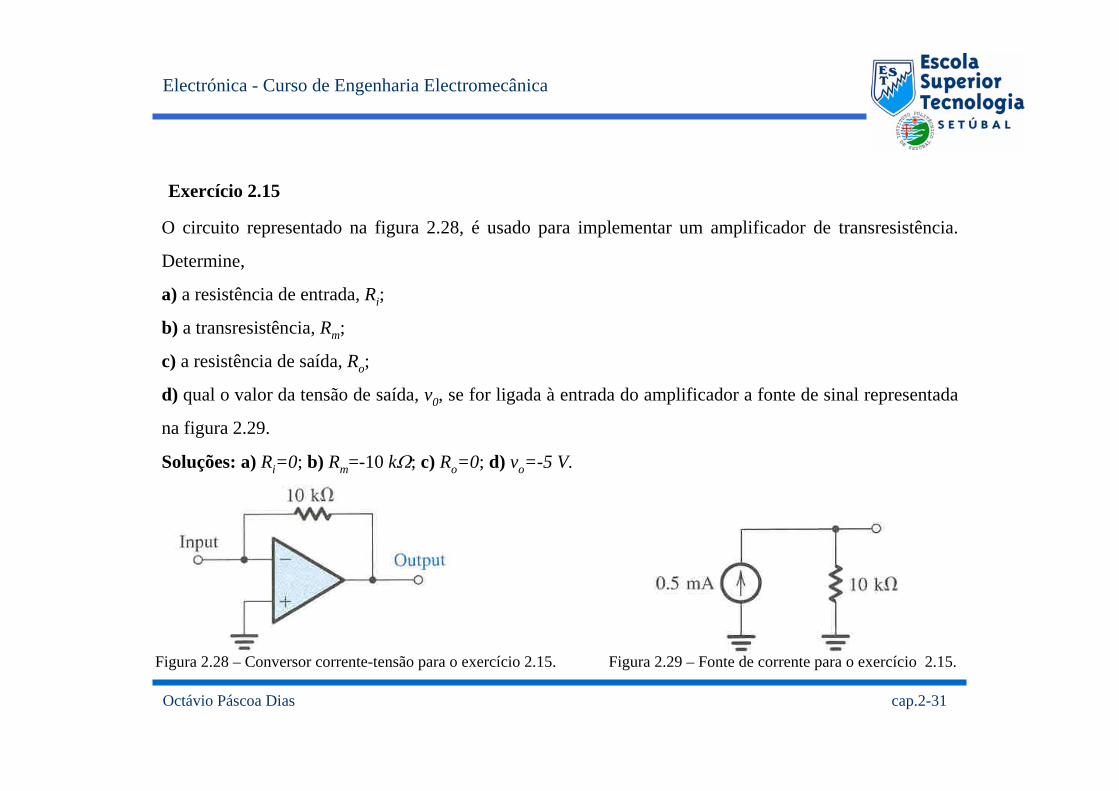
Exercício 2.15
O circuito representado na figura 2.28, é usado para implementar um amplificador de transresistência.
Determine,
a) a resistência de entrada, Ri;
b) a transresistência, Rm;
c) a resistência de saída, Ro;
d) qual o valor da tensão de saída, v0, se for ligada à entrada do amplificador a fonte de sinal representada
na figura 2.29.
Soluções: a) Ri=0; b) Rm=-10 kΩ; c) Ro=0; d) vo=-5 V.
Figura 2.28 – Conversor corrente-tensão para o exercício 2.15. Figura 2.29 – Fonte de corrente para o exercício 2.15.
Octávio Páscoa Dias cap.2-32
Electrónica - Curso de Engenharia Electromecânica
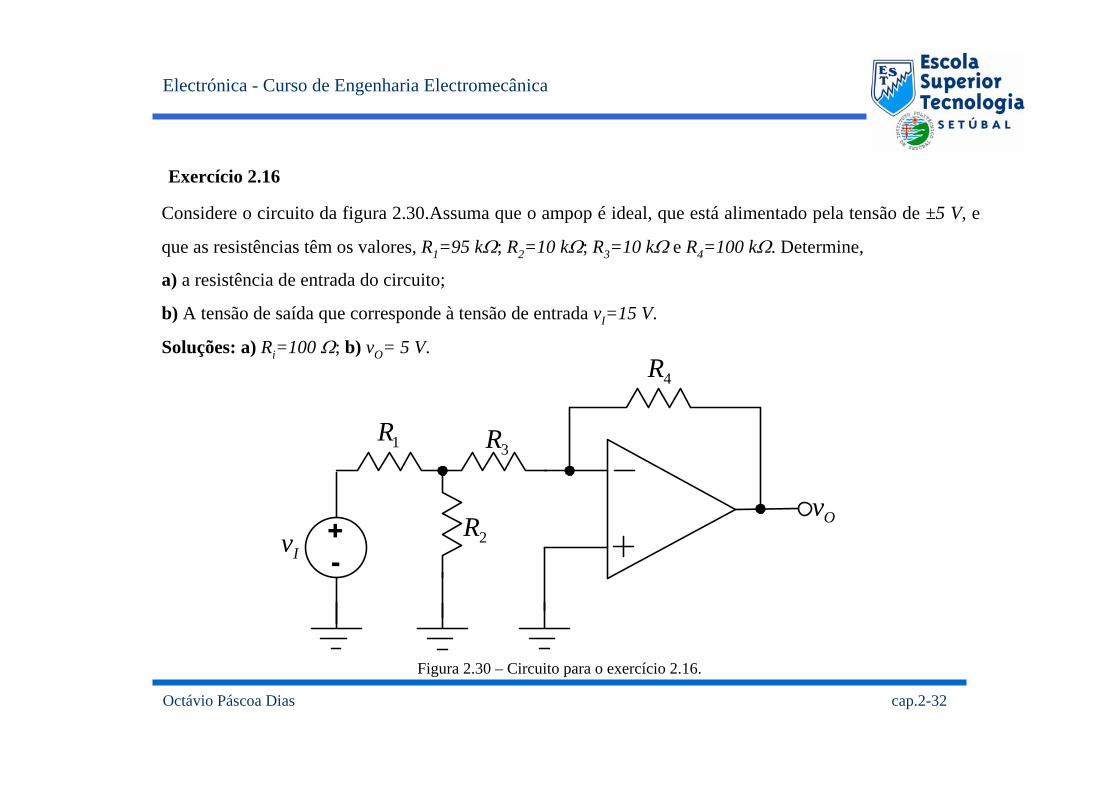
Exercício 2.16
Considere o circuito da figura 2.30.Assuma que o ampop é ideal, que está alimentado pela tensão de ±5 V, e
que as resistências têm os valores, R1=95 kΩ; R2=10 kΩ; R3=10 kΩ e R4=100 kΩ. Determine,
a) a resistência de entrada do circuito;
b) A tensão de saída que corresponde à tensão de entrada vI=15 V.
Soluções: a) Ri=100 Ω; b) vO= 5 V.
Figura 2.30 – Circuito para o exercício 2.16.
1R
2R
3R
4R
IvOv
Octávio Páscoa Dias cap.2-33
Electrónica - Curso de Engenharia Electromecânica
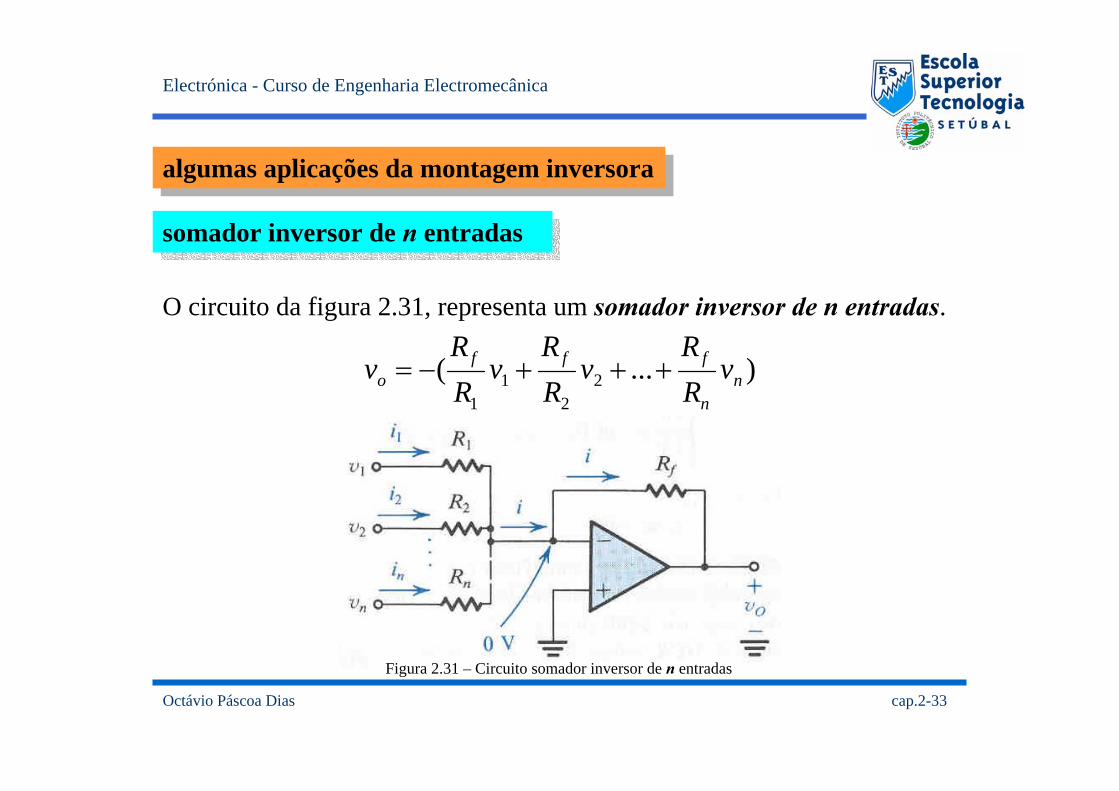
algumas aplicações da montagem inversoraalgumas aplicações da montagem inversora
somador inversor de n entradassomador inversor de n entradas
O circuito da figura 2.31, representa um somador inversor de n entradas.
)...( 22
11
nn
fffo v
RR
vRR
vRR
v +++−=
Figura 2.31 – Circuito somador inversor de n entradas
Octávio Páscoa Dias cap.2-34
Electrónica - Curso de Engenharia Electromecânica
2i
circuito integradorcircuito integrador
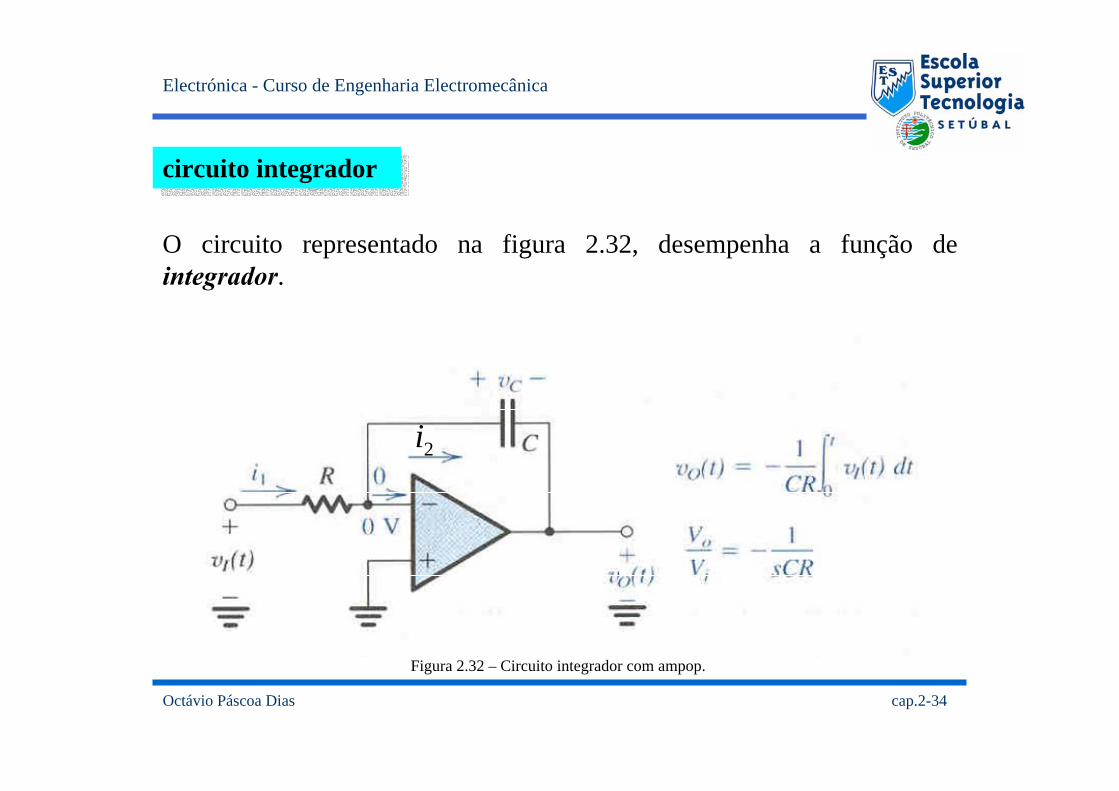
O circuito representado na figura 2.32, desempenha a função de integrador.
Figura 2.32 – Circuito integrador com ampop.
Octávio Páscoa Dias cap.2-35
Electrónica - Curso de Engenharia Electromecânica
circuito integrador (cont.)circuito integrador (cont.)
dtdvCi
Rviii Ci === 2121 ;;
∫∫∫ −=⇒−=
−=⇔=−
t
io
t
i
t
o
ioio
dtvCR
vdtvCR
dv
dtvCR
dvRv
dtdvC
000
11
1
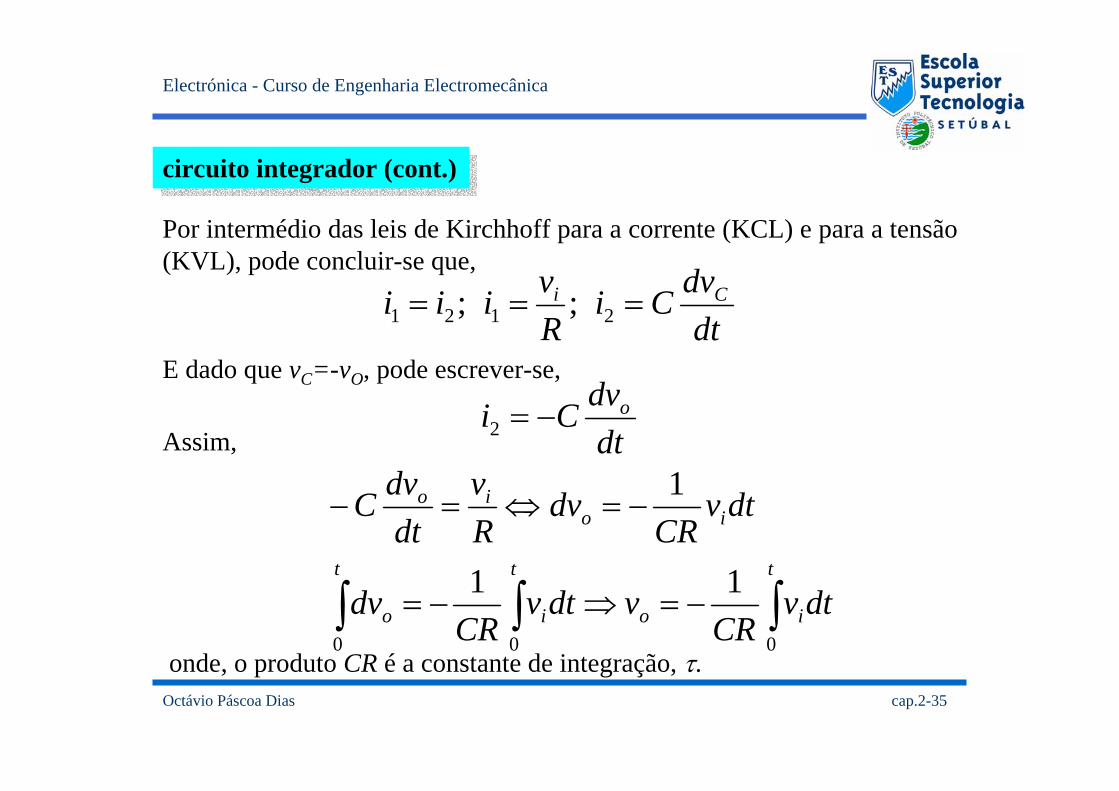
Por intermédio das leis de Kirchhoff para a corrente (KCL) e para a tensão (KVL), pode concluir-se que,
E dado que vC=-vO, pode escrever-se,
dtdvCi o−=2Assim,
onde, o produto CR é a constante de integração, τ.
Octávio Páscoa Dias cap.2-36
Electrónica - Curso de Engenharia Electromecânica
Este resultado demonstra que o circuito desempenha a função de integrador, uma vez que a saída, vO, é constituída pelo integral da tensão de entrada, vI, multiplicada por uma constante. O estudo do circuito pode ser desenvolvido por intermédio da Transformada de Laplace (TL), a qual permite transformar equações integro-diferenciais, obtidas pela aplicação das Leis de Kirchhoff a um circuito com elementos constantes, em equações algébricas, lineares, cuja manipulação é menos trabalhosa.
A utilização da TL consiste nos seguintes passos:• primeiro as funções do tempo são transformadas em funções de umavariável s, no campo complexo;
• em seguida efectuam-se as operações matemáticas com as funçõestransformadas no domínio s;
• por último efectua-se o processo inverso, que consiste na identificaçãodas funções do tempo, que correspondem às funções de s obtidas.
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-37
Electrónica - Curso de Engenharia Electromecânica
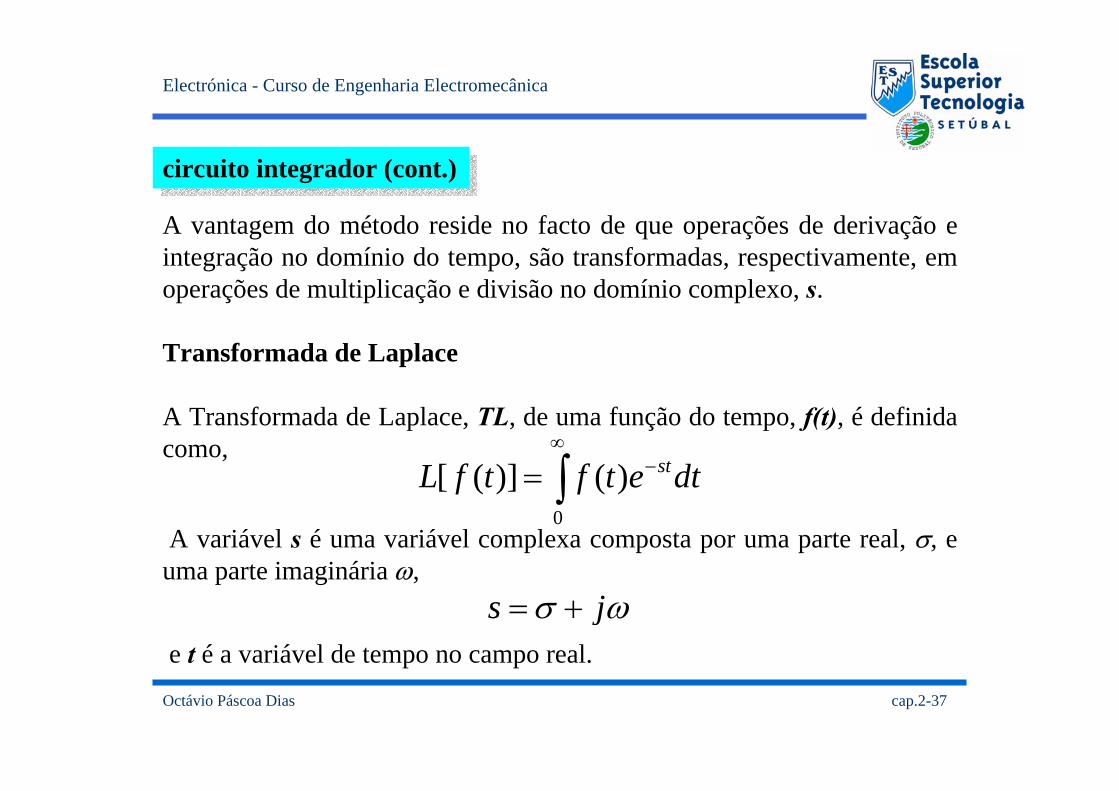
A vantagem do método reside no facto de que operações de derivação e integração no domínio do tempo, são transformadas, respectivamente, em operações de multiplicação e divisão no domínio complexo, s.
Transformada de Laplace
A Transformada de Laplace, TL, de uma função do tempo, f(t), é definida como,
A variável s é uma variável complexa composta por uma parte real, σ, e uma parte imaginária ω,
∫∞
−=0
)()]([ dtetftfL st
ωσ js +=e t é a variável de tempo no campo real.
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-38
Electrónica - Curso de Engenharia Electromecânica
Pode mostrar-se que a TL do integral é dada por,
)(1])([0
sFs
tfLt
=∫onde, F(s) é a TL de f(t).
e a TL da derivada é dada por,
)(])([0
ssFdt
tdfLt
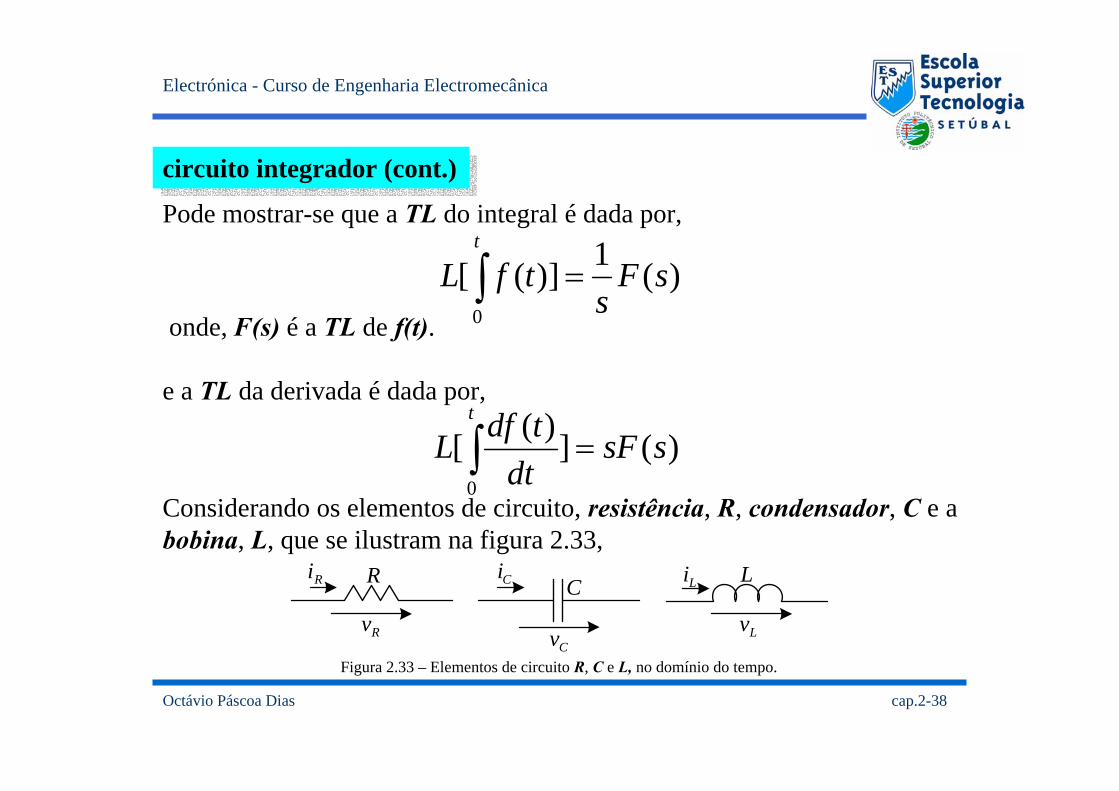
=∫Considerando os elementos de circuito, resistência, R, condensador, C e a bobina, L, que se ilustram na figura 2.33,
Figura 2.33 – Elementos de circuito R, C e L, no domínio do tempo.
C
Cv
Ci Li
Lv
LRi
Rv
R
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-39
Electrónica - Curso de Engenharia Electromecânica
)()()(
)()()(
)()()(
ssLIsVdtdiLtv
ssCVsIdtdvCti
sRIsVRitv
TLL
TLC
TLR
=⎯→⎯=
=⎯→⎯=
=⎯→⎯=
Da aplicação da TL às tensões e correntes que existem numa resistência, condensador e bobina, com condições iniciais nulas, obtém-se,
Por intermédio destes resultados podem obter-se as impedâncias, Z, que pertencem ao domínio s,
sLsIsVsZ
sCsIsVsZ
RsIsVsZ
L
C
R
==
==
==
)()()(
1)()()(
)()()(
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-40
Electrónica - Curso de Engenharia Electromecânica
Aplicando o conceito de impedância ao integrador representado na figura 2.32, obtém-se,
)(11)(1)()(
1
)()( sV
sRCsV
sRCsVsV
RsC
sVsV
ioi
o
i
o ×−=⇒−=⇔−=
Comparando este resultado, com a TL do integral, conclui-se que circuito realiza a função de integração, dada a presença do factor 1/s na expressão de Vo=f(Vi).
Para o regime sinusoidal de amplitude constante, (σ=0), tem-se, s=jω, e assim,
RCjVV
i
o
ω1
−=
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-41
Electrónica - Curso de Engenharia Electromecânica
É usual, por ser cómodo, estudar o comportamento da função de transferência,
CRjjT
ωω 1)( −=
com o auxílio dos Diagramas de Bode para o módulo, G(ω), e para a fase, Φ(ω), com,
G(ω)=20log|T(jω)|
e,Φ(ω)=argumentoT(jω)
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-42
Electrónica - Curso de Engenharia Electromecânica
O diagrama de Bode, para a amplitude, do circuito integrador ilustrado na figura 2.32, pode ser obtido do modo que a seguir se descreve,
RCG
RCjG
ωω
ωω 1log20)(1log20)( =⇔−=
)log(20)()log(201log20)( RCGRCG ωωωω −=⇒−=
ω =1/RC
ω =0,1×1/RC
dBGRCRC
G 0)()1log(20)( =⇒×−= ωω
dBGRCRC
G 20)()11,0log(20)( +=⇒×−= ωω
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-43
Electrónica - Curso de Engenharia Electromecânica
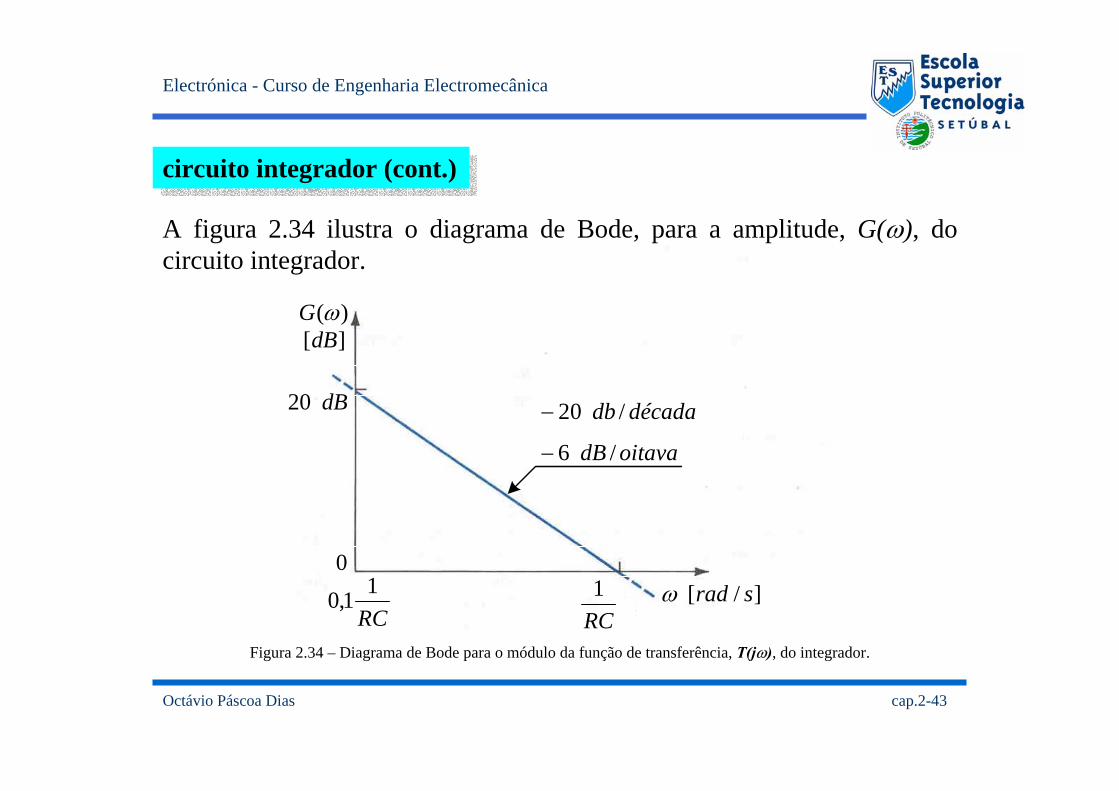
Figura 2.34 – Diagrama de Bode para o módulo da função de transferência, T(jω), do integrador.
RC1
RC11,0
0
oitavadB
décadadb
/6
/20
−
−dB20
)(ωG][dB
]/[ sradω
circuito integrador (cont.)circuito integrador (cont.)
A figura 2.34 ilustra o diagrama de Bode, para a amplitude, G(ω), do circuito integrador.
Octávio Páscoa Dias cap.2-44
Electrónica - Curso de Engenharia Electromecânica
º90)(º270º900º180)()arg()1arg()1arg()(
+=Φ⇒−=−+−=Φ−+−=Φ
ωωωω RCj
circuito integrador (cont.)circuito integrador (cont.)
O diagrama de Bode para a fase, avalia o comportamento, com a frequência, da fase do circuito integrador, isto é, a relação entre a fase do sinal, de entrada, Vi, e a fase do sinal de saída, Vo.
Tendo em conta que a função de transferência do integrador implementado pelo circuito da figura 2.33, é dada por,
RCjjT
ωω 1)( −=
Então,
Octávio Páscoa Dias cap.2-45
Electrónica - Curso de Engenharia Electromecânica
circuito integrador (cont.)circuito integrador (cont.)
]/[ sradω
)(ωΦ
º90+
Figura 2.35 – Diagrama de Bode para a fase da função de transferência, T(jω), do integrador.
A figura 2.35 mostra o diagrama de Bode para a fase, Φ(ω), do circuito integrador. Repare-se que, se o integrador não fosse inversor, a fase seria de -90º.
Octávio Páscoa Dias cap.2-46
Electrónica - Curso de Engenharia Electromecânica
2R
1R
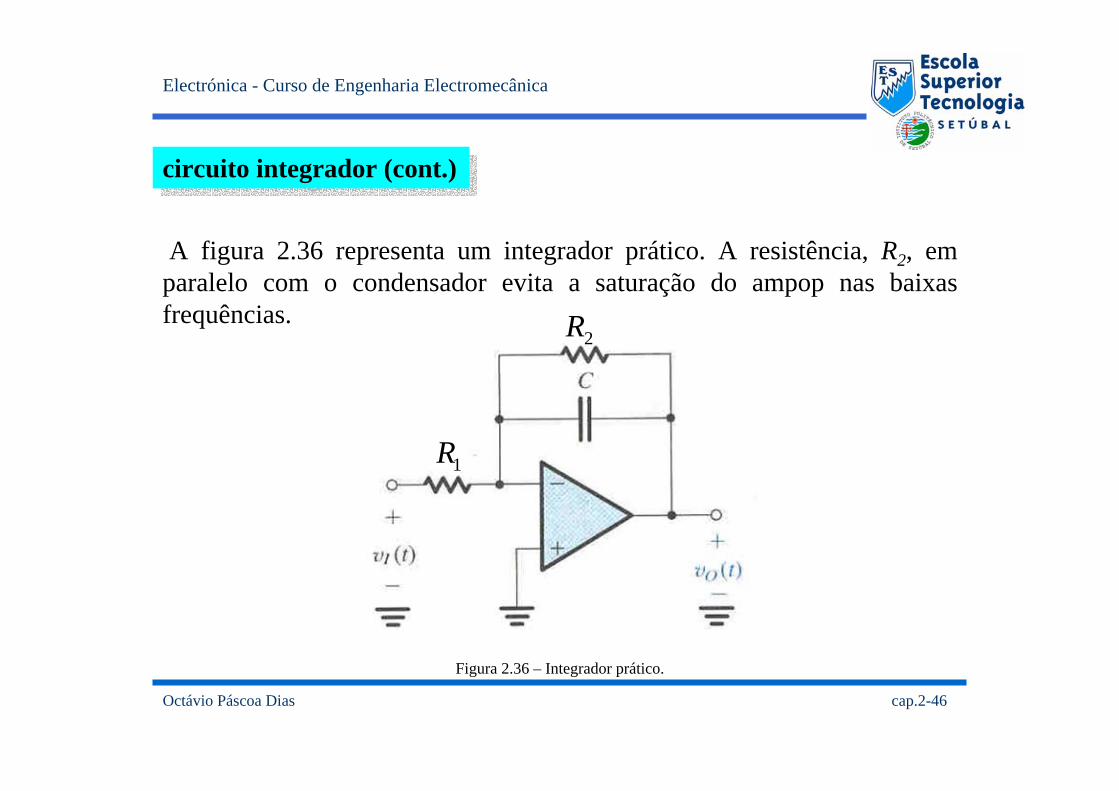
Figura 2.36 – Integrador prático.
A figura 2.36 representa um integrador prático. A resistência, R2, em paralelo com o condensador evita a saturação do ampop nas baixas frequências.
circuito integrador (cont.)circuito integrador (cont.)
Octávio Páscoa Dias cap.2-47
Electrónica - Curso de Engenharia Electromecânica
circuito diferenciadorcircuito diferenciador
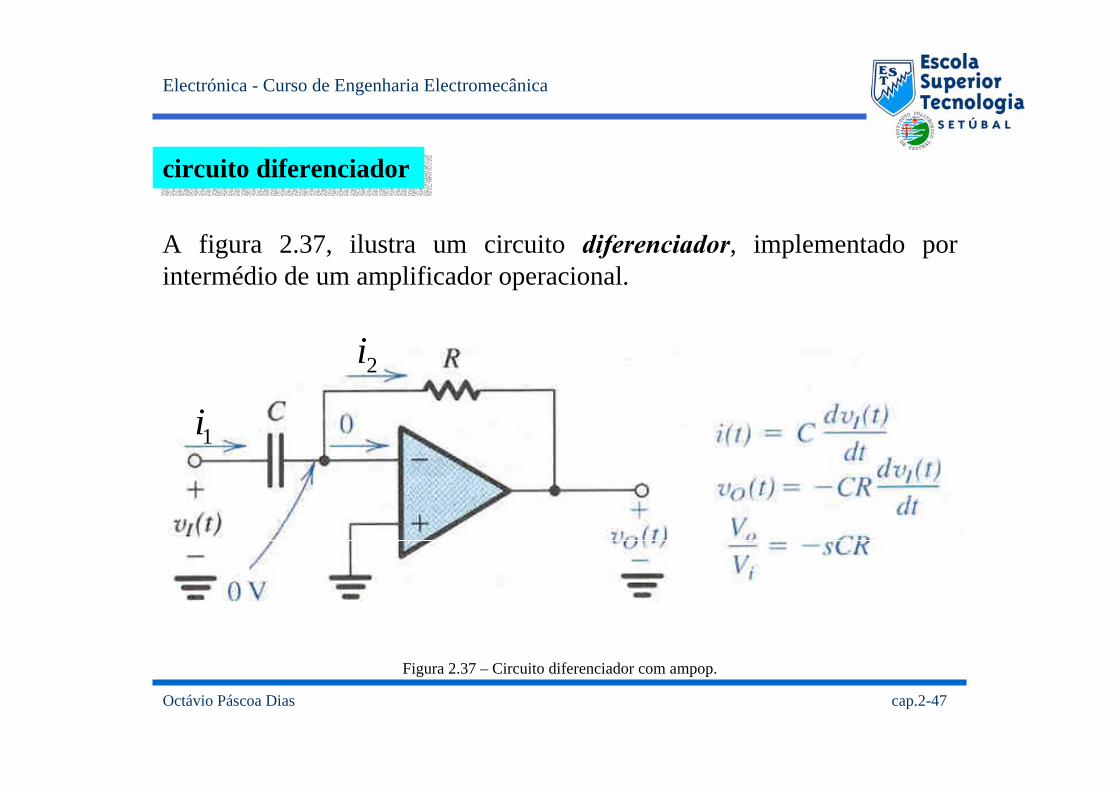
A figura 2.37, ilustra um circuito diferenciador, implementado por intermédio de um amplificador operacional.
Figura 2.37 – Circuito diferenciador com ampop.
2i
1i
Octávio Páscoa Dias cap.2-48
Electrónica - Curso de Engenharia Electromecânica
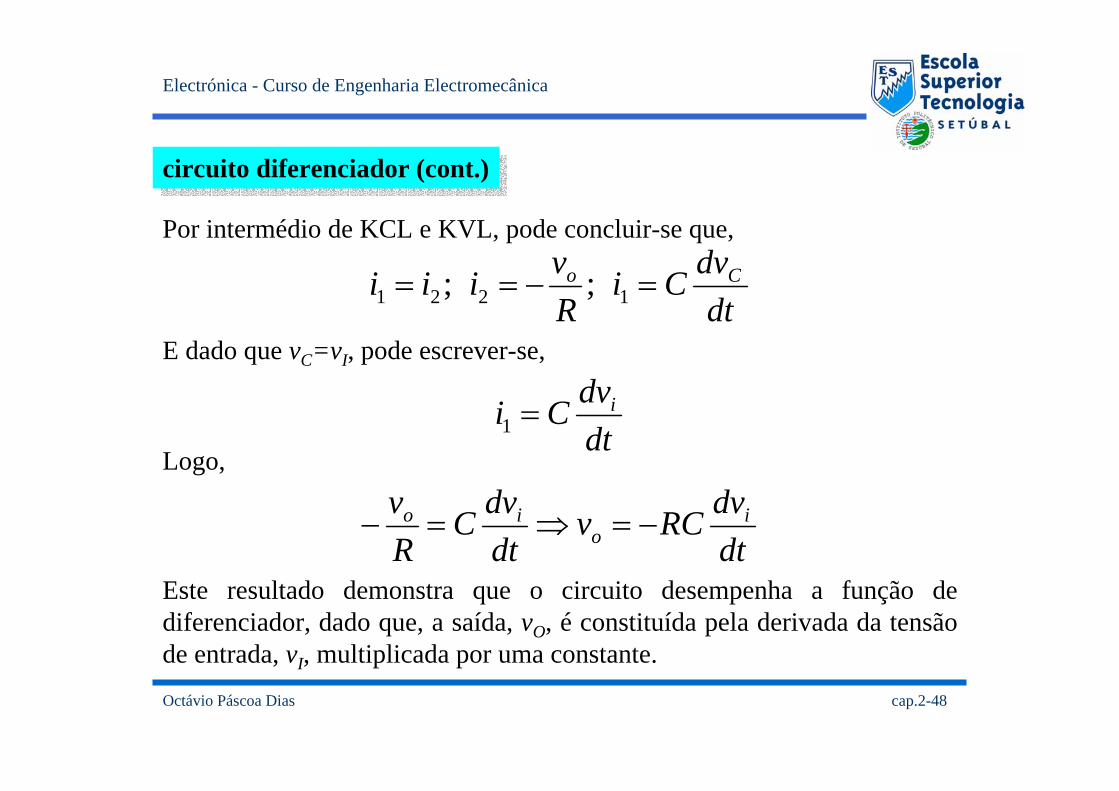
dtdvRCv
dtdvC
Rv i
oio −=⇒=−
circuito diferenciador (cont.)circuito diferenciador (cont.)
Este resultado demonstra que o circuito desempenha a função de diferenciador, dado que, a saída, vO, é constituída pela derivada da tensão de entrada, vI, multiplicada por uma constante.
Por intermédio de KCL e KVL, pode concluir-se que,
E dado que vC=vI, pode escrever-se,dt
dvCiRviii Co =−== 1221 ;;
dtdvCi i=1
Logo,
Octávio Páscoa Dias cap.2-49
Electrónica - Curso de Engenharia Electromecânica
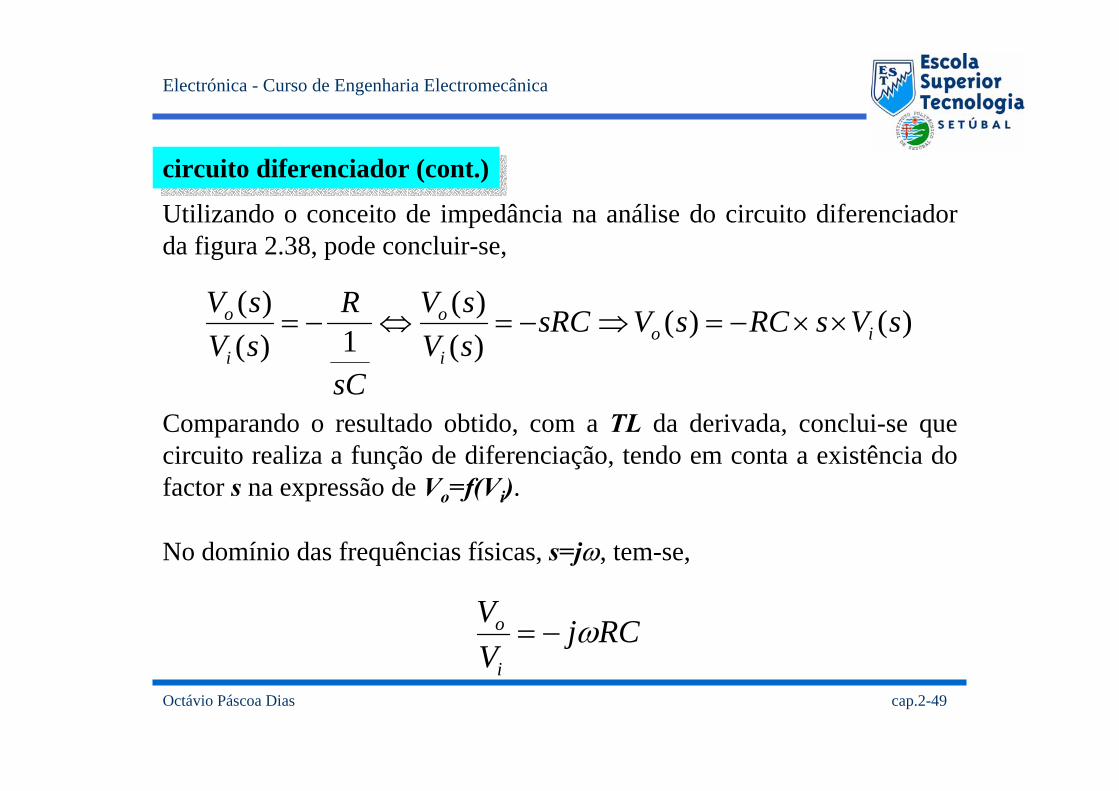
Comparando o resultado obtido, com a TL da derivada, conclui-se que circuito realiza a função de diferenciação, tendo em conta a existência do factor s na expressão de Vo=f(Vi).
No domínio das frequências físicas, s=jω, tem-se,
)()()()(
1)()( sVsRCsVsRC
sVsV
sC
RsVsV
ioi
o
i
o ××−=⇒−=⇔−=
Utilizando o conceito de impedância na análise do circuito diferenciadorda figura 2.38, pode concluir-se,
circuito diferenciador (cont.)circuito diferenciador (cont.)
RCjVV
i
o ω−=
Octávio Páscoa Dias cap.2-50
Electrónica - Curso de Engenharia Electromecânica
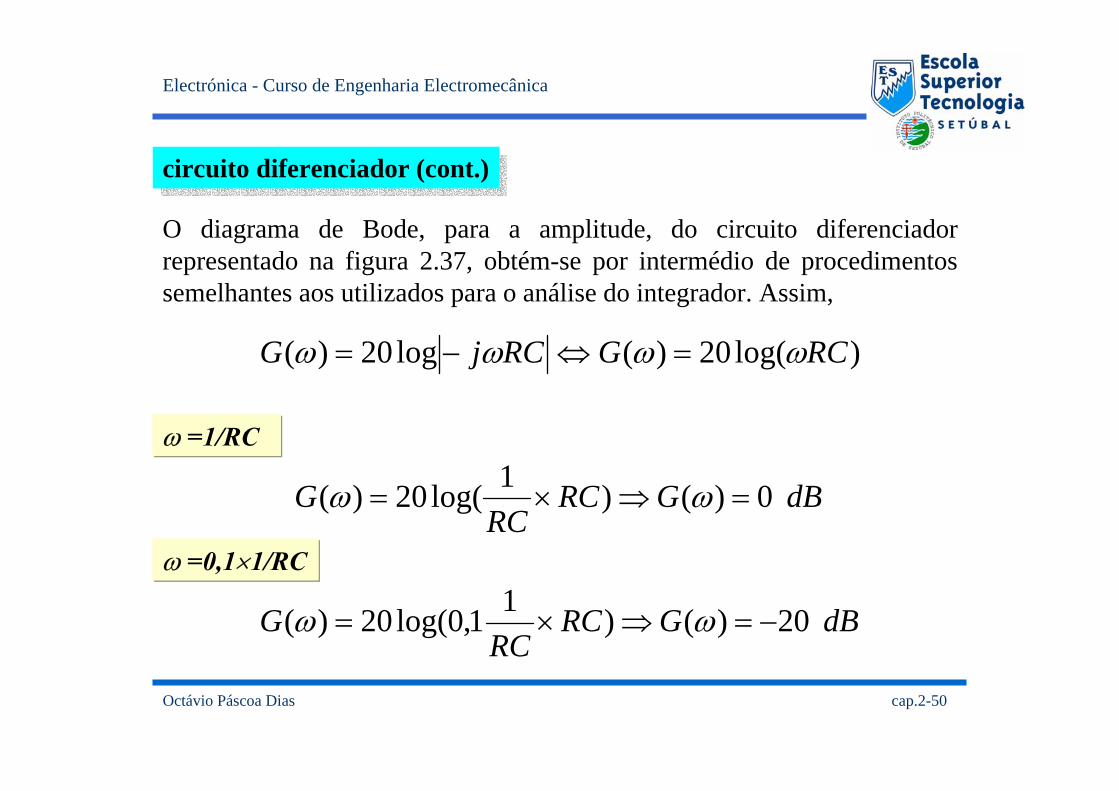
)log(20)(log20)( RCGRCjG ωωωω =⇔−=
ω =1/RC
ω =0,1×1/RC
dBGRCRC
G 0)()1log(20)( =⇒×= ωω
dBGRCRC
G 20)()11,0log(20)( −=⇒×= ωω
circuito diferenciador (cont.)circuito diferenciador (cont.)
O diagrama de Bode, para a amplitude, do circuito diferenciadorrepresentado na figura 2.37, obtém-se por intermédio de procedimentos semelhantes aos utilizados para o análise do integrador. Assim,
Octávio Páscoa Dias cap.2-51
Electrónica - Curso de Engenharia Electromecânica
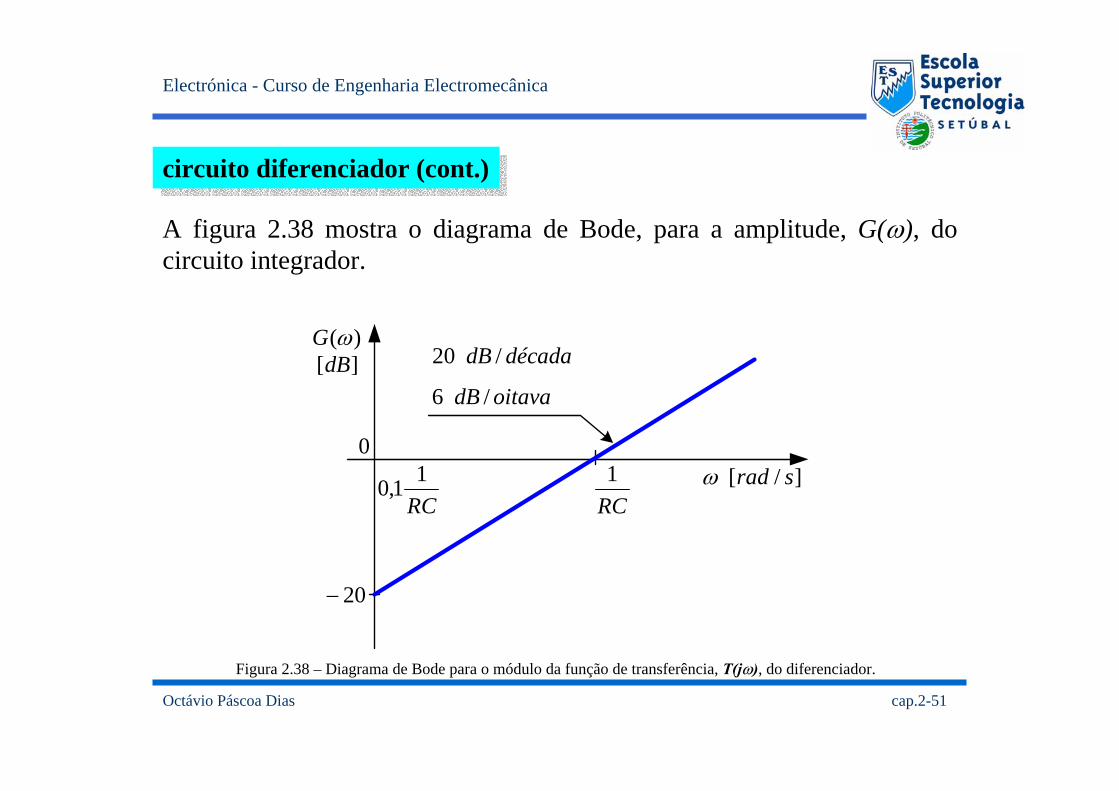
Figura 2.38 – Diagrama de Bode para o módulo da função de transferência, T(jω), do diferenciador.
oitavadB
décadadB
/6
/20
RC1
RC11,0
0]/[ sradω
)(ωG][dB
20−
circuito diferenciador (cont.)circuito diferenciador (cont.)
A figura 2.38 mostra o diagrama de Bode, para a amplitude, G(ω), do circuito integrador.
Octávio Páscoa Dias cap.2-52
Electrónica - Curso de Engenharia Electromecânica
)arg()1arg()( RCjωω +−=Φ
circuito diferenciador (cont.)circuito diferenciador (cont.)
Tendo em conta a função de transferência do diferenciador da figura 2.37,
T(jω)=-jωRCEntão,
É de realçar que, se o circuito não fosse inversor, a fase seria de +90º.
º90)(º90º180)( −=Φ⇒+−=Φ ωω
Octávio Páscoa Dias cap.2-53
Electrónica - Curso de Engenharia Electromecânica
circuito diferenciador (cont.)circuito diferenciador (cont.)
)(ωΦ
]/[ sradω
90−
0
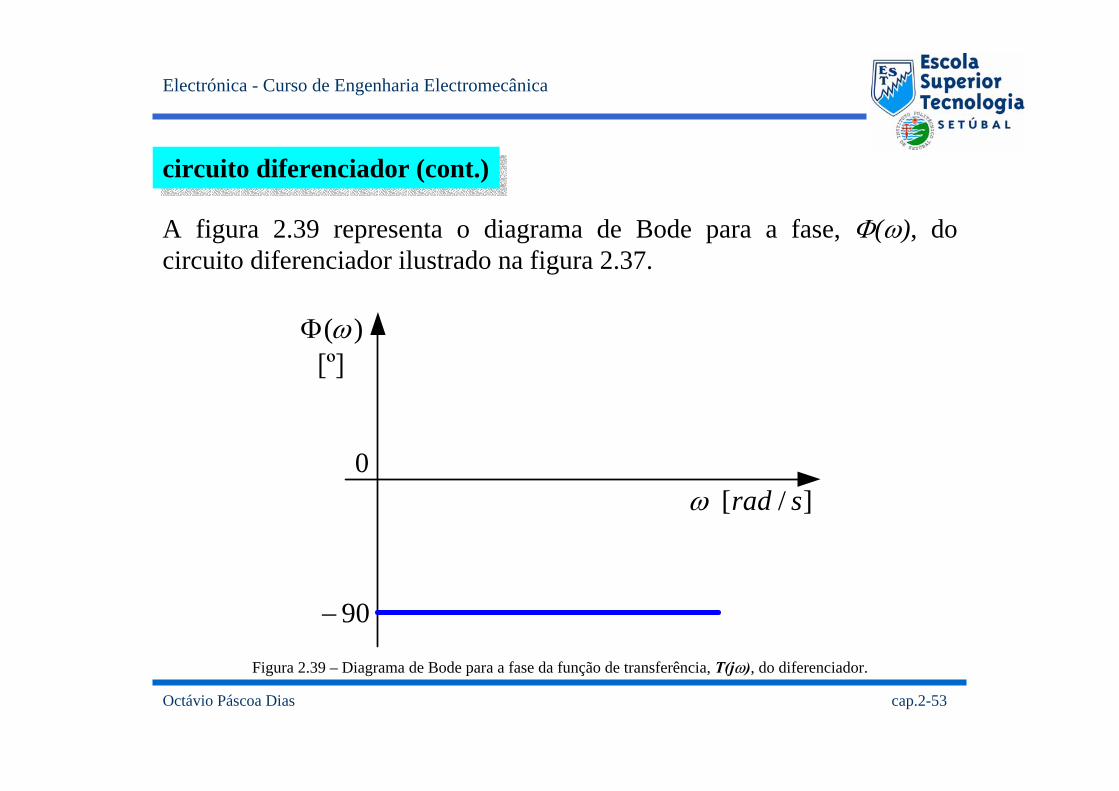
Figura 2.39 – Diagrama de Bode para a fase da função de transferência, T(jω), do diferenciador.
A figura 2.39 representa o diagrama de Bode para a fase, Φ(ω), do circuito diferenciador ilustrado na figura 2.37.
Octávio Páscoa Dias cap.2-54
Electrónica - Curso de Engenharia Electromecânica
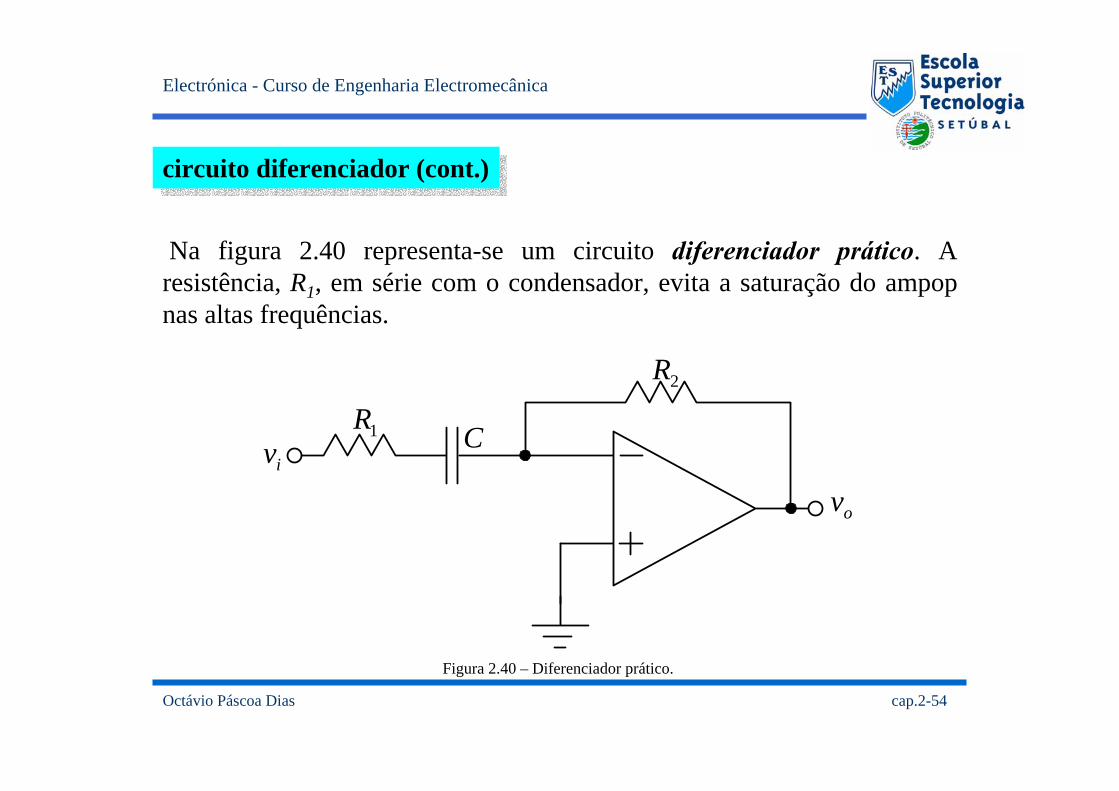
Figura 2.40 – Diferenciador prático.
Na figura 2.40 representa-se um circuito diferenciador prático. A resistência, R1, em série com o condensador, evita a saturação do ampopnas altas frequências.
1R2R
Civ
ov
circuito diferenciador (cont.)circuito diferenciador (cont.)
Octávio Páscoa Dias cap.2-55
Electrónica - Curso de Engenharia Electromecânica
R
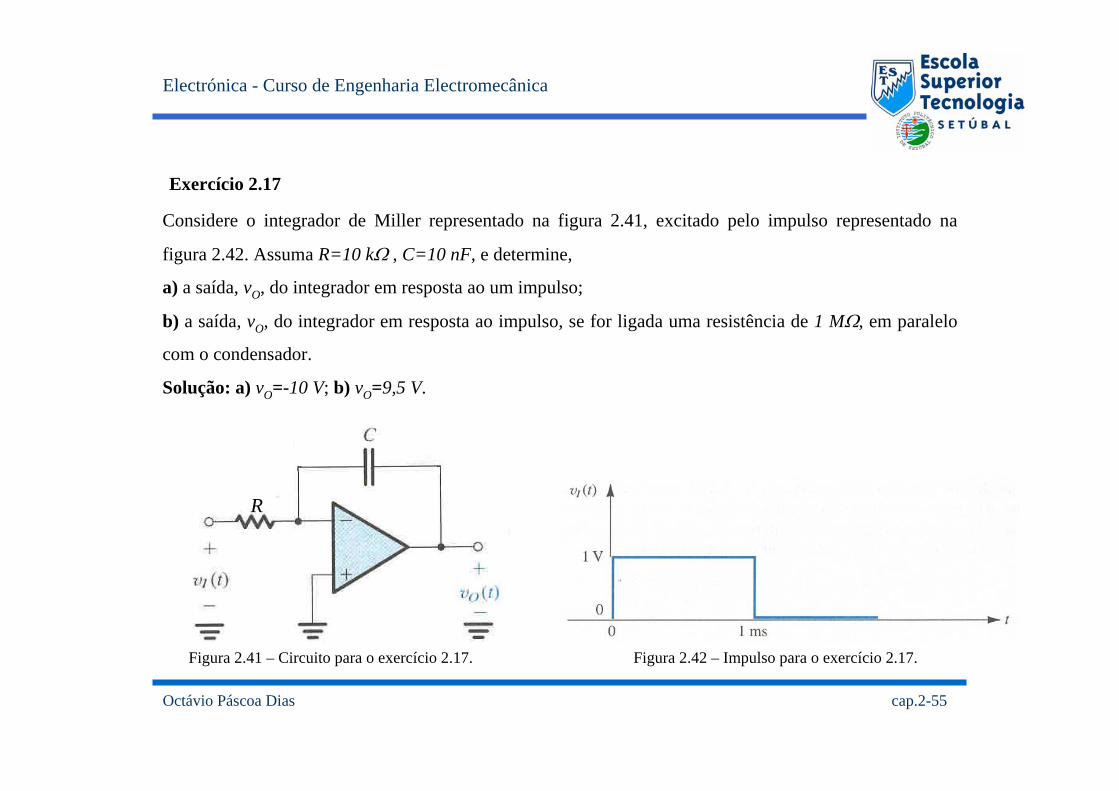
Exercício 2.17
Considere o integrador de Miller representado na figura 2.41, excitado pelo impulso representado na
figura 2.42. Assuma R=10 kΩ , C=10 nF, e determine,
a) a saída, vO, do integrador em resposta ao um impulso;
b) a saída, vO, do integrador em resposta ao impulso, se for ligada uma resistência de 1 MΩ, em paralelo
com o condensador.
Solução: a) vO=-10 V; b) vO=9,5 V.
Figura 2.41 – Circuito para o exercício 2.17. Figura 2.42 – Impulso para o exercício 2.17.

Octávio Páscoa Dias cap.2-56
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.17
Considere uma onda quadrada simétrica com 20 Vpp, 0 V de valor médio e com o período de 2 ms,
aplicada a um integrador de Miller. Determine o valor da constante de tempo, τ = RC, para que a tensão
de saída tenha a forma triangular com 20 Vpp.
Solução: 0,5 ms.
Exercício 2.18
Use um ampop ideal para projectar um integrador inversor com a resistência de entrada de 10 kΩ e a
constante de tempo de 10 -3 s, e determine,
a) a amplitude do ganho e a respectiva fase à frequência de 10 rad/s;
b) a amplitude da resposta e a respectiva fase à frequência de 1 rad/s;
c) a frequência à qual o ganho é unitário.
Soluções: R=10 kΩ; C=0,1 µF; a) |Vo/Vi|=100; Φ=+90º , b) |Vo/Vi|=1000; Φ=+90º ; c) 1000 rad/s
Octávio Páscoa Dias cap.2-57
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.19
Com base num ampop considerado ideal, projecte um diferenciador para ter a constante de tempo de 10-2 s
para um condensador de entrada com a capacidade de 0,01 µF. Determine,
a) a amplitude da resposta e a respectiva fase à frequência de 10 rad/s;
b) a amplitude e a fase da resposta à frequência de 103 rad/s;
c) o valor da resistência ligada em seríe com o condensador para limitar a 100 o ganho do diferenciador.
Soluções: C=0,01 µF; R=1 MΩ;; a) |Vo/Vi|=0,1; Φ = -90º , b) |Vo/Vi|=10; Φ = -90º ; c) 10 kΩ.
Exercício 2.20
Use um amplificador operacional para projectar um circuito somador inversor ponderado, com duas
entradas, v1 e v2. O circuito deve realizar a função, vO=-(v1+v2). Dimensione valores para as resistências
de entrada R1, R2 e para a resistência de realimentação Rf, de forma a que para a tensão máxima de saída
de 10 V, a corrente na resistência de realimentação, não exceda 1 mA.
Soluções: Rf=10 kΩ; R1=10 kΩ; R2=2 k.
Octávio Páscoa Dias cap.2-58
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.21
Um integrador de Miller, está implementado com um ampop, uma resistência R de 100 kΩ e um
condensador C de 0,1 µF. Assuma que é aplicado um sinal sinusoidal na entrada do integrador, e
determine,
a) a frequência, em Hz, para a qual a amplitude da saída é igual à amplitude da entrada;
b) a fase da saída, relativamente à entrada, para a frequência determinada em a);
c) o factor que multiplica a amplitude da saída se a frequência determinada em a) baixar 1 década;
d) A fase para o valor da frequência especificado na alínea c).Soluções: a) 15,91 Hz; b) +90º; c) 10; d) +90º.
Exercício 2.22
Considere um integrador de Miller, realizado com um ampop, uma resistência R e um condensador C.
a) dimensione os valores de R e C, para impor a constante de tempo τ=1 s e a resistência de entrada
Ri=100 kΩ;
b) sabendo que em t=0 é aplicada na entrada a tensão de -1 V dc e que nesse instante a se tem vO=-10 V,
determine o tempo necessário para vO atingir os valores de 0 V e +10 V.
Soluções: a) R=100 kΩ; b) vO=0 V⇒ t=10 s; vO=+10 V⇒ t=20 s.
Octávio Páscoa Dias cap.2-59
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.23
Um integrador de Miller, exibe o ganho de -100, à frequência de 100 Hz. Determine,
a) a frequência, em Hz, para a qual o ganho se reduz para -1;
b) a constante de tempo do integrador.Soluções: a) 10 kHz; b) τ=15,92 µs.
Exercício 2.24
Considere um integrador de Miller.
a) Dimensione os seus componentes de forma a tyer o ganho unitário à frequência de 1 krad/s, e a
resistência de entrada igual a 100 kΩ;
b) esboce a saída esperada para uma entrada consttuída por um impulso com 2 V de amplitude e a largura
de 2 ms;
c) Caracterize a saída, quando é aplicado à entrada o sinal vI=2sin1000t.
Soluções: a) R=100 kΩ; C= 10 nF; c) vO=2(cos103t-1) ou vO=2(sin(103t+π/2)-1);
Octávio Páscoa Dias cap.2-60
Electrónica - Curso de Engenharia Electromecânica
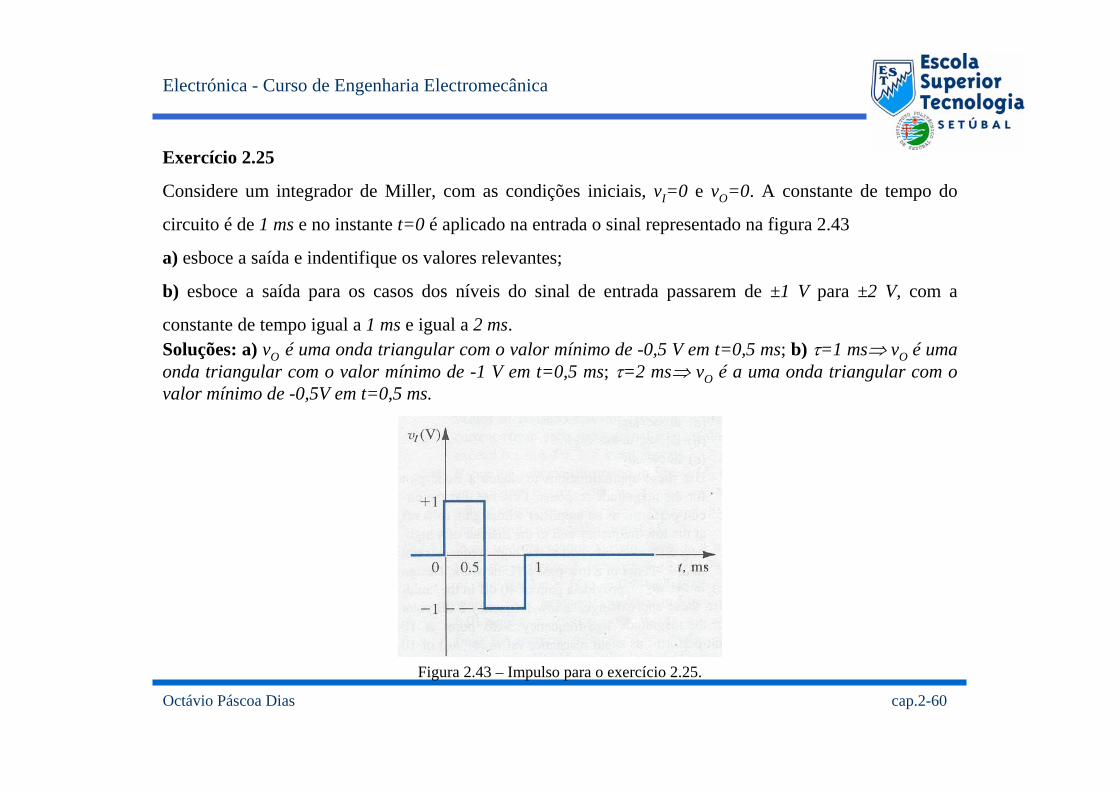
Exercício 2.25
Considere um integrador de Miller, com as condições iniciais, vI=0 e vO=0. A constante de tempo do
circuito é de 1 ms e no instante t=0 é aplicado na entrada o sinal representado na figura 2.43
a) esboce a saída e indentifique os valores relevantes;
b) esboce a saída para os casos dos níveis do sinal de entrada passarem de ±1 V para ±2 V, com a
constante de tempo igual a 1 ms e igual a 2 ms.Soluções: a) vO é uma onda triangular com o valor mínimo de -0,5 V em t=0,5 ms; b) τ=1 ms⇒ vO é uma onda triangular com o valor mínimo de -1 V em t=0,5 ms; τ=2 ms⇒ vO é a uma onda triangular com o valor mínimo de -0,5V em t=0,5 ms.
Figura 2.43 – Impulso para o exercício 2.25.
Octávio Páscoa Dias cap.2-61
Electrónica - Curso de Engenharia Electromecânica
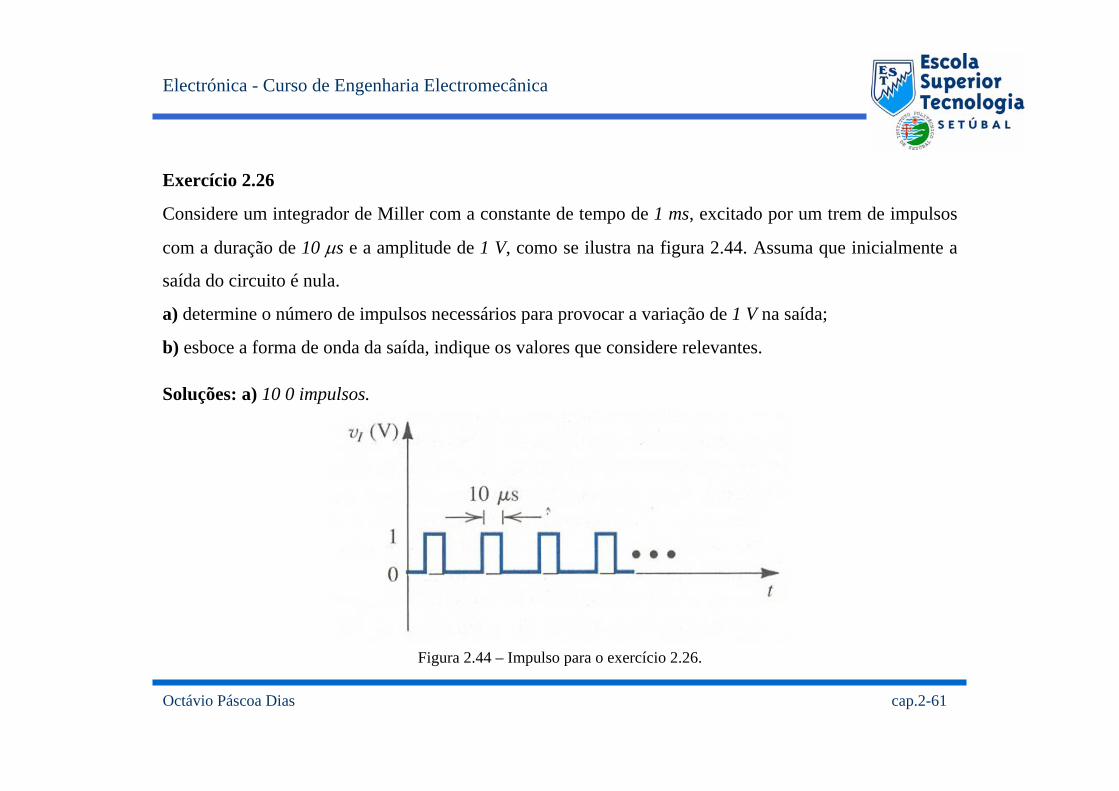
Exercício 2.26
Considere um integrador de Miller com a constante de tempo de 1 ms, excitado por um trem de impulsos
com a duração de 10 µs e a amplitude de 1 V, como se ilustra na figura 2.44. Assuma que inicialmente a
saída do circuito é nula.
a) determine o número de impulsos necessários para provocar a variação de 1 V na saída;
b) esboce a forma de onda da saída, indique os valores que considere relevantes.
Soluções: a) 10 0 impulsos.
Figura 2.44 – Impulso para o exercício 2.26.
Octávio Páscoa Dias cap.2-62
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.27
O circuito ilustrado na figura 2.45, implementa uma função passa-baixo de 1ª ordem, sendo usualmente
designado por filtro passa-baixo, activo de 1ª ordem.
a) mostre que a função de transferência, T(s), do circuito, pode ser expressa por, T(s)=-(R2/R1)/(1+sCR2);
b) mostre que o módulo do ganho do circuito, em dc, é dado por, (R2/R1);
c) mostre que a frequência de queda de 3 dB, está localizada em ω0=1/CR2;
d) projecte o circuito para obter a resistência de entrada de 1 kΩ, o ganho de 20 dB em dc, e a frequência
de queda de 3 dB localizada em 4 kHz;
e) determine a frequência, para a qual, o ganho se torna unitário, isto é, |Av|=1.
Soluções: d) R1=1 kΩ; R2=10 kΩ; C=4 nF; e) f=40 kHz.
Octávio Páscoa Dias cap.2-63
Electrónica - Curso de Engenharia Electromecânica
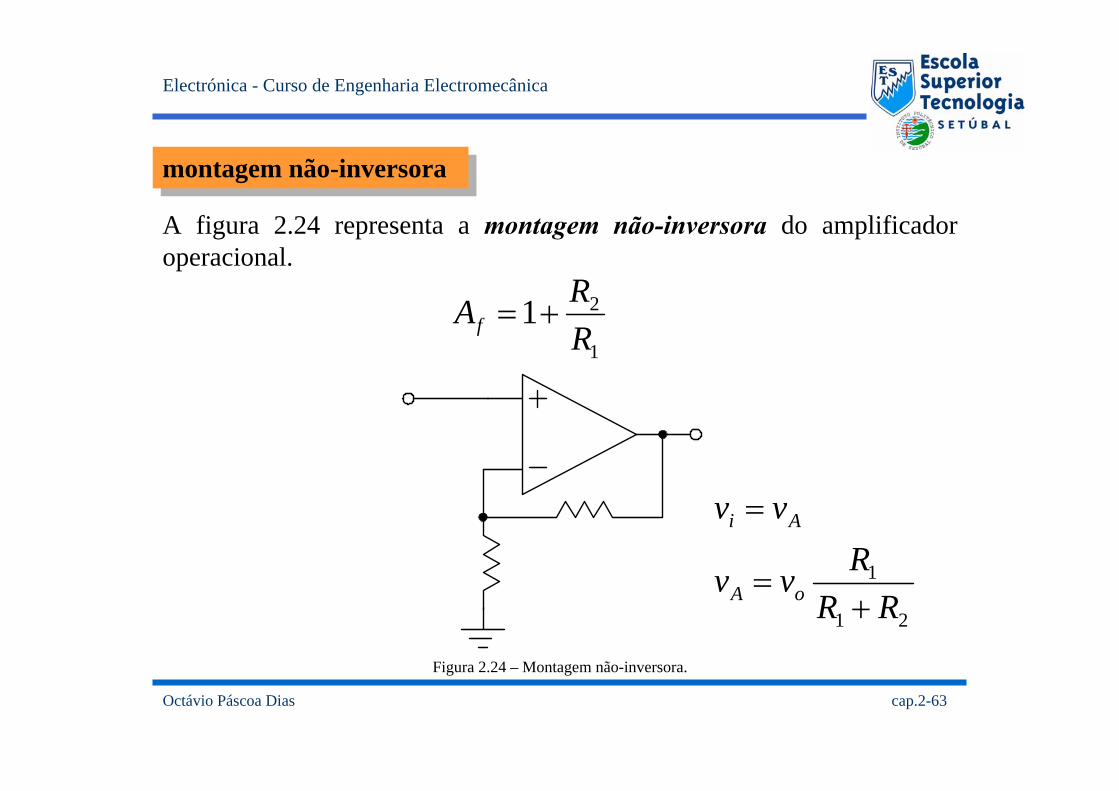
montagem não-inversoramontagem não-inversora
1
21RRAf +=
A figura 2.24 representa a montagem não-inversora do amplificador operacional.
Figura 2.24 – Montagem não-inversora.
21
1
RRRvv
vv
oA
Ai
+=
=
Octávio Páscoa Dias cap.2-64
Electrónica - Curso de Engenharia Electromecânica
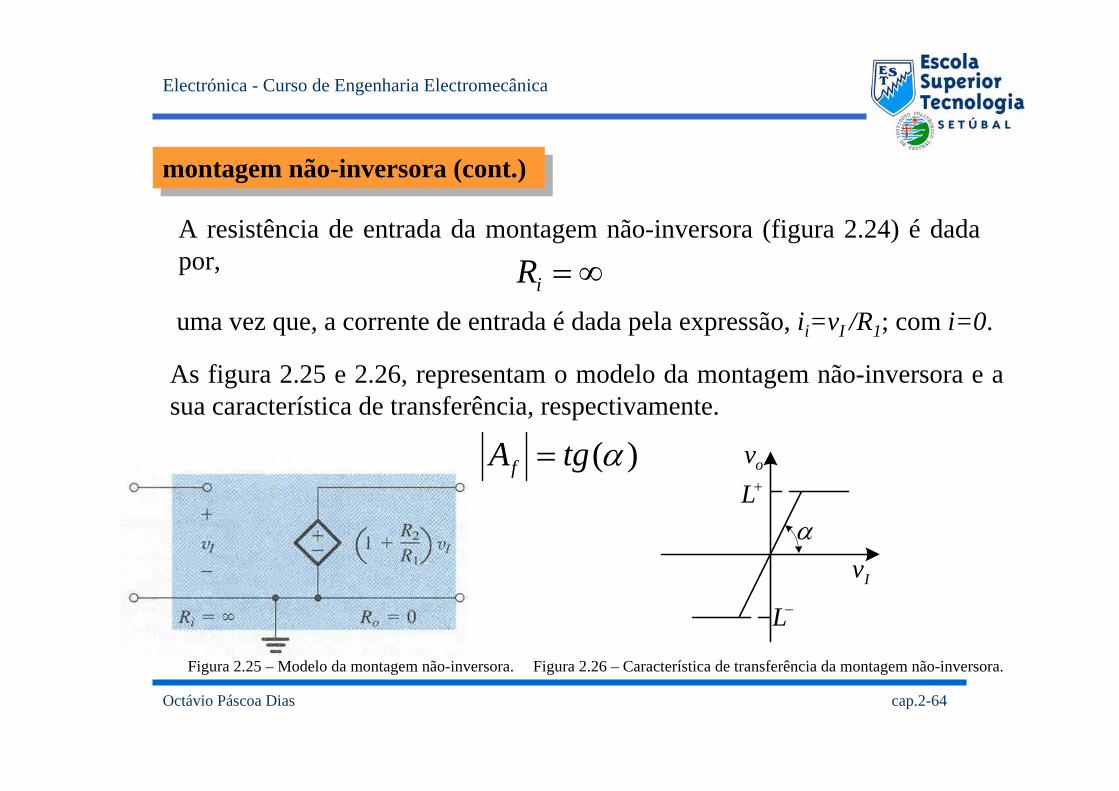
montagem não-inversora (cont.)montagem não-inversora (cont.)
α
Iv
ov+L
−L
Figura 2.26 – Característica de transferência da montagem não-inversora.Figura 2.25 – Modelo da montagem não-inversora.
A resistência de entrada da montagem não-inversora (figura 2.24) é dada por, ∞=iRuma vez que, a corrente de entrada é dada pela expressão, ii=vI /R1; com i=0.
As figura 2.25 e 2.26, representam o modelo da montagem não-inversora e a sua característica de transferência, respectivamente.
)(αtgAf =
Octávio Páscoa Dias cap.2-65
Electrónica - Curso de Engenharia Electromecânica
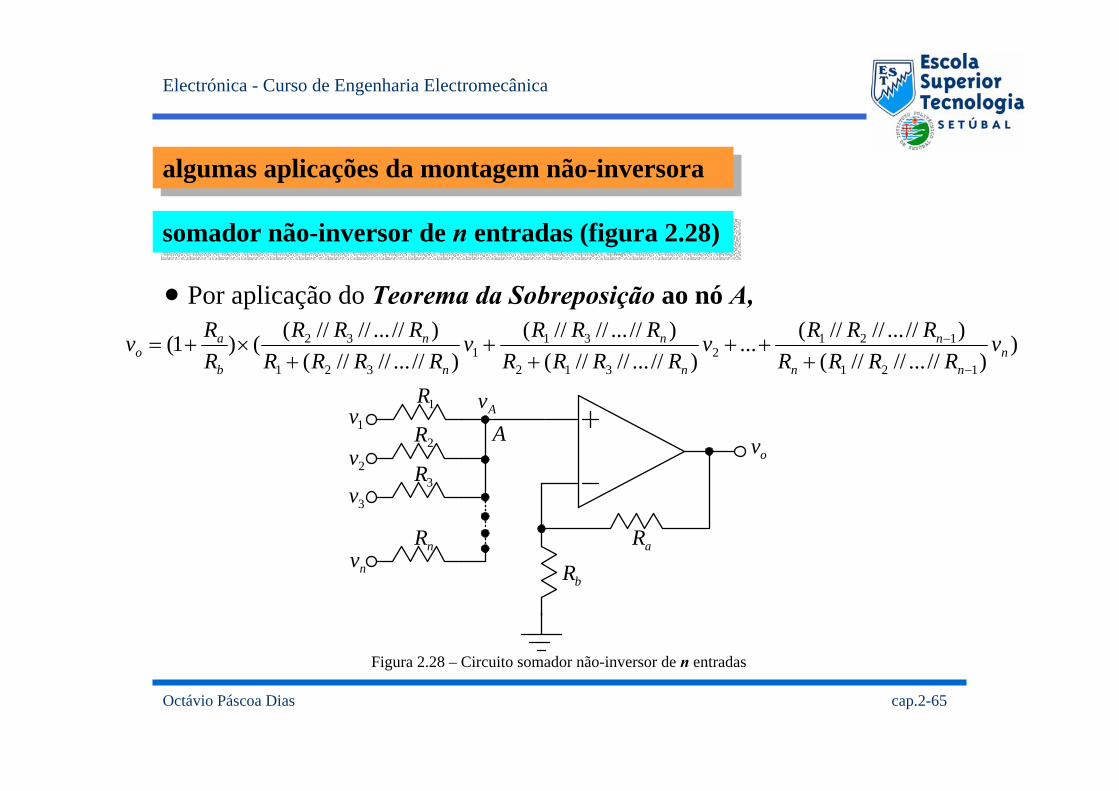
algumas aplicações da montagem não-inversoraalgumas aplicações da montagem não-inversora
somador não-inversor de n entradas (figura 2.28)somador não-inversor de n entradas (figura 2.28)
))//...////(
)//...////(...)//...////(
)//...////()//...////(
)//...////(()1(121
1212
312
311
321
32n
nn
n
n
n
n
n
b
ao v
RRRRRRRv
RRRRRRRv
RRRRRRR
RRv
−
−
+++
++
+×+=
Figura 2.28 – Circuito somador não-inversor de n entradas
n Por aplicação do Teorema da Sobreposição ao nó A,
1vov
bRaR
AvA
1R
2R
3R
nR
2v
3v
nv
Octávio Páscoa Dias cap.2-66
Electrónica - Curso de Engenharia Electromecânica
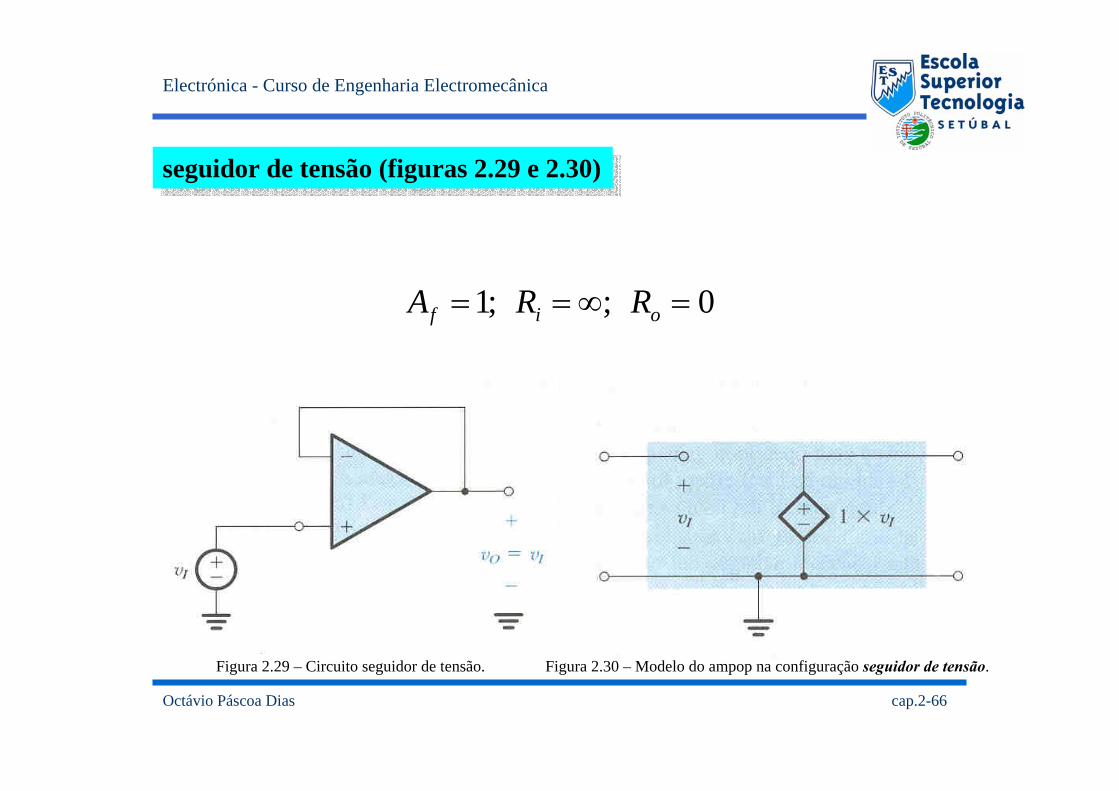
seguidor de tensão (figuras 2.29 e 2.30)seguidor de tensão (figuras 2.29 e 2.30)
Figura 2.30 – Modelo do ampop na configuração seguidor de tensão.Figura 2.29 – Circuito seguidor de tensão.
0;;1 =∞== oif RRA
Octávio Páscoa Dias cap.2-67
Electrónica - Curso de Engenharia Electromecânica
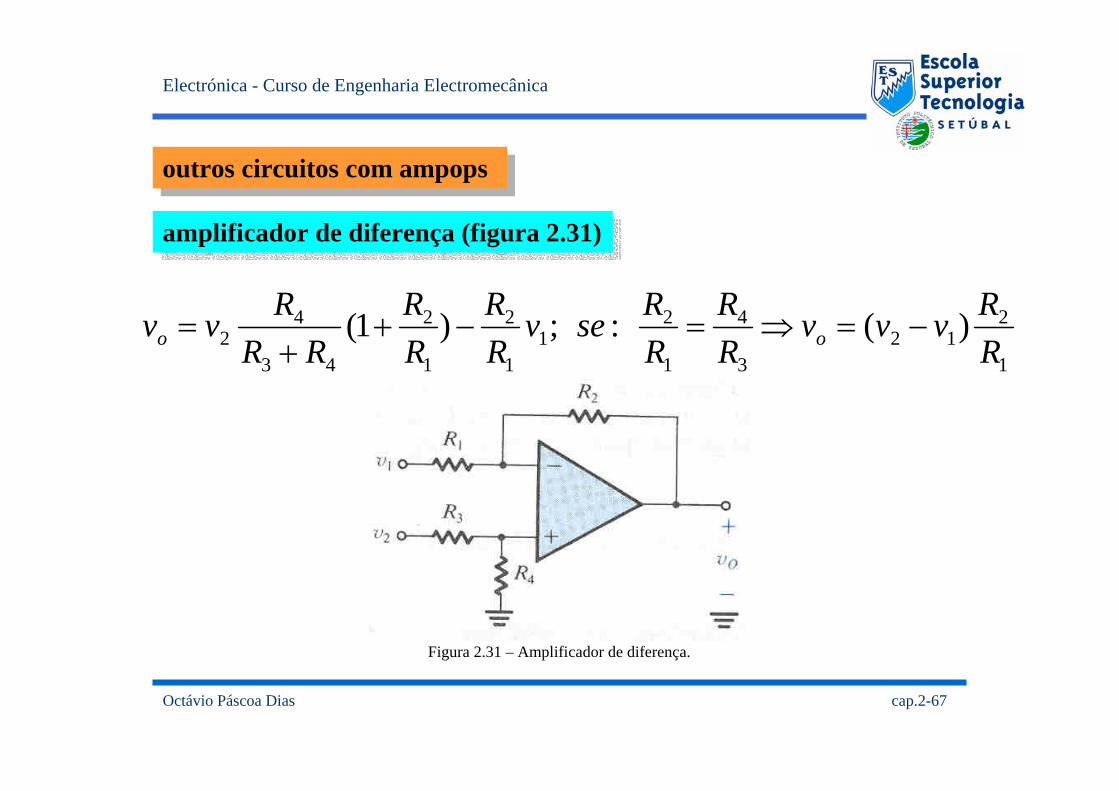
outros circuitos com ampopsoutros circuitos com ampops
amplificador de diferença (figura 2.31)amplificador de diferença (figura 2.31)
1
212
3
4
1
21
1
2
1
2
43
42 )(:;)1(
RRvvv
RR
RRsev
RR
RR
RRRvv oo −=⇒=−++
=
Figura 2.31 – Amplificador de diferença.
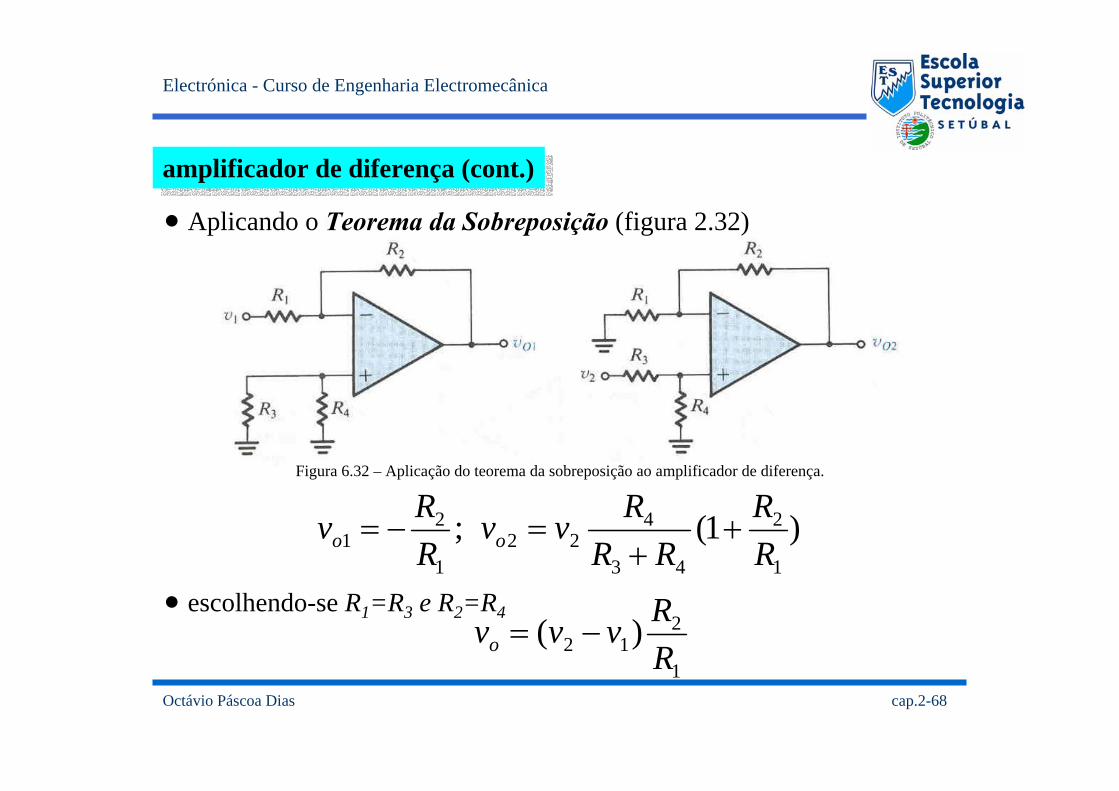
Octávio Páscoa Dias cap.2-68
Electrónica - Curso de Engenharia Electromecânica
)1(;1
2
43
422
1
21 R
RRR
RvvRRv oo +
+=−=
n Aplicando o Teorema da Sobreposição (figura 2.32)
Figura 6.32 – Aplicação do teorema da sobreposição ao amplificador de diferença.
n escolhendo-se R1=R3 e R2=R4
1
212 )(
RRvvvo −=
amplificador de diferença (cont.)amplificador de diferença (cont.)
Octávio Páscoa Dias cap.2-69
Electrónica - Curso de Engenharia Electromecânica
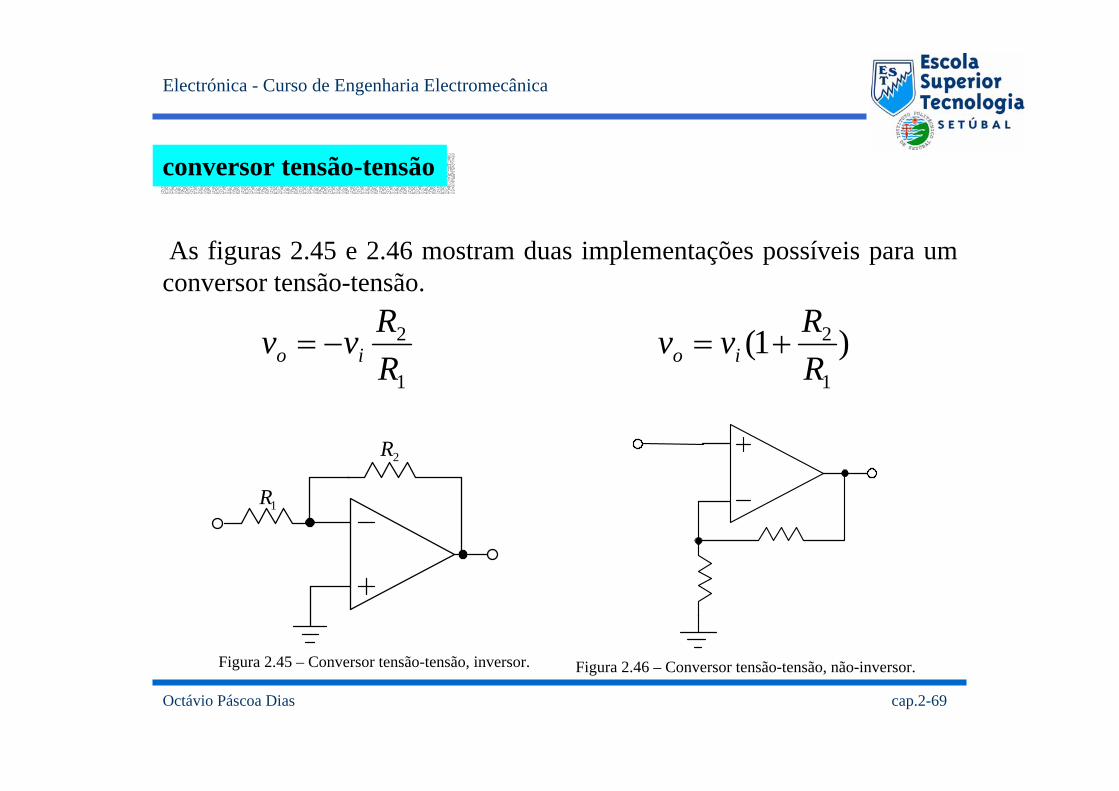
conversor tensão-tensãoconversor tensão-tensão
As figuras 2.45 e 2.46 mostram duas implementações possíveis para um conversor tensão-tensão.
)1(1
2
RRvv io +=
Figura 2.46 – Conversor tensão-tensão, não-inversor.
1R
2R
Figura 2.45 – Conversor tensão-tensão, inversor.
1
2
RRvv io −=
Octávio Páscoa Dias cap.2-70
Electrónica - Curso de Engenharia Electromecânica
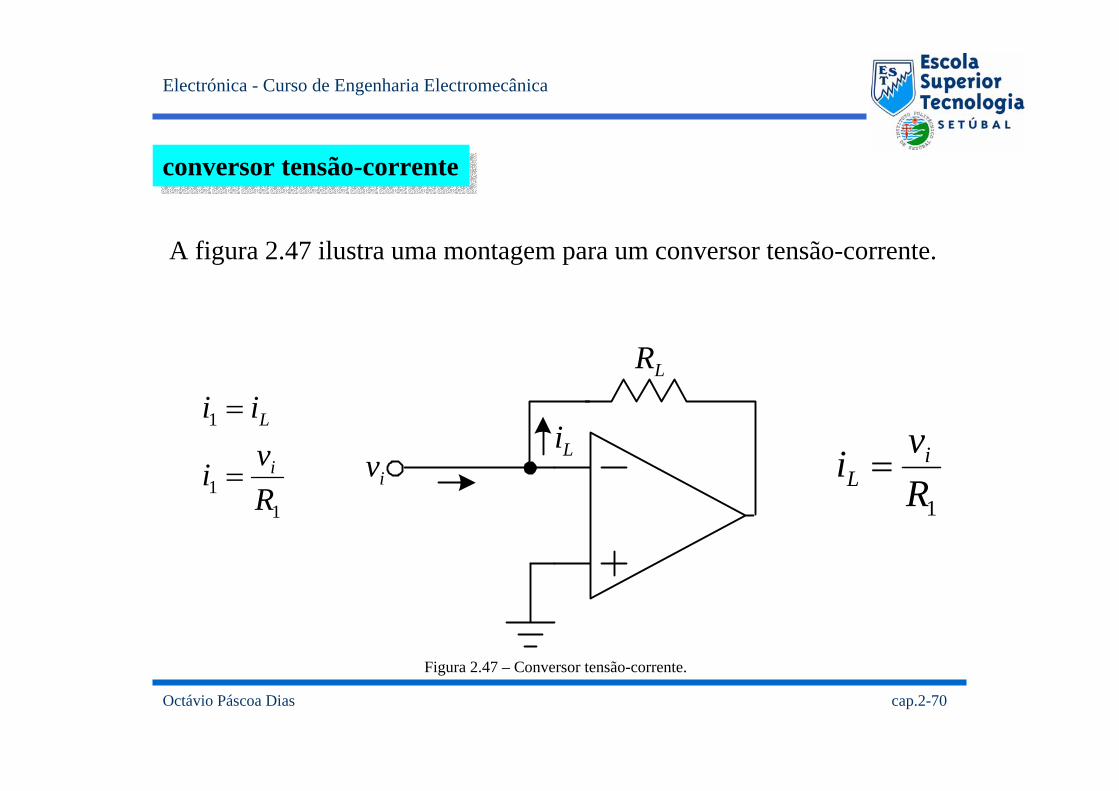
conversor tensão-correnteconversor tensão-corrente
Figura 2.47 – Conversor tensão-corrente.
A figura 2.47 ilustra uma montagem para um conversor tensão-corrente.
11
1
Rvi
ii
i
L
=
=
1Rvi i
L =
LR
iv Li
Octávio Páscoa Dias cap.2-71
Electrónica - Curso de Engenharia Electromecânica
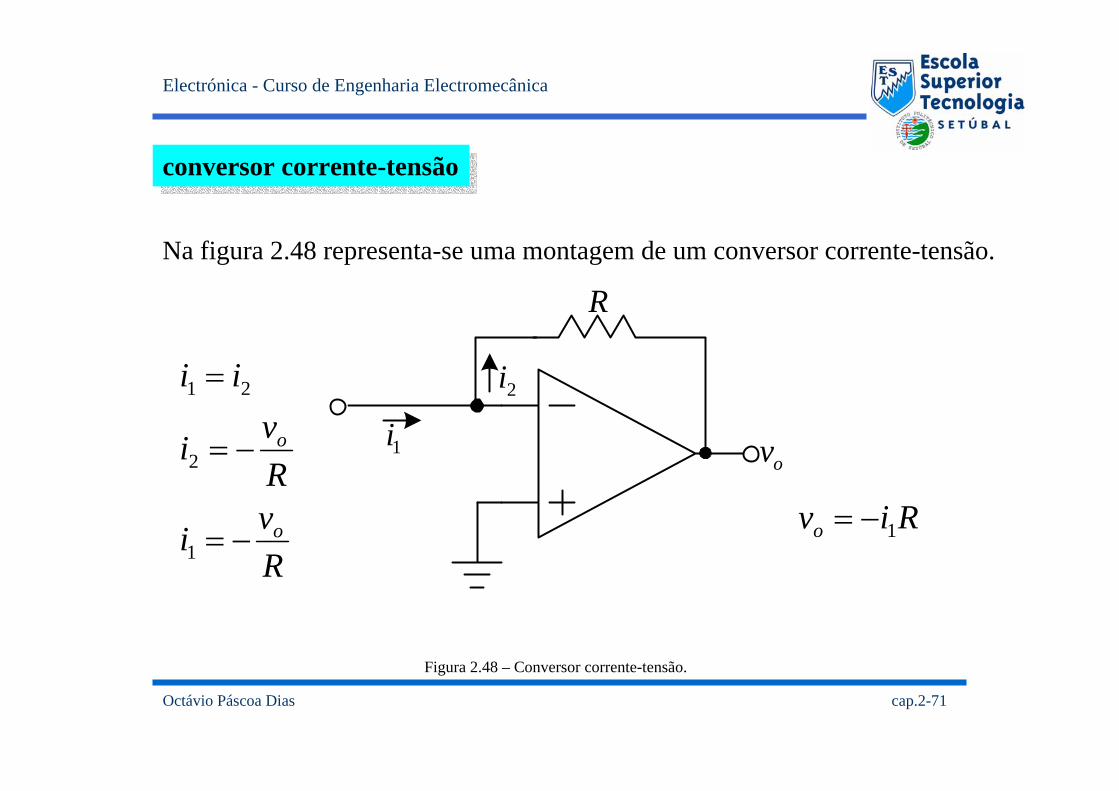
conversor corrente-tensãoconversor corrente-tensão
R
2i
1iov
Figura 2.48 – Conversor corrente-tensão.
Na figura 2.48 representa-se uma montagem de um conversor corrente-tensão.
Rvi
Rvi
ii
o
o
−=
−=
=
1
2
21
Rivo 1−=
Octávio Páscoa Dias cap.2-72
Electrónica - Curso de Engenharia Electromecânica
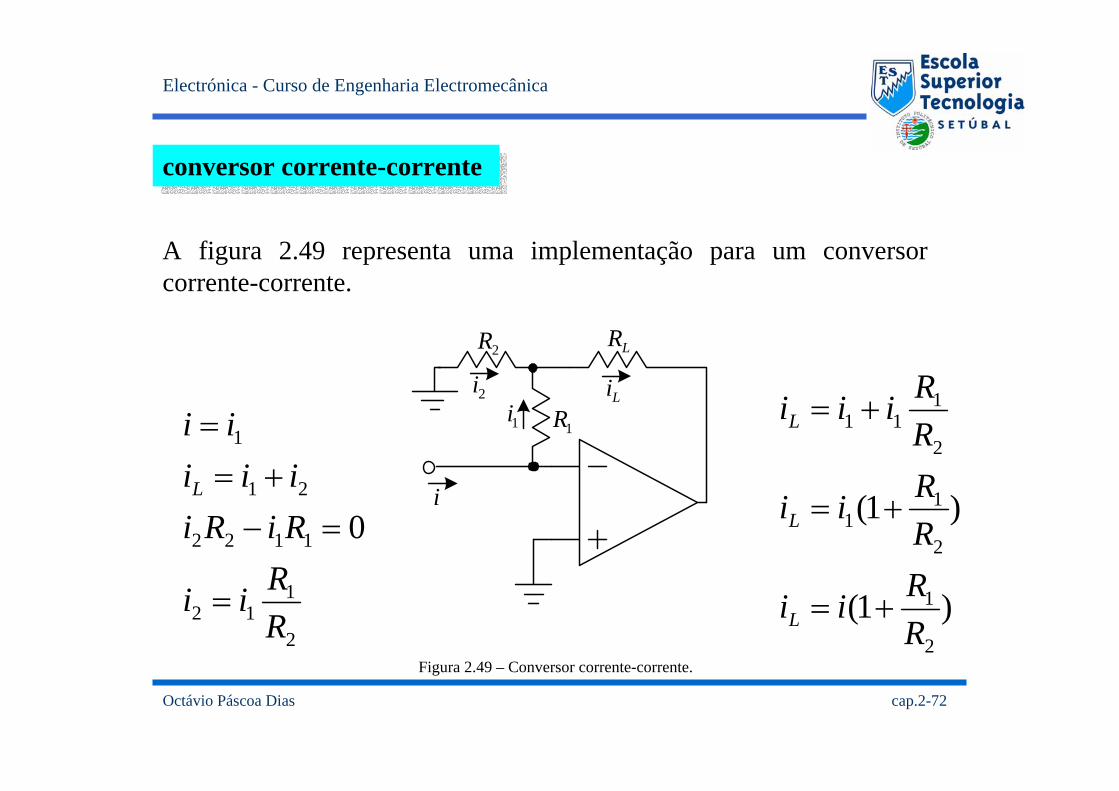
A figura 2.49 representa uma implementação para um conversor corrente-corrente.
conversor corrente-correnteconversor corrente-corrente
LR
i
2i1i
Li1R
2R
Figura 2.49 – Conversor corrente-corrente.2
112
1122
21
1
0
RRii
RiRiiii
ii
L
=
=−+=
=
)1(
)1(
2
1
2
11
2
111
RRii
RRii
RRiii
L
L
L
+=
+=
+=
Octávio Páscoa Dias cap.2-73
Electrónica - Curso de Engenharia Electromecânica
3v
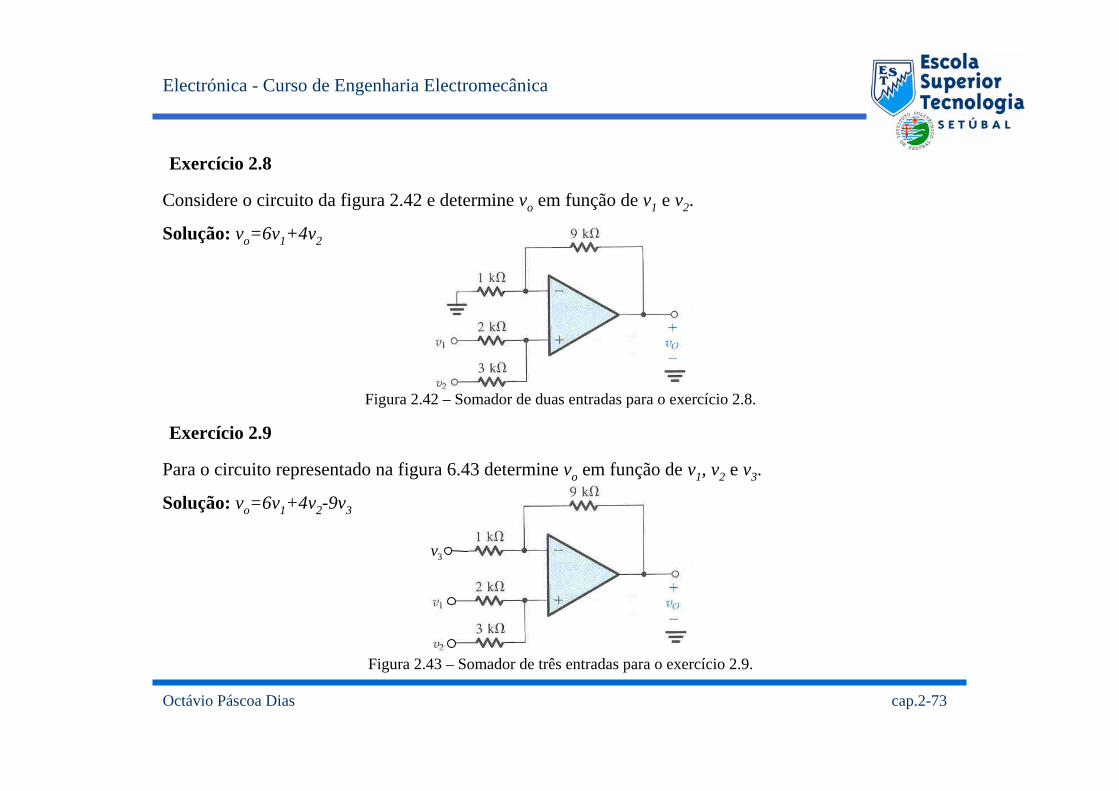
Exercício 2.8
Considere o circuito da figura 2.42 e determine vo em função de v1 e v2.
Solução: vo=6v1+4v2
Exercício 2.9
Para o circuito representado na figura 6.43 determine vo em função de v1, v2 e v3.
Solução: vo=6v1+4v2-9v3
Figura 2.42 – Somador de duas entradas para o exercício 2.8.
Figura 2.43 – Somador de três entradas para o exercício 2.9.
Octávio Páscoa Dias cap.2-74
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.10
Projecte um amplificador não-inversor com o ganho de 2. À tensão máxima de saída de 10 V a corrente no
divisor deve 10 µA.
Solução: R1=R2=0,5 MΩ.
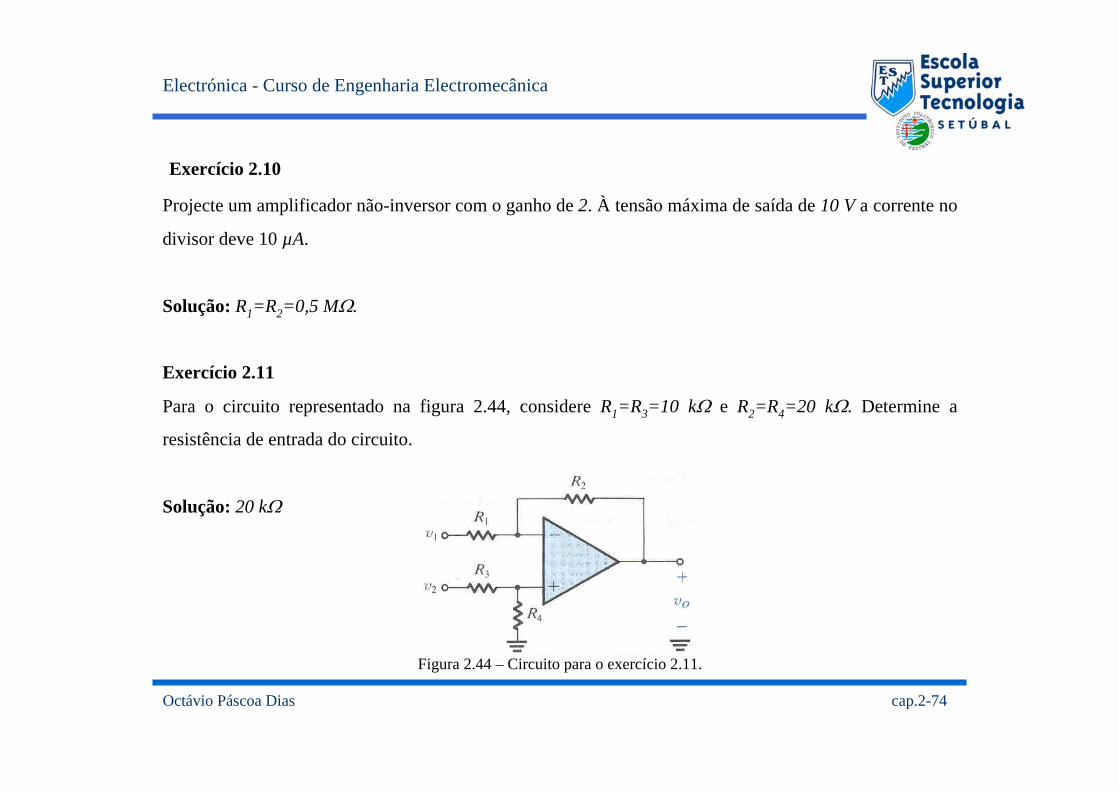
Exercício 2.11
Para o circuito representado na figura 2.44, considere R1=R3=10 kΩ e R2=R4=20 kΩ. Determine a
resistência de entrada do circuito.
Solução: 20 kΩ
Figura 2.44 – Circuito para o exercício 2.11.
Octávio Páscoa Dias cap.2-75
Electrónica - Curso de Engenharia Electromecânica
2.6 – Operação não-linear do ampop2.6 – Operação não-linear do ampop
comparadores sem histeresecomparadores sem histerese
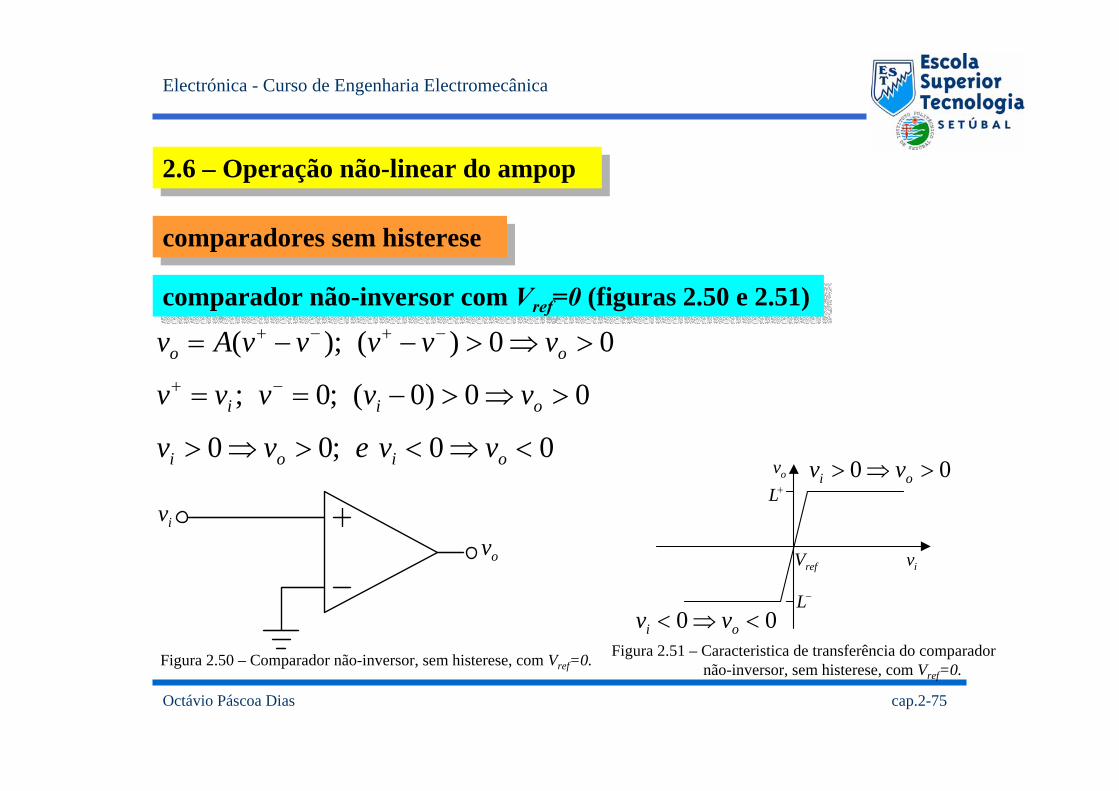
comparador não-inversor com Vref=0 (figuras 2.50 e 2.51)comparador não-inversor com Vref=0 (figuras 2.50 e 2.51)
Figura 2.50 – Comparador não-inversor, sem histerese, com Vref=0.
00;00
00)0(;0;
00)();(
<⇒<>⇒>
>⇒>−==
>⇒>−−=−+
−+−+
oioi
oii
oo
vvevv
vvvvv
vvvvvAv
iv
ov
Figura 2.51 – Caracteristica de transferência do comparadornão-inversor, sem histerese, com Vref=0.
+L
−L
refV
ov
iv
00 <⇒< oi vv
00 >⇒> oi vv
Octávio Páscoa Dias cap.2-76
Electrónica - Curso de Engenharia Electromecânica
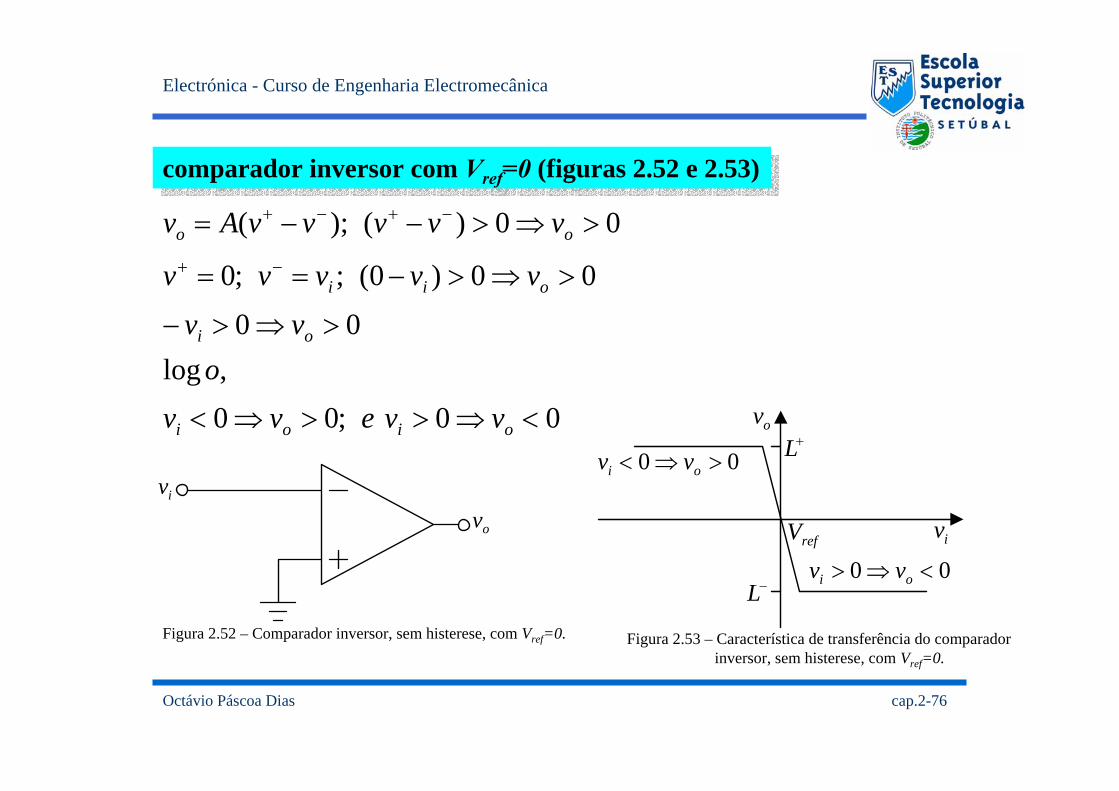
comparador inversor com Vref=0 (figuras 2.52 e 2.53)comparador inversor com Vref=0 (figuras 2.52 e 2.53)
oviv
Figura 2.52 – Comparador inversor, sem histerese, com Vref=0. Figura 2.53 – Característica de transferência do comparadorinversor, sem histerese, com Vref=0.
00;00,log
00
00)0(;;0
00)();(
<⇒>>⇒<
>⇒>−
>⇒>−==
>⇒>−−=−+
−+−+
oioi
oi
oii
oo
vvevvo
vv
vvvvv
vvvvvAv
00 >⇒< oi vv
00 <⇒> oi vv
+L
−L
ov
ivrefV
Octávio Páscoa Dias cap.2-77
Electrónica - Curso de Engenharia Electromecânica
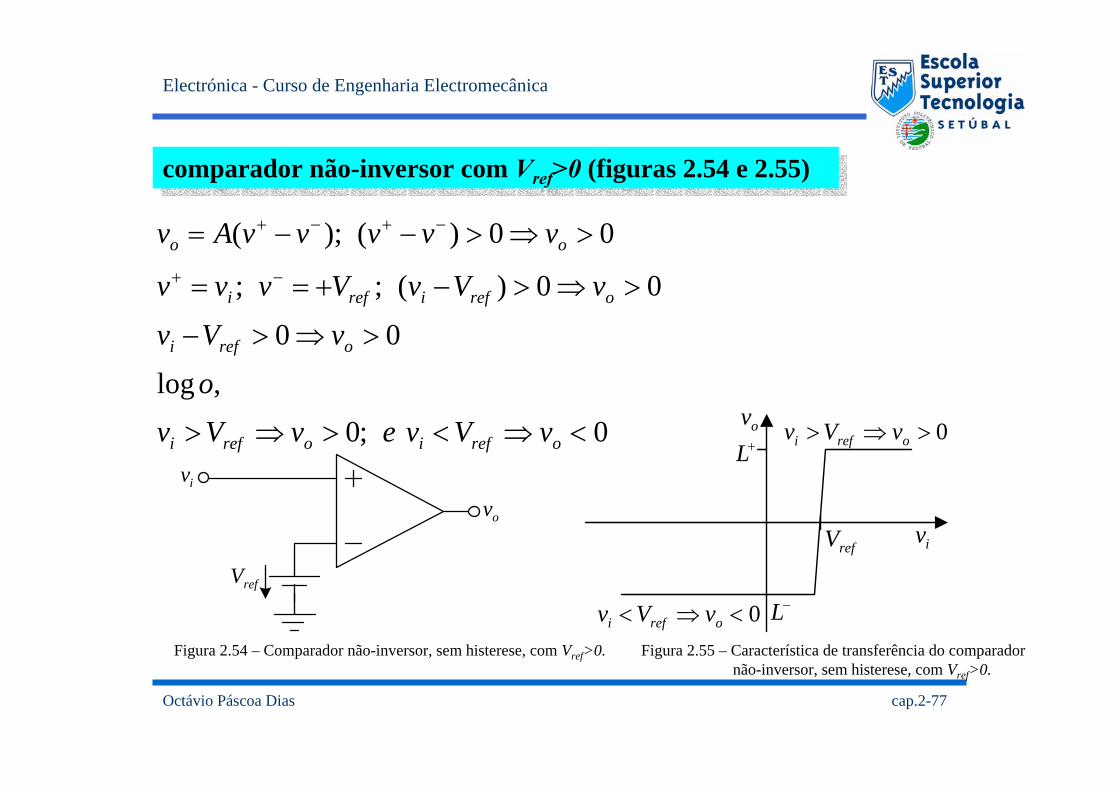
comparador não-inversor com Vref>0 (figuras 2.54 e 2.55)comparador não-inversor com Vref>0 (figuras 2.54 e 2.55)
Figura 2.54 – Comparador não-inversor, sem histerese, com Vref>0. Figura 2.55 – Característica de transferência do comparadornão-inversor, sem histerese, com Vref>0.
0;0,log
00
00)(;;
00)();(
<⇒<>⇒>
>⇒>−
>⇒>−+==
>⇒>−−=−+
−+−+
orefiorefi
orefi
orefirefi
oo
vVvevVvo
vVv
vVvVvvv
vvvvvAv
+L
−L
ov
ivrefV
0<⇒< orefi vVv
0>⇒> orefi vVv
refV
oviv
Octávio Páscoa Dias cap.2-78
Electrónica - Curso de Engenharia Electromecânica
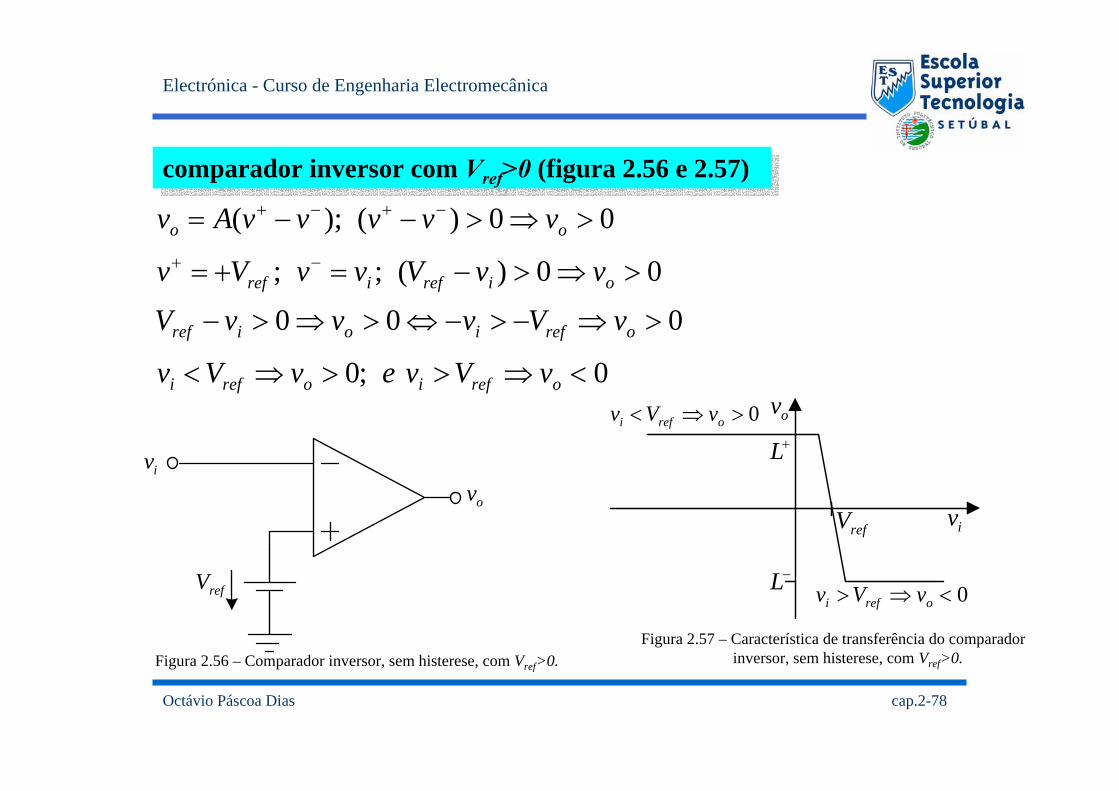
comparador inversor com Vref>0 (figura 2.56 e 2.57)comparador inversor com Vref>0 (figura 2.56 e 2.57)
Figura 2.56 – Comparador inversor, sem histerese, com Vref>0.Figura 2.57 – Característica de transferência do comparador
inversor, sem histerese, com Vref>0.
0;0
000
00)(;;
00)();(
<⇒>>⇒<
>⇒−>−⇔>⇒>−
>⇒>−=+=
>⇒>−−=−+
−+−+
orefiorefi
orefioiref
oirefiref
oo
vVvevVv
vVvvvV
vvVvvVv
vvvvvAv
+L
−L
ov
ivrefV
0<⇒> orefi vVv
0>⇒< orefi vVv
oviv
refV
Octávio Páscoa Dias cap.2-79
Electrónica - Curso de Engenharia Electromecânica
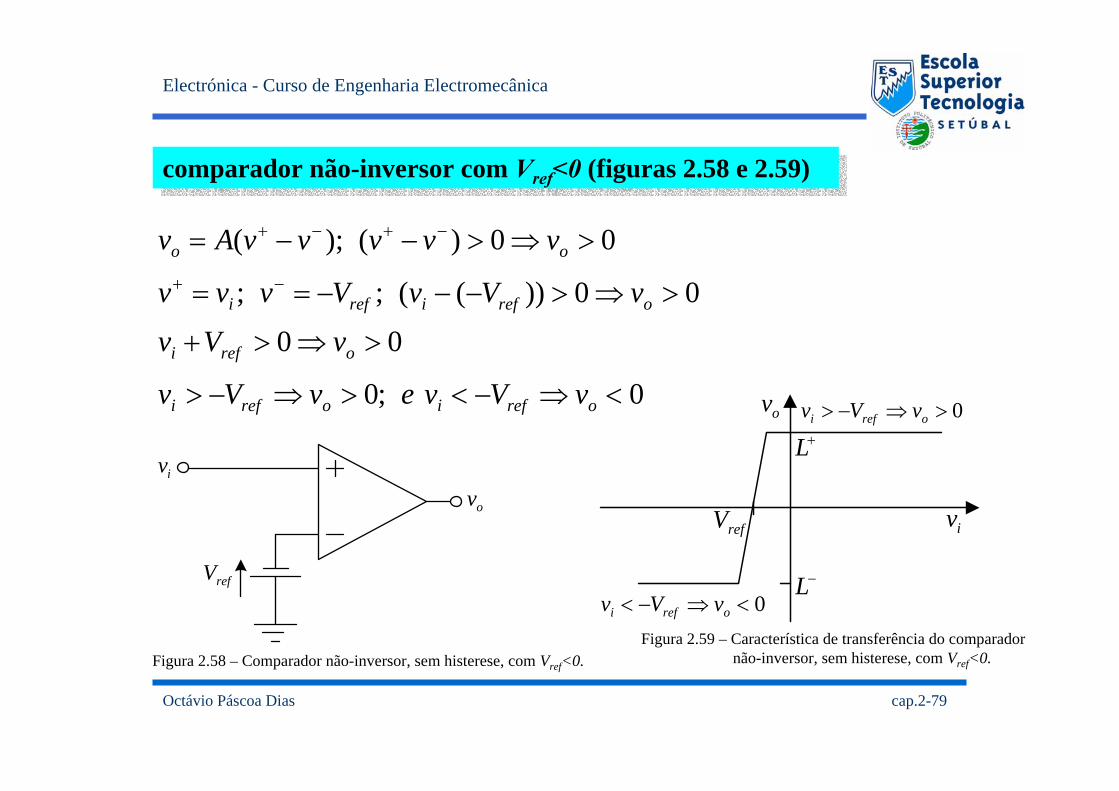
comparador não-inversor com Vref<0 (figuras 2.58 e 2.59)comparador não-inversor com Vref<0 (figuras 2.58 e 2.59)
Figura 2.58 – Comparador não-inversor, sem histerese, com Vref<0.Figura 2.59 – Característica de transferência do comparador
não-inversor, sem histerese, com Vref<0.
0;0
00
00))((;;
00)();(
<⇒−<>⇒−>
>⇒>+
>⇒>−−−==
>⇒>−−=−+
−+−+
orefiorefi
orefi
orefirefi
oo
vVvevVv
vVv
vVvVvvv
vvvvvAv
oviv
refV0<⇒−< orefi vVv
0>⇒−> orefi vVv+L
−L
ov
ivrefV
Octávio Páscoa Dias cap.2-80
Electrónica - Curso de Engenharia Electromecânica
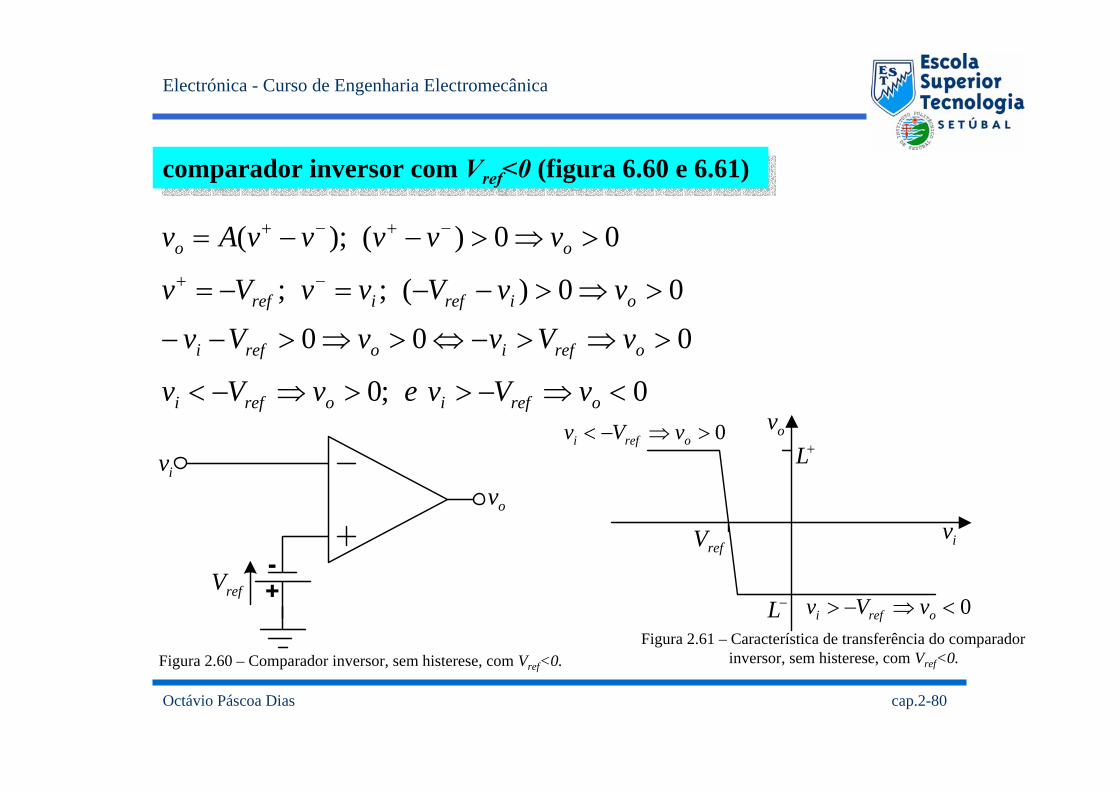
comparador inversor com Vref<0 (figura 6.60 e 6.61)comparador inversor com Vref<0 (figura 6.60 e 6.61)
Figura 2.60 – Comparador inversor, sem histerese, com Vref<0.Figura 2.61 – Característica de transferência do comparador
inversor, sem histerese, com Vref<0.
0;0
000
00)(;;
00)();(
<⇒−>>⇒−<
>⇒>−⇔>⇒>−−
>⇒>−−=−=
>⇒>−−=−+
−+−+
orefiorefi
orefiorefi
oirefiref
oo
vVvevVv
vVvvVv
vvVvvVv
vvvvvAv
+L
−L
ov
ivrefV
0<⇒−> orefi vVv
0>⇒−< orefi vVv
oviv
refV
Octávio Páscoa Dias cap.2-81
Electrónica - Curso de Engenharia Electromecânica
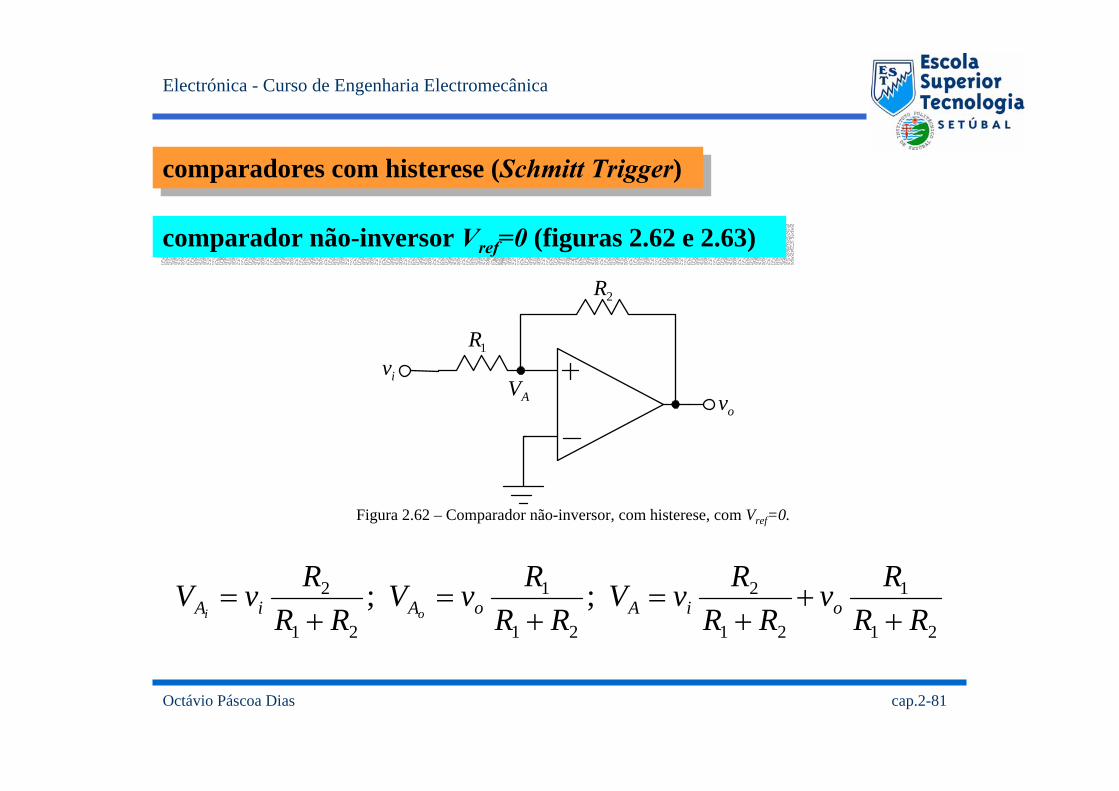
comparador não-inversor Vref=0 (figuras 2.62 e 2.63)comparador não-inversor Vref=0 (figuras 2.62 e 2.63)
comparadores com histerese (Schmitt Trigger)comparadores com histerese (Schmitt Trigger)
Figura 2.62 – Comparador não-inversor, com histerese, com Vref=0.
2R
1R
AViv
ov
21
1
21
2
21
1
21
2 ;;RR
RvRR
RvVRR
RvVRR
RvV oiAoAiA oi ++
+=
+=
+=
Octávio Páscoa Dias cap.2-82
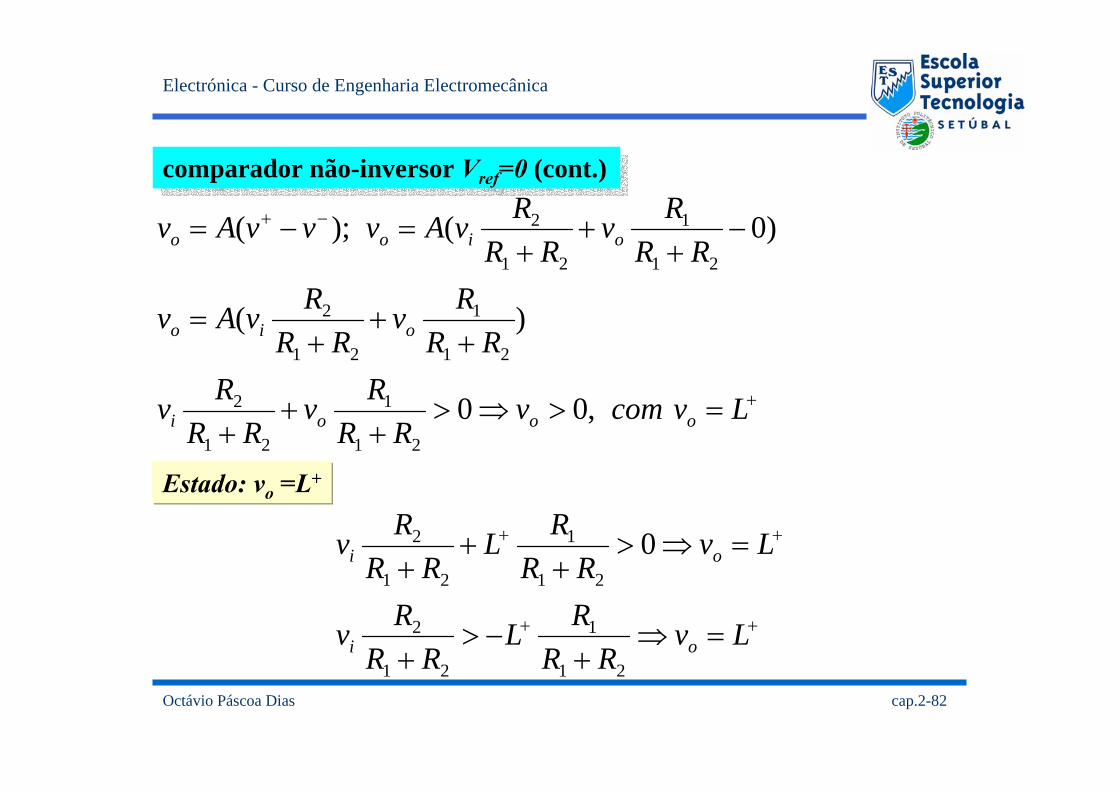
Electrónica - Curso de Engenharia Electromecânica
+
−+
=>⇒>+
++
++
+=
−+
++
=−=
LvcomvRR
RvRR
Rv
RRRv
RRRvAv
RRRv
RRRvAvvvAv
oooi
oio
oioo
,00
)(
)0();(
21
1
21
2
21
1
21
2
21
1
21
2
comparador não-inversor Vref=0 (cont.)comparador não-inversor Vref=0 (cont.)
Estado: vo =L+
++
++
=⇒+
−>+
=⇒>+
++
LvRR
RLRR
Rv
LvRR
RLRR
Rv
oi
oi
21
1
21
2
21
1
21
2 0
Octávio Páscoa Dias cap.2-83
Electrónica - Curso de Engenharia Electromecânica
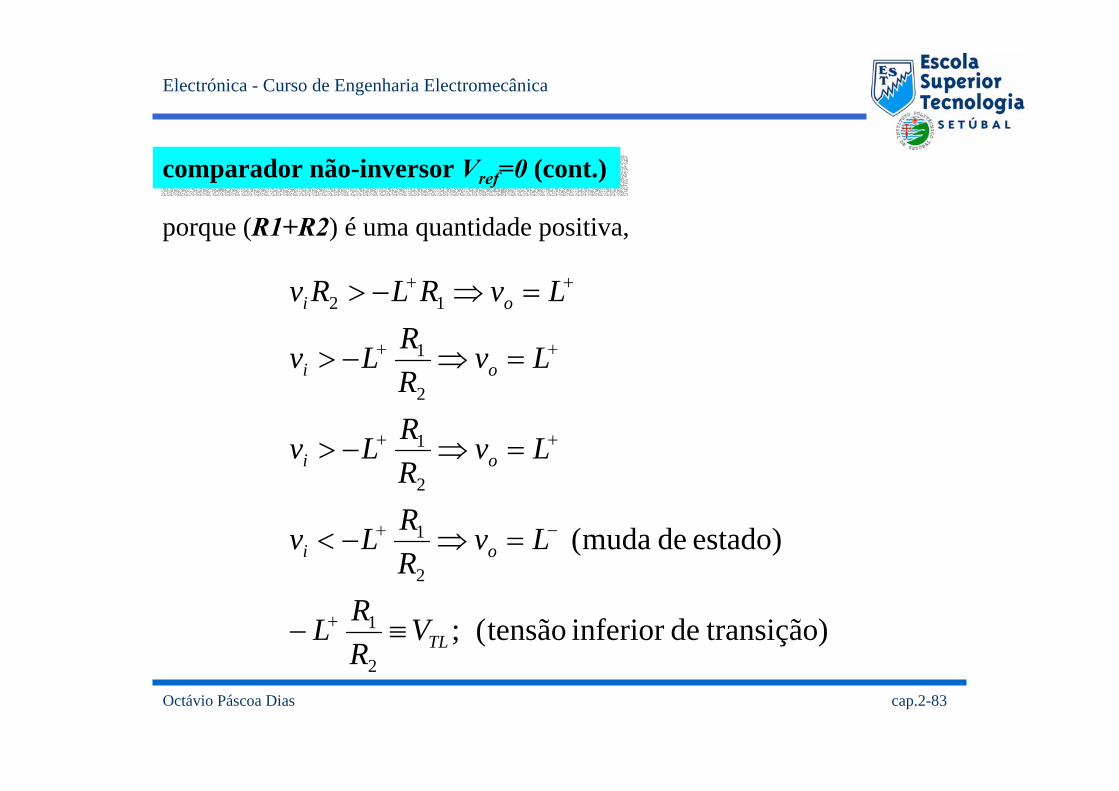
) transiçãodeinferior tensão(;
)estado de muda(
2
1
2
1
2
1
2
1
12
TL
oi
oi
oi
oi
VRRL
LvRRLv
LvRRLv
LvRRLv
LvRLRv
≡−
=⇒−<
=⇒−>
=⇒−>
=⇒−>
+
−+
++
++
++
comparador não-inversor Vref=0 (cont.)comparador não-inversor Vref=0 (cont.)
porque (R1+R2) é uma quantidade positiva,
Octávio Páscoa Dias cap.2-84
Electrónica - Curso de Engenharia Electromecânica
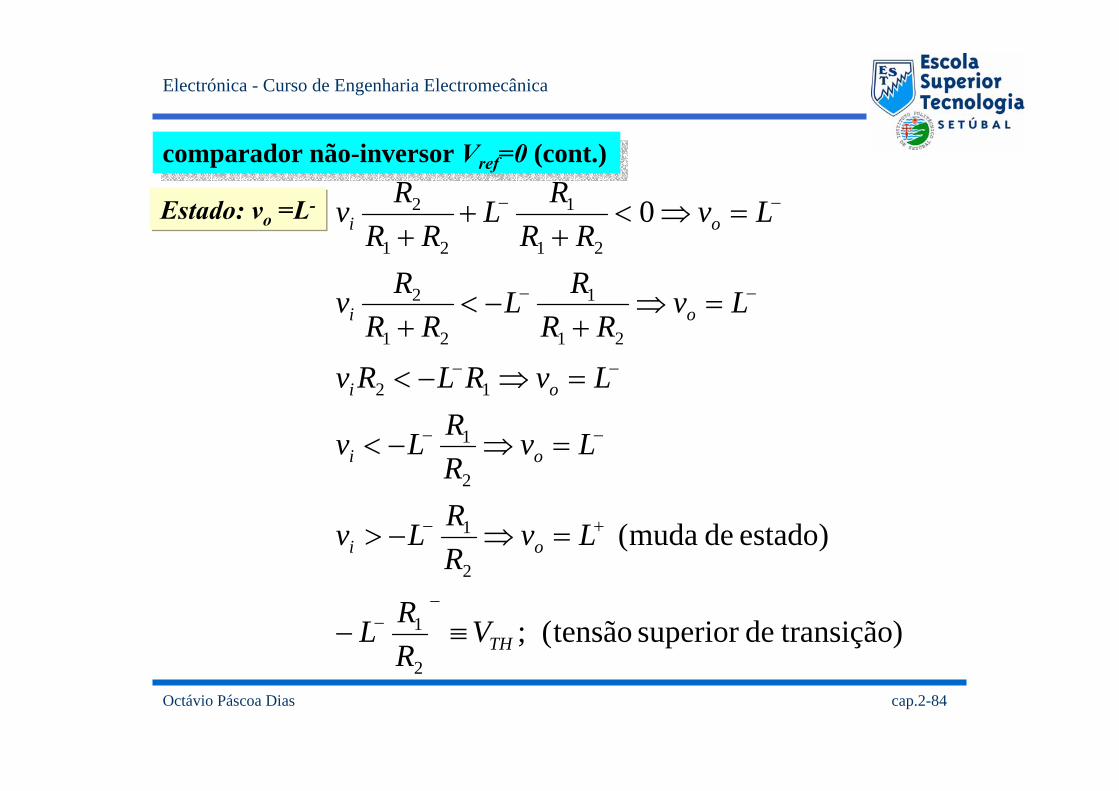
comparador não-inversor Vref=0 (cont.)comparador não-inversor Vref=0 (cont.)
Estado: vo =L-
) transiçãodesuperior tensão(;
)estado de muda(
0
2
1
2
1
2
1
12
21
1
21
2
21
1
21
2
TH
oi
oi
oi
oi
oi
VRRL
LvRRLv
LvRRLv
LvRLRv
LvRR
RLRR
Rv
LvRR
RLRR
Rv
≡−
=⇒−>
=⇒−<
=⇒−<
=⇒+
−<+
=⇒<+
++
−−
+−
−−
−−
−−
−−
Octávio Páscoa Dias cap.2-85
Electrónica - Curso de Engenharia Electromecânica
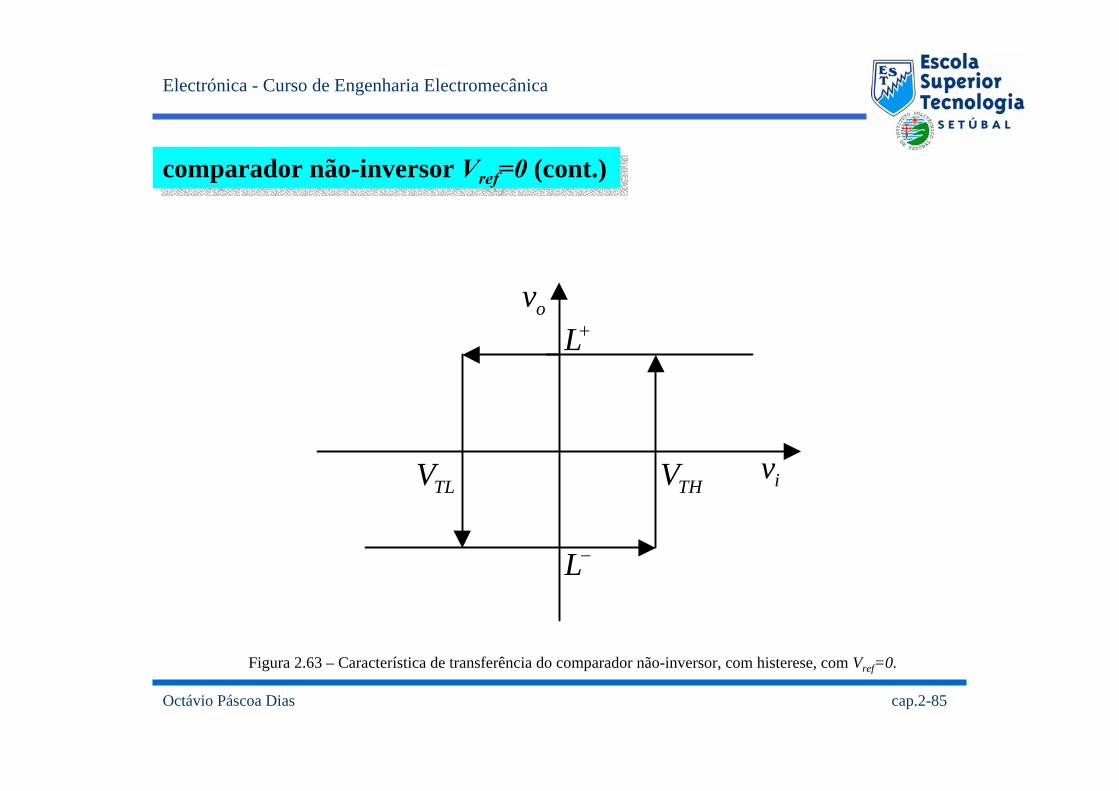
comparador não-inversor Vref=0 (cont.)comparador não-inversor Vref=0 (cont.)
Figura 2.63 – Característica de transferência do comparador não-inversor, com histerese, com Vref=0.
+L
−L
ov
ivTLV THV
Octávio Páscoa Dias cap.2-86
Electrónica - Curso de Engenharia Electromecânica
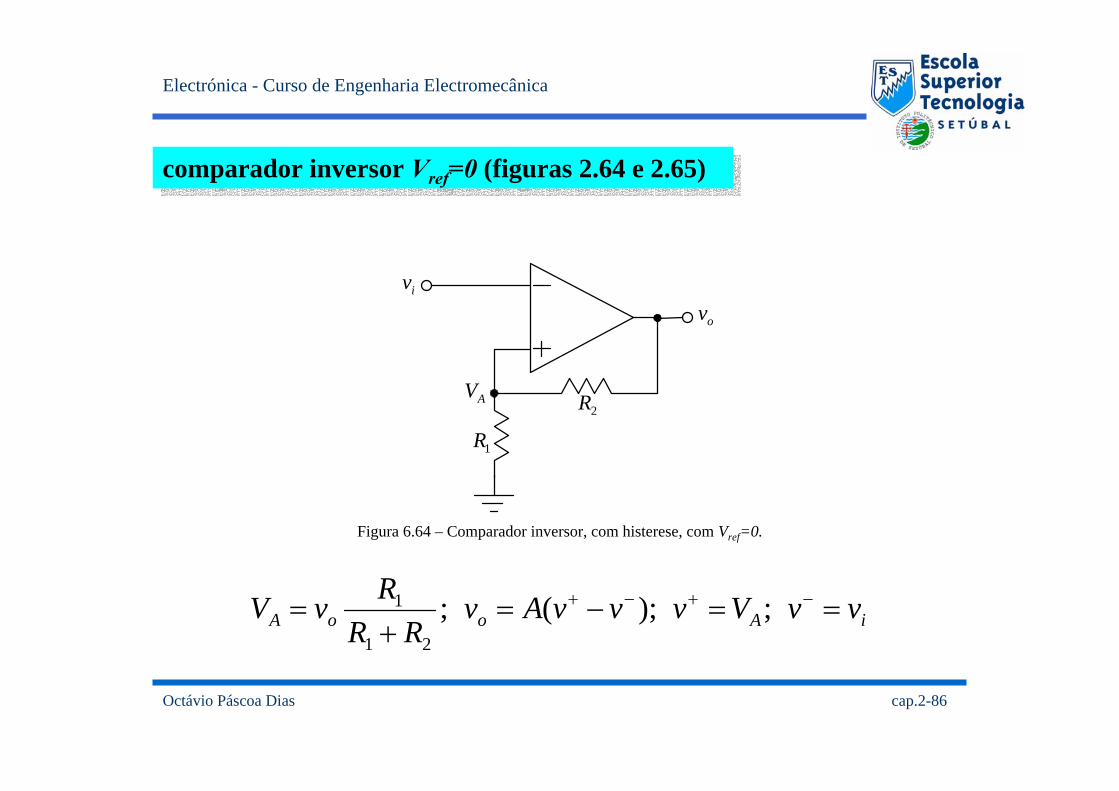
comparador inversor Vref=0 (figuras 2.64 e 2.65)comparador inversor Vref=0 (figuras 2.64 e 2.65)
Figura 6.64 – Comparador inversor, com histerese, com Vref=0.
iAooA vvVvvvAvRR
RvV ==−=+
= −+−+ ;);(;21
1
iv
ov
1R2RAV
Octávio Páscoa Dias cap.2-87
Electrónica - Curso de Engenharia Electromecânica
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
++
+
=⇒+
<⇒=⇒+
−>−
=⇒>−+
−+
=
LvRR
RvvLvRR
Rvv
LvvRR
RvvRR
RvAv
ooiooi
oioioo
21
1
21
1
21
1
21
1 0 :logo ),(
Estado: vo =L+
) transiçãodesuperior (tensão ;
estado) de (muda ;
21
1
21
1
21
1
THo
ooi
ooi
VRR
Rv
LvRR
Rvv
LvRR
Rvv
≡+
=⇒+
>
=⇒+
<
−
+
Octávio Páscoa Dias cap.2-88
Electrónica - Curso de Engenharia Electromecânica
Estado: vo =L+
) transiçãodesuperior (tensão ;
estado) de (muda ;
21
1
21
1
21
1
THo
oi
oi
VRR
Rv
LvRR
RLv
LvRR
RLv
≡+
=⇒+
>
=⇒+
<
−+
++
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
Octávio Páscoa Dias cap.2-89
Electrónica - Curso de Engenharia Electromecânica
) transiçãodeinferior (tensão ;
estado) de (muda ;
0
21
1
21
1
21
1
21
1
21
1
21
1
TL
oi
oi
ooiooi
oio
VLRR
R
LvLRR
Rv
LvLRR
Rv
LvvRR
RvLvRR
Rvv
LvvRR
Rv
≡+
=⇒+
<
=⇒+
>
=⇒+
>⇔=⇒+
−<−
=⇒<−+
−
+−
−−
−−
−
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
Estado: vo =L-
Octávio Páscoa Dias cap.2-90
Electrónica - Curso de Engenharia Electromecânica
+L
−L
ov
ivTHVTLV
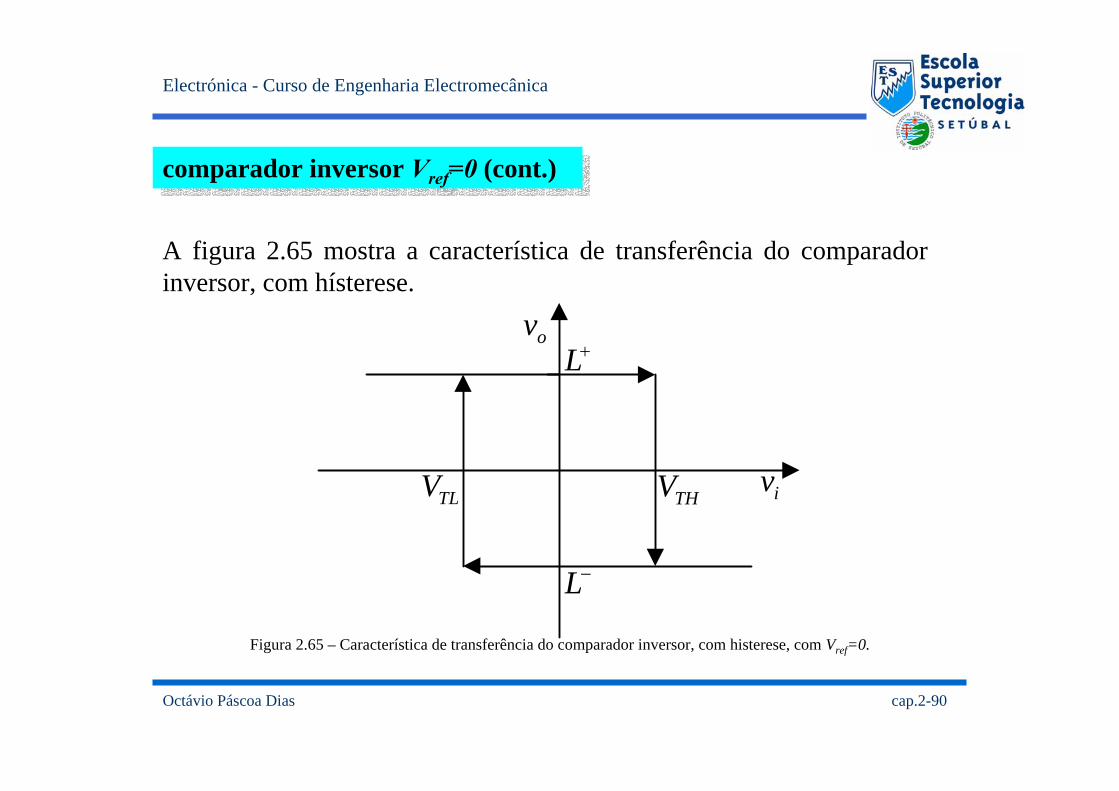
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
Figura 2.65 – Característica de transferência do comparador inversor, com histerese, com Vref=0.
A figura 2.65 mostra a característica de transferência do comparadorinversor, com hísterese.
Octávio Páscoa Dias cap.2-91
Electrónica - Curso de Engenharia Electromecânica
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
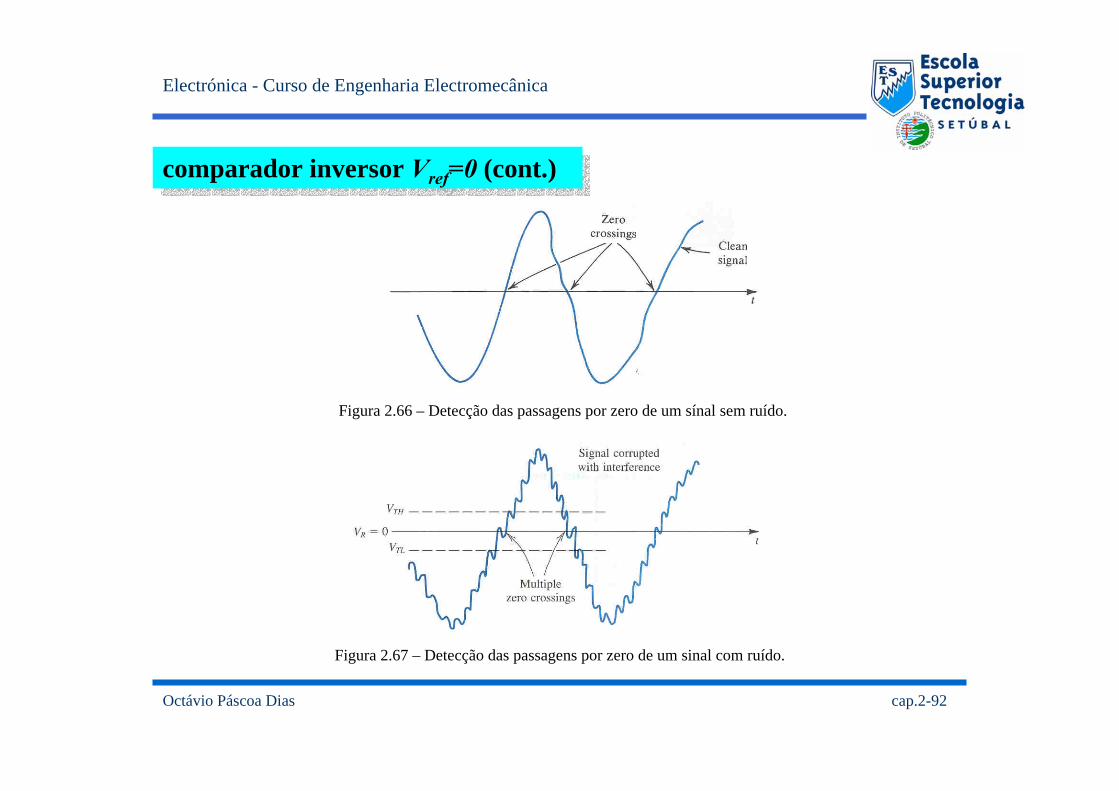
Para exemplificar a utilidade dos comparadores com histerese, considere-se uma aplicação muito comum, que consiste em detectar o número de vezes que um sinal arbitrário passa por zero.
Se a função for implementada por um comparador sem histerese, a saída do comparador muda de estado de cada vez que o sinal passa por zero. Se o sinal não estiver corrompido com ruído (figura 2.66) o comparador detecta o número real de vezes que o sinal passa por zero. Porém, se o sinal contiver ruído sobreposto (figura 2.67), o comparador sem histerese irá detectar falsas passagens do sinal por zero, devido à presença do ruído. No entanto, se for conhecido o valor aproximado da amplitude do ruído sobreposto ao sinal, o projectista do sistema poderá implementar um comparador com histerese, cuja largura de histerese (VTH-VTL) seja dupla da amplitude do ruído, evitando assim, a detecção de falsas passagens do sinal por zero.
Octávio Páscoa Dias cap.2-92
Electrónica - Curso de Engenharia Electromecânica
comparador inversor Vref=0 (cont.)comparador inversor Vref=0 (cont.)
Figura 2.66 – Detecção das passagens por zero de um sínal sem ruído.
Figura 2.67 – Detecção das passagens por zero de um sinal com ruído.
Octávio Páscoa Dias cap.2-93
Electrónica - Curso de Engenharia Electromecânica
2.7 – Características não-ideais dos ampops2.7 – Características não-ideais dos ampops
Embora as técnicas de projecto e análise de circuitos com amplificadores operacionais, nas quais é assumido o conceito de ampop ideal, possam e devam ser utilizadas, por constituírem uma boa aproximação às situações reais, de facto, quando são utilizados amplificadores operacionais, verifica-se que algumas características não se comportam de acordo com as previsões fornecidas por aquelas técnicas de análise, uma vez que o conceito de amplificador ideal não existe na prática onde, naturalmente, o projectista é confrontado com amplificadores operacionais reais.
Nesta secção vão ser estudadas algumas características não ideais dos amplificadores operacionais, para que possam ser previstos os desvios à situação ideal e estudar técnicas que permitam minimizar os seus efeitos.
Octávio Páscoa Dias cap.2-94
Electrónica - Curso de Engenharia Electromecânica
ganho finito e largura de bandaganho finito e largura de banda
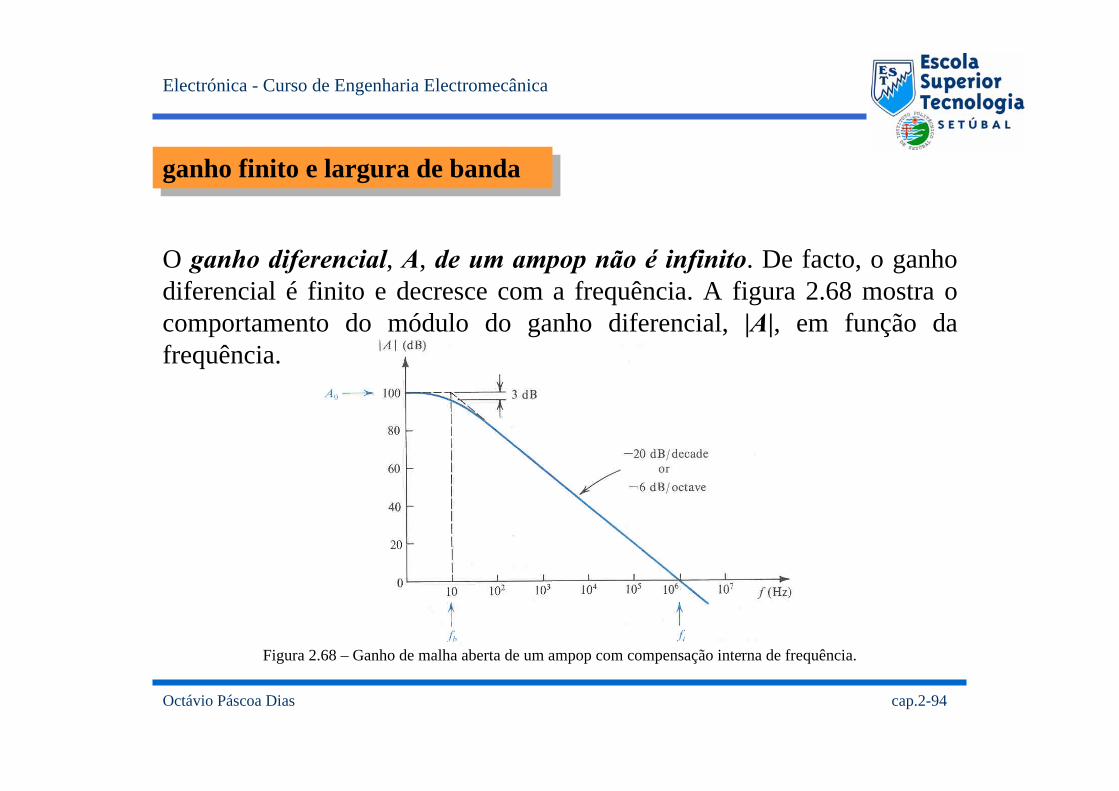
O ganho diferencial, A, de um ampop não é infinito. De facto, o ganho diferencial é finito e decresce com a frequência. A figura 2.68 mostra o comportamento do módulo do ganho diferencial, |A|, em função dafrequência.
Figura 2.68 – Ganho de malha aberta de um ampop com compensação interna de frequência.
Octávio Páscoa Dias cap.2-95
Electrónica - Curso de Engenharia Electromecânica
ganho finito e largura de banda (cont.)ganho finito e largura de banda (cont.)
É de realçar que, embora o ganho, A, seja bastante elevado em dc, ele começa a decrescer a partir dos 10 Hz, com um declive de -20dB/década. Este comportamento é típico de ampops com compensação interna de frequência.
Esta técnica de compensação consiste em incluir um condensador no circuito do amplificador operacional, com o objectivo de evitar que o ampop entre em auto-oscilação.
A inclusão do condensador faz com que o ganho do ampop tenha o comportamento de uma rede RC passa-baixo, de 1ª ordem, pelo facto do condensador dar origem a um pólo dominante no circuito que realiza o ampop.
Octávio Páscoa Dias cap.2-96
Electrónica - Curso de Engenharia Electromecânica
ganho finito e largura de banda (cont.)ganho finito e largura de banda (cont.)
Por analogia com a resposta de uma rede RC de 1ª ordem, o ganho A(s)do ampop, com compensação interna de frequência, pode ser expressa por,
b
sAsA
ω+
=1
)( 0
onde,ωb é a frequência de queda de 3 dB; e A0 é o ganho diferencial em dc(ω=0).
Para as frequências físicas (s=jω) tem-se,
b
jAjA
ωωω
+=
1)( 0
Octávio Páscoa Dias cap.2-97
Electrónica - Curso de Engenharia Electromecânica
ganho finito e largura de banda (cont.)ganho finito e largura de banda (cont.)
Para frequências ω>>ωb, pode fazer-se a aproximação,
e assim,
ωωω
ωωω
jAjAj
AjA b
b
00 )()( =⇔=
ωω
ωωω bb A
jAjA 00)( ==
Designando por ωt a frequência à qual o ganho é unitário, 0 dB, tem-se,
btbb AAA ωωωω
ωω
000 1 =⇒=⇔=
Octávio Páscoa Dias cap.2-98
Electrónica - Curso de Engenharia Electromecânica
ganho finito e largura de banda (cont.)ganho finito e largura de banda (cont.)
Deste modo, a equação,
pode ser escrita na forma, ωωω bAjA 0)( =
e assim, ωωω tjA =)(
ωωωj
jA t=)(
A frequência ωt é designada por largura de banda para o ganho unitário. De facto, o valor de ωt corresponde ao produto ganho-largura de banda(GB), que é constante para cada amplificador e consiste numa característica linear do ampop que limita a sua resposta em frequência.
Octávio Páscoa Dias cap.2-99
Electrónica - Curso de Engenharia Electromecânica
saturação na saídasaturação na saída
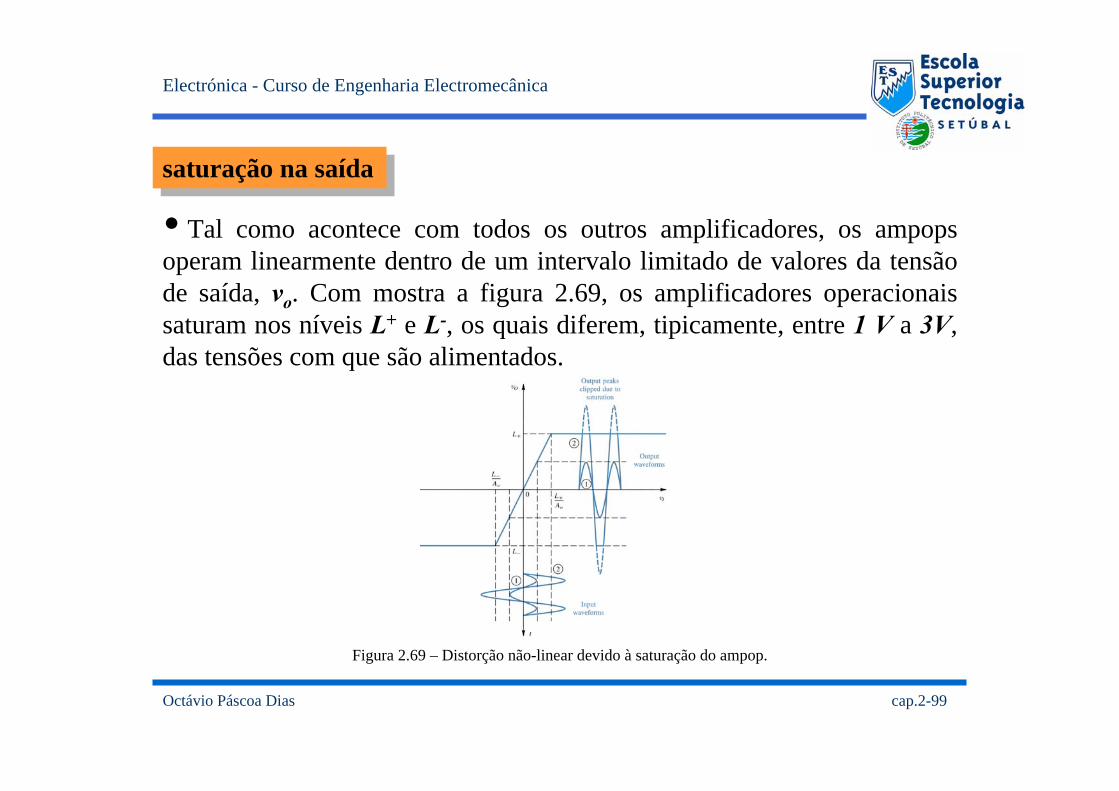
Tal como acontece com todos os outros amplificadores, os ampopsoperam linearmente dentro de um intervalo limitado de valores da tensão de saída, vo. Com mostra a figura 2.69, os amplificadores operacionais saturam nos níveis L+ e L-, os quais diferem, tipicamente, entre 1 V a 3V, das tensões com que são alimentados.
Figura 2.69 – Distorção não-linear devido à saturação do ampop.
Octávio Páscoa Dias cap.2-100
Electrónica - Curso de Engenharia Electromecânica
taxa de inflexão (slew rate)taxa de inflexão (slew rate)
O declive da variação da tensão de saída, vo, dos ampops tem um valor máximo que não deve ser excedido. Esta limitação é designada por taxa de inflexão (slew rate – SR), e provoca distorção não-linear se a variação no tempo, do sinal de saída, for superior à taxa de inflexão do ampoputilizado.
A taxa de inflexão (SR) é usualmente expressa em V/µs, e definida por,
maxdtdvSR o=
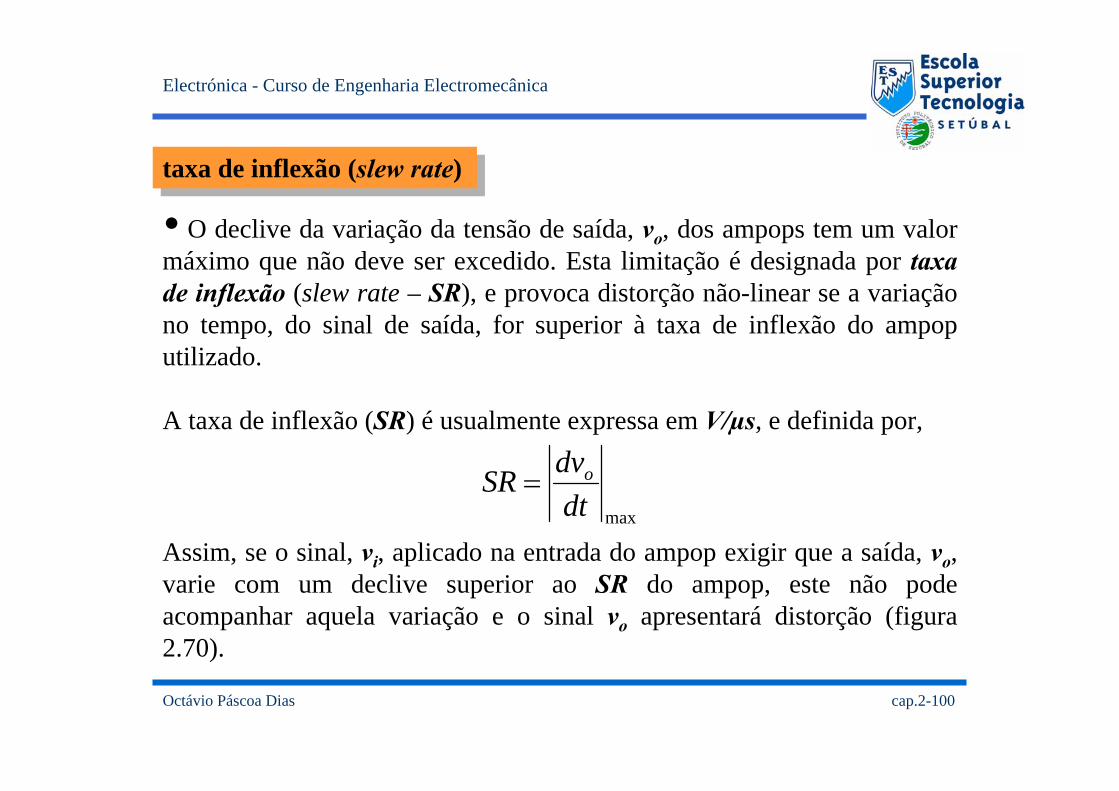
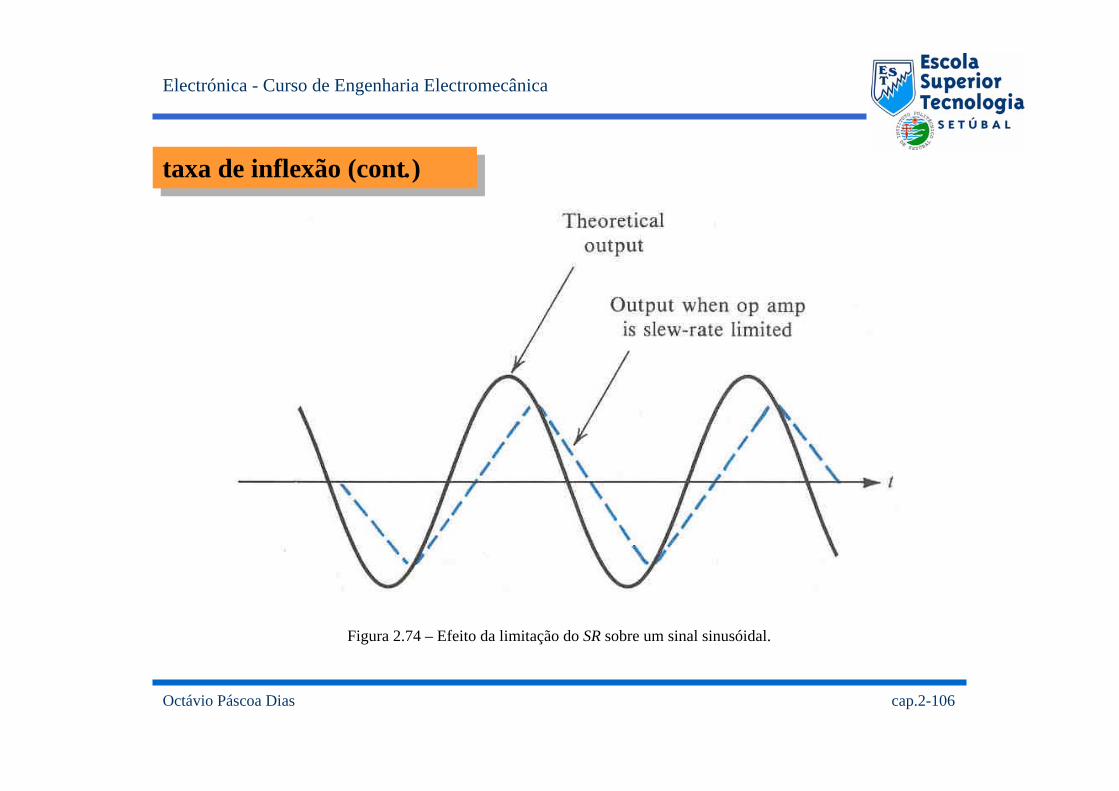
Assim, se o sinal, vi, aplicado na entrada do ampop exigir que a saída, vo, varie com um declive superior ao SR do ampop, este não pode acompanhar aquela variação e o sinal vo apresentará distorção (figura 2.70).
Octávio Páscoa Dias cap.2-101
Electrónica - Curso de Engenharia Electromecânica
taxa de inflexão (slew rate)taxa de inflexão (slew rate)
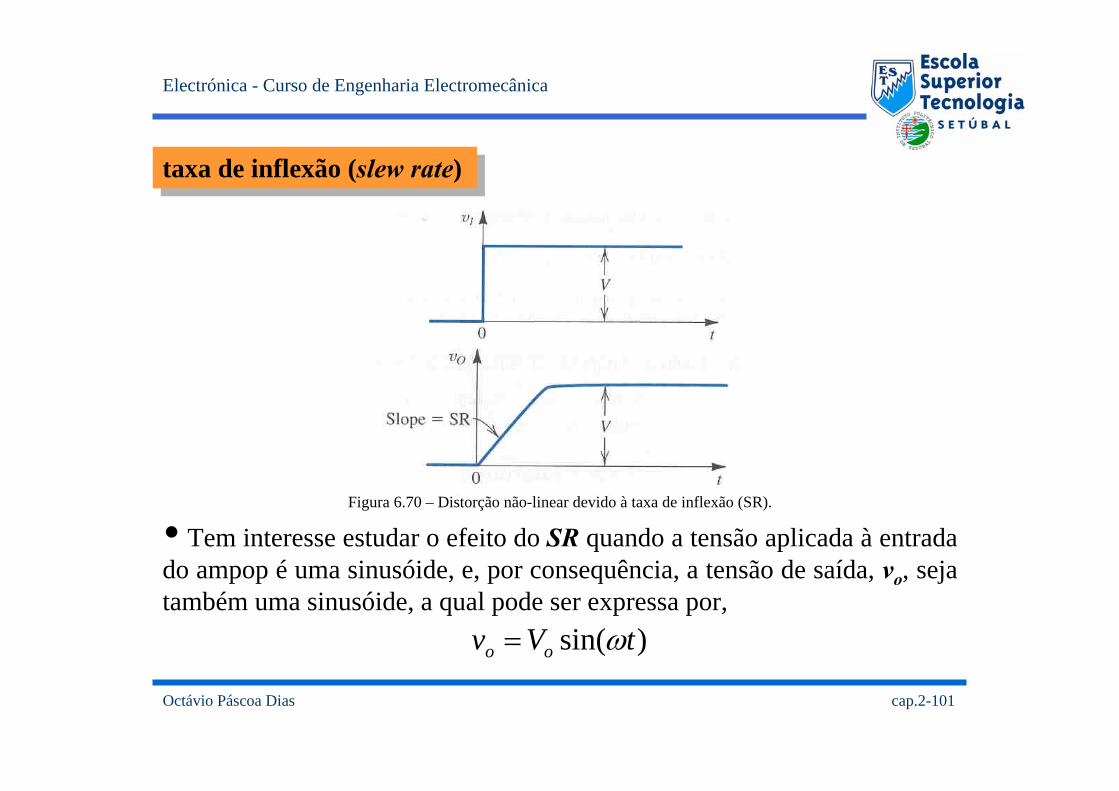
Tem interesse estudar o efeito do SR quando a tensão aplicada à entrada do ampop é uma sinusóide, e, por consequência, a tensão de saída, vo, seja também uma sinusóide, a qual pode ser expressa por,
Figura 6.70 – Distorção não-linear devido à taxa de inflexão (SR).
)sin( tVv oo ω=
Octávio Páscoa Dias cap.2-102
Electrónica - Curso de Engenharia Electromecânica
taxa de inflexão (cont.)taxa de inflexão (cont.)
Dado que,
maxdtdvSR o=
tem-se,
maxmaxmax
))cos(()cos()sin( tVtVtVdtdSR ooo ωωωωω ⇔−⇔=
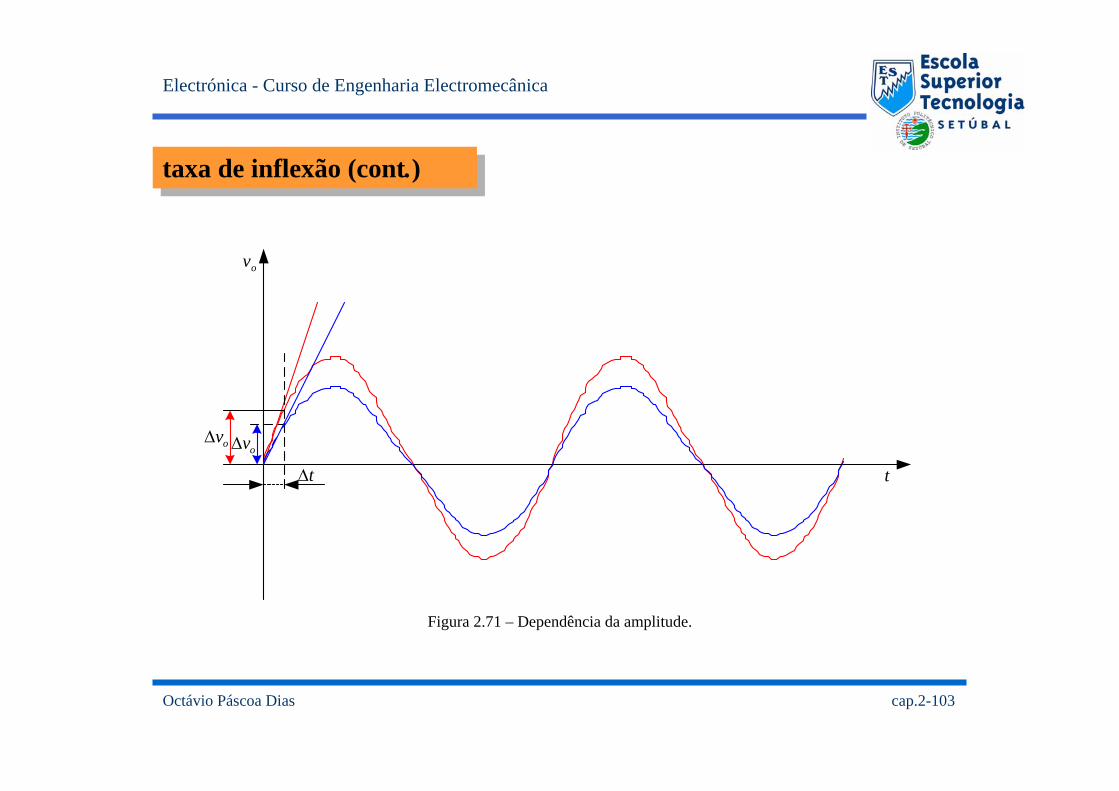
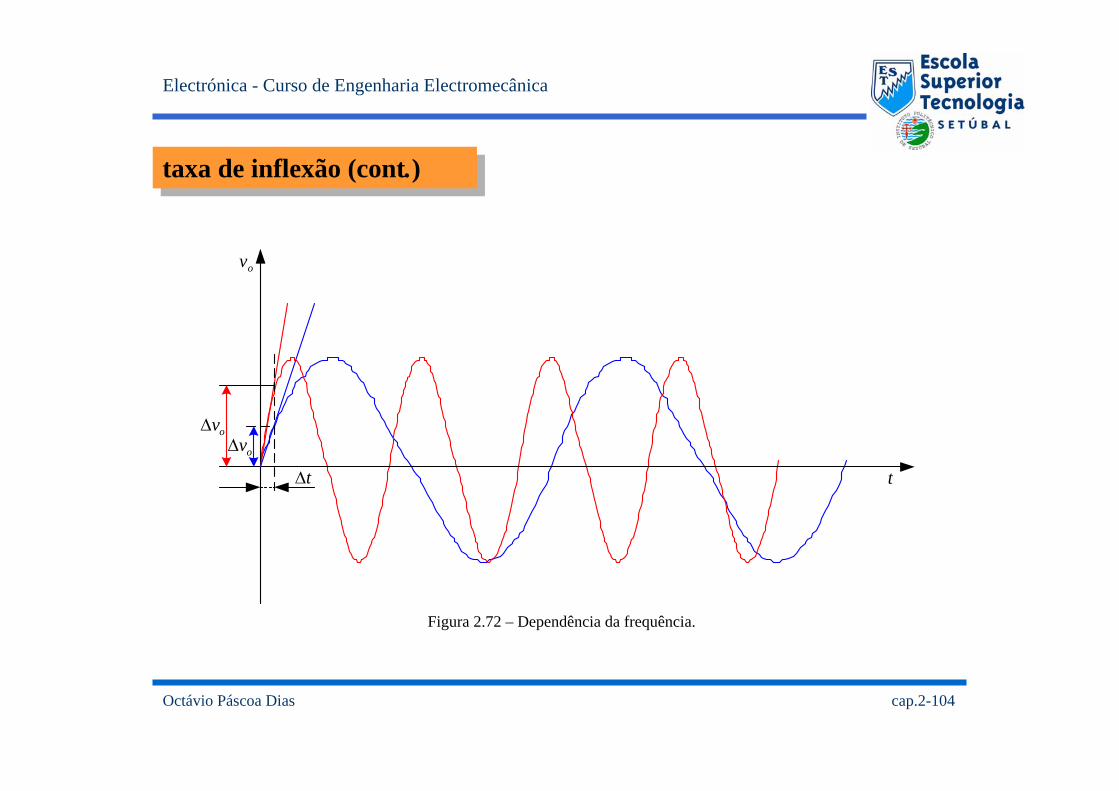
Uma vez que a função coseno apresenta a sua variação máxima em t=0, obtém-se, ωoVSR =e assim, para não haver distorção na saída devido ao SR, tem de verificar-se a condição, SRVo ≤ωque explicita a dependência da variação de vo da frequência e da amplitude (figuras 2.71 a 2.74).
Octávio Páscoa Dias cap.2-103
Electrónica - Curso de Engenharia Electromecânica
ov∆ov∆
t∆
ov
t
taxa de inflexão (cont.)taxa de inflexão (cont.)
Figura 2.71 – Dependência da amplitude.
Octávio Páscoa Dias cap.2-104
Electrónica - Curso de Engenharia Electromecânica
ov∆ov∆
t∆
ov
t
taxa de inflexão (cont.)taxa de inflexão (cont.)
Figura 2.72 – Dependência da frequência.
Octávio Páscoa Dias cap.2-105
Electrónica - Curso de Engenharia Electromecânica
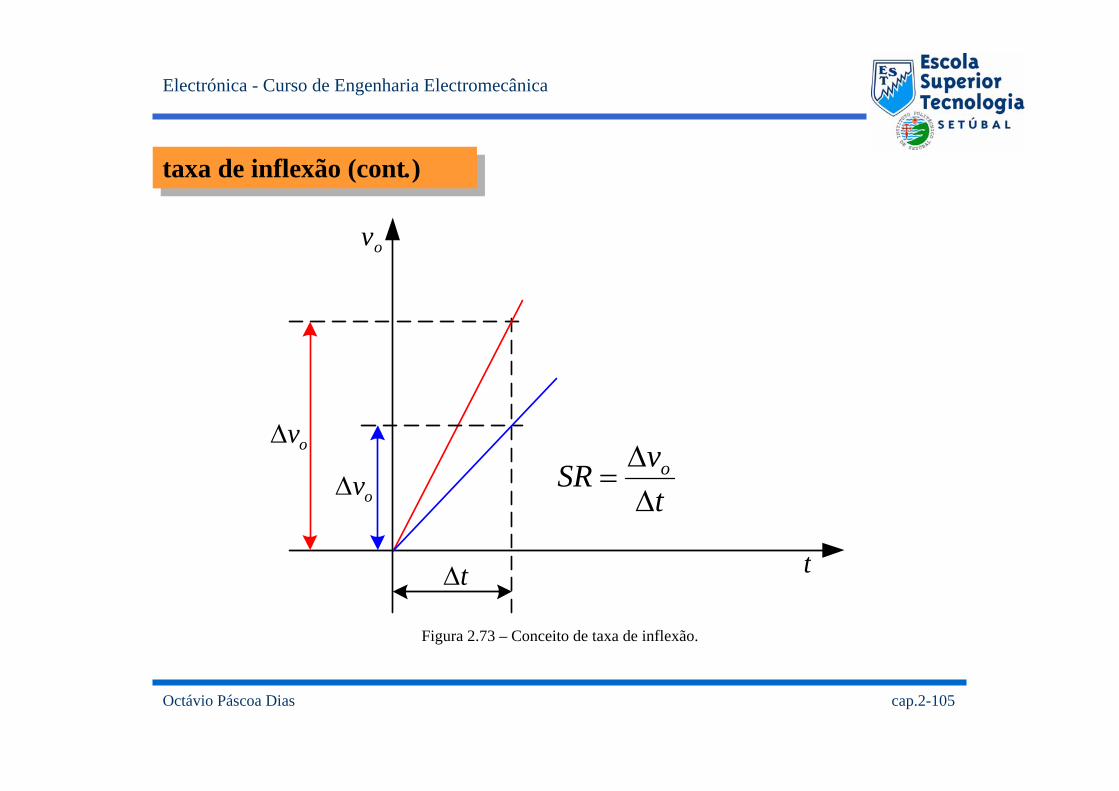
tvSR o
∆∆
=ov∆
t∆
ov
t
ov∆
taxa de inflexão (cont.)taxa de inflexão (cont.)
Figura 2.73 – Conceito de taxa de inflexão.
Octávio Páscoa Dias cap.2-106
Electrónica - Curso de Engenharia Electromecânica
Figura 2.74 – Efeito da limitação do SR sobre um sinal sinusóidal.
taxa de inflexão (cont.)taxa de inflexão (cont.)
Octávio Páscoa Dias cap.2-107
Electrónica - Curso de Engenharia Electromecânica
ganho de modo comumganho de modo comum
Considere-se a situação de um ampop excitado por duas fontes de sinal v1 e v2, (figura 2.75). Esta situação configura a operação real de um ampop, sendo possível identificar uma componente de excitação diferencial ou anti-simétrica, vd, e uma componente de modo-comum ou simétrica, vC (figura 2.76).
A componente diferencial é caracterizada pela expressão,12 vvvd −=
2dv
−
o que equivale a aplicar à entrada não-inversora uma fonte de sinal,
e à entrada inversora a fonte de sinal,2dv
+
Octávio Páscoa Dias cap.2-108
Electrónica - Curso de Engenharia Electromecânica
ganho de modo comum (cont.)ganho de modo comum (cont.)
De facto,d
dd vvvvv=−=−−+ 12)
2(
2A componente de modo-comum é descrita pela expressão,
212 vvvCM
+=
Assim, a tensão de saída, vo, é dada por,
CMCMddo vAvAv ×+×=
onde,Ad é o ganho diferencial; ACM é o ganho de modo-comum; vd é a componente diferencial e vC é a componente de modo-comum.
Octávio Páscoa Dias cap.2-109
Electrónica - Curso de Engenharia Electromecânica
ganho de modo comum (cont.)ganho de modo comum (cont.)
O conceito de ampop ideal implica,
Ad=∞ e AC=0,
Porém nos amplificadores operacionais reais,
Ad é finito e AC≠0
Para avaliar o desempenho do ampop quanto à rejeição do modo-comum, uma vez que idealmente essa rejeição deveria ser infinita, define-se a relação de rejeição de modo-comum (commom–mode rejection ratio– CMRR), por intermédio da expressão,
dBemAACMRRCM
d ; log20=
Octávio Páscoa Dias cap.2-110
Electrónica - Curso de Engenharia Electromecânica
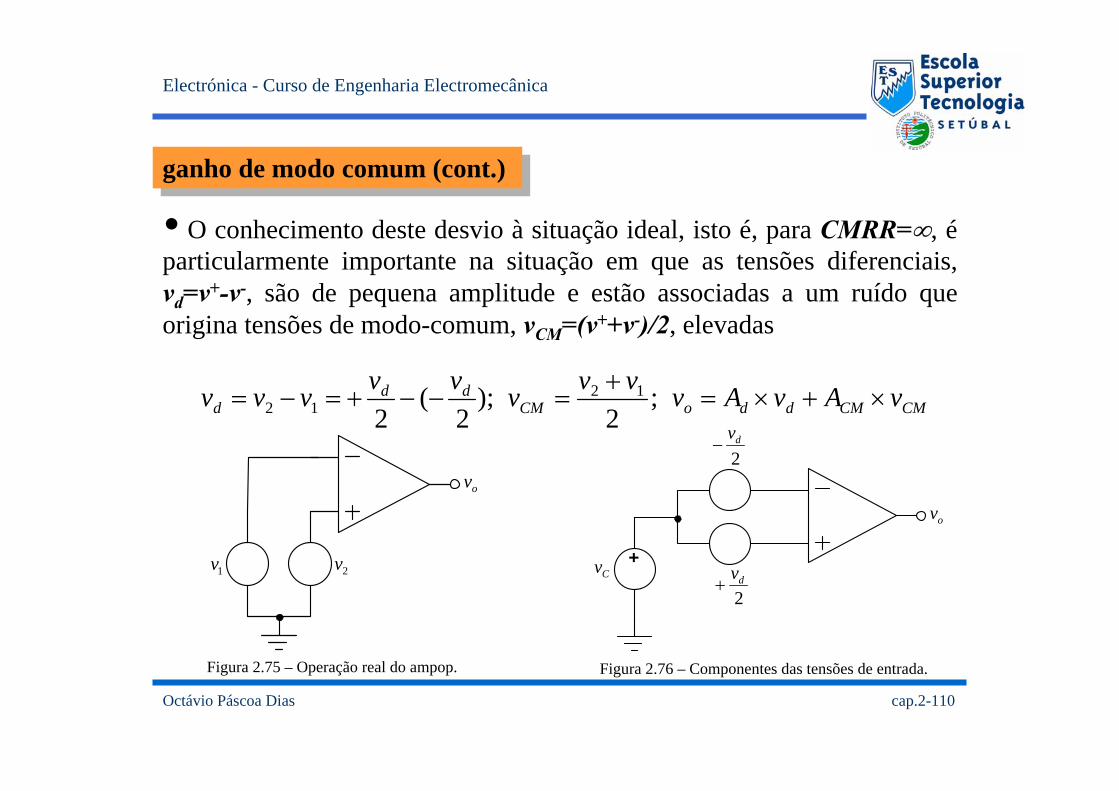
Figura 2.76 – Componentes das tensões de entrada.
O conhecimento deste desvio à situação ideal, isto é, para CMRR=∞, éparticularmente importante na situação em que as tensões diferenciais, vd=v+-v-, são de pequena amplitude e estão associadas a um ruído que origina tensões de modo-comum, vCM=(v++v-)/2, elevadas
ganho de modo comum (cont.)ganho de modo comum (cont.)
2dv
+
2dv
−
+ov
Cv
CMCMddoCMdd
d vAvAvvvvvvvvv ×+×=+
=−−+=−= ;2
);2
(2
1212
1v
ov
2v
Figura 2.75 – Operação real do ampop.
Octávio Páscoa Dias cap.2-111
Electrónica - Curso de Engenharia Electromecânica
resistências de entrada e de saídaresistências de entrada e de saída
A figura 2.77 mostra o modelo do ampop com as resistências de entrada e de saída incluídas.
A resistência de entrada diferencial, Rid, é a resistência “vista” por uma fonte de tensão ligada entre as entradas não-inversora (+) e inversora (-), como se ilustra na figura 2.78.
A resistência de entrada de modo-comum, Ric é a resistência “vista” por uma fonte que produz uma tensão de modo-comum (figura 6.79)
A resistência de saída, Ro, é a resistência “vista” pela carga ligada à saída do amplificador operacional.
Tipicamente: Rid=100 MΩ; Ric=1 MΩ; Ro=100 Ω.
Octávio Páscoa Dias cap.2-112
Electrónica - Curso de Engenharia Electromecânica
ovdv
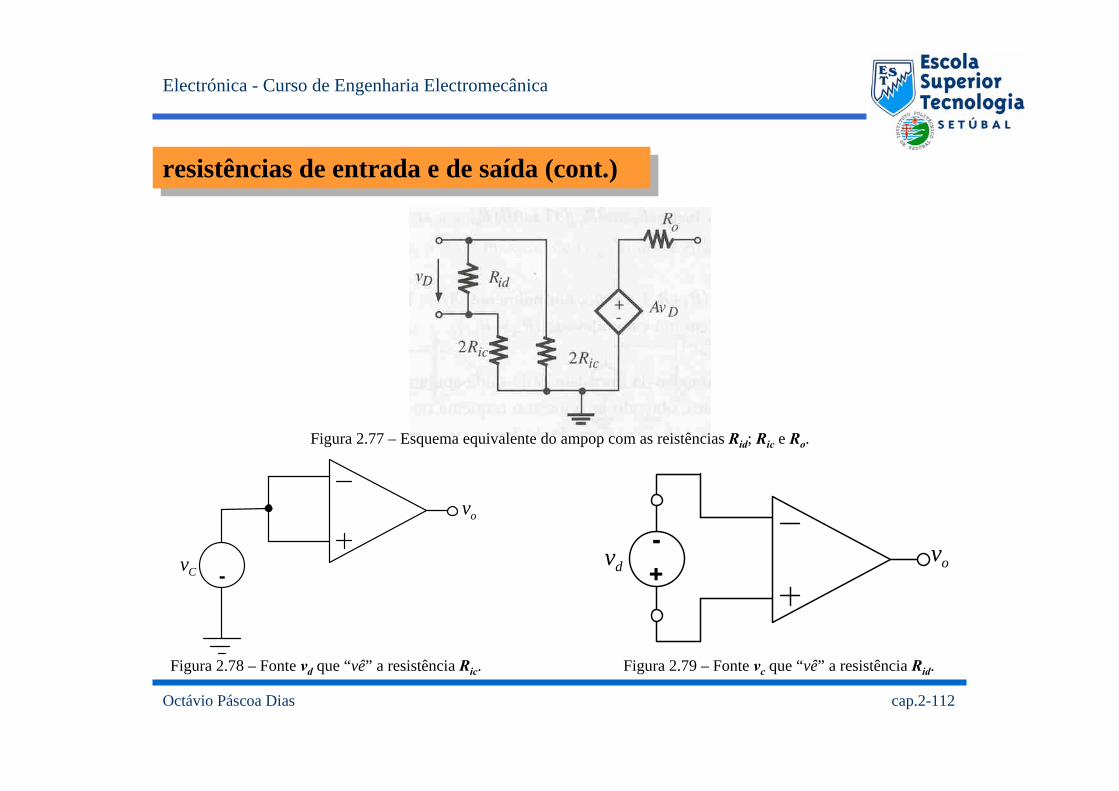
resistências de entrada e de saída (cont.)resistências de entrada e de saída (cont.)
Figura 2.77 – Esquema equivalente do ampop com as reistências Rid; Ric e Ro.
Figura 2.78 – Fonte vd que “vê” a resistência Ric. Figura 2.79 – Fonte vc que “vê” a resistência Rid.
ov
Cv -
Octávio Páscoa Dias cap.2-113
Electrónica - Curso de Engenharia Electromecânica
tensão de desvio de entrada (offset voltage)tensão de desvio de entrada (offset voltage)
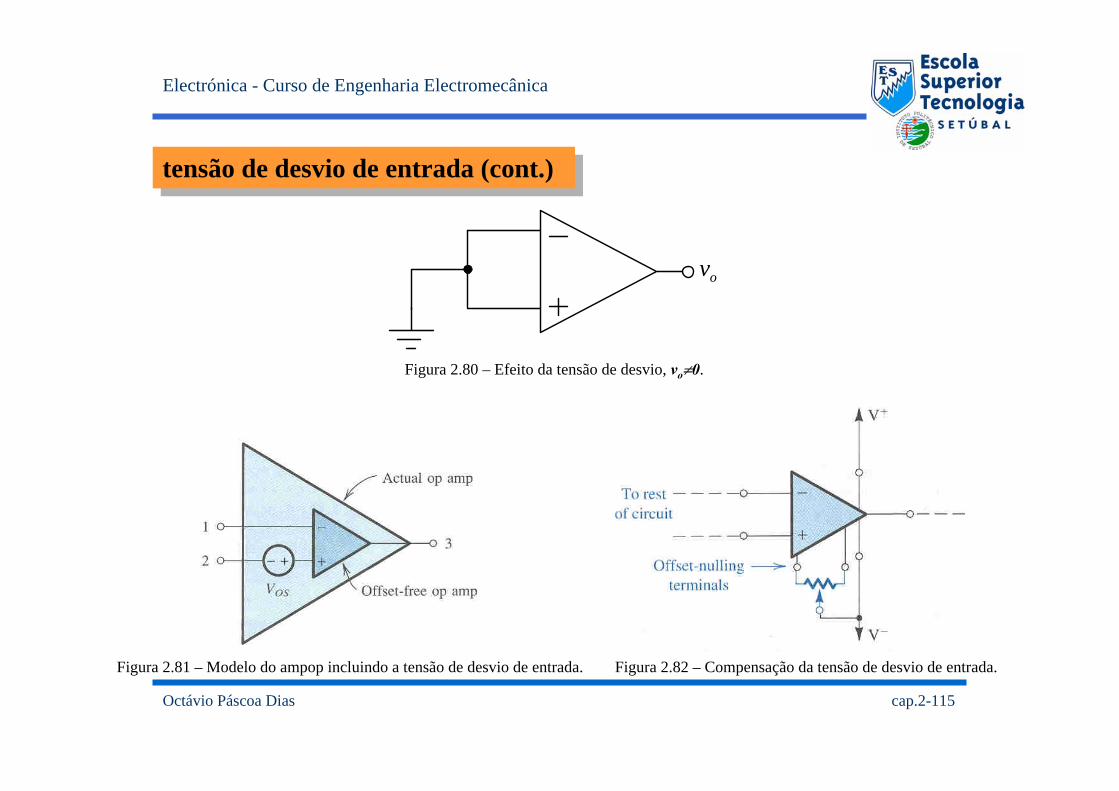
Para introduzir o conceito de tensão de desvio de entrada (offsetvoltage), VOS, considere-se um ampop, no qual os dois terminais de entrada (+ e -), foram ligados à massa (figura 2.80). Nesta situação, contrariando as previsões para o ampop ideal, constata-se que a saída se encontra na saturação positiva, L+, ou na saturação negativa, L-.
A saída do ampop pode ser ajustada a zero, ligando uma fonte dc de polaridade e amplitude apropriadas, entre os terminais de entrada do amplificador operacional, isto é, para que a saída seja nula é necessário que a tensão diferencial seja diferente de zero. Deste modo, a tensão de desvio de entra, VOS, tem uma amplitude igual e polaridade oposta à fonte de tensão aplicada externamente.
Octávio Páscoa Dias cap.2-114
Electrónica - Curso de Engenharia Electromecânica
tensão de desvio de entrada (cont.)tensão de desvio de entrada (cont.)
A existência de VOS, deve-se aos desequilíbrios do comportamento do par diferencial que constitui a entrada do ampop. De facto, na prática, não é fácil realizar um par diferencial com simetria perfeita. Usualmente as folhas de especificação do fabricante indicam os valores máximos de VOS, que tipicamente se situam no intervalo de 1 mV a 5 mV. Porém, as folhas de especificação nunca referem a polaridade, uma vez que não é possível prever o desequilíbrio do par diferencial. Para analisar o efeito de VOSsobre a operação dos circuitos implementados com ampops, é necessário que o modelo do ampop inclua a tensão de desvio de entrada. Este modelo é constituído por uma fonte dc com o valor de VOS, ligado em série com o terminal da entrada não inversora, seguido de um ampop ideal, como mostra a figura 2.81.
Alguns ampos possuem dois terminais dedicados à compensação da tensão de desvio de entrada (figura 2.82)
Octávio Páscoa Dias cap.2-115
Electrónica - Curso de Engenharia Electromecânica
tensão de desvio de entrada (cont.)tensão de desvio de entrada (cont.)
Figura 2.81 – Modelo do ampop incluindo a tensão de desvio de entrada. Figura 2.82 – Compensação da tensão de desvio de entrada.
Figura 2.80 – Efeito da tensão de desvio, vo≠0.
ov
Octávio Páscoa Dias cap.2-116
Electrónica - Curso de Engenharia Electromecânica
correntes de polarização de entradacorrentes de polarização de entrada
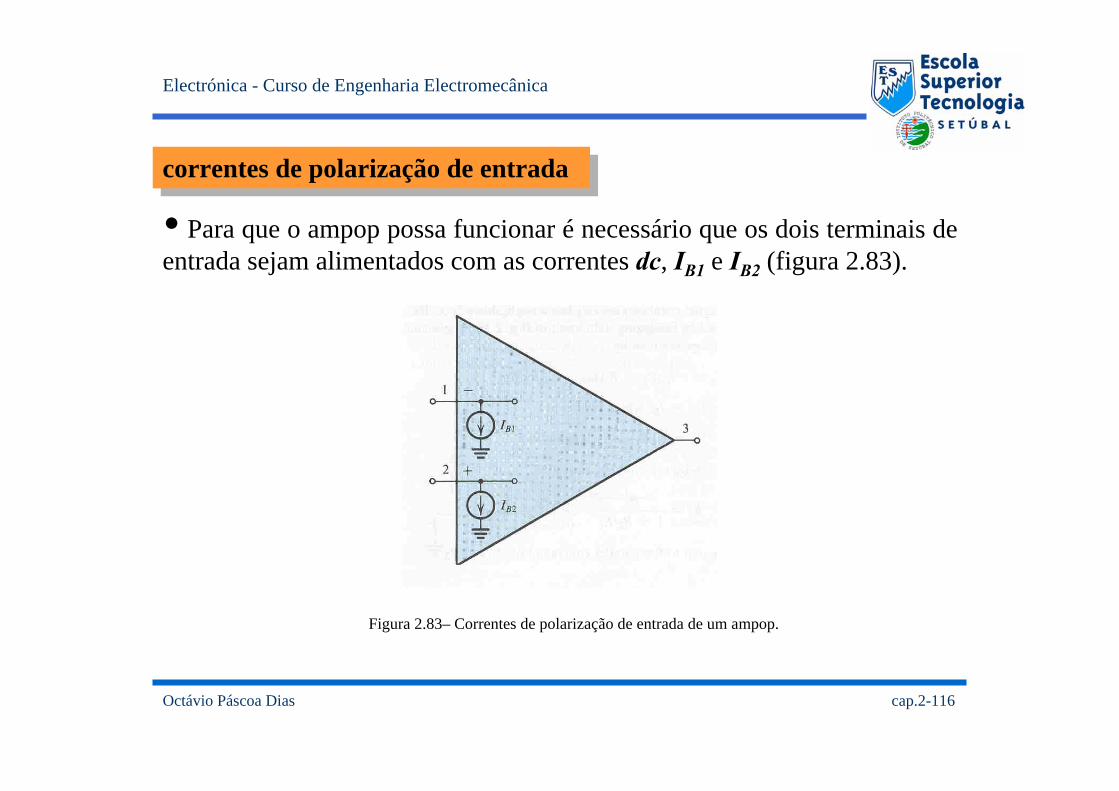
Para que o ampop possa funcionar é necessário que os dois terminais de entrada sejam alimentados com as correntes dc, IB1 e IB2 (figura 2.83).
Figura 2.83– Correntes de polarização de entrada de um ampop.
Octávio Páscoa Dias cap.2-117
Electrónica - Curso de Engenharia Electromecânica
Usualmente o fabricante especifica o valor médio das correntes IB1 e IB2, assim, como a diferença entre elas. O valor médio, IB, das duas correntes, é designado por corrente de polarização de entrada (input bias current), e caracterizada pela expressão,
221 BB
BIII +
=
correntes de polarização de entrada (cont.)correntes de polarização de entrada (cont.)
e a diferença entre as duas correntes é designada por corrente de desvio de entrada (input offset current), que é determinada por,
21 BBOS III −=
Nos ampops cujo par diferencial é realizado com transistores de junção bipolares (BJT), as correntes IB e IOS têm os valores típicos de 100 nA e 10 nA, respectivamente. Para os pares diferenciais implementados com transistores de efeito de campo, aqueles valores são da ordem dos pA.
Octávio Páscoa Dias cap.2-118
Electrónica - Curso de Engenharia Electromecânica
correntes de polarização de entrada (cont.)correntes de polarização de entrada (cont.)
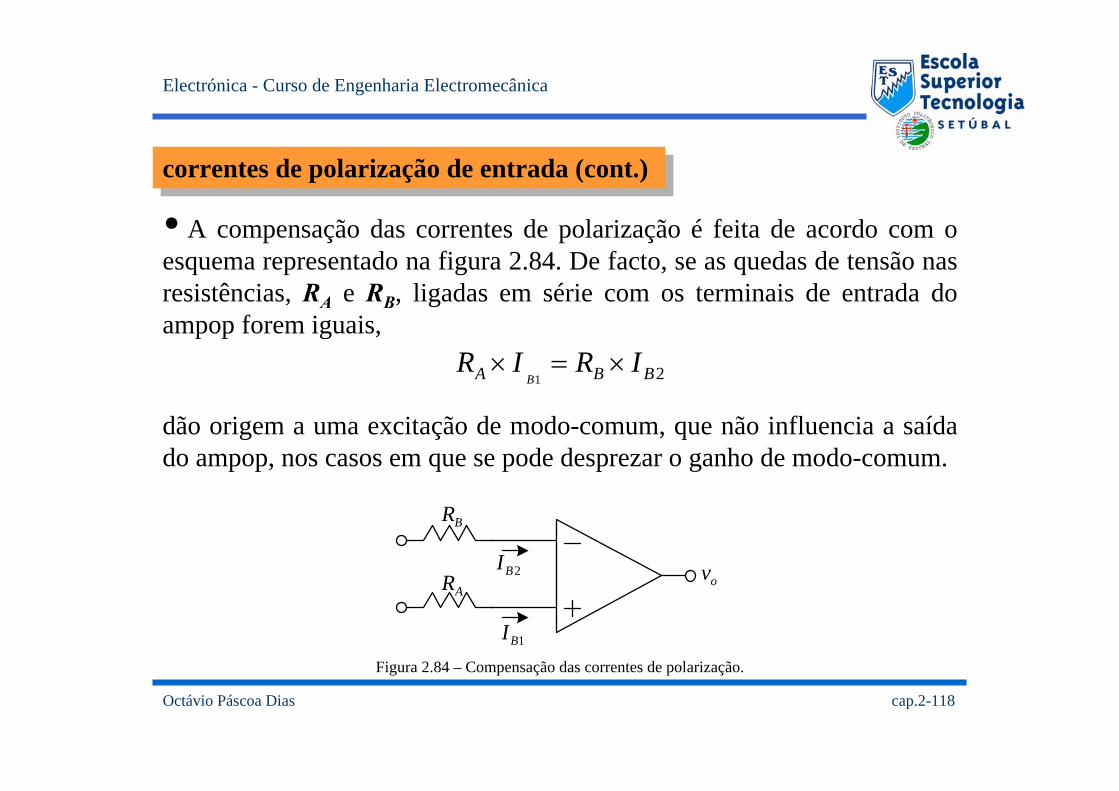
A compensação das correntes de polarização é feita de acordo com o esquema representado na figura 2.84. De facto, se as quedas de tensão nas resistências, RA e RB, ligadas em série com os terminais de entrada do ampop forem iguais,
dão origem a uma excitação de modo-comum, que não influencia a saída do ampop, nos casos em que se pode desprezar o ganho de modo-comum.
21 BBA IRIRB
×=×
ovAR
BR
1BI
2BI
Figura 2.84 – Compensação das correntes de polarização.
Octávio Páscoa Dias cap.2-119
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.12
Considere um amplificador operacional compensado internamente, com o ganho dc, sem realimentação,
igual a 106 e com o ganho ac de 40 dB para f=10 kHz. Determine,
a) a frequência de queda de 3 dB sem realimentação;
b) a frequência, ft, correspondente ao ganho unitário;
c) o produto ganho-largura de banda;
d) o valor do ganho à frequência de 1 kHz.
Soluções: a) 1 Hz; b) 1 MHz; c) 1 MHz; d) 60 dB.
Exercício 2.13
Considere um ampop com o ganho de 106 dB em dc e com ft=2 MHz. Determine o ganho nas frequências
de 1 kHz; 10 kHz e 100 kHz.
Soluções: 2000; 200; 20.
Octávio Páscoa Dias cap.2-120
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.14
Use um ampop com o ganho de 106 dB em dc e a frequência ft=2 MHz, para realizar um amplificador
não-inversor com o ganho de 100, e determine a correspondente frequência de queda de 3 dB.
Solução: 20 kHz.
Exercício 2.15
Considere um amplificador operacional com o comportamento linear para valores da tensão de saída, vo,
dentro do intervalo ±10V. Se o ampop for usado para implementar um amplificador nã-inversor com o
ganho de 200, determine a amplitude máxima de um sinal sinusoidal que que aplicado na entrada produza
uma saída sem distorção devido à saturação.
Solução: 0,05 V.
Exercício 2.16
Um ampop com a taxa de inflexão SR=1 V/µs está ligado na configuração seguidor de tensão. Determine
a frequência máxima de um sinal sinusoidal com a amplitude de 1 V, que aplicado na entrada produza
uma saída sem distorção devido à taxa de inflexão.
Solução: 159,15 kHz
Octávio Páscoa Dias cap.2-121
Electrónica - Curso de Engenharia Electromecânica
Exercício 2.17
Considere um amplificador operacional com o comportamento linear para valores da tensão de saída, vo,
dentro do intervalo ±10V e o SR=1 V/µs. Determine,
a) a frequência máxima de operação, fM, com vo a variar dentro da excursão linear máxima;
b) a amplitude máxima do sinal de saída, sem distorção devido ao SR, para um sinal de entrada com uma
frequência igual 5 vezes a frequência máxima, fM, determinada alínea anterior.
Soluções: a) 15,9 kHz; b) 2 V.
Recommended

















