-
Prof. Edson A. R. Theodoro UTFPR Cornlio Procpio
-
Definio:
Um SEP dito estvel pequenas perturbaes se, e somente se, o mesmo
capaz de manter o sincronismo entre os geradores sncronos
conectados ao SEP aps ser submetido a uma pequena perturbao.
Pequena perturbao: aquela tal que o sistema linearizado em torno
do ponto de operao de interesse reproduz de forma satisfatria
(qualitativa e quantitativamente) a resposta do sistema original
(no linear).
2
-
Causas:
Alterao no despacho de carga/gerao;
Variaes aleatrias de carga;
Alteraes nos taps de transformadores (OLTCs).
3
-
Problemas locais:
Associados a um gerador (ou planta) oscilando contra o resto do
sistema;
Problema similar ao sistema OMIB;
Problema mais comum em estabilidade pequenas perturbaes;
Modos de oscilao locais (entre mquinas ou intra-planta) = 0,7 a
2 Hz.
4
-
Problemas globais:
Associados a um grupo de geradores oscilando contra outro grupo
de geradores (inter-rea);
Possuem duas formas distintas:
Oscilao de baixa frequncia envolvendo todos os geradores do
sistema: 0,1 a 0,3 Hz;
Oscilaes de alta frequncia entre subgrupos de geradores: 0,4 a
0,7 Hz.
5
-
Problemas relacionados aos controles:
Geram oscilaes devido ao ajuste inadequado dos controladores
(regulador de tenso e velocidade) de um gerador.
Problemas relacionados ao eixo do conjunto turbina-gerador:
Geram oscilaes devido aos modos torsionais
mecnicos do conjunto turbina-gerador.
6
-
Lembrando que a equao do swing, em sua forma exata, dada em funo
do torque lquido sobre o gerador.
A variao do torque eltrico (Te) possui duas componentes:
7
= +
Torque sincronizante
Torque de amortecimento
-
8
Dd
t
CASO 1
Dd
t
CASO 2
Dd
t
CASO 3
-
A instabilidade pode resultar de:
1 modo no-oscilatrio ou aperidico, resultante da falta de torque
sincronizante (Ts) => geralmente pode ser evitado com o ajuste
do regulador de tenso;
2 modo oscilatrio, resultante da falta de torque de
amortecimento (TD) => este o modo de instabilidade mais comum em
SEPs.
9
-
Seja o sistema no linear: = (), e considere um ponto de
equilbrio 0.
Expandindo em srie de Taylor:
= 0 +
|0( 0) +
Desprezando os termos de alta ordem:
0 =
|0 0 = |0 ( 0)
= (sistema linearizado)
10
-
Seja A uma matriz (n x n) e f um vetor (n x 1), ento todo
escalar l que satisfaz a relao:
=
chamado autovalor da matriz A.
Da equao anterior: = 0
Para solues no triviais temos: det = 0 Uma vez que se existe (
)1 ento = 0.
11
-
Seja o sistema linearizado: =
A equao caraterstica deste sistema dada por:
= 0
As razes da equao caraterstica so os chamados autovalores da
matriz A.
12
-
Exemplo 1 OMIB sem amortecimento
Equao caractersitica e autovalores.
Exemplo 2 OMIB com amortecimento
Equao caractersitica e autovalores.
13
-
1. Mtodo de Lyapunov (Teorema de Hartman-Grobman)
Dada as razes da equao caracterstica (autovalores) do sistema
linearizado:
Se todos os autovalores tem parte real negativa ->
estabilidade assinttica do equilbrio;
Se pelo menos um autovalor possui parte real positiva ->
instabilidade do equilbrio;
Se existe autovalor com parte real nula -> nada se pode
afirmar sobre a estabilidade do equilbrio.
14
-
2. Mtodo de Lyapunov (Funo de Lyapunov Funo escalar
auxiliar)
Dada uma funo escalar V: Rn->R, localmente definida positiva
em uma regio D em torno do ponto de equilbrio sob anlise:
Se semidefinida negativa em D ento o ponto de equilbrio
estvel;
Se definida negativa em D ento o ponto de equilbrio
assintticamente estvel.
15
-
16 Fonte: Kundur, 1994.
-
17 Fonte: Kundur, 1994.
-
18 Fonte: Kundur, 1994.
-
Seja = o sistema linearizado:
E f um vetor (n x 1) e A uma matriz (n x n). Um autovetor
direita satisfaz a equao:
=
E y um vetor (1 x n) e A uma matriz (n x n). Um autovetor
esquerda satisfaz a equao:
=
19
-
Sejam f e y autovetores direita e esquerda:
Se ambos os autovetores esto associados autovalores distintos
ento:
. = 0 (ortogonais)
Se ambos os autovetores esto associados um mesmo autovalores
ento:
. = (em particular = 1)
20
-
Matrizes modais:
= [1 2 3 ]
= [1 2
3
]
Assim,
= 1 (relao entre autovetores)
No sistema linearizado = : A resposta de cada varivel de estado
uma
combinao linear de todas as variveis de estado (existe um
acoplamento cruzado).
21
-
Para eliminar este acoplamento cruzado faz-se a seguinte mudana
de variveis:
=
Assim, = (1) = , com a matriz diagonal composta pelos
autovalores da matriz A.
De outra forma: = , = 1, ,
Cuja soluo : = (0)
22
-
Lembrando que: =
() = (0)=1
Sendo: = 1 = ()
= [ 0 ]=1
= =1
A resposta do sistema linear depende dos autovalores e
respectivos autovetores.
23
-
= [ 0 ]
=1
24
Elemento i do autovetor direita
Autovetor esquerda
-
O produto escalar = 0 representa a magnitude da excitao devido s
condies iniciais.
A multiplicao vetorial =1
d a combinao linear entre os diferentes modos (respectivos aos
diferentes autovalores). Se o vetor de condies iniciais estiver na
direo
do j-simo autovetor (), ento as multiplicaes 0 = 0 se , e
somente o modo j excitado!
25
-
Seja um autovalor l = s+jw
Alguns dos valores caractersticos deste autovalor so:
Frequncia natural de oscilao amortecida:
= 2 + 2
Frequncia de oscilao amortecida: =
2
Fator de amortecimento: = cos =
2+2
Constante de decaimento: =1
|| =
2||
26
-
Objetivo: aumentar o amortecimento dos modos de oscilao
relacionados oscilaes de origem eletromecnica (alterao na posio dos
autovalores da matriz do sistema linearizado).
Existem vrias possibilidades para a melhora da estabilidade
pequenas pertubaes:
27
-
1 Projeto de controladores: PSS: Power System Stabilizer;
FACTS: Flexible AC Transmission Systems;
Controle de amortecimento com elos de transmisso HVDC (High
Voltage Direct Current );
2 Alterao do ponto de operao do SEP
(redespacho de gerao ativa e reativa);
3 Outros mtodos. 28
-
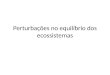
Determine os autovalores, e seus valores caractersticos, e a
resposta do sistema linearizado (Dx(t)) para o seguinte sistema
OMIB quando sujeito perda da linha 1.
29
LINHA 1
~
GERADOR Modelo clssico
P= 0,9 p.u. Q= 0,3 p.u.
(superexcitado)
TRAFO com tap = 1,0
BARRAMENTO INFINITO
LINHA 2
j0,30
j0,15
j0,5 j0,93
0,9950o
H= 3,5 s, considere D igual a: (a) zero, (b) 10 e (c)-10.
1,036
-
1 Kundur, P., Power System Stability and Control, McGraw-Hill,
1994.
2 Lallement, G., Inman, D.J., A Tutorial on Complex Eigenvalues,
XIII IMAC.
30