BAB 2
MOTOR ARUS TERUS
PENGENALAN
Motor adalah merupakan mesin elektrik yang menukarkan tenaga elektrik kepada tenaga
mekanik. Tidakannya adalah berdasarkan kepada prinsip dimana apabila satu pengalir
yang membawa arus ditempatkan di dalam medan magnet, ia akan mengalami satu daya
mekanik yang mempunyai arah yang diberi oleh Hukum Tangan Kanan Fleming dan
magnitud.
Dari segi binaan, sebuah motor AT adalah serupa dengan penjana AT, malah
sebagaimana yang telah dinyatakan dalam bahagian yang lalu, sebuah mesin AT boleh
saling tukar kegunaannya, sebagai sebuah penjana seperti penjana mengikut tatarajah
sambungan sambungan medan dan angker iaitu jenis pirau, siri dan majmuk.
2.1 KONSEP PENUKARAN KUASA ELEKTRIK KEPADA KUASA
MEKANIKAL
Motor elektrik merupakan peranti yang menggunakan tenaga elektrik bagi menghasilkan
tenaga mekanik, hampir sepenuhnya melalui tindak balas medan magnet dan pengalir
yang mengalirkan arus elektrik. Proses sebaliknya, iaitu yang menggunakan tenaga
mekanik bagi menghasilkan tenaga elektrik, dicapai dengan penjana elektrik atau
dinamo. Motor tarikan (traction motor) yang digunakan pada kenderaan seringkali
melaksanakan kedua-dua tugasan.
Kegunaan motor elektrik boleh didapati dalam kegunaan seperti kipas,
penghembus dan pam industri, alatan mesin, peralatan rumah, perkakasan kuasa, dan
pemacu cakera komputer, antara kegunaan lain. Merujuk rajah 2.1 adalah contoh motor
arus terus. Motor elektrik mungkin beroperasi menggunakan arus terus dari bateri dalam
1
peranti mudah alih atau motor kenderaan, atau menggunakan arus ulang-alik dari grid
pengagihan elektrik pusat. Motor terkecil boleh didapati dalam jam tangan. Motor
bersaiz sederhana dengan ciri-cir dan dimensi piawaian memberikan kuasa mekanik
mudah bagi kegunaan perkilangan. Motor elektrik terbesar adalah yang digunakan bagi
pendorongan kapal besar, dan bagi tujuan seperti pemampat talian paip, dengan rating
beribu kilowatt. Motor elektrik boleh dikelaskan mengikut sumber kuasa elektrik,
menurut binaan dalamnya, dan menurut penggunaan.
Prinsip fizik mengenai penghasilan kuasa mekanik melalui tindak balas arus
elektrik dan medan magnet telah diketahui seawal 1821. Motor elektrik dengan
peningkatan kecekapannya dibina sepanjang abad ke-19, tetapi penggunaan motor
elektrik bagi tujuan perdagangan pada skala besar memerlukan penjana elektrik
berkesan dan jaringan pengagihan elektrik.
Rajah 2.1: Motor Arus Terus
2
2.2 PRINSIP KENDALIAN MOTOR AT
Lazimnya, putaran yang berlaku pada motor AT diperoleh melalui saling tindak medan
magnet iaitu antara medan magnet kekal dari kutub medan di pemegun dengan medan
magnet angker. Saling tindak kedua-dua medan ini menghasilkan daya kilas yang akan
menyebabkan pemutar berputar.
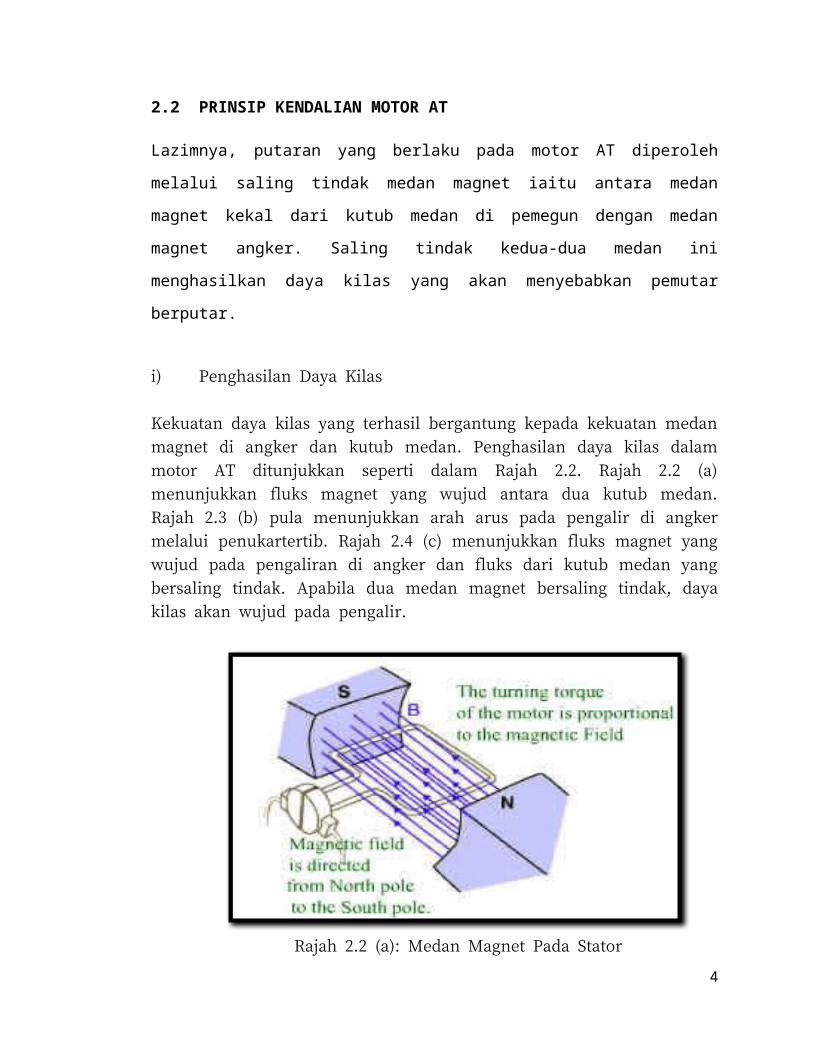
i) Penghasilan Daya Kilas
Kekuatan daya kilas yang terhasil bergantung kepada kekuatan medan magnet di angker
dan kutub medan. Penghasilan daya kilas dalam motor AT ditunjukkan seperti dalam
Rajah 2.2. Rajah 2.2 (a) menunjukkan fluks magnet yang wujud antara dua kutub
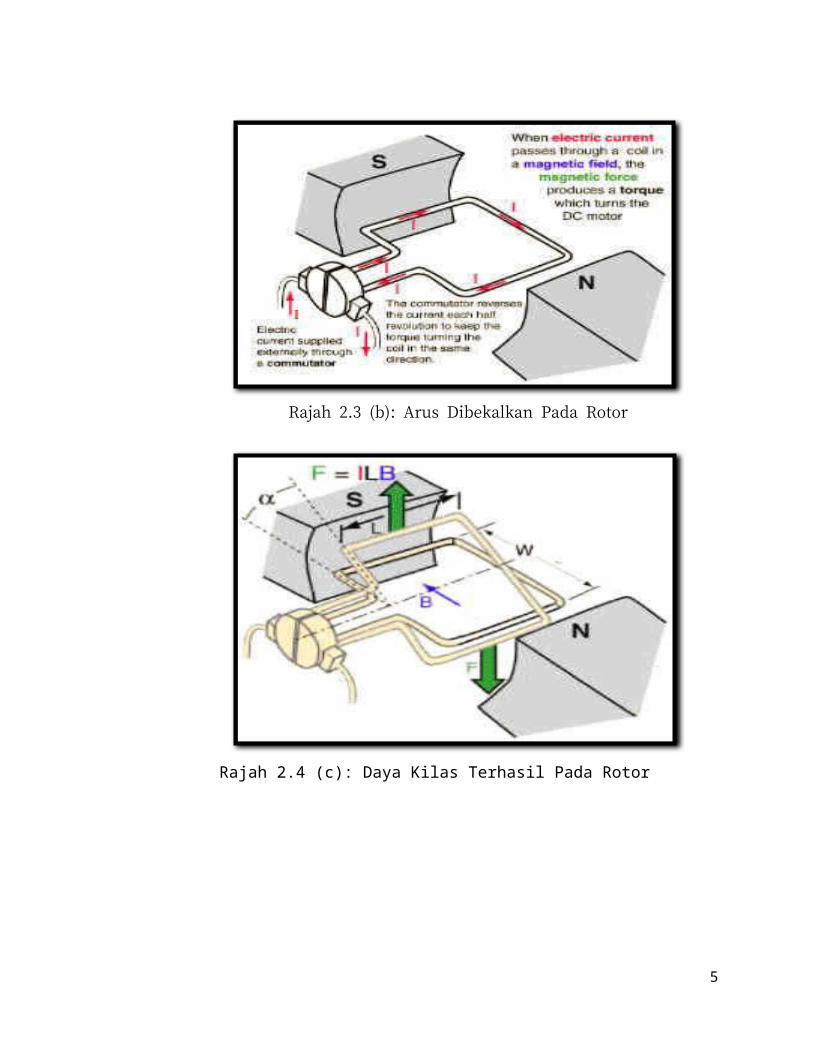
medan. Rajah 2.3 (b) pula menunjukkan arah arus pada pengalir di angker melalui
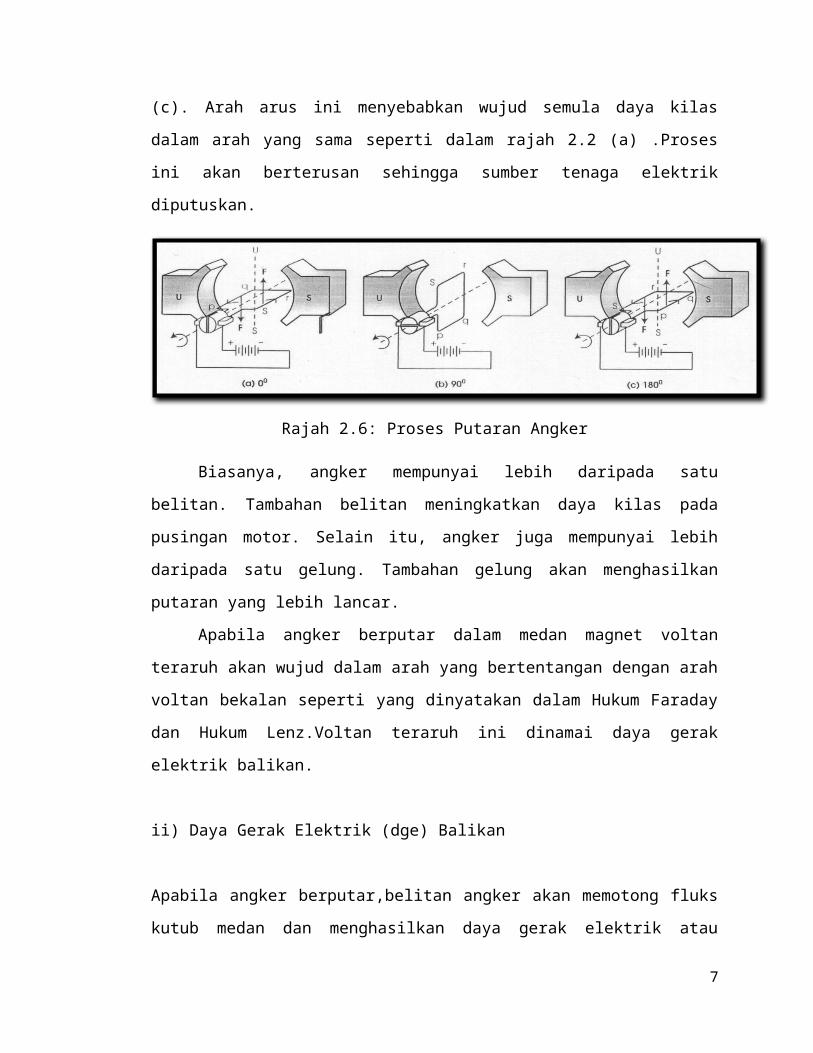
penukartertib. Rajah 2.4 (c) menunjukkan fluks magnet yang wujud pada pengaliran di
angker dan fluks dari kutub medan yang bersaling tindak. Apabila dua medan magnet
bersaling tindak, daya kilas akan wujud pada pengalir.
Rajah 2.2 (a): Medan Magnet Pada Stator
3
Rajah 2.3 (b): Arus Dibekalkan Pada Rotor
Rajah 2.4 (c): Daya Kilas Terhasil Pada Rotor
4
Arah daya dapat ditentukan dengan Petua Tangan Kiri Fleming.
Rajah 2.5: Petua Tangan Kiri Fleming
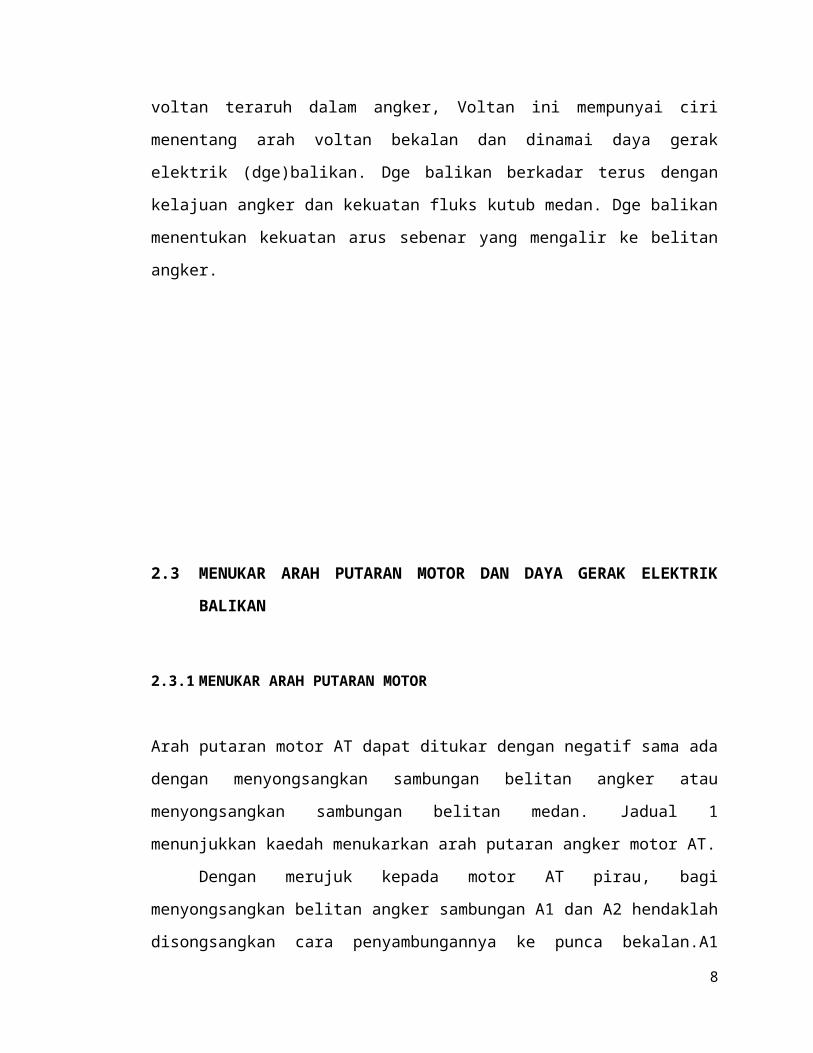
Kendalian motor AT adalah seperti yang dalam digambarkan dalam Rajah 2.6.
Merujuk kepada rajah 2.2(a) semasa gelung mendatar (pada 0 darjah), arus dalam
gelung mengalir dalam arah ‘pqrs’. Daya kilas untuk memutarkan gelung akan wujud
mengikut arah lawan jam sehingga mencapai kedudukan 90 darjah seperti yang
ditunjukkan dalam rajah 2.3 (b). Pada kedudukan 90 darjah (Rajah 2.3 (b)) arus tidak
lagi mengalir dalam gelung, maka tiada lagi daya kilas yang wujud pada gelung di
angker. Walau bagaimanapun, disebabkan oleh momentum dalam angker semasa
berputar,gelung terus berputar melepasi kedudukan 90 darjah. Apabila gelung mula
berputar dari,kedudukan 90 darjah ke 180 darjah,arus dalam gelung akan mengalir
semula pada arah ‘srpq’seperti yang ditunjukkan dalam rajah 2.4 (c). Arah arus ini
menyebabkan wujud semula daya kilas dalam arah yang sama seperti dalam rajah 2.2 (a)
.Proses ini akan berterusan sehingga sumber tenaga elektrik diputuskan.
5

Rajah 2.6: Proses Putaran Angker
Biasanya, angker mempunyai lebih daripada satu belitan. Tambahan belitan
meningkatkan daya kilas pada pusingan motor. Selain itu, angker juga mempunyai lebih
daripada satu gelung. Tambahan gelung akan menghasilkan putaran yang lebih lancar.
Apabila angker berputar dalam medan magnet voltan teraruh akan wujud dalam
arah yang bertentangan dengan arah voltan bekalan seperti yang dinyatakan dalam
Hukum Faraday dan Hukum Lenz.Voltan teraruh ini dinamai daya gerak elektrik
balikan.
ii) Daya Gerak Elektrik (dge) Balikan
Apabila angker berputar,belitan angker akan memotong fluks kutub medan dan
menghasilkan daya gerak elektrik atau voltan teraruh dalam angker, Voltan ini
mempunyai ciri menentang arah voltan bekalan dan dinamai daya gerak elektrik
(dge)balikan. Dge balikan berkadar terus dengan kelajuan angker dan kekuatan fluks
kutub medan. Dge balikan menentukan kekuatan arus sebenar yang mengalir ke belitan
angker.
6
2.3 MENUKAR ARAH PUTARAN MOTOR DAN DAYA GERAK
ELEKTRIK BALIKAN
2.3.1 MENUKAR ARAH PUTARAN MOTOR
Arah putaran motor AT dapat ditukar dengan negatif sama ada dengan menyongsangkan
sambungan belitan angker atau menyongsangkan sambungan belitan medan. Jadual 1
menunjukkan kaedah menukarkan arah putaran angker motor AT.
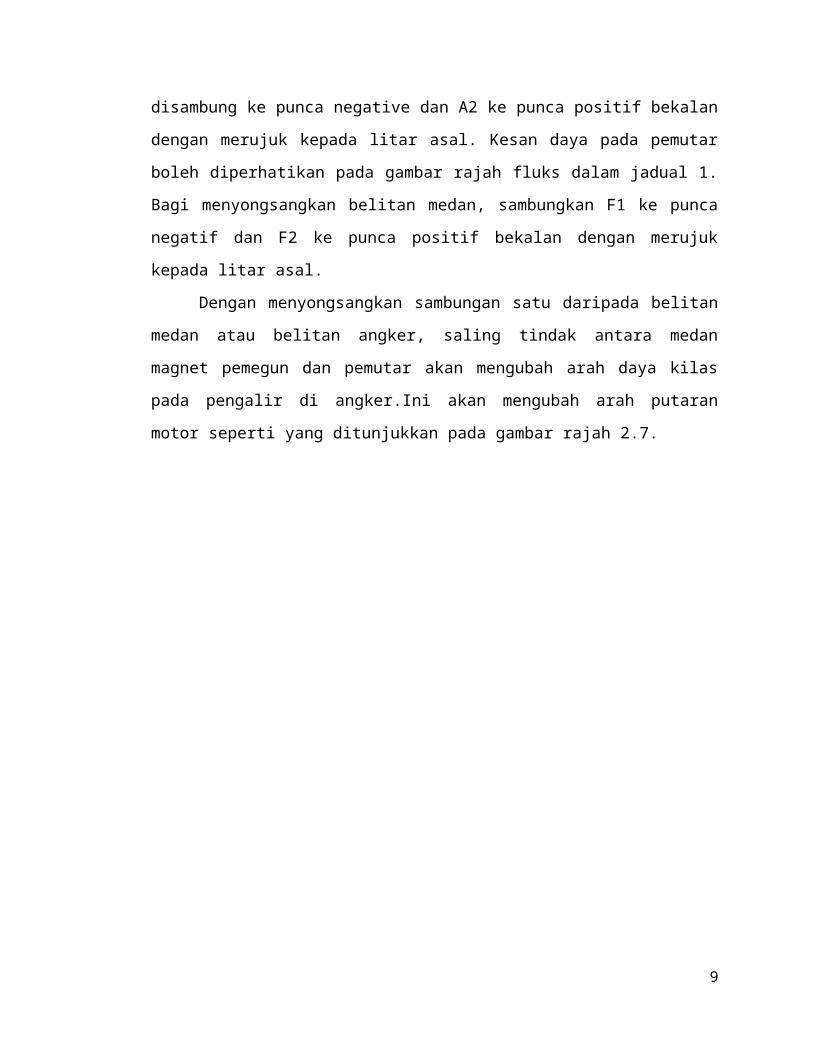
Dengan merujuk kepada motor AT pirau, bagi menyongsangkan belitan angker
sambungan A1 dan A2 hendaklah disongsangkan cara penyambungannya ke punca
bekalan.A1 disambung ke punca negative dan A2 ke punca positif bekalan dengan
merujuk kepada litar asal. Kesan daya pada pemutar boleh diperhatikan pada gambar
rajah fluks dalam jadual 1. Bagi menyongsangkan belitan medan, sambungkan F1 ke
punca negatif dan F2 ke punca positif bekalan dengan merujuk kepada litar asal.
Dengan menyongsangkan sambungan satu daripada belitan medan atau belitan
angker, saling tindak antara medan magnet pemegun dan pemutar akan mengubah arah
daya kilas pada pengalir di angker.Ini akan mengubah arah putaran motor seperti yang
ditunjukkan pada gambar rajah 2.7.
7
Rajah 2.7: Arah Putaran Motor
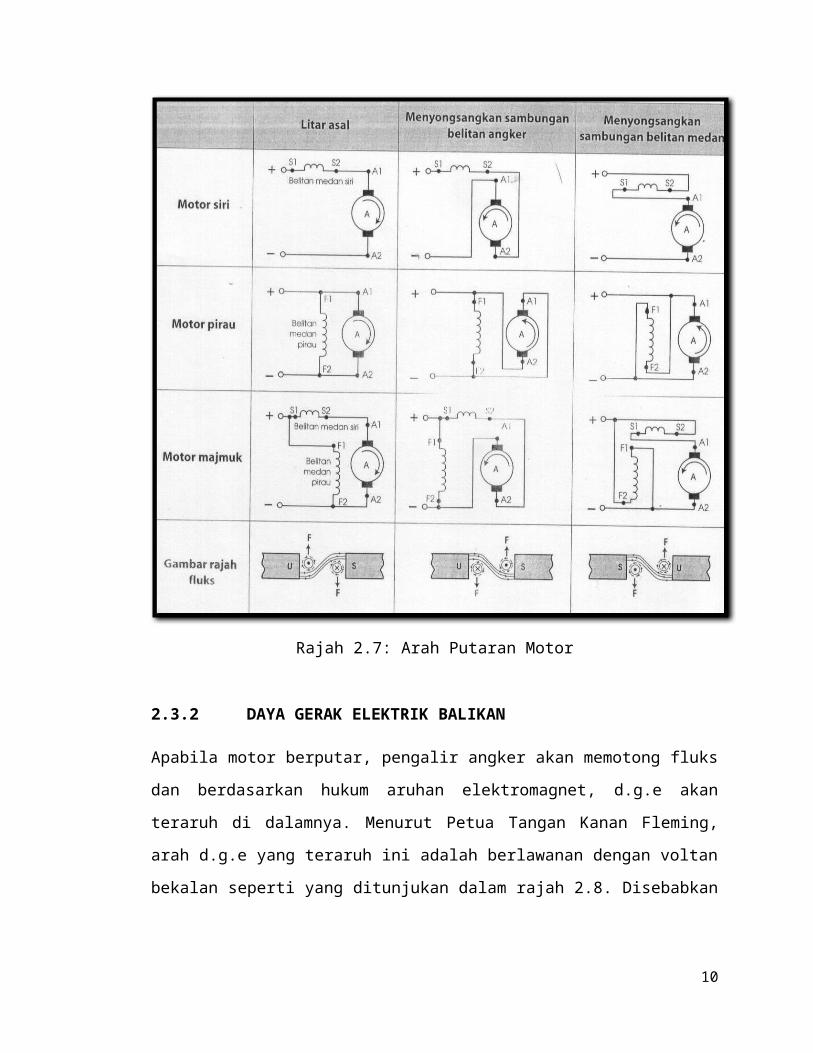
2.3.2 DAYA GERAK ELEKTRIK BALIKAN
Apabila motor berputar, pengalir angker akan memotong fluks dan berdasarkan hukum
aruhan elektromagnet, d.g.e akan teraruh di dalamnya. Menurut Petua Tangan Kanan
Fleming, arah d.g.e yang teraruh ini adalah berlawanan dengan voltan bekalan seperti
yang ditunjukan dalam rajah 2.8. Disebabkan oleh arahnya yang bertentangan itu,
dirujuk sebagai d.g.e balikan Eb.
8
Rajah 2.8: Arah D.g.e Yang Teraruh
Penghasilan d.g.e balikan inilah yang memungkinkan pertukaran tenaga dari
elektrik kepada tenaga mekanik berlaku dalam motor AT. Pergerakan angker dalam
menghasilkan d.g.e balikan Eb boleh diibaratkan seperti meletakan bateri yang
mempunyai beza upaya Eb merintang bekalan utama Volt. Untuk menghasilkan arus Ia,
semestinya Volt terpaksa menghadapi tentangan daripada Eb. Kuasa yang diperlukan
untuk mengatasi tetangan tersebut.
Pm = Eb . Ia watt
Dimana;
Eb = ØPZn / a volt
n = kelajuan putaran angker
Dan;
Ia = voltan bersih
rintangan =
V−EbRa
A
Ra = Rintangan litar angker
9
Daripada persamaan diatas, dapat diperhatikan bahawa d.g.e balikan bergantung antara
satu sama lain ke atas kelajuan putaran angker. Apabila kelajuan tinggi, Eb juga tinggi
dan arus Ia akan menjadi kecil. Sebaliknya apabila kelajuan menurun, Eb juga akan
menurun, maka arus Ia akan mengalir untuk menghasilkan lebih daya kilas.
2.4 MOTOR JENIS SIRI, PIRAU DAN GABUNGAN
2.4.1 MOTOR JENIS SIRI
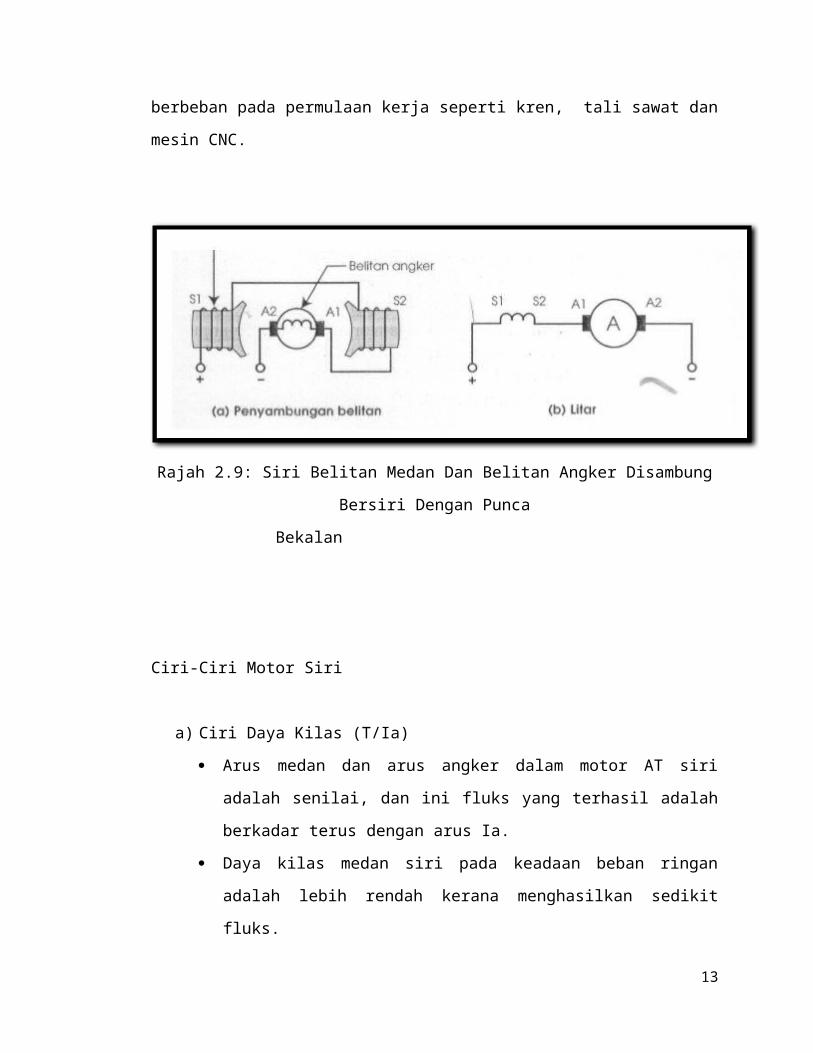
Bagi motor AT siri belitan medan dan belitan angker disambung bersiri dengan punca
bekalan seperti yang ditunjukkan dalam rajah 2.9 dibawah. Arus dalam belitan medan
akan mengalir dalam belitan angker. Ketika voltan bekalan mula dibekalkan, tidak
terdapat dge balikan di angker. Ini membolehkan arus permulaan yang tinggi mengalir
pada belitan medan dan belitan angker. Keadaan ini menghasilkan daya kilas permulaan
yang tinggi . Oleh berbeban pada permulaan kerja seperti kren, tali sawat dan mesin
CNC.
Rajah 2.9: Siri Belitan Medan Dan Belitan Angker Disambung Bersiri Dengan Punca
Bekalan
10
Ciri-Ciri Motor Siri
a) Ciri Daya Kilas (T/Ia)
Arus medan dan arus angker dalam motor AT siri adalah senilai, dan ini
fluks yang terhasil adalah berkadar terus dengan arus Ia.
Daya kilas medan siri pada keadaan beban ringan adalah lebih rendah kerana
menghasilkan sedikit fluks.
b) Ciri Kelajuan (N/Ia)
Apabila sedikit beban dikenakan pada aci arus angker Ia adalah kecil maka
kelajuan mesin meningkat.
Motor siri biasanya dikendalikan dalam keadaan berbeban.
Pada kelajuan rendah, daya kilas adalah tinggi dan ini memberikan
kecekapan yang baik.
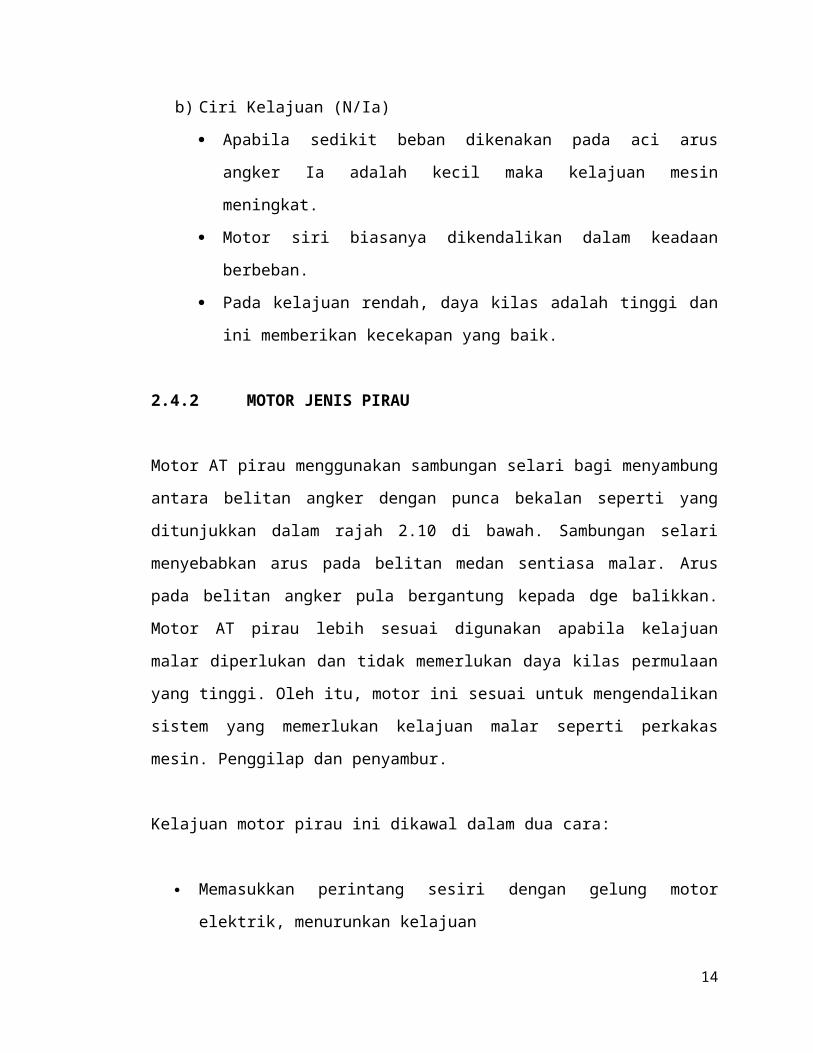
2.4.2 MOTOR JENIS PIRAU
Motor AT pirau menggunakan sambungan selari bagi menyambung antara belitan
angker dengan punca bekalan seperti yang ditunjukkan dalam rajah 2.10 di bawah.
Sambungan selari menyebabkan arus pada belitan medan sentiasa malar. Arus pada
belitan angker pula bergantung kepada dge balikkan. Motor AT pirau lebih sesuai
digunakan apabila kelajuan malar diperlukan dan tidak memerlukan daya kilas
permulaan yang tinggi. Oleh itu, motor ini sesuai untuk mengendalikan sistem yang
memerlukan kelajuan malar seperti perkakas mesin. Penggilap dan penyambur.
Kelajuan motor pirau ini dikawal dalam dua cara:
Memasukkan perintang sesiri dengan gelung motor elektrik, menurunkan
kelajuan
Memasukkan perintang dalam mean litar, kelajuan akan berubah dengan setiap
perubahan beban. Kelajuan adalah malar pada mana-mana set kawalan.
11
Kebanyakannya digunakan untuk servis mengubah kelajuan; contohnya pada kes
mesin.
Ciri-Ciri Motor Pirau
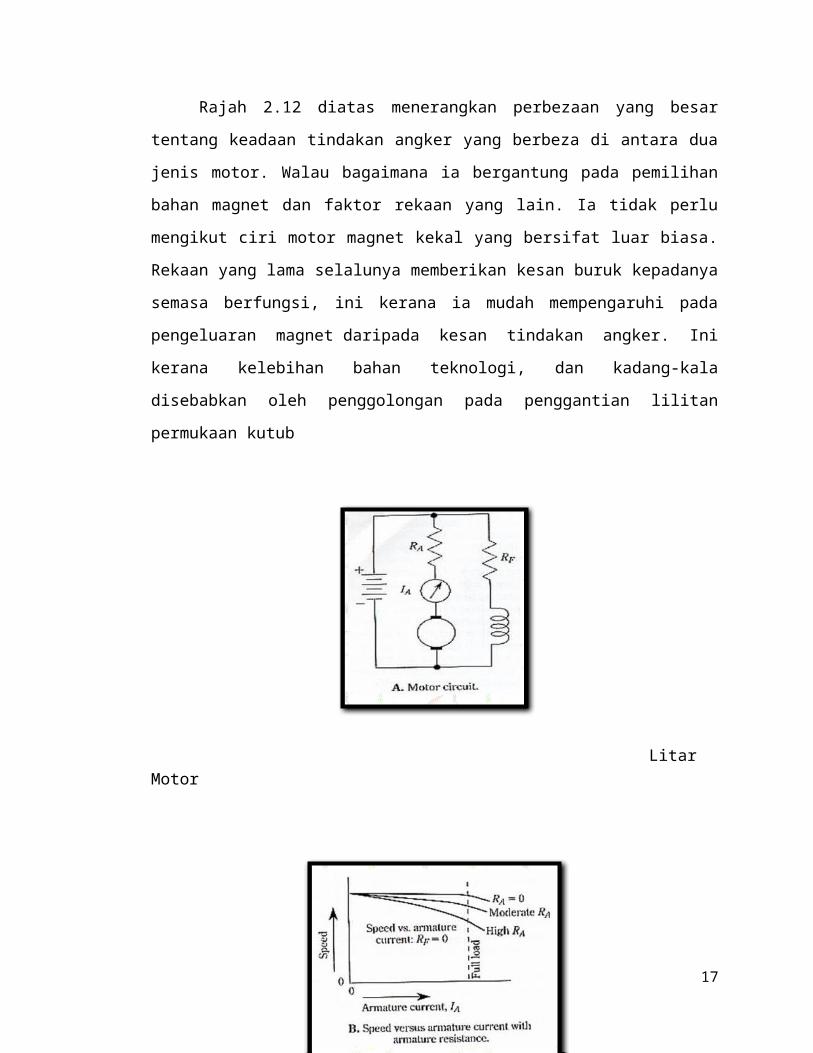
Rajah 2.10: Litar motor arus terus pirau
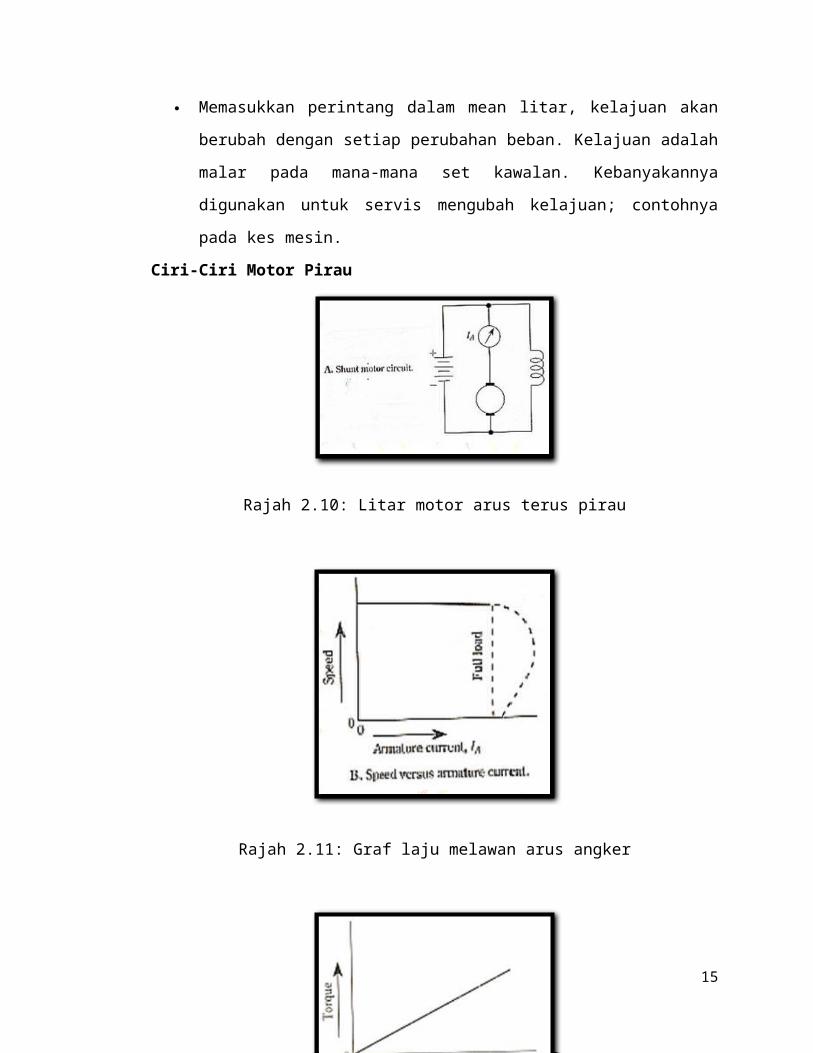
Rajah 2.11: Graf laju melawan arus angker
12
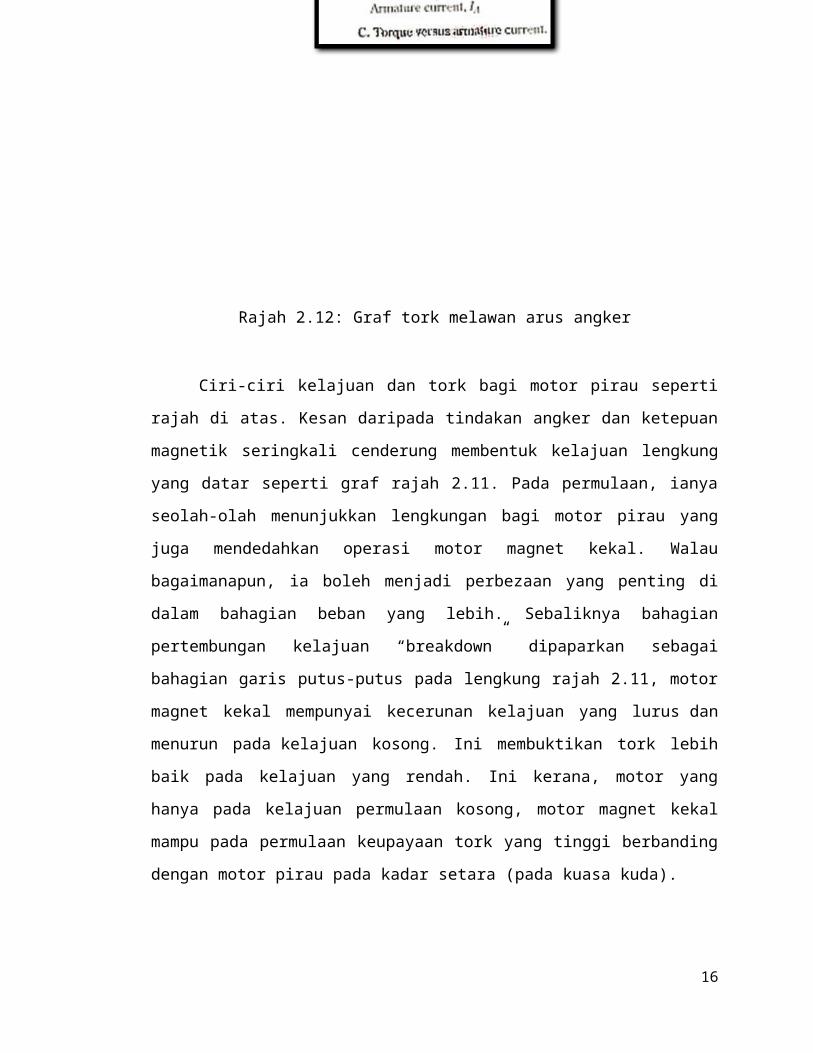
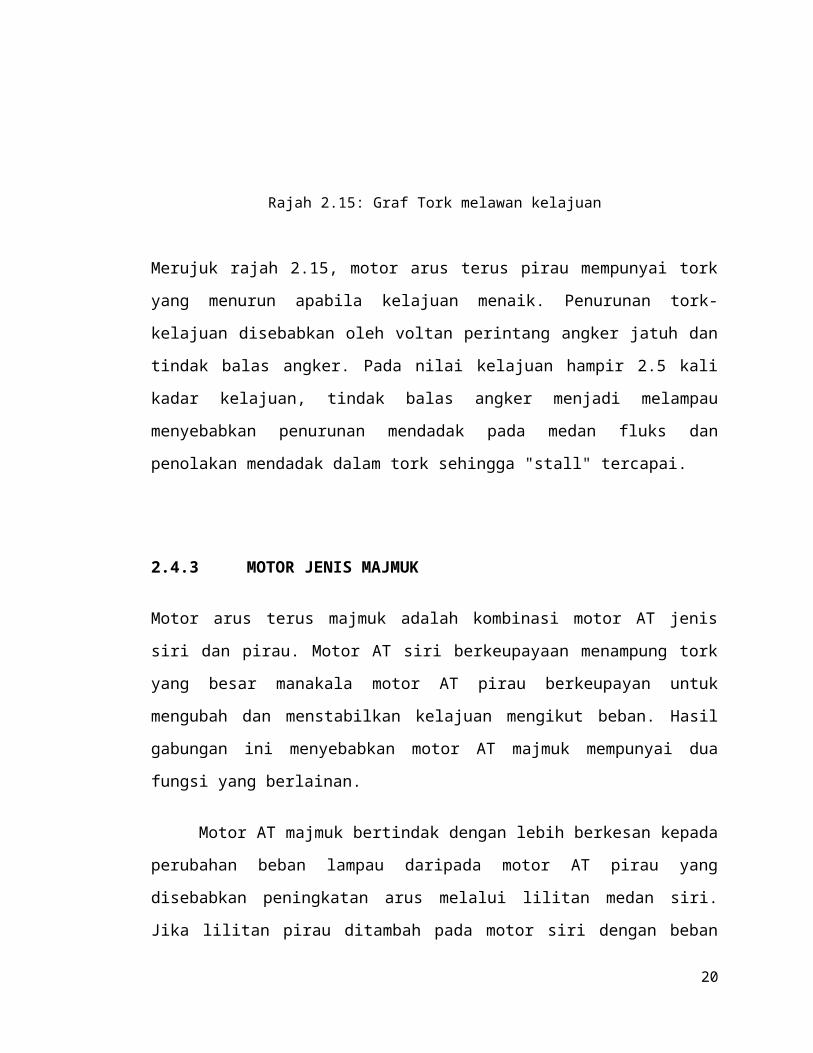
Rajah 2.12: Graf tork melawan arus angker
Ciri-ciri kelajuan dan tork bagi motor pirau seperti rajah di atas. Kesan daripada
tindakan angker dan ketepuan magnetik seringkali cenderung membentuk kelajuan
lengkung yang datar seperti graf rajah 2.11. Pada permulaan, ianya seolah-olah
menunjukkan lengkungan bagi motor pirau yang juga mendedahkan operasi motor
magnet kekal. Walau bagaimanapun, ia boleh menjadi perbezaan yang penting di dalam
bahagian beban yang lebih. Sebaliknya bahagian pertembungan kelajuan “breakdown”
dipaparkan sebagai bahagian garis putus-putus pada lengkung rajah 2.11, motor magnet
kekal mempunyai kecerunan kelajuan yang lurus dan menurun pada kelajuan kosong.
Ini membuktikan tork lebih baik pada kelajuan yang rendah. Ini kerana, motor yang
hanya pada kelajuan permulaan kosong, motor magnet kekal mampu pada permulaan
keupayaan tork yang tinggi berbanding dengan motor pirau pada kadar setara (pada
kuasa kuda).
Rajah 2.12 diatas menerangkan perbezaan yang besar tentang keadaan tindakan
angker yang berbeza di antara dua jenis motor. Walau bagaimana ia bergantung pada
pemilihan bahan magnet dan faktor rekaan yang lain. Ia tidak perlu mengikut ciri motor
magnet kekal yang bersifat luar biasa. Rekaan yang lama selalunya memberikan kesan
buruk kepadanya semasa berfungsi, ini kerana ia mudah mempengaruhi pada
pengeluaran magnet daripada kesan tindakan angker. Ini kerana kelebihan bahan
teknologi, dan kadang-kala disebabkan oleh penggolongan pada penggantian lilitan
permukaan kutub
13
Litar Motor
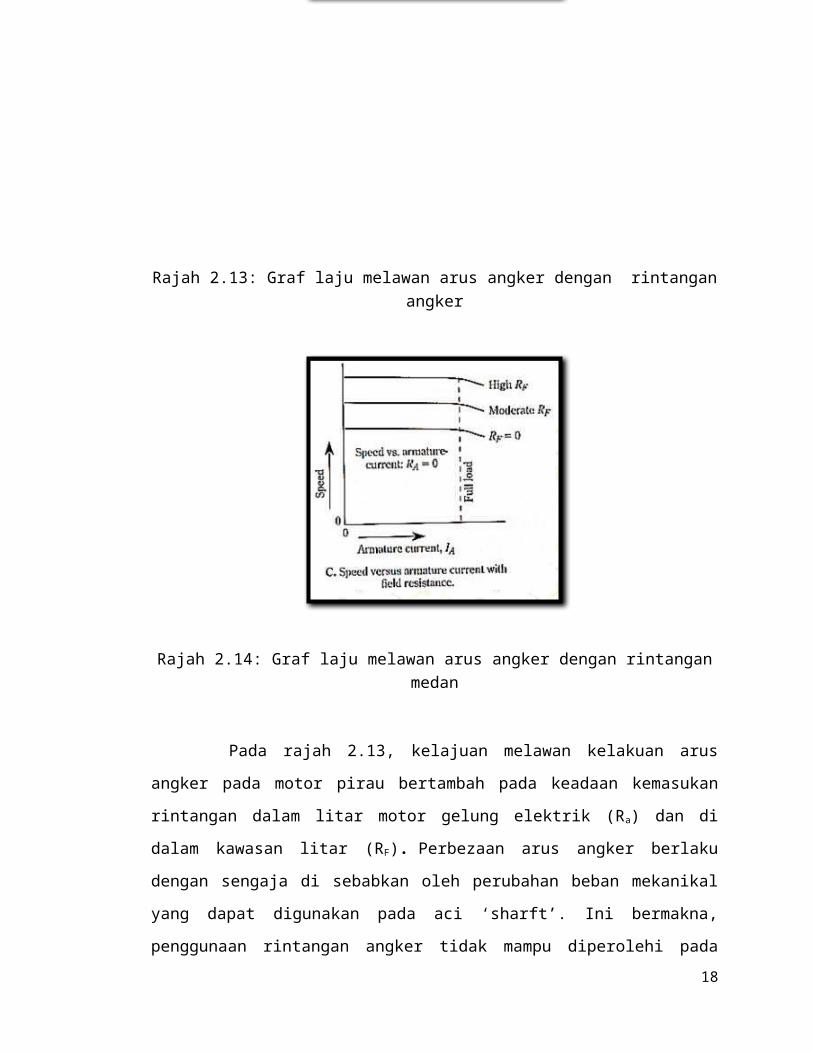
Rajah 2.13: Graf laju melawan arus angker dengan rintangan angker
Rajah 2.14: Graf laju melawan arus angker dengan rintangan medan
Pada rajah 2.13, kelajuan melawan kelakuan arus angker pada motor pirau
bertambah pada keadaan kemasukan rintangan dalam litar motor gelung elektrik (Ra)
dan di dalam kawasan litar (RF). Perbezaan arus angker berlaku dengan sengaja di
sebabkan oleh perubahan beban mekanikal yang dapat digunakan pada aci ‘sharft’. Ini
14
bermakna, penggunaan rintangan angker tidak mampu diperolehi pada kadar kelajuan
yang rendah. Dalam keadaan yang lain, apabila rintangan dimasukkan di dalam medan
litar, kadar kelajuan yang tinggi boleh didapati. Kekurangan penggunaan pada rintangan
angker akan menghalang pendekatan pada kelakuan kelajuan malar. Ia juga, merupakan
kuasa penghapusan di dalam rintangan yang menunjukkan masalah yang besar pada
motor yang besar. Daripada penyemakan graf pada rajah 2.14, medan rintangan, kaedah
kepada kawalan kelajuan yang menunjukkan kelebihan sifat (selain itu tidak
berkemampuan untuk memperolehi kadar kelajuan yang rendah). Walau bagaimanapun,
kelemahan pada kawasan menurun. Percubaan mengurang kelajuan dengan faktor
melebihkan dari empat ke satu dengan kecenderungan kaedah menyebabkan
pengurangan kerumitan dan ketidakstabilan operasi.
Operasi
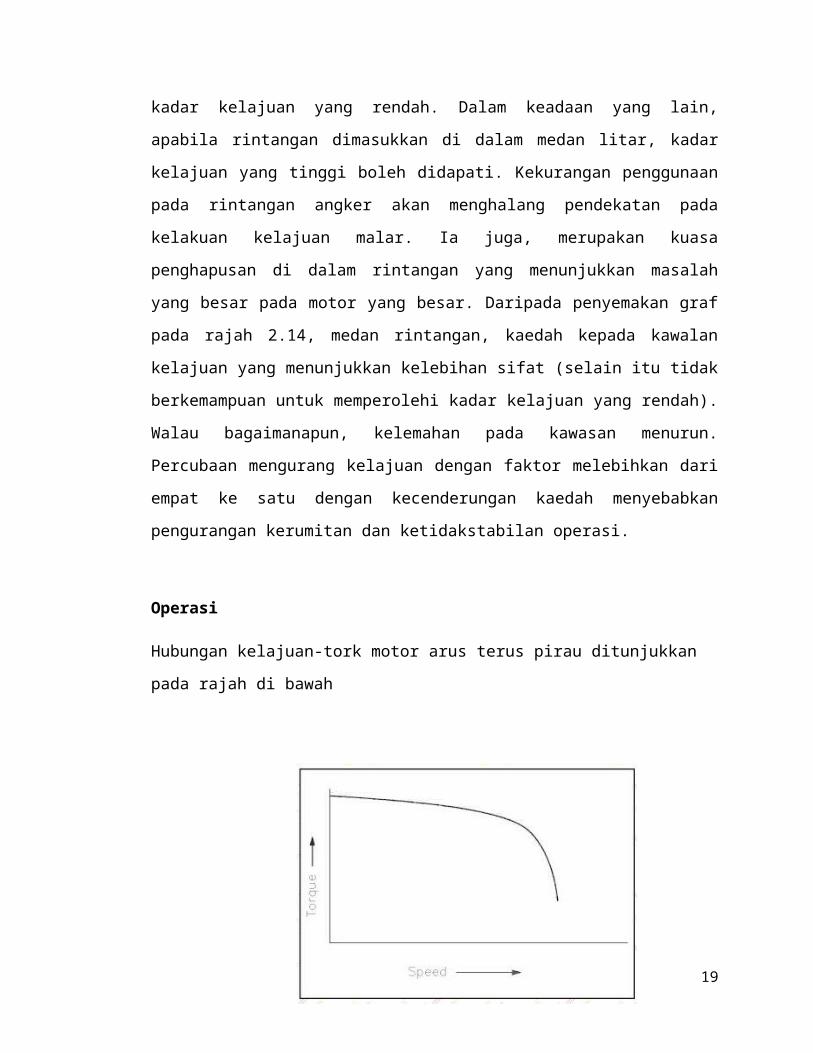
Hubungan kelajuan-tork motor arus terus pirau ditunjukkan pada rajah di bawah
Rajah 2.15: Graf Tork melawan kelajuan
Merujuk rajah 2.15, motor arus terus pirau mempunyai tork yang menurun apabila
kelajuan menaik. Penurunan tork-kelajuan disebabkan oleh voltan perintang angker
15
jatuh dan tindak balas angker. Pada nilai kelajuan hampir 2.5 kali kadar kelajuan, tindak
balas angker menjadi melampau menyebabkan penurunan mendadak pada medan fluks
dan penolakan mendadak dalam tork sehingga "stall" tercapai.
2.4.3 MOTOR JENIS MAJMUK
Motor arus terus majmuk adalah kombinasi motor AT jenis siri dan pirau. Motor AT siri
berkeupayaan menampung tork yang besar manakala motor AT pirau berkeupayan
untuk mengubah dan menstabilkan kelajuan mengikut beban. Hasil gabungan ini
menyebabkan motor AT majmuk mempunyai dua fungsi yang berlainan.
Motor AT majmuk bertindak dengan lebih berkesan kepada perubahan beban
lampau daripada motor AT pirau yang disebabkan peningkatan arus melalui lilitan
medan siri. Jika lilitan pirau ditambah pada motor siri dengan beban yang sedikit, motor
siri tersebut akan cenderung untuk beroperasi pada kelajuan yang melampau. Oleh yang
demikian, fluks medan pirau yang ditambah akan menghadkan kelajuan motor dan
menghalang kemusnahan motor berlaku.
Motor AT majmuk ini biasanya digunakan dalam lif, pemampat udara, alat
pengangkut (kontena) dan banyak lagi
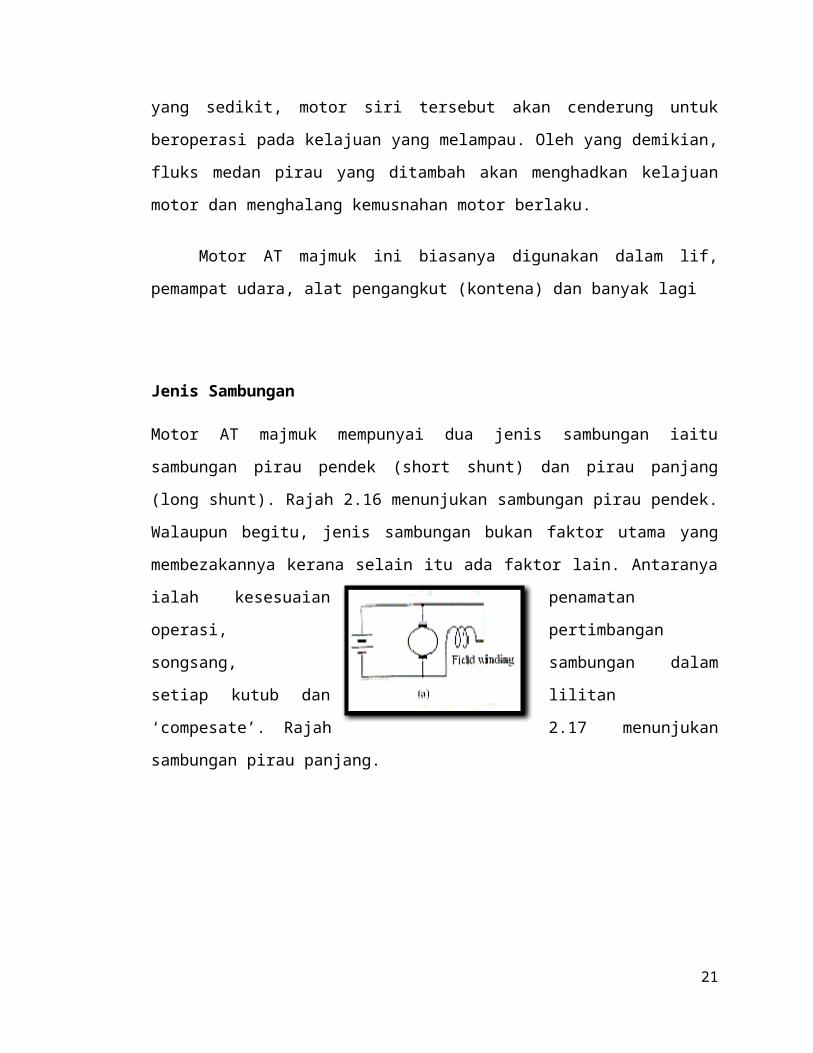
Jenis Sambungan
Motor AT majmuk mempunyai dua jenis sambungan iaitu sambungan pirau pendek
(short shunt) dan pirau panjang (long shunt). Rajah 2.16 menunjukan sambungan pirau
pendek. Walaupun begitu, jenis sambungan bukan faktor utama yang membezakannya
kerana selain itu ada faktor lain. Antaranya ialah kesesuaian penamatan operasi,
pertimbangan songsang, sambungan dalam setiap kutub dan lilitan ‘compesate’. Rajah
2.17 menunjukan sambungan pirau panjang.
16
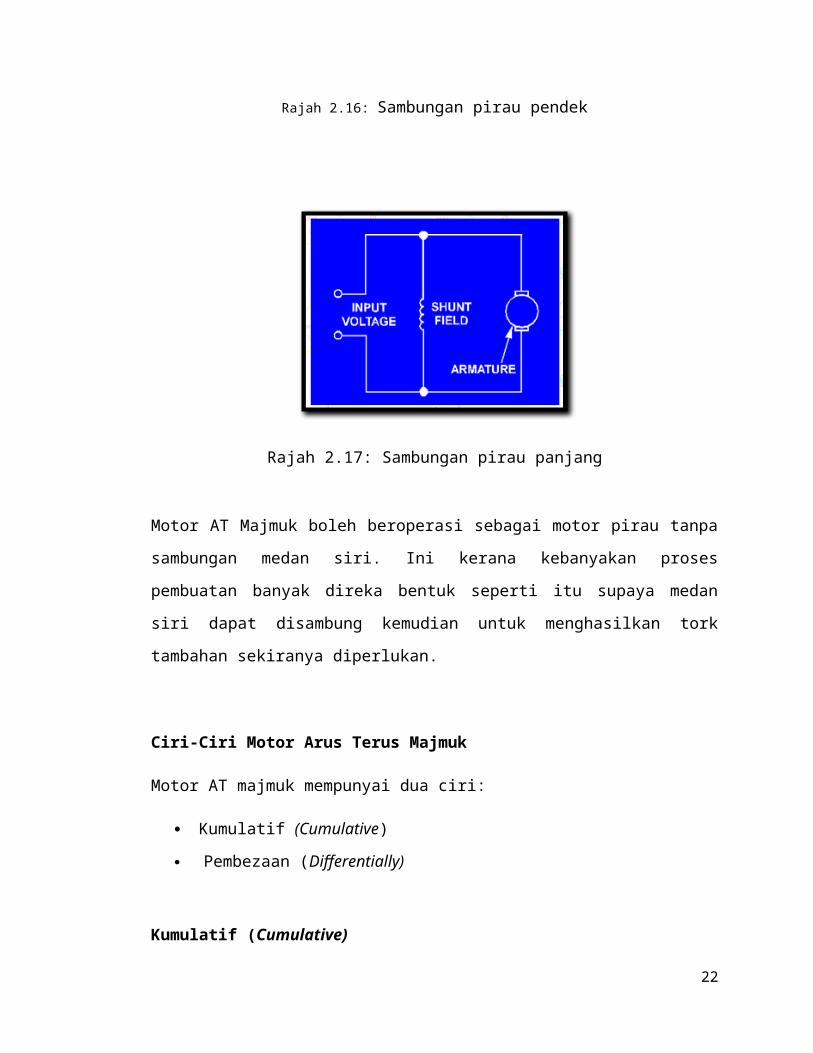
Rajah 2.16: Sambungan pirau pendek
Rajah 2.17: Sambungan pirau panjang
Motor AT Majmuk boleh beroperasi sebagai motor pirau tanpa sambungan medan siri.
Ini kerana kebanyakan proses pembuatan banyak direka bentuk seperti itu supaya medan
siri dapat disambung kemudian untuk menghasilkan tork tambahan sekiranya
diperlukan.
Ciri-Ciri Motor Arus Terus Majmuk
Motor AT majmuk mempunyai dua ciri:
Kumulatif (Cumulative)
Pembezaan (Differentially)
Kumulatif (Cumulative)
17
Apabila disambung secara kumulatif, medan siri yang disambungkan akan
membantu medan pirau menghasilkan tindak balas yang cepat daripada motor
pirau itu sendiri.
fluks medan, Ff = K3 · Ish + K4 · Ia
di mana K3 & K4 = pemalar medan siri & pirau
EMF, Ec = K1( K3 · Ish + K4 · Ia ) ῳ
Tork di dalam angker diberi sebagai:
Ta = K1( K3 · Ish + K4 · Ia ) Ia
Di mana nilai tork lebih besar daripada motor pirau dengan nilai arus angker
yang sama.
Kelajuan motor diberi oleh persamaan :
= ( Vt – Ia( Rs + Ra )) / ( K1( K3Ish + K4Ia ))
Apabila beban motor bertambah Ia bertambah dan nilai pengangka akan
berkurangan manakala nilai penyebut bertambah. Oleh itu kejatuhan laju
kumulatif motor majmuk adalah lebih cepat berbanding laju motor pirau.
= ( 1 / Ia ) (( Tc / Tsh ) – 1 )
Di mana
Tsh = K1K3IshIa
Tc = K1K3Ish( 1 + Ia )Ia
Pembezaan (Differentially)
Apabila disambungkan secara pembezaan, medan siri akan menentang medan
pirau dan ia dikenali sebagai “suicide motor” kerana kecenderungan untuk
memusnah.
Fluks medan , Ff = K3Ish – K4Ia
18
Persamaan EMF diberi oleh :
Ec = K1( K3 · Ish – K4 · Ia ) ῳ
Tork di dalam angker diberi sebagai :
Ta = K1( K3 · Ish – K4 · Ia )Ia
Di mana nilai penyebut akan berkurang apabila Ia (beban motor) bertambah. Apabila
laju bertambah nilai penyebut (K3Ish – K4Ia) akan mencapai nilai 0 dan akan
menyebabkan motor berhenti.
Kadangkala apabila litar medan siri terdedah kepada beban secara tiba-tiba,
medan siri akan bertindak sebagai pengawal dan polarity semua medan menjadi
songsang. Ini mengakibatkan motor akan berhenti dan memulakan operasinya semula
pada arah yang bertentangan. Jika beban terlampau tinggi motor yang disambungkan
secara pembezaan boleh bertukar arah.
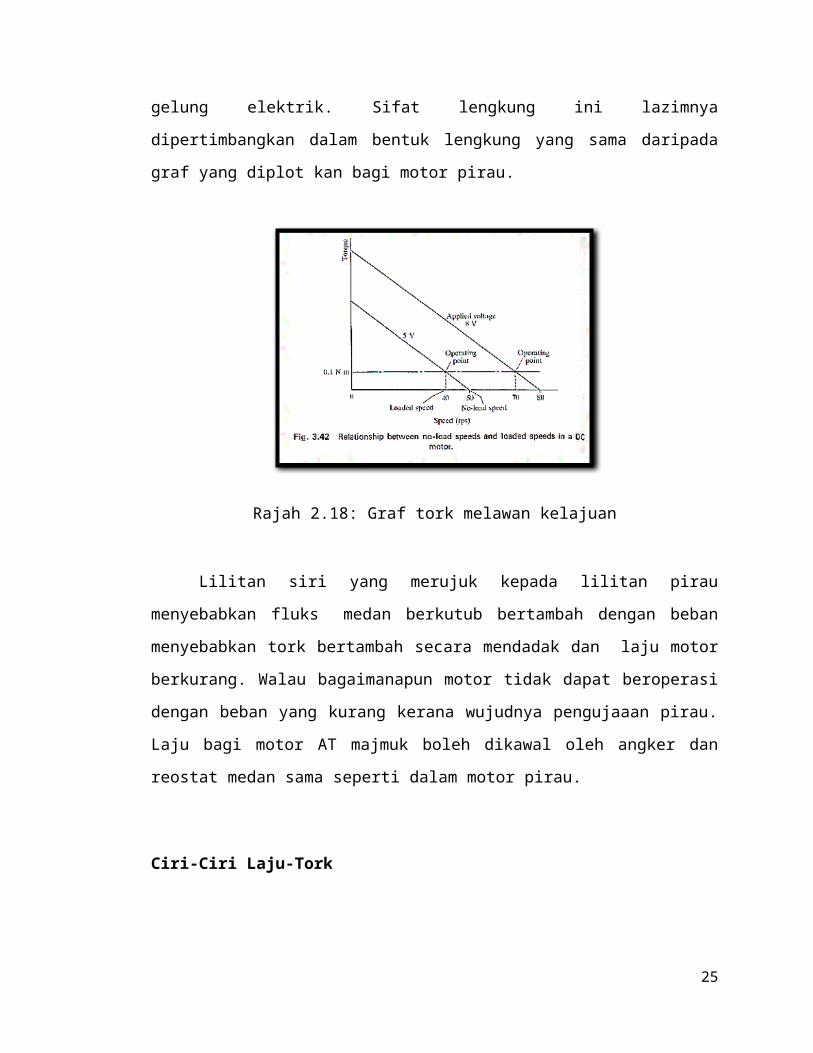
Rajah 2.18 menunjukan Graf sifat tork dan laju bagi motor arus terus jenis
majmuk sebagai fungsi arus pada gelung elektrik. Sifat lengkung ini lazimnya
dipertimbangkan dalam bentuk lengkung yang sama daripada graf yang diplot kan bagi
motor pirau.
Rajah 2.18: Graf tork melawan kelajuan
19
Lilitan siri yang merujuk kepada lilitan pirau menyebabkan fluks medan
berkutub bertambah dengan beban menyebabkan tork bertambah secara mendadak dan
laju motor berkurang. Walau bagaimanapun motor tidak dapat beroperasi dengan beban
yang kurang kerana wujudnya pengujaaan pirau. Laju bagi motor AT majmuk boleh
dikawal oleh angker dan reostat medan sama seperti dalam motor pirau.
Ciri-Ciri Laju-Tork
Ciri-ciri laju-tork bagi motor AT majmuk terlibat lebih banyak berbanding kes
motor AT pirau dan siri.
Tork terbahagi kepada dua komponen iaitu Tsh dan Ts (hasil daripada medan
siri dan medan pirau.)
Walau bagaimanapun kita perlu mengambil kira bahawa Tsh dan
Ts mempunyai komponen kesan medan siri yang sama.
Nilai tork yang terhasil boleh dituils sebagai :
Ta = Tsh + Ts = K1·K3·Ish·Ia + K1·K4·Ia²
2.5 PERBANDINGAN CIRI-CIRI MOTOR AT
Terdapat beberapa jenis motor AT dan ciri-cirinya juga adalah berbeza. Jenis-jenis
motor tersebut adalah motor siri, motor pirau dan motor majmuk. Motor majmuk ini
terbahagi kepada dua iaitu motor majmuk panjang dan motor majmuk pendek. Jadual
2.1 berikut adalah ciri-ciri setiap motor tersebut:
Jenis Motor Ciri-ciri
Pirau
Kelajuan hampir malar
Kelajuan boleh dilaras
20
Daya kilas permulaan yang sederhana
Siri
Kelajuan berubah
Daya kilas permulaan yang tinggi
Kelajuan berubah boleh dilaras
Majmuk
Kelajuan berubah
Daya kilas permulaan yang tinggi
Kelajuan berubah boleh dilaras
Jadual 1: Ciri-ciri Motor AT
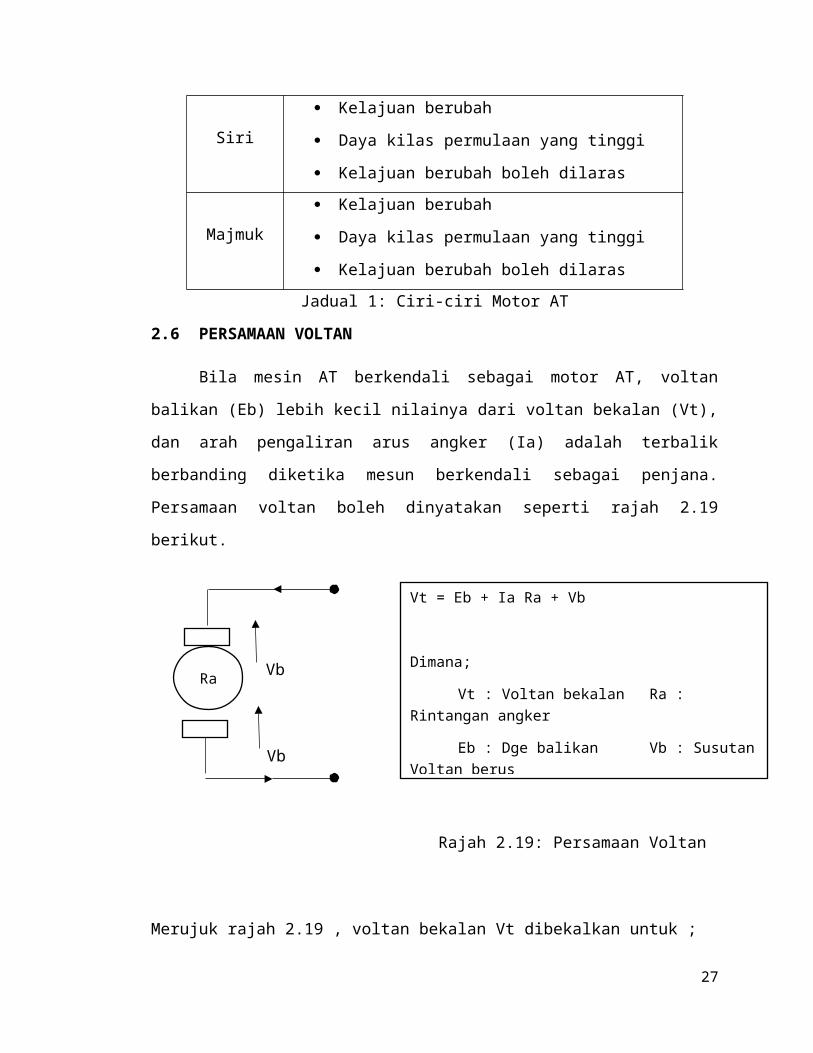
2.6 PERSAMAAN VOLTAN
Bila mesin AT berkendali sebagai motor AT, voltan balikan (Eb) lebih kecil
nilainya dari voltan bekalan (Vt), dan arah pengaliran arus angker (Ia) adalah terbalik
berbanding diketika mesun berkendali sebagai penjana. Persamaan voltan boleh
dinyatakan seperti rajah 2.19 berikut.
Vb
Vb
Rajah 2.19: Persamaan Voltan
Merujuk rajah 2.19 , voltan bekalan Vt dibekalkan untuk ;
Mengatasi dge balikan Eb
Membekalkan susutan ohm dalam litar angker (Ia Ra) susutan voltan berus (Vb).
Dengan mendarabkan persamaan di atas dengan Ia;
Vt = Eb Ia + Ia² Ra + Ia Vb
21
Ra
Vt = Eb + Ia Ra + Vb
Dimana;
Vt : Voltan bekalan Ra : Rintangan angker
Eb : Dge balikan Vb : Susutan Voltan berus
Ia : Arus angker
Dimana ;
Vt Ia = Kuasa masukan (elektrik) pada angker
Eb Ia = Kuasa elektrik senilai dengan kuasa mekanik terhasil dalam angker.
Ia² Ra = Kehilangan kuasa (tembaga) dalam angker
Ia Vb = Kehilangan kuasa pada berus
Daripada jumlah kuasa dibekalkan kepada angker, sebahagiannya hilang sebagai
susutan tembaga, susutan berus dan lain-lain manakala bakinya ditukar kepada kuasa
mekanik dalam angker;
Pm = Eb Ia = 2 ( phi ) NTa / 60 Watt
= Vt Ia - Ia² Ra - Ia Vb
Daripada persamaan di atas, ditunjukan secara metamatik bahawa kuasa maksima motor
AT dihasilkan bila Eb = Vt / 2. Keadaan ini tidak dapat direalisasikan kerana arus akan
terlalu tinggi pada keadaan tersebut.
Contoh 1
Sebuah motor pirau AT 1200V mempunyai rintangan angker sebanyak 0.25ohm dan
mengalami kejatuhan berus sebanyak 3V. Kirakan
(a) Arus angker apabila Eb berjumlah 110V
(b) Arus angker apabila Eb jatuh kepada 105V
(c) Peratusan dalam Dge balikan dan arus angker
Jawapan
(a) Persamaan bagi voltan angker ialah;
22
V = Eb + Ia Ra + kejatuhan berus
Oleh itu, arus angker Ia = V−Eb−kejatuhanberus
Ra =
120−110−30.25
=28A
(b) Apabila Eb berubah, Ia = 120−105−3
0.25 = 48A
(c) Peratusan perubahan, Eb = 110−105
110X 100 = 4.5%
Ia = 48−28
28 X 100 = 71.5%
Daripada contoh di atas dapat diperhatikan bahawa perubahan kecil dalam dge balikan
(disebabkan oleh perubahan halaju putaran) menghasilkan perubahan besar dalam
magnitud arus angker.
Contoh 2
Sebuah penjana pirau AT 25kw, 250V mempunyai rintangan angker dan medan masing-
masing berjumlah 0.06ohm dan 100ohm. Kirakan jumlah kuasa angker yang dihasilkan
sekiranya mesin tersebut berkendalian sebagai:
(a) Sebuah penjana membekalkan kuasa keluaran sebanyak 25kw
(b) Sebuah motor mengambil kuasa sebanyak 25kw
Jawapan
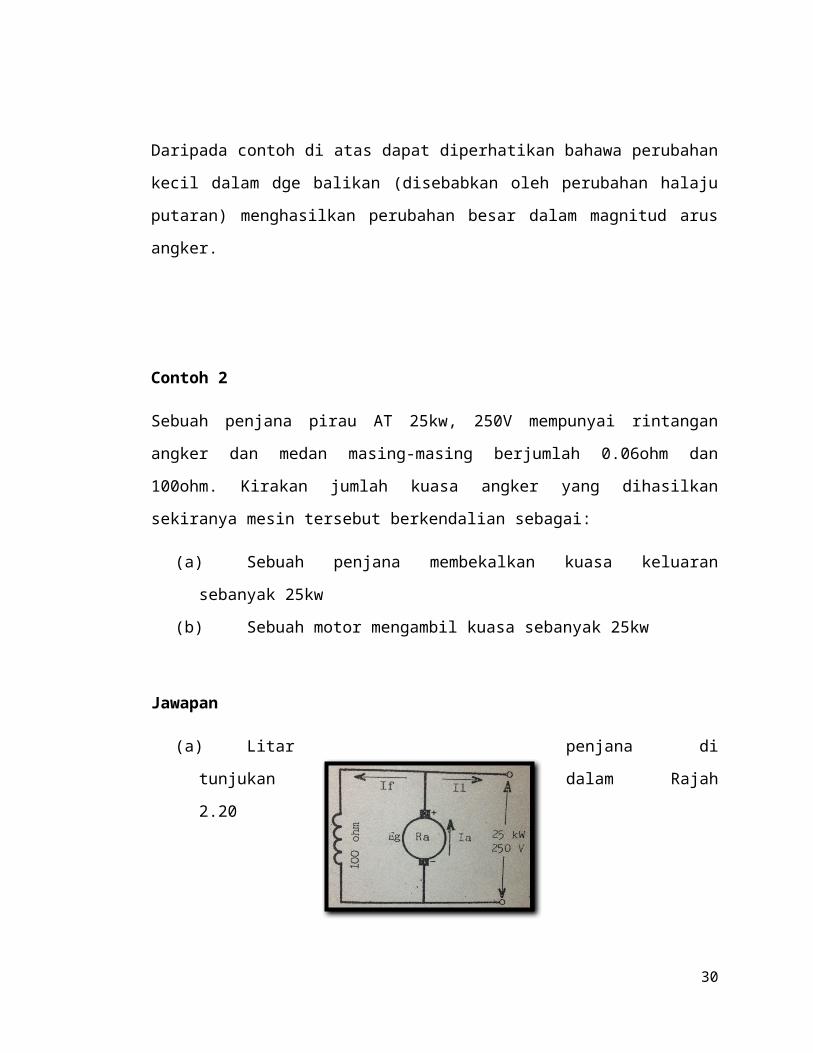
(a) Litar penjana di tunjukan dalam Rajah 2.20
23
Rajah 2.20: Litar Penjana
Arus keluaran I1 = 25kw / 250V = 100A
Arus medan If = 250V / 100ohm = 2.5A
Arus angker Ia = I1 + Ia = 102.5A
D.g.e terjana Eg = V + Ia Ra volt
Eg = 250 + (102.5 X 0.06)
Eg = 256.15V
Kuasa yang dihasilkan dalam angker;
P = Eg Ia watt
P = 256.15 X 102.5
P = 26. 26 kw
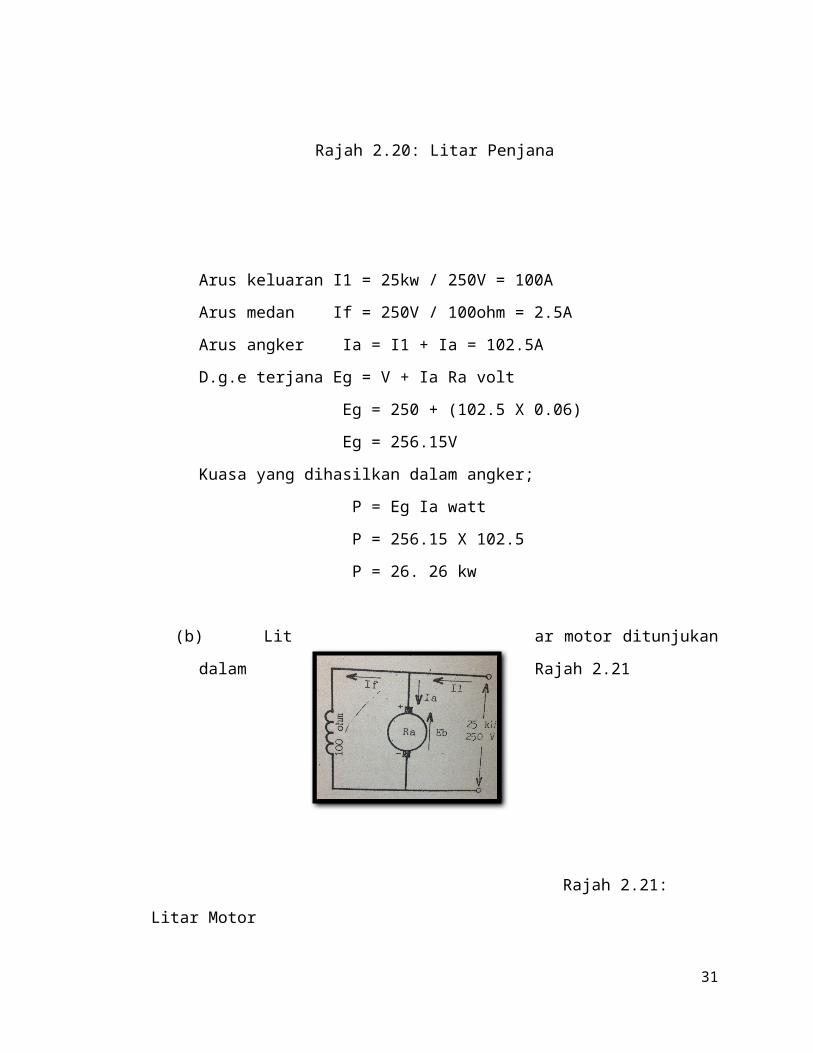
(b) Litar motor ditunjukan dalam Rajah 2.21
Rajah 2.21: Litar Motor
Arus masukan I1 = 25kw / 250V = 100A
Arus angker Ia = 100 – 2.5 = 97.5A
24
D.g.e balikan Eb = V – Ia Ra volt
Eb = 250 – (97.5 X 0.06)
Eb = 244.15 volt
Kuasa yang dihasilkan dalam angker;
Pm = Eb Ia watt
Pm = 244.15 X 97.5
Pm = 23.8 kw
2.7 DAYA KILAS ANGKER DAN DAYA KILAS
Daya kilas ditakrifkan sebagai tindakan daya ke atas satu jasad yang berkecenderungan
untuk menyebabkan jasad tersebut berputar. Dalam lain perkataan ia juga boleh
ditakrifkan sebagai momen piuhan atau pusingan pada satu paksi.
Daya kilas diukur sebagai hasil darab di antara daya dan jejari di mana daya tersebut
bertindak dalam bentuk persamaan iaitu:
T=F×r (Nm)
Dan kuasa mekanik yang dihasilkan oleh daya kilas ialah:
Pm = 2π nT watt
Dimana n adalah kelajuan putaran dalam pusingan per-saat (pss).
Daya kilas angker (Ta)
Andaikan Ta sebagai daya kilas yang dihasilkan oleh angker. Apabila ia berputarpada
kelajuan n p.s.s dan di ukur dalam unit N-m, maka kuasa yang dihasilkan olehnya ialah:
Pm = 2π n × Ta watt
25
Dan daripada persamaan 2-3 bagi kuasa mekanik yang terhasil dalam angker, kita dapati
bahawa:
Pm = Ebla watt
Oleh itu, 2π n Ta = Ebla, maka
Ta = Ebla/2π n = 0.159 ×Ebla/n
Tetapi d.g.e balikan, Eb = ᶲP n Z/a volt, maka persamaan diatas boleh ditulis sebagai;
Ta = ᶲP n Z/2π n a
= 0.159 ᶲZia (P/a)
Daripada persamaan di atas, kita dapati bahawa daya kilas angker adalah berkadaran
terus dengan fluks dan arus angker, atau Ta ά ФIa:
a) Bagi motor siri, Ta ά Ia² kerana fluksnya berkadar terus dengan arus angker.
b) Bagi motor pirau, Ta ά Ia kerana fluksnya sentiasa malar.
Daya Kilas Aci (Tsh)
Sebahagian daripada daya kilas yang dihasilkan dalam angker adalah digunakan untuk
mengatasi kehilangan besi dan geseran dalam motor dan daya kilas bersih yang terdapat
pada aci motor yang digunakan untuk menggerakkan beban dikenali sebagai daya kilas
aci (Tsh). Daya kilas aci boleh diberi sebagai:
Tsh = keluaran dalam watt/2π n
Perbezaan di antara daya kilas angker dan daya kilas aci (Ta-Tsh) diistilahkan sebagai
daya kilas hilang, dan nilainya boleh diberi sebagai:
Ta-Tsh = kehilangan besi dan geseran (W)/ 2π n
26
2.8 MENGAWAL KELAJUAN MOTOR
Kawalan kelajuan ialah kawalan motor sama ada hendak dilajukan atau
sebaliknya. Kelajuan motor AT dapat dikawal dengan mengawal voltan ke angker,
mengawal arus di medan dan mengawal voltan bekalan. Terdapat juga teknik lain yang
boleh digunakan untuk mengawal motor. Teknik kawalan yang akan di terangkan adalah
berdasarkan litar pemacu yang dipilih. Setelah meneltii kebaikan jenis-jenis litar pemacu
motor AT, litar motor pirau adalah lebih baik berbanding litar motor siri. Terdapat tiga
teknik kawalan yang di pertimbangkan untuk litar pemacu motor pirau iaitu :
i) Kawalan kelajuan dengan penambahan rintangan dalam litar amatur
ii) Kawalan kelajuan dengan melaras voltan amatur
iii) Kawalan kelajuan menggunakan Modulasi Lebar Denyut (PWM)
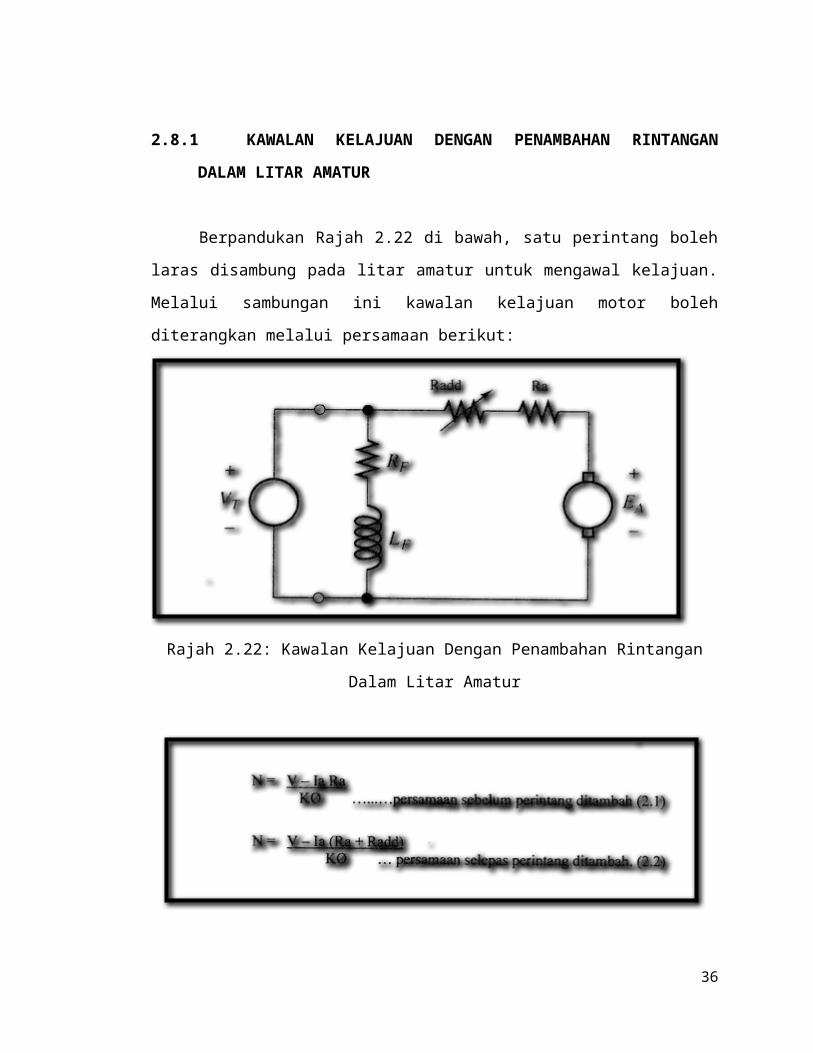
2.8.1 KAWALAN KELAJUAN DENGAN PENAMBAHAN RINTANGAN
DALAM LITAR AMATUR
Berpandukan Rajah 2.22 di bawah, satu perintang boleh laras disambung pada
litar amatur untuk mengawal kelajuan. Melalui sambungan ini kawalan kelajuan motor
boleh diterangkan melalui persamaan berikut:
27
Rajah 2.22: Kawalan Kelajuan Dengan Penambahan Rintangan Dalam Litar Amatur
Melalui persamaan di atas, terdapat dua bahagia iaitu kelajuan tanpa beban No dan
kejatuhan kelajuan AN iaitu :
Dari persamaan di atas, penambahan rintangan akan memberi kesan pada
bahagian kejatuhan kelajuan sahaja. Apabila Radd ditambah, AN akan meningkat.
Peningkatan AN masih lagi kurang daripada No tetapi telah menyebabkan kelajuan
motor, N berkurang. Sekiranya Radd terus ditambah, kelajuan akan terus berkurangan.
28
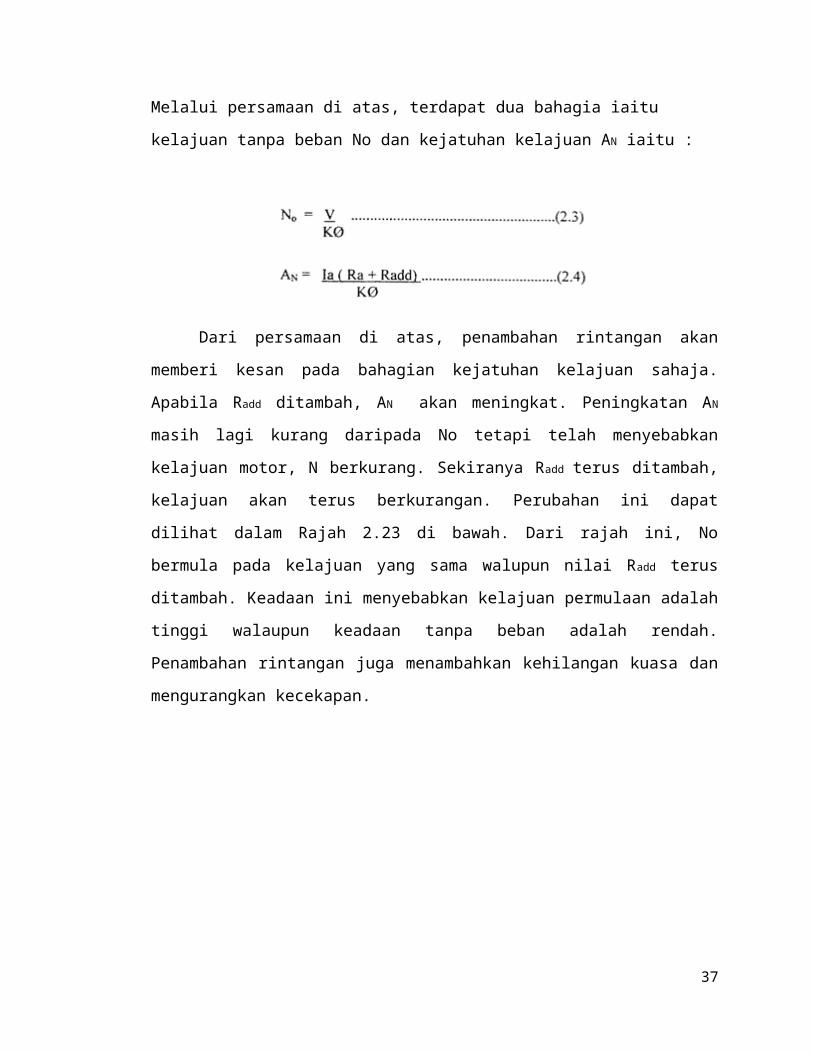
Perubahan ini dapat dilihat dalam Rajah 2.23 di bawah. Dari rajah ini, No bermula pada
kelajuan yang sama walupun nilai Radd terus ditambah. Keadaan ini menyebabkan
kelajuan permulaan adalah tinggi walaupun keadaan tanpa beban adalah rendah.
Penambahan rintangan juga menambahkan kehilangan kuasa dan mengurangkan
kecekapan.
Rajah 2.23: Analisis Kelajuan Dengan Penambahan Rintangan
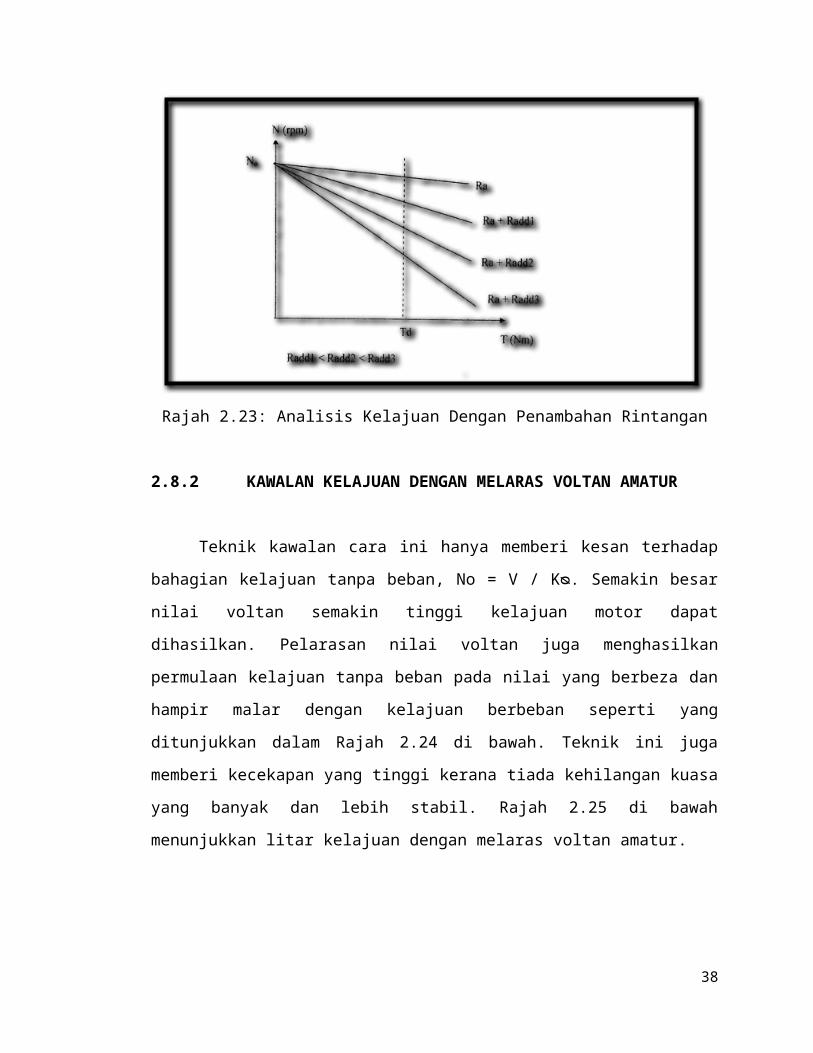
2.8.2 KAWALAN KELAJUAN DENGAN MELARAS VOLTAN AMATUR
Teknik kawalan cara ini hanya memberi kesan terhadap bahagian kelajuan tanpa
beban, No = V / Kᴓ. Semakin besar nilai voltan semakin tinggi kelajuan motor dapat
dihasilkan. Pelarasan nilai voltan juga menghasilkan permulaan kelajuan tanpa beban
pada nilai yang berbeza dan hampir malar dengan kelajuan berbeban seperti yang
ditunjukkan dalam Rajah 2.24 di bawah. Teknik ini juga memberi kecekapan yang
tinggi kerana tiada kehilangan kuasa yang banyak dan lebih stabil. Rajah 2.25 di bawah
menunjukkan litar kelajuan dengan melaras voltan amatur.
29
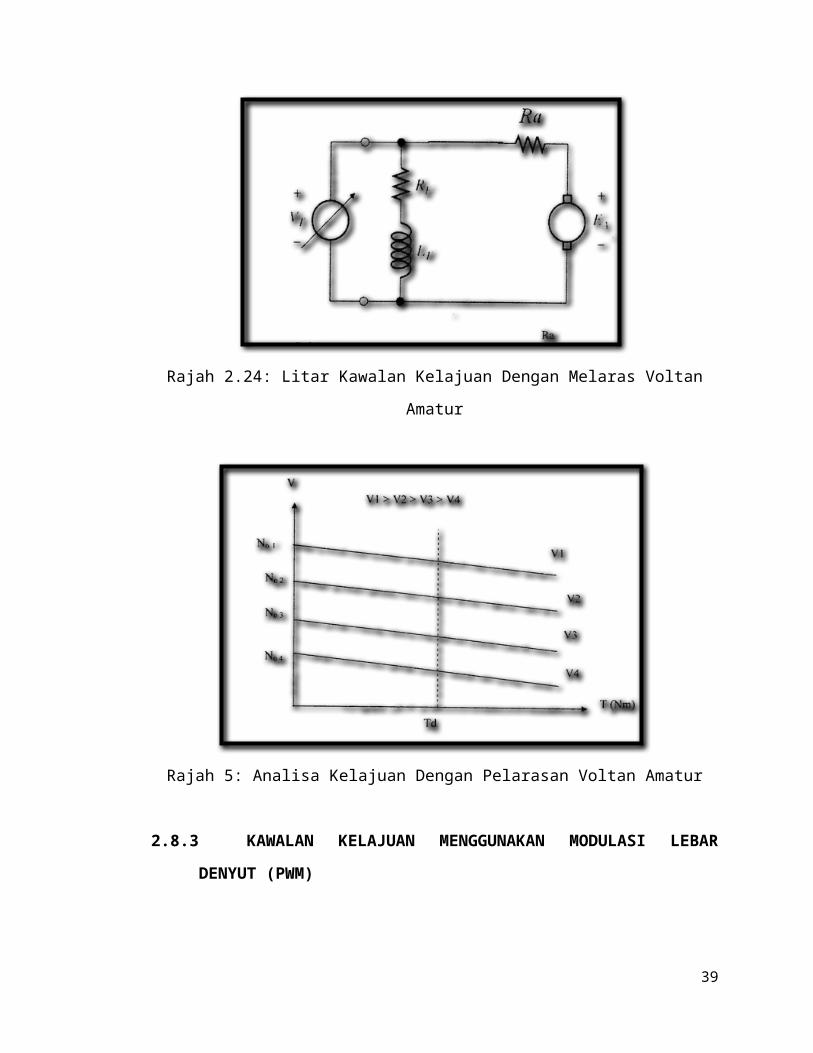
Rajah 2.24: Litar Kawalan Kelajuan Dengan Melaras Voltan Amatur
Rajah 5: Analisa Kelajuan Dengan Pelarasan Voltan Amatur
2.8.3 KAWALAN KELAJUAN MENGGUNAKAN MODULASI LEBAR
DENYUT (PWM)
PWM adalah satu teknik kawalan motor AT menggunakan denyut-denyut
gelombang. Kelebaran denyut dikawal untuk menentukan kelajuan motor, semakin lebar
denyut maka semakit laju putaran motor. Kelebaran denyut boleh dikawal dengan
30
menggunakan perintang boleh laras, semakin rendah nilai rintangan semakin lebar
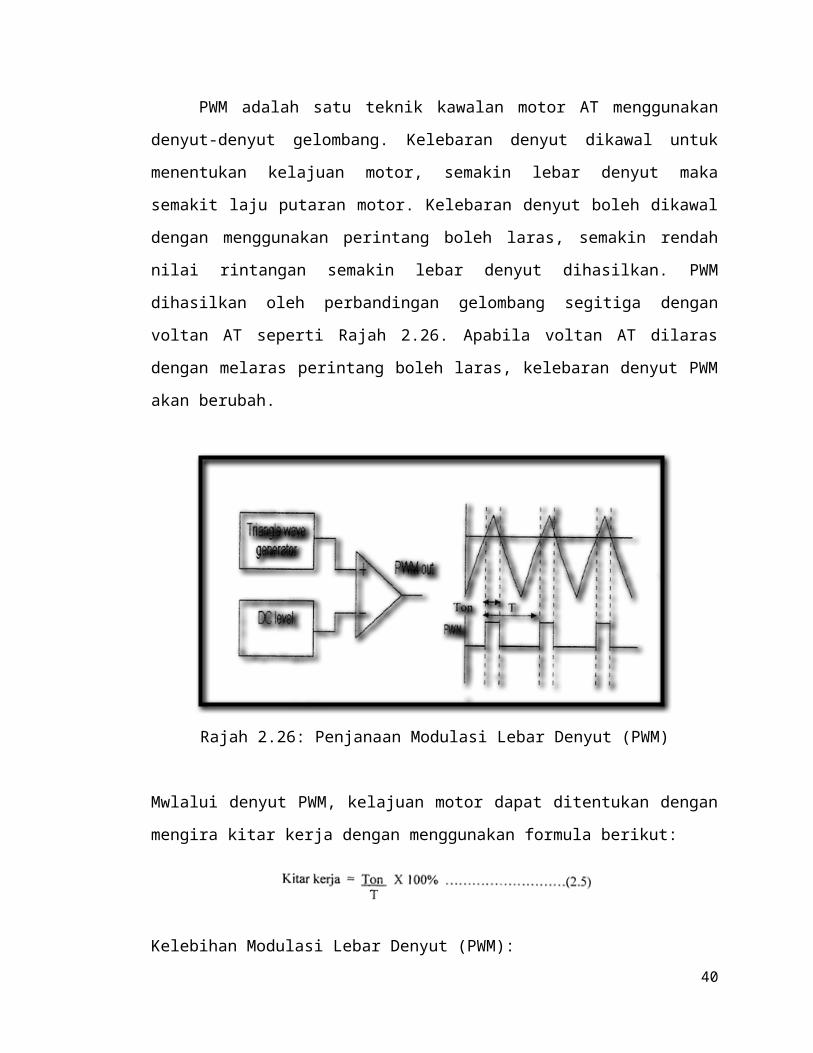
denyut dihasilkan. PWM dihasilkan oleh perbandingan gelombang segitiga dengan
voltan AT seperti Rajah 2.26. Apabila voltan AT dilaras dengan melaras perintang boleh
laras, kelebaran denyut PWM akan berubah.
Rajah 2.26: Penjanaan Modulasi Lebar Denyut (PWM)
Mwlalui denyut PWM, kelajuan motor dapat ditentukan dengan mengira kitar kerja
dengan menggunakan formula berikut:
Kelebihan Modulasi Lebar Denyut (PWM):
a) Denyut yang terhasil berkadaran dengan voltan.
b) Dapat menghasilkan daya kilas lebih pada motor berbanding kaedah lain.
c) Dapat mengatasi rintangan dalaman motor dengan mudah
d) Semua kuasa pada bekalan kuasa dihantar sepenuhnya kepada beban.
31
2.9 PENGATURAN KELAJUAN
Pengaturan kelajuan adalah merujuk kepada perubahan kelajuan motor apabila daya
kilas beban yang dikenakan, sedang keadaan lain-lainnya dikekalkan (malar). Perubahan
kelajuan yang di maksudkan ialah pertukaran yang disebabkan oleh sifat yang dimiliki
atau yang terwujud pada motor berkenaan dan bukannya perubahan yang dilakukan
melalui pelarasan alat atau peranti kawalan kelajuan seperti reostart dan sebagainya.
Pengaturan kelajuan motor ditakrifkan sebagai:
Perubahan dalam kelajuan apabila beban motor dikurangkan dari nilai kadaran kepada
sifar, dan diungkapkan dalam seperatusan kelajuan beban penuh
Peratusan pengaturan = Nn 1−Nf 1
Nf 1X 100=dN
NX 100
Contoh 1
Sebuah motor pirau 240V berputar pada kelajuan 1000psm dan mengambil arus
sebanyak 10A pada keadaan tanpa beban. Jumlah rintangan angker dan medan masing-
masing berjumlah 0.2ohm dan 120ohm. Kirakan kelajuan ketika berbeban dan
mengambil arus sebanyak 42A. Anggapkan fluks dalam keadaan malar.
Jawapan
Persamaan yang akan digunakan ialah N/No = Eb/Ebo (fluks berkeadaan malar)
Arus medan pirau If = 240V/120ohm = 2A
Arus angker pada keadaan tanpa beban Iao = 10 – 2 = 8A
Arus angker pada keadaan berbeban Ia = 42 – 2 = 40A
32
(a) Eb pada keadaan tanpa beban Ebo = V – (Ia X Ra) = 240 – (8 X 0.2) = 238.4 V
(b) Eb pada keadaan berbeban Eb = V – (Ia X Ra) = 240 – (40 X 0.2) = 232.0 V
Oleh itu, N = No XEb
Ebo
= 1000 X232.0238.4
=973 psm
Contoh 2
Rintangan litar angker sebuah motor siri 25hp (kuasa kuda) 250V berjumlah
0.1ohm. Rintangan medannya pula berjumlah 0.05ohm dan ia mengalami kejatuhan
berus sebanyak 3V. Apabila ia mengambil arus sebanyak 85A, kelajuan putarannya
ialah 600psm. Kirakan
(a) Kelajuan putaran ketika ia mengambil arus sebanyak 100A.
(b) Kelajuan putaran ketika ia mengambil arus sebanyak 40A.
(c) Kelajuan putaran (a) dan (b) sekiranya pelencing (diverter) 0.05ohm
digunakan.
Jawapan
Formula yang digunakan ialah N2 = N 1Eb 2Eb 1
XIa 1Ia 2
(a) Eb pada keadaan arus masukan 85A, Eb1 = V – Ia (Ra + Rs) – kejatuhan
berus
Eb1 = 250 – 85 (0.1 + 0.05) -3
Eb1 = 234.3V
Eb pada keadaan arus masukan 100A, Eb2 = 250 -100 (0.1 + 0.05) -3
33
Eb2= 232V
Kelajuan ketika arus masukan 100A, N2 = 600232
234.3X
85100
=¿506psm
(b) Eb pada keadaan arus masukan 40A, Eb3 = V – Ia (Ra + Rs) – kejatuhan berus
Eb3 = 250 – 40 (0.1 + 0.05) – 3 Eb3 = 241V
Kelajuan putaran pada keadaan tersebut ialah:
N 3= 241234.3
X8540
=¿1260psm
(c) Kesan penggunaan pelencong 0.05ohm ialah untuk mengurangkan arus
medan siri (seterusnya fluks) sebanyak 50% daripada nilai asal. Rintangan
efektif medan siri dan pelencong ialah 0.025ohm
Eb pada keadaan arus masukan 100A, Eb2 = V – Ia (Ra + Rsd) – kejatuhan
berus
= 250 – 100 (0.1 + 0.025) -3
= 234.5V
Kelajuan putaran pada keadaan tersebut ialah:
N 2=234.5234.3
X85
(100
2)=1022 psm
Eb pada keadaan arus masukan 40A, Eb3 = 250 – 40 (0.1 + 0.025) – 3
Eb3 = 242V
Kelajuan putaran pada keadaan tersebut ialah:
34
N 3=600242
234.3X
85
(402
)=2630 psm
2.10 KEHILANGAN DAN KECEKAPAN
Kehilangan yang berlaku dalam motor AT adalah sama sama seperti yang terdapat pada
penjana AT, iaitu:
a) Kehilangan tembaga
b) Kehilangan magnet
c) Kehilangan mekanik
Kuasa maksimum akan terhasil dalam motor apabila:
IaRa = V/2 = Eb
Dan kecekapan maksimum akan berlaku apabila jumlah kehilangan tembaga menyamai
jumlah kehilangan tetap, iaitu kehilangan magnet dan kehilangan mekanik (termasuk
kehilangan tembaga medan bagi motor pirau)
Peringkat kuasa bagi motor AT adalah seperti rajah 2.27 di bawah.
Rajah 2.27: Rajah Blok Bagi Peringkat Kuasa Motor AT
2.11 PENGHIDUP MOTOR AT
Penghidup/ Pemula motor DC mempunyai beberapaa jenis. Antaranya adalah plat dua
muka, plat tiga muka dan plat empat muka. Gambar rajah 2.28, rajah 2.29 dan rajah 2.30
di bawah menunjukkan jenis-jenis plat muka tersebut.
35
Kuasa masukan pada motor
Kehilangan tembaga
Kuasa dalam pada angker
Kehilangan besi dan geseran
Kuasa kehilangan pada aci
Rajah 2.28: Pemula Plat Dua Muka
Rajah 2.29: Pemula Plat Tiga Muka
36
Rajah 2.30: Pemula Plat Empat Muka
2.11.1 BAHAGIAN UTAMA PEMULA PLAT MUKA
Rajah 2.31: Bahagian Utama Pemula Plat Muka
Rajah 2.31 menunjukan bahagian utama pemula plat muka dan kendalian plat dua muka
seperti berikut:
Perintang Pemula berfungsi sebagai penghad arus permulaan
Geganti Tanpa Voltan berfungsi sebagai pelindung tanpa voltan
Geganti Beban Lampau berfungsi sebagai pelindung beban lebih
37
Rajah 2.32: Pergerakan Plat
Rajah 2.32 menunjukan pergerakan plat. Kendalian plat tersebut seperti berikut:
Lengan / tangkai bertugas sebagai penyambung litar di antara perintang pemula
dengan pengubah nilai rintangan pengubah.
Pegas ( spring ) Berfungsi sebagai pengawal lengan agar kembali ke kedudukan
asal jika berlaku gangguan bekalan.
2.11.2 KENDALIAN PLAT MUKA
Rajah 2.33: Kendalian Plat muka
38
Rajah 2.33 menunjukan pergerakan dan kendalian plat muka. Prinsip kendalian plat
muka adalah seperti berikut:
Prinsip Kendalian
a) Sentuhan 1 - arus mengalir melalui R1, R2, R3 & R4.
b) Sentuhan 2 - arus mengalir melalui R2, R3 & R4.
c) Sentuhan 3 - arus mengalir melalui R3 & R4.
d) Sentuhan 4 - arus mengalir melalui R4.
e) Sentuhan 5 - arus mengalir terus ke angker.
f) Tangkai dipegang oleh gegelung tanpa voltan.
2.12 KEGUNAAN MOTOR A.T.
Berdasarkan perbincangan mengenai ciri-ciri motor AT, boleh la diringkaskan bahawa;
(a) Motor Pirau
Kelajuannya hampir malar
Daya kilas permulaanya tidak setinggi daya kilas motor siri bagi jumlah
arus masukan yang sama.
Oleh itu, ia igunakan:
Untuk tugas pacuan yang memerlukan kelajuan yang malar daripada
tanpa beban kepada keadaan beban penuh.
Untuk memacu beban pada peringkat kelajuan yang berbeza, tetapi
dengan tempoh bagi setiap peringkat kelajuan yang agak lama (dimana ia
berkeadaan malar) seperti pada mesi larik. Kawalan kelajuan dibuat
melalui pengatur medan pirau.
39
(b) Motor Siri
Mempunyai daya kilas permulaan yang tinggi.
Mempunyai kelajuan yang rendah pada beban tinggi dan sebaliknya.
Oleh itu, ia digunaka:
Untuk tugas pacuan yang mempunyai beban permulaan yang tinggi.
Apabila motor boleh digandingkan terus kepada beban.
Apabila kelajuan yang malar tidak dipentingkan.
Ringkasan bagi kegunaan motor AT adalah seperti berikut:
Jenis motor Ciri-ciri Kegunaan
Pirau
Kelajuan hampir malar. Kelajuan boleh dilaraskan Daya kilas permulaan yang
sederhana.
Mesin larik
Pam empar
Mesin perkakas
Kipas penghembus
Pam salingan
Siri
Kelajuan berubah
Daya kilas permulaan yang
tinggi
Kelajuan berubah dan boleh
laras
Penggerak alih elektrik
Kren
Pesawat angkat
Majmuk
Kelajuan berubah
Daya kilas permulaan yang
tinggi
Kelajuan berubah dan boleh
laras
Lif atau penaik
Kekacip
Mesin penebuk
Mesin pengetam
Pengisar guling
Jadual 2.2: Ringkasan Kegunaan Motor AT
40
41
Recommended