Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Digitale Signalverarbeitung, Vorlesung 3:Laplace- und z-Transformation
30. Oktober 2017
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
1 Moodle-Test
2 Laplacetransformation
3 z-TransformationZiel: Reverse-Engineering fur Digitale FilterEinfuhrung der z-Transformation
4 EigenschaftenKonvergenzEigenschaften
5 Verwendungz-Ubertragungsfunktion
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Test 1
Der erste Moodle-Test besteht aus zwei Phasen:
Ubungsaufgaben fur den Test sind online 8.11.-9.11. (00:01CET - 23:59 CET)
Der Test selbst, in dem es 5 Versuche gibt, ist online am10.11. (00:01 CET - 23:59 CET)
Fur diesen Test gibt es insgesamt maximal 5 Bonuspunkte fur dieKlausur im WS17/18
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Test 1
Themen:
Rechnen mit komplexen Zahlen
Eigenschaften von Systemen (Linearitat, Zeitinvarianz,Kausalitat, ... siehe VL1)
Quantisierung (VL2)
Abtasttheorem (VL2-3)
Eigenschaften von Fourier-, Laplace- und z-Transformation,DTFT (VL2-3)
z-Ubertragungsfunktion (VL4)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
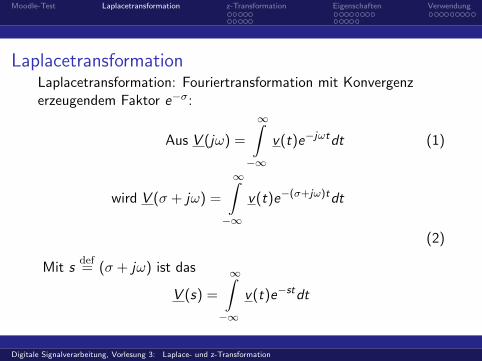
LaplacetransformationLaplacetransformation: Fouriertransformation mit Konvergenzerzeugendem Faktor e−σ:
Aus V (jω) =
∞∫−∞
v(t)e−jωtdt (1)
wird V (σ + jω) =
∞∫−∞
v(t)e−(σ+jω)tdt
(2)
Mit sdef= (σ + jω) ist das
V (s) =
∞∫−∞
v(t)e−stdt
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
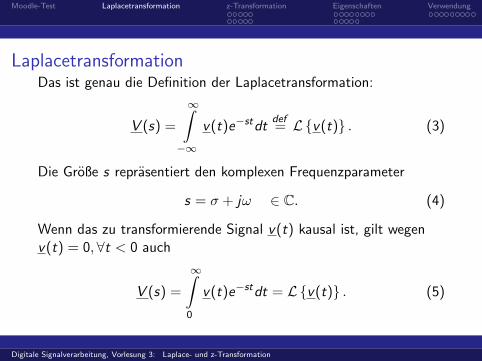
LaplacetransformationDas ist genau die Definition der Laplacetransformation:
V (s) =
∞∫−∞
v(t)e−stdtdef= Lv(t) . (3)
Die Große s reprasentiert den komplexen Frequenzparameter
s = σ + jω ∈ C. (4)
Wenn das zu transformierende Signal v(t) kausal ist, gilt wegenv(t) = 0, ∀t < 0 auch
V (s) =
∞∫0
v(t)e−stdt = Lv(t) . (5)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
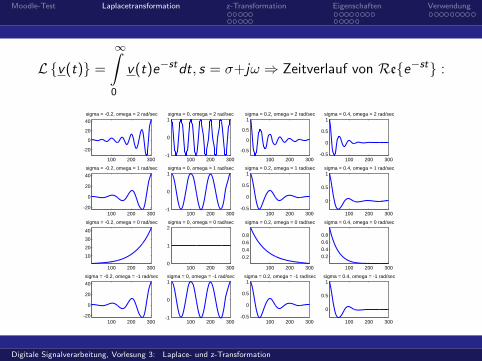
Lv(t) =
∞∫0
v(t)e−stdt, s = σ+jω ⇒ Zeitverlauf von Ree−st :
100 200 300
-20
0
20
40sigma = -0.2, omega = 2 rad/sec
100 200 300-1
0
1sigma = 0, omega = 2 rad/sec
100 200 300
-0.5
0
0.5
1sigma = 0.2, omega = 2 rad/sec
100 200 300-0.5
0
0.5
1sigma = 0.4, omega = 2 rad/sec
100 200 300-20
0
20
40sigma = -0.2, omega = 1 rad/sec
100 200 300-1
0
1sigma = 0, omega = 1 rad/sec
100 200 300-0.5
0
0.5
1sigma = 0.2, omega = 1 rad/sec
100 200 300
0
0.5
1sigma = 0.4, omega = 1 rad/sec
100 200 300
10
20
30
40
sigma = -0.2, omega = 0 rad/sec
100 200 3000
1
2sigma = 0, omega = 0 rad/sec
100 200 300
0.20.40.60.8
sigma = 0.2, omega = 0 rad/sec
100 200 300
0.20.40.60.8
sigma = 0.4, omega = 0 rad/sec
100 200 300-20
0
20
40sigma = -0.2, omega = -1 rad/sec
100 200 300-1
0
1sigma = 0, omega = -1 rad/sec
100 200 300-0.5
0
0.5
1sigma = 0.2, omega = -1 rad/sec
100 200 300
0
0.5
1sigma = 0.4, omega = -1 rad/sec
Figure :
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
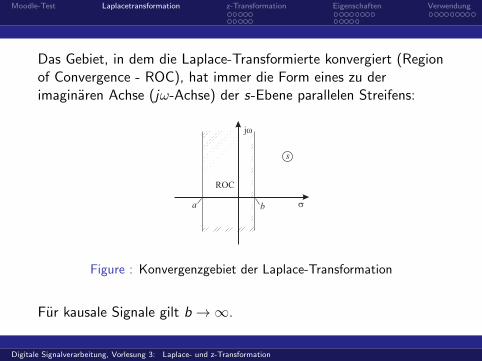
Das Gebiet, in dem die Laplace-Transformierte konvergiert (Regionof Convergence - ROC), hat immer die Form eines zu derimaginaren Achse (jω-Achse) der s-Ebene parallelen Streifens:
Figure : Konvergenzgebiet der Laplace-Transformation
Fur kausale Signale gilt b →∞.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Anwendungen der Laplace-Transformation:
Wegen L
ddt v(t)
= sLv(t) werden aus
Differentialgleichungen oft gut losbare algebraischeGleichungen.
Fur zeitkontinuierliche, lineare Systeme ist dieLaplacetransformation die Methode zum Entwurf von stabilenRegelkreisen.
Fur zeitdiskrete Signale und Systeme bildet dieLaplace-Transformation den Ausgangspunkt der Entwicklungder z-Transformation.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Ziel: Reverse-Engineering fur Digitale Filter
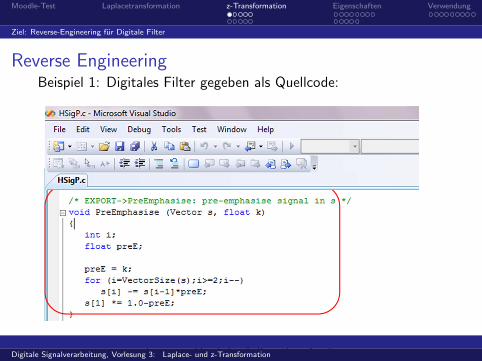
Reverse EngineeringBeispiel 1: Digitales Filter gegeben als Quellcode:
Figure : Digitales Filter als c-CodeDigitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Ziel: Reverse-Engineering fur Digitale Filter
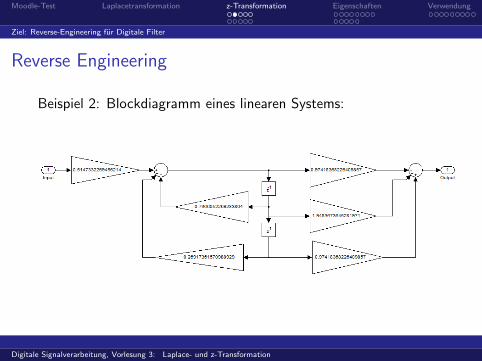
Reverse Engineering
Beispiel 2: Blockdiagramm eines linearen Systems:
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Ziel: Reverse-Engineering fur Digitale Filter
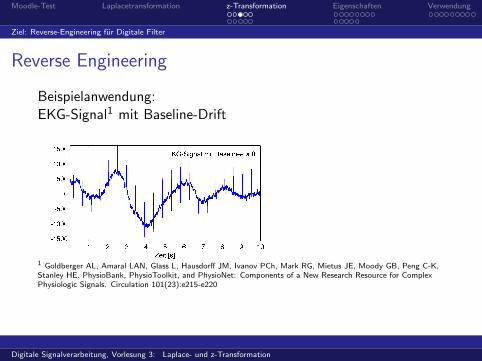
Reverse Engineering
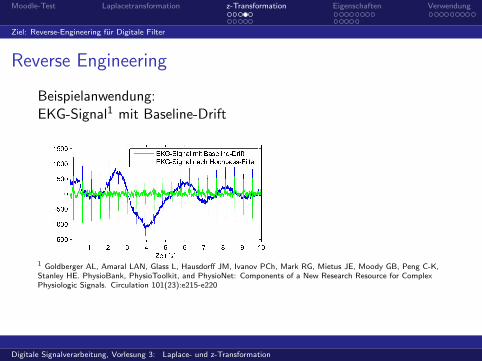
Beispielanwendung:EKG-Signal1 mit Baseline-Drift
1 Goldberger AL, Amaral LAN, Glass L, Hausdorff JM, Ivanov PCh, Mark RG, Mietus JE, Moody GB, Peng C-K,Stanley HE. PhysioBank, PhysioToolkit, and PhysioNet: Components of a New Research Resource for ComplexPhysiologic Signals. Circulation 101(23):e215-e220
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Ziel: Reverse-Engineering fur Digitale Filter
Reverse Engineering
Beispielanwendung:EKG-Signal1 mit Baseline-Drift
1 Goldberger AL, Amaral LAN, Glass L, Hausdorff JM, Ivanov PCh, Mark RG, Mietus JE, Moody GB, Peng C-K,Stanley HE. PhysioBank, PhysioToolkit, and PhysioNet: Components of a New Research Resource for ComplexPhysiologic Signals. Circulation 101(23):e215-e220
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Ziel: Reverse-Engineering fur Digitale Filter
Reverse Engineering
Weg dorthin:
Einfuhrung der z-Transformation
Konvergenz & Eigenschaften
z-Ubertragungsfunktion digitaler Systeme
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Einfuhrung der z-Transformation
Einfuhrung der z-Transformation
Laplacetransformation fur abgetastete Signale:
L
∞∑k=−∞
v0(t)δ(t − kT )
=
∞∫−∞
∞∑k=−∞
v0(t)δ(t − kT )e−stdt
=∞∑
k=−∞
∞∫−∞
v0(t)δ(t − kT )e−stdt
=∞∑
k=−∞v0(kT )e−skT . (6)
Gleichung (6) beschreibt also die Laplace-Transformierte desabgetasteten Signals.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Einfuhrung der z-Transformation
z-Transformation
V∗(s) =∞∑
k=−∞v0(kT )e−sTk . (7)
Ubergang zur diskreten Signalfolge v(k) = v0(kT ) und Definition
von zdef= esT fuhrt zu
V (z) =∞∑
k=−∞v(k)z−k
def= Zv(k). (8)
Die z-Transformierte der Folge v(k) ist also genau dieLaplacetransformierte des abgetasteten Zeitsignals!
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Einfuhrung der z-Transformation
Laplacetransformation fur abgetastete Signale
In∑∞
k=−∞ v0(kT )e−skT ist e−skT = e−σkT · e−jkωT
Wegen e−ja = e−j(a+N2π) gilt:
e−jkω1T = e−jk(ω1T+N2π) = e−jk(ω2T ) mit ω2T − ω1T = 2πN
⇒ ω2 − ω1 = 2πNT
⇒ Die Laplace-Transformierte ist in ω-Richtung periodisch mit derAbtastkreisfrequenz 2π
T = 2πfA.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Einfuhrung der z-Transformation
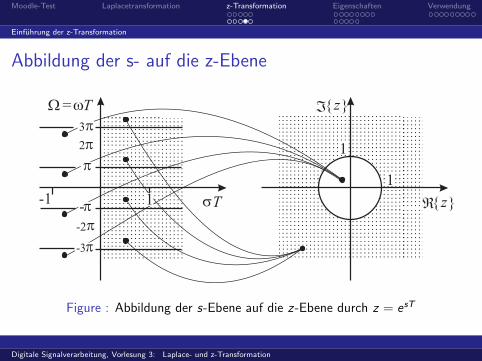
Abbildung der s- auf die z-Ebene
Figure : Abbildung der s-Ebene auf die z-Ebene durch z = esT
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Einfuhrung der z-Transformation
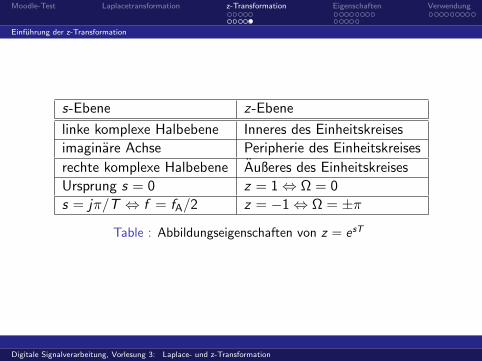
s-Ebene z-Ebene
linke komplexe Halbebene Inneres des Einheitskreises
imaginare Achse Peripherie des Einheitskreises
rechte komplexe Halbebene Außeres des Einheitskreises
Ursprung s = 0 z = 1⇔ Ω = 0
s = jπ/T ⇔ f = fA/2 z = −1⇔ Ω = ±π
Table : Abbildungseigenschaften von z = esT
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
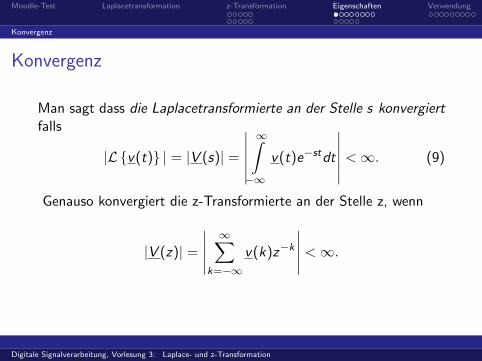
Konvergenz
Man sagt dass die Laplacetransformierte an der Stelle s konvergiertfalls
|L v(t) | = |V (s)| =
∣∣∣∣∣∣∞∫−∞
v(t)e−stdt
∣∣∣∣∣∣ <∞. (9)
Genauso konvergiert die z-Transformierte an der Stelle z, wenn
|V (z)| =
∣∣∣∣∣∞∑
k=−∞v(k)z−k
∣∣∣∣∣ <∞.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Konvergenz
Aus der Aquivalenz von Laplace- und z-Transformation lasst sichdas Konvergenzgebiet der z-Transformation herleiten.
Die Laplace-Transformierte konvergiert fur kausale Signaleund Systeme rechts von einer Grenze σ > a
Wegen z = esT = e(σ+jω)T = eσT e jωt = |z |e jωt
also wegen |z | = eσT
konvergiert die z-Transformierte fur alle σ > a und damit furalle |z | > eaT .
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Konvergenz
Das gleiche Prinzip funktioniert auch fur Signale, die kausale undnichtkausale Anteile haben (die also rechts und links der Zeit t = 0Werte 6= 0 besitzen):
Die Laplace-Transformierte konvergiert fur Signale undSysteme in einem Band a < σ < b.
Dann konvergiert die z-Transformierte wegen |z | = eσT furalle a < σ < b, also fur alle eaT < |z | < ebT .
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Konvergenz und Stabilitat
Ein LTI-System ist BIBO-Stabil, wenn
∞∑k=−∞
|h(k)| <∞. (10)
Das kann man am Konvergenzgebiet der z-Transformierten derImpulsantwort gut uberprufen!
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation

Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
|H(z)| =
∣∣∣∣∣∞∑
k=−∞h(k)z−k
∣∣∣∣∣ (11)
≤∞∑
k=−∞
∣∣∣h(k)z−k∣∣∣ (12)
=∞∑
k=−∞|h(k)||z−k | (13)
Wenn h(k) ein BIBO-stabiles System beschreibt, konvergiert alsoauch H(z) fur |z | = 1.Umgekehrt: Wenn fur H(z) der Einheitskreis, |z | = 1, nicht in derROC liegt, dann ist das System nicht BIBO-stabil.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Beispiele zur Konvergenz
Zeitverzogerter Dirac-Impuls:
v(k) = δ(k −m), m ∈ N0.
Eingesetzt in die Definition der z-Transformation (8) ergibt sich
V (z) = Zδ(k −m) =∞∑k=0
δ(k −m)z−k = z−m.
Speziell wenn m = 0 ist, folgt also auch Zδ(k) = 1.Also ist das Spektrum des Dirac-Impulses frequenzunabhangig(=weiß), und konvergiert in der gesamten z-Ebene.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Beispiele zur Konvergenz
Komplexe kausale Exponentialfolge:
v(k) = (ae jΩ)k , ∀k ≥ 0 a,Ω ∈ R. (14)
Die Durchfuhrung der z-Transformation (8) ergibt:
V (z) =∞∑k=0
ake jkΩz−k =∞∑k=0
(ae jΩz−1)k . (15)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Konvergenz
Die Formel (15) stellt eine geometrische Reihe dar. Deswegen ist
V (z) =∞∑k=0
(ae jΩz−1)k <∞ (16)
falls|ae jΩz−1| < 1. (17)
Deswegen
ROC (geom. Reihe): |z | > |ae jΩ| = |a|. (18)
In diesem Gebiet der z-Ebene existiert die z-Transformierte (15),d.h. die unendliche Summe konvergiert ∀|z | > |a| absolut bzw.V (z) ist in diesem Gebiet beschrankt:
V (z) =∞∑k=0
(ae jΩz−1)k =1
1− ae jΩz−1=
z
z − ae jΩ. (19)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Eigenschaften
Verschiebungssatz der z-Transformation
Gesucht wird die z-Transformierte einer zeitlich verschobenen Folgev(k − l), l ∈ Z:
Zv(k − l) =∞∑k=0
v(k − l)z−k . (20)
Weil v(k) als kausal vorausgesetzt wurde, mussen zwei Falleunterschieden werden.
Verzogerung (l ≥ 0)
Linksseitige Verschiebung (l < 0)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Eigenschaften
Verzogerung
Es gilt mit der Substitution λ = k − l (und k = λ+ l)
Zv(k − l) =∞∑k=0
v(k − l)z−k = z−l∞∑
λ=−lv(λ)z−λ
Da in der letzten Summe auf Werte der Folge v(λ) fur λ < 0zugegriffen wird, fur die v(λ) = 0 gilt, folgt:
Zv(k − l) = z−l∞∑λ=0
v(λ)z−λ = z−lV (z) (21)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Eigenschaften
Linksseitige Verschiebung (l < 0)Wieder der selbe Trick, aber mit den Substitutionen m = −l undλ = k + m:
Zv(k − l) = Zv(k + m) =∞∑k=0
v(k + m)z−k
= zm∞∑λ=m
v(λ)z−λ
= zm∞∑λ=0
v(λ)z−λ − zmm−1∑λ=0
v(λ)z−λ
= zmV (z)−m−1∑λ=0
v(λ)zm−λ
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Eigenschaften
Faltungssatz der z-Transformation
Die Konsequenz der Faltung zweier Folgen im Zeitbereich ist imz-Bereich eine Multiplikation.
Um das zu zeigen, benutzt man den Verschiebungssatz:
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
Eigenschaften
Faltungssatz der z-Transformation
Zv1(k) ∗ v2(k) = Z
∞∑ν=0
v1(ν)v2(k − ν)
=∞∑k=0
∞∑ν=0
v1(ν)v2(k − ν)z−k (22)
=∞∑ν=0
v1(ν)∞∑k=0
v2(k − ν)z−k
=∞∑ν=0
v1(ν)z−νV 2(z)
= V 1(z)V 2(z)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
z-UbertragungsfunktionWenn h(k) die Impulsantwort eines linearen, zeitdiskreten Systemsist, und am Eingang das kausale Signal v(k) anliegt, gilt fur denAusgangswert y(k) = v(k) ∗ h(k).
Fur die z-Transformierte gilt mit dem Faltungssatz:
Y (z) = H(z) · V (z).
Definition: Systemfunktion
H(z) =Y (z)
V (z)(23)
Die Funktion H(z) wird als z-Ubertragungsfunktion des Systemsoder Systemfunktion bezeichnet.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches BeispielDie Systemfunktion kann aus dem Blockdiagramm oder Quellcodegewonnen werden.
Als erstes wird dazu die Zeitfunktion (= Differenzengleichung)bestimmt (siehe Tafel)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches Beispiel
Ganz allgemein konnte man hierfur auch schreiben:
y(k) =m∑µ=0
bµv(k − µ)−n∑ν=1
aνy(k − ν)
Die z-Transformierte bekommt man uber den Verschiebungssatzder z-Transformation und deren Linearitat. So findet man:
Y (z) =m∑µ=0
bµV (z)z−µ −n∑ν=1
aνY (z)z−ν . (24)
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches Beispiel
Schließlich kann daraus Y (z)/V (z) berechnet werden, wenn mannoch a0 = 1 wahlt:
Y (z) +n∑ν=1
aνY (z)z−ν =m∑µ=0
bµV (z)z−µ
Y (z)a0z−0 +
n∑ν=1
aνY (z)z−ν =m∑µ=0
bµV (z)z−µ
Y (z)n∑ν=0
aνz−ν = V (z)
m∑µ=0
bµz−µ
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches Beispiel
So erhalt man dann
H(z) =Y (z)
V (z)
=
∑mµ=0 bµz
−µ∑nν=0 aνz
−ν
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches Beispiel
Wozu?
Mit Y (z) = H(z)V (z) kann nun fur ein beliebiges Eingangssignaldieses Systems auch das Ausgangssignal berechnet werden.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Praktisches BeispielDabei kann man wieder einsetzen z = esT = e(σ+jω)T .Fur σ = 0 und Ω = ωT , also z = e jΩ, kommt man auf
H(e jΩ) =Y (e jΩ)
V (e jΩ)=
∑mµ=0 bµe
−jµΩ∑nν=0 aνe
−jνΩ
und erhalt daraus auch das Ubertragungsverhalten des Systems,beispielsweise den Amplitudengang (siehe Beispiel):
|H(e jΩ)| =|Y (e jΩ)||V (e jΩ)|
=|∑m
µ=0 bµe−jµΩ|
|∑n
ν=0 aνe−jνΩ|
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Lernziele
Nach dieser Vorlesung sollten Sie
die Laplace-Transformation als um einen Konvergenzfaktorerweiterte Fouriertransformation verstehen
wissen, wie sich die z-Transformation aus derLaplace-Transformation ergibt,
welche wesentlichen Eigenschaften sie beitzt
und wie man mit der z-Transformation digitale Systemeanalysieren kann.
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Moodle-Test Laplacetransformation z-Transformation Eigenschaften Verwendung
z-Ubertragungsfunktion
Vielen Dank fur Ihre Aufmerksamkeit!
Digitale Signalverarbeitung, Vorlesung 3: Laplace- und z-Transformation
Recommended

















