KAUNO TECHNOLOGIJOS UNIVERSITETAS
INFORMATIKOS FAKULTETAS
P175D003 INFORMATIKOS TEORIJA
E. VERSLO SISTEMŲ MODELIAVIMAS
Referatas
Atliko: dokt. Aleksejus Michalkovič
Priemė: prof. H. Pranevičius
KAUNAS, 2011

Turinys1. E. verslas.................................................................................................................................................................3
2. DEVS modelis.........................................................................................................................................................5
2.1 Klasikinis DEVS modelis................................................................................................................................5
2.2 Dinaminis DEVS modelis...............................................................................................................................8
2.3 Mobilieji agentai ir MDEVS modelis............................................................................................................10
2.4 MDEVS modelio taikymo e. komercijoje pavyzdys......................................................................................13
3. PLA modelis..........................................................................................................................................................14
3.1 Klasikinis PLA modelis.................................................................................................................................14
3.2 PLA modelio imitavimo algoritmas...............................................................................................................15
3.3 Dinaminis PLA modelis................................................................................................................................16
3.4 dynPLA modelio taikymo e. komercijoje pavyzdys......................................................................................19
Apibendrinimai.............................................................................................................................................................20
Literatūra.......................................................................................................................................................................21
2

1. E. verslas
Verslas jau nuo seniausių laikų supa žmones. Šiuolaikiniame gyvenime nėra tokio žmogaus, kuris
nebūtų vienokiu ar kitokiu būdu susijęs su verslu. Visi mes esame bankų klientai, lankomes parduotuvėse,
dirbame pelno siekiančiose organizacijose ir panašiai. Tačiau kitoje daugumai kasdieninių žmonių
nežinomoje verslo pusėje vyksta ne tik sudėtingi matematiniai procesai, bet ir tokie verslo procesai kaip
strateginis bei kooperacinis valdymas, marketingas, gamyba ir t.t. Žinoma, versle, kaip ir daugelyje kitų
sryčių, yra susidūriama su ypač dideliu dokumentų kiekiu. Akivaizdu, kad jau praeito amžiaus viduryje buvo
ieškomos galimybės, kurios leistų žymiai sumažinti popierių kiekį. Tokiu būdu galima pasiekti ne tik
pigesnį, paprastesnį bei greitesnį duomenų apsikeitimo lygį, bet ir palengvinti bendravimą tarp verslo
partnerių. Tai ir buvo elektroninio verslo (e. verslo) pradžia.
E. verslas – tai nėra verslas tiesiogine prasme. E. verslas yra suprantamas, kaip verslo modelis, kuris
automatizuoja verslo procesus, duomenų apsikeitimą bei komecinę transakciją naudojant informacines
sistemas. E. verslo modeliai leidžia suprasti atskirus modeliuojamos srities elementus, sąsają tarp jų, bei
leidžia modifikuoti šiuos elementus. Dažnai verslo analitikai analizuoja formalius e. verslo modelius. Tai
leidžia jiems pasigilinti į verslo sritį.
Tačiau kas gi iš tikrųjų yra verslo modelis? Otto Petrovic, Christian Kittl ir Ryan D. Teksten savo
straipnyje pabrėžia, kad ši savoka yra viena iš labiausiai diskutuojamų, tačiau kartu ir mažiausiai
suprantamų. Vieną iš geriausių šios savokos apibrėžimų pateikė P. Timmers‘as savo 1998 metų straipsnyje.
Verslo modelis yra suprantamas kaip konceptualinis bei architektūrinis verslo strategijos taikymas. Verslo
modelis yra verslo procesų taikymo pagrindas.
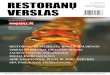
1 pav. Verslo logikos trikampis
3
Strategija
Verslo modelis
Verslo procesas
Planavimo lygis
Archtektūrinis lygis
Taikymo lygis
E. verslo procesų
adaptacija
E. verslo galimybės
ICT įtampa

Verslo procesai yra naudojami ne tik e. versle, bet ir e. komercijoje. Verslo procesas – tai tarpusavyje
surištų uždavinių sistema, kuri yra naudojama paslaugoms arba prekems sukurti. Dažnai atskiri verslo
procesai yra jungiami į vieną bendrą procesą. Paprasčiausias verslo proceso pavyzdys yra šiuo metu ypač
populiarios internetinės parduotuvės. 2 paveiksle pavaizduota Amazon.com internetinės parduotuvės verslo
proceso schema:
2 pav. Verslo procesas
Reikia suprasti ir tai, kad e. verslas yra, kaip ir įprastas verslas, gana sudėtinga dinaminė sistema. Tai
reiškia, kad ši sistema yra tokia, jog gali vienu metu teikti paslaugas kelioms e. verslo sudedomosioms
dalims (pvz. verslo partneriams, klientams, darbotojams ir pan.). Todėl atliekant e. verslo modeliavimą
būtina įvertinti ir sistemos dinamiškumą.
Dinaminė sistema yra tokia sistema, kurios būsiena kinta realiame laike priklausomai nuo ja
veikiančių veiksnių. Tačiau pastaruoju metu ypač populiarėja tokios sistemos, kai veiksniai gali sukelti ne
tik būsienos, bet ir pačios struktūros pakeitimus. Tai reiškia, kad sistemoje gali atsirasti papildomų
komponentų, ryšių tarp jų, o kai kurie komponentai gali būti ir pašalinti iš sistemos. Tokio tipo sistemos
dažnai yra vadinamos dinaminėmis su kintančia struktūra. Vienas iš tokių sistemų pavyzdžių yra mobiliųjų
agentų sistemos. Modeliuojant šias sistemas reikia aprašyti kiekvienos struktūrą fiksuotu laiko momentų,
kurios vėliau yra sujungiamos į bendrą modelį.
Pastaruoju metu yra siekiama formalizuoti dinaminių sistemų su kintančią struktūra modeliavimą.
Dažnai tam yra naudojami automatų teorija pagrįsti DEVS ir jam artimas PLA matematiniai modeliai. Šių
modelių modifikacijos taip pat įvertina sistemos dinamiškumą.
4

2. DEVS modelis
DEVS (angl. Descrete Event System Specification) – tai formalus diskrečiais įvykiais valdomos
sistemos modelis. Jis leidžia aprašyti taikomus praktikoje modulius naudojant blokais naudojant hierarchinį
požiūrį. Pirmą kartą DEVS modelis buvo apibrėžtas aštuntame praeito amžiaus dešimtmetyje kaip priemonė,
kuri buvo skirta diskretiems įvykiams modeliuoti. Realioji sistema, sumodeliuota taikant DEVS, gali būti
aprašyta kaip submodulių (blokų) kompozicija. DEVS blokai gali būti dviejų tipų: atominiai ir jungtiniai.
Šie blokai taip pat yra DEVS modeliai.
2.1 Klasikinis DEVS modelis
Kiekvieną atominį DEVS modelį apibrėžia septynios komponentės:
M=¿
čia X – įviesčių įvykių aibė, S – būsienų aibė, Y – išvesčių įvykių aibė, δint – vidinio perėjimo funkcija,
δext – išorinio perėjimo funkcija, λ – išvesties funkcija, ta – laiko funkcija.
Kiekvienas DEVS modelis gali turėti ryšių su kitais modeliais. Šiuos ryšius įtakoja įvesties ir išvesties
įvykiai. Kai modelis gauna įvesties duomenis, išorinio perėjimo funkcija nusako, koks bus sistemos elgesys
esant tokiems duomenims. Vėliau, kai baigiasi būsienos gyvavimo trūkmė (tą nusako laiko funkcija), vidinio
perėjimo funkcija sukūria vidinį įvykį ir sistema pereina į kitą būsieną. Pasiekti rezultatai yra persiunčiami
kitiems modeliams išvesties funkcijos pagalba. Taip gaunami jungtiniai modeliai.
Jungtinis DEVS modelis gali apjungti kaip atominius, taip ir kitus jungtinius modelius. Formaliai šį
modelį aprašo tokia struktūra:
CM=⟨ X , Y ,D , {M i } , {I i } , {Z ij }⟩
čia X – įviesčių įvykių aibė, Y – išvesčių įvykių aibė, D – indeksų aibė. Kiekvienam i∈D Mi – yra
atomonis arba jungtinis DEVS modelis, o Ii – i-tojo modelio poveikių aibė. Taip pat kiekvienam j∈ I i Zij –
yra perėjimo nuo modelio Mi prie modelio Mj funkcija.
Matome, kad jungtinį modelį galima apibrėžti kaip bazinių komponenčių (atominių arba jungtinių
DEVS modelių), kurios yra tarpusavyje surištos, aibę. Kiekvieno modelio M i poveikis taip pat nusako, koks
modelis Mj turi gauti rezultatą. Tam yra sukūriama i-tojo modelio poveikių aibė, kurią sudaro modelių,
kuriems yra skirti atitinkamo modelio rezultatai, indeksai. Šie indeksai nusako kokiam modeliui bus
5

persiunčiami kito modelio gauti išvesties duomenys. Perėjimo funkcija Z ij modelio Mi išvesties duomenis
paverčia modelio Mj įvesties duomenimis.
Taigi matome, kad jungtinis DEVS modelis turi hierarhinę struktūrą, kurią galima pavaizduoti taip:
3 pav. Jungtinio DEVS modelio struktūros pavyzdys
Matematine prasme jungtinio DEVS modelio struktūra yra panaši į grafą. Grafo viršūnės yra DEVS
modeliai, o briaunos – yra ryšiai tarp šių modelių.
Kadangi sujungus daugybę išvien veikiančių komponenčių daugelis vidinių perėjimų vyksta tuo pačiu
metu, tai yra įvedama papildoma funkcija select : 2D → D (čia D – unikalių komponenčių vardų aibė), kurios
pagalba nuosekliose imitavimo sistemose yra sprendžiama kolizijų problema.
6
Jungtinis modelis Jungtinis modelis
Atominis modelis
Atominis modelis
Jungtinis modelis
Atominis modelis
Jungtinis modelis Jungtinis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Jungtinis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Atominis modelis
Atominis modelis Atominis modelis
Atominis modelisAtominis modelis
Atominis modelis
Atominis modelis
Atominis modelis

DEVS modelių imitavimas yra vykdomas pagal Zeigler pasiūlytą abstraktaus imitatoriaus koncepciją.
Šis principas kiekvieną DEVS modelį susieja su virtualiu procesoriumi. Todėl, imitavimas yra vykdomas
perduodant žinutes tarp abstrakčių imitatorių, o ne tarp pačių DEVS modelių. DEVS imitavimo algoritme
egzistuoja trijų tipų procesoriai (4 pav.): imitatorius, koordinatorius ir pagrindinis koordinatorius (angl. root
coordinator). Kiekvienas atominis modelis turi imitatorių, kuris saugo modelio artimiausio įvykio laiką tnext.
Jungtinis modelis turi koordinatorių, kuris surenka visą informaciją iš jam pavaldžių imitatorių ir išrenka
minimalų laiką tmin, kurį persiunčią pagrindiniam koordinatoriui. Pagrindinis koordinatorius yra atsakingas
už minimumo išrinkimą iš visų atsiustų laikų. Minimalus laikas Min yra persiunčiamas visiems imitatoriams
pranešimu (*). Imitatoriai, kurių artimiausias vidinis įvykis yra lygus Min inicijuoja vidinį įvykį, kurio metu
yra generuojamas išvesties signalas y ir išsiunčiamas signalu (done). Šis signalas persiunčiamas tėviniam
koordinatoriui (išorėje gaubiančio jungtinio modelio koordinatoriui), kuris pagal Z (išėjimo pavertimo į
įėjimą) funkciją perduoda išorinį signalą atitinkamam modeliui pranešimu (x).
4 pav. DEVS abstraktus imitatorius
Tačiau, kai jau buvo minėta, e. verslo sistemoms modeliuoti reikia kitokių modelių. Aprašytas DEVS
modelis netinka, nes turi fiksuotą struktūrą. Tai reiškia, kad šio modelio pokyčius sukeliantys įvykiai įtakoja
tik modelio būsienas. Todėl buvo pasiūlyta DEVS modelio modifikacija – dinaminis DEVS modelis
(dynDEVS) – kuri leidžia modeliuoti sistemas su kintančia struktūra.
7

2.2 Dinaminis DEVS modelis
Žinoma, intuatyviai yra aišku, kad dinaminę sistemą galima aprašyti ir taikant formalųjį DEVS
modelį. Tačiau tokiu atvėju reikėtų numatyti visus įmanomus sistemų pokyčius, padidinti modelio būsienų
aibę bei įvesti painius ryšius tarp modelio sudedamųjų. Taigi teoriškai formalūs DEVS modeliai gali būti
naudojami sistemoms su kintančia struktūra aprašyti. Dėja, praktiškas šių modelių taikymas sistemoms su
kintančia struktūra modeliuoti yra neįmanomas arba neracionalus. Ypatingos problemos kyla norint
modeliuoti sistemą, kurioje atsiranda arba yra naikinami kai kurie ryšiai. Tokių problemų neturi dinaminis
DEVS modelis, kuris gali prisitaikyti prie sistemos evoliucijos bei yra save organizuojantis modelis.
dynDEVS modelis gali vykdyti vidinius struktūros pokyčius, tačiau lieka statinis išorinės aplinkos
atžvilgiu. Modelis turi tokį apibrėžimą:
dynDEVS= ⟨ X ,Y , minit , M (minit )⟩
čia X ir Y – įvesties ir išvesties įvykių struktūrizuotos aibės,minit∈M (minit ) – modelis pradiniu laiko
momentu, Minit – modelių aibė, kurios struktūra yra tokia:
¿
čia S – būsienų aibė, sinit∈S – būsiena pradiniu laiko momentu, δint : Q×X→S – vidinio perėjimo
funkcija (čia aibė Q= {(s ,e ) :s∈S , 0≤ e ≤ ta ( s ) }), δext : S→S – išorinio perėjimo funkcija, ρα : S→M(minit) –
modelio struktūrinio perėjimo funkcija, λ : S→Y – išvesties funkcija, ta : S → R0+ ¿∪ {∞ }¿ – laiko funkcija. Taip
pat dynDEVS modelis tenkina savybę:
(∀n∈M (minit ) )(∃m∈M (minit ) :n=ρα ( sm ) , sm∈Sm)∨n=minit.
Būtent modelio struktūrinio perėjimo funkcija ρα realizuoja atominių modelių struktūrinius pokyčius,
t.y sukuria naujas arba naikina nereikalingas komponentes. Kiekvienas toks struktūrinis pokytis gali iššaukti
naujo submodelio atsiradimą. Tam, kad būtų išlaikomas nuoseklumas tarp modelių funkcija išsaugo dviems
sekantiems modeliams būdingas parametrų reikšmes m ir n, bei pagal nutilėjimą priskiria pradines reikšmes
naujai susidarusiems modeliams. dynDEVS modelio perėjimus galima pavaizduoti tokia schema:
8

5 pav. Struktūriniai ir nestruktūriniai perėjimai dynDEVS modelyje
Bendruoju atvėju visi iš naujai pridėti modeliai yra saugomi aibėje M(minit). Taigi, kaip gaime matyti iš
5 paveiklslo, kiekvienas dynDEVS modelis vystosi kaip DEVS modelių seka. Tačiau, nors vidinė modelio
struktūra gali pakisti, sąsaja tarp modelio ir vartotojo išlieka tokia pati. Taip pat išorinis stebėtojas gali
matyti visus struktūrinius pokyčius net ir tuo atvėju, kai išvesties duomenys priklauso nuo vidinių sistemos
pokyčių. Taigi sistemos sąsaja yra jos vientisumo dalis, kuri, nepriklausomai nuo galimų vidinių struktūros
pokyčių, gali būti pasiūlyta vartotojui.
Realizuojant dynDEVS modelį naudojant programavimo kalbas tokias kaip C++ arba Java nauji
modeliai yra prijungiami arba pašalinami naudojant metodus addMethod( ), removeMethod( ), kurie turi
vieną parametrą – patį modelį. Ryšiams tarp modelių nustatyti arba pašalinti naudojami metodai
addCoupling(), removeCoupling(), kurie turi keturius parametrus – patį modelį, šio modelio išvesties ryšius,
modelį, kuriam skirti išvesties duomenys, bei jo įvesties ryšius. Toks parametrų skaičius yra naudojamas dėl
to, kad norint pašalinti DEVS modelį reikia nutraukti ir jo ryšius, o norint prijungti naują modelį reikia
nustatyti ir ryšius su kitais modeliais. Tarkime, turime tokią sistemą su kintančia strukturą:
6 pav. Sistemos su kintančia struktūra pavyzdys
Šią sistemą galime gauti naudojant tokį algoritmą:
(1) addModel(C);
(2) addCoupling(C, COutputPort, B, BInputPort);
(3) removeModel(A);
Nors teoriškai nėra jokių apribojimų kurios dynDEVS modelio komponentės gali sukelti struktūros
pakyčius, praktikoje tam yra naudojami atominiai DEVS modeliai, nes jungtinių modeliu elgsena priklauso
nuo atominių modelių. Dažniausiai struktūros pokytis pasideda nuo atominio modelio vidinių arba išorinių
perėjimų. Tai yra patogu, nes struktūros pokyčius dažniausiai sukelia aplinkybių pokyčiai, kuriuos DEVS
modelis supranta kaip tam tikrus įvykius ir apdoroja juos naudojant vidinio bei išorinio perėjimo funkcijas.
Taigi tam tikra prasme atominiai DEVS modeliai stebi sistemą. Atsižvelgiant į 6 paveikslą matome, kad
sistemos komponentė B gali atlikti priežiūros funkcijas ir inicijuoti sistemos pokyčius. Taip, pavyzdžiui,
komponentė B gali stebėti komponentės A įvestį ir, jeigu yra tenkinama tam tikra sąlyga, gali pridėti naują 9

komponentę C ir ryšį tarp C ir B. Toliau B stebi C įvestį ir tam tikros sąlygos tenkinimo atvėju pašalina iš
sistemos komponentę A bei ryšį taip A ir B.
Jungtinio modelio analogas dinaminiu atvėju yra tinklinis DEVS modelis (dynNDEVS), kuris
hierarhiniu būdu aprašo jį sudarančias kompomentes bei ryšius tarp jų. Šio modelio apibrėžimas yra panašus
į klasikinio dynDEVS apibrėžimą, tik šį kartą vietoj minit naudojamas parametras ninit, kuris reiškia
konfigūracijos pradžią bei priklauso N(ninit) modelių aibei. Šios aibės struktūra yra panaši į klasikinio
jungtinio modelio struktūrą, tačiau vietoj statinių modelių čia yra naudojami dinaminiai, bei atsiranda
papildoma tinklų perėjimo funkcija ρN. Naudojant šią funkciją yra apibrėžiami visi tinklo struktūros
pokyčiai. Tinklo perėjimo funkcijos paskirtis yra reaguoti į atominių modelių būsienų pokyčius.
Imitavimo sistemose kolizijų problema yra sprendžiama naudojant funkciją select : 2D → D, kuri yra
įterpiama į modelių aibės Minit (dynNDEVS atveju – į N(ninit)) struktūrą.
2.3 Mobilieji agentai ir MDEVS modelis
E. versle kaip ir e. komercijoje dažnai yra naudojami mobilieji agentai. Mobilusis agentas yra toks
programinis agentas, kuris gali pats migruoti kompiuteriniu tinklu iš vienos vietos į kitą ir joje atlikti
užduotis (7 pav).
7 pav. Mobiliojo agento migravimas
Pagrindinė idėja, pakeisti darbą tiesiogiai jungiantis prie nutolusio kompiuterio (virtualios darbo
vietos, duomenų bazių ir pan.) mobiliuoju agentu. Paprastai vartotojas, norėdamas rasti tam tikrą
informaciją, interneto pagalba turi prisijungti prie tam tikrų duomenų bazių. Neradęs reikiamos
informacijos, jis jungiasi prie kito duomenų serverio. Atlikdamas paiešką, vartotojas visą laiką išlieka
prisijungęs prie duomenų bazės, dėl to yra apkraunamas kompiuterinis tinklas. Be to, interneto ryšys gali
nutrūkti ir užduotis negalės būti atlikta iki galo. Tuo tarpu, MA panaudojimas leidžia išvengti šių
nepatogumų. Suformulavęs užklausą ir kitus MA reikiamus parametrus, vartotojas paleidžia agentą migruoti
kompiuteriniu tinklu tam, kad surasti reikiamos informacijos ar atlikti tam tikrus skaičiavimus. Kol MA
10

migruoja, vartotojui nereikia būti prisijungusiam prie tinklo. Tokiu būdu yra sumažinamas kompiuterinio
tinklo apkrovimas bei ryšio kaštai.
E-komercijos erdvėje mobilieji agentai atlieka pirkėjo ir pardavėjo vaidmenis. Agentai pardavėjai
atitinka prekybininkus, agentai pirkėjai atitinka vartotojus. Pardavėjų bei pirkėjų agentai veikia ir
konkuruoja elektroninėje erdvėje (agentavietėje). Migruodami iš vienos agentavietės į kitą MA renka,
analizuoja informaciją ir galiausiai ją pateikia vartotojui. Pagrindinė e-komercijos agentaviečių užduotis
priimti atvykstančius pirkėjų ir pardavėjų agentus, juos aptarnauti, palengvinti komunikavimą, bei
migravimą.
Mobiliesiems agentams modeliuoti reikia specialių priemonių. Taip yra todėl, kad šios sistemos
skirtingai nuo kitų reikalauja mobilumo, ir dėl šios priežasties yra sudėtingesnės. Mobilieji agentai yra
diskrečiųjų įvykių sistemos su kintančia struktūra žiūrint iš tos pusės, kad šios sistemos yra tinklai, kuriais
juda mobilieji agentai. Mobiliojo agento modelio pavyzdys yra pademostruotas 8 paveiksle.
8 pav. Mobiliojo agento modelio pavyzdys
Mobiliųjų agentų modeliavimui buvo pasiūlytas DEVS modelio praplėtimas MDEVS. Šis modelis
palaiko ne tik vidinius struktūros pokyčius, bet ir ryšių tarp modelių dinaminius pokyčius. Kaip ir klasikinio
DEVS modelio atvėju, MDEVS formalizmą sudaro atominis ir jungtinis modeliai. Atominiai modeliai valdo
nematomas sistemos komponentes. Šių modelių struktūra sutampa su klasikinio DEVS formalizmo atominiu
modeliu. Jungtiniai modeliai aprašo vidinių modelių tarpusavio sąryšius. Naudojant šiuos sąryšius
simuliacijos pranešimai yra persiūnčiami tam tikram modeliui. Skirtingai nuo klasikinio DEVS jungtinio
modelio MDEVS jugtinis modelis sugeba atlikti vidinės struktūros pokyčius. Šis modelis yra apibrėžiamas
kaip struktūra
CM=⟨ X ,Y ,S , ρ , δ , {M i } ,C ,Select ⟩
Modelio kompomentės turi tokias reikšmes:
X=X ¿⋃Xc h, čia Xin – įvesčių įvykių aibė, Xch – struktūros pokyčių aibė
Y – išvesčių įvykių aibė
S – būsienų aibė
{M i }∈M ¿ – aktyviųjų modelių aibė (M* – visų modelių aibė)
ρ :S →2M ¿
– modelio aktyvacijos funkcija
11

δ : Xc h× S → S – struktūrinių perėjimų funkcija
C={ EIC ,EOC , IC , SCC } – ryšių aibė, čia EIC⊆ X ¿×¿ i X i× S - išorinių įvesties ryšių
sąryšiai, EOC⊆¿ i Y i× Y × S - išorinių išvesties ryšių sąryšiai, IC⊆¿ i Y i× ¿ j X j × S - vidinių
ryšių sąryšiai, SCC⊆¿ i Y i× Xc h× S - pokyčių ryšių sąryšiai
Select : 2{Mi }→ M i - select funkcija
Jungtinis modelis keičia savo struktūrą gavęs įvesties pranešimą, kuris priklauso aibėi Xch. Struktūros
būsiena duotoju laiko momentu nusako aktyviųjų modelių bei ryšių aibes. Gautas struktūros pokyčio įvykis
pakeičia modelio būsieną naudojant struktūrinio perėjimo funkciją. Ryšių sąryšiai aktyvuojami priklausomai
nuo modelio būsienos.
MDEVS modelio imitavimui naudojamas abstaktaus imitavimo koncepciją, kuri yra plačiai aprašyta
šio darbo 2.1 skyrelyje. Imitavimo pavyzdys yra pavaizduotas 9 paveksle.
9 pav. MDEVS modelio imitavimo pavyzdys
12

2.4 MDEVS modelio taikymo e. komercijoje pavyzdys
10 paveiksle pavaizduota e. komercijos proceso schema, kuri gali būti realizuota naudojant MDEVS
modelį. Šioje schemoje mobilieji agentai bendrauja su paslaugų tiekėjais. 11 paveiksle yra pavaizduotas šios
schemos modelis.
10 pav. E. komercijos proceso schema
11 pav. E. komercijos proceso modelis
Tarkime, vartotojas (Host A) nori pirkti knygą. User Interface Agent pagalba vartotojas sukuria
mobilųjį agentą. Šis agentas gauna užklausą rasti gerą knygą naudojant internetines knygų parduotuves nuo
vartotojo. Mobilusis agentas pirmiausia nueina į paslaugų direktoriją (angl. Service Directory), kurioje yra
registruotų knygų parduotuvių sąrašas. Direktorijos agentas savo duomenų bazėje turi visą informaciją apie
tiekėjus. Gavęs tiekėjų sarašą mobilusis agentas kreipiasi į kiekvieną tiekėją. Taip bendraujant su kiekvienu
tiekėjo agentu vartotojo mobilusis agentas gauna knygų kurias, vartotojas nori pirkti, sąrašą.
13

3. PLA modelis
3.1 Klasikinis PLA modelis
Kitas matematimatinis modelis, skirtas dinaminėms sistemoms modeliuoti yra PLA (angl. Piece-
Linear Aggregate – Atkarpomis tiesinis agregatas) modelis. Šis modelis priklauso laikinių automatų modelių
klasei. Agregatas aprašomas įvesties bei išvesties aibėmis (atitinkamai X ir Y), ir būsena Z. Įvykiai šiuo
atvėju yra suskirstomi į išorinius E‘ bei vidinius E‘‘. Reakcijos į įvykius (t.y būsenos pokyčiai) aprašomos
operatoriais H, o išėjimo signalai generuojami operatorių G pagalba. Taigi, trumpai PLA modelį galima
apibrėžti tokia struktūra:
Ag= ⟨ X , Y ,E ' , E' ' ,Z , H ,G ⟩
Agregato būsiena Z yra aprašoma kaip dviejų komponenčių pora Z=⟨ν ( t ) , zν (t) ⟩, čia ν(t) – diskrečioji
dedamoji, o zν(t) – tolydžioji dedamoji. Tokiu būdu agregato būsena gali pakisti tik tuo atveju, jeigu
agregatas gauna išorinį signalą arba kai kinta tolydžioji dedamoji (t.y. įvyksta vidinis įvykis). Agregato
funkcionavimas yra stebimas diskrečiais laiko momentais, priklausančiais aibei T={t 0 ,t 1 , …,tm }, kuri
įtraukia laiko momentus, kurie nusako, kada ateina išoriniai įvykiaie '∈ E ' bei įvyksta vidiniai įvykiai
e ' ' ∈E ' ' . Tokio agregato pavyzdys yra pavaizduotas 12 paveiksle:
12 pav. PLA agregato pavyzdys
Operatoriai H apibrėžia naują agregato būseną įvykus išoriniam ar vidiniam įvykiui:
z ( tm+1 )=H [ z (tm ,e i) ] , e i∈ E'⋃E ' '
Operatoriai G, priklausomai nuo būsenos, apibrėžia agregato generuojamus išvesties signalus:
y=G [ z (tm , ei)] , e i∈ E '⋃E ' '
Aibė susijungusių agregatų sudaro agregatinę sistemą. PLA agregatinė sistema yra aprašoma nurodant
ją sudarančius agregatus K bei šių agregatų įvesties bei išvesties matricas. Šios sistemos pavyzdys yra
pavaizduotas 13 paveiksle:
14

13 pav. Agregatinės sistemos schema
Agregatų įvesčių matrica turi tokį pavidalą:
R=(r11 r12
r 21 r22
… …r1 L r2L
)čia r1 i - numeris agregato, priimančio įvesties signalą iš i-tojo ryšio kanalo. Komponentė įgyja
diskrečiasias reikšmes iš aibės (1, 2, …, K);
r2 i- numeris r1 i-jo įėjimo, į kurį ateina signalas i-tuoju kanalu (1 ≤r2 i ≤ N r).
Agregatų išvesčių matrica :
H=(h11 h12 …h21 h22 …… … …
h1M
h2M
…hK 1 hK 2 … hKM
)čia hij - numeris kanalo, į kurį ateina i-tojo agregato j-tasis išėjimo signalas, be to 1 ≤h ij ≤ L, o
M= max1≤k ≤ K
{M k }
Agregatinėje sistemoje vienu kanalu gali būti perduodamas tik vienas išvesties signalas. Sistema yra
uždara, t.y į ją nepatenka ir iš jos neišeina jokie išoriniai signalai.
3.2 PLA modelio imitavimo algoritmas
Tarkime, kad agregatinė sistema susideda iš K agregatų, kurie susijungę ryšiais. Aibę įvykių, kurie gali
įvykti agregatinėje sistemoje, žymėkime E:
E=¿k=1 ¿ K Ek' '
Čia E‘‘ – aibė įvykių, kurie gali įvykti k-jame agregate. Kitas aibės E įvykio laiko momentas tm+1 yra
išrenkamas naudojantis formule:
tm+1= min1 ≤ k ≤ K
minwk
wk (er' ' , tm )
čia w k (er' ' ,tm )∈ zν k
(tm).
15

Žemiau pateikti PLA modeliavimo algoritmo žingsniai:
1. Formuojamos agregatų pradinės būsenos;
zk (t0 )={νk (t0 ) , rk (t 0 ) , z νk ( t0)}, k=1, K
2. Naudojantis tm+1 išraiška nustatomas kitas artimiausias vidinio įvykio įvykimo laiko momentas ir
agregato numeris, kuriame tas įvykis turi įvykti.
3. Naudojantis operatorius H ir G apibrėžiama nauja k-tojo agregato būsena, formuojami išvesties
signalai, priklausantys aibei ~Y bei nustatoma nauja visų kitų agregatų būsena.
4. Vyksta išvesties signalų aibės ~Y patikrinimas. Jeigu šioje aibėje yra nors vienas elementas
y i∈Y k , 1≤ i≤ M k, tuomet naudojantis matrica H yra nustatomas kanalo numeris, kuriuo turi būti
perduodamas išėjimo signalas, o naudojantis matrica R nustatomas ir agregato numeris r1 hk i, kuriam
perduodamas signalas yi. Jeigu ~Y aibė yra netuščia, pereinama prie 5 žingsnio, priešingu atveju grįžtama
prie 2 žingsnio.
5. Apibrėžiama nauja agregato r1 hk i būsena gavus įėjimo signal xi ir formuojamas naujas išvesties
signalas, kuris įtraukiamas į aibę ~Y . Apdorotas signalas yi pašalinamas iš aibės
~Y ir grįžtama prie 4
žingsnio.
3.3 Dinaminis PLA modelis
Klasikinis PLA modelis, panašiai kaip ir klasikinis DEVS modelis, yra statinis, todėl norint modeliuoti
dinamines sistemas su kintančia struktūra reikia modifikuoti šį modelį. Tokiu atvėju galime kalbėti apie
dinaminį PLA modelį (dynPLA).
dynPLA modelis praplėčia klasikinį PLA modelį naujomis operacijos, skirtomis modifikuoti agregato
bei agregatinės sistemos aprašymus. Kiekvienas agregatas turi galimybę keisti savo bei visos sistemos
struktūrą, manipuliuojant naujai įvestomis operacijomis, tokiomis kaip naujo agregato įvedimas arba
agregato įėjimo signalo pašalinimas.
H ir G operatoriai dynPLA modelyje yra aprašomi kaip aibės, kurios gali pasipildyti naujais
operatoriais arba pašalinti esamus, tačiau visi galimi agregato operatoriai turi būti aprašyti iš anksto.
Papildomos išraiškų operacijos, kurios nusako struktūros pokyčius yra apibrėžiamos agregatų operatoriuose.
dynPLA meta-modelis yra pavaizduotas 14 paveiksle:
16

14 pav. dynPLA meta-modelis
PLA modelyje agregato perėjimo operatoriai aprašo tolydinės bei diskretinės komponenčių pokyčius
priklausomai nuo vidinių ir išorinių įvykių. dynPLA agregate tie patys įvykiai gali iššaukti ir struktūros pokyčius,
aprašomus perėjimo operatoriuose. Todėl agregato būsena yra praplečiama įtraukiant visus likusius agregato atributus
su vidinių agregatų ir ryšių aibėmis. Taigi dynPLA gali būti apibrėžta kaip struktūra:
Adyn ( t )=⟨ AΣ ( t ) , RΣ(t )⟩
čia {Ag1 ( t ) ,. .. , Agn( t )}∈ A Σ( t )- vidinių agregatų aibė laiko momentu t,
RΣ (t )={Ag1 ( t ), . .. , Agn( t )}×{Y 1( t ) ,. .. , Y n ( t )}→{Ag1 ( t ) ,. .. , Agn( t )}×{X1( t ) , .. , Xn ( t )} - ryšių aibė laiko momentu t,
∀ Ag( t )∈ AΣ ( t )- agregatas su struktūra ⟨ X ( t ) ,Y ( t ), E( t ) , Z ( t ) ,H ( t ),G( t ) , A ( t ), R( t )⟩ ,
čia X ( t ) - įvesties signalų aibė laiko momentu t,
Y ( t ) - išvesties signalų aibė laiko momentu t,
E( t )=E' ( t )∪E' ' ( t ) - įvykių aibė laiko momentu t,
E' ( t )- išorinių įvykių aibė laiko momentu t,
E' ' ( t )=E1
' ' ( t )∪E2' ' (t )- vidinių įvykių aibė laiko momentu t;
E1
' ' ( t )- būseną keičiančių vidinių įvykių aibė laiko momentu t,
E2
' ' ( t )- struktūrinių vidinių įvykių aibė laiko momentu t,
H ( t )- perėjimo operatorių aibė laiko momentu t,
G( t )- išėjimo operatorių aibė laiko momentu t,
A( t )⊂A Σ( t )- vidinių agregatų aibė laiko momentu t,
R( t )⊂RΣ ( t )- ryšių aibė laiko momentu t,17

Z( t )=⟨ X ( t ) ,Y ( t ) , E( t ) , ν ( t ) , zν ( t ) ,H ( t ) , G( t ), A( t ) , R( t )⟩-būsena laiko momentu t,
zν ( t )- tolydinė komponentė laiko momentu t,
ν (t )- diskretinė komponentė laiko momentu t.
dynPLA modelyje tarp agregatiniams susijungimams aprašyti yra naudojama M matrica, kuri apibrėžia
agregatų ryšius laiko momentu t. Kiekvienas ryšys iš sujungimų matricos yra aprašomas pagal žemiau
pateiktą struktūrą.
1 lentelė. Agregatų sujungimo matricos struktūra
Kanalo numeris Iš agregato Išvestis Į agregatą Įvestis
Skaičius Agregato vardas Išvesties signalo vardas Agregato vardas Įvesties signalo vardas
dynPLA modelyje agregatinės sistemos bei ją sudarančių agregatų struktūros pokyčius gali iššaukti tik
įvykiai. Kiekvienas agregato išorinis įvykis yra tam tikro vidinio įvykio pasekmė. Tai reiškia, kad egzistuoja
vidiniai įvykiai, kurie inicijuoja struktūros pakitimus. Kiekvieno tokio įvykio metu agregatas turi galimybę
atlikti struktūrines modifikacijas. Agregatas norėdamas atlikti struktūrinius pokyčius kituose agregatuose
turi turėti visą informaciją apie jį supančią aplinką, kurios kiekvienos pokytis reiškia šios informacijos
atnaujinimą. Toks būdas, kai agregatams leidžiama keisti ne vien savo, bet ir kitų agregatų struktūras,
reikalauja daug papildomų veiksmų, kadangi visi agregatai turi būti nuolat informuojami apie kiekvieną
išorės struktūrinį pakitimą. Visus dynPLA modelio vykdomus struktūros pokyčius galima suskirstyti į dvi
grupes:
Vidiniai agregato struktūros pokyčiai – tai agregato struktūrą apibrėžiančių atributų aibių pokyčiai,
kurie neįtakoja agregato išorinės sąsajos pokyčių, tokie kaip diskretaus kintamojo pašalinimas/pridėjimas ir
t.t. Tam tikri agregatų atributai tarpusavyje yra susiję, todėl pokyčiai vienoje atributų aibėje iššaukia
pokyčius kitose susijusiose atributų aibėse. Pavyzdžiui, norint pridėti naują vidinį įvykįen' ', neužtenka vidinių
įvykių aibę papildyti nauju elementu E' ' (tm+1 )=E' ' (tm )⋃en' '. Agregato vidinių įvykių skaičius yra lygus
tolydinės dedamosios elementų skaičiui, be to, kiekvienam vidiniam ir išoriniam įvykiui yra priskiriami
operatoriai. Todėl, atsiradus naujam vidiniam įvykiui, agregato tolydinė dedamoji turi pasipildyti nauja
komponente zν (tm+1 )=z ν (t m )⋃w(e¿¿n' ' , t m)¿, perėjimo operatorių aibė nauju operatoriumi
H (tm+1 )=H (t m )⋃H (e¿¿n' ' )¿ skirtu šiam įvykiui apdoroti.
Agregatinės sistemos pokyčiai - tai struktūros pokyčiai, kurių metu laike pakinta agregatinę sistemą
sudarančių agregatų bei ryšių aibės.
Visi agregatinės sistemos struktūros pokyčiai yra pastebimi išoriniam vartotojui. Tam tikros pokyčių
operacijos keičia tik agregatinės sistemos struktūrą, kitos papildomai iššaukia struktūrines modifikacijas ir
18

vidinių agregatų aprašymuose. Čia prie standartinių pokyčių, tokių kaip agregato prijungimas ir pašalinimas
bei ryšio prijungimas ir pašalinimas, pridedamas agregato transportavimas iš vienos agregatinės sistemos į
kitą, kuris iš esmės yra dviejų pokyčių (agregato pašalinimas iš vienos sistemos bei prijungimas prie kitos
sistemos) kombinacija. Agregatas gali būti transportuojamas į kitą agregatinę sistemą vienu hierarchiniu
lygiu žemiau arba aukščiau, o tap pat iš vienos agregatinės sistemos į kitą, kurias išorėje gaubia ta pati
agregatinė sistema. Kiekvienas iš šių pokyčių iššaukia atitinkamus struktūrinius sistemos pokyčius. Pavyzdžiui
šalinant agregatą iš sistemos taip pat turi pašalinami ir ryšiai taip šio ir kitų agregatų. Šie veiksmai yra būtini
norint užtikrinti korektišką dynPLA modelio funkcionavimą. Priklausomai nuo modeliuojamo uždavinio
specifikos, šie pokyčiai gali iššaukti ir papildomus struktūros pokyčius (pvz., atsirasti naujas diskretus
kintamasis), kurių aprašymas yra paliekamas specifikuotojo nuožiūrai.
3.4 dynPLA modelio taikymo e. komercijoje pavyzdys
15 paveiksle yra pavaizduota e. komercijos mobilios agentinės sistemos (e-KMAS) su maršrutiniu
agento migravimu dynPLA modelis. Jame Vartotojų Sąsajos, Vartotojų Sąsajos Agentai, Paslaugų
Katalogas, Tiekėjai yra vaizduojami atskiromis agregatinėmis sistemomis atitinkamai VSi, VSAi, D, Ti, kuriuos
išorėje gaubia agregatinė sistema Tinklas, i=1 , n .
15 pav. e-KMAS su maršrutiniu agento migravimu agregatinė schema
19

Kiekviena VSi agregatinė sistema turi po vieną vartotojo sąsajos agento agregatą VSAi ,i=1 , n Sistema
VSi vidinio įvykio e1' ' metu generuoja užduotis, kurios yra perduodamos VSAi agregatui. Šis agregatas, gavęs
užduotį išsiunčia signalą yadd agregatui VSi ir taip inicijuoja mobilaus agento agregato MAi sukūrimą. VSAi
agregatas sukurtam MAi paveda užduoties atlikimą ydo. . MAi agregatas, gavęs užduotį, pradeda savo
migravimą. Kai MAi turi tuščius tiekėjų bei prekių sąrašus išoriniu signalu inicijuoja migravimą iš VSi į
paslaugų katalogą aprašančią agregatinę sistemą D. Visi MAi agregato išoriniai signalai migruoti yra
perduodami į Tinklas agregatinę sistemą. Sistema Tinklas perkelia MAi agregatą į nurodytą agregatinę
sistemą bei prideda jam ryšius. Persikėlęs į D, agregatas MAi išoriniu signalu ygetL formuoja užklausą tiekėjų
sąrašui gauti. Gavęs tiekėjų sąrašą MAi migruoja toliau, t.y į pirmą sąraše list esantį tiekėją. Pirmas sąraše
nurodytas tiekėjas - agregatinė sistema Ti išimama iš eilės ir priskiriama kintamajam VIET. Kiekvieno
tiekėjo agregate MAi agregatas generuoja išorinį signalą prekių sąrašui gauti. MAi agregato prekių sąrašas
goods(t) yra papildomas gauta informacija. Kai visi tiekėjai iš sąrašo yra aplankyti, MAi grįžta į savo pradinę
vietą VSi agregatinę sistemą, kur perduoda visą surinktą informaciją. Kai VSAi gauna visą surinktą
informaciją iš MAi, jis persiunčia duomenis VSi agregatinei sistemai bei išvesties signalu ydel inicijuoja MAi
pašalinimą.
Apibendrinimai
Žinoma, ekonomikos bei verslo srytys negali egzistuoti be matematinių modelių. Net e. verslo procesų
atvėju jiems modeliuoti yra naudojami tokie statinių matematinių modelių DEVS ir PLA praplėtimai, kaip
MDEVS ir dynPLA. Šie modeliai yra dinaminiai todėl gali pakankamai tiksliai aprašyti sudėtingas e. verslo
sistemas su kintančia struktūra. Ypač sėkmingai šie modeliai gali būti pritaikyti e. prekybos srityje,
naudojant specialius programinius agentus, kurie gali migruoti iš vienos sistemos į kitą bei atlikti jose
įvairias užduotis – mobiliuosius agentus.
20

Literatūra
1. Agnė Paulauskaitė – Tarasevičienė. Sistemų su kintančiomis struktūromis modeliavimas agregatiniu metodu
2. http://www.sce.carleton.ca/faculty/wainer/papers/spe482.pdf 3. L. F. Perrone, F. P. Wieland, J. Liu, B. G. Lawson, D. M. Nicol, and R. M. Fujimoto, eds. A
simulation algorithm for dynamic structure DEVS modeling4. http://sim.kaist.ac.kr/paper/JF/JF-34.pdf 5. Alexander Osterwalder. An e-Business Model Ontology for Modeling e-Business6. Xiaolin Hu, Bernard P. Zeigler, and Saurabh Mittal. Dynamic Reconfiguration in DEVS Component-
based Modeling and Simulation7. A. M. Uhrmacher. Dynamic structures in modeling and simulation: a reflective approach
21
Recommended