Kinematyka: opis ruchu
Fizyka I (B+C)
Wykład III:
• Pojecia podstawowe
⇒ punkt materialny, układ odniesienia, układ współrzednych
⇒ tor, predkosc, przyspieszenie
⇒ pochodna i całka z funkcji
• Ruch jednostajny
• Ruch jednostajnie przyspieszony
Pojecia podstawowe
Punkt materialny
Ciało, którego rozmiary mozna w danym zagadnieniu zaniedbac.
Zazwyczaj przyjmujemy, ze punkt materialny powinien byc dostatecznie mały.
Nie jest to jednak konieczne !
Przykład: “wózek” na torze powietrznym.
Wazne jest, zeby ciało nie miało dodatkowych “stopni swobody”(np. obroty , drgania własne, stany wzbudzone)
Połozenie punktu materialnego całkowicie okresla jego “stan”.
⇒ pojecie punktu materialnego umozliwia prosty opis wielu sytuacji fizycznych.
Naogół przyjmujemy, ze punkt materialny obdarzony jest masa.
A.F.Zarnecki Wykład III 1
Pojecia podstawowe
RuchZmiana połozenia ciała wzgledem wybranego układu odniesienia.
Układ odniesieniaCiało, które wybieramy jako “punkt odniesienia”.
Najczesciej jest nim Ziemia...
Układ odniesienia mozna tez zdefiniowac okreslajac jego połozenie (lub ruch)wzgledem wybranego ciała lub grupy ciał.
Przykład:
• układ srodka masy zderzajacych sie czastek
• układ zwiazany ze srodkiem Galaktyki
A.F.Zarnecki Wykład III 2
Pojecia podstawowe
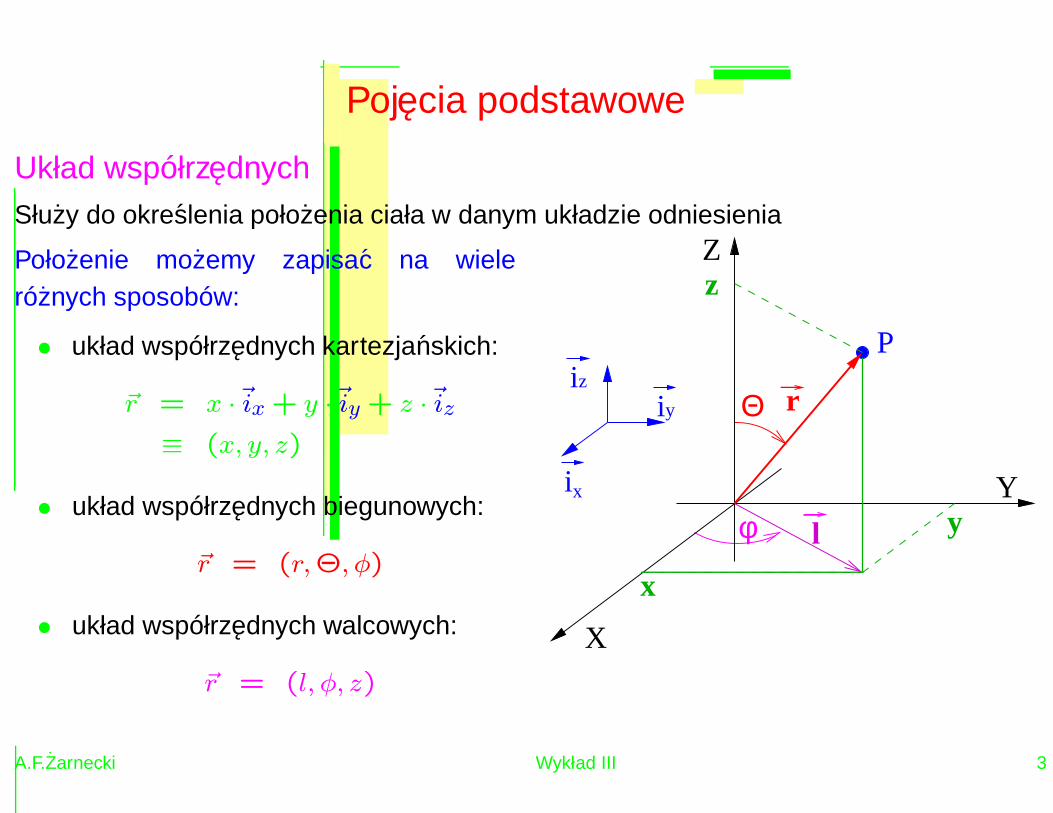
Układ współrzednychSłuzy do okreslenia połozenia ciała w danym układzie odniesienia
Połozenie mozemy zapisac na wieleróznych sposobów:
• układ współrzednych kartezjanskich:
~r = x ·~ix + y ·~iy + z ·~iz
≡ (x, y, z)
• układ współrzednych biegunowych:
~r = (r,Θ, φ)
• układ współrzednych walcowych:
~r = (l, φ, z)
r
l
i
ii
P
Zz
Θ
X
Y
x
yφx
y
z
A.F.Zarnecki Wykład III 3
Pojecia podstawowe
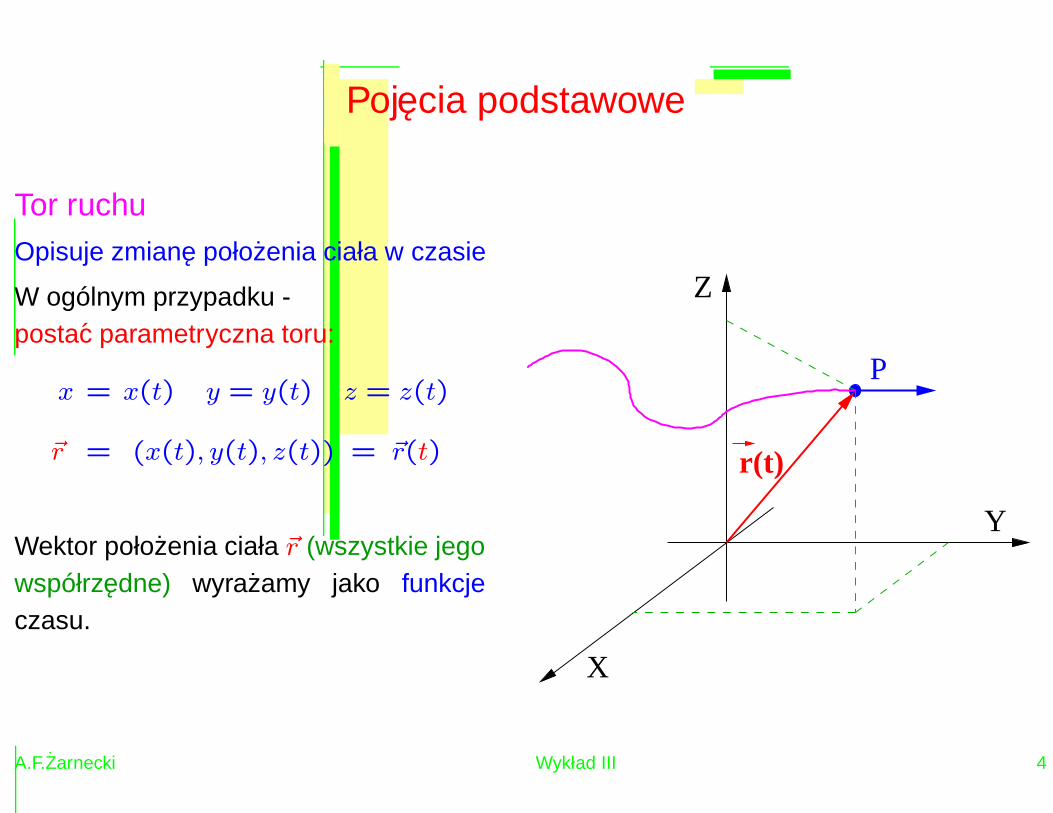
Tor ruchuOpisuje zmiane połozenia ciała w czasie
W ogólnym przypadku -postac parametryczna toru:
x = x(t) y = y(t) z = z(t)
~r = (x(t), y(t), z(t)) = ~r(t)
Wektor połozenia ciała ~r (wszystkie jegowspółrzedne) wyrazamy jako funkcjeczasu.
Z
P
r(t)
X
Y
A.F.Zarnecki Wykład III 4
Pojecia podstawowe
Tor ruchuW szczególnych przypadkach mozliwejest odwrócenie jednej z zaleznosci:
t = F (x)
czas wyrazamy jako funkcje współrzednej
⇒ postac uwikłana toru:
y = y(F (x)) = y(x) z = z(x)
~r = (x, y(x), z(x))
FunkcjeW fizyce bardzo czesto staramy sie opisaczaleznosci pomiedzy róznymi wielkosciamiw postaci funkcyjnej.
Naogół do oznaczenia funkcji uzywamysymbolu odpowiadajacego danej wielkoscifizycznej, np.:
droga - s, wysokosc - h, predkosc - v
Postac funkcyjna zalezy jednak od wyboruargumentu funkcji !
W przypadku opisu toru:y(t) i y(x) to dwie rózne funkcje !choc opisuja ta sama wielkosc fizyczna
A.F.Zarnecki Wykład III 5
Pojecia podstawowe
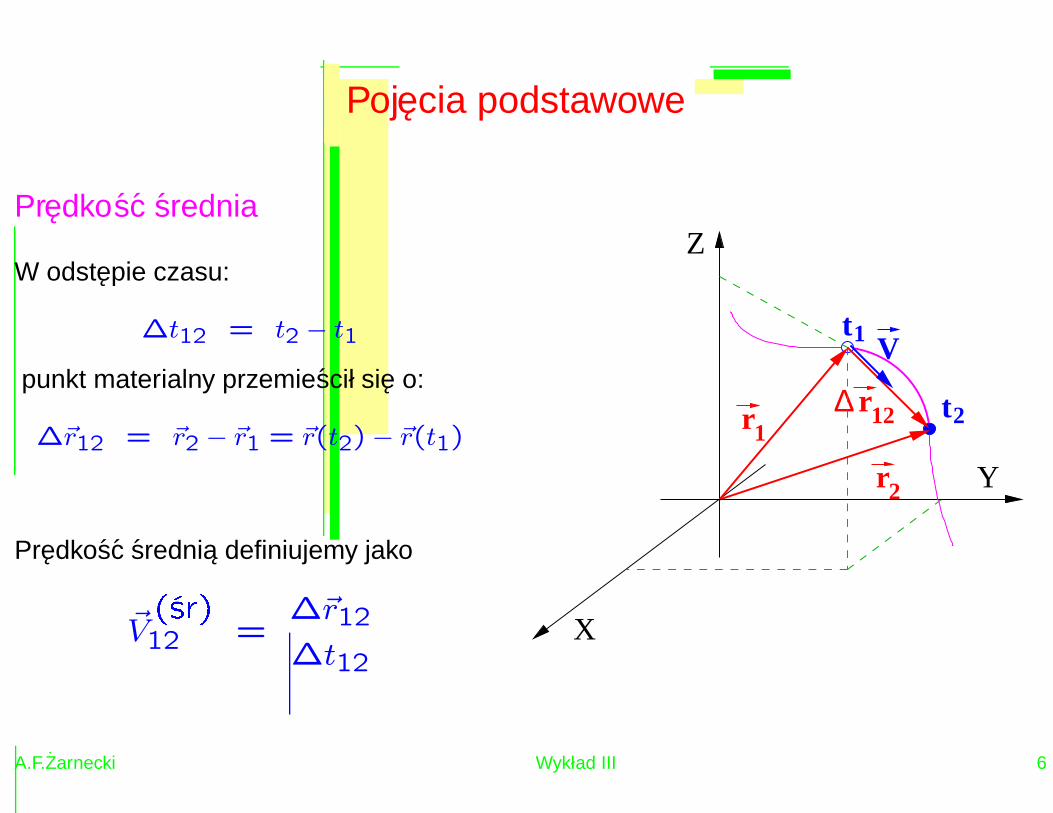
Predkosc srednia
W odstepie czasu:
∆t12 = t2 − t1
punkt materialny przemiescił sie o:
∆~r12 = ~r2 − ~r1 = ~r(t2) − ~r(t1)
Predkosc srednia definiujemy jako
~V
� � ��
12 =∆~r12
∆t12
r r12∆
Z
1
Vt
t
1
2
2
r
X
Y
A.F.Zarnecki Wykład III 6
Pojecia podstawowe
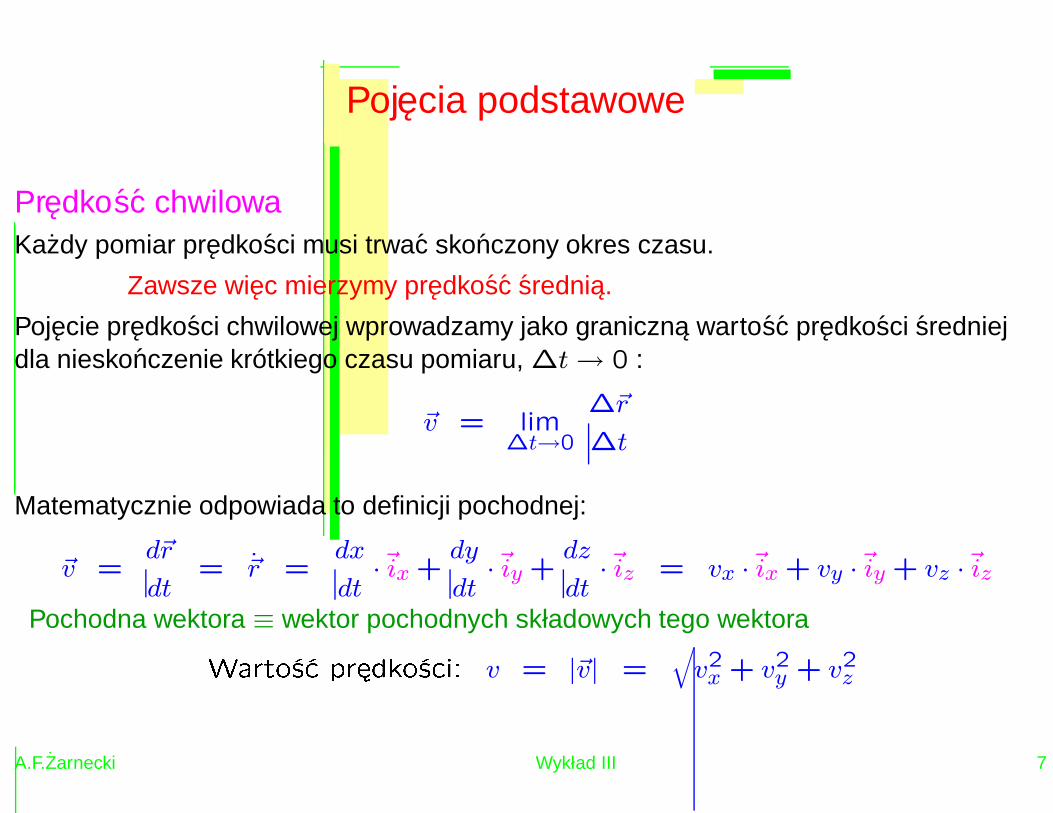
Predkosc chwilowaKazdy pomiar predkosci musi trwac skonczony okres czasu.
Zawsze wiec mierzymy predkosc srednia.
Pojecie predkosci chwilowej wprowadzamy jako graniczna wartosc predkosci sredniejdla nieskonczenie krótkiego czasu pomiaru, ∆t → 0 :
~v = lim∆t→0
∆~r
∆t
Matematycznie odpowiada to definicji pochodnej:
~v =d~r
dt= ~r =
dx
dt·~ix +
dy
dt·~iy +
dz
dt·~iz = vx ·~ix + vy ·~iy + vz ·~iz
Pochodna wektora ≡ wektor pochodnych składowych tego wektora
� �� ��� � � � �� �� � � v = |~v| =√
v2x + v2
y + v2z
A.F.Zarnecki Wykład III 7
Pojecia podstawowe
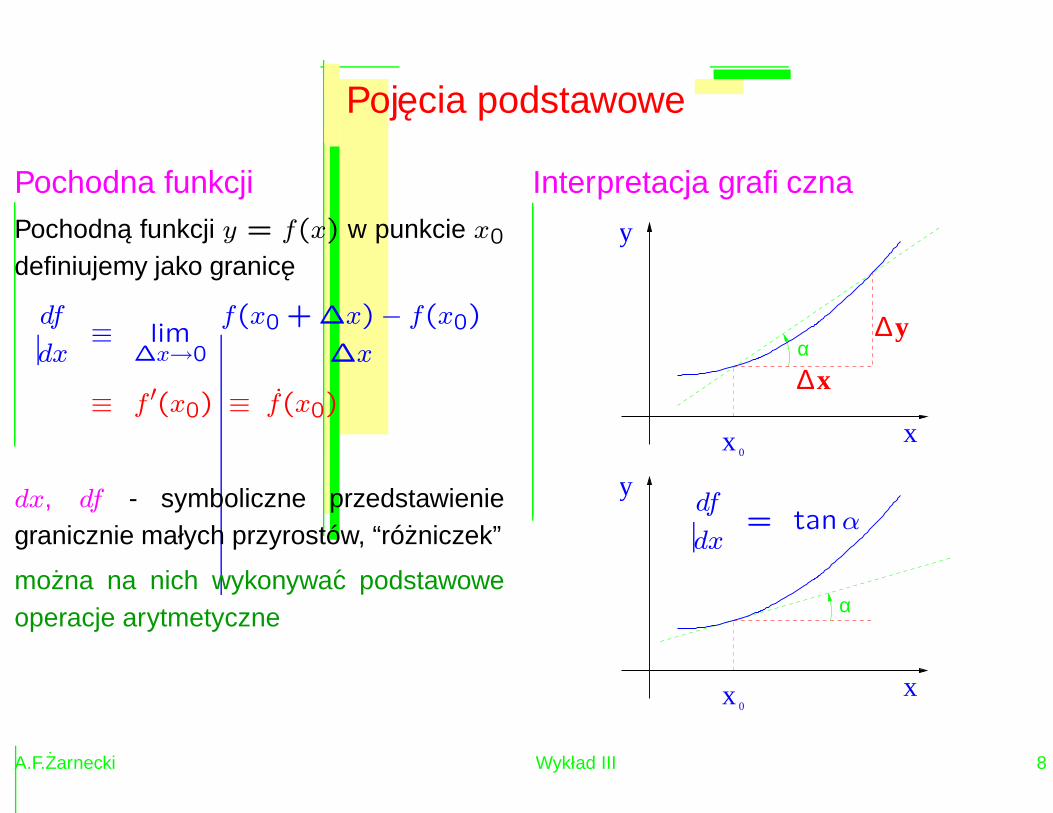
Pochodna funkcjiPochodna funkcji y = f(x) w punkcie x0
definiujemy jako granice
df
dx≡ lim
∆x→0
f(x0 + ∆x) − f(x0)
∆x
≡ f ′(x0) ≡ f(x0)
dx, df - symboliczne przedstawieniegranicznie małych przyrostów, “rózniczek”
mozna na nich wykonywac podstawoweoperacje arytmetyczne
Interpretacja graficzna
α
α
x 0
x 0
∆x
∆y
x
y
x
y
df
dx= tanα
A.F.Zarnecki Wykład III 8
Pojecia podstawowe
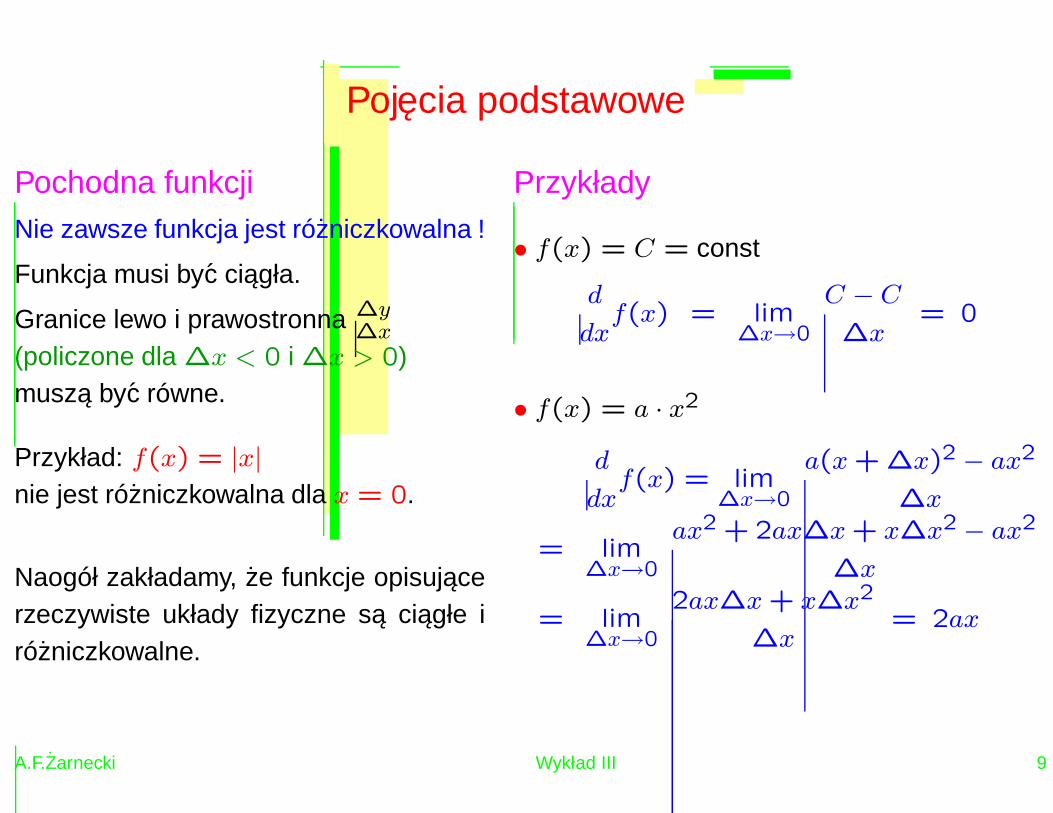
Pochodna funkcjiNie zawsze funkcja jest rózniczkowalna !
Funkcja musi byc ciagła.
Granice lewo i prawostronna ∆y∆x
(policzone dla ∆x < 0 i ∆x > 0)musza byc równe.
Przykład: f(x) = |x|
nie jest rózniczkowalna dla x = 0.
Naogół zakładamy, ze funkcje opisujacerzeczywiste układy fizyczne sa ciagłe irózniczkowalne.
Przykłady
• f(x) = C = const
d
dxf(x) = lim
∆x→0
C − C
∆x= 0
• f(x) = a · x2
d
dxf(x) = lim
∆x→0
a(x + ∆x)2 − ax2
∆x
= lim∆x→0
ax2 + 2ax∆x + x∆x2 − ax2
∆x
= lim∆x→0
2ax∆x + x∆x2
∆x= 2ax
A.F.Zarnecki Wykład III 9
Pojecia podstawowe
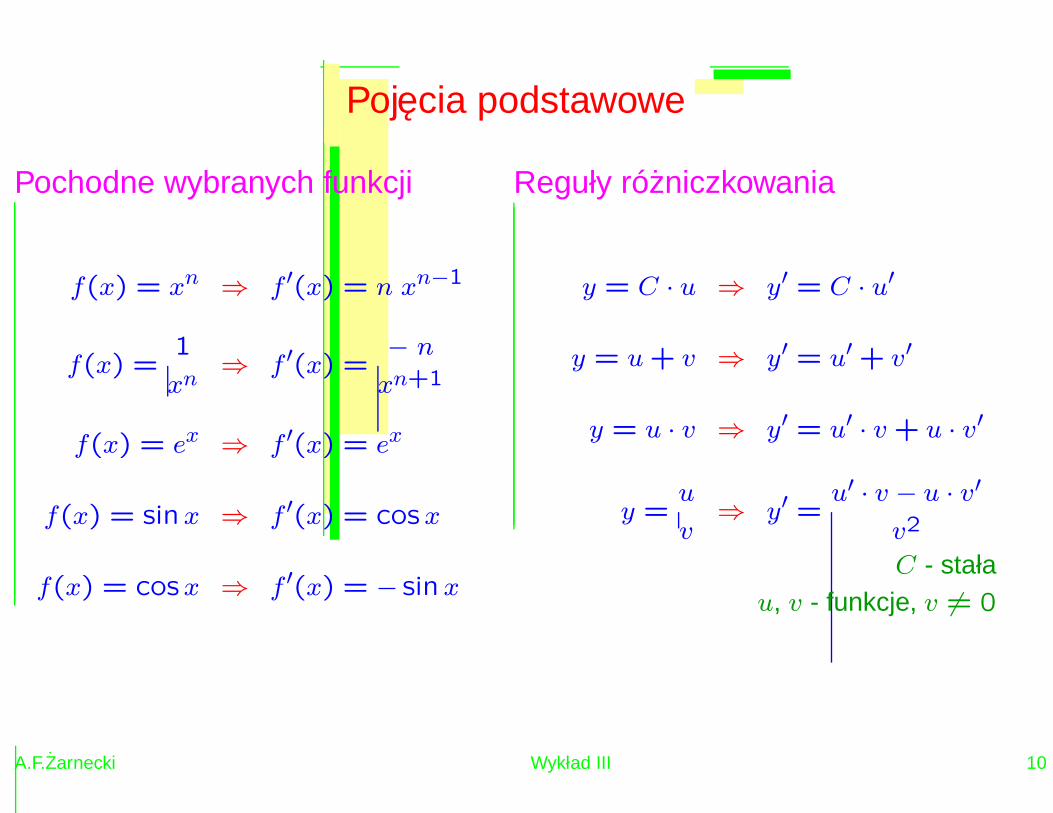
Pochodne wybranych funkcji
f(x) = xn ⇒ f ′(x) = n xn−1
f(x) =1
xn⇒ f ′(x) =
− n
xn+1
f(x) = ex ⇒ f ′(x) = ex
f(x) = sinx ⇒ f ′(x) = cos x
f(x) = cosx ⇒ f ′(x) = − sin x
Reguły rózniczkowania
y = C · u ⇒ y′ = C · u′
y = u + v ⇒ y′ = u′ + v′
y = u · v ⇒ y′ = u′ · v + u · v′
y =u
v⇒ y′ =
u′ · v − u · v′
v2
C - stałau, v - funkcje, v 6= 0
A.F.Zarnecki Wykład III 10
Pojecia podstawowe
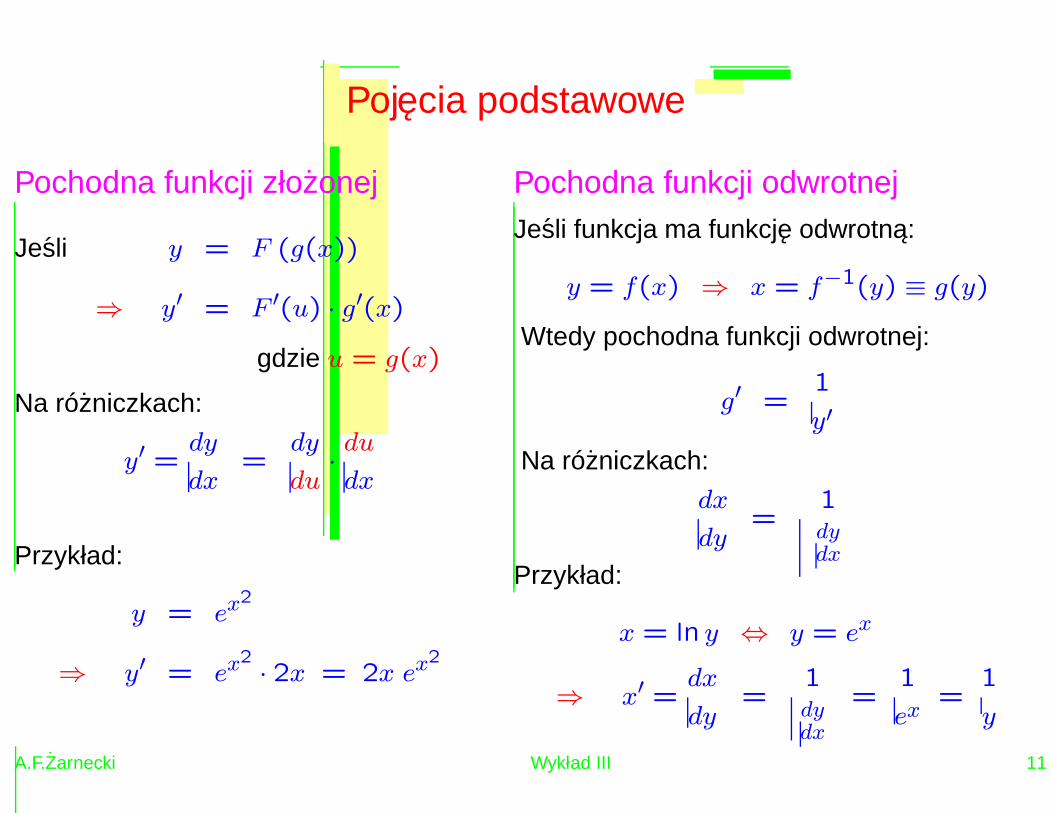
Pochodna funkcji złozonej
Jesli y = F (g(x))
⇒ y′ = F ′(u) · g′(x)
gdzie u = g(x)
Na rózniczkach:
y′ =dy
dx=
dy
du·du
dx
Przykład:
y = ex2
⇒ y′ = ex2· 2x = 2x ex2
Pochodna funkcji odwrotnejJesli funkcja ma funkcje odwrotna:
y = f(x) ⇒ x = f−1(y) ≡ g(y)
Wtedy pochodna funkcji odwrotnej:
g′ =1
y′
Na rózniczkach:
dx
dy=
1dydx
Przykład:
x = ln y ⇔ y = ex
⇒ x′ =dx
dy=
1dydx
=1
ex=
1
y
A.F.Zarnecki Wykład III 11
Pojecia podstawowe
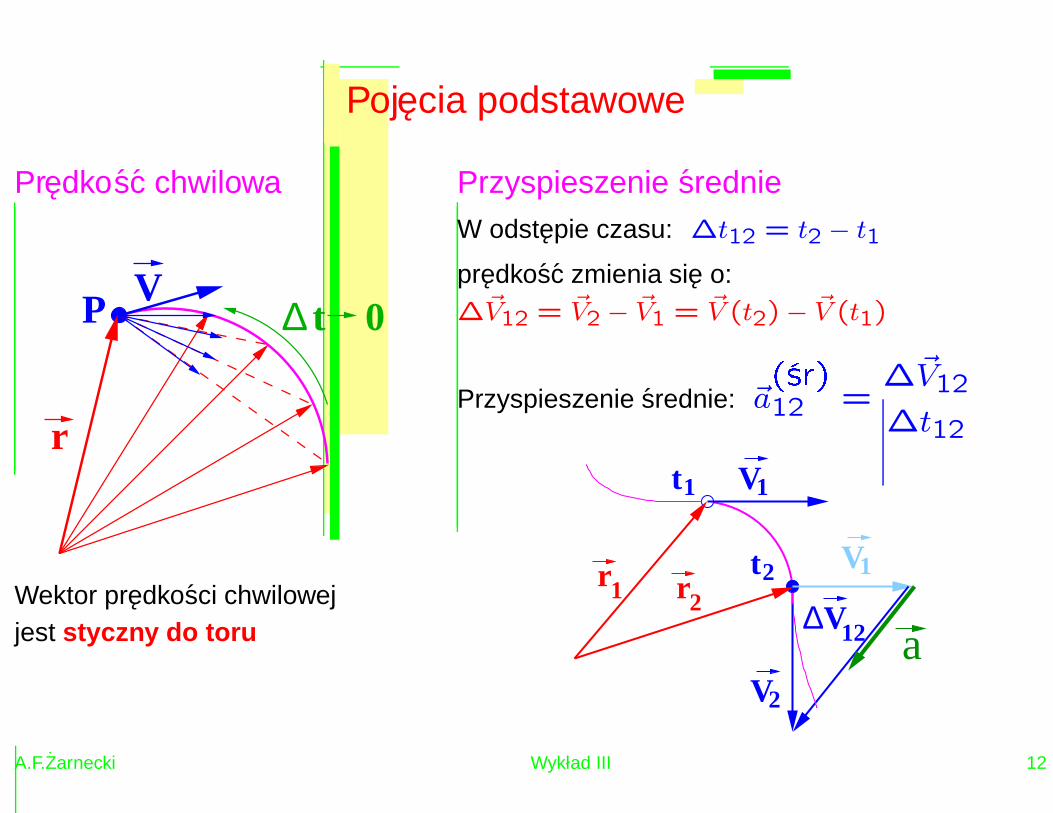
Predkosc chwilowa
r
V∆ t 0P
Wektor predkosci chwilowejjest styczny do toru
Przyspieszenie srednieW odstepie czasu: ∆t12 = t2 − t1
predkosc zmienia sie o:∆~V12 = ~V2 − ~V1 = ~V (t2) − ~V (t1)
Przyspieszenie srednie: ~a
� � ��
12 =∆~V12
∆t12
r t2
t1 V1
2r
V2
V1
∆V12
1
a
A.F.Zarnecki Wykład III 12
Pojecia podstawowe
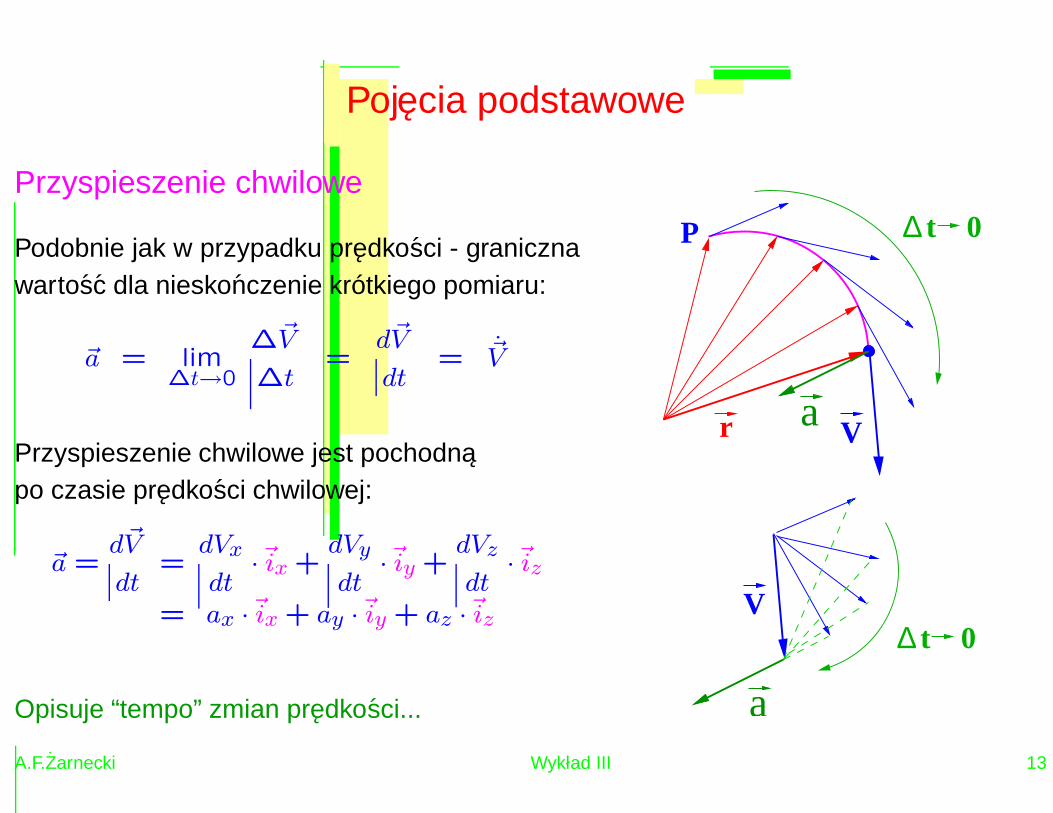
Przyspieszenie chwilowe
Podobnie jak w przypadku predkosci - granicznawartosc dla nieskonczenie krótkiego pomiaru:
~a = lim∆t→0
∆~V
∆t=
d~V
dt= ~V
Przyspieszenie chwilowe jest pochodnapo czasie predkosci chwilowej:
~a =d~V
dt=
dVx
dt·~ix +
dVy
dt·~iy +
dVz
dt·~iz
= ax ·~ix + ay ·~iy + az ·~iz
Opisuje “tempo” zmian predkosci...
Vr a
∆ t 0
V∆ t 0
a
P
A.F.Zarnecki Wykład III 13
Klasyfikacja ruchów
Ze wzgledu na tor wybrane przypadki szczególne
• prostoliniowy, odbywajacy sie wzdłuz lini prostejZawsze mozemy tak wybrac układ współrzednych aby
y(t) = z(t) = 0 ⇒ ~r(t) =~ix · x(t)
• płaski, odbywajacy sie w ustalonej płaszczyznie
z(t) = 0 ⇒ ~r(t) =~ix · x(t) + ~iy · y(t)
• po okregu
Ze wzgledu na przyspieszenie
• jednostajny ⇒ wartosc predkosci pozostaje stała: |~V | = const
• jednostajnie przyspieszony ⇒ przyspieszenie jest stałe: ~a = const
A.F.Zarnecki Wykład III 14
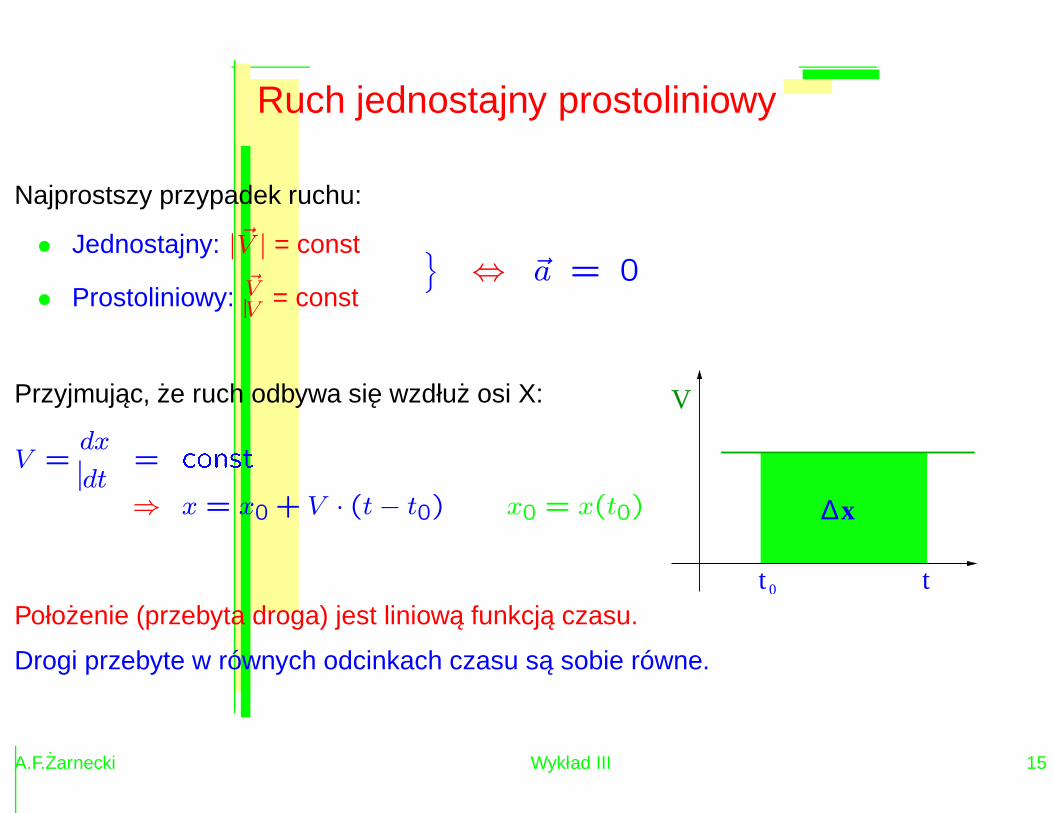
Ruch jednostajny prostoliniowy
Najprostszy przypadek ruchu:
• Jednostajny: |~V | = const
• Prostoliniowy:~VV
= const
}
⇔ ~a = 0
Przyjmujac, ze ruch odbywa sie wzdłuz osi X:
V =dx
dt= � �� � �
⇒ x = x0 + V · (t − t0) x0 = x(t0)
t 0 t
∆
V
x
Połozenie (przebyta droga) jest liniowa funkcja czasu.
Drogi przebyte w równych odcinkach czasu sa sobie równe.
A.F.Zarnecki Wykład III 15
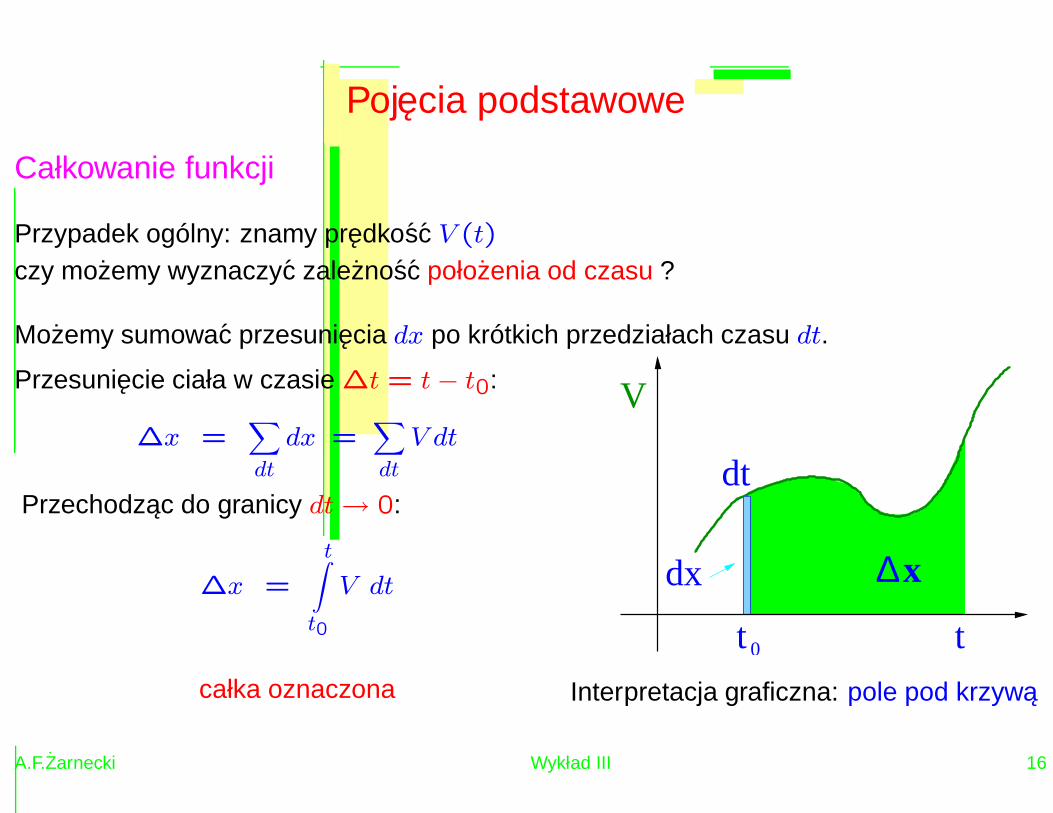
Pojecia podstawowe
Całkowanie funkcji
Przypadek ogólny: znamy predkosc V (t)
czy mozemy wyznaczyc zaleznosc połozenia od czasu ?
Mozemy sumowac przesuniecia dx po krótkich przedziałach czasu dt.
Przesuniecie ciała w czasie ∆t = t − t0:
∆x =∑
dt
dx =∑
dt
V dt
Przechodzac do granicy dt → 0:
∆x =
t∫
t0
V dt
całka oznaczona
t 0
∆x
t
V
dt
dx
Interpretacja graficzna: pole pod krzywa
A.F.Zarnecki Wykład III 16
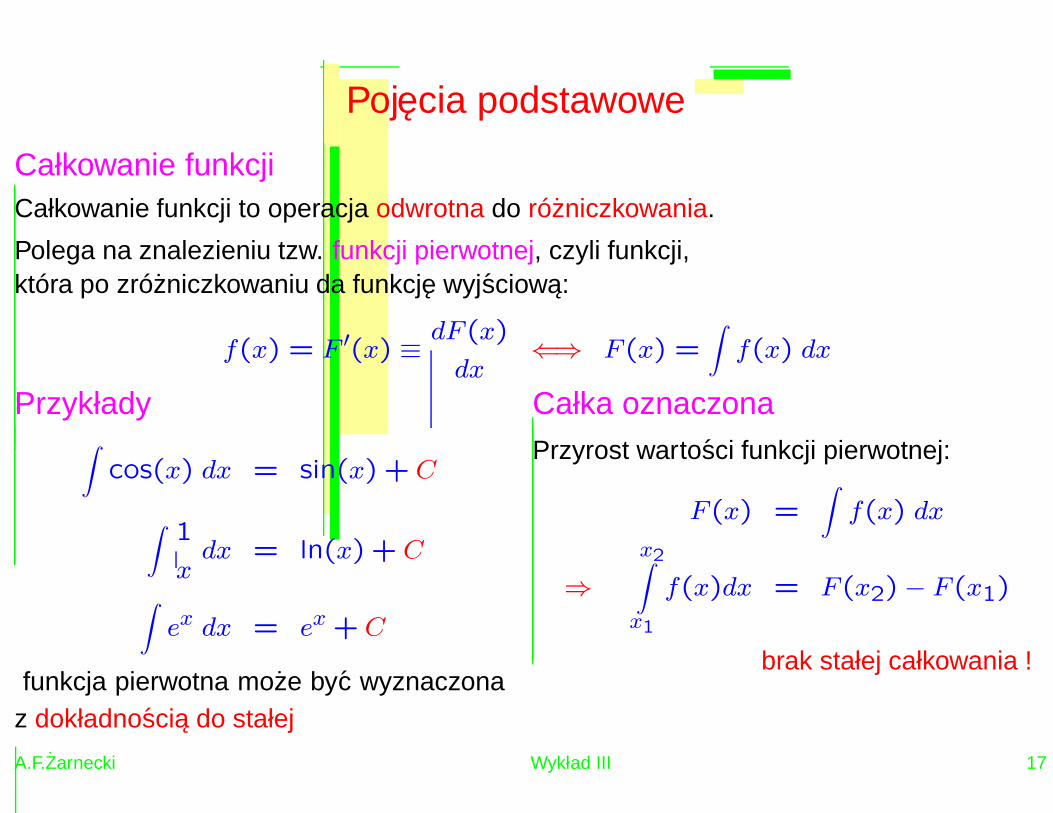
Pojecia podstawowe
Całkowanie funkcjiCałkowanie funkcji to operacja odwrotna do rózniczkowania.
Polega na znalezieniu tzw. funkcji pierwotnej, czyli funkcji,która po zrózniczkowaniu da funkcje wyjsciowa:
f(x) = F ′(x) ≡dF (x)
dx⇐⇒ F (x) =
∫
f(x) dx
Przykłady∫
cos(x) dx = sin(x) + C
∫
1
xdx = ln(x) + C
∫
ex dx = ex + C
funkcja pierwotna moze byc wyznaczonaz dokładnoscia do stałej
Całka oznaczonaPrzyrost wartosci funkcji pierwotnej:
F (x) =
∫
f(x) dx
⇒
x2∫
x1
f(x)dx = F (x2) − F (x1)
brak stałej całkowania !
A.F.Zarnecki Wykład III 17
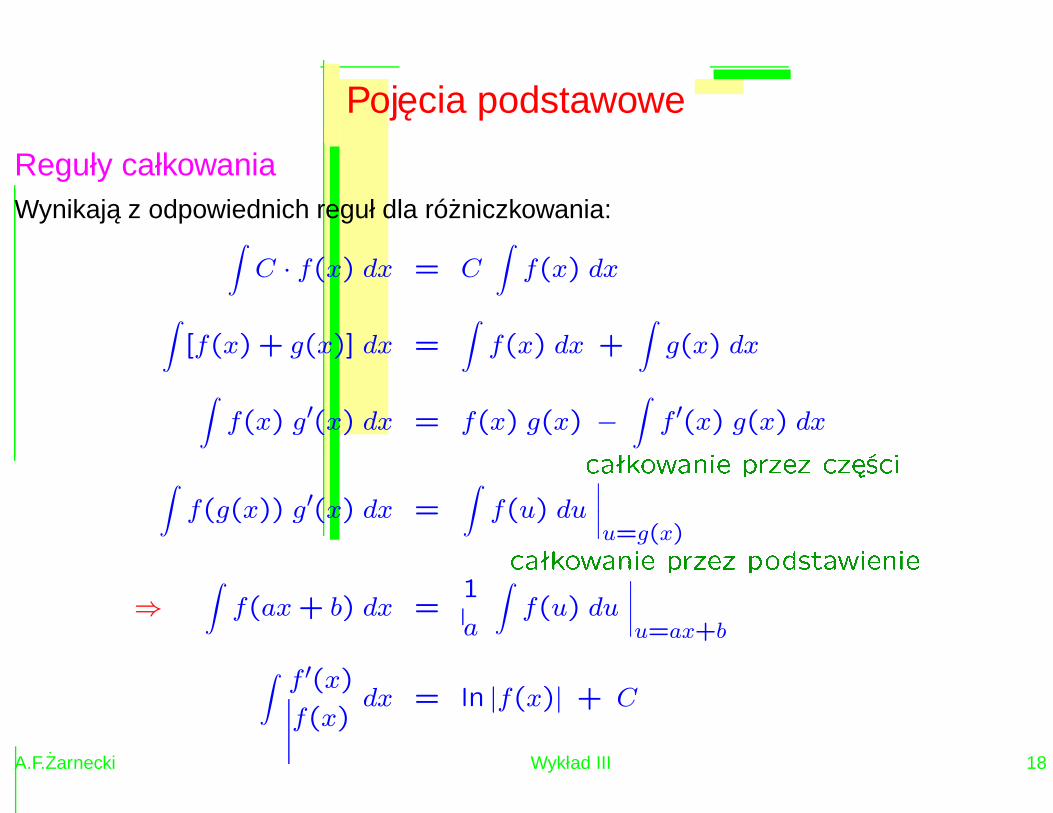
Pojecia podstawowe
Reguły całkowaniaWynikaja z odpowiednich reguł dla rózniczkowania:
∫
C · f(x) dx = C
∫
f(x) dx
∫
[f(x) + g(x)] dx =∫
f(x) dx +∫
g(x) dx
∫
f(x) g′(x) dx = f(x) g(x) −∫
f ′(x) g(x) dx
� � �� � � �� � ��� �� �� �� �
∫
f(g(x)) g′(x) dx =
∫
f(u) du
∣
∣
∣
∣
u=g(x)� � �� � � �� � � �� �� � � � � � � �� �
⇒∫
f(ax + b) dx =1
a
∫
f(u) du
∣
∣
∣
∣
u=ax+b
∫
f ′(x)
f(x)dx = ln |f(x)| + C
A.F.Zarnecki Wykład III 18
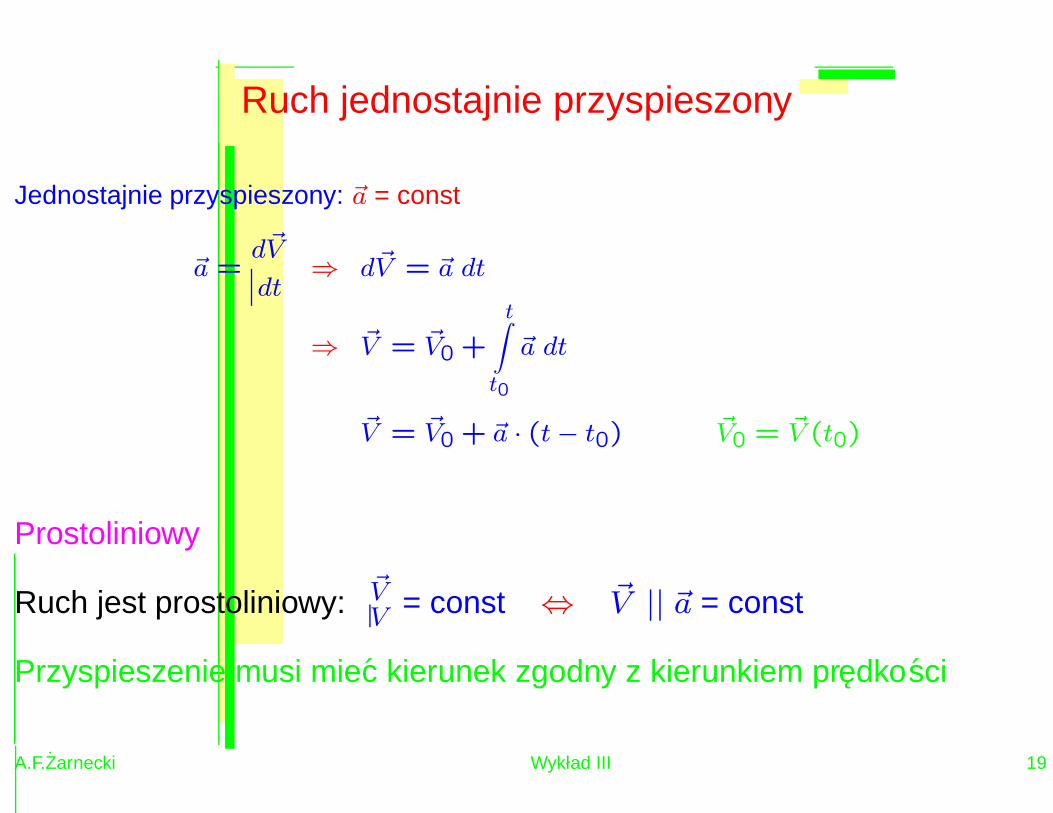
Ruch jednostajnie przyspieszony
Jednostajnie przyspieszony: ~a = const
~a =d~V
dt⇒ d~V = ~a dt
⇒ ~V = ~V0 +
t∫
t0
~a dt
~V = ~V0 + ~a · (t − t0) ~V0 = ~V (t0)
Prostoliniowy
Ruch jest prostoliniowy:~VV
= const ⇔ ~V || ~a = const
Przyspieszenie musi miec kierunek zgodny z kierunkiem predkosci
A.F.Zarnecki Wykład III 19
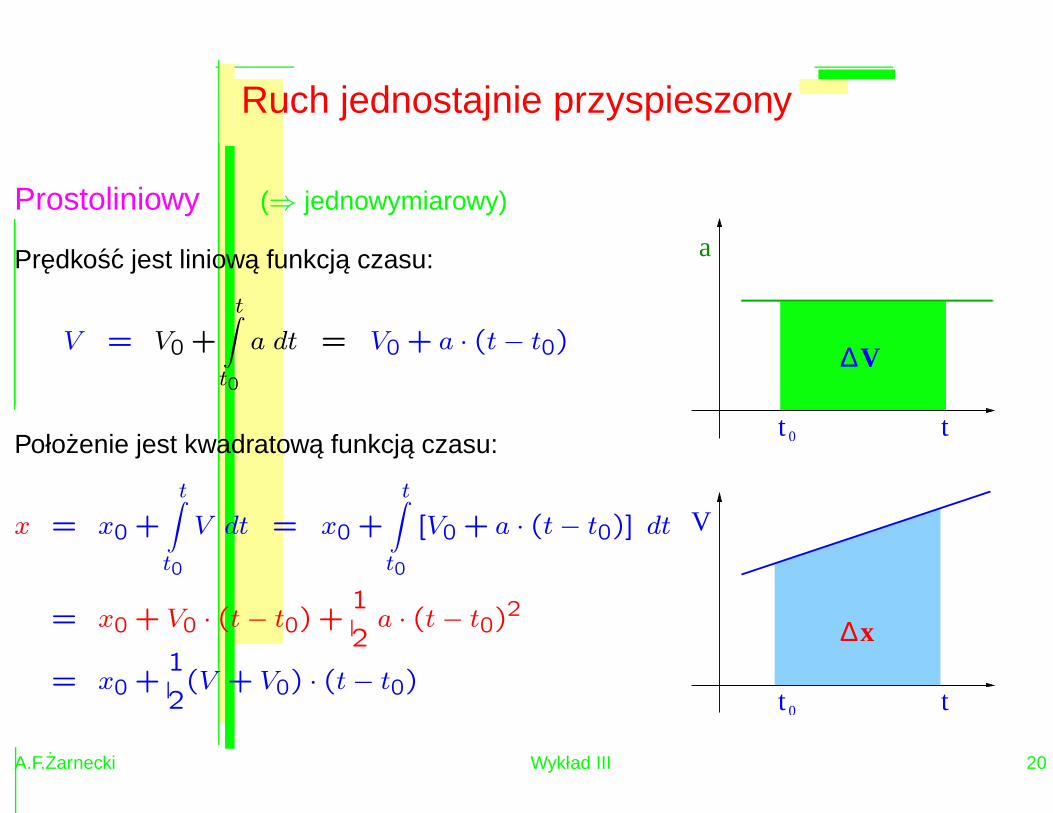
Ruch jednostajnie przyspieszony
Prostoliniowy (⇒ jednowymiarowy)
Predkosc jest liniowa funkcja czasu:
V = V0 +
t∫
t0
a dt = V0 + a · (t − t0)
Połozenie jest kwadratowa funkcja czasu:
x = x0 +
t∫
t0
V dt = x0 +
t∫
t0
[V0 + a · (t − t0)] dt
= x0 + V0 · (t − t0) +1
2a · (t − t0)
2
= x0 +1
2(V + V0) · (t − t0)
t 0 t
∆V
a
t 0 t
∆x
V
A.F.Zarnecki Wykład III 20
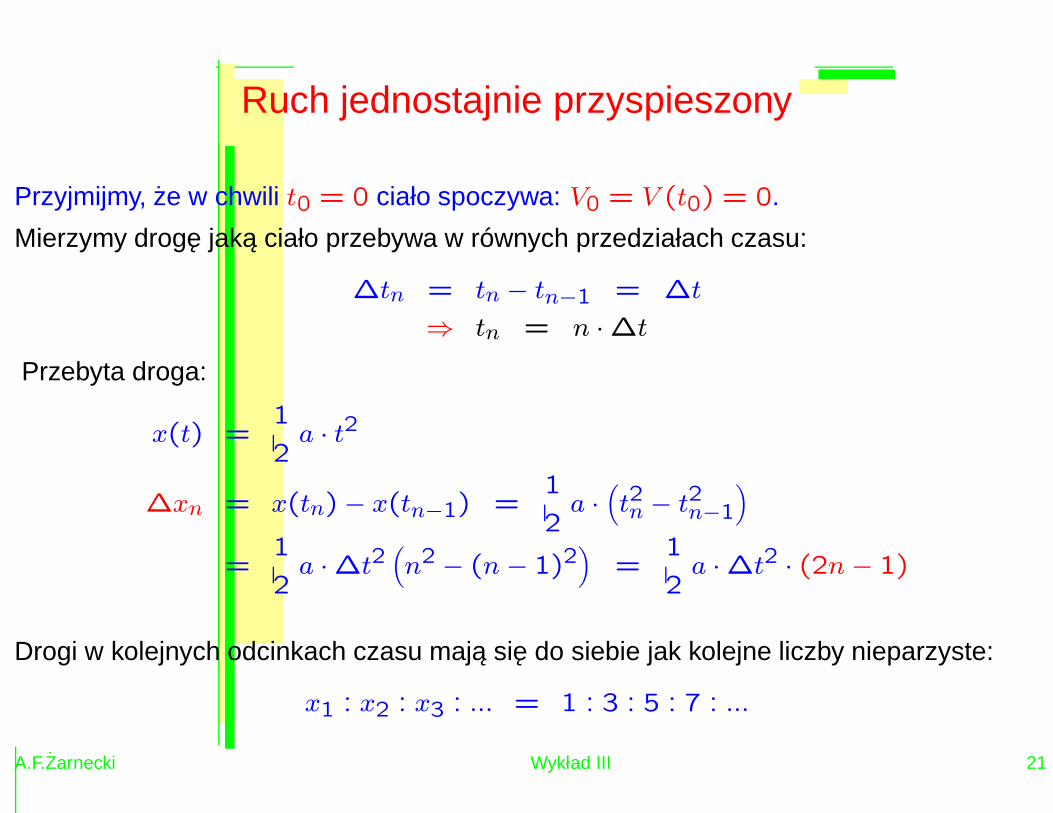
Ruch jednostajnie przyspieszony
Przyjmijmy, ze w chwili t0 = 0 ciało spoczywa: V0 = V (t0) = 0.
Mierzymy droge jaka ciało przebywa w równych przedziałach czasu:
∆tn = tn − tn−1 = ∆t
⇒ tn = n · ∆t
Przebyta droga:
x(t) =1
2a · t2
∆xn = x(tn) − x(tn−1) =1
2a ·
(
t2n − t2n−1
)
=1
2a · ∆t2
(
n2 − (n − 1)2)
=1
2a · ∆t2 · (2n − 1)
Drogi w kolejnych odcinkach czasu maja sie do siebie jak kolejne liczby nieparzyste:
x1 : x2 : x3 : ... = 1 : 3 : 5 : 7 : ...
A.F.Zarnecki Wykład III 21
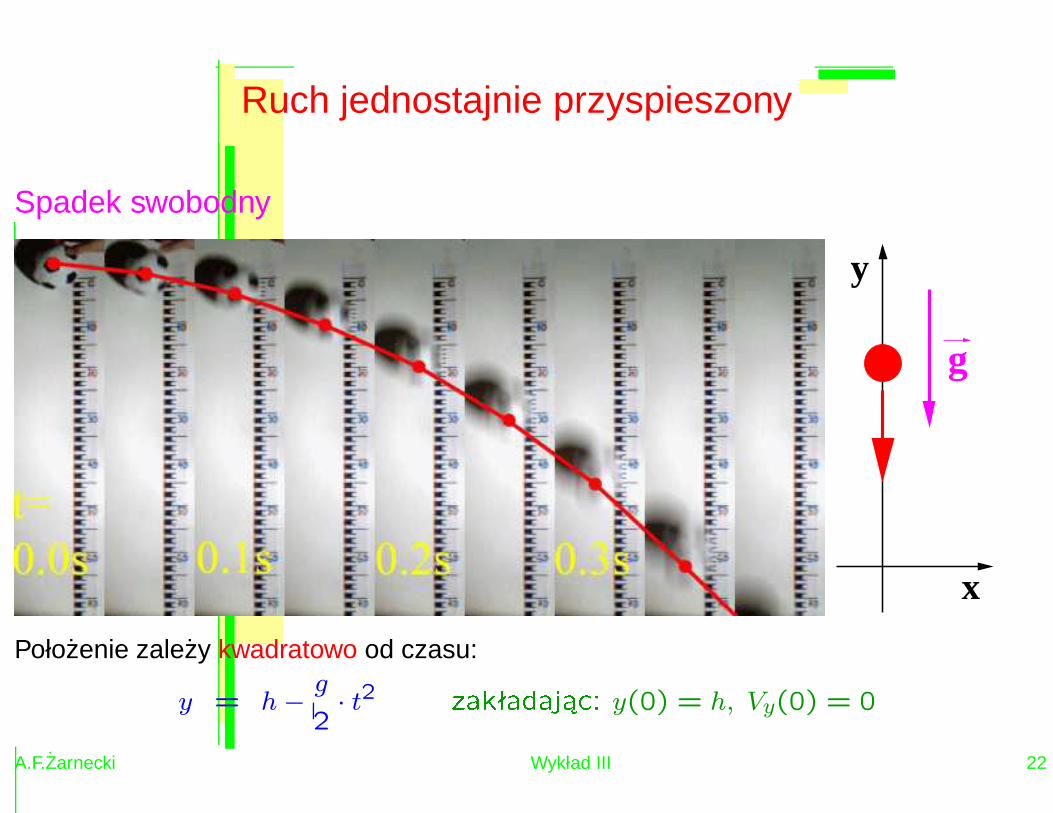
Ruch jednostajnie przyspieszony
Spadek swobodny
y
x
g
Połozenie zalezy kwadratowo od czasu:
y = h −g
2· t2 � �� � � � � � �� y(0) = h, Vy(0) = 0
A.F.Zarnecki Wykład III 22
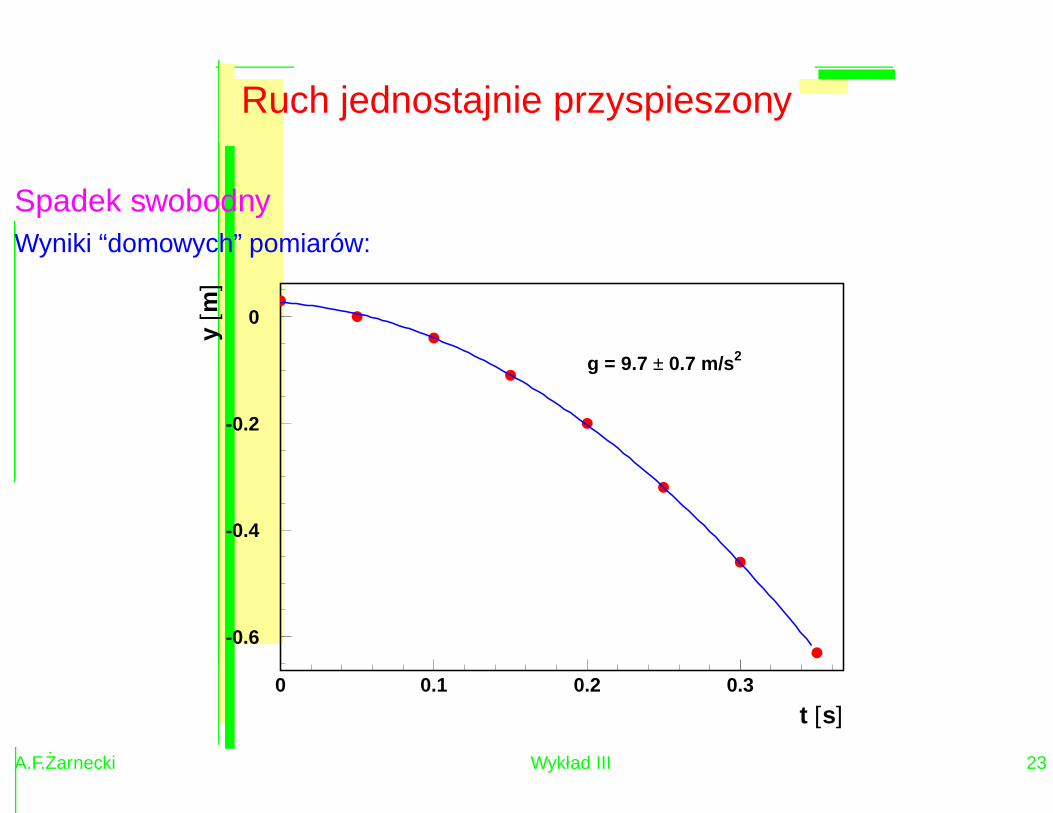
Ruch jednostajnie przyspieszony
Spadek swobodnyWyniki “domowych” pomiarów:
t [s]
y [m
]
g = 9.7 ± 0.7 m/s2
-0.6
-0.4
-0.2
0
0 0.1 0.2 0.3
A.F.Zarnecki Wykład III 23
Recommended