Mapping and Pursuit-Evasion Strategies For a Simple Wall-Following Robot
Anna Yershova
Duke University Algorithms Seminar
April 20, 2010
The Main Theme:Planning in Information Spaces
Think about the devices we build that intermingle sensors, actuators, and computers.
They are completely blind to the world until we equip them with sensors.
All of their accomplishments rest on their ability to sift through sensor data and make appropriate decisions.
References
IROS 2009 TUTORIALThe 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems
Filtering and Planning in Information SpacesDate: 11 October 2009, Time: 8:45-5:30
By: Steve LaValle, University of Illinois
References
Mapping and Pursuit-Evasion Strategies For a Simple Wall-Following RobotAnna Yershova, Benjamin Tovar, Max Katsev, Robert Ghrist, and Steven M. LaValleIEEE Transactions on Robotics, 2010, under review
Bitbots: Simple Robots Solving Complex TasksAnna Yershova, Benjamin Tovar, Robert Ghrist, and Steven M. LaValle,
In Proc. The Twentieth National Conference on Artificial Intelligence (AAAI 2005)
J. Barraquand and P. Ferbach. Motion planning with uncertainty:The information space approach. In Proceedings IEEE InternationalConference on Robotics & Automation, pages 1341–1348, 1995.
A. Blum, P. Raghavan, and B. Schieber. Navigating in unfamiliargeometric terrains. In Proceedings ACM Symposium on ComputationalGeometry, pages 494–504, 1991.
M. Blum and D. Kozen. On the power of the compass (or, why mazesare easier to search than graphs). In Proceedings Annual Symposium onFoundations of Computer Science, pages 132–142, 1978.
B. R. Donald. On information invariants in robotics. ArtificialIntelligence Journal, 72:217–304, 1995.
M. A. Erdmann. On motion planning with uncertainty. Master’s thesis,Massachusetts Institute of Technology, Cambridge, MA, August 1984.
S. L. Laubach and J. W. Burdick. An autonomous sensor-based pathplanning for planetary microrovers. In Proceedings IEEE International Conference on Robotics & Automation, 1999.
S. Suri, E. Vicari, and P. Widmayer. Simple robots with minimal sensing: From local visibility to global geometry. International Journal of Robotics Research, 27(9):1055–1067, September 2008.
S. Thrun, W. Burgard, and D. Fox. Probabilistic Robotics. MIT Press, Cambridge, MA, 2005.

Scenarios with Sensors Needed
Scenarios with Sensors Needed
Where are Sensors?
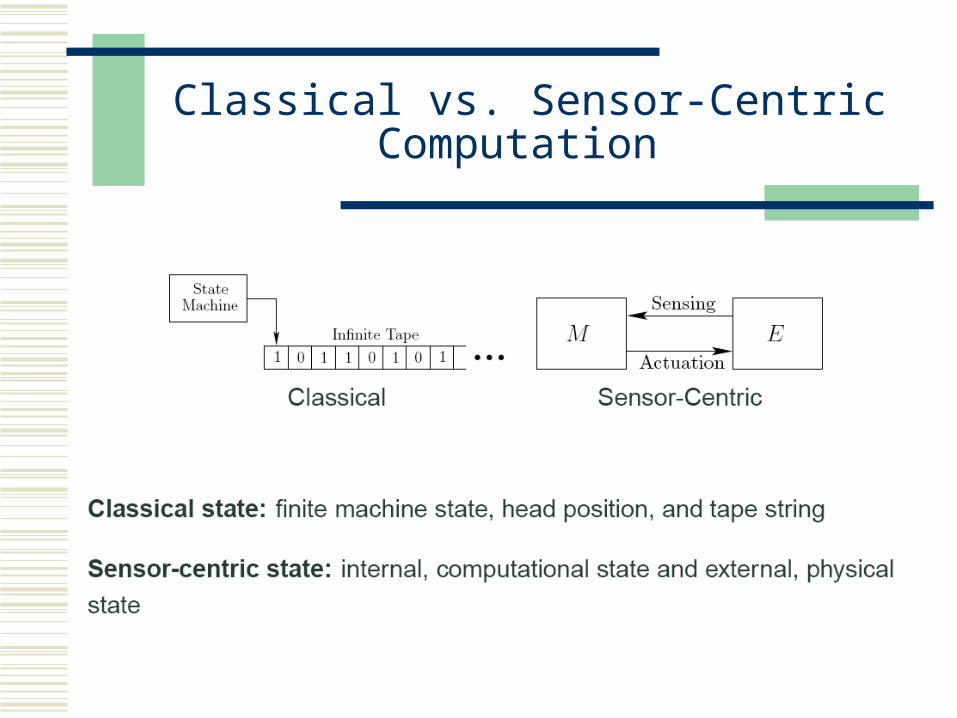
Classical vs. Sensor-Centric Computation
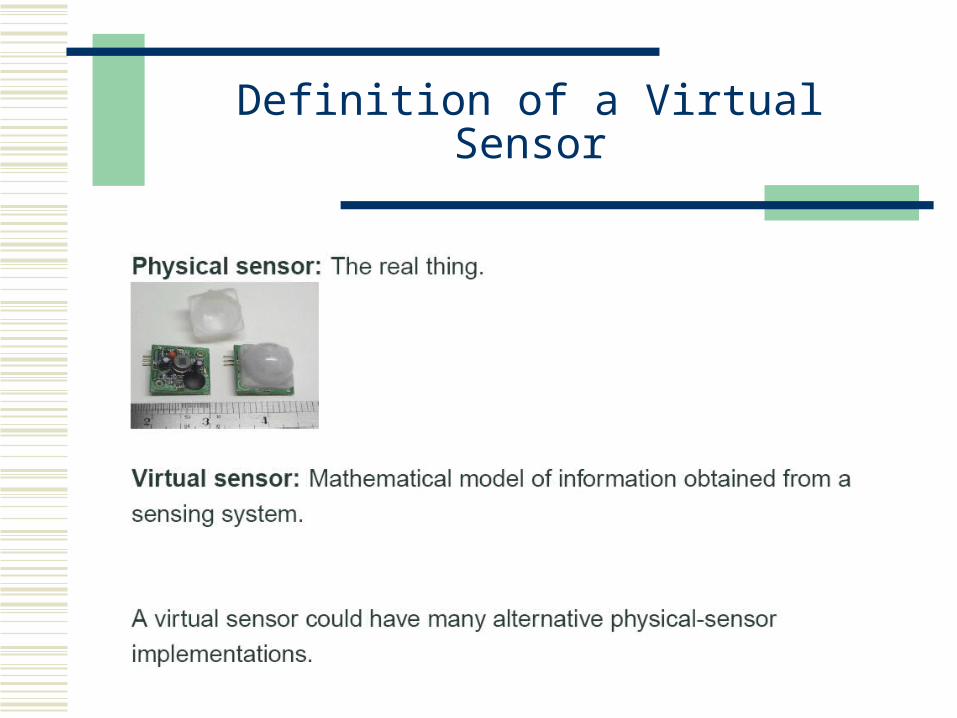
Definition of a Virtual Sensor
Definition of a Virtual Sensor
Simple Example
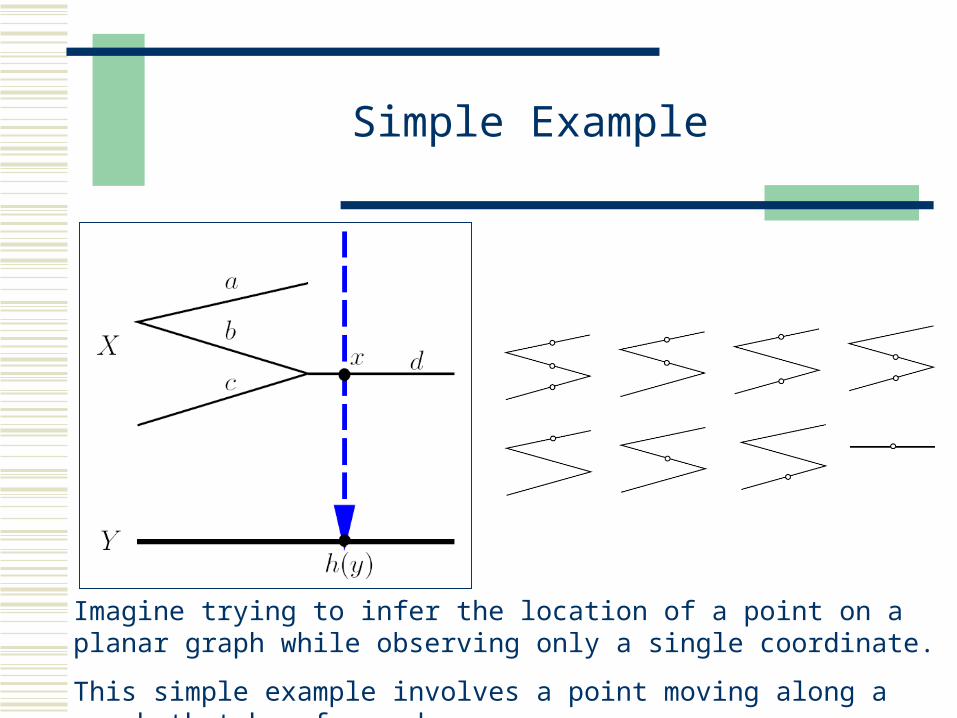
Imagine trying to infer the location of a point on a planar graph while observing only a single coordinate.
This simple example involves a point moving along a graph that has four edges.
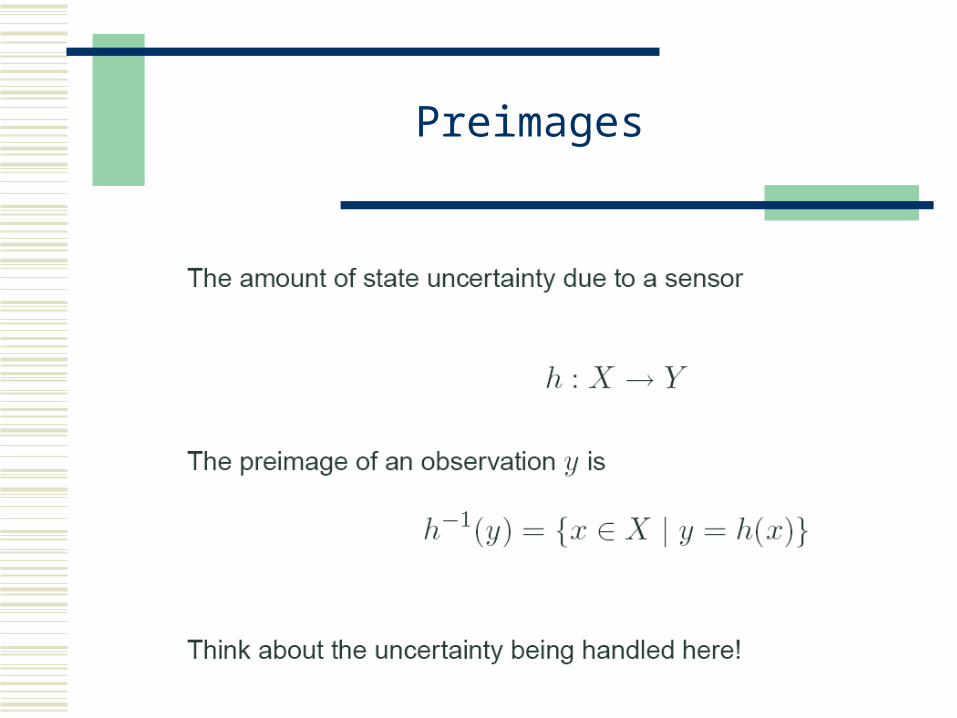
Preimages
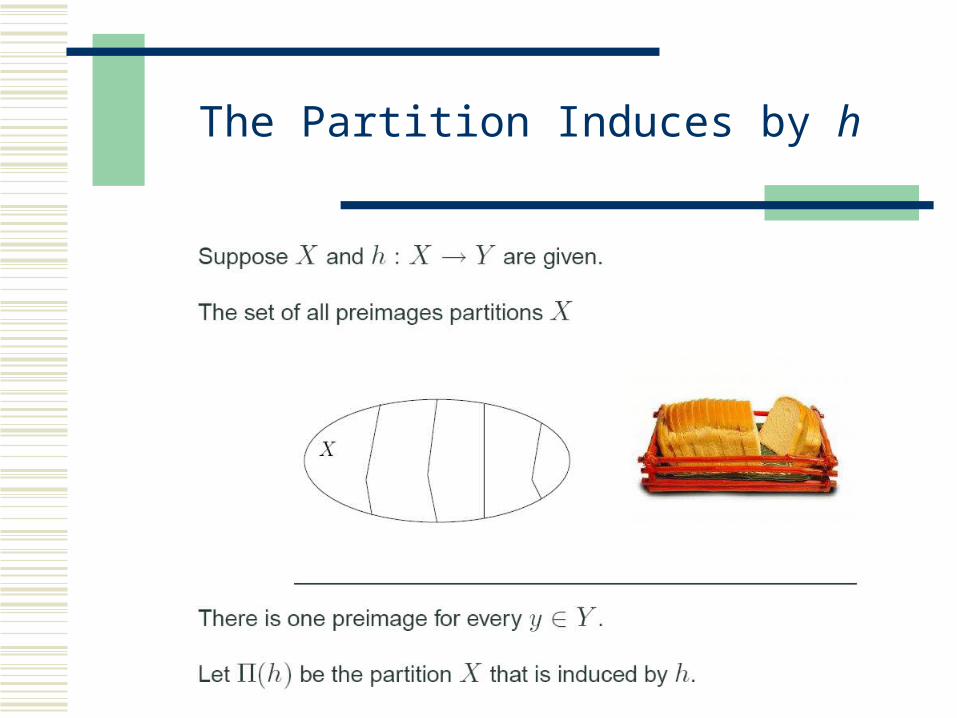
The Partition Induces by h
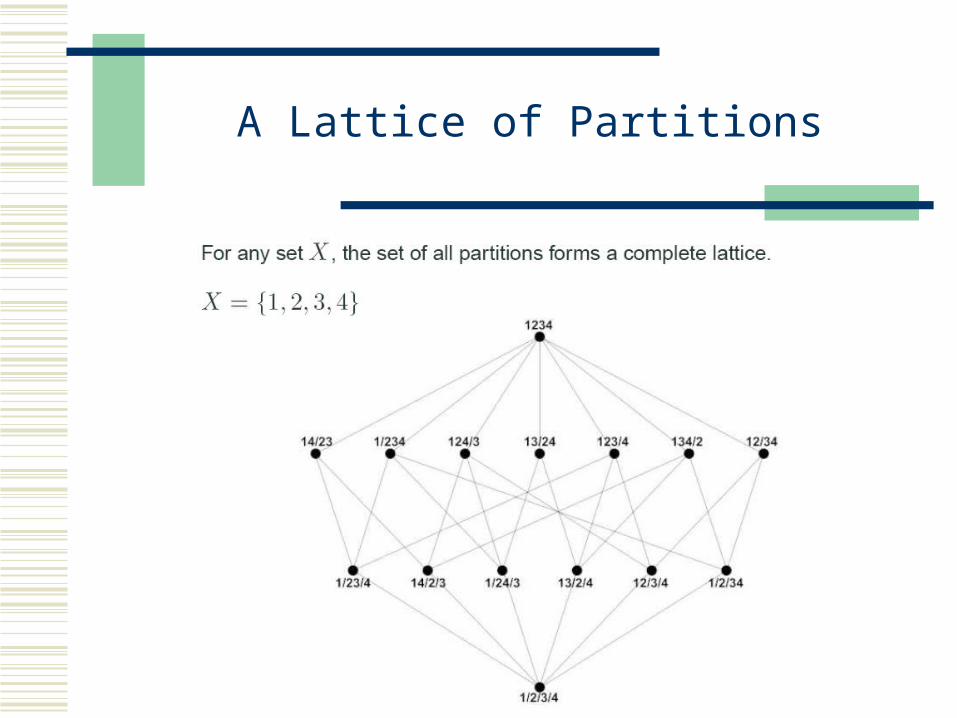
A Lattice of Partitions
The Sensor Lattice
The Main Theme:Planning in Information Spaces
It is tempting (and common) to introduce the most complete and accurate sensors possible to eliminate uncertainties and learn a detailed, complex model of the surrounding world.
In contrast, our theme is to start with sensing first and then understand what information is minimally needed to solve specific tasks.
If we can accomplish our mission without knowing certain details about the world, then the overall system may be more simple and robust.
Solving Complex Tasks with aSimple Wall-Following Robot
What kinds of global information can be learned and what kinds of tasks can be accomplished with as little sensing and actuation as possible.
Imagine designing motion strategies for a simple, low-cost, differential-drive robot.
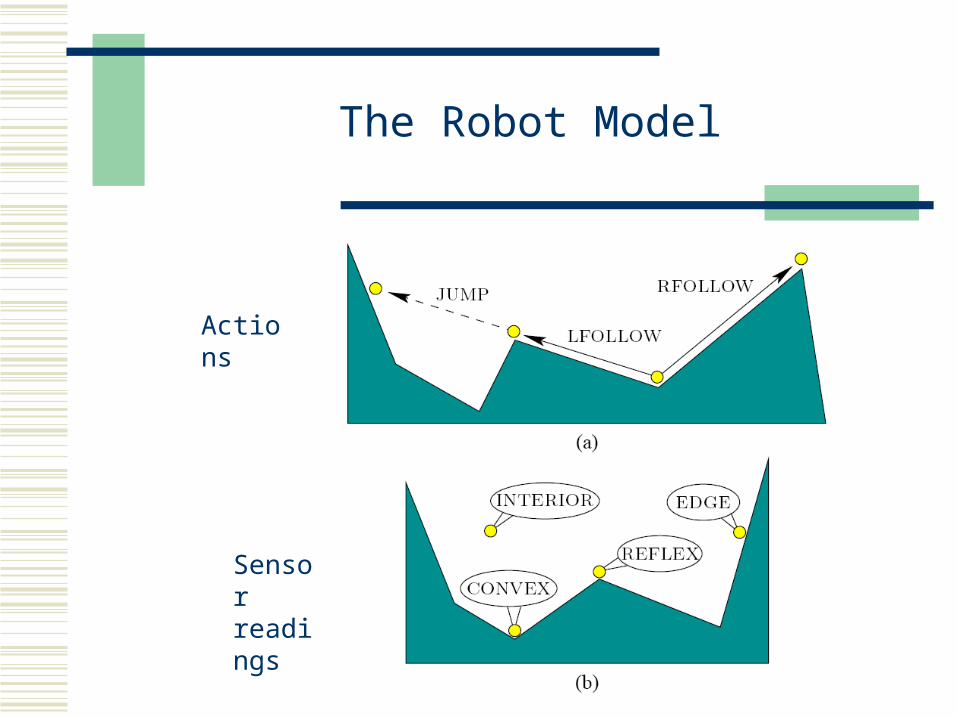
The Robot Model
Actions
Sensor readings
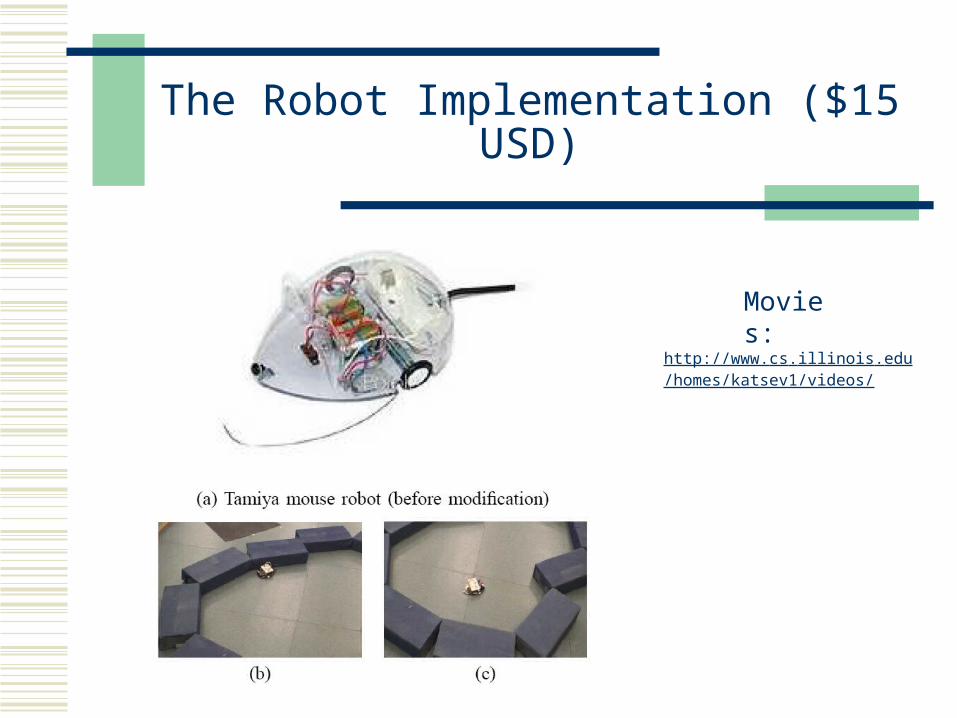
The Robot Implementation ($15 USD)
Movies:
http://www.cs.illinois.edu/homes/katsev1/videos/
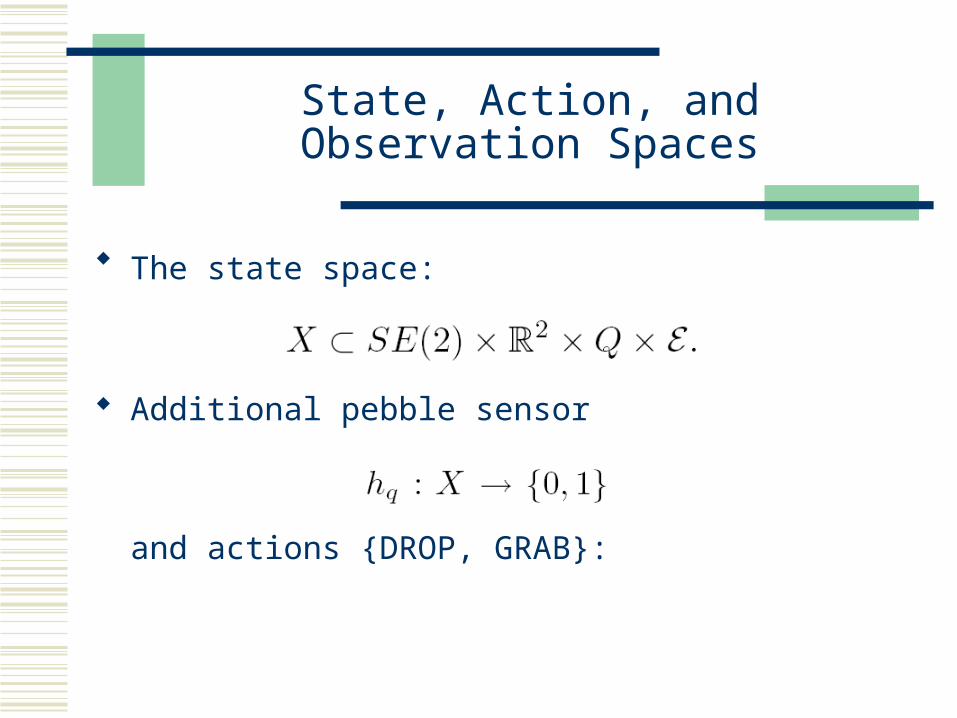
State, Action, and Observation Spaces
The state space:
Additional pebble sensor
and actions {DROP, GRAB}:
Information Spaces
Although we assume that the state space is known, the particular state will be, in general, unknown to the robot.
We need to be precise about what information the robot has available.
Such information is called information space
History I-space:
More Information Spaces
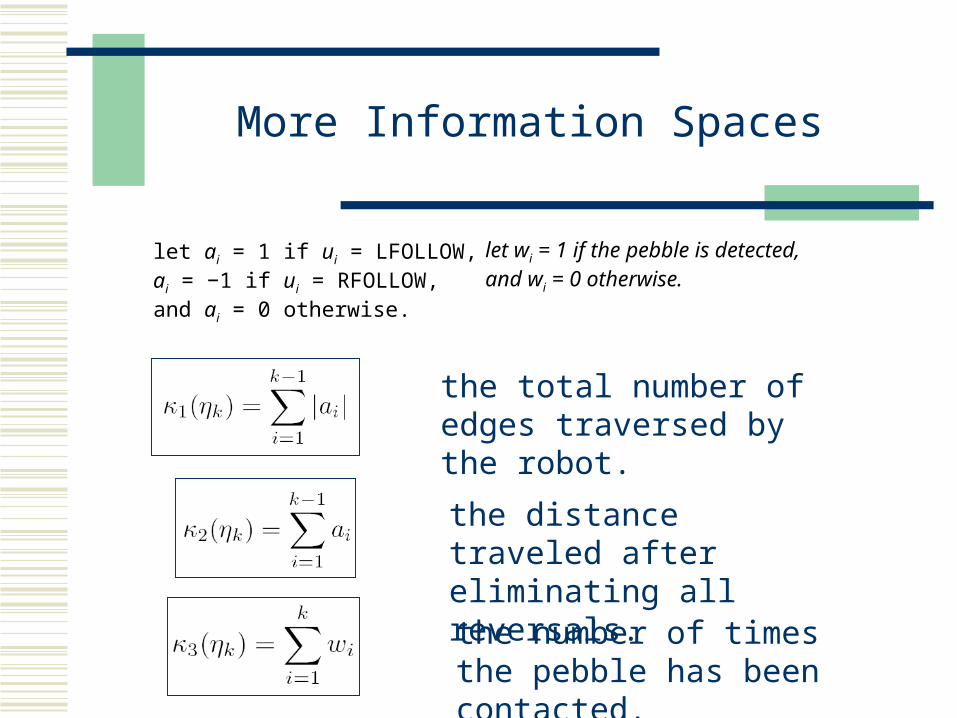
the total number of edges traversed by the robot.
the distance traveled after eliminating all reversals.
let ai = 1 if ui = LFOLLOW,ai = −1 if ui = RFOLLOW, and ai = 0 otherwise.
let wi = 1 if the pebble is detected,and wi = 0 otherwise.
the number of times the pebble has been contacted.
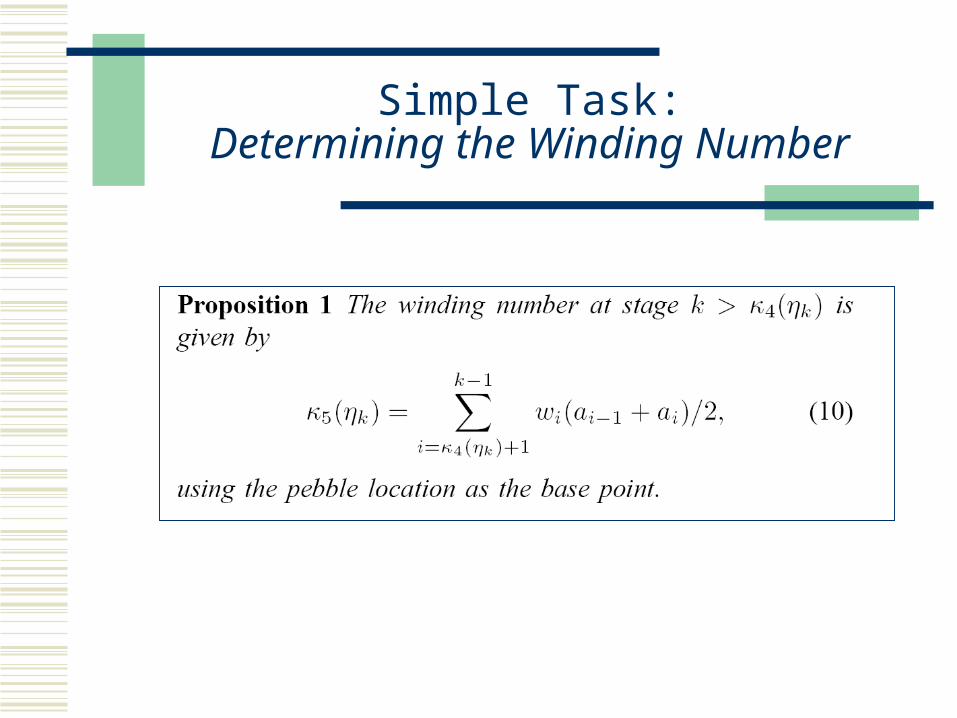
Simple Task:Determining the Winding Number
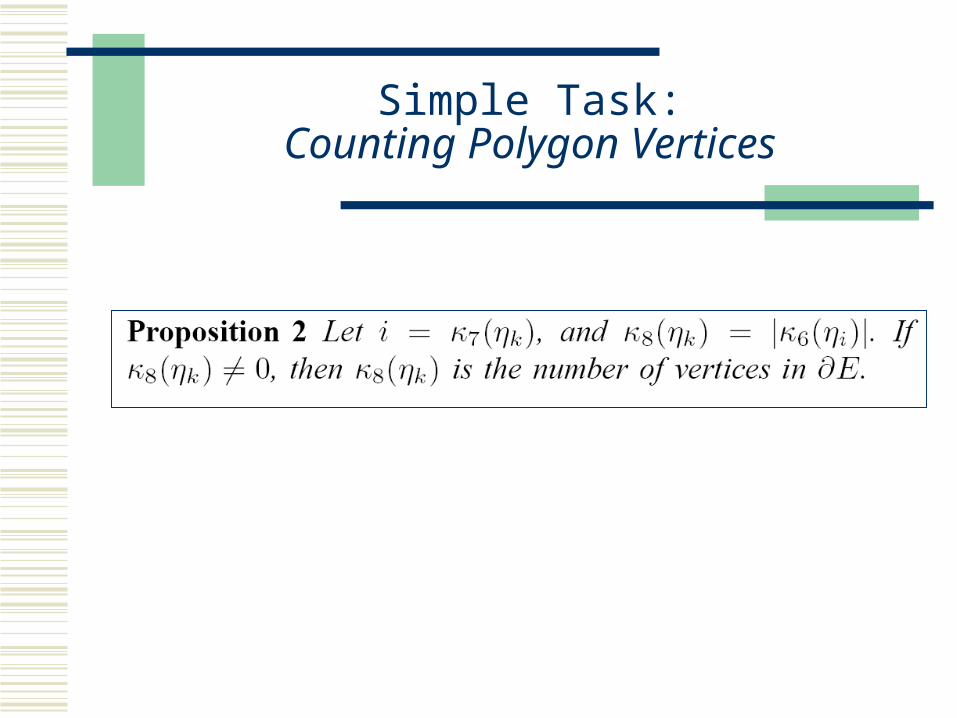
Simple Task:Counting Polygon Vertices
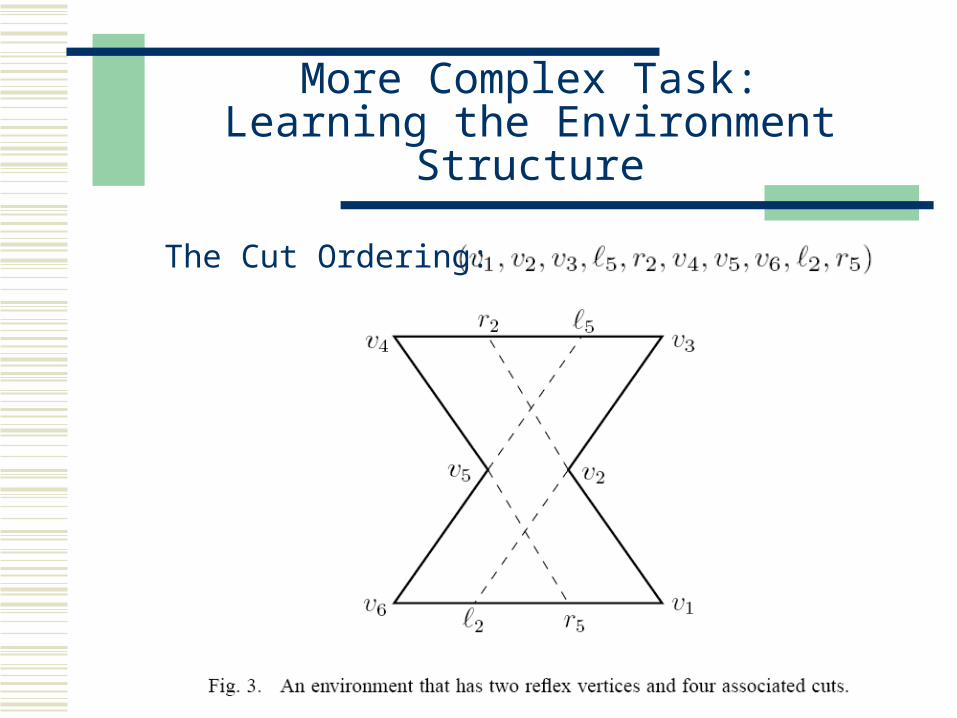
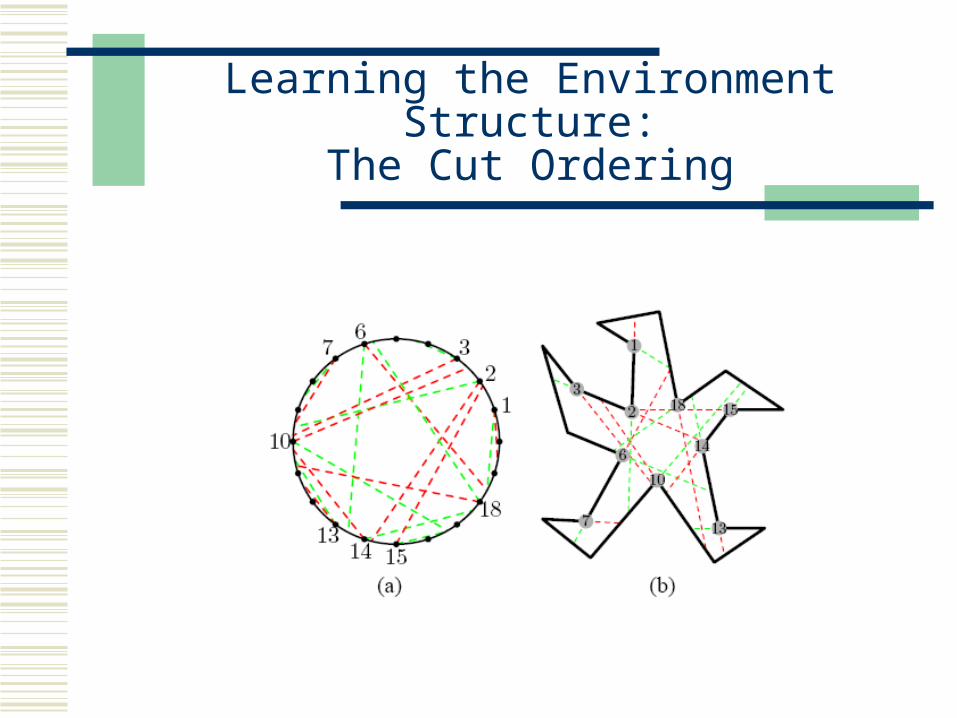
More Complex Task:Learning the Environment Structure
The Cut Ordering:
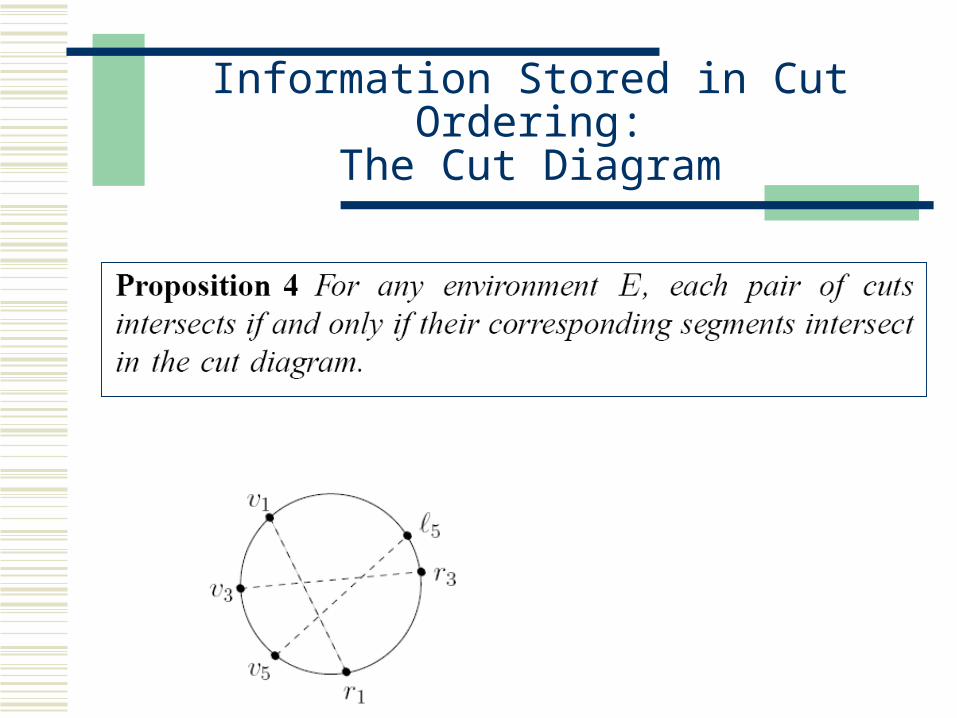
Information Stored in Cut Ordering:The Cut Diagram
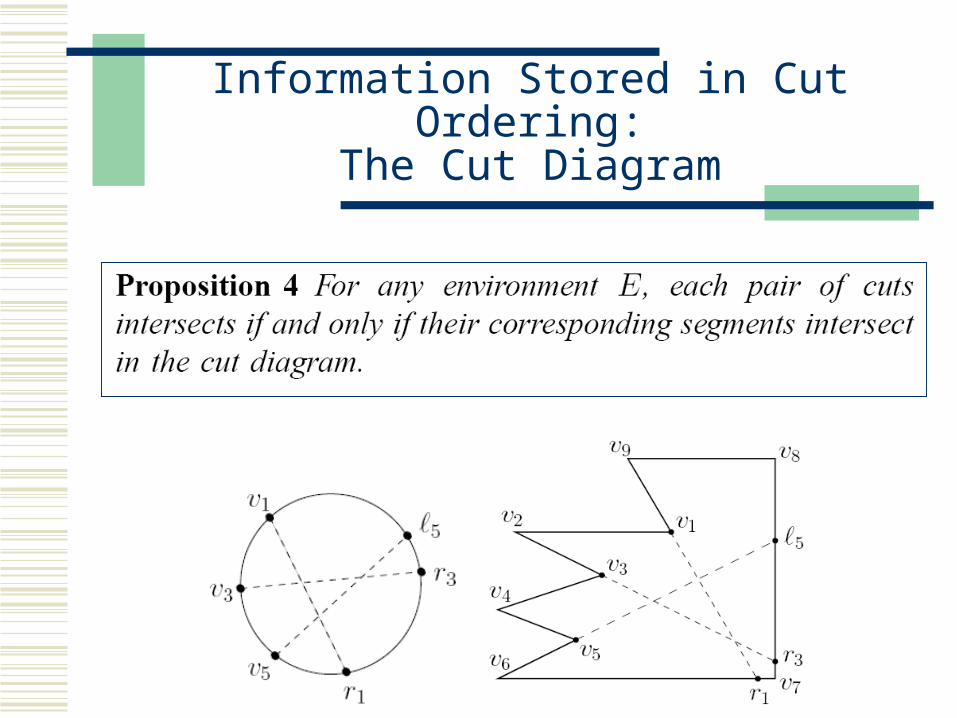
Information Stored in Cut Ordering:The Cut Diagram
Learning the Environment Structure:The Cut Ordering
Learning the Environment Structure:The Cut Ordering
The robot can learn the cut ordering associated with E using O(n2) actions and O(n) space, in which n is the number of vertices in ∂E.
Without sensing a pebble, the robot cannot construct the cut ordering.
Once the cut ordering has been learned, no additional combinatorial information regarding the cut arrangement of E can be obtained.
More Complex Task: Pursuit-Evasion!
Detect all unpredictably moving targets in the polygonal environment.
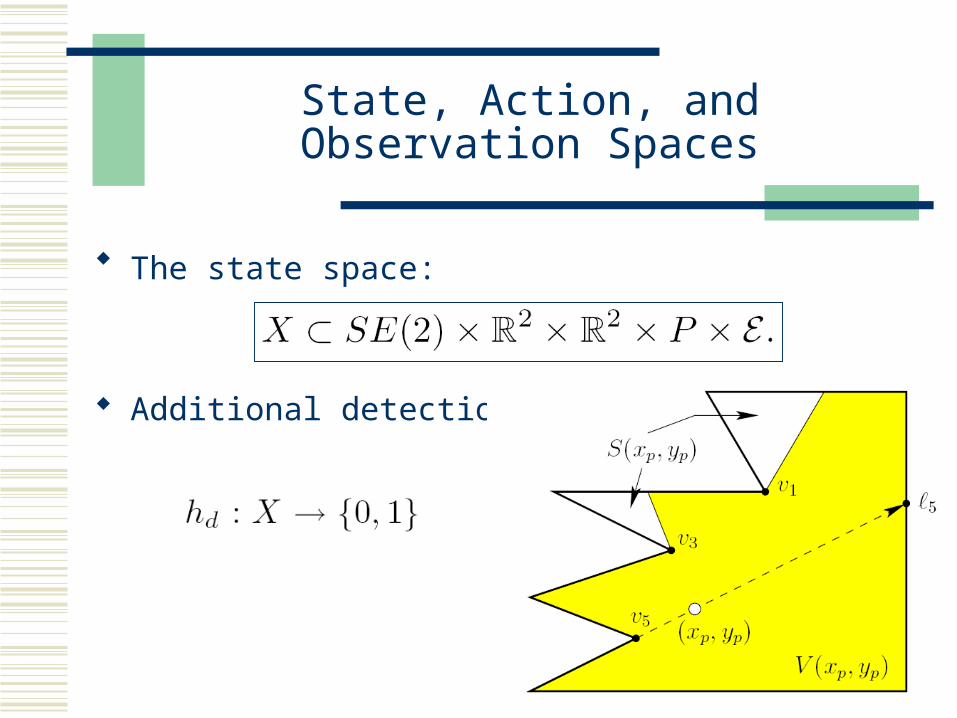
State, Action, and Observation Spaces
The state space:
Additional detection sensor
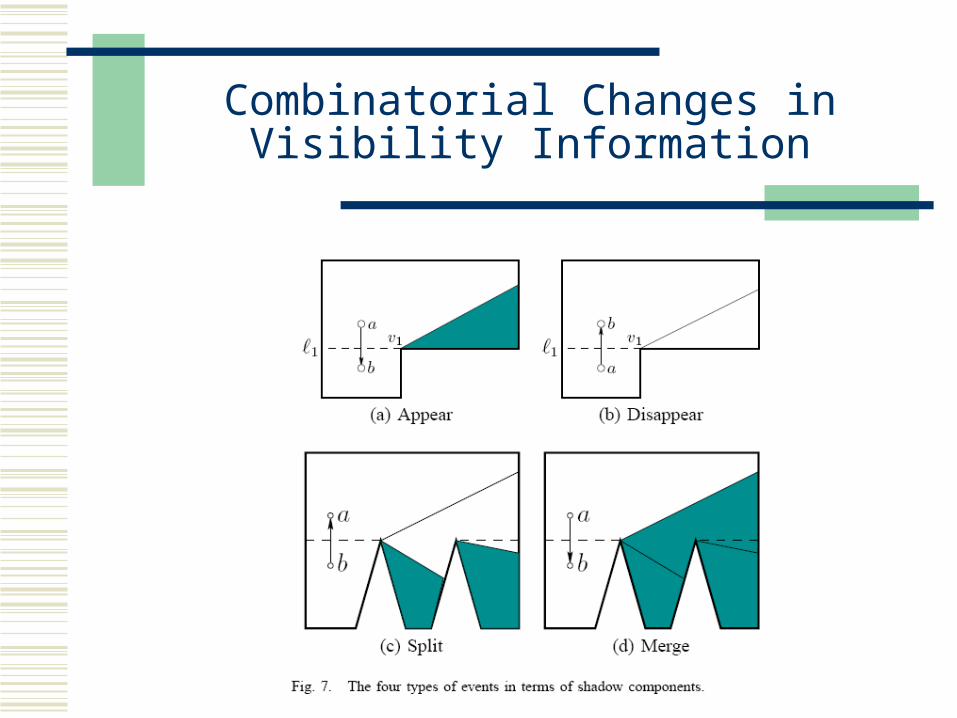
Combinatorial Changes in Visibility Information
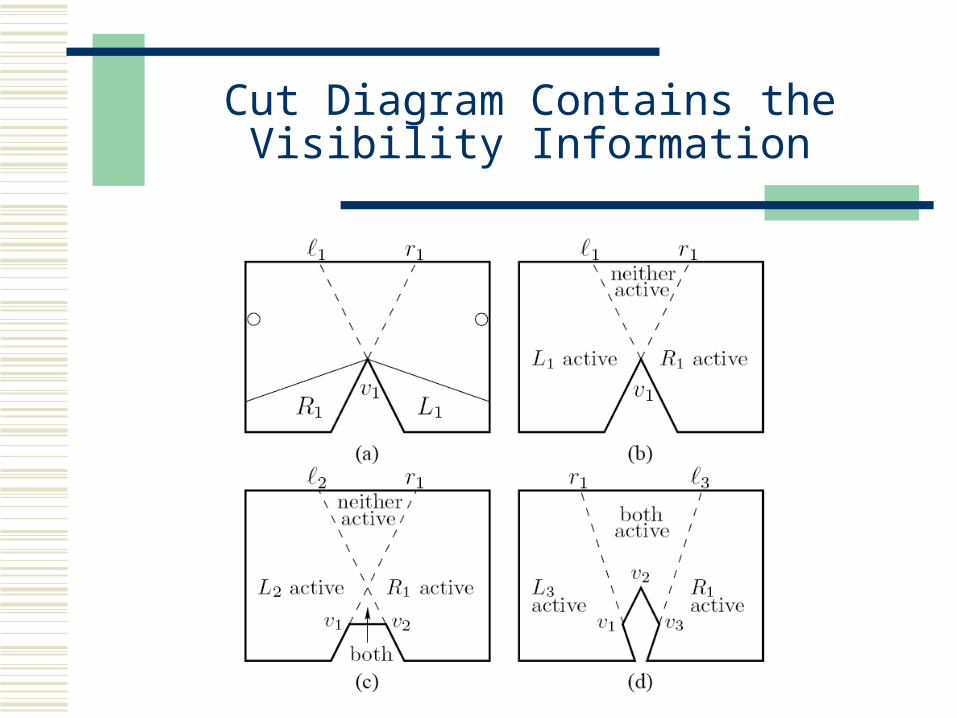
Cut Diagram Contains the Visibility Information
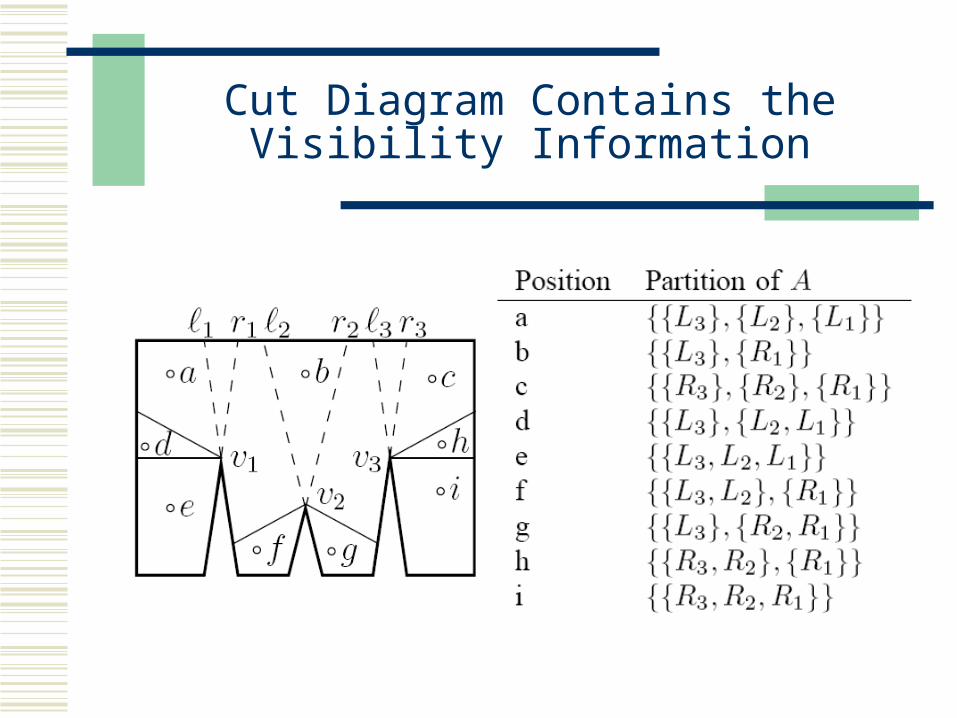
Cut Diagram Contains the Visibility Information
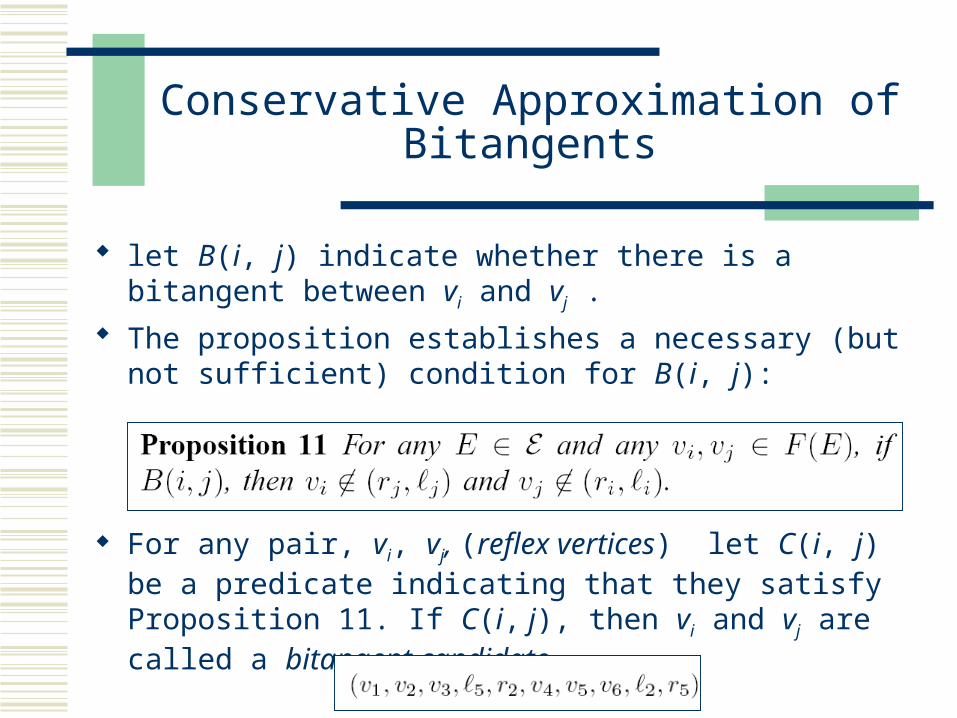
Conservative Approximation of Bitangents
let B(i, j) indicate whether there is a bitangent between vi and vj .
The proposition establishes a necessary (but not sufficient) condition for B(i, j):
For any pair, vi, vj, (reflex vertices) let C(i, j) be a predicate indicating that they satisfy Proposition 11. If C(i, j), then vi and vj are called a bitangent candidate.
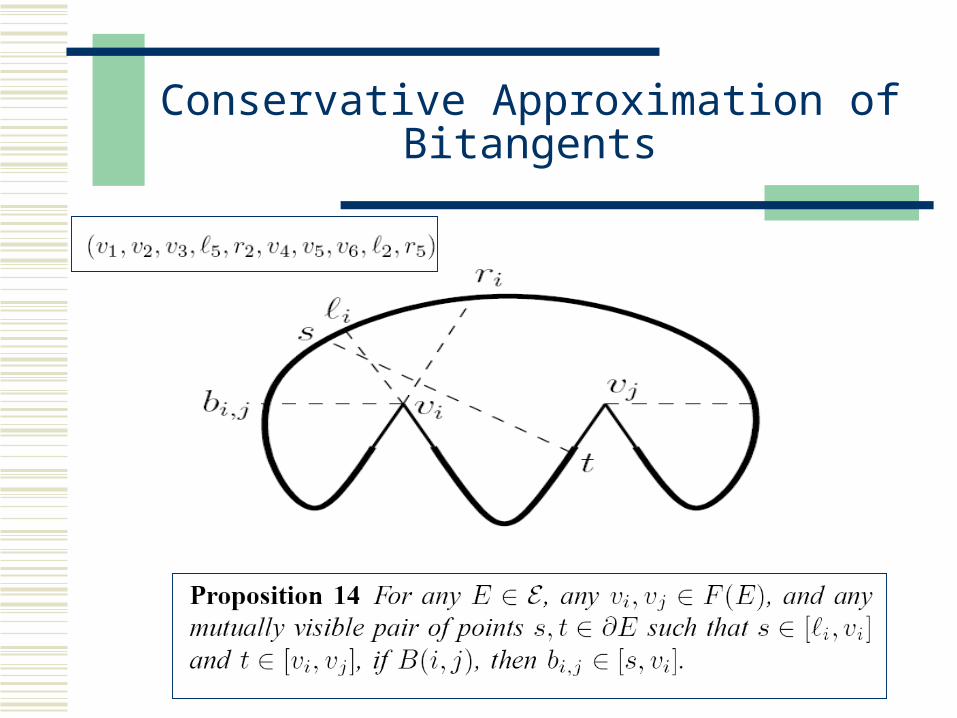
Conservative Approximation of Bitangents
Pursuit-Evasion Strategy
Any systematic search over the visibility polygon components using the bitangent approximations
Simulation Results
Movies:http://www.cs.duke.edu/~yershova/movies/t5.mpg
http://www.cs.duke.edu/~yershova/movies/taz.mpg
Conclusions and Future Directions
Virtual sensors: The interface from physical sensor to filters h : X → Y slices X into equivalence classes All basic sensors embed into the sensor lattice All planning problems live in an I-space Design virtual sensors, filters, planning problems together around
a task. Particular examples are demonstrated on a simple wall-following
robot, and strategies are developed for solving complex tasks Localization and mapping Pursuit-evasion
Conclusions and Future Directions
Relationship to Theory of Computation:
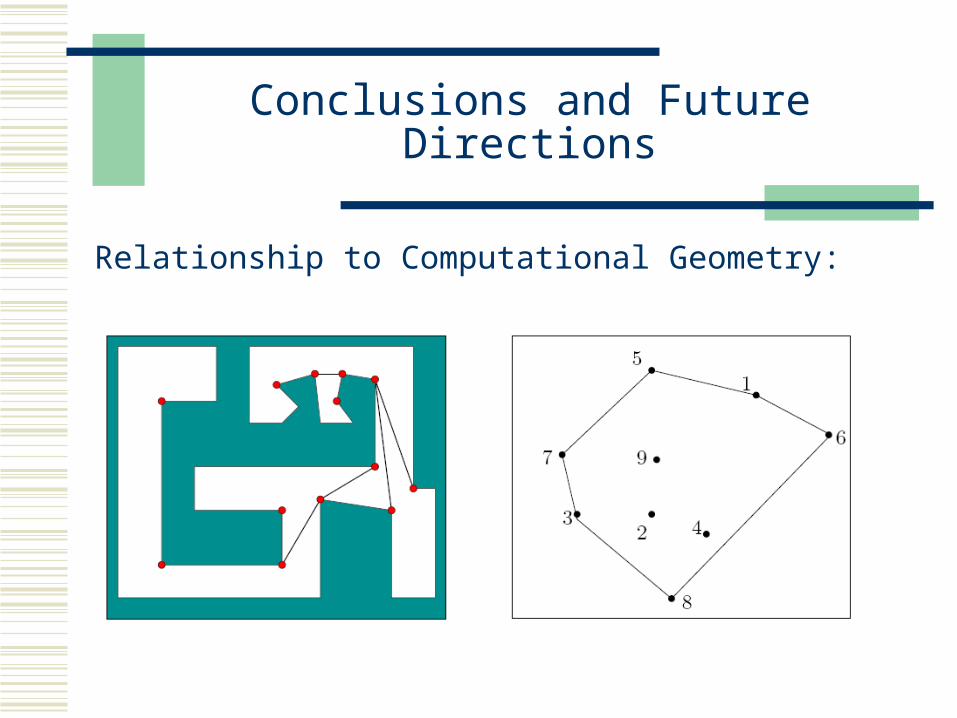
Conclusions and Future Directions
Relationship to Computational Geometry:
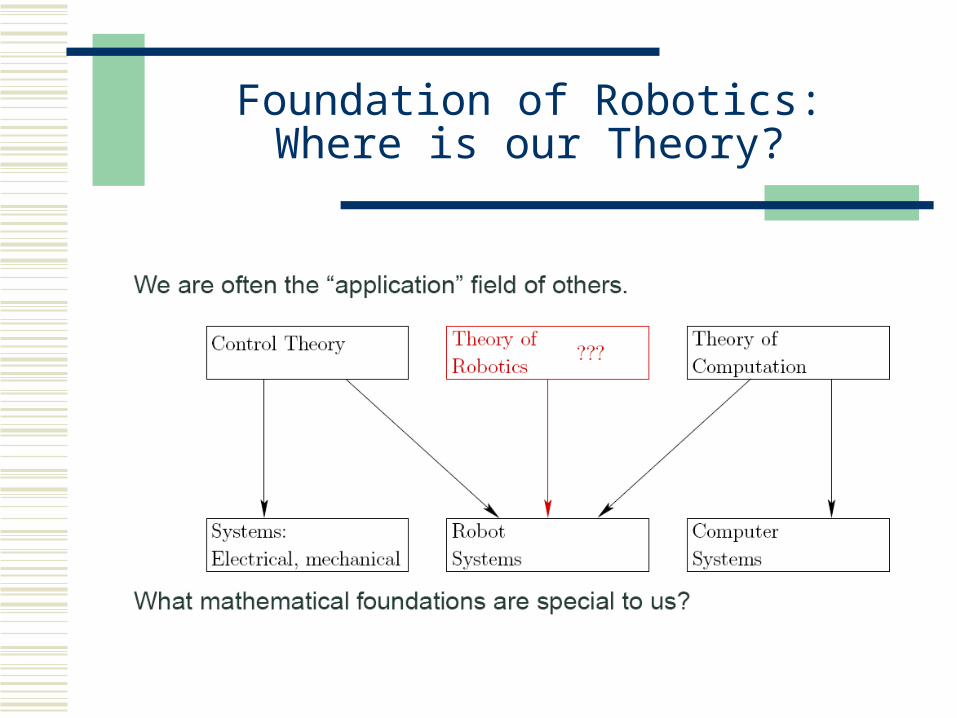
Foundation of Robotics:Where is our Theory?
Recommended

















