
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 1
OrdonnancementTemps Réel
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 2
Introduction
● Tâches temps réel soumises à des contraintes de temps, plus ou moins strictes ➢ instant de démarrage➢ instant de fin ➢ absolus ou relatifs à d'autres tâches
● le but de l'ordonnancement est de permettre le respect de ces contraintes, lorsque l'exécution se produit dans un mode courant
● il doit permettre de borner les effets d'incidents ou de surcharges
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 3
Caractéristiques des tâches (1)
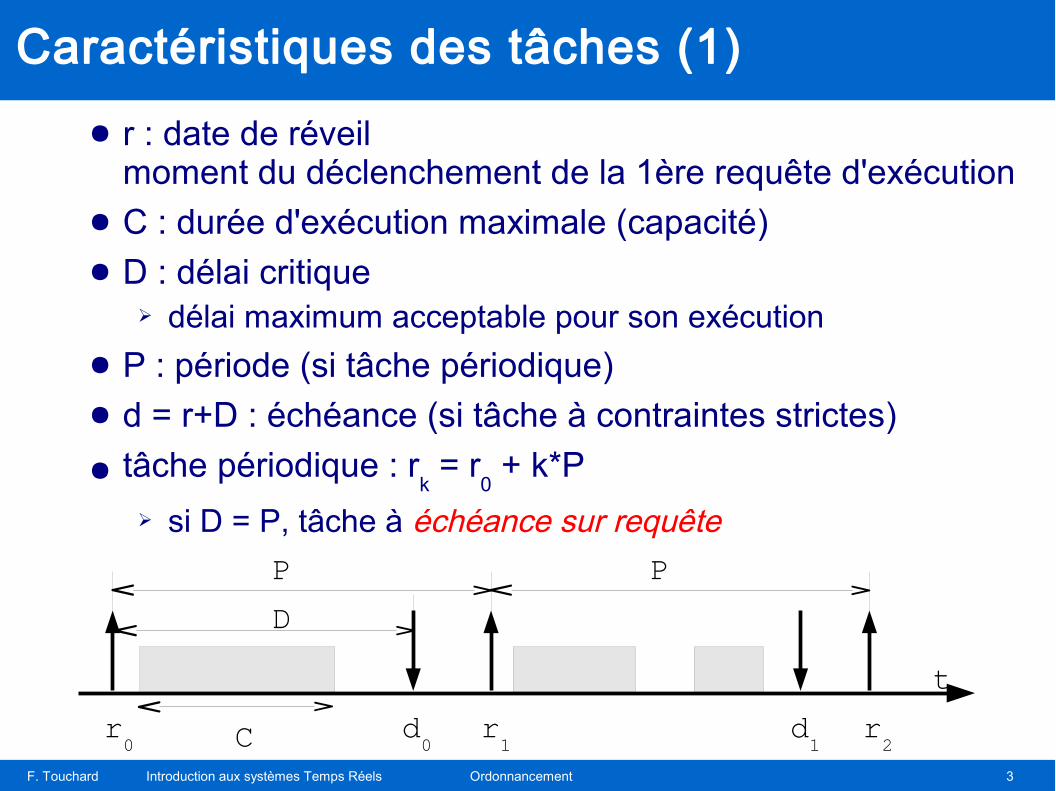
● r : date de réveilmoment du déclenchement de la 1ère requête d'exécution
● C : durée d'exécution maximale (capacité)● D : délai critique
➢ délai maximum acceptable pour son exécution
● P : période (si tâche périodique)● d = r+D : échéance (si tâche à contraintes strictes)
● tâche périodique : rk = r
0 + k*P
➢ si D = P, tâche à échéance sur requête
r0
d0
r1
d1
r2C
D
P P
t
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 4
Caractéristiques des tâches (2)
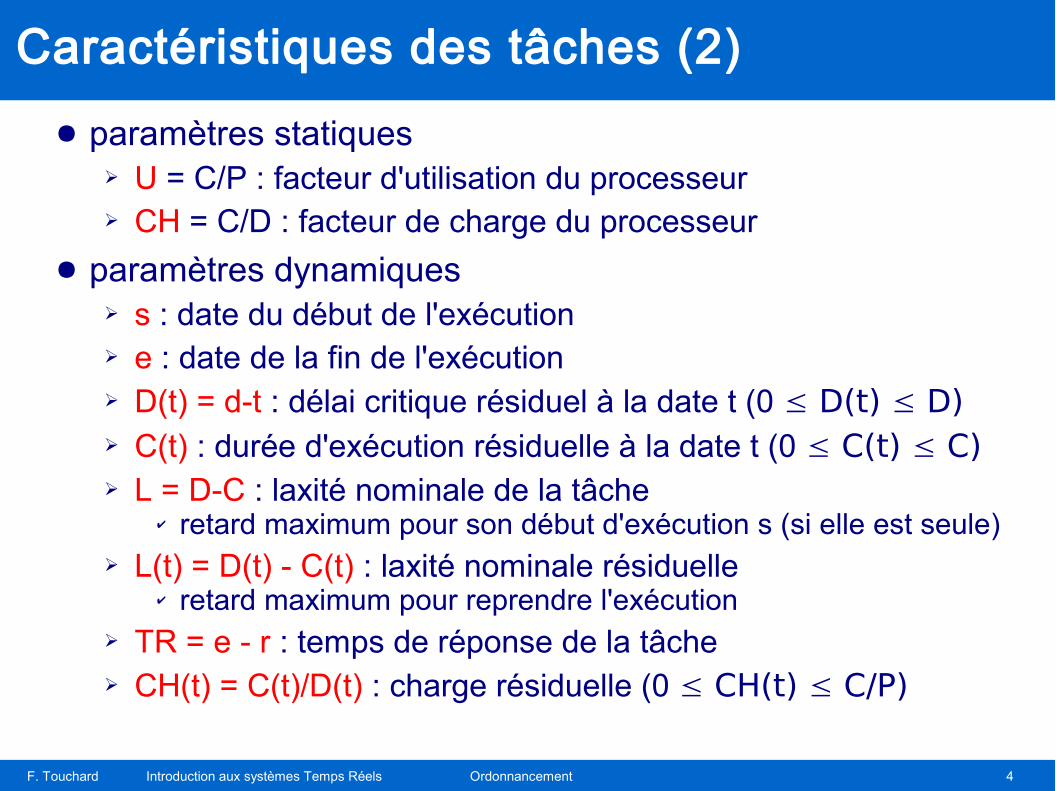
● paramètres statiques➢ U = C/P : facteur d'utilisation du processeur ➢ CH = C/D : facteur de charge du processeur
● paramètres dynamiques➢ s : date du début de l'exécution➢ e : date de la fin de l'exécution➢ D(t) = d-t : délai critique résiduel à la date t (0 ≤ D(t) ≤ D)➢ C(t) : durée d'exécution résiduelle à la date t (0 ≤ C(t) ≤ C)➢ L = D-C : laxité nominale de la tâche
✔ retard maximum pour son début d'exécution s (si elle est seule)➢ L(t) = D(t) - C(t) : laxité nominale résiduelle
✔ retard maximum pour reprendre l'exécution➢ TR = e - r : temps de réponse de la tâche➢ CH(t) = C(t)/D(t) : charge résiduelle (0 ≤ CH(t) ≤ C/P)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 5
Caractéristiques des tâches (3)
● préemptibles ou non● dépendance ou indépendance
➢ ordre partiel prédéterminé ou induit➢ partage de ressources
● priorité externe➢ ordonnancement hors ligne déterminé à la conception
● gigue (jitter) maximale➢ variation entre la requête et le début de l'exécution
● urgence ↔ échéance
● importance
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 6
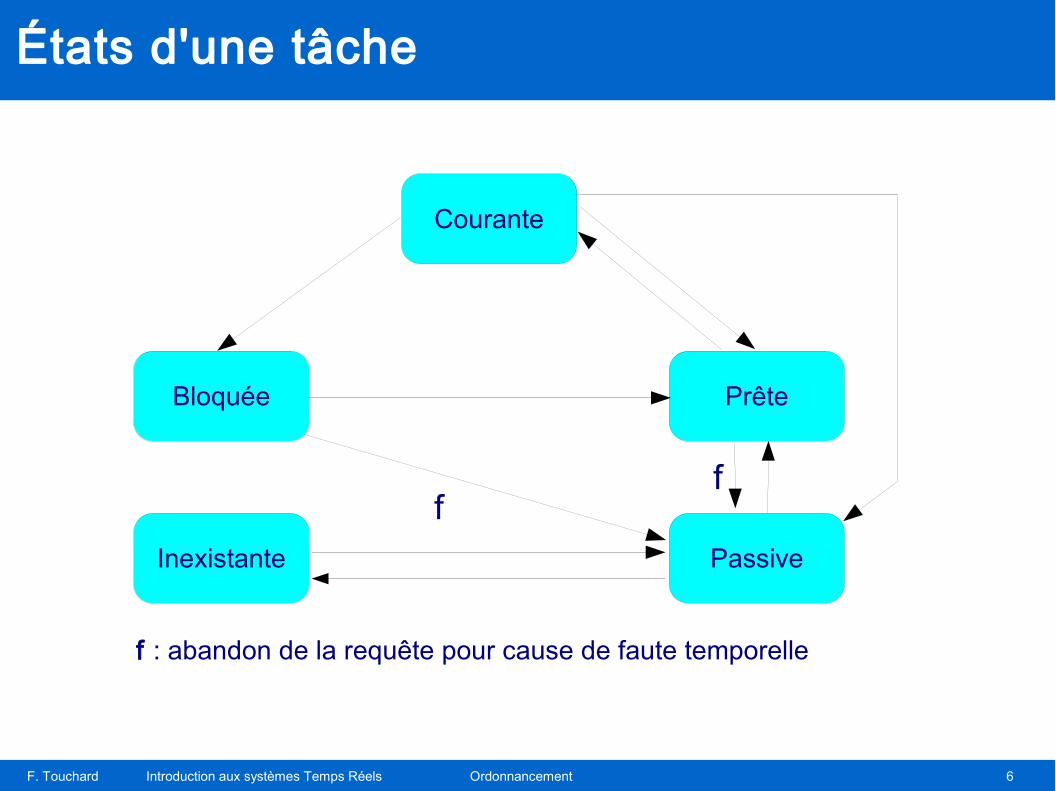
États d'une tâche
Courante
Bloquée
Inexistante
Prête
ff
f : abandon de la requête pour cause de faute temporelle
Passive
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 7
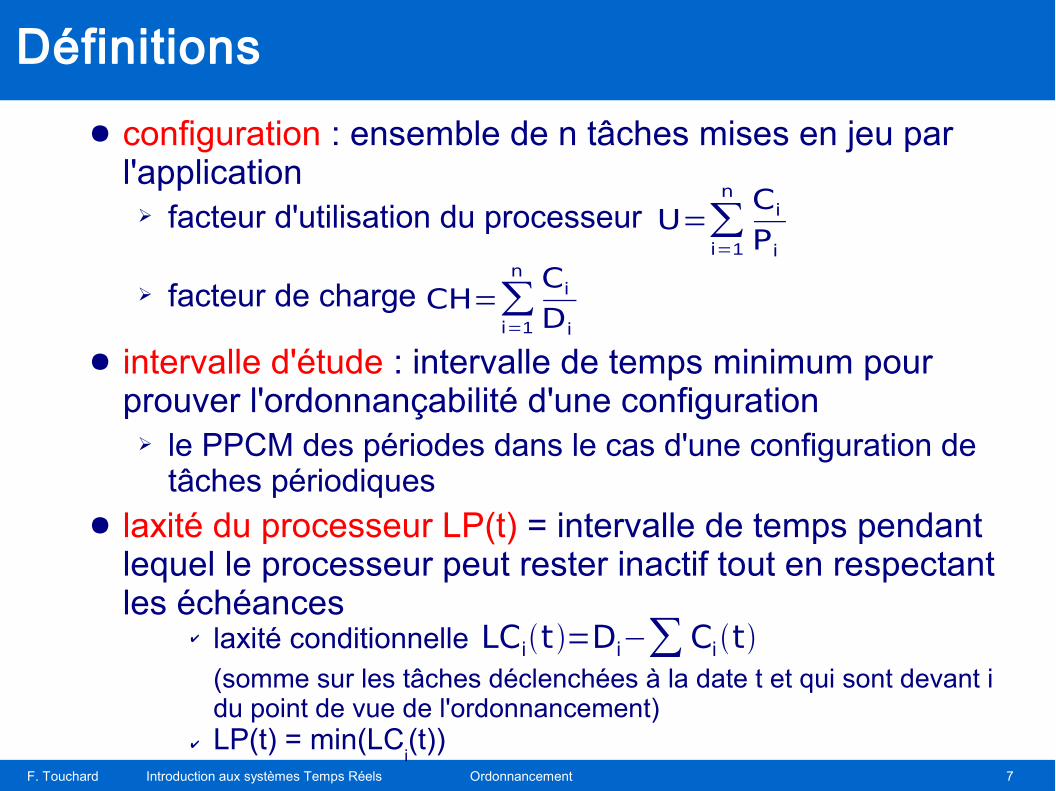
Définitions
● configuration : ensemble de n tâches mises en jeu par l'application➢ facteur d'utilisation du processeur
➢ facteur de charge
● intervalle d'étude : intervalle de temps minimum pour prouver l'ordonnançabilité d'une configuration➢ le PPCM des périodes dans le cas d'une configuration de
tâches périodiques● laxité du processeur LP(t) = intervalle de temps pendant
lequel le processeur peut rester inactif tout en respectant les échéances
✔ laxité conditionnelle
(somme sur les tâches déclenchées à la date t et qui sont devant i du point de vue de l'ordonnancement)
✔ LP(t) = min(LCi(t))
U=∑i=1
n Ci
Pi
CH=∑i=1
n Ci
Di
LCit=Di−∑Cit
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 8
Buts de l'ordonnancement
● piloter l'application avec 2 objectifs majeurs :➢ en fonctionnement nominal : respect des contraintes
temporelles➢ en fonctionnement anormal (par exemple pannes
matérielles) : atténuer les effets des surcharges et maintenir un état cohérent et sécuritaire
● ordonnancer = planifier l'exécution des requêtes de façon à respecter les contraintes de temps➢ de toutes les requêtes en fonctionnement nominal➢ d'au moins les requêtes les plus importantes (c'est-à-dire
celles nécessaires à la sécurité du procédé) en fonctionnement anormal
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 9
Typologie des algorithmes
● en ligne ou hors ligne➢ choix dynamique ou prédéfini à la conception
● préemptif ou non préemptif➢ une tâche peut perdre le processeur (au profit d'une tâche
plus prioritaire) ou non➢ algorithme préemptif toutes les tâches préemptibles⇔
● stratégie du meilleur effort ou inclémence➢ en TR mou, meilleur effort = faire au mieux avec les
processeurs disponibles➢ en TR dur, obligation des respecter les contraintes
temporelles : inclémence aux fautes temporelles
● centralisé ou réparti
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 10
Plan du cours
● ordonnancement des tâches indépendantes● ordonnancement des tâches dépendantes
➢ partage de ressources➢ contraintes de précédence
● ordonnancement en cas de surcharge

11
Ordonnancement destâches indépendantes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 12
Introduction
● tâches indépendantes :➢ pas de partage de ressources➢ pas de contraintes de précédence
● cas des algorithmes en ligne➢ dynamique➢ sur la base d'une priorité définie
✔ soit de manière empirique✔ soit à partir d'un paramètre temporel de la tâche
➢ priorité constante ou variable avec le temps➢ à priorité identique, on évite la préemption➢ test d'acceptabilité hors ligne si tous les paramètres sont
connus➢ sinon test de garantie au réveil des tâches
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 13
tâches périodiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 14
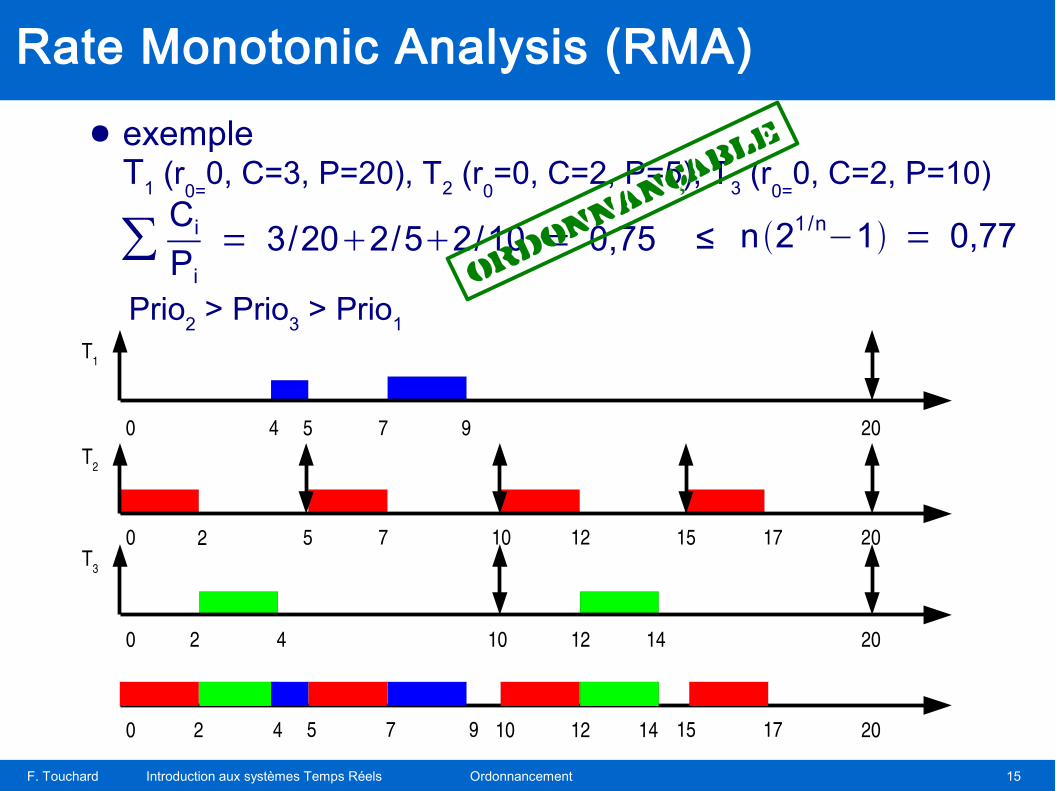
Rate Monotonic Analysis (RMA)
● algorithme à priorité constante● basé sur la période (tâches à échéance sur requête) :
➢ la tâche de plus petite période est la plus prioritaire
● test d'acceptabilité (condition suffisante)
● quand n est très grand : n(21/n – 1) ~ ln 2 = 0,69● dans la pratique, on peut rencontrer des
ordonnancements valides qui vont jusqu'à 88%● on peut montrer que RMA est un algorithme « optimal » :
➢ une configuration qui ne peut pas être ordonnancée par RMA ne pourra pas être ordonnée par un autre algorithme à priorité fixe
∑i=1
n Ci
Pi
n 21 /n−1
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 15
Rate Monotonic Analysis (RMA)
● exempleT
1 (r
0=0, C=3, P=20), T
2 (r
0=0, C=2, P=5), T
3 (r
0=0, C=2, P=10)
∑Ci
Pi
= 3/202/52/10 = 0,75 n 21 /n−1 = 0,77ordonnança
ble
0 5 7 10 12 15 17 202
T2
0 2 4 12 14 2010
T3
T1
0 4 205 7 9
0 2 4 12 14 20105 7 9 15 17
≤
Prio2 > Prio
3 > Prio
1
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 16
Deadline Monotonic Analysis (DMA)
● algorithme à priorité constante● basé sur le délai critique :
➢ la tâche de plus petit délai critique est la plus prioritaire
● test d'acceptabilité (condition suffisante)
● équivalent à RMA dans le cas des tâches à échéance sur requête, meilleur dans les autres cas
∑i=1
n Ci
Di
⩽n(21/n−1)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 17
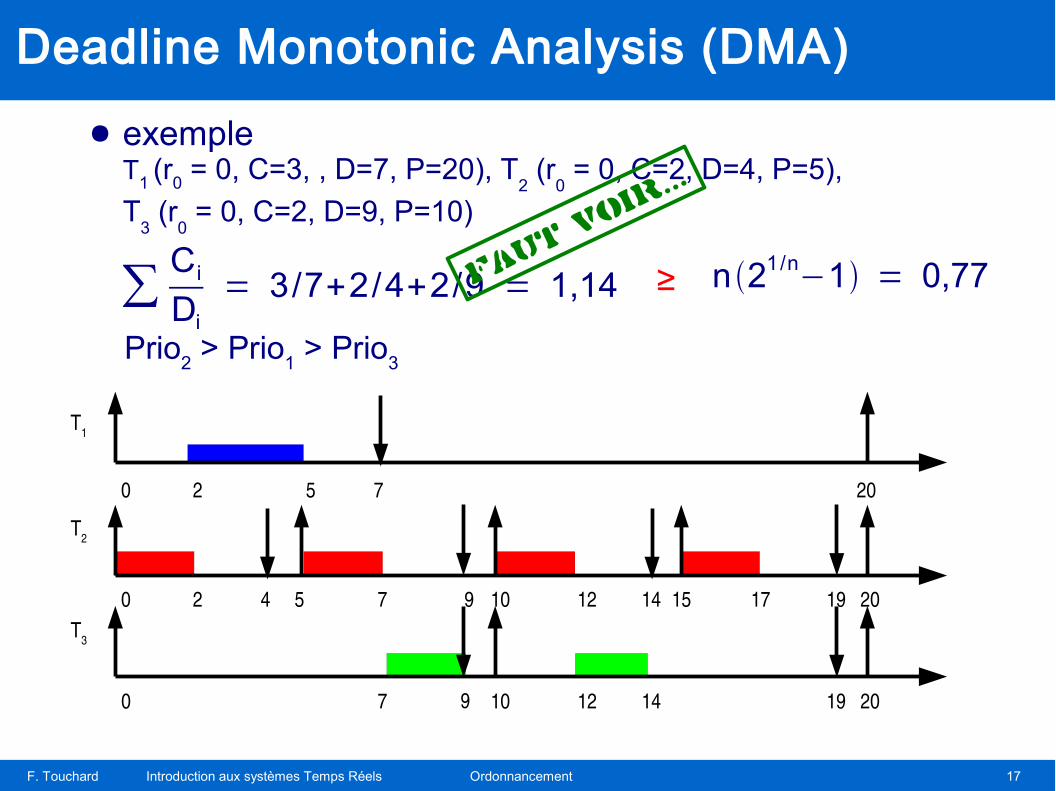
Deadline Monotonic Analysis (DMA)
● exempleT
1 (r
0 = 0, C=3, , D=7, P=20), T
2 (r
0 = 0, C=2, D=4, P=5),
T3 (r
0 = 0, C=2, D=9, P=10)
∑Ci
Di
= 3 /7+2 /4+2 /9 = 1,14 n 21 /n−1 = 0,77≥faut voir...
0 5 7 10 12 15 17 204 9 19142
T2
0 2 5 7 20
T1
0 12 14 207 9 10 19
T3
Prio2 > Prio
1 > Prio
3
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 18
Earliest Deadline First (EDF)
● algorithme à priorité variable ou dynamique● basé sur l'échéance
➢ à chaque instant (i.e à chaque réveil de tâche), la priorité maximale est donnée à la tâche dont l'échéance est la plus proche
● test d'acceptabilité ➢ condition nécessaire
➢ condition suffisante
● on peut montrer que EDF est un algorithme optimal pour les algorithmes à priorité dynamique
∑i=1
n Ci
Pi
≤1
∑i=1
n Ci
Di
≤1
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 19
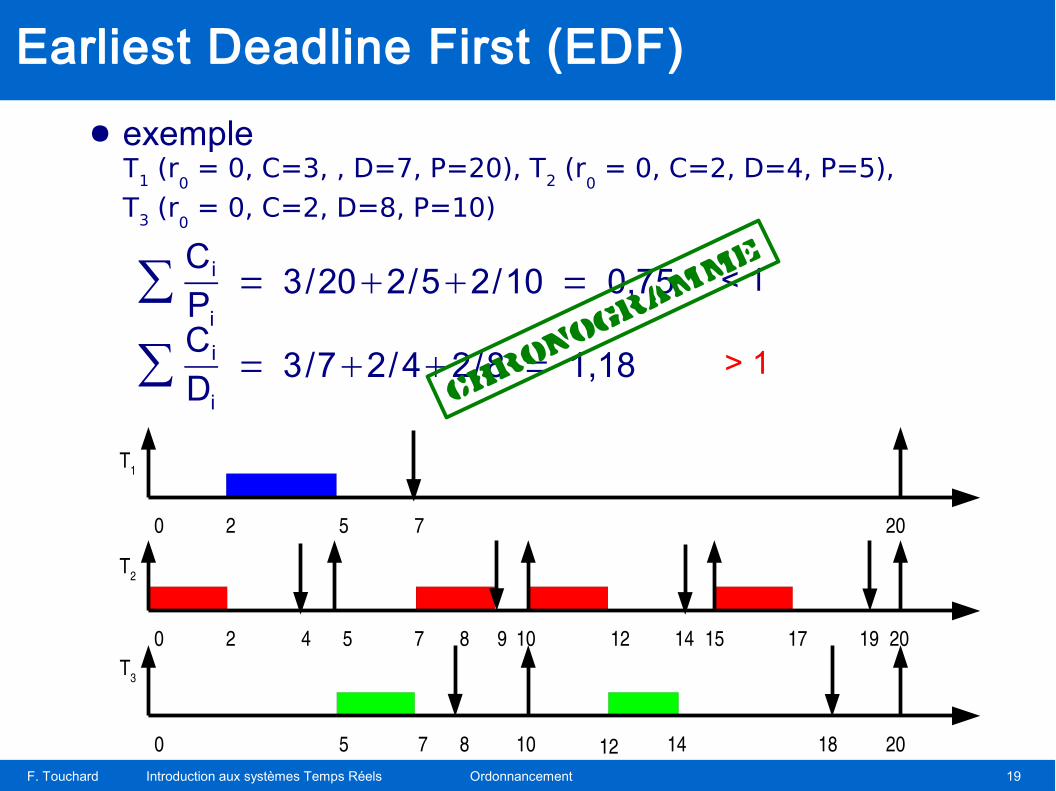
Earliest Deadline First (EDF)
● exempleT1 (r0
= 0, C=3, , D=7, P=20), T2 (r0 = 0, C=2, D=4, P=5),
T3 (r0 = 0, C=2, D=8, P=10)
∑Ci
Pi
= 3 /202/52/10 = 0,75 < 1
∑Ci
Di
= 3 /72/42/8 = 1,18 > 1
0
0
0
2 5
5
8
7
10 12
12 14
15 17 20
20
20
4
7
9
8 10
19
18
142 5 7
T1
T2
T3
chronogramme
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 20
Exercice
● soit une configuration avec 2 tâches à échéance sur requête :
T1 : (r
0 = 0, C
1 = 2, P
1 = 5)
T2 : (r
0 = 0, C
2 = 4, P
2 = 7)
● intervalle d'étude ?● la configuration est-elle ordonnançable avec RMA ?
Justifiez votre réponse.● même question avec EDF● tracer les chronogrammes en indiquant les éventuelles
fautes temporelles
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 21
Least Laxity First (LLF)
● algorithme à priorité variable● aussi appelé Least Slack Time (LST)● basé sur la laxité résiduelle
➢ la priorité maximale est donnée à la tâche qui a la plus petite laxité résiduelle L(t) = D(t) – C(t)
● équivalent à EDF si on ne calcule la laxité qu'au réveil des tâches
● optimum à trouver entre la granularité du calcul et le nombre de changements de contexte provoqués
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 22
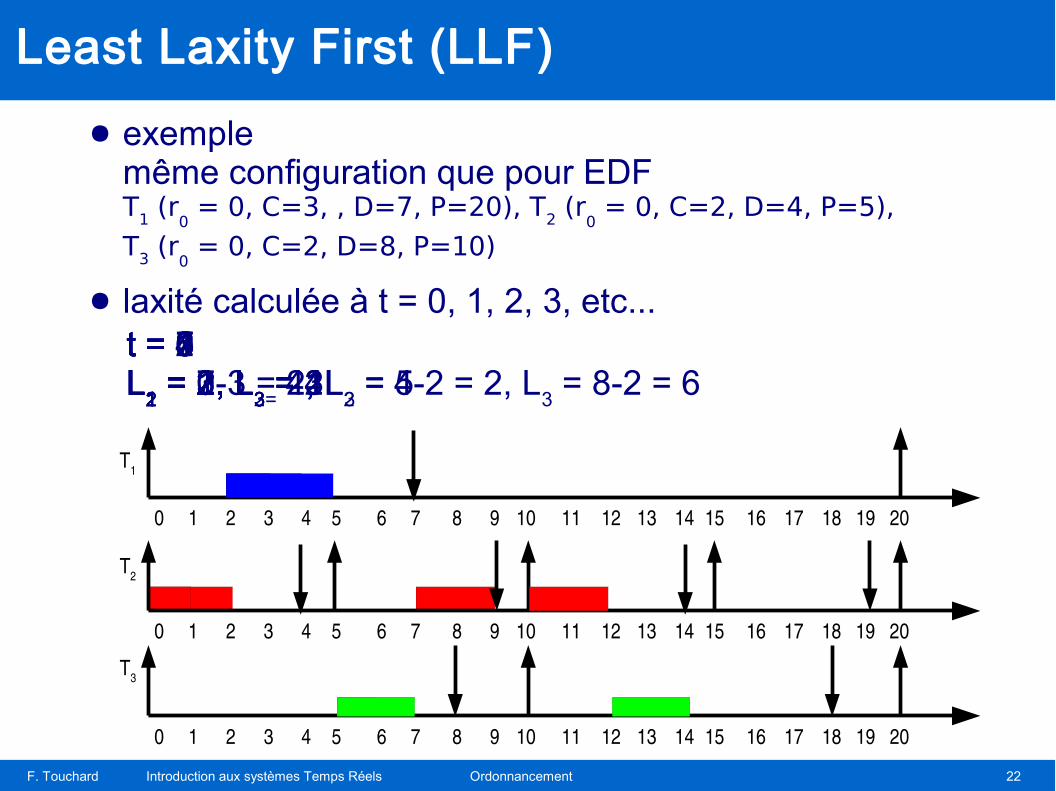
Least Laxity First (LLF)
● exemplemême configuration que pour EDFT1 (r0
= 0, C=3, , D=7, P=20), T2 (r0 = 0, C=2, D=4, P=5),
T3 (r0 = 0, C=2, D=8, P=10)
● laxité calculée à t = 0, 1, 2, 3, etc...
0 8 10 12 15 17 204 9 19142 5 7
T1
T2
T3
1 3 6 11 13 16 18
0 8 10 12 15 17 204 9 19142 5 71 3 6 11 13 16 18
0 8 10 12 15 17 204 9 19142 5 71 3 6 11 13 16 18
t = 0 L
1 = 7-3 = 4, L
2 = 4-2 = 2, L
3 = 8-2 = 6
t = 1 L
1 = 3, L
2= 2, L
3 = 5
t = 2 L
1 = 2, L
3 = 4
t = 3L
1 = 2, L
3 = 3
t = 4L
1 = 2, L
3 = 2
t = 5L
2 = 2, L
3 = 1
t = 6L
2 = 1, L
3 = 1
t = 7L
2 = 0
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 23
Traitement des tâches apériodiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 24
Introduction
● tâches prises en compte dans une configuration comprenant déjà des tâches périodiques critiques➢ les tâches apériodiques peuvent être critiques (contrainte
stricte) ou non (contrainte relative)
● a priori, on ne connaît pas l'instant d'arrivée de la requête de réveil de la tâche apériodique➢ besoin d'une hypothèse sur le taux d'arrivée maximal des
requêtes➢ les tâches apériodiques dont le taux d'arrivée est borné
supérieurement sont dites « sporadiques »✔ ⇒ la charge dûe aux tâches apériodiques est bornée✔ on peut garantir la réponse
➢ si le taux d'arrivée n'est pas borné : pas de garantie possible✔ mais garantie éventuelle au cas par cas ✔ test d'acceptance pour les tâches apériodiques critiques
(fermes)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 25
Introduction
● buts à atteindre :➢ si contraintes relatives : minimiser le temps de réponse➢ si contraintes strictes : maximiser le nombre de tâches
acceptées en respectant leurs contraintes
● 2 grandes catégories de traitement➢ traitement en arrière-plan➢ traitement par serveurs➢ beaucoup d'études d'algorithmes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 26
Tâches apériodiquesà contraintes relatives
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 27
Traitement d'arrière-plan (1)
● tâches apériodiques ordonnancées quand le processeur est oisif➢ les tâches périodiques restent les plus prioritaires (tâches
critiques)
● ordonnancement relatif des tâches apériodiques en mode FIFO
● préemption des tâches apériodiques par les tâches périodiques
● traitement le plus simple, mais le moins performant
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 28
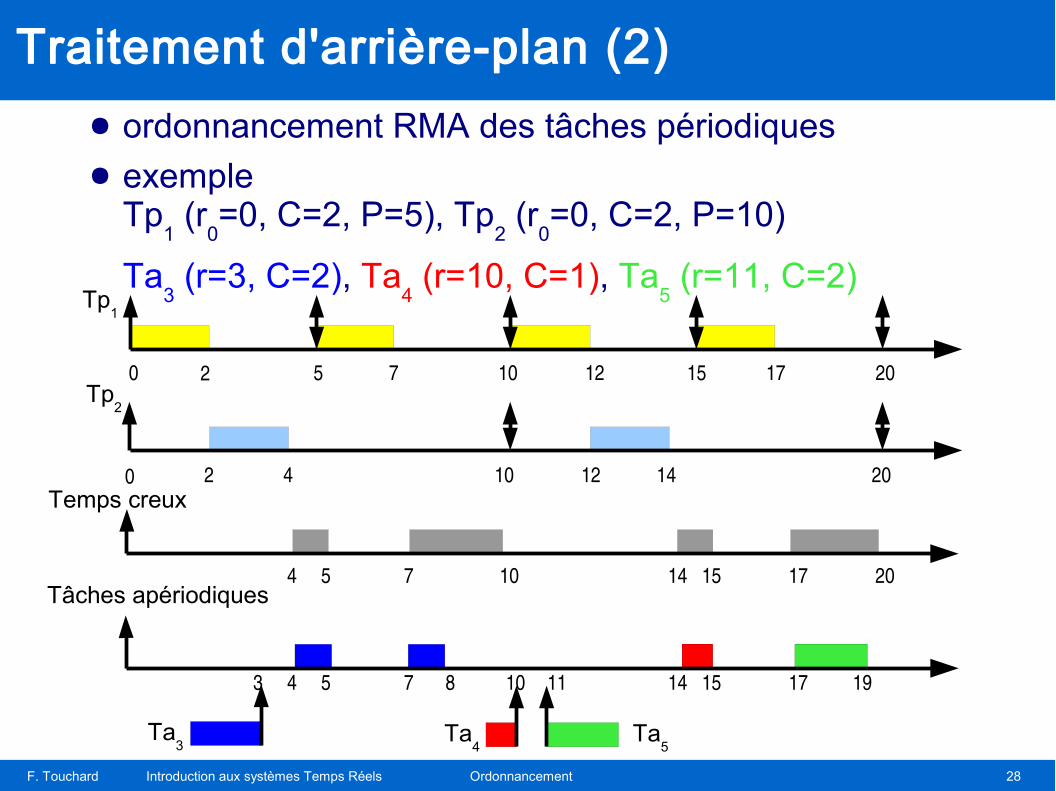
Traitement d'arrière-plan (2)
● ordonnancement RMA des tâches périodiques● exemple
Tp1 (r
0=0, C=2, P=5), Tp
2 (r
0=0, C=2, P=10)
Ta3 (r=3, C=2), Ta
4 (r=10, C=1), Ta
5 (r=11, C=2)
0 5 7 10 12 15 17 202
Tp1
0 14 20102 4 12
Tp2
Temps creux
4 5 7 10 14 15 17 20
Ta3
Ta4
Ta5
4 5 14 171510 11
Tâches apériodiques
7 8 193
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 29
Traitement par serveur (1)
● un serveur est une tâche périodique créée spécialement pour prendre en compte les tâches apériodiques
● serveur caractérisé par ➢ sa période➢ son temps d'exécution : capacité du serveur ➢ serveur généralement ordonnancé suivant le même
algorithme que les autres tâches périodiques (RMA)➢ une fois actif, le serveur sert les tâches apériodiques dans
la limite de sa capacité. ➢ l'ordre de traitement des tâches apériodiques ne dépend
pas de l'algorithme général
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 30
Traitement par serveur par scrutation (1)
● Serveurs par scrutation (polling)➢ à chaque activation, traitement des tâches en suspens
jusqu'à épuisement de la capacité ou jusqu'à ce qu'il n'y ait plus de tâches en attente
➢ si aucune tâche n'est en attente (à l'activation ou parce que la dernière tâche a été traitée) , le serveur se suspend immédiatement et perd sa capacité qui peut être réutilisée par les tâches périodiques (amélioration du temps de réponse)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 31
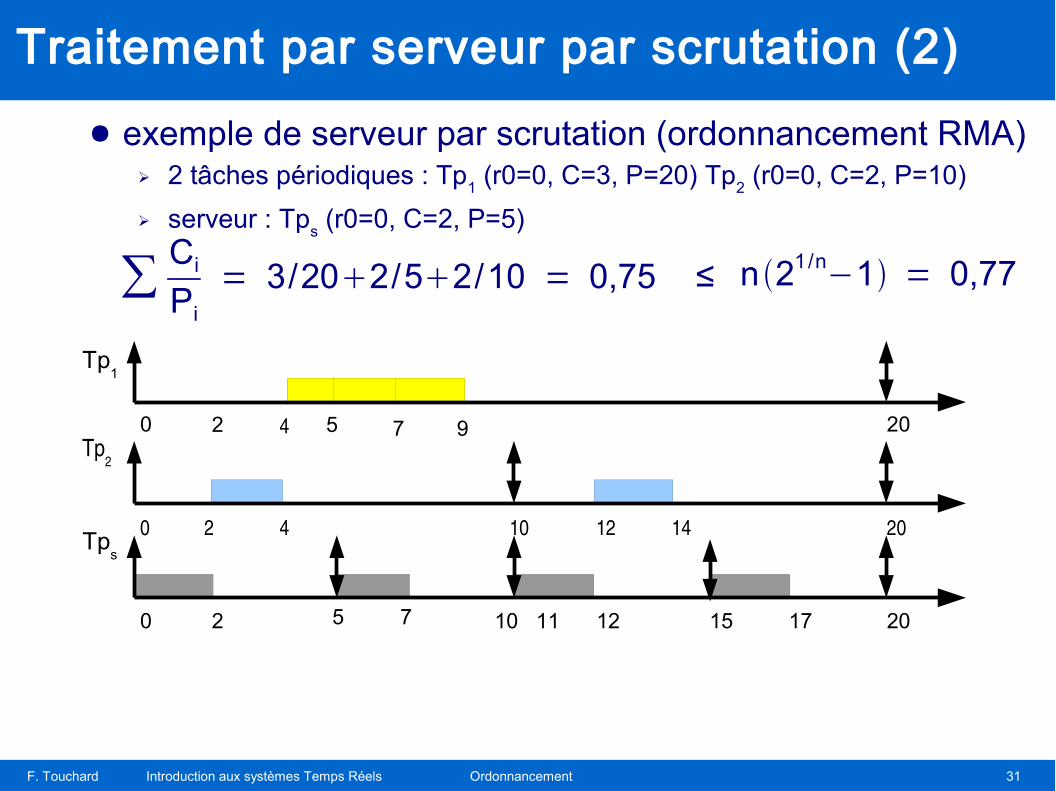
Traitement par serveur par scrutation (2)
● exemple de serveur par scrutation (ordonnancement RMA)➢ 2 tâches périodiques : Tp
1 (r0=0, C=3, P=20) Tp
2 (r0=0, C=2, P=10)
➢ serveur : Tps (r0=0, C=2, P=5)
0 202
Tp1
5
0 2 12 14 2010
Tp2
0 2 12 15 2010
Tps
115 7 17
4
4 7 9
∑Ci
Pi
= 3/202/52/10 = 0,75 n 21 /n−1 = 0,77≤
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 32
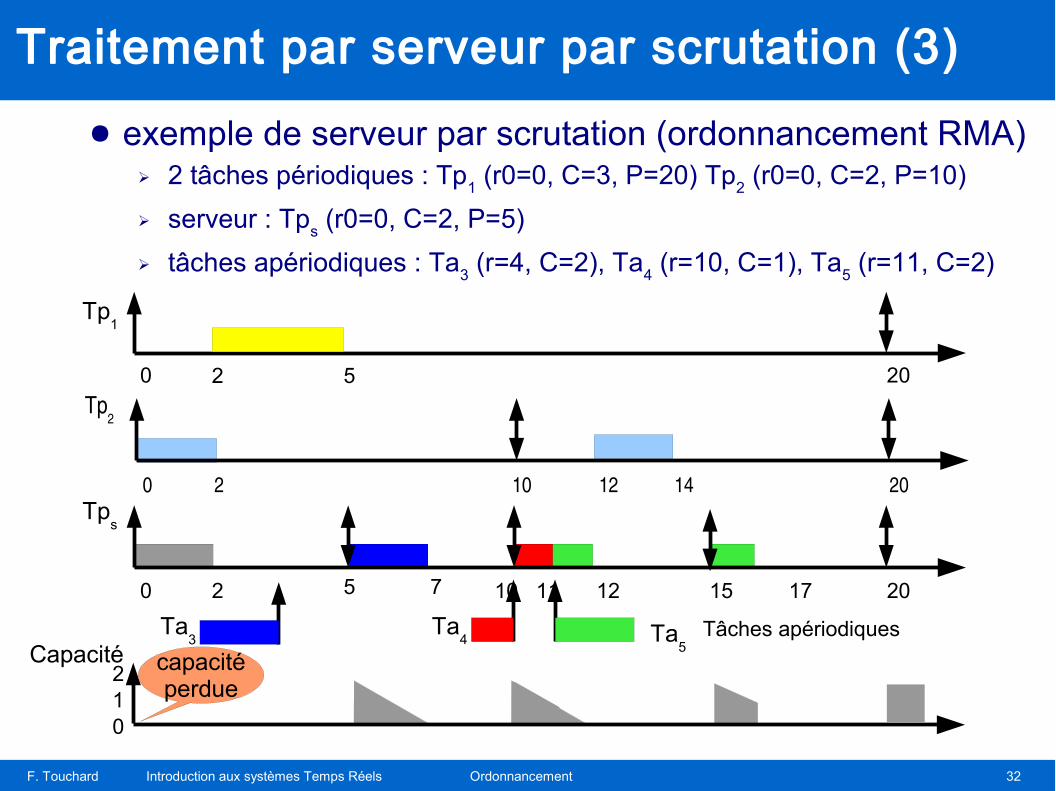
Traitement par serveur par scrutation (3)
● exemple de serveur par scrutation (ordonnancement RMA)➢ 2 tâches périodiques : Tp
1 (r0=0, C=3, P=20) Tp
2 (r0=0, C=2, P=10)
➢ serveur : Tps (r0=0, C=2, P=5)
➢ tâches apériodiques : Ta3 (r=4, C=2), Ta
4 (r=10, C=1), Ta
5 (r=11, C=2)
0 202
Tp1
5
0 2 12 14 2010
Tp2
0 2 12 15 2010
Tps
5 7 1711
012
Capacité capacitéperdue
Ta5
Tâches apériodiquesTa3
Ta4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 33
● limitations du serveur par scrutation➢ perte de la capacité si aucune tâche apériodique en attente➢ si occurrence d'une tâche apériodique alors que le serveur
est suspendu, il faut attendre la requête suivante
Traitement par serveur par scrutation (4)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 34
● Serveur sporadique➢ améliore le temps de réponse des tâches apériodiques
sans diminuer le taux d'utilisation du processeur pour les tâches périodiques
➢ comme le serveur ajournable mais ne retrouve pas sa capacité à période fixe
➢ le serveur sporadique peut être considéré comme une tâche périodique « normale » du point de vue des critères d'ordonnancement
Traitement par serveur sporadique (1)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 35
Traitement par serveur sporadique (2)
● calcul de la récupération de capacité➢ le serveur est dit « actif » quand la priorité de la tâche
courante Pexe
est supérieure ou égale à celle du serveur Ps
➢ le serveur est dit « inactif » si Pexe
< Ps
➢ RT : date de la récupération✔ calculée dès que le serveur devient actif (t
A)
✔ égale à tA + T
s
➢ RA : montant de la récupération à effectuer à RT✔ calculée à l'instant t
I où le serveur devient inactif ou que la
capacité est épuisée✔ égal à la capacité consommée pendant l'intervalle [t
A, t
I]
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 36
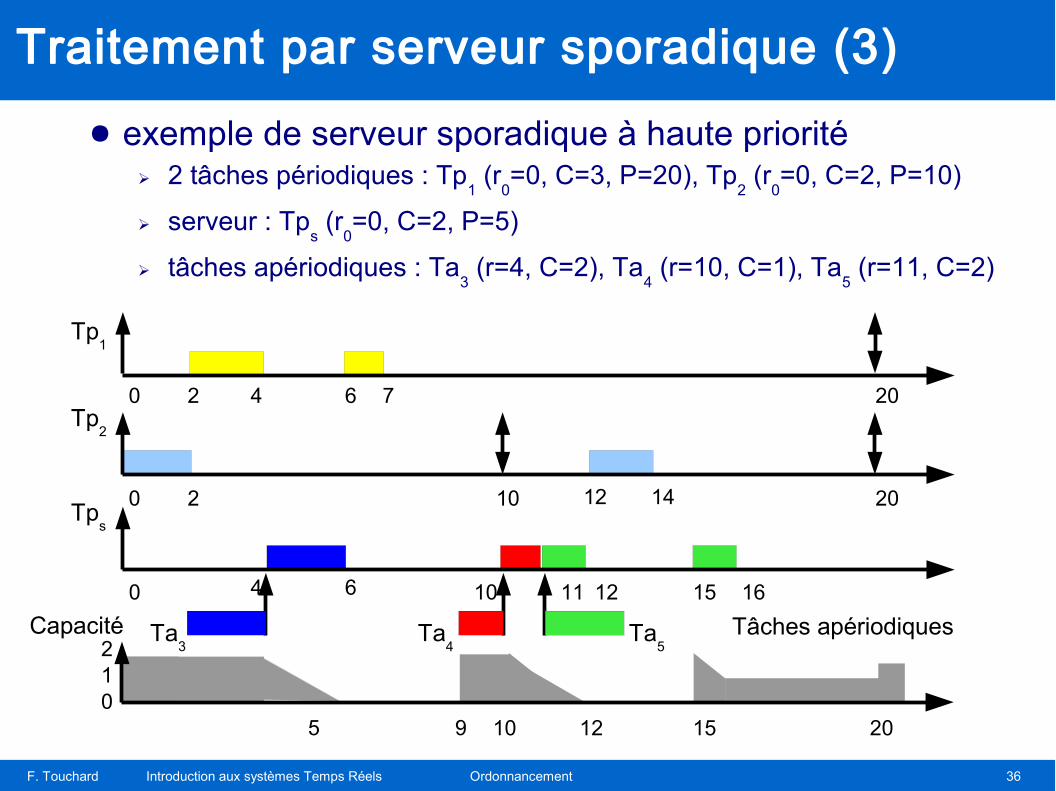
Traitement par serveur sporadique (3)
● exemple de serveur sporadique à haute priorité➢ 2 tâches périodiques : Tp
1 (r
0=0, C=3, P=20), Tp
2 (r
0=0, C=2, P=10)
➢ serveur : Tps (r
0=0, C=2, P=5)
➢ tâches apériodiques : Ta3 (r=4, C=2), Ta
4 (r=10, C=1), Ta
5 (r=11, C=2)
0 20
Tp1
2 4 7
20 20
Tp2
10
6
12 14
0
Tps
4 6 10 11 12 15 16
Ta5
9012
Capacité
10 12 15 205
Tâches apériodiquesTa3
Ta4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 37
Exercice
● 2 tâches périodiques + 1 serveur sporadique➢ Tp
1 : t
1 = 0, C
1 = 1, T
1 = 5
➢ Tp2 : t
2 = 0, C
2 = 4, T
2 = 15
➢ SS : Cs = 5, T
s = 10
● tâches apériodiques :➢ Ta
1 : t
a1 = 4, C
a1 = 2
➢ Ta2 : t
a2 = 8, C
a2 = 2
● ordonnancement ?
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 38
Tâches apériodiquesà contraintes strictes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 39
● les algorithmes précédents restent possibles● mais exécution d'un test d'acceptance avant l'acceptation
ou le rejet de la tâche :➢ suffisamment de temps CPU disponible (processeur oisif ou
capacité serveur disponible) avant l'échéance de la tâche apériodique
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 40
Principe de l'ordonnancement
● ordonnancer les tâches en EDF● A chaque nouvelle tâche apériodique, faire tourner une
"routine de garantie" pour vérifier que toutes les contraintes temporelles seront respectées➢ si oui, accepter la tâche.➢ si non, refuser la tâche.
● 2 politiques d'acceptation dynamique :➢ acceptation dans les temps creux➢ ordonnancement conjoint
● favorise les tâches périodiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 41
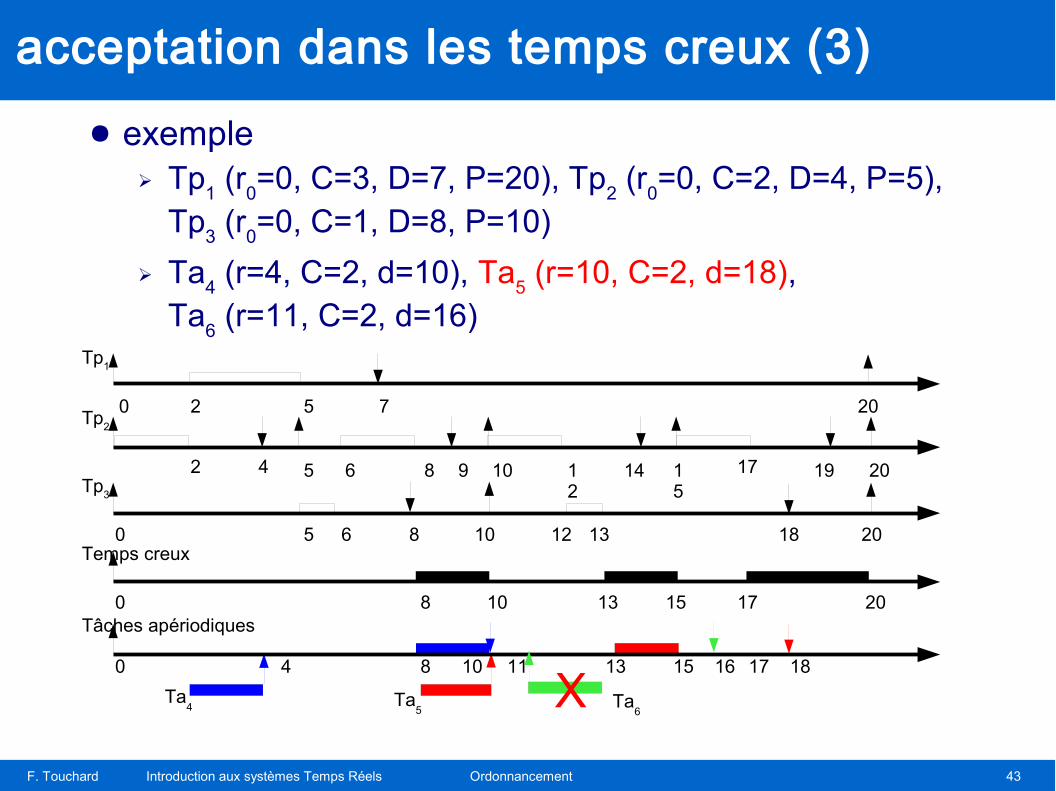
acceptation dans les temps creux (1)
● ordonnancement EDF des tâches périodiques● les tâches apériodiques acceptées sont ordonnancées
dans les temps creux des tâches périodiques (~ méthode d'arrière-plan) selon l'algorithme EDF
● routine de garantie (au réveil d'une tâche apériodique):➢ teste l'existence d'un temps creux suffisant entre le réveil et
l'échéance de la tâche apériodique)➢ vérifie que l'acceptation de la nouvelle tâche ne remet pas
en cause le respect des contraintes temporelles des autres tâches apériodiques déjà acceptées et non encore terminées
➢ si OK, la tâche est ajoutée à la liste des tâches apériodiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 42
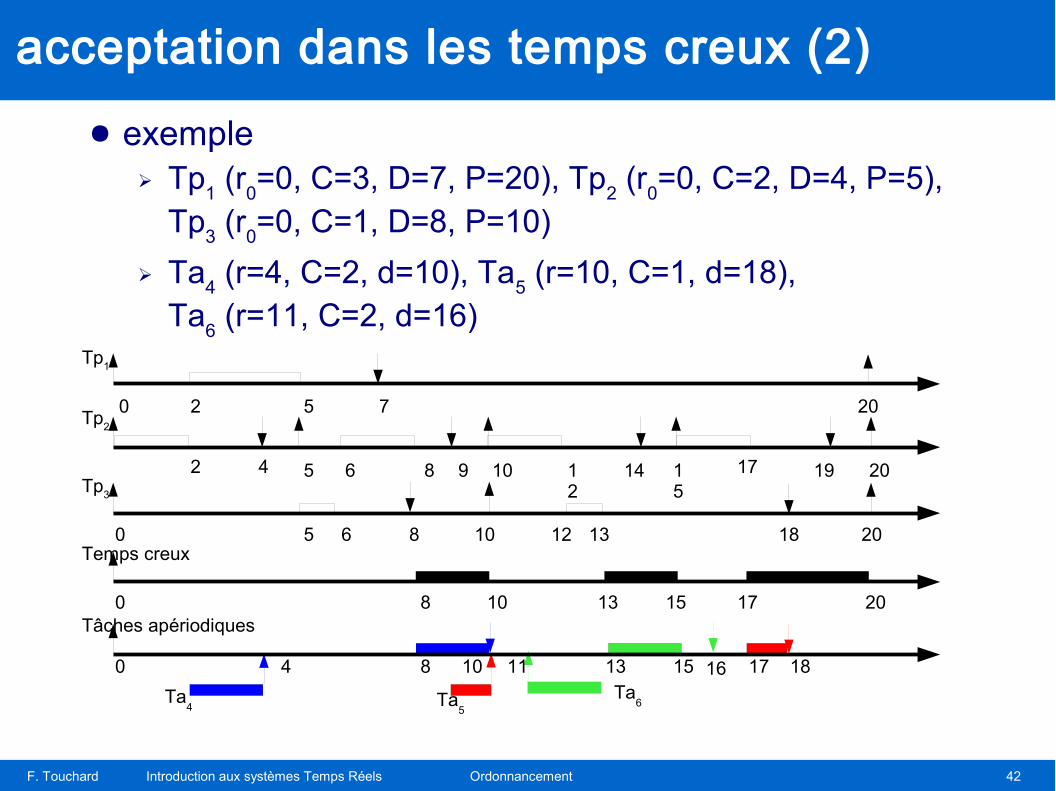
● exemple➢ Tp
1 (r
0=0, C=3, D=7, P=20), Tp
2 (r
0=0, C=2, D=4, P=5),
Tp3 (r
0=0, C=1, D=8, P=10)
➢ Ta4 (r=4, C=2, d=10), Ta
5 (r=10, C=1, d=18),
Ta6 (r=11, C=2, d=16)
Ta6
Tp1
Tp2
Tp3
0
0
2
2
5
4 5 6
5 6
7
8
8
9 10
10
12
12 13
14 15
17
18
19 20
20
20Temps creux
0 8 10 13 15 17 20
Ta4 Ta
5
acceptation dans les temps creux (2)
Tâches apériodiques
0 11 15 17 184 13108 16
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 43
● exemple➢ Tp
1 (r
0=0, C=3, D=7, P=20), Tp
2 (r
0=0, C=2, D=4, P=5),
Tp3 (r
0=0, C=1, D=8, P=10)
➢ Ta4 (r=4, C=2, d=10), Ta
5 (r=10, C=2, d=18),
Ta6 (r=11, C=2, d=16)
16
Tp1
Tp2
Tp3
0
0
2
2
5
4 5 6
5 6
7
8
8
9 10
10
12
12 13
14 15
17
18
19 20
20
20Temps creux
0 8 10 13 15 17 20
Ta4 Ta
5
acceptation dans les temps creux (3)
Tâches apériodiques
0 11 15 17 184 13108
X Ta6
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 44
ordonnancement conjoint (1)
● la séquence des tâches périodiques n'est plus immuable● à l'arrivée de chaque nouvelle tâche apériodique,
construction d'une nouvelle séquence EDF➢ si la construction est possible : acceptation de la tâche➢ sinon rejet
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 45
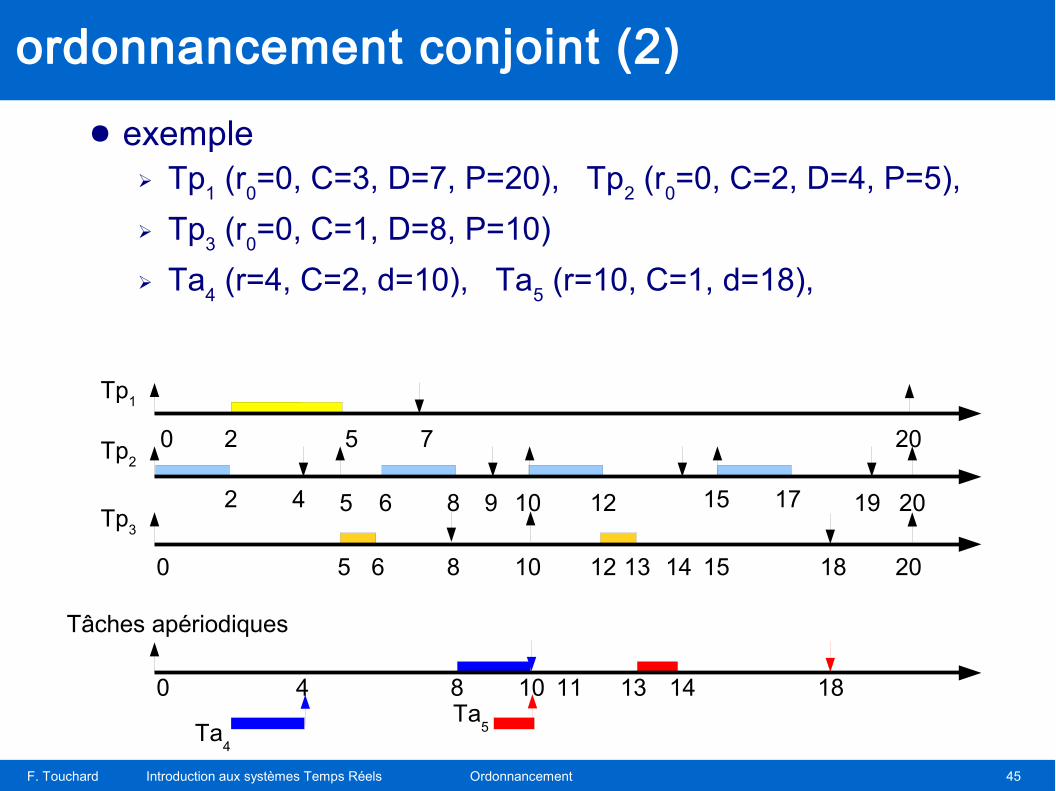
ordonnancement conjoint (2)
● exemple ➢ Tp
1 (r
0=0, C=3, D=7, P=20), Tp
2 (r
0=0, C=2, D=4, P=5),
➢ Tp3 (r
0=0, C=1, D=8, P=10)
➢ Ta4 (r=4, C=2, d=10), Ta
5 (r=10, C=1, d=18),
Ta4
Ta5
Tp3
Tp2
2 4 5 6 8 9 10 12 15 17 19 20
Tp1
0 2 5 7 20
60 5 8 10 14 18 201512 13
Tâches apériodiques
0 8 10 11 13 14 184
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 46
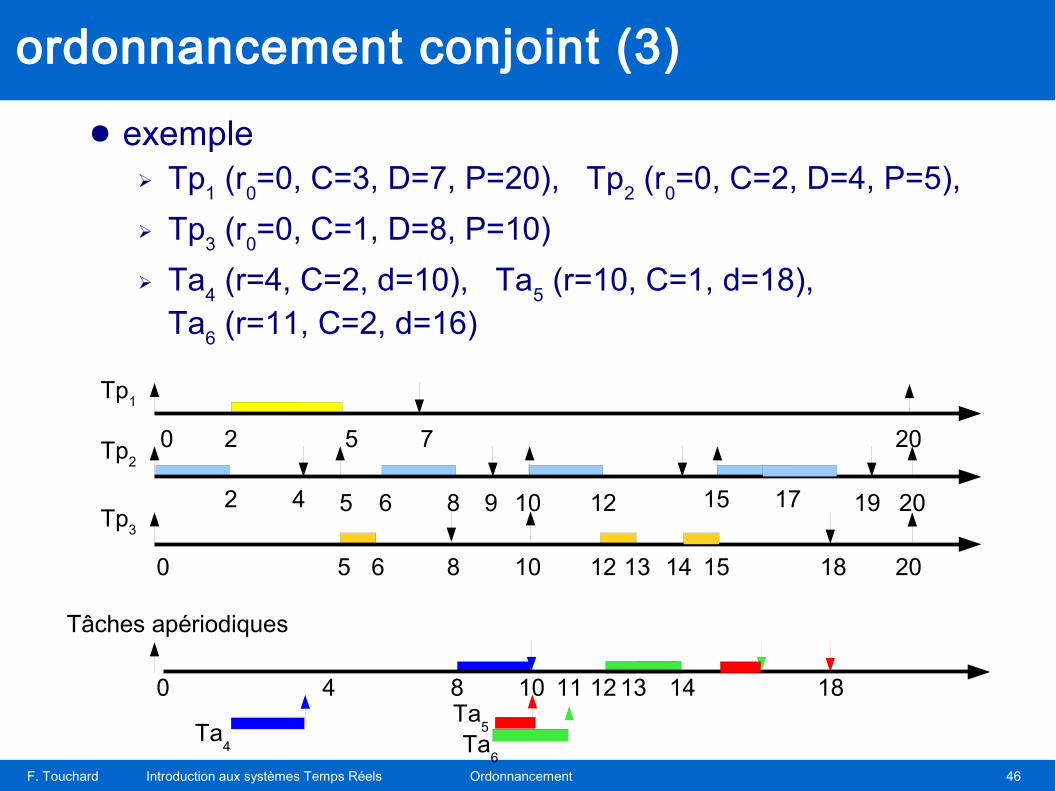
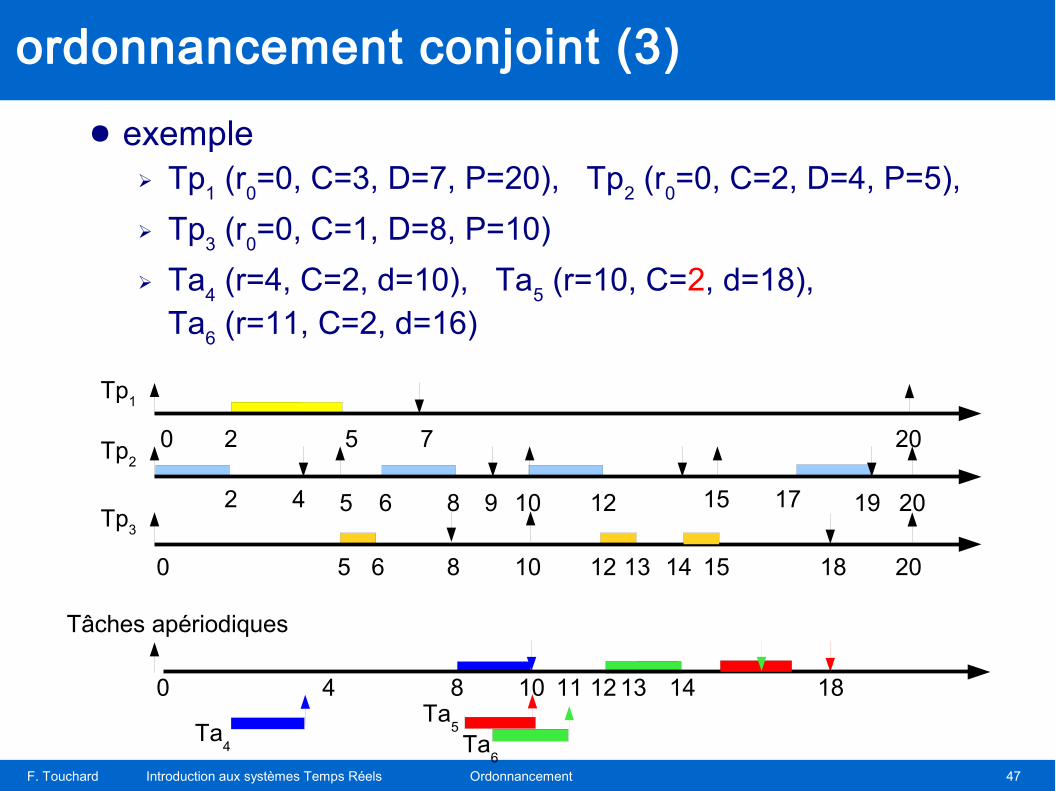
ordonnancement conjoint (3)
● exemple ➢ Tp
1 (r
0=0, C=3, D=7, P=20), Tp
2 (r
0=0, C=2, D=4, P=5),
➢ Tp3 (r
0=0, C=1, D=8, P=10)
➢ Ta4 (r=4, C=2, d=10), Ta
5 (r=10, C=1, d=18),
Ta6 (r=11, C=2, d=16)
Ta4
Ta5
Tp3
Tp2
2 4 5 6 8 9 10 12 15 17 19 20
Tp1
0 2 5 7 20
60 5 8 10 14 18 201512 13
Tâches apériodiques
0 8 10 11 13 14 184 12
Ta6
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 47
ordonnancement conjoint (3)
● exemple ➢ Tp
1 (r
0=0, C=3, D=7, P=20), Tp
2 (r
0=0, C=2, D=4, P=5),
➢ Tp3 (r
0=0, C=1, D=8, P=10)
➢ Ta4 (r=4, C=2, d=10), Ta
5 (r=10, C=2, d=18),
Ta6 (r=11, C=2, d=16)
Ta4
Ta5
Tp3
Tp2
2 4 5 6 8 9 10 12 15 17 19 20
Tp1
0 2 5 7 20
60 5 8 10 14 18 201512 13
Tâches apériodiques
0 8 10 11 13 14 184 12
Ta6

48
Ordonnancementde tâches
dépendantes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 49
Plan
● types de contraintes étudiées➢ contraintes de précédence➢ contraintes liées au partage de ressources critiques
● présentation et illustration des contraintes● algorithmes pour les ordonnancer● étude de cas : la mission Pathfinder sur Mars (TD)
50
Présentation des contraintes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 51
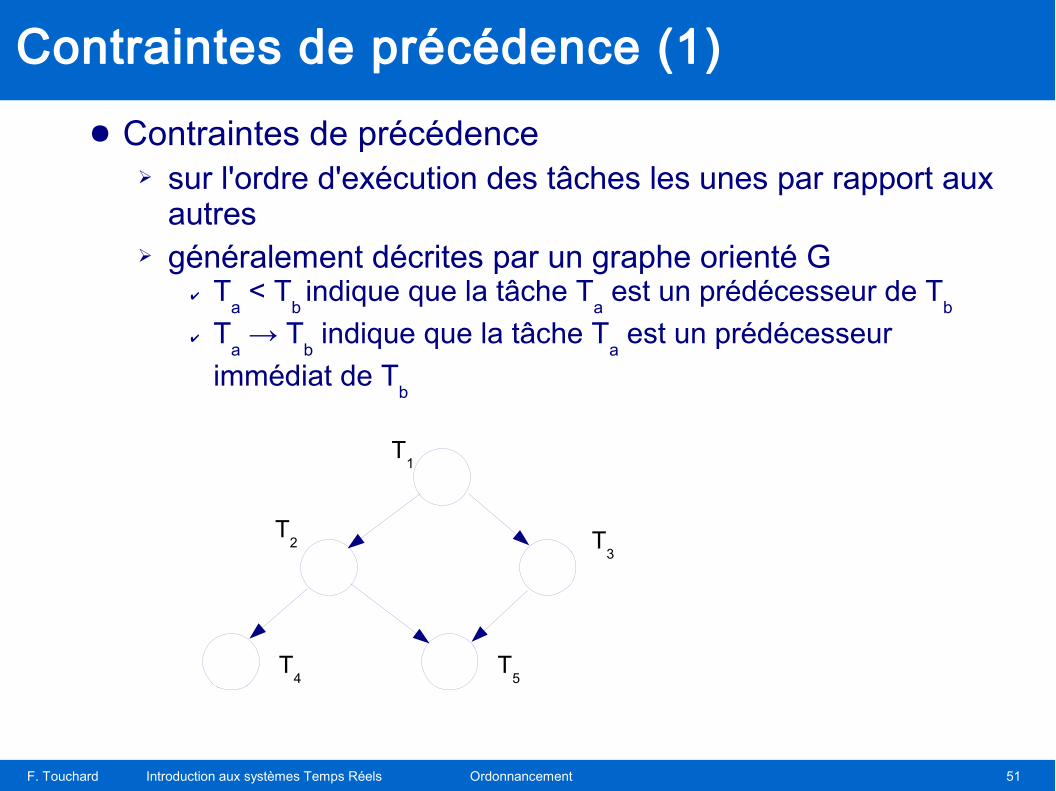
Contraintes de précédence (1)
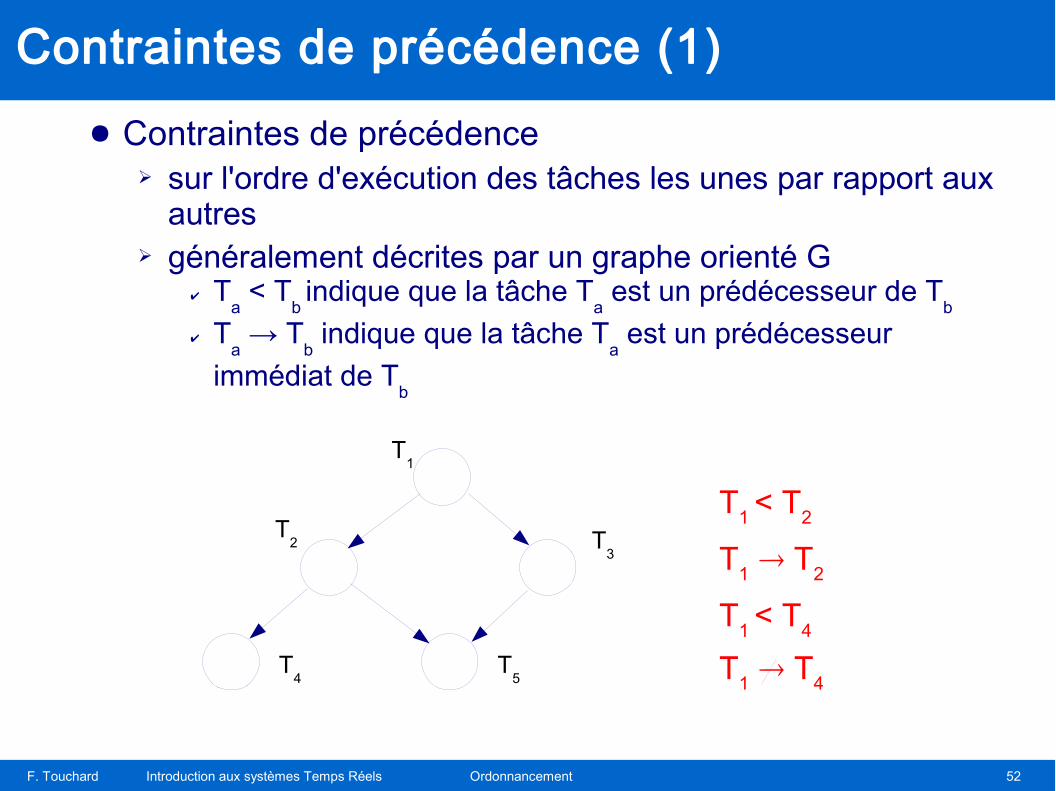
● Contraintes de précédence➢ sur l'ordre d'exécution des tâches les unes par rapport aux
autres➢ généralement décrites par un graphe orienté G
✔ Ta < T
b indique que la tâche T
a est un prédécesseur de T
b
✔ Ta → T
b indique que la tâche T
a est un prédécesseur
immédiat de Tb
T1
T2 T
3
T5
T4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 52
Contraintes de précédence (1)
● Contraintes de précédence➢ sur l'ordre d'exécution des tâches les unes par rapport aux
autres➢ généralement décrites par un graphe orienté G
✔ Ta < T
b indique que la tâche T
a est un prédécesseur de T
b
✔ Ta → T
b indique que la tâche T
a est un prédécesseur
immédiat de Tb
T1
T2 T
3
T5
T4
T1 < T
2
T1 < T
4
T1 T
2
T1 T
4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 53
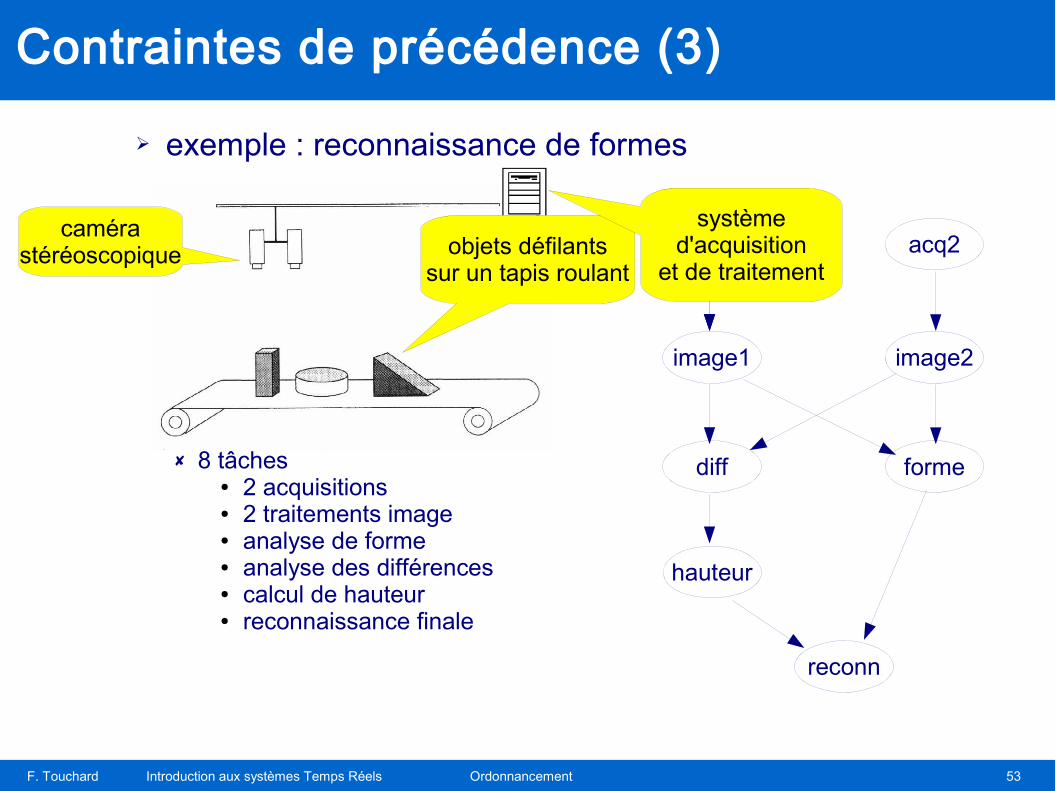
➢ exemple : reconnaissance de formes
acq1 acq2
image1 image2
forme
hauteur
diff
reconn
✘ 8 tâches● 2 acquisitions● 2 traitements image● analyse de forme● analyse des différences● calcul de hauteur● reconnaissance finale
Contraintes de précédence (3)
camérastéréoscopique objets défilants
sur un tapis roulant
systèmed'acquisition
et de traitement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 54
Partage de ressources (1)
● contraintes sur les accès aux ressources➢ ressource : toute structure logicielle qui peut être utilisée
par une tâche pour son exécution➢ privée si dédiée à la tâche➢ partagée si elle peut être utilisée par plusieurs tâche➢ exclusive si une seule tâche à la fois peut l'utiliser➢ l'accès séquentiel par plusieurs tâches à une ressource
exclusive nécessite un mécanisme de synchronisation➢ les codes implémentant les opérations en exclusion
mutuelle sont des sections critiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 55
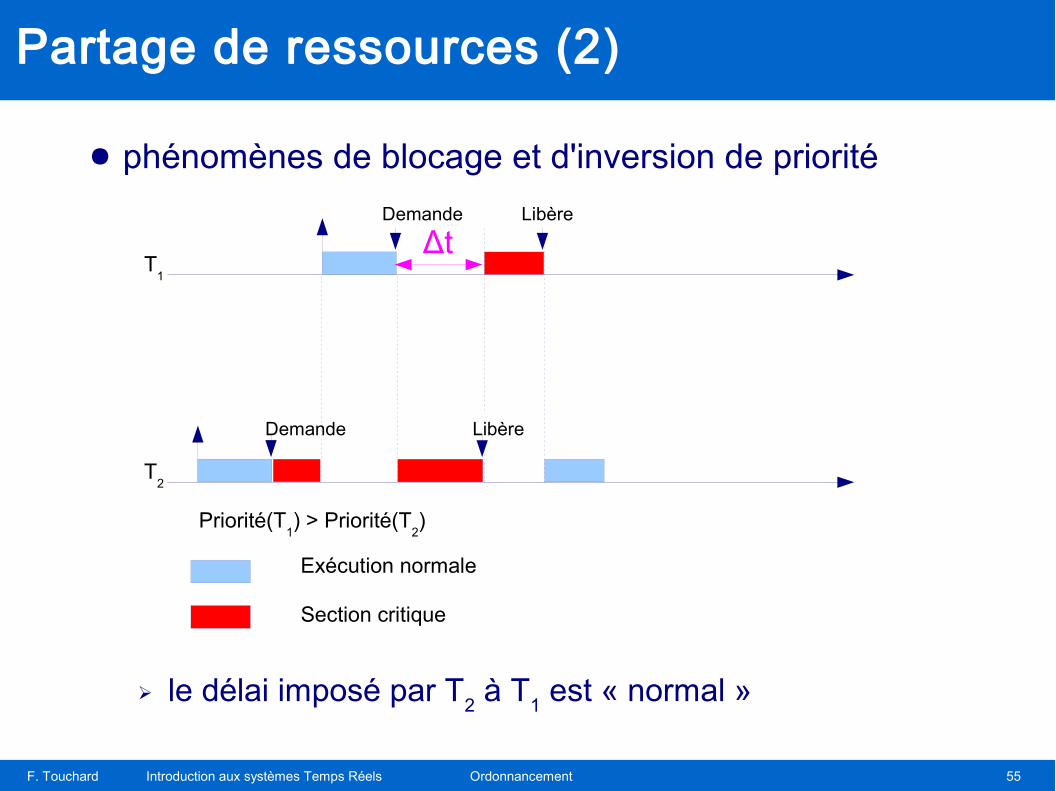
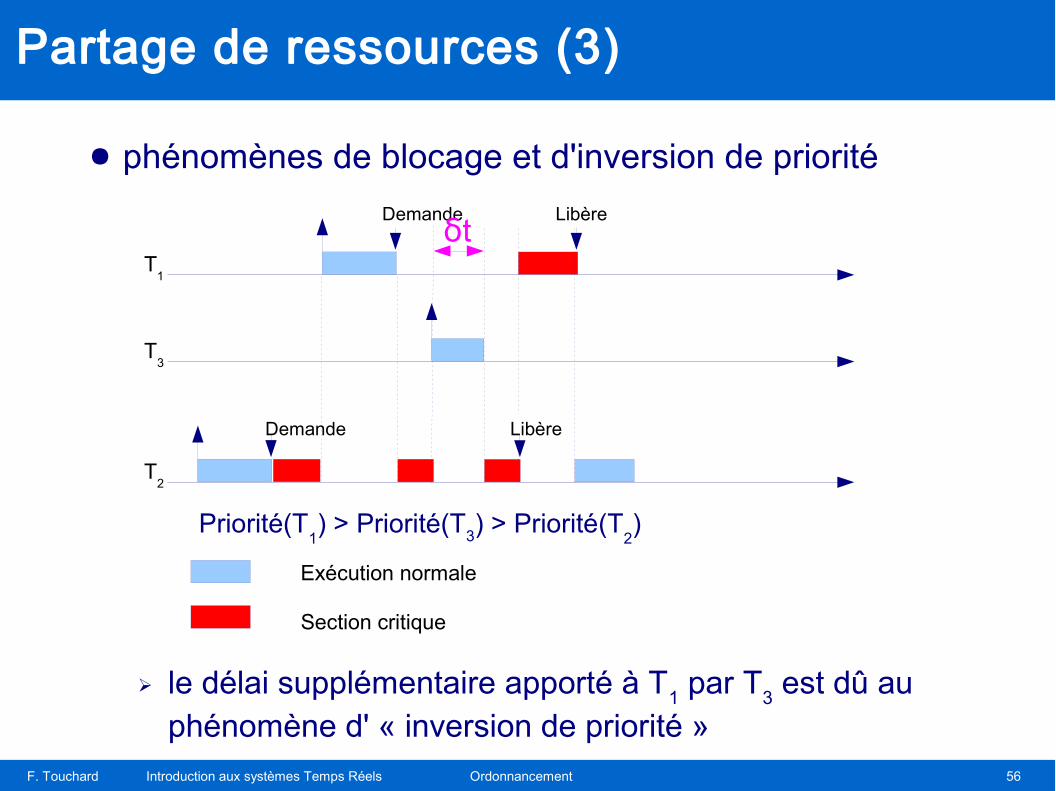
● phénomènes de blocage et d'inversion de priorité
Exécution normale
Section critique
Priorité(T1) > Priorité(T
2)
T1
T2
Demande
Demande
Libère
Libère
Partage de ressources (2)
➢ le délai imposé par T2 à T
1 est « normal »
Δt
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 56
● phénomènes de blocage et d'inversion de priorité
Exécution normale
Section critique
Priorité(T1) > Priorité(T
3) > Priorité(T
2)
T1
T2
Demande
Demande
T3
Libère
Libère
Partage de ressources (3)
➢ le délai supplémentaire apporté à T1 par T
3 est dû au
phénomène d' « inversion de priorité »
δt
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 57
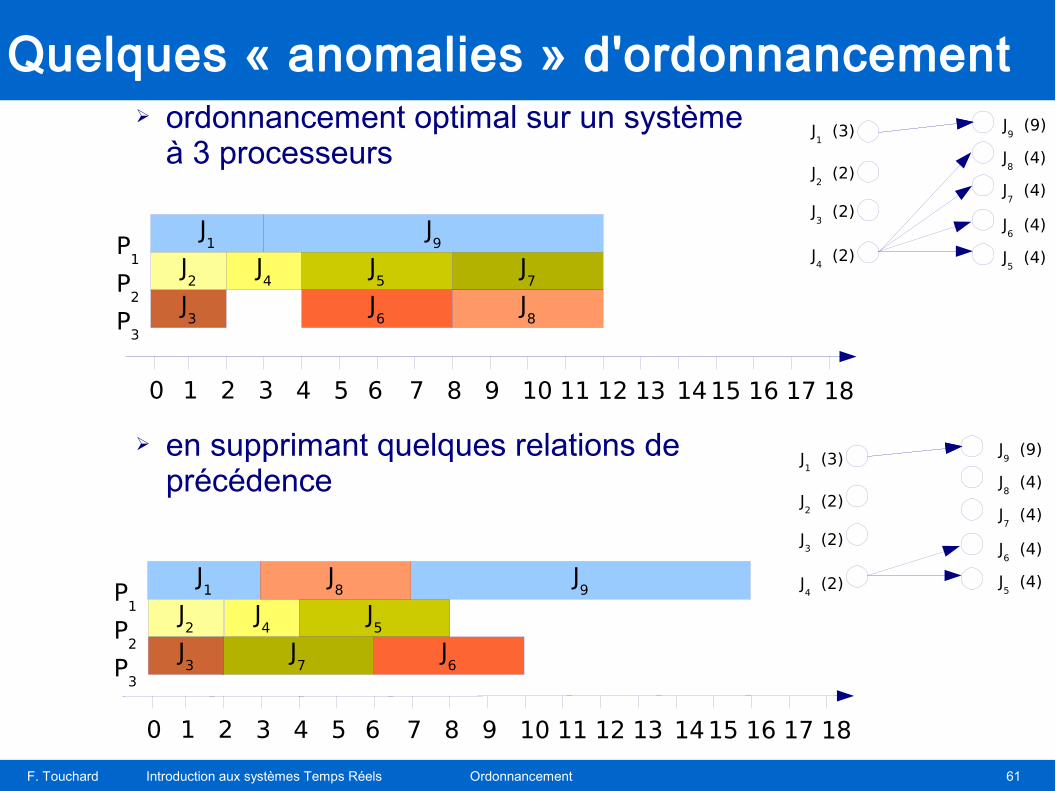
● Théorème de Graham : si un ensemble de tâches est ordonnancé de façon optimale sur un système multi-processeur avec des priorités assignées, des temps d'exécution fixées et des contraintes de précédence, alors le fait d'augmenter le nombre de processeurs, de réduire les temps d'exécution ou de relaxer les contraintes de précédence peut conduire à détériorer la durée d'exécution de l'algorithme
Quelques « anomalies » d'ordonnancement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 58
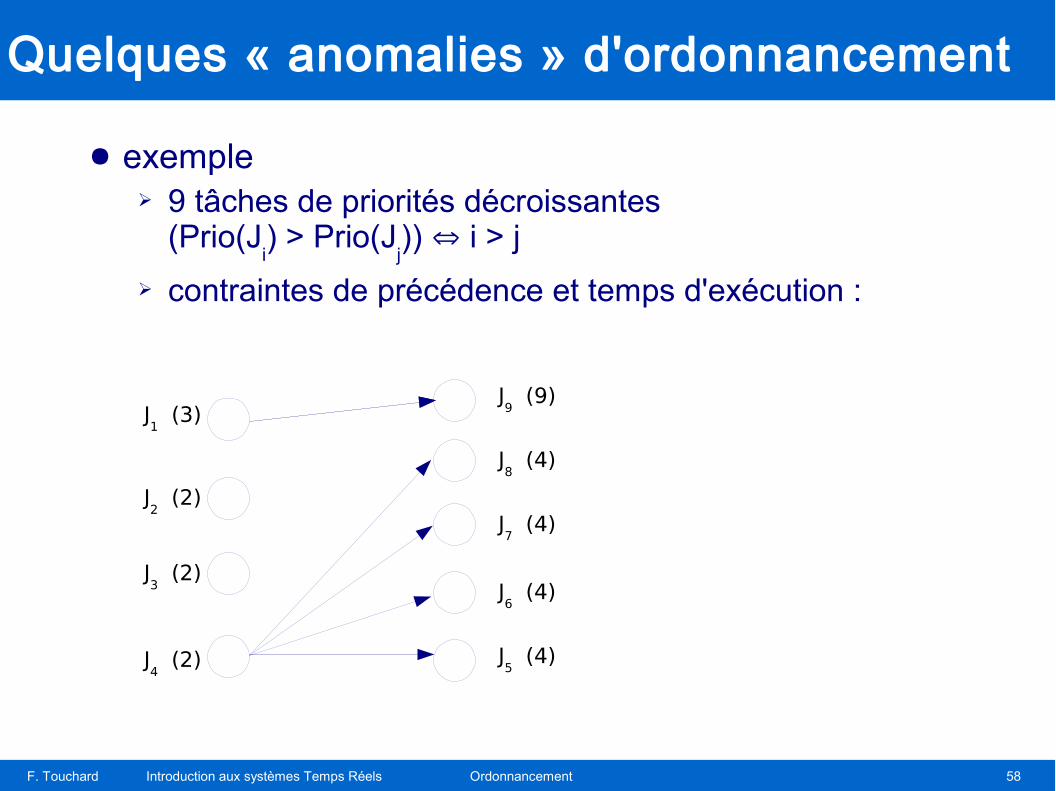
● exemple ➢ 9 tâches de priorités décroissantes
(Prio(Ji) > Prio(J
j)) ⇔ i > j
➢ contraintes de précédence et temps d'exécution :
J1 (3)
J2 (2)
J3 (2)
J4 (2) J
5 (4)
J6 (4)
J7 (4)
J8 (4)
J9 (9)
Quelques « anomalies » d'ordonnancement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 59
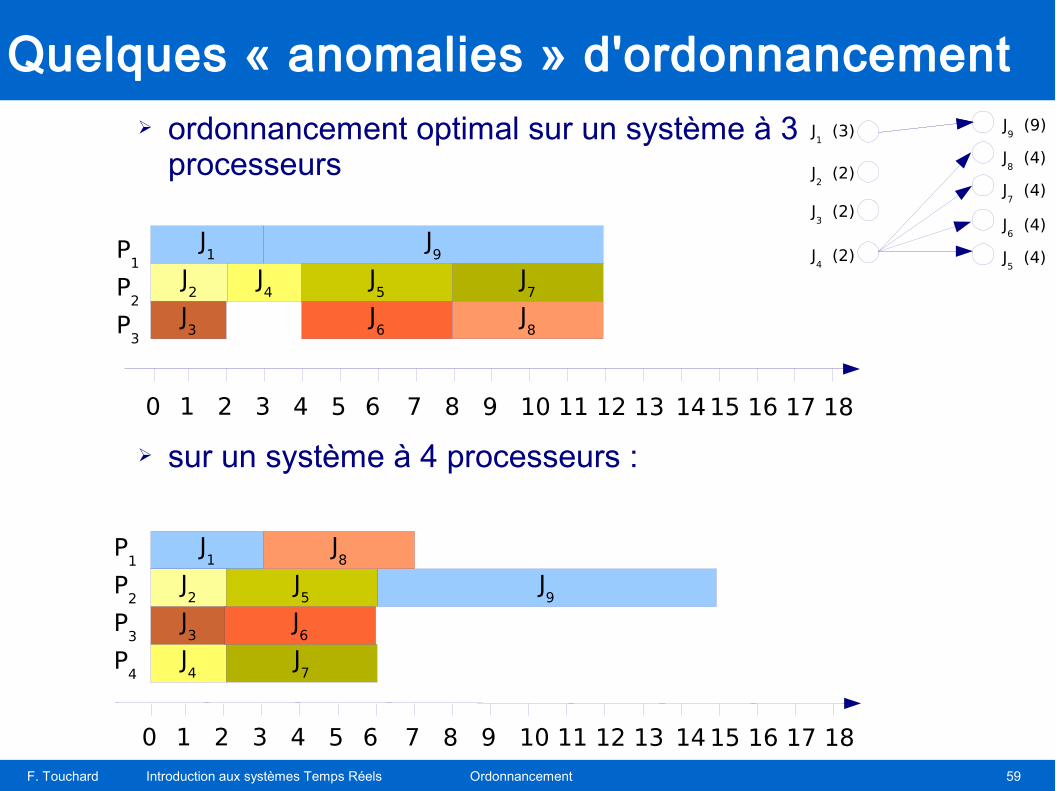
➢ ordonnancement optimal sur un système à 3 processeurs
➢ sur un système à 4 processeurs :
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8
P1
P2
P3
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8
P1
P2
P3
P4
J1 (3)
J2 (2)
J3 (2)
J4 (2) J
5 (4)
J6 (4)
J7 (4)
J8 (4)
J9 (9)
Quelques « anomalies » d'ordonnancement
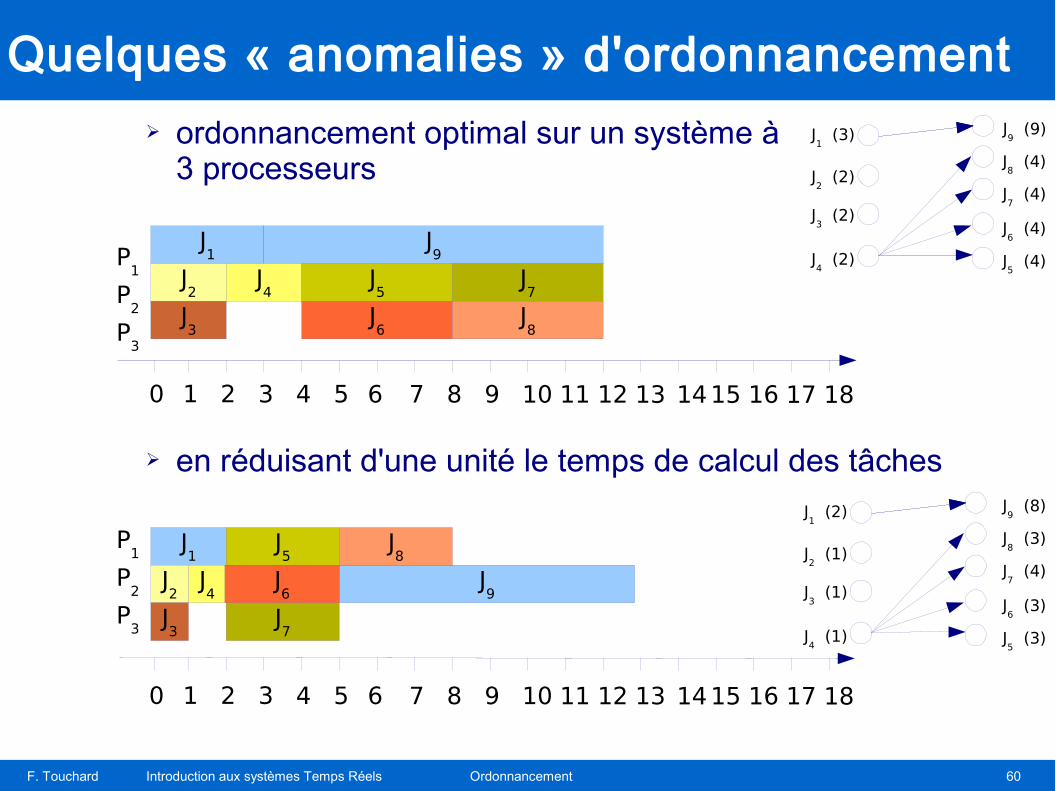
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 60
➢ ordonnancement optimal sur un système à 3 processeurs
➢ en réduisant d'une unité le temps de calcul des tâches
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8
P1
P2
P3
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8
P1
P2
P3
J1 (3)
J2 (2)
J3 (2)
J4 (2) J
5 (4)
J6 (4)
J7 (4)
J8 (4)
J9 (9)
J1 (2)
J2 (1)
J3 (1)
J4 (1) J
5 (3)
J6 (3)
J7 (4)
J8 (3)
J9 (8)
Quelques « anomalies » d'ordonnancement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 61
➢ ordonnancement optimal sur un système à 3 processeurs
➢ en supprimant quelques relations de précédence
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8
P1
P2
P3
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180
J1
J9
J2
J4
J5
J7
J3
J6
J8P
1
P2
P3
J1 (3)
J2 (2)
J3 (2)
J4 (2) J
5 (4)
J6 (4)
J7 (4)
J8 (4)
J9 (9)
J1 (3)
J2 (2)
J3 (2)
J4 (2) J
5 (4)
J6 (4)
J7 (4)
J8 (4)
J9 (9)
Quelques « anomalies » d'ordonnancement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 62
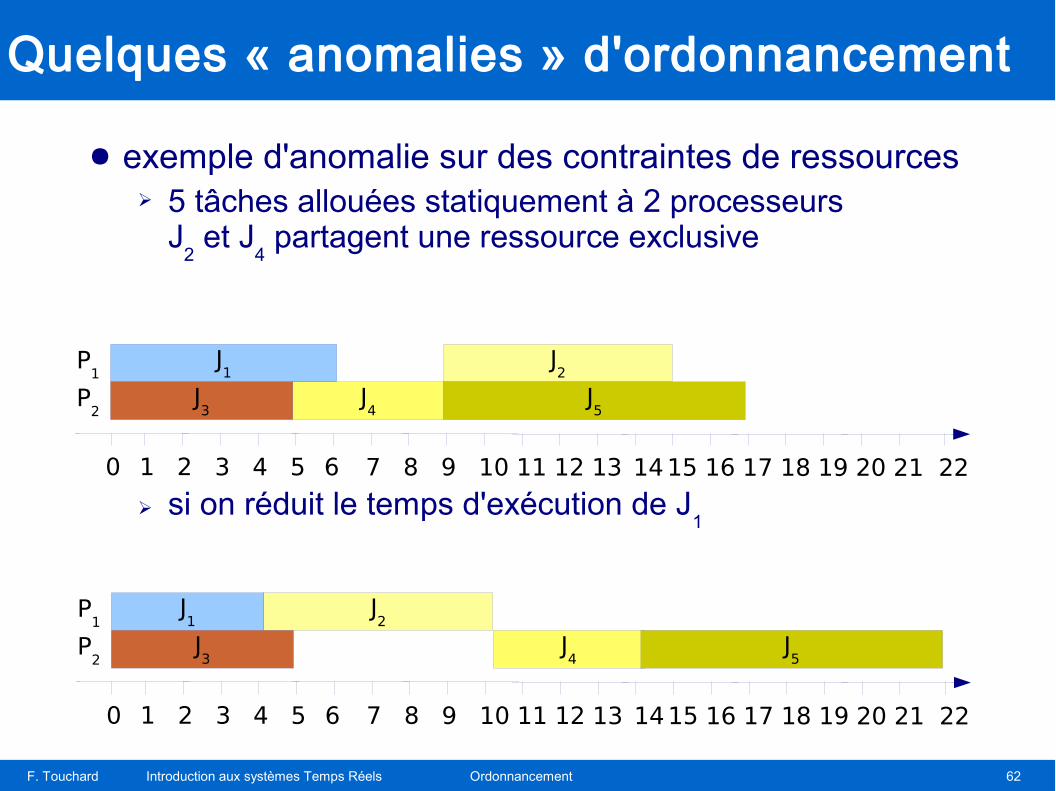
● exemple d'anomalie sur des contraintes de ressources➢ 5 tâches allouées statiquement à 2 processeurs
J2 et J
4 partagent une ressource exclusive
➢ si on réduit le temps d'exécution de J1
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180 19 20 21 22
J1
J2
J4
J5
J3
P1
P2
1 2 3 4 5 6 7 8 9 10 11 12 13 1415 16 17 180 19 20 21 22
J1
J2
J4
J5
J3
P1
P2
Quelques « anomalies » d'ordonnancement
Algorithmes d'ordonnancement
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 64
● ici, seulement précédence simple➢ si T
i est périodique de période P
i, alors T
j l'est aussi et P
j = P
i
● principe de l'établissement de l'ordonnancement :➢ transformer l'ensemble des tâches dépendantes en un
ensemble de tâches « indépendantes » que l'on ordonnancera par un algorithme classique
➢ par des modifications des paramètres des tâches ✔ si T
i → T
j alors la règle de transformation doit respecter
✘ rj r
i
✘ Prioi > Prio
j
➢ validation de l'ordonnançabilité selon des critères utilisés pour des tâches indépendantes
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 65
● contraintes de précédence et Rate Monotonic➢ la transformation s'opère hors ligne sur la date de réveil
et sur les délais critiques✔ r*
i = Max{r
i, r*
j} pour tous les j tels que T
j → T
i
✔ si Ti → T
j alors Prio
i > Prio
j dans le respect de la règle
d'affectation des priorités par RMA
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 66
● contraintes de précédence et Deadline Monotonic➢ la transformation s'opère hors ligne sur la date de réveil
et sur les délais critiques✔ r*
i = Max{r
i, r*
j} pour tous les j tels que T
j → T
i
✔ D*i = Max{Di, D*
j} pour tous les j tels que T
j → T
i
✔ si Ti → T
j alors Prio
i > Prio
j dans le respect de la règle
d'affectation des priorités par DMA
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 67
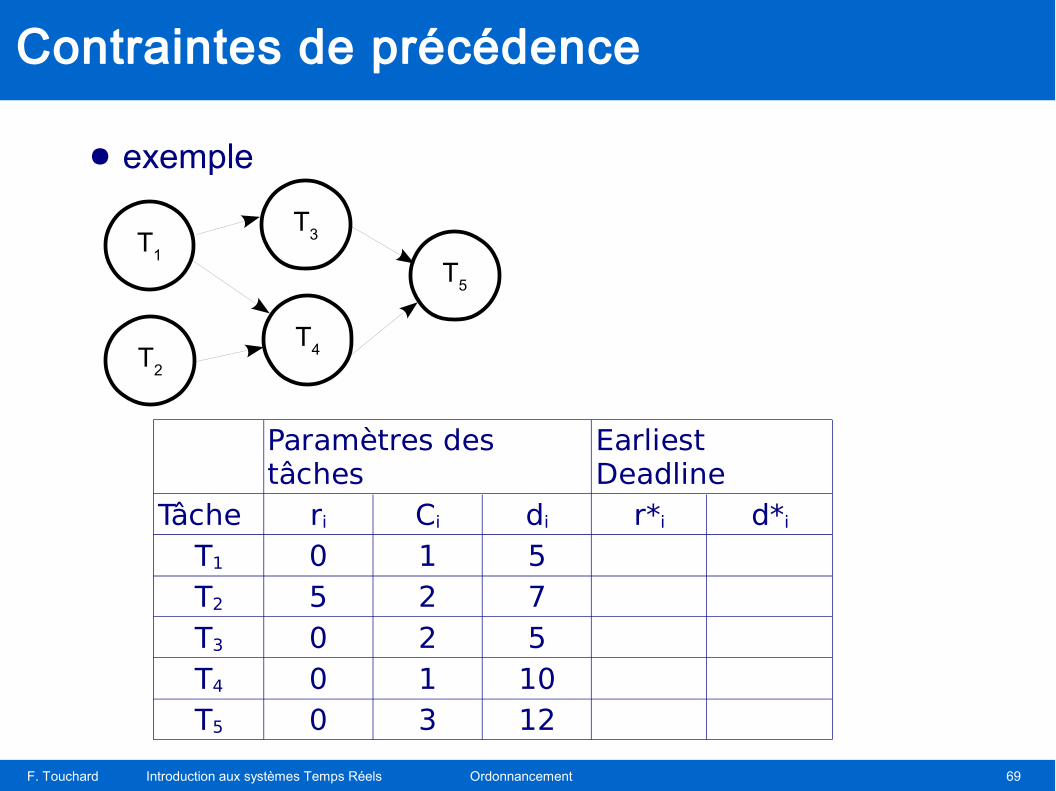
● contraintes de précédence et EDF➢ modification des échéances de façon à ce qu'une tâche ait
toujours un di inférieur à celui de ses successeurs
(algorithme de Chetto et al.)➢ une tâche ne doit être activable que si tous ses
prédécesseurs ont terminé leur exécution ➢ modification de la date de réveil et de l'échéance
✔ r*i = Max{r
i, Max{r*
j + C
j}} pour tous les j tels que T
j → T
i
✔ d*i = Min{d
i, Min{d*
j - C
j}} pour tous les j tels que T
i → T
j
✔ on itère sur les prédécesseurs et successeurs immédiats✔ on commence les calculs par les tâches qui n'ont pas de
prédécesseurs pour le calcul des r et par les tâches qui n'ont pas de successeur pour le calcul des d
Contraintes de précédence
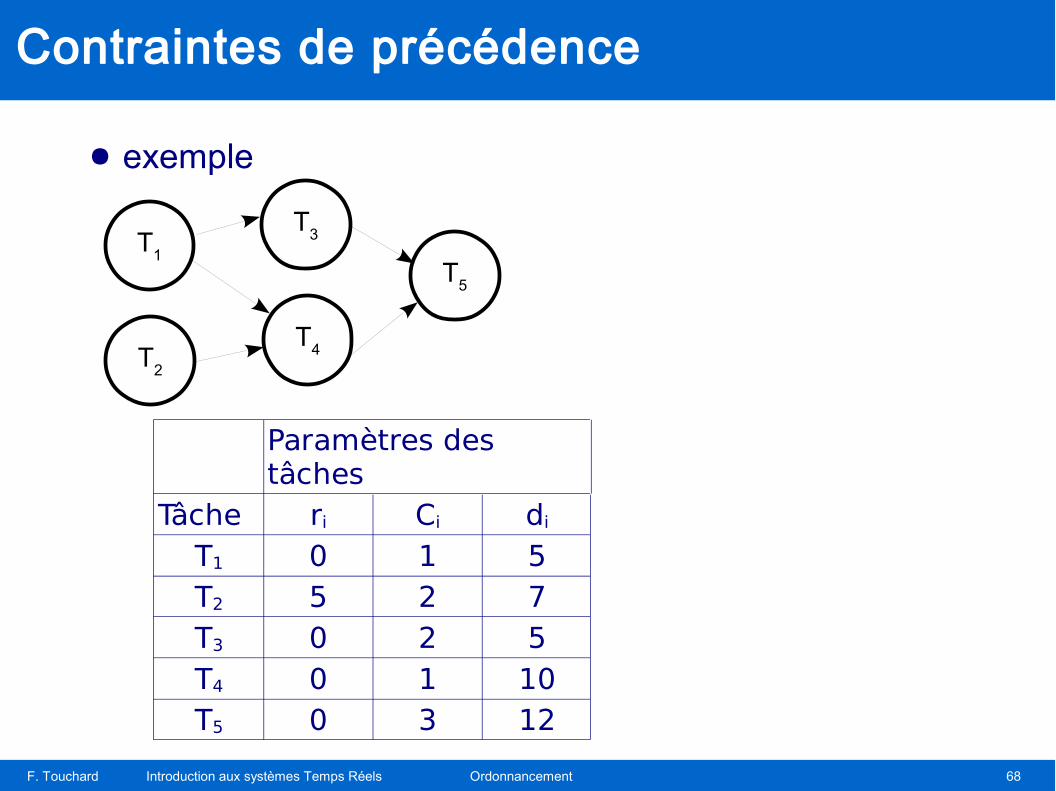
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 68
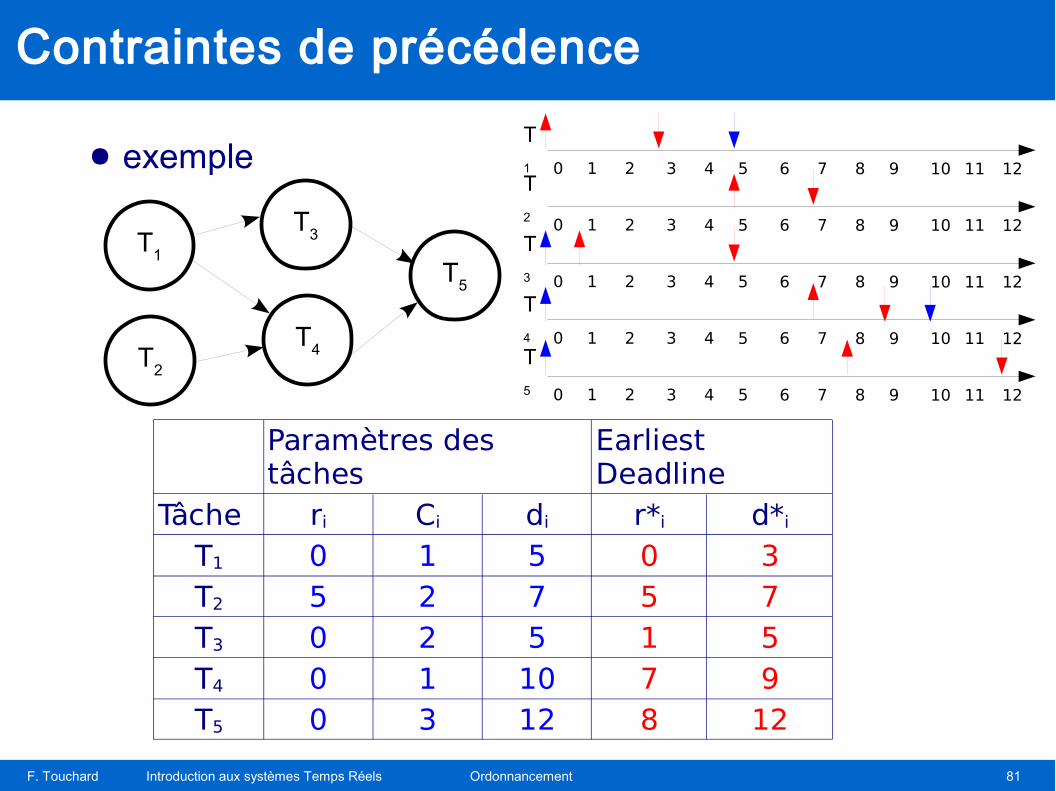
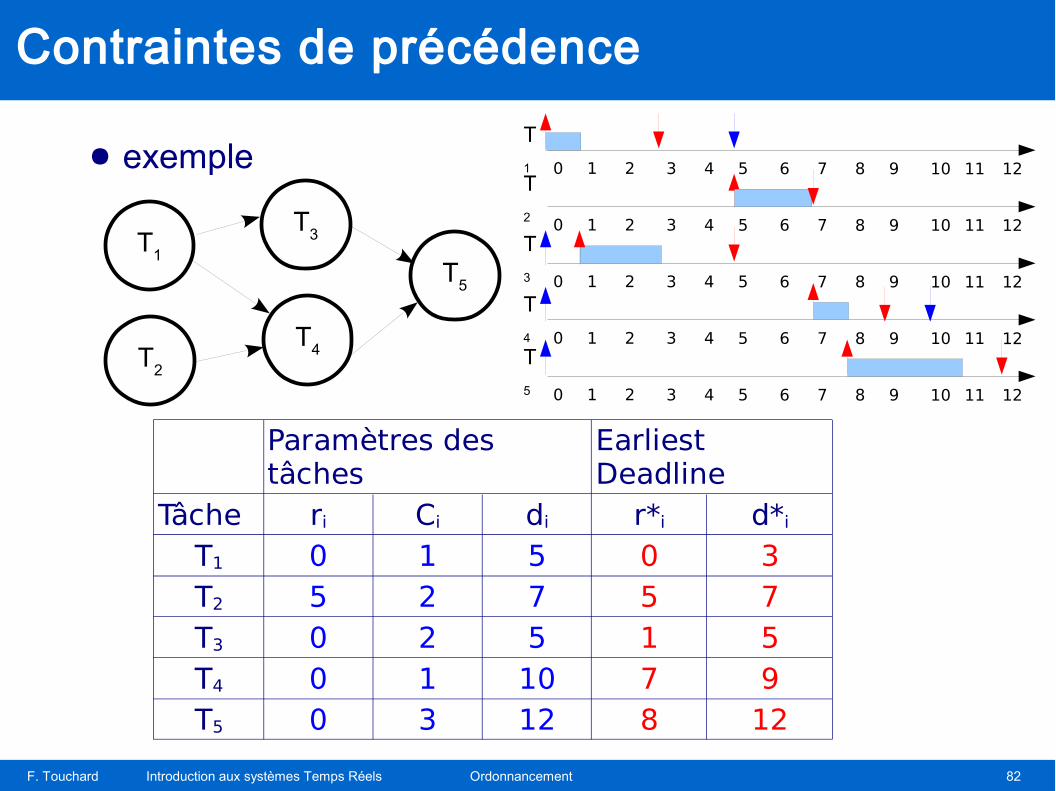
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
Tâche ri Ci di
T1 0 1 5T2 5 2 7T3 0 2 5T4 0 1 10T5 0 3 12
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 69
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5T2 5 2 7T3 0 2 5T4 0 1 10T5 0 3 12
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 70
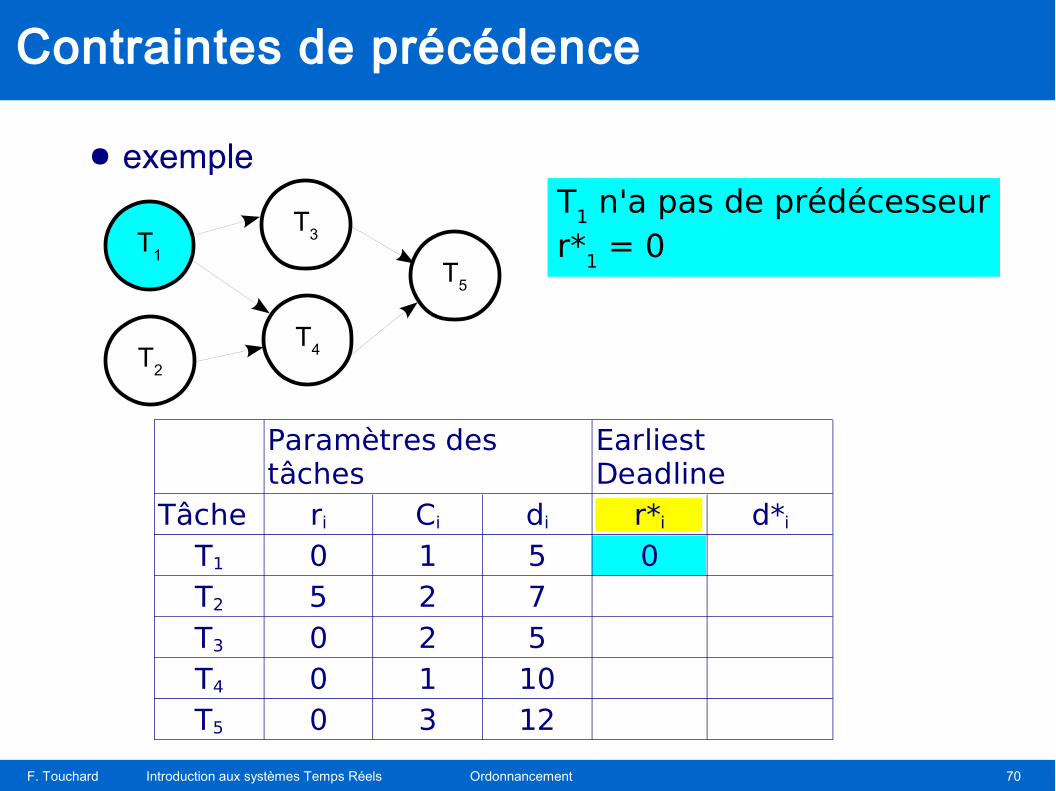
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7T3 0 2 5T4 0 1 10T5 0 3 12
T1 n'a pas de prédécesseurr*1 = 0
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 71
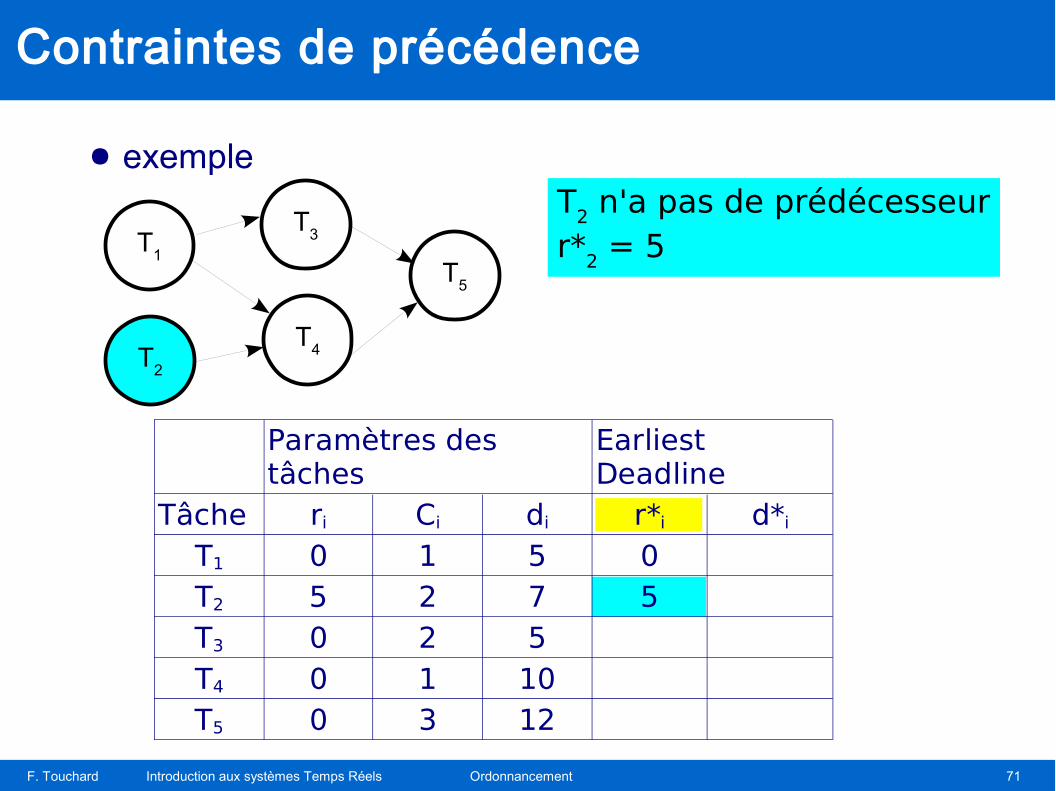
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5T4 0 1 10T5 0 3 12
T2 n'a pas de prédécesseurr*2 = 5
Contraintes de précédence
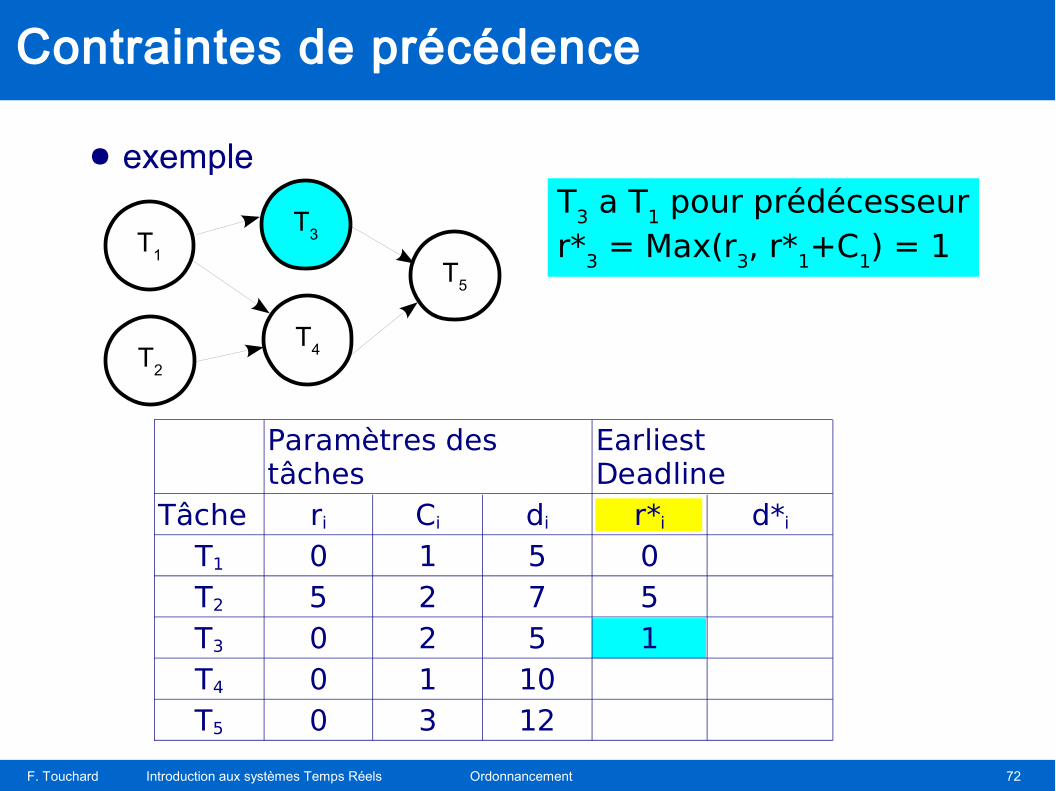
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 72
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1T4 0 1 10T5 0 3 12
Contraintes de précédence
T3 a T1 pour prédécesseurr*3 = Max(r3, r*1+C1) = 1
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 73
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
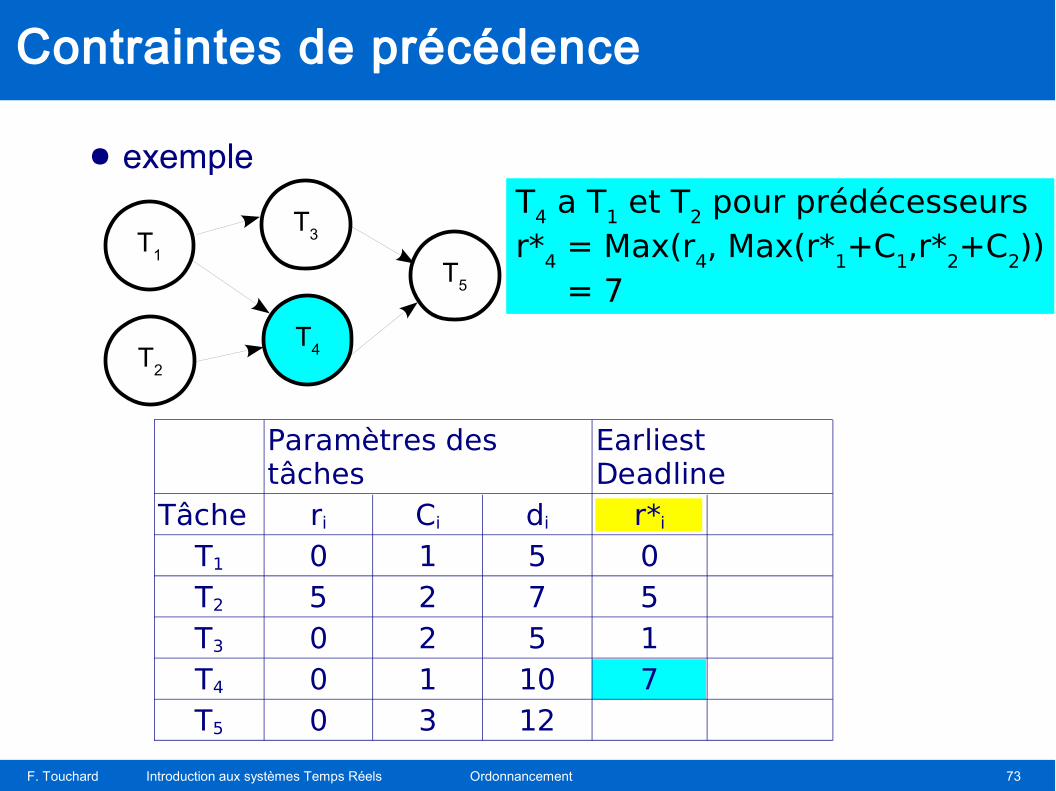
Tâche ri Ci di r*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1T4 0 1 10 7T5 0 3 12
Contraintes de précédence
T4 a T1 et T2 pour prédécesseursr*4 = Max(r4, Max(r*1+C1,r*2+C2)) = 7
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 74
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
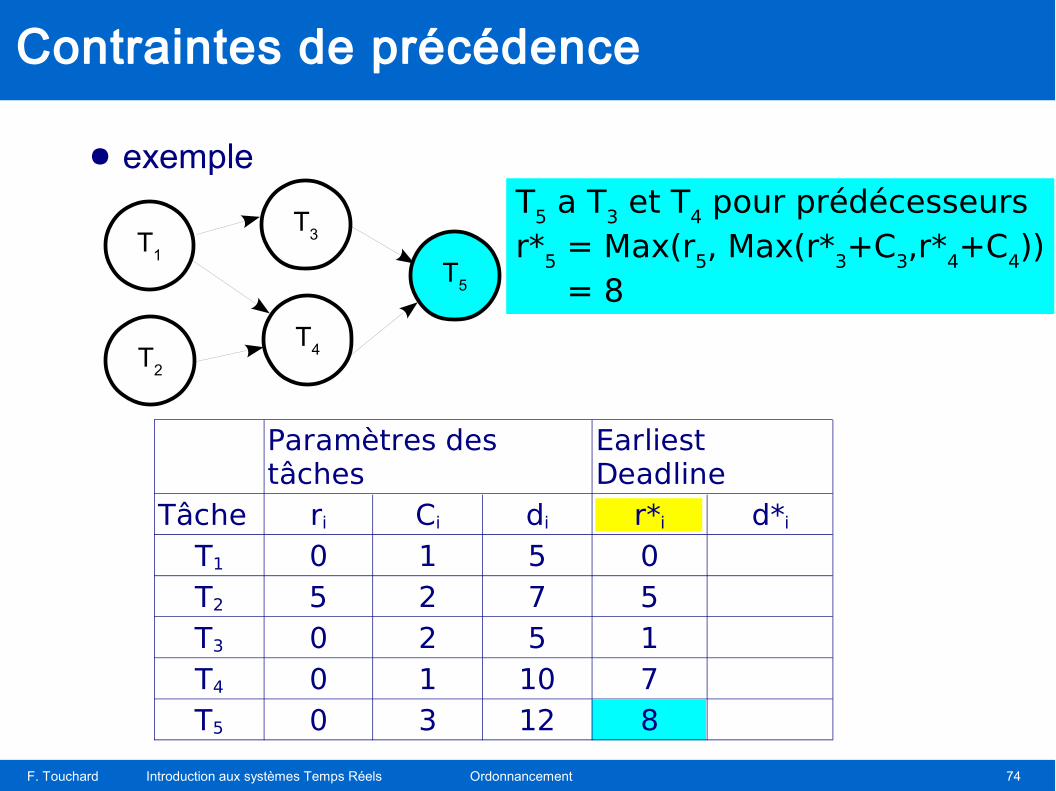
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1T4 0 1 10 7T5 0 3 12 8
Contraintes de précédence
T5 a T3 et T4 pour prédécesseursr*5 = Max(r5, Max(r*3+C3,r*4+C4)) = 8
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 75
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
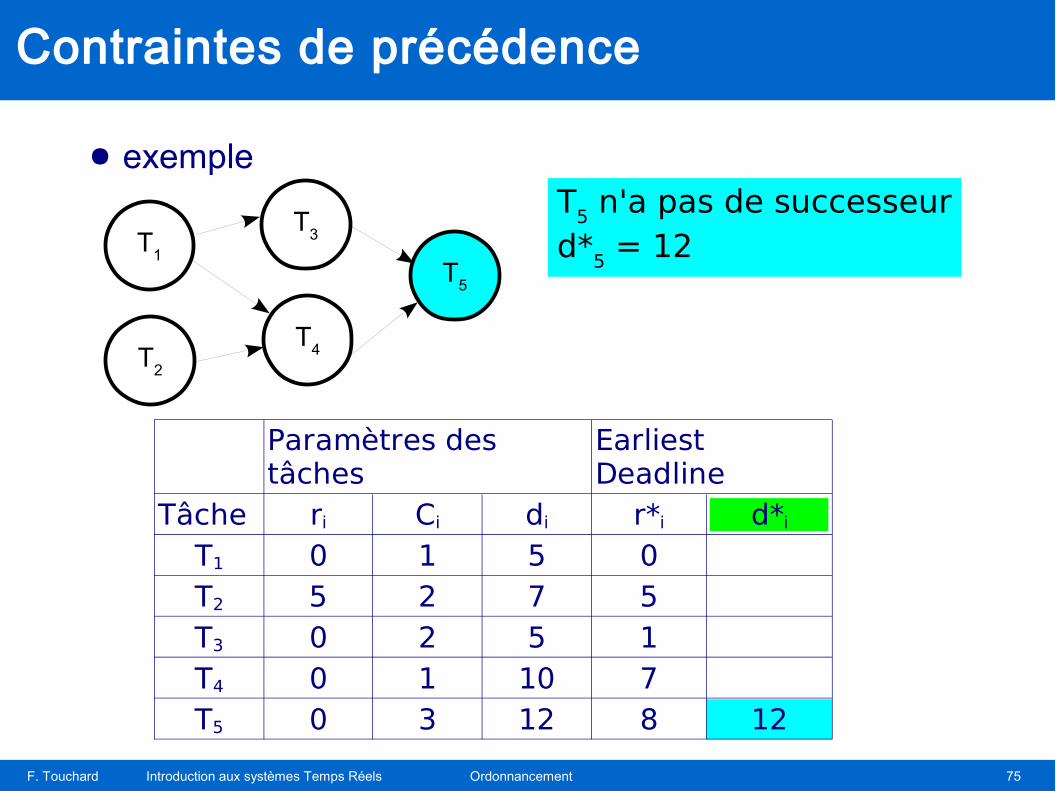
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1T4 0 1 10 7T5 0 3 12 8 12
T5 n'a pas de successeurd*5 = 12
Contraintes de précédence
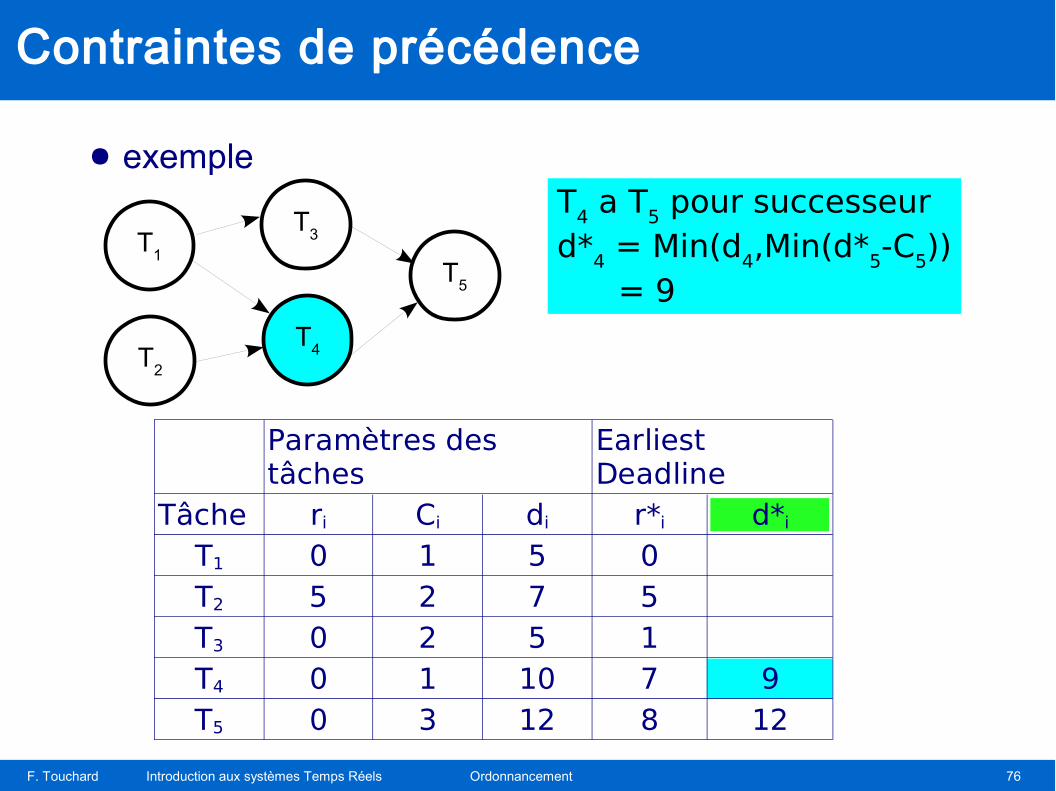
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 76
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1T4 0 1 10 7 9T5 0 3 12 8 12
Contraintes de précédence
T4 a T5 pour successeurd*4 = Min(d4,Min(d*5-C5)) = 9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 77
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
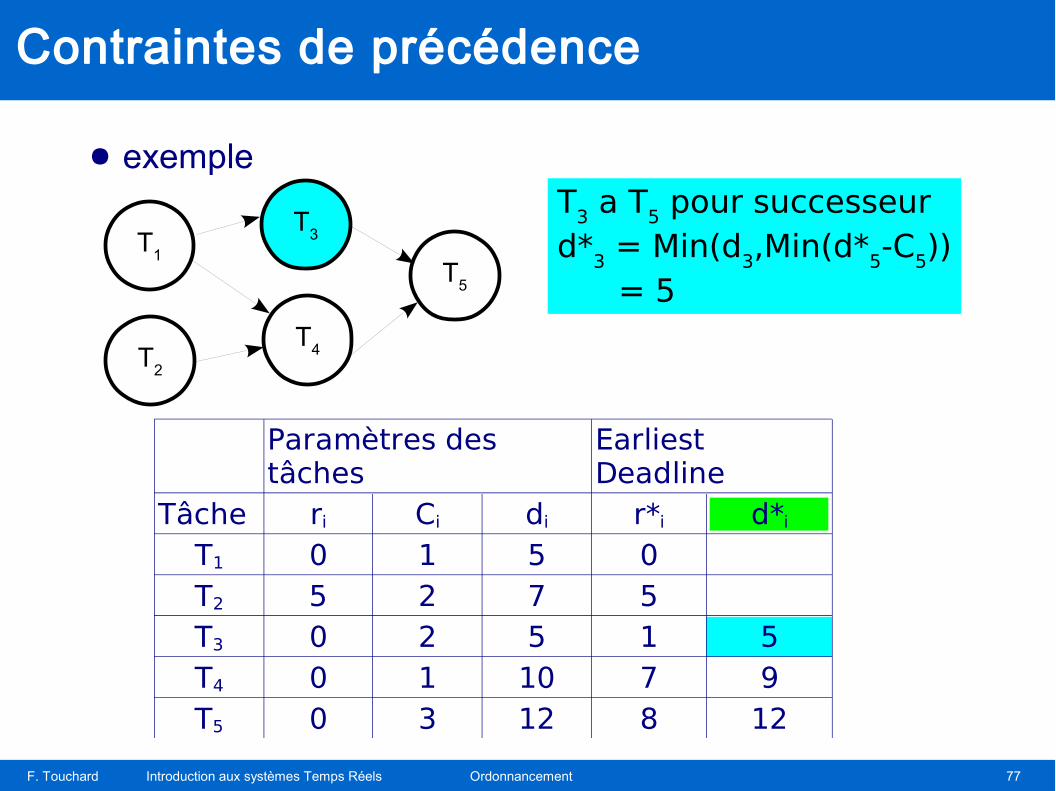
T3 a T5 pour successeurd*3 = Min(d3,Min(d*5-C5)) = 5
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 78
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0T2 5 2 7 5 7T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
Contraintes de précédence
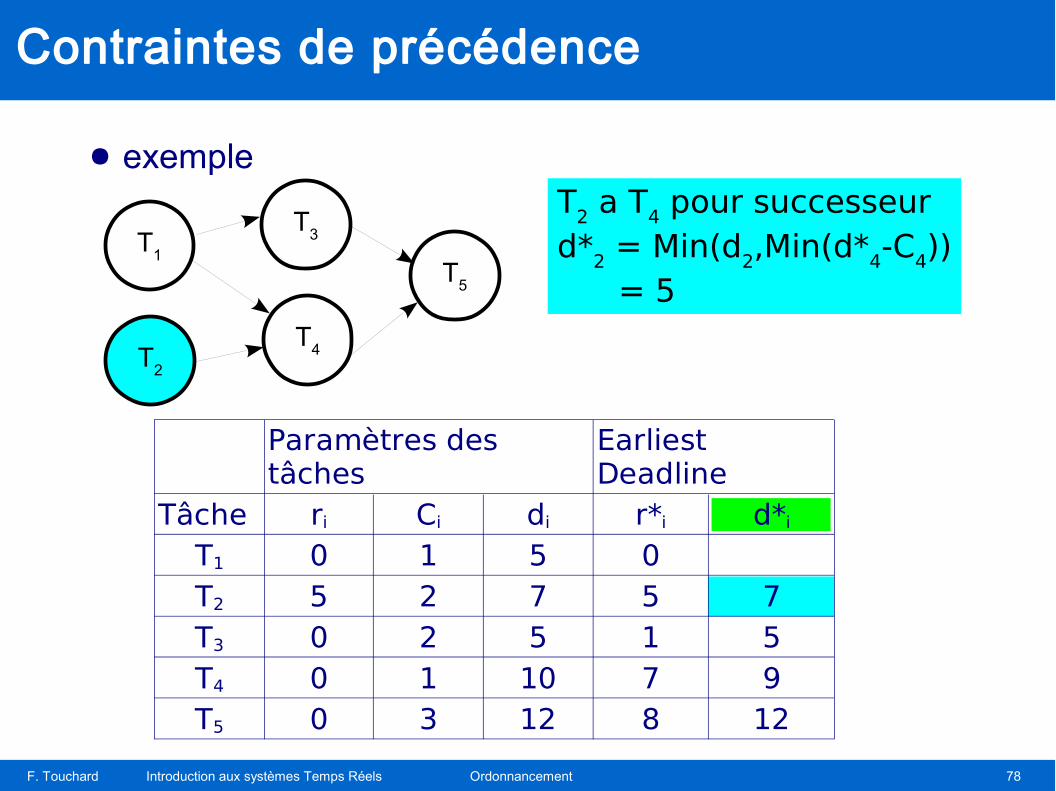
T2 a T4 pour successeurd*2 = Min(d2,Min(d*4-C4)) = 5
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 79
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0 3T2 5 2 7 5 7T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
Contraintes de précédence
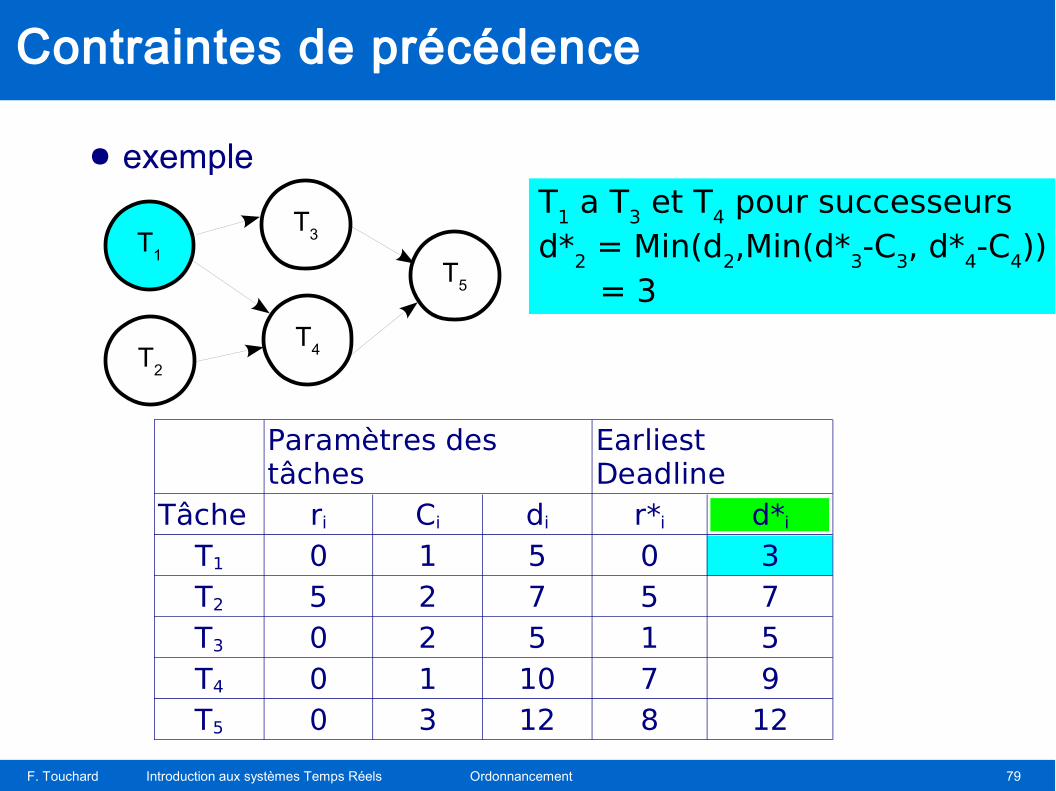
T1 a T3 et T4 pour successeursd*2 = Min(d2,Min(d*3-C3, d*4-C4)) = 3
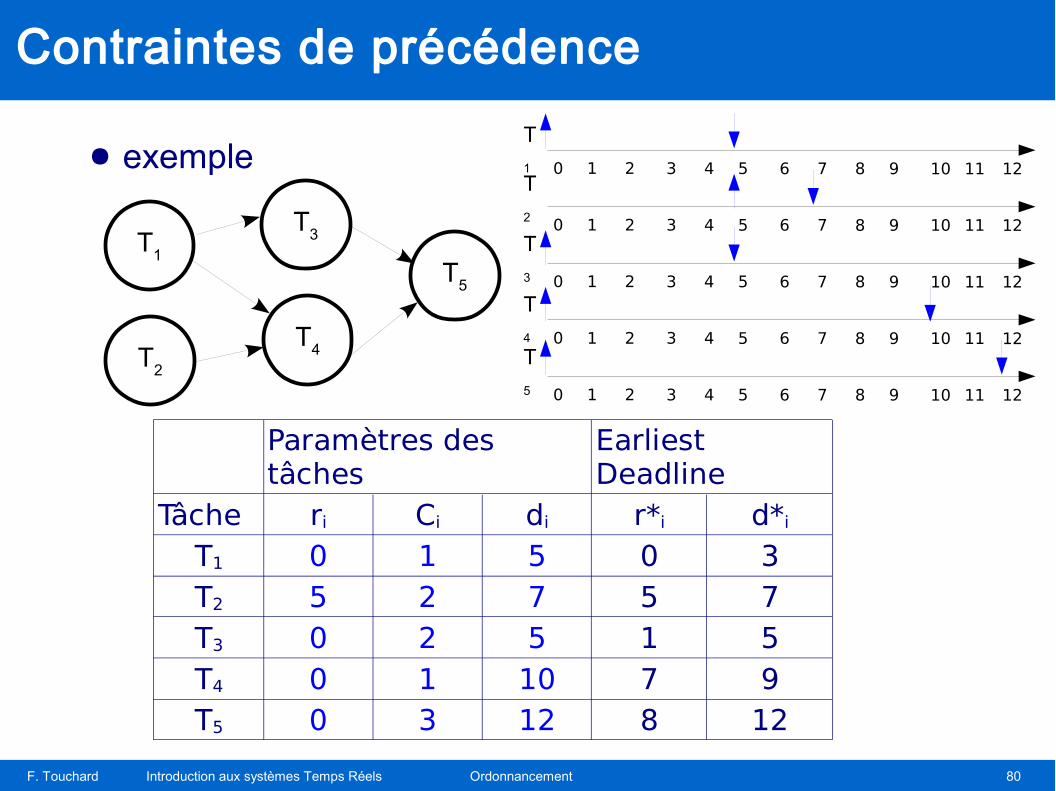
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 80
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0 3T2 5 2 7 5 7T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
T
3
T
2
T
1
T
4
T
5
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 81
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0 3T2 5 2 7 5 7T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
T
3
T
2
T
1
T
4
T
5
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 82
● exemple
T1
T2
T3
T4
T5
Paramètres destâches
EarliestDeadline
Tâche ri Ci di r*i d*i
T1 0 1 5 0 3T2 5 2 7 5 7T3 0 2 5 1 5T4 0 1 10 7 9T5 0 3 12 8 12
T
3
T
2
T
1
T
4
T
5
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
0 1 2 3 4 5 6 7 8 9 10 11 12
Contraintes de précédence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 83
● une ressource critique ne peut● être utilisée simultanément par plusieurs tâches● être réquisitionnée par une autre tâche
● notion de section critique● séquence d'instructions pendant lesquelles on utilise une
ressource critique➢ sans problème dans le cas d'un ordonnancement non
préemptif, mais c'est rarement le cas dans un environnement temps réel ⇒ évaluation du temps de réponse très difficile, sinon impossible
✔ abondante littérature !
Partage de ressources critiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 84
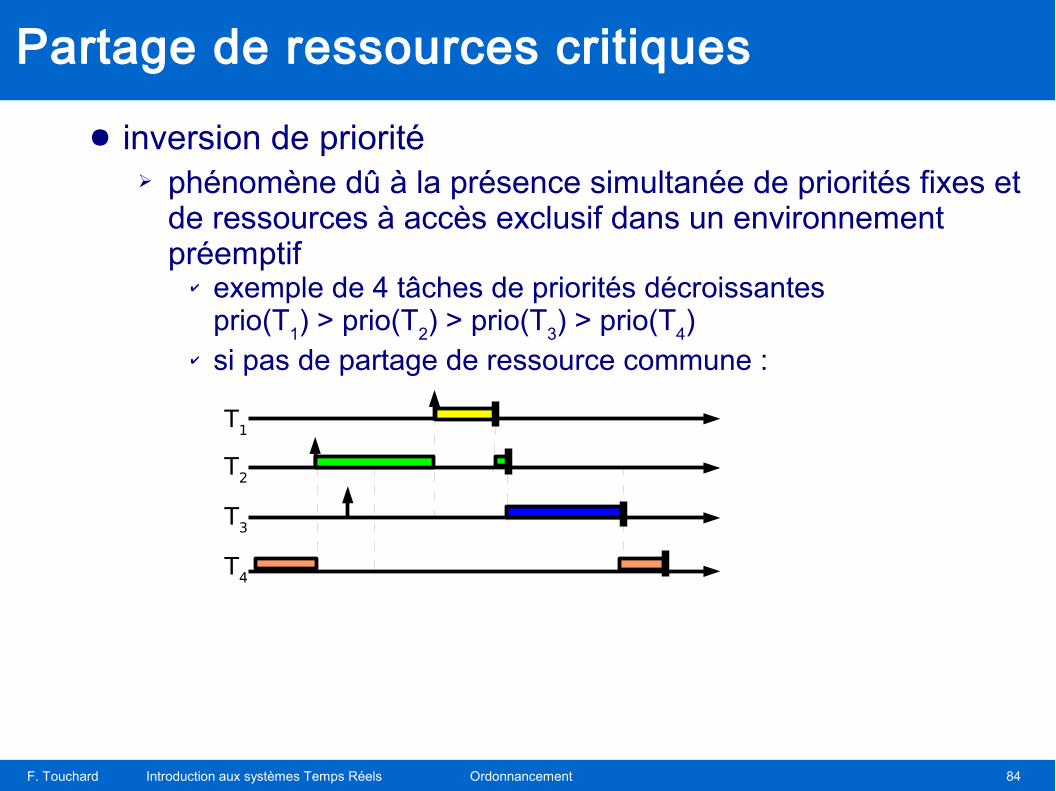
● inversion de priorité➢ phénomène dû à la présence simultanée de priorités fixes et
de ressources à accès exclusif dans un environnement préemptif
✔ exemple de 4 tâches de priorités décroissantes prio(T
1) > prio(T
2) > prio(T
3) > prio(T
4)
✔ si pas de partage de ressource commune :
T1
T2
T3
T4
Partage de ressources critiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 85
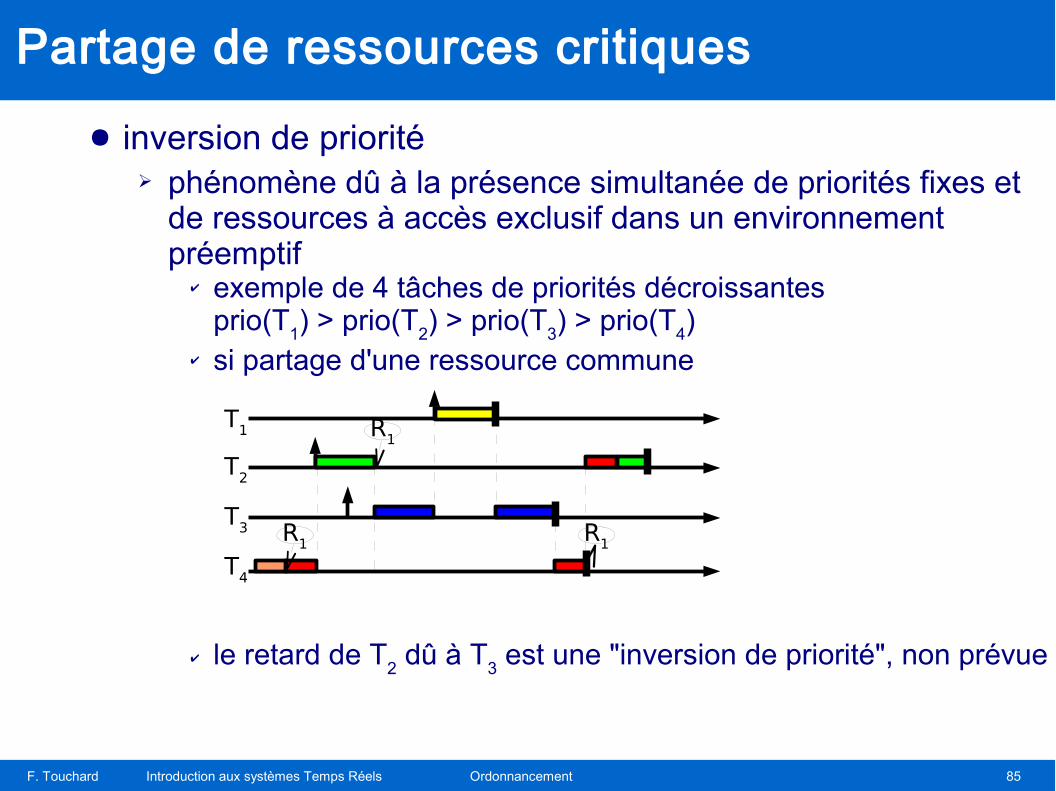
● inversion de priorité➢ phénomène dû à la présence simultanée de priorités fixes et
de ressources à accès exclusif dans un environnement préemptif
✔ exemple de 4 tâches de priorités décroissantes prio(T
1) > prio(T
2) > prio(T
3) > prio(T
4)
✔ si partage d'une ressource commune
✔ le retard de T2 dû à T
3 est une "inversion de priorité", non prévue
T1
T2
T3
T4
R1
R1
R1
Partage de ressources critiques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 86
● principe : attribuer à la tâche qui possède la ressource la priorité de la tâche de plus haute priorité qui attend la ressource
● hypothèses de travail➢ n tâches périodiques T
1, T
2, ... , T
n (période P
i, capacité C
i)
à échéance sur requête➢ partageant m ressources R
1, R
2, ... , R
m
➢ chaque ressource Rj est gardée par un sémaphore binaire
Sj limitant une section critique z
i,j (pour T
i)
➢ Pi : priorité nominale, p
i : priorité active
P1 > P
2 > ... > P
n
➢ zi,j ⊂ zi,k ou zi,k ⊂ zi,j ou zi,j ∩ zi,k = ∅ ∀ zi,j et zi,k
Héritage de priorité
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 87
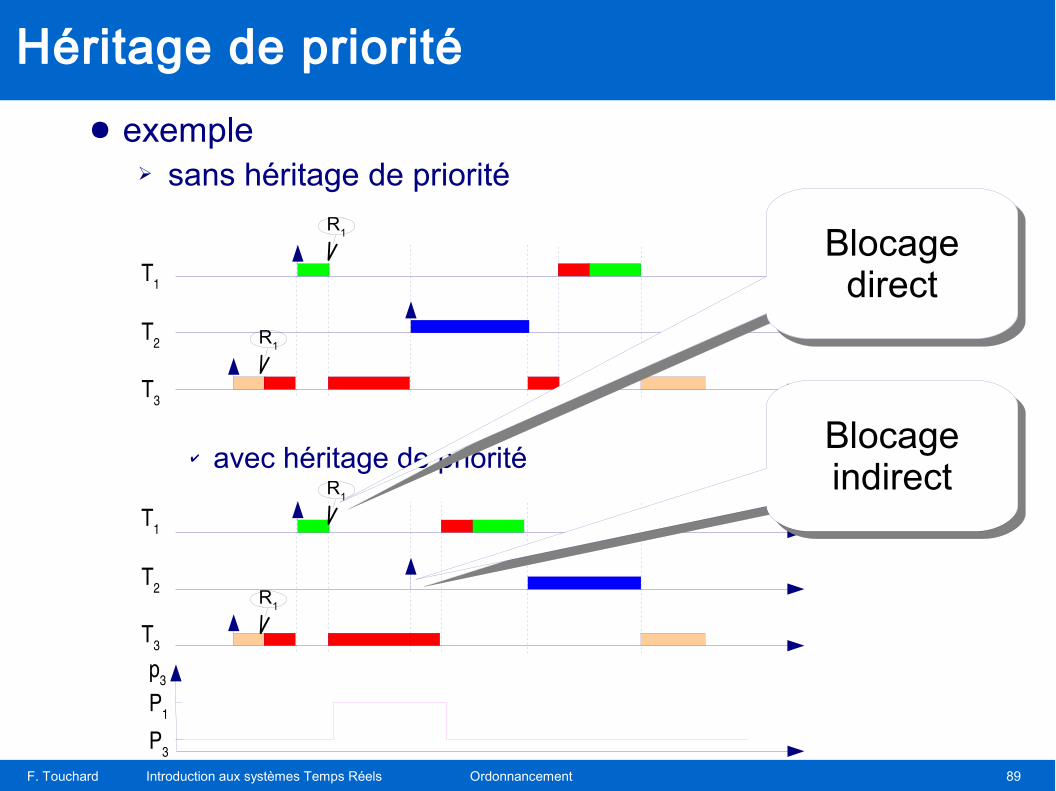
● définition du protocole d'héritage de priorité➢ les tâches sont ordonnancées suivant leur priorité active ➢ quand une tâche T
i cherche à entrer dans une section
critique zi,j et que la ressource R
j est déjà possédée par une
tâche Tk, de priorité plus faible, alors T
i se bloque (sinon T
i
entre dans zi,j)
➢ la tâche Ti, bloquée, transmet sa priorité à T
k qui peut alors
redémarrer et terminer l'exécution de la section critique zk,j
➢ quand Tk sort de la section critique, il relâche le sémaphore
Sj et la tâche de plus haute priorité est réveillée. Si aucune
tâche n'est encore bloquée par Tk, alors p
k est ramenée à
Pk, sinon on donne à p
k la plus haute des priorités des
tâches en attente
Héritage de priorité
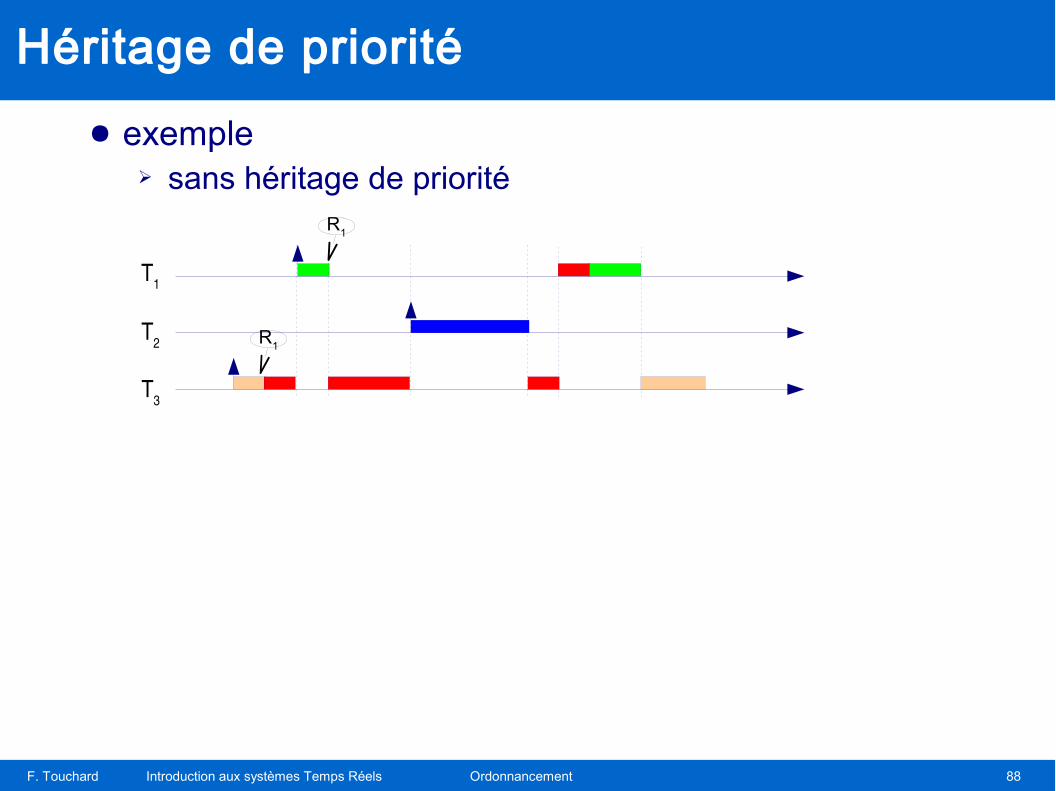
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 88
● exemple➢ sans héritage de priorité
R1
R1
T1
T2
T3
Héritage de priorité
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 89
● exemple➢ sans héritage de priorité
✔ avec héritage de priorité
p3
P1
P3
R1
R1
R1
R1
T1
T2
T3
T1
T2
T3
Héritage de priorité
Blocagedirect
Blocagedirect
Blocageindirect
Blocageindirect
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 90
● propriétés du protocole d'héritage des priorités➢ le temps de blocage B d'une tâche de haute priorité par
une tâche de plus basse priorité nominale est borné➢ mais le calcul de ce temps de blocage maximum peut
être très complexe➢ condition nécessaire d'ordonnançabilité par un
algorithme Rate Monotonic :
∀ i , 1≤ i≤n , ∑k=1i C
k
Tk
Bi
Ti
≤ i 2 1 /i−1
Héritage de priorité
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 91
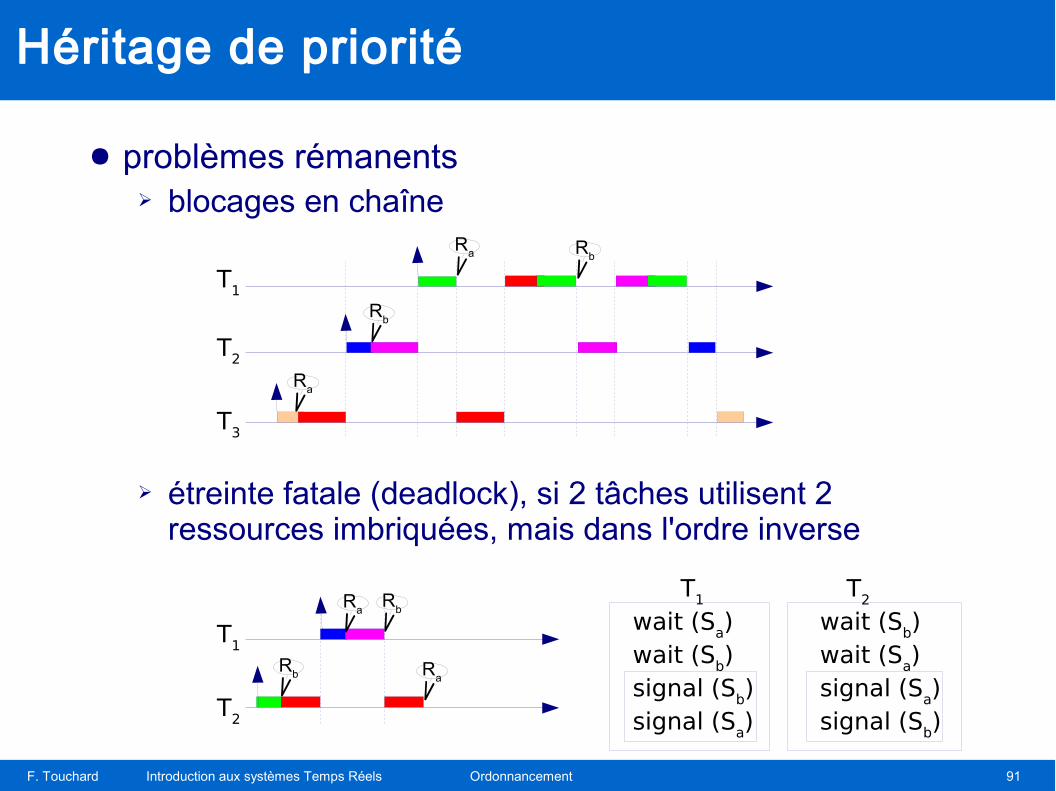
● problèmes rémanents➢ blocages en chaîne
➢ étreinte fatale (deadlock), si 2 tâches utilisent 2 ressources imbriquées, mais dans l'ordre inverse
Ra
Rb
Ra R
b
T1
T2
T3
T1
T2
Rb
Rb
Ra
Ra
wait (Sa)wait (Sb)signal (Sb)signal (Sa)
wait (Sb)wait (Sa)signal (Sa)signal (Sb)
T1 T2
Héritage de priorité

F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 92
● introduit à la fin des années 80 pour résoudre le problème d'inversion de priorité tout en prévenant l'occurence de deadlocks et de blocages en chaîne
● amélioration du protocole d'héritage de priorité : une tâche ne peut pas entrer dans une section critique s'il y a un sémaphore acquis qui pourrait la bloquer
● principe : on attribue à chaque sémaphore une priorité plafond égale à la plus haute priorité des tâches qui pourraient l'acquérir. Une tâche ne pourra entrer dans la section critique que si elle possède une priorité supérieure à toutes celles des priorités plafond des sémaphores acquis par les autres tâches
Priorité plafonnée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 93
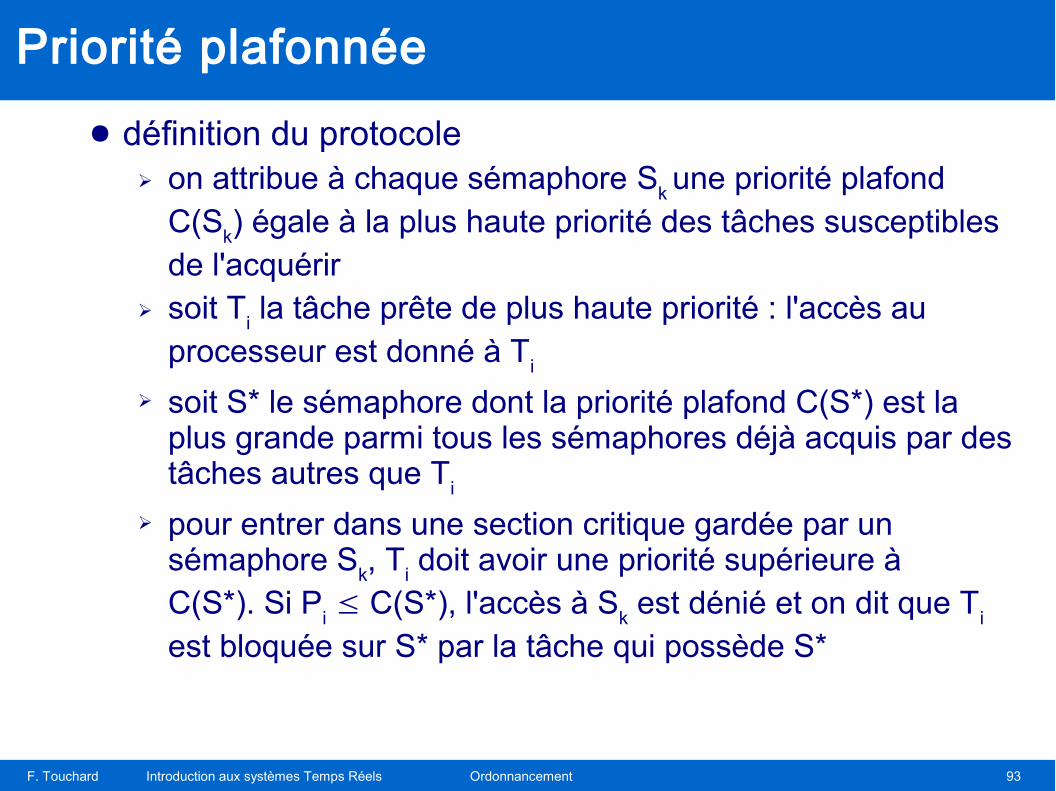
● définition du protocole➢ on attribue à chaque sémaphore S
k une priorité plafond
C(Sk) égale à la plus haute priorité des tâches susceptibles
de l'acquérir➢ soit T
i la tâche prête de plus haute priorité : l'accès au
processeur est donné à Ti
➢ soit S* le sémaphore dont la priorité plafond C(S*) est la plus grande parmi tous les sémaphores déjà acquis par des tâches autres que T
i
➢ pour entrer dans une section critique gardée par un sémaphore S
k, T
i doit avoir une priorité supérieure à
C(S*). Si Pi ≤ C(S*), l'accès à S
k est dénié et on dit que T
i
est bloquée sur S* par la tâche qui possède S*
Priorité plafonnée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 94
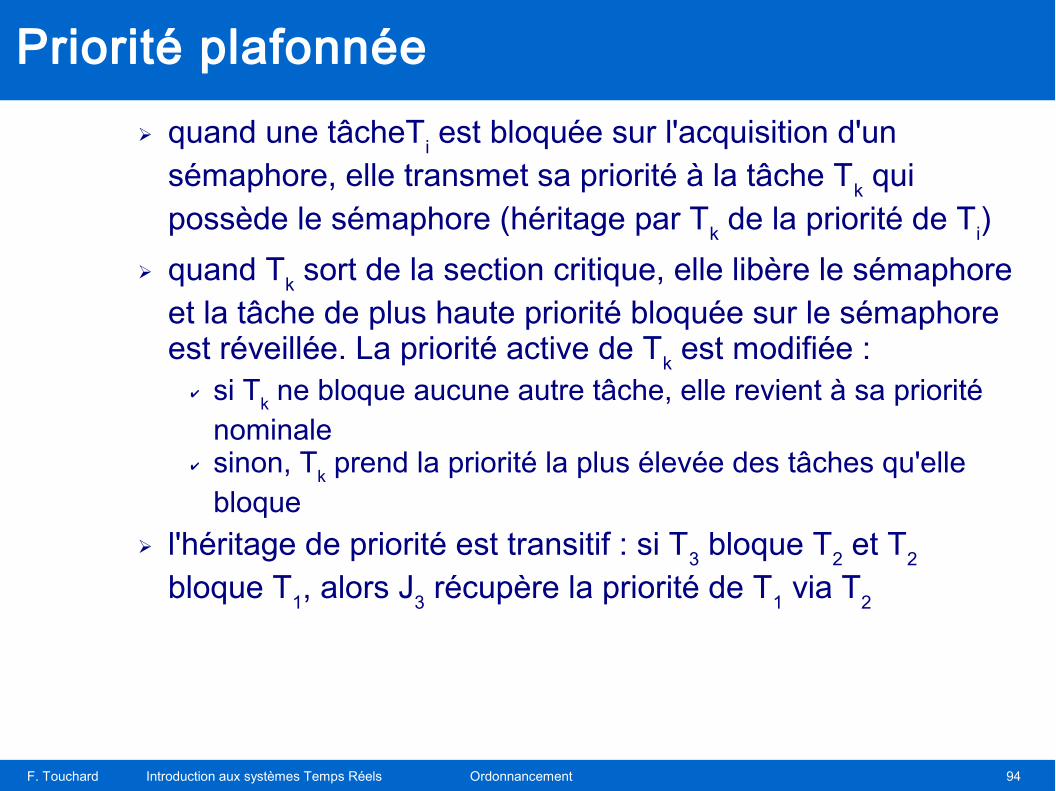
➢ quand une tâcheTi est bloquée sur l'acquisition d'un
sémaphore, elle transmet sa priorité à la tâche Tk qui
possède le sémaphore (héritage par Tk de la priorité de T
i)
➢ quand Tk sort de la section critique, elle libère le sémaphore
et la tâche de plus haute priorité bloquée sur le sémaphore est réveillée. La priorité active de T
k est modifiée :
✔ si Tk ne bloque aucune autre tâche, elle revient à sa priorité
nominale✔ sinon, T
k prend la priorité la plus élevée des tâches qu'elle
bloque
➢ l'héritage de priorité est transitif : si T3 bloque T
2 et T
2
bloque T1, alors J
3 récupère la priorité de T
1 via T
2
Priorité plafonnée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 95
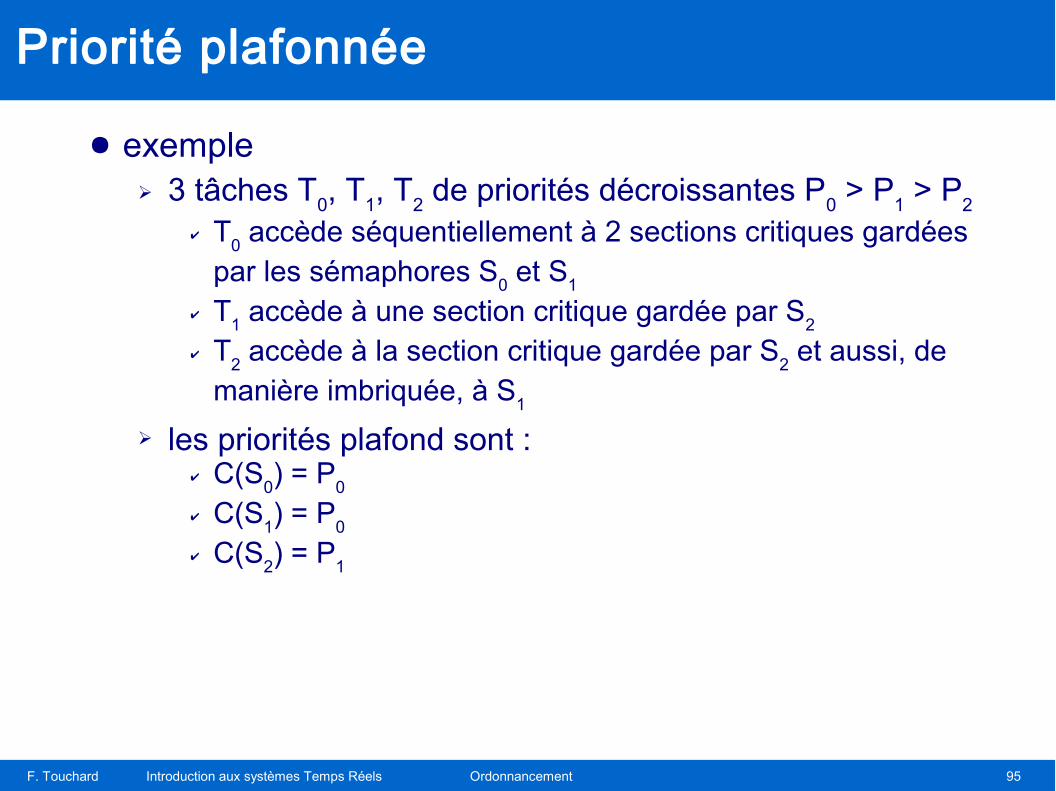
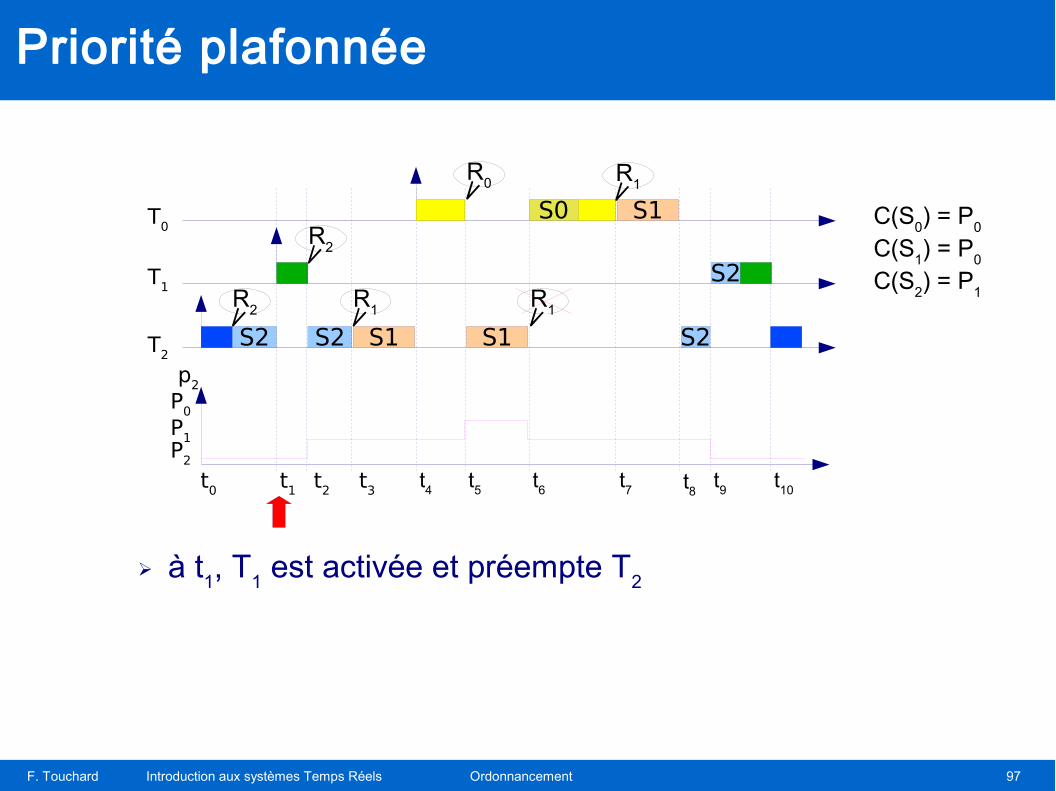
● exemple➢ 3 tâches T
0, T
1, T
2 de priorités décroissantes P
0 > P
1 > P
2
✔ T0 accède séquentiellement à 2 sections critiques gardées
par les sémaphores S0 et S
1
✔ T1 accède à une section critique gardée par S
2
✔ T2 accède à la section critique gardée par S
2 et aussi, de
manière imbriquée, à S1
➢ les priorités plafond sont :✔ C(S
0) = P
0
✔ C(S1) = P
0
✔ C(S2) = P
1
Priorité plafonnée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 96
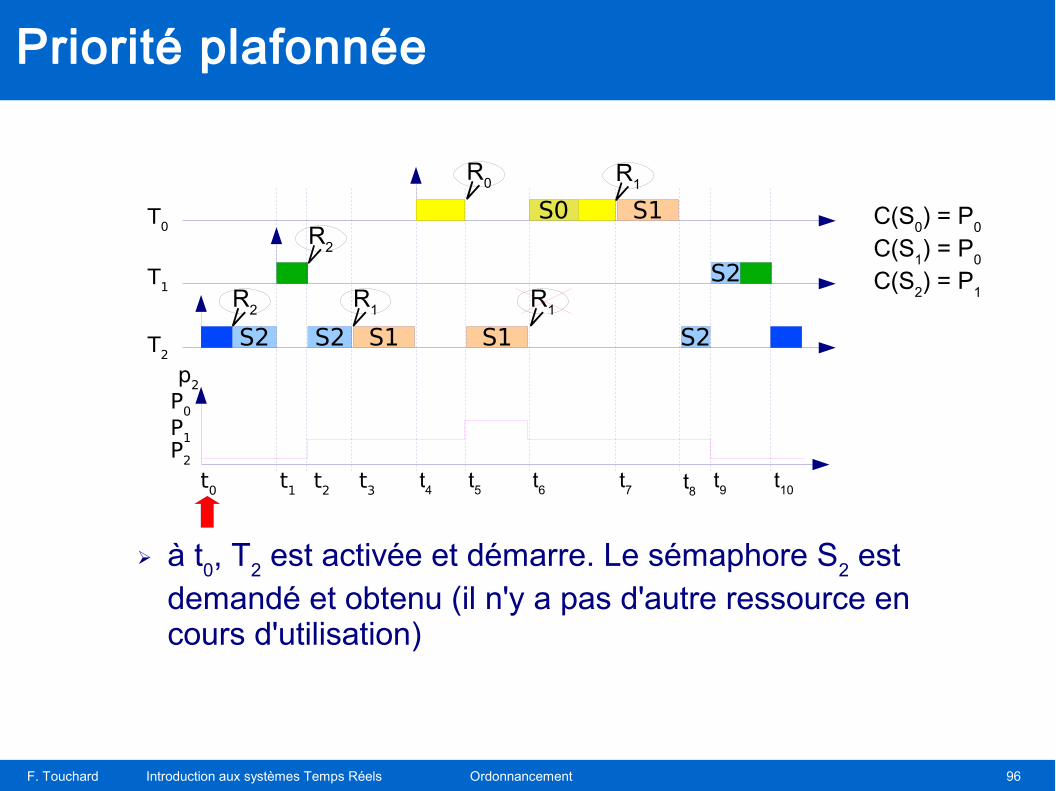
➢ à t0, T
2 est activée et démarre. Le sémaphore S
2 est
demandé et obtenu (il n'y a pas d'autre ressource en cours d'utilisation)
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 97
➢ à t1, T
1 est activée et préempte T
2
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 98
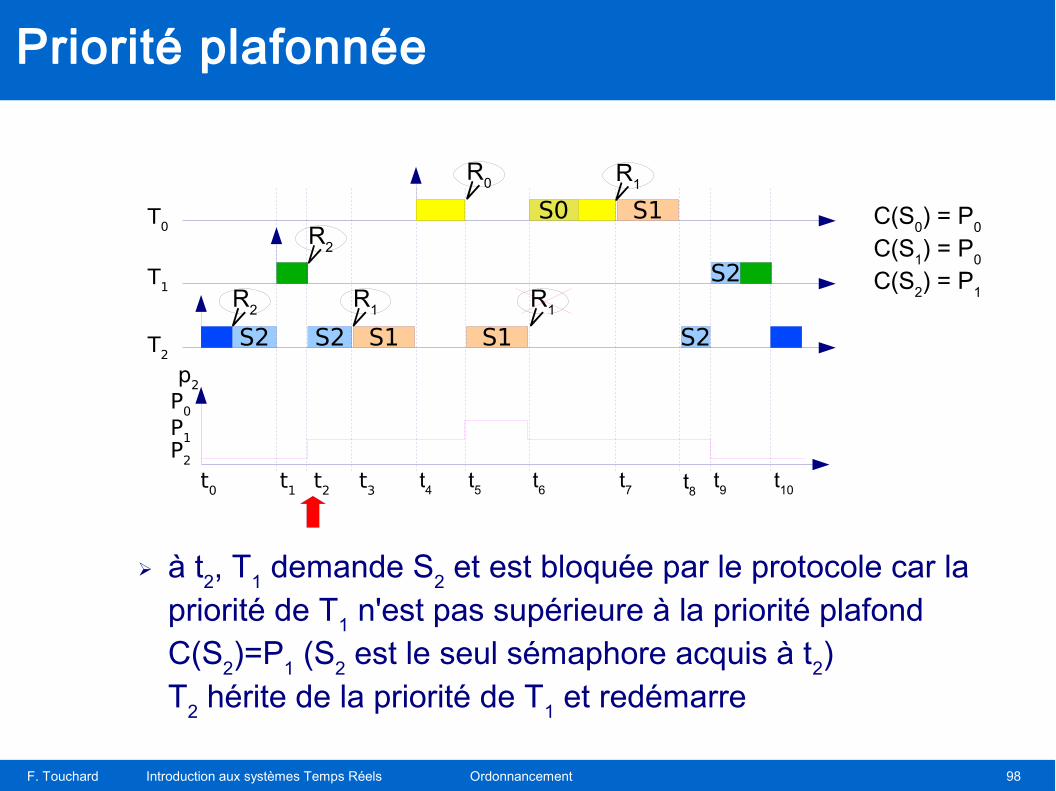
➢ à t2, T
1 demande S
2 et est bloquée par le protocole car la
priorité de T1 n'est pas supérieure à la priorité plafond
C(S2)=P
1 (S
2 est le seul sémaphore acquis à t
2)
T2 hérite de la priorité de T
1 et redémarre
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 99
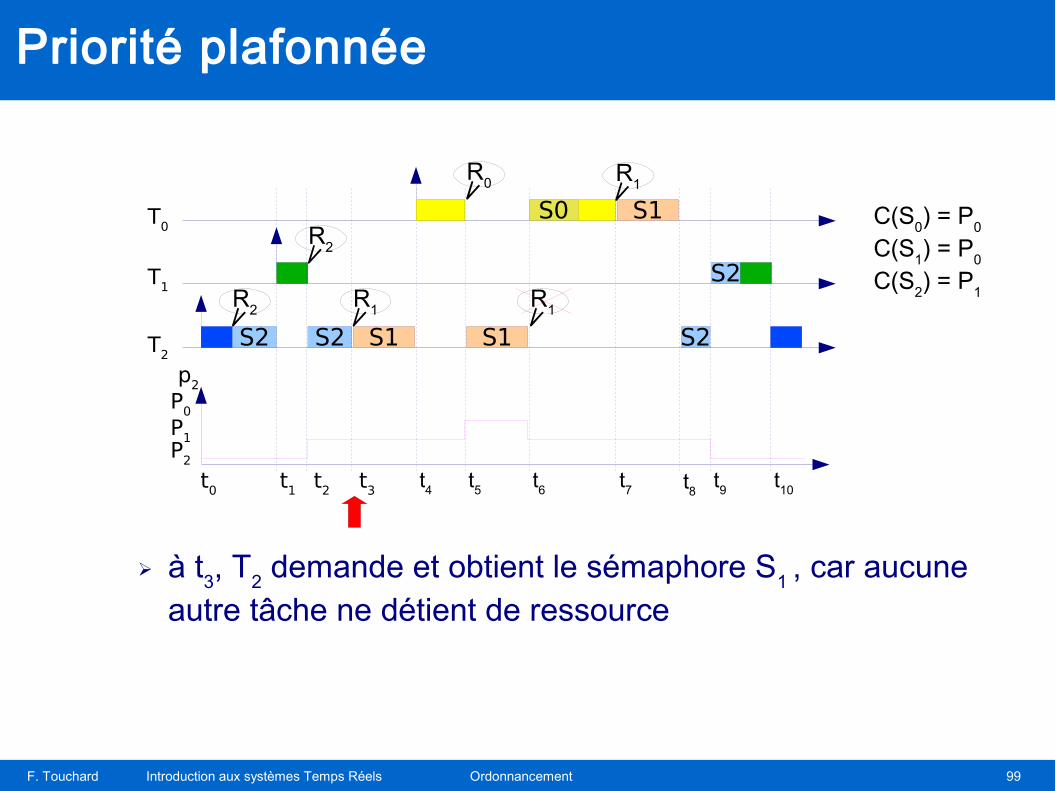
➢ à t3, T
2 demande et obtient le sémaphore S
1 , car aucune
autre tâche ne détient de ressource
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 100
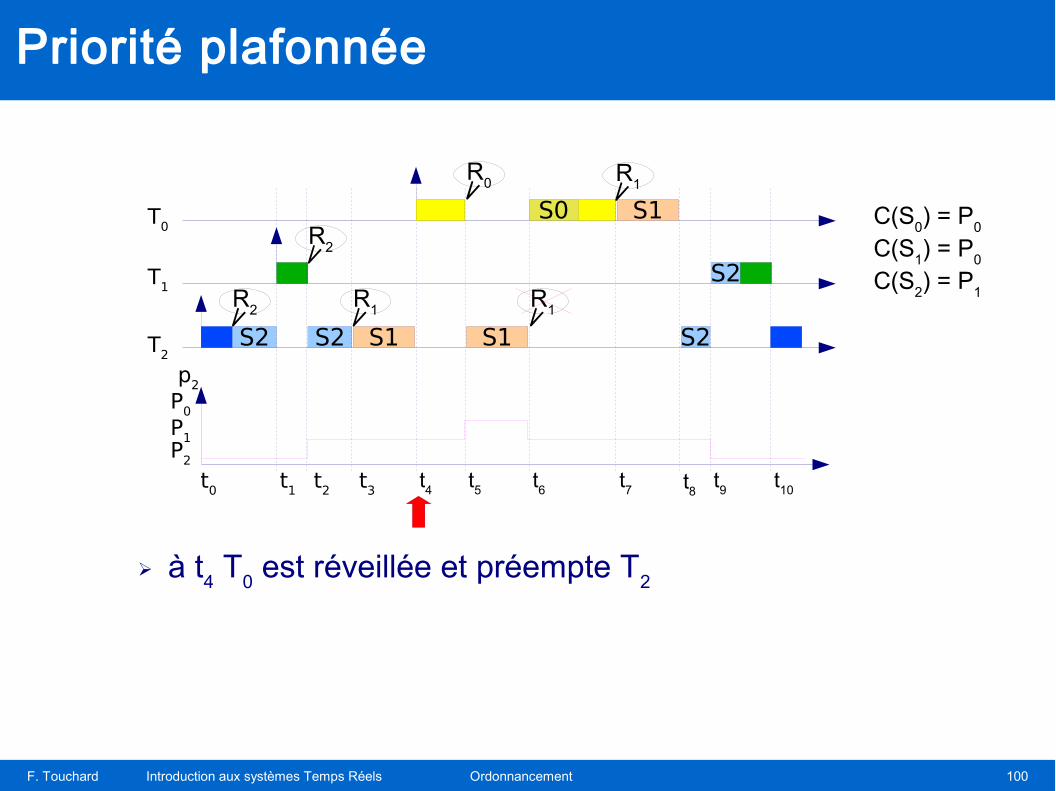
➢ à t4 T
0 est réveillée et préempte T
2
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
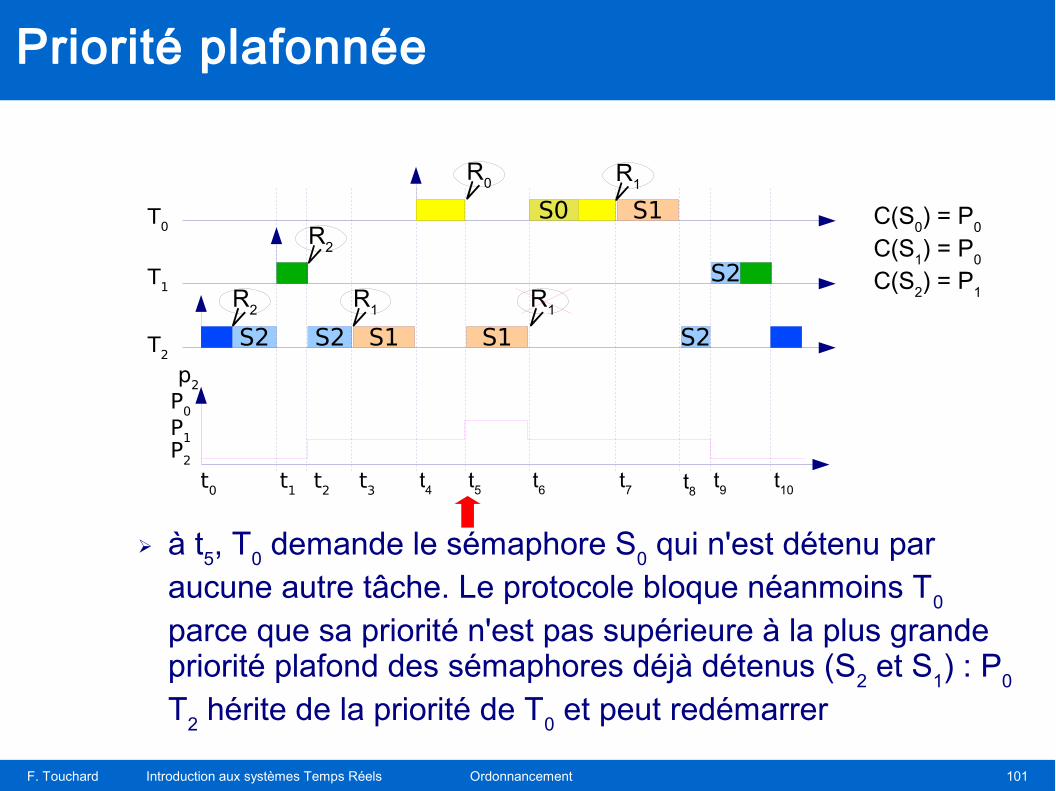
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 101
➢ à t5, T
0 demande le sémaphore S
0 qui n'est détenu par
aucune autre tâche. Le protocole bloque néanmoins T0
parce que sa priorité n'est pas supérieure à la plus grande priorité plafond des sémaphores déjà détenus (S
2 et S
1) : P
0
T2 hérite de la priorité de T
0 et peut redémarrer
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
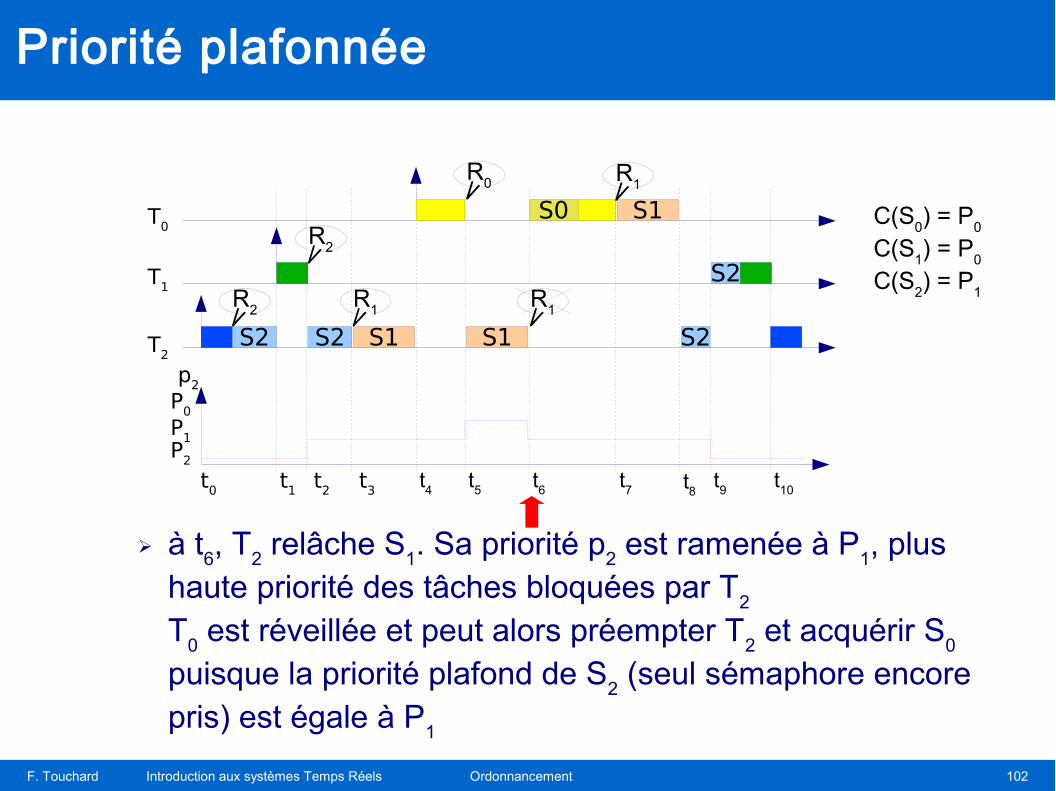
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 102
➢ à t6, T
2 relâche S
1. Sa priorité p
2 est ramenée à P
1, plus
haute priorité des tâches bloquées par T2
T0 est réveillée et peut alors préempter T
2 et acquérir S
0
puisque la priorité plafond de S2 (seul sémaphore encore
pris) est égale à P1
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
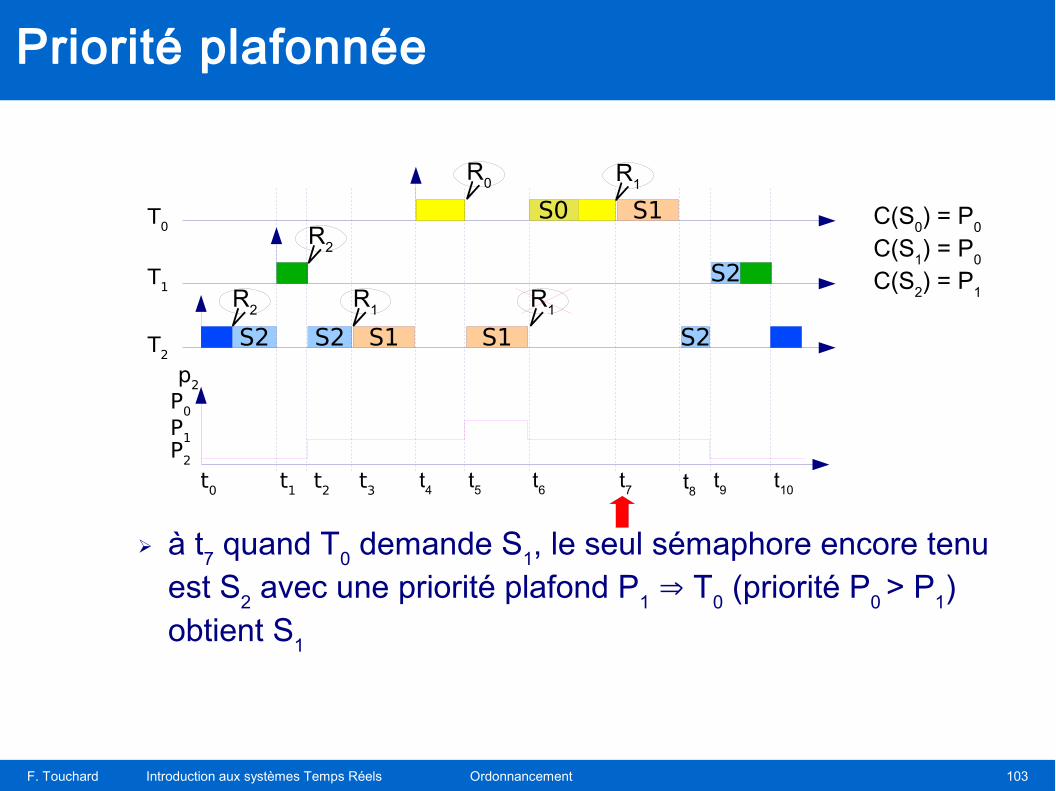
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 103
➢ à t7 quand T
0 demande S
1, le seul sémaphore encore tenu
est S2 avec une priorité plafond P
1 T
0 (priorité P
0 > P
1)
obtient S1
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
Priorité plafonnée
t9
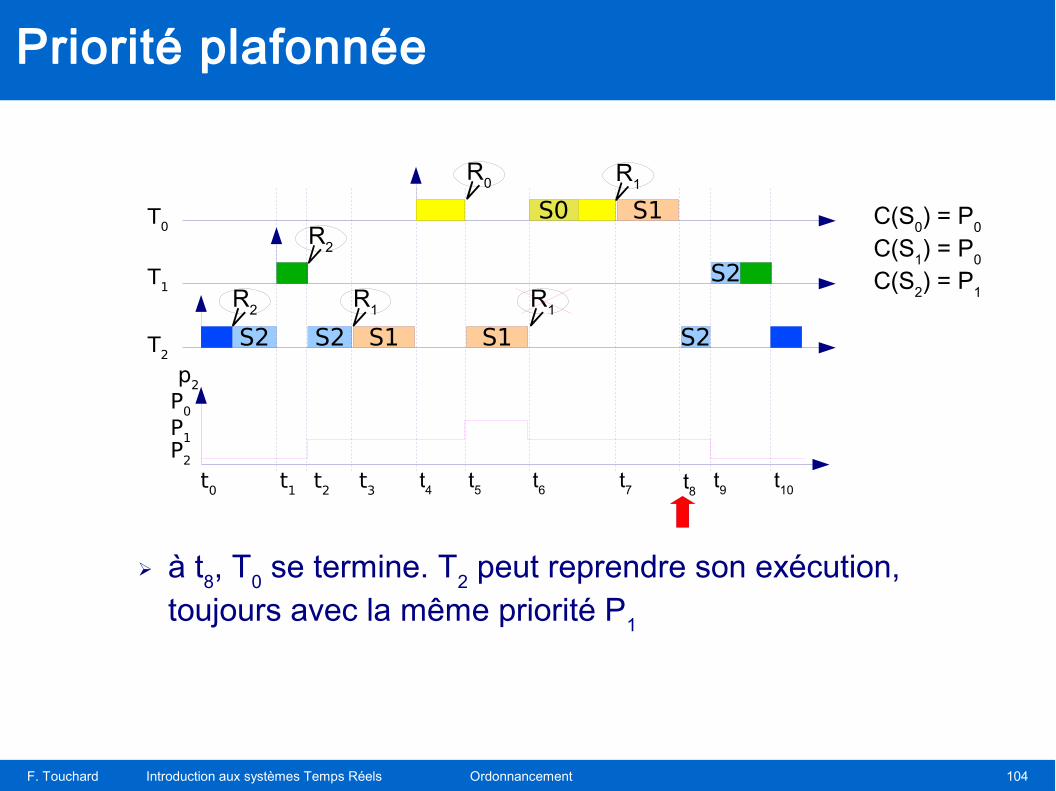
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 104
➢ à t8, T
0 se termine. T
2 peut reprendre son exécution,
toujours avec la même priorité P1
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 105
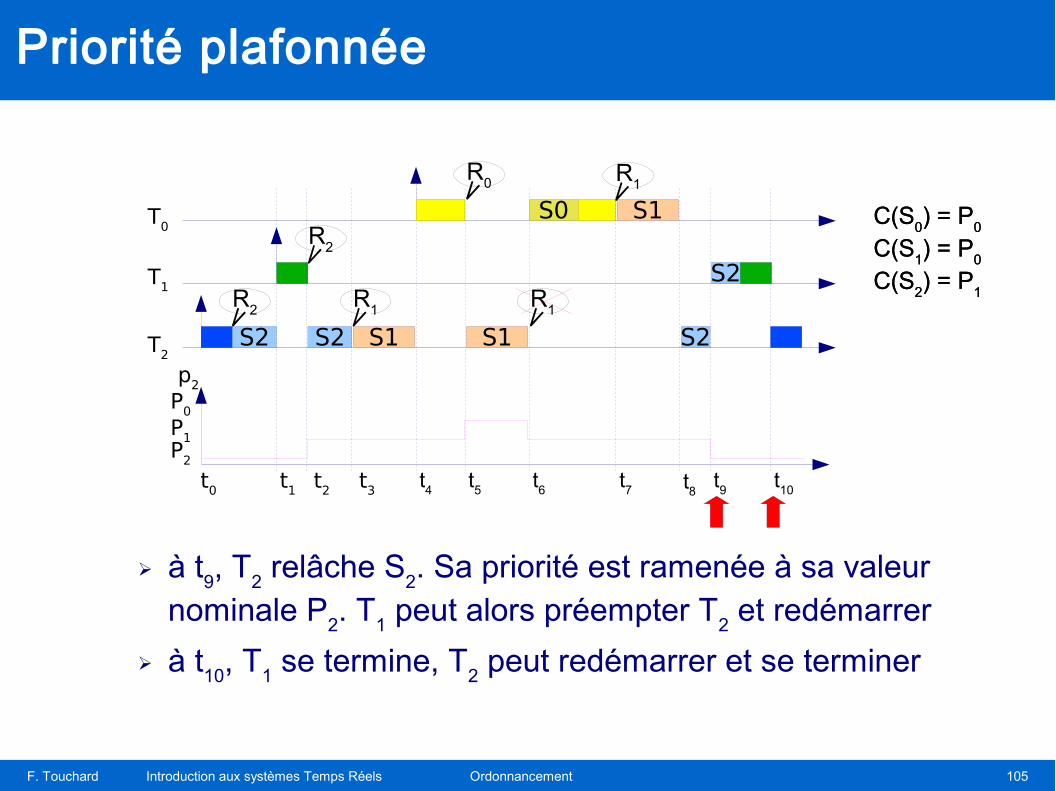
➢ à t9, T
2 relâche S
2. Sa priorité est ramenée à sa valeur
nominale P2. T
1 peut alors préempter T
2 et redémarrer
➢ à t10
, T1 se termine, T
2 peut redémarrer et se terminer
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
Priorité plafonnée
T0
T1
T2
p2
P2
P1
P0
S2
R2
R2
S2 S1
R1
t0 t1 t2 t3t4
t5
R0
S1
t6
S0 S1
R1
t7
S2
t8
S2
t10
R1
C(S0) = P
0
C(S1) = P
0
C(S2) = P
1
t9
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 106
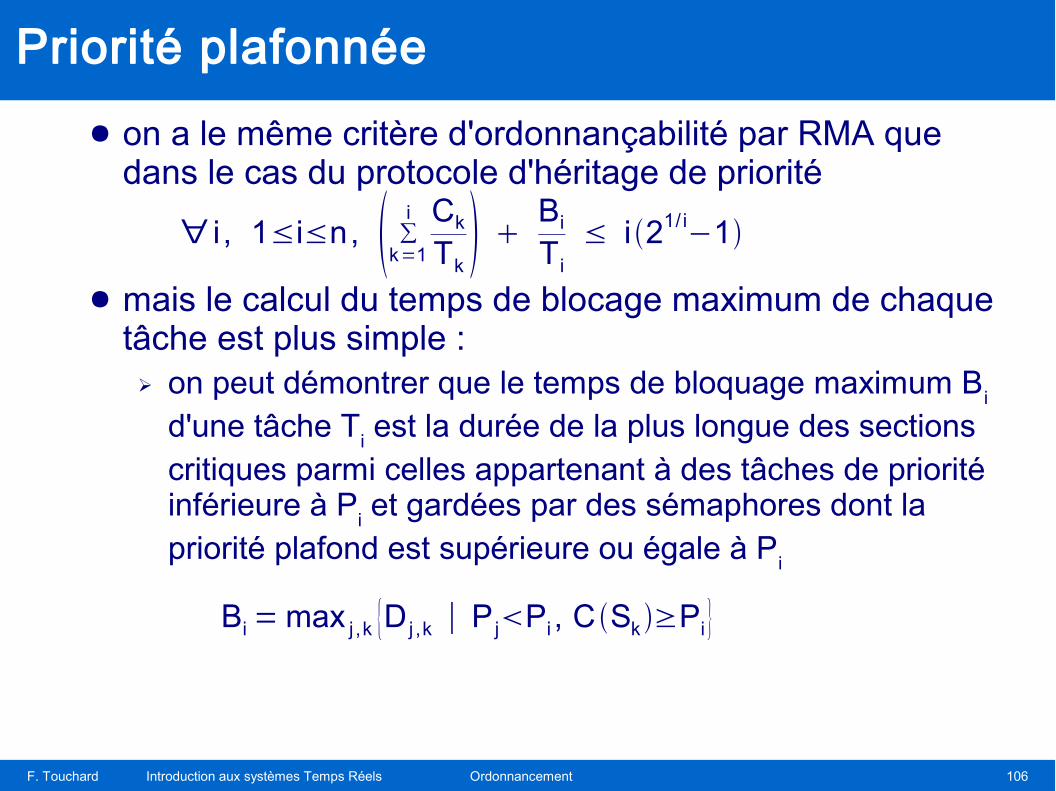
● on a le même critère d'ordonnançabilité par RMA que dans le cas du protocole d'héritage de priorité
● mais le calcul du temps de blocage maximum de chaque tâche est plus simple :➢ on peut démontrer que le temps de bloquage maximum B
i
d'une tâche Ti est la durée de la plus longue des sections
critiques parmi celles appartenant à des tâches de priorité inférieure à P
i et gardées par des sémaphores dont la
priorité plafond est supérieure ou égale à Pi
Bi = max j ,k {D j ,k ∣ P jPi , C Sk ≥Pi}
∀ i , 1≤i≤n, ∑k=1
i Ck
Tk
Bi
T i
≤ i21/ i−1
Priorité plafonnée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 107
exercice
● tâches avec demandes de ressources imbriquées

F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 108
exemple : la mission Pathfinder

109
Ordonnancement en situations de surcharge
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 110
Plan
● notions liées à la surcharge➢ définitions ➢ métrique
● schémas d'ordonnancement➢ classes d'algorithmes➢ tâches périodiques➢ tâches quelconques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 111
Notion de surcharge
● quand la charge du processeur est telle qu'il est impossible de respecter toutes les échéances
● origines possibles multiples➢ matériel, par exemple une transmission défectueuse qui fait
qu'un signal arrive en retard (réseau surchargé)➢ contention sur une ressource critique➢ réveil de tâches apériodiques suite à des alarmes
● les algorithmes à priorités classiques (du type EDF ou RMA) offrent des performances souvent médiocre en cas de surcharge
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 112
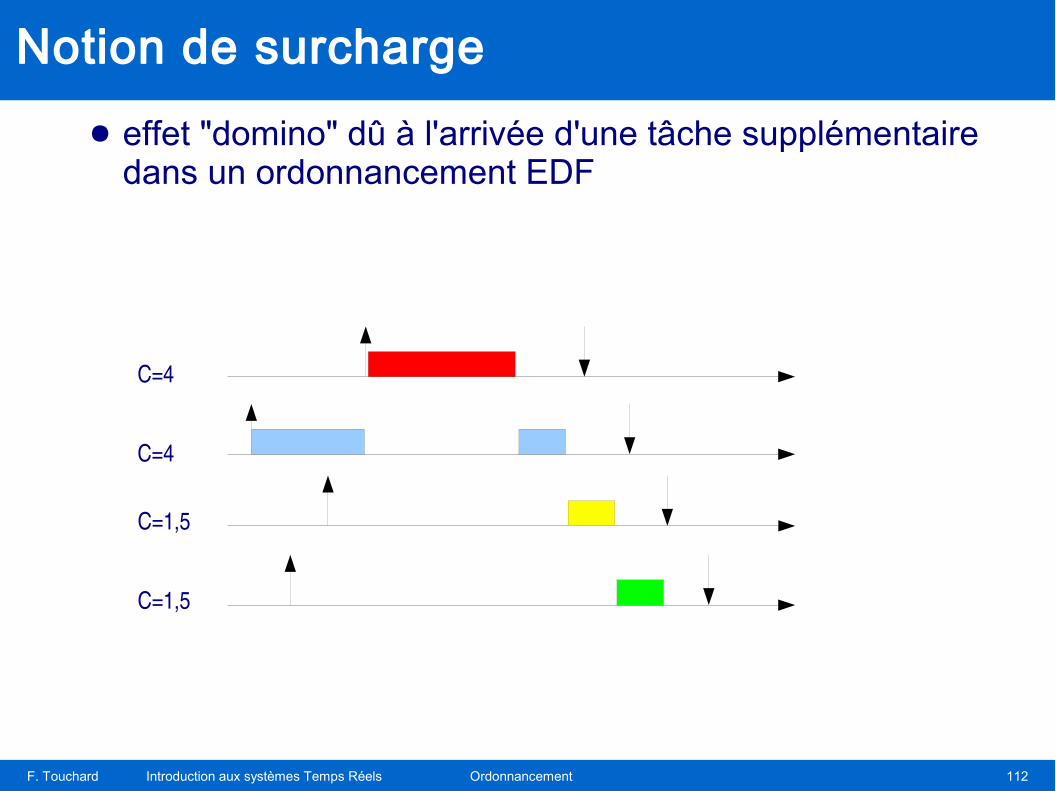
Notion de surcharge
● effet "domino" dû à l'arrivée d'une tâche supplémentaire dans un ordonnancement EDF
C=4
C=4
C=1,5
C=1,5
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 113
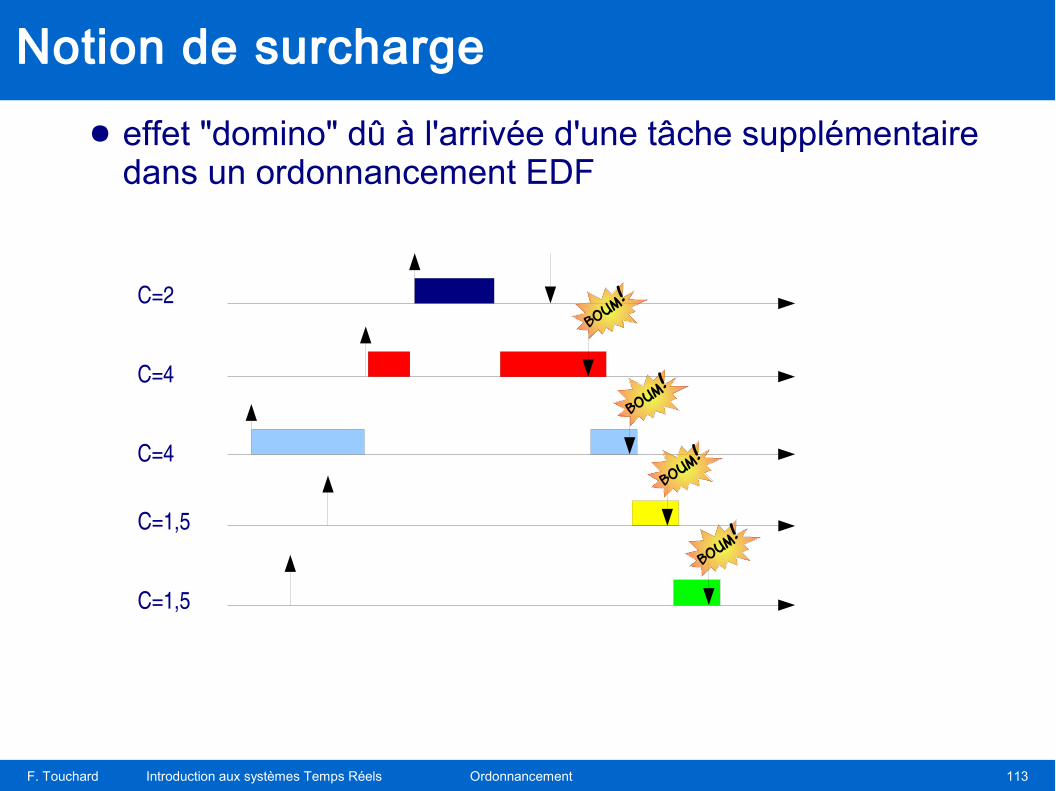
Notion de surcharge
● effet "domino" dû à l'arrivée d'une tâche supplémentaire dans un ordonnancement EDF
C=4
C=4
C=1,5
C=1,5
C=2Bo
um!
Boum!
Boum!
Boum!
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 114
Notion de surcharge
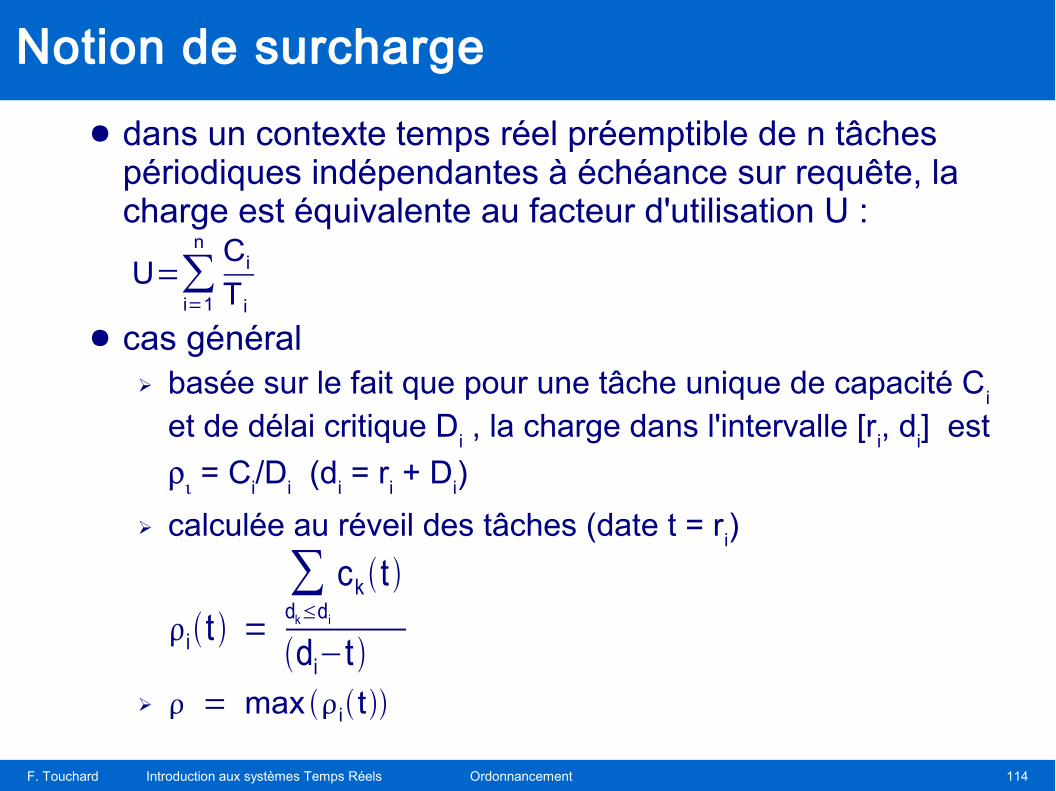
● dans un contexte temps réel préemptible de n tâches périodiques indépendantes à échéance sur requête, la charge est équivalente au facteur d'utilisation U :
● cas général➢ basée sur le fait que pour une tâche unique de capacité C
i
et de délai critique Di , la charge dans l'intervalle [r
i, d
i] est
= Ci/D
i (d
i = r
i + D
i)
➢ calculée au réveil des tâches (date t = ri)
➢
U=∑i=1
n Ci
T i
i t =
∑dk≤di
ck t
di−t = max i t
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 115
Notion de surcharge
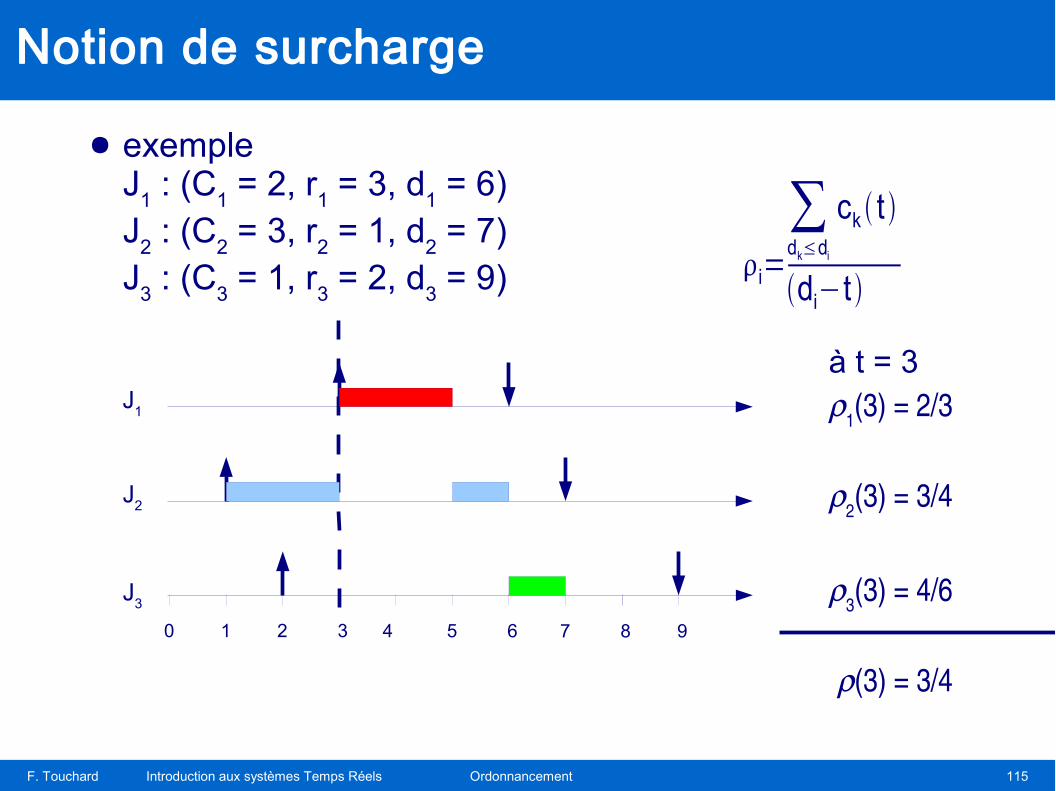
● exemple J
1 : (C
1 = 2, r
1 = 3, d
1 = 6)
J2 : (C
2 = 3, r
2 = 1, d
2 = 7)
J3 : (C
3 = 1, r
3 = 2, d
3 = 9)
1(3) = 2/3
2(3) = 3/4
3(3) = 4/6
(3) = 3/4
0 1 2 3 4 5 6 7 8 9
J1
J2
J3
i=
∑dk≤di
ck t
di−t
à t = 3
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 116
Notion de surcharge
● en l'absence de possibilité de surcharge, l'optimalité d'un algorithme est facile à définir et l'importance relative des tâches n'a pas d'intérêt
● en présence d'un système où l'arrivée dynamique de tâches est autorisée, il n'y a pas d'algorithme qui puisse garantir la bonne exécution de l'ensemble des tâches
● l'importance de l'exécution d'une tâche ne peut pas se définir seulement à l'aide de son échéance➢ il est sûrement plus important de faire la mesure d'un
capteur toutes les 10s que de mettre à jour l'heure sur l'écran de contrôle toute les secondes
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 117
Notion de surcharge
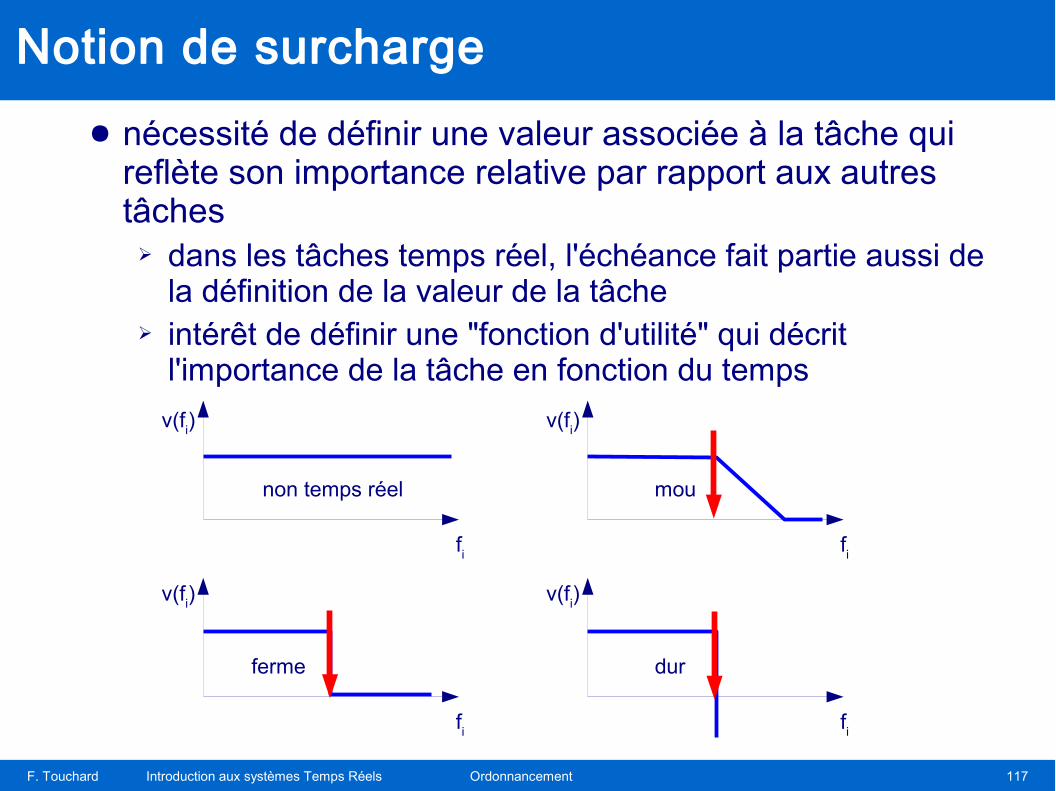
● nécessité de définir une valeur associée à la tâche qui reflète son importance relative par rapport aux autres tâches➢ dans les tâches temps réel, l'échéance fait partie aussi de
la définition de la valeur de la tâche➢ intérêt de définir une "fonction d'utilité" qui décrit
l'importance de la tâche en fonction du temps
v(fi)
fi
v(fi)
fi
v(fi)
fi
v(fi)
fi
non temps réel mou
durferme
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 118
Notion de surcharge
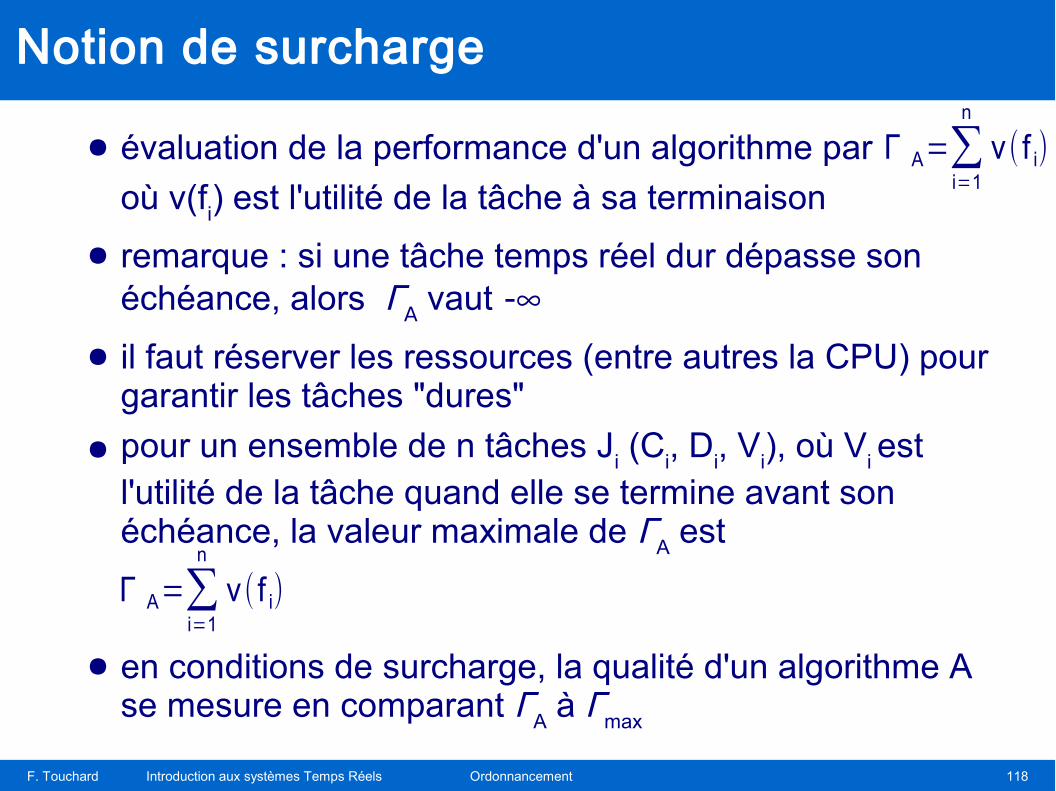
● évaluation de la performance d'un algorithme par
où v(fi) est l'utilité de la tâche à sa terminaison
● remarque : si une tâche temps réel dur dépasse son échéance, alors ΓA vaut -
● il faut réserver les ressources (entre autres la CPU) pour garantir les tâches "dures"
● pour un ensemble de n tâches Ji (C
i, D
i, V
i), où V
i est
l'utilité de la tâche quand elle se termine avant son échéance, la valeur maximale de Γ
A est
● en conditions de surcharge, la qualité d'un algorithme A
se mesure en comparant ΓA à Γ
max
Γ A=∑i=1
n
v( f i)
Γ A=∑i=1
n
v( f i)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 119
Gestion des situations de surcharge
● Rappel : en présence d'un système où l'arrivée dynamique de tâches est autorisée, il n'y a pas d'algorithme qui puisse garantir la bonne exécution de l'ensemble des tâches
● seulement des politiques plus ou moins bien adaptées aux circonstances➢ tâches périodiques➢ tâches quelconques
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 120
Tâches périodiques
● pas d'arrivée dynamique de nouvelles tâches● durées d'exécutions variables, non forcément bornables● 2 politiques présentées :
➢ méthode du mécanisme à échéance➢ méthode du calcul approché
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 121
Méthode du mécanisme à échéance (1)
● principe : ➢ chaque tâche a 2 versions
✔ version primaire assurant une bonne qualité de service mais dans un temps indéterminé
✔ version secondaire fournissant un résultat suffisamment acceptable au bout d'un temps connu
● l'algorithme de tolérance aux fautes doit assurer le respect de toutes les échéances, soit par le primaire soit par le secondaire➢ si les 2 marchent, on garde le primaire➢ si le primaire ne réussit pas, le secondaire doit réussir➢ ordonnancement = juxtaposition d'une séquence des
primaires et d'une des secondaires + règle de décision pour commuter de l'une à l'autre
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 122
Méthode du mécanisme à échéance (2)
● 2 politiques possibles :➢ politique de la Première Chance :
✔ Prio (Secondaires) > Prio (Primaires)✔ ⇒ les primaires sont exécutés dans les temps creux du
processeur après leur secondaire➢ politique de la Seconde Chance :
✔ primaires exécutés avant les secondaires✔ secondaires exécutés plus tard✔ si le primaire réussit, le secondaire n'est pas exécuté
● pour obtenir un minimum de qualité de service, il faut un certain pourcentage de réussite des primaires et donc garder suffisamment de temps de processeur pour cela
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 123
Méthode du calcul approché
● chaque tâche est décomposée en 2 parties :➢ mandataire, fournissant un résultat approché et devant
s'exécuter dans le respect de son échéance➢ optionnelle, affinant le résultat et exécutée seulement s'il
reste assez de temps
● évite les surcoûts dûs à la coordination entre plusieurs versions d'une même tâche
● même remarque que précédemment à propos de la qualité de service minimale
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 124
Tâches quelconques
● modèle canonique des tâches insuffisant, basé sur➢ urgence ↔ délai critique
● un nouveau paramètre est nécessaire: ➢ importance, codant le caractère primordial de la tâche dans
l'application➢ définition subjective (cahier des charges)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 125
Tâches quelconques
● cause fréquente des fautes temporelles : occurrence d'une tâche apériodique➢ possible de les rejeter par une routine de garantie,
éventuellement vers un autre processeur moins chargé dans un environnement réparti
✔ mais le mécanisme est lourd
⇒ ordonnancement à importance
● 3 classes de politiques pour décider l'acceptation (ou le rejet) des nouvelles tâches :➢ meilleur effort➢ avec garantie➢ robuste
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 126
Tâches quelconques
● meilleur effort➢ pas de prédiction en cas de surcharge➢ les nouvelles tâches sont toujours acceptées➢ seul moyen d'action : les niveaux relatifs des priorités
Queue destâches prêtes en courstâche toujours acceptée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 127
Tâches quelconques
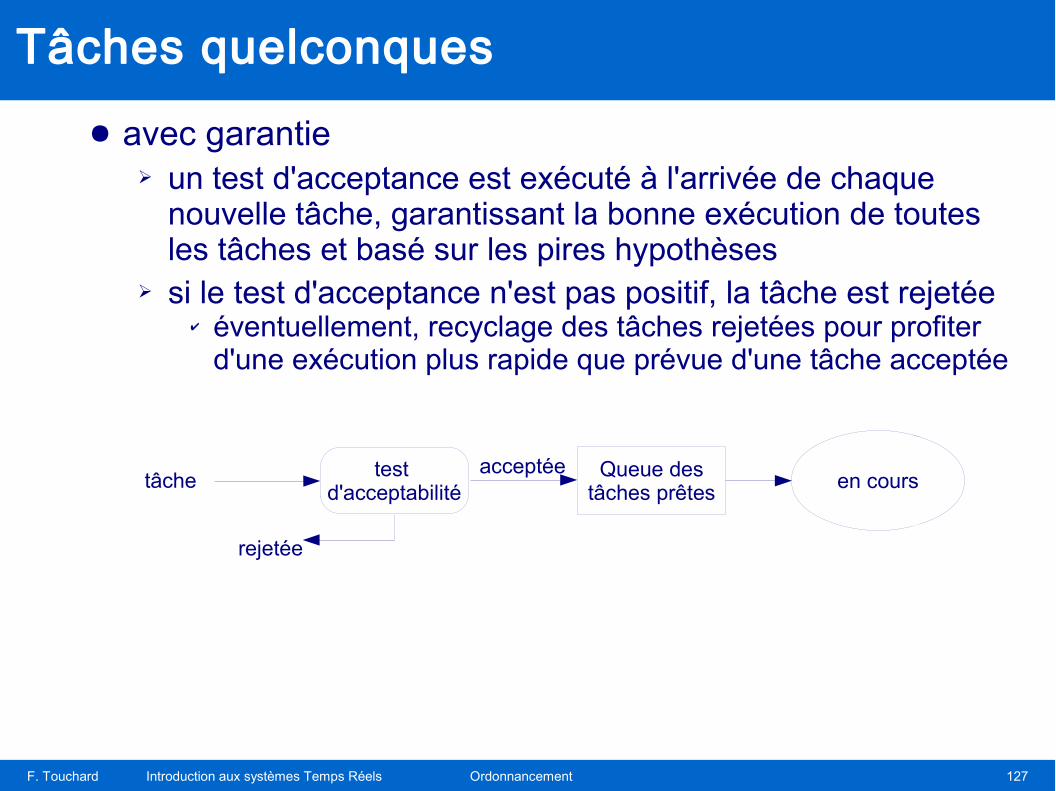
● avec garantie➢ un test d'acceptance est exécuté à l'arrivée de chaque
nouvelle tâche, garantissant la bonne exécution de toutes les tâches et basé sur les pires hypothèses
➢ si le test d'acceptance n'est pas positif, la tâche est rejetée✔ éventuellement, recyclage des tâches rejetées pour profiter
d'une exécution plus rapide que prévue d'une tâche acceptée
tâcheacceptée Queue des
tâches prêtes en courstest d'acceptabilité
rejetée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 128
Tâches quelconques
● robuste➢ séparation des contraintes temporelles et de l'importance
des tâches➢ 2 politiques : une pour l'acceptation de nouvelles tâches,
une pour le rejet de tâches➢ quand une nouvelle tâche arrive, on exécute un test
d'acceptabilité✔ si le test passe, la tâche est mise dans la queue des tâches
prêtes✔ si le test ne passe pas, on exécute l'algorithme de rejet qui
permet d'éliminer une ou plusieurs tâches de moindre importance
✔ éventuellement, recyclage des tâches rejetées pour profiter d'une exécution plus rapide que prévue d'une tâche acceptée
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 129
Tâches quelconques
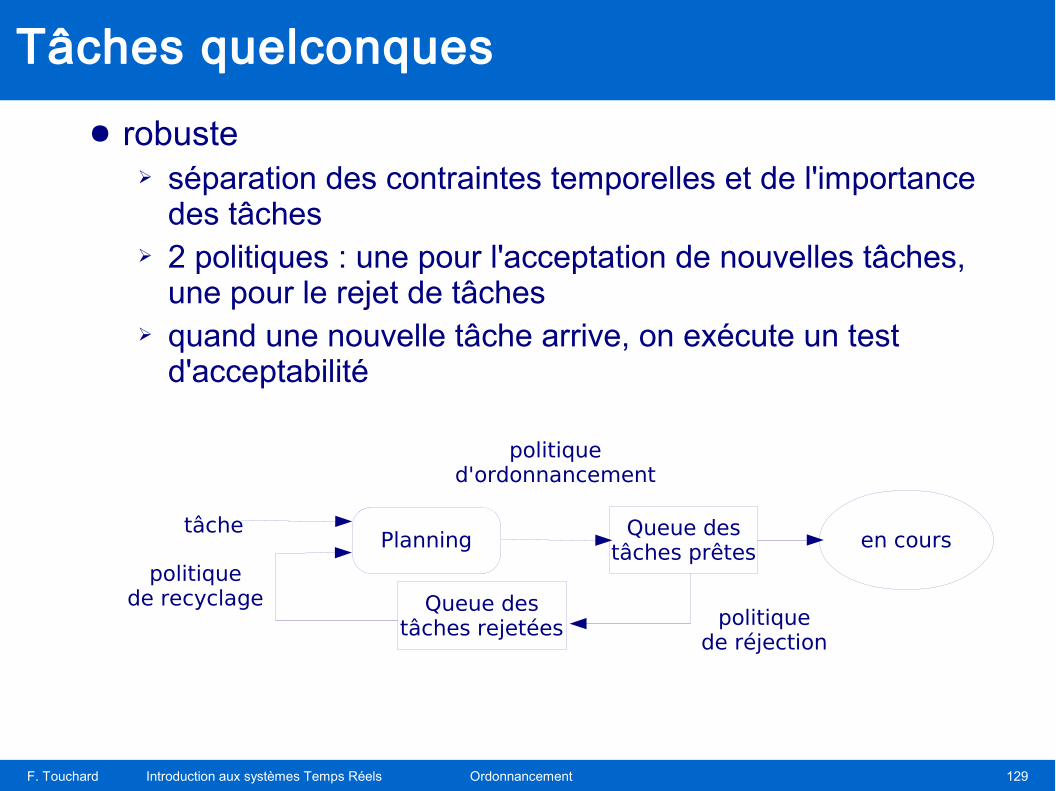
● robuste➢ séparation des contraintes temporelles et de l'importance
des tâches➢ 2 politiques : une pour l'acceptation de nouvelles tâches,
une pour le rejet de tâches➢ quand une nouvelle tâche arrive, on exécute un test
d'acceptabilité
tâche
politiqued'ordonnancement
Queue destâches prêtes en coursPlanning
politiquede réjection
Queue destâches rejetées
politiquede recyclage
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 130
Test de garantie
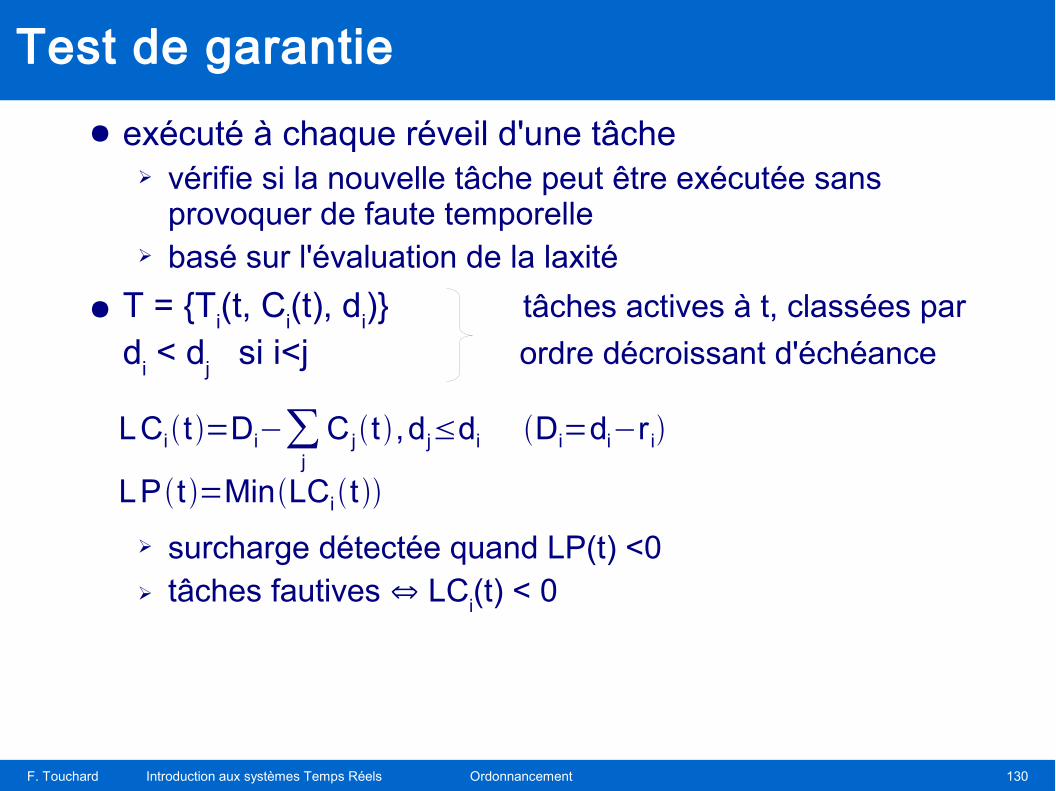
● exécuté à chaque réveil d'une tâche➢ vérifie si la nouvelle tâche peut être exécutée sans
provoquer de faute temporelle➢ basé sur l'évaluation de la laxité
● T = {Ti(t, C
i(t), d
i)} tâches actives à t, classées par
di < d
j si i<j ordre décroissant d'échéance
➢ surcharge détectée quand LP(t) <0➢ tâches fautives ⇔ LC
i(t) < 0
LCi t=Di−∑j
C j t ,dj≤di Di=di−r i
LP t=MinLCi t
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 131
Ordonnancement par importance
● critère d'importance utilisé pour éliminer des exécutions de tâches parmi celles dont les échéances sont inférieures ou égales à celle de la tâche fautive
● plusieurs politiques possibles :➢ stabilisation de l'importance des tâches ordonnancées➢ maximisation de la somme des importances des tâches
garanties
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 132
Stabilisation de l'importance (1)
● assurer que ce sont les tâches les plus importantes qui font le moins de fautes temporelles
● amélioration du modèle des tâches :➢ mode de fonctionnement normal➢ modes de fonctionnement de survie, invoqués quand le
mode de fonctionnement normal doit être arrêté➢ propriétés d'exécution du mode normal
✔ ajournabilité, quand l'exécution de la tâche peut être supprimée avant qu'elle n'ait commencé
✔ révocabilité, quand l'exécution de la tâche peut être supprimée alors qu'elle est déjà commencée
✔ les 4 combinaisons sont possibles
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 133
Stabilisation de l'importance (2)
● 3 modes de survie :➢ ajournement➢ révocation ➢ faute temporelle
● les modes d'ajournement et de révocation contiennent les opérations à exécuter dans chaque cas➢ communication de résultats à d'autres tâches, exécution
d'un travail paliatif, suppression de tâches liées par une précédence, etc...
● le mode de faute temporelle est exécuté quand la tâche commet la faute, et doit être défini pour chacun des modes normal, ajournement et révocation
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 134
Stabilisation de l'importance (3)
Task T is
beginMode Normal
actions du mode normal(Cn,dn,propriétés,Impn)Mode Ajournement
actions du mode ajournement(Caj,daj,exécution obligatoire)Mode Révocation
actions du mode révocation(Crv,drv,exécution obligatoire)Mode Faute Temporelle actions si Faute Temporelle mode normal(Cnf) actions si Faute Temporelle mode ajournement(Cajf) actions si Faute Temporelle mode révocation(Crvf)
end
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 135
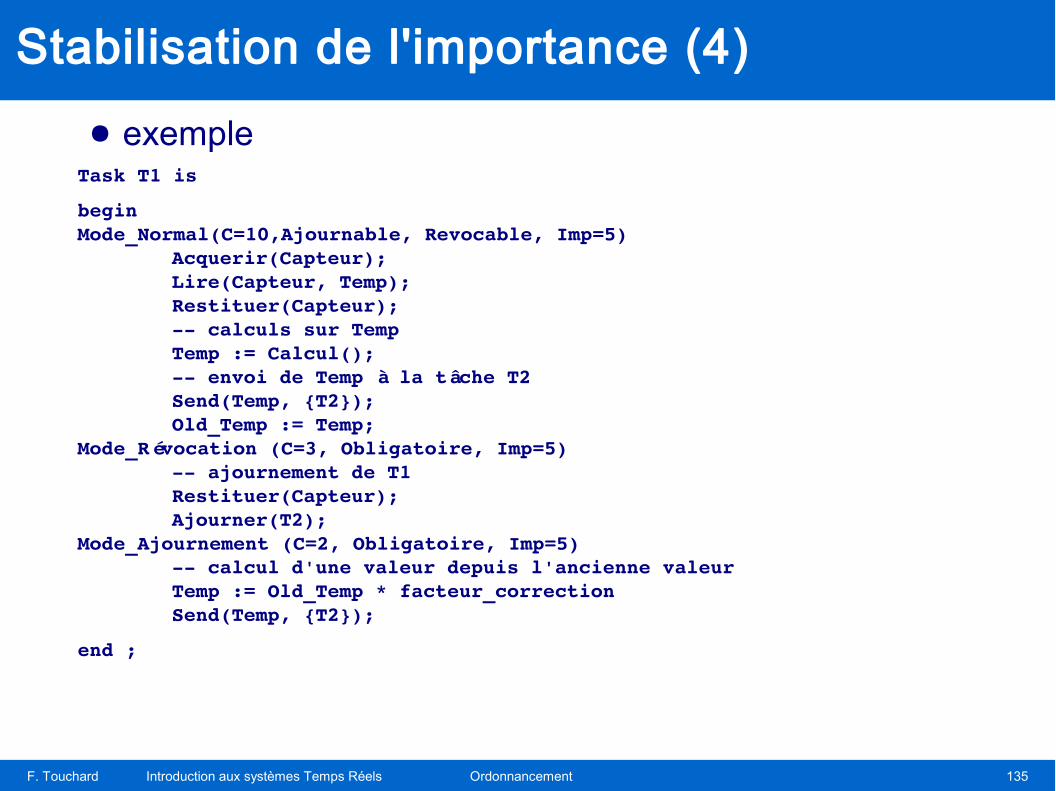
● exempleTask T1 is
beginMode_Normal(C=10,Ajournable, Revocable, Imp=5)
Acquerir(Capteur);Lire(Capteur, Temp);Restituer(Capteur); calculs sur TempTemp := Calcul(); envoi de Temp à la tâche T2Send(Temp, {T2});Old_Temp := Temp;
Mode_Révocation (C=3, Obligatoire, Imp=5) ajournement de T1Restituer(Capteur);Ajourner(T2);
Mode_Ajournement (C=2, Obligatoire, Imp=5) calcul d'une valeur depuis l'ancienne valeurTemp := Old_Temp * facteur_correctionSend(Temp, {T2});
end ;
Stabilisation de l'importance (4)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 136
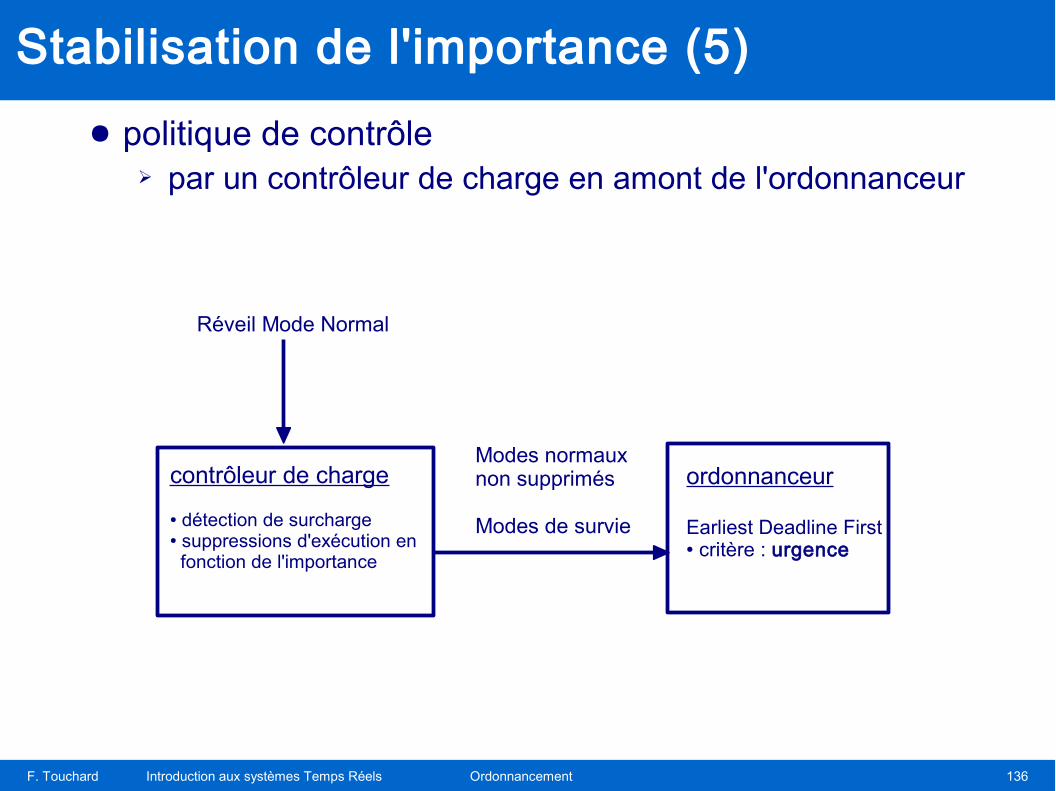
Stabilisation de l'importance (5)
● politique de contrôle➢ par un contrôleur de charge en amont de l'ordonnanceur
Modes normaux non supprimés
Modes de survie
Réveil Mode Normal
contrôleur de charge
● détection de surcharge● suppressions d'exécution en fonction de l'importance
ordonnanceur
Earliest Deadline First● critère : urgence
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 137
Stabilisation de l'importance (6)
● détection de la surcharge par évaluation de la laxité➢ à chaque réveil, calcul de la laxité courante de chaque
mode actifM = {M
xi (r, C
xi(r), d
xi, Imp
xi} avec x = n, aj ou rv, i = 1, m
et dxi < d
xj (i<j) l'ensemble des modes actifs à la date r triés
par échéance croissantelaxité du mode M
xi :
➢ si toutes les laxités sont positives, pas de surcharge ordonnancement de la tâche par EDF⇒
➢ M n'est pas ordonnançable s'il existe un mode Mxf pour
lequel la laxité Lxf(r) est négative. Le mode M
xf est fautif et la
surcharge est |L
xf(r)|
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 138
Stabilisation de l'importance (7)
● résorption de la surcharge par utilisation de l'importance➢ M' = {M
ni(r, C
ni(r), d
ni, Imp
ni), i=1,p, M' M l'ensemble des ⊆
modes normaux ajournables ou révocables dont l'échéance d
ni est inférieure ou égale à d
nf
➢ le contrôleur supprime les modes normaux un par un par ordre croissant d'importance. A chaque suppression, le mode de survie correspondant est activé (révocation ou ajournement suivant que la tâche est démarrée ou non)
➢ la surcharge est résorbée quand la somme des temps d'exécution des modes de survie activés est supérieure ou égale à la valeur de la surcharge
➢ s'il n' y a pas assez de modes normaux dans M', alors des fautes temporelles subsisteront et il faudra exécuter les modes de survie faute temporelle
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 139
Optimisation de la somme des importances
● algorithme RED (Robust Earliest Deadline) [Buttazzo]➢ gestion des tâches apériodiques dans un environnement
temps réel ferme➢ introduit la notion de tolérance sur l'échéance, c'est-à-dire le
retard après l'échéance pendant lequel le résultat est encore acceptable
➢ tâches caractérisées par✔ le temps d'exécution dans le pire des cas C
i
✔ l'échéance normale Di (échéance "primaire")
✔ la tolérance sur l'échéance Mi (échéance "secondaire")
✔ la valeur Vi de l'importance de la tâche
➢ les tâches sont acceptées sur leur échéance secondaire et ordonnancées sur leur échéance primaire
✔ (tolérance > 0) est différent de (échéance plus lointaine)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 140
● détection de la surcharge par les algorithmes classiques basés sur la laxité résiduelle
● pour un ensemble de tâches J={J1, J
2,... , J
n} classées par
ordre d'échéances croissantes, la laxité résiduelle peut être calculée efficacement par la formuleL
i = L
i-1 + (d
i – d
i-1) - c
i(t)
● on peut définir ➢ le temps de dépassement : E
i = max (0, -(L
i + M
i))
➢ le temps de dépassement maximal : Emax
= max(Ei)
● un ordonnancement sera➢ faisable ssi L
i ≥ 0 pour toutes les tâches
➢ tolérant ssi il existe des Li < 0 mais que E
max = 0
Optimisation de la somme des importances
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 141
Optimisation de la somme des importances
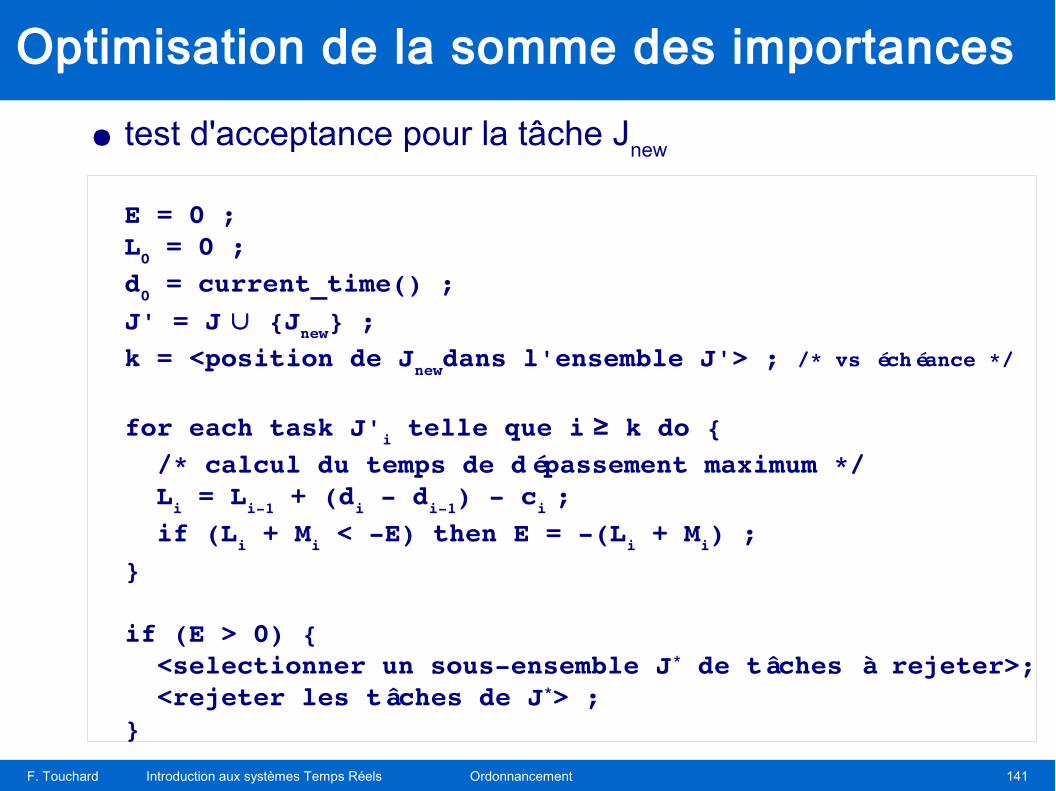
● test d'acceptance pour la tâche Jnew
E = 0 ;L0 = 0 ;d0 = current_time() ;J' = J ∪ {Jnew} ;k = <position de Jnewdans l'ensemble J'> ; /* vs échéance */
for each task J'i telle que i ≥ k do { /* calcul du temps de dépassement maximum */ Li = Li1 + (di di1) ci ; if (Li + Mi < E) then E = (Li + Mi) ;}
if (E > 0) { <selectionner un sousensemble J* de tâches à rejeter>; <rejeter les tâches de J*> ;}
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 142
● plusieurs stratégies pour respecter les échéances des tâches critiques➢ la plus simple : rejet d'une tâche, en choisissant la tâche de
plus petite importance dont le temps d'exécution résiduel est plus grand que la surcharge
● les tâches rejetées sont mises dans une file d'attente, classées par ordre décroissant de valeur
● quand une tâche termine son exécution avant sa pire échéance, l'algorithme essaie de réinjecter les tâches de plus grande valeur et de laxité positive. Les tâches de laxité négative sont définitivement éliminées
Optimisation de la somme des importances
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 143
exemple
● 2 tâches périodiques➢ Tp
1 (r
0=0, C=1, D=7, P=10, Imp=3)
➢ Tp2 (r
0=0, C=3, D=4, P=5, Imp=1)
● 4 tâches apériodiques➢ Tap
3 (r
0=4, C=0.2, d=5, Imp=4)
➢ Tap4 (r
0=5.5, C=1, d=10, Imp=5)
➢ Tap5 (r
0=6, C=1, d=8, Imp=2)
➢ Tap6 (r
0=7, C=1.5, d=9.5, Imp=6)
● ordonnancées par EDF● T(t) est la configuration des tâches actives à l'instant t● d est la date de l'échéance
(ne pas confondre avec le délai critique D)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 144
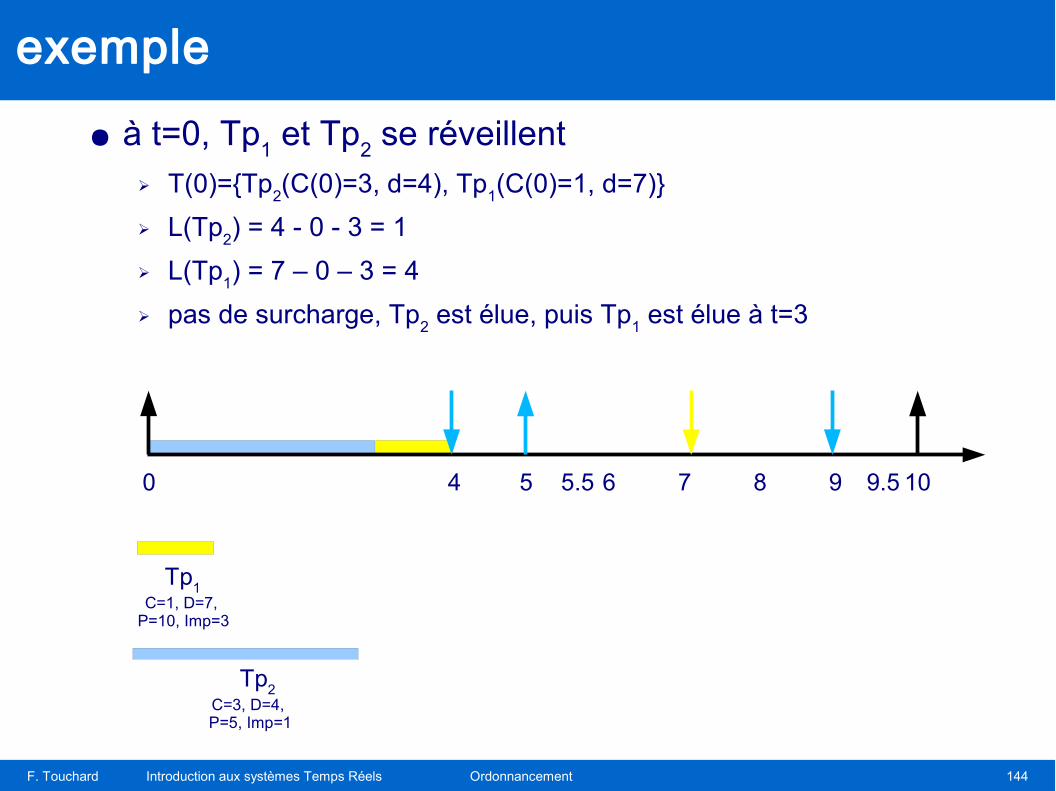
exemple
● à t=0, Tp1 et Tp
2 se réveillent
➢ T(0)={Tp2(C(0)=3, d=4), Tp
1(C(0)=1, d=7)}
➢ L(Tp2) = 4 - 0 - 3 = 1
➢ L(Tp1) = 7 – 0 – 3 = 4
➢ pas de surcharge, Tp2 est élue, puis Tp
1 est élue à t=3
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 145
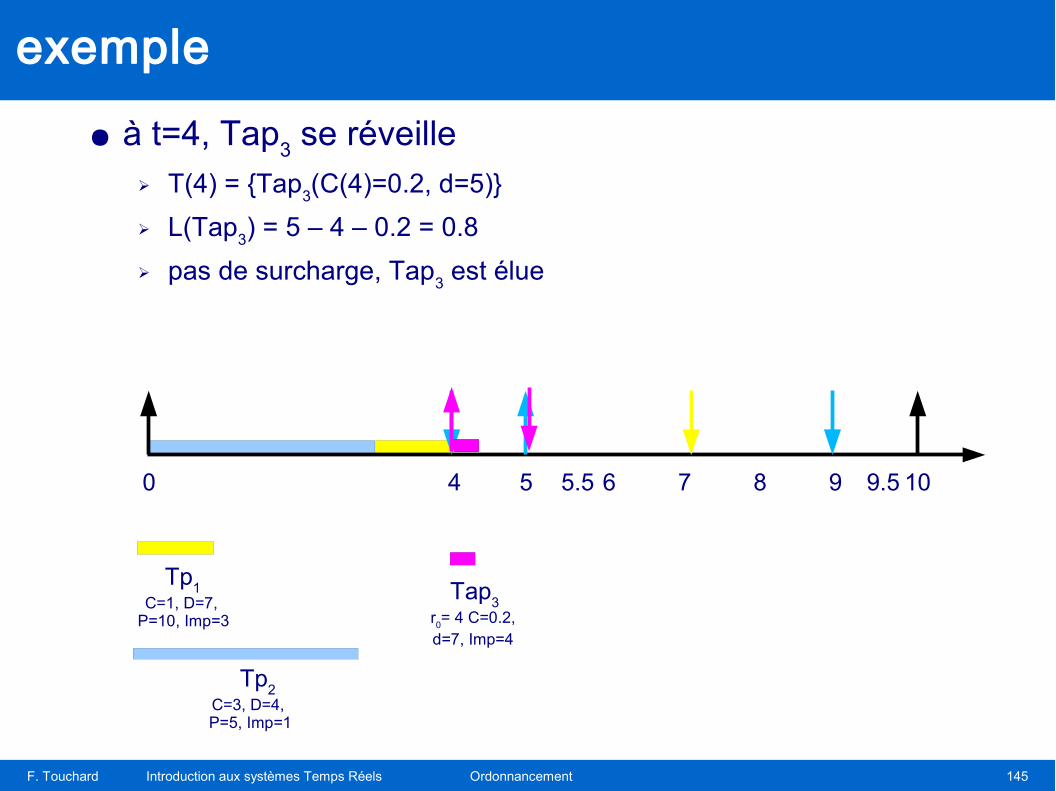
exemple
● à t=4, Tap3 se réveille
➢ T(4) = {Tap3(C(4)=0.2, d=5)}
➢ L(Tap3) = 5 – 4 – 0.2 = 0.8
➢ pas de surcharge, Tap3 est élue
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
Tap3
r0= 4 C=0.2,
d=7, Imp=4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 146
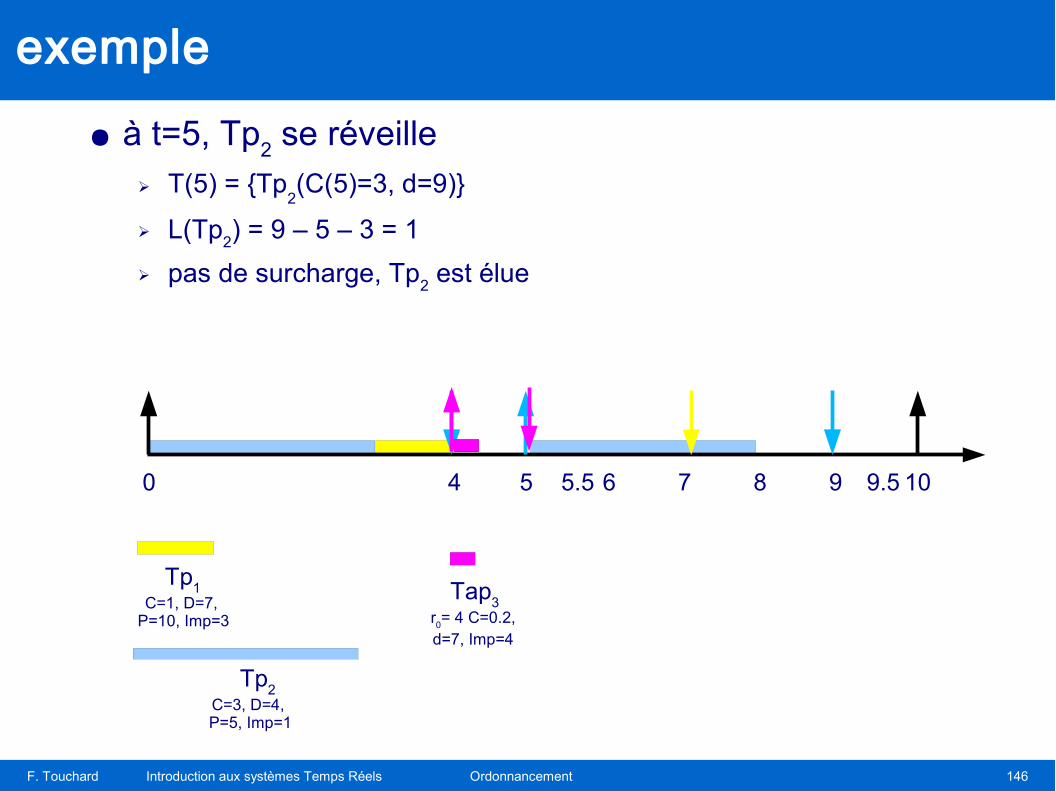
exemple
● à t=5, Tp2 se réveille
➢ T(5) = {Tp2(C(5)=3, d=9)}
➢ L(Tp2) = 9 – 5 – 3 = 1
➢ pas de surcharge, Tp2 est élue
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
Tap3
r0= 4 C=0.2,
d=7, Imp=4
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 147
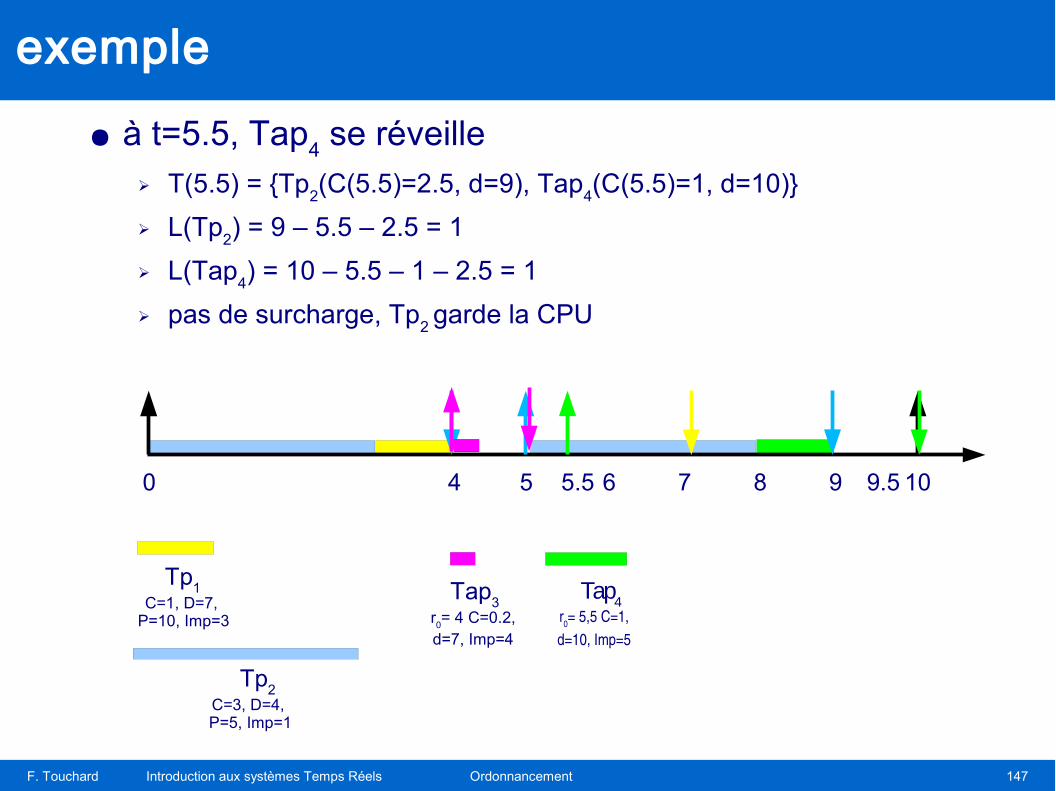
exemple
● à t=5.5, Tap4 se réveille
➢ T(5.5) = {Tp2(C(5.5)=2.5, d=9), Tap
4(C(5.5)=1, d=10)}
➢ L(Tp2) = 9 – 5.5 – 2.5 = 1
➢ L(Tap4) = 10 – 5.5 – 1 – 2.5 = 1
➢ pas de surcharge, Tp2 garde la CPU
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
Tap3
r0= 4 C=0.2,
d=7, Imp=4
Tap4r0= 5,5 C=1,d=10, Imp=5
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 148
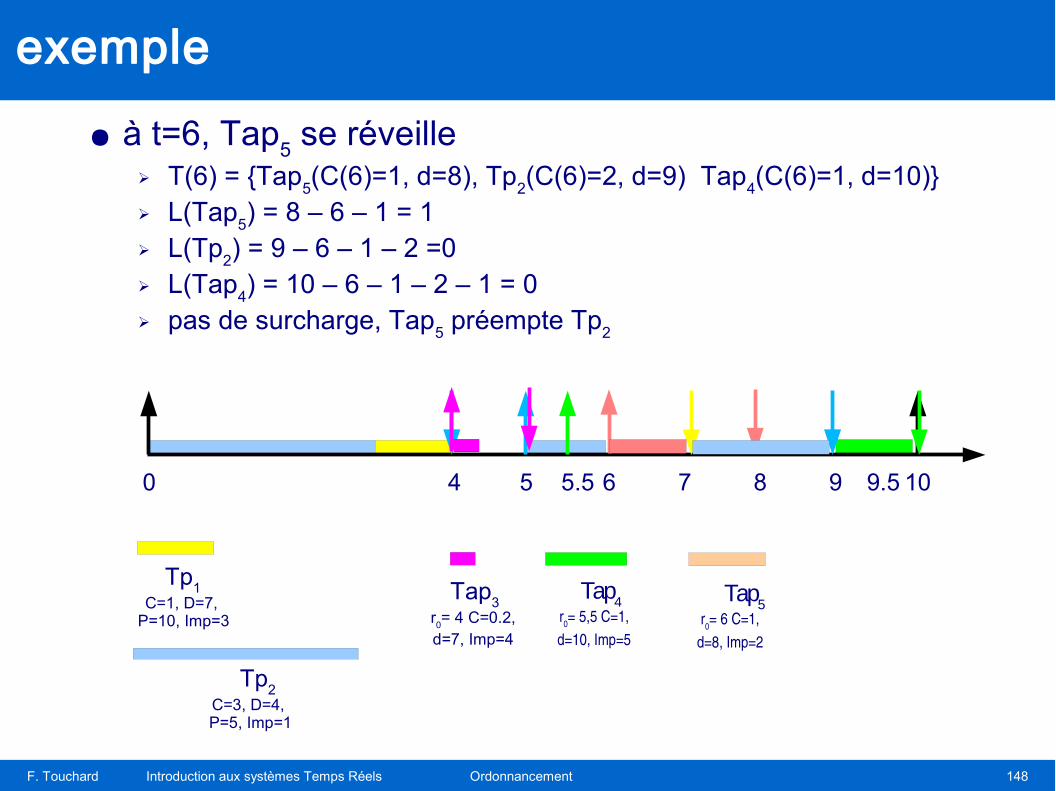
exemple
● à t=6, Tap5 se réveille
➢ T(6) = {Tap5(C(6)=1, d=8), Tp
2(C(6)=2, d=9) Tap
4(C(6)=1, d=10)}
➢ L(Tap5) = 8 – 6 – 1 = 1
➢ L(Tp2) = 9 – 6 – 1 – 2 =0
➢ L(Tap4) = 10 – 6 – 1 – 2 – 1 = 0
➢ pas de surcharge, Tap5 préempte Tp
2
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
Tap3
r0= 4 C=0.2,
d=7, Imp=4
Tap4r0= 5,5 C=1,d=10, Imp=5
Tap5r0= 6 C=1,
d=8, Imp=2
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 149
exemple
● à t=7, Tap6 se réveille
➢ T(7) = {Tp2(C(7)=2, d=9), Tap
6(C(7)=1.5, d=9.5), Tap
4(C(7)=1, d=10)}
➢ L(Tp2) = 9 – 7 - 2 = 0
➢ L(Tap6) = 9.5 – 7 – 2 - 1.5 = -1
➢ surcharge, Tap6 est fautive avec une surcharge de 1
➢ suppression de tâches dont les échéances sont inférieures ou égales à celles de Tap
6 par ordre croissant des importances
⇒ suppression de Tp2
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 150
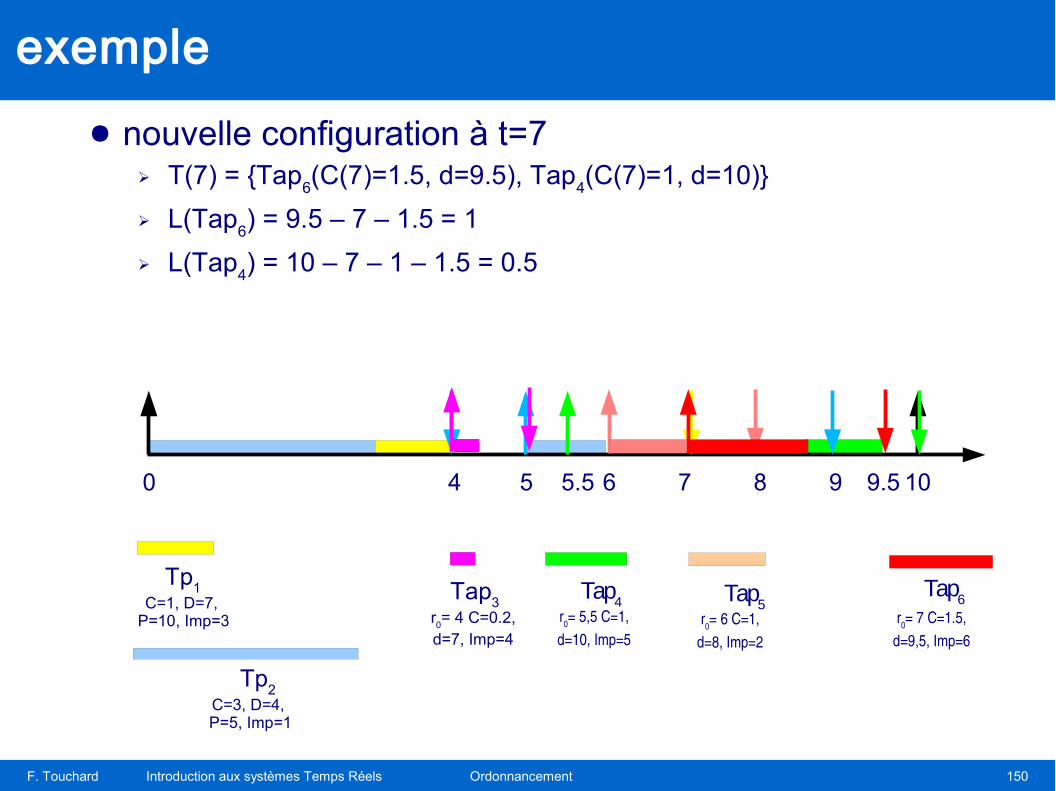
exemple
● nouvelle configuration à t=7➢ T(7) = {Tap
6(C(7)=1.5, d=9.5), Tap
4(C(7)=1, d=10)}
➢ L(Tap6) = 9.5 – 7 – 1.5 = 1
➢ L(Tap4) = 10 – 7 – 1 – 1.5 = 0.5
Tap6r0= 7 C=1.5,
d=9,5, Imp=6
0 4 5 5.5 6 7 8 9 9.5 10
Tp1
C=1, D=7, P=10, Imp=3
Tp2
C=3, D=4, P=5, Imp=1
Tap3
r0= 4 C=0.2,
d=7, Imp=4
Tap4r0= 5,5 C=1,d=10, Imp=5
Tap5r0= 6 C=1,
d=8, Imp=2
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 151
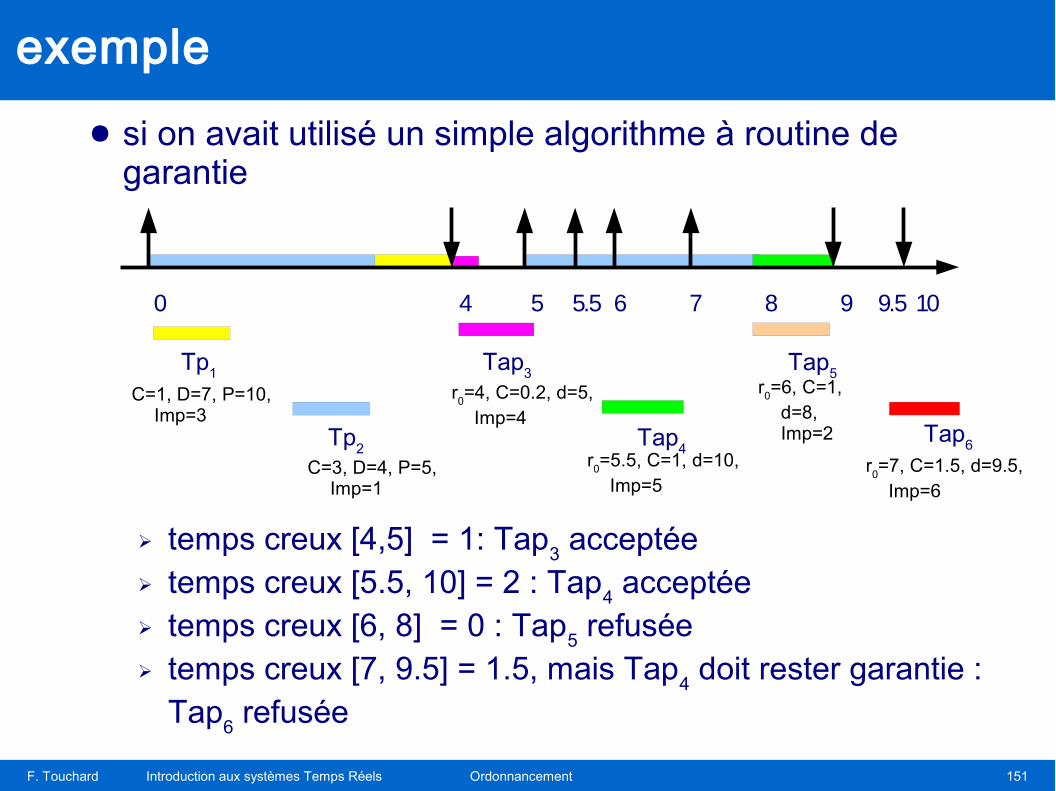
exemple
● si on avait utilisé un simple algorithme à routine de garantie
➢ temps creux [4,5] = 1: Tap3 acceptée
➢ temps creux [5.5, 10] = 2 : Tap4 acceptée
➢ temps creux [6, 8] = 0 : Tap5 refusée
➢ temps creux [7, 9.5] = 1.5, mais Tap4 doit rester garantie :
Tap6 refusée
0 4 5 5.5 6 7 8 9 109.5
Tp1
Tp2
Tap3
Tap4
Tap5
Tap6
C=1, D=7, P=10, Imp=3
C=3, D=4, P=5, Imp=1
r0=4, C=0.2, d=5, Imp=4
r0=5.5, C=1, d=10,
Imp=5
r0=6, C=1,
d=8, Imp=2
r0=7, C=1.5, d=9.5,
Imp=6
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 152
Conclusion
● on a vu comment ordonnancer "théoriquement" des tâches ayant des contraintes temporelles de façon à respecter ces contraintes ou à minimiser les effets du non-respect, tout en ayant éventuellement des contraintes de précédence et/ou de partage de ressources
● on va voir étudier maintenant les outils qui vont nous aider à satisfaire ces contraintes➢ systèmes d'exploitation➢ supports physiques de communication (bus de terrain) ➢ outils de programmation
✔ gestion des tâches (création, destruction, priorités, etc...)✔ gestion du temps (alarmes, chronomètres, etc...)✔ outils de communication (files de messages, mémoire
partagée, etc...)✔ outils de synchronisation (sémaphores, mutex, variables
conditionnelles, etc...)
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 153
F. Touchard Introduction aux systèmes Temps Réels Ordonnancement 154
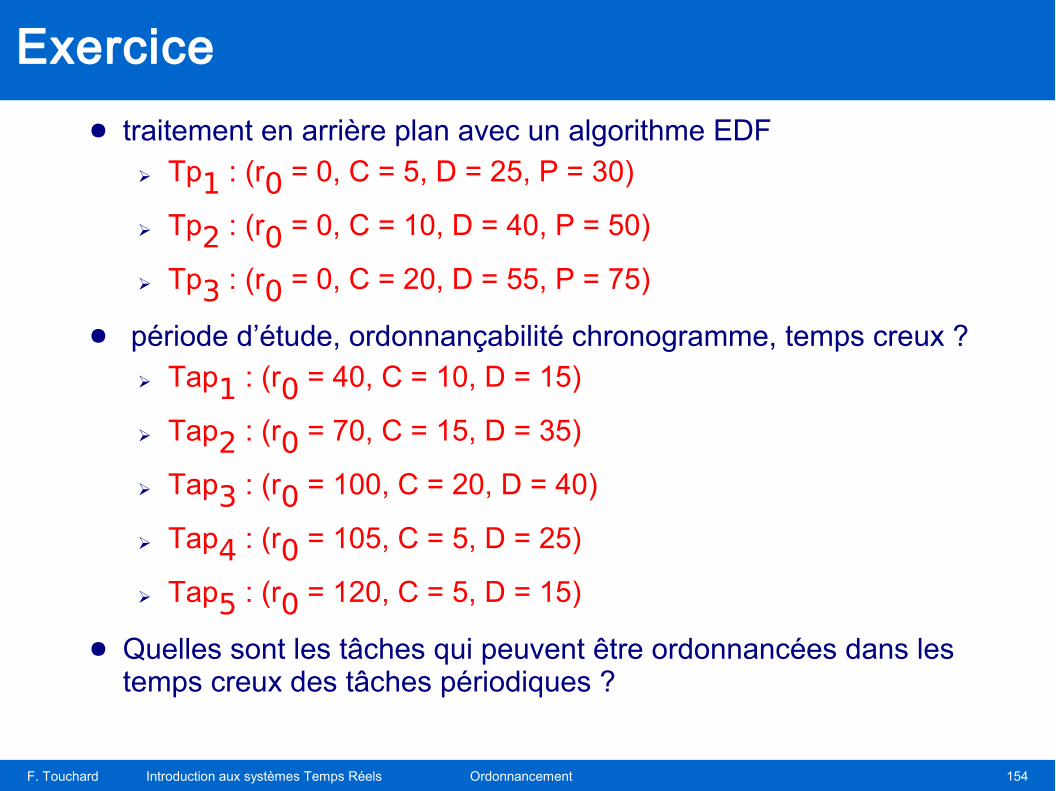
Exercice
● traitement en arrière plan avec un algorithme EDF
➢ Tp1 : (r0 = 0, C = 5, D = 25, P = 30)
➢ Tp2 : (r0 = 0, C = 10, D = 40, P = 50)
➢ Tp3 : (r0 = 0, C = 20, D = 55, P = 75)
● période d’étude, ordonnançabilité chronogramme, temps creux ?
➢ Tap1 : (r0 = 40, C = 10, D = 15)
➢ Tap2 : (r0 = 70, C = 15, D = 35)
➢ Tap3 : (r0 = 100, C = 20, D = 40)
➢ Tap4 : (r0 = 105, C = 5, D = 25)
➢ Tap5 : (r0 = 120, C = 5, D = 15)
● Quelles sont les tâches qui peuvent être ordonnancées dans les temps creux des tâches périodiques ?
Recommended




![[hal-00481496, v1] Couplage planification-ordonnancement](https://img.pdfslide.tips/doc/110x75/6285e5a769c825465b74b19c/hal-00481496-v1-couplage-planification-ordonnancement-.jpg)












