Partie 3
Energie-Puissance
Cours de Dynamique

Torseur des efforts
extérieurs au solide S isoléTorseur dynamique du
solide S / au galiléen


D’après la définition du cdg : S
MG dm 0 ��������������

D’après la définition du cdg : S
MG dm 0 ��������������

Rappel important : le comoment de deux torseurs est un invariant. On peut donc exprimer les deux torseurs en un point quelconque
sans faire varier le résultat du calcul de l’énergie cinétique. (A condition que ce point soit le même pour les deux torseurs).

Calculé sans tenir compte de la translation
Pour l’ensemble des mouvements de S1/ au repère galiléen
Energie cinétique due à la translation seule

F1
A
S1
z0
x0
y0O
F2
F3
R0

Le pt

, B0 , B0
A

1 2m LC 2/1
1 2r LC 2/1

A
A
A


A2 1 2/1 1 2V T(S S ) = ����������������������������
iP

A2 1 2/1 1 2V T(S S ) = ����������������������������
iP2 1 2/1 (A,1 2)
MP P(S S ) = ����������������������������
iPP2 1 2/1 (A,1 2)
MR R(S S ) = ����������������������������
iRP

A2 1 2/1 1 2V T(S S ) = ����������������������������
iP2 1 2/1 (A,1 2)
MP P(S S ) = ����������������������������
iPP2 1 2/1 (A,1 2)
MR R(S S ) = ����������������������������
iRP Ex : le glissement entre 2 disques.
M2 1 2/1 (M)1 2V dT(S S ) = d ����������������������������
iPP





Y
P
Arbre moteur
Arbre récepteur
1
2
A
BX
eC eω 1 1J , r
2 2J , r
sC sω

Y
P
1
2
A
BX
eC eω 1 1J , r
2 2J , r
sC sω
Arbre moteur
Arbre récepteur

1 2T
BZ
Y
1 2N
=20°

AZ
P
1 2T
BZ
Y
1 2N
=20°
2 1T
2 1N
P

Fin
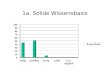
Pignon
Crémaillère
2 Crémaillère
1 primitif du pignonSoit le solide 1 constitué d’un arbre moteur solidaire d’un pignon. On note J son l’inertie par rapport à l’axe et sa vitesse de rotation par rapport au bâti 0.
La crémaillère 2 de masse M de rayon R engrène avec le pignon 1 et se déplace à la vitesse
2 Bâti 0
x
y
z
O
22/0 M1Ec = V
2
A,2 / 0 V = V x��������������
O z ω
21/0 J ω1Ec =
2
On exprime les énergies cinétiques des solides en mouvement
Avec ici : V = R ω
2
1/0V
R
1 Ec =2
J
U (1 2)2
/0 2J + M
R1Ec = V2
Masse équivalente ramenée à la crémaillère
Exemple :
équiv 2J + M
RM =
Recommended