TH22452 ROBOTIKA
Pendahuluan
Actuator atau penggerak merupakan ototbagi robot
• Tipe penggerak yang umum digunakan:• Motor listrik(Electric Motors)• Aktuator Hidrolis• Aktuator Pneumatis
TH22452 ROBOTIKA
Karakteristik Aktuator
Dalam pemilihan suatu aktuator yang sesuaiuntuk suatu robot selalu terkait dengan
• Berat• Power to weight Ratio• Operating Pressure• Stiffness• Compliance• Use of Reduction Gear
TH22452 ROBOTIKA
Electric
• Motor DC
• Motor Stepper• Motor Induksi
• Motor Servo• Solenoid
TH22452 ROBOTIKA
Motor DC
• Paling umum & Paling lama penggunaannya di Industri
• Terdiri dari Rotor dan Stator• Bisa memiliki stator permanent magnet
maupun stator kumparan• Kecepatan diatur dengan Tegangan• Torsi diatur dengan Arus

TH22452 ROBOTIKA
Motor DC
• Permanent magnet DC Motor
TH22452 ROBOTIKA
Motor DC
• Brushless DC Motor
TH22452 ROBOTIKA
Motor Stepper
• Biasa dipakai padaFloppy Disk Computer
• Pengaturan dilakukandengan pemberianpulsa tertentu
• MemerlukanRangkaian Digital
TH22452 ROBOTIKA
Motor Induksi
• AC Induction Motor

TH22452 ROBOTIKA
Servo Motor
• Servo Motor adalah suatu sistem yang terdiri dari motor (bisa berupa Motor DC, AC, ataupun stepper) yang memilikikonfigurasi pengendalian Close loop menggunakan elemen feedback, sehinggadapat diatur untuk berputar padakecepatan dan torsi tertentu, sertabergerak menuju posisi atau sudut tertentu
TH22452 ROBOTIKA
Servo Motor
• Bisa sangat variatifketelitian danharganya

TH22452 ROBOTIKA
Reduction Gear
• Motor Listrikseringkalimembutuhkan GigiReduksi ketikadigunakan padasistem penggerakuntuk mengurangiinersia pada motor
TH22452 ROBOTIKA
Hidrolis
• Penggerak ini menggunakan medium zat cairdan menggunakan pompa hidrolis sebagaisumber energi dan inverse pump atau silinderaktuator sebagai penyalur daya, sertamenggunakan sejumlah katup untukpengaturannya
• Penggerak ini memiliki power to weight ratio yang tinggi
• Kompatibilitas dengan Control electronic danMicroprocessor
• Umum digunakan pada produksi automotif

TH22452 ROBOTIKA
Hidrolis
• Contoh penggunaan
TH22452 ROBOTIKA
Hidrolis
Secara lebih detail tersusun atas:• Silinder Hidrolis Linear atau rotasional dan Ram• Pompa Hidrolis• Electric Motor• Sistem Pendingin• Reservoir• Servovalves• Safety Check Valves• Connecting Hose• Sensory sistem
TH22452 ROBOTIKA
Hidrolis
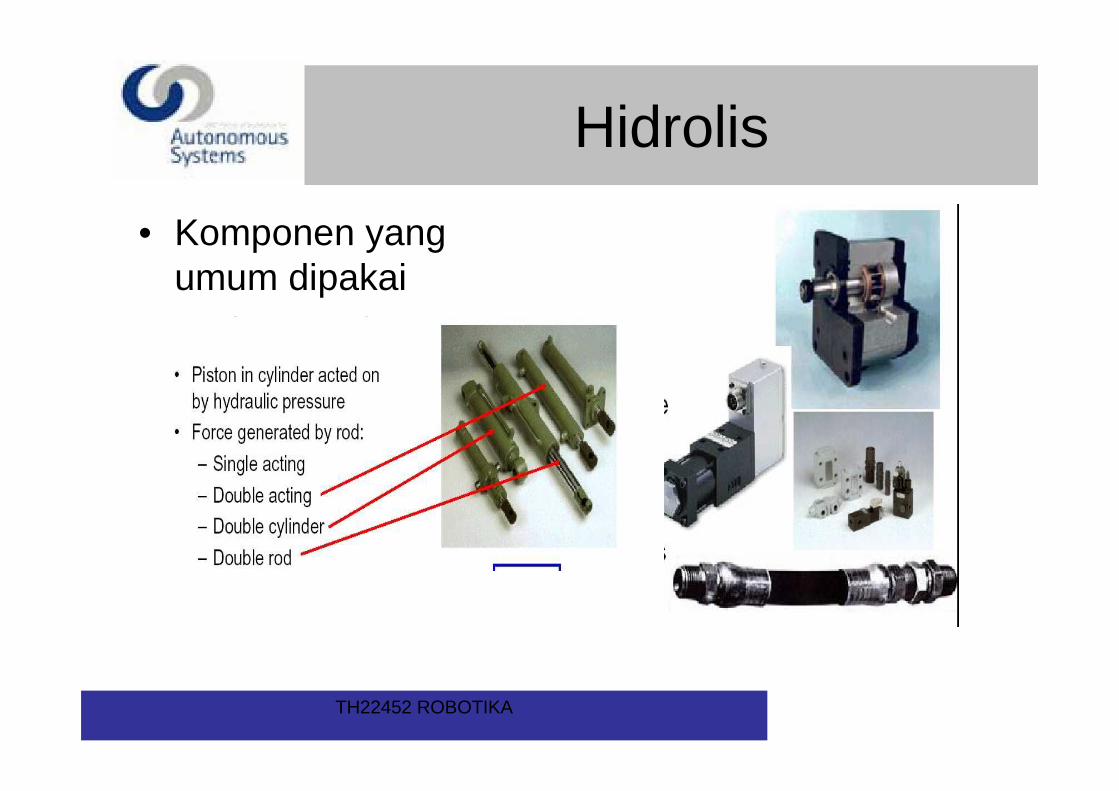
• Komponen yang umum dipakai
TH22452 ROBOTIKA
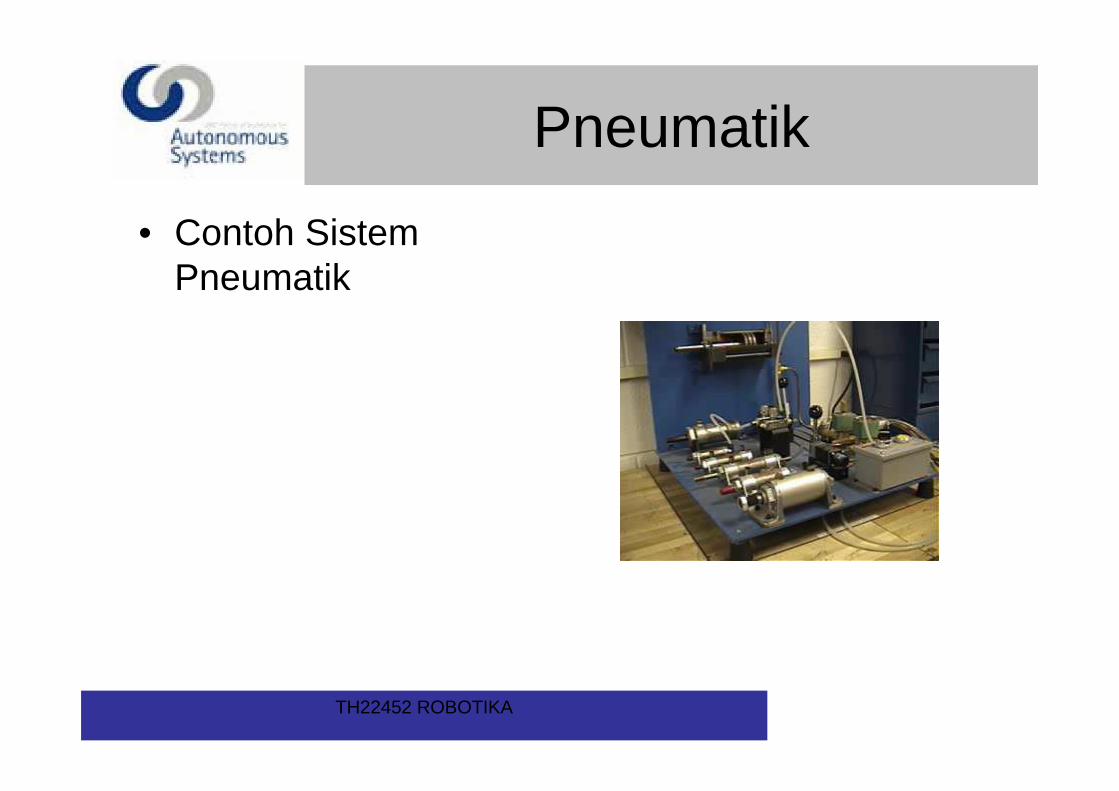
Pneumatik
• Aktuator Pneumatik secara prinsip samadengan aktuator hidrolis. Suatu sumberudara bertekanan digunakan untukmenggerakkan silinder linier ataupunrotari, dikendalikan oleh solenoid valves manual maupun electric
TH22452 ROBOTIKA
Pneumatik
• Contoh SistemPneumatik

TH22452 ROBOTIKA
Penggerak Elektris
• Dapat disesuaikan untuk semua ukuranRobot
• Kendali lebih mudah,baik utk Robot yang Presisi
• Relatif bersih• Reliable, low maintenance
TH22452 ROBOTIKA
Penggerak Elektris
• Stiffnessnya kurang• Memerlukan Gigi reduksi• Motor memerlukan piranti pengereman
TH22452 ROBOTIKA
Penggerak Hidrolis
• Cocok untuk beban berat• Cocok Untuk Robot yang besar• Power/Weight Rationya besar• Tidak memerlukan gigi reduksi• Dapat beroperasi pada berbagai
kecepatan• Dapat dibiarkan pada posisi tertentu tanpa
timbul kerusakan
TH22452 ROBOTIKA
Penggerak Hidrolis
• Kebocoran, tidak cocok utk ruangan• Memerlukan pompa, reservoir, pipa• Mahal& berisik• Terpegaruh oleh suhu• Peka terhadap kotoran yg masuk
TH22452 ROBOTIKA
Penggerak Pneumatis
• Komponen mudah diperoleh• Realibilitas Komponen tinggi• Tak ada lelehan, tak ada percikan• Murah&Sederhana• Tekanan yg lebih rendah dibanding sistem
hidrolis• Cocok utk aplikasi on-off, pick&place
TH22452 ROBOTIKA
Penggerak Pneumatis
• Berisik• Memerlukan Filter, tekanan tertentu• Linearitas kurang• Berubah bentuk pada beban konstan• Stiffness kurang, respon kurang akurat• Power/weight ratio rendah
TH22452 ROBOTIKA
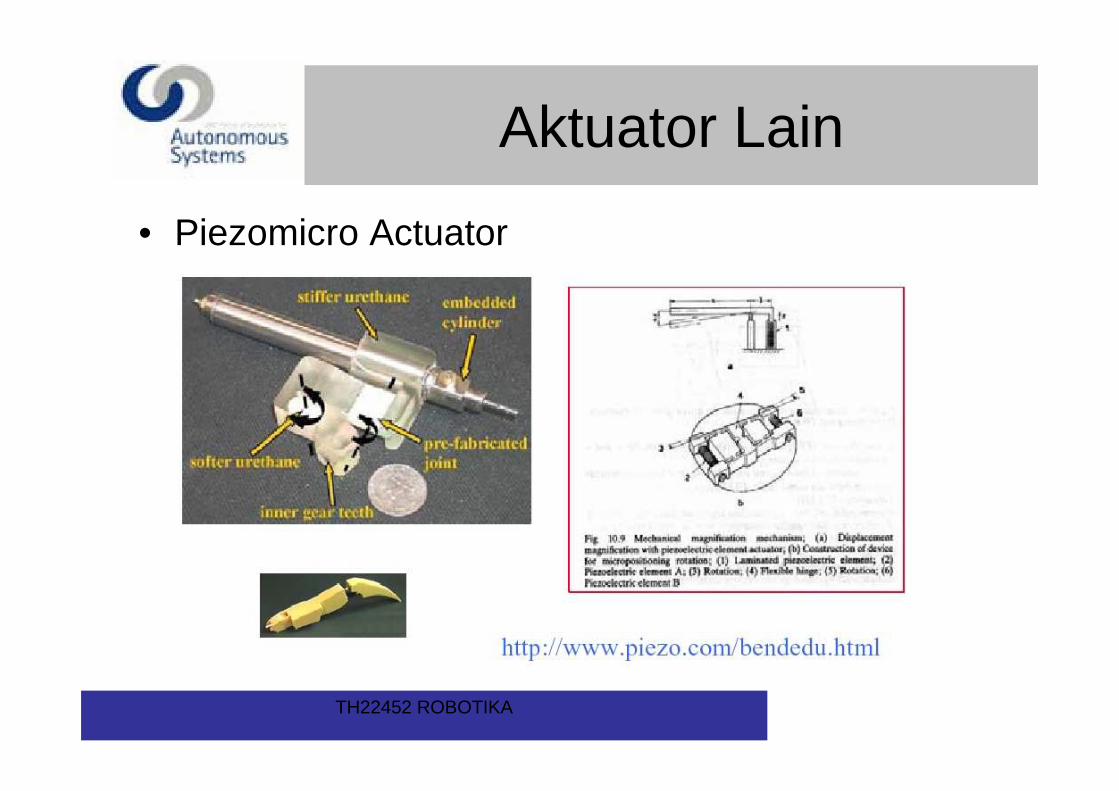
Aktuator Lain
• Piezomicro Actuator
TH22452 ROBOTIKA
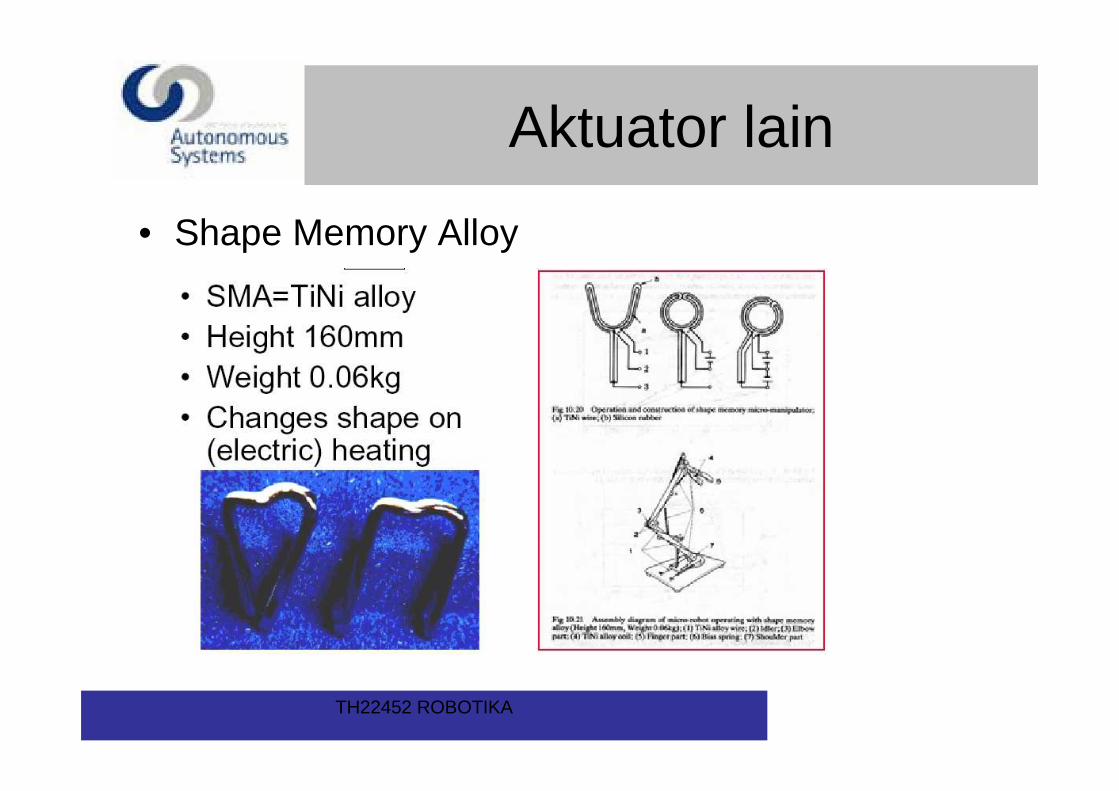
Aktuator lain
• Shape Memory Alloy
TH22452 ROBOTIKA
• Penggerak Elektris• DC servo motor berbasis ATmega8 atau
STM32F103C8T6 • Sensor yang digunakan potesiometer,
atau magnetic encoder dan sensor suhu• Menggunakan sinyal TTL atau RS485
Dynamixel
TH22452 ROBOTIKA
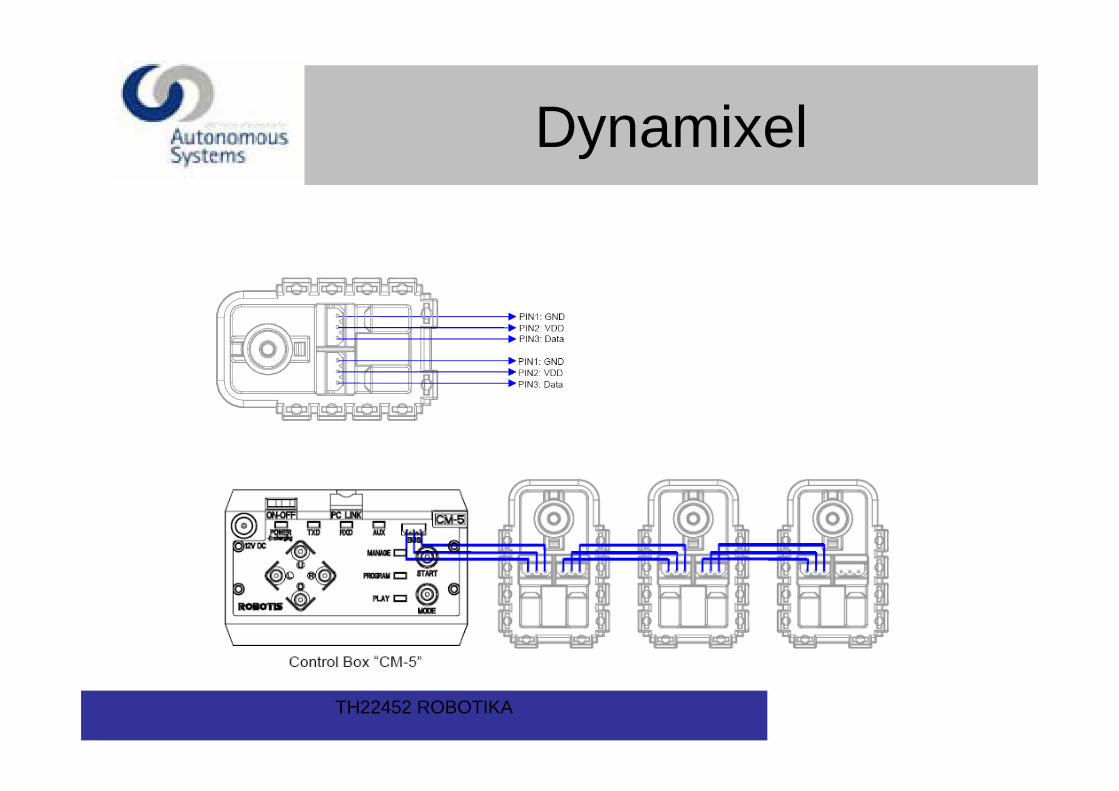
Dynamixel

TH22452 ROBOTIKA
Dynamixel
• Protocol

TH22452 ROBOTIKA
Dynamixel
• Tersedia dalam berbagai piliha torsi
TH22452 ROBOTIKA
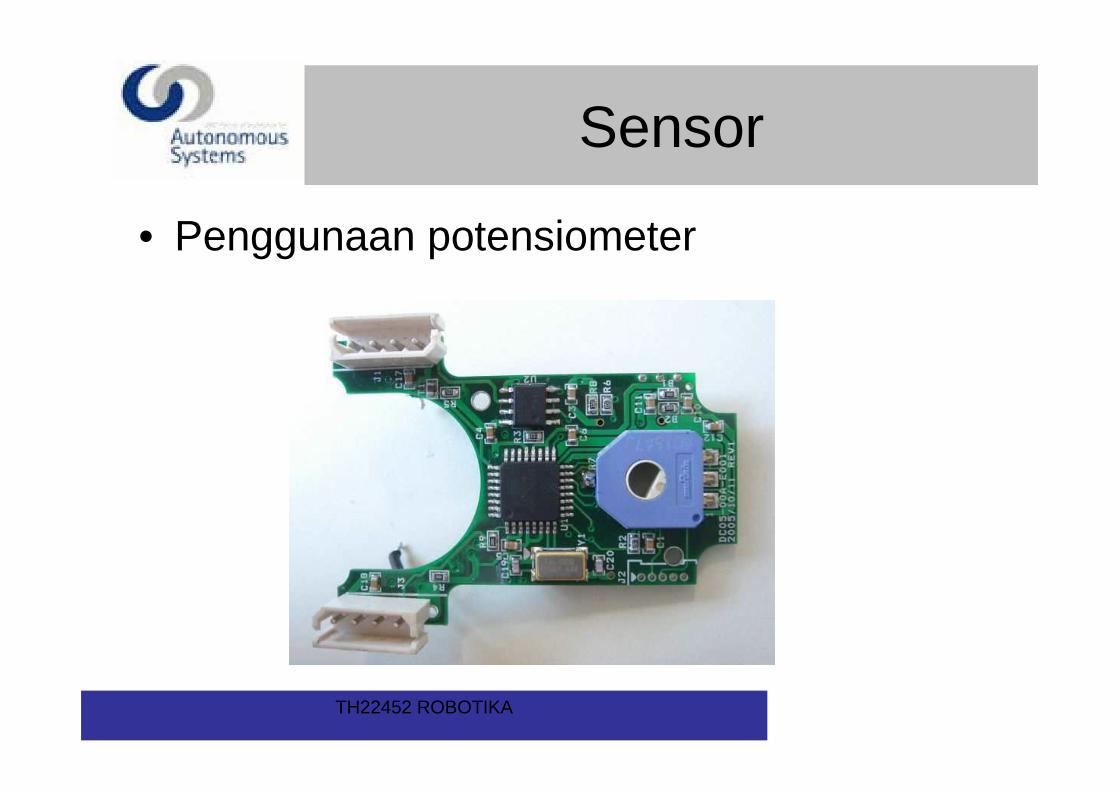
Sensor
• Penggunaan potensiometer
TH22452 ROBOTIKA
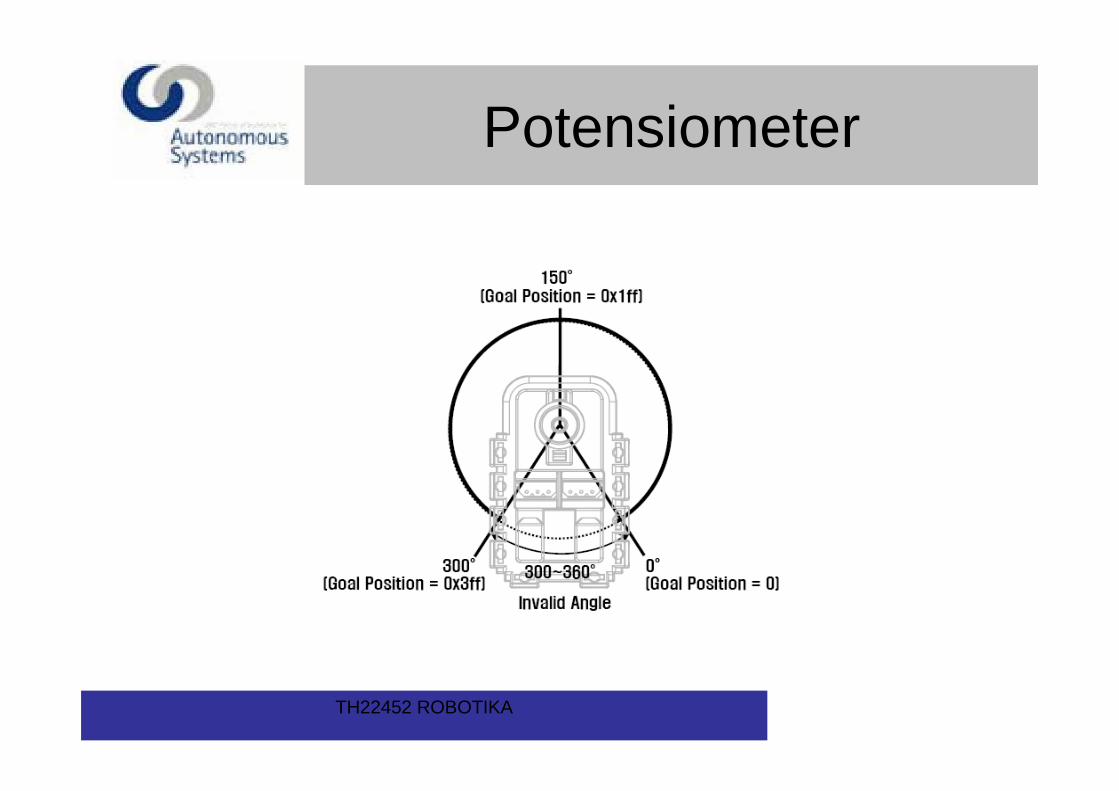
Potensiometer
TH22452 ROBOTIKA
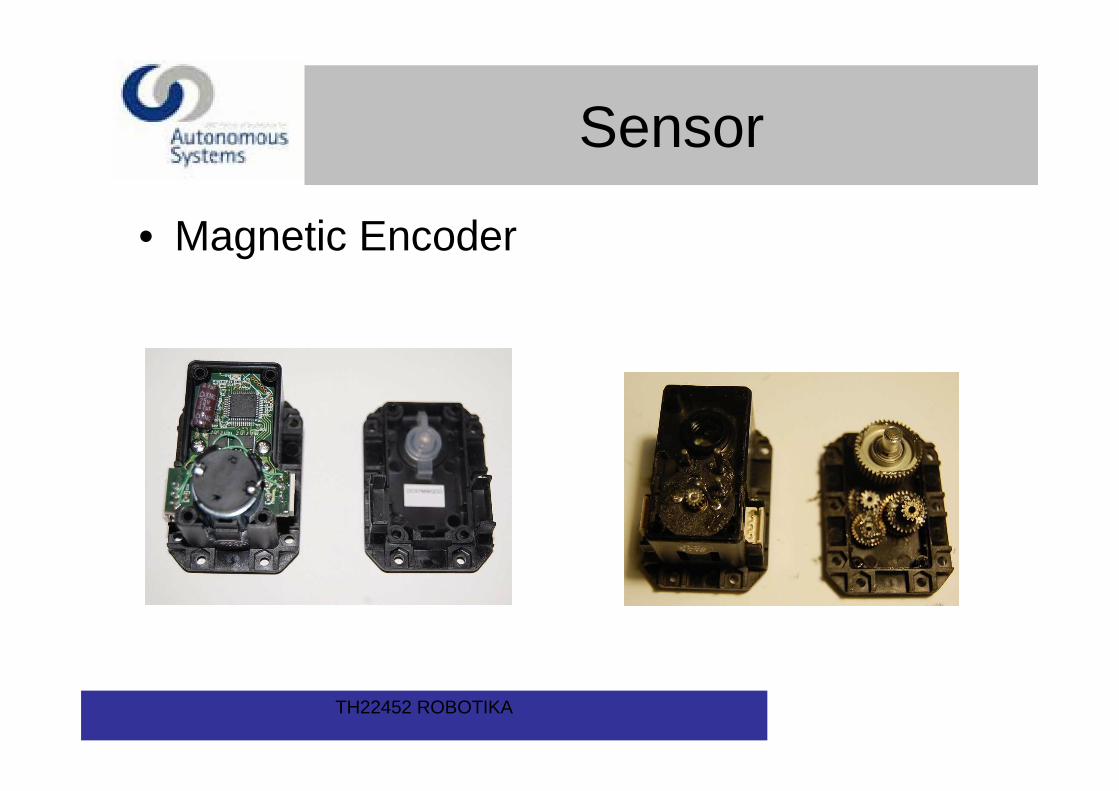
Sensor
• Magnetic Encoder
TH22452 ROBOTIKA
Referensi
• Yoram Koren,”Robotics for Engineers”, McGrawHill International halaman 51-81
• Saeed B Niku, Introduct. To Robotics Analysis, Systems, Appl.”, Prentice Hall halaman 173-218
• http://www.engr.colostate.edu/~dga/video_demos/robotics/index.html
Recommended