Embed Size (px)
Citation preview
Кинематичен анализ на конструкциите
1
Конструкции II-ри тип, които не могат да се
построят изцяло чрез конзоли и диади,
съдържат затворени кинематични вериги,
диади и връзки.
Проверка за мигновена изменяемост на
конструкции II-ри тип
Кинематичен анализ на
конструкциите
ижн. Иван Иванов
Кинематичен анализ на конструкциите
2
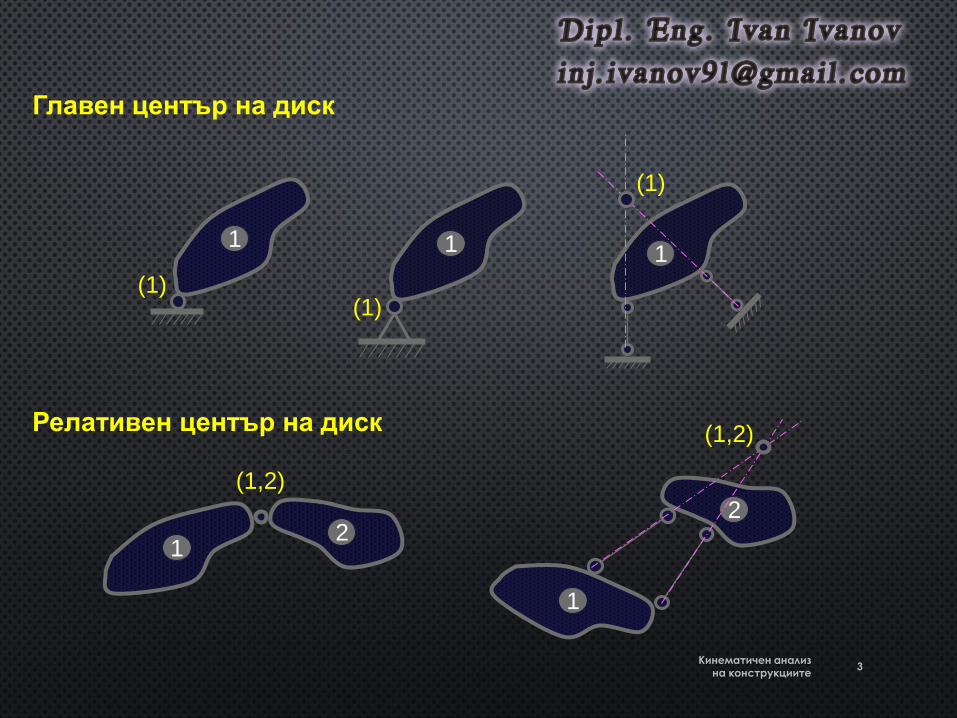
Главен център на диск – неподвижна точка
около, която дискът се завърта в даден момент.
Ако дискът е неподвижен той няма главен център.
Релативен център на диск – точката около,
която взаимно се завъртат два диска. Той е
свързващата става на двата диска – реална или
фиктивна.
Основни кинематични теореми при
движение на система от дискове
Кинематичен анализ на конструкциите
3
Релативен център на диск
Главен център на диск
1 1 1
(1)(1)
(1)
12
(1,2)
1
2
(1,2)

Кинематичен анализ на конструкциите
4
Теорема I – Двата главни центрове на два диска и техният
релативен център лежат на една и съща права.
12
(1)(1,2) (2)
Невъзможно
взаимно
завъртане!!(1)
(1,2)
(2)
12
(1)+(2)=(1,2) !!
Кинематичен анализ на конструкциите
5
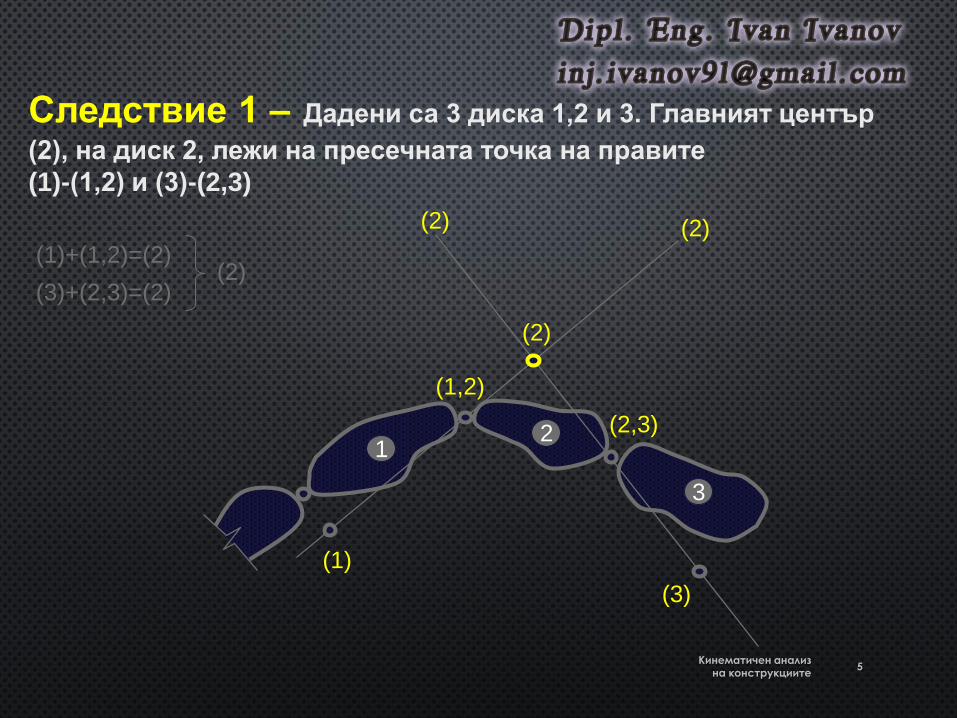
Следствие 1 – Дадени са 3 диска 1,2 и 3. Главният център
(2), на диск 2, лежи на пресечната точка на правите
(1)-(1,2) и (3)-(2,3)
12
(1)
(1,2)
3
(2,3)
(2)
(3)
(2)
(2)
(1)+(1,2)=(2)
(3)+(2,3)=(2)(2)
Кинематичен анализ на конструкциите
6
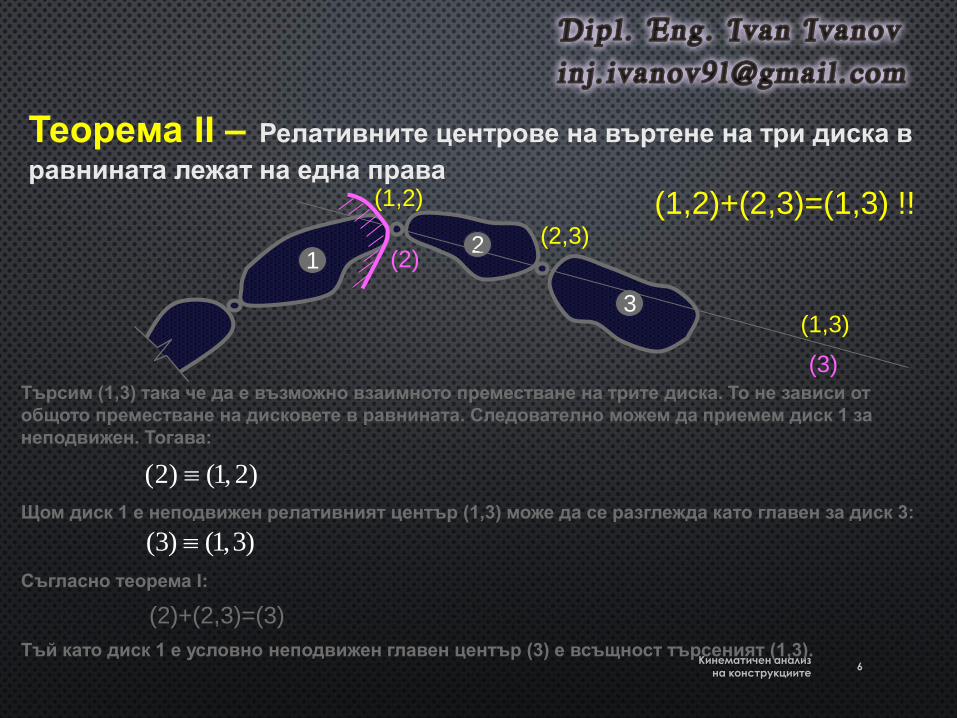
Теорема II – Релативните центрове на въртене на три диска в
равнината лежат на една права
12
(1,2)
3
(2,3)
(1,3)
Търсим (1,3) така че да е възможно взаимното преместване на трите диска. То не зависи от
общото преместване на дисковете в равнината. Следователно можем да приемем диск 1 за
неподвижен. Тогава:
(2) (1, 2)
(3) (1,3)
Щом диск 1 е неподвижен релативният център (1,3) може да се разглежда като главен за диск 3:
Съгласно теорема I:
(2)
(2)+(2,3)=(3)
(3)
Тъй като диск 1 е условно неподвижен главен център (3) е всъщност търсеният (1,3).
(1,2)+(2,3)=(1,3) !!
Кинематичен анализ на конструкциите
7
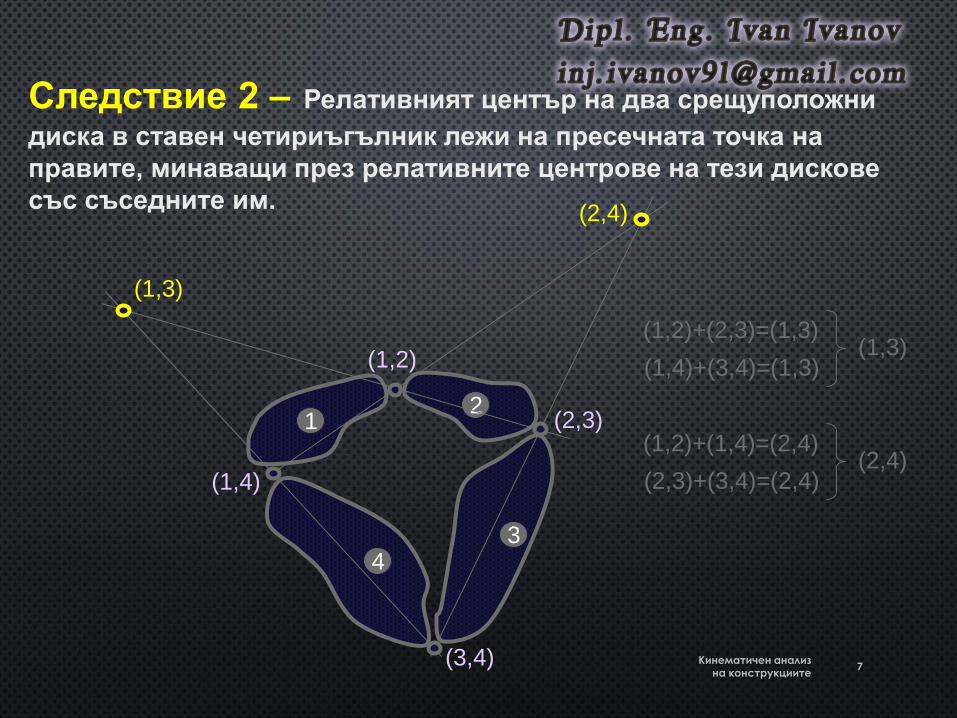
Следствие 2 – Релативният център на два срещуположни
диска в ставен четириъгълник лежи на пресечната точка на
правите, минаващи през релативните центрове на тези дискове
със съседните им.
12
3
(1,2)+(2,3)=(1,3)
(1,4)+(3,4)=(1,3)(1,3)
4
(1,2)
(2,3)
(3,4)
(1,4)
(1,3)
(2,4)
(1,2)+(1,4)=(2,4)
(2,3)+(3,4)=(2,4)(2,4)
Кинематичен анализ на конструкциите
8
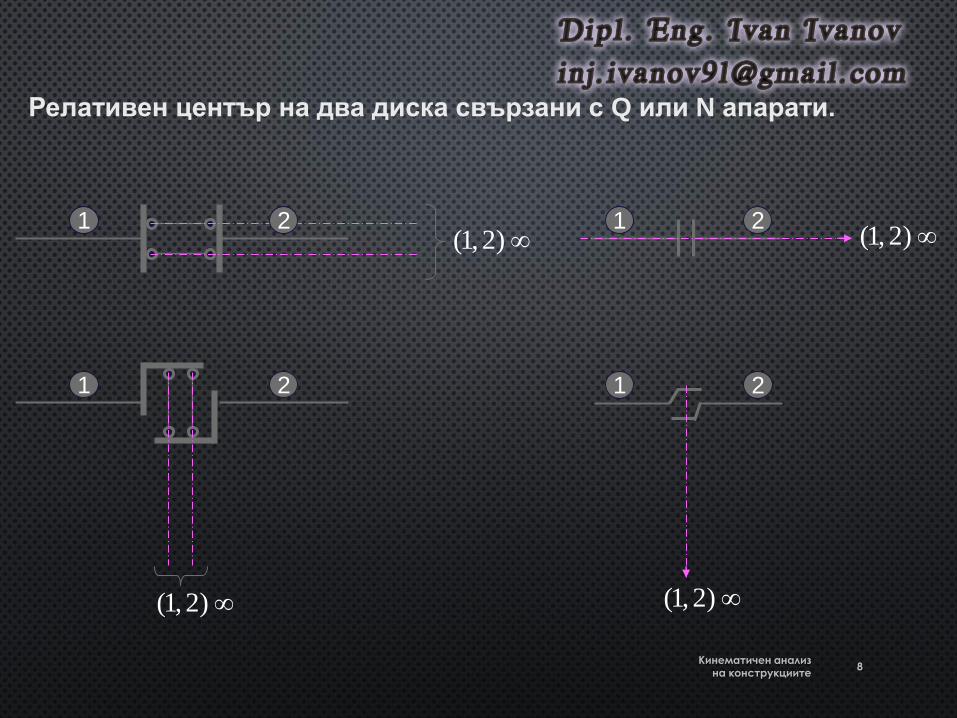
Релативен център на два диска свързани с Q или N апарати.
1 2(1, 2)
1 2
(1, 2)
1 2(1, 2)
1 2
(1, 2)
Кинематичен анализ на конструкциите
9
1) Ако за един център се получат две възможни положения това
означава, че той не съществува.
Ако центърът е главен, съответният диск ще бъде неподвижен.
Ако центърът е релативен съответните два диска не се завъртат и могат да се
заменят с един единствен диск.
Следствия
(1) (1,2) (2)
(1) (2) (1,2)
(1,2) (1,3) (2,3)
2) Ако два центъра се сливат в тази точка непременно се намира и
трети център.
Кинематичен анализ на конструкциите
10
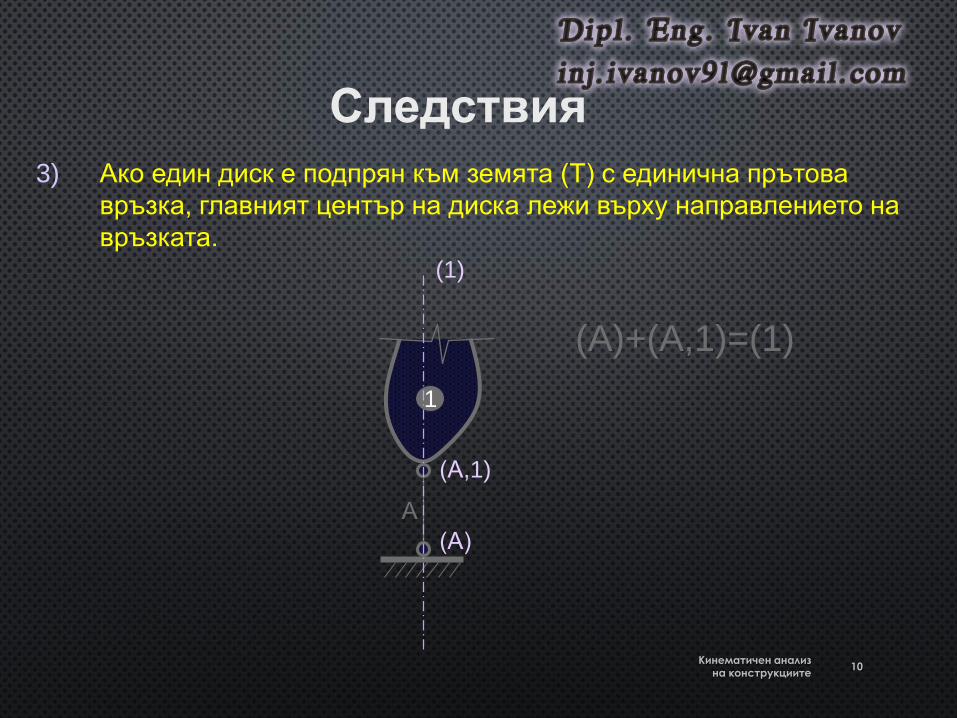
3) Ако един диск е подпрян към земята (Т) с единична прътова
връзка, главният център на диска лежи върху направлението на
връзката.
Следствия
А
1
(А)
(А,1)
(A)+(A,1)=(1)
(1)
W=0
НЕОГРАНИЧЕНИ ПО ГОЛЕМИНА
ОПОРНИ РЕАКЦИИ, РАЗРЕЗНИ УСИЛИЯ И ПРЕМЕСТВАНИЯ
ЕДИН ПЪТ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМА
НЕПРЕМЕННО ТРЯБВА ДА СЕ ИЗСЛЕДВА ОТНОСНО
МИГНОВЕНАТА Й ИЗМЕНЯЕМОСТКинематичен анализ
на конструкциите11
1)
2)
3)
4)
5)
6)
Кинематичен анализ на конструкциите
12
(1,2)+(2,3)=(1,3) !!
(A)+(A,1)=(1)
План на работа
Кинематичен анализ на конструкциите
13
Кинематичен анализ на конструкциите
14
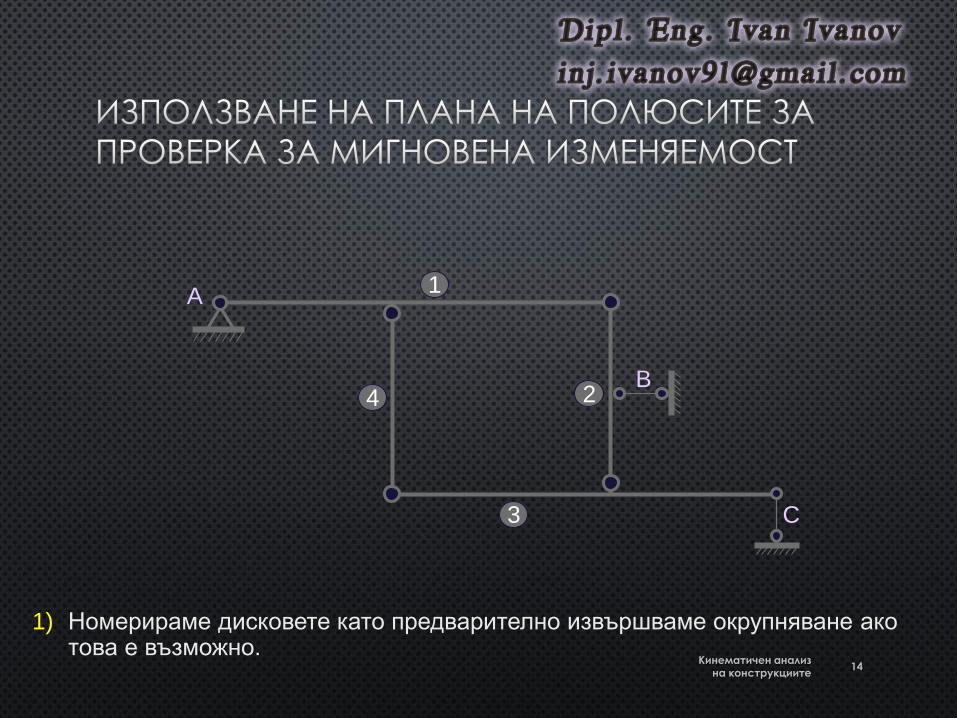
1) Номерираме дисковете като предварително извършваме окрупняване ако това е възможно.
1
2
3
4
A
B
C
Кинематичен анализ на конструкциите
15
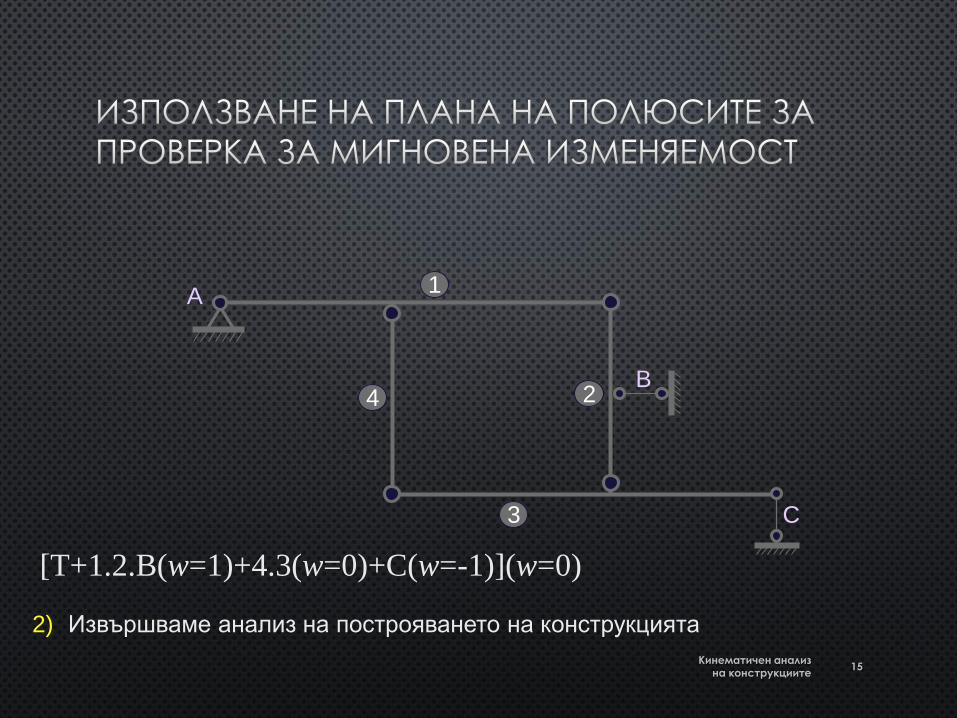
2) Извършваме анализ на построяването на конструкцията
1
2
3
4
A
B
C
[T+1.2.B(w=1)+4.3(w=0)+C(w=-1)](w=0)
Кинематичен анализ на конструкциите
16
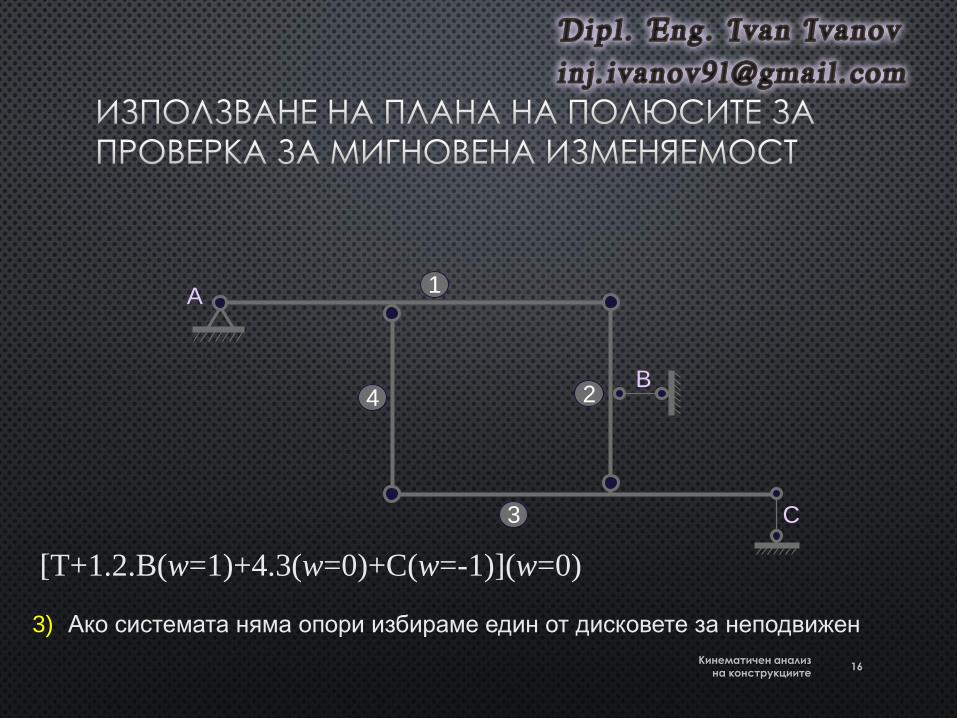
3) Ако системата няма опори избираме един от дисковете за неподвижен
1
2
3
4
A
B
C
[T+1.2.B(w=1)+4.3(w=0)+C(w=-1)](w=0)
Кинематичен анализ на конструкциите
17
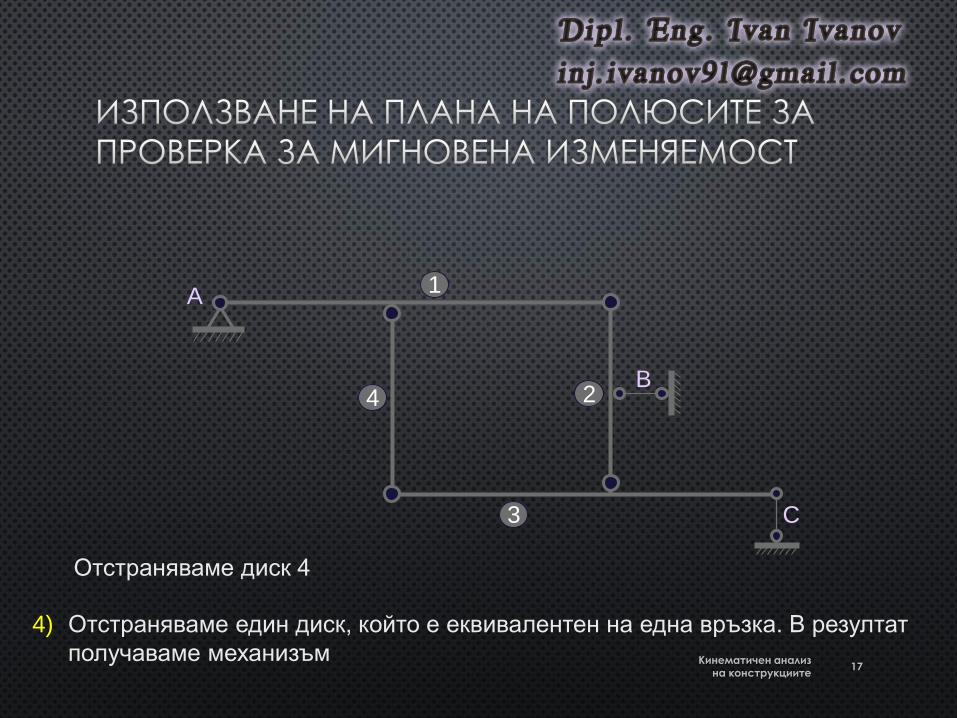
4) Отстраняваме един диск, който е еквивалентен на една връзка. В резултат
получаваме механизъм
1
2
3
4
A
B
C
Отстраняваме диск 4
(2)
Кинематичен анализ на конструкциите
18
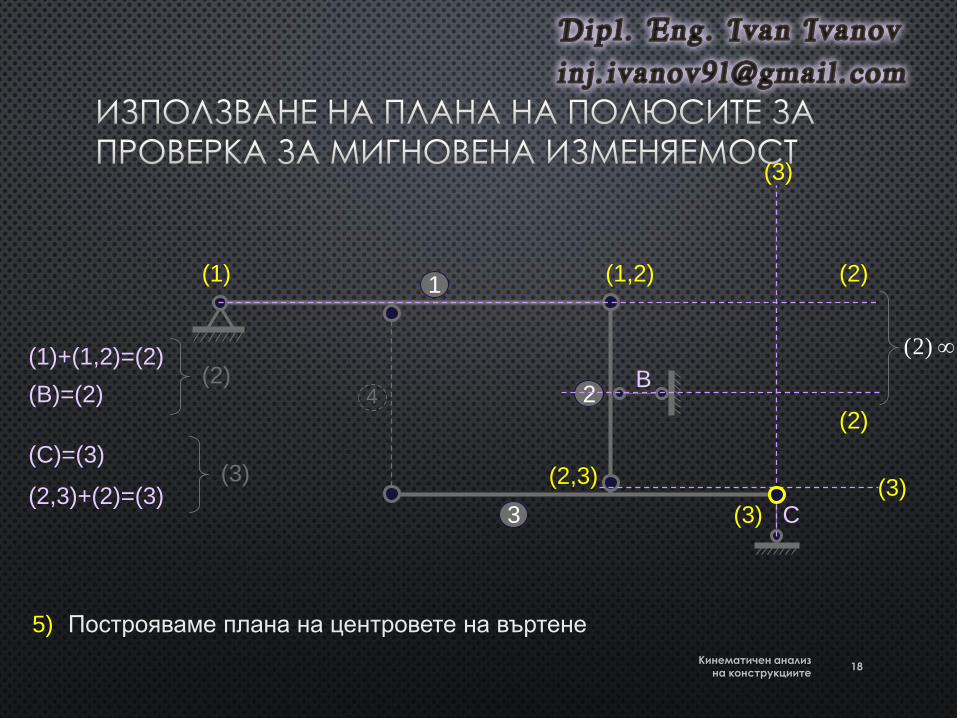
5) Построяваме плана на центровете на въртене
1
2
3
B
C
(1) (1,2)
(2,3)
(2)
(1)+(1,2)=(2)
(B)=(2)(2)
(2)
(C)=(3)
(3)
(2,3)+(2)=(3)(3)
(3)(3)
4
(2)
Кинематичен анализ на конструкциите
19
(2,3)+(2)=(3)
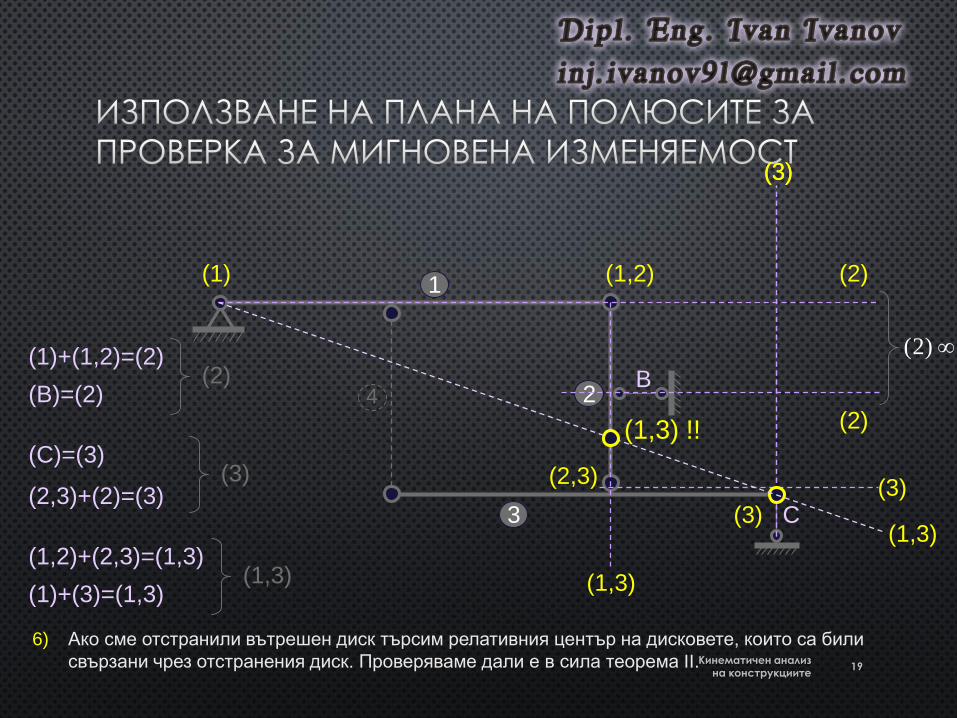
6) Ако сме отстранили вътрешен диск търсим релативния център на дисковете, които са били
свързани чрез отстранения диск. Проверяваме дали е в сила теорема II.
1
2
3
B
C
(1) (1,2)
(2,3)
(2)
(1)+(1,2)=(2)
(B)=(2)(2)
(2)
(C)=(3)
(3)
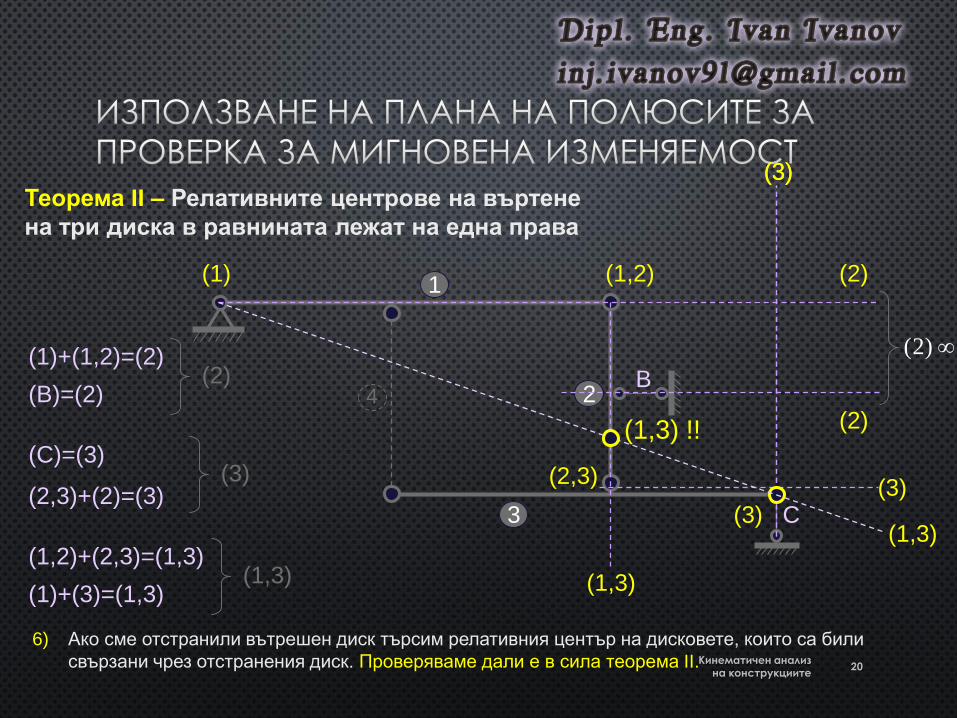
(1,2)+(2,3)=(1,3)
(1)+(3)=(1,3)(1,3) (1,3)
(3)
(3)(3)
(3)(1,3)
(1,3) !!
4
(2)
Кинематичен анализ на конструкциите
20
(2,3)+(2)=(3)
6) Ако сме отстранили вътрешен диск търсим релативния център на дисковете, които са били
свързани чрез отстранения диск. Проверяваме дали е в сила теорема II.
1
2
3
B
C
(1) (1,2)
(2,3)
(2)
(1)+(1,2)=(2)
(B)=(2)(2)
(2)
(C)=(3)
(3)
(1,2)+(2,3)=(1,3)
(1)+(3)=(1,3)(1,3) (1,3)
(3)
(3)(3)
(3)(1,3)
(1,3) !!
Теорема II – Релативните центрове на въртене
на три диска в равнината лежат на една права
4
(2)
Кинематичен анализ на конструкциите
21
(2,3)+(2)=(3)
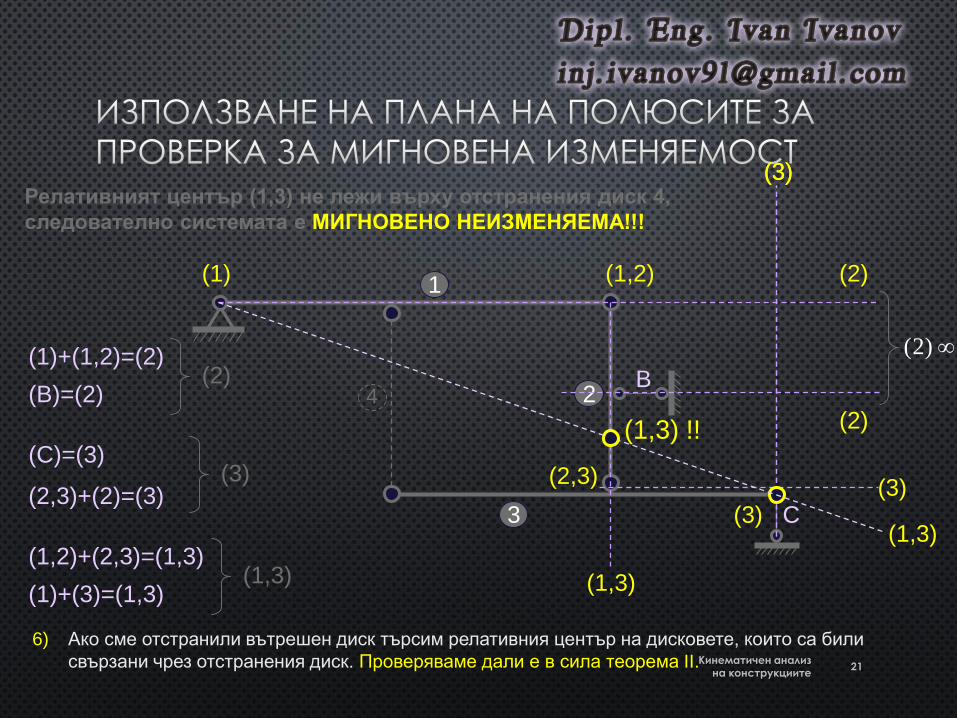
6) Ако сме отстранили вътрешен диск търсим релативния център на дисковете, които са били
свързани чрез отстранения диск. Проверяваме дали е в сила теорема II.
1
2
3
B
C
(1) (1,2)
(2,3)
(2)
(1)+(1,2)=(2)
(B)=(2)(2)
(2)
(C)=(3)
(3)
(1,2)+(2,3)=(1,3)
(1)+(3)=(1,3)(1,3) (1,3)
(3)
(3)(3)
(3)(1,3)
(1,3) !!
Релативният център (1,3) не лежи върху отстранения диск 4,
следователно системата е МИГНОВЕНО НЕИЗМЕНЯЕМА!!!
4
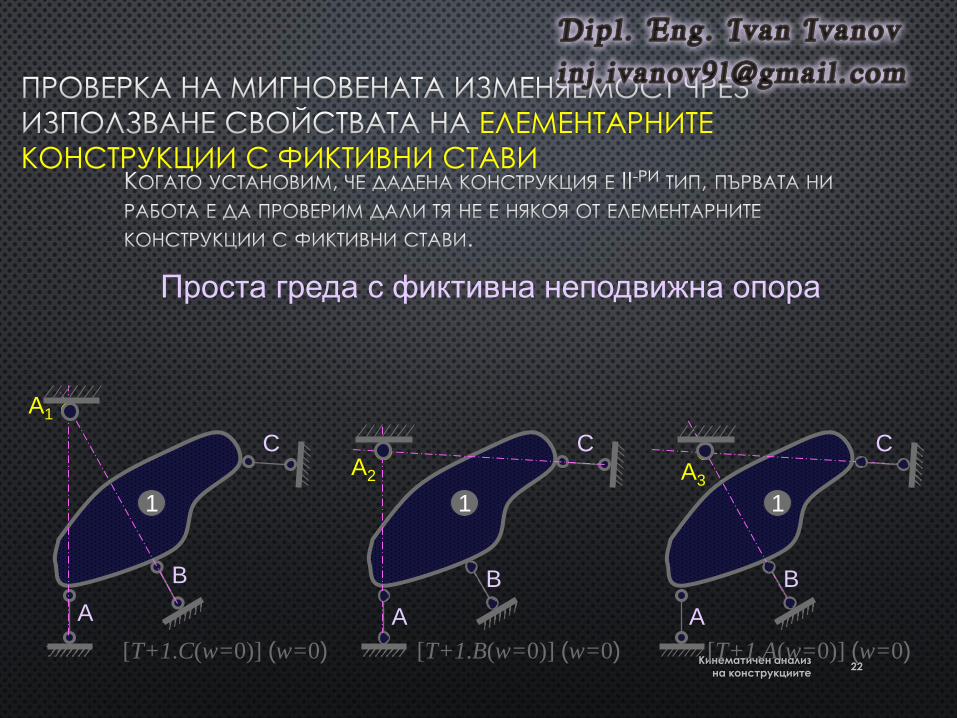
ЕЛЕМЕНТАРНИТЕ
КОНСТРУКЦИИ С ФИКТИВНИ СТАВИ
Кинематичен анализ на конструкциите
22
Проста греда с фиктивна неподвижна опора
A1
A2 A3
A
B
C
A
B
A
B
[T+1.C(w=0)] (w=0) [T+1.B(w=0)] (w=0) [T+1.A(w=0)] (w=0)
1 1 1
C C
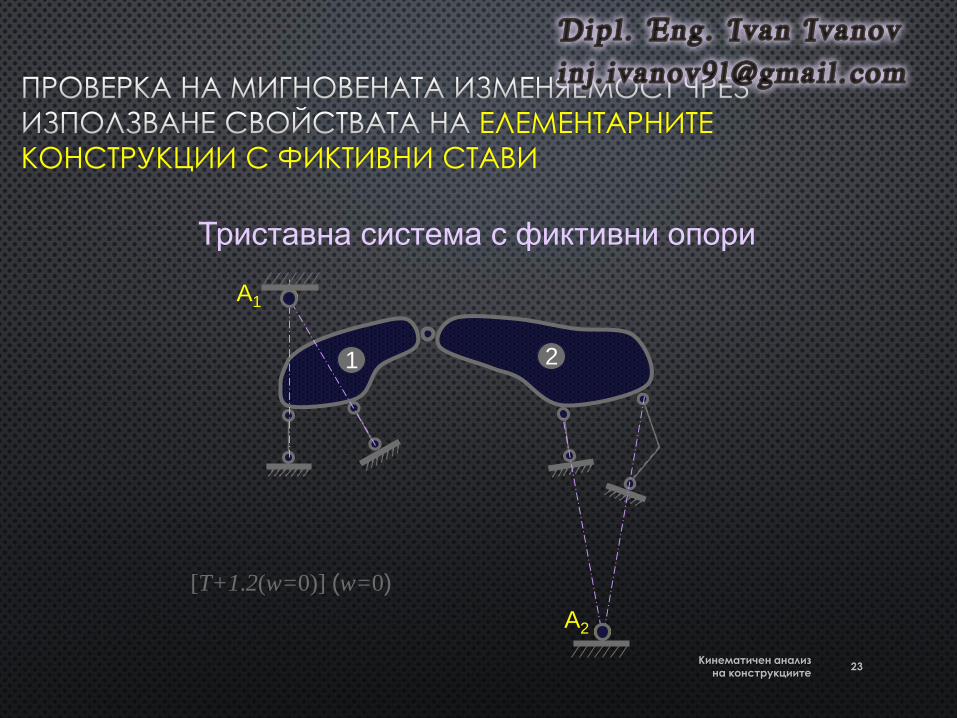
ЕЛЕМЕНТАРНИТЕ
КОНСТРУКЦИИ С ФИКТИВНИ СТАВИ
Кинематичен анализ на конструкциите
23
Триставна система с фиктивни опори
A1
A2
1 2
[T+1.2(w=0)] (w=0)
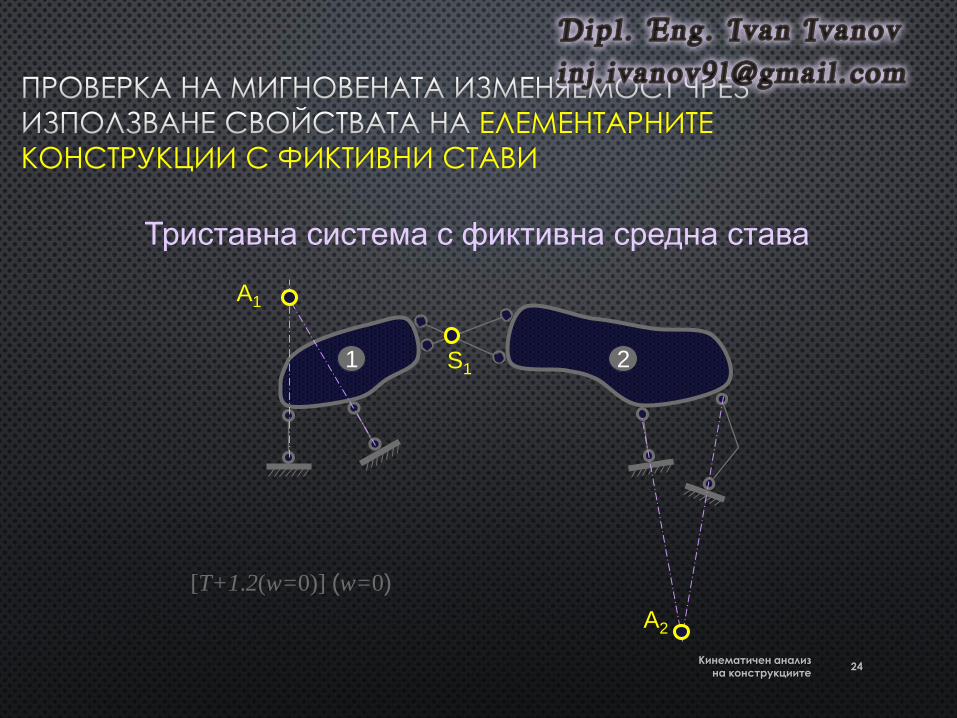
ЕЛЕМЕНТАРНИТЕ
КОНСТРУКЦИИ С ФИКТИВНИ СТАВИ
Кинематичен анализ на конструкциите
24
Триставна система с фиктивна средна става
A1
A2
S11 2
[T+1.2(w=0)] (w=0)
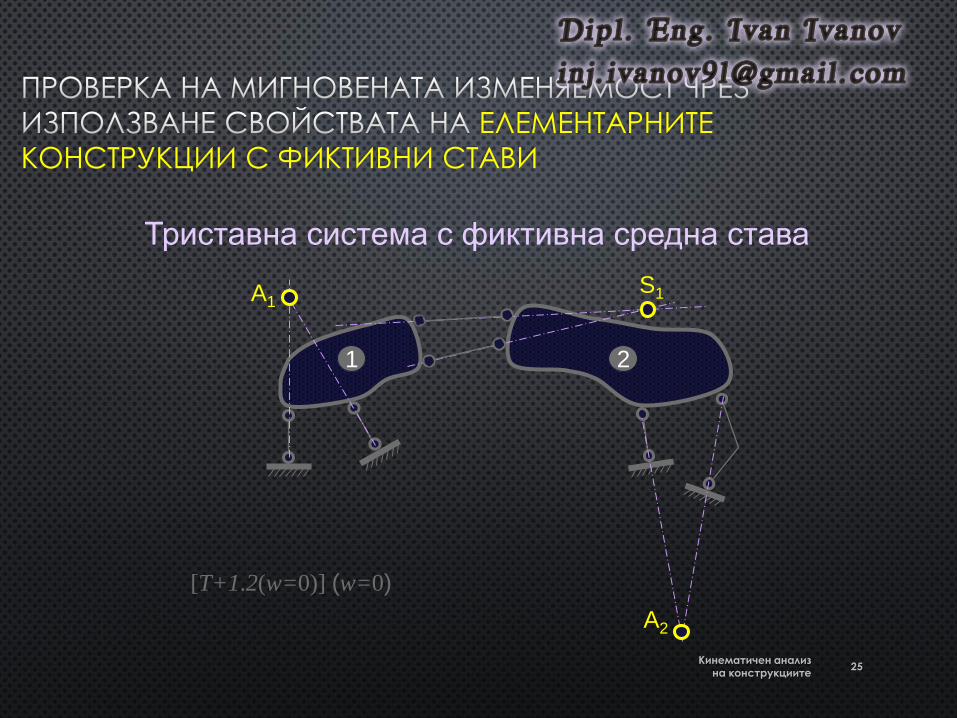
ЕЛЕМЕНТАРНИТЕ
КОНСТРУКЦИИ С ФИКТИВНИ СТАВИ
Кинематичен анализ на конструкциите
25
Триставна система с фиктивна средна става
A1
A2
S1
1 2
[T+1.2(w=0)] (w=0)
ЕЛЕМЕНТАРНИТЕ
КОНСТРУКЦИИ С ФИКТИВНИ СТАВИ
Кинематичен анализ на конструкциите
26
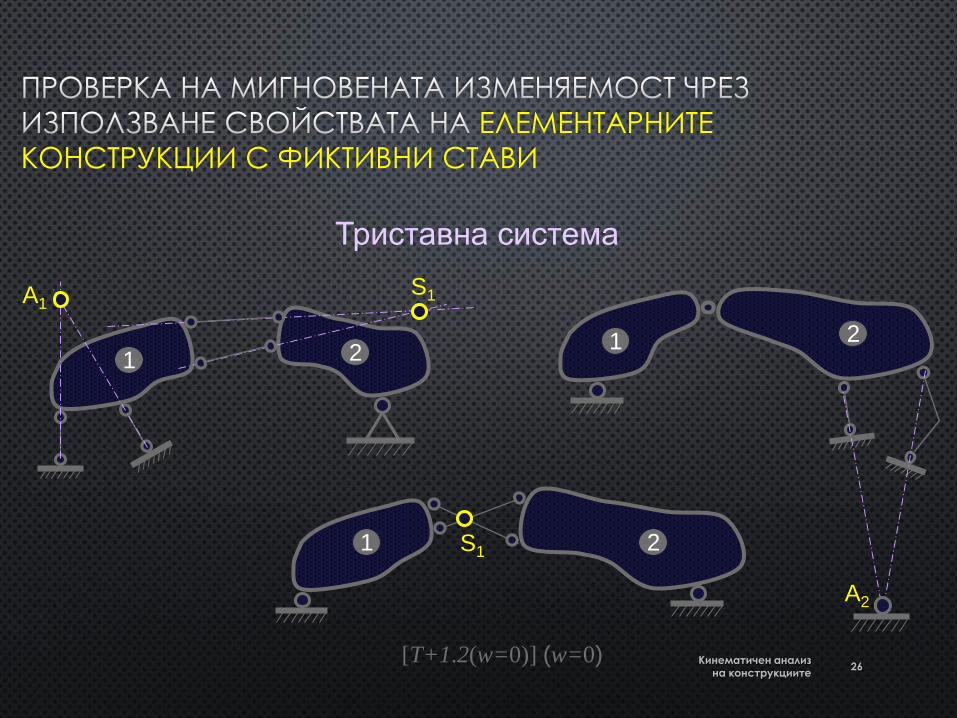
Триставна система
A1S1
A2
S1
1 221
1 2
[T+1.2(w=0)] (w=0)
Кинематичен анализ на конструкциите
27
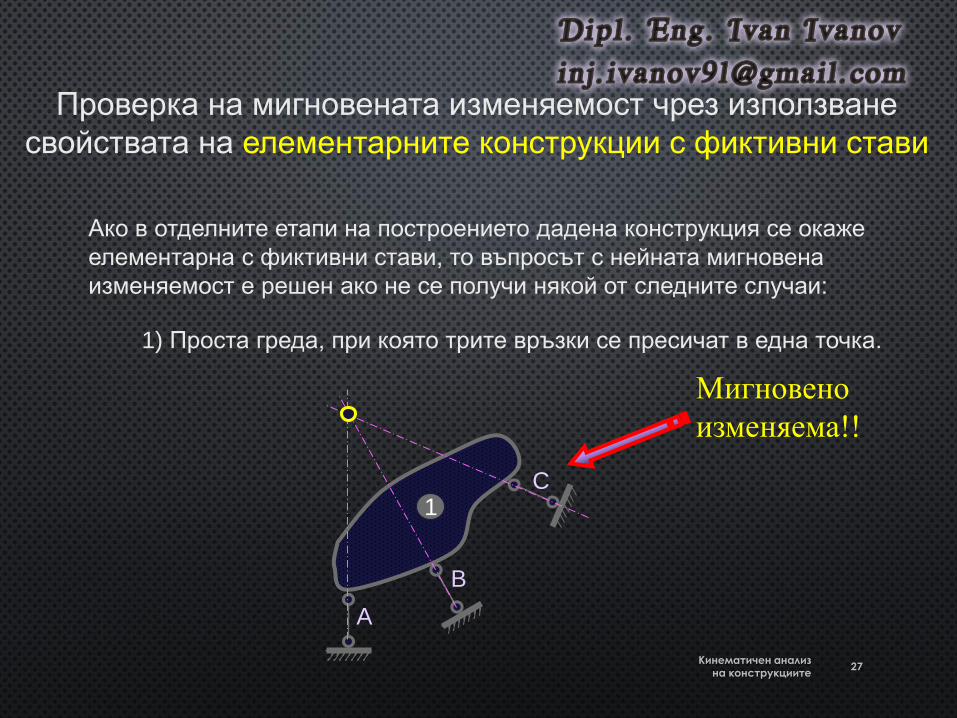
Проверка на мигновената изменяемост чрез използване
свойствата на елементарните конструкции с фиктивни стави
Ако в отделните етапи на построението дадена конструкция се окаже
елементарна с фиктивни стави, то въпросът с нейната мигновена
изменяемост е решен ако не се получи някой от следните случаи:
1) Проста греда, при която трите връзки се пресичат в една точка.
A
B
C1
Мигновено
изменяема!!

Кинематичен анализ на конструкциите
28
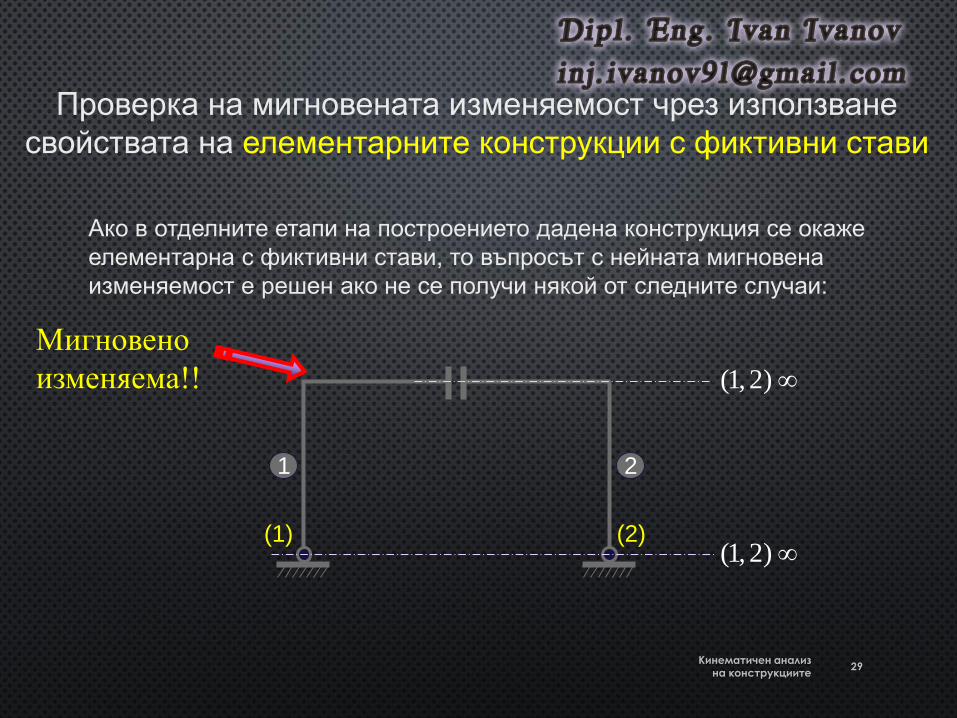
Проверка на мигновената изменяемост чрез използване
свойствата на елементарните конструкции с фиктивни стави
Ако в отделните етапи на построението дадена конструкция се окаже
елементарна с фиктивни стави, то въпросът с нейната мигновена
изменяемост е решен ако не се получи някой от следните случаи:
2) Изродена диада.
Мигновено
изменяема!!A1
1 2 A2
S1
Кинематичен анализ на конструкциите
29
Проверка на мигновената изменяемост чрез използване
свойствата на елементарните конструкции с фиктивни стави
Ако в отделните етапи на построението дадена конструкция се окаже
елементарна с фиктивни стави, то въпросът с нейната мигновена
изменяемост е решен ако не се получи някой от следните случаи:
1 2
(1, 2)
(1) (2)(1, 2)
Мигновено
изменяема!!
Кинематичен анализ на конструкциите
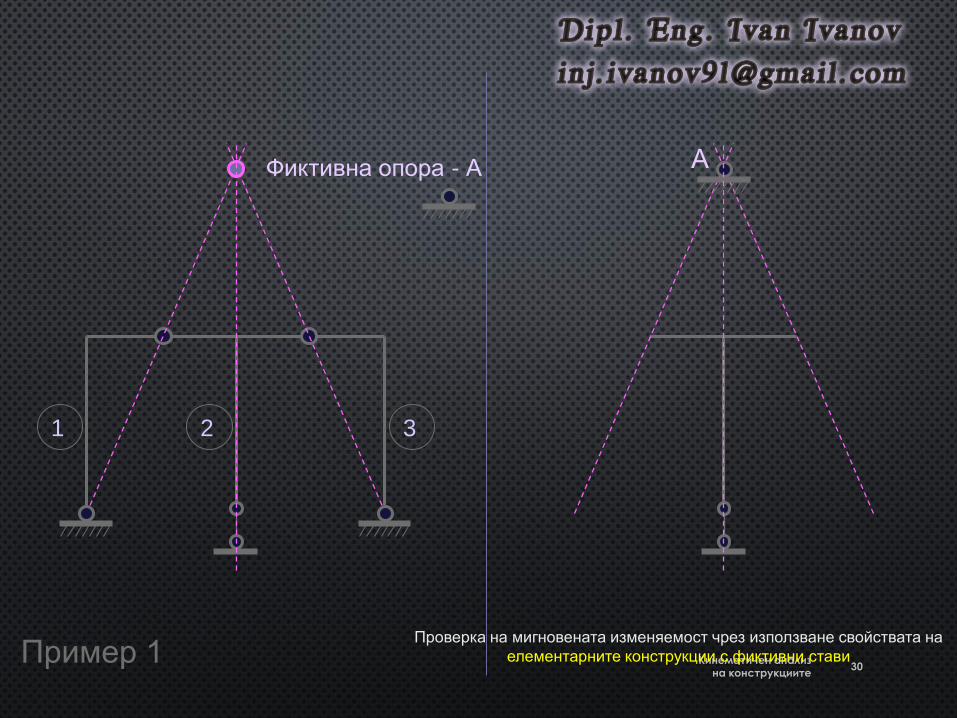
30
Фиктивна опора - А А
1 2 3
Пример 1Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
31
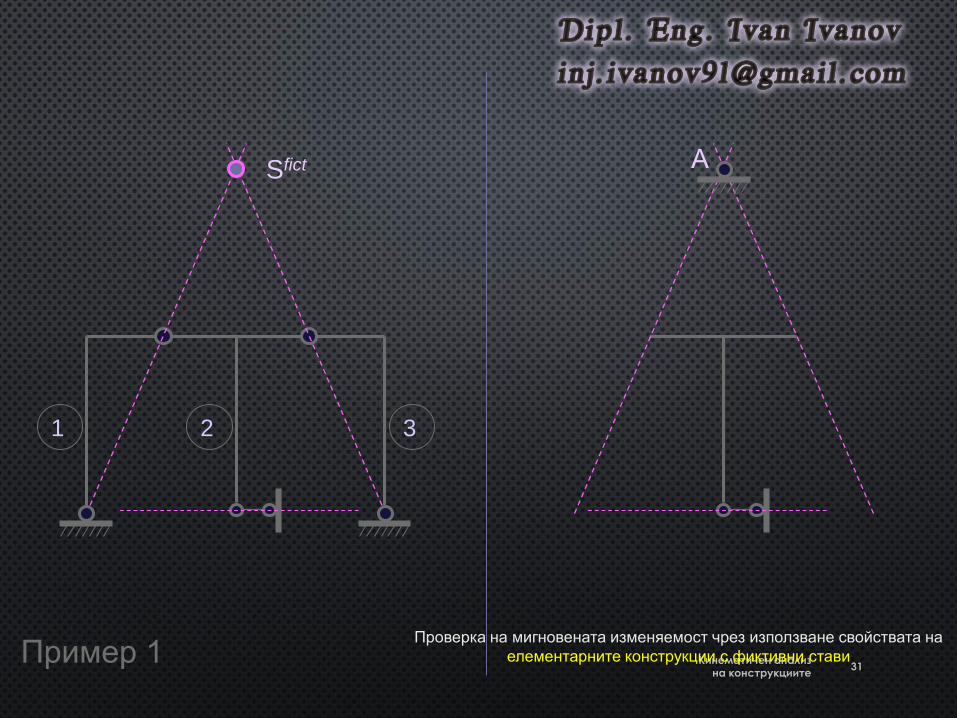
Sfict А
1 2 3
Пример 1Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
32
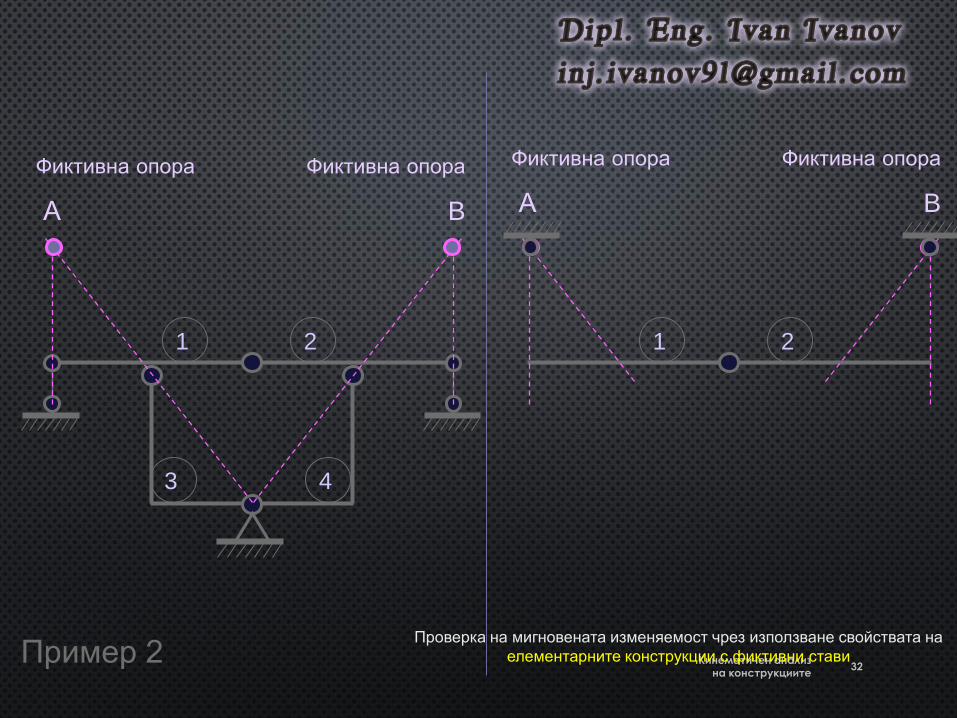
Фиктивна опора
А
1 2
3
Фиктивна опора
B
4
1 2
Фиктивна опора
А
Фиктивна опора
B
Пример 2Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
33
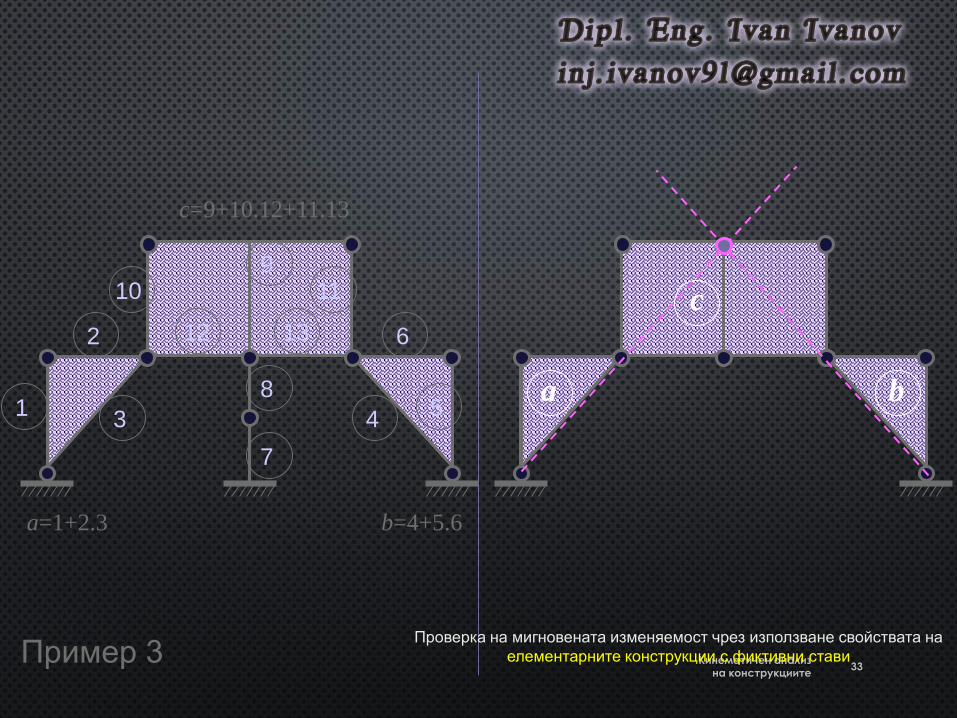
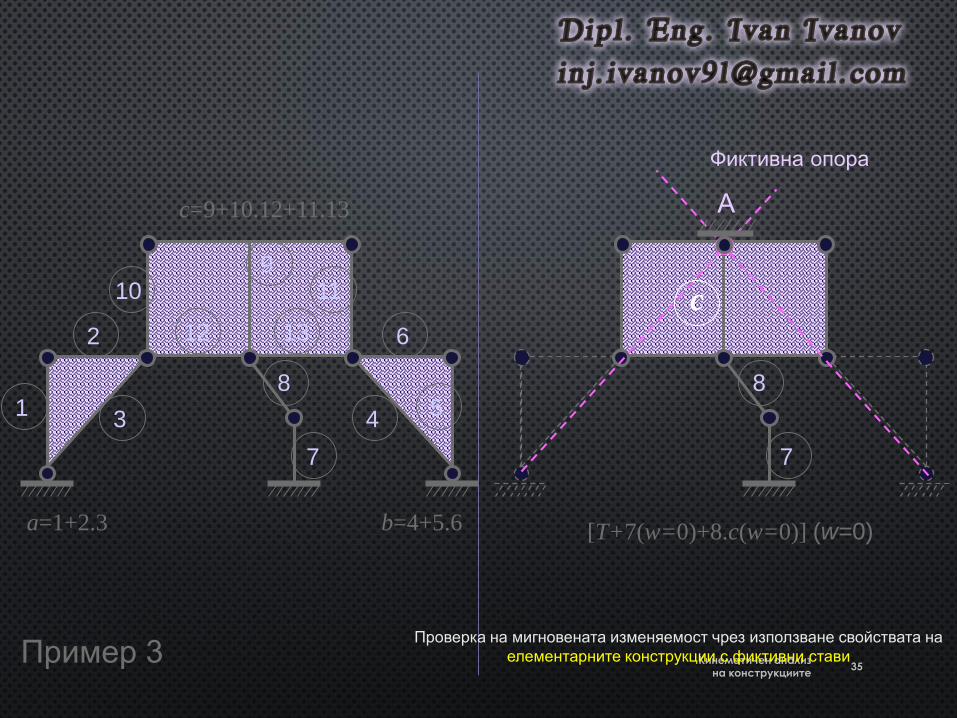
c=9+10.12+11.13
a=1+2.3 b=4+5.6
1
2
3 45
6
7
9
8
10
12 13
11
a b
c
Пример 3Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
34
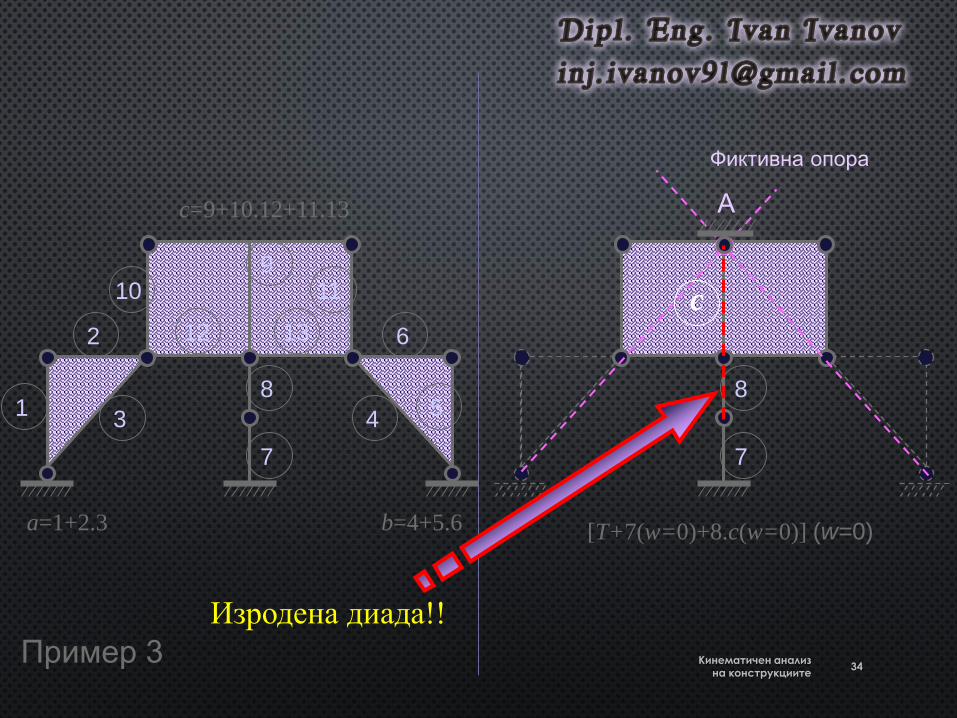
7
8
c=9+10.12+11.13
a=1+2.3 b=4+5.6
1
2
3 45
6
7
9
8
10
12 13
11 c
Фиктивна опора
А
[T+7(w=0)+8.c(w=0)] (w=0)
Изродена диада!!
Пример 3
Кинематичен анализ на конструкциите
35
c=9+10.12+11.13
a=1+2.3 b=4+5.6
c
Фиктивна опора
А
[T+7(w=0)+8.c(w=0)] (w=0)
Пример 3
7
881
2
3 45
6
910
12 13
11
7
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
36
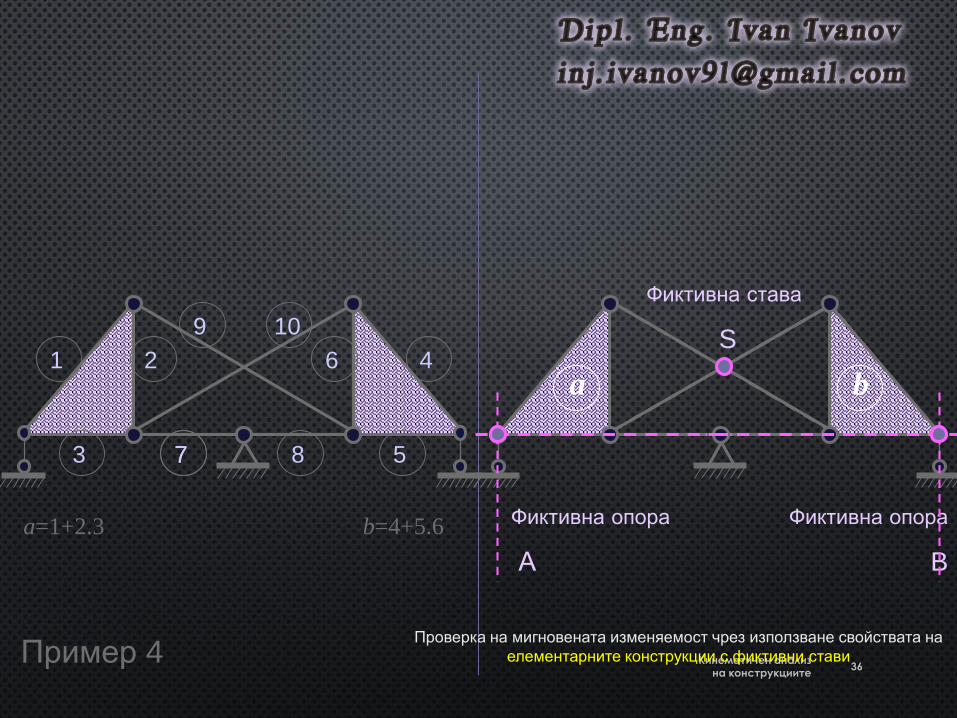
a=1+2.3 b=4+5.6
1 2 6 4
3 587
109
a b
Фиктивна става
S
7
Фиктивна опора
А
Фиктивна опора
B
Пример 4Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
37
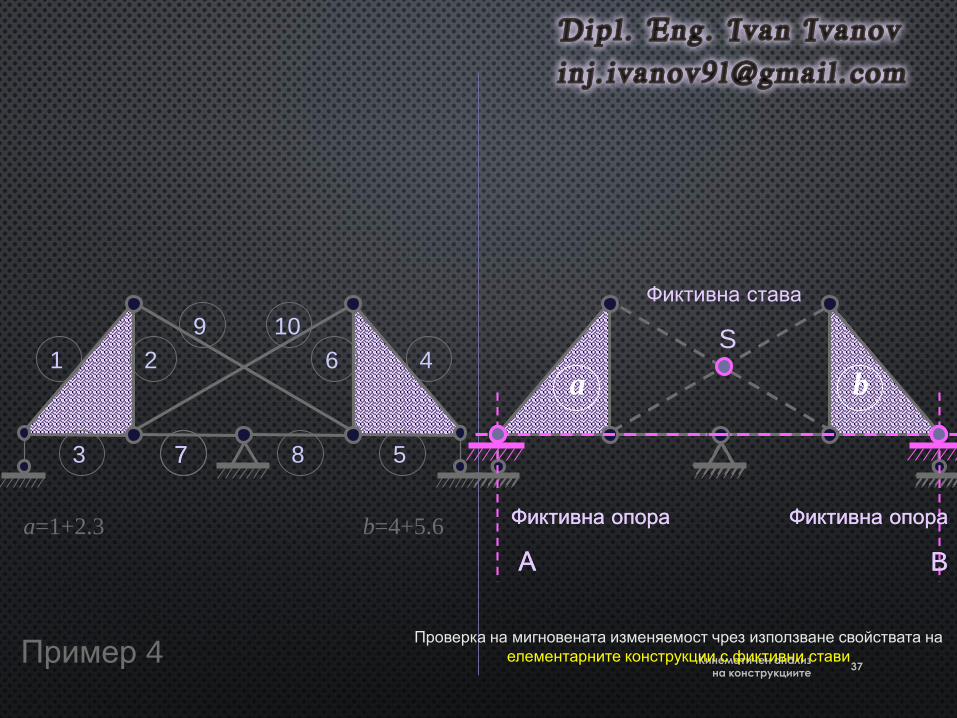
a=1+2.3 b=4+5.6
1 2 6 4
3 587
109
a b
Фиктивна става
S
7
Фиктивна опора
А
Фиктивна опора
B
Фиктивна опора
А
Фиктивна опора
B
Пример 4Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
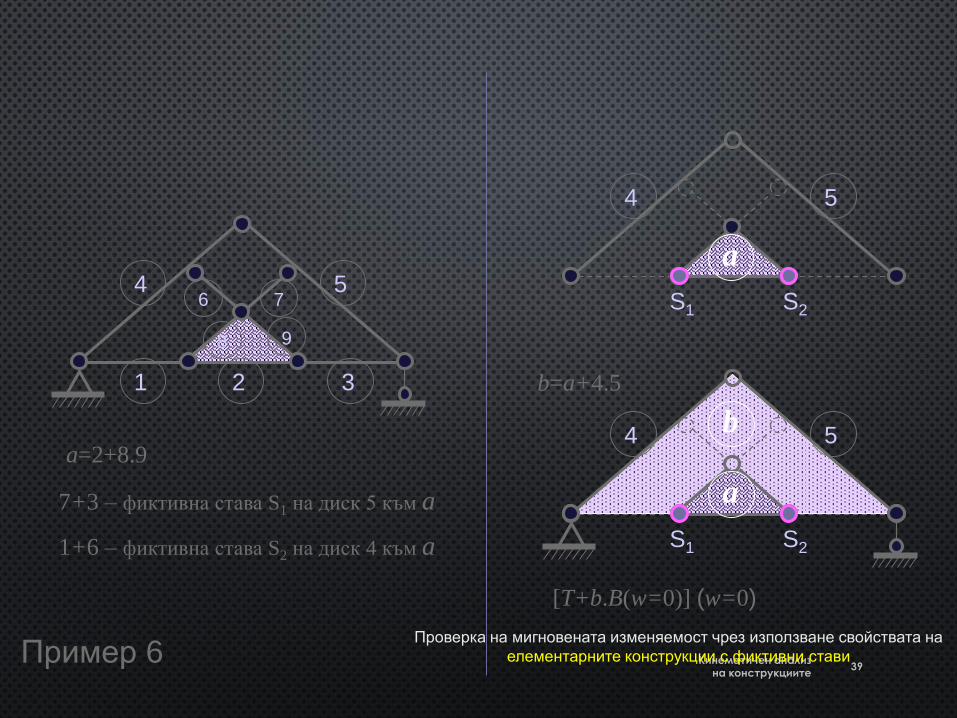
38
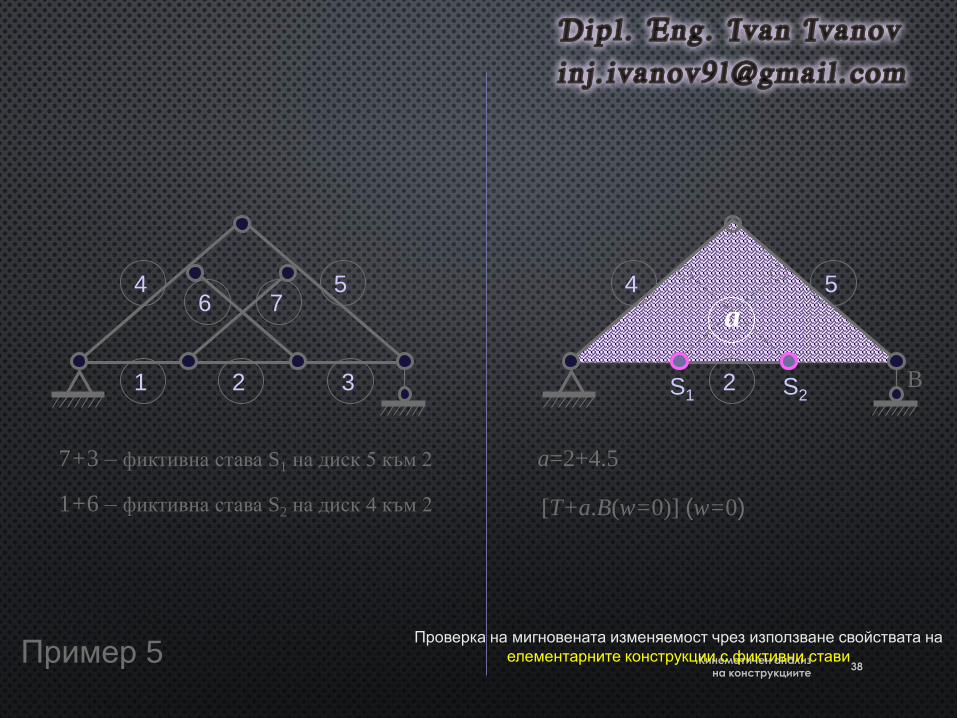
a=2+4.5
S1
4 5
2 S21
Пример 5
4
3
56 7
2
7+3 – фиктивна става S1 на диск 5 към 2
1+6 – фиктивна става S2 на диск 4 към 2 [T+a.B(w=0)] (w=0)
a
B
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
39
b
b=a+4.51
Пример 6
4
3
56
7+3 – фиктивна става S1 на диск 5 към a
1+6 – фиктивна става S2 на диск 4 към a
[T+b.B(w=0)] (w=0)
7
2
8 9
a=2+8.9
a
S1 S2
4 5
a
S1 S2
4 5
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
40
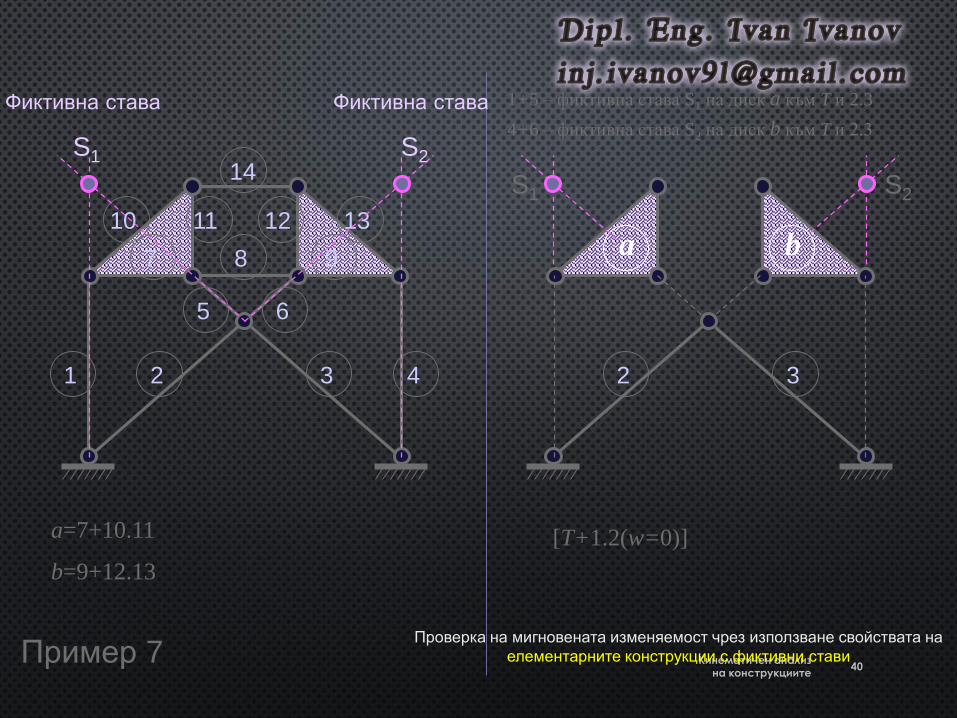
b=9+12.13
a=7+10.11
Пример 7
1 432
5 6
10 11 12 13
14
87 9a b
32
[T+1.2(w=0)]
Фиктивна става
S1
Фиктивна става
S2
1+5 – фиктивна става S1 на диск a към T и 2.3
4+6 – фиктивна става S2 на диск b към T и 2.3
S1 S2
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
41
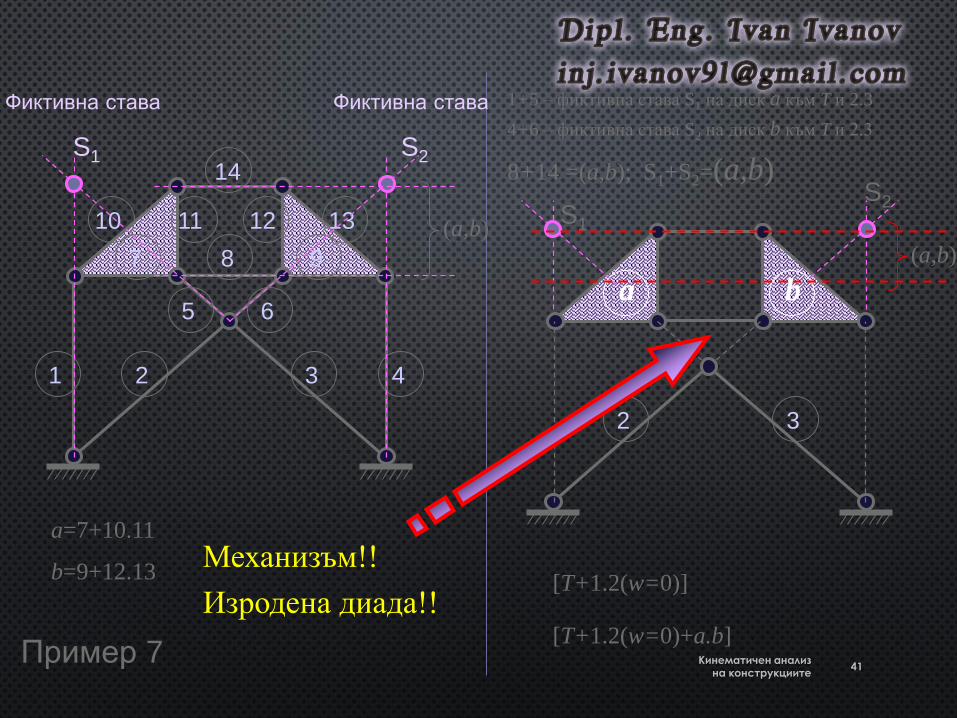
b=9+12.13
a=7+10.11
Пример 7
1 432
5 6
10 11 12 13
14
87 9
a b
32
[T+1.2(w=0)]
Фиктивна става
S1
Фиктивна става
S2
1+5 – фиктивна става S1 на диск a към T и 2.3
4+6 – фиктивна става S2 на диск b към T и 2.3
S1
S2
(a,b)
8+14 =(a,b); S1+S2=(a,b)
(a,b)
[T+1.2(w=0)+a.b]
Механизъм!!
Изродена диада!!
Кинематичен анализ на конструкциите
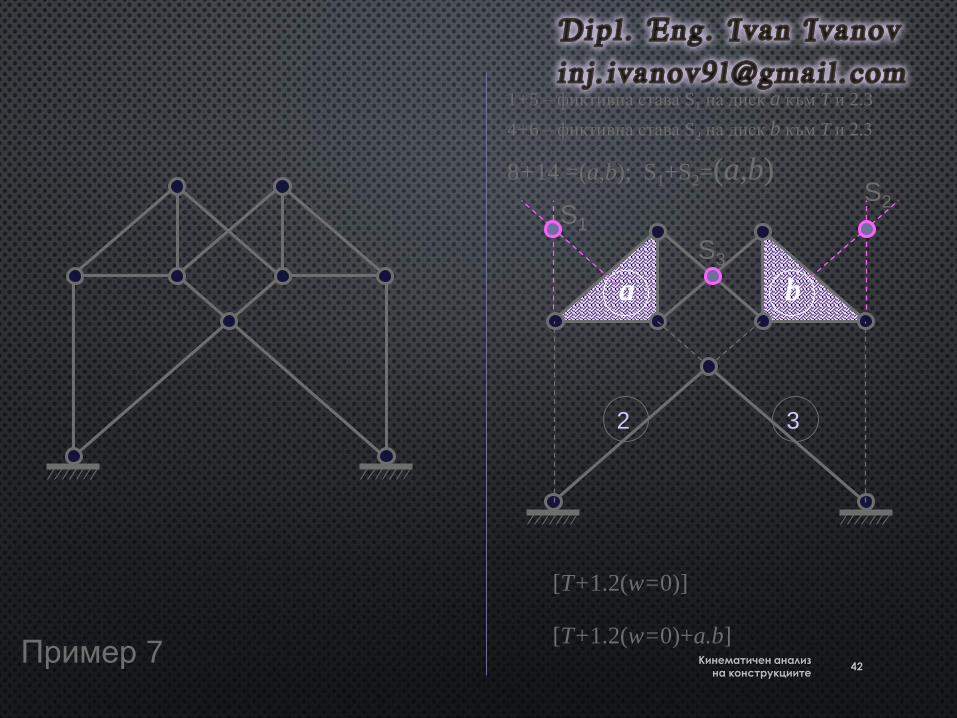
42Пример 7
a b
32
[T+1.2(w=0)]
1+5 – фиктивна става S1 на диск a към T и 2.3
4+6 – фиктивна става S2 на диск b към T и 2.3
S1
S2
8+14 =(a,b); S1+S2=(a,b)
[T+1.2(w=0)+a.b]
S3
Кинематичен анализ на конструкциите
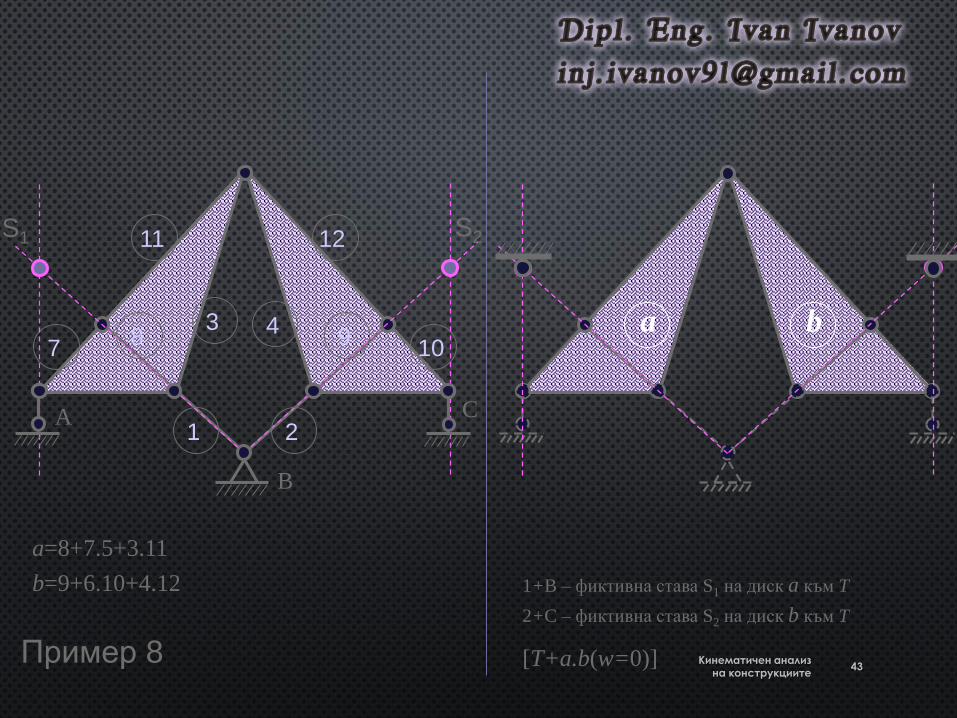
43
a=8+7.5+3.11
b=9+6.10+4.12
7
Пример 8
11 12
103 4
8 9
1+B – фиктивна става S1 на диск a към T
2+C – фиктивна става S2 на диск b към T
[T+a.b(w=0)]
S2S1
a b
1 2A
B
C
Кинематичен анализ на конструкциите
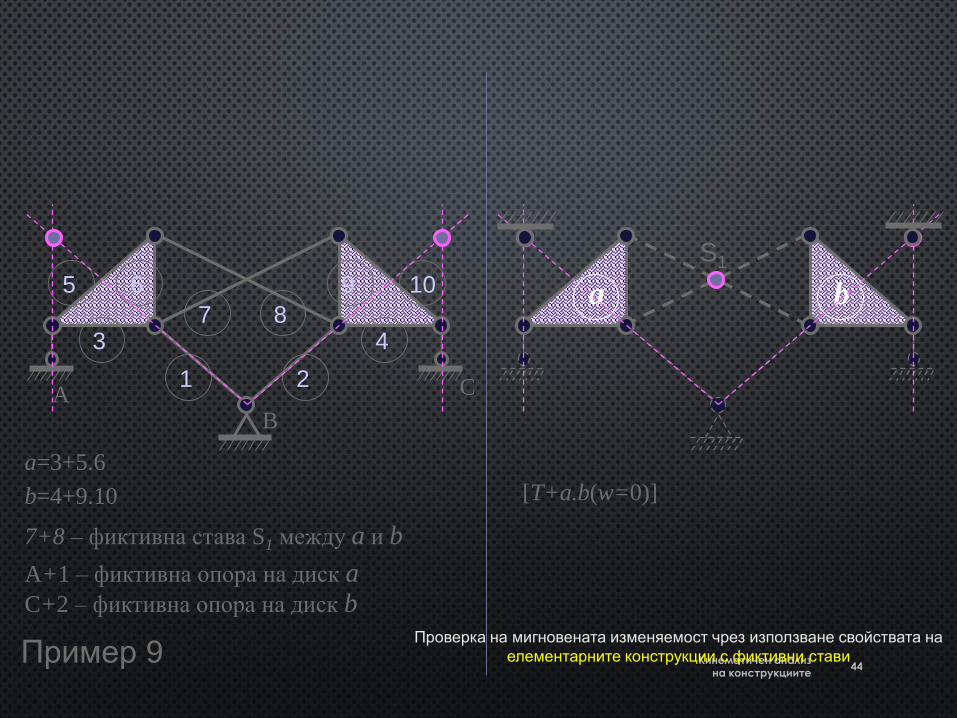
44
1
a=3+5.6
Пример 9
2
3 4
5 6 9 10
7 8
b=4+9.10
AB
C
a b
7+8 – фиктивна става S1 между a и b
S1
A+1 – фиктивна опора на диск aC+2 – фиктивна опора на диск b
[T+a.b(w=0)]
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
45
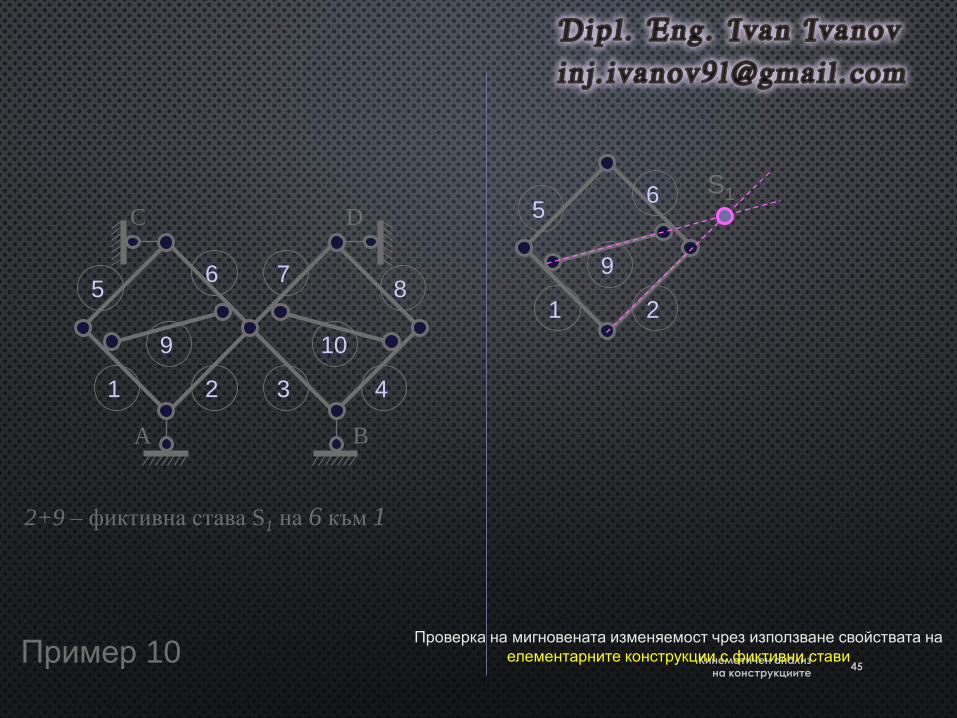
1
Пример 10
2 3 4
56 7
8
9 10
A B
C D
1 2
56
9
S1
2+9 – фиктивна става S1 на 6 към 1
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
46
B
D
A
C
S1
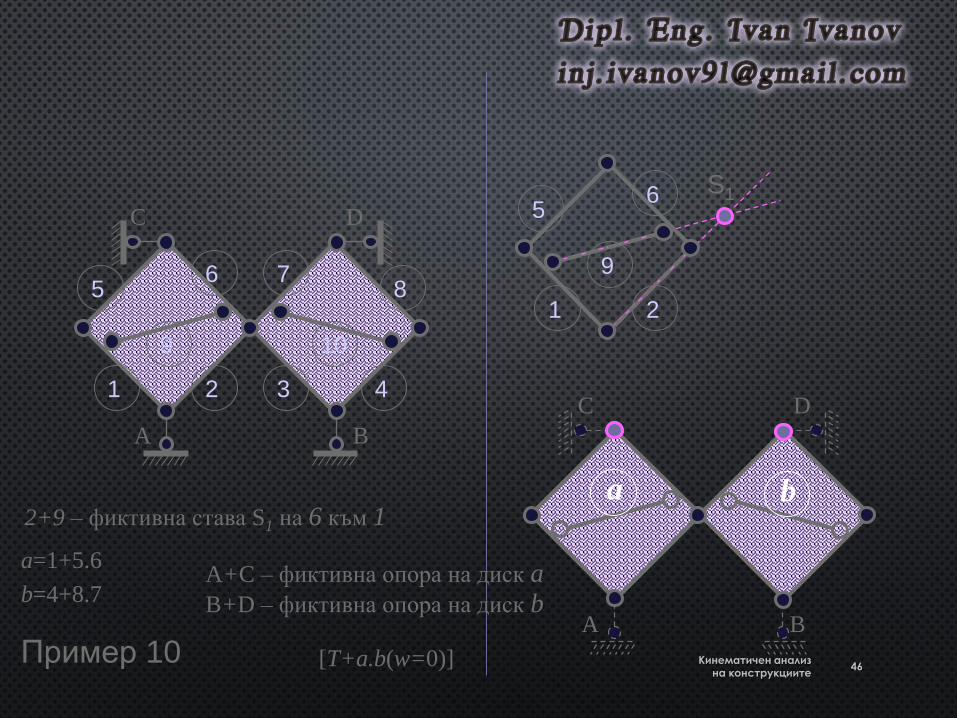
1
Пример 10
2 3 4
56 7
8
9 10
A B
C D
1 2
56
9
2+9 – фиктивна става S1 на 6 към 1
a=1+5.6
b=4+8.7
ba
A+C – фиктивна опора на диск aB+D – фиктивна опора на диск b
[T+a.b(w=0)]
Кинематичен анализ на конструкциите
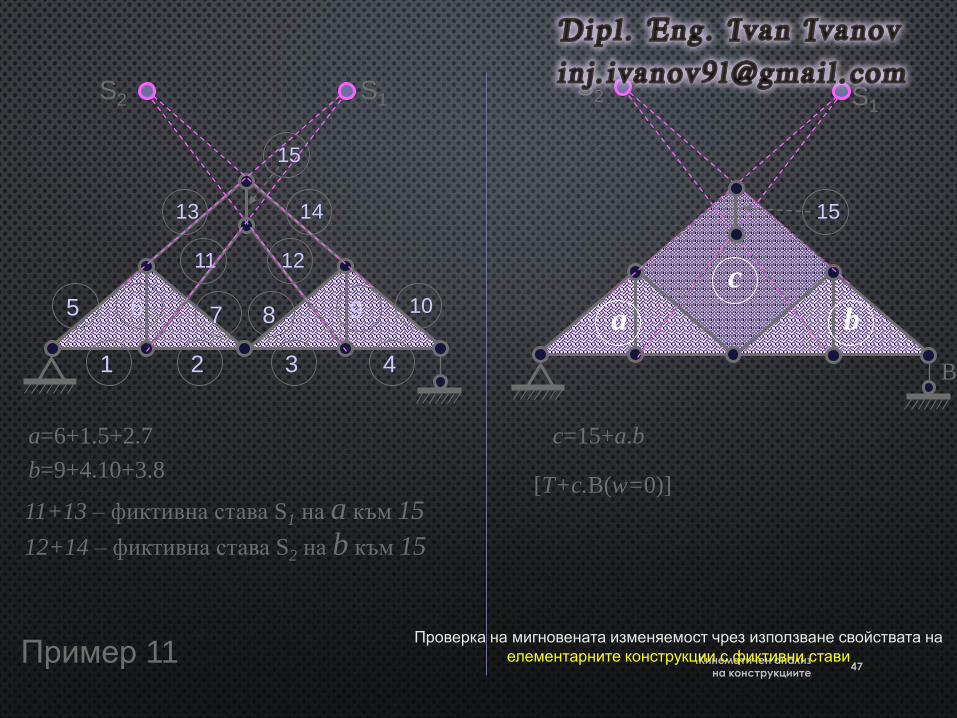
47
a=6+1.5+2.7
Пример 11
5 6 9 10
11 12
7 8
1 2 3 4
13 14
15
b=9+4.10+3.8
11+13 – фиктивна става S1 на a към 15
12+14 – фиктивна става S2 на b към 15
S1S2
a b
S2 S1
c=15+a.b
15
c
[T+c.B(w=0)]
B
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави
Кинематичен анализ на конструкциите
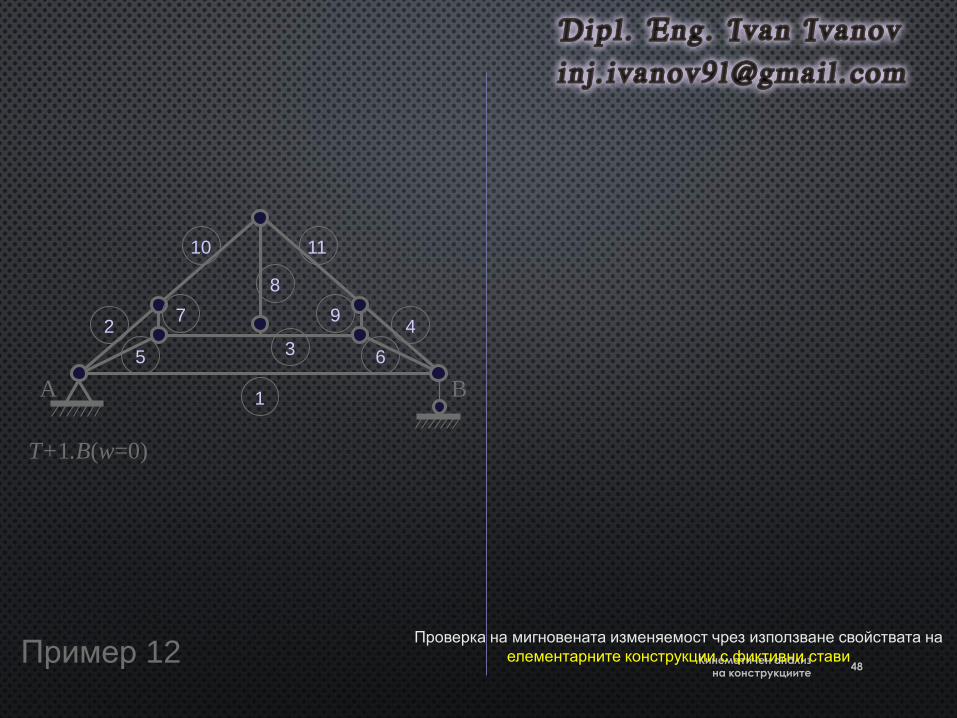
48Пример 12
1
10
2 4
8
3
7 9
5 6
11
T+1.B(w=0)
A B
Проверка на мигновената изменяемост чрез използване свойствата на
елементарните конструкции с фиктивни стави





























