Embed Size (px)
Citation preview

Actividad #2

sensoresTáctilAcústicoFotosensibleUltrasónico

actuadoresServomotorLámparabluetooth

Sensor tactilLe permiten al robot responder a obstáculos
en el entorno.
menú

Sensor acústicoEl sensor acústico detecta el nivel de
decibeles: la suavidad o intensidad de un sonido. El sensor acústico detecta dB y dBA. dBA: sonidos que el oído humano es capaz de oír.
dB: todos los sonidos existentes, incluyendo los sonidos demasiado altos o bajos para el oído humano.menú
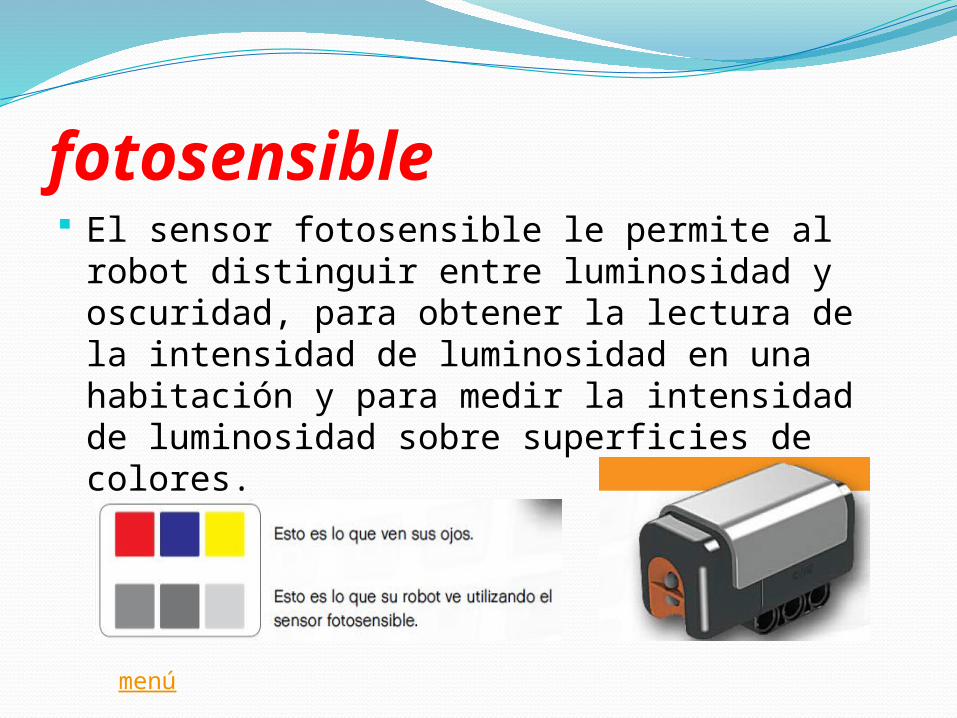
fotosensible El sensor fotosensible le permite al robot
distinguir entre luminosidad y oscuridad, para obtener la lectura de la intensidad de luminosidad en una habitación y para medir la intensidad de luminosidad sobre superficies de colores.
menú

Sensor ultrasónicoEl sensor ultrasónico le permite al robot ver y
reconocer objetos, evitar obstáculos, medir distancias y detectar movimiento.
El sensor ultrasónico utiliza el mismo principio científico que los murciélagos: mide la distancia calculando el tiempo que demora una onda de sonido en golpear un objeto y volver, al igual que un eco.
menú

Servomotor(actuador)Los tres servomotores interactivos le
proporcionan al robot la capacidad de moverse. El bloque Desplazar [Move] automáticamente alinea sus velocidades para que el robot se mueva suavemente.
Menú
Lámpara(actuador)Se puede encender y apagar las lámparas, para
crear patrones intermitentes de luz. También pueden utilizarse para activar el sensor fotosensible, para mostrar que un motor está
encendido o para indicar el estado de un sensor. También puede utilizarlas para darle vitalidad a los “ojos” de su robot u otras funciones.
menú

Bluetooth(actuador)El Bluetooth es una tecnología de
comunicación que hace posible el envío y la recepción de datos sin cables. Utilizando las funciones del Bluetooth, puede instalar una conexión inalámbrica entre su NXT y otros dispositivos Bluetooth, como otras unidades NXT, teléfonos móviles y ordenadores.
menú