Embed Size (px)
DESCRIPTION
Cours de Sciences des matériaux : 1- Préambule – Notions générales 2- Liaisons atomiques – Cohésion et propriétés des solides 3- Propriétés mécaniques 4- Equilibres de phases et Thermodynamique des solides 5- Les solides cristallisés et les défauts cristallins 6- Les transformations à l’état solide 7- Cinétique des transformations. 8- Notions de base sur les traitements thermiques.
Citation preview

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 1
H E I Troisième année 2013/2014
SCIENCE DES MATERIAUX
Documents de cours
.M. SOUISSI - J.Y. DAUPHIN

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 2

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 3
Sommaire 1. Préambule – Notions générales ............................................................................ 4
1.1 Subdivision par domaines d’emploi. ................................................................ 4
1.2 Segmentation économique. ............................................................................... 4
1.3 Quelques chiffres… .......................................................................................... 4
1.4 Le choix des matériaux ..................................................................................... 5 1.5 Différence entre Propriétés et Performances .................................................... 6
1.6 Quelques principes généraux de la Science des Matériaux. ............................. 7
2 Les liaisons atomiques - Cohésion et propriétés des solides. .................................. 8
2.1 Rappels sur la structure électronique des atomes. ............................................ 8
2.2 Les différents types de liaisons chimiques. .................................................... 11
2.3 Energie de cohésion - Force de liaison. .......................................................... 16
2.4 Les trois classes de matériaux ........................................................................ 18
3 Propriétés mécaniques ........................................................................................... 20 3.1 Rappels sur l’élasticité linéaire ....................................................................... 20
3.2 Mesure des propriétés mécaniques ................................................................. 23
4 Equilibres de phases et Thermodynamique des solides. ........................................ 29
4.1 Phases et diagrammes de phases. ................................................................... 29
4.2 Formation de la microstructure. ...................................................................... 33
5 Les solides cristallisés et les défauts cristallins. .................................................... 37
5.1 Rappels sur la structure cristalline des solides. .............................................. 37
5.2 Les structures cristallines des métaux. ........................................................... 41
5.3 Sites et atomes interstitiels dans les structures cristallines des métaux. ......... 44
5.4 Les défauts cristallins. .................................................................................... 45 5.5 Mécanismes de la déformation plastique dans les cristaux ............................ 47
6 Les transformations à l’état solide. ........................................................................ 50 6.1 Introduction aux traitements thermiques 6.2 La nature des transformations à l’état solide. ................................................. 52
6.3 Les deux types de transformations hétérogènes. ............................................ 52
6.4 La germination. ............................................................................................... 53 6.5 La diffusion dans les solides. .......................................................................... 55
7 Cinétique des transformations à l’état solide. ........................................................ 59
7.1 Lois cinétiques des transformations par Germination et Croissance. ............. 59
7.2 Cinétique expérimentale. ................................................................................ 59
7.3 Le diagramme cinétique TTT de condition isotherme. ................................. 60
7.4 Le diagramme cinétique TTT de refroidissement continu. ........................... 62
7.5 Cinétique des transformations polymorphiques. ............................................ 63
8 Notions de base sur les traitements thermiques des métaux. ................................. 65
8.1 Les traitements thermiques des aciers. ........................................................... 65
8.2 Les alliages à durcissement par précipitation. ................................................ 66
9 Annexes ..................................................................................................................... 89

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 4
1. Préambule – Notions générales
1.1.1 Matériaux structurels
Environ 80% des matériaux. Matériaux utilisés essentiellement pour réaliser des structures résistantes. Intérêt prioritaire pour les propriétés et les performances d’ordre mécanique.
1.1.2 Matériaux fonctionnels
Environ 20%. Matériaux recherchés pour des performances particulières. Exemple des matériaux pour la microélectronique ou le domaine des capteurs.
1.2.1 Matériaux traditionnels :
Bien connus, les moins chers, grande concurrence : aciers courants, verre, briques, etc. Connaissance largement répandue des conditions de mise en œuvre. Nombreuses références d’emploi. Grande concurrence et prix bas.
1.2.2 Matériaux avancés :
Extrapolation de matériaux traditionnels par une optimisation de certaines propriétés. Pas de rupture technologique majeure. Situation de monopoles dans certains cas.
1.2.3 Matériaux nouveaux :
Propriétés nouvelles, voire révolutionnaires, entraînant une rupture technologique. Mais peu de recul. Risque et prix élevés. Fournisseurs exclusifs et souvent incertains.
Répartition mondiale de la consommation des principaux matériaux
en millions de tonnes/an.
Béton environ 5000 Mt/an Aciers 1300 Mt/an Polymères 150 Mt/an Aluminium 22 Mt/an Cuivre 12 Mt/an
1.1 Subdivision par domaines d’emploi.
1.2 Segmentation économique.
1.3 Quelques chiffres…

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 5
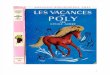
Les interventions de la SdM lors des différentes étapes du cycle de vie d’un objet manufacturé
Matières
Mise en forme
Pièce ouobjet neuf
Vie de l'objet
Recyclage
Valorisation
Déchet
Elaboration, alliages..
Cahierdes charges Fatigue, usure, corrosion
environnement, rupture..
Prop. méca, assemblage,traitements thermiques,revêtements....
Choix
Contrôles
Matériau
1.4 Le choix des matériaux

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 6
1.5.1 Quelques Propriétés des matériaux
Propriétés mécaniquesPropriétés mécaniquesPropriétés mécaniquesPropriétés mécaniques
module d’élasticité
limite d’élasticité
charge à la rupture
ductilité, allongement à la rupture
viscosité
vitesse de fluage
capacité d’amortissement
dureté
résistance à la fatigue
résistance à l’usure
ténacité
Propriétés chimiquesPropriétés chimiquesPropriétés chimiquesPropriétés chimiques
résistance à la corrosion
résistance à l’oxydation à chaud
réactivité avec d’autres produits
équilibres de phases
Propriétés physiquesPropriétés physiquesPropriétés physiquesPropriétés physiques
masse volumique
chaleur spécifique
coefficient de dilatation
transparence
conductibilité thermique
conductibilité électrique
chaleurs latentes de transformation
1.5.2 Quelques Performances des matériaux
Performances Performances Performances Performances
techniquestechniquestechniquestechniques
usinabilité
soudabilité
aptitude à l’assemblage
aptitude à la mise en forme
fiabilité
reproductibilité
durabilité
Performances Performances Performances Performances
sociosociosociosocio----économiqueséconomiqueséconomiqueséconomiques
disponibilité
nocivité
aptitude au recyclage
coût
familiarité
1.5 Différence entre Propriétés et Performances

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 7
1. La cohésion des solides dépend du type des liaisons atomiques.
2. Les matériaux appartiennent à trois classes distinctes : les céramiques, les métaux et les
polymères.
3. 84% des éléments purs ont un comportement métallique.
4. Il existe de nombreuses phases à l’état solide.
5. Il est fréquent d’observer des phases solides métastables.
6. Beaucoup de matériaux sont polyphasés.
7. 80% des matériaux sont cristallisés, les autres sont amorphes.
8. Les matériaux cristallisés sont presque toujours polycristallins.
9. Le diamètre d’un atome quelconque est voisin de 0.25 nm.
10. La microstructure d’un solide caractérise la nature, la taille et la disposition interne des
phases qui constituent un matériau, ainsi que les défauts qu’il contient.
11. La microstructure dépend du matériau lui-même mais aussi largement des conditions de
son élaboration.
12. On ne voit pas les atomes au microscope mais la microstructure.
1.6 Quelques principes généraux de la Science des Matériaux.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 8
2 Les liaisons atomiques - Cohésion et propriétés des solides.
2.1.1 Niveaux d’énergie - Orbitales - Nombres quantiques.
Autour du noyau, les électrons sont situés sur des orbitales caractérisées par des niveaux
d’énergie discrets. Chaque orbitale est définie par quatre nombres quantiques:
• n, nombre quantique principal, entier naturel 1,2,3... niveau ou couche (K, L, M, N, ...) détermine la taille de l’orbitale. • l, nombre quantique angulaire, de 0 à n-1 sous-niveaux s, p, d, f,... détermine la forme de l’orbitale • m, nombre quantique magnétique, de -l à l détermine l’orientation • s, nombre de spin détermine le sens de circulation •
Le remplissage des orbitales pour des atomes de numéro atomique croissant se fait par: La règle de Pauli : deux électrons se partagent la même orbitale s’ils sont de spin opposé. La règle de Hundt : les électrons de même spin occupent des orbitales de même énergie.
2.1.2 Remplissage des premiers niveaux d’énergie.
Le remplissage des différents niveaux d’énergie s’effectue normalement jusqu'à l’Argon en
occupant successivement les sous-niveaux s(2 électrons) et p(6 électrons) de chaque couche. Les électrons occupent les orbitales vides s’ils sont de spin égal.
Anomalie de remplissage du niveau 3d Structure électronique des premiers éléments
2.1 Rappels sur la structure électronique des atomes.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 9
2.1.3 Remplissage des couches électroniques pour les 30 premiers éléments.
Le tableau ci-dessous montre le remplissage des niveaux électroniques des 30 premiers
atomes au fur et à mesure que le numéro atomique augmente. Tout se passe par occupation successive des sous-couches s puis p jusqu’au Néon (couches
K et L remplies).. A partir du Sodium, la 3ème couche, M, commence par se remplir régulièrement jusqu’à
l’Argon (3s et 3p remplies). A partir du Potassium, une anomalie considérable se produit : la couche 3d devrait se
remplir à la suite de 3p mais on observe à la place le remplissage de la couche 4s, dont le niveau d’énergie est inférieur.
Ainsi sont formés le Potassium puis le calcium, qui possèdent donc une couche 3d totalement vide.
L’augmentation du numéro atomique va ensuite faire apparaître 10 éléments, du Scandium au Zinc, par occupation progressive des dix niveaux d’énergie possibles pour la couche 3d. Tous ces éléments possèdent une couche 4s contenant deux électrons peu liés au noyau : ils constituent la première série des métaux de transition
Le même phénomène se produit à nouveau pour les couches 4d, 5d et 6d et conduit à l’apparition de trois autres séries de métaux de transition.
Les sous-couches 5f et 6f connaissent aussi le même sort et ces anomalies de remplissage sont à l’origine des deux séries de chacune 14 métaux de comportement très voisin, appelés respectivement Lanthanides et Actinides
K L M N s
(2 él.) s
(2 él.) p
(6 él.) s
(2 él.) p
(6 él.) d
(10 él.) s
(2 él.)
1s2 H, He
1s2
2s2 Li, Be
1s2
2s2 2p6 B, C, N, O, F, Ne
1s2
2s2 2p6
3s2 Na, Mg
1s2
2s2 2p6 3s2 3p6 Al, Si, P, S, Cl, Ar
1s2 2s2 2p6 3s2 3p6 remplissage anormal 4s2 K, Ca
1s2 2s2 2p6 3s2 3p6 3d10 Sc,Ti,V,Cr,Mn,Fe,Co,Ni,Cu,Zn
4s2
Conséquences :
• Les éléments de la série de transition ont des électrons périphériques peu liés. Rayons atomiques faibles. Grande conduction thermique et électrique. Oxydation facile (la corrosion aussi). Pas d’interaction avec les photons (réflecteurs de la lumière). Ce sont tous des métaux.
• Formation d’une liaison de type particulier (métallique) à l’état solide. Tendance à la compacité maximale. Cristallisation intense, dans des systèmes simples.
• Les métaux sont très nombreux (84% des éléments).

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 10
2.1.4 Le tableau périodique des éléments.
Dans la nature, on identifie des atomes de numéro atomique différent (et donc de masse
atomique différente), variant de 1 à environ deux cents. Le remplissage des couches atomiques subissant les anomalies citées ci-dessus conduit
cependant à reproduire périodiquement la même nature des couches les plus externes. Celles-ci sont responsables des phénomènes de liaisons chimiques que nous allons voir un peu plus loin. Aussi, des atomes différents en masse possèdent-ils les mêmes types de comportement chimique.
C’est ce que montre le célèbre Tableau périodique des Éléments de Mendéléiev :
• Les éléments situés en colonne sont chimiquement comparables. • Les éléments de la colonne la plus à droite sont les gaz rares : ils sont les seuls à posséder
une couche externe complètement remplie. Pour cette raison, ils ne forment pas de liaisons chimiques et sont inactifs : ils ne forment pas de composés avec les autres éléments et ne parviennent même pas à constituer facilement des états denses (liquide ou solides).
• Les deux colonnes de gauche correspondent aux alcalins et alcalino-terreux. Ils possèdent une dernière couche de type s (premier sous niveau d’énergie d’une couche). En perdant un ou deux électrons ils acquièrent la structure très stable d’un gaz rare. Ils sont donc faciles à ioniser (oxyder).
• Les éléments, plutôt légers type B, C, Si, etc.., situés dans le triangle surligné à droite, possèdent une dernière couche environ à moitié remplie : ils formeront facilement des liaisons fortes mettant en jeu plusieurs électrons. Ce sont les métalloïdes.
• Tous les autres éléments (les plus nombreux) possèdent une anomalie de remplissage et sont des métaux.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 11
2.2.1 La liaison covalente.
Partage des électrons périphériques par deux atomes identiques (liaison homopolaire) ou possédant une couche externe proche du demi remplissage (liaison hétéropolaire). Les électrons mis en commun se déplacent sur des orbitales moléculaires, communes aux deux atomes.
Liaisons de très forte énergie, avec une grande directivité et une grande fixité de la distance inter atomique.
Exemple du Chlore formant la molécule diatomique Cl2 par une liaison covalente
homopolaire.
Exemple du Carbone : hybridation des orbitales sp3. Les orbitales atomiques 2s et 2p forment 4 orbitales identiques. Les quatre liaisons sont disposées en tétraèdre comme c’est le cas du diamant et de nombreux composés du carbone
Structure du méthane
Structure du diamant
2.2 Les différents types de liaisons chimiques.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 12
Exemple du Carbone : hybridation des orbitales sp2. Formation de trois liaisons planes σ à partir
d’une orbitale 2s et de deux orbitales 2p, complétées par une liaison π provenant de l’orbitale 2s restante. C’est la structure des doubles liaisons du carbone (éthylène) et des deux types de liaisons assurant la cohésion du graphite. Les liaisons σ forment la structure plane hexagonale, la liaison π maintient seule la cohésion entre plans graphitiques.
Structure du graphite.
2.2.2 La liaison ionique.
Association d’ions positifs et négatifs. Les électrons se déplacent vers les atomes de plus grande électroaffinité. Les couches électroniques externes sont modifiées et chaque ion a une structure électronique externe de gaz rare. Liaison non orientée mais la neutralité électrique entraîne une alternance stricte des atomes.
Exemple de NaCl :
Structure du Néon Structure de l’Argon

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 13
Empilement compact dans NaCl. Alternance des ions positifs et négatifs.
2.2.3 La liaison métallique.
Les ions métalliques sont liés entre eux par un gaz d’électrons provenant des électrons de valence qui sont délocalisés et circulent dans tout le solide.
Liaison forte, isotrope, entraînant une grande compacité de l’empilement des atomes. Exemple du Magnésium :
2.2.4 Les liaisons faibles ou secondaires.
Proviennent de l’attraction électrostatique entre atomes ou molécules formant des dipôles : forces de Van der Waals entre atomes rendus dipolaires par l’agitation thermique, forces entre molécules iono-covalentes polarisées, liaison H.
Liaisons de faible énergie responsables de la cohésion de nombreux liquides et des polymères.
Exemple de l’eau :
Na + Cl -

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 14
Exemple d’un polyamide linéaire (Nylon 6-6) :
Exemples de liaisons secondaires d’énergie croissante du fait de la polarisation de la molécule :
C
H
H
HH C
H
Cl
HH C
Cl
Cl
ClCl
MéthaneTf = 88 K
VinyleTf = 113 K
Tétrachlorure de carbone Tf = 250 K
La délocalisation électronique plus intense dans l’exemple du CCl4 se traduit par un effet
dipolaire plus fort, une liaison plus solide et donc une température de fusion plus élevée.
2.2.5 Comparaison des propriétés des solides selon la nature des liaisons.
Liaison Exemple Propriétés
Tf E a r D Covalente C électrons partagés e e f m/e 0/f Ionique NaCl électrons attirés m/e e f e 0
Métallique Cu électrons délocalisés m/e m m f e Liaisons faibles H2O attraction dipolaire f f e e m
Tf = température de fusion e = élevé E = module d’élasticité en tension m = moyen a = coefficient de dilatation linéaire f = faible r = résistivité électrique 0 = # nulle D = ductilité
Les liaisons principales entre C, N, O et H sont surtout covalentes (traits pleins). Elles assurent la cohésion des atomes d’une chaîne.
Les liaisons secondaires (en pointillé) sont des ponts Hydrogène qui s’établissent entre les H et les O de deux chaînes voisines.
Ces pontages assurent la cohésion des chaînes entre elles.
Ce sont surtout elles qui sont responsables du comportement du polymère solide.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 15
2.2.6 Le caractère mixte des liaisons.
Représentation du caractère mixte des liaisons dans les solides réels.
Covalente C,Si,AsGa..
FaibleH2O, N2, CH4
IoniqueMgO, NaCl...
Métallique Cu,Pb..
Diamant
Graphite
SiO2
Mg2Si
W
Sn
Fe
2.2.7 Taille des atomes et des ions.
La taille des atomes varie selon le numéro atomique et le nombre des électrons circulant sur
les orbitales. Elle varie lorsque l’atome est ionisé. Les atomes ont cependant une taille étonnamment peu variable, comparée à la grande
variété des masses atomiques (retenir qu’un atome moyen a un diamètre de 2.5 Å).
Elément
Matomique g/mole
Rayon de l’atome en Å ( 1 Å = 10 nm) liaison covalente liaison métallique liaison ionique
Li 7 1.22 1.53 C 12 0.77 N 14 0.74 Na 23 1.57 1.85 0.98 Al 27 1.25 1.43 0.55 Fe 56 1.16 1.24 0.83 Fe2+
0.67 Fe3+ Ag 108 1.34 1.44 1.13 Pb 207 1.54 1.74 1.32

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 16
2.3.1 Energie de cohésion.
Quel que soit le type de liaison qui s’établit entre deux atomes, l’énergie potentielle du système qu’ils constituent est diminuée lorsque la liaison se forme. Cette énergie est la résultante de deux composantes antagonistes : l’énergie d’attraction électrostatique Ua entre les charges de signe opposé et l’énergie de répulsion Ur provenant du recouvrement des orbitales des deux atomes lorsque ceux-ci s’approchent. L’énergie de liaison Ul et d0, la distance d’équilibre entre les deux atomes liés, sont données par la courbe U(d), dite courbe de Lennard-Jones de la liaison.
La force de cohésion dérive de l’énergie potentielle : dd
dUF = .
UUUUaaaaattraction électrostatiqueattraction électrostatiqueattraction électrostatiqueattraction électrostatique
UUUUrrrrrépulsion des orbitalesrépulsion des orbitalesrépulsion des orbitalesrépulsion des orbitales
Energie résultanteEnergie résultanteEnergie résultanteEnergie résultante
longueur d'équilibrelongueur d'équilibrelongueur d'équilibrelongueur d'équilibrede la liaisonde la liaisonde la liaisonde la liaison
UUUU
UUUUllll
distance ddistance ddistance ddistance d
force de liaisonforce de liaisonforce de liaisonforce de liaison
FFFF
ForceForceForceForcethéoriquethéoriquethéoriquethéoriquede cohésionde cohésionde cohésionde cohésion
distance ddistance ddistance ddistance d0000
rigidité de la liaisonrigidité de la liaisonrigidité de la liaisonrigidité de la liaison
répulsionrépulsionrépulsionrépulsion
attractionattractionattractionattraction
2.3 Energie de cohésion - Force de liaison.
ma d
AU −= ( A>0)
m vaut de 1 à 5 selon la liaison
nr d
BU = (B>0)
n vaut de 6 à 11 selon la liaison
La force théorique de liaison vaut environ E/15, selon les modèles.
C’est une valeur très élevée qu’infirme l’expérience dans la majorité des cas.
(on verra plus loin pourquoi). La « rigidité » de la liaison est :
• forte pour les liaisons covalentes, • moyenne pour les métaux • faible pour les liaisons secondaires.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 17
2.3.2 Application de l’énergie de cohésion : la dilatation thermique des solides.
Si une énergie de vibration (énergie thermique d’agitation des atomes autour de leur position d’équilibre) se superpose à l’énergie potentielle de la liaison, la longueur moyenne de la liaison se trouve augmentée du fait de la forme de la courbe U(d). C’est la dilatation universelle des solides quand la température s’accroît. L’ampleur du phénomène dépend de la nature de la liaison : faible pour les céramiques, moyenne dans le cas des métaux, celle-ci est très marquée pour les polymères.
Si Uth excède Ul, la liaison est rompue et on observe la sublimation du solide.
évolution de la distance moyenneentre les atomes quand Uth augmente
U
Uth
distance dUl
longueur moyenne de liaisonpour l'énergie de vibration Uth
2.3.3 Comparaison des courbes de Lennard-Jones selon le type de liaison.
Les courbes U(d) des trois grands types de liaisons sont schématiquement représentées sur la figure suivante. • les liaisons iono-covalentes sont les plus intenses (U1 le plus grand) et les plus rigides. • les liaisons métalliques sont les plus compactes (d2 le plus petit). • les liaisons secondaires sont peu énergétiques et peu compactes.
U
distance d
Liaison iono-covalente
Liaison secondaire
Liaison métallique
U 3
U 2
U 1
d2 d3d1

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 18
2.4.1 Métaux, céramiques et polymères.
2.4.1.1 LES METAUX ET ALLIAGES METALLIQUES
Propriétés physiques et mécaniques
• solides atomiques de grande densité • cohésion par liaisons métalliques • températures de fusion moyennes • tous cristallisés dans des systèmes simples • très bons conducteurs électriques et thermiques • rigidité moyenne à élevée • déformables plastiquement et tenaces • opaques à la lumière
Propriétés chimiques • sensibles à l’oxydation Caractéristiques économiques
• abondance et prix très variables • nombreux fabricants • recyclage possible • toxicité possible
Mise en œuvre
• très nombreux procédés bien connus
2.4.1.2 LES CERAMIQUES
Propriétés physiques et mécaniques
• combinaisons métal et élément léger : O, B, C et N. • solides moléculaires de densité moyenne • cohésion par liaisons iono-covalentes • températures de fusion très élevées • amorphes ou cristallisés • grande dureté • rigidité élevée • fragiles • tenue mécanique élevée à chaud
Propriétés chimiques • inertes jusqu’aux hautes températures Caractéristiques
économiques
• céramiques traditionnelles et céramiques techniques • abondance et prix très variables • nombreux fabricants • recyclage difficile
Mise en œuvre
• procédés anciens et simples ou très sophistiqués • assemblage difficile
2.4 Les trois classes de matériaux

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 19
2.4.1.3 LES POLYMERES ORGANIQUES
Propriétés
physiques et mécaniques
• chaînes carbonées contenant des éléments non-métalliques • solides moléculaires de faible densité • cohésion par liaisons faibles et covalentes • températures de fusion faibles • isolants thermiques et électriques • amorphes ou partiellement cristallisés • dilatation thermique importante • faible résistance mécanique • rigidité faible à très faible • tenue mécanique très sensible à la température
Propriétés
chimiques
• réactivité chimique très variable, souvent très faible dans les conditions ambiantes
• sensibles au vieillissement et à la lumière Caractéristiques
économiques
• abondance liée à la pétrochimie • prix très variables • nombreux fabricants • recyclage peu efficace ou impossible
Mise en œuvre
• différente suivant les thermoplastiques ou les thermodurcissables • procédés faciles très nombreux • faible coût
2.4.2 Les matériaux composites.
Les matériaux composites ne forment pas une classe de matériaux à part. Ils sont obtenus par mélange de matériaux provenant chacun de l’une des trois classes précédentes. Leurs propriétés se trouvent modifiées de façon continue par la proportion de chaque composant. Voici quelques exemples :

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 20
3 Propriétés mécaniques
3.1.1 Déformation élastique en tension/compression uniaxiale.
Une force F s’exerce sur la surface A et étire le matériau suivant l’axe vertical. La seule contrainte subie est σz, contrainte de tension uniaxiale dirigée selon z (les contraintes extérieures σx et σy sont égales à 0) : σz = F/A. , s’exprime en Mpa (N/mm2).
On définit ex, ey, ez, les variations relatives des dimensions initiales x, y et z :.
ex = (x’-x)/x ey = (y’-y)/y ez = (z’-z)/z
F
xy
z
x'y'
z'
F
A
L’élasticité linéaire est correctement vérifiée dans le cas des matériaux de forte cohésion
(céramiques, métaux à haut point de fusion). C’est la loi de Hooke qui s’écrit :
σz = E .ez
E est le module d’élasticité en tension, ou module d’Young. Il a la dimension d’une contrainte. Du fait des valeurs très élevées de E, on l’exprime souvent en GPa.
Le coefficient de Poisson du matériau est ν = -ex/ez ( = - es/ez si le matériau est isotrope). Il caractérise l’aptitude du matériau à changer de dimension dans une direction
orthogonale à la contrainte σz. Lors d’une sollicitation en tension ou en compression uniaxiale, le volume du matériau peut
varier. On calcule ce changement grâce au coefficient de Poisson, en effet : soit V le volume initial et V’ le volume sous contrainte :
V = x.y.z V’ = x’.y’.z’ = x.y.z.(1+ex+ey+ez) au premier ordre.
La variation relative de volume est : ∆ = (V’-V)/V = ex+ey+ez = ez.(1-2ν).
Les matériaux dont ν est voisin de 0.5 ne changent donc pas de volume sous l’effet d’une tension ou d’une compression uniaxiale. Il s’agit uniquement des élastomères et des polymères les moins rigides. Pour les matériaux de grande rigidité (céramiques, diamant) ν est compris entre 0.1 et 0.2. Ces matériaux changent le plus de volume lorsqu’on les étire!
Les métaux ont des coefficients de Poisson compris entre 0.25 et 0.4.
3.1 L’élasticité des solides

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 21
3.1.2 Déformation élastique en cisaillement.
La force F s’exerce sur la surface A, parallèlement à celle-ci. Elle incline le matériau suivant la direction x. La contrainte subie est τx = F/A. Elle s’exprime en Mpa (N/mm2).
F
a
xy
z
F�
A
On définit la variation de forme par γ, la tangente de l’angle θ : γ = tgθ = a/z. La loi d’élasticité en cisaillement s’écrit :
τx = G.γ
G est le module élastique de cisaillement, ou module de Coulomb du matériau. Le cisaillement n’entraîne pas de changement de volume (θ est très petit).
3.1.3 Déformation élastique en compression uniforme.
La sollicitation extérieure est une pression uniforme p, qui s’exerce sur tout le volume. La variation de volume est :
∆ = (V’-V)/V La loi d’élasticité s’écrit :
p = - K.∆
K = est le module de compressibilité du matériau.
3.1.4 Relations entre les constantes élastiques.
Le comportement élastique d’un matériau est donc défini par quatre constantes :E, G, ν et K. Deux seulement sont indépendantes.
En effet, ces constantes sont reliées entre elles par les relations suivantes :
E = 3K(1-2ν) = 2G(1+ν)
3.1.5 Energie élastique.
La déformation élastique s’accompagne d’un stockage d’énergie réversible (principe des
ressorts). En tension, pour σ1 < Re, cette énergie s’écrit : ∫ === 1
0
22
1 22
σ σσE
eE
deU E
énergie élastique
σ=F/S0
Re
e1 e = ∆L/L0

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 22
Dans le cas d’une contrainte σ2 excédant Re, l’énergie consommée se partage en énergie
d’écrouissage (de déformation plastique) et en énergie élastique, stockée dans le matériau tant que la contrainte σz est présente :
énergie élastique
énergie plastique
3.1.6 Anélasticité - élasticité des élastomères.
• De nombreux matériaux présentent une élasticité plus complexe que l’élasticité linéaire. Du fait de phénomènes de frottement interne (mouvements de dislocations mobiles dans les métaux ou de chaînes carbonées dans les polymères), une partie de l’énergie fournie pour la déformation élastique est transformée en chaleur. On constate un effet d’hystérésis sur la courbe de mise en charge. Ces matériaux sont amortisseurs de vibrations.
Hystérésis élastique dans la courbe de traction d’une fonte grise
• Les élastomères présentent tous une forme particulière de courbe d’élasticité. Celle-ci est très plate à faible allongement : on met en jeu le dépliement facile de chaînes enroulées sur elles-mêmes. Puis la pente de la courbe augmente à très fort allongement. Le module d’élasticité augmente rapidement du fait d’un alignement de plus en plus intense des chaînes polymères et d’une sollicitation croissante des liaisons covalentes qu’elles contiennent.
Allongement e
Contrainte
Courbe de déformation élastique d’un élastomère lors d’un cycle de charge
σ = F/S0
σ2
Re
e = ∆L/L0 e2

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 23
3.2.1 La mesure des propriétés de résistance en tension : l’essai de traction.
Diversité de comportement de quelques matériaux soumis en tension.
3.2 Mesure des propriétés mécaniques

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 24
Exemple de courbe de traction d’un matériau déformable plastiquement (métal).
F/S 0
R 0,2
Rm
Pente : module d'Young
A%
L imite d'élasticité vraie
déformat
ion répar
tie homo
gène
début de s triction
rupture
Les grandeurs caractéristiques classiques, dites « nominales », qui figurent dans les bases de données des matériaux, sont :
Résistance Limite d’élasticité en MPa Re ou R0.2 Résistance à la traction en MPa Rm
Plasticité ou ductilité
Allongement rémanent à la rupture en %
A%
Coefficient de striction en %
Σ% = 100.(So - Srupt)/S0
Cas particulier des aciers : la déformation plastique est produite par deux phénomènes successifs. Tout d’abord, une déformation localisée forme les « bandes de Lüders » (défaut d’aspect à l’emboutissage) qui s’étendent à tout le matériau avant que n’apparaisse la déformation homogène normale .On détermine le plus souvent la limite d’élasticité par Rel.
F/S 0
R el
Rm
déformation hétérogène
déformation homogène
R eh
déformation élastique
e = ∆L/L0
e = ∆L/L0

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 25
Cas des polymères linéaires déformables : la déformation plastique, souvent intense, est
précédée par une déformation élastique qui s’étend jusqu’au seuil d’écoulement, qui est l’équivalent de la limite d’élasticité des matériaux rigides. Cette déformation élastique est non-linéaire et conduit à définir deux modules distincts.
F/S0
e = � L/L0
seuild'écoulement
rupture
module tangent
module sécant
3.2.2 La courbe rationnelle de traction :
On trace σvraie = f(ε) à partir de la courbe nominale avec :
• La contrainte vraie )1(0
eS
F
S
Fvraie +==σ ,
car à volume constant S0L0 = SL, et S0 = S.L/L0 = S.(1+e)
• L’allongement rationnel : )1()(0
0eLn
L
LLn
l
dlL
L+=== ∫ε
Comparaison des courbes nominale et rationnelle pour un matériau déformable :
Allongement e ou e
ruptureCourbe nominale� N = F/S0
Courbe rationnelle� vraie = F/S
Rm
Cette représentation permet de mettre en évidence la symétrie traction/compression. La modélisation la plus courante de la courbe rationnelle de traction est la loi de LUDVIK :
σ = k.εn ,
e = ∆L/L0
σvraie = F/S
σN = F/S0
Allongement e ou ε

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 26
où k et n sont des constantes du matériau (n est le coefficient d’écrouissage).
3.2.3 L’essai de flexion.
L’essai de traction présente un grave inconvénient : il nécessite la fabrication, en général par usinage,
d’échantillons aux formes complexes (filetages ou bossages pour fixer l’échantillon sur la machine d’essai). Beaucoup de matériaux durs et fragiles ne permettent pas facilement une telle mise en forme. C’est surtout le
cas des céramiques et des verres, mais aussi de certains polymères. On utilise alors l’essai mécanique de flexion pour mesurer le comportement. C’est aussi un
cas de sollicitation mécanique très fréquent dans le monde réel.
Un échantillon de section constante est placé sur deux appuis ponctuels et soumis en son centre à une charge progressive F qui fait apparaître une flèche d.
La limite majeure de cet essai est que le matériau n’est pas soumis à une contrainte unique, comme dans le cas de l’essai de traction/compression.
En effet, sous l’effet de la force F, le matériau subit une contrainte variable selon la distance x entre le centre du barreau (fibre neutre) et l’une ou l’autre surface.
Dans le cas de la figure, la partie haute (x compris entre 0 et +h/2, h étant la hauteur du barreau) est en compression. Dans la partie basse (x compris entre 0 et -h/2), le matériau est en tension. Au centre du barreau la contrainte est nulle (fibre neutre).
La valeur de σ(x) s’écrit : σ(x) = x . M/I avec : M = moment fléchissant au point d’application de F. Ici M = FL/4 I = Moment d’inertie de la section I = bh3/12 pour une section rectangulaire I = π R4/4 pour une section circulaire
Flèche d
Force F
Distance entre appuis L
+h/2
-h/2
Compression
Traction
σ

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 27
3.2.4 La mesure de la dureté.
On imprime une empreinte dans le matériau par un poinçon et on mesure la taille de l’empreinte. Suivant la nature des matériaux, il existe plusieurs systèmes de mesure.
Les plus reproductibles sont la dureté VICKERS et la dureté BRINELL. Dans l’essai VICKERS, le poinçon est une pyramide de diamant, la charge P varie de
quelques grammes à 50 daN.
d
P
MatériauVue en plan
La géométrie connue du poinçon permet de calculer la dureté comme étant la contrainte
maximale subie lors de l’enfoncement, calculée à partir de la mesure de la diagonale d de l’empreinte :
HVP = (1.854.P)/d2 en daN/mm2, (souvent exprimée sans dimension) La valeur de HV ne dépend pas du choix de P et permet de construire une échelle continue
de dureté pour tous les matériaux.
0000 22220000 111100000000 333355550000 777700000000 1111555500000000 4444000000000000
ppppoooollllyyyymmmmèèèèrrrreeeessss
mmmmééééttttaaaauuuuxxxx ppppuuuurrrrssss
aaaalllllllliiiiaaaaggggeeeessss
ccccéééérrrraaaammmmiiiiqqqquuuueeeessss ttttrrrraaaaddddiiiittttiiiioooonnnneeeelllllllleeeessss
ccccéééérrrraaaammmmiiiiqqqquuuueeeessss tttteeeecccchhhhnnnniiiiqqqquuuueeeessss
ddddiiiiaaaammmmaaaannnntttt,,,, BBBBNNNN
aaaacccciiiieeeerrrrssss ssssppppéééécccciiiiaaaauuuuxxxx
lllliiiimmmmiiiitttteeee dddd''''uuuussssiiiinnnnaaaabbbbiiiilllliiiittttéééé
555500000000
La dureté BRINELL est d’application plus restreinte car elle utilise comme poinçon une bille d’acier trempé. L’empreinte forme une calotte sphérique très petite et peu profonde dont on mesure le diamètre.
3.2.5 La mesure de la ténacité.
La ténacité mesure l’énergie de déchirement d’un matériau. C’est une grandeur complexe, qui dépend du mode de déformation et de la vitesse de sollicitation.
Dans une plaque plane munie d’une entaille interne de longueur 2a, la contrainte moyenne σ est amplifiée au voisinage du fond d’entaille, en fonction de l’aciguïté de celle-ci.
2222aaaa
aaaa
���� xxxx
0
0
σmax
ρ

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 28
On définit Kt, le facteur de concentration de contrainte comme :
ρσσ a
KT 210
max +==
C’est cette concentration des contraintes qui est responsable de la propagation d’une fissure. Selon leur nature, les matériaux y sont plus ou moins résistants : les matériaux fragiles subissent une décohésion brutale par rupture des liaisons et se rompent totalement car ρ reste très petit. Dans le cas des métaux plastiques, la rupture est ralentie par la déformation qui tend à émousser le fond d’entaille et ainsi à diminuer σmax.
Le paramètre intrinsèque le plus important est KIC, facteur d’intensité de contrainte critique.
Dans le cas d’une ouverture de la fissure, on définit KIC comme : KIC = σc aπ = (E.Gc)0.5
Pour une fissure de longueur a, la rupture se produit lorsque la contrainte σc est atteinte. Gc définit l’énergie de propagation de fissure. Elle s’exprime en J/m2.
3.2.6 La mesure de la résilience.
La résilience est une mesure assez grossière de la ténacité : c’est l’énergie de rupture par choc mesurée par un mouton-pendule dont on observe l’angle de remontée après rupture. Elle est représentée par le symbole K et s’exprime en J/cm2.
Cette mesure sert surtout à faire apparaître le phénomène de rupture fragile dans les
matériaux qui y sont sensibles. Normalement, dans le cas des métaux, le déchirement s’effectue de façon ductile, en
absorbant beaucoup d’énergie. Les métaux dont le système cristallin n’est pas compact (fer et aciers, zinc, cobalt, molybdène,..) peuvent aussi subir une rupture par clivage analogue à celle des céramiques : c’est le comportement fragile. Celui-ci s’impose à basse température.
On détermine alors la température de transition T50 qui est un paramètre technique capital pour le choix des matériaux travaillant à froid.
100
50
0
Cristallinité=% surface fragile
Résilience
TempératureT50
Rupture fragile
Rupture ductileRupture
mixte
Position de départ du bras
Appuis
Marteau

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 29
4 Equilibres de phases et Thermodynamique des solides.
4.1.1 L’enthalpie libre.
La fonction d’état thermodynamique la plus adaptée pour évaluer l’énergie interne d’un solide est l’enthalpie libre de Gibbs, G :
G = H G = H G = H G = H ---- T.ST.ST.ST.S L’enthalpie H représente l’énergie des liaisons dans le solide. L’entropie S, dite de configuration, introduit la part d’ordre interne de l’architecture du
solide. Un solide ordonné (cristal parfait, par exemple), a une entropie plus faible que le même alliage à l’état amorphe ou liquide.
Théoriquement, la phase qui se forme est celle qui possède l’enthalpie libre la plus petite. Pour les solides, dans bien des cas, les phénomènes cinétiques et les faibles variations de G
qui existent entre des phases différentes conduisent à faire apparaître des phases dont l’enthalpie libre n’est pas la plus faible : la phase est alors métastable.
4.1.2 Diagramme de phases d’un corps pur.
SSSSoooolllliiiiddddeeeeLLLLiiiiqqqquuuuiiiiddddeeee
VVVVaaaappppeeeeuuuurrrr
TTTTeeeemmmmppppéééérrrraaaattttuuuurrrreeee
PPPPrrrreeeessssssssiiiioooonnnn
ppppooooiiiinnnntttt ttttrrrriiiipppplllleeee
TTTTffffuuuussssiiiioooonnnn TTTTéééébbbbuuuullll llll iiii tttt iiiioooonnnn
1111 aaaattttmmmm....
DDDDiiiiaaaaggggrrrraaaammmmmmmmeeee ddddeeee pppphhhhaaaasssseeeessss dddd''''uuuunnnn éééélllléééémmmmeeeennnntttt oooouuuu dddd''''uuuunnnn ccccoooorrrrppppssss ppppuuuurrrr....
ppppooooiiiinnnntttt ccccrrrriiiittttiiiiqqqquuuueeee
TTTTeeeemmmmppppéééérrrraaaattttuuuurrrreeee
PPPP ==== 1111 aaaattttmmmm....
SSSSoooolllliiiiddddeeeeccccrrrriiiissssttttaaaalllllllliiiinnnn
LLLLiiiiqqqquuuuiiiiddddeeee VVVVaaaappppeeeeuuuurrrr
GGGGssssoooolllliiiiddddeeee
GGGGlllliiiiqqqquuuuiiiiddddeeee
GGGGvvvvaaaappppeeeeuuuurrrr
4.1 Phases et diagrammes de phases.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 30
4.1.3 Diagramme de phases d’un mélange élémentaire binaire.
Nature des phases solidesNature des phases solidesNature des phases solidesNature des phases solides.
Phase = solide homogène, pas obligatoirement à composition fixe, mais identifiable par un système cristallin et des propriétés caractéristiques.
• Solutions solides terminales. Elles contiennent l’élément pur qui limite le domaine. Elles ont le même système cristallin simple que cet élément.
• Solutions intermédiaires étendues. Phases intermétalliques ou composés chimiques à composition variable, différentes des éléments purs à partir desquels elles se forment. Systèmes cristallins complexes.
• Composés chimiquement définis (ou stoechiométriques). De formule AmBn, avec n et m entiers. Diagramme de phasesDiagramme de phasesDiagramme de phasesDiagramme de phases.... Représentation dans le plan température/composition de la nature des phases. L’effet de la
pression est rarement pris en compte. La composition de l’élément soluté est représentée en % massiques, parfois complétée par
une échelle en % atomiques. Règle de la variance de Gibbs : v = n - φ + 2 (2 car 2 variables : T et p)
n = nombre de composants du mélange φ= nombre de phases en général :
p = 1 atm., v = n - φ + 1 Cas des mélanges binaires (2 composants).Cas des mélanges binaires (2 composants).Cas des mélanges binaires (2 composants).Cas des mélanges binaires (2 composants).
v = 3-φ Formation d’une phase unique : v = 2. Deux degrés de liberté : température et composition.
Un domaine monophasé est représenté par une surface dans le diagramme. Formation d’un mélange de deux phases : v = 1. Un seul degré de liberté. A température
donnée, ces deux phases ont des compositions fixées. Formation d’un mélange de trois phases : v = 0. Possible seulement en certains points
particuliers du diagramme mais le mélange triphasé est impossible à stabiliser.
4.1.4 Règles de fonctionnement des diagrammes binaires.
1- Règle de la température. Si on se déplace à température constante depuis l’élément composant A pur jusqu'à
l’élément B pur, on franchit des domaines alternativement mono et biphasés. Les intersections avec les lignes du diagramme indiquent les solubilités des phases à la température considérée.
pppphhhhaaaasssseeee 1111 pppphhhhaaaasssseeee 2222 pppphhhhaaaasssseeee 3333
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
1111 ++++ 2222 2222++++3333
TTTT
mmmmoooonnnnoooopppphhhhaaaasssséééé mmmmoooonnnnoooopppphhhhaaaasssséééé mmmmoooonnnnoooopppphhhhaaaasssséééébbbbiiiipppphhhhaaaasssséééébbbbiiiipppphhhhaaaasssséééé

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 31
2- Règle des segments inverses.
Dans un domaine biphasé, on connaît graphiquement la nature et la composition de chacune des deux phases qui sont en équilibre à la température T considérée. La règle des segments inverses permet de calculer la fraction massique de chaque phase.
pppphhhhaaaasssseeee 1111
pppphhhhaaaasssseeee 2222
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
1111 ++++ 2222
TTTT
XXXX2222 XXXX1111XXXX
aaaalllllllliiiiaaaaggggeeee
Fraction massique de la phase 1 : f1 = (X - X2)/(X1 - X2) Fraction massique de la phase 2 : f2 = (X1 - X)/(X1 - X2)
f1 + f2 = 1
Diagrammes à eutectique.Diagrammes à eutectique.Diagrammes à eutectique.Diagrammes à eutectique. De très nombreux diagrammes possèdent cette configuration qui transforme une phase
unique en un mélange très fin de deux autres phases à température constante. Le point E est un eutectique si la phase 1 est liquide, sinon c’est un eutectoïde. Sur le schéma suivant, l’alliage eutectique de composition XE est refroidi jusqu'à TE . A cette
température, la phase 2, de composition X2, et la phase 3, de composition X3, apparaissent simultanément et forment un agrégat biphasé de morphologie le plus souvent lamellaire.
pppphhhhaaaasssseeee 1111
pppphhhhaaaasssseeee 2222
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
pppphhhhaaaasssseeee 2222 ++++ pppphhhhaaaasssseeee 3333
TTTT
XXXX2222 XXXX3333XXXXEEEE
aaaalllllllliiiiaaaaggggeeee eeeeuuuutttteeeeccccttttiiiiqqqquuuueeee
pppphhhhaaaasssseeee 3333
TTTTEEEE
TTTTffffAAAA
TTTTffffBBBB
EEEE
MMMM NNNN

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 32
Le mélange biphasé eutectique est donc de composition constante et contient, à TE :
fphase 2 = (X3-XE)/(X3-X2) et fphase 3 = (XE-X2)/(X3-X2). Pour la composition particulière XE, c’est tout le solide qui est constitué de cet alliage
eutectique. Pour des compositions d’alliages comprises entre M et E, l’alliage contiendra une part de
phase 2 dite « primaire », le reste étant constitué d’eutectique. Symétriquement, les alliages compris entre E et N contiendront de la phase 3 primaire et de l’eutectique.
Diagrammes à péritectique.Diagrammes à péritectique.Diagrammes à péritectique.Diagrammes à péritectique. Cette transformation à température constante transforme deux phases en une seule
nouvelle, différente des deux autres, si la composition de l’alliage est XP.
pppphhhhaaaasssseeee 1111
pppphhhhaaaasssseeee 2222
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
pppphhhhaaaasssseeee 2222++++pppphhhhaaaasssseeee 3333
TTTT
XXXX2222 XXXX1111XXXXPPPPccccoooommmmppppoooossssiiiittttiiiioooonnnn ppppéééérrrriiiitttteeeeccccttttiiiiqqqquuuueeee
pppphhhhaaaasssseeee 3333
TTTTPPPP
TTTTffffAAAA
EEEE
MMMM NNNN
pppphhhhaaaasssseeee 1111++++pppphhhhaaaasssseeee 3333
pppphhhhaaaasssseeee 1111++++pppphhhhaaaasssseeee 2222
LLLL
PPPP
Sur le schéma, entre L et P deux phases 1 et 2 se sont formées. A la température TP, ces deux
phases, de composition X1 et X2, disparaissent au profit de la seule phase 3. Pour des alliages situés entre M et P, la phase 2 est en excès et subsiste avec la phase 3.
Entre P et N, c’est la phase 1 qui est présente avec la phase 3 en dessous de TP.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 33
4.2.1 Cas de la solidification d’un solide monophasé.
Lors de la formation d’une phase solide à partir d’un liquide, on observe la croissance simultanée de nombreux cristaux de formes ramifiées : les dendrites. Leur ramification est d’autant plus marquée que la vitesse de solidification est rapide.
Les angles entre les « bras » d’une dendrite sont ceux que forment les directions principales du réseau cristallographique.
Cette forme très particulière des cristaux en formation est due à des variations locales de la température provoquée par le dégagement de la chaleur latente de solidification et favorisant la croissance du solide dans des directions privilégiées.
La solidification de l’alliage monophasé XE se déroule selon le schéma ci-dessous :
4.2 Formation de la microstructure.
pppphhhhaaaasssseeee ssssoooolllliiiiddddeeee
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
TTTT
XXXXEEEE
TTTTffffAAAApppphhhhaaaasssseeee lllliiiiqqqquuuuiiiiddddeeee
23
4
5
1

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 34
On voit que lorsque la solidification est complète, les grains qui se sont formés se sont rejoints et forment le réseau des joints de grain. La forme dendritique a disparu.
4.2.2 Cas de la solidification d’un solide biphasé.
Prenons maintenant le cas d’un alliage plus riche en élément B. A basse température le matériau sera biphasé et contiendra les phases solides α et β. La phase α se forme dans les mêmes conditions que dans l’exemple précédent et tout est
identique jusqu’à la température T3. Par contre, en dessous de T3, on voit apparaître β qui se forme à partir du solide α. Les
conditions de croissance ne sont plus du tout celles de la solidification. La germination de β est beaucoup plus difficile et se fera préférentiellement dans les joints de grains de α.
Quant à la croissance, elle est fortement contrôlée par le milieu solide environnant : • les grains de β se développeront dans les directions cristallographiques de α les plus favorables,
ce qui privilégie la formation de β sous forme d’aiguilles ou de plaquettes. • La diffusion qui régit la vitesse de croissance est très limitée car le milieu est solide. Les grains
seront donc petits et nombreux. • Ces conditions cinétiques de croissance sont parfois tellement limitées par rapport à la
solidification que, dans bien des cas, la formation de β ne pourra pas satisfaire les conditions d’équilibre et le solide final sera métastable (hors d’équilibre). On constatera par exemple une quantité de β plus faible que prévu, ou même l’absence totale de cette phase. On verra plus tard que l’on joue souvent sur cette particularité dans le cas d’alliages industriels pour modifier leurs propriétés.
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
TTTT
XXXXEEEE
TTTTffffAAAApppphhhhaaaasssseeee lllliiiiqqqquuuuiiiiddddeeee
2
3
4
1
3
2
1
Phase β

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 35
4.2.3 Cas de la solidification d’un eutectique.
Prenons maintenant le cas d’un alliage de composition eutectique, noté XE sur le diagramme ci-dessous :
La solidification a lieu à une température particulière TE et fait apparaître en même temps
les deux phases α, de composition X2 et β, de composition X3. La température reste constante jusqu’à la solidification complète. La morphologie du mélange de phases eutectique est presque toujours lamellaire : des
feuillets très minces de phase α alternent avec ceux de phase β. Le développement de cette microstructure est très rapide car il nécessite un très faible déplacement par diffusion dans le liquide des atomes composants A et B pour atteindre la composition voulue.
On peut constater que la croissance se fait dans une direction perpendiculaire à celle des atomes.
Cette structure biphasée « germe » en de nombreux endroits
dans le liquide et sa croissance génère des grains d’eutectique qui se rejoignent et forment une structure analogue à la micrographie ci-contre.
Direction de croissance du constituant eutectique
Phase α
Phase β
Mouvements de diffusion des atomes A et B
pppphhhhaaaasssseeee lllliiiiqqqquuuuiiiiddddeeee
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
TTTT
XXXX2222 XXXX3333XXXXEEEE
aaaalllllllliiiiaaaaggggeeee eeeeuuuutttteeeeccccttttiiiiqqqquuuueeee
TTTTEEEE
TTTTffffAAAA
TTTTffffBBBB
EEEE
MMMM NNNN
P3
P2
P1

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 36
L’aspect plus ou moins large des lamelles dépend de l’incidence du plan de coupe de l’échantillon par rapport au système lamellaire.
4.2.4 Cas de la solidification d’un solide proche d’un eutectique.
Soit un alliage de composition différente de l’eutectique, mais coupant le segment horizontal de température TE entre M et N, par exemple du côté gauche :
La solidification commence comme pour un alliage monophasé et forme des dendrites de
phase α. Mais à la température TE, le reste de phase liquide a atteint la composition XE et forme brutalement de l’eutectique dans l’espace « inerdendritique ».
Enfin, la phase α, de composition X2, va former la phase β, de composition X3, comme dans le cas de l’alliage biphasé, et principalement localisée aux contours des dendrites primaires.
Ce cas très fréquent produit une microstructure célèbre qui contient :
• deux phases : α et β. La phase α est présente dans les cristaux dendritiques « primaires » et dans l’eutectique.
• trois constituants qui sont les matériaux visibles au microscope : les dendrites de α primaire, l’eutectique et la phase β « secondaire » rejetée par les dendrites primaires.
Dendrites primaires de phase α
Eutectique
Phase β secondaire
ccccoooommmmppppoooossssiiiittttiiiioooonnnn eeeennnn BBBB
AAAA ppppuuuurrrr BBBB ppppuuuurrrr
TTTT
XXXX2222 XXXX3333XXXX
TTTTEEEE
TTTTffffAAAA
TTTTffffBBBB
EEEE
MMMM NNNN
XXXXEEEE
α β
Liq.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 37
5 Les solides cristallisés et les défauts cristallins.
Plus de 80% des solides possèdent un arrangement atomique ordonné à grande distance
(état cristallin). A l’échelle atomique, ces arrangements se traduisent par des symétries d’environnement et de position des atomes extrêmement strictes et une très forte anisotropie des propriétés. De nombreuses propriétés dépendent étroitement de la structure cristalline : conduction, plasticité, rupture, densité ... • Tous les métaux et leurs alliages sont cristallisés dans des systèmes simples et denses. • De nombreuses céramiques sont cristallisées, souvent avec des systèmes complexes. • Les polymères sont rarement cristallisés du fait de la diversité des éléments de chaînes polymères. Ils ne peuvent jamais être totalement cristallisés.
5.1.1 La structure cristalline.
La connaissance de la structure cristalline nécessite trois informations : 1. Le réseau cristallinLe réseau cristallinLe réseau cristallinLe réseau cristallin, constitué par un ensemble de nœuds cristallographiques, faisant
apparaître les éléments de symétrie de l’empilement. Les atomes ne sont pas nécessairement situés sur ces nœuds. Tous les cristaux appartiennent à l’un des 14 réseaux de Bravais.
5.1 Rappels sur la structure cristalline des solides.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 38
2. La maille élémentaireLa maille élémentaireLa maille élémentaireLa maille élémentaire, qui donne les dimensions d’un volume minimum possédant les
propriétés de symétrie du cristal. La maille est déterminée par 3 vecteurs non-coplanaires dont les coordonnées constituent les paramètres de maille. Tous les autres atomes du cristal peuvent être retrouvés par translation selon chacun de ces 3 vecteurs.
3. Le motifLe motifLe motifLe motif, qui indique l’emplacement de la matière contenue dans la maille en fournissant la position relative et la nature des atomes situés à l’intérieur.
5.1.2 Masse volumique théorique.
Le volume de la maille et le motif étant connus, on peut calculer la masse volumique du cristal par :
mailleladeVolume
motifduatomesdesMasseth −−−
−−−−=.ρ = ∑=
n
i
i
VN
M
1 *
avec Mi = masse atomique de l’atome i du motif n = nombre d’atomes dans le motif. N = nombre d’Avogadro = 6.02 1023 atomes rééls par atome/gramme. V = volume d’une maille La masse volumique réelle est toujours légèrement plus faible que la masse volumique
théorique car elle intègre la présence de défauts cristallins.
5.1.3 Voisinage et coordination.
Dans une structure cristalline, chaque atome possède un certain nombre de voisins, relié au type de liaison qui assure sa cohésion à l’ensemble du solide. Le nombre de premiers voisins d’un atome est la coordination de cet atome dans la structure. La coordination peut varier de 3 à 12 selon la nature de l’empilement cristallin.
La position de chaque atome du motif est donnée en coordonnées relatives, indépendantes de la valeur absolue des paramètres.
5.1.4 Plans cristallographiques.
Les plans cristallographiques sont des plans contenant certains nœuds du réseau cristallin. Ils constituent des familles de plans parallèles de propriétés cristallographiques identiques.
Ils coupent la maille élémentaire avec la même inclinaison et sont équidistants de la même distance d, dite « interéticulaire » (c’est cette grandeur qui est mesurée par diffraction X).
Pour « indexer » ces différents plans et indiquer leur position par rapport à la maille, on
utilise les indices de Millerindices de Millerindices de Millerindices de Miller. Dans un cristal, dont la maille élémentaire est représentée ci-dessous et dont les paramètres
sont a,b,c, on considère un plan réticulaire quelconque qui coupe les axes de la maille en X, Y et Z.
Les quatre mailles a,b,c et d représentent le même réseau 2D. Les mailles a et d sont primitives car elles ne possèdent pas de nœuds internes.
aaaa bbbb
cccc
dddd

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 39
Les coordonnées de ces intersections sont respectivement égales à :
X = A.a Y = B.b Z = C.c Les indices de Miller de cette famille de plans, traditionnellement notés h, k et l,
s’obtiennent en prenant les inverses de A, B et C et en les multipliant par n de manière à ce que h, k et l soient entiers et les plus petits possible :
h = n/A k = n/B l = n/C On peut aussi déterminer h, k et l de la façon suivante : à partir du nœud choisi comme
origine, on compte, dans la direction x, le nombre de plans parallèles rencontrés le long de la distance a séparant deux nœud du réseau. Ce nombre est égal à la valeur absolue de l’indice h suivant la direction x.
Voici quelques exemples de plans dans un système 2D (ou en considérant, en 3D, que tous ces plans sont perpendiculaires au plan de la figure). Les points noirs représentent les nœuds du réseau. Pour la famille de plans représentés dans le coin inférieur droit, le nombre de plans rencontrés suivant la direction a est h=1. Dans la direction b, k=3 et dans la direction c, perpendiculaire au plan de la feuille, l=0 puisque cet axe est parallèle au plan cristallographique et qu’il n’y a pas intersection.
Pour une famille de plans parallèles, les indices de Miller sont identiques. Si un plan rencontre un axe dans sa partie négative, l’indice de Miller est négatif et on le
note en indiquant un signe moins au dessus de la valeur de l’indice. Une famille de plans est représentée par ses indices h, k et l notés entre parenthèses. Les systèmes de haute symétrie possèdent de nombreuses familles de plans
cristallographiques de propriétés identiques.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 40
Voici quelques exemples de plans cristallographiques :
5.1.5 Directions cristallographiques.
L’identification de directions particulières est plus directe que celle des plans. Elle est obtenue en représentant entre crochets les coordonnées du nœud le plus proche de l’origine par où passe la droite orientée de direction voulue.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 41
La liaison métallique impose le rapprochement maximal des centres atomiques et le plus
grand nombre possible de premiers voisins. C’est la raison de l’adoption par la majorité des métaux de systèmes cristallins de grande
densité et, en conséquence, de haute symétrie et de grande simplicité.
5.2.1 La structure cubique à faces centrées.
Le paramètre unique est a.
La maille comporte 4 atomes situés en (0,0,0) ;(0, 2
1,2
1) ;(
2
1,
2
1,0) et (
2
1,0,
2
1).
L’empilement compact est obtenu dans les plans diagonaux (111). Les atomes sont au contact le long de la diagonale d’une face. La coordination est de 12 et la compacité de 0.74.
C’est la structure de :Ag, Al, Au, Cu, Feγ, Ni, Pb, Ca.
5.2.2 La structure hexagonale compacte.
Les paramètres sont a, c et l’angle γ = 2π/3. La maille n’est que le tiers du prisme à base hexagonale.
Elle comporte 2 atomes (en noir sur la figure) situés en (0,0,0) et (3
1,3
2,2
1).
L’empilement compact est obtenu dans les plans de base (001). Les atomes sont au contact le long de l’arête a du prisme. La coordination est de 12 et la compacité de 0.74.
C’est la structure de : Be, Cd, Co, Mg, Tiα, Zn, Zr.
5.2 Les structures cristallines des métaux.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 42
Cependant, on constate que tous ces réseaux réels hexagonaux ne sont pas « compacts » et que le rapport c/a s’éloigne de la valeur de compacité maximale 1.633.
5.2.3 La structure cubique centrée.
Le paramètre est a.
La maille contient deux atomes en (0,0,0) et (2
1,
2
1,2
1) .
L’empilement n’est plus compact : la compacité tombe à 0.68 et la coordination à 8. Les atomes sont au contact le long de la diagonale du cube.
Les métaux qui cristallisent dans cette structure n’ont pas une liaison purement métallique. Ce sont : Cr, Feα, Li, K, Na, Mo, Tiβ, W.
5.2.4 Autres structures importantes.
Les métalloïdes tels que le silicium, le carbone diamant, le germanium, le gallium, cristallisent dans la structure cubique « diamant ».
La symétrie principale est cubique à faces centrées mais la maille contient huit atomes et l’empilement n’est pas compact, du fait des liaisons covalentes qui imposent une coordination de 4.
Les composés intermétalliques cristallisent dans plusieurs types de systèmes, tous complexes, et caractérisés par des motifs contenant parfois plusieurs centaines d’atomes par maille.
Ces phases ne sont pas compactes et se rapprochent des céramiques.
5.2.5 Structures cristallographiques des céramiques.
Les composés ioniques et covalents utilisent de nombreux systèmes cristallins différents, plus complexes que ceux des métaux. En effet, outre la compacité, d’autres impératifs doivent être satisfaits pour assurer les liaisons internes : alternance des charges des ions positifs et négatifs, encombrement stérique, angle et longueurs des liaisons.
La figure suivante rassemble quelques unes de ces structures : a) structure du chlorure de césium CsCl. b) structure du chlorure de sodium NaCl. c) structure de la blende, sulfure de zinc ZnS. d) structure de la fluorine, fluorure de calcium CaF2.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 43
e) structure du titanate de baryum BaTiO3.
5.2.6 Structures cristallographiques des polymères.
Les polymères les plus simples peuvent présenter un ordre cristallographique qui modifie fortement les propriétés. Ces structures ne sont pas toujours très complexes, comme on peut le voir sur la figure suivante représentant la maille orthorhombique du polyéthylène :

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 44
Le plus souvent, les atomes de soluté à l’intérieur d’une solution solide sont en substitution :
ils remplacent sur un nœud du réseau un atome de solvant et ne modifient que faiblement les dimensions du réseau.
Les atomes les plus petits, H, B, C et N, peuvent s’intégrer par insertion dans les « trous » des réseaux cristallins grâce à leur petite taille. Ces trous sont les sites interstitiels. Chaque structure cristalline possède des sites plus ou moins accueillants pour ces atomes dont l’influence sur les propriétés est très grande.
Il existe deux types de site, selon l’environnement de l’interstitiel central : • les sites tétraédriques. • les sites octaédriques.
Voici les emplacements de ces sites pour les trois grandes structures métalliques :
5.3 Sites et atomes interstitiels dans les structures cristallines des
métaux.
FC
C
C

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 45
Aucun système cristallin n’est exempt de défauts. Ceux-ci sont de trois types : • les défauts ponctuels : les lacunes et les interstitiels, qui représentent un manque ou un excès de matière à l’intérieur de l’ordre cristallin. Ils jouent un très grand rôle dans la conduction électrique des semi-conducteurs et dans les mécanismes de diffusion dans les solides.
LLLL
LLLL
LLLL
LLLL
IIII
IIII
• les défauts linéaires : les dislocations, qui sont associées à des demi-plans cristallins en excès dans un volume cristallisé. Elles sont responsables de la plasticité des métaux.
• les défauts surfaciques : les joints de grains et les fautes d’empilement. Ils représentent des discontinuités étendues entre deux volumes cristallins voisins. Ils assurent la germination des changements de phase.
5.4.1 Les dislocations.
Il existe deux modèles idéaux de défaut linéaire dans un cristal : • la dislocation-coin, telle que celle représentée ci-dessous en a). Il s’agit d’un demi-plan excédentaire qui déforme le cristal, par compression au dessus du plan qui contient l’extrémité du demi-plan, par tension en dessous.
• la dislocation-vis, comme représentée en b). Elle correspond à un défaut de positionnement des atomes, en hélice autour de la ligne de dislocation.
• Les dislocations réelles « serpentent » dans le matériau et sont alternativement vis ou coin, en formant des boucles (figures c) et d)).
Une dislocation est définie par la ligne le long de laquelle se reproduit le défaut dans le
cristal et par le vecteur de Bürgers, b, qui mesure l’écart de position des atomes.
5.4 Les défauts cristallins.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 46
5.4.2 Le déplacement des dislocations.
• Sous l’effet d’une contrainte de cisaillement τ, le cristal parfait (-a) ne se déforme qu’élastiquement.
• Si une dislocation-coin (-b) est présente, elle se déplace dans le sens d’application de τ. Elle ne peut quitter son plan de glissement.
• S’il s’agit d’une dislocation-vis (-c), son déplacement est perpendiculaire à τ. Elle pourra changer facilement de direction autour de sa ligne, pour s’adapter à l’orientation de la sollicitation.
Le déplacement se fait toujours perpendiculairement à la ligne de dislocation. Lorsque la dislocation atteint la surface du cristal, est disparaît et laisse un cristal parfait
déformé plastiquement d’une quantité égale à la longueur de son vecteur de Bürgers (en bas). De même, s’il s’agit d’une boucle de dislocations, son déplacement fournit un cristal parfait
déformé.
5.4.3 Rôle des dislocations.
Les dislocations sont à l’origine du phénomène de la déformation plastique de certains matériaux. Une étude détaillée de leur rôle permet de montrer les faits suivants : • Les dislocations sont très nombreuses et mobiles dans les métaux. • Elles se déplacent à l’intérieur d’un grain mais ne peuvent en franchir les frontières.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 47
• Elles sont presque immobiles dans les céramiques. • On définit Λ, densité de dislocations, comme la longueur totale de lignes de dislocations contenues dans un cm3 (ou le nombre de lignes qui traversent un cm2).
• Les dislocations se multiplient lors de la déformation plastique. Certains éléments de la microstructure sont des sources de dislocations (inclusions, précipités). La déformation plastique augmente leur densité : leur déplacement s’en trouve entravé, ce qui constitue le phénomène de durcissement par écrouissage. Λ varie fortement avec la déformation :
Matériau Λ en cm-2
monocristal à l’équilibre 102 métal normal 105 métal déformé 108 à 1010 métal irradié jusqu'à 1015
• La vitesse de déplacement des dislocations est limitée : si la vitesse de sollicitation est élevée, elles ne peuvent se déplacer suffisamment vite et la capacité de déformation est réduite.
• La présence de dislocations augmente l’enthalpie libre des phases. • Par chauffage, certains mécanismes entraînent l’anihilation des dislocations. C’est le phénomène de recuit, lors duquel un matériau écroui contenant de nombreuses dislocations voit leur densité décroître et retrouve ses capacités de déformation plastique.
5.5.1 Les phénomènes de glissement dans les systèmes cristallins.
Si on exerce une tension (ou une compression) sur un cristal métallique, on constate qu’au
delà de la limite d’élasticité il se déforme de façon irréversible par des mécanismes microscopiques de glissement tels que ci-dessous :
La contrainte véritablement responsable du déplacement est la composante de cisaillement qui s’est exercée dans le plan XX’.
On constate que, pour un système cristallin donné, ce sont toujours les mêmes plans cristallographiques qui sont sujets au glissement : c’est dans ces plans que le mouvement des dislocations s’effectue le plus facilement, en suivant des directions particulières.
Plans et directions de glissement constituent les systèmes de glissement du cristal. Pour les trois systèmes les plus importants, ces systèmes sont :
5.5 Mécanismes de la déformation plastique dans les cristaux

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 48
A- système hexagonal : les plans de base et 3 directions (3 systèmes). B- système Cubique à faces centrées : les plans diagonaux du cube et 3 directions. (12 systèmes égaux).
C- Système Cubique centré : les plans diagonaux de faces avec 2 directions (12 systèmes) plus deux autres types de glissement plus difficiles à activer.
5.5.2 Le facteur de Schmid.
La contrainte de cisaillement critique qui a entraîné la déformation dans le plan de glissement est : τ = Fc/Sc. Elle est orientée selon la direction de glissement d. Celle-ci forme un angle λ avec l’axe de sollicitation, et se trouve située dans le plan de glissement qui, lui, forme un angle φ avec cet axe.
Fc = F.cos λ et Sc = S0/cos φ, donc τ = σ. cosφ . cos λ cosφ . cos λ est le facteur de Schmid du système de glissement qui s’est activé. La courbe ci-dessous à gauche (a) montre la variation de la contrainte à la limite d’élasticité
en tension mesurée sur des monocristaux présentant des orientations différentes à la sollicitation du même système de glissement. La courbe de droite (b) trace la variation de cette contrainte en fonction du facteur de Schmid.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 49
A toutes ces valeurs de la contrainte de tension correspond une seule et même valeur de τc qui est bien la grandeur fondamentale décrivant ce qui se produit lors de la déformation plastique.
5.5.3 Limite d’élasticité des matériaux polycristallins
Si la sollicitation extérieure de tension s’exerce sur un métal polycristallin (ensemble de
petits cristaux identiques mais désorientés, cas le plus fréquent), les grains se déforment plastiquement les uns après les autres.
En effet, ceux dont les systèmes de glissement sont les mieux orientés par rapport à l’axe de la sollicitation subiront des glissements pour de faibles valeurs de σ car leur facteur de Schmid est proche de 0.5. Il s’agit des grains pour lesquels la composante de cisaillement est maximale, soit ceux dont un système de glissement est voisin de 45° par rapport à l’axe de tension.
Au fur et à mesure que la contrainte σ augmente, les grains moins bien orientés s’activent à leur tour.
C’est ce phénomène qui est schématisé sur les courbes ci-dessus et qui rend bien compte de
la forme réelle des courbes de traction des matériaux déformables au voisinage de la limite d’élasticité.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 50
6 Les Traitements thermiques .
6.1 Introduction aux chapitres 6, 7 et 8: Comment choisir le matériau idéal ? Lors de la vie d’une pièce, trois époques différentes se déroulent : La fabrication et la mise en forme : le matériau doit être peu résistant (peu dur) et déformable. Pendant l’utilisation : on cherche le plus souvent un matériau résistant et tenace. A la fin de vie : le matériau doit être peu résistant et cassant pour faciliter le recyclage. Ces exigences sont tout à fait contradictoires et conduisent le plus souvent à des choix de
matériaux procédant de compromis. Les quatre mécanismes de base permettant de durcir un matériau. Selon les cas, on cherche à durcir ou à adoucir un matériau constituant déjà une pièce. Il s’agit donc de chercher des mécanismes modifiant les propriétés des matériaux à l’état
solide. Prenons le cas d’un alliage simple monophasé que l’on veut « durcir », c’est à dire augmenter
la résistance (Re) et donc la dureté (HV). Quatre mécanismes physiques indépendants et cumulables peuvent augmenter la résistance :
• Augmenter le ou les éléments d’alliage dans la solution solide initiale. Cet effet d’alliage est très variable selon les éléments considérés. Ainsi, 0.3% de silicium ajoutés au fer a augmente Re de 50% mais plusieurs % de nickel ne produiront qu’un faible effet. De toute façon, s’il s’agit d’une pièce terminée, comment introduire ces nouveaux additifs dans sa masse ?
• Provoquer une déformation plastique. L’effet de l’écrouissage ne peut qu’augmenter Re, parfois d’une façon spectaculaire. C’est le cas de certains aciers inoxydables particulièrement mous à l’état non déformés mais qui durcissent très fortement dès qu’on les déforme. Ces matériaux sont, pour cette raison, difficiles à usiner mais cette propriété est très utilisée lors de leur mise en forme pour augmenter leurs performances mécaniques. Mais comment durcir une pièce par cette méthode si l’on ne peut pas changer sa forme ?
• Ajouter à l’alliage des éléments permettant de le rendre légèrement biphasé et obtenir la précipitation très fine d’une seconde phase. Les particules très petites mais très nombreuses de cette seconde phase forment des obstacles fixes qui gênent les mouvements des dislocations. Ce durcissement par précipitation, dont l’effet physique est assez proche de celui de l’écrouissage, est la source de performances souvent très élevées dans de célèbres familles d’alliages industriels. C’est le cas des alliages d’aluminium Duralumin par exemple. Mais comment incorporer cet élément d’alliage à une pièce, et comment y faire apparaître cette seconde phase ?
• Diminuer la taille de grain. Plus le grain est petit et moins les dislocations responsables de la déformation plastique sont libres de leurs déplacements. Elles doivent « accommoder » la déformation locale du réseau cristallin proche des joints de grains et ne peuvent se mouvoir que sous l’effet d’une contrainte extérieure plus intense. Si ce mécanisme est à l’origine des performances élevées de nombreux alliages modernes, il est à nouveau malaisé de modifier beaucoup la taille de grain dans une pièce finie. Les mêmes principes, appliqués en sens inverse, servent à adoucir un matériau trop dur. Ces mécanismes sont à l’origine des variations de propriétés de la grande masse des
matériaux usuels. Ces derniers sont choisis à la suite d’un compromis entre les trois cahiers des charges correspondant aux trois époques de la vie d’une pièce décrites initialement.
Ceci conduit à des solutions acceptables et peu onéreuses dans le cas de pièces courantes supportant de faibles sollicitations.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 51
Les matériaux pour fortes sollicitations et leurs traitements thermiques. Ces matériaux devant fortement résister ou présenter une grande dureté ne peuvent remplir
simultanément les trois parties de ce cahier des charges. On cherche donc des matériaux à deux états : l’un dur et l’autre mou, que l’on fait apparaître
en appliquant des traitements thermiques. Ces matériaux sont donc susceptibles de présenter à froid deux états thermodynamiques. L’un
est stable, l’autre est métastable et ces deux états possèdent des propriétés les plus opposées possibles.
On peut donc passer d’un état à l’autre par des transformations réversibles qui sont des changements de phases à l’état solide obtenues par des traitements thermiques. Ces derniers ont aussi bien comme rôle de provoquer certaines transformations que d’en inhiber d’autres.
Dans le monde très vaste des matériaux, cette propriété n’est pas fréquente du tout et seules quelques familles d’alliages possèdent cette capacité.
L’application de traitements thermiques est en effet avant tout lié à l’emploi des métaux et de leurs alliages, surtout du fait que c’est parmi eux que l’on trouve le plus grand nombre de phases métastables.
Mais dans le domaine des céramiques aussi, les traitements thermiques sont très fréquents et reposent sur les mêmes principes. Citons par exemple la vitrification, l’émaillage ou la trempe du verre. Par contre, on ne trouve pas de traitements thermiques à proprement parler dans le cas des polymères.
Le choix de matériaux à traitement thermique a une grande influence économique car le prix des pièces s’en trouve fortement augmenté. De plus, l’emploi de traitements thermique ne se fait pas sans difficultés puisque l’application de températures souvent très hautes est à l’origine d’oxydation et de déformations qu’il faut savoir prévoir et limiter.
Malgré cela, on peut constater qu’un grand nombre d’objets ne peuvent être produits que par
ces procédés et que certaines propriétés extrêmes méritent bien ces efforts supplémentaires. Pour illustrer ceci, voici une liste (incomplète) de certains de ces objets dont beaucoup
appartiennent à la vie courante : • l’outillage. En allant du vulgaire tournevis aux outils de coupe les plus perfectionnés. • tous les ressorts. • la coutellerie au sens large, de l’ouvre-boîte au scalpel. • de nombreuses pièces dans les moteurs, les transmissions et les machines industrielles. • les roulements à billes et systèmes assimilés. • les armes. • beaucoup d’appareils sous pression. • …sans oublier les aiguilles à coudre…..
On comprendra aisément qu’il s’agit maintenant d’aller voir de plus près la cinétique des transformations !

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 52
Les transformations à l’état solide donc il sera question ci-dessous sont celles qui sont
décrites par les diagrammes de phases. Il s’agit donc presque toujours de transformations réversibles, faisant apparaître des solides de structure différente selon la température et éventuellement la pression. Ces phases peuvent être stables ou métastables au sens de la thermodynamique.
Les transformations irréversibles suivent également les mêmes principes mais sont moins concernées dans le cas qui nous intéresse ici.
Selon les mécanismes qui transforment un solide en un autre, ont fait apparaître deux types de
mécanisme. Prenons un exemple (fictif) pour faire comprendre cette distinction : Soit un alliage tel que représenté dans le diagramme ci-dessous.
A l’état 1 de départ, cet alliage est monophasé α1. Portons-le à l’état 2, à la température Tp : il devient biphasé et une fraction volumique de α2
se forme (calculable par la règle des segments inverses), alors que la composition en B dans α1 diminue.
Si on observe le déroulement de cette transformation, on observe presque toujours le phénomène suivant : la phase initiale disparaît au profit de la nouvelle et la transformation a lieu sur un « front ». A un instant donné il existe donc une partie du volume composé de la phase mère et l’autre de la phase fille. Ces transformations sont appelées hétérogènes.
Leurs cinétiques très différentes permettent de classer les transformations hétérogènes en deux catégories :
6.2 La nature des transformations à l’état solide.
6.3 Les deux types de transformations hétérogènes.
Temp.
α1
α2
1
2
% B
T p

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 53
6.3.1 Transformations par Germination et Croissance.
Le changement de phase se fait d’abord à partir de germes de la nouvelle phase qui se
stabilisent, puis par croissance de ces germes. Très fréquentes et variées. La plupart des transformations visibles dans les diagrammes d’équilibre sont de cette catégorie.
Exemples :
• Transformations allotropiques d’un élément solide pur.
• Transformations allotropiques d’un alliage.
• Transformations eutectiques et eutectoïdes.
• Précipitation d’une phase minoritaire.
• Cristallisation. Recristallisation.
• Croissance d’un revêtement. L’étape de croissance comporte toujours un mécanisme d’interface , souvent très rapide.
Mais dans certaines transformations on observe aussi l’effet de la diffusion (transformations allotropiques, précipitations) qui ralentit toujours la cinétique de transformation.
6.3.2 Transformations polymorphiques ou massives.
Elles s’observent dans les cas peu fréquents où les phases mère et fille présentent une
parenté cristallographique importante. La transformation se fait par basculement brutal de plans atomiques entiers qui, en changeant légèrement de position, font apparaître la nouvelle structure cristallographique.
Si on peut encore identifier une période de germination, la rapidité extrême de la croissance fait qu’on considère celle-ci comme infinie : sa représentation cinétique est donc particulière car il est impossible de bloquer une transformation polymorphique par trempe rapide (au contraire !). De plus, elle se produit sans diffusion possible du fait de la grande vitesse de croissance: la phase fille a donc obligatoirement la même composition que la phase mère.
Les conditions cristallographiques très strictes nécessaires pour observer ce type de mécanisme expliquent le petit nombre de ces transformations. Elles sont pourtant particulièrement importantes puisque parmi elles figure la très célèbre transformation martensitique des fer/carbone (c’est à dire des aciers) qui a donné son nom à une série de transformations de grand intérêt technique. C’est aussi le cas de tous les alliages à mémoire de forme et plusieurs familles d’alliages industriels se transforment ainsi (laitons, titane).
On connaît aussi des transformations martensitiques de grande importance technique dans le domaine des céramiques.
6.4 La germination.
La germination est le tout début d’une transformation hétérogène. Autrement dit, le résultat de la transformation est si faible qu’il est, par nature, extrêmement difficile d’obtenir des résultats expérimentaux lors de la germination (sauf par quelques rares méthodes comme la mesure de la résistivité).
Par contre il existe de nombreuses théories qui utilisent toutes des principes communs et dont le principal résultat est exposé ci-dessous :

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 54
6.4.1 Intensité de germination. Effet de la déstabilisation.
L’intensité de germination est le nombre de germes stables formés par unité de volume à la
suite d’une déstabilisation ∆T. Cette grandeur joue beaucoup sur la cinétique totale de la transformation. Elle dépend de l’ampleur du ∆T, comme le montre le schéma qualitatif suivant.
Soit l’élément pur A. Il existe sous forme de la phase α, stable à haute température, ou β stable à basse température. Ces deux domaines sont définis par la température d’équilibre Téq.
On compare la transformation au refroidissement de la phase α en phase β par trois déstabilisations de plus en plus éloignées de Téq, et situées aux températures T1, T2 et T3.
On note que l’intensité de germination passe par une valeur maximale,l’intensité de germination passe par une valeur maximale,l’intensité de germination passe par une valeur maximale,l’intensité de germination passe par une valeur maximale, pour une
température inférieure à Téq car, pour des déstabilisations de grande amplitude, la diminution très
forte de l’agitation thermique aux basses températures empêche la formation des germes
Les conséquences de ce phénomène sont très importantes :
• On peut bloquer une transformation par germination et croissance si on refroidit à assez
basse température, dans une trempe rapide, la phase qui est stable à haute température.
• Il existe un optimum de déstabilisation qui favorise la cinétique d’une transformation.
• Enfin, ce phénomène n’existe pas pour la transformation inverse au chauffage puisque,
cette fois-ci, la production de germes augmente avec l’agitation thermique, plus on
s’éloigne de Téq. On ne peut donc pas bloquer une transformation G+C au chauffage.
Téq
T T
Intensité de germination germes/unité de volume
T1
T2
T3
Phase α
Phase β
A Composition
I1
I2
I3
Au refroidissement
Au chauffage

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 55
6.5 La diffusion dans les solides.
6.5.1 Les mécanismes élémentaires de la diffusion.
Le mouvement des atomes dans un solide est dû à l’existence de défauts. Les plus importants pour la diffusion sont les lacunes (absence d’un atome sur un nœud cristallographique, notée 1 sur le schéma ci-dessous) et les atomes interstitiels (présence de petits atomes (H, B, C ou N) dans les « trous » du réseau hôte, notée 3).
Sous l’effet de l’agitation thermique, un atome voisin d’une lacune, par exemple, a une certaine probabilité de «sauter » à sa place et donc d’échanger sa position avec elle dans le réseau cristallin. Le résultat est un transport de matière par diffusion.
On définit ce phénomène statistique par la fréquence de saut, Γ, qui dépendra de la nature de l’atome, des dimensions des distances inter atomiques dans le cristal et, bien sûr, de la température responsable de l’agitation thermique.
Si l’atome A diffusant se déplace dans un solide constitué entièrement de A, on parle d’autodiffusion. S’il s’agit d’un atome B se déplaçant dans un solide A ou dans un alliage AB, on parle de diffusion chimique. Celle-ci sera orientée dans le sens des gradients de composition dans l’alliage, alors que l’autodiffusion est isotrope.
6.5.2 Les lois de FICK.
Les deux lois de Fick rendent compte de la diffusion en prenant en compte les variations de composition qu’elle génère lorsque deux matériaux de composition différente sont accolés.
La première loi de Fick correspond à des conditions dites « stationnaires » : une section, située dans un matériau comportant les éléments A et B, est soumise à un flux d’atomes A, par exemple, sous l’effet d’un gradient de concentration. Ce flux s’écrit :
J est le flux d’atomes A à travers la section,
D est le coefficient d’interdiffusion, exprimé en m2/secondes (le plus souvent en cm2/sec)
x
C
∂∂
est le gradient de concentration en A, présent de part et d’autre de la section.
x
CDJ
∂∂−=
Lacune
Atome auto interstitiel
Atome soluté en substitution
Atome soluté en insertion

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 56
La première loi de Fick n’est pas d’un grand intérêt en SdM car elle suppose que les concentrations ne varient pas, ce qui n’est pas le cas dans les problèmes de transformations. Mais elle permet d’introduire la notion de coefficient de diffusioncoefficient de diffusioncoefficient de diffusioncoefficient de diffusion, D. Celui-ci dépend intensément de la température par une loi d’Arrhénius :
D = D0 . exp (-∆Hd/RT)
avec, pour l’atome considéré, dans la phase solide où il diffuse :
D0 = facteur de fréquence,
∆Hd = enthalpie de diffusion
Il faut noter qu’on parle d’ »inter diffusion », c’est à dire du mouvement conjoint d’atomes A et B. En effet, la représentation de Fick ne permet pas de décrire le mouvement des atomes A ou B seuls puisque le mouvement des atomes A à travers la section s’accompagne de celui des atomes de B dans l’autre sens.
La seconde loi de Fick, dite « en conditions dynamiques » est beaucoup plus utile.
Elle provient de la différentiation de la première loi et s’écrit, en nous limitant au cas où D est considéré comme constant :
Cette équation aux dérivées partielles rend compte de l’évolution de la composition en fonction de la distance et du temps. On lui connaît un grand nombre de solutions analytiques, dépendant des conditions aux limites et de la géométrie du milieu où se déroule la diffusion, et qui permettent de décrire l’évolution de profils de concentrationprofils de concentrationprofils de concentrationprofils de concentration.
Voici, à titre d’exemple schématique, le genre de courbes Conentration = f(distance) que cette seconde loi de Fick permet de calculer.
La figure ci-dessous représente l’évolution en fonction du temps du profil de concentration en atomes A lorsqu'un volume semi-infini d’élément A pur, accolé parfaitement à un volume semi-infini d’élément B pur, subit la diffusion à une température T constante et que le temps t augmente.
2
2
x
CD
t
C
∂∂=
∂∂

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 57
Mais le résultat précédent n’est valable que si la nature des solides A et B est la même (même type de phase). Autrement dit, si A et B forment une solution solide unique complète (cas très rare).
6.5.3 Diffusion en système binaire polyphasé.
Donc, dans un cas plus courant, les éléments purs A et B forment par alliage des phases qui sont décrites par leur diagramme d’équilibre. Si nous traçons dans ce diagramme une horizontale à la température de diffusion, on constate que plusieurs phases différentes sont stables en fonction de la composition.
Dans l’exemple ci-contre, à la température de diffusion T0, en partant de A pur et en enrichissant en élément B, on va
donc traverser successivement les phases α, β, δ et γ.
Le profil de concentration en B correspondant est représenté sous le diagramme et montre qu’après diffusion, le matériau sera constitué de la superposition de couches de ces quatre phases.
Aucune couche biphasée ne se sera formée.
En effet, la variation du potentiel chimique de B, véritable moteur du déplacement des atomes de B vers l’élément A, doit être monotone à travers la zone de diffusion.
Dans un diagramme binaire, les zones biphasées correspondent à des mélanges d’équipotentiels chimiques (les deux phases mélangées sont stables) et aucune diffusion ne pourrait s'y produire.
Ce résultat a beaucoup d’importance pour prédire la nature des revêtements formés par diffusion (nature des phases et compositions).
6.5.4 Loi d’équivalence temps-température.
Considérons un phénomène de diffusion à différentes étapes de son déroulement.
On peut, pour cela, prendre comme exemple la progression en distance d’une composition donnée sur le profil de concentration précédent au fur et à mesure que le temps s’écoule.
Ou encore l’épaisseur d’un revêtement formé par diffusion, ou la taille d’une particule de précipité en train de se former à partir d’une matrice.
Dans tous ces cas, la transformation dépendait du temps et de la température qui fixe D.
Comment évolueraient ces transformations si le temps ou la température étaient différents ?

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 58
Pour prédire ces évolutions, on utilise une loi fondamentale de la diffusion, dite d’Einstein, ou encore loi d’équivalence de diffusionloi d’équivalence de diffusionloi d’équivalence de diffusionloi d’équivalence de diffusion, et qui s’écrit :
x2 = k D.t
avec,
x = distance parcourue par diffusion depuis t = 0
k = coefficient dépendant de la géométrie
D = coefficient d’interdiffusion à la température T
t = temps de diffusion
Ainsi,
• à température constante (D = cte), les épaisseurs de revêtement x1 et x2 (ou la taille de
particules) au bout des temps t1 et t2 sont reliées par 2
22
1
21
t
x
t
x=
• à temps constant, mais pour deux températures différentes T1 et T2 (soit D1 et D2) les
revêtements x1 et x2 sont reliés par 2
22
1
21
D
x
D
x= .
• Cette loi montre aussi que l’épaisseur d’un revêtement dont la cinétique est gouvernée par diffusion est proportionnelle à t1/2.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 59
7 Cinétique des transformations à l’état solide.
Un modèle cinétique unique rend suffisamment bien compte des changements de phase par
G+C. C’est la loi d’AVRAMI qui s’écrit :
f = 1 – exp (-ktn) avec f : fraction volumique transformée. k : coefficient de vitesse = Vgerm. * V croiss. où Vgerm. est la vitesse de germination et Vcroiss.
celle de croissance. n : ordre de la cinétique.
En cas de croissance linéaire, n varie de 3 à 4. Pour les croissances paraboliques, n vaut 3/2. Il faut remarquer que cette loi de cinétique est « globale » : elle associe l’étape de
germination à celle de croissance. Pour mesurer la cinétique, on détermine les temps t1, t50 et t99, correspondants
respectivement à f = 1%, 50% et 99% du volume transformé.
7.2 Cinétique expérimentale. La détermination des constantes de la loi d’Avrami se fait par des expériences de cinétique
bien particulières et fait appel à des techniques variées de mesure de f. Ces mesures sont dites continues si on peut suivre l’évolution d’une grandeur sensible à la
quantité de phase présente pendant la transformation. C’est le cas de la dilatométrie, qui est la méthode expérimentale la plus intéressante car simple et suffisamment précise dans la plupart des cas.
Ces mesures peuvent être aussi discontinues si on peut laisser une transformation évoluer puis figer l’état du matériau par un brusque refroidissement. On comprend qu’ainsi il est ensuite possible d’appliquer au matériau toutes la panoplie des techniques de mesure de phases possibles à température ambiante, comme la diffraction quantitative des RX, l’analyse d’images micrographiques et certaines mesures magnétiques.
Mais est-on bien sûr d’avoir bloqué la transformation ? La courbe suivante montre l’allure moyenne caractéristique d’une courbe de cinétique de
transformation du type Avrami. Après une période de germination, souvent très brève, où rien n’est encore visible, la transformation débute, accélère, puis ralentit asymptotiquement au fur et à mesure que les volumes nouveaux de nouvelle phase se rejoignent.
D’une façon générale et normalisée, pour mesurer une cinétique, on détermine sur cette courbe les temps caractéristiques t1, t50 et t99, correspondants respectivement à f = 1%, 50% et 99% du volume transformé.
7.1 Lois cinétiques des transformations par Germination et Croissance.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 60
Courbe typique d’une cinétique de transformation par germination et croissance. Position des trois points « début », « milieu » et « fin » de cette transformation.
Supposons un matériau stable à haute température sous la forme d’une phase unique α. Si on déstabilise brutalement cette phase en l’amenant à une température où une autre phase β
est stable, on pratique une trempe isotherme et on doit assister au changement de phase de α en β. La cinétique de cette transformation, qui dépendra de la température de trempe, est représentée par le diagramme TTT – isotherme de la transformation (diagramme Transformation en fonction du Temps et de la Température).
Voici ci-après trois courbes cinétiques obtenues pour trois déstabilisations aux températures
T1, T2 et T3, de plus en plus basses. Le diagramme TTT « isotherme » (plus exactement « obtenu en condition isotherme ») est
obtenu en traçant dans le diagramme temps/température les lieux des points « début de transformation » (t1), « demi-transformation » (t50) et « fin de transformation »
7.3 Le diagramme cinétique TTT de condition isotherme.
Fraction f
Temps
t1 t50 t99
1%
99%
50%

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 61
(t99). Diagramme TTT-isotherme schématique d’une transformation G + C
Ce diagramme présente une forme de « C », ce qui est une caractéristique d’une
transformation par germination et croissance. Pour des déstabilisations proches de la température d’équilibre de la transformation, comme
la trempe à la température T1, la germination est faible et c’est ce mécanisme qui est responsable de la lenteur de la cinétique.
Pour des trempes à basse température, comme T3, la germination est intense mais la croissance, surtout si elle est gouvernée par diffusion est lente. Le résultat est une transformation « qui se traîne », voire qui ne finit plus.
Pour toutes les transformations par germination et croissance, il existe toujours un domaine de température où germination et croissance sont optimales et où la cinétique globale est la plus rapide, comme c’est le cas pour T2 sur la figure.
Ce diagramme cinétique ne peut, cependant, être utilisé que si on respecte le mode de trempe isotherme, c’est à dire un changement très rapide de la température. Dans la pratique, ce n’est applicable qu’aux pièces de petites dimensions (boulonnerie par exemple) et particulièrement pratiqué en utilisant comme four des sels fondus qui garantissent un très intense échange thermique.
Fraction f
Température
Temps
Fin
demi
Début
T3
T3 T1
T2

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 62
Supposons toujours le même matériau stable à haute température sous forme de α. On va maintenant observer le déroulement de la transformation α en β lors d’un
refroidissement régulier et continu, caractérisé par un chemin de refroidissement particulier dans le diagramme Température-Temps.
Cette fois-ci, la transformation ne se déroule plus à température constante et les conditions de germination et de croissance évoluent continuellement entre le début et la fin de la transformation.
De la même façon que pour la courbe isotherme, on peut tracer les lieux des points « début de transformation » (t1), « demi-transformation » (t50) et « fin de transformation » (t99).
Le dessin du domaine de transformation apparaît alors comme celui qui figure sur la figure 3 et constituera le diagramme TTT de refroidissement continu de la transformation.
Diagramme schématique TTT de refroidissement continu d’une transformation par germination et croissance.
Si on prend le cas du chemin de refroidissement R1, le plus lent, ses points d’intersection avec le domaine de transformation permettent de déterminer les températures de début de
7.4 Le diagramme cinétique TTT de refroidissement continu.
Fraction f
Temps Température
Chemin de refroidissement R1
R2 R3 R4
Cinétique de transformation de R1
Cinétique de transformation de R2
0.6
65%
A B
0.0
0.9
Tdébu
Tfi 100
0.50

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 63
transformation (Tdébut) et de fin (Tfin). Entre les deux, l’intersection avec la courbe en pointillés indique le franchissement de la demi-transformation.
Quand le chemin de refroidissement est plus rapide, la fin de transformation se situe à une température si basse que la croissance ne se fait plus, et la transformation n’est pas complètement effectuée (dans notre cas, il subsistera du α à basse température).
C’est le cas du chemin R2. On voit que la courbe f = f(t) atteint son maximum pour f = 0.65 et ce résultat est reporté sur le diagramme TTT-RC sous forme de la valeur numérique de f, exprimée en %, juste en dessous de l’intersection avec la frontière basse du domaine de transformation. Par opposition, le chemin R1 conduisait à une transformation complète, ce qu’on identifie à la valeur 100% indiquée en dessous de Tfin.
Le chemin R3 est la limite de ce phénomène : il est tangent en B au domaine de transformation, aussi celle-ci n’atteindra même pas f = 1%. On l’appelle le chemin critique de la transformation et toute transformation par germination et croissance possède cette grandeur caractéristique qui présente une grande importance.
En effet, pour tout refroidissement plus rapide que R3 (R4 par exemple), la transformation n’a pas lieu : elle est bloquée car sa cinétique n’est plus capable de suivre l’abaissement rapide de la température.
Applications des transformations en Refroidissement continu. Comparé à la trempe isotherme, le refroidissement continu présente, dans la pratique, un bien
plus grand intérêt car c’est le cas le plus fréquent qu’on observe quand on refroidit une pièce à l’air calme ou dans le cas du refroidissement d’une pièce massive de grande inertie thermique.
Pour les traitements thermiques, le diagramme TTT-RC a donc beaucoup plus d’applications et est plus largement utilisé, comme nous le verrons en détail lors des TD et des TP.
7.5 Cinétique des transformations polymorphiques. On a vu que ces transformations possèdent une cinétique extrêmement rapide, voire
explosive, qui ne dépend pas du temps mais seulement de la température atteinte. En effet, on constate que ces transformations progressent pendant les changements de température mais ne se développent pas en conditions isothermes (on parle aussi de transformations athermiques).
Une conséquence de cette cinétique très particulière est qu’une transformation polymorphique ne peut pas être bloquée par une déstabilisation intense : contrairement aux transformations par germination et croissance, on ne peut donc pas éviter par des traitements thermiques les transformations polymorphiques.
Dans la pratique, les transformations polymorphiques sont caractérisées par deux températures caractéristiques :
la température Ms, qui indique le début de la transformation ( 1% détecté). la température Mf, qui indique la fin de transformation (99%). Entre ces deux températures, la loi représentant l’avancement de la transformation s’écrit :
f = 1 – exp [ - k . ( Ms – T )]
f est la fraction volumique transformée, k est une constante cinétique dépendant de la composition, T est la température atteinte entre Ms et Mf.
Dans le cas de la transformation martensitique des aciers, les températures Ms et Mf sont basses. C’est particulièrement vrai pour Mf, qui peut se situer, pour certaines compositions, à des températures inférieures à celle de l’azote liquide. Il est alors impossible d’obtenir une transformation complète.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 64
La représentation d’une transformation polymorphique dans les diagrammes TTT, isotherme comme RC, est très simple : c’est une horizontale pour T = Ms, éventuellement complétée par une autre pour Mf.
Si la phase initiale suit un chemin thermique traversant cet intervalle, la transformation se produit irrémédiablement.
Représentation d’une transformation polymorphique dans un diagramme TTT - RC.
Position des températures caractéristiques Ms et Mf .
Ms
M f
T
Temps
Déroulement de la transformation polymorphique

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 65
8 Notions de base sur les traitements thermiques des métaux.
Les aciers pour traitements thermiques, dits « spéciaux », sont avant tout des alliages fer/carbone dont la teneur massique en carbone peut varier entre 0.1 et 1.5%.
Le diagramme d’équilibre prévoit la nature des phases et des constituants présents dans ces matériaux ainsi que les températures associées à ces changements de phases:
Fers
et aciers doux Aciers
hypoeutectoïdes Aciers
hypereutctoïdes Teneur en carbone 0 à 0.1 0.1 à 0.8 0.8 à 1.5 Nature des phases à
l’équilibre Ferrite α + Fe3C
Nature des constituants Ferrite α + Fe3C tertiaire
Ferrite α + Perlite
+ Fe3C tertiaire
Fe3C secondaire +Perlite
Températures caractéristiques
A3 A3 et A1 Am et A1
On peut noter que tous les aciers sont, à haute température supérieure à A3 ou Am, constitués
de la même phase unique, cubique à faces centrées : l’austénite γγγγ. Cependant, les aciers commerciaux contiennent toujours d’autres éléments que le carbone.
Certains proviennent des procédés d’élaboration ( Mn, Si, P, S), d’autres sont des additions volontaires, destinées à modifier la cinétique des transformations à l’état solide entre les phases fer/carbone et à faire apparaître de nouvelles phases (carbures surtout) qui, même en faible quantité, améliorent les performances mécaniques.
8.1.1 Phases stables et métastables du système fer/carbone.
Le diagramme d’équilibre montre que tous les aciers devraient, à basse température, être constitués des mêmes phases les plus stables, soient la ferrite α et le carbure Fe3C (cémentite). Cependant, lorsque l’on abaisse sa température, l’austénite présente trois types de transformations différentes, suivant la vitesse de refroidissement (refroidissement continu) ou l’ampleur d’un brusque changement de température (trempe isotherme).
Pour cette raison, ces matériaux offrent une grande diversité de constitutions en fonction du traitement thermique appliqué (en conséquence, ils présentent donc des courbes TTT assez complexes) et offrent une incroyable palette de propriétés mécaniques.
Le détail de ces transformations, ainsi que les très importantes applications qui en découlent, seront abordés en TD d’une façon détaillée.
Type de
refroidissement Nature de la transformation
Phases formées Constituants formés
Performances
Lent d’équilibre (par G + C)
Ferrite α + Fe3C
selon tableau 1 état adouci plastique
Moyen bainitique (par G + C)
Ferrite sursaturée + carbures
Bainite supérieure ou inférieure
résistance élevée ténacité moyenne à bonne
Rapide martensitique (athermique)
martensite α’ martensite α’ très dure fragile
8.1 Les traitements thermiques des aciers.

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 66
8.2 Les alliages à durcissement par précipitation. Parmi les matériaux présentant deux états structuraux on trouve les alliages à durcissement
par précipitation ou à durcissement structural, parmi lesquels figurent les alliages métalliques qui présentent les propriétés mécaniques les plus élevées connues.
Les plus importants de ces matériaux sont les alliages d’aluminium (beaucoup d’entre eux), les alliages MARAGING, des alliages à base nickel et de cuivre, ainsi que certains aciers inoxydables.
8.2.1 Principe du durcissement par précipitation (ou durcissement structural).
Ces matériaux sont durcis par la précipitation d’une seconde phase dans une matrice
initialement monophasée. Si cette possibilité est thermodynamiquement très courante au vu du diagramme d’équilibre
de nombreux systèmes, il faut rassembler des conditions physiques très strictes pour que ce mécanisme puisse présenter un intérêt pratique et des performances suffisantes. Ceci explique le nombre assez restreint des familles d’alliages industriels réellement utilisées.
L’effet de durcissement est obtenu par le blocage des lignes de dislocations dans la matrice du fait de la présence des corps étrangers que représentent les précipités de la seconde phase (ce n’est pas que le matériau soit moins déformable mais sa déformation demande alors d’appliquer des sollicitations extérieures plus intenses).
Si ces particules sont trop petites, elles ne freinent pas assez le mouvement des dislocations qui peuvent les traverser. Si elles sont trop rares, et donc trop éloignées les unes des autres, les dislocations les contournent. Il est donc indispensable d’obtenir la précipitation de la seconde phase avec une extrême finesse pour garantir une distance moyenne entre particules minimale.
Ceci n’est obtenu que si les systèmes cristallins des deux phases présentent des éléments suffisamment voisins, ce qui représente une condition très restrictive. De plus, on améliore le phénomène en choisissant des conditions de germination intenses (précipitation à une température très éloignée de la température d’équilibre).
8.2.2 Les étapes d’un traitement thermique de précipitation.
Les alliages à précipitation sont décrits par des diagrammes de la forme ci-dessous :
Temp.
Phase a
Phase b
1
2
3
% BT ambiante
T p

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 67
Le traitement thermique se déroule de la façon suivante :
• L’alliage est d’abord porté en 1, à une température suffisamment haute pour atteindre le domaine monophasé a. Il y est maintenu assez longtemps pour garantir l’homogénéité de la composition. Ce traitement est appelé chauffage de « mise en solution ».
• L’alliage est ensuite refroidi rapidement (de 1 à 2) pour figer la structure monophasée à la température ambiante. Le refroidissement doit donc être plus rapide que la vitesse critique de la précipitation de la phase b. Il conduit à un état métastable constitué par la solution solide a sursaturée.
• A ce stade, on procède à la mise en forme et à l’usinage de la pièce en bénéficiant des propriétés de plasticité et de dureté moyenne de l’état monophasé a.
• On pratique enfin le traitement de précipitation (de 2 à 3) en faisant apparaître progressivement la phase b à température modérée. La précipitation augmente la résistance et diminue la plasticité du matériau. Le résultat de ce traitement, obtenu par germination et croissance, dépend du temps et de la température (loi d’équivalence temps-température).
L’augmentation de la résistance évolue avec le temps de la façon suivante :
Résistance (dureté)
T2<T1
Log temps
DurcissementVieillissement
optimum des propriétés
T3<T2
T1
Dans l’étape de durcissement, il existe un couple température/temps qui conduit aux
performances optimales. Si on poursuit le traitement, on assiste à une décroissance lente de la résistance due à la
coalescence des particules et à l’augmentation de leur distance moyenne (vieillissement). Ce traitement de durcissement, dit « doux », a l’avantage de changer les propriétés du
matériau par une modification mineure de sa microstructure : la fraction volumique qui apparaît est faible et ne provoque pas de déformation ni de contraintes internes intenses, comme c’est la cas avec la martensite des aciers au carbone. C’est la raison pour laquelle on choisit ce type d’alliage dans le cas de pièces de grande complexité de formes ou pour assurer la plus grande sécurité possible (trains d’atterrissage par exemple).

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 68
9 Annexes Propriétés mécaniques comparées pour les trois classes de matériaux

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 69

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 70

HEI – 3ème année Cours de Science des Matériaux M. SOUISSI & J.Y. DAUPHIN 2013-2014 71



![[ CINÉMA & AUDIOVISUEL ] Lycéens et apprentis au cinéma en … · 2019. 8. 1. · Le dispositif Lycéens et apprentis au cinéma s’adresse aux élèves et aux apprentis des lycées](https://img.pdfslide.tips/doc/110x75/5fe02a1312390f6e5264c2d0/-cinma-audiovisuel-lycens-et-apprentis-au-cinma-en-2019-8-1.jpg)